|
I2C čŹč鹊 ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣, čüąĖąĮčģčĆąŠąĮąĮčŗą╣, ą┐ąŠą╗čāą┤čāą┐ą╗ąĄą║čüąĮčŗą╣ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čüčāčēąĄčüčéą▓ąŠą▓ą░čéčī ąĮą░ ąŠą┤ąĮąŠą╣ čłąĖąĮąĄ ąĮąĄčüą║ąŠą╗čīą║ąŠ čāčüčéčĆąŠą╣čüčéą▓ master ąĖ slave. ą©ąĖąĮą░ I2C čüąŠą┤ąĄčƹȹĖčé 2 čüąĖą│ąĮą░ą╗ą░: ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ (serial data line, SDA) ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ čéą░ą║čéčŗ (serial clock, SCL). ą×ą▒ą░ čüąĖą│ąĮą░ą╗ą░ ą┐ąŠą┤čéčÅąĮčāčéčŗ ą║ ą╗ąŠą│. 1 ą▓ąĄčĆčģąĮąĖą╝ąĖ ąĮą░ą│čĆčāąĘąŠčćąĮčŗą╝ąĖ čĆąĄąĘąĖčüč鹊čĆą░ą╝ąĖ (pull-up).
ąŻ ESP32 ąĄčüčéčī ą┤ą▓ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ I2C (čā ESP32-C3 ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ I2C č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ), ą║ąŠč鹊čĆčŗąĄ ąŠčéą▓ąĄčćą░čÄčé ąĘą░ ąŠą▒čĆą░ą▒ąŠčéą║čā ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ ą┐ąŠ čłąĖąĮąĄ I2C. ą×ą┤ąĖąĮ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ I2C ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą╗ąĖą▒ąŠ ą║ą░ą║ master, ą╗ąĖą▒ąŠ ą║ą░ą║ slave. ą×ą┤ąĮą░ą║ąŠ ąĮąĄ čā ą▓čüąĄčģ čćąĖą┐ąŠą▓ čüąĄą╝ąĄą╣čüčéą▓ą░ ESP32 ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ I2C ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą▓ čĆąĄąČąĖą╝ąĄ slave (ąĮą░ą┐čĆąĖą╝ąĄčĆ čéą░ą║ čā ESP32-C2).
ąÆ čüąŠčüčéą░ą▓ąĄ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖčÅ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ ESP-IDF [2] ąĄčüčéčī ą┤čĆą░ą╣ą▓ąĄčĆ I2C, ą║ąŠč鹊čĆčŗą╣ ąŠą▒čüą╗čāąČąĖą▓ą░ąĄčé ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ ą┐ąŠ čłąĖąĮąĄ I2C. ąöčĆą░ą╣ą▓ąĄčĆ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ čäčāąĮą║čåąĖąĖ:
ŌŚÅ ą¦č鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī ą▒ą░ą╣čé ą▓ čĆąĄąČąĖą╝ąĄ Master.
ŌŚÅ ąĀąĄąČąĖą╝ Slave.
ŌŚÅ ą¦č鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī ą▓ čĆąĄą│ąĖčüčéčĆąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą▓ čüą▓ąŠčÄ ąŠč湥čĆąĄą┤čī čüčćąĖčéčŗą▓ą░čÄčéčüčÅ/ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ master.
[ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆą░ I2C]
ąÆ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĄą╝ ąŠą┐ąĖčüą░ąĮąĖąĖ ąŠą┐ąĖčüčŗą▓ą░čÄčéčüčÅ čéąĖą┐ąŠą▓čŗąĄ čłą░ą│ąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ I2C.
1. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ - ąĮą░ čŹč鹊ą╝ čłą░ą│ąĄ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąŠąĮąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ - čĆąĄąČąĖą╝ master ąĖą╗ąĖ slave, ąĮąŠąČą║ąĖ GPIO ą┤ą╗čÅ čüąĖą│ąĮą░ą╗ąŠą▓ SDA ąĖ SCL, čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░, ąĖ čé. ą┤.
2. ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ - ą░ą║čéąĖą▓ą░čåąĖčÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĮą░ ąŠą┤ąĮąŠą╝ ąĖąĘ ą┤ą▓čāčģ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ I2C ą▓ ą║ą░č湥čüčéą▓ąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ master ąĖą╗ąĖ slave.
3. ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹊ą│ąŠ, ą║ą░ą║ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆ - ąĄčüą╗ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ master, č鹊 čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖčÅą╝ąĖ. ąĢčüą╗ąĖ slave - ąŠčéą▓ąĄčé ąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠčé master.
4. ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ - ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ąĖ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ I2C.
5. ą×ą┐čåąĖąŠąĮą░ą╗čīąĮąŠ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮą░čÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ą░čÅ ąĮą░čüčéčĆąŠą╣ą║ą░ I2C - ą┐ąŠą┤čüčéčĆąŠą╣ą║ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (čéą░ą╣ą╝ąĖąĮą│ąĖ, ą┐ąŠčĆčÅą┤ąŠą║ ą▒ąĖčé, ąĖ čé. ą┐.).
6. ą×ą▒čĆą░ą▒ąŠčéą║ą░ ąŠčłąĖą▒ąŠą║ - ą║ą░ą║ čĆą░čüą┐ąŠąĘąĮą░čéčī ąĖ ąŠą▒čĆą░ą▒ąŠčéą░čéčī ąŠčłąĖą▒ą║ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĖ ąŠčłąĖą▒ą║ąĖ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ.
7. ąŻą┤ą░ą╗ąĄąĮąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆą░ - ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖąĄ čĆąĄčüčāčĆčüąŠą▓, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ I2C, ą║ąŠą│ą┤ą░ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ ąĘą░ą▓ąĄčĆčłąĄąĮčŗ.
[ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ]
ąöą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ąŠą▒ą╝ąĄąĮą░ ą┐ąŠ čłąĖąĮąĄ I2C ąĮą░čćąĖąĮą░čÄčé čü ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤čĆą░ą╣ą▓ąĄčĆą░. ąŁč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ čüčéčĆčāą║čéčāčĆčŗ i2c_config_t:
ŌŚÅ ąŻčüčéą░ąĮąŠą▓ą║ą░ čĆąĄąČąĖą╝ą░ master ąĖą╗ąĖ slave (ąĘąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ i2c_mode_t).
ŌŚÅ ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ąĮąŠąČąĄą║ GPIO ą┤ą╗čÅ SDA ąĖ SCL, čāčüčéą░ąĮąŠą▓ą║ą░ ą┐čĆąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą┐ąŠą┤čéčÅąČą║ąĖ pull-up.
ŌŚÅ ąŻčüčéą░ąĮąŠą▓ą║ą░ čüą║ąŠčĆąŠčüčéąĖ ąŠą▒ą╝ąĄąĮą░ (č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ master).
ŌŚÅ ąóąŠą╗čīą║ąŠ ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ slave - čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ąĖą╗ąĖ ąĮąĄčé 10-ą▒ąĖčéąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░ ą░ą┤čĆąĄčüą░čåąĖąĖ, čāčüčéą░ąĮąŠą▓ą║ą░ ą░ą┤čĆąĄčüą░.
ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčüčÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ i2c_param_config() čü ą┐ąĄčĆąĄą┤ą░č湥ą╣ ąĄą╣ ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąĮąŠą╝ąĄčĆą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ I2C ąĖ čüčéčĆčāą║čéčāčĆčŗ i2c_config_t.
ą¤čĆąĖą╝ąĄčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┤ą╗čÅ master:
int i2c_master_port = 0;
i2c_config_t conf = {
.mode = I2C_MODE_MASTER,
.sda_io_num = CONFIG_I2C_MASTER_SDA_IO,
.sda_pullup_en = GPIO_PULLUP_ENABLE,
.scl_io_num = CONFIG_I2C_MASTER_SCL_IO,
.scl_pullup_en = GPIO_PULLUP_ENABLE,
.master.clk_speed = CONFIG_I2C_MASTER_FREQ_HZ,
// ąŚą┤ąĄčüčī ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čäą╗ą░ą│ąĖ I2C_SCLK_SRC_FLAG_* ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą░
// ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ I2C:
.clk_flags = 0,
};
ą¤čĆąĖą╝ąĄčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┤ą╗čÅ slave:
int i2c_slave_port = I2C_SLAVE_NUM;
i2c_config_t conf_slave = {
.sda_io_num = CONFIG_I2C_SLAVE_SDA_IO,
.sda_pullup_en = GPIO_PULLUP_ENABLE,
.scl_io_num = CONFIG_I2C_SLAVE_SCL_IO,
.scl_pullup_en = GPIO_PULLUP_ENABLE,
.mode = I2C_MODE_SLAVE,
.slave.addr_10bit_en = 0,
.slave.slave_addr = CONFIG_ESP_SLAVE_ADDR,
.clk_flags = 0,
};
ąØą░ čŹč鹊ą╝ čłą░ą│ąĄ i2c_param_config() čéą░ą║ąČąĄ čāčüčéą░ąĮąŠą▓ąĖčé ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ I2C ą▓ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ą║ąŠč鹊čĆčŗąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĄą╣ I2C. ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ ąŠą▒ čŹč鹊ą╝ čüą╝. ą┤ą░ą╗ąĄąĄ ą▓čĆąĄąĘą║čā "ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮą░čÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ą░čÅ ąĮą░čüčéčĆąŠą╣ą║ą░ I2C".
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ. ąöąŠą▒ą░ą▓ą╗čÅąĄčéčüčÅ clock allocator ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čĆą░ąĘą╗ąĖčćąĮčŗčģ ąĖčüč鹊čćąĮąĖą║ąŠą▓ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ. ą×ąĮ ą▒čāą┤ąĄčé ą▓čŗą▒ąĖčĆą░čéčī ąŠą┤ąĖąĮ ąĖąĘ ąĖčüč鹊čćąĮąĖą║ąŠą▓ čéą░ą║č鹊ą▓, ą║ąŠč鹊čĆčŗą╣ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆąĖčé ą▓čüąĄą╝ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝ ą┐ąŠ čćą░čüč鹊č鹥 ąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčÅą╝ (ą║ą░ą║ ąĘą░ą┐čĆą░čłąĖą▓ą░ą╗ąŠčüčī ą▓ i2c_config_t::clk_flags).
ąÜąŠą│ą┤ą░ ą┐ąŠą╗ąĄ i2c_config_t::clk_flags čĆą░ą▓ąĮąŠ 0, clock allocator ą▓čŗą▒ąĄčĆąĄčé č鹊ą╗čīą║ąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĄ čü ąČąĄą╗ą░ąĄą╝ąŠą╣ čćą░čüč鹊č鹊ą╣. ąĢčüą╗ąĖ ąĮąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą▓ čüą┐ąĄčåąĖą░ą╗čīąĮčŗčģ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčÅčģ, čéą░ą║ąĖčģ ą║ą░ą║ APB, č鹊 ą▓čŗ ą╝ąŠąČąĄč鹥 ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī clock allocator ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą░ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓ č鹊ą╗čīą║ąŠ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ąČąĄą╗ą░ąĄą╝ąŠą╣ čćą░čüč鹊č鹊ą╣. ąöą╗čÅ čŹč鹊ą│ąŠ čāčüčéą░ąĮąŠą▓ąĖč鹥 i2c_config_t::clk_flags ą▓ 0. ąöą╗čÅ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ čéą░ą║č鹊ą▓ čüą╝. čéą░ą▒ą╗ąĖčåčā ąĮąĖąČąĄ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗąĄ čéą░ą║čéčŗ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝čŗ, ąĄčüą╗ąĖ ąĮąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé ąĘą░ą┐čĆąŠčłąĄąĮąĮčŗą╝ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčÅą╝, čé. ąĄ. ą╗čÄą▒ąŠą╣ ą▒ąĖčé ąĘą░ą┐čĆąŠčłąĄąĮąĮčŗčģ ą▓ąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣ (clk_flags) čĆą░ą▓ąĄąĮ 0.
ąóą░ą▒ą╗ąĖčåą░ 1. ąźą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ąĖčüč鹊čćąĮąĖą║ąŠą▓ čéą░ą║č鹊ą▓ ESP32.
| ąśą╝čÅ čéą░ą║č鹊ą▓ |
ą¦ą░čüč鹊čéą░ čéą░ą║č鹊ą▓ |
MAX čćą░čüč鹊čéą░ SCL |
ąÆąŠąĘą╝ąŠąČąĮąŠčüčéąĖ čéą░ą║č鹊ą▓ |
| APB clock |
80 ą£ąōčå |
4 ą£ąōčå |
/ |
ążą╗ą░ą│ąĖ i2c_config_t::clk_flags ąĖą╝ąĄčÄčé čüą╗ąĄą┤čāčÄčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ:
I2C_SCLK_SRC_FLAG_AWARE_DFS: čüą║ąŠčĆąŠčüčéčī čéą░ą║č鹊ą▓ I2C ąĮąĄ ą╝ąĄąĮčÅąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą╝ąĄąĮčÅąĄčéčüčÅ čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ APB.
I2C_SCLK_SRC_FLAG_LIGHT_SLEEP: ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ čĆąĄąČąĖą╝ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ Light-sleep, ą▓ ą║ąŠč鹊čĆąŠą╝ čéą░ą║čéčŗ APB ąĮąĄ čĆą░ą▒ąŠčéą░čÄčé.
ąØąĄą║ąŠč鹊čĆčŗąĄ čäą╗ą░ą│ąĖ ą╝ąŠą│čāčé ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ ąĮą░ ESP32, ą┐ąŠčŹč鹊ą╝čā ą┐ąĄčĆąĄą┤ ąĖčģ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ąŠąĘąĮą░ą║ąŠą╝čīč鹥čüčī čü č鹥čģąĮąĖč湥čüą║ąĖą╝ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠą╝.
ą¦ą░čüč鹊čéą░ čéą░ą║č鹊ą▓ SCL ą▓ čĆąĄąČąĖą╝ąĄ master ąĮąĄ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▒ąŠą╗čīčłąĄ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čćą░čüč鹊čéčŗ ą┤ą╗čÅ SCL, čāą┐ąŠą╝čÅąĮčāč鹊ą╣ ą▓ čéą░ą▒ą╗ąĖčåąĄ ą▓čŗčłąĄ.
(ą£ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ) čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ SCL ą▒čāą┤ąĄčé ąĘą░ą▓ąĖčüąĄčéčī ąŠčé ąĮąŠą╝ąĖąĮą░ą╗ą░ čĆąĄąĘąĖčüč鹊čĆąŠą▓ pull-up ąĖ ąĄą╝ą║ąŠčüčéąĖ čüąĖą│ąĮą░ą╗ąŠą▓ čłąĖąĮčŗ (ąĖą╗ąĖ ąŠčé ąĄą╝ą║ąŠčüčéąĖ ą▓čüąĄčģ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ ą║ čłąĖąĮąĄ čāčüčéčĆąŠą╣čüčéą▓). ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅą╝ čüą╗ąĄą┤čāąĄčé ą▓čŗą▒čĆą░čéčī ą║ąŠčĆčĆąĄą║čéąĮčŗą╣ ąĮąŠą╝ąĖąĮą░ą╗ čĆąĄąĘąĖčüč鹊čĆąŠą▓ pull-up, čćč鹊ą▒čŗ čłąĖąĮą░ čĆą░ą▒ąŠčéą░ą╗ą░ ąĮą░ ąĮčāąČąĮąŠą╣ čćą░čüč鹊č鹥. ą×ą▒čŗčćąĮąŠ ą┤ą╗čÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ I2C ą▓čŗą▒ąĖčĆą░čÄčé čĆąĄąĘąĖčüč鹊čĆčŗ pull-up ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé 1 ą║ą×ą╝ ą┤ąŠ 10 ą║ą×ą╝, ąŠą┤ąĮą░ą║ąŠ ą┤ą╗čÅ čĆą░ąĘąĮčŗčģ čćą░čüč鹊čé ą╝ąŠą│čāčé ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ čĆą░ąĘąĮčŗąĄ ąĮąŠą╝ąĖąĮą░ą╗čŗ čĆąĄąĘąĖčüč鹊čĆąŠą▓. ąÆ ąŠą▒čēąĄą╝, č湥ą╝ ą▓čŗčłąĄ ą▓čŗą▒čĆą░ąĮąĮą░čÅ čćą░čüč鹊čéą░, č鹥ą╝ ą╝ąĄąĮčīčłąĄ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĮąŠą╝ąĖąĮą░ą╗ čĆąĄąĘąĖčüč鹊čĆąŠą▓ (ąĮąŠ ąĮąĄ ą╝ąĄąĮčīčłąĄ 1 ą║ą×ą╝). ą¤čĆąĖčćąĖąĮą░ ą▓ č鹊ą╝, čćč鹊 čüą╗ąĖčłą║ąŠą╝ ą▒ąŠą╗čīčłąŠą╣ čĆąĄąĘąĖčüč鹊čĆ ą▒čāą┤ąĄčé čüąĖą╗čīąĮąŠ ąŠą│čĆą░ąĮąĖčćąĖą▓ą░čéčī č鹊ą║, ą┐čĆąĖą▓ąŠą┤čÅ ą║ čāą▓ąĄą╗ąĖč湥ąĮąĖčÄ ą▓čĆąĄą╝ąĄąĮąĖ ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ čüąĖą│ąĮą░ą╗ą░ ąĖ čāą╝ąĄąĮčīčłąĄąĮąĖčÄ čĆą░ą▒ąŠč湥ą╣ čćą░čüč鹊čéčŗ čłąĖąĮčŗ. ą×ą▒čŗčćąĮąŠ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čĆąĄąĘąĖčüč鹊čĆčŗ ą▓ ąĖąĮč鹥čĆą▓ą░ą╗ąĄ 2 .. 5 ą║ą×ą╝, ąŠą┤ąĮą░ą║ąŠ ą╝ąŠąČąĄčé ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ čāč鹊čćąĮąĄąĮąĖąĄ ąĮąŠą╝ąĖąĮą░ą╗ąŠą▓, čćč鹊ą▒čŗ ą┐ąŠą┤ąŠą│ąĮą░čéčī ąĖčģ ą┐ąŠą┤ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
[ąśąĮčüčéą░ą╗ą╗čÅčåąĖčÅ ą┤čĆą░ą╣ą▓ąĄčĆą░]
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┤čĆą░ą╣ą▓ąĄčĆ I2C ą▒čŗą╗ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ, čāčüčéą░ąĮąŠą▓ąĖč鹥 ąĄą│ąŠ ą┐čāč鹥ą╝ ą▓čŗąĘąŠą▓ą░ čäčāąĮą║čåąĖąĖ i2c_driver_install() čüąŠ čüą╗ąĄą┤čāčÄčēąĖą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ:
ŌŚÅ ąØąŠą╝ąĄčĆ ą┐ąŠčĆčéą░ (ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░) I2C, čéąĖą┐ i2c_port_t.
ŌŚÅ ąĀąĄąČąĖą╝ master ąĖą╗ąĖ slave, ą▓čŗą▒čĆą░ąĮąĮčŗą╣ ąĖąĘ i2c_mode_t.
ŌŚÅ (ąóąŠą╗čīą║ąŠ ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ slave) čĆą░ąĘą╝ąĄčĆ ą▓čŗą┤ąĄą╗čÅąĄą╝čŗčģ ą▒čāč乥čĆąŠą▓ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ. ą¤ąŠčüą║ąŠą╗čīą║čā ą┐čĆąĖąĮčåąĖą┐ čĆą░ą▒ąŠčéčŗ čłąĖąĮčŗ I2C ąŠčĆąĖąĄąĮčéąĖčĆąŠą▓ą░ąĮ ąĮą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ master, ą┤ą░ąĮąĮčŗąĄ ą╝ąŠą│čāčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčīčüčÅ ąŠčé slave ą║ master č鹊ą╗čīą║ąŠ ą┐ąŠ ąĘą░ą┐čĆąŠčüčā master. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čāčüčéčĆąŠą╣čüčéą▓ąŠ slave ą┤ąŠą╗ąČąĮąŠ ąĖą╝ąĄčéčī ą▒čāč乥čĆ ąŠčéą┐čĆą░ą▓ą║ąĖ, ą║ąŠą┤ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ slave ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ. ąöą░ąĮąĮčŗąĄ ąŠčüčéą░čÄčéčüčÅ ą▓ ą▒čāč乥čĆąĄ ąŠčéą┐čĆą░ą▓ą║ąĖ, čćč鹊ą▒čŗ ąĖčģ ą╝ąŠą│ ą┐čĆąŠčćąĖčéą░čéčī master ą┐ąŠ čüą▓ąŠąĄą╝čā čāčüą╝ąŠčéčĆąĄąĮąĖčÄ.
ŌŚÅ ążą╗ą░ą│ąĖ ą┤ą╗čÅ ą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (čüą╝. ąĘąĮą░č湥ąĮąĖčÅ ESP_INTR_FLAG_* ą▓ esp_hw_support/include/esp_intr_alloc.h).
[ą×ą▒ą╝ąĄąĮ ą▓ čĆąĄąČąĖą╝ąĄ master]
ą¤ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ I2C-ą┤čĆą░ą╣ą▓ąĄčĆą░ ESP32 ą│ąŠč鹊ą▓ ą║ ąŠą▒ą╝ąĄąĮčā čü ą┤čĆčāą│ąĖą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ I2C.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ I2C, čĆą░ą▒ąŠčéą░čÄčēąĖą╣ ą▓ čĆąĄąČąĖą╝ąĄ master, ąŠčéą▓ąĄčćą░ąĄčé ąĘą░ čāčüčéą░ąĮąŠą▓ą║čā ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ čü čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ I2C slave ąĖ ąŠčéą┐čĆą░ą▓ą║čā ą║ąŠą╝ą░ąĮą┤, ą┐čĆąĖą▓ąŠą┤čÅčēąĖčģ ą▓ ą┤ąĄą╣čüčéą▓ąĖąĄ slave - ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą╗čÅ ą┐čĆąŠą▓ąĄą┤ąĄąĮąĖčÅ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ąĖ ąŠčéą┐čĆą░ą▓ą║ąĖ čüčćąĖčéą░ąĮąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ąŠą▒čĆą░čéąĮąŠ ą║ master.
ąöą╗čÅ čāą╗čāčćčłąĄąĮąĖčÅ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĖ čŹč鹊ą│ąŠ ą┐čĆąŠčåąĄčüčüą░ ą┤čĆą░ą╣ą▓ąĄčĆ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą║ąŠąĮč鹥ą╣ąĮąĄčĆ, čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╣ "command link", ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░ą┐ąŠą╗ąĮąĄąĮčŗ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčīčÄ ą║ąŠą╝ą░ąĮą┤, ąĖ ąĘą░č鹥ą╝ ą┐ąĄčĆąĄą┤ą░ąĮ ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā I2C.
Master Write. ą¤čĆąĖą╝ąĄčĆ ąĮąĖąČąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ čüčéčĆąŠąĖčéčüčÅ command link ą┤ą╗čÅ I2C master, čćč鹊ą▒čŗ ąŠčéą┐čĆą░ą▓ąĖčéčī n ą▒ą░ą╣čé čāčüčéčĆąŠą╣čüčéą▓čā slave.
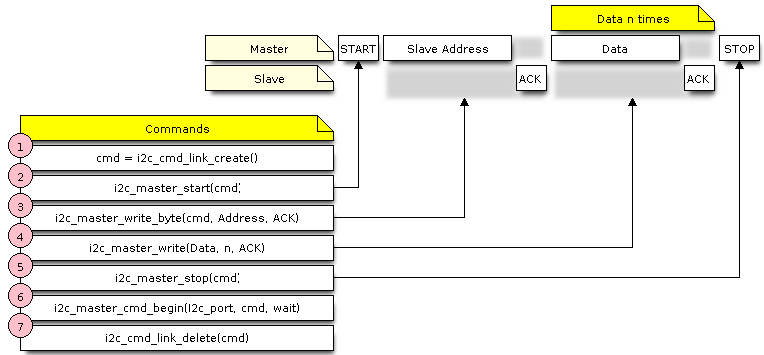
ąĀąĖčü. 1. I2C command link - ą┐čĆąĖą╝ąĄčĆ ąĘą░ą┐ąĖčüąĖ master.
ąĪą╗ąĄą┤čāčÄčēąĄąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ čĆą░ą▒ąŠčéą░ąĄčé command link ą┤ą╗čÅ "master write", ą║ą░ą║ ąŠąĮ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ąĖ čćč鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ąĮčāčéčĆąĖ:
1. ąĪąŠąĘą┤ą░ąĄčéčüčÅ command link ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ i2c_cmd_link_create(). ąŚą░č鹥ą╝ command link ąĘą░ą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčīčÄ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ą▓ slave:
(a) Start bit - ą▓čŗąĘąŠą▓ąŠą╝ i2c_master_start().
(b) Slave address - ą▓čŗąĘąŠą▓ąŠą╝ i2c_master_write_byte(). ąÆ ą║ą░č湥čüčéą▓ąĄ ą░čĆą│čāą╝ąĄąĮčéą░ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ąŠą┤ąĖąĮ ą▒ą░ą╣čé ą░ą┤čĆąĄčüą░.
(c) Data - ąŠą┤ąĖąĮ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą▓ ą║ą░č湥čüčéą▓ąĄ ą░čĆą│čāą╝ąĄąĮčéą░ i2c_master_write().
(d) Stop bit - ą▓čŗąĘąŠą▓ąŠą╝ i2c_master_stop().
ąŻ ąŠą▒ąŠąĖčģ čäčāąĮą║čåąĖą╣ i2c_master_write_byte() ąĖ i2c_master_write() ąĄčüčéčī ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╣ ą░čĆą│čāą╝ąĄąĮčé, čāą║ą░ąĘčŗą▓ą░čÄčēąĖą╣, ą┤ąŠą╗ąČąĄąĮ ą╗ąĖ master čāą▒ąĄą┤ąĖčéčīčüčÅ, čćč鹊 ą┐ąŠą╗čāčćąĖą╗ ą▒ąĖčé ACK.
2. ąŚą░ą┐čāčüą║ą░ąĄčéčüčÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ command link ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ I2C ą┐čāč鹥ą╝ ą▓čŗąĘąŠą▓ą░ i2c_master_cmd_begin(). ąÜą░ą║ č鹊ą╗čīą║ąŠ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ąĮą░čćą░ą╗ąŠčüčī, command link ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮ.
3. ą¤ąŠčüą╗ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą║ąŠą╝ą░ąĮą┤ ąŠčüą▓ąŠą▒ąŠąČą┤ą░čÄčéčüčÅ čĆąĄčüčāčĆčüčŗ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą┤ą╗čÅ command link, ą┐čāč鹥ą╝ ą▓čŗąĘąŠą▓ą░ i2c_cmd_link_delete().
Master Read. ą¤čĆąĖą╝ąĄčĆ ąĮąĖąČąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ ą┐ąŠčüčéčĆąŠąĖčéčī command link ą┤ą╗čÅ I2C master, čćč鹊ą▒čŗ ą┐čĆąŠčćąĖčéą░čéčī n ą▒ą░ą╣čé ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░ slave.

ąĀąĖčü. 2. I2C command link - ą┐čĆąĖą╝ąĄčĆ čćč鹥ąĮąĖčÅ master.
ąÆ čüčĆą░ą▓ąĮąĄąĮąĖąĖ čü ąĘą░ą┐ąĖčüčīčÄ ą┤ą░ąĮąĮčŗčģ, command link ąĘą░ą┐ąŠą╗ąĮčÅąĄčéčüčÅ ąĮą░ čłą░ą│ąĄ 4 ąĮąĄ ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖą╣ i2c_master_write..., ą░ i2c_master_read_byte() ąĖ/ąĖą╗ąĖ i2c_master_read(). ąóą░ą║ąČąĄ ą┐ąŠčüą╗ąĄą┤ąĮąĄąĄ čćč鹥ąĮąĖąĄ ąĮą░ čłą░ą│ąĄ 5 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ čéą░ą║, čćč鹊 master ąĮąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▒ąĖčé ACK.
ąśąĮą┤ąĖą║ą░čåąĖčÅ Write ąĖą╗ąĖ Read. ą¤ąŠčüą╗ąĄ ąŠčéą┐čĆą░ą▓ą║ąĖ ą░ą┤čĆąĄčüą░ slave-čāčüčéčĆąŠą╣čüčéą▓ą░ (čłą░ą│ 3 ąĮą░ ąŠą▒ąŠąĖčģ ą┤ąĖą░ą│čĆą░ą╝ą╝ą░čģ čĆąĖčü. 1 ąĖ čĆąĖčü. 2), čāčüčéčĆąŠą╣čüčéą▓ąŠ master ą╗ąĖą▒ąŠ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ slave, ą╗ąĖą▒ąŠ čćąĖčéą░ąĄčé ąĖąĘ ąĮąĄą│ąŠ. ąśąĮč乊čĆą╝ą░čåąĖčÅ ąŠ č鹊ą╝, ą║ą░ą║ą░čÅ ąĖąĘ čŹčéąĖčģ ąŠą┐ąĄčĆą░čåąĖą╣ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé, čüą║čĆčŗčéą░ ą▓ čüą░ą╝ąŠą╝ ą╝ą╗ą░ą┤čłąĄą╝ ą▒ąĖč鹥 ą░ą┤čĆąĄčüą░ slave-čāčüčéčĆąŠą╣čüčéą▓ą░.
ą¤ąŠ čŹč鹊ą╣ ą┐čĆąĖčćąĖąĮąĄ command link, ą┐ąŠčüčŗą╗ą░ąĄą╝čŗą╣ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ master ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ą┤ą░ąĮąĮčŗčģ ą▓ slave, čüąŠą┤ąĄčƹȹĖčé ą░ą┤čĆąĄčü (ESP_SLAVE_ADDR << 1) | I2C_MASTER_WRITE, ąĖ čŹč鹊 ą▓čŗą│ą╗čÅą┤ąĖčé čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
i2c_master_write_byte(cmd, (ESP_SLAVE_ADDR << 1) | I2C_MASTER_WRITE, ACK_EN);
ąöą╗čÅ čćč鹥ąĮąĖčÅ ąĖąĘ slave ą▓čŗąĘąŠą▓ ą▒čāą┤ąĄčé ą▓čŗą│ą╗čÅą┤ąĄčéčī čéą░ą║:
i2c_master_write_byte(cmd, (ESP_SLAVE_ADDR << 1) | I2C_MASTER_READ, ACK_EN);
[ą×ą▒ą╝ąĄąĮ ą▓ čĆąĄąČąĖą╝ąĄ slave]
ą¤ąŠčüą╗ąĄ ąĖąĮčüčéą░ą╗ą╗čÅčåąĖąĖ I2C-ą┤čĆą░ą╣ą▓ąĄčĆą░ ESP32 ą│ąŠč鹊ą▓ ą║ ąŠą▒ą╝ąĄąĮčā čü ą┤čĆčāą│ąĖą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ I2C. ąöą╗čÅ čĆąĄąČąĖą╝ą░ slave ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ API-čäčāąĮą║čåąĖąĖ:
i2c_slave_read_buffer(). ąÆčüčÅą║ąĖą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ master ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ slave, slave ą▒čāą┤ąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüąŠčģčĆą░ąĮčÅčéčī ąĘą░ą┐ąĖčüą░ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▓ ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÄ slave ą▓čŗąĘą▓ą░čéčī čäčāąĮą║čåąĖčÄ i2c_slave_read_buffer(), ą║ąŠą│ą┤ą░ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ. ąŻ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ čéą░ą║ąČąĄ ąĄčüčéčī ą┐ą░čĆą░ą╝ąĄčéčĆ, čāą║ą░ąĘčŗą▓ą░čÄčēąĖą╣ ą▓čĆąĄą╝čÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ, ąĄčüą╗ąĖ ą▓ ą▒čāč乥čĆąĄ ą┐čĆąĖąĄą╝ą░ ąĮąĄčé ą┤ą░ąĮąĮčŗčģ. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÄ slave ąČą┤ą░čéčī ą▓ č鹥č湥ąĮąĖąĄ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ čéą░ą╣ą╝ą░čāčéą░ ą╝ąŠą╝ąĄąĮčéą░ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą▓ ą▒čāč乥čĆ.
i2c_slave_write_buffer(). ąæčāč乥čĆ ąŠčéą┐čĆą░ą▓ą║ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ slave čģąŠč湥čé ąŠčéą┐čĆą░ą▓ąĖčéčī čāčüčéčĆąŠą╣čüčéą▓čā master, ą▓ ą┐ąŠčĆčÅą┤ą║ąĄ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ FIFO. ąöą░ąĮąĮčŗąĄ ąŠčüčéą░čÄčéčüčÅ ąĘą┤ąĄčüčī, ą┐ąŠą║ą░ master ąĮąĄ ąĘą░ą┐čĆąŠčüąĖčé ąĖčģ. ąŻ čäčāąĮą║čåąĖąĖ i2c_slave_write_buffer() ąĄčüčéčī ą┐ą░čĆą░ą╝ąĄčéčĆ ą┤ą╗čÅ čāą║ą░ąĘą░ąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ, ąĄčüą╗ąĖ ą▒čāč乥čĆ ąŠčéą┐čĆą░ą▓ą║ąĖ čāąČąĄ ąĘą░ą┐ąŠą╗ąĮąĄąĮ. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗ąĖčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÄ slave application ąČą┤ą░čéčī ą▓ č鹥č湥ąĮąĖąĄ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ čéą░ą╣ą╝ą░čāčéą░ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ ą▓ ą▒čāč乥čĆąĄ ąŠčéą┐čĆą░ą▓ą║ąĖ ą░ą┤ąĄą║ą▓ą░čéąĮąŠą│ąŠ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░.
ą¤čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░, ą│ą┤ąĄ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čŹčéąĖčģ čäčāąĮą║čåąĖą╣, ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ $ESPIDF_PATH/examples/peripherals/i2c.
ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąÆąŠ ą▓čĆąĄą╝čÅ ąĖąĮčüčéą░ą╗ą╗čÅčåąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čéą░ą║ąČąĄ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ I2C.
ąÜą░ą║ čāą┐ąŠą╝ąĖąĮą░ą╗ąŠčüčī ą▓čŗčłąĄ ą▓ ą║ąŠąĮčåąĄ čüąĄą║čåąĖąĖ "ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ", ą║ąŠą│ą┤ą░ čäčāąĮą║čåąĖčÅ i2c_param_config() ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą┤ą╗čÅ ą┐ąŠčĆčéą░ I2C, ąŠąĮą░ čéą░ą║ąČąĄ čāčüčéą░ąĮąŠą▓ąĖčé ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ I2C ą▓ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĄą╣ I2C. ąØąĄą║ąŠč鹊čĆčŗąĄ ą┤čĆčāą│ąĖąĄ čüą▓čÅąĘą░ąĮąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāčÄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ I2C.
ąÆčüąĄ čŹčéąĖ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą╝ąŠąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī ąĮą░ ąĘąĮą░č湥ąĮąĖčÅ, ąŠą┐čĆąĄą┤ąĄą╗čÅąĄą╝čŗąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝, čü ą┐ąŠą╝ąŠčēčīčÄ ą▓čŗąĘąŠą▓ą░ čüą┐ąĄčåąĖą░ą╗čīąĮčŗčģ čäčāąĮą║čåąĖą╣, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗčģ ą▓ čéą░ą▒ą╗ąĖčåąĄ ąĮąĖąČąĄ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ąĘąĮą░č湥ąĮąĖčÅ čéą░ą╣ą╝ąĖąĮą│ą░ čāą║ą░ąĘą░ąĮčŗ ą▓ čéą░ą║čéą░čģ čłąĖąĮčŗ APB. ą¦ą░čüč鹊čéą░ APB čāą║ą░ąĘą░ąĮą░ ą▓ I2C_APB_CLK_FREQ.
ąóą░ą▒ą╗ąĖčåą░ 2. ąöčĆčāą│ąĖąĄ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝čŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ I2C.
| ążčāąĮą║čåąĖčÅ |
ąÜąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝čŗą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ |
| i2c_set_period() |
ąÆčĆąĄą╝čÅ ą╗ąŠą│. 1 ąĖ ą╗ąŠą│. 0 ą┤ą╗čÅ ąĖą╝ą┐čāą╗čīčüąŠą▓ SCL. |
| i2c_set_start_timing() |
ąóą░ą╣ą╝ąĖąĮą│ čüąĖą│ąĮą░ą╗ąŠą▓ SCL ąĖ SDA, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüąĖą│ąĮą░ą╗ąŠą▓ START. |
| i2c_set_stop_timing() |
ąóą░ą╣ą╝ąĖąĮą│ čüąĖą│ąĮą░ą╗ąŠą▓ SCL ąĖ SDA, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüąĖą│ąĮą░ą╗ąŠą▓ STOP. |
| i2c_set_data_timing() |
ąÆčĆąĄą╝ąĄąĮąĮą░čÅ ą▓ąĘą░ąĖą╝ąŠčüą▓čÅąĘčī ą╝ąĄąČą┤čā čüąĖą│ąĮą░ą╗ą░ą╝ąĖ SCL ąĖ SDA, ą║ąŠą│ą┤ą░ slave ąĖčģ ąŠčåąĖčäčĆąŠą▓čŗą▓ą░ąĄčé, ą░ čéą░ą║ąČąĄ ą║ąŠą│ą┤ą░ master ąĖčģ ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄčé. |
| i2c_set_timeout() |
ąóą░ą╣ą╝ą░čāčé I2C. |
| i2c_set_data_mode() |
ąÆčŗą▒ąŠčĆ, ą║ą░ą║ąŠą╣ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ą▒ąĖčé ą┐ąĄčĆą▓čŗą╝ ą┐čĆąĖ ą┐ąĄčĆąĄą┤ą░č湥 / ą┐čĆąĖąĄą╝ąĄ, LSB ąĖą╗ąĖ MSB, ą▓čŗą▒ąŠčĆ ąŠą┤ąĮąŠą│ąŠ ąĖąĘ čĆąĄąČąĖą╝ąŠą▓, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ ą▓ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖąĖ i2c_trans_mode_t. |
ąÜą░ąČą┤ą░čÅ ąĖąĘ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗčģ ą▓ čéą░ą▒ą╗ąĖčåąĄ 2 čäčāąĮą║čåąĖą╣ ąĖą╝ąĄąĄčé ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮčāčÄ čäčāąĮą║čåąĖčÄ _get_, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ą┐čĆąŠą▓ąĄčĆąĖčéčī č鹥ą║čāčēąĄąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ čéą░ą╣ą╝ą░čāčéą░ I2C ą▓čŗąĘąŠą▓ąĖč鹥 i2c_get_timeout().
ąöą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ ąĘąĮą░č湥ąĮąĖą╣ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝čŗčģ ą▓ ą┐čĆąŠčåąĄčüčüąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░, čüą╝. čäą░ą╣ą╗ driver/i2c.c ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čü čüčāčäčäąĖą║čüąŠą╝ _DEFAULT.
ąóą░ą║ąČąĄ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čĆą░ąĘą╗ąĖčćąĮčŗąĄ ąĮąŠąČą║ąĖ GPIO ą┤ą╗čÅ čüąĖą│ąĮą░ą╗ąŠą▓ SDA ąĖ SCL, ąĖ ą┐ąŠčüą╗ąĄ čŹč鹊ą│ąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī čĆąĄąĘąĖčüč鹊čĆčŗ pull-up ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ i2c_set_pin(). ąĢčüą╗ąĖ ą▓čŗ čģąŠčéąĖč鹥 ąĖąĘą╝ąĄąĮąĖčéčī čāąČąĄ ą▓ą▓ąĄą┤ąĄąĮąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 čäčāąĮą║čåąĖčÄ i2c_param_config().
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ pull-up čĆąĄąĘąĖčüč鹊čĆčŗ ESP32 ąĖą╝ąĄčÄčé ąĮąŠą╝ąĖąĮą░ą╗ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ą┤ąĄčüčÅčéą║ąŠą▓ ą║ąĖą╗ąŠąŠą╝, čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą║ąŠč鹊čĆčŗčģ ą▓ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąĄ čüą╗čāčćą░ąĄą▓ čüą╗ąĖčłą║ąŠą╝ ą▒ąŠą╗čīčłąŠąĄ, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ąŠą▒ąŠą╣čéąĖčüčī ą▒ąĄąĘ ą▓ąĮąĄčłąĮąĖčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓ I2C pull-up. ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ąĮąĄčłąĮąĖąĄ čĆąĄąĘąĖčüč鹊čĆčŗ pull-up čü ąĮąŠą╝ąĖąĮą░ą╗ą░ą╝ąĖ, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ąĖ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ I2C.
[ą×ą▒čĆą░ą▒ąŠčéą║ą░ ąŠčłąĖą▒ąŠą║]
ą×čüąĮąŠą▓ąĮčŗąĄ čäčāąĮą║čåąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ I2C ą╗ąĖą▒ąŠ ą▓ąŠąĘą▓čĆą░čéčÅčé ESP_OK ą┐čĆąĖ čāčüą┐ąĄčłąĮąŠą╝ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ, ą╗ąĖą▒ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ ą▓ čüą╗čāčćą░ąĄ ąĮąĄčāą┤ą░čćąĖ. ąźąŠčĆąŠčłą░čÅ ą┐čĆą░ą║čéąĖą║ą░ - ą▓čüąĄą│ą┤ą░ ą┐čĆąŠą▓ąĄčĆčÅčéčī ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĖąĘ čäčāąĮą║čåąĖą╣ ąĘąĮą░č湥ąĮąĖčÅ ąĖ ą┐čĆąĄą┤čāčüą╝ąŠčéčĆąĄčéčī ąŠą▒čĆą░ą▒ąŠčéą║čā ąŠčłąĖą▒ąŠą║. ąöčĆą░ą╣ą▓ąĄčĆ čéą░ą║ąČąĄ ą┐ąĄčćą░čéą░ąĄčé ą▓ ą╗ąŠą│ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą┤ąĄčéą░ą╗ąĖąĘąĖčĆčāčÄčé ąŠčłąĖą▒ą║čā, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┐čĆąĖ ą┐čĆąŠą▓ąĄčĆą║ąĄ ą┤ąŠą┐čāčüčéąĖą╝ąŠčüčéąĖ ą▓ą▓ąĄą┤ąĄąĮąĮąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. ąöą╗čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüč鹥ą╣ čüą╝. čäą░ą╣ą╗ driver/i2c.c ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čü čüčāčäčäąĖą║čüąŠą╝ _ERR_STR.
ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą╗čÅ ąĘą░čģą▓ą░čéą░ ąŠčéą║ą░ąĘąŠą▓ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ slave čĆą░čüčéčÅą│ąĖą▓ą░ąĄčé čüąĖą│ąĮą░ą╗ čéą░ą║č鹊ą▓ ąĮą░ čüą╗ąĖčłą║ąŠą╝ ą▒ąŠą╗čīčłąŠąĄ ą▓čĆąĄą╝čÅ, ą║ąŠą│ą┤ą░ ą┐ąŠą┤ą│ąŠčéą░ą▓ą╗ąĖą▓ą░ąĄčé ąŠčéą┐čĆą░ą▓ą║čā ą┤ą░ąĮąĮčŗčģ ąŠą▒čĆą░čéąĮąŠ ą║ master, čüčĆą░ą▒ąŠčéą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ I2C_TIME_OUT_INT.
ąÆ čüą╗čāčćą░ąĄ ąŠčłąĖą▒ą║ąĖ ąŠą▒ą╝ąĄąĮą░ ą▓čŗ ą╝ąŠąČąĄč鹥 čüą▒čĆąŠčüąĖčéčī ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ ą░ą┐ą┐ą░čĆą░čéąĮčŗąĄ ą▒čāč乥čĆčŗ ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖą╣ i2c_reset_tx_fifo() ąĖ i2c_reset_rx_fifo() ą┤ą╗čÅ ą▒čāč乥čĆąŠą▓ ąŠčéą┐čĆą░ą▓ą║ąĖ ąĖ ą┐čĆąĖąĄą╝ą░ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ.
[ą¤čĆąĖą╝ąĄčĆ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ]
ąĪą╝. $ESPIDF_PATH/examples/peripherals/i2c.
ąØąĖąČąĄ ą▓ čéą░ą▒ą╗ąĖčåąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ąŠą▒čēąĄąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ čäčāąĮą║čåąĖą╣. ą¤ąŠą╗ąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ čäčāąĮą║čåąĖą╣, čéąĖą┐ąŠą▓ ą┤ą░ąĮąĮčŗčģ ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖą╣ čüą╝. ą▓ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ [1].
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĮąĄ ą▓čüąĄ čäčāąĮą║čåąĖąĖ Espressif ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé čĆąĄąČąĖą╝ slave, ąĮą░ą┐čĆąĖą╝ąĄčĆ ESP32C2. ążčāąĮą║čåąĖąĖ čü ą║ąŠčĆąĮąĄą╝ _master_ ą┤ąŠą╗ąČąĮčŗ ą▓čŗąĘą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ą▓ čĆąĄąČąĖą╝ąĄ I2C master, čäčāąĮą║čåąĖąĖ čü ą║ąŠčĆąĮąĄą╝ _slave_ ą┤ąŠą╗ąČąĮčŗ ą▓čŗąĘčŗą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ą▓ čĆąĄąČąĖą╝ąĄ I2C slave.
| ążčāąĮą║čåąĖčÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| i2c_driver_install |
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą┤čĆą░ą╣ą▓ąĄčĆ I2C. ąÆ čĆąĄąČąĖą╝ąĄ master, ąĄčüą╗ąĖ ą║čŹčł ąČąĄą╗ą░č鹥ą╗čīąĮąŠ ąĘą░ą┐čĆąĄčéąĖčéčī (ą║ą░ą║ ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┐čĆąĖ ąĘą░ą┐ąĖčüąĖ flash) ąĖ slave čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠ ą║ ąĖąĮč鹥čĆą▓ą░ą╗ą░ą╝ ą▓čĆąĄą╝ąĄąĮąĖ, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ESP_INTR_FLAG_IRAM. ąÆ čéą░ą║ąŠą╝ čüą╗čāčćą░ąĄ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ą┐ą░ą╝čÅčéčī, ą▓čŗą┤ąĄą╗ąĄąĮąĮčāčÄ ą▓ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╝ RAM ą┤ą╗čÅ čäčāąĮą║čåąĖą╣ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ i2c, ą┐ąŠč鹊ą╝čā čćč鹊 ą╝čŗ ąĮąĄ ą╝ąŠąČąĄą╝ ąŠą▒čĆą░čēą░čéčīčüčÅ ą║ psram (ąĄčüą╗ąĖ psram čĆą░ąĘčĆą░čłąĄąĮą░) ą▓ čäčāąĮą║čåąĖąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠą│ą┤ą░ ą║čŹčł ąĘą░ą┐čĆąĄčēąĄąĮą░. |
| i2c_driver_delete |
ąŻą┤ą░ą╗ąĖčé ą┤čĆą░ą╣ą▓ąĄčĆ. ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĮąĄ ą┐ąŠč鹊ą║ąŠą▒ąĄąĘąŠą┐ą░čüąĮą░. ąŻą▒ąĄą┤ąĖč鹥čüčī ą┐ąĄčĆąĄą┤ ą▓čŗąĘąŠą▓ąŠą╝ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ, čćč鹊 ąĮąĖ ąŠą┤ąĖąĮ ąĖąĘ ą┐ąŠč鹊ą║ąŠą▓ ąĮąĄ ą▒čāą┤ąĄčé ą┐ąŠčüč鹊čÅąĮąĮąŠ čāą┤ąĄčƹȹĖą▓ą░čéčī čüąĄą╝ą░č乊čĆčŗ. |
| i2c_param_config |
ąÜąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé čłąĖąĮčā I2C čü čāą║ą░ąĘą░ąĮąĮčŗą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ. |
| i2c_reset_tx_fifo |
ąĪą▒čĆąŠčüąĖčé ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ FIFO ą┐ąĄčĆąĄą┤ą░čćąĖ I2C. |
| i2c_reset_rx_fifo |
ąĪą▒čĆąŠčüąĖčé FIFO ą┐čĆąĖąĄą╝ą░ I2C. |
| i2c_set_pin |
ąÜąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé ą▓čŗą▓ąŠą┤čŗ GPIO ą┤ą╗čÅ čüąĖą│ąĮą░ą╗ąŠą▓ SCK ąĖ SDA. |
| i2c_master_write_to_device |
ąÆčŗą┐ąŠą╗ąĮčÅąĄčé ąĘą░ą┐ąĖčüčī ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠąĄ ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝čā ą┐ąŠčĆčéčā I2C. ąŁčéą░ čäčāąĮą║čåąĖčÅ čÅą▓ą╗čÅąĄčéčüčÅ ąŠą▒ąĄčĆčéą║ąŠą╣ ąĮą░ą┤ i2c_master_start(), i2c_master_write(), i2c_master_read(), ąĖ čé. ą┤. |
| i2c_master_read_from_device |
ąÆčŗą┐ąŠą╗ąĮąĖčé čćč鹥ąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝čā ą┐ąŠčĆčéčā I2C. ąŁč鹊 čäčāąĮą║čåąĖčÅ čÅą▓ą╗čÅąĄčéčüčÅ ąŠą▒ąĄčĆčéą║ąŠą╣ ąĮą░ą┤ i2c_master_start(), i2c_master_write(), i2c_master_read(), ąĖ čé. ą┤. |
| i2c_master_write_read_device |
ąÆčŗą┐ąŠą╗ąĮčÅąĄčé ąĘą░ą┐ąĖčüčī, ąĘą░ ą║ąŠč鹊čĆčŗą╝ ąĖą┤ąĄčé čćč鹥ąĮąĖąĄ. ą£ąĄąČą┤čā ąĘą░ą┐ąĖčüčīčÄ ąĖ čćč鹥ąĮąĖąĄą╝ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüąĖą│ąĮą░ą╗ REPEATED START I2C, čłąĖąĮą░ ąĮąĄ ąŠčüą▓ąŠą▒ąŠąČą┤ą░ąĄčéčüčÅ, ą┐ąŠą║ą░ čŹčéąĖ ą┤ą▓ąĄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ąĮąĄ ąĘą░ą▓ąĄčĆčłą░čéčüčÅ. ąŁčéą░ čäčāąĮą║čåąĖčÅ čÅą▓ą╗čÅąĄčéčüčÅ ąŠą▒ąĄčĆčéą║ąŠą╣ ąĮą░ą┤ i2c_master_start(), i2c_master_write(), i2c_master_read(), ąĖ čé. ą┤. |
| i2c_cmd_link_create_static |
ąĪąŠąĘą┤ą░ąĄčé ąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé čüą┐ąĖčüąŠą║ ą║ąŠą╝ą░ąĮą┤ I2C čü čāą║ą░ąĘą░ąĮąĮčŗą╝ ą▒čāč乥čĆąŠą╝. ąÆčüąĄ ą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ ąĖą╗ąĖ čüąĖą│ąĮą░ą╗ąŠą▓ (START, STOP, ACK, ...) ą▒čāą┤čāčé ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ ą▓ čŹč鹊ą╝ ą▒čāč乥čĆąĄ. ąŁč鹊čé ą▒čāč乥čĆ ą┤ąŠą╗ąČąĄąĮ ąŠčüčéą░ą▓ą░čéčīčüčÅ ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗą╝ ą▓ č鹥č湥ąĮąĖąĄ ą▓čüąĄą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čéčĆą░ąĮąĘą░ą║čåąĖąĖ. ą¤ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą▓čüąĄčģ čéčĆą░ąĮąĘą░ą║čåąĖą╣ I2C čéčĆąĄą▒čāąĄčéčüčÅ ą▓čŗąĘą▓ą░čéčī i2c_cmd_link_delete_static(). ąØą░čüč鹊čÅč鹥ą╗čīąĮąŠ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĮąĄ ą▓čŗą┤ąĄą╗čÅčéčī čŹč鹊čé ą▒čāč乥čĆ ą▓ čüč鹥ą║ąĄ (čé. ąĄ. ą▓ ą╗ąŠą║ą░ą╗čīąĮčŗčģ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ čäčāąĮą║čåąĖąĖ). ąśčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ čĆą░ąĘą╝ąĄčĆ ą┤ą░ąĮąĮčŗčģ ą╝ąŠąČąĄčé čāą▓ąĄą╗ąĖčćąĖčéčīčüčÅ ą▓ ą▒čāą┤čāčēąĄą╝, ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ čüč鹥ą║ą░, ą┐ąŠčüą║ąŠą╗čīą║čā ą╝ą░ą║čĆąŠčü I2C_LINK_RECOMMENDED_SIZE čéą░ą║ąČąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ą▒ąŠą╗čīčłąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ. ąøčāčćčłąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▒čāč乥čĆ, čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ čüčéą░čéąĖč湥čüą║ąĖ ąĖą╗ąĖ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ (č湥čĆąĄąĘ malloc). |
| i2c_cmd_link_delete_static |
ą×čüą▓ąŠą▒ąŠą┤ąĖčé čüą┐ąĖčüąŠą║ ą║ąŠą╝ą░ąĮą┤ I2C, ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗą╣ čüčéą░čéąĖč湥čüą║ąĖ ą▓čŗąĘąŠą▓ąŠą╝ i2c_cmd_link_create_static. |
| i2c_cmd_link_create |
ąĪąŠąĘą┤ą░ąĄčé ąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé čüą┐ąĖčüąŠą║ ą║ąŠą╝ą░ąĮą┤ I2C čü čāą║ą░ąĘą░ąĮąĮčŗą╝ ą▒čāč乥čĆąŠą╝. ą¤ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą▓čüąĄčģ čéčĆą░ąĮąĘą░ą║čåąĖą╣ I2C čéčĆąĄą▒čāąĄčéčüčÅ ą▓čŗąĘą▓ą░čéčī i2c_cmd_link_delete() ą┤ą╗čÅ ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖčÅ čĆąĄčüčāčĆčüąŠą▓. ąóčĆąĄą▒čāąĄą╝ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą▓čŗą┤ąĄą╗čÅąĄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ. |
| i2c_cmd_link_delete |
ą×čüą▓ąŠą▒ąŠą┤ąĖčé čüą┐ąĖčüąŠą║ ą║ąŠą╝ą░ąĮą┤ I2C, čüąŠąĘą┤ą░ąĮąĮčŗą╣ čĆą░ąĮąĄąĄ ą▓čŗąĘąŠą▓ąŠą╝ i2c_cmd_link_create. |
| i2c_master_start |
ą¤ąŠą╝ąĄčüčéąĖčé ą▓ ąŠč湥čĆąĄą┤čī čüąĖą│ąĮą░ą╗ START ą┤ą╗čÅ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ čüą┐ąĖčüą║ą░ ą║ąŠą╝ą░ąĮą┤. ąÆčŗąĘąŠą▓ąĖč鹥 i2c_master_cmd_begin() ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ą▓čüąĄčģ ą┐ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗčģ ą▓ ąŠč湥čĆąĄą┤čī ą║ąŠą╝ą░ąĮą┤. |
| i2c_master_write_byte |
ą¤ąŠą╝ąĄčüčéąĖčé ą▓ ąŠč湥čĆąĄą┤čī ą║ąŠą╝ą░ąĮą┤čā ąĘą░ą┐ąĖčüąĖ ą▒ą░ą╣čéą░ ą┤ą╗čÅ čüą┐ąĖčüą║ą░ ą║ąŠą╝ą░ąĮą┤. ą¦ąĄčĆąĄąĘ ą┐ąŠčĆčé I2C ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ 1 ą▒ą░ą╣čé. ąÆčŗąĘąŠą▓ąĖč鹥 i2c_master_cmd_begin() ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ą▓čüąĄčģ ą┐ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗčģ ą▓ ąŠč湥čĆąĄą┤čī ą║ąŠą╝ą░ąĮą┤. |
| i2c_master_write |
ą¤ąŠą╝ąĄčüčéąĖčé ą▓ ąŠč湥čĆąĄą┤čī ą║ąŠą╝ą░ąĮą┤čā ąĘą░ą┐ąĖčüąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą▒ą░ą╣čé ą┤ą╗čÅ čüą┐ąĖčüą║ą░ ą║ąŠą╝ą░ąĮą┤. ąÆčŗąĘąŠą▓ąĖč鹥 i2c_master_cmd_begin() ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ą▓čüąĄčģ ą┐ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗčģ ą▓ ąŠč湥čĆąĄą┤čī ą║ąŠą╝ą░ąĮą┤. |
| i2c_master_read_byte |
ą¤ąŠą╝ąĄčüčéąĖčé ą▓ ąŠč湥čĆąĄą┤čī ą║ąŠą╝ą░ąĮą┤čā čćč鹥ąĮąĖčÅ ą▒ą░ą╣čéą░ ą┤ą╗čÅ čüą┐ąĖčüą║ą░ ą║ąŠą╝ą░ąĮą┤. ą¤ąŠ čłąĖąĮąĄ I2C ą▒čāą┤ąĄčé ą┐čĆąŠčćąĖčéą░ąĮ 1 ą▒ą░ą╣čé. ąÆčŗąĘąŠą▓ąĖč鹥 i2c_master_cmd_begin() ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ą▓čüąĄčģ ą┐ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗčģ ą▓ ąŠč湥čĆąĄą┤čī ą║ąŠą╝ą░ąĮą┤. |
| i2c_master_read |
ą¤ąŠą╝ąĄčüčéąĖčé ą▓ ąŠč湥čĆąĄą┤čī ą║ąŠą╝ą░ąĮą┤čā čćč鹥ąĮąĖčÅ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą▒ą░ą╣čé ą┤ą╗čÅ čüą┐ąĖčüą║ą░ ą║ąŠą╝ą░ąĮą┤. ą¤ąŠ čłąĖąĮąĄ I2C ą▒čāą┤ąĄčé ą┐čĆąŠčćąĖčéą░ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▒ą░ą╣čé. ąÆčŗąĘąŠą▓ąĖč鹥 i2c_master_cmd_begin() ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ą▓čüąĄčģ ą┐ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗčģ ą▓ ąŠč湥čĆąĄą┤čī ą║ąŠą╝ą░ąĮą┤. |
| i2c_master_stop |
ą¤ąŠą╝ąĄčüčéąĖčé ą▓ ąŠč湥čĆąĄą┤čī ą║ąŠą╝ą░ąĮą┤čā čüąĖą│ąĮą░ą╗ą░ STOP ą┤ą╗čÅ čüą┐ąĖčüą║ą░ ą║ąŠą╝ą░ąĮą┤. ąÆčŗąĘąŠą▓ąĖč鹥 i2c_master_cmd_begin() ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ą▓čüąĄčģ ą┐ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗčģ ą▓ ąŠč湥čĆąĄą┤čī ą║ąŠą╝ą░ąĮą┤. |
| i2c_master_cmd_begin |
ą¤ąŠčüčŗą╗ą░ąĄčé ą▓čüąĄ ą┐ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗąĄ ą▓ ąŠč湥čĆąĄą┤čī ą║ąŠą╝ą░ąĮą┤čŗ ą┐ąŠ čłąĖąĮąĄ I2C, ą▓ čĆąĄąČąĖą╝ąĄ master. ąŚą░ą┤ą░čćą░ (ą▓čŗąĘčŗą▓ą░čÄčēąĖą╣ ą║ąŠą┤) ą▒čāą┤ąĄčé ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮ, ą┐ąŠą║ą░ ą▓čüąĄ ą║ąŠą╝ą░ąĮą┤čŗ ąĮąĄ ą▒čāą┤čāčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ. ą¤ąŠčĆčé I2C ąĘą░čēąĖčēąĄąĮ ą╝čīčÄč鹥ą║čüąŠą╝, čéą░ą║ čćč鹊 čŹčéą░ čäčāąĮą║čåąĖčÅ ą┐ąŠč鹊ą║ąŠą▒ąĄąĘąŠą┐ą░čüąĮą░čÅ. |
| i2c_slave_write_buffer |
ąŚą░ą┐ąĖčüčŗą▓ą░ąĄčé ą▒ą░ą╣čéčŗ ą▓ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą║ąŠą╗čīčåąĄą▓ąŠą╣ ą▒čāč乥čĆ ą┤ą░ąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ą░ slave. ąÜąŠą│ą┤ą░ ą▒čāč乥čĆ TX FIFO ą┐čāčüčé, ISR ąĘą░ą┐ąŠą╗ąĮąĖčé ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ FIFO ą┤ą░ąĮąĮčŗą╝ąĖ ąĖąĘ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ą║ąŠą╗čīčåąĄą▓ąŠą│ąŠ ą▒čāč乥čĆą░. |
| i2c_slave_read_buffer |
ą¤čĆąŠčćąĖčéą░ąĄčé ą▒ą░ą╣čéčŗ ąĖąĘ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ą▒čāč乥čĆą░ I2C. ąÜąŠą│ą┤ą░ čłąĖąĮą░ I2C ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ, ISR ą▒čāą┤ąĄčé ą║ąŠą┐ąĖčĆąŠą▓ą░čéčī čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ ąĖąĘ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ RX FIFO ą▓ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą║ąŠą╗čīčåąĄą▓ąŠą╣ ą▒čāč乥čĆ. ąÆčŗąĘąŠą▓ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ą▒čāą┤ąĄčé č鹊ą│ą┤ą░ ą║ąŠą┐ąĖčĆąŠą▓ą░čéčī ą▒ą░ą╣čéčŗ ąĖąĘ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ą║ąŠą╗čīčåąĄą▓ąŠą│ąŠ ą▒čāč乥čĆą░ ą▓ ą▒čāč乥čĆ ą┤ą░ąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ. |
| i2c_set_period |
ąŻčüčéą░ąĮąŠą▓ąĖčé ą┐ąĄčĆąĖąŠą┤ čéą░ą║č鹊ą▓ I2C master. |
| i2c_get_period |
ą¤čĆąŠčćąĖčéą░ąĄčé č鹥ą║čāčēąĖą╣ ą┐ąĄčĆąĖąŠą┤ čéą░ą║č鹊ą▓ I2C master. |
| i2c_filter_enable |
ąĀą░ąĘčĆąĄčłą░ąĄčé ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ čäąĖą╗čīčéčĆ ąĮą░ čłąĖąĮąĄ I2C. ąśąĮąŠą│ą┤ą░ ąĮą░ čłąĖąĮčā I2C ą▓ą╗ąĖčÅčÄčé ą▓čŗčüąŠą║ąŠčćą░čüč鹊čéąĮčŗąĄ ą┐ąŠą╝ąĄčģąĖ (ąĮą░ą┐čĆąĖą╝ąĄčĆ ąĖą╝ą┐čāą╗čīčüčŗ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčīčÄ ą┐ąŠčĆčÅą┤ą║ą░ 20 ąĮčü), ąĖą╗ąĖ čäčĆąŠąĮčé ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ čéą░ą║č鹊ą▓ SCL ąŠč湥ąĮčī ą┐ąŠą╗ąŠą│ąĖą╣, čŹč鹊 ą╝ąŠąČąĄčé ąĮą░čĆčāčłąĖčéčī ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą╝ą░čłąĖąĮčŗ čüąŠčüč鹊čÅąĮąĖą╣ master. ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čäčāąĮą║čåąĖąĖ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ čäąĖą╗čīčéčĆą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠčéčäąĖą╗čīčéčĆąŠą▓čŗą▓ą░čéčī ą▓čŗčüąŠą║ąŠčćą░čüč鹊čéąĮčŗąĄ ą┐ąŠą╝ąĄčģąĖ, čćč鹊 ą┤ąĄą╗ą░ąĄčé čĆą░ą▒ąŠčéčā master ą▒ąŠą╗ąĄąĄ čüčéą░ą▒ąĖą╗čīąĮąŠą╣. |
| i2c_filter_disable |
ąŚą░ą┐čĆąĄčēą░ąĄčé čäąĖą╗čīčéčĆ čłąĖąĮčŗ I2C. |
| i2c_set_start_timing |
ąŻčüčéą░ąĮąŠą▓ąĖčé čéą░ą╣ą╝ąĖąĮą│ čüąĖą│ąĮą░ą╗ą░ START I2C master. |
| i2c_get_start_timing |
ą¤čĆąŠčćąĖčéą░ąĄčé č鹥ą║čāčēąĖą╣ čéą░ą╣ą╝ąĖąĮą│ čüąĖą│ąĮą░ą╗ą░ START I2C master. |
| i2c_set_stop_timing |
ąŻčüčéą░ąĮąŠą▓ąĖčé čéą░ą╣ą╝ąĖąĮą│ čüąĖą│ąĮą░ą╗ą░ STOP I2C master. |
| i2c_get_stop_timing |
ą¤čĆąŠčćąĖčéą░ąĄčé č鹥ą║čāčēąĖą╣ čéą░ą╣ą╝ąĖąĮą│ čüąĖą│ąĮą░ą╗ą░ STOP I2C master. |
| i2c_set_data_timing |
ąŻčüčéą░ąĮąŠą▓ąĖčé čéą░ą╣ą╝ąĖąĮą│ čüąĖą│ąĮą░ą╗ą░ ą┤ą░ąĮąĮčŗčģ I2C. |
| i2c_get_data_timing |
ą¤čĆąŠčćąĖčéą░ąĄčé čéą░ą╣ą╝ąĖąĮą│ čüąĖą│ąĮą░ą╗ą░ ą┤ą░ąĮąĮčŗčģ I2C. |
| i2c_set_timeout |
ąŻčüčéą░ąĮąŠą▓ąĖčé ąĘąĮą░č湥ąĮąĖąĄ čéą░ą╣ą╝ą░čāčéą░ I2C. |
| i2c_get_timeout |
ą¤čĆąŠčćąĖčéą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ čéą░ą╣ą╝ą░čāčéą░ I2C. |
| i2c_set_data_mode |
ąŻčüčéą░ąĮąŠą▓ąĖčé čĆąĄąČąĖą╝ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą┤ą░ąĮąĮčŗčģ I2C. |
| i2c_get_data_mode |
ą¤čĆąŠčćąĖčéą░ąĄčé čĆąĄąČąĖą╝ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą┤ą░ąĮąĮčŗčģ I2C. |
[ąĪčüčŗą╗ą║ąĖ]
1. ESP32 Inter-Integrated Circuit (I2C) site:espressif.com.
2. ąŻčüčéą░ąĮąŠą▓ą║ą░ čüčĆąĄą┤čŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ESP-IDF ą┤ą╗čÅ ESP32. |



