|
ą¤ąĄčĆąĄą▓ąŠą┤ ą░ą┐ąĮąŠčāčéą░ AVR274 [1], ą║ąŠč鹊čĆčŗą╣ ąŠą┐ąĖčüčŗą▓ą░ąĄčé čüąŠčäč鹊ą▓čāčÄ čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ ąŠą┤ąĮąŠą┐čĆąŠą▓ąŠą┤ąĮąŠą│ąŠ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠčĆčéą░ (UART). ą¤čĆąŠč鹊ą║ąŠą╗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┐ąŠą╗čāą┤čāą┐ą╗ąĄą║čüąĮčŗą╣ ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ ą╝ąĄąČą┤čā 2 čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ (ą┐ąĄčĆąĄą┤ą░čćą░ ą▓ čĆą░ąĘąĮčŗčģ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅčģ ą╝ąŠąČąĄčé ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī ą┐ąŠąŠč湥čĆąĄą┤ąĮąŠ). ąöą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čéčĆąĄą▒čāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ ą▓ąĮąĄčłąĮąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (external interrupt) ąĮą░ ą┐ąŠčĆč鹥 ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ I/O, ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čüčĆą░ą▓ąĮąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ (timer compare interrupt).
[1. ą×čüąĮąŠą▓ąĮčŗąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ąĖ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ UART]
ŌĆó UART čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ
ŌĆó ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐ąŠą╗čāą┤čāą┐ą╗ąĄą║čüąĮčŗą╣ ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ ą┐ąŠ ąŠą┤ąĮąŠą╝čā ą┐čĆąŠą▓ąŠą┤čā
ŌĆó ąśčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ
ŌĆó ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ąŠ 9600 ąĮą░ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹥 čÅą┤čĆą░ 1 ą£ąōčå
ŌĆó ą×ą┐ąĖčüą░ąĮąĮčŗą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ UART čüąŠą▓ą╝ąĄčüčéąĖą╝ čü ą╗čÄą▒čŗą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ AVR┬«, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą▓ąĮąĄčłąĮąĄąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ (external interrupt, ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ ąĮą░ ąĮąŠąČą║ąĄ GPIO) ąĖ ąĖą╝ąĄąĄčé 8-ą▒ąĖčéąĮčŗą╣ čéą░ą╣ą╝ąĄčĆ čü ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čüčĆą░ą▓ąĮąĄąĮąĖčÅ (timer compare interrupt).
ą×ą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ čü ą┐ąŠą╝ąŠčēčīčÄ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ UART ąŠą▒čŗčćąĮąŠ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ąŠčéą┤ąĄą╗čīąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ (čüąĖą│ąĮą░ą╗čŗ RX ąĖ TX). ą×ą┤ąĮąŠą┐čĆąŠą▓ąŠą┤ąĮčŗą╣ UART ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ č鹊ą╗čīą║ąŠ ąŠą┤ąĮčā čüąĖą│ąĮą░ą╗čīąĮčāčÄ ą╗ąĖąĮąĖčÄ. ą¤ąŠčŹč鹊ą╝čā čéą░ą║ąŠą╣ UART čÅą▓ą╗čÅąĄčéčüčÅ ąĖą┤ąĄą░ą╗čīąĮčŗą╝ ą┤ą╗čÅ čüą╗čāčćą░ąĄą▓, ą║ąŠą│ą┤ą░ ąĮčāąČąĮąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ąĮąĄą┤ąŠčĆąŠą│ąŠąĄ čĆąĄčłąĄąĮąĖčÅ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ, ąĖ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą▓čŗčüąŠą║ą░čÅ čüą║ąŠčĆąŠčüčéčī ąĖ ą┐ąŠą╗ąĮąŠą┤čāą┐ą╗ąĄą║čüąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░. ąŁč鹊čé ą░ą┐ąĮąŠčāčé ąŠą┐ąĖčüčŗą▓ą░ąĄčé čüąŠčäč鹊ą▓čāčÄ (ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčāčÄ) čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ ąŠą┤ąĮąŠą┐čĆąŠą▓ąŠą┤ąĮąŠą│ąŠ UART. ą¤čĆąŠč鹊ą║ąŠą╗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┐ąŠą╗čāą┤čāą┐ą╗ąĄą║čüąĮčŗą╣ ąŠą▒ą╝ąĄąĮ ą╝ąĄąČą┤čā ą┤ą▓čāą╝čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ AVR. ąöą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čéčĆąĄą▒čāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą▓čŗą▓ąŠą┤ ą┐ąŠčĆčéą░ I/O, ąĮą░ ą║ąŠč鹊čĆąŠą╝ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ąĮąĄčłąĮąĄąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ (external interrupt), ąĖ čéčĆąĄą▒čāąĄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čüčĆą░ą▓ąĮąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ (timer compare interrupt).
[2. ąóąĄąŠčĆąĖčÅ: ą║ą░ą║ čŹč鹊 čĆą░ą▒ąŠčéą░ąĄčé]
2.1. ążčĆąĄą╣ą╝ (ą▒ąĖč鹊ą▓čŗą╣ ą║ą░ą┤čĆ) UART
ą¤čĆąŠč鹊ą║ąŠą╗ UART ąĖčüą┐ąŠą╗čīąĘčāąĄčé čüčéą░ąĮą┤ą░čĆčé ą░čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ. ąöą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ, ą▒ąĖčé ąĘą░ ą▒ąĖč鹊ą╝, ą║ą░ąČą┤ąŠą╝čā ą▒ąĖčéčā ąŠčéą▓ąŠą┤ąĖčéčüčÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ąŠčéčĆąĄąĘąŠą║ ą▓čĆąĄą╝ąĄąĮąĖ. ąŁčéą░ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čäčĆąĄą╣ą╝ ąĖąĘ 8 ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ, 1 čüčéą░čĆč鹊ą▓ąŠą│ąŠ ą▒ąĖčéą░ ąĖ 2 čüč鹊ą┐ąŠą▓čŗčģ ą▒ąĖčé, ą║ą░ą║ čŹč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 2-1 (čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą║ą░ąČą┤čŗą╣ ą▒ąĖč鹊ą▓čŗą╣ ą║ą░ą┤čĆ čüąŠčüč鹊ąĖčé ąĖąĘ 11 菹╗ąĄą╝ąĄąĮčéą░čĆąĮčŗčģ ą▒ąĖč鹊ą▓čŗčģ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓). ąóą░ą║ąŠą╣ č乊čĆą╝ą░čé ą▓čŗą▒čĆą░ąĮ ą┐ąŠč鹊ą╝čā, čćč鹊 ąĮą░ ą┐čĆą░ą║čéąĖą║ąĄ ąĖą╝ąĄąĮąĮąŠ ąŠąĮ čćą░čēąĄ ą▓čüąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ. ąöčĆčāą│ąĖąĄ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤čĆčāą│ąĖąĄ č乊čĆą╝ą░čéčŗ čäčĆąĄą╣ą╝ą░, ą║ ą┐čĆąĖą╝ąĄčĆčā čüąŠčüč鹊čÅčēąĖąĄ ąĖąĘ 5..9 ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ, 1 ą▒ąĖčéą░ č湥čéąĮąŠčüčéąĖ (parity, ą▒ąĖčé ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąĮą░ą╗ąĖčćąĖčÅ ąŠčłąĖą▒ą║ąĖ), ąĖ 1 čüč鹊ą┐ąŠą▓čŗą╣ ą▒ąĖčé. ąÜąŠąĮąĄčćąĮąŠ ąČąĄ, ąŠą▒ąĄ ą┐ąĄčĆąĄą┤ą░čÄčēąĖąĄ čüč鹊čĆąŠąĮčŗ ą▓ ąŠą▒ą╝ąĄąĮąĄ č鹊čćą║ą░-č鹊čćą║ą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĮą░čüčéčĆąŠąĄąĮčŗ ąĮą░ ąŠą┤ąĖąĮ ąĖ č鹊čé ąČąĄ č乊čĆą╝ą░čé ą┤ą░ąĮąĮčŗčģ. ąÜąŠą│ą┤ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĮąĄčé, č鹊 čüąĖą│ąĮą░ą╗čīąĮą░čÅ ą╗ąĖąĮąĖčÅ UART ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąŠą│. 1.
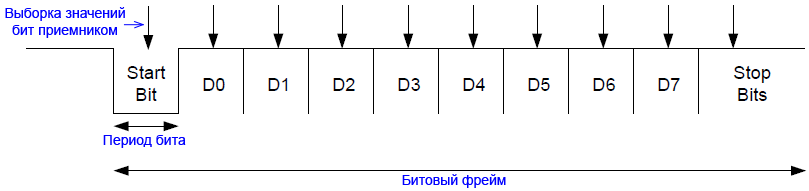
ąĀąĖčü. 2-1. ążąŠčĆą╝ą░čé čäčĆąĄą╣ą╝ą░ UART.

ąĀąĖčü. 2.2. ążčĆąĄą╣ą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ čüąĖą╝ą▓ąŠą╗ą░ ASCII 'a' (ą║ąŠą┤ 0x61).
2.2. ą¤ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ
ą¤ąĄčĆąĄą┤ą░čćą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčéčüčÅ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ čüčéą░čĆč鹊ą▓ąŠą│ąŠ ą▒ąĖčéą░, ą║ąŠč鹊čĆčŗą╣ ą▓čüąĄą│ą┤ą░ čĆą░ą▓ąĄąĮ 0 (čüąĖą│ąĮą░ą╗čīąĮą░čÅ ą╗ąĖąĮąĖčÅ ą┐čĆąĖčéčÅą│ąĖą▓ą░ąĄčéčüčÅ ą║ ąĮąĖąČąĮąĄą╝čā čāčĆąŠą▓ąĮčÄ). ą¤čĆąĖąĄą╝ąĮąĖą║ ąĮą░ ą┤čĆčāą│ąŠą╣ čüč鹊čĆąŠąĮąĄ ą╗ąĖąĮąĖąĖ ą┤ąĄč鹥ą║čéąĖčĆčāąĄčé čüą┐ą░ą┤ čāčĆąŠą▓ąĮčÅ ąĮą░ ą╗ąĖąĮąĖąĖ, ąĖ ą┐ąŠ čŹč鹊ą╝čā čüąŠą▒čŗčéąĖčÄ ą╝ąŠąČąĄčé ąĘą░čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░čéčīčüčÅ čü ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ąŠą╝ (čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ čéčĆąĄą▒čāąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠčĆčĆąĄą║čéąĮąŠą│ąŠ ą┐čĆąĖąĄą╝ą░ ą▓čüąĄčģ ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ). ąĪą░ą╝čŗą╣ ą╝ą╗ą░ą┤čłąĖą╣ ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą┐ąĄčĆą▓čŗą╝ (čüą╝. čĆąĖčü. 2-2).
ąÆčŗčģąŠą┤čŗ čü ąŠčéą║čĆčŗčéčŗą╝ ą║ąŠą╗ą╗ąĄą║č鹊čĆąŠą╝ čćą░čüč鹊 ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ čéą░ą║ąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą╗ąĖąĮąĖąĄą╣ ą┤ą░ąĮąĮčŗčģ, ąŠą┤ąĮą░ą║ąŠ ąĄčüą╗ąĖ čüčĆą░ąĘčā ąŠą▒ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮą░ ą╗ąĖąĮąĖąĖ ą▒čāą┤čāčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ą▓ ąŠą┤ąĮąŠ ąĖ č鹊 ąČąĄ ą▓čĆąĄą╝čÅ, č鹊 ą┐ąĄčĆąĄą┤ą░čéčćąĖą║, ą┐ąĄčĆąĄą┤ą░čÄčēąĖą╣ ą╗ąŠą│. 0, ą▓čüąĄ čĆą░ą▓ąĮąŠ ą▒čāą┤ąĄčé ą┐čĆąĖčéčÅą│ąĖą▓ą░čéčī ą╗ąĖąĮąĖčÄ ą║ ą╗ąŠą│. 0, ą║ąŠą│ą┤ą░ ą▓č鹊čĆąŠą╣ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ ą┐čŗčéą░ąĄčéčüčÅ ą┐ąĄčĆąĄą┤ą░čéčī ą▒ąĖčé 1. ą¦č鹊ą▒čŗ ąŠą▒čĆą░ą▒ąŠčéą░čéčī čŹčéčā čüąĖčéčāą░čåąĖčÄ, UART ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ąĘą░ą┐čāčüą║ą░ąĄčé ą┐ąĄčĆąĄą┤ą░čćčā, ą║ąŠą│ą┤ą░ ąŠąĮ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąĄą╝ą░. ą¤ąĄčĆąĄą┤ą░čéčćąĖą║ čéą░ą║ąČąĄ ą┐čĆąŠą▓ąĄčĆčÅąĄčé čüąĖą│ąĮą░ą╗čīąĮčāčÄ ą╗ąĖąĮąĖčÄ ą┐ąĄčĆąĄą┤ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ ąĮąŠą▓ąŠą│ąŠ ą▒ąĖčéą░, čćč鹊ą▒čŗ čāą▒ąĄą┤ąĖčéčīčüčÅ, čćč鹊 ąĄčæ čüąŠčüč鹊čÅąĮąĖąĄ ąĮąĄ ąĖąĘą╝ąĄąĮąĖą╗ąŠčüčī, ą║ąŠą│ą┤ą░ ą┐ąĄčĆąĄą┤ą░ą▓ą░ą╗čüčÅ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą▒ąĖčé. ążą╗ą░ą│ ąŠčłąĖą▒ą║ąĖ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ąĄčüą╗ąĖ ą┐čĆąĖąĮčÅčé ą▒ąĖčé ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ, ą║ąŠą│ą┤ą░ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╝ ą┐ąĄčĆąĄą┤ą░ą▓ą░ą╗čüčÅ ą▒ąĖčé ą▓čŗčüąŠą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ.
2.3. ą¤čĆąĖąĄą╝ ą┤ą░ąĮąĮčŗčģ
ą¤čĆąĖąĄą╝ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą▒čŗą╗ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮ čüčéą░čĆč鹊ą▓čŗą╣ ą▒ąĖčé ąĮą░ ą╗ąĖąĮąĖąĖ. ąŚą░č鹥ą╝ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąĖąĮąĖąĖ ą░ąĮą░ą╗ąĖąĘąĖčĆčāąĄčéčüčÅ ą┐ąŠčüąĄčĆąĄą┤ąĖąĮąĄ ą║ą░ąČą┤ąŠą│ąŠ ą▒ąĖč鹊ą▓ąŠą│ąŠ ąĖąĮč鹥čĆą▓ą░ą╗ą░ čäčĆąĄą╣ą╝ą░, čćč鹊ą▒čŗ ą┐čĆąĖąĮčÅčéčī ąĘąĮą░č湥ąĮąĖąĄ ą║ą░ąČą┤ąŠą│ąŠ ą▒ąĖčéą░ ąĖąĮč乊čĆą╝ą░čåąĖąĖ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą║ ą┐čĆąĖą╝ąĄčĆčā, ą┐ąĄčĆą▓čŗą╣ ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ ą┐ąŠčüą╗ąĄ 1.5 ą┐ąĄčĆąĖąŠą┤ą░ ą▒ąĖčéą░ ą┐ąŠčüą╗ąĄ ąĮą░čćą░ą╗ą░ čüčéą░čĆč鹊ą▓ąŠą│ąŠ ą▒ąĖčéą░. ąŁčéą░ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ (ą┤ą╗čÅ čāą┐čĆąŠčēąĄąĮąĖčÅ, ąĖ čāą╝ąĄąĮčīčłąĄąĮąĖčÅ ąĘą░ą│čĆčāąĘą║ąĖ čÅą┤čĆą░ AVR) ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čéčĆąŠą╣ąĮčāčÄ ą╝ą░ąČąŠčĆąĖčéą░čĆąĮčāčÄ ą▓čŗą▒ąŠčĆą║čā ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą▒ąĖčéą░ (čŹč鹊čé čüą┐ąŠčüąŠą▒ čāč鹊čćąĮąĄąĮąĖčÅ ąĘąĮą░č湥ąĮąĖčÅ ą▒ąĖčéą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąĄ ą░ą┐ą┐ą░čĆą░čéąĮąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮčŗčģ UART).
2.4. ąæąĖč鹊ą▓ą░čÅ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ (Baud Rate)
ąĪą║ąŠčĆąŠčüčéčī ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ UART ąĘą░ą┤ą░ąĄčéčüčÅ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą╝ baud rate. ąĢą│ąŠ ąĘąĮą░č湥ąĮąĖąĄ ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮąŠ ą║ąŠą╗ąĖč湥čüčéą▓čā ą▒ąĖč鹊ą▓čŗčģ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąŠčģąŠą┤čÅčé ąĘą░ ąĄą┤ąĖąĮąĖčåčā ą▓čĆąĄą╝ąĄąĮąĖ. ąóą░ą║ ą║ą░ą║ ą▓ąŠ čäčĆąĄą╣ą╝ąĄ ą┐čĆąĖą╝ąĄąĮčÅčÄčéčüčÅ čüčéą░čĆč鹊ą▓čŗą╣ ąĖ čüč鹊ą┐ąŠą▓čŗąĄ ą▒ąĖčéčŗ, č鹊 čĆąĄą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą╝ąĄąĮčīčłąĄ (ą┤ą╗čÅ ąĮą░čłąĄą│ąŠ ą┐čĆąĖą╝ąĄčĆą░ ąŠąĮą░ čĆą░ą▓ąĮą░ 8/11 ąŠčé ąĘąĮą░č湥ąĮąĖčÅ baud rate). ą¤čĆąĖąĄą╝ąĮąĖą║ ąĖ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĮą░čüčéčĆąŠąĄąĮčŗ ąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąŠą┤ąĮąŠą│ąŠ ąĖ č鹊ą│ąŠ ąČąĄ ąĘąĮą░č湥ąĮąĖčÅ baud rate, ąĖąĮą░č湥 ąŠąĮąĖ ąĮąĄ čüą╝ąŠą│čāčé ąĘą░čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░čéčīčüčÅ ą┐ąŠ ą▒ąĖčéą░ą╝, ąĖ ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ ąĮąĄ ą┐ąŠą╗čāčćąĖčéčüčÅ. ąśą╝ąĄąĄčéčüčÅ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čĆčÅą┤ čüą║ąŠčĆąŠčüč鹥ą╣ baud rate: 4800, 9600, 19200, 28800, 38400 ąĖ čé. ą┤.
2.5. ąĪąŠą▒čŗčéąĖčÅ ąŠčłąĖą▒ą║ąĖ (Error Conditions)
ąÆ ą┐čĆąŠčåąĄčüčüąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą╝ąŠą│čāčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ ąŠčłąĖą▒ą║ąĖ čĆą░ąĘąĮąŠą│ąŠ ą▓ąĖą┤ą░. ąĢčüą╗ąĖ čüą║ąŠčĆąŠčüčéąĖ baud rate čüą╗ąĖčłą║ąŠą╝ ąŠčéą╗ąĖčćą░čÄčéčüčÅ ą╝ąĄąČą┤čā ą┤ą▓čāą╝čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ, č鹊 ąŠąĮąĖ ą▒čāą┤čāčé čĆą░čüčüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮčŗ. ą¤ąŠčüą║ąŠą╗čīą║čā baud rate ąĘą░ą▓ąĖčüąĖčé ąŠčé čéą░ą║ąŠą▓ąŠą╣ čćą░čüč鹊čéčŗ čÅą┤čĆą░ AVR, čŹčéą░ ą┐čĆąŠą▒ą╗ąĄą╝ą░ ą╝ąŠąČąĄčé ą▓ąŠąĘąĮąĖą║ąĮčāčéčī, ąĄčüą╗ąĖ čĆąĄą░ą╗čīąĮą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé č鹊ą╣, ą║ąŠč鹊čĆą░čÅ ąĮčāąČąĮą░. ąÜ ą┐čĆąĖą╝ąĄčĆčā, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čéą░ą║č鹊ą▓čŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ (internal RC oscillator), č鹊 čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĄą│ąŠ ąŠčéą║ą░ą╗ąĖą▒čĆąŠą▓ą░čéčī ą┐ąĄčĆąĄą┤ ąĮą░čćą░ą╗ąŠą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ UART. ą¤ąŠąČą░ą╗čāą╣čüčéą░ ąŠą▒čĆą░čéąĖč鹥čüčī ą║ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ą░ą┐ąĮąŠčāčéą░ą╝, čćč鹊ą▒čŗ čāąĘąĮą░čéčī, ą║ą░ą║ ą║ą░ą╗ąĖą▒čĆąŠą▓ą░čéčī ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ RC-ą│ąĄąĮąĄčĆą░č鹊čĆ.
ą¤čĆąĖąĮčÅčéčŗą╣ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ ąŠą┤ąĮąŠą▒ą░ą╣č鹊ą▓ąŠą╝ ą▒čāč乥čĆąĄ ą┤ą░ąĮąĮčŗčģ. ąĢčüą╗ąĖ ą┐čĆąĖąĮčÅčéčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĮąĄ ą▒čŗą╗ąĖ ąŠą▒čĆą░ą▒ąŠčéą░ąĮčŗ ą▓ąŠą▓čĆąĄą╝čÅ, ą┤ąŠ č鹊ą│ąŠ ą║ą░ą║ ąĮą░čćą░ą╗čüčÅ ą┐čĆąĖąĄą╝ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą▒ą░ą╣čéą░, č鹊 ą▒čāč乥čĆ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮ, ąĖ čüčéą░čĆčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▒čāą┤čāčé ą┐ąĄčĆąĄąĘą░ą┐ąĖčüą░ąĮčŗ. ążą╗ą░ą│ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čéą░ą║ą░čÅ ąŠčłąĖą▒ą║ą░. ąÆ čāčüčéčĆą░ąĮąĄąĮąĖąĖ čéą░ą║ąŠą╣ ąŠčłąĖą▒ą║ąĖ ą╝ąŠąČąĄčé ą┐ąŠą╝ąŠčćčī čüąĮąĖąČąĄąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ čüą║ąŠčĆąŠčüčéąĖ UART, ą╗ąĖą▒ąŠ čāą▓ąĄą╗ąĖč湥ąĮąĖąĄ čĆą░ąĘą╝ąĄčĆą░ ą▒čāč乥čĆą░, č鹊ą│ą┤ą░ čā ąŠčüąĮąŠą▓ąĮąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą▒čāą┤ąĄčé ą▒ąŠą╗čīčłąĄ ą▓čĆąĄą╝ąĄąĮąĖ, čćč鹊ą▒čŗ ąŠą▒čĆą░ą▒ąŠčéą░čéčī ą┐čĆąĖąĮčÅčéčŗąĄ ą┤ą░ąĮąĮčŗąĄ. ąøąĖą▒ąŠ ąĮčāąČąĮąŠ ą▓čŗąĘčŗą▓ą░čéčī ą┐čĆąŠčåąĄą┤čāčĆčā ą┐čĆąŠą▓ąĄčĆą║ąĖ ąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▒čāč乥čĆą░ čćą░čēąĄ, čü ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą▓ąŠąĘą╝ąŠąČąĮąŠą╣ čćą░čüč鹊č鹊ą╣.
ąĢčüą╗ąĖ čłčāą╝ąŠą▓ąŠą╣ ąĖą╝ą┐čāą╗čīčü ą┐ąŠą╝ąĄčģ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ ą┐ąĄčĆąĄą▓ąĄą┤ąĄčé ą╗ąĖąĮąĖčÄ čüąĖą│ąĮą░ą╗ą░ ą▓ ą╗ąŠą│. 0, č鹊 AVR ąŠą┐čĆąĄą┤ąĄą╗ąĖčé čüą┐ą░ą┤ čüąĖą│ąĮą░ą╗ą░ ąĖ ąĮą░čćąĮąĄčé ą┐čĆąĖąĄą╝. ąĢčüą╗ąĖ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąŠ ąĮą░čćą░ą╗ąŠ čüčéą░čĆč鹊ą▓ąŠą│ąŠ ą▒ąĖčéą░, ąĮąŠ ąŠąĮ ąŠą║ą░ąĘą░ą╗čüčÅ ąĮąĄąĮčāą╗ąĄą▓čŗą╝, č鹊 AVR ąŠčüčéą░ąĮąŠą▓ąĖčé ą┐čĆąĖąĄą╝ ąĖ ąĮąĄ čüąŠčģčĆą░ąĮąĖčé ąĮąĖą║ą░ą║ąĖčģ ą┤ą░ąĮąĮčŗčģ, ąĮąŠ ąĄčüą╗ąĖ ąĖą╝ą┐čāą╗čīčü čłčāą╝ą░ ąŠą║ą░ąĘą░ą╗čüčÅ ą┤ą╗ąĖąĮąĮąĄąĄ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čåąĖą║ą╗ąŠą▓ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ, č鹊 ą▒čāą┤ąĄčé ą┐čĆąĖąĮčÅčé ąĖ čüąŠčģčĆą░ąĮąĄąĮ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮčŗą╣ ą▒ą░ą╣čé (ą║ąŠč鹊čĆčŗą╣ ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ ąĮąĖą║č鹊 ąĮąĄ ą┐ąĄčĆąĄą┤ą░ą▓ą░ą╗).
ą©čāą╝ ą╝ąŠąČąĄčé čéą░ą║ąČąĄ ąĖčüą║ą░ąĘąĖčéčī čäčĆąĄą╣ą╝ ąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąóą░ą║ ą║ą░ą║ čüąŠčüč鹊čÅąĮąĖąĄ ą▒ąĖčéą░ ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ čĆą░ąĘ, č鹊 čäčĆąĄą╣ą╝ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĖąĮčÅčé čü ąŠčłąĖą▒ą║ąŠą╣, ąĄčüą╗ąĖ ąĖą╝ą┐čāą╗čīčü čłčāą╝ą░ ą┐čĆąĖčłąĄą╗čüčÅ ąĮą░ ą╝ąŠą╝ąĄąĮčé čüčćąĖčéčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝ čüąŠčüč鹊čÅąĮąĖčÅ čüąĖą│ąĮą░ą╗čīąĮąŠą╣ ą╗ąĖąĮąĖąĖ. ąöą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąĮą░ą╗ąĖčćąĖčÅ čéą░ą║ąĖčģ ąŠčłąĖą▒ąŠą║ ą╝ąŠąČąĄčé ą┐ąŠą╝ąŠčćčī ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄ ą║ čäčĆąĄą╣ą╝čā UART ą▒ąĖčéą░ č湥čéąĮąŠčüčéąĖ (parity bit), ą┐čĆąĖ čŹč鹊ą╝ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░ąĮąĮąŠ ą╝ąŠą│čāčé ą▒čŗčéčī ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮčŗ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮąŠčćąĮčŗąĄ ąŠčłąĖą▒ą║ąĖ čäčĆąĄą╣ą╝ą░.
ą¤ąŠčüą║ąŠą╗čīą║čā ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ UART ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, č鹊 ąŠčüąĮąŠą▓ąĮąŠą╣ ą║ąŠą┤ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ (ą║ąŠą┤ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ą║ąŠč鹊čĆčŗą╣ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą▓ ą│ą╗ą░ą▓ąĮąŠą╝ čåąĖą║ą╗ąĄ main) ą╝ąŠąČąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ "ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ", ą▓ą╝ąĄčüč鹥 čü ąŠą▒ą╝ąĄąĮąŠą╝ UART. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ą┐ąŠčüą║ąŠą╗čīą║čā AVR ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, č鹊 ą┤čĆčāą│ąĖąĄ ą░ą║čéąĖą▓ąĮčŗąĄ ąĖčüč鹊čćąĮąĖą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą╝ąŠą│čāčé ą┐ąŠą▓ą╗ąĖčÅčéčī ąĮą░ UART (ą║ ą┐čĆąĖą╝ąĄčĆčā, ąĮąĄ ą▒čāą┤čāčé č鹊čćąĮąŠ ą▓čŗčćąĖčüą╗čÅčéčīčüčÅ ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą▒ąĖč鹊ą▓), ąĖ čŹč鹊 ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ąŠčłąĖą▒ą║ą░ą╝ ą▓ ąŠą▒ą╝ąĄąĮąĄ ą┤ą░ąĮąĮčŗą╝ąĖ.
ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī UART ą▓ ąŠą▒ą╝ąĄąĮąĄ č鹊čćą║ą░-č鹊čćą║ą░, ą║ąŠą│ą┤ą░ ąŠą┤ąĮąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ čÅą▓ą╗čÅąĄčéčüčÅ ą│ą╗ą░ą▓ąĮčŗą╝, ą┤čĆčāą│ąŠąĄ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╝ (čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝ą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ master/slave). ąóąŠą│ą┤ą░ slave ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ ąĖčģ ąĘą░ą┐čĆąŠčüąĖą╗ master. ąŁč鹊 ą┐čĆąĄą┤ąŠčéą▓čĆą░čéąĖčé čüąĖčéčāą░čåąĖąĖ, ą║ąŠą│ą┤ą░ ąŠą▒ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ąĄčĆąĄą┤ą░čÄčé ą▓ ąŠą┤ąĮąŠ ąĖ č鹊 ąČąĄ ą▓čĆąĄą╝čÅ. ąĢčüą╗ąĖ slave ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąŠčłąĖą▒ą║ąĖ, č鹊 ąŠąĮ ą╝ąŠąČąĄčé čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī ąŠą▒ čŹč鹊ą╝ ą┤ą╗čÅ master, ąĄčüą╗ąĖ ą┐čĆąĖčéčÅąĮąĄčé čüąĖą│ąĮą░ą╗čīąĮčāčÄ ą╗ąĖąĮąĖčÄ UART ą║ ą╗ąŠą│. 0 ąĮą░ ąĘą░ą┤ą░ąĮąĮąŠąĄ ą▓čĆąĄą╝čÅ. ąóąŠą│ą┤ą░ ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čäą╗ą░ą│ ąŠčłąĖą▒ą║ąĖ master, ąĖ ąŠą▒ą╝ąĄąĮ ą▒čāą┤ąĄčé ą┐čĆąŠą┤ąŠą╗ąČąĄąĮ č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ slave ą┐čĆąĄą║čĆą░čéąĖčé čāą┤ąĄčƹȹĖą▓ą░čéčī ą╗ąĖąĮąĖčÄ čü čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąŠą│. 0.
ą¤čĆąĖą╝. ą┐ąĄčĆąĄą▓ąŠą┤čćąĖą║ą░: čüčģąĄą╝ą░ ąŠą▒ą╝ąĄąĮą░ master/slave čćą░čüč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą░ąČąĄ ą▓ čäąĖąĘąĖč湥čüą║ąĖ ą┐ąŠą╗ąĮąŠą┤čāą┐ą╗ąĄą║čüąĮčŗčģ čüąĖčüč鹥ą╝ą░čģ, ą║ąŠą│ą┤ą░ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ąŠčéą┤ąĄą╗čīąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ TX ąĖ RX. ąŁč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ čü čåąĄą╗čīčÄ čāą┐čĆąŠčēąĄąĮąĖčÅ ą╗ąŠą│ąĖą║ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ąŠą▒ą╝ąĄąĮą░, ąĖ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐čĆąŠčēąĄ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░čéčī ą▓čŗčüąŠą║ąŠčāčĆąŠą▓ąĮąĄą▓ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ąŠą▒ą╝ąĄąĮąĖą▓ą░čÄčēąĖčģčüčÅ ą┤ą░ąĮąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓. ąÆ čćą░čüčéąĮąŠčüčéąĖ, ą┐čĆąĖąĮčåąĖą┐ master/slave ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ ą▓ąĄčĆčüąĖąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ STK500, ą░ čéą░ą║ąČąĄ čŹč鹊 ąŠčüąĮąŠą▓ąĮąŠą╣ ą┐čĆąĖąĮčåąĖą┐ čĆą░ą▒ąŠčéčŗ čłąĖąĮčŗ USB.
[3. ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ]
ąÜąŠą┤, ąŠą┐ąĖčüčŗą▓ą░ąĄą╝čŗą╣ ą▓ čŹč鹊ą╝ ą░ą┐ąĮąŠčāč鹥, ąĮą░ą┐ąĖčüą░ąĮ ą║ą░ą║ ą┤čĆą░ą╣ą▓ąĄčĆ, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗą╣ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ č湥čĆąĄąĘ UART.
3.1. ąŻčüčéą░ąĮąŠą▓ą║ą░ čüą║ąŠčĆąŠčüčéąĖ Baud Rate
ąöą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą┐čĆąĖ ą▓čŗą▒ąŠčĆą║ąĄ ą▒ąĖčé ą┐čĆąĖąĄą╝ą░ ąĖ ą┐čĆąĖ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĖ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗčģ ą▒ąĖčé, ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čüčĆą░ą▓ąĮąĄąĮąĖčÅ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░ čü ą┐čĆąĄą┤čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ (timer compare interrupt). ąóą░ą╣ą╝ąĄčĆ ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ ąŠčćąĖčüčéą║ąĖ ą┐čĆąĖ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖąĖ čüčĆą░ą▓ąĮąĄąĮąĖčÅ, čĆąĄąČąĖą╝ Clear Timer on Compare (CTC), ąĖ ąĮą░ čŹč鹊 čüąŠą▒čŗčéąĖąĄ ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. ąŁč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé, ą║ąŠą│ą┤ą░ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░ čāčĆą░ą▓ąĮąĖą▓ą░ąĄčéčüčÅ čü čüąŠą┤ąĄčƹȹĖą╝čŗą╝ čĆąĄą│ąĖčüčéčĆą░ čüčĆą░ą▓ąĮąĄąĮąĖčÅ (output compare register). ąÆčĆąĄą╝čÅ ą╝ąĄąČą┤čā ą║ą░ąČą┤čŗą╝ čéą░ą║ąĖą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄą╝ ąĘą░ą▓ąĖčüąĖčé ąŠčé čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ čÅą┤čĆą░, ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐čĆąĄą┤ą┤ąĄą╗ąĖč鹥ą╗čÅ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ čéą░ą╣ą╝ąĄčĆą░ (ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ ą┤ąĄą╗ąĄąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░), ąĖ ąŠčé ąĘąĮą░č湥ąĮąĖčÅ, ąĘą░ą┐ąĖčüą░ąĮąĮąŠą│ąŠ ą▓ čĆąĄą│ąĖčüčéčĆ čüčĆą░ą▓ąĮąĄąĮąĖčÅ (compare register), ą║ą░ą║ čŹč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ ążąŠčĆą╝čāą╗ąĄ 3-1. ąŻčüčéą░ąĮąŠą▓ą║ą░ compare value ą▓ ąĘąĮą░č湥ąĮąĖąĄ 10 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą╝ąĄąČą┤čā ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝ąĖ ą▓ 11 čéąĖą║ąŠą▓. ąØą░čüčéčĆąŠą╣ą║ąĖ čüą║ąŠčĆąŠčüčéąĖ UART (Baud rate) čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą▓ čģąĄą┤ąĄčĆąĄ UART, čäą░ą╣ą╗ąĄ single_wire_UART.h.
System Clock
Baud Rate = --------------------------------------------------
(One Period Compare Setting + 1) * Timer Prescaler
ążąŠčĆą╝čāą╗ą░ 3-1. ąÆčŗčćąĖčüą╗ąĄąĮąĖąĄ čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ (Baud Rate).
System Clock
One Period Compare Setting = --------------------------- - 1
Baud Rate * Timer Prescaler
ążąŠčĆą╝čāą╗ą░ 3-2. ąÆčŗčćąĖčüą╗ąĄąĮąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ čĆąĄą│ąĖčüčéčĆą░ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖčÅ.
ą¤ąŠčÅčüąĮąĄąĮąĖčÅ ą║ č乊čĆą╝čāą╗ą░ą╝: "System Clock" ąŠąĘąĮą░čćą░ąĄčé čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā čüąĖčüč鹥ą╝čŗ ą▓ ąōčå. "One Period Compare Setting" - ąĘąĮą░č湥ąĮąĖąĄ, ąĘą░ą┐ąĖčüą░ąĮąĮąŠąĄ ą▓ čĆąĄą│ąĖčüčéčĆ čüčĆą░ą▓ąĮąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ (output compare register). "Timer Prescaler" - ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą┤ąĄą╗ąĄąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░. "One Period Compare Setting" - ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ čĆąĄą│ąĖčüčéčĆą░ čüčĆą░ą▓ąĮąĄąĮąĖčÅ, ą║ąŠč鹊čĆąŠąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą┐ąĄčĆąĖąŠą┤ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÅ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░, čćč鹊 ąĘą░ą┤ą░ąĄčé ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą▒ąĖčéą░ UART.
ąóą░ą▒ą╗ąĖčåą░ 3-1. ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐ąĄčĆąĖąŠą┤ą░ ą▒ąĖčéą░ UART ą┤ą╗čÅ čćą░čüč鹊čéčŗ čéą░ą║č鹊ą▓ąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ 1, 2, 4 ąĖ 8 ą£ąōčå.
Baud
Rate
(bps) |
1 ą£ąōčå |
2 ą£ąōčå |
| OPS |
PS |
Error |
OPS |
PS |
Error |
| 4800 |
207 |
1 |
-0.16% |
51 |
8 |
-0.16% |
| 9600 |
103 |
1 |
-0.16% |
207 |
1 |
-0.16% |
| 19200 |
ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ |
103 |
1 |
-0.16% |
|
4 ą£ąōčå |
8 ą£ąōčå |
| 4800 |
103 |
8 |
-0.16% |
207 |
8 |
-0.16% |
| 9600 |
51 |
8 |
-0.16% |
103 |
8 |
-0.16% |
| 19200 |
207 |
1 |
-0.16% |
51 |
8 |
-0.16% |
| 28800 |
138 |
1 |
0.08% |
34 |
8 |
0.82% |
| 38400 |
103 |
1 |
-0.16% |
207 |
1 |
-0.16% |
ą¤ąŠčÅčüąĮąĄąĮąĖčÅ ą║ čéą░ą▒ą╗ąĖčåąĄ: OPS ąŠąĘąĮą░čćą░ąĄčé One Period Settings (One Period Compare Settings, ąĘąĮą░č湥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ čüčĆą░ą▓ąĮąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░, ąŠčé ą║ąŠč鹊čĆąŠą│ąŠ ąĘą░ą▓ąĖčüąĖčé ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą╝ąĄąČą┤čā čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÅą╝ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čéą░ą╣ą╝ąĄčĆą░ ąĖ ą▓čŗąĘąŠą▓ą░ą╝ąĖ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ Timer_Compare_SW_UART_ISR), PS ąŠąĘąĮą░čćą░ąĄčé Prescaler Setting (ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą┤ąĄą╗ąĄąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░), Error ąŠąĘąĮą░čćą░ąĄčé ą┐ąŠą│čĆąĄčłąĮąŠčüčéčī ą┐ąŠą╗čāč湥ąĮąĮąŠą╣ čĆąĄą░ą╗čīąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ UART ą▓ ą┐čĆąŠčåąĄąĮčéą░čģ (ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ čéčĆąĄą▒čāąĄą╝ąŠą╣ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ).
ąÆ čéą░ą▒ą╗ąĖčåąĄ 3-1 ą┐ąŠą║ą░ąĘą░ąĮčŗ čāčüčéą░ąĮąŠą▓ą║ąĖ čéą░ą╣ą╝ąĄčĆą░ ą┤ą╗čÅ ąĮąĄą║ąŠč鹊čĆčŗčģ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ čüą║ąŠčĆąŠčüč鹥ą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ, ą░ čéą░ą║ąČąĄ ą┐ąŠą╗čāčćą░čÄčēą░čÅčüčÅ ą┐ąŠą│čĆąĄčłąĮąŠčüčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ. ą¤ąŠą│čĆąĄčłąĮąŠčüčéčī čāčüčéą░ąĮąŠą▓ą║ąĖ čüą║ąŠčĆąŠčüčéąĖ čüą║ąŠčĆąŠčüčéąĖ (Error) ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ą┐ąŠ č乊čĆą╝čāą╗ąĄ 3-3.

ążąŠčĆą╝čāą╗ą░ 3-3. ąÆčŗčćąĖčüą╗ąĄąĮąĖąĄ ąŠčłąĖą▒ą║ąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ čüą║ąŠčĆąŠčüčéąĖ UART.
ą¤ąŠčÅčüąĮąĄąĮąĖčÅ ą║ č乊čĆą╝čāą╗ąĄ: Error[%] - ą┐ąŠą│čĆąĄčłąĮąŠčüčéčī čāčüčéą░ąĮąŠą▓ą║ąĖ čüą║ąŠčĆąŠčüčéąĖ, ąĮą░čüą║ąŠą╗čīą║ąŠ čüą║ąŠčĆąŠčüčéčī ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé čüčéą░ąĮą┤ą░čĆčéąĮąŠą╣. Baud RateClosest Match - čüą║ąŠčĆąŠčüčéčī UART ą┐ąŠ čüčéą░ąĮą┤ą░čĆčéčā. Baud Rate - ą┐ąŠą╗čāč湥ąĮąĮą░čÅ ą┐ąŠ č乊čĆą╝čāą╗ąĄ 3-1 čĆąĄą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī.
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī UART, ą║ąŠč鹊čĆčāčÄ čĆąĄą░ą╗čīąĮąŠ ą╝ąŠąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī, ąĘą░ą▓ąĖčüąĖčé ąŠčé čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ čÅą┤čĆą░ AVR ąĖ ąŠčé ąĄą│ąŠ ąĘą░ą│čĆčāąČąĄąĮąĮąŠčüčéąĖ ą┤čĆčāą│ąĖą╝ąĖ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅą╝ąĖ (ą║ąŠą┤ąŠą╝, ą║ąŠč鹊čĆčŗą╣ ą┤ąŠą╗ąČąĄąĮ ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ ą▓ ą┤čĆčāą│ąĖčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅčģ ąĖ ą▓ ą│ą╗ą░ą▓ąĮąŠą╝ čåąĖą║ą╗ąĄ main). ąĢčüą╗ąĖ ą┐čĆąĄą▓čŗčüąĖčéčī čŹčéčā čüą║ąŠčĆąŠčüčéčī, č鹊 UART ą┐ąĄčĆąĄčüčéą░ąĮąĄčé čĆą░ą▒ąŠčéą░čéčī, ąĖ ąŠčüąĮąŠą▓ąĮą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ čéą░ą║ąČąĄ ą┐čĆą░ą║čéąĖč湥čüą║ąĖ ą┐ąĄčĆąĄčüčéą░ąĮąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčī čüą▓ąŠąĖ čäčāąĮą║čåąĖąĖ. ąóą░ą║ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐ąŠč鹊ą╝čā, čćč鹊 ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ ąĮąĄ čāčüą┐ąĄąĄčé ąĘą░ą▓ąĄčĆčłąĖčéčīčüčÅ, ą║ą░ą║ čéą░ą╣ą╝ąĄčĆ čüąĮąŠą▓ą░ ą┤ąŠčüčćąĖčéą░ąĄčé ą┤ąŠ ąĘąĮą░č湥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░ čüčĆą░ą▓ąĮąĄąĮąĖčÅ, ąĖ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąĮąŠą▓ąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čåąĖą║ą╗ąŠą▓, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮąŠ ą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĖ compare interrupt, čüąŠčüčéą░ą▓ą╗čÅąĄčé ąŠą║ąŠą╗ąŠ 100..110, ąĖ ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĮą░čüčéčĆąŠąĄą║ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░. ąØą░ ą┐čĆą░ą║čéąĖą║ąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ čÅą┤čĆą░ 1 ą£ąōčå ą┤ą░ąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą▓ąŠąĘą╝ąŠąČąĮčāčÄ čüą║ąŠčĆąŠčüčéčī UART ąŠą║ąŠą╗ąŠ 10000 ą▒ąĖčé/čüąĄą║ (ą▒ąŠą┤). ą¤čĆąĖ čŹč鹊ą╣ čüą║ąŠčĆąŠčüčéąĖ ą▓čüąĄ ą▓čĆąĄą╝čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ CPU ą▒čāą┤ąĄčé ąĖąĘčĆą░čüčģąŠą┤ąŠą▓ą░ąĮąŠ č鹊ą╗čīą║ąŠ ąĮą░ ąŠą▒čĆą░ą▒ąŠčéą║čā UART, ąĖ ąĮą░ ąŠčüčéą░ą╗čīąĮčŗąĄ ąĘą░ą┤ą░čćąĖ ą┐čĆą░ą║čéąĖč湥čüą║ąĖ čåąĖą║ą╗ąŠą▓ ąĮąĄ ąŠčüčéą░ąĮąĄčéčüčÅ. ą×čüąĮąŠą▓ąĮąŠą╣ ą║ąŠą┤ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ (ą┤ąĄą╣čüčéą▓ąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąŠą║čĆčāčćąĖą▓ą░čÄčéčüčÅ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ čåąĖą║ą╗ąĄ main) ą┤ąŠą╗ąČąĄąĮ ąĖą╝ąĄčéčī ąĮąĄą║ąŠč鹊čĆąŠąĄ ą▓čĆąĄą╝čÅ ąĮą░ ąŠą▒čĆą░ą▒ąŠčéą║čā ą┐čĆąĖąĮčÅčéčŗčģ ą┤ą░ąĮąĮčŗčģ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ ą┐ąŠčüčéčāą┐ąĖčé ąĮąŠą▓čŗą╣ ą▒ąĖč鹊ą▓čŗą╣ čäčĆąĄą╣ą╝, ąĖąĮą░č湥 ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąŠčłąĖą▒ą║ą░ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ, ąĖ ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĮą░ ą┐čĆąĖąĄą╝ąĄ ą▒čāą┤čāčé ą┐ąŠč鹥čĆčÅąĮčŗ. ą¤ąŠčŹč鹊ą╝čā čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ąĖčéčī čüą║ąŠčĆąŠčüčéčī ąŠą▒ą╝ąĄąĮą░ UART ąĮąĄčüą║ąŠą╗čīą║ąŠ ąĮąĖąČąĄ ą┐čĆąĄą┤ąĄą╗čīąĮąŠ ą┤ąŠą┐čāčüčéąĖą╝ąŠą╣ ą┤ą╗čÅ ąĘą░ą┤ą░ąĮąĮąŠą╣ čćą░čüč鹊čéčŗ čÅą┤čĆą░, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čéčĆąĄą▒ąŠą▓ą░ąĮąĖą╣ ą║ ą║ąŠą┤čā ąŠčüąĮąŠą▓ąĮąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
System Clock
Baud Rate < --------------------------------------------------
Maximum Cycles in Compare Interrupt
ążąŠčĆą╝čāą╗ą░ 3-4. ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą┤ąŠą┐čāčüčéąĖą╝ą░čÅ čüą║ąŠčĆąŠčüčéčī ąŠą▒ą╝ąĄąĮą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ UART.
ą¤ąŠčÅčüąĮąĄąĮąĖčÅ ą║ č乊čĆą╝čāą╗ąĄ: Baud Rate - ą┐ąŠą╗čāč湥ąĮąĮą░čÅ ą┐ąŠ č乊čĆą╝čāą╗ąĄ 3-1 čĆąĄą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī. System Clock - čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░, ąĮą░ ą║ąŠč鹊čĆąŠą╣ čĆą░ą▒ąŠčéą░ąĄčé AVR. Maximum Cycles in Compare Interrupt - ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čüčĆą░ą▓ąĮąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ ą▓ čåąĖą║ą╗ą░čģ čÅą┤čĆą░.
3.2. ąÉą┐ą┐ą░čĆą░čéčāčĆą░, ąĮą░ ą║ąŠč鹊čĆąŠą╣ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ UART (Hardware)
ąÆ čŹč鹊ą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čłąĖąĮą░ ą┤ą░ąĮąĮčŗčģ UART čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮą░ ą▓ čĆą░čüč湥č鹥 ąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▓ąĮąĄčłąĮąĄą│ąŠ ą▓ąĄčĆčģąĮąĄą│ąŠ ąĮą░ą│čĆčāąĘąŠčćąĮąŠą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░ (pull-up). ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┤ąŠą╗ąČąĮčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ąĮąŠąČą║ąĖ ą▓ą▓ąŠą┤ą░ ą▓čŗą▓ąŠą┤ą░ (I/O, GPIO) čü ąŠčéą║čĆčŗčéčŗą╝ ą║ąŠą╗ą╗ąĄą║č鹊čĆąŠą╝ (ąŠčéą║čĆčŗčéčŗą╝ čüč鹊ą║ąŠą╝). ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ąĮčāąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ąĄčłąĮąĄąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą╗čÅ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ąĮą░čćą░ą╗ą░ ą┐čĆąĖčģąŠą┤čÅčēąĄą│ąŠ ą▒ąĖč鹊ą▓ąŠą│ąŠ čäčĆąĄą╣ą╝ą░.
ąóąĖą┐ąĖčćąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĮą░ą│čĆčāąĘąŠčćąĮąŠą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░ pull-up ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ AVR čüąŠčüčéą░ą▓ą╗čÅąĄčé 15..40k?. ąÜąŠą│ą┤ą░ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą▒ąĖčé čü ą▓čŗčüąŠą║ąĖą╝ ą╗ąŠą│ąĖč湥čüą║ąĖą╝ čāčĆąŠą▓ąĮąĄą╝, ąĖą╗ąĖ ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐čĆąĖąĄą╝, č鹊 ą┐ąŠčĆčé AVR ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ UART ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čéčĆąĄčéčīąĄą╝ čüąŠčüč鹊čÅąĮąĖąĖ (ąĮą░čüčéčĆąŠąĄąĮ ą║ą░ą║ ą▓čģąŠą┤ čü ąŠčéą║ą╗čÄč湥ąĮąĮčŗą╝ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ ąĮą░ą│čĆčāąĘąŠčćąĮčŗą╝ čĆąĄąĘąĖčüč鹊čĆąŠą╝). ąæąĖčé čü ąĮąĖąĘą║ąĖą╝ ą╗ąŠą│ąĖč湥čüą║ąĖą╝ čāčĆąŠą▓ąĮąĄą╝ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą┐čāč鹥ą╝ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąŠčĆčéą░ ą║ą░ą║ ą▓čŗčģąŠą┤ą░ čü ą▓čŗą▓ąĄą┤ąĄąĮąĮčŗą╝ ą▓ ą┐ąŠčĆčé ą╗ąŠą│. 0.
ąĢčüą╗ąĖ čéčĆąĄą▒čāąĄčéčüčÅ ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ ą┐ąŠ čäąĖąĘąĖč湥čüą║ąŠą╝čā ą║ą░ąĮą░ą╗čā čüčéą░ąĮą┤ą░čĆčéą░ RS-232, č鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┐čĆąĖą▓ąĄą┤ąĄąĮąĖąĄ čāčĆąŠą▓ąĮčÅ čüąĖą│ąĮą░ą╗ą░ UART ą║ ąĘąĮą░č湥ąĮąĖčÅą╝ -12..-15V (čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą╗ąŠą│. 1) ąĖ +12..+15V (čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą╗ąŠą│. 0). ąöą╗čÅ čŹč鹊ą│ąŠ ąĮčāąČąĮą░ čüą┐ąĄčåąĖą░ą╗čīąĮą░čÅ čüčģąĄą╝ą░, ą║ąŠč鹊čĆą░čÅ ą┤ąĄą╗ą░ąĄčé ąĖąĮą▓ąĄčĆčüąĖčÄ, ąĖ ą┐čĆąĖą▓ąŠą┤ąĖčé čāčĆąŠą▓ąĮąĖ čüąĖą│ąĮą░ą╗ą░ ą║ ąĮčāąČąĮčŗą╝ ąĘąĮą░č湥ąĮąĖčÅą╝. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╣ čćąĖą┐ ąĖąĮč鹥čĆč乥ą╣čüą░ MAX232 ą║ąŠą╝ą┐ą░ąĮąĖąĖ Maxim. ą×ąĮ čĆą░ą▒ąŠčéą░ąĄčé ąŠčé ąŠą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ 5V, ąĖ ąĖą╝ąĄąĄčé ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ DC/DC, čćč鹊ą▒čŗ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ čāčĆąŠą▓ąĮąĖ RS-232.
ą¤čĆąĖą╝. ą┐ąĄčĆąĄą▓ąŠą┤čćąĖą║ą░: ą╝ąŠąČąĮąŠ čéą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čī čü ą│ą░ą╗čīą▓ą░ąĮąĖč湥čüą║ąŠą╣ ąĖąĘąŠą╗čÅčåąĖąĄą╣ ąĮą░ ąŠčüąĮąŠą▓ąĄ ąŠą┐čéčĆąŠąĮąŠą▓ [2].
3.3. ąĀąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ (Status register)
ąĀąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ ąŠą┤ąĮąŠą┐čĆąŠą▓ąŠą┤ąĮąŠą│ąŠ UART čüąŠą┤ąĄčƹȹĖčé čüą╗ąĄą┤čāčÄčēąĖąĄ 4 čäą╗ą░ą│ą░: SW_UART_TX_BUFFER_FULL, SW_UART_RX_BUFFER_FULL, SW_UART_RX_BUFFER_OVERFLOW, SW_UART_FRAME_ERROR.
SW_UART_TX_BUFFER_FULL čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ąĄčüą╗ąĖ ą┤ą░ąĮąĮčŗąĄ TX ą│ąŠč鹊ą▓čŗ ą║ ą┐ąĄčĆąĄą┤ą░č湥. ąŁč鹊čé čäą╗ą░ą│ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠą▒ąĮčāą╗ąĄąĮ, ą║ąŠą│ą┤ą░ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ čäčāąĮą║čåąĖčÅ SW_UART_transmit.
SW_UART_RX_BUFFER_FULL čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ąĄčüą╗ąĖ ą▓ ą┐čĆąĖąĄą╝ąĮąŠą╝ ą▒čāč乥čĆąĄ ąĄčüčéčī ąĮąĄąŠą▒čĆą░ą▒ąŠčéą░ąĮąĮčŗąĄ ą┐čĆąĖąĮčÅčéčŗąĄ ą┤ą░ąĮąĮčŗąĄ. ąŁč鹊čé čäą╗ą░ą│ ą┤ąŠą╗ąČąĄąĮ čāčüčéą░ąĮąŠą▓ąĖčéčīčüčÅ ą▓ ą╗ąŠą│. 1, ą║ąŠą│ą┤ą░ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ čäčāąĮą║čåąĖčÅ SW_UART_Receive.
SW_UART_RX_BUFFER_OVERFLOW čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą┐čĆąĖčģąŠą┤čÅčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠč鹥čĆčÅąĮčŗ ąĖąĘ-ąĘą░ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ (ąĮąŠą▓čŗą╣ ą┐čĆąĖąĄą╝ ąĮą░čćą░ą╗čüčÅ, ąĮąŠ čĆą░ąĮąĄąĄ ą┐čĆąĖąĮčÅčéčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĮąĄ ą▒čŗą╗ąĖ ąŠą▒čĆą░ą▒ąŠčéą░ąĮčŗ).
SW_UART_FRAME_ERROR čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ąĄčüą╗ąĖ ąĮąĄąŠąČąĖą┤ą░ąĮąĮąŠ ąŠą▒ąĮą░čĆčāąČąĄąĮą░ ą╗ąŠą│. 1 ą▓ čüčéą░čĆč鹊ą▓ąŠą╝ ą▒ąĖč鹥 (ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ čüčéą░čĆč鹊ą▓čŗą╣ ą▒ąĖčé ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓čüąĄą│ą┤ą░ ąĮčāą╗ąĄą▓čŗą╝), ąĖą╗ąĖ ąĄčüą╗ąĖ ąŠą▒ąĮą░čĆčāąČąĄąĮ ą╗ąŠą│. 0 ą▓ čüč鹊ą┐ąŠą▓ąŠą╝ ą▒ąĖč鹥 (čüč鹊ą┐ąŠą▓čŗą╣ ą▒ąĖčé ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓čüąĄą│ą┤ą░ ą▓ ą╗ąŠą│. 1). ąóą░ą║ąČąĄ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą┐čĆąĖ ą┐ąĄčĆąĄą┤ą░č湥 čüčćąĖčéą░ąĮąĮčŗą╣ ą▒ąĖčé ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé č鹊ą│ąŠ, čćč鹊 ą▒čŗą╗ ą┐ąĄčĆąĄą┤ą░ąĮ.
ą¦č鹊ą▒čŗ čāą╝ąĄąĮčīčłąĖčéčī čĆą░ąĘą╝ąĄčĆ ą║ąŠą┤ą░, čĆąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╝ąĄčēąĄąĮ ą▓ čĆąĄą│ąĖčüčéčĆ GPIO, ąĄčüą╗ąĖ čŹč鹊 ą┤ąŠčüčéčāą┐ąĮąŠ (čŹč鹊 ąĮąĄą╗čīąĘčÅ čüą┤ąĄą╗ą░čéčī ą┤ą╗čÅ ATmega32).
3.4. ąĪč湥čéčćąĖą║ UART
ą¤ąĄčĆąĄą╝ąĄąĮąĮą░čÅ čüč湥čéčćąĖą║ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ą║ąŠą┤ąĄ ą┤čĆą░ą╣ą▓ąĄčĆą░ UART, čćč鹊ą▒čŗ čāą┐čĆą░ą▓ą╗čÅčéčī čüąŠčüč鹊čÅąĮąĖąĄą╝, ąĖ ą║ą░ą║ąŠą╣ ą▒ąĖčé ą┐čĆąĖąĮąĖą╝ą░ąĄčéčüčÅ/ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ č湥čĆąĄąĘ UART. UART ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ, ą║ąŠą│ą┤ą░ ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ čĆą░ą▓ąĮąŠ 0. ąŚąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ čÅą▓ą╗čÅąĄčéčüčÅ č湥čéąĮčŗą╝ ą┐čĆąĖ ą┐ąĄčĆąĄą┤ą░č湥 ąĖ ąĮąĄč湥čéąĮčŗą╝ ą┐čĆąĖ ą┐čĆąĖąĄą╝ąĄ, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 3-1.

ąĀąĖčü. 3-1. ąŚąĮą░č湥ąĮąĖčÅ čüč湥čéčćąĖą║ą░ UART.
3.5. ążčāąĮą║čåąĖąĖ UART
ąöčĆą░ą╣ą▓ąĄčĆ čüąŠčüč鹊ąĖčé ąĖąĘ čéčĆąĄčģ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗčģ čäčāąĮą║čåąĖą╣ (ąŠą┐ąĖčüą░ąĮąĖąĄ čäčāąĮą║čåąĖą╣ čüą╝. ą┤ą░ą╗ąĄąĄ):
void SW_UART_Enable(void);
void SW_UART_Transmit(uint8_t);
uint8_t SW_UART_Receive(void);
SW_UART_status čÅą▓ą╗čÅąĄčéčüčÅ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╣ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣, ą║ąŠč鹊čĆą░čÅ čāą┤ąĄčƹȹĖą▓ą░ąĄčé čäą╗ą░ą│ąĖ čüąŠčüč鹊čÅąĮąĖčÅ UART (čüą╝. čĆą░ąĘą┤ąĄą╗ 3.3). ą£ą░ą║čĆąŠčüčŗ SET_FLAG, CLEAR_FLAG ąĖ READ_FLAG, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ą▓ čģąĄą┤ąĄčĆąĄ single_wire_UART.h, ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠčüčéčāą┐ą░ ą║ čäą╗ą░ą│ą░ą╝.
ąÆ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ UART ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čéą░ą║ąČąĄ čüą╗ąĄą┤čāčÄčēąĖąĄ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ:
__interrupt void External_SW_UART_ISR();
__interrupt void Timer_Compare_SW_UART_ISR();
ą¤ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą┤ą░ąĮąĮčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąĖąĮčÅčéčŗ ąĖą╗ąĖ ą┐ąĄčĆąĄą┤ą░ąĮčŗ č湥čĆąĄąĘ UART, ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮ ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ SW_UART_Enable. ą×ąĮ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé ąĮąŠąČą║čā UART ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ (ą┐čĆąĖ čŹč鹊ą╝ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą▓čŗčüąŠą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī ą▒ą╗ą░ą│ąŠą┤ą░čĆčÅ ą▓ąĮąĄčłąĮąĄą╝čā pull-up čĆąĄąĘąĖčüč鹊čĆčā). ąĀąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ ąĖ čüč湥čéčćąĖą║ ąŠčćąĖčēą░čÄčéčüčÅ, čéą░ą║ čćč鹊 ąĖčüčģąŠą┤čÅčēąĖąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ, ąĄčüą╗ąĖ ąŠąĮąĖ čĆą░ą▒ąŠčéą░ą╗ąĖ, ą▒čāą┤čāčé ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ. ąŚą░ą┐čĆąĄčé ą▓ąĮąĄčłąĮąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ ąŠčüčéą░ąĮąŠą▓čÅčé čĆą░ą▒ąŠčéčā UART.

ąĀąĖčü. 3-2. ąÉą╗ą│ąŠčĆąĖčéą╝ čĆą░ą▒ąŠčéčŗ čäčāąĮą║čåąĖąĖ SW_UART_Enable().
ążčāąĮą║čåąĖčÅ SW_UART_Transmit() ą┐ąŠą╗čāčćą░ąĄčé 1 ą▒ą░ą╣čé ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ąĖ ą┤ąŠą▒ą░ą▓ą╗čÅąĄčé čŹč鹊čé ą▒ą░ą╣čé ą▓ ą▒čāč乥čĆ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąÜąŠą│ą┤ą░ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ čŹčéą░ čäčāąĮą║čåąĖčÅ, č鹊 čäą╗ą░ą│ SW_UART_TX_BUFFER_FULL ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠčćąĖčēąĄąĮ (ąĄą│ąŠ ą┤ąŠą╗ąČąĄąĮ ąŠčćąĖčēą░čéčī ą▓ąĮąĄčłąĮąĖą╣ ą║ąŠą┤ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒ą░ą╣čé), ąĖąĮą░č湥 ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆčāąĄčéčüčÅ ą┐ąŠč鹥čĆčÅ ą┤ą░ąĮąĮčŗčģ. ąĢčüą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ ąĮąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé, ą║ąŠą│ą┤ą░ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ čŹčéą░ čäčāąĮą║čåąĖčÅ, č鹊 ąĘą░ą┐čāčüčéąĖčéčüčÅ ąĮąŠą▓ą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ą┐čāč鹥ą╝ ąŠčéą┐čĆą░ą▓ą║ąĖ čüčéą░čĆč鹊ą▓ąŠą│ąŠ ąĮčāą╗ąĄą▓ąŠą│ąŠ ą▒ąĖčéą░ ąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░.
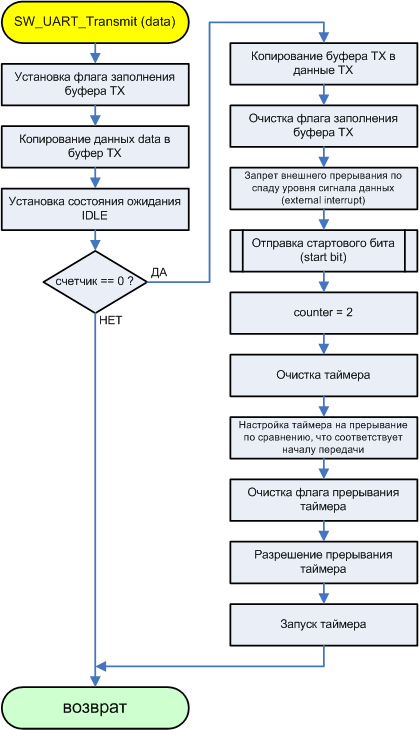
ąĀąĖčü. 3-3. ąÉą╗ą│ąŠčĆąĖčéą╝ čĆą░ą▒ąŠčéčŗ čäčāąĮą║čåąĖąĖ SW_UART_Transmit().
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓ąŠąĘą▓čĆą░čéąĖčé ą┐čĆąĖąĮčÅčéčŗą╣ ą▒ą░ą╣čé ą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ Rx_data. ą¤ąĄčĆąĄą┤ ą▓čŗąĘąŠą▓ąŠą╝ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐čĆąŠą▓ąĄčĆąĄąĮ čäą╗ą░ą│ UART_RX_BUFFER_FULL, čćč鹊ą▒čŗ čāą▒ąĄą┤ąĖčéčīčüčÅ, čćč鹊 ą▓ ą▒čāč乥čĆąĄ Rx_data ąĄčüčéčī ą▓ąĄčĆąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ. ą¤čĆąĖ ą┐čĆąĖąĄą╝ąĄ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą▒ą░ą╣čé, čüą╗ąĄą┤čāčÄčēąĖčģ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝, ąŠč湥ąĮčī ą▓ą░ąČąĮąŠ ą▓čŗąĘą▓ą░čéčī čŹčéčā čäčāąĮą║čåąĖčÄ ą┤ąŠ ą┐čĆąĖąĄą╝ą░ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą▒ą░ą╣čéą░, ąĖąĮą░č湥 ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮ ąĖ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠč鹥čĆčÅčÄčéčüčÅ.
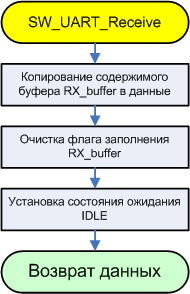
ąĀąĖčü. 3-4. ąÉą╗ą│ąŠčĆąĖčéą╝ čĆą░ą▒ąŠčéčŗ čäčāąĮą║čåąĖąĖ SW_UART_Receive().
ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ ą▓ąĮąĄčłąĮąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ External_SW_UART_ISR() ą▒čāą┤ąĄčé ą▓čŗąĘą▓ą░ąĮ ą┐čĆąĖ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĖ čüą┐ą░ą┤ą░ čāčĆąŠą▓ąĮčÅ čüąĖą│ąĮą░ą╗ą░ ą┤ą░ąĮąĮčŗčģ UART, ą║ąŠą│ą┤ą░ ąĮąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčÄčēąĖčģčüčÅ ąŠą┐ąĄčĆą░čåąĖą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖą╗ąĖ ą┐čĆąĖąĄą╝ą░. ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąŠą▓ąĄčĆčÅąĄčé, čćč鹊 ąĮąŠąČą║ą░ ą▓čŗą▓ąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ UART ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą╗ąŠą│. 0. ąĢčüą╗ąĖ čŹč鹊 ąĮąĄ čéą░ą║, č鹊 ą┐čĆąĖąĄą╝ ąĮąĄ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ. ą¤ąŠčüą╗ąĄ ąĮą░čćą░ą╗ą░ ą┐čĆąĖąĄą╝ą░ čäčĆąĄą╣ą╝ą░ ąĘą░ą┐čĆąĄčēą░čÄčéčüčÅ ą┤ą░ą╗čīąĮąĄą╣čłąĖąĄ ą▓ąĮąĄčłąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, čéą░ą║ čćč鹊 ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖąĄ čüą┐ą░ą┤čŗ čāčĆąŠą▓ąĮčÅ ąĮąĄ ą▓čŗąĘąŠą▓čāčé ą┐ąŠą▓č鹊čĆąĮąŠą│ąŠ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čü ąĮąŠą▓čŗą╝ ą▓čŗąĘąŠą▓ąŠą╝ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ External_SW_UART_ISR. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, External_SW_UART_ISR ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čüčéą░čĆč鹊ą▓ąŠą│ąŠ ą▒ąĖčéą░ čäčĆąĄą╣ą╝ą░.
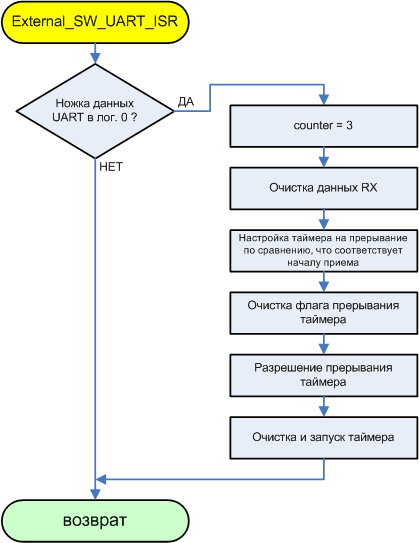
ąĀąĖčü. 3-5. ąÉą╗ą│ąŠčĆąĖčéą╝ čĆą░ą▒ąŠčéčŗ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ External_SW_UART_ISR().
ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖčÄ čéą░ą╣ą╝ąĄčĆą░ Timer_Compare_SW_UART_ISR() (ą╝ąŠą╝ąĄąĮčéčŗ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ ą┐ąŠą║ą░ąĘą░ąĮčŗ čüčéčĆąĄą╗ąŠčćą║ą░ą╝ąĖ ąĮą░ čĆąĖčü. 3-1) čāą┐čĆą░ą▓ą╗čÅąĄčé ąŠą▒čĆą░ą▒ąŠčéą║ąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░ ą▒ąĖč鹊ą▓ąŠą│ąŠ čäčĆąĄą╣ą╝ą░. ą×ąĮ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ, ą║ąŠą│ą┤ą░ ąĘąĮą░č湥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ čüčĆą░ą▓ąĮąĄąĮąĖčÅ (output compare) čāčĆą░ą▓ąĮąĖą▓ą░ąĄčéčüčÅ čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░, ąĖ ą║ąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čéą░ą╣ą╝ąĄčĆą░. ąØą░ ą┐ąĄčĆąĄą┤ą░č湥 čüč湥čéčćąĖą║ UART ąĮą░čćąĖąĮą░ąĄčé čüčćąĖčéą░čéčī čü č湥čéąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ (2, 4, ...), ą░ ąĮą░ ą┐čĆąĖąĄą╝ąĄ čü ąĮąĄč湥čéąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ (1, 3, ... ąØąĄ ą┐čāčéą░ą╣č鹥 čüč湥čéčćąĖą║ UART čüąŠ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝ čüč湥čéčćąĖą║ąŠą╝ čéą░ą╣ą╝ąĄčĆą░). ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ąĖ ą┐čĆąĖąĄą╝ą░ (čĆąĖčü. 3-8) ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ (čĆąĖčü. 3-7) čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ ąĮą░ą┐čĆčÅą╝čāčÄ ą▓ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░. ą¤ąŠąČą░ą╗čāą╣čüčéą░ ąŠą▒čĆą░čéąĖč鹥čüčī ą║ čĆąĖčü. 3-1 ą┤ą╗čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüč鹥ą╣ ą┐ąŠ ą┐ąŠą▓ąŠą┤čā čĆą░ąĘąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣ čüč湥čéčćąĖą║ą░.
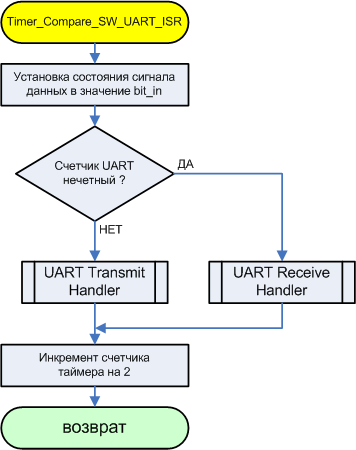
ąĀąĖčü. 3-6. ąÉą╗ą│ąŠčĆąĖčéą╝ čĆą░ą▒ąŠčéčŗ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ Timer_Compare_SW_UART_ISR().
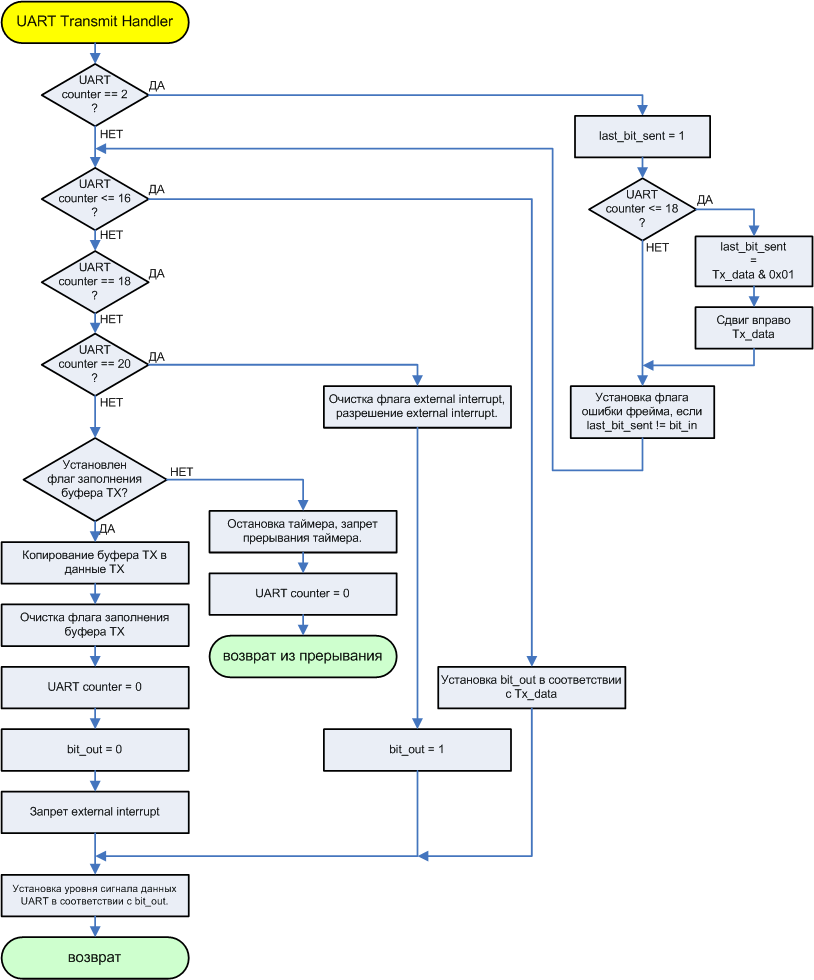
ąĀąĖčü. 3-7. ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐ąĄčĆąĄą┤ą░čćąĖ UART_Transmit_Handler().
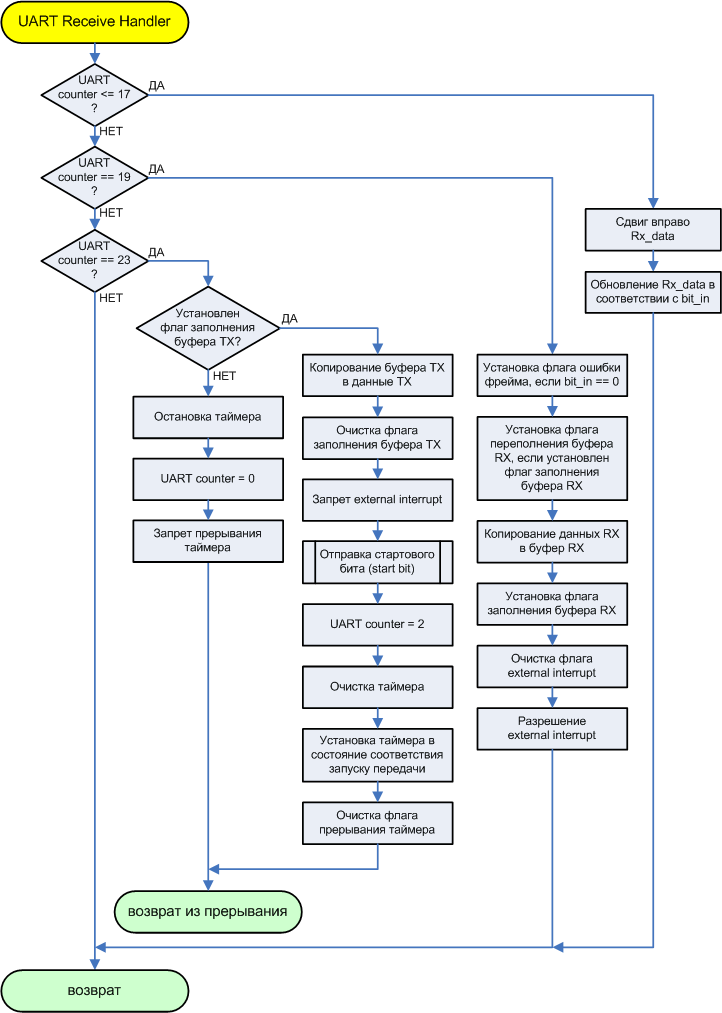
ąĀąĖčü. 3-8. ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĖąĄą╝ą░ UART Receive Handler().
3.6. ą¤čĆąŠą│čĆą░ą╝ą╝ą░ ą┐čĆąĖą╝ąĄčĆą░
ą£ąŠą┤čāą╗čī main.c čüąŠą┤ąĄčƹȹĖčé ą║ąŠą┤ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┐čĆąĖą╝ąĄčĆą░ ą┤ą╗čÅ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ čüąŠčäč鹊ą▓ąŠą│ąŠ ąŠą┤ąĮąŠą┐čĆąŠą▓ąŠą┤ąĮąŠą│ąŠ UART. ą×ąĮ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą▓ ą╝ą░čüčüąĖą▓ ą▒ą░ą╣čé, ąĖ ą┐ąĄčĆąĄą┤ą░ąĄčé čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ ąŠą▒čĆą░čéąĮąŠ, ą║ąŠą│ą┤ą░ ą╝ą░čüčüąĖą▓ ąĘą░ą┐ąŠą╗ąĮąĖčéčüčÅ, ąĖą╗ąĖ ą║ąŠą│ą┤ą░ ą▒čāą┤ąĄčé ą┐čĆąĖąĮčÅčé čüąĖą╝ą▓ąŠą╗ ą▓ąŠąĘą▓čĆą░čéą░ ą║ą░čĆąĄčéą║ąĖ '\n'.
3.7. ąĀą░ąĘą╝ąĄčĆ ą║ąŠą┤ą░
ą¤čĆąĖ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ IAR┬« EWAVR 4.21A, čü ą▓ą║ą╗čÄč湥ąĮąĮąŠą╣ ąŠą┐čéąĖą╝ąĖąĘą░čåąĖąĄą╣ ą┐ąŠ čüą║ąŠčĆąŠčüčéąĖ ą┐ąŠ ą╝ą░ą║čüąĖą╝čāą╝čā, čĆą░ąĘą╝ąĄčĆ ą║ąŠą┤ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ UART ąĘą░ąĮąĖą╝ą░ąĄčé ąŠą║ąŠą╗ąŠ 500 ą▒ą░ą╣čé.
[4. ąŻą║ą░ąĘą░ąĮąĖčÅ ą┐ąŠ ą▒čŗčüčéčĆąŠą╝čā čüčéą░čĆčéčā]
ąśčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą│čĆčāąČąĄąĮ ą▓ ą░čĆčģąĖą▓ąĄ ą┐ąŠ čüčüčŗą╗ą║ąĄ [3] ąĖą╗ąĖ čü čüą░ą╣čéą░ ą║ąŠą╝ą┐ą░ąĮąĖąĖ Atmel. ąÜąŠą┤ ąĮą░ą┐ąĖčüą░ąĮ ą┤ą╗čÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ATmega32 ąĖ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮ ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ čüčĆąĄą┤čŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ IAR EWAVR 4.20A. ąöą╗čÅ ą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ ą┐čĆąĖą╝ąĄčĆą░, ą║ąŠą│ą┤ą░ ąĮąĄ čüą┤ąĄą╗ą░ąĮąŠ ąĮąĖą║ą░ą║ąĖčģ ąĖąĘą╝ąĄąĮąĄąĮąĖą╣, čéčĆąĄą▒čāąĄčéčüčÅ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆ IAR EWAVR. ąÆ čäą░ą╣ą╗ąĄ readme.html ąĖą╝ąĄąĄčéčüčÅ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ Doxygen.
[ąĪčüčŗą╗ą║ąĖ]
1. AVR274: Single-wire Software UART on tinyAVR and megaAVR devices site:atmel.com.
2. ąĪąŠą┐čĆčÅąČąĄąĮąĖąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čü ą║ąŠą╝ą┐čīčÄč鹥čĆąŠą╝ ą▒ąĄąĘ MAX232.
3. 131211AVR274.zip - ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤, ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ. |



