ą¤ą╗ą░čéą║ą░ Teensy┬« 4.0 [1] ąŠčüąĮąŠą▓ą░ąĮą░ ąĮą░ ą┤ąŠą▓ąŠą╗čīąĮąŠ ą╝ąŠčēąĮąŠą╝ ą┐čĆąŠčåąĄčüčüąŠčĆąĄ MIMXRT1062DVL6A [2] (ARM Cortex-M7 600 ą£ąōčå) ą▓ ą║ąŠčĆą┐čāčüąĄ LFBGA196, ąĖ ąĄčæ ą╝ąŠąČąĮąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ą▓ čüčĆąĄą┤ąĄ Arduino (ąĮą░ ą╝ąŠą╝ąĄąĮčé ą┐ąĄčĆąĄą▓ąŠą┤ą░ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ čŹč鹊 Arduino 1.8.16 ą┐čĆąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą╝ ą┐ą░čéč湥 Teensyduino, Version 1.55).
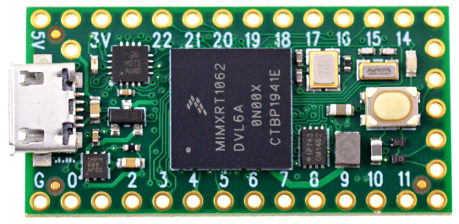
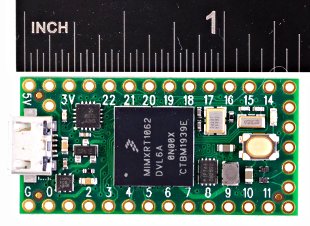
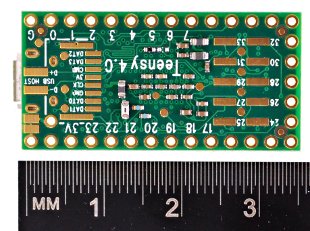
ąĀąĖčü. 1. ą×ą▒čēąĖą╣ ą▓ąĖą┤ ąĮą░ ą▓ąĄčĆčģąĮčÄčÄ čüč鹊čĆąŠąĮčā ą┐ą╗ą░čéčŗ Teensy 4.0.
ą×čüąĮąŠą▓ąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ Teensy 4.0:
ŌĆó ARM Cortex-M7, čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ 600 ą£ąōčå.
ążčāąĮą║čåąĖčÅ Teensy 4.1 Teensy 4.0
Ethernet
10/100 Mbit DP83825 PHY (6 ąĮąŠąČąĄą║)
ąĮąĄčé
USB Host
5 ąĮąŠąČąĄą║ čü čäčāąĮą║čåąĖąĄą╣ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝/ą│ąŠčĆčÅč湥ą│ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ USB
2 ąĮąŠąČą║ąĖ čü ą║ąŠąĮčéą░ą║čéą░ą╝ąĖ SMT(1)
SDIO (4-čĆą░ąĘčĆčÅą┤ąĮą░čÅ čłąĖąĮą░ ą┤ą░ąĮąĮčŗčģ)
Micro SD Socket
8 ąĮąŠąČąĄą║ SMT(1)
ąØąŠąČą║ąĖ PWM
35
31
ąÉąĮą░ą╗ąŠą│ąŠą▓čŗąĄ ą▓čģąŠą┤čŗ
18
14
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą┐ąŠčĆčéčŗ
8
7
ą¤ą░ą╝čÅčéčī FLASH
8 ą╝ąĄą│ą░ą▒ą░ą╣čé
2 ą╝ąĄą│ą░ą▒ą░ą╣čéą░
ą¤ą░ą╝čÅčéčī QSPI
2 čćąĖą┐ą░ + ą┐ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝
ą┐ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝
ą©čéčŗčĆąĄą▓čŗąĄ ą║ąŠąĮčéą░ą║čéčŗ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ ą┐ą╗ą░č鹥 ą╝ą░ą║ąĄčéąĖčĆąŠą▓ą░ąĮąĖčÅ (breadboard I/O)
42
24
ąÆčŗą▓ąŠą┤čŗ SMT(1)
7
16
ąĪąĖą│ąĮą░ą╗čŗ ą║ą░čĆčéčŗ SD
6
0
ąÆčüąĄą│ąŠ ąĮąŠąČąĄą║ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░
55
40
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (1): ą║ąŠąĮčéą░ą║čéąĮčŗąĄ ą┐ą╗ąŠčēą░ą┤ą║ąĖ ą╝ąĄą┤ąĖ ąĮą░ ąŠą▒čĆą░čéąĮąŠą╣ čüč鹊čĆąŠąĮąĄ ą┐ą╗ą░čéčŗ.
[ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ]
Arduino IDE + Teensyduino . ą¤ąŠą┐čāą╗čÅčĆąĮą░čÅ čüčĆąĄą┤ą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino ą▓ą╝ąĄčüč鹥 čü čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ą┐ą╗ą░ą│ąĖąĮąŠą╝ Teensyduino čŹč鹊 ąŠčüąĮąŠą▓ąĮąŠą╣ ąĖąĮčüčéčĆčāą╝ąĄąĮčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą╗čÅ Teensy. ąØą░ Windows, Linux ąĖ čüčéą░čĆčŗčģ Mac čüąĮą░čćą░ą╗ą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ Arduino, ąĘą░č鹥ą╝ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ąĖąĮčüčéą░ą╗ą╗čÅč鹊čĆ Teensyduino, ą║ąŠč鹊čĆčŗą╣ ą┤ąŠą▒ą░ą▓ą╗čÅąĄčé ą┐ąŠą┤ą┤ąĄčƹȹ║čā Teensy ą┤ą╗čÅ Arduino IDE. On newer Macs, an all-in-one download is provided. Teensyduino includes a large collection of libraries which are tested and optimized for Teensy. Other libraries may be installed manually or by Arduino's library manager.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĮą░ ą╝ąŠą╝ąĄąĮčé ąĮą░ą┐ąĖčüą░ąĮąĖčÅ čüčéą░čéčīąĖ ą┤ąŠą╗ąČąĮą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčīčüčÅ ą▓ąĄčĆčüąĖčÅ Arduino 1.8.16 ąĖ Teensyduino ą▓ąĄčĆčüąĖąĖ 1.55 [3]. ąÆąĮąĖą╝ą░ąĮąĖąĄ: ąĖąĮčüčéą░ą╗ą╗čÅč鹊čĆ Teensyduino 1.55 ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čāčüčéą░ąĮąŠą▓ą║čā ąĮą░ ą▒ąŠą╗ąĄąĄ ąĮąŠą▓čŗąĄ ą▓ąĄčĆčüąĖąĖ Arduino. ąöą╗čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ ą▓ąĄčĆčüąĖą╣ ąŠą▒čĆą░čēą░ą╣č鹥čüčī ąĮą░ čüčéčĆą░ąĮąĖčćą║čā ąĘą░ą│čĆčāąĘą║ąĖ Teensyduino [3].
Visual Micro . ąŁč鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ąĮą░ą┤čüčéčĆąŠą╣ą║ą░, ą║ąŠč鹊čĆą░čÅ ą┤ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī Microsoft Visual Studio ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ Arduino-čüąŠą▓ą╝ąĄčüčéąĖą╝čŗčģ ą┐ą╗ą░čé, ą▓ą║ą╗čÄčćą░čÅ Teensy. ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąĮą░ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮą░čÅ čüąĖčüč鹥ą╝ą░ Windows. Visual Micro ą║ąŠą╝ą╝ąĄčĆč湥čüą║ąĖą╣, ą┐ą╗ą░čéąĮčŗą╣ ą┐čĆąŠą┤čāą║čé.
PlatformIO . ąŁč鹊 ą║čĆąŠčüčüą┐ą╗ą░čéč乊čĆą╝ąĄąĮąĮą░čÅ IDE čü ą╝ąĮąŠą│ąĖą╝ąĖ ą┐čĆąŠą┤ą▓ąĖąĮčāčéčŗą╝ąĖ čäčāąĮą║čåąĖčÅą╝ąĖ. ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ Windows, Linux ąĖ Macintosh.
CircuitPython . ąŁčéą░ čüąĖčüč鹥ą╝ą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé HEX-čäą░ą╣ą╗, ą║ąŠč鹊čĆčŗą╣ ąÆčŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄč鹥 ą▓ Teensy 4.0 čü ą┐ąŠą╝ąŠčēčīčÄ ąĘą░ą│čĆčāąĘčćąĖą║ą░ Teensy Loader (čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ ą┤ą░ą╗ąĄąĄ). ąŚą░č鹥ą╝ Teensy ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčéčüčÅ ąĮą░ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ ą║ą░ą║ čäą╗ąĄčłą║ą░ (USB-ą┤ąĖčüą║), ą║čāą┤ą░ ą║ąŠą┐ąĖčĆčāąĄčéčüčÅ ąĖą╗ąĖ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ąÆą░čł ą║ąŠą┤ ąĮą░ čÅąĘčŗą║ąĄ Python. CircuitPython ąĮąĄ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą▓čüčÄ ą┤ąŠčüčéčāą┐ąĮčāčÄ ą░ą┐ą┐ą░čĆą░čéčāčĆčā Teensy 4.0.
ąÜąŠą╝ą░ąĮą┤ąĮą░čÅ čüčéčĆąŠą║ą░ + Makefile . ąŁč鹊 ąĮąĄ ą│čĆą░čäąĖč湥čüą║ą░čÅ čüčĆąĄą┤ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄą╝ą░čÅ ąĖąĮčüčéą░ą╗ą╗čÅč鹊čĆąŠą╝ Teensyduino.
Teensy 4.x: {ą║ą░čéą░ą╗ąŠą│ čāčüčéą░ąĮąŠą▓ą║ąĖ Arduino}/hardware/teensy/avr/cores/teensy4/Makefile
[ą¤čĆąŠčåąĄčüčüąŠčĆ Teensy 4.0 ]
ą¤ą╗ą░čéą░ Teensy 4.0 ą┐ąŠčüčéčĆąŠąĄąĮą░ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą┐čĆąŠčåąĄčüčüąŠčĆą░ MIMXRT1062DVL6A ą║ąŠą╝ą┐ą░ąĮąĖąĖ NXP [2].
ą¤čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčī . ARM Cortex-M7 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąŠč湥ąĮčī ą╝ąŠčēąĮąŠąĄ čÅą┤čĆąŠ CPU ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┤ą╗čÅ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ čüąĖčüč鹥ą╝ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ. ą¤čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčī CPU ą▓ ąĮąĄčüą║ąŠą╗čīą║ąŠ čĆą░ąĘ ą▒ąŠą╗čīčłąĄ, č湥ą╝ čā ąŠą▒čŗčćąĮčŗčģ 32-ą▒ąĖčéąĮčŗčģ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓.
ąĀąĖčü. 2. ąĪčĆą░ą▓ąĮąĄąĮąĖąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ ą┐ą╗ą░čé Arduino ąĮą░ č鹥čüč鹥 CoreMark Benchmark.
ąöą▓ąŠą╣ąĮą░čÅ čüčāą┐ąĄčĆčüą║ą░ą╗čÅčĆąĮą░čÅ ą░čĆčģąĖč鹥ą║čéčāčĆą░ . Cortex-M7 ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čüąŠą▒ąŠą╣ ą┤ą▓ąŠą╣ąĮąŠą╣ čüčāą┐ąĄčĆčüą║ą░ą╗čÅčĆąĮčŗą╣ ą┐čĆąŠčåąĄčüčüąŠčĆ. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 M7 ą╝ąŠąČąĄčé ą▓čŗą┐ąŠą╗ąĮąĖčéčī 2 ąĖąĮčüčéčĆčāą║čåąĖąĖ ąĘą░ ąŠą┤ąĖąĮ ą┐ąĄčĆąĖąŠą┤ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ 600 ą£ąōčå! ąÜąŠąĮąĄčćąĮąŠ, ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ 2 ąĖąĮčüčéčĆčāą║čåąĖą╣ ąĘą░ą▓ąĖčüąĖčé ąŠčé ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĖąĮčüčéčĆčāą║čåąĖą╣ ąĖ čĆąĄą│ąĖčüčéčĆąŠą▓ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆąŠą╝. ą¤čĆąŠčüčéčŗąĄ ą▒ąĄąĮčćą╝ą░čĆą║ąĖ ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé, čćč鹊 ą║ąŠą┤ C++, čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąĮčŗą╣ Arduino ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé č鹥ąĮą┤ąĄąĮčåąĖčÄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ 2 ąĖąĮčüčéčĆčāą║čåąĖą╣ ąĘą░ čéą░ą║čé čü ą▓ąĄčĆąŠčÅčéąĮąŠčüčéčīčÄ ąŠčé 40% ą┤ąŠ 50% ą┐čĆąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĖ ąĖąĮč鹥ąĮčüąĖą▓ąĮčŗčģ ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čåąĄą╗čŗčģ čćąĖčüąĄą╗ ąĖ čāą║ą░ąĘą░č鹥ą╗ąĄą╣.
Floating Point Unit . ąæą╗ąŠą║ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čćąĖčüąĄą╗ čü ą┐ą╗ą░ą▓ą░čÄčēąĄą╣ ąĘą░ą┐čÅč鹊ą╣ (Floating Point Unit, FPU) ą░ą┐ą┐ą░čĆą░čéąĮąŠ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą░čĆąĖčäą╝ąĄčéąĖč湥čüą║ąĖąĄ ąŠą┐ąĄčĆą░čåąĖąĖ ąĮą░ą┤ 32-ą▒ąĖčéąĮčŗą╝ąĖ čćąĖčüą╗ą░ą╝ąĖ float ąĖ 64-ą▒ąĖčéąĮčŗą╝ąĖ čćąĖčüą╗ą░ą╝ąĖ double. ąĪą║ąŠčĆąŠčüčéčī ą╝ą░č鹥ą╝ą░čéąĖč湥čüą║ąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ 32-čĆą░ąĘčĆčÅą┤ąĮčŗčģ čćąĖčüąĄą╗ float ą┐čĆąĖą▒ą╗ąĖąĘąĖč鹥ą╗čīąĮąŠ čéą░ą║ą░čÅ ąČąĄ, ą║ą░ą║ čüą║ąŠčĆąŠčüčéčī ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čåąĄą╗čŗčģ čćąĖčüąĄą╗. ą×ą▒čĆą░ą▒ąŠčéą║ą░ 64-ą▒ąĖčéąĮčŗčģ čćąĖčüąĄą╗ double ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ 2 čĆą░ąĘą░ ą╝ąĄą┤ą╗ąĄąĮąĮąĄąĄ, č湥ą╝ ąŠą▒čĆą░ą▒ąŠčéą║ą░ 32-ą▒ąĖčéąĮčŗčģ čćąĖčüąĄą╗ float.
Tightly Coupled Memory . ąŁč鹊 čüą┐ąĄčåąĖą░ą╗čīąĮą░čÅ ą░ą┐ą┐ą░čĆą░čéąĮą░čÅ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī, ą┐ąŠąĘą▓ąŠą╗čÅčÄčēą░čÅ Cortex-M7 čāčüą║ąŠčĆąĖčéčī ą┤ąŠčüčéčāą┐ ą║ ą┐ą░ą╝čÅčéąĖ ą┤ąŠ 1 čéą░ą║čéą░ ąĮą░ ąŠą▒čĆą░čēąĄąĮąĖąĄ čü ą┐ąŠą╝ąŠčēčīčÄ ą┐ą░čĆčŗ 64-čĆą░ąĘčĆčÅą┤ąĮčŗčģ čłąĖąĮ. ą©ąĖąĮą░ ITCM ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé 64-čĆą░ąĘčĆčÅą┤ąĮčŗą╣ ą╝ą░čĆčłčĆčāčé ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą║ąĖ ąĖąĮčüčéčĆčāą║čåąĖą╣. ą©ąĖąĮą░ DTCM ą▓ čĆąĄą░ą╗čīąĮąŠčüčéąĖ čŹč鹊 ą┐ą░čĆą░ 32-ą▒ąĖčéąĮčŗčģ ą╝ą░čĆčłčĆčāč鹊ą▓, ą┐ąŠąĘą▓ąŠą╗čÅčÄčēą░čÅ M7 ą▓čŗą┐ąŠą╗ąĮąĖčéčī 2 čĆą░ąĘą┤ąĄą╗čīąĮčŗčģ ą┤ąŠčüčéčāą┐ą░ ą║ ą┐ą░ą╝čÅčéąĖ ąĘą░ 1 ą┐ąĄčĆąĖąŠą┤ čéą░ą║č鹊ą▓. ąŁčéąĖ 菹║čüčéčĆąĄą╝ą░ą╗čīąĮąŠ čüą║ąŠčĆąŠčüčéąĮčŗąĄ čłąĖąĮčŗ ąŠčéą┤ąĄą╗ąĄąĮčŗ ąŠčé ąŠčüąĮąŠą▓ąĮąŠą╣ čłąĖąĮčŗ M7 AXI, č湥čĆąĄąĘ ą║ąŠč鹊čĆčāčÄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┤ąŠčüčéčāą┐ ą║ ą┤čĆčāą│ąŠą╣ (ąĮąĄ TCM) ą┐ą░ą╝čÅčéąĖ ąĖ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝.
ąÜčŹčł . ąśą╝ąĄąĄčéčüčÅ ą┤ą▓ąĄ ąŠą▒ą╗ą░čüčéąĖ ą║čŹčłą░, ą║ą░ąČą┤ą░čÅ ą┐ąŠ 32 ą║ąĖą╗ąŠą▒ą░ą╣čéą░. ą×ą┤ąĮą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĖąĮčüčéčĆčāą║čåąĖą╣, ą┤čĆčāą│ą░čÅ ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ, čćč鹊ą▒čŗ čāčüą║ąŠčĆąĖčéčī ą┐ąŠą▓č鹊čĆčÅčÄčēąĖąĄčüčÅ ąŠą┐ąĄčĆą░čåąĖąĖ ą┤ąŠčüčéčāą┐ą░ ą║ ąĮąĄ-TCM ą┐ą░ą╝čÅčéąĖ.
ą¤čĆąĄą┤čüą║ą░ąĘą░ąĮąĖąĄ ą▓ąĄčéą▓ą╗ąĄąĮąĖą╣ . Cortex-M7 čŹč鹊 ą┐ąĄčĆą▓čŗą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ARM, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĖą╣ č鹥čģąĮąĖą║čā ą┐čĆąĄą┤čüą║ą░ąĘą░ąĮąĖčÅ čāčüą╗ąŠą▓ąĮčŗčģ ą┐ąĄčĆąĄčģąŠą┤ąŠą▓ ą▓ ąĖčüą┐ąŠą╗ąĮąĄąĮąĖąĖ ą║ąŠą┤ą░ (branch prediction). ąØą░ ą┐ą╗ą░čéč乊čĆą╝ą░čģ Cortex-M4 ąĖ ą▒ąŠą╗ąĄąĄ čĆą░ąĮąĮąĖčģ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ čåąĖą║ą╗ąŠą▓ ąĖ ą┤čĆčāą│ąŠą│ąŠ ą║ąŠą┤ą░ čü čāčüą╗ąŠą▓ąĮčŗą╝ąĖ ą┐ąĄčĆąĄčģąŠą┤ą░ą╝ąĖ čéčĆąĄą▒ąŠą▓ą░ą╗ąĖ ąĮą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą▓ąĄčéą▓ą╗ąĄąĮąĖą╣ 3 čéą░ą║čéą░. ąØą░ M7 ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čåąĖą║ą╗ ą▓čŗą┐ąŠą╗ąĮąĖčéčüčÅ ąĮąĄčüą║ąŠą╗čīą║ąŠ čĆą░ąĘ, ą┐čĆąĄą┤čüą║ą░ąĘą░ąĮąĖąĄ ą▓ąĄčéą▓ą╗ąĄąĮąĖčÅ čāčüčéčĆą░ąĮčÅąĄčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čĆą░čüčģąŠą┤čŗ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 č湥ą│ąŠ ąĮą░ ą▓ąĄčéą▓ą╗ąĄąĮąĖąĄ čéčĆą░čéąĖčéčüčÅ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ čéą░ą║čé ą▓ą╝ąĄčüč鹊 čéčĆąĄčģ.
ą”ąĖčäčĆąŠą▓ą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ čüąĖą│ąĮą░ą╗ąŠą▓ . DSP-ąĖąĮčüčéčĆčāą║čåąĖąĖ čāčüą║ąŠčĆčÅčÄčé ąŠą▒čĆą░ą▒ąŠčéą║čā čüąĖą│ąĮą░ą╗ąŠą▓, čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ čåąĖčäčĆąŠą▓čŗčģ čäąĖą╗čīčéčĆąŠą▓ ąĖ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖą╣ ążčāčĆčīąĄ. ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ Audio ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čŹčéąĖ DSP-ąĖąĮčüčéčĆčāą║čåąĖąĖ.
[ąÆąĮąĄčłąĮąĖąĄ ą▓čŗą▓ąŠą┤čŗ ą┐ąŠčĆč鹊ą▓ ]
ąŻ Teensy 4.0 ą▓čüąĄą│ąŠ 40 ąĮąŠąČąĄą║ ą┤ą╗čÅ ą▓ą▓ąŠą┤ą░ ąĖ ą▓čŗą▓ąŠą┤ą░ čüąĖą│ąĮą░ą╗ąŠą▓. ąÜ 24 ąĖąĘ ąĮąĖčģ ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ ą┐čĆąŠčēąĄ ą▓čüąĄą│ąŠ, ą┐ąŠč鹊ą╝čā čćč鹊 ąŠąĮąĖ čĆą░ąĘą▓ąĄą┤ąĄąĮčŗ ąĮą░ ąŠą▒čŗčćąĮčŗąĄ čłčéčŗčĆąĄą▓čŗąĄ ą▓čŗą▓ąŠą┤čŗ. ą×čüčéą░ą╗čīąĮčŗąĄ ą▓čŗą▓ąŠą┤čŗ čĆą░ąĘą▓ąĄą┤ąĄąĮčŗ ąĮą░ ą║ąŠąĮčéą░ą║čéąĮčŗąĄ ą┐ą╗ąŠčēą░ą┤ą║ąĖ ą╝ąĄą┤ąĖ čü ąŠą▒čĆą░čéąĮąŠą╣ čüč鹊čĆąŠąĮčŗ ą┐ą╗ą░čéčŗ.
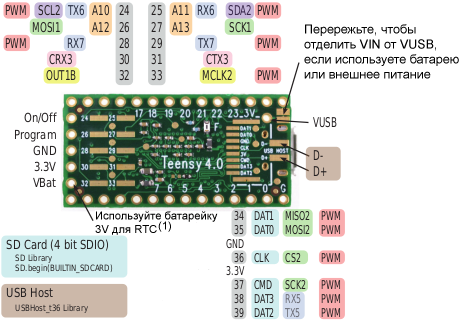
ąĀąĖčü. 3. ąÆąĖą┤ ąĮą░ ą║ąŠąĮčéą░ą║čéąĮčŗąĄ ą┐ą╗ąŠčēą░ą┤ą║ąĖ čü ą▓ąĄčĆčģąĮąĄą╣ čüč鹊čĆąŠąĮčŗ ą┐ą╗ą░čéčŗ.
ąĀąĖčü. 4. ąÆąĖą┤ ąĮą░ ą║ąŠąĮčéą░ą║čéąĮčŗąĄ ą┐ą╗ąŠčēą░ą┤ą║ąĖ čü ąĮąĖąČąĮąĄą╣ čüč鹊čĆąŠąĮčŗ ą┐ą╗ą░čéčŗ.
[ą”ąĖčäčĆąŠą▓čŗąĄ ą┐ąŠčĆčéčŗ ]
ą”ąĖčäčĆąŠą▓ąŠą╣ ą▓ą▓ąŠą┤ . ą¤ąŠčĆčéčŗ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą▓ą▓ąŠą┤ą░ ą╗ąŠą│ąĖč湥čüą║ąĖčģ čāčĆąŠą▓ąĮąĄą╣ 0 ąĖą╗ąĖ 1. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĮąŠąČą║ąĖ ą┐ąŠčĆč鹊ą▓ Teensy 4.0 čĆą░ą▒ąŠčéą░čÄčé ąĮą░ ą▓ą▓ąŠą┤ (ą▓čģąŠą┤čŗ INPUT), ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ čü keeper-čĆąĄąĘąĖčüč鹊čĆąŠą╝. ąÆčŗą▓ąŠą┤čŗ Teensy 4.0 ą╝ąŠą│čāčé čĆą░ą▒ąŠčéą░čéčī čü čāčĆąŠą▓ąĮčÅą╝ąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣ ąŠčé 0V ą┤ąŠ 3.3V, ąŠąĮąĖ ąĮąĄ ąŠą▒ą╗ą░ą┤ą░čÄčé čäčāąĮą║čåąĖąĄą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ čü čāčĆąŠą▓ąĮčÅą╝ąĖ 5V (not 5V tolerant). ą¤ąŠčŹč鹊ą╝čā ąĮąĄ ą┐ąŠą┤ą░ą▓ą░ą╣č鹥 ąĮą░ ąĮąŠąČą║ąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čüą▓čŗčłąĄ 3.3V.
ąĀąĄąĘąĖčüč鹊čĆčŗ Pullup/Pulldown/Keeper . ąÆčüąĄ čåąĖčäčĆąŠą▓čŗąĄ ą▓čŗą▓ąŠą┤čŗ ąŠą▒ą╗ą░ą┤ą░čÄčé ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠą╣ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčīčÄ ą┐ąŠą┤ą║ą╗čÄčćą░čéčī ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖąĄ čĆąĄąĘąĖčüč鹊čĆčŗ čéąĖą┐ą░ pullup, pulldown ąĖą╗ąĖ keeper. ą×ąĮąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą┤čéčÅąČą║ąĖ ą╗ąŠą│ąĖč湥čüą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ą║ ą╗ąŠą│. 1 (HIGH), ąĖą╗ąĖ ą║ ą╗ąŠą│. 0 (LOW), ąĖą╗ąĖ ą║ ąŠą┤ąĮąŠą╝čā ąĖ č鹊ą╝čā ąČąĄ čāčĆąŠą▓ąĮčÄ, ąĄčüą╗ąĖ ą▓čģąŠą┤ ąĮąĄ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą▓ąĮąĄčłąĮąĖą╝ čåąĖčäčĆąŠą▓čŗą╝ čüąĖą│ąĮą░ą╗ąŠą╝. ą×ą▒čŗčćąĮąŠ čŹčéąĖ čĆąĄąĘąĖčüč鹊čĆčŗ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą▓ąĮąĄčłąĮąĖčģ ą║ąĮąŠą┐ąŠą║ ąĖ ą┐ąĄčĆąĄą╝čŗč湥ą║. ąöą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą▓čüčéčĆąŠąĄąĮąĮčŗčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓ ą┐ąŠą┤čéčÅąČą║ąĖ ą┤ąŠą╗ąČąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čäčāąĮą║čåąĖčÅ pinMode čü ą┐ą░čĆą░ą╝ąĄčéčĆąŠą╝ INPUT_PULLUP ąĖą╗ąĖ INPUT_PULLDOWN.
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ . ąÆčüąĄ čåąĖčäčĆąŠą▓čŗąĄ ą▓čŗą▓ąŠą┤čŗ ą╝ąŠą│čāčé ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░čéčī ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą╗ąŠą│ąĖč湥čüą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 attachInterrupt ą┤ą╗čÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą│ąŠ ąĘą░ą┐čāčüą║ą░ čäčāąĮą║čåąĖąĖ ą┐ąŠ čüąŠą▒čŗčéąĖčÄ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čāčĆąŠą▓ąĮčÅ. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ąŠą╗ąČąĮčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćąĖčüčéčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ą┐ąĄčĆąĄą║ą╗čÄčćą░čÄčéčüčÅ čüą╗ąĖčłą║ąŠą╝ čćą░čüč鹊. ąöą╗čÅ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čüąŠą▒čŗčéąĖą╣ ąŠčé ą║ąĮąŠą┐ąŠą║, ą┐ąĄčĆąĄą║ą╗čÄčćą░č鹥ą╗ąĄą╣ ąĖ ą┤čĆčāą│ąĖčģ čüąĖą│ąĮą░ą╗ąŠą▓ ąĮą░ ą║ąŠč鹊čĆčŗčģ ą▓ąŠąĘą╝ąŠąČąĮčŗ ą┐ąŠą╝ąĄčģąĖ ąŠčé ą┤čĆąĄą▒ąĄąĘą│ą░ ą╝ąĄčģą░ąĮąĖč湥čüą║ąĖčģ ą║ąŠąĮčéą░ą║č鹊ą▓, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā Bounce .
ą”ąĖčäčĆąŠą▓ąŠą╣ ą▓čŗą▓ąŠą┤ . ąÆčüąĄ čåąĖčäčĆąŠą▓čŗąĄ ą┐ąŠčĆčéčŗ ą╝ąŠą│čāčé čéą░ą║ąČąĄ čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓čŗčģąŠą┤. ąöą╗čÅ čŹč鹊ą│ąŠ ą┤ąŠą╗ąČąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čäčāąĮą║čåąĖčÅ pinMode čü ą┐ą░čĆą░ą╝ąĄčéčĆąŠą╝ OUTPUT (ą▓čŗčģąŠą┤ čü ą┤ą▓čāčģčéą░ą║čéąĮčŗą╝ ą▒čāč乥čĆąŠą╝) ąĖą╗ąĖ OUTPUT_OPENDRAIN (ą▓čŗčģąŠą┤ čü ąŠčéą║čĆčŗčéčŗą╝ čüč鹊ą║ąŠą╝). ążčāąĮą║čåąĖąĖ digitalWrite ąĖ digitalToggle ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĮąŠąČą║ąŠą╣ ą▓čŗčģąŠą┤ą░. ąŻčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 1 (HIGH) ąĖą╝ąĄąĄčé ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ 3.3V. ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čŗą╣ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ ą▓čŗčģąŠą┤ąĮąŠą╣ č鹊ą║ 4 ą╝ąÉ.
ą©ąśą£ . 31 čåąĖčäčĆąŠą▓čŗčģ ą┐ąŠčĆčéą░ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé čäčāąĮą║čåąĖčÄ čłąĖčĆąŠčéąĮąŠ-ąĖą╝ą┐čāą╗čīčüąĮąŠą╣ ą╝ąŠą┤čāą╗čÅčåąĖąĖ (Pulse Width Modulation, PWM). ąŁč鹊 ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüą║ąŠčĆąŠčüčéčīčÄ ą▓čĆą░čēąĄąĮąĖčÅ ą╝ąŠč鹊čĆą░, čÅčĆą║ąŠčüčéčīčÄ ą╗ą░ą╝ą┐ąŠč湥ą║ ąĖą╗ąĖ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą▓ (LED) ąĖą╗ąĖ ą┤čĆčāą│ąĖčģ čåąĄą╗ąĄą╣, ą│ą┤ąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čāą┐čĆą░ą▓ą╗čÅčéčī čüčĆąĄą┤ąĮąĄą╣ ą▓čŗčģąŠą┤ąĮąŠą╣ ą╝ąŠčēąĮąŠčüčéčīčÄ čü ą┐ąŠą╝ąŠčēčīčÄ ą©ąśą£ (PWM). ąóą░ą║ąČąĄ PWM ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čüąĖąĮč鹥ąĘą░ ąĘą▓čāą║ąŠą▓čŗčģ čüąĖą│ąĮą░ą╗ąŠą▓. PWM čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čäčāąĮą║čåąĖąĄą╣ analogWrite. 19 ą│čĆčāą┐ą┐ PWM ą╝ąŠą│čāčé čĆą░ą▒ąŠčéą░čéčī ąĮą░ čĆą░ąĘąĮčŗčģ čćą░čüč鹊čéą░čģ ą╝ąŠą┤čāą╗čÅčåąĖąĖ, ą║ąŠč鹊čĆčŗą╝ąĖ čāą┐čĆą░ą▓ą╗čÅąĄčé čäčāąĮą║čåąĖčÅ analogWriteFrequency.
ą×ą│čĆą░ąĮąĖč湥ąĮąĖąĄ čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ . ąĪčāčēąĄčüčéą▓čāąĄčé čüą┐ąĄčåąĖą░ą╗čīąĮą░čÅ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą░ą║čéąĖą▓ą░čåąĖąĖ ą▒ąŠą╗ąĄąĄ ą╝ąĄą┤ą╗ąĄąĮąĮčŗčģ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖą╣ čāčĆąŠą▓ąĮčÅ (Slew Rate Limiting), čćč鹊 ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ čāą╝ąĄąĮčīčłą░ąĄčé ą▓čŗčüąŠą║ąŠčćą░čüč鹊čéąĮčŗąĄ ą┐ąŠą╝ąĄčģąĖ, ą║ąŠą│ą┤ą░ ą║ čåąĖčäčĆąŠą▓čŗą╝ ą▓čŗčģąŠą┤ą░ą╝ ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą┤ą╗ąĖąĮąĮčŗąĄ ą┐čĆąŠą▓ąŠą┤ą░. ąĪ čŹč鹊ą╣ čäčāąĮą║čåąĖąĄą╣ čüąĮąĖąČą░ąĄčéčüčÅ čüą║ąŠčĆąŠčüčéčī ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čāčĆąŠą▓ąĮčÅ ąĮą░ ą▓čŗčģąŠą┤ąĄ. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ čüąŠčüčéą░ą▓ą╗čÅąĄčé ą▓čüąĄą│ąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ąĮą░ąĮąŠčüąĄą║čāąĮą┤, čćč鹊 ą┤ąŠčüčéą░č鹊čćąĮąŠ ą┤ą╗čÅ čüąĮąĖąČąĄąĮąĖčÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąĮąĄąČąĄą╗ą░č鹥ą╗čīąĮčŗčģ ą▓čŗčüąŠą║ąŠčćą░čüč鹊čéąĮčŗčģ ą┐ąŠą╝ąĄčģ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▓čŗąĘčŗą▓ą░čéčī ą┐čĆąŠą▒ą╗ąĄą╝čŗ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą┤ą╗ąĖąĮąĮčŗčģ čüąĖą│ąĮą░ą╗čīąĮčŗčģ čüąŠąĄą┤ąĖąĮąĄąĮąĖą╣.
ąØą░čüčéčĆą░ąĖą▓ą░ąĄą╝ą░čÅ ąĮą░ą│čĆčāąĘąŠčćąĮą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī . ąÆčŗčģąŠą┤ąĮąŠąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą║ą░ąČą┤ąŠą│ąŠ ą▓čŗčģąŠą┤ą░ ą╝ąŠąČąĄčé čāą┐čĆą░ą▓ą╗čÅčéčīčüčÅ ą▓čŗą▒ąŠčĆąŠą╝ ąŠą┤ąĮąŠą│ąŠ ąĖąĘ 7 ąĘąĮą░č湥ąĮąĖą╣ ąŠčé 150 ą×ą╝ (čüą░ą╝čŗą╣ ą╝ą░ą╗ąŠą╝ąŠčēąĮčŗą╣ ą▓čŗčģąŠą┤) ą┤ąŠ 21 ą×ą╝ (čüą░ą╝čŗą╣ ą╝ąŠčēąĮčŗą╣ ą▓čŗčģąŠą┤).
ąØą░čüčéčĆą░ąĖą▓ą░ąĄą╝ą░čÅ ą┐ąŠą╗ąŠčüą░ ą┐čĆąŠą┐čāčüą║ą░ąĮąĖčÅ . ą¤ąŠą╗ąŠčüą░ ą┐čĆąŠą┐čāčüą║ą░ąĮąĖčÅ ą▓čŗčģąŠą┤ą░ čéą░ą║ąČąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ, 4 ą▓ą░čĆąĖą░ąĮčéą░ą╝ąĖ: 50, 100, 150 ąĖ 200 ą£ąōčå.
ąØąŠąČą║ą░ LED . ąÆčŗą▓ąŠą┤ ą┐ąŠčĆčéą░ 13 čéčĆą░ą┤ąĖčåąĖąŠąĮąĮąŠ ą▓ čüąĖčüč鹥ą╝ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ Arduino ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ čüą▓ąĄč鹊ą┤ąĖąŠą┤čā (LED). ąöą╗čÅ ąĘą░ąČąĖą│ą░ąĮąĖčÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ čŹč鹊čé ą┐ąŠčĆčé ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĮą░čüčéčĆąŠąĄąĮ ą║ą░ą║ ą▓čŗčģąŠą┤. ąĢčüą╗ąĖ ąČąĄ ą┐ąŠčĆčé 13 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ ą▓čģąŠą┤, č鹊 ą▓ąĮąĄčłąĮąĖą╣ čüąĖą│ąĮą░ą╗ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┤ąŠčüčéą░č鹊čćąĮąŠ ą╝ąŠčēąĮčŗą╝, čćč鹊ą▒čŗ ą┐ąŠą┤ą░čéčī ąĮą░ ą┐ąŠčĆčé 13 čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 1, ą┐ąŠčüą║ąŠą╗čīą║čā čüą▓ąĄč鹊ą┤ąĖąŠą┤ čüąŠąĘą┤ą░ąĄčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĮą░ą│čĆčāąĘą║čā. ąöą╗čÅ ą┐ąŠčĆčéą░ 13 čäčāąĮą║čåąĖčÅ pinMode ąĮąĄ ą┤ąŠą╗ąČąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čü ą┐ą░čĆą░ą╝ąĄčéčĆąŠą╝ INPUT_PULLUP (čŹč鹊 ą▓čŗąĘąŠą▓ąĄčé čüą╗ą░ą▒ąŠąĄ čüą▓ąĄč湥ąĮąĖąĄ LED ąĖ čüą╝ąĄčēąĄąĮąĖąĄ čāčĆąŠą▓ąĮčÅ ąĮą░ ą▓čģąŠą┤ąĄ ą┐ąŠčĆčÅą┤ą║ą░ 2V).
[ąÉąĮą░ą╗ąŠą│ąŠą▓čŗąĄ ą┐ąŠčĆčéčŗ ]
ąÉąĮą░ą╗ąŠą│ąŠą▓čŗąĄ ą▓čģąŠą┤čŗ . 14 ąĮąŠąČąĄą║ ą┐ąŠčĆč鹊ą▓ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗąĄ ą▓čģąŠą┤čŗ (ąÉą”ą¤), ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą┤ą╗čÅ ąŠčåąĖčäčĆąŠą▓ą║ąĖ čüąĖą│ąĮą░ą╗ąŠą▓ ą┤ą░čéčćąĖą║ąŠą▓, ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ čāčĆąŠą▓ąĮčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĖą╗ąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┤čĆčāą│ąĖčģ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗčģ čüąĖą│ąĮą░ą╗ąŠą▓. ąæą░ąĘąŠą▓čŗą╣ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą▓ą▓ąŠą┤ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ čäčāąĮą║čåąĖąĄą╣ analogRead. ąĀą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čüąŠčüčéą░ą▓ą╗čÅąĄčé 10 ą▒ąĖčé (ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ ąĮą░ ą▓čģąŠą┤ąĄ ąŠčé 0 ą┤ąŠ 1023), ąĮąŠ čŹč鹊 ą╝ąŠąČąĮąŠ ąĮą░čüčéčĆąŠąĖčéčī čäčāąĮą║čåąĖąĄą╣ analogReadResolution. ąÉą┐ą┐ą░čĆą░čéčāčĆą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī čĆą░ąĘčĆąĄčłą░čÄčēčāčÄ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī ą┤ąŠ 12 ą▒ąĖčé, ąĮąŠ ąĮą░ ą┐čĆą░ą║čéąĖą║ąĄ ąĖąĘ-ąĘą░ čłčāą╝ą░ ą▒ąŠą╗ąĄąĄ čāą┤ąŠą▒ąĮąĄąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī 10 ą▒ąĖčé. ąæąŠą╗ąĄąĄ ą┐čĆąŠą┤ą▓ąĖąĮčāčéčŗąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą┤ąŠčüčéčāą┐ąĮčŗ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ADC .
ąöąĖą░ą┐ą░ąĘąŠąĮ ą┤ą╗čÅ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ ą▓ą▓ąŠą┤ą░ čäąĖą║čüąĖčĆąŠą▓ą░ąĮ, ąĖ čüąŠčüčéą░ą▓ą╗čÅąĄčé ąŠčé 0V ą┤ąŠ 3.3V. ąØą░ ą┐ą╗ą░č鹥 Teensy 4.0 čäčāąĮą║čåąĖčÅ analogReference() ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé. ąÉąĮą░ą╗ąŠą│ąŠą▓čŗąĄ ą▓čŗą▓ąŠą┤čŗ ąĮąĄ ą┤ąŠą┐čāčüą║ą░čÄčé čĆą░ą▒ąŠčéčā čü čāčĆąŠą▓ąĮčÅą╝ąĖ 5V (not 5V tolerant). ąØąĄ ą┐ąŠą┤ą░ą▓ą░ą╣č鹥 ąĮą░ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗąĄ ą▓čŗą▓ąŠą┤čŗ čāčĆąŠą▓ąĮąĖ, ą┐čĆąĄą▓čŗčłą░čÄčēąĖąĄ ą┐ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÄ 3.3V.
ąÜąŠą╝ą┐ą░čĆą░č鹊čĆčŗ . ąÉąĮą░ą╗ąŠą│ąŠą▓čŗąĄ ą║ąŠą╝ą┐ą░čĆą░č鹊čĆčŗ ą╝ąŠą│čāčé ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░čéčī ą▓ąĮąĄčłąĮąĖą╣ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ čüąĖą│ąĮą░ą╗ ą▓ čåąĖčäčĆąŠą▓ąŠą╣, čü č鹊čćąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ ą┐ąŠčĆąŠą│ąŠą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, ą┐ąŠ ą║ąŠč鹊čĆąŠą╝čā čüąĖą│ąĮą░ą╗ ą║ą▓ą░ą╗ąĖčäąĖčåąĖčĆčāąĄčéčüčÅ ą║ą░ą║ 0 ąĖą╗ąĖ 1 (ąŠą┤ąĮąŠčĆą░ąĘčĆčÅą┤ąĮčŗą╣ ąÉą”ą¤).
[ąśąĮč鹥čĆč乥ą╣čüčŗ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ ]
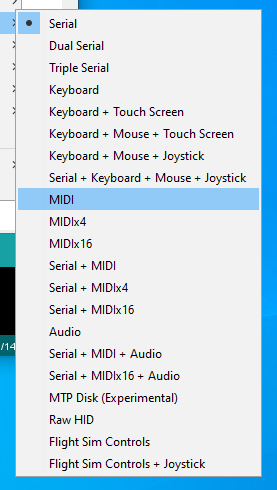
ąŻčüčéčĆąŠą╣čüčéą▓ąŠ USB . ą×čüąĮąŠą▓ąĮąŠą╣ ą╝ąĄč鹊ą┤ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ čü ą▓ąĮąĄčłąĮąĖą╝ ą╝ąĖčĆąŠą╝ ą┤ą╗čÅ Teensy - ąĖąĮč鹥čĆč乥ą╣čü USB, ą║ąŠč鹊čĆčŗą╣ čĆą░ą▒ąŠčéą░ąĄčé ą▓ čĆąĄąČąĖą╝ąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ / ą┐ąĄčĆąĖč乥čĆąĖąĖ USB čüąŠ čüą║ąŠčĆąŠčüčéčīčÄ 480 ą╝ąĄą│ą░ą▒ąĖčé/čüąĄą║ (High Speed USB). ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ Teensyduino ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą╝ąĮąŠą│ąĖąĄ čéąĖą┐čŗ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ USB čü ą║ąŠą╝ą┐čīčÄč鹥čĆąŠą╝ PC ąĖą╗ąĖ Mac, ą║ąŠč鹊čĆčŗąĄ ą▓čŗą▒ąĖčĆą░čÄčéčüčÅ č湥čĆąĄąĘ ą╝ąĄąĮčÄ Tools -> USB Type. ąØąĄą║ąŠč鹊čĆčŗąĄ ąĖąĘ čŹčéąĖčģ čéąĖą┐ąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ (ą║ąŠą╝ą┐ąŠąĘąĖčéąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ USB).
ąĀąĖčü. 5. ą£ąĄąĮčÄ Tools -> USB Type ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé čéąĖą┐ čāčüčéčĆąŠą╣čüčéą▓ą░ USB, ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ Teensy.
Serial . ąóą░ą║ąŠą╣ čéąĖą┐ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ąĖą┤ąĄąĮ ąĮą░ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ ą║ą░ą║ COM-ą┐ąŠčĆčé (Windows) ąĖą╗ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ serial (Mac, Linux). Serial ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ąĖ čŹč鹊 ąĮą░ąĖą▒ąŠą╗ąĄąĄ čćą░čüč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ čéąĖą┐ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣. ąÆ čćą░čüčéąĮąŠčüčéąĖ čĆąĄąČąĖą╝ Serial ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čāčéąĖą╗ąĖč鹊ą╣ ą╝ąŠąĮąĖč鹊čĆą░ čüčĆąĄą┤čŗ Arduino (Arduino Serial Monitor) ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ ąŠčéą╗ą░ą┤ąŠčćąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣. ąæą░ą╣čéčŗ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą▓ ąŠą▒ąŠąĖčģ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅčģ ąĮą░ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ USB (ąĮą░čüčéčĆąŠą╣ą║ą░ baud rate COM-ą┐ąŠčĆčéą░ ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ).
ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ Teensyduino čüąŠą┤ąĄčƹȹĖčé ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą║ąŠą┤ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą▓čŗčüąŠą║ąŠą╣ čüą║ąŠčĆąŠčüčéąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ č湥čĆąĄąĘ USB. ą¤čĆąĖ ąŠą▒čŗčćąĮąŠą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ čü Arduino Serial Monitor čĆąĄąČąĖą╝ USB Serial Mode ą┐ą╗ą░čéčŗ Teensy čüąŠą▓ą╝ąĄčüčéąĖą╝ čü ąŠą▒čŗčćąĮčŗą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╝ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄą╝, čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąĮčŗą╝ ą┤ą╗čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┐ąŠčĆč鹊ą▓, ąĮą░ą┐čĆąĖą╝ąĄčĆ CoolTerm (ą▒čāą┤čāčé čĆą░ą▒ąŠčéą░čéčī ąĖ ą┤čĆčāą│ąĖąĄ čāčéąĖą╗ąĖčéčŗ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ č鹥čĆą╝ąĖąĮą░ą╗ą░, čéą░ą║ąĖąĄ ą║ą░ą║ Putty, TerraTerm, SecureCRT ąĖ čé. ą┐.). ąÆ čüčĆąĄą┤ąĄ Arduino ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ąŠčüčéčāą┐ąĮąŠ ą┤ą╗čÅ Teensy ą║ą░ą║ čāčüčéčĆąŠą╣čüčéą▓ąŠ Serial. ąÆ čĆąĄąČąĖą╝ą░čģ ą┤ą▓ąŠą╣ąĮąŠą│ąŠ ąĖ čéčĆąŠą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┤ąŠą▒ą░ą▓ą╗čÅčÄčéčüčÅ SerialUSB1 ąĖ SerialUSB2.
Emulated Serial . ąØą░čüčéčĆąŠą╣ą║ą░ čéąĖą┐ą░ USB, ą▓ ą║ąŠč鹊čĆąŠą╝ ąŠčéčüčāčéčüčéą▓čāąĄčé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü, ąĖ ą┤ą╗čÅ ąĄą│ąŠ 菹╝čāą╗čÅčåąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą╗ą░čüčü ąĖąĮč鹥čĆč乥ą╣čüą░ HID. ąÆ čŹčéąĖčģ čĆąĄąČąĖą╝ą░čģ PC ąĖą╗ąĖ Mac ąĮąĄ ą▒čāą┤čāčé ąŠą┐čĆąĄą┤ąĄą╗čÅčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ ą║ą░ą║ COM-ą┐ąŠčĆčé ąĖą╗ąĖ ą║ą░ą║ serial-čāčüčéčĆąŠą╣čüčéą▓ąŠ, ąĮąŠ ąÆčŗ ą▓čüąĄ ąĄčēąĄ čüą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓čŗąĘąŠą▓čŗ Serial.print() ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ č鹥ą║čüčéą░ ą▓ Arduino Serial Monitor.
MIDI - Musical Instrument Device. MIDI čćą░čüč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čĆčāč湥ą║ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, čüą╗ą░ą╣ą┤ąĄčĆąŠą▓ ąĖ ą║ąĮąŠą┐ąŠą║ ą┤ą╗čÅ ą╝čāąĘčŗą║ą░ą╗čīąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ąĖ čāčüčéčĆąŠą╣čüčéą▓ ą░ą║čāčüčéąĖą║ąĖ ąĖ ą╝čāąĘčŗą║ą░ą╗čīąĮąŠą│ąŠ čüąŠą┐čĆąŠą▓ąŠąČą┤ąĄąĮąĖčÅ. ąĪąŠąŠą▒čēąĄąĮąĖčÅ MIDI ą╝ąŠą│čāčé ąŠčéą┐čĆą░ą▓ą╗čÅčéčīčüčÅ ą▓ ąŠą▒ąŠąĖčģ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅčģ. Teensyduino MIDI ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéčī čŹč鹊ą│ąŠ ą║ą╗ą░čüčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░ čü Macintosh, Linux ąĖ Windows ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ č鹊ą╗čīą║ąŠ ąĖčģ ą▓čüčéčĆąŠąĄąĮąĮčŗčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓. ąĀąĄąČąĖą╝čŗ MIDIx4 & MIDIx16 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé 4 ąĖą╗ąĖ 16 ą▓ąĖčĆčéčāą░ą╗čīąĮčŗčģ ą┐ąŠčĆčéą░ / ą║ą░ą▒ąĄą╗čÅ MIDI. ąśą╝čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ MID, ą║ąŠč鹊čĆąŠąĄ ą▓ąĖą┤ąĖčé ą║ąŠą╝ą┐čīčÄč鹥čĆ, ą╝ąŠąČąĮąŠ ąĮą░čüčéčĆąŠąĖčéčī.
Audio . ąŁč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąŠ ą┤ą╗čÅ ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ čüč鹥čĆąĄąŠč乊ąĮąĖč湥čüą║ąŠą╣ ąĘą▓čāą║ąŠą▓ąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ. ąŻčüčéčĆąŠą╣čüčéą▓ąŠ USB Audio ą║ąŠą╝ą┐čīčÄč鹥čĆ ą▓ąĖą┤ąĖčé ą║ą░ą║ ąĘą▓čāą║ąŠą▓čāčÄ ą║ą░čĆčéčā USB. ąĪ ą┐ąŠą╝ąŠčēčīčÄ čüą▓ąŠą╣čüčéą▓ ąĘą▓čāą║ą░ ą║ąŠą╝ą┐čīčÄč鹥čĆą░ ą╝ąŠąČąĮąŠ ą┐čĆąŠąĖą│čĆčŗą▓ą░čéčī ąĘą▓čāą║ąŠą▓čŗąĄ ą┐ąŠč鹊ą║ąĖ č湥čĆąĄąĘ Teensy, ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, ą║ąŠč鹊čĆčŗąĄ ąĘą░ą┐ąĖčüčŗą▓ą░čÄčé ąĖą╗ąĖ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčé ąĘą▓čāą║, ą╝ąŠą│čāčé ą┐ąŠą╗čāčćą░čéčī ą░čāą┤ąĖąŠą┤ą░ąĮąĮčŗąĄ ąŠčé Teensy ą║ą░ą║ ąĄčüą╗ąĖ ą▒čŗ čŹč鹊 ą▒čŗą╗ USB-ą╝ąĖą║čĆąŠč乊ąĮ. USB Audio ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé čüąŠą▓ą╝ąĄčüčéąĮąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ Teensy Audio , čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░čéčī ąĘą▓čāą║ ąÆą░čłąĄą│ąŠ ą║ąŠą╝ą┐čīčÄč鹥čĆą░ čü ą╗čÄą▒ąŠą╣ čüąĖčüč鹥ą╝ąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĘą▓čāą║ą░, ą║ąŠč鹊čĆčāčÄ ąÆčŗ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĄč鹥 ąĮą░ Teensy.
Keyboard - čüčéą░ąĮą┤ą░čĆčéąĮą░čÅ USB-ą║ą╗ą░ą▓ąĖą░čéčāčĆą░ ąĮą░ 104 ą║ą╗ą░ą▓ąĖčłąĖ. ą£ąŠąČąĮąŠ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ąĮą░ąČą░čéąĖčÅ ą║ą╗ą░ą▓ąĖčł ą▓ ą║ąŠą╝ą┐čīčÄč鹥čĆ, ą┐ąŠąĘą▓ąŠą╗čÅčÅ čāą┐čĆą░ą▓ą╗čÅčéčī ą┐ąŠčćčéąĖ ą╗čÄą▒čŗą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╝ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄą╝. ąóą░ą║ąČąĄ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą╗ą░ą▓ąĖčłąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ Media-čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ (play, pause, volume, ąĖ čé. ą┐.). ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ą╝ąĮąŠą│ąĖąĄ čĆą░čüą║ą╗ą░ą┤ą║ąĖ ą║ą╗ą░ą▓ąĖą░čéčāčĆ, ąŠčéą╗ąĖčćą░čÄčēąĖąĄčüčÅ ąŠčé čĆą░čüą║ą╗ą░ą┤ą║ąĖ US, čćč鹊 ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ č湥čĆąĄąĘ ą╝ąĄąĮčÄ Tools -> Keyboard Layout.
Mouse - 菹╝čāą╗čÅčåąĖčÅ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą╣ ą╝čŗčłąĖ USB. ąØą░ ą║ąŠą╝ą┐čīčÄč鹥čĆ ą╝ąŠąČąĮąŠ ąŠčéą┐čĆą░ą▓ąĖčéčī ą║ą░ą║ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠąĄ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ, ą║ą░ą║ čā ąŠą▒čŗčćąĮąŠą╣ ą╝čŗčłąĖ, čéą░ą║ ąĖ ą░ą▒čüąŠą╗čÄčéąĮčāčÄ ą┐ąŠąĘąĖčåąĖčÄ ąĮą░ 菹║čĆą░ąĮąĄ, ą║ą░ą║ čü čåąĖčäčĆąŠą▓čŗą╝ ą┐ąĄčĆąŠą╝/ą┐ą╗ą░ąĮčłąĄč鹊ą╝. ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ čéą░ą║ąČąĄ ą║ąĮąŠą┐ą║ąĖ ą╝čŗčłąĖ ąĖ ą║ąŠą╗ąĄčüąĖą║ąŠ ą┐čĆąŠą║čĆčāčéą║ąĖ.
Joystick . ąŁč鹊 ąĖą│čĆąŠą▓ąŠą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čü ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ 6 ąŠčüąĄą╣ (X, Y, Z, Zr, Slider1, Slider2), 32 ą║ąĮąŠą┐ąŠą║ ąĖ 1 ą▓ąĄčĆčģąĮąĄą╣ hat-ą║ąĮąŠą┐ą║ąŠą╣. ąóąĖą┐ Joystick ą┐ąŠą╗ąĄąĘąĄąĮ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖą│čĆą░ą╝ąĖ ąĖą╗ąĖ ą┤čĆčāą│ąĖčģ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓, ąŠčéą▓ąĄčćą░čÄčēąĖčģ ąĮą░ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ąČąŠą╣čüčéąĖą║ą░.
Touchscreen - 菹╝čāą╗ąĖčĆčāąĄčé čéą░čćčüą║čĆąĖąĮ čü ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčīčÄ ąŠą▒ąĮą░čĆčāąČąĄąĮąĖčÅ ą┤ąŠ 10 ą┐ąŠąĘąĖčåąĖą╣ ą┐ą░ą╗čīčåąĄą▓.
MTP Disk - Media Transfer, ąĮą░ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ čéą░ą║ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓ąĖą┤ąĖčéčüčÅ ą║ą░ą║ č鹥ą╗ąĄč乊ąĮ ąĖą╗ąĖ ą║ą░ą╝ąĄčĆą░ čü ąŠą▒čēąĖą╝ąĖ čäą░ą╣ą╗ą░ą╝ąĖ.
Flight Sim - ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĖąĮč鹥ą│čĆą░čåąĖčÄ čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╝ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄą╝ X-Plane flight simulator. ą¤ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ ąĖ ąŠčĆą│ą░ąĮčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓ čüąĖą╝čāą╗čÅč鹊čĆąĄ ą┐čĆąĖą▓čÅąĘą░ąĮčŗ ą║ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗą╝ ą▓ ą║ąŠą┤ąĄ, čĆą░ą▒ąŠčéą░čÄčēąĄą╝ ąĮą░ Teensy.
Raw HID - ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠą▒ą╝ąĄąĮąĖą▓ą░čéčīčüčÅ 64-ą▒ą░ą╣čéąĮčŗą╝ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅą╝ąĖ čü ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąĖą╝ ą¤ą×, čĆą░ą▒ąŠčéą░čÄčēąĖą╝ ąĮą░ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ.
ąźąŠčüčé USB . ąÆč鹊čĆąŠą╣ ą┐ąŠčĆčé USB čĆą░ą▒ąŠčéą░ąĄčé ą▓ čĆąĄąČąĖą╝ąĄ čģąŠčüčéą░, ą┐ąŠąĘą▓ąŠą╗čÅčÅ ą┐ąŠą┤ą║ą╗čÄčćą░čéčī ą║ ąĮąĄą╝čā čāčüčéčĆąŠą╣čüčéą▓ą░ USB. ąöą╗čÅ čŹč鹊ą│ąŠ ąĮą░ Teensy 4.0 ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą▓ąĄ ą╝ą░ą╗ąĄąĮčīą║ąĖąĄ ą║ąŠąĮčéą░ą║čéąĮčŗąĄ ą┐ą╗ąŠčēą░ą┤ą║ąĖ SMT ąĮą░ ąŠą▒čĆą░čéąĮąŠą╣ čüč鹊čĆąŠąĮąĄ ą┐ą╗ą░čéčŗ (čüą╝. čĆąĖčü. 4).
ąŁč鹊čé ą┐ąŠčĆčé čĆą░ą▒ąŠčéą░ąĄčé ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ąŠčüąĮąŠą▓ąĮąŠą│ąŠ ą┐ąŠčĆčéą░ čāčüčéčĆąŠą╣čüčéą▓ą░ USB ą┐ą╗ą░čéčŗ Teensy 4.0, čéą░ą║ čćč鹊 ą╝ąŠąČąĮąŠ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ čĆą░ą▒ąŠčéą░čéčī čü čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ USB, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝ąĖ ą║ ą┐ąŠčĆčéčā USB čģąŠčüčéą░, ąĖ ąŠą▒ą╝ąĄąĮąĖą▓ą░čéčīčüčÅ ą┤ą░ąĮąĮčŗą╝ąĖ čü ą║ąŠą╝ą┐čīčÄč鹥čĆąŠą╝ č湥čĆąĄąĘ ą┐ąŠčĆčé USB čāčüčéčĆąŠą╣čüčéą▓ą░. ą¤ąŠčĆčé čģąŠčüčéą░ USB čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ čüą║ąŠčĆąŠčüčéąĖ 480 (High Speed USB), 12 (Full Speed USB) ąĖą╗ąĖ 1.5 (Low Speed USB) ą╝ąĄą│ą░ą▒ąĖčé/čüąĄą║, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čüą║ąŠčĆąŠčüčéąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ USB, ą║ąŠč鹊čĆąŠąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ. ąöą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čģą░ą▒čŗ USB. ąöą╗čÅ ą┐ąŠčĆčéą░ čģąŠčüčéą░ USB ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ USBHost_t36 . ąÜą░ą▒ąĄą╗čī ąŠčé ą┐ąŠčĆčéą░ čģąŠčüčéą░ USB ąŠą▒čŗčćąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ąĖą╗ąĖ ą║ čģą░ą▒čā, ąĖą╗ąĖ ą║ čāčüčéčĆąŠą╣čüčéą▓čā USB.
Serial . 7 ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┐ąŠčĆč鹊ą▓ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą┐ąŠą┤ą║ą╗čÄčćą░čéčī UART-čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ MIDI, ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą▓ GPS, čāčüčéčĆąŠą╣čüčéą▓ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąŠčüą▓ąĄčēąĄąĮąĖąĄą╝ DMX, ą▒ąĄčüą┐čĆąŠą▓ąŠą┤ąĮčŗąĄ ą╝ąŠą┤čāą╗ąĖ ESP, ąĖ čé. ą┤. ąÆčüąĄ čŹčéąĖ 7 ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┐ąŠčĆč鹊ą▓ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗ ą┤čĆčāą│ ąŠčé ą┤čĆčāą│ą░, ąĖ ą╝ąŠą│čāčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ąĖ ą┐čĆąĖąĮąĖą╝ą░čéčī ą┤ą░ąĮąĮčŗąĄ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ. ąŁčéąĖ ą┐ąŠčĆčéčŗ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓ą╝ąĄčüč鹥 čü USB (čćč鹊 ąĖą╝ąĄąĄčé ą╝ąĄčüč鹊 ąĮą░ ąĮąĄą║ąŠč鹊čĆčŗčģ ą┐ą╗ą░čéą░čģ Arduino). ąØą░ ą▓čüąĄčģ 7 ą┐ąŠčĆčéą░čģ ąĄčüčéčī čüč鹥ą║ąĖ FIFO ą┤ą╗čÅ ą┐ąŠą▓čŗčłąĄąĮąĖčÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ čĆą░ą▒ąŠčéčŗ ąĮą░ ą▓čŗčüąŠą║ąĖčģ čüą║ąŠčĆąŠčüčéčÅčģ ą┐ąĄčĆąĄą┤ą░čćąĖ.
I2C . ąĢčüčéčī 3 ą┐ąŠčĆčéą░ ą┤ą╗čÅ I2C (čüąĖą│ąĮą░ą╗čŗ SDA ąĖ SCL), ą┐ąŠąĘą▓ąŠą╗čÅčÄčēąĖąĄ ą┐ąŠą┤ą║ą╗čÄčćą░čéčī čłąĖčĆąŠą║ąĖą╣ čüą┐ąĄą║čéčĆ ą╝ąĖą║čĆąŠčüčģąĄą╝ čü čéą░ą║ąĖą╝ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝. ąöą╗čÅ I2C ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ Wire . ąÆčüąĄ ą┐ąŠčĆčéčŗ I2C ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ čüą║ąŠčĆąŠčüčéąĖ 100, 400 ąĖ 1000 ą║ąĖą╗ąŠą▒ąĖčé/čüąĄą║.
SPI . ąĢčüčéčī 3 ą┐ąŠčĆčéą░ ą┤ą╗čÅ SPI (čü čüąĖą│ąĮą░ą╗ą░ą╝ąĖ MOSI, MISO, SCK), ą┐ąŠąĘą▓ąŠą╗čÅčÄčēąĖąĄ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮčŗąĄ čćąĖą┐čŗ, SD-ą║ą░čĆčéčŗ, ą┤ąĖčüą┐ą╗ąĄąĖ. ąöą╗čÅ čŹč鹊ą│ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ SPI . ą¤ąĄčĆą▓čŗą╣ ą┐ąŠčĆčé SPI čüąĮą░ą▒ąČąĄąĮ FIFO ą┤ą╗čÅ ą┐ąŠą▓čŗčłąĄąĮąĖčÅ čāčüč鹊ą╣čćąĖą▓ąŠčüčéąĖ ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮčŗčģ ą┐ąĄčĆąĄą┤ą░čć. ąÜą░ąČą┤čŗą╣ čćąĖą┐, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╣ ą║ čłąĖąĮąĄ SPI, čéčĆąĄą▒čāąĄčé čüąĖą│ąĮą░ą╗ą░ ą▓čŗą▒ąŠčĆą║ąĖ (chip select, CS). ąæąŠą╗čīčłąĖąĮčüčéą▓ąŠ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĖčģ SPI, ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ čŹč鹊ą╣ čåąĄą╗ąĖ ą╗čÄą▒ąŠą╣ čåąĖčäčĆąŠą▓ąŠą╣ ą▓čŗą▓ąŠą┤ ą┐ąŠčĆčéą░. ąóą░ą║ąČąĄ ą┐ąŠčĆčéčŗ SPI ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą░ą┐ą┐ą░čĆą░čéąĮąŠą╣ ą▓čŗą▒ąŠčĆą║ąĖ CS, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓ čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░čģ ą┤ą╗čÅ ą┐ąŠą▓čŗčłąĄąĮąĖčÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ.
CAN . 3 ą┐ąŠčĆčéą░ ą┤ą╗čÅ čłąĖąĮčŗ CAN ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą┐ąŠą┤ą║ą╗čÄčćą░čéčīčüčÅ ą║ ą░ą▓č鹊ą╝ąŠą▒ąĖą╗čīąĮąŠą╝čā ąĖ ąĖąĮą┤čāčüčéčĆąĖą░ą╗čīąĮąŠą╝čā ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖčÄ. ąöą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čłąĖąĮčŗ CAN ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┤ąŠą▒ą░ą▓ą╗ąĄąĮą░ čüą┐ąĄčåąĖą░ą╗čīąĮą░čÅ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ čéčĆą░ąĮčüąĖą▓ąĄčĆą░, čüąŠą│ą╗ą░čüčāčÄčēą░čÅ čäąĖąĘąĖč湥čüą║čāčÄ ą╗ąĖąĮąĖčÄ CAN čü 菹╗ąĄą║čéčĆąĖč湥čüą║ąĖą╝ąĖ čüąĖą│ąĮą░ą╗ą░ą╝ąĖ čłąĖąĮčŗ CAN ą┐ą╗ą░čéčŗ Teensy.
FlexIO . ą×č湥ąĮčī ą│ąĖą▒ą║ąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝ąŠąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ čü čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╝ ąĮą░ą▒ąŠčĆąŠą╝ ąĮąŠąČąĄą║ ą┐ąŠčĆč鹊ą▓, čĆąĄą│ąĖčüčéčĆąŠą▓ čüą┤ą▓ąĖą│ą░, čéą░ą╣ą╝ąĄčĆąŠą▓, ą╗ąŠą│ąĖą║ąĖ ąĖ ą╝ą░čłąĖąĮčŗ čüąŠčüč鹊čÅąĮąĖą╣. ąØą░ ąŠčüąĮąŠą▓ąĄ FlexIO ą╝ąŠąČąĮąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī UART (serial), I2C, SPI, I2S audio, PWM. ąóą░ą║ąČąĄ ą╝ąŠąČąĮąŠ čüčéčĆąŠąĖčéčī ąĖąĮč鹥čĆč乥ą╣čüčŗ čü čāąĮąĖą║ą░ą╗čīąĮčŗą╝ąĖ čüą▓ąŠą╣čüčéą▓ą░ą╝ąĖ, čéą░ą║ąĖą╝ąĖ ą║ą░ą║ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮčŗąĄ ą▓ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ TriantaduoWS2811 .
[ąöąĖčüą┐ą╗ąĄąĖ ]
ILI9341 320x240 Color TFT . ąŁčéąĖ ą┤ąĖčüą┐ą╗ąĄąĖ ą╗čāčćčłąĄ ą▓čüąĄą│ąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ Teensy 4.0, ą┤ą╗čÅ ąĮąĖčģ ąĄčüčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▓čŗčüąŠą║ąŠą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮčŗčģ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║, ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čÄčēąĖčģ ą▓čŗčüąŠą║čāčÄ čüą║ąŠčĆąŠčüčéčī ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖčÅ. ILI9341 ąŠą▒čŗčćąĮąŠ čüą░ą╝čŗą╣ ą╗čāčćčłąĖą╣ ą▓čŗą▒ąŠčĆ ą┤ąĖčüą┐ą╗ąĄčÅ ąĖąĘ-ąĘą░ ąŠčéą╗ąĖčćąĮąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ.
ąĀąĖčü. 6. ąŁą║čĆą░ąĮ ILI9341 320x240 Color TFT.
ST7735 Color TFT . ąŁčéąĖ ą┤ąĖčüą┐ą╗ąĄąĖ ąĮąĄą╝ąĮąŠą│ąŠ ą╝ąĄąĮčīčłąĄ ąĖ čā ąĮąĖčģ ą╝ąĄąĮčīčłąĄ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą║ą░čĆčéąĖąĮą║ąĖ, č湥ą╝ čā ILI9341. ąĪčāčēąĄčüčéą▓čāčÄčé ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ą┤ą╗čÅ ST7735 ąĖ ST7789, ą║ąŠč鹊čĆčŗąĄ čĆą░ą▒ąŠčéą░čÄčé čéą░ą║ąČąĄ ąŠč湥ąĮčī čģąŠčĆąŠčłąŠ.
SSD1306 Monochrome OLED . ąŁčéąĖ ą╝ą░ą╗ąĄąĮčīą║ąĖąĄ ą┤ąĖčüą┐ą╗ąĄąĖ ąŠč湥ąĮčī ą┐ąŠą┐čāą╗čÅčĆąĮčŗ ąĖ čģąŠčĆąŠčłąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ.
Pixel Pipeline . ąĪą┐ąĄčåąĖą░ą╗čīąĮą░čÅ ą│čĆą░čäąĖč湥čüą║ą░čÅ ą┐ąŠą┤čüąĖčüč鹥ą╝ą░, ą║ąŠč鹊čĆą░čÅ ą╝ąŠąČąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ čåą▓ąĄč鹊ą▓ąŠą│ąŠ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░, ą┤ąĄą╗ą░čéčī ąĘą░č鹥ą╝ąĮąĄąĮąĖąĄ (alpha blending) ąĖ čåą▓ąĄč鹊ą▓čāčÄ ą║ąŠčĆčĆąĄą║čåąĖčÄ (chroma keying), ą▒ąĖą╗ąĖąĮąĄą╣ąĮąŠąĄ ą╝ą░čüčłčéą░ą▒ąĖčĆąŠą▓ą░ąĮąĖąĄ (bilinear resize) ąĖ ą┤čĆčāą│ąĖąĄ ąŠą┐ąĄčĆą░čåąĖąĖ ąĮą░ą┤ ą▒čāč乥čĆą░ą╝ąĖ ą║ą░ą┤čĆą░ (frame buffers). ą¤čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ą▓ąĄčüčīą╝ą░ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčéą░ą╗čīąĮą░.
ą¤ąŠčćčéąĖ ą▓čüąĄ ą┤ąĖčüą┐ą╗ąĄąĖ, čĆą░ą▒ąŠčéą░čÄčēąĖąĄ čü ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ą╝ąĖ Arduino, čéą░ą║ąČąĄ čĆą░ą▒ąŠčéą░čÄčé ąĖ ąĮą░ Teensy 4.0.
[Audio ]
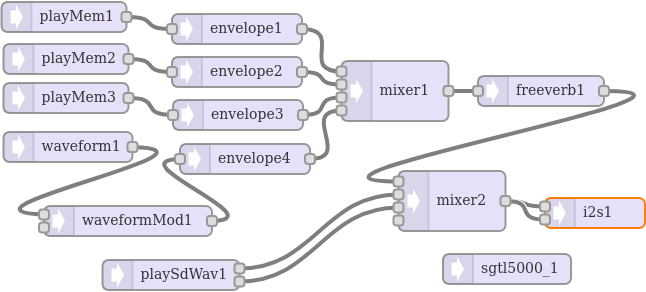
ąĀąĖčü. 7. ą¤čĆąŠą│čĆą░ą╝ą╝ą░ Audio Design Tool čāą┐čĆąŠčēą░ąĄčé čüąŠąĘą┤ą░ąĮąĖąĄ čüąĖčüč鹥ą╝čŗ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĘą▓čāą║ąŠą▓čŗčģ ą┐ąŠč鹊ą║ąŠą▓.
I2S/TDM . 2 čåąĖčäčĆąŠą▓čŗčģ ąĘą▓čāą║ąŠą▓čŗčģ ą┐ąŠčĆčéą░, ąĮą░ąĖą▒ąŠą╗ąĄąĄ čćą░čüč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ čü audio-čłąĖą╗ą┤ąŠą╝. ąŁčéąĖ ą┐ąŠčĆčéčŗ ą╝ąŠą│čāčé ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ąĖ ą┐čĆąĖąĮąĖą╝ą░čéčī ą┤ąŠ 8 ą░čāą┤ąĖąŠą║ą░ąĮą░ą╗ąŠą▓ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ I2S, ąĖą╗ąĖ ą┤ąŠ 16 ą║ą░ąĮą░ą╗ąŠą▓ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ TDM.
I2SI - 1 ąĮąŠąČą║ą░ stereo-ą▓čŗčģąŠą┤ą░, 1 ąĮąŠąČą║ą░ stereo-ą▓čģąŠą┤ą░, 3 stereo-ą▓čģąŠą┤ą░ ąĖą╗ąĖ ąĮąŠąČą║ąĖ ą▓čŗčģąŠą┤ąŠą▓.
ąĀąĖčü. 8. Audio Shield ą┐čĆąĄąŠą▒čĆą░ąĘčāąĄčé I2S Digital Audio ą▓ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗąĄ stereo ą▓čģąŠą┤čŗ ąĖ ą▓čŗčģąŠą┤čŗ.
ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╣ č乊čĆą╝ą░čé ą┤ą╗čÅ ąĮąĄą┤ąŠčĆąŠą│ąŠą│ąŠ DAC-čćąĖą┐ą░ PT8211 DAC.
ąĀąĖčü. 9. PT8211, ąĮąĄą┤ąŠčĆąŠą│ąŠą╣ DAC čü čģąŠčĆąŠčłąĖą╝ ą║ą░č湥čüčéą▓ąŠą╝ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ stereo.
[ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąŠčüą▓ąĄčēąĄąĮąĖąĄą╝, čüą▓ąĄč鹊ą┤ąĖąŠą┤čŗ ]
WS2812B/NeoPixel . ąöą▓ąĄ ą▓čŗčüąŠą║ąŠą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮčŗąĄ, ąĮąĄ ą▒ą╗ąŠą║ąĖčĆčāčÄčēąĖąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ąŠčüąĮąŠą▓ąĮąŠą│ąŠ ą║ąŠą┤ą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčé čüą▓ąĄč鹊ą┤ąĖąŠą┤čŗ (Light-Emitting Diodes, LED) WS2812B.
ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ OctoWS2811 ą┐ąĄčĆąĄą┤ą░ąĄčé ą╗čÄą▒ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čŗčģąŠą┤ąŠą▓ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ, ą┐ąŠąĘą▓ąŠą╗čÅčÅ ąŠą▒ąĮąŠą▓ą╗čÅčéčī čüą▓ąĄč湥ąĮąĖąĄ ą┐ąŠčćčéąĖ ą╗čÄą▒ąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ LED čü čćą░čüč鹊č鹊ą╣ ą┤ąŠ 30 ąōčå, čćč鹊 čāąČąĄ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ ą▓ąŠčüą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮąĖčÅ ą▓ąĖą┤ąĄąŠčüąĖą│ąĮą░ą╗ą░. ąØą░ Teensy 4.0 ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ OctoWS2811 ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą╗čÄą▒ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čåąĖčäčĆąŠą▓čŗčģ ą▓čŗą▓ąŠą┤ąŠą▓, ąĮąĄ ąŠą│čĆą░ąĮąĖčćąĖą▓ą░čÅčüčī č鹊ą╗čīą║ąŠ 8 ą▓čŗą▓ąŠą┤ą░ą╝ąĖ, ą║ą░ą║ ą▒čŗą╗ąŠ ąĮą░ Teensy 3.x.
ąĀąĖčü. 10. ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ OctoWS2811 čāą┐čĆą░ą▓ą╗čÅąĄčé 1920 čłčé. WS2812B RGB LED čü čćą░čüč鹊č鹊ą╣ ą║ą░ą┤čĆąŠą▓ 30 ąōčå.
ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ WS2812Serial ą┐ąĄčĆąĄą┤ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ąĮą░ ąŠą┤ąĖąĮ ą▓čŗčģąŠą┤, ąŠą┤ąĮą░ą║ąŠ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ąŠ 8 菹║ąĘąĄą╝ą┐ą╗čÅčĆąŠą▓ ą║ą╗ą░čüčüą░ čŹč鹊ą╣ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ. ąØąĄ ą▒ą╗ąŠą║ąĖčĆčāčÄčēą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčé DMA ą┤ą╗čÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą│ąŠ ą▓čŗą▓ąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ąŠčüąĮąŠą▓ąĮąŠą╣ ą║ąŠą┤ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé čĆą░ą▒ąŠčéą░čéčī. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą▒ąŠą╗ąĄąĄ čüą╗ąŠąČąĮčŗąĄ ą░ąĮąĖą╝ą░čåąĖąĖ ąĖą╗ąĖ ą▒ąŠą╗ąĄąĄ čŹčäč乥ą║čéąĖą▓ąĮčāčÄ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖčÄ ąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą┤čĆčāą│ąĖčģ ąĘą░ą┤ą░čć ą┐ąŠ čüčĆą░ą▓ąĮąĄąĮąĖčÄ čü čéčĆą░ą┤ąĖčåąĖąŠąĮąĮąŠą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĄą╣ ą┐čĆąŠč鹊ą║ąŠą╗ą░ WS2812B čü ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĖąĄą╝.
ą©ąĖą╗ą┤čŗ SmartMatrix ąĖ SmartLED ą┤ą╗čÅ LED-ą┐ą░ąĮąĄą╗ąĄą╣ HUB75 RGB. ą©ąĖą╗ą┤ SmartLED (ą▓ąĄčĆčüąĖąĖ 5) ą┐ąŠąĘą▓ąŠą╗čÅąĄčé Teensy 4.0 čāą┐čĆą░ą▓ą╗čÅčéčī ą▓čŗčüąŠą║ąŠą║ą░č湥čüčéą▓ąĄąĮąĮąŠą╣ ą│čĆą░čäąĖą║ąŠą╣ ąĮą░ ą▒ąŠą╗čīčłąŠą╝ ą╝ą░čüčüąĖą▓ąĄ ą┐ą░ąĮąĄą╗ąĄą╣ HUB75 RGB LED (ąŠčé 32x16 ą┤ąŠ 128x64 č鹊č湥ą║). ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ SmartMatrix čāą┐čĆąŠčēą░ąĄčé čĆąĖčüąŠą▓ą░ąĮąĖąĄ ą▒ą░ąĘąŠą▓čŗčģ ą│čĆą░čäąĖč湥čüą║ąĖčģ ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖą╣, ą▓čŗą▓ąŠą┤ąĖčé čüčéą░čéąĖč湥čüą║ąĖą╣ č鹥ą║čüčé ąĖ ą┤ąĄą╗ą░čéčī ąĄą│ąŠ čüą║čĆąŠą╗ą╗ąĖąĮą│, čĆąĖčüąŠą▓ą░čéčī ą║čĆą░čüąĖą▓čŗąĄ ą║ą░čĆčéąĖąĮą║ąĖ čü ą┐ąŠą╝ąŠčēčīčÄ FastLED ąĖ ą┐čĆąŠąĖą│čĆčŗą▓ą░čéčī ą░ąĮąĖą╝ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ GIF ąĮą░ ą┐ą░ąĮąĄą╗ąĖ. SmartMatrix ąĖčüą┐ąŠą╗čīąĘčāąĄčé čüą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ čäčāąĮą║čåąĖąĖ Teensy 4.0, čćč鹊ą▒čŗ ą┐ąŠčüčŗą╗ą░čéčī ą┤ą░ąĮąĮčŗąĄ ą│čĆą░čäąĖą║ąĖ čü ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╝ąĖ ąĘą░čéčĆą░čéą░ą╝ąĖ ą▓čŗčćąĖčüą╗ąĖč鹥ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ CPU, čéą░ą║ čćč鹊 ą╝ąŠąČąĮąŠ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ ąĘą░ą│čĆčāąĘąĖčéčī CPU ą┤čĆčāą│ąĖą╝ąĖ ąĘą░ą┤ą░čćą░ą╝ąĖ, čéą░ą║ąĖą╝ąĖ ą║ą░ą║ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ č湥čĆąĄąĘ SPI, ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ čäą░ą╣ą╗ą░, ąĖą╗ąĖ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ą│čĆą░čäąĖą║ąĖ čüą╗ąŠąČąĮčŗčģ ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖą╣.
DMX Lighting Control . ąøčÄą▒ąŠą╣ ąĖąĘ 7 ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┐ąŠčĆč鹊ą▓ ą╝ąŠąČąĄčé čŹčäč乥ą║čéąĖą▓ąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ čü DMX-ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ą╝ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąŠčüą▓ąĄčēąĄąĮąĖąĄą╝.
RGB LED . ą×ą▒čŗčćąĮčŗąĄ LED ą╝ąŠą│čāčé čāą┐čĆą░ą▓ą╗čÅčéčīčüčÅ čü ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄą╝ PWM (ą©ąśą£) ą┤ą╗čÅ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čĆą░ąĘą╗ąĖčćąĮąŠą╣ čÅčĆą║ąŠčüčéąĖ čüą▓ąĄč湥ąĮąĖčÅ. ąŁč鹊čé čäčāąĮą║čåąĖąŠąĮą░ą╗ ą┤ąŠčüčéčāą┐ąĄąĮ čü ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄą╝ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ SoftPWM ąĖ ShiftPWM .
ąĀąĖčü. 11. ShiftPWM čāą┐čĆą░ą▓ą╗čÅąĄčé 16 čłčé. RGB LED č湥čĆąĄąĘ 6 ą╝ąĖą║čĆąŠčüčģąĄą╝ 74HCT595.
[ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ, RTC, čéą░ą╣ą╝ąĄčĆčŗ ]
ąÜą▓ą░čĆčåčŗ ąĖ ą│ąĄąĮąĄčĆą░čåąĖčÅ čéą░ą║č鹊ą▓ . ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ 2 ą║ą▓ą░čĆčåąĄą▓čŗčģ čĆąĄąĘąŠąĮą░č鹊čĆą░ ą┤ą╗čÅ č鹊čćąĮąŠą│ąŠ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą║č鹊ą▓čŗčģ čćą░čüč鹊čé ąĖ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ. ąÜą▓ą░čĆčå ąĮą░ 24 ą£ąōčå ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą▒ą░ąĘąŠą▓ąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ čüąĖčüč鹥ą╝čŗ ąĖ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓. ąĪąĖčüč鹥ą╝ą░ čüąĖąĮč鹥ąĘą░ čéą░ą║č鹊ą▓ čü čäą░ąĘąŠą▓ąŠą╣ ą┐ąŠą┤čüčéčĆąŠą╣ą║ąŠą╣ čćą░čüč鹊čéčŗ (phase locked loop, PLL) ą┐ąŠą▓čŗčłą░ąĄčé čćą░čüč鹊čéčā čéą░ą║č鹊ą▓ 24 ą£ąōčå ą┤ąŠ ąĮčāąČąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ.
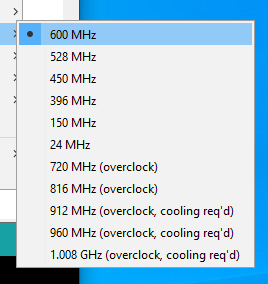
ąĀąĖčü. 12. ą£ąĄąĮčÄ ą▓čŗą▒ąŠčĆą░ ąŠčüąĮąŠą▓ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ.
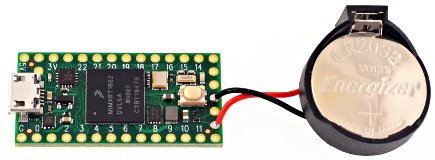
ą×čéą┤ąĄą╗čīąĮčŗą╣ ą║ą▓ą░čĆčå ąĮą░ 32.768 ą║ąōčå ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čćą░čüąŠą▓ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (Real Time Clock, RTC). ąĢčüą╗ąĖ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą║ VBAT ą┤ąĖčüą║ąŠą▓čāčÄ ą▒ą░čéą░čĆąĄą╣ą║čā ąĮą░ 3V, č鹊 ą│ąĄąĮąĄčĆą░č鹊čĆ 32.768 ą║ąōčå ą┐čĆąŠą┤ąŠą╗ąČąĖčé čĆą░ą▒ąŠčéčā, ą┐ąŠąĘą▓ąŠą╗čÅčÅ RTC ąŠčéčüčćąĖčéčŗą▓ą░čéčī čüąĄą║čāąĮą┤čŗ, ą╝ąĖąĮčāčéčŗ, čćą░čüčŗ, ąĖ ą┤ą░čéčā ą┤ą░ąČąĄ ą║ąŠą│ą┤ą░ ąŠčüąĮąŠą▓ąĮąŠą╣ ąĖčüč鹊čćąĮąĖą║ ą┐ąĖčéą░ąĮąĖčÅ ą▓čŗą║ą╗čÄč湥ąĮ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé.
ąĀąĖčü. 13. ąæą░čéą░čĆąĄą╣ą║ą░ CR2032, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮą░čÅ ą║ VBAT, ą┐ąŠąĘą▓ąŠą╗čÅąĄčé Teensy 4.0 ą┐čĆąŠą┤ąŠą╗ąČą░čéčī ąŠčéčüčćąĖčéčŗą▓ą░čéčī ą┤ą░čéčā/ą▓čĆąĄą╝čÅ, ą║ąŠą│ą┤ą░ ąŠą▒čēąĄąĄ ą┐ąĖčéą░ąĮąĖąĄ ą▓čŗą║ą╗čÄč湥ąĮąŠ.
ążąŠčĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ . 4 čéą░ą╣ą╝ąĄčĆą░ ą▓čŗą┤ąĄą╗ąĄąĮčŗ ą┤ą╗čÅ č鹊čćąĮąŠą│ąŠ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ. ą×ąĮąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāčÄčéčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ ą║ą╗ą░čüčüą░ IntervalTimer.
ąóą░ą╣ą╝ąĄčĆčŗ ą©ąśą£ (PWM). 32 čéą░ą╣ą╝ąĄčĆą░ čāą┐čĆą░ą▓ą╗čÅčÄčé ąĮąŠąČą║ą░ą╝ąĖ PWM, ąĖą╗ąĖ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┤čĆčāą│ąĖčģ čäčāąĮą║čåąĖą╣, čüą▓čÅąĘą░ąĮąĮčŗčģ čü ąĖąĮč鹥čĆą▓ą░ą╗ą░ą╝ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ ą│ąĄąĮąĄčĆą░čåąĖąĄą╣ čéą░ą║č鹊ą▓. ą×ą▒čŗčćąĮąŠ ą║ čŹčéąĖą╝ čéą░ą╣ą╝ąĄčĆą░ą╝ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┤ąŠčüčéčāą┐ č湥čĆąĄąĘ čäčāąĮą║čåąĖčÄ analogWrite ąĖą╗ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ, ąŠą┤ąĮą░ą║ąŠ čŹčéąĖ čéą░ą╣ą╝ąĄčĆčŗ ąŠą▒ą╗ą░ą┤ą░čÄčé ą▓ąĄčüčīą╝ą░ ą┐čĆąŠą┤ą▓ąĖąĮčāčéčŗą╝ čäčāąĮą║čåąĖąŠąĮą░ą╗ąŠą╝, ą║ ą║ąŠč鹊čĆąŠą╝čā ą╝ąŠąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ ą┐čāč鹥ą╝ ą┐čĆčÅą╝ąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖčģ čĆąĄą│ąĖčüčéčĆą░ą╝ąĖ.
FlexPWM1 Module0 - čāą┐čĆą░ą▓ą╗čÅąĄčé ąĮąŠąČą║ą░ą╝ąĖ PWM 1, 36, 37.
Watchdog Timer . 3 ąŠčéą┤ąĄą╗čīąĮčŗčģ čüč鹊čĆąŠąČąĄą▓čŗčģ čéą░ą╣ą╝ąĄčĆą░ (watchdog timer, WDT) ą╝ąŠą│čāčé ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘąĖčéčī Teensy, ąĄčüą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ą┐ąŠč鹥čĆą┐ąĄą╗ąŠ čüą▒ąŠą╣ ąĖą╗ąĖ ąĘą░ą▓ąĖčüą╗ąŠ. ąĢčüą╗ąĖ čüč鹊čĆąŠąČąĄą▓ąŠą╣ čéą░ą╣ą╝ąĄčĆ ąĘą░ą┐čāčēąĄąĮ, č鹊 ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ čüą▒čĆą░čüčŗą▓ą░čéčīčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╝ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄą╝ Teensy. ąĢčüą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĮąĄ čüą▒čĆą░čüčŗą▓ą░ą╗ą░ čüč鹊čĆąŠąČąĄą▓ąŠą╣ čéą░ą╣ą╝ąĄčĆ čüą╗ąĖčłą║ąŠą╝ ą┤ąŠą╗ą│ąŠ, č鹊 Teensy ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘąĖčéčüčÅ.
ąĪą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ čéą░ą╣ą╝ąĄčĆčŗ . ąŁčéąĖ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čéą░ą╣ą╝ąĄčĆčŗ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé č乊čĆą╝ąĖčĆąŠą▓ą░čéčī ąĘą░ą┤ąĄčƹȹ║ąĖ, čāą┐čĆą░ą▓ą╗čÅčéčī čćą░čüč鹊č鹊ą╣ ą▓čŗą▒ąŠčĆąŠą║ ąŠčåąĖčäčĆąŠą▓ą║ąĖ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░, ą╝ąŠą┤čāą╗ąĖčĆąŠą▓ą░čéčī ąĮąĄčüčāčēčāčÄ, ąĖą╗ąĖ ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą┤čĆčāą│ąĖąĄ čüą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ ąĘą░ą┤ą░čćąĖ čéą░ą╣ą╝ąĖąĮą│ą░, ą▒ąĄąĘ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮąĖčÅ ą║ą░ą║ąĖčģ-ą╗ąĖą▒ąŠ ą┤čĆčāą│ąĖčģ čéą░ą╣ą╝ąĄčĆąŠą▓, ąŠčĆąĖąĄąĮčéąĖčĆąŠą▓ą░ąĮąĮčŗčģ ąĮą░ PWM.
GPT1, GPT2 - ąŠą▒čŗčćąĮčŗąĄ 32-ą▒ąĖčéąĮčŗąĄ čéą░ą╣ą╝ąĄčĆčŗ (Generic Periodic Timer).
Cycle Counter . 32-ą▒ąĖčéąĮčŗą╣ čüč湥čéčćąĖą║, ą║ąŠč鹊čĆčŗą╣ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ čü ą║ą░ąČą┤čŗą╝ čéą░ą║č鹊ą╝ CPU (čćą░čüč鹊čéą░ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮąĖčÅ 600 ą£ąōčå). ą¤čĆąŠą│čĆą░ą╝ą╝ą░ ą╝ąŠąČąĄčé ą┐čĆąŠčćąĖčéą░čéčī ARM_DWT_CYCCNT, čćč鹊ą▒čŗ č鹊čćąĮąŠ ąĖąĘą╝ąĄčĆąĖčéčī ą║ąŠčĆąŠčéą║ąĖąĄ ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ.
SysTick . ąŁč鹊čé čüąĖčüč鹥ą╝ąĮčŗą╣ čéą░ą╣ą╝ąĄčĆ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą║ą░ąČą┤čāčÄ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤čā. ąæąŠą╗čīčłąĖąĮčüčéą▓ąŠ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ ąĖčüą┐ąŠą╗čīąĘčāčÄčé čŹč鹊čé čéą░ą╣ą╝ąĄčĆ ą┤ą╗čÅ ąŠčéčüč湥čéą░ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ. ąóą░ą║ąČąĄ ąĄą│ąŠ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčŗąĄ čüąĖčüč鹥ą╝čŗ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (čéą░ą║ąĖąĄ ą║ą░ą║ FreeRTOS) ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čüą▓ąŠąĄą│ąŠ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░.
Software Timing . ą¤čĆąŠą│čĆą░ą╝ą╝ąĮčŗąĄ čäčāąĮą║čåąĖąĖ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąĘą░ą┤ąĄčƹȹĄą║:
delay() , delayMicroseconds() , delayNanoseconds() . ąŁčéąĖ čäčāąĮą║čåąĖąĖ č乊čĆą╝ąĖčĆčāčÄčé ąĘą░ą┤ąĄčƹȹ║čā ą▓ ąĄą┤ąĖąĮąĖčåą░čģ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤, ą╝ąĖą║čĆąŠčüąĄą║čāąĮą┤ ąĖ ąĮą░ąĮąŠčüąĄą║čāąĮą┤ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ.
elapsedMillis , elapsedMicros - čŹčéąĖ ą║ą╗ą░čüčüčŗ C++ čĆą░ą▒ąŠčéą░čÄčé ą║ą░ą║ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ, ą║ąŠč鹊čĆą░čÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ čü ą║ą░ąČą┤ąŠą╣ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ąŠą╣ ąĖ ą╝ąĖą║čĆąŠčüąĄą║čāąĮą┤ąŠą╣ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ. ąŁčéąĖ ą║ą╗ą░čüčüčŗ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ ąĄčüčéčī, ą╗ąĖą▒ąŠ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮčŗ, čćč鹊 ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ čāą┐čĆąŠčēą░ąĄčé čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ ą┐ąŠą▓č鹊čĆčÅčÄčēąĖčģčüčÅ ą┤ąĄą╣čüčéą▓ąĖą╣ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ, ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą┐čĆąŠčłąĄą┤čłąĖčģ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ, ąŠčéčüą╗ąĄąČąĖą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ą░čāč鹊ą▓, ąĖ čé. ą┤. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čéą░ą║ąĖčģ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ ąŠą│čĆą░ąĮąĖč湥ąĮąŠ č鹊ą╗čīą║ąŠ ą┤ąŠčüčéčāą┐ąĮąŠą╣ ą┐ą░ą╝čÅčéčīčÄ.
millis() , micros() - čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ čäčāąĮą║čåąĖąĖ Arduino ą┤ą╗čÅ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĮąĖčÅ čüąĖčüč鹥ą╝ąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ą░čģ ąĖ ą╝ąĖą║čĆąŠčüąĄą║čāąĮą┤ą░čģ.
Real Time Clock - Date & Time . RTC ą╝ąŠąČąĄčé ąŠčéčüčćąĖčéčŗą▓ą░čéčī ą┤ą░čéčā ąĖ ą▓čĆąĄą╝čÅ (date/time). ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ Time ąŠą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ą╝ąĄčüč鹥 čü RTC. Teensy Loader ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé RTC ą▓čĆąĄą╝ąĄąĮąĄą╝ čģąŠčüčéą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ PC, ą║ąŠą│ą┤ą░ ąĘą░ą│čĆčāąČą░ąĄčé ą║ąŠą┤ firmware (uploading) ą▓ ą┐ą░ą╝čÅčéčī Teensy. ąĢčüą╗ąĖ ą┐čĆąĖ čŹč鹊ą╝ ą┤ąĖčüą║ąŠą▓ą░čÅ ą▒ą░čéą░čĆąĄą╣ą║ą░ 3V ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ą║ VBAT, č鹊 RTC ą┐čĆąŠą┤ąŠą╗ąČąĖčé ąŠčéčüč湥čé ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠą│ą┤ą░ ąŠčüąĮąŠą▓ąĮąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ ą▒čāą┤ąĄčé ąŠčéą║ą╗čÄč湥ąĮąŠ (čüą╝. čĆąĖčü. 13).
[ą¤ąĖčéą░ąĮąĖąĄ ]
USB . ą¦ą░čüč鹊 ą┐ą╗ą░čéą║ą░ Teensy ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ą╝ąĄčüč鹥 čü ą║ąŠą╝ą┐čīčÄč鹥čĆąŠą╝, ąĖ č鹊ą│ą┤ą░ ąŠąĮą░ ą┐ąŠą╗čāčćą░ąĄčé ą┐ąĖčéą░ąĮąĖąĄ č湥čĆąĄąĘ ą║ą░ą▒ąĄą╗čī USB (ą┐ąŠčĆčé čāčüčéčĆąŠą╣čüčéą▓ą░ USB). ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ USB ą┐ąŠčüčéčāą┐ą░ąĄčé ąĮą░ ą▓čŗą▓ąŠą┤ VUSB, ą║ąŠč鹊čĆčŗą╣ čüąŠąĄą┤ąĖąĮąĄąĮ čü VIN ąĖ ą┐ąŠą┤ą░ąĄčé ą┐ąĖčéą░ąĮąĖąĄ ąĮą░ ą▓čüčÄ ą┐ą╗ą░čéčā.
ąÆčŗą▓ąŠą┤ VIN . ąÜąŠą│ą┤ą░ ą┐ąĖčéą░ąĮąĖąĄ ąŠčé USB ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą░ąĮąŠ ą┐ąĖčéą░ąĮąĖąĄ 5V ąĮą░ ą▓čŗą▓ąŠą┤ VIN. ą¤ąŠčüą║ąŠą╗čīą║čā VIN ąĖ VUSB čüąŠąĄą┤ąĖąĮąĄąĮčŗ, ąĮąĄą╗čīąĘčÅ ą┐ąŠą┤ą░ą▓ą░čéčī ą▓ąĮąĄčłąĮąĄąĄ ą┐ąĖčéą░ąĮąĖąĄ ąĮą░ VIN, ą║ąŠą│ą┤ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ą░ą▒ąĄą╗čī USB, čćč鹊ą▒čŗ ąĮąĄ ą┤ąŠą┐čāčüą║ą░čéčī ą┐ąŠą┐ą░ą┤ą░ąĮąĖčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ ąĮą░ ą┐ąŠčĆčé USB ą║ąŠą╝ą┐čīčÄč鹥čĆą░ (ąĖą╗ąĖ ąĮą░ą┤ąŠ ą┐čĆąĄą┤ą┐čĆąĖąĮąĖą╝ą░čéčī čüą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ ą╝ąĄčĆčŗ, ąĮą░ą┐čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ąĘą░čēąĖčéąĮąŠą│ąŠ ą┤ąĖąŠą┤ą░ ą©ąŠčéčéą║ąĖ). ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠ ą╝ąŠąČąĮąŠ ą┐ąĄčĆąĄčĆąĄąĘą░čéčī ą┐ąĄčĆąĄą╝čŗčćą║čā ąĮą░ ąŠą▒čĆą░čéąĮąŠą╣ čüč鹊čĆąŠąĮąĄ ą┐ą╗ą░čéčŗ, čćč鹊ą▒čŗ čĆą░ąĘą┤ąĄą╗ąĖčéčī čåąĄą┐ąĖ VUSB ąĖ VIN, čćč鹊 ą┐ąŠąĘą▓ąŠą╗ąĖčé ą▒ąĄąĘąŠą┐ą░čüąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćą░čéčī ą║ą░ą▒ąĄą╗čī USB ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ Teensy 4.0.
3.3V . ąØą░ ą┐ą╗ą░č鹥 Teensy 4.0 čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ LDO, ą║ąŠč鹊čĆčŗą╣ čāą╝ąĄąĮčīčłą░ąĄčé ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ 5V ąŠčé VUSB/VIN ą┤ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ 3.3V, ą║ąŠč鹊čĆąŠąĄ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ąĘą░ą┐ąĖčéčŗą▓ą░ąĄčé ąŠčüąĮąŠą▓ąĮąŠą╣ ą┐čĆąŠčåąĄčüčüąŠčĆ ąĖ ą▓čüąĄ ą┤čĆčāą│ąĖąĄ 菹╗ąĄą╝ąĄąĮčéčŗ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ. ą×čé ą▓čŗą▓ąŠą┤ą░ 3.3V ą╝ąŠą│čāčé ą▒čŗčéčī ąĘą░ą┐ąĖčéą░ąĮčŗ ą▓ąĮąĄčłąĮąĖąĄ čüčģąĄą╝čŗ, ąŠą┤ąĮą░ą║ąŠ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝čŗą╣ ąĖą╝ąĖ č鹊ą║ ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąĄą▓čŗčłą░čéčī 250 mA. Teensy 4.0 ąĮąĄ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮą░ ą┐ąŠą╗čāčćą░čéčī ą┐ąĖčéą░ąĮąĖąĄ ąŠčé ą▓čŗą▓ąŠą┤ą░ 3.3V, ąĮąŠ čŹč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ ą┐čāč鹥ą╝ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą╣ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĖ čüčģąĄą╝čŗ ą┐ą╗ą░čéčŗ.
USB Host . ą¤ą╗ą░čéą░ Teensy 4.0 ąĮąĄ čüąĮą░ą▒ąČąĄąĮą░ čüčģąĄą╝ąŠą╣ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ ą║ čģąŠčüčéčā USB ą▓ąĮąĄčłąĮąĖčģ čāčüčéčĆąŠą╣čüčéą▓ (čŹčéąĖ čüčģąĄą╝čŗ ąĮą░ Teensy 4.1 čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ). ą¤ąŠčĆčé čģąŠčüčéą░ USB ą▓čŗą▓ąŠą┤ąĖčé č鹊ą╗čīą║ąŠ čüąĖą│ąĮą░ą╗čŗ ą┤ą░ąĮąĮčŗčģ (D+ ąĖ D-). ąÜąŠą│ą┤ą░ Teensy 4.0 ą┐ąŠą╗čāčćą░ąĄčé ą┐ąĖčéą░ąĮąĖąĄ ąŠčé ą║ą░ą▒ąĄą╗čÅ USB, ąĖą╗ąĖ ąŠą│čĆą░ąĮąĖč湥ąĮą░ ąĖčüč鹊čćąĮąĖą║ąŠą╝ ą┐ąĖčéą░ąĮąĖčÅ 5V, ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝čŗčģ čāčüčéčĆąŠą╣čüčéą▓ USB ą║ ą┐ąŠčĆčéčā čģąŠčüčéą░ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ čäčāąĮą║čåąĖčÅ ą│ąŠčĆčÅč湥ą│ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ.
MIMXRT1062DVL6A. ą¤čĆąĖ čĆą░ą▒ąŠč鹥 ąĮą░ čćą░čüč鹊č鹥 600 ą£ąōčå ą┐ą╗ą░čéą░ Teensy 4.0 ą┐ąŠčéčĆąĄą▒ą╗čÅąĄčé ą┐čĆąĖą▒ą╗ąĖąĘąĖč鹥ą╗čīąĮąŠ 100 mA. ąŻą╝ąĄąĮčīčłąĄąĮąĖąĄ čćą░čüč鹊čéčŗ CPU ą┤ąŠ 528 ą£ąōčå ąĖą╗ąĖ ąĮąĖąČąĄ čüąĮąĖąČą░ąĄčé ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ č鹊ą║ą░.
ążčāąĮą║čåąĖąĖ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ . ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ Snooze [].
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝ ą┐ąĖčéą░ąĮąĖčÅ CPU . DC-DC buck-ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čī ą┐ąŠąĮąĖąČą░ąĄčé ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ, ą║ąŠč鹊čĆąŠąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┤ą╗čÅ čÅą┤čĆą░ CPU. ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ą╝ąŠąČąĄčé čāą┐čĆą░ą▓ą╗čÅčéčī čŹčéąĖą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝ čü čłą░ą│ąŠą╝ čāčĆąŠą▓ąĮąĄą╣ 50 mV. ąØą░ čćą░čüč鹊č鹥 600 ą£ąōčå CPU čĆą░ą▒ąŠčéą░ąĄčé ąŠčé 1.25V. ąöą╗čÅ čćą░čüč鹊čéčŗ 528 ą£ąōčå ąĖ ąĮąĖąČąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ 1.15V. ąØą░ čćą░čüč鹊č鹥 24 ą£ąōčå ą┤ą╗čÅ CPU ą┤ąŠčüčéą░č鹊čćąĮąŠ čāčĆąŠą▓ąĮčÅ 0.95V. ą¤čĆąĖ ą┐ąŠą▓čŗčłąĄąĮąĖąĖ čćą░čüč鹊čéčŗ čüą▓ąĄčĆčģ ąĮąŠą╝ąĖąĮą░ą╗ą░ (overclocking) ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąĖąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ.
VBAT . ąÜą░ą║ čāąČąĄ čāą┐ąŠą╝ąĖąĮą░ą╗ąŠčüčī, ą║ ą▓čŗą▓ąŠą┤čā VBAT ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ čĆąĄąĘąĄčĆą▓ąĮąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ░ąĮąĖčÅ čĆą░ą▒ąŠčéčŗ RTC (ąŠčéčüč湥čé ą┤ą░čéčŗ ąĖ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠą│ą┤ą░ ąŠčüąĮąŠą▓ąĮąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ ąŠčéą║ą╗čÄč湥ąĮąŠ). ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą┤ą╗čÅ čŹč鹊ą╣ čåąĄą╗ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ąĖčüą║ąŠą▓čāčÄ ą▒ą░čéą░čĆąĄą╣ą║čā CR2032, čģąŠčéčÅ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ąĖ ą┤čĆčāą│ąĖąĄ ą▒ą░čéą░čĆąĄą╣ą║ąĖ ąĮą░ 3V.
ąÆčŗą▓ąŠą┤ On/Off ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖąĄą╝ . ąĢčüčéčī čüą┐ąĄčåąĖą░ą╗čīąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ, ą▓ ą║ąŠč鹊čĆąŠą╝ ą▓čŗą║ą╗čÄčćą░ąĄčéčüčÅ ą┐ąĖčéą░ąĮąĖąĄ 3.3V. ąŁč鹊 ą╝ąŠąČąĄčé čāą┐čĆą░ą▓ą╗čÅčéčīčüčÅ ą▓čŗą▓ąŠą┤ąŠą╝ On/Off ą┐ą╗ą░čéčŗ, ąĄčüą╗ąĖ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą║ąĮąŠą┐ą║čā ą╝ąĄąČą┤čā čŹčéąĖą╝ ą▓čŗą▓ąŠą┤ąŠą╝ ąĖ čłąĖąĮąŠą╣ GND. ąÆąŠ ą▓čĆąĄą╝čÅ čĆą░ą▒ąŠčéčŗ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ čāą┤ąĄčƹȹ░ąĮąĖąĄ čŹč鹊ą╣ ą║ąĮąŠą┐ą║ąĖ ąĮą░ ą▓čĆąĄą╝čÅ ą▒ąŠą╗čīčłąĄ 4 čüąĄą║čāąĮą┤ ą▓čŗą║ą╗čÄčćą░ąĄčé ą┐ąĖčéą░ąĮąĖąĄ. ąĢčüą╗ąĖ ą┐ąĖčéą░ąĮąĖąĄ ą▓čŗą║ą╗čÄč湥ąĮąŠ, č鹊 ąĮą░ąČą░čéąĖąĄ čŹč鹊ą╣ ą║ąĮąŠą┐ą║ąĖ ąĮą░ 0.5 čüąĄą║čāąĮą┤ čüąĮąŠą▓ą░ ą▓ą║ą╗čÄčćąĖčé ą┐ąĖčéą░ąĮąĖąĄ 3.3V, ąĖ ą┐čĆąŠčåąĄčüčüąŠčĆ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘąĖčéčüčÅ. ąĢčüą╗ąĖ ą║ VBAT ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ą▒ą░čéą░čĆąĄą╣ą║ą░ 3V, č鹊 čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ (ą▒čŗą╗ąŠ ąŠąĮąŠ ą▓ą║ą╗čÄč湥ąĮąŠ ąĖą╗ąĖ ą▓čŗą║ą╗čÄč湥ąĮąŠ ą▓čŗą▓ąŠą┤ąŠą╝ On/Off) čüąŠčģčĆą░ąĮąĖčéčüčÅ, ą║ąŠą│ą┤ą░ ąŠčüąĮąŠą▓ąĮąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ ąŠčéą║ą╗čÄč湥ąĮąŠ. ąæąĄąĘ VBAT čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ 3.3V ą┐čĆąĖ ąŠčéą║ą╗čÄč湥ąĮąĖąĖ ą▓ąĮąĄčłąĮąĄą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ ą▓čüąĄą│ą┤ą░ ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēą░čéčīčüčÅ ą║ čüąŠčüč鹊čÅąĮąĖčÄ ą▓ą║ą╗čÄč湥ąĮąŠ, ą┤ą░ąČąĄ ą║ąŠą│ą┤ą░ ą║ąĮąŠą┐ą║ą░ On/Off ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ą░čüčī ą┤ą╗čÅ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ 3.3V ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą▒čŗą╗ąŠ ąŠčéą║ą╗čÄč湥ąĮąŠ ąŠčüąĮąŠą▓ąĮąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ VIN/VUSB.
[ą¤ą░ą╝čÅčéčī ]
ąĀąĖčü. 14. ąóčĆąĖ čĆąĄą│ąĖąŠąĮą░ ą┐ą░ą╝čÅčéąĖ Teensy 4.0.
Program/Flash . ąŻ Teensy 4.0 ąĄčüčéčī 2 ą╝ąĄą│ą░ą▒ą░ą╣čéą░ ą┐ą░ą╝čÅčéąĖ flash, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮąŠą╣ ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ (ą║ąŠą┤ firmware). ąóą░ą║ąČąĄ ą┐ą░ą╝čÅčéčī flash ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ąĖ ą╝ą░čüčüąĖą▓ąŠą▓ (ąŠą▒čŖąĄą║č鹊ą▓, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ č湥čĆąĄąĘ PROGMEM ąĖ F()). ą¦ą░čüčéčī ą┐ą░ą╝čÅčéąĖ flash čü ą┐ąŠą╝ąŠčēčīčÄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ LittleFS ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ čäą░ą╣ą╗ąŠą▓ąŠąĄ čģčĆą░ąĮąĖą╗ąĖčēąĄ. ąÆąĄčĆčģąĮčÅčÅ ąŠą▒ą╗ą░čüčéčī 64K čŹč鹊ą╣ ą┐ą░ą╝čÅčéąĖ ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮą░ ą┤ą╗čÅ čŹą╝čāą╗čÅčåąĖąĖ EEPROM (菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗčģ ą┤ą░ąĮąĮčŗčģ) ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ LED blink restore.
RAM . ą×ą┐ąĄčĆą░čéąĖą▓ąĮą░čÅ ą┐ą░ą╝čÅčéčī 1024K ą┤ąŠčüčéčāą┐ąĮą░ ą┤ą╗čÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ ąĖ ą┤ą░ąĮąĮčŗčģ. ą¤ąŠą╗ąŠą▓ąĖąĮą░ čŹč鹊ą╣ ą┐ą░ą╝čÅčéąĖ (RAM1) ąŠą▒ą╗ą░ą┤ą░ąĄčé ą┐ąŠą▓čŗčłąĄąĮąĮčŗą╝ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖąĄą╝ (tightly coupled memory). ąöčĆčāą│ą░čÅ ą┐ąŠą╗ąŠą▓ąĖąĮą░ (RAM2) ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮą░ ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ DMA. ą×ą▒čŗčćąĮąŠ ą▒ąŠą╗čīčłąĖąĄ ą╝ą░čüčüąĖą▓čŗ ąĖ ą▒čāč乥čĆčŗ ą┤ą░ąĮąĮčŗčģ čĆą░ąĘą╝ąĄčēą░čÄčéčüčÅ ą▓ RAM2 ą┤ą╗čÅ čŹą║ąŠąĮąŠą╝ąĖąĖ RAM1, ą║ąŠč鹊čĆą░čÅ ą▓čŗą┤ąĄą╗čÅąĄčéčüčÅ ą┤ą╗čÅ ąŠą▒čŗčćąĮčŗčģ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ.
EEPROM . ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ 1080 ą▒ą░ą╣čé 菹╝čāą╗ąĖčĆčāąĄą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ EEPROM. ąŚą░ą┐ąĖčüčī ą▓ čŹčéčā ą┐ą░ą╝čÅčéčī ą▓čĆąĄą╝ąĄąĮąĮąŠ ą┐čĆąĖąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ąŠą┤ą░ ąĖąĘ flash. ąöą╗čÅ ą┤ąŠčüčéčāą┐ą░ ą║ ą┐ą░ą╝čÅčéąĖ 菹╝čāą╗ąĖčĆčāąĄą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ EEPROM ąŠą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ EEPROM , čéą░ą║ąČąĄ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čäčāąĮą║čåąĖąĖ AVR libc.
ąÜą╗čÄč湥ą▓čŗąĄ čüą╗ąŠą▓ą░ ą┤ą╗čÅ čüčéą░čéąĖč湥čüą║ąŠą│ąŠ čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ . ąÜąŠą│ą┤ą░ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé čüą▒ąŠčĆą║čā ą║ąŠą┤ą░ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, ą▓čüąĄ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ, ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ static ąĖ ą║ąŠą╝ą┐ąĖą╗ąĖčĆčāąĄą╝čŗą╣ ą║ąŠą┤ - ą▓čüąĄ čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ čĆą░ąĘą╝ąĄčēą░čÄčéčüčÅ ą▓ ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗčģ ąŠą▒ą╗ą░čüčéčÅčģ ą┐ą░ą╝čÅčéąĖ. ąŁč鹊 ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ čüčéą░čéąĖč湥čüą║ąĖą╝ ą▓čŗą┤ąĄą╗ąĄąĮąĖąĄą╝ ą┐ą░ą╝čÅčéąĖ (static allocation), ą┐ąŠč鹊ą╝čā čćč鹊 ą░ą┤čĆąĄčüą░ ą┐ą░ą╝čÅčéąĖ ąŠą▒čŖąĄą║č鹊ą▓ (ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ, čäčāąĮą║čåąĖą╣) čäąĖą║čüąĖčĆčāčÄčéčüčÅ ą▓ ą╝ąŠą╝ąĄąĮčé ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆ ą┐čŗčéą░ąĄčéčüčÅ ą▓čŗą┤ąĄą╗ąĖčéčī ą┐ą░ą╝čÅčéčī ą┤ą╗čÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ ąĖ ą┤ą░ąĮąĮčŗčģ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čüą▓ąĄčĆčģą▒čŗčüčéčĆąŠą╣ (ultra-fast) ą┐ą░ą╝čÅčéąĖ DTCM ąĖ ITCM. ąĪą╗ąĄą┤čāčÄčēąĖąĄ ą║ą╗čÄč湥ą▓čŗąĄ čüą╗ąŠą▓ą░ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé čāą┐čĆą░ą▓ą╗čÅčéčī čĆą░ąĘą╝ąĄčēąĄąĮąĖąĄą╝ ąŠą▒čŖąĄą║č鹊ą▓, čćč鹊ą▒čŗ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆ čĆą░ąĘą╝ąĄčēą░ą╗ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ ąĖ ą║ąŠą┤ ą▓ ąĮčāąČąĮčŗčģ ąŠą▒ą╗ą░čüčéčÅčģ ą┐ą░ą╝čÅčéąĖ.
DMAMEM - ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ č湥čĆąĄąĘ DMAMEM ą▒čāą┤čāčé čĆą░ąĘą╝ąĄčēą░čéčīčüčÅ ą▓ ąĮą░čćą░ą╗ąĄ RAM2. ą×ą▒čŗčćąĮąŠ čüčÄą┤ą░ ą┐ąŠą╝ąĄčēą░čÄčéčüčÅ ą▒čāč乥čĆčŗ ąĖ ą▒ąŠą╗čīčłąĖąĄ ą╝ą░čüčüąĖą▓čŗ. ąŁčéąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ ąĮąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮčŗ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ, ąÆą░čłą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ čüą░ą╝ą░ ą┤ąŠą╗ąČąĮą░ ąĘą░ą┐ąĖčüą░čéčī čéčāą┤ą░ ąĮą░čćą░ą╗čīąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ, ąĄčüą╗ąĖ čŹč鹊 ą▒čŗą╗ąŠ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ.
PROGMEM ąĖ F() - ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ č湥čĆąĄąĘ PROGMEM, ąĖ čüčéčĆąŠą║ąĖ, ąĘą░ą║ą╗čÄč湥ąĮąĮčŗąĄ ą▓ F(), ą▒čāą┤čāčé čĆą░ąĘą╝ąĄčēą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ą▓ ą┐ą░ą╝čÅčéąĖ flash. ąÜ ąĮąĖą╝ ą╝ąŠąČąĮąŠ ąŠą▒čĆą░čēą░čéčīčüčÅ ą║ą░ą║ ąŠą▒čŗčćąĮąŠ, ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čüą┐ąĄčåąĖą░ą╗čīąĮčŗčģ čäčāąĮą║čåąĖą╣, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖčüčī ą┤ą╗čÅ 8-ą▒ąĖčéąĮčŗčģ ą┐ą╗ą░čé Arduino ą┐čĆąĖ čćč鹥ąĮąĖąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ PROGMEM.
FASTRUN - čäčāąĮą║čåąĖąĖ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ č湥čĆąĄąĘ FASTRUN, čĆą░ąĘą╝ąĄčēą░čÄčéčüčÅ ą▓ ąĮą░čćą░ą╗ąĄ RAM1. ąśčģ ą║ąŠą┐ąĖčÅ čéą░ą║ąČąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ flash, ąŠčéą║čāą┤ą░ ą║ąŠą┤ąŠą╝ ąĘą░ą┐čāčüą║ą░ (ą║ąŠą┤ startup) ąŠąĮąĖ ą║ąŠą┐ąĖčĆčāčÄčéčüčÅ ą▓ RAM1 ąĖ čāąČąĄ ąŠčéčéčāą┤ą░ ą▒čāą┤čāčé čĆą░ą▒ąŠčéą░čéčī. ąÜ čŹčéąĖą╝ čäčāąĮą║čåąĖčÅą╝ ą┐čĆąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĖ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┤ąŠčüčéčāą┐ č湥čĆąĄąĘ čłąĖąĮčā Cortex-M7 ITCM, čü ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą▓ąŠąĘą╝ąŠąČąĮčŗą╝ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖąĄą╝. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čäčāąĮą║čåąĖąĖ ą▒ąĄąĘ ą║ą░ą║ąŠą│ąŠ-ą╗ąĖą▒ąŠ čāą║ą░ąĘą░ąĮąĖčÅ čéąĖą┐ą░ ą┐ą░ą╝čÅčéąĖ ą▒čāą┤čāčé ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčīčüčÅ ą║ą░ą║ FASTRUN. ą£ą░ą╗ąĄąĮčīą║ą░čÅ ąŠą▒ą╗ą░čüčéčī ą┐ą░ą╝čÅčéąĖ ąŠą▒čŗčćąĮąŠ ąŠčüčéą░ąĄčéčüčÅ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĮąŠą╣, ą┐ąŠč鹊ą╝čā čćč鹊 ą┤ąŠčüčéčāą┐ č湥čĆąĄąĘ čłąĖąĮčā ITCM ą┤ąŠą╗ąČąĄąĮ ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčīčüčÅ č湥čĆąĄąĘ ąŠą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ, čĆą░ąĘą╝ąĄčĆ ą║ąŠč鹊čĆčŗčģ ąĮą░čåąĄą╗ąŠ ą┤ąĄą╗ąĖčéčüčÅ ąĮą░ 32K.
FLASHMEM - čäčāąĮą║čåąĖąĖ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ č湥čĆąĄąĘ FLASHMEM, ą▓čŗą┐ąŠą╗ąĮčÅčÄčéčüčÅ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ąĖąĘ flash. ąĢčüą╗ąĖ ą║čŹčł Cortex-M7 ą┐ąŠą║ą░ ąĮąĄ čüąŠą┤ąĄčƹȹĖčé ą║ąŠą┐ąĖčÄ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ, ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąĮąĄą║ąŠč鹊čĆą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ ą▓ ą▓čŗą▒ąŠčĆą║ą░čģ ąĖąĮčüčéčĆčāą║čåąĖą╣, ą┐ąŠą║ą░ ą║ąŠą┤ ąĮąĄ čüą║ąŠą┐ąĖčĆčāąĄčéčüčÅ ą▓ ą║čŹčł M7. ąÜą╗čÄč湥ą▓ąŠąĄ čüą╗ąŠą▓ąŠ FLASHMEM ą┤ąŠą╗ąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą║ąŠą┤ą░ startup ąĖ ą┤čĆčāą│ąĖčģ čäčāąĮą║čåąĖą╣, čüą║ąŠčĆąŠčüčéčī čĆą░ą▒ąŠčéčŗ ą║ąŠč鹊čĆčŗčģ ąĮąĄ ą▓ą░ąČąĮą░.
ąöąĖąĮą░ą╝ąĖč湥čüą║ąŠąĄ ą▓čŗą┤ąĄą╗ąĄąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ . ąĪčāčēąĄčüčéą▓čāąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ (ąĖ ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖčÅ) ąŠą▒ą╗ą░čüč鹥ą╣ ą┐ą░ą╝čÅčéąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ čĆą░ą▒ąŠčéčŗ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ - č鹥čģ ąŠą▒ą╗ą░čüč鹥ą╣, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ą▒čŗą╗ąĖ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮčŗ čüčéą░čéąĖč湥čüą║ąĖą╝ čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄą╝ ą┐ą░ą╝čÅčéąĖ. ąśąĘ-ąĘą░ čüą┐ąĄčåąĖčäąĖčćąĮąŠą│ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą░ą┤čĆąĄčüąŠą▓ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣, ą▓čŗčćąĖčüą╗čÅąĄą╝ąŠą│ąŠ ą▓ąŠ ą▓čĆąĄą╝čÅ čĆą░ą▒ąŠčéčŗ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, čéą░ą║ąŠąĄ ą▓čŗą┤ąĄą╗ąĄąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖą╝ (dynamic memory allocation). ąÜ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą╝čā ą▓čŗą┤ąĄą╗ąĄąĮąĖčÄ ąŠčéąĮąŠčüčÅčéčüčÅ:
ąøąŠą║ą░ą╗čīąĮčŗąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ . ąŁč鹊 ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆą░čģ čäčāąĮą║čåąĖąĖ, ąĖ ą║ąŠč鹊čĆčŗąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ąĮčāčéčĆąĖ čäčāąĮą║čåąĖąĖ, ą░ čéą░ą║ąČąĄ ą┤ą╗čÅ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ąĖąĘ čäčāąĮą║čåąĖąĖ. ąŁčéąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ ąŠą▒čŗčćąĮąŠ čĆą░ąĘą╝ąĄčēą░čÄčéčüčÅ ą▓ čüč鹥ą║ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĖą╗ąĖ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ ą┐čĆąŠčåąĄčüčüąŠčĆą░. ąóą░ą║ąČąĄ ą▓ čüč鹥ą║ąĄ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ č鹥ą║čāčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĖ čüąŠčüč鹊čÅąĮąĖąĄ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (Interrupt Service Routine, ISR). ąĪč鹥ą║ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čüąŠ čüčéą░čĆčłąĖčģ ą░ą┤čĆąĄčüąŠą▓ RAM1, ąĖ ą┐čĆąĖ ą▓čŗą┤ąĄą╗ąĄąĮąĖąĖ ą┐ą░ą╝čÅčéąĖ čĆą░čüč鹥čé ą▓ąĮąĖąĘ, ą▓ čüč鹊čĆąŠąĮčā čāą╝ąĄąĮčīčłąĄąĮąĖčÅ ą░ą┤čĆąĄčüą░. ą×ą▒ą╗ą░čüčéčī ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ ą╗ąŠą║ą░ą╗čīąĮčŗčģ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ čŹč鹊 ąŠą▒ą╗ą░čüčéčī RAM1, ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ą░čÅ ą║ąŠą┤ąŠą╝ FASTRUN, ą░ čéą░ą║ąČąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╝ąĖ ąĖą╗ąĖ ąŠą▒ąĮčāą╗čÅąĄą╝čŗą╝ąĖ ą┐čĆąĖ čüčéą░čĆč鹥 ą│ą╗ąŠą▒ą░ą╗čīąĮčŗą╝ąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗą╝ąĖ.
Heap (ą║čāčćą░) . ąŁč鹊 ąŠą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ, ą▓čŗą┤ąĄą╗čÅąĄą╝čŗąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥čćąĮčŗą╝ąĖ čäčāąĮą║čåąĖčÅą╝ąĖ malloc() čÅąĘčŗą║ą░ C, ąŠą┐ąĄčĆą░č鹊čĆąŠą╝ new čÅąĘčŗą║ą░ C++, String-ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗą╝ąĖ Arduino. ąÜčāčćą░ čĆą░ąĘą╝ąĄčēą░ąĄčéčüčÅ ą▓ RAM2, ąĮą░čćąĖąĮą░čÅčüčī čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ DMAMEM.
RTC RAM . 16 ą▒ą░ą╣čé ą┐ą░ą╝čÅčéąĖ čüą▓čÅąĘą░ąĮčŗ čü RTC. ąæą░čéą░čĆąĄą╣ą║ą░ 3V, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮą░čÅ ą║ VBAT, čüąŠčģčĆą░ąĮčÅąĄčé čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čŹč鹊ą╣ ą┐ą░ą╝čÅčéąĖ, ą║ąŠą│ą┤ą░ ąŠčüąĮąŠą▓ąĮąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ ą▓čŗą║ą╗čÄč湥ąĮąŠ. ąÜ čŹč鹊ą╣ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąŠą▒čĆą░čēąĄąĮąĖąĄ č湥čĆąĄąĘ 32-ą▒ąĖčéąĮčŗąĄ čĆąĄą│ąĖčüčéčĆčŗ LPGPR0 .. LPGPR3.
SD Card . ąÆčüčéčĆąŠąĄąĮąĮčŗą╣ čüą╗ąŠčé ą║ą░čĆčéčŗ SD ą┐ąŠąĘą▓ąŠą╗ąĖčé ąÆą░ą╝ čģčĆą░ąĮąĖčéčī ą▒ąŠą╗čīčłąĖąĄ ąŠą▒čŖąĄą╝čŗ ą┤ą░ąĮąĮčŗčģ. ąöą╗čÅ ą┤ąŠčüčéčāą┐ą░ ą║ čŹč鹊ą╣ ą║ą░čĆč鹥 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ Arduino SD , ą┤ą╗čÅ čŹč鹊ą│ąŠ čüą┤ąĄą╗ą░ą╣č鹥 ą▓čŗąĘąŠą▓ SD.begin(BUILTIN_SDCARD). ąĪą╗ąŠčé ą║ą░čĆčéčŗ SD ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▒čŗčüčéčĆčŗą╣ 4-čĆą░ąĘčĆčÅą┤ąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü SDIO ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ ą║ ą┤ą░ąĮąĮčŗą╝ ą║ą░čĆčéčŗ. ąÜą░čĆčéčŗ SD čéą░ą║ąČąĄ ą╝ąŠą│čāčé ą┐ąŠą┤ą║ą╗čÄčćą░čéčīčüčÅ č湥čĆąĄąĘ ąĮąŠąČą║ąĖ SPI, čŹč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ ą▓čŗąĘąŠą▓ąŠą╝ SD.begin(cspin), ą┐čĆąĖ čŹč鹊ą╝ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▒ąŠą╗ąĄąĄ ą╝ąĄą┤ą╗ąĄąĮąĮčŗą╣ ą┤ąŠčüčéčāą┐ č湥čĆąĄąĘ ąŠą┤ąĮąŠčĆą░ąĘčĆčÅą┤ąĮčŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗ SPI.
SPI Flash . ą¦ąĖą┐čŗ ą┐ą░ą╝čÅčéąĖ Flash ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ č湥čĆąĄąĘ ąĮąŠąČą║ąĖ SPI. ąŁč鹊 ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ą╝ąĖ SerialFlash ąĖ LittleFS .
[ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ]
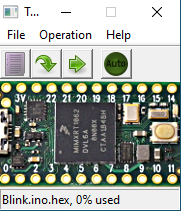
Teensy Loader . ąØąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ flash ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ąĖ čāčéąĖą╗ąĖčéčŗ Teensy Loader. ąĪčĆąĄą┤ą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ Arduino IDE (ąĖą╗ąĖ ą┤čĆčāą│ąŠąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čüą▒ąŠčĆą║ąĖ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ Arduino IDE ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĘą░ą┐čāčüą║ą░ąĄčé Teensy Loader, ą║ąŠą│ą┤ą░ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ (ą┐čĆąĖ ą▓čŗą▒ąŠčĆąĄ ą▓ ą╝ąĄąĮčÄ ąĪą║ąĄčéčć -> ąŚą░ą│čĆčāąĘą║ą░, ąĖą╗ąĖ ą┐čĆąĖ ąĮą░ąČą░čéąĖąĖ ą│ąŠčĆčÅčćąĖčģ ą║ą╗ą░ą▓ąĖčł Ctrl+U). ąĢčüą╗ąĖ ąÆą░čł čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą║ąŠą┤ čüąŠčģčĆą░ąĮąĄąĮ ą▓ HEX-č乊čĆą╝ą░č鹥 čäą░ą╣ą╗ą░, č鹊 Teensy Loader ą╝ąŠąČąĄčé čéą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ąŠčéą┤ąĄą╗čīąĮąŠ, čćč鹊ą▒čŗ ąĘą░ą┐ąĖčüą░čéčī HEX-čäą░ą╣ą╗ ą▓ ą┐ą░ą╝čÅčéčī flash ą┐ą╗ą░čéą║ąĖ Teensy.
ąĀąĖčü. 15. ą×čüąĮąŠą▓ąĮąŠąĄ ąŠą║ąĮąŠ čāčéąĖą╗ąĖčéčŗ Teensy Loader.
ąÉą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖą╣ ą▓čģąŠą┤ ą▓ čĆąĄąČąĖą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ . ą¤čĆąĖ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĄ ą┤ą╗čÅ Teensy ą┐ąŠčüą╗ąĄ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąŠą▒čŗčćąĮąŠ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ą░čÅ ąĘą░ą│čĆčāąĘą║ą░. ąŻčéąĖą╗ąĖčéą░ "teensy_reboot" ąĖčēąĄčé Teensy ąĮą░ ą▓čüąĄčģ ą┐ąŠčĆčéą░čģ USB, ąĖ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ąĘą░ą┐čĆąŠčü (serial baud rate ąĖą╗ąĖ HID feature report) ą┤ą╗čÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą│ąŠ ą┐ąĄčĆąĄčģąŠą┤ą░ ą▓ čĆąĄąČąĖą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ.
Program Pushbutton . ąĢčüą╗ąĖ ą║ąŠą┤, ą║ąŠč鹊čĆčŗą╣ čĆą░ąĮąĄąĄ ą▒čŗą╗ ąĘą░ą┐ąĖčüą░ąĮ ą▓ Teensy, ąĮąĄ ą┐čĆąŠčüą╗čāčłąĖą▓ą░ąĄčé ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ USB, ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖą╣ ą▓čģąŠą┤ ą▓ čĆąĄąČąĖą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĮąĄą▓ąŠąĘą╝ąŠąČąĄąĮ. ąöą╗čÅ čŹč鹊ą│ąŠ čüą╗čāčćą░čÅ ąĮą░ ą┐ą╗ą░č鹥 čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą║ąĮąŠą┐ą║ą░, ąĮą░ąČą░čéąĖąĄ ąĮą░ ą║ąŠč鹊čĆčāčÄ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé Teensy ą▓ čĆąĄąČąĖą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▓ąŠčüčüčéą░ąĮąŠą▓ąĖčéčīčüčÅ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ą┐ą╗ąŠčģąŠą│ąŠ ą║ąŠą┤ą░. ąŻą┤ąĄčƹȹ░ąĮąĖąĄ čŹč鹊ą╣ ą║ąĮąŠą┐ą║ąĖ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé Teensy ą▓ čĆąĄąČąĖą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ. ąŁč鹊 ąĮąĄ "ą║ąĮąŠą┐ą║ą░ čüą▒čĆąŠčüą░", ą║ąŠč鹊čĆą░čÅ ą┐ąĄčĆąĄąĘą░ą┐čāčüčéąĖčé ąÆą░čłčā ą┐čĆąŠą│čĆą░ą╝ą╝čā. ąŁčéą░ ą║ąĮąŠą┐ą║ą░ čüą┐ąĄčåąĖą░ą╗čīąĮąŠ ą▓čŗą┤ąĄą╗ąĄąĮą░ ą┤ą╗čÅ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĖąĘ ą┐ą╗ąŠčģąŠą│ąŠ ą║ąŠą┤ą░. ąØąŠąČą║ą░ ą┤ą╗čÅ čäčāąĮą║čåąĖąĖ Program Pushbutton čéą░ą║ąČąĄ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▓ąĮąĄčłąĮąĄą╣ ą░ą┐ą┐ą░čĆą░čéčāčĆąĄ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ ą┐ą╗ą░čéčā ą▓ čĆąĄąČąĖą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ.
Red LED . ąÜčĆą░čüąĮčŗą╣ čüą▓ąĄč鹊ą┤ąĖąŠą┤ ą▓čŗą┤ąĄą╗ąĄąĮ ą┤ą╗čÅ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ ąĘą░ą│čĆčāąĘčćąĖą║ą░ (Bootloader Active). ąÜąŠą│ą┤ą░ ąĘą░ą│čĆčāąĘčćąĖą║ ą░ą║čéąĖą▓ąĄąĮ ąĖ ąČą┤ąĄčé ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ čü ą║ąŠą╝ą┐čīčÄč鹥čĆąŠą╝, ą║čĆą░čüąĮčŗą╣ čüą▓ąĄč鹊ą┤ąĖąŠą┤ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ąĮąĄ čÅčĆą║ąŠąĄ čüą▓ąĄč湥ąĮąĖąĄ. ąÜąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąĘą░ą┐ąĖčüčī ąĘą░ą│čĆčāąĘčćąĖą║ąŠą╝ ą▓ ą┐ą░ą╝čÅčéčī flash, čüą▓ąĄč湥ąĮąĖąĄ čüčéą░ąĮąŠą▓ąĖčéčüčÅ čÅčĆą║ąĖą╝.
ąĀąĖčü. 16. LED, ąŠč鹊ą▒čĆą░ąČą░čÄčēąĖą╣ čüąŠčüč鹊čÅąĮąĖąĄ ąĘą░ą│čĆčāąĘčćąĖą║ą░.
Reset . ąØą░ ą┐ą╗ą░č鹥 Teensy 4.0 ąĮąĄčé ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ čüą▒čĆąŠčüą░. ąĪą▒čĆąŠčü ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ, čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čüč鹊čĆąŠąČąĄą▓čŗčģ čéą░ą╣ą╝ąĄčĆąŠą▓, ąĖą╗ąĖ čü ą┐ąŠą╝ąŠčēčīčÄ čĆąĄą│ąĖčüčéčĆą░ SCB_AIRCR.
Memory Wipe & LED Blink Restore . ąĢčüą╗ąĖ ą║ąĮąŠą┐ą║ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čāą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ č鹥č湥ąĮąĖąĄ 13 .. 17 čüąĄą║čāąĮą┤, ą┐ą╗ą░čéą░ Teensy 4.0 ą┐ąŠą╗ąĮąŠčüčéčīčÄ čüąŠčéčĆąĄčé 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝čāčÄ ą┐ą░ą╝čÅčéčī ąĖ ą▓ąŠčüčüčéą░ąĮąŠą▓ąĖčé ą▓ ą┐ą░ą╝čÅčéąĖ flash ą┐čĆąŠčüč鹥ą╣čłčāčÄ ą┐čĆąŠą│čĆą░ą╝ą╝čā, ą╝ąĖą│ą░čÄčēčāčÄ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝ (simple LED blink). ąÆ ąĮą░čćą░ą╗ąĄ čŹč鹊ą│ąŠ ąĖąĮč鹥čĆą▓ą░ą╗ą░ ą▓čĆąĄą╝ąĄąĮąĖ čāą┤ąĄčƹȹ░ąĮąĖčÅ ą║ąĮąŠą┐ą║ąĖ red LED ą▒čāą┤ąĄčé ąĮąĄą┤ąŠą╗ą│ąŠ ą╝ąĖą│ą░čéčī. ąÜąŠą│ą┤ą░ ą┐ą░ą╝čÅčéčī flash čüčéąĖčĆą░ąĄčéčüčÅ, red LED čÅčĆą║ąŠ čüą▓ąĄčéąĖčéčüčÅ. ą¤ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ Teensy 4.0 ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘąĖčéčüčÅ ąĖ ąĘą░ą┐čāčüčéąĖčé ą┐čĆąŠą│čĆą░ą╝ą╝čā simple LED blink, čüą▓ąĄč鹊ą┤ąĖąŠą┤ LED ą▒čāą┤ąĄčé ą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą╝ąĖą│ą░čéčī.
Bootloader Chip . ąŚą░ą│čĆčāąĘčćąĖą║ Teensy 4.0 čģčĆą░ąĮąĖčéčüčÅ ą▓ ąŠčéą┤ąĄą╗čīąĮąŠą╣ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ ą┐ą░ą╝čÅčéąĖ. ąÆčüčÅ ąŠčüąĮąŠą▓ąĮą░čÅ ą┐ą░ą╝čÅčéčī čćąĖą┐ą░ ą┤ąŠčüčéčāą┐ąĮą░ ą┤ą╗čÅ ąÆą░čłąĄą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ. ą¤čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ąÆą░čłą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĘą░ą┐čāčüčéąĖčéčüčÅ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ. ąŚą░ą│čĆčāąĘčćąĖą║ ąĮąĄ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓ ą╝ąŠą╝ąĄąĮčé čüčéą░čĆčéą░ (startup), ą║ą░ą║ čŹč鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąĄ Arduino-čüąŠą▓ą╝ąĄčüčéąĖą╝čŗčģ ą┐ą╗ą░čé. ąÆčŗą┤ąĄą╗ąĄąĮąĮčŗą╣ čäąĖąĘąĖč湥čüą║ąĖ čćąĖą┐ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĘą░čēąĖčéąĖčéčī ąĘą░ą│čĆčāąĘčćąĖą║ Teensy ąŠčé ą┤ąŠčüčéčāą┐ą░ čüąŠ čüč鹊čĆąŠąĮčŗ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, čćč鹊 ąĮąĄ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÄ flash ą┐ąŠą▓čĆąĄą┤ąĖčéčī ąĖą╗ąĖ čüč鹥čĆąĄčéčī ąĘą░ą│čĆčāąĘčćąĖą║.
Code Security . Teensy 4.0 ą▓ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ąĘą░čēąĖčéčā ą║ąŠą┤ą░ (code security), čłąĖčäčĆąŠą▓ą░ąĮąĖąĄ ąĖ ą░čāč鹥ąĮčéąĖčäąĖą║ą░čåąĖčÄ. ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ čŹčéąĖčģ čäčāąĮą║čåąĖą╣ ą┐ą╗ą░ąĮąĖčĆčāąĄčéčüčÅ ą▓ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┤ą╗čÅ ą▒čāą┤čāčēąĖčģ ą┐ą╗ą░čé.
[ąĪą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ čäčāąĮą║čåąĖąĖ ]
Nested Interrupt Controller . ąÆąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▓ą╗ąŠąČąĄąĮąĮąŠčüčéąĖ ą▓čŗąĘąŠą▓ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ąĮą░čüčéčĆąŠąĄąĮąĮčŗą╝ąĖ ą┐čĆąĖąŠčĆąĖč鹥čéą░ą╝ąĖ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┤ąŠą▒ąĖčéčīčüčÅ ąĮąĖąĘą║ąŠą╣ ą╗ą░č鹥ąĮčéąĮąŠčüčéąĖ ąĘą░ą┐čāčüą║ą░ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (ISR), čüą║ąŠčĆąŠčüčéčī ąĖ čüą▓ąŠąĄą▓čĆąĄą╝ąĄąĮąĮąŠčüčéčī ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą║ąŠč鹊čĆčŗčģ ą║čĆąĖčéąĖč湥čüą║ąĖ ą▓ą░ąČąĮą░. ąæąĖą▒ą╗ąĖąŠč鹥ą║ąĖ Teensyduino ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą▓ą╗ąŠąČąĄąĮąĮąŠčüčéčī ą▓čŗąĘąŠą▓ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (interrupt nesting) čü čāčĆąŠą▓ąĮčÅą╝ąĖ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ą╝ ą╝ąĮąŠą│ąĖčģ čéąĖą┐ąŠą▓ čģąŠčĆąŠčłąŠ čĆą░ą▒ąŠčéą░čéčī ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝.
Direct Memory Access (DMA). ąŻ ą┐čĆąŠčåąĄčüčüąŠčĆą░ Teensy 4.0 ąĄčüčéčī 32-ą║ą░ąĮą░ą╗čīąĮčŗą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐čĆčÅą╝ąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░ ą║ ą┐ą░ą╝čÅčéąĖ (DMA) ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ. ąŁčéąĖ ą║ą░ąĮą░ą╗čŗ DMA ąĖčüą┐ąŠą╗čīąĘčāčÄčé ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ Audio, LED ąĖ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ ąĮą░ 菹║čĆą░ąĮ. ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗ DMAChannel.h, ąŠą┐ąĖčüčŗą▓ą░čÄčēąĖą╣ čāčĆąŠą▓ąĄąĮčī ą░ą▒čüčéčĆą░ą║čåąĖąĖ ą┤ą╗čÅ DMA. ąæą╗ąŠą║ąĖ ą┐ąĄčĆąĖč乥čĆąĖąĖ USB device, USB host, SD card ąĖ Ethernet čéą░ą║ąČąĄ ąĖą╝ąĄčÄčé ą▓čüčéčĆąŠąĄąĮąĮčāčÄ ą┐ąŠą┤ą┤ąĄčƹȹ║čā ą┤ą╗čÅ čüąŠą▓ą╝ąĄčüčéąĮąŠą╣ čĆą░ą▒ąŠčéčŗ čü DMA.
Random Number Generator . ąōąĄąĮąĄčĆą░č鹊čĆ čüą╗čāčćą░ą╣ąĮčŗčģ čćąĖčüąĄą╗ čŹč鹊 ą░ą┐ą┐ą░čĆą░čéąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ, ą│ąĄąĮąĄčĆąĖčĆčāčÄčēąĄąĄ čüą╗čāčćą░ą╣ąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ čü ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ čüą║ąŠčĆąŠčüčéčīčÄ. ąöą╗čÅ ą┤ąŠčüčéčāą┐ą░ ą║ ą│ąĄąĮąĄčĆą░č鹊čĆčā čüą╗čāčćą░ą╣ąĮčŗčģ čćąĖčüą╗ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ Entropy .
Cryptographic Acceleration . ąĪąĖą╝ą╝ąĄčéčĆąĖčćąĮčŗąĄ ą░ą╗ą│ąŠčĆąĖčéą╝čŗ čłąĖčäčĆąŠą▓ą░ąĮąĖčÅ ąĖ ąŠą┤ąĮąŠąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╣ čģčŹčł ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░čüčüčćąĖčéą░ąĮ ą░ą┐ą┐ą░čĆą░čéąĮąŠ, ąŠą┤ąĮą░ą║ąŠ ą┐ąŠą║ą░ ąĮąĄčé ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ, ą║ąŠč鹊čĆą░čÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čŹčéčā ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī.
Temperature Sensor . ąÆčüčéčĆąŠąĄąĮąĮčŗą╣ ą┤ą░čéčćąĖą║ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ą╝ąŠąČąĄčé ąĖąĘą╝ąĄčĆąĖčéčī č鹥ą╝ą┐ąĄčĆą░čéčāčĆčā ą▓ąĮčāčéčĆąĖ ąŠčüąĮąŠą▓ąĮąŠą│ąŠ čćąĖą┐ą░. ąöą╗čÅ ą┤ąŠčüčéčāą┐ą░ ą║ čŹč鹊ą╝čā ą┤ą░čéčćąĖą║čā ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ InternalTemperature .
[ąóąĄčģąĮąĖč湥čüą║ą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ]
i.MX RT1060 Processor Reference Manual site:pjrc.com - ą▓čüčÅ ą┐ąŠą╗ąĄąĘąĮą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą┐ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÄ ą┐čĆąŠčåąĄčüčüąŠčĆą░.
[ąōą░ą▒ą░čĆąĖčéąĮčŗąĄ čĆą░ąĘą╝ąĄčĆčŗ ]
ąĀąĖčü. 17. ąÆąĖą┤ ąĮą░ ą│ą░ą▒ą░čĆąĖčéčŗ čü ą▓ąĄčĆčģąĮąĄą╣ čüč鹊čĆąŠąĮčŗ ą┐ą╗ą░čéčŗ.
ąĀąĖčü. 18. ąĀą░ąĘą╝ąĄčĆčŗ ą┐ą╗ą░čéčŗ.
ąĀąĖčü. 19. ąÆąĖą┤ ąĮą░ ą│ą░ą▒ą░čĆąĖčéčŗ čü ąĮąĖąČąĮąĄą╣ čüč鹊čĆąŠąĮčŗ ą┐ą╗ą░čéčŗ.
[ą¤čĆąĖąĮčåąĖą┐ąĖą░ą╗čīąĮą░čÅ čüčģąĄą╝ą░ ]
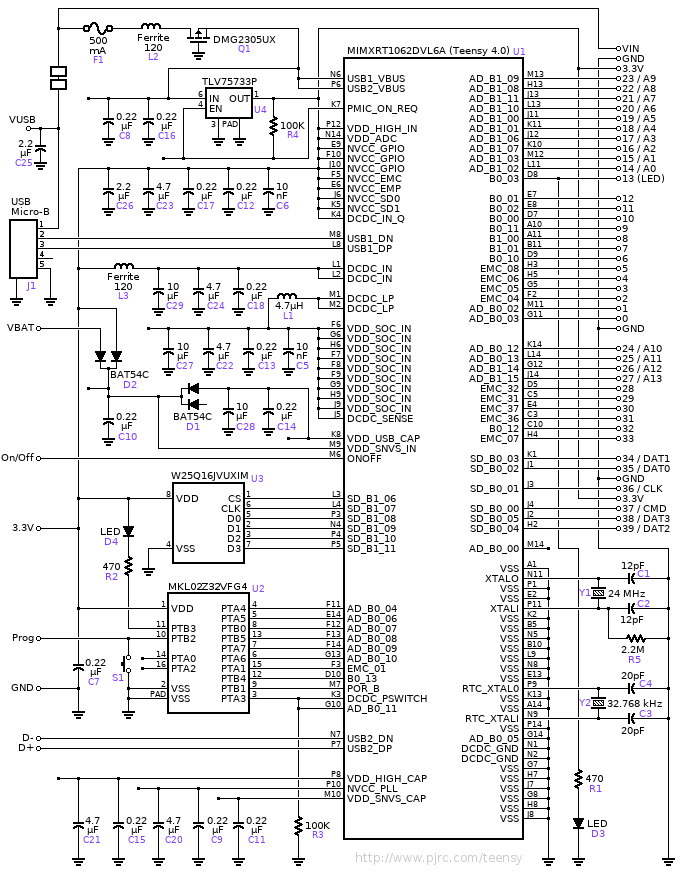
ąĀąĖčü. 20. ą¤čĆąĖąĮčåąĖą┐ąĖą░ą╗čīąĮą░čÅ čüčģąĄą╝ą░ Teensy4.0.
[ąĀą░ąĘą╝ąĄčēąĄąĮąĖąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ ąĮą░ ą┐ą╗ą░č鹥 ]
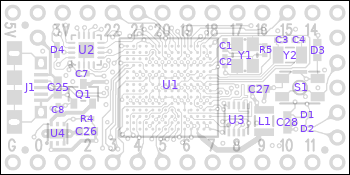
ąĀąĖčü. 21. ąĀą░ąĘą╝ąĄčēąĄąĮąĖąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ ąĮą░ ą▓ąĄčĆčģąĮąĄą╣ čüč鹊čĆąŠąĮąĄ ą┐ą╗ą░čéčŗ Teensy4.0.
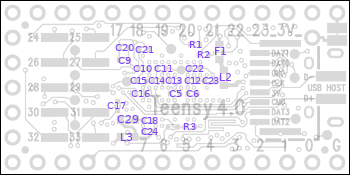
ąĀąĖčü. 22. ąĀą░ąĘą╝ąĄčēąĄąĮąĖąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ ąĮą░ ąĮąĖąČąĮąĄą╣ čüč鹊čĆąŠąĮąĄ ą┐ą╗ą░čéčŗ Teensy4.0.
[ąĪčüčŗą╗ą║ąĖ ]
1 . Teensy 4.0 Development Board site:pjrc.com.2 . MIMXRT1062DVL6A site:nxp.com.3 . Download Teensyduino site:pjrc.com.4 . Teensy 4.0 site:aliexpress.com.