| nRF52x: периферийное устройство PWM |
|
| Добавил(а) microsin | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Аппаратный модуль PWM позволяет генерировать сигналы широтно-импульсной модуляции (ШИМ, pulse width modulation, PWM) на ножках портов GPIO. Реализован счетчик с возможностью счета вверх и вниз, с 4 каналами PWM, которые управляют назначенными выводами портов GPIO. Три блока модуля PWM могут предоставить до 12 каналов PWM с индивидуальным управлением частотой в группах, в которых находятся до 4 каналов. Кроме того, встроенный декодер и функция EasyDMA делают возможным манипулирование скважностью PWM без вмешательства CPU. Произвольные последовательности скважностей считываются из Data RAM, и могут быть выстроены в цепочку, чтобы организовать двойную буферизацию (ping-pong buffering) или повторение сложных циклов из буферов. Основные возможность модуля PWM: • Фиксированная базовая частота PWM с программируемым делителем частоты тактов.
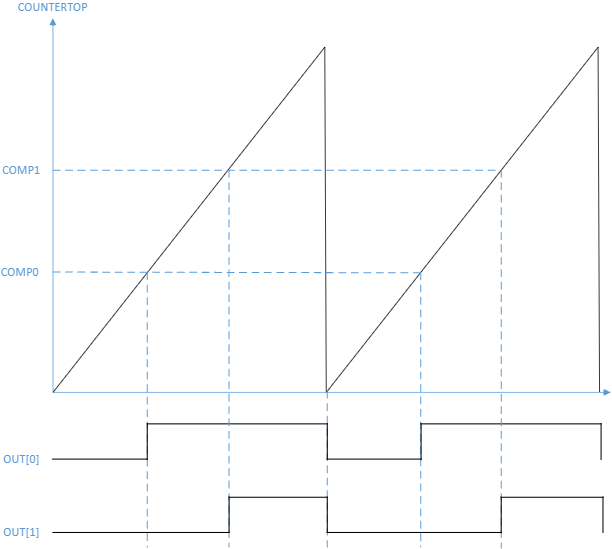
Рис. 1. Внутренняя структура аппаратного модуля PWM. [Счетчик] Счетчик PWM (wave counter) отвечает за генерацию импульсов со скважностью, которая зависит от значений сравнения (COMP0 .. COMP3) и от частоты PWM, которая зависит от предела счета COUNTERTOP. Имеется один общий 15-разрядный счетчик с 4 каналами сравнения. Таким образом, все эти 4 канала работают с общим периодом (на общей частоте PWM), однако у каждого из них можно настроить индивидуальную скважность и полярность импульсов PWM. Полярность устанавливается значением, прочитанным из RAM (см. рис. 4), в то время как регистр MODE управляет режимом счета - либо счет вверх, либо счет вверх и вниз. Верхнее значение счета задает регистр COUNTERTOP. Значение этого регистра вместе с выбранным значением для PRESCALER частоты тактов PWM_CLK определяют период PWM. Значение COUNTERTOP меньшее, чем значение для сравнения, приведет к отсутствию генерации импульсов PWM. Соответственно на OUT[n] будет удерживаться постоянная лог. 1, если полярность установлена на FallingEdge. Все регистры сравнения внутренние, и могут конфигурироваться только через декодер, представленный далее. Регистр COUNTERTOP можно безопасно записать в любой момент времени. Его значение анализируется и учитывается сразу после задачи запуска (START task). Если в DECODER.LOAD записано любое значение, отличающееся от WaveForm, то COUNTERTOP также будет анализироваться после задачи STARTSEQ[n], и тогда будет загружено новое значение из RAM во время проигрывания последовательности скважностей. Если DECODER.LOAD=WaveForm, то значение регистра COUNTERTOP игнорируется, и вместо этого принимаются значения из RAM (см. далее "Декодер + EasyDMA"). Рис. 2 показывает работу счетчика в режиме счета вверх (MODE=PWM_MODE_Up) с тремя каналами PWM, работающими на одной частоте, но с разными скважностями. Счетчик автоматически сбрасывается в 0, когда достигает значения COUNTERTOP, и уровень на OUT[n] будет инвертироваться. OUT[n] удерживается в лог. 0, если значение сравнения 0, и удерживается в лог. 1 соответственно, если установлено значение COUNTERTOP, когда полярность установлена в FallingEdge. Режим со счетом вверх генерирует импульсы ШИМ с выравниванием по началу периода (PWM edge-aligned). Ниже приведен пример кода: uint16_t pwm_seq[4] = {PWM_CH0_DUTY, PWM_CH1_DUTY, PWM_CH2_DUTY, PWM_CH3_DUTY}; NRF_PWM0->PSEL.OUT[0] = (first_pin << PWM_PSEL_OUT_PIN_Pos) | (PWM_PSEL_OUT_CONNECT_Connected << PWM_PSEL_OUT_CONNECT_Pos); NRF_PWM0->PSEL.OUT[1] = (second_pin << PWM_PSEL_OUT_PIN_Pos) | (PWM_PSEL_OUT_CONNECT_Connected << PWM_PSEL_OUT_CONNECT_Pos); NRF_PWM0->ENABLE = (PWM_ENABLE_ENABLE_Enabled << PWM_ENABLE_ENABLE_Pos); NRF_PWM0->MODE = (PWM_MODE_UPDOWN_Up << PWM_MODE_UPDOWN_Pos); NRF_PWM0->PRESCALER = (PWM_PRESCALER_PRESCALER_DIV_1 << PWM_PRESCALER_PRESCALER_Pos); NRF_PWM0->COUNTERTOP = (16000 << PWM_COUNTERTOP_COUNTERTOP_Pos); //1 msec NRF_PWM0->LOOP = (PWM_LOOP_CNT_Disabled << PWM_LOOP_CNT_Pos); NRF_PWM0->DECODER = (PWM_DECODER_LOAD_Individual << PWM_DECODER_LOAD_Pos) | (PWM_DECODER_MODE_RefreshCount << PWM_DECODER_MODE_Pos); NRF_PWM0->SEQ[0].PTR = ((uint32_t)(pwm_seq) << PWM_SEQ_PTR_PTR_Pos); NRF_PWM0->SEQ[0].CNT = ((sizeof(pwm_seq) / sizeof(uint16_t)) << PWM_SEQ_CNT_CNT_Pos); NRF_PWM0->SEQ[0].REFRESH = 0; NRF_PWM0->SEQ[0].ENDDELAY = 0; NRF_PWM0->TASKS_SEQSTART[0] = 1;
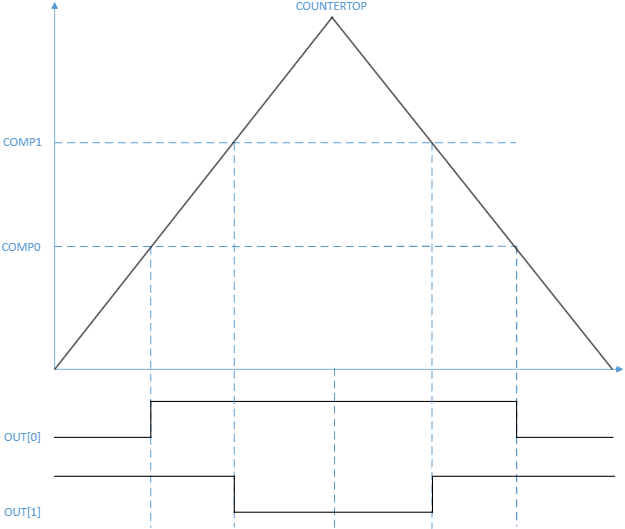
Рис. 2. Пример PWM со счетом вверх, полярность FallingEdge. Для вычисления периода PWM TPWM(Up) и разрешающей способности по длительности импульсов Tsteps можно использовать формулы: TPWM(Up) = TPWM_CLK * COUNTERTOP На рис. 3 показан режим работы, когда счетчик считает вверх и вниз (от предыдущего примера отличается только настройкой MODE=PWM_MODE_UpAndDown), с двумя каналами PWM, работающими на одной частоте, но с разными скважностями и полярностью импульсов. Счетчик начинает декрементироваться до 0, когда при счете вверх достигнуто значение COUNTERTOP, и инвертируется OUT[n], когда значение сравнения достигнуто второй раз. В результате получаются импульсы PWM, длительность которых меняется с выравниванием посередине (PWM center-aligned). uint16_t pwm_seq[4] = {PWM_CH0_DUTY, PWM_CH1_DUTY, PWM_CH2_DUTY, PWM_CH3_DUTY}; NRF_PWM0->PSEL.OUT[0] = (first_pin << PWM_PSEL_OUT_PIN_Pos) | (PWM_PSEL_OUT_CONNECT_Connected << PWM_PSEL_OUT_CONNECT_Pos); NRF_PWM0->PSEL.OUT[1] = (second_pin << PWM_PSEL_OUT_PIN_Pos) | (PWM_PSEL_OUT_CONNECT_Connected << PWM_PSEL_OUT_CONNECT_Pos); NRF_PWM0->ENABLE = (PWM_ENABLE_ENABLE_Enabled << PWM_ENABLE_ENABLE_Pos); NRF_PWM0->MODE = (PWM_MODE_UPDOWN_UpAndDown << PWM_MODE_UPDOWN_Pos); NRF_PWM0->PRESCALER = (PWM_PRESCALER_PRESCALER_DIV_1 << PWM_PRESCALER_PRESCALER_Pos); NRF_PWM0->COUNTERTOP = (16000 << PWM_COUNTERTOP_COUNTERTOP_Pos); //1 msec NRF_PWM0->LOOP = (PWM_LOOP_CNT_Disabled << PWM_LOOP_CNT_Pos); NRF_PWM0->DECODER = (PWM_DECODER_LOAD_Individual << PWM_DECODER_LOAD_Pos) | (PWM_DECODER_MODE_RefreshCount << PWM_DECODER_MODE_Pos); NRF_PWM0->SEQ[0].PTR = ((uint32_t)(pwm_seq) << PWM_SEQ_PTR_PTR_Pos); NRF_PWM0->SEQ[0].CNT = ((sizeof(pwm_seq) / sizeof(uint16_t)) << PWM_SEQ_CNT_CNT_Pos); NRF_PWM0->SEQ[0].REFRESH = 0; NRF_PWM0->SEQ[0].ENDDELAY = 0; NRF_PWM0->TASKS_SEQSTART[0] = 1;
Рис. 3. Пример PWM со счетом вверх/вниз. В режиме счета вверх/вниз для вычисления периода PWM TPWM(Up And Down) и разрешающей способности по длительности импульсов Tsteps можно использовать формулы: TPWM(Up And Down) = TPWM_CLK * 2 * COUNTERTOP [Декодер + EasyDMA] Декодер использует EasyDMA для выборки параметров PWM, сохраненных в Data RAM, и обновления внутренних регистров сравнения, основываясь на режиме работы. Упомянутые параметры PWM организованы в последовательность, содержащую как минимум половину слова (16 бит). Самый старший значащий бит здесь (MSB, bit[15]) обозначает полярность OUT[n], в то время как остальные bit[14:0] представляют собой 15-разрядное значение для сравнения:
Назначение бит:
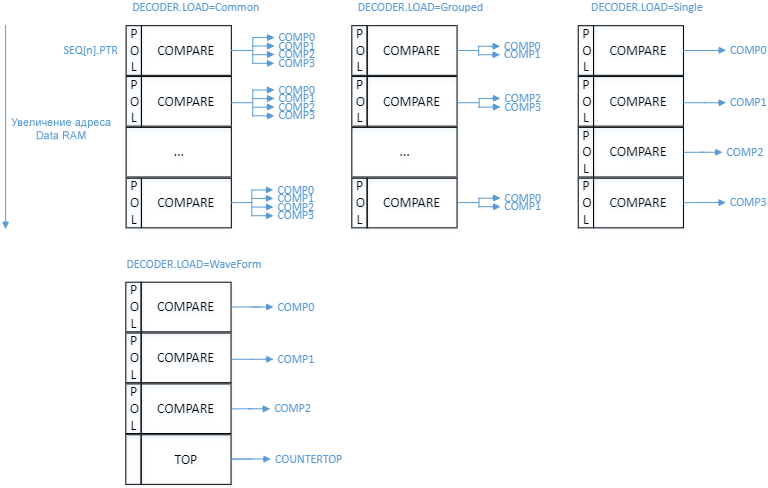
Регистр DECODER управляет, каким образом содержимое RAM интерпретируется и загружается во внутренние регистры сравнения. Поле LOAD может использоваться для управления загрузкой - загружаются ли значения RAM во все каналы сравнения, или же альтернативно будет обновляться группа, либо все каналы будут обновляться индивидуальными значениями. Рис. 4 иллюстрирует, как организованы параметры, сохраненные в RAM, и как они перенаправляются в различные каналы сравнения в разных режимах.
Рис. 4. Режимы доступа к памяти со стороны декодера. Доступен специальный режим работы, когда DECODER.LOAD установлен в WaveForm. В этом режиме можно разрешить до 3 каналов PWM - OUT[0], OUT[1] и OUT[2]. В RAM загружаются за один раз 4 значения: первая, вторая и третья ячейки RAM используются для загрузки значений регистров сравнения, и четвертая используется для загрузки регистра COUNTERTOP. Это дает возможность получить до 3 каналов PWM, при котором может меняться базовая частота PWM. Этот режим работы полезен для генерации сигналов произвольной формы в таких приложениях, как светодиодное освещение. Регистр SEQ[n].REFRESH=N (один на последовательность n=0 или 1) будет инструктировать о новой величине ширины импульса, сохраненной в RAM, на каждом (N+1)-ом периоде PWM. Установка этого регистра в 0 приведет к новой смене рабочего цикла для каждого периода PWM до тех пор, пока наблюдается минимальный период PWM. Обратите внимание, что регистры SEQ[n].REFRESH и SEQ[n].ENDDELAY игнорируются, когда DECODER.MODE=NextStep. Следующее значение загружается при получении каждой новой задачи следующего шага (NEXTSTEP task). SEQ[n].PTR это указатель, используемый для выборки значений COMPARE из RAM. Если SEQ[n].PTR не указывает на область Data RAM, то транзакция EasyDMA может вызвать HardFault или повреждение содержимого RAM. Для дополнительной информации по разным регионам памяти см. [2]. После установки указателя SEQ[n].PTR на желаемую область RAM, в регистре SEQ[n].CNT должно быть установлено количество половинок слов (порций данных по 16-бит), находящихся в последовательности. Важно отметить, что режимы Grouped и Single требуют одну половинку слова на группу, либо либо одну половинку слова на канал соответственно, что увеличивает расход RAM. Если в этот момент генерация PWM еще не запущена, отправка SEQSTART[n] task загрузит первое значение из RAM, затем запустит генерацию PWM. Будет сгенерировано событие SEQSTARTED[n], как только EasyDMA прочитал первый параметр PWM из RAM, и счетчик начал его выполнять. Когда LOOP.CNT=0, последовательность n=0 или 1 проигрывается один раз. После того, как последнее значение из последовательности было загружено и запущено на выполнение, генерируется событие SEQEND[n]. Генерация The PWM продолжится с последним загруженным значением. См. рис. 5 для примера такого простого проигрывания. Чтобы полностью остановить генерацию PWM и принудительно перевести соответствующие ножки в определенное состояние, можно в любой момент запустить STOP task. Сгенерируется событие STOPPED, года генерация PWM остановилась в конце текущего формируемого периода PWM, и ножки перейдут в состояние ожидания, как определено в GPIO->OUT. Затем генерация PWM может быть запущена заново выдачей SEQSTART[n] task. SEQSTART[n] возобновит генерацию PWM после того, как загрузится первое значение из буфера RAM, который определен регистром SEQ[n].PTR. В таблице ниже показано, когда аппаратно анализируются определенные регистры. Следует проявлять осторожность, когда обновляются эти регистры, чтобы избежать ситуации, когда значения применяются раньше, чем это ожидалось. Таблица 1. Когда можно безопасно обновлять регистры PWM.
Важное замечание: SEQ[n].REFRESH и SEQ[n].ENDDELAY игнорируются в конце сложной последовательности, о чем показывает событие LOOPSDONE. Причина этого в том, что последнее загруженное из RAM значение остается действующим, пока программа не предпримет дальнейшие действия (пока не перезапустит последовательность, либо не остановит генерацию PWM). На рис. 5 показана работа следующего кода, используемого для конфигурации и параметров времени в последовательности, где используется только последовательность 0, и она запускается только один раз с новым значением скважности PWM для каждого периода. NRF_PWM0->PSEL.OUT[0] = (first_pin << PWM_PSEL_OUT_PIN_Pos) | (PWM_PSEL_OUT_CONNECT_Connected << PWM_PSEL_OUT_CONNECT_Pos); NRF_PWM0->ENABLE = (PWM_ENABLE_ENABLE_Enabled << PWM_ENABLE_ENABLE_Pos); NRF_PWM0->MODE = (PWM_MODE_UPDOWN_Up << PWM_MODE_UPDOWN_Pos); NRF_PWM0->PRESCALER = (PWM_PRESCALER_PRESCALER_DIV_1 << PWM_PRESCALER_PRESCALER_Pos); NRF_PWM0->COUNTERTOP = (16000 << PWM_COUNTERTOP_COUNTERTOP_Pos); //1 msec NRF_PWM0->LOOP = (PWM_LOOP_CNT_Disabled << PWM_LOOP_CNT_Pos); NRF_PWM0->DECODER = (PWM_DECODER_LOAD_Common << PWM_DECODER_LOAD_Pos) | (PWM_DECODER_MODE_RefreshCount << PWM_DECODER_MODE_Pos); NRF_PWM0->SEQ[0].PTR = ((uint32_t)(seq0_ram) << PWM_SEQ_PTR_PTR_Pos); NRF_PWM0->SEQ[0].CNT = ((sizeof(seq0_ram) / sizeof(uint16_t)) << PWM_SEQ_CNT_CNT_Pos); NRF_PWM0->SEQ[0].REFRESH = 0; NRF_PWM0->SEQ[0].ENDDELAY = 0; NRF_PWM0->TASKS_SEQSTART[0] = 1;
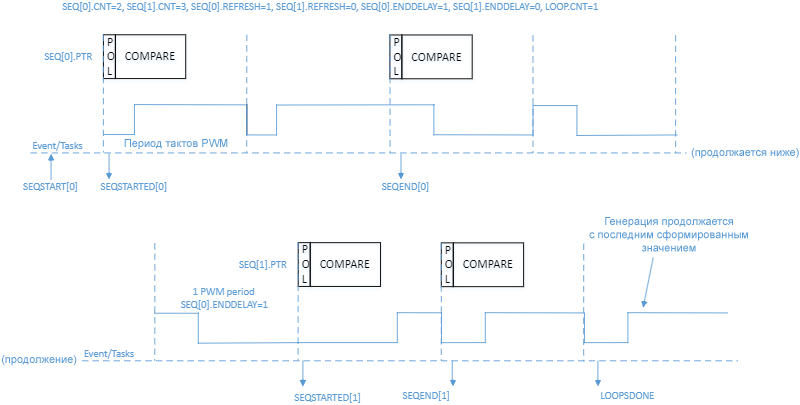
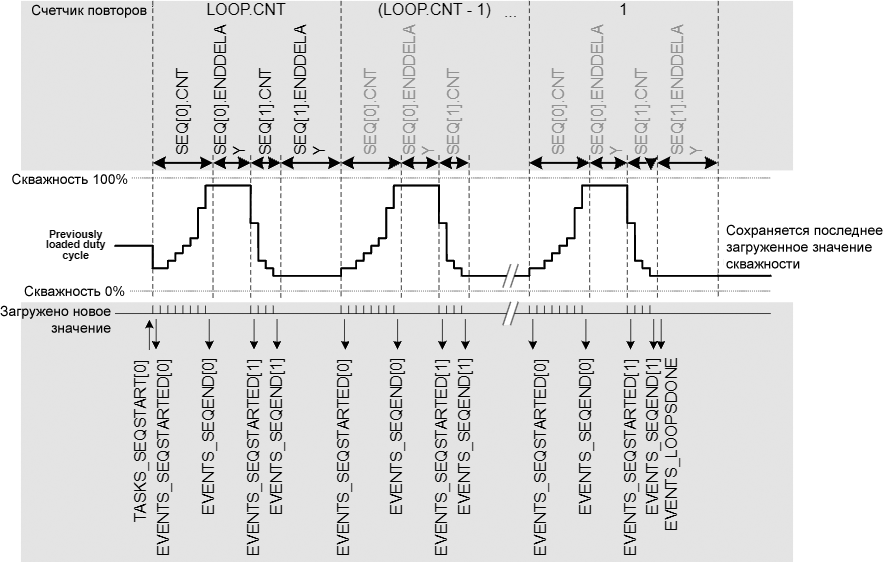
Рис. 5. Пример запуска простой последовательности. Более сложный пример показан на рис. 6, где LOOP.CNT > 0 . В этом случае осуществляется автоматическое проигрывание, состоящее из последовательности SEQ[0], задержки delay 0, последовательности SEQ[1], задержки delay 1, и затем снова по кругу SEQ[0], и так далее. Пользователь может выбрать запуск сложной последовательности с SEQ[0] или SEQ[1] путем активации либо SEQSTART[0], либо SEQSTART[1] task. Сложное проигрывание всегда завершается с delay 1. Две последовательности 0 и 1 определены адресами таблиц значений в Data RAM (указываются SEQ[n].PTR) и соответствующими размерами буфера (SEQ[n].CNT). Скорость, с которой новое значение загружается, определяется индивидуально для каждой последовательности через SEQ[n].REFRESH. Переход от проигрывания последовательности 1 к проигрыванию последовательности 0 неявный, регистр LOOP.CNT позволяет задать количество таких переходов (повторных запусков). Другими словами, LOOP.CNT задает количество полностью автоматических повторов проигрывания сложной последовательности. В примере ниже последовательность 0 определена с SEQ[0].REFRESH, установленным в 1 - это значит, что новый цикл скважности PWM инициируется на каждом втором периоде PWM. Эта сложная последовательность запускается активацией SEQSTART[0], поэтому сначала проигрывается SEQ[0]. Поскольку SEQ[0].ENDDELAY=1, здесь будет задержка на 1 период PWM между последним периодом последовательности 0 и первым периодом последовательности 1. Поскольку SEQ[1].ENDDELAY=0, здесь нет задержки delay 1, так что SEQ[0] запустится сразу по окончанию SEQ[1]. Однако, поскольку LOOP.CNT = 1, проигрывание остановится после однократного проигрывания SEQ[1], и сгенерируются оба события SEQEND[1] и LOOPSDONE (в этом случае порядок возникновения этих событий не гарантируется). NRF_PWM0->PSEL.OUT[0] = (first_pin << PWM_PSEL_OUT_PIN_Pos) | (PWM_PSEL_OUT_CONNECT_Connected << PWM_PSEL_OUT_CONNECT_Pos); NRF_PWM0->ENABLE = (PWM_ENABLE_ENABLE_Enabled << PWM_ENABLE_ENABLE_Pos); NRF_PWM0->MODE = (PWM_MODE_UPDOWN_Up << PWM_MODE_UPDOWN_Pos); NRF_PWM0->PRESCALER = (PWM_PRESCALER_PRESCALER_DIV_1 << PWM_PRESCALER_PRESCALER_Pos); NRF_PWM0->COUNTERTOP = (16000 << PWM_COUNTERTOP_COUNTERTOP_Pos); //1 msec NRF_PWM0->LOOP = (1 << PWM_LOOP_CNT_Pos); NRF_PWM0->DECODER = (PWM_DECODER_LOAD_Common << PWM_DECODER_LOAD_Pos) | (PWM_DECODER_MODE_RefreshCount << PWM_DECODER_MODE_Pos); NRF_PWM0->SEQ[0].PTR = ((uint32_t)(seq0_ram) << PWM_SEQ_PTR_PTR_Pos); NRF_PWM0->SEQ[0].CNT = ((sizeof(seq0_ram) / sizeof(uint16_t)) << PWM_SEQ_CNT_CNT_Pos); NRF_PWM0->SEQ[0].REFRESH = 1; NRF_PWM0->SEQ[0].ENDDELAY = 1; NRF_PWM0->SEQ[1].PTR = ((uint32_t)(seq1_ram) << PWM_SEQ_PTR_PTR_Pos); NRF_PWM0->SEQ[1].CNT = ((sizeof(seq1_ram) / sizeof(uint16_t)) << PWM_SEQ_CNT_CNT_Pos); NRF_PWM0->SEQ[1].REFRESH = 0; NRF_PWM0->SEQ[1].ENDDELAY = 0; NRF_PWM0->TASKS_SEQSTART[0] = 1;
Рис. 6. Пример использования двух последовательностей, проигрываемых друг за другом. Декодер может быть также сконфигурирован для асинхронной загрузки новой скважности PWM. Если установлено DECODER.MODE = NextStep, то активация NEXTSTEP task приведет к обновлению внутренних регистров сравнения на следующем периоде PWM. Рисунки ниже дают обзор каждой части произвольной последовательности в различных режимах (LOOP.CNT=0 и LOOP.CNT>0). В частности представлено следующее: • Начальный и конечный цикл скважности на выходе (выходах) PWM. Обратите внимание, что пример однократного проигрывания применим также и к SEQ[1], здесь SEQ[0] представлена только для упрощения.
Рис. 7. Однократное проигрывание (LOOP.CNT=0).
Рис. 8. Сложная последовательность (LOOP.CNT>0), начинающаяся с SEQ[0].
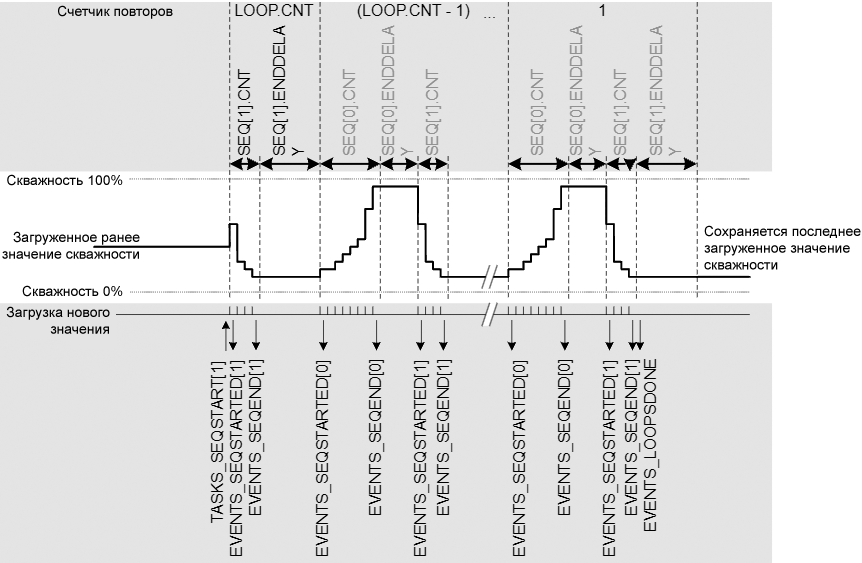
Рис. 9. Сложная последовательность (LOOP.CNT>0), начинающаяся с SEQ[1]. Имейте в виду, что если используется простая или сложная последовательность, у неё должна быть длина SEQ[n].CNT>0 . [Ограничения] Предыдущее значение сравнения будет повторено, если выбран период PWM короче, чем время, требуемое для EasyDMA, чтобы сделать выборку из RAM и обновить внутренние регистры сравнения. Это реализовано для работы без паразитных импульсов, даже если выбраны очень короткие периоды PWM. [Конфигурация ножек портов] Сигналы OUT[n] (n=0..3), связанные с каждым каналом модуля PWM, отображаются на физические выводы портов в соответствии с конфигурацией, указанной соответствующими регистрами PSEL.OUT[n]. Если SEL.OUT[n].CONNECT установлено в Disconnected, соответствующий сигнал модуля PWM не подключен к любому физическому выводу. Регистры PSEL.OUT[n] и их конфигурации используются только пока модуль PWM разрешен, и активна генерация PWM (счетчик запущен), и это сохраняется пока устройство находится в режиме System ON, см. описание модуля POWER [3] для дополнительной информации о режимах энергопотребления. Для гарантии корректного поведения модуля PWM выводы, которые PWM использует, должны быть сконфигурированы в периферийном устройстве GPIO [4], как это описано в таблице 2, и это должно быть сделано перед разрешением модуля PWM. Исходное состояние выводов, когда они находятся в состоянии ожидания (pins idle state) определяется регистрами OUT в модуле GPIO. Это гарантирует, что выводы, используемые модулем PWM, переключаются корректно, если генерация PWM остановлена активацией STOP task, если сам модуль PWM временно запрещен, или устройство временно вошло в System OFF. Эта конфигурация должна сохраняться в GPIO для выбранных ножек IO при условии, что модуль PWM подключенным к внешней схеме PWM (например силовые ключи). В любой момент времени может быть назначено только одно периферийное устройство для переключения определенной ножки GPIO. Если не выполнить это условие, то возможно непредсказуемое поведение. Таблица 2. Рекомендуемая конфигурация GPIO перед запуском генерации PWM.
[Регистры PWM] Таблица 3. Экземпляры PWM, базовые адреса начала адресного пространства регистров.
Таблица 4. Обзор регистров PWM.
Смещение адреса: 0x200. Запись 1 разрешает шорткат, запись 0 запрещает. Чтение показывает текущее состояние. Биты регистра SHORTS:
Назначение бит:
Смещение адреса: 0x300. Запись 1 разрешает соответствующее прерывание, запись 0 запрещает. Чтение показывает состояние прерывания: 0 прерывание запрещено, 1 разрешено. Биты регистра INTEN:
Назначение бит:
Смещение адреса: 0x304. Запись 1 разрешает соответствующее прерывание. Запись 0 не оказывает никакого влияния. Чтение показывает состояние прерывания: 0 прерывание запрещено, 1 разрешено. Биты регистра INTENSET:
Назначение бит:
Смещение адреса: 0x308. Запись 1 запрещает соответствующее прерывание. Запись 0 не оказывает никакого влияния. Чтение показывает состояние прерывания: 0 прерывание запрещено, 1 разрешено. Биты регистра INTENCLR:
Назначение бит:
Смещение адреса: 0x500. Запись 1 разрешает работу модуля PWM. Чтение показывает состояние: 0 работа аппаратного модуля PWM запрещена, 1 разрешена. Биты регистра ENABLE:
Назначение бит:
Смещение адреса: 0x504. Запись выбирает режим счета, чтение показывает текущий выбранный режим. Биты регистра MODE:
Назначение бит:
Смещение адреса: 0x508. Верхнее значение, до которого считает счетчик. Биты регистра COUNTERTOP:
Назначение бит:
Смещение адреса: 0x50C. Биты регистра PRESCALER:
Назначение бит:
Смещение адреса: 0x510. Биты регистра DECODER:
Назначение бит:
Смещение адреса: 0x514. Биты регистра LOOP:
Назначение бит:
Смещение адреса: 0x520 + (n * 0x20). Биты регистра SEQ[n].PTR:
Назначение бит:
Смещение адреса: 0x524 + (n * 0x20). Биты регистра SEQ[n].CNT:
Назначение бит:
Смещение адреса: 0x528 + (n * 0x20). Биты регистра SEQ[n].REFRESH:
Назначение бит:
Смещение адреса: 0x52C + (n * 0x20). Биты регистра SEQ[n].ENDDELAY:
Назначение бит:
Смещение адреса: 0x560 + (n * 0x04). Биты регистра PSEL.OUT[n]:
Назначение бит:
[Электрические параметры PWM]
[Ссылки] 1. nRF52832 PWM Pulse width modulation site:nordicsemi.com. |