|
MAVLink čŹč鹊 ąŠč湥ąĮčī ąŠą▒ą╗ąĄą│č湥ąĮąĮčŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗ ąŠą▒ą╝ąĄąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅą╝ąĖ ą┤ą╗čÅ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ čü ą┤čĆąŠąĮą░ą╝ąĖ (ąĖ ą╝ąĄąČą┤čā ą▒ąŠčĆč鹊ą▓čŗą╝ąĖ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░ą╝ąĖ ą┤čĆąŠąĮąŠą▓).
MAVLink čüą╗ąĄą┤čāąĄčé čüąŠą▓čĆąĄą╝ąĄąĮąĮąŠą╣ ą│ąĖą▒čĆąĖą┤ąĮąŠą╣ čüčģąĄą╝ąĄ ą┐čāą▒ą╗ąĖą║ą░čåąĖąĖ-ą┐ąŠą┤ą┐ąĖčüą║ąĖ (publish-subscribe) ąĖ čłą░ą▒ą╗ąŠąĮčā ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĖ ą▓ąĘą░ąĖą╝ąŠčüą▓čÅąĘąĖ č鹊čćą║ą░-č鹊čćą║ą░ (point-to-point): ą┐ąŠč鹊ą║ąĖ ą┤ą░ąĮąĮčŗčģ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ / ą┐čāą▒ą╗ąĖą║čāčÄčéčüčÅ ą║ą░ą║ č鹥ą╝čŗ (topics), ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗčģ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓, čéą░ą║ąĖčģ ą║ą░ą║ ą┐čĆąŠč鹊ą║ąŠą╗ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ (mission protocol) ąĖą╗ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ (parameter protocol) čÅą▓ą╗čÅąĄčéčüčÅ point-to-point čü ą┐ąŠą▓č鹊čĆąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░č湥ą╣ (retransmission).
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čĆą░čüčłąĖčäčĆąŠą▓ą║čā ąĮąĄąĘąĮą░ą║ąŠą╝čŗčģ č鹥čĆą╝ąĖąĮąŠą▓ ąĖ čüąŠą║čĆą░čēąĄąĮąĖą╣ čüą╝. ą▓ ąĪą╗ąŠą▓ą░čĆąĖą║ąĄ MAVLink, ą▓ ą║ąŠąĮčåąĄ čüčéą░čéčīąĖ.
ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčéčüčÅ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ čüą┐ąŠčüąŠą▒ąŠą╝ č湥čĆąĄąĘ čäą░ą╣ą╗čŗ XML [2]. ąÜą░ąČą┤čŗą╣ čäą░ą╣ą╗ XML ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ąĮą░ą▒ąŠčĆ čüąŠąŠą▒čēąĄąĮąĖą╣, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ čćą░čüčéąĮąŠą╣ čüąĖčüč鹥ą╝ąŠą╣ MAVLink, čćč鹊 čéą░ą║ąČąĄ ąĮą░ąĘčŗą▓ą░čÄčé ą┤ąĖą░ą╗ąĄą║č鹊ą╝. ąØą░ą▒ąŠčĆ čüą┐čĆą░ą▓ąŠčćąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣, čĆąĄą░ą╗ąĖąĘčāąĄą╝čŗą╣ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠą╝ ąĮą░ąĘąĄą╝ąĮčŗčģ čüčéą░ąĮčåąĖą╣ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖ ą░ą▓č鹊ą┐ąĖą╗ąŠč鹊ą▓, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą▓ common.xml (ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ ą┤ąĖą░ą╗ąĄą║č鹊ą▓ čüčéčĆąŠąĖčéčüčÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ čŹč鹊ą│ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ).
ąōąĄąĮąĄčĆą░č鹊čĆčŗ ą║ąŠą┤ą░ [3] čüąŠąĘą┤ą░čÄčé ąĖąĘ čŹčéąĖčģ XML-ąŠą┐ąĖčüą░ąĮąĖą╣ ą│ąŠč鹊ą▓čŗąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ čÅąĘčŗą║ąŠą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ. ąŁčéąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ ą▓ ą┤čĆąŠąĮą░čģ, ąĮą░ąĘąĄą╝ąĮčŗčģ čüčéą░ąĮčåąĖčÅčģ (ą┐čāą╗čīčéą░čģ) čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ąĖ ą▓ ą┤čĆčāą│ąĖčģ MAVLink-čüąĖčüč鹥ą╝ą░čģ. ąōąĄąĮąĄčĆąĖčĆčāąĄą╝čŗąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ąŠą▒čŗčćąĮąŠ ąĖą╝ąĄčÄčé ąĘą░čēąĖčéčā ą╗ąĖčåąĄąĮąĘąĖąĄą╣ MIT, ąĖ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ą╝ąŠą│čāčé ą▒ąĄąĘ ą║ą░ą║ąĖčģ-ą╗ąĖą▒ąŠ ąŠą│čĆą░ąĮąĖč湥ąĮąĖą╣ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ ą╗čÄą▒čŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ, ą▓ č鹊ą╝ čćąĖčüą╗ąĄ ąĖ čü ąĘą░ą║čĆčŗčéčŗą╝ ąĖčüčģąŠą┤ąĮčŗą╝ ą║ąŠą┤ąŠą╝.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: C-čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ čüąŠčüč鹊ąĖčé ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ čüąŠčüč鹊ąĖčé č鹊ą╗čīą║ąŠ ąĖąĘ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗčģ čäą░ą╣ą╗ąŠą▓ (*.h), ąĖ ąŠąĮą░ ąČąĄčüčéą║ąŠ ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮą░, čćč鹊 čģąŠčĆąŠčłąŠ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ čüąĖčüč鹥ą╝, ąŠą│čĆą░ąĮąĖč湥ąĮąĮčŗčģ ą┐ąŠ čĆąĄčüčāčĆčüą░ą╝ ą┐ą░ą╝čÅčéąĖ (RAM, flash). ąŁč鹊 ą┐čĆąŠą▓ąĄčĆąĄąĮąĮąŠąĄ čĆąĄčłąĄąĮąĖąĄ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠąĄ ą▓ąŠ ą╝ąĮąŠą│ąĖčģ ą┐čĆąŠą┤čāą║čéą░čģ, ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čÄčēąĄąĄ ąĮą░ą┤ąĄąČąĮąŠąĄ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖąĄ ą╝ąĄąČą┤čā ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░ą╝ąĖ ąŠčé čĆą░ąĘąĮčŗčģ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣.
ąÜą╗čÄč湥ą▓čŗąĄ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéąĖ MAVlink:
ŌĆó ą×č湥ąĮčī ą▓čŗčüąŠą║ą░čÅ čŹčäč乥ą║čéąĖą▓ąĮąŠčüčéčī. MAVLink 1 ąĖčüą┐ąŠą╗čīąĘčāąĄčé č鹊ą╗čīą║ąŠ 8 ą▒ą░ą╣čé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąĮą░ ą┐ą░ą║ąĄčé, ą▓ą║ą╗čÄčćą░čÄčēąĄą╣ ą┐ąŠą┤ą┤ąĄčƹȹ║čā čüąĖą│ąĮą░ą╗ą░ čüčéą░čĆčéą░ (start sign) ąĖ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąŠą┐čāčüą║ą░ ą┐ą░ą║ąĄčéą░ (packet drop). MAVLink 2 ąĖčüą┐ąŠą╗čīąĘčāąĄčé čāąČąĄ 14 ą▒ą░ą╣čé čüą╗čāąČąĄą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ (ąŠą┤ąĮą░ą║ąŠ čŹč鹊čé ą┐čĆąŠč鹊ą║ąŠą╗ ą▒ąŠą╗ąĄąĄ ą▒ąĄąĘąŠą┐ą░čüąĮčŗą╣ ąĖ čĆą░čüčłąĖčĆčÅąĄą╝čŗą╣). ą¤ąŠčüą║ąŠą╗čīą║čā MAVLink ąĮąĄ čéčĆąĄą▒čāąĄčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą│ąŠ ą║ą░ą┤čĆąĖčĆąŠą▓ą░ąĮąĖčÅ, ąŠąĮ ąŠč湥ąĮčī čģąŠčĆąŠčłąŠ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą│ą┤ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąŠč湥ąĮčī ąŠą│čĆą░ąĮąĖč湥ąĮąĮą░čÅ ą┐ąŠą╗ąŠčüą░ ą┐čĆąŠą┐čāčüą║ą░ąĮąĖčÅ ą║ą░ąĮą░ą╗ą░.
ŌĆó ą×č湥ąĮčī ąĮą░ą┤ąĄąČąĮčŗą╣. MAVLink ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čü 2009 ą│ąŠą┤ą░ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą╝ąĄąČą┤čā čĆą░ąĘą╗ąĖčćąĮčŗą╝ąĖ ą╝ąŠą┤ąĄą╗čÅą╝ąĖ, ą┐čāą╗čīčéą░ą╝ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (ąĖ ą┤čĆčāą│ąĖą╝ąĖ čāąĘą╗ą░ą╝ąĖ) ą┐ąŠ čĆą░ąĘą╗ąĖčćąĮčŗą╝ ąĖ čüą╗ąŠąČąĮčŗą╝ ą║ą░ąĮą░ą╗ą░ą╝ čüą▓čÅąĘąĖ (čü ą▓čŗčüąŠą║ąŠą╣ ąĘą░ą┤ąĄčƹȹ║ąŠą╣ ąĖ čłčāą╝ą░ą╝ąĖ). ą×ąĮ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą╝ąĄč鹊ą┤čŗ ąŠą▒ąĮą░čĆčāąČąĄąĮąĖčÅ ąŠčéą▒čĆą░čüčŗą▓ą░ąĮąĖčÅ, ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖčÅ ą┐ą░ą║ąĄč鹊ą▓ ąĖ ąĖčģ ą░čāč鹥ąĮčéąĖčäąĖą║ą░čåąĖčÄ.
ŌĆó ą£ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╝ąĮąŠąČąĄčüčéą▓ąŠ ą┐ąŠą┐čāą╗čÅčĆąĮčŗčģ čÅąĘčŗą║ąŠą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĮą░ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░čģ ąĖ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčŗčģ čüąĖčüč鹥ą╝ą░čģ (ARM7, ATMega, dsPic, STM32, ą░ čéą░ą║ąČąĄ Windows, Linux, MacOS, Android ąĖ iOS).
ŌĆó ą¤ąŠąĘą▓ąŠą╗čÅąĄčé čüąŠčüčāčēąĄčüčéą▓ąŠą▓ą░čéčī ą▓ čüąĄčéąĖ ą┤ąŠ 255 ą║ąŠąĮą║čāčĆąĄąĮčéąĮčŗčģ čüąĖčüč鹥ą╝ (ą╝ąŠą┤ąĄą╗ąĖ, ą┐čāą╗čīčéčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ąĖ čé. ą┤.).
ŌĆó ą¤ąŠąĘą▓ąŠą╗čÅąĄčé čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą║ą░ą║ ą▓ąĮąĄčłąĮąĖąĄ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ (offboard, čé. ąĄ. ą║ą░ą║ ą┐čĆąĖą╝ąĄčĆ ą╝ąĄąČą┤čā ąĮą░ąĘąĄą╝ąĮąŠą╣ čüčéą░ąĮčåąĖąĄą╣ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖ ą┤čĆąŠąĮąŠą╝), čéą░ą║ ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ (onboard, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą╝ąĄąČą┤čā ą░ą▓č鹊ą┐ąĖą╗ąŠč鹊ą╝ ąĖ ą▒ąŠčĆč鹊ą▓ąŠą╣ ą║ą░ą╝ąĄčĆąŠą╣, čāą┐čĆą░ą▓ą╗čÅąĄą╝ąŠą╣ č湥čĆąĄąĘ MAVLink).
ąĪą┐ąĖčüąŠą║ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ čÅąĘčŗą║ąŠą▓ ąĖ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą▓ čüą╝. [1].
ą×čéą╗ąĖčćąĖąĄ ą▓ąĄčĆčüąĖą╣ MAVLink 1 ąĖ MAVLink 2. ąÆ ąŠčüąĮąŠą▓ąĮąŠą╝ ą┐čĆąŠč鹊ą║ąŠą╗ ą▓ąĄčĆčüąĖąĖ 2 čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ ą║ą░ą║ čĆą░čüčłąĖčĆąĄąĮąĖąĄ ą▓ąĄčĆčüąĖąĖ 1, čé. ąĄ. ą▓ ą▓ąĄčĆčüąĖąĖ 2 čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ąŠą▒čĆą░čéąĮą░čÅ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéčī čü ą┐čĆąŠč鹊ą║ąŠą╗ąŠą╝ ą▓ąĄčĆčüąĖąĖ 1. ą£ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ą┐ą░ą║ąĄčéą░ čā MAVLink v1.0 čüąŠčüčéą░ą▓ą╗čÅąĄčé 263 ą▒ą░ą╣čéą░, ą░ čā MAVLink v2.0 čüąŠčüčéą░ą▓ą╗čÅąĄčé 280 ą▒ą░ą╣čé, ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ čā ąŠą▒ąŠąĖčģ ą▓ąĄčĆčüąĖą╣ 255 ą▒ą░ą╣čé (ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą╝ą░ą║čĆąŠčüąŠą╝ MAVLINK_MAX_PAYLOAD_LEN ą▓ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ mavlink_types.h čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ). ąÆąĄčĆąŠčÅčéąĮąŠ čĆą░ąĘą╝ąĄčĆ ą┐ą░ą║ąĄčéą░ ą▒čŗą╗ ą▓čŗą▒čĆą░ąĮ čü ą┐čĆąĖą▓čÅąĘą║ąŠą╣ ą║ LoRa. ąæąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ ą┐čĆąŠ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéąĖ ą▓ąĄčĆčüąĖą╣ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čüą╝. [7].
[ą¤ąŠčłą░ą│ąŠą▓ąŠąĄ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ą┤ą╗čÅ ąĮąŠą▓ąĖčćą║ą░]
1. ą×ą┐čĆąĄą┤ąĄą╗ąĖč鹥čüčī čü ą┤ąĖą░ą╗ąĄą║č鹊ą╝ ą▓ą░čłąĄą│ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ MAVlink. ąó. ąĄ. ąĮčāąČąĮąŠ ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖčéčī XML-čäą░ą╣ą╗, ą│ą┤ąĄ ą▒čāą┤čāčé ąŠą┐ąĖčüą░ąĮčŗ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░. ąŚą░ ąŠčüąĮąŠą▓čā ą╝ąŠąČąĮąŠ ą▓ąĘčÅčéčī ą│ąŠč鹊ą▓čŗą╣ XML-čäą░ą╣ą╗ ąĖąĘ ą┐ą░ą┐ą║ąĖ message_definitions/v1.0 čĆąĄą┐ąŠąĘąĖč鹊čĆąĖčÅ [4].
2. ąĪą║ą░čćą░ą╣č鹥 ą┐ą░ą║ąĄčé ą│ąĄąĮąĄčĆą░č鹊čĆą░ C-ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ. ąĀąĄą║ąŠą╝ąĄąĮą┤čāčÄ čāčéąĖą╗ąĖčéčā mavlink [5], ąŠąĮą░ ąĮą░ą┐ąĖčüą░ąĮą░ ąĮą░ Python ąĖ ąĖą╝ąĄąĄčé ą┐čĆąŠčüč鹊ą╣ ąĖąĮč鹥čĆč乥ą╣čü ą║ą░ą║ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ, čéą░ą║ ąĖ GUI. ąĢčüą╗ąĖ čā ą▓ą░čü ą▓ąŠąĘąĮąĖą║ą╗ąĖ čéčĆčāą┤ąĮąŠčüčéąĖ čü čāčüčéą░ąĮąŠą▓ą║ąŠą╣, č鹊 čüą╝. ą▓čĆąĄąĘą║čā ąĮąĖąČąĄ.
MAVLink Toolchain čŹč鹊 ą┐ą░ą║ąĄčé čāčéąĖą╗ąĖčé, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗą╣ ą┤ą╗čÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ MAVLink ąĖąĘ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠą│ąŠ XML-čäą░ą╣ą╗ą░ čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ ą┤ąĖą░ą╗ąĄą║čéą░.
ąÆ čüąŠčüčéą░ą▓ čŹč鹊ą│ąŠ ą┐ą░ą║ąĄčéą░ ą▓čģąŠą┤čÅčé XML-ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ MAVLink [2], ą░ čéą░ą║ąČąĄ 2 ą▓ą░čĆąĖą░ąĮčéą░ čāčéąĖą╗ąĖčéčŗ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ, ąŠą▒ą░ ąĮą░ą┐ąĖčüą░ąĮčŗ ąĮą░ Python: ąŠą┤ąĮą░ čü ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ, ą┤čĆčāą│ą░čÅ GUI. ą×ą▒ąĄ čāčéąĖą╗ąĖčéčŗ ą│ąĄąĮąĄčĆąĖčĆčāčÄčé ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ MAVLink ąĮą░ ą▓čŗą▒čĆą░ąĮąĮąŠą╝ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ čÅąĘčŗą║ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ. ąöąŠčüčéčāą┐ąĮčŗ ą▓ą░čĆąĖą░ąĮčéčŗ čÅąĘčŗą║ąŠą▓ ą┤ą╗čÅ ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝ąŠą╣ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ: C, C++11, CS, Java, JavaScript, JavaScript_Stable, JavaScript_NextGen, TypeScript, Python, Python2, Python3, Lua, WLua, ObjC, Swift, čéą░ą║ąČąĄ ą╝ąŠąČąĮąŠ ą▓čŗą▒čĆą░čéčī ą▓ąĄčĆčüąĖčÄ ą┐čĆąŠč鹊ą║ąŠą╗ą░ MAVLink: 1.0 ąĖą╗ąĖ 2.0.
ąŚą░ą╝ąĄčćą░ąĮąĖąĄ: ą▓ą░ą╝ ąĮąĄ ąĮčāąČąĮąŠ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčī čŹč鹊čé čéčāą╗č湥ą╣ąĮ, ąĄčüą╗ąĖ ą▓čŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 čÅąĘčŗą║ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ C ąĖ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą┤ąĖą░ą╗ąĄą║čé [2] ą┤ą╗čÅ čüą▓ąŠąĄą│ąŠ ą┐čĆąŠąĄą║čéą░. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┐čĆąŠčüč鹊 ąĘą░ą│čĆčāąĘąĖč鹥 ą│ąŠč鹊ą▓čŗąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ (čüą╝. Prebuilt MAVLink C Libraries) ą┐ąĄčĆąĄą╣ą┤ąĖč鹥 ą║ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ą┐ąŠ ąĖąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÄ (čüą╝. Using C Libraries).
ą¦č鹊ą▒čŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī MAVLink, ą▓ą░ą╝ ą┐ąŠąĮą░ą┤ąŠą▒čÅčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ:
Python 3
Python 3 Pip
TkInter (ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ Python, ą║ąŠč鹊čĆą░čÅ ąĮčāąČąĮą░ ą┤ą╗čÅ GUI-čāčéąĖą╗ąĖčéčŗ ą│ąĄąĮąĄčĆą░č鹊čĆą░), ąŠąĮą░ ą▓ą║ą╗čÄč湥ąĮą░ ą▓ Python 3.7.
ąĢčüą╗ąĖ ą▓čŗ čüąŠąĘą┤ą░ąĄč鹥 ąĮąŠą▓čŗąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ XML, č鹊 ą┤ąŠą╗ąČąĮčŗ čāčüčéą░ąĮąŠą▓ąĖčéčī lxml ąĖ libxml2 ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ ąĮą░ ą║ąŠčĆčĆąĄą║čéąĮąŠčüčéčī XML ąĖ ą┤ą╗čÅ č乊čĆą╝ą░čéąĖčĆąŠą▓ą░ąĮąĖčÅ XML.
[ąŻčüčéą░ąĮąŠą▓ą║ą░ MAVLink toolchain]
1. ąŻčüčéą░ąĮąŠą▓ąĖč鹥 Python 3.7+:
ąØą░ Windows: ąĘą░ą│čĆčāąĘąĖč鹥 Python for Windows (https://www.python.org/downloads/).
Ubuntu Linux ą┐čĆąŠą▓ąĄčĆčīč鹥, čćč鹊 čā ą▓ą░čü čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ Python ąĖ Pip:
$ sudo apt install python3 python3-pip
2. ąÆčŗą┐ąŠą╗ąĮąĖč鹥 ą║ą╗ąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ąŠčäąĖčåąĖą░ą╗čīąĮąŠą│ąŠ čĆąĄą┐ąŠąĘąĖč鹊čĆąĖčÅ mavlink:
$ git clone https://github.com/mavlink/mavlink.git --recursive
3. ąŻčüčéą░ąĮąŠą▓ąĖč鹥 čéčĆąĄą▒čāąĄą╝čŗąĄ ą┐ą░ą║ąĄčéčŗ:
$ python3 -m pip install -r pymavlink/requirements.txt
ąóąĄą┐ąĄčĆčī čā ą▓ą░čü ąĄčüčéčī ą▓čüąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠąĄ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ NAVLink [3].
ąōąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą║ąŠą┤ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ MAVLink ą╝ąŠąČąĮąŠ čü ą┐ąŠą╝ąŠčēčīčÄ ą┤ą▓čāčģ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗčģ ąĖąĮčüčéčĆčāą╝ąĄąĮč鹊ą▓:
ŌĆó GUI-čāčéąĖą╗ąĖčéą░: mavgenerate.
ŌĆó ąŻčéąĖą╗ąĖčéą░ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ: mavgen, ą║ąŠč鹊čĆą░čÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čāčéąĖą╗ąĖč鹊ą╣ mavgenerate ą║ą░ą║ č乊ąĮąŠą▓čŗą╣ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖą╣.
ąŁčéąĖ čāčéąĖą╗ąĖčéčŗ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą▓ ą╝ąŠą│čāčé čüąĖąĮč鹥ąĘąĖčĆąŠą▓ą░čéčī ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ą▓ąĄčĆčüąĖą╣ MAVLink 2 ąĖ MAVLink 1 ą┤ą╗čÅ čüą╗ąĄą┤čāčÄčēąĖčģ čÅąĘčŗą║ąŠą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ: C, C++11, CS, Java, JavaScript, JavaScript_Stable, JavaScript_NextGen, TypeScript, Python, Python2, Python3, Lua, WLua, ObjC, Swift. ąöą╗čÅ MAVLink 1 ą┤ąŠčüčéčāą┐ąĮčŗ č鹊ą╗čīą║ąŠ čÅąĘčŗą║ąĖ C#, JavaScript, ObjC, Swift.
ą¤čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮčŗąĄ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ. ąŻ ą▓ą░čü ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ MAVLink toolchain (čüą╝. ą▓čĆąĄąĘą║čā ą▓čŗčłąĄ), ą│ą┤ąĄ čüąŠą┤ąĄčƹȹ░čéčüčÅ ą║ą░ą║ čāčéąĖą╗ąĖčéčŗ mavgenerate ąĖ mavgen, čéą░ą║ ąĖ XML-ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čüąŠąŠą▒čēąĄąĮąĖą╣ [2]. ąĢčüą╗ąĖ ą▓čŗ ą│ąĄąĮąĄčĆąĖčĆčāąĄč鹥 čüąŠąŠą▒čēąĄąĮąĖčÅ ą┤ą╗čÅ čüą▓ąŠąĄą│ąŠ ą┤ąĖą░ą╗ąĄą║čéą░, č鹊 čüą┤ąĄą╗ą░ą╣č鹥 ą║ąŠą┐ąĖčÄ čäą░ą╣ą╗ą░ (čäą░ą╣ą╗ąŠą▓) ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖą╣ ą▓ ą┤ąĖčĆąĄą║č鹊čĆąĖčÄ message_definitions/v1.0/.
[ąĪą▒ąŠčĆą║ą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ čü ą┐ąŠą╝ąŠčēčīčÄ Mavgenerate GUI]
ą¤čĆąŠą│čĆą░ą╝ą╝ą░ mavgenerate.py čŹč鹊 Python-čüą║čĆąĖą┐čé ą│čĆą░čäąĖč湥čüą║ąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ ą┤ą╗čÅ MAVLink. ą×ąĮą░ ą┐ąŠą┤ ą║ą░ą┐ąŠč鹊ą╝ ąĘą░ą┐čāčüą║ą░ąĄčé čāčéąĖą╗ąĖčéčā ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ mavgen, ąĖ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé č鹥 ąČąĄ čüą░ą╝čŗąĄ ąŠą┐čåąĖąĖ.
GUI-čāčéąĖą╗ąĖčéčā ą╝ąŠąČąĮąŠ ąĘą░ą┐čāčüčéąĖčéčī ą▓ ą╗čÄą▒ąŠą╝ ą╝ąĄčüč鹥, čāą║ą░ąĘą░ą▓ ą░čĆą│čāą╝ąĄąĮčé -m ą▓ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĄ Python:
$ python3 -m mavgenerate
ąÆ ą┐ąŠčüą╗ąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čŹč鹊ą╣ ą║ąŠą╝ą░ąĮą┤čŗ ą▓čŗ čāą▓ąĖą┤ąĖč鹥 čüą╗ąĄą┤čāčÄčēąĖą╣ ąĖąĮč鹥čĆč乥ą╣čü:
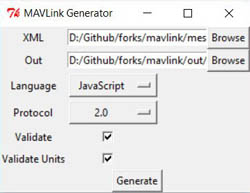
ąöą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥čćąĮąŠą│ąŠ ą║ąŠą┤ą░ MAVLink ą▓čŗą┐ąŠą╗ąĮąĖč鹥 čüą╗ąĄą┤čāčÄčēąĖąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ:
1. ąÆčŗą▒ąĄčĆąĖč鹥 čåąĄą╗ąĄą▓ąŠą╣ čäą░ą╣ą╗ XML, ąĖąĘ ą║ąŠč鹊čĆąŠą│ąŠ ą┤ąŠą╗ąČąĮą░ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčīčüčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ (ą║ąĮąŠą┐ą║ą░ Browse ąĮą░ą┐čĆąŠčéąĖą▓ ą┐ąŠą╗čÅ ą▓ą▓ąŠą┤ą░ XML). ąŁč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ą║ą░ą║ ą│ąŠč鹊ą▓čŗą╣ čäą░ą╣ą╗, ąĮą░ą┐čĆąĖą╝ąĄčĆ ąŠą┤ąĖąĮ ąĖąĘ XML-čäą░ą╣ą╗ąŠą▓ ą║ą░čéą░ą╗ąŠą│ą░ mavlink/message_definitions/1.0, čéą░ą║ ąĖ ą▓ą░čł čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╣ čäą░ą╣ą╗, čüąŠąĘą┤ą░ąĮąĮčŗą╣ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą┐čĆąĖą╝ąĄčĆą░.
ąĢčüą╗ąĖ ą▓čŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╣ ą┤ąĖą░ą╗ąĄą║čé, č鹊 čüą║ąŠą┐ąĖčĆčāą╣č鹥 ą▓ ą┐ą░ą┐ą║čā XML-čäą░ą╣ą╗ą░ ą▓ą░čłąĄą│ąŠ ą┤ąĖą░ą╗ąĄą║čéą░ čéą░ą║ąČąĄ čäą░ą╣ą╗čŗ all.xml, common.xml, minimal.xml, ą▓ąĘčÅčéčŗąĄ ąĖąĘ ą║ą░čéą░ą╗ąŠą│ą░ mavlink/message_definitions/1.0. ą×ąĮąĖ ą╝ąŠą│čāčé ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ ąĖ ą┤ąŠą╗ąČąĮčŗ ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą▓ ąŠą┤ąĮąŠą╣ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ, ąĄčüą╗ąĖ ą▓ą░čł ą┤ąĖą░ą╗ąĄą║čé ąĘą░ą▓ąĖčüąĖčé ąŠčé čŹčéąĖčģ čäą░ą╣ą╗ąŠą▓. ąÜą░ą║ ą▓ą░čĆąĖą░ąĮčé ą╝ąŠąČąĮąŠ čüą┤ąĄą╗ą░čéčī ą║ąŠą┐ąĖčÄ ą▓ą░čłąĄą│ąŠ ą┤ąĖą░ą╗ąĄą║čéą░ ą▓ ą║ą░čéą░ą╗ąŠą│ mavlink/message_definitions/1.0 ąĖ ą▓čŗą▒čĆą░čéčī čäą░ą╣ą╗ ą▓ą░čłąĄą│ąŠ ą┤ąĖą░ą╗ąĄą║čéą░ ąĖąĘ čŹč鹊ą│ąŠ ą║ą░čéą░ą╗ąŠą│ą░.
2. ąÆčŗą▒ąĄčĆąĖč鹥 čåąĄą╗ąĄą▓čāčÄ ą┤ąĖčĆąĄą║č鹊čĆąĖčÄ, ą║čāą┤ą░ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮą░ ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝ą░čÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ (ą║ąĮąŠą┐ą║ą░ Browse ąĮą░ą┐čĆąŠčéąĖą▓ ą┐ąŠą╗čÅ ą▓ą▓ąŠą┤ą░ Out). ąŁč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗čÄą▒ą░čÅ ą┐čāčüčéą░čÅ ą┐ą░ą┐ą║ą░ ąĮą░ ą┤ąĖčüą║ąĄ (ąĮą░ą┐čĆąĖą╝ąĄčĆ mavlink/include).
3. ąÆčŗą▒ąĄčĆąĖč鹥 ąŠą┤ąĖąĮ ąĖąĘ ą▓ą░čĆąĖą░ąĮč鹊ą▓ čÅąĘčŗą║ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ (ą║ąĮąŠą┐ą║ąŠą╣ čüą┐čĆą░ą▓ą░ ąŠčé ą╝ąĄčéą║ąĖ Language), ą┤ą╗čÅ ą║ąŠč鹊čĆąŠą│ąŠ ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░.
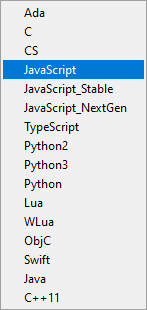
ąÆ čćą░čüčéąĮąŠčüčéąĖ, ą┤ą╗čÅ JavaScript ąĄčüčéčī 3 ąŠą┐čåąĖąĖ:
ŌĆó JavaScript_Stable čŹč鹊 čüčéą░čĆą░čÅ ą▓ąĄčĆčüąĖčÅ, ą║ąŠč鹊čĆą░čÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé č鹊ą╗čīą║ąŠ MAVLink 1.0.
ŌĆó JavaScript_NextGen ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČą░čÅ ą▓ąĄčĆčüąĖčÅ, ą║ąŠč鹊čĆą░čÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé MAVLink 1 ąĖ 2 čü ą┐ąŠą┤ą┐ąĖčüčīčÄ.
ŌĆó JavaScript čŹč鹊 "ą┤ąŠą▓ąĄčĆąĄąĮąĮčŗą╣ ą▓ą░čĆąĖą░ąĮčé" ą┤ą╗čÅ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝ąŠą╣ ą▓ąĄčĆčüąĖąĖ. ąÆ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé JavaScript_Stable.
4. ąÆčŗą▒ąĄčĆąĖč鹥 čåąĄą╗ąĄą▓čāčÄ ą▓ąĄčĆčüąĖčÄ ą┐čĆąŠč鹊ą║ąŠą╗ą░ MAVLink (ą║ąĮąŠą┐ą║ą░ čüą┐čĆą░ą▓ą░ ąŠčé ą╝ąĄčéą║ąĖ Protocol). ąĢčüą╗ąĖ ą│ąĄąĮąĄčĆą░č鹊čĆ ą┤ą╗čÅ ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ čÅąĘčŗą║ą░ čŹč鹊 ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé, č鹊 ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 2.0.
ą¤čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖąĄ: ą┐ąŠą┐čŗčéą║ą░ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąĘą░ą║ąŠąĮčćąĖčéčüčÅ ąĮąĄčāą┤ą░č湥ą╣, ąĄčüą╗ąĖ ą▓čŗą▒čĆą░ąĮąĮą░čÅ ą▓ąĄčĆčüąĖčÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ MAVLink ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┤ą╗čÅ ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ čÅąĘčŗą║ą░.
5. ą×ą┐čåąĖąŠąĮą░ą╗čīąĮąŠ ą┐ąŠčüčéą░ą▓čīč鹥 ą│ą░ą╗ąŠčćą║ąĖ Validate ąĖ/ąĖą╗ąĖ Validate Units, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąŠą▓ąĄčĆčÅčÄčé čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ XML.
6. ąÜą╗ąĖą║ąĮąĖč鹥 ąĮą░ ą║ąĮąŠą┐ą║čā Generate.
[ąōąĄąĮąĄčĆą░čåąĖčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ čü ą┐ąŠą╝ąŠčēčīčÄ Mavgen Command Line Tool]
ąĪą║čĆąĖą┐čé mavgen.py čŹč鹊 čāčéąĖą╗ąĖčéą░ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ MAVLink ą┤ą╗čÅ čĆą░ąĘą╗ąĖčćąĮčŗčģ čÅąĘčŗą║ąŠą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ. ąÆčŗ ą╝ąŠąČąĄč鹥 ąĘą░ą┐čāčüčéąĖčéčī čāčéąĖą╗ąĖčéčā mavgen ąĖąĘ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ mavlink. ą×ą┤ąĮą░ą║ąŠ ąĄčüą╗ąĖ ą▓čŗ čĆąĄčłąĖą╗ąĖ ąĘą░ą┐čāčüą║ą░čéčī ąĄčæ ąĖąĘ ą╗čÄą▒ąŠą│ąŠ ą║ą░čéą░ą╗ąŠą│ą░, č鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┤ąŠą▒ą░ą▓ąĖčéčī ą┐čāčéčī ą┤ąŠ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ mavlink ą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ ąŠą║čĆčāąČąĄąĮąĖčÅ PYTHONPATH.
ąŚą░ą╝ąĄčćą░ąĮąĖąĄ: čüą║čĆąĖą┐čé mavgen.py čÅą▓ą╗čÅąĄčéčüčÅ backend-ąŠą╝, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčé GUI mavgenerate. ąÆčüąĄ, čćč鹊 ąŠą┐ąĖčüą░ąĮąŠ ą┤ą░ą╗ąĄąĄ, ąŠčéąĮąŠčüąĖčéčüčÅ ą║ ąŠą▒ąŠąĖą╝ čāčéąĖą╗ąĖčéą░ą╝, ą║ą░ą║ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ, čéą░ą║ ąĖ GUI. ą×ą┤ąĮą░ą║ąŠ čüčāčēąĄčüčéą▓čāąĄčé ąŠčéą╗ąĖčćąĖąĄ ą▓ čüąĖąĮčéą░ą║čüąĖčüąĄ ą┤ą╗čÅ ąŠą┐čåąĖąĖ --output: GUI-čāčéąĖą╗ąĖčéą░ ąĘą░ą┤ą░ąĄčé ąĖą╝čÅ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čäą░ą╣ą╗ą░, ą░ čāčéąĖą╗ąĖčéą░ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ ąĖą╝čÅ ą▓čŗčģąŠą┤ąĮąŠą╣ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ.
ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮ ą┐čĆąĖą╝ąĄčĆ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ MAVLink 2 ą┤ą╗čÅ čÅąĘčŗą║ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ C ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą┤ąĖą░ą╗ąĄą║čéą░ my_dialect.xml:
$ python3 -m pymavlink.tools.mavgen --lang=C --wire-protocol=2.0 \
--output=generated/include/mavlink/v2.0 message_definitions/v1.0/my_dialect.xml
ą×ą┐ąĖčüą░ąĮąĖąĄ čüąĖąĮčéą░ą║čüąĖčüą░ ąĖ ąŠą┐čåąĖą╣ ą╝ąŠąČąĮąŠ ą┐ąŠą┤čüą╝ąŠčéčĆąĄčéčī, ąĘą░ą┐čāčüčéąĖą▓ mavgen.py čü čäą╗ą░ą│ąŠą╝ -h:
$ cd ~/mavlink/pymavlink/tools/
$ python mavgen.py -h
usage: mavgen.py [-h] [-o OUTPUT]
[--lang {Ada,C,CS,JavaScript,JavaScript_Stable,JavaScript_NextGen,
TypeScript,Python2,Python3,Python,Lua,WLua,ObjC,Swift,Java,C++11}]
[--wire-protocol {0.9,1.0,2.0}] [--no-validate]
[--error-limit ERROR_LIMIT] [--strict-units]
XML [XML ...]
ąŁčéą░ čāčéąĖą╗ąĖčéą░ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖą╣ čüąŠąŠą▒čēąĄąĮąĖą╣ MAVLink.
ą¤ąŠąĘąĖčåąĖąŠąĮąĮčŗąĄ ą░čĆą│čāą╝ąĄąĮčéčŗ:
XML ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ MAVLink (ąŠą┐ąĖčüą░ąĮąĖąĄ ą┤ąĖą░ą╗ąĄą║čéą░)
ą×ą┐čåąĖąĖ:
-h, --help ą¤ąŠą║ą░ąČąĄčé čŹčéčā ą┐ąŠą┤čüą║ą░ąĘą║čā ąĖ ąĘą░ą▓ąĄčĆčłąĖčé čĆą░ą▒ąŠčéčā.
-o, --output OUTPUT ąŚą░ą┤ą░ąĄčé ą▓čŗčģąŠą┤ąĮčāčÄ ą┤ąĖčĆąĄą║č鹊čĆąĖčÄ.
--lang {Ada,C,CS,JavaScript,JavaScript_Stable,JavaScript_NextGen,TypeScript,
Python2,Python3,Python,Lua,WLua,ObjC,Swift,Java,C++11}
ą»ąĘčŗą║ ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝ąŠą│ąŠ ą║ąŠą┤ą░ [ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ Python].
--wire-protocol {0.9,1.0,2.0}
ąÆąĄčĆčüąĖčÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ MAVLink [ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 1.0].
--no-validate ąØąĄ ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą┐čĆąŠą▓ąĄčĆą║čā ą║ąŠčĆčĆąĄą║čéąĮąŠčüčéąĖ XML. ą£ąŠąČąĄčé čāčüą║ąŠčĆąĖčéčī
ą│ąĄąĮąĄčĆą░čåąĖčÄ ą║ąŠą┤ą░, ą║ąŠą│ą┤ą░ XML ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░ąĮąĮąŠ ą║ąŠčĆčĆąĄą║čéąĮčŗąĄ.
--error-limit ERROR_LIMIT
ą×ą│čĆą░ąĮąĖč湥ąĮąĖąĄ ąĮą░ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąŠč鹊ą▒čĆą░ąČą░ąĄą╝čŗčģ
ąŠčłąĖą▒ąŠą║ ą┐čĆąŠą▓ąĄčĆą║ąĖ XML.
--strict-units ąÆčŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą┐čĆąŠą▓ąĄčĆą║ąĖ ą░čéčĆąĖą▒čāč鹊ą▓ units.
3. ąĪą│ąĄąĮąĄčĆąĖčĆčāą╣č鹥 ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā, ą┐ąŠą╗čāčćąĖčéčüčÅ ą┐čĆąĖą╝ąĄčĆąĮąŠ ą▓ąŠčé čéą░ą║ąŠą╣ ąĮą░ą▒ąŠčĆ čäą░ą╣ą╗ąŠą▓:
$ tree
.
Ōö£ŌöĆŌöĆ checksum.h
Ōö£ŌöĆŌöĆ mavlink_conversions.h
Ōö£ŌöĆŌöĆ mavlink_helpers.h
Ōö£ŌöĆŌöĆ mavlink_types.h
Ōö£ŌöĆŌöĆ MyMavlink
Ōöé Ōö£ŌöĆŌöĆ mavlink.h
Ōöé Ōö£ŌöĆŌöĆ mavlink_msg_battery_status.h
Ōöé Ōö£ŌöĆŌöĆ mavlink_msg_command_ack.h
Ōöé Ōö£ŌöĆŌöĆ mavlink_msg_command_cancel.h
Ōöé Ōö£ŌöĆŌöĆ mavlink_msg_command_int.h
Ōöé Ōö£ŌöĆŌöĆ mavlink_msg_command_long.h
Ōöé Ōö£ŌöĆŌöĆ mavlink_msg_converter_status.h
Ōöé Ōö£ŌöĆŌöĆ MyMavlink.h
Ōöé Ōö£ŌöĆŌöĆ testsuite.h
Ōöé ŌööŌöĆŌöĆ version.h
ŌööŌöĆŌöĆ protocol.h
2 directories, 15 files
ąĪą║ąŠą┐ąĖčĆčāą╣č鹥 čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĮčŗąĄ čäą░ą╣ą╗čŗ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ą▓ ą║ą░čéą░ą╗ąŠą│ ą▓ą░čłąĄą│ąŠ ą┐čĆąŠąĄą║čéą░.
[ąÜą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī, ąĮą░ ą┐čĆąĖą╝ąĄčĆąĄ ą┐čĆąŠč鹊ą║ąŠą╗ą░ UART]
4. ą¤ąĄčĆąĄą┤ą░čćą░. ąĀąĄą░ą╗ąĖąĘčāą╣č鹥 ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓čāčÄ čäčāąĮą║čåąĖčÄ ą┐ąĄčĆąĄą┤ą░čćąĖ č湥čĆąĄąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé. ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą▓ą░čłąĄą╣ čüąĖčüč鹥ą╝čŗ čŹč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī čäčāąĮą║čåąĖčÅ, ą║ąŠč鹊čĆą░čÅ ą┐ąĄčĆąĄą┤ą░ąĄčé ą┐ąŠ ąŠą┤ąĮąŠą╝čā ą▒ą░ą╣čéčā, ąĖą╗ąĖ čäčāąĮą║čåąĖčÅ, ą║ąŠč鹊čĆą░čÅ ą┐ąĄčĆąĄą┤ą░ąĄčé čüčĆą░ąĘčā ą▒ą╗ąŠą║ ą▒ą░ą╣čé:
comm_send_ch (chan, uint8_t) ążčāąĮą║čåąĖčÅ, ą║ąŠč鹊čĆą░čÅ ą┐ąĄčĆąĄą┤ą░ąĄčé ąŠą┤ąĖąĮ ą▒ą░ą╣čé č湥čĆąĄąĘ MAVlink-ą║ą░ąĮą░ą╗ chan.
MAVLINK_SEND_UART_BYTES(chan, (const uint8_t *)buf, len) ążčāąĮą║čåąĖčÅ, ą║ąŠč鹊čĆą░čÅ ą┐ąĄčĆąĄą┤ą░ąĄčé len ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą▒čāč乥čĆą░ buf č湥čĆąĄąĘ MAVlink-ą║ą░ąĮą░ą╗ chan.
ą¤čĆąĖą╝ąĄčĆ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ, ą┐čĆąŠą▓ąĄčĆą║ąĖ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ą░ą║ąĄč鹊ą▓ čüą╝. ą▓ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĮąŠą╝ čäą░ą╣ą╗ąĄ MyMavlink/testsuite.h.
5. ą¤čĆąĖąĄą╝. ąÆčüčéą░ą▓čīč鹥 ą▓čŗąĘąŠą▓ čäčāąĮą║čåąĖąĖ mavlink_parse_char ąĮą░ ą║ą░ąČą┤ąŠą╝ ą┐ąŠą╗čāčćą░ąĄą╝ąŠą╝ ą▒ą░ą╣č鹥. ąØą░ą┐čĆąĖą╝ąĄčĆ:
// ą¤ąŠą╗čāč湥ąĮą░ ą┐ąŠčĆčåąĖčÅ ąĖąĘ received ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ą▓ ą▒čāč乥čĆąĄ buf.
mavlink_status_t status;
mavlink_message_t msg;
int chan;
int byteidx = 0;
while(byteidx < received)
{
if (mavlink_parse_char(chan, buf[byteidx], &msg, &status))
{
printf("Received message with ID %d, sequence: %d from component %d of system %d\n",
msg.msgid, msg.seq, msg.compid, msg.sysid);
// ąÆ čŹč鹊ą╝ ą╝ąĄčüč鹥 ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą┤ą░ąĮąĮčŗčģ ą▓ čüčéčĆčāą║čéčāčĆą░čģ status ąĖ msg.
memset(&status, 0, sizeof(status));
memset(&msg, 0, sizeof(msg));
}
byteidx++;
}
ążčāąĮą║čåąĖčÅ mavlink_parse_char ąĮą░ą║ą░ą┐ą╗ąĖą▓ą░ąĄčé ąĖ ą┐ą░čĆčüąĖčé ą┐čĆąĖčģąŠą┤čÅčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠ ą┐čĆąŠč鹊ą║ąŠą╗čā MAVlink. ążčāąĮą║čåąĖčÅ ą╝ąŠąČąĄčé ą▓ąĄčĆąĮčāčéčī 0, 1 ąĖą╗ąĖ 2. ąĢčüą╗ąĖ 0, č鹊 ą┤ąĄą╗ą░čéčī ąĮąĖč湥ą│ąŠ ąĮąĄ ąĮą░ą┤ąŠ, ą┐ą░ą║ąĄčé MAVlink ąĄčēąĄ ąĮąĄ ą┐čĆąĖąĮčÅčé. ąĢčüą╗ąĖ čäčāąĮą║čåąĖčÅ ą▓ąŠąĘą▓čĆą░čéąĖą╗ą░ 1, č鹊 čŹč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┐ą░ą║ąĄčé ą▒čŗą╗ čāčüą┐ąĄčłąĮąŠ ą┐čĆąĖąĮčÅčé, ąĖ ą┤ą░ąĮąĮčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮčŗ/ą┐čĆąŠą░ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮčŗ ą▓ čüčéčĆčāą║čéčāčĆą░čģ msg ąĖ status. ąĢčüą╗ąĖ čäčāąĮą║čåąĖčÅ ą▓ąŠąĘą▓čĆą░čéąĖą╗ą░ 2, č鹊 ą┐čĆąŠąĖąĘąŠčłą╗ą░ ąŠčłąĖą▒ą║ą░ CRC.
ąÆ čüą╗čāčćą░ąĄ čāčüą┐ąĄčłąĮąŠą│ąŠ ą▓ąŠąĘą▓čĆą░čéą░ (ą║ąŠą│ą┤ą░ čäčāąĮą║čåąĖčÅ mavlink_parse_char ą▓ąĄčĆąĮčāą╗ą░ 1) ą┤ą░ąĮąĮčŗąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ąĖąĘą▓ą╗ąĄč湥ąĮčŗ ąĖąĘ msg čü ą┐ąŠą╝ąŠčēčīčÄ ą▓čüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčŗčģ čäčāąĮą║čåąĖą╣ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ mavlink_msg_status_get_ąĖą╝čÅ_ą┐ą░čĆą░ą╝ąĄčéčĆą░, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮčŗ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ MyMavlink/mavlink_msg_xxxxxx.h.
ąÆ čüą╗čāčćą░ąĄ ąŠčłąĖą▒ąŠčćąĮąŠą│ąŠ ą▓ąŠąĘą▓čĆą░čéą░ (ą║ąŠą│ą┤ą░ čäčāąĮą║čåąĖčÅ mavlink_parse_char ą▓ąĄčĆąĮčāą╗ą░ 2) ą┤ą░ąĮąĮčŗąĄ ą▓ msg ą╝ąŠą│čāčé ą▒čŗčéčī ąĮąĄą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗ, ąĖ ąĖčģ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī č鹊ą╗čīą║ąŠ čü čāč湥č鹊ą╝ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ čĆąĖčüą║ą░. ąöą░ąĮąĮčŗąĄ ą▓ čüčéčĆčāą║čéčāčĆąĄ status ą╝ąŠąČąĮąŠ ą┐ąŠč鹥ąĮčåąĖą░ą╗čīąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ąŠčåąĄąĮą║ąĖ ą┐čĆąĖčćąĖąĮčŗ ąŠčéą║ą░ąĘą░.
ąÆčŗ ą╝ąŠąČąĄč鹥 ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ą┤ą▓ą░ ąŠą┤ąĖąĮą░ą║ąŠą▓čŗčģ čāčüčéčĆąŠą╣čüčéą▓ą░, čüąŠąĄą┤ąĖąĮąĖčéčī ąĖčģ čüąĖą│ąĮą░ą╗čŗ RXD ąĖ TXD, ąĖ ą┐čĆąŠą▓ąĄčĆąĖčéčī čĆą░ą▒ąŠčéčā ą┐čĆąŠč鹊ą║ąŠą╗ą░ MAVlink ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ mavlink_test_all (ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą▓ MyMavlink/testsuite.h).
[ą¤čĆąĖą╝ąĄčĆ PC-čāčéąĖą╗ąĖčéčŗ MAVlink]
ąĪą║ą░čćą░ą╣č鹥 ąĖ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆčāą╣č鹥 čāčéąĖą╗ąĖčéčā mavlink_control [6].
$ git clone https://github.com/mavlink/c_uart_interface_example.git
$ cd c_uart_interface_example
$ make
ą¤ąŠą┤ą║ą╗čÄčćąĖč鹥 ą▓ą░čłčā čüąĖčüč鹥ą╝čā ą║ UART č鹥čüčéąĖčĆčāąĄą╝ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ą║ąŠą╝ą░ąĮą┤čā:
$ ./mavlink_control -d /dev/ttyUSB1 -b 115200
ąŚą░ą┐čāčüčéąĖč鹥 ą┐ąĄčĆąĄą┤ą░čćčā čüąŠąŠą▒čēąĄąĮąĖą╣ MAVlink ąĮą░ č鹥čüčéąĖčĆčāąĄą╝ąŠą╝ čāčüčéčĆąŠą╣čüčéą▓ąĄ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ąĮą░ ąŠą▒ąŠąĖčģ čüč鹊čĆąŠąĮą░čģ ąŠą▒ą╝ąĄąĮą░ ą┤ąŠą╗ąČąĮčŗ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčīčüčÅ ąŠą┤ąĖąĮą░ą║ąŠą▓čŗąĄ ą┤ąĖą░ą╗ąĄą║čéčŗ MAVlink.
[ąĪą╗ąŠą▓ą░čĆąĖą║ MAVLink]
AGL altitude at ground level, ą▓čŗčüąŠčéą░ ąĮą░ą┤ ąĘąĄą╝ą╗čæą╣.
APM ąŠčéąĮąŠčüąĖčéčüčÅ ą║ ArduPilotMega, čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖą╣ ą┤ąĖą░ą╗ąĄą║čé ąĖą╗ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ ą┐čĆąŠč鹊ą║ąŠą╗ąĄ MAVLink (APM čŹč鹊 ąŠą┤ąĮą░ ąĖąĘ čĆąĄą░ą╗ąĖąĘą░čåąĖą╣ MAVlink).
ARM ąĪąŠą║čĆą░čēąĄąĮąĖąĄ ąŠčé "Armed", ąŠą▒čŗčćąĮąŠ ąŠąĘąĮą░čćą░ąĄčé ąŠ čüčéą░čéčāčüąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ - ą░ą║čéąĖą▓ąĮąŠ ąŠąĮąŠ (ARMED) ąĖą╗ąĖ ąĮąĄą░ą║čéąĖą▓ąĮąŠ (DISARMED).
DCM ąŠąĘąĮą░čćą░ąĄčé Direction Cosine Matrix, ą║ąŠčüąĖąĮčāčüąĮą░čÅ ą╝ą░čéčĆąĖčåą░ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ąŁč鹊 ą╝ą░čéčĆąĖčåą░ 3x3, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ą░čÅ ą┤ą╗čÅ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠą▓ąŠčĆąŠč鹊ą▓, ąĖ čüą┐ąŠčüąŠą▒ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖčÅ ąŠčĆąĖąĄąĮčéą░čåąĖąĖ, čüą▓ąŠą▒ąŠą┤ąĮčŗą╣ ąŠčé gimbal-lock. ąŁč鹊 ą▒ąŠą╗ąĄąĄ ąĮą░ą┤ąĄąČąĮčŗą╣ čüą┐ąŠčüąŠą▒, č湥ą╝ čāą│ą╗čŗ ąŁą╣ą╗ąĄčĆą░, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą┐ąŠčüčéčĆą░ą┤ą░čéčī ą╗čī gimbal lock.
EFI Electronic Fuel Injectors, 菹╗ąĄą║čéčĆąŠąĮąĮąŠ-čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗąĄ č乊čĆčüčāąĮą║ąĖ č鹊ą┐ą╗ąĖą▓ą░.
EKF Extended Kalman Filter, ą░ą╗ą│ąŠčĆąĖčéą╝ ą┤ą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ą┐ąŠąĘąĖčåąĖąĖ, čāčüą║ąŠčĆąĄąĮąĖčÅ ąĖ čāą│ą╗ąŠą▓ąŠą╣ ąŠčĆąĖąĄąĮčéą░čåąĖąĖ MAV ąĮą░ ąŠčüąĮąŠą▓ąĄ ą┤ą░ąĮąĮčŗčģ ą│ąĖčĆąŠčüą║ąŠą┐ąŠą▓, ą║ąŠą╝ą┐ą░čüą░, GPS, čüą║ąŠčĆąŠčüčéąĖ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą▓ąŠąĘą┤čāčģą░ ąĖ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ą▒ą░čĆąŠą╝ąĄčéčĆąĖč湥čüą║ąŠą│ąŠ ą┤ą░ą▓ą╗ąĄąĮąĖčÅ.
ENU East North Up, ąŠčéąĮąŠčüąĖčéčüčÅ ą║ ą║ą░ą┤čĆčā čü ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ ąŠ ą║ąŠąŠčĆą┤ąĖąĮą░čéą░čģ čāčüčéčĆąŠą╣čüčéą▓ą░ (čüą╝. čéą░ą║ąČąĄ NED, FRD, FLU).
ESC ąŠą▒ąŠąĘąĮą░čćą░ąĄčé Electronic Speed Controller, 菹╗ąĄą║čéčĆąŠąĮąĮčŗą╣ čĆąĄą│čāą╗čÅč鹊čĆ čüą║ąŠčĆąŠčüčéąĖ.
FC Flight Controller, ą┐ąŠą╗ąĄčéąĮčŗą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ MAV.
FLU Forward Left Up ąŠčéąĮąŠčüąĖčéčüčÅ ą║ ą║ą░ą┤čĆčā čü ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ ąŠ ą║ąŠąŠčĆą┤ąĖąĮą░čéą░čģ čāčüčéčĆąŠą╣čüčéą▓ą░ (čüą╝. čéą░ą║ąČąĄ NED, ENU, FRD).
FRD Forward Right Down, ąŠčéąĮąŠčüąĖčéčüčÅ ą║ ą║ą░ą┤čĆčā čü ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ ąŠ ą║ąŠąŠčĆą┤ąĖąĮą░čéą░čģ čāčüčéčĆąŠą╣čüčéą▓ą░ (čüą╝. čéą░ą║ąČąĄ NED, ENU, FLU).
GCS Ground Control Station, ąĮą░ąĘąĄą╝ąĮą░čÅ čüčéą░ąĮčåąĖčÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ.
gimbal lock ą┐ąŠč鹥čĆčÅ ąŠą┤ąĮąŠą╣ čüč鹥ą┐ąĄąĮąĖ čüą▓ąŠą▒ąŠą┤čŗ, ą║ąŠč鹊čĆą░čÅ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą║ąŠą│ą┤ą░ ą┤ą▓ą░ ą║ą░čĆą┤ą░ąĮą░ ą│ąĖčĆąŠčüą║ąŠą┐ą░ ą▓čĆą░čēą░čÄčéčüčÅ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ ą┤čĆčāą│ ą┤čĆčāą│čā. ąóąĄčĆą╝ąĖąĮ ąŠčéąĮąŠčüąĖčéčüčÅ ą║ čüą┐ąŠčüąŠą▒čā ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖčÅ čāą│ą╗ąŠą▓čŗčģ ą║ąŠąŠčĆą┤ąĖąĮą░čé ą▓ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ (ą▒ąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ čüą╝. "Understanding Gimbal Lock and how to prevent it").
IMU Inertial Measurement Unit, ąĖąĮąĄčĆčåąĖą░ą╗čīąĮčŗą╣ ąĖąĘą╝ąĄčĆąĖč鹥ą╗čīąĮčŗą╣ ą▒ą╗ąŠą║, ą▓ ą┐čĆąŠčüč鹊čĆąĄčćąĖąĖ ą│ąĖčĆąŠčüą║ąŠą┐ - 菹╗ąĄą║čéčĆąŠąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ, ą║ąŠč鹊čĆąŠąĄ ąĖąĘą╝ąĄčĆčÅąĄčé ąĖ čüąŠąŠą▒čēą░ąĄčé ą┐čĆąĖą╗ąŠąČąĄąĮąĮčāčÄ čüąĖą╗čā, čāą│ą╗ąŠą▓ąŠąĄ čāčüą║ąŠčĆąĄąĮąĖąĄ, ą░ čéą░ą║ąČąĄ ąĖąĮąŠą│ą┤ą░ ąŠčĆąĖąĄąĮčéą░čåąĖčÄ ą▓ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ. ąŁčéąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą░ą║čüąĄą╗ąĄčĆąŠą╝ąĄčéčĆčŗ, ą│ąĖčĆąŠčüą║ąŠą┐čŗ, ą░ čéą░ą║ąČąĄ ąĖąĮąŠą│ą┤ą░ ą╝ą░ą│ąĮąĖč鹊ą╝ąĄčéčĆčŗ. ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą╝ą░ą│ąĮąĖč鹊ą╝ąĄčéčĆ, č鹊 IMU ąĮą░ąĘčŗą▓ą░čÄčé IMMU (ąĖąĘ ąÆąĖą║ąĖą┐ąĄą┤ąĖąĖ).
MAV Micro Air Vehicle, ą┤ąĖčüčéą░ąĮčåąĖąŠąĮąĮąŠ čāą┐čĆą░ą▓ą╗čÅąĄą╝ą░čÅ ą╗ąĄčéą░čÄčēą░čÅ ą╝ąŠą┤ąĄą╗čī.
NED North East Down, ąŠčéąĮąŠčüąĖčéčüčÅ ą║ ą║ą░ą┤čĆčā čü ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ ąŠ ą║ąŠąŠčĆą┤ąĖąĮą░čéą░čģ čāčüčéčĆąŠą╣čüčéą▓ą░ (čüą╝. čéą░ą║ąČąĄ FLU, FRD, ENU).
MSL Mean Sea Level, ą▓čŗčüąŠčéą░ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ čāčĆąŠą▓ąĮčÅ ą╝ąŠčĆčÅ.
Odometry ąŠą┤ąŠą╝ąĄčéčĆąĖčÅ, ąŠčåąĄąĮą║ą░ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą▓ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ, ą┐čĆąĖąĮčåąĖą┐ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą║ąŠč鹊čĆąŠą│ąŠ ąŠčüąĮąŠą▓ą░ąĮ ąĮą░ ą┤ą▓ąĖąČąĖč鹥ą╗ąĄ (ą║ąŠą╗ąĄčüąŠ, ą│čĆąĄą▒ąĮąŠą╣ ą▓ąĖąĮčé).
PPM Pulse-Position Modulation, čäą░ąĘąŠąĖą╝ą┐čāą╗čīčüąĮą░čÅ ą╝ąŠą┤čāą╗čÅčåąĖčÅ.
PWM Pulse Width Modulation, čłąĖčĆąŠčéąĮąŠ-ąĖą╝ą┐čāą╗čīčüąĮą░čÅ ą╝ąŠą┤čāą╗čÅčåąĖčÅ (ą©ąśą£).
RC Remote Control, ą┤ąĖčüčéą░ąĮčåąĖąŠąĮąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ.
ROI Region Of Interest, ąĖąĮč鹥čĆąĄčüčāčÄčēą░čÅ ąŠą▒ą╗ą░čüčéčī.
RPM Revolutions Per Minute, ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąŠą▒ąŠčĆąŠč鹊ą▓ ą▓ ą╝ąĖąĮčāčéčā.
RSSI Received Signal Strength Indicator, ąĖąĮą┤ąĖą║ą░č鹊čĆ čāčĆąŠą▓ąĮčÅ ą┐čĆąĖąĮąĖą╝ą░ąĄą╝ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░.
RTC Real Time Clock, čćą░čüčŗ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ.
UAV Unmanned Aerial Vehicle, ą▒ąĄčüą┐ąĖą╗ąŠčéąĮąĖą║.
UAVCAN ąŠąĘąĮą░čćą░ąĄčé Uncomplicated Application-level Vehicular Computing And Networking. ąŁč鹊 ąŠčéą║čĆčŗčéčŗą╣ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗ ą┤ą╗čÅ čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣ ąĖ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą▓ ą░čŹčĆąŠą║ąŠčüą╝ąĖč湥čüą║ąŠą╣ č鹥čģąĮąĖą║ąĄ ąĖ čĆąŠą▒ąŠč鹊č鹥čģąĮąĖą║ąĄ. ąÉą▒ą▒čĆąĄą▓ąĖą░čéčāčĆą░ ąĘą▓čāčćąĖčé čéą░ą║, ą║ą░ą║ ą▒čāą┤č鹊 ą▓ ą┐čĆąŠč鹊ą║ąŠą╗ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čłąĖąĮą░ CAN, ąĮąŠ ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ čŹč鹊 ąŠčéą┤ąĄą╗čīąĮčŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗ čü čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╝ ą┐čĆąŠąĖčüčģąŠąČą┤ąĄąĮąĖąĄą╝.
VTOL Vertical Take-Off and Landing, ą▓ąĄčĆčéąĖą║ą░ą╗čīąĮčŗą╣ ą▓ąĘą╗ąĄčé ąĖ ą┐ąŠčüą░ą┤ą║ą░.
WIP Work In Progress, ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĄ.
[ąĪčüčŗą╗ą║ąĖ]
1. MAVLink Developer Guide site:mavlink.io.
2. MAVLink: čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ.
3. Generating MAVLink Libraries site:mavlink.io.
4. mavlink / mavlink.
5. Installing MAVLink Toolchain site:mavlink.io.
6. mavlink / c_uart_interface_example.
7. MAVLink Versions site:mavlink.io. |



