|
ąŁč鹊čé ą┤ąŠą║čāą╝ąĄąĮčé (ą┐ąĄčĆąĄą▓ąŠą┤ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ą░ [1]) ąŠą┐ąĖčüčŗą▓ą░ąĄčé čäčāąĮą║čåąĖąĖ ąĖ čĆą░ą▒ąŠčéčā ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ (MCU) STM8 ąĘą░ą│čĆčāąĘčćąĖą║ą░ STSW-STM8068 (bootloader). ąŁč鹊čé ą║ąŠą┤ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ąŠčüč鹊čÅąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ MCU (ROM) ąĖ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĘą░ą┐ąĖčüą░čéčī ąŠą▒ą╗ą░čüčéąĖ ą▓čüčéčĆąŠąĄąĮąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ, ą▓ą║ą╗čÄčćą░čÅ ą┐ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ Flash, EEPROM ą┤ą░ąĮąĮčŗčģ ąĖ RAM. ąŚą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą▓ MCU č湥čĆąĄąĘ ąĮą░ą▒ąŠčĆ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ LINUART/UART/USART, SPI ąĖ CAN. ąÜąŠą┤ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą┐ąŠčćčéąĖ ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╣ ą┤ą╗čÅ ą▓čüąĄčģ ą▓ąĄčĆčüąĖą╣ STM8. ą×ą┤ąĮą░ą║ąŠ ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ č鹥čģ ąĖą╗ąĖ ąĖąĮčŗčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą╝ąŠą┤ąĄą╗ąĖ MCU ą╝ąŠąČąĄčé ą╝ąĄąĮčÅčéčīčüčÅ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą╗čÅ 128-ą║ąĖą╗ąŠą▒ą░ą╣čéąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ SPI ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ).
ąĪą╗ąĄą┤čāąĄčé ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗą╝ čĆąĄčłąĄąĮąĖąĄą╝ ą┤ą╗čÅ ą▓ąĮčāčéčĆąĖčüčģąĄą╝ąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą╝ąŠąČąĄčé čéą░ą║ąČąĄ čüą╗čāąČąĖčéčī ąĖąĮč鹥čĆč乥ą╣čü ąŠčéą╗ą░ą┤čćąĖą║ą░ SWIM, ą║ąŠč鹊čĆčŗą╣ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčé ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ č鹊ą╗čīą║ąŠ ą┐ąŠ ąŠą┤ąĮąŠą╝čā ą┐čĆąŠą▓ąŠą┤čā [3].
ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ąĘą░ą│čĆčāąĘčćąĖą║ ą┐čĆąŠą▓ąĄčĆčÅąĄčé, čÅą▓ą╗čÅąĄčéčüčÅ ą╗ąĖ ą┐ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ čćąĖčüč鹊ą╣, ąĖą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą╗ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ą▒ą░ą╣čé ąŠą┐čåąĖą╣, ą┐ąŠąĘą▓ąŠą╗čÅčÄčēąĖą╣ ąĖąĘą╝ąĄąĮčÅčéčī ą║ąŠą┤. ąĢčüą╗ąĖ čāčüą╗ąŠą▓ąĖčÅ ąĘą░ą┐čāčüą║ą░ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ąĮąĄ ą▓čŗą┐ąŠą╗ąĮčÅčÄčéčüčÅ, č鹊 ąĘą░ą│čĆčāąĘčćąĖą║ ąĘą░ą┐čāčüą║ą░ąĄčé ą║ąŠą┤ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, ąĖąĮą░č湥 ąĘą░ą│čĆčāąĘčćąĖą║ ą▒ąĄčĆąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĮą░ čüąĄą▒čÅ ąĖ ąČą┤ąĄčé ąĘą░ą│čĆčāąĘą║ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ.
ąÜąŠą│ą┤ą░ ąĘą░ą│čĆčāąĘčćąĖą║ ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ, ą▓čŗą┐ąŠą╗ąĮčÅčÄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ ąŠčüąĮąŠą▓ąĮčŗąĄ ąĘą░ą┤ą░čćąĖ:
ŌĆó ą×ą┐čĆą░čłąĖą▓ą░čÄčéčüčÅ ą▓čüąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ąĖąĮč鹥čĆč乥ą╣čüčŗ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą║ą░ą║ąŠą╣ ąĖąĮč鹥čĆč乥ą╣čü ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ (ąĮą░ą▒ąŠčĆ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą╝ąŠą┤ąĄą╗ąĖ MCU, čüą╝. čéą░ą▒ą╗ąĖčåčā 1).
ŌĆó ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ ą║ąŠą┤, ą┤ą░ąĮąĮčŗąĄ, ą▒ą░ą╣čéčŗ ąŠą┐čåąĖą╣ ąĖ/ąĖą╗ąĖ čéą░ą▒ą╗ąĖčåčŗ ą▓ąĄą║č鹊čĆąŠą▓ ą┐ąŠ čāą║ą░ąĘą░ąĮąĮčŗą╝ ą░ą┤čĆąĄčüą░ą╝. ąŁčéąĖ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠčüčéčāą┐ą░čÄčé ąŠčé čģąŠčüčéą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ (ąŠą▒čŗčćąĮąŠ čŹč鹊 ą║ąŠą╝ą┐čīčÄč鹥čĆ, ąĮą░ ą║ąŠč鹊čĆąŠą╝ ąĘą░ą┐čāčēąĄąĮą░ čāčéąĖą╗ąĖčéą░ DFU [2]).
ąÆ ą║ą░ąČą┤ąŠą╝ MCU STM8 ą▓čüčéčĆąŠąĄąĮ čüą┐ąĄčåąĖčäąĖčćąĮčŗą╣ ą║ąŠą┤ ąĘą░ą│čĆčāąĘčćąĖą║ą░, ą║ąŠč鹊čĆčŗą╣ čÅą▓ą╗čÅąĄčéčüčÅ ąŠą▒čēąĖą╝ ą┤ą╗čÅ čåąĄą╗ąŠą╣ ą│čĆčāą┐ą┐čŗ čāčüčéčĆąŠą╣čüčéą▓ STM8. ąĪąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĄ ą╝ąĄąČą┤čā ą│čĆčāą┐ą┐ą░ą╝ąĖ STM8 ąĖ ą╝ąŠą┤ąĄą╗čÅą╝ąĖ STM8 ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ 1. ąÆčüąĄ čāą┐ąŠą╝čÅąĮčāčéčŗąĄ ą│čĆčāą┐ą┐čŗ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓ ąŠą┐ąĖčüą░ąĮąĖąĖ čŹč鹊ą│ąŠ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ą░.
ąóą░ą▒ą╗ąĖčåą░ 1. ąōčĆčāą┐ą┐čŗ STM8, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĖčģ ąĘą░ą│čĆčāąĘčćąĖą║.
| ąōčĆčāą┐ą┐ą░ STM8 |
ą£ąŠą┤ąĄą╗ąĖ MCU |
| STM8AF ąĖ STM8S Series high density |
STM8AF52xx, STM8AF6269/8x/Ax, STM8AF51xx, STM8AF6169/7x/8x/9x/Ax, STM8S20xxx, STM8S007xx |
| STM8AF ąĖ STM8S Series medium density |
STM8AF622x/4x, STM8AF6266/68, STM8AF612x/4x, STM8AF6166/68, STM8S105xx, STM8S005xx |
| STM8L ąĖ STM8AL Series high/medium+ density |
STM8L15xx8, STM8L15xR6, STM8L16xx8, STM8L052R8, STM8AL318x, STM8AL3L8x, STM8AL31E8x, STM8AL3LE8x |
| STM8L ąĖ STM8AL Series medium density |
STM8L15xC4, STM8L15xK4, STM8L15xG4, STM8L15xC6, STM8L15xK6, STM8L15xG6, STM8L052C6, STM8AL313x, STM8AL314x, STM8AL316x, STM8AL3L4x, STM8AL3L6x |
| STM8L Series low density |
STM8L15xC2, STM8L15xK2, STM8L15xG2, STM8L15xC3, STM8L15xK3, STM8L15xG3, STM8Lx151F3, STM8L050J3, STM8L051F3 |
ąÆ čéą░ą▒ą╗ąĖčåąĄ 2 ą┐čĆąĖą▓ąĄą┤ąĄąĮ čüą┐ąĖčüąŠą║ čāčüčéčĆąŠą╣čüčéą▓ STM8 ą▒ąĄąĘ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ąĘą░ą│čĆčāąĘčćąĖą║ą░ (ą▓ąĮčāčéčĆąĖ ą║čĆąĖčüčéą░ą╗ą╗ą░ MCU ąĮąĄčé ROM bootloader). ą¤čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ čŹčéąĖčģ čāčüčéčĆąŠą╣čüčéą▓ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ąĮą░ą┐ąĖčüą░čéčī čüą▓ąŠą╣ čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╣ ąĘą░ą│čĆčāąĘčćąĖą║ ąĖ čüąŠčģčĆą░ąĮąĖčéčī ąĄą│ąŠ ą▓ ąŠą▒ą╗ą░čüčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ UBC program area (čüą╝. čĆčāą║ąŠą▓ąŠą┤čüčéą▓ą░ ą┐ąŠ čüąĄčĆąĖčÅą╝ STM8S, STM8AF, STM8L, STM8AL ąĖ STM8T ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒ ąŠą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ UBC).
ąóą░ą▒ą╗ąĖčåą░ 2. ąōčĆčāą┐ą┐čŗ STM8 ą▒ąĄąĘ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░.
| ąōčĆčāą┐ą┐ą░ STM8 |
ą£ąŠą┤ąĄą╗ąĖ MCU |
| STM8AF ąĖ STM8S Series low density |
STM8AF621x/2x, STM8Sx03xx, STM8S001xx |
| STM8L101 line low density |
STM8L101xx, STM8L001xx |
| STM8T Series ultra low-power |
STM8TL5xxx |
[ąÉą║čéąĖą▓ą░čåąĖčÅ ąĘą░ą│čĆčāąĘčćąĖą║ą░]
ąÉą┐ą┐ą░čĆą░čéąĮčŗą╣ ą▓ąĄą║č鹊čĆ čüą▒čĆąŠčüą░ STM8 ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ąĮą░čćą░ą╗ąĄ boot ROM (0x006000), ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą┤čĆčāą│ąĖąĄ ą▓ąĄą║č鹊čĆą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ ą┐ą░ą╝čÅčéąĖ Flash, ąĮą░čćąĖąĮą░čÅ čü ą░ą┤čĆąĄčüą░ 0x008004.
MCU ąĘą░ą┐čāčüą║ą░ąĄčé boot ROM (ą┤ąĄą╗ą░ąĄčé ą▒ąĄąĘčāčüą╗ąŠą▓ąĮčŗą╣ ą┐ąĄčĆąĄčģąŠą┤ ą▓ ąŠą▒ą╗ą░čüčéčī boot ROM), ąĖ ą┐ąŠčüą╗ąĄ ą┐čĆąŠą▓ąĄčĆą║ąĖ čÅč湥ąĄą║ ą┐ą░ą╝čÅčéąĖ ą┐ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ ą░ą┤čĆąĄčüą░ą╝ (čüą╝. ą┤ą░ą╗ąĄąĄ čéą░ą▒ą╗ąĖčåčā 4 "ą¤ąĄčĆą▓ąŠąĮą░čćą░ą╗čīąĮčŗąĄ ą┐čĆąŠą▓ąĄčĆą║ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░"), ą▒čāą┤ąĄčé ą╗ąĖą▒ąŠ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮ ąĘą░ą│čĆčāąĘčćąĖą║, ą╗ąĖą▒ąŠ ą▒čāą┤ąĄčé ąĘą░ą┐čāčēąĄąĮ ą║ąŠą┤ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ą▓ąĄą║č鹊čĆąŠą╝ čüą▒čĆąŠčüą░ (0x008000).
ąÉą╗ą│ąŠčĆąĖčéą╝ ą░ą║čéąĖą▓ą░čåąĖąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ąŠą┐ąĖčüą░ąĮ ąĮą░ čĆąĖčü. 1. ąÆ ą┐čĆąĄą┤čŗą┤čāčēąĖčģ ą▓ąĄčĆčüąĖčÅčģ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖą╗čüčÅ ą▓ąŠąĘą▓čĆą░čé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ "wait for SYNCH" ("ąŠąČąĖą┤ą░ąĮąĖąĄ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ", čüą╝. ą┐čāąĮą║čéąĖčĆąĮčāčÄ ą╗ąĖąĮąĖčÄ ą┐ąĄčĆąĄčģąŠą┤ą░ ąĮą░ čĆąĖčü. 1), ą║ąŠą│ą┤ą░ č鹥čüčé ąĮą░ čćąĖčüč鹊čéčā ą┐ą░ą╝čÅčéąĖ Flash ("Flash virgin") ą▒čŗą╗ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮčŗą╣. ąÆ ą▒ąŠą╗ąĄąĄ ąĮąŠą▓čŗčģ ą▓ąĄčĆčüąĖčÅčģ čŹč鹊 ą▒čŗą╗ąŠ ąĘą░ą╝ąĄąĮąĄąĮąŠ ąĮą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╝ (software reset, SW reset) čüą▒čĆąŠčüąŠą╝, čćč鹊ą▒čŗ ą┐čĆąĄą┤ąŠčéą▓čĆą░čéąĖčéčī ą▓čģąŠą┤ firmware ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą▓ ą▒ąĄčüą║ąŠąĮąĄčćąĮčŗą╣ čåąĖą║ą╗ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ąĖąĘ-ąĘą░ 菹╗ąĄą║čéčĆąŠą╝ą░ą│ąĮąĖčéąĮčŗčģ ą┐ąŠą╝ąĄčģ). ąŁčéą░ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖčÅ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą▓ čéą░ą▒ą╗ąĖčåąĄ 15 ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ "ąŚą░čēąĖčéą░ ąŠčé ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ EMC". ąÆ čéą░ą▒ą╗ąĖčåąĄ 3 ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą▓ąĄčĆčüąĖąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░, ą▓ ą║ąŠč鹊čĆčŗčģ ą┐čāąĮą║čéąĖčĆąĮą░čÅ ą╗ąĖąĮąĖčÅ ąĘą░ą╝ąĄąĮąĄąĮą░ ąĮą░ SW reset.
ąØąŠą╝ąĄčĆ ą▓ąĄčĆčüąĖąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą▓čŗčćąĖčéčŗą▓ą░ąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ąŠą╣ Get (čüą╝. ą┤ą░ą╗ąĄąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ Get ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ą▓čĆąĄąĘą║ąĄ). ąÆąĄčĆčüąĖčÅ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮą░ ą┤ą▓čāą╝čÅ čåąĖčäčĆą░ą╝ąĖ BCD (čü ą┤ąĄčüčÅčéąĖčćąĮąŠą╣ č鹊čćą║ąŠą╣ ą╝ąĄąČą┤čā ą┤ą▓čāą╝čÅ čåąĖčäčĆą░ą╝ąĖ), ąĘą░ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĮčŗą╝ąĖ ą▓ ąŠą┤ąĮąŠą╝ ą▒ą░ą╣č鹥, ą║ąŠč鹊čĆčŗą╣ ą▓čŗą┤ą░ąĄčéčüčÅ ą║ą░ą║ čĆąĄąĘčāą╗čīčéą░čé ą║ąŠą╝ą░ąĮą┤čŗ Get. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą▒ą░ą╣čé ą▓ąĄčĆčüąĖąĖ 0x21 ąŠą▒ąŠąĘąĮą░čćą░ąĄčé bootloader version 2.1.
ąóą░ą▒ą╗ąĖčåą░ 3. ąÆąĄčĆčüąĖąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░, ą┤ą╗čÅ ą║ąŠč鹊čĆčŗčģ ą▓ąĄčĆąĄąĮ ą░ą╗ą│ąŠčĆąĖčéą╝ ą░ą║čéąĖą▓ą░čåąĖąĖ ąĮą░ čĆąĖčü. 1.
| ąōčĆčāą┐ą┐ą░ STM8 |
Bootloader version |
| STM8AF ąĖ STM8S Series high density |
v2.2 |
| STM8AF ąĖ STM8S Series medium density |
v1.3 |
| STM8L ąĖ STM8AL Series high/medium+ density |
v1.0 |
| STM8L ąĖ STM8AL Series medium density |
v1.2 |
| STM8L Series low density |
v1.0 |
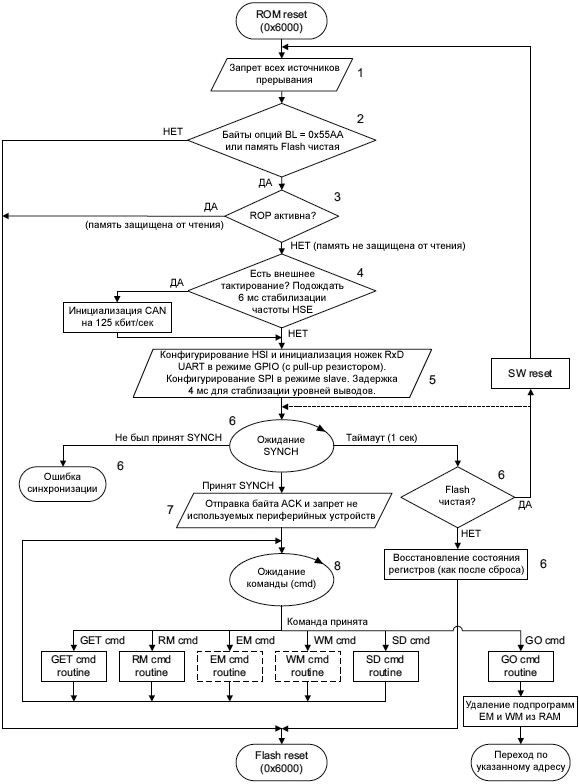
ąĀąĖčü. 1. ąÉą╗ą│ąŠčĆąĖčéą╝ ą░ą║čéąĖą▓ą░čåąĖąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
(1) ąĪą╝. ą┤ą░ą╗ąĄąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ ąĘą░ą│čĆčāąĘčćąĖą║ą░, ą│ą┤ąĄ ąŠą▒čŖčÅčüąĮčÅčÄčéčüčÅ ą╝ąĄčüčéą░ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ ąŠčé 1 ą┤ąŠ 8.
(2) ąĪą╝. čéą░ą▒ą╗ąĖčåčā 4 "ą¤ąĄčĆą▓ąŠąĮą░čćą░ą╗čīąĮčŗąĄ ą┐čĆąŠą▓ąĄčĆą║ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░".
(3) ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, ąŠą║čĆčāąČąĄąĮąĮčŗąĄ ą╗ąĖąĮąĖąĄą╣ ąĖąĘ č鹊č湥ą║, ąĘą░ą│čĆčāąČą░čÄčéčüčÅ čģąŠčüč鹊ą╝ ą▓ RAM. ą×ąĮąĖ čāą┤ą░ą╗čÅčÄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ąŠą╣ GO ą┐ąĄčĆąĄą┤ ą┐čĆčŗąČą║ąŠą╝ ą▓ ą┐ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ Flash ą┤ą╗čÅ ąĘą░ą┐čāčüą║ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ.
(4) ą¦ąĖčüč鹊čéą░ ą┐ą░ą╝čÅčéąĖ Flash ą┐čĆąŠą▓ąĄčĆčÅąĄčéčüčÅ ą░ąĮą░ą╗ąĖąĘąŠą╝ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ ą┐ąŠ ą░ą┤čĆąĄčüčā 0x8000. ąĢčüą╗ąĖ [0x8000] == 0x82 ąĖą╗ąĖ 0xAC, č鹊 ą┐ą░ą╝čÅčéčī Flash ąĮąĄ čćąĖčüčéą░čÅ.
[ąÉą╗ą│ąŠčĆąĖčéą╝ ąĘą░ą│čĆčāąĘčćąĖą║ą░]
ąŚą┤ąĄčüčī ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ąŠą┐ąĖčüą░ąĮąĖąĄ čłą░ą│ąŠą▓ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ąĮą░ čĆąĖčü. 1:
1. ąŚą░ą┐čĆąĄčēą░čÄčéčüčÅ ą▓čüąĄ ąĖčüč鹊čćąĮąĖą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣.
2. MCU ą╝ąŠąČąĄčé ąĘą░ą┐čāčüčéąĖčéčī ą┐čĆąŠčåąĄčüčü ąĘą░ą│čĆčāąĘčćąĖą║ą░ čü ą┐ąŠą╝ąŠčēčīčÄ ą┐čĆąŠą▓ąĄčĆąŠą║, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗčģ ą▓ čéą░ą▒ą╗ąĖčåąĄ 4 - ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čüąŠą┤ąĄčƹȹĖą╝čŗą╝ ą┐ąĄčĆą▓ąŠą╣ čÅč湥ą╣ą║ąĖ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ Flash (0x008000) ąĖ ą▒ą░ą╣čé ąŠą┐čåąĖą╣, čĆą░ąĘčĆąĄčłą░čÄčēąĖčģ čĆą░ą▒ąŠčéčā ąĘą░ą│čĆčāąĘčćąĖą║ą░ ("bootloader enable" option bytes). MCU ą┐čĆąŠą▓ąĄčĆčÅąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ čāčüą╗ąŠą▓ąĖčÅ ąĘą░ą┐čāčüą║ą░ ąĘą░ą│čĆčāąĘčćąĖą║ą░ (čŹč鹊čé ą┐čĆąŠčåąĄčüčü ą┐čĆąŠą▓ąĄčĆą║ąĖ čüčāą╝ą╝ą░čĆąĮąŠ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮ ą▓ čéą░ą▒ą╗ąĖčåąĄ 4):
ąŻčüą╗ąŠą▓ąĖąĄ 1: MCU ą┐čĆąŠą▓ąĄčĆčÅąĄčé, ą┐čāčüčéą░ ą╗ąĖ ą┐ą░ą╝čÅčéčī čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐čāč鹥ą╝ ą░ąĮą░ą╗ąĖąĘą░ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ ą┐ąŠ ą░ą┤čĆąĄčüčā 0x008000 (ą▓ąĄą║č鹊čĆ čüą▒čĆąŠčüą░). ąĢčüą╗ąĖ ą▒ą░ą╣čé ą┐ąŠ čŹč鹊ą╝čā ą░ą┤čĆąĄčüčā ąĮąĄ čĆą░ą▓ąĄąĮ 0x82 ąĖą╗ąĖ 0xAC, č鹊 ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ čćąĖčüč鹊ąĄ, ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ ąŠčüčéą░ąĄčéčüčÅ ą▓ ą░ą║čéąĖą▓ąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ ąĖ ąČą┤ąĄčé ą║ąŠą╝ą░ąĮą┤ ąŠčé čģąŠčüčéą░ ą▒ąĄąĘ čéą░ą╣ą╝ą░čāč鹊ą▓.
ąŻčüą╗ąŠą▓ąĖąĄ 2: MCU ą┐čĆąŠą▓ąĄčĆčÅąĄčé, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą╗ąĖ ą▒ą░ą╣čéčŗ ąŠą┐čåąĖą╣ (2 ą▒ą░ą╣čéą░) ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ ąĘą░ą│čĆčāąĘčćąĖą║ą░, ąĖą╗ąĖ ąĮąĄčé. ąŚą░ą│čĆčāąĘčćąĖą║ čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄą╝ 0x55AA, ąĖ ąĘą░ą┐čĆąĄčēą░ąĄčéčüčÅ ą┤ą╗čÅ ą▓čüąĄčģ ą┤čĆčāą│ąĖčģ ąĘąĮą░č湥ąĮąĖą╣ (ą│ą┤ąĄ čĆą░ąĘą╝ąĄčēą░čÄčéčüčÅ čŹčéąĖ ą▒ą░ą╣čéčŗ ą▓ ą┐ą░ą╝čÅčéąĖ, čüą╝. ą┤ą░čéą░čłąĖčé ąĮą░ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ MCU). ąĢčüą╗ąĖ ą▓ čŹčéąĖčģ ą▒ą░ą╣čéą░čģ ąŠą┐čåąĖą╣ 0x55AA, č鹊 ąĘą░ą│čĆčāąĘčćąĖą║ ąŠčüčéą░ąĄčéčüčÅ ą░ą║čéąĖą▓ąĮčŗą╝ ąĖ ąČą┤ąĄčé ą║ąŠą╝ą░ąĮą┤ ąŠčé čģąŠčüčéą░, ą┐ąŠą║ą░ ąĮąĄ ąĖčüč鹥č湥čé čéą░ą╣ą╝ą░čāčé ą▓ 1 čüąĄą║čāąĮą┤čā. ąĢčüą╗ąĖ ą▓ č鹥č湥ąĮąĖąĄ čŹč鹊ą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ čģąŠčüčé ąĮąĄ ą┐ąĄčĆąĄą┤ą░ą╗ ą║ąŠą╝ą░ąĮą┤čā, č鹊 ąĘą░ą│čĆčāąĘčćąĖą║ ą┤ąĄą╗ą░ąĄčé ą┐čĆčŗąČąŠą║ ą┐ąŠ ą▓ąĄą║č鹊čĆčā ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (jump 0x008000).
ąŻčüą╗ąŠą▓ąĖąĄ 3: ąĄčüą╗ąĖ ą▒ą░ą╣čéčŗ ąŠą┐čåąĖą╣ ąĘą░ą┐čĆąĄčéąĖą╗ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ (čéą░ą╝ ąĮą░čģąŠą┤ąĖčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄ, ąŠčéą╗ąĖčćą░čÄčēąĄąĄčüčÅ ąŠčé 0x55AA), č鹊 ąĘą░ą│čĆčāąĘčćąĖą║ ą┤ąĄą╗ą░ąĄčé ą┐čĆčŗąČąŠą║ ą┐ąŠ ą▓ąĄą║č鹊čĆčā ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (jump 0x008000).
3. ąÜąŠą│ą┤ą░ ąĘą░čēąĖčéą░ ąŠčé čćč鹥ąĮąĖčÅ (ROP) ą░ą║čéąĖą▓ąĮą░, č鹊 čćč鹥ąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ Flash ąĘą░ą┐čĆąĄčēąĄąĮąŠ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąĘą░ą│čĆčāąĘčćąĖą║ ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ąĖ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ. ąĢčüą╗ąĖ ROP ąĮąĄą░ą║čéąĖą▓ąĮą░, č鹊 ąĘą░ą│čĆčāąĘčćąĖą║ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé čüą▓ąŠąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ (čüą╝. "ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ A. ąÜą░ą║ ąŠą▒ąĮąŠą▓ąĖčéčī MCU, čā ą║ąŠč鹊čĆąŠą│ąŠ ą░ą║čéąĖą▓ąĮą░ ąĘą░čēąĖčéą░ ROP").
4. ą¤ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ CAN ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░, ąĘą░ą┤ą░ąĮąĮą░čÅ čüąĮą░čĆčāąČąĖ (8 ą£ąōčå, 16 ą£ąōčå ąĖą╗ąĖ 24 ą£ąōčå). CAN ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčéčüčÅ ąĮą░ čüą║ąŠčĆąŠčüčéąĖ 125 ą║ą▒ąĖčé/čüąĄą║. ąśąĮč鹥čĆč乥ą╣čüą░ą╝ UART ąĖ SPI ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ąĮą░ą╗ąĖčćąĖąĄ ą▓ąĮąĄčłąĮąĄą│ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ. ąØčāąČąĮąŠ ą┐ąŠą┤ąŠąČą┤ą░čéčī 6 ą╝čü, čćč鹊ą▒čŗ čüčéą░ą╗ą░ čüčéą░ą▒ąĖą╗čīąĮąŠą╣ čćą░čüč鹊čéą░ ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ HSE.
5. ąŚą░ą┐čāčüą║ą░ąĄčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ RC (HSI) ąĮą░ čćą░čüč鹊č鹥 16 ą£ąōčå, ąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāčÄčéčüčÅ ąĮąŠąČą║ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ UART ą▓ čĆąĄąČąĖą╝ąĄ ą▓čģąŠą┤ą░ čü ą▓ąĄčĆčģąĮąĖą╝ąĖ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖą╝ąĖ čĆąĄąĘąĖčüč鹊čĆą░ą╝ąĖ (pull-up) ą┐čāč鹥ą╝ ąĮą░čüčéčĆąŠą╣ą║ąĖ čĆąĄą│ąĖčüčéčĆąŠą▓ GPIO. SPI ąĖąĮąĖčåąĖąĖčĆčāąĄčéčüčÅ ą▓ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą╝ čĆąĄąČąĖą╝ąĄ (slave mode). ąŚą░č鹥ą╝ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąŠąČąĖą┤ą░ąĮąĖąĄ 4 ą╝čü, čćč鹊ą▒čŗ ąĘą░čüčéą░ą▒ąĖą╗ąĖąĘąĖčĆąŠą▓ą░ą╗ąĖčüčī čāčĆąŠą▓ąĮąĖ ąĮąŠąČą║ą░čģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓. ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ, čćč鹊ą▒čŗ čģąŠčüčé ą┐ąŠą┤ąŠąČą┤ą░ą╗ 10 ą╝čü ąŠčé ą╝ąŠą╝ąĄąĮčéą░ čüą▒čĆąŠčüą░ MCU ą┐ąĄčĆąĄą┤ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ ą▒ą░ą╣čéą░/čüąŠąŠą▒čēąĄąĮąĖčÅ SYNCH. ąŁč鹊 ą▓čĆąĄą╝čÅ čéčĆąĄą▒čāąĄčéčüčÅ ą┤ą╗čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░.
6. ą×ą┐čĆą░čłąĖą▓ą░čÄčéčüčÅ ąĖąĮč鹥čĆč乥ą╣čüčŗ: ą▓čüąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐čĆąŠą▓ąĄčĆčÅčÄčéčüčÅ ąĘą░ą│čĆčāąĘčćąĖą║ąŠą╝ ą▓ ąŠąČąĖą┤ą░ąĮąĖąĖ ą▒ą░ą╣čéą░/čüąŠąŠą▒čēąĄąĮąĖčÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (SYNCH = 0x7F) ą▓ č鹥č湥ąĮąĖąĄ čéą░ą╣ą╝ą░čāčéą░ ą▓ 1 čüąĄą║čāąĮą┤čā. ąĢčüą╗ąĖ ąĖčüč鹥ą║ čéą░ą╣ą╝ą░čāčé ąĖ ą┐ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ Flash čćąĖčüčéą░čÅ, č鹊 ąĘą░ą│čĆčāąĘčćąĖą║ ąŠčüčéą░ąĄčéčüčÅ ą░ą║čéąĖą▓ąĮčŗą╝, ą▓ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠą╝ čåąĖą║ą╗ąĄ ąŠąČąĖą┤ą░čÅ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤ ąŠčé čģąŠčüčéą░ č湥čĆąĄąĘ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čüą▒čĆąŠčü. ąĢčüą╗ąĖ ą┐ąŠčüą╗ąĄ ąĖčüč鹥č湥ąĮąĖčÅ čéą░ą╣ą╝ą░čāčéą░ ą┐ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ Flash ąĮąĄ čćąĖčüčéą░čÅ, č鹊 ąĘą░ą│čĆčāąĘčćąĖą║ ą▓ąŠčüčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆąŠą▓ ą▓ čüąŠčüč鹊čÅąĮąĖąĄą╝ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ąĖ ą┤ąĄą╗ą░ąĄčé ą┐čĆčŗąČąŠą║ ąĮą░ ą▓ąĄą║č鹊čĆ čüą▒čĆąŠčüą░ (ąĮą░čģąŠą┤ąĖčéčüčÅ ą┐ąŠ ą░ą┤čĆąĄčüčā 0x008000). ąöą╗čÅ ą▓ąĄčĆčüąĖą╣ ąĘą░ą│čĆčāąĘčćąĖą║ą░, ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗčģ ą▓ čéą░ą▒ą╗ąĖčåąĄ 3, SW reset ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą┐ąŠčüą╗ąĄ ąĖčüč鹥č湥ąĮąĖčÅ čéą░ą╣ą╝ą░čāčéą░ ą▓ č鹊ą╝ čüą╗čāčćą░ąĄ, ąĄčüą╗ąĖ ą┐ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ ą┐čāčüčéą░čÅ (ą┐ąŠč鹊ą╝čā čćč鹊 ą▒ąĄąĘąŠą┐ą░čüąĮąĄąĄ ąŠčüčéą░ą▓ą░čéčīčüčÅ ą▓ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠą╝ čåąĖą║ą╗ąĄ, ąĄčüą╗ąĖ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ą░ą┐ą┐ą░čĆą░čéąĮą░čÅ ąŠčłąĖą▒ą║ą░ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ).
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┐čĆąĖ ąŠčłąĖą▒ą║ąĄ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (ąĘą░ą│čĆčāąĘčćąĖą║ ą┐čĆąĖąĮčÅą╗ ą▒ą░ą╣čé/čüąŠąŠą▒čēąĄąĮąĖąĄ, ąŠčéą╗ąĖčćą░čÄčēąĖą╣čüčÅ ąŠčé SYNCH = 0x7F), ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ą╝ąŠąČąĮąŠ čĆą░ąĘą╗ąĖčćą░čéčī 2 čĆą░ąĘąĮčŗąĄ čüąĖčéčāą░čåąĖąĖ. ąÆ čüą╗čāčćą░ąĄ UART ąĮąĄąŠą▒čģąŠą┤ąĖą╝ čüą▒čĆąŠčü MCU ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ ą┐ąŠą▓č鹊čĆąĮą░čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ (čüą╝. "ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ E. ą×ą│čĆą░ąĮąĖč湥ąĮąĖčÅ ąĘą░ą│čĆčāąĘčćąĖą║ą░ UART"). ąÆ čüą╗čāčćą░ąĄ CAN ąĖą╗ąĖ SPI ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠą┤ąŠą╗ąČąĄąĮ ąŠą┐čĆąŠčü ąĖąĮč鹥čĆč乥ą╣čüąŠą▓, ą┐ąŠą║ą░ ąĮąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ąĖą╗ąĖ ąĮąĄ ąĖčüč鹥č湥čé čéą░ą╣ą╝ą░čāčé.
7. ąĢčüą╗ąĖ UART-čŗ ą┐čĆąĖąĮčÅą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ, č鹊 ąĘą░ą│čĆčāąĘčćąĖą║ ą┐ąŠ ąĮąĄą╝čā ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĖčé čüą║ąŠčĆąŠčüčéčī ąĖąĮč鹥čĆč乥ą╣čüą░, ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé UART ąĖ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą║ čłą░ą│čā 8. ąĢčüą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą┐ąŠčüčéčāą┐ąĖą╗ąŠ č湥čĆąĄąĘ CAN ąĖą╗ąĖ SPI, č鹊 ąĘą░ą│čĆčāąĘčćąĖą║ čüčĆą░ąĘčā ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą║ čłą░ą│čā 8.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą║ą░ą║ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ąĖąĘ ą┤ąŠčüčéčāą┐ąĮčŗčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ ą┐čĆąĖąĮčÅą╗ čüąŠąŠą▒čēąĄąĮąĖąĄ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ, ą▓čüąĄ ą┤čĆčāą│ąĖąĄ ąĖąĮč鹥čĆč乥ą╣čüčŗ ąĘą░ą┐čĆąĄčēą░čÄčéčüčÅ.
8. ą×ąČąĖą┤ą░ąĮąĖąĄ ą║ąŠą╝ą░ąĮą┤: ą║ąŠą╝ą░ąĮą┤čŗ ą┐čĆąŠą▓ąĄčĆčÅčÄčéčüčÅ ąĖ ą▓čŗą┐ąŠą╗ąĮčÅčÄčéčüčÅ ą▓ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠą╝ čåąĖą║ą╗ąĄ. ą¦č鹊ą▒čŗ ą▓čŗą╣čéąĖ ąĖąĘ ąĘą░ą│čĆčāąĘčćąĖą║ą░, čģąŠčüčé ą┤ąŠą╗ąČąĄąĮ ą┐ąŠčüą╗ą░čéčī ą║ąŠą╝ą░ąĮą┤čā GO. ą¤ąŠčüą╗ąĄ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤čŗ GO ąĘą░ą│čĆčāąĘčćąĖą║ čāą┤ą░ą╗čÅąĄčé ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ EM ąĖ WM ąĖąĘ RAM ąĖ ą┤ąĄą╗ą░ąĄčé ą┐čĆčŗąČąŠą║ ąĮą░ ą░ą┤čĆąĄčü, ą▓čŗą▒čĆą░ąĮąĮčŗą╣ čģąŠčüč鹊ą╝.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ąĘą░ą┐ąĖčüą░čéčī/čüč鹥čĆąĄčéčī ą┤ą░ąĮąĮčŗąĄ ą▓ąŠ Flash ąĖ EEPROM, čģąŠčüčé ą┤ąŠą╗ąČąĄąĮ čüąĮą░čćą░ą╗ą░ ąĘą░ą┐ąĖčüą░čéčī ą▓ RAM čüą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ąĖ čüčéąĖčĆą░ąĮąĖčÅ. ąŁčéąĖ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ (čäą░ą╣ą╗čŗ ąĮą░ čÅąĘčŗą║ąĄ ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░ *.s19) ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ ą▓ą╝ąĄčüč鹥 čü ąĘą░ą│čĆčāąĘčćąĖą║ąŠą╝. ąźąŠčüčé ą┤ąŠą╗ąČąĄąĮ ą▓čŗą│čĆčāąĘąĖčéčī čŹčéąĖ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┐ąŠ ą░ą┤čĆąĄčüčā 0x0000A0. ąĪą╝. ą┤ą░ą╗ąĄąĄ čüąĄą║čåąĖčÄ "ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ erase/write ą▓ ą┐ą░ą╝čÅčéąĖ RAM".
ąóą░ą▒ą╗ąĖčåą░ 4. ą¤ąĄčĆą▓ąŠąĮą░čćą░ą╗čīąĮčŗąĄ ą┐čĆąŠą▓ąĄčĆą║ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░.
| ą¤ąŠčĆčÅą┤ąŠą║ ą┐čĆąŠą▓ąĄčĆą║ąĖ |
ą¤čĆąŠą▓ąĄčĆčÅąĄą╝ąŠąĄ čāčüą╗ąŠą▓ąĖąĄ |
ąĀąĄą░ą╗čīąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ Flash
-> čüą╗ąĄą┤čāčÄčēąĄąĄ ą┤ąĄą╣čüčéą▓ąĖąĄ |
| 1 ą┐čĆąŠą▓ąĄčĆą║ą░ |
[0x008000] < > (0x82 ąĖą╗ąĖ 0xAC) |
ą¤ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ čćąĖčüčéą░. ąŚą░ą│čĆčāąĘčćąĖą║ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé čĆą░ą▒ąŠčéčā. |
| 2 ą┐čĆąŠą▓ąĄčĆą║ą░ |
[BL_OPT] == 0x55AA(1) |
ą¤ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ čāąČąĄ ą▒čŗą╗ą░ ąĘą░ą┐ąĖčüą░ąĮą░, čĆą░ą▒ąŠčéą░ ąĘą░ą│čĆčāąĘčćąĖą║ą░ čĆą░ąĘčĆąĄčłąĄąĮą░ ą▒ą░ą╣čéą░ą╝ąĖ ąŠą┐čåąĖą╣ BL_OPT. ąŚą░ą│čĆčāąĘčćąĖą║ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé čĆą░ą▒ąŠčéčā. |
| 3 ą┐čĆąŠą▓ąĄčĆą║ą░ |
ROP ą░ą║čéąĖą▓ąĮą░ |
ą¤ą░ą╝čÅčéčī MCU ąĘą░čēąĖčēąĄąĮą░ ąŠčé čćč鹥ąĮąĖčÅ -> ą┐ąĄčĆąĄčģąŠą┤ ą┐ąŠ ą▓ąĄą║č鹊čĆčā čüą▒čĆąŠčüą░ ą▓ ą┐ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ Flash (ąĘą░ą┐čāčüą║ ą┐čĆąĖą║ą╗ą░ą┤ąĮąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ). |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
(1) ąĪą╝. ą┤ą░čéą░čłąĖčé ąĮą░ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ MCU ą┤ą╗čÅ ą╝ąĄčüčéą░ čĆą░ąĘą╝ąĄčēąĄąĮąĖčÅ [BL_OPT] ą▒ą░ą╣čéą░ ąŠą┐čåąĖą╣ ąĮą░ ą║ą░čĆč鹥 ą┐ą░ą╝čÅčéąĖ.
(2) ą¤ąŠčüą╗ąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐čĆąŠą▓ąĄčĆčÅąĄčéčüčÅ ą▒ąĖčé ROP, čćč鹊ą▒čŗ ąĮąĄ ą┤ąŠą┐čāčüčéąĖčéčī ąĮąĄą░ą▓č鹊čĆąĖąĘąŠą▓ą░ąĮąĮąŠąĄ čćč鹥ąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ Flash ąĖ EEPROM ą┤ą░ąĮąĮčŗčģ.
[ąØą░čüčéčĆąŠą╣ą║ąĖ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓]
ąÆ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ąŠą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ą░ą┐ą┐ą░čĆą░čéąĮčŗąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ STM8:
ŌĆó UARTs/LINUART
ŌĆó SPI
ŌĆó CAN
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓ąŠ ą▓čĆąĄą╝čÅ ąĘą░ą│čĆčāąĘą║ąĖ (ą║ąŠą│ą┤ą░ ąĘą░ą│čĆčāąĘčćąĖą║ ą┐ąŠ ą┐čĆąŠčåąĄą┤čāčĆąĄ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĖą╗ ąĖąĮč鹥čĆč乥ą╣čü ąĖ ąĮą░čćą░ą╗ čĆą░ą▒ąŠčéčā čü ąĮąĖą╝) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü, ą▓čüąĄ ąŠčüčéą░ą╗čīąĮčŗąĄ ąĘą░ą┐čĆąĄčēą░čÄčéčüčÅ.
ąóą░ą▒ą╗ąĖčåą░ 5. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ąĖąĮč鹥čĆč乥ą╣čüčŗ, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü MCU STM8(1).
| ąōčĆčāą┐ą┐ą░ STM8 |
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü |
| STM8AF Series - high density |
USART, LINUART (ą▓ čĆąĄąČąĖą╝ąĄ "reply"), CAN |
| STM8AF Series - medium density |
LINUART (ą▓ čĆąĄąČąĖą╝ąĄ "reply"), SPI |
| STM8S Series - high density |
UART1, UART3 (ą▓ čĆąĄąČąĖą╝ąĄ "reply"), CAN |
| STM8S Series - medium density |
UART2 (ą▓ čĆąĄąČąĖą╝ąĄ "reply"), SPI |
| STM8L Series - low density |
UART, SPI |
| STM8L ąĖ STM8AL Series - medium density |
UART |
| STM8L ąĖ STM8AL Series high/medium+ density |
UART1, UART2, UART3 (ą▓ čĆąĄąČąĖą╝ąĄ "reply"), SPI1, SPI2 |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (1): čéą░ą▒ą╗ąĖčåą░ ą▓čŗčłąĄ ąŠčéčĆą░ąČą░ąĄčé č鹊ą╗čīą║ąŠ č鹥ą║čāčēąĖąĄ ą▓ąĄčĆčüąĖąĖ ąĘą░ą│čĆčāąĘčćąĖą║ąŠą▓ ąĖ čüąŠčüč鹊čÅąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓.
USART/UART. ąŁč鹊 ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą░čüąĖąĮčģčĆąŠąĮąĮčŗą╣ ąŠą▒ą╝ąĄąĮ. ąØą░čüčéčĆąŠą╣ą║ąĖ USART/UART:
ŌĆó ąÜą░ą┤čĆ ą┤ą░ąĮąĮčŗčģ: 1 čüčéą░čĆčé-ą▒ąĖčé, 8 ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ, 1 ą▒ąĖčé č湥čéąĮąŠčüčéąĖ ąĮą░čüčéčĆąŠąĄąĮ ąĮ č湥čéąĮąŠčüčéčī ą┤ą░ąĮąĮčŗčģ, 1 čüč鹊ą┐-ą▒ąĖčé.
ŌĆó ąĪą║ąŠčĆąŠčüčéčī: baud rate ą┤ąĄč鹥ą║čéąĖčĆčāąĄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ąŠą╝ ą┐ąŠ ą║ąŠą╝ą░ąĮą┤ąĄ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ. ąÜąŠą│ą┤ą░ čģąŠčüčé ą┐ąŠčüčŗą╗ą░ąĄčé ą▒ą░ą╣čé čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ 0x7F, ąĘą░ą│čĆčāąĘčćąĖą║ ą░ąĮą░ą╗ąĖąĘąĖčĆčāąĄčé ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĄą│ąŠ čāčĆąŠą▓ąĮąĄą╣ ąĖ ą┐ąŠ ąĮąĖą╝ ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčé čüą║ąŠčĆąŠčüčéčī USART/UART, čćč鹊ą▒čŗ ąŠąĮą░ čüąŠą▓ą┐ą░ą┤ą░ą╗ą░ čüąŠ čüą║ąŠčĆąŠčüčéčīčÄ čģąŠčüčéą░. ą£ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ baud rate = 1 Mbps (115200 baud ą┤ą╗čÅ STM8L/AL-high/medium+ density), ą╝ąĖąĮąĖą╝ą░ą╗čīąĮą░čÅ baud rate = 4800 bps.
ą¦č鹊ą▒čŗ čĆą░ą▒ąŠčéą░ą╗ąŠ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čüą║ąŠčĆąŠčüčéąĖ, ąĮą░ ą┐ą╗ą░č鹥 ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ąŠą╗ąČąĮą░ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čéčīčüčÅ čüčéą░ą▒ąĖą╗čīąĮąŠčüčéčī čüąĖą│ąĮą░ą╗ą░ RxD (ąĘą░ą│čĆčāąĘčćąĖą║ čĆą░ąĘčĆąĄčłą░ąĄčé ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ pull-up ąĮą░ ąĮąŠąČą║ąĄ RxD).
ąØą░čüčéčĆąŠą╣ą║ąĖ ą▓čŗą▓ąŠą┤ąŠą▓:
ŌĆó ąÜąŠą│ą┤ą░ ąĘą░ą│čĆčāąĘčćąĖą║ ąŠąČąĖą┤ą░ąĄčé ą▒ą░ą╣čéą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (SYNCH = 0x7F), ąĮąŠąČą║ąĖ RxD ąĮą░čüčéčĆą░ąĖą▓ą░čÄčéčüčÅ ą▓ čĆąĄąČąĖą╝ ą▓ą▓ąŠą┤ą░ čü ą▓ąĄčĆčģąĮąĖą╝ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖą╝ čĆąĄąĘąĖčüč鹊čĆąŠą╝ (pull-up).
ŌĆó ąĢčüą╗ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ čü ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ USART/UART, č鹊 ąĮąŠąČą║ąĖ TxD ąĮą░čüčéčĆą░ąĖą▓ą░čÄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą┤ą▓čāčģčéą░ą║čéąĮąŠą│ąŠ ą▓čŗčģąŠą┤ą░ (push-pull).
ŌĆó ąĢčüą╗ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ ąĮąĄ ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ (ąĘą░ čéą░ą╣ą╝ą░čāčéą░ ą▓ 1 čüąĄą║čāąĮą┤čā ąĮąĄ ą▒čŗą╗ ą┐čĆąĖąĮčÅčé ą▒ą░ą╣čé SYNCH), č鹊 ą▓čüąĄ ąĮąŠąČą║ąĖ USART/UART čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░.
ŌĆó ąĢčüą╗ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ą╗čüčÅ ąĮą░ ą┤čĆčāą│ąŠą╣ ąĖąĮč鹥čĆč乥ą╣čü (ąŠčéą╗ąĖčćą░čÄčēąĖą╣čüčÅ ąŠčé USART/UART), č鹊 ąĮąŠąČą║ąĖ RxD ąŠčüčéą░čÄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą▓ą▓ąŠą┤ą░ čü ą▓ąĄčĆčģąĮąĄą╣ ą┐ąŠą┤čéčÅąČą║ąŠą╣ (internal pull-up).
LINUART/UART ą▓ čĆąĄąČąĖą╝ąĄ "Reply". ąØą░čüčéčĆąŠą╣ą║ąĖ:
ŌĆó ąÜą░ą┤čĆ ą┤ą░ąĮąĮčŗčģ: 1 čüčéą░čĆčé-ą▒ąĖčé, 8 ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ, ą▒ąĄąĘ ą▒ąĖčéą░ č湥čéąĮąŠčüčéąĖ, 1 čüč鹊ą┐-ą▒ąĖčé.
ŌĆó ąĪą║ąŠčĆąŠčüčéčī: baud rate ą┤ąĄč鹥ą║čéąĖčĆčāąĄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ąŠą╝ ą┐ąŠ ą║ąŠą╝ą░ąĮą┤ąĄ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ. ąÜąŠą│ą┤ą░ čģąŠčüčé ą┐ąŠčüčŗą╗ą░ąĄčé ą▒ą░ą╣čé čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ 0x7F, ąĘą░ą│čĆčāąĘčćąĖą║ ą░ąĮą░ą╗ąĖąĘąĖčĆčāąĄčé ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĄą│ąŠ čāčĆąŠą▓ąĮąĄą╣ ąĖ ą┐ąŠ ąĮąĖą╝ ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčé čüą║ąŠčĆąŠčüčéčī USART/UART, čćč鹊ą▒čŗ ąŠąĮą░ čüąŠą▓ą┐ą░ą┤ą░ą╗ą░ čüąŠ čüą║ąŠčĆąŠčüčéčīčÄ čģąŠčüčéą░. ą£ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ baud rate = 550 kbps (115200 baud ą┤ą╗čÅ STM8L/AL-high/medium+ density), ą╝ąĖąĮąĖą╝ą░ą╗čīąĮą░čÅ baud rate = 4800 bps.
ą¦č鹊ą▒čŗ čĆą░ą▒ąŠčéą░ą╗ąŠ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čüą║ąŠčĆąŠčüčéąĖ, ąĮą░ ą┐ą╗ą░č鹥 ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ąŠą╗ąČąĮą░ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čéčīčüčÅ čüčéą░ą▒ąĖą╗čīąĮąŠčüčéčī čüąĖą│ąĮą░ą╗ą░ RxD (ąĘą░ą│čĆčāąĘčćąĖą║ čĆą░ąĘčĆąĄčłą░ąĄčé ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ pull-up ąĮą░ ąĮąŠąČą║ąĄ RxD).
ąĀąĄąČąĖą╝ Reply. ąźąŠčüčé ą┤ąŠą╗ąČąĄąĮ ąŠčéą▓ąĄčćą░čéčī ąĮą░ ą▓čüąĄ ą▒ą░ą╣čéčŗ, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠčüą╗ą░ąĮčŗ ąĖąĘ ąĘą░ą│čĆčāąĘčćąĖą║ą░. ąĢčüą╗ąĖ čüąĖą│ąĮą░ą╗čŗ TxD ąĖ RxD ąĖčüą┐ąŠą╗čīąĘčāčÄčé ąŠą┤ąĖąĮ ąĖ č鹊čé ąČąĄ čäąĖąĘąĖč湥čüą║ąĖą╣ ą▓čŗą▓ąŠą┤ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ąŠą▒ą╝ąĄąĮ 1-wire), č鹊 ąŠčéą▓ąĄčéčŗ ąŠčé čģąŠčüčéą░ ąĮąĄ ąŠą▒čÅąĘą░č鹥ą╗čīąĮčŗ, ą┐ąŠčüą║ąŠą╗čīą║čā ą▓čŗą▓ąŠą┤čŗ RxD ąĖ TxD čüąŠą▓ą┐ą░ą┤ą░čÄčé.
ąØą░čüčéčĆąŠą╣ą║ąĖ ą▓čŗą▓ąŠą┤ąŠą▓:
ŌĆó ąÜąŠą│ą┤ą░ ąĘą░ą│čĆčāąĘčćąĖą║ ąŠąČąĖą┤ą░ąĄčé ą▒ą░ą╣čéą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (SYNCH = 0x7F), ąĮąŠąČą║ąĖ RxD ąĮą░čüčéčĆą░ąĖą▓ą░čÄčéčüčÅ ą▓ čĆąĄąČąĖą╝ ą▓ą▓ąŠą┤ą░ čü ą▓ąĄčĆčģąĮąĖą╝ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖą╝ čĆąĄąĘąĖčüč鹊čĆąŠą╝ (pull-up).
ŌĆó ąĢčüą╗ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ čü ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ LINUART/UART, č鹊 ąĮąŠąČą║ąĖ TxD ąĮą░čüčéčĆą░ąĖą▓ą░čÄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą┤ą▓čāčģčéą░ą║čéąĮąŠą│ąŠ ą▓čŗčģąŠą┤ą░ (push-pull).
ŌĆó ąĢčüą╗ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ ąĮąĄ ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ (ąĘą░ čéą░ą╣ą╝ą░čāčé ą▓ 1 čüąĄą║čāąĮą┤čā ąĮąĄ ą▒čŗą╗ ą┐čĆąĖąĮčÅčé ą▒ą░ą╣čé SYNCH), č鹊 ą▓čüąĄ ąĮąŠąČą║ąĖ LINUART/UART čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░.
ŌĆó ąĢčüą╗ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ą╗čüčÅ ąĮą░ ą┤čĆčāą│ąŠą╣ ąĖąĮč鹥čĆč乥ą╣čü (ąŠčéą╗ąĖčćą░čÄčēąĖą╣čüčÅ ąŠčé LINUART/UART), č鹊 ąĮąŠąČą║ąĖ RxD ąŠčüčéą░čÄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą▓ą▓ąŠą┤ą░ čü ą▓ąĄčĆčģąĮąĄą╣ ą┐ąŠą┤čéčÅąČą║ąŠą╣ (internal pull-up).
SPI. ąØą░čüčéčĆąŠą╣ą║ąĖ ą┤ą╗čÅ SPI čüą╗ąĄą┤čāčÄčēąĖąĄ:
ŌĆó 8 ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ, MSB ąĖą┤ąĄčé ą┐ąĄčĆą▓čŗą╝.
ŌĆó ąĪą║ąŠčĆąŠčüčéčī ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ čćą░čüč鹊č鹊ą╣ čüąĖą│ąĮą░ą╗ą░ čéą░ą║č鹊ą▓ čģąŠčüčéą░, ą┐ąŠčüą║ąŠą╗čīą║čā ąŠąĮ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą╝ą░čüč鹥čĆ čłąĖąĮčŗ.
ŌĆó ą¤ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ SPI ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąŠą┤čćąĖąĮąĄąĮąĖčÅ (slave mode) čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąŠą╣ NSS.
ŌĆó ą¤ąŠą╗čÅčĆąĮąŠčüčéčī ą┤ą░ąĮąĮčŗčģ: CPOL = 0 (ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ čāčĆąŠą▓ąĄąĮčī SCK ą╗ąŠą│. 0), CPHA = 0 (ą┐ąĄčĆą▓čŗą╣ ą┐ąĄčĆąĄą┐ą░ą┤ čéą░ą║č鹊ą▓ čüą╗čāąČąĖčé ą┤ą╗čÅ ąĘą░čģą▓ą░čéą░ čāčĆąŠą▓ąĮčÅ ą┤ą░ąĮąĮčŗčģ).
ą¤ąĄčĆąĄą┤ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ ą▒ą░ą╣čéą░ čģąŠčüčé ą┤ąŠą╗ąČąĄąĮ ą▓čŗą┤ąĄčƹȹ░čéčī ąĘą░ą┤ąĄčƹȹ║čā 6 ą╝ą║čü.
ą¤ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ SPI ą┤ąŠčüčéčāą┐ąĮąŠ č湥čĆąĄąĘ ą▓čŗą▓ąŠą┤čŗ SPI_SCK, SPI_MOSI ąĖ SPI_MISO čüąŠ čüą╗ąĄą┤čāčÄčēąĖą╝ąĖ ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ąĖ:
ŌĆó ąÜąŠą│ą┤ą░ ąĘą░ą│čĆčāąĘčćąĖą║ ąČą┤ąĄčé ą▒ą░ą╣čéą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (SYNCH = 0x7F) ąĮąŠąČą║ąĖ SPI_MISO ąĮą░čüčéčĆąŠąĄąĮčŗ ą▓ čĆąĄąČąĖą╝ąĄ ą┤ą▓čāčģčéą░ą║čéąĮąŠą│ąŠ ą▓čŗčģąŠą┤ą░ (push-pull).
ŌĆó ąĢčüą╗ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ ąĮąĄ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮ (ąĮąĄ ą▒čŗą╗ ą┐ąŠą╗čāč湥ąĮ ą▒ą░ą╣čé SYNCH ąĘą░ čéą░ą╣ą╝ą░čāčé ą▓ 1 čüąĄą║čāąĮą┤čā), č鹊 ą▓čüąĄ ąĮąŠąČą║ąĖ SPI_MISO ąĮą░čüčéčĆą░ąĖą▓ą░čÄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░.
ŌĆó ąĢčüą╗ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ą╗čüčÅ ąĮą░ ą┤čĆčāą│ąŠą╝ ąĖąĮč鹥čĆč乥ą╣čüą░ (ąĮąĄ SPI), č鹊 ąĮąŠąČą║ąĖ SPI_MISO ąŠčüčéą░čÄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą┤ą▓čāčģčéą░ą║čéąĮąŠą│ąŠ ą▓čŗčģąŠą┤ą░ (push-pull).
CAN. ą¦č鹊ą▒čŗ ą░ą┤čĆąĄčüąŠą▓ą░čéčī čāčüčéčĆąŠą╣čüčéą▓ą░, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗąĄ ą║ ąŠą┤ąĮąŠą╣ ąĖ č鹊ą╣ ąČąĄ čłąĖąĮąĄ, ą┐čĆąŠč鹊ą║ąŠą╗ CAN ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▓ čüą▓ąŠąĄą╝ ą║ą░ą┤čĆąĄ ą┐ąŠą╗ąĄ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (Standard ID 11 ą▒ąĖčé) ąĖ ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠąĄ ą┐ąŠą╗ąĄ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (extended ID 18 ą▒ąĖčé). ąĀąĖčü. 2 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą║ą░ą┤čĆ CAN, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčé č鹊ą╗čīą║ąŠ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ.

ąĀąĖčü. 2. ążčĆąĄą╣ą╝ CAN.
ąØą░čüčéčĆąŠą╣ą║ąĖ CAN čüą╗ąĄą┤čāčÄčēąĖąĄ:
ŌĆó ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ Standard (ąĮąĄ Extended).
ŌĆó ąĪą║ąŠčĆąŠčüčéčī čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą▒ąĖčé.
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ čüą║ąŠčĆąŠčüčéčī 125 ą║ąĖą╗ąŠą▒ąĖčé/čüąĄą║. ąŁčéą░ čüą║ąŠčĆąŠčüčéčī ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮą░ ą▓ąŠ ą▓čĆąĄą╝čÅ čĆą░ą▒ąŠčéčŗ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą║ąŠą╝ą░ąĮą┤ąŠą╣ speed, č湥ą╝ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┤ąŠčüčéąĖą│ąĮčāčéą░ čüą║ąŠčĆąŠčüčéčī ą┤ąŠ 1 Mbit/čüąĄą║.
ąØą░čüčéčĆąŠą╣ą║ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ (ąŠčé STM8 ą║ čģąŠčüčéčā):
ŌĆó Tx mailbox0: čĆą░ąĘčĆąĄčłąĄąĮ.
ŌĆó Tx mailbox1 ąĖ Tx mailbox2: ąĘą░ą┐čĆąĄčēąĄąĮ.
ŌĆó Tx ID: 0x02.
ŌĆó ąśčüčģąŠą┤čÅčēąĖąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ čüąŠą┤ąĄčƹȹ░čé 1 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ.
ąØą░čüčéčĆąŠą╣ą║ąĖ ą┐čĆąĖąĄą╝ą░ (ąŠčé čģąŠčüčéą░ ą║ STM8):
ŌĆó ąæą░ą╣čé čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ 0x7F ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ID RX, ą░ ąĮąĄ ą▓ ą┐ąŠą╗ąĄ ą┤ą░ąĮąĮčŗčģ ą┐ą░ą║ąĄčéą░.
ŌĆó ID RX ąĘą░ą▓ąĖčüąĖčé ąŠčé ą║ąŠą╝ą░ąĮą┤čŗ (0x00, 0x03, 0x11, 0x21, 0x31, 0x43).
ŌĆó ą¤čĆąŠą▓ąĄčĆą║ą░ ąĮą░ ąŠčłąĖą▒ą║čā: ąĄčüą╗ąĖ ą┐ąŠą╗ąĄ ąŠčłąĖą▒ą║ąĖ (ą▒ąĖčéčŗ [6:4] ą▓ čĆąĄą│ąĖčüčéčĆąĄ CESR) ąŠčéą╗ąĖčćą░čÄčéčüčÅ ąŠčé 000b, č鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠčéą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ąĖ čģąŠčüčéčā ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ NACK.
ŌĆó ąÆ čüą╗čāčćą░ąĄ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ FIFO (overrun condition) čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠčéą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ąĖ čģąŠčüčéčā ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ NACK.
ą¤čĆąĖčģąŠą┤čÅčēąĖąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ą╝ąŠą│čāčé čüąŠą┤ąĄčƹȹ░čéčī ąŠčé 1 ą┤ąŠ 8 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ.
ą¤ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ CAN ą┤ąŠčüčéčāą┐ąĮąŠ č湥čĆąĄąĘ ąĮąŠąČą║ąĖ CAN_TX ąĖ CAN_RX, čüąŠ čüą╗ąĄą┤čāčÄčēąĖą╝ąĖ ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ąĖ:
ŌĆó ąÜąŠą│ą┤ą░ ąĘą░ą│čĆčāąĘčćąĖą║ ąČą┤ąĄčé ą▒ą░ą╣čéą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą▓ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąĄ čäčĆąĄą╣ą╝ą░ CAN (SYNCH = 0x7F), ąĮąŠąČą║ą░ CAN_TX ąĮą░čüčéčĆąŠąĄąĮą░ ą▓ čĆąĄąČąĖą╝ąĄ ą┤ą▓čāčģčéą░ą║čéąĮąŠą│ąŠ ą▓čŗčģąŠą┤ą░ (push-pull).
ŌĆó ąĢčüą╗ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ ąĮąĄ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ą╗čüčÅ (ąĘą░ čéą░ą╣ą╝ą░čāčé ą▓ 1 čüąĄą║čāąĮą┤čā ąĮąĄ ą▒čŗą╗ąŠ ą▒ą░ą╣čéą░ SYNCH), č鹊 ąĮąŠąČą║ą░ CAN_TX ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░.
ŌĆó ąĢčüą╗ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ą╗čüčÅ ąĮą░ ą┤čĆčāą│ąŠą╣ ąĖąĮč鹥čĆč乥ą╣čü (ąĮąĄ CAN), č鹊 ąĮąŠąČą║ą░ CAN_TX ąŠčüčéą░ąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą┤ą▓čāčģčéą░ą║čéąĮąŠą│ąŠ ą▓čŗčģąŠą┤ą░ (push-pull).
[ąÜąŠą╝ą░ąĮą┤čŗ ąĘą░ą│čĆčāąĘčćąĖą║ą░]
ąÜąŠą╝ą░ąĮą┤čŗ, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ąĘą░ą│čĆčāąĘčćąĖą║ąŠą╝, ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą▓ čéą░ą▒ą╗ąĖčåąĄ 6.
ąóą░ą▒ą╗ąĖčåą░ 6. ąÜąŠą╝ą░ąĮą┤čŗ ąĘą░ą│čĆčāąĘčćąĖą║ą░.
| ąÜąŠą╝ą░ąĮą┤ą░ |
ąÜąŠą┤ ą║ąŠą╝ą░ąĮą┤čŗ |
ą×ą┐ąĖčüą░ąĮąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ |
| Get |
0x00 |
ą¤ąŠą╗čāč湥ąĮąĖąĄ ą▓ąĄčĆčüąĖąĖ ąĖ čüą┐ąĖčüą║ą░ ą┤ąŠą┐čāčüčéąĖą╝čŗčģ ą║ąŠą╝ą░ąĮą┤, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ č鹥ą║čāčēąĄą╣ ą▓ąĄčĆčüąĖąĄą╣ ąĘą░ą│čĆčāąĘčćąĖą║ą░. |
| Read Memory |
0x11 |
ą¦č鹥ąĮąĖąĄ ą┤ąŠ 256 ą▒ą░ą╣čé ą┐ą░ą╝čÅčéąĖ, ąĮą░čćąĖąĮą░čÅ čü ą░ą┤čĆąĄčüą░, čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ čģąŠčüč鹊ą╝. |
| Erase Memory |
0x43 |
ąĪčéąĖčĆą░ąĄčé ąŠą┤ąĖąĮ čüąĄą║č鹊čĆ ąĖą╗ąĖ ą▓čüąĄ čüąĄą║č鹊čĆčŗ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ Flash / data EEPROM. |
| Write Memory |
0x31 |
ąŚą░ą┐ąĖčüčŗą▓ą░ąĄčé ą┤ąŠ 128 ą▒ą░ą╣čé ą▓ RAM ąĖą╗ąĖ ą┐ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ Flash / data EEPROM, ąĮą░čćąĖąĮą░čÅ čü ą░ą┤čĆąĄčüą░, čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ čģąŠčüč鹊ą╝. |
| Speed |
0x03 |
ą¤ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠą╝ąĄąĮčÅčéčī čüą║ąŠčĆąŠčüčéčī CAN ą▓ąŠ ą▓čĆąĄą╝čÅ čĆą░ą▒ąŠčéčŗ ąĘą░ą│čĆčāąĘčćąĖą║ą░. |
| Go |
0x21 |
ąöąĄą╗ą░ąĄčé ą▒ąĄąĘčāčüą╗ąŠą▓ąĮčŗą╣ ą┐ąĄčĆąĄčģąŠą┤ ą┐ąŠ ą░ą┤čĆąĄčüčā, čāą║ą░ąĘą░ąĮąĮąŠą╝čā čģąŠčüč鹊ą╝, čćč鹊ą▒čŗ ąĘą░ą┐čāčüčéąĖčéčī ąĘą░ą│čĆčāąČąĄąĮąĮčŗą╣ ą║ąŠą┤. |
ąóą░ą▒ą╗ąĖčåą░ 7. ąÜąŠą┤čŗ ąĘą░ą│čĆčāąĘčćąĖą║ą░.
| ą£ąĮąĄą╝ąŠąĮąĖą║ą░ |
ąÜąŠą┤ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| SYNCH |
0x7F |
ąæą░ą╣čé čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ. |
| ACK |
0x79 |
Acknowledge, ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ. |
| NACK |
0x1F |
No acknowledge, ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ. |
| Token |
0xXX |
ąøčÄą▒ąŠą╣ ą▒ą░ą╣čé, ą║ąŠč鹊čĆčŗą╣ čģąŠčüčé ą┐ąŠčüčŗą╗ą░ąĄčé ą▓ ąĘą░ą│čĆčāąĘčćąĖą║ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü SPI, čćč鹊ą▒čŗ ą┐čĆąĖąĮčÅčéčī ąŠčéą▓ąĄčé ąŠčé ąĘą░ą│čĆčāąĘčćąĖą║ą░ (čéčĆąĄą▒čāąĄčéčüčÅ ą┐ąĄčĆąĄą┤ą░čéčī ą┤ą░ąĮąĮčŗąĄ č湥čĆąĄąĘ SPI, ą║ąŠą│ą┤ą░ ąĮčāąČąĮąŠ ą┐čĆąĖąĮčÅčéčī ą┤ą░ąĮąĮčŗąĄ, čŹč鹊 čüą▓čÅąĘą░ąĮąŠ čü ąŠčüąŠą▒ąĄąĮąĮąŠčüčéčīčÄ čĆą░ą▒ąŠčéčŗ SPI ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čéą░ą║č鹊ą▓). ą×ą▒čŗčćąĮąŠ ą┤ą╗čÅ ąĘąĮą░č湥ąĮąĖčÅ č鹊ą║ąĄąĮą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ 0x00. |
| BUSY |
0xAA |
ąĪąŠčüč鹊čÅąĮąĖąĄ čäą╗ą░ą│ą░ ąĘą░ąĮčÅč鹊čüčéąĖ. |
ąÜąŠą│ą┤ą░ ąĘą░ą│čĆčāąĘčćąĖą║ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čŗ č湥čĆąĄąĘ UART, CAN ąĖą╗ąĖ SPI, ąŠą▒čēąĖą╣ ą┐čĆąŠč鹊ą║ąŠą╗ čüą╗ąĄą┤čāčÄčēąĖą╣:
1. ąŚą░ą│čĆčāąĘčćąĖą║ ą┐ąŠčüčŗą╗ą░ąĄčé ą▒ą░ą╣čé ACK (0x79) čģąŠčüčéčā ąĖ ąČą┤ąĄčé ą░ą┤čĆąĄčü ą░ą┤čĆąĄčü ąĖ ą▒ą░ą╣čé ą║ąŠąĮčéčĆąŠą╗čīąĮąŠą╣ čüčāą╝ą╝čŗ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąŠą▓ąĄčĆčÅčÄčéčüčÅ ą┐čĆąĖ ą┐ąŠą╗čāč湥ąĮąĖąĖ.
2. ąÜąŠą│ą┤ą░ ą░ą┤čĆąĄčü ą┐čĆą░ą▓ąĖą╗čīąĮčŗą╣ ąĖ ą║ąŠąĮčéčĆąŠą╗čīąĮą░čÅ čüčāą╝ą╝ą░ ą▓ ą┐ąŠčĆčÅą┤ą║ąĄ, ąĘą░ą│čĆčāąĘčćąĖą║ ą┐ąŠčüčŗą╗ą░ąĄčé ą▒ą░ą╣čé ACK (0x79), ąĖąĮą░č湥 ą┐ąŠčüčŗą╗ą░ąĄčé ą▒ą░ą╣čé NACK (0x1F) ąĖ ąŠą▒čĆčŗą▓ą░ąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ. ąŚą░ą│čĆčāąĘčćąĖą║ ąČą┤ąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗčģ ą▒ą░ą╣čé (N ą▒ą░ą╣čé) ąĖ ą▒ą░ą╣čé ą║ąŠąĮčéčĆąŠą╗čīąĮąŠą╣ čüčāą╝ą╝čŗ.
ŌĆō ąĢčüą╗ąĖ ą║ąŠąĮčéčĆąŠą╗čīąĮą░čÅ čüčāą╝ą╝ą░ ą▓ ą┐ąŠčĆčÅą┤ą║ąĄ, č鹊 ąĘą░ą│čĆčāąĘčćąĖą║ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą║ąŠą╝ą░ąĮą┤čā, ąĮą░čćąĖąĮą░čÅ čü ą┐čĆąĖąĮčÅč鹊ą│ąŠ ą░ą┤čĆąĄčüą░.
ŌĆō ąĢčüą╗ąĖ ą║ąŠąĮčéčĆąŠą╗čīąĮą░čÅ čüčāą╝ą╝ą░ ąĮąĄ ą▓ ą┐ąŠčĆčÅą┤ą║ąĄ, č鹊 ąĘą░ą│čĆčāąĘčćąĖą║ ą┐ąŠčüčŗą╗ą░ąĄčé čüąĮą░čćą░ą╗ą░ NACK, ąĖ ąŠą▒čĆčŗą▓ą░ąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą┐čĆąĖąĮčÅč鹊ą╣ ą║ąŠą╝ą░ąĮą┤čŗ.
ą¤čĆąŠč鹊ą║ąŠą╗čŗ ąĘą░ą│čĆčāąĘčćąĖą║ą░ č湥čĆąĄąĘ UART ąĖ SPI ąĖą┤ąĄąĮčéąĖč湥ąĮ ą▓ąĮčāčéčĆąĖ MCU, ąĮąŠ ąŠčéą╗ąĖčćą░čÄčéčüčÅ čüąŠ čüč鹊čĆąŠąĮčŗ čģąŠčüčéą░. ąØčāąČąĄąĮ ą▒ą░ą╣čé č鹊ą║ąĄąĮą░, ą║ąŠą│ą┤ą░ č湥čĆąĄąĘ SPI ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą║ą░ąČą┤čŗą╣ ą▒ą░ą╣čé (čüą╝. čĆąĖčüčāąĮą║ąĖ 5, 11, 17, 23 ąĖ 31).
ą¤čĆąŠč鹊ą║ąŠą╗ ąĘą░ą│čĆčāąĘčćąĖą║ą░ CAN ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé ą▓čüąĄčģ ą┤čĆčāą│ąĖčģ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓.
ąØąĖąČąĄ ą▓ąŠ ą▓čĆąĄąĘą║ą░čģ ąŠą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ą║ąŠą╝ą░ąĮą┤čŗ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą┤ą╗čÅ čĆą░ąĘąĮčŗčģ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓.
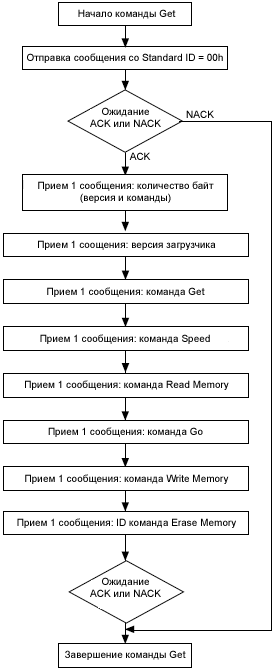
ąÜąŠą╝ą░ąĮą┤ą░ Get ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čģąŠčüčéčā ą┐ąŠą╗čāčćąĖčéčī ą▓ąĄčĆčüąĖčÄ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ąĖ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ąĖą╝ ą║ąŠą╝ą░ąĮą┤čŗ. ąÜąŠą│ą┤ą░ ąĘą░ą│čĆčāąĘčćąĖą║ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čā Get, ąŠąĮ ą┐ąĄčĆąĄą┤ą░čüčé čģąŠčüčéčā čüą▓ąŠčÄ ą▓ąĄčĆčüąĖčÄ ąĖ ą║ąŠą┤čŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ ą║ąŠą╝ą░ąĮą┤.
[USART/LINUART/UART1/UART2/UART3]
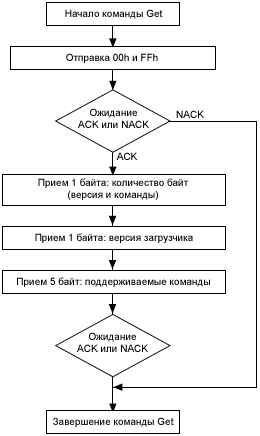
ąĀąĖčü. 3. ąÜąŠą╝ą░ąĮą┤ą░ Get č湥čĆąĄąĘ USART/LINUART/UART1/UART2/UART3 ąĮą░ čüč鹊čĆąŠąĮąĄ čģąŠčüčéą░.
ąźąŠčüčé ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ą▒ą░ą╣čéčŗ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
ąæą░ą╣čé 1: 0x00 - Command ID.
ąæą░ą╣čé 2: 0xFF - ąÜąŠąĮčéčĆąŠą╗čīąĮą░čÅ čüčāą╝ą╝ą░ (ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčé).

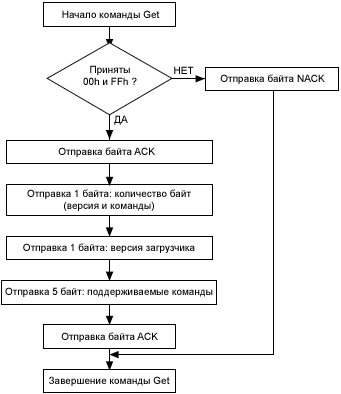
ąĀąĖčü. 4. ąÜąŠą╝ą░ąĮą┤ą░ Get USART/LINUART/UART1/UART2/UART3 ąĮą░ čüč鹊čĆąŠąĮąĄ MCU.
STM8 ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ą▒ą░ą╣čéčŗ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
ąæą░ą╣čé 1: ACK (ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čģąŠčüčé ąŠčéą┐čĆą░ą▓ąĖą╗ ą║ąŠą╝ą░ąĮą┤čā).
ąæą░ą╣čé 2: N = 5 = ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮčŗčģ ą▒ą░ą╣čé -1 (1 Ōēż N+1 Ōēż 256).
ąæą░ą╣čé 3: ą▓ąĄčĆčüąĖčÅ ąĘą░ą│čĆčāąĘčćąĖą║ą░ (0 < version Ōēż 255).
ąæą░ą╣čé 4: 0x00 - ą║ąŠą╝ą░ąĮą┤ą░ Get.
ąæą░ą╣čé 5: 0x11 - ą║ąŠą╝ą░ąĮą┤ą░ Read Memory.
ąæą░ą╣čé 6: 0x21 - ą║ąŠą╝ą░ąĮą┤ą░ Go.
ąæą░ą╣čé 7: 0x31 - ą║ąŠą╝ą░ąĮą┤ą░ Write Memory.
ąæą░ą╣čé 8: 0x43 - ą║ąŠą╝ą░ąĮą┤ą░ Erase Memory.
ąæą░ą╣čé 9: ACK.
[SPI]
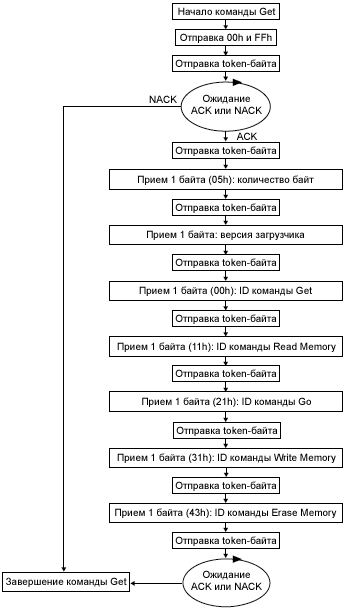
ąĀąĖčü. 5. ąÜąŠą╝ą░ąĮą┤ą░ Get č湥čĆąĄąĘ SPI ąĮą░ čüč鹊čĆąŠąĮąĄ čģąŠčüčéą░.
ąźąŠčüčé ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ą▒ą░ą╣čéčŗ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
ąæą░ą╣čé 1: 0x00 - Command ID.
ąæą░ą╣čé 2: 0xFF - ąÜąŠąĮčéčĆąŠą╗čīąĮą░čÅ čüčāą╝ą╝ą░ (ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčé).
ąæą░ą╣čé 3 (token): 0xXY; čģąŠčüčé ąČą┤ąĄčé ACK ąĖą╗ąĖ NACK.
ąæą░ą╣čé 4 (token): 0xXY; čģąŠčüčé ąČą┤ąĄčé 0x05.
...
ąæą░ą╣čé 11 (token): 0xXY; čģąŠčüčé ąČą┤ąĄčé ACK ąĖą╗ąĖ NACK.
ąĀąĖčü. 6. ąÜąŠą╝ą░ąĮą┤ą░ Get č湥čĆąĄąĘ SPI - ąĮą░ čüč鹊čĆąŠąĮąĄ MCU.
STM8 ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ą▒ą░ą╣čéčŗ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
ąæą░ą╣čé 1: ACK.
ąæą░ą╣čé 2: N = 5 = ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝čŗčģ ą▒ą░ą╣čé -1 (1 Ōēż N+1 Ōēż 256).
ąæą░ą╣čé 3: ą▓ąĄčĆčüąĖčÅ ąĘą░ą│čĆčāąĘčćąĖą║ą░ (0 < version Ōēż 255).
ąæą░ą╣čé 4: 0x00 - ą║ąŠą╝ą░ąĮą┤ą░ Get.
ąæą░ą╣čé 5: 0x11 - ą║ąŠą╝ą░ąĮą┤ą░ Read Memory.
ąæą░ą╣čé 6: 0x21 - ą║ąŠą╝ą░ąĮą┤ą░ Go.
ąæą░ą╣čé 7: 0x31 - ą║ąŠą╝ą░ąĮą┤ą░ Write Memory.
ąæą░ą╣čé 8: 0x43 - ą║ąŠą╝ą░ąĮą┤ą░ Erase Memory.
ąæą░ą╣čé 9: ACK.
[CAN]
ąĀąĖčü. 7. ąÜąŠą╝ą░ąĮą┤ą░ Get č湥čĆąĄąĘ CAN ąĮą░ čüč鹊čĆąŠąĮąĄ čģąŠčüčéą░.
ąźąŠčüčé ą┐ąŠčüčŗą╗ą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
ąĪąŠąŠą▒čēąĄąĮąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ: Std ID = 0x00, ą║ąŠą┤ ą┤ą╗ąĖąĮčŗ ą┤ą░ąĮąĮčŗčģ (DLC) = ąĮąĄ ąĖą╝ąĄąĄčé ąĘąĮą░č湥ąĮąĖčÅ.

ąĀąĖčü. 8. ąÜąŠą╝ą░ąĮą┤ą░ Get č湥čĆąĄąĘ CAN ąĮą░ čüč鹊čĆąŠąĮąĄ MCU.
STM8 ą┐ąŠčüčŗą╗ą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
ąĪąŠąŠą▒čēąĄąĮąĖąĄ 1: Std ID = 0x02, DLC = 1, data = ACK.
ąĪąŠąŠą▒čēąĄąĮąĖąĄ 2: Std ID = 0x02, DLC = 1, data = N = 6 = ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąŠčüčŗą╗ą░ąĄą╝čŗčģ ą▒ą░ą╣čé -1 (1 Ōēż N+1 Ōēż 256).
ąĪąŠąŠą▒čēąĄąĮąĖąĄ 3: Std ID = 0x02, DLC = 1, data = ą▓ąĄčĆčüąĖčÅ ąĘą░ą│čĆčāąĘčćąĖą║ą░ (0 < version Ōēż 255).
ąĪąŠąŠą▒čēąĄąĮąĖąĄ 4: Std ID = 0x02, DLC = 1, data = 0x00 - ą║ąŠą╝ą░ąĮą┤ą░ Get.
ąĪąŠąŠą▒čēąĄąĮąĖąĄ 5: Std ID = 0x02, DLC = 1, data = 0x03 - ą║ąŠą╝ą░ąĮą┤ą░ Speed.
ąĪąŠąŠą▒čēąĄąĮąĖąĄ 6: Std ID = 0x02, DLC = 1, data = 0x11 - ą║ąŠą╝ą░ąĮą┤ą░ Read Memory.
ąĪąŠąŠą▒čēąĄąĮąĖąĄ 7: Std ID = 0x02, DLC = 1, data = 0x21 - ą║ąŠą╝ą░ąĮą┤ą░ Go.
ąĪąŠąŠą▒čēąĄąĮąĖąĄ 8: Std ID = 0x02, DLC = 1, data = 0x31 - ą║ąŠą╝ą░ąĮą┤ą░ Write Memory.
ąĪąŠąŠą▒čēąĄąĮąĖąĄ 9: Std ID = 0x02, DLC = 1, data = 0x43 - ą║ąŠą╝ą░ąĮą┤ą░ Erase Memory.
ąĪąŠąŠą▒čēąĄąĮąĖąĄ 10: Std ID = 0x02, DLC = 1, data = ACK.
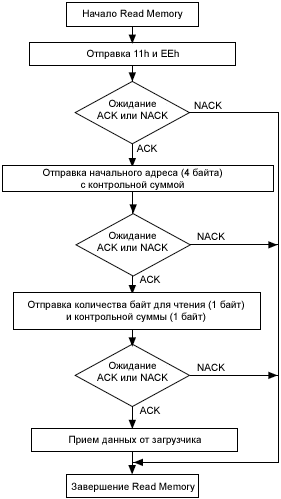
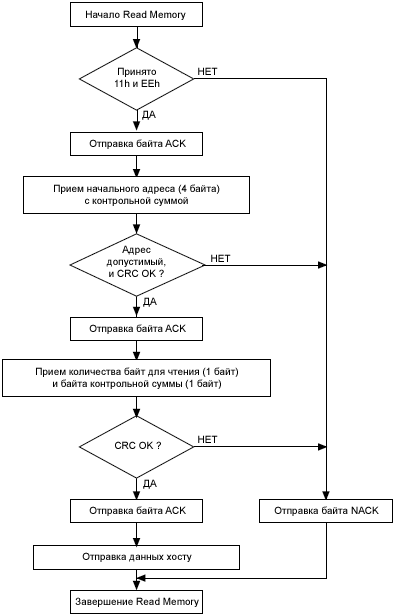
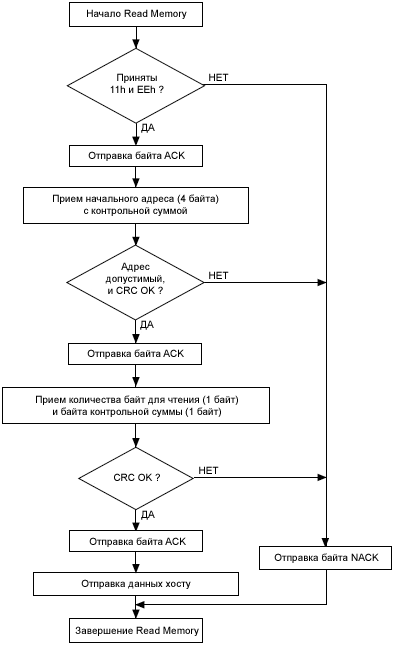
ąÜąŠą╝ą░ąĮą┤ą░ čćąĖčéą░ąĄčé ą┐ą░ą╝čÅčéčī (RAM, ą┐ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ Flash, ą┤ą░ąĮąĮčŗąĄ EEPROM ąĖą╗ąĖ čĆąĄą│ąĖčüčéčĆčŗ). ąÜąŠą│ą┤ą░ ąĘą░ą│čĆčāąĘčćąĖą║ ą┐ąŠą╗čāčćą░ąĄčé ą║ąŠą╝ą░ąĮą┤čā Read Memory, ąŠąĮ ą┐ąĄčĆąĄą┤ą░ąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ ((N + 1) ą▒ą░ą╣čé) čģąŠčüčéčā, ąĮą░čćąĖąĮą░čÅ čü čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ ą▓ ą║ąŠą╝ą░ąĮą┤ąĄ ą░ą┤čĆąĄčüą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┤ąŠą┐čāčüčéąĖą╝čŗą╝ąĖ čüčćąĖčéą░čÄčéčüčÅ ą░ą┤čĆąĄčüą░ RAM, ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ Flash, EEPROM ą┤ą░ąĮąĮčŗčģ ąĖ ą░ą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆąŠą▓ (čüą╝. ą┤ą░čéą░čłąĖčé ąĮą░ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ MCU). ąĢčüą╗ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ ą┐čĆąĖąĮčÅą╗ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą░ą┤čĆąĄčü, č鹊 ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąŠčłąĖą▒ą║ą░ (čüą╝. čéą░ą▒ą╗ąĖčåčā 10).
[USART/LINUART/UART1/UART2/UART3]
ąĀąĖčü. 9. ąÜąŠą╝ą░ąĮą┤ą░ Read Memory č湥čĆąĄąĘ USART/LINUART/UART1/UART2/UART3 ąĮą░ čüč鹊čĆąŠąĮąĄ čģąŠčüčéą░.
ąźąŠčüčé ą┐ąŠčüčŗą╗ą░ąĄčé ą▒ą░ą╣čéčŗ ą▓ STM8 čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
ąæą░ą╣čéčŗ 1-2: 0x11+0xEE (ą║ąŠą╝ą░ąĮą┤ą░ ąĖ ąĄčæ ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčé).
ąæą░ą╣čéčŗ 3-6: ąĮą░čćą░ą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü (ą░ą┤čĆąĄčü 32-ą▒ąĖčéąĮčŗą╣).
ąæą░ą╣čé 3 = MSB.
ąæą░ą╣čé 6 = LSB.
ąæą░ą╣čé 7: ą║ąŠąĮčéčĆąŠą╗čīąĮą░čÅ čüčāą╝ą╝ą░ = XOR (ą▒ą░ą╣čé 3, ą▒ą░ą╣čé 4, ą▒ą░ą╣čé 5, ą▒ą░ą╣čé 6).
ąæą░ą╣čé 8: ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą┤ą╗čÅ čćč鹥ąĮąĖčÅ -1 (0 Ōēż N Ōēż 255).
ąæą░ą╣čé 9: ą║ąŠąĮčéčĆąŠą╗čīąĮą░čÅ čüčāą╝ą╝ą░ (ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčé ą▒ą░ą╣čéą░ 8).
ąĀąĖčü. 10. ąÜąŠą╝ą░ąĮą┤ą░ Read Memory č湥čĆąĄąĘ USART/LINUART/UART1/UART2/UART3 ąĮą░ čüč鹊čĆąŠąĮąĄ MCU.
[SPI]
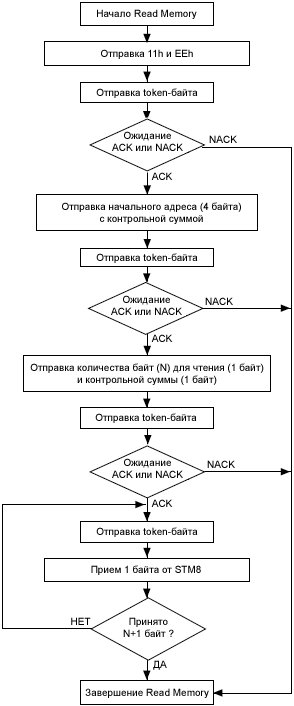
ąĀąĖčü. 11. ąÜąŠą╝ą░ąĮą┤ą░ Read Memory č湥čĆąĄąĘ SPI ąĮą░ čüč鹊čĆąŠąĮąĄ čģąŠčüčéą░.
ąźąŠčüčé ą┐ąŠčüčŗą╗ą░ąĄčé ą▒ą░ą╣čéčŗ ą▓ STM8 čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
ąæą░ą╣čé 1: 0x11 - Command ID.
ąæą░ą╣čé 2: 0xEE - ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčé ą║ąŠą╝ą░ąĮą┤čŗ.
ąæą░ą╣čé 3 (token): 0xXY; čģąŠčüčé ąČą┤ąĄčé ACK ąĖą╗ąĖ NACK ąŠčé MCU.
ąæą░ą╣čéčŗ 4-7: ąĮą░čćą░ą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü (32-ą▒ąĖčéąĮčŗą╣ ą░ą┤čĆąĄčü).
ąæą░ą╣čé 4 = MSB.
ąæą░ą╣čé 7 = LSB.
ąæą░ą╣čé 8: ą║ąŠąĮčéčĆąŠą╗čīąĮą░čÅ čüčāą╝ą╝ą░ = XOR (ą▒ą░ą╣čé 4, ą▒ą░ą╣čé 5, ą▒ą░ą╣čé 6, ą▒ą░ą╣čé 7).
ąæą░ą╣čé 9 (token): 0xXY; čģąŠčüčé ąČą┤ąĄčé ACK ąĖą╗ąĖ NACK ąŠčé MCU.
ąæą░ą╣čé 10: ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą┤ą╗čÅ čćč鹥ąĮąĖčÅ -1 (0 Ōēż N Ōēż 255).
ąæą░ą╣čé 11: ą║ąŠąĮčéčĆąŠą╗čīąĮą░čÅ čüčāą╝ą╝ą░ (ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčé ą▒ą░ą╣čéą░ 10).
ąæą░ą╣čé 12 (token): 0xXY; čģąŠčüčé ąČą┤ąĄčé 1-ą╣ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ.
ąæą░ą╣čé 12+N (token): 0xXY; čģąŠčüčé ąČą┤ąĄčé N+1-ą╣ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ.
ąĀąĖčü. 12. ąÜąŠą╝ą░ąĮą┤ą░ Read memory č湥čĆąĄąĘ SPI ąĮą░ čüč鹊čĆąŠąĮąĄ MCU.
[CAN]
ąĪąŠąŠą▒čēąĄąĮąĖąĄ CAN ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čģąŠčüč鹊ą╝ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
ŌĆó ID čüąŠą┤ąĄčƹȹĖčé ą║ąŠą┤ ą║ąŠą╝ą░ąĮą┤čŗ (0x11).
ŌĆó ą¤ąŠą╗ąĄ ą┤ą░ąĮąĮčŗčģ čüąŠą┤ąĄčƹȹĖčé ą░ą┤čĆąĄčü ąĮą░ąĘąĮą░č湥ąĮąĖčÅ (4 ą▒ą░ą╣čéą░, ą▒ą░ą╣čé 1 čüčéą░čĆčłąĖą╣, ąĖ ą▒ą░ą╣čé 4 ą╝ą╗ą░ą┤čłąĖą╣ ą▒ą░ą╣čé ą░ą┤čĆąĄčüą░) ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé (N) ą┤ą╗čÅ čćč鹥ąĮąĖčÅ.
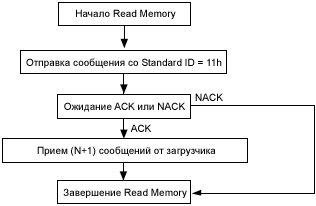
ąĀąĖčü. 13. ąÜąŠą╝ą░ąĮą┤ą░ Read Memory č湥čĆąĄąĘ CAN ąĮą░ čüč鹊čĆąŠąĮąĄ čģąŠčüčéą░.
ąźąŠčüčé ą┐ąŠčüčŗą╗ą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤čŗ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
Std ID = 0x11, DLC = 0x05, data = MSB, 0xXX, 0xYY, LSB, N (ą│ą┤ąĄ 0 < N Ōēż 255).

ąĀąĖčü. 14. ąÜąŠą╝ą░ąĮą┤ą░ Read Memory č湥čĆąĄąĘ CAN ąĮą░ čüč鹊čĆąŠąĮąĄ MCU.
STM8 ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé čüąŠąŠą▒čēąĄąĮąĖčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
ąĪąŠąŠą▒čēąĄąĮąĖąĄ ACK: Std ID = 0x02, DLC = 1, data = ACK.
ąĪąŠąŠą▒čēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ 1: Std ID = 0x02, DLC = 1, data = 0xXX.
ąĪąŠąŠą▒čēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ 2: Std ID = 0x02, DLC = 1, data = 0xXX.
...
ąĪąŠąŠą▒čēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ (N+1): Std ID = 0x02, DLC = 1, data = 0xXX.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĘą░ą│čĆčāąĘčćąĖą║ ą┐ąŠčüčŗą╗ą░ąĄčé čüč鹊ą╗čīą║ąŠ čüąŠąŠą▒čēąĄąĮąĖą╣ ą┤ą░ąĮąĮčŗčģ, čüą║ąŠą╗čīą║ąŠ ą▒ą░ą╣čé ą╝ąŠąČąĮąŠ ą┐čĆąŠčćąĖčéą░čéčī.
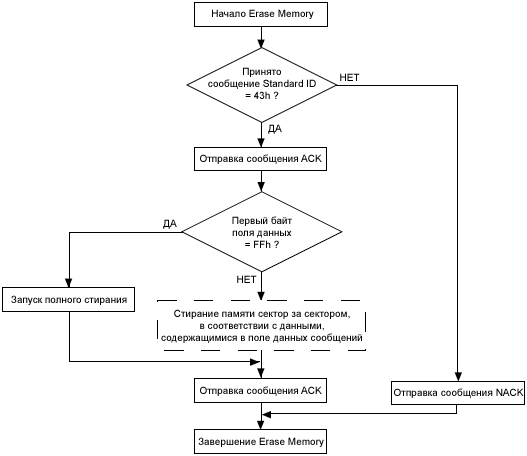
ąÜąŠą╝ą░ąĮą┤ą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čģąŠčüčéčā čüč鹥čĆąĄčéčī čüąĄą║č鹊čĆą░ Flash ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ ąĖ data EEPROM.
ąŚą░ą│čĆčāąĘčćąĖą║ ą┐ąŠą╗čāčćą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ čüčéąĖčĆą░ąĮąĖčÅ, ą║ąŠą│ą┤ą░ ID čüąŠą┤ąĄčƹȹĖčé čéąĖą┐ ą║ąŠą╝ą░ąĮą┤čŗ 0x43, ąĖ ą┐ąŠą╗ąĄ ą┤ą░ąĮąĮčŗčģ čüąŠą┤ąĄčƹȹĖčé čüąĄą║č鹊čĆą░ ą┤ą╗čÅ ąŠčćąĖčüčéą║ąĖ (čüą╝. čéą░ą▒ą╗ąĖčåčā 9 čü ą║ąŠą┤ą░ą╝ąĖ čüąĄą║č鹊čĆąŠą▓ STM8). ąĪ čĆą░ąĘą╝ąĄčĆąŠą╝ čüąĄą║č鹊čĆą░ 1 ą║ąĖą╗ąŠą▒ą░ą╣čé ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą│čĆą░ąĮčāą╗čÅčĆąĮąŠčüčéčī ą║ąŠą╝ą░ąĮą┤čŗ čüčéąĖčĆą░ąĮąĖčÅ ą▓ 8 ą▒ą╗ąŠą║ąŠą▓ (1 ą▒ą╗ąŠą║ = 128 ą▒ą░ą╣čé). ąĢčüą╗ąĖ čģąŠčüčéčā ąĮą░ą┤ąŠ čüč鹥čĆąĄčéčī č鹊ą╗čīą║ąŠ 1 ą▒ą░ą╣čé, č鹊 ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ąŠą╝ą░ąĮą┤ą░ ąĘą░ą┐ąĖčüąĖ (ąĘą░ą┐ąĖčüčī 0x00).
ą×ą┐ąĖčüą░ąĮąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ Erase Memory:
1. ąŚą░ą│čĆčāąĘčćąĖą║ ą┐čĆąĖąĮąĖą╝ą░ąĄčé 1 ą▒ą░ą╣čé, ą║ąŠč鹊čĆčŗą╣ čüąŠą┤ąĄčƹȹĖčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ (N) čüčéąĖčĆą░ąĄą╝čŗčģ čüąĄą║č鹊čĆąŠą▓. N ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ MCU.
2. ąŚą░č鹥ą╝ ąĘą░ą│čĆčāąĘčćąĖą║ ą┐čĆąĖąĮąĖą╝ą░ąĄčé (N + 1) ą▒ą░ą╣čé, ą│ą┤ąĄ ą║ą░ąČą┤čŗą╣ ą▒ą░ą╣čé čüąŠą┤ąĄčƹȹĖčé ą║ąŠą┤ čüąĄą║č鹊čĆą░ (čüą╝. čéą░ą▒ą╗ąĖčåčā 9 čü ą║ąŠą┤ą░ą╝ąĖ čüąĄą║č鹊čĆąŠą▓ STM8).
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ "čüč鹥čĆąĄčéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čüąĄą║č鹊čĆą░" ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą▓ RAM. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ąĘą░ą│čĆčāąĘąĖčéčī ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čā čüčéąĖčĆą░ąĮąĖčÅ ą▓ RAM ą┐ąĄčĆąĄą┤ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ ą║ąŠą╝ą░ąĮą┤čŗ čüčéąĖčĆą░ąĮąĖčÅ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą┤ą╗čÅ ąĮąĄą║ąŠč鹊čĆčŗčģ ą▓ąĄčĆčüąĖą╣ ąĘą░ą│čĆčāąĘčćąĖą║ą░ čŹč鹊 ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ (čüą╝. ą┤ą░ą╗ąĄąĄ "ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ erase/write ą▓ ą┐ą░ą╝čÅčéąĖ RAM").
ą¤čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖąĄ: ąĄčüą╗ąĖ čģąŠčüčé ąŠčéą┐čĆą░ą▓ąĖčé ą║ąŠą╝ą░ąĮą┤čā čüčéąĖčĆą░ąĮąĖčÅ, ą║ąŠč鹊čĆą░čÅ čüąŠą┤ąĄčƹȹĖčé ąĮąĄą║ąŠč鹊čĆčŗą╣ ą║ąŠčĆčĆąĄą║čéąĮčŗą╣ ą║ąŠą┤ čüąĄą║č鹊čĆą░ ąĖ ąŠą┤ąĖąĮ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┐čĆąĄčēąĄąĮąĮčŗčģ ą║ąŠą┤ąŠą▓ čüąĄą║č鹊čĆą░ (čüą╝. čéą░ą▒ą╗ąĖčåčā 9 čü ą║ąŠą┤ą░ą╝ąĖ čüąĄą║č鹊čĆąŠą▓ STM8), č鹊 ą║ąŠą╝ą░ąĮą┤ą░ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ ąĮąĄčāą┤ą░č湥ą╣, ąĖ ąĮąĖ ąŠą┤ąĖąĮ ą▒ą╗ąŠą║ ąĮąĄ ą▒čāą┤ąĄčé čüč鹥čĆčé.
[USART/LINUART/UART1/UART2/UART3]
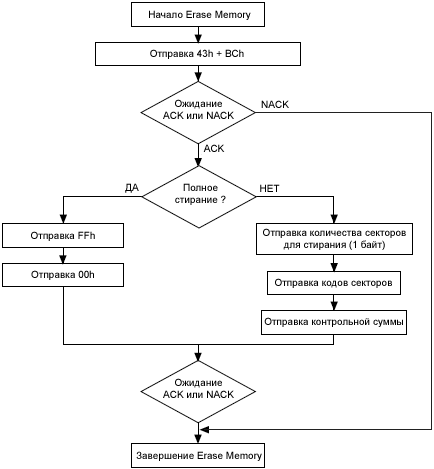
ąĀąĖčü. 15. ąÜąŠą╝ą░ąĮą┤ą░ Erase Memory č湥čĆąĄąĘ USART/LINUART/UART1/2/3 ąĮą░ čüč鹊čĆąŠąĮąĄ čģąŠčüčéą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
(1) "Total erase" čüčéąĖčĆą░ąĄčé ą┐ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ ąĖ data EEPROM. ąŚą░ą│čĆčāąĘčćąĖą║ čüąŠčéčĆąĄčé ą▓čüčÄ ą┐ą░ą╝čÅčéčī čüąĄą║č鹊čĆ ąĘą░ čüąĄą║č鹊čĆąŠą╝.
(2) ąĀą░ąĘą╝ąĄčĆ čüąĄą║č鹊čĆą░ 1 ą║ąĖą╗ąŠą▒ą░ą╣čé ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╣ ą┤ą╗čÅ ą▓čüąĄčģ MCU STM8. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą│čĆą░ąĮčāą╗čÅčĆąĮąŠčüčéčī ą║ąŠą╝ą░ąĮą┤čŗ čüčéąĖčĆą░ąĮąĖčÅ čüąŠčüčéą░ą▓ą╗čÅąĄčé 8 ą▒ą╗ąŠą║ąŠą▓. ą¦č鹊ą▒čŗ čüč鹥čĆąĄčéčī 1 ą▒ą░ą╣čé, ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ąŠą╝ą░ąĮą┤ą░ ąĘą░ą┐ąĖčüąĖ.
ąźąŠčüčé ą┐ąŠčüčŗą╗ą░ąĄčé ą▒ą░ą╣čéčŗ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
ąæą░ą╣čé 1: 0x43 - Command ID.
ąæą░ą╣čé 2: 0xBC - ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčé ą║ąŠą╝ą░ąĮą┤ąĄ.
ąæą░ą╣čé 3: 0xFF ąĖą╗ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüčéąĖčĆą░ąĄą╝čŗčģ čüąĄą║č鹊čĆąŠą▓ (0 Ōēż N Ōēż M); ąĄčüą╗ąĖ N > M, ą▓ ąĘą░ą│čĆčāąĘčćąĖą║ąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąŠčłąĖą▒ą║ą░ cmd_error, ą┐ąŠčüą╗ąĄ ą║ąŠč鹊čĆąŠą╣ ąĘą░ą│čĆčāąĘčćąĖą║ ą┐čĆąĖą╝ąĄčé N+1 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ąĖ ą║ąŠąĮčéčĆąŠą╗čīąĮčāčÄ čüčāą╝ą╝čā (čé. ąĄ. čģąŠčüčé ąĘą░ą▓ąĄčĆčłąĖčé ą║ąŠą╝ą░ąĮą┤čā).
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: N ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ MCU. M = (čĆą░ąĘą╝ąĄčĆ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ Flash ą▓ ą║ąĖą╗ąŠą▒ą░ą╣čéą░čģ) + (čĆą░ąĘą╝ąĄčĆ data EEPROM ą▓ ą║ąĖą╗ąŠą▒ą░ą╣čéą░čģ) -1.
ą¤čĆąĖą╝ąĄčĆ ą┤ą╗čÅ STM8S Series-high density: M = 129, ą┐ąŠč鹊ą╝čā čćč鹊 čĆą░ąĘą╝ąĄčĆ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ Flash 128 ą║ąĖą╗ąŠą▒ą░ą╣čé ąĖ data EEPROM 2 ą║ąĖą╗ąŠą▒ą░ą╣čéą░ (128 + 2 - 1).
ą¤čĆąĖą╝ąĄčĆ ą┤ą╗čÅ STM8S Series-medium density: M = 32, ą┐ąŠč鹊ą╝čā čćč鹊 ą┐ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ Flash 32 ą║ąĖą╗ąŠą▒ą░ą╣čéą░, ąĖ data EEPROM 1 ą║ąĖą╗ąŠą▒ą░ą╣čé (32 + 1 - 1).
ąæą░ą╣čé 4 ąĖą╗ąĖ N+1 ą▒ą░ą╣čé: 0x00 ąĖą╗ąĖ (N+1 ą▒ą░ą╣čé ąĖ ąĘą░č鹥ą╝ ą║ąŠąĮčéčĆąŠą╗čīąĮą░čÅ čüčāą╝ą╝ą░: XOR(N,[N+1 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ])).
ą¤čĆąĖą╝ąĄčĆ ą┤ą╗čÅ STM8L ąĖ STM8AL Series-low density: M = 8, ą┐ąŠč鹊ą╝čā čćč鹊 ą┐ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ Flash 8 ą║ąĖą╗ąŠą▒ą░ą╣čé ąĖ data EEPROM (256 ą▒ą░ą╣čé) ą▓ čüą╗ąĄą┤čāčÄčēąĄą╝ ąĮą░čćą░ą╗čīąĮąŠą╝ 1 ą║ąĖą╗ąŠą▒ą░ą╣č鹥 (8 + 1 - 1).
ąæą░ą╣čé 4 ąĖą╗ąĖ N+1 ą▒ą░ą╣čé: 0x00 ąĖą╗ąĖ (N+1 ą▒ą░ą╣čé ąĖ ąĘą░č鹥ą╝ ą║ąŠąĮčéčĆąŠą╗čīąĮą░čÅ čüčāą╝ą╝ą░: XOR(N,[N+1 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ])).

ąĀąĖčü. 16. ąÜąŠą╝ą░ąĮą┤ą░ Erase Memory č湥čĆąĄąĘ USART/LINUART/UART1/2/3 ąĮą░ čüč鹊čĆąŠąĮąĄ MCU.
[SPI]

ąĀąĖčü. 17. ąÜąŠą╝ą░ąĮą┤ą░ Erase Memory č湥čĆąĄąĘ SPI ąĮą░ čüč鹊čĆąŠąĮąĄ čģąŠčüčéą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ą░ čüčéąĖčĆą░ąĮąĖčÅ č湥čĆąĄąĘ SPI, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┐ąŠą┤ąŠąČą┤ą░čéčī ąĖąĘą▓ąĄčüčéąĮčŗą╣ ąĖąĮč鹥čĆą▓ą░ą╗ ą▓čĆąĄą╝ąĄąĮąĖ (čüą╝. ą▒ą╗ąŠą║ "ąŚą░ą┤ąĄčƹȹ║ą░" ąĮą░ čĆąĖčü. 17) ą┐ąĄčĆąĄą┤ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ token-ą▒ą░ą╣čéą░. ąŁč鹊čé ąĖąĮč鹥čĆą▓ą░ą╗ ąĘą░ą┤ąĄčƹȹ║ąĖ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą║ąŠą╗ąĖč湥čüčéą▓ą░ čüčéąĖčĆą░ąĄą╝čŗčģ čüąĄą║č鹊čĆąŠą▓ (N). Delay = 30 * (N + 1)[ą╝čü], ąĘą┤ąĄčüčī 0 Ōēż N Ōēż 32. N = 32 ą▓ čüą╗čāčćą░ąĄ ą┐ąŠą╗ąĮąŠą╣ ąŠčćąĖčüčéą║ąĖ (total erase). ąĪą╝. čéą░ą║ąČąĄ "ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ C. ą×ą┐čåąĖąĖ čéą░ą╣ą╝ąĖąĮą│ą░ SPI".
ąźąŠčüčé ą┐ąŠčüčŗą╗ą░ąĄčé ą▒ą░ą╣čéčŗ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
ąæą░ą╣čé 1: 0x43 - Command ID.
ąæą░ą╣čé 2: 0xBC - ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčé ą║ąŠą╝ą░ąĮą┤ąĄ.
ąæą░ą╣čé 3 (token): 0xXY; čģąŠčüčé ąČą┤ąĄčé ACK ąĖą╗ąĖ NACK.
ąæą░ą╣čé 4: 0xFF ąĖą╗ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüčéąĖčĆą░ąĄą╝čŗčģ čüąĄą║č鹊čĆąŠą▓ (0 Ōēż N Ōēż 32). ąĢčüą╗ąĖ N > 32, č鹊 ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąŠčłąĖą▒ą║ą░ cmd_error.
ąæą░ą╣čé 5 ąĖą╗ąĖ N+1 ą▒ą░ą╣čé: 0x00 ąĖą╗ąĖ (N+1) ą▒ą░ą╣čé, ąĖ ąĘą░č鹥ą╝ ą║ąŠąĮčéčĆąŠą╗čīąĮą░čÅ čüčāą╝ą╝ą░: XOR(N,[N+1 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ]).
ą¤ąŠčüą╗ąĄą┤ąĮąĖą╣ ą▒ą░ą╣čé (token): 0xXY; čģąŠčüčé ąČą┤ąĄčé ACK ąĖą╗ąĖ NACK.

ąĀąĖčü. 18. ąÜąŠą╝ą░ąĮą┤ą░ Erase Memory č湥čĆąĄąĘ SPI ąĮą░ čüč鹊čĆąŠąĮąĄ MCU.
[CAN]
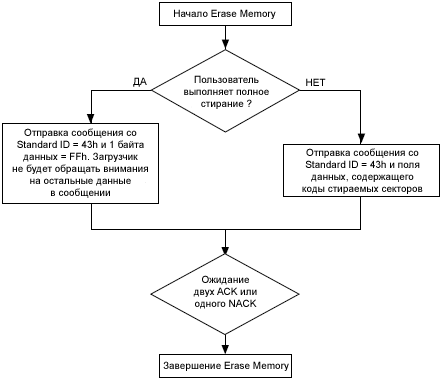
ąĀąĖčü. 19. ąÜąŠą╝ą░ąĮą┤ą░ Erase Memory č湥čĆąĄąĘ CAN ąĮą░ čüč鹊čĆąŠąĮąĄ čģąŠčüčéą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
(1) ąŚą░ą│čĆčāąĘčćąĖą║ čüčéąĖčĆą░ąĄčé ą┐ą░ą╝čÅčéčī čüąĄą║č鹊čĆ ąĘą░ čüąĄą║č鹊čĆąŠą╝.
(2) ąĀą░ąĘą╝ąĄčĆ čüąĄą║č鹊čĆą░ 1 ą║ąĖą╗ąŠą▒ą░ą╣čé ą┤ą╗čÅ ą▓čüąĄčģ MCU STM8. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą│čĆą░ąĮčāą╗čÅčĆąĮąŠčüčéčī ą║ąŠą╝ą░ąĮą┤čŗ erase čüąŠčüčéą░ą▓ą╗čÅąĄčé 8 ą▒ą╗ąŠą║ąŠą▓. ąöą╗čÅ čüčéąĖčĆą░ąĮąĖčÅ 1 ą▒ą░ą╣čéą░ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ąŠą╝ą░ąĮą┤ą░ ąĘą░ą┐ąĖčüąĖ.
ąźąŠčüčé ą┐ąŠčüčŗą╗ą░ąĄčé ą▒ą░ą╣čéčŗ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
ąĪąŠąŠą▒čēąĄąĮąĖąĄ ą┐ąŠą╗ąĮąŠą│ąŠ čüčéąĖčĆą░ąĮąĖčÅ: Std ID = 0x43, DLC = 0x01, data = 0xFF.
ąĪąŠąŠą▒čēąĄąĮąĖąĄ ą┤ą╗čÅ ą┐ąŠčüąĄą║č鹊čĆąĮąŠą│ąŠ čüčéąĖčĆą░ąĮąĖčÅ: Std ID = 0x43, DLC = ąŠčé 0x01 ą┤ąŠ 0x08, data = čüą╝. čéą░ą▒ą╗ąĖčåčā 9: čü ą║ąŠą┤ą░ą╝ąĖ čüąĄą║č鹊čĆąŠą▓ STM8.
ąĀąĖčü. 20. ąÜąŠą╝ą░ąĮą┤ą░ Erase Memory č湥čĆąĄąĘ CAN ąĮą░ čüč鹊čĆąŠąĮąĄ MCU.
ąÜąŠą╝ą░ąĮą┤ą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čģąŠčüčéčā ąĘą░ą┐ąĖčüą░čéčī ą┤ą░ąĮąĮčŗąĄ ą▓ ą╗čÄą▒ąŠąĄ ą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ą╝ąĄčüč鹊 ąĮą░ ą║ą░čĆč鹥 ą┐ą░ą╝čÅčéąĖ (RAM, ą┐ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ Flash, data EEPROM ąĖą╗ąĖ čĆąĄą│ąĖčüčéčĆčŗ) ąĮą░čćąĖąĮą░čÅ čü čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ ą░ą┤čĆąĄčüą░. ą¤ąŠčüčéčāą┐ą░čÄčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ ą▓čüąĄą│ą┤ą░ ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ą▓ RAM ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ąŠąĮąĖ ąĘą░ą│čĆčāąČą░čÄčéčüčÅ ą▓ čÅč湥ą╣ą║ąĖ ą┐ą░ą╝čÅčéąĖ, ą║ąŠč鹊čĆčŗąĄ čāą║ą░ąĘą░ą╗ čģąŠčüčé. ąŚą░č鹥ą╝ ąĘą░ą│čĆčāąĘčćąĖą║ ą┐čĆąŠą▓ąĄčĆčÅąĄčé, čģąŠč湥čé ą╗ąĖ čģąŠčüčé ąĘą░ą┐ąĖčüą░čéčī ą┤ą░ąĮąĮčŗąĄ ą▓ RAM, ąĖą╗ąĖ ąČąĄ ą┐ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ Flash/data EEPROM.
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝ąŠą│ąŠ ą▒ą╗ąŠą║ą░ ą┤ą╗čÅ STM8 čĆą░ą▓ąĄąĮ 128 ą▒ą░ą╣čéą░ą╝ ą┤ą░ąĮąĮčŗčģ. ą¦č鹊ą▒čŗ ąĘą░ą┐ąĖčüą░čéčī ą┤ą░ąĮąĮčŗąĄ ą▓ čÅč湥ą╣ą║ąĖ ą┐ą░ą╝čÅčéąĖ Flash/EEPROM, ąĘą░ą│čĆčāąĘčćąĖą║ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą┤ą▓ąĄ čĆą░ąĘąĮčŗąĄ ąŠą┐ąĄčĆą░čåąĖąĖ ąĘą░ą┐ąĖčüąĖ:
1. WordWrite/FastWordWrite (ąĘą░ą┐ąĖčüčī čüą╗ąŠą▓ą░ / ą▒čŗčüčéčĆą░čÅ ąĘą░ą┐ąĖčüčī čüą╗ąŠą▓ą░): ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą▒ą░ą╣čé ą▓ ą┐ą░ą╝čÅčéčī Flash/EEPROM. ąŁč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝čŗčģ čģąŠčüč鹊ą╝ ą▒ą░ą╣čé ą╝ąĄąĮčīčłąĄ 128. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąĘą░ą│čĆčāąĘčćąĖą║ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ąŠą┐ąĄčĆą░čåąĖčÄ N čĆą░ąĘ.
2. BlockWrite (ąĘą░ą┐ąĖčüčī ą▒ą╗ąŠą║ą░): ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą▒ą╗ąŠą║ ą▓ ą┐ą░ą╝čÅčéčī Flash/EEPROM. ąŁč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝čŗčģ čģąŠčüč鹊ą╝ ą▒ą░ą╣čé (N) 128, ąĖ ą░ą┤čĆąĄčü čĆą░ą▓ąĄąĮ čćąĖčüą╗čā, ąĮą░čåąĄą╗ąŠ ą┤ąĄą╗čÅčēąĄą╝čāčüčÅ ąĮą░ 128. ąöčĆčāą│ąĖą╝ąĖ čüą╗ąŠą▓ą░ą╝ąĖ, ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čŹč鹊ą╣ ąŠą┐ąĄčĆą░čåąĖąĖ ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ čģąŠčüč鹊ą╝ ą▒ą╗ąŠą║ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓čŗčĆą░ą▓ąĮąĄąĮ ąĮą░ ą▒ą╗ąŠą║ ą┐ą░ą╝čÅčéąĖ. ąĢčüą╗ąĖ ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖąĄ ąĮąĄ čüąŠą▒ą╗čÄą┤ą░ąĄčéčüčÅ, č鹊 ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▒ą░ą╣č鹊ą▓ą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ ąĘą░ą┐ąĖčüąĖ (ą║ąŠč鹊čĆą░čÅ čĆą░ą▒ąŠčéą░ąĄčé ą╝ąĄą┤ą╗ąĄąĮąĮąĄąĄ).
ąĪą╝. ą┤ą░čéą░čłąĖčé ąĮą░ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ MCU, čćč鹊ą▒čŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą░ą┤čĆąĄčü. ąĢčüą╗ąĖ ąĮą░čćą░ą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü ąĮąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╣, č鹊 ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąŠčłąĖą▒ą║ą░ add_error (čüą╝. čéą░ą▒ą╗ąĖčåčā 10).
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą║ąŠą┤ ą║ąŠą╝ą░ąĮą┤čŗ ąĘą░ą┐ąĖčüąĖ ą┐čĆąĖąĮčÅčéčŗčģ ą┤ą░ąĮąĮčŗčģ ą┐ąŠ čāą║ą░ąĘą░ąĮąĮąŠą╝čā ą░ą┤čĆąĄčüčā ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą▓ RAM. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ąĘą░ą│čĆčāąĘąĖčéčī ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čā ąĘą░ą┐ąĖčüąĖ ą▓ RAM ą┐ąĄčĆąĄą┤ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ ą║ąŠą╝ą░ąĮą┤čŗ ąĘą░ą┐ąĖčüąĖ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą┤ą╗čÅ ąĮąĄą║ąŠč鹊čĆčŗčģ ąĘą░ą│čĆčāąĘčćąĖą║ąŠą▓ čŹč鹊 ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ (čüą╝. ą┤ą░ą╗ąĄąĄ čüąĄą║čåąĖčÄ "ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ erase/write ą▓ ą┐ą░ą╝čÅčéąĖ RAM").
[USART/LINUART/UART1/UART2/UART3]
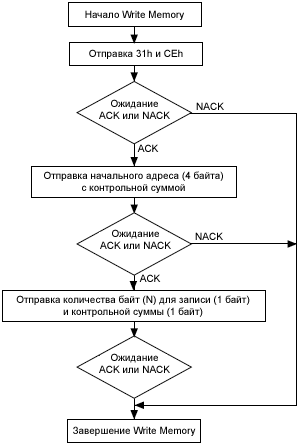
ąĀąĖčü. 21. ąÜąŠą╝ą░ąĮą┤ą░ Write Memory č湥čĆąĄąĘ USART/LINUART/UART1/UART2/UART3 ąĮą░ čüč鹊čĆąŠąĮąĄ čģąŠčüčéą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čüą╝. ą┤ą░čéą░čłąĖčé ąĮą░ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ MCU, čćč鹊ą▒čŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą░ą┤čĆąĄčü. ąĢčüą╗ąĖ ąĮą░čćą░ą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü ąĮąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╣, č鹊 ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąŠčłąĖą▒ą║ą░ add_error (čüą╝. čéą░ą▒ą╗ąĖčåčā 10).
ąźąŠčüčé ą┐ąŠčüčŗą╗ą░ąĄčé ą▒ą░ą╣čéčŗ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
ąæą░ą╣čé 1: 0x31 - Command ID.
ąæą░ą╣čé 2: 0xCE - ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčé ą║ąŠą╝ą░ąĮą┤čŗ.
Bytes 3-6: ąĮą░čćą░ą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü (32-ą▒ąĖčéąĮčŗą╣ ą░ą┤čĆąĄčü).
ąæą░ą╣čé 3 = MSB.
ąæą░ą╣čé 6 = LSB.
ąæą░ą╣čé 7: ą║ąŠąĮčéčĆąŠą╗čīąĮą░čÅ čüčāą╝ą╝ą░ = XOR (ą▒ą░ą╣čé 3, ą▒ą░ą╣čé 4, ą▒ą░ą╣čé 5, ą▒ą░ą╣čé 6).
ąæą░ą╣čé 8: ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ -1: N = 0 ... 127. ąĢčüą╗ąĖ N > 127, č鹊 ą▓ ąĘą░ą│čĆčāąĘčćąĖą║ąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąŠčłąĖą▒ą║ą░ cmd_error.
N+1 ą▒ą░ą╣čé: ą╝ą░ą║čüąĖą╝čāą╝ 128 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ.
ąæą░ą╣čé ą║ąŠąĮčéčĆąŠą╗čīąĮąŠą╣ čüčāą╝ą╝čŗ: XOR (N,[N+1 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ]).

ąĀąĖčü. 22. ąÜąŠą╝ą░ąĮą┤ą░ Write Memory č湥čĆąĄąĘ USART/LINUART/UART1/UART2/UART3 ąĮą░ čüč鹊čĆąŠąĮąĄ MCU.
[SPI]
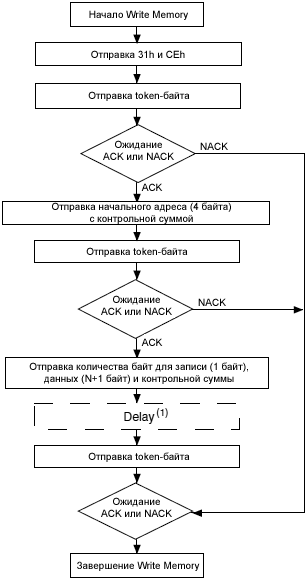
ąĀąĖčü. 23. ąÜąŠą╝ą░ąĮą┤ą░ Write Memory č湥čĆąĄąĘ SPI ąĮą░ čüč鹊čĆąŠąĮąĄ čģąŠčüčéą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (1): ąĘą┤ąĄčüčī ąĮčāąČąĮą░ ąĘą░ą┤ąĄčƹȹ║ą░ Delay ąĖą╗ąĖ ąŠą┐čĆąŠčü čäą╗ą░ą│ą░ ąĘą░ąĮčÅč鹊čüčéąĖ BUSY, ąĄčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ čŹč鹊 ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé. ąŚą░ą┤ąĄčƹȹ║ą░ Delay ą▓ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ą░čģ ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ą┐ąŠ č乊čĆą╝čāą╗ąĄ: Delay = 8.45 x n. ąŚą┤ąĄčüčī n čŹč鹊 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čåąĖą║ą╗ąŠą▓ ąĘą░ą┐ąĖčüąĖ (ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ąĖą╗ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą╗ąŠą║ąŠą▓, čüą╝. čéą░ą▒ą╗ąĖčåčā 8).
ąóą░ą▒ą╗ąĖčåą░ 8. ą¤čĆąĖą╝ąĄčĆčŗ ąĘą░ą┤ąĄčƹȹ║ąĖ.
| ąÜąŠą╝ą░ąĮą┤ą░ Write Memory |
Delay (ąĘą░ą┤ąĄčƹȹ║ą░) ą▓ ą╝čü |
| 128 ą▒ą░ą╣čé, ą▓čŗčĆąŠą▓ąĮąĄąĮąĮčŗčģ ą▓ ą┐ą░ą╝čÅčéąĖ ąĮą░ ą│čĆą░ąĮąĖčåčā ą▒ą╗ąŠą║ą░ |
8.45 |
| 128 ą▒ą░ą╣čé, ąĮąĄ ą▓čŗčĆąŠą▓ąĮąĄąĮąĮčŗčģ ą▓ ą┐ą░ą╝čÅčéąĖ ąĮą░ ą│čĆą░ąĮąĖčåčā ą▒ą╗ąŠą║ą░ |
1082 |
| 1 ą▒ą░ą╣čé |
8.45 |
| 10 ą▒ą░ą╣čé |
84.5 |
ąÆ čĆąĄąČąĖą╝ąĄ SPI, ąĄčüą╗ąĖ MCU ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ąŠčéą┐čĆą░ą▓ą║čā čäą╗ą░ą│ą░ ąĘą░ąĮčÅč鹊čüčéąĖ BUSY ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ Flash/EEPROM, č鹊 ąĘą░ą┤ąĄčƹȹ║ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą╝ąĄąĮąĄąĮą░ ąĮą░ ąŠą┐čĆąŠčü čüąŠčüč鹊čÅąĮąĖčÅ MCU (ą▓ ąĮąĄą│ąŠ ą┐ąŠčüčŗą╗ą░ąĄčéčüčÅ ąĮą░ą▒ąŠčĆ token-ą▒ą░ą╣č鹊ą▓). ąÆąŠ ą▓čĆąĄą╝čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ MCU ą┐ąŠčüčŗą╗ą░ąĄčé čäą╗ą░ą│ BUSY (0xAA) č湥čĆąĄąĘ SPI. ąÜąŠą│ą┤ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąŠ, MCU ą┐ąŠčüčŗą╗ą░ąĄčé ACK/NACK, čćč鹊ą▒čŗ ą┐ąŠą║ą░ąĘą░čéčī čĆąĄąĘčāą╗čīčéą░čé ąŠą┐ąĄčĆą░čåąĖąĖ - ąĘą░ą▓ąĄčĆčłąĖą╗ąŠčüčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čāčüą┐ąĄčłąĮąŠ ąĖą╗ąĖ ąĮąĄčāą┤ą░čćąĮąŠ.
ąÆ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ čéą░ą║ąŠą╣ ąŠą┐čĆąŠčü ą▓ąŠąĘą╝ąŠąČąĄąĮ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ STM8AF/S-medium density čü ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąĮčŗą╝ąĖ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ą╝ąĖ RAM (čüą╝. "ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ C. ą×ą┐čåąĖąĖ čéą░ą╣ą╝ąĖąĮą│ą░ SPI"). ąØą░ čāčüčéčĆąŠą╣čüčéą▓ą░čģ STM8L/AL-low density ąĖ STM8L/AL-high/medium+ density čäą╗ą░ą│ BUSY flag ą┐ąŠčüčŗą╗ą░ąĄčéčüčÅ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü SPI.
ąźąŠčüčé ą┐ąŠčüčŗą╗ą░ąĄčé ą▒ą░ą╣čéčŗ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
ąæą░ą╣čé 1: 0x31 - Command ID.
ąæą░ą╣čé 2: 0xCE - ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčé ą║ąŠą╝ą░ąĮą┤čŗ.
ąæą░ą╣čé 3 (token): XY; čģąŠčüčé ąČą┤ąĄčé ACK ąĖą╗ąĖ NACK.
ąæą░ą╣čéčŗ 4 .. 7: ąĮą░čćą░ą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü (32-ą▒ąĖčéąĮčŗą╣ ą░ą┤čĆąĄčü).
ąæą░ą╣čé 4 = MSB.
ąæą░ą╣čé 7 = LSB.
ąæą░ą╣čé 8: ą║ąŠąĮčéčĆąŠą╗čīąĮą░čÅ čüčāą╝ą╝ą░ = XOR (ą▒ą░ą╣čé 4, ą▒ą░ą╣čé 5, ą▒ą░ą╣čé 6 ąĖ ą▒ą░ą╣čé 7).
ąæą░ą╣čé 9 (token): XY; čģąŠčüčé ąČą┤ąĄčé ACK ąĖą╗ąĖ NACK.
ąæą░ą╣čé 10: ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ -1: N = 0 ... 127); ąĄčüą╗ąĖ N > 127, č鹊 ą▓ ąĘą░ą│čĆčāąĘčćąĖą║ąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąŠčłąĖą▒ą║ą░ cmd_error.
N+1 ą▒ą░ą╣čé: ą╝ą░ą║čüąĖą╝čāą╝ 128 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ.
ąæą░ą╣čé ą║ąŠąĮčéčĆąŠą╗čīąĮąŠą╣ čüčāą╝ą╝čŗ: XOR (N, [N+1 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ]).
ąÆą░ąČąĮąŠąĄ ąĘą░ą╝ąĄčćą░ąĮąĖąĄ: ą┐ąĄčĆąĄą┤ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ token-ą▒ą░ą╣čéą░ čģąŠčüčé ą┤ąŠą╗ąČąĄąĮ ą┐ąŠą┤ąŠąČą┤ą░čéčī, ą┐ąŠą║ą░ ąĘą░ą│čĆčāąĘčćąĖą║ ąĘą░ą▓ąĄčĆčłąĖčé ąĘą░ą┐ąĖčüčī ą▓čüąĄčģ ą┤ą░ąĮąĮčŗčģ ą▓ ą┐ą░ą╝čÅčéčī. ąĪą╝. ą▓čŗčłąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ąĘą░ą┤ąĄčƹȹ║ąĖ Delay (ąĖą╗ąĖ ąŠą┐čĆąŠčüą░ ąĘą░ąĮčÅč鹊čüčéąĖ).
ą¤ąŠčüą╗ąĄą┤ąĮąĖą╣ ą▒ą░ą╣čé (token): 0xXY; čģąŠčüčé ąČą┤ąĄčé ACK ąĖą╗ąĖ NACK.

ąĀąĖčü. 24. ąÜąŠą╝ą░ąĮą┤ą░ Write Memory č湥čĆąĄąĘ SPI ąĮą░ čüč鹊čĆąŠąĮąĄ MCU.
[CAN]
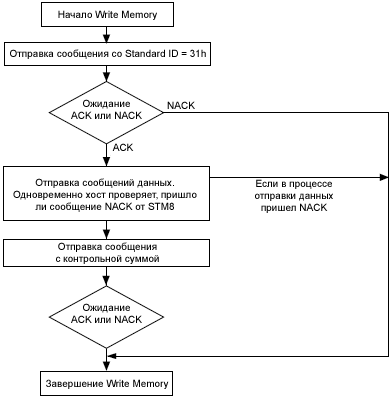
ąĀąĖčü. 25. ąÜąŠą╝ą░ąĮą┤ą░ Write Memory č湥čĆąĄąĘ CAN ąĮą░ čüč鹊čĆąŠąĮąĄ čģąŠčüčéą░.
ąźąŠčüčé ą┐ąŠčüčŗą╗ą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
ąĪąŠąŠąŠą▒čēąĄąĮąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ: Std ID = 0x31, DLC = 0x05, data = MSB, 0xXX, 0xYY, LSB, N. N = 0 ... 127, ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ -1. ąĢčüą╗ąĖ N > 127, č鹊 ą▓ ąĘą░ą│čĆčāąĘčćąĖą║ąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąŠčłąĖą▒ą║ą░ cmd_error.
ąĪąŠąŠą▒čēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ 1: Std ID = 0x04, DLC_1 = 1 .. 8, data = byte_11, .., byte_18.
ąĪąŠąŠą▒čēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ 2: Std ID = 0x04, DLC_2 = 1 .. 8, data = byte_21, .., byte_28.
ąĪąŠąŠą▒čēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ 3: Std ID = 0x04, DLC_3 = 1 .. 8, data = byte_31, .., byte_38.
...
ąĪąŠąŠą▒čēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ M: Std ID = 0x04, DLC_M = 1 .. 8, data = byte_m1, .., byte_M8.
ąĪąŠąŠą▒čēąĄąĮąĖąĄ ą║ąŠąĮčéčĆąŠą╗čīąĮąŠą╣ čüčāą╝ą╝čŗ: Std ID = 0x04, DLC = 1, data = XOR (N,[N+1 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ]).
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
(1) DLC_1 + DLC_2 + ... DLC_M = 128 ą╝ą░ą║čüąĖą╝čāą╝.
(2) ąŚą░ą│čĆčāąĘčćąĖą║ ąĮąĄ ą┐čĆąŠą▓ąĄčĆčÅąĄčé Standard ID ą▓ čüąŠąŠą▒čēąĄąĮąĖčÅčģ ą┤ą░ąĮąĮčŗčģ ąĖ ą║ąŠąĮčéčĆąŠą╗čīąĮąŠą╣ čüčāą╝ą╝čŗ. ą¤ąŠčŹč鹊ą╝čā ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ID ąŠčé 0x00 ą┤ąŠ 0xFF, ąĮąŠ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą▓čüąĄ ąČąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ID = 0x04.

ąĀąĖčü. 26. ąÜąŠą╝ą░ąĮą┤ą░ Write Memory č湥čĆąĄąĘ CAN ąĮą░ čüč鹊čĆąŠąĮąĄ MCU.
ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠą╝ąĄąĮčÅčéčī čüą║ąŠčĆąŠčüčéčī ąĖąĮč鹥čĆč乥ą╣čüą░ CAN ą▓ąŠ ą▓čĆąĄą╝čÅ ą░ą║čéąĖą▓ąĮąŠą╣ čüąĄčüčüąĖąĖ čü ąĘą░ą│čĆčāąĘčćąĖą║ąŠą╝. ąÜąŠą╝ą░ąĮą┤ą░ Speed ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĖąĮč鹥čĆč乥ą╣čü CAN.

ąĀąĖčü. 27. ąÜąŠą╝ą░ąĮą┤ą░ Speed č湥čĆąĄąĘ CAN ąĮą░ čüč鹊čĆąŠąĮąĄ čģąŠčüčéą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┐ąŠčüą╗ąĄ ąŠčéą┐čĆą░ą▓ą║ąĖ ąĮąŠą▓ąŠą╣ čüą║ąŠčĆąŠčüčéąĖ (baud rate), ąĘą░ą│čĆčāąĘčćąĖą║ ą┐ąŠčüčŗą╗ą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ ACK ąĮą░ čüčéą░čĆąŠą╣ čüą║ąŠčĆąŠčüčéąĖ. ą¤ąŠčŹč鹊ą╝čā čģąŠčüčé ąČą┤ąĄčé, ą┐ąŠą║ą░ MCU ąĮąĄ ąŠčéą┐čĆą░ą▓ąĖčé ACK, ąĖ č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą╝ąĄąĮčÅąĄčé čüą▓ąŠčÄ čüą║ąŠčĆąŠčüčéčī.
ąźąŠčüčé ą┐ąŠčüčŗą╗ą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
ąĪąŠąŠą▒čēąĄąĮąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ: Std ID = 0x03, DLC = 0x01, data = 0xXX.
ąŚą┤ąĄčüčī 0xXX ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą╣ ąĮą░ ąŠčüąĮąŠą▓ąĄ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ HSE čüą║ąŠčĆąŠčüčéąĖ:
0x01 -> baud rate = 125 kbps
0x02 -> baud rate = 250 kbps
0x03 -> baud rate = 500 kbps
0x04 -> baud rate = 1 Mkbps

ąĀąĖčü. 27. ąÜąŠą╝ą░ąĮą┤ą░ Speed č湥čĆąĄąĘ CAN ąĮą░ čüč鹊čĆąŠąĮąĄ MCU.
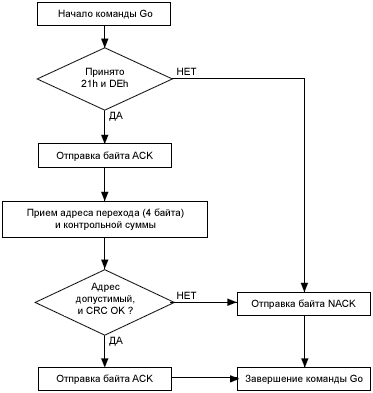
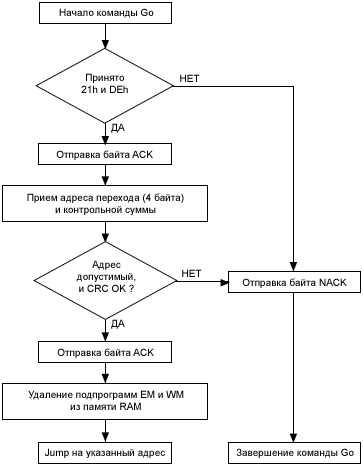
ąÜąŠą╝ą░ąĮą┤ą░ ąĘą░ą┐čāčüą║ą░ąĄčé ąĘą░ą│čĆčāąČąĄąĮąĮčŗą╣ ą║ąŠą┤ (ąĖą╗ąĖ ą╗čÄą▒ąŠą╣ ą┤čĆčāą│ąŠą╣ ą║ąŠą┤) ą┐čāč鹥ą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠ ą░ą┤čĆąĄčüčā, čāą║ą░ąĘą░ąĮąĮąŠą╝čā čģąŠčüč鹊ą╝.
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą║ąŠą╝ą░ąĮą┤ą░ Go ą▓čŗą┐ąŠą╗ąĮąĄąĮą░, ąŠą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ ąĖ ą┤ą░ąĮąĮčŗčģ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ. ą¤čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ąŠą╗ąČąĮčŗ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčī ąŠą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĖ ą┤ą░ąĮąĮčŗčģ, čćč鹊ą▒čŗ čāčüčéą░ąĮąŠą▓ąĖčéčī ą┤ą╗čÅ ą┐ą░ą╝čÅčéąĖ čüąŠčüč鹊čÅąĮąĖąĄ ąĘą░čēąĖčéčŗ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ.
ąöą╗čÅ ą░ą┤čĆąĄčüą░ ą┐ąĄčĆąĄčģąŠą┤ą░ ą┤ąŠą╗ąČąĄąĮ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą░ą┤čĆąĄčü RAM, ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ Flash, EEPROM ą┤ą░ąĮąĮčŗčģ ąĖ ą░ą┤čĆąĄčü čĆąĄą│ąĖčüčéčĆą░ (čüą╝. ą┤ą░čéą░čłąĖčé ąĮą░ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ NCU). ąĢčüą╗ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ ą┐čĆąĖą╝ąĄčé ąĮąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą░ą┤čĆąĄčü, č鹊 ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąŠčłąĖą▒ą║ą░ add_error (čüą╝. čéą░ą▒ą╗ąĖčåčā 10).
[USART/LINUART/UART1/UART2/UART3]

ąĀąĖčü. 29. ąÜąŠą╝ą░ąĮą┤ą░ Go č湥čĆąĄąĘ USART/LINUART/UART1/UART2/UART3 ąĮą░ čüč鹊čĆąŠąĮąĄ čģąŠčüčéą░.
ąźąŠčüčé ą┐ąŠčüčŗą╗ą░ąĄčé ą▒ą░ą╣čéčŗ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
ąæą░ą╣čé 1: 0x21 - Command ID.
ąæą░ą╣čé 2: 0xDE - ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčé ą║ąŠą╝ą░ąĮą┤čŗ.
ąæą░ą╣čéčŗ 3-6: ą░ą┤čĆąĄčü ą┐ąĄčĆąĄčģąŠą┤ą░ (32-ą▒ąĖčéąĮčŗą╣ ą░ą┤čĆąĄčü).
ąæą░ą╣čé 3 = MSB.
...
ąæą░ą╣čé 6 = LSB.
ąæą░ą╣čé 7: ą║ąŠąĮčéčĆąŠą╗čīąĮą░čÅ čüčāą╝ą╝ą░ = XOR (ą▒ą░ą╣čé 3, ą▒ą░ą╣čé 4, ą▒ą░ą╣čé 5, ą▒ą░ą╣čé 6).
ąĀąĖčü. 30. ąÜąŠą╝ą░ąĮą┤ą░ Go č湥čĆąĄąĘ USART/LINUART/UART1/UART2/UART3 ąĮą░ čüč鹊čĆąŠąĮąĄ MCU.
[SPI]
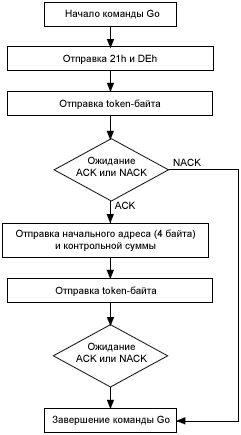
ąĀąĖčü. 31. ąÜąŠą╝ą░ąĮą┤ą░ Go č湥čĆąĄąĘ SPI ąĮą░ čüč鹊čĆąŠąĮąĄ čģąŠčüčéą░.
ąźąŠčüčé ą┐ąŠčüčŗą╗ą░ąĄčé ą▒ą░ą╣čéčŗ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
ąæą░ą╣čé 1: 0x21 - Command ID.
ąæą░ą╣čé 2: 0xDE - ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčé ą║ąŠą╝ą░ąĮą┤čŗ.
ąæą░ą╣čé 3 (token): 0xXY; čģąŠčüčé ąČą┤ąĄčé ACK ąĖą╗ąĖ NACK.
ąæą░ą╣čéčŗ 4-7: ą░ą┤čĆąĄčü ą┐ąĄčĆąĄčģąŠą┤ą░ (32-ą▒ąĖčéąĮčŗą╣ ą░ą┤čĆąĄčü).
ąæą░ą╣čé 4 = MSB.
...
ąæą░ą╣čé 7 = LSB.
ąæą░ą╣čé 8: ą║ąŠąĮčéčĆąŠą╗čīąĮą░čÅ čüčāą╝ą╝ą░ = XOR (ą▒ą░ą╣čé 4, ą▒ą░ą╣čé 5, ą▒ą░ą╣čé 6, ą▒ą░ą╣čé 7).
ąæą░ą╣čé 9 (token): 0xXY; čģąŠčüčé ąČą┤ąĄčé ACK ąĖą╗ąĖ NACK.
ąĀąĖčü. 32. ąÜąŠą╝ą░ąĮą┤ą░ Go č湥čĆąĄąĘ SPI ąĮą░ čüč鹊čĆąŠąĮąĄ MCU.
[CAN]

ąĀąĖčü. 33. ąÜąŠą╝ą░ąĮą┤ą░ Go č湥čĆąĄąĘ CAN ąĮą░ čüč鹊čĆąŠąĮąĄ čģąŠčüčéą░.
ąźąŠčüčé ą┐ąŠčüčŗą╗ą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
ąĪąŠąŠą▒čēąĄąĮąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ Go: Std ID = 0x21, DLC = 0x04, data = MSB, 0xXX, 0xYY, LSB.
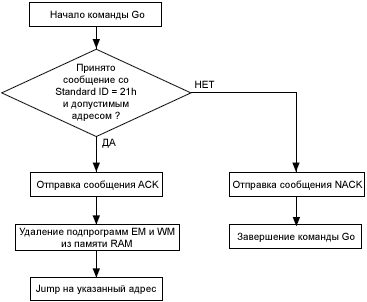
ąĀąĖčü. 34. ąÜąŠą╝ą░ąĮą┤ą░ Go č湥čĆąĄąĘ CAN ąĮą░ čüč鹊čĆąŠąĮąĄ MCU.
ąóą░ą▒ą╗ąĖčåą░ 9. ąÜąŠą┤čŗ čüąĄą║č鹊čĆąŠą▓ STM8.
ąÜąŠą┤
čüąĄą║č鹊čĆą░
|
ą¤ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ Flash / data EEPROM |
| STM8AF ąĖ STM8S Series high density |
STM8AF ąĖ STM8S Series medium density |
STM8L ąĖ STM8AL Series medium density |
STM8L ąĖ STM8AL Series high/medium
+ density |
STM8L Series low density |
| 0x00 |
0x008000 .. 0x0083FF |
| 0x01 |
0x008400 .. 0x0087FF |
| 0x02 |
0x008800 .. 0x008BFF |
| 0x03 |
0x008C00 .. 0x008FFF |
| 0x04 |
0x009000 .. 0x0093FF |
| 0x05 |
0x009400 .. 0x0097FF |
| 0x06 |
0x009800 .. 0x009BFF |
| 0x07 |
0x009C00 .. 0x009FFF |
| 0x08 |
0x00A000 .. 0x00A3FF |
0x001000 .. 0x0010FF |
| 0x09 |
0x00A400 .. 0x00A7FF |
- |
| 0x0A |
0x00A800 .. 0x00ABFF |
- |
| 0x0B |
0x00AC00 .. 0x00AFFF |
- |
| 0x0C |
0x00B000 .. 0x00B3FF |
- |
| 0x0D |
0x00B400 .. 0x00B7FF |
- |
| 0x0E |
0x00B800 .. 0x00BBFF |
- |
| 0x0F |
0x00BC00 .. 0x00BFFF |
- |
| 0x10 |
0x00C000 .. 0x00C3FF |
- |
| 0x11 |
0x00C400 .. 0x00C7FF |
- |
| 0x12 |
0x00C800 .. 0x00CBFF |
- |
| 0x13 |
0x00CC00 .. 0x00CFFF |
- |
| 0x14 |
0x00D000 .. 0x00D3FF |
- |
| 0x15 |
0x00D400 .. 0x00D7FF |
- |
| 0x16 |
0x00D800 .. 0x00DBFF |
- |
| 0x17 |
0x00DC00 .. 0x00DFFF |
- |
| 0x18 |
0x00E000 .. 0x00E3FF |
- |
| 0x19 |
0x00E400 .. 0x00E7FF |
- |
| 0x1A |
0x00E800 .. 0x00EBFF |
- |
| 0x1B |
0x00EC00 .. 0x00EFFF |
- |
| 0x1C |
0x00F000 .. 0x00F3FF |
- |
| 0x1D |
0x00F400 .. 0x00F7FF |
- |
| 0x1E |
0x00F800 .. 0x00FBFF |
- |
| 0x1F |
0x00FC00 .. 0x00FFFF |
- |
| 0x20 |
0x010000 .. 0x0103FF |
0x004000 .. 0x0043FF |
0x001000 .. 0x0013FF |
0x010000 .. 0x0103FF |
- |
| 0x21 |
0x010400 .. 0x0107FF |
- |
- |
0x010400 .. 0x0107FF |
- |
| 0x22 |
0x010800 .. 0x010BFF |
- |
- |
0x010800 .. 0x010BFF |
- |
| 0x23 |
0x010C00 .. 0x010FFF |
- |
- |
0x010C00 .. 0x010FFF |
- |
| 0x24 |
0x011000 .. 0x0113FF |
- |
- |
0x011000 .. 0x0113FF |
- |
| 0x25 |
0x011400 .. 0x0117FF |
- |
- |
0x011400 .. 0x0117FF |
- |
| 0x26 |
0x011800 .. 0x011BFF |
- |
- |
0x011800 .. 0x011BFF |
- |
| 0x27 |
0x011C00 .. 0x011FFF |
- |
- |
0x011C00 .. 0x011FFF |
- |
| 0x28 |
0x012000 .. 0x0123FF |
- |
- |
0x012000 .. 0x0123FF |
- |
| 0x29 |
0x012400 .. 0x0127FF |
- |
- |
0x012400 .. 0x0127FF |
- |
| 0x2A |
0x012800 .. 0x012BFF |
- |
- |
0x012800 .. 0x012BFF |
- |
| 0x2B |
0x012C00 .. 0x012FFF |
- |
- |
0x012C00 .. 0x012FFF |
- |
| 0x2C |
0x013000 .. 0x0133FF |
- |
- |
0x013000 .. 0x0133FF |
- |
| 0x2D |
0x013400 .. 0x0137FF |
- |
- |
0x013400 .. 0x0137FF |
- |
| 0x2E |
0x013800 .. 0x013BFF |
- |
- |
0x013800 .. 0x013BFF |
- |
| 0x2F |
0x013C00 .. 0x013FFF |
- |
- |
0x013C00 .. 0x013FFF |
- |
| 0x30 |
0x014000 .. 0x0143FF |
- |
- |
0x014000 .. 0x0143FF |
- |
| 0x31 |
0x014400 .. 0x0147FF |
- |
- |
0x014400 .. 0x0147FF |
- |
| 0x32 |
0x014800 .. 0x014BFF |
- |
- |
0x014800 .. 0x014BFF |
- |
| 0x33 |
0x014C00 .. 0x014FFF |
- |
- |
0x014C00 .. 0x014FFF |
- |
| 0x34 |
0x011000 .. 0x0153FF |
- |
- |
0x011000 .. 0x0153FF |
- |
| 0x35 |
0x015400 .. 0x0157FF |
- |
- |
0x015400 .. 0x0157FF |
- |
| 0x36 |
0x015800 .. 0x015BFF |
- |
- |
0x015800 .. 0x015BFF |
- |
| 0x37 |
0x015C00 .. 0x015FFF |
- |
- |
0x015C00 .. 0x015FFF |
- |
| 0x38 |
0x016000 .. 0x0163FF |
- |
- |
0x016000 .. 0x0163FF |
- |
| 0x39 |
0x016400 .. 0x0167FF |
- |
- |
0x016400 .. 0x0167FF |
- |
| 0x3A |
0x016800 .. 0x016BFF |
- |
- |
0x016800 .. 0x016BFF |
- |
| 0x3B |
0x016C00 .. 0x016FFF |
- |
- |
0x016C00 .. 0x016FFF |
- |
| 0x3C |
0x017000 .. 0x0173FF |
- |
- |
0x017000 .. 0x0173FF |
- |
| 0x3D |
0x017400 .. 0x0177FF |
- |
- |
0x017400 .. 0x0177FF |
- |
| 0x3E |
0x017800 .. 0x017BFF |
- |
- |
0x017800 .. 0x017BFF |
- |
| 0x3F |
0x017C00 .. 0x017FFF |
- |
|
0x017C00 .. 0x017FFF |
- |
| 0x40 |
0x018000 .. 0x0183FF |
- |
- |
0x001000 .. 0x0013FF |
- |
| 0x41 |
0x018400 .. 0x0187FF |
- |
- |
0x001400 .. 0x0017FF |
- |
| 0x42 |
0x018800 .. 0x018BFF |
- |
- |
- |
- |
| 0x43 |
0x018C00 .. 0x018FFF |
- |
- |
- |
- |
| 0x44 |
0x019000 .. 0x0193FF |
- |
- |
- |
- |
| 0x45 |
0x019400 .. 0x0197FF |
- |
- |
- |
- |
| 0x46 |
0x019800 .. 0x019BFF |
- |
- |
- |
- |
| 0x47 |
0x019C00 .. 0x019FFF |
- |
- |
- |
- |
| 0x48 |
0x01A000 .. 0x01A3FF |
- |
- |
- |
- |
| 0x49 |
0x01A400 .. 0x01A7FF |
- |
- |
- |
- |
| 0x4A |
0x01A800 .. 0x01ABFF |
- |
- |
- |
- |
| 0x4B |
0x01AC00 .. 0x01AFFF |
- |
- |
- |
- |
| 0x4C |
0x01B000 .. 0x01B3FF |
- |
- |
- |
- |
| 0x4D |
0x01B400 .. 0x01B7FF |
- |
- |
- |
- |
| 0x4E |
0x01B800 .. 0x01BBFF |
- |
- |
- |
- |
| 0x4F |
0x01BC00 .. 0x01BFFF |
- |
- |
- |
- |
| 0x50 |
0x01C000 .. 0x01C3FF |
- |
- |
- |
- |
| 0x51 |
0x01C400 .. 0x01C7FF |
- |
- |
- |
- |
| 0x52 |
0x01C800 .. 0x01CBFF |
- |
- |
- |
- |
| 0x53 |
0x01CC00 .. 0x01CFFF |
- |
- |
- |
- |
| 0x54 |
0x01D000 .. 0x01D3FF |
- |
- |
- |
- |
| 0x55 |
0x01D400 .. 0x01D7FF |
- |
- |
- |
- |
| 0x56 |
0x01D800 .. 0x01DBFF |
- |
- |
- |
- |
| 0x57 |
0x01DC00 .. 0x01DFFF |
- |
- |
- |
- |
| 0x58 |
0x01E000 .. 0x01E3FF |
- |
- |
- |
- |
| 0x59 |
0x01E400 .. 0x01E7FF |
- |
- |
- |
- |
| 0x5A |
0x01E800 .. 0x01EBFF |
- |
- |
- |
- |
| 0x5B |
0x01EC00 .. 0x01EFFF |
- |
- |
- |
- |
| 0x5C |
0x01F000 .. 0x01F3FF |
- |
- |
- |
- |
| 0x5D |
0x01F400 .. 0x01F7FF |
- |
- |
- |
- |
| 0x5E |
0x10F800 .. 0x10FBFF |
- |
- |
- |
- |
| 0x5F |
0x10FC00 .. 0x10FFFF |
- |
- |
- |
- |
| 0x60 |
0x200000 .. 0x2003FF |
- |
- |
- |
- |
| 0x61 |
0x200400 .. 0x2007FF |
- |
- |
- |
- |
| 0x62 |
0x020800 .. 0x020BFF |
- |
- |
- |
- |
| 0x63 |
0x020C00 .. 0x020FFF |
- |
- |
- |
- |
| 0x64 |
0x021000 .. 0x0213FF |
- |
- |
- |
- |
| 0x65 |
0x021400 .. 0x0217FF |
- |
- |
- |
- |
| 0x66 |
0x021800 .. 0x021BFF |
- |
- |
- |
- |
| 0x67 |
0x021C00 .. 0x021FFF |
- |
- |
- |
- |
| 0x68 |
0x022000 .. 0x0223FF |
- |
- |
- |
- |
| 0x69 |
0x022400 .. 0x0227FF |
- |
- |
- |
- |
| 0x6A |
0x022800 .. 0x022BFF |
- |
- |
- |
- |
| 0x6B |
0x022C00 .. 0x022FFF |
- |
- |
- |
- |
| 0x6C |
0x022000 .. 0x0223FF |
- |
- |
- |
- |
| 0x6D |
0x022400 .. 0x0227FF |
- |
- |
- |
- |
| 0x6E |
0x023800 .. 0x023BFF |
- |
- |
- |
- |
| 0x6F |
0x023C00 .. 0x023FFF |
- |
- |
- |
- |
| 0x70 |
0x024000 .. 0x0243FF |
- |
- |
- |
- |
| 0x71 |
0x024400 .. 0x0247FF |
- |
- |
- |
- |
| 0x72 |
0x024800 .. 0x024BFF |
- |
- |
- |
- |
| 0x73 |
0x024C00 .. 0x024FFF |
- |
- |
- |
- |
| 0x74 |
0x025000 .. 0x0253FF |
- |
- |
- |
- |
| 0x75 |
0x025400 .. 0x0257FF |
- |
- |
- |
- |
| 0x76 |
0x025800 .. 0x025BFF |
- |
- |
- |
- |
| 0x77 |
0x025C00 .. 0x025FFF |
- |
- |
- |
- |
| 0x78 |
0x026000 .. 0x0263FF |
- |
- |
- |
- |
| 0x79 |
0x026400 .. 0x0267FF |
- |
- |
- |
- |
| 0x7A |
0x026800 .. 0x026BFF |
- |
- |
- |
- |
| 0x7B |
0x026C00 .. 0x026FFF |
- |
- |
- |
- |
| 0x7C |
0x027000 .. 0x0273FF |
- |
- |
- |
- |
| 0x7D |
0x027400 .. 0x0277FF |
- |
- |
- |
- |
| 0x7E |
0x027800 .. 0x027BFF |
- |
- |
- |
- |
| 0x7F |
0x027C00 .. 0x027FFF |
- |
- |
- |
- |
| 0x80 |
0x004000 .. 0x0043FF |
- |
- |
- |
- |
| 0x81 |
0x004400 .. 0x0047FF |
- |
- |
- |
- |
[ą£ąŠą┤ąĄą╗čī ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ (čüąĄčĆąĖąĖ STM8AF, STM8AL, STM8L ąĖ STM8S)]
ąÜąŠą┤ ąĘą░ą│čĆčāąĘčćąĖą║ą░ (boot code) čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ čü ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╝ ą╗ąŠą│ąĖč湥čüą║ąĖą╝ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą╝ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą║ą░ą┤čĆą░ą╝ąĖ ą║ąŠą╝ą░ąĮą┤ ą╝ąĄąČą┤čā čģąŠčüč鹊ą╝ ąĖ ą╗čÄą▒čŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ (MCU) čüąĄčĆąĖą╣ STM8AF, STM8AL, STM8L ąĖ STM8S.
ąŚą░ą│čĆčāąĘčćąĖą║ ą╝ąŠąČąĄčé ąĘą░ą│čĆčāąČą░čéčī ąĘą░ ąŠą┤ąĖąĮ čĆą░ąĘ ą┤ąŠ 128 ą▒ą░ą╣čé. ą¤ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ąĘą░ąĮąĖą╝ą░čÄčé RAM ąŠčé ą░ą┤čĆąĄčüą░ 0x000000 ą┤ąŠ ą░ą┤čĆąĄčüą░ 0x00009F.
ąĢčüą╗ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ ą▒čŗą╗ čĆą░ąĘčĆąĄčłąĄąĮ (ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čéą░ą▒ą╗ąĖčåąĄą╣ 4), ąĖ ąĖčüč鹥ą║ą╗ąĖ čéą░ą╣ą╝ą░čāčéčŗ (ąĮąĄ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ą░ą║čéąĖą▓ą░čåąĖčÅ čģąŠčüčéą░, ąĖą╗ąĖ ą┐čĆąŠąĖąĘąŠčłąĄą╗ ą┐ąĄčĆąĄčģąŠą┤ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ), č鹊 čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ RAM ą╝ąŠąČąĄčé ąŠčüčéą░čéčīčüčÅ ąĖąĘą╝ąĄąĮąĄąĮąĮčŗą╝ ąĘą░ą│čĆčāąĘčćąĖą║ąŠą╝. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĘą░ą┐čāčüčéąĖą╗ąŠčüčī, ąĖ ą┐čĆąŠąĖąĘąŠčłąĄą╗ čüą▒čĆąŠčü, č鹊 čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ RAM ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ą░ą┤čĆąĄčüąŠą▓ 0x000000 .. 0x00009F ą▒čāą┤ąĄčé ąĖąĘą╝ąĄąĮąĄąĮąŠ ąĘą░ą│čĆčāąĘčćąĖą║ąŠą╝ ą┤ąŠ ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ąĢčüą╗ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ ąĘą░ą┐čĆąĄčēąĄąĮ čü ą┐ąŠą╝ąŠčēčīčÄ ą▒ą░ą╣čéą░ ąŠą┐čåąĖą╣ ąĖą╗ąĖ ą░ą║čéąĖą▓ą░čåąĖąĄą╣ ąĘą░čēąĖčéčŗ ROP, č鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┐čĆąŠąĖąĘą▓ąĄčüčéąĖ čüą╗ąĄą┤čāčÄčēąĖąĄ ąĮąĄąĘąĮą░čćąĖč鹥ą╗čīąĮčŗąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ:
ŌĆó ąÆąĄčĆčüąĖąĖ MCU čüąĄčĆąĖą╣ STM8L ąĖ STM8AL, ąĖ ą┐ąŠčüą╗ąĄą┤ąĮąĖčģ čüąĄčĆąĖą╣ STM8AF ąĖ STM8S (čüą╝. čéą░ą▒ą╗ąĖčåčā 3): RAM ąĮąĄ ą╝ąĄąĮčÅąĄčéčüčÅ ąĘą░ą│čĆčāąĘčćąĖą║ąŠą╝.
ŌĆó ąÆąĄčĆčüąĖąĖ MCU čüąĄčĆąĖą╣ STM8AF ąĖ STM8S čü ą▒ąŠą╗ąĄąĄ čüčéą░čĆčŗą╝ąĖ ą▓ąĄčĆčüąĖčÅą╝ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░: RAM ą╝ąĄąĮčÅąĄčéčüčÅ ą┐ąŠ ą░ą┤čĆąĄčüą░ą╝ 0x000095 ąĖ 0x000099.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠąĄ (ą┐čāčüč鹊ąĄ) ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ bootloader ROM ąĘą░ą┐ąŠą╗ąĮąĄąĮąŠ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╝ ą║ąŠą┤ąŠą╝ ąŠą┐ąĄčĆą░čåąĖąĖ (0x71). ąĢčüą╗ąĖ ą┐ąŠ ą╗čÄą▒ąŠą╣ ą┐čĆąĖčćąĖąĮąĄ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ąĖąĘ-ąĘą░ čłčāą╝ą░ EMC) čÅą┤čĆąŠ ąĮą░čćąĮąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą║ąŠą┤ ą▓ ąŠą▒ą╗ą░čüčéąĖ, ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮąŠą╣ 0x71, č鹊 ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąŠčłąĖą▒ą║ą░ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝ąŠą╣ ąŠą┐ąĄčĆą░čåąĖąĖ (illegal opcode) ąĖ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖą╣ čüą▒čĆąŠčü. ąŁč鹊 ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░ąĄčé ą▓čģąŠą┤ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą▓ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠąĄ ąĘą░čåąĖą║ą╗ąĖą▓ą░ąĮąĖąĄ (ąĘą░ą▓ąĖčüą░ąĮąĖąĄ) ą▒ąĄąĘ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą│ąŠ čüą▒čĆąŠčüą░, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠčłąĄą╗ čüą╗čāčćą░ą╣ąĮčŗą╣ ą┐ąĄčĆąĄčģąŠą┤ ą┐ąŠ "ą┐čāčüč鹊ą╝čā" ą░ą┤čĆąĄčüčā. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖąĄ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą│ąŠ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ.
[ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ erase/write ą▓ ą┐ą░ą╝čÅčéąĖ RAM]
ą¤ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ RAM erase/write ą┐čĆąĖą║čĆąĄą┐ą╗ąĄąĮčŗ ą║ čŹč鹊ą╝čā ą┤ąŠą║čāą╝ąĄąĮčéčā ą║ą░ą║ ą┤ą▓ąŠąĖčćąĮčŗą╣ ą║ąŠą┤ ą▓ č乊čĆą╝ą░č鹥 S19. ąśą╝čÅ čäą░ą╣ą╗ą░ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą│čĆčāą┐ą┐čā STM8 (čé. ąĄ. 128 ą║ąĖą╗ąŠą▒ą░ą╣čé, 32 ą║ąĖą╗ąŠą▒ą░ą╣čéą░, 8 ą║ąĖą╗ąŠą▒ą░ą╣čé) ąĖ ąĮąŠą╝ąĄčĆ ą▓ąĄčĆčüąĖąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░, ą┤ą╗čÅ ą║ąŠč鹊čĆąŠą│ąŠ čŹčéą░ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĮą░ą┐ąĖčüą░ąĮą░.
ą¦č鹊ą▒čŗ čüč鹥čĆąĄčéčī ąĖą╗ąĖ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ą┐ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ Flash ąĖą╗ąĖ data EEPROM, ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĘą░ą│čĆčāąČąĄąĮčŗ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą▓ RAM, ąĮą░čćąĖąĮą░čÅ čü ą░ą┤čĆąĄčüą░ 0x0000A0.
ą¤čĆąĖą╝ąĄčĆ ąĖą╝ąĄąĮąŠą▓ą░ąĮąĖčÅ RAM ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ erase/write:
ŌĆó 128-ą║ąĖą╗ąŠą▒ą░ą╣čéąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ (high density) čüąĄčĆąĖą╣ STM8AF ąĖ STM8S: E_W_ROUTINEs_128K_ver_2.2.s19.
ŌĆó 32-ą║ąĖą╗ąŠą▒ą░ą╣čéąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ (medium density) čüąĄčĆąĖą╣ STM8AF ąĖ STM8S: E_W_ROUTINEs_32K_ver_1.3.s19.
ŌĆó 8-ą║ąĖą╗ąŠą▒ą░ą╣čéąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ (low density) čüąĄčĆąĖą╣ STM8L ąĖ STM8AL: E_W_ROUTINEs_8K_verL_1.0.s19 (čŹč鹊 č鹊ą╗čīą║ąŠ ą┐ą░čéčć ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĮąŠą╣ ą▓ąĮčāčéčĆąĖ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ RAM: ąĘą░ą│čĆčāąĘąĖčéčüčÅ ąŠą┤ąĖąĮ ą▒ą░ą╣čé 0xB2 ą┐ąŠ ą░ą┤čĆąĄčüčā 0x01EA).
ŌĆó ąŻčüčéčĆąŠą╣čüčéą▓ą░ čüąĄčĆąĖą╣ STM8L ąĖ STM8AL: ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĘą░ą│čĆčāąČą░čéčī ąĮąĄ ąĮčāąČąĮąŠ, ąŠąĮąĖ ą║ąŠą┐ąĖčĆčāčÄčéčüčÅ ą▓ RAM ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĖąĘ ROM, ą║ąŠą│ą┤ą░ ąĘą░ą│čĆčāąĘčćąĖą║ ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ čģąŠčüč鹊ą╝ (ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ąĘą░ą│čĆčāąĘčćąĖą║ ą┐ąŠą╗čāčćąĖą╗ ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą▒ą░ą╣čé SYNCH).
ą¦č鹊ą▒čŗ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą╗čÄą▒čāčÄ ą║ąŠą╝ą░ąĮą┤čā (Get, Read, Erase, Write, Speed ąĖ Go) ąĘą░ą│čĆčāąĘčćąĖą║ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čćą░čüčéčī RAM ą┤ą╗čÅ čüą▓ąŠąĖčģ čüąŠą▒čüčéą▓ąĄąĮąĮčŗčģ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ ąĖ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ RAM erase/write. ą¤ąŠčŹč鹊ą╝čā ąĘą░ą┐čĆąĄčēąĄąĮąŠ ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą║ąŠą╝ą░ąĮą┤čŗ ąĘą░ą┐ąĖčüąĖ (ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ ą║ąŠą╝ą░ąĮą┤ ąĘą░ą┐ąĖčüąĖ, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ erase/write) čü ą░ą┤čĆąĄčüą░ą╝ąĖ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą▓ čüą╗ąĄą┤čāčÄčēąĖčģ ąŠą▒ą╗ą░čüčéčÅčģ RAM:
ŌĆó MCU čüąĄčĆąĖą╣ STM8AF ąĖ STM8S: ąŠčé 0x000000 ą┤ąŠ 0x0001FF.
ŌĆó MCU čüąĄčĆąĖą╣ STM8L ąĖ STM8AL: ąŠčé 0x000000 ą┤ąŠ 0x0001FF.
[ą×ą▒čĆą░ą▒ąŠčéą║ą░ ąŠčłąĖą▒ąŠą║]
ąŚą░ą│čĆčāąĘčćąĖą║ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ ą┐čĆąŠą▓ąĄčĆąŠą║, ą▓ą║ą╗čÄčćą░čÅ ą┐čĆąŠą▓ąĄčĆą║čā ąĮą░ ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą░ą┤čĆąĄčüą░ ą▓ ą║ąŠą╝ą░ąĮą┤ą░čģ, ą┐čĆąŠą▓ąĄčĆą║čā ą║ąŠąĮčéčĆąŠą╗čīąĮčŗčģ čüčāą╝ą╝ ą║ąŠą╝ą░ąĮą┤ ąĖ ą▓ąĄčĆąĖčäąĖą║ą░čåąĖčÄ ąĘą░ą┐ąĖčüąĖ. ąŚą░ą│čĆčāąĘčćąĖą║ ąĮąĄ ą┐čĆąŠą▓ąĄčĆčÅąĄčé ą┤ąŠčüčéčāą┐ ą▓ ąŠą▒ą╗ą░čüčéčī UBC. ąĢčüą╗ąĖ ąĘą░ą┐ąĖčüčī ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčüčÅ ą▓ ąŠą▒ą╗ą░čüčéčī, ąĘą░čēąĖčēąĄąĮąĮčāčÄ ąŠčé ąĘą░ą┐ąĖčüąĖ, č鹊 ą▓ąĄčĆąĖčäąĖą║ą░čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ čü ąŠčłąĖą▒ą║ąŠą╣ ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ ą▓ąĄčĆąĮąĄčé NACK.
ąóą░ą▒ą╗ąĖčåą░ 10 ąŠą┐ąĖčüčŗą▓ą░ąĄčé čéąĖą┐čŗ ąŠčłąĖą▒ą║ąĖ ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ąĘą░ą│čĆčāąĘčćąĖą║ą░.
ąóą░ą▒ą╗ąĖčåą░ 10. ą×čłąĖą▒ą║ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░.
| ą×čłąĖą▒ą║ą░ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ąöąĄą╣čüčéą▓ąĖčÅ ąĘą░ą│čĆčāąĘčćąĖą║ą░ |
| cmd_error |
ąĢčüą╗ąĖ ą┐čĆąĖąĮčÅčéą░ ąĘą░ą┐čĆąĄčēąĄąĮąĮą░čÅ ą║ąŠą╝ą░ąĮą┤ą░. ąĢčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ąŠčłąĖą▒ą║ą░ ą┐čĆąŠą▓ąĄčĆą║ąĖ č湥čéąĮąŠčüčéąĖ (parity error) ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą║ąŠą╝ą░ąĮą┤čŗ. ąĢčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ąŠčłąĖą▒ą║ą░ ą▓ąŠ ą▓čĆąĄą╝čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤čŗ (čüą╝. čéą░ą▒ą╗ąĖčåčā 6 čüąŠ čüą┐ąĖčüą║ąŠą╝ ą║ąŠą╝ą░ąĮą┤ ąĘą░ą│čĆčāąĘčćąĖą║ą░). |
ą×čéą┐čĆą░ą▓ąĖčé ą▒ą░ą╣čé NACK ąĖ ą▓ąĄčĆąĮąĄčéčüčÅ ą║ ą┐čĆąŠą▓ąĄčĆą║ąĄ ą┐čĆąĖčģąŠą┤čÅčēąĖčģ ą║ąŠą╝ą░ąĮą┤. |
| add_error |
ąĢčüą╗ąĖ ą┐čĆąĖąĮčÅčéą░čÅ ą║ąŠą╝ą░ąĮą┤ą░ čüąŠą┤ąĄčƹȹĖčé ąĘą░ą┐čĆąĄčēąĄąĮąĮčŗą╣ ą░ą┤čĆąĄčü ąĮą░ąĘąĮą░č湥ąĮąĖčÅ. ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ ą┤ąŠą┐čāčüčéąĖą╝čŗčģ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░čģ ą░ą┤čĆąĄčüąŠą▓ čüą╝. ą┤ą░čéą░čłąĖčéčŗ ąĮą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ STM8AF/AL/L/S. |
[ąÆčĆąĄą╝čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ]
ąĪą║ąŠą╗čīą║ąŠ ąĘą░ą╣ą╝ąĄčé ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ, ąĘą░ą▓ąĖčüąĖčé ąŠčé čüą║ąŠčĆąŠčüčéąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ą¤čĆąĖą╝ąĄčĆčŗ ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓ą║ą╗čÄčćą░čÄčé ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą┤ą╗čÅ čüą╗ąĄą┤čāčÄčēąĖčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ ąĖ čüą║ąŠčĆąŠčüč鹥ą╣:
ŌĆó USART/LINUART/UART1/UART2/UART3: 128 ą║ąĖą╗ąŠą▒ąĖčé/čüąĄą║, 256 ą║ąĖą╗ąŠą▒ąĖčé/čüąĄą║, 500 ą║ąĖą╗ąŠą▒ąĖčé/čüąĄą║.
ŌĆó SPI: 125 ą║ąĖą╗ąŠą▒ąĖčé/čüąĄą║, 250 ą║ąĖą╗ąŠą▒ąĖčé/čüąĄą║, 500 ą║ąĖą╗ąŠą▒ąĖčé/čüąĄą║, 1 ą╝ąĄą│ą░ą▒ąĖčé/čüąĄą║.
ŌĆó CAN: 125 ą║ąĖą╗ąŠą▒ąĖčé/čüąĄą║, 250 ą║ąĖą╗ąŠą▒ąĖčé/čüąĄą║, 500 ą║ąĖą╗ąŠą▒ąĖčé/čüąĄą║, 1 ą╝ąĄą│ą░ą▒ąĖčé/čüąĄą║.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖą╗ąĖčüčī ąĮą░ ą▒ą╗ąŠą║ą░čģ 48 ą║ąĖą╗ąŠą▒ą░ą╣čé ąĖą╗ąĖ 32 ą║ąĖą╗ąŠą▒ą░ą╣čéą░, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čéąĖą┐ą░ MCU ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ąóą░ą▒ą╗ąĖčåčŗ 11, 12 ąĖ 13 ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé ą▓čĆąĄą╝čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą▓ ą┐ą░ą╝čÅčéčī ą┐čĆąŠą│ą░ą╝ą╝ Flash čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ą┤ą╗čÅ USART/LINUART/UART1/UART2/UART3, SPI ąĖ CAN.
ąóą░ą▒ą╗ąĖčåą░ 11. ąÆčĆąĄą╝čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ č湥čĆąĄąĘ USART/LINUART/UART1/UART2/UART3.
ą¦č鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ
|
ąĪą║ąŠčĆąŠčüčéčī, bps |
| 128000 |
256000 |
500000 |
| 48 ą║ą▒ą░ą╣čé |
7.73 čüąĄą║ |
5.34 čüąĄą║ |
4.08 čüąĄą║ |
| 1 ą▒ą╗ąŠą║ |
20.13 ą╝čü |
13.53 ą╝čü |
10.65 ą╝čü |
| 1 ą▒ą░ą╣čé |
7.52 ą╝čü |
6.93 ą╝čü |
6.65 ą╝čü |
ąóą░ą▒ą╗ąĖčåą░ 12. ąÆčĆąĄą╝čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ č湥čĆąĄąĘ SPI.
ą¦č鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ
|
ąĪą║ąŠčĆąŠčüčéčī, ą║ą▒ąĖčé/čüąĄą║
|
| 125 |
250 |
500 |
1000 |
| 32 ą║ą▒ą░ą╣čé |
4.46 čüąĄą║ |
3.34 čüąĄą║ |
2.81 čüąĄą║ |
2.55 čüąĄą║ |
| 1 ą▒ą╗ąŠą║ |
17.44 ą╝čü |
13.04 ą╝čü |
11.01 ą╝čü |
9.95 ą╝čü |
| 1 ą▒ą░ą╣čé |
8.52 ą╝čü |
8.12 ą╝čü |
7.93 ą╝čü |
7.84 ą╝čü |
ąóą░ą▒ą╗ąĖčåą░ 13. ąÆčĆąĄą╝čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ č湥čĆąĄąĘ CAN.
ą¦č鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ
|
ąĪą║ąŠčĆąŠčüčéčī, ą║ą▒ąĖčé/čüąĄą║
|
| 125 |
250 |
500 |
1000 |
| 48 ą║ą▒ą░ą╣čé |
9.50 čüąĄą║ |
6.40 čüąĄą║ |
4.85 čüąĄą║ |
4.07 čüąĄą║ |
| 1 ą▒ą╗ąŠą║ |
24.73 ą╝čü |
16.66 ą╝čü |
12.63 ą╝čü |
0.60 ą╝čü |
| 1 ą▒ą░ą╣čé |
9.23 ą╝čü |
8.53 ą╝čü |
7.91 ą╝čü |
7.68 ą╝čü |
ążčāąĮą║čåąĖčÅ ąĘą░čēąĖčéčŗ ąŠčé čćč鹥ąĮąĖčÅ ROP ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░ąĄčé ąŠčé ąĮąĄčüą░ąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ MCU č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü SWIM. ąÆąŠ ą▓čĆąĄą╝čÅ čüą▓ąŠąĄą╣ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ąĘą░ą│čĆčāąĘčćąĖą║ ą┐čĆąŠą▓ąĄčĆčÅąĄčé čüąŠčüč鹊čÅąĮąĖąĄ ROP (ą░ąĮą░ą╗ąĖąĘąŠą╝ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ ą▒ą░ą╣čéą░ ąŠą┐čåąĖą╣ ROP), ąĖ ąĄčüą╗ąĖ ąĘą░čēąĖčéą░ ROP čĆą░ąĘčĆąĄčłąĄąĮą░, č鹊 ąĘą░ą│čĆčāąĘčćąĖą║ ąĮąĄ ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ. ąŁč鹊 ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čüčćąĖčéčŗą▓ą░ąĮąĖčÅ ą┐čĆąŠčłąĖą▓ą║ąĖ ąĖ ą┤ą░ąĮąĮčŗčģ č湥čĆąĄąĘ ąĘą░ą│čĆčāąĘčćąĖą║ (ąĖą╗ąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ąĘą░ą┐ąĖčüąĖ ąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čéčĆąŠčÅąĮčüą║ąŠą│ąŠ ą║ąŠą┤ą░).
ą×ą┤ąĮą░ą║ąŠ ąĮą░ ą┐čĆą░ą║čéąĖą║ąĄ ą╝ąŠąČąĄčé ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ ąĮąĄ č鹊ą╗čīą║ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąĘą░čēąĖčéčŗ ROP, ąĮąŠ ąĖ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ą┐čĆąŠčłąĖą▓ą║ąĖ, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ąĘą░ą┐ąĖčüą░čéčī ąĮąŠą▓ąŠąĄ firmware č湥čĆąĄąĘ IAP. ąŁč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī čüą┤ąĄą╗ą░ąĮąŠ č湥čĆąĄąĘ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ąĖ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖąĄ čü ąĘą░ą│čĆčāąĘčćąĖą║ąŠą╝ ą┐ąŠ čüą╗ąĄą┤čāčÄčēąĖą╝ ą┐čĆą░ą▓ąĖą╗ą░ą╝.
[ą¤čĆą░ą▓ąĖą╗ą░ ą┤ą╗čÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆčŗąĄ ąĘą░čēąĖčēąĄąĮčŗ ROP]
1. ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĘą░čēąĖčēąĄąĮąŠ ą░ą║čéąĖą▓ą░čåąĖąĄą╣ ROP (čćč鹊 ąĘą░ą┐čĆąĄčēą░ąĄčé čćč鹥ąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ č湥čĆąĄąĘ SWIM).
2. ąŚą░ą│čĆčāąĘčćąĖą║ ąĮąĄ ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ąĖąĘ-ąĘą░ ą┐čĆąŠą▓ąĄčĆą║ąĖ čüąŠčüč鹊čÅąĮąĖčÅ ROP (čćč鹊ą▒čŗ ąĘą░ą┐čĆąĄčéąĖčéčī čćč鹥ąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ č湥čĆąĄąĘ ąĘą░ą│čĆčāąĘčćąĖą║).
3. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ąŠčéą▓ąĄčćą░ąĄčé ąĘą░ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄ ą░čāč鹥ąĮčéąĖčäąĖą║ą░čåąĖąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┐ąŠčüą╗ąĄ ą┐čĆąŠą▓ąĄčĆą║ąĖ ą▓ą▓ąŠą┤ą░ ą┐ą░čĆąŠą╗čÅ.
4. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą┐ąŠčüą╗ąĄ čāčüą┐ąĄčłąĮąŠą╣ ą┐čĆąŠą▓ąĄčĆą║ąĖ ą░čāč鹥ąĮčéąĖčäąĖą║ą░čåąĖąĖ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĘą░ą┐čāčüčéąĖčéčī ąĘą░ą│čĆčāąĘčćąĖą║ (ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄą╝ jump ą┐ąŠ čüą┐ąĄčåąĖčäąĖč湥čüą║ąŠą╝čā ą░ą┤čĆąĄčüčā ąĘą░ą│čĆčāąĘčćąĖą║ą░). ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ąĘą░ą│čĆčāąĘčćąĖą║ ą╝ąŠąČąĄčé ąŠą▒ąĮąŠą▓ąĖčéčī ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ąŠą▒čŗčćąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝.
ą¤ąŠ ą┐čĆąĖą▓ąĄą┤ąĄąĮąĮčŗą╝ ą▓čŗčłąĄ ą┐čĆą░ą▓ąĖą╗ą░ą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą▒ąĮąŠą▓ą╗ąĄąĮąŠ č湥čĆąĄąĘ čĆąĄąĘąĖą┤ąĄąĮčéąĮčŗą╣ ąĘą░ą│čĆčāąĘčćąĖą║, ąĮą░čģąŠą┤čÅčēąĖą╣čüčÅ ą▓ ROM. ąĢą┤ąĖąĮčüčéą▓ąĄąĮąĮąŠąĄ čāčüą╗ąŠą▓ąĖąĄ ąĘą░ą║ą╗čÄčćą░ąĄčéčüčÅ ą▓ č鹊ą╝, čćč鹊 ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (firmware) ą┤ąŠą╗ąČąĮąŠ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąŠą▓ą░čéčī čü ą┐čĆąŠčåąĄčüčüąŠą╝ ą▓čŗą│čĆčāąĘą║ąĖ, ą║ą░ą║ ąŠą┐ąĖčüą░ąĮąŠ ąĮąĖąČąĄ:
ŌĆó ąÆ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ą┐čĆąŠčåąĄą┤čāčĆą░ ą░čāč鹥ąĮčéąĖčäąĖą║ą░čåąĖąĖ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ąŠčéą┐čĆą░ą▓ą║ą░ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą╣ ą║ąŠą╝ą░ąĮą┤čŗ čü ą┐ą░čĆąŠą╗ąĄą╝ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ).
ŌĆó ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ čüą┤ąĄą╗ą░čéčī ą┐ąĄčĆąĄą┤ą░čćčā čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓ č鹊čćą║čā "ROP check", ą│ą┤ąĄ ą┐čĆąŠą▓ąĄčĆčÅąĄčéčüčÅ č鹊čćą║ą░ ą▓čģąŠą┤ą░ ąĘą░ą│čĆčāąĘčćąĖą║ą░ (čćč鹊ą▒čŗ ąŠą▒ąŠą╣čéąĖ ą┐čĆąŠą▓ąĄčĆą║čā ROP ąĘą░ą│čĆčāąĘčćąĖą║ąŠą╝). ąĪą╝. čéą░ą▒ą╗ąĖčåčā 14 ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ B, ą│ą┤ąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ ą░ą┤čĆąĄčüą░ č鹊č湥ą║ ą▓čģąŠą┤ą░ ą▓ ąĘą░ą│čĆčāąĘčćąĖą║.
ROM-ąĘą░ą│čĆčāąĘčćąĖą║ ą╝ąŠąČąĄčé ą▒čŗčéčī ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮ čģąŠčüč鹊ą╝ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░ (čüą╝. ą▓čŗčłąĄ čüąĄą║čåąĖčÄ "ąÉą║čéąĖą▓ą░čåąĖčÅ ąĘą░ą│čĆčāąĘčćąĖą║ą░"). ą×ą┤ąĮą░ą║ąŠ ąĘą░ą│čĆčāąĘčćąĖą║ ą╝ąŠąČąĄčé čéą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą┤ą╗čÅ čĆą░ąĘą╗ąĖčćąĮčŗčģ čåąĄą╗ąĄą╣. ąÆ čéą░ą▒ą╗ąĖčåąĄ 14 ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ąŠčüąĮąŠą▓ąĮčŗąĄ č鹊čćą║ąĖ ą▓čģąŠą┤ą░ ą▓ ąĘą░ą│čĆčāąĘčćąĖą║, ąĖ ąŠą┐ąĖčüą░ąĮąŠ, ą║ą░ą║ ąŠąĮąĖ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ.
ąóą░ą▒ą╗ąĖčåą░ 14. ąóąŠčćą║ąĖ ą▓čģąŠą┤ą░ ą▓ ąĘą░ą│čĆčāąĘčćąĖą║ (bootloader entry point).
ąØą░ąĘą▓ą░ąĮąĖąĄ č鹊čćą║ąĖ ą▓čģąŠą┤ą░
|
ąÉą┤čĆąĄčü (ą▓ąĄčĆčüąĖčÅ ąĘą░ą│čĆčāąĘčćąĖą║ą░)(1) |
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ |
| STM8AF ąĖ and STM8S Series high density |
STM8AF ąĖ STM8S Series medium density |
STM8L ąĖ STM8AL Series medium density |
STM8L ąĖ STM8AL
Series
high/
edium+ density |
STM8L ąĖ STM8AL Series low density |
| Reset |
0x006000 |
ą×čéčüčÄą┤ą░ ąĘą░ą│čĆčāąĘčćąĖą║ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ. ą£ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąČąĄčüčéą║ąŠą│ąŠ čüą▒čĆąŠčüą░. |
| BL option check |
0x00601E (v2.1)(2) 0x00601E (v2.2) |
0x00601E (v1.2)(3) 0x006018 (v1.3) |
0x00601A (v1.1) 0x00601F (v1.2) |
0x00601F (v1.1) |
0x00601F (v1.0) |
ą£ąĄčüč鹊 ą┐ąŠčüą╗ąĄ ą┐čĆąŠą▓ąĄčĆą║ąĖ, čĆą░ąĘčĆąĄčłąĄąĮ ą╗ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ ą▒ą░ą╣čéą░ą╝ąĖ ąŠą┐čåąĖą╣. ą£ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ąĖąĘ firmware ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, ą║ąŠą│ą┤ą░ ąĘą░ą┐čāčüą║ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ąĘą░ą┐čĆąĄčēąĄąĮ ą▒ą░ą╣čéą░ą╝ąĖ ąŠą┐čåąĖą╣. |
| ROP check |
0x00602E (v2.1)(2) 0x00602E (v2.2) |
0x00602E (v1.2)(3) 0x006028 (v1.3) |
0x006028 (v1.1) 0x00602D (v1.2)(4) |
0x00602D (v1.1) |
0x00602D (v1.0) |
ą£ąĄčüč鹊 ą┐ąŠčüą╗ąĄ ą┐čĆąŠą▓ąĄčĆą║ąĖ ąĘą░čēąĖčéčŗ ąŠčé ąĘą░ą┐ąĖčüąĖ. ą£ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ąĖąĘ firmware ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, ąĄčüą╗ąĖ ą░ą║čéąĖą▓ąĮą░ ąĘą░čēąĖčéą░ ROP - ą┤ą╗čÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĘą░čēąĖčēąĄąĮąĮąŠą│ąŠ ROP (ą┐ąŠčüą╗ąĄ ą░čāč鹥ąĮčéąĖčäąĖą║ą░čåąĖąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ). |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
(1) ąÉą┤čĆąĄčü ąĘą░ą▓ąĖčüąĖčé ąŠčé ą▓ąĄčĆčüąĖąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░, ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮ ą▓ ąĄą│ąŠ čüą╗ąĄą┤čāčÄčēąĄą╣, ą▒ąŠą╗ąĄąĄ ąĮąŠą▓ąŠą╣ ą▓ąĄčĆčüąĖąĖ. ąŚą░ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ čüą▓čÅąČąĖč鹥čüčī čü ą╗ąŠą║ą░ą╗čīąĮčŗą╝ ąŠčäąĖčüąŠą╝ STMicroelectronics.
(2) ąöą╗čÅ čŹč鹊ą╣ ą▓ąĄčĆčüąĖąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ RAM ą┐ąŠ ą░ą┤čĆąĄčüčā 0x000099 ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ ąĘąĮą░č湥ąĮąĖąĄ 0x00 ąĖą╗ąĖ 0x01 (0x00 = ą▒ąĄąĘ čéą░ą╣ą╝ą░čāčéą░, 0x01 = 1 čüąĄą║čāąĮą┤ą░ čéą░ą╣ą╝ą░čāčéą░ ąĘą░ą│čĆčāąĘčćąĖą║ą░).
(3) ąöą╗čÅ čŹč鹊ą╣ ą▓ąĄčĆčüąĖąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ RAM ą┐ąŠ ą░ą┤čĆąĄčüčā 0x000095 ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ ąĘąĮą░č湥ąĮąĖąĄ 0x00 ąĖą╗ąĖ 0x01 (0x00 = ą▒ąĄąĘ čéą░ą╣ą╝ą░čāčéą░, 0x01 = 1 čüąĄą║čāąĮą┤ą░ čéą░ą╣ą╝ą░čāčéą░ ąĘą░ą│čĆčāąĘčćąĖą║ą░).
(4) ąöą╗čÅ ą▓ąĄčĆčüąĖąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░ 1.0 ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ č鹊čćą║ą░ ąŠą▒čģąŠą┤ą░ ą┐čĆąŠą▓ąĄčĆą║ąĖ ąĘą░čēąĖčéčŗ čćč鹥ąĮąĖčÅ (ROP check entry point).
ą¤ąĄčĆąĄą┤ jump ą▓ č鹊čćą║čā ą▓čģąŠą┤ą░ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą▓čüąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ (čéą░ą╣ą╝ąĄčĆčŗ, ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓, ąĮąŠąČą║ąĖ GPIO čŹčéąĖčģ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓) ą▓ ąĖčģ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░, čćč鹊ą▒čŗ ąĘą░ą│čĆčāąĘčćąĖą║ ą╝ąŠą│ ą║ąŠčĆčĆąĄą║čéąĮąŠ ą┐čĆąŠą┤ąŠą╗ąČąĖčéčī čüą▓ąŠąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ. ąŚą░ą│čĆčāąĘčćąĖą║ ą▒čŗą╗ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ čü čéą░ą║ąĖą╝ čĆą░čüč湥č鹊ą╝, čćč鹊 ąĮą░ ą▓čģąŠą┤ąĄ ą┐ąŠą╗čāčćą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ MCU ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ (ą║ąŠą│ą┤ą░ ą▓čüąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ čüą▓ąŠąĄą╝ čüąŠčüč鹊čÅąĮąĖąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ).
ąöą╗čÅ ą▓čüąĄčģ MCU ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ čüą┤ąĄą╗ą░čéčī jump ąĮą░ č鹊čćą║čā ą▓čģąŠą┤ą░ ą▓ ąĘą░ą│čĆčāąĘčćąĖą║, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąŠą▒ąĮąŠą▓ąĖčéčī č鹥ąĮąĄą▓čŗąĄ čĆąĄą│ąĖčüčéčĆčŗ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ TIM2 ąĖ TIM3 (prescaler shadow registers) ą▓ ąĘąĮą░č湥ąĮąĖąĄ 1 čü ą┐ąŠą╝ąŠčēčīčÄ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝ąŠą│ąŠ ą║ąŠą┤ą░:
...
// ąŚą░ą┐čāčüą║ čüąŠą▒čŗčéąĖčÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (update event),
// čćč鹊ą▒čŗ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ TIM3 ąŠą▒ąĮąŠą▓ąĖą╗čüčÅ ą▓ ąĘąĮą░č湥ąĮąĖąĄ 1:
TIM3->EGR = 0x01;
// ą×čćąĖčüčéą║ą░ ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝ąŠą│ąŠ čäą╗ą░ą│ą░ update event
// ą▓ ą▒ąĖč鹥 TIM3_SR1 čü ą┐ąŠą╝ąŠčēčīčÄ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ
// ą▓ ąĮąĄą│ąŠ ąĮčāą╗čÅ:
TIM3->SR1;
TIM3->SR1 = 0x00;
// jump, ą┐ąĄčĆąĄą┤ą░čćą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĮą░ ą░ą┤čĆąĄčü č鹊čćą║ąĖ ą▓čģąŠą┤ą░:
_asm("jp 0x601E");
...
[SPI čü ą┐čĆąŠą▓ąĄčĆą║ąŠą╣ čüąŠčüč鹊čÅąĮąĖčÅ ąĘą░ąĮčÅč鹊čüčéąĖ]
ąÆąŠ ą▓čĆąĄąĘą║ą░čģ čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ ą║ąŠą╝ą░ąĮą┤ Erase Memory ąĖ Write Memory, čĆą░ą▒ąŠčéą░čÄčēąĖčģ č湥čĆąĄąĘ SPI, čüąŠą┤ąĄčƹȹ░čéčüčÅ čĆąĖčüčāąĮą║ąĖ čü ą░ą╗ą│ąŠčĆąĖčéą╝ąŠą╝ čĆą░ą▒ąŠčéčŗ čŹčéąĖčģ ą║ąŠą╝ą░ąĮą┤. ąØąĄą┤ąŠčüčéą░č鹊ą║ SPI ą▓ č鹊ą╝, čćč鹊 čģąŠčüčé čāą┐čĆą░ą▓ą╗čÅąĄčé čéčĆą░ąĮąĘą░ą║čåąĖčÅą╝ąĖ čü ą┐ąŠą╝ąŠčēčīčÄ ąŠą┐čĆąŠčüą░ ą┤ą░ąĮąĮčŗčģ ąĖąĘ MCU. ąĢčüą╗ąĖ MCU ąĘą░ąĮčÅčé (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ąŠąĮ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčé ą┐ą░ą╝čÅčéčī Flash), č鹊 čģąŠčüčé ą┐ąŠą╗čāčćąĖčé ąŠčéą▓ąĄčé ą▓ ą▓ąĖą┤ąĄ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą▒ą░ą╣čéą░, ą║ąŠč鹊čĆčŗą╣ ą▒čŗą╗ ąĘą░ą┐ąĖčüą░ąĮ ą▓ čĆąĄą│ąĖčüčéčĆ ą┤ą░ąĮąĮčŗčģ SPI (čŹč鹊 ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╣ ą▒ą░ą╣čé čü ą╝ąŠą╝ąĄąĮčéą░ ą┐čĆąĄą┤čŗą┤čāčēąĄą│ąŠ ąŠą┐čĆąŠčüą░). ąóą░ą║ čćč鹊 čā čģąŠčüčéą░ ąĮąĄčé čüą┐ąŠčüąŠą▒ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą▒čŗą╗ ą╗ąĖ ą┐čĆąĖąĮčÅčéčŗą╣ ąŠčé MCU ą▒ą░ą╣čé ą║ąŠčĆčĆąĄą║čéąĮčŗą╝ (ąĮąŠą▓čŗą╝) ąŠčéą▓ąĄč鹊ą╝, ąĖą╗ąĖ ąČąĄ čŹč鹊 ą▒ą░ą╣čé ąŠčé ą┐čĆąĄą┤čŗą┤čāčēąĄą│ąŠ ąŠčéą▓ąĄčéą░.
ąØą░ ą┐čĆą░ą║čéąĖą║ąĄ, ąĄčüą╗ąĖ čģąŠčüčé ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčé MCU ą▓čŗą┐ąŠą╗ąĮąĖčéčī č鹥ą║čāčēčāčÄ ą║ąŠą╝ą░ąĮą┤čā čüčéąĖčĆą░ąĮąĖčÅ ąĖą╗ąĖ ąĘą░ą┐ąĖčüąĖ (ACK ąĖą╗ąĖ NACK ąŠčé MCU ą┐ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ąŠą┐ąĄčĆą░čåąĖąĖ), č鹊 čģąŠčüčé ąĘąĮą░ąĄčé, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ąĘą░ąĮčÅč鹊 ąĖ ąĘą░ą▓ąĄčĆčłąĖą╗ąŠ ąŠą┐ąĄčĆą░čåąĖąĖ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čģąŠčüčé ą┤ąŠą╗ąČąĄąĮ ą┤ąŠą▒ą░ą▓ąĖčéčī ą┐ąŠą┤čģąŠą┤čÅčēčāčÄ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčāčÄ ąĘą░ą┤ąĄčƹȹ║čā, čćč鹊ą▒čŗ ą┐ąŠąĘą▓ąŠą╗ąĖčéčī MCU ąĘą░ą║ąŠąĮčćąĖčéčī ąŠą┐ąĄčĆą░čåąĖčÄ (čüą╝. ą▒ą╗ąŠą║ "Delay" ąĮą░ čĆąĖčü. 17 ąĖ 23). ąśąĮą░č湥 ąŠčéą▓ąĄčé ąĮąĄ ąĖą╝ąĄąĄčé čüą╝čŗčüą╗ą░, ąĖ ąŠą▒ą╝ąĄąĮ ą┐ąŠą╗čāčćąĖčéčüčÅ čĆą░čüčüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╣.
ąóą░ą║ąŠąĄ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ čüą┐ąĄčåąĖčäąĖčćąĮąŠ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ č鹥čģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓, čĆą░ą▒ąŠč鹊ą╣ ą║ąŠč鹊čĆčŗčģ čāą┐čĆą░ą▓ą╗čÅąĄčé čģąŠčüčé (ą╝ą░čüč鹥čĆ čłąĖąĮčŗ), čéą░ą║ąĖčģ ą║ą░ą║ ąĖąĮč鹥čĆč乥ą╣čü SPI. ąöčĆčāą│ąĖąĄ ąĖąĮč鹥čĆč乥ą╣čüčŗ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą▓ ąĘą░ą│čĆčāąĘčćąĖą║ąĄ, ą▓ą║ą╗čÄčćą░čÅ UART ąĖ CAN, ąĮąĄ čāą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ąČąĄčüčéą║ąŠ ą╝ą░čüč鹥čĆąŠą╝ (ąĖ čü ąĮąĖą╝ąĖ MCU ąĖą╝ąĄąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čüą░ą╝ąŠą╝čā ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą┐ąĄčĆąĄą┤ą░čćčā ą┤ą░ąĮąĮčŗčģ ą▒ąĄąĘ ąŠą┐čĆąŠčüą░ čģąŠčüč鹊ą╝).
[ą£ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąĮčŗąĄ RAM-ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ erase/write]
ą¦č鹊ą▒čŗ ąĖąĘą▒ą░ą▓ąĖčéčīčüčÅ ąŠčé ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąĘą░ą┤ąĄčƹȹ║ąĖ ąĮą░ čüč鹊čĆąŠąĮąĄ čģąŠčüčéą░ ąĖ čāčüą║ąŠčĆąĖčéčī ąŠą▒ą╝ąĄąĮ SPI (ą┐ąŠč鹊ą╝čā čćč鹊 ąĘą░ą┤ąĄčƹȹ║ą░ čü ąĘą░ą┐ą░čüąŠą╝ ąŠą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą┤ąŠą╗čīčłąĄ ą▓čĆąĄą╝ąĄąĮąĖ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ąŠą┐ąĄčĆą░čåąĖąĖ), čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮčŗ čüą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ RAM-ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ erase/write. ąŁčéąĖ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą▓čŗą┐ąŠą╗ąĮčÅčÄčé ą┤ą╗ąĖč鹥ą╗čīąĮčŗąĄ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąŠą┐ąĄčĆą░čåąĖąĖ čéą░ą║ ąČąĄ, ą║ą░ą║ ąĖ čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ąŠą┐ąĄčĆą░čåąĖąĖ erase/write. ąÜąŠą│ą┤ą░ MCU ąĘą░ąĮčÅčé, ąŠąĮ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ą▓ ą▓ąĖą┤ąĄ ąŠčéą▓ąĄčéą░ čģąŠčüčéčā ą▒ą░ą╣čé ąĘą░ąĮčÅč鹊čüčéąĖ BUSY (0xAA). ąźąŠčüčé ą╝ąŠąČąĄčé ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ ąĘą░ą┐čĆą░čłąĖą▓ą░čéčī ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░ ąŠčéą▓ąĄčé, ąĄčüą╗ąĖ ą┐čĆąĖčłąĄą╗ ąŠčéą▓ąĄčé BUSY, č鹊 čŹč鹊 ąĘąĮą░čćąĖčé, čćč鹊 ąŠą┐ąĄčĆą░čåąĖčÅ ąĄčēąĄ ąĮąĄ ąĘą░ą▓ąĄčĆčłąĄąĮą░. ą¤ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ąŠą┐ąĄčĆą░čåąĖąĖ MCU ąŠčéą▓ąĄčéąĖčé ą▒ą░ą╣č鹊ą╝ ACK ąĖą╗ąĖ NACK, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čĆąĄąĘčāą╗čīčéą░čéą░ ąŠą┐ąĄčĆą░čåąĖąĖ. ąóąŠą│ą┤ą░ ą▒ą╗ąŠą║ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ "Delay" ąĮą░ čĆąĖčüčāąĮą║ą░čģ 17 ąĖ 23 ąĘą░ą╝ąĄąĮčÅąĄčéčüčÅ čåąĖą║ą╗ąŠą╝ ąŠą┐čĆąŠčüą░, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ą┐čĆąĖąĮčÅčé ąŠčéą▓ąĄčé ACK ąĖą╗ąĖ NACK.

ąĀąĖčü. 35. ąŻą┤ą░ą╗ąĄąĮąĖąĄ ąĘą░ą┤ąĄčƹȹ║ąĖ (Delay) ą▓ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąĮčŗčģ RAM-ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░čģ.
ą£ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąĮčŗąĄ RAM-ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ erase/write ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ąŠą┐čĆąŠčüą░ SPI ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ ą┤ą╗čÅ 32-ą║ąĖą╗ąŠą▒ą░ą╣čéąĮčŗčģ MCU STM8AF/S. MCU STM8L/AL čüą░ą╝ąĖ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ RAM čü ąŠčéą▓ąĄč鹊ą╝ čüąŠčüč鹊čÅąĮąĖčÅ BUSY (ą┤ą╗čÅ ąĮąĖčģ ą║ąŠą┐ąĖčĆąŠą▓ą░čéčī ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ erase/write ąĮąĄ ąĮčāąČąĮąŠ).
ąöą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░ čäąĖčĆą╝ą░ STMicroelectronics ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖą╗ą░ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ PC, ąĖąĘą▓ąĄčüčéąĮąŠąĄ ą║ą░ą║ "Flash loader demonstrator", ą║ąŠč鹊čĆąŠąĄ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠą▒ąĮąŠą▓ąĖčéčī firmware ą▓ STM8 č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü UART (ąĮą░ čüč鹊čĆąŠąĮąĄ PC čŹč鹊 čéčĆą░ą┤ąĖčåąĖąŠąĮąĮčŗą╣ RS-232 ąĖą╗ąĖ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╣ COM-ą┐ąŠčĆčé USB CDC). ąŁč鹊 ą¤ą× čĆą░ą▒ąŠčéą░ąĄčé ą┐ąŠą┤ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąŠą╣ Microsoft┬« Windows┬«, ąĖ ąĄą│ąŠ ą╝ąŠąČąĮąŠ ąĘą░ą│čĆčāąĘąĖčéčī čü čüą░ą╣čéą░ www.st.com.
ąĪ čŹčéąĖą╝ ą¤ą× ą╗čÄą▒ąŠąĄ firmware, čüąŠčģčĆą░ąĮąĄąĮąĮąŠąĄ ą▓ čäą░ą╣ą╗ *.s19, ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą│čĆčāąČąĄąĮąŠ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ STM8AF/AL/L/S. ą¤ą× čéą░ą║ąČąĄ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą┐čĆąŠą▓ąĄčĆą║čā ą▓čŗą│čĆčāąČąĄąĮąĮąŠą│ąŠ firmware ąĖ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠąĄ čüčéąĖčĆą░ąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ.
ąĀąĖčü. 36. ą¤čĆąŠą│čĆą░ą╝ą╝ą░ "Flash loader demonstrator".
ą×ą│čĆą░ąĮąĖč湥ąĮąĖąĄ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą▓ą▓ąĄą┤ąĄąĮąŠ ąĮąĄ ąĖąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 ąĘą░ą│čĆčāąĘčćąĖą║ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠ, ąĖ ąĮąĄ ąĖąĘ-ąĘą░ ąĮąĄčüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ čüąŠ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅą╝ąĖ. ą¤čĆąĖčćąĖąĮą░ ą▓ čüą┐ąĄčåąĖčäąĖą║ąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ STM8 ROM bootloader ą║ąŠąĮąĄčćąĮčŗą╝ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝.
ą¦č鹊ą▒čŗ ą┐čĆąĄą┤ąŠčéą▓čĆą░čéąĖčéčī ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖąĄ ą┐čĆąŠą▒ą╗ąĄą╝, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 čüą┐ąŠčüąŠą▒ ąŠą▒čģąŠą┤ą░ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ ąĘą░ą│čĆčāąĘčćąĖą║ą░ UART, ąŠą┐ąĖčüą░ąĮąĮčŗą╣ ą┤ą░ą╗ąĄąĄ, ą║ąŠą│ą┤ą░ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ.
[ąÉą▓č鹊ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čüą║ąŠčĆąŠčüčéąĖ UART]
ąÜą░ą║ čāą┐ąŠą╝ąĖąĮą░ą╗ąŠčüčī ą▓čŗčłąĄ ą▓ čüąĄą║čåąĖąĖ ąŠą┐ąĖčüą░ąĮąĖčÅ ąĮą░čüčéčĆąŠąĄą║ USART/UART, ąĘą░ą│čĆčāąĘčćąĖą║ ąŠą┐čĆą░čłąĖą▓ą░ąĄčé ą▓čüąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ (UART, SPI, CAN) ą▓ ąŠąČąĖą┤ą░ąĮąĖąĖ ą▒ą░ą╣čéą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ. ą×ą▒ą╝ąĄąĮ čü ąĘą░ą│čĆčāąĘčćąĖą║ąŠą╝ ąĮą░čćąĖąĮą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĮčÅčéčŗą╣ ą▒ą░ą╣čé čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čĆą░ą▓ąĄąĮ 0x7F.
ąöą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ č湥čĆąĄąĘ UART čüą║ąŠčĆąŠčüčéčī, čü ą║ąŠč鹊čĆąŠą╣ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą┤ą░ąĮąĮčŗąĄ, ąĖąĘąĮą░čćą░ą╗čīąĮąŠ ąĮąĄąĖąĘą▓ąĄčüčéąĮą░ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘčćąĖą║ą░. ąöą╗čÅ SPI ąĖ CAN čüąĖčéčāą░čåąĖčÅ ą┤čĆčāą│ą░čÅ, ą┐ąŠč鹊ą╝čā čćč鹊 čüą║ąŠčĆąŠčüčéčī SPI ąĘą░ą┤ą░ąĄčéčüčÅ čéą░ą║čéą░ą╝ąĖ čģąŠčüčéą░, ą░ ą┤ą╗čÅ CAN čüą║ąŠčĆąŠčüčéčī ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čäąĖą║čüąĖčĆąŠą▓ą░ąĮą░ ąĮą░ 125 ą║ąĖą╗ąŠą▒ąĖčé/čüąĄą║.
ą¤ąĄčĆąĄą┤ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĄą╣ ąĖąĮč鹥čĆč乥ą╣čüą░ UART ąĘą░ą│čĆčāąĘčćąĖą║ ą░ąĮą░ą╗ąĖąĘąĖčĆčāąĄčé ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĮą░ ąĮąŠąČą║ąĄ ą┐čĆąĖąĄą╝ą░ UART (ąĮąŠąČą║ą░ RxD GPIO), ąŠąČąĖą┤ą░čÅ ą▒ą░ą╣čéą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ 0x7F, ąĖ ą┐ąŠ ąĄą│ąŠ ąĖąĘą╝ąĄčĆąĄąĮąĮčŗą╝ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčÅą╝ ąĮčāą╗ąĄą╣ ąĖ ąĄą┤ąĖąĮąĖčå ą▓čŗčćąĖčüą╗čÅąĄčé čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ. ąŁč鹊 ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ ą░ą▓č鹊ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄą╝ čüą║ąŠčĆąŠčüčéąĖ UART.
1. ą£ą░čüč鹥čĆ ą┐ąŠčüčŗą╗ą░ąĄčé 0x7F ą▓ ą▓ąĖą┤ąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą║ą░ą┤čĆą░ (LSB ąĖą┤ąĄčé ą┐ąĄčĆą▓čŗą╝) ąĮą░ ą▓čģąŠą┤ ąĖąĮč鹥čĆč乥ą╣čüą░ UART. ąæą░ą╣čé 0x7F čüąŠčüč鹊ąĖčé ąĖąĘ čüą╗ąĄą┤čāčÄčēąĖčģ čćą░čüč鹥ą╣:
ŌĆō Start-ą▒ąĖčé (ą╗ąŠą│. 0).
ŌĆō 7 čüą╗ąĄą┤čāčÄčēąĖčģ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ą▒ąĖčé ą╗ąŠą│. 1 (LSB ą▒ąĖčé ąĖą┤ąĄčé ą┐ąĄčĆą▓čŗą╝).
ŌĆō 1 ą▒ąĖčé ą▓ ą╗ąŠą│. 0 (MSB ą▒ąĖčé ą▒ą░ą╣čéą░ 0x7F).
ŌĆō ąæąĖčé č湥čéąĮąŠčüčéąĖ even (ą╗ąŠą│. 1).
ŌĆō Stop-ą▒ąĖčé (ą╗ąŠą│ 1).
2. ąŚą░ą│čĆčāąĘčćąĖą║ ąŠą┐čĆą░čłąĖą▓ą░ąĄčé čāčĆąŠą▓ąĄąĮčī ąĮą░ ąĮąŠąČą║ąĄ RxD, ąŠąČąĖą┤ą░čÅ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ start-ą▒ąĖčéą░ (ą╗ąŠą│. 0).
3. ąÆ ą╝ąŠą╝ąĄąĮčé ą┐ąĄčĆąĄą┐ą░ą┤ą░ ąŠčé 0 ą║ 1 (ąŠą║ąŠąĮčćą░ąĮąĖąĄ start-ą▒ąĖčéą░) ąĘą░ą│čĆčāąĘčćąĖą║ ąĘą░ą┐čāčüą║ą░ąĄčé čéą░ą╣ą╝ąĄčĆ, čćč鹊ą▒čŗ ą┐ąŠ ąĄą│ąŠ čüč湥čéčćąĖą║čā ąĖąĘą╝ąĄčĆąĖčéčī ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī 7 ą╗ąŠą│ąĖč湥čüą║ąĖčģ ąĄą┤ąĖąĮąĖč湥ą║.
4. ąŚą░ą│čĆčāąĘčćąĖą║ ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čéą░ą╣ą╝ąĄčĆ ą┐ąŠ čüą┐ą░ą┤čā čāčĆąŠą▓ąĮčÅ RxD (ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ 7 čüą╗ąĄą┤čāčÄčēąĖčģ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ą▒ąĖčé ą╗ąŠą│. 1, ą▓ ą╝ąŠą╝ąĄąĮčé ąĮą░čćą░ą╗ą░ MSB). ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čéąĖą║ąŠą▓ čéą░ą╣ą╝ąĄčĆą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ 7 ą╗ąŠą│ąĖč湥čüą║ąĖčģ ąĄą┤ąĖąĮąĖčå ą▒ą░ą╣čéą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ 0x7F. ą¤ąŠ čüč湥čéčćąĖą║čā čéą░ą╣ą╝ąĄčĆą░ ąĘą░ą│čĆčāąĘčćąĖą║ ą▓čŗčćąĖčüą╗čÅąĄčé ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ąŠą┤ąĮąŠą│ąŠ ą▒ąĖčéą░ (ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéąĖą║ąŠą▓ ą┤ąĄą╗ąĖčéčüčÅ ąĮą░ 7), ą┐ąŠ čŹč鹊ą╣ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą▓čŗčćąĖčüą╗čÅąĄčé čüą║ąŠčĆąŠčüčéčī UART (baudrate), ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ UART. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ąĘą░ą│čĆčāąĘčćąĖą║ ą│ąŠč鹊ą▓ ą║ ą┐čĆąĖąĮčÅčéąĖčÄ čüą╗ąĄą┤čāčÄčēąĄą╣ ą║ąŠą╝ą░ąĮą┤čŗ ąŠčé čģąŠčüčéą░.
[ą×ą┐ąĖčüą░ąĮąĖąĄ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ UART]
ąÉą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠąĄ ą▓čŗčćąĖčüą╗ąĄąĮąĖąĄ čüą║ąŠčĆąŠčüčéąĖ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé, čćč鹊 čģąŠčüčé ąŠčéą┐čĆą░ą▓ąĖčé 0x7F ą▓ ą║ą░č湥čüčéą▓ąĄ ą▒ą░ą╣čéą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ. ą×ą┤ąĮą░ą║ąŠ ą▓čŗčćąĖčüą╗ąĄąĮąĖąĄ čüą║ąŠčĆąŠčüčéąĖ ą▒čāą┤ąĄčé ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮčŗą╝, ąĄčüą╗ąĖ čģąŠčüčé ąŠčéą┐čĆą░ą▓ąĖčé ą▒ą░ą╣čé, ąŠčéą╗ąĖčćą░čÄčēąĖą╣čüčÅ ąŠčé 0x7F, ą┐ąŠč鹊ą╝čā čćč鹊 ąĘą░ą│čĆčāąĘčćąĖą║ ąŠąČąĖą┤ą░ąĄčé čüąĄą╝ąĖ čüą╗ąĄą┤čāčÄčēąĖčģ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ą╗ąŠą│. 1 ą▓čüą╗ąĄą┤ ąĘą░ start-ą▒ąĖč鹊ą╝ čäčĆąĄą╣ą╝ą░. ąÆ čŹč鹊ą╣ čüąĖčéčāą░čåąĖąĖ ą▓ąŠąĘąŠą▒ąĮąŠą▓ąĖčéčī ąŠą▒ą╝ąĄąĮ ą┐ąŠą╝ąŠąČąĄčé č鹊ą╗čīą║ąŠ čüą▒čĆąŠčü MCU STM8.
ąĪą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ, čģąŠčüčé ą┤ąŠą╗ąČąĄąĮ ąŠčéą┐čĆą░ą▓ąĖčéčī 0x7F ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░, čćč鹊ą▒čŗ ą║ąŠčĆčĆąĄą║čéąĮąŠ ąĘą░ą┐čāčüčéąĖčéčī ąĘą░ą│čĆčāąĘčćąĖą║ ąĮą░ ąĖąĮč鹥čĆč乥ą╣čüąĄ UART, ą╗ąĖą▒ąŠ ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ąĮąĖč湥ą│ąŠ ą┐ąŠčüčŗą╗ą░čéčī ą▓ č鹥č湥ąĮąĖąĄ 1 čüąĄą║čāąĮą┤čŗ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░, čćč鹊ą▒čŗ ąĘą░ą│čĆčāąĘčćąĖą║ ąĮąĄ ąĘą░ą┐čāčüčéąĖą╗čüčÅ, ąĖ ąĮą░čćą░ą╗ąŠ ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ. ąøčÄą▒ąŠą╣ ą┤čĆčāą│ąŠą╣ ą▒ą░ą╣čé, ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╣ ąĘą░ą│čĆčāąĘčćąĖą║čā ą▓ č鹥č湥ąĮąĖąĄ 1 čüąĄą║čāąĮą┤čŗ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░, ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą▓čģąŠą┤čā ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą▓ ą▒ąĄčüą║ąŠąĮąĄčćąĮčŗą╣ čåąĖą║ą╗ ąŠąČąĖą┤ą░ąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤čŗ ąĮąĄ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ.
ąóą░ą║ą░čÅ čüąĖčéčāą░čåąĖčÅ ą╝ąŠąČąĄčé ą▓ąŠąĘąĮąĖą║ąĮčāčéčī ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, ąĄčüą╗ąĖ STM8 ą▒čŗą╗ąŠ čüą▒čĆąŠčłąĄąĮąŠ ą▓ č鹊čé ą╝ąŠą╝ąĄąĮčé, ą║ąŠą│ą┤ą░ ą▒ąŠą╗čīčłąŠą╣ ąŠą▒čŖąĄą╝ ą┤ą░ąĮąĮčŗčģ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü UART. ąóąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓ąŠą╣ą┤ąĄčé ą▓ ą▒ąĄčüą║ąŠąĮąĄčćąĮčŗą╣ čåąĖą║ą╗ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ąĖąĘ-ąĘą░ ą┐čĆąĖąĄą╝ą░ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ "ą▒ą░ą╣čé čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ".
[ą×ą▒čģąŠą┤ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ UART]
ą¤čĆąŠą▒ą╗ąĄą╝ą░, ąŠą┐ąĖčüą░ąĮąĮą░čÅ ą▓čŗčłąĄ, ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą┐čĆą░ą▓ą╗ąĄąĮą░ ą┐ąŠ čüą╗ąĄą┤čāčÄčēąĄą╣ ą╝ąĄč鹊ą┤ąĖą║ąĄ. ą×ąĮą░ ąŠčüąĮąŠą▓ą░ąĮą░ ąĮą░ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĖ ą║ąŠą┤ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ MCU. ąŁč鹊 čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ, ąĄčüą╗ąĖ ąÆą░čłąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐čĆąĖ ąĘą░ą┐čāčüą║ąĄ ą▓čģąŠą┤ąĖčé ą▓ ą▒ąĄčüą║ąŠąĮąĄčćąĮčŗą╣ čåąĖą║ą╗, ą║ąŠą│ą┤ą░ ąĮą░čćąĖąĮą░ąĄčéčüčÅ ąŠą▒ą╝ąĄąĮ č湥čĆąĄąĘ UART. ąØąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī čüą╗ąĄą┤čāčÄčēąĖąĄ čłą░ą│ąĖ:
1. ąŚą░ą┐čĆąĄčéąĖč鹥 ąĘą░ą│čĆčāąĘčćąĖą║ ą▒ą░ą╣čéą░ą╝ąĖ ąŠą┐čåąĖą╣ (ąĮą░ čćąĖčüčéčŗčģ MCU ąĘą░ą│čĆčāąĘčćąĖą║ ąĘą░ą┐čĆąĄčēąĄąĮ).
2. ąÆčüčéą░ą▓čīč鹥 ą▓ ą║ąŠą┤ čüą▓ąŠąĄą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čā, ą║ąŠč鹊čĆą░čÅ ąĘą░ą┐čāčüčéąĖčé ąĘą░ą│čĆčāąĘčćąĖą║, ą║ąŠą│ą┤ą░ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ firmware. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą║ąŠą┤ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ąŠą╗ąČąĄąĮ ą┤ąĄą╗ą░čéčī jump ą▓ čāą║ą░ąĘą░ąĮąĮčāčÄ č鹊čćą║čā ą▓čģąŠą┤ą░ ąĘą░ą│čĆčāąĘčćąĖą║ą░ (bootloader entry point, čüą╝. čéą░ą▒ą╗ąĖčåčā 14 ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ B).
ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ą┐čĆąĖ čüą▒čĆąŠčüąĄ ąĘą░ą│čĆčāąĘčćąĖą║ ąĮąĄ ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ, ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ą▓ąŠą╣ą┤ąĄčé ą▓ ą▒ąĄčüą║ąŠąĮąĄčćąĮčŗą╣ čåąĖą║ą╗, ą║ąŠą│ą┤ą░ ą┐čĆąĖą╝ąĄčé č湥čĆąĄąĘ UART čüą╗čāčćą░ą╣ąĮčŗąĄ ą▒ą░ą╣čéčŗ. ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ąĘą░ą│čĆčāąĘčćąĖą║ čüčĆą░ąĘčā ąĘą░ą┐čāčüčéąĖčé ą║ąŠą┤ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą▒ąĄąĘ ą▓čüčÅą║ąŠą╣ ąĘą░ą┤ąĄčƹȹ║ąĖ, čćč鹊 čéą░ą║ąČąĄ ą▓čŗą│ą╗čÅą┤ąĖčé ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą║ą░ą║ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠąĄ ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ąŠ.
ąĢčüą╗ąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąŠą▒ąĮąŠą▓ąĖčéčī ą║ąŠą┤ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ą▓čŗą┐ąŠą╗ąĮąĖč鹥 čüą╗ąĄą┤čāčÄčēčāčÄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┤ąĄą╣čüčéą▓ąĖą╣:
1. ąØą░ąČą╝ąĖč鹥 čüą┐ąĄčåąĖą░ą╗čīąĮčāčÄ ą║ąĮąŠą┐ą║čā, ą║ąŠč鹊čĆą░čÅ ą░ą║čéąĖą▓ąĖčĆčāąĄčé ąĘą░ą│čĆčāąĘčćąĖą║ čü ą┐ąŠą╝ąŠčēčīčÄ ą┐ąĄčĆąĄą┤ą░čćąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĮą░ čāą║ą░ąĘą░ąĮąĮčāčÄ bootloader entry point. ąØąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 ą║ UART ą┐čĆąĖ čŹč鹊ą╝ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ čģąŠčüčé, ąĖ ąŠąĮ ąĮąĄ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ąĮąĖą║ą░ą║ąĖčģ čüą╗čāčćą░ą╣ąĮčŗčģ ą▒ą░ą╣čé.
2. ąŚą░ą┐čāčüčéąĖč鹥 čģąŠčüčé ą┤ą╗čÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą║ąŠą┤ą░ čü ą┐ąŠą╝ąŠčēčīčÄ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ROM bootloader.
3. ąĪą▒čĆąŠčüčīč鹥 čāčüčéčĆąŠą╣čüčéą▓ąŠ, ą║ąŠą│ą┤ą░ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ.
ą×ą┐ąĖčüą░ąĮąĮčŗą╣ čüą┐ąŠčüąŠą▒ ąĘą░ą┐čāčüą║ą░ ąĘą░ą│čĆčāąĘčćąĖą║ą░ čü ą┐ąŠą╝ąŠčēčīčÄ ą║ąĮąŠą┐ą║ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą╝ąĄąĮąĄąĮ ą┤čĆčāą│ąĖą╝ čāčüą╗ąŠą▓ąĖąĄą╝ ąĘą░ą┐čāčüą║ą░ ąĘą░ą│čĆčāąĘčćąĖą║ą░, ąĮą░ą┐čĆąĖą╝ąĄčĆ čü ą┐ąŠą╝ąŠčēčīčÄ ąŠčéą┐čĆą░ą▓ą║ąĖ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü čüą┐ąĄčåąĖą░ą╗čīąĮąŠą╣ ą║ąŠą╝ą░ąĮą┤čŗ ąĖą╗ąĖ ą┐ą░čĆąŠą╗čÅ ą░čāč鹥ąĮčéąĖčäąĖą║ą░čåąĖąĖ (čćč鹊ą▒čŗ ąŠą▒ąĮąŠą▓ąĖčéčī firmware ą╝ąŠą│ č鹊ą╗čīą║ąŠ ą░ą▓č鹊čĆąĖąĘąŠą▓ą░ąĮąĮčŗą╣ ą┐ąĄčĆčüąŠąĮą░ą╗).
ą×ą┐ąĄčĆą░čåąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą╝ąŠąČąĄčé ą┐ąŠč鹥čĆą┐ąĄčéčī ą║čĆą░čģ ą▓ ą┐čĆąŠčåąĄčüčüąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ąĖąĘ-ąĘą░ ąĮąĄąŠąČąĖą┤ą░ąĮąĮąŠą│ąŠ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░). ąóąŠą│ą┤ą░ ą▓ ąĘą░ą│čĆčāąĘčćąĖą║ čüąĮąŠą▓ą░ ą▓ąŠą╣čéąĖ ąĮąĄ ą┐ąŠą╗čāčćąĖčéčüčÅ, ą┐ąŠč鹊ą╝čā čćč鹊 ą║ąŠą┤ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĮąĄ ą▒čŗą╗ ą║ąŠčĆčĆąĄą║čéąĮąŠ ąŠą▒ąĮąŠą▓ą╗ąĄąĮ. ą¦č鹊ą▒čŗ ą┐čĆąĄą┤ąŠčéą▓čĆą░čéąĖčéčī ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖąĄ čéą░ą║ąŠą╣ ą┐čĆąŠą▒ą╗ąĄą╝čŗ, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ, čćč鹊ą▒čŗ čģąŠčüčé ą▓čŗą┐ąŠą╗ąĮąĖą╗ čüą╗ąĄą┤čāčÄčēąĖąĄ čłą░ą│ąĖ ą┐ąĄčĆąĄą┤ ą▓čģąŠą┤ąŠą╝ ą▓ ąĘą░ą│čĆčāąĘčćąĖą║:
1. ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ROM bootloader č湥čĆąĄąĘ ą▒ą░ą╣čéčŗ ąŠą┐čåąĖą╣ ą┐ąĄčĆąĄą┤ ąĘą░ą│čĆčāąĘą║ąŠą╣ ą║ąŠą┤ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ.
2. ąŚą░ą│čĆčāąĘą║ą░ ą║ąŠą┤ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąŠą▒čŗčćąĮčŗą╝ čüą┐ąŠčüąŠą▒ąŠą╝ čü ą┐ąŠą╝ąŠčēčīčÄ ROM bootloader ąĖ ą┐čĆąŠą▓ąĄčĆą║ą░ ąĘą░ą│čĆčāąĘą║ąĖ.
3. ą¤ąŠą▓č鹊čĆąĮčŗą╣ ąĘą░ą┐čĆąĄčé ROM bootloader ą▒ą░ą╣čéą░ą╝ąĖ ąŠą┐čåąĖą╣.
ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĮą░čÅ ą│čĆčāą┐ą┐ą░ STM8 čüą▓čÅąĘą░ąĮą░ čü ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ ą║ąŠą┤ąŠą╝ ąĘą░ą│čĆčāąĘčćąĖą║ą░. ąŁč鹊čé ą║ąŠą┤ čü č鹥č湥ąĮąĖąĄą╝ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąŠą┤ą▓ąĄčĆą│ą░ąĄčéčüčÅ čāą╗čāčćčłąĄąĮąĖčÅą╝, ąĖ ą┐ąŠčÅą▓ą╗čÅčÄčéčüčÅ ąĮąŠą▓čŗąĄ ą▓ąĄčĆčüąĖąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░. ą×čéą╗ąĖčćąĖčÅ čĆą░ąĘąĮčŗčģ ą▓ąĄčĆčüąĖą╣ ąĘą░ą│čĆčāąĘčćąĖą║ą░ čüčāą╝ą╝ą░čĆąĮąŠ ą┐ąŠą║ą░ąĘą░ąĮčŗ ą▓ čéą░ą▒ą╗ąĖčåąĄ 15 ą▓ą╝ąĄčüč鹥 čü ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅą╝ąĖ, čāą╗čāčćčłąĄąĮąĖčÅą╝ąĖ ąĖ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĮčŗą╝ąĖ čäčāąĮą║čåąĖčÅą╝ąĖ.
ąóą░ą▒ą╗ąĖčåą░ 15. ą×ą┐ąĖčüą░ąĮąĖąĄ ąŠą│čĆą░ąĮąĖč湥ąĮąĖą╣, čāą╗čāčćčłąĄąĮąĖą╣ ąĖ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĮčŗčģ čäčāąĮą║čåąĖą╣ ą▓ čĆą░ąĘąĮčŗčģ ą▓ąĄčĆčüąĖčÅčģ ąĘą░ą│čĆčāąĘčćąĖą║ą░.
| ąōčĆčāą┐ą┐ą░ STM8 |
ąÆąĄčĆčüąĖčÅ ąĘą░ą│čĆčāąĘčćąĖą║ą░ |
ąĀąĄą▓ąĖąĘąĖčÅ MCU |
ą×ą│čĆą░ąĮąĖč湥ąĮąĖčÅ, čāą╗čāčćčłąĄąĮąĖčÅ ąĖ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĮčŗąĄ čäčāąĮą║čåąĖąĖ |
| STM8AF ąĖ STM8S Series high density |
2.1 |
Rev X |
ąØą░čćą░ą╗čīąĮą░čÅ ą▓ąĄčĆčüąĖčÅ. ą×ą│čĆą░ąĮąĖč湥ąĮąĖčÅ:
ŌĆō ąóą░ą║čéčŗ CPU čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ HSI/1 (16 ą£ąōčå), ą║ąŠą│ą┤ą░ ąĘą░ą│čĆčāąĘčćąĖą║ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗čÅąĄčé čĆą░ą▒ąŠčéčā.
ŌĆō ąśąĮč鹥čĆč乥ą╣čü CAN čĆą░ą▒ąŠčéą░ąĄčé ąĮąĄą║ąŠčĆčĆąĄą║čéąĮąŠ. ąĪą▓čÅąČąĖč鹥čüčī čü ą▒ą╗ąĖąČą░ą╣čłąĖą╝ ąŠčäąĖčüąŠą╝ ą┐čĆąŠą┤ą░ąČ STMicroelectronics ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖąĮčüčéčĆčāą║čåąĖą╣ ą┐ąŠ ąŠą▒čģąŠą┤čā ą┐čĆąŠą▒ą╗ąĄą╝čŗ CAN ą▓ čŹč鹊ą╣ ą▓ąĄčĆčüąĖąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░. |
| 2.2 |
Rev U ąĖ T: STM8AFxxxx52xx, STM8AF6269/8x/Ax
Rev Y, 6, W, 7: STM8S207/208xx |
ąŻą╗čāčćčłąĄąĮąĖčÅ:
ŌĆō ąŚą░čēąĖčéą░ ąŠčé ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ EMC.
ąśčüą┐čĆą░ą▓ą╗ąĄąĮčŗ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ:
ŌĆō ąØą░čüčéčĆąŠą╣ą║ą░ čéą░ą║č鹊ą▓ CPU ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ąŠą▒čĆą░čéąĮąŠ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░, ą║ąŠą│ą┤ą░ ąĘą░ą│čĆčāąĘčćąĖą║ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗čÅąĄčé čĆą░ą▒ąŠčéčā.
ŌĆō ą¤ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ CAN čĆą░ą▒ąŠčéą░ąĄčé ą║ąŠčĆčĆąĄą║čéąĮąŠ. |
| STM8AF ąĖ STM8S Series medium density |
1.2 |
Rev Y: STM8AF612x/4x, STM8AF6166/68
Rev Z: STM8S105xx |
ąØą░čćą░ą╗čīąĮą░čÅ ą▓ąĄčĆčüąĖčÅ. ą×ą│čĆą░ąĮąĖč湥ąĮąĖčÅ:
ŌĆō ąóą░ą║čéčŗ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ąĮą░ 16 ą£ąōčå ą┐ąŠčüą╗ąĄ ą║ąŠą╝ą░ąĮą┤čŗ Go (ą┐čĆąĄčüą║ą░ą╗ąĄčĆ HSI ąĮąĄ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ąŠą▒čĆą░čéąĮąŠ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░). |
| 1.3 |
Rev X, W: STM8AF622x/4x, STM8AF6266/68
Rev Y, 6, X, 7: STM8S105xx |
ąŻą╗čāčćčłąĄąĮąĖčÅ:
ŌĆō ąŚą░čēąĖčéą░ ąŠčé ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ EMC.
ąśčüą┐čĆą░ą▓ą╗ąĄąĮčŗ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ:
ŌĆō ą¤ąŠčüą╗ąĄ ą║ąŠą╝ą░ąĮą┤čŗ Go ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čéą░ą║č鹊ą▓čŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ HSI.
ąöąŠą▒ą░ą▓ą╗ąĄąĮąĮą░čÅ čäčāąĮą║čåąĖčÅ:
ŌĆō ą¤ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ SPI ąĖčüą┐ąŠą╗čīąĘčāąĄčé čäą╗ą░ą│ BUSY (čüą╝. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ C). |
| STM8L ąĖ STM8AL Series high/medium+ density |
1.0 |
Rev A |
ąØą░čćą░ą╗čīąĮą░čÅ ą▓ąĄčĆčüąĖčÅ. ąŻą╗čāčćčłąĄąĮąĖąĄ:
ŌĆō ąŚą░čēąĖčéą░ ąŠčé ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ EMC.
ą×ą│čĆą░ąĮąĖč湥ąĮąĖąĄ:
ŌĆō ąŚą░ą┐čĆąĄčēą░ąĄčéčüčÅ ą┐čĆąŠą▓ąĄčĆą║ą░ ąĘą░ą│čĆčāąĘčćąĖą║ą░, ą║ąŠą│ą┤ą░ ąŠąĮ ą▓ąŠąĘąŠą▒ąĮąŠą▓ąĖčé čĆą░ą▒ąŠčéčā. |
| 1.1 |
Rev Z |
ąśčüą┐čĆą░ą▓ą╗ąĄąĮąŠ ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĄ:
- ą¤čĆąŠą▓ąĄčĆą║ą░ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ąĮąĄ ąĘą░ą┐čĆąĄčēą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ąŠąĮ ą▓ąŠąĘąŠą▒ąĮąŠą▓ąĖčé čĆą░ą▒ąŠčéčā. |
| STM8L ąĖ STM8AL Series medium density |
1.0 |
Rev A |
ąØą░čćą░ą╗čīąĮą░čÅ ą▓ąĄčĆčüąĖčÅ. ą×ą│čĆą░ąĮąĖč湥ąĮąĖčÅ:
ŌĆō ąØąĄ ą┐čĆąŠą▓ąĄčĆčÅąĄčéčüčÅ ą▒ąĖčé ąĘą░čēąĖčéčŗ ąŠčé čćč鹥ąĮąĖčÅ (ROP).
ŌĆō ąóą░ą║čéčŗ CPU čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ąĮą░ HSI/1 (16 ą£ąōčå), ą║ąŠą│ą┤ą░ ąĘą░ą│čĆčāąĘčćąĖą║ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗čÅąĄčé čĆą░ą▒ąŠčéčā.
ŌĆō ąóą░ą╣ą╝ą░čāčé ąĮą░ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą▒ą░ą╣čéą░ SYNCH ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ čüąŠčüčéą░ą▓ą╗čÅąĄčé 500 ą╝čü ą▓ą╝ąĄčüč鹊 1 čüąĄą║čāąĮą┤čŗ. |
| 1.1 |
Rev B |
ą×ą│čĆą░ąĮąĖč湥ąĮąĖčÅ:
ŌĆō ąóą░ą║čéčŗ CPU čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ąĮą░ HSI/1 (16 ą£ąōčå), ą║ąŠą│ą┤ą░ ąĘą░ą│čĆčāąĘčćąĖą║ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗čÅąĄčé čĆą░ą▒ąŠčéčā.
ŌĆō ąóą░ą╣ą╝ą░čāčé ąĮą░ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą▒ą░ą╣čéą░ SYNCH ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ čüąŠčüčéą░ą▓ą╗čÅąĄčé 500 ą╝čü ą▓ą╝ąĄčüč鹊 1 čüąĄą║čāąĮą┤čŗ.
ąśčüą┐čĆą░ą▓ą╗ąĄąĮąŠ ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĄ:
ŌĆō ąóąĄą┐ąĄčĆčī ą┐čĆąŠą▓ąĄčĆčÅąĄčéčüčÅ ą▒ąĖčé ąĘą░čēąĖčéčŗ ąŠčé čćč鹥ąĮąĖčÅ. |
| 1.2 |
Rev Z |
ąŻą╗čāčćčłąĄąĮąĖąĄ:
ŌĆō ąŚą░čēąĖčéą░ ąŠčé ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ EMC.
ą×ą│čĆą░ąĮąĖč湥ąĮąĖčÅ:
ŌĆō ąĢčüą╗ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ čĆą░ąĘčĆąĄčłąĄąĮ, č鹊 ą┐ąŠčüą╗ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ (ą┐ąŠčüą╗ąĄ ąĖčüč鹥č湥ąĮąĖčÅ 1 čüąĄą║čāąĮą┤čŗ čéą░ą╣ą╝ą░čāčéą░ ąĖą╗ąĖ ą┐ąŠčüą╗ąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤čŗ Go) čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ąĮąĄą║ąŠčĆčĆąĄą║čéąĮčŗąĄ ą║ą╗čÄčćąĖ MASS ą▓ čĆąĄą│ąĖčüčéčĆąĄ FLASH_PUKR. ąŁčéą░ ąŠą┐ąĄčĆą░čåąĖčÅ ą▒ą╗ąŠą║ąĖčĆčāąĄčé ą▒čāą┤čāčēąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ čüąŠčüč鹊čÅąĮąĖčÅ ą▒ąĄąĘ ąĘą░čēąĖčéčŗ ąŠčé ąĘą░ą┐ąĖčüąĖ ą┤ą╗čÅ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝. ąśąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 ą┐ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ąĮą░ ąĘą░ą┐ąĖčüčī ąĮąĄąĘą░čēąĖčēąĄąĮąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ ą▓ąŠ ą▓čĆąĄą╝čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░, ąŠąĮą░ ąŠčüčéą░ąĄčéčüčÅ ą▓ čéą░ą║ąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ ą┤ąŠ č鹥čģ ą┐ąŠčĆ, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮą░ ąĘą░čēąĖčéą░. ąĢčüą╗ąĖ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ čéčĆąĄą▒čāąĄčéčüčÅ čäčāąĮą║čåąĖąŠąĮą░ą╗ IAP, č鹊 ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ąĘą░čēąĖčēą░čéčī ąŠčé ąĘą░ą┐ąĖčüąĖ ą┐ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝, ąĖąĮą░č湥 ąĘą░čēąĖčéą░ ąŠčé ąĘą░ą┐ąĖčüąĖ ąŠčüčéą░ąĮąĄčéčüčÅ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ą┤ąŠ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ čüą▒čĆąŠčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░.
ŌĆō ąĢčüą╗ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ čĆą░ąĘčĆąĄčłąĄąĮ, č鹊 ą┐ąĄčĆąĄą┤ ą┐ąĄčĆąĄčģąŠą┤ąŠą╝ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ (ą┐ąŠčüą╗ąĄ čéą░ą╣ą╝ą░čāčéą░ ą▓ 1 čüąĄą║čāąĮą┤čā) ą┐ą░ą╝čÅčéčī ą┤ą░ąĮąĮčŗčģ ąŠčüčéą░ąĄčéčüčÅ ąĮąĄąĘą░čēąĖčēąĄąĮąĮąŠą╣ (ąŠąĮą░ ąĮąĄ ą▒čŗą╗ą░ ąĘą░čēąĖčēąĄąĮą░ ą▓ąŠ ą▓čĆąĄą╝čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░). ąöą╗čÅ ą┐ąŠą▓čŗčłąĄąĮąĖčÅ ąĮą░ą┤ąĄąČąĮąŠčüčéąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĮčāąČąĮąŠ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░čéčī ąĘą░čēąĖčéčā ąŠčé ąĘą░ą┐ąĖčüąĖ ą┤ą╗čÅ ą┐ą░ą╝čÅčéąĖ ą┤ą░ąĮąĮčŗčģ.
ŌĆō ąĢčüą╗ąĖ ROP ą░ą║čéąĖą▓ąĮą░, ąĮąŠ ąĘą░ą│čĆčāąĘčćąĖą║ čĆą░ąĘčĆąĄčłąĄąĮ ą▒ą░ą╣čéą░ą╝ąĖ ąŠą┐čåąĖą╣, č鹊 ąĘą░ą│čĆčāąĘčćąĖą║ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ąĮąĄą║ąŠčĆčĆąĄą║čéąĮčŗąĄ ą║ą╗čÄčćąĖ MASS ą▓ čĆąĄą│ąĖčüčéčĆąĄ FLASH_PUKR (čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ą┐čĆąŠą▓ąĄčĆą║ąĖ ROP). ąŁčéą░ ąŠą┐ąĄčĆą░čåąĖčÅ ąĮą░ą▓čüąĄą│ą┤ą░ ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąĘą░čēąĖčéčŗ ąŠčé ąĘą░ą┐ąĖčüąĖ. ąĢčüą╗ąĖ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ čéčĆąĄą▒čāąĄčéčüčÅ čäčāąĮą║čåąĖąŠąĮą░ą╗ IAP (čü ą░ą║čéąĖą▓ąĮąŠą╣ ROP) č鹊 ąĘą░ą│čĆčāąĘčćąĖą║ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░ą┐čĆąĄčēąĄąĮ ą▒ą░ą╣čéą░ą╝ąĖ ąŠą┐čåąĖą╣.
ąśčüą┐čĆą░ą▓ą╗ąĄąĮčŗ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ:
ŌĆō ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ CPU ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ąŠą▒čĆą░čéąĮąŠ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░, ą║ąŠą│ą┤ą░ ąĘą░ą│čĆčāąĘčćąĖą║ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗čÅąĄčé čĆą░ą▒ąŠčéčā.
ŌĆō ąóą░ą╣ą╝ą░čāčé ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ą▒ą░ą╣čéą░ SYNCH ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĮą░ 1 čüąĄą║čāąĮą┤čā. |
| STM8L Series low density |
1.1 |
Rev Z |
ąØą░čćą░ą╗čīąĮą░čÅ ą▓ąĄčĆčüąĖčÅ. ą×ą│čĆą░ąĮąĖč湥ąĮąĖčÅ:
ŌĆō ąĢčüą╗ąĖ ąĘą░ą│čĆčāąĘčćąĖą║ čĆą░ąĘčĆąĄčłąĄąĮ, č鹊 ą┐ąĄčĆąĄą┤ ą┐ąĄčĆąĄčģąŠą┤ąŠą╝ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ (ą┐ąŠčüą╗ąĄ čéą░ą╣ą╝ą░čāčéą░ ą▓ 1 čüąĄą║čāąĮą┤čā) ą┐ą░ą╝čÅčéčī ą┤ą░ąĮąĮčŗčģ ąŠčüčéą░ąĄčéčüčÅ ąĮąĄąĘą░čēąĖčēąĄąĮąĮąŠą╣ (ąŠąĮą░ ąĮąĄ ą▒čŗą╗ą░ ąĘą░čēąĖčēąĄąĮą░ ą▓ąŠ ą▓čĆąĄą╝čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░). ąöą╗čÅ ą┐ąŠą▓čŗčłąĄąĮąĖčÅ ąĮą░ą┤ąĄąČąĮąŠčüčéąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĮčāąČąĮąŠ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░čéčī ąĘą░čēąĖčéčā ąŠčé ąĘą░ą┐ąĖčüąĖ ą┤ą╗čÅ ą┐ą░ą╝čÅčéąĖ ą┤ą░ąĮąĮčŗčģ. |
| ąÆčüąĄ ą│čĆčāą┐ą┐čŗ |
ąÆčüąĄ ą▓ąĄčĆčüąĖąĖ |
ąÆčüąĄ čĆąĄą▓ąĖąĘąĖąĖ |
ąÜąŠą│ą┤ą░ ąĘą░ą│čĆčāąĘčćąĖą║ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčé ą┐ąĄčĆąĄą┤ą░čćčā čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠčüą╗ąĄ 1 čüąĄą║čāąĮą┤čŗ čéą░ą╣ą╝ą░čāčéą░, ą┐čĆąĄčüą║ą░ą╗ąĄčĆ ą┤ą╗čÅ TIM3 ąĮąĄ ą┐ąŠą╗čāčćą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą┤ąĄą╗ąĄąĮąĖčÅ 1). ąĀąĄą│ąĖčüčéčĆ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ TIM3_PSCR ąĖą╝ąĄąĄčé ą║ąŠčĆčĆąĄą║čéąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (0x0000), ąĮąŠ ąŠąĮąŠ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ čüąŠą▒čŗčéąĖčÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ TIM3. ą¤ąŠčŹč鹊ą╝čā ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ, ą║ąŠą│ą┤ą░ ąĘą░ą│čĆčāąĘčćąĖą║ čĆą░ąĘčĆąĄčłąĄąĮ, , ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čüąŠą▒čŗčéąĖąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ (čāčüčéą░ąĮąŠą▓ąĖčéčī ą▒ąĖčé UG ą▓ čĆąĄą│ąĖčüčéčĆąĄ TIM3_EGR) čćč鹊ą▒čŗ ąĘąĮą░č湥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ TIM3_PSCR ą▒čŗą╗ąŠ ą┐ąĄčĆąĄą┤ą░ąĮąŠ ą▓ čäąĖąĘąĖč湥čüą║ąĖą╣ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ. ąśąĮą░č湥 ą┐čĆąĄčüą║ą░ą╗ąĄčĆ ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ąĮąĄą║ąŠčĆčĆąĄą║čéąĮčŗą╣ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą┤ąĄą╗ąĄąĮąĖčÅ ą┤ąŠ č鹥čģ ą┐ąŠčĆ, ą┐ąŠą║ą░ ąĮąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čüą╗ąĄą┤čāčÄčēąĄąĄ čüąŠą▒čŗčéąĖąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ TIM3. |
[ąĪą╗ąŠą▓ą░čĆąĖą║]
ACK acknowledge, ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ (ąŠčéčĆąĖčåą░č鹥ą╗čīąĮčŗą╝ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄą╝ ą▒čāą┤ąĄčé NACK).
BCD binary-coded decimal, ą┤ą▓ąŠąĖčćąĮąŠ-ą┤ąĄčüčÅčéąĖčćąĮąŠąĄ čćąĖčüą╗ąŠ. ąśąĘ ąÆąĖą║ąĖą┐ąĄą┤ąĖąĖ: 8421-BCD čŹč鹊 č乊čĆą╝ą░ ąĘą░ą┐ąĖčüąĖ čĆą░čåąĖąŠąĮą░ą╗čīąĮčŗčģ čćąĖčüąĄą╗, ą║ąŠą│ą┤ą░ ą║ą░ąČą┤čŗą╣ ą┤ąĄčüčÅčéąĖčćąĮčŗą╣ čĆą░ąĘčĆčÅą┤ čćąĖčüą╗ą░ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą▓ ą▓ąĖą┤ąĄ ąĄą│ąŠ č湥čéčŗčĆčæčģą▒ąĖčéąĮąŠą│ąŠ ą┤ą▓ąŠąĖčćąĮąŠą│ąŠ ą║ąŠą┤ą░. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą║ą░ąČą┤ą░čÅ č鹥čéčĆą░ą┤ą░ ą┤ą▓ąŠąĖčćąĮąŠ-ą┤ąĄčüčÅčéąĖčćąĮąŠą│ąŠ čćąĖčüą╗ą░ ą╝ąŠąČąĄčé ą┐čĆąĖąĮąĖą╝ą░čéčī ąĘąĮą░č湥ąĮąĖčÅ ąŠčé 00002 (010) ą┤ąŠ 10012 (910). ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┤ąĄčüčÅčéąĖčćąĮąŠąĄ čćąĖčüą╗ąŠ 31110 ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮąŠ ą▓ ą┤ą▓ąŠąĖčćąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ čüčćąĖčüą╗ąĄąĮąĖčÅ ą▓ ą┤ą▓ąŠąĖčćąĮąŠą╝ ą║ąŠą┤ąĄ ą║ą░ą║ 1 0011 01112, ą░ ą▓ ą┤ą▓ąŠąĖčćąĮąŠ-ą┤ąĄčüčÅčéąĖčćąĮąŠą╝ ą║ąŠą┤ąĄ ą║ą░ą║ 0011 0001 0001BCD.
BL bootloader, ąĘą░ą│čĆčāąĘčćąĖą║.
bps bit per second, čüą║ąŠčĆąŠčüčéčī ą▓ ą▒ąĖčé/čüąĄą║.
DFU Direct Firmware Update, ą┤ąŠčüą╗ąŠą▓ąĮčŗą╣ ą┐ąĄčĆąĄą▓ąŠą┤ "ą┐čĆčÅą╝ąŠąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ą╝ąĖą║čĆąŠą┐čĆąŠą│čĆą░ą╝ą╝čŗ". ąóąĄčĆą╝ąĖąĮ ąŠą▒ąŠąĘąĮą░čćą░ąĄčé č鹥čģąĮąŠą╗ąŠą│ąĖčÄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┐čĆąŠčłąĖą▓ą║ąĖ MCU čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ąĘą░ą│čĆčāąĘčćąĖą║ą░.
EMC electromagnetic compatibility, 菹╗ąĄą║čéčĆąŠą╝ą░ą│ąĮąĖčéąĮą░čÅ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéčī. ąóąĄčĆą╝ąĖąĮ, ąŠą▒ąŠąĘąĮą░čćą░čÄčēąĖą╣ čāčüč鹊ą╣čćąĖą▓ąŠčüčéčī ą║ ą┐ąŠą╝ąĄčģą░ą╝ (EMI).
EM čüąŠą║čĆą░čēąĄąĮąĖąĄ ąŠčé Erase Memory (čĆąĖčü. 1).
EMI electromagnetic interference, 菹╗ąĄą║čéčĆąŠą╝ą░ą│ąĮąĖčéąĮčŗąĄ ą┐ąŠą╝ąĄčģąĖ.
GPIO general purpose input/output, ą▓čģąŠą┤čŗ/ą▓čŗčģąŠą┤čŗ ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ.
IAP in-application programming, ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓ čüąĖčüč鹥ą╝ąĄ. ąóąŠ ąČąĄ čüą░ą╝ąŠąĄ, čćč鹊 ąĖ ISP.
ISP in-system programming, ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓ čüąĖčüč鹥ą╝ąĄ. ąóąŠ ąČąĄ čüą░ą╝ąŠąĄ, čćč鹊 ąĖ IAP.
HSE high speed external, ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮą░čÅ ą▓ąĮąĄčłąĮčÅčÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ (ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝ ą║ą▓ą░čĆčåąĄą╝ ąĖą╗ąĖ ą▓ąĮąĄčłąĮąĖą╝ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą╝).
HSI high speed internal, ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░.
LSB least significant bit, čüą░ą╝čŗą╣ ą╝ą╗ą░ą┤čłąĖą╣ ąĘąĮą░čćą░čēąĖą╣ ą▒ąĖčé. ąóą░ą║ąČąĄ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą║ąŠąĮč鹥ą║čüčéą░, ą╝ąŠąČąĄčé ąŠąĘąĮą░čćą░čéčī čüą░ą╝čŗą╣ ą╝ą╗ą░ą┤čłąĖą╣ ą▒ą░ą╣čé.
MCU microcontroller unit, ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ.
MSB most significant bit, čüą░ą╝čŗą╣ čüčéą░čĆčłąĖą╣ ąĘąĮą░čćą░čēąĖą╣ ą▒ąĖčé. ąóą░ą║ąČąĄ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą║ąŠąĮč鹥ą║čüčéą░, ą╝ąŠąČąĄčé ąŠąĘąĮą░čćą░čéčī čüą░ą╝čŗą╣ čüčéą░čĆčłąĖą╣ ą▒ą░ą╣čé.
NACK negative acknowledge, ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ (ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮčŗą╝ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄą╝ ą▒čāą┤ąĄčé ACK).
NSS node select slave, čüąĖą│ąĮą░ą╗ ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą║ąĖ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮą░ čłąĖąĮąĄ SPI.
RAM random access memory, ą┐ą░ą╝čÅčéčī čü ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮčŗą╝ ą┤ąŠčüčéčāą┐ąŠą╝, ąŠą┐ąĄčĆą░čéąĖą▓ąĮą░čÅ ą┐ą░ą╝čÅčéčī, ą×ąŚąŻ.
ROM read-only memory, ą┐ą░ą╝čÅčéčī č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ, ą┐ąŠčüč鹊čÅąĮąĮą░čÅ ą┐ą░ą╝čÅčéčī, ą¤ąŚąŻ.
ROP readout protection, ąĘą░čēąĖčéą░ ąŠčé čćč鹥ąĮąĖčÅ ą║ąŠą┤ą░.
routine ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░.
SWIM single wire interface module, ąŠą┤ąĮąŠą┐čĆąŠą▓ąŠą┤ąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ąŠčéą╗ą░ą┤ą║ąĖ, ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ.
SW reset ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čüą▒čĆąŠčü.
token č鹊ą║ąĄąĮ, ą┐čāčüč鹊ą╣ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮčŗą╣ ą▒ą░ą╣čé, čüą╗čāąČąĖčé ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖ ą┐čĆąĖąĄą╝ą░ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ACK ąĖą╗ąĖ NACK. ąóąŠą║ąĄąĮ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĖąĘ-ąĘą░ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéąĖ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ SPI - ąŠą▒ą╝ąĄąĮ ą▓ ąŠą▒ąĄ čüč鹊čĆąŠąĮčŗ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ, čé. ąĄ. ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ (ą▓ ąĮą░čłąĄą╝ čüą╗čāčćą░ąĄ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ čüą╗čāąČąĖčé MCU) ą╝ąŠąČąĄčé ąŠčéą┐čĆą░ą▓ąĖčéčī čüą▓ąŠąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ čģąŠčüčé ą┐ąĄčĆąĄą┤ą░čüčé ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮčŗą╣ ą▒ą░ą╣čé (č鹊ą║ąĄąĮ).
UBC user boot code, ą┐ą░ą╝čÅčéčī, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮą░čÅ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘčćąĖą║ą░.
WM čüąŠą║čĆą░čēąĄąĮąĖąĄ ąŠčé Write Memory (čĆąĖčü. 1).
[ąĪčüčŗą╗ą║ąĖ]
1. UM0560 User manual STM8 bootloader site:st.com.
2. 201128UM0560-Flasher-STM8.zip - ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ, ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮą░čÅ čāčéąĖą╗ąĖčéą░ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü ąĘą░ą│čĆčāąĘčćąĖą║ąŠą╝ STM8.
3. UM0470 STM8 SWIM communication protocol and debug module site:st.com. |



