ąŚą┤ąĄčüčī ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐ąĄčĆąĄą▓ąŠą┤ FAQ [1] čü čüą░ą╣čéą░ espressif.com. ąÆčüąĄ ąĮąĄą┐ąŠąĮčÅčéąĮčŗąĄ čüąŠą║čĆą░čēąĄąĮąĖčÅ ąĖ č鹥čĆą╝ąĖąĮčŗ čüą╝. ą▓ čĆą░ąĘą┤ąĄą╗ąĄ "ąĪą╗ąŠą▓ą░čĆąĖą║" ą▓ ą║ąŠąĮčåąĄ čüčéą░čéčīąĖ.
[ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ (Application) ]
ąÆčŗ ą╝ąŠąČąĄč鹥 ąĘą░ą┐čāčüčéąĖčéčī čüą║čĆąĖą┐čé gen_mish.sh user1.bin user2.bin
1 . ąĪą║ąŠą╝ą┐ąĖą╗ąĖčĆčāą╣č鹥 user1.bin, ąĖčüą┐ąŠą╗čīąĘčāčÅ ą║ąŠčĆčĆąĄą║čéąĮčŗąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ Flash ąĖ boot.
2 . ąÆčŗą┐ąŠą╗ąĮąĖč鹥 ą║ąŠą╝ą░ąĮą┤čā "make clean", ą║ąŠč鹊čĆą░čÅ ąŠčćąĖčüčéąĖčé čäą░ą╣ą╗čŗ, čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ąĮą░ ą┐ąĄčĆą▓ąŠą╝ čłą░ą│ąĄ. ąĪą║ąŠą╝ą┐ąĖą╗ąĖčĆčāą╣č鹥 user2.bin, ąĖ ą│ą░čĆą░ąĮčéąĖčĆčāą╣č鹥 ą┐čĆąĖ čŹč鹊ą╝, čćč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 ą┤ą╗čÅ ąĮąĄą│ąŠ č鹥 ąČąĄ čüą░ą╝čŗąĄ ąŠą┐čåąĖąĖ, čćč鹊 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ user1.bin.
ążą░ą╣ą╗čŗ user1.bin user2.bin
ą¤čĆąĖčćąĖąĮ ąŠčéą║ą░ąĘą░ OTA ą╝ąŠąČąĄčé ą▒čŗčéčī ą╝ąĮąŠąČąĄčüčéą▓ąŠ. ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąŠą▒čĆą░čéąĖčéčīčüčÅ ą║ ą┤ąŠą║čāą╝ąĄąĮčéčā "ESP8266 FOTA Guide" [2] ą┐ąĄčĆąĄą┤ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖą╣ FOTA API.
ąæčŗčüčéčĆčŗą╣ čüą┐ąĖčüąŠą║ ą┐čĆąŠą▓ąĄčĆą║ąĖ ą┤ą╗čÅ čāčüčéčĆą░ąĮąĄąĮąĖčÅ ą┐čĆąŠą▒ą╗ąĄą╝ čü ąŠčéą║ą░ąĘą░ą╝ąĖ OTA:
ŌĆó ąŻą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą▓čŗą▒čĆą░ąĮ čĆą░ąĘą╝ąĄčĆ Flash, ą║ąŠą│ą┤ą░ ąĘą░ą│čĆčāąČą░ąĄč鹥 firmware ą▓ ą┐ą░ą╝čÅčéčī Flash.blank.bin user1.bin user2.bin
ąĢčüą╗ąĖ ąÆčŗ čģąŠčéąĖč鹥 ąŠą▒čüą╗čāąČąĖą▓ą░čéčī ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ OTA č湥čĆąĄąĘ čüą▓ąŠą╣ čüąĄčĆą▓ąĄčĆ, č鹊 ą┤ąŠą╗ąČąĮčŗ čāą▒ąĄą┤ąĖčéčīčüčÅ, čćč鹊 čüąĄčĆą▓ąĄčĆ ą╝ąŠąČąĄčé ą┐ąŠąĮąĖą╝ą░čéčī ąĘą░ą┐čĆąŠčüčŗ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┐čĆąŠčłąĖą▓ą║ąĖ (firmware upgrade requests) ąĖ ąŠčéą▓ąĄčćą░čéčī ąĮą░ ąĮąĖčģ.
ą×ą▒čĆą░ą▒ąŠčéą║čā ąĘą░ą┐čĆąŠčüą░ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą╝ąŠąČąĮąŠ ąŠą▒ąŠąĘąĮą░čćąĖčéčī čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
1 . ąÆ ąŠą▒ą╗ą░ą║ąŠ ą┐ąŠčüčŗą╗ą░ąĄčéčüčÅ HEAD , ąĘą░ą┐čĆą░čłąĖą▓ą░čÄčēąĖą╣ ą┤ą╗ąĖąĮčā BIN. ąĪąĄčĆą▓ąĄčĆ ąŠčéą▓ąĄčćą░ąĄčé ą┐ą░ą║ąĄč鹊ą╝ HTTP (ą│ą┤ąĄ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ ą┤ą╗ąĖąĮąĄ BIN ą▓ą║ą╗čÄč湥ąĮą░ ą▓ HTTP HEAD).
2 . ąØą░ ąŠčüąĮąŠą▓ąĄ ą┐ąŠą╗čāč湥ąĮąĮąŠą╣ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ ą┤ą╗ąĖąĮąĄ BIN, ąŠčćąĖčēą░čÄčéčüčÅ čüąĄą║č鹊čĆą░ ESP8266 Flash, čćč鹊ą▒čŗ ąŠą▒ąĮąŠą▓ąĖčéčī ą┐čĆąŠčłąĖą▓ą║čā čü ą┐ąŠą╝ąŠčēčīčÄ API (spi_flash_erase_sector ).
3 . ą¤ąŠčüčŗą╗ą░ąĄčéčüčÅ ąĘą░ą┐čĆąŠčü GET , čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī BIN-čäą░ą╣ą╗ čü čüąĄčĆą▓ąĄčĆą░. ą×čćąĖčēąĄąĮąĮą░čÅ ąŠą▒ą╗ą░čüčéčī ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮą░ ąĮąŠą▓čŗą╝ čäą░ą╣ą╗ąŠą╝ BIN.
ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ą╝ąŠą│čāčé ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčéčī ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ č湥čĆąĄąĘ čüą▓ąŠą╣ čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╣ čüąĄčĆą▓ąĄčĆ. ąŁč鹊čé čüąĄčĆą▓ąĄčĆ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąŠą▒čüą╗čāąČąĖą▓ą░čéčī ąĘą░ą┐čĆąŠčüčŗ HTTP, ąĖ čā ąĮąĄą│ąŠ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čäčāąĮą║čåąĖąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ (device control features).
ąöą╗čÅ čüą┐čĆą░ą▓ą║ąĖ ą┐ąŠ API čüą╝. [3].
ąöą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ čü čüąĄčĆą▓ąĄčĆčā ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗ HTTP. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą║ąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ESP8266 ąĘą░ą┐čāčüą║ą░ąĄčé čüąŠą║ąĄčé ąĖ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ąĘą░ą┐čĆąŠčü ąÆą░čłąĄą╝čā ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąŠą╝čā čüąĄčĆą▓ąĄčĆčā:
GET /your-bin-file-path.bin HTTP/1.1
Host: yourdomain.com
Connection: keep-alive Cache-Control: max-age=0
Accept:
text/html,application/xhtml+xml,application/xml;q=0.9,image/webp,*/*;q=0.8
User-Agent:
Mozilla/5.0 (X11; Linux x86_64) AppleWebKit/537.36 (KHTML, like Gecko)
Chrome/39.0.2171.95 Safari/537.36
Accept-Encoding: gzip, deflate, sdch
Accept-Language:
en-US,en;q=0.8,ja;q=0.6,zh-CN;q=0.4,zh-TW;q=0.2
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą┐čĆąŠč鹊ą║ąŠą╗ HTTP ąĘą░ą┤ą░ąĄčé, čćč鹊 ąĘą░ą┐čĆąŠčüčŗ ąŠą║ą░ąĮčćąĖą▓ą░čÄčéčüčÅ ąĮą░ "\r\n\r\n", ą┐ąŠčŹč鹊ą╝čā ą┐ąŠąČą░ą╗čāą╣čüčéą░ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 čŹčéčā ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÄ ą▓ąĮčāčéčĆąĖ ą▓čüąĄą╣ čäčĆą░ąĘčŗ ąĘą░ą┐čĆąŠčüą░.
ąÆčŗ ą╝ąŠąČąĄč鹥 ąŠčéą╗ą░ąČąĖą▓ą░čéčī čüą▓ąŠą╣ čüąĄčĆą▓ąĄčĆ č湥čĆąĄąĘ ą║ąŠąĮčüąŠą╗čī telnet (ą┐ąĄčĆąĄą┤ čŹčéąĖą╝ čāą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 čüąĄčĆą▓ąĖčü telnet čĆą░ąĘčĆąĄčłąĄąĮ ąĮą░ ąÆą░čłąĄą╝ PC):
telnet ąĖą╝čÅ_ąĖą╗ąĖ_IP_čüąĄčĆą▓ąĄčĆą░ ąĮąŠą╝ąĄčĆ_ą┐ąŠčĆčéą░
ąóą░ą║ąČąĄ ąÆčŗ ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ 菹╝čāą╗čÅč鹊čĆčŗ č鹥čĆą╝ąĖąĮą░ą╗ą░ (TeraTerm, SecureCRT, putty ąĖ čé. ą┤.), ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ą┐čĆąŠč鹊ą║ąŠą╗ telnet.
ąÆąŠčé ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▓ąŠąĘą╝ąŠąČąĮčŗčģ ą┐čĆąĖčćąĖąĮ SmartConfig fail:
ŌĆó ąÆąĄčĆčüąĖčÅ APP ąĮąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé SDK ąĖą╗ąĖ ą▓ąĄčĆčüąĖąĖ SmartConfig.
ąĢčüą╗ąĖ ąĮąĖ ąŠą┤ąĖąĮ ąĖąĘ čŹčéąĖčģ čüąŠą▓ąĄč鹊ą▓ ąĮąĄ čĆąĄčłąĖą╗ ąÆą░čłčā ą┐čĆąŠą▒ą╗ąĄą╝čā, č鹊 ą┐ąŠąČą░ą╗čāą╣čüčéą░ ą┐čĆąĖčłą╗ąĖč鹥 ą╗ąŠą│ ąŠčéą╗ą░ą┤ą║ąĖ (debug log) čüą╗čāąČą▒ąĄ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ espressif.com, čćč鹊ą▒čŗ ąŠąĮą░ ą╝ąŠą│ą╗ą░ ą┐čĆąŠą░ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī ą┐čĆąŠą▒ą╗ąĄą╝čā.
ąĢčüą╗ąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą▓čŗąĘąŠą▓ąĄčé API smartconfig_start() , č鹊 ą▒čāą┤ąĄčé ą▓čŗą▓ąĄą┤ąĄąĮą░ čüčéčĆąŠą║ą░ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ "SC version: vX.X.X". ąÆ čéą░ą▒ą╗ąĖčåąĄ ąĮąĖąČąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ čüą▓čÅąĘą░ąĮąĮčŗąĄ ą▓ąĄčĆčüąĖąĖ SDK ąĖ APP ą┤ą╗čÅ ą▓ąĄčĆčüąĖą╣ SmartConfig:
sdk v1.2.0
smartconfig v2.4
app v0.3.4.x
sdk v1.3.0
smartconfig v2.5
smartconfig v2.5.1
sdk v1.4.0
smartconfig v2.5.2
sdk v1.5.0
smartconfig v2.5.3
sdk v1.5.4
smartconfig v2.5.4
ąöą░, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé. ESP8266 ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čāčēąĄąĮ ą║ą░ą║ čüąĄčĆą▓ąĄčĆ ą▓ ąŠą▒ąŠąĖčģ čĆąĄąČąĖą╝ą░čģ SoftAP (č鹊čćą║ą░ ą┤ąŠčüčéčāą┐ą░ Wi-Fi) ąĖ Station (ą║ą╗ąĖąĄąĮčé Wi-Fi).
ŌĆó ąÜąŠą│ą┤ą░ čüąĄčĆą▓ąĄčĆ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ SoftAP, ą║ą╗ąĖąĄąĮčéčŗ ą╝ąŠą│čāčé ąĮą░ą┐čĆčÅą╝čāčÄ ą┐ąŠą┤ą║ą╗čÄčćą░čéčīčüčÅ ą║ čģąŠčüčéčā ESP8266 ąĖą╗ąĖ čüąĄčĆą▓ąĄčĆčā ą┐ąŠ IP-ą░ą┤čĆąĄčüčā (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ) 192.168.4.1.AT+CIPSERVER .
1 . ąöą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čĆąĄąČąĖą╝ą░ SoftAP + Station ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ą║ąŠą╝ą░ąĮą┤čā: AT+CWMODE=3 .
2 . ąöą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ čĆąŠčāč鹥čĆčā ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ą║ąŠą╝ą░ąĮą┤čā: AT+CWJAP="SSID","password" .
3 . ąĪąŠąĘą┤ą░ą╣č鹥 čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ TCP ąĖ ą┐ąĄčĆąĄą┤ą░ą╣č鹥 ą┤ą░ąĮąĮčŗąĄ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü č乊čĆą╝ą░č鹊ą╝ ą┐ą░ą║ąĄčéą░ HTTP, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčüčāąĮą║ąĄ ąĮąĖąČąĄ. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 čüąĖą╝ą▓ąŠą╗čŗ ą┐ąĄčĆąĄą▓ąŠą┤ą░ čüčéčĆąŠą║ąĖ [(0x0d 0x0a) ąĖą╗ąĖ (CR LF)] ą▓ą░ąČąĮčŗ ą┤ą╗čÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ čüčéčĆąŠą║ąĖ, ąĖ ąŠąĮąĖ ąĮąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠą┐čāčēąĄąĮčŗ.
4 . ą¤čĆąĖąĮąĖą╝ą░ą╣č鹥 ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĖąĘ ą┐ą░ą║ąĄč鹊ą▓ HTTP.
ą¤čĆąĖą╝ąĄčĆ, ą║ą░ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī AT-ą║ąŠą╝ą░ąĮą┤čā AT "AT+TEST" ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ ą┐ą░ą┐ą║ąĄ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮčŗčģ AT-ą┐čĆąĖą╝ąĄčĆąŠą▓ Non-OS SDK (\ESP8266_NONOS_SDK\examples\at\user\user_main.c at_funcationType . ą£čŗ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ ą║ąŠą╝ą░ąĮą┤čā AT+TEST ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐čĆąĖą╝ąĄčĆą░ č鹊ą│ąŠ, ą║ą░ą║ čŹč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ.
1 . ąÆą▓ąĄą┤ąĖč鹥 at_testCmd : ą║ąŠą╝ą░ąĮą┤ą░ č鹥čüčéą░ ą▓ č乊čĆą╝ą░č鹥 AT+TEST=? . ąÆ AT demo ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąĮąŠą╣ callback-čäčāąĮą║čåąĖąĄą╣ ą▒čāą┤ąĄčé at_testCmdTest . ąŚą░ą┐čĆąŠčü ąĮą░ č鹥čüčé ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ, čćč鹊ą▒čŗ ą▓ąĄčĆąĮčāčéčī ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĘąĮą░č湥ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░. ąĢčüą╗ąĖ at_testCmd ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮą░ ą║ą░ą║ NULL , č鹊 ąŠąĮą░ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░.
2 . ąÆą▓ąĄą┤ąĖč鹥 at_queryCmd : ą║ąŠą╝ą░ąĮą┤ą░ ąĘą░ą┐čĆąŠčüą░ ą▓ č乊čĆą╝ą░č鹥 AT+TEST=? . ąÆ AT demo ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąĮąŠą╣ callback-čäčāąĮą║čåąĖąĄą╣ ą▒čāą┤ąĄčé at_queryCmdTest . ąŚą░ą┐čĆąŠčü ąĮą░ č鹥čüčé ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą▓ąŠąĘą▓čĆą░čéą░ č鹥ą║čāčēąĄą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ. ąĢčüą╗ąĖ at_queryCmdTest ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮą░ ą║ą░ą║ NULL , č鹊 ąŠąĮą░ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░.
3 . ąÆą▓ąĄą┤ąĖč鹥 at_setupCmd : ą║ąŠą╝ą░ąĮą┤ą░ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĖą╝ąĄąĄčé č乊čĆą╝ą░čé AT+TEST=parameter1,parameter2,..., . ąÆ AT demo ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąĮąŠą╣ callback-čäčāąĮą║čåąĖąĄą╣ ą▒čāą┤ąĄčé at_setupCmdTest . ąÜąŠą╝ą░ąĮą┤ą░ čāčüčéą░ąĮąŠą▓ą║ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮą░ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĘąĮą░č湥ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░. ąĢčüą╗ąĖ at_setupCmdTest ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮą░ ą║ą░ą║ NULL , č鹊 ąŠąĮą░ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░.
4 . ąÆą▓ąĄą┤ąĖč鹥 at_exeCmd : ą║ąŠą╝ą░ąĮą┤ą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▓ č乊čĆą╝ą░č鹥 AT+TEST . ąÆ AT demo ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąĮąŠą╣ callback-čäčāąĮą║čåąĖąĄą╣ ą▒čāą┤ąĄčé at_exeCmdTest . ąÜąŠą╝ą░ąĮą┤ą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮą░, čćč鹊ą▒čŗ ąĘą░ą┐čāčüčéąĖčéčī ą║ą░ą║čāčÄ-ą╗ąĖą▒ąŠ ąŠą┐ąĄčĆą░čåąĖčÄ. ąĢčüą╗ąĖ at_exeCmdTest ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮą░ ą║ą░ą║ NULL , č鹊 ąŠąĮą░ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░.
ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąĮčāąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čāčüčéčĆąŠą╣čüčéą▓ą░ (device ID). ąØą░ą┐čĆąĖą╝ąĄčĆ, device ID=1234 čéčĆąĄą▒čāąĄčéčüčÅ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĄą│ąŠ ą║ą╗ąĖąĄąĮčéčüą║ąĖą╣ ą░ą║ą║ą░čāąĮčé WeChat. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 čüą╗ąĄą┤čāčÄčēčāčÄ ą║ąŠą╝ą░ąĮą┤čā:
curl -q "https://api.weixin.qq.com/cgi-bin/token?
grant_type=client_credential&appid=wx0f74f861897f84b5&secret
=your_We Chatname_32characters_please"
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čŹč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ č鹊ą║ąĄąĮą░ ą┤ąŠčüčéčāą┐ą░. ąŚą┤ąĄčüčī "your_WeChatname_32characters_please " ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ą║ą╗ąĖąĄąĮčéčüą║ąĖą╣ WeChat API App Secret, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╗čāč湥ąĮ č湥čĆąĄąĘ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ, ąĖ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┤ą╗ąĖąĮąŠą╣ 32 čüąĖą╝ą▓ąŠą╗ą░.
ąÆąŠąĘą▓čĆą░čé:
curl -d '{"device_num":"1","device_list":[{"id":"1234","mac":"18fe3497d500","connect_protocol":"4",
"auth_key":"00000000000000000000000000000000",
"close_strategy":"1","conn_strategy":"1","crypt_method":"0","auth_ver":"0","manu_mac_pos":"-2",
"ser_mac_pos":"-2"}],"op_type":"0", "product_id": 5157}'
"https://api.weixin.qq.com/device/authorize_device?access_token=L2_2V1E98Vk-jTXenXDZjDT0GaudUn_VGTRa7O98
hdfT0lTZa2B7nj6YvXN01gssQa3ZraRgjALuCvxd-SamuPR885KJabaw1EYLA0kns-Yglr4ryolEhHb-QcnWMaNqSEDjACANZY"
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čŹč鹊 čāčüčéą░ąĮąŠą▓ą║ą░ device ID=1234.
ąöą░ą╗ąĄąĄ ąĮčāąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī AT-ą║ąŠą╝ą░ąĮą┤čā:
AT+CWSTARTDISCOVER="gh_9e2cff3dfa51","1234",1
ąŚą┤ąĄčüčī ą▓ "gh_9e2cff3dfa51", "9e2cff3dfa51" ąĘą░ą┤ą░ąĄčéčüčÅ ąÆą░čł ąŠčäąĖčåąĖą░ą╗čīąĮčŗą╣ ą░ą║ą║ą░čāąĮčé WeChat.
ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ą╝ąŠą│čāčé ą┤ąŠą▒ą░ą▓ąĖčéčī čüą▓ąŠčÄ AT-ą║ąŠą╝ą░ąĮą┤čā ąĮą░ ąŠčüąĮąŠą▓ąĄ AT-ą║ąŠą╝ą░ąĮą┤ ESP8266, ąĖčüą┐ąŠą╗čīąĘčāčÅ ą║ąŠą┤ ą┐čĆąĖą╝ąĄčĆą░ ESP8266_NONOS_SDK\examples\at
ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüčéčī ą║ąŠą╝ą░ąĮą┤ą░:
AT+CMDTEST=param1,param2,param3,...,paramN\r\n
ąóąŠą│ą┤ą░ ąĘąĮą░č湥ąĮąĖąĄ, ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮąŠąĄ strlen(ŌĆ£AT+CMDTEST=param1,param2,param3,....paramN\r\nŌĆØ), ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą╝ąĄąĮčīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮąŠ 128.
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ čüą╝. ą▓ ESP8266 SDKs & Demos [5].
ąöą╗čÅ ąŠą▒ąŠąĖčģ SDK, Non-OS SDK ąĖ RTOS SDK, ą╝ąĄčüč鹊 čĆą░ąĘą╝ąĄčēąĄąĮąĖčÅ ą┤ą▓ąŠąĖčćąĮčŗčģ čäą░ą╣ą╗ąŠą▓ firmware ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ čüąŠą┤ąĄčƹȹĖą╝čŗą╝ ą┐ąŠą┤čģąŠą┤čÅčēąĄą│ąŠ čüą║čĆąĖą┐čéą░ ą╗ąĖąĮą║ąĄčĆą░. ąÆ čüą╗čāčćą░ąĄ ąĮąĄ-FOTA firmware ą║ąŠą┤ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ čüąŠą┤ąĄčƹȹĖčéčüčÅ ą▓ eagle.irom0.text.bin eagle.app.v6.ld SDK/ld
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ą╝ąĄčüč鹊 ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ eagle.irom0.text.bin
ąÉą┤čĆąĄčü, ą┐ąŠą╝ąĄč湥ąĮąĮčŗą╣ ą│ąŠą╗čāą▒ąŠą╣ čĆą░ą╝ą║ąŠą╣, čÅą▓ą╗čÅąĄčéčüčÅ ą░ą┤čĆąĄčüąŠą╝ flash ą┤ą╗čÅ eagle.irom0.text.bin
[ą×ą▒ą╗ą░ą║ąŠ (Cloud) ]
1 . ąÜą░ą║ č鹊ą╗čīą║ąŠ ąĘą░ą│čĆčāąČąĄąĮ master-device-key, čāčüčéčĆąŠą╣čüčéą▓ąŠ ESP8266 ą│ąŠč鹊ą▓ąŠ ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÄ.
2 . ąÜąŠąĮąĄčćąĮčŗą╣ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī Airkiss/ESP-TOUCH /v1/device/activate
3 . ąÜąŠąĮąĄčćąĮčŗą╣ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ąĖčüą┐ąŠą╗čīąĘčāąĄčé App, ą▓čŗąĘčŗą▓ą░ąĄčé ąĖąĮč鹥čĆč乥ą╣čü /v1/device/authorize
4 . ąÆą╗ą░ą┤ąĄąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ESP8266 č鹊 ąČąĄ čüą░ą╝ąŠąĄ, čćč鹊 ąĖ ą▓ą╗ą░ą┤ąĄąĮąĖąĄ ą║ą╗čÄč湊ą╝ čāčüčéčĆąŠą╣čüčéą▓ą░, čü ą┐ąŠą╝ąŠčēčīčÄ ą║ąŠč鹊čĆąŠą│ąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé čāą┐čĆą░ą▓ą╗čÅčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠą╝.
5 . ąÜąŠąĮąĄčćąĮčŗą╣ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé ą▓čŗąĘą▓ą░čéčī /v1/user/devices
6 . ąÆ ą║ą░č湥čüčéą▓ąĄ ą▓ą╗ą░ą┤ąĄą╗čīčåą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ąŠąĮąĄčćąĮčŗą╣ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé ą▓čŗąĘą▓ą░čéčī /v1/device/share /v1/device/authorize
[ąÉą┐ą┐ą░čĆą░čéčāčĆą░ (Hardware) ]
1 . ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ čåąĖčäčĆąŠą▓ąŠą╣ čćą░čüčéąĖ: 1.8V - 3.3V.
2 . ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╣ čćą░čüčéąĖ: 3.0V - 3.6V (čüą░ą╝ąŠąĄ ąĮąĖąĘą║ąŠąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ 2.7V).
3 . ą¤ąĖą║ąŠą▓ąŠąĄ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ č鹊ą║ą░ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╣ čüčģąĄą╝čŗ: 350 mA.
4 . ą¤ąĖą║ąŠą▓ąŠąĄ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ č鹊ą║ą░ čåąĖčäčĆąŠą▓ąŠą╣ čüčģąĄą╝čŗ: 200 mA.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: CHIP_EN čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĖ 3.0V - 3.6V, ą┐ąŠąČą░ą╗čāą╣čüčéą░ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čī čāčĆąŠą▓ąĮčÅ, čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéčī čü čåąĖčäčĆąŠą▓ąŠą╣ ą╗ąŠą│ąĖą║ąŠą╣ 1.8V.
ą¤čĆąŠąĄą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ąĖčüč鹊čćąĮąĖą║ąŠą▓ ą┐ąĖčéą░ąĮąĖčÅ ą┤ą╗čÅ čĆą░ą┤ąĖąŠčćą░čüč鹊čéąĮčŗčģ čüčģąĄą╝ (RF) čüą░ą╝ąŠ ą┐ąŠ čüąĄą▒ąĄ čÅą▓ą╗čÅąĄčéčüčÅ ąĖčüą║čāčüčüčéą▓ąŠą╝ ąĖ čéčĆąĄą▒čāąĄčé čĆą░čüčüą╝ąŠčéčĆąĄąĮąĖčÅ ą╝ąĮąŠą│ąĖčģ č鹥ą╝. ą×ą┤ąĮą░ą║ąŠ ąĘą┤ąĄčüčī ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą║čĆą░čéą║ąĖą╣ čüą┐ąĖčüąŠą║ ą┤ą╗čÅ ą│ą░čĆą░ąĮčéąĖąĖ, čćč鹊 čāčćč鹥ąĮčŗ ą▓ą░ąČąĮčŗąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ:
1 . ąĢčüą╗ąĖ ąÆčŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 čĆąĄą│čāą╗čÅč鹊čĆ LDO, č鹊 čāą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 čĆą░ąĘąĮąĖčåą░ čā ąĄą│ąŠ Vin ąĖ Vout ą┤ąŠčüčéą░č鹊čćąĮą░ ą▓ąĄą╗ąĖą║ą░ ą┤ą╗čÅ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╣ (ą┐ąŠ ą┐ą░čüą┐ąŠčĆčéčā) čĆą░ą▒ąŠčéčŗ čŹč鹊ą│ąŠ čĆąĄą│čāą╗čÅč鹊čĆą░.
2 . ąĀą░ąĘą▓čÅąĘčŗą▓ą░čÄčēąĖą╣ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆ čłąĖąĮčŗ ą┐ąĖčéą░ąĮąĖčÅ ą┤ąŠą╗ąČąĄąĮ ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą▒ą╗ąĖąĘą║ąŠ ą║ ESP8266, ąĖ ą┤ąŠą╗ąČąĄąĮ ąĖą╝ąĄčéčī ąĮąĖąĘą║ąĖą╣ ESR.
3 . ąØąĖą║ąŠą│ą┤ą░ ąĮąĄ ą┐ąŠą┤ą║ą╗čÄčćą░ą╣č鹥 ąĮą░ą┐čĆčÅą╝čāčÄ ą║ ESP8266 ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ čü čāčĆąŠą▓ąĮčÅą╝ąĖ ą╗ąŠą│ąĖą║ąĖ 5V.
4 . ąĢčüą╗ąĖ ESP8266 ą┐ąĖčéą░ąĄčéčüčÅ ąŠčé ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čÅ DC-DC, č鹊 ą│ą░čĆą░ąĮčéąĖčĆčāą╣č鹥, č鹊 ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čī ą┐čĆą░ą▓ąĖą╗čīąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ čüą┐čĆąŠąĄą║čéąĖčĆąŠą▓ą░ąĮ. ą¤čāą╗čīčüą░čåąĖąĖ ąĖ ą┐ąŠą╝ąĄčģąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čéčēą░č鹥ą╗čīąĮąŠ ąŠčéčäąĖą╗čīčéčĆąŠą▓ą░ąĮčŗ ą║ą░čüą║ą░ą┤ąĮčŗą╝ąĖ LC-čäąĖą╗čīčéčĆą░ą╝ąĖ, ąĄčüą╗ąĖ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ.
ESP8266 čÅą▓ą╗čÅąĄčéčüčÅ ą▓čŗčüąŠą║ąŠ-ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ą╝ąĖą║čĆąŠčüčģąĄą╝ąŠą╣, ą▓ ą║ąŠč鹊čĆąŠą╣ čüąŠčüčĆąĄą┤ąŠč鹊č湥ąĮčŗ ą║ą░ą║ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗąĄ RF-čüčģąĄą╝čŗ (čĆą░ą┤ąĖąŠ), čéą░ą║ ąĖ čåąĖčäčĆąŠą▓čŗąĄ čāąĘą╗čŗ. ą¤čĆąĖ ąĘą░ą│čĆčāąĘą║ąĄ (booting) čéą░ą║ąĖąĄ čäčāąĮą║čåąĖąĖ, ą║ą░ą║ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ą░ čĆą░ą┤ąĖąŠčćą░čüč鹊čéčŗ, ą╝ąŠą│čāčé ą┐ąŠčéčĆąĄą▒ą╗čÅčéčī ąĘą░ą╝ąĄčéąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ 菹ĮąĄčĆą│ąĖąĖ. ą£ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ (ą╝ą│ąĮąŠą▓ąĄąĮąĮą░čÅ) ą░ąĮą░ą╗ąŠą│ąŠą▓ą░čÅ ą╝ąŠčēąĮąŠčüčéčī ą╝ąŠąČąĄčé čüčćąĖčéą░čéčīčüčÅ ąĮą░ čāčĆąŠą▓ąĮąĄ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝ąŠą│ąŠ č鹊ą║ą░ 500 mA, ąĖ čåąĖčäčĆąŠą▓čŗąĄ čüčģąĄą╝čŗ ąĮą░ ą┐ąĖą║ąĄ ą╝ąŠą│čāčé ą┐ąŠčéčĆąĄą▒ą╗čÅčéčī ąŠą║ąŠą╗ąŠ 200 mA. ąØąŠčĆą╝ą░ą╗čīąĮčŗą╣ čĆą░ą▒ąŠčćąĖą╣ č鹊ą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ąŠą▒čŗčćąĮąŠ čüąŠčüčéą░ą▓ą╗čÅąĄčé ąŠą║ąŠą╗ąŠ 100 mA, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĖ ą┤ąĖąĘą░ą╣ąĮą░ čüčģąĄą╝čŗ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąÆą░čłą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ą░ čüčģąĄą╝čŗ ą┤ąŠą╗ąČąĮą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą┤ą░čéčī č鹊ą║ 500 mA ą▒ąĄąĘ čćčĆąĄąĘą╝ąĄčĆąĮąŠą│ąŠ ą┐ą░ą┤ąĄąĮąĖčÅ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, ą▓čŗčģąŠą┤čÅčēąĄą│ąŠ ąĘą░ ą┐čĆąĄą┤ąĄą╗čŗ čĆą░ą▒ąŠčćąĖčģ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖą╣.
ąöą▓ąĄ ą▒ą░čéą░čĆąĄą╣ą║ąĖ AA, čüąŠąĄą┤ąĖąĮąĄąĮąĮčŗąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ, ą╝ąŠą│čāčé ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ą┐ąĖčéą░ąĮąĖąĄ ą┤ą╗čÅ ESP8266. ąŻ čÅč湥ą╣ą║ąĖ Li-Po čüą╗ąĖčłą║ąŠą╝ ą▓ąĄą╗ąĖą║ąŠ ą║ąŠą╗ąĄą▒ą░ąĮąĖąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąŠčé ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąŠą╗ąĮąŠą│ąŠ ąĘą░čĆčÅą┤ą░ ą┤ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čĆą░ą▒ąŠč湥ą│ąŠ čĆą░ąĘčĆčÅą┤ą░, ą┐ąŠčŹč鹊ą╝čā čÅč湥ą╣ą║čā Li-Po ąĮąĄą╗čīąĘčÅ ąĮą░ą┐čĆčÅą╝čāčÄ ą┐ąŠą┤ą║ą╗čÄčćą░čéčī ą║ ą┐ąĖčéą░ąĮąĖčÄ ESP8266.
ESP8266 čüąŠą┤ąĄčƹȹĖčé ą┐čĆąĄčåąĖąĘąĖąŠąĮąĮčāčÄ čüčģąĄą╝čā RF (čĆą░ą┤ąĖąŠčéčĆą░ą║čé), ąĮą░ ą║ąŠč鹊čĆčāčÄ ą▓ą╗ąĖčÅčÄčé ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ąĖą╗ąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ą¤čĆčÅą╝ąŠąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ čüčģąĄą╝čŗ RF ą║ ąĮąĄčĆąĄą│čāą╗ąĖčĆčāąĄą╝ąŠą╝čā ąĖčüč鹊čćąĮąĖą║čā ą┐ąĖčéą░ąĮąĖčÅ ąĮąĄ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ.
ąØą░čüč鹊čÅč鹥ą╗čīąĮąŠ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čī DC-DC ąĖą╗ąĖ čĆąĄą│čāą╗čÅč鹊čĆ LDO, čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī čĆą░ą▒ąŠčéčā ESP8266 čüąŠą│ą╗ą░čüąĮąŠ ąĄčæ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ.
ą¤ą░ą╝čÅčéčī SPI flash čÅą▓ą╗čÅąĄčéčüčÅ ąĖąĮč鹥ą│čĆą░ą╗čīąĮąŠą╣ čćą░čüčéčīčÄ čüąĖčüč鹥ą╝čŗ, čéą░ą║ ą║ą░ą║ ą▓ ąĮąĄą╣ čģčĆą░ąĮčÅčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĖ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ. ą¦č鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéčī čü čåąĖčäčĆąŠą▓ąŠą╣ ą╗ąŠą│ąĖą║ąŠą╣, ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ SPI flash ą┤ąŠą╗ąČąĮąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓ąŠą▓ą░čéčī čāčĆąŠą▓ąĮčÄ ą╗ąŠą│ąĖą║ąĖ GPIO.
ąÆčŗą▓ąŠą┤ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ CHIP_EN (chip enable) ąĮąĄ ąĖą╝ąĄąĄčé ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą▓ąĄčĆčģąĮąĄą│ąŠ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĄą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░ (pull-up). ą×ąĮ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠą┤čéčÅąĮčāčé čüąĮą░čĆčāąČąĖ ą║ čāčĆąŠą▓ąĮčÄ ą╗ąŠą│. 1, čćč鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī čĆą░ą▒ąŠčéčā ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ. CHIP_EN ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠą┤čéčÅąĮčāčé ą║ ą▓čŗčüąŠą║ąŠą╝čā čāčĆąŠą▓ąĮčÄ ą┐ąŠčüą╗ąĄ ąĖą╗ąĖ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ čü ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝ VDD33. ą¤ąŠčüą╗ąĄ ąĖčüč鹥č湥ąĮąĖčÅ 60 ą╝čü ąŠčé ą╝ąŠą╝ąĄąĮčéą░, ą║ąŠą│ą┤ą░ CHIP_EN ą┐ąŠą╗čāčćąĖą╗ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 1, čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▒čāą┤ąĄčé ąŠą┐čĆąĄą┤ąĄą╗čÅčéčī čĆąĄąČąĖą╝ ąĘą░ą│čĆčāąĘą║ąĖ ąĮą░ ąŠčüąĮąŠą▓ąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą▓čŗą▓ąŠą┤ąŠą▓ GPIO15, GPIO0, GPIO2, ąĖ ąĘą░č鹥ą╝ čāčüčéą░ąĮąŠą▓ąĖčé čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ č湥čĆąĄąĘ UART.
EXT_RSTB : ą▓čŗą▓ąŠą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ čüą▒čĆąŠčüą░. ąŁč鹊čé ą▓čŗą▓ąŠą┤ ąĖą╝ąĄąĄčé ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą▓ąĄčĆčģąĮąĖą╣ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖą╣ čĆąĄąĘąĖčüč鹊čĆ (internal pull-up), ą┐ąŠčŹč鹊ą╝čā ąĄčüą╗ąĖ ąĄą│ąŠ ąŠčüčéą░ą▓ąĖčéčī ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝, č鹊 ąĮą░ ąĮąĄą╝ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 1. ą¤ąŠą┤ą░čćą░ ą╗ąŠą│. 0 ąĮą░ čŹč鹊čé ą▓čŗą▓ąŠą┤ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÄ čüą▒čĆąŠčüą░ čćąĖą┐ą░. ąĪąĖą│ąĮą░ą╗ čüą▒čĆąŠčüą░ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī 0.25 IO + 100 ą╝ą║čü. ąöąĖą░ą│čĆą░ą╝ą╝ą░ čüąĖą│ąĮą░ą╗ąŠą▓ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüą╗ąĄą┤čāčÄčēą░čÅ:
ą×ą┐ąĖčüą░ąĮąĖąĄ ąĖąĮč鹥čĆą▓ą░ą╗ą░ ą▓čĆąĄą╝ąĄąĮąĖ MIN MAX ąĢą┤.
t1
ąÆčĆąĄą╝čÅ ąĮą░čĆą░čüčéą░ąĮąĖčÅ VDD33
10
2000
ą╝ą║čü
t2
ąÆčĆąĄą╝čÅ ąĮą░čĆą░čüčéą░ąĮąĖčÅ EXT_RSTB
0
2
ą╝čü
t3
EXT_RSTB ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ ą╗ąŠą│. 1 ą┐ąŠčüą╗ąĄ VDD33
0.1
-
ą╝čü
t4
ąÆčĆąĄą╝čÅ ąĮą░čĆą░čüčéą░ąĮąĖčÅ CHIP_EN
0
2
ą╝čü
t5
CHIP_EN ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ ą╗ąŠą│. 1 ą┐ąŠčüą╗ąĄ EXT_RSTB
0.1
-
ą╝čü
ESP8266 ąĖą╝ąĄąĄčé ą▓ąĮčāčéčĆąĄąĮąĮąĄąĄ ą×ąŚąŻ (IRAM) 64 ą║ąĖą╗ąŠą▒ą░ą╣čéą░ ąĖ DRAM 96 ą║ąĖą╗ąŠą▒ą░ą╣čé.
IRAM ą┤ąĄą╗ąĖčéčüčÅ ąĮą░ 2 ą▒ą╗ąŠą║ą░: ą┐ąĄčĆą▓čŗą╣ ą▒ą╗ąŠą║ ąĮą░ 32 ą║ąĖą╗ąŠą▒ą░ą╣čéą░ čģčĆą░ąĮąĖčé ą║ąŠą┤, ąĖ ąĮąĄ ą┐ąŠą╝ąĄčćą░ąĄčéčüčÅ ICACHE_FLASH_ATTR (.text). ąĪą╗ąĄą┤čāčÄčēąĖąĄ 32 ą║ąĖą╗ąŠą▒ą░ą╣čé čŹč鹊 iCache, ą║ąŠč鹊čĆčŗą╣ čģčĆą░ąĮąĖčé ą║ąŠą┤, ą┐ąŠą╝ąĄč湥ąĮąĮčŗą╣ ICACHE_FLASH_ATTR .
ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ Non-OS SDK, ąĮą░čćą░ą╗čīąĮčŗąĄ 80 ą║ąĖą╗ąŠą▒ą░ą╣čé DRAM ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ .data/.bss/.rodata/heap .data/.bss/.rodata/heap
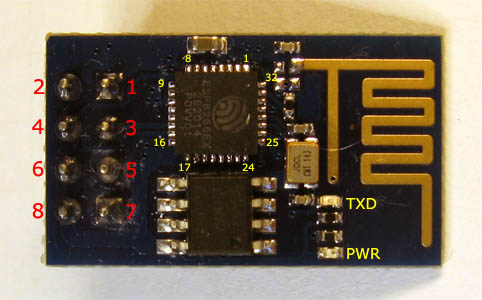
[ą¤ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ]
ą×ą┤ąĖąĮ ą║ą░ąĮą░ą╗, čćą░čüč鹊čéą░ ąŠčåąĖčäčĆąŠą▓ą║ąĖ 100k ą▓čŗą▒ąŠčĆąŠą║/čüąĄą║ ą┐čĆąĖ ą▓čŗą║ą╗čÄč湥ąĮąĮąŠą╝ ą╝ąŠą┤ąĄą╝ąĄ Wi-Fi, ąĖ 1k ą▓čŗą▒ąŠčĆąŠą║ ą┐čĆąĖ ąĮąŠčĆą╝ą░ą╗čīąĮąŠ-ą░ą║čéąĖą▓ąĮąŠą╝ ą╝ąŠą┤ąĄą╝ąĄ Wi-Fi. ąĀą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī 12 ą▒ąĖčé (10 ą▒ąĖčé ą┐čĆąĖ čćč鹥ąĮąĖąĖ č湥čĆąĄąĘ ą▓čŗąĘąŠą▓ system_adc_read() ).
ADC č鹥čüąĮąŠ ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮ čü ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ąĖ čüčģąĄą╝ą░ą╝ąĖ čĆą░ą┤ąĖąŠčéčĆą░ą║čéą░ (RF) ąĖ ą┐ąŠčŹč鹊ą╝čā ąĮą░ąĘąĮą░č湥ąĮąĖąĄ ą▒ąĖčé ąĖ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ čĆąĄą│ąĖčüčéčĆą░čģ ąĮąĄą┤ąŠčüčéčāą┐ąĮčŗ ą┤ą╗čÅ ąŠčéą║čĆčŗč鹊ą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ. ąĀą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ ą▓čŗčĆą░ąČą░čÄčé čüąŠąČą░ą╗ąĄąĮąĖąĄ ąĖąĘ-ąĘą░ čŹčéąĖčģ ąĮąĄčāą┤ąŠą▒čüčéą▓, ąĖ ą┐čĆąĖą│ą╗ą░čłą░čÄčé ąŠą▒čĆą░čēą░čéčīčüčÅ ą▓ č鹥čģą┐ąŠą┤ą┤ąĄčƹȹ║čā ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ.
ąÜąŠą│ą┤ą░ ESP8266 ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ą║ čĆąŠčāč鹥čĆą░ą╝, ąŠąĮą░ ą▓ąŠą╣ą┤ąĄčé ą▓ modem_sleep č鹊ą╗čīą║ąŠ ą▓ čĆąĄąČąĖą╝ąĄ ą║ą╗ąĖąĄąĮčéą░ Wi-Fi (č鹊ą╗čīą║ąŠ ą▓ STA mode), čćč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ č鹊ą║ąŠą▓ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą║čĆąĖčüčéą░ą╗ą╗ą░ ąĖ ąĘąĮą░č湥ąĮąĖą╣ ąŠą┐ąŠčĆąĮčŗčģ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣, ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 č湥ą│ąŠ ąŠčåąĖčäčĆąŠą▓ą║ą░ ADC ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī ą▓ ąĮąĄąĮąŠčĆą╝ą░ą╗čīąĮąŠą╝ čĆąĄąČąĖą╝ąĄ.
ąĢčüą╗ąĖ čéčĆąĄą▒čāąĄčéčüčÅ ą▓čŗčüąŠą║ą░čÅ č鹊čćąĮąŠčüčéčī, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 API-ą▓čŗąĘąŠą▓ system_adc_fast_read . ą×ą┤ąĮą░ą║ąŠ ą┐čĆąĖ čŹč鹊ą╝ RF-čāąĘą╗čŗ čćąĖą┐ą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą▓čŗą║ą╗čÄč湥ąĮčŗ ą┐ąĄčĆąĄą┤ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅą╝ąĖ ADC, ąĖ čüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąŠąĖąĘąŠą╣čéąĖ ąŠčéą║ą╗čÄč湥ąĮąĖąĄ Wi-Fi. ąöą╗čÅ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ąĮąĖąĘą║ąŠą╣ č鹊čćąĮąŠčüčéąĖ, ą║ąŠą│ą┤ą░ ą┤ąŠą┐čāčüčéąĖą╝ą░ čĆą░ąĘąĮąĖčåą░ ą╝ąĄąČą┤čā čćč鹥ąĮąĖčÅą╝ąĖ 1 ąĖą╗ąĖ 2, ą▒ą╗ąŠą║ Wi-Fi ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ non_sleep.
ąöą╗čÅ ą╝ąĄąĮčīčłąĄą╣ č鹊čćąĮąŠčüčéąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé ą▓ą▓ąĄčüčéąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝čā ą▓ čĆąĄąČąĖą╝ čüąĮą░ (sleep mode). ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ 菹ĮąĄčĆą│ąĖąĖ čüąĮąĖąĘąĖčéčüčÅ.
ąÆąĮčāčéčĆąĄąĮąĮąĖą╣ ADC (ąÉą”ą¤) ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ESP8266 ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ąĖą╗ąĖ ą┤ą╗čÅ ą┐čĆąĖą▒ą╗ąĖąĘąĖč鹥ą╗čīąĮąŠą╣ ąŠčåąĄąĮą║ąĖ č鹊ą║ą░, ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝ąŠą│ąŠ ą▓ąĮąĄčłąĮąĖą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, ą┐ąŠčüą║ąŠą╗čīą║čā ąĮą░ čĆą░ą▒ąŠčéčā ADC ą▓ą╗ąĖčÅąĄčé čłčāą╝, ADC ą┤ąŠą╗ąČąĄąĮ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ č鹥čģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą│ą┤ąĄ ąĮąĄ ąĮčāąČąĮą░ ą▓čŗčüąŠą║ą░čÅ č鹊čćąĮąŠčüčéčī (ąĮą░ą┐čĆąĖą╝ąĄčĆ, č鹥čĆą╝ąŠčĆąĄą╗ąĄ, ąĖ čé. ą┐.).
tx_addr ą░ą┤čĆąĄčü ąŠčéą┐čĆą░ą▓ą║ąĖtx_cmd ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝ą░čÅ ą║ąŠą╝ą░ąĮą┤ą░tx_rep ą▓čĆąĄą╝čÅ ą┐ąŠą▓č鹊čĆąĄąĮąĖčÅ
ąĪ ą║ą▓ą░čĆčåąĄą▓čŗą╝ čĆąĄąĘąŠąĮą░č鹊čĆąŠą╝ 26 ą£ąōčå čüą║ąŠčĆąŠčüčéčī ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ESP8266 ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ čüąŠčüčéą░ą▓ą╗čÅąĄčé 74880 ą┤ą╗čÅ UART0. ąśąĘ-ąĘą░ čŹč鹊ą│ąŠ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą╝ąŠą│čāčé ą┐ąŠčÅą▓ą╗čÅčéčīčüčÅ "ąĮąĄ čćąĖčéą░ąĄą╝čŗąĄ" čüąĖą╝ą▓ąŠą╗čŗ.
ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ą╝ąŠą│čāčé ą┐ąŠą╝ąĄąĮčÅčéčī ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ UART ą▓ č鹥ą╗ąĄ čäčāąĮą║čåąĖąĖ user_main() . ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┐ąŠą╝ąĄąĮčÅą╣č鹥 čüą║ąŠčĆąŠčüčéčī (baud rate) čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
void ICACHE_FLASH_ATTR uart_init (UartBautRate uart0_br, UartBautRate uart1_br)
{
// rom ąĖčüą┐ąŠą╗čīąĘčāąĄčé 74880 baut_rate, ąĘą┤ąĄčüčī ą┐ąŠą▓č鹊čĆąĮą░čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ
UartDev.baut_rate = uart0_br;
uart_config(UART0);
UartDev.baut_rate = uart1_br;
uart_config(UART1);
}
ąöą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ č乊čĆą╝ą░čéą░ ą┤ą░ąĮąĮčŗčģ ąŠą▒ą╝ąĄąĮą░ UART ąŠą▒čĆą░čéąĖč鹥čüčī ą║ čäą░ą╣ą╗čā uart.c SDK/driver_lib/driver/
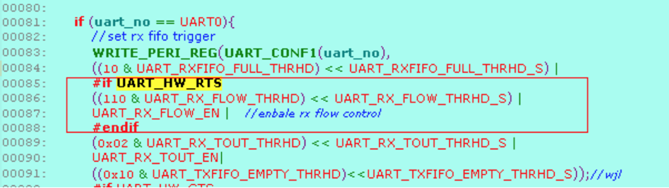
ąöą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ąŠą╝ (hardware flow control) ą┐čĆąĖ ąŠą▒ą╝ąĄąĮąĄ ą┤ą░ąĮąĮčŗą╝ąĖ UART ą▓čŗą┐ąŠą╗ąĮčÅčÄčé čüą╗ąĄą┤čāčÄčēąĖąĄ čłą░ą│ąĖ:
1 . ąŻčüčéą░ąĮąŠą▓ąĖč鹥 čüą╗ąĄą┤čāčÄčēąĖąĄ ą░čéčĆąĖą▒čāčéčŗ ą▓ 1 ą┐čāč鹥ą╝ ą┐čĆą░ą▓ą║ąĖ uart.h:
// ąĀą░ąĘčĆąĄčłą░ąĄčé ą┤ą╗čÅ UART0 hw flow control RTS, ą▓čŗą▓ąŠą┤ MTDO: #define UART_HW_RTS 1 // ąĀą░ąĘčĆąĄčłą░ąĄčé ą┤ą╗čÅ UART0 hw flow control CTS, ą▓čŗą▓ąŠą┤ MTCK: #define UART_HW_CTS 1
2 . ąĪą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 ą┐ąŠčĆąŠą│ ą┤ą╗čÅ hardware flow control. ąÜą░ą║ čŹč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ, ą┐ąŠą║ą░ąĘą░ąĮąŠ ą║čĆą░čüąĮčŗą╝ ą║ąŠąĮčéčāčĆąŠą╝ ąĮą░ čüą║čĆąĖąĮčłąŠč鹥 ąĮąĖąČąĄ. ąÜąŠą│ą┤ą░ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą▓ RXFIFO čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąŠą╗čīčłąĄ 110, čüąĖą│ąĮą░ą╗ RTS ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ą▓ ą╗ąŠą│. 1.
UART1 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé č鹊ą╗čīą║ąŠ ą▓čŗą▓ąŠą┤ TxD ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ ą╗ąŠą│ą░. ąŁč鹊 ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ą░ą║ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓čā ą▓čŗą▓ąŠą┤čā č湥čĆąĄąĘ ą│ą╗ą░ą▓ąĮčŗą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé UART0, ą║ąŠą│ą┤ą░ ąŠąĮ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┤čĆčāą│ąĖčģ čåąĄą╗ąĄą╣.
ąĪą╝. čüą╗ąĄą┤čāčÄčēąĖą╣ ą┐čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ UART1:
void ICACHE_FLASH_ATTR uart_init_new (void )
{
// ą×ąČąĖą┤ą░ąĮąĖąĄ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ čüč鹥ą║ąŠą▓ FIFO:
UART_WaitTxFifoEmpty(UART0);
UART_WaitTxFifoEmpty(UART1);
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ąĮą░čüčéčĆąŠąĄą║ UART:
UART_ConfigTypeDef uart_config;
uart_config.baud_rate = BIT_RATE_74880;
uart_config.data_bits = UART_WordLength_8b;
uart_config.parity = USART_Parity_None;
uart_config.stop_bits = USART_StopBits_1;
uart_config.flow_ctrl = USART_HardwareFlowControl_None;
uart_config.UART_RxFlowThresh = 120 ;
uart_config.UART_InverseMask = UART_None_Inverse;
UART_ParamConfig(UART0, & uart_config);
UART_IntrConfTypeDef uart_intr;
uart_intr.UART_IntrEnMask = UART_RXFIFO_TOUT_INT_ENA
| UART_FRM_ERR_INT_ENA
| UART_RXFIFO_FULL_INT_ENA;
uart_intr.UART_RX_FifoFullIntrThresh = 100 ;
uart_intr.UART_RX_TimeOutIntrThresh = 2 ;
uart_intr.UART_TX_FifoEmptyIntrThresh = 20 ;
UART_IntrConfig(UART0, & uart_intr);
// ąØą░ąĘąĮą░č湥ąĮąĖąĄ UART1 ą┤ą╗čÅ ą┐ąĄčćą░čéąĖ:
UART_SetPrintPort(UART1);
// ąĀąĄą│ąĖčüčéčĆą░čåąĖčÅ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ:
UART_intr_handler_register(uart0_rx_intr_handler);
ETS_UART_INTR_ENABLE();
}
ąØąĄčé, ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé. ąÉą┐ą┐ą░čĆą░čéčāčĆą░ SDIO ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī č鹊ą╗čīą║ąŠ ą▓ čĆąĄąČąĖą╝ąĄ čāčüčéčĆąŠą╣čüčéą▓ą░, čé. ąĄ. ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé č鹊ą╗čīą║ąŠ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╣ ą┐čĆąŠčäąĖą╗čī. ą¤ąŠčŹč鹊ą╝čā SDIO ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ESP8266 ąĮąĄ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ čģąŠčüčé, čāą┐čĆą░ą▓ą╗čÅčÅ ą┤čĆčāą│ąĖą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ SDIO, čéą░ą║ąĖą╝ąĖ ą║ą░ą║ ą║ą░čĆčéčŗ SD.
Hardware SDIO slave module ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčāčÄ čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā 50 ą£ąōčå. ąóą░ą║ ą║ą░ą║ SDIO ąĘą░ą┤ą░ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ 4 ą╗ąĖąĮąĖą╣ ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ, č鹊 ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 čŹčäč乥ą║čéąĖą▓ąĮą░čÅ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ čüąŠčüčéą░ą▓ą╗čÅąĄčé 50*4 = 200 Mbps.
ąÆ ą╗čÄą▒ąŠą╝ čüą╗čāčćą░ąĄ ą┐čĆąŠą▒ą╗ąĄą╝čŗ ąĮąĄ ąĘą░ą▓ąĖčüčÅčé ąŠčé ą┤ąĖąĘą░ą╣ąĮą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ LED. ąĢčüą╗ąĖ ąĮą░ LED ą┐ąŠą┤ą░ąĄčéčüčÅ č鹊ą║ ąŠčé ą╗ąŠą│. 0, ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮą░čÅ ą║ ąĮąĄą╝čā ąĮąŠąČą║ą░ GPIO ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ą▓ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 0 ą┐čĆąĖ ą┐ąŠą┤ą░č湥 ą┐ąĖčéą░ąĮąĖčÅ, č鹊 LED ą╝ąŠąČąĄčé ąĘą░ąČąĖą│ą░čéčīčüčÅ ąĖą╗ąĖ ą╝ąĄčĆčåą░čéčī. ąĢčüą╗ąĖ čüą▓ąĄč鹊ą┤ąĖąŠą┤ ąĘą░ąČąĖą│ą░ąĄčéčüčÅ ąŠčé ą╗ąŠą│. 1, č鹊 ą┐čĆąĖčćąĖąĮą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ č鹊ą╝, čćč鹊 ąĮą░ ą▓čüąĄčģ ąĮąŠąČą║ą░čģ GPIO čĆą░ąĘčĆąĄčłąĄąĮčŗ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ čĆąĄąĘąĖčüč鹊čĆčŗ pull-up (ą║čĆąŠą╝ąĄ ąĮąŠąČąĄą║ GPIO4 ąĖ GPIO5, čüą▓čÅąĘą░ąĮąĮčŗčģ čü Flash).
ąĀąĄčłąĄąĮąĖąĄ ą┐čĆąŠą▒ą╗ąĄą╝čŗ:
1 . ąŚą░ą┐čĆąĄčéąĖč鹥 ą▓čüąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ čĆąĄąĘąĖčüč鹊čĆčŗ pull-up ą▓ čäčāąĮą║čåąĖąĖ user_init , ą║ąŠč鹊čĆą░čÅ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ.
2 . ąĢčüą╗ąĖ ą┐ąĄčĆą▓čŗą╣ ą╝ąĄč鹊ą┤ ąĮąĄ čüčĆą░ą▒ąŠčéą░ą╗, č鹊 čüą▓čÅąČąĖč鹥čüčī čüąŠ čüą╗čāąČą▒ąŠą╣ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ Espressif ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ čüą┐ąĄčåąĖą░ą╗čīąĮąŠ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ čäą░ą╣ą╗ą░ boot.bin boot.bin user.bin
3 . ą¤ąŠą┤ą║ą╗čÄčćą░ą╣č鹥 čüą▓ąĄč鹊ą┤ąĖąŠą┤čŗ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊ą▒čŗ ąŠąĮąĖ ąĘą░ąČąĖą│ą░ą╗ąĖčüčī ąŠčé ą╗ąŠą│. 0, č鹊ą│ą┤ą░ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ čĆąĄąĘąĖčüč鹊čĆčŗ pull-up, ą║ąŠą│ą┤ą░ ąŠąĮąĖ čĆą░ąĘčĆąĄčłąĄąĮčŗ, ąĮąĄ ą▒čāą┤čāčé ą┐ąŠą┤ą░ą▓ą░čéčī ą▓ ąĮąĖčģ č鹊ą║.
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 PWM ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ, ąĖ ą╝ą░ą╗čŗą╣ ą▓čŗą▒čĆąŠčü ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮ ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ čĆą░ąĘčĆąĄčłą░čÄčēąĄą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ, ą║ąŠč鹊čĆąŠą╣ ą╝ąŠąČąĄčé ą┤ąŠčüčéąĖčćčī PWM. ąÆ čĆąĄąČąĖą╝ąĄ ą▓čŗčüąŠą║ąŠą╣ č鹊čćąĮąŠčüčéąĖ (high accuracy) čĆą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī ą╝ąŠąČąĄčé ą▒čŗčéčī ą┤ąŠ 22222 ąŠčéčüč湥č鹊ą▓. ą×ą┤ąĮą░ą║ąŠ čüą║ą▓ą░ąČąĮąŠčüčéčī ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą╝ąŠąČąĄčé ą┤ąŠčüčéąĖčćčī 100%.
ąĢčüą╗ąĖ ąÆčŗ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ API, ą║ą░ą║ ą▓ ą┐čĆąĖą╝ąĄčĆąĄ ąĖąĘ SDK demo (light_set_aim ąĖ light_set_aim_r ), č鹊 čŹčéąĖ API ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮčŗ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ąŠčüą▓ąĄčēąĄąĮąĖčÅ, ąĖ ą┐ąŠčŹč鹊ą╝čā ą▓ ąĮąĖčģ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ ą┐ą╗ą░ą▓ąĮčŗąĄ ą┐ąĄčĆąĄčģąŠą┤čŗ čüą║ą▓ą░ąČąĮąŠčüčéąĖ.
ąöą╗čÅ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ ą▓ ą┤čĆčāą│ąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ, ą│ą┤ąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą▒čŗčüčéčĆąŠąĄ čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖąĄ PWM, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 pwm_set_duty ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ čüą║ą▓ą░ąČąĮąŠčüčéąĖ, ąĖ ą▓čŗąĘąŠą▓ąĖč鹥 pwm_start , čćč鹊ą▒čŗ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą┐čĆąĖą╝ąĄąĮąĖčéčī ąĮąŠą▓čāčÄ čüą║ą▓ą░ąČąĮąŠčüčéčī čåąĖą║ą╗ą░ PWM.
ąØąĄčé, ąĮąĄ čÅą▓ą╗čÅčÄčéčüčÅ. ą×ą┤ąĮą░ą║ąŠ ą╝ąĮąŠą│ąĖąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą╝ąŠą│čāčé ąŠą▒čģąŠą┤ąĖčéčī čŹč鹊 ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĄ ą┐čāč鹥ą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čĆąĄąĘąĖčüč鹊čĆąĮąŠą│ąŠ ą┤ąĄą╗ąĖč鹥ą╗čÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĖą╗ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą▓ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░, čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ ąĮą░čüč鹊čÅč鹥ą╗čīąĮąŠ čĆąĄą║ąŠą╝ąĄąĮą┤čāčÄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐ąŠą┤čģąŠą┤čÅčēčāčÄ ą╝ąĖą║čĆąŠčüčģąĄą╝čā ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čÅ čāčĆąŠą▓ąĮčÅ (ą║ą░ą║ ąĮą░ą┐čĆąĖą╝ąĄčĆ GTL2003 ąĖą╗ąĖ MAX3002) ą┤ą╗čÅ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ 5V-ą╗ąŠą│ąĖą║ąŠą╣. ąØąĄą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ čŹč鹊ą╣ čĆąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖąĖ ą▓ ą║ąŠąĮąĄčćąĮąŠą╝ čüč湥č鹥 ą╝ąŠąČąĄčé ą┐ąŠą▓čĆąĄą┤ąĖčéčī ESP8266.
ąĪą╝. ESP8266 Technical Reference [6].
ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ ą┤ą▓ą░ ą┐čĆąĖą╝ąĄčĆą░ ąŠą┐ąĄčĆą░čåąĖą╣ čü GPIO.
ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą╗čÅ Non-OS SDK, ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą▓čģąŠą┤ ą┤ą╗čÅ MTDO ą▓ čĆąĄąČąĖą╝ąĄ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÅ ą┐ąŠ čüą┐ą░ą┤čā čāčĆąŠą▓ąĮčÅ (falling-edge-triggered mode):
void ICACHE_FLASH_ATTR gpio_init (void )
{
// ąÆą║ą╗čÄč湥ąĮąĖąĄ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠą╣ čäčāąĮą║čåąĖąĖ GPIO:
PIN_FUNC_SELECT(PERIPHS_IO_MUX_MTDO_U,FUNC_GPIO15);
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓ čĆąĄąČąĖą╝ąĄ ą▓čģąŠą┤ą░:
GPIO_DIS_OUTPUT(GPIO_ID_PIN(15 ));
// ąŚą░ą║čĆčŗčéąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ GPIO:
ETS_GPIO_INTR_DISABLE();
// ąĀąĄą│ąĖčüčéčĆą░čåąĖčÅ čäčāąĮą║čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ:
ETS_GPIO_INTR_ATTACH(GPIO_INTERRUPT,NULL );
// ąĪčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖąĄ ą▒čāą┤ąĄčé ą┐ąŠ čüą┐ą░ą┤čā:
gpio_pin_intr_state_set(GPIO_ID_PIN(15 ),GPIO_PIN_INTR_NEGEDGE);
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ GPIO:
ETS_GPIO_INTR_ENABLE() ;
}
ąóąŠ ąČąĄ čüą░ą╝ąŠąĄ ą┤ą╗čÅ RTOS SDK:
void ICACHE_FLASH_ATTR gpio_init (void )
{
// ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ą┤ą╗čÅ čüčéčĆčāą║čéčāčĆčŗ GPIO Init:
GPIO_ConfigTypeDef gpio_in_cfg;
// ąóčĆąĖą│ą│ąĄčĆ ą┐ąŠ čüą┐ą░ą┤čā:
gpio_in_cfg.GPIO_IntrType = GPIO_PIN_INTR_NEGEDGE;
// ąĀąĄąČąĖą╝ ą▓čģąŠą┤ą░:
gpio_in_cfg.GPIO_Mode = GPIO_Mode_Input;
// ąÜą░ą║ąŠą╣ ą▓čŗą▓ąŠą┤ ą▒čāą┤ąĄčé čĆą░ąĘčĆąĄčłąĄąĮ:
gpio_in_cfg.GPIO_Pin = GPIO_Pin_15;
// ąÆčŗąĘąŠą▓ čäčāąĮą║čåąĖąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ:
gpio_config(& gpio_in_cfg);
GPIO_REG_WRITE(GPIO_STATUS_W1TC_ADDRESS, BIT(GPIO_UART_IN_NUM));
// ąĀąĄą│ąĖčüčéčĆą░čåąĖčÅ čäčāąĮą║čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ:
gpio_intr_handler_register(interrupt_GPIO_UART);
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ GPIO:
_xt_isr_unmask(1 << ETS_GPIO_INUM);
}
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠą┤ąĮąŠą│ąŠ ąĖ č鹊ą│ąŠ ąČąĄ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░ ą╝ąŠą│čāčé ą▒čŗčéčī ąĮąĄąĘąĮą░čćąĖč鹥ą╗čīąĮčŗąĄ čĆą░ąĘą╗ąĖčćąĖčÅ ą▓ ą║ąŠą┤ą░ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ RTOS ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ą▒ąĄąĘ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ (Non-OS applications).
ąæčāč乥čĆ ą┤ą░ąĮąĮčŗčģ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ HSPI čüąŠčüč鹊ąĖčé ąĖąĘ 16 čüą╗ąŠą▓ (ąĖą╗ąĖ 64 ą▒ą░ą╣čéą░). ąØą░ ą║ą░čĆč鹥 ą┐ą░ą╝čÅčéąĖ ąŠąĮ ą┤ąŠčüčéčāą┐ąĄąĮ čüą╗ąŠą▓ą░ą╝ąĖ ą║ą░ą║ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮčŗą╣ ą▒ą╗ąŠą║. ąæčāč乥čĆ ąŠč湥ąĮčī ą│ąĖą▒ąŠą║ ą▓ ą┐ą╗ą░ąĮąĄ č鹊ą│ąŠ, čćč鹊 čüąŠą┤ąĄčƹȹ░čēąĖąĄčüčÅ ą▓ ąĮąĄą╝ ą┤ą░ąĮąĮčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮčŗ ą╗ąĖą▒ąŠ ą╝ą╗ą░ą┤čłąĖą╝ (LSB), ą╗ąĖą▒ąŠ čüčéą░čĆčłąĖą╝ (MSB) ą▒ąĖč鹊ą╝ ą▓ą┐ąĄčĆąĄą┤, ąĖ čéą░ą║ąČąĄ ą║ ąĮąĄą╝čā ą╝ąŠąČąĄčé ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčīčüčÅ ą┤ąŠčüčéčāą┐ čü čĆą░ąĘąĮčŗą╝ ą┐ąŠčĆčÅą┤ą║ąŠą╝ ą▒ą░ą╣čé - ą╗ąĖą▒ąŠ little-endian, ą╗ąĖą▒ąŠ big-endian. ąŁč鹊 čāčüčéčĆą░ąĮčÅąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéčī ą▓ ą╗ąĖčłąĮąĖčģ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗčģ ą╝ą░ąĮąĖą┐čāą╗čÅčåąĖčÅčģ ąĮą░ą┤ čüąŠą┤ąĄčƹȹĖą╝čŗą╝ ą▒čāč乥čĆą░. ąÜąŠą│ą┤ą░ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮ ą▒čāč乥čĆ HSPI, ąĘą░ą│čĆčāąĘą║ą░ ą║ą░ąĮą░ą╗ą░ ą╝ąŠąČąĄčé ą┐čĆąĄą▓čŗčłą░čéčī 90% ąĮą░ čāą╝ąĄčĆąĄąĮąĮčŗčģ čéą░ą║č鹊ą▓čŗčģ čćą░čüč鹊čéą░čģ.
ąÆ ąŠčéą╗ąĖčćąĖąĄ ąŠčé ąĖąĮč鹥čĆč乥ą╣čüą░ I2C (ąĖą╗ąĖ TWI) čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā ąĖąĮč鹥čĆč乥ą╣čüą░ HSPI ąĮąĄ ąĮčāąČąĮąŠ ą┤ąĄą╗ą░čéčī ą╝ąĄą┤ą╗ąĄąĮąĮąĄąĄ, č湥ą╝ čüą░ą╝ąŠąĄ ą╝ąĄą┤ą╗ąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓ čüąĄčéąĖ ąĖąĮč鹥čĆč乥ą╣čüą░. ąĪą║ąŠčĆąŠčüčéčī ą╝ąŠąČąĮąŠ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ ąĖąĘą╝ąĄąĮčÅčéčī ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü č鹥ą║čāčēąĖą╝ ą░ą║čéąĖą▓ąĮčŗą╝ ą▓ąĮąĄčłąĮąĖą╝ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝ č湥čĆąĄąĘ SPI.
ąÆčŗą▓ąŠą┤ HSPI_CS0 ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ ąĖąĮč鹥čĆč乥ą╣čüčā HSPI, ąĖ ąŠąĮ ą╝ąŠąČąĄčé čāą┐čĆą░ą▓ą╗čÅčéčīčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ. ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ LCD, ą║ąŠč鹊čĆčŗąĄ čéčĆąĄą▒čāčÄčé čćą░čüč鹊ą╣ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ čüąĖą│ąĮą░ą╗ą░ ą▓čŗą▒ąŠčĆą║ąĖ CS.
ą¤ąŠąČą░ą╗čāą╣čüčéą░ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥 č鹥čĆą╝ąĖąĮąĖčĆčāčÄčēąĖąĄ čĆąĄąĘąĖčüč鹊čĆčŗ ąĖčüč鹊čćąĮąĖą║ą░ čüąĖą│ąĮą░ą╗ą░, ą║ąŠą│ą┤ą░ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄč鹥 ąŠč湥ąĮčī ą▒čŗčüčéčĆčŗąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░.
ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 CLEAR_PERI_REG_MASK(SPI_USER(spiNum), SPI_USR_MISO_HIGHPART); , čćč鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▓ąĄčĆčģąĮąĄą╣ čćą░čüčéąĖ ą▒čāč乥čĆą░ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ.
ąĪą╝. example/peripheral_test
wifi_station_set_auto_connect wifi_station_ap_number_set wifi_set_phy_mode wifi_softap_set_config wifi_station_set_config wifi_set_opmode system_restart_enhance system_restore system_upgrade_reboot
ą¤ąŠčüą╗ąĄą┤ąĮąĖąĄ 3 čüąĄą║č鹊čĆą░ ą│ą╗ą░ą▓ąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ flash (primary Flash memory) ąĮą░ąĘąĮą░č湥ąĮčŗ ą┐ąŠą┤ čģčĆą░ąĮąĖą╗ąĖčēąĄ čüąĖčüč鹥ą╝ąĮčŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ (system parameter area). ą¤ąĄčĆą▓čŗąĄ 2 čÅą▓ą╗čÅčÄčéčüčÅ ą║ąŠą┐ąĖčÅą╝ąĖ, ą┐ąŠčŹč鹊ą╝čā ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĮą░ ą║ąŠą┐ąĖčÅ ąŠčüčéą░ąĮąĄčéčüčÅ ą▓ čåąĄą╗ąŠčüčéąĖ, ą║ąŠą│ą┤ą░ čüą╗čāčćą░ą╣ąĮąŠ ą┐čĆąŠą┐ą░ą┤ąĄčé ą┐ąĖčéą░ąĮąĖąĄ ą┐čĆąĖ ąĘą░ą┐ąĖčüąĖ ąŠą┤ąĮąŠą│ąŠ čüąĄą║č鹊čĆą░. ą¤ąŠčüą╗ąĄą┤ąĮąĖą╣ čüąĄą║č鹊čĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čäą╗ą░ą│ą░, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄą│ąŠ, ą║ą░ą║ąŠą╣ ąĖąĘ ą┐ąĄčĆą▓čŗčģ ą┤ą▓čāčģ čüąĄą║č鹊čĆąŠą▓ ąĮčāąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī. ąŁč鹊čé ą╝ąĄčģą░ąĮąĖąĘą╝ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 ą▓ą░ąČąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą▒čāą┤čāčé ą┐ąŠą▓čĆąĄąČą┤ąĄąĮčŗ ąĖąĘ-ąĘą░ ąŠčéą║ą░ąĘą░ ą┐ąĖčéą░ąĮąĖčÅ ą▓ąŠ ą▓čĆąĄą╝čÅ ąŠą┐ąĄčĆą░čåąĖą╣ čüčéąĖčĆą░ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ (erase/write).
ąØąĄčé, ą▓čüąĄ ąŠą┐ąĄčĆą░čåąĖąĖ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą▓čŗčĆąŠą▓ąĮąĄąĮčŗ ą┐ąŠ ą│čĆą░ąĮąĖčåąĄ 4 ą▒ą░ą╣čé (ąĮą░ čüą╗ąŠą▓ąŠ). ąĀą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ ąĮą░čüč鹊čÅč鹥ą╗čīąĮąŠ čĆąĄą║ąŠą╝ąĄąĮą┤čāčÄčé ą┐čĆąĖą╝ąĄąĮčÅčéčī čĆąĄą┤ą║ąĖąĄ ą▒ą╗ąŠčćąĮčŗąĄ ąŠą┐ąĄčĆą░čåąĖąĖ ą▓ą╝ąĄčüč鹊 čćą░čüč鹊 ą┐ąŠą▓č鹊čĆčÅčÄčēąĖčģčüčÅ ą╝ą░ąĮąĖą┐čāą╗čÅčåąĖą╣ čü ą╝ą░ą╗čŗą╝ąĖ ąŠą▒čŖąĄą╝ą░ą╝ąĖ ą┤ą░ąĮąĮčŗčģ (ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▒čāč乥čĆ ą┤ą╗čÅ Flash ą▓ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ąŠą┐ąĄčĆą░čéąĖą▓ąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ).
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ą┐ą░ą╝čÅčéčī flash čŹč鹊 ąŠčéą┤ąĄą╗čīąĮą░čÅ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░, ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝ą░čÅ ą║ ESP8266 čüąĮą░čĆčāąČąĖ. ąĢčüą╗ąĖ ąÆą░čł ą║ąŠą┤ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą▓ čüąĖčüč鹥ą╝ą░čģ čü čĆą░ąĘąĮčŗą╝ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅą╝ąĖ ą┐ą░ą╝čÅčéąĖ, č鹊 ąĖą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ąĮą░čćą░ą╗čīąĮą░čÅ ąĘą░ą│čĆčāąĘą║ą░ firmware ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┐čĆąĖ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą╝ ą▓čŗą▒ąŠčĆąĄ čĆą░ąĘą╝ąĄčĆą░ flash. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą▓ ąĘąŠąĮąĄ ąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠčüčéąĖ ą║ąŠą┤ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ ą░ą┤čĆąĄčüąŠą▓ Flash, čćč鹊ą▒čŗ ąĮąĄ ą┐ąŠąĘą▓ąŠą╗čÅčéčī ąĘą░ą┐ąĖčüčī/čćč鹥ąĮąĖąĄ ą░ą┤čĆąĄčüąŠą▓, ą║ąŠč鹊čĆčŗąĄ čäąĖąĘąĖč湥čüą║ąĖ ąĮąĄą┤ąŠčüčéčāą┐ąĮčŗ.
ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą╗čÅ čĆą░ąĘą╝ąĄčĆą░ flash 8 ą╝ąĄą│ą░ą▒ąĖčé ąŠą┐ąĄčĆą░čåąĖąĖ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ ą┐ąŠ ą░ą┤čĆąĄčüą░ą╝ čüą▓čŗčłąĄ 0xFFFFF ą▒čāą┤čāčé ąĮąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╝ąĖ.
ąØąĖąČąĄ ą┤ą░ąĮ ą┐čĆąĖą╝ąĄčĆ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ č鹥čüčéą░ flash. ąŚą┤ąĄčüčī ą▓čģąŠą┤ąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ: uint32 sector ąĘą░ą┤ą░ąĄčé ąĮą░čćą░ą╗čīąĮčŗą╣ čüąĄą║č鹊čĆ, ąĖ uint32 ąĘą░ą┤ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüąĄą║č鹊čĆąŠą▓ ą┤ą╗čÅ čüčéąĖčĆą░ąĮąĖčÅ (erase).
#define FLASH_WRITE_LEN_BYTE (1024*4) #define FLASH_WRITE_CONTENT (0X10)
// ąÆčģąŠą┤ąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ: uint32 sector ąĘą░ą┤ą░ąĄčé ąĮą░čćą░ą╗čīąĮčŗą╣ čüąĄą║č鹊čĆ, // ąĖ uint32 ąĘą░ą┤ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüąĄą║č鹊čĆąŠą▓ ą┤ą╗čÅ čüčéąĖčĆą░ąĮąĖčÅ (erase). void flash_sector_rw_test (uint32 sector, uint32 cnt)
{
char * w_data= (char * )os_malloc(FLASH_WRITE_LEN_BYTE);
uint32 flash_operate= 0 ;
uint32 i= 0 ;
uint8 status= 0 ;
os_printf("Test Sector is 0x%x \n " ,sector);
if (NULL == w_data){
os_printf("Memory little \n " );
return ;
}
os_memset(w_data,FLASH_WRITE_CONTENT,FLASH_WRITE_LEN_BYTE);
for (i= 0 ; i < cnt; i++ )
{
if (spi_flash_erase_sector(sector+ i)== 0 )
{
os_printf("erase sector0x%x ok \n " ,sector+ i);
}
else
{
os_printf("Err:erase sector0x%x err \n " ,sector+ i);
}
}for (i= 0 ; i < cnt; i++ )
{
if (spi_flash_write((sector+ i)* (FLASH_WRITE_LEN_BYTE),
(uint32* )w_data,FLASH_WRITE_LEN_BYTE)== 0 )
{
os_printf("write sector 0x%x ok \n " ,sector+ i);
}
else
{
os_printf("Err:write sector 0x%x err \n " ,sector+ i);
}
}for (i= 0 ; i < cnt; i++ )
{
os_memset(w_data,0x00 ,FLASH_WRITE_LEN_BYTE);
if (spi_flash_read((sector+ i)* (FLASH_WRITE_LEN_BYTE),
(uint32* )w_data,FLASH_WRITE_LEN_BYTE)== 0 )
{
uint32 j= 0 ;
for (j= 0 ; j < FLASH_WRITE_LEN_BYTE; j++ )
{
if (* (w_data+ j)!= FLASH_WRITE_CONTENT)
{
os_printf("Err Flash read w_data[%d]=0x%x \n " ,j,w_data[j]);
//status=1;
}
if (* (w_data+ j)== FLASH_WRITE_CONTENT&& j== FLASH_WRITE_LEN_BYTE- 1 )
{
os_printf("Sector0x%x Test Ok \n " ,sector+ i);
}
}
}
}
ą¦č鹊ą▒čŗ ą┐čĆąŠą▓ąĄčĆąĖčéčī, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą╗ąĖ čćąĖą┐ flash čĆąĄąČąĖą╝ QIO:
1 . QE (Quad Enable) čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą▒ąĖčéčā BIT(9) ą▓ čĆąĄą│ąĖčüčéčĆąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ flash (flash status register).
2 . ążąŠčĆą╝ą░čé čĆąĄą│ąĖčüčéčĆą░ čüąŠčüč鹊čÅąĮąĖčÅ ąĘą░ą┐ąĖčüąĖ (write status register) čüą╗ąĄą┤čāčÄčēąĖą╣: 01H + StatusReg1 + StatusReg2.
3 . ąöąŠą╗ąČąĮčŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ:
ŌĆó Flash ą┤ąŠą╗ąČąĮą░ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī ą║ąŠą╝ą░ąĮą┤čā EBh, čćč鹊ą▒čŗ čĆą░ą▒ąŠčéą░ą╗ čĆąĄąČąĖą╝ QIO.
ą¦č鹊ą▒čŗ ą┐čĆąŠą▓ąĄčĆąĖčéčī, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą╗ąĖ čćąĖą┐ flash čĆąĄąČąĖą╝ DIO, ąĮčāąČąĮąŠ ą┐čĆąŠą▓ąĄčĆąĖčéčī, čćč鹊 ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ą║ąŠą╝ą░ąĮą┤čŗ:
ŌĆó Flash ą┤ąŠą╗ąČąĮą░ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī ą║ąŠą╝ą░ąĮą┤čā BBh, čćč鹊ą▒čŗ čĆą░ą▒ąŠčéą░ą╗ čĆąĄąČąĖą╝ DIO.
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ISSI flash ą╝ąŠąČąĄčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī čĆąĄąČąĖą╝ QIO.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĘą┤ąĄčüčī ą┐ąŠą┤ "ą┐čĆąŠąĘčĆą░čćąĮčŗą╝" ą┐ąŠąĮąĖą╝ą░ąĄčéčüčÅ čĆąĄąČąĖą╝ transparent transmission mode, ą║ąŠą│ą┤ą░ ą▓čüąĄ ą┤ą░ąĮąĮčŗąĄ, ą┐čĆąŠčģąŠą┤čÅčēąĖąĄ č湥čĆąĄąĘ UART ą▓ ąŠą▒ąŠąĖčģ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅčģ, ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą▒ąĄąĘ ąĖąĘą╝ąĄąĮąĄąĮąĖą╣, ą║ą░ą║ ąĄčüčéčī, ą┐ąŠ čĆą░ą┤ąĖąŠą║ą░ąĮą░ą╗čā Wi-Fi (čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ ą▓čģąŠą┤ą░ ą▓ "ą┐čĆąŠąĘčĆą░čćąĮčŗą╣" čĆąĄąČąĖą╝ ą▓ čüčéą░čéčīąĄ [7]).
ą¤čĆąĖčćąĖąĮą░ ą┐čĆąŠą┐ą░ą┤ą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą▓ č鹊ą╝, čćč鹊 ąĮąĄ čĆą░ąĘčĆąĄčłąĄąĮąŠ ą░ą┐ą┐ą░čĆą░čéąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ (hardware flow control). ąĀąĄąČąĖą╝ ą┐čĆąŠąĘčĆą░čćąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┐čĆąŠč鹊ą║ąŠą╗ TCP, čĆą░ąĘą╝ąĄčĆ ą┤ą░ąĮąĮčŗčģ ą║ą░ąČą┤ąŠą│ąŠ ą┐ą░ą║ąĄčéą░ čā ą║ąŠč鹊čĆąŠą│ąŠ ąŠą▒čŗčćąĮąŠ 1460 ą▒ą░ą╣čé (čćč鹊 ąĘą░ą▓ąĖčüąĖčé ąŠčé čüč鹥ą║ą░ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓). ą¤ąŠą║ą░ čüąŠčüč鹊čÅąĮąĖąĄ čüąĄčéąĖ čģąŠčĆąŠčłąĄąĄ, ąĖ ą▒čāč乥čĆ ąĮąĄ ąĘą░ąĮčÅčé, ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą┐ąŠčüč鹊čÅąĮąĮąŠ, ą▒ąĄąĘ ąĘą░ą┤ąĄčƹȹĄą║. ąÜąŠą│ą┤ą░ ą▓ ą┐čĆąŠąĘčĆą░čćąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ąĖąĮč鹥čĆą▓ą░ą╗ ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąĖąĄą╝ą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ą┐čĆąĄą▓čŗčłą░ąĄčé 20 ą╝čü, č鹊 čüčćąĖčéą░ąĄčéčüčÅ, čćč鹊 ą┐ąĄčĆąĄą┤ą░čćą░ ąĘą░ą▓ąĄčĆčłąĄąĮą░, ąĖ ą┐čĆąĖąĮčÅčéčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą┐ąŠ čüąĄčéąĖ. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ąĮąĄ čüąŠą│ą╗ą░čüąŠą▓ą░ąĮąĮąŠčüčéąĖ ą┐ą░ą║ąĄč鹊ą▓, ąĄčüą╗ąĖ čüąĄč鹥ą▓ąŠąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ąĮąĄ ąŠč湥ąĮčī ą║ą░č湥čüčéą▓ąĄąĮąĮąŠąĄ, ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą╝ąŠą│čāčé ą┐ąŠč鹥čĆčÅčéčīčüčÅ. ą¦č鹊ą▒čŗ čŹč鹊ą│ąŠ ąĮąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖą╗ąŠ, čĆą░ąĘčĆąĄčłąĖč鹥 čäčāąĮą║čåąĖčÄ flow control.
ąóą░ą║ąĖčģ ą┐ąŠčĆč鹊ą▓ ą┤ą▓ą░, UART0 ąĖ UART1. ą¤ąŠčĆčé UART0 ą┐ąŠą╗ąĮąŠčåąĄąĮąĮčŗą╣, čā ąĮąĄą│ąŠ ąĄčüčéčī ą▓ ąĮą░ą╗ąĖčćąĖąĖ ą▓čŗą▓ąŠą┤ Tx ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ Rx ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░. ą×ą┤ąĮą░ą║ąŠ čā ą┐ąŠčĆčéą░ UART1 ąĄčüčéčī č鹊ą╗čīą║ąŠ ą▓čŗą▓ąŠą┤ ą┐ąĄčĆąĄą┤ą░čćąĖ Tx, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ ą▓ ą╗ąŠą│ ąŠčéą╗ą░ą┤ą║ąĖ (ąĄą│ąŠ ą▓čŗą▓ąŠą┤ Rx ąĘą░ąĮčÅčé ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄą╝ ą║ ą┐ą░ą╝čÅčéąĖ SPI-Flash).
ąÜčĆąŠą╝ąĄ ąĮąŠąČą║ąĖ XPD_DCDC, ą┤čĆčāą│ąĖąĄ ą▓čŗą▓ąŠą┤čŗ GPIO ą╝ąŠą│čāčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą┤ą╗čÅ ą╗ąŠą│. 1.
ąĪąŠčüč鹊čÅąĮąĖąĄ čāčĆąŠą▓ąĮčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ąŠą▓ GPIO ą┐ąŠčüą╗ąĄ ąĘą░ą│čĆčāąĘą║ąĖ: ą║čĆąŠą╝ąĄ 6 SDIO + GPIO4 + GPIO5 + GPIO16, ą▓čüąĄ ą┤čĆčāą│ąĖąĄ ąĮąŠąČą║ąĖ GPIO ąĖą╝ąĄčÄčé ą▓čüčéčĆąŠąĄąĮąĮčŗąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ ą▓ąĄčĆčģąĮąĖąĄ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖąĄ čĆąĄąĘąĖčüč鹊čĆčŗ (pull-up), ą║ąŠč鹊čĆčŗąĄ ą┐ąĄčĆąĄą▓ąŠą┤čÅčé ą▓ąĖčüčÅčēąĖą╣ čāčĆąŠą▓ąĄąĮčī ą▓čģąŠą┤ą░ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 1. ą¦č鹊ą▒čŗ ą┐ąŠą┤čéčÅąĮčāčéčī ą▓ąĖčüčÅčēąĖą╣ ą▓čŗą▓ąŠą┤ GPIO ą║ ą╗ąŠą│. 0, čéčĆąĄą▒čāąĄčéčüčÅ ą▓ąĮąĄčłąĮąĖą╣ čĆąĄąĘąĖčüč鹊čĆ pull-down ąĖą╗ąĖ čüčģąĄą╝ą░ ąĖąĮą▓ąĄčĆč鹊čĆą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓ąĮąĄčłąĮąĖą╣ čāčĆąŠą▓ąĄąĮčī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┤ą╗čÅ ąĮąŠąČą║ąĖ GPIO ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī +5V. ąØąŠąČą║ąĖ GPIO4, GPIO5 ąĮąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠą┤čéčÅąĮčāčéčŗ ą║ ą╗ąŠą│. 1 ą▓ąĮąĄčłąĮąĖą╝ čĆąĄąĘąĖčüč鹊čĆąŠą╝ 1 ą£ą×ą╝, ą▓ą╝ąĄčüč鹊 čŹč鹊ą│ąŠ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 čĆąĄąĘąĖčüč鹊čĆ 100 ą║ą×ą╝.
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÅ ąĮąŠąČą║ą░ U0TXD (ą▓čŗčģąŠą┤ ą┐ąŠčĆčéą░ UART0) ą▒čāą┤ąĄčé ą┐ąĄčćą░čéą░čéčī čüąŠąŠą▒čēąĄąĮąĖčÅ ą║ąŠą┤ą░ ROM ą┐čĆąĖ čüčéą░čĆč鹥 ESP8266, čćč鹊 ą╝ąŠąČąĮąŠ ąĘą░ą┐čĆąĄčéąĖčéčī ą┤ą╗čÅ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ą┐čāč鹥ą╝ čäčāąĮą║čåąĖąĖ UART pin exchange. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ą╝ąŠą│čāčé ą▓čŗąĘą▓ą░čéčī čäčāąĮą║čåąĖčÄ system_uart_swap ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą▓čŗą▓ąŠą┤ąŠą▓ U0TXD ąĖ U0RXD ąĮą░ U0RTS (MTDO/ GPIO15) ąĖ U0CTS (MTCK/GPIO13). ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą▓čŗą▓ąŠą┤čŗ U0TXD+U0RXD ą▓čüąĄ ąĄčēąĄ ą╝ąŠąČąĮąŠ ą░ą┐ą┐ą░čĆą░čéąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ. ą¤ąŠą┤ą║ą╗čÄčćąĖč鹥 MTDO ą║ MCU RXD ąĖ MTCK ą║ MCU TXD ą┤ą╗čÅ ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮąĖčÅ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ (ą┐ąŠą┤ MCU ą┐ąŠąĮąĖą╝ą░ąĄčéčüčÅ ą▓ąĮąĄčłąĮąĖą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ, ąĮą░ą┐čĆąĖą╝ąĄčĆ AVR).
[ą¤čĆąŠč鹊ą║ąŠą╗ ]
TCP: 1460 ą▒ą░ą╣čé
[ąĪąĖčüč鹥ą╝ą░ ]
ąöą╗čÅ ą┐ąŠą▓čŗčłąĄąĮąĖčÅ ąĮą░ą┤ąĄąČąĮąŠčüčéąĖ čüąĖčüč鹥ą╝čŗ ą▓ čāčüą╗ąŠą▓ąĖčÅčģ ą▓čŗčüąŠą║ąĖčģ ą┐ąŠą╝ąĄčģ, ą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝čā ESP8266 ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮ ą┤ą▓čāčģčāčĆąŠą▓ąĮąĄą▓čŗą╣ čüč鹊čĆąŠąČąĄą▓ąŠą╣ ą╝ąĄčģą░ąĮąĖąĘą╝ (watchdog) ą▓ą║ą╗čÄčćą░čÄčēąĖą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ watchdog ąĖ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ watchdog. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąŠą▒ą░ čŹčéąĖčģ čüč鹊čĆąŠąČąĄą▓čŗčģ čéą░ą╣ą╝ąĄčĆą░ čĆą░ąĘčĆąĄčłąĄąĮčŗ.
ąśąĮč鹥čĆą▓ą░ą╗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ hardware watchdog čüąŠčüčéą░ą▓ą╗čÅąĄčé 0.8*2048 ą╝čü (1638.4 ą╝čü). ąśąĮč鹥čĆą▓ą░ą╗ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čüąŠčüčéą░ą▓ą╗čÅąĄčé 0.8*8192 ą╝čü (6553.6 ą╝čü). ąśąĮč鹥čĆą▓ą░ą╗ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čŹč鹊 ą┐čĆąĄą┤ąĄą╗ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠą│ą┤ą░ ąĮčāąČąĮąŠ čüą▒čĆąŠčüąĖčéčī watchdog ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. ąĢčüą╗ąĖ ąĖčüč鹥ą║ ąĖąĮč鹥čĆą▓ą░ą╗ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ąĖ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ čüč鹊čĆąŠąČąĄą▓ąŠą╣ čéą░ą╣ą╝ąĄčĆ ąĮąĄ ą▒čŗą╗ čüą▒čĆąŠčłąĄąĮ, č鹊 čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ čüą▒čĆąŠčü (hardware watchdog reset). ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĄčüą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĮąĄ ą▓čŗą┐ąŠą╗ąĮąĖą╗ą░ čüą▒čĆąŠčü čüč鹊čĆąŠąČąĄą▓ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░ ą▓ č鹥č湥ąĮąĖąĄ 6553.6 ą╝čü, č鹊 ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╝čā čüą▒čĆąŠčüčā čüąĖčüč鹥ą╝čŗ. ąĢčüą╗ąĖ ąČąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą▓ č鹥č湥ąĮąĖąĄ 8192 ąĮąĄ ą▓čŗą┐ąŠą╗ąĮąĖą╗ą░ čüą▒čĆąŠčü ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ čüč鹊čĆąŠąČąĄą▓ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░, č鹊 čŹč鹊 ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░ąĮąĮąŠ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ watchdog reset.
ą¤čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čüč鹊čĆąŠąČąĄą▓ąŠą╣ čéą░ą╣ą╝ąĄčĆ (software watchdog) ąŠčüąĮąŠą▓ą░ąĮ ąĮą░ čéą░ą╣ą╝ąĄčĆąĄ MAC ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ ąĘą░ą┤ą░čćą░ą╝ąĖ (task arrangement). ąśąĮč鹥čĆą▓ą░ą╗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čüąŠčüčéą░ą▓ą╗čÅąĄčé 1600 ą╝čü, ąĖ ąŠąĮ čĆą░ą▓ąĄąĮ ąĖąĮč鹥čĆą▓ą░ą╗čā ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥, ą║ąŠą│ą┤ą░ čĆą░ą▒ąŠčéą░čÄčé ąŠą▒ą░ čüč鹊čĆąŠąČąĄą▓čŗčģ čéą░ą╣ą╝ąĄčĆą░, ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ čĆą░ą▒ąŠčéą░ą╗ą░ ą▓ č鹥č湥ąĮąĖąĄ 1600 ą╝čü, č鹊 čŹč鹊 ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╝čā čüą▒čĆąŠčüčā (software watchdog). ąĢčüą╗ąĖ ąČąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ čĆą░ą▒ąŠčéą░ą╗ą░ čüą▓čŗčłąĄ 3200 ą╝čü, č鹊 čŹč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░ąĮąĮąŠą╝čā čüą▒čĆąŠčüčā ąŠčé čüč鹊čĆąŠąČąĄą▓ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░.
ąóąĄą║čāčēą░čÅ ą▓ąĄčĆčüąĖčÅ SDK ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĘą░ą┐čĆąĄčéąĖčéčī č鹊ą╗čīą║ąŠ software watchdog. ą£ąŠą│čāčé ą▒čŗčéčī ą┐čĆąĄą┤ą┐čĆąĖąĮčÅčéčŗ čüą╗ąĄą┤čāčÄčēąĖąĄ čüą┐ąŠčüąŠą▒čŗ ąĖąĘą▒ąĄąČą░čéčī watchdog reset, ą║ąŠą│ą┤ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ąĘą░ąĮąĖą╝ą░ąĄčé CPU čüą╗ąĖčłą║ąŠą╝ ą┤ąŠą╗ą│ąŠ:
1 . ąĢčüą╗ąĖ ąÆą░čłą░ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĮčāąČą┤ą░ąĄčéčüčÅ ą▓ ąŠą║ąĮąĄ ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąĄąČą┤čā software watchdog reset ąĖ hardware watchdog reset, č鹊 ąÆčŗ ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čäčāąĮą║čåąĖčÄ system_soft_wdt_stop() , čćč鹊ą▒čŗ ąĘą░ą┐čĆąĄčéąĖčéčī software watchdog. ą¤ąŠčüą╗ąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ąÆą░čłąĄą│ąŠ ą║ąŠą┤ą░ ą╝ąŠąČąĮąŠ ą┐ąĄčĆąĄąĘą░ą┐čāčüčéąĖčéčī software watchdog čü ą┐ąŠą╝ąŠčēčīčÄ čäčāąĮą║čåąĖąĖ system_soft_wdt_restart() .
2 . ąÆčŗ ą╝ąŠąČąĄč鹥 čüą▒čĆą░čüčŗą▓ą░čéčī watchdog ą▓ čåąĖą║ą╗ą░čģ čüą▓ąŠąĄą│ąŠ ą║ąŠą┤ą░ čü ą┐ąŠą╝ąŠčēčīčÄ čäčāąĮą║čåąĖąĖ system_soft_wdt_feed() , čćč鹊ą▒čŗ watchdog ąŠą▒ąĮąŠą▓ą╗čÅą╗čüčÅ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ čüą│ąĄąĮąĄčĆąĖčĆčāąĄčé čüą▒čĆąŠčü.
ąóą░ą╣ą╝ąĄčĆ watchdog ąĮąĄ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą┐čāčüčéčŗąĄ ą▒ąĄčüą║ąŠąĮąĄčćąĮčŗąĄ čåąĖą║ą╗čŗ. ąÜą░ą║ čāą┐ąŠą╝ąĖąĮą░ą╗ąŠčüčī ą▓čŗčłąĄ, ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ watchdog ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ čüą▒čĆąŠčüčā, ąĄčüą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ čüą╗ąĖčłą║ąŠą╝ ą┤ąŠą╗ą│ąŠ ąĘą░ą▓ąĖčüąĮąĄčé ąĮą░ ąŠą┐čĆąŠčüąĄ ą║ą░ą║ąŠą│ąŠ-č鹊 čüąŠą▒čŗčéąĖčÅ, ąĖą╗ąĖ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čåąĖą║ą╗čŗ ą┤ą╗čÅ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĘą░ą┤ąĄčƹȹĄą║. ąĀą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ čĆąĄą║ąŠą╝ąĄąĮą┤čāčÄčé ą┤ą╗čÅ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĘą░ą┤ąĄčƹȹĄą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī callback-čäčāąĮą║čåąĖąĖ (čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗąĄ čäčāąĮą║čåąĖąĖ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░) ąĖ API čéą░ą╣ą╝ąĄčĆą░.
ąöą╗čÅ ąŠą┐čĆąŠčüą░ čüąŠą▒čŗčéąĖčÅ, ąĄčüą╗ąĖ čŹč鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ, ą▓čüąĄą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖą╗ąĖ čäčāąĮą║čåąĖąĖ API čéą░ą╣ą╝ąĄčĆą░, čćč鹊ą▒čŗ ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčī čćą░čüčéčŗąĄ ą┐čĆąŠą▓ąĄčĆą║ąĖ. ąæąŠą╗čīčłąĖąĮčüčéą▓ąŠ čüąŠą▒čŗčéąĖą╣ ą╝ąŠąČąĮąŠ ą┐čĆąĖą▓čÅąĘą░čéčī ą║ callback-čäčāąĮą║čåąĖčÅą╝ ąĖąĘ SDK, ąĖ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ąŠą┐čĆąŠčüą░ ą┐ąŠčćčéąĖ ą▓čüąĄą│ą┤ą░ ą╝ąŠąČąĮąŠ ąĖąĘą▒ąĄąČą░čéčī.
ąöą╗čÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣ Non-OS SDK ą▓čŗčÅą▓ą╗ąĄąĮąĖąĄ ą╝ąĄčüčé čāč鹥čćą║ąĖ ą┐ą░ą╝čÅčéąĖ ą╝ąŠąČąĮąŠ ą┐čĆąŠąĖąĘą▓ąĄčüčéąĖ ą┐čāč鹥ą╝ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ MEMLEAK_DEBUG , čćč鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ čäčāąĮą║čåąĖčÄ ąŠčéą╗ą░ą┤ą║ąĖ.
ąÆčŗąĘąŠą▓ąĖč鹥 os_malloc , os_zalloc , os_calloc , os_realloc , os_free ą▓ą╝ąĄčüč鹊 ąŠą▒čŗčćąĮčŗčģ čäčāąĮą║čåąĖą╣ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü ą║čāč湥ą╣. ąŁčéąĖ ąŠčéą╗ą░ą┤ąŠčćąĮčŗąĄ čäčāąĮą║čåąĖąĖ ą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ/ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ ąĘą░ą┐ąĖčüčŗą▓ą░čÄčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ, ą║ąŠč鹊čĆčāčÄ ą╝ąŠąČąĮąŠ čĆą░čüą┐ąĄčćą░čéą░čéčī ą▓čŗąĘąŠą▓ąŠą╝ API-čäčāąĮą║čåąĖąĖ system_print_meminfo() . ąÆ ą╗ąŠą│ ą▒čāą┤ąĄčé ą▓čŗą▓ąĄą┤ąĄąĮą░ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą┐ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÄ ą║čāčćąĖ.
ąöą╗čÅ ąŠčéą╗ą░ą┤ą║ąĖ čāč鹥čćą║ąĖ ą┐ą░ą╝čÅčéąĖ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 čüą╗ąĄą┤čāčÄčēąĖąĄ čłą░ą│ąĖ:
1 . ąśąĘą╝ąĄąĮąĖč鹥 ąŠčüąĮąŠą▓ąĮąŠą╣ makefile ą▓ ą┐čĆąŠąĄą║č鹥, ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĖč鹥 ą▓ ąĮąĄą╝ DMEMLEAK_DEBUG ą┐ąŠčüą╗ąĄ CONFIGURATION_DEFINES .
ąØą░ą┐čĆąĖą╝ąĄčĆ:
CONFIGURATION_DEFINES = -DMEMLEAK_DEBUG
2 . ąÆ ą║ąŠą┤ąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, čéą░ą║ąŠą╝ ą║ą░ą║ user_main.c mem.h
#include ŌĆ£mem.h"
bool ICACHE_FLASH_ATTR check_memleak_debug_enable ()
{
return MEMLEAK_DEBUG_ENABLE;
}
3 . ąÆčŗąĘąŠą▓ąĖč鹥 system_print_meminfo() API, ą│ą┤ąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čāč鹥čćą║ą░ ą┐ą░ą╝čÅčéąĖ. ąĀą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ čĆąĄą║ąŠą╝ąĄąĮą┤čāčÄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čŹčéčā API-čäčāąĮą║čåąĖčÄ č鹊ą╗čīą║ąŠ ą▓ ą║ą╗čÄč湥ą▓čŗčģ ą╝ąĄčüčéą░čģ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ.
ąŚą░ą╝ąĄčćą░ąĮąĖąĄ: RTOS SDK ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé č鹊čé ąČąĄ ą╝ąĄč鹊ą┤ ą▓čŗčÅą▓ą╗ąĄąĮąĖčÅ čāč鹥č湥ą║ ą┐ą░ą╝čÅčéąĖ ą┐čĆąĖ čĆą░ą▒ąŠč鹥 čü ą║čāč湥ą╣, ą║ą░ą║ ąĖ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ Non-OS SDK. ą¤čĆąŠ č鹥čģąĮąĖą║ąĖ ą┐ąŠąĖčüą║ą░ ąĖ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĮąĖčÅ čāč鹥č湥ą║ ą┐ą░ą╝čÅčéąĖ čüą╝. ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ ą┐ąŠ FreeRTOS.
Fatal exceptions (ąĮąĄąĖčüą┐čĆą░ą▓ąĖą╝ą░čÅ ąŠčłąĖą▒ą║ą░, čäą░čéą░ą╗čīąĮąŠąĄ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ) ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčéčüą╗ąĄąČąĄąĮąŠ, ąĄčüą╗ąĖ čā ąÆą░čü ąĄčüčéčī čäą░ą╣ą╗ ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░ (*.S), ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗čüčÅ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┤ą▓ąŠąĖčćąĮąŠą│ąŠ ą║ąŠą┤ą░. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąÆčŗ ąŠą▒ąĮą░čĆčāąČąĖą╗ąĖ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ ą┐čĆąĖ čĆą░ą▒ąŠč鹥 user1.bin
Fatal exception (28):
epc1=0x4025bfa6, epc2=0x00000000, epc3=0x00000000,
excvaddr=0x0000000f, depc=0x00000000
ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąÆčŗ ą┤ąŠą╗ąČąĮčŗ ą┐čĆąŠąĖąĮčüą┐ąĄą║čéąĖčĆąŠą▓ą░čéčī ą░ą┤čĆąĄčü 0x4025bfa6 ą▓ čäą░ą╣ą╗ąĄ user1.S
ąÜąŠą│ą┤ą░ čĆą░ą▒ąŠčéą░čÄčé flash.bin irom0text.bin eagle.S
ESP8266 čĆąĄą░ą╗ąĖąĘčāąĄčé ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čéą░ą╣ą╝ąĄčĆ. ąÜ čéą░ą╣ą╝ąĄčĆčā ą╝ąŠąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ č湥čĆąĄąĘ os_timer API, ąĖ čŹč鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čéą░ą╣ą╝ąĄčĆ, ą║ąŠč鹊čĆčŗą╣ ąĮąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé "ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ", ą│ąĄąĮąĄčĆąĖčĆčāčÅ ą▓ą╝ąĄčüč鹊 čŹč鹊ą│ąŠ ąĘą░ą┤ą░čćčā (task), ą║ąŠč鹊čĆą░čÅ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ąŠą▒čŗčćąĮąŠą╣ ąĘą░ą┤ą░čćąĖ ąĮą░ ąŠč湥čĆąĄą┤ąĖ. ą×ą┤ąĮą░ą║ąŠ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ čéą░ą╣ą╝ąĄčĆ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÅ ąĘą░ą┐čāčüą║ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĮąĄ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮčŗ ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▓čŗčüąŠą║ąŠąĮą░ą│čĆčāąČąĄąĮąĮčŗčģ (ą┐ąŠčéčĆąĄą▒ą╗čÅčÄčēąĖčģ ą╝ąĮąŠą│ąŠ čéą░ą║č鹊ą▓ ą┐čĆąŠčåąĄčüčüąŠčĆą░) ąĘą░ą┤ą░čć.
ąŚą░ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéčÅą╝ąĖ ąŠą▒čĆą░čéąĖč鹥čüčī ą║ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ "ESP8266 Non-OS SDK API Reference" ąĖą╗ąĖ "ESP8266 RTOS SDK API Reference" (čüą╝. [2]), ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé SDK, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥. ą×ą┤ąĮą░ą║ąŠ ą▓ ą║ą░č湥čüčéą▓ąĄ ą│ą╗ą░ą▓ąĮąŠą│ąŠ ą┐čĆą░ą▓ąĖą╗ą░ čüą╗ąĄą┤čāąĄčé ąĖą╝ąĄčéčī ą▓ ą▓ąĖą┤čā, čćč鹊 čäčāąĮą║čåąĖąĖ, ą┤ąĄą║ą╗ą░čĆąĖčĆąŠą▓ą░ąĮąĮčŗąĄ čü ICACHE_FLASH_ATTR , ąĮąĄ ą┤ąŠą╗ąČąĮčŗ ą▓čŗąĘčŗą▓ą░čéčīčüčÅ ąĖčģ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ Non-OS SDK. ąóą░ą║ąČąĄ ąĮąĄ ąĘą░ąĮąĖą╝ą░ą╣č鹥 čüą╗ąĖčłą║ąŠą╝ ą╝ąĮąŠą│ąŠ ą▓čĆąĄą╝čÅ CPU ą▓ąĮčāčéčĆąĖ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
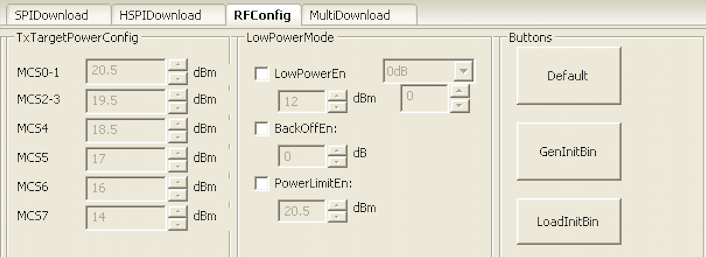
ąöą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ čéčĆą░ą║čéą░ RF ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī API-čäčāąĮą║čåąĖčÄ system_phy_set_max_tpw . ąĀą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ čĆąĄą║ąŠą╝ąĄąĮą┤čāčÄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čāčéąĖą╗ąĖčéčā flash download tool ą┤ą╗čÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĮą░čüčéčĆąŠąĄą║ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ąÆą░čłąĖą╝ąĖ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝ąĖ. ąÜą╗ąĖą║ąĮąĖč鹥 ą▓ ąĮąĄą╣ ąĮą░ ą║ąĮąŠą┐ą║čā GenInitBin ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čäą░ą╣ą╗ą░ esp_init_data_default.bin
ŌĆó LowPowerEn: čāčüčéą░ąĮąŠą▓ąĖč鹥 ą╝ąŠčēąĮąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░ (Tx Power) ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čĆąĄąČąĖą╝ą░.
ąöą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ESP8266_Non-OS SDK: čäčāąĮą║čåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą╗čāčćąĖą╗ąĖ ą░čéčĆąĖą▒čāčé ICACHE_FLASH_ATTR , čĆą░ąĘą╝ąĄčēą░čÄčéčüčÅ ą▓ čüąĄą║čåąĖąĖ IROM. ą×ąĮąĖ ą▒čāą┤čāčé čĆą░ą▒ąŠčéą░čéčī ąĖąĘ ą║čŹčłą░, ą║ąŠą│ą┤ą░ ą▓čŗąĘčŗą▓ą░čÄčéčüčÅ CPU. ąĪ ą┤čĆčāą│ąŠą╣ čüč鹊čĆąŠąĮčŗ, čäčāąĮą║čåąĖąĖ ą▒ąĄąĘ ą░čéčĆąĖą▒čāčéą░ ICACHE_FLASH_ATTR ąĘą░ą│čĆčāąČą░čÄčéčüčÅ ą▓ IRAM ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ. ąśąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 čĆą░ąĘą╝ąĄčĆ IRAM ąŠą│čĆą░ąĮąĖč湥ąĮ, ą╝čŗ ąĮąĄ ą╝ąŠąČąĄą╝ ąĘą░ą│čĆčāąĘąĖčéčī ą▓čüąĄ ą║ąŠą┤čŗ ą▓ IRAM ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ. ą¤ąŠčŹč鹊ą╝čā ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ čäčāąĮą║čåąĖą╣ čüąĮą░ą▒ąČąĄąĮčŗ ą░čéčĆąĖą▒čāč鹊ą╝ ICACHE_FLASH_ATTR , ąĖ ąĘą░ą│čĆčāąČą░čÄčéčüčÅ ą▓ IROM.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ICACHE_FLASH_ATTR -čäčāąĮą║čåąĖąĖ ą▓ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą┐ąŠčüą║ąŠą╗čīą║čā čŹč鹊 ą╝ąŠąČąĄčé ą▓čŗąĘą▓ą░čéčī ą║ąŠąĮčäą╗ąĖą║čé čü ąŠą┐ąĄčĆą░čåąĖčÅą╝ąĖ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ Flash.
ąöą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ESP8266_RTOS SDK: čäčāąĮą║čåąĖąĖ čĆą░ąĘą╝ąĄčēąĄąĮčŗ ą▓ čüąĄą║čåąĖąĖ IROM ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ąĖ ąĮąĄ ąĮčāąČą┤ą░čÄčéčüčÅ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą▓ čüąĮą░ą▒ąČąĄąĮąĖąĖ ą░čéčĆąĖą▒čāč鹊ą╝ ICACHE_FLASH_ATTR . ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čéą░ą║ąČąĄ čĆą░ą▒ąŠčéą░čÄčé ąĖąĘ IROM. ą¤ąŠčŹč鹊ą╝čā ąĄčüą╗ąĖ čäčāąĮą║čåąĖąĖ ą▓čŗąĘčŗą▓ą░čÄčéčüčÅ čćą░čüč鹊, č鹊 ąŠąĮąĖ ą┤ąŠą╗ąČąĮčŗ čĆą░ą▒ąŠčéą░čéčī ąĖąĘ IRAM, ą┤ą╗čÅ čŹč鹊ą│ąŠ ąŠąĮąĖ ą┤ąŠą╗ąČąĮčŗ ą┤ąĄą║ą╗ą░čĆąĖčĆąŠą▓ą░čéčīčüčÅ čü ą░čéčĆąĖą▒čāč鹊ą╝ IRAM_ATTR .
ąÆ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ Non-OS SDK ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čäčāąĮą║čåąĖąĖ ą┐čĆąĖčüą▓ą░ąĖą▓ą░ąĄčéčüčÅ ą░čéčĆąĖą▒čāčé IRAM_ATTR. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĄčüą╗ąĖ ąÆčŗ čģąŠčéąĖč鹥, čćč鹊ą▒čŗ čäčāąĮą║čåąĖčÅ ą▒čŗą╗ą░ čĆą░ąĘą╝ąĄčēąĄąĮą░ ą▓ IRAM, č鹊 ą┐čĆąŠčüč鹊 ąĮąĄ čāą║ą░ąĘčŗą▓ą░ą╣č鹥 ą░čéčĆąĖą▒čāčé ICACHE_FLASH_ATTR ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĖ/ą┤ąĄą║ą╗ą░čĆą░čåąĖąĖ čäčāąĮą║čåąĖąĖ.
ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čĆą░ąĘą╝ąĄčĆ ą║ąŠą┤ą░ čüą╗ąĖčłą║ąŠą╝ ą▓ąĄą╗ąĖą║, čćč鹊ą▒čŗ ą┐ąŠą╝ąĄčüčéąĖčéčīčüčÅ ą▓ IROM. ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ čüąŠą▓ąĄč鹊ą▓ ą┤ą╗čÅ čĆąĄčłąĄąĮąĖčÅ čŹč鹊ą╣ ą┐čĆąŠą▒ą╗ąĄą╝čŗ:
ąöą╗čÅ SDK_v0.9.5 ąĖą╗ąĖ ą▒ąŠą╗ąĄąĄ ąĮąŠą▓čŗčģ ą▓ąĄčĆčüąĖą╣:
1 . ąĪą║ąŠą╝ą┐ąĖą╗ąĖčĆčāą╣č鹥 ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, čćč鹊ą▒čŗ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī eagle.flash.bin eagle.irom0text.bin
(a) ąĢčüą╗ąĖ ąŠą▒čēąĖą╣ čĆą░ąĘą╝ąĄčĆ eagle.flash.bin eagle.irom0text.bin eagle.flash.bin eagle.irom0text.bin
2 . ąĪą┤ąĄą╗ą░ą╣č鹥 čĆąĄą▓ąĖąĘąĖčÄ eagle.app.v6.new.512.app1.ld
rom0_0_seg: org = 0x40201010, len = 0x2B000
ą┐ąŠą╝ąĄąĮčÅą╣č鹥 ąĘąĮą░č湥ąĮąĖąĄ len ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ąÆą░čłąĖą╝ eagle.irom0text.bin eagle.irom0text.bin
irom0_0_seg: org = 0x40201010, len = 0x2D000
3 . ąĪą║ąŠą╝ą┐ąĖą╗ąĖčĆčāą╣č鹥 ąĖ čüą│ąĄąĮąĄčĆąĖčĆčāą╣č鹥 user1.bin
P.S.: ą▓ ąĖčüčģąŠą┤ąĮąŠą╝ ą║ąŠą┤ąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅą╣č鹥 čäčāąĮą║čåąĖąĖ IRAM ą▒ąĄąĘ ą░čéčĆąĖą▒čāčéą░ ICACHE_FLASH_ATTR , ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ąĘą░ąĮąĖą╝ą░čéčī čüą░ą╝ąŠąĄ ą▒ąŠą╗čīčłąĄąĄ 32 ą║ąĖą╗ąŠą▒ą░ą╣čéą░; čüąĮą░ą▒ąČą░ą╣č鹥 čäčāąĮą║čåąĖąĖ IROM ą░čéčĆąĖą▒čāč鹊ą╝ ICACHE_FLASH_ATTR , ąĖ ąŠąĮąĖ ą▒čāą┤čāčé čĆą░ąĘą╝ąĄčēąĄąĮčŗ ą▓ irom0_0_seg .
ąśąĘ-ąĘą░ ąŠą│čĆą░ąĮąĖč湥ąĮąĮąŠą│ąŠ čĆą░ąĘą╝ąĄčĆą░ RAM čäčāąĮą║čåąĖąĖ ą▓ IRAM ą▒čāą┤čāčé ąĘą░ą│čĆčāąČąĄąĮčŗ ą▓ ą×ąŚąŻ ąĖ ą▒čāą┤čāčé ą┤ąŠčüčéčāą┐ąĮčŗ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ; čäčāąĮą║čåąĖąĖ ąĖąĘ IROM ą▒čāą┤čāčé ąĘą░ą│čĆčāąČą░čéčīčüčÅ ą▓ ą║čŹčł ąĖąĘ ą┐ą░ą╝čÅčéąĖ Flash, ąĖ ą▒čāą┤čāčé ąĘą░ą┐čāčüą║ą░čéčīčüčÅ ąŠčéčéčāą┤ą░ č鹊ą╗čīą║ąŠ ą┐čĆąĖ ąĖčģ ą▓čŗąĘąŠą▓ąĄ.
ąØąĄčé. ąóąŠčćą║ą░ ą▓čģąŠą┤ą░ ą║ąŠą┤ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čäčāąĮą║čåąĖąĖ user_init .
ą¦č鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī ą┐čĆąĖ ą┤ąŠčüčéčāą┐ąĄ ą║ RAM ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą▓čŗčĆąŠą▓ąĮąĄąĮčŗ ą┐ąŠ ą│čĆą░ąĮąĖčåąĄ ą▓ 4 ą▒ą░ą╣čéą░ (ąĮą░ čüą╗ąŠą▓ąŠ, čé. ąĄ. ą▒ą░ą╣č鹊ą▓čŗą╣ ą░ą┤čĆąĄčü ą┤ąŠčüčéčāą┐ą░ ą┤ąŠą╗ąČąĄąĮ ąĮą░čåąĄą╗ąŠ ą┤ąĄą╗ąĖčéčīčüčÅ ąĮą░ 4), čŹč鹊 ą┤ąŠą╗ąČąĮąŠ čāčćąĖčéčŗą▓ą░čéčīčüčÅ ą┐čĆąĖ ą┤ąŠčüčéčāą┐ąĄ ą║ ą┐ą░ą╝čÅčéąĖ čü ą┐ąŠą╝ąŠčēčīčÄ čāą║ą░ąĘą░č鹥ą╗čÅ. ąśąĮą░č湥 ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąŠčéą║ą░ąĘ čĆą░ąĘčŗą╝ąĄąĮąŠą▓ą░ąĮąĖčÅ čāą║ą░ąĘą░č鹥ą╗čÅ ąĖ čüą▒ąŠą╣. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 os_memcpy(ąĖą╗ąĖ memcpy) ą┤ą╗čÅ ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą┐ąŠ čāą║ą░ąĘą░č鹥ą╗čÄ ą▓ą╝ąĄčüč鹊 float temp = *((float*)data) .
ą×čüąĮąŠą▓ąĮčŗąĄ ąŠčéą╗ąĖčćąĖčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ:
[Non-OS SDK ]
Non-OS SDK ąĖčüą┐ąŠą╗čīąĘčāąĄčé čéą░ą╣ą╝ąĄčĆčŗ ąĖ callback-čäčāąĮą║čåąĖąĖ ą║ą░ą║ ąŠčüąĮąŠą▓ąĮąŠą╣ čüą┐ąŠčüąŠą▒ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čĆą░ąĘą╗ąĖčćąĮčŗčģ čäčāąĮą║čåąĖą╣ - ą▓ą╗ąŠąČąĄąĮąĮčŗčģ čüąŠą▒čŗčéąĖą╣ (nested events) ąĖ čäčāąĮą║čåąĖą╣, ą║ąŠč鹊čĆčŗąĄ ąĘą░ą┐čāčüą║ą░čÄčéčüčÅ ą┐čĆąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ čüąŠą▒čŗčéąĖčÅčģ. Non-OS SDK ąĖčüą┐ąŠą╗čīąĘčāąĄčé čüąĄč鹥ą▓ąŠą╣ ąĖąĮč鹥čĆč乥ą╣čü espconn; ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅą╝ ąĮčāąČąĮąŠ čĆą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čéčī čüą▓ąŠąĄ ą¤ą× čü čāč湥č鹊ą╝ ą┐čĆą░ą▓ąĖą╗ ąĖąĮč鹥čĆč乥ą╣čüą░ espconn. ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒čĆą░čēą░ą╣č鹥čüčī ą║ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ą░ą╝ SDK [2].
[RTOS SDK ]
1 . RTOS SDK ąŠčüąĮąŠą▓ą░ąĮ ąĮą░ FreeRTOS, čŹč鹊 ą╝ąĮąŠą│ąŠąĘą░ą┤ą░čćąĮą░čÅ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮą░čÅ čüąĖčüč鹥ą╝ą░ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (ą×ąĪąĀąÆ). ąÆčŗ ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ąĖąĮč鹥čĆč乥ą╣čüčŗ FreeRTOS [8] ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆąĄčüčāčĆčüą░ą╝ąĖ, ąŠą┐ąĄčĆą░čåąĖą╣ recycling, ąĘą░ą┤ąĄčƹȹ║ąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ, ąŠą▒ą╝ąĄąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅą╝ąĖ ą╝ąĄąČą┤čā ąĘą░ą┤ą░čćą░ą╝ąĖ (inter-task messaging) ąĖ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą╝ąĄąČą┤čā ąĮąĖą╝ąĖ, ąĖ ą┤čĆčāą│ąĖąĄ ąŠčüąĮąŠą▓ą░ąĮąĮčŗąĄ ąĮą░ ąĘą░ą┤ą░čćą░čģ (ą▓ č鹥čĆą╝ąĖąĮą░čģ FreeRTOS 菹╗ąĄą╝ąĄąĮčéą░čĆąĮą░čÅ ąĄą┤ąĖąĮąĖčåą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ Task, čé. ąĄ. ąĘą░ą┤ą░čćą░) ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą░ą╗ą│ąŠčĆąĖčéą╝ąŠą▓ ąÆą░čłąĄą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ą¤čĆąŠ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ ą╝ąĄč鹊ą┤ąŠą▓ ąĖąĮč鹥čĆč乥ą╣čüą░ FreeRTOS čüą╝. ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ ąĮą░ ąŠčäąĖčåąĖą░ą╗čīąĮąŠą╝ čüą░ą╣č鹥 FreeRTOS, ąĖą╗ąĖ ąŠč湥ąĮčī čģąŠčĆąŠčłčāčÄ ą║ąĮąĖąČą║čā "USING THE FreeRTOS REAL TIME KERNEL - A Practical Guide" (ąĄčæ ą┐ąĄčĆąĄą▓ąŠą┤ ąĮą░ čĆčāčüčüą║ąĖą╣ čÅąĘčŗą║ čüą╝. ą▓ [8]).
2 . ąĀą░ą▒ąŠčéą░ čüąĄčéąĖ ą▓ RTOS SDK ąŠčüąĮąŠą▓ą░ąĮą░ ąĮą░ čüčéą░ą▓čłąĄą╝ čāąČąĄ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ API čüč鹥ą║ą░ lwIP. RTOS SDK ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐ą░ą║ąĄčé, ą│ą┤ąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ąĖąĮč鹥čĆč乥ą╣čü BSD Socket API. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ą╝ąŠą│čāčé ąĮą░ą┐čĆčÅą╝čāčÄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī API čüąŠą║ąĄč鹊ą▓ ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ąĖ ą┐ąŠčĆčéąĖčĆąŠą▓ą░čéčī čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čü ą┤čĆčāą│ąĖčģ ą┐ą╗ą░čéč乊čĆą╝, ąĖčüą┐ąŠą╗čīąĘčāčÅ API čüąŠą║ąĄč鹊ą▓ ą┤ą╗čÅ ESP8266. ąŁč鹊 ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ čüąĮąĖąČą░ąĄčé ąĘą░čéčĆą░čéčŗ ą▓čĆąĄą╝ąĄąĮąĖ ąĮą░ ąŠą▒čāč湥ąĮąĖąĄ ąĖ čĆą░ąĘčĆą░ą▒ąŠčéą║čā, ą▓ąŠąĘąĮąĖą║ą░čÄčēąĖąĄ ą┐čĆąĖ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĖ ąĮą░ ą┤čĆčāą│čāčÄ ą┐ą╗ą░čéč乊čĆą╝čā.
3 . RTOS SDK ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā cJSON čäčāąĮą║čåąĖąĖ ą║ąŠč鹊čĆąŠą╣ čāą┐čĆąŠčēą░čÄčé ą┐ą░čĆčüąĖąĮą│ ą┐ą░ą║ąĄč鹊ą▓ JSON.
4 . RTOS ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ Wi-Fi čüąŠą▓ą╝ąĄčüčéąĖą╝ą░ čü ąĖąĮč鹥čĆč乥ą╣čüą░ą╝ąĖ Non-OS SDK, SmartConfig, čü ąĖąĮč鹥čĆč乥ą╣čüą░ą╝ąĖ ą┤ą╗čÅ Sniffer, čüąĖčüč鹥ą╝ąĮčŗą╝ąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ą╝ąĖ, ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ čéą░ą╣ą╝ąĄčĆą░, ąĖąĮč鹥čĆč乥ą╣čüą░ą╝ąĖ FOTA ąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ą╝ąĖ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓, ąŠą┤ąĮą░ą║ąŠ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ AT-ą║ąŠą╝ą░ąĮą┤.
1 . ąÆčŗąĘąŠą▓čŗ wifi_set_ip_info ąĖ wifi_set_macaddr ą┤ąŠą┐čāčüčéąĖą╝ąŠ ą▓čŗąĘčŗą▓ą░čéčī č鹊ą╗čīą║ąŠ ąĖąĘ user_init .
2 . ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą▓čŗąĘčŗą▓ą░čéčī system_timer_reinit ąĖąĘ user_init , ąĖąĮą░č湥 ą▓čüąĄ čéą░ą╣ą╝ąĄčĆčŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą▓ąĘą▓ąĄą┤ąĄąĮčŗ.
3 . ąĢčüą╗ąĖ wifi_station_set_config ą▓čŗąĘą▓ą░ąĮą░ ąĖąĘ user_init , ąĮąĖąČąĮąĖą╣ čüą╗ąŠą╣ ą▒čāą┤ąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüąŠąĄą┤ąĖąĮčÅčéčīčüčÅ čü čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ čĆąŠčāč鹥čĆąŠą╝ ą▒ąĄąĘ ą▓čŗąĘąŠą▓ą░ wifi_station_connect .
4 . ąÆčŗąĘąŠą▓ wifi_station_set_auto_connect ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░, čćč鹊ą▒čŗ ąŠąĮąŠ ą▓čüčÅą║ąĖą╣ čĆą░ąĘ ą┐čĆąĖ čüčéą░čĆč鹥 ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąŠą┤ą║ą╗čÄčćą░ą╗ąŠčüčī ą║ čüąŠčģčĆą░ąĮąĄąĮąĮąŠą╝čā čĆąŠčāč鹥čĆčā. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą▒čŗą╗ ą▓čŗąĘą▓ą░ąĮ ąĖąĮč鹥čĆč乥ą╣čü ąĖąĘ user_init čü ąĘą░ą┐čĆąĄč鹊ą╝ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą│ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ čĆąŠčāč鹥čĆčā, č鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓ čŹč鹊 ą▓čĆąĄą╝čÅ ąĮąĄ ą▒čāą┤ąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąŠą┤ą║ą╗čÄčćą░čéčīčüčÅ ą║ čĆąŠčāč鹥čĆčā. ąĢčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü ą▒čāą┤ąĄčé ą▓čŗąĘą▓ą░ąĮ ą▓ ą┤čĆčāą│ąŠą╝ ą╝ąĄčüč鹥, č鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ą▒čāą┤ąĄčé ą▓ čüą╗ąĄą┤čāčÄčēąĖą╣ čĆą░ąĘ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąŠą┤ą║ą╗čÄčćą░čéčīčüčÅ ą║ čĆąŠčāč鹥čĆčā.
ąÆ čĆąĄąČąĖą╝ąĄ ą╗ąĄą│ą║ąŠą│ąŠ čüąĮą░ (Light-sleep mode) čĆą░ą▒ąŠčéą░ CPU ą┐čĆąĖąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ąĖ ąŠąĮ ąĮąĄ ąŠčéą▓ąĄčćą░ąĄčé ąĮą░ čüąĖą│ąĮą░ą╗čŗ ąĖą╗ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą┐ąŠčüčéčāą┐ą░čÄčēąĖąĄ ąŠčé ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čüąĖą│ąĮą░ą╗čŗ GPIO ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĮą░čüčéčĆąŠąĄąĮčŗ čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊ą▒čŗ čĆą░ąĘą▒čāą┤ąĖčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ. ą¤čĆąŠčåąĄčüčü ą▓čŗčģąŠą┤ą░ ąĖąĘ čüąĮą░ čéčĆąĄą▒čāąĄčé ą╝ąĄąĮąĄąĄ 3 ą╝čü.
wifi_station_disconnect();
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ąĮčāą╗ąĄą▓ąŠą│ąŠ čĆąĄąČąĖą╝ą░ WiFi (null mode):
wifi_set_opmode(NULL_MODE);
wifi_fpm_set_sleep_type(LIGHT_SLEEP_T);
wifi_fpm_open();
PIN_FUNC_SELECT(PERIPHS_IO_MUX_MTCK_U, FUNC_GPIO13);// ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖąĄ ą▓čŗčģąŠą┤ą░ ąĖąĘ čüąĮą░ ą┐ąŠ ą┐ąĄčĆąĄą┐ą░ą┤čā ą▓ ą╗ąŠą│. 0!
gpio_pin_wakeup_enable(13 , GPIO_PIN_INTR_LOLEVEL);
wifi_fpm_set_wakeup_cb(ssc_fpm_wakup_call);
wifi_fpm_do_sleep(FPM_SLEEP_MAX_TIME);
ą×ą┐ąŠčĆąĮąŠą╣ ą┤ą╗čÅ FRC1 čÅą▓ą╗čÅąĄčéčüčÅ čćą░čüč鹊čéą░ 80 ą£ąōčå. ąÜąŠčŹčäčäąĖčåąĖąĄąĮčé ą┤ąĄą╗ąĄąĮąĖčÅ (DIV) ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ 1, 16 ąĖ 256. ąĀą░ąĘą╗ąĖčćąĮčŗąĄ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéčŗ ą┤ąĄą╗ąĄąĮąĖčÅ ą▒čāą┤čāčé ą▓ą╗ąĖčÅčéčī ąĮą░ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą║ą░ąČą┤ąŠą│ąŠ čéąĖą║ą░.
FRC1 čüčćąĖčéą░ąĄčé ą▓ąĮąĖąĘ, ą┐čĆąĖ čŹč鹊ą╝ ąĘąĮą░č湥ąĮąĖąĄ COUNT_VALUE čü ą║ą░ąČą┤čŗą╝ čéąĖą║ąŠą╝ čāą╝ąĄąĮčīčłą░ąĄčéčüčÅ ąĮą░ 1.
FRC1 ą╝ąŠąČąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą▓ čĆąĄąČąĖą╝ą░čģ auto-feed-mode ąĖą╗ąĖ non-auto-feed-mode. Auto-feed-mode: ą║ąŠą│ą┤ą░ čüčĆą░ą▒ąŠčéą░ą╗ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, čĆąĄą│ąĖčüčéčĆ COUNT_VALUE ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąŠą╗čāčćąĖčé ąĘąĮą░č湥ąĮąĖąĄ ąĖąĘ FRC1_LOAD_VALUE , ąĖ ąĮą░čćąĮąĄčé ąŠą┐ąĄčĆą░čåąĖčÄ ą┤ąĄą║čĆąĄą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮąĖčÅ. Non-auto-feed-mode: ą║ąŠą│ą┤ą░ čüčĆą░ą▒ąŠčéą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, čĆąĄą│ąĖčüčéčĆ COUNT_VALUE ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ 0x7fffff, ąĖ ąŠą┐ąĄčĆą░čåąĖčÅ ą┤ąĄą║čĆąĄą╝ąĄąĮčéą░ ą┐čĆąŠą┤ąŠą╗ąČąĖčéčüčÅ.
ą£ąŠą│čāčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ FRC ąŠčé ąĖčüč鹊čćąĮąĖą║ąŠą▓ FRC1 ąĖ NMI interrupt source. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ NMI ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąŠ (ąĘą░ą┐čĆąĄčēąĄąĮąŠ) ą║ąŠą┤ąŠą╝ CPU. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ NMI ąĖą╝ąĄąĄčé čāčĆąŠą▓ąĄąĮčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ LEVEL3 ą▓ čüąĖčüč鹥ą╝ąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ESP8266, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą┤čĆčāą│ąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖą╝ąĄčÄčé čāčĆąŠą▓ąĄąĮčī LEVEL1. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ NMI ą┐ąŠ ą┐čĆąĖąŠčĆąĖč鹥čéčā ą┐čĆąĄąŠą▒ą╗ą░ą┤ą░ąĄčé ąĮą░ ą╗čÄą▒čŗą╝ąĖ ą┤čĆčāą│ąĖą╝ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝ąĖ.
ąŚą░ą╝ąĄčćą░ąĮąĖąĄ ą┐ąŠ ą┐ąŠą▓ąŠą┤čā SDK HW_TIMER : ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą┤ąĄą╗ąĄąĮąĖčÅ SDK čĆą░ą▓ąĄąĮ 16, ą┐ąŠčŹč鹊ą╝čā ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą║ą░ąČą┤ąŠą│ąŠ čéąĖą║ą░ čüąŠčüčéą░ą▓ą╗čÅąĄčé 0.2 ą╝ą║čü. ą¤ą░čĆą░ą╝ąĄčéčĆ hw_timer_arm ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ąŠ ą╝ąĖą║čĆąŠčüąĄą║čāąĮą┤, čü ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ 1677000 ą╝ą║čü.
[1. ąĪąŠčģčĆą░ąĮčÅą╣č鹥 čüčéčĆąŠą║ąĖ ą▓ ą┐ą░ą╝čÅčéąĖ Flash ]
(1) ąĀą░ąĘą╝ąĄčüčéąĖč鹥 ąĮąĄą║ąŠč鹊čĆčŗąĄ čüčéčĆąŠą║ąĖ ą▓ąŠ flash, ąŠčüąŠą▒ąĄąĮąĮąŠ ą┤ą╗ąĖąĮąĮčŗąĄ, čéą░ą║ąĖąĄ ą║ą░ą║ ąĘą░ą┐čĆąŠčüčŗ HTML ąĖ čłą░ą▒ą╗ąŠąĮčŗ ąŠčéą▓ąĄč鹊ą▓. ąØą░ą┐čĆąĖą╝ąĄčĆ, čüčéčĆąŠą║ą░ ąĖąĘąĮą░čćą░ą╗čīąĮąŠ ą▒čŗą╗ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ čéą░ą║:
#define test_string "hello world"
ąÆčŗ ą╝ąŠąČąĄč鹥 ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī čŹčéčā čüčéčĆąŠą║čā čüą╗ąĄą┤čāčÄčēąĖą╝ čüą┐ąŠčüąŠą▒ąŠą╝, ąĖ č鹊ą│ą┤ą░ ąŠąĮą░ ą▒čāą┤ąĄčé čĆą░ąĘą╝ąĄčēąĄąĮą░ ą▓ąŠ flash:
static const char test_string[] ICACHE_RODATA_ATTR = "hello world" ;
(2) ąÜąŠą│ą┤ą░ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄč鹥 čüčéčĆąŠą║ąŠą▓čŗąĄ ą║ąŠąĮčüčéą░ąĮčéčŗ čü ICACHE_RODATA_ATTR , ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ą┤ąŠą╗ąČąĮčŗ ą┐ąŠą╗čāčćą░čéčī ą┤ąŠčüčéčāą┐ ą║ ąĄčæ čüąŠą┤ąĄčƹȹĖą╝ąŠą╝čā ąŠą┐ąĄčĆą░čåąĖčÅą╝ąĖ čćč鹥ąĮąĖčÅ, ą▓čŗčĆąŠą▓ąĮąĄąĮąĮčŗą╝ąĖ ą┐ąŠ čĆą░ąĘą╝ąĄčĆčā čüą╗ąŠą▓ą░ (ą▒ą░ą╣č鹊ą▓čŗą╣ ą░ą┤čĆąĄčü ą┤ąŠčüčéčāą┐ą░ ą┤ąŠą╗ąČąĄąĮ ąĮą░čåąĄą╗ąŠ ą┤ąĄą╗ąĖčéčīčüčÅ ąĮą░ 4). ąóą░ą║ ą║ą░ą║ ą┤ą░ąĮąĮčŗąĄ ą▓ąŠ flash ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮčŗ ą┐ąŠčĆčåąĖčÅą╝ąĖ ą┐ąŠ 4 ą▒ą░ą╣čéą░, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ą┤ąŠą╗ąČąĮčŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą╝ą░ą║čĆąŠčü ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą▓čŗčĆąŠą▓ąĮąĄąĮąĮąŠą╣ ą┤ą╗ąĖąĮčŗ čüčéčĆąŠą║ąĖ:
#define GET_ALIGN_STRING_LEN(str) ((strlen(str) + 3) & ~3)
ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čüčéčĆąŠą║ąĖ, ą▓čŗą┤ąĄą╗ąĖč鹥 ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ ąĮąŠą▓čŗą╣ ąŠą▒čŖąĄą║čé ą╝ą░čüčüąĖą▓ą░, čćč鹊ą▒čŗ ą┐čĆąŠčćąĖčéą░čéčī čéčāą┤ą░ ą┤ą░ąĮąĮčŗąĄ čüčéčĆąŠą║ąĖ ąĖąĘ flash. ąŚą░č鹥ą╝ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 os_memcpy API ą┤ą╗čÅ ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖčÅ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ čüčéčĆąŠą║ąĖ:
unsigned int str_len = GET_ALIGN_STRING_LEN(test_string);char * tmp_string = (char * )os_malloc(str_len);
os_memcpy(tmp_string, test_string, str_len);
(3) ąÆ ą║ąŠą┤ąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 test_string . ąŁč鹊 čéą░ą║ąČąĄ čĆąĄčłąĖčé ą┐čĆąŠą▒ą╗ąĄą╝čā ąĖčüą║ą╗čÄč湥ąĮąĖą╣, ą▓čŗąĘą▓ą░ąĮąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅą╝ąĖ ą┐čĆąĖ ąĮąĄ ą▓čŗčĆąŠą▓ąĮąĄąĮąĮąŠą╝ ą┤ąŠčüčéčāą┐ąĄ čü čüąŠą┤ąĄčƹȹĖą╝ąŠą╝čā ą┐ą░ą╝čÅčéąĖ flash, ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ čüąĮąĖąČą░čÅ ąŠą▒čŖąĄą╝ RAM, ąĘą░ąĮąĖą╝ą░ąĄą╝čŗą╣ ąÆą░čłąĖą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝.
(4) ąÜąŠą│ą┤ą░ ą║ąŠą┤ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą╝ąĄč鹊ą┤ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ, ąŠą┐ąĖčüą░ąĮąĮčŗą╣ ą▓čŗčłąĄ, č鹊 ąĮčāąČąĮąŠ ąŠčüą▓ąŠą▒ąŠąČą┤ą░čéčī ą┐ą░ą╝čÅčéčī čü ą┐ąŠą╝ąŠčēčīčÄ ą▓čŗąĘąŠą▓ą░:
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ąĄčüą╗ąĖ čŹč鹊ą│ąŠ ąĮąĄ ą┤ąĄą╗ą░čéčī, č鹊 ą┐ąŠčüč鹊čÅąĮąĮčŗąĄ ą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ čāą╝ąĄąĮčīčłą░čé ąĄčæ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓ ą║čāč湥, ąĖ ą┤ą╗čÅ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░ čÅą┤čĆą░ ą╝ąŠąČąĄčé ąĮąĄ čģą▓ą░čéąĖčéčī ą┐ą░ą╝čÅčéąĖ, čćč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠą╣ čĆą░ą▒ąŠč鹥 ąĖ ąŠčéą║ą░ąĘčā ą▓čŗąĘąŠą▓ąŠą▓ API.
[2. ąĪąŠčģčĆą░ąĮčÅą╣č鹥 ą┤ą░ąĮąĮčŗąĄ ą║ąŠąĮčüčéą░ąĮčé ą▓ąŠ flash ]
(1) ąØą░ą┐čĆčÅą╝čāčÄ čĆą░ąĘą╝ąĄčēą░ą╣č鹥 ą╝ą░čüčüąĖą▓čŗ unit32 ą▓ ą┐ą░ą╝čÅčéąĖ flash. ą¤čĆąĖą╝ąĄčĆ:
const uint32 array[4 ] ICACHE_RODATA_ATTR =
{
0x11111111 , 0x22222222 , 0x33333333 , 0x44444444
};
ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ą╝ąŠą│čāčé ąĮą░ą┐čĆčÅą╝čāčÄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čÅč湥ą╣ą║ąĖ čŹč鹊ą│ąŠ ą╝ą░čüčüąĖą▓ą░ ą▒ąĄąĘ ą║ą░ą║ąĖčģ-ą╗ąĖą▒ąŠ ą┐čĆąŠą▒ą╗ąĄą╝ (array[0], ąĖ čé. ą┐.).
(2) ą×ą┤ąĮą░ą║ąŠ ą┤ąŠčüčéčāą┐čŗ ąĮą░ čćč鹥ąĮąĖąĄ ą║ ą╝ą░čüčüąĖą▓ą░ą╝ unit8 ąĖ unit16 ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą▓čŗčĆąŠą▓ąĮąĄąĮčŗ ą┐ąŠ ą│čĆą░ąĮąĖčåąĄ 4 ą▒ą░ą╣čéą░. ą¤čĆąĖą╝ąĄčĆ:
const uint8 array[7 ] ICACHE_RODATA_ATTR = {0x01 , 0x02 , 0x03 , 0x04 , 0x05 , 0x06 , 0x07 };
ąĢčüą╗ąĖ ąÆą░ą╝ ąĮčāąČąĮąŠ ą┐čĆąŠčćąĖčéą░čéčī 菹╗ąĄą╝ąĄąĮčéčŗ ą▓ ą╝ą░čüčüąĖą▓ąĄ char ą┐ąŠ ą▒ą░ą╣čéą░ą╝, ą┐ąŠą┐čĆąŠą▒čāą╣č鹥 ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ čćąĖčéą░čéčī ą▓ ą┐ą░ą╝čÅčéčī RAM 菹╗ąĄą╝ąĄąĮčéčŗ ą┐ąŠčĆčåąĖčÅą╝ąĖ ą┐ąŠ 4 ą▒ą░ą╣čéą░, ąĖ ąĘą░č鹥ą╝ čćąĖčéą░ą╣č鹥 ą║ą░ąČą┤čŗą╣ ą▒ą░ą╣čé ą┐ąŠ ąĄą│ąŠ čüą╝ąĄčēąĄąĮąĖčÄ 0..3.. ą¤čĆčÅą╝ąŠą╣ ą┤ąŠčüčéčāą┐ ą║ ąŠčéą┤ąĄą╗čīąĮčŗą╝ 菹╗ąĄą╝ąĄąĮčéą░ą╝ ą▒ą░ą╣č鹊ą▓ąŠą│ąŠ ą╝ą░čüčüąĖą▓ą░ čŹč鹊ą│ąŠ ą┐čĆąĖą╝ąĄčĆą░ (array[1], ąĖ čé. ą┐.) ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ąŠčéą║ą░ąĘčā ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
(3) ąöą╗čÅ čüčéčĆčāą║čéčāčĆ ą┐ą░ą╝čÅčéąĖ ąŠą▒čēąĖą╝ ą┐čĆąĖąĮčåąĖą┐ąŠą╝ ą┤ąŠčüčéčāą┐ą░ ą║ ąĮąĖą╝ čÅą▓ą╗čÅąĄčéčüčÅ ą▓čŗą┤ąĄą╗ąĄąĮąĖąĄ ą┤ąŠčüčéą░č鹊čćąĮąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą┐ą░ą╝čÅčéąĖ ą▓ RAM, ą║ąŠč鹊čĆąŠąĄ ą▒ąŠą╗čīčłąĄ čĆą░ąĘą╝ąĄčĆą░ ą┐ą░ą╝čÅčéąĖ čüčéčĆčāą║čéčāčĆčŗ, ą║ąŠč鹊čĆčāčÄ ąÆčŗ čģąŠčéąĖč鹥 ą┐čĆąŠčćąĖčéą░čéčī. ą¦ąĖčéą░ą╣č鹥 ą┤ą░ąĮąĮčŗąĄ ąĖąĘ ą┐ąŠčĆčåąĖčÅą╝ąĖ, čĆą░ąĘą╝ąĄčĆ ą║ąŠč鹊čĆčŗčģ ą┤ąĄą╗ąĖčéčüčÅ ąĮą░ 4 ą▒ą░ą╣čéą░, ąĖ čüąŠčģčĆą░ąĮčÅą╣č鹥 ąĖčģ ą▓ RAM. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ąŠą▒čŖąĄą║čé ą▓ ą║ąŠą┤ąĄ ą║ą░ą║ ąŠą▒čŗčćąĮąŠ, čćč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ ą┐čĆąĄą┤čŗą┤čāčēąĄą╝ ą┐čĆąĖą╝ąĄčĆąĄ. ą¤čĆąŠčüč鹊 ąĖąĘą╝ąĄąĮąĖč鹥 ą║ąŠą┤ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ čüčéčĆčāą║čéčāčĆčŗ ą▓ą╝ąĄčüč鹊 čćč鹥ąĮąĖčÅ ą╝ą░čüčüąĖą▓ą░.
[3. ąĪąŠčģčĆą░ąĮčÅą╣č鹥 čüčéčĆąŠą║ąĖ ąŠčéą╗ą░ą┤ą║ąĖ ą▓ ą┐ą░ą╝čÅčéąĖ flash ]
ąĪčéčĆąŠą║ąĖ, ą▓čŗą▓ąŠą┤ąĖą╝čŗąĄ ąĮą░ ą┐ąĄčćą░čéčī ą▓čüčéčĆąŠąĄąĮąĮąŠą╣ čäčāąĮą║čåąĖąĄą╣ printf , ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ RAM. ąĢčüą╗ąĖ ąÆą░ą╝ ąĮąĄ ąĮčāąČąĮąŠ čćą░čüč鹊 ą┐ąĄčćą░čéą░čéčī ą▓ ą╗ąŠą│ čüčéčĆąŠą║ąĖ ąŠčéą╗ą░ą┤ą║ąĖ, ąĖą╗ąĖ ąĄčüą╗ąĖ čŹčéąĖ čüčéčĆąŠą║ąĖ čüą╗ąĖčłą║ąŠą╝ ą┤ą╗ąĖąĮąĮčŗąĄ, č鹊 ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮąŠąĄ os_printf API ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ čüčéčĆąŠą║ ąŠčéą╗ą░ą┤ą║ąĖ ą▓ąŠ flash ą▓ą╝ąĄčüč鹊 RAM.
[4. ąĪčéą░čĆą░ą╣č鹥čüčī ąĖąĘą▒ąĄą│ą░čéčī ą│ą╗ąŠą▒ą░ą╗čīąĮčŗčģ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ ]
ąōą╗ąŠą▒ą░ą╗čīąĮčŗąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ čćą░čüč鹊 ąĘą░ąĮąĖą╝ą░čÄčé ąĖąĘą╗ąĖčłąĮąĄąĄ ą╝ąĄčüč鹊, ą┐ąŠčüą║ąŠą╗čīą║čā ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ąŠąĮąĖ čüą║ąŠčĆąĄąĄ ą▓čüąĄą│ąŠ ąĮąĄ ą▓ąŠ ą▓čüąĄ ą▓čĆąĄą╝čÅ ąČąĖąĘąĮąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. Espressif ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé API ą┤ą╗čÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą│ąŠ ą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ, čćč鹊 ą╝ąŠąČąĮąŠ ą┐čĆąĖą╝ąĄąĮčÅčéčī ą┤ą╗čÅ čüąĮąĖąČąĄąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗčģ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ. ąöą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ čüąŠą▒čŗčéąĖą╣ ą▓čüąĄą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 os_malloc ąĖ os_free ą┤ą╗čÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą│ąŠ ą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ ą╝ąĄčüčéą░ ą▓ ą┐ą░ą╝čÅčéąĖ, ą║ąŠą│ą┤ą░ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ. ą×ą┤ąĮą░ą║ąŠ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ ąĮąĄ čĆąĄą║ąŠą╝ąĄąĮą┤čāčÄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čćą░čüč鹊ąĄ ą▓čŗą┤ąĄą╗ąĄąĮąĖąĄ/ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ ą┐ąŠčĆčåąĖčÅą╝ąĖ čĆą░ąĘąĮąŠą│ąŠ čĆą░ąĘą╝ąĄčĆą░.
ąÜąŠą│ą┤ą░ ESP8266 ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ AP, ąŠąĮą░ čüąŠčģčĆą░ąĮčÅąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ą║ą░ąĮą░ą╗ąĄ AP ą▓ ą┐ą░ą╝čÅčéąĖ RTC.
ŌĆó ąÜąŠą│ą┤ą░ ąÆčŗ čüą▒čĆą░čüčŗą▓ą░ąĄč鹥 ESP8266 ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ, ąĖą╗ąĖ ą║ąŠą│ą┤ą░ ESP8266 ą▓čŗčģąŠą┤ąĖčé ąĖąĘ čĆąĄąČąĖą╝ą░ ą│ą╗čāą▒ąŠą║ąŠą│ąŠ čüąĮą░ (Deep-sleep mode), č鹊 ąŠąĮą░ čćąĖčéą░ąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ą║ą░ąĮą░ą╗ąĄ AP ąĖąĘ ą┐ą░ą╝čÅčéąĖ RTC, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ą┐čŗčéą░ąĄčéčüčÅ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčīčüčÅ ą║ AP ąĮą░ čŹč鹊ą╝ ą║ą░ąĮą░ą╗ąĄ.
ąÆčŗ ą╝ąŠąČąĄč鹥 ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░čéčī čüą╗ąĄą┤čāčÄčēąĄąĄ čĆąĄčłąĄąĮąĖąĄ ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ąĖ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ ą║ą░ąĮą░ą╗ąĄ AP, ą║ąŠą│ą┤ą░ ą▓ą║ą╗čÄčćą░ąĄčéčüčÅ ą┐ąĖčéą░ąĮąĖąĄ ąĖą╗ąĖ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ čüą▒čĆąŠčü ESP8266. ąöą╗čÅ čŹč鹊ą│ąŠ ąÆčŗ ą╝ąŠąČąĄč鹥 ąĖąĘą▒ąĄąČą░čéčī čüąĖčéčāą░čåąĖąĖ, ą│ą┤ąĄ ESP8266 čüą║ą░ąĮąĖčĆčāąĄčé ą▓čüąĄ ą┤ąŠčüčéčāą┐ąĮčŗąĄ ą║ą░ąĮą░ą╗čŗ ą┤ą╗čÅ ą┐ąŠąĖčüą║ą░ AP, ą║ ą║ąŠč鹊čĆąŠą╣ ą▒čŗą╗ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą▓ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ čĆą░ąĘ. ąŁč鹊 ą┐ąŠą╝ąŠąČąĄčé čāčüą║ąŠčĆąĖčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą┐čĆąĖ čüčéą░čĆč鹥.
1 . ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ESP8266 ą┐ąŠą┤ą║ą╗čÄčćąĖą╗ą░čüčī ą║ AP, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 čäčāąĮą║čåąĖčÄ wifi_get_channel ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ą┐čĆąŠčćąĖčéą░čéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠčé č鹥ą║čāčēąĄą╝ ą║ą░ąĮą░ą╗ąĄ AP, ąĘą░č鹥ą╝ ąÆčŗ ą╝ąŠąČąĄč鹥 čüąŠčģčĆą░ąĮąĖčéčī čŹčéčā ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą▓ SPI Flash. ą¤ąĄčĆąĄą┤ ąĘą░ą┐ąĖčüčīčÄ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ ą║ą░ąĮą░ą╗ąĄ ąĮčāąČąĮąŠ ą┐čĆąŠą▓ąĄčĆąĖčéčī, čćč鹊 ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ ą║ą░ąĮą░ą╗ąĄ ą┤ąŠą┐čāčüčéąĖą╝ą░čÅ.
2 . ąÜąŠą│ą┤ą░ ESP8266 ą┐ąŠą╗čāčćą░ąĄčé ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ čüą▒čĆąŠčü ąĖą╗ąĖ ą┐čĆąŠčģąŠą┤ąĖčé čåąĖą║ą╗ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąŠąĄ firmware ą╝ąŠąČąĄčé ą┐čĆąŠčćąĖčéą░čéčī čüąŠčģčĆą░ąĮąĄąĮąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą║ą░ąĮą░ą╗ą░ ąĖąĘ flash. ą¤čāč鹥ą╝ ą▓čŗąĘąŠą▓ą░ WRITE_PERI_REG(0x600011f4, 1 << 16 | channel) , ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ ą║ą░ąĮą░ą╗ąĄ AP ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮą░ ą▓ ą┐ą░ą╝čÅčéčī RTC. ąśąĮč乊čĆą╝ą░čåąĖčÅ ąŠ ą║ą░ąĮą░ą╗ąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╗čāč湥ąĮą░ ąĮą░ą┐čĆčÅą╝čāčÄ ąĖąĘ ą┐ą░ą╝čÅčéąĖ RTC, čćč鹊ą▒čŗ ą┐ąŠą╝ąŠčćčī čüąĮąĖąĘąĖčéčī ą▓čĆąĄą╝čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ.
3 . ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮą░ čäčāąĮą║čåąĖčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą│ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ (auto connection), čćč鹊ą▒čŗ ESP8266 ą┐čĆąŠčćąĖčéą░ą╗ą░ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ą║ą░ąĮą░ą╗ąĄ AP ąĖ ą┐ąŠą┤ą║ą╗čÄčćąĖą╗ą░čüčī ą║ AP ąĮą░ čŹč鹊ą╝ ą║ą░ąĮą░ą╗ąĄ.
ąÆ ą┐ą░ą╝čÅčéąĖ RTC ą║čŹčłąĖčĆčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ ą║ą░ąĮą░ą╗ąĄ. ąöčĆčāą│ą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ (čéą░ą║ą░čÅ ą║ą░ą║ SSID ąĖ Password) čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ąŠ Flash, ą║ąŠą│ą┤ą░ ąÆčŗ ą▓čŗąĘčŗą▓ą░ąĄč鹥 čäčāąĮą║čåąĖčÄ wifi_station_set_config .
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĄčüą╗ąĖ ąÆą░čłąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ čéčĆąĄą▒čāąĄčé ąŠč湥ąĮčī čćą░čüčéčŗčģ čüą▒čĆąŠčüąŠą▓ ąĖą╗ąĖ čćą░čüč鹊 ą┐čĆąŠčģąŠą┤ąĖčé čåąĖą║ą╗čŗ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ/ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ, č鹊 čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ąĮąĄčłąĮčÄčÄ ą┐ą░ą╝čÅčéčī RTC ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ ą║ą░ąĮą░ą╗ąĄ. ą×č湥ąĮčī čćą░čüčéčŗąĄ ąĘą░ą┐ąĖčüąĖ ą▓ ą┐ą░ą╝čÅčéčī flash ąĮąĄ čĆąĄą║ąŠą╝ąĄąĮą┤čāčÄčéčüčÅ, ą┐ąŠč鹊ą╝čā čćč鹊 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čåąĖą║ą╗ąŠą▓ ąĘą░ą┐ąĖčüąĖ ą┤ą╗čÅ ą┐ą░ą╝čÅčéąĖ flash ąŠą│čĆą░ąĮąĖč湥ąĮąŠ.
ąŻą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ą║ąŠą│ą┤ą░ ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ ESP8266, č鹊 ą▓čŗą▓ąŠą┤čŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆąĄąČąĖą╝ąŠą╝ ąĘą░ą│čĆčāąĘą║ąĖ (strapping pins) čāą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ąĮą░ čéčĆąĄą▒čāąĄą╝čŗčģ ą╗ąŠą│ąĖč湥čüą║ąĖčģ čāčĆąŠą▓ąĮčÅčģ. ąĢčüą╗ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗąĄ čüąĮą░čĆčāąČąĖ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ąĄčĆąĄą▓ąŠą┤čÅčé strapping-ą▓čŗą▓ąŠą┤čŗ ą▓ ąĮąĄąČąĄą╗ą░č鹥ą╗čīąĮčŗąĄ čāčĆąŠą▓ąĮąĖ ą╗ąŠą│ąĖą║ąĖ, č鹊 ESP8266 ą╝ąŠąČąĄčé ąĘą░ą│čĆčāąĘąĖčéčīčüčÅ ą▓ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠą╝ čĆąĄąČąĖą╝ąĄ čĆą░ą▒ąŠčéčŗ. ąóąŠą│ą┤ą░ ą┐čĆąĖ ąŠčéčüčāčéčüčéą▓ąĖąĖ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ čĆą░ą▒ąŠčéą░čÄčēąĄą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ čéą░ą╣ą╝ąĄčĆ watchdog ą╝ąŠąČąĄčé čüą▒čĆąŠčüąĖčéčī čćąĖą┐.
ąöą╗čÅ čģąŠčĆąŠčłąĄą╣ ą┐čĆą░ą║čéąĖč湥čüą║ąŠą╣ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ čüčģąĄą╝čŗ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ, čćč鹊ą▒čŗ ą▓čŗą▓ąŠą┤čŗ strapping ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖčüčī č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąĖąĮč鹥čĆč乥ą╣čüą░ čüąŠ ą▓čģąŠą┤ą░ą╝ąĖ ą▓ąĮąĄčłąĮąĖčģ čāčüčéčĆąŠą╣čüčéą▓, čćč鹊ą▒čŗ čŹčéąĖ ą▓čģąŠą┤čŗ ąĮą░čģąŠą┤ąĖą╗ąĖčüčī ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą▓čŗčüąŠą║ąŠą│ąŠ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅ. ąóąŠą│ą┤ą░ čŹčéąĖ ą▓ąĮąĄčłąĮąĖąĄ ą▓čģąŠą┤čŗ ąĮąĄ ą▒čāą┤čāčé ą▓ą╗ąĖčÅčéčī ąĮą░ ą╗ąŠą│ąĖč湥čüą║ąĖąĄ čāčĆąŠą▓ąĮąĖ ą▓čŗą▓ąŠą┤ąŠą▓ strapping ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ.
ą¤čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ąĖą╗ąĖ čüą▒čĆąŠčüąĄ ESP8266 ąŠčåąĄąĮąĖą▓ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ čüą┐ąĄčåąĖą░ą╗čīąĮčŗčģ ą▓čŗą▓ąŠą┤ąŠą▓, ą║ąŠč鹊čĆčŗąĄ ąĘą░ą┤ą░čÄčé čĆąĄąČąĖą╝ ąĘą░ą│čĆčāąĘą║ąĖ (boot mode). ąŁč鹊 čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗąĄ ą▓čŗą▓ąŠą┤čŗ boot strapping pins. ą×ąĮąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé, ą║ą░ą║ ą▒čāą┤ąĄčé ąĘą░ą│čĆčāąČą░čéčīčüčÅ ESP8266. ąÆąŠčé ą┐čĆąĖą╝ąĄčĆ ąĖąĮč乊čĆą╝ą░čåąĖąĖ boot mode, ą║ąŠč鹊čĆą░čÅ ą┐ąĄčćą░čéą░ąĄčéčüčÅ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ:
ets Jan 8 2013,rst cause:1, boot mode:(3,2)
ą¤ąĄčĆą▓ą░čÅ čåąĖčäčĆą░ 3 ą▓ čüą║ąŠą▒ą║ą░čģ ą┐ąŠčüą╗ąĄ "boot mode:" ąŠą▒ąŠąĘąĮą░čćą░ąĄčé č鹥ą║čāčēąĖą╣ čĆąĄąČąĖą╝ ąĘą░ą│čĆčāąĘą║ąĖ ESP8266. ąÜą░ą║ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čéą░ą▒ą╗ąĖčåą░ ąĮąĖąČąĄ, čĆąĄąČąĖą╝ ąĘą░ą│čĆčāąĘą║ąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ 3-ą▒ąĖčéąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ ą╗ąŠą│ąĖč湥čüą║ąĖčģ čāčĆąŠą▓ąĮąĄą╣ ąĮą░ ą▓čŗą▓ąŠą┤ą░čģ strapping pins [GPIO15, GPIO0, GPIO2].
ąŻčĆąŠą▓ąĮąĖ GPIO15, GPIO0, GPIO2 Boot Mode
7 (111)
SDIO HighSpeed V2 IO
6 (110)
SDIO LowSpeed V1 IO
5 (101)
SDIO HighSpeed V1 IO
4 (100)
SDIO LowSpeed V2 IO
3 (011)
Flash Boot
2 (010)
Jump Boot
1 (001)
UART Boot
0 (000)
Remapping
[ąśąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖą╣ ]
[ążą░ąĘą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ]
ą¤ą░ą╝čÅčéčī Flash ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮą░ ą┐čāč鹥ą╝ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ESP8266 ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā č湥čĆąĄąĘ UART. ąŁč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ č湥čĆąĄąĘ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čī USB - TTL UART (ą║ąŠč鹊čĆčŗąĄ ą▓ ąŠą▒ąĖą╗ąĖąĖ ą┐čĆąŠą┤ą░čÄčéčüčÅ ąĮą░ čüą░ą╣čéą░čģ aliexpress ąĖ dx.com). ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖąĮčüčéčĆčāą║čåąĖą╣, ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąŠčäąĖčåąĖą░ą╗čīąĮčŗą╣ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖą╣ ą┐ąĄčĆąĄą┐čĆąŠčłąĖą▓ą║ąĖ (Espressif official Flash download tool), ąŠą▒čĆą░čēą░ą╣č鹥čüčī ą║ ą┤ąŠą║čāą╝ąĄąĮčéčā "ESP8266 SDK Getting Started Guide" [2].
Download tool: http://espressif.com/zh-hans/support/download/other-tools Download method: http://espressif.com/zh-hans/support/download/documents
[ążą░ąĘą░ ą╝ą░čüčüąŠą▓ąŠą│ąŠ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░ ]
ąØąĄ ąŠč湥ąĮčī čāą┤ąŠą▒ąĮąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ESP8266 č湥čĆąĄąĘ UART ą┐čĆąĖ ą▒ąŠą╗čīčłąĖčģ ąŠą▒čŖąĄą╝ą░čģ ą▓čŗą┐čāčüą║ą░ čāčüčéčĆąŠą╣čüčéą▓, ą╝ąŠąČąĄčé ą▒čŗčéčī čāą┤ąŠą▒ąĮąĄąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐čĆčÅą╝ąŠąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čćąĖą┐ąŠą▓ Flash čü ą┐ąŠą╝ąŠčēčīčÄ čüą┐ąĄčåąĖą░ą╗čīąĮčŗčģ ą┐čĆąŠą│čĆą░ą╝ą╝ą░č鹊čĆąŠą▓.
ą¦č鹊ą▒čŗ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą┤ą▓ąŠąĖčćąĮčŗą╣ čäą░ą╣ą╗, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮ ą▓ ą┐ą░ą╝čÅčéčī SPI Flash ą┐ąĄčĆąĄą┤ čüą▒ąŠčĆą║ąŠą╣ ą┐ą╗ą░čéčŗ, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 Espressif Flash download tool ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą║ąŠą╝ą▒ąĖąĮąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ čäą░ą╣ą╗ą░ ą┤ą╗čÅ Flash. ąŻą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ąÆčŗ ą║ąŠčĆčĆąĄą║čéąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ą╗ąĖ čĆą░ąĘą╝ąĄčĆ Flash ą┐ąĄčĆąĄą┤ ą│ąĄąĮąĄčĆą░čåąĖąĄą╣ ą║ąŠą╝ą▒ąĖąĮąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą┤ą▓ąŠąĖčćąĮąŠą│ąŠ ąŠą▒čĆą░ąĘą░ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐ą░ą╝čÅčéąĖ SPI Flash.
[Wi-Fi ]
IP-ą░ą┤čĆąĄčü ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ESP8266 SoftAP čĆą░ą▓ąĄąĮ 192.168.4.1.
ESP8266 ąĮąĄ ą╝ąŠąČąĄčé ąŠą▒čĆą░ą▒ąŠčéą░čéčī čüąĖčéčāą░čåąĖčÄ, ą║ąŠą│ą┤ą░ IP-ą░ą┤čĆąĄčü SoftAP ąĖ Station ą┐čĆąĖąĮą░ą┤ą╗ąĄąČą░čé ąŠą┤ąĮąŠą╣ ą┐ąŠą┤čüąĄčéąĖ, ą▓ ąĮą░čłąĄą╝ čüą╗čāčćą░ąĄ čŹč鹊 ą┐ąŠą┤čüąĄčéčī 192.168.4.x. ą¦č鹊ą▒čŗ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ čüčĆą░ą▒ąŠčéą░ą╗ąŠ, ąĮčāąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī ą┐ąŠą┤čüąĄčéčī čā čĆąŠčāč鹥čĆą░, ą║ ą║ąŠč鹊čĆąŠą╝čā ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ (ą║ąŠą│ą┤ą░ ESP8266 čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą║ą╗ąĖąĄąĮčé), ąĖą╗ąĖ ąĮčāąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī ą┐ąŠą┤čüąĄčéčī čā ESP8266, ą║ąŠą│ą┤ą░ ąŠąĮą░ ą▓čŗčüčéčāą┐ą░ąĄčé ą▓ ą║ą░č湥čüčéą▓ąĄ AP.
ąĢčüą╗ąĖ ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĖčéčī, čćč鹊 ąÆčŗ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą▓ą▓ąĄą╗ąĖ SSID, č鹊 ą▓ąŠąĘą╝ąŠąČąĮčŗ 2 ą┐čĆąĖčćąĖąĮčŗ ą┐čĆąŠą▒ą╗ąĄą╝čŗ.
1 . ąśčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ąĮąĄčüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ čüąĖą╝ą▓ąŠą╗čŗ ą▓ ąĖą╝ąĄąĮąĖ SSID. ąĀą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ čüčéčĆąŠą│ąŠ čĆąĄą║ąŠą╝ąĄąĮą┤čāčÄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī č鹊ą╗čīą║ąŠ čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ čüąĖą╝ą▓ąŠą╗čŗ, čéą░ą║ąĖąĄ ą║ą░ą║ čüąĖą╝ą▓ąŠą╗čŗ ąĖ čåąĖčäčĆčŗ ą░ąĮą│ą╗ąĖą╣čüą║ąŠą│ąŠ ą░ą╗čäą░ą▓ąĖčéą░.
2 . ąÆč鹊čĆą░čÅ ąĖ ą▒ąŠą╗ąĄąĄ ą▓ąĄčĆąŠčÅčéąĮą░čÅ ą┐čĆąĖčćąĖąĮą░ - ą┐ą░čĆą░ą╝ąĄčéčĆ bssid_set . ąŻčüčéą░ąĮąŠą▓ąĖč鹥 stationConf.bssid_set = 0 , ąĄčüą╗ąĖ čģąŠčéąĖč鹥 ą┐ąŠą┤ą║ą╗čÄčćąĖčéčīčüčÅ ą║ čĆąŠčāč鹥čĆčā, čā ą║ąŠč鹊čĆąŠą│ąŠ ąĮąĄ ąĮčāąČąĮąŠ čāą║ą░ąĘčŗą▓ą░čéčī MAC-ą░ą┤čĆąĄčü.
ESP8266 ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čüąŠą▓ą╝ąĄčüčéąĮąŠąĄ čüčāčēąĄčüčéą▓ąŠą▓ą░ąĮąĖąĄ čĆąĄąČąĖą╝ąŠą▓ SoftAP + Station, ąŠą┤ąĮą░ą║ąŠ čā ESP8266 ąĄčüčéčī č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ą║ą░ąĮą░ą╗, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüąŠą▓ą╝ąĄčüčéąĮąŠ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ Station ąĖ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ SoftAP. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ESP8266 SoftAP ą▒čāą┤ąĄčé ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ ą┐ąŠą┤čüčéčĆą░ąĖą▓ą░čéčī ąĘąĮą░č湥ąĮąĖąĄ ą║ą░ąĮą░ą╗ą░ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ESP8266 Station, čćč鹊 ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ čüą╗ąĄą┤čāčÄčēąĖą╝ ą▓ą░čĆąĖą░ąĮčéą░ą╝ ą┐ąŠą▓ąĄą┤ąĄąĮąĖčÅ.
[ąÆą░čĆąĖą░ąĮčé 1 ]
1 . ESP8266 Station ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ą║ čĆąŠčāč鹥čĆčā (ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĖą╝, čćč鹊 ąĮąŠą╝ąĄčĆ ą║ą░ąĮą░ą╗ą░ 6).
2 . ąĀąĄąČąĖą╝ ESP8266 SoftAP ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ wifi_softap_set_config .
3 . API ą▓ąĄčĆąĮąĄčé true, ąĄčüą╗ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą║ąŠčĆčĆąĄą║čéąĮą░, ąŠą┤ąĮą░ą║ąŠ ąĮąŠą╝ąĄčĆ ą║ą░ąĮą░ą╗ą░ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąŠą┤čüčéčĆąŠąĖčéčüčÅ ą║ č鹊ą╝čā ąČąĄ ąĘąĮą░č湥ąĮąĖčÄ, čćč鹊 ąĖ čā ąĖąĮč鹥čĆč乥ą╣čüą░ ESP8266 Station (ą▓ ąĮą░čłąĄą╝ čüą╗čāčćą░ąĄ 6).
[ąÆą░čĆąĖą░ąĮčé 2 ]
1 . ąæčŗą╗ ą▓čŗąĘąŠą▓ wifi_softap_set_config , ąĖ ESP8266 čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ čĆąĄąČąĖą╝ąĄ SoftAP (ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĖą╝, čćč鹊 ąĮąŠą╝ąĄčĆ ą║ą░ąĮą░ą╗ą░ 5).
2 . ąÜ ESP8266 SoftAP ą┐ąŠą┤ą║ą╗čÄčćąĖą╗ąĖčüčī ą┤čĆčāą│ąĖąĄ čüčéą░ąĮčåąĖąĖ.
3 . ESP8266 Station ą┐ąŠą┤ą║ą╗čÄčćąĖą╗ą░čüčī ą║ čĆąŠčāč鹥čĆčā (ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĖą╝, čćč鹊 ą║ą░ąĮą░ą╗ čĆąŠčāč鹥čĆą░ 6).
4 . ESP8266 SoftAP ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąŠą┤čüčéčĆąŠąĖčé ąĮąŠą╝ąĄčĆ ą║ą░ąĮą░ą╗ą░ ą║ č鹊ą╝čā ąČąĄ ąĘąĮą░č湥ąĮąĖčÄ, čćč鹊 ąĖ čā ESP8266 Station (ą▓ ąĮą░čłąĄą╝ čüą╗čāčćą░ąĄ 6);
5 . ą¤ąŠčüą║ąŠą╗čīą║čā ą║ą░ąĮą░ą╗ RF ą┐ąŠą╝ąĄąĮčÅą╗čüčÅ, č鹊 čüčéą░ąĮčåąĖčÅ, ą║ąŠč鹊čĆą░čÅ ą▒čŗą╗ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ą║ ESP8266 SoftAP, ą┐ąŠč鹥čĆčÅąĄčé ą║ąŠąĮąĮąĄą║čé Wi-Fi.
[ąÆą░čĆąĖą░ąĮčé 3 ]
1 . ąÜ ESP8266 SoftAP ą┐ąŠą┤ą║ą╗čÄčćąĖą╗ąĖčüčī ą┤čĆčāą│ąĖąĄ čüčéą░ąĮčåąĖąĖ.
2 . ąĢčüą╗ąĖ ESP8266 Station ą┐ąŠą┐čŗčéą░ąĄčéčüčÅ ą▓čŗą┐ąŠą╗ąĮąĖčéčī čüą║ą░ąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ąĖą╗ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ čĆąŠčāč鹥čĆčā, č鹊 ESP8266 SoftAP ą╝ąŠąČąĄčé ą┐ąŠč鹥čĆčÅčéčī čüą▓čÅąĘčī, ąĖ ą╝ąŠą│čāčé ąĮą░ą▒ą╗čÄą┤ą░čéčīčüčÅ ą┐ąŠč鹥čĆąĖ ą┐ą░ą║ąĄč鹊ą▓ UDP ąĖą╗ąĖ ping.
ąŁč鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐ąŠč鹊ą╝čā, čćč鹊 ESP8266 Station ą▒čāą┤ąĄčé ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčī čüą║ą░ąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠ ą▓čüąĄą╝ ą║ą░ąĮą░ą╗ą░ą╝ ą▓ ą┐ąŠąĖčüą║ąĄ čåąĄą╗ąĄą▓ąŠą│ąŠ čĆąŠčāč鹥čĆą░. ą¤ąŠčŹč鹊ą╝čā ESP8266 SoftAP čéą░ą║ąČąĄ ą┐ąŠą╝ąĄąĮčÅąĄčé ą║ą░ąĮą░ą╗, čćč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą┐čĆąŠą▒ą╗ąĄą╝ą░ą╝ ą▓ čüčāčēąĄčüčéą▓čāčÄčēąĖčģ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅčģ.
ąÆ čéą░ą║ąŠą╣ čüąĖčéčāą░čåąĖąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ą╝ąŠą│čāčé čāčüčéą░ąĮąŠą▓ąĖčéčī čéą░ą╣ą╝ąĄčĆ ąĖ ą▓čŗąĘą▓ą░čéčī wifi_station_disconnect ą┐ąŠ ąĖčüč鹥č湥ąĮąĖčÄ ąĘą░ą┤ąĄčƹȹ║ąĖ čéą░ą╣ą╝ąĄčĆą░, čćč鹊ą▒čŗ ąŠčüčéą░ąĮąŠą▓ąĖčéčī ą┐ąŠą┐čŗčéą║ąĖ ESP8266 Station ą┐ąŠą┤ą║ą╗čÄčćąĖčéčīčüčÅ ą║ čĆąŠčāč鹥čĆčā. ąöčĆčāą│ąŠą╣ ą╝ąĄč鹊ą┤ - ą▓čŗąĘčŗą▓ą░čéčī wifi_station_set_reconnect_policy ąĖ wifi_station_set_auto_connect ą▓ ąĮą░čćą░ą╗ąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, čćč鹊ą▒čŗ ąĘą░ą┐čĆąĄčéąĖčéčī ESP8266 Station ą┐ąĄčĆąĄą┐ąŠą┤ą║ą╗čÄčćą░čéčīčüčÅ ą║ čĆąŠčāč鹥čĆčā.
ąŚą┤ąĄčüčī ą║ą░ąĮą░ą╗ ąŠčéąĮąŠčüąĖčéčüčÅ ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ čćą░čüč鹊č鹥 ą▓ ą┤ąŠą┐čāčüčéąĖą╝ąŠą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ čćą░čüč鹊čé, ą▓čŗą┤ąĄą╗ąĄąĮąĮąŠą╝ ą┤ą╗čÅ čüąĖčüč鹥ą╝ Wi-Fi. ąóąĄčģąĮąĖč湥čüą║ąĖ ąÆčŗ ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╗čÄą▒ąŠą╣ ą║ą░ąĮą░ą╗ ą┐ąŠ čüą▓ąŠąĄą╝čā ą▓čŗą▒ąŠčĆčā. ą×ą┤ąĮą░ą║ąŠ ą▓ ąÆą░čłąĄą╣ čüčéčĆą░ąĮąĄ ąĮąĄą║ąŠč鹊čĆčŗąĄ ą║ą░ąĮą░ą╗čŗ ą╝ąŠą│čāčé ą▒čŗčéčī ąĮąĄą╗ąĄą│ą░ą╗čīąĮčŗ!
ą¤čĆąŠą║ąŠąĮčüčāą╗čīčéąĖčĆčāą╣č鹥čüčī čü ą┤ąŠą║čāą╝ąĄąĮč鹊ą╝ "ESP8266 Wi-Fi Channel Selection Guidelines" [2] ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ ą▓čŗą▒ąŠčĆąĄ ą╗čāčćčłąĄą│ąŠ ą║ą░ąĮą░ą╗ą░ ą┤ą╗čÅ čüą▓ąŠąĄą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ą£ąĄč鹊ą┤čŗ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ESP8266 ą║ ą▒ąĄčüą┐čĆąŠą▓ąŠą┤ąĮąŠą╝čā čĆąŠčāč鹥čĆčā ą┐ąŠ Wi-Fi:
1 . ąĀą░ąĘčĆąĄčłąĖč鹥 ESP8266 Smartconfig. ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ESP8266 ą╝ąŠąČąĄčé čüą║ą░ąĮąĖčĆąŠą▓ą░čéčī ą░čéčĆąĖą▒čāčé ą┐ą░ą║ąĄč鹊ą▓ ą▓ čĆąĄąČąĖą╝ąĄ čüąĮąĖčäč乥čĆą░, ąĖ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčüčÅ ą║ čĆąŠčāč鹥čĆčā.
2 . ąĀą░ąĘčĆąĄčłąĖč鹥 čĆąĄąČąĖą╝ SoftAP ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ESP8266, čćč鹊ą▒čŗ ą║ ąĮąĄą╝čā ą╝ąŠą│ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčīčüčÅ čüą╝ą░čĆčéč乊ąĮ, ąĖ čāčüčéą░ąĮąŠą▓ąĖą╗ąŠčüčī čüčéą░ą▒ąĖą╗čīąĮąŠąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ TCP/UDP. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ čüą╝ą░čĆčéč乊ąĮ ą╝ąŠąČąĄčé ą┐ąĄčĆąĄą┤ą░čéčī SSID (čŹč鹊 ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ č鹊čćą║ąĖ ą┤ąŠčüčéčāą┐ą░ ESP8266) ąĖ password (ą┐ą░čĆąŠą╗čī ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠčüčéčāą┐ą░).
3 . ąĀą░ąĘčĆąĄčłąĖč鹥 ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ WPS, ą║ąŠč鹊čĆą░čÅ čéčĆąĄą▒čāąĄčé ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄ ą║ąĮąŠą┐ąŠą║ ą║ čāčüčéčĆąŠą╣čüčéą▓čā ESP8266, ąĖą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ą╝ąŠą▒ąĖą╗čīąĮąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ WPS ą┐ąŠčüą╗ąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ SoftAP.
ąśąĘą╝ąĄąĮąĄąĮąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┤ą╗čÅ ESP8266 SoftAP ą┐čāč鹥ą╝ ą▓čŗąĘąŠą▓ą░ wifi_softap_set_config() ą╝ąŠą│čāčé ą▒čŗčéčī ąĖąĮąŠą│ą┤ą░ ąĮąĄčāą┤ą░čćąĮčŗą╝ąĖ ą▓ ą║ąŠąĮč鹥ą║čüč鹥 ą▓ą▓ąŠą┤ą░ ąĖčģ ą▓ ą┤ąĄą╣čüčéą▓ąĖąĄ, ąĄčüą╗ąĖ ą▓čŗąĘąŠą▓ API ą▒čŗą╗ ą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮ ąĖąĘ callback-čäčāąĮą║čåąĖąĖ. ą¤ąŠą┤ąŠą▒ąĮčŗąĄ čüąĖčéčāą░čåąĖąĖ ą╝ąŠą│čāčé ą▓ąŠąĘąĮąĖą║ą░čéčī ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą║ąŠą│ą┤ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐čŗčéą░ąĄčéčüčÅ ą┐ąĄčĆąĄą║ą╗čÄčćąĖčéčīčüčÅ ą▓ čĆąĄąČąĖą╝ Station ąĖąĘ čĆąĄąČąĖą╝ą░ SoftAP ą▓ąĮčāčéčĆąĖ callback-čäčāąĮą║čåąĖąĖ, ą┐čĆąĖą▓čÅąĘą░ąĮąĮąŠą╣ ą║ čüąŠą▒čŗčéąĖčÅą╝ SoftAP.
ą¦č鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊ą▒čŗ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ, čüą┤ąĄą╗ą░ąĮąĮąŠąĄ wifi_softap_set_config() , ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą▓čüčéčāą┐ąĖą╗ąŠ ą▓ ą┤ąĄą╣čüčéą▓ąĖąĄ, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 API-čäčāąĮą║čåąĖčÄ system_os_task() ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ąĘą░ą┤ą░čćąĖ, ą║ąŠč鹊čĆą░čÅ ą┐ąŠą╝ąĄąĮčÅąĄčé ąĮą░čüčéčĆąŠą╣ą║ąĖ SoftAP. ąóą░ą║ąČąĄ čāą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ESP8266 čāčüą┐ąĄčłąĮąŠ ą┐ąĄčĆąĄą║ą╗čÄčćąĖą╗ą░čüčī ą▓ čĆąĄąČąĖą╝ SoftAP ą┐ąĄčĆąĄą┤ ą╗čÄą▒čŗą╝ ą▓čŗąĘąŠą▓ąŠą╝ API-čäčāąĮą║čåąĖą╣ SoftAP. ą¤čĆąĖą╝ąĄčĆ:
LOCAL void ICACHE_FLASH_ATTR some_callback_function (void )
{
unsigned char res;
os_event_t * testQueue;
// ąŻą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ESP8266 ą▓ čĆąĄąČąĖą╝ąĄ SoftAP!
res = wifi_set_opmode_current (0x02 );
os_printf (" \r\n Set op mode returned: %d" , res);
testQueue = (os_event_t * )os_malloc(sizeof (os_event_t )* 4 );
system_os_task (set_ap_config, USER_TASK_PRIO_1, testQueue, 4 );
// ą¤čĆąŠą┤ąŠą╗ąČąĄąĮąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ čüąĄčĆą▓ąĄčĆą░, ąĖ čé. ą┐.
ap_server_setup (AP_PORT);
}
void set_ap_config (os_event_t * e)
{
struct softap_config ap;
// ąĪąĮą░čćą░ą╗ą░ ą┐ąŠą╗čāč湥ąĮąĖąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
wifi_softap_get_config(& ap);
os_memset(ap.ssid, 0 , 32 );
os_memset(ap.password, 0 , 64 );
os_memcpy(ap.ssid, "SSIDhere" , 8 );
os_memcpy(ap.password, "PASSWDhere" , 10 );
ap.authmode = AUTH_WPA2_PSK;
ap.ssid_len = 0 ; // ąśą╗ąĖ čŹč鹊 ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮą░čÅ ą┤ą╗ąĖąĮą░
ap.max_connection = 1 ; // MAX ą▓ąŠąĘą╝ąŠąČąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüčéą░ąĮčåąĖą╣
wifi_softap_set_config (& ap); // ą×ą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ESP8266 SoftAP!
}
[ąĪą╗ąŠą▓ą░čĆąĖą║ ]
AP access Point, ąĖą╝ąĄąĄčéčüčÅ ą▓ ą▓ąĖą┤čā č鹊čćą║ą░ ą┤ąŠčüčéčāą┐ą░ Wi-Fi.
APP čüąŠą║čĆą░čēąĄąĮąĖąĄ ąŠčé application (ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ).
FOTA Firmware Over The Air. ą×ą▒ą╗ą░čćąĮą░čÅ č鹥čģąĮąŠą╗ąŠą│ąĖčÅ Espressif Systems, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮą░čÅ ą┤ą╗čÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┐čĆąŠčłąĖą▓ą║ąĖ č湥čĆąĄąĘ Wi-Fi.
LDO Low Drop-Out. ąśą╝ąĄąĄčéčüčÅ ą▓ ą▓ąĖą┤čā ą╗ąĖąĮąĄą╣ąĮčŗą╣ čĆąĄą│čāą╗čÅč鹊čĆ čü ąĮąĖąĘą║ąĖą╝ ą┐čĆąŠčģąŠą┤ąĮčŗą╝ ą┐ą░ą┤ąĄąĮąĖąĄą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ.
OTA over the air. ą×ąĘąĮą░čćą░ąĄčé ą┐ąĄčĆąĄą┤ą░čćą░ č湥ą│ąŠ-ąĮąĖą▒čāą┤čī, ąĮą░ą┐čĆąĖą╝ąĄčĆ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ą┐čĆąŠčłąĖą▓ą║ąĖ (firmware) "ą┐ąŠ ą▓ąŠąĘą┤čāčģčā", čé. ąĄ. ą┐ąŠ čĆą░ą┤ąĖąŠą║ą░ąĮą░ą╗čā Wi-Fi.
RTC Real Time Clock, čćą░čüčŗ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ.
SmartConfig ą┐čĆąŠč鹊ą║ąŠą╗ ESP-TOUCH ą║ąŠą╝ą┐ą░ąĮąĖąĖ Espressif čĆąĄą░ą╗ąĖąĘčāąĄčé č鹥čģąĮąŠą╗ąŠą│ąĖčÄ Smart Config, ą║ąŠč鹊čĆą░čÅ ą┐ąŠą╝ąŠą│ą░ąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅą╝ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮą░ ąŠčüąĮąŠą▓ąĄ ESP8266EX ą║ čüąĄčéąĖ Wi-Fi č湥čĆąĄąĘ ą┐čĆąŠčüč鹊ąĄ ą¤ą× ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠąĄ ąĮą░ čüą╝ą░čĆčéč乊ąĮąĄ. ą¤ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ čüą╝. ą▓ ą┤ąŠą║čāą╝ąĄąĮč鹥 [4].
SoftAP čĆąĄąČąĖą╝ čćąĖą┐ą░ ESP8266, ą║ąŠą│ą┤ą░ ąŠąĮ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ č鹊čćą║ą░ ą┤ąŠčüčéčāą┐ą░ Wi-Fi (AP).
Station čĆąĄąČąĖą╝ čćąĖą┐ą░ ESP8266, ą║ąŠą│ą┤ą░ ąŠąĮ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą║ą╗ąĖąĄąĮčé č鹊čćą║ąĖ ą┤ąŠčüčéčāą┐ą░ Wi-Fi (ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ ąĮąĄą╣).
WeChat ą┐ąŠą┐čāą╗čÅčĆąĮąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ą╗čÅ ąŠą▒čēąĄąĮąĖčÅ, ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ESP8266.
WPS Wi-Fi Protected Setup. ąśąĘ "ąÆąĖą║ąĖą┐ąĄą┤ąĖąĖ": Wi-Fi Protected Setup (ąĘą░čēąĖčēčæąĮąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░), WPS - čüčéą░ąĮą┤ą░čĆčé (ąĖ ąŠą┤ąĮąŠąĖą╝čæąĮąĮčŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗) ą┐ąŠą╗čāą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą│ąŠ čüąŠąĘą┤ą░ąĮąĖčÅ ą▒ąĄčüą┐čĆąŠą▓ąŠą┤ąĮąŠą╣ čüąĄčéąĖ Wi-Fi, čüąŠąĘą┤ą░ąĮąĮčŗą╣ Wi-Fi Alliance. ą×čäąĖčåąĖą░ą╗čīąĮąŠ ąĘą░ą┐čāčēąĄąĮ 8 čÅąĮą▓ą░čĆčÅ 2007 ą│ąŠą┤ą░. ą”ąĄą╗čīčÄ ą┐čĆąŠč鹊ą║ąŠą╗ą░ WPS čÅą▓ą╗čÅąĄčéčüčÅ čāą┐čĆąŠčēąĄąĮąĖąĄ ą┐čĆąŠčåąĄčüčüą░ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą▒ąĄčüą┐čĆąŠą▓ąŠą┤ąĮąŠą╣ čüąĄčéąĖ, ą┐ąŠčŹč鹊ą╝čā ąĖąĘąĮą░čćą░ą╗čīąĮąŠ ąŠąĮ ąĮą░ąĘčŗą▓ą░ą╗čüčÅ Wi-Fi Simple Config. ą¤čĆąŠč鹊ą║ąŠą╗ ą┐čĆąĖąĘą▓ą░ąĮ ąŠą║ą░ąĘą░čéčī ą┐ąŠą╝ąŠčēčī ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅą╝, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ąŠą▒ą╗ą░ą┤ą░čÄčé čłąĖčĆąŠą║ąĖą╝ąĖ ąĘąĮą░ąĮąĖčÅą╝ąĖ ąŠ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéąĖ ą▓ ą▒ąĄčüą┐čĆąŠą▓ąŠą┤ąĮčŗčģ čüąĄčéčÅčģ, ąĖ ą║ą░ą║ čüą╗ąĄą┤čüčéą▓ąĖąĄ, ąĖą╝ąĄčÄčé čüą╗ąŠąČąĮąŠčüčéąĖ ą┐čĆąĖ ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮąĖąĖ ąĮą░čüčéčĆąŠąĄą║. WPS ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠą▒ąŠąĘąĮą░čćą░ąĄčé ąĖą╝čÅ čüąĄčéąĖ ąĖ ąĘą░ą┤ą░ąĄčé čłąĖčäčĆąŠą▓ą░ąĮąĖąĄ ą┤ą╗čÅ ąĘą░čēąĖčéčŗ ą▒ąĄčüą┐čĆąŠą▓ąŠą┤ąĮąŠą╣ Wi-Fi čüąĄčéąĖ ąŠčé ąĮąĄčüą░ąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░ ą▓ čüąĄčéčī, ą┐čĆąĖ čŹč鹊ą╝ ąĮąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą▓čĆčāčćąĮčāčÄ ąĘą░ą┤ą░ą▓ą░čéčī ą▓čüąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ.
[ąĪčüčŗą╗ą║ąĖ ]
1 . FAQ ESP8266 site:espressif.com .2 . Download Documents site:espressif.com.3 . Iot Espressif API DOCUMENTATION .4 . ESP-TOUCH User Guide site:espressif.com.5 . ESP8266 SDKs & Demos .6 . ESP8266 Technical Reference site:espressif.com.7 . ESP8266: ą┐čĆąĖą╝ąĄčĆ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤ AT .8 . FreeRTOS: ą┐čĆą░ą║čéąĖč湥čüą║ąŠąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ, čćą░čüčéčī 1 (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĘą░ą┤ą░čćą░ą╝ąĖ) .