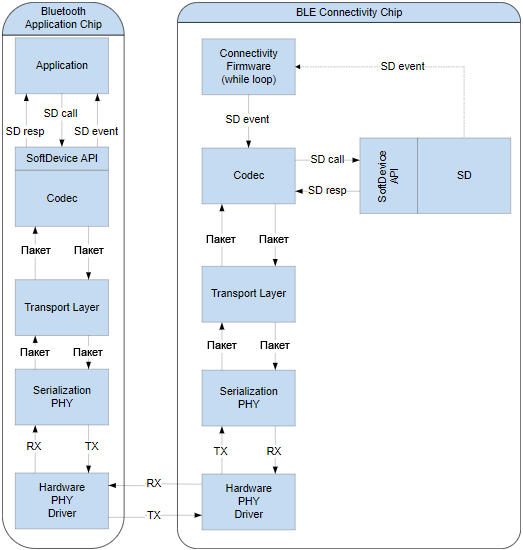
ąÆ serialized-ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ ą║ąŠą┤ąĄą║ąĖ čüąĄčĆąĖą░ą╗ąĖąĘą░čåąĖąĖ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čÄčé ą╝ąĄčģą░ąĮąĖąĘą╝ ą┤ą╗čÅ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤ ąĖ čüąŠą▒čŗčéąĖą╣ ą╝ąĄąČą┤čā Bluetooth Application Chip ąĖ BLE Connectivity Chip.

ąĀąĖc. 2. ą×ą▒čēąĖą╣ č乊čĆą╝ą░čé ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ą░ą║ąĄčéą░ čüąĄčĆąĖą░ą╗ąĖąĘą░čåąĖąĖ.
ąÜąŠą╝ą░ąĮą┤čŗ ąĖ ąŠčéą▓ąĄčéčŗ. ąØą░ čüą╗ąĄą┤čāčÄčēąĄą╝ čĆąĖčüčāąĮą║ąĄ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮ ą┐ąŠč鹊ą║ ą║ąŠą╝ą░ąĮą┤ ąĖ ąŠčéą▓ąĄč鹊ą▓, ą║ąŠč鹊čĆčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą▓ serialized-ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ.

ąĀąĖčü. 3. ąÜčāčĆčüąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ą░ą║ąĄč鹊ą▓ ą║ąŠą╝ą░ąĮą┤ ąĖ ąŠčéą▓ąĄč鹊ą▓.
| ąóąĖą┐ ą┐ą░ą║ąĄčéą░ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0x00 Command |
ą¤ą░ą║ąĄčé, ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╣ ąĖąĘ Application Chip ą▓ BLE Connectivity Chip, ą│ą┤ąĄ ąŠąĮ ą┤ąĄą║ąŠą┤ąĖčĆčāąĄčéčüčÅ, ąĖ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēą░čÅ čäčāąĮą║čåąĖčÅ SoftDevice. |
| 0x01 Command Response |
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▓ ą┐čĆąĖąĮčÅčéą░ čäčāąĮą║čåąĖčÅ ą▓ SoftDevice, ą▓ BLE Connectivity Chip ą║ąŠą┤ąĖčĆčāąĄčéčüčÅ ąŠčéą▓ąĄčé, ąĖ ą▓ Application Chip ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą┐ą░ą║ąĄčé ąŠčéą▓ąĄčéą░ (response packet). |
| 0x03 DTM Command |
ą¤ą░ą║ąĄčé, ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╣ ąĖąĘ Application Chip ą▓ BLE Connectivity Chip, ą│ą┤ąĄ ąŠąĮ ą┤ąĄą║ąŠą┤ąĖčĆčāąĄčéčüčÅ, ąĖ čćąĖą┐ ą▓čģąŠą┤ąĖčé ą▓ čĆąĄąČąĖą╝ DTM. |
| 0x04 DTM Command Response |
ą¤ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ BLE Connectivity Chip ą▓ąŠą╣ą┤ąĄčé ą▓ čĆąĄąČąĖą╝ DTM, ąŠąĮ ąŠčéą▓ąĄčéąĖčé response-ą┐ą░ą║ąĄč鹊ą╝, ą┐ąĄčĆąĄą┤ą░ą▓ą░čÅ čŹč鹊čé ą┐ą░ą║ąĄčé ą▓ Application Chip. |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĄčüą╗ąĖ ą┐ąŠą╗ąĄ ą┤ą╗ąĖąĮčŗ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ ą║ąŠą╝ą░ąĮą┤čŗ, č鹊 ą▓čŗąĘąŠą▓ serialized API ą▓ąĄčĆąĮąĄčé ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ NRF_ERROR_INVALID_LENGTH ąĖąĘ ą║ąŠą┤ąĄą║ą░ ą▓ Application Chip.
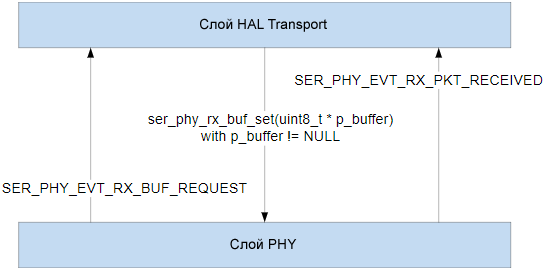
ąĪąŠą▒čŗčéąĖčÅ. ąØą░ čüą╗ąĄą┤čāčÄčēąĄą╝ čĆąĖčüčāąĮą║ąĄ ą┐ąŠą║ą░ąĘą░ąĮ ą┐ąŠč鹊ą║ ą┐ą░ą║ąĄč鹊ą▓ čüąŠą▒čŗčéąĖą╣ ą▓ serialized-ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ.
ąĀąĖčü. 4. ą¤ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┐ą░ą║ąĄč鹊ą▓ čüąŠą▒čŗčéąĖą╣.
| ąóąĖą┐ ą┐ą░ą║ąĄčéą░ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
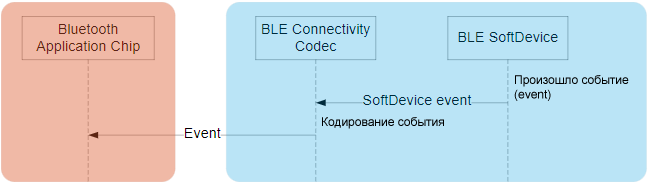
| 0x02 Event |
ąĢčüą╗ąĖ ą▓ SoftDevice ą┐čĆąŠąĖąĘąŠčłą╗ąŠ čüąŠą▒čŗčéąĖąĄ, č鹊 ą┐ą░ą║ąĄčé čüąŠą▒čŗčéąĖčÅ (event packet) ąŠčéą┐čĆą░ą▓ąĖčéčüčÅ ąĖąĘ BLE Connectivity Chip ą▓ Application Chip. |
ąØąĖąČąĄ ąŠą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ą┐čĆą░ą▓ąĖą╗ą░ ą┐čĆąĖ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĖ ą║ą░ąČą┤ąŠą│ąŠ čéąĖą┐ą░ ą┤ą░ąĮąĮčŗčģ ą▓ serialized-ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ.
ąÜąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐čĆąĖą╝ąĖčéąĖą▓ąĮčŗčģ ą░čĆą│čāą╝ąĄąĮč鹊ą▓. ąÉčĆą│čāą╝ąĄąĮčéčŗ čäčāąĮą║čåąĖąĖ ą║ąŠą┤ąĖčĆčāčÄčéčüčÅ ą▓ č鹊ą╝ ąČąĄ ą┐ąŠčĆčÅą┤ą║ąĄ, ą║ą░ą║ ąŠąĮąĖ čüą╗ąĄą┤čāčÄčé ą▓ ą┤ąĄą║ą╗ą░čĆą░čåąĖąĖ čäčāąĮą║čåąĖąĖ. ąÜąŠą│ą┤ą░ ą░čĆą│čāą╝ąĄąĮčéčŗ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą┐ąŠ ąĘąĮą░č湥ąĮąĖčÄ (by value), ąŠąĮąĖ ą║ąŠą┤ąĖčĆčāčÄčéčüčÅ ą║ą░ą║ ąĄčüčéčī (ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ąĖčģ čĆą░ąĘą╝ąĄčĆą░ ąĖ ą┐ąŠčĆčÅą┤ą║ą░ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ). ą¤ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 ą┐ąŠą╗čāčćą░č鹥ą╗čī ąĘąĮą░ąĄčé ąŠ ą┐ąŠčĆčÅą┤ą║ąĄ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ąĖ čéąĖą┐ąĄ 菹╗ąĄą╝ąĄąĮč鹊ą▓. ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĖąĘ čäčāąĮą║čåąĖąĖ čéą░ą║ąČąĄ ą║ąŠą┤ąĖčĆčāąĄčéčüčÅ ą▓ ą┐ą░ą║ąĄčé ąĖ ą┐ąŠčüčŗą╗ą░ąĄčéčüčÅ ą▓ ąŠčéą▓ąĄč鹥.
ą¤čĆąĖą╝ąĄčĆ:
uint32_t foo(uint32_t arg1, uint8_t arg2);
ą¤ą░ą║ąĄčé ąĘą░ą┐čĆąŠčüą░:
ąóąĖą┐ ą┐ą░ą║ąĄčéą░: 1 ą▒ą░ą╣čé
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čäčāąĮą║čåąĖąĖ (Function ID): 1 ą▒ą░ą╣čé
arg1: 4 ą▒ą░ą╣čéą░
arg2: 1 ą▒ą░ą╣čé
ą¤ą░ą║ąĄčé ąŠčéą▓ąĄčéą░:
ąóąĖą┐ ą┐ą░ą║ąĄčéą░: 1 ą▒ą░ą╣čé
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čäčāąĮą║čåąĖąĖ (Function ID): 1 ą▒ą░ą╣čé
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: 4 ą▒ą░ą╣čéą░
ąÜąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ ą░čĆą│čāą╝ąĄąĮč鹊ą▓, ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠąĄ ą┐ąŠ čāą║ą░ąĘą░č鹥ą╗čÄ. ąĢčüą╗ąĖ ą░čĆą│čāą╝ąĄąĮč鹊ą╝ čäčāąĮą║čåąĖąĖ čÅą▓ą╗čÅąĄčéčüčÅ čāą║ą░ąĘą░č鹥ą╗čī, č鹊 ąŠąĮ ą║ąŠą┤ąĖčĆčāąĄčéčüčÅ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čģą░čĆą░ą║č鹥čĆą░ ą░čĆą│čāą╝ąĄąĮčéą░.
ąĢčüą╗ąĖ ą┤ą░ąĮąĮčŗąĄ, ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗąĄ ą┐ąŠ čāą║ą░ąĘą░č鹥ą╗čÄ, čŹč鹊 ą▓čģąŠą┤ąĮąŠą╣ ą░čĆą│čāą╝ąĄąĮčé, č鹊 ąŠąĮ ą║ąŠą┤ąĖčĆčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą▓ ą┐ą░ą║ąĄč鹥 ąĘą░ą┐čĆąŠčüą░, ąĖ ąĮąĄ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ą▓ ą┐ą░ą║ąĄč鹥 ąŠčéą▓ąĄčéą░. ąÉčĆą│čāą╝ąĄąĮčé, ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ čāą║ą░ąĘą░č鹥ą╗ąĄą╝, ą┐čĆąĄą┤čłąĄčüčéą▓čāąĄčé ą▓ ą┐ą░ą║ąĄč鹥 1-ą▒ą░ą╣čéąĮčŗą╝ čäą╗ą░ą│ąŠą╝, ą║ąŠč鹊čĆčŗą╣ čāą║ą░ąĘčŗą▓ą░ąĄčé, čĆą░ą▓ąĄąĮ ą╗ąĖ čāą║ą░ąĘą░č鹥ą╗čī NULL ąĖą╗ąĖ ąĮąĄčé. ąöą░ąĮąĮčŗąĄ ą┐čĆąĖčüčāčéčüčéą▓čāčÄčé č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ čāą║ą░ąĘą░č鹥ą╗čī ąĮąĄ čĆą░ą▓ąĄąĮ NULL.
ą¤čĆąĖą╝ąĄčĆ:
uint32_t foo(uint32_t * arg1);
ą¤ą░ą║ąĄčé ąĘą░ą┐čĆąŠčüą░:
ąóąĖą┐ ą┐ą░ą║ąĄčéą░: 1 ą▒ą░ą╣čé
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čäčāąĮą║čåąĖąĖ (Function ID): 1 ą▒ą░ą╣čé
Arg1 ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čäą╗ą░ą│: 1 ą▒ą░ą╣čé
arg1: 4 ą▒ą░ą╣čéą░ (ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ)
ą¤ą░ą║ąĄčé ąŠčéą▓ąĄčéą░:
ąóąĖą┐ ą┐ą░ą║ąĄčéą░: 1 ą▒ą░ą╣čé
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čäčāąĮą║čåąĖąĖ (Function ID): 1 ą▒ą░ą╣čé
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: 4 ą▒ą░ą╣čéą░
ąĢčüą╗ąĖ ą░čĆą│čāą╝ąĄąĮčé ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ, č鹊 ą┐ą░ą║ąĄčé ąĘą░ą┐čĆąŠčüą░ čüąŠą┤ąĄčƹȹĖčé č鹊ą╗čīą║ąŠ čäą╗ą░ą│ ą┐čĆąĖčüčāčéčüčéą▓ąĖčÅ ąĖ čüąŠą┤ąĄčƹȹĖčé ą┤ą░ąĮąĮčŗąĄ ą░čĆą│čāą╝ąĄąĮčéą░. ą¤ą░ą║ąĄčé ąŠčéą▓ąĄčéą░ čüąŠą┤ąĄčƹȹĖčé ą║ą░ą║ čäą╗ą░ą│ ą┐čĆąĖčüčāčéčüčéą▓ąĖčÅ, čéą░ą║ ąĖ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┤ą░ąĮąĮčŗčģ.
ą¤čĆąĖą╝ąĄčĆ:
uint32_t foo(uint32_t * arg1);
ą¤ą░ą║ąĄčé ąĘą░ą┐čĆąŠčüą░:
ąóąĖą┐ ą┐ą░ą║ąĄčéą░: 1 ą▒ą░ą╣čé
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čäčāąĮą║čåąĖąĖ (Function ID): 1 ą▒ą░ą╣čé
Arg1 ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čäą╗ą░ą│: 1 ą▒ą░ą╣čé
ą¤ą░ą║ąĄčé ąŠčéą▓ąĄčéą░:
ąóąĖą┐ ą┐ą░ą║ąĄčéą░: 1 ą▒ą░ą╣čé
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čäčāąĮą║čåąĖąĖ (Function ID): 1 ą▒ą░ą╣čé
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: 4 ą▒ą░ą╣čéą░
Arg1 ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čäą╗ą░ą│: 1 ą▒ą░ą╣čé
arg1: 4 ą▒ą░ą╣čéą░ (ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ)
ąĢčüą╗ąĖ ą░čĆą│čāą╝ąĄąĮčé ąŠą┐ąĖčüą░ąĮ ą║ą░ą║ ą┤ą╗čÅ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░, č鹊 ąĄą│ąŠ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ą║ą░ą║ ą▓ ą┐ą░ą║ąĄč鹥 ąĘą░ą┐čĆąŠčüą░, čéą░ą║ ąĖ ą▓ ą┐ą░ą║ąĄč鹥 ąŠčéą▓ąĄčéą░.
ąÜąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ čüčéčĆčāą║čéčāčĆ. ąĪčéčĆčāą║čéčāčĆčŗ ą║ąŠą┤ąĖčĆčāčÄčéčüčÅ čéą░ą║ąĖą╝ ąČąĄ čüą┐ąŠčüąŠą▒ąŠą╝, ą║ą░ą║ ąĖ ą░čĆą│čāą╝ąĄąĮčéčŗ čäčāąĮą║čåąĖąĖ. ąŁą╗ąĄą╝ąĄąĮčéčŗ čüąŠčģčĆą░ąĮčÅčÄčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ą┐ąŠčĆčÅą┤ąŠą║ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą║čĆąŠą╝ąĄ čüą╗čāčćą░ąĄą▓, ą║ąŠą│ą┤ą░ čŹč鹊čé ą┐ąŠčĆčÅą┤ąŠą║ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┐ąŠą╝ąĄąĮčÅčéčī. ąóą░ą║ąĖąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗ, ą║ąŠą│ą┤ą░ čüčéčĆčāą║čéčāčĆą░ čüąŠą┤ąĄčƹȹĖčé ą┐ąŠą╗ąĄ čāą║ą░ąĘą░č鹥ą╗čÅ ąĮą░ ą┤ą░ąĮąĮčŗąĄ ąĖ ą┐ąŠą╗ąĄ ą┤ą╗ąĖąĮčŗ, ąĖ ą┐ąŠą╗ąĄ ą┤ą╗ąĖąĮčŗ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą┐ąŠčüą╗ąĄ ą┐ąŠą╗čÅ čāą║ą░ąĘą░č鹥ą╗čÅ ąĮą░ ą┤ą░ąĮąĮčŗąĄ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą▓ą░ąČąĮąŠ ąŠčéą┐čĆą░ą▓ąĖčéčī čüąĮą░čćą░ą╗ą░ ą┤ą╗ąĖąĮčā ą┐ąŠą╗čÅ ą┐ąĄčĆąĄą┤ čĆąĄą░ą╗čīąĮčŗą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ. ąĢčüą╗ąĖ čüčéčĆčāą║čéčāčĆą░ čüąŠą┤ąĄčƹȹĖčé ą▓ čüąĄą▒ąĄ ą▓ą╗ąŠąČąĄąĮąĮčŗąĄ čüčéčĆčāą║čéčāčĆčŗ, č鹊 ąŠąĮąĖ čĆą░ąĘą▓ąŠčĆą░čćąĖą▓ą░čÄčéčüčÅ ąĖ ą║ąŠą┤ąĖčĆčāąĄčéčüčÅ ą▓ ą┐ąŠčĆčÅą┤ą║ąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ.
ą¤čĆąĖą╝ąĄčĆ:
typedef struct
{
uint8_t elementA;
} nested_element_t;
typedef struct
{
uint8_t elementA;
nested_element_t elementB;
uint8_t elementC;
} foo_t;
uint32_t foo(foo_t * p_data);
ą¤ą░ą║ąĄčé ąĘą░ą┐čĆąŠčüą░:
ąóąĖą┐ ą┐ą░ą║ąĄčéą░: 1 ą▒ą░ą╣čé
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čäčāąĮą║čåąĖąĖ (Function ID): 1 ą▒ą░ą╣čé
p_data, čäą╗ą░ą│ ą┐čĆąĖčüčāčéčüčéą▓ąĖčÅ: 1 ą▒ą░ą╣čé
p_data->elementA: 1 ą▒ą░ą╣čé
p_data->elementB->elementA: 1 ą▒ą░ą╣čé
p_data->elementC: 1 ą▒ą░ą╣čé
ąĢčüą╗ąĖ čüčéčĆčāą║čéčāčĆą░ čüąŠą┤ąĄčƹȹĖčé čāą║ą░ąĘą░č鹥ą╗ąĖ, č鹊 ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ č鹊 ąČąĄ čüą░ą╝ąŠąĄ ą┐čĆą░ą▓ąĖą╗ąŠ čĆą░ąĘą▓ąŠčĆą░čćąĖą▓ą░ąĮąĖčÅ, ąĮą░ą┐čĆąĖą╝ąĄčĆ:
typedef struct
{
uint8_t elementA;
} nested_element_t;
typedef struct
{
uint8_t elementA;
nested_element_t* p_elementB;
uint8_t elementC;
} foo_t;
uint32_t foo(foo_t * p_data);
ą¤ą░ą║ąĄčé ąĘą░ą┐čĆąŠčüą░:
ąóąĖą┐ ą┐ą░ą║ąĄčéą░: 1 ą▒ą░ą╣čé
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čäčāąĮą║čåąĖąĖ (Function ID): 1 ą▒ą░ą╣čé
p_data, čäą╗ą░ą│ ą┐čĆąĖčüčāčéčüčéą▓ąĖčÅ: 1 ą▒ą░ą╣čé
p_data->elementA: 1 ą▒ą░ą╣čé
p_data->p_elementB, čäą╗ą░ą│ ą┐čĆąĖčüčāčéčüčéą▓ąĖčÅ: 1 ą▒ą░ą╣čé
p_data->p_elementB->elementA: 1 ą▒ą░ą╣čé (ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ)
p_data->elementC: 1 ą▒ą░ą╣čé
ąÜąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ą┤ą╗ąĖąĮčŗ. ąÜąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ ą┤ą╗ąĖąĮčŗ ą┤ą░ąĮąĮčŗčģ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ čüąŠčüč鹊ąĖčé ąĖąĘ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą╗ąĖąĮčŗ ąĖ ą▒čāč乥čĆą░. ąśąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 ą▒čāč乥čĆ čŹč鹊 čāą║ą░ąĘą░č鹥ą╗čī, čäą╗ą░ą│ ą┐čĆąĖčüčāčéčüčéą▓ąĖčÅ ą┐ąŠą╝ąĄčēą░ąĄčéčüčÅ ą┐ąĄčĆąĄą┤ ą▒čāč乥čĆąŠą╝, ąĖ ąŠąĮ ą║ąŠą┤ąĖčĆčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ čŹč鹊čé čāą║ą░ąĘą░č鹥ą╗čī ąĮąĄ čĆą░ą▓ąĄąĮ NULL. ą¤ąŠą╗ąĄ ą┤ą╗ąĖąĮčŗ ą║ąŠą┤ąĖčĆčāąĄčéčüčÅ ą┐ąĄčĆąĄą┤ ą┤ą░ąĮąĮčŗą╝ąĖ, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ą┐ąŠčĆčÅą┤ą║ą░ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą░čĆą│čāą╝ąĄąĮč鹊ą▓ čäčāąĮą║čåąĖąĖ ąĖą╗ąĖ ą┐ąŠčĆčÅą┤ą║ą░ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą┐ąŠą╗ąĄą╣ ą▓ čüčéčĆčāą║čéčāčĆąĄ.
ą¤čĆąĖą╝ąĄčĆ:
uint32_t foo(foo_t * p_data, uint16_t len);
ą¤ą░ą║ąĄčé ąĘą░ą┐čĆąŠčüą░:
ąóąĖą┐ ą┐ą░ą║ąĄčéą░: 1 ą▒ą░ą╣čé
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čäčāąĮą║čåąĖąĖ (Function ID): 1 ą▒ą░ą╣čé
ąöą╗ąĖąĮą░: 2 ą▒ą░ą╣čéą░
p_data, čäą╗ą░ą│ ą┐čĆąĖčüčāčéčüčéą▓ąĖčÅ: 1 ą▒ą░ą╣čé
p_data, čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ: n ą▒ą░ą╣čé
ąÆ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ čüą╗čāčćą░čÅčģ ą▓ SoftDevice API ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ą┤ą╗ąĖąĮčŗ, ą│ą┤ąĄ ą┐ąŠą╗ąĄ ą┤ą░ąĮąĮčŗčģ ąĮąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄčé ą┐čĆąĖą╝ąĄąĮčÅčÄčéčüčÅ ą┤čĆčāą│ąĖąĄ ą╝ąĄč鹊ą┤čŗ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čĆą░ąĘą╝ąĄčĆą░ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ą┤ą╗ąĖąĮčŗ (ąĮą░ą┐čĆąĖą╝ąĄčĆ čäą╗ą░ą│ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąŠą│ąŠ čéąĖą┐ą░). ąÆ ą┐ąŠą┤ąŠą▒ąĮčŗčģ čüą╗čāčćą░čÅčģ čüąĄčĆąĖą░ą╗ąĖąĘą░čåąĖčÅ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą┐ą░čĆčüąĖąĮą│ čéą░ą║ąĖčģ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąĖčģ ą┤ą╗ąĖąĮčŗ.
ąÜąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ ą▒ąĖč鹊ą▓čŗčģ ą┐ąŠą╗ąĄą╣. ą¤ąŠčĆčÅą┤ąŠą║ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ą▒ąĖč鹊ą▓čŗčģ ą┐ąŠą╗ąĄą╣ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čüąĄčĆąĖą░ą╗ąĖąĘą░čåąĖąĄą╣, ą┐ąŠčŹč鹊ą╝čā čŹč鹊čé ą┐ąŠčĆčÅą┤ąŠą║ ąĮąĄ ąĘą░ą▓ąĖčüąĖčé ąĮąĖ ąŠčé ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░, ąĮąĖ ąŠčé ą░čĆčģąĖč鹥ą║čéčāčĆčŗ.