|
ŌĆó ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐čĆąŠč鹊ą║ąŠą╗ Dallas 1-Wire┬« ąĮą░ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ.
ŌĆó ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ čüąŠą▓ą╝ąĄčüčéąĖą╝ą░ čüąŠ ą▓čüąĄą╝ąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ą╝ąĖ AVR.
ŌĆó ą£ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą▒čĆą░ąĮą░ čĆą░ą▒ąŠčéą░ ą┐ąŠ ąŠą┐čĆąŠčüčā ąĖą╗ąĖ ą┐ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝.
ŌĆó ąÆą░čĆąĖą░ąĮčé čü ąŠą┐čĆąŠčüąŠą╝ ąĮąĄ čéčĆąĄą▒čāąĄčé ąĮąĖą║ą░ą║ąŠą╣ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ąŚą┤ąĄčüčī ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐ąĄčĆąĄą▓ąŠą┤ ą┤ą░čéą░čłąĖčéą░ Atmel AVR318: Dallas 1-Wire┬« master [1].
[ąÆą▓ąĄą┤ąĄąĮąĖąĄ]
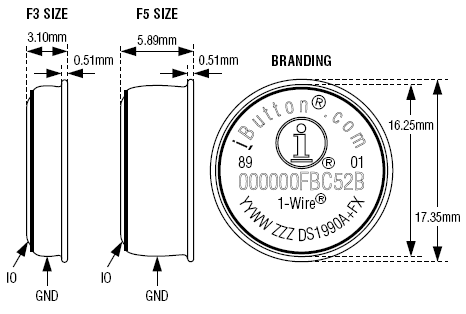
ąŻčüčéčĆąŠą╣čüčéą▓ą░ Dallas 1-Wire┬« čāąĮąĖą║ą░ą╗čīąĮčŗ č鹥ą╝, čćč鹊 ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ ąĖą╝ čéčĆąĄą▒čāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ čüąĖą│ąĮą░ą╗čīąĮčŗą╣ ą┐čĆąŠą▓ąŠą┤ ąĖ ąŠą▒čēąĖą╣ ą┐čĆąŠą▓ąŠą┤. ąś ą┐ąŠą┤ą░čćą░ ą┐ąĖčéą░ąĮąĖčÅ, ąĖ ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ ą▓ ąŠą▒ąŠąĖčģ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅčģ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┐ąŠ 1 ą┐čĆąŠą▓ąŠą┤čā (ąŠčéčüčÄą┤ą░ ąĖ ą┐ąŠčłą╗ąŠ ąĮą░ąĘą▓ą░ąĮąĖąĄ čłąĖąĮčŗ 1-Wire). ąŻčüčéčĆąŠą╣čüčéą▓ą░ 1-Wire ąĘą░ą▓ąŠąĄą▓ą░ą╗ąĖ ąĘą░čüą╗čāąČąĄąĮąĮčāčÄ ą┐ąŠą┐čāą╗čÅčĆąĮąŠčüčéčī ą▓ ą║ą░č湥čüčéą▓ąĄ 菹╗ąĄą║čéčĆąŠąĮąĮčŗčģ ą║ą╗čÄč湥ą╣ (ą║ą╗čÄčćąĖ-čéą░ą▒ą╗ąĄčéą║ąĖ iButton čüąĄčĆąĖą╣ DS1990) ąĖ ą┤ą░čéčćąĖą║ąŠą▓ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ (DS18B20).
 |
 |
ąöą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čüą╝ąŠą│ ąŠą▒ą╝ąĄąĮąĖą▓ą░čéčīčüčÅ ą┤ą░ąĮąĮčŗą╝ąĖ ą┐ąŠ ą┐čĆąŠč鹊ą║ąŠą╗čā 1-Wire, ąĮčāąČąĄąĮ č鹊ą╗čīą║ąŠ 1 ą▓čŗą▓ąŠą┤ ą┐ąŠčĆčéą░ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ GPIO. ąŁč鹊čé ą░ą┐ąĮąŠčāčé ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ ą╝ąŠąČąĮąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą╝ą░čüč鹥čĆą░ čłąĖąĮčŗ 1-Wire ąĮą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ AVR ą▓ ą┤ą▓čāčģ ą▓ą░čĆąĖą░ąĮčéą░čģ: ą╗ąĖą▒ąŠ čćąĖčüč鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ (ą▓ą░čĆąĖą░ąĮčé čü ąŠą┐čĆąŠčüąŠą╝), ą╗ąĖą▒ąŠ čü ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮąĖąĄą╝ ą╝ąŠą┤čāą╗čÅ USART (UART).
[ąØąĄą╝ąĮąŠą│ąŠ č鹥ąŠčĆąĖąĖ: ą║ą░ą║ čĆą░ą▒ąŠčéą░ąĄčé ą┐čĆąŠč鹊ą║ąŠą╗ Dallas 1-Wire]
ąÜą░ą║ čāąČąĄ čāą┐ąŠą╝ąĖąĮą░ą╗ąŠčüčī, čłąĖąĮą░ 1-Wire ąĖčüą┐ąŠą╗čīąĘčāąĄčé č鹊ą╗čīą║ąŠ 1 ą┐čĆąŠą▓ąŠą┤ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ąĖčéą░ąĮąĖčÅ ąĖ čüąĖą│ąĮą░ą╗ąŠą▓. ą×ą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ ą░čüąĖąĮčģčĆąŠąĮąĮčŗą╣ ąĖ ą┐ąŠą╗čāą┤čāą┐ą╗ąĄą║čüąĮčŗą╣, ąĖ čüą╗ąĄą┤čāąĄčé ąČąĄčüčéą║ąŠą╣ čüčģąĄą╝ąĄ master-slave (ą│ą╗ą░ą▓ąĮčŗą╣-ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╣). ą×ą┤ąĮąŠ ąĖą╗ąĖ čüčĆą░ąĘčā ąĮąĄčüą║ąŠą╗čīą║ąŠ slave-čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą║ ąŠą┤ąĮąŠą╣ čłąĖąĮąĄ, ą┐čĆąĖč湥ą╝ ąĮą░ čŹč鹊ą╣ čłąĖąĮąĄ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą╝ą░čüč鹥čĆ.
ąÆ čüąŠčüč鹊čÅąĮąĖąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle) ąĮą░ čłąĖąĮąĄ ą▓čŗčüąŠą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī, ą┤ą╗čÅ čŹč鹊ą│ąŠ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąĖčüčāčéčüčéą▓ąŠą▓ą░čéčī ą▓ąĄčĆčģąĮąĖą╣ ąĮą░ą│čĆčāąĘąŠčćąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆ (pull-up), č湥čĆąĄąĘ ą║ąŠč鹊čĆčŗą╣ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą┐čĆąĖčģąŠą┤ąĖčé ą┐ąĖčéą░ąĮąĖąĄ. ą¦č鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą▓ąĄą╗ąĖčćąĖąĮčā pull-up čĆąĄąĘąĖčüč鹊čĆą░, ąĘą░ą│ą╗čÅąĮąĖč鹥 ą▓ ą┤ą░čéą░čłąĖčé ąĮą░ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ. ąÆčüąĄ čāčüčéčĆąŠą╣čüčéą▓ą░, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗąĄ ą║ čłąĖąĮąĄ, ą┤ąŠą╗ąČąĮčŗ ąĖą╝ąĄčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐čĆąĖčéčÅąĮčāčéčī čāčĆąŠą▓ąĄąĮčī čłąĖąĮčŗ ą║ ą╗ąŠą│. 0. ą¤ąŠčüą╗ąĄ master čéčĆąĄą▒čāąĄčéčüčÅ ąĮą░ą╗ąĖčćąĖąĄ ą▒čāč乥čĆą░ čü ą▓čŗčģąŠą┤ąŠą╝ ą▓ ą▓ąĖą┤ąĄ ąŠčéą║čĆčŗč鹊ą│ąŠ ą║ąŠą╗ą╗ąĄą║č鹊čĆą░ ąĖą╗ąĖ ąŠčéą║čĆčŗč鹊ą│ąŠ čüč鹊ą║ą░, ąĄčüą╗ąĖ čā master ąĮąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ ą┐ąŠčĆčé ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą▓ čéčĆąĄčéčīąĄ čüąŠčüč鹊čÅąĮąĖąĄ.
ą×ą▒ą╝ąĄąĮ čüąĖą│ąĮą░ą╗ą░ą╝ąĖ ą┐ąŠ čłąĖąĮąĄ 1-Wire čĆą░ąĘą┤ąĄą╗ąĄąĮ ąĮą░ čüą╗ąŠčéčŗ ą┐ąŠ 60 ą╝ą║čü. ąÆ č鹥č湥ąĮąĖąĄ ąŠą┤ąĮąŠą│ąŠ čüą╗ąŠčéą░ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ąŠą┤ąĖąĮ ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ. ąØą░ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī čüą╗ąŠčéą░ čüčāčēąĄčüčéą▓čāčÄčé ą▒ąŠą╗čīčłąĖąĄ ą┤ąŠą┐čāčüą║ąĖ ąŠčé ąĮąŠą╝ąĖąĮą░ą╗ą░, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čāą┐čĆąŠčüčéąĖčéčī ąĖ čāą┤ąĄčłąĄą▓ąĖčéčī ąĖąĘą│ąŠč鹊ą▓ą╗ąĄąĮąĖąĄ slave-čāčüčéčĆąŠą╣čüčéą▓. ą×ą┤ąĮą░ą║ąŠ ą▓čüąĄ čĆą░ą▓ąĮąŠ ąŠčé master čéčĆąĄą▒čāąĄčéčüčÅ ą▓čŗčüąŠą║ą░čÅ č鹊čćąĮąŠčüčéčī ą▓ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĖ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ čłąĖąĮčŗ, čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ čüąŠ slave-čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ čü čĆą░ąĘąĮąŠą╣ ą▒ą░ąĘąŠą╣ ą▓čĆąĄą╝ąĄąĮąĖ. ąóą░ą║ čćč鹊 ąŠč湥ąĮčī ą▓ą░ąČąĮąŠ čāą║ą╗ą░ą┤čŗą▓ą░čéčīčüčÅ ą▓ ą╗ąĖą╝ąĖčéčŗ ą▓čĆąĄą╝ąĄąĮąĖ, ąŠą┐ąĖčüą░ąĮąĮčŗąĄ ą▓ čüą╗ąĄą┤čāčÄčēąĖčģ čüąĄą║čåąĖčÅčģ. ąæąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ ą┐čĆąŠ ą┐čĆąŠč鹊ą║ąŠą╗ 1-Wire ąĮą░ čĆčāčüčüą║ąŠą╝ čÅąĘčŗą║ąĄ ą╝ąŠąČąĮąŠ ą┐ąŠčćąĖčéą░čéčī ą▓ čüčéą░čéčīąĄ [2].
ąæą░ąĘąŠą▓čŗąĄ čüąĖą│ąĮą░ą╗čŗ čłąĖąĮčŗ 1-Wire
ąŻčüčéčĆąŠą╣čüčéą▓ąŠ master (ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ) ąĮą░čćąĖčéą░ąĄčé ą╗čÄą▒čāčÄ ą┐čĆąŠčåąĄą┤čāčĆčā ąŠą▒ą╝ąĄąĮą░ ąĮą░ čłąĖąĮąĄ ą┐čāč鹥ą╝ ą┐čĆąĖčéčÅą│ąĖą▓ą░ąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ čłąĖąĮčŗ ą║ ą╗ąŠą│. 0. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┐čĆąĖ ą┐ąĄčĆąĄą┤ą░č湥 ą║ą░ąČą┤ąŠą│ąŠ ą▒ąĖčéą░, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ, ą╝ą░čüč鹥čĆ ą▓čüąĄą│ą┤ą░ ąĖąĮąĖčåąĖąĖčĆčāąĄčé ą┐ąĄčĆąĄą┤ą░čćčā ą▒ąĖčéą░. ąŁč鹊 ą▓čüąĄą│ą┤ą░ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┐ąĄčĆąĄą▓ąŠą┤ąŠą╝ čłąĖąĮčŗ master-ąŠą╝ ą▓ ą╗ąŠą│. 0, čćč鹊 čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆčāąĄčé ą╗ąŠą│ąĖą║čā ą▓čĆąĄą╝ąĄąĮąĖ čāčćą░čüčéąĮąĖą║ąŠą▓ ąŠą▒ą╝ąĄąĮą░ čłąĖąĮčŗ. ąśą╝ąĄąĄčéčüčÅ 5 ą▒ą░ąĘąŠą▓čŗčģ ą║ąŠą╝ą░ąĮą┤ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą┐ąŠ čłąĖąĮąĄ 1-Wire: "Write 1", "Write 0", "Read", "Reset" ąĖ "Presence".
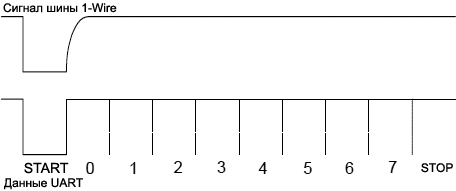
Write 1. ąŁč鹊čé čüąĖą│ąĮą░ą╗ ą┐ąŠą║ą░ąĘą░ąĮ ąĮą░ čĆąĖčü. 1. Master ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé čłąĖąĮčā ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 0 ąĮą░ ą▓čĆąĄą╝čÅ ąŠčé 1 ą┤ąŠ 15 ą╝ą║čü. ąŚą░č鹥ą╝ master ąŠčéą┐čāčüą║ą░ąĄčé čłąĖąĮčā ąĮą░ ąŠčüčéą░ą▓čłąĄąĄčüčÅ ą▓čĆąĄą╝čÅ čüą╗ąŠčéą░.

ąĀąĖčü. 1. ąÜąŠą╝ą░ąĮą┤ą░-čüąĖą│ąĮą░ą╗ "Write 1".
Write 0. ąŁč鹊čé čüąĖą│ąĮą░ą╗ ą┐ąŠą║ą░ąĘą░ąĮ ąĮą░ čĆąĖčü. 2. Master ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé čłąĖąĮčā ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 0 ąĮą░ ą▓čĆąĄą╝čÅ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 60 ą╝ą║čü, ąĮąŠ ąĮąĄ ą┤ąŠą╗čīčłąĄ 120 ą╝ą║čü.

ąĀąĖčü. 2. ąÜąŠą╝ą░ąĮą┤ą░-čüąĖą│ąĮą░ą╗ "Write 0".
Read. ąÜąŠą╝ą░ąĮą┤ą░ čćč鹥ąĮąĖčÅ ą┐ąŠą║ą░ąĘą░ąĮą░ ąĮą░ čĆąĖčü. 3. Master ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé čłąĖąĮčā ą▓ ą╗ąŠą│. 0 ąĮą░ ą▓čĆąĄą╝čÅ ąŠčé 1 ą┤ąŠ 15 ą╝ą║čü. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ slave čāą┤ąĄčƹȹĖą▓ą░ąĄčé čłąĖąĮčā ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąŠą│. 0, ąĄčüą╗ąĖ ąŠąĮąŠ čģąŠč湥čé ą┐ąĄčĆąĄą┤ą░čéčī 0. ąĢčüą╗ąĖ slave čģąŠč湥čé ą┐ąĄčĆąĄą┤ą░čéčī 1, č鹊 ąŠąĮąŠ ąĮąĄ ą▒čāą┤ąĄčé ąĘą░čģą▓ą░čéčŗą▓ą░čéčī čłąĖąĮčā, čłąĖąĮą░ ąŠčüčéą░ąĮąĄčéčüčÅ ąĮąĄą┐čĆąĖčéčÅąĮčāč鹊ą╣ ą║ ąĘąĄą╝ą╗ąĄ ąĘą░ ą▓čĆąĄą╝čÅ čüą╗ąŠčéą░, ąĖ ąĮą░ ąĮąĄą╣ ą▒čāą┤ąĄčé ą┐čĆąŠčćąĖčéą░ąĮą░ ą╗ąŠą│. 1. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, master ą┤ąŠą╗ąČąĄąĮ ą┐čĆąŠčćąĖčéą░čéčī čüąŠčüč鹊čÅąĮąĖąĄ čłąĖąĮčŗ č湥čĆąĄąĘ 15 ą╝ą║čü ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čłąĖąĮą░ ą▒čŗą╗ą░ ą┐čĆąĖčéčÅąĮčāčéą░ ą║ ą╗ąŠą│. 0 ą▓ ą╝ąŠą╝ąĄąĮčé ąĮą░čćą░ą╗ą░ čüą╗ąŠčéą░. ąĪ č鹊čćą║ąĖ ąĘčĆąĄąĮąĖčÅ master č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ Write 1 č鹊čćąĮąŠ čéą░ą║ąŠąĄ ąČąĄ, ą║ą░ą║ ąĖ čüąĖą│ąĮą░ą╗ą░ Read. ąĀąĄą░ą╗čīąĮčŗą╣ ą▓ąĖą┤ čüąĖą│ąĮą░ą╗ą░ ą▒čāą┤ąĄčé ąĘą░ą▓ąĖčüąĄčéčī ąŠčé ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ slave-čāčüčéčĆąŠą╣čüčéą▓ą░, ą░ ąĮąĄ ąŠčé čüąĖą│ąĮą░ą╗ą░ master, ą║ąŠč鹊čĆčŗą╣ čāą┐čĆą░ą▓ą╗čÅąĄčé čłąĖąĮąŠą╣ ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠ ą┤ą╗čÅ čüąĖą│ąĮą░ą╗ąŠą▓ Write 1 ąĖ Read.

ąĀąĖčü. 3. ąÜąŠą╝ą░ąĮą┤ą░-čüąĖą│ąĮą░ą╗ "Read".
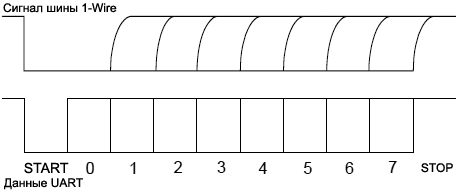
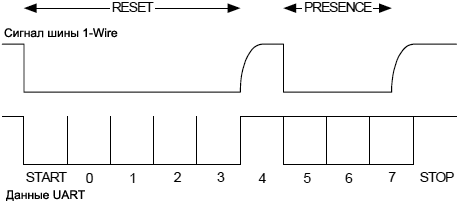
Reset/Presence. ąĪąĖą│ąĮą░ą╗čŗ Reset (čüą▒čĆąŠčü) ąĖ Presence (ą┐čĆąĖčüčāčéčüčéą▓ąĖąĄ ąĮą░ čłąĖąĮąĄ) ą▓ąĘą░ąĖą╝ąŠčüą▓čÅąĘą░ąĮčŗ, ą┐ąŠčŹč鹊ą╝čā ąĘą┤ąĄčüčī ąŠąĮąĖ ą┐ąŠą║ą░ąĘą░ąĮčŗ čüąŠą▓ą╝ąĄčüčéąĮąŠ (čüą╝. čĆąĖčü. 4). ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ąĮą░ ą║ą░čĆčéąĖąĮą║ąĄ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī čüąĖą│ąĮą░ą╗ąŠą▓ ą┐ąŠą║ą░ąĘą░ąĮą░ čāčüą╗ąŠą▓ąĮąŠ, ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ ą╝ą░čüčłčéą░ą▒ ą╝ąŠąČąĄčé ąŠčéą╗ąĖčćą░čéčīčüčÅ. ąĪąĮą░čćą░ą╗ą░ master ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé čłąĖąĮčā ą▓ ą╗ąŠą│. 0 ąĮą░ ą▓čĆąĄą╝čÅ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 8 čéą░ą╣ą╝-čüą╗ąŠč鹊ą▓ (čé. ąĄ. 480 ą╝ą║čü), ąĖ ąĘą░č鹥ą╝ ąŠčüą▓ąŠą▒ąŠąČą┤ą░ąĄčé ąĄčæ. ąŁč鹊čé ąĖąĮč鹥čĆą▓ą░ą╗ ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ čüąĖą│ąĮą░ą╗ąŠą╝ Reset. ąĢčüą╗ąĖ ąĮą░ čłąĖąĮąĄ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ slave, č鹊 ąŠąĮąŠ ą┤ąŠą╗ąČąĮąŠ ą┐ąŠčüą╗ąĄ čüąĖą│ąĮą░ą╗ą░ Reset ą▓čŗą┤ą░čéčī ąĮą░ čłąĖąĮčā ąĖą╝ą┐čāą╗čīčü ą╗ąŠą│. 0 č湥čĆąĄąĘ 60 ą╝ą║čü ą┐ąŠčüą╗ąĄ ąŠčéą┐čāčüą║ą░ąĮąĖčÅ master-ąŠą╝ čłąĖąĮčŗ, ąĖ čāą┤ąĄčƹȹĖą▓ą░čéčī ą╗ąŠą│. 0 ą▓ č鹥č湥ąĮąĖąĄ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 60 ą╝ą║čü. ąŁč鹊čé ąŠčéą▓ąĄčé ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ čüąĖą│ąĮą░ą╗ąŠą╝ Presence. ąĢčüą╗ąĖ ąĮą░ čłąĖąĮąĄ ąĮąĄ ą┐ąŠčÅą▓ąĖą╗čüčÅ čüąĖą│ąĮą░ą╗ Presence, č鹊 ą╝ą░čüč鹥čĆ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĖčéčī, čćč鹊 ą║ čłąĖąĮąĄ ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ąĮąĖą║ą░ą║ąŠąĄ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ, čéą░ą║ čćč鹊 ą┤ą░ą╗čīąĮąĄą╣čłąĖą╣ ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ ąĮąĄą▓ąŠąĘą╝ąŠąČąĄąĮ.

ąĀąĖčü. 4. ąĪąĖą│ąĮą░ą╗čŗ "Reset" ąĖ "Presence".
ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĖąĄ čüąĖą│ąĮą░ą╗ąŠą▓. ąōąĄąĮąĄčĆą░čåąĖčÅ čüąĖą│ąĮą░ą╗ąŠą▓ 1-Wire čü ą┐ąŠą╝ąŠčēčīčÄ AVR ą┤ąĄą╗ą░ąĄčéčüčÅ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ čü ą┐ąŠą╝ąŠčēčīčÄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆąĄąČąĖą╝ąŠą╝ ą┐ąŠčĆčéą░ GPIO. ąó. ąĄ. ą╝ąĄąĮčÅąĄčéčüčÅ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ ą┐ąŠčĆčéą░, ąĖ ąĄą│ąŠ ą▓čŗčģąŠą┤ąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ ąĘąĮą░č湥ąĮąĖą╣ ą▓ čĆąĄą│ąĖčüčéčĆčŗ DDRx ąĖ PORTx, ąĖ čŹč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ čü čāčćą░čüčéąĖąĄą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ąĘą░ą┤ą░ą▓ą░ąĄą╝čŗčģ ąĘą░ą┤ąĄčƹȹĄą║. ą¤ąŠą┤čĆąŠą▒ąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąŠčåąĄčüčüą░ ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ą▓ čüąĄą║čåąĖąĖ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ.
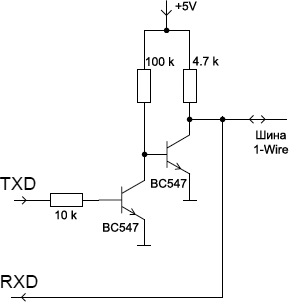
ąōąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĖąĄ čüąĖą│ąĮą░ą╗ąŠą▓ čü ą┐ąŠą╝ąŠčēčīčÄ UART. ąæą░ąĘąŠą▓čŗą╣ ąĮą░ą▒ąŠčĆ čüąĖą│ąĮą░ą╗ąŠą▓ 1-Wire čéą░ą║ąČąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮ čü ą┐ąŠą╝ąŠčēčīčÄ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ UART, ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą▓ čÅą┤čĆąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ AVR. ąŁč鹊čé čüą┐ąŠčüąŠą▒ čéčĆąĄą▒čāąĄčé, čćč鹊ą▒čŗ ą║ čłąĖąĮąĄ ą▒čŗą╗ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ąŠą▒ą░ čüąĖą│ąĮą░ą╗ą░ TXD ąĖ RXD ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ UART. ąóą░ą║ąČąĄ čéčĆąĄą▒čāąĄčéčüčÅ ąĮą░ą╗ąĖčćąĖąĄ ą▓ąĮąĄčłąĮąĄą│ąŠ ą▒čāč乥čĆą░ čü ąŠčéą║čĆčŗčéčŗą╝ ą║ąŠą╗ą╗ąĄą║č鹊čĆąŠą╝ ąĖą╗ąĖ ąŠčéą║čĆčŗčéčŗą╝ čüč鹊ą║ąŠą╝, čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖčÅ čłąĖąĮčŗ, ą║ąŠą│ą┤ą░ ąĮą░ ą▓čŗčģąŠą┤ąĄ UART ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ą╗ąŠą│. 1. ąØą░ čĆąĖčü. 5 ą┐ąŠą║ą░ąĘą░ąĮą░ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ čéą░ą║ąŠą│ąŠ ą▒čāč乥čĆą░ ąĮą░ čéčĆą░ąĮąĘąĖčüč鹊čĆą░čģ NPN. ąØąŠą╝ąĖąĮą░ą╗čŗ čĆąĄąĘąĖčüč鹊čĆąŠą▓ ąĖ čéąĖą┐čŗ čéčĆą░ąĮąĘąĖčüč鹊čĆąŠą▓ ąŠčĆąĖąĄąĮčéąĖčĆąŠą▓ąŠčćąĮčŗąĄ, čāą║ą░ąĘą░ąĮčŗ č鹊ą╗čīą║ąŠ ą▓ ą║ą░č湥čüčéą▓ąĄ čĆąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖąĖ. ąöą╗čÅ č鹊čćąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ pull-up čĆąĄąĘąĖčüč鹊čĆą░ čüą╝. čĆąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖąĖ ą▓ ą┤ą░čéą░čłąĖč鹥 ąĮą░ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ, ą║ąŠč鹊čĆąŠąĄ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄč鹥 ą║ čłąĖąĮąĄ 1-Wire.
ąĀąĖčü. 5. ąæčāč乥čĆ ąĮą░ ą▒ąĖą┐ąŠą╗čÅčĆąĮčŗčģ čéčĆą░ąĮąĘąĖčüč鹊čĆą░čģ (ąŠčéą║čĆčŗčéčŗą╣ ą║ąŠą╗ą╗ąĄą║č鹊čĆ).
ąöą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüąĖą│ąĮą░ą╗ą░ 1-Wire ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č乊čĆą╝ą░čé čäčĆąĄą╣ą╝ą░ ą┤ą░ąĮąĮčŗčģ UART 8 ą▒ąĖčé, ą▒ąĄąĘ č湥čéąĮąŠčüčéąĖ (no parity), 1 čüč鹊ą┐-ą▒ąĖčé. ą×ą┤ąĖąĮ čäčĆąĄą╣ą╝ ą┤ą░ąĮąĮčŗčģ UART ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ ą▒ąĖčéą░ ąĖą╗ąĖ ą┤ą╗čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ RESET/PRESENCE. ąÆ čéą░ą▒ą╗ąĖčåąĄ 1 ą┐ąŠą║ą░ąĘą░ąĮąŠ, ą║ą░ą║ ąĮčāąČąĮąŠ ąĮą░čüčéčĆąŠąĖčéčī ą╝ąŠą┤čāą╗čī UART, čćč鹊ą▒čŗ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ąĮčāąČąĮčŗąĄ č乊čĆą╝čŗ čüąĖą│ąĮą░ą╗ą░, ąĖ ą║ą░ą║ ąŠąĮąĖ ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāčÄčéčüčÅ ąĮą░ ą┐čĆąĖąĄą╝ąĄ. ąĪąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čłą░ą▒ą╗ąŠąĮčŗ ą▒ąĖč鹊ą▓ UART ą┐ąŠą║ą░ąĘą░ąĮčŗ ąĮą░ čĆąĖčü. 6..10.
ąóą░ą▒ą╗ąĖčåą░ 1. ąĪąĖą│ąĮą░ą╗čŗ UART ą┤ą╗čÅ čŹą╝čāą╗čÅčåąĖąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ 1-Wire.
| ąĪąĖą│ąĮą░ą╗ |
ąĪą║ąŠčĆąŠčüčéčī |
ą¤ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ |
ą¤čĆąĖąĮąĖą╝ą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ |
| Write 1 |
115200 |
FFh |
FFh |
| Write 0 |
115200 |
00h |
00h |
| Read |
115200 |
FFh |
FFh 菹║ą▓ąĖą▓ą░ą╗ąĄąĮč鹥ąĮ ą┐čĆąŠčćąĖčéą░ąĮąĮąŠą╝čā ą▒ąĖčéčā 1. ąÆčüąĄ ą┤čĆčāą│ąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ čŹą║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮčŗ ą▒ąĖčéčā 0. |
| Reset/Presence |
9600 |
F0h |
F0h čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąŠčéčüčāčéčüčéą▓ąĖčÄ čüąĖą│ąĮą░ą╗ą░ presence. ąøčÄą▒ąŠąĄ ą┤čĆčāą│ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąĮą░ą╗ąĖčćąĖčÄ čüąĖą│ąĮą░ą╗ą░ presence. |
ą¤čĆąĖą╝. ą┐ąĄčĆąĄą▓ąŠą┤čćąĖą║ą░: čüą║ąŠčĆąĄąĄ ą▓čüąĄą│ąŠ, ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ 1-Wire čüą┐ąĄčåąĖą░ą╗čīąĮąŠ ą┐čĆąŠąĄą║čéąĖčĆąŠą▓ą░ą╗ąĖčüčī ą┐ąŠą┤ čüčéą░ąĮą┤ą░čéąĮčŗąĄ čüą║ąŠčĆąŠčüčéąĖ čĆą░ą▒ąŠčéčŗ RS-232, ą┐ąŠč鹊ą╝čā čćč鹊 ą┤ą░ąČąĄ ą▓ ą╝ąŠą╝ąĄąĮčé ą┐ąĄčĆą▓ąŠą│ąŠ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ ąĮą░ čĆčŗąĮą║ąĄ čāčüčéčĆąŠą╣čüčéą▓ 1-Wire čāąČąĄ ą▒čŗą╗ąĖ ą┤ąŠčüčéčāą┐ąĮčŗ ą┐čĆąŠčüčéčŗąĄ čüčćąĖčéčŗą▓ą░č鹥ą╗ąĖ slave-čāčüčéčĆąŠą╣čüčéą▓, ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝čŗąĄ ą║ COM-ą┐ąŠčĆčéčā ą║ąŠą╝ą┐čīčÄč鹥čĆą░. ąæčŗą╗ čéą░ą║ąČąĄ ąŠą┐čāą▒ą╗ąĖą║ąŠą▓ą░ąĮ ą░ą┐ąĮąŠčāčé Dallas, ąŠą┐ąĖčüčŗą▓ą░čÄčēąĖą╣ čéą░ą║ąŠąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ. ą×čéą║čĆčŗč鹊čüčéčī ą┐čĆąŠč鹊ą║ąŠą╗ą░ ąĖ ą┐čĆąŠčüč鹊čéą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠ čüą║ą░ąĘčŗą▓ą░ą╗ąĖčüčī ąĮą░ ą┐ąŠą┐čāą╗čÅčĆąĖąĘą░čåąĖąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ 1-Wire.
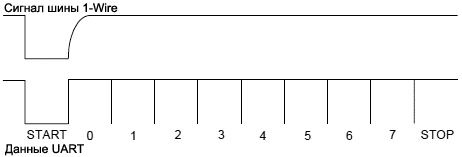
ąĀąĖčü. 6. ąĪąĖą│ąĮą░ą╗ Write 1 ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ąĮą░ą▒ąŠčĆ ą▒ąĖčé UART.
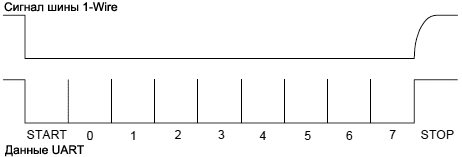
ąĀąĖčü. 7. ąĪąĖą│ąĮą░ą╗ Write 0 ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ąĮą░ą▒ąŠčĆ ą▒ąĖčé UART.
ąĀąĖčü. 8. ąĪąĖą│ąĮą░ą╗ Read 0 ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ąĮą░ą▒ąŠčĆ ą▒ąĖčé UART.
ąĀąĖčü. 9. ąĪąĖą│ąĮą░ą╗ Read 1 ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ąĮą░ą▒ąŠčĆ ą▒ąĖčé UART.
ąĀąĖčü. 10. ąĪąĖą│ąĮą░ą╗ Reset/Presence ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ąĮą░ą▒ąŠčĆ ą▒ąĖčé UART.
ąÜąŠą╝ą░ąĮą┤čŗ ROM. ąÜą░ąČą┤ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ 1-Wire čüąŠą┤ąĄčƹȹĖčé ą│ą╗ąŠą▒ą░ą╗čīąĮčŗą╣, čāąĮąĖą║ą░ą╗čīąĮčŗą╣ 64-ą▒ąĖčéąĮčŗą╣ ąĮąŠą╝ąĄčĆ (ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ), čģčĆą░ąĮąĖą╝čŗą╣ ą▓ ą┐ąŠčüč鹊čÅąĮąĮąŠą╣ ąĮąĄą┐ąĄčĆąĄąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ (ROM). ąŁč鹊čé ąĮąŠą╝ąĄčĆ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čāą┐čĆąŠčēąĄąĮąĖčÅ ą░ą┤čĆąĄčüą░čåąĖąĖ ą║ą░ą║ čćąĖčüą╗ąŠą▓ąŠą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ąŠčéą┤ąĄą╗čīąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ąĮą░ čłąĖąĮąĄ. ąśą╝ąĄąĮąĮąŠ čŹč鹊čé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą▓čŗą▒ąĖčé ąĮą░ ą║ąŠčĆą┐čāčüąĄ ą║ą╗čÄč湥ą╣ iButton ą▓ ą▓ąĖą┤ąĄ čłąĄčüčéąĮą░ą┤čåą░č鹥čĆąĖčćąĮąŠą│ąŠ čćąĖčüą╗ą░.
 |
 |
64-ą▒ąĖčéąĮčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüąŠčüč鹊ąĖčé ąĖąĘ 3 čćą░čüč鹥ą╣: 8-ą▒ąĖčéąĮčŗą╣ ą║ąŠą┤ čüąĄą╝ąĄą╣čüčéą▓ą░, 48-ą▒ąĖčéąĮčŗą╣ čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ ąĖ 8-ą▒ąĖčéąĮą░čÅ CRC, ą║ąŠč鹊čĆą░čÅ ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ąŠčé ą┐ąĄčĆą▓čŗčģ 56 ą▒ąĖčé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░. ąöą╗čÅ čĆą░ą▒ąŠčéčŗ čü čŹčéąĖą╝ 64-ą▒ąĖčéąĮčŗą╝ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝ ąĖą╝ąĄąĄčéčüčÅ ąĮąĄą▒ąŠą╗čīčłąŠą╣ ąĮą░ą▒ąŠčĆ ą║ąŠą╝ą░ąĮą┤, ąŠąĮąĖ ąĮą░ąĘčŗą▓ą░čÄčéčüčÅ ą║ąŠą╝ą░ąĮą┤čŗ ROM. ąÆ čéą░ą▒ą╗ąĖčåąĄ 2 ą┐ąŠą║ą░ąĘą░ąĮčŗ čŹčéąĖ 6 ą║ąŠą╝ą░ąĮą┤ ROM.
ąóą░ą▒ą╗ąĖčåą░ 2. ąÜąŠą╝ą░ąĮą┤čŗ ROM.
| ąÜąŠą╝ą░ąĮą┤ą░ |
ąÜąŠą┤ |
ąØą░ąĘąĮą░č湥ąĮąĖąĄ |
| READ ROM |
33h |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖčÅ |
| SKIP ROM |
CCh |
ą¤čĆąŠą┐čāčüą║ ą░ą┤čĆąĄčüą░čåąĖąĖ |
| MATCH ROM |
55h |
ąÉą┤čĆąĄčüą░čåąĖčÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. |
| SEARCH ROM |
F0h |
ą¤ąŠą╗čāčćąĖčéčī 64-ą▒ąĖčéąĮčŗąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓ ąĮą░ čłąĖąĮąĄ |
| OVERDRIVE SKIP ROM |
3Ch |
ąÆąĄčĆčüąĖčÅ ą║ąŠą╝ą░ąĮą┤čŗ SKIP ROM ąĮą░ ą┐ąŠą▓čŗčłąĄąĮąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ |
| OVERDRIVE MATCH ROM |
69h |
ąÆąĄčĆčüąĖčÅ ą║ąŠą╝ą░ąĮą┤čŗ MATCH ROM ąĮą░ ą┐ąŠą▓čŗčłąĄąĮąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ |
READ ROM. ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ąĮą░ čłąĖąĮąĄ, ą║ ą║ąŠč鹊čĆąŠą╣ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ąŠą┤ąĮąŠ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ, čćč鹊ą▒čŗ ą┐čĆąŠčćąĖčéą░čéčī čāąĮąĖą║ą░ą╗čīąĮčŗą╣ 64-ą▒ąĖčéąĮčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ. ąĢčüą╗ąĖ ą║ čłąĖąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ slave-čāčüčéčĆąŠą╣čüčéą▓, č鹊 čĆąĄąĘčāą╗čīčéą░č鹊ą╝ čŹč鹊ą╣ ą║ąŠą╝ą░ąĮą┤čŗ ą▒čāą┤ąĄčé čĆąĄąĘčāą╗čīčéą░čé AND ąŠčé ą▓čüąĄčģ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ (čé. ąĄ. čĆą░čüą┐ąŠąĘąĮą░čéčī ą┤ą░ąĮąĮčŗąĄ ą║ą░ąČą┤ąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą┐ąŠ ąŠčéą┤ąĄą╗čīąĮąŠčüčéąĖ ąĮąĄą╗čīąĘčÅ). ąś ą║ąŠąĮąĄčćąĮąŠ ąČąĄ, ąĄčüą╗ąĖ ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĖčéčī, čćč鹊 ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ą▒ąĄąĘ ąŠčłąĖą▒ąŠą║, ą┐čĆąĖ ąĮą░ą╗ąĖčćąĖąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čāčüčéčĆąŠą╣čüčéą▓ ąĮą░ čłąĖąĮąĄ ą║ąŠąĮčéčĆąŠą╗čīąĮą░čÅ čüčāą╝ą╝ą░ CRC ąĮąĄ čüąŠą▓ą┐ą░ą┤ąĄčé.
SKIP ROM. ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ, čåąĄą╗čīčÄ čÅą▓ą╗čÅąĄčéčüčÅ ąĮąĄ ąĮą░ ą║ą░ą║ąŠąĄ-č鹊 ą║ąŠąĮą║čĆąĄčéąĮąŠąĄ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ. ąØą░ čłąĖąĮąĄ, ą│ą┤ąĄ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ, ą┤ąŠčüčéą░č鹊čćąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ąŠą╝ą░ąĮą┤čā SKIP ROM ą┤ą╗čÅ ą░ą┤čĆąĄčüą░čåąĖąĖ čŹč鹊ą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ą¤čĆąĖ ąĮą░ą╗ąĖčćąĖąĖ ąĮą░ čłąĖąĮąĄ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ slave-čāčüčéčĆąŠą╣čüčéą▓ ą║ąŠą╝ą░ąĮą┤ą░ SKIP ROM ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą░ą┤čĆąĄčüą░čåąĖąĖ ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓ čüčĆą░ąĘčā. ąŁč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╗ąĄąĘąĮčŗą╝ č鹊ą╗čīą║ąŠ ą▓ č鹊ą╝ čüą╗čāčćą░ąĄ, ą║ąŠą│ą┤ą░ ąĮą░ą┤ąŠ ą┐ąŠą┤ą░čéčī ą║ąŠą╝ą░ąĮą┤čā ą▓čüąĄą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ, ąĮą░ą┐čĆąĖą╝ąĄčĆ ąĘą░ą┐čāčüčéąĖčéčī ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ąĮą░ ą▓čüąĄčģ čüąĄąĮčüąŠčĆą░čģ čüčĆą░ąĘčā. ą¤čĆąĖ ąĮą░ą╗ąĖčćąĖąĖ ąĮą░ čłąĖąĮąĄ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ slave-čāčüčéčĆąŠą╣čüčéą▓ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤čā SKIP ROM ąĮąĄą▓ąŠąĘą╝ąŠąČąĮąŠ.
MATCH ROM. ąÜąŠą╝ą░ąĮą┤ą░ MATCH ROM ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą░ą┤čĆąĄčüą░čåąĖąĖ ąŠčéą┤ąĄą╗čīąĮčŗčģ slave-čāčüčéčĆąŠą╣čüčéą▓ ąĮą░ čłąĖąĮąĄ. ą¤ąŠčüą╗ąĄ ą║ąŠą╝ą░ąĮą┤čŗ MATCH ROM ą┐ąŠ čłąĖąĮąĄ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą┐ąŠą╗ąĮčŗą╣ 64-ą▒ąĖčéąĮčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ. ąÜąŠą│ą┤ą░ čŹč鹊 ąĘą░ą▓ąĄčĆčłąĖą╗ąŠčüčī, čĆą░ąĘčĆąĄčłąĄąĮąŠ ąŠčéą▓ąĄčćą░čéčī č鹊ą╗čīą║ąŠ č鹊ą╝čā čāčüčéčĆąŠą╣čüčéą▓čā ąĮą░ čłąĖąĮąĄ, ą║ąŠč鹊čĆąŠąĄ ąĖą╝ąĄąĄčé č鹊čćąĮąŠ čŹč鹊čé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ - ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ą┐čĆąĖąĮčÅčé čüą╗ąĄą┤čāčÄčēąĖą╣ ąĖą╝ą┐čāą╗čīčü reset.
SEARCH ROM. ąÜąŠą╝ą░ąĮą┤ą░ SEARCH ROM ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ, ą║ąŠą│ą┤ą░ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ ą▓čüąĄčģ slave-čāčüčéčĆąŠą╣čüčéą▓ ąĮąĄ ąĖąĘą▓ąĄčüčéąĮčŗ ąĘą░čĆą░ąĮąĄąĄ. ą×ąĮą░ ą┤ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą▓čüąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ čāčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ čüąĄą╣čćą░čü ą║ čłąĖąĮąĄ. ąĪąĮą░čćą░ą╗ą░ ą║ąŠą╝ą░ąĮą┤ą░ SEARCH ROM ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą┐ąŠ čłąĖąĮąĄ ą╝ą░čüč鹥čĆąŠą╝. ąŚą░č鹥ą╝ ą╝ą░čüč鹥čĆ čćąĖčéą░ąĄčé ąŠą┤ąĖąĮ ą▒ąĖčé ąĖąĘ čłąĖąĮčŗ. ąÜą░ąČą┤ąŠąĄ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą╝ąĄčēą░ąĄčé čüą▓ąŠą╣ ą┐ąĄčĆą▓čŗą╣ ą▒ąĖčé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ąĮą░ čłąĖąĮčā. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą╝ą░čüč鹥čĆ ą┐čĆąŠčćąĖčéą░ąĄčé ą╗ąŠą│ąĖč湥čüą║ąŠąĄ AND ąŠčé ą▓čüąĄčģ ą┐ąĄčĆą▓čŗčģ ą▒ąĖčé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ ąĮą░ čłąĖąĮąĄ. ąŚą░č鹥ą╝ ą╝ą░čüč鹥čĆ čćąĖčéą░ąĄčé čüą╗ąĄą┤čāčÄčēąĖą╣ ą▒ąĖčé ąĮą░ čłąĖąĮąĄ. ąóąŠą│ą┤ą░ ą║ą░ąČą┤ąŠąĄ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą╝ąĄčēą░ąĄčé ąĮą░ čłąĖąĮčā ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ čüą▓ąŠąĄą╝čā ą┐ąĄčĆą▓ąŠą╝čā ą▒ąĖčéčā. ą£ą░čüč鹥čĆ ą┐čĆąŠčćąĖčéą░ąĄčé čŹč鹊čé ą▒ąĖčé ą║ą░ą║ ą╗ąŠą│ąĖč湥čüą║ąŠąĄ AND ąŠčé ą▓čüąĄčģ ą╗ąŠą│ąĖč湥čüą║ąĖčģ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖą╣ ą┐ąĄčĆą▓ąŠą│ąŠ ą▒ąĖčéą░ ąŠčé ą▓čüąĄčģ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓. ąĢčüą╗ąĖ ą▓čüąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖą╝ąĄą╗ąĖ ą▓ ą┐ąĄčĆą▓ąŠą╝ ą▒ąĖč鹥 ą╗ąŠą│. 1, č鹊 ą╝ą░čüč鹥čĆ ą┐čĆąŠčćąĖčéą░ąĄčé 10b. ąĢčüą╗ąĖ ąČąĄ ą▓čüąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖą╝ąĄą╗ąĖ ą▓ ą┐ąĄčĆą▓ąŠą╝ ą▒ąĖč鹥 0, č鹊 ą╝ą░čüč鹥čĆ ą┐čĆąŠčćąĖčéą░ąĄčé 01b. ąÆ čŹčéąĖčģ ą┤ą▓čāčģ čüą╗čāčćą░čÅčģ ą▒ąĖčé ą╝ąŠąČąĄčé ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮ ą║ą░ą║ ą┐ąĄčĆą▓čŗą╣ ą▒ąĖčé čā ą▓čüąĄčģ ą░ą┤čĆąĄčüąŠą▓. ąóąŠą│ą┤ą░ ą╝ą░čüč鹥čĆ ąĘą░ą┐ąĖčłąĄčé čŹč鹊čé ą▒ąĖčé ąŠą▒čĆą░čéąĮąŠ, čŹč鹊 ą┤ą░čüčé čŹčäč乥ą║čé, čćč鹊 ą▓čüąĄ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐čĆąŠą┤ąŠą╗ąČą░čé ą┐ąŠčüčŗą╗ą░čéčī čüą▓ąŠąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ. ąĢčüą╗ąĖ ąĮą░ čłąĖąĮąĄ ą┐čĆąĖčüčāčéčüčéą▓čāčÄčé čāčüčéčĆąŠą╣čüčéą▓ą░, čā ą║ąŠč鹊čĆčŗčģ ą┐ąĄčĆą▓čŗą╣ ą▒ąĖčé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ąŠčéą╗ąĖčćą░ąĄčéčüčÅ (čé. ąĄ. čā ąŠą┤ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ąĄčĆą▓čŗą╣ ą▒ąĖčé 0, čā ą┤čĆčāą│ąŠą│ąŠ ą┐ąĄčĆą▓čŗą╣ ą▒ąĖčé 1), č鹊 ą╝ą░čüč鹥čĆ ą┐čĆąŠčćąĖčéą░ąĄčé ąĮą░ čłąĖąĮąĄ 00. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą╝ą░čüč鹥čĆ ą┤ąŠą╗ąČąĄąĮ čüą┤ąĄą╗ą░čéčī ą▓čŗą▒ąŠčĆ - čģąŠč湥čé ą╗ąĖ ąŠąĮ ąŠą▒čĆą░čēą░čéčīčüčÅ ą┐ąŠ ą░ą┤čĆąĄčüčā, ą│ą┤ąĄ ą▓ ą┐ąĄčĆą▓ąŠą╝ ą▒ąĖč鹥 ą▒čāą┤ąĄčé 0, ąĖą╗ąĖ ą┐ąŠ ą░ą┤čĆąĄčüčā, ą│ą┤ąĄ ą▓ ą┐ąĄčĆą▓ąŠą╝ ą▒ąĖč鹥 ą▒čāą┤ąĄčé 1. ąÆčŗą▒ąŠčĆ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮ ąĮą░ čłąĖąĮčā, ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 č湥ą│ąŠ ą▓čüąĄ čāčüčéčĆąŠą╣čüčéą▓ą░, čā ą║ąŠč鹊čĆčŗčģ ą▓ ą┐ąĄčĆą▓ąŠą╝ ą▒ąĖč鹥 ąŠą║ą░ąČąĄčéčüčÅ ąĮąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▓čŗą▒čĆą░ąĮąĮąŠą╝čā ąĘąĮą░č湥ąĮąĖčÄ ą▒ąĖčé, ąŠčüčéą░ąĮčāčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ.
ąŚą░č鹥ą╝ ą╝ą░čüč鹥čĆ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą║ čüą╗ąĄą┤čāčÄčēąĄą╝čā ą▒ąĖčéčā, ąĖ ą┐čĆąŠčåąĄčüčü ą┐ąŠą▓č鹊čĆčÅąĄčéčüčÅ ą┤ąŠ č鹥čģ ą┐ąŠčĆ, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤čāčé ą┐čĆąŠčćąĖčéą░ąĮčŗ ą▓čüąĄ 64 ą▒ąĖčéą░. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ą▒čāą┤ąĄčé ą┐čĆąŠčćąĖčéą░ąĮ ąŠą┤ąĖąĮ 64-ą▒ąĖčéąĮčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čāčüčéčĆąŠą╣čüčéą▓ą░, ą║ąŠč鹊čĆąŠąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ą║ čłąĖąĮąĄ. ą¦č鹊ą▒čŗ čĆą░čüą┐ąŠąĘąĮą░čéčī ą┤čĆčāą│ąĖąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ, ą║ąŠą╝ą░ąĮą┤ą░ SEARCH ROM ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĘą░ą┐čāčēąĄąĮą░ ąĘą░ąĮąŠą▓ąŠ, ąĮąŠ ąĮą░ čŹč鹊čé čĆą░ąĘ ąĮą░ čüą┐ąŠčĆąĮąŠą╝ ą▒ąĖč鹥 ą▓čŗą▒ąŠčĆ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą┤ąĄą╗ą░ąĮ ąĮą░ ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮčŗą╣. ą¤ąŠą▓č鹊čĆąĄąĮąĖąĄ čŹč鹊ą╣ ą┐čĆąŠčåąĄą┤čāčĆčŗ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąŠčćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ č鹊ą╝čā, čćč鹊 ą▓čüąĄ ąĖčģ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ ą▒čāą┤čāčé čĆą░čüą┐ąŠąĘąĮą░ąĮčŗ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ ąĮą░ č鹊, čćč鹊 ą║ąŠą│ą┤ą░ ąĘą░ą║ąŠąĮč湥ąĮ ą┐ąŠąĖčüą║ ąŠą┤ąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░, č鹊 ą▓čüąĄ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░, ą║čĆąŠą╝ąĄ ąŠą┤ąĮąŠą│ąŠ, ą┤ąŠą╗ąČąĮčŗ ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle). ąóą░ą║ čćč鹊 č鹥ą┐ąĄčĆčī ą╝ąŠąČąĮąŠ ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčī ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ čü čŹčéąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ą▒ąĄąĘ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą╣ ą░ą┤čĆąĄčüą░čåąĖąĖ ąĄą│ąŠ ą║ąŠą╝ą░ąĮą┤ąŠą╣ MATCH ROM.
Overdrive ROM. ąÜąŠą╝ą░ąĮą┤čŗ overdrive ROM ąĘą┤ąĄčüčī ąĮąĄ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čÄčéčüčÅ, ą┐ąŠčüą║ąŠą╗čīą║čā ą┤ą░ąĮąĮčŗą╣ ą┤ąŠą║čāą╝ąĄąĮčé ąŠčéąĮąŠčüąĖčéčüčÅ č鹊ą╗čīą║ąŠ ą║ ą║ąŠą╝ą░ąĮą┤ą░ą╝, čĆą░ą▒ąŠčéą░čÄčēąĖą╝ ąĮą░ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ.
Memory/function. ąÜąŠą╝ą░ąĮą┤čŗ ą┤ąŠčüčéčāą┐ą░ ą║ ą┐ą░ą╝čÅčéąĖ/čäčāąĮą║čåąĖčÅą╝ ąŠčéąĮąŠčüčÅčéčüčÅ ą║ čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖą╝ ą║ąŠą╝ą░ąĮą┤ą░ą╝, ąĘą░ą▓ąĖčüčÅčēąĖą╝ ąŠčé ą║ąŠąĮą║čĆąĄčéąĮąŠą│ąŠ slave-čāčüčéčĆąŠą╣čüčéą▓ą░. ąŁčéąĖ ą║ąŠą╝ą░ąĮą┤čŗ ąŠą▒čŗčćąĮąŠ čĆą░ą▒ąŠčéą░čÄčé čü čćč鹥ąĮąĖąĄą╝ ąĖ ąĘą░ą┐ąĖčüčīčÄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ ąĖ čĆąĄą│ąĖčüčéčĆąŠą▓ slave-čāčüčéčĆąŠą╣čüčéą▓. ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ąĮąĄą║ąŠč鹊čĆąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čŹčéąĖčģ ą║ąŠą╝ą░ąĮą┤, ąĮąŠ ąĮąĄ ą▓čüąĄ ą║ąŠą╝ą░ąĮą┤čŗ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓čüąĄą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ. ą¤ąŠčĆčÅą┤ąŠą║ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ čüą┐ąĄčåąĖčäąĖč湥ąĮ ą┤ą╗čÅ ą║ąŠąĮą║čĆąĄčéąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖ ąŠčüąĮąŠą▓ąĮąŠą╣ čüčéą░ąĮą┤ą░čĆčé čŹč鹊 ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé. ą¤ąŠą┤čĆąŠą▒ąĮąŠ ą║ąŠą╝ą░ąĮą┤čŗ ą┐ą░ą╝čÅčéąĖ ąĘą┤ąĄčüčī ąĮąĄ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čÄčéčüčÅ.
ąśčéą░ą║, ą▓čüąĄ 1-Wire čāčüčéčĆąŠą╣čüčéą▓ą░ čüą╗ąĄą┤čāčÄčé ą▒ą░ąĘąŠą▓ąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ:
1. ą£ą░čüč鹥čĆ ą┐ąŠčüčŗą╗ą░ąĄčé ąĮą░ čłąĖąĮčā čüąĖą│ąĮą░ą╗ Reset.
2. Slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ (ąĖą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĄčüą╗ąĖ ąĖčģ ąĮąĄčüą║ąŠą╗čīą║ąŠ ąĮą░ čłąĖąĮąĄ) ąŠčéą▓ąĄčćą░čÄčé ąĖą╝ą┐čāą╗čīčüąŠą╝ Presence.
3. ą£ą░čüč鹥čĆ ą┐ąŠčüčŗą╗ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čā ROM, ą║ąŠč鹊čĆą░čÅ čŹčäč乥ą║čéąĖą▓ąĮąŠ ą░ą┤čĆąĄčüčāąĄčé ąŠą┤ąĮąŠ ąĖą╗ąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ slave-čāčüčéčĆąŠą╣čüčéą▓.
4. ą£ą░čüč鹥čĆ ą┐ąŠčüčŗą╗ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čā Memory.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą┤ą╗čÅ ąĮą░čćą░ą╗ą░ ą║ą░ąČą┤ąŠą│ąŠ čłą░ą│ą░ ąĮčāąČąĮąŠ ąĘą░ą▓ąĄčĆčłąĖčéčī čüą┤ąĄą╗ą░ąĮąĮčŗą╣ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ čłą░ą│. ą×ą┤ąĮą░ą║ąŠ čŹč鹊 ąĮąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ą┤ąĄą╗ą░čéčī ą┤ą╗čÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą▓čüąĄą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą╝ąŠąČąĮąŠ ą┐ąŠčüą╗ą░čéčī ąĮąŠą▓čŗą╣ Reset ą┐ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤čŗ ROM ą┤ą╗čÅ ąĮą░čćą░ą╗ą░ ąĮąŠą▓ąŠą│ąŠ čåąĖą║ą╗ą░ ąŠą▒ą╝ąĄąĮą░.
CRC. ąÜąŠąĮčéčĆąŠą╗čīąĮą░čÅ čüčāą╝ą╝ą░, Cyclic Redundancy Check (CRC) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ 1-Wire ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī čåąĄą╗ąŠčüčéąĮąŠčüčéčī ą┤ą░ąĮąĮčŗčģ. ąóąĄąŠčĆąĖčÅ CRC ąĘą┤ąĄčüčī ąĮąĄ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░ąĄčéčüčÅ. ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐čĆąŠ CRC čüą╝. [2].
ąÆ čāčüčéčĆąŠą╣čüčéą▓ą░čģ 1-Wire ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą│ą╗ą░ą▓ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ą┤ą▓ąĄ čĆą░ąĘąĮčŗčģ CRC. ą×ą┤ąĮą░ 8-ą▒ąĖčéąĮą░čÅ (ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ Dallas
One Wire CRC, DOW-CRC, ąĖą╗ąĖ ą┐čĆąŠčüč鹊 CRC8), ą▓č鹊čĆą░čÅ 16-ą▒ąĖčéąĮą░čÅ (CRC16). CRC8 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ čüąĄą║čåąĖąĖ ROM ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓. ąóą░ą║ąČąĄ CRC8 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ąĮąĄą║ąŠč鹊čĆčŗčģ čāčüčéčĆąŠą╣čüčéą▓ą░čģ ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ ą┤čĆčāą│ąĖčģ ą┤ą░ąĮąĮčŗčģ, ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ ą║ąŠą╝ą░ąĮą┤, ą▓čŗą┤ą░ąĮąĮčŗčģ ąĮą░ čłąĖąĮąĄ. CRC16 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ąĮąĄą║ąŠč鹊čĆčŗčģ čāčüčéčĆąŠą╣čüčéą▓ą░čģ ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ ąĮą░ ąŠčłąĖą▒ą║ąĖ ą▓ ą┤ąŠčüčéą░č鹊čćąĮąŠ ą▒ąŠą╗čīčłąĖčģ ąĮą░ą▒ąŠčĆą░čģ ą┤ą░ąĮąĮčŗčģ.
ąÉą┐ą┐ą░čĆą░čéąĮčŗą╣ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčé 8-ą▒ąĖčéąĮąŠą╣ CRC, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ąĮą░ 64-ą▒ąĖčéąĮąŠą╝ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąĄ, ą┐ąŠą║ą░ąĘą░ąĮ ąĮą░ čĆąĖčü. 11. ąæą╗ąŠą║ą░ą╝ąĖ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ ąŠčéą┤ąĄą╗čīąĮčŗąĄ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ čüą┤ą▓ąĖą│ą░. ąŁą║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮčŗą╣ ą┐ąŠą╗ąĖąĮąŠą╝ ą┤ą╗čÅ čŹč鹊ą╣ CRC ą▒čāą┤ąĄčé X8 + X5 + X4 + 1.
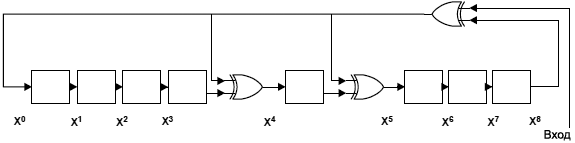
ąĀąĖčü. 11. ąÉą┐ą┐ą░čĆą░čéąĮčŗą╣ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčé CRC8, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ą▓ 1-Wire čāčüčéčĆąŠą╣čüčéą▓ą░čģ.
ąÉą┐ą┐ą░čĆą░čéąĮčŗą╣ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčé 16-ą▒ąĖčéąĮąŠą╣ CRC, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ą▓ ąĮąĄą║ąŠč鹊čĆčŗčģ čāčüčéčĆąŠą╣čüčéą▓ą░čģ 1-Wire, ą┐ąŠą║ą░ąĘą░ąĮ ąĮą░ čĆąĖčü. 12. ąæą╗ąŠą║ą░ą╝ąĖ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ ąŠčéą┤ąĄą╗čīąĮčŗąĄ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ čüą┤ą▓ąĖą│ą░. ąŁą║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮčŗą╣ ą┐ąŠą╗ąĖąĮąŠą╝ ą┤ą╗čÅ čŹč鹊ą╣ CRC ą▒čāą┤ąĄčé X16 + X15 + X2 + 1.
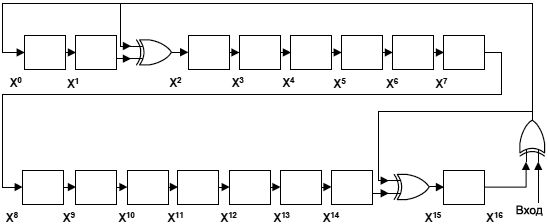
ąĀąĖčü. 12. ąÉą┐ą┐ą░čĆą░čéąĮčŗą╣ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčé CRC16, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ą▓ 1-Wire čāčüčéčĆąŠą╣čüčéą▓ą░čģ.
[ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ]
ąŚą┤ąĄčüčī čĆą░čüčüą╝ąŠčéčĆąĄąĮčŗ 3 čĆą░ąĘąĮčŗąĄ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ 1-Wire (ą┤čĆą░ą╣ą▓ąĄčĆčŗ): čćąĖčüč鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ GPIO čü ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖą╝ ąŠą┐čĆąŠčüąŠą╝ (ą▒ąĄąĘ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣), ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąŠą│ąŠ ąŠą┐čĆąŠčüą░ UART (ą▒ąĄąĘ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣) ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ UART čü ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮąĖąĄą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąØąĖąČąĄ ą┤ą░ąĮąŠ ą║ąŠčĆąŠčéą║ąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ą║ą░ąČą┤ąŠą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ, ą┐ąŠą┤čĆąŠą▒ąĮą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą┐ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÄ ąĮąĄ ą▓ą║ą╗čÄč湥ąĮą░ ą▓ čŹč鹊čé ą┤ąŠą║čāą╝ąĄąĮčé. ą¤ąŠąČą░ą╗čāą╣čüčéą░, čüą╝. ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ ą▓ ąĖčüčģąŠą┤ąĮąŠą╝ ą║ąŠą┤ąĄ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą░ą┐ąĮąŠčāčéą░ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ, ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ.
ą£ąŠąČąĮąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą┐čĆąŠč鹊ą║ąŠą╗ 1-Wire č鹊ą╗čīą║ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ, ą▒ąĄąĘ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ ą║ą░ą║ąŠą╣-ą╗ąĖą▒ąŠ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ. ąöąŠčüč鹊ąĖąĮčüčéą▓ąŠ čéą░ą║ąŠą│ąŠ čĆąĄčłąĄąĮąĖčÅ ą▓ ą┐čĆąŠčüč鹊č鹥 - ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮ č鹊ą╗čīą║ąŠ 1 ą▓čŗą▓ąŠą┤ GPIO, ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ 1 pull-up čĆąĄąĘąĖčüč鹊čĆ. ą¤ąŠčüą║ąŠą╗čīą║čā ą▓čüąĄ ą▓čŗą▓ąŠą┤čŗ GPIO ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ AVR ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗąĄ, ąĖ čā ąĮąĖčģ ąĄčüčéčī ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝čŗą╣ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ pull-up čĆąĄąĘąĖčüč鹊čĆčŗ, č鹊 AVR ą╝ąŠą│čāčé čāą┐čĆą░ą▓ą╗čÅčéčī čłąĖąĮąŠą╣ 1-Wire ą▒ąĄąĘ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą▓ąĮąĄčłąĮąĖčģ čüčģąĄą╝. ąÆ č鹥čģ čüą╗čāčćą░čÅčģ, ą║ąŠą│ą┤ą░ ąĮąŠą╝ąĖąĮą░ą╗ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░ ąĮąĄ ą┐ąŠą┤čģąŠą┤ąĖčé ą┐ąŠą┤ č鹥ą║čāčēčāčÄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ slave-čāčüčéčĆąŠą╣čéą▓, ąĖąĘ ą▓ąĮąĄčłąĮąĄą╣ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ čéčĆąĄą▒čāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą▓ąĮąĄčłąĮąĖą╣ čĆąĄąĘąĖčüč鹊čĆ. ąØąĄą┤ąŠčüčéą░č鹊ą║ čŹč鹊ą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą▓ č鹊ą╝, čćč鹊 ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĘą░ą│čĆčāąČąĄąĮ ąĮąĄą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮčŗą╝ąĖ ąĘą░ą┤ąĄčƹȹ║ą░ą╝ąĖ ąĮą░ ąŠąČąĖą┤ą░ąĮąĖąĄ ą┤ą╗čÅ ąŠčéčĆą░ą▒ąŠčéą║ąĖ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ Reset/Presence ąĖ ą▒ąĖč鹊ą▓čŗčģ čüąĖą│ąĮą░ą╗ąŠą▓. ą¦č鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ą║ąŠčĆčĆąĄą║čéąĮčŗąĄ ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ čłąĖąĮčŗ 1-Wire, ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒ąĖč鹊ą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĘą░ą┐čĆąĄčēąĄąĮčŗ. ąöąŠą┐čāčüčéąĖą╝ą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ ą╝ąĄąČą┤čā ą┐ąĄčĆąĄą┤ą░č湥ą╣ ą┤ą▓čāčģ čüąŠčüąĄą┤ąĮąĖčģ ą▒ąĖčé (recovery time, ą▓čĆąĄą╝čÅ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ) ąĮąĄ ąŠą│čĆą░ąĮąĖč湥ąĮą░ čüą▓ąĄčĆčģčā, čéą░ą║ čćč鹊 ą╝ąŠąČąĮąŠ ą▒ąĄąĘąŠą┐ą░čüąĮąŠ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠčüą╗ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą║ą░ąČą┤ąŠą│ąŠ ą▒ąĖčéą░. ąÜąŠą│ą┤ą░ čłąĖąĮą░ 1-Wire ą░ą║čéąĖą▓ąĮą░, ąĖąĘ-ąĘą░ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ čüąĖą│ąĮą░ą╗ą░ Reset/Presence ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą╗ą░č鹥ąĮčéąĮąŠčüčéčī ą▓ ąŠą▒čĆą░ą▒ąŠčéą║ąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą╗čÅ čüą░ą╝ąŠą│ąŠ čģčāą┤čłąĄą│ąŠ čüą╗čāčćą░čÅ ą╝ąĄąĮčīčłąĄ 1 ą╝čü.
ą×ą┐čĆą░čłąĖą▓ą░ąĄą╝čŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆ UART ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ UART ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ AVR (ą║ąŠč鹊čĆčŗą╣ ąĄčüčéčī ą┐ąŠčćčéąĖ ąĮą░ ą▓čüąĄčģ AVR) ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čéčĆąĄą▒čāąĄą╝čŗčģ čüąĖą│ąĮą░ą╗ąŠą▓ čłąĖąĮčŗ 1-Wire. ą×čüčéą░ą╗čīąĮą░čÅ čćą░čüčéčī ą┤čĆą░ą╣ą▓ąĄčĆą░ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╝čā ą┤čĆą░ą╣ą▓ąĄčĆčā, ą║ąŠč鹊čĆčŗą╣ ą▒čŗą╗ ąŠą┐ąĖčüą░ąĮ ą▓ ą┐čĆąĄą┤čŗą┤čāčēąĄą╝ ą░ą▒ąĘą░čåąĄ. ąōą╗ą░ą▓ąĮąŠąĄ ą┤ąŠčüč鹊ąĖąĮčüčéą▓ąŠ čŹč鹊ą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą▓ čüčĆą░ą▓ąĮąĄąĮąĖąĖ čü čćąĖčüč鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╝ ą▓ č鹊ą╝, čćč鹊 ą╝ąĄąĮčīčłąĄ čĆą░ąĘą╝ąĄčĆ ą║ąŠą┤ą░, ąĖ ąĄčēąĄ č鹊čé čäą░ą║čé, čćč鹊 ąĮąĄ ąĮą░ą┤ąŠ ąŠčéą║ą╗čÄčćą░čéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒ąĖč鹊ą▓, ą┐ąŠč鹊ą╝čā čćč鹊 ą╝ąŠą┤čāą╗čī UART ą▓čŗą┤ąĄčƹȹĖą▓ą░ąĄčé ąĮčāąČąĮčŗąĄ ąĘą░ą┤ąĄčƹȹ║ąĖ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ ą░ą┐ą┐ą░čĆą░čéąĮąŠ. ąØąĄą┤ąŠčüčéą░č鹊ą║ ą▓ č鹊ą╝, čćč鹊 ąĮčāąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą▓ą░ GPIO, ą┐čĆąĖč湥ą╝ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ GPIO (ą┐čĆąĖą▓čÅąĘą░ąĮąĮčŗąĄ ą║ TX ąĖ RX ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ UART), čéą░ą║ąČąĄ ąĮčāąČąĮą░ ąĮąĄą║ąŠč鹊čĆą░čÅ ą▓ąĮąĄčłąĮčÅčÅ čüčģąĄą╝ą░.
ąöčĆą░ą╣ą▓ąĄčĆ ąĮą░ ąŠčüąĮąŠą▓ąĄ UART čü ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮąĖąĄą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé čüąĖą│ąĮą░ą╗čŗ čłąĖąĮčŗ č鹊čćąĮąŠ čéą░ą║ ąČąĄ, ą║ą░ą║ čŹč鹊 ą┤ąĄą╗ą░ąĄčé ą┤čĆą░ą╣ą▓ąĄčĆ UART čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╝ ąŠą┐čĆąŠčüąŠą╝. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠąĄ ą┤ąŠčüč鹊ąĖąĮčüčéą▓ąŠ ą▓ č鹊ą╝, čćč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą░ą▓č鹊ą╝ą░čéąĖąĘąĖčĆąŠą▓ą░čéčī ą┐čĆąĖąĄą╝ ąĖ ą┐ąĄčĆąĄą┤ą░čćčā ą┤ąŠ 255 ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ čü ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą╣ ąĘą░ą│čĆčāąĘą║ąŠą╣ ą▓čŗčćąĖčüą╗ąĖč鹥ą╗čīąĮąŠą│ąŠ čÅą┤čĆą░ AVR.
ąöčĆą░ą╣ą▓ąĄčĆčŗ čü ąŠą┐čĆąŠčüąŠą╝ čĆą░ąĘą┤ąĄą╗ąĄąĮčŗ ąĮą░ ą┤ą▓ąĄ čćą░čüčéąĖ: ą│ąĄąĮąĄčĆą░čåąĖčÅ čüąĖą│ąĮą░ą╗ąŠą▓ ąĮą░ čāčĆąŠą▓ąĮąĄ ą▒ąĖčéą░, ąĖ ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒ą░ą╣čé ąĖ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą║ąŠą╝ą░ąĮą┤ ROM. ą£ąĄąČą┤čā ą┤ą▓čāą╝čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╝ąĖ ą▓ąĄčĆčüąĖčÅą╝ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ čĆą░ąĘą╗ąĖčćą░čÄčéčüčÅ č鹊ą╗čīą║ąŠ ą┐čĆąŠčåąĄą┤čāčĆčŗ čāčĆąŠą▓ąĮčÅ ą▒ąĖčé (ą┐ąŠčüą║ąŠą╗čīą║čā čüąĖą│ąĮą░ą╗čŗ čłąĖąĮčŗ č乊čĆą╝ąĖčĆčāčÄčéčüčÅ ą▓ ąŠą┤ąĮąŠą╝ čüą╗čāčćą░ąĄ čćč鹥ąĮąĖąĄą╝/ąĘą░ą┐ąĖčüčīčÄ čĆąĄą│ąĖčüčéčĆąŠą▓ GPIO, ą▓ ą┤čĆčāą│ąŠą╝ čüą╗čāčćą░ąĄ čćč鹥ąĮąĖąĄą╝/ąĘą░ą┐ąĖčüčīčÄ čĆąĄą│ąĖčüčéčĆąŠą▓ UART), ąĮąŠ ą┤ą░ą╗ąĄąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ąŠą▒čēąĖą╣ ąĖąĮč鹥čĆč乥ą╣čü, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą▓čŗčüąŠą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ čü ą╗čÄą▒čŗą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝.
[ą¤čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ GPIO]
ąĪ čćąĖčüč鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĄą╣, ą║ąŠč鹊čĆą░čÅ ąŠą┐ąĖčüą░ąĮą░ ą▓ čŹč鹊ą╝ ą░ą┐ąĮąŠčāč鹥, ą╝ąŠąČąĮąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī čüčĆą░ąĘčā ąĮąĄčüą║ąŠą╗čīą║ąŠ čłąĖąĮ 1-Wire, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ ą║ ąŠą┤ąĮąŠą╝čā AVR. ąÆčüąĄ čłąĖąĮčŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą║ ąŠą┤ąĮąŠą╝čā ąĖ č鹊ą╝čā ąČąĄ ą┐ąŠčĆčéčā ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ č鹊ą╗čīą║ąŠ ą║ PORTB, ąĖą╗ąĖ č鹊ą╗čīą║ąŠ ą║ PORTD), ąĮąŠ ą║ą░ą║ąŠą╣ ą┐ąŠčĆčé ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ - ą╝ąŠąČąĮąŠ ą▓čŗą▒čĆą░čéčī ąŠą┐čåąĖčÅą╝ąĖ ą┐ąĄčĆąĄą┤ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĄą╣. ąŁč鹊 ąŠą│čĆą░ąĮąĖčćąĖą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čłąĖąĮ ą┤ąŠ 8, ąŠą┤ąĮą░ą║ąŠ čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čłąĖąĮ ą┐ąŠ čĆą░ąĘčĆčÅą┤ą░ą╝ ą┐ąŠčĆčéą░ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝ąŠ. ąÆčüąĄ ą▓čŗą▓ąŠą┤čŗ, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮčŗ ą┐ąŠą┤ čłąĖąĮčŗ 1-Wire, ąŠčüčéą░čÄčéčüčÅ ąĮąĄčéčĆąŠąĮčāčéčŗą╝ąĖ. ą¤ąŠčüą║ąŠą╗čīą║čā ą▓čüąĄ čłąĖąĮčŗ 1-Wire ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą║ ąŠą┤ąĮąŠą╝čā ąĖ č鹊ą╝čā ąČąĄ ą┐ąŠčĆčéčā, č鹊 ą╝ąŠąČąĮąŠ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą▓čŗą┐ąŠą╗ąĮčÅčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ąŠą┐ąĄčĆą░čåąĖą╣ ą▓ ąŠą┤ąĮąŠ ąĖ č鹊 ąČąĄ ą▓čĆąĄą╝čÅ ąĮą░ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čłąĖąĮą░čģ. ąŁč鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ ą┐čāč鹥ą╝ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮąĖčÅ ą░čĆą│čāą╝ąĄąĮčéą░ ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą░ ąĮčāąČąĮąŠą│ąŠ ą▓čŗą▓ąŠą┤ą░ ąĖą╗ąĖ ą▓čŗą▓ąŠą┤ąŠą▓, ą║ąŠč鹊čĆčŗą╣ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą║ą░ąČą┤ąŠą╣ čäčāąĮą║čåąĖąĖ. ąŁč鹊čé ą░čĆą│čāą╝ąĄąĮčé ą┤ąŠą╗ąČąĄąĮ čüąŠą┤ąĄčƹȹ░čéčī ą▓ čüąĄą▒ąĄ ą▒ąĖč鹊ą▓čāčÄ ą╝ą░čüą║čā ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą┤ąŠą╗ąČąĮčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čŹč鹊ą╣ ąŠą┐ąĄčĆą░čåąĖąĖ. ąÜ ą┐čĆąĖą╝ąĄčĆčā, čŹč鹊 ą┤ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐ąŠčüą╗ą░čéčī čüąĖą│ąĮą░ą╗ Reset ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąĮą░ 8 čłąĖąĮ, ąĄčüą╗ąĖ ą┐ąĄčĆąĄą┤ą░čéčī 0xff ą▓ ą░čĆą│čāą╝ąĄąĮč鹥 ą╝ą░čüą║ąĖ ą▓čŗą▓ąŠą┤ąŠą▓. ąŚąĮą░č湥ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ, čÅą▓ą╗čÅąĄčéčüčÅ ą▒ąĖč鹊ą▓ąŠą╣ ą╝ą░čüą║ąŠą╣ ąŠčé ą▓čüąĄčģ čłąĖąĮ, ą│ą┤ąĄ ąŠą┤ąĮąŠ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ slave-čāčüčéčĆąŠą╣čüčéą▓ ąŠčéą▓ąĄčéąĖą╗ąŠ čüąĖą│ąĮą░ą╗ąŠą╝ presence. ąŁčéą░ ą▒ąĖč鹊ą▓ą░čÅ ą╝ą░čüą║ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░č鹥ą╝ ą┐ąĄčĆąĄą┤ą░ąĮą░ ą▓ ą║ą░č湥čüčéą▓ąĄ ą░čĆą│čāą╝ąĄąĮčéą░ ą▓čŗą▓ąŠą┤ąŠą▓ ą▓ čäčāąĮą║čåąĖčÄ, ą║ąŠč鹊čĆą░čÅ ą▓čŗą┤ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čā SKIP ROM, ąĖ čéą░ą║ ą┤ą░ą╗ąĄąĄ. ąÆčüąĄ čäčāąĮą║čåąĖąĖ ą▓ čŹč鹊ą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ą▓čŗą▒ąŠčĆ ą▓čŗą▓ąŠą┤ąŠą▓. ąÜą░ą║ ąŠčüąĮąŠą▓ąĮąŠąĄ ą┐čĆą░ą▓ąĖą╗ąŠ ą▓čüąĄ ą║ąŠą╝ą░ąĮą┤čŗ, ą║ąŠč鹊čĆčŗąĄ ąĘą░ą┐ąĖčüčŗą▓ą░čÄčé ą┤ą░ąĮąĮčŗąĄ ąĮą░ čłąĖąĮčŗ, ą╝ąŠą│čāčé ą░ą┤čĆąĄčüąŠą▓ą░čéčī ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ čłąĖąĮ. ąÜąŠą╝ą░ąĮą┤čŗ, ą║ąŠč鹊čĆčŗąĄ čćąĖčéą░čÄčé ą▒ąŠą╗ąĄąĄ ąŠą┤ąĮąŠą│ąŠ ą▒ąĖčéą░ čü čłąĖąĮčŗ, ą╝ąŠą│čāčé ą░ą┤čĆąĄčüąŠą▓ą░čéčī č鹊ą╗čīą║ąŠ ąŠą┤ąĮčā čłąĖąĮčā.
ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ. ą¤čĆąŠčåąĄą┤čāčĆą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĖąĮč鹥čĆč乥ą╣čüą░ 1-Wire ąŠč湥ąĮčī ą┐čĆąŠčüčéą░. ą×ąĮą░ ąĘą░ą║ą╗čÄčćą░ąĄčéčüčÅ ą▓ ąĮą░čüčéčĆąŠą╣ą║ąĄ ą▓čŗą▓ąŠą┤ąŠą▓ čłąĖąĮ 1-Wire ą▓ čĆąĄąČąĖą╝ ą▓ą▓ąŠą┤ą░, ąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ąĮą░ čŹčéąĖčģ ą▓čŗą▓ąŠą┤ą░čģ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓ pull-up, ąĖ ąĄčüą╗ąĖ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ, ą┐ąĄčĆąĄą▓ąŠą┤ čłąĖąĮčŗ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle mode). ąØąĄą║ąŠč鹊čĆčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ čüčĆąĄą░ą│ąĖčĆčāčÄčé ąĮą░ čäčĆąŠąĮčé ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ ąĮą░ čłąĖąĮąĄ ą║ą░ą║ ąĮą░ ąŠą║ąŠąĮčćą░ąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░ Reset, ąĖ ąŠčéą▓ąĄčéčÅčé ą▓čŗą┤ą░č湥ą╣ čüąĖą│ąĮą░ą╗ą░ Presence. ą¦č鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 čŹč鹊čé čüąĖą│ąĮą░ą╗ ąĮąĄ ą┐ąŠą▓ą╗ąĖčÅąĄčé ąĮą░ ą╗čÄą▒ąŠą╣ ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ, ą┐ąŠčüą╗ąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą┐ąŠčĆčéą░ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮą░ ąĘą░ą┤ąĄčƹȹ║ą░, čĆą░ą▓ąĮą░čÅ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĖąĘ čüąĖą│ąĮą░ą╗ą░ Reset.
ąæąĖč鹊ą▓čŗąĄ čäčāąĮą║čåąĖąĖ ąĮąĖąČąĮąĄą│ąŠ čāčĆąŠą▓ąĮčÅ. ąŁčéąĖ čäčāąĮą║čåąĖąĖ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą░ą┐ąĮąŠčāč鹊ą╝ AN126 ą║ąŠą╝ą┐ą░ąĮąĖąĖ Dallas Semiconductors. ąÆčüąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą▓čĆąĄą╝ąĄąĮąĖ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčÄčé čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čŗą╝ ąĘąĮą░č湥ąĮąĖčÅą╝ ą▓ čŹč鹊ą╝ ą░ą┐ąĮąŠčāč鹥. ąóčĆąĄą▒čāąĄčéčüčÅ 10 čĆą░ąĘą╗ąĖčćąĮčŗčģ ąĘą░ą┤ąĄčƹȹĄą║, ą║ąŠč鹊čĆčŗąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą▓ čéą░ą▒ą╗ąĖčåąĄ 3.
ąóą░ą▒ą╗ąĖčåą░ 3. ąŚą░ą┤ąĄčƹȹ║ąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖą╝ąĄąĮčÅčÄčéčüčÅ ąĮą░ čāčĆąŠą▓ąĮąĄ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒ąĖč鹊ą▓.
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝ą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ (ą╝ą║čü) |
| A |
6 |
| B |
64 |
| C |
60 |
| D |
10 |
| E |
9 |
| F |
55 |
| G |
0 |
| H |
480 |
| I |
70 |
| J |
410 |
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ąĘą░ą┤ąĄčƹȹ║ą░ G ą▓ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╝ čĆąĄąČąĖą╝ąĄ čĆą░ą▓ąĮą░ 0.
ą¤ąŠčüą║ąŠą╗čīą║čā ąŠą┐ąĄčĆą░čåąĖąĖ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ ąĮą░ C, ąĮąĄ ąĮą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ, č鹊 ąĮą░čüčéčĆąŠą╣ą║ąĖ ąŠą┐čéąĖą╝ąĖąĘą░čåąĖąĖ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░ ąĖ ą┤čĆčāą│ąĖąĄ čäą░ą║č鹊čĆčŗ ą╝ąŠą│čāčé ą┐ąŠą▓ą╗ąĖčÅčéčī ąĮą░ č乊čĆą╝ąĖčĆčāąĄą╝čŗąĄ ąĘą░ą┤ąĄčƹȹ║ąĖ. ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą┐čĆąŠą░ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī č乊čĆą╝čā čüąĖą│ąĮą░ą╗ą░ čü ą┐ąŠą╝ąŠčēčīčÄ ąŠčüčåąĖą╗ą╗ąŠą│čĆą░čäą░, ąĖ ą┐ąŠą┤čüčéčĆąŠąĖčéčī ąĘą░ą┤ąĄčƹȹ║ąĖ, ąĄčüą╗ąĖ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ.
ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ čäčāąĮą║čåąĖą╣ čüą╗ąŠčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒ąĖčé ą┐ąŠą║ą░ąĘą░ąĮą░ ąĮą░ čĆąĖčü. 13. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čäčāąĮą║čåąĖčÅ DetectPresence ąĖ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé čüąĖą│ąĮą░ą╗ Reset, ąĖ čüą╗čāčłą░ąĄčé čłąĖąĮčā ąĮą░ ą┐čĆąĄą┤ą╝ąĄčé ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ Presence. ąÆčüąĄ čäčāąĮą║čåąĖąĖ čāčĆąŠą▓ąĮčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒ąĖčé ą╝ąŠą│čāčé ą░ą┤čĆąĄčüąŠą▓ą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čłąĖąĮ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ.
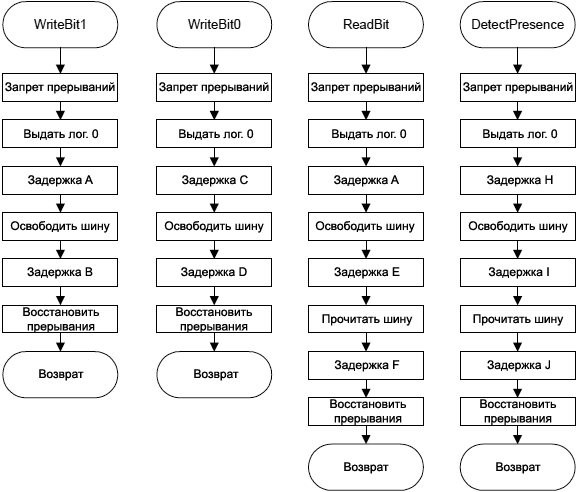
ąĀąĖčü. 13. ążčāąĮą║čåąĖąĖ čüą╗ąŠčÅ ą┐ąĄčĆąĄą┤ą░čćą░ ą▒ąĖčé.
ą¤čĆąĖą╗ąŠąČąĄąĮčŗ ą┤ą▓ą░ ą╝ą░ą║čĆąŠčüą░ ą┤ą╗čÅ ą┐čĆąĖčéčÅą│ąĖą▓ą░ąĮąĖčÅ čłąĖąĮčŗ ą║ ą╗ąŠą│. 0 ąĖ ą┤ą╗čÅ ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖčÅ čłąĖąĮčŗ. ą×ąĮąĖ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ ą║ą░ą║ ą╝ą░ą║čĆąŠčüčŗ, ą┐ąŠč鹊ą╝čā čćč鹊 ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čćą░čüč鹊, čéą░ą║ čćč鹊 čāčüčéčĆą░ąĮčÅąĄčéčüčÅ ąĮąĄąĮčāąČąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ ą▓ ą▓ąĖą┤ąĄ ą▓čŗąĘąŠą▓ą░ čäčāąĮą║čåąĖąĖ ąĖ ą▓ąŠąĘą▓čĆą░čéą░ ąĖąĘ čäčāąĮą║čåąĖąĖ, čćč鹊 ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠ ą▓ą╗ąĖčÅąĄčé ąĮą░ č鹊čćąĮąŠčüčéčī č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ąĖą░ą│čĆą░ą╝ą╝ čüąĖą│ąĮą░ą╗ąŠą▓ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ.
[ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ ąŠą┐čĆąŠčüą░ UART]
ąÆ čŹč鹊ą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą▓čüąĄ ąĘą░ą┤ąĄčƹȹ║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą╗čÅ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čüąĖą│ąĮą░ą╗ąŠą▓ čłąĖąĮčŗ ąŠą▒čüą╗čāąČąĖą▓ą░čÄčéčüčÅ ą╝ąŠą┤čāą╗ąĄą╝ UART. ą¦č鹊ą▒čŗ ąŠčéą┐čĆą░ą▓ąĖčéčī ą▒ąĖčé, čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ čüą║ąŠčĆąŠčüčéčī UART (Baud Rate) ąĮą░ ą┐ąŠą┤čģąŠą┤čÅčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąĖ čĆąĄą│ąĖčüčéčĆ ą┤ą░ąĮąĮčŗčģ UART ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ąĮčāąČąĮčāčÄ č乊čĆą╝čā čüąĖą│ąĮą░ą╗ą░, ą║ą░ą║ čŹč鹊 ą▒čŗą╗ąŠ ąŠą┐ąĖčüą░ąĮąŠ ą▓ čüąĄą║čåąĖąĖ "ąōąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĖąĄ čüąĖą│ąĮą░ą╗ąŠą▓ čü ą┐ąŠą╝ąŠčēčīčÄ UART" (čüą╝. čéą░ą║ąČąĄ čĆąĖčü. 6..10).
ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ. ą¦č鹊ą▒čŗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī ą┤čĆą░ą╣ą▓ąĄčĆ UART čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╝ ąŠą┐čĆąŠčüąŠą╝, ą░ą┐ą┐ą░čĆą░čéčāčĆą░ UART ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĮą░čüčéčĆąŠąĄąĮą░ čü ą┐čĆą░ą▓ąĖą╗čīąĮčŗą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ. ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░, čāčüčéą░ąĮąŠą▓ą║ą░ č乊čĆą╝ą░čéą░ ą┤ą░ąĮąĮčŗčģ 8 ą▒ąĖčé, ą▒ąĄąĘ č湥čéąĮąŠčüčéąĖ (no parity), 1 čüč鹊ą┐-ą▒ąĖčé ąĖ čüą║ąŠčĆąŠčüčéčī ąŠą▒ą╝ąĄąĮą░ 115.2 ą║ąĖą╗ąŠą▒ąŠą┤.
ąŁč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ č鹊ą╝čā, čćč鹊 ą▓čŗą▓ąŠą┤ TXD ą╝ąŠą┤čāą╗čÅ UART ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle) čü čāčĆąŠą▓ąĮąĄą╝ ą╗ąŠą│. 1. ą¤ąŠą┤čćąĖąĮąĄąĮąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ąŠčüą┐čĆąĖą╝čāčé čäčĆąŠąĮčé ąĮą░čĆą░čüčéą░ąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ TXD ą║ą░ą║ ąŠą║ąŠąĮčćą░ąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ RESET, ąĖ ąŠčéą▓ąĄčéčÅčé čüąĖą│ąĮą░ą╗ąŠą╝ presence.
ąæąĖč鹊ą▓čŗąĄ čäčāąĮą║čåąĖąĖ ąĮąĖąČąĮąĄą│ąŠ čāčĆąŠą▓ąĮčÅ. ąÆčüąĄ čŹčéąĖ čäčāąĮą║čåąĖąĖ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ ą▓ ą┤čĆą░ą╣ą▓ąĄčĆąĄ čü ąŠą┐čĆąŠčüąŠą╝ UART č湥čĆąĄąĘ ąŠą┤ąĮčā ąŠą▒čēčāčÄ čäčāąĮą║čåąĖčÄ OWI_TouchBit. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓čŗą▓ąŠą┤ąĖčé ą┐ąĄčĆą▓čŗą╣ ą▓čģąŠą┤ąĮąŠą╣ ą░čĆą│čāą╝ąĄąĮčé ą▓ ą╝ąŠą┤čāą╗čī UART, ąČą┤ąĄčé ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ UART, ąĖ ąĘą░č鹥ą╝ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ą┐čĆąĖąĮčÅč鹊ąĄ ąĘąĮą░č湥ąĮąĖąĄ. ąÜą░ąČą┤ą░čÅ ąĖąĘ ą▒ąĖč鹊ą▓čŗčģ čäčāąĮą║čåąĖą╣ ą▓čŗąĘčŗą▓ą░ąĄčé OWI_TouchBit čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝, ą║ąŠč鹊čĆąŠąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą║ąŠčĆčĆąĄą║čéąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░ ąĮą░ čłąĖąĮąĄ.
ąśąĮč鹥čĆč乥ą╣čü ą║ čŹčéąĖą╝ čäčāąĮą║čåąĖčÅą╝ č鹊čé ąČąĄ čüą░ą╝čŗą╣, čćč鹊 ąĖ ą▓ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╝ ąŠą┐čĆąŠčüąŠą╝ ą┐ąŠčĆčéą░ (ą▒ąĄąĘ UART). ąÉčĆą│čāą╝ąĄąĮčé pins ąŠą┤ąĮą░ą║ąŠ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą▓ ą┤čĆą░ą╣ą▓ąĄčĆąĄ UART čü ąŠą┐čĆąŠčüąŠą╝. ąØą░ą▒ąŠčĆ ą╝ą░ą║čĆąŠčüąŠą╝ ą┤ąĄą╗ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮčŗą╝ ą▓čŗąĘąŠą▓ čŹčéąĖčģ čäčāąĮą║čåąĖą╣ čü ą░čĆą│čāą╝ąĄąĮč鹊ą╝ pins ąĖą╗ąĖ ą▒ąĄąĘ ąĮąĄą│ąŠ. ąĢčüą╗ąĖ ą░čĆą│čāą╝ąĄąĮčé pins ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé, č鹊 ąŠąĮ ą▒čāą┤ąĄčé čāą┤ą░ą╗ąĄąĮ ą╝ą░ą║čĆąŠčüąŠą╝.
ążčāąĮą║čåąĖąĖ ą▓čŗčüąŠą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą╝ąĮąŠą│ąĖąĄ čäčāąĮą║čåąĖąĖ ąĮą░ čŹč鹊ą╝ čāčĆąŠą▓ąĮąĄ ą┐čĆąĖąĮąĖą╝ą░čÄčé ą▓ ą║ą░č湥čüčéą▓ąĄ ą░čĆą│čāą╝ąĄąĮčéą░ čéąĖą┐ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒ąĄąĘąĘąĮą░ą║ąŠą▓ąŠąĄ čåąĄą╗ąŠąĄ (unsigned char pointer). ąŁč鹊čé čāą║ą░ąĘą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ čāą║ą░ąĘčŗą▓ą░čéčī ąĮą░ ą╝ą░čüčüąĖą▓ ą┐ą░ą╝čÅčéąĖ ąĖąĘ 8 ą▒ą░ą╣čé, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čäčāąĮą║čåąĖąĄą╣. ąÆčŗą┤ąĄą╗ąĄąĮąĖąĄ čŹčéąĖčģ ą╝ą░čüčüąĖą▓ąŠą▓ ą▓ ą┐ą░ą╝čÅčéąĖ, ą░ ąĖąĮąŠą│ą┤ą░ ąĖ ąĖčģ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ ą▓čŗąĘčŗą▓ą░čÄčēąĄą╣ čäčāąĮą║čåąĖąĄą╣. ąŁč鹊čé ą┤ąŠą║čāą╝ąĄąĮčé č湥čéą║ąŠ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ąŠą│ą┤ą░ ą┐ą░ą╝čÅčéčī ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮą░ čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ą┐ąĄčĆąĄą┤ ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ.
ążčāąĮą║čåąĖąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒ą░ą╣čéą░
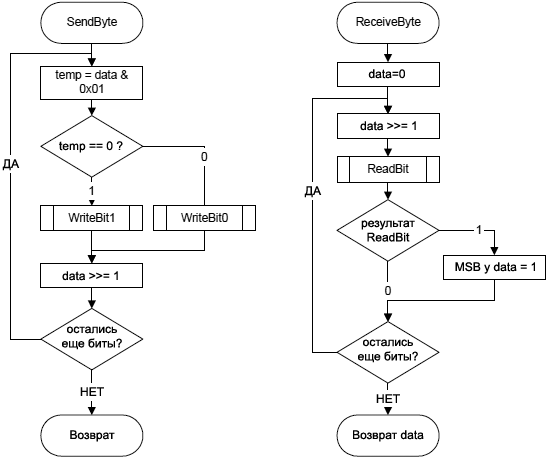
ąĀąĖčü. 14. ążčāąĮą║čåąĖąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒ą░ą╣čéą░.
ąÜąŠą╝ą░ąĮą┤čŗ ROM. ąĀąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ ą▓čüąĄ ąŠčüąĮąŠą▓ąĮčŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ ROM ą┤ą╗čÅ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ ąŠą▒ą╝ąĄąĮą░. ąĪą░ą╝ą░čÅ ą┐čĆąŠčüčéą░čÅ ąĖąĘ ąĮąĖčģ ą║ąŠą╝ą░ąĮą┤ą░ SKIP ROM. ą×ąĮą░ ą┐čĆąŠčüč鹊 ą▓čŗąĘčŗą▓ą░ąĄčé čäčāąĮą║čåąĖčÄ SendByte, ą║ąŠč鹊čĆą░čÅ ą┐ąŠą╗čāčćą░ąĄčé ą▒ą░ą╣čé ą║ąŠą╝ą░ąĮą┤čŗ SKIP ROM ą▓ ą║ą░č湥čüčéą▓ąĄ ą░čĆą│čāą╝ąĄąĮčéą░. ąÉą╗ą│ąŠčĆąĖčéą╝čŗ ą┤ą╗čÅ ą║ąŠą╝ą░ąĮą┤ READ ROM ąĖ MATCH ROM ą┐ąŠą║ą░ąĘą░ąĮčŗ ąĮą░ čĆąĖčü. 15.
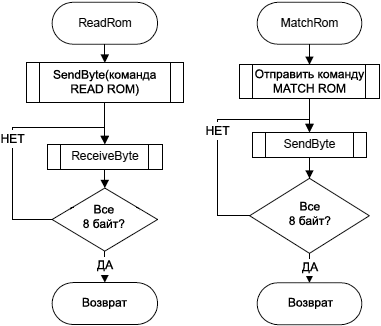
ąĀąĖčü. 15. ąÉą╗ą│ąŠčĆąĖčéą╝ čĆą░ą▒ąŠčéčŗ Read ROM (čćč鹥ąĮąĖąĄ ROM).
ąÉą╗ą│ąŠčĆąĖčéą╝ ą┤ą╗čÅ ą║ąŠą╝ą░ąĮą┤čŗ SEARCH ROM ą┐ąŠą║ą░ąĘą░ąĮ ąĮą░ čĆąĖčü. 16. ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖčēąĄčé ąŠą┤ąĮąŠ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐čĆąĖ ą║ą░ąČą┤ąŠą╝ čüą▓ąŠąĄą╝ ąĘą░ą┐čāčüą║ąĄ, ą┐ąŠą║ą░ ąĮąĄ ąŠčüčéą░ąĮąĄčéčüčÅ ąĮąĖ ąŠą┤ąĮąŠą│ąŠ ąĮąĄčĆą░čüą┐ąŠąĘąĮą░ąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮą░ čłąĖąĮąĄ. ąÆąŠ ą▓čĆąĄą╝čÅ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ąĘą░ą┐čāčüą║ą░ ąŠąĮą░ ą▓ąĄčĆąĮąĄčé OWI_ROM_SEARCH_FINISHED. ąÆ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ ą┐ą░čĆą░ą╝ąĄčéčĆčā pin, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą░ čłąĖąĮčŗ, ą▓ čŹčéčā čäčāąĮą║čåąĖčÄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮčŗ 2 ą┐ą░čĆą░ą╝ąĄčéčĆą░: lastDeviation ąĖ bitPattern. ąŁčéąĖ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ čāą┐čĆą░ą▓ą╗čÅčÄčé ą┐ąŠąĖčüą║ąŠą╝ slave-čāčüčéčĆąŠą╣čüčéą▓ą░. ą×ą▒čĆą░čéąĖč鹥čüčī ą║ čéą░ą▒ą╗ąĖčåąĄ 4, čćč鹊ą▒čŗ ą┐ąŠąĮčÅčéčī, ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čŹčéąĖ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą┤ą╗čÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąŠą╗ąĮąŠą│ąŠ ą┐ąŠąĖčüą║ą░ ą▓čüąĄčģ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓.
ąóą░ą▒ą╗ąĖčåą░ 4. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ bitPattern ąĖ lastDeviation.
|
BitPattern |
lastDeviation |
| ą¤ąĄčĆą▓čŗą╣ čĆą░ąĘ |
8-ą▒ą░ą╣čéąĮčŗą╣ ą╝ą░čüčüąĖą▓ ąĘą░ą┐ąŠą╗ąĮčÅąĄčéčüčÅ ąĮčāą╗čÅą╝ąĖ. |
0 |
| ą¤ąŠčüą╗ąĄą┤čāčÄčēąĖąĄ ąĘą░ą┐čāčüą║ąĖ |
ąÜąŠą┐ąĖčÅ 8-ą▒ą░ą╣čéąĮąŠą│ąŠ ą╝ą░čüčüąĖą▓ą░, ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮąŠą│ąŠ č湥čĆąĄąĘ čāą║ą░ąĘą░č鹥ą╗čī bitPattern ąĮą░ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╝ ąĘą░ą┐čāčüą║ąĄ. |
ąŚąĮą░č湥ąĮąĖąĄ, ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮąŠąĄ ąĖąĘ SearchRom ąĮą░ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╝ ąĘą░ą┐čāčüą║ąĄ. |
ążčāąĮą║čåąĖčÅ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ čéą░ą║ąĖą╝ čüą┐ąŠčüąŠą▒ąŠą╝ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ą┤ą░čéčī ą▓čŗąĘčŗą▓ą░čÄčēąĄą╝čā ą║ąŠą┤čā ą╝ą░ą║čüąĖą╝čāą╝ ą│ąĖą▒ą║ąŠčüčéąĖ. ą¤čĆąĖą╝ąĄčĆ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ čü ąŠą┐čĆąŠčüąŠą╝ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ ąĄą│ąŠ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐ąŠą╗ąĮąŠą│ąŠ ą┐ąŠąĖčüą║ą░.
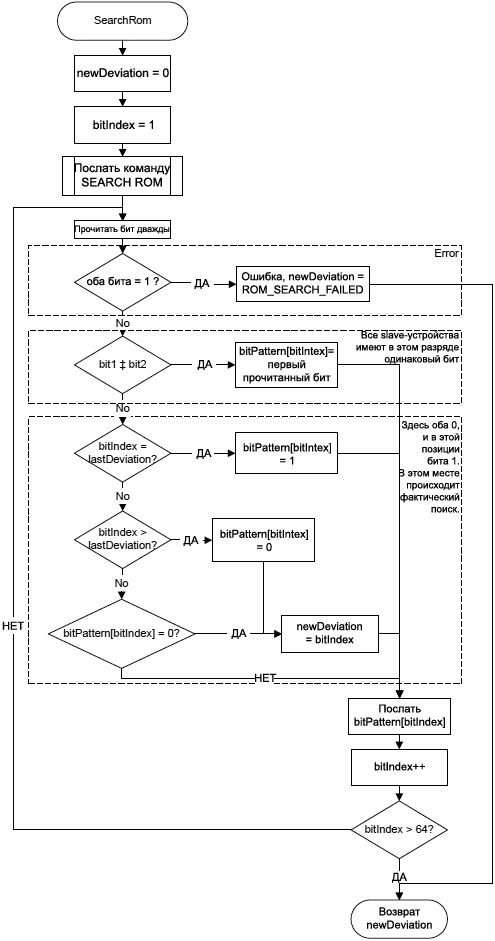
ąĀąĖčü. 16. ąÜąŠą╝ą░ąĮą┤ą░ Search ROM (ą┐ąŠąĖčüą║ ROM).
ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ. ąÆą░ąČąĮąŠ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čüąĖą│ąĮą░ą╗čŗ čłąĖąĮčŗ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ č鹊čćąĮąŠ, ąĮą░čüą║ąŠą╗čīą║ąŠ čŹč鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ. ą¦č鹊ą▒čŗ ą┤ąŠą▒ąĖčéčīčüčÅ čŹč鹊ą│ąŠ, ąĮčāąČąĮąŠ č鹊čćąĮąŠ č乊čĆą╝ąĖčĆąŠą▓ą░čéčī ąĘą░ą┤ąĄčƹȹ║ąĖ. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗčģ čåąĖą║ą╗ąŠą▓ čéą░ą║č鹊ą▓ ą┤ą╗čÅ ąĘą░ą┤ąĄčƹȹ║ąĖ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą╝ąĖą║čĆąŠčüąĄą║čāąĮą┤ ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ą▓ąŠ ą▓čĆąĄą╝čÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ. ąÜąŠą│ą┤ą░ ą│ąĄąĮąĄčĆąĖčĆčāčÄčéčüčÅ čüąĖą│ąĮą░ą╗čŗ, ąĮąĄą║ąŠč鹊čĆčŗąĄ čéą░ą║čéčŗ č鹥čĆčÅčÄčéčüčÅ, ą║ąŠą│ą┤ą░ čłąĖąĮą░ ą┐čĆąĖčéčÅą│ąĖą▓ą░ąĄčéčüčÅ ą║ ą╗ąŠą│. 0, ąĖ ą║ąŠą│ą┤ą░ čłąĖąĮą░ ąŠčüą▓ąŠą▒ąŠąČą┤ą░ąĄčéčüčÅ. ąŁčéąĖ čåąĖą║ą╗čŗ čéą░ą║č鹊ą▓ ą▓čŗčćąĖčéą░čÄčéčüčÅ ąĖčģ ą║ąŠą╗ąĖč湥čüčéą▓ą░ čéą░ą║č鹊ą▓čŗčģ čåąĖą║ą╗ąŠą▓, ąĮčāąČąĮčŗčģ ą┤ą╗čÅ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ąĘą░ą┤ąĄčƹȹ║ąĖ. ąĢčüą╗ąĖ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ čüą╗ąĖčłą║ąŠą╝ ą╝ą░ą╗ą░, č鹊 ą╝ąŠąČąĄčé ą┐ąŠą╗čāčćąĖčéčīčüčÅ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░. ąØčāąČąĮą░ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ąĮąĄ ąĮąĖąČąĄ 2.17 ą£ąōčå, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī čüą░ą╝čŗąĄ ą║ąŠčĆąŠčéą║ąĖąĄ ąĘą░ą┤ąĄčƹȹ║ąĖ.
[ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ UART čü ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮąĖąĄą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣]
ąöą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ UART čü ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝ąĖ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą║ ą░ą┐ą┐ą░čĆą░čéčāčĆąĄ č鹥 ąČąĄ čüą░ą╝čŗąĄ, čćč鹊 ąĖ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ UART čü ąŠą┐čĆąŠčüąŠą╝. ąæą░ąĘąŠą▓ą░čÅ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéčī čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čü ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝ąĖ, ą┐ąŠą║ą░ąĘą░ąĮąĮąŠą╣ ą▓ čŹč鹊ą╝ ą░ą┐ąĮąŠčāč鹥, čüąŠčüč鹊ąĖčé ą▓ č鹊ą╝, čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║čāčÄ ą┐ąĄčĆąĄą┤ą░čćčā ąĖ ą┐čĆąĖąĄą╝ ą▒ąŠą╗čīčłąĖčģ ą┐ąŠčĆčåąĖą╣ ą┤ą░ąĮąĮčŗčģ ąĮą░ čłąĖąĮąĄ. ąŁč鹊 čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ ą▓ ą┤ą▓čāčģ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░čģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (Interrupt Service Routines, ISR). ąöą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą▓čüąĄčģ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą┤ąŠą╗ąČąĮčŗ ą▓čŗąĘčŗą▓ą░čéčīčüčÅ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▓čüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčŗčģ čäčāąĮą║čåąĖą╣, ąĖ čŹčéąĖ ISR ąĘą░ą▓ąĄčĆčłą░čÄčé čéčĆą░ąĮąĘą░ą║čåąĖčÄ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ. ąŁč鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ ą┤ą╗čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ Reset/Presence ąĖą╗ąĖ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą╗čÄą▒ąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ ąŠčé 1 ą┤ąŠ 255 ą▓ ąŠą┤ąĮąŠą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ, ą▒ąĄąĘ ą║ą░ą║ąŠą│ąŠ-č鹊 ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą│ąŠ ą▓ą╝ąĄčłą░č鹥ą╗čīčüčéą▓ą░ ą▓ ąĘą░ą┐čāčēąĄąĮąĮčŗą╣ ą┐čĆąŠčåąĄčüčü.
ą¦č鹊ą▒čŗ čüą┤ąĄą╗ą░čéčī ISR-čŗ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą┐čĆąŠčüčéčŗą╝ąĖ, ąĮąĄ ą┤ąĄą╗ą░ąĄčéčüčÅ čĆą░ąĘą╗ąĖčćąĖąĄ ą┤ą╗čÅ ą┐čĆąŠčåąĄčüčüąŠą▓ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░. UDRE ISR ą┐čĆąŠčüč鹊 ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ąŠą┤ąĖąĮ ą▒ąĖčé ąĖąĘ ą▒čāč乥čĆą░ ą┤ą░ąĮąĮčŗčģ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ ą┐čĆąĖ čüą▓ąŠąĄą╝ ąĘą░ą┐čāčüą║ąĄ. RXC ISR ą┐čĆąĖąĮąĖą╝ą░ąĄčé č鹊čé ąČąĄ ą▒ ą▒ąĖčé, ąĖ ą┐ąŠą╝ąĄčēą░ąĄčé ąĄą│ąŠ ąŠą▒čĆą░čéąĮąŠ ą▓ ą▒čāč乥čĆ ą┤ą░ąĮąĮčŗčģ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ą▓ ą║ąŠč鹊čĆąŠą╝ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą┤ą░ąĮąĮčŗąĄ. ąÆąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▒čāą┤čāčé ąĖą┤ąĄąĮčéąĖčćąĮčŗ ą┐čĆąĖąĮčÅčéčŗą╝, ąĖ ą▒čāč乥čĆ ą┤ą░ąĮąĮčŗčģ ąĮąĄ ą┐ąŠą╝ąĄąĮčÅąĄčéčüčÅ. ąÆąŠ ą▓čĆąĄą╝čÅ ą┐čĆąĖąĄą╝ą░ ą┤ąŠą╗ąČąĮčŗ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ąĄą┤ąĖąĮąĖčćą║ąĖ, ą┐ąŠčüą║ąŠą╗čīą║čā č乊čĆą╝ą░ čüąĖą│ąĮą░ą╗ą░ "write 1" čüąŠą▓ą┐ą░ą┤ą░ąĄčé čü č乊čĆą╝ąŠą╣ čüąĖą│ąĮą░ą╗ą░ čćč鹥ąĮąĖčÅ. ąĪąĖą│ąĮą░ą╗ ąĮą░ čłąĖąĮąĄ ąŠą┐čĆą░čłąĖą▓ą░ąĄčéčüčÅ, čćč鹊ą▒čŗ čüčćąĖčéą░čéčī ąĘąĮą░č湥ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą┐ąŠčüą╗ą░ą╗ąŠ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ. ąŚą░č鹥ą╝ čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą▒čāą┤ąĄčé ą┐ąŠą╝ąĄčēąĄąĮąŠ ą▓ ą▒čāč乥čĆ ą┤ą░ąĮąĮčŗčģ.
ąóčĆąĖ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗčģ čäą╗ą░ą│ą░ čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆčāčÄčé ąŠ čüąŠčüč鹊čÅąĮąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ 1-Wire: busy, presence ąĖ error. ążą╗ą░ą│ busy čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ą┐ąŠą║ą░ ąĄčēąĄ ąĄčüčéčī ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ. ążą╗ą░ą│ presence čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ąĄčüą╗ąĖ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮ čüąĖą│ąĮą░ą╗ Presence, ą║ąŠą│ą┤ą░ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čüąĖą│ąĮą░ą╗ Reset. ąŁč鹊čé čäą╗ą░ą│ ąŠčüčéą░ąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝, ą┐ąŠą║ą░ čüąĖą│ąĮą░ą╗ Reset ą┐ąŠ čłąĖąĮąĄ ąĮąĄ ą┐ąŠą╗čāčćąĖą╗ ą▓ ąŠčéą▓ąĄčé čüąĖą│ąĮą░ą╗ Presence. ążą╗ą░ą│ error čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ UART ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ą╗ ąŠčłąĖą▒ą║čā čäčĆąĄą╣ą╝ą░. ąÆ čŹč鹊ą╣ čüąĖčéčāą░čåąĖąĖ ą┐ąŠ čłąĖąĮąĄ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮ ąĮąŠą▓čŗą╣ čüąĖą│ąĮą░ą╗ Reset. ąŁč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ čüą▒čĆąŠčüčā ą▓čüąĄčģ slave-čāčüčéčĆąŠą╣čüčéą▓ ąĮą░ čłąĖąĮąĄ, ą░ čéą░ą║ąČąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąŠą▓ UDRE ISR ąĖ RXC ISR.
ą¤ąŠčüą║ąŠą╗čīą║čā ISR-čŗ ą┤ąŠą╗ąČąĮčŗ ąĘą░ą▓ąĄčĆčłąĖčéčī čüą▓ąŠčÄ čĆą░ą▒ąŠčéčā ą║ą░ą║ ą╝ąŠąČąĮąŠ ą▒čŗčüčéčĆąĄąĄ, ą▒ąŠą╗ąĄąĄ čüą╗ąŠąČąĮčŗąĄ čäčāąĮą║čåąĖąĖ, ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ ą║ąŠą╝ą░ąĮą┤ ROM, ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ ą▓ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░čģ ISR. ą¤čĆąĖą╗ą░ą│ą░ąĄą╝čŗą╣ ą║ąŠą┤ ą┐čĆąĖą╝ąĄčĆą░ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ čéą░ą║ąŠąĄ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ ą▓ ą╝ą░čłąĖąĮąĄ ą║ąŠąĮąĄčćąĮčŗčģ čüąŠčüč鹊čÅąĮąĖą╣ (Finite State Machine, FSM).
ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (Interrupt Service Routine, ISR). ąÉą╗ą│ąŠčĆąĖčéą╝čŗ ą┤ą╗čÅ ISR ą┐ąŠą║ą░ąĘą░ąĮčŗ ąĮą░ čĆąĖčü. 17 ąĖ 18. ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ ISR čüąŠą▒čŗčéąĖčÅ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ UART Data Register Empty (UDRE) ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą▓čüčÅą║ąĖą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ čüą▓ąŠą▒ąŠą┤ąĮąŠąĄ ą╝ąĄčüč鹊 ą▓ ą▒čāč乥čĆąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ UART. ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ ISR ą┤ą╗čÅ čüąŠą▒čŗčéąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ UART Receive Complete (RXC) ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą┤ą░ąĮąĮčŗąĄ ą┐čĆąĖąĮčÅčéčŗ, ąĖ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą▓ ą▒čāč乥čĆąĄ ą┐čĆąĖąĄą╝ą░ UART.
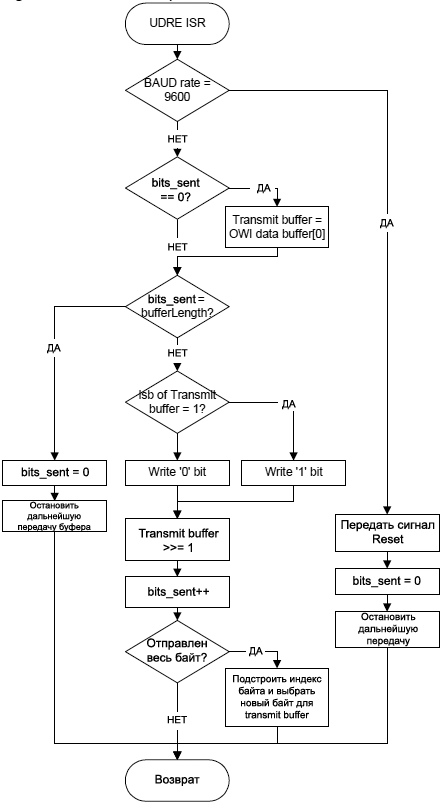
ąĀąĖčü. 17. ąÉą╗ą│ąŠčĆąĖčéą╝ ISR ą┤ą╗čÅ UDRE.

ąĀąĖčü. 18. ąÉą╗ą│ąŠčĆąĖčéą╝ RXC ą┤ą╗čÅ UDRE.
ąÆčüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčŗąĄ čäčāąĮą║čåąĖąĖ. ą×ąĮąĖ ąĮčāąČąĮčŗ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĮąĄą║ąŠč鹊čĆčŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ą║ąŠč鹊čĆčŗąĄ ąĮčāąČąĮčŗ ą┤ą╗čÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ą¤ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▓čüąĄčģ ąĮčāąČąĮčŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą┐ąĄčĆąĄą┤ą░čćą░ ąĖąĮąĖčåąĖąĖčĆčāąĄčéčüčÅ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ UDRE. ąÉą╗ą│ąŠčĆąĖčéą╝čŗ ą▓čüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčŗčģ čäčāąĮą║čåąĖą╣ ą┐ąŠą║ą░ąĘą░ąĮčŗ ąĮą░ čĆąĖčü. 19.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čäčāąĮą║čåąĖčÅ ReceiveData (čäčāąĮą║čåąĖčÅ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ) ą▓ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĘą░ą┐ąŠą╗ąĮčÅąĄčé ą▒čāč乥čĆ ą┤ą░ąĮąĮčŗčģ ąĄą┤ąĖąĮąĖčćą║ą░ą╝ąĖ, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ą▓čŗąĘčŗą▓ą░ąĄčé čäčāąĮą║čåąĖčÄ TransmitData (čäčāąĮą║čåąĖčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ). RXC ISR ą▒čāą┤ąĄčé ą┤ąĄą╗ą░čéčī ą▓čŗą▒ąŠčĆą║ąĖ čüąĖą│ąĮą░ą╗ą░ ąĖ ą┐ąŠą╝ąĄčüčéąĖčé ą▓ ą▒čāč乥čĆ ą┤ą░ąĮąĮčŗčģ ą┐čĆąŠčćąĖčéą░ąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą┐ąĄčĆąĄą┤ą░ą╗ąŠ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ.
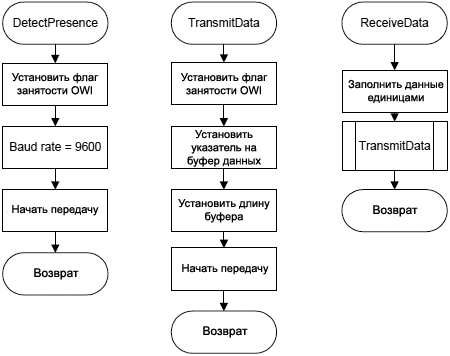
ąĀąĖčü. 19. ąÆčüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčŗąĄ čäčāąĮą║čåąĖąĖ.
[ąÆčŗčćąĖčüą╗ąĄąĮąĖąĄ CRC]
ąöą░ą╗ąĄąĄ ąŠą┐ąĖčüą░ąĮ ą░ą╗ą│ąŠčĆąĖčéą╝ ą┤ą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ą┤ą▓čāčģ čĆą░ąĘąĮčŗčģ čéąĖą┐ąŠą▓ CRC. ą¤ąĄčĆąĄą╝ąĄąĮąĮą░čÅ crc ą╗ąĖą▒ąŠ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ 0, ą╗ąĖą▒ąŠ ą▓ ąĮą░čćą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ CRC, čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝ąŠąĄ "seed". ąŁč鹊 ąŠą▒čŖčÅčüąĮčÅąĄčéčüčÅ ąĮąĖąČąĄ. ąĪąŠą║čĆą░čēąĄąĮąĖąĄ LSB ąŠąĘąĮą░čćą░ąĄčé Least Significant Bit, čé. ąĄ. čüą░ą╝čŗą╣ ą╝ą╗ą░ą┤čłąĖą╣ ą▒ąĖčé. ąĪąŠą║čĆą░čēąĄąĮąĖąĄ MSB ąŠąĘąĮą░čćą░ąĄčé Most Significant Bit, čé. ąĄ. čüą░ą╝čŗą╣ čüčéą░čĆčłąĖą╣ ą▒ąĖčé.
1. ąØą░ą╣čéąĖ ą╗ąŠą│ąĖč湥čüą║ąŠąĄ ąĖčüą║ą╗čÄčćą░čÄčēąĄąĄ ąĖą╗ąĖ (XOR) ą╝ąĄąČą┤čā LSB čā CRC ąĖ LSB čā ą┤ą░ąĮąĮčŗčģ.
2. ąĢčüą╗ąĖ čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ čĆą░ą▓ąĮąŠ 0, č鹊:
a. ąĪą┤ą▓ąĖąĮčāčéčī ą▓ą┐čĆą░ą▓ąŠ CRC.
3. ąĢčüą╗ąĖ čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ čĆą░ą▓ąĮąŠ 1, č鹊:
a. ąØą░ą╣čéąĖ ąĮąŠą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ CRC ą┐čāč鹥ą╝ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ąŠą┐ąĄčĆą░čåąĖąĖ XOR ą╝ąĄąČą┤čā CRC ąĖ ą┐ąŠą╗ąĖąĮąŠą╝ąŠą╝ CRC.
b. ąĪą┤ą▓ąĖąĮčāčéčī ą▓ą┐čĆą░ą▓ąŠ CRC.
c. ąŻčüčéą░ąĮąŠą▓ąĖčéčī MSB čā CRC ą▓ 1.
4. ąĪą┤ą▓ąĖąĮčāčéčī ą▓ą┐čĆą░ą▓ąŠ ą┤ą░ąĮąĮčŗąĄ.
5. ą¤ąŠą▓č鹊čĆąĖčéčī ą▓čüčÄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī 8 (ąĖą╗ąĖ 16) čĆą░ąĘ.
ąŁč鹊čé ą░ą╗ą│ąŠčĆąĖčéą╝ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠ ą║ą░ą║ ą┤ą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ CRC8, čéą░ą║ąĖ ąĖ ą┤ą╗čÅ CRC16. ąĀą░ąĘąĮąĖčåą░ č鹊ą╗čīą║ąŠ ą▓ čĆą░ąĘčĆčÅą┤ąĮąŠčüčéąĖ CRC ąĖ čĆąĄą│ąĖčüčéčĆąĄ čüą┤ą▓ąĖą│ą░ ą┤ą╗čÅ ąĮąĄą│ąŠ (8 ą▒ąĖčé ą┤ą╗čÅ CRC8, 16 ą▒ąĖčé ą┤ą╗čÅ CRC16) ąĖ ą▓ ąĘąĮą░č湥ąĮąĖąĖ čćąĖčüą╗ą░ ą┐ąŠą╗ąĖąĮąŠą╝ą░. ąŁč鹊 čćąĖčüą╗ąŠ čüąĖą╝čāą╗ąĖčĆčāąĄčé čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ 菹╗ąĄą╝ąĄąĮč鹊ą▓ XOR ą▓ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╝ ą▓čŗčćąĖčüą╗ąĖč鹥ą╗ąĄ CRC. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠą╗ąĖąĮąŠą╝ą░ čüąŠčüčéą░ą▓ą╗čÅąĄčé 18h ą┤ą╗čÅ CRC8 ąĖ 4002h ą┤ą╗čÅ CRC16.
ąÉą╗ą│ąŠčĆąĖčéą╝čŗ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ąĮą░ą╣čéąĖ ąĘąĮą░č湥ąĮąĖąĄ CRC ą┐ąŠ ąŠą┤ąĮąŠą╝čā ą▒ą░ą╣čéčā ąĘą░ čĆą░ąĘ, ąĮąŠ CRC "seed" ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮąŠ ą║ą░ą║ ą░čĆą│čāą╝ąĄąĮčé ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ą╝ CRC. ąóą░ą║ąĖą╝ čüą┐ąŠčüąŠą▒ąŠą╝ čĆąĄąĘčāą╗čīčéą░čé ąŠčé ąŠą┤ąĮąŠą╣ ąŠą┐ąĄčĆą░čåąĖąĖ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ CRC ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮ čüą╗ąĄą┤čāčÄčēąĄą╣ ąŠą┐ąĄčĆą░čåąĖąĖ ą▓ą╝ąĄčüč鹥 čüąŠ čüą╗ąĄą┤čāčÄčēąĖą╝ ą▒ą░ą╣č鹊ą╝, čéą░ą║ čćč鹊 ą┐ąŠą╗čāčćą░ąĄčéčüčÅ čŹčäč乥ą║čé ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ CRC ąŠčé ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▒ą░ą╣čé.
ą¤čĆąŠą▓ąĄčĆą║ą░ CRC ą┤ą╗čÅ 64-ą▒ąĖčéąĮčŗčģ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ą▓ OWI_CheckRomCRC. ą×ąĮą░ ą┐čĆąŠčüč鹊 ą▓čŗčćąĖčüą╗čÅąĄčé ąĘąĮą░č湥ąĮąĖąĄ CRC8 ąŠčé ą┐ąĄčĆą▓čŗčģ 56 ą▒ąĖčé, ąĖ čüčĆą░ą▓ąĮąĖą▓ą░ąĄčé ąĖčģ čü ą┐ąŠčüą╗ąĄą┤ąĮąĖą╝ąĖ 8 ą▒ąĖčéą░ą╝ąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░.
[ą¤čĆąĖą╝ąĄčĆčŗ ą║ąŠą┤ą░]
ą¤čĆąĖą▓ąĄą┤ąĄąĮčŗ 2 ą┐čĆąĖą╝ąĄčĆą░ ą║ąŠą┤ą░, ą║ąŠč鹊čĆčŗąĄ ąĖą╗ą╗čÄčüčéčĆąĖčĆčāčÄčé, ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čĆą░ąĘąĮčŗąĄ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ 1-Wire.
ą¤čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ čü ąŠą┐čĆąŠčüąŠą╝. ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čü ąŠą┐čĆąŠčüąŠą╝, ą║ąŠč鹊čĆčŗąĄ ą┤ąĄą╗ą░čÄčé ą┐ąŠąĖčüą║ čāčüčéčĆąŠą╣čüčéą▓ ąĮą░ čłąĖąĮą░čģ, ąĘą░ą┤ą░ąĮąĮčŗčģ ą║ą░ą║ BUSES. ąŻčüčéčĆąŠą╣čüčéą▓ą░ čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą▓ ą╝ą░čüčüąĖą▓ąĄ čéąĖą┐ą░ OWI_device. OWI_device čÅą▓ą╗čÅąĄčéčüčÅ čüčéčĆčāą║čéčāčĆąŠą╣, ą║ąŠč鹊čĆą░čÅ čüąŠą┤ąĄčƹȹĖčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠą▒ čāčüčéčĆąŠą╣čüčéą▓ąĄ, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą╝ ą║ čłąĖąĮąĄ, ąĖ ąĄą│ąŠ 64-ą▒ąĖčéąĮčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ. ąöčĆą░ą╣ą▓ąĄčĆ ąĘą░č鹥ą╝ ąĖčēąĄčé čüčĆąĄą┤ąĖ ą┤ąŠčüčéčāą┐ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ čüąĄąĮčüąŠčĆ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ DS1820 ąĖ čåąĖčäčĆąŠą▓ąŠą╣ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆ DS2890. ąĢčüą╗ąĖ ą║ą░ą║ąŠąĄ-č鹊 ąĖąĘ čŹčéąĖčģ čāčüčéčĆąŠą╣čüčéą▓ (ąĖą╗ąĖ ąŠą▒ą░) ąĮą░ą╣ą┤ąĄąĮąŠ ąĮą░ čłąĖąĮąĄ, ąŠąĮąĖ ą▒čāą┤čāčé ą┐ąŠčüč鹊čÅąĮąĮąŠ ąŠą┐čĆą░čłąĖą▓ą░čéčīčüčÅ ą▓ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠą╝ čåąĖą║ą╗ąĄ. ąÆ ą║ą░ąČą┤ąŠą╣ ąĖč鹥čĆą░čåąĖąĖ čüčćąĖčéčŗą▓ą░ąĄčéčüčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆą░ ąĖąĘ DS1820, ąĖ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ą┤ą▓ąĖąČą║ą░ DS2890 čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčéčüčÅ ąĮą░ ąĄą┤ąĖąĮąĖčåčā, ąŠą▒čĆąĄąĘą░čÅčüčī ą┐ąŠ ą╝ąŠą┤čāą╗čÄ 256. ąóąĄą╝ą┐ąĄčĆą░čéčāčĆą░ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ ą▓ PORTB, čéą░ą║ čćč鹊 ąĄčæ ą╝ąŠąČąĮąŠ ąĮą░ą▒ą╗čÄą┤ą░čéčī čüą▓ąĄč湥ąĮąĖąĄą╝ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą▓ LED ąĮą░ ą┐ą╗ą░č鹥 čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ STK500.
ą¤čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┐čĆąŠčüč鹊 ą┐ąŠą║ą░ąĘą░čéčī, ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čĆą░ąĘąĮčŗąĄ čćą░čüčéąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░. ąÜąŠą┤ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ čüą░ą╝čŗą╝ ąŠą▒čēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą▒ąĄąĘ ąŠą┐čéąĖą╝ąĖąĘą░čåąĖąĖ ą┐ąŠą┤ ą║ą░ą║ąĖąĄ-č鹊 čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ. ą¤ąŠčŹč鹊ą╝čā ąĖą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ą┐čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ ąĮąĄ ą┐ąŠą╝ąĄčüčéąĖčéčüčÅ ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ, čā ą║ąŠč鹊čĆčŗčģ ąĮą░ ą▒ąŠčĆčéčā ą╝ąĄąĮčīčłąĄ 4 ą║ąĖą╗ąŠą▒ą░ą╣čé ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝. ą×ą┤ąĮą░ą║ąŠ čüą░ą╝ ą┤čĆą░ą╣ą▓ąĄčĆ ą┐ąŠą╗ąĮąŠčüčéčīčÄ čüąŠą▓ą╝ąĄčüčéąĖą╝ čüąŠ ą▓čüąĄą╝ąĖ ą╝ąŠą┤ąĄą╗čÅą╝ąĖ AVR, ą▓ą║ą╗čÄčćą░čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ čü 1 ą║ąĖą╗ąŠą▒ą░ą╣č鹊ą╝ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝.
ą¤čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ čü ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮąĖąĄą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ą╝ą░čłąĖąĮą░ FSM. ąĢčüą╗ąĖ ą┤čĆą░ą╣ą▓ąĄčĆ ąĮąĄ ąĘą░ąĮčÅčé ą┐ąĄčĆąĄą┤ą░č湥ą╣ ą┤ą░ąĮąĮčŗčģ ą┐ąŠ čłąĖąĮąĄ, č鹊 čŹčéą░ FSM ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą▓ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠą╝ čåąĖą║ą╗ąĄ. ąÜąŠą│ą┤ą░ ą┤čĆą░ą╣ą▓ąĄčĆ ąĘą░ąĮčÅčé, č鹊 FSM ą┐čĆąŠą┐čāčüą║ą░ąĄčéčüčÅ, čćč鹊ą▒čŗ ą┐ąŠąĘą▓ąŠą╗ąĖčéčī čĆą░ą▒ąŠčéą░čéčī ą┤čĆčāą│ąŠą╝čā ą║ąŠą┤čā. ąĪą░ą╝ą░ ą┐ąŠ čüąĄą▒ąĄ FSM ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé, čćč鹊 ąĮą░ čłąĖąĮąĄ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ąĄą┤ąĖąĮčüčéą▓ąĄąĮąĮčŗą╣ ą┤ą░čéčćąĖą║ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ DS1820. ą×ąĮą░ čćąĖčéą░ąĄčé č鹥ą║čāčēčāčÄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčā, ąĖ ą▓čŗčćąĖčüą╗čÅąĄčé CRC, čćč鹊ą▒čŗ čāą▒ąĄą┤ąĖčéčīčüčÅ, čćč鹊 čćč鹥ąĮąĖąĄ ą▒čŗą╗ąŠ ą║ąŠčĆčĆąĄą║čéąĮčŗą╝. ąŚą░č鹥ą╝ č鹥ą╝ą┐ąĄčĆą░čéčāčĆą░ ą┐ąŠą╝ąĄčēą░ąĄčéčüčÅ ą▓ ą│ą╗ąŠą▒ą░ą╗čīąĮčāčÄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ. ąØąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ąĘą░ąĮčÅč鹊čüčéąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░, ą▒ąĄčüą║ąŠąĮąĄčćąĮčŗą╣ čåąĖą║ą╗ ą▓čŗą▓ąŠą┤ąĖčé č鹥ą╝ą┐ąĄčĆą░čéčāčĆčā ą▓ PORTB, čéą░ą║ čćč鹊 ąĄčæ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą╝ąŠąČąĮąŠ ąŠčéčüą╗ąĄąČąĖą▓ą░čéčī ą┐ąŠ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ą╝ ą┐ą╗ą░čéčŗ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ STK500.
[ąæčŗčüčéčĆčŗą╣ čüčéą░čĆčé]
ąśčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤. ąĢą│ąŠ ą╝ąŠąČąĮąŠ ąĘą░ą│čĆčāąĘąĖčéčī ą▓ ą▓ąĖą┤ąĄ zip-čäą░ą╣ą╗ą░ čü čüą░ą╣čéą░ atmel.com (ąĖą╗ąĖ čüą╝. [3]). ąĀą░čüą┐ą░ą║čāą╣č鹥 ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą▓ ą╗čÄą▒čāčÄ ą▓čŗą▒čĆą░ąĮąĮčāčÄ ąÆą░ą╝ąĖ ą┐ą░ą┐ą║čā. ąŻą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 čüąŠčģčĆą░ąĮąĄąĮą░ čüčéčĆčāą║čéčāčĆą░ ą┤ąĖčĆąĄą║č鹊čĆąĖą╣ ą▓ č鹊ą╝ ą▓ąĖą┤ąĄ, ą▓ ą║ą░ą║ąŠą╝ ąŠąĮą░ ą▒čŗą╗ą░ ą▓ ą░čĆčģąĖą▓ąĄ. ąŚą┤ąĄčüčī ąĄčüčéčī 3 ą┐ąŠą┤ą┐ą░ą┐ą║ąĖ: polled, interrupt_driven ąĖ common_files. ą¤ą░ą┐ą║ą░ common_files čüąŠą┤ąĄčƹȹĖčé čäčāąĮą║čåąĖąĖ CRC, ąŠą▒čēąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ, čüą┐ąĄčåąĖčäąĖčćąĮčŗąĄ ą┤ą╗čÅ ą┐čĆąĖą╝ąĄąĮčÅąĄą╝ąŠą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ UART. ą¤ą░ą┐ą║ąĖ polled ąĖ interrupt_driven čüąŠą┤ąĄčƹȹ░čé ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĖ ą┐čĆąĖą╝ąĄčĆčŗ ą║ąŠą┤ą░.
ąÜą░ąČą┤ą░čÅ ą┐ą░ą┐ą║ą░ čüąŠą┤ąĄčƹȹĖčé ą▓ čüąĄą▒ąĄ čäą░ą╣ą╗ source.doc. ąŁčéąĖ čäą░ą╣ą╗čŗ čüąŠą┤ąĄčƹȹ░čé ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ ą┐ąŠ ąĖčüčģąŠą┤ąĮąŠą╝čā ą║ąŠą┤čā. ą¤ąŠąČą░ą╗čāą╣čüčéą░ ąŠą▒čĆą░čéąĖč鹥čüčī ą║ čŹč鹊ą╣ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüč鹥ą╣ ąŠ č鹊ą╝, ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čĆą░ąĘąĮčŗąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ.
ąöčĆą░ą╣ą▓ąĄčĆ čü ąŠą┐čĆąŠčüąŠą╝. ąÜąŠčĆąŠčéą║ąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ą║ą░ąČą┤ąŠą│ąŠ čäą░ą╣ą╗ą░ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ čü ąŠą┐čĆąŠčüąŠą╝ ą┤ą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ 5.
ąóą░ą▒ą╗ąĖčåą░ 5. ążą░ą╣ą╗čŗ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ čü čĆą░ą▒ąŠč鹊ą╣ ą┐ąŠ ąŠą┐čĆąŠčüčā (ą▒ąĄąĘ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣).
| ążą░ą╣ą╗ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| main.c |
ą¤čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą┤čĆą░ą╣ą▓ąĄčĆą░ čü ąŠą┐čĆąŠčüąŠą╝. |
| OWISWBitFunctions.c |
ąæąĖč鹊ą▓čŗąĄ čäčāąĮą║čåąĖąĖ ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ, čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮčŗąĄ čü ą┐ąŠą╝ąŠčēčīčÄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą┐čĆąŠčüą░ GPIO, ą▒ąĄąĘ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. |
| OWIUARTBitFunctions.c |
ąæąĖč鹊ą▓čŗąĄ čäčāąĮą║čåąĖąĖ ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ, čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮčŗąĄ čü ą┐ąŠą╝ąŠčēčīčÄ ąŠą┐čĆąŠčüą░ UART. |
| OWIBitFunctions.h |
ą×ą▒čēąĖą╣ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗ ą┤ą╗čÅ čäčāąĮą║čåąĖą╣ ą╝ąŠą┤čāą╗ąĄą╣ OWISWBitFunctions.c ąĖ OWIUARTBitfunctions.c. |
| OWIHighLevelFunctions.c |
ążčāąĮą║čåąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą▓ąĄčĆčģąĮąĄą│ąŠ čāčĆąŠą▓ąĮčÅ. |
| OWIHighLevelFunctions.h |
ąŚą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗ ą┤ą╗čÅ ą╝ąŠą┤čāą╗čÅ OWIHighLevelFunctions.c. |
| OWIPolled.h |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗą╣ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ čü ąŠą┐čĆąŠčüąŠą╝. |
| source.doc |
ąöąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ ą┐ąŠ ąĖčüčģąŠą┤ąĮąŠą╝čā ą║ąŠą┤čā ą▓ čŹč鹊ą╣ ą┐ą░ą┐ą║ąĄ. |
ą¦č鹊ą▒čŗ ąĮą░čćą░čéčī čĆą░ą▒ąŠčéčā čü ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ąĖ, čĆą░ą▒ąŠčéą░čÄčēąĖą╝ąĖ ą┐ąŠ ąŠą┐čĆąŠčüčā, ą▓čŗą┐ąŠą╗ąĮąĖč鹥 čüą╗ąĄą┤čāčÄčēąĖąĄ čłą░ą│ąĖ:
ŌĆó ąĪąŠąĘą┤ą░ą╣č鹥 ąĮąŠą▓čŗą╣ ą┐čĆąŠąĄą║čé ą▓ čüčĆąĄą┤ąĄ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ IAR embedded workbench. ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą▓ąĄčĆčüąĖąĖ IAR, čŹč鹊 ą╝ąŠąČąĄčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčī čéą░ą║ąČąĄ čüąŠąĘą┤ą░ąĮąĖčÅ čĆą░ą▒ąŠč湥ą│ąŠ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ (workspace).
ŌĆó ąöąŠą▒ą░ą▓čīč鹥 ą▓ ą┐čĆąŠąĄą║čé ą▓čüąĄ čäą░ą╣ą╗čŗ *.c ąĖąĘ ą┤ąĖčĆąĄą║č鹊čĆąĖą╣ polled ąĖ common_files.
ŌĆó ąÆčŗą▒ąĄčĆąĖč鹥 ą║ąŠčĆąĮąĄą▓čāčÄ ą┐ą░ą┐ą║čā ą┐čĆąŠąĄą║čéą░ ą▓ ą▒čĆą░čāąĘąĄčĆąĄ ą┐čĆąŠąĄą║č鹊ą▓ IAR. ąĪą┤ąĄą╗ą░ą╣č鹥 ąĮą░ ąĮąĄčæ ą┐čĆą░ą▓čŗą╣ ą║ą╗ąĖą║ ąĖ ą▓čŗą▒ąĄčĆąĖč鹥 Options..., ą┐čĆąĖ čŹč鹊ą╝ ąŠč鹊ą▒čĆą░ąĘąĖčéčüčÅ ą┤ąĖą░ą╗ąŠą│ ąĮą░čüčéčĆąŠą╣ą║ąĖ ąŠą┐čåąĖą╣ ą┐čĆąŠąĄą║čéą░.
ŌĆó ą¤ąŠą┤ General/Target čāą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ą▓čŗą▒čĆą░ąĮčŗ ą┐čĆą░ą▓ąĖą╗čīąĮčŗą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĖ ą┐čĆą░ą▓ąĖą╗čīąĮą░čÅ ą╝ąŠą┤ąĄą╗čī ą┐ą░ą╝čÅčéąĖ.
ŌĆó ą¤ąŠą┤ General/Library configuration ą┐ąŠčüčéą░ą▓čīč鹥 ą│ą░ą╗ąŠčćą║čā ąĮą░ ąŠą┐čåąĖąĖ "Enable bit definitions in I/O include files".
ŌĆó ą¤ąŠą┤ General/System čāčüčéą░ąĮąŠą▓ąĖč鹥 čüč鹥ą║ ą┤ą░ąĮąĮčŗčģ Data stack (CSTACK) ą▓ ąĘąĮą░č湥ąĮąĖąĄ 0x40 ąĖ čüč鹥ą║ ą▓ąŠąĘą▓čĆą░čéą░ Return stack (RSTACK) ą▓ ąĘąĮą░č湥ąĮąĖąĄ 0x10. ąŁč鹊 čéčĆąĄą▒čāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąĖą╝ąĄčĆą░, ąĖąĮč鹥ąĮčüąĖą▓ąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĄą│ąŠ ą┐ą░ą╝čÅčéčī. ąĀą░ąĘą╝ąĄčĆ ą┐ąŠą┤ čüč鹥ą║ąĖ ą╝ąĄąĮčīčłąĄ ą╝ąŠą│čāčé čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčéčī ą┤čĆčāą│ąĖą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅą╝, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčé čŹč鹊čé ą┤čĆą░ą╣ą▓ąĄčĆ.
ŌĆó ąĢčüą╗ąĖ ą┤ą╗čÅ ąŠčéą╗ą░ą┤ą║ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ AVRStudio, č鹊 ąĮčāąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī č乊čĆą╝ą░čé ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čäą░ą╣ą╗ą░. ą¤ąŠą┤ XLINK/Output ą▓čŗą▒ąĄčĆąĖč鹥 Format/Other, ąĖ ąĘą░č鹥ą╝ ą▓čŗą▒ąĄčĆąĖč鹥 "ubrof 8 (forced)" ąĖąĘ ą▓čŗą┐ą░ą┤ą░čÄčēąĄą│ąŠ čüą┐ąĖčüą║ą░ Output format.
ŌĆó ą×čéą║čĆąŠą╣č鹥 čäą░ą╣ą╗ OWIPolled.h ą┤ą╗čÅ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ, ąĖ ąĮą░ą╣ą┤ąĖč鹥 čéą░ą╝ čüąĄą║čåąĖčÄ čü ąĖą╝ąĄąĮąĄą╝ "User defines" (ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ).
ŌĆó ąÆčŗą▒ąĄčĆąĖč鹥 ą╗ąĖą▒ąŠ č鹊ą╗čīą║ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆ (software only) ąĖą╗ąĖ ą┤čĆą░ą╣ą▓ąĄčĆ UART ą┐čāč鹥ą╝ čĆą░čüą║ąŠą╝ą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠą┤ąĮąŠą╣ ąĖąĘ čüčéčĆąŠą║, ą║ą░ą║ čŹč鹊 ąŠą┐ąĖčüą░ąĮąŠ ą▓ čäą░ą╣ą╗ąĄ.
ŌĆó ą¤ąĄčĆąĄą╝ąĄčüčéąĖč鹥čüčī ą▓ąĮąĖąĘ ą║ čüąĄą║čåąĖąĖ, ąŠčéąĮąŠčüčÅčēąĄą╣čüčÅ ą║ ą▓čŗą▒čĆą░ąĮąĮąŠą╝čā ą┤čĆą░ą╣ą▓ąĄčĆčā.
ŌĆó ą¤ąŠą┤čüčéčĆąŠą╣č鹥 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą▓ čüąĄą║čåąĖąĖ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝ąĖ čāčüčéą░ąĮąŠą▓ą║ą░ą╝ąĖ, ą║ą░ą║ čŹč鹊 ąŠą┐ąĖčüą░ąĮąŠ ą▓ čäą░ą╣ą╗ąĄ.
ŌĆó ąóąĄą┐ąĄčĆčī ą┐čĆąŠąĄą║čé ą│ąŠč鹊ą▓ ą║ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ.
ąöčĆą░ą╣ą▓ąĄčĆ čü ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝ąĖ. ąÜąŠčĆąŠčéą║ąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ą║ą░ąČą┤ąŠą│ąŠ čäą░ą╣ą╗ą░ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ 6.
ąóą░ą▒ą╗ąĖčåą░ 6. ążą░ą╣ą╗čŗ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ čü čĆą░ą▒ąŠč鹊ą╣ ą┐ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝.
| ążą░ą╣ą╗ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| main.c |
ą¤čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą┤čĆą░ą╣ą▓ąĄčĆą░ čü ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝ąĖ. |
| OWIInterruptDriven.h |
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗą╣ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ čü ąŠą┐čĆąŠčüąŠą╝. |
| OWIIntFunctions.c |
ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖ ą▓čüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčŗčģ čäčāąĮą║čåąĖą╣. |
| OWIIntFunctions.h |
ąŚą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗ ą┤ą╗čÅ ą╝ąŠą┤čāą╗čÅ OWIIntFunctions.c. |
| source.doc |
ąöąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ ą┐ąŠ ąĖčüčģąŠą┤ąĮąŠą╝čā ą║ąŠą┤čā ą▓ čŹč鹊ą╣ ą┐ą░ą┐ą║ąĄ. |
ą¦č鹊ą▒čŗ ąĮą░čćą░čéčī čĆą░ą▒ąŠčéčā čü ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ąĖ, čĆą░ą▒ąŠčéą░čÄčēąĖą╝ąĖ ą┐ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝, ą▓čŗą┐ąŠą╗ąĮąĖč鹥 čüą╗ąĄą┤čāčÄčēąĖąĄ čłą░ą│ąĖ:
ŌĆó ąĪąŠąĘą┤ą░ą╣č鹥 ąĮąŠą▓čŗą╣ ą┐čĆąŠąĄą║čé ą▓ čüčĆąĄą┤ąĄ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ IAR embedded workbench. ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą▓ąĄčĆčüąĖąĖ IAR, čŹč鹊 ą╝ąŠąČąĄčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčī čéą░ą║ąČąĄ čüąŠąĘą┤ą░ąĮąĖčÅ čĆą░ą▒ąŠč湥ą│ąŠ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ (workspace).
ŌĆó ąöąŠą▒ą░ą▓čīč鹥 ą▓ ą┐čĆąŠąĄą║čé ą▓čüąĄ čäą░ą╣ą╗čŗ *.c ąĖąĘ ą┤ąĖčĆąĄą║č鹊čĆąĖą╣ interrupt_driven ąĖ common_files.
ŌĆó ąÆčŗą▒ąĄčĆąĖč鹥 ą║ąŠčĆąĮąĄą▓čāčÄ ą┐ą░ą┐ą║čā ą┐čĆąŠąĄą║čéą░ ą▓ ą▒čĆą░čāąĘąĄčĆąĄ ą┐čĆąŠąĄą║č鹊ą▓ IAR. ąĪą┤ąĄą╗ą░ą╣č鹥 ąĮą░ ąĮąĄčæ ą┐čĆą░ą▓čŗą╣ ą║ą╗ąĖą║ ąĖ ą▓čŗą▒ąĄčĆąĖč鹥 Options..., ą┐čĆąĖ čŹč鹊ą╝ ąŠč鹊ą▒čĆą░ąĘąĖčéčüčÅ ą┤ąĖą░ą╗ąŠą│ ąĮą░čüčéčĆąŠą╣ą║ąĖ ąŠą┐čåąĖą╣ ą┐čĆąŠąĄą║čéą░.
ŌĆó ą¤ąŠą┤ General/Target čāą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ą▓čŗą▒čĆą░ąĮčŗ ą┐čĆą░ą▓ąĖą╗čīąĮčŗą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĖ ą┐čĆą░ą▓ąĖą╗čīąĮą░čÅ ą╝ąŠą┤ąĄą╗čī ą┐ą░ą╝čÅčéąĖ.
ŌĆó ą¤ąŠą┤ General/Library configuration ą┐ąŠčüčéą░ą▓čīč鹥 ą│ą░ą╗ąŠčćą║čā ąĮą░ ąŠą┐čåąĖąĖ "Enable bit definitions in I/O include files".
ŌĆó ąĢčüą╗ąĖ ą┤ą╗čÅ ąŠčéą╗ą░ą┤ą║ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ AVRStudio, č鹊 ąĮčāąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī č乊čĆą╝ą░čé ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čäą░ą╣ą╗ą░. ą¤ąŠą┤ XLINK/Output ą▓čŗą▒ąĄčĆąĖč鹥 Format/Other, ąĖ ąĘą░č鹥ą╝ ą▓čŗą▒ąĄčĆąĖč鹥 "ubrof 8 (forced)" ąĖąĘ ą▓čŗą┐ą░ą┤ą░čÄčēąĄą│ąŠ čüą┐ąĖčüą║ą░ Output format.
ŌĆó ą×čéą║čĆąŠą╣č鹥 čäą░ą╣ą╗ ŌĆ£OWIInterruptDriven.hŌĆØ ą┤ą╗čÅ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ, ąĖ ąĮą░ą╣ą┤ąĖč鹥 čéą░ą╝ čüąĄą║čåąĖčÄ čü ąĖą╝ąĄąĮąĄą╝ "User defines" (ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ).
ŌĆó ą¤ąŠą╝ąĄąĮčÅą╣č鹥 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą▓ čüąĄą║čåąĖąĖ "User defines", čćč鹊ą▒čŗ ąŠąĮąĖ ąŠčéčĆą░ąČą░ą╗ąĖ čĆąĄą░ą╗čīąĮčāčÄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ.
ŌĆó ąóąĄą┐ąĄčĆčī ą┐čĆąŠąĄą║čé ą│ąŠč鹊ą▓ ą║ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ.
[ąĪčüčŗą╗ą║ąĖ]
1. AVR318: Dallas 1-Wire master site:atmel.com.
2. iButton: ąŠą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąŠč鹊ą║ąŠą╗ą░, 菹╗ąĄą║čéčĆąŠąĮąĮčŗą╣ ąĘą░ą╝ąŠą║ ąĮą░ ą║ą╗čÄčćą░čģ-čéą░ą▒ą╗ąĄčéą║ą░čģ.
3. 141130AVR318.zip - ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą┐čĆąĖą╝ąĄčĆąŠą▓, ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ. |



