|
ąÆ čŹč鹊ą╣ čüčéą░čéčīąĄ ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčéčüčÅ ą┐čĆąĖą╝ąĄčĆ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠą▒ą╝ąĄąĮą░ ą╝ąĄąČą┤čā ą┤ą▓čāą╝čÅ SPI-čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ Rockchip, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą▓ ą║ą░č湥čüčéą▓ąĄ Master ąĖ Slave, ąĖ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠą│ąŠ ą╝ą░ąĮąĖą┐čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ SPI ą▓ user space, čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ ą╝ąĄąČą┤čā Master ąĖ Slave (ą┐ąĄčĆąĄą▓ąŠą┤ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ [1]). ąÉčĆčģąĖą▓ čü ą║ąŠą┤ąŠą╝ ą╝ąŠąČąĮąŠ čüą║ą░čćą░čéčī čü Google-ą┤ąĖčüą║ą░ (čüą╝. čüčüčŗą╗ą║čā ąĮą░ Code.zip ą▓ ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮąŠą╣ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ [1]).
[1. ą£ąŠą┤ąĖčäąĖą║ą░čåąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ Kernel]
1.1. ąĪąŠčģčĆą░ąĮąĖč鹥 čäą░ą╣ą╗ ąĖ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ąŠčćąĖčüčéą║čā, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ą┐ąĄčĆąĄą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÄ.
$ cd ~/SDK_directory/sysdrv/source/kernel
$ cp ./arch/arm/configs/luckfox_rv1106_linux_defconfig .config
$ make ARCH=arm menuconfig
1.2. ąśąĘą╝ąĄąĮąĄąĮąĖąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ
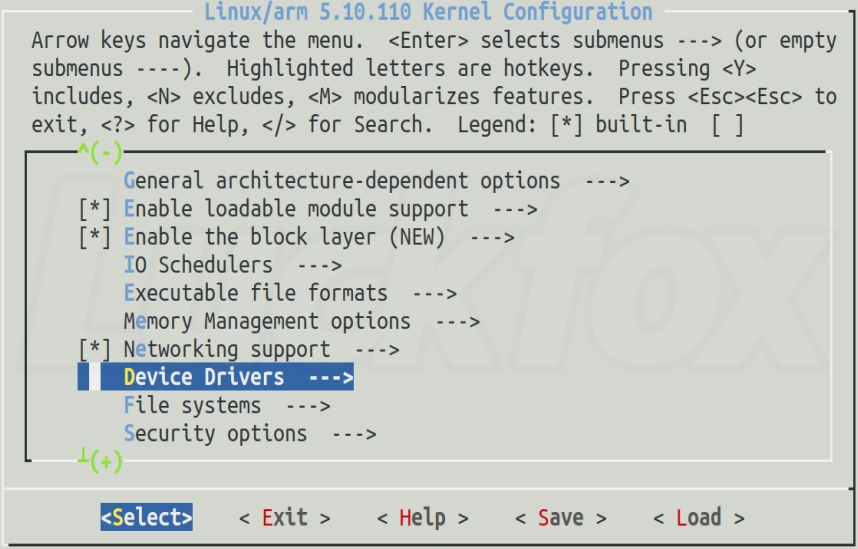
1. ąÆčŗą▒ąĄčĆąĖč鹥 "Device Drivers":
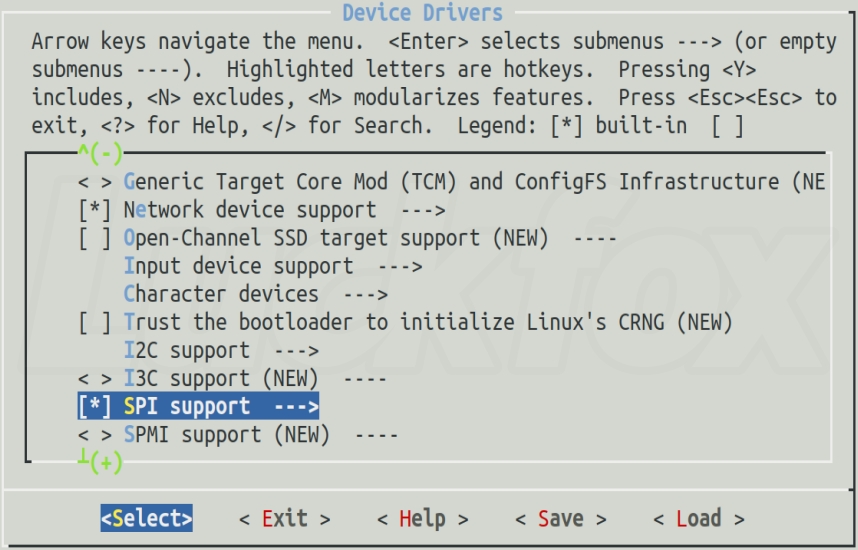
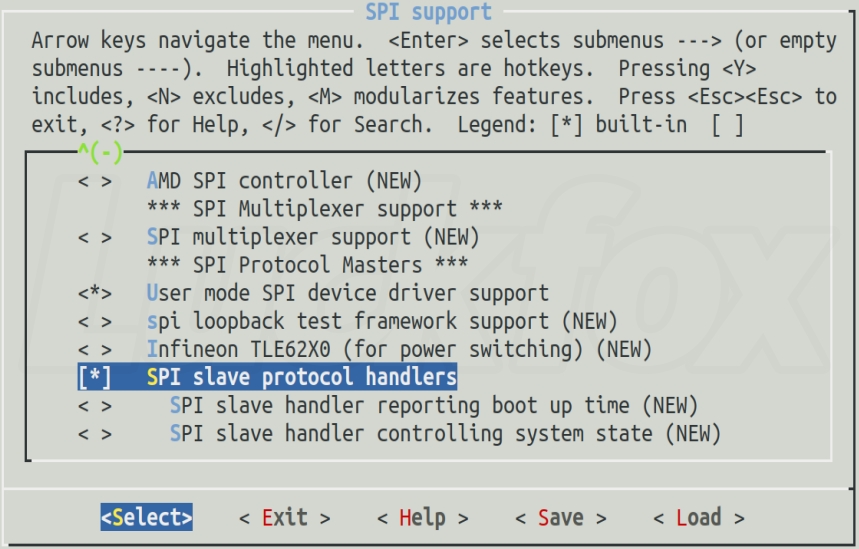
2. ąÆčŗą▒ąĄčĆąĖč鹥 "Select "SPI support":
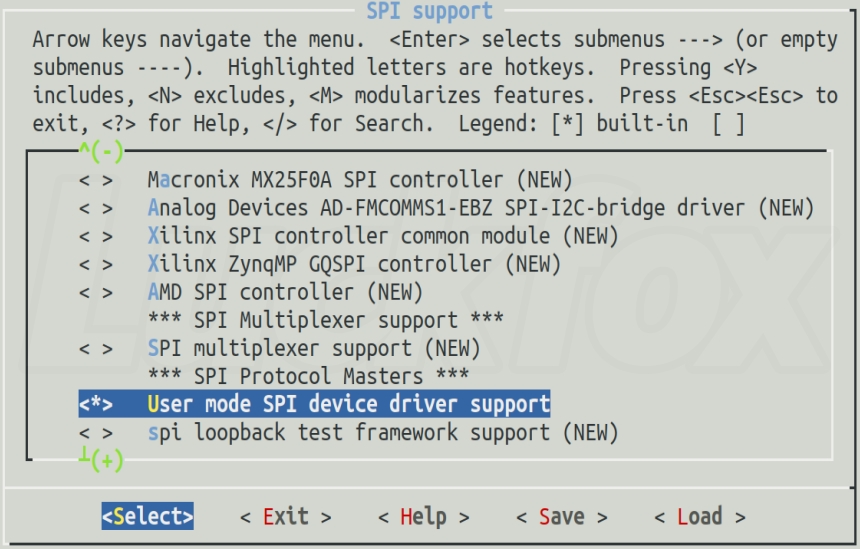
3. ąĪą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 user space ąĮą░ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮčāčÄ čĆą░ą▒ąŠčéčā čü SPI:
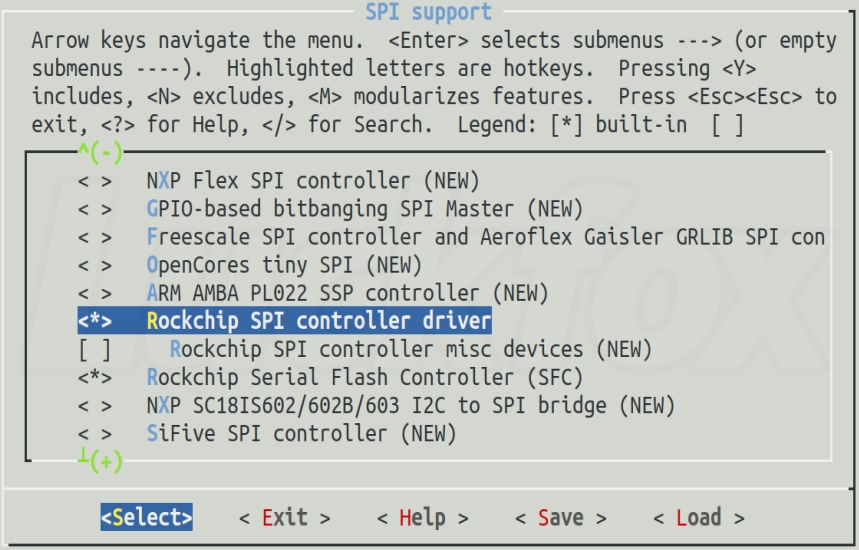
4. ąĀą░ąĘčĆąĄčłąĖč鹥 "Rockchip SPI controller driver" ą┤ą╗čÅ Master ą▓čŗą▒ąŠčĆąŠą╝ "Y":
5. ąĀą░ąĘčĆąĄčłąĖč鹥 "SPI slave protocol handlers" ą┤ą╗čÅ Slave ą▓čŗą▒ąŠčĆąŠą╝ "Y":
1.3. ąĪąŠčģčĆą░ąĮąĖč鹥 config, ą▓ąĄčĆąĮąĖč鹥čüčī ą▓ ą┤ąĖčĆąĄą║č鹊čĆąĖčÄ SDK ąĖ ą┐ąĄčĆąĄą║ąŠą╝ą┐ąĖą╗ąĖčĆčāą╣č鹥 čÅą┤čĆąŠ (kernel).
$ make ARCH=arm savedefconfig
$ cp defconfig arch/arm/configs/luckfox_rv1106_linux_defconfig
$ cd ~/SDK_directory
$ ./build kernel
[2. ą£ąŠą┤ąĖčäąĖą║ą░čåąĖčÅ Device Tree]
1. ążą░ą╣ą╗čŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ ą▓čüąĄčģ ą┐ą╗ą░čé ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ ą║ą░čéą░ą╗ąŠą│ąĄ:
< SDK directory>/project/cfg/BoardConfig_IPC/
ąÜą░ąČą┤čŗą╣ *.mk čäą░ą╣ą╗ ą▓ čŹč鹊ą╝ ą║ą░čéą░ą╗ąŠą│ąĄ ąŠą┐ąĖčüčŗą▓ą░ąĄčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąŠčéą┤ąĄą╗čīąĮąŠą╣ ą╝ąŠą┤ąĄą╗ąĖ ą┐ą╗ą░čéčŗ Luckfox Pico, čéą░ą║ąĖąĄ ą║ą░ą║ čåąĄą╗ąĄą▓ą░čÅ ą░čĆčģąĖč鹥ą║čéčāčĆą░ (target architecture), ąĘą░ą│čĆčāąĘąŠčćąĮčŗą╣ ąĮąŠčüąĖč鹥ą╗čī (boot medium), ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ąĘą░ą│čĆčāąĘčćąĖą║ (Uboot), čÅą┤čĆąŠ (kernel) ąĖ ąĮą░čüčéčĆąŠą╣ą║ąĖ čéą░ą▒ą╗ąĖčåčŗ čĆą░ąĘą┤ąĄą╗ąŠą▓ (partition settings).
ą¤ąĄčĆąĄą╝ąĄąĮąĮą░čÅ RK_KERNEL_DTS čäą░ą╣ą╗ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ą╗ą░čéčŗ čāą║ą░ąĘčŗą▓ą░ąĄčé čäą░ą╣ą╗ ą┤ąĄčĆąĄą▓ą░ čāčüčéčĆąŠą╣čüčéą▓ (Device Tree Source, DTS) ą┤ą╗čÅ čÅą┤čĆą░. ąĢčüą╗ąĖ ą▓ąĘčÅčéčī ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐čĆąĖą╝ąĄčĆą░ Luckfox Pico ąĖ ąŠčéą║čĆčŗčéčī ąĄą│ąŠ čäą░ą╣ą╗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ BoardConfig-EMMC-NONE-RV1103_Luckfox_Pico-IPC.mk, č鹊 ą╝čŗ čāą▓ąĖą┤ąĖą╝, čćč鹊 ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ RK_KERNEL_DTS čāą║ą░ąĘčŗą▓ą░ąĄčé čäą░ą╣ą╗ rv1103g-luckfox-pico.dts.
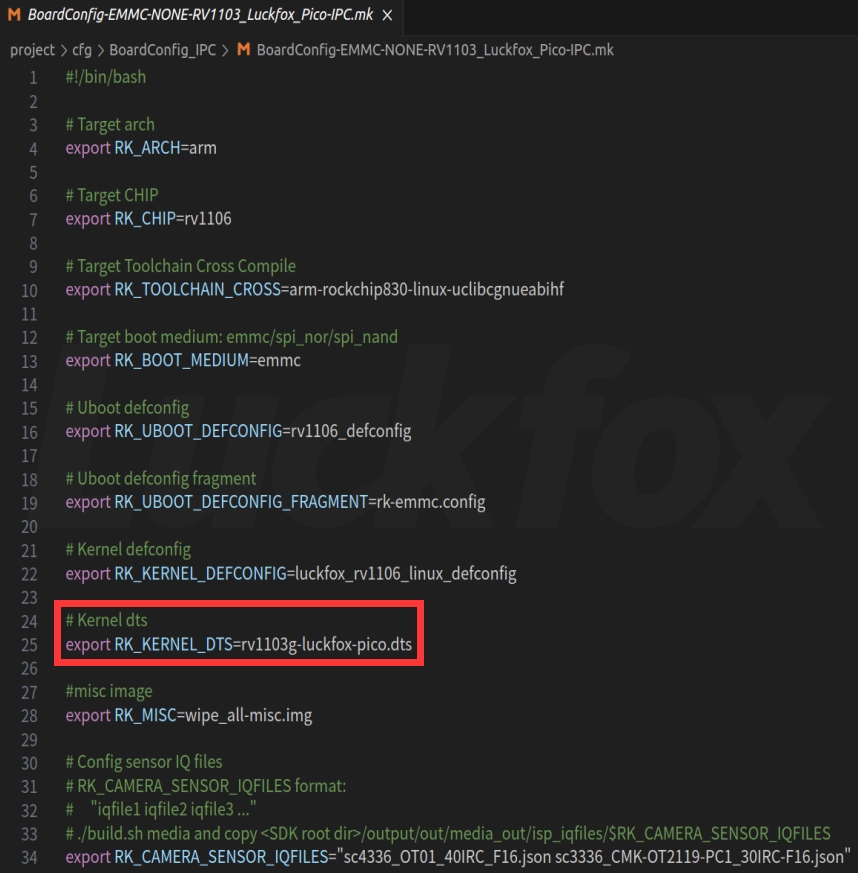
ą×čüąĮąŠą▓čŗą▓ą░čÅčüčī ąĮą░ ąĘąĮą░č湥ąĮąĖąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ RK_KERNEL_DTS, ą┐čāčéčī čäą░ą╣ą╗ą░ ą┤ąĄčĆąĄą▓ą░ čāčüčéčĆąŠą╣čüčéą▓ ą┐ą╗ą░čéčŗ Luckfox Pico ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
< SDK directory>/sysdrv/source/kernel/arch/arm/boot/dts/rv1103g-luckfox-pico.dts
2. ąśąĘą╝ąĄąĮąĖč鹥 čäą░ą╣ą╗ Device Tree.
ąØą░ čüč鹊čĆąŠąĮąĄ Master:
&spi0 {
status = "okay";
spi_test@00 {
compatible = "rockchip,spidev";
reg = < 0>;
spi-cpha;
spi-cpol;
spi-lsb-first;
spi-max-frequency = < 49000000>;
status = "okay";
};
};
ąØą░ čüč鹊čĆąŠąĮąĄ Slave:
&spi0 {
status = "okay";
spi-slave;
slave {
compatible ="rockchip,spidev";
reg = < 0>;
id = < 0>;
};
};
2.2. ąÜąŠą╝ą┐ąĖą╗čÅčåąĖčÅ čÅą┤čĆą░
1. ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą▓čŗą▒ąŠčĆąŠą╝ ą▓ ą╝ąĄąĮčÄ čüą║čĆąĖą┐čéą░ ./build.sh lunch ąŠą┤ąĮąŠą╣ ąĖąĘ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣ ą┤ą╗čÅ ą┐ą╗ą░čé LuckFox Pico, LuckFox Pico Mini A, LuckFox Pico Mini B, LuckFox Pico Plus ąĖ LuckFox Pico Pro/Max:
~/luckfox-pico$ ./build.sh lunch
ls: cannot access 'BoardConfig*.mk': No such file or directory
You're building on Linux
Lunch menu...pick a combo:
BoardConfig-*.mk naming rules:
BoardConfig-"Boot Media"-"Power Plan"-"Hardware Version"-"Application Scenario".mk
BoardConfig-"boot medium"-"power solution"-"hardware version"-"applicaton".mk
----------------------------------------------------------------
0. BoardConfig_IPC/BoardConfig-EMMC-NONE-RV1103_Luckfox_Pico-IPC.mk
boot medium: EMMC
power solution (power plan): NONE
hardware version: RV1103_Luckfox_Pico
applicaton (scenario): IPC
----------------------------------------------------------------
----------------------------------------------------------------
1. BoardConfig_IPC/BoardConfig-EMMC-NONE-RV1103_Luckfox_Pico_Mini_A-IPC.mk
boot medium: EMMC
power solution (power plan): NONE
hardware version: RV1103_Luckfox_Pico_Mini_A
applicaton (scenario): IPC
----------------------------------------------------------------
----------------------------------------------------------------
2. BoardConfig_IPC/BoardConfig-SPI_NAND-NONE-RV1103_Luckfox_Pico_Mini_B-IPC.mk
boot medium: SPI_NAND
power solution (power plan): NONE
hardware version: RV1103_Luckfox_Pico_Mini_B
applicaton (scenario): IPC
----------------------------------------------------------------
----------------------------------------------------------------
3. BoardConfig_IPC/BoardConfig-SPI_NAND-NONE-RV1103_Luckfox_Pico_Plus-IPC.mk
boot medium: SPI_NAND
power solution (power plan): NONE
hardware version: RV1103_Luckfox_Pico_Plus
applicaton (scenario): IPC
----------------------------------------------------------------
----------------------------------------------------------------
4. BoardConfig_IPC/BoardConfig-SPI_NAND-NONE-RV1106_Luckfox_Pico_Pro_Max-IPC.mk
boot medium: SPI_NAND
power solution (power plan): NONE
hardware version: RV1106_Luckfox_Pico_Pro_Max
applicaton (scenario): IPC
----------------------------------------------------------------
Which would you like? [0]: 0
[build.sh:info] switching to board: /home/luckfox/luckfox-pico/project/cfg/
BoardConfig_IPC/BoardConfig-EMMC-NONE-RV1103_Luckfox_Pico-IPC.mk
[build.sh:info] Running build_select_board succeeded.
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą▒čŗą╗ ą▓čŗą▒čĆą░ąĮ ą▓ą░čĆąĖą░ąĮčé 0, čé. ąĄ. ą┐ą╗ą░čéą░ Luckfox Pico.
2. ą¤ąĄčĆąĄą║ąŠą╝ą┐ąĖą╗ąĖčĆčāą╣č鹥 čÅą┤čĆąŠ ą║ąŠą╝ą░ąĮą┤ąŠą╣:
~/luckfox-pico$ ./build.sh kernel
2.3. ą¤ąĄčĆąĄą┐čĆąŠčłąĄą╣č鹥 čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąĮąŠąĄ firmware.
[3. SPI-ąŠą▒ą╝ąĄąĮ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ąĮą░ C]
3.1. ążčāąĮą║čåąĖčÅ ioctl. ą¤čĆąĖ ąĮą░ą┐ąĖčüą░ąĮąĖąĖ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čäčāąĮą║čåąĖčÅ ioctl ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ąĮą░čüčéčĆąŠąĄą║ SPI. ą¤čĆąŠč鹊čéąĖą┐ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ čüą╗ąĄą┤čāčÄčēąĖą╣:
#include < sys/ioctl.h>
int ioctl(int fd, unsigned long request, ...);
ąÜąŠą│ą┤ą░ čäčāąĮą║čåąĖčÅ ioctl ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ č湥čĆąĄąĘ SPI, ąŠą▒čŗčćąĮąŠ ą┐čĆąĖą╝ąĄąĮčÅčÄčé čüą╗ąĄą┤čāčÄčēąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąĘą░ą┐čĆąŠčüą░:
SPI_IOC_RD_MODE: ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ąĮą░čüčéčĆąŠąĄą║ č鹥ą║čāčēąĄą│ąŠ čĆąĄąČąĖą╝ą░ ąŠą▒ą╝ąĄąĮą░ SPI. ąŁč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ąĘą░ą┐čĆąŠčüą░ čćąĖčéą░ąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ čĆąĄąČąĖą╝ą░ ą▓ čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮčāčÄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ č鹥ą║čāčēąĖčģ ąĮą░čüčéčĆąŠąĄą║ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ ąĖ čäą░ąĘčŗ SPI (CPOL ąĖ CPHA).
SPI_IOC_WR_MODE: ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ čĆąĄąČąĖą╝ą░ ąŠą▒ą╝ąĄąĮą░ SPI. ąÆą░ą╝ ąĮčāąČąĮąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąŠą▒čŗčćąĮąŠ čüąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠąĄ ąĖąĘ ą┤ą▓čāčģ ą┤ą▓ąŠąĖčćąĮčŗčģ čåąĖčäčĆ ą┤ą╗čÅ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ ąĖ čäą░ąĘčŗ ąŠą▒ą╝ąĄąĮą░ SPI.
SPI_IOC_RD_BITS_PER_WORD: ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▒ąĖčé ą▓ čüą╗ąŠą▓ąĄ ą┤ą░ąĮąĮčŗčģ. ą¤čĆąŠčćąĖčéą░ąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮąŠ ą▓ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčāčÄ čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮčāčÄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ.
SPI_IOC_WR_BITS_PER_WORD: ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▒ąĖčé ą▓ čüą╗ąŠą▓ąĄ ą┤ą░ąĮąĮčŗčģ. ąÆą░ą╝ ąĮčāąČąĮąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, čćč鹊ą▒čŗ čāą║ą░ąĘą░čéčī čĆą░ąĘą╝ąĄčĆ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠą│ąŠ ąĖ ą┐čĆąĖąĮąĖą╝ą░ąĄą╝ąŠą│ąŠ čüą╗ąŠą▓ą░ ą▓ ą▒ąĖčéą░čģ.
SPI_IOC_RD_MAX_SPEED_HZ: ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ ą┤ą░ąĮąĮčŗčģ (čćą░čüč鹊čéčŗ čéą░ą║č鹊ą▓) čłąĖąĮčŗ SPI. ąŁč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ąĘą░ą┐čĆąŠčüą░ čüčćąĖčéčŗą▓ą░ąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ čüą║ąŠčĆąŠčüčéąĖ ą▓ čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮčāčÄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ.
SPI_IOC_WR_MAX_SPEED_HZ: ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ čłąĖąĮčŗ SPI. ąÆą░ą╝ ąĮčāąČąĮąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ čāą║ą░ąĘą░ąĮąĖčÅ čćą░čüč鹊čéčŗ čéą░ą║č鹊ą▓ čłąĖąĮčŗ SPI.
SPI_IOC_MESSAGE(N): ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ąŠą┐ąĄčĆą░čåąĖą╣ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ ą┐ąŠ čłąĖąĮąĄ SPI. ąŁč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ąĘą░ą┐čĆąŠčüą░ čéčĆąĄą▒čāąĄčé čāą║ą░ąĘą░č鹥ą╗čÅ ąĮą░ ą╝ą░čüčüąĖą▓ 菹╗ąĄą╝ąĄąĮč鹊ą▓ čüčéčĆčāą║čéčāčĆ spi_ioc_transfer, ą│ą┤ąĄ ą║ą░ąČą┤čŗą╣ 菹╗ąĄą╝ąĄąĮčé ąŠą┐ąĖčüčŗą▓ą░ąĄčé ąŠą┐ąĄčĆą░čåąĖčÄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ SPI, ą▒ą╗ą░ą│ąŠą┤ą░čĆčÅ č湥ą╝čā ą╝ąŠąČąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ąŠą┐ąĄčĆą░čåąĖą╣.
3.2. ą¤čĆąĖą╝ąĄčĆ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ. ąĪą╗ąĄą┤čāčÄčēąĖąĄ ą┤ą▓ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąŠčüčāčēąĄčüčéą▓ą╗čÅčÄčé SPI-ąŠą▒ą╝ąĄąĮ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ ą▓ ą║ą░č湥čüčéą▓ąĄ ą│ą╗ą░ą▓ąĮąŠą│ąŠ (Master) ąĖ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ (Slave) čāčüčéčĆąŠą╣čüčéą▓ą░ čłąĖąĮčŗ.
ąØą░ čüč鹊čĆąŠąĮąĄ Master:
#include < stdio.h>
#include < stdlib.h>
#include < stdint.h>
#include < fcntl.h>
#include < unistd.h>
#include < linux/spi/spidev.h>
#include < sys/ioctl.h>
#define SPI_DEVICE_PATH "/dev/spidev0.0"
int main() {
int spi_file;
uint8_t tx_buffer[255];
uint8_t rx_buffer[50];
// ą×čéą║čĆčŗčéąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI:
if ((spi_file = open(SPI_DEVICE_PATH, O_RDWR)) < 0) {
perror("Failed to open SPI device");
return -1;
}
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ čĆąĄąČąĖą╝ą░ SPI ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▒ąĖčé ą▓ čüą╗ąŠą▓ąĄ ą┤ą░ąĮąĮčŗčģ:
uint8_t mode = SPI_MODE_0;
uint8_t bits = 8;
if (ioctl(spi_file, SPI_IOC_WR_MODE, &mode) < 0) {
perror("Failed to set SPI mode");
close(spi_file);
return -1;
}
if (ioctl(spi_file, SPI_IOC_WR_BITS_PER_WORD, &bits) < 0) {
perror("Failed to set SPI bits per word");
close(spi_file);
return -1;
}
// ą¤ąŠą┤ą│ąŠč鹊ą▓ą║ą░ čéčĆą░ąĮąĘą░ą║čåąĖąĖ SPI:
struct spi_ioc_transfer transfer = {
.tx_buf = (unsigned long)tx_buffer,
.rx_buf = (unsigned long)rx_buffer,
.len = sizeof(tx_buffer),
.delay_usecs = 0,
.speed_hz = 49000000, // čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ SPI ą▓ ąōčå
.bits_per_word = 8,
};
// ą×čéą┐čĆą░ą▓ą║ą░ ą┤ą░ąĮąĮčŗčģ:
for (int i = 0; i < transfer.len; i++)
tx_buffer[i] = i;
if (ioctl(spi_file, SPI_IOC_MESSAGE(1), &transfer) < 0) {
perror("Failed to perform SPI transfer");
close(spi_file);
return -1;
}
printf("Send %d bytes of data max speed: %d Hz.\n",
transfer.len,transfer.speed_hz);
// ąŚą░ą║čĆčŗčéąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI:
close(spi_file);
return 0;
}
ąØą░ čüč鹊čĆąŠąĮąĄ Slave:
#include < stdio.h>
#include < stdlib.h>
#include < stdint.h>
#include < fcntl.h>
#include < unistd.h>
#include < linux/spi/spidev.h>
#include < sys/ioctl.h>
#include < string.h>
#define SPI_DEVICE_PATH "/dev/spidev0.0"
int main() {
int spi_file,ret;
uint8_t tx_buffer[50];
uint8_t rx_buffer[255];
// ą×čéą║čĆčŗčéąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI:
if ((spi_file = open(SPI_DEVICE_PATH, O_RDWR)) < 0) {
perror("Failed to open SPI device");
return -1;
}
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ čĆąĄąČąĖą╝ą░ SPI ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▒ąĖčé ą▓ čüą╗ąŠą▓ąĄ ą┤ą░ąĮąĮčŗčģ:
uint8_t mode = SPI_MODE_0;
uint8_t bits = 8;
if (ioctl(spi_file, SPI_IOC_WR_MODE, &mode) < 0) {
perror("Failed to set SPI mode");
close(spi_file);
return -1;
}
if (ioctl(spi_file, SPI_IOC_WR_BITS_PER_WORD, &bits) < 0) {
perror("Failed to set SPI bits per word");
close(spi_file);
return -1;
}
// ą¤ąŠą┤ą│ąŠč鹊ą▓ą║ą░ čéčĆą░ąĮąĘą░ą║čåąĖąĖ SPI:
struct spi_ioc_transfer transfer = {
.tx_buf = (unsigned long)tx_buffer,
.rx_buf = (unsigned long)rx_buffer,
.len = sizeof(rx_buffer),
.delay_usecs = 0,
.speed_hz = 49000000, // čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ SPI ą▓ ąōčå
.bits_per_word = 8,
};
while(1)
{
// ą×čćąĖčüčéą║ą░ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░:
memset(rx_buffer,0,sizeof(rx_buffer));
// ą×ąČąĖą┤ą░ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ:
do {
ret = ioctl(spi_file, SPI_IOC_MESSAGE(1), &transfer);
} while (ret < 0);
// ąÆčŗą▓ąŠą┤ ąĮą░ ą┐ąĄčćą░čéčī čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ rx_buffer:
printf("--Receive %d bytes of data max speed:%d ąōčå---\n",
ret, transfer.speed_hz);
printf("SPI RX: 0x%08X:", 0);
for (int i = 0; i < ret; i++) {
printf(" %02X",rx_buffer[i] );
if ((i + 1) % 16 == 0){
printf("\nSPI RX: 0x%08X:", i+1);
}
}
printf("\n");
}
// ąŚą░ą║čĆčŗčéąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI:
close(spi_file);
return 0;
}
3.3. ą¤čāčéčī čäą░ą╣ą╗ą░ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI ąĘą░ą┤ą░ąĄčéčüčÅ čüčéčĆąŠą║ąŠą╣:
#define SPI_DEVICE_PATH "/dev/spidev0.0"
3.4. ą×čéą║čĆčŗčéąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI. ąŁčéą░ čüąĄą║čåąĖčÅ ą║ąŠą┤ą░ ą┐čŗčéą░ąĄčéčüčÅ ąŠčéą║čĆčŗčéčī čāą║ą░ąĘą░ąĮąĮčŗą╣ čäą░ą╣ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI.
if ((spi_file = open(SPI_DEVICE_PATH, O_RDWR)) < 0) {
perror("Failed to open SPI device");
return -1;
}
3.5. ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ SPI. ąĪą╗ąĄą┤čāčÄčēąĖą╣ ą║ąŠą┤ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠą▒ą╝ąĄąĮą░ ą▓ čĆąĄąČąĖą╝ąĄ SPI Mode 0 (clock polarity 0, clock phase 0) ąĖ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čĆą░ąĘą╝ąĄčĆ čüą╗ąŠą▓ą░ ą┤ą░ąĮąĮčŗčģ 8 ą▒ąĖčé, čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ą║ąŠčĆčĆąĄą║čéąĮąŠčüčéčī ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ SPI.
uint8_t mode = SPI_MODE_0;
uint8_t bits = 8;
if (ioctl(spi_file, SPI_IOC_WR_MODE, &mode) < 0) {
perror("Failed to set SPI mode");
close(spi_file);
return -1;
}
if (ioctl(spi_file, SPI_IOC_WR_BITS_PER_WORD, &bits) < 0) {
perror("Failed to set SPI bits per word");
close(spi_file);
return -1;
}
ą¤ąĄčĆąĄą╝ąĄąĮąĮą░čÅ transfer ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čüčéčĆčāą║čéčāčĆčā ą┤ą░ąĮąĮčŗčģ čéąĖą┐ą░ spi_ioc_transfer, čüąŠą┤ąĄčƹȹ░čēčāčÄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ čéčĆą░ąĮąĘą░ą║čåąĖąĖ SPI. ąŚą┤ąĄčüčī čāą║ą░ąĘčŗą▓ą░čÄčéčüčÅ ą▒čāč乥čĆčŗ ą┤ą░ąĮąĮčŗčģ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░, ą┤ą╗ąĖąĮą░ čéčĆą░ąĮąĘą░ą║čåąĖąĖ, ąĘą░ą┤ąĄčƹȹ║ą░, čüą║ąŠčĆąŠčüčéčī SPI ą▓ ąōąĄčĆčåą░čģ ąĖ čĆą░ąĘą╝ąĄčĆ čüą╗ąŠą▓ą░ ą┤ą░ąĮąĮčŗčģ. ąŁčéą░ čüčéčĆčāą║čéčāčĆą░ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčīčüčÅ ą▓ SPI_IOC_MESSAGE čäčāąĮą║čåąĖąĖ ioctl, čćč鹊ą▒čŗ ą▓čŗą┐ąŠą╗ąĮąĖą╗ą░čüčī čéčĆą░ąĮąĘą░ą║čåąĖčÅ SPI.
struct spi_ioc_transfer transfer = {
.tx_buf = (unsigned long)tx_buffer,
.rx_buf = (unsigned long)rx_buffer,
.len = sizeof(rx_buffer),
.delay_usecs = 0,
.speed_hz = 49000000, // čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ SPI ą▓ ąōčå
.bits_per_word = 8,
};
3.6. ą×čéą┐čĆą░ą▓ą║ą░ ą┤ą░ąĮąĮčŗčģ. ąĪą╗ąĄą┤čāčÄčēąĖą╣ ą║ąŠą┤ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čäčāąĮą║čåąĖčÄ ioctl ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čéčĆą░ąĮąĘą░ą║čåąĖąĖ SPI. ąŻą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéčĆą░ąĮąĘą░ą║čåąĖą╣ 1 čü ą┐ąŠą╝ąŠčēčīčÄ ą╝ą░ą║čĆąŠčüą░ SPI_IOC_MESSAGE(1), ą░ ą▓ čéčĆąĄčéčīąĄą╝ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ čüčüčŗą╗ą║ą░ ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą╣ čĆą░ąĮąĄąĄ. ąĢčüą╗ąĖ čéčĆą░ąĮąĘą░ą║čåąĖčÅ SPI ą▒čŗą╗ą░ ąĮąĄčāą┤ą░čćąĮąŠą╣, č鹊 ą┐ąĄčćą░čéą░ąĄčéčüčÅ čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠą▒ ąŠčłąĖą▒ą║ąĄ, ąĖ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ čäą░ą╣ą╗ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI ąĘą░ą║čĆčŗą▓ą░ąĄčéčüčÅ.
// ą×čéą┐čĆą░ą▓ą║ą░ ą┤ą░ąĮąĮčŗčģ:
for (int i = 0; i < transfer.len; i++)
tx_buffer[i] = i;
if (ioctl(spi_file, SPI_IOC_MESSAGE(1), &transfer) < 0) {
perror("Failed to perform SPI transfer");
close(spi_file);
return -1;
}
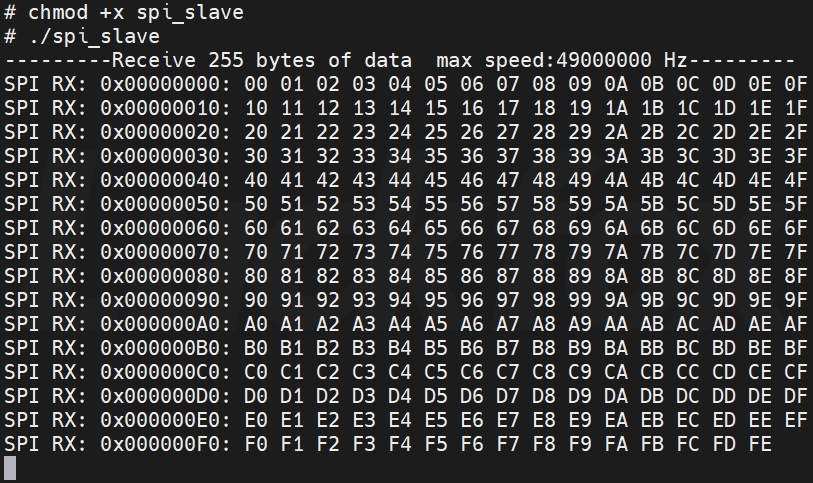
3.7. ą¤čĆąĖąĄą╝ ą┤ą░ąĮąĮčŗčģ ąĮą░ čüč鹊čĆąŠąĮąĄ Slave
ąĪą╗ąĄą┤čāčÄčēąĖą╣ čüąĄą│ą╝ąĄąĮčé ą║ąŠą┤ą░ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü ąŠčćąĖčüčéą║ąĖ ą▒čāč乥čĆą░ ą┤ą░ąĮąĮčŗčģ, ąĘą░č鹥ą╝ ą┐čĆąŠą▓ąĄčĆčÅąĄčéčüčÅ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĖąĘ čäčāąĮą║čåąĖąĖ ioctl, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą▒čŗą╗ąĖ ą╗ąĖ ą┐čĆąĖąĮčÅčéčŗ ą┤ą░ąĮąĮčŗąĄ. ąĢčüą╗ąĖ ą┤ą░ąĮąĮčŗąĄ ąĮąĄ ą▒čŗą╗ąĖ ą┐čĆąĖąĮčÅčéčŗ, č鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐čĆąŠą║čĆčāčéą║ą░ čåąĖą║ą╗ą░, čéą░ą║ąĖą╝ čüą┐ąŠčüąŠą▒ąŠą╝ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąŠąČąĖą┤ą░ąĮąĖąĄ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ąŠčé Master. ą¤čĆąĖ ą┐ąŠą╗čāč湥ąĮąĖąĖ ą┤ą░ąĮąĮčŗčģ čäčāąĮą║čåąĖčÅ ioctl ą▓ąŠąĘą▓čĆą░čéąĖčé ą┤ą╗ąĖąĮčā ą┐čĆąĖąĮčÅčéčŗčģ ą┤ą░ąĮąĮčŗčģ. ąŚą░č鹥ą╝ ą┐čĆąĖąĮčÅčéčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčćą░čéą░čÄčéčüčÅ ą▓ hex-č乊čĆą╝ą░č鹥, ąĖ ą┐čĆąŠčåąĄčüčü ą┐ąŠą▓č鹊čĆčÅąĄčéčüčÅ - čüąĮąŠą▓ą░ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ čåąĖą║ą╗ ąŠąČąĖą┤ą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ.
while(1)
{
// ą×čćąĖčüčéą║ą░ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░:
memset(rx_buffer,0,sizeof(rx_buffer));
// ą×ąČąĖą┤ą░ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ:
do {
ret = ioctl(spi_file, SPI_IOC_MESSAGE(1), &transfer);
} while (ret < 0);
// ąÆčŗą▓ąŠą┤ ąĮą░ ą┐ąĄčćą░čéčī čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ rx_buffer:
printf("---Receive %d bytes of data max speed:%d Hz---\n",
ret, transfer.speed_hz);
printf("SPI RX: 0x%08X:", 0);
for (int i = 0; i < ret; i++) {
printf(" %02X",rx_buffer[i] );
if ((i + 1) % 16 == 0){
printf("\nSPI RX: 0x%08X:", i+1);
}
} printf("\n");
}
3.8. ąÜčĆąŠčüčü ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÅ. ąĪą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąŠčåąĄčüčüą░ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą▓ čüčéą░čéčīąĄ [2].
[4. ąŚą░ą┐čāčüą║ ą┐čĆąŠą│čĆą░ą╝ą╝]
4.1. ą¤ąĄčĆąĄą┤ą░čćą░ čäą░ą╣ą╗ą░. ą¤ąĄčĆąĄą┤ą░čćą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮą░ čü ą┐ąŠą╝ąŠčēčīčÄ TFTP ąĖą╗ąĖ ADB (čüą╝. [2]).
$ adb push path_to_file destination_on_development_board
.. ąĖą╗ąĖ:
$ adb -s device_serial_number push path_to_file destination_on_development_board
ąĪąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ ą▓ ą║ąŠą╝ą░ąĮą┤ąĄ adb ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čāą║ą░ąĘčŗą▓ą░čéčī, ą║ąŠą│ą┤ą░ ą║ čģąŠčüčéčā č湥čĆąĄąĘ USB ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ čāčüčéčĆąŠą╣čüčéą▓:
$ adb -s d48936ed7d155xxx push spi /
4.2. ąĪąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ą╝ąĄąČą┤čā čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ Master ąĖ Slave.
1. ąĪąŠąĄą┤ąĖąĮąĖč鹥 ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ ąĘąĄą╝ą╗čÄ čāčüčéčĆąŠą╣čüčéą▓ GND.
2. ąĪąŠąĄą┤ąĖąĮąĖč鹥 ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ čüąĖą│ąĮą░ą╗čŗ SPI0_MISO, SPI0_MOSI, SPI0_CLK ąĖ CPI0_CS0.
4.3. ąŚą░ą┐čāčüą║ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ. ą¤ąŠą╝ąĄąĮčÅą╣č鹥 ą┐čĆą░ą▓ą░ ą┤ąŠčüčéčāą┐ą░ ąĮą░ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗą╣ čäą░ą╣ą╗ spi ąĖ ąĘą░ą┐čāčüčéąĖč鹥 ą┐čĆąŠą│čĆą░ą╝ą╝čā ąĮą░ ąŠą▒ąŠąĖčģ čāčüčéčĆąŠą╣čüčéą▓ą░čģ:
4.4. ąĀąĄąĘčāą╗čīčéą░čéčŗ čĆą░ą▒ąŠčéčŗ ą┐čĆąŠą│čĆą░ą╝ą╝
ąØą░ čüč鹊čĆąŠąĮąĄ Master ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ:

ąØą░ čüč鹊čĆąŠąĮąĄ Slave ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓čŗą▓ąŠą┤ ą┐ąŠą╗čāč湥ąĮąĮčŗčģ ą┤ą░ąĮąĮčŗčģ:
[ąĪčüčŗą╗ą║ąĖ]
1. LuckFox SPI Master-Slave Communication site:wiki.luckfox.com.
2. LuckFox SPI: ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ čü ą▓ąĮąĄčłąĮąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝. |



