|
FreeMODBUS čŹč鹊 ą▒ąĄčüą┐ą╗ą░čéąĮą░čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ą┐ąŠą┐čāą╗čÅčĆąĮąŠą│ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ MODBUS, čüą┐ąĄčåąĖą░ą╗čīąĮąŠ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąĮą░čÅ ą┤ą╗čÅ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ čüąĖčüč鹥ą╝. MODBUS čŹč鹊 ą┐ąŠą┐čāą╗čÅčĆąĮčŗą╣ čüąĄč鹥ą▓ąŠą╣ ą┐čĆąŠč鹊ą║ąŠą╗, čłąĖčĆąŠą║ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą▓ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ąĄąĮąĮąŠą╣ ąĖąĮą┤čāčüčéčĆąĖąĖ.
ąĪč鹥ą║ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ MODBUS čéčĆąĄą▒čāąĄčé ąĮą░ą╗ąĖčćąĖčÅ ą┤ą▓čāčģ čüą╗ąŠąĄą▓ ą┐čĆąŠč鹊ą║ąŠą╗ą░:
Modbus Application Protocol (ą┐čĆąŠč鹊ą║ąŠą╗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ Modbus) - ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą╝ąŠą┤ąĄą╗čī ą┤ą░ąĮąĮčŗčģ ąĖ čäčāąĮą║čåąĖąĖ.
Network - ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čüčĆąĄą┤čā ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ.
ąÆ č鹥ą║čāčēąĄą╣ ą▓ąĄčĆčüąĖąĖ FreeMODBUS (ąĮą░ ą╝ąŠą╝ąĄąĮčé ąĮą░ą┐ąĖčüą░ąĮąĖčÅ čüčéą░čéčīąĖ čŹč鹊 ą▓ąĄčĆčüąĖčÅ FreeMODBUS 1.6) ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ Modbus Application Protocol v1.1a, ąĖ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ čĆąĄąČąĖą╝čŗ ą┐ąĄčĆąĄą┤ą░čćąĖ RTU/ASCII, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ą▓ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ Modbus over serial 1.0. ą¤ąŠčüą║ąŠą╗čīą║čā ą▓ąĄčĆčüąĖčÅ 0.7 FreeMODBUS čéą░ą║ąČąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé MODBUS TCP, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ą▓ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąĄ [2]. ąĪč鹥ą║ FreeMODBUS ą╗ąĖčåąĄąĮąĘąĖčĆčāąĄčéčüčÅ ą┐ąŠą┤ ąĘą░čēąĖč鹊ą╣ ą╗ąĖčåąĄąĮąĘąĖąĖ BSD (čćč鹊 ąĮąĄ ąŠčéąĮąŠčüąĖčéčüčÅ ą║ ą┤ąĄą╝ąŠ-ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅą╝, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą╗ąĖčåąĄąĘąĖčĆąŠą▓ą░čéčīčüčÅ ąŠčéą┤ąĄą╗čīąĮąŠ), čĆą░ąĘčĆąĄčłą░čÄčēąĄą╣ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▓ ą║ąŠą╝ą╝ąĄčĆč湥čüą║ąĖčģ čåąĄą╗čÅčģ. ąÆ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ čäčāąĮą║čåąĖąĖ MODBUS:
| ąÜąŠą┤ |
ążčāąĮą║čåąĖčÅ |
| 0x01 |
Read Coils |
| 0x02 |
Read Discrete Inputs |
| 0x03 |
Read Holding Registers |
| 0x04 |
Read Input Register |
| 0x05 |
Write Single Coil |
| 0x06 |
Write Single Register |
| 0x0F |
Write Multiple Coils |
| 0x10 |
Write Multiple Registers |
| 0x11 |
Report Slave ID |
| 0x17 |
Read/Write Multiple Registers |
ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ FreeMODBUS ąŠčüąĮąŠą▓ą░ąĮą░ ąĮą░ čüą░ą╝čŗčģ čüą▓ąĄąČąĖčģ čüčéą░ąĮą┤ą░čĆčéą░čģ, ąĖ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čü ąĮąĖą╝ąĖ ą┐ąŠą╗ąĮąŠčüčéčīčÄ čüąŠą▓ą╝ąĄčüčéąĖą╝ą░. ą¤čĆąĖąĄą╝ ąĖ ą┐ąĄčĆąĄą┤ą░čćą░ čäčĆąĄą╣ą╝ąŠą▓ Modbus RTU/ASCII čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ ąĮą░ ą╝ą░čłąĖąĮą░čģ čüąŠčüč鹊čÅąĮąĖą╣, čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗčģ callback-čäčāąĮą║čåąĖčÅą╝ąĖ ąĖąĘ čüą╗ąŠčÅ ą░ą▒čüčéčĆą░ą║čåąĖąĖ ąŠčé ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ (hardware abstraction layer, HAL). ąŁč鹊 ą┤ąĄą╗ą░ąĄčé ą┐čĆąŠčüčéčŗą╝ ą┐ąŠčĆčéąĖčĆąŠą▓ą░ąĮąĖąĄ čüč鹥ą║ą░ ąĮą░ ą┤čĆčāą│ąĖąĄ ą┐ą╗ą░čéč乊čĆą╝čŗ. ąĢčüą╗ąĖ čäčĆąĄą╣ą╝ ąĘą░ą▓ąĄčĆčłąĄąĮ, č鹊 ąŠąĮ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ čüą╗ąŠą╣ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ (Modbus Application Layer), ą│ą┤ąĄ ą░ąĮą░ą╗ąĖąĘąĖčĆčāąĄčéčüčÅ ąĄą│ąŠ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ. ąÆ čüą╗ąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ąŠčüčéčāą┐ąĮčŗ čģčāą║ąĖ, ą┐ąŠąĘą▓ąŠą╗čÅčÄčēąĖąĄ ą┤ąŠą▒ą░ą▓ą╗čÅčéčī ąĮąŠą▓čŗąĄ čäčāąĮą║čåąĖąĖ Modbus.
ą¤čĆąŠč鹊ą║ąŠą╗ MODBUS ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čüčéčĆčāą║čéčāčĆčā ąŠą▒ą╝ąĄąĮą░ čüąŠąŠą▒čēąĄąĮąĖą╣ ą╝ąĄąČą┤čā ą│ą╗ą░ą▓ąĮčŗą╝ ąĖ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ (ą╝ąŠą┤ąĄą╗čī master-slave). ąŻčüčéčĆąŠą╣čüčéą▓ąŠ master ą▓čŗą┤ą░ąĄčé slave-čāčüčéčĆąŠą╣čüčéą▓čā ąĖąĮčüčéčĆčāą║čåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé čüčćąĖčéčŗą▓ą░čéčī ąĖą╗ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ slave-čāčüčéčĆąŠą╣čüčéą▓ą░. Slave-čāčüčéčĆąŠą╣čüčéą▓ą░ ąŠčéą▓ąĄčćą░ąĄčé ąĮą░ ąĖąĮčüčéčĆčāą║čåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ ąĄą╝čā ą┤ą░ąĄčé master.
Master ą╝ąŠąČąĄčé ą▒čŗčéčī ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ čüąĖčüč鹥ą╝čŗ, ą░ slave ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčéčī ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░. Master ą╝ąŠąČąĄčé ą╗ąĖą▒ąŠ ąŠą▒ą╝ąĄąĮąĖą▓ą░čéčīčüčÅ ą┤ą░ąĮąĮčŗą╝ąĖ čü ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ slave, ąĖą╗ąĖ ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░čéčī čłąĖčĆąŠą║ąŠą▓ąĄčēą░č鹥ą╗čīąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┤ą╗čÅ ą▓čüąĄčģ slave-čāčüčéčĆąŠą╣čüčéą▓.
Modbus master ą┐ąĄčĆąĄą┤ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ, čüąŠą┤ąĄčƹȹ░čēąĖąĄ ą░ą┤čĆąĄčü ąŠą┐čĆą░čłąĖą▓ą░ąĄą╝ąŠą│ąŠ slave (1 ą▒ą░ą╣čé), ą║ąŠą┤ čäčāąĮą║čåąĖąĖ, ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčēąĖą╣ ąĘą░ą┐čĆąŠčü (1 ą▒ą░ą╣čé), ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ (n ą▒ą░ą╣čé), ą┐čĆąŠą▓ąĄčĆąŠčćąĮčŗą╣ ą║ąŠą┤ CRC16 (2 ą▒ą░ą╣čéą░).
ąÆ čĆą░ą▒ąŠč湥ą╝ čĆąĄąČąĖą╝ąĄ Modbus slave ąĮąĖą║ą░ą║ąŠą│ąŠ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠą│ąŠ ą▒ą╗ąŠą║ą░ ą┤ą╗čÅ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ ą┐ąŠ ą┐čĆąŠč鹊ą║ąŠą╗čā Modbus ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ. ą×čéą┐čĆą░ą▓ą║ą░ ąĖ ą┐čĆąĖąĄą╝ č鹥ą╗ąĄą│čĆą░ą╝ą╝ Modbus ą▓čŗą┐ąŠą╗ąĮčÅčÄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ.
[ąĀąĄąČąĖą╝ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ]
ąĀąĄąČąĖą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą▒ąĖčé ą▓ ą▒ą░ą╣čéą░čģ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą┐ąŠ čüąĄčéąĖ, ąĖ ą║ą░ą║ ąĖąĮč乊čĆą╝ą░čåąĖčÅ čüąŠąŠą▒čēąĄąĮąĖčÅ čāą┐ą░ą║ąŠą▓čŗą▓ą░ąĄčéčüčÅ ą▓ ą┐ąŠč鹊ą║ čüąŠąŠą▒čēąĄąĮąĖą╣, ąĖ ą║ą░ą║ ą┤ąĄą║ąŠą┤ąĖčĆčāąĄčéčüčÅ. ąĪčāčēąĄčüčéą▓čāąĄčé ą┤ą▓ą░ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ čĆąĄąČąĖą╝ą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ:
ASCII mode
RTU mode
ąÜąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ čäčĆąĄą╣ą╝ąŠą▓ ą┤ą╗čÅ ąŠą▒ąŠąĖčģ čŹčéąĖčģ čĆąĄąČąĖą╝ąŠą▓ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčüčāąĮą║ąĄ ąĮąĖąČąĄ.
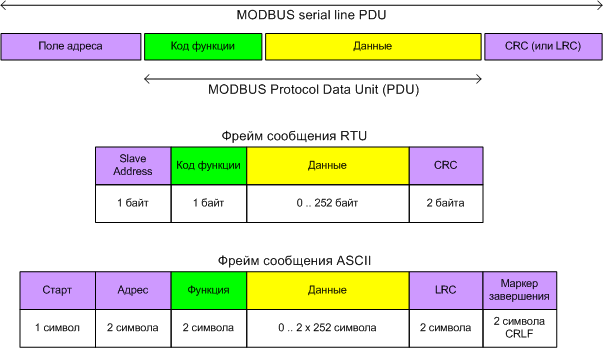
ąĀąĄąČąĖą╝ ASCII. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą║ą░ąČą┤čŗą╣ ą▒ą░ą╣čé čüąŠąŠą▒čēąĄąĮąĖą╣ ą║ąŠą┤ąĖčĆčāąĄčéčüčÅ ą┤ą▓čāą╝čÅ čüąĖą╝ą▓ąŠą╗ą░ą╝ąĖ ASCII (American Standard Code for Information Interchange). ąĀąĄąČąĖą╝ ASCII ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐čĆąĖą╝ąĄąĮčÅčéčī ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ąŠ čüąĄą║čāąĮą┤, čćč鹊 čāą┐čĆąŠčēą░ąĄčé ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ ą║ą░ą║ ąŠčéą┤ąĄą╗čīąĮčŗčģ čüąĖą╝ą▓ąŠą╗ąŠą▓, čéą░ą║ ąĖ ą│čĆą░ąĮąĖčå čüąŠąŠą▒čēąĄąĮąĖą╣.
ąĪąŠąŠą▒čēąĄąĮąĖąĄ ASCII ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü čüąĖą╝ą▓ąŠą╗ą░ ą┤ą▓ąŠąĄč鹊čćąĖčÅ, ąĖ ąĘą░ą║ą░ąĮčćąĖą▓ą░ąĄčéčüčÅ ąĮą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą▓ąŠąĘą▓čĆą░čéą░ ą║ą░čĆąĄčéą║ąĖ ąĖ ą┐ąĄčĆąĄą▓ąŠą┤ą░ čüčéčĆąŠą║ąĖ (CRLF, ą║ąŠą┤čŗ ASCII 0DH ąĖ 0AH). ąÆ čĆąĄąČąĖą╝ąĄ ASCII ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ąĖą╗ąĖ čüąĖą╝ą▓ąŠą╗ ąĮąĄčüąĄčé ą▓ čüąĄą▒ąĄ č鹊ą╗čīą║ąŠ 7 ą┐ąŠą╗ąĄąĘąĮčŗčģ ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ.
ąÆ čĆąĄąČąĖą╝ąĄ ASCII ą▓čüąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ čüąĄčéąĖ ąČą┤čāčé ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ čüąĖą╝ą▓ąŠą╗ą░ ą┤ą▓ąŠąĄč鹊čćąĖčÅ, ą║ąŠč鹊čĆąŠąĄ ąŠą▒ąŠąĘąĮą░čćą░ąĄčé ąĮą░čćą░ą╗ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąś čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą┤ąĄą║ąŠą┤ąĖčĆčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ č鹥ą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝, ą║ąŠč鹊čĆąŠą╝čā ąŠąĮąŠ ą▒čŗą╗ąŠ ą░ą┤čĆąĄčüąŠą▓ą░ąĮąŠ.
ąĀąĄąČąĖą╝ RTU. ąÆ čĆąĄąČąĖą╝ąĄ RTU (Remote Terminal Unit) ą║ą░ąČą┤čŗą╣ 8-ą▒ąĖčéąĮčŗą╣ ą▒ą░ą╣čé čüąŠąŠą▒čēąĄąĮąĖčÅ čüąŠą┤ąĄčƹȹĖčé ą┤ą▓ą░ 4-ą▒ąĖčéąĮčŗčģ HEX-čüąĖą╝ą▓ąŠą╗ą░ (čé. ąĄ. ą▒ą░ą╣čé ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ ą┤ą▓ąŠąĖčćąĮąŠą╝ ą▓ąĖą┤ąĄ), ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą║ą░ą║ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮčŗą╣ ą┐ąŠč鹊ą║ ą▒ą░ą╣čé.
ą¤čĆąŠą╝ąĄąČčāč鹊ą║ ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąĄąČą┤čā čüąŠąŠą▒čēąĄąĮąĖčÅą╝ąĖ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠčéą┤ąĄą╗ąĖčéčī čüąŠąŠą▒čēąĄąĮąĖčÅ ą┤čĆčāą│ ąŠčé ą┤čĆčāą│ą░. ąÆ čĆąĄąČąĖą╝ąĄ RTU čüąŠąŠą▒čēąĄąĮąĖčÅ ąĮą░čćąĖąĮą░čÄčéčüčÅ ą▓ ąĖąĮč鹥čĆą▓ą░ą╗ąĄ čéąĖčłąĖąĮčŗ, ą║ąŠč鹊čĆčŗą╣ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 3.5 čüąĖą╝ą▓ąŠą╗ą░ ąĮą░ ąĘą░ą┤ą░ąĮąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ čüąĄčéąĖ. ąÆąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą╝ąĄąČą┤čā ąŠčéą┤ąĄą╗čīąĮčŗą╝ąĖ ą▒ą░ą╣čéą░ą╝ąĖ ąĮąĄ ą┤ąŠą╗ąČąĮčŗ ą┐čĆąĄą▓čŗčłą░čéčī ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ 1.5 čüąĖą╝ą▓ąŠą╗ą░. ąĢčüą╗ąĖ ąĖąĮč鹥čĆą▓ą░ą╗ ą┐čĆąĄą▓čŗčüąĖą╗ 1.5 čüąĖą╝ą▓ąŠą╗ą░, č鹊 čüą╗ąĄą┤čāčÄčēąĖą╣ ą▒ą░ą╣čé ą▒čāą┤ąĄčé ą░ą┤čĆąĄčüąŠą▓ą░ąĮ ą║ą░ą║ ąĮąŠą▓ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ.
ąŻčéąĖą╗ąĖčéčŗ ą┐čĆąŠą▓ąĄčĆą║ąĖ Modbus ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą┤ąĖą░ą│ąĮąŠčüčéąĖą║ąĖ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ ąĖ ą┐čĆąŠą▓ąĄčĆą║ąĖ ą┤ą░ąĮąĮčŗčģ ą┐ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝čā ą░ą┤čĆąĄčüčā. ąŁčéąĖ čāčéąĖą╗ąĖčéčŗ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ slave-čāčüčéčĆąŠą╣čüčéą▓ Modbus.
[Radzio! Modbus Master Simulator]
ąŁč鹊 ą▒ąĄčüą┐ą╗ą░čéąĮą░čÅ Windows-čāčéąĖą╗ąĖčéą░, ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ą░ ą┤ą╗čÅ Modscan, Modbus Poll, Simplymodbus. ąŻčéąĖą╗ąĖčéą░ ą╝ąŠąČąĄčé ąŠą▒ą╝ąĄąĮąĖą▓ą░čéčīčüčÅ ą┤ą░ąĮąĮčŗą╝ąĖ čü ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ slave-čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ. ąśąĮč鹥čĆč乥ą╣čü ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąŠč湥ąĮčī čāą┤ąŠą▒ąĄąĮ ąĖ ąĮą░ą┤ąĄąČąĄąĮ. ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗ ŌĆō Modbus RTU / Modbus TCP 1.6.
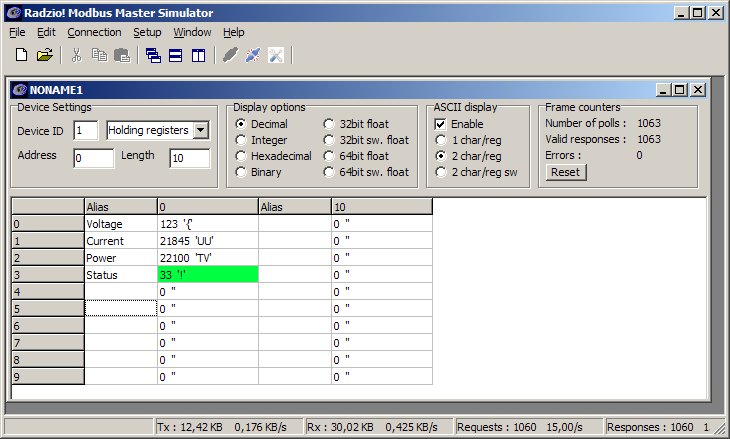
ąĪčüčŗą╗ą║ą░ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ - Radzio! Modbus Master Simulator site:en.radzio.dxp.pl.
[Modbus Tester ą║ąŠą╝ą┐ą░ąĮąĖąĖ Schneider electric]
Modbus Tester ą▒ąĄčüą┐ą╗ą░č鹥ąĮ. ąŁč鹊 ą┐čĆąŠčüčéą░čÅ Windows-čāčéąĖą╗ąĖčéą░, ą┐ąŠąĘą▓ąŠą╗čÅčÄčēą░čÅ čćąĖčéą░čéčī ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░čéčī ą▓ čĆąĄą│ąĖčüčéčĆ slave-čāčüčéčĆąŠą╣čüčéą▓ą░ Modbus. ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą┐čĆąŠč鹊ą║ąŠą╗čŗ - Modbus TCP/IP, Modbus RTU, Modbus ASCII, Jbus.
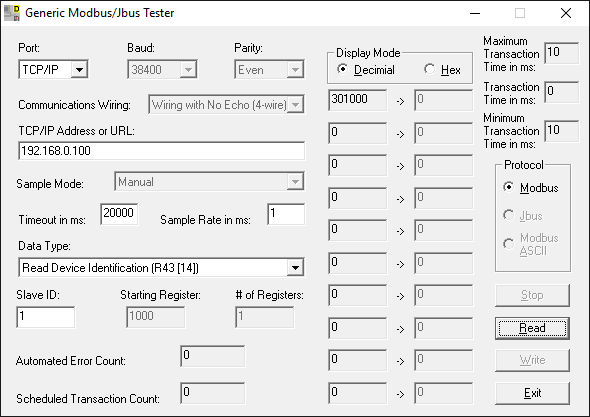
ą¦č鹊ą▒čŗ čüąŠąĄą┤ąĖąĮąĖčéčīčüčÅ čüąŠ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ č湥čĆąĄąĘ TCP/IP, ąĮčāąČąĮąŠ ą▓čŗą▒čĆą░čéčī ą┐ąŠčĆčé ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ąĖ ą▓ą▓ąĄčüčéąĖ IP-ą░ą┤čĆąĄčü čāčüčéčĆąŠą╣čüčéą▓ą░. ąöą╗čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ slave-čāčüčéčĆąŠą╣čüčéą▓čā ASCII/MODBUS RTU ąĮčāąČąĮąŠ ą▓čŗą▒čĆą░čéčī COM-ą┐ąŠčĆčé ąĖ ą▓ą▓ąĄčüčéąĖ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ - čüą║ąŠčĆąŠčüčéčī (baud rate), ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĖą╗ąĖ ąĮąĄčé ą║ąŠąĮčéčĆąŠą╗čī č湥čéąĮąŠčüčéąĖ (parity). ąŚą░č鹥ą╝ ąĮčāąČąĮąŠ ą▓ą▓ąĄčüčéąĖ ą░ą┤čĆąĄčü čāčüčéčĆąŠą╣čüčéą▓ą░, čéąĖą┐ ą┤ą░ąĮąĮčŗčģ, ą░ą┤čĆąĄčü ąĮčāąČąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą╝ąŠąČąĮąŠ čćąĖčéą░čéčī ąĖą╗ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░čéčī ąĘąĮą░č湥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░.
ąĪčüčŗą╗ą║ą░ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ - What is Modbus Tester and how do I use it? site:se.com.
[QModMaster]
ąæąĄčüą┐ą╗ą░čéąĮą░čÅ čāčéąĖą╗ąĖčéą░ ą┤ą╗čÅ čüąĖčüč鹥ą╝ Windows ąĖ Linux, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┐čĆąŠč鹊ą║ąŠą╗čŗ Modbus RTU ąĖ Modbus TCP. ą¤ąŠąĘą▓ąŠą╗čÅąĄčé ą╗ąĄą│ą║ąŠ ąŠą▒ą╝ąĄąĮąĖą▓ą░čéčīčüčÅ ą┤ą░ąĮąĮčŗą╝ąĖ čüąŠ slave-čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ ąĖ ą╝ąŠąĮąĖč鹊čĆąĖčéčī čéčĆą░čäąĖą║ Modbus.

ąĪčüčŗą╗ą║ą░ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ - QModMaster Download site:sourceforge.net.
[Modpoll Modbus® Polling Tool]
ąŁč鹊 ą▒ąĄčüą┐ą╗ą░čéąĮą░čÅ čāčéąĖą╗ąĖčéą░ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ - čüąĖą╝čāą╗čÅč鹊čĆ ą╝ą░čüč鹥čĆą░ Modbus, čĆą░ą▒ąŠčéą░čÄčēą░čÅ ąĮą░ Windows, Linux, Solaris, QNX 6, Raspberry Pi, BeagleBoard ąĖ ą┤čĆčāą│ąĖčģ ąŠčüąĮąŠą▓ą░ąĮąĮčŗčģ ąĮą░ čÅą┤čĆąĄ ARM čāčüčéčĆąŠą╣čüčéą▓ą░čģ Linux.
ą¤čĆąĖą╝ąĄčĆ ą▓čŗą▓ąŠą┤ą░ čāčéąĖą╗ąĖčéčŗ modpoll:
C:\Program Files (x86)\MPT>modpoll.exe -c 4 -r 2000 -m tcp 192.168.0.100
modpoll 3.6 - FieldTalk(tm) Modbus(R) Master Simulator
Copyright (c) 2002-2018 proconX Pty Ltd
Visit https://www.modbusdriver.com for Modbus libraries and tools.
Protocol configuration: MODBUS/TCP
Slave configuration...: address = 1, start reference = 2000, count = 4
Communication.........: 192.168.0.100, port 502, t/o 1.00 s, poll rate 1000 ms
Data type.............: 16-bit register, output (holding) register table
-- Polling slave... (Ctrl-C to stop)
[2000]: 0
[2001]: 0
[2002]: 0
[2003]: 0
-- Polling slave... (Ctrl-C to stop)
[2000]: 0
[2001]: 0
[2002]: 0
[2003]: 0
-- Polling slave... (Ctrl-C to stop)
[2000]: 0
[2001]: 0
[2002]: 0
[2003]: 0
-- Polling slave... (Ctrl-C to stop)
[2000]: 0
[2001]: 0
[2002]: 0
[2003]: 0
-- Polling slave... (Ctrl-C to stop)
^C
C:\Program Files (x86)\MPT>
ąĪą┐čĆą░ą▓ą║ą░ ą┐ąŠ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĄ (ą▓čŗą▓ąŠą┤ ą▓ ąŠčéą▓ąĄčé ąĮą░ ą║ąŠą╝ą░ąĮą┤čā modpoll.exe -h):
Usage: modpoll [OPTIONS] SERIALPORT|HOST [WRITEVALUES...]
ąÉčĆą│čāą╝ąĄąĮčéčŗ:
SERIALPORT ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé, ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐čĆąŠč鹊ą║ąŠą╗ Modbus ASCII ąĖą╗ąĖ Modbus RTU.
COM1, COM2 ... ąĮą░ Windows
/dev/ttyS0, /dev/ttyS1 ... ąĮą░ Linux
HOST ąśą╝čÅ čģąŠčüčéą░ ąĖą╗ąĖ IP-ą░ą┤čĆąĄčü, ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐čĆąŠč鹊ą║ąŠą╗ MDBUS/TCP.
WRITEVALUES ąĪą┐ąĖčüąŠą║ ąĘąĮą░č湥ąĮąĖą╣ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ. ąĢčüą╗ąĖ ąĮąĖč湥ą│ąŠ ąĮąĄ čāą║ą░ąĘą░ąĮąŠ (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ) č鹊 modpoll
ą┐čĆąŠčćąĖčéą░ąĄčé ą┤ą░ąĮąĮčŗąĄ.
ą×čüąĮąŠą▓ąĮčŗąĄ ąŠą┐čåąĖąĖ:
-m ascii ą¤čĆąŠč鹊ą║ąŠą╗ Modbus ASCII.
-m rtu ą¤čĆąŠč鹊ą║ąŠą╗ RTU (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ąĄčüą╗ąĖ SERIALPORT čüąŠą┤ąĄčƹȹĖčé \ ąĖą╗ąĖ COM).
-m tcp ą¤čĆąŠč鹊ą║ąŠą╗ MODBUS/TCP (ąĖąĮą░č湥 ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ).
-m udp MODBUS UDP.
-m enc Modbus RTU, ąĖąĮą║ą░ą┐čüčāą╗ąĖčĆąŠą▓ą░ąĮąĮčŗą╣ č湥čĆąĄąĘ TCP.
-a # Slave address (1-255 ą┤ą╗čÅ serial, 0-255 ą┤ą╗čÅ TCP, 1 ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ).
-r # ąØą░čćą░ą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü ąĘąĮą░č湥ąĮąĖą╣ (1-65536, ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 100).
-c # ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ąĘąĮą░č湥ąĮąĖą╣ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ (1-125, 1 ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ).
-t 0 ąóąĖą┐ ą┤ą░ąĮąĮčŗčģ ą┤ąĖčüą║čĆąĄčéąĮčŗą╣ ą▓čŗčģąŠą┤ (coil).
-t 1 ąóąĖą┐ ą┤ą░ąĮąĮčŗčģ ą┤ąĖčüą║čĆąĄčéąĮčŗą╣ ą▓čģąŠą┤.
-t 3 ąóąĖą┐ ą┤ą░ąĮąĮčŗčģ 16-ą▒ąĖčéąĮčŗą╣ ą▓čģąŠą┤ąĮąŠą╣ čĆąĄą│ąĖčüčéčĆ.
-t 3:hex ąóąĖą┐ ą┤ą░ąĮąĮčŗčģ 16-ą▒ąĖčéąĮčŗą╣ ą▓čģąŠą┤ąĮąŠą╣ čĆąĄą│ąĖčüčéčĆ čü HEX-ąŠč鹊ą▒čĆą░ąČąĄąĮąĖąĄą╝.
-t 3:int ąóąĖą┐ ą┤ą░ąĮąĮčŗčģ 32-ą▒ąĖčéąĮčŗą╣ integer ą▓ čéą░ą▒ą╗ąĖčåąĄ ą▓čģąŠą┤ąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓.
-t 3:mod ąóąĖą┐ ą┤ą░ąĮąĮčŗčģ 32-ą▒ąĖčéąĮčŗą╣ module 10000 ą▓ čéą░ą▒ą╗ąĖčåąĄ ą▓čģąŠą┤ąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓.
-t 3:float ąóąĖą┐ ą┤ą░ąĮąĮčŗčģ 32-ą▒ąĖčéąĮčŗą╣ float ą▓ čéą░ą▒ą╗ąĖčåąĄ ą▓čģąŠą┤ąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓.
-t 4 ąóąĖą┐ ą┤ą░ąĮąĮčŗčģ 16-ą▒ąĖčéąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ ą▓čŗčģąŠą┤ą░ (holding), ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ.
-t 4:hex ąóąĖą┐ ą┤ą░ąĮąĮčŗčģ 16-ą▒ąĖčéąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ ą▓čŗčģąŠą┤ą░ (holding), čü HEX-ąŠč鹊ą▒čĆą░ąČąĄąĮąĖąĄą╝.
-t 4:int ąóąĖą┐ ą┤ą░ąĮąĮčŗčģ 32-ą▒ąĖčéąĮčŗą╣ integer ą▓ čéą░ą▒ą╗ąĖčåąĄ ą▓čŗčģąŠą┤ąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓ (holding).
-t 4:mod ąóąĖą┐ ą┤ą░ąĮąĮčŗčģ 32-ą▒ąĖčéąĮčŗą╣ module 10000 ą▓ čéą░ą▒ą╗ąĖčåąĄ ą▓čŗčģąŠą┤ąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓ (holding).
-t 4:float ąóąĖą┐ ą┤ą░ąĮąĮčŗčģ 32-ą▒ąĖčéąĮčŗą╣ float ą▓ čéą░ą▒ą╗ąĖčåąĄ ą▓čŗčģąŠą┤ąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓ (holding).
-i Slave čĆą░ą▒ąŠčéą░ąĄčé čü 32-ą▒ąĖčéąĮčŗą╝ąĖ integer čü ą┐ąŠčĆčÅą┤ą║ąŠą╝ ą▒ą░ą╣čé big-endian.
-f Slave čĆą░ą▒ąŠčéą░ąĄčé čü 32-ą▒ąĖčéąĮčŗą╝ąĖ float čü ą┐ąŠčĆčÅą┤ą║ąŠą╝ ą▒ą░ą╣čé big-endian.
-e ąśčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī 32-ą▒ąĖčéąĮčŗą╣ čĆąĄąČąĖą╝ čĆąĄą│ąĖčüčéčĆą░ Daniel/Enron (ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé -i ąĖ -f).
-0 ąØą░čćą░ą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü ąŠčéčüčćąĖčéčŗą▓ą░ąĄčéčüčÅ ąŠčé 0 (ą░ą┤čĆąĄčüą░čåąĖčÅ PDU) ą▓ą╝ąĄčüč鹊 1.
-1 ą×ą┐čĆąŠčüąĖčéčī č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ čĆą░ąĘ, ąĖąĮą░č湥 ąŠą┐čĆą░čłąĖą▓ą░čéčī čü ąĖąĮč鹥čĆą▓ą░ą╗ąŠą╝ poll rate.
-l # ąśąĮč鹥čĆą▓ą░ą╗ ąŠą┐čĆąŠčüą░ (poll rate) ą▓ ą╝čü, (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 1000).
-o # ąóą░ą╣ą╝ą░čāčé ą▓ čüąĄą║čāąĮą┤ą░čģ (0.01 .. 10.0, ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 1.0 čüąĄą║čāąĮą┤ą░).
ą×ą┐čåąĖąĖ ą┤ą╗čÅ MODBUS/TCP, UDP ąĖ RTU č湥čĆąĄąĘ TCP:
-p # ąĮąŠą╝ąĄčĆ ą┐ąŠčĆčéą░ IP (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 502).
ą×ą┐čåąĖąĖ ą┤ą╗čÅ Modbus ASCII ąĖ Modbus RTU:
-b # ąĪą║ąŠčĆąŠčüčéčī, baudrate (ąĮą░ą┐čĆąĖą╝ąĄčĆ 9600, 19200, ...). ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 19200.
-d # ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ąĖčé ą▓ čäčĆąĄą╣ą╝ąĄ (7 ąĖą╗ąĖ 8 ą┤ą╗čÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ASCII, 8 ą┤ą╗čÅ RTU).
-s # ąÜąŠą╗ąĖč湥čüčéą▓ąŠ stop-ą▒ąĖčé (1 ąĖą╗ąĖ 2, ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 1).
-p none ąæąĄąĘ ą║ąŠąĮčéčĆąŠą╗čÅ č湥čéąĮąŠčüčéąĖ.
-p even ąÜąŠąĮčéčĆąŠą╗čī ą┐ąŠ č湥čéąĮąŠčüčéąĖ (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ).
-p odd ąÜąŠąĮčéčĆąŠą╗čī ą┐ąŠ ąĮąĄč湥čéąĮąŠčüčéąĖ.
-4 # ąĀąĄąČąĖą╝ RS-485, RTS ą▓ą║ą╗čÄč湥ąĮ ą┐čĆąĖ ą┐ąĄčĆąĄą┤ą░č湥 ąĖ ąĄčēąĄ # ą╝čü ą┐ąŠčüą╗ąĄ čŹč鹊ą│ąŠ.
ąĪčüčŗą╗ą║ą░ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ - Modpoll Modbus Master Simulator site:modbusdriver.com.
ąÆčüąĄ ąŠą┐ąĖčüą░ąĮąĮčŗąĄ čāčéąĖą╗ąĖčéčŗ ą╝ąŠąČąĮąŠ čüą║ą░čćą░čéčī ą┐ąŠ čüčüčŗą╗ą║ąĄ [6].
[ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ Modbus TCP]
ąŚą┤ąĄčüčī čĆą░čüčüą╝ą░čéčĆąĖą▓ą░ąĄčéčüčÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ Modbus TCP ąĮą░ ąŠčüąĮąŠą▓ąĄ FreeRTOS ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ LwIP ąĖ FreeMODBUS. ą¤ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 ą▓čŗ čāąČąĄ čüąŠąĘą┤ą░ą╗ąĖ čĆą░ą▒ąŠčćąĖą╣ ą┐čĆąŠąĄą║čé, ą│ą┤ąĄ ą╝ąŠąČąĄč鹥 čüąŠąĘą┤ą░ą▓ą░čéčī ąĖ ąĘą░ą┐čāčüą║ą░čéčī ąĘą░ą┤ą░čćąĖ FreeRTOS, ąĖ čüč鹥ą║ LwIP čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĖ čĆą░ą▒ąŠčéą░ąĄčé. ą×čüčéą░ą╗ąŠčüčī ą┤ąŠą▒ą░ą▓ąĖčéčī čäčāąĮą║čåąĖąŠąĮą░ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░ ModbusTCP.
ą¤čĆąŠčåąĄčüčü ą┐ąŠ čłą░ą│ą░ą╝:
1. ąĪą║ą░čćą░ą╣č鹥 ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā FreeMODBUS [4]. ąØą░ ą╝ąŠą╝ąĄąĮčé ąĮą░ą┐ąĖčüą░ąĮąĖčÅ čüčéą░čéčīąĖ čŹč鹊 ą▒čŗą╗ą░ ą▓ąĄčĆčüąĖčÅ FreeMODBUS 1.6. ąĀą░čüą┐ą░ą║čāą╣č鹥 ą░čĆčģąĖą▓ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ą▓ ąŠčéą┤ąĄą╗čīąĮčŗą╣ ą║ą░čéą░ą╗ąŠą│, ąĮą░čģąŠą┤čÅčēąĖą╣čüčÅ ą▓ ą┐ą░ą┐ą║ąĄ ą┐čĆąŠąĄą║čéą░.
2. ąĪąŠąĘą┤ą░ą╣č鹥 ąĘą░ą┤ą░čćčā FreeRTOS, ą║ąŠč鹊čĆą░čÅ ą┤ąŠ ą▓čģąŠą┤ą░ ą▓ ą▒ąĄčüą║ąŠąĮąĄčćąĮčŗą╣ čåąĖą║ą╗ for(;;) ąĘą░ą┐čāčüą║ą░ąĄčé čäčāąĮą║čåąĖčÄ eMBTCPInit, ąĖ ą▓ąĮčāčéčĆąĖ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠą│ąŠ čåąĖą║ą╗ą░ ą┤ąĄą╗ą░ąĄčé ą▓čŗąĘąŠą▓čŗ eMBPoll (ą║ąŠąĮą║čĆąĄčéąĮčŗą╣ ą┐čĆąĖą╝ąĄčĆ čüą╝. ą▓ąŠ ą▓čĆąĄąĘą║ąĄ ą┤ą░ą╗ąĄąĄ).
3. ą¤ąĄčĆąĄą║ąŠą╝ą┐ąĖą╗ąĖčĆčāą╣č鹥 ą┐čĆąŠąĄą║čé. ąÜąŠą╝ą┐ąĖą╗čÅč鹊čĆ čĆčāą│ąĮąĄčéčüčÅ ąĮą░ ąŠčéčüčāčéčüčéą▓ąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖą╣ ą┤ą╗čÅ ąĮąŠą▓čŗčģ čäčāąĮą║čåąĖą╣ Modbus, ą║ąŠč鹊čĆčŗąĄ ąÆčŗ č鹊ą╗čīą║ąŠ čćč鹊 ą┤ąŠą▒ą░ą▓ąĖą╗ąĖ (eMBTCPInit, eMBPoll). ąĀą░ąĘčĆąĄčłąĖč鹥 ą▓ ą┐čĆąŠąĄą║č鹥 ą▓čüąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ą┐čāč鹥ą╝ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖčÅ ąĮčāąČąĮčŗčģ ą╝ąŠą┤čāą╗ąĄą╣ FreeMODBUS ąĖ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą▓ ą┐čĆąŠąĄą║č鹥 ą┐čāč鹥ą╣ ą┐ąŠąĖčüą║ą░ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗčģ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗčģ čäą░ą╣ą╗ąŠą▓.
4. ąØą░ ą║ą░ą║ąŠą╝-č鹊 čŹčéą░ą┐ąĄ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖčÅ ą╝ąŠą┤čāą╗ąĄą╣ ą▓ ą┐čĆąŠąĄą║čé ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆ ąĘą░ą┐čĆąŠčüąĖčé čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ čäčāąĮą║čåąĖą╣ ą┤ą╗čÅ ą┐ąŠčĆčéąĖčĆąŠą▓ą░ąĮąĖčÅ FreeMODBUS ąĮą░ čĆą░ą▒ąŠčćčāčÄ čüčĆąĄą┤čā, ą│ą┤ąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ čĆą░ą▒ąŠčéą░ąĄčé (čäčāąĮą║čåąĖąĖ ą┐ąŠčĆčéą░ FreeMODBUS). ąŁč鹊 čäčāąĮą║čåąĖąĖ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąŠą▒čŗčéąĖą╣, čāčüčéą░ąĮąŠą▓ą║ąĖ ąĖ ąĘą░ą║čĆčŗčéąĖčÅ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ TCP, ą┐čĆąĖąĄą╝ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ą░ą║ąĄč鹊ą▓, ąŠčéą╗ą░ą┤ą║ąĖ ąĖ čé. ą┐., čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ čäčāąĮą║čåąĖą╣ ą┐čĆąĖą▓čÅąĘą░ąĮą░ ą║ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéčÅą╝ čåąĄą╗ąĄą▓ąŠą╣ čüąĖčüč鹥ą╝čŗ - ą║ ą╝ąŠą┤ąĄą╗ąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ TCP ąĖ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéčÅą╝ RTOS. ążčāąĮą║čåąĖąĖ ą┐ąŠčĆčéą░ FreeMODBUS ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą▓ čéą░ą▒ą╗ąĖčåąĄ ąĮąĖąČąĄ:
| ążčāąĮą║čåąĖčÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| ą£ąŠą┤čāą╗čī portevent.c (ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ čäčāąĮą║čåąĖąĖ). |
| xMBPortEventInit |
ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą┐ąŠą┤čüąĖčüč鹥ą╝čŗ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąŠą▒čŗčéąĖą╣. |
| vMBPortEventClose |
ąöąĄąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą┐ąŠą┤čüąĖčüč鹥ą╝čŗ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąŠą▒čŗčéąĖą╣. |
| xMBPortEventPost |
ąōąĄąĮąĄčĆą░čåąĖčÅ čüąŠą▒čŗčéąĖčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ FreeModbus. ą¤ąŠčÅą▓ą╗ąĄąĮąĖąĄ čüąŠą▒čŗčéąĖčÅ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆčāąĄčé ą┐ąŠč鹊ą║ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąŠą▒čŗčéąĖčÅ FreeModbus, ąĖ ą▒čāą┤čāčé ą▓čŗą┐ąŠą╗ąĮąĄąĮčŗ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ. |
| xMBPortEventGet |
ąÆčŗą▒ąŠčĆą║ą░ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ čüąŠą▒čŗčéąĖąĖ. |
| ą£ąŠą┤čāą╗čī portother.c. ąŁč鹊 ąŠčéą╗ą░ą┤ąŠčćąĮčŗąĄ čäčāąĮą║čåąĖąĖ, ąĖ ąŠąĮąĖ ąĮčāąČąĮčŗ č鹊ą╗čīą║ąŠ ą▓ č鹊ą╝ čüą╗čāčćą░ąĄ, ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮą░ ąŠčéą╗ą░ą┤ą║ą░ ą║ąŠą┤ą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ FreeMODBUS. |
| prvvMBTCPLogFrame |
ąōąĄąĮąĄčĆąĖčĆčāąĄčé ą║čĆą░čéą║ąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ čäčĆąĄą╣ą╝ą░ Modbus TCP, ąĖ ą▓čŗą▓ąŠą┤ąĖčé ąĄą│ąŠ čü ą┐ąŠą╝ąŠčēčīčÄ čäčāąĮą║čåąĖąĖ vMBPortLog. |
| vMBPortLog |
ążčāąĮą║čåąĖčÅ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą▓čŗą▓ąŠą┤ą░ ąŠčéą╗ą░ą┤ąŠčćąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ. ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą╝ąŠąČąĄčé ą▓čŗą▓ąŠą┤ąĖčéčī č鹥ą║čüčé ąŠčéą╗ą░ą┤ąŠčćąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣ ą╗ąĖą▒ąŠ ąĮą░ 菹║čĆą░ąĮ LCD, ą╗ąĖą▒ąŠ ą▓ ą┐ąŠčĆčé UART (ą┐čĆąĖą╝ąĄčĆ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą▓čŗą▓ąŠą┤ą░ ą▓ ą┐ąŠčĆčé USART6 ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ STM32F4xx čüą╝. ą▓ąŠ ą▓čĆąĄąĘą║ąĄ ąĮąĖąČąĄ). |
| ą£ąŠą┤čāą╗čī porttcp.c (ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ čäčāąĮą║čåąĖąĖ). |
| xMBTCPPortInit |
ą¤ąŠą┤ą│ąŠčéą░ą▓ą╗ąĖą▓ą░ąĄčé čüąĖčüč鹥ą╝čā ąŠą▒ą╝ąĄąĮą░ ą┐ą░ą║ąĄčéą░ą╝ąĖ TCP. |
| prvvMBPortReleaseClient |
ą×čüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüąĄčüčüąĖčÄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ čü čüąĄčĆą▓ąĄčĆąŠą╝ Modbus TCP. |
| vMBTCPPortClose |
ąŚą░ą║čĆčŗčéąĖąĄ ą▓čüąĄčģ čüąĄč鹥ą▓čŗčģ čüąŠą║ąĄč鹊ą▓ TCP. |
| vMBTCPPortDisable |
ąŚą░ą║čĆčŗą▓ą░ąĄčé ą▓čüąĄ čüčāčēąĄčüčéą▓čāčÄčēąĖąĄ čüąĄčüčüąĖąĖ Modbus TCP. |
| prvxMBTCPPortAccept |
ą¤čĆąĖąĮąĖą╝ą░ąĄčé čüąĄč鹥ą▓ąŠąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ. |
| prvvMBTCPPortError |
ą×ą▒čĆą░ą▒ąŠčéą║ą░ čäą░čéą░ą╗čīąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ. |
| prvxMBTCPPortReceive |
ą¤čĆąĖąĄą╝ ą┐ą░ą║ąĄčéą░. |
| xMBTCPPortGetRequest |
ą¤ąŠą╗čāč湥ąĮąĖąĄ ąĘą░ą┐čĆąŠčüą░ Modbus TCP. |
| xMBTCPPortSendResponse |
ą×čéą┐čĆą░ą▓ą║ą░ ąŠčéą▓ąĄčéą░ ąĮą░ ąĘą░ą┐čĆąŠčü Modbus TCP. |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓ ą║ą░č湥čüčéą▓ąĄ čüąĄčĆą▓ąĄčĆą░ Modbus ą▓čŗčüčéčāą┐ą░ąĄčé ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ ąŠą┐čĆą░čłąĖą▓ą░ąĄą╝ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ, ą░ ą▓ ą║ą░č湥čüčéą▓ąĄ ą║ą╗ąĖąĄąĮčéą░ - ą│ą╗ą░ą▓ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ čüąĄčéąĖ, ąŠą▒čŗčćąĮąŠ ą┐ąĄčĆčüąŠąĮą░ą╗čīąĮčŗą╣ ą║ąŠą╝ą┐čīčÄč鹥čĆ. ą×ą┤ąĮą░ą║ąŠ ą▓ č鹥čĆą╝ąĖąĮąŠą╗ąŠą│ąĖąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ TCP/IP ąŠą▒ą░ čŹčéąĖčģ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ ą┐čĆąŠčåąĄčüčüąĄ ąŠą▒ą╝ąĄąĮą░ ą▓čŗčüčéčāą┐ą░čÄčé ą▓ ą┤ą▓čāčģ čĆąŠą╗čÅčģ - ąĖ ą║ą░ą║ čüąĄčĆą▓ąĄčĆ TCP (ą┐čĆąŠčüą╗čāčłąĖą▓ą░čÄčēąĖą╣ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐ąŠčĆčé 502), ąĖ ą║ą░ą║ ą║ą╗ąĖąĄąĮčé TCP.
ą¤čĆąŠčēąĄ ą▓čüąĄą│ąŠ ą▓ąĘčÅčéčī čäčāąĮą║čåąĖąĖ ą┐ąŠčĆčéą░ FreeMODBUS ą│ąŠč鹊ą▓čŗąĄ, ąĖąĘ čĆą░ą▒ąŠčćąĖčģ ą┐čĆąĖą╝ąĄčĆąŠą▓. ą¤čĆąĖą╝ąĄčĆčŗ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ ą║ą░čéą░ą╗ąŠą│ąĄ demo, ą░ ą╝ąŠą┤čāą╗ąĖ portevent.c, portother.c ąĖ porttcp.c ą▓ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ąĄ port ą┐čĆąĖą╝ąĄčĆą░. ą¤čĆąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ čŹčéąĖ ą╝ąŠą┤čāą╗ąĖ ą╝ąŠąČąĮąŠ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░čéčī, čćč鹊ą▒čŗ ąŠąĮąĖ čāčćąĖčéčŗą▓ą░ą╗ąĖ čüą┐ąĄčåąĖčäąĖą║čā ąÆą░čłąĄą│ąŠ ą┐čĆąŠąĄą║čéą░. ą£ąŠą┤čāą╗ąĖ ą┤ą╗čÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ STM32F4xx čüą╝. ą▓ąŠ ą▓čĆąĄąĘą║ąĄ ąĮąĖąČąĄ.
5. ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ Modbus (ą║ą░ą║ąĖąĄ ąĘą░ą┐čĆąŠčüčŗ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ, ąĖ ą║ą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝) ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčéčüčÅ čéą░ą▒ą╗ąĖčåąĄą╣ xFuncHandlers. ąŁč鹊 ą┐čĆąŠčüčéą░čÅ čéą░ą▒ą╗ąĖčåą░, ą│ą┤ąĄ ą║ą░ąČą┤ą░čÅ čüčéčĆąŠą║ą░ čüąŠčüč鹊ąĖčé ąĖčģ ą┤ą▓čāčģ ą┐ąŠą╗ąĄą╣ - ą║ąŠą╝ą░ąĮą┤ą░ (ąĘą░ą┐čĆąŠčü) Modbus ąĖ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čäčāąĮą║čåąĖčÄ ąĄą│ąŠ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ (čüčéčĆąŠą║ą░ čŹč鹊 菹║ąĘąĄą╝ą┐ą╗čÅčĆ čüčéčĆčāą║čéčāčĆčŗ xMBFunctionHandler). ą¤čĆąĖą╝ąĄčĆ čéą░ą▒ą╗ąĖčåčŗ xFuncHandlers:
static const xMBFunctionHandler xFuncHandlers[10] =
{
{0x01, eMBFuncReadCoils },
{0x02, eMBFuncReadDiscreteInputs },
{0x03, eMBFuncReadHoldingRegister },
{0x04, eMBFuncReadInputRegister },
{0x05, eMBFuncWriteCoil },
{0x0F, eMBFuncWriteMultipleCoils },
{0x10, eMBFuncWriteMultipleHoldingRegister },
{0x11, eMBFuncReportSlaveID },
{0x17, eMBFuncReadWriteMultipleHoldingRegister},
{0, NULL}
};
ąÆ čŹč鹊ą╣ čéą░ą▒ą╗ąĖčåąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ čüą╗ąĄą┤čāčÄčēąĖą╣ čäčāąĮą║čåąĖąŠąĮą░ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░ Modbus: čćč鹥ąĮąĖąĄ ąŠą▒ą╝ąŠč鹊ą║ (ąĘą░ą┐čĆąŠčü 0x01), čćč鹥ąĮąĖąĄ čåąĖčäčĆąŠą▓čŗčģ ą▓čģąŠą┤ąŠą▓ (ąĘą░ą┐čĆąŠčü 0x02), čćč鹥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ čģčĆą░ąĮąĄąĮąĖčÅ (ąĘą░ą┐čĆąŠčü 0x03), čćč鹥ąĮąĖąĄ ą▓čģąŠą┤ąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ (ąĘą░ą┐čĆąŠčü 0x04), ąĘą░ą┐ąĖčüčī ąŠą▒ą╝ąŠč鹊ą║ (ąĘą░ą┐čĆąŠčü 0x05), ąĘą░ą┐ąĖčüčī ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ąŠą▒ą╝ąŠč鹊ą║ (ąĘą░ą┐čĆąŠčü 0x0F), ąĘą░ą┐ąĖčüčī ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓ čģčĆą░ąĮąĄąĮąĖčÅ (ąĘą░ą┐čĆąŠčü 0x10), ąĘą░ą┐čĆąŠčü ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ Modbus (ąĘą░ą┐čĆąŠčü 0x11), ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓ čģčĆą░ąĮąĄąĮąĖčÅ (ąĘą░ą┐čĆąŠčü 0x17).
ąöą╗čÅ čüą▓ąŠąĄą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ Modbus ąÆą░ą╝ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖčéčī ą░ąĮą░ą╗ąŠą│ąĖčćąĮčāčÄ čéą░ą▒ą╗ąĖčåčā ąĖ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą║ąŠą┤ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąŠą▓ ąĘą░ą┐čĆąŠčüąŠą▓.
6. ąĢčüą╗ąĖ čćč鹊-č鹊 ą┐ąŠčłą╗ąŠ ąĮąĄ čéą░ą║, ąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąŠčéą╗ą░ąČąĖą▓ą░čéčī ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ čüč鹥ą║ą░ FreeMODBUS, č鹊 ą▓ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ port.h ąŠą┐čĆąĄą┤ąĄą╗ąĖč鹥 ą▓ 1 ą╝ą░ą║čĆąŠčü MB_TCP_DEBUG, ąĖ ą┐ąŠą┤ą│ąŠč鹊ą▓čīč鹥 ąĮąĄąŠą▒čģąŠą┤ąĖą╝čāčÄ čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ čäčāąĮą║čåąĖąĖ vMBPortLog (ą┐čĆąĖą╝ąĄčĆ čüą╝. ą▓ąŠ ą▓čĆąĄąĘą║ąĄ ąĮąĖąČąĄ).
ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮčŗ č鹊ą╗čīą║ąŠ ą║čāčüą║ąĖ ą║ąŠą┤ą░, ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāčÄčēąĖąĄ ąŠčüąĮąŠą▓ąĮąŠą╣ čäčāąĮą║čåąĖąŠąĮą░ą╗. ą¤ąŠą╗ąĮčŗą╣ ą│ąŠč鹊ą▓čŗą╣ ą┐čĆąŠąĄą║čé IAR 8.30 čü ąĖčüčģąŠą┤ąĮčŗą╝ ą║ąŠą┤ąŠą╝ ą┤ą╗čÅ STM32F407 ą╝ąŠąČąĮąŠ čüą║ą░čćą░čéčī ą┐ąŠ čüčüčŗą╗ą║ąĄ [5].
[main.c]
ą¤ąŠč鹊ą║ FreeRTOS, ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčēąĖą╣ ą┐čĆąŠč鹊ą║ąŠą╗ ModbusTCP:
static void modbusTask(void *argument)
{
bool bModBusInitOK;
eMBErrorCode xStatus;
/* ąÜąŠą┤ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą┤ą╗čÅ LWIP */
MX_LWIP_Init();
// ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čüč鹥ą║ą░ Modbus:
if(eMBTCPInit(MB_TCP_PORT_USE_DEFAULT) != MB_ENOERR)
{
umsg("FreeMODBUS: can't initialize modbus stack!\n");
bModBusInitOK = false;
}
else if (eMBEnable() != MB_ENOERR)
{
umsg("FreeMODBUS: can't enable modbus stack!\n");
}
else
{
bModBusInitOK = true;
}
/* ąæąĄčüą║ąŠąĮąĄčćąĮčŗą╣ čåąĖą║ą╗ */
for(;;)
{
if (bModBusInitOK)
{
xStatus = eMBPoll();
if (MB_ENOERR != xStatus)
{
umsg("ą×čłąĖą▒ą║ą░ FreeMODBUS: %i\n", xStatus);
}
CheckLink();
}
}
}
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čäčāąĮą║čåąĖčÅ umsg ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▓čŗą▓ąŠą┤ąĖčéčī ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮčŗąĄ ąŠčéą╗ą░ą┤ąŠčćąĮčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčāčÄ ą║ąŠąĮčüąŠą╗čī USART6.
[port.h]
#define MB_TCP_DEBUG 1
// ąŁč鹊čé ą▓ą░čĆąĖą░ąĮčé čĆą░ą▒ąŠčéą░ąĄčé (ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ą░ ąĮą░ ą╝čīčÄč鹥ą║čüąĄ čüčĆąĄą┤čüčéą▓ą░ą╝ąĖ RTOS):
//#define OS_ENTER_CRITICAL() sys_arch_protect()
//#define OS_EXIT_CRITICAL() sys_arch_unprotect(NULL)
// ąŁč鹊čé ą▓ą░čĆąĖą░ąĮčé č鹊ąČąĄ čĆą░ą▒ąŠčéą░ąĄčé (ąČąĄčüčéą║ą░čÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ą░ čü ą┐čĆčÅą╝čŗą╝ ąĘą░ą┐čĆąĄč鹊ą╝
// ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąĖ ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ ą▓ą╗ąŠąČąĄąĮąĮąŠčüčéąĖ):
#define OS_ENTER_CRITICAL() vPortEnterCritical()
#define OS_EXIT_CRITICAL() vPortExitCritical()
// ą£ąŠąČąĮąŠ ą┤ą░ąČąĄ čüąŠą▓čüąĄą╝ ąĘą░ą║ąŠą╝ą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčī ą╝ą░ą║čĆąŠčüčŗ OS_ENTER_CRITICAL ąĖ OS_EXIT_CRITICAL.
#define ENTER_CRITICAL_SECTION( ) OS_ENTER_CRITICAL()
#define EXIT_CRITICAL_SECTION( ) OS_EXIT_CRITICAL()
[portevent.c]
#include "settings.h"
#if (MODBUS_EVENT_PORT == MODBUS_EVENT_WITH_QUEUE)
#include "portevent-with-queue.c"
#elif (MODBUS_EVENT_PORT == MODBUS_EVENT_WITH_MBOX)
#include "portevent-with-mbox.c"
#else
#error "None Modbus portevent selected!"
#endif
ą£ą░ą║čĆąŠčüąŠą╝ MODBUS_EVENT_PORT ą╝ąŠąČąĮąŠ ą▓čŗą▒čĆą░čéčī ąŠą┤ąĖąĮ ąĖąĘ ą▓ą░čĆąĖą░ąĮč鹊ą▓ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąŠą▒čŗčéąĖą╣ - ąĮą░ ąŠčüąĮąŠą▓ąĄ ąŠč湥čĆąĄą┤ąĖ ąĖą╗ąĖ ąĮą░ ąŠčüąĮąŠą▓ąĄ mailbox FreeRTOS. ąØą░ ą╝ąŠą╣ ą▓ąĘą│ą╗čÅą┤, ąŠąĮąĖ čĆą░ą▒ąŠčéą░čÄčé ą┐ąŠčćčéąĖ ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠ, ąĮą░ ąŠčüąĮąŠą▓ąĄ mailbox ąŠčéą║ą╗ąĖą║ ąĮą░ čüąŠą▒čŗčéąĖčÅ ąĮąĄą╝ąĮąŠą│ąŠ ą▒čŗčüčéčĆąĄąĄ.
[portother.c]
#define MB_FRAME_LOG_BUFSIZE 512
#ifdef MB_TCP_DEBUG
void prvvMBTCPLogFrame( UCHAR * pucMsg, UCHAR * pucFrame, USHORT usFrameLen )
{
int i;
int res = 0;
int iBufPos = 0;
size_t iBufLeft = MB_FRAME_LOG_BUFSIZE;
static CHAR arcBuffer[MB_FRAME_LOG_BUFSIZE];
assert( pucFrame != NULL );
for( i = 0; i < usFrameLen; i++ )
{
/* ąÆčŗą▓ąŠą┤ąĖčé ąĮą░ ą┐ąĄčćą░čéčī ąĮąĄą║ąŠč鹊čĆčāčÄ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ čäčĆąĄą╣ą╝ąĄ. */
switch ( i )
{
case 0:
/* TID = Transaction Identifier (ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čéčĆą░ąĮčüą╗čÅčåąĖąĖ). */
res = snprintf( &arcBuffer[iBufPos], iBufLeft, "| TID = " );
break;
case 2:
/* PID = Protocol Identifier (ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐čĆąŠč鹊ą║ąŠą╗ą░). */
res = snprintf( &arcBuffer[iBufPos], iBufLeft, " | PID = " );
break;
case 4:
/* ąöą╗ąĖąĮą░ */
res = snprintf( &arcBuffer[iBufPos], iBufLeft, " | LEN = " );
break;
case 6:
/* UID = Unit Identifier (ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čÄąĮąĖčéą░). */
res = snprintf( &arcBuffer[iBufPos], iBufLeft, " | UID = " );
break;
case 7:
/* MB Function Code (ą║ąŠą┤ čäčāąĮą║čåąĖąĖ MODBUS). */
res = snprintf( &arcBuffer[iBufPos], iBufLeft, "|| FUNC = " );
break;
case 8:
/* MB PDU rest (ąŠčüčéą░č鹊ą║: ą┤ą░ąĮąĮčŗąĄ PDU). */
res = snprintf( &arcBuffer[iBufPos], iBufLeft, " | DATA = " );
break;
default:
res = 0;
break;
}
if( res == -1 )
{
break;
}
else
{
iBufPos += res;
iBufLeft -= res;
}
/* ąÆčŗą▓ąŠą┤ ąĮą░ ą┐ąĄčćą░čéčī ą┤ą░ąĮąĮčŗčģ. */
res = snprintf( &arcBuffer[iBufPos], iBufLeft, "%02X", pucFrame[i] );
if( res == -1 )
{
break;
}
else
{
iBufPos += res;
iBufLeft -= res;
}
}
if( res != -1 )
{
/* ąöąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄ ą║ąŠąĮčåą░ čüčéčĆąŠą║ąĖ čäčĆąĄą╣ą╝ą░. */
res = snprintf( &arcBuffer[iBufPos], iBufLeft, " |\r\n" );
if( res != -1 )
{
vMBPortLog( MB_LOG_DEBUG, (const CHAR*)pucMsg, "%s", arcBuffer );
}
}
}
void vMBPortLog( eMBPortLogLevel eLevel,
const CHAR * szModule,
const CHAR * szFmt,
... )
{
va_list args;
static const char *arszLevel2Str[] = {"DEBUG", "INFO", "WARN", "ERROR"};
static char mbtmpbuf[UPRINTF_BUF_SIZE];
int16_t outsize;
va_start( args, szFmt );
outsize = vsprintf(mbtmpbuf, szFmt, args);
mbtmpbuf[outsize+1] = 0;
va_end( args );
umsg("%s: %s: %s", arszLevel2Str[eLevel], szModule, mbtmpbuf);
}
#endif
[umsg.h]
int16_t uprintf (const char *fmt, ...)
{
int16_t outsize;
va_list ap;
// ąÆąĄčĆąĮąĄčé ąŠčłąĖą▒ą║čā, ąĄčüą╗ąĖ č乊čĆą╝ą░čé čÅą▓ą╗čÅąĄčéčüčÅ čāą║ą░ąĘą░č鹥ą╗ąĄą╝ NULL:
if (!fmt) { return -1; }
// ąÆąĄčĆąĮąĄčé ąŠčłąĖą▒ą║čā, ąĄčüą╗ąĖ čüčéčĆąŠą║ą░ ą┐čĆąĄą▓čŗčłą░ąĄčé čĆą░ąĘą╝ąĄčĆ ą▒čāč乥čĆą░, čü čāč湥č鹊ą╝
// ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗčģ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ 2 čüąĖą╝ą▓ąŠą╗ąŠą▓: CR ąĖ ąĮčāą╗ąĄą▓ąŠą╣ č鹥čĆą╝ąĖąĮą░č鹊čĆ ASCIIZ:
if (UPRINTF_BUF_SIZE-2 < strlen(fmt)) { return -1; }
va_start (ap,fmt);
outsize = vsprintf(strbuf,fmt,ap);
strbuf[outsize+1] = 0;
va_end (ap);
usartputs(strbuf);
xSemaphoreGive(usarttxSemaphore);
return outsize;
}
//***************************************
//* ą£ą░ą║čĆąŠčü umsg ą▓čŗą▓ąŠą┤ąĖčé č乊čĆą╝ą░čéąĖčĆąŠą▓ą░ąĮąĮčŗą╣ č鹥ą║čüčé ą▓ UART č鹊čćąĮąŠ čéą░ą║ ąČąĄ,
//* ą║ą░ą║ čŹč鹊 ą┤ąĄą╗ą░ąĄčé printf ą▓ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą▓čŗą▓ąŠą┤. ąÉčĆą│čāą╝ąĄąĮčé fmt čüąŠą┤ąĄčƹȹĖčé
//* ąĮą░ą▒ąŠčĆ čüą┐ąĄčåąĖčäąĖą║ą░č鹊čĆąŠą▓ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ, ą┤ąĖčĆąĄą║čéąĖą▓čŗ ąĖ ąŠą▒čŗčćąĮčŗąĄ čüąĖą╝ą▓ąŠą╗čŗ,
//* ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čŗą▓ąŠą┤ąŠą╝.
//*
//* ą¤ą░čĆą░ą╝ąĄčéčĆčŗ:
//* fmt č鹥ą║čüčé, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé čüąŠą┤ąĄčƹȹ░čéčī čüą┐ąĄčåąĖčäąĖą║ą░č鹊čĆčŗ č乊čĆą╝ą░čéą░
//* ... čüą┐ąĖčüąŠą║ ą░čĆą│čāą╝ąĄąĮč鹊ą▓
//*
//* ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗčģ čüąĖą╝ą▓ąŠą╗ąŠą▓, ąĘą░
//* ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ CR. ąĢčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ąŠčłąĖą▒ą║ą░, č鹊 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ
//* ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ.
//*
//* ąÜąŠą╝ą░ąĮą┤čŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ:
//* '\e' escape character. It maps to the ASCII Escape code, 27
//* '\f' form feed/flush screen
//* '\n' new line
//* '\r' carriage return
//* '\t' horizontal tab
//* '\v' vertical tab
//*/
#define umsg(...) \
{ \
uprintf (__VA_ARGS__); \
}
[ąĪčüčŗą╗ą║ąĖ]
1. FreeMODBUS A portable MODBUS ASCII/RTU and TCP implementation site:embedded-solutions.at.
2. Modbus Messaging on TCP/IP Implementation Guide v1.0a site:modbus.org.
3. Modbus Test Utility - Free alternative to Modscan / Modbus Poll / Simply Modbus site:automationforum.in.
4. cwalter-at/freemodbus site:github.com.
5. 191011Modbus-STM32F407-public.zip - ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą┐čĆąĖą╝ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ Modbus TCP (ą┐čĆąŠąĄą║čé ą┤ą╗čÅ IAR 8.3, ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ STM32F407).
6. 191211Modbus-server.zip - čāčéąĖą╗ąĖčéčŗ ą┤ą╗čÅ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ Modbus (菹╝čāą╗čÅč鹊čĆčŗ ą║ą╗ąĖąĄąĮčéą░ Modbus).
7. MODBUS: čüą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. |



