ąÆ čŹč鹊ą╣ čüčéą░čéčīąĄ (ą┐ąĄčĆąĄą▓ąŠą┤ ą░ą┐ąĮąŠčāčéą░ AN690 Microchip [1]) ąŠą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą╝ąĄč鹊ą┤ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą│ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čĆą░ąĘą╝ąĄčĆą░ ą┐ą░ą╝čÅčéąĖ EEPROM čü ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╝ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ I2C. ąĀą░čüčüą╝ą░čéčĆąĖą▓ą░čÄčéčüčÅ č鹥ą╝čŗ:
ŌĆó ąÉą▓č鹊ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čĆą░ąĘą╝ąĄčĆą░ ą┐ą░ą╝čÅčéąĖ, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą╣ ą║ čłąĖąĮąĄ I2C
[ąÉą▓č鹊ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čĆą░ąĘą╝ąĄčĆą░ ą┐ą░ą╝čÅčéąĖ, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą╣ ą║ čłąĖąĮąĄ I2C ]
ąÆ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ čü ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ą╝ąĖ, ą│ą┤ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐ą░ą╝čÅčéčī Serial EEPROM, čćą░čüč鹊 ą▓čüčéą░ąĄčé ą┐čĆąŠą▒ą╗ąĄą╝ą░ čüąŠą│ą╗ą░čüąŠą▓ą░ąĮąĖčÅ čéčĆąĄą▒ąŠą▓ą░ąĮąĖą╣ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĖ ąŠą┐čéąĖą╝ąĖąĘą░čåąĖąĖ čüč鹊ąĖą╝ąŠčüčéąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ čćą░čüč鹊 ąĮčāąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čĆą░ąĘąĮčŗąĄ čĆą░ąĘą╝ąĄčĆčŗ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ čĆą░ąĘąĮčŗčģ ą▓ąĄčĆčüąĖą╣ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ąŠą┤ąĮą░ą║ąŠ čåąĄąĮąŠą▓čŗąĄ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ čéčĆąĄą▒čāčÄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ą░ąČą┤čŗą╣ čĆą░ąĘ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ą┐ą░ą╝čÅčéąĖ. ą¤čĆąĖą╝ąĄčĆąŠą╝ čéąĖą┐ąŠą▓ąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▒ą░ąĘąŠą▓ą░čÅ čüčéą░ąĮčåąĖčÅ (ą┐čĆąĖąĄą╝ąĮąĖą║) ą┤ąĖčüčéą░ąĮčåąĖąŠąĮąĮąŠ čāą┐čĆą░ą▓ą╗čÅąĄą╝ąŠą╣ čüąĖčüč鹥ą╝čŗ ąŠčéą║čĆčŗčéąĖčÅ ą┤ą▓ąĄčĆąĖ ą│ą░čĆą░ąČą░. ąÆąĄčĆčüąĖąĖ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé čģčĆą░ąĮąĖčéčī ą▓ ą┐ą░ą╝čÅčéąĖ 4, 20, 200 ąĖą╗ąĖ 1000 ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣, ą╝ąŠą│ą╗ąĖ ą▒čŗ čü ąŠą┤ąĮąĖą╝ ąĖ č鹥ą╝ ąČąĄ ąĖčüčģąŠą┤ąĮčŗą╝ ą║ąŠą┤ąŠą╝, ą┐ąŠą┤čģąŠą┤čÅčēąĖą╝ ą║ čĆą░ąĘą╗ąĖčćąĮčŗą╝ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╝ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ą╝ ą┐ą░ą╝čÅčéąĖ.
Microchip ą┐ąŠčüčéą░ą▓ą╗čÅąĄčé čłąĖčĆąŠą║ąĖą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĄą╝ą║ąŠčüčéąĖ ą┐ą░ą╝čÅčéąĖ čü ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ I2C (ąŠčé 16 ą▒ą░ą╣čé ą▓ 24C00 ą┤ąŠ 32k ą▒ą░ą╣čé 24C256). ąŻ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą┐ąŠčüąŠą▒ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą║ą░ą║ą░čÅ ą┐ą░ą╝čÅčéčī ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĮą░ čłąĖąĮąĄ I2C, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąĄčæ ą░ą┤čĆąĄčüąŠą▓ą░čéčī.
ąöą╗čÅ čĆąĄčłąĄąĮąĖčÅ čŹč鹊ą╣ ą┐čĆąŠą▒ą╗ąĄą╝čŗ ąĄčüčéčī 2 ą▓ąŠąĘą╝ąŠąČąĮčŗčģ ą╝ąĄč鹊ą┤ą░ - ąŠą┤ąĖąĮ čüąŠčüč鹊ąĖčé ą▓ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĖ ą║ą░ą║ąŠą╣-ą╗ąĖą▒ąŠ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┤ą╗čÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ąĮą░ą┐čĆąĖą╝ąĄčĆ čü ą┐ąŠą╝ąŠčēčīčÄ DIP-ą┐ąĄčĆąĄą║ą╗čÄčćą░č鹥ą╗ąĄą╣ ąĖą╗ąĖ ą┐ąĄčĆąĄą╝čŗč湥ą║, ąĖ ą┤čĆčāą│ąŠą╣ čüą┐ąŠčüąŠą▒ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ą░ą╝čÅčéąĖ. ąÆ čŹč鹊ą╝ ą░ą┐ąĮąŠčāč鹥 ą┐ąŠą║ą░ąĘą░ąĮąŠ, ą║ą░ą║ ą┐čĆąŠčüč鹊 ąĖ ą▒ąĄąĘąŠą┐ą░čüąĮąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠąĄ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ.
ą×ą┐ąĖčüą░ąĮąĮčŗąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗąĄ č鹥čģąĮąĖą║ąĖ ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāčÄčéčüčÅ ąĮą░ ąŠą▒čŗčćąĮąŠą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ PIC16C62A čüčĆąĄą┤ąĮąĄą│ąŠ čåąĄąĮąŠą▓ąŠą│ąŠ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░, ąĖ čŹč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą┐čĆąŠč鹥čüčéąĖčĆąŠą▓ą░ąĮąŠ ąĮą░ ą┤ąĄą╝ąŠ-ą┐ą╗ą░č鹥 PICDEM2. ąÆąĄčüčī ą║ąŠą┤ ą╝ąŠąČąĄčé ą▒čŗčéčī ą░ą┤ą░ą┐čéąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą┤čĆčāą│ąĖčģ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ čüąĄą╝ąĄą╣čüčéą▓ą░ PICmicro (čü čÅą┤čĆą░ą╝ąĖ 12, 14, 16 ąĖ/ąĖą╗ąĖ ą┤čĆčāą│ąĖą╝ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅą╝ąĖ ą▓čŗą▓ąŠą┤ąŠą▓) ą┐čāč鹥ą╝ ąĮąĄąĘąĮą░čćąĖč鹥ą╗čīąĮčŗčģ ąĖąĘą╝ąĄąĮąĄąĮąĖą╣ ą▓ ąĖčüčģąŠą┤ąĮąŠą╝ ą║ąŠą┤ąĄ.
[ąĪčéą░ąĮą┤ą░čĆčé I2C ]
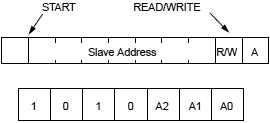
ą¤čĆąŠč鹊ą║ąŠą╗ I2C ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčāčÄ čłąĖąĮčā, čĆą░ą▒ąŠčéą░čÄčēčāčÄ ą┐ąŠ ą┐čĆąĖąĮčåąĖą┐čā ą│ą╗ą░ą▓ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ ą║ ąĮąĄą╝čā ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ (čüčģąĄą╝ą░ master/slave). ąōą╗ą░ą▓ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ (master) čŹč鹊 ąŠą▒čŗčćąĮąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ, ą║ąŠč鹊čĆčŗą╣ čāą┐čĆą░ą▓ą╗čÅąĄčé čłąĖąĮąŠą╣, ą│ąĄąĮąĄčĆąĖčĆčāąĄčé čéą░ą║čéčŗ (SCL) ąĖ č乊čĆą╝ąĖčĆčāąĄčé čüąĖą│ąĮą░ą╗čŗ START ąĖ STOP ąĮą░ čłąĖąĮąĄ. Serial EEPROM ą▓ąĄą┤ąĄčé čüąĄą▒čÅ ą║ą░ą║ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ (slave) čāčüčéčĆąŠą╣čüčéą▓ąŠ, ąĖ ąŠąĮąŠ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ ą┤ą░ąĮąĮčŗčģ ą▓ąŠ ą▓čĆąĄą╝čÅ ąŠą┐ąĄčĆą░čåąĖą╣ čćč鹥ąĮąĖčÅ. ąÆąŠ ą▓čĆąĄą╝čÅ ąŠą┐ąĄčĆą░čåąĖą╣ ąĘą░ą┐ąĖčüąĖ EEPROM čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą┐čĆąĖąĄą╝ąĮąĖą║, č乊čĆą╝ąĖčĆčāčÅ čüąĖą│ąĮą░ą╗čŗ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠą│ąŠ ąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ (ACK ąĖ NACK) ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ master. ąĪąĖą│ąĮą░ą╗čŗ START ąĖ STOP ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ąŠą╝ ą┤ą░ąĮąĮčŗčģ ą┐ąŠ čłąĖąĮąĄ. ąØąŠčĆą╝ą░ą╗čīąĮą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü čüąĖą│ąĮą░ą╗ą░ START ąĖ ąĘą░ą║ą░ąĮčćąĖą▓ą░ąĄčéčüčÅ čüąĖą│ąĮą░ą╗ąŠą╝ STOP. ąŚą░ START ąĮą░čćąĖąĮą░ąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ą░ čćč鹥ąĮąĖčÅ ąĖą╗ąĖ ąĘą░ą┐ąĖčüąĖ, čüąŠą┤ąĄčƹȹ░čēą░čÅ ą░ą┤čĆąĄčü čāčüčéčĆąŠą╣čüčéą▓ą░, čŹčéčā ą║ąŠą╝ą░ąĮą┤čā č乊čĆą╝ąĖčĆčāąĄčé master. ąŁč鹊čé ą┐ąĄčĆą▓čŗą╣ ą▒ą░ą╣čé ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▒ą░ą╣č鹊ą╝ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ąŠąĮ ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāąĄčé ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čüą╗ąĄą┤čāčÄčēčāčÄ ąŠą┐ąĄčĆą░čåąĖčÄ - čćč鹥ąĮąĖąĄ čŹč鹊 ą▒čāą┤ąĄčé ąĖą╗ąĖ ąĘą░ą┐ąĖčüčī. ąóąĖą┐ąŠą▓ąŠą╣ ą▒ą░ą╣čé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ą╗čÅ Serial EEPROM ą┐ąŠą║ą░ąĘą░ąĮ ąĮą░ čĆąĖčü. 1. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą▒ą░ą╣čé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü čüąĖą│ąĮą░ą╗ą░ START, ąĘą░ ą║ąŠč鹊čĆčŗą╝ ąĖą┤ąĄčé 4-ą▒ąĖčéąĮčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čéąĖą┐ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ (ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ čéąĖą┐ą░ EEPROM čŹč鹊 ą▒čāą┤čāčé ą▒ąĖčéčŗ 1010), ąĘą░č鹥ą╝ 3 ą▒ąĖčéą░, ą▓čŗą▒ąĖčĆą░čÄčēąĖąĄ ą║ąŠąĮą║čĆąĄčéąĮčāčÄ ą╝ąĖą║čĆąŠčüčģąĄą╝čā ąĮą░ čłąĖąĮąĄ I2C (A2, A1, A0), ą▒ąĖčé čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ (R/W), ąĘą░ ą║ąŠč鹊čĆčŗą╝ ą┤ąŠą╗ąČąĮąŠ ąĖą┤čéąĖ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ąŠčé slave-čāčüčéčĆąŠą╣čüčéą▓ą░ (ACK).
ąĀąĖčü. 1. ąĪčéčĆčāą║čéčāčĆą░ ą▒ą░ą╣čéą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ.
[Smart Serial ąĖą╗ąĖ I2C? ]
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮą░čÅ čłąĖąĮą░ I2C ąĖą╝ąĄąĄčé ą╝ąĮąŠą│ąŠ ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ ą┐ąĄčĆąĄą┤ ą┤čĆčāą│ąĖą╝ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╝ąĖ čłąĖąĮą░ą╝ąĖ ą┤ą╗čÅ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ čāčüčéčĆąŠą╣čüčéą▓. ą©ąĖąĮą░ I2C čü čéčĆąĖą│ą│ąĄčĆą░ą╝ąĖ ą©ą╝ąĖčéčéą░ ąĮą░ ą▓čģąŠą┤ą░čģ, čüčĆą░ą▒ą░čéčŗą▓ą░čÄčēąĖčģ ą┐ąŠ čāčĆąŠą▓ąĮčÄ, ą┤ą░ąĄčé ą╗čāčćčłčāčÄ ą┐ąŠą╝ąĄčģąŠąĘą░čēąĖčēąĄąĮąĮąŠčüčéčī ą┐ąŠ čüčĆą░ą▓ąĮąĄąĮąĖčÄ čü č鹥čģąĮąŠą╗ąŠą│ąĖčÅą╝ąĖ, ą║ąŠč鹊čĆčŗąĄ ąŠčüąĮąŠą▓ą░ąĮčŗ ąĮą░ ą┐ąĄčĆąĄą┐ą░ą┤ą░čģ čāčĆąŠą▓ąĮčÅ. ąöą╗čÅ ąŠą▒ą╝ąĄąĮą░ čü ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ą╝ąĖ ą┐ą░ą╝čÅčéąĖ ąĮąĄ čéčĆąĄą▒čāčÄčéčüčÅ ą║ąŠą┤čŗ ąŠą┐ąĄčĆą░čåąĖą╣ ąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ąĖąĮčéčāąĖčéąĖą▓ąĮąŠ-ą┐ąŠąĮčÅčéąĮčāčÄ čüčģąĄą╝čā ąŠą┐ąĄčĆą░čåąĖą╣.
ą×ą┤ąĮą░ą║ąŠ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗ ąŠą│čĆą░ąĮąĖčćąĖą▓ą░ąĄčé ą░ą┤čĆąĄčüą░čåąĖčÄ ą┐ą░ą╝čÅčéąĖ ą╝ą░ą║čüąĖą╝čāą╝ąŠą╝ 16K ą▒ą░ą╣čé ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ 8-ą▒ąĖčéąĮąŠą│ąŠ ą░ą┤čĆąĄčüą░ ąĖ čéčĆąĄčģ ą▓čŗą▓ąŠą┤ąŠą▓ A0, A1 ąĖ A2 (8 x 2 ą║ąĖą╗ąŠą▒ą░ą╣čéą░). ąŚą┤ąĄčüčī ąĘą░ą║ą╗čÄčćą░ąĄčéčüčÅ ąĮąĄą║ą░čÅ ą┤ąĖą╗ąĄą╝ą╝ą░. ąĪ ą┐ąŠčÅą▓ą╗ąĄąĮąĖąĄą╝ ą▒ąŠą╗ąĄąĄ čüąŠą▓čĆąĄą╝ąĄąĮąĮčŗčģ ą┐ąĄčĆčüąŠąĮą░ą╗čīąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ čüą▓čÅąĘąĖ, čéą░ą║ąĖčģ ą║ą░ą║ čüąŠč鹊ą▓čŗąĄ č鹥ą╗ąĄč乊ąĮčŗ, ąĮą░ą╗ą░ą┤ąŠąĮąĮąĖą║ąĖ ąĖ ą┤čĆčāą│ąĖąĄ ą┐ąĄčĆąĄąĮąŠčüąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░, 16K ą▒ą░ą╣čé ą▒čāą┤ąĄčé ąĮąĄą┤ąŠčüčéą░č鹊čćąĮąŠ.
ą¤ąŠčŹč鹊ą╝čā ą▓ čüą▓čÅąĘąĖ čü čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝ąĖ ąĖąĮą┤čāčüčéčĆąĖąĖ ą║ ą┐ąŠą▓čŗčłąĄąĮąĖčÄ čĆą░ąĘą╝ąĄčĆąŠą▓ ą┐ą░ą╝čÅčéąĖ I2C ą▓ąŠ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ ą┐ąŠčÅą▓ąĖą╗ą░čüčī ą║ąŠąĮčåąĄą┐čåąĖčÅ Smart Serial, čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčÄčēą░čÅ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝ čāą╝ąĄąĮčīčłąĄąĮąĖčÅ ąĖąĘąĮąŠčüą░ ą┐ą░ą╝čÅčéąĖ, ą┐ąŠą▓čŗčłąĄąĮąĖčÅ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéąĖ ą┤ą░ąĮąĮčŗčģ. ąóą░ą║ąČąĄ čü čŹč鹊ą╣ ą║ąŠąĮčåąĄą┐čåąĖąĄą╣ ą▒čŗą╗ą░ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮą░ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéčī ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čŹąĮąĄčĆą│ąĖąĖ.
ąÜąŠą╝ą┐ą░ąĮąĖąĄą╣ Microchip ą▒čŗą╗ą░ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮą░ čüčģąĄą╝ą░ ą░ą┤čĆąĄčüą░čåąĖąĖ ą┤ą╗čÅ I2C Serial EEPROM, ąŠčüąĮąŠą▓ą░ąĮąĮą░čÅ ąĮą░ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╝ ą┐čĆąŠč鹊ą║ąŠą╗ąĄ I2C ąĖ ą░ą┤čĆąĄčüąĄ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĮąŠ ą▒čŗą╗ ą▓ą▓ąĄą┤ąĄąĮ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╣ ą▒ą░ą╣čé ą░ą┤čĆąĄčüą░, čćč鹊ą▒čŗ ą┐ąŠąĘą▓ąŠą╗ąĖčéčī čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║čā ą┐čĆąĖą╝ąĄąĮąĖčéčī ą┤ąŠ 256K ą▒ąĖčé ąĮą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖ ą┤ąŠą▒ą░ą▓ąĖčéčī ąŠčé 1 ą┤ąŠ 8 čāčüčéčĆąŠą╣čüčéą▓ ąĮą░ ąŠą┤ąĮčā čüąĖčüč鹥ą╝ąĮčāčÄ čłąĖąĮčā I2C. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗ąĖą╗ąŠ ą▒čāą┤čāčēąĄąĄ čĆą░čüčłąĖčĆąĄąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ, ąĖ ą┤ą░ą╗ąŠ ą┐čĆąŠą┤ą▓ąĖąĮčāčéčŗąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą▓ ą╝ą░ą╗ąĄąĮčīą║ąĖčģ, čŹčäč乥ą║čéąĖą▓ąĮčŗčģ ą┐ąŠ čüč鹊ąĖą╝ąŠčüčéąĖ čĆą░ąĘčĆą░ą▒ąŠčéą║ą░čģ.
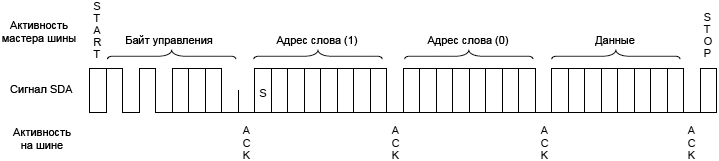
ąöą╗čÅ ą┐ąĄčĆą▓ąŠą│ąŠ ą▒ą░ą╣čéą░, ąĖą╗ąĖ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą│ąŠ ą▒ą░ą╣čéą░, Smart Serial ą┐čĆąĖą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ I2C (čüą╝. čĆąĖčü. 2). ąĪą╗ąĄą┤čāčÄčēąĖąĄ 2 ą▒ą░ą╣čéą░ (ą▓ą╝ąĄčüč鹊 ąŠą┤ąĮąŠą│ąŠ) ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé ą░ą┤čĆąĄčü ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄą╝ąŠą╣ ąŠą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ.
ąĀąĖčü. 2. ąŚą░ą┐ąĖčüčī ą▒ą░ą╣čéą░.
[ąöčĆčāą│ąŠą╣ ąĮą░ą▒ąŠčĆ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ ą┤ą╗čÅ čłąĖąĮčŗ I2C ]
ąÜąŠą╝ą┐ą░ąĮąĖąĄą╣ Microchip Technology ą▒čŗą╗ąŠ ąŠą┐čāą▒ą╗ąĖą║ąŠą▓ą░ąĮąŠ ą╝ąĮąŠąČąĄčüčéą▓ąŠ ą░ą┐ąĮąŠčāč鹊ą▓ čü ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ ą║ čłąĖąĮąĄ I2C: AN515, AN537, AN558, AN567, AN608, AN554, AN578 ąĖ AN535. ąØąĖąČąĄ ą▒čāą┤čāčé ą▒čāą┤čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮčŗ č鹥čģąĮąĖą║ąĖ ąĖąĘ čŹčéąĖčģ ą┤ą░čéą░čłąĖč鹊ą▓, ąĖ ąĮą░ ąŠčüąĮąŠą▓ąĄ ąĖčģ ą║ąŠą┤ą░ ą▒čāą┤čāčé čüąŠąĘą┤ą░ąĮ ą║ąŠą╝ą┐ą░ą║čéąĮčŗą╣, ą╝ąŠčēąĮčŗą╣ ąĮą░ą▒ąŠčĆ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝. ąĪąĮą░čćą░ą╗ą░ ą▒čāą┤ąĄčé ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮ ą▒ą░ąĘąŠą▓čŗą╣ ąĮą░ą▒ąŠčĆ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ [3, 4, 6, 8, 10], čćč鹊ą▒čŗ ąŠąĮąĖ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ą╗ąĖ ą░ą┤čĆąĄčüą░čåąĖčÄ Standard I2C ąĖ Smart Serial, ą▓čŗą▒ąĖčĆą░ą╗ąĖ runtime čüčģąĄą╝čā ą░ą┤čĆąĄčüą░čåąĖąĖ ą┐ąŠčüčĆąĄą┤čüčéą▓ąŠą╝ čäą╗ą░ą│ą░ SMART.
ąøąĖčüčéąĖąĮą│ 1 (i2c.inc) ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĮąŠą▓čŗą╣ ąĮą░ą▒ąŠčĆ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝. ąÜą░ą║ ąŠą▒čŗčćąĮąŠ, ąĘą┤ąĄčüčī ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé 2 čüą╗ąŠčÅ čäčāąĮą║čåąĖą╣:
ŌĆó ąØąĖąČąĮąĖą╣ čüą╗ąŠą╣ (čüąŠčüč鹊čÅčēąĖą╣ ąĖąĘ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝: BSTOP, BSTART, RXI2C, TXI2C, BITIN, BITOUT, ERR), ą║ąŠč鹊čĆčŗą╣ čĆąĄą░ą╗ąĖąĘčāąĄčé ąŠčéą┐čĆą░ą▓ą║čā ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ąŠą┤ąĖąĮąŠčćąĮčŗčģ ą▒ąĖčé ąĖ ą▒ą░ą╣č鹊ą▓ ąĮą░ čłąĖąĮąĄ, ąĖ ąĮą░ čŹč鹊ą╝ čüą╗ąŠąĄ ąĮąĄčé ąĮąŠą▓ąŠą│ąŠ ą║ąŠą┤ą░.
ŌĆó ąÆąĄčĆčģąĮąĖą╣ čüą╗ąŠą╣ (čüąŠčüč鹊čÅčēąĖą╣ ąĖąĘ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝: RDbyte, WRbyte ąĖ SETI2C), ą║ąŠč鹊čĆčŗą╣ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čŗ ąĖ ąĘą░ą▒ąŠčéąĖčéčüčÅ ąŠ čüčģąĄą╝ą░čģ ą░ą┤čĆąĄčüą░čåąĖąĖ. ąÆ čŹč鹊ą╣ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ ąŠą▒čüčāąČą┤ą░ąĄčéčüčÅ ąĖą╝ąĄąĮąĮąŠ čŹč鹊čé čüą╗ąŠą╣.
ąØąŠą▓ąŠą▓ą▓ąĄą┤ąĄąĮąĖąĄ ąĘą┤ąĄčüčī čüą╗ąĄą┤čāčÄčēąĄąĄ: ą▓ čäčāąĮą║čåąĖčÄ SETI2C ą┐ąĄčĆąĄąĮąĄčüąĄąĮ ą▓ąĄčüčī ą║ąŠą┤, ą║ąŠč鹊čĆčŗą╣ čĆą░ą▒ąŠčéą░ąĄčé čü ą┤ąĄčéą░ą╗čÅą╝ąĖ čüčģąĄą╝čŗ ą░ą┤čĆąĄčüą░čåąĖąĖ. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┐ąŠą╗čāčćą░ąĄčé čäą╗ą░ą│ SMART ąĮą░ ą▓čģąŠą┤ąĄ, ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą░ą┤čĆąĄčüą░čåąĖčÄ Standard ąĖą╗ąĖ Smart ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ąĄą│ąŠ ąĘąĮą░č湥ąĮąĖąĄą╝. ążčāąĮą║čåąĖąĖ RDbyte ąĖ WRbyte ą┐ąŠą╗ą░ą│ą░čÄčéčüčÅ ąĮą░ SETI2C ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą║ąŠą╝ą░ąĮą┤čŗ ąĖ ą░ą┤čĆąĄčüą░, čćč鹊ą▒čŗ ą┤ąŠą▒ąĖčéčīčüčÅ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ čüąŠ Standard ąĖ Smart Serial.
[ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čüčģąĄą╝čŗ ą░ą┤čĆąĄčüą░čåąĖąĖ ]
ąĪą╗ąĄą┤čāčÄčēąĖą╣ ąĮąĄą▒ąŠą╗čīčłąŠą╣ čłą░ą│ ą║ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╝čā ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÄ čĆą░ąĘą╝ąĄčĆą░ ą┐ą░ą╝čÅčéąĖ - ąĮą░ą╝ ąĮčāąČąĮąŠ ąĮą░ą╣čéąĖ ą╝ąĄč鹊ą┤, čćč鹊ą▒čŗ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčéą╗ąĖčćąĖčéčī Smart Serial ąĖ Standard Serial EEPROM. ą¤čĆąĄą┤ą╗ą░ą│ą░ąĄčéčüčÅ ą┐čĆąŠčüč鹊ą╣ ąĖ ą║ąŠą╝ą┐ą░ą║čéąĮčŗą╣ ą░ą╗ą│ąŠčĆąĖčéą╝, čüąŠčüč鹊čÅčēąĖą╣ ąĖąĘ 4 čłą░ą│ąŠą▓:
1 . ą¤ąĄčĆąĄą▓ąŠą┤ I2C ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ ą▓ čĆąĄąČąĖą╝ Smart Serial (čāčüčéą░ąĮąŠą▓ą║ąŠą╣ čäą╗ą░ą│ą░ SMART).
2 . ąÆčŗą┤ą░ąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ą░ write ą▓ čÅč湥ą╣ą║čā 0000, čü ąĘą░ą┐ąĖčüčīčÄ 1.
ąĢčüą╗ąĖ ą┐ą░ą╝čÅčéčī čüčéą░ąĮą┤ą░čĆčéąĮą░čÅ I2C, č鹊 čŹčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčéčüčÅ ą║ą░ą║ ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą╣ ąĘą░ą┐ąĖčüąĖ (sequential write) ą┤ą▓čāčģ ą▒ą░ą╣čé, ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ąĘą░ą┐ąĖčłąĄčéčüčÅ ą▒ą░ą╣čé 00 ą▓ čÅč湥ą╣ą║čā 0000 ąĖ ą▒ą░ą╣čé 01 ą▓ čÅč湥ą╣ą║čā 0001. ąĢčüą╗ąĖ ąČąĄ ą┐ą░ą╝čÅčéčī Smart Serial, č鹊 ą╝čŗ ą┐ąŠą╗čāčćąĖą╝ ą║ąŠčĆčĆąĄą║čéąĮčāčÄ ąĖąĮč鹥čĆą┐čĆąĄčéą░čåąĖčÄ ą░ą┤čĆąĄčüą░, ąĖ ą▓ čÅč湥ą╣ą║čā 0000 ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮ ą▒ą░ą╣čé 01.
3 . ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ I2C ą┐ąĄčĆąĄą▓ąŠą┤čÅčéčüčÅ ą▓ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čĆąĄąČąĖą╝ (Standard I2C Mode, ą┐čāč鹥ą╝ ąŠčćąĖčüčéą║ąĖ čäą╗ą░ą│ą░ SMART).
4 . ąÆčŗą┤ą░ąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ą░ read čÅč湥ą╣ą║ąĖ 0000.
ąĢčüą╗ąĖ ą┐ą░ą╝čÅčéčī ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠ Standard I2C, č鹊 čŹčéą░ ą║ąŠą╝ą░ąĮą┤ą░ read ą┤ą░čüčé ąĮą░ą╝ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čÅč湥ą╣ą║ąĖ 0000, ą║ąŠč鹊čĆą░čÅ ą▒čŗą╗ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ 0. ąĢčüą╗ąĖ ąČąĄ ą┐ą░ą╝čÅčéčī čéąĖą┐ą░ Smart Serial, č鹊 ą┐ąŠą╗čāčćąĖčéčüčÅ ą║ąŠą╝ą░ąĮą┤ą░ čćč鹥ąĮąĖčÅ čü čćą░čüčéąĖčćąĮąŠą╣ (ąĮąĄą┐ąŠą╗ąĮąŠą╣) ą░ą┤čĆąĄčüą░čåąĖąĖ. ąóąŠ, čćč鹊 ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé, ąĮąĄ ąŠčéąĮąŠčüąĖčéčüčÅ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ą║ čĆą░ą▒ąŠč鹥 čłąĖąĮčŗ I2C, ą┤ą░ą▓ą░ą╣č鹥 ą┐čĆąŠą░ąĮą░ą╗ąĖąĘąĖčĆčāąĄą╝ čŹčéąĖ ą┤ą▓ą░ ą▓ąŠąĘą╝ąŠąČąĮčŗčģ čüą╗čāčćą░čÅ.
a) ą¦ą░čüčéąĖčćąĮą░čÅ ą░ą┤čĆąĄčüą░čåąĖčÅ č鹊ą╗čīą║ąŠ čāčüčéą░ąĮąŠą▓ąĖčé čüčéą░čĆčłąĖąĄ ąĘąĮą░čćą░čēąĖąĄ ą▒ąĖčéčŗ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ą░ą┤čĆąĄčüą░, ąĖ ąŠčüčéą░ą▓ąĖčé ąĮąĄ ąĖąĘą╝ąĄąĮąĄąĮąĮčŗą╝ąĖ ą╝ą╗ą░ą┤čłąĖąĄ 8 ą▒ąĖčé. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą▒čāą┤ąĄčé ą┐čĆąŠčćąĖčéą░ąĮą░ čÅč湥ą╣ą║ą░ 0000.
ąĢčüą╗ąĖ ą▓ ąŠą▒ąŠąĖčģ čüą╗čāčćą░čÅčģ ą┐čĆąŠčåąĄčüčü ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ čćč鹥ąĮąĖąĄą╝ 1, č鹊 čŹč鹊 čāą║ą░ąČąĄčé ąĮą░ą╝ ąĮą░ ą┐ą░ą╝čÅčéčī Smart Serial. ąĢčüą╗ąĖ ą▒čāą┤ąĄčé ą┐čĆąŠčćąĖčéą░ąĮ 0, č鹊 čŹč鹊 ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮą░čÅ ą┐ą░ą╝čÅčéčī Standard I2C.
ąøąĖčüčéąĖąĮą│ 2 (i2cauto.asm) čĆąĄą░ą╗ąĖąĘčāąĄčé čŹč鹊čé ą┐čĆąŠčüč鹊ą╣ ą░ą╗ą│ąŠčĆąĖčéą╝ ąĮą░ 10 čüčéčĆąŠą║ą░čģ ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░.
ąŚą░ą╝ąĄčćą░ąĮąĖąĄ: ąŠč湥ą▓ąĖą┤ąĮąŠ, čćč鹊 ąŠą┐ąĖčüą░ąĮąĮą░čÅ ą┐čĆąŠčåąĄą┤čāčĆą░ ą┐ąŠą▓čĆąĄą┤ąĖčé čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čÅč湥ąĄą║ 0000 ąĖ 0001, ąĖ ąĮąĄ čüčāčēąĄčüčéą▓čāąĄčé čüą┐ąŠčüąŠą▒ą░ čüąŠčģčĆą░ąĮąĖčéčī ąĖ ą▓ąŠčüčüčéą░ąĮąŠą▓ąĖčéčī ąĖčģ (ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ čüčģąĄą╝ą░ ą░ą┤čĆąĄčüą░čåąĖąĖ!).
[ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čĆą░ąĘą╝ąĄčĆą░ ą┐ą░ą╝čÅčéąĖ ]
ą¤ąŠčüą╗ąĄą┤ąĮąĖą╣ čłą░ą│ ą║ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╝čā ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÄ čĆą░ąĘą╝ąĄčĆą░ ą┐ą░ą╝čÅčéąĖ - čĆą░ąĘčĆą░ą▒ąŠčéą║ą░ ą░ą╗ą│ąŠčĆąĖčéą╝ą░, ą║ąŠč鹊čĆčŗą╣ ąŠą┐čĆąĄą┤ąĄą╗ąĖčé čĆą░ąĘą╝ąĄčĆ ą┐ą░ą╝čÅčéąĖ ą┐ąŠ ąĖą╝ąĄčÄčēąĄą╣čüčÅ čüčģąĄą╝ąĄ ą░ą┤čĆąĄčüą░čåąĖąĖ. ą¤čĆąĄą┤ą┐ąŠą╗ąŠąČąĖą╝, čćč鹊 čāąČąĄ ąĖąĘą▓ąĄčüč鹥ąĮ čéąĖą┐ ą┐ą░ą╝čÅčéąĖ - Standard ąĖą╗ąĖ Smart, ąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąĄčæ čĆą░ąĘą╝ąĄčĆ.
ąöąĄč鹥ą║čéąĖčĆčāčÄčēąĖą╣ ą░ą╗ą│ąŠčĆąĖčéą╝ ą▒čāą┤ąĄčé ą▒ą░ąĘąĖčĆąŠą▓ą░čéčīčüčÅ ąĮą░ ą┐čĆąŠčüč鹊ą╝ ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĄąĮąĖąĖ: ąĄčüą╗ąĖ ą┐ą░ą╝čÅčéčī ąĖą╝ąĄąĄčé čĆą░ąĘą╝ąĄčĆ N, č鹊 ą┐ąŠą┐čŗčéą║ą░ ą░ą┤čĆąĄčüą░čåąĖąĖ ą▓ąĮąĄ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ 0..N-1 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą┐ąŠą┐ą░ą┤ą░ąĮąĖčÄ ąŠą▒čĆą░čéąĮąŠ ą▓ čŹč鹊čé ą┤ąĖą░ą┐ą░ąĘąŠąĮ. ą¤ąŠčüą║ąŠą╗čīą║čā čüą░ą╝čŗąĄ čüčéą░čĆčłąĖąĄ (ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ) ą▒ąĖčéčŗ ą░ą┤čĆąĄčüą░ ą▒čāą┤čāčé ą┐čĆąŠčüč鹊 ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░čéčīčüčÅ, ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ąŠąĮąĖ ąĮąĄ ą▒čāą┤čāčé ąĖą╝ąĄčéčī ąĘąĮą░č湥ąĮąĖčÅ. ąŁč鹊 ą╝ąŠąČąĮąŠ ą┐čĆąŠčüč鹊 ą┐čĆąŠą▓ąĄčĆąĖčéčī ą┐ąŠ ą┤ą░čéą░čłąĖčéčā ą║ą░ąČą┤ąŠą╣ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ.
ą£ąŠąČąĮąŠ čĆą░ąĘčĆą░ą▒ąŠčéą░čéčī ą┐čĆąŠčüčéčāčÄ č鹥čüčé-čäčāąĮą║čåąĖčÄ, ą║ąŠč鹊čĆą░čÅ čüą║ą░ąČąĄčé ąĮą░ą╝, ąĖą╝ąĄąĄčé ą╗ąĖ ą┐ą░ą╝čÅčéčī čĆą░ąĘą╝ąĄčĆ N, ąĖą╗ąĖ čā ąĮąĄčæ čĆą░ąĘą╝ąĄčĆ ą╝ąĄąĮčīčłąĄ. ąØą░ ą┐čüąĄą▓ą┤ąŠą║ąŠą┤ąĄ čŹčéą░ čäčāąĮą║čåąĖčÅ ą▒čāą┤ąĄčé ą▓čŗą│ą╗čÅą┤ąĄčéčī ą┐čĆąĖą╝ąĄčĆąĮąŠ čéą░ą║:
bool TestIfSizeIs (u32 N)
{
// ąÉą┤čĆąĄčüą░ ą┐ą░ą╝čÅčéąĖ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 0..N-1?
u8 TEMP;
TEMP = Read(0000 );
if (Read(N) == TEMP)
{
Write(0000 , TEMP+ 1 );
if (Read(N) == TEMP+ 1 )
{
Write(0 ,TEMP- 1 );
return TRUE;
}
}
// ąśąĮą░č湥:
return (FALSE)
}
ąĪ ą┐ąŠą╝ąŠčēčīčÄ čéą░ą║ąŠą╣ čäčāąĮą║čåąĖąĖ ą╝čŗ ą╝ąŠąČąĄą╝ ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░čéčī čåąĖą║ą╗ ą┐čĆąŠą▓ąĄčĆą║ąĖ čĆą░ąĘą╝ąĄčĆąŠą▓ ą┐ą░ą╝čÅčéąĖ. ąÆ čüą╗čāčćą░ąĄ ą┐ą░ą╝čÅčéąĖ Standard I2C čåąĖą║ą╗ ą╝ąŠąČąĄčé ą┐čĆąŠą▓ąĄčĆčÅčéčī ąŠčé N=128 ą┤ąŠ N=2048 (ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ąŠčé 24C01 ą┤ąŠ 24C16) čāą┤ą▓ą░ąĖą▓ą░čÅ N ąĮą░ ą║ą░ąČą┤ąŠą╣ ąĖč鹥čĆą░čåąĖąĖ:
u8 StandardI2CMemDetect (void )
{
// ążčāąĮą║čåąĖčÅ ą▓ąĄčĆąĮąĄčé ąĮąŠą╝ąĄčĆ ą╝ąŠą┤ąĄą╗ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ 1..16.
u16 N = 128 ;
u8 MODEL = 1 ;
do
{
if (TestIfSizeIs(N))
break ;
else
{
N= N* 2 ;
MODEL= MODEL* 2 ;
}
}
while (N <= 2048 );
return MODEL;
}
ą¤ąŠą┤ąŠą▒ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ čäčāąĮą║čåąĖčÅ ą╝ąŠąČąĄčé ą┐čĆąŠą░ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī ą┐ą░ą╝čÅčéčī Smart Serial ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé N=4096 ą┤ąŠ N=32768.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą▓ čŹč鹊ą╝ ą┐čĆąŠčüč鹊ą╝ ą░ą╗ą│ąŠčĆąĖčéą╝ąĄ ąĮąĄ čĆąĄąĘąĄčĆą▓ąĖčĆčāčÄčéčüčÅ čÅč湥ą╣ą║ąĖ ą┐ą░ą╝čÅčéąĖ. ąśąĘą╝ąĄąĮčÅąĄą╝ą░čÅ čÅč湥ą╣ą║ą░ ą▓ ą┐čĆąŠčåąĄčüčüąĄ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓čüąĄą│ą┤ą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮą░ ąĖ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮą░.
ąÆčüąĄ ą│ąŠč鹊ą▓ąŠ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čĆą░ąĘą╝ąĄčĆą░ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ. ąĪąĮą░čćą░ą╗ą░ ą╝čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖą╝ čüčģąĄą╝čā ą░ą┤čĆąĄčüą░čåąĖąĖ, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ą▓ąŠą╣ą┤ąĄą╝ ą▓ čåąĖą║ą╗, ąĖąĘą╝ąĄčĆčÅčÄčēąĖą╣ čĆąĄą░ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ą┐ą░ą╝čÅčéąĖ. ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čüčģąĄą╝čŗ ą░ą┤čĆąĄčüą░čåąĖąĖ čåąĖą║ą╗ ą▒čāą┤ąĄčé ą┐čĆąŠą▓ąĄčĆčÅčéčī čĆą░ąĘąĮčŗąĄ ą┤ąĖą░ą┐ą░ąĘąŠąĮčŗ čĆą░ąĘą╝ąĄčĆąŠą▓ ą┐ą░ą╝čÅčéąĖ, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čĆą░ąĘąĮčŗą╝ čĆą░ąĘą╝ąĄčĆą░ą╝ ą╝ąŠą┤ąĄą╗ąĄą╣ ą╝ąĖą║čĆąŠčüčģąĄą╝ ą┐ą░ą╝čÅčéąĖ, ą┤ąŠčüčéčāą┐ąĮčŗčģ ąĮą░ čĆčŗąĮą║ąĄ.
ąøąĖčüčéąĖąĮą│ 2 (i2cauto.asm) čĆąĄą░ą╗ąĖąĘčāčÄčé ąĮą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ ąŠą▒ą░ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ (ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čüčģąĄą╝čŗ ą░ą┤čĆąĄčüą░čåąĖąĖ ąĖ čĆą░ąĘą╝ąĄčĆą░).
ąÜąŠą┤ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠč鹥čüčéąĖčĆąŠą▓ą░ąĮ ąĮą░ PIC16C62A (ą┐ą╗ą░čéą░ PICDEM2) ąĖą╗ąĖ ą╗čÄą▒ąŠą╣ ą┤čĆčāą│ąŠą╣ čåąĄą╗ąĄą▓ąŠą╣ čüąĖčüč鹥ą╝ąĄ (ą┐ąŠčüą╗ąĄ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ąĮąŠąČąĄą║ ą▓čŗą▓ąŠą┤ąŠą▓ ą╗ąĖčüčéąĖąĮą│ą░ 2 i2cauto.asm). ą¤ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ą░ą╝čÅčéąĖ I2C ą▓ čüąŠą║ąĄčé DIL ą┐ą╗ą░čéčŗ PICDEM2, ą┐ąŠą┤ą░ą╣č鹥 ąĮą░ ąĮąĄčæ ą┐ąĖčéą░ąĮąĖąĄ ąĖą╗ąĖ ąĮą░ąČą╝ąĖč鹥 ą║ąĮąŠą┐ą║čā čüą▒čĆąŠčüą░, ąĖ čüą▓ąĄč鹊ą┤ąĖąŠą┤čŗ ą┐ąŠą║ą░ąČčāčé ą▓ ą┤ą▓ąŠąĖčćąĮąŠą╝ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖąĖ ąĘąĮą░č湥ąĮąĖąĄ TYPE (čüą╝. čéą░ą▒ą╗ąĖčåčā 1).
ąóą░ą▒ą╗ąĖčåą░ 1. ąŚąĮą░č湥ąĮąĖąĄ TYPE ą┤ą╗čÅ čĆą░ąĘąĮčŗčģ ą╝ąĖą║čĆąŠčüčģąĄą╝ ą┐ą░ą╝čÅčéąĖ.
Standard I2C Smart Serial
TYPE ąĀą░ąĘą╝ąĄčĆ ą£ąŠą┤ąĄą╗čī TYPE ąĀą░ąĘą╝ąĄčĆ ą£ąŠą┤ąĄą╗čī
01
128
24C01
32
4096
24C32
02
256
24C02
64
8192
24C64
04
512
24C04
128
16384
24C128
08
1024
24C08
0
32768
24C256
16
2048
24C16
ąÆčŗ ą╝ąŠąČąĄč鹥 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčī ąĖ ąĖąĘą╝ąĄąĮąĖčéčī ą┐čĆąĄą┤ą╗ą░ą│ą░ąĄą╝čŗą╣ ą║ąŠą┤ (čüą╝. ąĮąĖąČąĄ ą▓čĆąĄąĘą║čā "ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ A: ą║ąŠą┤ ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░ ą┤ą╗čÅ PIC16C62A"), čćč鹊ą▒čŗ ąŠąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓ąŠą▓ą░ą╗ ąÆą░čłąĖą╝ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝. ą×ą┤ąĮą░ą║ąŠ čüčéą░čĆą░ą╣č鹥čüčī čāčćąĖčéčŗą▓ą░čéčī ą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąĄčĆąĄąĘą░ą┐ąĖčüąĄą╣ (ąŠą│čĆą░ąĮąĖč湥ąĮąĮčŗą╣ čĆąĄčüčāčĆčü) ą╝ąĖą║čĆąŠčüčģąĄą╝ EEPROM, ąĖ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčāčÄ čāčéąĖą╗ąĖčéčā "Endurance" ąŠčé Microchip Technology, ą║ąŠą│ą┤ą░ čĆą░ąĘčĆą░ą▒ą░čéčŗą▓ą░ąĄč鹥 ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čü ąŠčüąŠą▒čŗą╝ąĖ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝ąĖ ą║ ąĮą░ą┤ąĄąČąĮąŠčüčéąĖ [11, 12].
[ąĪąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéčī ]
ą¤ąŠčćčéąĖ ą▓ąĄčüčī ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ ą║ąŠą┤ čüčéčĆąŠą│ąŠ čüą╗ąĄą┤čāąĄčé čüčāčēąĄčüčéą▓čāčÄčēąĖą╝ čüčéą░ąĮą┤ą░čĆčéą░ą╝ I2C ąĖ Smart Serial, ą┐ąŠčŹč鹊ą╝čā ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüąŠą▓ą╝ąĄčüčéąĖą╝ čü ą╗čÄą▒čŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ Serial EEPROM ąŠčé ą╗čÄą▒ąŠą│ąŠ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĖą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ čŹčéąĖčģ čüčéą░ąĮą┤ą░čĆč鹊ą▓. ą×ą┤ąĮą░ą║ąŠ ą║ąŠą┤ ą┐čĆąŠą▓ąĄčĆčÅą╗čüčÅ č鹊ą╗čīą║ąŠ čü ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ą╝ąĖ Microchip Serial EEPROM, ąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ čüą░ą╝ąŠčüč鹊čÅč鹥ą╗čīąĮąŠ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéčī ą║ąŠą┤ą░ čü ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ą╝ąĖ ą┐ą░ą╝čÅčéąĖ ąŠčé ą┤čĆčāą│ąĖčģ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣.
ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, ą▓ąŠąĘą╝ąŠąČąĮčŗ ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┐čĆąŠą▒ą╗ąĄą╝čŗ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ ąĮą░ čłą░ą│ąĄ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čüčģąĄą╝čŗ ą░ą┤čĆąĄčüą░čåąĖąĖ. ążą░ą║čéąĖč湥čüą║ąĖ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ ą▓ čüą╗čāčćą░ąĄ čćą░čüčéąĖčćąĮąŠą╣ ą░ą┤čĆąĄčüą░čåąĖąĖ (čćč鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąĮą░ čłą░ą│ąĄ 4 ą▓ čüą╗čāčćą░ąĄ Smart Serial) ąĮąĄ čÅą▓ą╗čÅąĄčéčüčÅ čćą░čüčéčīčÄ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ. ąØąĄčüą╝ąŠčéčĆčÅ ąĮą░ č鹊, čćč鹊 čü č鹥ą║čāčēąĄą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ Smart Serial ą┐čĆąĄą┤ą╗ą░ą│ą░ąĄą╝ąŠąĄ čĆąĄčłąĄąĮąĖąĄ čĆą░ą▒ąŠčéą░ąĄčé ąĮąŠčĆą╝ą░ą╗čīąĮąŠ (čü ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ą╝ąĖ Microchip ą▓ą┐ą╗ąŠčéčī ą┤ąŠ 24C256), ąĮąĄ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčéčüčÅ, čćč鹊 čŹč鹊 čéą░ą║ąČąĄ čģąŠčĆąŠčłąŠ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī ąĖ ą▓ ą▒čāą┤čāčēąĄą╝.
[ąøąĖčüčéąĖąĮą│ 1: I2C.INC ]
;********************************************************************** ;* ążą░ą╣ą╗: I2C.INC ;********************************************************************** ;* ąÉą▓č鹊čĆ: Lucio Di Jasio ;* ąÜąŠą╝ą┐ą░ąĮąĖčÅ: Microchip Technology ;* ąĀąĄą▓ąĖąĘąĖčÅ: RevA0 ;* ąöą░čéą░: 5-7-98 ;* ąÉčüčüąĄą╝ą▒ą╗ąĖčĆąŠą▓ą░ąĮąŠ čü ą┐ąŠą╝ąŠčēčīčÄ MPASM v02.15 ;********************************************************************** ;* ą¤čĆąĖą╝ąĄčĆčŗ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ READ/WRITE čłąĖąĮčŗ I2C/TWI ą┤ą╗čÅ ąŠą▒ąŠąĖčģ ;* ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ čüčģąĄą╝ ą░ą┤čĆąĄčüą░čåąĖąĖ Smart Serial ąĖ Standard I2C. ;* ąÆąĄčĆčüąĖčÅ PIC16CXXX mid-range (čÅą┤čĆąŠ 14 ą▒ąĖčé) ;* ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ: ;* 1) ąÆčüąĄ čéą░ą╣ą╝ąĖąĮą│ąĖ ąŠčüąĮąŠą▓ą░ąĮčŗ ąĮą░ ą║ą▓ą░čĆčåąĄ 4 ą£ąōčå čü čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ;* ą▓čĆąĄą╝ąĄąĮąĄą╝ ąĖąĮčüčéčĆčāą║čåąĖąĖ 1 ą╝ą║čü. ;* 2) ąÉą┤čĆąĄčüą░ ąĖ ą╗ąĖč鹥čĆą░ą╗čīąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą░ąĮčŗ ą▓ HEX-č乊čĆą╝ąĄ, ąĄčüą╗ąĖ ąĮąĄ čāą║ą░ąĘą░ąĮąŠ ;* čćč鹊-č鹊 ą┤čĆčāą│ąŠąĄ. ;***************************************************************************** ;* ąØą░ąĘąĮą░č湥ąĮąĖąĄ čäą░ą╣ą╗ą░ čĆąĄą│ąĖčüčéčĆąŠą▓ ;***************************************************************************** CBLOCK FLAGS
INDHI ; ą░ą┤čĆąĄčü
INDLO
DATO ; ą▒čāč乥čĆ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ čäčāąĮą║čåąĖą╣ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ
ERCODE ; ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ (čüą╝. čéą░ą▒ą╗ąĖčåčā ąĮąĖąČąĄ)
EEBUF ; ą▒čāč乥čĆ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ
SLAVEbuf ; SLAVE-ą░ą┤čĆčüąĄ (+ addrHi ąĮą░ 24LC16)
COUNT
AUX
ENDC ;********************************************************************** ; ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čäą╗ą░ą│ąŠą▓ ; # define FLAG_EE FLAGS ,0 ; ąŠčłąĖą▒ą║ąĖ čłąĖąĮčŗ I2C # define SMART FLAGS ,1 ; Smart(1) Standard(0) ; ;***************************************************************************** ;* ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą▒ąĖčé ;***************************************************************************** # define SLAVE B '10100000' ; ąÉą┤čĆąĄčü čāčüčéčĆąŠą╣čüčéą▓ą░ (1010xxx0) ; ą║ąŠą┤čŗ ąŠčłąĖą▒ąŠą║ # define ERR_NACK 1 ; ąĮąĄ ą┐čĆąŠčćąĖčéą░ąĮ ACK # define ERR_STOP 2 ; SDA ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮ ąĮą░ STOP # define ERR_TOWR 3 ; čéą░ą╣ą╝ą░čāčé čćč鹥ąĮąĖčÅ (> 20 ą╝čü) # define ERR_LOCK 4 ; SDA ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮ ą▓ BITOUT
;***************************************************************************** ;* RDbyte ;* ą¦č鹥ąĮąĖąĄ ąŠą┤ąĮąŠą│ąŠ ą▒ą░ą╣čéą░ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ serial EEPROM ;* ;* ąÆčģąŠą┤: INDHI/LO ;* SLAVE = ą░ą┤čĆąĄčü čāčüčéčĆąŠą╣čüčéą▓ą░ (1010xxx0) ;* ąÆčŗčģąŠą┤: DATO = ą┤ą░ąĮąĮčŗąĄ, ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ ąĖąĘ serial EEPROM ;***************************************************************************** RDbyte bcf FLAG_EE ; čüą▒čĆąŠčü čäą╗ą░ą│ą░ ąŠčłąĖą▒ą║ąĖ
call SETI2C ; čāčüčéą░ąĮąŠą▓ą║ą░ čāą║ą░ąĘą░č鹥ą╗čÅ ą░ą┤čĆąĄčüą░ ; ą▓čģąŠą┤ ą▓ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠąĄ čćč鹥ąĮąĖąĄ (sequential reading) RDnext call BSTART ; START
movf SLAVEbuf ,W ; ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ SLAVE addr(+IndHi ą┐čĆąĖ 24LC16)
movwf EEBUF
bsf EEBUF ,0 ; ą║ąŠą╝ą░ąĮą┤ą░ čćč鹥ąĮąĖčÅ
call TXI2C ; ą▓čŗą▓ąŠą┤ SLAVE + address + ą║ąŠą╝ą░ąĮą┤ą░ read
call RXI2C ; čćč鹥ąĮąĖąĄ ą▓ DATO ąĖ ACKnowledge
movf EEBUF ,W
movwf DATO
bsf STATUS ,C ; ACK = 1 (NOT ACK)
call BITOUT ; ą┤ą╗čÅ ąŠčüčéą░ąĮąŠą▓ą║ąĖ ą▓ą▓ąŠą┤ą░ (STOP)
goto BSTOP ; ą│ąĄąĮąĄčĆą░čåąĖčÅ STOP-ą▒ąĖčéą░
;***************************************************************************** ;* WRbyte ;* ąŚą░ą┐ąĖčüčī ąŠą┤ąĮąŠą│ąŠ ą▒ą░ą╣čéą░ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ EEPROM ;* ;* ąÆčģąŠą┤: DATO = ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ ;* INDHI/LO = ą░ą┤čĆąĄčü EEPROM ;* SLAVE = ą░ą┤čĆąĄčü čāčüčéčĆąŠą╣čüčéą▓ą░ (1010xxx0) ;* PROT = 1 SmartSerial | 0 Standard ;* ąÆčŗčģąŠą┤: FLAG_EE = čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ, ąĄčüą╗ąĖ ąŠą┐ąĄčĆą░čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī ąĮąĄčāą┤ą░čćąĮąŠ ;***************************************************************************** WRbyte bcf FLAG_EE ; čüą▒čĆąŠčü čäą╗ą░ą│ą░ ąŠčłąĖą▒ą║ąĖ
call SETI2C ; čāčüčéą░ąĮąŠą▓ą║ą░ čāą║ą░ąĘą░č鹥ą╗čÅ ą░ą┤čĆąĄčüą░
movf DATO ,W ; ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ DATO
movwf EEBUF ; ą▓ ą▒čāč乥čĆ
call TXI2C ; ą▓čŗą▓ąŠą┤ DATO ąĖ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ACKnowledge
call BSTOP ; ą│ąĄąĮąĄčĆą░čåąĖčÅ STOP-ą▒ąĖčéą░ ; čåąĖą║ą╗ ąŠąČąĖą┤ą░ąĮąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ąĘą░ą┐ąĖčüąĖ
movlw .80 ; 80 = čéą░ą╣ą╝ą░čāčé 20 ą╝čü
movwf AUX WRpoll CL RWDT ; čüą▒čĆąŠčü čüč鹊čĆąŠąČąĄą▓ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░
bcf FLAG_EE
call BSTART ; čüčéą░čĆčé
movlw SLAVE
movwf EEBUF
call TXI2C ; ąĖ ą║ąŠą╝ą░ąĮą┤ą░ ąĘą░ą┐ąĖčüąĖ
btfss FLAG_EE ; ąĄčüą╗ąĖ ąĮąĄ ACK -> ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ 3 -> BUSY
goto WRpollE
WRbusy decfsz AUX ,F
goto WRpoll
movlw ERR_TOWR ; čéą░ą╣ą╝ą░čāčé ąĘą░ą┐ąĖčüąĖ
call ERR WRpollE goto BSTOP ; ą▓čŗčģąŠą┤ čü ąŠčéą┐čĆą░ą▓ą║ąŠą╣ čüąĖą│ąĮą░ą╗ą░ STOP
;***************************************************************************** ;* SETI2C ;* ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čāą║ą░ąĘą░č鹥ą╗čī ą░ą┤čĆąĄčüą░ ąĮą░ INDHI/LO, ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüčģąĄą╝ą░ ;* ą░ą┤čĆąĄčüą░čåąĖąĖ Smart ąĖą╗ąĖ Standard, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čäą╗ą░ą│ą░ SMART. ;* ;* ąÆčģąŠą┤: INDHI = ą░ą┤čĆąĄčü EEPROM ;* INDLO ;* SLAVE = ą░ą┤čĆąĄčü čāčüčéčĆąŠą╣čüčéą▓ą░ (1010xxx0) ;* SMART = 1 Smart Serial | 0 Standard I2C ;* ąÆčŗčģąŠą┤: SLAVEbuf ą┤ą╗čÅ sequential read ;***************************************************************************** SETI2C
btfsc SMART ; ąĄčüą╗ąĖ 0, č鹊 Standard I2C
goto Smart ; ąĄčüą╗ąĖ 1, č鹊 Smart Serial
Standard
bcf STATUS ,C ;
rlf INDHI ,W ; ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄ ą║ slave-ą░ą┤čĆąĄčüčā
iorlw SLAVE ; čüčéą░čĆčłąĖčģ ą▒ąĖčé ą░ą┤čĆąĄčüą░
movwf EEBUF
movwf SLAVEbuf ; čüąŠčģčĆą░ąĮąĄąĮąĖąĄ ą┤ą╗čÅ sequential read
call BSTART ; ą│ąĄąĮąĄčĆą░čåąĖčÅ START-ą▒ąĖčéą░
call TXI2C ; ą▓čŗą▓ąŠą┤ ą┐ąĄčĆą▓ąŠą│ąŠ ą▒ą░ą╣čéą░ ą║ąŠą╝ą░ąĮą┤čŗ
goto SETseq
Smart
movlw SLAVE ; ą┐ąŠą┤ą│ąŠč鹊ą▓ą║ą░ slave-ą░ą┤čĆąĄčüą░
movwf EEBUF
movwf SLAVEbuf ; čüąŠčģčĆą░ąĮąĄąĮąĖąĄ ą┤ą╗čÅ sequential read
call BSTART ; ą│ąĄąĮąĄčĆą░čåąĖčÅ START-ą▒ąĖčéą░
call TXI2C ; ą▓čŗą▓ąŠą┤ ą┐ąĄčĆą▓ąŠą│ąŠ ą▒ą░ą╣čéą░ ą║ąŠą╝ą░ąĮą┤čŗ
movf INDHI ,W ;
movwf EEBUF ; ą▓čŗą▓ąŠą┤ čüčéą░čĆčłąĄą│ąŠ ą▒ą░ą╣čéą░ ą░ą┤čĆąĄčüą░
call TXI2C SETseq
movf INDLO ,W ; ąŠčéą┐čĆą░ą▓ą║ą░ ą╝ą╗ą░ą┤čłąĄą│ąŠ ą▒ą░ą╣čéą░ ą░ą┤čĆąĄčüą░
movwf EEBUF
goto TXI2C ; ą▓čŗą▓ąŠą┤ ą░ą┤čĆąĄčüą░ čüą╗ąŠą▓ą░
;***************************************************************************** ;* TXI2C ;* ą¤ąĄčĆąĄą┤ą░ąĄčé 8 ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ ;* ;* ąÆčģąŠą┤: EEBUF ;* ąÆčŗčģąŠą┤: ąĮąĄčé ;***************************************************************************** TXI2C
movlw .8 ; Set counter for eight bits
movwf COUNT TXlp
rlf EEBUF ,F ; ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ CARRY
call BITOUT ; ąŠčéą┐čĆą░ą▓ą║ą░ ą▒ąĖčéą░
decfsz COUNT ,F ; ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ 8 ą▒ąĖčé?
goto TXlp ; ąĮąĄčé...
call BITIN ; čćč鹥ąĮąĖąĄ ą▒ąĖčéą░ ACK
movlw ERR_NACK
btfsc STATUS ,C ; ą┐čĆąŠą▓ąĄčĆą║ą░ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ
call ERR ; ąĮąĄčé ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░
return
;***************************************************************************** ;* BITOUT ;* ą×čéą┐čĆą░ą▓ą║ą░ ąŠą┤ąĮąŠą│ąŠ ą▒ąĖčéą░ ;* ;* ąÆčģąŠą┤: ą▒ąĖčé ą▓ čäą╗ą░ą│ąĄ ą┐ąĄčĆąĄąĮąŠčüą░ CARRY ;* ąÆčŗčģąŠą┤: ą▒ąĖčé ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą┐ąŠ čłąĖąĮąĄ I2C ;* ąĢčüą╗ąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ, č鹊 čāčüčéą░ąĮąŠą▓čÅčéčüčÅ ą▒ąĖčéčŗ ąŠčłąĖą▒ą║ąĖ. ;***************************************************************************** BITOUT
btfss STATUS ,C ; 0 ąĖą╗ąĖ 1?
goto Bit0
Bit1
bsf STATUS ,RP0 ; ą▓čŗą▒ąŠčĆ RAM bank 1
bsf SDA ; ą▓čģąŠą┤ SDA (pull up -> 1)
bcf STATUS ,RP0 ; ąŠą▒čĆą░čéąĮąŠ ą▓ RAM bank 0
movlw ERR_LOCK
btfss SDA ; ą¤čĆąŠą▓ąĄčĆą║ą░ ąĮą░ ąŠčłąĖą▒ą║čā
call ERR ; SDA ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮ ą╝ąĖą║čĆąŠčüčģąĄą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ
goto Cl k1
Bit0
bsf STATUS ,RP0 ; ą▓čŗą▒ąŠčĆ RAM bank 1
bcf SDA ; ą▓čŗčģąŠą┤ SDA
bcf STATUS ,RP0 ; ąŠą▒čĆą░čéąĮąŠ ą▓ RAM bank 0
bcf SDA ; čüą▒čĆąŠčü ą▓ 0
nop ; ąĘą░ą┤ąĄčƹȹ║ą░ Clk1
bsf SCL ; ą┐ąĄčĆąĄą▓ąŠą┤ SCL ą▓ ą╗ąŠą│. 1
nop
nop
nop ; ąĘą░ą┤ąĄčƹȹ║ą░ ą╝ąĖąĮąĖą╝čāą╝ 4 ą╝ą║čü
nop
nop
bcf SCL ; ą┐ąĄčĆąĄą▓ąŠą┤ SCL ą▓ ą╗ąŠą│. 0
return
;***************************************************************************** ;* RXI2C ;* ą¤čĆąĖąĄą╝ 8 ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ ;* ;* ąÆčģąŠą┤: ąĮąĄčé ;* ąÆčŗčģąŠą┤: RXBUF = ą┐čĆąĖąĮčÅčéčŗą╣ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ;***************************************************************************** RXI2C
movlw .8 ; 8 ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ
movwf COUNT
clrf EEBUF RXlp
call BITIN ; ąĮąŠą▓čŗą╣ ą▒ąĖčé ą▓ CARRY
rlf EEBUF ,F ; ą▓ą▓ąŠą┤ ąĮąŠą▓ąŠą│ąŠ ą▒ąĖčéą░
decfsz COUNT ,F ; ąŠą▒čĆą░ą▒ąŠčéą░ąĮąŠ 8 ą▒ąĖčé?
goto RXlp
return
;***************************************************************************** ;* BITIN ;* ą¤čĆąĖąĄą╝ ąŠą┤ąĮąŠą│ąŠ ą▒ąĖčéą░ ;* ;* ąÆčģąŠą┤: ąĮąĄčé ;* ąÆčŗčģąŠą┤: EEBUF, 0 ą┐čĆąĖąĮčÅčéčŗą╣ ą▒ąĖčé ;***************************************************************************** BITIN
bsf STATUS ,RP0 ; ą▓čŗą▒ąŠčĆ RAM bank 1
bsf SDA ; čāčüčéą░ąĮąŠą▓ą║ą░ SDA ą┤ą╗čÅ ą▓ą▓ąŠą┤ą░
bcf STATUS ,RP0 ; ąŠą▒čĆą░čéąĮąŠ ą▓ RAM bank 0
bsf SCL ; SCL = 1
nop
nop
nop
nop ; ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ
CLRC
btfsc SDA ; čćč鹥ąĮąĖąĄ SDA ą▓ CARRY
bsf STATUS ,C
bcf SCL ; ą▓ąŠąĘą▓čĆą░čé čü SCL = 0
return
;***************************************************************************** ;* ąōąĄąĮąĄčĆą░čåąĖčÅ ą▒ąĖčéą░ START ;* ;* ąÆčģąŠą┤: ąĮąĄčé ;* ąÆčŗčģąŠą┤: ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ ąŠą▒ą╝ąĄąĮ ą┐ąŠ čłąĖąĮąĄ ;***************************************************************************** BSTART
bsf STATUS ,RP0 ; ą▓čŗą▒ąŠčĆ RAM bank 1
bsf SDA ; ą▓čģąŠą┤ SDA (pull up -> 1)
bcf STATUS ,RP0 ; ąŠą▒čĆą░čéąĮąŠ ą▓ RAM bank 0
bsf SCL ; SCL = 1
nop
nop
nop
nop ; 5 ą╝ą║čü ą┐ąĄčĆąĄą┤ čüą┐ą░ą┤ąŠą╝ SDA
bsf STATUS ,RP0 ; ą▓čŗą▒ąŠčĆ RAM bank 1
bcf SDA ; ą▓čŗčģąŠą┤ SDA
bcf STATUS ,RP0 ; ąŠą▒čĆą░čéąĮąŠ ą▓ RAM bank 0
bcf SDA ; SDA = 0
nop
nop
nop
nop ; 4 ą╝ą║čü ą┐ąĄčĆąĄą┤ čüą┐ą░ą┤ąŠą╝ SCL
bcf SCL ; ąĮą░čćą░ą╗ąŠ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ čéą░ą║č鹊ą▓
return
;***************************************************************************** ;* ąōąĄąĮąĄčĆą░čåąĖčÅ ą▒ąĖčéą░ STOP ;* ;* ąÆčģąŠą┤: ąĮąĄčé ;* ąÆčŗčģąŠą┤: STOP condition ąĮą░ čłąĖąĮąĄ ;***************************************************************************** BSTOP
bsf STATUS ,RP0 ; ą▓čŗą▒ąŠčĆ RAM bank 1
bcf SDA ; ą▓čŗčģąŠą┤ SDA
bcf STATUS ,RP0 ; ąŠą▒čĆą░čéąĮąŠ ą▓ RAM bank 0
bcf SDA ; SDA = 0
bsf SCL ; SCL = 1
nop
nop
nop
nop ; 4 ą╝ą║čü ą┐ąĄčĆąĄą┤ ąĮą░čĆą░čüčéą░ąĮąĖąĄą╝ SDA
bsf STATUS ,RP0 ; ą▓čŗą▒ąŠčĆ RAM bank 1
bsf SDA ; ą▓čģąŠą┤ SDA (pull-up -> 1) ą┐ąŠą║ą░ SCL = 1
bcf STATUS ,RP0 ; ąŠą▒čĆą░čéąĮąŠ ą▓ RAM bank 0
movlw ERR_STOP ; ą┐ąŠą╗čāč湥ąĮąĖąĄ ą║ąŠą┤ą░ ąŠčłąĖą▒ą║ąĖ
btfss SDA ; ą╗ąŠą│. 1?
call ERR ; ąŠčłąĖą▒ą║ą░, SDA ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮ ą┐ąĄčĆąĄą┤ STOP
bcf SCL ; SCL = 0
return
;***************************************************************************** ;* TWI/I2C - čéą░ą▒ą╗ąĖčåą░ ąŠčłąĖą▒ąŠą║ čüąŠčüč鹊čÅąĮąĖčÅ ąŠą▒ą╝ąĄąĮą░ CPU ;* ;* ąÆčģąŠą┤: W-reg = ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ ;* ąÆčŗčģąŠą┤: ERCODE = ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ ;* FLAG(ERROR) = 1 ;***************************************************************************** ERR
bcf STATUS ,RP0 ; ąŠą▒čĆą░čéąĮąŠ ą▓ RAM bank 0 ; ąĘą░ą┐ąĖčüčī ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ ąŠčłąĖą▒ą║ąĖ
movwf ERCODE ; čüąŠčģčĆą░ąĮąĄąĮąĖąĄ ą║ąŠą┤ą░ ąŠčłąĖą▒ą║ąĖ
bsf FLAG_EE ; čāčüčéą░ąĮąŠą▓ą║ą░ čäą╗ą░ą│ą░ ąŠčłąĖą▒ą║ąĖ
return
[ąøąĖčüčéąĖąĮą│ 2: I2CAUTO.ASM ]
LIST n = 0 , c = 132
RADIX HEX
PROCESSOR PIC16C62A
;********************************************************************** ;* ążą░ą╣ą╗: I2CAUTO.ASM ;********************************************************************** ;* ąÉą▓č鹊čĆ: Lucio Di Jasio ;* ąÜąŠą╝ą┐ą░ąĮąĖčÅ: Microchip Technology ;* ąĀąĄą▓ąĖąĘąĖčÅ: RevA0 ;* ąöą░čéą░: 5-7-98 ;* ąÉčüčüąĄą╝ą▒ą╗ąĖčĆąŠą▓ą░ąĮąŠ čü ą┐ąŠą╝ąŠčēčīčÄ MPASM v02.15 ;********************************************************************** ;* ą¤ąŠą┤ą║ą╗čÄčćą░ąĄą╝čŗąĄ čäą░ą╣ą╗čŗ: ;* p16c62A.inc rev1.01 ;* ;********************************************************************** ;* ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čĆą░ąĘą╝ąĄčĆą░ ą┐ą░ą╝čÅčéąĖ I2C EEPROM. ;* ;* PIC16CXXX /+5V ;* +-----------+ | ;* | Vdd+--------------+--------+ 24CXXX ;* | | +++ | +--------+ ;* | | | | +--+Vdd | ;* | | | | 4k7 | | ;* | | +++ | | ;* | RC4+--------------+-----------+SDA | ;* | RC3+--------------------------+SCL | ;* | | | | ;* | Vss+--------------+-----------+Vss | ;* +-----------+ | +--------+ ;* GND ;* ;* ą£ąŠąČąĮąŠ ą┐čĆąŠą▓ąĄčĆąĖčéčī ąĮą░ PICDEM2 demo board. ;**********************************************************************
INCLUDE "P16C62A.INC"
__CONFIG _XT_OSC & _CP_OFF & _WDT_ON
__IDLOCS H '62A0' ;********************************************************************** ;* ąÆąĮąĄčłąĮąĖą╣ ą║ą▓ą░čĆčå 4 ą£ąōčå ;* ąĮąĄčé ąĘą░čēąĖčéčŗ ą║ąŠą┤ą░ ;* ąĮąĄčé čüč鹊čĆąŠąČąĄą▓ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░ ;* ID code "62A0" ;********************************************************************** ; ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓ # define SDA PORTC ,4 ; i I2C SDA # define SCL PORTC ,3 ; o I2C SCL MASKA equ 0 FF ; ą▓čüąĄ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą▓čģąŠą┤čŗ MASKB equ 00 ; ą▓čüąĄ ą▓čŗčģąŠą┤čŗ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ LED MASKC equ b '11110111' ; ąĮą░ čŹč鹊ą╝ ą┐ąŠčĆč鹥 čüąĖą│ąĮą░ą╗čŗ SCL ąĖ SDA ; SCL ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ ąĮą░ ą▓čŗčģąŠą┤ ;------------------------------------------------------------ ; ąØą░ąĘąĮą░č湥ąĮąĖąĄ RAM
CBLOCK 20
TEMP
SIZELO ; čĆą░ąĘą╝ąĄčĆ ą┐ą░ą╝čÅčéąĖ
SIZEHI
TYPE ; čéąĖą┐ ą┐ą░ą╝čÅčéąĖ
ENDC ;**********************************************************************
org 00 ; ą▓ąĄą║č鹊čĆ čüą▒čĆąŠčüą░
goto Start
;**********************************************************************
org 04 ; ą▓ąĄą║č鹊čĆ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ
retfie ; ą▓ąŠąĘą▓čĆą░čé čü ą┐ąŠą▓č鹊čĆąĮčŗą╝ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣
;**********************************************************************
INCLUDE "i2c.inc" ;********************************************************************** ;* MemDetect: ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čĆą░ąĘą╝ąĄčĆą░ ą┐ą░ą╝čÅčéąĖ ;* ;* ąÆčģąŠą┤: ąĮąĄčé ;* ąÆčŗčģąŠą┤: SIZEHI/LO ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ą┐ą░ą╝čÅčéąĖ ;* TYPE čéąĖą┐ ą┐ą░ą╝čÅčéąĖ (čüą╝. čéą░ą▒ą╗ąĖčåčā ąĮąĖąČąĄ) ;* FLAG_EE čäą╗ą░ą│ ąŠčłąĖą▒ą║ąĖ čłąĖąĮčŗ ;* ERCODE ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ čłąĖąĮčŗ ;* ;* Standard I2C Smart Serial ;* TYPE SIZE MODEL TYPE SIZE MODEL ;* 01 128 24C01/21/41 32 4096 24C32 ;* 02 256 24C02/62 64 8192 24C65/64 ;* 04 512 24C04 128 16384 24C128 ;* 08 1024 24C08 0 32768 24C256 ;* 16 2048 24C16/164 ;* ;********************************************************************** MemDetect
clrf INDHI ; ą░ą┤čĆąĄčü 0000h
clrf INDLO
bsf SMART ; write(smart, 0000, 1)
movlw 1
movwf DATO
call WRbyte
bcf SMART
call RDbyte ; read(standard, 0000)
movf DATO ,W
btfsc STATUS ,Z
goto StandardD
SmartD
bsf SMART ; čŹč鹊 Smart Serial
movlw HIGH (.4096 )
movwf SI ZEHI ; čĆą░ąĘą╝ąĄčĆ = 4096 ą▒ą░ą╣čé
clrf SI ZELO
movlw .32
movwf TYPE ; ąĮą░čćąĖąĮą░ąĄą╝ čü TYPE = 24C32
goto TestD
StandardD
bcf SMART ; čŹč鹊 Standard Serial
movlw .128
movwf SI ZELO ; čĆą░ąĘą╝ąĄčĆ = 128 byte
clrf SI ZEHI
movlw 01
movwf TYPE ; ąĮą░čćąĖąĮą░ąĄą╝ čü TYPE = 24C01 TestD
call RDbyte ; TEMP=read(0)
movf DATO ,W
movwf TEMP LoopDet movf SI ZELO ,W ; DATO=read(SMART, size)
movwf INDLO
movf SI ZEHI ,W
movwf INDHI
call RDbyte
movf DATO ,W
xorwf TEMP ,W ; čüčĆą░ą▓ąĮąĄąĮąĖąĄ TEMP čü DATO
btfss STATUS ,Z
goto LoopDN
incf TEMP ,W ; ąĄčüą╗ąĖ čĆą░ą▓ąĮąŠ, č鹊 TEMP=TEMP+1
movwf TEMP
movwf DATO
clrf INDHI
clrf INDLO
call WRbyte ; write(SMART, 0000, TEMP)
movf SI ZELO ,W ; if (read(SMART, size) == TEMP)
movwf INDLO
movf SI ZEHI ,W
movwf INDHI
call RDbyte
movf DATO ,w ; ąĄčüą╗ąĖ ą▓čüąĄ ąĄčēąĄ ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, č鹊 čŹč鹊 ąĘąĮą░čćąĖčé,
xorwf TEMP ,W ; čćč鹊 ą╝čŗ ą┤ąŠčüčéąĖą│ą╗ąĖ čĆąĄą░ą╗čīąĮąŠą│ąŠ čĆą░ąĘą╝ąĄčĆą░ ą┐ą░ą╝čÅčéąĖ
btfsc STATUS ,Z
goto DetEx
LoopDN
bcf STATUS ,C ; čāą┤ą▓ąŠąĄąĮąĖąĄ čĆą░ąĘą╝ąĄčĆą░ ą┐ą░ą╝čÅčéąĖ
rlf SI ZELO ,F
rlf SI ZEHI ,F
bcf STATUS ,C
rlf TYPE ,F ; čāą┤ą▓ąŠąĄąĮąĖąĄ ą║ąŠą┤ą░ TYPE
btfss TYPE ,4
goto LoopDet
DetEx
nop
return
;********************************************************************** ; ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą┐ąŠčĆč鹊ą▓ ąĖ čĆąĄą│ąĖčüčéčĆą░ ąŠą┐čåąĖą╣ Start
bsf STATUS ,RP0 ; ą▓čŗą▒ąŠčĆ RAM bank 1
movlw MASKA ; čāčüčéą░ąĮąŠą▓ą║ą░ čĆąĄą│ąĖčüčéčĆąŠą▓ tris
movwf PORTA ; PORTA
movlw MASKB ;
movwf PORTB ; PORTB
movlw MASKC ;
movwf PORTC ; PORTC
movlw b '00000111' ; čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ pullup, ą┐čĆąĄčüą║ą░ą╗ąĄčĆ TMR0 1:256
movwf OPTION_REG
bcf STATUS ,RP0
clrf FLAGS ; čüą▒čĆąŠčü ą▓čüąĄčģ čäą╗ą░ą│ąŠą▓
;**********************************************************************
Main
call MemDetect ; ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čĆą░ąĘą╝ąĄčĆą░ ą┐ą░ą╝čÅčéąĖ
movf TYPE ,W ; ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐ą╗ą░čéą░ PICDEM2, č鹊
movwf PORTB ; TYPE ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ąĮą░ čüą▓ąĄč鹊ą┤ąĖąŠą┤čŗ LED MainLoop
goto MainLoop ; ąĘą░čåąĖą║ą╗ąĖą▓ą░ąĮąĖąĄ ą┤ąŠ čüą▒čĆąŠčüą░
END
[ąĪčüčŗą╗ą║ąĖ ]
1 . AN690 I2C Memory Autodetect site:microchip.com (00690a.pdf).2 . Best way to detect EEPROM size site:avrfreaks.net.3 . AN515 Communicating with I2CŌäó Bus Using the PIC16C5X, Bruce Negley.4 . AN535 Logic Powered Serial EEPROMs, R. J. Fisher and Bruce Negley.5 . AN558 Using the 24xx65 and the 24xx32 with Stand-alone PIC16C54 Code, Dick Fisher and Bruce Negley.6 . AN567 Interfacing the 24LCxxB Serial EEPROMs to the PIC16C54, Bruce Negley.7 . AN608 Converting to 24LCXXB and 93LCxx Serial EEPROMs, Nathan John.8 . AN536 Basic Serial EEPROM Operation, Steve Drehobl.9 . AN554 Software Implementation of I2CŌäó Bus Master, Amar Palacherla.10 . AN559 Optimizing Serial Bus Operations with Proper Write Cycle Times, Lenny French.11 . AN537 Serial EEPROM Endurance, Steve Drehobl.12 . AN602 How to get 10 Million Cycles Out of Your Microchip Serial EEPROM, David Wilkie.