ąÜ čüąŠąČą░ą╗ąĄąĮąĖčÄ, ą┐čĆąĖčłą╗ąŠčüčī čüč鹊ą╗ą║ąĮčāčéčīčüčÅ čü ą▒ąŠą╗čīčłąŠą╣ ą┐ą░čĆčéąĖąĄą╣ ą▒čĆą░ą║ąŠą▓ą░ąĮąĮčŗčģ ą╝ąĖą║čĆąŠčüčģąĄą╝ AD7691 [1], ą║ąŠč鹊čĆčāčÄ ąĮą░ą╝ ą┐ąŠčüčéą░ą▓ąĖą╗ą░ ą║ąŠą╝ą┐ą░ąĮąĖčÅ ą×ą×ą× "ąÉą╝ąĄčéąĖčüčé ąŁą╗ąĄą║čéčĆąŠąĮąĖą║čü". ąśąĘ 50 čłčéčāą║ ąŠą║ą░ąĘą░ą╗ąŠčüčī ą│ąŠą┤ąĮčŗą╝ąĖ č鹊ą╗čīą║ąŠ 4. ą¤ąŠčŹč鹊ą╝čā ą┐ąŠąĮą░ą┤ąŠą▒ąĖą╗ąŠčüčī čüąŠą▒čĆą░čéčī č鹥čüč鹥čĆ, čćč鹊ą▒čŗ ą┐čĆąŠą▓ąĄčĆčÅčéčī ąĖčüą┐čĆą░ą▓ąĮąŠčüčéčī ą╝ąĖą║čĆąŠčüčģąĄą╝ ąÉą”ą¤.
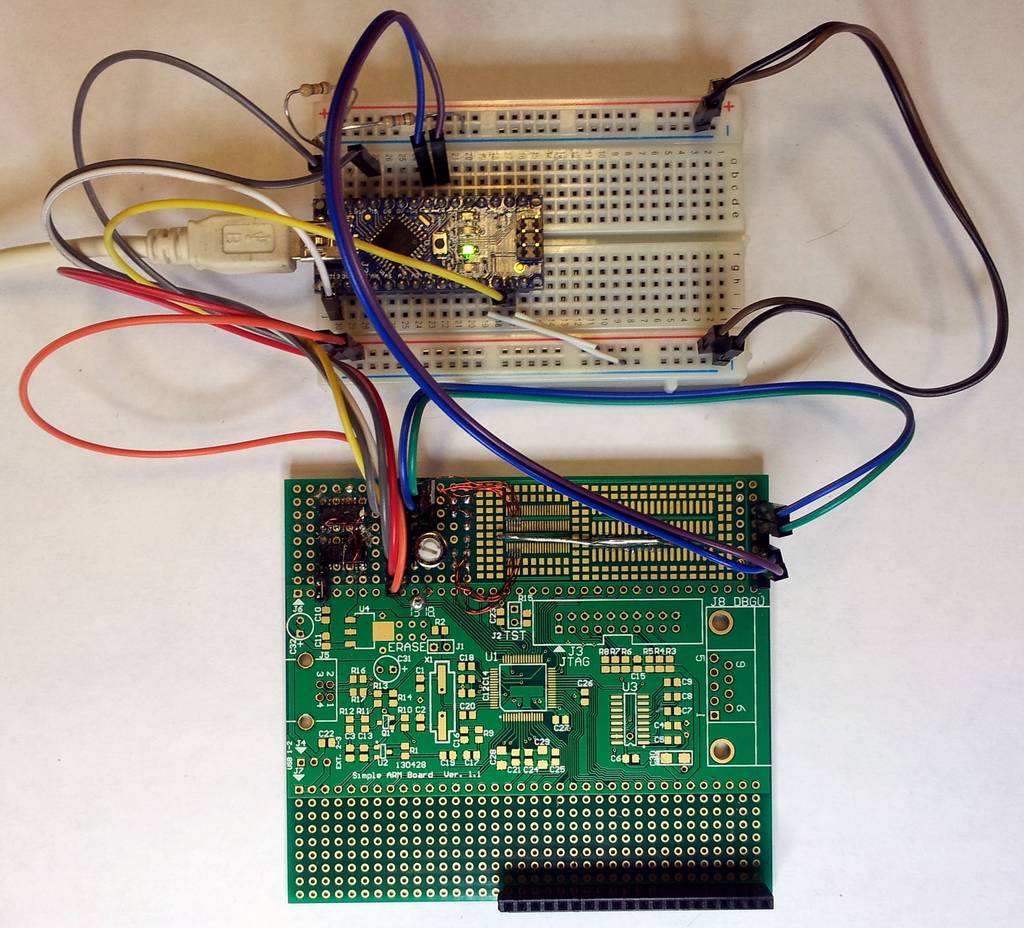
ąóąĄčüč鹥čĆ ą▒čŗą╗ čüąŠą▒čĆą░ąĮ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą┐ą╗ą░čéčŗ Arduino (ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ATmega328p), čüą╝. čüčģąĄą╝čā ąĮą░ čĆąĖčü. ąĮąĖąČąĄ.
ą¤čĆąĖąĮčåąĖą┐ čĆą░ą▒ąŠčéčŗ ą┤ąŠą▓ąŠą╗čīąĮąŠ ą┐čĆąŠčüč鹊ą╣. ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé čüąĖą│ąĮą░ą╗čŗ ąŠą┐čĆąŠčüą░ ąÉą”ą¤ (SCK, SDO, CNV, ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┐ąŠčĆčéčŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ PB5 ą┤ą╗čÅ SCK, PB4 ą┤ą╗čÅ SDO, PB1 ą┤ą╗čÅ CNV), ą║ąŠč鹊čĆąŠąĄ čĆą░ą▒ąŠčéą░ąĄčé ą▓ 3-ą┐čĆąŠą▓ąŠą┤ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ, ą▒ąĄąĘ ąĖąĮą┤ąĖą║ą░č鹊čĆą░ ąĘą░ąĮčÅč鹊čüčéąĖ [1]. ąÆ ą║ą░č湥čüčéą▓ąĄ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą┤ą╗čÅ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗčģ ą▓čģąŠą┤ąŠą▓ ąÉą”ą¤ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐čĆąŠąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆą░ą╝ąĖ (C1, C2) ąĖą╝ą┐čāą╗čīčü, č乊čĆą╝ąĖčĆčāąĄą╝čŗą╣ ą║ą╗čÄčćą░ą╝ąĖ GPIO ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (PD4, PD5, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗąĄ ą║ čĆąĄąĘąĖčüč鹊čĆą░ą╝ R5, R6). ąĀąĄąĘčāą╗čīčéą░čéčŗ čüčćąĖčéčŗą▓ą░ąĮąĖčÅ ąÉą”ą¤ ą▓ ą▓ąĖą┤ąĄ ą┤ą▓ąŠąĖčćąĮčŗčģ čĆą░ąĘčĆčÅą┤ąŠą▓ D17..D0 ą║ąŠą┤ą░ ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą▓čŗą▓ąŠą┤čÅčéčüčÅ ą▓ ąŠą║ąĮąŠ ą║ąŠąĮčüąŠą╗ąĖ č鹥čĆą╝ąĖąĮą░ą╗ą░, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą╣ ą║ ą▓ąĖčĆčéčāą░ą╗čīąĮąŠą╝čā COM-ą┐ąŠčĆčéčā ą┐ą╗ą░čéčŗ Arduino.
ąöą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ č鹥čüč鹥čĆąŠą╝ ąĖą╝ąĄąĄčéčüčÅ ą┐čĆąŠčüč鹥ą╣čłąĄąĄ ą╝ąĄąĮčÄ:
ąĢčüą╗ąĖ ąĮą░ąČą░čéčī ą▓ ą║ąŠąĮčüąŠą╗ąĖ ą║ą╗ą░ą▓ąĖčłčā ?, č鹊 ą▓čŗą▓ąĄą┤ąĄčéčüčÅ ą┐ąŠą┤čüą║ą░ąĘą║ą░. ąĢčüą╗ąĖ ąĮą░ąČą░čéčī 1, ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠąĄ čćč鹥ąĮąĖąĄ ąÉą”ą¤ čü ą▓čŗą▓ąŠą┤ąŠą╝ čĆąĄąĘčāą╗čīčéą░č鹊ą▓ ą▓ ą║ąŠąĮčüąŠą╗čī. ąĢčüą╗ąĖ ąĮą░ąČą░čéčī 2, č鹊 ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čüą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┤ą╗čÅ ąÉą”ą¤ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮčŗą╣ ąĖą╝ą┐čāą╗čīčü, ą┐čĆąĖ čŹč鹊ą╝ čĆąĄąĘčāą╗čīčéą░čé čćč鹥ąĮąĖčÅ ąÉą”ą¤ ą▒čāą┤ąĄčé ą┐ą╗ą░ą▓ąĮąŠ čüą┐ą░ą┤ą░čéčī ąŠčé ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą│ąŠ ą╝ą░ą║čüąĖą╝čāą╝ą░ ą┤ąŠ 0, ąĖ ą╝ąŠąČąĮąŠ ąĮą░ą▒ą╗čÄą┤ą░čéčī ąĮą░čüą║ąŠą╗čīą║ąŠ ąĖąĘą╝ąĄčĆčÅąĄčéčüčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ąĖ ą║ą░ą║ ą╝ąĄąĮčÅčÄčéčüčÅ čĆą░ąĘčĆčÅą┤čŗ ą┤ą░ąĮąĮčŗčģ ąÉą”ą¤. ąĢčüą╗ąĖ ąĮą░ąČą░čéčī 3, č鹊 ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čüą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┤ą╗čÅ ąÉą”ą¤ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮčŗą╣ ąĖą╝ą┐čāą╗čīčü, ą┐čĆąĖ čŹč鹊ą╝ čĆąĄąĘčāą╗čīčéą░čé čćč鹥ąĮąĖčÅ ąÉą”ą¤ ą▒čāą┤ąĄčé ą┐ą╗ą░ą▓ąĮąŠ čüą┐ą░ą┤ą░čéčī ąŠčé ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠą│ąŠ ą╝ą░ą║čüąĖą╝čāą╝ą░ ą┤ąŠ 0.
ąĀą░ą▒ąŠčéą░ ą▒čĆą░ą║ąŠą▓ą░ąĮąĮčŗčģ ąÉą”ą¤ ąŠčéą╗ąĖčćą░ą╗ą░čüčī ąŠčé ąĖčüą┐čĆą░ą▓ąĮčŗčģ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝. ąŻ ą▒čĆą░ą║ąŠą▓ą░ąĮąĮčŗčģ ą▓čüąĄą│ą┤ą░ čĆą░ąĘčĆčÅą┤čŗ D3..D0 čćąĖčéą░ą╗ąĖčüčī ą║ą░ą║ 0, ąĖ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą╝ąĄąĮčÅą╗ąĖčüčī. ą×čüčéą░ą╗čīąĮčŗąĄ čĆą░ąĘčĆčÅą┤čŗ ą┤ą░ą▓ą░ą╗ąĖ ą║ąŠą┤, čüąŠą▓ąĄčĆčłąĄąĮąĮąŠ ąĮąĄą░ą┤ąĄą║ą▓ą░čéąĮčŗą╣ ą▓čģąŠą┤ąĮąŠą╝čā ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą╝čā ąĮą░ą┐čĆčÅąČąĄąĮąĖčÄ. ą¤ąŠą┐ą░ą┤ą░ą╗ąĖčüčī čéą░ą║ąČąĄ ąÉą”ą¤, ą║ąŠč鹊čĆčŗąĄ ą▓ąŠąŠą▒čēąĄ ąĮąĄ ą▓čŗą┤ą░ą▓ą░ą╗ąĖ ąĮąĖą║ą░ą║ąŠą│ąŠ ą║ąŠą┤ą░ ąĮą░ ą▓čŗčģąŠą┤ąĄ. ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ čüąĖą│ąĮą░ą╗ąŠą▓ ąĖąĮč鹥čĆč乥ą╣čüą░ ąĖčüą┐čĆą░ą▓ąĮčŗčģ ąĖ ąĮąĄąĖčüą┐čĆą░ą▓ąĮčŗčģ ąÉą”ą¤.
ąóąĄčüč鹥čĆąŠą╝ ą╝ąŠąČąĮąŠ ą┐čĆąŠą▓ąĄčĆčÅčéčī ąĮąĄ č鹊ą╗čīą║ąŠ ąÉą”ą¤ AD7691, ąĮąŠ ąĖ ą┤čĆčāą│ąĖąĄ 16-ą▒ąĖčéąĮčŗąĄ ąĖ 18-ą▒ąĖčéąĮčŗąĄ ąÉą”ą¤ čü čéą░ą║ąĖą╝ ąČąĄ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ ąĖ čåąŠą║ąŠą╗ąĄą▓ą║ąŠą╣.
ą¤čĆąŠą│čĆą░ą╝ą╝ą░ ą┤ą╗čÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą▒čŗą╗ą░ ąĮą░ą┐ąĖčüą░ąĮą░ čü ą┐ąŠą╝ąŠčēčīčÄ AVR Studio 4.19. ąöą╗čÅ ą┐ąĄčĆąĄą┐čĆąŠčłąĖą▓ą║ąĖ č湥čĆąĄąĘ USB ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗čüčÅ čłčéą░čéąĮčŗą╣ ąĘą░ą│čĆčāąĘčćąĖą║ Arduino ą▓ą╝ąĄčüč鹥 čü čāčéąĖą╗ąĖč鹊ą╣ AVRDUDE. ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąŠą┐čĆąŠčüą░ ąÉą”ą¤ ąĖ ą▓čŗą▓ąŠą┤ą░ čĆąĄąĘčāą╗čīčéą░č鹊ą▓. ą¤ąŠą╗ąĮąŠčüčéčīčÄ ą┐čĆąŠąĄą║čé ąĖ ą┐čĆąŠčłąĖą▓ą║čā ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą╝ąŠąČąĮąŠ čüą║ą░čćą░čéčī ą┐ąŠ čüčüčŗą╗ą║ąĄ [2].
/////////////////////////////////////////////////////////////////////////
// ą¤čĆąŠą│čĆą░ą╝ą╝ą░ ą┤ą╗čÅ ATmega328P (ą┐ą╗ą░čéą░ Arduino Nano v3.0), ą┐čĆąŠą▓ąĄčĆčÅčÄčēą░čÅ
// čĆą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī ąÉą”ą¤ AD7691 (ąĖą╗ąĖ ą┤čĆčāą│ąĖčģ čü ą░ąĮą░ą╗ąŠą│ąĖčćąĮčŗą╝ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝,
// ąĮą░ą┐čĆąĖą╝ąĄčĆ AD7687).
//
// ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ąÉą”ą¤:
// SDI ą▓čüąĄą│ą┤ą░ ą╗ąŠą│. 1
// SCK ą║ SCK ą┐ąŠčĆčéą░ SPI (PB5)
// SDO ą║ MISO ą┐ąŠčĆčéą░ SPI (PB4)
// CNV ą║ GPIO PB1
//
// ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓čģąŠą┤ąĮčŗą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝ ąÉą”ą¤:
// - ą║ GPIO PD4
// + ą║ GPIO PD5
#include < inttypes.h >
#include < stdbool.h >
#include < avr/io.h >
#include < avr/interrupt.h >
#include < string.h >
#include < util/delay.h >
#include < stdio.h >
//ąĢčüą╗ąĖ čĆą░čüą║ąŠą╝ą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčī čüčéčĆąŠą║čā čü ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄą╝ HARDWARE_SPI, č鹊 ą▒čāą┤ąĄčé
// ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ SPI ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ąÉą”ą¤. ąśąĮą░č湥 ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ
// ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ SPI (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ ą▓čŗą▓ąŠą┤ą░ą╝ąĖ GPIO).
//#define HARDWARE_SPI 1
#define CNV PB1
#define _SS PB2
#define MOSI PB3
#define MISO PB4
#define SCK PB5
#define u8 unsigned char
#define s8 signed char
#define u16 unsigned int
#define u32 uint32_t
#define s32 int32_t
#define false 0
#define true 1
#define MODE_COLD_START 0
#define MODE_ADC_CONTINUOUS_READ 1
#define MODE_ADC_TEST_MINUS 2
#define MODE_ADC_TEST_PLUS 3
#define MODE_SHOW_HELP 4
#define MODE_WAIT 5
u8 mode = MODE_COLD_START;
typedef union
{
s32 sval; //ąöą╗čÅ ą▓čŗą▓ąŠą┤ą░
u32 uval; //ąöą╗čÅ ąŠčéą╗ą░ą┤ą║ąĖ
u8 bytes[4]; //ą£ą░čüčüąĖą▓ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ąŠčåąĖčäčĆąŠą▓ą║ąĖ
}adcdata_t;
adcdata_t adcdata;
#ifdef HARDWARE_SPI
//ąĀą░ą▒ąŠčéą░ č湥čĆąĄąĘ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ SPI.
void initSPImaster (void)
{
volatile char IOReg;
//ąØą░čüčéčĆąŠą╣ą║ą░ ~SS ą║ą░ą║ ą▓čŗčģąŠą┤ą░, čćč鹊ą▒čŗ ąŠąĮ ąĮąĄ ą▓ą╗ąĖčÅą╗
// ąĮą░ čĆą░ą▒ąŠčéčā master-ą░:
DDRB |= (1 << _SS);
//ąØą░čüčéčĆąŠą╣ą║ą░ MOSI ąĖ SCK ą║ą░ą║ ą▓čŗčģąŠą┤ą░:
DDRB |= (1 << MOSI)|(1 << SCK);
//ąØą░čüčéčĆąŠą╣ą║ą░ ąĮąŠąČą║ąĖ ą║ąŠąĮą▓ąĄčĆčüąĖąĖ:
DDRB |= (1 << CNV);
//ąØą░čüčéčĆąŠą╣ą║ą░ čĆąĄą│ąĖčüčéčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ SPCR.
//ąóą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ SPI ą▒čāą┤ąĄčé 16/4=4 ą£ąōčå, MSB ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ
// ąĖą┤ąĄčé ą┐ąĄčĆą▓čŗą╝. ąæąĖčéčŗ CPHA ąĖ CPOL: čĆą░ą▒ąŠčéą░čÄčé ą▓čüąĄ ą▓ą░čĆąĖą░ąĮčéčŗ,
// ą║čĆąŠą╝ąĄ CPHA=1 ąĖ CPOL=1.
SPCR = (1 << SPE)|(1 << MSTR)|(1 << CPOL);
IOReg = SPSR; // ąŠčćąĖčüčéąĖčéčī ą▒ąĖčé SPIF ą▓ čĆąĄą│ąĖčüčéčĆąĄ SPSR
IOReg = SPDR;
}
//ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ čćąĖčéą░ąĄčé 18 ą▒ąĖčé ąĖąĘ ąÉą”ą¤ ą▓ ą╝ą░čüčüąĖą▓ bytes[4].
void readADC (void)
{
s8 idx;
PORTB &= ~(1 << CNV);
for (idx=2; idx >= 0; idx--)
{
SPDR = 0;
while (!(SPSR & (1 << SPIF)));
adcdata.bytes[idx] = SPDR;
}
PORTB |= (1 << CNV);
adcdata.uval >>= 6;
if (adcdata.bytes[2]&0x02)
{
adcdata.bytes[3] = 0xFF;
adcdata.bytes[2] |= 0xFC;
}
else
{
adcdata.bytes[3] = 0x00;
adcdata.bytes[2] &= ~0xFC;
}
}
#else
//ąĀą░ą▒ąŠčéą░ č湥čĆąĄąĘ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ SPI.
void initSPImaster (void)
{
//ąØą░čüčéčĆąŠą╣ą║ą░ MOSI, SCK ąĖ CNV ą║ą░ą║ ą▓čŗčģąŠą┤ą░:
DDRB |= (1 << MOSI)|(1 << SCK)|(1 << CNV);
}
#define READBITADC(tobyte) \
adcdata.bytes[tobyte] << = 1;\
if(PINB & (1 << MISO))\
adcdata.bytes[tobyte] |= 0x01;\
if(0==(PINB & (1 << MISO)))\
adcdata.bytes[tobyte] &= ~0x01;\
PORTB |= (1 << SCK);\
PORTB &= ~(1 << SCK)
//ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ č湥čĆąĄąĘ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░ąĮąĮčŗą╣ SPI
// čćąĖčéą░ąĄčé 18 ą▒ąĖčé ąĖąĘ ąÉą”ą¤ ą▓ ą╝ą░čüčüąĖą▓ bytes[4].
void readADC (void)
{
u8 bitcnt;
adcdata.uval = 0;
PORTB &= ~(1 << CNV);
for (bitcnt=0; bitcnt < 2; bitcnt++)
{
READBITADC(2);
}
for (bitcnt=0; bitcnt < 8; bitcnt++)
{
READBITADC(1);
}
for (bitcnt=0; bitcnt < 8; bitcnt++)
{
READBITADC(0);
}
PORTB |= (1 << CNV);
if (adcdata.bytes[2]&0x02)
{
adcdata.bytes[3] = 0xFF;
adcdata.bytes[2] |= 0xFC;
}
else
{
adcdata.bytes[3] = 0x00;
adcdata.bytes[2] &= ~0xFC;
}
}
#endif
u8 rxbuf[RXBUF_SIZE];
u8 inrx, outrx;
u8 txbuf[TXBUF_SIZE];
u8 intx, outtx;
void uartInit(u32 baudrate, u8 parity, u8 stopbits, u8 databits)
{
usbDWord_t br;
br.dword = F_CPU / (8L * baudrate) - 1;
UCSR0A |= (1 << U2X0);
/* ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ USART */
UCSR0B = 0;
UCSR0C = URSEL_MASK | ((parity==1? 3:parity) << UPM00)
| ((stopbits >> 1) << USBS0) | ((databits-5) << UCSZ00);
UBRR0L = br.bytes[0];
UBRR0H = br.bytes[1];
inrx = outrx = 0;
intx = outtx = 0;
UCSR0A &= ~(1 << TXC0); //čüą▒čĆą░čüčŗą▓ą░ąĄą╝ čäą╗ą░ą│ ąŠą║ąŠąĮčćą░ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ
//čĆą░ąĘčĆąĄčłą░ąĄą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą┐čĆąĖąĄą╝ąĮąĖą║ ąĖ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║
UCSR0B = (1 << RXEN0) | (1 << TXEN0) | (1 << RXCIE0);
}
//ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ USART
ISR (USART_RX_vect)
{
rxbuf[inrx++] = UDR0;
inrx &= RXBUF_MASK;
rxtimeout = 0;
}
u8 idxDiff (u8 idxIN, u8 idxOUT, u8 bufsize)
{
if (idxIN >= idxOUT)
return (idxIN - idxOUT);
else
return ((bufsize - idxOUT) + idxIN);
}
/////////////////////////////////////////////////////////////////////////////////
// ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ. ą¤ąĄčĆąĄą┤ ą┐čĆąŠą▓ąĄčĆą║ąŠą╣ ą┐čĆąŠą▓ąĄčĆčÅąĄčé
// čāčüą╗ąŠą▓ąĖąĄ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ UDR0 (ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čäą╗ą░ą│ UDRE0).
void handlerUsartTX (void)
{
while (intx != outtx)
{
if (UCSR0A & (1 << UDRE0))
{
UDR0 = txbuf[outtx++]; //ą┐ąĄčĆąĄą┤ą░ąĄą╝ ą▒ą░ą╣čé
outtx &= TXBUF_MASK;
}
}
}
/////////////////////////////////////////////////////////////////////////////////
// ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄčé ą┐čĆąĖąĄą╝ ą║ąŠą╝ą░ąĮą┤čŗ ąĘą░ą┐čāčüą║ą░ #ABC.
// ąĢčüą╗ąĖ ą▒čŗą╗ą░ ą║ąŠą╝ą░ąĮą┤ą░ #ABC, č鹊 ą▓ąĄčĆąĮąĄčé true, ąĖ ąŠą▒ąĮčāą╗ąĖčé ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░.
u8 handlerUsartRX (void)
{
if (inrx!=outrx)
{
switch(rxbuf[outrx])
{
case '?':
mode = MODE_SHOW_HELP;
break;
case '1':
mode = MODE_ADC_CONTINUOUS_READ;
break;
case '2':
mode = MODE_ADC_TEST_MINUS;
break;
case '3':
mode = MODE_ADC_TEST_PLUS;
break;
}
outrx++;
outrx &= RXBUF_MASK;
return true;
}
else
return false;
}
static inline void outchar (char sym)
{
UDR0 = sym; //ą┐ąĄčĆąĄą┤ą░ąĄą╝ ą▒ą░ą╣čé č湥čĆąĄąĘ UART
while(!(UCSR0A & (1 << UDRE0)));
}
#define REF198_VOLTAGE 4.096
#define ONE_BIT_VOLTAGE ((double)REF198_VOLTAGE/131071)
char tmpstr[32];
static void outputADCdata (void)
{
u8 bitcnt, databyte;
s8 idx;
//ąÆčŗą▓ąŠą┤ ą┤ą▓ąŠąĖčćąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ:
for (idx=2; idx >= 0; idx--)
{
databyte = adcdata.bytes[idx];
if (2==idx)
{
for (bitcnt=0; bitcnt < 2; bitcnt++)
{
if (databyte & 0x02)
outchar('1');
else
outchar('0');
databyte << = 1;
}
}
else
{
for (bitcnt=0; bitcnt < 8; bitcnt++)
{
if (databyte & 0x80)
outchar('1');
else
outchar('0');
databyte << = 1;
}
}
outchar(' ');
}
//ąÆčŗą▓ąŠą┤ ąĖąĘą╝ąĄčĆąĄąĮąĮąŠą│ąŠ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą▓ č乊čĆą╝ą░č鹥 float:
sprintf(tmpstr, "%2.4fv ", ONE_BIT_VOLTAGE * adcdata.sval);
for (idx=0; idx < sizeof(tmpstr); idx++)
{
if (0==tmpstr[idx])
break;
outchar(tmpstr[idx]);
}
//outchar('\n');
outchar('\r');
}
char usage [] = "\
? help\n\r\
1 continuously read AD76xx\n\r\
2 one-shoot -\n\r\
3 one-shoot +\n\r";
void main (void)
{
initSPImaster();
uartInit(115200, 0/*no parity*/, 1/*stopbits*/, 8/*databits*/);
sei();
while(1)
{
switch(mode)
{
case MODE_COLD_START:
for (u8 txtidx=0;usage[txtidx];txtidx++)
outchar(usage[txtidx]);
mode = MODE_ADC_CONTINUOUS_READ;
break;
case MODE_ADC_CONTINUOUS_READ:
readADC();
outputADCdata();
break;
case MODE_ADC_TEST_MINUS:
PORTD &= ~((1 << PD4)|(1 << PD5));
DDRD |= (1 << PD4)|(1 << PD5);
PORTD |= (1 << PD4);
_delay_ms(10);
DDRD &= ~((1 << PD4)|(1 << PD5));
PORTD &= ~((1 << PD4)|(1 << PD5));
mode = MODE_ADC_CONTINUOUS_READ;
break;
case MODE_ADC_TEST_PLUS:
PORTD &= ~((1 << PD4)|(1 << PD5));
DDRD |= (1 << PD4)|(1 << PD5);
PORTD |= (1 << PD5);
_delay_ms(10);
DDRD &= ~((1 << PD4)|(1 << PD5));
PORTD &= ~((1 << PD4)|(1 << PD5));
mode = MODE_ADC_CONTINUOUS_READ;
break;
case MODE_SHOW_HELP:
for (u8 txtidx=0;usage[txtidx];txtidx++)
outchar(usage[txtidx]);
mode = MODE_WAIT;
break;
}
handlerUsartRX();
handlerUsartTX();
}
}