ąŚą┤ąĄčüčī ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ą┤ąĄčéą░ą╗čīąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ, ą║ą░ą║ ąĮą░čćą░čéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ ARM . ąŁč鹊 ą╝ąĖąĮąĖą╝ą░ą╗ąĖčüčéąĖčćąĮąŠąĄ, ą┐čĆąŠčüč鹊ąĄ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ, ą┐ąŠąĘą▓ąŠą╗čÅčÄčēąĄąĄ ą┐ąŠąĮčÅčéčī ą┐čĆąĖąĮčåąĖą┐ ąĮą░ą┐ąĖčüą░ąĮąĖčÅ ąĖ ąĘą░ą┐čāčüą║ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ ąĮą░ ą┐ą╗ą░čéč乊čĆą╝ąĄ AT91SAM7S (ą┐ąĄčĆąĄą▓ąŠą┤ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ą░ [1]).
ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ Atmel čüąĄčĆąĖąĖ AT91SAM7S64 ąŠč湥ąĮčī čģąŠčĆąŠčłąŠ ą┐ąŠą┤čģąŠą┤čÅčé ą┤ą╗čÅ ą▒čŗčüčéčĆąŠą│ąŠ čüčéą░čĆčéą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ąĮą░ ARM: ąŠąĮąĖ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą┐čĆąŠčüčéčŗąĄ ąĖ ą┤ąĄčłąĄą▓čŗąĄ (AT91SAM7S64 ą▓ ą║ąŠčĆą┐čāčüąĄ TQFP64 čüč鹊ąĖčé ąĮą░ AliExpress ąŠą║ąŠą╗ąŠ 113 čĆčāą▒ą╗ąĄą╣, ąĖą╗ąĖ $2), ą▓ ąĮąĖčģ ąĄčüčéčī ą▓čüčéčĆąŠąĄąĮąĮąŠąĄ ą×ąŚąŻ (RAM) ąĖ ą┐ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ (FLASH) ą┐ąŠčĆčé JTAG, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗą╣ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ą┐ą░ą╝čÅčéąĖ ąĖ ąŠčéą╗ą░ą┤ą║ąĖ, ąĖ ą╝ąĮąŠąČąĄčüčéą▓ąŠ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą┤ą╗čÅ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, ą▓čüąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ąĮčāąČąĮąŠ ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ, ą┤ąŠčüčéčāą┐ąĮąŠ ą▒ąĄčüą┐ą╗ą░čéąĮąŠ.
[ąóčĆąĄą▒čāąĄą╝ąŠąĄ ą¤ą× ]
ąĪąĮą░čćą░ą╗ą░ ąÆą░ą╝ ąĮčāąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ą▓čüąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ. ąĢčüą╗ąĖ ąÆčŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī Windows, ąĖ čüą┐ąŠą║ąŠą╣ąĮąŠ ąŠčéąĮąŠčüąĖč鹥čüčī ą║ ąĮą░čĆčāčłąĄąĮąĖčÄ ą╗ąĖčåąĄąĮąĘąĖąŠąĮąĮčŗčģ čüąŠą│ą╗ą░čłąĄąĮąĖą╣, č鹊 čüą░ą╝čŗą╣ ą╗čāčćčłąĖą╣ ą▓čŗą▒ąŠčĆ ą┤ą╗čÅ čüčéą░čĆčéą░ - Windows, ą┐ą░ą║ąĄčé čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ IAR ąĖ ąŠą┤ąĖąĮ ąĖąĘ ą║ą╗ąŠąĮąŠą▓ JTAG J-Link, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ąĮąĄą┤ąŠčĆąŠą│ąŠ ą║čāą┐ąĖčéčī ąĮą░ AliExpress (čåąĄąĮą░ ąĮąĄ ą▒ąŠą╗ąĄąĄ 1200 čĆčāą▒ą╗ąĄą╣, čé. ąĄ. ąŠą║ąŠą╗ąŠ $21). ąØąŠ čŹčéą░ čüčéą░čéčīčÅ ąĮąĄ ąŠą▒ čŹč鹊ą╝, ąĘą┤ąĄčüčī ą▒čāą┤ąĄą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī č鹊ą╗čīą║ąŠ čüą▓ąŠą▒ąŠą┤ąĮąŠąĄ ą¤ą×.
ąÜąŠąĮąĄčćąĮąŠ, ąÆčŗ ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čéą░ą║ąČąĄ ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮąĮčŗąĄ čüčĆąĄą┤čŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ (IDE) ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ Eclipse, ąŠą┤ąĮą░ą║ąŠ ąŠą┐ąĖčüą░ąĮąĖąĄ ąĖčģ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą▓ čŹč鹊ą╣ čüčéą░čéčīąĄ ąĮąĄ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░ąĄčéčüčÅ. ą¤čĆąĄą┤ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠ čā ąÆą░čü ąĄčüčéčī č鹥ą║čüč鹊ą▓čŗą╣ čĆąĄą┤ą░ą║č鹊čĆ ąĖ ą▒ą░ąĘąŠą▓čŗą╣ ąŠą┐čŗčé, ą║ą░ą║ ą┐ąĖčüą░čéčī ą┐čĆąŠą│čĆą░ą╝ą╝čŗ čü ą┐ąŠą╝ąŠčēčīčÄ ąĖąĮčüčéčĆčāą╝ąĄąĮč鹊ą▓ GNU (make, gcc). ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, čŹčéą░ čüčéą░čéčīčÅ ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčé, ą║ą░ą║ ą▓čŗą┐ąŠą╗ąĮčÅčéčī čĆą░ąĘčĆą░ą▒ąŠčéą║čā ą┐ąŠ Linux, čģąŠčéčÅ ą╝ą░ą╗ąŠ ąŠčéą╗ąĖčćąĖą╣ č鹊ą│ąŠ ąČąĄ čüą░ą╝ąŠą│ąŠ ą┐čĆąŠčåąĄčüčüą░ ą▓ čüčĆąĄą┤ąĄ Windows ąĖ ą┤čĆčāą│ąĖčģ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčŗčģ čüąĖčüč鹥ą╝.
ąśčéą░ą║, čüąĮą░čćą░ą╗ą░ ąÆą░ą╝ ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ čüą╗ąĄą┤čāčÄčēąĄąĄ:
ŌĆó ARM-GCC: čŹč鹊 ąĮą░ą▒ąŠčĆ čāčéąĖą╗ąĖčé "GNU toolchain", čüąŠą┤ąĄčƹȹ░čēąĖą╣ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆ, ą░čüčüąĄą╝ą▒ą╗ąĄčĆ ąĖ ą╗ąĖąĮą║ąĄčĆ ą┤ą╗čÅ ą║čĆąŠčüčü-ą┐ą╗ą░čéč乊čĆą╝ąĄąĮąĮąŠą╣ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ ARM (čüą╗ąŠą▓ąĄčćą║ąŠ "ą║čĆąŠčüčü" ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čĆą░ąĘčĆą░ą▒ąŠčéą║ą░ ą┤ą╗čÅ ARM ą▓ąĄą┤ąĄčéčüčÅ ą▓ čüčĆąĄą┤ąĄ ą┤čĆčāą│ąŠą╣ čüčĆąĄą┤čŗ ą▓čŗą┐ąŠą╗ąĄąĮąĖčÅ, čé. ąĄ. Linux ąĖą╗ąĖ Windows). ą¤ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ ąÆčŗ ą┐ąŠą╗čāčćąĖč鹥 čāčéąĖą╗ąĖčéčŗ arm-elf-gcc, arm-elf-as ąĖ arm-elf-ld. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ Linux ąĖ Mac OS X ą╝ąŠą│čāčé ąĮą░ą╣čéąĖ ąĖąĮčüčéčĆčāą║čåąĖąĖ ą┐ąŠ ąĖąĮčüčéą░ą╗ą╗čÅčåąĖąĖ ąĖ ą│ąŠč鹊ą▓čŗąĄ ą▒ąĖąĮą░čĆąĮąĖą║ąĖ ą▓ čüčéą░čéčīąĄ [2]. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ Windows ąĮą░ą╣ą┤čāčé ąŠčéą╗ąĖčćąĮčŗą╣ ą┐ą░ą║ąĄčé ą▓čüąĄą│ąŠ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠą│ąŠ ą▓ YAGARTO [3].
ŌĆó OpenOCD: open on-chip debugger, ąŠčéą║čĆčŗčéčŗą╣ ąĖ ą▒ąĄčüą┐ą╗ą░čéąĮčŗą╣ ąŠčéą╗ą░ą┤čćąĖą║ [4]. ąĢčüą╗ąĖ ąÆčŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī Linux, č鹊 čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ čüą┤ąĄą╗ą░čéčī ą▓čŗą▒ąŠčĆą║čā ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ ąĖąĘ čĆąĄą┐ąŠąĘąĖč鹊čĆąĖčÅ SVN ąĖ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÅ čŹč鹊ą│ąŠ ą║ąŠą┤ą░ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ čüą░ą╝čŗčģ čüą▓ąĄąČąĖčģ ą▒ąĖąĮą░čĆąĮąĖą║ąŠą▓ OpenOCD. ąÜą░ą║ čŹč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ, čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ ąĮą░ ąŠčäąĖčåąĖą░ą╗čīąĮąŠą╝ čüą░ą╣č鹥 OpenOCD. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ Windows ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī OpenOCD ąĖąĘ čüąŠčüčéą░ą▓ą░ YAGARTO [3].
ŌĆó ą×ą▒čŗčćąĮčŗąĄ čāčéąĖą╗ąĖčéčŗ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ GNU make, ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüčĆąĄą┤ą░ ą┤ą╗čÅ ąĖčüą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤ (shell), č鹥ą║čüč鹊ą▓čŗą╣ čĆąĄą┤ą░ą║č鹊čĆ ąĖ čé. ą┤. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ Linux ąĖ Mac OS X ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüą▓ąŠąĖ čłčéą░čéąĮčŗąĄ čāčéąĖą╗ąĖčéčŗ. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ Windows ą┐ąŠą╗čāčćą░čé ą▓čüąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠąĄ ą▓ą╝ąĄčüč鹥 čü YAGARTO [3].
[ąóčĆąĄą▒čāąĄą╝ą░čÅ ą░ą┐ą┐ą░čĆą░čéčāčĆą░ ]
ą¤ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ą¤ą× ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ ąĮą░ą╣čéąĖ čüą╗ąĄą┤čāčÄčēąĄąĄ ąČąĄą╗ąĄąĘąŠ:
ŌĆó ąÜą░ą▒ąĄą╗čī JTAG: ąŠąĮ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ čü ąŠą┤ąĮąŠą╣ čüč鹊čĆąŠąĮčŗ ą║ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą╝čā ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā ARM, ąĖ čü ą┤čĆčāą│ąŠą╣ čüč鹊čĆąŠąĮčŗ ą║ PC. ąĢčüčéčī ą╝ąĮąŠąČąĄčüčéą▓ąŠ ą║ą░ą▒ąĄą╗ąĄą╣ JTAG, ąĮąŠ čüą╗ąĄą┤čāąĄčé ą▓čŗą▒čĆą░čéčī č鹊čé, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ OpenOCD. ą×ą▒čŗčćąĮąŠ čŹč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ą║ą░ą▒ąĄą╗čī ąĮą░ ąŠčüąĮąŠą▓ąĄ čćąĖą┐ą░ FT2232H [5]. ąÉą▓č鹊čĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ čüą░ą╝ąŠą┤ąĄą╗čīąĮčŗą╣ ą║ą░ą▒ąĄą╗čī USB-AtmelPrg [6].
ąĪą░ą╝čŗą╣ ą┤ąĄčłąĄą▓čŗą╣ ą║ą░ą▒ąĄą╗čī ą┤ą╗čÅ JTAG-ąĖąĮč鹥čĆč乥ą╣čüą░ ąŠą▒čŗčćąĮąŠ ąĮą░ąĘčŗą▓ą░čÄčé "wiggler", ąŠąĮ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠą╝čā ą┐ąŠčĆčéčā ą┐čĆąĖąĮč鹥čĆą░ PC (ą┐ąŠčĆčé LPT), ąĖ čŹč鹊 čéą░ą║ąČąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ OpenOCD. ąÆčŗ ą╝ąŠąČąĄč鹥 ą╗ąĄą│ą║ąŠ čüą┤ąĄą╗ą░čéčī wiggler čüą░ą╝ąŠčüč鹊čÅč鹥ą╗čīąĮąŠ, ąĄą│ąŠ čüčģąĄą╝ą░ ą┤ąŠčüčéčāą┐ąĮą░ ą▓ ąśąĮč鹥čĆąĮąĄčé, ąŠą┤ąĮą░ą║ąŠ ąĖą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ą╝ąĮąŠą│ąĖąĄ ąČą░ą╗čāčÄčéčüčÅ ąĮą░ ąŠčłąĖą▒ą║ąĖ ąĖ ąĮąĄčüčéą░ą▒ąĖą╗čīąĮčāčÄ čĆą░ą▒ąŠčéčā čŹč鹊ą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ąØąĄą║ąŠč鹊čĆčŗąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą║ą░ą▒ąĄą╗čī Amontec JTAGKey-Tiny, ąŠąĮ ą┤ąŠą▓ąŠą╗čīąĮąŠ ąĮąĄą┤ąŠčĆąŠą│ąŠą╣ (ąŠą║ąŠą╗ąŠ $40), čü ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ USB ąĖ ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ OpenOCD. ąóą░ą║ąČąĄ čģąŠčĆąŠčłąĖą╣ ą▓ą░čĆąĖą░ąĮčé - ą║ą░ą▒ąĄą╗čī Turtelizer2 [7].
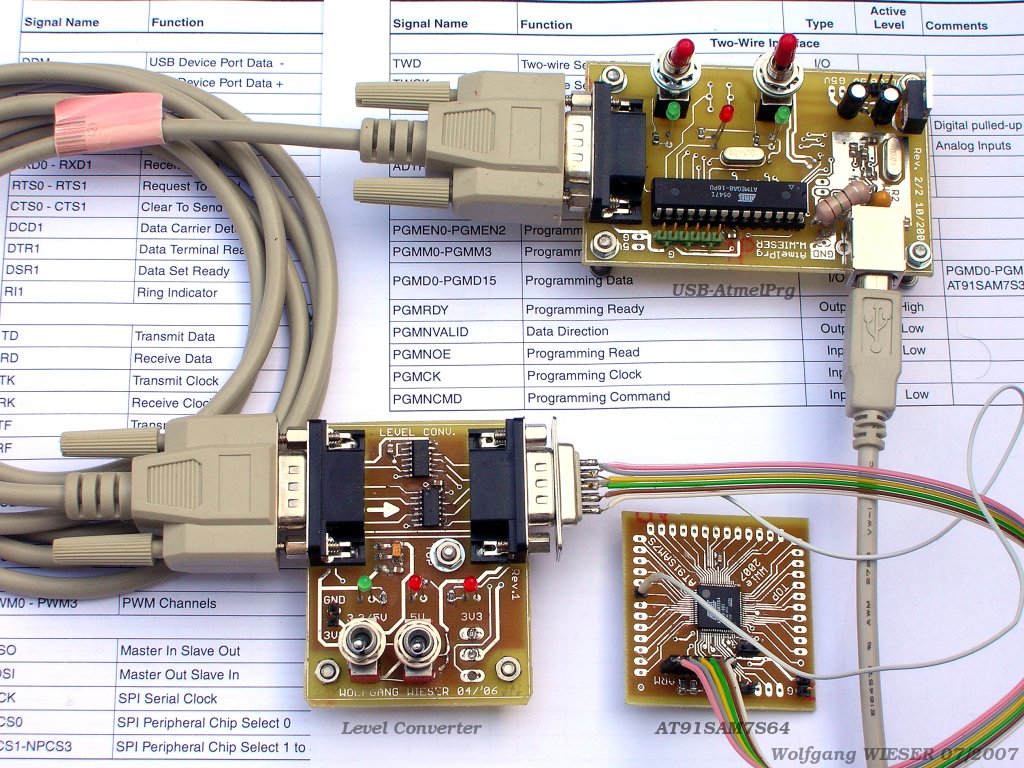
ŌĆó ą¤ą╗ą░čéą░ čü ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ AT91SAM7S64: ąĮą░ ąĮąĄą╣ ą╝čŗ ą▒čāą┤ąĄą╝ ąĘą░ą┐čāčüą║ą░čéčī ą┐čĆąŠčüč鹥ą╣čłčāčÄ ą┐čĆąŠą│čĆą░ą╝ą╝čā "hello-world". ąØą░ ą┐ą╗ą░č鹥 ą╝ąŠąČąĄčé ą▒čŗčéčī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ AT91SAM7S64 ąĖą╗ąĖ AT91SAM7S256. ąÆčŗ ą╝ąŠąČąĄč鹥 ą║čāą┐ąĖčéčī ą┐ą╗ą░čéčā čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ AT91SAM7S-EK ąŠčé Atmel ąĮą░ Digikey ą┐čĆąĖą╝ąĄčĆąĮąŠ ąĘą░ $150 ąĖą╗ąĖ čüąŠą▒čĆą░čéčī čüą░ą╝ąŠčüč鹊čÅč鹥ą╗čīąĮąŠ [8], ą╝ąĮąŠą│ąŠ ą┐ąŠą┤ąŠą▒ąĮčŗčģ ą┐ą╗ą░čé ąĄčüčéčī ąĮą░ AliExpress. ąÉą▓č鹊čĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ ą┐čĆąŠčüč鹥ą╣čłčāčÄ ą┐ą╗ą░čéčā čü ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╝ ąĮą░ą▒ąŠčĆąŠą╝ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓, ą║ąŠč鹊čĆčŗąĄ čéčĆąĄą▒čāčÄčéčüčÅ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąöąŠą╗ąČąĄąĮ ą▒čŗčéčī ą║ą▓ą░čĆčå ąĮą░ čćą░čüč鹊čéčā 18.432 ą£ąōčå, ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▒ą╗ąŠą║ąĖčĆčāčÄčēąĖčģ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆąŠą▓ ąĖ ą▓ąĄčĆčģąĮąĖąĄ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖąĄ čĆąĄąĘąĖčüč鹊čĆčŗ ąĖ čüčéą░ą▒ąĖą╗ąĖąĘą░č鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ 3.3V.
ąØą░ č乊č鹊ą│čĆą░čäąĖąĖ ąĮąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮą░ ą╝ąĖąĮąĖą╝ą░ą╗ąĖčüčéąĖč湥čüą║ą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čüąĖčüč鹥ą╝čŗ: ą┐ą╗ą░čéą░ AT91SAM7S čüą┐čĆą░ą▓ą░ ą▓ąĮąĖąĘčā (ąĄčæ čüčģąĄą╝ą░ ą┐ąŠą║ą░ąĘą░ąĮą░ ą▓ąŠ ą▓čĆąĄąĘą║ąĄ ą▓čŗčłąĄ). ąØą░ č乊č鹊ą│čĆą░čäąĖąĖ ąĮąĄ ą▓ąĖą┤ąĮčŗ ą║ą▓ą░čĆčå ąĖ ą▒ą╗ąŠą║ąĖčĆčāčÄčēąĖąĄ ą┐ąĖčéą░ąĮąĖąĄ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆčŗ, ą┐ąŠč鹊ą╝čā čćč鹊 ąŠąĮąĖ ąĮą░čģąŠą┤čÅčéčüčÅ ąĮą░ ąĮąĖąČąĮąĄą╣ čüč鹊čĆąŠąĮąĄ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░čéčŗ.
[ą¤čĆąŠčüč鹥ą╣čłą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ Hello-World ]
ąŚą┤ąĄčüčī ą┐čĆąĖą▓ąĄą┤ąĄąĮą░ ą┐čĆąŠčüčéą░čÅ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐čĆąĖą╝ąĄčĆą░ ą┤ą╗čÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ AT91SAM7S.
ąśčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤: minimalistic-hello-world-1.0.tar.gz [9] (61 ą║ąĖą╗ąŠą▒ą░ą╣čé source tarball, čüąČą░čéčŗą╣ ą░čĆčģąĖą▓ą░č鹊čĆąŠą╝ gzip). ąÆąĄčĆčüąĖčÅ 1.0 (2007-07-19), ą░ą▓č鹊čĆ Wolfgang Wieser, ąŠą┐čāą▒ą╗ąĖą║ąŠą▓ą░ąĮ ą┐ąŠ ą╗ąĖčåąĄąĮąĘąĖąĖ GNU GPL (Version 2), čéčĆąĄą▒čāąĄčé ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░ ARM-GCC.
ąÆ ą░čĆčģąĖą▓ąĄ minimalistic-hello-world-1.0.tar.gz ąĮą░čģąŠą┤čÅčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ čäą░ą╣ą╗čŗ:
ążą░ą╣ą╗ ąØą░ąĘąĮą░č湥ąĮąĖąĄ
AT91SAM7S64.h
ążą░ą╣ą╗ ąĖąĘ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ Atmel, ąŠąĮ čüąŠą┤ąĄčƹȹĖčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ, ą║ąŠč鹊čĆą░čÅ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ąĮčāčéčĆąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ AT91SAM7S64.
AT91SAM7S256.h
ąóąŠ ąČąĄ čüą░ą╝ąŠąĄ ą┤ą╗čÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ AT91SAM7S256.
AT91SAM7.h
ąĪąĖą╝ą▓ąŠą╗čīąĮą░čÅ čüčüčŗą╗ą║ą░ ąĮą░ ąŠą┤ąĖąĮ ąĖąĘ ą▓čŗčłąĄčāą║ą░ąĘą░ąĮąĮčŗčģ čäą░ą╣ą╗ąŠą▓. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ Windows ą╝ąŠą│čāčé ą┐čĆąŠčüč鹊 čüą┤ąĄą╗ą░čéčī ą║ąŠą┐ąĖčÄ čäą░ą╣ą╗ą░ AT91SAM7S64.h ąĖą╗ąĖ AT91SAM7S256.h ą▓ čĆą░ą▒ąŠč湥ą╝ ą║ą░čéą░ą╗ąŠą│ąĄ ą┐čĆąŠąĄą║čéą░ ą┐ąŠą┤ ąĖą╝ąĄąĮąĄą╝ AT91SAM7.h.
main.c
ą×čüąĮąŠą▓ąĮąŠą╣ ą║ąŠą┤ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┐čĆąĖą╝ąĄčĆą░ "hello-world", ąĮą░ą┐ąĖčüą░ąĮąĮčŗą╣ ąĮą░ čÅąĘčŗą║ąĄ C.
crt.s
ąØąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗą╣ ą║ąŠą┤ ąĘą░ą┐čāčüą║ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (startup code), ąĮą░ą┐ąĖčüą░ąĮąĮčŗą╣ ąĮą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ.
Makefile
ą×ą▒čŗčćąĮčŗą╣ ą║ąŠą╝ą░ąĮą┤ąĮčŗą╣ čäą░ą╣ą╗ ą┤ą╗čÅ čāčéąĖą╗ąĖčéčŗ GNU make.
ld_flash.cmd
ąĪą║čĆąĖą┐čé ą║ąŠą╝ą░ąĮą┤ ą╗ąĖąĮą║ąĄčĆą░ (čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ ąĮąĖąČąĄ).
openocd-flash.cfg
ążą░ą╣ą╗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ OpenOCD, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗą╣ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ą┤ą▓ąŠąĖčćąĮąŠą│ąŠ ą║ąŠą┤ą░ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą▓ ą┐ą░ą╝čÅčéčī ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ AT91SAM7S.
openocd.cfg
ąóą░ą║ąŠą╣ ąČąĄ čäą░ą╣ą╗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ąĮąŠ ą▒ąĄąĘ ąĖąĮčüčéčĆčāą║čåąĖą╣ ą┤ą╗čÅ ą┐čĆąŠčłąĖą▓ą║ąĖ ą┐ą░ą╝čÅčéąĖ.
openocd_doflash
ą”ąĄą╗ąĄą▓ąŠą╣ čüą║čĆąĖą┐čé OpenOCD, ą║ąŠč鹊čĆčŗą╣ čüąŠą┤ąĄčƹȹĖčé čĆąĄą░ą╗čīąĮčŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ ą┐čĆąŠčłąĖą▓ą║ąĖ ą┐ą░ą╝čÅčéąĖ.
ąÆ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čüąŠą┤ąĄčƹȹĖčéčüčÅ č鹊ą╗čīą║ąŠ ą▓ ą┤ą▓čāčģ ą╝ąŠą┤čāą╗čÅčģ, čŹč鹊 čäą░ą╣ą╗čŗ main.c ąĖ crt.s.
ążą░ą╣ą╗ crt.s čŹč鹊 ąĮąĖąĘą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗą╣ ą║ąŠą┤ ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗą╣ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ čÅą┤čĆą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ą×ąĮ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé čüčéą░čéąĖč湥čüą║ąĖąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ, ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčé čüč鹥ą║ąĖ ąĖ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (IRQ handlers), ąĖ ą▓ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ ą▓čüąĄčģ čüą▓ąŠąĖčģ ą┤ąĄą╣čüčéą▓ąĖą╣ ą┐ąĄčĆąĄą┤ą░ąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓ čäčāąĮą║čåąĖčÄ main(), ąĮą░ą┐ąĖčüą░ąĮąĮčāčÄ ąĮą░ čÅąĘčŗą║ąĄ C. ąÜąŠą┤ ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░ ą▓ čŹč鹊ą╣ čüčéą░čéčīąĄ ąĮąĄ ąŠą▒čüčāąČą┤ą░ąĄčéčüčÅ, čćąĖčéą░ą╣č鹥 ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ ą▓ ą░čĆčģąĖą▓ąĄ [9].
ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮ ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą╝ąŠą┤čāą╗čÅ main.c. ą£ąĮąŠą│ąĖąĄ ą┤ą╗čÅ čāą┐čĆąŠčēąĄąĮąĖčÅ ą┐ąŠą┤čĆąŠą▒ąĮčŗąĄ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ ąĘą┤ąĄčüčī čāą┤ą░ą╗ąĄąĮčŗ, ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ čüą╝. ą▓ [9]. ążčāąĮą║čåąĖčÅ Initialize() ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ, ą▓ą║ą╗čÄčćą░čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░. ążčāąĮą║čåąĖčÅ PanicBlinker() ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą┤ąĄą╗ą░ąĄčé ą▓ąŠąĘą▓čĆą░čé, ąŠąĮą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┤ąĖą░ą│ąĮąŠčüčéąĖą║ąĖ ąŠčłąĖą▒ąŠą║ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝ąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░ ą║ ą┐ą░ą╝čÅčéąĖ. ą×ąĮą░ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ąĖąĘ crt.s.
/* * main.c - ą┐čĆąŠčüč鹥ą╣čłą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ AT91SAM7 (hello world). * * Copyright (c) 2007 by Wolfgang Wieser. */ #include "AT91SAM7.h"
typedef signed char int8;typedef unsigned char uint8;
#define nop() __asm__ __volatile__("nop")
//ąØąŠąČą║ąĖ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ą╝ąĖ #define LED_A (1U << 0) /* PA0, pin 48 */ #define LED_B (1U << 1) /* PA1, pin 47 */
//ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣: static void DefaultInterruptHandler (void )
{ /* ąóčāčé ąĮąĄčé ąĮąĖą║ą░ą║ąĖčģ ą┤ąĄą╣čüčéą▓ąĖą╣. */ }static void SpuriousInterruptHandler (void )
{ /* ąŚą┤ąĄčüčī č鹊ąČąĄ ąĮąĖą║ą░ą║ąĖčģ ą┤ąĄą╣čüčéą▓ąĖą╣, ą┐čĆąŠčüč鹊 ą▒čŗčüčéčĆčŗą╣ ą▓ąŠąĘą▓čĆą░čé. */ }
// ąæąĄčüą║ąŠąĮąĄčćąĮčŗą╣ čåąĖą║ą╗, ą▓ ą║ąŠč鹊čĆąŠą╝ ą╝ąĖą│ą░ąĄčé čüą▓ąĄč鹊ą┤ąĖąŠą┤ LED_A (PA0). // ąŁč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┤ąĖą░ą│ąĮąŠčüčéąĖą║ąĖ ąŠčłąĖą▒ąŠą║. extern void PanicBlinker (uint8 code);void PanicBlinker (uint8 code)
{
volatile AT91PS_PIO pPIO = AT91C_BASE_PIOA;
pPIO-> PIO_PER |= LED_A; // ąĀą░ąĘčĆąĄčłą░ąĄčé PIO čāą┐čĆą░ą▓ą╗čÅčéčī čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝.
pPIO-> PIO_OER |= LED_A; // ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą▓čŗčģąŠą┤ą░.
pPIO-> PIO_SODR = LED_A; // ąØą░čćą░ą╗ąŠ čü ą▓čŗą║ą╗čÄč湥ąĮąĮčŗą╝ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝.
for (;;)
{
uint8 i;
unsigned int j;
for (i=0 ; i < code; i++ )
{
pPIO-> PIO_CODR = LED_A; // ą╗ąŠą│. 0, čüą▓ąĄč鹊ą┤ąĖąŠą┤ ą▓ą║ą╗čÄčćą░ąĄčéčüčÅ.
for (j=300000 ; j; j-- ) nop();
pPIO-> PIO_SODR = LED_A; // ą╗ąŠą│. 1, čüą▓ąĄč鹊ą┤ąĖąŠą┤ ą▓čŗą║ą╗čÄčćą░ąĄčéčüčÅ.
for (j=300000 ; j; j-- ) nop();
}
// ą”ąĖą║ą╗ ą┤ą╗čÅ ąĮąĄą║ąŠč鹊čĆąŠą╣ ąĘą░ą┤ąĄčƹȹ║ąĖ:
for (j=300000*3 ; j; j-- ) nop();
}
}
// ążčāąĮą║čåąĖčÅ ą┤ą╗čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ. static void Initialize (void )
{
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ą║ąŠą╗ąĖč湥čüčéą▓ą░ čåąĖą║ą╗ąŠą▓ ąŠąČąĖą┤ą░ąĮąĖčÅ ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ ą║ FLASH (Flash Wait sate).
// ąŚą┤ąĄčüčī čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ąĮčāą╗ąĄą▓ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čåąĖą║ą╗ąŠą▓ ąŠąČąĖą┤ą░ąĮąĖčÅ (0 wait states).
AT91C_BASE_MC-> MC_FMR = ((AT91C_MC_FMCN)& (22 << 16 )) | AT91C_MC_FWS_0FWS;
// ąŚą░ą┐čĆąĄčé čüč鹊čĆąŠąČąĄą▓ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░ (watchdog).
AT91C_BASE_WDTC-> WDTC_WDMR= AT91C_WDTC_WDDIS;
// ąŚą░ą┐čāčüą║ ąŠčüąĮąŠą▓ąĮąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░.
AT91PS_PMC pPMC = AT91C_BASE_PMC;
pPMC-> PMC_MOR = (( AT91C_CKGR_OSCOUNT & (6U << 8 )) | AT91C_CKGR_MOSCEN );
while (! (pPMC-> PMC_SR & AT91C_PMC_MOSCS));
// ąÆčŗą▒ąŠčĆ ą▓ ą║ą░č湥čüčéą▓ąĄ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ master clock (MCK).
// ąŁč鹊 ąŠčüąĮąŠą▓ąĮąŠą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ, čüčéą░ą▒ąĖą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą║ą▓ą░čĆčåąĄą╝.
pPMC-> PMC_MCKR = AT91C_PMC_CSS_MAIN_CLK;
while (! (pPMC-> PMC_SR & AT91C_PMC_MCKRDY));
pPMC-> PMC_MCKR = AT91C_PMC_CSS_MAIN_CLK | AT91C_PMC_PRES_CLK;
while (! (pPMC-> PMC_SR & AT91C_PMC_MCKRDY));
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čüą▒čĆąŠčüą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ. ąŁč鹊 ą┐ąŠą╝ąŠą│ą░ąĄčé ą▓ ąŠčéą╗ą░ą┤ą║ąĄ.
AT91C_BASE_RSTC-> RSTC_RMR = 0xa5000400U | AT91C_RSTC_URSTEN;
// ąØą░čüčéčĆąŠą╣ą║ą░ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ.
// 0 čŹč鹊 FIQ, 1 čŹč鹊 SYS.
int i;
for (i=0 ; i < 31 ; i++ )
{ AT91C_BASE_AIC-> AIC_SVR[i] = (unsigned )& DefaultInterruptHandler; }
AT91C_BASE_AIC-> AIC_SPU = (unsigned )& SpuriousInterruptHandler;
// ąØą░čüčéčĆąŠą╣ą║ą░ ąĮąŠąČąĄą║ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ą╝ąĖ.
volatile AT91PS_PIO pPIO = AT91C_BASE_PIOA;
// ąĀą░ąĘčĆąĄčłą░ąĄčé PIO ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ą╝ąĖ:
pPIO-> PIO_PER = LED_A | LED_B;
// ąĀą░ąĘčĆąĄčłą░ąĄčé ą▓čŗčģąŠą┤čŗ ąĮą░ ąĮąŠąČą║ą░čģ, ą║čāą┤ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ čüą▓ąĄč鹊ą┤ąĖąŠą┤čŗ:
pPIO-> PIO_OER = LED_A | LED_B;
// ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĮą░čćą░ą╗čīąĮąŠąĄ čüąŠčüč鹊ąĮąĖąĄ ą▓čŗčģąŠą┤ąŠą▓ ą▓ ą╗ąŠą│. 1, ą┐čĆąĖ čŹč鹊ą╝
// čüą▓ąĄč鹊ą┤ąĖąŠą┤čŗ ą▓čŗą║ą╗čÄč湥ąĮčŗ:
pPIO-> PIO_SODR = LED_A | LED_B;
}
int main (void )
{
Initialize();
// *(int*)0x800000=177; // < -- ą¤čĆąĖą▓ąĄą┤ąĄčé ą║ ąŠčłąĖą▒ą║ąĄ data abort.
// (*((void(*)(void))0x800000))(); // < -- ą¤čĆąĖą▓ąĄą┤ąĄčé ą║ ąŠčłąĖą▒ą║ąĄ prefetch abort.
// ą¤ąĄčĆąĄą║ą╗čÄčćą░ąĄčé čüą▓ąĄč鹊ą┤ąĖąŠą┤čŗ, ąĮą░ ąŠč湥ąĮčī ą▓čŗčüąŠą║ąŠą╣ čüą║ąŠčĆąŠčüčéąĖ (čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ
// ąĘą░ą▓ąĖčüąĖčé ąŠčé čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ ą┐čĆąŠčåąĄčüčüąŠčĆą░). ą¤ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ąĮą░čüč鹊ą╗čīą║ąŠ ą▒čŗčüčéčĆąŠąĄ,
// čćč鹊 ąĄą│ąŠ ą╝ąŠąČąĮąŠ čāą▓ąĖą┤ąĄčéčī č鹊ą╗čīą║ąŠ čü ą┐ąŠą╝ąŠčēčīčÄ ąŠčüčåąĖą╗ą╗ąŠą│čĆą░čäą░.
volatile AT91PS_PIO pPIO = AT91C_BASE_PIOA;
for (;;)
{
// ą¤ąĄčĆą▓ąŠąĄ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ:
pPIO-> PIO_CODR = LED_A;
pPIO-> PIO_SODR = LED_A;
// ąÆč鹊čĆąŠąĄ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ:
pPIO-> PIO_CODR = LED_A;
pPIO-> PIO_SODR = LED_A;
// ąØąĄą▒ąŠą╗čīčłą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░:
int i;
for (i=0 ; i < 10 ; i++ ) nop();
}
return (0 );
}
ąśąĘ čŹč鹊ą│ąŠ ą║ąŠą┤ą░ ą╝ąŠąČąĮąŠ čāą▓ąĖą┤ąĄčéčī, čćč鹊 čäčāąĮą║čåąĖčÅ main() čüąĮą░čćą░ą╗ą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ą░ą┐ą┐ą░čĆą░čéčāčĆčā, ąĖ ąĘą░č鹥ą╝ ą▓čģąŠą┤ąĖčé ą▓ ą▒ąĄčüą║ąŠąĮąĄčćąĮčŗą╣ čåąĖą║ą╗, ą║ąŠč鹊čĆčŗą╣ ą┤ąĄčĆą│ą░ąĄčé ąĮąŠąČą║ąŠą╣ LED_A (PA0, pin 48). ą¤ąŠčüą║ąŠą╗čīą║čā ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ą╗ą░ ąŠčüąĮąŠą▓ąĮąŠą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ, č鹊 ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 ą║ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ą▓ą░čĆčåąĄą▓čŗą╣ čĆąĄąĘąŠąĮą░č鹊čĆ. ą£ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╗čÄą▒ąŠą╣ ą║ą▓ą░čĆčåąĄą▓čŗą╣ čĆąĄąĘąŠąĮą░č鹊čĆ, ąĮąŠ čćą░čēąĄ ą▓čüąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą║ą▓ą░čĆčå ąĮą░ čćą░čüč鹊čéčā 18.432 ą£ąōčå, ą┐ąŠč鹊ą╝čā čćč鹊 ąŠąĮ čģąŠčĆąŠčłąŠ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą▓ą║ą╗čÄčćą░čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ ąĖąĮč鹥čĆč乥ą╣čüą░ USB ąĮą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ AT91SAM7S. ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą▒ą╗ąŠą║ PLL ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, ą┐ąŠčŹč鹊ą╝čā ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ čäąĖą╗čīčéčĆą░ ą▓č鹊čĆąŠą│ąŠ ą┐ąŠčĆčÅą┤ą║ą░, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą║ ąĮąŠąČą║ąĄ PLLRC.
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ą╝ąĖą│ą░ąĮąĖąĄ ąĮą░čüč鹊ą╗čīą║ąŠ ą▒čŗčüčéčĆąŠąĄ, čćč鹊 ą▒ąĄąĘ ąŠčüčåąĖą╗ą╗ąŠą│čĆą░čäą░ ąÆčŗ ąĄą│ąŠ ąĮąĄ ąĘą░ą╝ąĄčéąĖč鹥. ą¦č鹊ą▒čŗ ą╝ąĖą│ą░ąĮąĖąĄ čüčéą░ą╗ąŠ ąĘą░ą╝ąĄčéąĮčŗą╝ ą▒ąĄąĘ ąŠčüčåąĖą╗ą╗ąŠą│čĆą░čäą░, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą╝ąĄąČą┤čā ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅą╝ąĖ ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░ ą▓čüčéą░ą▓ąĖčéčī čåąĖą║ą╗čŗ ąĘą░ą┤ąĄčƹȹ║ąĖ, ą║ą░ą║ čŹč鹊 čüą┤ąĄą╗ą░ąĮąŠ ą▓ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ PanicBlinker().
[ąÜąŠą╝ą┐ąĖą╗čÅčåąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ]
ąÜąŠąĮąĄčćąĮąŠ, ąÆčŗ ą╝ąŠąČąĄč鹥 čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī čŹčéčā ą┐čĆąŠą│čĆą░ą╝ą╝čā ą▓ ą┤ą▓ąŠąĖčćąĮčŗą╣ čäą░ą╣ą╗ ą┐čĆąŠčüčéčŗą╝ ą▓čŗąĘąŠą▓ąŠą╝ make ąĖąĘ ą║ąŠčĆąĮąĄą▓ąŠą╣ ą┐ą░ą┐ą║ąĖ ą┐čĆąŠąĄą║čéą░, ąŠą┤ąĮą░ą║ąŠ čüą╗ąĄą┤čāąĄčé ąĘąĮą░čéčī ąŠ ąĮąĄą║ąŠč鹊čĆčŗčģ čéčĆąĄą▒čāąĄą╝čŗčģ čłą░ą│ą░čģ:
1 . ąĪąĮą░čćą░ą╗ą░ crt.s ą░čüčüąĄą╝ą▒ą╗ąĖčĆčāąĄčéčüčÅ ą▓ ąŠą▒čŖąĄą║čéąĮčŗą╣ čäą░ą╣ą╗ crt.o, ąĖ main.c ą║ąŠą╝ą┐ąĖą╗ąĖčĆčāąĄčéčüčÅ ą▓ ąŠą▒čŖąĄą║čéąĮčŗą╣ čäą░ą╣ą╗ main.o:
arm-elf-as -mapcs-32 crt.s -o crt.o
arm-elf-gcc -I. -c -fno-common -O2 -g main.c
ą×ą┐čåąĖčÅ -fno-common čüą║ąŠčĆąĄąĄ ą▓čüąĄą│ąŠ ąĮąĄ ąĮčāąČąĮą░, ąĮąŠ ąŠąĮą░ ąĘą░čēąĖčéąĖčé ąÆą░čü ąŠčé ąĮąĄą║ąŠč鹊čĆčŗčģ ą▓ąŠąĘą╝ąŠąČąĮčŗčģ ąŠčłąĖą▒ąŠą║. ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ ą┐ąŠ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆčā GCC.
2 . ą¤ąŠą╗čāč湥ąĮąĮčŗąĄ ąŠą▒čŖąĄą║čéąĮčŗąĄ čäą░ą╣ą╗čŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą╗ąĖąĮą║ąŠą▓ą░ąĮčŗ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ą▓ąŠąĖčćąĮąŠą│ąŠ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝ąŠą│ąŠ ą║ąŠą┤ą░. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą╗ąĖąĮą║ąĄčĆčā ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ąŠą┐čåąĖčÅ -nostartfiles ą┐ąŠčüą║ąŠą╗čīą║čā čā ąĮą░čü čāąČąĄ ąĄčüčéčī čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╣ ą║ąŠą┤ ąĘą░ą┐čāčüą║ą░ ą▓ crt.o. ą¤čĆąĖ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą╗čÄą▒čŗčģ ą┐čĆąŠąĄą║č鹊ą▓ čāą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 čāą║ą░ąĘą░ą╗ąĖ ą╗ąĖąĮą║ąŠą▓ą║čā ą║ąŠą┤ą░ ąĘą░ą┐čāčüą║ą░ ą▓ą╝ąĄčüč鹥 čüąŠ ą▓čüąĄą╝ąĖ ą┤čĆčāą│ąĖą╝ąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗą╝ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ą╝ąĖ. ą×ą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ ąĖ ąĖčģ čĆą░ąĘą╝ąĄčĆčŗ ą┤ą╗čÅ čüč鹥ą║ą░ (stack) ąĖ ą║čāčćąĖ (heap) ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ čüą║čĆąĖą┐č鹥 ą╗ąĖąĮą║ąĄčĆą░ ld_flash.cmd:
arm-elf-ld -T ld_flash.cmd -nostartfiles -o main.elf crt.o main.o
ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ čłą░ą│ą░ ą┐ąŠą╗čāčćąĖčéčüčÅ ą┤ą▓ąŠąĖčćąĮčŗą╣ čäą░ą╣ą╗ main.elf ą▓ č乊čĆą╝ą░č鹥 ELF. ąÆ ąĮąĄą╝ čüąŠą┤ąĄčƹȹĖčéčüčÅ čéą░ą║ąČąĄ ąŠčéą╗ą░ą┤ąŠčćąĮą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ, ą┐ąŠč鹊ą╝čā čćč鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą▒čŗą╗ą░ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮą░ čü ąŠą┐čåąĖąĄą╣ -g.
3 . ąóąĄą┐ąĄčĆčī ąĮčāąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ą┤ą▓ąŠąĖčćąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, čćč鹊ą▒čŗ ąĖčģ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ą┐čĆąŠčłąĖčéčī ą▓ ą┐ą░ą╝čÅčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ (FLASH) ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąöą▓ąŠąĖčćąĮčŗą╣ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗą╣ ą║ąŠą┤ ą┤ą╗čÅ ą┐čĆąŠčłąĖą▓ą║ąĖ ąĖąĘą▓ą╗ąĄą║ą░ąĄčéčüčÅ ąĖąĘ čäą░ą╣ą╗ą░ ELF:
arm-elf-objcopy --output-target= binary main.elf main.bin
ążą░ą╣ą╗ main.bin ą╝ąŠąČąĄčé ą▒čŗčéčī č鹥ą┐ąĄčĆčī ąĘą░ą┐ąĖčüą░ąĮ ą▓ 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝čāčÄ ą┐ą░ą╝čÅčéčī FLASH ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ AT91SAM7S. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ čüą▒čĆąŠčü ąĖą╗ąĖ ą▓čŗą║ą╗čÄč湥ąĮąĖąĄ/ą▓ą║ą╗čÄč湥ąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ąĘą░ą┐čāčüą║čā ąĮą░čłąĄą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, ąĖ ą╝ąŠąČąĮąŠ ą▒čāą┤ąĄčé ąĮą░ą▒ą╗čÄą┤ą░čéčī (ąŠčüčåąĖą╗ą╗ąŠą│čĆą░č乊ą╝) ą╝ąĄčĆčåą░ąĮąĖąĄ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ LED_A.
ąĪą║čĆąĖą┐čé ą╗ąĖąĮą║ąĄčĆą░ ld_flash.cmd ąŠč湥ąĮčī ą▓ą░ąČąĮą░čÅ čćą░čüčéčī ą▓čüąĄą│ąŠ ą┐čĆąŠčåąĄčüčüą░, ą▓ ąĮąĄą╝ čüąŠą┤ąĄčƹȹĖčéčüčÅ čüą╗ąĄą┤čāčÄčēąĄąĄ:
/* ąŚą┤ąĄčüčī čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ č鹊čćą║ą░ ą▓čģąŠą┤ą░ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝čā, entry point (ą░ą┤čĆąĄčü _vec_reset ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą▓ čäą░ą╣ą╗ąĄ crt.s). */
ENTRY(_vec_reset)
/* ąŻą║ą░ąĘčŗą▓ą░čÄčéčüčÅ ąŠą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ AT91SAM7S64: */
MEMORY
{
flash : ORIGIN = 0 , LENGTH = 64 K /* FLASH EPROM */
ram : ORIGIN = 0x00200000 , LENGTH = 16 K /* static RAM */
}
/* ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ čüąĖą╝ą▓ąŠą╗ą░ _stack_end (ąŠą▒ąŠąĘąĮą░č湥ąĮąĖąĄ ą║ąŠąĮčåą░ čüč鹥ą║ą░): */
_stack_end = 0x203FFC ; /* AT91SAM7S64 */
/* ą×ą┐čĆąĄą┤ąĄą╗čÅčÄčéčüčÅ ą▓čŗčģąŠą┤ąĮčŗąĄ čüąĄą║čåąĖąĖ: */
SECTIONS
{
. = 0 ; /* čāčüčéą░ąĮąŠą▓ą║ą░ ą▓ 0 č鹥ą║čāčēąĄą│ąŠ čüč湥čéčćąĖą║ą░ ą░ą┤čĆąĄčüą░ */
.text : /* ą║ąŠą╗ą╗ąĄą║čåąĖčÅ ą▓čüąĄčģ čüąĄą║čåąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą▓ ą┐ą░ą╝čÅčéąĖ FLASH ą┐ąŠčüą╗ąĄ čģąŠą╗ąŠą┤ąĮąŠą│ąŠ čüčéą░čĆčéą░ */
{
* (.text) /* ą▓čüąĄ čüąĄą║čåąĖąĖ .text (ą║ąŠą┤ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, code) */
* (.rodata) /* ą▓čüąĄ čüąĄą║čåąĖąĖ .rodata (ą║ąŠąĮčüčéą░ąĮčéčŗ, čüčéčĆąŠą║ąĖ ąĖ čé. ą┐.) */
* (.rodata* ) /* ą▓čüąĄ čüąĄą║čåąĖąĖ .rodata* (ą║ąŠąĮčüčéą░ąĮčéčŗ, čüčéčĆąŠą║ąĖ ąĖ čé. ą┐.) */
* (.glue_7) /* ą▓čüąĄ čüąĄą║čåąĖąĖ .glue_7 (ąĮąĄą┐ąŠąĮčÅčéąĮąŠ, ą┤ą╗čÅ č湥ą│ąŠ čŹč鹊) */
* (.glue_7t) /* ą▓čüąĄ čüąĄą║čåąĖąĖ .glue_7t (ąĮąĄą┐ąŠąĮčÅčéąĮąŠ, ą┤ą╗čÅ č湥ą│ąŠ čŹč鹊) */
_etext = .; /* ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ čüąĖą╝ą▓ąŠą╗ą░ _etext čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą▒ą░ą╣čéą░ ą║ąŠą┤ą░ */
} > flash /* ą║ąŠą╝ą░ąĮą┤ą░ čĆą░ąĘą╝ąĄčüčéąĖčéčī ą▓čüąĄ ą▓čŗčłąĄą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮąŠąĄ ą▓ ą┐ą░ą╝čÅčéčī FLASH */
.data : /* ą║ąŠą╗ą╗ąĄą║čåąĖčÅ ą▓čüąĄčģ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗčģ čüąĄą║čåąĖą╣ .data, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┐ą░ą┤ą░čÄčé ą▓ RAM */
{
_data = .; /* čüąŠąĘą┤ą░ąĮąĖąĄ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ čüąĖą╝ą▓ąŠą╗ą░, ą┐ąŠą╝ąĄčćą░čÄčēąĄą│ąŠ ąĮą░čćą░ą╗ąŠ čüąĄą║čåąĖąĖ .data */
* (.data) /* ą▓čüąĄ čüąĄą║čåąĖąĖ .data */
_edata = .; /* ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ čüąĖą╝ą▓ąŠą╗ą░, ą┐ąŠą╝ąĄčćą░čÄčēąĄą│ąŠ ą║ąŠąĮąĄčå čüąĄą║čåąĖąĖ .data */
} > ram AT > flash /* ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąŠą╝ąĄčüčéąĖčéčī ą▓čüąĄ ą▓čŗčłąĄą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮąŠąĄ ą▓ RAM (ąĮąŠ ąĘą░ą│čĆčāąĘąĖčéčī ą║ąŠą┐ąĖčÄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░č鹊čĆą░ LMA ą▓ąŠ FLASH) */
.bss : /* ą║ąŠą╗ą╗ąĄą║čåąĖčÅ ą▓čüąĄčģ ąĮąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗčģ čüąĄą║čåąĖą╣ .bss, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┐ą░ą┤ą░čÄčé ą▓ RAM */
{
_bss_start = .; /* ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ čüąĖą╝ą▓ąŠą╗ą░, ą┐ąŠą╝ąĄčćą░čÄčēąĄą│ąŠ ąĮą░čćą░ą╗ąŠ čüąĄą║čåąĖąĖ .bss */
* (.bss) /* ą▓čüąĄ čüąĄą║čåąĖąĖ .bss */
} > ram /* ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąŠą╝ąĄčüčéąĖčéčī ą▓čüąĄ ą▓čŗčłąĄą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮąŠąĄ ą▓ RAM; ą▓čüąĄ čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ ą▒čāą┤čāčé ąŠčćąĖčēąĄąĮčŗ ą║ąŠą┤ąŠą╝ ąĘą░ą┐čāčüą║ą░ startup */
. = ALIGN(4 ); /* čāą▓ąĄą╗ąĖč湥ąĮąĖąĄ č鹥ą║čāčēąĄą│ąŠ čüč湥čéčćąĖą║ą░ ą░ą┤čĆąĄčüą░ ąĮą░ ą│čĆą░ąĮąĖčåčā, ą▓čŗčĆąŠą▓ąĮąĄąĮąĮčāčÄ ąĮą░ 32-ą▒ąĖčéąĮčŗą╣ ą▒ą░ą╣č鹊ą▓čŗą╣ ą░ą┤čĆąĄčü */
_bss_end = . ; /* ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ čüąĖą╝ą▓ąŠą╗ą░, ą┐ąŠą╝ąĄčćą░čÄčēąĄą│ąŠ ą║ąŠąĮąĄčå čüąĄą║čåąĖąĖ .bss */
}
_end = .; /* ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ čüąĖą╝ą▓ąŠą╗ą░, ą┐ąŠą╝ąĄčćą░čÄčēąĄą│ąŠ ą║ąŠąĮąĄčå RAM ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ */
ąÆą░ąČąĮąŠąĄ ąĘą░ą╝ąĄčćą░ąĮąĖąĄ: ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĮą░čÅ ąĘą┤ąĄčüčī ą┐čĆąŠčüč鹥ą╣čłą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ hello-world ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮą░ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ąĮą░ AT91SAM7S64. ąÆ čüą╗čāčćą░ąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ AT91SAM7S256 ąĮčāąČąĮąŠ čüą┤ąĄą╗ą░čéčī čüą╗ąĄą┤čāčÄčēąĄąĄ:
ŌĆó ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ Linux: čüą┤ąĄą╗ą░ą╣č鹥 čüąĖą╝ą▓ąŠą╗čīąĮčāčÄ čüčüčŗą╗ą║čā AT91SAM7.h, čćč鹊ą▒čŗ ąŠąĮą░ čāą║ą░ąĘčŗą▓ą░ą╗ą░ ąĮą░ čäą░ą╣ą╗ AT91SAM7S256.h ą▓ą╝ąĄčüč鹊 čäą░ą╣ą╗ą░ AT91SAM7S64.h. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ Windows: ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ą║ąŠą┐ąĖčÄ čäą░ą╣ą╗ą░ AT91SAM7S256.h (ąĖą╗ąĖ ą┐ąĄčĆąĄąĖą╝ąĄąĮčāą╣č鹥 ąĄą│ąŠ) ą▓ čäą░ą╣ą╗ AT91SAM7.h.
ŌĆó ą¤ąŠą╝ąĄąĮčÅą╣č鹥 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ ąĖ čüč鹥ą║ą░ ą▓ čüą║čĆąĖą┐č鹥 ą╗ąĖąĮą║ąĄčĆą░ ld_flash.cmd, ą┐ąŠčüą║ąŠą╗čīą║čā ą┐ą░ą╝čÅčéčī AT91SAM7S256 ą▓ č湥čéčŗčĆąĄ čĆą░ąĘą░ ą▒ąŠą╗čīčłąĄ (čŹč鹊 ąŠčéąĮąŠčüąĖčéčüčÅ ąĖ ą║ FLASH, ąĖ ą║ RAM):
MEMORY
{
flash : ORIGIN = 0 , LENGTH =256 K /* FLASH EPROM */
ram : ORIGIN = 0x00200000 , LENGTH = 64 K /* static RAM */
}
_stack_end = 0x20FFFC ; /* AT91SAM7S256 */
[ą¤čĆąŠčłąĖą▓ą║ą░ ąĖ ąĘą░ą┐čāčüą║ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ]
ąóąĄą┐ąĄčĆčī ą▓čüąĄ ą│ąŠč鹊ą▓ąŠ ąĘą░ą┐čāčüčéąĖčéčī ąĮą░čłčā ą┐čĆąŠą│čĆą░ą╝ą╝čā ąĮą░ čåąĄą╗ąĄą▓ąŠą╝ ąČąĄą╗ąĄąĘąĄ. ą¦č鹊ą▒čŗ ą┐ąŠą╝ąĄčüčéąĖčéčī ą┤ą▓ąŠąĖčćąĮčŗą╣ ą║ąŠą┤ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą▓ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ą░ą╝čÅčéąĖ FLASH ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ą╝ąŠąČąĮąŠ ą┐čĆąŠčüč鹊 ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą║ąŠą╝ą░ąĮą┤čā make flash. ąŁč鹊 ą┤ą░čüčé čüąĖą│ąĮą░ą╗ ą┤ą╗čÅ OpenOCD ąĘą░ą│čĆčāąĘąĖčéčī main.bin. ąØąŠ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ čŹč鹊 ą╝ąŠąČąĮąŠ ą▒čāą┤ąĄčé čüą┤ąĄą╗ą░čéčī, čāą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 OpenOCD ą║ąŠčĆčĆąĄą║čéąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░. ąöą╗čÅ čŹč鹊ą│ąŠ ąĮčāąČąĮąŠ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī ąĮą░ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ openocd.cfg:
telnet_port 4444
gdb_port 3333
# ąÜąŠą╝ą░ąĮą┤čŗ, čüą┐ąĄčåąĖą░ą╗čīąĮąŠ ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ USB-AtmelPrg. # ąśčģ ąĮčāąČąĮąŠ ąĖąĘą╝ąĄąĮąĖčéčī, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 ą┤čĆčāą│ąŠą╣ ą░ą┤ą░ą┐č鹥čĆ JTAG.
interface usbatmelprg
jtag_speed 0
jtag_nsrst_delay 200
jtag_ntrst_delay 200
reset_config srst_only srst_pulls_trst
# ą”ąĄą╗ąĄą▓ąŠą╣ ą┐čĆąŠčåąĄčüčüąŠčĆ ąĖąĘ čüąĄčĆąĖąĖ AT91SAM7:
jtag_device 4 0x1 0xf 0xe
target arm7tdmi little run_and_halt 0 arm7tdmi
run_and_halt_time 0 30
flash bank at91sam7 0 0 0 0 0
daemon_startup reset
ą×ą▒čŗčćąĮąŠ ąĮčāąČąĮąŠ č鹊ą╗čīą║ąŠ ą┐ąŠą╝ąĄąĮčÅčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą░ą┤ą░ą┐č鹥čĆą░ JTAG. ą¤čĆąĄą┤čŗą┤čāčēą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮą░ ą┤ą╗čÅ čüą░ą╝ąŠą┤ąĄą╗čīąĮąŠą│ąŠ ą║ą░ą▒ąĄą╗čÅ USB-AtmelPrg [6], ąĮąŠ ąĄčüą╗ąĖ ąÆčŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 Amontec JTAGKey, č鹊 ą╝ąŠąČąĄč鹥 ąĘą░ą╝ąĄąĮąĖčéčī čüąĄą║čåąĖčÄ JTAG čüą╗ąĄą┤čāčÄčēąĖą╝ čüąŠą┤ąĄčƹȹĖą╝čŗą╝:
# ąÜąŠą╝ą░ąĮą┤čŗ, čüą┐ąĄčåąĖčäąĖčćąĮčŗąĄ ą┤ą╗čÅ Amontec JTAGKey:
interface ft2232
ft2232_device_desc "Amontec JTAGkey A"
ft2232_layout jtagkey
ft2232_vid_pid 0x0403 0xcff8
jtag_speed 2
jtag_nsrst_delay 200
jtag_ntrst_delay 200
ąŚą░č鹥ą╝ čģąŠčĆąŠčłąĄą╣ ąĖą┤ąĄąĄą╣ ą▒čāą┤ąĄčé ą▒čŗčüčéčĆąŠ ą┐čĆąŠč鹥čüčéąĖčĆąŠą▓ą░čéčī čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ čü JTAG ą┐čāč鹥ą╝ ąĘą░ą┐čāčüą║ą░ OpenOCD, ą┤ą╗čÅ čŹč鹊ą│ąŠ ąŠčéą║čĆąŠą╣č鹥 ą┤ą▓ą░ č鹥čĆą╝ąĖąĮą░ą╗ą░. ąÆ ą┐ąĄčĆą▓ąŠą╝ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ą║ąŠą╝ą░ąĮą┤čā openocd -f openocd.cfg, čüą╝. čüąĄčüčüąĖčÄ č鹥čĆą╝ąĖąĮą░ą╗ą░ ąĮąĖąČąĄ.
bash# openocd -f openocd.cfg
Info: ../../trunk/src/openocd.c:86 main() : Open
On-Chip Debugger ( 2007-06-28 12:30 CEST)
Opened USB connection to 0403:6003:
Hardware: USB-AtmelPrg, Rev. 2/2
Info: ../../../trunk/src/jtag/usbatmelprg.cc:21
4 usbatmelprg_init() :
Connected to 0403:6003 ( USB-AtmelPrg, Rev. 2/2) :
Device: USB AtmelPrg Rev 2.3
Vendor: Wolfgang WIESER, 07/2007
Firmware version: 0x203
Protocol version: 5() : srst resets test logic
, too
Info: ../../../trunk/src/server/server.c:67 add
_connection() : accepted 'telnet' connection from 0
Info: ../../../trunk/src/server/server.c:367 se
rver_loop() : dropped 'telnet' connection
ąÆąŠ ą▓č鹊čĆąŠą╣ čüąĄčüčüąĖąĖ č鹥čĆą╝ąĖąĮą░ą╗ą░ ąŠčéą║čĆąŠą╣č鹥 ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ telnet ą║ąŠą╝ą░ąĮą┤ąŠą╣ telnet localhost 4444, čüą╝. čüąĄčüčüąĖčÄ ąĮąĖąČąĄ.
bash# telnet localhost 4444
Trying 127.0.0.1...
Connected to localhost.
Escape character is '^]' .
Open On-Chip Debugger
> poll
target state: halted
target halted in ARM state due to debug
request, current mode: System
cpsr: 0x800000df pc: 0x000005e4
> resume
Target 0 resumed
> halt
requesting target halt...
> Target 0 halted
target halted in ARM state due to debug
request, current mode: System
cpsr: 0x800000df pc: 0x000005e0
> shutdown
Connection closed by foreign host.
ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ Windows ą╝ąŠą│čāčé ąĘą░ą┐čāčüčéąĖčéčī čüąĄčüčüąĖčÄ telnet čü ą┐ąŠą╝ąŠčēčīčÄ ąĘą░ą┐čāčüą║ą░ cmd.exe ąĖąĘ ą╝ąĄąĮčÄ ą¤čāčüą║, ąĖ ąĘą░č鹥ą╝ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčīčüčÅ ą║ ą┐ąŠčĆčéčā 4444 ą┐ąŠ ąĖą╝ąĄąĮąĖ localhost, ą║ąŠč鹊čĆąŠąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą░ą┤čĆąĄčüčā 127.0.0.1.
ąÜą░ą║ ąÆčŗ ą╝ąŠąČąĄč鹥 ą▓ąĖą┤ąĄčéčī, čüąĄčüčüąĖčÅ telnet ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą║ąŠą╝ą░ąĮą┤čŗ OpenOCD. ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą╗ąĮąŠą│ąŠ čüą┐ąĖčüą║ą░ ą║ąŠą╝ą░ąĮą┤ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ą║ąŠą╝ą░ąĮą┤čā help, ąĖą╗ąĖ ą┐čĆąŠčüą╝ąŠčéčĆąĖč鹥 ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ OpenOCD. ąÆą░ąČąĮąŠ, čćč鹊ą▒čŗ OpenOCD čüąŠąŠą▒čēąĖą╗ą░ ąŠ ą┤ąŠą┐čāčüčéąĖą╝ąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ čåąĄą╗ąĄą▓ąŠą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░ (target) ąĖ ąĘąĮą░č湥ąĮąĖąĄ cpsr; ąĄčüą╗ąĖ ąÆčŗ čāą▓ąĖą┤ąĖč鹥 čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ, č鹊 ąŠą▒ą╝ąĄąĮ č湥čĆąĄąĘ JTAG čüą║ąŠčĆąĄąĄ ą▓čüąĄą│ąŠ čĆą░ą▒ąŠčéą░ąĄčé ą┐čĆą░ą▓ąĖą╗čīąĮąŠ.
ąóąĄą┐ąĄčĆčī ą╝ąŠąČąĮąŠ ąĘą░ą│čĆčāąĘąĖčéčī ąĖ ąĘą░ą┐čāčüčéąĖčéčī ą┐čĆąŠą│čĆą░ą╝ą╝čā ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąĪą║ąŠą┐ąĖčĆčāą╣č鹥 ąÆą░čłąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ JTAG ą▓ čäą░ą╣ą╗ openocd.cfg ą┐ąŠą┤ąŠą▒ąĮąŠ č鹊ą╝čā, ą║ą░ą║ čŹč鹊 čüą┤ąĄą╗ą░ąĮąŠ ą▓ čäą░ą╣ą╗ąĄ openocd_flash.cfg. ąŚą░ą╝ąĄčćą░ąĮąĖąĄ: ąĄčüčéčī ąŠą┤ąĮąŠ ą╝ą░ą╗ąŠąĘą░ą╝ąĄčéąĮąŠąĄ ąŠčéą╗ąĖčćąĖąĄ ą╝ąĄąČą┤čā čŹčéąĖą╝ąĖ ą┤ą▓čāą╝čÅ čäą░ą╣ą╗ą░ą╝ąĖ: ą║ąŠą╝ą░ąĮą┤ą░ target ą▓ čäą░ą╣ą╗ąĄ openocd.cfg ąĖčüą┐ąŠą╗čīąĘčāąĄčé run_and_halt, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą▓ openocd_flash.cfg čŹč鹊 run_and_init.
ąÜąŠą╝ą░ąĮą┤ą░ make flash ą▒čāą┤ąĄčé ą┤ąĄą╗ą░čéčī ą┐ąŠčćčéąĖ č鹊 ąČąĄ čüą░ą╝ąŠąĄ, ą║ą░ą║ ą▓čŗčłąĄą┐čĆąĖą▓ąĄą┤ąĄąĮąĮą░čÅ čüąĄčüčüąĖčÅ telnet, ąĮąŠ ą▓ą╝ąĄčüč鹊 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ telnet čüąĖčüč鹥ą╝ą░ OpenOCD ą┐ąŠą╗čāčćą░ąĄčé ą║ąŠą╝ą░ąĮą┤čŗ ąĖąĘ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą│ąŠ čäą░ą╣ą╗ą░ openocd_doflash:
# ąĪą║čĆąĖą┐čé ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ FLASH-ą┐ą░ą╝čÅčéąĖ AT91SAM7Sxx. # ąØą░ą┐ąĖčüą░ąĮ Wolfgang Wieser 07/2007.
wait_halt
armv4_5 core_state arm
mww 0xffffff60 0x003c0100 # MC_FMR: čĆąĄąČąĖą╝ flash (FWS=1,FMCN=60, ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▒ąĄąĘąŠą┐ą░čüąĮąŠ)
mww 0xfffffd44 0x00008000 # ąĘą░ą┐čĆąĄčé čüč鹊čĆąŠąČąĄą▓ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░ (watchdog)
mww 0xfffffc20 0x00000601 # CKGR_MOR : čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ąŠčüąĮąŠą▓ąĮąŠą│ąŠ čéą░ą║č鹊ą▓ąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░
wait 100 # ąĮąĄą▒ąŠą╗čīčłąŠąĄ ąŠąČąĖą┤ą░ąĮąĖąĄ ą┤ą╗čÅ čüčéą░ą▒ąĖą╗ąĖąĘą░čåąĖąĖ ą│ąĄąĮąĄčĆą░č鹊čĆą░ (100 ą╝čü)
mww 0xfffffc30 0x00000001 # PMC_MCKR : MCK = MAIN_CLK (master clock = main) wait 100
arm7_9 fast_memory_access enable # ą┤ą╗čÅ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ >32 ą║ąōčå
flash write 0 main.bin 0x0 # ąĘą░ą┐ąĖčüčī flash wait 10
dump_image flash.bin 0x00100000 2048 # ąŠą▒čĆą░čéąĮąŠąĄ čćč鹥ąĮąĖąĄ ą┐ąĄčĆą▓čŗčģ 2 ą║ąĖą╗ąŠą▒ą░ą╣čé ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ
mww 0xfffffd08 0xa5000401 # čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čüą▒čĆąŠčüą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ
reset
shutdown
ą¤ąĄčĆą▓čŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ mww (čüąŠą║čĆą░čēąĄąĮąĖąĄ ąŠčé memory write word, čé. ąĄ. "ąĘą░ą┐ąĖčüčī čüą╗ąŠą▓ą░ ą▓ ą┐ą░ą╝čÅčéčī") čĆą░ąĘčĆąĄčłą░čÄčé čĆą░ą▒ąŠčéčā ą│ą╗ą░ą▓ąĮąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ąĖ ąĘą░ą┐čāčüą║ą░čÄčé čÅą┤čĆąŠ ARM ąĮą░ ą▓čŗčüąŠą║ąŠą╣ čćą░čüč鹊č鹥 ą▓ą╝ąĄčüč鹊 ąĮąĖąĘą║ąŠą╣ (ąĮąĖąĘą║ą░čÅ čćą░čüč鹊čéą░ ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ąĖą╗ąĖ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ). ąŁč鹊 ą┐ąŠą▓čŗčłąĄąĮąĖąĄ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ čāčüą║ąŠčĆčÅąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ, ą┐ąŠčüą║ąŠą╗čīą║čā ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐čĆąĖą╝ąĄąĮąĖčéčī ąŠą┐čåąĖčÄ fast_memory_access. ą¤ąŠčüą╗ąĄ ąĘą░ą┐ąĖčüąĖ čäą░ą╣ą╗ą░ main.bin ą▓ ą┐ą░ą╝čÅčéčī flash ą┐ąĄčĆą▓čŗąĄ 2 ą║ąĖą╗ąŠą▒ą░ą╣čéą░ ą┐ą░ą╝čÅčéąĖ ą▓čŗčćąĖčéčŗą▓ą░čÄčéčüčÅ ąŠą▒čĆą░čéąĮąŠ ąĖ ą┐ąŠą╝ąĄčēą░čÄčéčüčÅ ą▓ čäą░ą╣ą╗ flash.bin. ąŻčéąĖą╗ąĖčéą░ make čüčĆą░ą▓ąĮąĖčé čŹč鹊čé čäą░ą╣ą╗ čü ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮčŗą╝ čäą░ą╣ą╗ąŠą╝ main.bin, čćč鹊ą▒čŗ ą┐čĆąŠą▓ąĄčĆąĖčéčī čāčüą┐ąĄčłąĮąŠčüčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ (ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ą┤ą╗čÅ ą┐ąĄčĆą▓čŗčģ 2 ą║ąĖą╗ąŠą▒ą░ą╣čé). ą¤ąŠčüą╗ąĄą┤ąĮąĖąĄ čüčéčĆąŠą║ąĖ ą▓čŗą▓ąŠą┤ą░ make flash ą┤ąŠą╗ąČąĮčŗ ą▓čŗą│ą╗čÅą┤ąĄčéčī ą┐čĆąĖą╝ąĄčĆąĮąŠ čéą░ą║:
cmp main.bin flash.bin
cmp: EOF on main.bin
make: [ flash] Error 1 ( ignored)
ąŚą░ą╝ąĄčćą░ąĮąĖąĄ: ąÆą░ą╝ ąĮčāąČąĮąŠ ą▓čĆčāčćąĮčāčÄ ą┐čĆąŠą▓ąĄčĆąĖčéčī čĆąĄąĘčāą╗čīčéą░čé ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤čŗ cmp. ąĪąŠąŠą▒čēąĄąĮąĖąĄ "Error 1" ą┐ąŠ č鹊ą╣ ą┐čĆąĖčćąĖąĮąĄ, čćč鹊 ąĮąĄ ą┤ąŠčüčéąĖą│ąĮčāčé ą║ąŠąĮąĄčå čäą░ą╣ą╗ą░ main.bin ("EOF on main.bin" ąĖą╗ąĖ "EOF on flash.bin"). ąØąŠ ąĄčüą╗ąĖ cmp čüąŠąŠą▒čēąĖčé "the two files differ" (ą┤ą▓ą░ čäą░ą╣ą╗ą░ ąŠčéą╗ąĖčćą░čÄčéčüčÅ), č鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ąĮąĄ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ.
ąōąŠč鹊ą▓ąŠ! ąóąĄą┐ąĄčĆčī ąÆčŗ ą┤ąŠą╗ąČąĮčŗ čāą▓ąĖą┤ąĄčéčī ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮčŗąĄ ąĖą╝ą┐čāą╗čīčüčŗ ąĮą░ ąĮąŠąČą║ąĄ ą┐ąŠčĆčéą░ PA0 (pin 48) čü ą┐ąŠą╝ąŠčēčīčÄ ąŠčüčåąĖą╗ą╗ąŠą│čĆą░čäą░. ąĢčüą╗ąĖ ą║ čŹč鹊ą╣ ąĮąŠąČą║ąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ čüą▓ąĄč鹊ą┤ąĖąŠą┤ (ą╝ąĄąČą┤čā +3.3V ąĖ ą▓čŗą▓ąŠą┤ąŠą╝ ą┐ąŠčĆčéą░ PA0 č湥čĆąĄąĘ č鹊ą║ąŠąŠą│čĆą░ąĮąĖčćąĖč鹥ą╗čīąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆ), č鹊 ąŠąĮ ą▒čāą┤ąĄčé čüą▓ąĄčéąĖčéčīčüčÅ ąŠč湥ąĮčī čüą╗ą░ą▒ąŠ (ąĖąĘ-ąĘą░ ąĮąĖąĘą║ąŠą╣ čüą║ą▓ą░ąČąĮąŠčüčéąĖ ąĖą╝ą┐čāą╗čīčüąŠą▓ č鹊ą║ą░). ąöą╗čÅ čāą▓ąĄą╗ąĖč湥ąĮąĖčÅ ąĄą│ąŠ čÅčĆą║ąŠčüčéąĖ ąĮčāąČąĮąŠ ąĖąĘą╝ąĄąĮąĖčéčī ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĘą░ą┤ąĄčƹȹĄą║ ą▓ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠą╝ čåąĖą║ą╗ąĄ ą╝ąŠą┤čāą╗čÅ main.c.
ą×čćąĖčüčéą║ą░ ą┐ą░ą╝čÅčéąĖ flash ą║ąŠą╝ą░ąĮą┤ąŠą╣ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ flash erase 0 0 15 ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ, ą┐ąŠč鹊ą╝čā čćč鹊 ą║ąŠą╝ą░ąĮą┤ą░ flash write ą▓ą║ą╗čÄčćą░ąĄčé čåąĖą║ą╗ ą░ą▓č鹊ąŠčćąĖčüčéą║ąĖ (auto-erase cycle). ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąŠą│ąŠ čüą▒čĆąŠčüą░ (mww 0xfffffd08 0xa5000401) ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ą╝ąŠą│ą╗ą░ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ čĆą░ą▒ąŠčéą░čéčī ą║ąŠą╝ą░ąĮą┤ą░ reset. ąŁč鹊 ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠąĄ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čüą▒čĆąŠčüą░ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊 ą░ą┐ą┐ą░čĆą░čéčāčĆą░ AT91SAM7 ąĮąĄ ą┤ąĄą╗ą░ąĄčé ąĮąĖą║ą░ą║ąĖčģ ą┤ąĄą╣čüčéą▓ąĖą╣ ą┤ą╗čÅ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą▓ čĆą░ą▒ąŠčéčā ą▓čŗą▓ąŠą┤ą░ NRST.
[ą×čéą╗ą░ą┤ą║ą░ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ]
ąĪ ą┐ąŠą╝ąŠčēčīčÄ OpenOCD ą╝ąŠąČąĮąŠ ą▓čŗą┐ąŠą╗ąĮčÅčéčī ąŠčéą╗ą░ą┤ą║čā ą║ąŠą┤ą░. ą£ąŠąČąĮąŠ ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčī ą║ąŠą┤ ą▓čŗą┐ąŠą╗ąĮčÅąĄą╝ąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĮą░ čåąĄą╗ąĄą▓ąŠą╝ ARM (halt), ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą║ąŠą┤ ą┐ąŠ čłą░ą│ą░ą╝ (single-step) ąĖ čé. ą┐. ąŁč鹊 ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą┐čāč鹥ą╝ ą┐ąŠą▓č鹊čĆąĮąŠą│ąŠ ąŠčéą║čĆčŗčéąĖčÅ ą┤ą▓čāčģ č鹥čĆą╝ąĖąĮą░ą╗ąŠą▓. ąÆ ą┐ąĄčĆą▓ąŠą╝ č鹥čĆą╝ąĖąĮą░ą╗ąĄ ąĘą░ą┐čāčüčéąĖč鹥 ą║ąŠą╝ą░ąĮą┤čā openocd -f openocd.cfg, ą║ą░ą║ čŹč鹊 ą▒čŗą╗ąŠ čüą┤ąĄą╗ą░ąĮąŠ ą┐čĆąĖ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖąĖ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ č湥čĆąĄąĘ JTAG (ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠ ą╝ąŠąČąĮąŠ ąĘą░ą┐čāčüčéąĖčéčī ą║ąŠą╝ą░ąĮą┤čā make debug). ąÆąŠ ą▓č鹊čĆąŠą╝ č鹥čĆą╝ąĖąĮą░ą╗ąĄ ąĘą░ą┐čāčüčéąĖč鹥 ąŠčéą╗ą░ą┤čćąĖą║ (GNU debugger) ą║ąŠą╝ą░ąĮą┤ąŠą╣ arm-elf-gdb main.elf, ąĖ ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥 ąĄą│ąŠ ą║ OpenOCD ą▓čŗą┤ą░č湥ą╣ ą║ąŠą╝ą░ąĮą┤čŗ target remote :3333, ą║ąŠč鹊čĆą░čÅ ą▓ą▓ąŠą┤ąĖčéčüčÅ ą▓ ą┐čĆąĖą│ą╗ą░čłąĄąĮąĖąĖ ąŠčéą╗ą░ą┤čćąĖą║ą░ GDB.
ąóąĄą┐ąĄčĆčī ą╝ąŠąČąĮąŠ ą┐čĆąŠą▓ąŠą┤ąĖčéčī ąŠčéą╗ą░ą┤ą║čā čüą┐ąŠčüąŠą▒ąŠą╝, ą║ą░ą║ čŹč鹊 ąŠą▒čŗčćąĮąŠ ą┤ąĄą╗ą░ąĄčéčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ GDB. ąØąŠ čéčāčé ąČą┤ąĄčé ąĮąĄą║ąŠč鹊čĆą░čÅ ąĘą░čüą░ą┤ą░: č鹊čćą║ąĖ ąŠčüčéą░ąĮąŠą▓ą░ (breakpoints). ąóąŠčćą║ąĖ ąŠčüčéą░ąĮąŠą▓ą░ ąŠą▒čŗčćąĮąŠ čéčĆąĄą▒čāčÄčé ąĘą░ą╝ąĄąĮąĖčéčī ąĖąĮčüčéčĆčāą║čåąĖčÄ ą▓ ą╝ąĄčüč鹥 č鹊čćą║ąĖ ąŠčüčéą░ąĮąŠą▓ą░ ąĮą░ čüą┐ąĄčåąĖą░ą╗čīąĮčāčÄ ąĖąĮčüčéčĆčāą║čåąĖčÄ break, čćč鹊ą▒čŗ ąŠčéą╗ą░ą┤čćąĖą║ ą╝ąŠą│ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą╝ąŠą╝ąĄąĮčé ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą░ą┤čĆąĄčüą░ č鹊čćą║ąĖ ąŠčüčéą░ąĮąŠą▓ą░. ą×ą┤ąĮą░ą║ąŠ ą┤ą╗čÅ ą┐ą░ą╝čÅčéąĖ FLASH čŹč鹊 ąĮąĄą▓ąŠąĘą╝ąŠąČąĮąŠ, ą┐ąŠčŹč鹊ą╝čā ąÆčŗ ąŠą│čĆą░ąĮąĖč湥ąĮčŗ č鹊ą╗čīą║ąŠ ą┤ą▓čāą╝čÅ čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╝ąĖ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝ąĖ č鹊čćą║ą░ą╝ąĖ ąŠčüčéą░ąĮąŠą▓ą░ (hardware breakpoints), ą║ąŠč鹊čĆčŗąĄ ą▓čüčéčĆąŠąĄąĮčŗ ą▓ čüąĖčüč鹥ą╝čā ąŠčéą╗ą░ą┤ą║ąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ARM. ą¦č鹊ą▒čŗ čĆąĄčłąĖčéčī čŹčéčā ą┐čĆąŠą▒ą╗ąĄą╝čā, ą▓čŗą┐ąŠą╗ąĮąĖč鹥 čüą╗ąĄą┤čāčÄčēčāčÄ ą║ąŠą╝ą░ąĮą┤čā GDB ą┐ąĄčĆąĄą┤ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą╗čÄą▒ąŠą╣ č鹊čćą║ąĖ ąŠčüčéą░ąĮąŠą▓ą░: monitor arm7_9 force_hw_bkpts enable.
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ąÆčŗ ą╝ąŠąČąĄč鹥 ąĮą░ą┐čĆčÅą╝čāčÄ ą▓čŗąĘčŗą▓ą░čéčī ą║ąŠą╝ą░ąĮą┤čŗ OpenOCD ąĖąĘ GDB, čüąĮą░ą▒ąČą░čÅ ąĖčģ ą┐čĆąĄčäąĖą║čüąŠą╝ monitor. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą║ąŠą╝ą░ąĮą┤ą░ monitor reset čüą▒čĆąŠčüąĖčé ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐čĆąŠčüčéčŗą╝ ą║ąŠčĆąŠčéą║ąĖą╝ ą┐ąĄčĆąĄą▓ąŠą┤ąŠą╝ ąĮąŠąČą║ąĖ NRST ą▓ ą╗ąŠą│. 0.
ąÆąŠčé ą┐čĆąĖą╝ąĄčĆ ą┐čĆąŠčüč鹊ą╣ čüąĄčüčüąĖąĖ GDB:
bash# arm-elf-gdb main.elf
GNU gdb 6.4
Copyright 2005 Free Software Foundation, Inc.
GDB is free software, covered by the GNU General Public License, and you are
welcome to change it and/or distribute copies of it under certain conditions.
Type "show copying" to see the conditions.
There is absolutely no warranty for GDB. Type "show warranty" for details.
This GDB was configured as "--host=i686-pc-linux-gnu --target=arm-elf"...
(gdb) target remote :3333
Remote debugging using :3333
main () at main.c:166
166 for(i=0; i < 10; i++) nop();
(gdb) monitor arm7_9 force_hw_bkpts enable
force hardware breakpoints enabled
(gdb) print i
$1 = 7
(gdb) bt
#0 main () at main.c:166
(gdb) info regi
r0 0xfffff400 -3072
[...]
r12 0x1 1
sp 0x203fe4 2113508
lr 0x22c 556
pc 0x2e0 736
fps 0x0 0
cpsr 0x800000d7 -2147483433
(gdb) cont
Continuing.
[^C pressed]
Program received signal SIGINT, Interrupt.
0x000002e8 in main () at main.c:166
166 for(i=0; i < 10; i++) nop();
(gdb) kill
Kill the program being debugged? (y or n) y
ą£ąĮąŠą│ąŠąĄ ąĘą┤ąĄčüčī ą▓ąĘčÅč鹊 ąĖąĘ ąĘą░ą╝ąĄčćą░č鹥ą╗čīąĮąŠą╣ čüčéą░čéčīąĖ [10] (ą░ą▓č鹊čĆ James P. Lynch), ąŠąĮą░ čģąŠčĆąŠčłąŠ ą┐ąŠą╝ąŠąČąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅą╝ Windows.
[ąĪčüčŗą╗ą║ąĖ ]
1 . Programming AT91SAM7S ARM site:triplespark.net.2 . ARM GCC toolchain for Linux and Mac OS X site:embdev.net.3 . Yet another GNU ARM toolchain site:yagarto.org.4 . OpenOCD: čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, ąĮą░čćą░ą╗ąŠ .5 . FT2232H Board - ą╝ą░ą║ąĄčéąĮą░čÅ ą┐ą╗ą░čéą░ ąĮą░ ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą╝ čćąĖą┐ąĄ ą╝ąŠčüčéą░ USB čäąĖčĆą╝čŗ FTDI .6 . USB-AtmelPrg: Wolfgang's Universal Interface Cable site:triplespark.net.7 . Turtelizer 2 .8 . Simple ARM Board ąĮą░ AT91SAM7S256 .9 . minimalistic-hello-world-1.0.tar.gz .10 . AN_6250 Using Open Source Tools for AT91SAM7S Cross Development site:microchip.com.