┬½Easy things should be easy and hard things should be possible┬╗ ┬½ą¤čĆąŠčüčéčŗąĄ ą▓ąĄčēąĖ ą┤ąŠą╗ąČąĮčŗ ąŠčüčéą░ą▓ą░čéčīčüčÅ ą┐čĆąŠčüčéčŗą╝ąĖ, ą░ čüą╗ąŠąČąĮčŗąĄ ŌĆö čüčéą░čéčī ą▓čŗą┐ąŠą╗ąĮąĖą╝čŗą╝ąĖ┬╗
ąøą░čĆčĆąĖ ąŻąŠą╗ą╗, čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ čÅąĘčŗą║ą░ Perl.
[ąÆą╝ąĄčüč鹊 ą┐čĆąĄą┤ąĖčüą╗ąŠą▓ąĖčÅ ]
ąźąŠč鹥ą╗ąŠčüčī ąĮą░čćą░čéčī ą┐ąŠą▓ąĄčüčéą▓ąŠą▓ą░ąĮąĖąĄ ą▒ą░ąĮą░ą╗čīąĮąŠ, ąĮąŠ ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ čÅ ąĮąĄ čüčéčĆą░ą┤ą░ą╗ ąŠčé čüą║čāą║ąĖ, ąĮąĄ ąŠčłą░ą╗ąĄą╗ ąŠčé ą▓ąĮąĄąĘą░ą┐ąĮąŠ ąĮą░ą▓ą░ą╗ąĖą▓čłąĄą│ąŠčüčÅ čüą▓ąŠą▒ąŠą┤ąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, ąĖ čā ą╝ąĄąĮčÅ ąĮąĄ ąĘą░ą▓ą░ą╗čÅą╗ą░čüčī čüą╗čāčćą░ą╣ąĮąŠ ą▓ ą║ą╗ą░ą┤ąŠą▓ą║ąĄ ą┐ą░čĆą░ ą▒ąĄčüčģąŠąĘąĮčŗčģ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓. ąśą┤ąĄčÅ ą┐čĆąŠąĄą║čéą░ ą▓ąŠąĘąĮąĖą║ą╗ą░ čüąŠą▓ąĄčĆčłąĄąĮąĮąŠ ąĖąĮčüčéąĖąĮą║čéąĖą▓ąĮąŠ ąĮą░ čāčĆąŠą▓ąĮąĄ ą┐ąŠą┤čüąŠąĘąĮą░ąĮąĖčÅ, ąĮąŠčüčéą░ą╗čīą│ąĖčĆčāčÄčēąĄą│ąŠ ą┐ąŠ ą▓čüčÅą║ąĖą╝ ąĮąĄčüą▒čŗą▓čłąĖą╝čüčÅ ą╝ą░ą╗čīčćąĖčłąĄčüą║ąĖą╝ ą╝ąĄčćčéą░ą╝. ą×č湥ąĮčī ą▓ą┤čĆčāą│ ąĘą░čģąŠč鹥ą╗ąŠčüčī čüąŠą▒čĆą░čéčī čüą▓ąŠąĖą╝ąĖ čĆčāą║ą░ą╝ąĖ ąĮąĄčüą╗ąŠąČąĮčŗą╣ ąĖą│čĆąŠą▓ąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ-ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ą║ąŠą╝ą┐ą╗ąĄą║čü, čü ą│čĆą░čäąĖą║ąŠą╣ ąĮąĖąĘą║ąŠą│ąŠ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ, ąĖ ąĮą░ą┐ąŠą╗ąĮąĖčéčī ąĄąĄ ą║ąŠą┤ąŠą╝ ą┐ąŠčćčéąĖ ąĘą░ą▒čŗčéčŗčģ, ąĮąŠ čéą░ą║ąĖčģ ą╝ąĖą╗čŗčģ čüąĄčĆą┤čåčā, čüčéą░čĆčŗčģ ą║ąŠą╝ą┐čīčÄč鹥čĆąĮčŗčģ ąĖą│čĆ. ąÉ ą║č鹊 ą╝ą░ą╗ąŠ-ą╝ą░ą╗čīčüą║ąĖ čāą╝ąĄčÄčēąĖą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ąĖ čĆąŠąČą┤ąĄąĮąĮčŗą╣ ą▓ ąĪąĪąĪąĀ ąĮąĄ ą╝ąĄčćčéą░ą╗ čüą┤ąĄą╗ą░čéčī čüą▓ąŠą╣ ąóąĄčéčĆąĖčü? ąĢčēąĄ ąŠč湥ąĮčī čģąŠč鹥ą╗ąŠčüčī ą▓ čŹč鹊ą╝ ą┐čĆąŠąĄą║č鹥 ąŠčé ą┤čāčłąĖ ą┐ąŠčŹą║čüą┐ąĄčĆąĖą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčī čü ąČąĄą╗ąĄąĘąŠą╝ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ą╝ąĖ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ. ą¤ąŠ čüą┐ąĄčåąĖą░ą╗čīąĮąŠčüčéąĖ čÅ ą▓čĆą░čć, ą░ 菹╗ąĄą║čéčĆąŠąĮąĖą║ą░ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ą╗ąĖčłčī ą╝ąŠąĄ čģąŠą▒ą▒ąĖ, ą┐ąŠčŹč鹊ą╝čā ąĮąĄ čüčāą┤ąĖč鹥 čüčéčĆąŠą│ąŠ ą▓čüąĄ, čćč鹊 ą▒čāą┤ąĄčé ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąŠ ąĮąĖąČąĄ. ąĪą░ą╝ ąČąĄ čÅ ą▒čāą┤čā ąĮąĄčēą░ą┤ąĮąŠ ą║čĆąĖčéąĖą║ąŠą▓ą░čéčī ąĮąĄą║ąŠč鹊čĆčŗąĄ čüą▓ąŠąĖ čĆąĄčłąĄąĮąĖčÅ ąĖ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ, čéą░ą║ ą║ą░ą║ ąŠąĮąĖ ą▓ ąĖč鹊ą│ąĄ ąŠą║ą░ąĘą░ą╗ąĖčüčī ąĖą╗ąĖ čüą╗ą░ą▒čŗą╝ąĖ, ąĖą╗ąĖ ąĖąĘą▒čŗč鹊čćąĮčŗą╝ąĖ, ą░ ą┐ąŠčĆąŠą╣ ąĖ ą▓ąŠą▓čüąĄ ąŠčłąĖą▒ąŠčćąĮčŗą╝ąĖ.
[ą¤ąŠą┤ą│ąŠč鹊ą▓ą║ą░ ]
ąöą╗čÅ ąĮą░čćą░ą╗ą░ čÅ čĆąĄčłąĖą╗ ąĖąĘčāčćąĖčéčī ąĖą┤ąĄčÄ čüąŠąĘą┤ą░ąĮąĖčÅ čüą▓ąŠąĄą╣ ąĖą│čĆčāčłą║ąĖ (ąĮą░ąĘą▓ą░ą╗ ąĄčæ Tetris-Box) ąĖ ą┐ąŠąĖčüą║ą░čéčī ą┐čĆąŠč鹊čéąĖą┐čŗ. ą¤ąŠąĖčüą║ ą▓ ąĖąĮč鹥čĆąĮąĄč鹥 ąŠą║ą░ąĘą░ą╗čüčÅ ą▓ąĄčüčīą╝ą░ čĆąĄąĘčāą╗čīčéą░čéąĖą▓ąĄąĮ. ą» ąŠą▒ąĮą░čĆčāąČąĖą╗ ą┤ąĄčüčÅčéą║ąĖ ą┐ąĄčĆą▓ąŠą┐čĆąŠčģąŠą┤čåąĄą▓, ą║ąŠč鹊čĆčŗąĄ ąŠą┐čāą▒ą╗ąĖą║ąŠą▓ą░ą╗ąĖ čüą▓ąŠąĖ ąĘą░ą╝ąĄčćą░č鹥ą╗čīąĮčŗąĄ ą┐čĆąŠąĄą║čéčŗ. ą×čüąĮąŠą▓ąĮą░čÅ ą╝ą░čüčüą░ ąĖčģ ąĖąĮąŠčüčéčĆą░ąĮčåčŗ, ąĮąŠ ą┐čĆąĖčÅčéąĮąŠ, čćč鹊 ąĮąĄčüą║ąŠą╗čīą║ąŠ ą░ą▓č鹊čĆąŠą▓ ąŠą║ą░ąĘą░ą╗ąĖčüčī čüąŠąŠč鹥č湥čüčéą▓ąĄąĮąĮąĖą║ą░ą╝ąĖ. ąśąĮč鹥čĆąĄčü ą╝ąŠą╣ ą▒čŗą╗ ą┐čĆąĄą┤ąĄą╗čīąĮąŠ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆąĄąĮ, ąĖ čüčĆą░ąĘčā ąĘą░čģąŠč鹥ą╗ąŠčüčī čüą┤ąĄą╗ą░čéčī ą╗čāčćčłąĄ, ą▒ąŠą╗čīčłąĄ ąĖ ą╝ąŠčēąĮąĄąĄ... ąĪą┤ąĄą╗ą░čéčī čćč鹊-č鹊 čéą░ą║ąŠąĄ ąĮą░ ą┐čĆąĄą┤ąĄą╗ąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣ Arduino ąĖ čüą▓ąŠąĖčģ ą▓ąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣.
ąÜąŠą╝ą┐ą╗ąĄą║čéčāčÄčēąĖąĄ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╣ ą╝ą░čüčüąĄ ąĘą░ą║ą░ąĘą░ą╗ ąĮą░ Ebay. ąĪč鹊ąĖčé ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 čŹč鹊čé čüą┐ąŠčüąŠą▒ ą┐ąŠą║čāą┐ą║ąĖ ą╝ąĄąĮčÅ ąĮąĖ čĆą░ąĘčā ąĮąĄ čĆą░ąĘąŠčćą░čĆąŠą▓ą░ą╗. ąÆąŠ-ą┐ąĄčĆą▓čŗčģ, ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą┐čĆą░ą║čéąĖč湥čüą║ąĖ ą▓čüąĄ, ąĖ ą▓ąŠ-ą▓č鹊čĆčŗčģ, ą▓čüąĄ ą▒čŗą╗ąŠ č鹊čćąĮąŠ, ą║ą░ą║ ą▓ ą░ą┐č鹥ą║ąĄ, ą▓čüąĄ čĆą░ą▒ąŠčéą░ą╗ąŠ ąĖ ą┐ąŠą╗čāčćąĖą╗ąŠčüčī čüąŠą▓čüąĄą╝ ąĮąĄ ą┤ąŠčĆąŠą│ąŠ. ąĢą┤ąĖąĮčüčéą▓ąĄąĮąĮą░čÅ ą┐čĆąŠą▒ą╗ąĄą╝ą░ ŌĆō ą┤ąŠą╗ą│ąŠ ąČą┤ą░čéčī, ąĮąŠ čÅ ąĮąĖą║čāą┤ą░ ąĮąĄ č鹊čĆąŠą┐ąĖą╗čüčÅ. ą¤ąŠ ą╝ąĄčĆąĄ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ ą┤ąĄčéą░ą╗ąĄą╣ ąĮą░čćą░ą╗ čüąŠą▒ąĖčĆą░čéčī čäčĆą░ą│ą╝ąĄąĮčéčŗ čüčģąĄą╝čŗ ąĖ č鹥čüčéąĖčĆąŠą▓ą░čéčī ąŠčéą┤ąĄą╗čīąĮčŗąĄ ą╝ąŠą┤čāą╗ąĖ ąĮą░ ą┐čĆąĖą│ąŠą┤ąĮąŠčüčéčī ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ. ąÆ čŹč鹊 ąČąĄ ą▓čĆąĄą╝čÅ čüąŠą▒ąĖčĆą░ą╗ ą┐ąŠ ą║čāčüąŠčćą║ą░ą╝ ą║ąŠą┤. ąØą░ ą┐ąŠą┤ą│ąŠč鹊ą▓ą║čā čāčłą╗ąŠ ą┐ąŠčćčéąĖ 2 ą╝ąĄčüčÅčåą░.
[ąÉą┐ą┐ą░čĆą░čéąĮą░čÅ čćą░čüčéčī ]
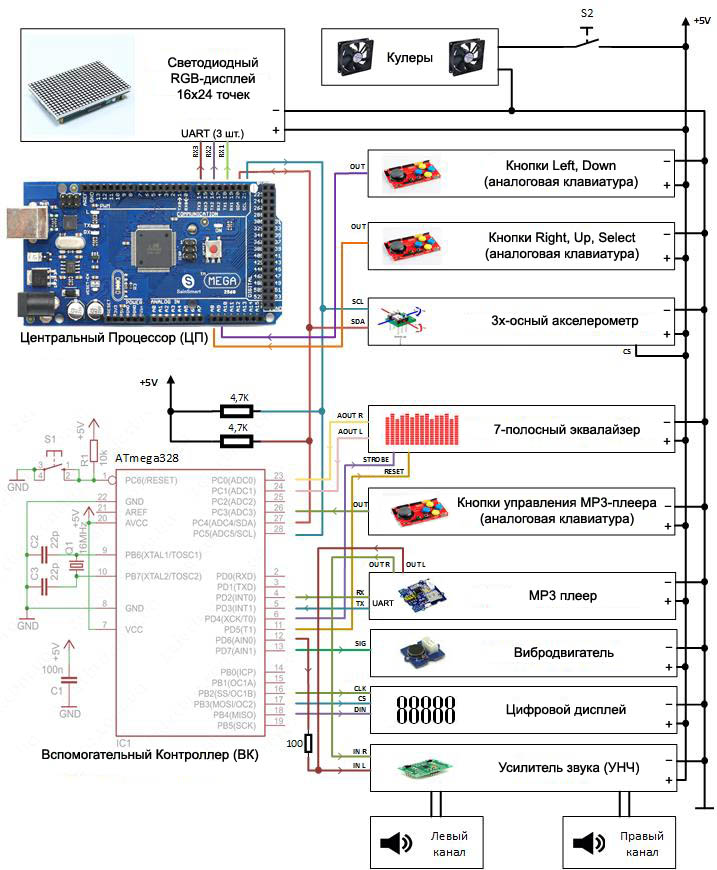
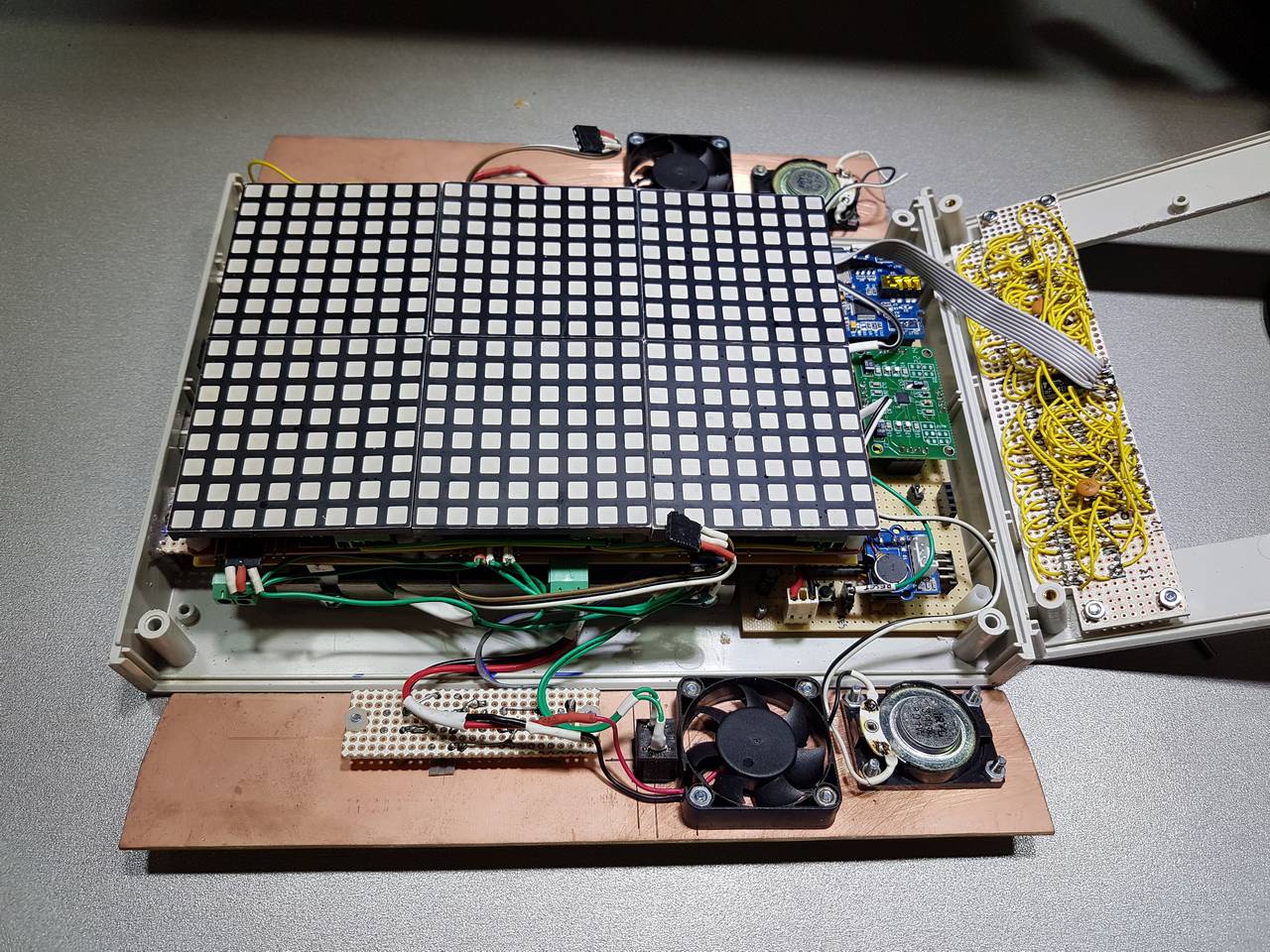
ąĪčģąĄą╝ą░ ąĖą│čĆčāčłą║ąĖ čüąŠčüč鹊ąĖčé ąĖąĘ čüą╗ąĄą┤čāčÄčēąĖčģ ą▒ą╗ąŠą║ąŠą▓:
ŌĆó ą”ąĄąĮčéčĆą░ą╗čīąĮčŗą╣ ą┐čĆąŠčåąĄčüčüąŠčĆ (Arduino MEGA2560), ąŠąĮ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą▓čüąĄ ąŠčüąĮąŠą▓ąĮčŗąĄ čäčāąĮą║čåąĖąĖ Tetris-box (čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ ąĮąĖąČąĄ).
[ą”ąĄąĮčéčĆą░ą╗čīąĮčŗą╣ ą┐čĆąŠčåąĄčüčüąŠčĆ (ą”ą¤) ]
ąĪąĄčĆą┤čåąĄą╝ ąĖą│čĆčāčłą║ąĖ čüčéą░ą╗ Arduino Mega 2560 [1]. ąŁč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ATmega2560, ą▓ ą║ąŠč鹊čĆąŠą╝ ąĄčüčéčī ą▓čüąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠąĄ ą┤ą╗čÅ čāą┤ąŠą▒ąĮąŠą╣ čĆą░ą▒ąŠčéčŗ: 54 čåąĖčäčĆąŠą▓čŗčģ ą▓čģąŠą┤ą░/ą▓čŗčģąŠą┤ą░, 16 ą░ąĮą░ą╗ąŠą│ąŠą▓čŗčģ ą▓čģąŠą┤ąŠą▓, 4 ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┐ąŠčĆčéą░ UART, FLASH-ą┐ą░ą╝čÅčéčī ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ 256 ą║ąĖą╗ąŠą▒ą░ą╣čé ąĖ ąŠč湥ąĮčī ą▒ąŠą╗čīčłąŠąĄ ą×ąŚąŻ - 8 ą║ąĖą╗ąŠą▒ą░ą╣čé. ąØą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ ą╝ąĮąĄ ąĮąĄ čāą┤ą░ą╗ąŠčüčī ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░čéčī ą┤ą░ąČąĄ ą┐ąŠą╗ąŠą▓ąĖąĮčŗ ą▓čüąĄčģ ą▓ąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣ ATmega2560, ąĮąŠ ą▓ąŠčé ąŠą┐ąĄčĆą░čéąĖą▓ąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ ą▓čĆąĄą╝ąĄąĮą░ą╝ąĖ ą║ą░čéą░čüčéčĆąŠčäąĖč湥čüą║ąĖ ąĮąĄ čģą▓ą░čéą░ą╗ąŠ. ąóą░ą║ čćč鹊 ą▓čŗą▒ąŠčĆ ą▒čŗą╗ ą┤ąŠčüčéą░č鹊čćąĮčŗą╝ ąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗą╝.
ą¤ą╗ą░čéč乊čĆą╝ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ ą┐ąŠčüčĆąĄą┤čüčéą▓ąŠą╝ čüčĆąĄą┤čŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino. ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ATmega2560 ą┐ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ čü ąĘą░ą┐ąĖčüą░ąĮąĮčŗą╝ ąĘą░ą│čĆčāąĘčćąĖą║ąŠą╝, ąŠą▒ą╗ąĄą│čćą░čÄčēąĖą╝ ąĘą░ą┐ąĖčüčī ąĮąŠą▓čŗčģ ą┐čĆąŠą│čĆą░ą╝ą╝ ą▒ąĄąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ąĮąĄčłąĮąĖčģ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą▓ ą┐čĆčÅą╝ąŠ č湥čĆąĄąĘ USB.
ąØą░ ą”ą¤ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ąŠčüąĮąŠą▓ąĮą░čÅ ąĖą│čĆąŠą▓ą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░, ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ąĮą░ąČą░čéąĖčÅ ą║ąĮąŠą┐ąŠą║ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ ąĖ ąĘąĮą░č湥ąĮąĖą╣ ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆą░, čĆąĄąĮą┤ąĄčĆąĖčéčüčÅ ą│čĆą░čäąĖą║ą░ ąĖ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ čüąŠ ą▓čüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčŗą╝ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝.
[ąĪą▓ąĄč鹊ą┤ąĖąŠą┤ąĮčŗą╣ ą┤ąĖčüą┐ą╗ąĄą╣ RGB 16čģ24 ]
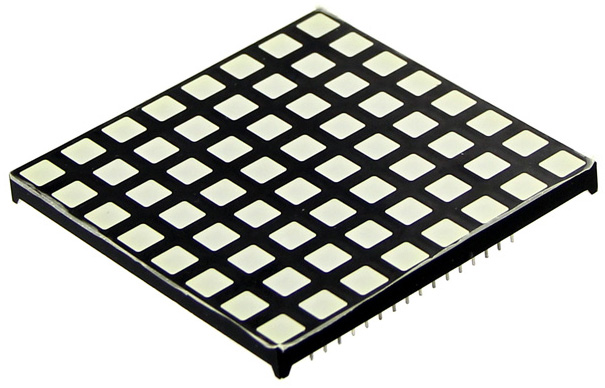
ą» čĆąĄčłąĖą╗ čüą┤ąĄą╗ą░čéčī ą┤ąĖčüą┐ą╗ąĄą╣ ąĮą░ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąĮčŗčģ ą╝ą░čéčĆąĖčåą░čģ RGB 8čģ8. ąĀą░ąĘą╝ąĄčĆ čŹą║čĆą░ąĮą░ čüčĆą░ąĘčā ąŠą│čĆą░ąĮąĖčćąĖą╗ ą┤ąŠ 16čģ24 ą┐ąĖą║čüąĄą╗ąĄą╣, čćč鹊 ą▓ ą║ąŠąĮąĄčćąĮąŠą╝ ąĖč鹊ą│ąĄ ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĖą╗ąŠ ą│ą░ą▒ą░čĆąĖčéčŗ ą▓čüąĄą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ą£ąĄąĮčīčłąĄ ą╝ąĮąĄ ą┐ąŠą║ą░ąĘą░ą╗ąŠčüčī ąĮąĄ ą║čĆčāč鹊, ą░ ą▒ąŠą╗čīčłąĄ ą▓ čĆčāą║ą░čģ ą┤ąĄčƹȹ░čéčī ą▒čŗą╗ąŠ ą▒čŗ ąĮąĄ čāą┤ąŠą▒ąĮąŠ.
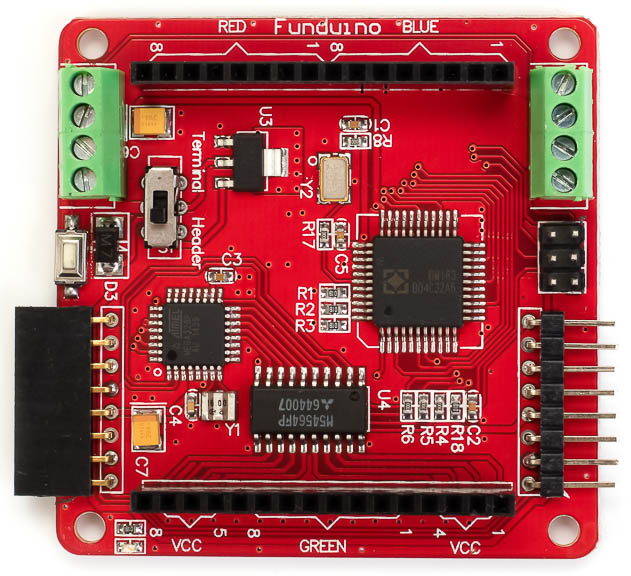
ąÆ ą║ą░č湥čüčéą▓ąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ RGB LED ą╝ą░čéčĆąĖčåčŗ čÅ ą▓čŗą▒čĆą░ą╗ ą┐ą╗ą░čéčā Funduino, ą║ą╗ąŠąĮ Colorduino [2]. ąŁč鹊čé ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čüą┐ąĄčåąĖą░ą╗čīąĮąŠ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čéčĆąĄčģčåą▓ąĄčéąĮčŗą╝ąĖ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąĮčŗą╝ąĖ ą╝ą░čéčĆąĖčåą░ą╝ąĖ, ąĖ ą┤ąŠčüčéą░č鹊čćąĮąŠ čģąŠčĆąŠčłąŠ ą┤ąŠą║čāą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮ. ąÆ ąĄą│ąŠ ąŠčüąĮąŠą▓ąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮčŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ATMega328P, 8 ą║ą░ąĮą░ą╗čīąĮčŗą╣ čāčüąĖą╗ąĖč鹥ą╗čī č鹊ą║ą░ M54564 ąĖ 24 - ą║ą░ąĮą░ą╗čīąĮčŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ą╝ąĖ DM163. ą¦ąĖą┐ DM163 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĘą░ą┤ą░ą▓ą░čéčī 16384 ą┐ąŠą╗čāč鹊ąĮąŠą▓ ą┐ąŠ ą║ą░ąČą┤ąŠą╝čā čåą▓ąĄčéčā. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ RGB LED ą╝ą░čéčĆąĖčå ą┐ąŠąĘą▓ąŠą╗ąĖą╗ąŠ ąŠčüą▓ąŠą▒ąŠą┤ąĖčéčī čåąĄąĮčéčĆą░ą╗čīąĮčŗą╣ ą┐čĆąŠčåąĄčüčüąŠčĆ, čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą▓čüąĄą╣ čüąĖčüč鹥ą╝ąŠą╣, ąŠčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣.
ążąĖąĘąĖč湥čüą║ąĖąĄ ą╝ą░čéčĆąĖčćąĮčŗąĄ ąĖąĮą┤ąĖą║ą░č鹊čĆčŗ ą▒čŗą▓ą░čÄčé ą┤ą▓čāčģ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖą╣: čü ą║čĆčāą│ą╗čŗą╝ ąĖ ą║ą▓ą░ą┤čĆą░čéąĮčŗą╝ ą┐ąĖą║čüąĄą╗ąĄą╝. ąÆ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčéą░čģ čü ąĮąĖą╝ąĖ ą╝ąĮąĄ ą┐ąŠą║ą░ąĘą░ą╗ąŠčüčī, čćč鹊 ą║ą▓ą░ą┤čĆą░čéąĮčŗą╣ ą┐ąĖą║čüąĄą╗čī ą┤ą╗čÅ ą╝ąŠąĖčģ ąĘą░ą┤ą░čć ą▓čŗą│ą╗čÅą┤ąĖčé ą▒ąŠą╗ąĄąĄ čŹčäč乥ą║čéąĮąŠ, ą┐ąŠčŹč鹊ą╝čā čÅ ąŠčüčéą░ąĮąŠą▓ąĖą╗ čüą▓ąŠą╣ ą▓čŗą▒ąŠčĆ ąĮą░ ąĮąĖčģ [3].
ą¤ą╗ą░čéą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čćčāčéčī ą╝ąĄąĮčīčłąĄ ą╝ą░čéčĆąĖčåčŗ, ąĖ čüą┐čĆąŠąĄą║čéąĖčĆąŠą▓ą░ąĮą░ čéą░ą║, čćč鹊 ąĖčģ ą╝ąŠąČąĮąŠ čüąŠąĄą┤ąĖąĮčÅčéčī ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝, ą┐ąŠą╗čāčćą░čÅ ą┤ąĖčüą┐ą╗ąĄąĖ ą▒ąŠą╗čīčłąĄą│ąŠ čĆą░ąĘą╝ąĄčĆą░. ąÉą┐ą┐ą░čĆą░čéąĮčŗąĄ ąĖąĮč鹥čĆč乥ą╣čüčŗ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čĆą░ą▒ąŠčéą░čÄčé ą┐ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ą╝ I2C ąĖ UART, ąĖ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą┐ąŠą┤ą║ą╗čÄčćą░čéčī ąĄą│ąŠ ą║ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ ą╗ąĖąĮąĄą╣ą║ąĖ Arduino.
ąÆ ą▒ą╗ąŠą║ ą┤ąĖčüą┐ą╗ąĄčÅ čüąŠčüč鹊ąĖčé ąĖąĘ čüą╗ąĄą┤čāčÄčēąĖčģ ąŠčüąĮąŠą▓ąĮčŗčģ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓:
ŌĆó Funduino V2 (Funduino) - 6 čłčé.
ąĀą░ąĘą╝ąĄčĆ ąŠą▒čēąĄą│ąŠ ą┐ąŠą╗čāč湥ąĮąĮąŠą│ąŠ ą┤ąĖčüą┐ą╗ąĄčÅ - 16čģ24 ą┐ąĖą║čüąĄą╗čÅ, 12čģ18 čüą╝.
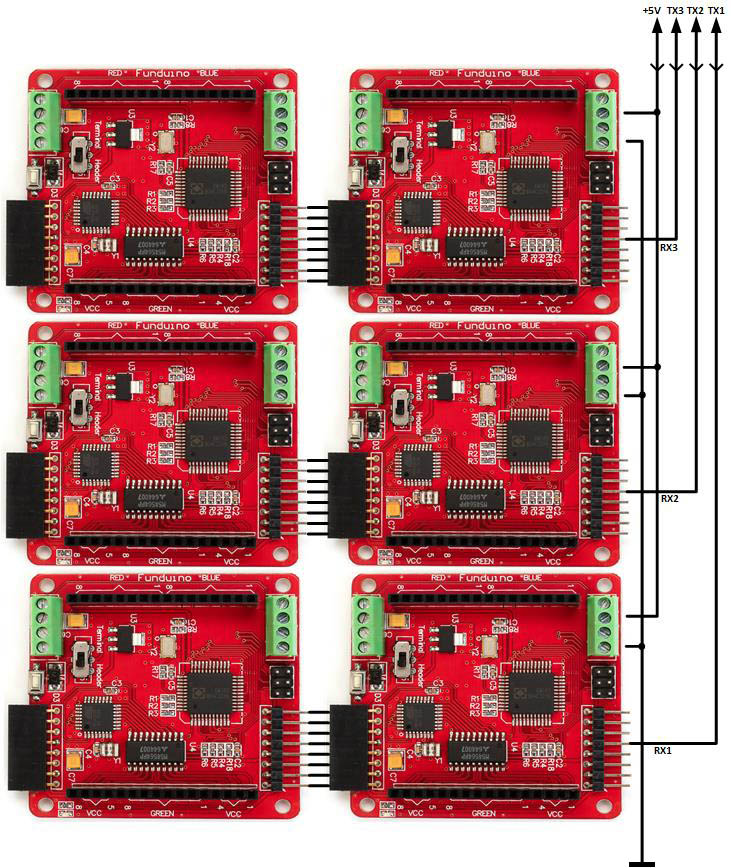
ąĪą▓ąŠą╣ ą┤ąĖčüą┐ą╗ąĄą╣ čÅ čüąŠą▒čĆą░ą╗ ąĖąĘ čéčĆąĄčģ ą┐ą░čĆ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓, čüąŠąĄą┤ąĖąĮąĄąĮąĮčŗčģ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝. ąÜą░ąČą┤ą░čÅ ą┐ą░čĆą░ ą┐ąŠą┤ą║ą╗čÄčćą░ą╗ą░čüčī ą║ čåąĄąĮčéčĆą░ą╗čīąĮąŠą╝čā ą┐čĆąŠčåąĄčüčüąŠčĆčā ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ą┤čĆčāą│ąĖčģ ą┐ą░čĆ ą┐ąŠ ą┐čĆąŠč鹊ą║ąŠą╗čā UART. ąöą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ č鹊ą╗čīą║ąŠ ą▓ ąŠą┤ąĮčā čüč鹊čĆąŠąĮčā ŌĆō ąŠčé ą”ą¤ ą▓ ą▒ą╗ąŠą║ąĖ ą┤ąĖčüą┐ą╗ąĄčÅ, ą▒ąĄąĘ ąŠą▒čĆą░čéąĮąŠą╣ čüą▓čÅąĘąĖ.
ą¤ąŠč湥ą╝čā čéą░ą║? ąÆ čüąĄčéąĖ čÅ ąĮą░čłąĄą╗ ą┤ąŠčüčéą░č鹊čćąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąĖą╝ąĄčĆąŠą▓ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ Funduino ą║ Arduino ą┐ąŠ ą┐čĆąŠč鹊ą║ąŠą╗čā I2C. ATmega2560 ąĖ ATMega328P ąĖą╝ąĄčÄčé ą░ą┐ą┐ą░čĆą░čéąĮčāčÄ čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ ą┐čĆąŠč鹊ą║ąŠą╗ą░ I2C (TWI). ąÆčüąĄ ą┐čĆąĖą╝ąĄčĆčŗ čĆą░ą▒ąŠčéą░ą╗ąĖ ąĘą░ą╝ąĄčćą░č鹥ą╗čīąĮąŠ, ą┐ąŠą║ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ąŠą│čĆą░ąĮąĖčćąĖą▓ą░ą╗ąŠčüčī ąŠą┤ąĮąĖą╝ ąĖą╗ąĖ ą┤ą▓čāą╝čÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ą╝ąĖ. ą¤čĆąĖ ą▒ąŠą╗čīčłąĄą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖą╣ ą║ą░čĆčéąĖąĮą║ą░ ąŠą▒ąĮąŠą▓ą╗čÅą╗ą░čüčī čüą╗ąĖčłą║ąŠą╝ ą╝ąĄą┤ą╗ąĄąĮąĮąŠ. ą©čéą░čéąĮą░čÅ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą┐ąŠ I2C ŌĆō 100 ą║ą▒ąĖčé/čüąĄą║, ąĮąŠ ąĮą░ ą┐čĆą░ą║čéąĖą║ąĄ ąČąĄ ąŠąĮą░ ąĮąĄ ą┐čĆąĄą▓čŗčłą░ą╗ą░ 15-20 ą║ą▒ąĖčé/čüąĄą║. ąĪąĖčéčāą░čåąĖčÅ ąĮąĄ ąĖąĘą╝ąĄąĮąĖą╗ą░čüčī ąĖ ą┐čĆąĖ ąĮą░čüčéčĆąŠą╣ą║ąĄ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ąĮą░ čüą║ąŠčĆąŠčüčéčī 400 ą║ą▒ąĖčé/čüąĄą║. ąÆąĄčĆąŠčÅčéąĮąŠ, ą▓čüąĄ ą┤ąĄą╗ąŠ ą▓ č鹊ą╝, ą┐čĆąĖąĮąĖą╝ą░čÄčēąĖą╣ ą┤ą░ąĮąĮčŗąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĖ čéą░ą╣ą╝ąĄčĆą░ ąĘą░ąĮčÅčé ąŠč鹊ą▒čĆą░ąČąĄąĮąĖąĄą╝ ą┤ą░ąĮąĮčŗčģ ąĮą░ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąĮąŠą╣ ą╝ą░čéčĆąĖčåąĄ, čćč鹊 ąĘą░ą╝ąĄčéąĮąŠ ą▓ą╗ąĖčÅąĄčé ąĮą░ čüą║ąŠčĆąŠčüčéčī ą┐čĆąĖąĄą╝ą░ ąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┤ą░ąĮąĮčŗčģ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ čåąĖą║ą╗ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ. ą¤čĆąĖ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĖ ą║ą░ą┤čĆą░ ą║ą░ąČą┤čŗą╣ ąĖąĘ 6 ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ ą┤ąŠą╗ąČąĄąĮ ą┐ąŠą╗čāčćąĖčéčī 192 ą▒ą░ą╣čéą░ ąĖąĮč乊čĆą╝ą░čåąĖąĖ, čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ą┤ą╗čÅ ą▓čüąĄčģ - 1152 ą▒ą░ą╣čéą░. ąÆ ą╝ąŠąĄą╝ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮč鹥 ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ą║ą░ą┤čĆą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖą╗ąŠ ą▒ąŠą╗ąĄąĄ č湥ą╝ ąĘą░ 500 ą╝čü, čćč鹊 ą▒čŗą╗ąŠ čüąŠą▓ąĄčĆčłąĄąĮąĮąŠ ąĮąĄą┐čĆąĖąĄą╝ą╗ąĄą╝ąŠ. ąöąŠą┐čāčüą║ą░čÄ, čćč鹊 čÅ čćč鹊 č鹊 ą┤ąĄą╗ą░ą╗ ąĮąĄ čéą░ą║, ąĮąŠ čāą╗čāčćčłąĖčéčī čŹčéčā čüąĖčéčāą░čåąĖčÄ ą╝ąĮąĄ ąĮąĄ čāą┤ą░ą╗ąŠčüčī.
ą¤ąŠč鹊ą╝ ąĮą░čćą░ą╗ąĖčüčī 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčéčŗ čü UART. ąŚą┤ąĄčüčī ą▓čüąĄ ą▒čŗą╗ąŠ čüąŠą▓čüąĄą╝ ąĮąĄ ą┐čĆąŠčüč鹊, ąĮąŠ čĆąĄąĘčāą╗čīčéą░čéčŗ ą┐ąŠą╗čāčćąĖą╗ąĖčüčī ąĮą░ą╝ąĮąŠą│ąŠ ą╗čāčćčłąĄ. UART ą▓ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░čģ ATMEL čéą░ą║ ąČąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą░ą┐ą┐ą░čĆą░čéąĮąŠ, ąĖ ąŠąĮ ąŠč湥ąĮčī ą▒čŗčüčéčĆčŗą╣ (ą┤ąŠ 2 ą╝ą▒ąĖčé/čüąĄą║). ą¤ąŠą╗čāč湥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĮą░ čüč鹊čĆąŠąĮąĄ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ą╝ąŠąČąĮąŠ ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░čéčī ą┐ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÄ. ąØąŠ ą▓ UART ąĮąĄ ą┐čĆąĄą┤čāčüą╝ąŠčéčĆąĄąĮą░ ą░ą┤čĆąĄčüą░čåąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą▓, ą┐ąŠčŹč鹊ą╝čā ą┐ąĄčĆąĄą┤ą░čéčī ą┤ą░ąĮąĮčŗąĄ ą╝ąŠąČąĮąŠ č鹊ą╗čīą║ąŠ čüčĆą░ąĘčā ą▓čüąĄ ąĖ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą▓čüąĄą╝ ą▓ąĄą┤ąŠą╝čŗą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝. ąÜą░ąČą┤čŗą╣ Funduino ą▒čŗą╗ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮąŠ, ąĖą╝ąĄą╗ ą╗ąĖčćąĮčŗą╣ ąĮąŠą╝ąĄčĆ ąĖ ┬½ąĘąĮą░ą╗┬╗ čüą▓ąŠčÄ ą┐ąŠąĘąĖčåąĖčÄ ąĮą░ 菹║čĆą░ąĮąĄ. ąóą░ą║, ą┐ąŠą╗čāčćąĖą▓ ą▓ąĄčüčī ą╝ą░čüčüąĖą▓ ą┤ą░ąĮąĮčŗčģ, ąŠąĮ ą▒čĆą░ą╗ ąĖąĘ ąĮąĖčģ čüą▓ąŠą╣ ą║čāčüąŠč湥ą║ ąĖ ąŠč鹊ą▒čĆą░ąČą░ą╗ ąĮą░ ą┤ąĖčüą┐ą╗ąĄąĄ. ąÆ ą┐čĆąĖąĮčåąĖą┐ąĄ ąĖ čü ąŠą┤ąĮąĖą╝ UART čŹč鹊čé ą┐čĆąĖąĮčåąĖą┐ ą┐ąŠčćčéąĖ ąĘą░čĆą░ą▒ąŠčéą░ą╗, ąĮąŠ 2 ąÜąæ SRAM ATmega328 ą▓ Funduino ą▒čŗą╗ąĖ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮčŗ ą┐ąŠą╗ąĮąŠčüčéčīčÄ, čćč鹊 ą▓čŗčĆą░ąČą░ą╗ąŠčüčī ą▓ ąĮąĄčāčüč鹊ą╣čćąĖą▓ąŠą╣ čĆą░ą▒ąŠč鹥. ąÆ ą║ą░č湥čüčéą▓ąĄ čåąĄąĮčéčĆą░ą╗čīąĮąŠą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą▓ ą┐čĆąŠąĄą║č鹥 čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ Arduino Mega 2560. ą×ąĮ ąĖą╝ąĄąĄčé ąĮą░ ą▒ąŠčĆčéčā 4 UART ąĖ čŹč鹊 čĆąĄčłąĖą╗ąŠ ą▓čüąĄ ą┐čĆąŠą▒ą╗ąĄą╝čŗ. ąĪąŠąĄą┤ąĖąĮąĖą▓ Funduino ą┐ąŠ ą┐ą░čĆą░ą╝ ąĖ ą┐ąŠą▓ąĄčüąĖą▓ ą║ą░ąČą┤čāčÄ ąĮą░ čüą▓ąŠą╣ UART, čÅ ą┐ąŠą╗čāčćąĖą╗ ąĖ ą▒ąŠą╗ąĄąĄ, č湥ą╝ ą┤ąŠčüčéą░č鹊čćąĮčāčÄ čüą║ąŠčĆąŠčüčéčī ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą║ą░čĆčéąĖąĮą║ąĖ, ąĖ čĆą░čåąĖąŠąĮą░ą╗čīąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ ą┐ą░ą╝čÅčéčī, ąĖ čāą┐čĆąŠčüčéąĖą╗ ą║ąŠą┤. ąóąĄą┐ąĄčĆčī ą║ą░ąČą┤ą░čÅ ą┐ą░čĆą░ Funduino ą┐ąŠą╗čāčćą░ą╗ą░ 384 ą▒ą░ą╣čéą░ ą┤ą░ąĮąĮčŗčģ ąĖ ą║ą░ąČą┤čŗą╣ ąĖąĘ ąĮąĖčģ ąĘą░ą▒ąĖčĆą░ą╗ čüą▓ąŠčÄ ą┐ąŠą╗ąŠą▓ąĖąĮčā.
ąśą┤ąĄčÅ čĆą░ą▒ąŠčéą░ą╗ą░, čĆą░ąĘą┤čĆą░ąČą░ą╗ąŠ č鹊ą╗čīą║ąŠ ąĮąĄ čüąĖą╗čīąĮąŠąĄ ąĖ ąĮąĄ čĆąĄą│čāą╗čÅčĆąĮąŠąĄ ą╝ąĄčĆčåą░ąĮąĖąĄ ą┤ąĖčüą┐ą╗ąĄčÅ. ąóąĄą┐ąĄčĆčī čŹč鹊 ą▒čŗą╗ąŠ čüą▓čÅąĘą░ąĮąŠ čü č鹥ą╝, čćč鹊 ą║ąŠą┤ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ąĮą░ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąĮąŠą╣ ą╝ą░čéčĆąĖčåąĄ ą▓čŗą┐ąŠą╗ąĮčÅą╗čüčÅ ą▓ ą│ą╗ą░ą▓ąĮąŠą╝ čåąĖą║ą╗ąĄ ąĖ ą║ąŠąĮąĄčćąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ą╗čüčÅ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ. ąÆ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮč鹥 čāą┤ą░ą╗ąŠčüčī ąĮą░ą╣čéąĖ ą║ąŠą╝ą┐čĆąŠą╝ąĖčüčüąĮčāčÄ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ, ą║ąŠą│ą┤ą░ ą╝ąĄčĆčåą░ąĮąĖąĄ čüčéą░ą╗ąŠ ąĮąĄąĘą░ą╝ąĄčéąĮčŗą╝.
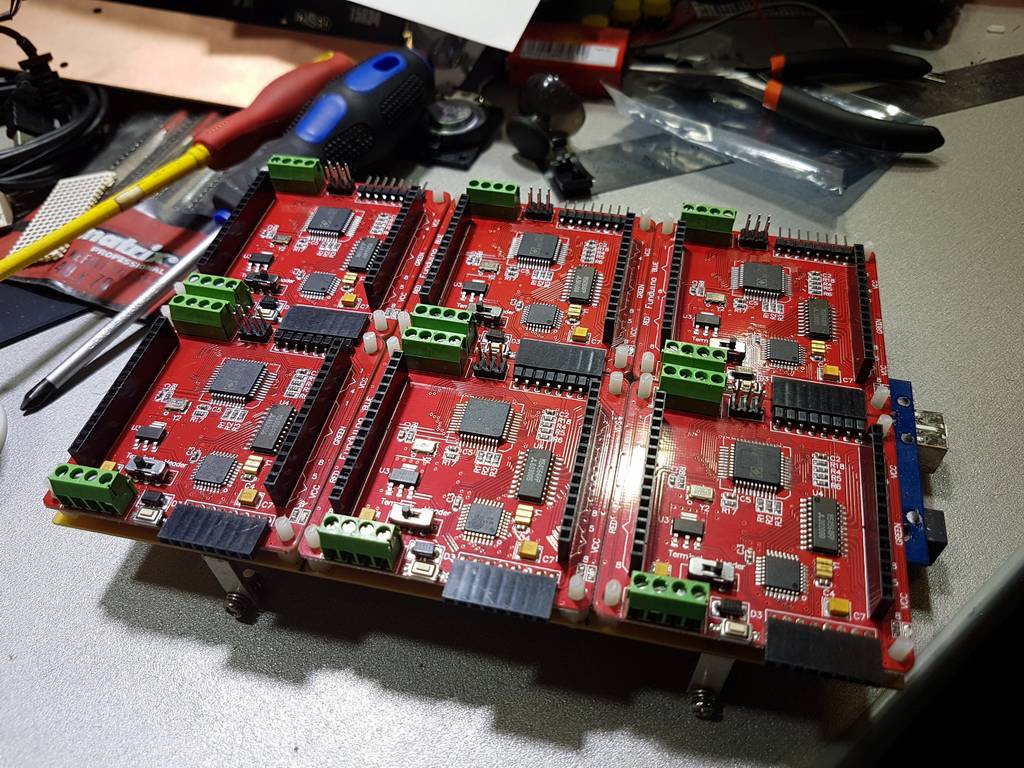
ąÆčüąĄ Funduino ą▒čŗą╗ąĖ čüą╝ąŠąĮčéąĖčĆąŠą▓ą░ąĮčŗ ą▓ą╝ąĄčüč鹥 ąĮą░ ą╝ąŠąĮčéą░ąČąĮąŠą╣ PCB ą┐ąŠą┤čģąŠą┤čÅčēąĄą│ąŠ čĆą░ąĘą╝ąĄčĆą░ ą┐čĆąĖ ą┐ąŠą╝ąŠčēąĖ ą┐ą╗ą░čüčéąĖą║ąŠą▓ąŠą│ąŠ ą║čĆąĄą┐ąĄąČą░ (čüą╝. č乊č鹊ą│ą░ą╗ąĄčĆąĄčÄ ąĮąĖąČąĄ ą▓ąŠ ą▓čĆąĄąĘą║ąĄ).
[3čģ-ąŠčüąĮčŗą╣ ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆ ]
ą¤čĆąĄą┤ą┐ąŠą╗ą░ą│ą░ą╗ąŠčüčī, čćč鹊 ąĖą│čĆčāčłą║ą░ ą▒čāą┤ąĄčé čāą┐čĆą░ą▓ą╗čÅčéčīčüčÅ ąĮąĄ č鹊ą╗čīą║ąŠ ą║ąĮąŠą┐ą║ą░ą╝ąĖ, ąĮąŠ ąĖ ą┤ą▓ąĖąČąĄąĮąĖąĄą╝ (ąĮą░ą║ą╗ąŠąĮą░ą╝ąĖ) ą║ąŠčĆą┐čāčüą░. ąöą╗čÅ čŹč鹊ą│ąŠ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąĘąĮą░čéčī ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ą║ąŠčĆą┐čāčüą░ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ąŚąĄą╝ą╗ąĖ. ąÆ čŹč鹊ą╝ ą╝ąŠą│čāčé ą┐ąŠą╝ąŠčćčī ą┤ą░čéčćąĖą║ąĖ, ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčēąĖąĄ čāčüą║ąŠčĆąĄąĮąĖąĄ. ą×ą┤ąĮąĖą╝ ąĖąĘ čéą░ą║ąĖčģ, čÅą▓ą╗čÅąĄčéčüčÅ ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆ ą║ąŠą╝ą┐ą░ąĮąĖąĖ NXP Semiconductors MMA7455L [4]. ąŁč鹊čé ą║čĆąŠčłąĄčćąĮčŗą╣ čćąĖą┐ čüą┐ąŠčüąŠą▒ąĄąĮ ąĘą░ą╝ąĄčĆčÅčéčī ą▓ąĄą║č鹊čĆ ą║ą░ąČčāčēąĄą│ąŠčüčÅ čāčüą║ąŠčĆąĄąĮąĖčÅ ą┐ąŠ čéčĆąĄą╝ ąŠčüčÅą╝, ąŠčåąĖčäčĆąŠą▓čŗą▓ą░čéčī čĆąĄąĘčāą╗čīčéą░čé ąĖ ąŠčéą┐čĆą░ą▓ą╗čÅčéčī ą┐ąŠą╗čāč湥ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ą╝ SPI ąĖą╗ąĖ I2C(TWI). ąóąŠčćąĮąŠčüčéčī ąĘą░ą╝ąĄčĆą░ čāčüą║ąŠčĆąĄąĮąĖčÅ ŌĆö 10 ą▒ąĖčé. ą¦čāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéčī ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆą░ ą╝ąŠąČąĄčé ą▓čŗą▒čĆą░čéčī ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī (┬▒2g, ┬▒4g ąĖ ┬▒8g).
ąöą╗čÅ čüą▓čÅąĘąĖ ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆą░ ąĖ Arduino Mega 2560 ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĖąĮč鹥čĆč乥ą╣čü I2C, ą┐ąŠčŹč鹊ą╝čā ą▓čģąŠą┤ CS ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ ą┐ąĖčéą░ąĮąĖčÄ. ą¦ąĖą┐čā ąĮą░ čłąĖąĮąĄ I2C ą┐čĆąĖčüą▓ąŠąĄąĮ ą░ą┤čĆąĄčü 1Dh (čüą╝. [4]).
ąöą╗čÅ ą╝ąĄąĮčÅ ą┤ąŠ čüąĖčģ ą┐ąŠčĆ ąĘą░ą│ą░ą┤ą║ą░, čćč鹊 čéą░ą╝ ą▓ąĮčāčéčĆąĖ čŹč鹊ą╣ ą║čĆąŠčłąĄčćąĮąŠą╣ ą╝ąĖą║čĆąŠčüčģąĄą╝ą║ąĖ, ąĮąŠ č鹊, čćč鹊 ą▒ą╗ą░ą│ąŠą┤ą░čĆčÅ ąĄą╣, ą╝ąŠąČąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗čÅčéčī ąŠčĆąĖąĄąĮčéą░čåąĖčÄ ąĖą│čĆčāčłą║ąĖ ą▓ čéčĆčæčģą╝ąĄčĆąĮąŠą╝ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ, ą╝ąĄąĮčÅ ą┐čĆąĖčÅčéąĮąŠ ą▓ąĘą▓ąŠą╗ąĮąŠą▓ą░ą╗ąŠ. ąŚąĮą░ą║ąŠą╝čüčéą▓ąŠ čü ą┤ą░čéčćąĖą║ąŠą╝ čéą░ą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ čüą╗ąŠąČąĮąŠčüčéąĖ ą┤ą╗čÅ ą╝ąĄąĮčÅ ą▓ąŠąŠą▒čēąĄ ą▒čŗą╗ąŠ ą▓ą┐ąĄčĆą▓čŗąĄ, ąĖ čÅ ą┐čĆąŠą▓ąĄą╗ ąĮąĖ ąŠą┤ąĖąĮ ą▒ąĖčéčŗą╣ čćą░čü ąĮą░ą┤ ąĖąĘčāč湥ąĮąĖąĄą╝ ąĄą│ąŠ ą┐ąŠą▓ą░ą┤ąŠą║: ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░, ą┐ąŠą│čĆąĄčłąĮąŠčüčéčī, čłčāą╝čŗ, čäąĖą╗čīčéčĆ ąÜą░ą╗ą╝ą░ąĮą░, ąĘą░ąĮąĖą╝ą░č鹥ą╗čīąĮą░čÅ čéčĆąĖą│ąŠąĮąŠą╝ąĄčéčĆąĖčÅ, čüą║ąŠčĆąŠčüčéčī ą┤ą▓ąĖąČąĄąĮąĖčÅ. ąÜąŠą│ą┤ą░ čŹčéą░ čłčéčāą║ą░ ąĮą░čćą░ą╗ą░ ą╝ąĄąĮčÅ čüą╗čāčłą░čéčīčüčÅ, ą╝ąĮąĄ ą┐ąŠą║ą░ąĘą░ą╗ąŠčüčī, čćč鹊 čÅ ą┐ąŠčüčéąĖą│ čéą░ą╣ąĮčŗ ą╝ąĖčĆąŠąĘą┤ą░ąĮąĖčÅ. ąØą░ čüą░ą╝ąŠą╝ ąČąĄ ą┤ąĄą╗ąĄ ą▓čüąĄ ą▒čŗą╗ąŠ ąŠč湥ąĮčī čüą║čĆąŠą╝ąĮąŠ, čÅ ą┐čĆąŠčüč鹊 ąĮą░čāčćąĖą╗čüčÅ čĆą░ąĘą╗ąĖčćą░čéčī ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ą▓ąĖąČąĄąĮąĖčÅ, čāą│ą╗čŗ ąĮą░ą║ą╗ąŠąĮą░ ą║ąŠčĆą┐čāčüą░ ąĖ ą▓čŗčćąĖčüą╗čÅčéčī čüą║ąŠčĆąŠčüčéčī čŹčéąĖčģ ąĮą░ą║ą╗ąŠąĮąŠą▓, č湥ą│ąŠ ą┤ą╗čÅ ą╝ąŠąĖčģ ąĘą░ą┤ą░čć ąŠą║ą░ąĘą░ą╗ąŠčüčī ą▒ąŠą╗ąĄąĄ, č湥ą╝ ą┤ąŠčüčéą░č鹊čćąĮąŠ.
[ąÆčüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčŗą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ (ąÆąÜ) ]
ą¤ąŠą╝ąĮąĖč鹥 486DX? ą£ąĮąĄ ą║ąŠą│ą┤ą░-č鹊 ąŠč湥ąĮčī ąĮčĆą░ą▓ąĖą╗ą░čüčī čüą░ą╝ą░ ąĖą┤ąĄčÅ čüąŠą┐čĆąŠčåąĄčüčüąŠčĆą░, ą║ąŠą│ą┤ą░ ą▓ čüąĖčüč鹥ą╝ąĄ ąĄčüčéčī čüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą┐čĆąŠčåąĄčüčüąŠčĆ, ą║ąŠč鹊čĆčŗą╣ čäčāąĮą║čåąĖąŠąĮąĖčĆčāąĄčé ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ, čĆą░čüčłąĖčĆčÅąĄčé čäčāąĮą║čåąĖąŠąĮą░ą╗ čåąĄąĮčéčĆą░ą╗čīąĮąŠą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ąĖ ąĖąĘą▒ą░ą▓ą╗čÅąĄčé ąĄą│ąŠ ąŠčé ą╗ąĖčłąĮąĄą╣ ą▓čŗčćąĖčüą╗ąĖč鹥ą╗čīąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ. ą» čĆąĄčłąĖą╗ čŹčéčā ąĖą┤ąĄčÄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ąĖ ą┤ąŠą▒ą░ą▓ąĖą╗ ą▓ čüąĖčüč鹥ą╝čā ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ATmega328 [5], ąĮą░ ą║ąŠč鹊čĆčŗą╣ ą┐ąŠą▓ąĄčüąĖą╗ ą▓čüčÄ ą▓čüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčāčÄ ą┐ąĄčĆąĖč乥čĆąĖčÄ. ąÆąÜ ąŠčéą▓ąĄčćą░ąĄčé ąĘą░ ą▓čŗą▓ąŠą┤ ąĘąĮą░č湥ąĮąĖą╣ ąĮą░ čåąĖčäčĆąŠą▓ąŠą╣ ą┤ąĖčüą┐ą╗ąĄą╣, ą░ čéą░ą║ąČąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ MP3 ą┐čĆąŠąĖą│čĆčŗą▓ą░č鹥ą╗ąĄą╝, čüą┐ąĖą║ąĄčĆąŠą╝, ą▓ąĖą▒čĆąŠą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╝ ąĖ 7 ą┐ąŠą╗ąŠčüąĮčŗą╝ ą░ąĮą░ą╗ąĖąĘą░č鹊čĆąŠą╝ čüą┐ąĄą║čéčĆą░. ąÆąŠąĘą╝ąŠąČąĮąŠ, čćč鹊 čü čŹčéąĖą╝ąĖ ąĘą░ą┤ą░čćą░ą╝ąĖ ą▓ą┐ąŠą╗ąĮąĄ ą╝ąŠą│ ą▒čŗ čüą┐čĆą░ą▓ąĖčéčüčÅ čüą░ą╝ Arduino Mega 2560 ąĖ ą▓čüąĄ čŹč鹊 ą┐čĆąŠčüč鹊 ą╝ąŠąĖ čäą░ąĮčéą░ąĘąĖąĖ, ąĮąŠ ą║ą░ą║ąŠąĄ ą┐ąŠą╗ąĄ ą┤ą╗čÅ čŹą║čüą┐ąĄčĆąĖą╝ąĄąĮč鹊ą▓. ąś ąĮąĖčćč鹊 ąĮąĄ ą╝ąŠą│ą╗ąŠ ą╝ąĄąĮčÅ ąŠčüčéą░ąĮąŠą▓ąĖčéčī =).
ąĪą▓čÅąĘčī ą”ą¤ ąĖ ąÆąÜ ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮą░ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü I2C. ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ Atmega ąĖą╝ąĄčÄčé ą░ą┐ą┐ą░čĆą░čéąĮčāčÄ ą┐ąŠą┤ą┤ąĄčƹȹ║čā ąĖąĮč鹥čĆč乥ą╣čüą░ I2C (TWI). ąøąĖąĮąĖąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ SDA ąĖ SCL čā ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ATmega328 čüąĖą┤čÅčé ąĮą░ ąĮąŠąČą║ą░čģ c ąĮąŠą╝ąĄčĆą░ą╝ąĖ 27 (PC4) ąĖ 28 (PC5), čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ, ąĮą░ ą┐ą╗ą░č鹥 Arduino Mega, SDA ŌĆö čŹč鹊 čåąĖčäčĆąŠą▓ąŠą╣ ą┐ąŠčĆčé 20, ą░ SCL ŌĆö čåąĖčäčĆąŠą▓ąŠą╣ ą┐ąŠčĆčé 21. ąæčŗą╗ą░ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮą░ ąĮąĄčüą╗ąŠąČąĮą░čÅ čüąĖčüč鹥ą╝ą░ ą║ąŠą╝ą░ąĮą┤, ą▒ą╗ą░ą│ąŠą┤ą░čĆčÅ ą║ąŠč鹊čĆčŗą╝ ą”ą¤ čāą┐čĆą░ą▓ą╗čÅą╗ ąÆąÜ ąĖ ą┐ąŠą╗čāčćą░ą╗ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ.
[MP3 ą┐čĆąŠąĖą│čĆčŗą▓ą░č鹥ą╗čī ąĖ čāčüąĖą╗ąĖč鹥ą╗čī ]
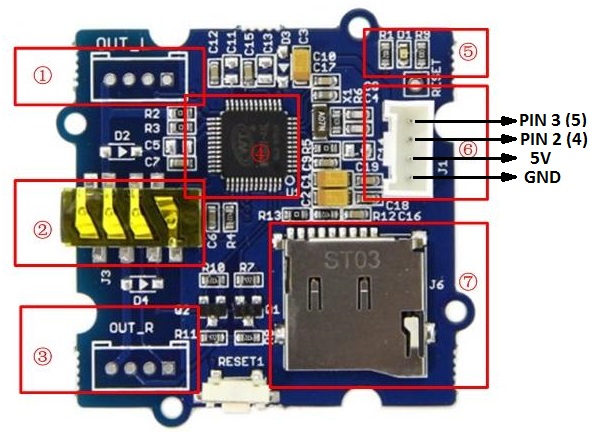
ąÜąŠąĮąĄčćąĮąŠ ąČąĄ ą╝ąŠčÅ ąĖą│čĆčāčłą║ą░ čüčĆą░ąĘčā ąĘą░ą╝čŗčłą╗čÅą╗ą░čüčī čüąŠ ąĘą▓čāą║ąŠą╝. ą£ąĄąĮčÄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, ą▓ąĖą┤ąĄąŠčŹčäč乥ą║čéčŗ, ąĖą│čĆčŗ ąĖ ą┤ą░ąČąĄ ąŠčéą┤ąĄą╗čīąĮčŗąĄ ąĖčģ 菹┐ąĖąĘąŠą┤čŗ ą╝ąŠą│čāčé ąĖą╝ąĄčéčī čüą▓ąŠąĄ č乊ąĮąŠą▓ąŠąĄ ąĘą▓čāą║ąŠą▓ąŠąĄ čüąŠą┐čĆąŠą▓ąŠąČą┤ąĄąĮąĖąĄ. ąÆ čŹč鹊ą╝ ą╝ąĮąĄ ą┐ąŠą╝ąŠą│ Grove - Serial MP3 Player [6], ą║ąŠč鹊čĆčŗą╣ ą▓čŗą┐ąŠą╗ąĮąĄąĮ ąĮą░ ą▒ą░ąĘąĄ čćąĖą┐ą░ WT5001 [7] ąĖ ąŠą▒ą╗ą░ą┤ą░ąĄčé ąŠč湥ąĮčī ą▒ąŠą╗čīčłąĖą╝ ą┐ąŠč鹥ąĮčåąĖą░ą╗ąŠą╝. ą¤čĆąŠąĖą│čĆčŗą▓ą░č鹥ą╗čī ąĖą╝ąĄąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ ą┐ąŠčĆč鹊ą▓: čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü UART, čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čĆą░ąĘčŖąĄą╝ ą┤ą╗čÅ čüč鹥čĆąĄąŠąĮą░čāčłąĮąĖą║ąŠą▓, ą╗ąĖąĮąĄą╣ąĮčŗą╣ ą▓čŗčģąŠą┤, ą░ čéą░ą║ąČąĄ ąĖąĮč鹥čĆč乥ą╣čü ą║ą░čĆčéčŗ ą┐ą░ą╝čÅčéąĖ MicroSD.
ą”ąĖčäčĆą░ą╝ąĖ ąĮą░ čĆąĖčüčāąĮą║ąĄ ą┐ąŠą╝ąĄč湥ąĮčŗ:
(1). ąøąĄą▓čŗą╣ ą║ą░ąĮą░ą╗ ą╗ąĖąĮąĄą╣ąĮąŠą│ąŠ ą▓čŗčģąŠą┤ą░.
ą¤čĆąŠčüč鹊ą╣ ąĮą░ ą┐ąĄčĆą▓čŗą╣ ą▓ąĘą│ą╗čÅą┤ ą╝ąŠą┤čāą╗čī ąŠą║ą░ąĘą░ą╗čüčÅ ą▓ą┐ąŠą╗ąĮąĄ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗą╝ ąĖ ąŠč湥ąĮčī ą┐ąŠčüą╗čāčłąĮčŗą╝. ą¤ąŠčüčŗą╗ą░čÅ ą║ąŠą╝ą░ąĮą┤čŗ ą║ ą╝ąŠą┤čāą╗čÄ č湥čĆąĄąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé, ą╝ąŠąČąĮąŠ ą║ąŠąĮčéčĆąŠą╗ąĖčĆąŠą▓ą░čéčī čüąŠčüč鹊čÅąĮąĖąĄ ą▓ąŠčüą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮąĖčÅ MP3, ą▓čŗą▒ąĖčĆą░čéčī ą║ąŠą╝ą┐ąŠąĘąĖčåąĖčÄ ą┐ąŠ ąĮąŠą╝ąĄčĆčā, ąĖąĘą╝ąĄąĮčÅčéčī ą│čĆąŠą╝ą║ąŠčüčéčī ąĖ čĆąĄąČąĖą╝ ą▓ąŠčüą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮąĖčÅ. ą¤čĆąŠąĖą│čĆčŗą▓ą░č鹥ą╗čī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą╝čā ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā ATmega328 ą┐ąŠčüčĆąĄą┤čüčéą▓ąŠą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░, čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮąŠą│ąŠ ą▓ ąĖąĘą▓ąĄčüčéąĮąŠą╣ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ SoftwareSerial [8] . ąÆ ąĖą│čĆčāčłą║ąĄ ą┐čĆąĄą┤čāčüą╝ąŠčéčĆąĄąĮąŠ ąĖ ą░ą┐ą┐ą░čĆą░čéąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓ąŠčüą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮąĖąĄą╝ ąĖ ą│čĆąŠą╝ą║ąŠčüčéčīčÄ ą┐čĆąĖ ą┐ąŠą╝ąŠčēąĖ ą║ąĮąŠą┐ąŠą║. ąÉąĮą░ą╗ąŠą│ąŠą▓ą░čÅ 5-ą║ąĮąŠą┐ąŠčćąĮą░čÅ ą║ą╗ą░ą▓ąĖą░čéčāčĆą░ ą▓čŗąĮąĄčüąĄąĮą░ ąĮą░ ą┐čĆą░ą▓čāčÄ ą┐ą░ąĮąĄą╗čī ą║ąŠčĆą┐čāčüą░.
ąÆčüąĄ ą╝čāąĘčŗą║ą░ą╗čīąĮčŗąĄ ą║ąŠą╝ą┐ąŠąĘąĖčåąĖąĖ ą▓ ąŠą┐čĆąĄą┤ąĄą╗čæąĮąĮąŠą╝ ą┐ąŠčĆčÅą┤ą║ąĄ ąĘą░ą┐ąĖčüą░ąĮčŗ ąĮą░ MicroSD. ąŁč鹊 ą▓ą░ąČąĮąŠ, čéą░ą║ ą║ą░ą║ ą▓ąŠčüą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮąĖąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠ č鹊ą╗čīą║ąŠ ą┐ąŠ ą┐ąŠčĆčÅą┤ą║ąŠą▓ąŠą╝čā ąĮąŠą╝ąĄčĆčā ą║ąŠą╝ą┐ąŠąĘąĖčåąĖąĖ, ą░ ąĮąĄ ą┐ąŠ ąĖą╝ąĄąĮąĖ čäą░ą╣ą╗ą░.
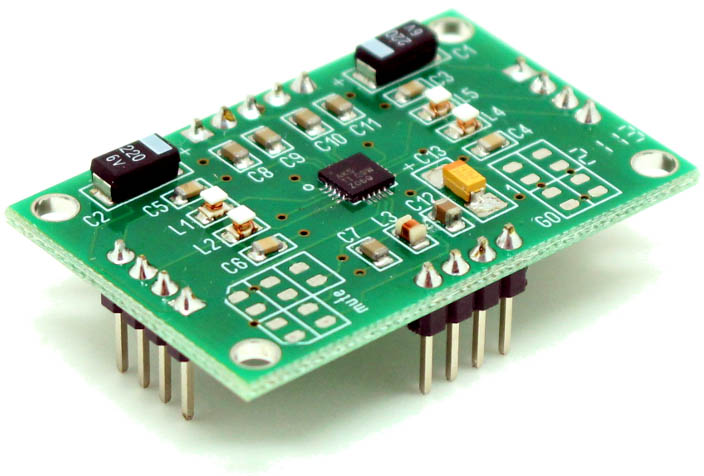
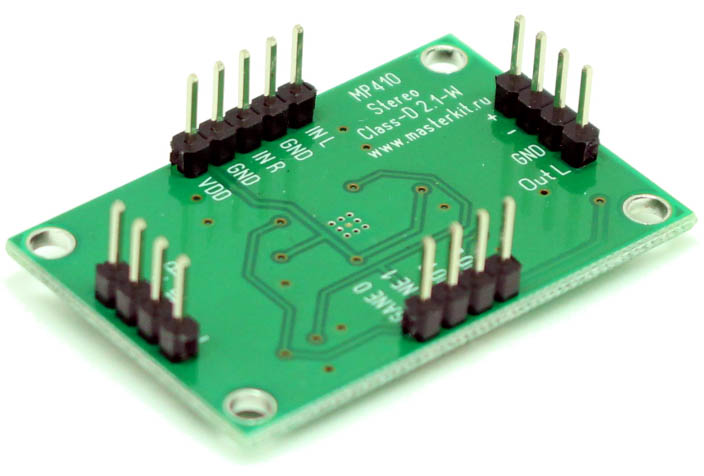
ąÆčŗčģąŠą┤ąĮą░čÅ ą╝ąŠčēąĮąŠčüčéčī MP3 ą┐čĆąŠąĖą│čĆčŗą▓ą░č鹥ą╗čÅ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ąĮą░ ą┤ąĖąĮą░ą╝ąĖą║ąĖ ąŠą║ą░ąĘą░ą╗ą░čüčī ąĮąĄą┤ąŠčüčéą░č鹊čćąĮąŠą╣, ą┐ąŠčŹč鹊ą╝čā čÅ ą┤ąŠą▒ą░ą▓ąĖą╗ ą▓ ą┐čĆąŠąĄą║čé ą║ąŠą╝ą┐ą░ą║čéąĮčŗą╣ čüč鹥čĆąĄąŠč乊ąĮąĖč湥čüą║ąĖą╣ čāčüąĖą╗ąĖč鹥ą╗čī ┬½D┬╗-ą║ą╗ą░čüčüą░ 2 čģ 2.2 ąÆčé [9].
ąŚą▓čāą║ ąĖą│čĆčāčłą║ąĖ ą▓ąŠčüą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčüčÅ ąĮą░ 2-ą▓ą░čéčéąĮčŗąĄ ą┤ąĖąĮą░ą╝ąĖą║ąĖ (ą║ą░ąČą┤čŗą╣ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄą╝ 4 ąŠą╝), ą║ąŠč鹊čĆčŗąĄ, ą║ąŠč鹊čĆčŗąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ ą▒ąŠą║ąŠą▓čŗąĄ ą┐ą░ąĮąĄą╗ąĖ ą║ąŠčĆą┐čāčüą░. ą£ąŠąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ąĮą░čāčłąĮąĖą║ąĖ, č鹊ą│ą┤ą░ ą┤ąĖąĮą░ą╝ąĖą║ąĖ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčéą║ą╗čÄčćą░čÄčéčüčÅ. ą» ą║ąŠąĮąĄčćąĮąŠ ąĄčēąĄ č鹊čé ą╝ąĄą╗ąŠą╝ą░ąĮ, ąĮąŠ čćąĖčüč鹊čéą░ ąĖ ą│čĆąŠą╝ą║ąŠčüčéčī ąĘą▓čāą║ą░ ą╝ąĄąĮčÅ ą▓ą┐ąŠą╗ąĮąĄ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆąĖą╗ąĖ. ą¤čĆąĖ ą╝ąŠąĮčéą░ąČąĄ MP3 ą┐čĆąŠąĖą│čĆčŗą▓ą░č鹥ą╗čÅ ą┤ąŠą┐čāčüčéąĖą╗ ą┤ąŠčüą░ą┤ąĮčāčÄ ą║ąŠąĮčüčéčĆčāą║čéąĖą▓ąĮčāčÄ ąŠčłąĖą▒ą║čā. ąØąĄ ą┐čĆąĄą┤čāčüą╝ąŠčéčĆąĄą╗ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąĖąĘą▓ą╗ąĄč湥ąĮąĖčÅ ą║ą░čĆčéčŗ MicroSD ą▒ąĄąĘ čĆą░ąĘą▒ąŠčĆą║ąĖ ą║ąŠčĆą┐čāčüą░. ąöčāą╝ą░ą╗ ąĮąĄ ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ.
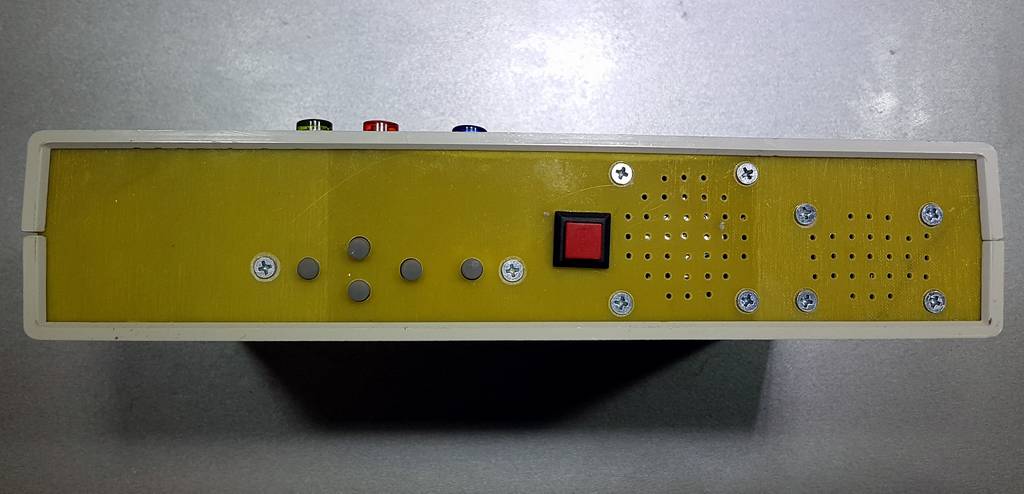
[ąĀąĄąĘąĖčüčéąĖą▓ąĮą░čÅ (ą░ąĮą░ą╗ąŠą│ąŠą▓ą░čÅ) ą║ąĮąŠą┐ąŠčćąĮą░čÅ ą║ą╗ą░ą▓ąĖą░čéčāčĆą░ ]
ąśą┤ąĄčÅ ąĘą░ą║ą╗čÄč湥ąĮą░ ą▓ č鹊ą╝, čćč鹊 ąĮąĄčüą║ąŠą╗čīą║ąŠ čĆąĄąĘąĖčüčéąĖą▓ąĮčŗčģ ą┤ąĄą╗ąĖč鹥ą╗ąĄą╣ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čü čĆą░ąĘąĮčŗą╝ąĖ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ą╝ąĖ ą┤ąĄą╗ąĄąĮąĖčÅ čü ą┐ąŠą╝ąŠčēčīčÄ ą║ąĮąŠą┐ąŠą║ ą┐ąŠą┤ą║ą╗čÄčćą░čÄčéčüčÅ ą║ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╝čā ą▓čŗčģąŠą┤čā ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąØą░ąČą░čéąĖąĄ ą║ą░ąČą┤ąŠą╣ ą║ąĮąŠą┐ą║ąĖ ąĘą░ą┤ą░ąĄčé ąŠą┐čĆąĄą┤ąĄą╗čæąĮąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĮąŠ ąĖąĘą╝ąĄčĆąĖčéčī ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą║ą░ą║ą░čÅ ąĖą╝ąĄąĮąĮąŠ ąĖąĘ ą║ąĮąŠą┐ąŠą║ ą▒čŗą╗ą░ ąĮą░ąČą░čéą░. ą”ąĄąĮąĮąŠčüčéčī čéą░ą║ąŠą╣ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ ą▓ č鹊ą╝, čćč鹊 ąĮą░ ąŠą┤ąĖąĮ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą▓čŗčģąŠą┤ ą╝ąŠąČąĮąŠ ą┐ąŠą▓ąĄčüąĖčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą║ąĮąŠą┐ąŠą║. ą×ą┤ąĮą░ą║ąŠ ąĄčüčéčī ąĖ čüąĄčĆčīąĄąĘąĮčŗąĄ ąĮąĄą┤ąŠčüčéą░čéą║ąĖ. ąÆąŠ-ą┐ąĄčĆą▓čŗčģ, čŹč鹊 ą▓čĆąĄą╝čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĮą░ąČą░čéąĖčÅ. ąÆ čāčüčéčĆąŠą╣čüčéą▓ą░čģ, čéčĆąĄą▒čāčÄčēąĖčģ ą▓čŗčüąŠą║ąŠą╣ čüą║ąŠčĆąŠčüčéąĖ čĆąĄą░ą║čåąĖąĖ ąĮą░ ąĮą░ąČą░čéąĖąĄ, čŹč鹊čé ą▓ą░čĆąĖą░ąĮčé čÅ ą▒čŗ ąĮąĄ čĆąĄą║ąŠą╝ąĄąĮą┤ąŠą▓ą░ą╗. ąÆąŠ-ą▓č鹊čĆčŗčģ, čŹč鹊 čüą╗ąŠąČąĮąŠčüčéčī ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą║ąŠą╝ą▒ąĖąĮąĖčĆąŠą▓ą░ąĮąĮčŗčģ ąĮą░ąČą░čéąĖą╣ ą║ąĮąŠą┐ąŠą║. ąÉ ą▓ čåąĄą╗ąŠą╝ ą┐ąŠą╗čāčćąĖą╗ą░čüčī ąĘą░ą▒ą░ą▓ąĮą░čÅ čłčéčāą║ą░ ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ. ąÆ ąĖą│čĆčāčłą║ąĄ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮąŠ 3 ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ. ą×ą┤ąĮą░ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ MP3 ą┐čĆąŠąĖą│čĆčŗą▓ą░č鹥ą╗ąĄą╝ (ą║ąĮąŠą┐ą║ąĖ "ą¤ąŻąĪąÜ-ą¤ąÉąŻąŚąÉ", "ąÆą¤ąĢąĀąĢąö", "ąØąÉąŚąÉąö", "ąōąĀą×ą£ąÜą×ąĪąóą¼ +", "ąōąĀą×ą£ąÜą×ąĪąóą¼ -") ąĖ ą┤ą▓ąĄ (2 ą║ąĮąŠą┐ą║ąĖ čüą╗ąĄą▓ą░ "ąÆąøąĢąÆą×", "ąÆąØąśąŚ" ąĖ 3 ą║ąĮąŠą┐ą║ąĖ čüą┐čĆą░ą▓ą░ "ąÆą½ąæą×ąĀ", "ąÆą¤ąĀąÉąÆą×", "ąÆąÆąĢąĀąź") ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖą│čĆąŠą▓čŗą╝ ą┐čĆąŠčåąĄčüčüąŠą╝. ąĪąĮą░čćą░ą╗ą░ čÅ ą┐čĆąŠąĄą║čéąĖčĆąŠą▓ą░ą╗ ąŠą┤ąĮčā ąŠą▒čēčāčÄ ą║ą╗ą░ą▓ąĖą░čéčāčĆčā ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖą│čĆąŠą╣, ąĮąŠ ą▓ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮč鹥 ąŠą▒ąĮą░čĆčāąČąĖą╗ ąĮąĄą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąŠč湥čéą░ąĮąĮčŗčģ ąĮą░ąČą░čéąĖą╣. ą¤ąŠąĘąČąĄ čÅ ąĮą░čłąĄą╗ ąĖ ą┤čĆčāą│ąĖąĄ čüčģąĄą╝čŗ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ, ą│ą┤ąĄ ą║ąŠą╝ą▒ąĖąĮąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ąĮą░ąČą░čéąĖčÅ ą║ąĮąŠą┐ąŠą║ ą┐čĆąĄą┤čāčüą╝ąŠčéčĆąĄąĮčŗ čüčĆą░ąĘčā. ą¤ąĄčĆąĄą┤ąĄą╗čŗą▓ą░čéčī ą▓čüąĄ ą┐ąŠą╗ąĮąŠčüčéčīčÄ čÅ ą┐ąŠą╗ąĄąĮąĖą╗čüčÅ, ą┐ąŠčŹč鹊ą╝čā ą┐ąŠčüą╗ąĄ ąĮąĄą▒ąŠą╗čīčłąĖčģ ą┤ąŠčĆą░ą▒ąŠč鹊ą║ ą┐čĆąŠčüč鹊 čĆą░ąĘą┤ąĄą╗ąĖą╗ ą║ąĮąŠą┐ą║ąĖ ąĮą░ 2 ą│čĆčāą┐ą┐čŗ ąĖ ą┐ąŠą▓ąĄčüąĖą╗ ą┐čĆą░ą▓čāčÄ ąĖ ą╗ąĄą▓čāčÄ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ ąĮą░ ąŠčéą┤ąĄą╗čīąĮčŗąĄ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗąĄ ą▓čģąŠą┤čŗ, čćč鹊 ą┤ą░ą╗ąŠ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą║ąŠą╝ą▒ąĖąĮąĖčĆąŠą▓ą░čéčī ąĮą░ąČą░čéąĖčÅ ąĮąĄą║ąŠč鹊čĆčŗčģ ą║ąĮąŠą┐ąŠą║. ą£ąĮąĄ čŹč鹊ą│ąŠ ą▒čŗą╗ąŠ ą▓ą┐ąŠą╗ąĮąĄ ą┤ąŠčüčéą░č鹊čćąĮąŠ.
ąÆčŗčģąŠą┤ąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┤ąĄą╗ąĖč鹥ą╗čÅ ą╗ąĄą│ą║ąŠ čĆą░čüčüčćąĖčéą░čéčī ą┐ąŠ ąĖąĘą▓ąĄčüčéąĮąŠą╣ č乊čĆą╝čāą╗ąĄ ąĖą╗ąĖ ąĖąĘą╝ąĄčĆąĖčéčī ą▓ąŠą╗čīčéą╝ąĄčéčĆąŠą╝, ą░ ą╝ąŠąČąĮąŠ čüčćąĖčéą░čéčī ą┐čĆą░ą▓ąĖą╗čīąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝. ą» ą┐ąŠčüčéčāą┐ąĖą╗ ąĖą╝ąĄąĮąĮąŠ čéą░ą║. ąØą░ą┐ąĖčüą░ą╗ č鹥čüč鹊ą▓čāčÄ ą┐čĆąŠą│čĆą░ą╝ą╝čā, ą║ąŠč鹊čĆą░čÅ ą┤ąĄą╗ą░ą╗ą░ 50 ą▓čŗą▒ąŠčĆąŠą║ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐čĆąĖ ąĮą░ąČą░čéąĖąĖ ąĮą░ ą║ąĮąŠą┐ą║čā ąĖ ą▓čŗčćąĖčüą╗čÅą╗ą░ čüčĆąĄą┤ąĮąĄąĄ. ą¤ąŠąČą░ą╗čāą╣, čŹč鹊 čüą░ą╝čŗą╣ ą┐čĆą░ą▓ąĖą╗čīąĮčŗą╣ ą▓ą░čĆąĖą░ąĮčé, čéą░ą║ ą║ą░ą║ čŹč鹊 ą▒čŗą╗ąŠ čģąŠčĆąŠčłąĄą╣ čĆą░ąĘą╝ąĖąĮą║ąŠą╣ ą▓ ąĮą░ą┐ąĖčüą░ąĮąĖąĖ ą║ąŠą┤ą░, ą┤ą░ ąĖ ąĮąŠą╝ąĖąĮą░ą╗čŗ čĆąĄąĘąĖčüč鹊čĆąŠą▓ ą╝ąŠą│čāčé ąŠčéą╗ąĖčćą░čéčīčüčÅ ąŠčé č鹥čģ, ą║ąŠč鹊čĆčŗąĄ ąĮą░ čüčģąĄą╝ąĄ (čüčģąĄą╝ą░ ąĮąĖąČąĄ ąŠčéčĆą░ąČą░ąĄčé č鹊ą╗čīą║ąŠ ąŠą▒čēąĖą╣ ą┐čĆąĖąĮčåąĖą┐ čĆą░ą▒ąŠčéčŗ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╣ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ).
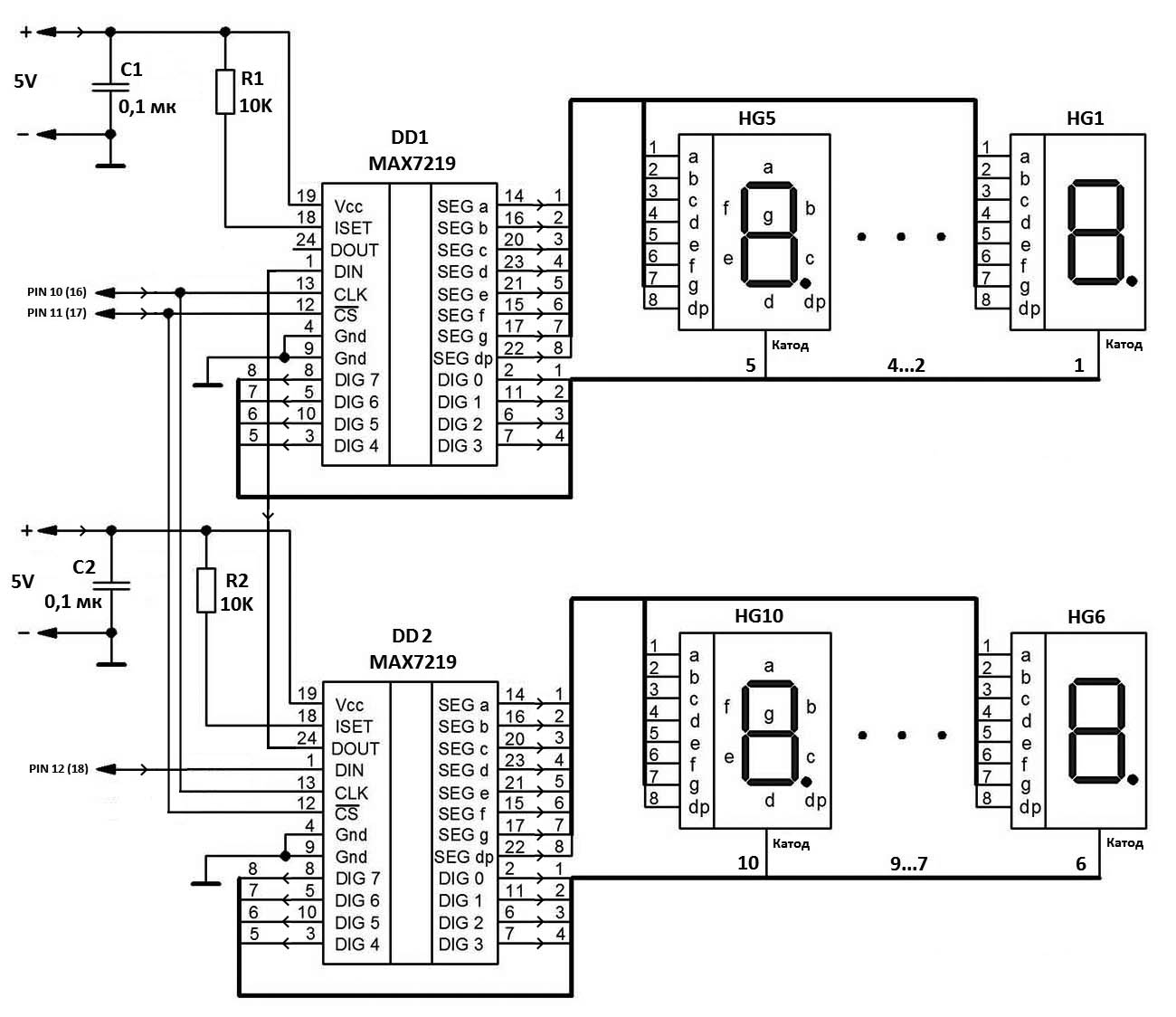
[ą”ąĖčäčĆąŠą▓ąŠą╣ ą┤ąĖčüą┐ą╗ąĄą╣ ]
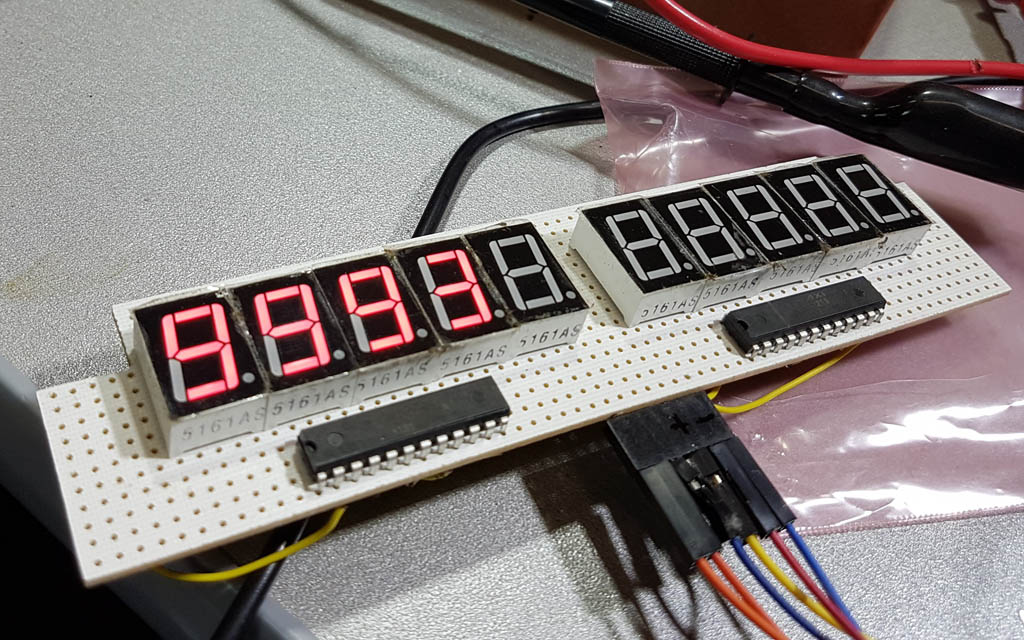
ą£ą░čéčĆąĖčćąĮčŗą╣ ą┤ąĖčüą┐ą╗ąĄą╣ čü čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ 16čģ24 ąĖą╝ąĄąĄčé ąĮąĄą┤ąŠčüčéą░č鹊čćąĮčŗąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą┤ą╗čÅ ą▓ąĖąĘčāą░ą╗ąĖąĘą░čåąĖąĖ čåąĖčäčĆąŠą▓ąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ ąĖą│čĆčŗ. 10-ąĘąĮą░čćąĮčŗą╣ čåąĖčäčĆąŠą▓ąŠą╣ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąĮčŗą╣ ą┤ąĖčüą┐ą╗ąĄą╣ čüą┐ąĄčåąĖą░ą╗čīąĮąŠ ą▓ą║ą╗čÄč湥ąĮ ą▓ ą┐čĆąŠąĄą║čé ą┤ą╗čÅ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ čüč湥čéą░, čāčĆąŠą▓ąĮčÅ, ą▓čĆąĄą╝ąĄąĮąĖ ąĖ čé.ą┐., ą▒ąĄąĘ č湥ą│ąŠ ąĮąĄą▓ąŠąĘą╝ąŠąČąĮąŠ ąŠą▒ąŠą╣čéąĖčüčī ą▓ ą╗čÄą▒ąŠą╣ 菹╗ąĄą║čéčĆąŠąĮąĮąŠą╣ ąĖą│čĆčāčłą║ąĄ.
ŌĆó ąÜčĆą░čüąĮčŗą╣ 7-čüąĄą│ą╝ąĄąĮčéąĮčŗą╣ ąĖąĮą┤ąĖą║ą░č鹊čĆ 5161AS ŌĆō 10 čłčé.
ąöčĆą░ą╣ą▓ąĄčĆ MAX7219 [10] ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čāą┐čĆą░ą▓ą╗čÅčéčī čüąĄą╝ąĖčüąĄą│ą╝ąĄąĮčéąĮčŗą╝ąĖ ąĖąĮą┤ąĖą║ą░č鹊čĆą░ą╝ąĖ čü ąŠą▒čēąĖą╝ ą║ą░č鹊ą┤ąŠą╝. ą£ą░ą║čüąĖą╝čāą╝ ą║ ąĮąĄą╝čā ą╝ąŠąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī 8 ąĖąĮą┤ąĖą║ą░č鹊čĆąŠą▓. ąÆ ąĖą│čĆčāčłą║ąĄ čéą░ą║ąĖčģ ąĖąĮą┤ąĖą║ą░č鹊čĆąŠą▓ 10, ą┐ąŠčŹč鹊ą╝čā ą┐ąŠąĮą░ą┤ąŠą▒ąĖą╗ąŠčüčī 2 ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ MAX7219, ą▓ą║ą╗čÄč湥ąĮąĮčŗąĄ ą║ą░čüą║ą░ą┤ąŠą╝ (DOUT ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ DIN).
ąöčĆą░ą╣ą▓ąĄčĆą░ čāą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ą┐ąŠ ąĖąĮč鹥čĆč乥ą╣čüčā SPI (ą▓ čĆąĄąČąĖą╝ąĄ 0) čü čćą░čüč鹊č鹊ą╣ ą┤ąŠ 10 ą£ąōčå. ąØčāąČąĮąŠ ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 ą┤čĆą░ą╣ą▓ąĄčĆ MAX7219 ąĮąĄ ą┐ąŠą╗ąĮąŠčüčéčīčÄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čüčéą░ąĮą┤ą░čĆčéą░ą╝ SPI, ąĮąŠ č鹥ą╝ ąĮąĄ ą╝ąĄąĮąĄąĄ ąĄą│ąŠ ą╝ąŠąČąĮąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ą┐ąŠ SPI ą▒ąĄąĘ ąŠčüąŠą▒čŗčģ ąŠą│čĆą░ąĮąĖč湥ąĮąĖą╣.
ąśąĮą┤ąĖą║ą░č鹊čĆ čüąŠą▒čĆą░ąĮ ąĮą░ PCB ą┐ąŠą┤čģąŠą┤čÅčēąĄą│ąŠ čĆą░ąĘą╝ąĄčĆą░, ą▓čüąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮčŗ ą╝ąŠąĮčéą░ąČąĮčŗą╝ ą┐čĆąŠą▓ąŠą┤ąŠą╝, ąĘą░čĆą░ą▒ąŠčéą░ą╗ čüčĆą░ąĘčā ąĖ ąĘą░ąĮčÅą╗ąŠ čŹč鹊 ą▓čüąĄ ąĮąĄ ą▒ąŠą╗ąĄąĄ 2 čćą░čüąŠą▓. ąÜąŠą│ą┤ą░ ąĘą░čüą▓ąĄčéąĖą╗ąĖčüčī čåąĖč乥čĆą║ąĖ, ąĮąĄ ą▒ąĄąĘ ą│ąŠčĆą┤ąŠčüčéąĖ ą▓ą┤čĆčāą│ ą▓čüą┐ąŠą╝ąĮąĖą╗, ą║ą░ą║ ą▓ 1984 ą│ąŠą┤čā (9 ą║ą╗ą░čüčü) ą┐ą░čÅą╗ čćą░čüč鹊č鹊ą╝ąĄčĆ ąĮą░ čüąĄčĆąĖąĖ ąÜ155 čü 5-čÄ ąĖąĮą┤ąĖą║ą░č鹊čĆą░ą╝ąĖ. ąÜą░ą║ ąĖąĘą╝ąĄąĮąĖą╗čüčÅ čü č鹊ą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąĖčĆ...
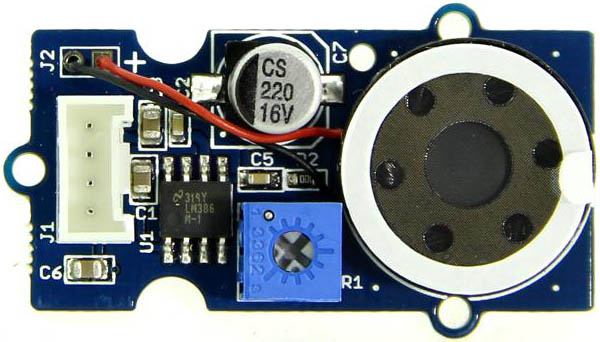
[ąĪą┐ąĖą║ąĄčĆ ąĖ ą▓ąĖą▒čĆąŠą┤ą▓ąĖą│ą░č鹥ą╗čī ]
ąĪą┐ąĖą║ąĄčĆ ąĖ ą▓ąĖą▒čĆąŠą┤ą▓ąĖą│ą░č鹥ą╗čī ą┤ąŠą▒ą░ą▓ą╗ąĄąĮčŗ ą▓ ąĖą│čĆčāčłą║ąĄ ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ąĘą▓čāą║ąŠą▓čŗčģ čüą┐ąĄčåčŹčäč乥ą║č鹊ą▓ ąĖ čŹčäč乥ą║čéą░ ą▓ąĖą▒čĆą░čåąĖąĖ ą║ąŠčĆą┐čāčüą░. ąŚą▓čāą║ąĖ čüą┐ąĄčåčŹčäč乥ą║č鹊ą▓ ą│ąĄąĮąĄčĆąĖčĆčāčÄčéčüčÅ ą┐čĆąĖ ą┐ąŠą╝ąŠčēąĖ ą┐čĆąŠčåąĄą┤čāčĆčŗ Arduino Tone() ąĖ ą▓čŗą▓ąŠą┤čÅčéčüčÅ ąĮąĄ čüą┐ąĖą║ąĄčĆ. ąØąŠ č鹊 ą╗ąĖ ą┐ąŠą┤čāą╝ą░ą╗ čÅ ąĮąĄą┤ąŠčüčéą░č鹊čćąĮąŠ, č鹊 ą╗ąĖ ą┤ąĄą╗ą░ą╗ čćč鹊-č鹊 ą║čĆąĖą▓ąŠ, č鹊 ą╗ąĖ čüą┐ąĖą║ąĄčĆ [11] ą║čāą┐ąĖą╗ ąĮąĄčāą┤ą░čćąĮčŗą╣, ąĮąŠ čéą░ą║ą░čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ą╝ąĄąĮčÅ ąĮąĄ čāčüčéčĆąŠąĖą╗ą░: ąĘą▓čāą║ ą▒čŗą╗ ąŠčéą▓čĆą░čéąĖč鹥ą╗čīąĮčŗą╣, ą│čĆąŠą╝ą║ąŠčüčéčī ą┐čĆą░ą║čéąĖč湥čüą║ąĖ ąĮąĄ čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ą╗ą░čüčī. ą¤ąŠąĘą┤ąĮąĄąĄ čÅ ąŠčéą║ą░ąĘą░ą╗čüčÅ ąŠčé čüą┐ąĖą║ąĄčĆą░ ąĖ čüčéą░ą╗ ą┐ąŠą┤ą░ą▓ą░čéčī čüąĖą│ąĮą░ą╗ ą┐čĆčÅą╝ąŠ čü ą║ąŠąĮčéą░ą║čéą░ ATmega328 č湥čĆąĄąĘ čĆąĄąĘąĖčüč鹊čĆ ąĮą░ ą▓čģąŠą┤ ą┐čĆą░ą▓ąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ čāčüąĖą╗ąĖč鹥ą╗čÅ.
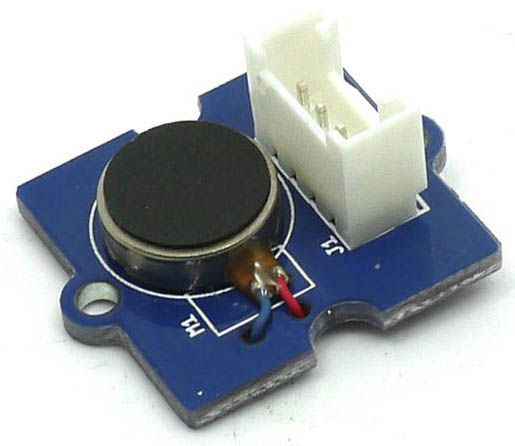
ąÆąĖą▒čĆąŠą┤ą▓ąĖą│ą░č鹥ą╗čī [12] ą┐čĆąĄą║čĆą░čüąĮąŠ ą▓ą┐ąĖčüą░ą╗čüčÅ ą▓ ą┐čĆąŠąĄą║čé ąĖ ą┐ąŠąĘą▓ąŠą╗ąĖą╗ ą┐čĆąĖą║ąŠčüąĮčāčéčīčüčÅ ą║ č鹥čģąĮąŠą╗ąŠą│ąĖąĖ čéą░ą║čéąĖą╗čīąĮąŠą╣ ąŠčéą┤ą░čćąĖ, ą║ąŠą│ą┤ą░, ą║ ą┐čĆąĖą╝ąĄčĆčā, ąĮąĄ č鹊ą╗čīą║ąŠ ą▓ąĖą┤ąĖčłčī ąĖ čüą╗čŗčłąĖčłčī ą║ą░čüą░ąĮąĖąĄ ą╝čÅčćąĖą║ą░ čĆą░ą║ąĄčéą║ąĖ, ąĮąŠ čćčāą▓čüčéą▓čāąĄčłčī čŹč鹊 čĆčāą║ą░ą╝ąĖ. ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╝ ąŠč湥ąĮčī ą┐čĆąŠčüč鹊ąĄ: ą┐ąŠą┤ą░ą╗ąĖ ą┐ąĖčéą░ąĮąĖąĄ- ą▓ąĖą▒čĆąĖčĆčāąĄčé, ąŠčéą║ą╗čÄčćąĖą╗ąĖ - ąŠčéą┤čŗčģą░ąĄčé.
[7-ą┐ąŠą╗ąŠčüąĮčŗą╣ ą░ąĮą░ą╗ąĖąĘą░č鹊čĆ čüą┐ąĄą║čéčĆą░ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ MSGEQ7 ]
ąæą╗ą░ą│ąŠą┤ą░čĆčÅ čŹč鹊ą╝čā čāčüčéčĆąŠą╣čüčéą▓čā, ąĖą│čĆčāčłą║čā ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ čĆąĄąČąĖą╝ąĄ čåą▓ąĄč鹊ą╝čāąĘčŗą║ąĖ ąĖą╗ąĖ ą║ą░ą║ ą┤ąĖčüą┐ą╗ąĄą╣ 菹║ą▓ą░ą╗ą░ą╣ąĘąĄčĆą░. ąŁčéčā ąĘą░ą▒ą░ą▓ąĮčāčÄ ą╝ąĖą║čĆąŠčüčģąĄą╝čā ą▓čŗą┐čāčüą║ą░ąĄčé ą║ąŠą╝ą┐ą░ąĮąĖčÅ Mixed Signal Integration [13]. ą×ąĮą░ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čüąŠą▒ąŠą╣ 7-ą┐ąŠą╗ąŠčüąĮčŗą╣ čäąĖą╗čīčéčĆ ą┤ą╗čÅ ą│čĆą░čäąĖč湥čüą║ąŠą│ąŠ 菹║ą▓ą░ą╗ą░ą╣ąĘąĄčĆą░. ą¦ąĖą┐ čüą┐ąŠčüąŠą▒ąĄąĮ ąĖąĘ ą▓čģąŠą┤ąĮąŠą│ąŠ ą░čāą┤ąĖąŠčüąĖą│ąĮą░ą╗ą░ ą▓čŗą┤ąĄą╗ąĖčéčī čćą░čüč鹊čéąĮčŗąĄ ą┐ąŠą╗ąŠčüčŗ 63 ąōčå, 160 ąōčå, 400 ąōčå, 1 ą║ąōčå, 2.5 ą║ąōčå, 6.25 ą║ąōčå ąĖ 16 ą║ąōčå. ąÆ ąĖą│čĆčāčłą║ąĄ čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ ą┐ąŠ ąŠą┤ąĮąŠą╣ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ ąĮą░ ą┐čĆą░ą▓čŗą╣ ąĖ ą╗ąĄą▓čŗą╣ ą║ą░ąĮą░ą╗.
ąĀą░ą▒ąŠčéą░čéčī čü MSGEQ7 ą┐čĆąŠčüč鹊, ąŠąĮą░ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą┐ąŠ ą┤ą▓čāą╝ čåąĖčäčĆąŠą▓čŗą╝ ą▓čģąŠą┤ą░ą╝ RESET ąĖ STROBE. ą¤ąŠčüą╗ąĄ ą┐ąŠą┤ą░čćąĖ čüčéą░čĆč鹊ą▓ąŠą│ąŠ ąĖą╝ą┐čāą╗čīčüą░ RESET ąĖ ąĮąĄą▒ąŠą╗čīčłąŠą╣ ąĘą░ą┤ąĄčƹȹ║ąĖ, ą┤ąŠčüčéą░č鹊čćąĮąŠ ą┐ąŠą┤ą░čéčī čüąĄą╝čī ąĖą╝ą┐čāą╗čīčüąŠą▓ ąĮą░ ą╗ąĖąĮąĖčÄ STROBE, ąĖ ą┐ąŠčüą╗ąĄ ą║ą░ąČą┤ąŠą│ąŠ čüčéčĆąŠą▒ąĖčĆčāčÄčēąĄą│ąŠ ąĖą╝ą┐čāą╗čīčüą░, ąĮą░ ą▓čŗčģąŠą┤ąĄ ANALOG OUT ą▒čāą┤ąĄčé ą┐ąŠčÅą▓ą╗čÅčéčīčüčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ, ą┐čĆąŠą┐ąŠčĆčåąĖąŠąĮą░ą╗čīąĮąŠąĄ čüąŠą┤ąĄčƹȹ░ąĮąĖčÄ ąŠą┤ąĮąŠą╣ ąĖąĘ čüąĄą╝ąĖ čćą░čüč鹊čéąĮčŗčģ ą┐ąŠą╗ąŠčü ą▓ ą░čāą┤ąĖąŠčüąĖą│ąĮą░ą╗ąĄ. ąĪ ą┤ą▓čāą╝čÅ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ą╝ąĖ čÅ čüą║ąŠčĆąĄąĄ ą▓čüąĄą│ąŠ ą┐ąŠą│ąŠčĆčÅčćąĖą╗čüčÅ. ą£ąŠąČąĮąŠ ą▒čŗą╗ąŠ ą▓ą┐ąŠą╗ąĮąĄ ąŠą▒ąŠą╣čéąĖčüčī ąĖ ąŠą┤ąĮąŠą╣, ą┐ąŠą┤ą║ą╗čÄčćąĖą▓ ą║ ąĮąĄą╣ ąŠą▒ą░ ą║ą░ąĮą░ą╗ą░. ąØąŠ ą┐čĆąŠą▓ąĄčĆąĖčéčī čŹč鹊 čÅ ąĮąĄ čāčüą┐ąĄą╗, čéą░ą║ ą║ą░ą║ ą┤ąŠ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čåą▓ąĄč鹊ą╝čāąĘčŗą║ąĖ ą▓ ąĖą│čĆčāčłą║ąĄ čĆčāą║ąĖ ą┐ąŠą║ą░ ąĮąĄ ą┤ąŠčłą╗ąĖ.
[ąÜąŠčĆą┐čāčü ąĖ čäąĖąĮą░ą╗čīąĮą░čÅ čüą▒ąŠčĆą║ą░ ąĖą│čĆčāčłą║ąĖ ]
ąÜąŠčĆą┐čāčü ą┤ą╗čÅ ąĖą│čĆčāčłą║ąĖ ą┐ąŠą┤čģąŠą┤čÅčēąĄą│ąŠ čĆą░ąĘą╝ąĄčĆą░ 225čģ165čģ65 ą╝ą╝ čÅ ąĮą░čłąĄą╗ ą▓ ą╝ą░ą│ą░ąĘąĖąĮąĄ ą¦ąĖą┐ ąĖ ąöąĖą┐ [14]. ą×ąĮ ą▓čŗą┐ąŠą╗ąĮąĄąĮ ąĖąĘ čüą▓ąĄčéą╗ąŠ-čüąĄčĆąŠą│ąŠ ą┐ą╗ą░čüčéąĖą║ą░, ą║ąŠč鹊čĆčŗą╣ ą╗ąĄą│ą║ąŠ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ. ąÆčüąĄ č鹥čģąĮąŠą╗ąŠą│ąĖč湥čüą║ąĖąĄ ąŠčéą▓ąĄčĆčüčéąĖčÅ ąĖ ąŠą║ąĮą░ ą▒čŗą╗ąĖ čüą┤ąĄą╗ą░ąĮčŗ ą▒ąĄąĘ ąŠčüąŠą▒čŗčģ čüą╗ąŠąČąĮąŠčüč鹥ą╣ ą┐čĆąĖ ą┐ąŠą╝ąŠčēąĖ čüą▓čæčĆą╗, ą╗ąŠą▒ąĘąĖą║ą░ ąĖ ąĮą░ą┐ąĖą╗čīąĮąĖą║ąŠą▓. ą£ąĄčģą░ąĮąĖč湥čüą║ą░čÅ ą┐čĆąŠčćąĮąŠčüčéčī ą▓ąĄčĆčģąĮąĄą╣ ą║čĆčŗčłą║ą░ ą┐ąŠčüą╗ąĄ ą▓čŗą┐ąĖą╗ąĖą▓ą░ąĮąĖčÅ ąŠą║ąŠąĮ ą┤ą╗čÅ ą│čĆą░čäąĖč湥čüą║ąŠą│ąŠ ąĖ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą┤ąĖčüą┐ą╗ąĄąĄą▓ ą┐ąŠąĮąĖąĘąĖą╗ą░čüčī, ą┐ąŠčŹč鹊ą╝čā ąĄąĄ ą┐čĆąĖčłą╗ąŠčüčī čāčüąĖą╗ąĖčéčī ąĮą░ą║ą╗ą░ą┤ą║ą░ą╝ąĖ ąĖąĘąĮčāčéčĆąĖ. ą©čéą░čéąĮčŗąĄ č湥čĆąĮčŗąĄ ą▒ąŠą║ąŠą▓čŗąĄ ą┐ą░ąĮąĄą╗ąĖ ą║ąŠčĆą┐čāčüą░ ą╝ąĮąĄ ąĮąĄ ą┐ąŠąĮčĆą░ą▓ąĖą╗ąĖčüčī, ąĖ čÅ ąĘą░ą╝ąĄąĮąĖą╗ ąĮą░ čüą▓ąĄčéą╗čŗąĄ čüč鹥ą║ą╗ąŠč鹥ą║čüč鹊ą╗ąĖč鹊ą▓čŗąĄ.
ąĪą▒ąŠčĆą║ą░ ąĖą│čĆčāčłą║ąĖ ą▒čŗą╗ą░ čģą░ąŠčéąĖčćąĮąŠą╣, ąĮąŠ 菹ĮąĄčĆą│ąĖčćąĮąŠą╣ ąĖ čüą╝ąĄą╗ąŠą╣. ą£ąĄčüčéą░ ą▓ ą║ąŠčĆą┐čāčüąĄ ą▒čŗą╗ąŠ ą┤ąŠčüčéą░č鹊čćąĮąŠ, ą┐ąŠčŹč鹊ą╝čā ą▒ąĄąĘ ąŠčüąŠą▒čŗčģ ą┐ąĄčĆąĄą┤ąĄą╗ąŠą║ ąĖ ą┤čāą▒ą╗ąĄą╣ ą▓čüąĄ ą╝ąŠą┤čāą╗ąĖ ąĘą░ąĮčÅą╗ąĖ čüą▓ąŠąĖ ą┐ąŠč湥čéąĮčŗąĄ ą╝ąĄčüčéą░. ąØąĄą╝ąĮąŠą│ąŠ ą┐čĆąĖčłą╗ąŠčüčī ą┐ąŠą▓ąŠąĘąĖčéčīčüčÅ čü ą┐ąŠą┤ą│ąŠąĮą║ąŠą╣ ą┤ąĖčüą┐ą╗ąĄčÅ, čćč鹊 ą▒čŗ ąŠąĮ čüč鹊čÅą╗ ą▓čĆąŠą▓ąĄąĮčī čü ą▓ąĄčĆčģąĮąĄą╣ ą║čĆčŗčłą║ąŠą╣. ąÆąĮčāčéčĆąĄąĮąĮčÅčÅ ą║ąŠą╝ą┐ąŠąĮąŠą▓ą║ą░ ą┐ąŠą╗čāčćąĖą╗ąŠčüčī ą┤ąŠčüčéą░č鹊čćąĮąŠ čāą┤ąŠą▒ąĮčŗą╣ ąĖ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗą╝, čéą░ą║ ą║ą░ą║ ą┐ąŠč鹊ą╝ ąĮąĄ čĆą░ąĘ ą┐čĆąĖčģąŠą┤ąĖą╗ąŠčüčī ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą▓čüąĄ čĆą░ąĘą▒ąĖčĆą░čéčī ąĖ čüąŠą▒ąĖčĆą░čéčī ą┐ąŠ ąĮąŠą▓ąŠą╣, ąĮąŠ ą▒ąŠą╗čīčłąŠą│ąŠ čéčĆčāą┤ą░ čŹč鹊 ąĮąĄ čüąŠčüčéą░ą▓ą╗čÅą╗ąŠ. ą¤čĆą░ą║čéąĖč湥čüą║ąĖ ą┤ą╗čÅ ą▓čüąĄčģ ą╝ąŠą┤čāą╗ąĄą╣ (MP3 ą┐čĆąŠąĖą│čĆčŗą▓ą░č鹥ą╗čī, čāčüąĖą╗ąĖč鹥ą╗čī, ą▓ąĖą▒čĆąŠą┤ą▓ąĖą│ą░č鹥ą╗čī, ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆ ąĖ čé.ą┐.) čÅ ą┐čĆąĄą┤čāčüą╝ąŠčéčĆąĄą╗ čüą▓ąŠąĖ ą┐ąŠčüą░ą┤ąŠčćąĮčŗąĄ ą╝ąĄčüčéą░ ą▓ čüą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ čĆą░ąĘčŖąĄą╝čŗ ąĖ ą▓čüąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ą╝ąĄąČą┤čā ą╝ąŠą┤čāą╗čÅą╝ąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮčŗ čéą░ą║ ąČąĄ ą║ą░ą▒ąĄą╗čÅą╝ąĖ čü čĆą░ąĘčŖąĄą╝ą░ą╝ąĖ (čüą╝. č乊č鹊ą│ą░ą╗ąĄčĆąĄčÄ ą▓ąŠ ą▓čĆąĄąĘą║ąĄ).
ąØą░ ąĘą░ą┤ąĮčÄčÄ ą┐ą░ąĮąĄą╗čī čÅ ą▓čŗą▓ąĄą╗ USB čĆą░ąĘčŖąĄą╝ ąĖ čĆą░ąĘčŖąĄą╝ ą┐ąĖčéą░ąĮąĖčÅ Arduino Mega 2560, ą▓ą║ą╗čÄčćą░č鹥ą╗čī ą▓ąĄąĮčéąĖą╗čÅč鹊čĆąŠą▓ ąŠčģą╗ą░ąČą┤ąĄąĮąĖčÅ ąĖ ąĄčēąĄ ąŠą┤ąĖąĮ ą┤čāą▒ą╗ąĖčĆčāčÄčēąĖą╣ čĆą░ąĘčŖąĄą╝ ą┐ąĖčéą░ąĮąĖčÅ. ąØą░ ą┐ąĄčĆąĄą┤ąĮąĄą╣ ą┐ą░ąĮąĄą╗ąĖ ąŠą║ą░ąĘą░ą╗čüčÅ ą▓čģąŠą┤ ą┤ą╗čÅ ąĮą░čāčłąĮąĖą║ąŠą▓. ąØą░ ą▒ąŠą║ąŠą▓čŗčģ ą┐ą░ąĮąĄą╗čÅčģ čĆą░ąĘą╝ąĄčēąĄąĮčŗ ą┤ąĖąĮą░ą╝ąĖą║ąĖ, ą▓ąĄąĮčéąĖą╗čÅč鹊čĆčŗ ąŠčģą╗ą░ąČą┤ąĄąĮąĖčÅ, ą║ą╗ą░ą▓ąĖą░čéčāčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ MP3 ą┐čĆąŠąĖą│čĆčŗą▓ą░č鹥ą╗čÅ, ą░ čéą░ą║ąČąĄ ą║ąĮąŠą┐ą║ą░ Reset.
ąĪ ą▓ąĄąĮčéąĖą╗čÅč鹊čĆą░ą╝ąĖ ąŠčģą╗ą░ąČą┤ąĄąĮąĖčÅ ą▓čüąĄ ą▓ąŠąŠą▒čēąĄ ą┐ąŠą╗čāčćąĖą╗ąŠčüčī ąĘą░ą▒ą░ą▓ąĮąŠ. ąÜąŠą│ą┤ą░-č鹊 ą╝ąĮąĄ ą┐čĆąĖčłą╗ąŠčüčī ąĘą░ą│ą╗čÅąĮčāčéčī ą▓ąĮčāčéčĆčī ą│ąĄą╣ą╝ą┐ą░ą┤ą░, ą│ą┤ąĄ čÅ čü čāą┤ąĖą▓ą╗ąĄąĮąĖąĄą╝ ąŠą▒ąĮą░čĆčāąČąĖą╗ ą║čāą╗ąĄčĆ, ą┐čĆąĖ ą┐ąŠą╗ąĮąŠą╝ ąŠčéčüčāčéčüčéą▓ąĖąĖ 菹╗ąĄą║čéčĆąŠąĮąĮčŗčģ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ čü ą┐ąŠą▓čŗčłąĄąĮąĮąŠą╣ č鹥ą┐ą╗ąŠąŠčéą┤ą░č湥ą╣. ą× ąĄą│ąŠ ąĖčüčéąĖąĮąĮąŠą╝ ąĮą░ąĘąĮą░č湥ąĮąĖąĄ čÅ čāąĘąĮą░ą╗ ą┐ąŠąĘąČąĄ. ą×ą║ą░ąĘą░ą╗ąŠčüčī, čćč鹊 ąŠąĮ čéą░ą╝ ą┤ą╗čÅ ąŠčģą╗ą░ąČą┤ąĄąĮąĖčÅ čĆčāą║ ąĖą│čĆąŠą║ą░. ąÆ ąĖą│čĆčāčłą║ąĄ čÅ ą┐ą╗ą░ąĮąĖčĆąŠą▓ą░ą╗ ąŠčģą╗ą░ąČą┤ą░čéčī 菹╗ąĄą║čéčĆąŠąĮąĮčŗąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ ą▓ ąĘą░ą╝ą║ąĮčāč鹊ą╝ ą║ąŠčĆą┐čāčüąĄ, ąĮąŠ ąŠą║ą░ąĘą░ą╗ąŠčüčī, čćč鹊 ąĮąĖą║ą░ą║ąŠą│ąŠ čüąĄčĆčīąĄąĘąĮąŠą│ąŠ ąĮą░ą│čĆąĄą▓ą░ ąĮąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé. ą¤ąŠčŹč鹊ą╝čā ą║čāą╗ąĄčĆčŗ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąŠčģą╗ą░ąČą┤ąĄąĮąĖčÅ čĆčāą║, ą░ ąĄčüą╗ąĖ č湥čüčéąĮąŠ, č鹊 čŹč鹊 ą┐čĆąŠčüč鹊 ą╗ąĖčłąĮąĖąĄ ą┤ąĄčéą░ą╗ąĖ.
ąĪ čüąŠą▓čĆąĄą╝ąĄąĮąĮąŠą╣ čģčāą┤ąŠąČąĄčüčéą▓ąĄąĮąĮąŠą╣ ąĖ čŹčüč鹥čéąĖč湥čüą║ąŠą╣ č鹊čćą║ąĖ ąĘčĆąĄąĮąĖčÅ čéą░ą║ąŠą╣ ą║ąŠčĆą┐čāčü ą┐čĆąŠčüč鹊 čāąČą░čüąĄąĮ, ąĮąŠ čŹč鹊 ąŠą▒čĆą░ąĘąĄčå ┬½čłąĄą┤ąĄą▓čĆą░ą╗čīąĮąŠą╣ čüą░ą╝ąŠą┤ąĄą╗ą║ąĖ┬╗ ąĖąĘ ą╝ąŠąĖčģ 80-čģ.
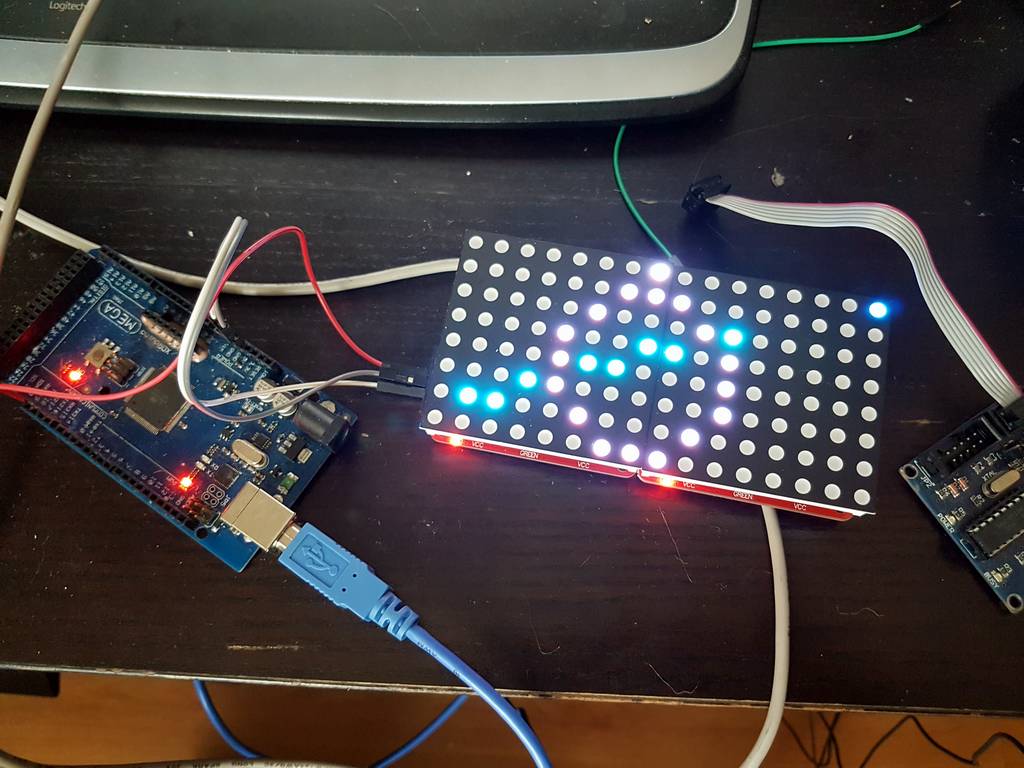
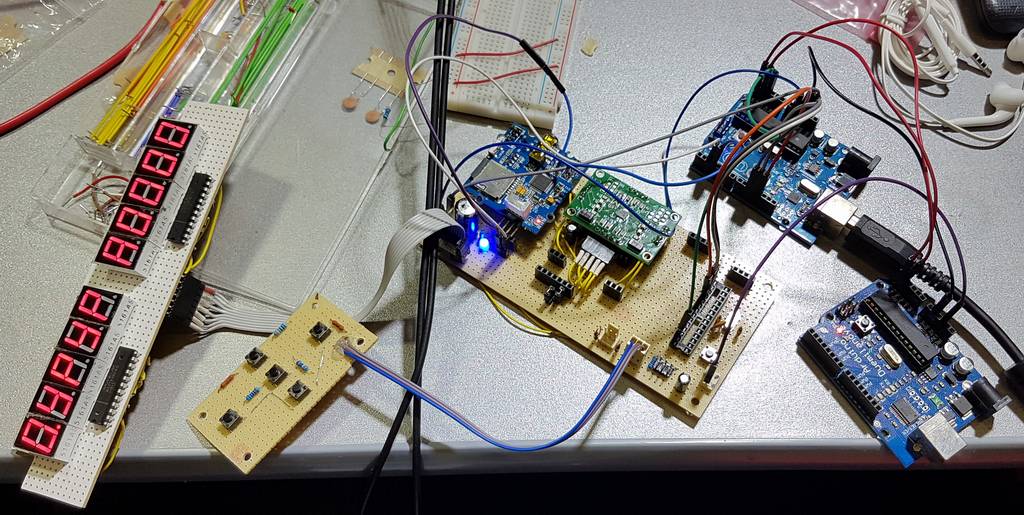
ą¤ąĄčĆą▓čŗąĄ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčéčŗ čü ą▓čŗą▓ąŠą┤ąŠą╝ ąĮą░ ą╝ą░čéčĆąĖčćąĮčŗą╣ ąĖąĮą┤ąĖą║ą░č鹊čĆ:
ąśą┤ąĄčé ą┐čĆąŠčåąĄčüčü ąŠčéą╗ą░ą┤ą║ąĖ:
ą¤čĆąĖąĮčåąĖą┐ ą║čĆąĄą┐ą╗ąĄąĮąĖčÅ ą╝ąŠą┤čāą╗ąĄą╣ ą│čĆą░čäąĖč湥čüą║ąĖčģ ąĖąĮą┤ąĖą║ą░č鹊čĆąŠą▓ Funduino:
ąÆčüąĄ ą╝ąŠą┤čāą╗ąĖ ą│čĆą░čäąĖč湥čüą║ąŠą│ąŠ ąĖąĮą┤ąĖą║ą░č鹊čĆą░ ąĘą░ą║čĆąĄą┐ą╗ąĄąĮčŗ:
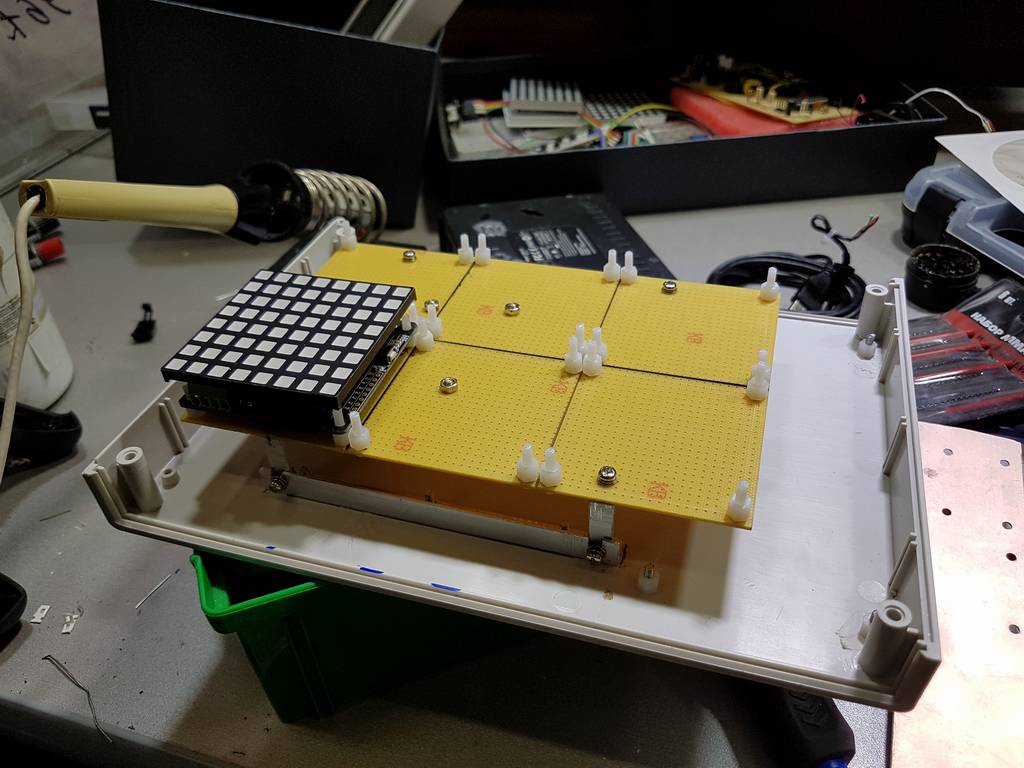
ąØą░čćą░ą╗čīąĮčŗąĄ čüčéą░ą┤ąĖąĖ čüą▒ąŠčĆą║ąĖ ą║ąŠąĮčüčéčĆčāą║čåąĖąĖ Tetris-Box:
ąĪąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą╝ąŠą┤čāą╗ąĄą╣ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝:
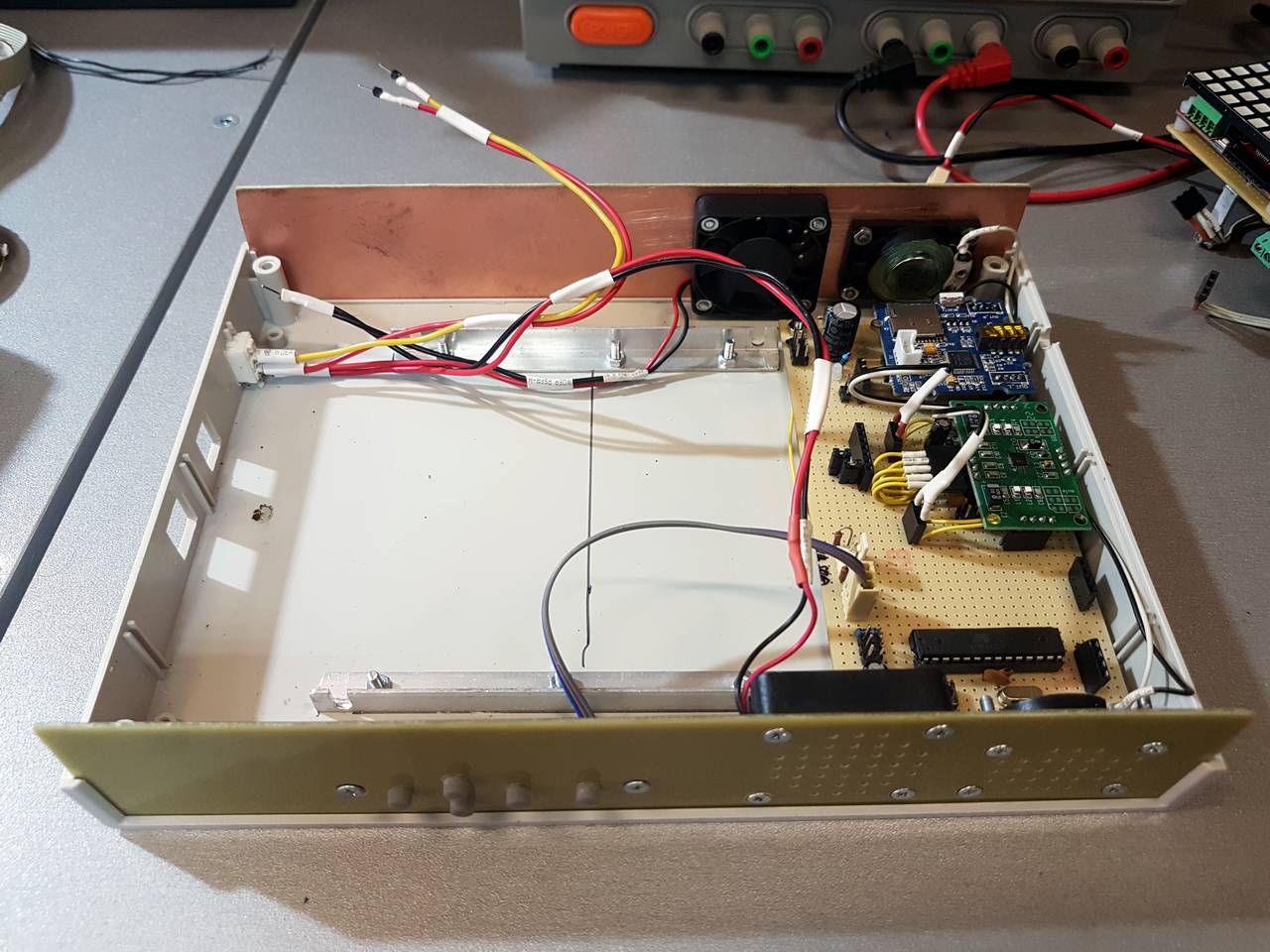
ąÆąĖą┤ ąĮą░ ą▓čŗą║ą╗čÄčćą░č鹥ą╗čī ą┐ąĖčéą░ąĮąĖčÅ ąĖ ą║ąŠąĮąĮąĄą║č鹊čĆčŗ:
ąÆąĖą┤ ąĮą░ ą▒ąŠą║ąŠą▓čāčÄ ą┐ą░ąĮąĄą╗čī čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖ ą┤ąĖąĮą░ą╝ąĖą║ąĖ:
[ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ]
ąĢčüą╗ąĖ ą▓ąĮąĖą╝ą░č鹥ą╗čīąĮąŠ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī ąĮą░ ą░ą┐ą┐ą░čĆą░čéąĮčāčÄ čćą░čüčéčī ąĖą│čĆčāčłą║ąĖ, č鹊 ąĮąĄčéčĆčāą┤ąĮąŠ čāą▒ąĄą┤ąĖčéčīčüčÅ, čćč鹊 ą▓ ąĮąĄą╣ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮąŠ čåąĄą╗čŗčģ 8 ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓: 6 ATMega328P ą▓ Funduino, 1 ą▓čüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčŗą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ATMega328P ąĖ čåąĄąĮčéčĆą░ą╗čīąĮčŗą╣ ą┐čĆąŠčåąĄčüčüąŠčĆ ATMega 2560. ąÆčüąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┤ą╗čÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ ąĮą░ą┐ąĖčüą░ąĮčŗ ąĮą░ čÅąĘčŗą║ąĄ ąĪ++ ą▓ čüčĆąĄą┤ąĄ Arduino. ąĪčĆąĄą┤ą░ Arduino, ą╝ąĮąĄ ą┐ąŠą║ą░ąĘą░ą╗ą░čüčī ąĮąĄ čüą╗ąĖčłą║ąŠą╝ čĆą░ąĘą▓ąĖč鹊ą╣ ąĖ čāą┤ąŠą▒ąĮąŠą╣ ą┤ą╗čÅ ą║ąŠą╝č乊čĆčéąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ, ąĮąŠ ą▓ą┐ąŠą╗ąĮąĄ čüąĄą▒ąĄ čéą░ą║ą░čÅ ą┤ąŠčüčéą░č鹊čćąĮą░čÅ ą┤ą╗čÅ ą┐čĆąŠąĄą║č鹊ą▓ čéą░ą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ. ąĪčĆą░ąĘčā čüąŠąŠą▒čēčā, čćč鹊 ąĮąĄ čÅ čüčéą░ą▓ąĖą╗ ą┐ąĄčĆąĄą┤ čüąŠą▒ąŠą╣ ąĘą░ą┤ą░čćąĖ ąĮą░ą┐ąĖčüą░čéčī ą▓čüčæ ąĖ ┬½čü ąĮčāą╗čÅ┬╗, ą┤ą░ ąĖ ą▓čĆčÅą┤ ą╗ąĖ ą▒čŗ čÅ ąŠčüąĖą╗ąĖą╗ čéą░ą║ąŠąĄ ąĮąĄą┐čĆąŠčüč鹊ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čüąŠ čüą▓ąŠąĖą╝ąĖ ą╗čÄą▒ąĖč鹥ą╗čīčüą║ąĖą╝ąĖ ąĮą░ą▓čŗą║ą░ą╝ąĖ. ąóą░ą║ ąĖ ą┐ąŠą╗čāčćąĖą╗ąŠčüčī, čćč鹊-č鹊 ąĮą░ą┐ąĖčüą░ą╗ čÅ čüą░ą╝, čćč鹊-č鹊 ąĮą░čłąĄą╗ ą▓ čüąĄčéąĖ ąĖ ą░ą┤ą░ą┐čéąĖčĆąŠą▓ą░ą╗ ą║ čüą▓ąŠąĖą╝ ąĘą░ą┤ą░čćą░ą╝. ą×č湥ąĮčī ą▒ąŠą╗čīčłąŠą╣ čāą┤ą░č湥ą╣ ą▒čŗą╗ąŠ ąŠą▒ąĮą░čĆčāąČąĖčéčī ą┤ąŠčüčéą░č鹊čćąĮąŠ čüą▓ąĄąČąĖą╣ ą┐čĆąŠąĄą║čé (2016 ą│ąŠą┤, čćčāčéčī-čćčāčéčī ą╝ąĄąĮčÅ ąŠą┐ąĄčĆąĄą┤ąĖą╗) ąŠčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ Dragon-dreamer [15]. ą×, čŹč鹊 ą║ąŠą┤ ąŠč湥ąĮčī ą▓čŗčüąŠą║ąŠą│ąŠ ą┐ąŠą╗ąĄčéą░! ąĪ ą┤ąŠčĆą░ą▒ąŠčéą║ą░ą╝ąĖ ą┐ąŠą┤ ą░ą┐ą┐ą░čĆą░čéąĮčāčÄ čćą░čüčéčī ąĖą│čĆčāčłą║ąĖ ąŠąĮ ą╗ąĄą│ ą▓ ąŠčüąĮąŠą▓čā ą╝ąŠąĄą│ąŠ ą┐čĆąŠąĄą║čéą░. ą¤čĆąŠą│čĆą░ą╝ą╝čŗ ąĖą│čĆčāčłą║ąĖ čÅ ąŠą┐ąĖčłčā čüčģąĄą╝ą░čéąĖčćąĮąŠ ąĖ ą┐čĆąŠčüč鹊, ą░ą║čåąĄąĮčéąĖčĆčāčÅ č鹊ą╗čīą║ąŠ ąĮą░ ą▓ą░ąČąĮčŗčģ ą┤ą╗čÅ ą┐ąŠąĮąĖą╝ą░ąĮąĖčÅ ąŠą▒čēąĖčģ ą┐čĆąĖąĮčåąĖą┐ąŠą▓ ą╝ąĄčüčéą░čģ. ąĢčüą╗ąĖ ą║č鹊-č鹊 ąĖąĘ ą╗čÄą▒ąŠą┐čŗčéčüčéą▓ą░ ą▓čüąĄ ąČąĄ ąĘą░čģąŠč湥čé ą┐ąŠčüą╝ąŠčéčĆąĄčéčī ąĖčüčģąŠą┤ąĮąĖą║ąĖ, č鹊 ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ą░čÄ, čćč鹊 ąŠąĮąĖ ą▓ čĆą░ą▒ąŠč湥ą╝ ą▒ąĄčüą┐ąŠčĆčÅą┤ą║ąĄ, čéą░ą║ ą║ą░ą║ ą▓čüąĄ ąĄčēąĄ ą▓ ą┐čĆąŠčåąĄčüčüąĄ ąĖ čü ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖčÅą╝ąĖ ąĮą░ English, čéą░ą║ ą║ą░ą║ čüčĆąĄą┤ą░ Arduino ą┐ą░čĆčā čĆą░ąĘ čüą┤ąĄą╗ą░ą╗ą░ čüčéčĆąŠą║ąĖ ąĮą░ ą║ąĖčĆąĖą╗ą╗ąĖčåąĄ ąĮąĄ čćąĖčéą░ąĄą╝čŗą╝ąĖ.
ąÆ ąĖą│čĆčāčłą║ąĄ čüąŠčéčĆčāą┤ąĮąĖčćą░čÄčé čéčĆąĖ ąŠčéą┤ąĄą╗čīąĮčŗąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ: ąŠčüąĮąŠą▓ąĮą░čÅ ąĖą│čĆąŠą▓ą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĮą░ ATMega 2560, Firmware ąĮą░ ą▓čüąĄčģ Funduino ąĖ Firmware ą▓čüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮąŠą│ąŠ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
Funduino . ąØą░ą┐ąŠą╝ąĮčÄ, čćč鹊 Funduino čüąŠą▒čĆą░ąĮčŗ ą┐ą░čĆą░ą╝ąĖ, ąĖ ą║ą░ąČą┤ą░čÅ ąĖąĘ čéčĆąĄčģ ą┐ą░čĆ ą┐ąŠą╗čāčćą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ąŠčé čåąĄąĮčéčĆą░ą╗čīąĮąŠą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą┐ąŠ ąŠą┤ąĮąŠą╝čā ąĖąĘ čéčĆąĄčģ USART. ąÜą░ąČą┤ą░čÅ Funduino ąĘąĮą░ąĄčé čüą▓ąŠą╣ ą┐ąŠčĆčÅą┤ą║ąŠą▓čŗą╣ ąĮąŠą╝ąĄčĆ ą▓ ą┐ą░čĆąĄ 0 ąĖą╗ąĖ 1. ąŁč鹊 ą▓ą░ąČąĮąŠ, čéą░ą║ ą║ą░ą║ ą┐ąŠ čŹč鹊ą╝čā ą┐čĆąĖąĘąĮą░ą║čā ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ Funduino ą▒ąĄčĆąĄčé ąĖąĘ ą╝ą░čüčüąĖą▓ą░ ą┐ąŠą╗čāč湥ąĮąĮčŗčģ ą┤ą░ąĮąĮčŗčģ čüą▓ąŠčÄ čćą░čüčéčī. ą¤ąŠą╗čāč湥ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ čŹč鹊 ąĮąĖčćč鹊 ąĖąĮąŠąĄ ą║ą░ą║ ą▓ąĄą╗ąĖčćąĖąĮčŗ čÅčĆą║ąŠčüčéąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ č鹊č湥ą║ ą╝ą░čéčĆąĖčåčŗ, ą║ąŠč鹊čĆčŗąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▓ čåąĖą║ą╗ąĄ ą┐ąŠčüčéčĆąŠčćąĮąŠ ą┐ąĄčĆąĄą┤ą░ąĄčé ą▓ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąĮčŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆ DM163 [16], čüąŠąĘą┤ą░ą▓ą░čÅ čāčüč鹊ą╣čćąĖą▓ąŠąĄ ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖąĄ. ąÆ ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮčŗčģ ą┐čĆąĖą╝ąĄčĆą░čģ ą┐čĆąŠčłąĖą▓ą║ąĖ Funduino [17], ąĮą░ą╣ą┤ąĄąĮąĮčŗčģ ą▓ čüąĄčéąĖ, ą┐ąŠą╗čāč湥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ ą│ą╗ą░ą▓ąĮąŠą╝ čåąĖą║ą╗ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, ą┐čĆąŠčåąĄą┤čāčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ DM163 čĆą░ą▒ąŠčéą░ąĄčé ą┐ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÄ ąĖ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ą┐ąŠą╗ąĮąŠą│ąŠ ą║ą░ą┤čĆą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čü čćą░čüč鹊č鹊ą╣ 100-120 ąōčå. ąÆ čüą▓ąŠąĖčģ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčéą░čģ ą┐čĆąĖ čéą░ą║ąŠą╝ ą░ą╗ą│ąŠčĆąĖčéą╝ąĄ ą╝ąĮąĄ ąĮąĄ čāą┤ą░ą╗ąŠčüčī ą┤ąŠą▒ąĖčéčīčüčÅ čāčüč鹊ą╣čćąĖą▓ąŠą│ąŠ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ąĮą░ čüą║ąŠčĆąŠčüčéąĖ ą┐čĆąĄą▓čŗčłą░čÄčēąĄą╣ 38400 ą▒ąĖčé/čüąĄą║. ą¤čĆąĖ ą▒ąŠą╗čīčłąĄą╣ čüą║ąŠčĆąŠčüčéąĖ ą┤ą░ąĮąĮčŗąĄ č鹥čĆčÅą╗ąĖčüčī. ą£ąĮąĄ ą┐ąŠą║ą░ąĘą░ą╗ąŠčüčī ą╗ąŠą│ąĖčćąĮčŗą╝ ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░čéčī ąĖ ą┐čĆąĖąĄą╝ ą┤ą░ąĮąĮčŗčģ ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī ą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĖ. ą×ąČąĖą┤ą░ą╗ąŠčüčī, čćč鹊 čŹčéąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą║ą░ą║-č鹊 čüą░ą╝ąĖ ą┤ąŠą│ąŠą▓ąŠčĆčÅčéčüčÅ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ ąĖ ą┐ąŠą┤čĆčāąČą░čéčüčÅ. ąØą░ ą┤ąĄą╗ąĄ ąČąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ čéą░ą╣ą╝ąĄčĆčā ąŠčéą║čĆąŠą▓ąĄąĮąĮąŠ ą╝ąĄčłą░ą╗ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÄ ą┐ąŠ ą┐čĆąĖąĄą╝čā ą▒ą░ą╣čéą░ ą┐ąŠ USART. ąśą┤ąĄčÅ čĆą░ą▒ąŠčéą░ą╗ą░, ąĮąŠ ą┐ąĄčĆąĄą┤ą░čćą░ ą▒čŗą╗ą░ ą▓ąŠąĘą╝ąŠąČąĮą░ č鹊ą╗čīą║ąŠ ąĮą░ ą╝ą░ą╗čŗčģ čüą║ąŠčĆąŠčüčéčÅčģ. ąóąŠą│ą┤ą░ čÅ ą▓čŗąĮąĄčü ą┐čĆąŠčåąĄą┤čāčĆčā čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ DM163 ą▓ ąŠčüąĮąŠą▓ąĮąŠą╣ čåąĖą║ą╗, ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ čćčāą┤ąŠ. ąØąĄ ą▒ąĄąĘ ą│ą╗čÄą║ąŠą▓, ą║ąŠąĮąĄčćąĮąŠ, ąĮąŠ ą╝ąĮąĄ čāą┤ą░ą╗ąŠčüčī ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ą┐ąĄčĆąĄą┤ą░čćčā ą┤ą░ąĮąĮčŗčģ ąĮą░ čüą║ąŠčĆąŠčüčéčÅčģ ą┤ąŠ 1 ą╝ą▒ąĖčé/čüąĄą║. ą¤ąŠą▒ąŠčćąĮčŗą╝ čŹčäč乥ą║č鹊ą╝ ą▒čŗą╗ąŠ ąĮąĄčĆąĄą│čāą╗čÅčĆąĮąŠąĄ ą╝ąĄčĆčåą░ąĮąĖąĄ ąĮąĄą║ąŠč鹊čĆčŗčģ ą╗ąĖąĮąĖą╣ ą╝ą░čéčĆąĖčåčŗ. ąØą░ ą╝ąĄąĮčīčłąĖčģ čüą║ąŠčĆąŠčüčéčÅčģ ąŠčé ą╝ąĄčĆčåą░ąĮąĖčÅ čāą┤ą░ą╗ąŠčüčī ąĖąĘą▒ą░ą▓ąĖčéčīčüčÅ. ąÆ ą┐čĆąŠąĄą║č鹥 čÅ ąŠčüčéą░ąĮąŠą▓ąĖą╗čüčÅ ąĮą░ čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ 250000 ą▒ąĖčé/čüąĄą║, čćč鹊 ą┐ąŠąĘą▓ąŠą╗ąĖą╗ąŠ ąŠą▒ąĮąŠą▓ą╗čÅčéčī ą║ą░ą┤čĆ ą┤ąĖčüą┐ą╗ąĄčÅ ąĘą░ 12-15 ą╝čü.
ąŚą░ąŠčüčéčĆčÄ ą▓ąĮąĖą╝ą░ąĮąĖąĄ ąĮą░ čéčĆąĄčģ čäčĆą░ą│ą╝ąĄąĮčéą░čģ ą║ąŠą┤ą░:
1 . ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ USART.
// ąŻčüčéą░ąĮąŠą▓ą║ą░ čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ 250000 ą▒ąĖčé/čüąĄą║:
UBRR0 = 3 ;// ąĀą░ąĘčĆąĄčłąĖčéčī ą┐čĆąĖąĄą╝ąĮąĖą║, ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÄ ą┐čĆąĖąĄą╝ą░ ą▒ą░ą╣čéą░:
UCSR0B = (1 << TXEN0)| (1 << RXEN0)| (1 << RXCIE0);// ążąŠčĆą╝ą░čé čäčĆąĄą╣ą╝ą░ 8 ą▒ąĖčé, 1 čüč鹊ą┐-ą▒ąĖčé:
UCSR0C = (1 << 7 )| (1 << UCSZ01)| (1 << UCSZ00);
2 . ąōą╗ą░ą▓ąĮčŗą╣ čåąĖą║ą╗.
...
if (data_ready)
{
// ą¤ąŠą╗čāč湥ąĮčŗ ą▓čüąĄ ą┤ą░ąĮąĮčŗąĄ.
cli(); // ąĘą░ą┐čĆąĄčéąĖčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ
data_ready = false ; // čüą▒čĆąŠčüąĖčéčī čäą╗ą░ą│ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą┤ą░ąĮąĮčŗčģ
if (LCDM_A% 2 == 0 )
{
// ą£ą░čéčĆąĖčåą░ ą┐ąĄčĆą▓ą░čÅ ą▓ ą┐ą░čĆąĄ, ą▓ąĘčÅčéčī ą┐ąĄčĆą▓čŗąĄ 192 ą▒ą░ą╣čéą░:
memcpy(Colorduino.curDrawFrame, LCDM_buf, 192 );
}
else
{
// ą£ą░čéčĆąĖčåą░ ą▓č鹊čĆą░čÅ ą▓ ą┐ą░čĆąĄ, ą▓ąĘčÅčéčī čüą╗ąĄą┤čāčÄčēąĖąĄ 192 ą▒ą░ą╣čéą░:
memcpy(Colorduino.curDrawFrame, LCDM_buf + 192 , 192 );
sei(); // čĆą░ąĘčĆąĄčłąĖčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ
}
// ąÆčŗą▓ąŠą┤ąĖą╝ ą┐ąŠčüčéčĆąŠčćąĮąŠ ą┤ą░ąĮąĮčŗąĄ ą╝ą░čéčĆąĖčåčŗ ą▓ DM163:
Colorduino.refresh();
// ąŚą░ą┤ąĄčƹȹ║ą░ 800 ą╝ą║čü:
Colorduino.delay_us(822 );
}
...
3 . ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÄ ą┐čĆąĖąĄą╝ą░ ą▒ą░ą╣čéą░.
ISR(USART_RX_vect)
{
switch (rx_MODE)
{
case RX_WAIT_SYNC:
// ąĀąĄąČąĖą╝ ąŠąČąĖą┤ą░ąĮąĖčÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ.
if (data_count >= 8 )
data_count = 0 ;
// ąæąĄčĆąĄą╝ ą▒ą░ą╣čé ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ USART ąĖ ą║ą╗ą░ą┤ąĄą╝ ą▓ ą▒čāč乥čĆ ą║ąŠą╝ą░ąĮą┤čŗ:
data_in[data_count] = UDR0;
if ((data_in[data_count++ ] == CHAR_NEWLINE))
{
// ą¤ąŠą╗čāč湥ąĮ End of line!
if ((data_in[0 ]== 'S' )
& (data_in[1 ]== 'Y' )
& (data_in[2 ]== 'N' )
& (data_in[3 ]== 'C' ))
{
// ą¤čĆąĖąĮčÅčéą░ ą║ąŠą╝ą░ąĮą┤ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (SYNC).
// ą×čćąĖčüčéą║ą░ ą▒čāč乥čĆą░ ą║ąŠą╝ą░ąĮą┤čŗ:
memset(data_in, 0 , sizeof (data_in));
// ąśąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄą╝ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ:
data_ready = false ;
data_count = 0 ;
// ą¤ąĄčĆąĄčģąŠą┤ ą▓ čĆąĄąČąĖą╝ ą┐čĆąĖąĄą╝ą░ čĆąĄą░ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ:
rx_MODE = RX_RECEIVE_DATA;
}
data_count = 0 ;
}
break ;
case RX_RECEIVE_DATA:
// ąĀąĄąČąĖą╝ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ.
// ąæąĄčĆąĄą╝ ą▒ą░ą╣čé ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ USART ąĖ ą║ą╗ą░ą┤ąĄą╝ ą▓ ą▒čāč乥čĆ ą┤ą░ąĮąĮčŗčģ:
LCDM_buf[data_count++ ] = UDR0;
if (data_count == LCDM_BUF_SIZE)
{
// ąöą░ąĮąĮčŗąĄ ą│ąŠč鹊ą▓čŗ.
// ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝ čäą╗ą░ą│, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąŠą▓ąĄčĆčÅąĄčéčüčÅ ą▓ ą│ą╗ą░ą▓ąĮąŠą╝ čåąĖą║ą╗ąĄ:
data_ready = true ;
// ą¤ąĄčĆąĄčģąŠą┤ąĖą╝ ą▓ čĆąĄąČąĖą╝ ąŠąČąĖą┤ą░ąĮąĖčÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ:
rx_MODE = RX_WAIT_SYNC;
}
break ;
}
}
ąĪą┐ąĖčüąŠą║ ą╝ąŠą┤čāą╗ąĄą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ Funduino:
ąØą░ąĘą▓ą░ąĮąĖąĄ ą╝ąŠą┤čāą╗čÅ ąØą░ąĘąĮą░č湥ąĮąĖąĄ
MX_CDUINO.ino
ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ. ą×čüąĮąŠą▓ąĮąŠą╣ čåąĖą║ą╗ ąĖ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ ą┐čĆąĖąĄą╝čā ą▒ą░ą╣čéą░ ą┐ąŠ USART
Colorduino.h, Colorduino.cpp
ąÜąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ DM163
ąÆčüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčŗą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ (ąÆąÜ) . ąÆąÜ čāą┐čĆą░ą▓ą╗čÅąĄčé ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ, ą┐ąŠą╗čāčćą░čÅ ą║ąŠą╝ą░ąĮą┤čŗ ąŠčé ą”ą¤. ą×ą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ čü ą”ą¤ ąĖą┤ąĄčé ą┐ąŠ ą┐čĆąŠč鹊ą║ąŠą╗čā I2C. ąöą╗čÅ čĆą░ą▒ąŠčéčŗ čü ą┐čĆąŠč鹊ą║ąŠą╗ąŠą╝ I2C čā Arduino ąĄčüčéčī čłčéą░čéąĮą░čÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ Wire, ą║ąŠč鹊čĆą░čÅ čāą┐čĆąŠčēą░ąĄčé ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖąĄ čü I2C/TWI-čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ, ą║ą░ą║ ą▓ čĆąĄąČąĖą╝ąĄ master (ą│ą╗ą░ą▓ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮą░ čłąĖąĮąĄ), čéą░ą║ ąĖ ą▓ čĆąĄąČąĖą╝ąĄ slave (ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ). ąÆąÜ, ą║ąŠč鹊čĆčŗą╣ čĆą░ą▒ąŠčéą░ąĄčé ą▓ čĆąĄąČąĖą╝ąĄ slave, ą┐čĆąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ą┐čĆąĖčüą▓ąŠąĄąĮ ą░ą┤čĆąĄčü h08. ąöą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▒čŗą╗ą░ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮą░ čüąĖčüč鹥ą╝ą░ ą║ąŠą╝ą░ąĮą┤. ąÜą░ąČą┤ą░čÅ ą║ąŠą╝ą░ąĮą┤ą░ ąĮą░čćąĖąĮą░ąĄčéčüčÅ ąĖ ąĘą░ą║ą░ąĮčćąĖą▓ą░ąĄčéčüčÅ ą▒ą░ą╣č鹊ą╝ h7F. ąÆč鹊čĆąŠą╣ ą▒ą░ą╣čé čāą║ą░ąĘčŗą▓ą░ąĄčé ą┤ą╗ąĖąĮčā ą║ąŠą╝ą░ąĮą┤čŗ ą▒ąĄąĘ čāč湥čéą░ čüčéą░čĆč鹊ą▓ąŠą│ąŠ ąĖ čüč鹊ą┐ąŠą▓ąŠą│ąŠ ą▒ą░ą╣čéą░. ąóčĆąĄčéąĖą╣ ą▒ą░ą╣čé ą║ąŠą┤ ą║ąŠą╝ą░ąĮą┤čŗ. ą×čüčéą░ą╗čīąĮčŗąĄ ą▒ą░ą╣čéčŗ ą┤ąŠ čüč鹊ą┐ąŠą▓ąŠą│ąŠ ŌĆō ą░čĆą│čāą╝ąĄąĮčéčŗ ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ.
ąĪą┐ąĖčüąŠą║ ąŠčüąĮąŠą▓ąĮčŗčģ ą║ąŠą╝ą░ąĮą┤ ąÆąÜ:
ąśą╝čÅ ą║ąŠą╝ą░ąĮą┤čŗ ąÜąŠą┤ ąØą░ąĘąĮą░č湥ąĮąĖąĄ
O_NONE
7F 02 00 7F
ą¤čāčüčéą░čÅ ą║ąŠą╝ą░ąĮą┤ą░
O_PLAY_SD
7F 04 A0 00 01 7F
ąÜąŠą╝ą░ąĮą┤ą░ ┬½ąÆąŠčüą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮąĖąĄ┬╗ ą┤ą╗čÅ MP3 ą┐čĆąŠąĖą│čĆčŗą▓ą░č鹥ą╗čÅ čü ąĮąŠą╝ąĄčĆąŠą╝ ą║ąŠą╝ą┐ąŠąĘąĖčåąĖąĖ
O_PAUSE
7F 02 A3 7F
ąÜąŠą╝ą░ąĮą┤ą░ ┬½ą¤ą░čāąĘą░┬╗ ą┤ą╗čÅ MP3 ą┐čĆąŠąĖą│čĆčŗą▓ą░č鹥ą╗čÅ
O_STOP
7F 02 A4 7F
ąÜąŠą╝ą░ąĮą┤ą░ ┬½ąĪč鹊ą┐┬╗ ą┤ą╗čÅ MP3 ą┐čĆąŠąĖą│čĆčŗą▓ą░č鹥ą╗čÅ
O_NEXT
7F 02 A5 7F
ąÜąŠą╝ą░ąĮą┤ą░ ┬½ąĪą╗ąĄą┤čāčÄčēą░čÅ┬╗ ą┤ą╗čÅ MP3 ą┐čĆąŠąĖą│čĆčŗą▓ą░č鹥ą╗čÅ
O_PREVIOUS
7F 02 A6 7F
ąÜąŠą╝ą░ąĮą┤ą░ ┬½ą¤čĆąĄą┤čŗą┤čāčēą░čÅ┬╗ ą┤ą╗čÅ MP3 ą┐čĆąŠąĖą│čĆčŗą▓ą░č鹥ą╗čÅ
O_SET_VOLUME
7F 03 A7 1F 7F
ąŻčüčéą░ąĮąŠą▓ą║ą░ ą│čĆąŠą╝ą║ąŠčüčéąĖ MP3 ą┐čĆąŠąĖą│čĆčŗą▓ą░č鹥ą╗čÅ
O_READ_VOLUME
7F 02 C1 7F
ą¤ąŠą╗čāčćąĖčéčī ąĘąĮą░č湥ąĮąĖčÅ ą│čĆąŠą╝ą║ąŠčüčéąĖ
O_PLAY_MODE
7F 03 A9 02 7F
ąŻčüčéą░ąĮąŠą▓ą║ą░ ą▓ąĖą┤ą░ ą▓ąŠčüą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮąĖčÅ MP3 ą┐čĆąŠąĖą│čĆčŗą▓ą░č鹥ą╗čÅ
O_READ_PLAY_STATE
7F 02 C2 7F
ą¤ąŠą╗čāčćąĖčéčī čĆąĄąČąĖą╝ ą▓ąŠčüą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮąĖčÅ
O_7SEG_SET_NUMBER
7F 08 E0 01 02 00 00 00 00 7F
ąÆčŗą▓ąĄčüčéąĖ čćąĖčüą╗ąŠ ąĮą░ čåąĖčäčĆąŠą▓ąŠą╣ ą┤ąĖčüą┐ą╗ąĄą╣
O_READ_MSGEQ7
7F 02 E1 7F
ą¤ąŠą╗čāčćąĖčéčī ą┤ą░ąĮąĮčŗąĄ 菹║ą▓ą░ą╗ą░ą╣ąĘąĄčĆą░
O_7SEG_SET_INTENSITY
7F 03 E2 09 7F
ąŻčüčéą░ąĮąŠą▓ąĖčéčī čÅčĆą║ąŠčüčéčī čüą▓ąĄč湥ąĮąĖčÅ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą┤ąĖčüą┐ą╗ąĄčÅ
O_VIBRO
7F 04 E3 00 00 7F
ąÆą║ą╗čÄčćąĖčéčī ą▓ąĖą▒čĆąŠą┤ą▓ąĖą│ą░č鹥ą╗čī ąĮą░ čāą║ą░ąĘą░ąĮąĮčŗą╣ ąĖąĮč鹥čĆą▓ą░ą╗ ą▓čĆąĄą╝ąĄąĮąĖ
O_TONE
7F 07 E5 00 00 00 00 00 7F
ąōąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ąĘą▓čāą║ čü čāą║ą░ąĘą░ąĮąĮąŠą╣ čćą░čüč鹊č鹊ą╣ ąĖ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčīčÄ. ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čäčāąĮą║čåąĖčÅ Arduino Tone()
O_7SEG_CLEAR
7F 02 E6 7F
ą×čćąĖčüčéąĖčéčī čåąĖčäčĆąŠą▓ąŠą╣ ą┤ąĖčüą┐ą╗ąĄą╣
O_7SEG_SET_CHAR
7F 04 E7 01 48 7F
ąÆčŗą▓ąĄčüčéąĖ čüąĖą╝ą▓ąŠą╗ ąĮą░ čåąĖčäčĆąŠą▓ąŠą╣ ą┤ąĖčüą┐ą╗ąĄą╣ ą▓ čāą║ą░ąĘą░ąĮąĮąŠą╣ ą┐ąŠąĘąĖčåąĖąĖ
O_7SEG_SET_DIGIT
7F 04 E8 01 05 7F
ąÆčŗą▓ąĄčüčéąĖ čåąĖčäčĆčā ąĮą░ čåąĖčäčĆąŠą▓ąŠą╣ ą┤ąĖčüą┐ą╗ąĄą╣ ą▓ čāą║ą░ąĘą░ąĮąĮąŠą╣ ą┐ąŠąĘąĖčåąĖąĖ
O_KEY_CTRL
7F 03 B0 01 7F
ąŚą░ą┐čĆąĄčéąĖčéčī ąĖą╗ąĖ čĆą░ąĘčĆąĄčłąĖčéčī čĆčāčćąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čü ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ MP3 ą┐čĆąŠąĖą│čĆčŗą▓ą░č鹥ą╗ąĄą╝
ą¤čĆąĖ ą┐ąŠą╗čāč湥ąĮąĖąĖ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą╣ ą║ąŠą╝ą░ąĮą┤čŗ ąÆąÜ čĆą░čüą┐ąŠąĘąĮą░ąĄčé, ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ąĄąĄ ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ą║ąŠą┤ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ čåąĄąĮčéčĆą░ą╗čīąĮąŠą╝čā ą┐čĆąŠčåąĄčüčüąŠčĆčā. ąöąŠ čüąĖčģ ą┐ąŠčĆ čāą┤ąĖą▓ą╗čÅčÄčüčī, ą║ą░ą║ čŹč鹊 ą▓čüąĄ ą▓ą╝ąĄčüč鹥 čĆą░ą▒ąŠčéą░ąĄčé.
ąĪą┐ąĖčüąŠą║ ą╝ąŠą┤čāą╗ąĄą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąÆąÜ:
ąśą╝čÅ čäą░ą╣ą╗ą░ ą╝ąŠą┤čāą╗čÅ ąØą░ąĘąĮą░č湥ąĮąĖąĄ
MX_BOX.ino
ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ. ąÆ ąŠčüąĮąŠą▓ąĮąŠą╝ čåąĖą║ą╗ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą┐čĆąĖąĄą╝ ą║ąŠą╝ą░ąĮą┤ ąŠčé ą”ą¤, ąĖčģ čĆą░čüą┐ąŠąĘąĮą░ą▓ą░ąĮąĖąĄ ąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ. ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĖąĄą╝ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą┐ąŠ ą┐čĆąŠč鹊ą║ąŠą╗čā I2C. ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ ąĮą░ąČą░čéąĖą╣ ą║ąĮąŠą┐ąŠą║.
mx_Keyboard.h, mx_Keyboard.cpp
ąÜą╗ą░čüčü ąĘą░ąĮąĖą╝ą░ąĄčéčüčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąŠą╣ ąĮą░ąČą░čéąĖą╣ ą║ąĮąŠą┐ąŠą║ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╣ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ: ąĘą░čēąĖčéą░ ąŠčé ą┤čĆąĄą▒ąĄąĘą│ą░, čĆą░čüą┐ąŠąĘąĮą░ąĮąĖąĄ ą║ąŠčĆąŠčéą║ąŠą│ąŠ, ą┤ą╗ąĖąĮąĮąŠą│ąŠ ąĮą░ąČą░čéąĖčÅ ąĖ ą░ą▓č鹊ą┐ąŠą▓č鹊čĆ.
wt5001_mp3.h, wt5001_mp3.cpp
ąÜą╗ą░čüčü ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü MP3 ą┐čĆąŠąĖą│čĆčŗą▓ą░č鹥ą╗ąĄą╝: čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆąĄąČąĖą╝ąŠą╝ ą▓ąŠčüą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮąĖčÅ, ą▓čŗą▒ąŠčĆ ą║ąŠą╝ą┐ąŠąĘąĖčåąĖąĖ, čĆąĄą│čāą╗ąĖčĆąŠą▓ą║ą░ ą│čĆąŠą╝ą║ąŠčüčéąĖ, ą¤ąŻąĪąÜ-ąĪąóą×ą¤-ą¤ąÉąŻąŚąÉ ąĖ čé.ą┐. ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ Arduino SoftwareSerial
mx_MSGEQ7.h, mx_MSGEQ7.cpp
ąÜą╗ą░čüčü ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé ą┐ąŠą╗čāč湥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ 7 ą┐ąŠą╗ąŠčüąĮąŠą│ąŠ 菹║ą▓ą░ą╗ą░ą╣ąĘąĄčĆą░. ążčāąĮą║čåąĖčÅ čäąĖą╗čīčéčĆą░čåąĖąĖ čłčāą╝ąŠą▓.
mx_base_class.h
ą×ą┐ąĖčüą░ąĮąĖąĄ ą▒ą░ąĘąŠą▓ąŠą│ąŠ ą║ą╗ą░čüčüą░ ą┤ą╗čÅ ą▓čüąĄčģ ą╝ąŠą┤čāą╗ąĄą╣
mx_7Seg.h, mx_7Seg.cpp
ąÜą╗ą░čüčü ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ 10-ąĘąĮą░čćąĮčŗą╝ 7-čüąĄą│ą╝ąĄąĮčéąĮčŗą╝ ąĖąĮą┤ąĖą║ą░č鹊čĆąŠą╝. ąĀą░ą▒ąŠčéą░ čü MAX7219 ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░ąĮą░ ą┐ąŠ ą┐čĆąŠč鹊ą║ąŠą╗čā SPI.
mx_Samples.h
ą¤čĆąĖą╝ąĄčĆ ą╝ąĄą╗ąŠą┤ąĖąĖ.
ąÜą░ą║ čĆą░ą▒ąŠčéą░ąĄčé čåąĄąĮčéčĆą░ą╗čīąĮčŗą╣ ą┐čĆąŠčåąĄčüčüąŠčĆ . ą¤ąŠčüą╗ąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ, ą▓ ą│ą╗ą░ą▓ąĮąŠą╝ čåąĖą║ą╗ąĄ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ąŠčüąĮąŠą▓ąĮąŠąĄ ą╝ąĄąĮčÄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, ą│ą┤ąĄ ą╝ąŠąČąĮąŠ ą▓čŗą▒čĆą░čéčī ąĖą│čĆčā ąĖą╗ąĖ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ąĮą░čüčéčĆąŠą╣ą║ąĖ.
ąśą│čĆčŗ:
┬½ąóąĄčéčĆąĖčü┬╗
ąöą╗čÅ ą║ą░ąČą┤ąŠą╣ ąĖą│čĆčŗ ą║čĆąŠą╝ąĄ čĆčāčćąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░ ą╝ąŠąČąĮąŠ ą▓čŗą▒čĆą░čéčī čĆąĄąČąĖą╝ AI, ą║ąŠą│ą┤ą░ ą▒čāą┤ąĄčé čüą░ą╝ąŠčüč鹊čÅč鹥ą╗čīąĮąŠ ąĖą│čĆą░čéčī ą▒ąŠčé.
ą”ą¤ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé ąŠčüąĮąŠą▓ąĮąŠą╣ ąĖą│čĆąŠą▓ąŠą╣ ą┐čĆąŠčåąĄčüčü. ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĖą│čĆąŠą╣ ą▓ąŠąĘą╝ąŠąČąĮąŠ, ą║ą░ą║ ą║ąĮąŠą┐ą║ą░ą╝ąĖ, čéą░ą║ ąĖ ą┤ą▓ąĖąČąĄąĮąĖąĄą╝ (ąĮą░ą║ą╗ąŠąĮą░ą╝ąĖ) ą║ąŠčĆą┐čāčüą░ ąĖą│čĆčāčłą║ąĖ. ąÆąŠ ą▓čĆąĄą╝čÅ ąŠąČąĖą┤ą░ąĮąĖčÅ ą▓čŗą▒ąŠčĆą░ ą╝ąĄąĮčÄ ąĖ ąĖą│čĆ ą▓ č乊ąĮąŠą▓ąŠą╝ čĆąĄąČąĖą╝ąĄ ą▓čŗą┐ąŠą╗ąĮčÅčÄčéčüčÅ ą╝čāąĘčŗą║ą░ą╗čīąĮčŗąĄ ą║ąŠą╝ą┐ąŠąĘąĖčåąĖąĖ. ąÆąŠ ą▓čĆąĄą╝čÅ ąĖą│čĆčŗ ą▓ąŠąĘą╝ąŠąČąĮčŗ ąĘą▓čāą║ąŠą▓čŗąĄ ąĖ ą▓ąĖą▒čĆą░čåąĖąŠąĮąĮčŗąĄ čŹčäč乥ą║čéčŗ. ąśą│čĆčā ą╝ąŠąČąĮąŠ ą┐čĆąĄčĆą▓ą░čéčī ąĖ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ ą▓ čĆąĄąČąĖą╝ ą┐ą░čāąĘčŗ, ą║ąŠą│ą┤ą░ ąĮą░ 菹║čĆą░ąĮąĄ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ čüą┐ąĄčåąĖą░ą╗čīąĮą░čÅ ąĘą░čüčéą░ą▓ą║ą░. ąśąĘ čŹč鹊ą│ąŠ čĆąĄąČąĖą╝ą░ ą╝ąŠąČąĮąŠ ą▓ąĄčĆąĮčāčéčīčüčÅ ą▓ ąĖą│čĆčā ąĖą╗ąĖ ąĘą░ą▓ąĄčĆčłąĖčéčī ąĄąĄ. ąøčāčćčłąĖąĄ čĆąĄąĘčāą╗čīčéą░čéčŗ ąĖą│čĆ ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ą▓ 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝čāčÄ ą┐ą░ą╝čÅčéčī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąōčĆą░čäąĖą║ą░ ┬½čĆąĖčüčāąĄčéčüčÅ┬╗ ą▓ ą▒čāč乥čĆ, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĖ ą║ą░ąČą┤ąŠą╝ ąĖąĘą╝ąĄąĮąĄąĮąĖąĖ, ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą┐ąŠ UART ąĮą░ Funduino ąĖ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ąŠč鹊ą▒čĆą░ąČą░ąĄčéčüčÅ ąĮą░ ą┤ąĖčüą┐ą╗ąĄąĄ. ą”ą¤ čāą┐čĆą░ą▓ą╗čÅąĄčé ą▓čüąĄą╝ąĖ ą┐ąĄčĆąĖč乥čĆąĖč湥čüą║ąĖą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ, ąŠčéą┤ą░ą▓ą░čÅ ą║ąŠą╝ą░ąĮą┤čŗ ąÆąÜ.
ąĪą┐ąĖčüąŠą║ ą╝ąŠą┤čāą╗ąĄą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą”ą¤:
ąśą╝čÅ čäą░ą╣ą╗ą░ ą╝ąŠą┤čāą╗čÅ ąØą░ąĘąĮą░č湥ąĮąĖąĄ
Adafruit_GFX.h, Adafruit_GFX.cpp, glcdfont.c, gfxfont.h
ąōčĆą░čäąĖč湥čüą║ą░čÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą┤ą╗čÅ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą┤ąĖčüą┐ą╗ąĄąĄą▓ čü čłąĖą║ą░čĆąĮčŗą╝ čäčāąĮą║čåąĖąŠąĮą░ą╗ąŠą╝: ąĮą░ą▒ąŠčĆ ą┐čĆąĖą╝ąĖčéąĖą▓ąŠą▓ (č鹊čćą║ą░, ą╗ąĖąĮąĖčÅ, ą║ą▓ą░ą┤čĆą░čé, ą║čĆčāą│, ą▓čŗą▓ąŠą┤ čĆą░čüčéčĆąŠą▓ąŠą╣ ą║ą░čĆčéąĖąĮą║ąĖ ąĖ čé. ą┐.), čĆą░ą▒ąŠčéą░ čüąŠ čłčĆąĖčäčéą░ą╝ąĖ ąĖ čé. ą┤. Copyright (c) 2013 Adafruit Industries. All rights reserved.
gamma.h
ąóą░ą▒ą╗ąĖčåą░ ą│ą░ą╝ą╝ą░ ą║ąŠčĆčĆąĄą║čåąĖąĖ čåą▓ąĄčéą░ ą┤ą╗čÅ čåą▓ąĄč鹊ą▓ąŠą╣ ą╝ąŠą┤ąĄą╗ąĖ HSV.
mx_accelerometer.h, mx_accelerometer.cpp
ąÜą╗ą░čüčü - ┬½ąŠą▒ąĄčĆčéą║ą░┬╗ ą┤ą╗čÅ ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓ąŠą╣ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ mx_MMA_7455. ą×ą┐čĆą░čłąĖą▓ą░ąĄčé ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆ ą┐ąŠ čéą░ą╣ą╝ąĄčĆčā čü čćą░čüč鹊č鹊ą╣ 61 ąōčå. ąĢąĄ čäčāąĮą║čåąĖąŠąĮą░ą╗ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠą┐čĆąĄą┤ąĄą╗čÅčéčī ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĖ čüą║ąŠčĆąŠčüčéčī ą┤ą▓ąĖąČąĄąĮąĖčÅ ą║ąŠčĆą┐čāčüą░ ąĖą│čĆčāčłą║ąĖ.
mx_AI.h, mx_AI.cpp
ąöą╗čÅ ą║ą░ąČą┤ąŠą╣ ąĖą│čĆčŗ, ą║čĆąŠą╝ąĄ čĆčāčćąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░ ą┐čĆąĄą┤čāčüą╝ąŠčéčĆąĄąĮ čĆąĄąČąĖą╝ AI (ąĖčüą║čāčüčüčéą▓ąĄąĮąĮčŗą╣ ąĖąĮč鹥ą╗ą╗ąĄą║čé). ąÆ čŹč鹊ą╝ ą╝ąŠą┤čāą╗ąĄ ąĖ ą╗ąĄąČą░čé ą▓čüąĄ ą░ą╗ą│ąŠčĆąĖčéą╝čŗ ą┤ą╗čÅ ą▒ąŠč鹊ą▓.
mx_animation.h, mx_animation.cpp
ążčāąĮą║čåąĖčÅ ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą│ąŠ čŹčäč乥ą║čéą░ ą┐čĆąŠą║čĆčāčéą║ąĖ (čüą║čĆąŠą╗ą╗ąĖąĮą│ą░) č鹥ą║čüčéą░ ą▓ ą╝ąĄąĮčÄ ąĖ ą┤čĆčāą│ąĖčģ ą╝ąĄčüčéą░čģ.
mx_asteroids.h, mx_asteroids.cpp
ąśą│čĆą░ ┬½ąÉčüč鹥čĆąŠąĖą┤čŗ┬╗.
mx_base_class.h
ą×ą┐ąĖčüą░ąĮąĖąĄ ą▒ą░ąĘąŠą▓ąŠą│ąŠ ą║ą╗ą░čüčüą░ ą┤ą╗čÅ ą▓čüąĄčģ ą╝ąŠą┤čāą╗ąĄą╣.
mx_bitmap.h, mx_bitmap.cpp
ąÆčŗą▓ąŠą┤ ąĮą░ 菹║čĆą░ąĮ čĆą░čüčéčĆąŠą▓ąŠą╣ ą║ą░čĆčéąĖąĮą║ąĖ. ąöčāą▒ą╗ąĖčĆčāąĄčé čäčāąĮą║čåąĖąŠąĮą░ą╗ Adafruit_GFX. ą¤ą╗ą░ąĮąĖčĆčāčÄ ąĖąĘą▒ą░ą▓ąĖčéčīčüčÅ.
mx_colors.h, mx_colors.cpp
ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü čåą▓ąĄč鹊ą╝: ą║ąŠąĮčüčéą░ąĮčéčŗ, ą║ąŠąĮą▓ąĄčĆčéą░čåąĖčÅ čĆą░ąĘąĮčŗčģ ą╝ąŠą┤ąĄą╗ąĄą╣ čåą▓ąĄč鹊ą▓, ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ čÅčĆą║ąŠčüčéąĖ, čåą▓ąĄč鹊ą▓ąŠą╣ ą║čĆčāą│, ą│čĆą░ą┤ąĖąĄąĮčéčŗ ąĖ čé. ą┐.
mx_Config.h
ąØąĄą║ąŠč鹊čĆčŗąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ.
mx_debugger.h, mx_debugger.cpp
ą£ąŠą┤čāą╗čī ąŠčéą╗ą░ą┤ą║ąĖ. ąæčŗą╗ čāą┤ąŠą▒ąĄąĮ ą┤ą╗čÅ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ. ąÆ ą┐čĆąĖąĮčåąĖą┐ąĄ ą▒ąŠą╗čīčłąĄ ąĮąĄ ąĮčāąČąĄąĮ.
mx_display.h, mx_display.cpp
ąÜą╗ą░čüčü ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü ą┤ąĖčüą┐ą╗ąĄąĄą╝. ąŁą║ąĘąĄą╝ą┐ą╗čÅčĆ ą║ą╗ą░čüčüą░ Adafruit_GFX, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÅ ą▓ąĄčüčī čäčāąĮą║čåąĖąŠąĮą░ą╗ čŹč鹊ą╣ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ. ą¤ąĄčĆąĄąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąŠą┤ąĮą░ ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓ą░čÅ ą┐čĆąŠčåąĄą┤čāčĆą░ drawPixel.
mx_display_helper.h, mx_display_helper.cpp
ąÜą╗ą░čüčü-┬½ąŠą▒ąĄčĆčéą║ą░┬╗ ą┤ą╗čÅ ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓ąŠą╣ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ mx_display. ąöąŠą▒ą░ą▓ą╗ąĄąĮčŗ ą┐čĆąŠčåąĄą┤čāčĆčŗ čüą┤ą▓ąĖą│ą░ 菹║čĆą░ąĮą░.
mx_font.h, mx_font.cpp
ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čüąŠ čłčĆąĖčäč鹊ą╝. ąöčāą▒ą╗ąĖčĆčāąĄčé čäčāąĮą║čåąĖąŠąĮą░ą╗ Adafruit_GFX. ą¤ą╗ą░ąĮąĖčĆčāčÄ ąĖąĘą▒ą░ą▓ąĖčéčīčüčÅ.
mx_game_helper.h, mx_game_helper.cpp
ąÜą╗ą░čüčü čü ąĮą░ą▒ąŠčĆąŠą╝ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ ąĖą│čĆąŠą▓čŗčģ ą░ąĮąĖą╝ą░čåąĖąŠąĮąĮčŗčģ ą┐čĆąĖą╝ąĖčéąĖą▓ąŠą▓: ąÆčüčéčāą┐ą╗ąĄąĮąĖąĄ, ą┐ą░čāąĘą░, ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ ąĖą│čĆčŗ ąĖ čé. ą┐.
mx_keyboard.h, mx_keyboard.cpp
ąÜą╗ą░čüčü ąĘą░ąĮąĖą╝ą░ąĄčéčüčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąŠą╣ ąĮą░ąČą░čéąĖą╣ ą║ąĮąŠą┐ąŠą║ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╣ ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ: ąĘą░čēąĖčéą░ ąŠčé ą┤čĆąĄą▒ąĄąĘą│ą░, čĆą░čüą┐ąŠąĘąĮą░ąĮąĖąĄ ą║ąŠčĆąŠčéą║ąŠą│ąŠ, ą┤ą╗ąĖąĮąĮąŠą│ąŠ ąĮą░ąČą░čéąĖčÅ ąĖ ą░ą▓č鹊ą┐ąŠą▓č鹊čĆ.
mx_labirint.h, mx_labirint.cpp
ąśą│čĆą░ ┬½ąøą░ą▒ąĖčĆąĖąĮčé┬╗.
mx_memory_free.h, mx_memory_free.cpp
ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čüą▓ąŠą▒ąŠą┤ąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ. ą¤ąŠą╝ąŠą│ą░ąĄčé ą┐čĆąĖ ąŠčéą╗ą░ą┤ą║ąĄ. ąÆ ą┐čĆąĖąĮčåąĖą┐ąĄ ą▒ąŠą╗čīčłąĄ ąĮąĄ ąĮčāąČąĄąĮ.
mx_menu.h, mx_menu.cpp
ąÜą╗ą░čüčü ąŠčĆą│ą░ąĮąĖąĘčāąĄčé ą▒ąŠą╗čīčłąŠąĄ ąĖ ąĄą┤ąĖąĮčüčéą▓ąĄąĮąĮąŠąĄ ą╝ąĄąĮčÄ.
mx_MMA_7455.h, mx_MMA_7455.cpp
ąÜą╗ą░čüčü ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü ą┤ą░čéčćąĖą║ąŠą╝ ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆą░. ąśčüą┐ąŠą╗čīąĘčāąĄčé ą┐čĆąŠč鹊ą║ąŠą╗ I2C
mx_move_helper.h, mx_move_helper.cpp
ąÜą╗ą░čüčü ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┤ą▓ąĖąČąĄąĮąĖą╣ ąŠčé ą║ąĮąŠą┐ąŠą║ ąĖ ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆą░.
mx_muse.h, mx_muse.cpp
ąÜą╗ą░čüčü ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü MP3 ą┐čĆąŠąĖą│čĆčŗą▓ą░č鹥ą╗ąĄą╝: čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆąĄąČąĖą╝ąŠą╝ ą▓ąŠčüą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮąĖčÅ, ą▓čŗą▒ąŠčĆ ą║ąŠą╝ą┐ąŠąĘąĖčåąĖąĖ, čĆąĄą│čāą╗ąĖčĆąŠą▓ą║ą░ ą│čĆąŠą╝ą║ąŠčüčéąĖ, ą¤ąŻąĪąÜ-ąĪąóą×ą¤-ą¤ąÉąŻąŚąÉ ąĖ čé. ą┐. ąÜčĆąŠą╝ąĄ čŹč鹊ą│ąŠ ą╝ąŠąČąĄčé ą┐ąŠą╗čāčćą░čéčī ą┤ą░ąĮąĮčŗąĄ ąŠčé 菹║ą▓ą░ą╗ą░ą╣ąĘąĄčĆą░, čāą┐čĆą░ą▓ą╗čÅčéčī čüą┐ąĖą║ąĄčĆąŠą╝ ąĖ ą▓ąĖą▒čĆąŠą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╝. ąĀą░ą▒ąŠčéą░ąĄčé ąŠą┐ąŠčüčĆąĄą┤ąŠą▓ą░ąĮąŠ č湥čĆąĄąĘ čäčāąĮą║čåąĖąŠąĮą░ą╗ ą║ą╗ą░čüčüą░ mx_slave_box
mx_num_display.h, mx_num_display.cpp
ąÜą╗ą░čüčü ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü 10-ąĘąĮą░čćąĮčŗą╝ čåąĖčäčĆąŠą▓čŗą╝ ą┤ąĖčüą┐ą╗ąĄąĄą╝. ąĀą░ą▒ąŠčéą░ąĄčé ąŠą┐ąŠčüčĆąĄą┤ąŠą▓ą░ąĮąŠ č湥čĆąĄąĘ čäčāąĮą║čåąĖąŠąĮą░ą╗ ą║ą╗ą░čüčüą░ mx_slave_box
mx_queue.h, mx_stack.h
ąÜą╗ą░čüčüčŗ ą┤ą╗čÅ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ čĆą░ą▒ąŠčéčŗ čüąŠ čüčéčĆčāą║čéčāčĆą░ą╝ąĖ ą┤ą░ąĮąĮčŗčģ čéąĖą┐ą░ ąŠč湥čĆąĄą┤čī ąĖ čüč鹥ą║. ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ąĮąĄą║ąŠč鹊čĆčŗčģ ąĖą│čĆą░čģ.
mx_slave_box.h, mx_slave_box.cpp
ąÜą╗ą░čüčü, ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čÄčēąĖą╣ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖąĄ ą”ą¤ ąĖ ąÆąÜ, ą║ąŠč鹊čĆčŗąĄ čüą▓čÅąĘą░ąĮčŗ ą┐ąŠ ą┐čĆąŠč鹊ą║ąŠą╗čā I2C.
mx_snake.h, mx_snake.cpp
ąśą│čĆą░ ┬½ąŚą╝ąĄą╣ą║ą░┬╗.
mx_space_invaders.h, mx_space_invaders.cpp
ąśą│čĆą░ ┬½ąÜąŠčüą╝ąĖč湥čüą║ąĖąĄ ąĘą░čģą▓ą░čéčćąĖą║ąĖ┬╗.
mx_storage.h, mx_storage.cpp mx_storage_clear.h, mx_storage_clear.cpp
ąØą░ą▒ąŠčĆ ą║ą╗ą░čüčüąŠą▓ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠą╣ ą┐ą░ą╝čÅčéčīčÄ EEPROM. ąÆ ą║ąŠč鹊čĆąŠą╣ čģčĆą░ąĮčÅčéčüčÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĖ ą╗čāčćčłąĖąĄ čĆąĄąĘčāą╗čīčéą░čéčŗ ąĖą│čĆ.
mx_tennis.h, mx_tennis.cpp
ąśą│čĆą░ ┬½ąóąĄąĮąĮąĖčü┬╗.
mx_tetris.h, mx_tetris.cpp
ąśą│čĆą░ ┬½ąóąĄčéčĆąĖčü┬╗.
mx_timer.h, mx_timer.cpp
ąÜą╗ą░čüčü ąóą░ą╣ą╝ąĄčĆ ąĘą░ą┤ą░ąĄčé čĆąĖčéą╝ ąĖą│čĆąŠą▓ąŠą╝čā ą┐čĆąŠčåąĄčüčüčā. ąśą│čĆąŠą▓ąŠą╣ čéą░ą║čé čüąŠčüčéą░ą▓ą╗čÅąĄčé 7 ą╝čü.
MX_TRIX.ino
ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ. ąÆ ąŠčüąĮąŠą▓ąĮąŠą╝ čåąĖą║ą╗ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą▓čŗąĘąŠą▓čŗ ą╝ąĄąĮčÄ.
mx_uart.h, mx_uart.cpp
ąÜą╗ą░čüčü ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü UART
mx_util.h, mx_util.cpp
ąĀą░ąĘąĮčŗąĄ ą▓čüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčŗąĄ ą┐čĆąŠčåąĄą┤čāčĆčŗ ąĖ čäčāąĮą║čåąĖąĖ.
[ąŚą░ą║ą╗čÄč湥ąĮąĖąĄ ]
ąĪąŠąĘą┤ą░ąĮąĖąĄ ąĖą│čĆčāčłą║ąĖ ą▒čŗą╗ąŠ ąĮąĄą┐čĆąŠčüčéčŗą╝, ąĮąŠ ąŠč湥ąĮčī čāą▓ą╗ąĄą║ą░č鹥ą╗čīąĮčŗą╝ ą┤ąĄą╗ąŠą╝. ą¤ąŠ čüčāčéąĖ ą┐ąŠą╗čāčćąĖą╗ą░čüčī 菹║čüčéčĆąĄą╝ą░ą╗čīąĮą░čÅ ą╗ą░ą▒ąŠčĆą░č鹊čĆąĮą░čÅ čĆą░ą▒ąŠčéą░ ą┐ąŠ ą▓čüąĄčüč鹊čĆąŠąĮąĮąĄą╝čā ąĖąĘčāč湥ąĮąĖčÄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ ą▓ ą▒ąŠąĄą▓čŗčģ čāčüą╗ąŠą▓ąĖčÅčģ. ąóčāčé č鹥ą▒ąĄ ąĖ ą▓ą▓ąŠą┤-ą▓čŗą▓ąŠą┤, ąĖ čéą░ą╣ą╝ąĄčĆčŗ ąĖ UART ąĖ I2C... ąŻą┤ą░ą╗ąŠčüčī čüą▓čÅąĘą░čéčī ą╝ąĄąČą┤čā čüąŠą▒ąŠą╣ ąĖ ąĘą░čüčéą░ą▓ąĖčéčī čüą╗čāąČąĖčéčī ąŠą▒čēąĄą╣ ąĘą░ą┤ą░č湥 ą╝ąĮąŠąČąĄčüčéą▓ąŠ 菹╗ąĄą║čéčĆąŠąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓. ąöąŠčüčéą░č鹊čćąĮąŠ ą╝ą░čüčłčéą░ą▒ąĮčŗą╝ ąĖ ąĮąĄ čüą║čāčćąĮčŗą╝ ą▒čŗą╗ąŠ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čüąĄą│ąŠ čŹč鹊ą│ąŠ ąČąĄą╗ąĄąĘą░. ą×ą│čĆąŠą╝ąĮąŠąĄ čāą┤ąŠą▓ąŠą╗čīčüčéą▓ąĖąĄ ą┤ąŠčüčéą░ą▓ąĖą╗ąŠ ąĮą░ą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗčģ ┬½ą▒ąŠč鹊ą▓┬╗ čü ąĘą░čćą░čéą║ą░ą╝ąĖ ┬½ąśčüą║čāčüčüčéą▓ąĄąĮąĮąŠą│ąŠ ąśąĮč鹥ą╗ą╗ąĄą║čéą░┬╗. ąÜąŠą│ą┤ą░-č鹊 ą┤ą░ą▓ąĮąŠ ą▒čŗą╗ą░ ą╝ąĄčćčéą░ ąĮą░ą┐ąĖčüą░čéčī ąĘą╝ąĄą╣ą║čā, ą║ąŠč鹊čĆą░čÅ ą┤ąŠą┐ąŠą╗ąĘą░ąĄčé ą┤ąŠ ┬½ą║ąŠąĮčåą░┬╗ ąĖą╗ąĖ ąĖą│čĆąŠą║ą░ ą▓ č鹥čéčĆąĖčü, ą║ąŠč鹊čĆčŗą╣ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą┐čĆąŠąĖą│čĆčŗą▓ą░ąĄčé. ąØčā, ą▓ąŠčé, č鹊čé čüą░ą╝čŗą╣ čüą╗čāčćą░ą╣. ąØąĄčüą╝ąŠčéčĆčÅ ąĮą░ čüą╗ąŠąČąĮąŠčüčéąĖ, ą▓čüąĄ čåąĄą╗ąĖ ą▒čŗą╗ąĖ ą┤ąŠčüčéąĖą│ąĮčāčéčŗ ąĖ ą▓čüąĄ ą╝ąĄčćčéčŗ čüą▒čŗą╗ąĖčüčī. ąś čāąČ čüąŠą▓čüąĄą╝ ą▒čāą┤ąĄčé čüčćą░čüčéčīąĄ č湥čĆąĄąĘ ą║čĆą░ą╣, ąĄčüą╗ąĖ čŹčéą░ čüčéą░čéčīčÅ ą▓ą┤ąŠčģąĮąŠą▓ąĖčé ą║ąŠą│ąŠ-ąĮąĖą▒čāą┤čī ąĮą░ ą┐ąŠą┤ąŠą▒ąĮčŗąĄ čéą▓ąŠčĆč湥čüą║ąĖąĄ ą┐ąŠą┤ą▓ąĖą│ąĖ.
ąÜąŠčĆąŠčéą║ąĖą╣ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮčŗą╣ ą▓ąĖą┤ąĄąŠčĆąŠą╗ąĖą║ [18]:
VIDEO
ą¤ąŠą╗ąĮčŗą╣ ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą╝ąŠąČąĮąŠ čüą║ą░čćą░čéčī ą┐ąŠ čüčüčŗą╗ą║ąĄ [19].
[ąĪčüčŗą╗ą║ąĖ ]
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čüčüčŗą╗ą║ąĖ, ą│ą┤ąĄ ą▓čüčéčĆąĄčćą░ąĄčéčüčÅ site:ąĖą╝čÅą┤ąŠą╝ąĄąĮą░ čŹč鹊 ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ ą┐ąŠąĖčüą║ąŠą▓ą░čÅ čüčéčĆąŠą║ą░ Google.
1 . Arduino MEGA 2560 .2 . Colorduino site:beta-estore.com.3 . 60mm Square 8*8 LED Matrix - RGB (Square-Dot) site:itead.cc.4 . AN3468 MMA745xL Digital Accelerometer site:nxp.com.5 . ATmega328 DATASHEET COMPLETE site:atmel.com.6 . Grove - Serial MP3 Player site:wiki.seeed.cc.7 . WT5001 site:microelectronicos.com.8 . ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ SoftwareSerial site:arduino.ua.9 . MP410 ąĪą▓ąĄčĆčģ菹║ąŠąĮąŠą╝ąĖčćąĮčŗą╣ čüč鹥čĆąĄąŠč乊ąĮąĖč湥čüą║ąĖą╣ čåąĖčäčĆąŠą▓ąŠą╣ čāčüąĖą╗ąĖč鹥ą╗čī ┬½D┬╗-ą║ą╗ą░čüčüą░ 2 čģ 2.2 ąÆčé (TPA2012D) site:masterkit.ru.10 . MAX7219/MAX7221 site:sparkfun.com.11 . Grove-Speaker site:wiki.seeed.cc.12 . Grove - Vibration Motor site:wiki.seeed.cc.13 . MSGEQ7 Seven Band Graphic Equalizer site:sparkfun.com.14 . G748, ąÜąŠčĆą┐čāčü ą┤ą╗čÅ ąĀąŁąÉ 225čģ165čģ65ą╝ą╝, ą┐ą╗ą░čüčéąĖą║ site:chipdip.ru.15 . GitHub - dragon-dreamer/RgbTetris site:github.com.16 . DM163 8x3-channel constant current LED driver site:siti.com.tw.17 . Colorduino Schematic and Demo Code site:itead.cc.18 . MY MEGA TETRIS BOX site:youtube.com.19 . 170425Tetris-Box-public.zip - ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤, č乊č鹊, ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ.