|
ąÆ čŹč鹊ą╣ čüčéą░čéčīąĄ (ą┐ąĄčĆąĄą▓ąŠą┤ [1]) ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ą┐čĆąŠčüč鹊ąĄ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ą┐ąŠ ą░ą┐ą┐ą░čĆą░čéčāčĆąĄ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÄ ąĮą░ ą┐ą╗ą░čéč乊čĆą╝ąĄ čćąĖą┐ąŠą▓ ESP32 čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čÅąĘčŗą║ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ Rust.
ąÆ čŹč鹊ą╝ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąĄ ą╝čŗ čüč乊ą║čāčüąĖčĆčāąĄą╝čüčÅ ąĮą░ ESP32, ąĮąĄą┤ąŠčĆąŠą│ąŠą╝ ąĖ ą╝ąŠčēąĮąŠą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ, ą║ąŠč鹊čĆčŗą╣ ąŠčéą╗ąĖčćąĮąŠ ą┐ąŠą┤ąŠą╣ą┤ąĄčé ą║ą░ą║ ą┤ą╗čÅ ąĮąŠą▓ąĖčćą║ąŠą▓, čéą░ą║ ąĖ ą┤ą╗čÅ čŹą║čüą┐ąĄčĆč鹊ą▓. ąÆčŗ ą╝ąŠąČąĄč鹥 ą║čāą┐ąĖčéčī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ESP32 ą║ą░ą║ čćą░čüčéčī ą║ą░ą║ąŠą│ąŠ-ąĮąĖą▒čāą┤čī čüčéą░čĆč鹥čĆ-ą║ąĖčéą░, ąĮą░ ą┐ą╗ą░č鹥 ą║ąŠč鹊čĆąŠą│ąŠ ą╝ąŠą│čāčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą┤ą░čéčćąĖą║ąĖ, čéą░ą║ąĖąĄ ą║ą░ą║ ą┤ą░čéčćąĖą║ąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ąĖą╗ąĖ ąŠčüą▓ąĄčēąĄąĮąĖčÅ.
[ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ]
ąöą╗čÅ ESP32 ąĮą░ą┐ąĖčüą░ąĮąŠ ą▒ąŠą╗čīčłąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čģąŠčĆąŠčłąŠ ą┤ąŠą║čāą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą╝ąŠą│čāčé ą▓ą░ą╝ ą▒čŗčüčéčĆąŠ ąŠčüą▓ąŠąĖčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ Rust, čüą╝. ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ ą┐ąŠ ESP-RS [3].
ą£čŗ čĆą░čüčüą╝ąŠčéčĆąĖą╝ čłą░ą│ąĖ ą┤ą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ ESP32-ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĮą░ Rust, ąŠčé čāčüčéą░ąĮąŠą▓ą║ąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗčģ čāčéąĖą╗ąĖčé ą┤ąŠ ąĮą░ą┐ąĖčüą░ąĮąĖčÅ ą▓ą░čłąĄą╣ ą┐ąĄčĆą▓ąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ. ąóą░ą║ąČąĄ ą▒čāą┤čāčé ąŠą┐ąĖčüą░ąĮčŗ čĆąĄčłąĄąĮąĖčÅ ą▓ąŠąĘą╝ąŠąČąĮčŗčģ ą┐čĆąŠą▒ą╗ąĄą╝, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ą▓čüąĄą│ą┤ą░ ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ ąŠčäąĖčåąĖą░ą╗čīąĮąŠą╣ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ.
ą©ą░ą│ 1: std ą┐čĆąŠčéąĖą▓ no_std
ąØą░ čÅąĘčŗą║ąĄ Rust čüčāčēąĄčüčéą▓čāąĄčé ą┤ą▓ą░ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą┐ąŠą┤čģąŠą┤ą░ ą║ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÄ: ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┐ąŠą╗ąĮąŠčüčéčīčÄ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╣ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ (ąŠą┐čåąĖčÅ std) ąĖą╗ąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĮąĄčüčéą░ąĮą┤ą░čĆčéąĮčŗčģ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ (ąŠą┐čåąĖčÅ no_std). ą¤ąŠąĮąĖą╝ą░ąĮąĖąĄ čĆą░ąĘąĮąĖčåčŗ ą╝ąĄąČą┤čā čŹčéąĖą╝ąĖ ą▓ą░čĆąĖą░ąĮčéą░ą╝ąĖ ąĖą╝ąĄąĄčé čĆąĄčłą░čÄčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐čĆąĖ čĆą░ą▒ąŠč鹥 čüąŠ ą▓čüčéčĆąŠąĄąĮąĮčŗą╝ąĖ čüąĖčüč鹥ą╝ą░ą╝ąĖ, ą│ą┤ąĄ čĆąĄčüčāčĆčüčŗ (ą┐ą░ą╝čÅčéčī ąĖ ą▓čĆąĄą╝čÅ ą┐čĆąŠčåąĄčüčüąŠčĆą░) čćą░čüč鹊 ąŠą│čĆą░ąĮąĖč湥ąĮčŗ.
std
ŌĆó ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ std ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą╝ąĮąŠąČąĄčüčéą▓ąŠ čäčāąĮą║čåąĖą╣ "ąĖąĘ ą║ąŠčĆąŠą▒ą║ąĖ", čéą░ą║ąĖąĄ ą║ą░ą║ ą║ąŠą╗ą╗ąĄą║čåąĖąĖ (ąĮą░ą┐čĆąĖą╝ąĄčĆ Vec), čĆą░ą▒ąŠčéą░ čü čäą░ą╣ą╗ą░ą╝ąĖ, čüąĄč鹥ą▓čŗą╝ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ą╝ąĖ ąĖ ą┐ąŠč鹊ą║ą░ą╝ąĖ. ąŁč鹊 čāčüą║ąŠčĆčÅąĄčé ąĖ čāą┐čĆąŠčēą░ąĄčé čĆą░ąĘčĆą░ą▒ąŠčéą║čā.
ŌĆó ą£ąĮąŠą│ąĖąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ Rust ąĖą╝ąĄčÄčé ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčī ąŠčé std, ą┐ąŠčŹč鹊ą╝čā ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ std ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▓ąŠčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čłąĖčĆąŠą║ąĖą╝ čüą┐ąĄą║čéčĆąŠą╝ ąĖą╝ąĄčÄčēąĖčģčüčÅ čĆąĄčüčāčĆčüąŠą▓.
ŌĆó ąĢčüą╗ąĖ ą▓čŗ čĆą░ąĘčĆą░ą▒ą░čéčŗą▓ą░ą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ Rust ą┤ą╗čÅ ą┤ąĄčüą║č鹊ą┐ą░ PC ąĖą╗ąĖ čüąĄčĆą▓ąĄčĆą░, č鹊 ą╝ąĮąŠą│ąŠąĄ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĖ ESP32 ąĮą░ Rust ą┐ąŠą║ą░ąČąĄčéčüčÅ ą▓ą░ą╝ ąĘąĮą░ą║ąŠą╝čŗą╝ ąĖ čāą┤ąŠą▒ąĮčŗą╝.
no_std
ŌĆó no_std čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮą░ ą┤ą╗čÅ čüąĖčüč鹥ą╝ čü ąŠč湥ąĮčī ąŠą│čĆą░ąĮąĖč湥ąĮąĮčŗą╝ąĖ čĆąĄčüčāčĆčüą░ą╝ąĖ, čćč鹊 ąĖą┤ąĄą░ą╗čīąĮąŠ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ čāčüčéčĆąŠą╣čüčéą▓.
ŌĆó ąÆčŗ ą╝ąŠąČąĄč鹥 ąĘą░ą┐čāčüą║ą░čéčī no_std-ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ąĮą░ ą░ą┐ą┐ą░čĆą░čéčāčĆąĄ ą▒ąĄąĘ OS, čćč鹊 菹║ąŠąĮąŠą╝ąĖčé čĆąĄčüčāčĆčüčŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ŌĆó ą¤čĆąŠą│čĆą░ą╝ą╝čŗ ą┐ąŠą╗čāčćą░čÄčéčüčÅ ą╝ąĄąĮčīčłąĄ ą┐ąŠ čĆą░ąĘą╝ąĄčĆčā, čćč鹊 ą╗čāčćčłąĄ ą▓čüąĄą│ąŠ čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ čāčüčéčĆąŠą╣čüčéą▓ą░čģ, ą│ą┤ąĄ ąŠą▒čŖąĄą╝ ą┐ą░ą╝čÅčéąĖ ąŠą│čĆą░ąĮąĖč湥ąĮ.
ą¤čĆąĖ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĄ ąĮą░ Rust ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ čāčüčéčĆąŠą╣čüčéą▓, ą║ąŠą│ą┤ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ čĆą░ą▒ąŠčéą░čÄčé ą▓ čāčüą╗ąŠą▓ąĖčÅčģ ąŠč湥ąĮčī ąŠą│čĆą░ąĮąĖč湥ąĮąĮąŠą╣ ąŠą┐ąĄčĆą░čéąĖą▓ąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ ąĖ ą▒ąĄąĘ ąĮą░ą╗ąĖčćąĖčÅ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ, ą╗čāčćčłąĖą╝ ą▓čŗą▒ąŠčĆąŠą╝ ą▒čāą┤ąĄčé no_std. ąŁč鹊čé ą▓ą░čĆąĖą░ąĮčé čāą┤ą░ą╗ąĖčé čäčāąĮą║čåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠčéčĆąĄą▒ą╗čÅčÄčé ą▒ąŠą╗čīčłąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüąĖčüč鹥ą╝ąĮčŗčģ čĆąĄčüčāčĆčüąŠą▓, čüąŠčüčĆąĄą┤ąŠč鹊čćąĖą▓ ą▓ąĮąĖą╝ą░ąĮąĖąĄ ąĮą░ ąŠčüąĮąŠą▓ąĮąŠą╝ čäčāąĮą║čåąĖąŠąĮą░ą╗ąĄ, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠą╝ ą┤ą╗čÅ ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓ąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ.
ąÆ čŹč鹊ą╝ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąĄ ą╝čŗ ą▒čāą┤ąĄą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī no_std ą┤ą╗čÅ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠą╣ čĆą░ą▒ąŠčéčŗ čü ą░ą┐ą┐ą░čĆą░čéčāčĆąŠą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ESP32.
ą©ą░ą│ 2: čāčüčéą░ąĮąŠą▓ą║ą░
ą¤ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą╝ąŠąČąĮąŠ ą▒čāą┤ąĄčé ąĮą░čćą░čéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī, ąĮą░ą╝ ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ čāčüčéą░ąĮąŠą▓ąĖčéčī čĆą░ą▒ąŠč湥ąĄ ąŠą║čĆčāąČąĄąĮąĖąĄ, ąŠčüąĮąŠą▓ą░ąĮąĮąŠąĄ ąĮą░ ą░čĆčģąĖč鹥ą║čéčāčĆąĄ ą▓ą░čłąĄą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ą¦ąĖą┐čŗ Espressif SoC (System on Chip, čüąĖčüč鹥ą╝čŗ ąĮą░ čćąĖą┐ąĄ, ą┤čĆčāą│ąŠąĄ ąĮą░ąĘą▓ą░ąĮąĖąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░) ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą░čĆčģąĖč鹥ą║čéčāčĆčŗ, čéą░ą║ąĖąĄ ą║ą░ą║ RISC-V ąĖ Xtensa, ąĖ ą┐čĆąŠčåąĄčüčü čāčüčéą░ąĮąŠą▓ą║ąĖ ąĘą░ą▓ąĖčüąĖčé ąŠčé č鹊ą│ąŠ, čćąĖą┐ ą║ą░ą║ąŠą╣ ą░čĆčģąĖč鹥ą║čéčāčĆčŗ ą▓čŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥.
ąśą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖčÅ ą░čĆčģąĖč鹥ą║čéčāčĆčŗ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ąĮą░ ą║ą░ą║ąŠą╣ ą░čĆčģąĖč鹥ą║čéčāčĆąĄ čĆą░ą▒ąŠčéą░ąĄčé ą▓ą░čł čćąĖą┐ ESP32.
Xtensa: ąĮą░ čŹč鹊ą╣ ą░čĆčģąĖč鹥ą║čéčāčĆąĄ čĆą░ą▒ąŠčéą░čÄčé čćąĖą┐čŗ ESP32 (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ESP32-WROOM, ESP32-Ethernet-Kit ąĖ ą┤čĆčāą│ąĖąĄ).
RISC-V: čŹč鹊 čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ čćąĖą┐ą░ ESP32-C3 (ą┐ą╗ą░čéčŗ ESP32-C3 SuperMini, LUATOS.COM/T/ESP32C3, LUATOS.COM/T/ESP32C3 b ąĖ ą┤čĆčāą│ąĖąĄ).
ą¦č鹊ą▒čŗ čāąĘąĮą░čéčī, ą║ ą║ą░ą║ąŠą╣ ą░čĆčģąĖč鹥ą║čéčāčĆąĄ ąŠčéąĮąŠčüąĖčéčüčÅ ą▓ą░čłąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ, ąŠą▒čĆą░čéąĖč鹥čüčī ą║ ąĄą│ąŠ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ, ąŠą▒čŗčćąĮąŠ ą┤ąŠčüčéčāą┐ąĮąŠą╣ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝ ą┤ą░čéą░čłąĖč鹥 ąĖą╗ąĖ ąĮą░ čüą░ą╣č鹥 ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ ą┐ą╗ą░čéčŗ.
ąŻčüčéą░ąĮąŠą▓ą║ą░ čéčāą╗č湥ą╣ąĮą░. ą¦č鹊ą▒čŗ čĆą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čéčī Rust-ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĮą░ čćąĖą┐ą░čģ Espressif SoC, ąĮą░ą╝ ąĮčāąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ą┐ąŠą┤čģąŠą┤čÅčēąĖą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖą╣ (čéčāą╗č湥ą╣ąĮ). ąŁč鹊 č鹊 ą╝ąĄčüč鹊, ą│ą┤ąĄ ą▓čüčéčāą┐ą░ąĄčé ą▓ ąĖą│čĆčā espup [2] ŌĆö čŹčéą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐ąŠą╝ąŠąČąĄčé čāčüčéą░ąĮąŠą▓ąĖčéčī ąĖ ąŠą▒čüą╗čāąČąĖą▓ą░čéčī čāčéąĖą╗ąĖčéčŗ čéčāą╗č湥ą╣ąĮą░ ą┤ą╗čÅ ą▓ą░čłąĄą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ą░čĆčģąĖč鹥ą║čéčāčĆčŗ.
ą¦č鹊ą▒čŗ čāčüčéą░ąĮąŠą▓ąĖčéčī espup, ąĘą░ą┐čāčüčéąĖč鹥 ą▓ č鹥čĆą╝ąĖąĮą░ą╗ąĄ čüą╗ąĄą┤čāčÄčēčāčÄ ą║ąŠą╝ą░ąĮą┤čā:
ąŚą░č鹥ą╝ čāčüčéą░ąĮąŠą▓ąĖč鹥 ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ čéčāą╗č湥ą╣ąĮčŗ:
ą¤ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▓čŗ čāą▓ąĖą┤ąĖč鹥 čüąŠąŠą▒čēąĄąĮąĖąĄ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ, ą│ą┤ąĄ ą▓ą░ą╝ čüąŠą▓ąĄčéčāčÄčé čāčüčéą░ąĮąŠą▓ąĖčéčī ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ ąŠą║čĆčāąČąĄąĮąĖčÅ:
[info]: Installation successfully completed!
To get started, you need to set up some environment variables by running:
'. $HOME/export-esp.sh'
This step must be done every time you open a new terminal.
See other methods for setting the environment in
< https://esp-rs.github.io/book/installation/riscv-and-xtensa.html#3-set-
up-the-environment-variables>
ąĢčüą╗ąĖ ą▓čŗ čüč鹊ą╗ą║ąĮąĄč鹥čüčī čü ąŠčłąĖą▒ą║ąŠą╣:
Caused by:
process didn't exit successfully: `/tmp/cargo-installlfnEMgk/release/build
/libudev-sys-678fd6d3ec7ef9ed/build-script-build` (exit status: 101)
...
--- stderr
thread 'main' panicked at '/home/danielez/.cargo/registry/src/index.crates
.io-6f17d22bba15001f/libudev-sys-0.1.4/build.rs:38:41:
called `Result::unwrap()` on an `Err` value: "pkg-config exited with
status code 1
PKG_CONFIG_ALLOW_SYSTEM_LIBS=1 PKG_CONFIG_ALLOW_SYSTEM_CFLAGS=1 pkg-config
--libs --cflags libudev
The system library `libudev` required by crate `libudev-sys` was not found.
The pkg-config utility tells us that `libudev.pc` needs to be installed and
the PKG_CONFIG_PATH environment variable must contain its parent directory.
NOTE: if you have installed the library, you may need to add PKG_CONFIG_PATH
to the directory containing `libudev.pc`.
"
.. č鹊 ą╝ąŠąČąĄč鹥 ąĄčæ ąĖčüą┐čĆą░ą▓ąĖčéčī ąĘą░ą┐čāčüą║ąŠą╝ ą║ąŠą╝ą░ąĮą┤čŗ (čüą╝. https://github.com/esp-rs/espflash/issues/108):
$ sudo apt-get install libudev-dev
[ąĪąŠąĘą┤ą░ąĮąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĮą░ ąŠčüąĮąŠą▓ąĄ čłą░ą▒ą╗ąŠąĮą░]
ąĪą╗ąĄą┤čāčÄčēąĖą╣ čłą░ą│ - čüąŠąĘą┤ą░ąĮąĖąĄ ą┐čĆąŠąĄą║čéą░ čü ą┐ąŠą╝ąŠčēčīčÄ čłą░ą▒ą╗ąŠąĮą░.
ąŻčüčéą░ąĮąŠą▓ąĖč鹥 čāčéąĖą╗ąĖčéčā cargo-generate, ą║ąŠč鹊čĆą░čÅ ą┐ąŠąĘą▓ąŠą╗ąĖčé ą▓ą░ą╝ čüąŠąĘą┤ą░čéčī ąĮąŠą▓čŗą╣ ą┐čĆąŠąĄą║čé ąĮą░ ąŠčüąĮąŠą▓ąĄ čüčāčēąĄčüčéą▓čāčÄčēąĄą│ąŠ čłą░ą▒ą╗ąŠąĮą░:
$ cargo install cargo-generate
ąŚą░č鹥ą╝ čüą│ąĄąĮąĄčĆąĖčĆčāą╣č鹥 ą┐čĆąŠąĄą║čé čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čłą░ą▒ą╗ąŠąĮą░ esp-template:
$ cargo generate esp-rs/esp-template
ąÜąŠą│ą┤ą░ ą┐čĆąŠąĄą║čé čüą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ, ąŠčéą║čĆąŠą╣č鹥 ąĄą│ąŠ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, čü ą┐ąŠą╝ąŠčēčīčÄ ą╗čÄą▒ąŠą╣ ą▓ą░čłąĄą╣ čüčĆąĄą┤čŗ IDE ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ VScode, ąĖą╗ąĖ ą┐čĆąŠčüč鹊 ą┐ąĄčĆąĄą╣ą┤čÅ ą▓ ą┤ąĖčĆąĄą║č鹊čĆąĖčÄ ą┐čĆąŠąĄą║čéą░ ą▓ č鹥čĆą╝ąĖąĮą░ą╗ąĄ), ąĖ ą┐čĆąŠą▓ąĄčĆčīč鹥 ą║ąŠą┤ ą▓ąĮčāčéčĆąĖ čäą░ą╣ą╗ą░ src/main.rs. ąŁč鹊čé ą║ąŠą┤ ą▒čāą┤ąĄčé ą▓čŗą│ą╗čÅą┤ąĄčéčī ą┐čĆąĖą╝ąĄčĆąĮąŠ čéą░ą║:
#![no_std]
#![no_main]
use esp_backtrace as _;
use esp_hal::{ clock::ClockControl, delay::Delay, peripherals::Peripherals, prelude::*,
system::SystemControl,
};
#[entry]
fn main() -> ! {
let peripherals = Peripherals::take();
let system = SystemControl::new(peripherals.SYSTEM);
let clocks = ClockControl::max(system.clock_control).freeze();
let delay = Delay::new(&clocks);
esp_println::logger::init_logger_from_env();
loop {
log::info!("Hello world!");
delay.delay(500.millis());
}
}
ąöą░ą▓ą░ą╣č鹥 čĆą░ąĘą▒ąĄčĆąĄą╝čüčÅ čćč鹊 čéčāčé ą┐čĆąŠąĖčüčģąŠą┤ąĖčé.
ąŁčéą░ ą┤ąĖčĆąĄą║čéąĖą▓ą░ ą│ąŠą▓ąŠčĆąĖčé Rust ąĮąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüčéą░ąĮą┤ą░čĆčéąĮčāčÄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā, čćč鹊 čćą░čüč鹊 ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ čüąĖčüč鹥ą╝.
ąŁč鹊 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ąŠą▒čŗčćąĮą░čÅ č鹊čćą║ą░ ą▓čģąŠą┤ą░ main ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ. ąÆą╝ąĄčüč鹊 ąĮąĄčæ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ čāą║ą░ąĘčŗą▓ą░ąĄą╝ą░čÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ č鹊čćą║ą░ ą▓čģąŠą┤ą░ (custom entry point), čćč鹊 čÅą▓ą╗čÅąĄčéčüčÅ ąŠą┤ąĮąĖą╝ ąĖąĘ čéąĖą┐ąŠą▓čŗčģ čĆąĄčłąĄąĮąĖą╣ ą┤ą╗čÅ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ čüąĖčüč鹥ą╝.
ąŁč鹊 ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé č鹊čćą║čā ą▓čģąŠą┤ą░ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝čā čü ą┐ąŠą╝ąŠčēčīčÄ čäčāąĮą║čåąĖąĖ main, ąĖąĘ ą║ąŠč鹊čĆąŠą╣ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ąŠąĘą▓čĆą░čé (-> ! čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ ą┤ąĖą▓ąĄčĆą│ąĄąĮčéąĮčāčÄ čäčāąĮą║čåąĖčÄ).
ąÆčŗ čéą░ą║ąČąĄ ą╝ąŠąČąĄč鹥 ąĘą░ą╝ąĄčéąĖčéčī, čćč鹊 čüčéčĆąŠčćą║ąŠą╣ use esp_hal::{ ąĖą╝ą┐ąŠčĆčéąĖčĆčāąĄčéčüčÅ HAL. ąÉą▒ą▒čĆąĄą▓ąĖą░čéčāčĆą░ HAL ąŠąĘąĮą░čćą░ąĄčé Hardware Abstraction Layer, ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą░ą▒čüčéčĆą░ą║čåąĖąĖ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ, čćč鹊 čćą░čüč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ čüąĖčüč鹥ą╝.
let peripherals = Peripherals::take();
ąŁčéą░ čüčéčĆąŠą║ą░ ą┐ąŠą╗čāčćą░ąĄčé ą┤ąŠčüčéčāą┐ ą║ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
let system = SystemControl::new(peripherals.SYSTEM);
ąŁčéą░ čüčéčĆąŠą║ą░ ą░ą║čéąĖą▓ąĖčĆčāąĄčé čüąĖčüč鹥ą╝ąĮčŗą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ čüąĖčüč鹥ą╝ąĮčŗą╝ąĖ čāčéąĖą╗ąĖčéą░ą╝ąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
let clocks = ClockControl::max(system.clock_control).freeze();
ąŁč鹊 ąĘą░ą┐čāčüčéąĖčé čüąĖčüč鹥ą╝ąĮąŠąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ąĮą░ čüą░ą╝ąŠą╣ ą▓čŗčüąŠą║ąŠą╣ čćą░čüč鹊č鹥 ąĖ ą▒ą╗ąŠą║ąĖčĆčāąĄčé čŹč鹊 čüąŠčüč鹊čÅąĮąĖąĄ. ąŁč鹊 ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī čü čüą░ą╝ąŠą╣ ą▓čŗčüąŠą║ąŠą╣ ą▓ąŠąĘą╝ąŠąČąĮąŠą╣ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčīčÄ. ąæą╗ąŠą║ąĖčĆąŠą▓ą║ą░ (.freeze) čŹč鹊ą╣ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 čüą║ąŠčĆąŠčüčéčī ąŠčüčéą░ąĄčéčüčÅ ą┐ąŠčüč鹊čÅąĮąĮąŠą╣ ą▓ąŠ ą▓čĆąĄą╝čÅ čĆą░ą▒ąŠčéčŗ, ą┐ąŠčŹč鹊ą╝čā ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĮąĄąŠąČąĖą┤ą░ąĮąĮčŗčģ ąĘą░ą╝ąĄą┤ą╗ąĄąĮąĖą╣ ąĖą╗ąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖą╣ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ.
[ąÆčŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ - Hello World]
ą¤ąŠą┤ą║ą╗čÄčćąĖč鹥 ą▓ą░čłčā ą┐ą╗ą░čéą║čā č湥čĆąĄąĘ USB ąĖ ąĘą░ą┐čāčüčéąĖč鹥 ą║ąŠą╝ą░ąĮą┤čā:
ą¤čĆąĖ ą┐ąĄčĆą▓ąŠą╝ ąĘą░ą┐čāčüą║ąĄ ąĮą░ Linux ą▓čŗ ą╝ąŠąČąĄč鹥 čāą▓ąĖą┤ąĄčéčī čüą╗ąĄą┤čāčÄčēčāčÄ ąŠčłąĖą▒ą║čā:
WARNING: use --release
We *strongly* recommend using release profile when building esp-hal.
The dev profile can potentially be one or more orders of magnitude
slower than release, and may cause issues with timing-senstive
peripherals and/or devices.
Finished `dev` profile [optimized + debuginfo] target(s) in 0.09s
Running `espflash flash --monitor target/xtensa-esp32-none-elf/debug/rust-test-esp32`
[2024-08-01T21:27:30Z INFO ] Serial port: '/dev/ttyUSB0'
[2024-08-01T21:27:30Z INFO ] Connecting...
Error: espflash::serial_error
├Ś Failed to open serial port /dev/ttyUSB0
Ōö£ŌöĆŌ¢Č Error while connecting to device
Ōö£ŌöĆŌ¢Č IO error while using serial port: Permission denied
ŌĢ░ŌöĆŌ¢Č Permission denied
ąŁčéą░ ąŠčłąĖą▒ą║ą░ čüą▓čÅąĘą░ąĮą░ čü ąŠčéčüčāčéčüčéą▓ąĖąĄą╝ ą┐čĆą░ą▓ ą┤ąŠčüčéčāą┐ą░ č鹥ą║čāčēąĄą│ąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą║ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝, čćč鹊 ąĖčüą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ąŠą╣:
$ sudo usermod -a -G dialout $USER
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▓ą░čł ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą▒čŗą╗ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮ ą▓ ą│čĆčāą┐ą┐čā dialout, ą▓ą░ą╝ ąĮčāąČąĮąŠ ą┐ąĄčĆąĄą╗ąŠą│ąĖąĮąĖčéčīčüčÅ, čćč鹊ą▒čŗ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą▓čüčéčāą┐ąĖą╗ąĖ ą▓ čüąĖą╗čā. ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠ ą▓čŗ ą╝ąŠąČąĄč鹥 ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘąĖčéčī čüą▓ąŠą╣ ą║ąŠą╝ą┐čīčÄč鹥čĆ.
ąÆą░čłąĄ čćą╗ąĄąĮčüčéą▓ąŠ ą▓ ą│čĆčāą┐ą┐ąĄ dialout ą╝ąŠąČąĮąŠ ą┐čĆąŠą▓ąĄčĆąĖčéčī ą║ąŠą╝ą░ąĮą┤ąŠą╣:
ąæčāą┤ąĄčé ą▓čŗą▓ąĄą┤ąĄąĮ čüą┐ąĖčüąŠą║ ą│čĆčāą┐ą┐, ą▓ ą║ąŠč鹊čĆčŗąĄ ą▓čģąŠą┤ąĖčé č鹥ą║čāčēąĖą╣ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī, ąĖ ą▓ čŹč鹊ą╝ čüą┐ąĖčüą║ąĄ ą┤ąŠą╗ąČąĮą░ ą┐čĆąĖčüčāčéčüčéą▓ąŠą▓ą░čéčī ą│čĆčāą┐ą┐ą░ dialout.
ąóąĄą┐ąĄčĆčī čüąĮąŠą▓ą░ ą┐ąŠą┐čĆąŠą▒čāą╣č鹥 ąĘą░ą┐čāčüčéąĖčéčī ą║ąŠą╝ą░ąĮą┤čā:
ąÆčŗ ą┤ąŠą╗ąČąĮčŗ čāą▓ąĖą┤ąĄčéčī čüą╗ąĄą┤čāčÄčēąĖą╣ ą▓čŗą▓ąŠą┤:
I (31) boot: ESP-IDF v5.1-beta1-378-gea5e0ff298-dirt 2nd stage bootloader
I (31) boot: compile time Jun 7 2023 07:48:23
I (33) boot: Multicore bootloader
I (37) boot: chip revision: v3.1
I (41) boot.esp32: SPI Speed : 40MHz
I (46) boot.esp32: SPI Mode : DIO
I (50) boot.esp32: SPI Flash Size : 4MB
I (55) boot: Enabling RNG early entropy source...
I (60) boot: Partition Table:
I (64) boot: ## Label Usage Type ST Offset Length
I (71) boot: 0 nvs WiFi data 01 02 00009000 00006000
I (79) boot: 1 phy_init RF data 01 01 0000f000 00001000
I (86) boot: 2 factory factory app 00 00 00010000 003f0000
I (94) boot: End of partition table
I (98) esp_image: segment 0: paddr=00010020 vaddr=3f400020 size=04168h ( 16744) map
I (112) esp_image: segment 1: paddr=00014190 vaddr=3ffb0000 size=0000ch ( 12) load
I (115) esp_image: segment 2: paddr=000141a4 vaddr=40080000 size=01028h ( 4136) load
I (125) esp_image: segment 3: paddr=000151d4 vaddr=00000000 size=0ae44h ( 44612)
I (148) esp_image: segment 4: paddr=00020020 vaddr=400d0020 size=05d24h ( 23844) map
I (157) boot: Loaded app from partition at offset 0x10000
I (157) boot: Disabling RNG early entropy source...
INFO - Hello world!
INFO - Hello world!
INFO - Hello world!
INFO - Hello world!
INFO - Hello world!
INFO - Hello world!
ąĪčéčĆąŠą║ą░ ą▓čŗą▓ąŠą┤ą░ ą▓ ą╗ąŠą│ log::info!("Hello world!"); ąŠą▒čŗčćąĮąŠ ą┐ąŠčüčŗą╗ą░ąĄčé č鹥ą║čüč鹊ą▓ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ č鹥čĆą╝ąĖąĮą░ą╗ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü UART ESP32. ąŁč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ (ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ ą║ąŠą╝ą┐čīčÄč鹥čĆą░), čćč鹊 ą┤ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čāą▓ąĖą┤ąĄčéčī ąĄą│ąŠ čü ą┐ąŠą╝ąŠčēčīčÄ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ.
[ą¤čĆąŠą│čĆą░ą╝ą╝ą░, ą╝ąĖą│ą░čÄčēą░čÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝]
ąæąŠą╗čīčłąĖąĮčüčéą▓ąŠ ą┐ą╗ą░čé čü ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ ESP32 ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮčŗ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝ (LED). ąöą░ą▓ą░ą╣č鹥 ą┐ąŠą┐čĆąŠą▒čāąĄą╝ ąĖą╝ ą┐ąŠą╝ąĖą│ą░čéčī. ąÆ ą┐čĆąĖą╝ąĄčĆąĄ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠą╝ ESP-RS, ą▓čŗ ą╝ąŠąČąĄč鹥 ąĮą░ą╣čéąĖ čüą╗ąĄą┤čāčÄčēąĖą╣ ą║ąŠą┤:
#![no_std]
#![no_main]
use esp_backtrace as _;
use esp_hal::{
clock::ClockControl,
delay::Delay,
gpio::{Io, Level, Output},
peripherals::Peripherals,
prelude::*,
system::SystemControl,
};
#[entry]
fn main() -> ! {
let peripherals = Peripherals::take();
let system = SystemControl::new(peripherals.SYSTEM);
let clocks = ClockControl::boot_defaults(system.clock_control).freeze();
// GPIO7 ąĮą░čüčéčĆąŠąĄąĮ ą║ą░ą║ ą▓čŗčģąŠą┤, ą▓ ąĮą░čćą░ą╗čīąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąŠą│. 1.
let io = Io::new(peripherals.GPIO, peripherals.IO_MUX);
let mut led = Output::new(io.pins.gpio7, Level::Low);
led.set_high();
// ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą║ą╗ą░čüčüą░ ąĘą░ą┤ąĄčƹȹ║ąĖ Delay ąĖ ąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ
// ą┤ą╗čÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ ą▓ čåąĖą║ą╗ąĄ.
let delay = Delay::new(&clocks);
loop {
led.toggle();
delay.delay_millis(500u32);
}
}
ąŚą┤ąĄčüčī ąĄčüčéčī ą┤ą▓ąĄ ąĮąŠą▓čŗąĄ čüčéčĆąŠą║ąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠąĮą░čćą░ą╗čā ą╝ąŠą│čāčé ą▒čŗčéčī ąĮąĄą┐ąŠąĮčÅčéąĮčŗ:
let io = Io::new(peripherals.GPIO, peripherals.IO_MUX);
ąŁčéą░ čüčéčĆąŠą║ą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ą░ą┐ą┐ą░čĆą░čéčāčĆčā ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ GPIO (General Purpose Input/Output), ą║ąŠč鹊čĆą░čÅ čāą┐čĆą░ą▓ą╗čÅąĄčé ą▓ą▓ąŠą┤ąŠą╝ ąĖ ą▓čŗą▓ąŠą┤ąŠą╝ č湥čĆąĄąĘ ąĮąŠąČą║ąĖ ą┐ąŠčĆč鹊ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. IO MUX (Input/Output multiplexer) ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā ą┐ąĄčĆąĄąĮą░ą┐čĆą░ą▓ą╗čÅčéčī čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ čüąĖą│ąĮą░ą╗čŗ ąĮą░ čäąĖąĘąĖč湥čüą║ąĖąĄ ą▓čŗą▓ąŠą┤čŗ ą║ąŠčĆą┐čāčüą░ čćąĖą┐ą░.
let mut led = Output::new(io.pins.gpio7, Level::Low);
ąŁčéą░ čüčéčĆąŠą║ą░ ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčé ąĮą░ ą▓čŗą▓ąŠą┤ ąĮąŠąČą║čā ą┐ąŠčĆčéą░ GPIO7, ą║ ą║ąŠč鹊čĆąŠą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ čüą▓ąĄč鹊ą┤ąĖąŠą┤. ąĪą▓ąĄč鹊ą┤ąĖąŠą┤ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ąĖ ą║ ą┤čĆčāą│ąŠą╝čā ą┐ąŠčĆčéčā, ąĮą░ą┐čĆąĖą╝ąĄčĆ GPIO2, ą┐čĆąŠą║ąŠąĮčüčāą╗čīčéąĖčĆčāą╣č鹥čüčī čü ą┐čĆąĖąĮčåąĖą┐ąĖą░ą╗čīąĮąŠą╣ čüčģąĄą╝ąŠą╣ ą▓ą░čłąĄą╣ ą┐ą╗ą░čéčŗ.
ą¤ąŠčüą╗ąĄ ąĘą░ą┐čāčüą║ą░ ą║ąŠą╝ą░ąĮą┤čŗ cargo run ąĮą░ ą┐ą╗ą░č鹥 ąĮą░č湥čé ą╝ąĖą│ą░čéčī čüą▓ąĄč鹊ą┤ąĖąŠą┤ čü ą┐ąĄčĆąĖąŠą┤ąŠą╝ 1 čüąĄą║čāąĮą┤ą░, čŹč鹊 ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé ą▒ąĄčüą║ąŠąĮąĄčćąĮčŗą╣ čåąĖą║ą╗:
loop {
led.toggle();
delay.delay_millis(500u32);
}
[ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ąĮąŠą┐ą║ąĖ]
ąóąĄą┐ąĄčĆčī ą╝čŗ čüą┤ąĄą╗ą░ąĄą╝ ąĮą░čł ą┐čĆąŠąĄą║čé ąĖąĮč鹥čĆą░ą║čéąĖą▓ąĮčŗą╝, ą┤ąŠą▒ą░ą▓ąĖą▓ ąŠą┐čĆąŠčü čüąŠčüč鹊čÅąĮąĖčÅ ą║ąĮąŠą┐ą║ąĖ. ą¤ąŠ ąĮą░ąČą░čéąĖčÅą╝ ąĮą░ ą║ąĮąŠą┐ą║čā ą╝čŗ ą▒čāą┤ąĄą╝ ąĘą░ąČąĖą│ą░čéčī ąĖ ą│ą░čüąĖčéčī čüą▓ąĄč鹊ą┤ąĖąŠą┤.
ąöą╗čÅ čŹč鹊ą│ąŠ ąĮą░ą╝ ą┐ąŠąĮą░ą┤ąŠą▒čÅčéčüčÅ:
ŌĆó ESP32 DEVKIT V1
ŌĆó 5 mm LED
ŌĆó 220 ą×ą╝ čĆąĄąĘąĖčüč鹊čĆ
ŌĆó ąÜąĮąŠą┐ą║ą░
ŌĆó 10k ą║ą×ą╝ čĆąĄąĘąĖčüč鹊čĆ
ŌĆó ą£ą░ą║ąĄčéąĮą░čÅ ą┐ą╗ą░čéą░ (Breadboard)
ŌĆó ą¤čĆąŠą▓ąŠą┤ą░ ą┤ą╗čÅ ą┐ąĄčĆąĄą╝čŗč湥ą║
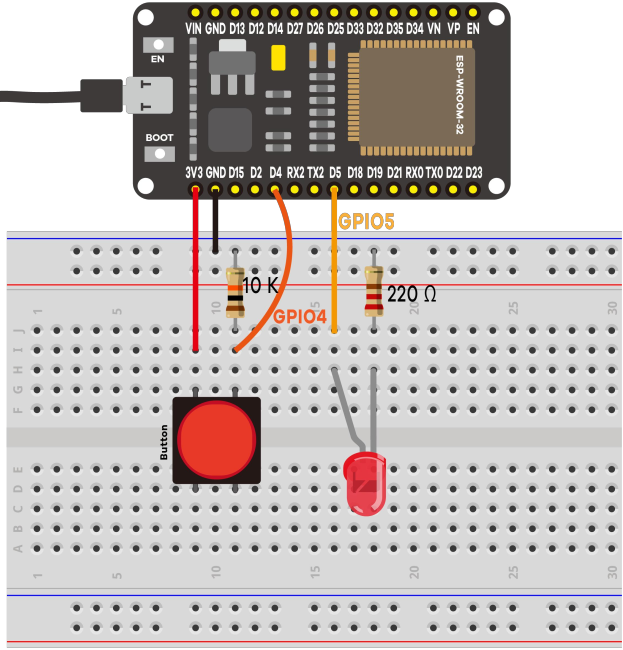
ąĪčģąĄą╝ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖą╣:
ąÜąŠą┤ Rust:
#![no_std]
#![no_main]
use esp_backtrace as _;
use esp_hal::{
gpio::{Input, Io, Level, Output, Pull},
peripherals::Peripherals,
prelude::*,
system::SystemControl,
};
#[entry]
fn main() -> ! {
let peripherals = Peripherals::take();
let _system = SystemControl::new(peripherals.SYSTEM);
let io = Io::new(peripherals.GPIO, peripherals.IO_MUX);
let mut red_led = Output::new(io.pins.gpio5, Level::Low);
let button = Input::new(io.pins.gpio4, Pull::Up);
loop {
if button.is_low() {
// ąÜąĮąŠą┐ą║ą░ ąĮą░ąČą░čéą░
red_led.set_high();
} else {
// ąÜąĮąŠą┐ą║ą░ ąŠčéą┐čāčēąĄąĮą░
red_led.set_low();
}
}
}
ą£čŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖ ą┐ąŠčĆčéčŗ GPIO4 ąĖ GPIO5 ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ (LED) ąĖ ą║ąĮąŠą┐ą║ąĖ (button) čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ. ąØą░čüčéčĆąŠą╣ą║ą░ ą┐ąŠčĆčéą░ ą┤ą╗čÅ ąŠą┐čĆąŠčüą░ ą║ąĮąŠą┐ą║ąĖ ąŠčéčĆą░ąČąĄąĮą░ čüą╗ąĄą┤čāčÄčēąĄą╣ čüčéčĆąŠčćą║ąŠą╣ ą║ąŠą┤ą░:
let button = Input::new(io.pins.gpio4, Pull::Up);
ąÜąĮąŠą┐ą║ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ą║ GPIO4, ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ ą║ą░ą║ ą▓čģąŠą┤ čü ą▓ąĄčĆčģąĮąĖą╝ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖą╝ čĆąĄąĘąĖčüč鹊čĆąŠą╝ (Pull::Up). ą¤ąŠą┤čéčÅąČą║ą░ čéą░ą║ąŠą│ąŠ čéąĖą┐ą░ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 čāčĆąŠą▓ąĄąĮčī ą┐ąŠčĆčéą░ ą║ąĮąŠą┐ą║ąĖ čüčćąĖčéčŗą▓ą░ąĄčéčüčÅ ą║ą░ą║ ą╗ąŠą│. 1, ąĄčüą╗ąĖ ą║ąĮąŠą┐ą║ą░ ąĮąĄ ąĮą░ąČą░čéą░. ąÆ ąĮą░ąČą░č鹊ą╝ čüąŠčüč鹊čÅąĮąĖąĖ ą║ąĮąŠą┐ą║ąĖ ąĮąŠąČą║ą░ ą┐ąŠčĆčéą░ ąĘą░ą╝čŗą║ą░ąĄčéčüčÅ ąĮą░ ąĘąĄą╝ą╗čÄ, ąĖ ąĄčæ ąĮąĖąĘą║ąĖą╣ ą┐ąŠč鹥ąĮčåąĖą░ą╗ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ GND čüčćąĖčéčŗą▓ą░ąĄčéčüčÅ ą║ą░ą║ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 0.
let mut red_led = Output::new(io.pins.gpio5, Level::Low);
ą¤ąŠčĆčé ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ GPIO5 čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą▓čŗčģąŠą┤. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čüą▓ąĄč鹊ą┤ąĖąŠą┤ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠą│ą░čłąĄąĮ, ą┐ąŠčŹč鹊ą╝čā ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ąĄą│ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄą╝ ą╝čŗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄą╝ GPIO5 ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąŠą│. 0 (Level::Low).
ą×ą┐čĆąŠčü ą║ąĮąŠą┐ą║ąĖ ąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĄ ąĖ ą▓čŗą║ą╗čÄč湥ąĮąĖąĄ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčéčüčÅ č鹥ą╗ąŠą╝ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠą│ąŠ čåąĖą║ą╗ą░:
loop {
if button.is_low() {
// ąÜąĮąŠą┐ą║ą░ ąĮą░ąČą░čéą░
red_led.set_high();
} else {
// ąÜąĮąŠą┐ą║ą░ ąŠčéą┐čāčēąĄąĮą░
red_led.set_low();
}
}
[ąĪčüčŗą╗ą║ąĖ]
1. Introduction to Embedded Systems with Rust: A Beginner's Guide Using ESP32 site:rust-dd.com.
2. rustup + espup: čéčāą╗č湥ą╣ąĮ ą┤ą╗čÅ Rust ąĮą░ ą┐ą╗ą░čéč乊čĆą╝ąĄ ESP32.
3. The Rust on ESP Book site:docs.espressif.com. |



