ąĪą║ą░čćą░ą╣č鹥 ą┤ąŠą║čāą╝ąĄąĮčé čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ ą▒čŗčüčéčĆąŠą│ąŠ čüčéą░čĆčéą░ [1]. ąöą░ą╗ąĄąĄ ą▒čāą┤čāčé ąĖąĮčüčéčĆčāą║čåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ ąŠą┐ąĖčüą░ąĮčŗ ą▓ čĆą░ąĘą┤ąĄą╗ąĄ "Manually Configure your Environment" čŹč鹊ą│ąŠ ą┤ąŠą║čāą╝ąĄąĮčéą░.
[ąĪą║ą░čćą░ą╣č鹥 SDK ąĖ ą┐čĆąĖą╝ąĄčĆčŗ ]
1 . ąĀąĄą┐ąŠąĘąĖč鹊čĆąĖą╣ Pico Examples ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐čĆąĖą╝ąĄčĆąŠą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ąĮą░ą┐ąĖčüą░ąĮąĮčŗčģ čü ą┐ąŠą╝ąŠčēčīčÄ SDK. ąöą╗čÅ ą║ą╗ąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ čŹčéąĖčģ čĆąĄą┐ąŠąĘąĖč鹊čĆąĖąĄą▓ čüąŠąĘą┤ą░ą╣č鹥 ą┤ąĖčĆąĄą║č鹊čĆąĖčÄ pico pico ą▓ ą▓ą░čłąĄą╣ ą┤ąŠą╝ą░čłąĮąĄą╣ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ:
$ mkdir ~/pico
2 . ąÆčŗą┐ąŠą╗ąĮąĖč鹥 ą║ą╗ąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ git-čĆąĄą┐ąŠąĘąĖč鹊čĆąĖąĄą▓ pico-sdk ąĖ pico-examples ą▓ čüąŠąĘą┤ą░ąĮąĮčāčÄ ą┐ą░ą┐ą║čā pico
$ cd ~/pico
$ git clone https://github.com/raspberrypi/pico-sdk.git --branch master
$ cd pico-sdk
$ git submodule update --init
$ cd ..
$ git clone https://github.com/raspberrypi/pico-examples.git --branch master
[ąŻčüčéą░ąĮąŠą▓ąĖč鹥 čéčāą╗č湥ą╣ąĮ ]
3 . ą¦č鹊ą▒čŗ ą▓čŗą┐ąŠą╗ąĮąĖčéčī čüą▒ąŠčĆą║ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ą▓ ą║ą░čéą░ą╗ąŠą│ąĄ pico-examples , ą▓ą░ą╝ ąĮčāąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ąĖąĮčüčéčĆčāą╝ąĄąĮčéčŗ. ą¦č鹊ą▒čŗ čüąŠą▒čĆą░čéčī ą┐čĆąŠąĄą║čéčŗ, ą▓ą░ą╝ ąĮčāąČąĄąĮ CMake , ą║čĆąŠčüčüą┐ą╗ą░čéč乊čĆą╝ąĄąĮąĮą░čÅ čüčĆąĄą┤ą░ ą┤ą╗čÅ čüą▒ąŠčĆą║ąĖ ą║ąŠą┤ą░, ą░ čéą░ą║ąČąĄ ARM GNU Toolchain . ąŚą░ą┐čāčüčéąĖč鹥 čüą╗ąĄą┤čāčÄčēčāčÄ ą║ąŠą╝ą░ąĮą┤čā ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ čŹčéąĖčģ ąĘą░ą▓ąĖčüąĖą╝ąŠčüč鹥ą╣:
$ sudo apt update
$ sudo apt install cmake gcc-arm-none-eabi libnewlib-arm-none-eabi build-essential
ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅą╝ Ubuntu ąĖ Debian ą╝ąŠąČąĄčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ ą▓čŗą┐ąŠą╗ąĮąĖčéčī čāčüčéą░ąĮąŠą▓ą║čā (ąĮą░ ą╝ąŠąĄą╣ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą╣ Ubuntu 24.04 čŹč鹊 ąĮąĄ ą┐ąŠąĮą░ą┤ąŠą▒ąĖą╗ąŠčüčī):
$ apt install g++ libstdc++-arm-none-eabi-newlib
[ąĪą▒ąŠčĆą║ą░ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ Blink ]
4 . ąśąĘ čüąŠąĘą┤ą░ąĮąĮąŠą╣ čĆą░ąĮąĄąĄ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ pico ą┐ąĄčĆąĄą╣ą┤ąĖč鹥 ą▓ ąĄčæ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ pico-examples ąĖ čüąŠąĘą┤ą░ą╣č鹥 ą▓ ąĮąĄą╝ ą┤ąĖčĆąĄą║č鹊čĆąĖčÄ build
$ cd pico-examples
$ mkdir build
$ cd build
5 . ąŻčüčéą░ąĮąŠą▓ąĖč鹥 ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ ąŠą║čĆčāąČąĄąĮąĖčÅ PICO_SDK_PATH , ą┐čĆąĄą┤ą┐ąŠą╗ą░ą│ą░čÅ, čćč鹊 ą▓čŗ ą║ą╗ąŠąĮąĖčĆąŠą▓ą░ą╗ąĖ pico-sdk ąĖ pico-examples ą▓ ąŠą┤ąĮčā ąĖ čéčā ąČąĄ ą┤ąĖčĆąĄą║č鹊čĆąĖčÄ:
$ export PICO_SDK_PATH=pico-sdk
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓ čŹč鹊ą╝ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąĄ ą╝čŗ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮčŗą╣ ą┐čāčéčī pico-sdk ą▓ ą┤ąĖčĆąĄą║č鹊čĆąĖčÄ čĆąĄą┐ąŠąĘąĖč鹊čĆąĖčÅ SDK ą┤ą╗čÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ąŠą║čĆčāąČąĄąĮąĖčÅ PICO_SDK_PATH. ą¤ąŠ ą║ą░ą║ąŠą╣-ąĮąĖą▒čāą┤čī ą┐čĆąĖčćąĖąĮąĄ čā ą▓ą░čü ą╝ąŠąČąĄčé ą▒čŗčéčī ą┤čĆčāą│ą░čÅ čüčéčĆčāą║čéčāčĆą░ ą║ą░čéą░ą╗ąŠą│ąŠą▓. ą¤ąŠčŹč鹊ą╝čā ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą╝ąĄčüčéą░ čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą▓ą░čłąĄą│ąŠ čĆąĄą┐ąŠąĘąĖč鹊čĆąĖčÅ ą▓čŗ ą╝ąŠąČąĄč鹥 ąĘą░ą╝ąĄąĮąĖčéčī čŹč鹊čé ą┐čāčéčī ąĮą░ ą┤čĆčāą│ąŠą╣, ą▓ č鹊ą╝ čćąĖčüą╗ąĄ ąĖ ą░ą▒čüąŠą╗čÄčéąĮčŗą╣.
6 . ąÆčŗą┐ąŠą╗ąĮąĖč鹥 ą║ąŠą╝ą░ąĮą┤čā ą┤ą╗čÅ ą┐ąŠą┤ą│ąŠč鹊ą▓ą║ąĖ ą║ čüą▒ąŠčĆą║ąĄ:
$ cmake ..
Using PICO_SDK_PATH from environment ('pico-sdk')
PICO_SDK_PATH is ~/pico/pico-sdk
Defaulting platform (PICO_PLATFORM) to 'rp2040' since not specified.
...
$ cmake ..
Using PICO_SDK_PATH from environment ('pico-sdk')
PICO_SDK_PATH is ~/pico/pico-sdk
Defaulting platform (PICO_PLATFORM) to 'rp2040' since not specified.
Defaulting target board (PICO_BOARD) to 'pico' since not specified.
Using board configuration from ~/pico/pico-sdk/src/boards/include/boards/pico.h
Pico Platform (PICO_PLATFORM) is 'rp2040'.
-- Defaulting build type to 'Release' since not specified.
Defaulting compiler (PICO_COMPILER) to 'pico_arm_cortex_m0plus_gcc'
since not specified.
Configuring toolchain based on PICO_COMPILER 'pico_arm_cortex_m0plus_gcc'
Defaulting PICO_GCC_TRIPLE to 'arm-none-eabi'
-- The C compiler identification is GNU 13.2.1
-- The CXX compiler identification is GNU 13.2.1
-- The ASM compiler identification is GNU
-- Found assembler: /usr/bin/arm-none-eabi-gcc
-- Detecting C compiler ABI info
-- Detecting C compiler ABI info - done
-- Check for working C compiler: /usr/bin/arm-none-eabi-gcc - skipped
-- Detecting C compile features
-- Detecting C compile features - done
-- Detecting CXX compiler ABI info
-- Detecting CXX compiler ABI info - done
-- Check for working CXX compiler: /usr/bin/arm-none-eabi-g++ - skipped
-- Detecting CXX compile features
-- Detecting CXX compile features - done
Build type is Release
-- Found Python3: ~/.pyenv/shims/python3 (found version "3.13.0") found
components: Interpreter TinyUSB available at
~/pico/pico-sdk/lib/tinyusb/src/portable/raspberrypi/rp2040;
enabling build support for USB.
BTstack available at ~/pico/pico-sdk/lib/btstack
cyw43-driver available at ~/pico/pico-sdk/lib/cyw43-driver
lwIP available at ~/pico/pico-sdk/lib/lwip
mbedtls available at ~/pico/pico-sdk/lib/mbedtls
CMake Warning at ~/pico/pico-sdk/tools/Findpicotool.cmake:30 (message):
No installed picotool with version 2.1.1 found - building from source
ąÆą░ąČąĮąŠąĄ ąĘą░ą╝ąĄčćą░ąĮąĖąĄ: SDK ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čüąŠą▒ąĖčĆą░ąĄčé ą▒ąĖąĮą░čĆąĮąĖą║ąĖ ą┤ą╗čÅ Raspberry Pi Pico . ą¦č鹊ą▒čŗ ą▓čŗą┐ąŠą╗ąĮąĖčéčī čüą▒ąŠčĆą║čā ą┤ą╗čÅ ą┤čĆčāą│ąŠą╣ ą┐ą╗ą░čéčŗ, ą┐ąĄčĆąĄą┤ą░ą╣č鹥 ąŠą┐čåąĖčÄ -DPICO_BOARD=board ą┤ą╗čÅ CMake, ąĘą░ą╝ąĄąĮąĖą▓ board ąĮą░ ąĖą╝čÅ ą┐ą╗ą░čéčŗ, ą║ąŠč鹊čĆčāčÄ ą▓čŗ čģąŠčéąĖč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī. ąöą╗čÅ čüą▒ąŠčĆą║ąĖ ą▒ąĖąĮą░čĆąĮąŠą│ąŠ ą║ąŠą┤ą░ ą┤ą╗čÅ Pico 2 ą┐ąĄčĆąĄą┤ą░ą╣č鹥 -DPICO_BOARD=pico2 . ąöą╗čÅ čüą▒ąŠčĆą║ąĖ ą▒ąĖąĮą░čĆąĮąĖą║ą░ ą┤ą╗čÅ Pico W ą┐ąĄčĆąĄą┤ą░ą╣č鹥 -DPICO_BOARD=pico_w . ąóą░ą║ąČąĄ ą▓čŗ ą╝ąŠąČąĄč鹥 čāą║ą░ąĘą░čéčī čüąĄčéčī Wi-Fi ąĖ ą┐ą░čĆąŠą╗čī ą┤ą╗čÅ ąĮąĄčæ, čćč鹊 ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ ą┤ą╗čÅ ą┐čĆąĖą╝ąĄčĆąŠą▓ Pico W, ą┐čāč鹥ą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ ąŠą┐čåąĖą╣ -DWIFI_SSID="ą▓ą░čłą░_čüąĄčéčī" -DWIFI_PASSWORD="ą▓ą░čł_ą┐ą░čĆąŠą╗čī" .
7 . ąóąĄą┐ąĄčĆčī ą▓čŗ ą╝ąŠąČąĄč鹥 ą▓čŗą┐ąŠą╗ąĮąĖčéčī čüą▒ąŠčĆą║čā ą▓čüąĄčģ ą┐čĆąĖą╝ąĄčĆąŠą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣. ąØąĖąČąĄ ą▒čāą┤čāčé ą┐ąŠą║ą░ąĘą░ąĮčŗ ą║ąŠą╝ą░ąĮą┤čŗ ą┤ą╗čÅ čüą▒ąŠčĆą║ąĖ ą┐čĆąŠąĄą║čéą░ blink (ąĄą│ąŠ ą║ąŠą┤ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čäą░ą╣ą╗ąĄ pico-examples/blink/blink.c ). ą¦č鹊ą▒čŗ ą▓čŗą┐ąŠą╗ąĮąĖčéčī čüą▒ąŠčĆą║čā ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ą░ ą┐čĆąĖą╝ąĄčĆąŠą▓, ą┐ąĄčĆąĄą╣ą┤ąĖč鹥 ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ ą┐ąĄčĆąĄą┤ ąĘą░ą┐čāčüą║ąŠą╝ make.
ąöą╗čÅ ąĮą░čłąĄą│ąŠ čüą╗čāčćą░čÅ ą╝čŗ ą▒čāą┤ąĄą╝ ą▓čŗą┐ąŠą╗ąĮčÅčéčī čüą▒ąŠčĆą║čā č鹊ą╗čīą║ąŠ blink, ą┐ąŠčŹč鹊ą╝čā čüąĮą░čćą░ą╗ą░ ą┐ąĄčĆąĄą╣ą┤ąĄą╝ ą▓ ą║ą░čéą░ą╗ąŠą│ blink, ą░ ąĘą░č鹥ą╝ ąĘą░ą┐čāčüčéąĖą╝ make.
$ cd blink
$ make -j4
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą┤ą╗čÅ ą║ąŠą╝ą░ąĮą┤čŗ make ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąŠą┐čåąĖčÅ -j4, čćč鹊 čāčüą║ąŠčĆąĖčé čüą▒ąŠčĆą║čā ą┐čāč鹥ą╝ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ č湥čéčŗčĆąĄčģ ąĘą░ą┤ą░ąĮąĖą╣ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ. ąĢčüą╗ąĖ ą▓čŗ ą▓čŗą┐ąŠą╗ąĮčÅąĄč鹥 čüą▒ąŠčĆą║čā ąĮą░ čģąŠčüč鹥 Raspberry Pi 5, č鹊 ą▓ą┐ąŠą╗ąĮąĄ ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĄčæ 4 čÅą┤čĆą░.
ąĀąĄąĘčāą╗čīčéą░č鹊ą╝ čüą▒ąŠčĆą║ąĖ ą▒čāą┤čāčé čüą╗ąĄą┤čāčÄčēąĖąĄ čäą░ą╣ą╗čŗ ą▓ ą║ą░čéą░ą╗ąŠą│ąĄ pico-examples/build/blink :
ążą░ą╣ą╗ ą×ą┐ąĖčüą░ąĮąĖąĄ
blink.bin ąĪčŗčĆąŠą╣ ą┤ą▓ąŠąĖčćąĮčŗą╣ ą║ąŠą┤ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ.
blink.dis ąöąĖąĘą░čüčüąĄą╝ą▒ą╗ąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą║ąŠą┤ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ.
blink.elf ąÜąŠą┤, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ąŠčéą╗ą░ą┤čćąĖą║ąŠą╝.
blink.elf.map ąÜą░čĆčéą░ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ.
blink.hex ąöą▓ąŠąĖčćąĮčŗą╣ ą║ąŠą┤ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą▓ HEX-č乊čĆą╝ą░č鹥.
blink.uf2 ążą░ą╣ą╗ UF2 [4] ą┤ą╗čÅ ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĮą░ čäą╗ąĄčłą║čā (USB Mass Storage Device), ą║ąŠč鹊čĆąŠą╣ ą┐čĆąĄą┤čüčéą░ą▓ąĖčéčüčÅ ąĮą░čł ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ Raspberry Pi ą┐čĆąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĖ ą┐ą╗ą░čéčŗ ą║ USB.
[ąŚą░ą│čĆčāąĘą║ą░ ąĖ ąĘą░ą┐čāčüą║ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą┐čĆąĖą╝ąĄčĆą░ ]
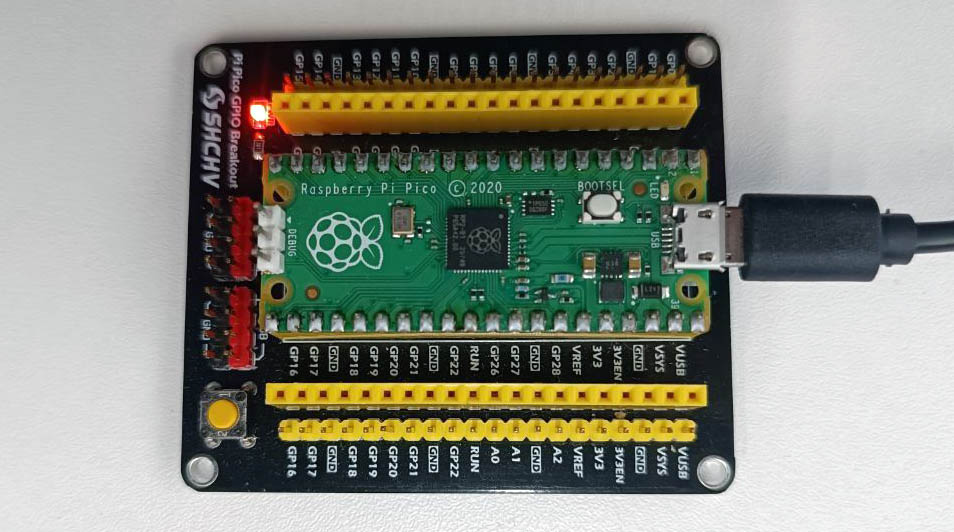
8 . ąöą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą▓ ą┐ą╗ą░čéčā čü ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ Raspberry Pi ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥 ąĄčæ č湥čĆąĄąĘ USB ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā, čüą╝ąŠąĮčéąĖčĆčāą╣č鹥 ąĄą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą║ą░ą║ USB Mass Storage Device ąĖ čüą║ąŠą┐ąĖčĆčāą╣č鹥 čäą░ą╣ą╗ *.uf2 ąĮą░ čŹčéčā čäą╗ąĄčłą║čā. ą£ąŠčÅ ą┐ą╗ą░čéą║ą░ Raspberry Pi Pico 2020 ąĮą░ Ubintu čüą╝ąŠąĮčéąĖčĆąŠą▓ą░ą╗ą░čüčī ą▓ ą║ą░čéą░ą╗ąŠą│ /media/user/RPI-RP2
ąØą░ąČą╝ąĖč鹥 ąĖ čāą┤ąĄčƹȹĖą▓ą░ą╣č鹥 ą║ąĮąŠą┐ą║čā BOOTSEL , ą║ąŠą│ą┤ą░ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄč鹥 ą▓ą░čłčā ą┐ą╗ą░čéą║čā ą║ą░ą▒ąĄą╗ąĄą╝ micro-USB, čćč鹊ą▒čŗ ąĘą░čüčéą░ą▓ąĖčéčī ąĘą░ą│čĆčāąĘčćąĖą║ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░čéčī USB Mass Storage Mode.
ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ "čäą╗ąĄčłą║ąĖ", ą║ąŠč鹊čĆąŠą╣ ą┐čĆąĄą┤čüčéą░ą▓ąĖą╗ą░čüčī ąĮą░čłą░ ą┐ą╗ą░čéą░:
$ ls -la /media/$USER/RPI-RP2/
total 28
drwxr-xr-x 2 user user 16384 čÅąĮą▓ 1 1970 .
drwxr-x---+ 3 root root 4096 ą░ą┐čĆ 11 10:56 ..
-r--r--r-- 1 user user 241 čüąĄąĮ 5 2008 INDEX.HTM
-r--r--r-- 1 user user 62 čüąĄąĮ 5 2008 INFO_UF2.TXT
9 . ąĪą║ąŠą┐ąĖčĆčāą╣č鹥 čäą░ą╣ą╗ *.uf2 ąĮą░ ą▓ą░čłčā ą┐ą╗ą░čéą║čā:
$ cp blink.uf2 /media/$USER/RPI-RP2
ą¤ąŠčüą╗ąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čŹč鹊ą╣ ą║ąŠą╝ą░ąĮą┤čŗ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ąĘą░ą┐čāčüčéąĖčé ą┐čĆąŠą│čĆą░ą╝ą╝čā, ąĖ ąĘąĄą╗ąĄąĮčŗą╣ čüą▓ąĄč鹊ą┤ąĖąŠą┤ ąĮą░ ą┐ą╗ą░č鹥 ąĮą░čćąĮąĄčé ą╝ąĖą│ą░čéčī.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓čŗ ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čāčéąĖą╗ąĖčéčā picotool ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ą▒ąĖąĮą░čĆąĮąĖą║ą░ UF2 ą▓ čüą▓ąŠčÄ ą┐ą╗ą░čéą║čā Pico, čüą╝. "Appendix B" ą┤ąŠą║čāą╝ąĄąĮčéą░ [1].
ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┐ą╗ą░čéč乊čĆą╝čŗ, ąĮą░ ą║ąŠč鹊čĆąŠą╣ ą▓čŗ ą▓čŗą┐ąŠą╗ąĮčÅąĄč鹥 ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÄ ą┤ą▓ąŠąĖčćąĮąŠą│ąŠ ą║ąŠą┤ą░, ą▓ą░ą╝ ą╝ąŠąČąĄčé ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ ą▓čĆčāčćąĮčāčÄ čüą╝ąŠąĮčéąĖčĆąŠą▓ą░čéčī USB-čāčüčéčĆąŠą╣čüčéą▓ąŠ čäą╗ąĄčłą║ąĖ ą┐ą╗ą░čéą║ąĖ (mass storage device, USB MSD):
$ dmesg | tail
[ 371.973555] sd 0:0:0:0: [sda] Attached SCSI removable disk
$ sudo mkdir -p /mnt/pico
$ sudo mount /dev/sda1 /mnt/pico
ąĢčüą╗ąĖ ą▓čŗ ą╝ąŠąČąĄč鹥 ą▓ąĖą┤ąĄčéčī čäą░ą╣ą╗čŗ ą▓ ą║ą░čéą░ą╗ąŠą│ąĄ /mnt/pico , č鹊 USB Mass Storage Device čüą╝ąŠąĮčéąĖčĆąŠą▓ą░ą╗ąŠčüčī ą║ąŠčĆčĆąĄą║čéąĮąŠ:
$ ls /mnt/pico/
INDEX.HTM INFO_UF2.TXT
ąÜąŠą┐ąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓ą░čłąĄą│ąŠ čäą░ą╣ą╗ą░ blink.uf2 ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ:
$ sudo cp blink.uf2 /mnt/pico
$ sudo sync
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┐ąŠčüą╗ąĄą┤ąĮčÅčÅ ą║ąŠą╝ą░ąĮą┤ą░ sudo sync ą╝ąŠąČąĄčé ąĮąĄ ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ.
ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčéą║ą╗čÄčćąĖčé USB Mass Storage Device ąĖ ąĘą░ą┐čāčüčéąĖčé ą▓ą░čł ą║ąŠą┤, ąĮąŠ ą┤ą╗čÅ ą┐ąŠą╗ąĮąŠą╣ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéąĖ čüą╗ąĄą┤čāąĄčé čéą░ą║ąČąĄ ą▓čĆčāčćąĮčāčÄ ąŠčéą╝ąŠąĮčéąĖčĆąŠą▓ą░čéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ čäą╗ąĄčłą║ąĖ:
$ sudo umount /mnt/pico
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąŠčéą║ą╗čÄč湥ąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ (ą║ą░ą▒ąĄą╗čÅ micro-USB) ąĮąĄ čāą┤ą░ą╗ąĖčé ą║ąŠą┤ ą▓ą░čłąĄą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĖąĘ ą┐ą░ą╝čÅčéąĖ čāčüčéčĆąŠą╣čüčéą▓ą░. ą¤čĆąĖ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ą┐ą╗ą░čéčŗ, ąĄčüą╗ąĖ ąĮąĄ čāą┤ąĄčƹȹĖą▓ą░čéčī ą┐čĆąĖ čŹč鹊ą╝ ą║ąĮąŠą┐ą║čā BOOTSEL, ą┐čĆąŠą│čĆą░ą╝ą╝ą░ čüąĮąŠą▓ą░ ąĘą░ą┐čāčüčéąĖčéčüčÅ, ąĖ čüą▓ąĄč鹊ą┤ąĖąŠą┤ ąĮą░čćąĮąĄčé ą╝ąĖą│ą░čéčī.
[ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┤čĆčāą│ąĖčģ ą┐ą╗ą░čé ]
ąÆ ąĮąĄą║ąŠč鹊čĆčŗčģ čüą╗čāčćą░čÅčģ ąĮą░ ą┐ą╗ą░č鹥 ą╝ąŠąČąĄčé ąĮąĄ ą▒čŗčéčī ą║ąĮąŠą┐ą║ąĖ BOOTSEL. ąóąŠą│ą┤ą░ ą┐ąŠąĮą░ą┤ąŠą▒čÅčéčüčÅ ą┤čĆčāą│ąĖąĄ čüą┐ąŠčüąŠą▒čŗ ąĘą░ą│čĆčāąĘą║ąĖ ą▓ą░čłąĄą│ąŠ ą║ąŠą┤ą░, čćč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąŠą┐ąĖčüą░ąĮąŠ ą▓ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąĄ ą▓ą░čłąĄą╣ ą┐ą╗ą░čéčŗ:
ŌĆó ąØą░ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąĄ ą┐ą╗ą░čé Pico ąĄčüčéčī ąĖąĮč鹥čĆč乥ą╣čü SWD (čüą╝. "Appendix A: Debugprobe" [1]) ą║ąŠč鹊čĆčŗą╣ čüą▒čĆąŠčüąĖčé ą┐ą╗ą░čéčā ąĖ ąĘą░ą│čĆčāąĘąĖčé ą║ąŠą┤ ą▒ąĄąĘ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ąĮą░ąČą░čéąĖčÅ ąĮą░ ą║ąĮąŠą┐ą║čā.RESET , ąĮąŠ ąĮąĄčé ą║ąĮąŠą┐ą║ąĖ BOOTSEL; ą╝ąŠąČąĄčé ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ ą┤ą▓ąŠą╣ąĮąŠąĄ ąĮą░ąČą░čéąĖąĄ ą║ąĮąŠą┐ą║ąĖ čüą▒čĆąŠčüą░ ą┤ą╗čÅ ą░ą║čéąĖą▓ąĖąĘą░čåąĖąĖ ąĘą░ą│čĆčāąĘčćąĖą║ą░.
ąÆąŠ ą▓čüąĄčģ čüą╗čāčćą░čÅčģ ą╗čāčćčłąĄ ą▓čüąĄą│ąŠ ą┐čĆąŠą║ąŠąĮčüčāą╗čīčéąĖčĆąŠą▓ą░čéčīčüčÅ čü ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĄą╣ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ ą┐ą╗ą░čéčŗ, ą│ą┤ąĄ ą┤ąŠą╗ąČąĄąĮ ąŠą┐ąĖčüčŗą▓ą░čéčīčüčÅ čüą░ą╝čŗą╣ ą╗čāčćčłąĖą╣ čüą┐ąŠčüąŠą▒ ąĘą░ą│čĆčāąĘą║ąĖ firmware ą▓ ą▓ą░čłčā ą┐ą╗ą░čéčā.
[ąĪąŠąĘą┤ą░ąĮąĖąĄ ą▓čĆčāčćąĮčāčÄ ą▓ą░čłąĄą│ąŠ čüąŠą▒čüčéą▓ąĄąĮąĮąŠą│ąŠ ą┐čĆąŠąĄą║čéą░ ]
1 . ąĪąŠąĘą┤ą░ą╣č鹥 ą║ą░čéą░ą╗ąŠą│ ą┐čĆąŠąĄą║čéą░ test čĆčÅą┤ąŠą╝ čü ą║ą░čéą░ą╗ąŠą│ąŠą╝ pico-sdk :
$ cd ~/pico
$ ls -la
total 16
drwxr-xr-x 7 user user 224 6 Apr 10:41 ./
drwx------@ 27 user user 864 6 Apr 10:41
drwxr-xr-x 10 user user 320 6 Apr 09:29 pico-examples/
drwxr-xr-x 13 user user 416 6 Apr 09:22 pico-sdk/
$ mkdir test
$ cd test
2 . ąĪąŠąĘą┤ą░ą╣č鹥 ą▓ čŹč鹊ą╝ ą║ą░čéą░ą╗ąŠą│ąĄ čäą░ą╣ą╗ test.c :
#include < stdio.h> #include "pico/stdlib.h" #include "hardware/gpio.h" #include "pico/binary_info.h" const uint LED_PIN = 25 ;ŌæĀint main ()
{
bi_decl(bi_program_description("This is a test binary." ));ŌæĪ
bi_decl(bi_1pin_with_name(LED_PIN, "On-board LED" ));
stdio_init_all();
gpio_init(LED_PIN);
gpio_set_dir(LED_PIN, GPIO_OUT);while (1 )
{
gpio_put(LED_PIN, 0 );
sleep_ms(250 );
gpio_put(LED_PIN, 1 );
puts ("Hello World\n" );
sleep_ms(1000 );
}
}ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
ŌæĀ ąŻčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ ąĮą░ ą┐ą╗ą░č鹥 LED ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ GP25 ąĮą░ Pico ąĖ Pico 2. ąĢčüą╗ąĖ ą▓čŗ ą▓čŗą┐ąŠą╗ąĮčÅąĄč鹥 čüą▒ąŠčĆą║čā ą┤ą╗čÅ Pico W, č鹊 LED ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ CYW43_WL_GPIO_LED_PIN. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüą╝. ą┐čĆąĖą╝ąĄčĆ Pico W blink ą▓ Github čĆąĄą┐ąŠąĘąĖč鹊čĆąĖąĖ Pico Examples (čäą░ą╣ą╗ picow_blink.c ) .picotool , čüą╝. Appendix B [1].
ążą░ą╣ą╗ CMakeLists.txt
cmake_minimum_required(VERSION 3.13)include (pico_sdk_import.cmake)
project(test_project C CXX ASM)
set(CMAKE_C_STANDARD 11)
set(CMAKE_CXX_STANDARD 17)
pico_sdk_init()
add_executable(test
test.c
)
pico_enable_stdio_usb(test 1)ŌæĀ
pico_enable_stdio_uart(test 1)ŌæĪ
pico_add_extra_outputs(test)
target_link_libraries(test pico_stdlib)
ŌæĀ ąĀą░ąĘčĆąĄčłą░ąĄčé ą▓čŗą▓ąŠą┤ č湥čĆąĄąĘ USB.
ąŚą░č鹥ą╝ čüą║ąŠą┐ąĖčĆčāą╣č鹥 čäą░ą╣ą╗ pico_sdk_import.cmake ąĖąĘ ą┐ą░ą┐ą║ąĖ external ą▓ ą▓ą░čłčā ą┐ą░ą┐ą║čā ą┐čĆąŠąĄą║čéą░ test , ąĮą░čģąŠą┤čÅčēčāčÄčüčÅ ą▓ ąĖąĮčüčéą░ą╗ą╗čÅčåąĖąĖ pico-sdk:
$ cp pico-sdk/external/pico_sdk_import.cmake .
ąÆčŗ ą┤ąŠą╗ąČąĮčŗ čāą▓ąĖą┤ąĄčéčī ą▓ ą┐ą░ą┐ą║ąĄ ą┐čĆąŠąĄą║čéą░ čćč鹊-č鹊 ą┐ąŠą┤ąŠą▒ąĮąŠąĄ:
$ ls -la
total 24
drwxr-xr-x 5 user user 160 6 Apr 10:46 ./
drwxr-xr-x 7 user user 224 6 Apr 10:41
-rw-r--r--@ 1 user user 394 6 Apr 10:37 CMakeLists.txt
-rw-r--r-- 1 user user 2744 6 Apr 10:40 pico_sdk_import.cmake
-rw-r--r-- 1 user user 383 6 Apr 10:37 test.c
ąóąĄą┐ąĄčĆčī ą▓čŗ ą╝ąŠąČąĄč鹥 ą▓čŗą┐ąŠą╗ąĮąĖčéčī čüą▒ąŠčĆą║čā č鹊čćąĮąŠ čéą░ą║ ąČąĄ, ą║ą░ą║ čŹč鹊 ą┤ąĄą╗ą░ą╗ąŠčüčī ą▓ ą┐čĆąŠąĄą║č鹥 "Hello World".
$ mkdir build
$ cd build
$ export PICO_SDK_PATH=pico-sdk
$ cmake ..
$ make
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ SDK ą▓čŗą┐ąŠą╗ąĮąĖčé čüą▒ąŠčĆą║čā ą▒ąĖąĮą░čĆąĮąŠą│ąŠ ą║ąŠą┤ą░ ą┤ą╗čÅ Raspberry Pi Pico. ą¦č鹊ą▒čŗ ą▓čŗą┐ąŠą╗ąĮąĖčéčī čüą▒ąŠčĆą║čā ą┤ą╗čÅ ą┤čĆčāą│ąŠą╣ ą┐ą╗ą░čéčŗ, ą┐ąĄčĆąĄą┤ą░ą╣č鹥 CMake ąŠą┐čåąĖčÄ -DPICO_BOARD=board , ąĘą░ą╝ąĄąĮąĖą▓ board ąĮą░ ąĖą╝čÅ ą┐ą╗ą░čéčŗ, ą║ąŠč鹊čĆčāčÄ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥. ąöą╗čÅ Pico 2 ą┐ąĄčĆąĄą┤ą░ą╣č鹥 -DPICO_BOARD=pico2 , ą┤ą╗čÅ Pico W ą┐ąĄčĆąĄą┤ą░ą╣č鹥 -DPICO_BOARD=pico_w . ą¦č鹊ą▒čŗ čāą║ą░ąĘą░čéčī čüąĄčéčī Wi-Fi ąĖ ą┐ą░čĆąŠą╗čī ą┤ą╗čÅ ąĮąĄčæ, ą║ ą║ąŠč鹊čĆąŠą╣ ą┤ąŠą╗ąČąĮą░ ą┐ąŠą┤ą║ą╗čÄčćą░čéčīčüčÅ Pico W, ą┐ąĄčĆąĄą┤ą░ą╣č鹥 -DWIFI_SSID="ą▓ą░čłą░_čüąĄčéčī" -DWIFI_PASSWORD="ą▓ą░čł_ą┐ą░čĆąŠą╗čī" .
ą¤čĆąŠčåąĄčüčü make čüą│ąĄąĮąĄčĆąĖčĆčāąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ čĆą░ąĘąĮčŗčģ čäą░ą╣ą╗ąŠą▓. ąÆ čüą╗ąĄą┤čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ąĮąĄą║ąŠč鹊čĆčŗąĄ ąĖąĘ ąĮąĖčģ, ąĖą╝ąĄčÄčēąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ ąĮą░ąĘąĮą░č湥ąĮąĖąĄ.
ąĀą░čüčłąĖčĆąĄąĮąĖąĄ čäą░ą╣ą╗ą░ ą×ą┐ąĖčüą░ąĮąĖąĄ
.bin ąöą▓ąŠąĖčćąĮčŗą╣ čäą░ą╣ą╗, ą│ą┤ąĄ čüąŠą┤ąĄčƹȹ░čéčüčÅ ą║ąŠą┤ ąĖ ą┤ą░ąĮąĮčŗąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ.
.elf ą¤ąŠą╗ąĮčŗą╣ ą▓čŗą▓ąŠą┤ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, čüąŠą┤ąĄčƹȹ░čēąĖą╣ ąŠčéą╗ą░ą┤ąŠčćąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ (čŹč鹊čé čäą░ą╣ą╗ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąŠčéą╗ą░ą┤čćąĖą║).
.uf2 ąÜąŠą┤ ąĖ ą┤ą░ąĮąĮčŗąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą▓ č乊čĆą╝ą░č鹥 UF2 [4], ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ąĮą░ "čäą╗ąĄčłą║čā" ąĘą░ą│čĆčāąĘčćąĖą║ą░, ą║ąŠą│ą┤ą░ ąŠąĮ ą╝ąŠąĮčéąĖčĆčāąĄčé ą▓ čüąĖčüč鹥ą╝ąĄ čüą▓ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ USB MSD.
.dis ąöąĖąĘą░čüčüąĄą╝ą▒ą╗ąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą║ąŠą┤ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą▒ąĖąĮą░čĆąĮąĖą║ą░.
.hex ąöą▓ąŠąĖčćąĮčŗą╣ ą║ąŠą┤ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą▓ HEX-č乊čĆą╝ą░č鹥.
.map ążą░ą╣ą╗ ą║ą░čĆčéčŗ ą┐ą░ą╝čÅčéąĖ, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čäą░ą╣ą╗čā .elf . ąÆ ą║ą░čĆč鹥 ą┐ą░ą╝čÅčéąĖ ąŠą┐ąĖčüčŗą▓ą░čÄčéčüčÅ čüąĄą│ą╝ąĄąĮčéčŗ ą▓ ą┐ą░ą╝čÅčéąĖ, ą║čāą┤ą░ ą╗ąĖąĮą║ąĄčĆ ą┐ąŠą╝ąĄčēą░ąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą║ąŠą┤ą░ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ.
ąŚą░ą╝ąĄčćą░ąĮąĖčÅ:
ŌĆó UF2 (USB Flashing Format) čŹč鹊 čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąĮčŗą╣ Microsoft č乊čĆą╝ą░čé čäą░ą╣ą╗ą░, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ą╝ąĖ Raspberry Pi ą┤ą╗čÅ ą┐čĆąŠčłąĖą▓ą║ąĖ čü ą┐ąŠą╝ąŠčēčīčÄ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ąĖ USB. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüą╝. čĆąĄą┐ąŠąĘąĖč鹊čĆąĖą╣ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ Microsoft UF2 [4].-DPICO_NO_FLASH=1 , ą╗ąĖą▒ąŠ ą▓čŗ ą╝ąŠąČąĄč鹥 ą┤ąŠą▒ą░ą▓ąĖčéčī pico_set_binary_type(TARGET_NAME no_flash) ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüą▒ąŠčĆą║ąŠą╣ ą▓ ą▓ą░čł čäą░ą╣ą╗ CMakeLists.txt . ąÆčŗ ą╝ąŠąČąĄč鹥 ąĘą░ą│čĆčāąĘąĖčéčī ą▒ąĖąĮą░čĆąĮčŗą╣ ą║ąŠą┤ RAM ą┤ą╗čÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ Raspberry Pi č湥čĆąĄąĘ UF2. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ąĮą░ ą▓ą░čłąĄą╣ ą┐ą╗ą░č鹥 ąĮąĄčé ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ flash, č鹊 ą▓čŗ ą╝ąŠąČąĄč鹥 ąĘą░ą│čĆčāąĘąĖčéčī ą▒ąĖąĮą░čĆąĮąĖą║, ą║ąŠč鹊čĆčŗą╣ čĆą░ą▒ąŠčéą░ąĄčé ą▓ RAM ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ąĖčüą┐ąŠą╗čīąĘčāčÅ UF2, ą┐čĆąŠčüčéčŗą╝ čāą║ą░ąĘą░ąĮąĖąĄą╝ ą░ą┤čĆąĄčüąŠą▓, ą│ą┤ąĄ ą┤ąŠą╗ąČąĮčŗ čĆą░čüą┐ąŠą╗ą░ą│ą░čéčīčüčÅ ą┤ą░ąĮąĮčŗąĄ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą▓čŗ ą╝ąŠąČąĄč鹥 ąĘą░ą│čĆčāąČą░čéčī ą║ąŠą┤ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ č鹊ą╗čīą║ąŠ ą▓ RAM ąĖą╗ąĖ č鹊ą╗čīą║ąŠ ą▓ FLASH, ąĮąŠ ąĮąĄ ą▓ ąŠą▒ą░ čŹčéąĖčģ ą╝ąĄčüčéą░ ą┐ą░ą╝čÅčéąĖ.
[ąĪčüčŗą╗ą║ąĖ ]
1 . Getting started with Raspberry Pi Pico-series .2 . FreeRTOS: SMP Demos for the Raspberry Pi Pico Board .3 . FreeRTOS / FreeRTOS-SMP-Demos - čĆąĄą┐ąŠąĘąĖč鹊čĆąĖą╣ GitHub.4 . microsoft / uf2 - čüčéą░ąĮą┤ą░čĆčé čäą░ą╣ą╗ą░ ąĘą░ą│čĆčāąĘčćąĖą║ą░ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ąĮą░ USB MSD.