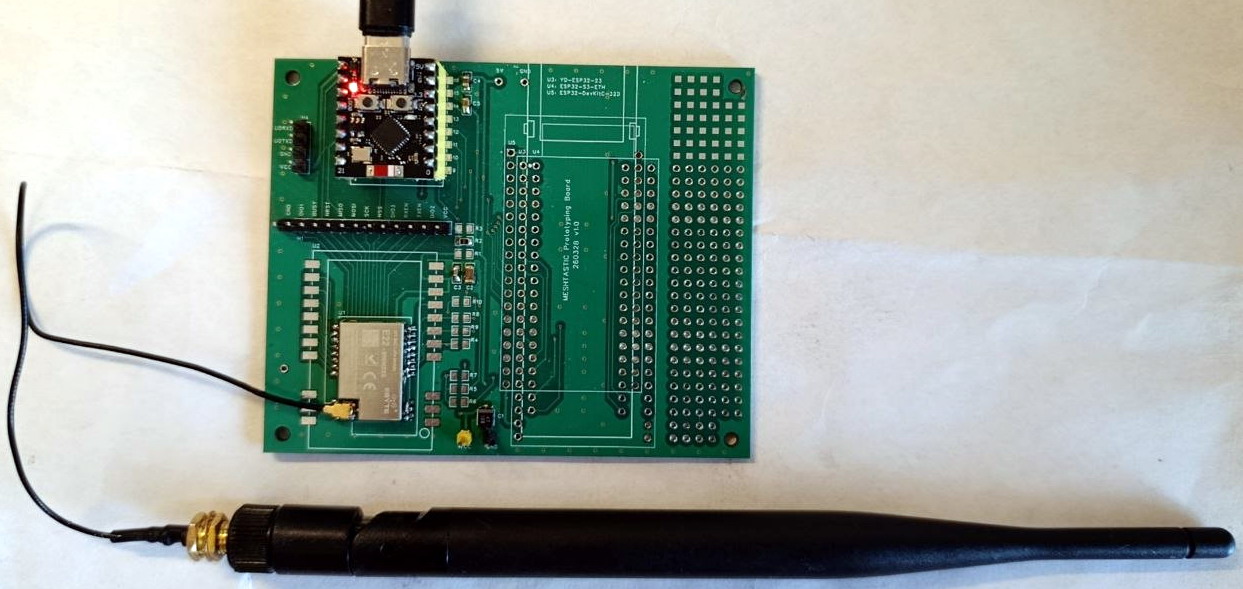
ąĪąĮą░čćą░ą╗ą░ ąĮą░ą┤ąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī čłą░ą│ąĖ "ąŁčéą░ą┐ 1" ąĖ "ąŁčéą░ą┐ 2" ąĖąĘ [1]. ąØą░ čŹčéąĖčģ čłą░ą│ą░čģ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ PlatformIO ąĖ ąĘą░ą║ą░čćąĖą▓ą░ąĄčéčüčÅ čĆąĄą┐ąŠąĘąĖč鹊čĆąĖą╣ Git ą┐čĆąŠąĄą║čéą░ Meshtastic .
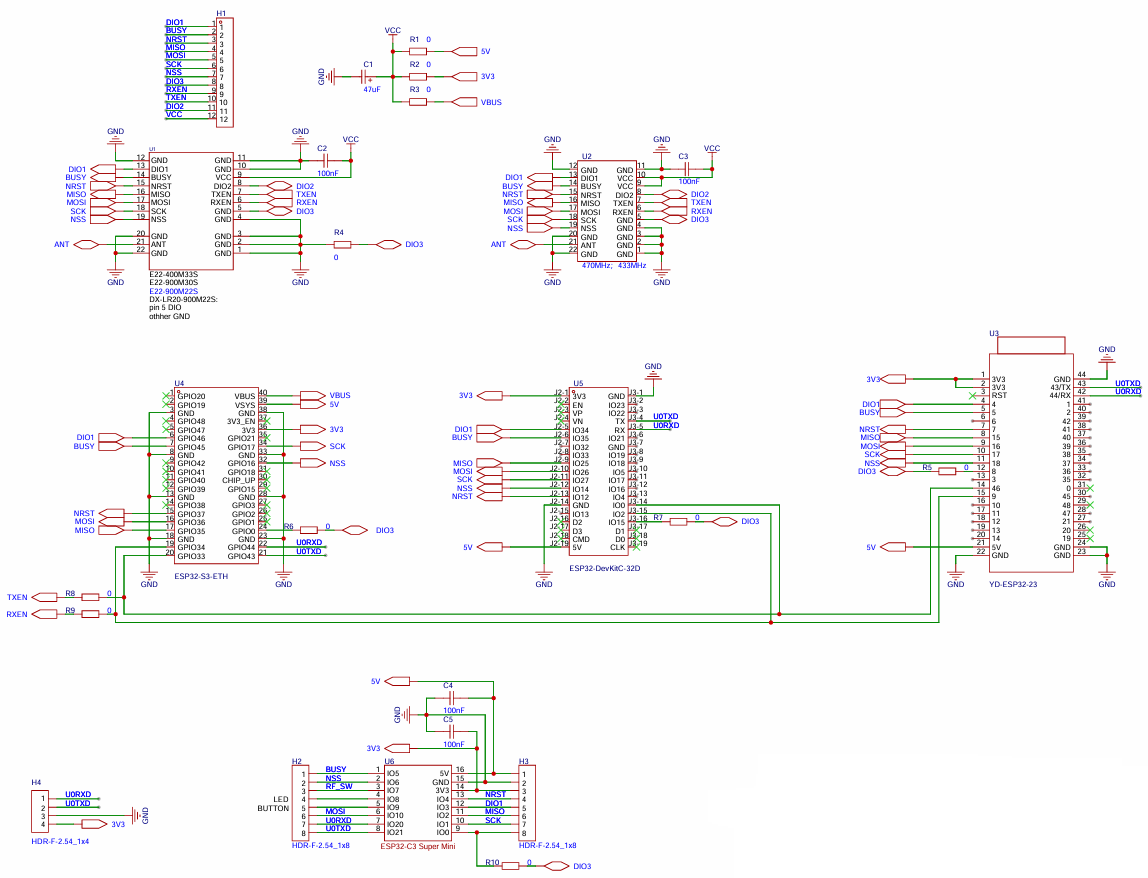
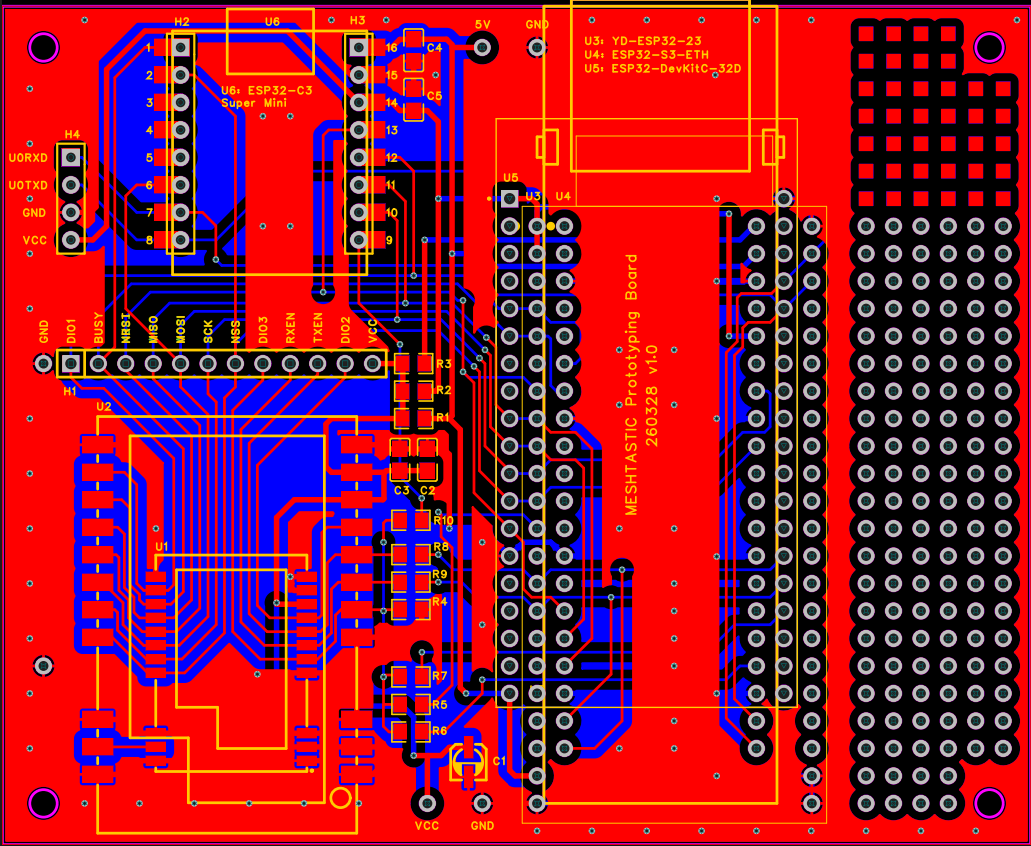
[ąŁčéą░ą┐ 3: ąÉą┤ą░ą┐čéą░čåąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┤ą╗čÅ E22-900M22 ]
1 . ąÆčŗą▒ąĄčĆąĖč鹥 ąŠčüąĮąŠą▓čā ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. ąÆ ą┐ą░ą┐ą║ąĄ variants/esp32c3/diy/esp32c3_super_mini SX1262 (ą╝ąŠą┤čāą╗čī E22-900M22S).
2 . ąĪą┤ąĄą╗ą░ą╣č鹥 ą║ąŠą┐ąĖčÄ ą┐ą░ą┐ą║ąĖ variants/esp32c3/diy/esp32c3_super_mini ąĖ ą▓čüąĄą│ąŠ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ, čćč鹊 ą▓ ąĮąĄą╣ ąĮą░čģąŠą┤ąĖčéčüčÅ, ą▓ ą┐ą░ą┐ą║čā variants/esp32c3/diy/myvariant .
3 . ą×čéčĆąĄą┤ą░ą║čéąĖčĆčāą╣č鹥 čäą░ą╣ą╗ myvariant/variant.h
ąöą╗čÅ ą╝ąŠą┤čāą╗čÅ ESP32-C3 Super Mini, ą╝ąŠą┤čāą╗čÅ E22-900M22S ąĮą░ ą┐ą╗ą░č鹥 260321mechtastic:
#ifndef _VARIANT_ESP32C3_SUPER_MINI_ #define _VARIANT_ESP32C3_SUPER_MINI_ /*---------------------------------------------------------------------------- * Headers *----------------------------------------------------------------------------*/ #ifdef __cplusplus extern "C" {#endif // __cplusplus // I2C (Wire) & OLED #define WIRE_INTERFACES_COUNT (1) #define I2C_SDA (8) #define I2C_SCL (0) // OLED ą┤ąĖčüą┐ą╗ąĄą╣ 0.96" 128x64, I2C, ąČąĄą╗č鹊-ą│ąŠą╗čāą▒ąŠą╣: #define USE_SSD1306 // GPS #undef GPS_RX_PIN #undef GPS_TX_PIN #define GPS_RX_PIN (20) #define GPS_TX_PIN (21) // Button #define BUTTON_PIN (9) // BOOT button // LoRa //#define USE_LLCC68 #define USE_SX1262 // #define USE_RF95 //#define USE_SX1268 #define LORA_DIO0 RADIOLIB_NC #define LORA_RESET (4) #define LORA_DIO1 (3) #define LORA_RXEN (7) #define LORA_BUSY (5) #define LORA_SCK (1) #define LORA_MISO (2) #define LORA_MOSI (10) #define LORA_CS (6) #define SX126X_CS LORA_CS #define SX126X_DIO1 LORA_DIO1 #define SX126X_BUSY LORA_BUSY #define SX126X_RESET LORA_RESET #define SX126X_RXEN LORA_RXEN // ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┤ą╗čÅ ą▓ąĮąĄčłąĮąĄą│ąŠ TCXO (32 ą£ąōčå): #define SX126X_DIO3_TCXO_VOLTAGE (1.8) #define TCXO_OPTIONAL // čćč鹊ą▒čŗ ą┐čĆąŠčłąĖą▓ą║ą░ ą┐čĆąŠą▒ąŠą▓ą░ą╗ą░ ąĖ TCXO, ąĖ XTAL #ifdef __cplusplus
}#endif /*---------------------------------------------------------------------------- * Arduino objects - C++ only *----------------------------------------------------------------------------*/ #endif
4 . ąŻčüčéą░ąĮąŠą▓ąĖč鹥 ą┐čĆą░ą▓ąĖą╗čīąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą╝ąŠčēąĮąŠčüčéąĖ. ąöą╗čÅ ą╝ąŠą┤čāą╗čÅ E22-900M22S ą▓ą░ąČąĮąŠ čāą║ą░ąĘą░čéčī ąĄą│ąŠ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčāčÄ ą▓čŗčģąŠą┤ąĮčāčÄ ą╝ąŠčēąĮąŠčüčéčī (22 ą┤ąæą╝). ą×ą▒čŗčćąĮąŠ čŹč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ čäą╗ą░ą│ąŠą▓ čüą▒ąŠčĆą║ąĖ. ąØą░ą╣ą┤ąĖč鹥 ąĖčģ ą▓ č鹊ą╝ ąČąĄ čäą░ą╣ą╗ąĄ variant.h , ąĖą╗ąĖ ą┤ąŠą▒ą░ą▓čīč鹥 ą▓ platformio.ini ą┤ą╗čÅ ą▓ą░čłąĄą│ąŠ ąŠą║čĆčāąČąĄąĮąĖčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ čüčéčĆąŠą║ąĖ:
#define EBYTE_E22_900M22S // ąÆą║ą╗čÄčćą░ąĄčé ą┐ąŠą┤ą┤ąĄčƹȹ║čā ą║ąŠąĮą║čĆąĄčéąĮąŠą│ąŠ ą╝ąŠą┤čāą╗čÅ #define TX_GAIN_LORA 7 // ąŻčüąĖą╗ąĄąĮąĖąĄ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ čāčüąĖą╗ąĖč鹥ą╗čÅ E22 // --- ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ą▓čŗą▓ąŠą┤ą░ čĆą░ą┤ąĖąŠčüąĖą│ąĮą░ą╗ą░ --- // ą£ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ ą▓čŗčģąŠą┤ąĮą░čÅ ą╝ąŠčēąĮąŠčüčéčī ą╝ąŠą┤čāą╗čÅ = +22 dBm: #define SX126X_MAX_POWER 22 // ąÆą║ą╗čÄčćą░ąĄčé DIO2 ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓ąĮąĄčłąĮąĖą╝ RF-ą┐ąĄčĆąĄą║ą╗čÄčćą░č鹥ą╗ąĄą╝: //#define SX126X_DIO2_AS_RF_SWITCH // --- ąóąŠą║ ąĖ čāčüąĖą╗ąĄąĮąĖąĄ (ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ, ą┤ą╗čÅ č鹊čćąĮąŠą╣ ąĮą░čüčéčĆąŠą╣ą║ąĖ) --- // ąøąĖą╝ąĖčé č鹊ą║ą░ ą▓ ą╝ąÉ ą┤ą╗čÅ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ ą╝ą░ą║čü. ą╝ąŠčēąĮąŠčüčéąĖ: #define SX126X_CURRENT_LIMIT 140.0
5 . ąöąŠą▒ą░ą▓čīč鹥 ą▓ą░čł ąĮąŠą▓čŗą╣ ą▓ą░čĆąĖą░ąĮčé čüą▒ąŠčĆą║ąĖ myvariant ą║ čüą┐ąĖčüą║čā ą▓ą░čĆąĖą░ąĮč鹊ą▓ Meshtastic. ąÜąŠčĆąĮąĄą▓ąŠą╣ čäą░ą╣ą╗ firmware\platformio.ini variants/*/*.ini platformio.ini ą▓ ą┐ą░ą┐ą║ąĄ myvariant .
extra_configs = variants/*/*.ini variants/*/*/platformio.ini # ąŁčéą░ čüčéčĆąŠčćą║ą░ ą┐ąŠą┤ą║ą╗čÄčćąĖčé čäą░ą╣ą╗ platformio.ini ą▓ ą▓ą░čłąĄą╣ ą┐ą░ą┐ą║ąĄ myvariant: variants/*/diy/*/platformio.ini src/graphics/niche/InkHUD/PlatformioConfig.ini
ą×čéą║čĆąŠą╣č鹥 čäą░ą╣ą╗ firmware/variants/esp32c3/diy/myvariant/platformio.ini ąĖ ą▓ąĮąĄčüąĖč鹥 ą▓ ąĮąĄą│ąŠ čüą╗ąĄą┤čāčÄčēąĖąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ (ąĖąĘą╝ąĄąĮąĄąĮąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą▓čŗą┤ąĄą╗ąĄąĮčŗ ąČąĖčĆąĮčŗą╝ čłčĆąĖčäč鹊ą╝):
; ESP32 C3 Super Mini Development Board ; https://www.espboards.dev/esp32/esp32-c3-super-mini/ [env:myvariant] extends = esp32c3_base board = esp32c3_super_mini build_flags = ${esp32c3_base.build_flags} -D myvariant -I variants/esp32c3/diy/myvariant -D ARDUINO_USB_MODE = 1 -D ARDUINO_USB_CDC_ON_BOOT = 1 board_level = extra
[ąŁčéą░ą┐ 4: ąĪą▒ąŠčĆą║ą░ ąĖ ąĘą░ą╗ąĖą▓ą║ą░ ą┐čĆąŠčłąĖą▓ą║ąĖ ]
ąóąĄą┐ąĄčĆčī, ą║ąŠą│ą┤ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą│ąŠč鹊ą▓ą░, ą╝ąŠąČąĮąŠ ą┐čĆąĖčüčéčāą┐ąĖčéčī ą║ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ.
1 . ą¤ąĄčĆąĄą╣ą┤ąĖč鹥 ą▓ ą║ąŠčĆąĮąĄą▓ąŠą╣ ą║ą░čéą░ą╗ąŠą│ čĆąĄą┐ąŠąĘąĖč鹊čĆąĖčÅ (ą▓ ą┐ą░ą┐ą║čā firmware ):
cd ..\..\..
2 . ąŚą░ą┐čāčüčéąĖč鹥 čüą▒ąŠčĆą║čā. ąÆ ą║ąŠčĆąĮąĄą▓ąŠą╣ ą┐ą░ą┐ą║ąĄ firmware ąĘą░ą│čĆčāąČąĄąĮąĮąŠą│ąŠ čĆąĄą┐ąŠąĘąĖč鹊čĆąĖčÅ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ą║ąŠą╝ą░ąĮą┤čā:
pio run -e myvariant
ą¤ąĄčĆą▓ą░čÅ čüą▒ąŠčĆą║ą░ ą╝ąŠąČąĄčé ąĘą░ąĮčÅčéčī 10-15 ą╝ąĖąĮčāčé, čéą░ą║ ą║ą░ą║ PlatformIO ąĘą░ą│čĆčāąĘąĖčé ą▓čüąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ąĖąĮčüčéčĆčāą╝ąĄąĮčéčŗ ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ. ąÆ čüą╗čāčćą░ąĄ čāčüą┐ąĄčģą░ ą▓čŗ čāą▓ąĖą┤ąĖč鹥 čüąŠąŠą▒čēąĄąĮąĖąĄ `SUCCESS`, ą░ ą│ąŠč鹊ą▓čŗą╣ čäą░ą╣ą╗ ą┐čĆąŠčłąĖą▓ą║ąĖ (`.bin` ąĖą╗ąĖ `.uf2`) ą▒čāą┤ąĄčé ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą▓ ą┐ą░ą┐ą║ąĄ .pio/build/myvariant/.
ąśčüą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąŠčłąĖą▒ąŠą║ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ, FAQ ]
$ pio run -e myvariant
Traceback (most recent call last):
File "/usr/bin/pio", line 33, in < module>
sys.exit(load_entry_point('platformio==4.3.4', 'console_scripts', 'pio')())
^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
File "/usr/bin/pio", line 25, in importlib_load_entry_point
return next(matches).load()
^^^^^^^^^^^^^^^^^^^^
File "/usr/lib/python3.12/importlib/metadata/__init__.py", line 205, in load
module = import_module(match.group('module'))
^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
File "/usr/lib/python3.12/importlib/__init__.py", line 90, in import_module
return _bootstrap._gcd_import(name[level:], package, level)
^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
File "< frozen importlib._bootstrap>", line 1387, in _gcd_import
File "< frozen importlib._bootstrap>", line 1360, in _find_and_load
File "< frozen importlib._bootstrap>", line 1331, in _find_and_load_unlocked
File "< frozen importlib._bootstrap>", line 935, in _load_unlocked
File "< frozen importlib._bootstrap_external>", line 995, in exec_module
File "< frozen importlib._bootstrap>", line 488, in _call_with_frames_removed
File "/usr/lib/python3/dist-packages/platformio/__main__.py", line 66, in < module>
@cli.resultcallback()
^^^^^^^^^^^^^^^^^^
AttributeError: 'PlatformioCLI' object has no attribute 'resultcallback'. Did you mean: 'result_callback'?
ąĪą┐ąŠčüąŠą▒ 1 : ą×ą▒ąĮąŠą▓ąĖčéčī PlatformIO č湥čĆąĄąĘ pip (čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ)
ąóą░ą║ ą║ą░ą║ PlatformIO ą▒čŗą╗ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ č湥čĆąĄąĘ čüąĖčüč鹥ą╝ąĮčŗą╣ ą┐ą░ą║ąĄčéąĮčŗą╣ ą╝ąĄąĮąĄą┤ąČąĄčĆ, ąĄą│ąŠ ąĮčāąČąĮąŠ ąŠą▒ąĮąŠą▓ąĖčéčī č湥čĆąĄąĘ pip:
# ąĪąĮą░čćą░ą╗ą░ čāą┤ą░ą╗ąĖč鹥 čüčéą░čĆčāčÄ ą▓ąĄčĆčüąĖčÄ ąĖąĘ čĆąĄą┐ąŠąĘąĖč鹊čĆąĖčÅ sudo apt remove platformio
# ąŻčüčéą░ąĮąŠą▓ąĖč鹥 čüą▓ąĄąČčāčÄ ą▓ąĄčĆčüąĖčÄ č湥čĆąĄąĘ pip pip install --upgrade platformio
ąĢčüą╗ąĖ pip ąĮąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ:
sudo apt install python3-pip pip install --upgrade platformio
ą¤ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┤ąŠą▒ą░ą▓čīč鹥 PlatformIO ą▓ PATH (ąĄčüą╗ąĖ ąĄčēčæ ąĮąĄ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮ):
echo 'export PATH="$PATH:$HOME/.local/bin"' >> ~/.bashrc source ~/.bashrc
ąĪą┐ąŠčüąŠą▒ 2 : ą×ą▒ąĮąŠą▓ąĖčéčī č湥čĆąĄąĘ ąŠčäąĖčåąĖą░ą╗čīąĮčŗą╣ čāčüčéą░ąĮąŠą▓čēąĖą║
# ąŻą┤ą░ą╗ąĖč鹥 čüčéą░čĆčāčÄ ą▓ąĄčĆčüąĖčÄ sudo apt remove platformio
# ąĪą║ą░čćą░ą╣č鹥 ąĖ ąĘą░ą┐čāčüčéąĖč鹥 ąŠčäąĖčåąĖą░ą╗čīąĮčŗą╣ čāčüčéą░ąĮąŠą▓čēąĖą║ wget https://raw.githubusercontent.com/platformio/platformio-core-installer \ /master/get-platformio.py -O get-platformio.py python3 get-platformio.py
# ąöąŠą▒ą░ą▓čīč鹥 ą▓ PATH echo 'export PATH="$PATH:$HOME/.platformio/penv/bin"' >> ~/.bashrc source ~/.bashrc
ąĪą┐ąŠčüąŠą▒ 3 : ąśčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī virtual environment (čćąĖčüčéą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░)
sudo apt remove platformio
# ąĪąŠąĘą┤ą░ą╣č鹥 ą▓ąĖčĆčéčāą░ą╗čīąĮąŠąĄ ąŠą║čĆčāąČąĄąĮąĖąĄ python3 -m venv pio-env source pio-env/bin/activate
# ąŻčüčéą░ąĮąŠą▓ąĖč鹥 PlatformIO pip install platformio
# ąóąĄą┐ąĄčĆčī pio ą┤ąŠčüčéčāą┐ąĄąĮ ą▓ čŹč鹊ą╝ ąŠą║čĆčāąČąĄąĮąĖąĖ pio --version
ą¤čĆąŠą▓ąĄčĆą║ą░ čāčüą┐ąĄčłąĮąŠą│ąŠ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ:
pio --version
ąÉą║čéčāą░ą╗čīąĮą░čÅ ą▓ąĄčĆčüąĖčÅ ąĮą░ ą╝ąŠą╝ąĄąĮčé 18 ą╝ą░čÅ 2026 ą│ąŠą┤ą░ ŌĆö 6.1.16 (ąĖą╗ąĖ ąĮąŠą▓ąĄąĄ). ąŻą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ą▓ąĄčĆčüąĖčÅ čüčéą░ą╗ą░ 5.2.1+.
ą¤ąŠčüą╗ąĄ čāčüą┐ąĄčłąĮąŠą│ąŠ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤ą░ pio run -e myvariant ą┤ąŠą╗ąČąĮą░ čĆą░ą▒ąŠčéą░čéčī ą║ąŠčĆčĆąĄą║čéąĮąŠ.
$ pio run -e myvariant
UnknownEnvNamesError: Unknown environment names 'myvariant'.
Valid names are 'sugarcube, m5stack-stamp-c3, elecrow-adv-35-tft, icarus, muzi-base,
...
heltec-v4, seeed_xiao_nrf52840_kit_i2c, heltec-v4-tft, feather_rp2040_rfm95, betafpv_900_tx_nano'
ą×čłąĖą▒ą║ą░ ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą▓ ą▓ą░čłąĄą╝ ą┐čĆąŠąĄą║č鹥 ąĮąĄčé čüčĆąĄą┤čŗ (environment) čü ąĖą╝ąĄąĮąĄą╝ myvariant. ąŁč鹊 ąĖą╝čÅ ą▓čŗ ą▓čŗą▒čĆą░ą╗ąĖ čüą░ą╝ąĖ, ąĮąŠ ąĄą│ąŠ ąĮčāąČąĮąŠ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą▓ čäą░ą╣ą╗ąĄ platformio.ini .
[ąĀąĄčłąĄąĮąĖąĄ: čüąŠąĘą┤ą░čéčī čüą▓ąŠčÄ čüčĆąĄą┤čā ą▓ platformio.ini ]
ąÆ ą║ąŠčĆąĮąĄ ą▓ą░čłąĄą│ąŠ ą┐čĆąŠąĄą║čéą░ Meshtastic ąĮą░ą╣ą┤ąĖč鹥 čäą░ą╣ą╗ platformio.ini . ąÆ ąĮčæą╝ ąĮčāąČąĮąŠ ą┤ąŠą▒ą░ą▓ąĖčéčī čüąĄą║čåąĖčÄ ą┤ą╗čÅ ą▓ą░čłąĄą╣ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
ąÆą░čĆąĖą░ąĮčé 1 : čüąŠąĘą┤ą░čéčī ąĮąŠą▓čāčÄ čüčĆąĄą┤čā ąĮą░ ąŠčüąĮąŠą▓ąĄ čüčāčēąĄčüčéą▓čāčÄčēąĄą╣
ąĪą║ąŠčĆąĄąĄ ą▓čüąĄą│ąŠ, ą┤ą╗čÅ ą▓ą░čłąĄą│ąŠ ą╝ąŠą┤čāą╗čÅ E22-900M22S ą╗čāčćčłąĄ ą▓čüąĄą│ąŠ ą┐ąŠą┤čģąŠą┤ąĖčé čüčĆąĄą┤ą░ `tlora-v2-1-1_6` ąĖą╗ąĖ `tbeam`. ąöąŠą▒ą░ą▓čīč鹥 ą▓ ą║ąŠąĮąĄčå čäą░ą╣ą╗ą░ platformio.ini :
[env:myvariant] extends = env:tlora-v2-1-1_6 board = ttgo-lora32-v21new build_flags = ${env : tlora-v2-1-1_6.build_flags} -I variants/myvariant ; ąĢčüą╗ąĖ ąĮčāąČąĮąŠ ą┐ąĄčĆąĄąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī variant.h ;board_build.variant = variants/myvariant
ąÆą░čĆąĖą░ąĮčé 2 : čüąŠąĘą┤ą░čéčī ą┐ąŠą╗ąĮąŠčüčéčīčÄ čüą▓ąŠčÄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ą┤ą╗čÅ E22-900M22S
[env:myvariant] platform = espressif32 board = ttgo-lora32-v21new framework = arduino build_flags = -D E22_900M22S -D USE_SX1262 -D SX126X_MAX_POWER = 22 -D SX126X_DIO3_TCXO_VOLTAGE = 1.8 -D SX126X_DIO2_AS_RF_SWITCH -I variants/myvariant ; SPI ą┐ąĖąĮčŗ ą┤ą╗čÅ E22 (ąĮą░čüčéčĆąŠą╣č鹥 ą┐ąŠą┤ ą▓ą░čł ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ) build_unflags = ${env : ttgo-lora32-v21new.build_unflags} lib_deps = ${env : ttgo-lora32-v21new.lib_deps}
ąÆą░čĆąĖą░ąĮčé 3 : čüą║ąŠą┐ąĖčĆąŠą▓ą░čéčī ąĖ ą┐ąĄčĆąĄąĖą╝ąĄąĮąŠą▓ą░čéčī čüčāčēąĄčüčéą▓čāčÄčēčāčÄ čüčĆąĄą┤čā
ą¤ąŠčüą╝ąŠčéčĆąĖč鹥 čüą┐ąĖčüąŠą║ ą┤ąŠčüčéčāą┐ąĮčŗčģ čüčĆąĄą┤ ŌĆö ąĮą░ą┐čĆąĖą╝ąĄčĆ, `tbeam` ąĖą╗ąĖ `heltec-v3` ŌĆö ąĖ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ąŠą┤ąĮčā ąĖąĘ ąĮąĖčģ ąĮą░ą┐čĆčÅą╝čāčÄ:
# ąÆą╝ąĄčüč鹊 myvariant ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 čüčāčēąĄčüčéą▓čāčÄčēąĄąĄ ąĖą╝čÅ pio run -e tbeam
# ąĖą╗ąĖ pio run -e heltec-v3
# ąĖą╗ąĖ pio run -e tlora-v2-1-1_6
ąĪąŠąĘą┤ą░ąĮąĖąĄ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ ą┤ą╗čÅ variant.h . ąĢčüą╗ąĖ ą▓čŗ čüąŠąĘą┤ą░ą╗ąĖ čüą▓ąŠčÄ čüčĆąĄą┤čā myvariant, ą▓ą░ą╝ čéą░ą║ąČąĄ ąĮčāąČąĮąŠ čüąŠąĘą┤ą░čéčī ą┤ąĖčĆąĄą║č鹊čĆąĖčÄ ą┤ą╗čÅ ą▓ą░čłąĄą│ąŠ čäą░ą╣ą╗ą░ variant.h :
# ąĪąŠąĘą┤ą░ą╣č鹥 ą┐ą░ą┐ą║čā ą┤ą╗čÅ ą▓ą░čłąĄą│ąŠ ą▓ą░čĆąĖą░ąĮčéą░ mkdir -p variants/myvariant
# ąĪą║ąŠą┐ąĖčĆčāą╣č鹥 čéčāą┤ą░ čäą░ą╣ą╗ variant.h (ą╝ąŠąČąĄč鹥 ą▓ąĘčÅčéčī ąĘą░ ąŠčüąĮąŠą▓čā čüčāčēąĄčüčéą▓čāčÄčēąĖą╣) cp variants/tbeam/variant.h variants/myvariant/ # ąĖą╗ąĖ čüąŠąĘą┤ą░ą╣č鹥 čüą▓ąŠą╣ nano variants/myvariant/variant.h
[ąæčŗčüčéčĆąŠąĄ čĆąĄčłąĄąĮąĖąĄ (ąĄčüą╗ąĖ čģąŠčéąĖč鹥 ą┐čĆąŠčüč鹊 čüąŠą▒čĆą░čéčī) ]
ąĢčüą╗ąĖ ą▓čŗ ąĮąĄ čģąŠčéąĖč鹥 ą▓ąŠąĘąĖčéčīčüčÅ čü čüąŠąĘą┤ą░ąĮąĖąĄą╝ čüą▓ąŠąĄą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ą┐čĆąŠčüč鹊 ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 čüčāčēąĄčüčéą▓čāčÄčēčāčÄ čüčĆąĄą┤čā, ą║ąŠč鹊čĆą░čÅ ąĮą░ąĖą▒ąŠą╗ąĄąĄ ą▒ą╗ąĖąĘą║ą░ ą║ ą▓ą░čłąĄą╝čā ąČąĄą╗ąĄąĘčā. ąöą╗čÅ E22-900M22S ą┐ąŠą┐čĆąŠą▒čāą╣č鹥:
pio run -e tbeam
ąĖą╗ąĖ:
pio run -e tlora-v2-1-1_6
ąŁčéąĖ čüčĆąĄą┤čŗ čāąČąĄ ąĖą╝ąĄčÄčé ą┐čĆą░ą▓ąĖą╗čīąĮčŗąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┤ą╗čÅ čćąĖą┐ą░ SX1262 ąĖ ą┤ąŠą╗ąČąĮčŗ čĆą░ą▒ąŠčéą░čéčī čü ą▓ą░čłąĖą╝ ą╝ąŠą┤čāą╗ąĄą╝. ą¤ąŠčüą╗ąĄ čāčüą┐ąĄčłąĮąŠą╣ čüą▒ąŠčĆą║ąĖ ą▓čŗ ą┐ąŠą╗čāčćąĖč鹥 ą┐čĆąŠčłąĖą▓ą║čā ą▓ ą┐ą░ą┐ą║ąĄ .pio/build/
$ pio run -e myvariant
Processing myvariant (board: esp32c3_super_mini; platform:
https://github.com/pioarduino/platform-espressif32/releases/download/55.03.38-1
/platform-espressif32.zip; framework: arduino)
-------------------------------------------------------------------------------
Platform Manager: Installing https://github.com/pioarduino/platform-espressif32
/releases/download/55.03.38-1/platform-espressif32.zip
Downloading [####################################] 100%
Unpacking [####################################] 100%
Platform Manager: espressif32@55.3.38 has been installed!
UnknownBoard: Unknown board ID 'esp32c3_super_mini'
ą×čłąĖą▒ą║ą░ `Unknown board ID 'esp32c3_super_mini'` ą▓ąŠąĘąĮąĖą║ą░ąĄčé, ą┐ąŠč鹊ą╝čā čćč鹊 PlatformIO ąĮąĄ ą╝ąŠąČąĄčé ąĮą░ą╣čéąĖ čüčéą░ąĮą┤ą░čĆčéąĮąŠąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą┐ą╗ą░čéčŗ čü čéą░ą║ąĖą╝ ID ą▓ ą▓ą░čłąĄą╣ č鹥ą║čāčēąĄą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. ąŁč鹊 ą┐ąŠčģąŠąČąĄ ąĮą░ č鹊, ą║ą░ą║ ąĄčüą╗ąĖ ą▒čŗ ą▓čŗ ą┐ąŠą┐čĆąŠčüąĖą╗ąĖ ą║ąŠą│ąŠ-č鹊 ąĮą░ą╣čéąĖ ą║ąĮąĖą│čā, ą║ąŠč鹊čĆąŠą╣ ąĮąĄčé ą▓ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ. ąÆ ą▓ą░čłąĄą╝ čäą░ą╣ą╗ąĄ platformio.ini čāą║ą░ąĘą░ąĮą░ ąĮąĄąĖąĘą▓ąĄčüčéąĮą░čÅ ą┐ą╗ą░čéč乊čĆą╝ą░.
ąÆąŠčé ą║ą░ą║ čŹč鹊 ą╝ąŠąČąĮąŠ ąĖčüą┐čĆą░ą▓ąĖčéčī:
1 . ą¤čĆąŠą▓ąĄčĆčīč鹥, čüčāčēąĄčüčéą▓čāąĄčé ą╗ąĖ čéą░ą║ą░čÅ ą┐ą╗ą░čéą░ ą▓ PlatformIO. ąĪąĮą░čćą░ą╗ą░ čāą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ą┐ą╗ą░čéą░ čü ID `esp32c3_super_mini` ą▓ąŠąŠą▒čēąĄ ąĖąĘą▓ąĄčüčéąĮą░ PlatformIO. ąÆčŗą┐ąŠą╗ąĮąĖč鹥 ą▓ č鹥čĆą╝ąĖąĮą░ą╗ąĄ ą║ąŠą╝ą░ąĮą┤čā:
pio boards
ą×ąĮą░ ą▓čŗą▓ąĄą┤ąĄčé ąŠą│čĆąŠą╝ąĮčŗą╣ čüą┐ąĖčüąŠą║ ą▓čüąĄčģ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ ą┐ą╗ą░čé. ą¤ąŠąĖčēąĖč鹥 ą▓ ąĮčæą╝ `esp32c3_super_mini`. ąĢčüą╗ąĖ ąĮąĄ ąĮą░ą╣ą┤ąĄč鹥, ąĘąĮą░čćąĖčé, ąĄčæ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠ ąĮąĄčé. ąÆ ą╝ąŠąĄą╝ čüą╗čāčćą░ąĄ ą▒čŗą╗ ą┐ąŠčģąŠąČąĖą╣ ą▓ą░čĆąĖą░ąĮčé ą┐ą╗ą░čéčŗ:
pio boards | grep esp32c3_super_mini nologo_esp32c3_super_mini ESP32C3 160MHz 4MB 320KB Nologo ESP32C3 SuperMini nologo_esp32c3_super_mini ESP32C3 160MHz 4MB 320KB Nologo ESP32C3 SuperMini
ą¤ąŠčŹč鹊ą╝čā ą▒čŗą╗ąŠ ą┤ąŠčüčéą░č鹊čćąĮąŠ ąĘą░ą╝ąĄąĮąĖčéčī esp32c3_super_mini ąĮą░ nologo_esp32c3_super_mini ą▓ ą╝ąŠąĄą╝ čäą░ą╣ą╗ąĄ variants/esp32c3/diy/esp32c3_super_mini/platformio.ini :
; ESP32 C3 Super Mini Development Board ; https://www.espboards.dev/esp32/esp32-c3-super-mini/ [env:myvariant] extends = esp32c3_base board = nologo_esp32c3_super_mini build_flags = ${esp32c3_base.build_flags} -D myvariant -I variants/esp32c3/diy/myvariant -D ARDUINO_USB_MODE = 1 -D ARDUINO_USB_CDC_ON_BOOT = 1 board_level = extra
2 . ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 ąŠčäąĖčåąĖą░ą╗čīąĮčāčÄ ą┐ą╗ą░čéčā (čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čŗą╣ čüą┐ąŠčüąŠą▒). ąĪą░ą╝čŗą╣ ąĮą░ą┤ąĄąČąĮčŗą╣ ą┐čāčéčī ŌĆö ą▓čŗą▒čĆą░čéčī čüčāčēąĄčüčéą▓čāčÄčēčāčÄ ą┐ą╗ą░čéčā, ąĮą░ąĖą▒ąŠą╗ąĄąĄ ą▒ą╗ąĖąĘą║čāčÄ ą┐ąŠ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ą░ą╝ ą║ ą▓ą░čłąĄą╝čā čāčüčéčĆąŠą╣čüčéą▓čā.
ąÆą░čĆąĖą░ąĮčé ąÉ: `tbeam` ŌĆö čéą░ą║ ą║ą░ą║ ą▓čŗ čĆą░ą▒ąŠčéą░ąĄč鹥 čü LoRa ąĖ, ą▓ąĄčĆąŠčÅčéąĮąŠ, ąĮą░ ą▒ą░ąĘąĄ ESP32, ąŠą┤ąĮąŠą╣ ąĖąĘ čüą░ą╝čŗčģ ą┐ąŠą┐čāą╗čÅčĆąĮčŗčģ ą┐ą╗ą░čé čÅą▓ą╗čÅąĄčéčüčÅ `tbeam`. ą¤čĆąŠčüč鹊 ąĘą░ą╝ąĄąĮąĖč鹥 `board = esp32c3_super_mini` ąĮą░ `board = tbeam`.
ąÆą░čĆąĖą░ąĮčé ąæ: `ttgo-lora32-v21new` ŌĆö ąĄčēąĄ ąŠą┤ąĖąĮ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĮčŗą╣ ą▓ą░čĆąĖą░ąĮčé ą┤ą╗čÅ LoRa-ą┐čĆąŠąĄą║č鹊ą▓.
ąÜą░ą║ čāąĘąĮą░čéčī ID: ą▓čŗ ą╝ąŠąČąĄč鹥 ąĮą░ą╣čéąĖ ID ąĮčāąČąĮąŠą╣ ą┐ą╗ą░čéčŗ čü ą┐ąŠą╝ąŠčēčīčÄ ą║ąŠą╝ą░ąĮą┤čŗ `pio boards | grep -i "ą▓ą░čłąĄ_ą║ą╗čÄč湥ą▓ąŠąĄ_čüą╗ąŠą▓ąŠ"`, ąĮą░ą┐čĆąĖą╝ąĄčĆ, `pio boards | grep -i "lora"`.
ąÆą░čł platformio.ini ą┐ąŠčüą╗ąĄ ą┐čĆą░ą▓ą║ąĖ ą▒čāą┤ąĄčé ą▓čŗą│ą╗čÅą┤ąĄčéčī čéą░ą║:
[env:myvariant] platform = espressif32 ; čÅą▓ąĮąŠ čāą║ą░ąČąĖč鹥 ą┐ą╗ą░čéč乊čĆą╝čā board = tbeam ; ąĘą░ą╝ąĄąĮąĖč鹥 ąĮą░ čüčāčēąĄčüčéą▓čāčÄčēąĖą╣ ID ą┐ą╗ą░čéčŗ framework = arduino
3 . ąĪąŠąĘą┤ą░ą╣č鹥 čüą▓ąŠčÄ čüąŠą▒čüčéą▓ąĄąĮąĮčāčÄ ą┐ą╗ą░čéčā (ą┐čĆąŠą┤ą▓ąĖąĮčāčéčŗą╣ čüą┐ąŠčüąŠą▒). ąĢčüą╗ąĖ ą▓čŗ č鹊čćąĮąŠ ąĘąĮą░ąĄč鹥, čćč鹊 ą▓ą░čłą░ ą┐ą╗ą░čéą░ čāąĮąĖą║ą░ą╗čīąĮą░ ąĖ ąĄčæ ąĮąĄčé ą▓ čüą┐ąĖčüą║ąĄ, ą▓čŗ ą╝ąŠąČąĄč鹥 ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąĄčæ čüą░ą╝ąĖ. ąöą╗čÅ čŹč鹊ą│ąŠ:
(a) ąĪąŠąĘą┤ą░ą╣č鹥 JSON-čäą░ą╣ą╗ čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ ą┐ą╗ą░čéčŗ. ąĪąŠąĘą┤ą░ą╣č鹥 čäą░ą╣ą╗, ąĮą░ą┐čĆąĖą╝ąĄčĆ, my_custom_board.json , ąĖ ą┐ąŠą╝ąĄčüčéąĖč鹥 ąĄą│ąŠ ą▓ ą┐ą░ą┐ą║čā ą▓ą░čłąĄą│ąŠ ą┐čĆąŠąĄą║čéą░: < ą▓ą░čł_ą┐čĆąŠąĄą║čé>/boards /boards ąĮąĄčé, čüąŠąĘą┤ą░ą╣č鹥 ąĄčæ.
(b) ąŚą░ą┐ąŠą╗ąĮąĖč鹥 JSON-čäą░ą╣ą╗. ą£ąĖąĮąĖą╝ą░ą╗čīąĮąŠ ąČąĖąĘąĮąĄčüą┐ąŠčüąŠą▒ąĮčŗą╣ ą┐čĆąĖą╝ąĄčĆ ą┤ą╗čÅ ESP32-ą┐ą╗ą░čéčŗ (ąĖčüą┐čĆą░ą▓čīč鹥 ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠą┤ ą▓ą░čłąĄ ąČąĄą╗ąĄąĘąŠ):
{ "build" : { "arduino" : { "ldscript" : "esp32_out.ld" }, "core" : "esp32" , "extra_flags" : "-DARDUINO_ESP32_DEV" , "f_cpu" : "240000000L" , "mcu" : "esp32" }, "frameworks" : ["arduino" , "espidf" ], "name" : "My Custom MechTastic Board" , "upload" : { "maximum_ram_size" : 327680 , "maximum_size" : 1310720 , "require_upload_port" : true , "speed" : 921600 }, "url" : "http://example.com" , "vendor" : "MechTastic" }
(c) ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 ąĄą│ąŠ ą▓ platformio.ini . ąóąĄą┐ąĄčĆčī ą▓čŗ ą╝ąŠąČąĄč鹥 ąŠą▒čĆą░čéąĖčéčīčüčÅ ą║ ąĮąĄą╝čā ą┐ąŠ ąĖą╝ąĄąĮąĖ čäą░ą╣ą╗ą░ (ą▒ąĄąĘ čĆą░čüčłąĖčĆąĄąĮąĖčÅ `.json`):
[env:myvariant] platform = espressif32 board = my_custom_board framework = arduino
Compiling .pio/build/myvariant/src/detect/ScanI2C.cpp.o
In file included from src/graphics/Screen.h:78,
from src/main.h:8,
from src/Power.cpp:23:
.pio/libdeps/myvariant/ESP8266 and ESP32 OLED driver for SSD1306 displays/src/SSD1306Wire.h:
In constructor 'SSD1306Wire::SSD1306Wire(uint8_t, int, int, OLEDDISPLAY_GEOMETRY, HW_I2C, int)':
.pio/libdeps/myvariant/ESP8266 and ESP32 OLED driver for SSD1306 displays/src/SSD1306Wire.h:87:51:
error: 'Wire1' was not declared in this scope; did you mean 'Wire'?
87 | this->_wire = (_i2cBus==I2C_ONE) ? &Wire : &Wire1;
| ^~~~~
| Wire
In file included from src/graphics/Screen.h:78,
from src/PowerFSM.cpp:16:
.pio/libdeps/myvariant/ESP8266 and ESP32 OLED driver for SSD1306 displays/src/SSD1306Wire.h:
In constructor 'SSD1306Wire::SSD1306Wire(uint8_t, int, int, OLEDDISPLAY_GEOMETRY, HW_I2C, int)':
.pio/libdeps/myvariant/ESP8266 and ESP32 OLED driver for SSD1306 displays/src/SSD1306Wire.h:87:51:
error: 'Wire1' was not declared in this scope; did you mean 'Wire'?
ą¤čĆąŠą▒ą╗ąĄą╝ą░ ą▓ č鹊ą╝, čćč鹊 ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą┤ąĖčüą┐ą╗ąĄčÅ ą┐čŗčéą░ąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī `Wire1`, ą║ąŠč鹊čĆąŠą│ąŠ ąĮąĄčé ąĮą░ ą▓ą░čłąĄą╝ ESP32-C3.
[ąæčŗčüčéčĆąŠąĄ čĆąĄčłąĄąĮąĖąĄ ]
ą×čéčĆąĄą┤ą░ą║čéąĖčĆčāą╣č鹥 čäą░ą╣ą╗ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ, ą║ąŠč鹊čĆčŗą╣ ą▓čŗąĘčŗą▓ą░ąĄčé ąŠčłąĖą▒ą║čā: .pio/libdeps/myvariant/ESP8266\ and\ ESP32\ OLED\ driver\ for\ SSD1306\ displays/src/SSD1306Wire.h
ąØą░ą╣ą┤ąĖč鹥 čüčéčĆąŠą║čā 87 (ą┐čĆąĖą╝ąĄčĆąĮąŠ):
this -> _wire = (_i2cBus== I2C_ONE) ? & Wire : & Wire1;
ąŚą░ą╝ąĄąĮąĖč鹥 ąĄčæ ąĮą░:
#ifdef Wire1 this -> _wire = (_i2cBus== I2C_ONE) ? & Wire : & Wire1;#else this -> _wire = & Wire;#endif
[ąØą░ą╗ąŠąČąĄąĮąĖąĄ ą┐ą░čéčćą░ PlatformIO (ą┐čĆą░ą▓ąĖą╗čīąĮčŗą╣ ą┐čāčéčī) ]
ą¦č鹊ą▒čŗ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĮąĄ čüą▒čĆąŠčüąĖą╗ąĖčüčī ą┐čĆąĖ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ, čüąŠąĘą┤ą░ą╣č鹥 ą┐ą░čéčć. ąÆ ą║ąŠčĆąĮąĄ ą┐čĆąŠąĄą║čéą░ čüąŠąĘą┤ą░ą╣č鹥 čäą░ą╣ą╗ ~/firmware/patches/ssd1306_wire1_fix.patch :
--- a/ src/ SSD1306Wire. h+++ b/ src/ SSD1306Wire. h@@ -80 ,12 +80 ,17 @@
this-> _sda = _sda;
this-> _scl = _scl;
#if !defined(ARDUINO_ARCH_ESP32)
this-> _wire = & Wire;
#elif defined(CONFIG_IDF_TARGET_ESP32C6)
this-> _wire = & Wire;
#else - this-> _wire = (_i2cBus== I2C_ONE) ? & Wire : & Wire1;+ #ifdef Wire1 + this-> _wire = (_i2cBus== I2C_ONE) ? & Wire : & Wire1;+ #else + this-> _wire = & Wire;+ #endif
#endif
this-> _frequency = _frequency;
}
ąĪąŠąĘą┤ą░ą╣č鹥 čäą░ą╣ą╗ ~/firmware/extra_scripts/pre_fix_wire1.py :
import os import subprocess print ("ąśčüą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ Wire1 ą┤ą╗čÅ ESP32-C3..." )= os. getcwd()
env_name = os. environ. get('PIOENV' , 'myvariant' )
wire_h = os. path. join(project_dir, ".pio" , "libdeps" , env_name,
"ESP8266 and ESP32 OLED driver for SSD1306 displays/src/SSD1306Wire.h" )if not os. path. exists(wire_h):
print (f"ŌØī ążą░ą╣ą╗ ąĮąĄ ąĮą░ą╣ą┤ąĄąĮ: { wire_h} " )
exit(0 )# ą¦ąĖčéą░ąĄą╝ čäą░ą╣ą╗ with open (wire_h, 'r' ) as f:
content = f. read()# ą¤čĆąŠą▓ąĄčĆčÅąĄą╝, ąĮčāąČąĮąŠ ą╗ąĖ ąĖčüą┐čĆą░ą▓ą╗čÅčéčī if '#ifdef Wire1' in content:
print ("Ō£ģ ąśčüą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čāąČąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮąŠ" )
exit(0 )# ąŚą░ą╝ąĄąĮčÅąĄą╝ čüčéčĆąŠą║čā
old_line = ' this->_wire = (_i2cBus==I2C_ONE) ? &Wire : &Wire1;'
new_lines = '''#ifdef Wire1 this->_wire = (_i2cBus==I2C_ONE) ? &Wire : &Wire1; #else this->_wire = &Wire; #endif''' if old_line in content:
content = content. replace(old_line, new_lines)
with open (wire_h, 'w' ) as f:
f. write(content)
print ("Ō£ģ ążą░ą╣ą╗ čāčüą┐ąĄčłąĮąŠ ąĖčüą┐čĆą░ą▓ą╗ąĄąĮ" )else :
print ("ŌØī ąĪčéčĆąŠą║ą░ ąĮąĄ ąĮą░ą╣ą┤ąĄąĮą░" )
ąŚą░č鹥ą╝ ą▓ ~/firmware/variants/esp32c3/diy/myvariant/platformio.ini ą▓ą░čĆąĖą░ąĮčéą░ ą┤ąŠą▒ą░ą▓čīč鹥:
[env:myvariant] ; ... ąŠčüčéą░ą╗čīąĮčŗąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ... extra_scripts = pre:extra_scripts/pre_fix_wire1.py
ą¤ąĄčĆąĄą║ąŠą╝ą┐ąĖą╗ąĖčĆčāą╣č鹥 ąĮą░čćąĖčüč鹊:
cd firmware rm -rf ./pio pio run -e myvariant -j $(nproc)
[ąĢčēčæ ą┐čĆąŠčēąĄ: ąŠčéą║ą╗čÄčćąĖčéčī ą┤ąĖčüą┐ą╗ąĄą╣ (ą▓čĆąĄą╝ąĄąĮąĮąŠąĄ čĆąĄčłąĄąĮąĖąĄ) ]
ąĢčüą╗ąĖ ą┤ąĖčüą┐ą╗ąĄą╣ ą▓ą░ą╝ ąĮąĄ ą║čĆąĖčéąĖč湥ąĮ ą┤ą╗čÅ č鹥ą║čāčēąĄą╣ čüą▒ąŠčĆą║ąĖ, ą┐čĆąŠčüč鹊 ąŠčéą║ą╗čÄčćąĖč鹥 ąĄą│ąŠ ą▓ variant.h :
// ąÆ ą▓ą░čłąĄą╝ variants/myvariant/variant.h #define HAS_SCREEN 0
ąś ą┤ąŠą▒ą░ą▓čīč鹥 ą▓ platformio.ini :
build_flags = -DHAS_SCREEN = 0
ą¤ąŠčüą╗ąĄ ąĖčüą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąŠčćąĖčüčéąĖč鹥 ą║ąĄčł ąĖ ą┐ąĄčĆąĄčüąŠą▒ąĄčĆąĖč鹥:
rm -rf .pio/build/myvariant pio run -e myvariant -j $(nproc)
ą×čłąĖą▒ą║ą░ ą┤ąŠą╗ąČąĮą░ ąĖčüč湥ąĘąĮčāčéčī. ąŁč鹊 ą║ą╗ą░čüčüąĖč湥čüą║ą░čÅ ą┐čĆąŠą▒ą╗ąĄą╝ą░ ą┤ą╗čÅ ESP32-C3, ą│ą┤ąĄ `Wire1` čäąĖąĘąĖč湥čüą║ąĖ ąŠčéčüčāčéčüčéą▓čāąĄčé.
ą£ąĄą┤ą╗ąĄąĮąĮą░čÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÅ Meshtastic ŌĆö ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮčæąĮąĮą░čÅ ą┐čĆąŠą▒ą╗ąĄą╝ą░, ąŠčüąŠą▒ąĄąĮąĮąŠ ąĄčüą╗ąĖ čŹč鹊 ą▓ą░čłą░ ą┐ąĄčĆą▓ą░čÅ čüą▒ąŠčĆą║ą░. ąĪą░ą╝ąŠąĄ ą▓ą░ąČąĮąŠąĄ, čćč鹊 ąĮčāąČąĮąŠ ąĘąĮą░čéčī: čŹč鹊 ąĮąŠčĆą╝ą░ą╗čīąĮąŠ, čćč鹊 ąŠąĮą░ ąĖą┤čæčé ą┤ąŠą╗ą│ąŠ. ąÆčüčÅ čüą╗ąŠąČąĮąŠčüčéčī ą▓ č鹊ą╝, čćč鹊 PlatformIO (ąĖąĮčüčéčĆčāą╝ąĄąĮčé čüą▒ąŠčĆą║ąĖ) ąĖąĘąĮą░čćą░ą╗čīąĮąŠ ąĮąĄ ąŠč湥ąĮčī ą▒čŗčüčéčĆ, ą░ Meshtastic ŌĆö ą┐čĆąŠąĄą║čé ąŠą│čĆąŠą╝ąĮčŗą╣ ąĖ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą║čāčćčā čĆą░ąĘąĮčŗčģ ą┐ą╗ą░čé.
ąÆąŠčé čćč鹊 ą▓čŗ ą╝ąŠąČąĄč鹥 čüą┤ąĄą╗ą░čéčī, čćč鹊ą▒čŗ čāčüą║ąŠčĆąĖčéčī ą┐čĆąŠčåąĄčüčü.
[3 čüą░ą╝čŗčģ čŹčäč乥ą║čéąĖą▓ąĮčŗčģ čüą┐ąŠčüąŠą▒ą░ čāčüą║ąŠčĆąĖčéčī čüą▒ąŠčĆą║čā ]
ąŁč鹊 ą╗čāčćčłąĖąĄ ą╝ąĄč鹊ą┤čŗ, ą║ąŠč鹊čĆčŗąĄ čĆąĄą░ą╗čīąĮąŠ čüąŠą║čĆą░čéčÅčé ą▓ą░čłąĄ ą▓čĆąĄą╝čÅ ąŠąČąĖą┤ą░ąĮąĖčÅ.
1. ąÆą║ą╗čÄčćąĖčéčī `ccache` (ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ą║ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÄ). ąŁč鹊 čüąĖčüč鹥ą╝ą░ ą║čŹčłąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ, ą║ąŠč鹊čĆą░čÅ ąĘą░ą┐ąŠą╝ąĖąĮą░ąĄčé čĆąĄąĘčāą╗čīčéą░čé čüą▒ąŠčĆą║ąĖ ą║ą░ąČą┤ąŠą│ąŠ čäą░ą╣ą╗ą░. ąĢčüą╗ąĖ ą▓čŗ ą┐ąĄčĆąĄą║ąŠą╝ą┐ąĖą╗ąĖčĆčāąĄč鹥 ą┐čĆąŠąĄą║čé čüąĮąŠą▓ą░ (ąĖą╗ąĖ ą┐ąĄčĆąĄą║ą╗čÄčćąĖč鹥čüčī ą╝ąĄąČą┤čā ą┐ąŠčģąŠąČąĖą╝ąĖ ą┐ą╗ą░čéą░ą╝ąĖ), `ccache` ą┐čĆąŠčüč鹊 ą┐ąŠą┤čüčéą░ą▓ąĖčé ą│ąŠč鹊ą▓čŗą╣ čĆąĄąĘčāą╗čīčéą░čé, 菹║ąŠąĮąŠą╝čÅ ąŠą│čĆąŠą╝ąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čĆąĄą╝ąĄąĮąĖ.
ą¦č鹊ą▒čŗ ąĄą│ąŠ ą▓ą║ą╗čÄčćąĖčéčī, ą┤ąŠą▒ą░ą▓čīč鹥 ą▓ ą▓ą░čł čäą░ą╣ą╗ platformio.ini ą▓ą░čĆąĖą░ąĮčéą░ čŹčéčā čüčéčĆąŠčćą║čā:
build_cache_dir = .pio/build_cache
ąÜą░ą║ čŹč鹊 ą┐ąŠą╝ąŠąČąĄčé: ą▓č鹊čĆą░čÅ ąĖ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖąĄ čüą▒ąŠčĆą║ąĖ čüčéą░ąĮčāčé ąĘą░ą╝ąĄčéąĮąŠ ą▒čŗčüčéčĆąĄąĄ.
2. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čäą╗ą░ą│ `-j` ą┤ą╗čÅ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠą╣ čüą▒ąŠčĆą║ąĖ . ąŁč鹊čé čäą╗ą░ą│ čāą║ą░ąĘčŗą▓ą░ąĄčé PlatformIO ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░čéčī ą▓čüąĄ čÅą┤čĆą░ ą▓ą░čłąĄą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą┤ą╗čÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąŠąĮ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą╝ąĄą┤ą╗ąĄąĮąĮąĄąĄ.
ąÆčŗą┐ąŠą╗ąĮčÅą╣č鹥 čüą▒ąŠčĆą║čā čéą░ą║:
pio run -e myvariant -j $(nproc)
ąÜą░ą║ čŹč鹊 ą┐ąŠą╝ąŠą│ą░ąĄčé: čüą▒ąŠčĆą║ą░ čüčéą░ąĮąŠą▓ąĖčéčüčÅ ąĮą░ą╝ąĮąŠą│ąŠ ą▒čŗčüčéčĆąĄąĄ ąĘą░ čüčćčæčé ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ. ąæąĄąĘ čŹč鹊ą│ąŠ čäą╗ą░ą│ą░ ą┐čĆąŠčåąĄčüčüąŠčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĮąĄ ą┐ąŠą╗ąĮąŠčüčéčīčÄ.
3. ąĪąŠą▒ąĖčĆą░čéčī č鹊ą╗čīą║ąŠ ąŠą┤ąĮčā ą║ąŠąĮą║čĆąĄčéąĮčāčÄ ą┐ą╗ą░čéčā. ąÆ PlatformIO ą╝ąŠąČąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą╝ąĮąŠąČąĄčüčéą▓ąŠ čüčĆąĄą┤ (`[env:...]`). ąĢčüą╗ąĖ ąĘą░ą┐čāčüčéąĖčéčī čüą▒ąŠčĆą║čā ą▒ąĄąĘ čāą║ą░ąĘą░ąĮąĖčÅ čüčĆąĄą┤čŗ, ąŠąĮ ąĮą░čćąĮčæčé ą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī ą▓čüčæ ą┐ąŠą┤čĆčÅą┤, čćč鹊 ą╝ąŠąČąĄčé ąĘą░ąĮčÅčéčī ą┤ąĄčüčÅčéą║ąĖ ą╝ąĖąĮčāčé ą┤ą░ąČąĄ ąĮą░ čüąŠą▓čĆąĄą╝ąĄąĮąĮąŠą╣ čĆą░ą▒ąŠč湥ą╣ čüčéą░ąĮčåąĖąĖ.
ąÆčüąĄą│ą┤ą░ čÅą▓ąĮąŠ čāą║ą░ąĘčŗą▓ą░ą╣č鹥 ą▓ą░čłčā čüčĆąĄą┤čā:
pio run -e myvariant
ąÜą░ą║ čŹč鹊 ą┐ąŠą╝ąŠą│ą░ąĄčé: ą▓čŗ ą║ąŠą╝ą┐ąĖą╗ąĖčĆčāąĄč鹥 čĆąŠą▓ąĮąŠ č鹊, čćč鹊 ą▓ą░ą╝ ąĮčāąČąĮąŠ, ąĖąĘą▒ąĄą│ą░čÅ ą╗ąĖčłąĮąĄą╣ čĆą░ą▒ąŠčéčŗ.
[ą¤ąŠč湥ą╝čā čüą▒ąŠčĆą║ą░ ą▓čüčæ ąĄčēčæ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╝ąĄą┤ą╗ąĄąĮąĮąŠą╣ ]
ąöą░ąČąĄ čü čŹčéąĖą╝ąĖ ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ąĖ ą┐čĆąŠčåąĄčüčü ą╝ąŠąČąĄčé ąĖą┤čéąĖ ąĮąĄ ą╝ą│ąĮąŠą▓ąĄąĮąĮąŠ. ąÆąŠčé ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐čĆąĖčćąĖąĮ, čü ą║ąŠč鹊čĆčŗą╝ąĖ čüčéą░ą╗ą║ąĖą▓ą░čÄčéčüčÅ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ:
1 . "ąźąŠą╗ąŠčüčéą░čÅ" čüą▒ąŠčĆą║ą░ ą▓čüčæ čĆą░ą▓ąĮąŠ čéčĆąĄą▒čāąĄčé ą▓čĆąĄą╝ąĄąĮąĖ: ą┤ą░ąČąĄ ąĄčüą╗ąĖ ą▓čŗ ąĮąĖč湥ą│ąŠ ąĮąĄ ą╝ąĄąĮčÅą╗ąĖ ą▓ ą║ąŠą┤ąĄ, PlatformIO ą╝ąŠąČąĄčé čéčĆą░čéąĖčéčī 30ŌĆō40 čüąĄą║čāąĮą┤ ą┐čĆąŠčüč鹊 ąĮą░ ą┐čĆąŠą▓ąĄčĆą║čā ąĘą░ą▓ąĖčüąĖą╝ąŠčüč鹥ą╣ ąĖ ąĘą░ą┐čāčüą║ ąĖąĮčüčéčĆčāą╝ąĄąĮč鹊ą▓. ąŁč鹊 ąŠčüąŠą▒ąĄąĮąĮąŠčüčéčī ąĄą│ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ čüąĖčüč鹥ą╝čŗ SCons.
2 . ąĀą░ąĘą╝ąĄčĆ ą┐čĆąŠąĄą║čéą░: Meshtastic ŌĆö čŹč鹊 ąĮąĄ ą┐čĆąŠčüč鹊 "ą╝ąĖą│ą░ąĮąĖąĄ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝". ąŁč鹊 čüą╗ąŠąČąĮą░čÅ ą┐čĆąŠčłąĖą▓ą║ą░ čü ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ mesh-čüąĄč鹥ą╣, GPS, ą┤ąĖčüą┐ą╗ąĄąĄą▓, Bluetooth ąĖ ą╝ąĮąŠą│ąŠą│ąŠ ą┤čĆčāą│ąŠą│ąŠ. ąæąŠą╗čīčłąŠą╣ ą║ąŠą┤ čéčĆąĄą▒čāąĄčé ą▓čĆąĄą╝ąĄąĮąĖ ąĮą░ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÄ.
3 . ąÉąĮčéąĖą▓ąĖčĆčāčü: ą▓ ąĮąĄą║ąŠč鹊čĆčŗčģ čüą╗čāčćą░čÅčģ ą░ąĮčéąĖą▓ąĖčĆčāčüąĮąŠąĄ ą¤ą× ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąŠąČąĄčé ąĘą░ą╝ąĄą┤ą╗čÅčéčī čüą▒ąŠčĆą║čā, ą┐čĆąŠą▓ąĄčĆčÅčÅ ą║ą░ąČą┤čŗą╣ čüąŠąĘą┤ą░ą▓ą░ąĄą╝čŗą╣ čäą░ą╣ą╗.
[ąÜčĆą░čéą║ą░čÅ ąĖąĮčüčéčĆčāą║čåąĖčÅ ą┤ą╗čÅ čāčüą║ąŠčĆąĄąĮąĖčÅ ]
1 . ąöąŠą▒ą░ą▓čīč鹥 `build_cache_dir = .pio/build_cache` ą▓ ą▓ą░čł platformio.ini .
2 . ąÆčüąĄą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 `-j` čäą╗ą░ą│:
pio run -e myvariant -j $(nproc)
3 . ąöą╗čÅ ą┐ąĄčĆą▓ąŠą╣ čüą▒ąŠčĆą║ąĖ ąĘą░ą┐ą░čüąĖč鹥čüčī č鹥čĆą┐ąĄąĮąĖąĄą╝. ąĪą╗ąĄą┤čāčÄčēąĖąĄ ą▒čāą┤čāčé ą▒čŗčüčéčĆąĄąĄ.
ąÆ PlatformIO ąĄčüčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čüą┐ąŠčüąŠą▒ąŠą▓ ąŠčćąĖčüčéą║ąĖ ą┐čĆąŠąĄą║čéą░. ą×čüąĮąŠą▓ąĮą░čÅ ą║ąŠą╝ą░ąĮą┤ą░ ŌĆö pio run -t clean , ąĮąŠ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čüąĖčéčāą░čåąĖąĖ ą╝ąŠą│čāčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčīčüčÅ čĆą░ąĘąĮčŗąĄ čāčĆąŠą▓ąĮąĖ ąŠčćąĖčüčéą║ąĖ.
[ąŻčĆąŠą▓ąĮąĖ ąŠčćąĖčüčéą║ąĖ ]
1 . ąĪčéą░ąĮą┤ą░čĆčéąĮą░čÅ ąŠčćąĖčüčéą║ą░ (clean)
ąŻą┤ą░ą╗čÅąĄčé č鹊ą╗čīą║ąŠ ą▓čĆąĄą╝ąĄąĮąĮčŗąĄ ąŠą▒čŖąĄą║čéąĮčŗąĄ čäą░ą╣ą╗čŗ ą┤ą╗čÅ č鹥ą║čāčēąĄą╣ čüčĆąĄą┤čŗ čüą▒ąŠčĆą║ąĖ, ąŠčüčéą░ą▓ą╗čÅčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ąĖ ą║ąĄčł ąĮąĄčéčĆąŠąĮčāčéčŗą╝ąĖ.
pio run -t clean
ąöą╗čÅ ą║ąŠąĮą║čĆąĄčéąĮąŠą╣ čüčĆąĄą┤čŗ:
pio run -e myvariant -t clean
ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī: ąŠą▒čŗčćąĮčŗąĄ ąŠčłąĖą▒ą║ąĖ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ, ą┐čĆąŠą▒ą╗ąĄą╝čŗ čü ąĖąĮą║čĆąĄą╝ąĄąĮčéą░ą╗čīąĮąŠą╣ čüą▒ąŠčĆą║ąŠą╣.
2 . ą¤ąŠą╗ąĮą░čÅ ąŠčćąĖčüčéą║ą░ (prune)
ąŻą┤ą░ą╗čÅąĄčé ą▓čüčæ ąĮąĄąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠąĄ ą║ąĄčłąĖčĆąŠą▓ą░ąĮąĮąŠąĄ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ (ąĮąĄąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą┐ą░ą║ąĄčéčŗ, ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ, ą║ąĄčł ą┐ą╗ą░čéč乊čĆą╝).
pio system prune
ą¤ąŠą║ą░ąĘą░čéčī, čćč鹊 ą▒čāą┤ąĄčé čāą┤ą░ą╗ąĄąĮąŠ, ą▒ąĄąĘ čĆąĄą░ą╗čīąĮąŠą│ąŠ čāą┤ą░ą╗ąĄąĮąĖčÅ:
pio system prune --dry-run
ą¤čĆąŠą┐čāčüčéąĖčéčī ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ:
pio system prune --force
ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī: ąĮąĄčģą▓ą░čéą║ą░ ą╝ąĄčüčéą░ ąĮą░ ą┤ąĖčüą║ąĄ, ą┐ąŠą┤ąŠąĘčĆąĄąĮąĖąĄ ąĮą░ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖąĄ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ ą║ąĄčłą░ PlatformIO.
3 . ąĀčāčćąĮą░čÅ ą┐ąŠą╗ąĮą░čÅ ąŠčćąĖčüčéą║ą░
ąŻą┤ą░ą╗ąĄąĮąĖąĄ ą▓čüąĄčģ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ą┐čĆąŠąĄą║čéą░ ąĖ ą║ąĄčłąĖčĆąŠą▓ą░ąĮąĮčŗčģ ąĘą░ą▓ąĖčüąĖą╝ąŠčüč鹥ą╣. ąĪą░ą╝čŗą╣ čĆą░ą┤ąĖą║ą░ą╗čīąĮčŗą╣ ą╝ąĄč鹊ą┤.
ąöą╗čÅ č鹥ą║čāčēąĄą│ąŠ ą┐čĆąŠąĄą║čéą░:
rm -rf .pio
ą¤ąŠą╗ąĮčŗą╣ čüą▒čĆąŠčü PlatformIO (ą▓čüąĄ ą┐čĆąŠąĄą║čéčŗ):
rm -rf ~/.platformio
ą¤ąĄčĆąĄčāčüčéą░ąĮąŠą▓ą║ą░ ą┐ą░ą║ąĄč鹊ą▓ ą┐čĆąĖ čüą╗ąĄą┤čāčÄčēąĄą╣ čüą▒ąŠčĆą║ąĄ:
pio run
ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī: ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą╝ąĄąČą┤čā čüčĆąĄą┤ą░ą╝ąĖ ą▓čŗąĘčŗą▓ą░ąĄčé ąŠčłąĖą▒ą║ąĖ "No such file or directory", ąĮąĄąŠą▒čŖčÅčüąĮąĖą╝čŗąĄ ą║ąŠąĮčäą╗ąĖą║čéčŗ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║, ą┐ąŠą╗ąĮčŗą╣ čüą▒ąŠą╣ ą┐ąŠčüą╗ąĄ ąĮąĄčāą┤ą░čćąĮąŠą│ąŠ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ.
[ąÜą░ą║ąŠą╣ ą╝ąĄč鹊ą┤ ą▓čŗą▒čĆą░čéčī ą┤ą╗čÅ ą▓ą░čłąĄą╣ čüąĖčéčāą░čåąĖąĖ ]
ąĪąĖčéčāą░čåąĖčÅ ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝ą░čÅ ą║ąŠą╝ą░ąĮą┤ą░
ą×ą▒čŗčćąĮą░čÅ ąŠčłąĖą▒ą║ą░ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ
pio run -t clean
ą×čłąĖą▒ą║ą░ ą┐ąŠčüą╗ąĄ čüą╝ąĄąĮčŗ variant.h
rm -rf .pio + ą┐ąĄčĆąĄčüą▒ąŠčĆą║ą░
ąĪą╝ąĄąĮą░ čüčĆąĄą┤čŗ čüą▒ąŠčĆą║ąĖ ą▓čŗąĘčŗą▓ą░ąĄčé ąŠčłąĖą▒ą║ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║
rm -rf .pio/libdeps/[env_name] rm -rf .pio
ąØąĄčģą▓ą░čéą║ą░ ą╝ąĄčüčéą░ ąĮą░ ą┤ąĖčüą║ąĄ
pio system prune
ą¤ąŠą╗ąĮčŗą╣ čüą▒ąŠą╣ PlatformIO
rm -rf ~/.platformio
ąĪąŠą▓ąĄčé: ą┤ą╗čÅ čüąĖčéčāą░čåąĖąĖ čüą▒ąŠčĆą║ąĖ Meshtastic čü ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąĖą╝ variant.h ą┐ąŠčüą╗ąĄ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ ąŠčłąĖą▒ąŠą║ čü I2C ąĖ Wire1 ąĖą╗ąĖ ą┐ąŠą┤ąŠą▒ąĮčŗą╝ąĖ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą┐ąŠą╗ąĮčāčÄ ąŠčćąĖčüčéą║čā ą┐čĆąŠąĄą║čéą░, čéą░ą║ ą║ą░ą║ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĘą░čéčĆąŠąĮčāą╗ąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ čäą░ą╣ą╗ąŠą▓:
rm -rf .pio pio run -e myvariant
ąŁč鹊 ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 ą▓čüąĄ ąŠą▒čŖąĄą║čéąĮčŗąĄ čäą░ą╣ą╗čŗ ą▒čāą┤čāčé ą┐ąĄčĆąĄą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮčŗ ąĘą░ąĮąŠą▓ąŠ čü ą▓ą░čłąĖą╝ąĖ ąŠą▒ąĮąŠą▓ą╗čæąĮąĮčŗą╝ąĖ ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ąĖ.
In file included from src/mesh/MemoryPool.h:9,
from src/mesh/MeshRadio.h:3,
from src/mesh/Default.h:2,
from src/SerialConsole.cpp:2:
src/configuration.h:68:2: error: #error APP_VERSION must be set by the build environment
68 | #error APP_VERSION must be set by the build environment
| ^~~~~
ąöąŠą▒ą░ą▓čīč鹥 ą▓ čäą░ą╣ą╗ variants/esp32c3/diy/myvariant/platformio.ini :
[env:myvariant] ... build_flags = ... -D APP_VERSION = \"2.5.0.myvariant\" # ąÆčĆąĄą╝ąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ -D HW_VERSION = \"1.0\"
src/main.cpp:174:52: error: 'USERPREFS_TZ_STRING' was not declared in this scope
174 | volatile static const char slipstreamTZString[] = {USERPREFS_TZ_STRING};
| ^~~~~~~~~~~~~~~~~~~
ąöąŠą▒ą░ą▓čīč鹥 ą▓ čäą░ą╣ą╗ variants/esp32c3/diy/myvariant/platformio.ini :
[env:myvariant] build_flags = ... -D USERPREFS_TZ_STRING = \"MSK-3\"
src/modules/ExternalNotificationModule.cpp: In constructor 'ExternalNotificationModule::ExternalNotificationModule()':
src/modules/ExternalNotificationModule.cpp:314:43: error: 'USERPREFS_RINGTONE_RTTTL' was not declared in this scope
314 | strncpy(rtttlConfig.ringtone, USERPREFS_RINGTONE_RTTTL, sizeof(rtttlConfig.ringtone));
| ^~~~~~~~~~~~~~~~~~~~~~~~
ąöąŠą▒ą░ą▓čīč鹥 ą▓ čäą░ą╣ą╗ variants/esp32c3/diy/myvariant/platformio.ini :
[env:myvariant] extends = esp32c3_base board = nologo_esp32c3_super_mini build_flags = ${esp32c3_base.build_flags} -D myvariant -I variants/esp32c3/diy/myvariant -D ARDUINO_USB_MODE = 1 -D ARDUINO_USB_CDC_ON_BOOT = 1 -D USERPREFS_TZ_STRING = \"MSK-3\" -D USERPREFS_RINGTONE_RTTTL = \"\" # ąöąŠą▒ą░ą▓čīč鹥 čŹčéčā čüčéčĆąŠą║čā board_level = extra extra_scripts = pre:extra_scripts/pre_fix_wire1.py
ą¤ąŠčüą╗ąĄ čāčüą┐ąĄčłąĮąŠą╣ čüą▒ąŠčĆą║ąĖ čäą░ą╣ą╗ čü ą┐čĆąŠčłąĖą▓ą║ąŠą╣, ą│ąŠč鹊ą▓čŗą╣ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ąĮą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ, ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ą░ą┐ą║ąĄ ą▓ą░čłąĄą│ąŠ ą┐čĆąŠąĄą║čéą░ ą┐ąŠ čüą╗ąĄą┤čāčÄčēąĄą╝čā ą┐čāčéąĖ:
ą┐čāčéčī_ą║_ą▓ą░čłąĄą╝čā_ą┐čĆąŠąĄą║čéčā/firmware/.pio/build/myvariant/firmware.bin
ąśč鹊ą│ąŠą▓čŗą╣ čäą░ą╣ą╗ ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ firmware.bin .pio/build/myvariant/
[ąÜą░ą║ čŹč鹊 čĆą░ą▒ąŠčéą░ąĄčé ]
myvariant platformio.ini č湥čĆąĄąĘ čäą╗ą░ą│ `-e myvariant`. ąĢčüą╗ąĖ ą▒čŗ ą▓čŗ čüąŠą▒ąĖčĆą░ą╗ąĖ ą┤čĆčāą│čāčÄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ, ąĮą░ą┐čĆąĖą╝ąĄčĆ, `pio run -e tbeam`, ą┐ą░ą┐ą║ą░ čü čĆąĄąĘčāą╗čīčéą░č鹊ą╝ ąĮą░ąĘčŗą▓ą░ą╗ą░čüčī ą▒čŗ tbeam .
firmware.bin
ąöčĆčāą│ąĖąĄ čäą░ą╣ą╗čŗ: čĆčÅą┤ąŠą╝ čü ąĮąĖą╝ ą▓čŗ ą╝ąŠąČąĄč鹥 ąĮą░ą╣čéąĖ ąĖ ą┤čĆčāą│ąĖąĄ ą░čĆč鹥čäą░ą║čéčŗ čüą▒ąŠčĆą║ąĖ, ąĮą░ą┐čĆąĖą╝ąĄčĆ, firmware.elf (ąŠčéą╗ą░ą┤ąŠčćąĮčŗą╣ čäą░ą╣ą╗ čü ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣) ąĖą╗ąĖ partitions.bin (čäą░ą╣ą╗ čü čéą░ą▒ą╗ąĖčåąĄą╣ čĆą░ąĘą┤ąĄą╗ąŠą▓ ą┐ą░ą╝čÅčéąĖ), ąĮąŠ ą┤ą╗čÅ ą┐čĆąŠčłąĖą▓ą║ąĖ ąŠą▒čŗčćąĮąŠ ąĮčāąČąĄąĮ č鹊ą╗čīą║ąŠ `.bin`.
ąĢčüą╗ąĖ ą▓čŗ ąĘą░čģąŠčéąĖč鹥 ąĖąĘą╝ąĄąĮąĖčéčī čüčéą░ąĮą┤ą░čĆčéąĮąŠąĄ čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖąĄ čŹč鹊ą╣ ą┐ą░ą┐ą║ąĖ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, čćč鹊ą▒čŗ ąĮąĄ ąĘą░čüąŠčĆčÅčéčī ą┐čĆąŠąĄą║čé), čŹč鹊 ą╝ąŠąČąĮąŠ čüą┤ąĄą╗ą░čéčī, ą┤ąŠą▒ą░ą▓ąĖą▓ ą▓ ą▓ą░čł platformio.ini ą▓ čüąĄą║čåąĖčÄ `[platformio]` ą┤ąĖčĆąĄą║čéąĖą▓čā `build_dir`.
ą¤čĆąĖą╝ąĄčĆ ą╗ąŠą│ą░:
..
Linking .pio/build/myvariant/firmware.elf
Memory Type Usage Summary:
+----------------------+--------------+----------+----------------+---------------+
| Memory Type/Section | Used [bytes] | Used [%] | Remain [bytes] | Total [bytes] |
+----------------------+--------------+----------+----------------+---------------+
| Flash Code | 127478 | | | |
| .text | 127478 | | | |
| DRAM | 45996 | 14.32 | 275300 | 321296 |
| .text | 36344 | 11.31 | | |
| .bss | 5648 | 1.76 | | |
| .data | 4004 | 1.25 | | |
| Flash Data | 39456 | | | |
| .rodata | 39200 | | | |
| .appdesc | 256 | | | |
| RTC SLOW | 72 | 0.88 | 8120 | 8192 |
| .rtc_reserved | 40 | 0.49 | | |
| .force_slow | 32 | 0.39 | | |
+----------------------+--------------+----------+----------------+---------------+
Total image size: 207314 bytes (.bin may be padded larger)
Note: The reported total sizes may be smaller than those in the technical reference manual
due to reserved memory and application configuration. The total flash size available for the
application is not included by default, as it cannot be reliably determined due to the presence
of other data like the bootloader, partition table, and application partition size. Retrieving
maximum program size .pio/build/myvariant/firmware.elf
Checking size .pio/build/myvariant/firmware.elf Advanced Memory Usage is available via
"PlatformIO Home > Project Inspect"
RAM: [ ] 2.9% (used 9652 bytes from 327680 bytes)
Flash: [= ] 8.5% (used 207026 bytes from 2424832 bytes)
*** Copied compiled esp32c3 IDF libraries to Arduino framework ***
*** Starting Arduino compile myvariant with custom libraries ***
Processing myvariant (board: nologo_esp32c3_super_mini;
platform: https://github.com/pioarduino/platform-espressif32/releases/download/55.03.38-1/
platform-espressif32.zip; framework: arduino)
--------------------------------------------------------------------------------
Tool Manager: Installing https://github.com/pioarduino/scons/releases/download/4.8.1/
scons-local-4.8.1.tar.gz
Downloading 0% 10% 20% 30% 40%
Unpacking 0% 10% 20% 30% 40% 50% 60% 70% 80% 90% 100%
Tool Manager: tool-scons@4.40801.0 has been installed!
Verbose mode can be enabled via `-v, --verbose` option ąśčüą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ Wire1 ą┤ą╗čÅ ESP32-C3...
ąśčüą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čāąČąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮąŠ
========================= [SUCCESS] Took 7.99 seconds =========================
Environment Status Duration myvariant SUCCESS 00:00:07.987
========================= 1 succeeded in 00:00:07.987 =========================
*** Original Arduino "idf_component.yml" restored
*** Building .pio/build/myvariant/firmware.bin esptool v5.2.0
Usage: esptool elf2image [OPTIONS] FILENAME Try 'esptool elf2image -h' for help
ŌĢŁŌöĆ Error ŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌĢ«
Ōöé Invalid value for 'FILENAME': Path '.pio/build/myvariant/firmware.elf' does not exist. Ōöé
ŌĢ░ŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌöĆŌĢ»
*** [.pio/build/myvariant/firmware.bin] Error 2
================================ [FAILED] Took 509.68 seconds ============================
Environment Status Duration myvariant FAILED 00:08:29.682
================================ 1 failed, 0 succeeded in 00:08:29.682 ===================
ąĪą┤ąĄą╗ą░ą╣č鹥 ą┐ąŠą╗ąĮčāčÄ ąŠčćąĖčüčéą║čā ąĖ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 čüą▒ąŠčĆą║čā ąĘą░ąĮąŠą▓ąŠ:
rm -rf .pio pio run -e myvariant -j $(nproc)
ą¤čĆąŠčłąĖčéčī ESP32-C3 ą╝ąŠąČąĮąŠ ąĮą░ą┐čĆčÅą╝čāčÄ ąĖąĘ PlatformIO ŌĆö čŹč鹊 čüą░ą╝čŗą╣ čāą┤ąŠą▒ąĮčŗą╣ čüą┐ąŠčüąŠą▒, čéą░ą║ ą║ą░ą║ ą▓čŗ čāąČąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 čŹčéčā čüčĆąĄą┤čā ą┤ą╗čÅ čüą▒ąŠčĆą║ąĖ. ąÆąŠčé ą║ą░ą║ čŹč鹊 čüą┤ąĄą╗ą░čéčī ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą┤ą╗čÅ ą▓ą░čłąĄą╣ ą┐ą╗ą░čéčŗ Nologo ESP32-C3 SuperMini.
[ą¤čĆąŠčłąĖą▓ą║ą░ č湥čĆąĄąĘ PlatformIO (čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čŗą╣ čüą┐ąŠčüąŠą▒) ]
PlatformIO ą╝ąŠąČąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĮą░ą╣čéąĖ ą┐ąŠčĆčé ąĖ ą┐čĆąŠčłąĖčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ. ą¤čĆąŠčüč鹊 ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ą║ąŠą╝ą░ąĮą┤čā:
pio run -e myvariant -t upload
ąĢčüą╗ąĖ ąĮčāąČąĮąŠ čāą║ą░ąĘą░čéčī ą┐ąŠčĆčé ą▓čĆčāčćąĮčāčÄ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą║ąŠą│ą┤ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ čāčüčéčĆąŠą╣čüčéą▓), ą┤ąŠą▒ą░ą▓čīč鹥 ą┐ą░čĆą░ą╝ąĄčéčĆ `--upload-port`:
pio run -e myvariant -t upload --upload-port /dev/ttyUSB0
PlatformIO ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąĄčĆąĄą▓ąĄą┤čæčé ą┐ą╗ą░čéčā ą▓ čĆąĄąČąĖą╝ ąĘą░ą│čĆčāąĘą║ąĖ, ą┐čĆąŠčłčīčæčé `firmware.bin` ąĖ ą┐ąĄčĆąĄąĘą░ą┐čāčüčéąĖčé čāčüčéčĆąŠą╣čüčéą▓ąŠ.
[ąĀčāčćąĮą░čÅ ą┐čĆąŠčłąĖą▓ą║ą░ č湥čĆąĄąĘ esptool.py ]
ąĢčüą╗ąĖ ą▓čŗ čģąŠčéąĖč鹥 ą┐čĆąŠčłąĖčéčī ą┐ą╗ą░čéčā ą▓čĆčāčćąĮčāčÄ ąĖą╗ąĖ čā ą▓ą░čü ąĮąĄčé PlatformIO, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ąŠčäąĖčåąĖą░ą╗čīąĮčŗą╣ ąĖąĮčüčéčĆčāą╝ąĄąĮčé esptool.py
1 . ąŻčüčéą░ąĮąŠą▓ąĖč鹥 esptool.py (ąĄčüą╗ąĖ ąĄčēčæ ąĮąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ):
pip install esptool
2 . ąĪąŠčéčĆąĖč鹥 čüčéą░čĆčāčÄ ą┐čĆąŠčłąĖą▓ą║čā (čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ):
esptool.py --chip esp32c3 --port /dev/ttyUSB0 erase_flash
3 . ąŚą░ą┐ąĖčłąĖč鹥 ąĮąŠą▓čāčÄ ą┐čĆąŠčłąĖą▓ą║čā:
esptool.py --chip esp32c3 --port /dev/ttyUSB0 --baud 460800 write_flash \ --flash_mode dio --flash_size 4MB --flash_freq 80m \ 0x0 .pio/build/myvariant/bootloader.bin \ 0x8000 .pio/build/myvariant/partitions.bin \ 0x10000 .pio/build/myvariant/firmware.bin
[ąØą░čüčéčĆąŠą╣ą║ą░ PlatformIO ą┤ą╗čÅ čüčéą░ą▒ąĖą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ ]
ąöąŠą▒ą░ą▓čīč鹥 ą▓ ą▓ą░čł platformio.ini ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą┤ą╗čÅ ą┐ąŠčĆčéą░ ąĖ ą╝ąŠąĮąĖč鹊čĆą░:
[env:myvariant] ; ... ąŠčüčéą░ą╗čīąĮčŗąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ... upload_port = /dev/ttyUSB0 monitor_port = ${this.upload_port} monitor_speed = 115200
ąĢčüą╗ąĖ ą▓čŗ ąĮąĄ ąĘąĮą░ąĄč鹥, ą║ą░ą║ąŠą╣ ą┐ąŠčĆčé ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ Linux, ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ą║ąŠą╝ą░ąĮą┤čā ls /dev/tty* ą┤ąŠ ąĖ ą┐ąŠčüą╗ąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą┐ą╗ą░čéčŗ ŌĆö ąĮąŠą▓čŗą╣ ą┐ąŠčÅą▓ąĖą▓čłąĖą╣čüčÅ ą┐ąŠčĆčé ąĖ ą▒čāą┤ąĄčé ą▓ą░čłąĖą╝.
[ą×čüąŠą▒ąĄąĮąĮąŠčüčéąĖ ESP32-C3 SuperMini ]
ą¤ą╗ą░čéčŗ Nologo ESP32-C3 SuperMini ąĖą╝ąĄčÄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ ąŠčüąŠą▒ąĄąĮąĮąŠčüč鹥ą╣:
1 . USB CDC ą▓ą║ą╗čÄčćčæąĮ: ą▓ ą▓ą░čłąĄą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čāąČąĄ ąĄčüčéčī -DARDUINO_USB_CDC_ON_BOOT=1 , čćč鹊 ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą┤ą╗čÅ čŹč鹊ą╣ ą┐ą╗ą░čéčŗ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, č湥čĆąĄąĘ čŹč鹊čé ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą▓čŗą▓ąŠą┤ ąŠčéą╗ą░ą┤ąŠčćąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣, ą┐ąĄčĆąĄą┐čĆąŠčłąĖą▓ą║ą░ Meshtastic ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĄą│ąŠ ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ąĖ (čü ą┐ąŠą╝ąŠčēčīčÄ čāčéąĖą╗ąĖčé Python CLI [2] ąĖ Web UI [3]).
2 . ąĀčāčćąĮąŠą╣ ą▓čģąŠą┤ ą▓ čĆąĄąČąĖą╝ ąĘą░ą│čĆčāąĘą║ąĖ: ąĮą░ ąĮąĄą║ąŠč鹊čĆčŗčģ ą┐ą╗ą░čéą░čģ C3 ą╝ąŠąČąĄčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčīčüčÅ ąĮą░ąČą░čéčī ąĖ čāą┤ąĄčƹȹĖą▓ą░čéčī ą║ąĮąŠą┐ą║čā BOOT, ąĘą░č鹥ą╝ ą║čĆą░čéą║ąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąĮą░ąČą░čéčī RESET (ąĖą╗ąĖ RST, EN), ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ąŠčéą┐čāčüčéąĖčéčī BOOT. ąóąŠą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą┐ą╗ą░čéą░ ą▓ąŠą╣ą┤čæčé ą▓ čĆąĄąČąĖą╝ ąĘą░ą│čĆčāąĘą║ąĖ. ąśąĮąŠą│ą┤ą░ ą┐ąŠą╝ąŠą│ą░ąĄčé ąĮą░ąČą░čéąĖąĄ BOOT ą▓ ą╝ąŠą╝ąĄąĮčé ąĮą░čćą░ą╗ą░ ą┐čĆąŠčłąĖą▓ą║ąĖ.
3 . ąĪą▒čĆąŠčü ą┐ąŠčüą╗ąĄ ą┐čĆąŠčłąĖą▓ą║ąĖ: ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┐ą╗ą░čéčŗ C3 ąĮąĄ ą┐ąĄčĆąĄąĘą░ą│čĆčāąČą░čÄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąŠčüą╗ąĄ ą┐čĆąŠčłąĖą▓ą║ąĖ. ąĢčüą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĮąĄ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ, ąĮą░ąČą╝ąĖč鹥 ą║ąĮąŠą┐ą║čā RESET ą▓čĆčāčćąĮčāčÄ ąĖą╗ąĖ ąŠčéą║ą╗čÄčćąĖč鹥/ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥 ą┐ą╗ą░čéčā ą┐ąŠ USB.
[ą¤čĆąŠą▓ąĄčĆą║ą░ čĆą░ą▒ąŠčéčŗ ]
ą¤ąŠčüą╗ąĄ ą┐čĆąŠčłąĖą▓ą║ąĖ ąŠčéą║čĆąŠą╣č鹥 ą╝ąŠąĮąĖč鹊čĆ ą┐ąŠčĆčéą░:
pio run -e myvariant -t monitor
ąĢčüą╗ąĖ ą▓čŗ ą▓ąĖą┤ąĖč鹥 ą╗ąŠą│ Meshtastic čü ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĄą╣ ą╝ąŠą┤čāą╗ąĄą╣ ŌĆö ą┐ą╗ą░čéą░ čāčüą┐ąĄčłąĮąŠ ą┐čĆąŠčłąĖčéą░ ąĖ čĆą░ą▒ąŠčéą░ąĄčé.
ąĢčüą╗ąĖ ą▓ąŠąĘąĮąĖą║ą╗ąĖ ą┐čĆąŠą▒ą╗ąĄą╝čŗ, ą┐čĆąŠą▓ąĄčĆčīč鹥 ą┤čĆą░ą╣ą▓ąĄčĆčŗ USB ąĖ ą┐čĆą░ą▓ą░ ą┤ąŠčüčéčāą┐ą░ ą║ ą┐ąŠčĆčéčā ą▓ Linux (ą╝ąŠąČąĮąŠ ą┤ąŠą▒ą░ą▓ąĖčéčī ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą▓ ą│čĆčāą┐ą┐čā `dialout`).
ąŻąĘąĮą░čéčī čüą┐ąĖčüąŠą║ čüąŠčüąĄą┤ąĮąĖčģ čāąĘą╗ąŠą▓ ą▓ čüąĄčéąĖ Meshtastic ą╝ąŠąČąĮąŠ, ąĮąŠ ą┤ą╗čÅ čŹč鹊ą│ąŠ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čüąĮą░čćą░ą╗ą░ ą▓ą║ą╗čÄčćąĖčéčī čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╣ ą╝ąŠą┤čāą╗čī Neighbor Info, čéą░ą║ ą║ą░ą║ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čŹčéą░ čäčāąĮą║čåąĖčÅ ąŠčéą║ą╗čÄč湥ąĮą░.
[ą¦č鹊 čéą░ą║ąŠąĄ ą╝ąŠą┤čāą╗čī Neighbor Info ]
ąŁč鹊 ą▓čüčéčĆąŠąĄąĮąĮą░čÅ, ąĮąŠ ąŠą┐čåąĖąŠąĮą░ą╗čīąĮą░čÅ čäčāąĮą║čåąĖčÅ ą┐čĆąŠčłąĖą▓ą║ąĖ Meshtastic. ąÜąŠą│ą┤ą░ ąŠąĮą░ ą▓ą║ą╗čÄč湥ąĮą░, ą▓ą░čł čāąĘąĄą╗ ą▒čāą┤ąĄčé ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ ąŠčéą┐čĆą░ą▓ą╗čÅčéčī ą▓ mesh-čüąĄčéčī čüą┐ąĖčüąŠą║ čüą▓ąŠąĖčģ ą┐čĆčÅą╝čŗčģ čüąŠčüąĄą┤ąĄą╣ (0-hop neighbors) ąĖ ą║ą░č湥čüčéą▓ąŠ čüą▓čÅąĘąĖ čü ąĮąĖą╝ąĖ (SNR). ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▓čüąĄą╝ čāčćą░čüčéąĮąĖą║ą░ą╝ čüąĄčéąĖ (ąĖą╗ąĖ čāąĘą╗ą░ą╝, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝ ą║ MQTT) ą┐ąŠčüčéčĆąŠąĖčéčī ą║ą░čĆčéčā čüą▓čÅąĘąĄą╣.
ąÆą░ąČąĮąŠ: čŹčéą░ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąĮąŠčüąĖčé ąĖčüą║ą╗čÄčćąĖč鹥ą╗čīąĮąŠ ąĖąĮč乊čĆą╝ą░čåąĖąŠąĮąĮčŗą╣ čģą░čĆą░ą║č鹥čĆ ąĖ ąĮąĄ ą▓ą╗ąĖčÅąĄčé ąĮą░ ą╝ą░čĆčłčĆčāčéąĖąĘą░čåąĖčÄ ą┐ą░ą║ąĄč鹊ą▓ ą▓ čüąĄčéąĖ.
[ąÜą░ą║ ą▓ą║ą╗čÄčćąĖčéčī ąĖ ąĮą░čüčéčĆąŠąĖčéčī ą╝ąŠą┤čāą╗čī ]
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝ąŠą┤čāą╗ąĄą╝ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ č湥čĆąĄąĘ Python CLI [2]. ąÆčüąĄ ą┐čĆąĖą╝ąĄčĆčŗ ą║ąŠą╝ą░ąĮą┤ ą┐ąŠą┤čģąŠą┤čÅčé ą┤ą╗čÅ ą▓ąĄčĆčüąĖą╣ firmware 2.2.0 ąĖ ą▓čŗčłąĄ.
1 . ąÆą║ą╗čÄčćąĖčéčī ą╝ąŠą┤čāą╗čī:
meshtastic --set neighbor_info.enabled true
2 . ąØą░čüčéčĆąŠąĖčéčī ąĖąĮč鹥čĆą▓ą░ą╗ ąŠčéą┐čĆą░ą▓ą║ąĖ (ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ): ąĖąĮč鹥čĆą▓ą░ą╗ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ŌĆö 6 čćą░čüąŠą▓ (21600 čüąĄą║čāąĮą┤) ąĖ ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╝ąĄąĮčīčłąĄ 4 čćą░čüąŠą▓ (14400 čüąĄą║čāąĮą┤). ą¦č鹊ą▒čŗ čāčüčéą░ąĮąŠą▓ąĖčéčī ąĖąĮč鹥čĆą▓ą░ą╗, ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą▓ 5 čćą░čüąŠą▓:
meshtastic --set neighbor_info.update_interval 18000
3 . ąĀą░ąĘčĆąĄčłąĖčéčī ąŠčéą┐čĆą░ą▓ą║čā ą┐ąŠ LoRa (ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ): ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ čüąŠčüąĄą┤čÅčģ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ č鹊ą╗čīą║ąŠ č湥čĆąĄąĘ MQTT ąĖ ą▓ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ. ą¦č鹊ą▒čŗ ąŠčéą┐čĆą░ą▓ą╗čÅčéčī ąĄčæ čéą░ą║ąČąĄ ą┐ąŠ LoRa, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 čŹčéčā ą║ąŠą╝ą░ąĮą┤čā. ążčāąĮą║čåąĖčÅ ą┤ąŠčüčéčāą┐ąĮą░ čü ą▓ąĄčĆčüąĖąĖ firmware 2.5.13:
meshtastic --set neighbor_info.transmit_over_lora true
4 . ą¤čĆąŠą▓ąĄčĆąĖčéčī č鹥ą║čāčēčāčÄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ą╝ąŠą┤čāą╗čÅ:
meshtastic --get neighbor_info
[ąōą┤ąĄ čüą╝ąŠčéčĆąĄčéčī čüą┐ąĖčüąŠą║ čüąŠčüąĄą┤ąĄą╣ ]
ą¤ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą╝ąŠą┤čāą╗čÅ ą┤ą░ąĮąĮčŗąĄ ąŠ čüąŠčüąĄą┤čÅčģ ą▒čāą┤čāčé ąŠčéą┐čĆą░ą▓ą╗čÅčéčīčüčÅ, ąĮąŠ, ą┐ąŠ čüąŠčüč鹊čÅąĮąĖčÄ ąĮą░ ąŠą║čéčÅą▒čĆčī 2023 ą│ąŠą┤ą░, ąĮąĄ čüčāčēąĄčüčéą▓ąŠą▓ą░ą╗ąŠ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ ą║ą╗ąĖąĄąĮč鹊ą▓ ą┤ą╗čÅ ąĖčģ ą▓ąĖąĘčāą░ą╗ąĖąĘą░čåąĖąĖ. ąÆčŗ ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüą╗ąĄą┤čāčÄčēąĖąĄ ą┐ąŠą┤čģąŠą┤čŗ:
MQTT: ąĄčüą╗ąĖ ą▓ą░čłą░ čüąĄčéčī ąĖą╝ąĄąĄčé MQTT-čłą╗čÄąĘ, ą┤ą░ąĮąĮčŗąĄ ąŠ čüąŠčüąĄą┤čÅčģ ą▒čāą┤čāčé ąĮą░ą║ą░ą┐ą╗ąĖą▓ą░čéčīčüčÅ ąĮą░ MQTT-čüąĄčĆą▓ąĄčĆąĄ. ąśčģ ą╝ąŠąČąĮąŠ čüąŠą▒ąĖčĆą░čéčī ąĖ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī ą┤ą╗čÅ ą┐ąŠčüčéčĆąŠąĄąĮąĖčÅ ą│čĆą░čäą░ čüąĄčéąĖ.
Traceroute: ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗą╣ čüą┐ąŠčüąŠą▒ čāą▓ąĖą┤ąĄčéčī čüąĄč鹥ą▓ąŠą╣ ą┐čāčéčī. ąÆčŗ ą╝ąŠąČąĄč鹥 ąŠčéą┐čĆą░ą▓ąĖčéčī traceroute ą┤ąŠ ą║ąŠąĮą║čĆąĄčéąĮąŠą│ąŠ čāąĘą╗ą░, čćč鹊ą▒čŗ čāą▓ąĖą┤ąĄčéčī ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī čāąĘą╗ąŠą▓ ąĮą░ ą┐čāčéąĖ ą║ ąĮąĄą╝čā. ąÆ ąĮąĄą║ąŠč鹊čĆčŗčģ ą║ą╗ąĖąĄąĮčéą░čģ, ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą▓ Meshtastic.Cli, ą┤ą╗čÅ čŹč鹊ą│ąŠ ąĄčüčéčī čüą┐ąĄčåąĖą░ą╗čīąĮą░čÅ ą║ąŠą╝ą░ąĮą┤ą░ `trace-route`.
[ąØą░čüčéčĆąŠą╣ą║ą░ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ ]
Python CLI [2]: ą║čĆąŠčüčüą┐ą╗ą░čéč乊čĆą╝ąĄąĮąĮą░čÅ ą║ąŠąĮčüąŠą╗čīąĮą░čÅ čāčéąĖą╗ąĖčéą░. ąÆ ąĮąĄą╣ ą┤ąŠčüčéčāą┐ąĄąĮ čüą░ą╝čŗą╣ ą┐ąŠą╗ąĮčŗą╣ čäčāąĮą║čåąĖąŠąĮą░ą╗ ą┐ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÄ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ Meshtastic.
Android : ą▓čüąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą╝ąŠą┤čāą╗čÅ Neighbor Info ą┤ąŠčüčéčāą┐ąĮčŗ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ ą▓ąĄčĆčüąĖąĖ 2.2.0 ąĖ ą▓čŗčłąĄ. ą¤čāčéčī ą║ ąĮą░čüčéčĆąŠą╣ą║ą░ą╝: ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮąŠąĄ ą╝ąĄąĮčÄ (čéčĆąĖ č鹊čćą║ąĖ) > Radio Configuration > Neighbor Info.
Apple (iOS) : ąĮą░ ą╝ąŠą╝ąĄąĮčé ąĮą░ą┐ąĖčüą░ąĮąĖčÅ ąŠčäąĖčåąĖą░ą╗čīąĮąŠą╣ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ čäčāąĮą║čåąĖčÅ ąĄčēąĄ ąĮąĄ ą▒čŗą╗ą░ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░.
Web UI [3]: ą▓čüąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą╝ąŠą┤čāą╗čÅ ą┤ąŠčüčéčāą┐ąĮčŗ ą▓ ą▓ąĄą▒-ąĖąĮč鹥čĆč乥ą╣čüąĄ.
ąĪč鹊ąĖčé ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 ą╝ąŠą┤čāą╗čī Neighbor Info ą╝ąŠąČąĄčé ąŠą▒ąĮą░čĆčāąČąĖą▓ą░čéčī čüąŠčüąĄą┤ąĄą╣ ą┤ą░ąČąĄ ąĮą░ čāąĘą╗ą░čģ, ą│ą┤ąĄ ąŠąĮ ąĮąĄ ą▓ą║ą╗čÄč湥ąĮ (ąĮą░čćąĖąĮą░čÅ čü ą▓ąĄčĆčüąĖąĖ firmware 2.3.2), ąĮąŠ ą┤ą╗čÅ ą┐ąŠą╗ąĮąŠą╣ ąĖ čĆąĄą│čāą╗čÅčĆąĮąŠą╣ ą║ą░čĆčéąĖąĮčŗ čüąĄčéąĖ ąĄą│ąŠ ą╗čāčćčłąĄ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░čéčī ąĮą░ ą▓čüąĄčģ ą▓ąŠąĘą╝ąŠąČąĮčŗčģ čāąĘą╗ą░čģ.
ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ Meshtastic ą┤ą╗čÅ Android ą▓ Google Play čāčüčéą░ąĮąŠą▓ąĖčéčī ąĮąĄ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ, ąŠąĮąŠ "ąØąĄą┤ąŠčüčéčāą┐ąĮąŠ ą▓ ą▓ą░čłąĄą╣ čüčéčĆą░ąĮąĄ". ąöą░ąČąĄ VPN ąĮąĄ ą┐ąŠą╝ąŠą│ą░ąĄčé. ąÜą░ą║ ą▒čŗčéčī?
ąźąŠčĆąŠčłą░čÅ ąĮąŠą▓ąŠčüčéčī ą▓ č鹊ą╝, čćč鹊 čā Meshtastic ąĄčüčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ąŠčäąĖčåąĖą░ą╗čīąĮčŗčģ ąĖ ą▒ąĄąĘąŠą┐ą░čüąĮčŗčģ čüą┐ąŠčüąŠą▒ąŠą▓ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠą╝ąĖą╝ąŠ Google Play.
ąÆąŠčé čéčĆąĖ ąĮą░ą┤ąĄąČąĮčŗčģ ą╝ąĄč鹊ą┤ą░, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą╝ąŠą│čāčé ą▓ą░ą╝ čāčüčéą░ąĮąŠą▓ąĖčéčī ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ:
ąĪą░ą╝čŗą╣ ą▒ąĄąĘąŠą┐ą░čüąĮčŗą╣ ąĖ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čŗą╣ čüą┐ąŠčüąŠą▒ ŌĆö F-Droid
F-Droid ŌĆö čŹč鹊 ąŠčäąĖčåąĖą░ą╗čīąĮčŗą╣ ą╝ą░ą│ą░ąĘąĖąĮ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ čü ąŠčéą║čĆčŗčéčŗą╝ ąĖčüčģąŠą┤ąĮčŗą╝ ą║ąŠą┤ąŠą╝. Meshtastic čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčé ąĄą│ąŠ ą║ą░ą║ ąŠčüąĮąŠą▓ąĮąŠą╣ čüą┐ąŠčüąŠą▒ čāčüčéą░ąĮąŠą▓ą║ąĖ .
1 . ąĪą║ą░čćą░ą╣č鹥 ąĖ čāčüčéą░ąĮąŠą▓ąĖč鹥 ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ F-Droid čü ąŠčäąĖčåąĖą░ą╗čīąĮąŠą│ąŠ čüą░ą╣čéą░: f-droid.org .2 . ą×čéą║čĆąŠą╣č鹥 F-Droid. ąÆąŠąĘą╝ąŠąČąĮąŠ, ą┐ąŠčéčĆąĄą▒čāąĄčéčüčÅ čĆą░ąĘčĆąĄčłąĖčéčī čāčüčéą░ąĮąŠą▓ą║čā ąĖąĘ ąĮąĄąĖąĘą▓ąĄčüčéąĮčŗčģ ąĖčüč鹊čćąĮąĖą║ąŠą▓ (č鹥ą╗ąĄč乊ąĮ čüą░ą╝ ą┐ąŠą┤čüą║ą░ąČąĄčé, ą║ą░ą║ čŹč鹊 čüą┤ąĄą╗ą░čéčī).3 . ąØą░ą╣ą┤ąĖč鹥 ą▓ ą┐ąŠąĖčüą║ąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ Meshtastic.4 . ąŻčüčéą░ąĮąŠą▓ąĖč鹥 ąĄą│ąŠ.
ąĪą░ą╝čŗą╣ ą▒čŗčüčéčĆčŗą╣ ąĖ ą┐čĆčÅą╝ąŠą╣ čüą┐ąŠčüąŠą▒ ŌĆö čāčüčéą░ąĮąŠą▓ą║ą░ APK (čü čĆčāčćąĮčŗą╝ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄą╝)
ąŁč鹊čé ą╝ąĄč鹊ą┤ ą┐ąŠą┤čģąŠą┤ąĖčé, ąĄčüą╗ąĖ ą▓čŗ ąĮąĄ čģąŠčéąĖč鹥 čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčī ą╗ąĖčłąĮąĖąĄ ą╝ą░ą│ą░ąĘąĖąĮčŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣. ąÆčŗ ą┐čĆąŠčüč鹊 čüą║ą░čćąĖą▓ą░ąĄč鹥 čāčüčéą░ąĮąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗.
1 . ą¤ąĄčĆąĄą╣ą┤ąĖč鹥 ąĮą░ ąŠčäąĖčåąĖą░ą╗čīąĮčāčÄ čüčéčĆą░ąĮąĖčåčā Releases (ąĀąĄą╗ąĖąĘčŗ) ą┐čĆąŠąĄą║čéą░ ąĮą░ GitHub: github.com/meshtastic/Meshtastic-Android/releases .2 . ąØą░ą╣ą┤ąĖč鹥 čüą░ą╝čŗą╣ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ čäą░ą╣ą╗ čü čĆą░čüčłąĖčĆąĄąĮąĖąĄą╝ `.apk` (ąĮą░ą┐čĆąĖą╝ąĄčĆ, `meshtastic_x.x.x.apk`). ąĪą║ą░čćą░ą╣č鹥 ąĄą│ąŠ ąĮą░ č鹥ą╗ąĄč乊ąĮ.3 . ąØą░ąČą╝ąĖč鹥 ąĮą░ čüą║ą░čćą░ąĮąĮčŗą╣ čäą░ą╣ą╗. ąóąĄą╗ąĄč乊ąĮ ą┐ąŠą┐čĆąŠčüąĖčé čĆą░ąĘčĆąĄčłąĖčéčī čāčüčéą░ąĮąŠą▓ą║čā ąĖąĘ ąĖčüč鹊čćąĮąĖą║ą░ (ą▒čĆą░čāąĘąĄčĆą░ ąĖą╗ąĖ ą╝ąĄąĮąĄą┤ąČąĄčĆą░ čäą░ą╣ą╗ąŠą▓), čüąŠą│ą╗ą░čüąĖč鹥čüčī.4 . ąŻčüčéą░ąĮąŠą▓ą║ą░ ąĘą░ą▓ąĄčĆčłąĄąĮą░.
ąÆą░ąČąĮąŠ: ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗąĄ ą▓čĆčāčćąĮčāčÄ, ąĮąĄ ą┐ąŠą╗čāčćą░čÄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖčģ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖą╣. ąÆą░ą╝ ą┐čĆąĖą┤ąĄčéčüčÅ ą┐ąŠą▓č鹊čĆčÅčéčī čŹčéąĖ čłą░ą│ąĖ, čćč鹊ą▒čŗ ąŠą▒ąĮąŠą▓ąĖčéčī ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą▓čĆčāčćąĮčāčÄ.
ąĀąĄąĘąĄčĆą▓ąĮčŗą╣ čüą┐ąŠčüąŠą▒ ŌĆö ą┐čĆąŠą▓ąĄčĆąĄąĮąĮčŗąĄ ąĘąĄčĆą║ą░ą╗ą░ APK
ąĢčüą╗ąĖ GitHub čĆą░ą▒ąŠčéą░ąĄčé ą╝ąĄą┤ą╗ąĄąĮąĮąŠ, ą╝ąŠąČąĮąŠ ą▓ąŠčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║čĆčāą┐ąĮčŗą╝ąĖ ąĖ ąĮą░ą┤ąĄąČąĮčŗą╝ąĖ ąĘąĄčĆą║ą░ą╗ą░ą╝ąĖ.
APKMirror: ąĘą░ą╣ą┤ąĖč鹥 ąĮą░ čüą░ą╣čé `apkmirror.com`, ąĮą░ą╣ą┤ąĖč鹥 "Meshtastic" ąĖ čüą║ą░čćą░ą╣č鹥 ą┐ąŠčüą╗ąĄą┤ąĮčÄčÄ ą▓ąĄčĆčüąĖčÄ. ąŁč鹊čé čüą░ą╣čé ą┐čĆąŠą▓ąĄčĆčÅąĄčé ą┐ąŠą┤ą┐ąĖčüąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, čćč鹊 ą┤ąĄą╗ą░ąĄčé ąĄą│ąŠ ą▒ąŠą╗ąĄąĄ ą▒ąĄąĘąŠą┐ą░čüąĮčŗą╝, č湥ą╝ čüą╗čāčćą░ą╣ąĮčŗąĄ čüą░ą╣čéčŗ.
[ąÜčĆą░čéą║ą░čÅ ąĖąĮčüčéčĆčāą║čåąĖčÅ ą┤ą╗čÅ ąĮąŠą▓ąĖčćą║ą░ ]
ąĢčüą╗ąĖ ą▓čŗ ąĮąĄ ąŠč湥ąĮčī ąĘąĮą░ą║ąŠą╝čŗ GitHub, ą┐čĆąŠčüč鹊 čüą╗ąĄą┤čāą╣č鹥 čŹč鹊ą╝čā ą┐ą╗ą░ąĮčā:
1 . ąĪą░ą╝čŗą╣ ą┐čĆą░ą▓ąĖą╗čīąĮčŗą╣ ą┐čāčéčī: čāčüčéą░ąĮąŠą▓ąĖč鹥 ą╝ą░ą│ą░ąĘąĖąĮ F-Droid, ą░ ąĖąĘ ąĮąĄą│ąŠ ŌĆö Meshtastic. ąóą░ą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą▒čāą┤ąĄčé ąŠą▒ąĮąŠą▓ą╗čÅčéčīčüčÅ čüą░ą╝ąŠ.2 . ąĪą░ą╝čŗą╣ ą▒čŗčüčéčĆčŗą╣ ą┐čāčéčī: čüą║ą░čćą░ą╣č鹥 ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ čäą░ą╣ą╗ `.apk` ąĖąĘ ąŠčäąĖčåąĖą░ą╗čīąĮąŠą│ąŠ čĆąĄą┐ąŠąĘąĖč鹊čĆąĖčÅ Meshtastic ąĮą░ GitHub ąĖ ąŠčéą║čĆąŠą╣č鹥 ąĄą│ąŠ ąĮą░ č鹥ą╗ąĄč乊ąĮąĄ.
ąÆčüąĄ čŹčéąĖ ą╝ąĄč鹊ą┤čŗ ą░ą▒čüąŠą╗čÄčéąĮąŠ ą╗ąĄą│ą░ą╗čīąĮčŗ ąĖ ą▒ąĄąĘąŠą┐ą░čüąĮčŗ, čéą░ą║ ą║ą░ą║ Meshtastic ŌĆö čŹč鹊 ą┐čĆąŠąĄą║čé čü ąŠčéą║čĆčŗčéčŗą╝ ąĖčüčģąŠą┤ąĮčŗą╝ ą║ąŠą┤ąŠą╝.
[ąĪčüčŗą╗ą║ąĖ ]
1 . Meshtastic: ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÅ ą┐čĆąŠčłąĖą▓ą║ąĖ .2 . Meshtastic Python CLI Guide .3 . Meshtastic Web Client Overview .