|
ąÜąŠą│ą┤ą░ ą╝čŗ čüčéą░ą╗ą║ąĖą▓ą░ąĄą╝čüčÅ čü ą▒ąŠą╗čīčłąŠą╣ ąĘą░ą┤ą░č湥ą╣ ą▓ ą┐ąŠą▓čüąĄą┤ąĮąĄą▓ąĮąŠą╣ ąČąĖąĘąĮąĖ, č鹊 ąŠą▒čŗčćąĮąŠ čüčéą░čĆą░ąĄą╝čüčÅ ą┐ąŠą┤ąĄą╗ąĖčéčī ąĄčæ ąĮą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą╝ąĄą╗ą║ąĖčģ, ą┐ąŠąĮčÅčéąĮčŗčģ ąĖ ą▒ąŠą╗ąĄąĄ ą┐čĆąŠčüčéčŗčģ ąĘą░ą┤ą░čć. ąŚą░č鹥ą╝ ą╝ąŠąČąĮąŠ čĆąĄčłą░čéčī čŹčéąĖ ąĘą░ą┤ą░čćąĖ ą┐ąŠčüč鹥ą┐ąĄąĮąĮąŠ, ąŠą┤ąĮčā ąĘą░ ąŠą┤ąĮąŠą╣, ą┐ąŠą║ą░ ą▓čüčÅ ąŠą▒čēą░čÅ ą▒ąŠą╗čīčłą░čÅ ąĘą░ą┤ą░čćą░ ąĮąĄ ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮą░. ąÆ ą╝ąĮąŠą│ąŠą┐ąŠč鹊čćąĮąŠą╣ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ą╝ čéą░ą║ąČąĄ ąĮčāąČąĮąŠ ą┐ąŠą┤ąĄą╗ąĖčéčī čüą▓ąŠąĄ čüą╗ąŠąČąĮąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĮą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ ąĮąĄą▒ąŠą╗čīčłąĖčģ čćą░čüč鹥ą╣, čü ą┐ą╗ą░ąĮąĖčĆčāąĄą╝čŗą╝ ąĖ ą┐čĆąŠą│ąĮąŠąĘąĖčĆčāąĄą╝čŗą╝ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄą╝. ąÜąŠą│ą┤ą░ ąŠą▒čēąĄąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąŠą▒ąŠčüąĮąŠą▓ą░ąĮąĮąŠ ą┐ąŠą┤ąĄą╗ąĄąĮąŠ ąĮą░ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą▓čŗą┐ąŠą╗ąĮčÅąĄą╝čŗąĄ ąĘą░ą┤ą░čćąĖ, ą┤ąĖąĘą░ą╣ąĮ čüąĖčüč鹥ą╝čŗ ą▒čāą┤ąĄčé čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčéčī ą┐ąŠ ąĄą╝ą║ąŠčüčéąĖ ąĖ ą▓čĆąĄą╝ąĄąĮąĖ čĆąĄą░ą║čåąĖąĖ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (real-time operation system, RTOS).
ąØą░ą┐čĆąĖą╝ąĄčĆ, čā ąĮą░čü ąĄčüčéčī ą║ą░ą║ą░čÅ-č鹊 ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝ą░čÅ čüąĖčüč鹥ą╝ą░ ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čéą░ą║ąĖčģ ąĘą░ą┤ą░čć. ąŁčéą░ čüąĖčüč鹥ą╝ą░ ą┤ąŠą╗ąČąĮą░ čüąŠą▒ąĖčĆą░čéčī ą┤ą░ąĮąĮčŗąĄ čü ą┤ą░čéčćąĖą║ąŠą▓ ąĖ ąŠč鹊ą▒čĆą░ąČą░čéčī ąĖčģ ąĮą░ 菹║čĆą░ąĮąĄ. ąÆ RTOS čŹčéą░ ąĘą░ą┤ą░čćą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┤ąĄą║ąŠą╝ą┐ąŠąĘąĖčĆąŠą▓ą░ąĮą░ ąĮą░ ą┤ą▓ąĄ ą┐ąŠą┤ąĘą░ą┤ą░čćąĖ. ą×ą┤ąĮą░ ąĖąĘ ąĮąĖčģ, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčüčāąĮą║ąĄ ąĮąĖąČąĄ, ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠ čüčćąĖčéčŗą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ čü ą┤ą░čéčćąĖą║ąŠą▓ ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ąĖčģ ą▓ ąŠą▒čēąĄą┤ąŠčüčéčāą┐ąĮčāčÄ (shared) ą┐ą░ą╝čÅčéčī. ąöčĆčāą│ą░čÅ ą┐ąŠą┤ąĘą░ą┤ą░čćą░ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ (ąĖą╗ąĖ ą┐ąŠ ą▓ąĮąĄčłąĮąĄą╝čā ąĘą░ą┐čĆąŠčüčā) čüčćąĖčéčŗą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ąĖąĘ čŹč鹊ą╣ ą┐ą░ą╝čÅčéąĖ ąĖ ą▓čŗą▓ąŠą┤ąĖčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┤ą░ąĮąĮčŗčģ ą┤ą░čéčćąĖą║ąŠą▓ ąĮą░ 菹║čĆą░ąĮ.

ąĀąĖčü. 1. ąÆąĮčāčéčĆąĄąĮąĮčÅčÅ čüčéčĆčāą║čéčāčĆą░ čāą┐čĆąŠčēąĄąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ, ą▓ ą║ąŠč鹊čĆąŠą╣ čĆą░ą▒ąŠčéą░čÄčé ą┤ą▓ąĄ ą┐ąŠą┤ąĘą░ą┤ą░čćąĖ.
ąÆ RT-Thread ąŠą▒čŖąĄą║čé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ą║ą░ąČą┤ąŠą╣ čéą░ą║ąŠą╣ ą┐ąŠą┤ąĘą░ą┤ą░č湥, ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ ą┐ąŠč鹊ą║ąŠą╝ (thread). ą¤ąŠč鹊ą║ čÅą▓ą╗čÅąĄčéčüčÅ ąĮąŠčüąĖč鹥ą╗ąĄą╝ ąŠą┤ąĮąŠą╣ ąĖąĘ ąĘą░ą┤ą░čć, ąĖ ąŠąĮ čÅą▓ą╗čÅąĄčéčüčÅ ą▒ą░ąĘąŠą▓ąŠą╣ ą┐ą╗ą░ąĮąĖčĆčāąĄą╝ąŠą╣ ąĄą┤ąĖąĮąĖčåąĄ ą▓ RT-Thread. ąŚą┤ąĄčüčī č鹥čĆą╝ąĖąĮ "ą┐ą╗ą░ąĮąĖčĆčāąĄą╝ąŠą╣" ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┐ąŠč鹊ą║čā ą▓čŗą┤ąĄą╗čÅąĄčéčüčÅ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ąĄą│ąŠ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ ąĖ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ ą┤čĆčāą│ąĖčģ ąĘą░ą┤ą░čć. ąÆ ą┐ąŠč鹊ą║ąĄ ąŠą┐ąĖčüą░ąĮ ą░ą╗ą│ąŠčĆąĖčéą╝ ąĘą░ą┤ą░čćąĖ ąĖ čüčĆąĄą┤ą░ ąĄą│ąŠ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ. ąÜąŠą│ą┤ą░ ą┐ąŠč鹊ą║ ą░ą║čéąĖą▓ąĄąĮ, ąŠąĮ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī čüąŠ čüą▓ąŠąĄą╣ čĆą░ą▒ąŠč湥ą╣ čüčĆąĄą┤ąŠą╣ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ (environment, ąĖą╗ąĖ ą║ąŠąĮč鹥ą║čüčé). ąÜ ą║ąŠąĮč鹥ą║čüčéčā ąŠčéąĮąŠčüąĖčéčüčÅ, ą▓ čćą░čüčéąĮąŠčüčéąĖ, ą║ą░ąČą┤ą░čÅ ą╗ąŠą║ą░ą╗čīąĮą░čÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą┐ąŠč鹊ą║ą░, ą┤ą░ąĮąĮčŗąĄ, čüč鹥ą║ąĖ, čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆąŠą▓, ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ ą┐ą░ą╝čÅčéąĖ ąĖ čé. ą┐. ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą│ąŠ ą┤ą╗čÅ ą┐ąŠč鹊ą║ą░ ą┐čĆąĖąŠčĆąĖč鹥čéą░ ąŠąĮ ą╝ąŠąČąĄčé ą┐ąŠą╗čāčćąĖčéčī ą▒ąŠą╗čīčłąĄ ąĖą╗ąĖ ą╝ąĄąĮčīčłąĄ čüą▓ąŠą▒ąŠą┤ąĮąŠą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ.
ąÆ čŹč鹊ą╣ čüčéą░čéčīąĄ (ą┐ąĄčĆąĄą▓ąŠą┤ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ [1]) ą┐čĆąĖą▓ąĄą┤ąĄąĮą░ ąŠą▒čēą░čÅ ą▓ą▓ąŠą┤ąĮą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą┐ąŠ API ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą┐ąŠč鹊ą║ą░ą╝ąĖ (thread management) ą▓ RT-Thread. ą¤ąŠčüą╗ąĄ ą┐čĆąŠčćč鹥ąĮąĖčÅ ą▓čŗ ą┐ąŠą╗čāčćąĖč鹥 ą▒ąŠą╗ąĄąĄ ą│ą╗čāą▒ąŠą║ąŠąĄ ą┐ąŠąĮąĖą╝ą░ąĮąĖąĄ ą╝ąĄčģą░ąĮąĖąĘą╝ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ą░ą╝ąĖ ą▓ RT-Thread. ąŚą┤ąĄčüčī čĆą░čüčüą╝ąŠčéčĆąĄąĮčŗ čüąŠčüč鹊čÅąĮąĖčÅ ą┐ąŠč鹊ą║ąŠą▓ ąĖ čéą░ą║ąĖąĄ ą▓ąŠą┐čĆąŠčüčŗ, ą║ą░ą║ čüąŠąĘą┤ą░ąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą▓, ąĘą░ąĄą╝ ąĮčāąČąĄąĮ ą┐ąŠč鹊ą║ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle thread) ąĖ čé. ą┤.
[ążčāąĮą║čåąĖąĖ Thread Management. ą¤čĆąĖąĮčåąĖą┐čŗ ą╝ąĮąŠą│ąŠąĘą░ą┤ą░čćąĮąŠčüčéąĖ RT-Thread]
ą×čüąĮąŠą▓ąĮąŠąĄ ąĮą░ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ RT-Thread thread management - čāą┐čĆą░ą▓ą╗čÅčéčī ą┐ąŠč鹊ą║ą░ą╝ąĖ ąĖ ą┐ą╗ą░ąĮąĖčĆąŠą▓ą░čéčī ąĖąĘ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ. ąÆ čüąĖčüč鹥ą╝ąĄ čüčāčēąĄčüčéą▓čāąĄčé 2 čéąĖą┐ą░ ą┐ąŠč鹊ą║ąŠą▓: system thread ąĖ user thread. System thread čŹč鹊 ą┐ąŠč鹊ą║, ą║ąŠč鹊čĆčŗą╣ čüąŠąĘą┤ą░ąĄčé čÅą┤čĆąŠ čüąĖčüč鹥ą╝čŗ (RT-Thread kernel). User thread čŹč鹊 ą┐ąŠč鹊ą║, ą║ąŠč鹊čĆčŗą╣ čüąŠąĘą┤ą░ąĮ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝. ą×ą▒ą░ čéąĖą┐ą░ ą┐ąŠč鹊ą║ą░ čüąŠąĘą┤ą░ą┤čāčé ąŠą▒čŖąĄą║čé ą┐ąŠč鹊ą║ą░ (thread object) ą▓ ą║ąŠąĮč鹥ą╣ąĮąĄčĆąĄ čÅą┤čĆą░ (kernel object container). ąÜąŠą│ą┤ą░ ą┐ąŠč鹊ą║ čāą┤ą░ą╗čÅąĄčéčüčÅ, ąŠąĮ čéą░ą║ąČąĄ ą▒čāą┤ąĄčé čāą┤ą░ą╗ąĄąĮ ąĖąĘ čŹč鹊ą│ąŠ ą║ąŠąĮč鹥ą╣ąĮąĄčĆą░. ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čüą╗ąĄą┤čāčÄčēąĄą╝ čĆąĖčüčāąĮą║ąĄ, čā ą║ą░ąČą┤ąŠą│ąŠ ą┐ąŠč鹊ą║ą░ ąĄčüčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▓ą░ąČąĮčŗčģ ą░čéčĆąĖą▒čāč鹊ą▓, čéą░ą║ąĖąĄ ą║ą░ą║ ą▒ą╗ąŠą║ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (Thread Control Block, TCB), čüč鹥ą║ (thread stack), čäčāąĮą║čåąĖčÅ ą▓čģąŠą┤ą░ (entry function, ąĖą╗ąĖ č鹥ą╗ąŠ ą┐ąŠč鹊ą║ą░), ąĖ čé. ą┤.

ąĀąĖčü. 2. RT-Thread kernel Object Container.
ą¤ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ RT-Thread (thread scheduler) čĆą░ą▒ąŠčéą░ąĄčé ą┐ąŠ ą┐čĆąĖąĮčåąĖą┐čā ą▓čŗč鹥čüąĮčÅčÄčēąĄą╣ ą╝ąĮąŠą│ąŠąĘą░ą┤ą░čćąĮąŠčüčéąĖ (preemptive sheduler), ąĖ ąĄą│ąŠ ąŠčüąĮąŠą▓ąĮą░čÅ čåąĄą╗čī - ą▓ąŠą▓čĆąĄą╝čÅ ąĮą░ą╣čéąĖ ąĘą░ą┤ą░čćčā čü čüą░ą╝čŗą╝ ą▓čŗčüąŠą║ąĖą╝ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ąĄą╝čā ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ ąĘą░ čüč湥čé ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ ą┤čĆčāą│ąĖčģ (ą╝ąĄąĮąĄąĄ ą┐čĆąĖąŠčĆąĖč鹥čéąĮčŗčģ, ąĖą╗ąĖ čü čéą░ą║ąĖą╝ ąČąĄ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝) ąĘą░ą┤ą░čć. ąŚą░ą┤ą░čćą░ čü čüą░ą╝čŗą╝ ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą│ąŠč鹊ą▓ąŠą╣ ą║ ąĘą░ą┐čāčüą║čā (ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Ready), ąĖ ą▓čüąĄą│ą┤ą░ ą╝ąŠąČąĄčé ą┐ąŠą╗čāčćąĖčéčī ą┐čĆą░ą▓ąŠ ąĮą░ ąŠą▒ą╗ą░ą┤ą░ąĮąĖąĄ ą▓čĆąĄą╝ąĄąĮąĄą╝ CPU.
ąÜąŠą│ą┤ą░ č鹥ą║čāčēąĖą╣ čĆą░ą▒ąŠčéą░čÄčēąĖą╣ ą┐ąŠč鹊ą║ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Ready ą▓čüčéčāą┐ą░ąĄčé ą▓ ą║ąŠąĮą║čāčĆąĄąĮčåąĖčÄ ąĘą░ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ čü ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąŠą┐čĆąĖąŠčĆąĖč鹥čéąĮčŗą╝ ą┐ąŠč鹊ą║ąŠą╝, ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ą┐čĆąĖąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čŹč鹊čé čĆą░ą▒ąŠčéą░čÄčēąĖą╣ ą┐ąŠč鹊ą║ (ą▓čŗč鹥čüąĮąĄąĮąĖąĄ) ąĖ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé CPU ą┤ą╗čÅ ą▒ąŠą╗ąĄąĄ ą┐čĆąĖąŠčĆąĖč鹥čéąĮąŠą│ąŠ ą┐ąŠč鹊ą║ą░.
ąĢčüą╗ąĖ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (interrupt service routine, ISR) čüąŠąĘą┤ą░ąĄčé čāčüą╗ąŠą▓ąĖčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄčģąŠą┤ą░ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Ready ą▒ąŠą╗ąĄąĄ ą┐čĆąĖąŠčĆąĖč鹥čéąĮąŠą│ąŠ ą┐ąŠč鹊ą║ą░, č湥ą╝ ą▓čŗą┐ąŠą╗ąĮčÅčÄčēąĖą╣čüčÅ č鹥ą║čāčēąĖą╣ ą┐ąŠč鹊ą║, č鹊 ą║ąŠą┤ ISR ąĘą░ą▓ąĄčĆčłą░ąĄčéčüčÅ, ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ąŠą╝ ą┐čĆąĄčĆą▓ą░ąĮąĮčŗą╣ ą┐ąŠč鹊ą║ ą┐čĆąĖąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ąĖ ąĮą░čćąĖąĮą░ąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ ą┐ąŠč鹊ą║ čü ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝.
ąÜąŠą│ą┤ą░ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ą┐ą╗ą░ąĮąĖčĆčāąĄčé ąĘą░ą┐čāčüą║ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąŠč鹊ą║ą░ ąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčé ąĖčģ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ, čüąĮą░čćą░ą╗ą░ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą║ąŠąĮč鹥ą║čüčé (ą╗ąŠą║ą░ą╗čīąĮčŗąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ, čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆąŠą▓, ą╝ąĄčüč鹊 ą▓ ą║ąŠą┤ąĄ, ą│ą┤ąĄ ą┐ąŠč鹊ą║ ą▒čŗą╗ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ąĖ čé. ą┐.) č鹥ą║čāčēąĄą│ąŠ ą▓čŗą┐ąŠą╗ąĮčÅčÄčēąĄą│ąŠčüčÅ ą┐ąŠč鹊ą║ą░. ąÜąŠą│ą┤ą░ čŹč鹊ą╝čā ą┐ąŠč鹊ą║čā ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ, ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ą▓ąŠčüčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĄą│ąŠ ą║ąŠąĮč鹥ą║čüčé.
Thread Control Block. ąÆ RT-Thread ą┤ą░ąĮąĮčŗąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ąŠą╝ (thread control block, TCB) ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ ą▓ čüčéčĆčāą║čéčāčĆąĄ rt_thread, ą┤ą░ąĮąĮčŗąĄ ą║ąŠč鹊čĆąŠą╣ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąŠą╣ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ą░ą╝ąĖ. ąÆ čüčéčĆčāą║čéčāčĆąĄ rt_thread čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ ą┐ąŠč鹊ą║ąĄ, čéą░ą║ą░čÅ ą║ą░ą║ ą┐čĆąĖąŠčĆąĖč鹥čé (priority), ąĖą╝čÅ ą┐ąŠč鹊ą║ą░ (ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąŠčéą╗ą░ą┤ą║ąĖ), čüčéą░čéčāčü ą┐ąŠč鹊ą║ą░, ąĖ čé. ą┤. ąÆ rt_thread čéą░ą║ąČąĄ ą▓ą║ą╗čÄč湥ąĮą░ čüčéčĆčāą║čéčāčĆą░ čüą▓čÅąĘą░ąĮąĮąŠą│ąŠ čüą┐ąĖčüą║ą░ ą┤ą╗čÅ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ą┐ąŠč鹊ą║ąŠą▓, ą║ąŠą╗ą╗ąĄą║čåąĖčÅ čüąŠą▒čŗčéąĖą╣ ą┤ą╗čÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą┐ąŠč鹊ą║ąŠą▓ ąĮą░ čüąŠą▒čŗčéąĖąĖ (event collection of thread waiting) ąĖ čé. ą┐. ąĪčéčĆčāą║čéčāčĆą░ rt_thread ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
/* Thread Control Block */
struct rt_thread
{
/* rt object */
char name[RT_NAME_MAX]; /**< ąĖą╝čÅ ą┐ąŠč鹊ą║ą░ */
rt_uint8_t type; /**< čéąĖą┐ ąŠą▒čŖąĄą║čéą░ */
rt_uint8_t flags; /**< čäą╗ą░ą│ąĖ ą┐ąŠč鹊ą║ą░ */
#ifdef RT_USING_MODULE
void *module_id; /**< ID ą╝ąŠą┤čāą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ */
#endif
rt_list_t list; /**< čüą┐ąĖčüąŠą║ ąŠą▒čŖąĄą║č鹊ą▓ */
rt_list_t tlist; /**< čüą┐ąĖčüąŠą║ ą┐ąŠč鹊ą║ąŠą▓ */
/* stack point and entry */
void *sp; /**< Stack Point, čāą║ą░ąĘą░č鹥ą╗čī čüč鹥ą║ą░ */
void *entry; /**< čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ č鹊čćą║čā ą▓čģąŠą┤ą░
(čäčāąĮą║čåąĖčÄ ą┐ąŠč鹊ą║ą░) */
void *parameter; /**< ą┐ą░čĆą░ą╝ąĄčéčĆ, ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗą╣
ą▓ čäčāąĮą║čåąĖčÄ ą┐ąŠč鹊ą║ą░ */
void *stack_addr; /**< ą░ą┤čĆąĄčü čüč鹥ą║ą░ ą▓ ą┐ą░ą╝čÅčéąĖ */
rt_uint32_t stack_size; /**< čĆą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ */
/* error code */
rt_err_t error; /**< ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ */
rt_uint8_t stat; /**< ą║ąŠą┤ čüąŠčüč鹊čÅąĮąĖčÅ ą┐ąŠč鹊ą║ą░ */
/* priority */
rt_uint8_t current_priority; /**< č鹥ą║čāčēąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé */
rt_uint8_t init_priority; /**< ąĮą░čćą░ą╗čīąĮčŗą╣ ą┐čĆąĖąŠčĆąĖč鹥čé */
#if RT_THREAD_PRIORITY_MAX > 32
rt_uint8_t number;
rt_uint8_t high_mask;
#endif
rt_uint32_t number_mask;
#if defined(RT_USING_EVENT)
/* thread event */
rt_uint32_t event_set;
rt_uint8_t event_info;
#endif
#if defined(RT_USING_SIGNALS)
rt_sigset_t sig_pending; /**< ąŠąČąĖą┤ą░čÄčēąĖąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąĖą│ąĮą░ą╗čŗ */
rt_sigset_t sig_mask; /**< ą▒ąĖčéčŗ ą╝ą░čüą║ąĖ čüąĖą│ąĮą░ą╗ąŠą▓ */
void *sig_ret; /**< čāą║ą░ąĘą░č鹥ą╗čī čüč鹥ą║ą░ ą▓ąŠąĘą▓čĆą░čéą░ ąĖąĘ čüąĖą│ąĮą░ą╗ą░ */
rt_sighandler_t *sig_vectors; /**< ą▓ąĄą║č鹊čĆą░ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąŠą▓ čüąĖą│ąĮą░ą╗ąŠą▓ */
void *si_list; /**< čüą┐ąĖčüąŠą║ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ čüąĖą│ąĮą░ą╗ą░čģ */
#endif
rt_ubase_t init_tick; /**< čéąĖą║ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą┐ąŠč鹊ą║ą░ */
rt_ubase_t remaining_tick; /**< ąŠčüčéą░ą╗ąŠčüčī čéąĖą║ąŠą▓ */
struct rt_timer thread_timer; /**< ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ čéą░ą╣ą╝ąĄčĆ ą┐ąŠč鹊ą║ą░ */
void (*cleanup)(struct rt_thread *tid); /**< čäčāąĮą║čåąĖčÅ ąŠčćąĖčüčéą║ąĖ ą┐čĆąĖ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ ą┐ąŠč鹊ą║ą░ */
rt_uint32_t user_data; /**< ą┐čĆąĖą▓ą░čéąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ,
ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ ą┐ąŠč鹊ą║čā */
};
typedef struct rt_thread *rt_thread_t;
ą¤ąŠą╗ąĄ init_priority čģčĆą░ąĮąĖčé ąĮą░čćą░ą╗čīąĮčŗą╣ ą┐čĆąĖąŠčĆąĖč鹥čé ą┐ąŠč鹊ą║ą░, ą║ąŠč鹊čĆčŗą╣ ąŠąĮ ą┐ąŠą╗čāčćąĖą╗ ą┐čĆąĖ čüąŠąĘą┤ą░ąĮąĖąĖ, ąĖ ąĘąĮą░č湥ąĮąĖąĄ ą┐čĆąĖąŠčĆąĖč鹥čéą░ ąĮąĄ ąĖąĘą╝ąĄąĮąĖčéčüčÅ ą▓ č鹥č湥ąĮąĖąĄ ą▓čüąĄą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąČąĖąĘąĮąĖ ą┐ąŠč鹊ą║ą░ (ą┐ąŠą║ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ąĮą░ ąĘą░ą┐čāčüčéąĖčé čäčāąĮą║čåąĖčÄ, ą║ąŠč鹊čĆą░čÅ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▓čĆčāčćąĮčāčÄ ą┐ąŠą╝ąĄąĮčÅčéčī ą┐čĆąĖąŠčĆąĖč鹥čé). ążčāąĮą║čåąĖčÅ cleanup ą▒čāą┤ąĄčé ą▓čŗąĘą▓ą░ąĮą░ ąĖąĘ ą┐ąŠč鹊ą║ą░ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle thread), ą║ąŠą│ą┤ą░ ą┐ąŠč鹊ą║ ą▓čŗą╣ą┤ąĄčé ąĖąĘ čüą▓ąŠąĄą╣ čäčāąĮą║čåąĖąĖ. ą¤ąŠčüą╗ąĄą┤ąĮąĄąĄ ą┐ąŠą╗ąĄ user_data ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐ąŠą╗ąĮąĄąĮąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ą┤ą╗čÅ ą┐ąŠč鹊ą║ą░, ąĖ ąĘą┤ąĄčüčī ą╝ąŠą│čāčé čģčĆą░ąĮąĖčéčīčüčÅ ą╗čÄą▒čŗąĄ ą┤ą░ąĮąĮčŗąĄ, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗąĄ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą┐ąŠč鹊ą║ą░.
Thread Stack. ąŻ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąŠč鹊ą║ą░ RT-Thread ąĖą╝ąĄąĄčéčüčÅ ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗą╣ čüč鹥ą║ (Thread Stack), ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ ą┐ąŠą┤ ą║ąŠč鹊čĆčŗą╣ ą▓čŗą┤ąĄą╗čÅąĄčéčüčÅ ą┐čĆąĖ čüąŠąĘą┤ą░ąĮąĖąĖ ą┐ąŠč鹊ą║ą░. ąÜąŠą│ą┤ą░ ą┐ąŠč鹊ą║ ą▓čŗč鹥čüąĮčÅąĄčéčüčÅ, ąĄą│ąŠ ą║ąŠąĮč鹥ą║čüčé čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ čŹč鹊ą╝ čüč鹥ą║ąĄ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ąŠą╝. ąÜąŠą│ą┤ą░ ą┐ąŠč鹊ą║ čüąĮąŠą▓ą░ ą┐ąŠą╗čāčćą░ąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ, ąĄą│ąŠ ą║ąŠąĮč鹥ą║čüčé ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ą▓ąŠčüčüčéą░ąĮąŠą▓ąĖčé ąĖąĘ čüč鹥ą║ą░.
ąĪč鹥ą║ ą┐ąŠč鹊ą║ą░ čéą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ ą╗ąŠą║ą░ą╗čīąĮčŗčģ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ ą▓ čäčāąĮą║čåąĖčÅčģ, čé. ąĄ. ą╗ąŠą║ą░ą╗čīąĮčŗąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ čäčāąĮą║čåąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą▓čŗąĘą▓ą░ą╗ ą┐ąŠč鹊ą║, čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą▓ čüč鹥ą║ąĄ čŹč鹊ą│ąŠ ą┐ąŠč鹊ą║ą░ ą▓ą╝ąĄčüč鹥 čü ą░ą┤čĆąĄčüąŠą╝ ą▓ąŠąĘą▓čĆą░čéą░ ąĖąĘ čäčāąĮą║čåąĖąĖ. ąøąŠą║ą░ą╗čīąĮčŗąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ ą▓ čäčāąĮą║čåąĖčÅčģ čéą░ą║ąČąĄ ą╝ąŠą│čāčé čüąŠčģčĆą░ąĮčÅčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ CPU (ą║ą░ą║ ą┐čĆąĖąĮčÅč鹊 ą▓ ą░čĆčģąĖč鹥ą║čéčāčĆąĄ ARM), ąĖ ą║ąŠą│ą┤ą░ čŹčéą░ čäčāąĮą║čåąĖčÅ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ąĖąĘ ą┤čĆčāą│ąŠą╣ čäčāąĮą║čåąĖąĖ, čŹčéąĖ ą╗ąŠą║ą░ą╗čīąĮčŗąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ čéą░ą║ąČąĄ čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą▓ čüč鹥ą║ąĄ č鹥ą║čāčēąĄą│ąŠ ą┐ąŠč鹊ą║ą░.
ąöą╗čÅ ą┐ąĄčĆą▓ąŠą│ąŠ ąĘą░ą┐čāčüą║ą░ ą┐ąŠč鹊ą║ą░ ąĄą│ąŠ ą║ąŠąĮč鹥ą║čüčé ą╝ąŠąČąĄčé ą▒čŗčéčī čüąŠąĘą┤ą░ąĮ ą▓čĆčāčćąĮčāčÄ, čćč鹊ą▒čŗ čāčüčéą░ąĮąŠą▓ąĖčéčī ąĮą░čćą░ą╗čīąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ąŠą║čĆčāąČąĄąĮąĖčÅ, čéą░ą║ąĖąĄ ą║ą░ą║ č鹊čćą║ą░ ą▓čģąŠą┤ą░ (entry function, čĆąĄą│ąĖčüčéčĆ PC), ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗą╣ ąĮą░ ą▓čģąŠą┤ąĄ ą┐ą░čĆą░ą╝ąĄčéčĆ (entry parameter, čĆąĄą│ąĖčüčéčĆ R0), ą░ą┤čĆąĄčü ą▓ąŠąĘą▓čĆą░čéą░ (return position, čĆąĄą│ąĖčüčéčĆ LR), č鹥ą║čāčēąĖą╣ čüčéą░čéčāčü CPU (machine operating status, čĆąĄą│ąĖčüčéčĆ CPSR).
ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ čüč鹥ą║ą░ ą▓ ą┐ą░ą╝čÅčéąĖ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą░čĆčģąĖč鹥ą║čéčāčĆčŗ ą┐čĆąŠčåąĄčüčüąŠčĆą░. ąÆąĄčĆčüąĖąĖ RT-Thread ą┤ąŠ 3.1.0 ą┐ąŠąĘą▓ąŠą╗čÅą╗ąĖ čüč鹥ą║čā čĆą░čüčéąĖ č鹊ą╗čīą║ąŠ ąŠčé čüčéą░čĆčłąĖą╝ ą░ą┤čĆąĄčüą░ą╝ ą║ ą╝ą╗ą░ą┤čłąĖą╝. ąöą╗čÅ ą░čĆčģąĖč鹥ą║čéčāčĆčŗ ARM Cortex-M čüč鹥ą║ ą┐ąŠč鹊ą║ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčüčéčĆčāąĖčĆąŠą▓ą░ąĮ, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčüčāąĮą║ąĄ ąĮąĖąČąĄ.
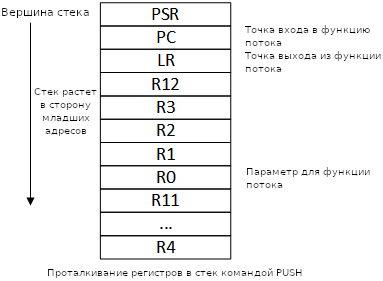
ąĀąĖčü. 3. ą×čĆą│ą░ąĮąĖąĘą░čåąĖčÅ čüč鹥ą║ą░ ARM Cortex-M.
ą¤čĆąĖ ąĮą░čüčéčĆąŠą╣ą║ąĄ čĆą░ąĘą╝ąĄčĆą░ čüč鹥ą║ą░ čüąŠąĘą┤ą░ą▓ą░ąĄą╝ąŠą│ąŠ ą┐ąŠč鹊ą║ą░ čāčćąĖčéčŗą▓ą░čÄčé ąŠą▒čŖąĄą╝ čüą▓ąŠą▒ąŠą┤ąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ CPU/MCU ąĖ ą┐čĆąŠą│ąĮąŠąĘąĖčĆčāąĄą╝ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓ą╗ąŠąČąĄąĮąĮčŗčģ ą▓čŗąĘąŠą▓ąŠą▓ čäčāąĮą║čåąĖą╣ ąĖ ISR. ą£ąĮąŠą│ąĖąĄ ą╝ąŠą┤ąĄą╗ąĖ MCU ąĖą╝ąĄčÄčé ąŠą│čĆą░ąĮąĖč湥ąĮąĮąŠąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ RAM, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĮąŠ ą▓čŗą┤ąĄą╗ąĖčéčī ą┐ąŠą┤ čüč鹥ą║ąĖ ą┐ąŠč鹊ą║ąŠą▓. ąśąĘąĮą░čćą░ą╗čīąĮąŠ ą╝ąŠąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ą┐čĆąĖ ąŠčéą╗ą░ą┤ą║ąĄ čĆą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ 1K ąĖą╗ąĖ 2K ą▒ą░ą╣čé, ąĖ ą┐ąŠč鹊ą╝ ą▓ ą║ąŠąĮčüąŠą╗ąĖ ąŠčéą╗ą░ą┤ą║ąĖ FinSH [3] ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ąŠą╝ą░ąĮą┤čā list_thread (ąĖą╗ąĖ ps) ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ čĆą░čüčģąŠą┤ąĄ ą┐ą░ą╝čÅčéąĖ čüč鹥ą║ą░ čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą┐ąŠč鹊ą║ąŠą▓. ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąŠą║ą░ąČąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ (ą▓ ą┐čĆąŠčåąĄąĮčéą░čģ) čüč鹥ą║ą░ ą┐ąŠč鹊ą║ąŠą▓, ąĖ ą┐ąŠ čŹč鹊ą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒čŖąĄą╝ čüč鹥ą║ą░ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąŠč鹊ą║ą░ ą╝ąŠąČąĮąŠ ą▓ą┐ąŠčüą╗ąĄą┤čüčéą▓ąĖąĖ ą┐ąŠą┤čüčéčĆąŠąĖčéčī ą▓ ą▒ąŠą╗čīčłčāčÄ ąĖą╗ąĖ ą╝ąĄąĮčīčłčāčÄ čüč鹊čĆąŠąĮčā. ą¤čĆąĖą╝ąĄčĆ ą▓čŗą▓ąŠą┤ą░ ą║ąŠą╝ą░ąĮą┤čŗ ps, čüč鹊ą╗ą▒ąĄčå "max used" ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čüč鹥ą║ą░ ą┐ąŠč鹊ą║ąŠą╝:
thread pri status sp_addr sp stack size max used left tick error
-------- --- ------- ---------- ---------- ---------- -------- ---------- -----
ble 4 suspend 0x0041f03c 0x0041ff70 0x00001000 12% 0x00000005 000
core_thr 2 suspend 0x0041da1c 0x0041e140 0x00000800 10% 0x00000003 000
wpas_thr 5 suspend 0x0041bf88 0x0041ce90 0x00001000 06% 0x00000005 000
kmsgbk 3 suspend 0x00419ef4 0x0041ae68 0x00001000 03% 0x00000005 000
tshell 20 ready 0x00417db4 0x00419c40 0x00002000 06% 0x00000008 000
ntp_sync 26 suspend 0x0041709c 0x00417618 0x00000600 27% 0x00000001 000
tcpip 4 suspend 0x00415990 0x004160b0 0x00000800 10% 0x0000000f 000
temp_det 5 suspend 0x00415240 0x00415568 0x00000400 29% 0x00000005 000
tidle 31 ready 0x003f97dc 0x003f9960 0x00000200 24% 0x0000000c 000
timer 6 suspend 0x003f9bb8 0x003fab38 0x00001000 05% 0x00000008 000
mythread 2 suspend 0x00413eb0 0x00414e28 0x00001000 03% 0x00000011 000
Thread State. ąÆ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ ąĮą░ ąŠą┤ąĮąŠą╝ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą╝ čÅą┤čĆąĄ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą┐ąŠč鹊ą║, ą▓čüąĄ ąŠčüčéą░ą╗čīąĮčŗąĄ ą▒čāą┤čāčé ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą▓ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ. ąĀą░ąĘą╗ąĖčćą░čÄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▓ąŠąĘą╝ąŠąČąĮčŗčģ čüąŠčüč鹊čÅąĮąĖą╣, ąŠčéąĮąŠčüčÅčēąĖčģčüčÅ ą║ ą┐čĆąŠčåąĄčüčüčā ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐ąŠč鹊ą║ąŠą╝: ąĮą░čćą░ą╗čīąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ (initial state), ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ą░ (suspended state), ą│ąŠč鹊ą▓ąĮąŠčüčéčī ą║ ąĘą░ą┐čāčüą║čā (ready state), ąĖ čé. ą┤. ąÆ RT-Thread čā ą┐ąŠč鹊ą║ą░ ą╝ąŠą│čāčé ą▒čŗčéčī 5 čüąŠčüč鹊čÅąĮąĖą╣, ąĖ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮą░čÅ čüąĖčüč鹥ą╝ą░ (ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║) ą▒čāą┤ąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą╝ąĄąĮčÅčéčī čŹč鹊 čüąŠčüč鹊čÅąĮąĖąĄ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹥ą║čāčēąĖčģ čāčüą╗ąŠą▓ąĖą╣.
5 čüąŠčüč鹊čÅąĮąĖą╣ ą┐ąŠč鹊ą║ą░ ą▓ RT-Thread ą┐ąŠą║ą░ąĘą░ąĮčŗ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄ:
| ąĪąŠčüč鹊čÅąĮąĖąĄ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| Initial State |
ąØą░čćą░ą╗čīąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠč鹊ą║ą░. ąÆ ąĮąĄą╝ ąŠąĮ ąĮą░čģąŠą┤ąĖčéčüčÅ, ą║ąŠą│ą┤ą░ č鹊ą╗čīą║ąŠ čćč鹊 ą▒čŗą╗ čüąŠąĘą┤ą░ąĮ, ąĮąŠ ąĄčēąĄ ąĮąĄ ąĘą░ą┐čāčēąĄąĮ. ąÆ ąĮą░čćą░ą╗čīąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ ą┐ąŠč鹊ą║ ąĮąĄ čāčćą░čüčéą▓čāąĄčé ą▓ čĆą░ą▒ąŠč鹥 ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░. ąÆ RT-Thread čŹč鹊 čüąŠčüč鹊čÅąĮąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą╝ą░ą║čĆąŠčüąŠą╝ RT_THREAD_INIT. |
| Ready State |
ąĪąŠčüč鹊čÅąĮąĖąĄ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ. ąÆ čŹč鹊ą╝ čüąŠčüč鹊čÅąĮąĖąĖ ą┐ąŠč鹊ą║ čüčéą░ą▓ąĖčéčüčÅ ą▓ ąŠč湥čĆąĄą┤čī ąĮą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ąĮą░čĆčÅą┤čā čü ą┤čĆčāą│ąĖą╝ąĖ ąĘą░ą┤ą░čćą░ą╝ąĖ. ąÆ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ ą┐ąŠč鹊ą║ą░ ąŠąĮ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ąŠąČąĖą┤ą░ąĮąĖąĖ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ. ąÜą░ą║ č鹊ą╗čīą║ąŠ CPU čüąĮąŠą▓ą░ čüčéą░ąĮąĄčé ą┤ąŠčüčéčāą┐ąĮčŗą╝ ą┐ąŠčüą╗ąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ č鹥ą║čāčēąĄą│ąŠ čĆą░ą▒ąŠčéą░čÄčēąĄą│ąŠ ą┐ąŠč鹊ą║ą░, ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ąĮą░ą╣ą┤ąĄčé č鹊čé ą┐ąŠč鹊ą║ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Ready, ą║ąŠč鹊čĆčŗą╣ ąĖą╝ąĄąĄčé čüą░ą╝čŗą╣ ą▓čŗčüąŠą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé, ąĖ ąĘą░ą┐čāčüčéąĖčé ąĄą│ąŠ (ą┐ąĄčĆąĄą▓ąĄą┤ąĄčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Running). ąĢčüą╗ąĖ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ąĮą░čģąŠą┤ąĖčéčüčÅ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐ąŠč鹊ą║ąŠą▓ čü ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝, č鹊 ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ą▒čāą┤ąĄčé ąĖčģ ąĘą░ą┐čāčüą║ą░čéčī ą┐ąŠ ąŠč湥čĆąĄą┤ąĖ. ąÆ RT-Thread čüąŠčüč鹊čÅąĮąĖąĄ Ready ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą╝ą░ą║čĆąŠčüąŠą╝ RT_THREAD_READY. |
| Running State |
ąĀą░ą▒ąŠč湥ąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠč鹊ą║ą░, ąĄą│ąŠ ą║ąŠą┤ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ. ąÆ ąŠą┤ąĮąŠčÅą┤ąĄčĆąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ čĆą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą┐ąŠč鹊ą║, ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą║ąŠč鹊čĆąŠą│ąŠ ą▓ąĄčĆąĮąĄčé čäčāąĮą║čåąĖčÅ rt_thread_self. ąÆ ą╝ąĮąŠą│ąŠčÅą┤ąĄčĆąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ ą╝ąŠąČąĄčé ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Running ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐ąŠč鹊ą║ąŠą▓. ąÆ RT-Thread čüąŠčüč鹊čÅąĮąĖąĄ Running ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą╝ą░ą║čĆąŠčüąŠą╝ RT_THREAD_RUNNING. |
| Suspended State |
ąŁč鹊 čüąŠčüč鹊čÅąĮąĖąĄ ąĖąĘą▓ąĄčüčéąĮąŠ čéą░ą║ąČąĄ ą║ą░ą║ čüąŠčüč鹊čÅąĮąĖąĄ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ, Blocking State. ą¤ąŠč鹊ą║ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ (ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮ) ą▓ ąŠąČąĖą┤ą░ąĮąĖąĖ ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖčÅ ą║ą░ą║ąŠą│ąŠ-ąĮąĖą▒čāą┤čī čĆąĄčüčāčĆčüą░, ąĖą╗ąĖ ąČąĄ ą┐ąŠč鹊ą║ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮ ąĮą░ ąĮąĄą║ąŠč鹊čĆąŠąĄ ą▓čĆąĄą╝čÅ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą╗čÅ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĘą░ą┤ąĄčƹȹ║ąĖ ą▓ ą░ą╗ą│ąŠčĆąĖčéą╝ąĄ). ą¤ąŠč鹊ą║ąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮčŗ ąĮą░ ąŠą▒čŖąĄą║čéą░čģ čüąĄą╝ą░č乊čĆą░, ąŠč湥čĆąĄą┤ąĖ ą╝čÄč鹥ą║čüą░. ąÆ čüąŠčüč鹊čÅąĮąĖąĖ ąŠčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠč鹊ą║ ąĮąĄ čāčćą░čüčéą▓čāąĄčé ą▓ ą║ąŠąĮą║čāčĆąĄąĮčåąĖąĖ ąĘą░ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ ąĮą░čĆčÅą┤čā čü ą┤čĆčāą│ąĖą╝ąĖ ą┐ąŠč鹊ą║ą░ą╝ąĖ, ąŠąĮ ąČą┤ąĄčé ąĖčüč鹥č湥ąĮąĖčÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ čéą░ą╣ą╝ą░čāčéą░, ą╗ąĖą▒ąŠ ąĮą░čüčéčāą┐ą╗ąĄąĮąĖčÅ ą║ą░ą║ąŠą│ąŠ-ąĮąĖą▒čāą┤čī čüąŠą▒čŗčéąĖčÅ (ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┐čāą▒ą╗ąĖą║ą░čåąĖąĖ čüąĄą╝ą░č乊čĆą░ ąĖą╗ąĖ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą▓ ąŠč湥čĆąĄą┤ąĖ). ąÆ RT-Thread čüąŠčüč鹊čÅąĮąĖąĄ Suspended ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą╝ą░ą║čĆąŠčüąŠą╝ RT_THREAD_SUSPEND. |
| Closed State |
ą¤ąŠč鹊ą║ ąĘą░ą║čĆčŗčé, ą▓ čŹč鹊 čüąŠčüč鹊čÅąĮąĖąĄ ąŠąĮ ą┐ąŠą┐ą░ą┤ą░ąĄčé, ą║ąŠą│ą┤ą░ ąĘą░ą▓ąĄčĆčłą░ąĄčé čüą▓ąŠčÄ čĆą░ą▒ąŠčéčā (ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčé ą▓čŗčģąŠą┤ ąĖąĘ čüą▓ąŠąĄą╣ čäčāąĮą║čåąĖąĖ). ą¤ąŠč鹊ą║ ą▓ ąĘą░ą║čĆčŗč鹊ą╝ čüąŠčüč鹊čÅąĮąĖąĖ ąĮąĄ čāčćą░čüčéą▓čāąĄčé ą▓ ą┐ą╗ą░ąĮąĖčĆąŠą▓ą░ąĮąĖąĖ ąĘą░ą┐čāčüą║ą░ ąĘą░ą┤ą░čć. ąÆ RT-Thread čüąŠčüč鹊čÅąĮąĖąĄ Closed ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą╝ą░ą║čĆąŠčüąŠą╝ RT_THREAD_CLOSE. |
Thread Priority. ąŻ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąŠč鹊ą║ą░ ą▓ RT-Thread ąĖą╝ąĄąĄčéčüčÅ ą┐čĆąĖąŠčĆąĖč鹥čé, čüąŠą│ą╗ą░čüąĮąŠ ą║ąŠč鹊čĆąŠą│ąŠ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ čĆą░čüą┐čĆąĄą┤ąĄą╗čÅąĄčé ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ ą╝ąĄąČą┤čā ą┐ąŠč鹊ą║ą░ą╝ąĖ. ą¦ąĄą╝ ą┐čĆąĖąŠčĆąĖč鹥čé čā ą┐ąŠč鹊ą║ą░ ą▓čŗčłąĄ, č鹥ą╝ čā ąĮąĄą│ąŠ ą▒ąŠą╗čīčłąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą┐ąĄčĆąĄą╣čéąĖ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Running.
RT-Thread ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą╝ą░ą║čüąĖą╝čāą╝ 256 čāčĆąŠą▓ąĮąĄą╣ ą┐čĆąĖąŠčĆąĖč鹥čéą░ ą┐ąŠč鹊ą║ąŠą▓ (0 .. 255). ą¦ąĄą╝ ą╝ąĄąĮčīčłąĄ čćąĖčüą╗ąŠ, ąŠą▒ąŠąĘąĮą░čćą░čÄčēąĄąĄ ą┐čĆąĖąŠčĆąĖč鹥čé, č鹥ą╝ ą▓čŗčłąĄ ą┐čĆąĖąŠčĆąĖč鹥čé, ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ 0 ąŠą▒ąŠąĘąĮą░čćą░ąĄčé čüą░ą╝čŗą╣ ąĮą░ąĖą▓čŗčüčłąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé. ąóą░ą║ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ąŠčüčéčāą┐ąĮčŗčģ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┤ą░ą╗ąĄą║ąŠ ąĮąĄ ą▓čüąĄą│ą┤ą░. ąÆ ąĮąĄą║ąŠč鹊čĆčŗčģ čüąĖčüč鹥ą╝ą░čģ, ą│ą┤ąĄ ąĮąĄ čéą░ą║ ą╝ąĮąŠą│ąŠ čĆąĄčüčāčĆčüąŠą▓, ą▓čŗ ą╝ąŠąČąĄč鹥 ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ čüąĖčüč鹥ą╝čŗ čéą░ą║, čćč鹊 ą▒čāą┤ąĄčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ 8 ąĖą╗ąĖ 32 čāčĆąŠą▓ąĮčÅ ą┐čĆąĖąŠčĆąĖč鹥čéą░, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čéčĆąĄą▒ąŠą▓ą░ąĮąĖą╣ č鹥ą║čāčēąĄą╣ čüąĖčéčāą░čåąĖąĖ. ąöą╗čÅ MCU čüąĄą╝ąĄą╣čüčéą▓ ARM Cortex-M ąŠą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ 32 čāčĆąŠą▓ąĮčÅ ą┐čĆąĖąŠčĆąĖč鹥čéą░. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čüą░ą╝čŗą╣ ąĮąĖąĘą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé ąĮą░ąĘąĮą░čćą░ąĄčéčüčÅ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą╣ ąĘą░ą┤ą░č湥 ąŠąČąĖą┤ą░ąĮąĖčÅ (idle thread), ą║ąŠč鹊čĆą░čÅ čÅą▓ą╗čÅąĄčéčüčÅ čüąĖčüč鹥ą╝ąĮąŠą╣ ąĖ ąŠą▒čŗčćąĮąŠ ąĮąĖą║ą░ą║ ąĮąĄ ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ (čģąŠčéčÅ ą┤ą╗čÅ čüą┐ąĄčåąĖą░ą╗čīąĮčŗčģ čåąĄą╗ąĄą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮą░ąĘąĮą░č湥ąĮą░ čäčāąĮą║čåąĖčÅ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░, ą▓čŗąĘčŗą▓ą░ąĄą╝ą░čÅ ąĖąĘ idle thread).
Time Slice. ąŻ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąŠč鹊ą║ą░ ąĄčüčéčī ą┐ą░čĆą░ą╝ąĄčéčĆ ą▓čŗą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą║ą▓ą░ąĮčéą░ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (time slice), ąŠą┤ąĮą░ą║ąŠ time slice ąĖą╝ąĄąĄčé ąĘąĮą░č湥ąĮąĖąĄ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čüąŠčüč鹊čÅąĮąĖčÅ Ready ą┐ąŠč鹊ą║ąŠą▓ čü ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝. ą¤ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čüą╗ą░ą╣čüąĖąĮą│ ą┤ą╗čÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą║ąŠąĮč鹥ą║čüčéą░ ą╝ąĄąČą┤čā ą┐ąŠč鹊ą║ą░ą╝ąĖ čü ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝, ąĖčüą┐ąŠą╗čīąĘčāčÅ ą╝ąĄč鹊ą┤ čåąĖą║ą╗ąĖč湥čüą║ąŠą│ąŠ ą▓čŗč鹥čüąĮąĄąĮąĖčÅ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÅ čĆąĄčüčāčĆčü CPU ą┐ąŠč鹊ą║ą░ą╝ ą┐ąŠ ąŠč湥čĆąĄą┤ąĖ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ time slice ąĖą│čĆą░ąĄčé čĆąŠą╗čī ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ ą┐čĆąŠą┤ąŠą╗ąČąĖč鹥ą╗čīąĮąŠčüčéąĖ čüąŠčüč鹊čÅąĮąĖčÅ Running ą┐ąŠč鹊ą║ą░, ąĖ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī čŹč鹊ą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐ąĄčĆąĖąŠą┤ąŠą╝ čéąĖą║ą░ čüąĖčüč鹥ą╝čŗ (OS Tick).
ą¤čĆąĄą┤ą┐ąŠą╗ąŠąČąĖą╝, čćč鹊 ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ 2 ą┐ąŠč鹊ą║ą░ A ąĖ B čü ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Ready. Time slice ą┐ąŠč鹊ą║ą░ A čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 10, ąĖ time slice ą┐ąŠč鹊ą║ą░ B čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 5. ąÜąŠą│ą┤ą░ ą▓ čüąĖčüč鹥ą╝ąĄ ąĮąĄčé ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Ready ąĮąĖą║ą░ą║ąĖčģ ą┤čĆčāą│ąĖčģ ą┐ąŠč鹊ą║ąŠą▓ čü ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝, č湥ą╝ čā A ąĖ B, ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ą▒čāą┤ąĄčé ą┐ąŠąŠč湥čĆąĄą┤ąĮąŠ ąĘą░ą┐čāčüą║ą░čéčī č鹊 ą┐ąŠč鹊ą║ A, č鹊 ą┐ąŠč鹊ą║ B. ą¤ąŠč鹊ą║ A ą▒čāą┤ąĄčé ą┐čĆąĖ čŹč鹊ą╝ čĆą░ą▒ąŠčéą░čéčī ą▓ č鹥č湥ąĮąĖąĄ 10 čéąĖą║ąŠą▓ čüąĖčüč鹥ą╝čŗ, ą░ ą┐ąŠč鹊ą║ B ą▓ č鹥č湥ąĮąĖąĄ 5 čéąĖą║ąŠą▓ (čüą╝. čĆąĖčü. 4).
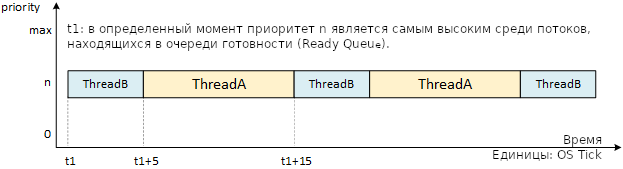
ąĀąĖčü. 4. ąĀą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąĄąČą┤čā ą┐ąŠč鹊ą║ą░ą╝ąĖ čü ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝.
Thread Entry Function. "Entry" ą▓ ąĖąĮč乊čĆą╝ą░čåąĖąĖ TCB ąŠą▒ąŠąĘąĮą░čćą░ąĄčé č鹊čćą║čā ą▓čģąŠą┤ą░ ą▓ ą┐ąŠč鹊ą║, ąĖą╗ąĖ ą░ą┤čĆąĄčü čäčāąĮą║čåąĖąĖ ą┐ąŠč鹊ą║ą░, ą│ą┤ąĄ ąŠą┐ąĖčüą░ąĮ ą▓ąĄčüčī ą░ą╗ą│ąŠčĆąĖčéą╝ čĆą░ą▒ąŠčéčŗ ą┐ąŠč鹊ą║ą░. ążčāąĮą║čåąĖčÅ ą┐ąŠč鹊ą║ą░ ą┐ąŠą╗ąĮąŠčüčéčīčÄ čĆą░ąĘčĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ čüąĖčüč鹥ą╝čŗ. ą×ą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ 2 ą▓ą░čĆąĖą░ąĮčéą░ čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ ą║ąŠą┤ą░ ą┤ą╗čÅ čäčāąĮą║čåąĖąĖ ą┐ąŠč鹊ą║ą░: čü ą▒ąĄčüą║ąŠąĮąĄčćąĮčŗą╝ čåąĖą║ą╗ąŠą╝ (Infinite Loop Mode) ąĖ ąĖą╗ąĖ čü ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╝ ąŠą┐ąĖčüą░ąĮąĖąĄą╝ ą┤ąĄą╣čüčéą▓ąĖą╣ ąĖ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖą╝ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄą╝ (Sequential Execution Mode, ąĖą╗ąĖ Finite-Cycle Mode).
Infinite Loop Mode. ążčāąĮą║čåąĖčÅ čü ą▒ąĄčüą║ąŠąĮąĄčćąĮčŗą╝ čåąĖą║ą╗ąŠą╝, čŹč鹊 ąĮą░ąĖą▒ąŠą╗ąĄąĄ čćą░čüč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ čĆąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ ą┐ąŠč鹊ą║ą░. ąÆ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčŗčģ čüąĖčüč鹥ą╝ą░čģ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (RTOS) ą┐ąŠč鹊ą║ąĖ ąŠą▒čŗčćąĮąŠ ą┐ą░čüčüąĖą▓ąĮčŗ, ąĖ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąŠą▓ąŠą┤čÅčé ą▓ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ, ąŠąČąĖą┤ą░čÅ ąĮą░čüčéčāą┐ą╗ąĄąĮąĖčÅ ą║ą░ą║ąŠą│ąŠ-ą╗ąĖą▒ąŠ čüąŠą▒čŗčéąĖčÅ. ąŁč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ą║ą░ą║ ą▓ąĮąĄčłąĮąĄąĄ čüąŠą▒čŗčéąĖąĄ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąŠčé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠčĆčéą░, ąĖą╗ąĖ ąĮą░ąČą░čéąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ąĮą░ ą║ąĮąŠą┐ą║čā), čéą░ą║ ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĄąĄ (ąĖčüč鹥č湥ąĮąĖąĄ čéą░ą╣ą╝ą░čāčéą░ ąĘą░ą┤ąĄčƹȹ║ąĖ). ą¤čĆąĖ ąĮą░čüčéčāą┐ą╗ąĄąĮąĖąĖ čüąŠą▒čŗčéąĖčÅ ą┐ąŠč鹊ą║ ą┐čĆąŠčüčŗą┐ą░ąĄčéčüčÅ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ąĮąĄą║ąĖąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ čüąĮąŠą▓ą░ ą▒ą╗ąŠą║ąĖčĆčāąĄčéčüčÅ ą▓ ąŠąČąĖą┤ą░ąĮąĖąĖ čüąŠą▒čŗčéąĖčÅ. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ čäčāąĮą║čåąĖčÅ ą┐ąŠč鹊ą║ą░ ą╝ąŠąČąĄčé ą▓čŗą│ą╗čÅą┤ąĄčéčī čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
void thread_entry(void* paramenter)
{
// ąÆ čŹč鹊ą╝ ą╝ąĄčüč鹥 ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąĄčĆą▓ąŠąĮą░čćą░ą╗čīąĮą░čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ.
...
// ąÆčģąŠą┤ ą▓ ą▒ąĄčüą║ąŠąĮąĄčćąĮčŗą╣ čåąĖą║ą╗:
while (1)
{
/* ą×ąČąĖą┤ą░ąĮąĖąĄ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ ą║ą░ą║ąŠą│ąŠ-ą╗ąĖą▒ąŠ čüąŠą▒čŗčéąĖčÅ.
ąŁč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ą░ ąĮą░ ąŠč湥čĆąĄą┤ąĖ ąĖą╗ąĖ
čüąĄą╝ą░č乊čĆąĄ, čü čéą░ą╣ą╝ą░čāč鹊ą╝ ąĖą╗ąĖ ą▒ąĄąĘ ąĮąĄą│ąŠ. */
/* ą×ą▒čĆą░ą▒ąŠčéą║ą░ čüąŠą▒čŗčéąĖčÅ */
}
}
ąØą░ ą┐ąĄčĆą▓čŗą╣ ą▓ąĘą│ą╗čÅą┤ čā ą┐ąŠč鹊ą║ąŠą▓ ąĮąĄčé ąŠą│čĆą░ąĮąĖč湥ąĮąĖą╣ ąĮą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą▓čüąĄčģ ąŠą┐ąĄčĆą░čåąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮčŗ. ą×ą┤ąĮą░ą║ąŠ ą▓ čéą░ą║ąŠą╝ čüą╗čāčćą░ąĄ, ą║ąŠą│ą┤ą░ ą┤ą╗čÅ ą┐ąŠč鹊ą║ąŠą▓ RTOS čÅą▓ąĮąŠ ąĮą░ąĘąĮą░č湥ąĮčŗ ą┐čĆąĖąŠčĆąĖč鹥čéčŗ, ąĄčüą╗ąĖ ą┐ąŠč鹊ą║ čü čüą░ą╝čŗą╝ ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ ąĘą░ą▓ąĖčüąĮąĄčé ą▓ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠą╝ čåąĖą║ą╗ąĄ, č鹊 čā ą┐ąŠč鹊ą║ąŠą▓ čü ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ ąĮąĖąČąĄ ąĮąĄ ą▒čāą┤ąĄčé ąĮąĖą║ą░ą║ąĖčģ čłą░ąĮčüąŠą▓ ąĘą░ą┐čāčüčéąĖčéčīčüčÅ, čćč鹊ą▒čŗ ą▓čŗą┐ąŠą╗ąĮąĖčéčī čüą▓ąŠčÄ čĆą░ą▒ąŠčéčā. ą¤ąŠčŹč鹊ą╝čā ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ, čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąĮąŠą╣ ąĮą░ ąŠčüąĮąŠą▓ąĄ RTOS, ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ą▓ąŠąĘąĮąĖą║ą░čéčī čüąĖčéčāą░čåąĖąĖ, ą║ąŠą│ą┤ą░ ą┐ąŠč鹊ą║ąĖ ą▓čüąĄą│ą┤ą░ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Running, ąĖ ą┤ąŠą╗ąČąĮąŠ čüčāčēąĄčüčéą▓ąŠą▓ą░čéčī ą║ą░ą║ąŠąĄ-č鹊 ą┤ąĄą╣čüčéą▓ąĖąĄ ą▓ ą║ąŠą┤ąĄ ą┐ąŠč鹊ą║ą░, ą║ąŠč鹊čĆąŠąĄ ąĘą░čüčéą░ą▓ą╗čÅąĄčé ąĄą│ąŠ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčīčüčÅ, čé. ąĄ. ąŠčéą║ą░ąĘą░čéčīčüčÅ ąŠčé ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čĆąĄčüčāčĆčüą░ CPU - ąĮą░ą┐čĆąĖą╝ąĄčĆ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčīčüčÅ ąĮą░ ąŠąČąĖą┤ą░ąĮąĖąĖ čüąŠą▒čŗčéąĖčÅ, ąĖą╗ąĖ ą┐čĆąĖąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčīčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ ą▓čŗąĘąŠą▓ą░ čäčāąĮą║čåąĖąĖ ąĘą░ą┤ąĄčƹȹ║ąĖ. ąóąŠą│ą┤ą░ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ą╝ąŠąČąĄčé ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ąŠčüą▓ąŠą▒ąŠą┤ąĖą▓čłąĄąĄčüčÅ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ ą┤čĆčāą│ąĖą╝ ą┐ąŠč鹊ą║ą░ą╝. ą”ąĄą╗čī čüąŠąĘą┤ą░ąĮąĖčÅ čäčāąĮą║čåąĖąĖ ą┐ąŠč鹊ą║ą░ čü ą▒ąĄčüą║ąŠąĮąĄčćąĮčŗą╝ čåąĖą║ą╗ąŠą╝ čüąŠčüč鹊ąĖčé ą▓ č鹊ą╝, čćč鹊ą▒čŗ ą┐ąŠąĘą▓ąŠą╗ąĖčéčī ą┐ąŠč鹊ą║čā ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ ąĘą░ą┐čāčüą║ą░čéčī čüą▓ąŠąĖ ą┤ąĄą╣čüčéą▓ąĖčÅ ąĖ ąĮąĖą║ąŠą│ą┤ą░ ą┐čĆąĖ čŹč鹊ą╝ ąĮąĄ ąĘą░ą▓ąĄčĆčłą░čéčīčüčÅ.
Sequential Execution, ąĖą╗ąĖ Finite-Cycle Mode. ąŁč鹊 čäčāąĮą║čåąĖčÅ ą▒ąĄąĘ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠą│ąŠ čåąĖą║ą╗ą░, ąŠą┐ąĖčüčŗą▓ą░čÄčēą░čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĮą░ą▒ąŠčĆ ą┤ąĄą╣čüčéą▓ąĖą╣. ąóą░ą║ąĖąĄ ą┐ąŠč鹊ą║ąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ąŠą┐ąĖčüą░ąĮčŗ ą║ą░ą║ "ąŠą┤ąĮąŠą║čĆą░čéąĮčŗąĄ", ą┐ąŠčüą╗ąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čüą▓ąŠąĖčģ ą┤ąĄą╣čüčéą▓ąĖą╣ ąŠąĮąĖ ą▒čāą┤čāčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čāą┤ąĄą╗ąĄąĮčŗ čüąĖčüč鹥ą╝ąŠą╣. ąĀąĄčüčāčĆčüčŗ, ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗąĄ ą┤ą╗čÅ čéą░ą║ąŠą│ąŠ ą┐ąŠč鹊ą║ą░, ąŠčüą▓ąŠą▒ąŠąČą┤ą░čÄčéčüčÅ čüą▒ąŠčĆčēąĖą║ąŠą╝ ą╝čāčüąŠčĆą░, ą▓čŗąĘčŗą▓ą░ąĄą╝ąŠą│ąŠ ąĖąĘ ą┐ąŠč鹊ą║ą░ ąŠąČąĖą┤ą░ąĮąĖčÅ.
static void thread_entry(void* parameter)
{
/* ą×ą▒čĆą░ą▒ąŠčéą║ą░ čéčĆą░ąĮąĘą░ą║čåąĖąĖ #1 */
...
/* ą×ą▒čĆą░ą▒ąŠčéą║ą░ čéčĆą░ąĮąĘą░ą║čåąĖąĖ #2 */
...
/* ą×ą▒čĆą░ą▒ąŠčéą║ą░ čéčĆą░ąĮąĘą░ą║čåąĖąĖ #3 */
...
}
Thread Error Code. ą×ą┤ąĖąĮ ą┐ąŠč鹊ą║ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čüąŠą▒ąŠą╣ ąŠą┤ąĖąĮ ąĖąĘ ą▓čŗą┐ąŠą╗ąĮčÅąĄą╝čŗčģ čüčåąĄąĮą░čĆąĖąĄą▓ (ą░ą╗ą│ąŠčĆąĖčéą╝ąŠą▓) ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąÜąŠą┤ ąŠčłąĖą▒ą║ąĖ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ą┐čĆąĖą▓čÅąĘą░ąĮ ą║ ąŠą║čĆčāąČąĄąĮąĖčÄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ (execution environment), čéą░ą║ čćč鹊 ą║ą░ąČą┤čŗą╣ ą┐ąŠč鹊ą║ čüąĮą░ą▒ąČąĄąĮ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą╣ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣, čüąŠą┤ąĄčƹȹ░čēąĄą╣ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ ą┐ąŠč鹊ą║ą░ (thread error code). ąÜąŠą┤ ąŠčłąĖą▒ą║ąĖ ą▓ą║ą╗čÄčćą░ąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ ą▓ą░čĆąĖą░ąĮčéčŗ ąŠčłąĖą▒ąŠą║:
#define RT_EOK 0 /* No error, ąŠčéčüčāčéčüčéą▓ąĖąĄ ąŠčłąĖą▒ą║ąĖ */
#define RT_ERROR 1 /* Regular error, ąŠą▒čēą░čÅ ąĖą╗ąĖ ąĮąĄąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮą░čÅ ąŠčłąĖą▒ą║ą░ */
#define RT_ETIMEOUT 2 /* Timeout error, čéą░ą╣ą╝ą░čāčé */
#define RT_EFULL 3 /* Resource is full, ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ čĆąĄčüčāčĆčüą░ */
#define RT_EEMPTY 4 /* No resource, ąŠčéčüčāčéčüčéą▓ąĖąĄ čĆąĄčüčāčĆčüą░ */
#define RT_ENOMEM 5 /* No memory, ąĮąĄčģą▓ą░čéą║ą░ ą┐ą░ą╝čÅčéąĖ */
#define RT_ENOSYS 6 /* System does not support, čüąĖčüč鹥ą╝ą░ čŹč鹊 ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé */
#define RT_EBUSY 7 /* System busy, čüąĖčüč鹥ą╝ą░ ąĘą░ąĮčÅčéą░ */
#define RT_EIO 8 /* IO error, ąŠčłąĖą▒ą║ą░ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ */
#define RT_EINTR 9 /* Interrupt system call, čüąĖčüč鹥ą╝ąĮčŗą╣ ą▓čŗąĘąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ */
#define RT_EINVAL 10 /* Invalid Parameter, ąĮąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ */
[ą¤ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą╝ąĄąČą┤čā čüąŠčüč鹊čÅąĮąĖčÅą╝ąĖ ą┐ąŠč鹊ą║ą░]
RT-Thread ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĮą░ą▒ąŠčĆ čüąĖčüč鹥ą╝ąĮčŗčģ čäčāąĮą║čåąĖą╣, čĆąĄą░ą╗ąĖąĘčāčÄčēąĖąĄ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą╝ąĄąČą┤čā 5 čüąŠčüč鹊čÅąĮąĖčÅą╝ąĖ ą┐ąŠč鹊ą║ąŠą▓. ąÆąĘą░ąĖą╝ąŠčüą▓čÅąĘčī ą╝ąĄąČą┤čā čüąŠčüč鹊čÅąĮąĖčÅą╝ąĖ ą┐ąŠč鹊ą║ąŠą▓ ą┐ąŠą║ą░ąĘą░ąĮą░ ąĮą░ čüą╗ąĄą┤čāčÄčēąĄą╝ čĆąĖčüčāąĮą║ąĄ:
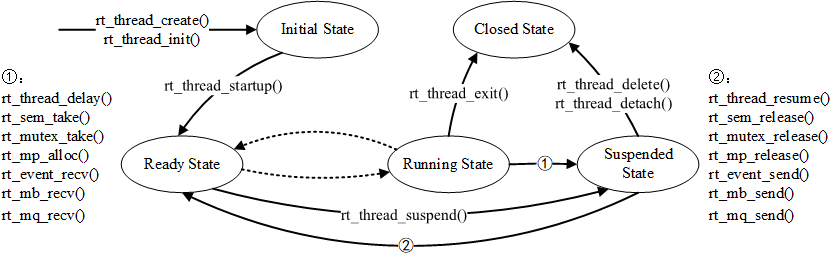
ąĀąĖčü. 5. ąöąĖą░ą│čĆą░ą╝ą╝ą░ ą┐ąĄčĆąĄčģąŠą┤ąŠą▓ ą╝ąĄąČą┤čā čüąŠčüč鹊čÅąĮąĖčÅą╝ąĖ ą┐ąŠč鹊ą║ą░.
ą¤ąŠč鹊ą║ ą▓čģąŠą┤ąĖčé ą▓ ąĮą░čćą░ą╗čīąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ (RT_THREAD_INIT) ą┐čĆąĖ ą▓čŗąĘąŠą▓ąĄ čäčāąĮą║čåąĖą╣ rt_thread_create/rt_thread_init. ąśąĘ ąĮą░čćą░ą╗čīąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ ą┐ąŠč鹊ą║ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ (RT_THREAD_READY) ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ rt_thread_startup. ąÜąŠą│ą┤ą░ ą┐ąŠč鹊ą║ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ, ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ą╝ąŠąČąĄčé ą┐ąĄčĆąĄą▓ąĄčüčéąĖ ąĄą│ąŠ ą▓ čĆą░ą▒ąŠč湥ąĄ čüąŠčüč鹊čÅąĮąĖąĄ (RT_THREAD_RUNNING). ąÜąŠą│ą┤ą░ ąĖąĘ č鹥ą╗ą░ ą┐ąŠč鹊ą║ą░ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ąŠą┤ąĮą░ ąĖąĘ čäčāąĮą║čåąĖą╣ rt_thread_delay, rt_sem_take, rt_mutex_take, rt_mb_recv, ąĖą╗ąĖ ą║ąŠą│ą┤ą░ ą┤ą╗čÅ ąĮąĄą│ąŠ ą▒ąŠą╗čīčłąĄ ąĮąĄčé čĆąĄčüčāčĆčüą░ CPU, ą┐ąŠč鹊ą║ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (RT_THREAD_SUSPEND). ąĢčüą╗ąĖ ą┐ąŠč鹊ą║ąĖ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ ą┐čĆąĖ ąŠąČąĖą┤ą░ąĮąĖąĖ čéą░ą╣ą╝ą░čāčéą░ ąĮąĄ ą┐ąŠą╗čāčćąĖą╗ąĖ čĆąĄčüčāčĆčü CPU, ąĖą╗ąĖ ą║ąŠą│ą┤ą░ ą┤čĆčāą│ąĖąĄ ą┐ąŠč鹊ą║ąĖ ąŠčüą▓ąŠą▒ąŠą┤ąĖą╗ąĖ CPU, č鹊 ą┐ąŠč鹊ą║ ą▓ąĄčĆąĮąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Ready.
ąĢčüą╗ąĖ ą┐ąŠč鹊ą║ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠčüą╗ąĄ ą▓čŗąĘąŠą▓ą░ čäčāąĮą║čåąĖą╣ rt_thread_delete/rt_thread_detach, č鹊 ąŠąĮ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą▓ąĄą┤ąĄąĮ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąĘą░ą║čĆčŗčéąĖčÅ (RT_THREAD_CLOSE). ąöą╗čÅ ą┐ąŠč鹊ą║ą░ ą▓ čĆą░ą▒ąŠč湥ą╝ čüąŠčüč鹊čÅąĮąĖąĖ (RT_THREAD_RUNNING), ąĄčüą╗ąĖ ąĄą│ąŠ čĆą░ą▒ąŠčéą░ ąĘą░ą▓ąĄčĆčłąĄąĮą░, č鹊 ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ čäčāąĮą║čåąĖčÅ rt_thread_exit ą║ą░ą║ ą┐ąŠčüą╗ąĄą┤ąĮąĄąĄ ą┤ąĄą╣čüčéą▓ąĖąĄ ą┐ąŠč鹊ą║ą░ ą┤ą╗čÅ ąĄą│ąŠ ą┐ąĄčĆąĄčģąŠą┤ą░ ą▓ ąĘą░ą║čĆčŗč鹊ąĄ čüąŠčüč鹊čÅąĮąĖąĄ (RT_THREAD_CLOSE).
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓ RT-Thread čā ą┐ąŠč鹊ą║ą░ čäą░ą║čéąĖč湥čüą║ąĖ ąĮąĄčé čüąŠčüč鹊čÅąĮąĖčÅ Running, ąĄą│ąŠ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮč鹊ą╝ čÅą▓ą╗čÅąĄčéčüčÅ čüąŠčüč鹊čÅąĮąĖąĄ Ready.
[ąĪąĖčüč鹥ą╝ąĮčŗą╣ ą┐ąŠč鹊ą║]
ąÜą░ą║ čāąČąĄ čāą┐ąŠą╝ąĖąĮą░ą╗ąŠčüčī, čüąĖčüč鹥ą╝ąĮčŗą╣ ą┐ąŠč鹊ą║ (system thread) čŹč鹊 ą┐ąŠč鹊ą║, ą║ąŠč鹊čĆčŗą╣ čüąŠąĘą┤ą░ąĄčéčüčÅ ą║ąŠą┤ąŠą╝ čüąĖčüč鹥ą╝čŗ, ąĖ ą┐ąŠč鹊ą║ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (user thread) čŹč鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ č鹊čé ą┐ąŠč鹊ą║, ą║ąŠč鹊čĆčŗą╣ ą▒čŗą╗ čüąŠąĘą┤ą░ąĮ ą▓čŗąĘąŠą▓ą░ą╝ąĖ čäčāąĮą║čåąĖčÅą╝ąĖ API-ąĖąĮč鹥čĆč乥ą╣čüą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ą░ą╝ąĖ (thread management). ąÜ čüąĖčüč鹥ą╝ąĮčŗą╝ ą┐ąŠč鹊ą║ą░ą╝ ą▓ čÅą┤čĆąĄ RT-Thread ąŠčéąĮąŠčüčÅčéčüčÅ ąĘą░ą┤ą░čćą░ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle thread) ąĖ ąŠčüąĮąŠą▓ąĮąŠą╣ ą┐ąŠč鹊ą║ (main thread).
Idle Thread. ą¤ąŠč鹊ą║ ąŠąČąĖą┤ą░ąĮąĖčÅ čüąŠąĘą┤ą░ąĄčéčüčÅ čüąĖčüč鹥ą╝ąŠą╣ čü čüą░ą╝čŗą╝ ąĮąĖąĘą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝, ąĖ ąŠąĮ ą▓čüąĄą│ą┤ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Ready. ąÜąŠą│ą┤ą░ ą▓ čüąĖčüč鹥ą╝ąĄ ąĮąĄčé ą┤čĆčāą│ąĖčģ ą┐ąŠč鹊ą║ąŠą▓ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Ready, ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▓čĆąĄą╝čÅ CPU ą┐ąŠč鹊ą║čā ąŠąČąĖą┤ą░ąĮąĖčÅ, ą▓ ą║ąŠč鹊čĆąŠą╝ čüąŠą┤ąĄčƹȹĖčéčüčÅ ą▒ąĄčüą║ąŠąĮąĄčćąĮčŗą╣ čåąĖą║ą╗, ą║ąŠč鹊čĆčŗą╣ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą┐čĆąĖąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą┐ąŠč鹊ą║ ąŠąČąĖą┤ą░ąĮąĖčÅ ąŠą▒čüą╗čāąČąĖą▓ą░ąĄčé čüą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ čäčāąĮą║čåąĖąĖ ą▓ RT-Thread.
ąĢčüą╗ąĖ ą║ą░ą║ąŠą╣-ą╗ąĖą▒ąŠ ą┐ąŠč鹊ą║ ąĘą░ą▓ąĄčĆčłą░ąĄčéčüčÅ, č鹊 čüąĖčüč鹥ą╝ą░ ą┤ąŠą╗ąČąĮą░ ąĄą│ąŠ čāą┤ą░ą╗ąĖčéčī ąĖ ąŠčüą▓ąŠą▒ąŠą┤ąĖčéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čĆąĄčüčāčĆčüčŗ. ą¤čĆąĖ čŹč鹊ą╝ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ čäčāąĮą║čåąĖčÅ rt_thread_exit, ą│ą┤ąĄ čüąĮą░čćą░ą╗ą░ ą┐ąŠč鹊ą║ čāą┤ą░ą╗čÅąĄčéčüčÅ ąĖąĘ čüąĖčüč鹥ą╝ąĮąŠą╣ ąŠč湥čĆąĄą┤ąĖ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ (system ready queue), ąĘą░č鹥ą╝ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠč鹊ą║ą░ ą╝ąĄąĮčÅąĄčéčüčÅ ąĮą░ Closed - čŹč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┐ąŠč鹊ą║ ą▒ąŠą╗čīčłąĄ ąĮąĄ čāčćą░čüčéą▓čāąĄčé ą▓ čĆą░ą▒ąŠč鹥 ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ čĆąĄčüčāčĆčüčŗ ą┐ąŠč鹊ą║ą░ ą┐ąĄčĆąĄą▓ąŠą┤čÅčéčüčÅ ą▓ ąŠč湥čĆąĄą┤čī ą┤ąĖčüčäčāąĮą║čåąĖąĖ (rt_thread_defunct queue, čŹč鹊 ąŠč湥čĆąĄą┤čī ą┐ąŠč鹊ą║ąŠą▓, ą║ąŠč鹊čĆčŗąĄ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ ąĘą░ą║čĆčŗč鹊ą╝ čüąŠčüč鹊čÅąĮąĖąĖ, ąĖ čĆąĄčüčāčĆčüčŗ ąĖčģ ąĄčēąĄ ąĮąĄ ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮčŗ). ą¤ąŠč鹊ą║ ąŠąČąĖą┤ą░ąĮąĖčÅ ą║ą░ą║ čĆą░ąĘ ąĘą░ąĮąĖą╝ą░ąĄčéčüčÅ ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖąĄą╝ čĆąĄčüčāčĆčüąŠą▓ ąĘą░ą║čĆčŗčéčŗčģ ą┐ąŠč鹊ą║ąŠą▓ ąĖ čāą┤ą░ą╗ąĄąĮąĖąĄą╝ ą┐ąŠč鹊ą║ą░.
ąóą░ą║ąČąĄ ą┐ąŠč鹊ą║ ąŠąČąĖą┤ą░ąĮąĖčÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĖąĮč鹥čĆč乥ą╣čü ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ąĖąĘ čüą▓ąŠąĄą│ąŠ č鹥ą╗ą░ hook-čäčāąĮą║čåąĖąĖ, ąĮą░ąĘąĮą░č湥ąĮąĮąŠą╣ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝. ąŁč鹊 ąŠą▒čĆą░ą▒ąŠčéčćąĖą║, ą║ąŠč鹊čĆčŗą╣ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą┐čĆąĖ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ą┐ąŠč鹊ą║ą░ ąŠąČąĖą┤ą░ąĮąĖčÅ, čćč鹊 ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ čéą░ą║ąĖčģ ąŠą┐ąĄčĆą░čåąĖą╣, ą║ą░ą║ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝, čāč湥čé čüčéą░čéąĖčüčéąĖą║ąĖ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (čéą░ą║ąŠą╣, ą║ą░ą║čāčÄ ąŠč鹊ą▒čĆą░ąČą░ąĄčé ą║ąŠą╝ą░ąĮą┤ą░ ps ą║ąŠąĮčüąŠą╗ąĖ FinSH), ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ watchdog, ąĖ čé. ą┐.
Main Thread. ąÜąŠą│ą┤ą░ čüąĖčüč鹥ą╝ą░ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ, ąŠąĮą░ čüąŠąĘą┤ą░ąĄčé ą│ą╗ą░ą▓ąĮčŗą╣ ą┐ąŠč鹊ą║ (main thread). ążčāąĮą║čåąĖčÅ čŹč鹊ą│ąŠ ą┐ąŠč鹊ą║ą░ ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ main_thread_entry. ąśąĘ ą│ą╗ą░ą▓ąĮąŠą│ąŠ ą┐ąŠč鹊ą║ą░ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ čäčāąĮą║čåąĖčÅ ą▓čģąŠą┤ą░ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ main (application entry function). ą¤ąŠčüą╗ąĄ ąĘą░ą┐čāčüą║ą░ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░ čüąĖčüč鹥ą╝čŗ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ąĘą░ą┐čāčüčéąĖčé main thread. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ą╝ąŠą│čāčé ą┤ąŠą▒ą░ą▓ąĖčéčī ą║ąŠą┤ čüą▓ąŠąĄą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą▓ čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ čäčāąĮą║čåąĖąĖ main.
/* ą×čüąĮąŠą▓ąĮą░čÅ čäčāąĮą║čåąĖčÅ čüąĖčüč鹥ą╝čŗ, čüąĖčüč鹥ą╝ąĮčŗą╣ ą┐ąŠč鹊ą║ */
void main_thread_entry(void *parameter)
{
/* ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ RT-Thread */
rt_components_init();
/* ąŚą░ą┐čāčüą║ čäčāąĮą║čåąĖąĖ main čüąĖčüč鹥ą╝čŗ */
#if defined (__CC_ARM)
extern int $Super$$main(void);
$Super$$main(); /* ąöą╗čÅ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░ ARMCC. */
#elif defined(__ICCARM__) || defined(__GNUC__)
extern int main(void);
main();
#endif
}

ąĀąĖčü. 6. ą¤čĆąŠčåąĄčüčü ąĘą░ą┐čāčüą║ą░ čüąĖčüč鹥ą╝čŗ.
[API čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ą░ą╝ąĖ]
ąØą░ čüą╗ąĄą┤čāčÄčēąĄą╣ ą║ą░čĆčéąĖąĮą║ąĄ ą┐ąŠą║ą░ąĘą░ąĮčŗ ąŠą┐ąĄčĆą░čåąĖąĖ čü ą┐ąŠč鹊ą║ą░ą╝ąĖ, čéą░ą║ąĖąĄ ą║ą░ą║ čüąŠąĘą┤ą░ąĮąĖąĄ/ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ, ąĘą░ą┐čāčüą║, čāą┤ą░ą╗ąĄąĮąĖąĄ/ąŠčéą║ą╗čÄč湥ąĮąĖąĄ. ąÆčŗ ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī rt_thread_create ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą│ąŠ ą┐ąŠč鹊ą║ą░ (dynamic thread), ąĖ rt_thread_init ą┤ą╗čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ čüčéą░čéąĖč湥čüą║ąŠą│ąŠ ą┐ąŠč鹊ą║ą░. ąĀą░ąĘą╗ąĖčćąĖąĄ ą╝ąĄąČą┤čā ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖą╝ ąĖ čüčéą░čéąĖč湥čüą║ąĖą╝ ą┐ąŠč鹊ą║ą░ą╝ąĖ ą▓ č鹊ą╝, čćč鹊 ą┤ą╗čÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą│ąŠ ą┐ąŠč鹊ą║ą░ čüąĖčüč鹥ą╝ą░ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓čŗą┤ąĄą╗čÅąĄčé ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ ą┤ą╗čÅ čüč鹥ą║ą░ ąĖ TCB ąĖąĘ ą┐ą░ą╝čÅčéąĖ ą║čāčćąĖ (heap, ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ ą▓čŗą┤ąĄą╗čÅąĄą╝ą░čÅ ą┐ą░ą╝čÅčéčī), ą░ ą┤ą╗čÅ čüčéą░čéąĖč湥čüą║ąŠą│ąŠ ą┐ąŠč鹊ą║ą░ ą┐ą░ą╝čÅčéčī ą▓čŗą┤ąĄą╗čÅąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüč鹊ą╝. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖą╣ ą┐ąŠč鹊ą║ čüąŠąĘą┤ą░ąĄčéčüčÅ ą▓ąŠ ą▓čĆąĄą╝čÅ čĆą░ą▒ąŠčéčŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ (runtime), ąĖ ąŠąĮ ą╝ąŠąČąĄčé ą▒čŗčéčī čüąŠąĘą┤ą░ąĮ č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čŗą╗ą░ čüąŠąĘą┤ą░ąĮą░ ą║čāčćą░ čüąĖčüč鹥ą╝čŗ. ą¤ą░ą╝čÅčéčī ą┤ą╗čÅ čüčéą░čéąĖč湥čüą║ąŠą│ąŠ ą┐ąŠč鹊ą║ą░ ą▓čŗą┤ąĄą╗čÅąĄčéčüčÅ ą▓ ą╝ąŠą╝ąĄąĮčé ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ą┐ą░ą╝čÅčéčī ą┐ąŠą┤ čüč鹥ą║ ą┐ąŠč鹊ą║ą░ ąĖ ąĄą│ąŠ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą▓čŗą┤ąĄą╗čÅąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüč鹊ą╝ ą┐čĆąĖ ąĮą░ą┐ąĖčüą░ąĮąĖąĖ ą║ąŠą┤ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
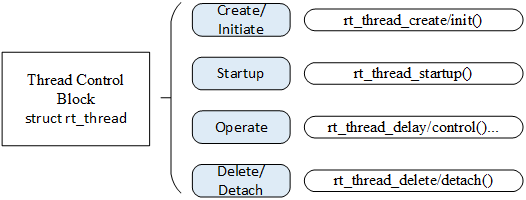
ąĀąĖčü. 7. ą×ą┐ąĄčĆą░čåąĖąĖ ąĮą░ą┤ ą┐ąŠč鹊ą║ą░ą╝ąĖ ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ API-čäčāąĮą║čåąĖąĖ RT-Thread.
ąĪąŠąĘą┤ą░ąĮąĖąĄ ąĖ čāą┤ą░ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ą░. ą¦č鹊ą▒čŗ čüčéą░čéčī ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗą╝ ąŠą▒čŖąĄą║č鹊ą╝, ą┐ąŠč鹊ą║ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüąŠąĘą┤ą░ąĮ čÅą┤čĆąŠą╝ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ. ąöąĖąĮą░ą╝ąĖč湥čüą║ąĖą╣ ą┐ąŠč鹊ą║ ą▓čŗ ą╝ąŠąČąĄč鹥 čüąŠąĘą┤ą░čéčī čüą╗ąĄą┤čāčÄčēąĄą╣ čäčāąĮą║čåąĖąĄą╣:
rt_thread_t rt_thread_create(const char* name,
void (*entry)(void* parameter),
void* parameter,
rt_uint32_t stack_size,
rt_uint8_t priority,
rt_uint32_t tick);
ąÜąŠą│ą┤ą░ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ čŹčéą░ čäčāąĮą║čåąĖčÅ, čüąĖčüč鹥ą╝ą░ ą▓čŗą┤ąĄą╗ąĖčé ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą┐ąŠč鹊ą║ą░ (thread handle) ąĖąĘ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą╣ ą┐ą░ą╝čÅčéąĖ (ą┤ąĄčüą║čĆąĖą┐č鹊čĆ čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ čéąĖą┐ą░ rt_thread_t, ą║ąŠč鹊čĆąŠąĄ ą▓ąŠąĘą▓čĆą░čéąĖčé čäčāąĮą║čåąĖčÅ), ąĖ čéą░ą║ąČąĄ ą▓čŗą┤ąĄą╗ąĖčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ ąĖąĘ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą╣ ą║čāčćąĖ ą┤ą╗čÅ čüč鹥ą║ą░, čĆą░ąĘą╝ąĄčĆ ą║ąŠč鹊čĆąŠą│ąŠ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą╝ stack_size. ąÆčŗą┤ąĄą╗čÅąĄą╝ą░čÅ ą┐ąŠą┤ čüč鹥ą║ ą┐ą░ą╝čÅčéčī ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ąĄčéčüčÅ ą▓ ą░ą┤čĆąĄčüąĮąŠą╝ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ ą╝ą░ą║čĆąŠčüąŠą╝ RT_ALIGN_SIZE, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą╝ ą▓ rtconfig.h (ąŠą▒čŗčćąĮąŠ čŹč鹊čé ą╝ą░ą║čĆąŠčü ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą║ą░ą║ 4, čćč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą░ą┤čĆąĄčü ąĮą░čćą░ą╗ą░ ąŠą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ ą┤ąŠą╗ąČąĄąĮ ąĮą░čåąĄą╗ąŠ ą┤ąĄą╗ąĖčéčīčüčÅ ąĮą░ 4).
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ čäčāąĮą║čåąĖąĖ rt_thread_create ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĖąĘ ąĮąĄčæ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąĖčüą░ąĮčŗ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄ:
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| name |
ąśą╝čÅ ą┐ąŠč鹊ą║ą░: č鹥ą║čüčé, ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ ą┤ą╗ąĖąĮą░ ą║ąŠč鹊čĆąŠą│ąŠ ąĘą░ą┤ą░ąĮą░ ą╝ą░ą║čĆąŠčüąŠą╝ RT_NAME_MAX ą▓ rtconfig.h. ąĢčüą╗ąĖ č鹥ą║čüčé ąĖą╝ąĄąĮąĖ ą┤ą╗ąĖąĮąĮąĄąĄ, č鹊 ąŠąĮ ą▒čāą┤ąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠą▒čĆąĄąĘą░ąĮ ą┤ąŠ ąĘąĮą░č湥ąĮąĖčÅ RT_NAME_MAX. |
| entry |
ążčāąĮą║čåąĖčÅ č鹥ą╗ą░ ą┐ąŠč鹊ą║ą░ (thread entry function). |
| parameter |
ą¤ą░čĆą░ą╝ąĄčéčĆ, ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗą╣ ą▓ čäčāąĮą║čåąĖčÄ ą┐ąŠč鹊ą║ą░. |
| stack_size |
ąĀą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ ą┐ąŠč鹊ą║ą░ ą▓ ą▒ą░ą╣čéą░čģ. |
| priority |
ą¤čĆąĖąŠčĆąĖč鹥čé ą┐ąŠč鹊ą║ą░. ąöąĖą░ą┐ą░ąĘąŠąĮ ą▓ąŠąĘą╝ąŠąČąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣ ą┤ą╗čÅ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓ ąŠčüąĮąŠą▓ą░ąĮ ąĮą░ čüąĖčüč鹥ą╝ąĮąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, čćč鹊 ąĘą░ą┤ą░ąĄčéčüčÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄą╝ ą╝ą░ą║čĆąŠčüą░ RT_THREAD_PRIORITY_MAX ą▓ rtconfig.h. ąĪą░ą╝čŗą╣ ąĮąĖąĘą║ąĖą╣ ą▓ąŠąĘą╝ąŠąČąĮčŗą╣ ą┐čĆąĖąŠčĆąĖč鹥čé ąŠą▒ąŠąĘąĮą░čćą░ąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄą╝ RT_THREAD_PRIORITY_MAX-1, čüą░ą╝čŗą╣ ą▓čŗčüąŠą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé ąĘąĮą░č湥ąĮąĖąĄą╝ 0. |
| tick |
ąÆčŗą┤ąĄą╗ąĄąĮąĮčŗą╣ ą┤ą╗čÅ ą┐ąŠč鹊ą║ą░ ąĖąĮč鹥čĆą▓ą░ą╗ ą▓čĆąĄą╝ąĄąĮąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ (time slice), čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▓ čüąĖčüč鹥ą╝ąĮčŗčģ čéąĖą║ą░čģ. |
| ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ |
| TCB |
ą¤čĆąĖ čāčüą┐ąĄčłąĮąŠą╝ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ čäčāąĮą║čåąĖąĖ ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą┐ąŠč鹊ą║ą░ (thread handle), ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčēąĖą╣ čüąŠą▒ąŠą╣ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā Thread Control Block ą┐ąŠč鹊ą║ą░. |
| RT_NULL |
ąŁč鹊 ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąŠčłąĖą▒ą║čā čüąŠąĘą┤ą░ąĮąĖčÅ ą┐ąŠč鹊ą║ą░. |
ąöą╗čÅ ąĮąĄą║ąŠč鹊čĆčŗčģ ą┐ąŠč鹊ą║ąŠą▓, čüąŠąĘą┤ą░ąĮąĮčŗčģ čü ą┐ąŠą╝ąŠčēčīčÄ rt_thread_create, ąĄčüą╗ąĖ ąŠąĮ ą▒ąŠą╗čīčłąĄ ąĮąĄ ąĮčāąČąĄąĮ, ą╗ąĖ ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ąŠčłąĖą▒ą║ą░ ą▓ąĮčāčéčĆąĖ ą┐ąŠč鹊ą║ą░, ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čäčāąĮą║čåąĖčÄ čāą┤ą░ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ą░ ąĖąĘ čüąĖčüč鹥ą╝čŗ:
rt_err_t rt_thread_delete(rt_thread_t thread);
ą¤ąŠčüą╗ąĄ ą▓čŗąĘąŠą▓ą░ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ąŠą▒čŖąĄą║čé ą┐ąŠč鹊ą║ą░ čāą┤ą░ą╗čÅąĄčéčüčÅ ąĖąĘ čüą┐ąĖčüą║ą░ ą┐ąŠč鹊ą║ąŠą▓ (thread list) ąĖ čāą┤ą░ą╗čÅąĄčéčüčÅ ąĖąĘ ą╝ąĄąĮąĄą┤ąČąĄčĆą░ ą┐ąŠč鹊ą║ąŠą▓ (kernel object manager). ąÜą░ą║ čüą╗ąĄą┤čüčéą▓ąĖąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ ą▓ ą║čāč湥, ą▓čŗą┤ąĄą╗ąĄąĮąĮąŠąĄ ą┐ąŠą┤ čüč鹥ą║ ą┐ąŠč鹊ą║ą░ ąĖ ąĄą│ąŠ TCB, ą▒čāą┤ąĄčé ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮąŠ, ąĖ ą╝ąŠąČąĄčé ą┐ąŠą▓č鹊čĆąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ ą┤čĆčāą│ąĖčģ čćą░čüčéčÅčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ążą░ą║čéąĖč湥čüą║ąĖ ą▓čŗąĘąŠą▓ čäčāąĮą║čåąĖąĖ rt_thread_delete ą┐ąŠč鹊ą║ąŠą╝ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé ąĄą│ąŠ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ RT_THREAD_CLOSE, ąĖ ą┐ąŠą╝ąĄčēą░ąĄčé ą▓ ąŠč湥čĆąĄą┤čī ą┤ąĖčüčäčāąĮą║čåąĖąĖ ą┐ąŠč鹊ą║ąŠą▓ (rt_thread_defunct queue). ążąĖąĘąĖč湥čüą║ąĖąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ ą┐ąŠ čāą┤ą░ą╗ąĄąĮąĖčÄ (ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ TCB ąĖ čüč鹥ą║ą░ ą┐ąŠč鹊ą║ą░) ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĘą░ą▓ąĄčĆčłąĄąĮčŗ ą┐ąŠąĘąČąĄ, ą║ąŠą│ą┤ą░ ąĘą░ą┐čāčüčéąĖčéčüčÅ čüą▒ąŠčĆčēąĖą║ ą╝čāčüąŠčĆą░, ą▓čŗąĘą▓ą░ąĮąĮčŗą╣ ąĖąĘ ąĘą░ą┤ą░čćąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle thread), ą║ąŠą│ą┤ą░ ąŠąĮą░ ąĘą░ą┐čāčüčéąĖčéčüčÅ.
ą¤ą░čĆą░ą╝ąĄčéčĆ čäčāąĮą║čåąĖąĖ rt_thread_delete ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĖąĘ ąĮąĄčæ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąĖčüą░ąĮčŗ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄ:
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| thread |
ąöąĄčüą║čĆąĖą┐č鹊čĆ ą┐ąŠč鹊ą║ą░, ą┐ąŠą┤ą╗ąĄąČą░čēąĄą│ąŠ čāą┤ą░ą╗ąĄąĮąĖčÄ. |
| ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ |
| RT_EOK |
ą¤ąŠą║ą░ąĘčŗą▓ą░ąĄčé čāčüą┐ąĄčłąĮąŠąĄ čāą┤ą░ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ą░. |
| RT_ERROR |
ą×čłąĖą▒ą║ą░ čāą┤ą░ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ą░. |
ąŁčéčā čäčāąĮą║čåąĖčÄ ą┤ąŠą┐čāčüčéąĖą╝ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖčģ ą┐ąŠč鹊ą║ąŠą▓, ą║ąŠą│ą┤ą░ ą▓ čüąĖčüč鹥ą╝ąĄ čĆą░ąĘčĆąĄčłąĄąĮą░ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ą░čÅ ą║čāčćą░ (dynamic heap), čćč鹊 ąĘą░ą┤ą░ąĄčéčüčÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄą╝ ą╝ą░ą║čĆąŠčüą░ RT_USING_HEAP.
ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ąĖ ąŠčéčüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą┐ąŠč鹊ą║ą░. ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą┐ąŠč鹊ą║ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮą░ čäčāąĮą║čåąĖąĄą╣ rt_thread_init, ą║ąŠą│ą┤ą░ čüąŠąĘą┤ą░ąĄčéčüčÅ čüčéą░čéąĖč湥čüą║ąĖą╣ ą┐ąŠč鹊ą║. "ąĪčéą░čéąĖč湥čüą║ąĖą╣" ąŠą▒ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┐ą░ą╝čÅčéčī ą┤ą╗čÅ ą┐ąŠč鹊ą║ą░ ą▓čŗą┤ąĄą╗čÅąĄčéčüčÅ ąĖąĘ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗčģ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ ą▓ ą╝ąŠą╝ąĄąĮčé ąĮą░ą┐ąĖčüą░ąĮąĖčÅ/ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ. ą»ą┤čĆąŠ RT-Thread ąĮąĄ ąŠčéą▓ąĄčćą░ąĄčé ąĘą░ ą▓čŗą┤ąĄą╗ąĄąĮąĖąĄ ąĖ ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ čüčéą░čéąĖč湥čüą║ąŠą│ąŠ ą┐ąŠč鹊ą║ą░.
rt_err_t rt_thread_init(struct rt_thread* thread,
const char* name,
void (*entry)(void* parameter),
void* parameter,
void* stack_start,
rt_uint32_t stack_size,
rt_uint8_t priority,
rt_uint32_t tick);
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čā čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ą┐ąŠ čüčĆą░ą▓ąĮąĄąĮąĖčÄ čü rt_thread_create ąĮą░ 2 ą┐ą░čĆą░ą╝ąĄčéčĆą░ ą▒ąŠą╗čīčłąĄ: thread ąĖ stack_start. ąŁč鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ čāą║ą░ąĘą░č鹥ą╗ąĖ ąĮą░ ąŠą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ TCB ąĖ čüč鹥ą║ą░, čŹčéąĖ ąŠą▒ą╗ą░čüčéąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą▓čŗą┤ąĄą╗ąĄąĮčŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ čüą░ą╝ąŠčüč鹊čÅč鹥ą╗čīąĮąŠ. ą×ą▒čŗčćąĮąŠ čŹč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ čüčéą░čéąĖč湥čüą║ąĖ, ą▓ ą╝ąŠą╝ąĄąĮčé ąĮą░ą┐ąĖčüą░ąĮąĖčÅ ą║ąŠą┤ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąĪą╗ąĄą┤čāąĄčé ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 ą░ą┤čĆąĄčü ą┤ą╗čÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠą│ąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ čüč鹥ą║ą░ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓čŗčĆąŠą▓ąĮąĄąĮ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝ąĖ čüąĖčüč鹥ą╝čŗ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą╗čÅ ARM čéčĆąĄą▒čāąĄčéčüčÅ ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖąĄ ąĮą░ 4 ą▒ą░ą╣čéą░, čé. ąĄ. ą░ą┤čĆąĄčü ąĮą░čćą░ą╗ą░ ąŠą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ ą┤ąŠą╗ąČąĄąĮ ąĮą░čåąĄą╗ąŠ ą┤ąĄą╗ąĖčéčīčüčÅ ąĮą░ 4).
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ čäčāąĮą║čåąĖąĖ rt_thread_init ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĖąĘ ąĮąĄčæ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąĖčüą░ąĮčŗ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄ:
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| thread |
Thread handle, ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą┐ąŠč鹊ą║ą░. ąŁč鹊 čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā TCB, ą║ąŠč鹊čĆčāčÄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą║ą░ą║ ą│ą╗ąŠą▒ą░ą╗čīąĮčāčÄ (static) ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ. |
| name |
ąśą╝čÅ ą┐ąŠč鹊ą║ą░: č鹥ą║čüčé, ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ ą┤ą╗ąĖąĮą░ ą║ąŠč鹊čĆąŠą│ąŠ ąĘą░ą┤ą░ąĮą░ ą╝ą░ą║čĆąŠčüąŠą╝ RT_NAME_MAX ą▓ rtconfig.h. ąĢčüą╗ąĖ č鹥ą║čüčé ąĖą╝ąĄąĮąĖ ą┤ą╗ąĖąĮąĮąĄąĄ, č鹊 ąŠąĮ ą▒čāą┤ąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠą▒čĆąĄąĘą░ąĮ ą┤ąŠ ąĘąĮą░č湥ąĮąĖčÅ RT_NAME_MAX. |
| entry |
ążčāąĮą║čåąĖčÅ č鹥ą╗ą░ ą┐ąŠč鹊ą║ą░ (thread entry function). |
| parameter |
ą¤ą░čĆą░ą╝ąĄčéčĆ, ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗą╣ ą▓ čäčāąĮą║čåąĖčÄ ą┐ąŠč鹊ą║ą░. |
| stack_start |
ąÉą┤čĆąĄčü ąĮą░čćą░ą╗ą░ ąŠą▒ą╗ą░čüčéąĖ čüč鹥ą║ą░ ą▓ ą┐ą░ą╝čÅčéąĖ. |
| stack_size |
ąĀą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ ą┐ąŠč鹊ą║ą░ ą▓ ą▒ą░ą╣čéą░čģ. |
| priority |
ą¤čĆąĖąŠčĆąĖč鹥čé ą┐ąŠč鹊ą║ą░. ąöąĖą░ą┐ą░ąĘąŠąĮ ą▓ąŠąĘą╝ąŠąČąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣ ą┤ą╗čÅ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓ ąŠčüąĮąŠą▓ą░ąĮ ąĮą░ čüąĖčüč鹥ą╝ąĮąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, čćč鹊 ąĘą░ą┤ą░ąĄčéčüčÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄą╝ ą╝ą░ą║čĆąŠčüą░ RT_THREAD_PRIORITY_MAX ą▓ rtconfig.h. ąĪą░ą╝čŗą╣ ąĮąĖąĘą║ąĖą╣ ą▓ąŠąĘą╝ąŠąČąĮčŗą╣ ą┐čĆąĖąŠčĆąĖč鹥čé ąŠą▒ąŠąĘąĮą░čćą░ąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄą╝ RT_THREAD_PRIORITY_MAX-1, čüą░ą╝čŗą╣ ą▓čŗčüąŠą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé ąĘąĮą░č湥ąĮąĖąĄą╝ 0. |
| tick |
ąÆčŗą┤ąĄą╗ąĄąĮąĮčŗą╣ ą┤ą╗čÅ ą┐ąŠč鹊ą║ą░ ąĖąĮč鹥čĆą▓ą░ą╗ ą▓čĆąĄą╝ąĄąĮąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ (time slice), čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▓ čüąĖčüč鹥ą╝ąĮčŗčģ čéąĖą║ą░čģ. |
| ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ |
| RT_EOK |
ą¤ąŠą║ą░ąĘčŗą▓ą░ąĄčé čāčüą┐ąĄčłąĮčāčÄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÄ ą┐ąŠč鹊ą║ą░. |
| RT_ERROR |
ą×čłąĖą▒ą║ą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą┐ąŠč鹊ą║ą░. |
ąöą╗čÅ ą┐ąŠč鹊ą║ąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮčŗ čü ą┐ąŠą╝ąŠčēčīčÄ rt_thread_init, ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ rt_thread_detach ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ č鹊ą╝čā, čćč鹊 ąŠą▒čŖąĄą║čé ą┐ąŠč鹊ą║ą░ ą▒čāą┤ąĄčé ąŠčéčüąŠąĄą┤ąĖąĮąĄąĮ (detach) ąŠčé ąŠč湥čĆąĄą┤ąĖ ą┐ąŠč鹊ą║ąŠą▓ ąĖ ą╝ąĄąĮąĄą┤ąČąĄčĆą░ ą┐ąŠč鹊ą║ąŠą▓ čÅą┤čĆą░.
rt_err_t rt_thread_detach (rt_thread_t thread);
ą¤ą░čĆą░ą╝ąĄčéčĆ čäčāąĮą║čåąĖąĖ rt_thread_detach ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĖąĘ ąĮąĄčæ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąĖčüą░ąĮčŗ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄ:
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| thread |
Thread handle, ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą┐ąŠč鹊ą║ą░. ąŁč鹊 čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā TCB, ą║ąŠč鹊čĆčāčÄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī čāą║ą░ąĘą░ą╗ ą┐čĆąĖ ą▓čŗąĘąŠą▓ąĄ rt_thread_init. |
| ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ |
| RT_EOK |
ą¤ąŠč鹊ą║ ą▒čŗą╗ čāčüą┐ąĄčłąĮąŠ ąŠčéą║ą╗čÄč湥ąĮ. |
| RT_ERROR |
ą×čłąĖą▒ą║ą░ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ ą┐ąŠč鹊ą║ą░. |
ąØą░ąĘąĮą░č湥ąĮąĖąĄ čäčāąĮą║čåąĖąĖ rt_thread_detach č鹊 ąČąĄ čüą░ą╝ąŠąĄ, čćč鹊 ąĖ čäčāąĮą║čåąĖąĖ rt_thread_delete. ąśčģ ąŠčéą╗ąĖčćąĖąĄ ą▓ č鹊ą╝, čćč鹊 čäčāąĮą║čåąĖčÅ rt_thread_delete ą╝ą░ąĮąĖą┐čāą╗ąĖčĆčāąĄčé ąŠą▒čŖąĄą║č鹊ą╝ ą┐ąŠč鹊ą║ą░, čüąŠąĘą┤ą░ąĮąĮčŗą╝ rt_thread_create, ą░ čäčāąĮą║čåąĖčÅ rt_thread_detach ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮą░ ą┤ą╗čÅ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ ą┐ąŠč鹊ą║ą░, ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ čäčāąĮą║čåąĖąĄą╣ rt_thread_init. ąĢčēąĄ ąŠą┤ąĮąŠ ąŠčéą╗ąĖčćąĖąĄ: čüčéą░čéąĖč湥čüą║ąĖą╣ ą┐ąŠč鹊ą║, ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╣ rt_thread_init, ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ąŠčéą║ą╗čÄčćą░čéčī čüą░ą╝ąŠą│ąŠ čüąĄą▒čÅ ą▓čŗąĘąŠą▓ąŠą╝ rt_thread_detach.
ąŚą░ą┐čāčüą║ ą┐ąŠč鹊ą║ą░. ą¤ąŠč鹊ą║ čüąŠąĘą┤ą░ąĄčéčüčÅ (ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčéčüčÅ) ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Initial, ąĖ ąĮąĄ ą┐ąŠą┐ą░ą┤ą░ąĄčé ą▓ ąŠč湥čĆąĄą┤čī ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░, ą┐ąŠą║ą░ ąĮąĄ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ Ready. ą¤ąŠčüą╗ąĄ čāčüą┐ąĄčłąĮąŠą│ąŠ čüąŠąĘą┤ą░ąĮąĖčÅ/ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą┐ąŠč鹊ą║ą░ ą┤ą╗čÅ ąĄą│ąŠ ą┐ąĄčĆąĄą▓ąŠą┤ą░ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą╝čŗ ą╝ąŠąČąĄą╝ ą▓čŗąĘą▓ą░čéčī čäčāąĮą║čåąĖčÄ rt_thread_startup:
rt_err_t rt_thread_startup(rt_thread_t thread);
ąÜąŠą│ą┤ą░ čŹčéą░ čäčāąĮą║čåąĖčÅ ą▓čŗąĘą▓ą░ąĮą░, čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠč鹊ą║ą░ ą╝ąĄąĮčÅąĄčéčüčÅ ąĮą░ Ready, ąĖ ąŠąĮ ą┐ąŠą╝ąĄčēą░ąĄčéčüčÅ ąŠč湥čĆąĄą┤čī ą┐ąŠč鹊ą║ąŠą▓, ą┐ąŠą┐ą░ą┤ą░čÅ ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░. ąĢčüą╗ąĖ čā č鹊ą╗čīą║ąŠ čćč鹊 ąĘą░ą┐čāčēąĄąĮąĮąŠą│ąŠ čŹč鹊ą╣ čäčāąĮą║čåąĖąĄą╣ ą┐ąŠč鹊ą║ą░ ą┐čĆąĖąŠčĆąĖč鹥čé čüą░ą╝čŗą╣ ą▓čŗčüąŠą║ąĖą╣ čüčĆąĄą┤ąĖ ą▓čüąĄčģ ąŠčüčéą░ą╗čīąĮčŗčģ ą┐ąŠč鹊ą║ąŠą▓, č鹊 č鹥ą║čāčēąĖą╣ ą┐ąŠč鹊ą║ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą┐čĆąĖąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ (ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Suspended), ąĖ ą┐ąŠą╗čāčćą░ąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čŹč鹊čé ąĮąŠą▓čŗą╣ čüąŠąĘą┤ą░ąĮąĮčŗą╣ ą┐ąŠč鹊ą║ (ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Running).
ą¤ą░čĆą░ą╝ąĄčéčĆ čäčāąĮą║čåąĖąĖ rt_thread_startup ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĖąĘ ąĮąĄčæ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąĖčüą░ąĮčŗ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄ:
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| thread |
Thread handle, ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą┐ąŠč鹊ą║ą░. |
| ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ |
| RT_EOK |
ą¤ąŠč鹊ą║ ą▒čŗą╗ čāčüą┐ąĄčłąĮąŠ ąĘą░ą┐čāčēąĄąĮ. |
| RT_ERROR |
ą×čłąĖą▒ą║ą░ ąĘą░ą┐čāčüą║ą░ ą┐ąŠč鹊ą║ą░. |
ą¤ąŠą╗čāč湥ąĮąĖąĄ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ č鹥ą║čāčēąĄą╝ ą┐ąŠč鹊ą║ąĄ. ąÆąŠ ą▓čĆąĄą╝čÅ čĆą░ą▒ąŠčéčŗ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąŠą┤ąĮą░ ąĖ čéą░ ąČąĄ čćą░čüčéčī ą║ąŠą┤ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čāčēąĄąĮą░ čĆą░ąĘąĮčŗą╝ąĖ ą┐ąŠč鹊ą║ą░ą╝ąĖ. ą¦č鹊ą▒čŗ ą▓čŗčÅčüąĮąĖčéčī, ą║ą░ą║ąŠą╣ ą┐ąŠč鹊ą║ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé čĆą░ą▒ąŠčéą░ąĄčé, ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čäčāąĮą║čåąĖčÅ rt_thread_self:
rt_thread_t rt_thread_self(void);
ążčāąĮą║čåąĖčÅ ą▓ąŠąĘą▓čĆą░čéąĖčé ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą┐ąŠč鹊ą║ą░, ąĖąĘ ą║ąŠč鹊čĆąŠą│ąŠ ąŠąĮą░ ą▒čŗą╗ą░ ą▓čŗąĘą▓ą░ąĮą░. ą¤čĆąĖą╝ąĄčĆ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖą╝ąĄąĮąĖ č鹥ą║čāčēąĄą│ąŠ ą┐ąŠč鹊ą║ą░ čü ą┐ąŠą╝ąŠčēčīčÄ čäčāąĮą║čåąĖąĖ rt_thread_self:
const char *thread_self_name (void)
{
const char *name;
rt_thread_t tid = rt_thread_self();
return (RT_NULL != tid) ? tid->name : "!not_fnd";
}
[ą×čüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ čĆąĄčüčāčĆčüą░ CPU]
ąÜąŠą│ą┤ą░ ąĖčüč鹥ą║ čüą╗ą░ą╣čü ą▓čĆąĄą╝ąĄąĮąĖ č鹥ą║čāčēąĄą│ąŠ ą┐ąŠč鹊ą║ą░, ąĖą╗ąĖ ą║ąŠą│ą┤ą░ čüą░ą╝ ą┐ąŠč鹊ą║ ą▓čŗąĘą▓ą░ą╗ čüą▓ąŠčÄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║čā (ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ ąĘą░ą┤ąĄčƹȹ║ąĖ ąĖą╗ąĖ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ), č鹊 ąŠąĮ ą▒ąŠą╗čīčłąĄ ąĮąĄ ąĘą░ąĮąĖą╝ą░ąĄčé ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ, ą┤ą░ą▓ą░čÅ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čŹč鹊čé čĆąĄčüčāčĆčü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤čĆčāą│ąĖą╝ ą┐ąŠč鹊ą║ą░ą╝. ąĪčāčēąĄčüčéą▓čāąĄčé čéą░ą║ąČąĄ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮą░čÅ čäčāąĮą║čåąĖčÅ, ą▓čŗąĘąŠą▓ ą║ąŠč鹊čĆąŠą╣ ąĖąĘ č鹥ą╗ą░ ą┐ąŠč鹊ą║ą░ ą┐čĆąŠčüč鹊 čāčüčéčāą┐ą░ąĄčé ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ ą┤čĆčāą│ąĖą╝ ą┐ąŠč鹊ą║ą░ą╝:
rt_err_t rt_thread_yield(void);
ą¤ąŠčüą╗ąĄ ą▓čŗąĘąŠą▓ą░ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ č鹥ą║čāčēąĖą╣ ą┐ąŠč鹊ą║ ą┐čĆąŠčüč鹊 čāą┤ą░ą╗ąĖčé čüą░ą╝ čüąĄą▒čÅ ąĖąĘ ąŠč湥čĆąĄą┤ąĖ ą│ąŠč鹊ą▓čŗčģ ą║ ąĘą░ą┐čāčüą║čā ą┐ąŠč鹊ą║ąŠą▓ (ready priority thread queue), ąĘą░č鹥ą╝ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ąĖčé čüą░ą╝ čüąĄą▒čÅ, ą┐ąŠą╝ąĄčüčéąĖą▓ ą▓ ą║ąŠąĮąĄčå čŹč鹊ą╣ ąŠč湥čĆąĄą┤ąĖ, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ą▓čŗą┐ąŠą╗ąĮąĖčé ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░ ąĮą░ ą┤čĆčāą│ąŠą╣ ąĮą░čģąŠą┤čÅčēąĖą╣čüčÅ ą▓ čŹč鹊ą╣ ąŠč湥čĆąĄą┤ąĖ ą┐ąŠč鹊ą║. ąĢčüą╗ąĖ ąČąĄ ą▓ ąŠč湥čĆąĄą┤ąĖ ąĮąĄčé ą┐ąŠč鹊ą║ąŠą▓ čü čéą░ą║ąĖą╝ ąČąĄ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝, č鹊 ą▓čŗąĘą▓ą░ą▓čłąĖą╣ čäčāąĮą║čåąĖčÄ rt_thread_yield ą┐ąŠč鹊ą║ ą┐čĆąŠą┤ąŠą╗ąČąĖčé čüą▓ąŠąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą▒ąĄąĘ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ.
ąöąĄą╣čüčéą▓ąĖąĄ čäčāąĮą║čåąĖąĖ rt_thread_yield ą┐ąŠą┤ąŠą▒ąĮąŠ čäčāąĮą║čåąĖąĖ rt_schedule, ąŠą┤ąĮą░ą║ąŠ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ čüąĖčüč鹥ą╝čŗ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ą▓ čüą╗čāčćą░ąĄ, ą║ąŠą│ą┤ą░ čüčāčēąĄčüčéą▓čāčÄčé ą┤čĆčāą│ąĖąĄ ą┐ąŠč鹊ą║ąĖ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Ready čü čéą░ą║ąĖą╝ ąČąĄ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝. ą¤ąŠčüą╗ąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ rt_thread_yield čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą║ čüą╗ąĄą┤čāčÄčēąĄą╝čā ąĮą░čģąŠą┤čÅčēąĄą╝čāčüčÅ ą▓ ąŠč湥čĆąĄą┤ąĖ ą┐ąŠč鹊ą║čā, č鹥ą║čāčēąĖą╣ ą┐ąŠč鹊ą║ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ąĖčéčüčÅ. ą¤ąŠčüą╗ąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ rt_schedule č鹥ą║čāčēąĖą╣ ą┐ąŠč鹊ą║ ąĮąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ą▒čāą┤ąĄčé ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ. ąöą░ąČąĄ ąĄčüą╗ąĖ ąŠąĮ ą▒čāą┤ąĄčé ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ąŠąĮ ąĮąĄ ą▒čāą┤ąĄčé ą┐ąŠą╝ąĄčēąĄąĮ ą▓ ą║ąŠąĮąĄčå čüą┐ąĖčüą║ą░ ą┐ąŠč鹊ą║ąŠą▓ Ready. ąÆą╝ąĄčüč鹊 čŹč鹊ą│ąŠ ą▒čāą┤ąĄčé ą▓čŗą▒čĆą░ąĮ ąĖ ąĘą░ą┐čāčēąĄąĮ ą┐ąŠč鹊ą║ čü čüą░ą╝čŗą╝ ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝. ąĢčüą╗ąĖ ąČąĄ ą▓ čüąĖčüč鹥ą╝ąĄ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ąĮąĄčé ą┐ąŠč鹊ą║ą░ čü ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝, ą│ąŠč鹊ą▓ąŠą│ąŠ ą║ ąĘą░ą┐čāčüą║čā, č鹊 ą┐ąŠčüą╗ąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ rt_schedule čüąĖčüč鹥ą╝ą░ ą┐čĆąŠą┤ąŠą╗ąČąĖčé čĆą░ą▒ąŠčéčā č鹥ą║čāčēąĄą│ąŠ ą┐ąŠč鹊ą║ą░, ąĮąĖą║ą░ą║ąŠą│ąŠ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą║ąŠąĮč鹥ą║čüčéą░ ąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąŠč湥čĆąĄą┤ąĖ ą┐ąŠč鹊ą║ąŠą▓ ąĮąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé.
Thread Sleep. ąØą░ ą┐čĆą░ą║čéąĖą║ąĄ ąĖąĮąŠą│ą┤ą░ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ "čāčüčŗą┐ąĖčéčī" ą┐ąŠč鹊ą║ ąĮą░ ąĮąĄą║ąŠč鹊čĆąŠąĄ ą▓čĆąĄą╝čÅ, čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ąĘą░ą┤ąĄčƹȹ║čā ą▓ ą▓čŗą┐ąŠą╗ąĮčÅąĄą╝ąŠą╝ ą░ą╗ą│ąŠčĆąĖčéą╝ąĄ. ąŁč鹊 ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ "thread sleep". ąÜąŠą│ą┤ą░ ą┐ąŠč鹊ą║ čāčģąŠą┤ąĖčé ą▓ "čüąŠąĮ" ąŠąĮ ąŠčüą▓ąŠą▒ąŠąČą┤ą░ąĄčé ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ ą┤ą╗čÅ ą┤čĆčāą│ąĖčģ ą┐ąŠč鹊ą║ąŠą▓. ąöą╗čÅ thread sleep ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čäčāąĮą║čåąĖąĖ:
rt_err_t rt_thread_sleep(rt_tick_t tick);
rt_err_t rt_thread_delay(rt_tick_t tick);
rt_err_t rt_thread_mdelay(rt_int32_t ms);
ąŁčéąĖ čéčĆąĖ čäčāąĮą║čåąĖąĖ ą┤ąĄą╗ą░čÄčé ąŠą┤ąĮąŠ ąĖ č鹊 ąČąĄ. ąÆčŗąĘąŠą▓ čäčāąĮą║čåąĖąĖ ąĖąĘ č鹥ą╗ą░ ą┐ąŠč鹊ą║ą░ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ąĄą│ąŠ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĄ (ą┐ąĄčĆąĄčģąŠą┤čā ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Suspend) ąĮą░ čāą║ą░ąĘą░ąĮąĮąŠąĄ ą▓čĆąĄą╝čÅ. ą¤ąŠčüą╗ąĄ ąĖčüč鹥č湥ąĮąĖčÅ čŹč鹊ą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąŠč鹊ą║ čüąĮąŠą▓ą░ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ Ready.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ čäčāąĮą║čåąĖą╣ ąĖ ąĖčģ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ąŠą┐ąĖčüą░ąĮčŗ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄ:
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| tick/ms |
ąÆčĆąĄą╝čÅ čüąĮą░ ą┐ąŠč鹊ą║ą░. ą×ąĮąŠ ą╝ąŠąČąĄčé ą╗ąĖą▒ąŠ ąĘą░ą┤ą░ą▓ą░čéčīčüčÅ ą▓ čéąĖą║ą░čģ čüąĖčüč鹥ą╝čŗ (ą┤ą╗čÅ čäčāąĮą║čåąĖą╣ rt_thread_sleep ąĖ rt_thread_delay), ąĖą╗ąĖ ą▓ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ą░čģ (rt_thread_mdelay). |
| ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ |
| RT_EOK |
ąŻčüą┐ąĄčłąĮąŠąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ ąŠą┐ąĄčĆą░čåąĖąĖ ąĘą░ą┤ąĄčƹȹ║ąĖ ą┐ąŠč鹊ą║ą░. |
[ą¤čĆąĖąŠčüčéą░ąĮąŠą▓ą║ą░ (Suspend) ąĖ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ (Resume) čĆą░ą▒ąŠčéčŗ ą┐ąŠč鹊ą║ą░]
ąÜąŠą│ą┤ą░ ą┐ąŠč鹊ą║ ą▓čŗąĘąŠą▓ąĄčé rt_thread_delay, ąŠąĮ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ą┐čĆąĖąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüą░ą╝ čüąĄą▒čÅ. ąÜąŠą│ą┤ą░ ą▒čāą┤ąĄčé ą▓čŗąĘą▓ą░ąĮą░ čéą░ą║ą░čÅ čäčāąĮą║čåąĖčÅ, ą║ą░ą║ rt_sem_take ąĖą╗ąĖ rt_mb_recv, č鹊 ą▓ čüą╗čāčćą░ąĄ ąĮąĄą┤ąŠčüčéčāą┐ąĮąŠčüčéąĖ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄą╝ąŠą│ąŠ ą┐ąŠč鹊ą║ ą▒čāą┤ąĄčé čéą░ą║ąČąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ. ąĢčüą╗ąĖ ą┐ąŠč鹊ą║ ąČą┤ąĄčé ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, č湥ą╝ ąĘą░ą┤ą░ąĮąŠ ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ čéą░ą╣ą╝ą░čāčéą░, č鹊 ąŠąĮ ą▒ąŠą╗čīčłąĄ ąĮąĄ ą▒čāą┤ąĄčé ąČą┤ą░čéčī, ąĖ ą▓ąĄčĆąĮąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ Ready. ąśą╗ąĖ, ą║ąŠą│ą┤ą░ ą┤čĆčāą│ąĖąĄ ą┐ąŠč鹊ą║ąĖ ąŠą┐čāą▒ą╗ąĖą║čāčÄčé/ąŠčüą▓ąŠą▒ąŠą┤čÅčé ąĘą░ą┐čĆąŠčłąĄąĮąĮčŗą╣ čĆąĄčüčāčĆčü, ą║ąŠč鹊čĆąŠą│ąŠ ąČą┤ąĄčé ą┐ąŠč鹊ą║, č鹊 ąŠąĮ čéą░ą║ąČąĄ ą▓ąĄčĆąĮąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ.
ą¤ąŠč鹊ą║ ą╝ąŠąČąĄčé ą▒čŗčéčī čéą░ą║ąČąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓čŗąĘąŠą▓ąŠą╝ čüą╗ąĄą┤čāčÄčēąĄą╣ čäčāąĮą║čåąĖąĖ:
rt_err_t rt_thread_suspend (rt_thread_t thread);
ą¤ą░čĆą░ą╝ąĄčéčĆ čäčāąĮą║čåąĖąĖ rt_thread_suspend ąĖ ąĄčæ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąĖčüą░ąĮčŗ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄ:
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| thread |
Thread handle, ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą┐ąŠč鹊ą║ą░. |
| ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ |
| RT_EOK |
ą¤ąŠč鹊ą║ ą▒čŗą╗ čāčüą┐ąĄčłąĮąŠ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ. |
| RT_ERROR |
ą×čłąĖą▒ą║ą░ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠč鹊ą║ą░, ą┐ąŠč鹊ą╝čā čćč鹊 ąŠąĮ ąĮąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ RT_THREAD_READY. |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąŠą▒čŗčćąĮąŠ ą▓čŗ ąĮąĄ ą┤ąŠą╗ąČąĮčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čŹčéčā čäčāąĮą║čåąĖčÄ ą┤ą╗čÅ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠč鹊ą║ąŠą╝ čüą░ą╝ąŠą│ąŠ čüąĄą▒čÅ. ąĢčüą╗ąĖ ąČąĄ ą▓čŗ čĆąĄčłąĖą╗ąĖ ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ąĖčéčī ą▓ ą║ąŠą┤ąĄ č鹥ą║čāčēąĖą╣ ą┐ąŠč鹊ą║, č鹊 čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ą▓čŗąĘąŠą▓ą░ čäčāąĮą║čåąĖąĖ rt_thread_suspend ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą▓čüčéą░ą▓ąĖčéčī ą▓čŗąĘąŠą▓ rt_schedule.
ą¤ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░ ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ rt_thread_suspend ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą▓čĆčāčćąĮčāčÄ. ąĪą╗ąĄą┤čāąĄčé ąĖą╝ąĄčéčī ą▓ ą▓ąĖą┤čā, čćč鹊 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čäčāąĮą║čåąĖčÄ rt_thread_suspend ąĮąĄ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ, ą┐ąŠč鹊ą╝čā čćč鹊 čŹč鹊 čüą╗ąĖčłą║ąŠą╝ čāčüą╗ąŠąČąĮčÅąĄčé ą┐ąŠąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ.
ą£ąŠąČąĮąŠ ą▓ąŠąĘąŠą▒ąĮąŠą▓ąĖčéčī čĆą░ą▒ąŠčéčā ą┐ąŠč鹊ą║ą░, ą║ąŠč鹊čĆčŗą╣ ą▒čŗą╗ ą┐ąĄčĆąĄą┤ čŹčéąĖą╝ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓čŗąĘąŠą▓ąŠą╝ rt_thread_suspend, čćč鹊ą▒čŗ ąŠąĮ čüąĮąŠą▓ą░ ą┐ąĄčĆąĄčłąĄą╗ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Ready ąĖ ą▒čŗą╗ąŠ ą┐ąŠą╝ąĄčēąĄąĮ ą▓ ąŠč湥čĆąĄą┤čī ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ čüąĖčüč鹥ą╝čŗ (system's ready queue). ąĢčüą╗ąĖ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ ą┐ąŠč鹊ą║ ąŠą║ą░ąČąĄčéčüčÅ ą┐ąĄčĆą▓čŗą╝ ą▓ čüą┐ąĖčüą║ąĄ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓, č鹊 čüąĖčüč鹥ą╝ą░ ą▓čŗą┐ąŠą╗ąĮąĖčé ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░. ąÆąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĄą╣ čäčāąĮą║čåąĖąĄą╣:
rt_err_t rt_thread_resume (rt_thread_t thread);
ą¤ą░čĆą░ą╝ąĄčéčĆ čäčāąĮą║čåąĖąĖ rt_thread_resume ąĖ ąĄčæ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąĖčüą░ąĮčŗ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄ:
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| thread |
Thread handle, ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą┐ąŠč鹊ą║ą░. |
| ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ |
| RT_EOK |
ąĀą░ą▒ąŠčéą░ ą┐ąŠč鹊ą║ą░ ą▒čŗą╗ą░ čāčüą┐ąĄčłąĮąŠ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮą░. |
| RT_ERROR |
ą×čłąĖą▒ą║ą░ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ą░, ą┐ąŠč鹊ą╝čā čćč鹊 ąŠąĮ ąĮąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ RT_THREAD_SUSPEND. |
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝. ąÜąŠą│ą┤ą░ ąĮčāąČąĮąŠ čāą┐čĆą░ą▓ą╗čÅčéčī ą┤čĆčāą│ąĖą╝ (ąĮąĄ č鹥ą║čāčēąĖą╝) ą┐ąŠč鹊ą║ąŠą╝, ą║ą░ą║ ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ ą┐ąŠą╝ąĄąĮčÅčéčī ą┐čĆąĖąŠčĆąĖč鹥čé ą┐ąŠč鹊ą║ą░ (čćč鹊 č鹊ąČąĄ ą║čüčéą░čéąĖ ąĮąĄ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ, ąĮąĄąĘą░č湥ą╝ ą┐ą╗ąŠą┤ąĖčéčī čüčāčēąĮąŠčüčéąĖ), ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüą╗ąĄą┤čāčÄčēčāčÄ čäčāąĮą║čåąĖčÄ:
rt_err_t rt_thread_control(rt_thread_t thread, rt_uint8_t cmd, void* arg);
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ čäčāąĮą║čåąĖąĖ rt_thread_control ąĖ ąĄčæ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąĖčüą░ąĮčŗ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄ:
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| thread |
Thread handle, ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą┐ąŠč鹊ą║ą░. |
| cmd |
ąŚą░ą┐čĆą░čłąĖą▓ą░ąĄą╝ą░čÅ ą┤ą╗čÅ ą┐ąŠč鹊ą║ą░ ą║ąŠą╝ą░ąĮą┤ą░. |
| arg |
ą¤ą░čĆą░ą╝ąĄčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. |
| ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ |
| RT_EOK |
ąÜąŠčĆčĆąĄą║čéąĮąŠąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. |
| RT_ERROR |
ą×čłąĖą▒ą║ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. |
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (ą┐ą░čĆą░ą╝ąĄčéčĆ cmd), ą║ąŠč鹊čĆčŗąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ čäą░ą╣ą╗ąĄ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░ rtdef.h:
/**
* ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ąŠą╝.
*/
#define RT_THREAD_CTRL_STARTUP 0x00 /**< ąŚą░ą┐čāčüą║ ą┐ąŠč鹊ą║ą░. */
#define RT_THREAD_CTRL_CLOSE 0x01 /**< ąŚą░ą║čĆčŗčéąĖąĄ ą┐ąŠč鹊ą║ą░. */
#define RT_THREAD_CTRL_CHANGE_PRIORITY 0x02 /**< ąśąĘą╝ąĄąĮąĄąĮąĖąĄ ą┐čĆąĖąŠčĆąĖč鹥čéą░ ą┐ąŠč鹊ą║ą░. */
#define RT_THREAD_CTRL_INFO 0x03 /**< ą¤ąŠą╗čāč湥ąĮąĖąĄ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ ą┐ąŠč鹊ą║ąĄ. */
ąöąĄą╣čüčéą▓ąĖąĄ RT_THREAD_CTRL_STARTUP ą░ąĮą░ą╗ąŠą│ąĖčćąĮąŠ ą▓čŗąĘąŠą▓čā rt_thread_startup. ąÜąŠą╝ą░ąĮą┤ą░ RT_THREAD_CTRL_CLOSE ąĘą░ą║čĆąŠąĄčé ą┐ąŠč鹊ą║, čćč鹊 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮąŠ ą▓čŗąĘąŠą▓čā rt_thread_delete. ąÜąŠą╝ą░ąĮą┤ą░ RT_THREAD_CTRL_CHANGE_PRIORITY ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ ąĖąĘą╝ąĄąĮąĖčé ą┐čĆąĖąŠčĆąĖč鹥čé ą┐ąŠč鹊ą║ą░.
ąŻčüčéą░ąĮąŠą▓ą║ą░ ąĖ čāą┤ą░ą╗ąĄąĮąĖąĄ čäčāąĮą║čåąĖąĖ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ąĘą░ą┤ą░čćąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ. ążčāąĮą║čåąĖčÅ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ąĘą░ą┤ą░čćąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle hook), ą▒čāą┤čāčćąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą╣, ą▒čāą┤ąĄčé ą▓čŗąĘčŗą▓ą░čéčīčüčÅ ąĖąĘ č鹥ą╗ą░ čüąĖčüč鹥ą╝ąĮąŠą╣ ąĘą░ą┤ą░čćąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle thread). ąŁč鹊 ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąŠą▓č鹊čĆčÅąĄą╝čŗčģ ąĘą░ą┤ą░čć, čéą░ą║ąĖčģ ą║ą░ą║ ą╝ąĄčĆčåą░ąĮąĖąĄ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝ LED (ą╝ąŠąČąĄčé ą┐ąŠą║ą░ąĘčŗą▓ą░čéčī, čćč鹊 čüąĖčüč鹥ą╝ą░ ąĮąĄ ąĘą░ą▓ąĖčüą╗ą░), ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čŹąĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ ąĖą╗ąĖ ą┤ą╗čÅ ą┤čĆčāą│ąĖčģ čäčāąĮą║čåąĖą╣. ąŻčüčéą░ąĮąŠą▓ą║ą░ ąĖ čāą┤ą░ą╗ąĄąĮąĖąĄ idle hook ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčüčÅ čäčāąĮą║čåąĖčÅą╝ąĖ:
rt_err_t rt_thread_idle_sethook(void (*hook)(void));
rt_err_t rt_thread_idle_delhook(void (*hook)(void));
ą¤ą░čĆą░ą╝ąĄčéčĆ ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ čäčāąĮą║čåąĖąĖ rt_thread_idle_sethook ąŠą┐ąĖčüą░ąĮčŗ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄ:
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| hook |
ążčāąĮą║čåąĖčÅ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ąŠąČąĖą┤ą░ąĮąĖčÅ. |
| ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ |
| RT_EOK |
ążčāąĮą║čåąĖčÅ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą▒čŗą╗ą░ čāčüą┐ąĄčłąĮąŠ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░. |
| RT_EFULL |
ąŻčüčéą░ąĮąŠą▓ą║ą░ ą▒čŗą╗ą░ ąĮąĄčāą┤ą░čćąĮąŠą╣. |
ą¤ą░čĆą░ą╝ąĄčéčĆ ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ čäčāąĮą║čåąĖąĖ rt_thread_idle_delhook ąŠą┐ąĖčüą░ąĮčŗ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄ:
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| hook |
ążčāąĮą║čåąĖčÅ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ąŠąČąĖą┤ą░ąĮąĖčÅ. |
| ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ |
| RT_EOK |
ążčāąĮą║čåąĖčÅ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą▒čŗą╗ą░ čāčüą┐ąĄčłąĮąŠ čāą┤ą░ą╗ąĄąĮą░. |
| RT_ENOSYS |
ąŻą┤ą░ą╗ąĄąĮąĖąĄ ą▒čŗą╗ąŠ ąĮąĄčāą┤ą░čćąĮčŗą╝. |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĘą░ą┤ą░čćą░ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle thread) čŹč鹊 ą┐ąŠč鹊ą║, ą║ąŠč鹊čĆčŗą╣ ą▓čüąĄą│ą┤ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą║ ąĘą░ą┐čāčüą║čā (Ready). ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, hook-čäčāąĮą║čåąĖčÅ ąĘą░ą┤ą░čćąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ ą┤ąŠą╗ąČąĮą░ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 čüąĖčüč鹥ą╝ąĮčŗą╣ čäčāąĮą║čåąĖąŠąĮą░ą╗ ąĘą░ą┤ą░čćąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ ąĮąĄ ą▒čāą┤ąĄčé ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ąĮą░ą┤ąŠą╗ą│ąŠ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ. ą¤ąŠčŹč鹊ą╝čā ą▓ hook-čäčāąĮą║čåąĖąĖ ąĮąĄą╗čīąĘčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čéą░ą║ąĖąĄ ą▓čŗąĘąŠą▓čŗ, ą║ą░ą║ rt_thread_delay, rt_sem_take, ąĖ čé. ą┐., ą┐ąŠč鹊ą╝čā čćč鹊 ąŠąĮąĖ ą╝ąŠą│čāčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĄ ąĘą░ą┤ą░čćąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ.
ąŻčüčéą░ąĮąŠą▓ą║ą░ Scheduler Hook. ąÆąŠ ą▓čĆąĄą╝čÅ čĆą░ą▒ąŠčéčŗ čüąĖčüč鹥ą╝čŗ čüčāčēąĄčüčéą▓čāąĄčé čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╣ ą┐čĆąŠčåąĄčüčü, ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčēąĖą╣ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čéąĖą║ą░, ą║ąŠč鹊čĆčŗą╣ ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄčé ą║ąŠąĮč鹥ą║čüčéčŗ ąĘą░ą┤ą░čć - ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║. ąöčĆčāą│ąĖą╝ąĖ čüą╗ąŠą▓ą░ą╝ąĖ, ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░ čŹč鹊 čüą░ą╝ąŠąĄ čćą░čüč鹊ąĄ čüąŠą▒čŗčéąĖąĄ ą▓ čüąĖčüč鹥ą╝ąĄ. ąśąĮąŠą│ą┤ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ą╝ąŠąČąĄčé ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ č鹊ą╝, ą║ą░ą║ąĖąĄ ąĘą░ą┤ą░čćąĖ ą░ą║čéąĖą▓ąĖčĆčāčÄčéčüčÅ ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ, ąĖ ą┤ą╗čÅ čŹč鹊ą╣ čåąĄą╗ąĖ ą╝ąŠąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī čäčāąĮą║čåąĖčÄ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░ - sheduler hook. ąŁčéą░ hook-čäčāąĮą║čåąĖčÅ ą▒čāą┤ąĄčé ą▓čŗąĘą▓ą░ąĮą░, ą║ąŠą│ą┤ą░ čüąĖčüč鹥ą╝ą░ ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄčé ą║ąŠąĮč鹥ą║čüčéčŗ ą┐ąŠč鹊ą║ąŠą▓:
void rt_scheduler_sethook(void (*hook)(struct rt_thread* from, struct rt_thread* to));
ąÆ ą║ą░č湥čüčéą▓ąĄ ą▓čģąŠą┤ąĮąŠą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░ čäčāąĮą║čåąĖčÅ rt_scheduler_sethook ą┐čĆąĖąĮąĖą╝ą░ąĄčé čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄą╝čāčÄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ hook-čäčāąĮą║čåąĖčÄ:
void shedhook (struct rt_thread* from, struct rt_thread* to);
ąŻ čŹč鹊ą╣ hook-čäčāąĮą║čåąĖąĖ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ čŹč鹊 čāą║ą░ąĘą░č鹥ą╗ąĖ ąĮą░ TCB ą┐ąŠč鹊ą║ąŠą▓, ą╝ąĄąČą┤čā ą║ąŠč鹊čĆčŗą╝ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░:
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| from |
ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒ą╗ąŠą║ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ąŠą╝, ąĖ ą║ąŠč鹊čĆčŗą╣ čüąĖčüč鹥ą╝ą░ čģąŠč湥čé ą▓čŗč鹥čüąĮąĖčéčī (ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ąĖčéčī). |
| to |
ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒ą╗ąŠą║ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ąŠą╝, ą║ąŠč鹊čĆąŠą╝čā čüąĖčüč鹥ą╝ą░ čģąŠč湥čé ą┐ąĄčĆąĄą┤ą░čéčī ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ. |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĖą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 hook-čäčāąĮą║čåąĖčÅ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĮą░ą┐ąĖčüą░ąĮą░ ąŠč湥ąĮčī ą░ą║ą║čāčĆą░čéąĮąŠ, ąĖąĮą░č湥 ąŠąĮą░ ą╝ąŠąČąĄčé ąĮą░čĆčāčłąĖčéčī čĆą░ą▒ąŠčéčā ą▓čüąĄą╣ čüąĖčüč鹥ą╝čŗ. Hook-čäčāąĮą║čåąĖčÅ ąĮąĄ ą┤ąŠą╗ąČąĮą░ ą▓čŗąĘčŗą▓ą░čéčī čüąĖčüč鹥ą╝ąĮčŗąĄ API-čäčāąĮą║čåąĖąĖ, ą░ ą┤ąĄą╣čüčéą▓ąĖčÅ ą▓ hook-čäčāąĮą║čåąĖąĖ ąĮąĄ ą┤ąŠą╗ąČąĮčŗ ą▓ą╗ąĖčÅčéčī ąĮą░ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░, ąĖ ąĄčæ ą║ąŠą┤ ą┤ąŠą╗ąČąĄąĮ ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ.
[ą¤čĆąĖą╝ąĄčĆ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ąŠčüąĮąŠą▓ą░ąĮąĮąŠą│ąŠ ąĮą░ ą┐ąŠč鹊ą║ą░čģ]
ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮčŗ ą┐čĆąŠčüčéčŗąĄ ą┐čĆąĖą╝ąĄčĆčŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ąĘą░ą┐čāčüčéąĖčéčī ą▓ čüąĖą╝čāą╗čÅč鹊čĆąĄ Keil.
ąĪąŠąĘą┤ą░ąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą▓. ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ čüąŠąĘą┤ą░ąĄčé ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖą╣ ą┐ąŠč鹊ą║ ąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé čüčéą░čéąĖč湥čüą║ąĖą╣ ą┐ąŠč鹊ą║, ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāčÅ ąŠą▒ą░ čüą┐ąŠčüąŠą▒ą░ ąĘą░ą┐čāčüą║ą░ ą┐ąŠč鹊ą║ąŠą▓. ąÜąŠą│ą┤ą░ ą┐ąŠč鹊ą║ ąĘą░ą▓ąĄčĆčłąĖčé čĆą░ą▒ąŠčéčā, ąŠąĮ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čāą┤ą░ą╗čÅąĄčéčüčÅ čüąĖčüč鹥ą╝ąŠą╣. ąöčĆčāą│ąŠą╣ ą┐ąŠč鹊ą║ ą▒čāą┤ąĄčé ą┐čĆąŠą┤ąŠą╗ąČą░čéčī ą┐ąĄčćą░čéą░čéčī ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░.
#include < rtthread.h>
#define THREAD_PRIORITY 25
#define THREAD_STACK_SIZE 512
#define THREAD_TIMESLICE 5
static rt_thread_t tid1 = RT_NULL;
/* Entry-čäčāąĮą║čåąĖčÅ ą┤ą╗čÅ Thread 1 */
static void thread1_entry(void *parameter)
{
rt_uint32_t count = 0;
while (1)
{
/* ą¤ąŠč鹊ą║ 1 čĆą░ą▒ąŠčéą░ąĄčé čü ąĮąĖąĘą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝, ąĖ ą┐ąĄčćą░čéą░ąĄčé ą▓ ą║ą░ąČą┤ąŠą╣
ąĖč鹥čĆą░čåąĖąĖ ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ count. */
rt_kprintf("thread1 count: %d\n", count ++);
rt_thread_mdelay(500);
}
}
ALIGN(RT_ALIGN_SIZE)
static char thread2_stack[1024];
static struct rt_thread thread2;
/* Entry-čäčāąĮą║čåąĖčÅ ą┤ą╗čÅ Thread 2 */
static void thread2_entry(void *param)
{
rt_uint32_t count = 0;
/* ąŻ ą┐ąŠč鹊ą║ą░ 2 ą┐čĆąĖąŠčĆąĖč鹥čé ą▓čŗčłąĄ, č湥ą╝ čā ą┐ąŠč鹊ą║ą░ 1, ąĖ
ą┐ąŠč鹊ą║ 2 ą▒čāą┤ąĄčé ąĘą░ą┐čāčēąĄąĮ ą▓ ą┐ąĄčĆą▓čāčÄ ąŠč湥čĆąĄą┤čī */
for (count = 0; count < 10 ; count++)
{
/* ą¤ąŠč鹊ą║ 2 ą┐ąĄčćą░čéą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ čüą▓ąŠąĄą│ąŠ čüč湥čéčćąĖą║ą░ */
rt_kprintf("thread2 count: %d\n", count);
}
rt_kprintf("thread2 exit\n");
/* ąóą░ą║ąČąĄ ą┐ąŠč鹊ą║ 2 ą▒čāą┤ąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčéą║ą╗čÄč湥ąĮ ąĖąĘ čüąĖčüč鹥ą╝čŗ, ą║ąŠą│ą┤ą░
ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą▓čŗčģąŠą┤ ąĖąĘ ąĄą│ąŠ čäčāąĮą║čåąĖąĖ. */
}
/* ą¤čĆąĖą╝ąĄčĆ ą╝ąĮąŠą│ąŠą┐ąŠč鹊čćąĮąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ */
int thread_sample(void)
{
/* ąĪąŠąĘą┤ą░ąĮąĖąĄ ą┐ąŠč鹊ą║ą░ 1 čü ąĖą╝ąĄąĮąĄą╝ thread1’╝īčü čäčāąĮą║čåąĖąĄą╣ ą▓čģąŠą┤ą░ thread1_entry */
tid1 = rt_thread_create("thread1",
thread1_entry, RT_NULL,
THREAD_STACK_SIZE,
THREAD_PRIORITY, THREAD_TIMESLICE);
/* ąŚą░ą┐čāčüą║ čŹč鹊ą│ąŠ ą┐ąŠč鹊ą║ą░, ąĄčüą╗ąĖ ą┐ą░ą╝čÅčéčī ą┤ą╗čÅ ąĄą│ąŠ TCB ą▒čŗą╗ą░ ą▓čŗą┤ąĄą╗ąĄąĮą░ čāčüą┐ąĄčłąĮąŠ */
if (tid1 != RT_NULL)
rt_thread_startup(tid1);
/* ąĪąŠąĘą┤ą░ąĮąĖąĄ ą┐ąŠč鹊ą║ą░ 2, čü ąĖą╝ąĄąĮąĄą╝ thread2’╝īčü čäčāąĮą║čåąĖąĄą╣ ą▓čģąŠą┤ą░ thread2_entry */
rt_thread_init(&thread2,
"thread2",
thread2_entry,
RT_NULL,
&thread2_stack[0],
sizeof(thread2_stack),
THREAD_PRIORITY - 1, THREAD_TIMESLICE);
rt_thread_startup(&thread2);
return 0;
}
/* ąŁą║čüą┐ąŠčĆčé ą▓ čüą┐ąĖčüąŠą║ ą║ąŠą╝ą░ąĮą┤ (msh command list) */
MSH_CMD_EXPORT(thread_sample, thread sample);
ąŚą░ą┐čāčüą║ čüąĖą╝čāą╗čÅčåąĖąĖ ą▓čŗą▓ąĄą┤ąĄąĮ čüą╗ąĄą┤čāčÄčēąĖą╣ čĆąĄąĘčāą╗čīčéą░čé:
\ | /
- RT - Thread Operating System
/ | \ 3.1.0 build Aug 24 2018
2006 - 2018 Copyright by rt-thread team
msh >thread_sample
msh >thread2 count: 0
thread2 count: 1
thread2 count: 2
thread2 count: 3
thread2 count: 4
thread2 count: 5
thread2 count: 6
thread2 count: 7
thread2 count: 8
thread2 count: 9
thread2 exit
thread1 count: 0
thread1 count: 1
thread1 count: 2
thread1 count: 3
...
ąÜąŠą│ą┤ą░ ą┐ąŠč鹊ą║ 2 ą┤ąŠčüčćąĖčéą░ąĄčé ą┤ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ, ąŠąĮ ąĘą░ą▓ąĄčĆčłąĖčé čüą▓ąŠčÄ čĆą░ą▒ąŠčéčā. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ 2 ą▒čāą┤ąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čāą┤ą░ą╗ąĄąĮ ąĖąĘ čüąĖčüč鹥ą╝čŗ, ąĖ čŹč鹊 ą▓ąĖą┤ąĮąŠ ą┐ąŠ ą╗ąŠą│čā ą║ąŠąĮčüąŠą╗ąĖ msh - ą┐ąŠč鹊ą║ thread2 ą▒ąŠą╗čīčłąĄ ąĮąĄ čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčé čüą▓ąŠą╣ čüč湥čéčćąĖą║. ą¤ąŠč鹊ą║ thread1 ą┐čĆąŠą┤ąŠą╗ąČąĖčé čĆą░ą▒ąŠčéčā ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠ, ą▓čŗą▓ąŠą┤čÅ ąĘąĮą░č湥ąĮąĖąĄ čüą▓ąŠąĄą│ąŠ čüč湥čéčćąĖą║ą░.
ąŚą░ą╝ąĄčćą░ąĮąĖąĄ ą┐ąŠ ą┐ąŠą▓ąŠą┤čā čāą┤ą░ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ąŠą▓: ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ ą┐ąŠč鹊ą║ąŠą▓ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ čåąĖą║ą╗ąĖč湥čüą║ąĖ, ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠ ą┐čĆąŠą║čĆčāčćąĖą▓ą░čÅ č鹥ą╗ąŠ čüą▓ąŠąĄą│ąŠ čåąĖą║ą╗ą░, ą▒ąĄąĘ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ čāą┤ą░ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ą░. ą¤ąŠč鹊ą║ąĖ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ąĘą░ą▓ąĄčĆčłąĖčéčī čüą▓ąŠčÄ čĆą░ą▒ąŠčéčā, RT-Thread čāą┤ą░ą╗ąĖčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐čĆąĖ ąĖąĘ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ, ąĖ čāą┤ą░ą╗ąĄąĮąĖąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ čäčāąĮą║čåąĖąĖ rt_thread_exit. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąĮčāąČąĮąŠ č鹊ą╗čīą║ąŠ ą┐ąŠąĮąĖą╝ą░čéčī čĆąŠą╗čī čŹč鹊ą│ąŠ API-ąĖąĮč鹥čĆč乥ą╣čüą░. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī rt_thread_exit ąĮąĄ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ (ąŠąĮą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮą░ ą┤čĆčāą│ąĖą╝ąĖ ą┐ąŠč鹊ą║ą░ą╝ąĖ, ąĖą╗ąĖ ą▓ čäčāąĮą║čåąĖąĖ čéą░ą╣ą╝ą░čāčéą░ ą┤ą╗čÅ čāą┤ą░ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ą░, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĮąĄčćą░čüč鹊).
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čüą╗ą░ą╣čüąĖąĮą│ą░ ą▓čĆąĄą╝ąĄąĮąĖ (Time Slice Round-Robin Scheduling). ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ čüąŠąĘą┤ą░ąĄčéčüčÅ 2 ą┐ąŠč鹊ą║ą░, ą║ąŠč鹊čĆčŗąĄ ą▓čüąĄą│ą┤ą░ ą┐ąĄčćą░čéą░čÄčé ąĘąĮą░č湥ąĮąĖąĄ čüą▓ąŠąĖčģ čüč湥čéčćąĖą║ąŠą▓:
#include < rtthread.h>
#define THREAD_STACK_SIZE 1024
#define THREAD_PRIORITY 20
#define THREAD_TIMESLICE 10
/* ąŻ ą┐ąŠč鹊ą║ąŠą▓ 1 ąĖ 2 ąŠą▒čēą░čÅ čäčāąĮą║čåąĖčÅ ą┐ąŠč鹊ą║ą░, ąĮąŠ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąĘą░ą┐čāčüą║ą░ ąŠčéą╗ąĖčćą░čÄčéčüčÅ */
static void thread_entry(void* parameter)
{
rt_uint32_t value;
rt_uint32_t count = 0;
value = (rt_uint32_t)parameter;
while (1)
{
if(0 == (count % 5))
{
rt_kprintf("thread %d is running ,thread %d count = %d\n", value, value, count);
if(count> 200)
return;
}
count++;
}
}
int timeslice_sample(void)
{
rt_thread_t tid = RT_NULL;
/* ąĪąŠąĘą┤ą░ąĮąĖąĄ ą┐ąŠč鹊ą║ą░ 1 */
tid = rt_thread_create("thread1",
thread_entry, (void*)1,
THREAD_STACK_SIZE,
THREAD_PRIORITY, THREAD_TIMESLICE);
if (tid != RT_NULL)
rt_thread_startup(tid);
/* ąĪąŠąĘą┤ą░ąĮąĖąĄ ą┐ąŠč鹊ą║ą░ 2 */
tid = rt_thread_create("thread2",
thread_entry, (void*)2,
THREAD_STACK_SIZE,
THREAD_PRIORITY, THREAD_TIMESLICE-5);
if (tid != RT_NULL)
rt_thread_startup(tid);
return 0;
}
/* ąŁą║čüą┐ąŠčĆčé ą▓ čüą┐ąĖčüąŠą║ ą║ąŠą╝ą░ąĮą┤ msh */
MSH_CMD_EXPORT(timeslice_sample, timeslice sample);
ąĀąĄąĘčāą╗čīčéą░čé čĆą░ą▒ąŠčéčŗ ą▒čāą┤ąĄčé ą▓čŗą│ą╗čÅą┤ąĄčéčī čéą░ą║:
\ | /
- RT - Thread Operating System
/ | \ 3.1.0 build Aug 27 2018
2006 - 2018 Copyright by rt-thread team
msh >timeslice_sample
msh >thread 1 is running ,thread 1 count = 0
thread 1 is running ,thread 1 count = 5
thread 1 is running ,thread 1 count = 10
thread 1 is running ,thread 1 count = 15
...
thread 1 is running ,thread 1 count = 125
thread 1 is rthread 2 is running ,thread 2 count = 0
thread 2 is running ,thread 2 count = 5
thread 2 is running ,thread 2 count = 10
thread 2 is running ,thread 2 count = 15
thread 2 is running ,thread 2 count = 20
thread 2 is running ,thread 2 count = 25
thread 2 is running ,thread 2 count = 30
thread 2 is running ,thread 2 count = 35
thread 2 is running ,thread 2 count = 40
thread 2 is running ,thread 2 count = 45
thread 2 is running ,thread 2 count = 50
thread 2 is running ,thread 2 count = 55
thread 2 is running ,thread 2 count = 60
thread 2 is running ,thread 2 cunning ,thread 2 count = 65
thread 1 is running ,thread 1 count = 135
..
thread 2 is running ,thread 2 count = 205
ąÜą░ą║ ą▓ąĖą┤ąĮąŠ ąĖąĘ čŹč鹊ą│ąŠ ą╗ąŠą│ą░, ą┐ąŠč鹊ą║ 2 čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ą┐ąŠą╗ąŠą▓ąĖąĮčā ą╝ąĄąĮčīčłąĄ ą▓čĆąĄą╝ąĄąĮąĖ, č湥ą╝ ą┐ąŠč鹊ą║ 1.
ą¤čĆąĖą╝ąĄčĆ Hook-čäčāąĮą║čåąĖąĖ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░. ą£čŗ ą╝ąŠąČąĄą╝ čāčüčéą░ąĮąŠą▓ąĖčéčī ą┐ąĄčĆąĄčģą▓ą░čéčćąĖą║ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░, čćč鹊ą▒čŗ ą▓čŗą┐ąŠą╗ąĮčÅčéčī ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░. ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ą┐ąĄčćą░čéą░ąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅčģ ą╝ąĄąČą┤čā ą┐ąŠč鹊ą║ą░ą╝ąĖ, ą▓čŗą▓ąŠą┤ čŹčéąĖčģ čüąŠąŠą▒čēąĄąĮąĖą╣ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą▓ hook-čäčāąĮą║čåąĖąĖ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░.
#include < rtthread.h>
#define THREAD_STACK_SIZE 1024
#define THREAD_PRIORITY 20
#define THREAD_TIMESLICE 10
/* ąĪč湥čéčćąĖą║ąĖ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąŠč鹊ą║ą░ */
volatile rt_uint32_t count[2];
/* ąŻ ą┐ąŠč鹊ą║ąŠą▓ 1 ąĖ 2 ąŠą▒čēą░čÅ čäčāąĮą║čåąĖčÅ ą┐ąŠč鹊ą║ą░, ąĮąŠ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąĘą░ą┐čāčüą║ą░ ąŠčéą╗ąĖčćą░čÄčéčüčÅ */
static void thread_entry(void* parameter)
{
rt_uint32_t value;
value = (rt_uint32_t)parameter;
while (1)
{
rt_kprintf("thread %d is running\n", value);
rt_thread_mdelay(1000); // Delay for a while
}
}
static rt_thread_t tid1 = RT_NULL;
static rt_thread_t tid2 = RT_NULL;
static void hook_of_scheduler(struct rt_thread* from, struct rt_thread* to)
{
rt_kprintf("from: %s --> to: %s \n", from->name , to->name);
}
int scheduler_hook(void)
{
/* ąŻčüčéą░ąĮąŠą▓ą║ą░ hook-čäčāąĮą║čåąĖąĖ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░ */
rt_scheduler_sethook(hook_of_scheduler);
/* ąĪąŠąĘą┤ą░ąĮąĖąĄ ą┐ąŠč鹊ą║ą░ 1 */
tid1 = rt_thread_create("thread1",
thread_entry, (void*)1,
THREAD_STACK_SIZE,
THREAD_PRIORITY, THREAD_TIMESLICE);
if (tid1 != RT_NULL)
rt_thread_startup(tid1);
/* ąĪąŠąĘą┤ą░ąĮąĖąĄ ą┐ąŠč鹊ą║ą░ 2 */
tid2 = rt_thread_create("thread2",
thread_entry, (void*)2,
THREAD_STACK_SIZE,
THREAD_PRIORITY,THREAD_TIMESLICE - 5);
if (tid2 != RT_NULL)
rt_thread_startup(tid2);
return 0;
}
/* ąŁą║čüą┐ąŠčĆčé ą▓ čüą┐ąĖčüąŠą║ ą║ąŠą╝ą░ąĮą┤ msh */
MSH_CMD_EXPORT(scheduler_hook, scheduler_hook sample);
ąĀąĄąĘčāą╗čīčéą░čé čĆą░ą▒ąŠčéčŗ čüąĖą╝čāą╗čÅčåąĖąĖ ą┐čĆąĖą╝ąĄčĆą░:
\ | /
- RT - Thread Operating System
/ | \ 3.1.0 build Aug 27 2018
2006 - 2018 Copyright by rt-thread team
msh > scheduler_hook
msh >from: tshell --> to: thread1
thread 1 is running
from: thread1 --> to: thread2
thread 2 is running
from: thread2 --> to: tidle
from: tidle --> to: thread1
thread 1 is running
from: thread1 --> to: tidle
from: tidle --> to: thread2
thread 2 is running
from: thread2 --> to: tidle
...
ąÜą░ą║ ą▓ąĖą┤ąĮąŠ ąĖąĘ ą╗ąŠą│ą░, čā čäčāąĮą║čåąĖąĖ ą┐ąĄčĆąĄčģą▓ą░čéčćąĖą║ą░ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░ ąĄčüčéčī ą┤ąŠčüčéčāą┐ ą║ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĖ ą┐ąŠč鹊ą║ąŠą▓ - ą▓čŗą▓ąŠą┤ąĖčéčüčÅ, ą║ą░ą║ąŠą╣ ą┐ąŠč鹊ą║ ą▓čŗč鹥čüąĮąĄąĮ, ąĖ ą║ą░ą║ąŠą╣ ą┐ąŠą╗čāčćąĖą╗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ.
[ąĪčüčŗą╗ą║ąĖ]
1. RT-Thread Thread Management site:rt-thread.io.
2. RT-Thread Studio IDE.
3. ąÜąŠąĮčüąŠą╗čī FinSH. |



