|
ąÆ čŹč鹊ą╣ čüčéą░čéčīąĄ čüąŠą┤ąĄčƹȹĖčéčüčÅ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ ą┐ąŠ čéąĖą┐ą░ą╝, čäčāąĮą║čåąĖčÅą╝ ąĖ ą╝ą░ą║čĆąŠčüą░ą╝ ąĘą░ą┤ą░čć FreeRTOS. ą×ąĮąĖ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą│ąĄąĮąĄčĆąĖčĆčāčÄčéčüčÅ ąĖąĘ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗčģ čäą░ą╣ą╗ąŠą▓ FreeRTOS. ąŚą┤ąĄčüčī ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐ąĄčĆąĄą▓ąŠą┤ ąĖčüč鹊čćąĮąĖą║ą░ [1], ą│ą┤ąĄ ą║ čüąŠąČą░ą╗ąĄąĮąĖčÄ ąĄčüčéčī ą┤ąŠčüą░ą┤ąĮčŗąĄ ąŠą┐ąĄčćą░čéą║ąĖ (ą║ąŠč鹊čĆčŗąĄ ą┐ąĄčĆąĄą▓ąŠą┤čćąĖą║ ą┐ąŠčüčéą░čĆą░ą╗čüčÅ ąĖčüą┐čĆą░ą▓ąĖčéčī). ąæąŠą╗ąĄąĄ ą┐čĆą░ą▓ąĖą╗čīąĮčāčÄ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ ą┐ąŠ čäčāąĮą║čåąĖčÅą╝ čüąŠą▓ąĄčéčāčÄ čüą╝ąŠčéčĆąĄčéčī ą▓ ąĖčüčģąŠą┤ąĮąŠą╝ ą║ąŠą┤ąĄ ą┐ąŠčĆčéą░ ESP-IDF FreeRTOS.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ESP-IDF FreeRTOS ąŠčüąĮąŠą▓čŗą▓ą░ąĄčéčüčÅ ąĮą░ Vanilla FreeRTOS v10.4.3. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čüąĖą╝ą╝ąĄčéčĆąĖčćąĮąŠą╣ ą╝ąĮąŠą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüą╝. [2]. ą¤ąŠ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╝ čäčāąĮą║čåąĖčÅą╝, ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĮčŗčģ ą▓ ESP-IDF FreeRTOS, čüą╝. [3]. ąĀą░čüčłąĖčäčĆąŠą▓ą║čā ąĮąĄąĘąĮą░ą║ąŠą╝čŗčģ č鹥čĆą╝ąĖąĮąŠą▓ čüą╝. ą▓ čĆą░ąĘą┤ąĄą╗ąĄ ąĪą╗ąŠą▓ą░čĆąĖą║, ą▓ ą║ąŠąĮčåąĄ čüčéą░čéčīąĖ. ąóą░ą║ąČąĄ čüą╝. čåąĖą║ą╗ čüčéą░č鹥ą╣, ą┐ąŠčüą▓čÅčēąĄąĮąĮčŗčģ FreeRTOS [12].
[ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ]
ąóčĆą░ą┤ąĖčåąĖąŠąĮąĮąŠ čÅą┤čĆąŠ Vanilla FreeRTOS ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāčÄčéčüčÅ ą┤ą╗čÅ ą┐ąŠčĆč鹊ą▓ ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ą┐čāč鹥ą╝ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą╝ą░ą║čĆąŠčüąŠą▓ #define config... ą▓ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ FreeRTOSConfig.h. ąĪ ą┐ąŠą╝ąŠčēčīčÄ čŹčéąĖčģ ą╝ą░ą║čĆąŠčüąŠą▓ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░ čÅą┤čĆą░ ąĖ čĆą░ąĘą╗ąĖčćąĮčŗąĄ čäčāąĮą║čåąĖąĖ čÅą┤čĆą░, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ čĆą░ąĘčĆąĄčłąĖčéčī ąĖą╗ąĖ ąĘą░ą┐čĆąĄčéąĖčéčī. ą×ą┤ąĮą░ą║ąŠ ą▓ čüčĆąĄą┤ąĄ ESP-IDF čäą░ą╣ą╗ FreeRTOSConfig.h čüčćąĖčéą░ąĄčéčüčÅ ą┐čĆąĖą▓ą░čéąĮčŗą╝, ąĖ ąŠąĮ ąĮąĄ čĆą░čüčüčćąĖčéą░ąĮ ąĮą░ ą┐čĆčÅą╝čāčÄ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖčÄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝. ąøčÄą▒ą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ FreeRTOS ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü menuconfig.
ESP-IDF FreeRTOS ą╝ąŠąČąĮąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą▓ ą┐čāč鹥ą╝ ąĘą░ą┐čāčüą║ą░ ą║ąŠą╝ą░ąĮą┤čŗ ą╝ąĄąĮčÄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐čĆąŠąĄą║čéą░ (idf.py menuconfig), ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ąĮą░ą┤ąŠ ąĘą░ą╣čéąĖ ą▓ čĆą░ąĘą┤ąĄą╗ ąĮą░čüčéčĆąŠąĄą║ Component Config / FreeRTOS (čüą╝. čüą║čĆąĖąĮčłąŠčé ąĮą░ čĆąĖčü. 1). ąöą░ą╗ąĄąĄ ą▒čāą┤ąĄčé ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ąĘąĮą░č湥ąĮąĖąĄ ąĮąĄą║ąŠč鹊čĆčŗčģ ąŠą┐čåąĖą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ESP-IDF FreeRTOS, ą┐ąŠą╗ąĮčŗą╣ čüą┐ąĖčüąŠą║ ąŠą┐čåąĖą╣ čüą╝. ą▓ [5].
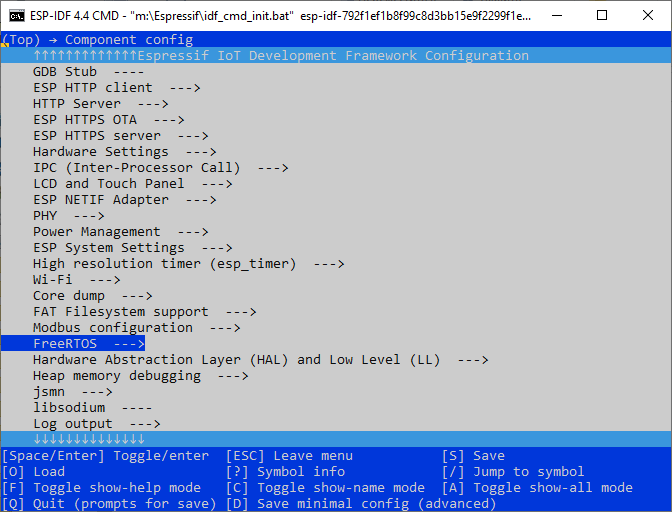
ąĀąĖčü. 1. ąŁą║čĆą░ąĮ čüąĖčüč鹥ą╝čŗ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąŠąĄą║čéą░ ąĮą░ ąŠčüąĮąŠą▓ąĄ ąĘą░ą┐čāčüą║ą░ ą║ąŠą╝ą░ąĮą┤čŗ idf.py menuconfig.
ąŻą┤ąŠą▒ąĮą░čÅ čäąĖčćą░ menuconfig: čüčāčēąĄčüčéą▓čāąĄčé ą┐ąŠąĖčüą║ ąĮčāąČąĮčŗčģ ąŠą┐čåąĖą╣ čü ą┐ąŠą╝ąŠčēčīčÄ čäčāąĮą║čåąĖąĖ [/] Jump to symbol. ąØą░ąČą╝ąĖč鹥 ą║ą╗ą░ą▓ąĖčłčā /, ąĖ čüčéą░ąĮąĄčé ą┤ąŠčüčéčāą┐ąĄąĮ ą▒čŗčüčéčĆčŗą╣ ą┐ąŠąĖčüą║ ą┐ąŠ ąŠą┐čåąĖčÅą╝.
ąÆ ą┐čĆąŠčåąĄčüčüąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ESP-IDF [4] ą▒čāą┤čāčé čéą░ą║ąČąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ čÅčĆą╗čŗą║ąĖ, ą║ąŠč鹊čĆčŗąĄ ąĘą░ą┐čāčüčéčÅčé čĆą░ą▒ąŠčćčāčÄ čüčĆąĄą┤čā ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čüą║čĆąĖą┐č鹊ą▓ Python. ąØą░ čŹčéąĖčģ čüą║čĆąĖą┐čéą░čģ ąŠčüąĮąŠą▓ą░ąĮ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖą╣ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ąĖ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ ą│ąĄąĮąĄčĆą░čåąĖąĖ (ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ) ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ čäą░ą╣ą╗ąŠą▓ ą┤ą╗čÅ ą┐čĆąŠąĄą║č鹊ą▓ ESP32. ąŁčéąĖ čÅčĆą╗čŗą║ąĖ ąĮą░čüčéčĆą░ąĖą▓ą░čÄčé ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ ąŠą║čĆčāąČąĄąĮąĖčÅ, ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┤ą╗čÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ.
ą×ą┤ąĖąĮ čÅčĆą╗čŗą║ ąĘą░ą┐čāčüą║ą░ąĄčé ą║ąŠą╝ą░ąĮą┤ąĮčāčÄ čüčéčĆąŠą║čā cmd.exe, ą┤čĆčāą│ąŠą╣ čÅčĆą╗čŗą║ ąĘą░ą┐čāčüą║ą░ąĄčé ą║ąŠą╝ą░ąĮą┤ąĮčāčÄ čüčéčĆąŠą║čā PowerShell. ąÜą░ą║ąĖą╝ ąĖąĘ ąĮąĖčģ ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ - ąĮąĄ ąĖą╝ąĄąĄčé ąĘąĮą░č湥ąĮąĖčÅ, ą▓čüąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé ąÆą░čłąĖčģ ą┐čĆąĄą┤ą┐ąŠčćč鹥ąĮąĖą╣. ąÆčüąĄ ąŠčüąĮąŠą▓ąĮčŗąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ čüčĆąĄą┤ą░ ESP-IDF ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčé ą┐čāč鹥ą╝ ąĘą░ą┐čāčüą║ą░ čüą║čĆąĖą┐čéą░ idf.py ą▓ą╝ąĄčüč鹥 čü ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠą╣ ą║ąŠą╝ą░ąĮą┤ąŠą╣, ąĮą░ą┐čĆąĖą╝ąĄčĆ menuconfig ąĖą╗ąĖ build. ąŁčéąĖą╝ čüąŠą▒čüčéą▓ąĄąĮąĮąŠ ąĖ ąŠą▒čŖčÅčüąĮčÅąĄčéčüčÅ ąĮąĄą▓čŗąĮąŠčüąĖą╝ą░čÅ č鹊čĆą╝ąŠąĘąĮčāč鹊čüčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ąŠčüąĮąŠą▓ąĮčŗčģ ąŠą┐ąĄčĆą░čåąĖą╣ ą▓ čüčĆąĄą┤ąĄ ESP-IDF.
ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, čŹčéąĖ ą║ąŠą╝ą░ąĮą┤čŗ ą╝ąŠąČąĮąŠ ąĘą░ą┐čāčüą║ą░čéčī ą░ą▓č鹊ąĮąŠą╝ąĮąŠ, ą▒ąĄąĘ ąĘą░ą┐čāčüą║ą░ čüčĆąĄą┤čŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ESP-IDF. ąÆąŠčé čéą░ą║, ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą╝ąŠąČąĮąŠ ąĘą░ą┐čāčüčéąĖčéčī ą╝ąĄąĮčÄ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąŠąĄą║čéą░ čü ą┐ąŠą╝ąŠčēčīčÄ idf.py:
1. ąŚą░ą┐čāčüčéąĖč鹥 ą║ąŠą╝ą░ąĮą┤ąĮčāčÄ čüčéčĆąŠą║čā čü ą┐ąŠą╝ąŠčēčīčÄ čÅčĆą╗čŗčćą║ą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, čÅčĆą╗čŗčćą║ą░ ESP-IDF 4.4 CMD).
2. ąĪ ą┐ąŠą╝ąŠčēčīčÄ ą║ąŠą╝ą░ąĮą┤čŗ cd ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ąĮą░ą▓ąĖą│ą░čåąĖčÄ ą▓ ą║ąŠčĆąĮąĄą▓ąŠą╣ ą║ą░čéą░ą╗ąŠą│ ą┐čĆąŠąĄą║čéą░ (ą║ą░čéą░ą╗ąŠą│, ą│ą┤ąĄ ąĮą░čģąŠą┤čÅčéčüčÅ čäą░ą╣ą╗čŗ .project ąĖ Makefile).
3. ąÆčŗą┐ąŠą╗ąĮąĖč鹥 čüą╗ąĄą┤čāčÄčēčāčÄ ą║ąŠą╝ą░ąĮą┤čā:
python.exe c:\Espressif\frameworks\esp-idf-v4.4\tools\idf.py menuconfig
ąŚą┤ąĄčüčī ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čāą║ą░ąĘą░čéčī ą┐ąŠą╗ąĮčŗą╣ ą┐čāčéčī ą╝ąĄčüčéą░ ąĮą░čģąŠąČą┤ąĄąĮąĖčÅ ąĮą░ ą┤ąĖčüą║ąĄ čäą░ą╣ą╗ą░ čüą║čĆąĖą┐čéą░ idf.py. ą×ąĮ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą║ą░čéą░ą╗ąŠą│ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ čüčĆąĄą┤čŗ ESP-IDF, ą┐ą░ą┐ą║ą░ tools.
CONFIG_FREERTOS_UNICORE ąĘą░ą┐čāčüčéąĖčé ESP-IDF FreeRTOS č鹊ą╗čīą║ąŠ ąĮą░ čÅą┤čĆąĄ CPU0. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čŹč鹊 ąĮąĄ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮąŠ ąĘą░ą┐čāčüą║čā Vanilla FreeRTOS. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, čŹčéą░ ąŠą┐čåąĖčÅ ą╝ąŠąČąĄčé ą┐ąŠą▓ą╗ąĖčÅčéčī ąĮą░ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ąŠčéąĮąŠčüčÅčéčüčÅ ą║ FreeRTOS. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ čŹčäč乥ą║čéą░ą╝ ąĘą░ą┐čāčüą║ą░ ESP-IDF FreeRTOS ąĮą░ ąŠą┤ąĮąŠą╝ čÅą┤čĆąĄ čüą╝. čĆą░ąĘą┤ąĄą╗ "ESP-IDF FreeRTOS Single Core" ą▓ čüčéą░čéčīąĄ [6]. ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ čéą░ą║ąČąĄ ą╝ąŠą│čāčé ą┐ąŠąĖčüą║ą░čéčī ą┤čĆčāą│ąĖąĄ ą╝ąĄčüčéą░ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ ąŠą┐čåąĖąĖ CONFIG_FREERTOS_UNICORE ą▓ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░čģ ESP-IDF.
CONFIG_FREERTOS_ASSERT_ON_UNTESTED_FUNCTION ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ąŠčüčéą░ąĮąŠą▓ą║ąĄ (halt) ą▓ čäčāąĮą║čåąĖčÅčģ ESP-IDF FreeRTOS, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ą▒čŗą╗ąĖ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą┐čĆąŠč鹥čüčéąĖčĆąŠą▓ą░ąĮčŗ ą▓ ą║ąŠąĮč鹥ą║čüč鹥 SMP.
CONFIG_FREERTOS_TASK_FUNCTION_WRAPPER ą┐čĆąĖą╝ąĄąĮąĖčé ą┤ą╗čÅ ą▓čüąĄčģ task-čäčāąĮą║čåąĖą╣ čüą┐ąĄčåąĖą░ą╗čīąĮčāčÄ ąŠą▒ąĄčĆčéą║čā (wrapper). ąÆ čüą╗čāčćą░ąĄ ąĮąĄąŠąČąĖą┤ą░ąĮąĮąŠą│ąŠ ą▓ąŠąĘą▓čĆą░čéą░ ąĖąĘ task-čäčāąĮą║čåąĖąĖ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ąĮąĄ ą┐ąŠ ą┐čĆąĖčćąĖąĮąĄ ą▓čŗąĘąŠą▓ą░ vTaskDelete()) čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ą▓ čäčāąĮą║čåąĖčÄ ąŠą▒ąĄčĆčéą║ąĖ. ąóąŠą│ą┤ą░ čäčāąĮą║čåąĖčÅ ąŠą▒ąĄčĆčéą║ąĖ ą▓čŗą▓ąĄą┤ąĄčé ą▓ ą╗ąŠą│ ąŠčłąĖą▒ą║čā ąĖ ą┐čĆąŠąĖąĘą▓ąĄą┤ąĄčé ą┐ąŠą╗ąĮąŠąĄ ą┐čĆąĄą║čĆą░čēąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ (abort). ą¤čĆąĖą╝ąĄčĆ ą▓čŗą▓ąŠą┤ą░ ą▓ ą╗ąŠą│ ą┤ą╗čÅ čéą░ą║ąŠą╣ čüąĖčéčāą░čåąĖąĖ:
E (25) FreeRTOS: FreeRTOS task should not return. Aborting now!
abort() was called at PC 0x40085c53 on core 0
[ą¤čĆąĖą╗ąŠąČąĄąĮąĖčÅ ESP-IDF FreeRTOS]
ąÆ ąŠčéą╗ąĖčćąĖąĄ ąŠčé Unlike Vanilla FreeRTOS, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąĮąĄ ąĮčāąČąĮąŠ ą▓čŗąĘčŗą▓ą░čéčī ąĘą░ą┐čāčüą║ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░ č湥čĆąĄąĘ vTaskStartScheduler(). ąÆą╝ąĄčüč鹊 čŹč鹊ą│ąŠ ESP-IDF FreeRTOS ąĘą░ą┐čāčüą║ą░ąĄčé ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ. ąóąŠčćą║ą░ ą▓čģąŠą┤ą░ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ ą┤ą╗čÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą▓ ą▓ąĖą┤ąĄ ą│ąŠč鹊ą▓ąŠą╣ čäčāąĮą║čåąĖąĖ void app_main(void), ą│ą┤ąĄ ą╝ąŠąČąĄčé ąĮą░čģąŠą┤ąĖčéčīčüčÅ čéčĆą░ą┤ąĖčåąĖąŠąĮąĮčŗą╣ ą▒ąĄčüą║ąŠąĮąĄčćąĮčŗą╣ čåąĖą║ą╗.
ŌŚÅ ą×ą▒čŗčćąĮąŠ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ą┤ąŠą╗ąČąĮčŗ ąĘą░ą┐čāčüą║ą░čéčī čüą▓ąŠąĖ ąĘą░ą┤ą░čćąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĖąĘ č鹥ą╗ą░ čäčāąĮą║čåąĖąĖ app_main.
ŌŚÅ ążčāąĮą║čåąĖąĖ app_main čĆą░ąĘčĆąĄčłąĄąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą▓ąŠąĘą▓čĆą░čé ą▓ ą╗čÄą▒ąŠą╝ ą╝ąĄčüč鹥 (ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┤ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ).
ŌŚÅ ążčāąĮą║čåąĖčÅ app_main ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ąĖąĘ ąĘą░ą┤ą░čćąĖ main.
ąŚą░ą┤ą░čćą░ main čŹč鹊 ąŠą┤ąĮą░ ąĖąĘ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ąĘą░ą┤ą░čć, ą║ąŠč鹊čĆčŗąĄ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĘą░ą┐čāčüą║ą░ąĄčé ESP-IDF ą▓ ą┐čĆąŠčåąĄčüčüąĄ čüčéą░čĆčéą░ (startup). ąŁčéąĖ ąĘą░ą┤ą░čćąĖ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą▓ čéą░ą▒ą╗ąĖčåąĄ 1.
ąóą░ą▒ą╗ąĖčåą░ 1. ąĪą┐ąĖčüąŠą║ ąĘą░ą┤ą░čć, čüąŠąĘą┤ą░ą▓ą░ąĄą╝čŗčģ ą▓ąŠ ą▓čĆąĄą╝čÅ startup.
| ąśą╝čÅ ąĘą░ą┤ą░čćąĖ |
ą¤čĆąĖą▓čÅąĘą║ą░ |
ą¤čĆąĖąŠčĆąĖč鹥čé |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| Main Task (main) |
CPU0 |
1 |
ąŚą░ą┤ą░čćą░, ą║ąŠč鹊čĆą░čÅ ą┐čĆąŠčüč鹊 ą▓čŗąĘčŗą▓ą░ąĄčé čäčāąĮą║čåąĖčÄ app_main. ąŁčéą░ ąĘą░ą┤ą░čćą░ čāą┤ą░ą╗ąĖčé čüą░ą╝čā čüąĄą▒čÅ, ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą▓čŗčģąŠą┤ ąĖąĘ app_main. |
| Idle Task (IDLEx) |
CPU0 ąĖ CPU1 |
0 |
ąŚą░ą┤ą░čćąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ, čüąŠąĘą┤ą░ą▓ą░ąĄą╝čŗąĄ ąĖ ą┐čĆąĖą▓čÅąĘčŗą▓ą░ąĄą╝čŗąĄ ą║ ą║ą░ąČą┤ąŠą╝čā CPUx. |
| IPC Task (ipcx) |
24 |
ąŚą░ą┤ą░čćąĖ IPC čüąŠąĘą┤ą░čÄčéčüčÅ ąĖ ą┐čĆąĖą▓čÅąĘčŗą▓ą░čÄčéčüčÅ ą║ ą║ą░ąČą┤ąŠą╝čā CPUx. ą×ąĮąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čäčāąĮą║čåąĖąĖ IPC [13]. |
[Task API]
ąŚą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗:
components/freertos/FreeRTOS-Kernel/include/freertos/task.h
BaseType_t xTaskCreatePinnedToCore (TaskFunction_t pvTaskCode,
const char *constpcName,
const uint32_t usStackDepth,
void *constpvParameters,
UBaseType_t uxPriority,
TaskHandle_t *constpvCreatedTask,
const BaseType_t xCoreID);
ąĪąŠąĘą┤ą░ąĄčé ąĮąŠą▓čāčÄ ąĘą░ą┤ą░čćčā task čü čāą║ą░ąĘą░ąĮąĮąŠą╣ ą┐čĆąĖą▓čÅąĘą║ąŠą╣ ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝čā čÅą┤čĆčā (affinity). ąöąĄą╣čüčéą▓ąĖąĄ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ą┐ąŠą┤ąŠą▒ąĮąŠ xTaskCreate, ąŠą┤ąĮą░ą║ąŠ ąĘą┤ąĄčüčī ą╝ąŠąČąĮąŠ ąĘą░ą║ą░ąĘą░čéčī ą┐čĆąĖą▓čÅąĘą║čā ą║ ąĮčāąČąĮąŠą╝čā čÅą┤čĆčā (task affinity) ą▓ ą╝ąĮąŠą│ąŠčÅą┤ąĄčĆąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ (SMP system).
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ pdPASS, ąĄčüą╗ąĖ ąĘą░ą┤ą░čćą░ ą▒čŗą╗ą░ čāčüą┐ąĄčłąĮąŠ čüąŠąĘą┤ą░ąĮą░ ąĖ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮą░ ą▓ čüą┐ąĖčüąŠą║ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ (ready list), ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ą▓ čäą░ą╣ą╗ąĄ projdefs.h
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
pvTaskCode: čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čäčāąĮą║čåąĖčÄ č鹊čćą║ąĖ ą▓čģąŠą┤ą░ (task entry). ąŚą░ą┤ą░čćąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊ą▒čŗ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą┤ąĄą╗ą░čéčī ą▓ąŠąĘą▓čĆą░čé ąĖąĘ čüą▓ąŠąĄą╣ čäčāąĮą║čåąĖąĖ (čé. ąĄ. čĆą░ą▒ąŠčéą░čéčī ą▓ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠą╝ čåąĖą║ą╗ąĄ), ą╗ąĖą▒ąŠ ąŠąĮąĖ ą┤ąŠą╗ąČąĮčŗ ąĘą░ą▓ąĄčĆčłą░čéčīčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ čäčāąĮą║čåąĖąĖ vTaskDelete.
pcName: ąŠą┐ąĖčüą░č鹥ą╗čīąĮąŠąĄ ąĖą╝čÅ ą┤ą╗čÅ ąĘą░ą┤ą░čćąĖ. ą¤ą░čĆą░ą╝ąĄčéčĆ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ čāą┐čĆąŠčēąĄąĮąĖčÅ ąŠčéą╗ą░ą┤ą║ąĖ, ąĖ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠ ą▒ąŠą╗čīčłąĄ ąĮąĖ ą┤ą╗čÅ č湥ą│ąŠ ąĮąĄ ąĮčāąČąĄąĮ. ą£ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ ą┤ą╗ąĖąĮą░ čüčéčĆąŠą║ąĖ ą┤ą╗čÅ ąĖą╝ąĄąĮąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ąŠą┐čåąĖąĄą╣ configMAX_TASK_NAME_LEN, ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 16.
usStackDepth: čĆą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ, čāą║ą░ąĘą░ąĮąĮčŗą╣ ą▓ ą▒ą░ą╣čéą░čģ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čŹč鹊 ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé vanilla FreeRTOS.
pvParameters: čāą║ą░ąĘą░č鹥ą╗čī, ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ ą┐ą░čĆą░ą╝ąĄčéčĆ ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ.
uxPriority: ą┐čĆąĖąŠčĆąĖč鹥čé, čü ą║ąŠč鹊čĆčŗą╝ ąĘą░ą┤ą░čćą░ ą┤ąŠą╗ąČąĮą░ čĆą░ą▒ąŠčéą░čéčī. ąĪąĖčüč鹥ą╝čŗ, ą▓ ą║ąŠč鹊čĆčŗčģ ąĖą╝ąĄąĄčéčüčÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ MPU, ą╝ąŠą│čāčé ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ čüąŠąĘą┤ą░ą▓ą░čéčī ąĘą░ą┤ą░čćąĖ ą▓ ą┐čĆąĖą▓ąĖą╗ąĖą│ąĖčĆąŠą▓ą░ąĮąĮąŠą╝ čĆąĄąČąĖą╝ąĄ (system mode) ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ portPRIVILEGE_BIT ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ ą┐čĆąĖąŠčĆąĖč鹥čéą░. ąØą░ą┐čĆąĖą╝ąĄčĆ, čćč鹊ą▒čŗ čüąŠąĘą┤ą░čéčī ą┐čĆąĖą▓ąĖą╗ąĄą│ąĖčĆąŠą▓ą░ąĮąĮčāčÄ ąĘą░ą┤ą░čćčā čü ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ 2 , ą┐ą░čĆą░ą╝ąĄčéčĆ uxPriority ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ąĘąĮą░č湥ąĮąĖąĄ (2 | portPRIVILEGE_BIT).
pvCreatedTask: ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąŠą▒čĆą░čéąĮąŠ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ (handle), ą┐ąŠ ą║ąŠč鹊čĆąŠą╝čā ą╝ąŠąČąĮąŠ ą▒čāą┤ąĄčé ą▓ą┐ąŠčüą╗ąĄą┤čüčéą▓ąĖąĖ čüčüčŗą╗ą░čéčīčüčÅ ąĮą░ čŹčéčā ąĘą░ą┤ą░čćčā.
xCoreID: ąĄčüą╗ąĖ ąĘąĮą░č湥ąĮąĖąĄ čŹč鹊ą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░ tskNO_AFFINITY, č鹊 čüąŠąĘą┤ą░ąĮąĮą░čÅ ąĘą░ą┤ą░čćą░ ąĮąĄ ą┐čĆąĖą▓čÅąĘčŗą▓ą░ąĄčéčüčÅ ąĮąĖ ą║ ą║ą░ą║ąŠą╝čā CPU, ąĖ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ą╝ąŠąČąĄčé ąĘą░ą┐čāčüčéąĖčéčī ąĄčæ ąĮą░ ą╗čÄą▒ąŠą╝ ą┤ąŠčüčéčāą┐ąĮąŠą╝ čÅą┤čĆąĄ. ąŚąĮą░č湥ąĮąĖčÅ 0 ąĖą╗ąĖ 1 ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé ąĮąŠą╝ąĄčĆ ąĖąĮą┤ąĄą║čüą░ CPU, ą║ ą║ąŠč鹊čĆąŠą╝čā ąĘą░ą┤ą░čćą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐čĆąĖčüčéčŗą║ąŠą▓ą░ąĮą░. ąĢčüą╗ąĖ čāą║ą░ąĘą░čéčī ąĘąĮą░č湥ąĮąĖąĄ, ą┐čĆąĄą▓čŗčłą░čÄčēąĄąĄ (portNUM_PROCESSORS-1), č鹊 čŹč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ąŠčłąĖą▒ą║ąĄ ą▓čŗąĘąŠą▓ą░ čäčāąĮą║čåąĖąĖ xTaskCreatePinnedToCore.
static BaseType_t xTaskCreate (TaskFunction_t pvTaskCode,
const char *constpcName,
const uint32_t usStackDepth,
void *constpvParameters,
UBaseType_t uxPriority,
TaskHandle_t *constpxCreatedTask);
ąĪąŠąĘą┤ą░ąĄčé ąĮąŠą▓čāčÄ ąĘą░ą┤ą░čćčā, ąĖ ą┤ąŠą▒ą░ą▓ą╗čÅąĄčé ąĄčæ ą▓ čüą┐ąĖčüąŠą║ ąĘą░ą┤ą░čć, ą│ąŠč鹊ą▓čŗčģ ą║ čĆą░ą▒ąŠč鹥.
ąÆąĮčāčéčĆąĖ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ FreeRTOS ąĘą░ą┤ą░čćąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčé 2 ą▒ą╗ąŠą║ą░ ą┐ą░ą╝čÅčéąĖ. ą¤ąĄčĆą▓čŗą╣ ą▒ą╗ąŠą║ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ čüčéčĆčāą║čéčāčĆ ą┤ą░ąĮąĮčŗčģ ąĘą░ą┤ą░čćąĖ (TCB). ąÆč鹊čĆąŠą╣ ą▒ą╗ąŠą║ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĘą░ą┤ą░č湥ą╣ ą┤ą╗čÅ čüą▓ąŠąĄą│ąŠ čüč鹥ą║ą░. ąĢčüą╗ąĖ ąĘą░ą┤ą░čćą░ čüąŠąĘą┤ą░ąĮą░ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ xTaskCreate(), č鹊 ąŠą▒ą░ čŹčéąĖčģ ą▒ą╗ąŠą║ą░ ą┐ą░ą╝čÅčéąĖ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓čŗą┤ąĄą╗čÅčÄčéčüčÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖą╝ čüą┐ąŠčüąŠą▒ąŠą╝ (ąĖąĘ ą║čāčćąĖ) ą▓ č鹥ą╗ąĄ čäčāąĮą║čåąĖąĖ xTaskCreate() (čüą╝. [14]). ąĢčüą╗ąĖ ąĘą░ą┤ą░čćą░ čüąŠąĘą┤ą░ąĄčéčüčÅ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ xTaskCreateStatic(), č鹊 čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ąŠą╗ąČąĄąĮ čüą░ą╝ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ąĮąĄąŠą▒čģąŠą┤ąĖą╝čāčÄ ą┐ą░ą╝čÅčéčī. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, xTaskCreateStatic() ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čüąŠąĘą┤ą░čéčī ąĘą░ą┤ą░čćčā ą▒ąĄąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą│ąŠ ą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ.
xTaskCreate() ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮą░ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ąĘą░ą┤ą░čćąĖ, ą║ąŠč鹊čĆą░čÅ ą┐ąŠą╗čāčćą░ąĄčé ąĮąĄąŠą│čĆą░ąĮąĖč湥ąĮąĮčŗą╣ ą┤ąŠčüčéčāą┐ ą║ąŠ ą▓čüąĄą╣ ą║ą░čĆč鹥 ą┐ą░ą╝čÅčéąĖ MCU. ąĪąĖčüč鹥ą╝čŗ, ą║ąŠč鹊čĆčŗąĄ čüąĮą░ą▒ąČąĄąĮčŗ ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ MPU, ą╝ąŠą│čāčé ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠ čüąŠąĘą┤ą░ą▓ą░čéčī ąĘą░ą┤ą░čćčā, ąĮą░ ą║ąŠč鹊čĆčāčÄ ąĮą░ą╗ąŠąČąĄąĮčŗ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ ą┤ąŠčüčéčāą┐ą░ čüąŠ čüč鹊čĆąŠąĮčŗ MPU, ą┤ą╗čÅ č湥ą│ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ xTaskCreateRestricted().
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ pdPASS, ąĄčüą╗ąĖ ąĘą░ą┤ą░čćą░ ą▒čŗą╗ą░ čāčüą┐ąĄčłąĮąŠ čüąŠąĘą┤ą░ąĮą░ ąĖ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮą░ ą▓ čüą┐ąĖčüąŠą║ ready, ąĖąĮą░č湥 ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ą▓ projdefs.h.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĄčüą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą╗ąŠą║ą░ą╗čīąĮčŗąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ ą┐ąŠč鹊ą║ą░ (čéą░ą║ąĖąĄ, ą║ąŠč鹊čĆčŗąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ čü ą║ą╗čÄč湥ą▓čŗą╝ čüą╗ąŠą▓ąŠą╝ __thread), č鹊 čģčĆą░ąĮąĖą╗ąĖčēąĄ ą┤ą╗čÅ ąĮąĖčģ ą▓čŗą┤ąĄą╗čÅąĄčéčüčÅ ąĖąĘ čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
pvTaskCode: čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čäčāąĮą║čåąĖčÄ č鹊čćą║ąĖ ą▓čģąŠą┤ą░ (task entry). ąŚą░ą┤ą░čćąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊ą▒čŗ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą┤ąĄą╗ą░čéčī ą▓ąŠąĘą▓čĆą░čé ąĖąĘ čüą▓ąŠąĄą╣ čäčāąĮą║čåąĖąĖ (čé. ąĄ. čĆą░ą▒ąŠčéą░čéčī ą▓ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠą╝ čåąĖą║ą╗ąĄ), ą╗ąĖą▒ąŠ ąŠąĮąĖ ą┤ąŠą╗ąČąĮčŗ ąĘą░ą▓ąĄčĆčłą░čéčīčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ čäčāąĮą║čåąĖąĖ vTaskDelete.
pcName: ąŠą┐ąĖčüą░č鹥ą╗čīąĮąŠąĄ ąĖą╝čÅ ą┤ą╗čÅ ąĘą░ą┤ą░čćąĖ. ą¤ą░čĆą░ą╝ąĄčéčĆ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ čāą┐čĆąŠčēąĄąĮąĖčÅ ąŠčéą╗ą░ą┤ą║ąĖ, ąĖ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠ ą▒ąŠą╗čīčłąĄ ąĮąĖ ą┤ą╗čÅ č湥ą│ąŠ ąĮąĄ ąĮčāąČąĄąĮ. ą£ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ ą┤ą╗ąĖąĮą░ čüčéčĆąŠą║ąĖ ą┤ą╗čÅ ąĖą╝ąĄąĮąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ąŠą┐čåąĖąĄą╣ configMAX_TASK_NAME_LEN, ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 16.
usStackDepth: čĆą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ, čāą║ą░ąĘą░ąĮąĮčŗą╣ ą▓ ą▒ą░ą╣čéą░čģ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čŹč鹊 ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé vanilla FreeRTOS.
pvParameters: čāą║ą░ąĘą░č鹥ą╗čī, ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ ą┐ą░čĆą░ą╝ąĄčéčĆ ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ.
uxPriority: ą┐čĆąĖąŠčĆąĖč鹥čé, čü ą║ąŠč鹊čĆčŗą╝ ąĘą░ą┤ą░čćą░ ą┤ąŠą╗ąČąĮą░ čĆą░ą▒ąŠčéą░čéčī. ąĪąĖčüč鹥ą╝čŗ, ą▓ ą║ąŠč鹊čĆčŗčģ ąĖą╝ąĄąĄčéčüčÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ MPU, ą╝ąŠą│čāčé ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ čüąŠąĘą┤ą░ą▓ą░čéčī ąĘą░ą┤ą░čćąĖ ą▓ ą┐čĆąĖą▓ąĖą╗ąĖą│ąĖčĆąŠą▓ą░ąĮąĮąŠą╝ čĆąĄąČąĖą╝ąĄ (system mode) ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ portPRIVILEGE_BIT ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ ą┐čĆąĖąŠčĆąĖč鹥čéą░. ąØą░ą┐čĆąĖą╝ąĄčĆ, čćč鹊ą▒čŗ čüąŠąĘą┤ą░čéčī ą┐čĆąĖą▓ąĖą╗ąĄą│ąĖčĆąŠą▓ą░ąĮąĮčāčÄ ąĘą░ą┤ą░čćčā čü ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ 2 , ą┐ą░čĆą░ą╝ąĄčéčĆ uxPriority ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ąĘąĮą░č湥ąĮąĖąĄ (2 | portPRIVILEGE_BIT).
pvCreatedTask: ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąŠą▒čĆą░čéąĮąŠ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ (handle), ą┐ąŠ ą║ąŠč鹊čĆąŠą╝čā ą╝ąŠąČąĮąŠ ą▒čāą┤ąĄčé ą▓ą┐ąŠčüą╗ąĄą┤čüčéą▓ąĖąĖ čüčüčŗą╗ą░čéčīčüčÅ ąĮą░ čŹčéčā ąĘą░ą┤ą░čćčā.
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ:
// ąĪąŠąĘą┤ą░ą▓ą░ąĄą╝ą░čÅ ąĘą░ą┤ą░čćą░.
void vTaskCode (void * pvParameters)
{
for( ;; )
{
// ąŚą┤ąĄčüčī ą▓čüčéą░ą▓ą╗čÅąĄčéčüčÅ ą║ąŠą┤ ąĘą░ą┤ą░čćąĖ.
}
}
// ążčāąĮą║čåąĖčÅ, ą║ąŠč鹊čĆą░čÅ čüąŠąĘą┤ą░ąĄčé ąĘą░ą┤ą░čćčā.
void vOtherFunction (void)
{
static uint8_t ucParameterToPass;
TaskHandle_t xHandle = NULL;
// ąĪąŠąĘą┤ą░ąĄčéčüčÅ ąĘą░ą┤ą░čćą░ ąĖ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ąĄčæ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ,
// čćč鹊 ą┐ą░čĆą░ą╝ąĄčéčĆ ucParameterToPass ą┤ąŠą╗ąČąĄąĮ čüčāčēąĄčüčéą▓ąŠą▓ą░čéčī ą▓ č鹥č湥ąĮąĖąĄ
// ą▓čüąĄą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąČąĖąĘąĮąĖ ąĘą░ą┤ą░čćąĖ, čéą░ą║ čćč鹊 ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąŠąĮ ą┤ąĄą║ą╗ą░čĆąĖčĆąŠą▓ą░ąĮ
// ą║ą░ą║ static. ąĢčüą╗ąĖ čŹč鹊 ą▒čŗą╗ą░ č鹊ą╗čīą║ąŠ ą╗ąĖčłčī ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ą░čÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ
// ąĖąĘ čüč鹥ą║ą░, č鹊 ąŠąĮą░ ą▓ąŠąĘą╝ąŠąČąĮąŠ ąĮąĄ ą▒čāą┤ąĄčé ą┤ą░ą╗čīčłąĄ čüčāčēąĄčüčéą▓ąŠą▓ą░čéčī, ąĖą╗ąĖ
// ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą▓čĆąĄąČą┤ąĄąĮą░ ą▓ č鹊čé ą╝ąŠą╝ąĄąĮčé, ą║ąŠą│ą┤ą░ ąĘą░ą┤ą░čćą░
// ą┐ąŠą┐čŗčéą░ąĄčéčüčÅ ąŠą▒čĆą░čéąĖčéčīčüčÅ ą║ ąĮąĄą╣.
xTaskCreate(vTaskCode,
"NAME",
STACK_SIZE,
&ucParameterToPass,
tskIDLE_PRIORITY,
&xHandle);
configASSERT(xHandle);
// ąöąĄčüą║čĆąĖą┐č鹊čĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāą┤ą░ą╗ąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ.
if(xHandle != NULL)
{
vTaskDelete( xHandle );
}
}
TaskHandle_t xTaskCreateStaticPinnedToCore (TaskFunction_t pvTaskCode,
const char *constpcName,
const uint32_t ulStackDepth,
void *const pvParameters,
UBaseType_t uxPriority,
StackType_t *const pxStackBuffer,
StaticTask_t *const pxTaskBuffer,
const BaseType_t xCoreID);
ąĪąŠąĘą┤ą░ąĄčé ąĮąŠą▓čāčÄ ąĘą░ą┤ą░čćčā task čü čāą║ą░ąĘą░ąĮąĮąŠą╣ ą┐čĆąĖą▓čÅąĘą║ąŠą╣ ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝čā čÅą┤čĆčā (affinity). ąöąĄą╣čüčéą▓ąĖąĄ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ą┐ąŠą┤ąŠą▒ąĮąŠ xTaskCreateStatic, ąŠą┤ąĮą░ą║ąŠ ąĘą┤ąĄčüčī ą╝ąŠąČąĮąŠ ąĘą░ą║ą░ąĘą░čéčī ą┐čĆąĖą▓čÅąĘą║čā ą║ ąĮčāąČąĮąŠą╝čā čÅą┤čĆčā (task affinity) ą▓ ą╝ąĮąŠą│ąŠčÅą┤ąĄčĆąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ (SMP system).
ąæčāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĘą░ą┤ą░čćąĖ, ąĮą░ ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĮąŠ ą▒čāą┤ąĄčé ą▓ą┐ąŠčüą╗ąĄą┤čüčéą▓ąĖąĖ čüčüčŗą╗ą░čéčīčüčÅ, ąĄčüą╗ąĖ ąĮąĄ ą▒čŗą╗ąŠ ą┐ąĄčĆąĄą┤ą░ąĮąŠ NULL ąĮąĖ ą┤ą╗čÅ pxStackBuffer, ąĮąĖ ą┤ą╗čÅ pxTaskBuffer. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąĘą░ą┤ą░čćą░ ą▒čŗą╗ą░ čāčüą┐ąĄčłąĮąŠ čüąŠąĘą┤ą░ąĮą░ ąĖ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮą░ ą▓ čüą┐ąĖčüąŠą║ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ (ready list). ąĢčüą╗ąĖ ąČąĄ ą▓ ą▓ ą╗čÄą▒ąŠą╝ ąĖąĘ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ pxStackBuffer ąĖą╗ąĖ pxTaskBuffer ą▒čŗą╗ ą┐ąĄčĆąĄą┤ą░ąĮ NULL, č鹊 ąĘą░ą┤ą░čćą░ ąĮąĄ ą▒čāą┤ąĄčé čüąŠąĘą┤ą░ąĮą░, ąĖ ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
pvTaskCode: čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čäčāąĮą║čåąĖčÄ č鹊čćą║ąĖ ą▓čģąŠą┤ą░ (task entry). ąŚą░ą┤ą░čćąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊ą▒čŗ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą┤ąĄą╗ą░čéčī ą▓ąŠąĘą▓čĆą░čé ąĖąĘ čüą▓ąŠąĄą╣ čäčāąĮą║čåąĖąĖ (čé. ąĄ. čĆą░ą▒ąŠčéą░čéčī ą▓ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠą╝ čåąĖą║ą╗ąĄ), ą╗ąĖą▒ąŠ ąŠąĮąĖ ą┤ąŠą╗ąČąĮčŗ ąĘą░ą▓ąĄčĆčłą░čéčīčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ čäčāąĮą║čåąĖąĖ vTaskDelete.
pcName: ąŠą┐ąĖčüą░č鹥ą╗čīąĮąŠąĄ ąĖą╝čÅ ą┤ą╗čÅ ąĘą░ą┤ą░čćąĖ. ą¤ą░čĆą░ą╝ąĄčéčĆ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ čāą┐čĆąŠčēąĄąĮąĖčÅ ąŠčéą╗ą░ą┤ą║ąĖ, ąĖ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠ ą▒ąŠą╗čīčłąĄ ąĮąĖ ą┤ą╗čÅ č湥ą│ąŠ ąĮąĄ ąĮčāąČąĄąĮ. ą£ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ ą┤ą╗ąĖąĮą░ čüčéčĆąŠą║ąĖ ą┤ą╗čÅ ąĖą╝ąĄąĮąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ąŠą┐čåąĖąĄą╣ configMAX_TASK_NAME_LEN ą▓ čäą░ą╣ą╗ąĄ FreeRTOSConfig.h (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 16).
usStackDepth: čĆą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ, čāą║ą░ąĘą░ąĮąĮčŗą╣ ą▓ ą▒ą░ą╣čéą░čģ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čŹč鹊 ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé vanilla FreeRTOS.
pvParameters: čāą║ą░ąĘą░č鹥ą╗čī, ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ ą┐ą░čĆą░ą╝ąĄčéčĆ ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ.
uxPriority: ą┐čĆąĖąŠčĆąĖč鹥čé, čü ą║ąŠč鹊čĆčŗą╝ ąĘą░ą┤ą░čćą░ ą┤ąŠą╗ąČąĮą░ čĆą░ą▒ąŠčéą░čéčī.
pxStackBuffer: ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą╝ą░čüčüąĖą▓ čéąĖą┐ą░ StackType_t čĆą░ąĘą╝ąĄčĆąŠą╝ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ą▓ ulStackDepth ąĖąĮą┤ąĄą║čüąŠą▓. ąŁč鹊čé ą╝ą░čüčüąĖą▓ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮ ą┤ą╗čÅ čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ, ą┐ą░ą╝čÅčéčī ą┤ą╗čÅ čüč鹥ą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ą▓čŗą┤ąĄą╗čÅčéčīčüčÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ.
pxTaskBuffer: čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ čéąĖą┐ą░ StaticTask_t, ą║ąŠč鹊čĆą░čÅ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ čüčéčĆčāą║čéčāčĆ ą┤ą░ąĮąĮčŗčģ ąĘą░ą┤ą░čćąĖ, ą┐ą░ą╝čÅčéčī ą┤ą╗čÅ čŹč鹊ą╣ čüčéčĆčāą║čéčāčĆčŗ ąĮąĄ ą▒čāą┤ąĄčé ą▓čŗą┤ąĄą╗čÅčéčīčüčÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ.
xCoreID: ąĄčüą╗ąĖ ąĘąĮą░č湥ąĮąĖąĄ čŹč鹊ą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░ tskNO_AFFINITY, č鹊 čüąŠąĘą┤ą░ąĮąĮą░čÅ ąĘą░ą┤ą░čćą░ ąĮąĄ ą┐čĆąĖą▓čÅąĘčŗą▓ą░ąĄčéčüčÅ ąĮąĖ ą║ ą║ą░ą║ąŠą╝čā CPU, ąĖ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ą╝ąŠąČąĄčé ąĘą░ą┐čāčüčéąĖčéčī ąĄčæ ąĮą░ ą╗čÄą▒ąŠą╝ ą┤ąŠčüčéčāą┐ąĮąŠą╝ čÅą┤čĆąĄ. ąŚąĮą░č湥ąĮąĖčÅ 0 ąĖą╗ąĖ 1 ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé ąĮąŠą╝ąĄčĆ ąĖąĮą┤ąĄą║čüą░ CPU, ą║ ą║ąŠč鹊čĆąŠą╝čā ąĘą░ą┤ą░čćą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐čĆąĖčüčéčŗą║ąŠą▓ą░ąĮą░. ąĢčüą╗ąĖ čāą║ą░ąĘą░čéčī ąĘąĮą░č湥ąĮąĖąĄ, ą┐čĆąĄą▓čŗčłą░čÄčēąĄąĄ (portNUM_PROCESSORS-1), č鹊 čŹč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ąŠčłąĖą▒ą║ąĄ ą▓čŗąĘąŠą▓ą░ čäčāąĮą║čåąĖąĖ xTaskCreatePinnedToCore.
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ:
// ąĀą░ąĘą╝ąĄčĆ ą▒čāč乥čĆą░, ą║ąŠč鹊čĆčŗą╣ ąĘą░ą┤ą░čćą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▓ ą║ą░č湥čüčéą▓ąĄ čüą▓ąŠąĄą│ąŠ čüč鹥ą║ą░.
// ąŚą░ą╝ąĄčćą░ąĮąĖąĄ: ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▓ ą▒ą░ą╣čéą░čģ, ą░ ąĮąĄ ą▓ ą║ąŠą╗ąĖč湥čüčéą▓ąĄ čüą╗ąŠą▓,
// ą║ą░ą║ čŹč鹊 ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ vanilla FreeRTOS.
#define STACK_SIZE 200
// ąĪčéčĆčāą║čéčāčĆą░, ą║ąŠč鹊čĆą░čÅ čģčĆą░ąĮąĖčé TCB čüąŠąĘą┤ą░ą▓ą░ąĄą╝ąŠą╣ ąĘą░ą┤ą░čćąĖ.
StaticTask_t xTaskBuffer;
// ąæčāč乥čĆ, ą║ąŠč鹊čĆčŗą╣ čüąŠąĘą┤ą░ą▓ą░ąĄą╝ą░čÅ ąĘą░ą┤ą░čćą░ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ čüą▓ąŠąĄą│ąŠ čüč鹥ą║ą░.
// ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą╝ą░čüčüąĖą▓ čüąŠčüč鹊ąĖčé ąĖąĘ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ čéąĖą┐ą░ StackType_t.
// ąĀą░ąĘą╝ąĄčĆ StackType_t ąĘą░ą▓ąĖčüąĖčé ąŠčé ą┐ąŠčĆčéą░ FreeRTOS.
StackType_t xStack[ STACK_SIZE ];
// ążčāąĮą║čåąĖčÅ, ą║ąŠč鹊čĆą░čÅ čĆąĄą░ą╗ąĖąĘčāąĄčé čüąŠąĘą┤ą░ą▓ą░ąĄą╝čāčÄ ąĘą░ą┤ą░čćčā.
void vTaskCode (void *pvParameters)
{
// ą×ąČąĖą┤ą░ąĄčéčüčÅ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░, čĆą░ą▓ąĮąŠąĄ 1, ą┐ąŠčüą║ąŠą╗čīą║čā
// ąĘąĮą░č湥ąĮąĖąĄ 1 ą▒čŗą╗ąŠ ą┐ąĄčĆąĄą┤ą░ąĮąŠ ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ pvParameters ą┐čĆąĖ ą▓čŗąĘąŠą▓ąĄ
// čäčāąĮą║čåąĖąĖ xTaskCreateStatic().
configASSERT( ( uint32_t ) pvParameters == 1UL );
for( ;; )
{
// ąŚą┤ąĄčüčī ąĮą░čģąŠą┤ąĖčéčüčÅ ą║ąŠą┤ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ ąĘą░ą┤ą░čćąĖ.
}
}
// ążčāąĮą║čåąĖčÅ, ą║ąŠč鹊čĆą░čÅ čüąŠąĘą┤ą░ąĄčé ąĘą░ą┤ą░čćčā.
void vOtherFunction (void)
{
TaskHandle_t xHandle = NULL;
// ąĪąŠąĘą┤ą░ąĮąĖąĄ ąĘą░ą┤ą░čćąĖ ą▒ąĄąĘ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą│ąŠ ą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ.
xHandle = xTaskCreateStaticPinnedToCore(
vTaskCode, // ążčāąĮą║čåąĖčÅ, ą│ą┤ąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ąĘą░ą┤ą░čćą░.
"NAME", // ą×ą┐ąĖčüą░č鹥ą╗čīąĮąŠąĄ ąĖą╝čÅ ąĘą░ą┤ą░čćąĖ.
STACK_SIZE, // ąĀąĄąĘą╝ąĄčĆ čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ ą▓ ą▒ą░ą╣čéą░čģ, ąĮąĄ ą▓ čüą╗ąŠą▓ą░čģ.
(void*)1, // ą¤ą░čĆą░ą╝ąĄčéčĆ, ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗą╣ ą▓ ąĘą░ą┤ą░čćčā.
tskIDLE_PRIORITY,// ą¤čĆąĖąŠčĆąĖč鹥čé čüąŠąĘą┤ą░ą▓ą░ąĄą╝ąŠą╣ ąĘą░ą┤ą░čćąĖ.
xStack, // ą£ą░čüčüąĖą▓, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą▓ ą║ą░č湥čüčéą▓ąĄ čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ.
&xTaskBuffer, // ą¤ąĄčĆąĄą╝ąĄąĮąĮą░čÅ, ą│ą┤ąĄ ą▒čāą┤ąĄčé čģčĆą░ąĮąĖčéčīčüčÅ TCB ąĘą░ą┤ą░čćąĖ.
1); // ąśčüą┐ąŠą╗čīąĘčāąĄą╝ąŠąĄ čÅą┤čĆąŠ ą┤ą╗čÅ ąĘą░ą┤ą░čćąĖ.
// pxStackBuffer ąĖ pxTaskBuffer ąĮąĄ NULL, čéą░ą║ čćč鹊 ąĘą░ą┤ą░čćą░ ą▒čāą┤ąĄčé čüąŠąĘą┤ą░ąĮą░,
// ąĖ ą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ xHandle ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĘą░ą┤ą░čćąĖ. ąŁč鹊čé ą┤ąĄčüą║čĆąĖą┐č鹊čĆ
// ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ ąĘą░ą┤ą░čćąĖ.
vTaskSuspend( xHandle );
}
static TaskHandle_t xTaskCreateStatic (TaskFunction_t pvTaskCode,
const char *constpcName,
const uint32_t ulStackDepth,
void *constpvParameters,
UBaseType_t uxPriority,
StackType_t *constpuxStackBuffer,
StaticTask_t *constpxTaskBuffer);
ąĪąŠąĘą┤ą░ąĄčé ąĮąŠą▓čāčÄ ąĘą░ą┤ą░čćčā, ąĖ ą┤ąŠą▒ą░ą▓ą╗čÅąĄčé ąĄčæ ą▓ čüą┐ąĖčüąŠą║ ąĘą░ą┤ą░čć, ą│ąŠč鹊ą▓čŗčģ ą║ čĆą░ą▒ąŠč鹥.
ąÆąĮčāčéčĆąĖ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ FreeRTOS ąĘą░ą┤ą░čćąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčé 2 ą▒ą╗ąŠą║ą░ ą┐ą░ą╝čÅčéąĖ. ą¤ąĄčĆą▓čŗą╣ ą▒ą╗ąŠą║ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ čüčéčĆčāą║čéčāčĆ ą┤ą░ąĮąĮčŗčģ ąĘą░ą┤ą░čćąĖ (TCB). ąÆč鹊čĆąŠą╣ ą▒ą╗ąŠą║ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĘą░ą┤ą░č湥ą╣ ą┤ą╗čÅ čüą▓ąŠąĄą│ąŠ čüč鹥ą║ą░. ąĢčüą╗ąĖ ąĘą░ą┤ą░čćą░ čüąŠąĘą┤ą░ąĮą░ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ xTaskCreate(), č鹊 ąŠą▒ą░ čŹčéąĖčģ ą▒ą╗ąŠą║ą░ ą┐ą░ą╝čÅčéąĖ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓čŗą┤ąĄą╗čÅčÄčéčüčÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖą╝ čüą┐ąŠčüąŠą▒ąŠą╝ (ąĖąĘ ą║čāčćąĖ) ą▓ č鹥ą╗ąĄ čäčāąĮą║čåąĖąĖ xTaskCreate() (čüą╝. [14]). ąĢčüą╗ąĖ ąĘą░ą┤ą░čćą░ čüąŠąĘą┤ą░ąĄčéčüčÅ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ xTaskCreateStatic(), č鹊 čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ąŠą╗ąČąĄąĮ čüą░ą╝ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ąĮąĄąŠą▒čģąŠą┤ąĖą╝čāčÄ ą┐ą░ą╝čÅčéčī. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, xTaskCreateStatic() ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čüąŠąĘą┤ą░čéčī ąĘą░ą┤ą░čćčā ą▒ąĄąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą│ąŠ ą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ.
ąæčāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĘą░ą┤ą░čćąĖ, ąĮą░ ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĮąŠ ą▒čāą┤ąĄčé ą▓ą┐ąŠčüą╗ąĄą┤čüčéą▓ąĖąĖ čüčüčŗą╗ą░čéčīčüčÅ, ąĄčüą╗ąĖ ąĮąĄ ą▒čŗą╗ąŠ ą┐ąĄčĆąĄą┤ą░ąĮąŠ NULL ąĮąĖ ą┤ą╗čÅ pxStackBuffer, ąĮąĖ ą┤ą╗čÅ pxTaskBuffer. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąĘą░ą┤ą░čćą░ ą▒čŗą╗ą░ čāčüą┐ąĄčłąĮąŠ čüąŠąĘą┤ą░ąĮą░ ąĖ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮą░ ą▓ čüą┐ąĖčüąŠą║ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ (ready list). ąĢčüą╗ąĖ ąČąĄ ą▓ ą▓ ą╗čÄą▒ąŠą╝ ąĖąĘ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ pxStackBuffer ąĖą╗ąĖ pxTaskBuffer ą▒čŗą╗ ą┐ąĄčĆąĄą┤ą░ąĮ NULL, č鹊 ąĘą░ą┤ą░čćą░ ąĮąĄ ą▒čāą┤ąĄčé čüąŠąĘą┤ą░ąĮą░, ąĖ ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
pvTaskCode: čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čäčāąĮą║čåąĖčÄ č鹊čćą║ąĖ ą▓čģąŠą┤ą░ (task entry). ąŚą░ą┤ą░čćąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊ą▒čŗ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą┤ąĄą╗ą░čéčī ą▓ąŠąĘą▓čĆą░čé ąĖąĘ čüą▓ąŠąĄą╣ čäčāąĮą║čåąĖąĖ (čé. ąĄ. čĆą░ą▒ąŠčéą░čéčī ą▓ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠą╝ čåąĖą║ą╗ąĄ), ą╗ąĖą▒ąŠ ąŠąĮąĖ ą┤ąŠą╗ąČąĮčŗ ąĘą░ą▓ąĄčĆčłą░čéčīčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ čäčāąĮą║čåąĖąĖ vTaskDelete.
pcName: ąŠą┐ąĖčüą░č鹥ą╗čīąĮąŠąĄ ąĖą╝čÅ ą┤ą╗čÅ ąĘą░ą┤ą░čćąĖ. ą¤ą░čĆą░ą╝ąĄčéčĆ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ čāą┐čĆąŠčēąĄąĮąĖčÅ ąŠčéą╗ą░ą┤ą║ąĖ, ąĖ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠ ą▒ąŠą╗čīčłąĄ ąĮąĖ ą┤ą╗čÅ č湥ą│ąŠ ąĮąĄ ąĮčāąČąĄąĮ. ą£ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ ą┤ą╗ąĖąĮą░ čüčéčĆąŠą║ąĖ ą┤ą╗čÅ ąĖą╝ąĄąĮąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ąŠą┐čåąĖąĄą╣ configMAX_TASK_NAME_LEN ą▓ čäą░ą╣ą╗ąĄ FreeRTOSConfig.h (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 16).
usStackDepth: čĆą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ, čāą║ą░ąĘą░ąĮąĮčŗą╣ ą▓ ą▒ą░ą╣čéą░čģ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čŹč鹊 ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé vanilla FreeRTOS.
pvParameters: čāą║ą░ąĘą░č鹥ą╗čī, ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ ą┐ą░čĆą░ą╝ąĄčéčĆ ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ.
uxPriority: ą┐čĆąĖąŠčĆąĖč鹥čé, čü ą║ąŠč鹊čĆčŗą╝ ąĘą░ą┤ą░čćą░ ą┤ąŠą╗ąČąĮą░ čĆą░ą▒ąŠčéą░čéčī.
pxStackBuffer: ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą╝ą░čüčüąĖą▓ čéąĖą┐ą░ StackType_t čĆą░ąĘą╝ąĄčĆąŠą╝ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ą▓ ulStackDepth ąĖąĮą┤ąĄą║čüąŠą▓. ąŁč鹊čé ą╝ą░čüčüąĖą▓ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮ ą┤ą╗čÅ čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ, ą┐ą░ą╝čÅčéčī ą┤ą╗čÅ čüč鹥ą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ą▓čŗą┤ąĄą╗čÅčéčīčüčÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ.
pxTaskBuffer: čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ čéąĖą┐ą░ StaticTask_t, ą║ąŠč鹊čĆą░čÅ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ čüčéčĆčāą║čéčāčĆ ą┤ą░ąĮąĮčŗčģ ąĘą░ą┤ą░čćąĖ, ą┐ą░ą╝čÅčéčī ą┤ą╗čÅ čŹč鹊ą╣ čüčéčĆčāą║čéčāčĆčŗ ąĮąĄ ą▒čāą┤ąĄčé ą▓čŗą┤ąĄą╗čÅčéčīčüčÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ.
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ:
// ąĀą░ąĘą╝ąĄčĆ ą▒čāč乥čĆą░, ą║ąŠč鹊čĆčŗą╣ ąĘą░ą┤ą░čćą░ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ čüą▓ąŠąĄą│ąŠ čüč鹥ą║ą░.
// ąŚą░ą╝ąĄčćą░ąĮąĖąĄ: čŹč鹊čé čĆą░ąĘą╝ąĄčĆ čāą║ą░ąĘą░ąĮ ą▓ ą▒ą░ą╣čéą░čģ, ą░ ąĮąĄ ą▓ ą║ąŠą╗ąĖč湥čüčéą▓ąĄ čüą╗ąŠą▓,
// ą║ą░ą║ čŹč鹊 ą╝ąŠąČąĮąŠ čāą▓ąĖą┤ąĄčéčī ą▓ vanilla FreeRTOS.
#define STACK_SIZE 200
// ąĪčéčĆčāą║čéčāčĆą░, ą║ąŠč鹊čĆą░čÅ ą▒čāą┤ąĄčé čģčĆą░ąĮąĖčéčī TCB čüąŠąĘą┤ą░ą▓ą░ąĄą╝ąŠą╣ ąĘą░ą┤ą░čćąĖ.
StaticTask_t xTaskBuffer;
// ąæčāč乥čĆ, ą║ąŠč鹊čĆčŗą╣ ąĘą░ą┤ą░čćą░ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ ą║ą░č湥čüčéą▓ąĄ čüą▓ąŠąĄą│ąŠ čüč鹥ą║ą░.
// ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą╝ą░čüčüąĖą▓ čüąŠčüč鹊ąĖčé ąĖąĘ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ čéąĖą┐ą░ StackType_t.
// ąĀąĄą░ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ StackType_t ąĘą░ą▓ąĖčüąĖčé ąŠčé ą┐ąŠčĆčéą░ FreeRTOS.
StackType_t xStack[ STACK_SIZE ];
// ążčāąĮą║čåąĖčÅ, ą║ąŠč鹊čĆą░čÅ čĆąĄą░ą╗ąĖąĘčāąĄčé čüąŠąĘą┤ą░ą▓ą░ąĄą╝čāčÄ ąĘą░ą┤ą░čćčā.
void vTaskCode (void * pvParameters)
{
// ą¤ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ 1, ą┐ąŠčüą║ąŠą╗čīą║čā 1 ą▒čŗą╗ąŠ
// ą┐ąĄčĆąĄą┤ą░ąĮąŠ ą▓ pvParameters ą┐čĆąĖ ą▓čŗąĘąŠą▓ąĄ xTaskCreateStatic().
configASSERT((uint32_t)pvParameters == 1UL);
for( ;; )
{
// ąĪčÄą┤ą░ ą▓čüčéą░ą▓ą╗čÅąĄčéčüčÅ ą║ąŠą┤ ąĘą░ą┤ą░čćąĖ.
}
}
// ążčāąĮą║čåąĖčÅ, ą║ąŠč鹊čĆą░čÅ čüąŠąĘą┤ą░ąĄčé ąĘą░ą┤ą░čćčā.
void vOtherFunction (void)
{
TaskHandle_t xHandle = NULL;
// ąŚą░ą┤ą░čćą░ ą▒čāą┤ąĄčé čüąŠąĘą┤ą░ąĮą░ ą▒ąĄąĘ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą│ąŠ ą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ.
xHandle = xTaskCreateStatic(
vTaskCode, // ążčāąĮą║čåąĖčÅ, ą║ąŠč鹊čĆą░čÅ čĆąĄą░ą╗ąĖąĘčāąĄčé ąĘą░ą┤ą░čćčā.
"NAME", // ąóąĄą║čüč鹊ą▓ąŠąĄ ąĖą╝čÅ ąĘą░ą┤ą░čćąĖ.
STACK_SIZE, // ąĀą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ ą▓ ą▒ą░ą╣čéą░čģ, ą░ ąĮąĄ ą▓ čüą╗ąŠą▓ą░čģ.
(void*)1, // ą¤ą░čĆą░ą╝ąĄčéčĆ, ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗą╣ ą▓ ąĘą░ą┤ą░čćčā.
tskIDLE_PRIORITY,// ą¤čĆąĖąŠčĆąĖč鹥čé, čü ą║ąŠč鹊čĆčŗą╝ ąĘą░ą┤ą░čćą░ čüąŠąĘą┤ą░ąĄčéčüčÅ.
xStack, // ą£ą░čüčüąĖą▓ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ čüč鹥ą║ą░.
&xTaskBuffer ); // ą¤ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ čüčéčĆčāą║čéčāčĆčŗ ą┤ą░ąĮąĮčŗčģ ąĘą░ą┤ą░čćąĖ.
// puxStackBuffer ąĖ pxTaskBuffer ąĮąĄ čĆą░ą▓ąĮčŗ NULL, ą┐ąŠčŹč鹊ą╝čā ąĘą░ą┤ą░čćą░ ą▒čāą┤ąĄčé
// čüąŠąĘą┤ą░ąĮą░, ąĖ ą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ xHandle ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĘą░ą┤ą░čćąĖ.
// ąŁč鹊čé ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĘą┤ąĄčüčī ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ ąĘą░ą┤ą░čćąĖ.
vTaskSuspend(xHandle);
}
void vTaskAllocateMPURegions(TaskHandle_t xTask,
const MemoryRegion_t * const pxRegions) PRIVILEGED_FUNCTION;
ąØą░ąĘąĮą░čćą░čÄčéčüčÅ čĆąĄą│ąĖąŠąĮčŗ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ ąŠą│čĆą░ąĮąĖč湥ąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ, ą║ąŠą│ą┤ą░ ąĘą░ą┤ą░čćą░ ą▒čŗą╗ą░ čüąŠąĘą┤ą░ąĮą░ ą▓čŗąĘąŠą▓ąŠą╝ xTaskCreateRestricted(). ąŁčéąĖ čĆąĄą│ąĖąŠąĮčŗ ą╝ąŠąČąĮąŠ ą┐ąĄčĆąĄąĮą░ąĘąĮą░čćąĖčéčī čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ vTaskAllocateMPURegions(). ą¤ą░čĆą░ą╝ąĄčéčĆ const pxRegions ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čĆąĄą│ąĖąŠąĮčŗ ą┐ą░ą╝čÅčéąĖ ąĘą░ą┤ą░čćąĖ ąĖ čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ąĮąĖą╝ąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┤ąŠčüčéčāą┐ą░, ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗąĄ ą┤ą╗čÅ ąĘą░ą┤ą░čćąĖ.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
xTask: ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąŠą▒ąĮąŠą▓ą╗čÅąĄą╝ąŠą╣ ąĘą░ą┤ą░čćąĖ.
pxRegions: čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā MemoryRegion_t, ą║ąŠč鹊čĆą░čÅ čüąŠą┤ąĄčƹȹĖčé ąĮąŠą▓čŗąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čĆąĄą│ąĖąŠąĮą░ ą┐ą░ą╝čÅčéąĖ.
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ:
// ą×ą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą╝ą░čüčüąĖą▓ čüčéčĆčāą║čéčāčĆ MemoryRegion_t, ą║ąŠč鹊čĆčŗą╣ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé
// čĆąĄą│ąĖąŠąĮ MPU, ą┐ąŠąĘą▓ąŠą╗čÅčÄčēąĖą╣ ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčī ą┤ąŠčüčéčāą┐ ąĮą░ čćč鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī ą┤ą╗čÅ
// 1024 ą▒ą░ą╣čé ąŠčé ąĮą░čćą░ą╗ą░ ą╝ą░čüčüąĖą▓ą░ ucOneKByte. ąöčĆčāą│ąĖąĄ ą┤ą▓ą░ ąĖąĘ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ
// čéčĆąĄčģ ą▓ąŠąĘą╝ąŠąČąĮčŗčģ čĆąĄą│ąĖąŠąĮą░ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ, ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ 0.
static const MemoryRegion_t xAltRegions[portNUM_CONFIGURABLE_REGIONS] =
{
// ą▒ą░ąĘąŠą▓čŗą╣ ą░ą┤čĆąĄčü ą┤ą╗ąĖąĮą░ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą┤ąŠčüčéčāą┐ą░
{ ucOneKByte, 1024, portMPU_REGION_READ_WRITE },
{ 0, 0, 0 },
{ 0, 0, 0 }
};
void vATask( void *pvParameters )
{
// ąŁčéą░ ąĘą░ą┤ą░čćą░ ą▒čŗą╗ą░ čüąŠąĘą┤ą░ąĮą░ čéą░ą║, čćč鹊 čā ąĮąĄčæ ąĄčüčéčī ą┤ąŠčüčéčāą┐ ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝
// čĆąĄą│ąĖąŠąĮą░ą╝ ą┐ą░ą╝čÅčéąĖ, ą║ą░ą║ čŹč鹊 ąĘą░ą┤ą░ąĮąŠ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĄą╣ MPU. ąÆ ąĮąĄą║ąŠč鹊čĆąŠą╝ ą╝ąĄčüč鹥
// ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 čĆąĄčłąĄąĮąĖąĄ, čćč鹊 čŹčéąĖ čĆąĄą│ąĖąŠąĮčŗ MPU ąĘą░ą╝ąĄąĮčÅčÄčéčüčÅ ąĮą░
// ą┤čĆčāą│ąĖąĄ, ą║ąŠč鹊čĆčŗąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓čŗčłąĄ ą▓ čüčéčĆčāą║čéčāčĆąĄ xAltRegions. ąöą╗čÅ čŹč鹊ą╣
// čåąĄą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓čŗąĘąŠą▓ vTaskAllocateMPURegions(). ąÆ ą║ą░č湥čüčéą▓ąĄ
// ą┐ąĄčĆą▓ąŠą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░ čāą║ą░ąĘą░ąĮ NULL, čŹčéąĖą╝ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčéčü, čćč鹊 ą▒čāą┤čāčé
// ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮčŗ čĆąĄą│ąĖąŠąĮčŗ MPU ąĘą░ą┤ą░čćąĖ, ąĖąĘ ą║ąŠč鹊čĆąŠą╣ ą▒čŗą╗ čüą┤ąĄą╗ą░ąĮ ą▓čŗąĘąŠą▓
// vTaskAllocateMPURegions.
vTaskAllocateMPURegions(NULL, xAltRegions);
// ąóąĄą┐ąĄčĆčī ąĘą░ą┤ą░čćą░ ą╝ąŠąČąĄčé ą┐čĆąŠą┤ąŠą╗ąČąĖčéčī čüą▓ąŠąĄ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ, ąĮąŠ čü čŹč鹊ą│ąŠ
// ą╝ąŠą╝ąĄąĮčéą░ ą╝ąŠąČąĄčé ąĖą╝ąĄčéčī ą┤ąŠčüčéčāą┐ č鹊ą╗čīą║ąŠ ą║ čüą▓ąŠąĄą╝čā čüč鹥ą║čā ąĖ ą║ ą╝ą░čüčüąĖą▓čā
// ucOneKByte (ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ ą╗čÄą▒čŗčģ ą┤čĆčāą│ąĖčģ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ čüčéą░čéąĖč湥čüą║ąĖ
// ąĖą╗ąĖ ąŠą▒čēąĖčģ čĆąĄą│ąĖąŠąĮąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą│ą┤ąĄ-ąĮąĖą▒čāą┤čī ąĄčēąĄ).
}
BaseType_t xTaskCreateRestricted (const TaskParameters_t * const pxTaskDefinition,
TaskHandle_t * pxCreatedTask) PRIVILEGED_FUNCTION;
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┤ąŠčüčéčāą┐ąĮą░ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ ąŠą┐čåąĖčÅ configSUPPORT_DYNAMIC_ALLOCATION ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą║ą░ą║ 1. ążčāąĮą║čåąĖčÅ xTaskCreateRestricted() ą┤ąŠą╗ąČąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ą▓ čüąĖčüč鹥ą╝ą░čģ, ą│ą┤ąĄ ąĄčüčéčī čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ MPU.
ąĪąŠąĘą┤ą░ąĄčé ąĮąŠą▓čāčÄ ąĘą░ą┤ą░čćčā, ąĖ ą┤ąŠą▒ą░ą▓ą╗čÅąĄčé ąĄčæ ą▓ čüą┐ąĖčüąŠą║ ąĘą░ą┤ą░čć, ą│ąŠč鹊ą▓čŗčģ ą║ čĆą░ą▒ąŠč鹥. ą¤ą░čĆą░ą╝ąĄčéčĆčŗ čäčāąĮą║čåąĖąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé čĆąĄą│ąĖąŠąĮčŗ ą┐ą░ą╝čÅčéąĖ ąĖ čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ąĮąĖą╝ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┤ąŠčüčéčāą┐ą░ ą┤ą╗čÅ ąĘą░ą┤ą░čćąĖ.
ąĪą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ xTaskCreateRestrictedStatic() ą┤ą╗čÅ ą▓ąĄčĆčüąĖąĖ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ, ą║ąŠč鹊čĆą░čÅ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠąĄ ą▓čŗą┤ąĄą╗ąĄąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ.
ąÆąŠąĘą▓čĆą░čéąĖčé pdPASS, ąĄčüą╗ąĖ ąĘą░ą┤ą░čćą░ ą▒čŗą╗ą░ čāčüą┐ąĄčłąĮąŠ čüąŠąĘą┤ą░ąĮą░ ąĖ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮą░ ą▓ čüą┐ąĖčüąŠą║ ready, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ą▓ projdefs.h.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
pxTaskDefinition: čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā, ą║ąŠč鹊čĆą░čÅ čüąŠą┤ąĄčƹȹĖčé ą▓ čüą▓ąŠąĖčģ ą┐ąŠą╗čÅčģ ąĮąŠčĆą╝ą░ą╗čīąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą▓ čäčāąĮą║čåąĖčÄ xTaskCreate() (čüą╝. ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ API ąĮą░ čäčāąĮą║čåąĖčÄ xTaskCreate), ą┐ą╗čÄčü ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ ą▒čāč乥čĆ čüč鹥ą║ą░ ąĖ ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čĆąĄą│ąĖąŠąĮąŠą▓ ą┐ą░ą╝čÅčéąĖ.
pxCreatedTask: ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, čćč鹊ą▒čŗ ą┐ąĄčĆąĄą┤ą░čéčī ąŠą▒čĆą░čéąĮąŠ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ čüąŠąĘą┤ą░ąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ, č湥čĆąĄąĘ ą║ąŠč鹊čĆčŗą╣ ąĮą░ ąĘą░ą┤ą░čćčā ą╝ąŠąČąĮąŠ ą▒čāą┤ąĄčé čüčüčŗą╗ą░čéčīčüčÅ ą▓ą┐ąŠčüą╗ąĄą┤čüčéą▓ąĖąĖ.
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ:
// ąĪąŠąĘą┤ą░ąĮąĖąĄ čüčéčĆčāą║čéčāčĆčŗ TaskParameters_t, ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčēąĄą╣ ąĘą░ą┤ą░čćčā.
static const TaskParameters_t xCheckTaskParameters =
{
vATask, // pvTaskCode - čäčāąĮą║čåąĖčÅ, ą│ą┤ąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą║ąŠą┤ ąĘą░ą┤ą░čćąĖ.
"ATask", // pcName - ą┐čĆąŠčüč鹊 ąŠą┐ąĖčüą░č鹥ą╗čīąĮąŠąĄ ąĖą╝čÅ ąĘą░ą┤ą░čćąĖ.
100, // usStackDepth - čĆą░ąĘą╝ąĄčĆ čüč鹥ą║ą░, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ą▓ čüą╗ąŠą▓ą░čģ.
NULL, // pvParameters - ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ čäčāąĮą║čåąĖčÄ ąĘą░ą┤ą░čćąĖ ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓.
(1UL | portPRIVILEGE_BIT), // uxPriority - ą┐čĆąĖąŠčĆąĖč鹥čé ąĘą░ą┤ą░čćąĖ. ąŚą┤ąĄčüčī
// čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé portPRIVILEGE_BIT, ąŠąĮ ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąĘą░ą┤ą░čćą░
// ą┤ąŠą╗ąČąĮą░ čĆą░ą▒ąŠčéą░čéčī ą▓ ą┐čĆąĖą▓ąĖą╗ąĄą│ąĖčĆąŠą▓ą░ąĮąĮąŠą╝ (čüąĖčüč鹥ą╝ąĮąŠą╝) čĆąĄąČąĖą╝ąĄ.
cStackBuffer,// puxStackBuffer - ą▒čāč乥čĆ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ.
// xRegions - ą▓čŗą┤ąĄą╗čÅąĄčéčüčÅ ą┤ąŠ čéčĆąĄčģ ąŠčéą┤ąĄą╗čīąĮčŗčģ čĆąĄą│ąĖąŠąĮąŠą▓ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░
// čüąŠ čüč鹊čĆąŠąĮčŗ ąĘą░ą┤ą░čćąĖ, čü ą┐ąŠą┤čģąŠą┤čÅčēąĖą╝ąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅą╝ąĖ ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░. ąĀą░ąĘąĮčŗąĄ
// ą┐čĆąŠčåąĄčüčüąŠčĆčŗ ąĖą╝ąĄčÄčé čĆą░ąĘąĮčŗąĄ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą║ ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖčÄ čĆąĄą│ąĖąŠąĮąŠą▓ ą┐ą░ą╝čÅčéąĖ,
// čüą╝. ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ ąĮą░ FreeRTOS ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą╗ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ.
{
// ąæą░ąĘąŠą▓čŗą╣ ą░ą┤čĆąĄčü ąöą╗ąĖąĮą░ ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ą┤ąŠčüčéčāą┐ą░
{cReadWriteArray, 32, portMPU_REGION_READ_WRITE},
{cReadOnlyArray, 32, portMPU_REGION_READ_ONLY},
{cPrivilegedOnlyAccessArray, 128, portMPU_REGION_PRIVILEGED_READ_WRITE}
}
};
int main( void )
{
TaskHandle_t xHandle;
// ąĪąŠąĘą┤ą░ąĄčéčüčÅ ąĘą░ą┤ą░čćą░ čü ą┐ąŠą╝ąŠčēčīčÄ čüčéčĆčāą║čéčāčĆčŗ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ ą▓čŗčłąĄ. ą¤čĆąĖ ą▓čŗąĘąŠą▓ąĄ
// ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčéčüčÅ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĘą░ą┤ą░čćąĖ, ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮ ą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ
// xHandle (ą▓č鹊čĆąŠą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ != NULL), ąŠą┤ąĮą░ą║ąŠ ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ čŹč鹊 ą┐čĆąŠčüč鹊
// ą┤ą╗čÅ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąĖ, ąĖ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĮąĖą│ą┤ąĄ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ.
xTaskCreateRestricted(&xRegTest1Parameters, &xHandle);
// ąŚą░ą┐čāčüą║ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░.
vTaskStartScheduler();
// ąĪčÄą┤ą░ ą╝čŗ ą┐ąŠą┐ą░ą┤ąĄą╝ č鹊ą╗čīą║ąŠ ą▓ č鹊ą╝ čüą╗čāčćą░ąĄ, ąĄčüą╗ąĖ ąĮąĄ ą▒čŗą╗ąŠ ą┤ąŠčüčéą░č鹊čćąĮąŠ ą┐ą░ą╝čÅčéąĖ
// ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ąĘą░ą┤ą░čćąĖ ąĘą░ą┤ą░čćąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle task) ąĖ/ąĖą╗ąĖ ąĘą░ą┤ą░čćąĖ ATask.
for( ;; );
}
void vTaskDelete (TaskHandle_t xTaskToDelete);
ą¦č鹊ą▒čŗ čŹčéą░ čäčāąĮą║čåąĖčÅ ą▒čŗą╗ą░ ą┤ąŠčüčéčāą┐ąĮą░, ąŠą┐čåąĖčÅ INCLUDE_vTaskDelete ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą║ą░ą║ 1.
ąŻą┤ą░ą╗čÅąĄčé ąĘą░ą┤ą░čćčā ąĖąĘ čüąĖčüč鹥ą╝čŗ RTOS. ąŚą░ą┤ą░čćą░ ą▒čāą┤ąĄčé čāą┤ą░ą╗ąĄąĮą░ ąĖąĘ ą▓čüąĄčģ čüą┐ąĖčüą║ąŠą▓ ready, blocked, suspended ąĖ event.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: idle task ąŠčéą▓ąĄčćą░ąĄčé ąĘą░ ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ čüąĖčüč鹥ą╝čŗ, čüą▓čÅąĘą░ąĮąĮąŠą╣ čü čāą┤ą░ą╗čÅąĄą╝čŗą╝ąĖ ąĘą░ą┤ą░čćą░ą╝ąĖ. ą¤ąŠčŹč鹊ą╝čā ą▓ą░ąČąĮąŠ, čćč鹊ą▒čŗ ą┤čĆčāą│ąĖąĄ ąĘą░ą┤ą░čćąĖ ąŠčüčéą░ą▓ą╗čÅą╗ąĖ ąĮąĄą║ąŠč鹊čĆąŠąĄ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ ą┤ą╗čÅ idle task, ąĄčüą╗ąĖ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓čŗąĘąŠą▓čŗ vTaskDelete(). ą¤ą░ą╝čÅčéčī, ą▓čŗą┤ąĄą╗ąĄąĮąĮą░čÅ ą║ąŠą┤ąŠą╝ ąĘą░ą┤ą░čćąĖ, ąĮąĄ ąŠčüą▓ąŠą▒ąŠąČą┤ą░ąĄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ, ąĖ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮą░ ą┐ąĄčĆąĄą┤ čāą┤ą░ą╗ąĄąĮąĖąĄą╝ ąĘą░ą┤ą░čćąĖ.
ąĪą╝. ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą▓ čäą░ą╣ą╗ąĄ death.c, ą│ą┤ąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą║ąŠą┤ ą┐čĆąĖą╝ąĄčĆą░, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĖą╣ vTaskDelete().
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
xTaskToDelete: ą┤ąĄčüą║čĆąĖą┐č鹊čĆ čāą┤ą░ą╗čÅąĄą╝ąŠą╣ ąĘą░ą┤ą░čćąĖ. ąÆ čŹč鹊ą╝ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ NULL, ąĄčüą╗ąĖ čāą┤ą░ą╗čÅąĄčéčüčÅ ąĘą░ą┤ą░čćą░, ąĖąĘ ą║ąŠč鹊čĆąŠą╣ ą▒čŗą╗ą░ ą▓čŗąĘą▓ą░ąĮą░ čäčāąĮą║čåąĖčÅ vTaskDelete.
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ:
void vOtherFunction (void)
{
TaskHandle_t xHandle;
// ąĪąŠąĘą┤ą░ąĄčéčüčÅ ąĘą░ą┤ą░čćą░, čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ąĄčæ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ.
xTaskCreate(vTaskCode, "NAME", STACK_SIZE, NULL, tskIDLE_PRIORITY, &xHandle);
// ąĪąŠčģčĆą░ąĮąĄąĮąĮčŗą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čüčüčŗą╗ą║ąĖ ąĮą░ čāą┤ą░ą╗čÅąĄą╝čāčÄ ąĘą░ą┤ą░čćčā.
vTaskDelete(xHandle);
}
ąÆą░ąČąĮąŠąĄ ąĘą░ą╝ąĄčćą░ąĮąĖąĄ: ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┐ąŠčĆčéčŗ FreeRTOS (ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┐ąŠčĆčé ESP-IDF ą┤ą╗čÅ čćąĖą┐ąŠą▓ ESP32) čéčĆąĄą▒čāčÄčé, čćč鹊ą▒čŗ ą▓čŗąĘąŠą▓ vTaskDelete(NULL) ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ čüč鹊čÅą╗ ą▓ ą║ąŠąĮčåąĄ č鹥ą╗ą░ čäčāąĮą║čåąĖąĖ ą┐ąŠč鹊ą║ą░. ąĢčüą╗ąĖ čŹč鹊 čāčüą╗ąŠą▓ąĖąĄ ąĮąĄ ą▓čŗą┐ąŠą╗ąĮąĖčéčī, č鹊 čüąŠčüč鹊čÅąĮąĖąĄ ąĘą░ą┤ą░čćąĖ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą┐ąŠą╝ąĄąĮčÅąĄčéčüčÅ ąĮą░ eDeleted, ąĖ ą▓čüąĄą│ą┤ą░ ą▒čāą┤ąĄčé eRunning.
void vTaskDelay (const TickType_t xTicksToDelay);
ąŚą░ą┤ąĄčƹȹĖą▓ą░ąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ąĘą░ą┤ą░čćąĖ ąĮą░ čāą║ą░ąĘą░ąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéąĖą║ąŠą▓. ąĀąĄą░ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ, ą▓ č鹥č湥ąĮąĖąĄ ą║ąŠč鹊čĆąŠą│ąŠ ąĘą░ą┤ą░čćą░ ąŠčüčéą░ąĄčéčüčÅ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĮąŠą╣, ąĘą░ą▓ąĖčüąĖčé ąŠčé čćą░čüč鹊čéčŗ čéąĖą║ąŠą▓. ąöą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ąĘąĮą░č湥ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ xTicksToDelay ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ąŠąĮčüčéą░ąĮčéą░ portTICK_PERIOD_MS, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ ą┐čĆąĖą╝ąĄčĆąĄ ąĮąĖąČąĄ. ąŁčéą░ ą║ąŠąĮčüčéą░ąĮčéą░ čāą║ą░ąĘčŗą▓ą░ąĄčé ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą┐ąĄčĆąĖąŠą┤ą░ čéąĖą║ą░ ą▓ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ą░čģ.
ą¦č鹊ą▒čŗ čŹčéą░ čäčāąĮą║čåąĖčÅ ą▒čŗą╗ą░ ą┤ąŠčüčéčāą┐ąĮą░, ąŠą┐čåąĖčÅ INCLUDE_vTaskDelay ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą║ą░ą║ 1.
vTaskDelay() ąĘą░ą┤ą░ąĄčé ą▓čĆąĄą╝čÅ, ą┐ąŠčüą╗ąĄ ąĖčüč鹥č湥ąĮąĖčÅ ą║ąŠč鹊čĆąŠą│ąŠ ąĘą░ą┤ą░čćą░ ąĘą░čģąŠč湥čé čüčéą░čéčī čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĮąŠą╣. ą×čéčüč湥čé ą▓čĆąĄą╝ąĄąĮąĖ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü ą╝ąŠą╝ąĄąĮčéą░ ą▓čŗąĘąŠą▓ą░ čäčāąĮą║čåąĖąĖ vTaskDelay. ąæčāą┤ąĄčé ą╗ąĖ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮą░ ąĘą░ą┤ą░čćą░ ą┐ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, ąĖą╗ąĖ ąĮąĄčé (čé. ąĄ. č鹊čćąĮąŠčüčéčī ą▓čŗą┤ąĄčƹȹ║ąĖ ąĘą░ą┤ą░ąĮąĮąŠą│ąŠ ąĖąĮč鹥čĆą▓ą░ą╗ą░), ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĘą░ą│čĆčāąČąĄąĮąĮąŠčüčéąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝ąĖ ąĖ ą┤čĆčāą│ąĖą╝ąĖ ąĘą░ą┤ą░čćą░ą╝ąĖ čü ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, vTaskDelay() ąĮąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą╝ąĄč鹊ą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆą░ą▒ąŠč鹊ą╣ ą║ąŠą┤ą░ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ. ąĪą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ xTaskDelayUntil() ą┤ą╗čÅ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓čŗ, ą║ąŠč鹊čĆą░čÅ ą▒čŗą╗ą░ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮą░ ą┤ą╗čÅ čāą┐čĆąŠčēąĄąĮąĖčÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą║ąŠą┤ą░, čĆą░ą▒ąŠčéą░čÄčēąĄą│ąŠ čü čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠą╣ čćą░čüč鹊č鹊ą╣. ążčāąĮą║čåąĖčÅ xTaskDelayUntil ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą░ą▒čüąŠą╗čÄčéąĮąŠąĄ ą▓čĆąĄą╝čÅ (ą▓ą╝ąĄčüč鹊 ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠą│ąŠ) ąĮą░ ą║ąŠč鹊čĆąŠą╝ ąĘą░ą┤ą░čćą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮą░.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
xTicksToDelay: ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ ą║ąŠą╗ąĖč湥čüčéą▓ąĄ čéąĖą║ąŠą▓ čüąĖčüč鹥ą╝čŗ, ą▓ č鹥č湥ąĮąĖąĄ ą║ąŠč鹊čĆąŠą│ąŠ ąĘą░ą┤ą░čćą░ ą┤ąŠą╗ąČąĮą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ.
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ:
void vTaskFunction (void * pvParameters)
{
// ąæą╗ąŠą║ąĖčĆąŠą▓ą║ą░ ąĮą░ 500 ą╝čü.
const TickType_t xDelay = 500 / portTICK_PERIOD_MS;
for( ;; )
{
// ąŚą░ą┤ą░čćą░ ą┐čĆąŠčüč鹊 ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄčé čüą▓ąĄč鹊ą┤ąĖąŠą┤ ą║ą░ąČą┤čŗąĄ 500 ą╝čü,
// ą▒ą╗ąŠą║ąĖčĆčāčÅčüčī ą╝ąĄąČą┤čā ą║ą░ąČą┤čŗą╝ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄą╝.
vToggleLED();
vTaskDelay( xDelay );
}
}
BaseType_t xTaskDelayUntil (TickType_t *constpxPreviousWakeTime,
const TickType_t xTimeIncrement);
ą¦č鹊ą▒čŗ čŹčéą░ čäčāąĮą║čåąĖčÅ ą▒čŗą╗ą░ ą┤ąŠčüčéčāą┐ąĮą░, ąŠą┐čåąĖčÅ INCLUDE_xTaskDelayUntil ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą▓ 1.
ąŚą░ą┤ąĄčƹȹĖą▓ą░ąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ąĘą░ą┤ą░čćąĖ ą┤ąŠ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ ą░ą▒čüąŠą╗čÄčéąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮą░ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖą╝ąĖ ąĘą░ą┤ą░čćą░ą╝ąĖ, čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ą┐ąŠčüč鹊čÅąĮąĮčāčÄ čćą░čüč鹊čéčā ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ąŠą┤ą░.
ą¤ąŠą▓ąĄą┤ąĄąĮąĖąĄ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé vTaskDelay ą▓ ąŠą┤ąĮąŠą╝ ą▓ą░ąČąĮąŠą╝ ą░čüą┐ąĄą║č鹥: vTaskDelay ą▒ą╗ąŠą║ąĖčĆčāąĄčé ąĘą░ą┤ą░čćčā ąĮą░ čāą║ą░ąĘą░ąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéąĖą║ąŠą▓ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą╝ąŠą╝ąĄąĮčéą░, ą║ąŠą│ą┤ą░ ą▒čŗą╗ą░ ą▓čŗąĘą▓ą░ąĮą░ vTaskDelay. ą¤ąŠ čŹč鹊ą╣ ą┐čĆąĖčćąĖąĮąĄ ąĘą░čéčĆčāą┤ąĮąĖč鹥ą╗čīąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī vTaskDelay ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠą╣ čćą░čüč鹊čéčŗ čĆą░ą▒ąŠčéčŗ čāčćą░čüčéą║ąŠą▓ ą║ąŠą┤ą░ ą╝ąĄąČą┤čā ą▓čŗąĘąŠą▓ą░ą╝ąĖ vTaskDelay (ą▓čĆąĄą╝čÅ ą╝ąĄąČą┤čā ą▓čŗąĘąŠą▓ą░ą╝ąĖ vTaskDelay ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮčŗą╝ ąĖąĘ-ąĘą░ čĆą░ą▒ąŠčéčŗ ą┤čĆčāą│ąĖčģ ąĘą░ą┤ą░čć ąĖ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣).
ąÆ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ vTaskDelay ąĘą░ą┤ą░ąĄčé ą▓čĆąĄą╝čÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą╝ąŠą╝ąĄąĮčéą░, ą║ąŠą│ą┤ą░ čäčāąĮą║čåąĖčÅ ą▒čŗą╗ą░ ą▓čŗąĘą▓ą░ąĮą░, čäčāąĮą║čåąĖčÅ xTaskDelayUntil ąĘą░ą┤ą░ąĄčé ą░ą▒čüąŠą╗čÄčéąĮčŗą╣ (č鹊čćąĮčŗą╣) ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ, ąĮą░ ą║ąŠč鹊čĆąŠą╝ čäčāąĮą║čåąĖčÅ čģąŠč湥čé ą▒čŗčéčī čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĮąŠą╣.
ą£ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╝ą░ą║čĆąŠčü pdMS_TO_TICKS() ą┤ą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ą║ąŠą╗ąĖč湥čüčéą▓ą░ čéąĖą║ąŠą▓ ąŠčé ą▓čĆąĄą╝ąĄąĮąĖ, ąĘą░ą┤ą░ąĮąĮąŠą│ąŠ ą▓ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ą░čģ.
ążčāąĮą║čåąĖčÅ ą▓ąŠąĘą▓čĆą░čéąĖčé ąĘąĮą░č湥ąĮąĖąĄ, ą┐ąŠ ą║ąŠč鹊čĆąŠą╝čā ą╝ąŠąČąĮąŠ ą┐čĆąŠą▓ąĄčĆąĖčéčī, ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠ ą╗ąĖ čäčāąĮą║čåąĖčÅ ą▒čŗą╗ą░ ąĘą░ą┤ąĄčƹȹ░ąĮą░. ąÆąŠąĘą▓čĆą░čēąĄąĮąĮąŠąĄ pdTRUE ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąĘą░ą┤ą░čćą░ ą▒čŗą╗ą░ ąĘą░ą┤ąĄčƹȹ░ąĮą░, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ pdFALSE. ąŚą░ą┤ą░čćą░ ąĮąĄ ą▒čŗą╗ą░ ąĘą░ą┤ąĄčƹȹ░ąĮą░, ąĄčüą╗ąĖ čüą╗ąĄą┤čāčÄčēąĄąĄ ąŠąČąĖą┤ą░ąĄą╝ąŠąĄ ą▓čĆąĄą╝čÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠą║ą░ąĘą░ą╗ąŠčüčī čāąČąĄ ą▓ ą┐čĆąŠčłą╗ąŠą╝.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
pxPreviousWakeTime: čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ, ą║ąŠč鹊čĆą░čÅ čģčĆą░ąĮąĖčé ą▓čĆąĄą╝čÅ, ąĮą░ ą║ąŠč鹊čĆąŠą╝ ąĘą░ą┤ą░čćą░ ą▒čŗą╗ą░ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ čĆą░ąĘ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮą░. ąŁčéą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮą░ č鹥ą║čāčēąĖą╝ ą▓čĆąĄą╝ąĄąĮąĄą╝ ą┐ąĄčĆąĄą┤ čüą▓ąŠąĖą╝ ą┐ąĄčĆą▓čŗą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ (čüą╝. ą┐čĆąĖą╝ąĄčĆ ąĮąĖąČąĄ). ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą▒čāą┤ąĄčé ąŠą▒ąĮąŠą▓ą╗ąĄąĮą░ ą▓ čĆą░ą╝ą║ą░čģ ą▓čŗąĘąŠą▓ą░ xTaskDelayUntil.
xTimeIncrement: ą┐ąĄčĆąĖąŠą┤ ą▓čĆąĄą╝ąĄąĮąĖ. ąŚą░ą┤ą░čćą░ ą▒čāą┤ąĄčé čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮą░ ą▓ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ *pxPreviousWakeTime + xTimeIncrement. ąÆčŗąĘąŠą▓ xTaskDelayUntil čü čéą░ą║ąĖą╝ ąČąĄ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą╝ xTimeIncrement, ą║ą░ą║ ąĖ čĆą░ąĮąĄąĄ, ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ č鹊ą╝čā, čćč鹊 ą▓čŗąĘąŠą▓čŗ xTaskDelayUntil ą▒čāą┤čāčé ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī čü čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮčŗą╝ąĖ ąĖąĮč鹥čĆą▓ą░ą╗ą░ą╝ąĖ ą▓čĆąĄą╝ąĄąĮąĖ.
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ:
// ąÆčŗą┐ąŠą╗ąĮčÅąĄčé ą┤ąĄą╣čüčéą▓ąĖąĄ ą║ą░ąČą┤čŗąĄ 10 čéąĖą║ąŠą▓.
void vTaskFunction (void * pvParameters)
{
TickType_t xLastWakeTime;
const TickType_t xFrequency = 10;
BaseType_t xWasDelayed;
// ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ xLastWakeTime ąĘąĮą░č湥ąĮąĖąĄą╝ č鹥ą║čāčēąĄą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ.
xLastWakeTime = xTaskGetTickCount ();
for( ;; )
{
// ą×ąČąĖą┤ą░ąĮąĖąĄ čüą╗ąĄą┤čāčÄčēąĄą╣ ą┐čĆąŠą║čĆčāčéą║ąĖ čåąĖą║ą╗ą░.
xWasDelayed = xTaskDelayUntil(&xLastWakeTime, xFrequency);
// ąŚą┤ąĄčüčī ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ ąĘą░ą┤ą░ąĮąĮąŠąĄ ą┤ąĄą╣čüčéą▓ąĖąĄ. ąŚąĮą░č湥ąĮąĖąĄ xWasDelayed
// ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą▒čŗą╗ ą╗ąĖ ą║ąŠčĆčĆąĄą║čéąĮąŠ
// ą▓čŗą┤ąĄčƹȹ░ąĮ ąĘą░ą┤ą░ąĮąĮčŗą╣ ąĖąĮč鹥čĆą▓ą░ą╗ ą▓čĆąĄą╝ąĄąĮąĖ, ą╗ąĖą▒ąŠ ąČąĄ ą╝ąŠą╝ąĄąĮčé ą▓čŗąĘąŠą▓ą░
// ą▒čŗą╗ čāą┐čāčēąĄąĮ ąĖąĘ-ąĘą░ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ą┤čĆčāą│ąĖčģ ąĘą░ą┤ą░čć ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣.
...
}
}
BaseType_t xTaskAbortDelay (TaskHandle_t xTask);
ą¦č鹊ą▒čŗ čŹčéą░ čäčāąĮą║čåąĖčÅ ą▒čŗą╗ą░ ą┤ąŠčüčéčāą┐ąĮą░, ąŠą┐čåąĖčÅ INCLUDE_xTaskAbortDelay ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą▓ ąĘąĮą░č湥ąĮąĖąĄ 1 (ą▓ čäą░ą╣ą╗ąĄ FreeRTOSConfig.h).
ąŚą░ą┤ą░čćą░ ą▒čāą┤ąĄčé ąŠčüčéą░ą▓ą░čéčīčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Blocked, ą║ąŠą│ą┤ą░ ąŠąĮą░ ąČą┤ąĄčé ąĮą░čüčéčāą┐ą╗ąĄąĮąĖčÅ čüąŠą▒čŗčéąĖčÅ. ą×ąČąĖą┤ą░ąĄą╝ąŠąĄ čüąŠą▒čŗčéąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗ąĖą▒ąŠ čüąŠą▒čŗčéąĖąĄą╝ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (ą║ąŠą│ą┤ą░ čäčāąĮą║čåąĖčÅ ąŠąČąĖą┤ą░ąĄčé ą┐čĆąŠą┤ąŠą╗ąČąĄąĮąĖčÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄ ą▓čŗąĘąŠą▓ą░ vTaskDelay), ą╗ąĖą▒ąŠ čüąŠą▒čŗčéąĖąĄą╝ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ąĮą░ ąŠą▒čŖąĄą║č鹥 (ą║ąŠą│ą┤ą░ ą▒čŗą╗ ą▓čŗąĘąŠą▓ ąŠąČąĖą┤ą░ąĮąĖčÅ ąĮą░ ąŠč湥čĆąĄą┤ąĖ xQueueReceive() ąĖą╗ąĖ ą▒čŗą╗ ą▓čŗąĘąŠą▓ ulTaskNotifyTake). ąĢčüą╗ąĖ ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ą▒čŗą╗ ą┐ąĄčĆąĄą┤ą░ąĮ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĘą░ą┤ą░čćąĖ, ą║ąŠč鹊čĆą░čÅ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Blocked, č鹊 čŹčéą░ ąĘą░ą┤ą░čćą░ ą▓čŗą╣ą┤ąĄčé ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ Blocked čü ą▓ąŠąĘą▓čĆą░č鹊ą╝ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓ č鹊 ą╝ąĄčüč鹊 čüą▓ąŠąĄą│ąŠ ą║ąŠą┤ą░, ą│ą┤ąĄ ą▒čŗą╗ąŠ ą░ą║čéąĖą▓ąĖąĘąĖčĆąŠą▓ą░ąĮąŠ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ.
ąØąĄ čüčāčēąĄčüčéą▓čāąĄčé ą▓ąĄčĆčüąĖąĖ FromISR ą┤ą╗čÅ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ, ą┐ąŠčüą║ąŠą╗čīą║čā ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÄ ąĮčāąČąĮąŠ ąĘąĮą░čéčī, ąĮą░ ą║ą░ą║ąŠą╝ ąŠą▒čŖąĄą║č鹥 ą▒čŗą╗ą░ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮą░ ąĘą░ą┤ą░čćą░, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą║ą░ą║ąĖąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ ąĮčāąČąĮąŠ ą┐čĆąĄą┤ą┐čĆąĖąĮčÅčéčī. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ąĘą░ą┤ą░čćą░ ą▒čŗą╗ą░ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮą░ ąĮą░ ąŠč湥čĆąĄą┤ąĖ, č鹊 ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ąŠą╗ąČąĄąĮ ąĘąĮą░čéčī, ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮą░ ą╗ąĖ ąŠč湥čĆąĄą┤čī.
ąæčāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ pdFAIL, ąĄčüą╗ąĖ xTask ąĮąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Blocked. ąśąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ pdPASS.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
xTask: ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĘą░ą┤ą░čćąĖ, ą║ąŠč鹊čĆą░čÅ ą┐ąŠą║ąĖąĮąĄčé čüąŠčüč鹊čÅąĮąĖąĄ Blocked.
UBaseType_t uxTaskPriorityGet (const TaskHandle_t xTask);
ą¦č鹊ą▒čŗ čŹčéą░ čäčāąĮą║čåąĖčÅ ą▒čŗą╗ą░ ą┤ąŠčüčéčāą┐ąĮą░, ąŠą┐čåąĖčÅ INCLUDE_uxTaskPriorityGet ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą▓ 1. ążčāąĮą║čåąĖčÅ ą▓ąĄčĆąĮąĄčé ąĘąĮą░č湥ąĮąĖąĄ ą┐čĆąĖąŠčĆąĖč鹥čéą░ ą┤ą╗čÅ ą╗čÄą▒ąŠą╣ čāą║ą░ąĘą░ąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
xTask: ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĘą░ą┤ą░čćąĖ. ą¤ąĄčĆąĄą┤ą░čćą░ NULL ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą▓ąŠąĘą▓čĆą░čéčā ą┐čĆąĖąŠčĆąĖč鹥čéą░ ąĘą░ą┤ą░čćąĖ, ąĖąĘ ą║ąŠč鹊čĆąŠą╣ ą▒čŗą╗ą░ ą▓čŗąĘą▓ą░ąĮą░ čäčāąĮą║čåąĖčÅ.
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ:
void vAFunction (void)
{
TaskHandle_t xHandle;
// ąĪąŠąĘą┤ą░ąĄčéčüčÅ ąĘą░ą┤ą░čćą░ ąĖ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ąĄčæ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ xHandle.
xTaskCreate(vTaskCode, "NAME", STACK_SIZE, NULL, tskIDLE_PRIORITY, &xHandle);
// ...
// ąĪąŠčģčĆą░ąĮąĄąĮąĮčŗą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐čĆąĖąŠčĆąĖč鹥čéą░
// čüąŠąĘą┤ą░ąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ. ąŚą░ą┤ą░čćą░ ą▒čŗą╗ą░ čüąŠąĘą┤ą░ąĮą░ čü ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ tskIDLE_PRIORITY,
// ąŠą┤ąĮą░ą║ąŠ ąĘą░ą┤ą░čćą░ ą╝ąŠąČąĄčé ą┤ą╗čÅ čüą░ą╝ąŠą╣ čüąĄą▒čÅ ą┐ąŠą╝ąĄąĮčÅčéčī ą┐čĆąĖąŠčĆąĖč鹥čé.
if (uxTaskPriorityGet( xHandle ) != tskIDLE_PRIORITY)
{
// ąŻ ąĘą░ą┤ą░čćąĖ ą┐čĆąĖąŠčĆąĖč鹥čé ą▒čŗą╗ ąĖąĘą╝ąĄąĮąĄąĮ.
}
// ...
// ą¤čĆąĖąŠčĆąĖč鹥čé ąĮą░čłąĄą│ąŠ ą║ąŠą┤ą░ ą▓čŗčłąĄ, č湥ą╝ čā čüąŠąĘą┤ą░ąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ?
if( uxTaskPriorityGet(xHandle) < uxTaskPriorityGet(NULL) )
{
// ąÆ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ ą┐čĆąĖąŠčĆąĖč鹥čé č鹥ą║čāčēąĄą╣ ąĘą░ą┤ą░čćąĖ (ą┐ąŠą╗čāč湥ąĮ ą┐čĆąĖ
// ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ NULL) ą▓čŗčłąĄ,
// č湥ą╝ čā čüąŠąĘą┤ą░ąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ.
}
}
UBaseType_t uxTaskPriorityGetFromISR (const TaskHandle_t xTask);
ąöąĄą╗ą░ąĄčé č鹊 ąČąĄ čüą░ą╝ąŠąĄ, čćč鹊 ąĖ uxTaskPriorityGet, ąĮąŠ čäčāąĮą║čåąĖčÅ uxTaskPriorityGetFromISR ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮą░ ą┤ą╗čÅ ą▓čŗąĘąŠą▓ą░ ąĖąĘ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (ISR).
eTaskState eTaskGetState (TaskHandle_txTask);
ą¦č鹊ą▒čŗ čŹčéą░ čäčāąĮą║čåąĖčÅ ą▒čŗą╗ą░ ą┤ąŠčüčéčāą┐ąĮą░, ąŠą┐čåąĖčÅ INCLUDE_eTaskGetState ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą║ą░ą║ 1. ążčāąĮą║čåąĖčÅ ą┐ąŠą╗čāčćąĖčé čüąŠčüč鹊čÅąĮąĖąĄ ą╗čÄą▒ąŠą╣ ąĘą░ą┤ą░čćąĖ. ąĪąŠčüč鹊čÅąĮąĖčÅ ą║ąŠą┤ąĖčĆčāčÄčéčüčÅ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ ąĖąĘ ą┐ąĄčĆąĄčćąĖčüą╗čÅąĄą╝ąŠą│ąŠ čéąĖą┐ą░ eTaskState.
ąÆąŠąĘą▓čĆą░čéąĖčé čüąŠčüč鹊čÅąĮąĖąĄ ąĘą░ą┤ą░čćąĖ xTask ą▓ ą╝ąŠą╝ąĄąĮčé ą▓čŗąĘąŠą▓ą░ čäčāąĮą║čåąĖąĖ. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 čüąŠčüč鹊čÅąĮąĖąĄ ąĘą░ą┤ą░čćąĖ ą╝ąŠąČąĄčé ą┐ąŠą╝ąĄąĮčÅčéčīčüčÅ ą▓ ą┐čĆąŠčåąĄčüčüąĄ ą▓čŗąĘąŠą▓ą░ čäčāąĮą║čåąĖąĖ, ąĖ ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĖąĘ čäčāąĮą║čåąĖąĖ ą┐čĆąŠą▓ąĄčĆčÅą╗ąŠčüčī ą▓čŗąĘčŗą▓ą░čÄčēąĄą╣ ąĘą░ą┤ą░č湥ą╣.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
xTask: ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĖąĮč鹥čĆąĄčüčāčÄčēąĄą╣ ąĘą░ą┤ą░čćąĖ.
void vTaskGetInfo (TaskHandle_txTask,
TaskStatus_t *pxTaskStatus,
BaseType_t xGetFreeStackSpace,
eTaskState eState);
ą¦č鹊ą▒čŗ čŹčéą░ čäčāąĮą║čåąĖčÅ ą▒čŗą╗ą░ ą┤ąŠčüčéčāą┐ąĮą░, ąŠą┐čåąĖčÅ configUSE_TRACE_FACILITY ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą║ą░ą║ 1.
ąŚą░ą┐ąŠą╗ąĮąĖčé čüčéčĆčāą║čéčāčĆčā TaskStatus_t ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ ąĘą░ą┤ą░čćąĖ.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
xTask: ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąŠą┐čĆą░čłąĖą▓ą░ąĄą╝ąŠą╣ ąĘą░ą┤ą░čćąĖ. ąĢčüą╗ąĖ xTask čāą║ą░ąĘą░ąĮąŠ NULL, č鹊 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮą░ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą┐ąŠ č鹥ą║čāčēąĄą╣ ąĘą░ą┤ą░č湥 (ąŠčéą║čāą┤ą░ ą▒čŗą╗ą░ ą▓čŗąĘą▓ą░ąĮą░ čäčāąĮą║čåąĖčÅ).
pxTaskStatus: čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā TaskStatus_t, ą┐ąŠą╗čÅ ą║ąŠč鹊čĆąŠą╣ ą▒čāą┤čāčé ąĘą░ą┐ąŠą╗ąĮąĄąĮčŗ ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ ąŠ ąĘą░ą┤ą░č湥, ąĮą░ ą║ąŠč鹊čĆčāčÄ čāą║ą░ąĘčŗą▓ą░ą╗ ą┐ą░čĆą░ą╝ąĄčéčĆ xTask.
xGetFreeStackSpace: čüčéčĆčāą║čéčāčĆą░ TaskStatus_t ą▒čāą┤ąĄčé čüąŠą┤ąĄčƹȹ░čéčī 菹╗ąĄą╝ąĄąĮčé, čüąŠąŠą▒čēą░čÄčēąĖą╣ ąŠ čüą░ą╝ąŠą╣ ą▓ąĄčĆčģąĮąĄą╣ ą│čĆą░ąĮąĖčåąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ (high water mark). ąÆčŗčćąĖčüą╗ąĄąĮąĖąĄ water mark ąĘą░ąĮąĖą╝ą░ąĄčé ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą╝ąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, ąĖ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ č鹊ą╝čā, čćč鹊 čüąĖčüč鹥ą╝ą░ ąĮą░ ąĮąĄą║ąŠč鹊čĆąŠąĄ ą▓čĆąĄą╝čÅ ą┐ąŠą┤ą▓ąĖčüąĮąĄčé, ą┐ąŠčŹč鹊ą╝čā ą┐ą░čĆą░ą╝ąĄčéčĆ xGetFreeStackSpace ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐čĆąŠą┐čāčüčéąĖčéčī ą┐čĆąŠą▓ąĄčĆą║čā ąĮą░ ą▓čŗčćąĖčüą╗ąĄąĮąĖąĄ high water mark. ąŚąĮą░č湥ąĮąĖąĄ high watermark value ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮąŠ č鹊ą╗čīą║ąŠ ą▓ č鹊ą╝ čüą╗čāčćą░ąĄ, ąĄčüą╗ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆ xGetFreeStackSpace ąĮąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ pdFALSE;
eState: čüčéčĆčāą║čéčāčĆą░ TaskStatus_t ą▒čāą┤ąĄčé čüąŠą┤ąĄčƹȹ░čéčī 菹╗ąĄą╝ąĄąĮčé ą┤ą╗čÅ čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠ čüąŠčüč鹊čÅąĮąĖąĖ ąŠą┐čĆą░čłąĖą▓ą░ąĄą╝ąŠą╣ ąĘą░ą┤ą░čćąĖ. ą¤ąŠą╗čāč湥ąĮąĖąĄ čüąŠčüč鹊čÅąĮąĖčÅ ąĘą░ą┤ą░čćąĖ čéą░ą║ąČąĄ ąĮąĄ ąŠč湥ąĮčī ą▒čŗčüčéčĆąŠąĄ, ą┐ąŠ čŹč鹊ą╣ ą┐čĆąĖčćąĖąĮąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ ą┐ą░čĆą░ą╝ąĄčéčĆ eState, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ąĖčüą║ą╗čÄčćąĖčéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ čüąŠčüč鹊čÅąĮąĖąĖ. ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ čāčüčéą░ąĮąŠą▓ąĖč鹥 ą┐ą░čĆą░ą╝ąĄčéčĆ eState ą▓ ąĘąĮą░č湥ąĮąĖąĄ eInvalid, ąĖąĮą░č湥 ąĘąĮą░č湥ąĮąĖąĄ, ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠąĄ ą▓ eState, ą▒čāą┤ąĄčé čüąŠąŠą▒čēą░čéčīčüčÅ ą║ą░ą║ č鹥ą║čāčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą▓ čüčéčĆčāą║čéčāčĆąĄ TaskStatus_t (ąĮąĖą║ą░ą║ąŠą│ąŠ čĆąĄą░ą╗čīąĮąŠą│ąŠ ąŠą┐čĆąŠčüą░ čüąŠčüč鹊čÅąĮąĖčÅ ąĮąĄ ą▒čāą┤ąĄčé).
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ:
void vAFunction (void)
{
TaskHandle_t xHandle;
TaskStatus_t xTaskDetails;
// ą¤ąŠą╗čāč湥ąĮąĖąĄ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ ąĘą░ą┤ą░čćąĖ ą┐ąŠ ąĄčæ ąĖą╝ąĄąĮąĖ.
xHandle = xTaskGetHandle("Task_Name");
// ą¤čĆąŠą▓ąĄčĆą║ą░ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░, čćč鹊 ąŠąĮ ąĮąĄ NULL.
configASSERT( xHandle );
// ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ ąĘą░ą┤ą░čćąĖ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąŠ ąĮąĄą╣ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣
// ąĖąĮč乊čĆą╝ą░čåąĖąĖ.
vTaskGetInfo(xHandle,
&xTaskDetails,
pdTRUE, // ą┤ąŠą▒ą░ą▓ąĖčéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÄ čüč鹥ą║ą░
eInvalid); // ą┤ąŠą▒ą░ą▓ąĖčéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ čüąŠčüč鹊čÅąĮąĖąĖ ąĘą░ą┤ą░čćąĖ.
}
void vTaskPrioritySet (TaskHandle_txTask, UBaseType_t uxNewPriority);
ą¦č鹊ą▒čŗ čŹčéą░ čäčāąĮą║čåąĖčÅ ą▒čŗą╗ą░ ą┤ąŠčüčéčāą┐ąĮą░, ąŠą┐čåąĖčÅ INCLUDE_vTaskPrioritySet ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ 1.
ąŻčüčéą░ąĮąŠą▓ąĖčé ą┐čĆąĖąŠčĆąĖč鹥čé ą┤ą╗čÅ ą╗čÄą▒ąŠą╣ ąĘą░ą┤ą░čćąĖ.
ą¤ąĄčĆąĄą┤ ą▓ąŠąĘą▓čĆą░č鹊ą╝ ąĖąĘ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░, ąĄčüą╗ąĖ ą┐čĆąĖąŠčĆąĖč鹥čé ą▒čŗą╗ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓čŗčłąĄ, č湥ą╝ ą┐čĆąĖąŠčĆąĖč鹥čé č鹥ą║čāčēąĄą╣ ąĘą░ą┤ą░čćąĖ (ąĖąĘ ą║ąŠč鹊čĆąŠą╣ ą▒čŗą╗ą░ ą▓čŗąĘą▓ą░ąĮą░ čäčāąĮą║čåąĖčÅ).
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
xTask: ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĘą░ą┤ą░čćąĖ, ą┤ą╗čÅ ą║ąŠč鹊čĆąŠą╣ ą▒čŗą╗ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┐čĆąĖąŠčĆąĖč鹥čé. ą¤ąĄčĆąĄą┤ą░čćą░ NULL ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ č鹊ą╝čā, čćč鹊 ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┐čĆąĖąŠčĆąĖč鹥čé č鹥ą║čāčēąĄą╣ ąĘą░ą┤ą░čćąĖ (ąĖąĘ ą║ąŠč鹊čĆąŠą╣ ą▒čŗą╗ą░ ą▓čŗąĘą▓ą░ąĮą░ čŹčéą░ čäčāąĮą║čåąĖčÅ).
uxNewPriority: ą┐čĆąĖąŠčĆąĖč鹥čé, ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┤ą╗čÅ ąĘą░ą┤ą░čćąĖ.
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ:
void vAFunction (void)
{
TaskHandle_t xHandle;
// ąĪąŠąĘą┤ą░ąĮąĖąĄ ąĘą░ą┤ą░čćąĖ, čüąŠčģčĆą░ąĮąĄąĮąĖąĄ ąĄčæ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░.
xTaskCreate(vTaskCode, "NAME", STACK_SIZE, NULL, tskIDLE_PRIORITY, &xHandle);
// ...
// ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ ą┤ą╗čÅ ą┐ąŠą▓čŗčłąĄąĮąĖčÅ ą┐čĆąĖąŠčĆąĖč鹥čéą░ čüąŠąĘą┤ą░ąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ.
vTaskPrioritySet(xHandle, tskIDLE_PRIORITY + 1);
// ...
// ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 ą┤ąĄčüą║čĆąĖą┐č鹊čĆ NULL, čćč鹊ą▒čŗ ą┐ąŠą▓čŗčüąĖčéčī ą┐čĆąĖąŠčĆąĖč鹥čé ąĮą░čłąĄą│ąŠ ą║ąŠą┤ą░
// ą┤ąŠ čéą░ą║ąŠą│ąŠ ąČąĄ čāčĆąŠą▓ąĮčÅ.
vTaskPrioritySet(NULL, tskIDLE_PRIORITY + 1);
}
void vTaskSuspend (TaskHandle_t xTaskToSuspend);
ą¦č鹊ą▒čŗ čŹčéą░ čäčāąĮą║čåąĖčÅ ą▒čŗą╗ą░ ą┤ąŠčüčéčāą┐ąĮą░, ąŠą┐čåąĖčÅ INCLUDE_vTaskSuspend ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą║ą░ą║ 1.
ążčāąĮą║čåąĖčÅ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ąĖčé ą╗čÄą▒čāčÄ ąĘą░ą┤ą░čćčā. ą¤čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮą░čÅ ąĘą░ą┤ą░čćą░ ąĮąĄ ą▒čāą┤ąĄčé ąĘą░ąĮąĖą╝ą░čéčī ą▓čĆąĄą╝čÅ MCU, ą┐čĆąĖąŠčĆąĖč鹥čé ąĘą░ą┤ą░čćąĖ ą┐čĆąĖ čŹč鹊ą╝ ąĮąĄ ą▒čāą┤ąĄčé ąĖą│čĆą░čéčī ąĮąĖą║ą░ą║ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ.
ąÆčŗąĘąŠą▓ vTaskSuspend ąĮąĄ čÅą▓ą╗čÅąĄčéčüčÅ ą║čāą╝čāą╗čÅčéąĖą▓ąĮčŗą╝, čé. ąĄ. ą▓čŗąĘąŠą▓ vTaskSuspend ą┤ą▓ą░ąČą┤čŗ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮč鹥ąĮ ąŠą┤ąĮąŠą║čĆą░čéąĮąŠą╝čā ąĄčæ ą▓čŗąĘąŠą▓čā, ąĖ ą┤ą╗čÅ ą▓ąŠąĘą▓čĆą░čéą░ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ready ą▒čāą┤ąĄčé ą┤ąŠčüčéą░č鹊čćąĮąŠ ąŠą┤ąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ vTaskResume.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
xTaskToSuspend: ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą┐čĆąĖąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝ąŠą╣ ąĘą░ą┤ą░čćąĖ. ą¤ąĄčĆąĄą┤ą░čćą░ NULL ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ č鹊ą╝čā, čćč鹊 ą▒čāą┤ąĄčé ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ č鹥ą║čāčēą░čÅ ąĘą░ą┤ą░čćą░ (ą║ąŠą┤, ąĖąĘ ą║ąŠč鹊čĆąŠą│ąŠ ą▒čŗą╗ą░ ą▓čŗąĘą▓ą░ąĮą░ čäčāąĮą║čåąĖčÅ).
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ:
void vAFunction (void)
{
TaskHandle_t xHandle;
// ąĪąŠąĘą┤ą░ąĮąĖąĄ ąĘą░ą┤ą░čćąĖ, čüąŠčģčĆą░ąĮąĄąĮąĖąĄ ąĄčæ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░.
xTaskCreate( vTaskCode, "NAME", STACK_SIZE, NULL, tskIDLE_PRIORITY, &xHandle );
// ...
// ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ ą┤ą╗čÅ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ čüąŠąĘą┤ą░ąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ.
vTaskSuspend(xHandle);
// ...
// ąĪąŠąĘą┤ą░ąĮąĮą░čÅ ąĘą░ą┤ą░čćą░ ąĮąĄ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī, ą┐ąŠą║ą░ ąĖąĘ ą┤čĆčāą│ąŠą╣ ąĘą░ą┤ą░čćąĖ ąĮąĄ ą▒čāą┤ąĄčé
// čüą┤ąĄą╗ą░ąĮ ą▓čŗąĘąŠą▓ vTaskResume(xHandle).
//...
// ą¤čĆąĖąŠčüčéą░ąĮąŠą▓ą║ą░ čüą░ą╝ąŠą│ąŠ čüąĄą▒čÅ.
vTaskSuspend(NULL);
// ąĪčÄą┤ą░ ą╝čŗ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą┐ąŠą┐ą░ą┤ąĄą╝, ą┐ąŠą║ą░ ą┤čĆčāą│ą░čÅ ąĘą░ą┤ą░čćą░ ąĮąĄ ą▓čŗąĘąŠą▓ąĄčé
// vTaskResume čü ą┤ąĄčüą║čĆąĖą┐č鹊čĆąŠą╝ ąĮą░čłąĄą╣ ąĘą░ą┤ą░čćąĖ.
}
void vTaskResume (TaskHandle_t xTaskToResume);
ą¦č鹊ą▒čŗ čŹčéą░ čäčāąĮą║čåąĖčÅ ą▒čŗą╗ą░ ą┤ąŠčüčéčāą┐ąĮą░, ąŠą┐čåąĖčÅ INCLUDE_vTaskSuspend ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą║ą░ą║ 1.
ąÆąŠąĘąŠą▒ąĮąŠą▓ą╗čÅąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ.
ąŚą░ą┤ą░čćą░, ą║ąŠč鹊čĆą░čÅ ą▒čŗą╗ą░ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ąŠą┤ąĮąĖą╝ ąĖąĘ ą▓čŗąĘąŠą▓ąŠą▓ vTaskSuspend, ą┐ąŠčüą╗ąĄ ą▓čŗąĘąŠą▓ą░ vTaskResume ą▒čāą┤ąĄčé čüąĮąŠą▓ą░ ą┤ąŠčüčéčāą┐ąĮą░ ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
xTaskToResume: ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĘą░ą┤ą░čćąĖ, ą║ąŠč鹊čĆą░čÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓ąŠąĘą▓čĆą░čēąĄąĮą░ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ready.
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ:
void vAFunction (void)
{
TaskHandle_t xHandle;
// ąĪąŠąĘą┤ą░ąĮąĖąĄ ąĘą░ą┤ą░čćąĖ, čüąŠčģčĆą░ąĮąĄąĮąĖąĄ ąĄčæ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░.
xTaskCreate(vTaskCode, "NAME", STACK_SIZE, NULL, tskIDLE_PRIORITY, &xHandle);
// ...
// ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ ą┤ą╗čÅ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ čüąŠąĘą┤ą░ąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ.
vTaskSuspend(xHandle);
// ...
// ąĪąŠąĘą┤ą░ąĮąĮą░čÅ ąĘą░ą┤ą░čćą░ ąĮąĄ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī, ą┐ąŠą║ą░ ąĖąĘ ą┤čĆčāą│ąŠą╣ ąĘą░ą┤ą░čćąĖ ąĮąĄ ą▒čāą┤ąĄčé
// čüą┤ąĄą╗ą░ąĮ ą▓čŗąĘąŠą▓ vTaskResume(xHandle).
//...
// ąÆąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ.
vTaskResume(xHandle);
// ąĪąŠąĘą┤ą░ąĮąĮą░čÅ ąĘą░ą┤ą░čćą░ čüąĮąŠą▓ą░ ą▒čāą┤ąĄčé ą┐ąŠčéčĆąĄą▒ą╗čÅčéčī ą▓čŗčćąĖčüą╗ąĖč鹥ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ MCU
// ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ąĄčæ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ ą▓ čüąĖčüč鹥ą╝ąĄ.
}
BaseType_t xTaskResumeFromISR (TaskHandle_t xTaskToResume);
ą¦č鹊ą▒čŗ čŹčéą░ čäčāąĮą║čåąĖčÅ ą▒čŗą╗ą░ ą┤ąŠčüčéčāą┐ąĮą░, ąŠą┐čåąĖčÅ INCLUDE_xTaskResumeFromISR ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą║ą░ą║ 1.
ąöąĄą╗ą░ąĄčé č鹊 ąČąĄ čüą░ą╝ąŠąĄ, čćč鹊 ąĖ vTaskResume, č鹊ą╗čīą║ąŠ čŹčéą░ ą▓ąĄčĆčüąĖčÅ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮą░ ą┤ą╗čÅ ą▓čŗąĘąŠą▓ą░ ąĖąĘ č鹥ą╗ą░ ISR.
ąŚą░ą┤ą░čćą░, ą║ąŠč鹊čĆą░čÅ ą▒čŗą╗ą░ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ąŠą┤ąĮąĖą╝ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĖą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ ą▓čŗąĘąŠą▓ąŠą▓ vTaskSuspend, čüąĮąŠą▓ą░ čüčéą░ąĮąĄčé ą┤ąŠčüčéčāą┐ąĮą░ ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄ ąŠą┤ąĖąĮąŠčćąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ xTaskResumeFromISR.
xTaskResumeFromISR ąĮąĄ ą┤ąŠą╗ąČąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ąĘą░ą┤ą░čćąĖ čü ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄą╝, ąĄčüą╗ąĖ ąĄčüčéčī čłą░ąĮčü, čćč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ ą┤ąŠ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ ąĘą░ą┤ą░čćąĖ, ą┐ąŠčüą║ąŠą╗čīą║čā čŹč鹊 ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ą┐čĆąŠą┐čāčüą║čā ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 ą╝ąĄčģą░ąĮąĖąĘą╝ čüąĄą╝ą░č乊čĆą░, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī čéą░ą║ąĖčģ čüąŠą▒čŗčéąĖą╣.
ąÆąŠąĘą▓čĆą░čéąĖčé pdTRUE ąĄčüą╗ąĖ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ąĘą░ą┤ą░čćąĖ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÄ ą║ąŠąĮč鹥ą║čüčéą░, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ pdFALSE. ąÆ ą║ąŠą┤ąĄ ISR čŹč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ, čéčĆąĄą▒čāąĄčéčüčÅ ą╗ąĖ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░ ą┐ąŠčüą╗ąĄ ą▓ąŠąĘą▓čĆą░čéą░ ąĖąĘ ISR.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
xTaskToResume: ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĘą░ą┤ą░čćąĖ, ą║ąŠč鹊čĆą░čÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓ąŠąĘą▓čĆą░čēąĄąĮą░ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ready.
void vTaskStartScheduler (void);
ąŚą░ą┐čāčüčéąĖčé ąŠą▒čĆą░ą▒ąŠčéą║čā čéąĖą║ąŠą▓ FreeRTOS (ąĮą░čćąĮąĄčé čĆą░ą▒ąŠčéčā ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ąĘą░ą┤ą░čć ąĖ ąĘą░ą┤ą░čćą░ idle). ą¤ąŠčüą╗ąĄ ą▓čŗąĘąŠą▓ą░ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ąĮą░čćąĮąĄčé ą┐ąĄčĆąĄą║ą╗čÄčćą░čéčī ą║ąŠąĮč鹥ą║čüčé ą╝ąĄąČą┤čā ąĘą░ą┤ą░čćą░ą╝ąĖ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ąĖčģ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ąĖ ą┐čĆąĖąŠčĆąĖč鹥čéą░ą╝ąĖ ąĖ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ą░ą╝ąĖ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┐ąŠčĆčé ESP-IDF FreeRTOS ąĘą░ą┐čāčüą║ą░ąĄčé ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ startup ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, čéą░ą║ čćč鹊 ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąĮąĄ ąĮčāąČąĮąŠ ą▓čŗąĘčŗą▓ą░čéčī vTaskStartScheduler() ąĖąĘ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ESP-IDF.
ąĪą╝. čäą░ą╣ą╗ main.c ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ą│ą┤ąĄ ą┤ą░ąĮ ą┐čĆąĖą╝ąĄčĆ čüąŠąĘą┤ą░ąĮąĖčÅ ąĘą░ą┤ą░čć ąĖ ąĘą░ą┐čāčüą║ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čÅą┤čĆą░ FreeRTOS.
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ:
void vAFunction (void)
{
// ąĪąŠąĘą┤ą░ąĮąĖąĄ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĮąŠą╣ ąĘą░ą┤ą░čćąĖ ą┐ąĄčĆąĄą┤ ąĘą░ą┐čāčüą║ąŠą╝ čÅą┤čĆą░.
xTaskCreate(vTaskCode, "NAME", STACK_SIZE, NULL, tskIDLE_PRIORITY, NULL);
// ąŚą░ą┐čāčüą║ čÅą┤čĆą░ (real time kernel) čü ą▓čŗč鹥čüąĮčÅčÄčēąĄą╣ ą╝ąĮąŠą│ąŠąĘą░ą┤ą░čćąĮąŠčüčéčīčÄ.
vTaskStartScheduler();
// ąĪčÄą┤ą░ ą╝čŗ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą┐ąŠą┐ą░ą┤ąĄą╝, ą║čĆąŠą╝ąĄ ą║ą░ą║ ą▓ čüąĖčéčāą░čåąĖąĖ, ą║ąŠą│ą┤ą░ ąĘą░ą┤ą░čćą░
// ą▓čŗąĘąŠą▓ąĄčé vTaskEndScheduler.
}
void vTaskEndScheduler (void);
ą×čüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąŠą▒čĆą░ą▒ąŠčéą║čā čéąĖą║ąŠą▓ čÅą┤čĆą░ RTOS. ąÆčüąĄ čüąŠąĘą┤ą░ąĮąĮčŗąĄ ąĘą░ą┤ą░čćąĖ ą▒čāą┤čāčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čāą┤ą░ą╗ąĄąĮčŗ čāą┤ą░ą╗ąĄąĮčŗ, ąĖ ą╝ąĮąŠą│ąŠąĘą░ą┤ą░čćąĮąŠčüčéčī (čü ą▓čŗč鹥čüąĮąĄąĮąĖąĄą╝ ąĖą╗ąĖ ą║ąŠąŠą┐ąĄčĆą░čéąĖą▓ąĮą░čÅ) ą▒čāą┤ąĄčé ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮą░. ąÆčŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ąĘą░č鹥ą╝ ą▓ąŠąĘąŠą▒ąĮąŠą▓ąĖčéčüčÅ ąŠčé ą╝ąŠą╝ąĄąĮčéą░, ą│ą┤ąĄ ą▒čŗą╗ ą▓čŗąĘąŠą▓ vTaskStartScheduler, ą║ą░ą║ ąĄčüą╗ąĖ ą▒čŗ č鹊ą╗čīą║ąŠ čćč鹊 ą┐čĆąŠąĖąĘąŠčłąĄą╗ ą▓ąŠąĘą▓čĆą░čé ąĖąĘ vTaskStartScheduler.
ąĪą╝. čäą░ą╣ą╗ main.c ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą▓ ą║ą░čéą░ą╗ąŠą│ąĄ demo/PC ą┤ą╗čÅ ą┐čĆąĖą╝ąĄčĆą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ vTaskEndScheduler ().
vTaskEndScheduler čéčĆąĄą▒čāąĄčé ąĮą░ą╗ąĖčćąĖčÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čäčāąĮą║čåąĖąĖ exit ąĮą░ čüą╗ąŠąĄ portable (čüą╝. vPortEndScheduler() ą▓ ą╝ąŠą┤čāą╗ąĄ port.c ą┤ą╗čÅ ą┐ąŠčĆčéą░ PC). ąŁč鹊 ą▓čŗą┐ąŠą╗ąĮąĖčé čüą┐ąĄčåąĖčäąĖčćąĮčŗąĄ ą┤ą╗čÅ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ ąŠą┐ąĄčĆą░čåąĖąĖ, čéą░ą║ąĖąĄ ą║ą░ą║ ąŠčüčéą░ąĮąŠą▓ą║ą░ čéąĖą║ąŠą▓ čÅą┤čĆą░.
vTaskEndScheduler() ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ č鹊ą╝čā, čćč鹊 ą▓čüąĄ čĆąĄčüčāčĆčüčŗ, ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗąĄ čÅą┤čĆąŠą╝, ą▒čāą┤čāčé ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮčŗ, ąŠą┤ąĮą░ą║ąŠ ąĮąĄ ą▒čāą┤čāčé ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮčŗ čĆąĄčüčāčĆčüčŗ, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ ą▓čŗą┤ąĄą╗ąĄąĮčŗ ąĘą░ą┤ą░čćą░ą╝ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ:
void vTaskCode (void * pvParameters)
{
for( ;; )
{
// ąŚą┤ąĄčüčī ą▓čüčéą░ą▓ą╗ąĄąĮ ą║ąŠą┤ ąĘą░ą┤ą░čćąĖ.
// ąÆ ąĮąĄą║ąŠč鹊čĆčŗą╣ ą╝ąŠą╝ąĄąĮčé ą╝čŗ ą╝ąŠąČąĄą╝ ąĘą░čģąŠč鹥čéčī ąĘą░ą║ąŠąĮčćąĖčéčī ąŠą▒čĆą░ą▒ąŠčéą║čā čÅą┤čĆą░,
// ą┤ą╗čÅ čŹč鹊ą│ąŠ ą▓čŗąĘąŠą▓ąĄą╝:
vTaskEndScheduler();
}
}
void vAFunction (void)
{
// ąĪąŠąĘą┤ą░ąĮąĖąĄ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĮąŠą╣ ąĘą░ą┤ą░čćąĖ ą┐ąĄčĆąĄą┤ ąĘą░ą┐čāčüą║ąŠą╝ čÅą┤čĆą░.
xTaskCreate(vTaskCode, "NAME", STACK_SIZE, NULL, tskIDLE_PRIORITY, NULL);
// ąŚą░ą┐čāčüą║ čÅą┤čĆą░ (real time kernel) čü ą▓čŗč鹥čüąĮčÅčÄčēąĄą╣ ą╝ąĮąŠą│ąŠąĘą░ą┤ą░čćąĮąŠčüčéčīčÄ.
vTaskStartScheduler ();
// ąĪčÄą┤ą░ ą╝čŗ ą┐ąŠą┐ą░ą┤ąĄą╝ č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ vTaskCode čüą┤ąĄą╗ą░ąĄčé ą▓čŗąĘąŠą▓
// vTaskEndScheduler(). ąóąŠą│ą┤ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ąŠą╣ą┤ąĄčé ą┤ąŠ čŹč鹊ą│ąŠ ą╝ąĄčüčéą░, ąĖ ą╝čŗ
// ą▓ąŠąĘą▓čĆą░čéąĖą╝čüčÅ ą▓ čüčĆąĄą┤čā ą▒ąĄąĘ ą╝ąĮąŠą│ąŠąĘą░ą┤ą░čćąĮąŠčüčéąĖ (single task execution).
}
void vTaskSuspendAll (void);
ą¤čĆąĖąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ą▒ąĄąĘ ąĘą░ą┐čĆąĄčéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░ ą▒ąŠą╗čīčłąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī ąĮąĄ ą▒čāą┤ąĄčé.
ą¤ąŠčüą╗ąĄ ą▓čŗąĘąŠą▓ą░ vTaskSuspendAll č鹥ą║čāčēą░čÅ ą░ą║čéąĖą▓ąĮą░čÅ ąĘą░ą┤ą░čćą░ ą┐čĆąŠą┤ąŠą╗ąČąĖčé čüą▓ąŠąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą▒ąĄąĘ čĆąĖčüą║ą░ ą▒čŗčéčī ą▓čŗč鹥čüąĮąĄąĮąĮąŠą╣, ą┐ąŠą║ą░ ąĮąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą▓čŗąĘąŠą▓ xTaskResumeAll.
API-čäčāąĮą║čåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠč鹥ąĮčåąĖą░ą╗čīąĮąŠ ą▓čŗąĘčŗą▓ą░čÄčé ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ vTaskDelayUntil(), xQueueSend(), ąĖ čé. ą┐.) ąĮąĄ ą┤ąŠą╗ąČąĮčŗ ą▓čŗąĘčŗą▓ą░čéčīčüčÅ, ą║ąŠą│ą┤ą░ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ.
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ:
void vTask1 (void * pvParameters)
{
for( ;; )
{
// ąŚą┤ąĄčüčī ąĮą░čćąĖąĮą░ąĄčéčüčÅ ą║ąŠą┤ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ ąĘą░ą┤ą░čćąĖ.
// ...
// ąÆ ą║ą░ą║ąŠą╣-č鹊 ą╝ąŠą╝ąĄąĮčé ąĘą░ą┤ą░čćą░ ąĘą░čģąŠč湥čé ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą┤ą╗ąĖč鹥ą╗čīąĮąŠąĄ ą▓čŗčćąĖčüą╗ąĄąĮąĖąĄ,
// ą▓ąŠ ą▓čĆąĄą╝čÅ ą║ąŠč鹊čĆąŠą│ąŠ ąŠąĮą░ ąĮąĄ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗč鹥čüąĮąĄąĮą░ ą┤čĆčāą│ąĖą╝ąĖ ąĘą░ą┤ą░čćą░ą╝ąĖ.
// ą×ąĮą░ ąĮąĄ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī taskENTER_CRITICAL/taskEXIT_CRITICAL,
// ą┐ąŠčüą║ąŠą╗čīą║čā ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ąŠą┐ąĄčĆą░čåąĖąĖ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ą┐ąŠč鹥čĆąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ
// ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ą▓ą║ą╗čÄčćą░čÅ čéąĖą║ąĖ.
// ąŁč鹊čé ą▓čŗąĘąŠą▓ ą┐čĆąĄą┤ąŠčéą▓čĆą░čéąĖčé ą▓čŗč鹥čüąĮąĄąĮąĖąĄ č鹥ą║čāčēąĄą╣ ąĘą░ą┤ą░čćąĖ.
vTaskSuspendAll();
// ąŚą┤ąĄčüčī ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ą▓čŗčłąĄčāą┐ąŠą╝čÅąĮčāčéą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ. ąŚą┤ąĄčüčī ąĮąĄčé
// ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą▓ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą║čĆąĖčéąĖč湥čüą║ąĖčģ čüąĄą║čåąĖą╣, ą┐ąŠčüą║ąŠą╗čīą║čā
// ą╝čŗ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ ą▓čüąĄ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ MCU.
// ąÆ č鹥č湥ąĮąĖąĄ čŹč鹊ą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓čüąĄ ąĄčēąĄ ą▒čāą┤čāčé čĆą░ą▒ąŠčéą░čéčī,
// ąĖ ą▒čāą┤ąĄčé ą┐čĆąŠą┤ąŠą╗ąČą░čéčīčüčÅ ąŠčéčüč湥čé čéąĖą║ąŠą▓ čÅą┤čĆą░.
// ...
// ąÜčĆąĖčéąĖč湥čüą║ą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮą░. ą¤ąĄčĆąĄąĘą░ą┐čāčüą║ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ
// čÅą┤čĆą░ RTOS.
xTaskResumeAll ();
}
}
BaseType_t xTaskResumeAll (void);
ąÆąŠąĘąŠą▒ąĮąŠą▓ąĖčé čĆą░ą▒ąŠčéčā ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ąŠąĮ ą▒čŗą╗ ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓čŗąĘąŠą▓ąŠą╝ vTaskSuspendAll().
ążčāąĮą║čåąĖčÅ xTaskResumeAll č鹊ą╗čīą║ąŠ ą╗ąĖčłčī ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗čÅąĄčé čĆą░ą▒ąŠčéčā ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░. ą×ąĮą░ ąĮąĄ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗čÅąĄčé ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗąĄ ąĘą░ą┤ą░čćąĖ, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ čĆą░ąĮąĄąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓čŗąĘąŠą▓ąŠą╝ vTaskSuspend().
ąÆąŠąĘą▓čĆą░čéąĖčé pdTRUE, ąĄčüą╗ąĖ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░ ą┐čĆąŠąĖąĘą▓ąĄą┤ąĄčé ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ pdFALSE.
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ:
void vTask1 (void * pvParameters)
{
for( ;; )
{
// ąŚą┤ąĄčüčī ąĮą░čćąĖąĮą░ąĄčéčüčÅ ą║ąŠą┤ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ ąĘą░ą┤ą░čćąĖ.
// ...
// ąÆ ą║ą░ą║ąŠą╣-č鹊 ą╝ąŠą╝ąĄąĮčé ąĘą░ą┤ą░čćą░ ąĘą░čģąŠč湥čé ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą┤ą╗ąĖč鹥ą╗čīąĮąŠąĄ ą▓čŗčćąĖčüą╗ąĄąĮąĖąĄ,
// ą▓ąŠ ą▓čĆąĄą╝čÅ ą║ąŠč鹊čĆąŠą│ąŠ ąŠąĮą░ ąĮąĄ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗč鹥čüąĮąĄąĮą░ ą┤čĆčāą│ąĖą╝ąĖ ąĘą░ą┤ą░čćą░ą╝ąĖ.
// ą×ąĮą░ ąĮąĄ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī taskENTER_CRITICAL/taskEXIT_CRITICAL,
// ą┐ąŠčüą║ąŠą╗čīą║čā ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ąŠą┐ąĄčĆą░čåąĖąĖ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ą┐ąŠč鹥čĆąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ
// ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ą▓ą║ą╗čÄčćą░čÅ čéąĖą║ąĖ.
// ąŁč鹊čé ą▓čŗąĘąŠą▓ ą┐čĆąĄą┤ąŠčéą▓čĆą░čéąĖčé ą▓čŗč鹥čüąĮąĄąĮąĖąĄ č鹥ą║čāčēąĄą╣ ąĘą░ą┤ą░čćąĖ.
vTaskSuspendAll();
// ąŚą┤ąĄčüčī ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ą▓čŗčłąĄčāą┐ąŠą╝čÅąĮčāčéą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ. ąŚą┤ąĄčüčī ąĮąĄčé
// ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą▓ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą║čĆąĖčéąĖč湥čüą║ąĖčģ čüąĄą║čåąĖą╣, ą┐ąŠčüą║ąŠą╗čīą║čā
// ą╝čŗ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ ą▓čüąĄ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ MCU.
// ąÆ č鹥č湥ąĮąĖąĄ čŹč鹊ą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓čüąĄ ąĄčēąĄ ą▒čāą┤čāčé čĆą░ą▒ąŠčéą░čéčī,
// ąĖ ą▒čāą┤ąĄčé ą┐čĆąŠą┤ąŠą╗ąČą░čéčīčüčÅ ąŠčéčüč湥čé čéąĖą║ąŠą▓ čÅą┤čĆą░.
// ...
// ą×ą┐ąĄčĆą░čåąĖčÅ ą▒čŗą╗ą░ ąĘą░ą▓ąĄčĆčłąĄąĮą░. ą¤ąĄčĆąĄąĘą░ą┐čāčüą║ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čÅą┤čĆą░ RTOS.
// ą£čŗ čģąŠčéąĖą╝ ą▓ čŹč鹊čé ą╝ąŠą╝ąĄąĮčé ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ ąĘą░ą┐čāčüčéąĖčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ
// ą║ąŠąĮč鹥ą║čüčéą░, ąĮąŠ ą▓ čŹč鹊ą╝ ąĮąĄ ą▒čāą┤ąĄčé čüą╝čŗčüą╗ą░, ąĄčüą╗ąĖ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ
// čĆą░ą▒ąŠčéčŗ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░ ąĖ čéą░ą║ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÄ ą║ąŠąĮč鹥ą║čüčéą░.
if(!xTaskResumeAll())
{
taskYIELD();
}
}
}
TickType_t xTaskGetTickCount (void);
ąÆąŠąĘą▓čĆą░čéąĖčé ą┐čĆąŠčłąĄą┤čłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéąĖą║ąŠą▓ ąŠčé ą╝ąŠą╝ąĄąĮčéą░ ą▓čŗąĘąŠą▓ą░ vTaskStartScheduler.
TickType_t xTaskGetTickCountFromISR (void);
ąŁčéčā ą▓ąĄčĆčüąĖčÄ xTaskGetTickCount ą╝ąŠąČąĮąŠ ą▒ąĄąĘąŠą┐ą░čüąĮąŠ ą▓čŗąĘčŗą▓ą░čéčī ąĖąĘ ISR - ą┐čĆąĖ čāčüą╗ąŠą▓ąĖąĖ, čćč鹊 TickType_t čÅą▓ą╗čÅąĄčéčüčÅ ąĄčüč鹥čüčéą▓ąĄąĮąĮčŗą╝ čĆą░ąĘą╝ąĄčĆąŠą╝ čüą╗ąŠą▓ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ MCU, ąĖą╗ąĖ ą▓ą╗ąŠąČąĄąĮąĮąŠčüčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą╗ąĖą▒ąŠ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ, ą╗ąĖą▒ąŠ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ.
ąÆąŠąĘą▓čĆą░čéąĖčé ą┐čĆąŠčłąĄą┤čłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéąĖą║ąŠą▓ ąŠčé ą╝ąŠą╝ąĄąĮčéą░ ą▓čŗąĘąŠą▓ą░ vTaskStartScheduler.
UBaseType_t uxTaskGetNumberOfTasks (void);
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┤ą░čć, ą║ąŠč鹊čĆąŠąĄ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╝ čÅą┤čĆąŠą╝ RTOS. ąŁč鹊 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓ą║ą╗čÄčćą░ąĄčé ą▓čüąĄ ąĘą░ą┤ą░čćąĖ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ready, blocked ąĖ suspended. ąŚą░ą┤ą░čćą░, ą║ąŠč鹊čĆą░čÅ ą▒čŗą╗ą░ čāą┤ą░ą╗ąĄąĮą░, ąĮąŠ ąĄčēąĄ ąĮąĄ ą▒čŗą╗ą░ ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮą░ ąĘą░ą┤ą░č湥ą╣ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle task), čéą░ą║ąČąĄ ą▒čāą┤ąĄčé ą┤ąŠą▒ą░ą▓ą╗ąĄąĮą░ ą▓ čŹč鹊 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ.
char *pcTaskGetName (TaskHandle_t xTaskToQuery);
ąóąĄą║čüčé (čāą┤ąŠą▒ąŠčćąĖčéą░ąĄą╝čŗą╣) ąĖą╝ąĄąĮąĖ ąĘą░ą┤ą░čćąĖ, ąĮą░ ą║ąŠč鹊čĆčāčÄ čüčüčŗą╗ą░čÄčéčüčÅ ą┐ąŠ ą┤ąĄčüą║čĆąĖą┐č鹊čĆčā xTaskToQuery. ąŚą░ą┤ą░čćą░ ą╝ąŠąČąĄčé čāąĘąĮą░čéčī čüąŠą▒čüčéą▓ąĄąĮąĮąŠąĄ ąĖą╝čÅ ą╗ąĖą▒ąŠ ą┐čāč鹥ą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ čüąŠą▒čüčéą▓ąĄąĮąĮąŠą│ąŠ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░, ą╗ąĖą▒ąŠ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą┐ą░čĆą░ą╝ąĄčéčĆą░ xTaskToQuery ą▓ NULL.
TaskHandle_t xTaskGetHandle (const char *pcNameToQuery);
ąÆąŠąĘą▓čĆą░čéąĖčé ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĘą░ą┤ą░čćąĖ (handle) ą┐ąŠ čāą┤ąŠą▒ąŠčćąĖčéą░ą╝ąŠą╝čā ąĖą╝ąĄąĮąĖ pcNameToQuery. ąĢčüą╗ąĖ ąĮąĄ ąĮą░ą╣ą┤ąĄąĮąŠ ąĮąĖ ąŠą┤ąĮąŠą│ąŠ čüąŠą▓ą┐ą░ą┤ą░čÄčēąĄą│ąŠ ąĖą╝ąĄąĮąĖ, č鹊 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ NULL. ą¦ąóąŠą▒čŗ čŹčéą░ čäčāąĮą║čåąĖčÅ ą▒čŗą╗ą░ ą┤ąŠčüčéčāą┐ąĮą░, ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ 1 ąŠą┐čåąĖčÅ INCLUDE_xTaskGetHandle.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čŹčéą░ čäčāąĮą║čåąĖčÅ čĆą░ą▒ąŠčéą░ąĄčé ą┤ąŠą▓ąŠą╗čīąĮąŠ ą╝ąĄą┤ą╗ąĄąĮąĮąŠ, ą┐ąŠčŹč鹊ą╝čā ąĮąĄ ą┤ąŠą╗ąČąĮą░ čćą░čüč鹊čé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ.
UBaseType_t uxTaskGetStackHighWaterMark (TaskHandle_t xTask);
ą¦č鹊ą▒čŗ čŹčéą░ čäčāąĮą║čåąĖčÅ ą▒čŗą╗ą░ ą┤ąŠčüčéčāą┐ąĮą░, ąŠą┐čåąĖčÅ INCLUDE_uxTaskGetStackHighWaterMark ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ 1 (ą▓ FreeRTOSConfig.h).
ąÆąŠąĘą▓čĆą░čéąĖčé ą▓ąĄčĆčģąĮčÄčÄ ą│čĆą░ąĮąĖčåčā ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ, ąĮą░ ą║ąŠč鹊čĆčāčÄ čüčüčŗą╗ą░čÄčéčüčÅ ą┐ąŠ ąĄčæ ą┤ąĄčüą║čĆąĖą┐č鹊čĆčā xTask. ąó. ąĄ. ą║ą░ą║ąŠąĄ ą▒čŗą╗ąŠ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ čüą▓ąŠą▒ąŠą┤ąĮąŠąĄ ą╝ąĄčüč鹊 ą▓ čüč鹥ą║ąĄ (ą▓ ą▒ą░ą╣čéą░čģ, ą░ ąĮąĄ ą▓ čüą╗ąŠą▓ą░čģ, ą║ą░ą║ ą▓ vanilla FreeRTOS) čü ą╝ąŠą╝ąĄąĮčéą░ ąĘą░ą┐čāčüą║ą░ ąĘą░ą┤ą░čćąĖ. ą¦ąĄą╝ ą╝ąĄąĮčīčłąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ čćąĖčüą╗ąŠ, č鹥ą╝ ąĘą░ą┤ą░čćą░ ą▒ą╗ąĖąČąĄ ą║ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÄ čüą▓ąŠąĄą│ąŠ čüč鹥ą║ą░.
uxTaskGetStackHighWaterMark() ąĖ uxTaskGetStackHighWaterMark2() ąŠą┤ąĖąĮą░ą║ąŠą▓čŗąĄ, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠą│ąŠ čéąĖą┐ą░. ą×ą┐čåąĖčÅ configSTACK_DEPTH_TYPE ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▓čŗą▒čĆą░čéčī ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝čŗą╣ čéąĖą┐. ąŁč鹊 čĆąĄčłą░ąĄčé ą┐čĆąŠą▒ą╗ąĄą╝čā ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ 8-ą▒ąĖčéąĮčŗčģ čéąĖą┐ąŠą▓ ą▒ąĄąĘ ąĮą░čĆčāčłąĄąĮąĖčÅ ąŠą▒čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą║ąŠč鹊čĆčŗąĄ ąŠąČąĖą┤ą░čÄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąĖčÅ ąĘąĮą░č湥ąĮąĖčÅ 8-čĆą░ąĘčĆčÅą┤ąĮąŠą│ąŠ čéąĖą┐ą░.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
xTask: ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĘą░ą┤ą░čćąĖ, ą┤ą╗čÅ ą║ąŠč鹊čĆąŠą╣ ą┐čĆąŠą▓ąĄčĆčÅąĄčéčüčÅ čĆą░čüčģąŠą┤ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ čüč鹥ą║ą░. ąŻčüčéą░ąĮąŠą▓ąĖč鹥 xTask ą▓ NULL, čćč鹊ą▒čŗ ą┐čĆąŠą▓ąĄčĆąĖčéčī čüč鹥ą║ čüąŠą▒čüčéą▓ąĄąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ (ąĖąĘ ą║ąŠč鹊čĆąŠą╣ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ čŹčéą░ čäčāąĮą║čåąĖčÅ).
configSTACK_DEPTH_TYPE uxTaskGetStackHighWaterMark2 (TaskHandle_t xTask);
ą¦č鹊ą▒čŗ čŹčéą░ čäčāąĮą║čåąĖčÅ ą▒čŗą╗ą░ ą┤ąŠčüčéčāą┐ąĮą░, ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ 1 ąŠą┐čåąĖčÅ INCLUDE_uxTaskGetStackHighWaterMark2 (ą▓ FreeRTOSConfig.h).
ąÆąŠąĘą▓čĆą░čéąĖčé ą▓ąĄčĆčģąĮčÄčÄ ą│čĆą░ąĮąĖčåčā ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ, ąĮą░ ą║ąŠč鹊čĆčāčÄ čüčüčŗą╗ą░čÄčéčüčÅ ą┐ąŠ ąĄčæ ą┤ąĄčüą║čĆąĖą┐č鹊čĆčā xTask. ąó. ąĄ. ą║ą░ą║ąŠąĄ ą▒čŗą╗ąŠ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ čüą▓ąŠą▒ąŠą┤ąĮąŠąĄ ą╝ąĄčüč鹊 ą▓ čüč鹥ą║ąĄ (ą▓ ą▓ čüą╗ąŠą▓ą░čģ, čéą░ą║ čćč鹊 ąĮą░ 32-ą▒ąĖčéąĮąŠą╣ ą╝ą░čłąĖąĮąĄ ąĘąĮą░č湥ąĮąĖąĄ 1 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé 4 ą▒ą░ą╣čéą░ą╝) čü ą╝ąŠą╝ąĄąĮčéą░ ąĘą░ą┐čāčüą║ą░ ąĘą░ą┤ą░čćąĖ. ą¦ąĄą╝ ą╝ąĄąĮčīčłąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ čćąĖčüą╗ąŠ, č鹥ą╝ ąĘą░ą┤ą░čćą░ ą▒ą╗ąĖąČąĄ ą║ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÄ čüą▓ąŠąĄą│ąŠ čüč鹥ą║ą░.
uxTaskGetStackHighWaterMark() ąĖ uxTaskGetStackHighWaterMark2() ąŠą┤ąĖąĮą░ą║ąŠą▓čŗąĄ, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠą│ąŠ čéąĖą┐ą░. ą×ą┐čåąĖčÅ configSTACK_DEPTH_TYPE ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▓čŗą▒čĆą░čéčī ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝čŗą╣ čéąĖą┐. ąŁč鹊 čĆąĄčłą░ąĄčé ą┐čĆąŠą▒ą╗ąĄą╝čā ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ 8-ą▒ąĖčéąĮčŗčģ čéąĖą┐ąŠą▓ ą▒ąĄąĘ ąĮą░čĆčāčłąĄąĮąĖčÅ ąŠą▒čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą║ąŠč鹊čĆčŗąĄ ąŠąČąĖą┤ą░čÄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąĖčÅ ąĘąĮą░č湥ąĮąĖčÅ 8-čĆą░ąĘčĆčÅą┤ąĮąŠą│ąŠ čéąĖą┐ą░.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
xTask: ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĘą░ą┤ą░čćąĖ, ą┤ą╗čÅ ą║ąŠč鹊čĆąŠą╣ ą┐čĆąŠą▓ąĄčĆčÅąĄčéčüčÅ čĆą░čüčģąŠą┤ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ čüč鹥ą║ą░. ąŻčüčéą░ąĮąŠą▓ąĖč鹥 xTask ą▓ NULL, čćč鹊ą▒čŗ ą┐čĆąŠą▓ąĄčĆąĖčéčī čüč鹥ą║ čüąŠą▒čüčéą▓ąĄąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ (ąĖąĘ ą║ąŠč鹊čĆąŠą╣ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ čŹčéą░ čäčāąĮą║čåąĖčÅ).
uint8_t *pxTaskGetStackStart (TaskHandle_t xTask);
ą¦č鹊ą▒čŗ čŹčéą░ čäčāąĮą║čåąĖčÅ ą▒čŗą╗ą░ ą┤ąŠčüčéčāą┐ąĮą░, ąŠą┐čåąĖčÅ INCLUDE_pxTaskGetStackStart ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ 1 (ą▓ FreeRTOSConfig.h).
ąÆąŠąĘą▓čĆą░čéąĖčé čüą░ą╝čŗą╣ ą╝ą░ą╗ąĄąĮčīą║ąĖą╣ ą░ą┤čĆąĄčü ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ čüč鹥ą║ą░ (čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ąĮą░čćą░ą╗ąŠ čüč鹥ą║ą░) ąĘą░ą┤ą░čćąĖ, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé č鹊ą│ąŠ, ą▓ ą║ą░ą║čāčÄ čüč鹊čĆąŠąĮčā čĆą░čüč鹥čé čüč鹥ą║ - ą▓ą▓ąĄčĆčģ ąĖą╗ąĖ ą▓ąĮąĖąĘ.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
xTask: ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĘą░ą┤ą░čćąĖ, ą┤ą╗čÅ ą║ąŠč鹊čĆąŠą╣ ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēą░čéčīčüčÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ čüč鹥ą║ąĄ. ąŻčüčéą░ąĮąŠą▓ąĖč鹥 xTask ą▓ NULL, čćč鹊ą▒čŗ čāąĘąĮą░čéčī ąĮą░čćą░ą╗ąŠ ą▓ ą┐ą░ą╝čÅčéąĖ čüąŠą▒čüčéą▓ąĄąĮąĮąŠą│ąŠ čüč鹥ą║ą░ ąĘą░ą┤ą░čćąĖ (ąĘą░ą┤ą░čćąĖ, ą║ąŠč鹊čĆą░čÅ ą▓čŗąĘčŗą▓ą░ąĄčé čŹčéčā čäčāąĮą║čåąĖčÄ).
void vTaskSetApplicationTaskTag (TaskHandle_t xTask,
TaskHookFunction_t pxHookFunction);
ąŻčüčéą░ąĮąŠą▓ąĖčé pxHookFunction ą▓ ą║ą░č湥čüčéą▓ąĄ hook-čäčāąĮą║čåąĖąĖ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ą┤ą╗čÅ ąĘą░ą┤ą░čćąĖ xTask [7].
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
xTask: ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĘą░ą┤ą░čćąĖ, ą┤ą╗čÅ ą║ąŠč鹊čĆąŠą╣ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ hook-čäčāąĮą║čåąĖčÄ. ą¤ąĄčĆąĄą┤ą░čćą░ xTask = NULL čāčüčéą░ąĮąŠą▓ąĖčé hook-čäčāąĮą║čåąĖčÄ ą┤ą╗čÅ ą▓čŗąĘčŗą▓ą░ą▓čłąĄą╣ ąĘą░ą┤ą░čćąĖ.
pxHookFunction: čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ hook-čäčāąĮą║čåąĖčÄ.
TaskHookFunction_t xTaskGetApplicationTaskTag (TaskHandle_t xTask);
ąÆąŠąĘą▓čĆą░čéąĖčé ąĘąĮą░č湥ąĮąĖąĄ pxHookFunction, ąĮą░ąĘąĮą░č湥ąĮąĮąŠąĄ ąĘą░ą┤ą░č湥 xTask. ąØąĄ ą▓čŗąĘčŗą▓ą░ą╣č鹥 čŹčéčā čäčāąĮą║čåąĖčÄ ąĖąĘ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą▓ą╝ąĄčüč鹊 ąĮąĄčæ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 xTaskGetApplicationTaskTagFromISR().
TaskHookFunction_t xTaskGetApplicationTaskTagFromISR (TaskHandle_t xTask);
ąÆąŠąĘą▓čĆą░čéąĖčé ąĘąĮą░č湥ąĮąĖąĄ pxHookFunction, ąĮą░ąĘąĮą░č湥ąĮąĮąŠąĄ ąĘą░ą┤ą░č湥 xTask. ąŁčéčā ą▓ąĄčĆčüąĖčÄ čäčāąĮą║čåąĖąĖ čüą╗ąĄą┤čāąĄčé ą▓čŗąĘčŗą▓ą░čéčī ąĖąĘ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
void vTaskSetThreadLocalStoragePointer (TaskHandle_t xTaskToSet,
BaseType_t xIndex,
void *pvValue);
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą╗ąŠą║ą░ą╗čīąĮąŠąĄ čģčĆą░ąĮąĖą╗ąĖčēąĄ ą┤ą╗čÅ čāą║ą░ąĘą░ąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ.
ąÜą░ąČą┤ą░čÅ ąĘą░ą┤ą░čćą░ čüąŠą┤ąĄčƹȹĖčé ą╝ą░čüčüąĖą▓ čāą║ą░ąĘą░č鹥ą╗ąĄą╣, čĆą░ąĘą╝ąĄčĆ ą║ąŠč鹊čĆąŠą│ąŠ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ąŠą┐čåąĖąĄą╣ configNUM_THREAD_LOCAL_STORAGE_POINTERS ą▓ FreeRTOSConfig.h. ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ čÅą┤čĆąŠ RTOS čüą░ą╝ąŠ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čŹčéąĖ čāą║ą░ąĘą░č鹥ą╗ąĖ, čéą░ą║ čćč鹊 čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čŹčéąĖ čāą║ą░ąĘą░č鹥ą╗ąĖ ą┤ą╗čÅ ą╗čÄą▒čŗčģ čåąĄą╗ąĄą╣ ą┐ąŠ čüą▓ąŠąĄą╝čā čāčüą╝ąŠčéčĆąĄąĮąĖčÄ.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
xTaskToSet: ąĘą░ą┤ą░čćą░, ą┤ą╗čÅ ą║ąŠč鹊čĆąŠą╣ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ local storage pointer.
xIndex: ąĖąĮą┤ąĄą║čü čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝ąŠą│ąŠ čāą║ą░ąĘą░č鹥ą╗čÅ, ąŠčé 0 ą┤ąŠ configNUM_THREAD_LOCAL_STORAGE_POINTERS-1.
pvValue: ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ čāą║ą░ąĘą░č鹥ą╗čÅ.
void *pvTaskGetThreadLocalStoragePointer (TaskHandle_t xTaskToQuery,
BaseType_t xIndex);
ą¤ąŠą╗čāčćą░ąĄčé čāą║ą░ąĘą░č鹥ą╗čī ą╗ąŠą║ą░ą╗čīąĮąŠą│ąŠ čģčĆą░ąĮąĖą╗ąĖčēą░ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ.
ąÜą░ąČą┤ą░čÅ ąĘą░ą┤ą░čćą░ čüąŠą┤ąĄčƹȹĖčé ą╝ą░čüčüąĖą▓ čāą║ą░ąĘą░č鹥ą╗ąĄą╣, čĆą░ąĘą╝ąĄčĆ ą║ąŠč鹊čĆąŠą│ąŠ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ąŠą┐čåąĖąĄą╣ configNUM_THREAD_LOCAL_STORAGE_POINTERS ą▓ FreeRTOSConfig.h. ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ čÅą┤čĆąŠ RTOS čüą░ą╝ąŠ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čŹčéąĖ čāą║ą░ąĘą░č鹥ą╗ąĖ, čéą░ą║ čćč鹊 čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čŹčéąĖ čāą║ą░ąĘą░č鹥ą╗ąĖ ą┤ą╗čÅ ą╗čÄą▒čŗčģ čåąĄą╗ąĄą╣ ą┐ąŠ čüą▓ąŠąĄą╝čā čāčüą╝ąŠčéčĆąĄąĮąĖčÄ.
ążčāąĮą║čåąĖčÅ ą▓ąŠąĘą▓čĆą░čéąĖčé ąĘąĮą░č湥ąĮąĖąĄ čāą║ą░ąĘą░č鹥ą╗čÅ.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
xTaskToQuery: ąĘą░ą┤ą░čćą░, ą┤ą╗čÅ ą║ąŠč鹊čĆąŠą╣ ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą╗ąŠą║ą░ą╗čīąĮąŠąĄ čģčĆą░ąĮąĖą╗ąĖčēąĄ.
xIndex: ąĖąĮą┤ąĄą║čü ą┐ąŠą╗čāčćą░ąĄą╝ąŠą│ąŠ čāą║ą░ąĘą░č鹥ą╗čÅ, ąŠčé 0 ą┤ąŠ configNUM_THREAD_LOCAL_STORAGE_POINTERS-1.
void vTaskSetThreadLocalStoragePointerAndDelCallback (TaskHandle_t xTaskToSet,
BaseType_t xIndex,
void *pvValue,
TlsDeleteCallbackFunction_t pvDelCallback);
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čāą║ą░ąĘą░č鹥ą╗čī ą╗ąŠą║ą░ą╗čīąĮąŠą│ąŠ čģčĆą░ąĮąĖą╗ąĖčēą░ ąĖ callback-čäčāąĮą║čåąĖčÄ čāą┤ą░ą╗ąĄąĮąĖčÅ.
ąÜą░ąČą┤ą░čÅ ąĘą░ą┤ą░čćą░ čüąŠą┤ąĄčƹȹĖčé ą╝ą░čüčüąĖą▓ čāą║ą░ąĘą░č鹥ą╗ąĄą╣, čĆą░ąĘą╝ąĄčĆ ą║ąŠč鹊čĆąŠą│ąŠ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ąŠą┐čåąĖąĄą╣ configNUM_THREAD_LOCAL_STORAGE_POINTERS ą▓ FreeRTOSConfig.h. ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ čÅą┤čĆąŠ RTOS čüą░ą╝ąŠ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čŹčéąĖ čāą║ą░ąĘą░č鹥ą╗ąĖ, čéą░ą║ čćč鹊 čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čŹčéąĖ čāą║ą░ąĘą░č鹥ą╗ąĖ ą┤ą╗čÅ ą╗čÄą▒čŗčģ čåąĄą╗ąĄą╣ ą┐ąŠ čüą▓ąŠąĄą╝čā čāčüą╝ąŠčéčĆąĄąĮąĖčÄ.
ąŻą║ą░ąĘą░č鹥ą╗ąĖ ą╗ąŠą║ą░ą╗čīąĮąŠą│ąŠ čģčĆą░ąĮąĖą╗ąĖčēą░, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗąĄ ą┤ą╗čÅ ąĘą░ą┤ą░čćąĖ, ą╝ąŠą│čāčé čüčüčŗą╗ą░čéčīčüčÅ ąĮą░ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗąĄ čĆąĄčüčāčĆčüčŗ. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┐ąŠą┤ąŠą▒ąĮą░ vTaskSetThreadLocalStoragePointer, ąĮąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüą┐ąŠčüąŠą▒ ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖčÅ čŹčéąĖčģ čĆąĄčüčāčĆčüąŠą▓, ą║ąŠą│ą┤ą░ ąĘą░ą┤ą░čćą░ čāą┤ą░ą╗čÅąĄčéčüčÅ. ąöą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čāą║ą░ąĘą░č鹥ą╗čÅ ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ callback-čäčāąĮą║čåąĖčÅ. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▒čāą┤ąĄčé ą▓čŗąĘą▓ą░ąĮą░, ą║ąŠą│ą┤ą░ ąĘą░ą┤ą░čćą░ čāą┤ą░ą╗čÅąĄčéčüčÅ, čü ąĖąĮą┤ąĄą║čüąŠą╝ ą╗ąŠą║ą░ą╗čīąĮąŠą│ąŠ čģčĆą░ąĮąĖą╗ąĖčēą░ čāą║ą░ąĘą░č鹥ą╗ąĄą╣ ąĖ ąĘąĮą░č湥ąĮąĖąĄą╝, ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗčģ ą▓ ą║ą░č湥čüčéą▓ąĄ ą░čĆą│čāą╝ąĄąĮč鹊ą▓.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
xTaskToSet: ąĘą░ą┤ą░čćą░, ą┤ą╗čÅ ą║ąŠč鹊čĆąŠą╣ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ čāą║ą░ąĘą░č鹥ą╗čī ą╗ąŠą║ą░ą╗čīąĮąŠą│ąŠ čģčĆą░ąĮąĖą╗ąĖčēą░.
xIndex: ąĖąĮą┤ąĄą║čü ą┤ą╗čÅ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝ąŠą│ąŠ čāą║ą░ąĘą░č鹥ą╗čÅ, ąŠčé 0 ą┤ąŠ configNUM_THREAD_LOCAL_STORAGE_POINTERS-1.
pvValue: ąĘąĮą░č湥ąĮąĖąĄ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝ąŠą│ąŠ čāą║ą░ąĘą░č鹥ą╗čÅ.
pvDelCallback: ą▓čŗąĘčŗą▓ą░ąĄą╝ą░čÅ čäčāąĮą║čåąĖčÅ ą┐čĆąĖ čāą┤ą░ą╗ąĄąĮąĖąĖ ąĘą░ą┤ą░čćąĖ ą┤ą╗čÅ čāą┤ą░ą╗ąĄąĮąĖčÅ čāą║ą░ąĘą░č鹥ą╗čÅ ą╗ąŠą║ą░ą╗čīąĮąŠą│ąŠ čģčĆą░ąĮąĖą╗ąĖčēą░.
void vApplicationGetIdleTaskMemory (StaticTask_t **ppxIdleTaskTCBBuffer,
StackType_t **ppxIdleTaskStackBuffer,
uint32_t *pulIdleTaskStackSize);
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ čüčéą░čéąĖč湥čüą║ąĖ ą▓čŗą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą▒ą╗ąŠą║ą░ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ FreeRTOS, čćč鹊ą▒čŗ čģčĆą░ąĮąĖčéčī Idle Task TCB. ąŁčéą░ čäčāąĮą║čåąĖčÅ čéčĆąĄą▒čāąĄčéčüčÅ, ą║ąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ąŠą┐čåąĖčÅ configSUPPORT_STATIC_ALLOCATION. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüą╝. [8].
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
ppxIdleTaskTCBBuffer: ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą┤ą╗čÅ ą▓čŗą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ čüčéą░čéąĖč湥čüą║ąĖ ą▒čāč乥čĆą░ TCB.
ppxIdleTaskStackBuffer: ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą┤ą╗čÅ čüčéą░čéąĖč湥čüą║ąĖ ą▓čŗą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą▒čāč乥čĆą░ čüč鹥ą║ą░ ą┤ą╗čÅ idle task.
pulIdleTaskStackSize: čāą║ą░ąĘą░č鹥ą╗čī ą┤ą╗čÅ ą║ąŠą╗ąĖč湥čüčéą▓ą░ 菹╗ąĄą╝ąĄąĮč鹊ą▓, ą║ąŠč鹊čĆąŠąĄ ą┐ąŠą╝ąĄčēą░ąĄčéčüčÅ ą▓ ą▓čŗą┤ąĄą┤ąĄąĮąĮčŗą╣ ą▒čāč乥čĆ čüč鹥ą║ą░.
BaseType_t xTaskCallApplicationTaskHook (TaskHandle_t xTask,
void *pvParameter);
ąÆčŗąĘčŗą▓ą░ąĄčé hook-čäčāąĮą║čåąĖčÄ, čüą▓čÅąĘą░ąĮąĮčāčÄ čü xTask. ą¤ąĄčĆąĄą┤ą░čćą░ NULL ą▓ xTask ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ č鹊ą╝čā, čćč鹊 ą▒čāą┤ąĄčé ą▓čŗąĘą▓ą░ąĮą░ hook-čäčāąĮą║čåąĖčÅ č鹥ą║čāčēąĄą╣ ąĘą░ą┤ą░čćąĖ (ąĖąĘ ą║ąŠč鹊čĆąŠą╣ ą▒čŗą╗ą░ ą▓čŗąĘą▓ą░ąĮą░ (xTaskCallApplicationTaskHook).
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
xTask: ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĘą░ą┤ą░čćąĖ, ą┤ą╗čÅ ą║ąŠč鹊čĆąŠą╣ ą▒čāą┤ąĄčé ą▓čŗąĘą▓ą░ąĮą░ hook-čäčāąĮą║čåąĖčÅ.
pvParameter: ą┐ą░čĆą░ą╝ąĄčéčĆ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ hook-čäčāąĮą║čåąĖčÄ ąĘą░ą┤ą░čćąĖ, ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆąŠą▓ą░ąĮ ą┐ąŠ čüą▓ąŠąĄą╝čā čāčüą╝ąŠčéčĆąĄąĮąĖčÄ. ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą▓ąŠąĘą▓čĆą░čéąĖčé hook-čäčāąĮą║čåąĖčÅ, ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąĮą░čÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝.
TaskHandle_t xTaskGetIdleTaskHandle (void);
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┤ąŠčüčéčāą┐ąĮą░ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ 1 ąŠą┐čåąĖčÅ INCLUDE_xTaskGetIdleTaskHandle (ą▓ FreeRTOSConfig.h).
ą¤čĆąŠčüč鹊 ą▓ąŠąĘą▓čĆą░čéąĖčé ą┤ąĄčüą║čĆąĖą┐č鹊čĆ idle task. ąØąĄą┤ąŠą┐čāčüčéąĖą╝ąŠ ą▓čŗąĘčŗą▓ą░čéčī xTaskGetIdleTaskHandle ą┤ąŠ ąĘą░ą┐čāčüą║ą░ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░.
UBaseType_t uxTaskGetSystemState (TaskStatus_t *constpxTaskStatusArray,
const UBaseType_t uxArraySize,
uint32_t *constpulTotalRunTime);
ą¦č鹊ą▒čŗ čŹčéą░ čäčāąĮą║čåąĖčÅ ą▒čŗą╗ą░ ą┤ąŠčüčéčāą┐ąĮą░, ąŠą┐čåąĖčÅ configUSE_TRACE_FACILITY ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ 1 (ą▓ FreeRTOSConfig.h).
uxTaskGetSystemState() ąĘą░ą┐ąŠą╗ąĮčÅąĄčé čüčéčĆčāą║čéčāčĆčā TaskStatus_t ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ ąĘą░ą┤ą░čćąĖ ą▓ čüąĖčüč鹥ą╝ąĄ. ąĪčéčĆčāą║čéčāčĆą░ TaskStatus_t čüąŠą┤ąĄčƹȹĖčé, ą▓ą╝ąĄčüč鹥 čü ą┤čĆčāą│ąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣, ą┐ąŠą╗čÅ ą┤ą╗čÅ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ ąĘą░ą┤ą░čćąĖ, ąĖą╝ąĄąĮąĖ ąĘą░ą┤ą░čćąĖ, ą┐čĆąĖąŠčĆąĖč鹥čéą░ ąĘą░ą┤ą░čćąĖ, čüąŠčüč鹊čÅąĮąĖčÅ ąĘą░ą┤ą░čćąĖ, ąĖ čéą░ą║ąČąĄ ąĄčüčéčī ąŠą▒čēąĄąĄ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ, ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĮąŠą│ąŠ ąĘą░ą┤ą░č湥ą╣.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čŹčéą░ čäčāąĮą║čåąĖčÅ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮą░ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąŠčéą╗ą░ą┤ą║ąĖ, ą┐ąŠčüą║ąŠą╗čīą║čā ąĄčæ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ č鹊ą╝čā, čćč鹊 ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ąŠčüčéą░ąĄčéčüčÅ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ą▓ č鹥č湥ąĮąĖąĄ ą┤ą╗ąĖč鹥ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ.
ążčāąĮą║čåąĖčÅ ą▓ąŠąĘą▓čĆą░čéąĖčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüčéčĆčāą║čéčāčĆ TaskStatus_t, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ ąĘą░ą┐ąŠą╗ąĮąĄąĮčŗ. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ą▓ąĮąŠ ą║ąŠą╗ąĖč湥čüčéą▓čā, ą║ąŠč鹊čĆąŠąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ą▓čŗąĘąŠą▓ąŠą╝ API-čäčāąĮą║čåąĖąĖ uxTaskGetNumberOfTasks, ąĮąŠ ą▒čāą┤ąĄčé čĆą░ą▓ąĮąŠ 0, ąĄčüą╗ąĖ ąĘąĮą░č湥ąĮąĖąĄ, ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠąĄ ą▓ uxArraySize, čüą╗ąĖčłą║ąŠą╝ ą╝ą░ą╗ąĄąĮčīą║ąŠąĄ.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
pxTaskStatusArray: čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą╝ą░čüčüąĖą▓ čüčéčĆčāą║čéčāčĆ TaskStatus_t. ąŁč鹊čé ą╝ą░čüčüąĖą▓ ą┤ąŠą╗ąČąĄąĮ čüąŠą┤ąĄčƹȹ░čéčī ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĮčā čüčéčĆčāą║čéčāčĆčā TaskStatus_t ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ ąĘą░ą┤ą░čćąĖ, ą║ąŠč鹊čĆąŠą╣ čāą┐čĆą░ą▓ą╗čÅąĄčé RTOS. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čŹčéąĖčģ ąĘą░ą┤ą░čć ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą▓čŗąĘąŠą▓ąŠą╝ uxTaskGetNumberOfTasks.
uxArraySize: čĆą░ąĘą╝ąĄčĆ ą╝ą░čüčüąĖą▓ą░, ąĮą░ ą║ąŠč鹊čĆčŗą╣ čāą║ą░ąĘčŗą▓ą░ąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆ pxTaskStatusArray. ąĀą░ąĘą╝ąĄčĆ čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▓ ą║ąŠą╗ąĖč湥čüčéą▓ąĄ ąĖąĮą┤ąĄą║čüąŠą▓ ą▓ ą╝ą░čüčüąĖą▓ąĄ, ąĖą╗ąĖ ą▓ ą║ąŠą╗ąĖč湥čüčéą▓ąĄ čüčéčĆčāą║čéčāčĆ TaskStatus_t, čüąŠą┤ąĄčƹȹ░čēąĖčģčüčÅ ą▓ ą╝ą░čüčüąĖą▓ąĄ, ąĮąŠ ąĮąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą▓ čŹč鹊ą╝ ą╝ą░čüčüąĖą▓ąĄ.
pulTotalRunTime: ąĄčüą╗ąĖ ąŠą┐čåąĖčÅ configGENERATE_RUN_TIME_STATS čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ 1 (ą▓ FreeRTOSConfig.h), č鹊 *pulTotalRunTime ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čäčāąĮą║čåąĖąĄą╣ ą▓ ąŠą▒čēąĄąĄ ą▓čĆąĄą╝čÅ čĆą░ą▒ąŠčéčŗ (ą║ą░ą║ čŹč鹊 ą▒čŗą╗ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ čéą░ą║čéą░ą╝ąĖ čüčéą░čéąĖčüčéąĖą║ąĖ, čüą╝. [9]) ąŠčé ą╝ąŠą╝ąĄąĮčéą░ ąĘą░ą│čĆčāąĘą║ąĖ čüąĖčüč鹥ą╝čŗ. ąŻą║ą░ąĘą░č鹥ą╗čī pulTotalRunTime ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ NULL, čćč鹊ą▒čŗ ąŠą┐čāčüčéąĖčéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠą▒čēąĄą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ čĆą░ą▒ąŠčéčŗ.
ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ:
// ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčé, ą║ą░ą║ ą╝ąŠąČąĮąŠ ą┐ąŠčüčéčĆąŠąĖčéčī čāą┤ąŠą▒ąĮčāčÄ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ
// čéą░ą▒ą╗ąĖčåčā čüčéą░čéąĖčüčéąĖą║ąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ąĘą░ą┤ą░čć ąĖąĘ ą┤ą░ąĮąĮčŗčģ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗčģ
// ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ uxTaskGetSystemState(). ąŁčéą░ čéą░ą▒ą╗ąĖčåą░ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ
// ą▓ ą▒čāč乥čĆ pcWriteBuffer.
void vTaskGetRunTimeStats (char *pcWriteBuffer)
{
TaskStatus_t *pxTaskStatusArray;
volatile UBaseType_t uxArraySize, x;
uint32_t ulTotalRunTime, ulStatsAsPercentage;
// ąōą░čĆą░ąĮčéąĖčĆčāąĄą╝, čćč鹊 ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗą╣ ą▒čāč乥čĆ ąĮąĄ ą▒čāą┤ąĄčé čüąŠą┤ąĄčƹȹ░čéčī čüčéčĆąŠą║čā.
pcWriteBuffer = 0x00;
// ąöąĄą╗ą░ąĄą╝ čüąĮąĖą╝ąŠą║ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ąĘą░ą┤ą░čć ą▓ čüą╗čāčćą░ąĄ, ąĄčüą╗ąĖ čŹč鹊 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ
// ą┐ąŠą╝ąĄąĮčÅą╗ąŠčüčī ą▓ąŠ ą▓čĆąĄą╝čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ.
uxArraySize = uxTaskGetNumberOfTasks();
// ąÆčŗą┤ąĄą╗čÅąĄą╝ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ (ąĖąĘ ą║čāčćąĖ) čüčéčĆčāą║čéčāčĆčā TaskStatus_t ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣
// ąĘą░ą┤ą░čćąĖ. ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠ čŹč鹊čé ą╝ą░čüčüąĖą▓ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą┤ąĄą╗ąĄąĮ čüčéą░čéąĖč湥čüą║ąĖ
// ą▓ąŠ ą▓čĆąĄą╝čÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ.
pxTaskStatusArray = pvPortMalloc(uxArraySize * sizeof(TaskStatus_t));
if (pxTaskStatusArray != NULL)
{
// ąōąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ čüčŗčĆą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ ą┐ąŠ ą║ą░ąČą┤ąŠą╣ ąĘą░ą┤ą░č湥.
uxArraySize = uxTaskGetSystemState(pxTaskStatusArray,
uxArraySize,
&ulTotalRunTime);
// ąöą╗čÅ ą┐čĆąŠčåąĄąĮčéą░ ą┐čĆąŠą▓ąĄą┤ąĄąĮąĮčŗčģ ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣.
ulTotalRunTime /= 100UL;
// ą¤ąŠąĘą▓ąŠą╗čÅąĄčé ąĖąĘą▒ąĄąČą░čéčī ąŠčłąĖą▒ąŠą║ ą┤ąĄą╗ąĄąĮąĖčÅ ąĮą░ 0.
if( ulTotalRunTime > 0 )
{
// ąöą╗čÅ ą║ą░ąČą┤ąŠą╣ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮąŠą╣ ą┐ąŠąĘąĖčåąĖąĖ ą▓ ą╝ą░čüčüąĖą▓ąĄ pxTaskStatusArray
// čüčŗčĆčŗąĄ ą┤ą░ąĮąĮčŗąĄ č乊čĆą╝ą░čéąĖčĆčāčÄčéčüčÅ ą┤ą╗čÅ ą┐čĆąĖą▓ąĄą┤ąĄąĮąĖčÅ ą▓ čāą┤ąŠą▒ąŠčćąĖčéą░ąĄą╝čŗą╣
// č乊čĆą╝ą░čé ASCII.
for (x = 0; x < uxArraySize; x++)
{
// ąĪą║ąŠą╗čīą║ąŠ ą┐čĆąŠčåąĄąĮč鹊ą▓ ąŠčé ąŠą▒čēąĄą│ąŠ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ą░
// čŹčéą░ ąĘą░ą┤ą░čćą░? ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą▓čüąĄą│ą┤ą░ ą▒čāą┤ąĄčé ąŠą║čĆčāą│ą╗ąĄąĮąŠ ą▓ąĮąĖąĘ ą┤ąŠ
// ą▒ą╗ąĖąČą░ą╣čłąĄą│ąŠ čåąĄą╗ąŠą│ąŠ. ulTotalRunTimeDiv100 čāąČąĄ ą▒čŗą╗ąŠ ą┐ąŠą┤ąĄą╗ąĄąĮąŠ
// ąĮą░ 100.
ulStatsAsPercentage = pxTaskStatusArray[x].ulRunTimeCounter / ulTotalRunTime;
if(ulStatsAsPercentage > 0UL)
{
sprintf(pcWriteBuffer, "%s\t\t%lu\t\t%lu%%\r\n",
pxTaskStatusArray[x].pcTaskName,
pxTaskStatusArray[x].ulRunTimeCounter,
ulStatsAsPercentage);
}
else
{
// ąĢčüą╗ąĖ ą┐čĆąŠčåąĄąĮčéąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čĆą░ą▓ąĮąŠ 0, č鹊 čŹč鹊 ąĘąĮą░čćąĖčé, čćč鹊 ąĘą░ą┤ą░čćą░
// ą┐ąŠčéčĆą░čéąĖą╗ą░ ą╝ąĄąĮčīčłąĄ 1% ąŠą▒čēąĄą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ.
sprintf(pcWriteBuffer, "%s\t\t%lu\t\t<1%%\r\n",
pxTaskStatusArray[x].pcTaskName,
pxTaskStatusArray[x].ulRunTimeCounter);
}
pcWriteBuffer += strlen((char*)pcWriteBuffer);
}
}
// ą£ą░čüčüąĖą▓ ą▒ąŠą╗čīčłąĄ ąĮąĄ ąĮčāąČąĄąĮ, ąŠčüą▓ąŠą▒ąŠą┤ąĖą╝ ą┐ą░ą╝čÅčéčī, ą│ą┤ąĄ ąŠąĮ ąĮą░čģąŠą┤ąĖą╗čüčÅ.
vPortFree(pxTaskStatusArray);
}
}
void vTaskList (char *pcWriteBuffer);
ąōąĄąĮąĄčĆąĖčĆčāąĄčé čüą┐ąĖčüąŠą║ ą▓čüąĄčģ č鹥ą║čāčēąĖčģ ąĘą░ą┤ą░čć.
ą¦č鹊ą▒čŗ čŹčéą░ čäčāąĮą║čåąĖčÅ ą▒čŗą╗ą░ ą┤ąŠčüčéčāą┐ąĮą░, ąŠą▒ąĄ ąŠą┐čåąĖąĖ configUSE_TRACE_FACILITY ąĖ configUSE_STATS_FORMATTING_FUNCTIONS ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą║ą░ą║ 1.
ąŚą░ą╝ąĄčćą░ąĮąĖąĄ: čŹčéą░ čäčāąĮą║čåąĖčÅ ąĘą░ą┐čĆąĄčéąĖčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓ąŠ ą▓čĆąĄą╝čÅ čüą▓ąŠąĄą│ąŠ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ. ą×ąĮą░ ąĮąĄ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮą░ ą┤ą╗čÅ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ąĖ ą┤ąŠą╗ąČąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ą▓ąŠ ą▓čĆąĄą╝čÅ ąŠčéą╗ą░ą┤ą║ąĖ.
ąĪčéčĆąŠąĖčé čüą┐ąĖčüąŠą║ ą▓čüąĄčģ č鹥ą║čāčēąĖčģ ąĘą░ą┤ą░čć, ą▓ą╝ąĄčüč鹥 čü ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ ąŠą▒ ąĖčģ č鹥ą║čāčēąĄą╝ čüąŠčüč鹊čÅąĮąĖąĖ ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ čüč鹥ą║ą░.
ąĪąŠčüč鹊čÅąĮąĖąĄ ąĘą░ą┤ą░čć ąŠą▒ąŠąĘąĮą░čćą░ąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ąĖ čüąĖą╝ą▓ąŠą╗ą░ą╝ąĖ: blocked ą║ą░ą║ B, ready ą║ą░ą║ R, deleted ą║ą░ą║ D, suspended ą║ą░ą║ S.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮą░ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čāą┤ąŠą▒čüčéą▓ą░, ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ąŠ ą╝ąĮąŠą│ąĖčģ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ. ą×ąĮą░ ą▓ąŠą▓čüąĄ ąĮąĄ čÅą▓ą╗čÅąĄčéčüčÅ čćą░čüčéčīčÄ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░.
vTaskList() ą▓čŗąĘčŗą▓ą░ąĄčé uxTaskGetSystemState(), ąĘą░č鹥ą╝ č乊čĆą╝ą░čéąĖčĆčāąĄčé ą▓čŗą▓ąŠą┤ uxTaskGetSystemState() ą▓ čāą┤ąŠą▒ąŠčćąĖčéą░ąĄą╝čŗą╣ č乊čĆą╝ą░čé, ą│ą┤ąĄ ą┐ąŠą║ą░ąĘą░ąĮčŗ ąĖą╝ąĄąĮą░ ąĘą░ą┤ą░čć, ąĖčģ čüąŠčüč鹊čÅąĮąĖąĄ ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čüč鹥ą║ą░.
ą¤ąŠčüą║ąŠą╗čīą║čā vTaskList() ąĘą░ą▓ąĖčüąĖčé ąŠčé ą▒ąĖą▒ą╗ąĖąŠč鹥čćąĮąŠą╣ čäčāąĮą║čåąĖąĖ sprintf(), čćč鹊 ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ čĆą░ąĘą┤čāą▓ą░ąĮąĖčÄ čĆą░ąĘą╝ąĄčĆą░ ą║ąŠą┤ą░, čĆą░čüčģąŠą┤čā čüč鹥ą║ą░, ąĖ čäčāąĮą║čåąĖčÅ ą╝ąŠąČąĄčé ą┤ą░ą▓ą░čéčī čĆą░ąĘąĮčŗąĄ čĆąĄąĘčāą╗čīčéą░čéčŗ ąĮą░ čĆą░ąĘąĮčŗčģ ą┐ą╗ą░čéč乊čĆą╝ą░čģ. ąÆ ą║ą░č湥čüčéą▓ąĄ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓čŗ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čāčĆąĄąĘą░ąĮąĮą░čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ sprintf(), ą║ąŠč鹊čĆą░čÅ ąĄčüčéčī ą▓ąŠ ą╝ąĮąŠą│ąĖčģ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ą░čģ FreeRTOS/Demo ą▓ čäą░ą╣ą╗ąĄ printf-stdarg.c (ąĖą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 printf-stdarg.c ąĮąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▓čüąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╣ sprintf).
ąÆ čüąĖčüč鹥ą╝ą░čģ, ą┐ąŠčüčéą░ą▓ą╗čÅąĄą╝čŗčģ ą▓ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ąŠ, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą▓čŗąĘčŗą▓ą░čéčī uxTaskGetSystemState() ąĮą░ą┐čĆčÅą╝čāčÄ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠčüčéčāą┐ą░ ą║ čüčŗčĆčŗą╝ ą┤ą░ąĮąĮčŗą╝ čüčéą░čéąĖčüčéąĖą║ąĖ, ą▓ą╝ąĄčüč鹊 č鹊ą│ąŠ čćč鹊ą▒čŗ ą▓čŗąĘčŗą▓ą░čéčī vTaskList().
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
pcWriteBuffer: ą▒čāč乥čĆ, ą║čāą┤ą░ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮą░ ą▓čŗčłąĄčāą┐ąŠą╝čÅąĮčāčéą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖąŠąĮąĮą░čÅ čéą░ą▒ą╗ąĖčåą░ ą┐ąŠ ąĘą░ą┤ą░čćą░ą╝ ą▓ ą▓ąĖą┤ąĄ čāą┤ąŠą▒ąŠčćąĖčéą░ąĄą╝ąŠą│ąŠ č鹥ą║čüčéą░ ASCII. ą¤ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 čŹč鹊čé ą▒čāč乥čĆ ą┤ąŠčüčéą░č鹊čćąĮąŠą│ąŠ čĆą░ąĘą╝ąĄčĆą░, čćč鹊ą▒čŗ ą▓ ąĮąĄą╝ ą┐ąŠą╝ąĄčüčéąĖą╗čüčÅ ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝čŗą╣ ąŠčéč湥čé. ąæčāą┤ąĄčé ą┤ąŠčüčéą░č鹊čćąĮčŗą╝ ą┐čĆąĖą▒ą╗ąĖąĘąĖč鹥ą╗čīąĮąŠ ą┐ąŠ 40 ą▒ą░ą╣čé ąĮą░ ą║ą░ąČą┤čāčÄ ąĘą░ą┤ą░čćčā.
void vTaskGetRunTimeStats (char *pcWriteBuffer);
ą¤ąŠą╗čāčćą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ č鹥ą║čāčēąĖčģ ąĘą░ą┤ą░čć ą▓ ą▓ąĖą┤ąĄ čüčéčĆąŠą║ąĖ.
ą¦č鹊ą▒čŗ ą▒čŗą╗ą░ ą┤ąŠčüčéčāą┐ąĮą░ čŹčéą░ čäčāąĮą║čåąĖčÅ, ąŠą▒ąĄ ąŠą┐čåąĖąĖ configGENERATE_RUN_TIME_STATS ąĖ configUSE_STATS_FORMATTING_FUNCTIONS ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą║ą░ą║ 1. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ čéą░ą║ąČąĄ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┤ą╗čÅ portCONFIGURE_TIMER_FOR_RUN_TIME_STATS() ąĖ portGET_RUN_TIME_COUNTER_VALUE(), čćč鹊ą▒čŗ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ čéą░ą╣ą╝ąĄčĆą░/čüč湥čéčćąĖą║ą░, ąĖ ą▓ąŠąĘą▓čĆą░čéąĖčéčī č鹥ą║čāčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ. ąĪč湥čéčćąĖą║ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ą▓ 10 čĆą░ąĘ ą▒ąŠą╗čīčłąĄ čüč湥čéčćąĖą║ą░ čéąĖą║ąŠą▓.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĘą░ą┐čĆąĄčēą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓ąŠ ą▓čĆąĄą╝čÅ čüą▓ąŠąĄą│ąŠ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ. ą×ąĮą░ ąĮąĄ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮą░ ą┤ą╗čÅ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą│ąŠ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ąĖ ą┤ąŠą╗ąČąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąŠčéą╗ą░ą┤ą║ąĖ. ążčāąĮą║čåąĖčÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮą░ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čāą┤ąŠą▒čüčéą▓ą░, ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ąŠ ą╝ąĮąŠą│ąĖčģ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ. ą×ąĮą░ ą▓ąŠą▓čüąĄ ąĮąĄ čÅą▓ą╗čÅąĄčéčüčÅ čćą░čüčéčīčÄ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░.
ąŻčüčéą░ąĮąŠą▓ą║ą░ ą▓ 1 ąŠą┐čåąĖąĖ configGENERATE_RUN_TIME_STATS ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ čüąŠčģčĆą░ąĮąĄąĮąĖčÄ ąĮą░ą║ąŠą┐ą╗ąĄąĮąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ ąĘą░ą┤ą░čćąĖ. ąóąŠčćąĮąŠčüčéčī ąĘąĮą░č湥ąĮąĖčÅ ąĮą░ą║ąŠą┐ą╗čÅąĄą╝ąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąĘą░ą▓ąĖčüąĖčé ąŠčé čćą░čüč鹊čéčŗ čéą░ą╣ą╝ąĄčĆą░, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą╝ą░ą║čĆąŠčüąŠą╝ portCONFIGURE_TIMER_FOR_RUN_TIME_STATS(). ąÆčŗąĘąŠą▓ vTaskGetRunTimeStats() ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ąŠą▒čēąĄąĄ ą▓čĆąĄą╝čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ą░ąČą┤ąŠą╣ ąĘą░ą┤ą░čćąĖ ą▓ ą▒čāč乥čĆ, ąĖ ą║ą░ą║ ą░ą▒čüąŠą╗čÄčéąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░, čéą░ą║ ąĖ ą┐čĆąŠčåąĄąĮčé ąŠčé ąŠą▒čēąĄą│ąŠ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĮąŠą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ čüąĖčüč鹥ą╝čŗ.
vTaskGetRunTimeStats() ą▓čŗąĘčŗą▓ą░ąĄčé uxTaskGetSystemState(), ąĘą░č鹥ą╝ č乊čĆą╝ą░čéąĖčĆčāąĄčé čćą░čüčéąĖ ą▓čŗą▓ąŠą┤ą░ uxTaskGetSystemState() ą▓ čāą┤ąŠą▒ąŠčćąĖčéą░ąĄą╝čāčÄ čéą░ą▒ą╗ąĖčåčā, ą│ą┤ąĄ ąŠč鹊ą▒čĆą░ąČą░ąĄčéčüčÅ ą▓čĆąĄą╝čÅ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ ąĘą░ą┤ą░čćąĖ, ą║ąŠč鹊čĆąŠąĄ ąĘą░ą┤ą░čćą░ ą┐čĆąŠą▓ąĄą╗ą░ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Running, ą▓ ą░ą▒čüąŠą╗čÄčéąĮąŠą╝ ąĖ ą┐čĆąŠčåąĄąĮčéąĮąŠą╝ ą▓ąĖą┤ąĄ.
vTaskGetRunTimeStats() ąĘą░ą▓ąĖčüąĖčé ąŠčé ą▒ąĖą▒ą╗ąĖąŠč鹥čćąĮąŠą╣ čäčāąĮą║čåąĖąĖ sprintf(), čćč鹊 ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ čĆą░ąĘą┤čāą▓ą░ąĮąĖčÄ čĆą░ąĘą╝ąĄčĆą░ ą║ąŠą┤ą░, čĆą░čüčģąŠą┤čā čüč鹥ą║ą░, ąĖ čäčāąĮą║čåąĖčÅ ą╝ąŠąČąĄčé ą┤ą░ą▓ą░čéčī čĆą░ąĘąĮčŗąĄ čĆąĄąĘčāą╗čīčéą░čéčŗ ąĮą░ čĆą░ąĘąĮčŗčģ ą┐ą╗ą░čéč乊čĆą╝ą░čģ. ąÆ ą║ą░č湥čüčéą▓ąĄ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓čŗ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čāčĆąĄąĘą░ąĮąĮą░čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ sprintf(), ą║ąŠč鹊čĆą░čÅ ąĄčüčéčī ą▓ąŠ ą╝ąĮąŠą│ąĖčģ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ą░čģ FreeRTOS/Demo ą▓ čäą░ą╣ą╗ąĄ printf-stdarg.c (ąĖą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 printf-stdarg.c ąĮąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▓čüąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╣ sprintf).
ąÆ čüąĖčüč鹥ą╝ą░čģ, ą┐ąŠčüčéą░ą▓ą╗čÅąĄą╝čŗčģ ą▓ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ąŠ, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą▓čŗąĘčŗą▓ą░čéčī uxTaskGetSystemState() ąĮą░ą┐čĆčÅą╝čāčÄ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠčüčéčāą┐ą░ ą║ čüčŗčĆčŗą╝ ą┤ą░ąĮąĮčŗą╝ čüčéą░čéąĖčüčéąĖą║ąĖ, ą▓ą╝ąĄčüč鹊 č鹊ą│ąŠ čćč鹊ą▒čŗ ą▓čŗąĘčŗą▓ą░čéčī vTaskGetRunTimeStats().
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
pcWriteBuffer: ą▒čāč乥čĆ, ą║čāą┤ą░ ą▒čāą┤čāčé ąĘą░ą┐ąĖčüą░ąĮčŗ ą▓čĆąĄą╝ąĄąĮą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▓ ą▓ąĖą┤ąĄ čāą┤ąŠą▒ąŠčćąĖčéą░ąĄą╝ąŠą│ąŠ č鹥ą║čüčéą░ ASCII. ą¤ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 čŹč鹊čé ą▒čāč乥čĆ ą┤ąŠčüčéą░č鹊čćąĮąŠą│ąŠ čĆą░ąĘą╝ąĄčĆą░, čćč鹊ą▒čŗ ą▓ ąĮąĄą╝ ą┐ąŠą╝ąĄčüčéąĖą╗čüčÅ ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝čŗą╣ ąŠčéč湥čé. ąæčāą┤ąĄčé ą┤ąŠčüčéą░č鹊čćąĮčŗą╝ ą┐čĆąĖą▒ą╗ąĖąĘąĖč鹥ą╗čīąĮąŠ ą┐ąŠ 40 ą▒ą░ą╣čé ąĮą░ ą║ą░ąČą┤čāčÄ ąĘą░ą┤ą░čćčā.
uint32_t ulTaskGetIdleRunTimeCounter (void);
ą¦č鹊ą▒čŗ ą▒čŗą╗ą░ ą┤ąŠčüčéčāą┐ąĮą░ čŹčéą░ čäčāąĮą║čåąĖčÅ, ąŠą▒ąĄ ąŠą┐čåąĖąĖ configGENERATE_RUN_TIME_STATS ąĖ configUSE_STATS_FORMATTING_FUNCTIONS ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą║ą░ą║ 1. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ čéą░ą║ąČąĄ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┤ą╗čÅ portCONFIGURE_TIMER_FOR_RUN_TIME_STATS() ąĖ portGET_RUN_TIME_COUNTER_VALUE(), čćč鹊ą▒čŗ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ čéą░ą╣ą╝ąĄčĆą░/čüč湥čéčćąĖą║ą░, ąĖ ą▓ąŠąĘą▓čĆą░čéąĖčéčī č鹥ą║čāčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ. ąĪč湥čéčćąĖą║ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ą▓ 10 čĆą░ąĘ ą▒ąŠą╗čīčłąĄ čüč湥čéčćąĖą║ą░ čéąĖą║ąŠą▓.
ąŻčüčéą░ąĮąŠą▓ą║ą░ ą▓ 1 ąŠą┐čåąĖąĖ configGENERATE_RUN_TIME_STATS ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ čüąŠčģčĆą░ąĮąĄąĮąĖčÄ ąĮą░ą║ąŠą┐ą╗ąĄąĮąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ ąĘą░ą┤ą░čćąĖ. ąóąŠčćąĮąŠčüčéčī ąĘąĮą░č湥ąĮąĖčÅ ąĮą░ą║ąŠą┐ą╗čÅąĄą╝ąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąĘą░ą▓ąĖčüąĖčé ąŠčé čćą░čüč鹊čéčŗ čéą░ą╣ą╝ąĄčĆą░, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą╝ą░ą║čĆąŠčüąŠą╝ portCONFIGURE_TIMER_FOR_RUN_TIME_STATS(). ąÆ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ uxTaskGetSystemState() ąĖ vTaskGetRunTimeStats() ąĘą░ą┐ąĖčüčŗą▓ą░čÄčé ą▓ ą▒čāč乥čĆ ąŠą▒čēąĄąĄ ą▓čĆąĄą╝čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐ąŠ ą║ą░ąČą┤ąŠą╣ ąĘą░ą┤ą░č湥, čäčāąĮą║čåąĖčÅ ulTaskGetIdleRunTimeCounter() ą▓ąŠąĘą▓čĆą░čéąĖčé ąŠą▒čēąĄąĄ ą▓čĆąĄą╝čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąĘą░ą┤ą░čćąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle task).
ąÆąĄčĆąĮąĄčé ąŠą▒čēąĄąĄ ą▓čĆąĄą╝čÅ čĆą░ą▒ąŠčéčŗ idle task. ąŁč鹊 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠč鹊čĆąŠąĄ ąĘą░ą┤ą░čćą░ ąŠąČąĖą┤ą░ąĮąĖčÅ čĆąĄą░ą╗čīąĮąŠ ą▓čŗą┐ąŠą╗ąĮčÅą╗ą░čüčī. ąĢą┤ąĖąĮąĖčåą░ ą▓čĆąĄą╝ąĄąĮąĖ ąĘą░ą▓ąĖčüąĖčé ąŠčé čćą░čüč鹊čéčŗ, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą╣ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą╝ą░ą║čĆąŠčüąŠą▓ portCONFIGURE_TIMER_FOR_RUN_TIME_STATS() ąĖ portGET_RUN_TIME_COUNTER_VALUE().
BaseType_t xTaskGenericNotify (TaskHandle_t xTaskToNotify,
UBaseType_t uxIndexToNotify,
uint32_t ulValue,
eNotifyAction eAction,
uint32_t *pulPreviousNotificationValue);
ą×čéą┐čĆą░ą▓ą╗čÅąĄčé ą┐čĆčÅą╝ąŠąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ (task notification) ąŠčé ąŠą┤ąĮąŠą╣ ąĘą░ą┤ą░čćąĖ ą║ ą┤čĆčāą│ąŠą╣, ą┐ąĄčĆąĄą┤ą░ą▓ą░čÅ ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ (ulValue) ąĖ ą┤ąĄą╣čüčéą▓ąĖąĄ (eAction). ą¤ąŠą┤čĆąŠą▒ąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ čüą╝. ą▓ [10]. ą¦č鹊ą▒čŗ čäčāąĮą║čåąĖčÅ ą▒čŗą╗ą░ ą┤ąŠčüčéčāą┐ąĮą░, ąŠą┐čåąĖčÅ configUSE_TASK_NOTIFICATIONS ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą▓ 1.
ąŻ ą║ą░ąČą┤ąŠą╣ ąĘą░ą┤ą░čćąĖ ąĄčüčéčī ą┐čĆąĖą▓ą░čéąĮčŗą╣ ą╝ą░čüčüąĖą▓ ąĘąĮą░č湥ąĮąĖą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ("notification values", ąĖą╗ąĖ ŌĆśnotificationsŌĆÖ), ą║ą░ąČą┤ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čŹč鹊 32-bit ą▒ąĖčéąĮąŠąĄ ą▒ąĄąĘąĘąĮą░ą║ąŠą▓ąŠąĄ čåąĄą╗ąŠąĄ (uint32_t). ąÜąŠąĮčüčéą░ąĮčéą░ configTASK_NOTIFICATION_ARRAY_ENTRIES čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĖąĮą┤ąĄą║čüąŠą▓ ą▓ čŹč鹊ą╝ ą╝ą░čüčüąĖą▓ąĄ, ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ąĄčüą╗ąĖ ąŠąĮą░ ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░, ą┐čĆąĖąĮąĖą╝ą░ąĄčéčüčÅ čĆą░ą▓ąĮąŠą╣ 1 (ą┤ą╗čÅ ąŠą▒čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ). ąöąŠ ą▓ąĄčĆčüąĖąĖ FreeRTOS V10.4.0 ą▒čŗą╗ąŠ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĮą░ ąĘą░ą┤ą░čćčā.
ąĪąŠą▒čŗčéąĖčÅ (events) ą╝ąŠą│čāčé ą▒čŗčéčī ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ ąŠčé ąŠą┤ąĮąŠą╣ ąĘą░ą┤ą░čćąĖ ą║ ą┤čĆčāą│ąŠą╣ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮąŠą│ąŠ ąŠą▒čŖąĄą║čéą░. ą¤čĆąĖą╝ąĄčĆčŗ čéą░ą║ąĖčģ ąŠą▒čŖąĄą║č鹊ą▓ - ąŠč湥čĆąĄą┤ąĖ, čüąĄą╝ą░č乊čĆčŗ, ą╝čīčÄč鹥ą║čüčŗ ąĖ ą│čĆčāą┐ą┐čŗ čüąŠą▒čŗčéąĖą╣ (event groups). ą×ą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ (task notifications) čŹč鹊 ą╝ąĄč鹊ą┤ ą┐čĆčÅą╝ąŠą╣ ąŠčéą┐čĆą░ą▓ą║ąĖ čüąŠą▒čŗčéąĖčÅ ą▓ ąĘą░ą┤ą░čćčā ą▒ąĄąĘ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ čéą░ą║ąŠą│ąŠ ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮąŠą│ąŠ ąŠą▒čŖąĄą║čéą░.
ą×ą┐ąŠą▓ąĄčēąĄąĮąĖąĄ (čāą▓ąĄą┤ąŠą╝ą╗ąĄąĮąĖąĄ, notification), ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮąŠąĄ ą▓ ąĘą░ą┤ą░čćčā, ą╝ąŠąČąĄčé ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą┤ąĄą╣čüčéą▓ąĖąĄ (action), čéą░ą║ąŠąĄ ą║ą░ą║ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ, ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčī ąĖą╗ąĖ ąĖąĮą║čĆąĄą╝ąĄąĮčé ąŠą┤ąĮąŠą│ąŠ ąĖąĘ ąĘąĮą░č湥ąĮąĖą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ (task notifications) ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ą┤ą░ąĮąĮčŗčģ ą▓ ąĘą░ą┤ą░čćčā, ąĖą╗ąĖ ą▓ ą║ą░č湥čüčéą▓ąĄ ą╗ąĄą│ą║ąĖčģ ąĖ ą▒čŗčüčéčĆčŗčģ ą┤ą▓ąŠąĖčćąĮčŗčģ čüąĄą╝ą░č乊čĆąŠą▓ ąĖą╗ąĖ čüąĄą╝ą░č乊čĆąŠą▓ čüąŠ čüč湥čéčćąĖą║ąŠą╝.
ąŚą░ą┤ą░čćą░ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī xTaskNotifyWaitIndexed() čćč鹊ą▒čŗ (ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ) ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčīčüčÅ ąĮą░ ąŠąČąĖą┤ą░ąĮąĖąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ, ąĖą╗ąĖ ulTaskNotifyTakeIndexed() čćč鹊ą▒čŗ (ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ) ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąŠąČąĖą┤ą░ąĮąĖčÅ ąĘąĮą░č湥ąĮąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ąĮąĄ ąĮčāą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ. ąŚą░ą┤ą░čćą░ ąĮąĄ čéčĆą░čéąĖčé ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ, ą║ąŠą│ą┤ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ (čüąŠčüč鹊čÅąĮąĖąĄ Blocked).
ąŻą▓ąĄą┤ąŠą╝ą╗ąĄąĮąĖąĄ, ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮąŠąĄ ąĘą░ą┤ą░č湥, ą▒čāą┤ąĄčé ąŠčüčéą░ą▓ą░čéčīčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ ą┤ąŠ č鹥čģ ą┐ąŠčĆ, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ąŠčćąĖčēąĄąĮąŠ ąĘą░ą┤ą░č湥ą╣ ą▓čŗąĘąŠą▓ąŠą╝ xTaskNotifyWaitIndexed() ąĖą╗ąĖ ulTaskNotifyTakeIndexed() (ąĖą╗ąĖ ąĖčģ un-indexed 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéą░ą╝ąĖ). ąĢčüą╗ąĖ ąĘą░ą┤ą░čćą░ čāąČąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Blocked ą┤ą╗čÅ ąŠąČąĖą┤ą░ąĮąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ, č鹊 ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą┤ąŠčüčéą░ą▓ą╗ąĄąĮąŠ, ąĘą░ą┤ą░čćą░ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓čŗčģąŠą┤ąĖčé ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ Blocked (čĆą░ąĘą▒ą╗ąŠą║ąĖčĆčāąĄčéčüčÅ) ąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ąŠčćąĖčēą░ąĄčéčüčÅ.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą║ą░ąČą┤ąŠąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą▓ ą╝ą░čüčüąĖą▓ąĄ čĆą░ą▒ąŠčéą░ąĄčé ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ - ąĘą░ą┤ą░čćą░ ąĘą░ ąŠą┤ąĖąĮ čĆą░ąĘ ą╝ąŠąČąĄčé ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ąĮą░ ąŠą┤ąĮąŠą╝ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĖ ą▓ ą╝ą░čüčüąĖą▓ąĄ, ąĖ ąĮąĄ ą▒čāą┤ąĄčé čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮą░ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄą╝, ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╝ ą▓ ą╝ą░čüčüąĖą▓ ą┐ąŠ ą┤čĆčāą│ąŠą╝čā ąĖąĮą┤ąĄą║čüčā.
ąśąĮč乊čĆą╝ą░čåąĖčÅ ą┤ą╗čÅ ąŠą▒čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ: ą┤ąŠ ą▓ąĄčĆčüąĖąĖ FreeRTOS V10.4.0 čā ą║ą░ąČą┤ąŠą╣ ąĘą░ą┤ą░čćąĖ ą▒čŗą╗ąŠ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ("notification value"), ąĖ ą▓čüąĄ API-čäčāąĮą║čåąĖąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čĆą░ą▒ąŠčéą░ą╗ąĖ ąĮą░ čŹč鹊ą╝ ąĘąĮą░č湥ąĮąĖąĖ. ąŚą░ą╝ąĄąĮą░ ąŠą┤ąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĮą░ ą╝ą░čüčüąĖą▓ čéą░ą║ąĖčģ ąĘąĮą░č湥ąĮąĖą╣ ą┐ąŠčéčĆąĄą▒ąŠą▓ą░ą╗ą░ ąĮąŠą▓ąŠą│ąŠ ąĮą░ą┐ąŠčĆą░ API-čäčāąĮą║čåąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│ą╗ąĖ ą▒čŗ ą░ą┤čĆąĄčüąŠą▓ą░čéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓ čŹč鹊ą╝ ą╝ą░čüčüąĖą▓ąĄ. xTaskNotify() čŹč鹊 ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮą░čÅ API-čäčāąĮą║čåąĖčÅ, ąĖ ąŠąĮą░ ąŠčüčéą░ą╗ą░čüčī ą┤ą╗čÅ ąŠą▒čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ, čĆą░ą▒ąŠčéą░čÅ čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓ ą╝ą░čüčüąĖą▓ąĄ čü ąĖąĮą┤ąĄą║čüąŠą╝ 0. ąÆčŗąĘąŠą▓ xTaskNotify() 菹║ą▓ąĖą▓ą░ą╗ąĄąĮč鹥ąĮ ą▓čŗąĘąŠą▓čā xTaskNotifyIndexed() čü ą┐ą░čĆą░ą╝ąĄčéčĆąŠą╝ uxIndexToNotify, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ą▓ 0.
eSetBits - čåąĄą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ, ąĮą░ ą║ąŠč鹊čĆąŠąĄ ąĮą░ą║ą╗ą░ą┤čŗą▓ą░ąĄčéčüčÅ ąŠą┐ąĄčĆą░čåąĖčÅ OR čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ ulValue. xTaskNotifyIndexed() ą▓ čéą░ą║ąŠą╝ čüą╗čāčćą░ąĄ ą▓čüąĄą│ą┤ą░ ą▓ąĄčĆąĮąĄčé pdPASS.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
xTaskToNotify: ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĘą░ą┤ą░čćąĖ, ą║ąŠč鹊čĆą░čÅ ąŠą┐ąŠą▓ąĄčēą░ąĄčéčüčÅ. ąöąĄčüą║čĆąĖą┐č鹊čĆ ąĘą░ą┤ą░čćąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ąŠąĘą▓čĆą░čēąĄąĮ ąĖąĘ API-čäčāąĮą║čåąĖąĖ xTaskCreate(), ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ąĘą░ą┤ą░čćąĖ, ąĖ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ čĆą░ą▒ąŠčéą░čÄčēąĄą╣ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ąĘą░ą┤ą░čćąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╗čāč湥ąĮ ą▓čŗąĘąŠą▓ąŠą╝ xTaskGetCurrentTaskHandle().
uxIndexToNotify: ąĖąĮą┤ąĄą║čü ą▓ ą╝ą░čüčüąĖą▓ąĄ ąĘąĮą░č湥ąĮąĖą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čåąĄą╗ąĄą▓ąŠą╣ ąĘą░ą┤ą░čćąĖ, ą║čāą┤ą░ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ. ąŚąĮą░č湥ąĮąĖąĄ uxIndexToNotify ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą╝ąĄąĮčīčłąĄ, č湥ą╝ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐čåąĖąĖ configTASK_NOTIFICATION_ARRAY_ENTRIES. ąŻ xTaskNotify() ąĮąĄčé čéą░ą║ąŠą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░, ąĖ ąŠąĮą░ ą▓čüąĄą│ą┤ą░ čłą╗ąĄčé ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą┐ąŠ ąĖąĮą┤ąĄą║čüčā 0.
ulValue: ą┤ą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ąŠčéą┐čĆą░ą▓ąĖčéčī čü ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄą╝. ąÜą░ą║ąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ, ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĘąĮą░č湥ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ eAction.
eAction: ąĘą░ą┤ą░ąĄčé, ą║ą░ą║ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ąŠą▒ąĮąŠą▓ą╗čÅąĄčé ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ, ąĄčüą╗ąĖ ąŠąĮąŠ ą▓ąŠąŠą▒čēąĄ ąĄčüčéčī. ąöą╗čÅ eAction ą┤ąŠą┐čāčüčéąĖą╝čŗ čüą╗ąĄą┤čāčÄčēąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ:
eIncrement - ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čåąĄą╗ąĖ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ. ulValue ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, ąĖ xTaskNotifyIndexed() ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą▓čüąĄą│ą┤ą░ ą▓ąĄčĆąĮąĄčé pdPASS.
eSetValueWithOverwrite - ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čåąĄą╗ąĖ ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ ąĘąĮą░č湥ąĮąĖąĄ ulValue, ą┤ą░ąČąĄ ąĄčüą╗ąĖ ąŠą┐ąŠą▓ąĄčēą░ąĄą╝ą░čÅ ąĘą░ą┤ą░čćą░ ąĄčēąĄ ąĮąĄ ąŠą▒čĆą░ą▒ąŠčéą░ą╗ąŠ ą┐čĆąĄą┤čŗą┤čāčēąĄąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą┐ąŠ č鹊ą╝čā ąČąĄ čüą░ą╝ąŠą╝čā ąĖąĮą┤ąĄą║čüčā ą▓ ą╝ą░čüčüąĖą▓ąĄ (čā ąĘą░ą┤ą░čćąĖ čāąČąĄ ąĄčüčéčī ąŠąČąĖą┤ą░čÄčēąĄąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą┐ąŠ čŹč鹊ą╝čā ąĖąĮą┤ąĄą║čüčā). ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ xTaskNotifyIndexed() ą▓čüąĄą│ą┤ą░ ą▓ąĄčĆąĮąĄčé pdPASS.
eSetValueWithoutOverwrite - ąĄčüą╗ąĖ ąŠą┐ąŠą▓ąĄčēą░ąĄą╝ą░čÅ ąĘą░ą┤ą░čćą░ ą┐ąŠą║ą░ ąĮąĄ ąĖą╝ąĄąĄčé ąŠąČąĖą┤ą░čÄčēąĄąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą┐ąŠ č鹊ą╝čā ąČąĄ čüą░ą╝ąŠą╝čā ąĖąĮą┤ąĄą║čüčā, č鹊 ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čåąĄą╗ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▓ ulValue ąĖ xTaskNotifyIndexed() ą▓ąĄčĆąĮąĄčé pdPASS. ąĢčüą╗ąĖ ąČąĄ ąŠą┐ąŠą▓ąĄčēą░ąĄą╝ą░čÅ ąĘą░ą┤ą░čćą░ čāąČąĄ ąĖą╝ąĄąĄčé ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ, ąŠąČąĖą┤ą░čÄčēąĄąĄ ą┐ąŠ č鹊ą╝čā ąČąĄ čüą░ą╝ąŠą╝čā ąĖąĮą┤ąĄą║čüčā, č鹊 ąĮąĖą║ą░ą║ąŠą│ąŠ ą┤ąĄą╣čüčéą▓ąĖčÅ ą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮąŠ ąĮąĄ ą▒čāą┤ąĄčé, ąĖ ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ pdFAIL.
eNoAction - ąĘą░ą┤ą░čćą░ ą┐ąŠą╗čāčćą░ąĄčé ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą┐ąŠ čāą║ą░ąĘą░ąĮąĮąŠą╝čā ąĖąĮą┤ąĄą║čüčā ą╝ą░čüčüąĖą▓ą░, ą▒ąĄąĘ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĘąĮą░č湥ąĮąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą┐ąŠ ąŠą▒ąĮąŠą▓ą╗čÅąĄą╝ąŠą╝čā ąĖąĮą┤ąĄą║čüčā. ulValue ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, ąĖ xTaskNotifyIndexed() ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą▓čüąĄą│ą┤ą░ ą▓ąŠąĘą▓čĆą░čéąĖčé pdPASS.
pulPreviousNotificationValue: čŹč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĘąĮą░č湥ąĮąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ-čüčāą▒čŖąĄą║čéą░ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ čäčāąĮą║čåąĖąĄą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▒čāą┤čāčé ąĖąĘą╝ąĄąĮąĄąĮčŗ ą╗čÄą▒čŗąĄ ą▒ąĖčéčŗ.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ čäčāąĮą║čåąĖąĄą╣ xTaskGenericNotify ąĘąĮą░č湥ąĮąĖąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĘąĮą░č湥ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ eAction, čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ čŹč鹊ą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░.
BaseType_t xTaskGenericNotifyFromISR (TaskHandle_t xTaskToNotify,
UBaseType_t uxIndexToNotify,
uint32_t ulValue,
eNotifyActioneAction,
uint32_t *pulPreviousNotificationValue,
BaseType_t *pxHigherPriorityTaskWoken);
ąŁč鹊 ą▓ąĄčĆčüąĖčÅ xTaskGenericNotify, ą║ąŠč鹊čĆą░čÅ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ąĖąĘ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (ISR). ą¦č鹊ą▒čŗ čŹčéąĖ čäčāąĮą║čåąĖąĖ ą▒čŗą╗ąĖ ą┤ąŠčüčéčāą┐ąĮčŗ, ąŠą┐čåąĖčÅ configUSE_TASK_NOTIFICATIONS ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ ą▓ 1. ą¤ąŠą┤čĆąŠą▒ąĮąŠ ą┐čĆąŠ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čć čüą╝. [10].
ąŻ ą║ą░ąČą┤ąŠą╣ ąĘą░ą┤ą░čćąĖ ąĄčüčéčī ą┐čĆąĖą▓ą░čéąĮčŗą╣ ą╝ą░čüčüąĖą▓ ąĘąĮą░č湥ąĮąĖą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ("notification values", ąĖą╗ąĖ ŌĆśnotificationsŌĆÖ), ą║ą░ąČą┤ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čŹč鹊 32-bit ą▒ąĖčéąĮąŠąĄ ą▒ąĄąĘąĘąĮą░ą║ąŠą▓ąŠąĄ čåąĄą╗ąŠąĄ (uint32_t). ąÜąŠąĮčüčéą░ąĮčéą░ configTASK_NOTIFICATION_ARRAY_ENTRIES čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĖąĮą┤ąĄą║čüąŠą▓ ą▓ čŹč鹊ą╝ ą╝ą░čüčüąĖą▓ąĄ, ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ąĄčüą╗ąĖ ąŠąĮą░ ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░, ą┐čĆąĖąĮąĖą╝ą░ąĄčéčüčÅ čĆą░ą▓ąĮąŠą╣ 1 (ą┤ą╗čÅ ąŠą▒čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ). ąöąŠ ą▓ąĄčĆčüąĖąĖ FreeRTOS V10.4.0 ą▒čŗą╗ąŠ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĮą░ ąĘą░ą┤ą░čćčā.
ąĪąŠą▒čŗčéąĖčÅ (events) ą╝ąŠą│čāčé ą▒čŗčéčī ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ ąŠčé ąŠą┤ąĮąŠą╣ ąĘą░ą┤ą░čćąĖ ą║ ą┤čĆčāą│ąŠą╣ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮąŠą│ąŠ ąŠą▒čŖąĄą║čéą░. ą¤čĆąĖą╝ąĄčĆčŗ čéą░ą║ąĖčģ ąŠą▒čŖąĄą║č鹊ą▓ - ąŠč湥čĆąĄą┤ąĖ, čüąĄą╝ą░č乊čĆčŗ, ą╝čīčÄč鹥ą║čüčŗ ąĖ ą│čĆčāą┐ą┐čŗ čüąŠą▒čŗčéąĖą╣ (event groups). ą×ą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ (task notifications) čŹč鹊 ą╝ąĄč鹊ą┤ ą┐čĆčÅą╝ąŠą╣ ąŠčéą┐čĆą░ą▓ą║ąĖ čüąŠą▒čŗčéąĖčÅ ą▓ ąĘą░ą┤ą░čćčā ą▒ąĄąĘ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ čéą░ą║ąŠą│ąŠ ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮąŠą│ąŠ ąŠą▒čŖąĄą║čéą░.
ą×ą┐ąŠą▓ąĄčēąĄąĮąĖąĄ (čāą▓ąĄą┤ąŠą╝ą╗ąĄąĮąĖąĄ, notification), ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮąŠąĄ ą▓ ąĘą░ą┤ą░čćčā, ą╝ąŠąČąĄčé ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą┤ąĄą╣čüčéą▓ąĖąĄ (action), čéą░ą║ąŠąĄ ą║ą░ą║ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ, ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčī ąĖą╗ąĖ ąĖąĮą║čĆąĄą╝ąĄąĮčé ąŠą┤ąĮąŠą│ąŠ ąĖąĘ ąĘąĮą░č湥ąĮąĖą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ (task notifications) ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ą┤ą░ąĮąĮčŗčģ ą▓ ąĘą░ą┤ą░čćčā, ąĖą╗ąĖ ą▓ ą║ą░č湥čüčéą▓ąĄ ą╗ąĄą│ą║ąĖčģ ąĖ ą▒čŗčüčéčĆčŗčģ ą┤ą▓ąŠąĖčćąĮčŗčģ čüąĄą╝ą░č乊čĆąŠą▓ ąĖą╗ąĖ čüąĄą╝ą░č乊čĆąŠą▓ čüąŠ čüč湥čéčćąĖą║ąŠą╝.
ąŚą░ą┤ą░čćą░ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī xTaskNotifyWaitIndexed() čćč鹊ą▒čŗ (ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ) ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčīčüčÅ ąĮą░ ąŠąČąĖą┤ą░ąĮąĖąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ, ąĖą╗ąĖ ulTaskNotifyTakeIndexed() čćč鹊ą▒čŗ (ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ) ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąŠąČąĖą┤ą░ąĮąĖčÅ ąĘąĮą░č湥ąĮąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ąĮąĄ ąĮčāą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ. ąŚą░ą┤ą░čćą░ ąĮąĄ čéčĆą░čéąĖčé ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ, ą║ąŠą│ą┤ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ (čüąŠčüč鹊čÅąĮąĖąĄ Blocked).
ąŻą▓ąĄą┤ąŠą╝ą╗ąĄąĮąĖąĄ, ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮąŠąĄ ąĘą░ą┤ą░č湥, ą▒čāą┤ąĄčé ąŠčüčéą░ą▓ą░čéčīčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ ą┤ąŠ č鹥čģ ą┐ąŠčĆ, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ąŠčćąĖčēąĄąĮąŠ ąĘą░ą┤ą░č湥ą╣ ą▓čŗąĘąŠą▓ąŠą╝ xTaskNotifyWaitIndexed() ąĖą╗ąĖ ulTaskNotifyTakeIndexed() (ąĖą╗ąĖ ąĖčģ un-indexed 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéą░ą╝ąĖ). ąĢčüą╗ąĖ ąĘą░ą┤ą░čćą░ čāąČąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Blocked ą┤ą╗čÅ ąŠąČąĖą┤ą░ąĮąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ, č鹊 ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą┤ąŠčüčéą░ą▓ą╗ąĄąĮąŠ, ąĘą░ą┤ą░čćą░ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓čŗčģąŠą┤ąĖčé ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ Blocked (čĆą░ąĘą▒ą╗ąŠą║ąĖčĆčāąĄčéčüčÅ) ąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ąŠčćąĖčēą░ąĄčéčüčÅ.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą║ą░ąČą┤ąŠąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą▓ ą╝ą░čüčüąĖą▓ąĄ čĆą░ą▒ąŠčéą░ąĄčé ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ - ąĘą░ą┤ą░čćą░ ąĘą░ ąŠą┤ąĖąĮ čĆą░ąĘ ą╝ąŠąČąĄčé ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ąĮą░ ąŠą┤ąĮąŠą╝ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĖ ą▓ ą╝ą░čüčüąĖą▓ąĄ, ąĖ ąĮąĄ ą▒čāą┤ąĄčé čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮą░ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄą╝, ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╝ ą▓ ą╝ą░čüčüąĖą▓ ą┐ąŠ ą┤čĆčāą│ąŠą╝čā ąĖąĮą┤ąĄą║čüčā.
ąśąĮč乊čĆą╝ą░čåąĖčÅ ą┤ą╗čÅ ąŠą▒čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ: ą┤ąŠ ą▓ąĄčĆčüąĖąĖ FreeRTOS V10.4.0 čā ą║ą░ąČą┤ąŠą╣ ąĘą░ą┤ą░čćąĖ ą▒čŗą╗ąŠ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ("notification value"), ąĖ ą▓čüąĄ API-čäčāąĮą║čåąĖąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čĆą░ą▒ąŠčéą░ą╗ąĖ ąĮą░ čŹč鹊ą╝ ąĘąĮą░č湥ąĮąĖąĖ. ąŚą░ą╝ąĄąĮą░ ąŠą┤ąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĮą░ ą╝ą░čüčüąĖą▓ čéą░ą║ąĖčģ ąĘąĮą░č湥ąĮąĖą╣ ą┐ąŠčéčĆąĄą▒ąŠą▓ą░ą╗ą░ ąĮąŠą▓ąŠą│ąŠ ąĮą░ą┐ąŠčĆą░ API-čäčāąĮą║čåąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│ą╗ąĖ ą▒čŗ ą░ą┤čĆąĄčüąŠą▓ą░čéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓ čŹč鹊ą╝ ą╝ą░čüčüąĖą▓ąĄ. xTaskNotify() čŹč鹊 ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮą░čÅ API-čäčāąĮą║čåąĖčÅ, ąĖ ąŠąĮą░ ąŠčüčéą░ą╗ą░čüčī ą┤ą╗čÅ ąŠą▒čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ, čĆą░ą▒ąŠčéą░čÅ čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓ ą╝ą░čüčüąĖą▓ąĄ čü ąĖąĮą┤ąĄą║čüąŠą╝ 0. ąÆčŗąĘąŠą▓ xTaskNotify() 菹║ą▓ąĖą▓ą░ą╗ąĄąĮč鹥ąĮ ą▓čŗąĘąŠą▓čā xTaskNotifyIndexed() čü ą┐ą░čĆą░ą╝ąĄčéčĆąŠą╝ uxIndexToNotify, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ą▓ 0.
eSetBits - čåąĄą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ, ąĮą░ ą║ąŠč鹊čĆąŠąĄ ąĮą░ą║ą╗ą░ą┤čŗą▓ą░ąĄčéčüčÅ ąŠą┐ąĄčĆą░čåąĖčÅ OR čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ ulValue. xTaskNotifyIndexed() ą▓ čéą░ą║ąŠą╝ čüą╗čāčćą░ąĄ ą▓čüąĄą│ą┤ą░ ą▓ąĄčĆąĮąĄčé pdPASS.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
xTaskToNotify: ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĘą░ą┤ą░čćąĖ, ą║ąŠč鹊čĆą░čÅ ąŠą┐ąŠą▓ąĄčēą░ąĄčéčüčÅ. ąöąĄčüą║čĆąĖą┐č鹊čĆ ąĘą░ą┤ą░čćąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ąŠąĘą▓čĆą░čēąĄąĮ ąĖąĘ API-čäčāąĮą║čåąĖąĖ xTaskCreate(), ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ąĘą░ą┤ą░čćąĖ, ąĖ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ čĆą░ą▒ąŠčéą░čÄčēąĄą╣ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ąĘą░ą┤ą░čćąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╗čāč湥ąĮ ą▓čŗąĘąŠą▓ąŠą╝ xTaskGetCurrentTaskHandle().
uxIndexToNotify: ąĖąĮą┤ąĄą║čü ą▓ ą╝ą░čüčüąĖą▓ąĄ ąĘąĮą░č湥ąĮąĖą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čåąĄą╗ąĄą▓ąŠą╣ ąĘą░ą┤ą░čćąĖ, ą║čāą┤ą░ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ. ąŚąĮą░č湥ąĮąĖąĄ uxIndexToNotify ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą╝ąĄąĮčīčłąĄ, č湥ą╝ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐čåąĖąĖ configTASK_NOTIFICATION_ARRAY_ENTRIES. ąŻ xTaskNotifyFromISR() ąĮąĄčé čéą░ą║ąŠą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░, ąĖ ąŠąĮą░ ą▓čüąĄą│ą┤ą░ čłą╗ąĄčé ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą┐ąŠ ąĖąĮą┤ąĄą║čüčā 0.
ulValue: ą┤ą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ąŠčéą┐čĆą░ą▓ąĖčéčī čü ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄą╝. ąÜą░ą║ąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ, ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĘąĮą░č湥ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ eAction.
eAction: ąĘą░ą┤ą░ąĄčé, ą║ą░ą║ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ąŠą▒ąĮąŠą▓ą╗čÅąĄčé ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ, ąĄčüą╗ąĖ ąŠąĮąŠ ą▓ąŠąŠą▒čēąĄ ąĄčüčéčī. ąöą╗čÅ eAction ą┤ąŠą┐čāčüčéąĖą╝čŗ čüą╗ąĄą┤čāčÄčēąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ:
eIncrement - ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čåąĄą╗ąĖ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ. ulValue ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, ąĖ xTaskNotifyIndexed() ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą▓čüąĄą│ą┤ą░ ą▓ąĄčĆąĮąĄčé pdPASS.
eSetValueWithOverwrite - ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čåąĄą╗ąĖ ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ ąĘąĮą░č湥ąĮąĖąĄ ulValue, ą┤ą░ąČąĄ ąĄčüą╗ąĖ ąŠą┐ąŠą▓ąĄčēą░ąĄą╝ą░čÅ ąĘą░ą┤ą░čćą░ ąĄčēąĄ ąĮąĄ ąŠą▒čĆą░ą▒ąŠčéą░ą╗ąŠ ą┐čĆąĄą┤čŗą┤čāčēąĄąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą┐ąŠ č鹊ą╝čā ąČąĄ čüą░ą╝ąŠą╝čā ąĖąĮą┤ąĄą║čüčā ą▓ ą╝ą░čüčüąĖą▓ąĄ (čā ąĘą░ą┤ą░čćąĖ čāąČąĄ ąĄčüčéčī ąŠąČąĖą┤ą░čÄčēąĄąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą┐ąŠ čŹč鹊ą╝čā ąĖąĮą┤ąĄą║čüčā). ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ xTaskNotifyIndexed() ą▓čüąĄą│ą┤ą░ ą▓ąĄčĆąĮąĄčé pdPASS.
eSetValueWithoutOverwrite - ąĄčüą╗ąĖ ąŠą┐ąŠą▓ąĄčēą░ąĄą╝ą░čÅ ąĘą░ą┤ą░čćą░ ą┐ąŠą║ą░ ąĮąĄ ąĖą╝ąĄąĄčé ąŠąČąĖą┤ą░čÄčēąĄąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą┐ąŠ č鹊ą╝čā ąČąĄ čüą░ą╝ąŠą╝čā ąĖąĮą┤ąĄą║čüčā, č鹊 ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čåąĄą╗ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▓ ulValue ąĖ xTaskNotifyIndexed() ą▓ąĄčĆąĮąĄčé pdPASS. ąĢčüą╗ąĖ ąČąĄ ąŠą┐ąŠą▓ąĄčēą░ąĄą╝ą░čÅ ąĘą░ą┤ą░čćą░ čāąČąĄ ąĖą╝ąĄąĄčé ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ, ąŠąČąĖą┤ą░čÄčēąĄąĄ ą┐ąŠ č鹊ą╝čā ąČąĄ čüą░ą╝ąŠą╝čā ąĖąĮą┤ąĄą║čüčā, č鹊 ąĮąĖą║ą░ą║ąŠą│ąŠ ą┤ąĄą╣čüčéą▓ąĖčÅ ą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮąŠ ąĮąĄ ą▒čāą┤ąĄčé, ąĖ ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ pdFAIL.
eNoAction - ąĘą░ą┤ą░čćą░ ą┐ąŠą╗čāčćą░ąĄčé ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą┐ąŠ čāą║ą░ąĘą░ąĮąĮąŠą╝čā ąĖąĮą┤ąĄą║čüčā ą╝ą░čüčüąĖą▓ą░, ą▒ąĄąĘ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĘąĮą░č湥ąĮąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą┐ąŠ ąŠą▒ąĮąŠą▓ą╗čÅąĄą╝ąŠą╝čā ąĖąĮą┤ąĄą║čüčā. ulValue ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, ąĖ xTaskNotifyIndexed() ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą▓čüąĄą│ą┤ą░ ą▓ąŠąĘą▓čĆą░čéąĖčé pdPASS.
pulPreviousNotificationValue: čŹč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĘąĮą░č湥ąĮąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ-čüčāą▒čŖąĄą║čéą░ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ čäčāąĮą║čåąĖąĄą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▒čāą┤čāčé ąĖąĘą╝ąĄąĮąĄąĮčŗ ą╗čÄą▒čŗąĄ ą▒ąĖčéčŗ.
pxHigherPriorityTaskWoken: xTaskNotifyFromISR() čāčüčéą░ąĮąŠą▓ąĖčé *pxHigherPriorityTaskWoken ą▓ pdTRUE, ąĄčüą╗ąĖ ąŠčéą┐čĆą░ą▓ą║ą░ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą▓čŗą▓ąŠą┤čā ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ Blocked ąĘą░ą┤ą░čćąĖ, ą║ąŠč鹊čĆąŠą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ, ąĖ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĮą░čÅ ąĘą░ą┤ą░čćą░ ąĖą╝ąĄąĄčé ą┐čĆąĖąŠčĆąĖč鹥čé ą▓čŗčłąĄ, č湥ą╝ ąĘą░ą┤ą░čćą░, ą║ąŠč鹊čĆą░čÅ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé. ąĢčüą╗ąĖ xTaskNotifyFromISR() čāčüčéą░ąĮąŠą▓ąĖčé čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą▓ pdTRUE, č鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĘą░ą┐čĆąŠčłąĄąĮąŠ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░ ą┤ąŠ ą▓čŗčģąŠą┤ą░ ąĖąĘ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąÜą░ą║ ąĖą╝ąĄąĮąĮąŠ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčéčüčÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░ ąĖąĘ ISR, ąĘą░ą▓ąĖčüąĖčé ąŠčé ą║ąŠąĮą║čĆąĄčéąĮąŠą│ąŠ ą┐ąŠčĆčéą░ FreeRTOS, čüą╝. čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╝čā ą┐ąŠčĆčéčā.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ čäčāąĮą║čåąĖąĄą╣ xTaskGenericNotifyFromISR ąĘąĮą░č湥ąĮąĖąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĘąĮą░č湥ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ eAction, čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ čŹč鹊ą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░.
BaseType_t xTaskGenericNotifyWait (UBaseType_t uxIndexToWaitOn,
uint32_t ulBitsToClearOnEntry,
uint32_t ulBitsToClearOnExit,
uint32_t *pulNotificationValue,
TickType_t xTicksToWait);
ą×ąČąĖą┤ą░ąĄčé ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖąĄ ą┐čĆčÅą╝ąŠą│ąŠ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąŠčé ą┤čĆčāą│ąŠą╣ ąĘą░ą┤ą░čćąĖ ą┐ąŠ čāą║ą░ąĘą░ąĮąĮąŠą╝čā ąĖąĮą┤ąĄą║čüčā ą▓ ą╝ą░čüčüąĖą▓ąĄ ąĘąĮą░č湥ąĮąĖą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ. ą¦č鹊ą▒čŗ čŹčéą░ čäčāąĮą║čåąĖčÅ ą▒čŗą╗ą░ ą┤ąŠčüčéčāą┐ąĮą░, ąŠą┐čåąĖčÅ configUSE_TASK_NOTIFICATIONS ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ ą▓ 1. ą¤ąŠą┤čĆąŠą▒ąĮąŠ ą┐čĆąŠ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čć čüą╝. [10].
ąŻ ą║ą░ąČą┤ąŠą╣ ąĘą░ą┤ą░čćąĖ ąĄčüčéčī ą┐čĆąĖą▓ą░čéąĮčŗą╣ ą╝ą░čüčüąĖą▓ ąĘąĮą░č湥ąĮąĖą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ("notification values", ąĖą╗ąĖ ŌĆśnotificationsŌĆÖ), ą║ą░ąČą┤ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čŹč鹊 32-bit ą▒ąĖčéąĮąŠąĄ ą▒ąĄąĘąĘąĮą░ą║ąŠą▓ąŠąĄ čåąĄą╗ąŠąĄ (uint32_t). ąÜąŠąĮčüčéą░ąĮčéą░ configTASK_NOTIFICATION_ARRAY_ENTRIES čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĖąĮą┤ąĄą║čüąŠą▓ ą▓ čŹč鹊ą╝ ą╝ą░čüčüąĖą▓ąĄ, ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ąĄčüą╗ąĖ ąŠąĮą░ ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░, ą┐čĆąĖąĮąĖą╝ą░ąĄčéčüčÅ čĆą░ą▓ąĮąŠą╣ 1 (ą┤ą╗čÅ ąŠą▒čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ). ąöąŠ ą▓ąĄčĆčüąĖąĖ FreeRTOS V10.4.0 ą▒čŗą╗ąŠ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĮą░ ąĘą░ą┤ą░čćčā.
ąĪąŠą▒čŗčéąĖčÅ (events) ą╝ąŠą│čāčé ą▒čŗčéčī ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ ąŠčé ąŠą┤ąĮąŠą╣ ąĘą░ą┤ą░čćąĖ ą║ ą┤čĆčāą│ąŠą╣ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮąŠą│ąŠ ąŠą▒čŖąĄą║čéą░. ą¤čĆąĖą╝ąĄčĆčŗ čéą░ą║ąĖčģ ąŠą▒čŖąĄą║č鹊ą▓ - ąŠč湥čĆąĄą┤ąĖ, čüąĄą╝ą░č乊čĆčŗ, ą╝čīčÄč鹥ą║čüčŗ ąĖ ą│čĆčāą┐ą┐čŗ čüąŠą▒čŗčéąĖą╣ (event groups). ą×ą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ (task notifications) čŹč鹊 ą╝ąĄč鹊ą┤ ą┐čĆčÅą╝ąŠą╣ ąŠčéą┐čĆą░ą▓ą║ąĖ čüąŠą▒čŗčéąĖčÅ ą▓ ąĘą░ą┤ą░čćčā ą▒ąĄąĘ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ čéą░ą║ąŠą│ąŠ ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮąŠą│ąŠ ąŠą▒čŖąĄą║čéą░.
ą×ą┐ąŠą▓ąĄčēąĄąĮąĖąĄ (čāą▓ąĄą┤ąŠą╝ą╗ąĄąĮąĖąĄ, notification), ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮąŠąĄ ą▓ ąĘą░ą┤ą░čćčā, ą╝ąŠąČąĄčé ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą┤ąĄą╣čüčéą▓ąĖąĄ (action), čéą░ą║ąŠąĄ ą║ą░ą║ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ, ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčī ąĖą╗ąĖ ąĖąĮą║čĆąĄą╝ąĄąĮčé ąŠą┤ąĮąŠą│ąŠ ąĖąĘ ąĘąĮą░č湥ąĮąĖą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ (task notifications) ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ą┤ą░ąĮąĮčŗčģ ą▓ ąĘą░ą┤ą░čćčā, ąĖą╗ąĖ ą▓ ą║ą░č湥čüčéą▓ąĄ ą╗ąĄą│ą║ąĖčģ ąĖ ą▒čŗčüčéčĆčŗčģ ą┤ą▓ąŠąĖčćąĮčŗčģ čüąĄą╝ą░č乊čĆąŠą▓ ąĖą╗ąĖ čüąĄą╝ą░č乊čĆąŠą▓ čüąŠ čüč湥čéčćąĖą║ąŠą╝.
ąŚą░ą┤ą░čćą░ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī xTaskNotifyWaitIndexed() čćč鹊ą▒čŗ (ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ) ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčīčüčÅ ąĮą░ ąŠąČąĖą┤ą░ąĮąĖąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ, ąĖą╗ąĖ ulTaskNotifyTakeIndexed() čćč鹊ą▒čŗ (ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ) ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąŠąČąĖą┤ą░ąĮąĖčÅ ąĘąĮą░č湥ąĮąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ąĮąĄ ąĮčāą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ. ąŚą░ą┤ą░čćą░ ąĮąĄ čéčĆą░čéąĖčé ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ, ą║ąŠą│ą┤ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ (čüąŠčüč鹊čÅąĮąĖąĄ Blocked).
ąŻą▓ąĄą┤ąŠą╝ą╗ąĄąĮąĖąĄ, ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮąŠąĄ ąĘą░ą┤ą░č湥, ą▒čāą┤ąĄčé ąŠčüčéą░ą▓ą░čéčīčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ ą┤ąŠ č鹥čģ ą┐ąŠčĆ, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ąŠčćąĖčēąĄąĮąŠ ąĘą░ą┤ą░č湥ą╣ ą▓čŗąĘąŠą▓ąŠą╝ xTaskNotifyWaitIndexed() ąĖą╗ąĖ ulTaskNotifyTakeIndexed() (ąĖą╗ąĖ ąĖčģ un-indexed 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéą░ą╝ąĖ). ąĢčüą╗ąĖ ąĘą░ą┤ą░čćą░ čāąČąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Blocked ą┤ą╗čÅ ąŠąČąĖą┤ą░ąĮąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ, č鹊 ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą┤ąŠčüčéą░ą▓ą╗ąĄąĮąŠ, ąĘą░ą┤ą░čćą░ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓čŗčģąŠą┤ąĖčé ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ Blocked (čĆą░ąĘą▒ą╗ąŠą║ąĖčĆčāąĄčéčüčÅ) ąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ąŠčćąĖčēą░ąĄčéčüčÅ.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą║ą░ąČą┤ąŠąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą▓ ą╝ą░čüčüąĖą▓ąĄ čĆą░ą▒ąŠčéą░ąĄčé ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ - ąĘą░ą┤ą░čćą░ ąĘą░ ąŠą┤ąĖąĮ čĆą░ąĘ ą╝ąŠąČąĄčé ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ąĮą░ ąŠą┤ąĮąŠą╝ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĖ ą▓ ą╝ą░čüčüąĖą▓ąĄ, ąĖ ąĮąĄ ą▒čāą┤ąĄčé čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮą░ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄą╝, ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╝ ą▓ ą╝ą░čüčüąĖą▓ ą┐ąŠ ą┤čĆčāą│ąŠą╝čā ąĖąĮą┤ąĄą║čüčā.
ąśąĮč乊čĆą╝ą░čåąĖčÅ ą┤ą╗čÅ ąŠą▒čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ: ą┤ąŠ ą▓ąĄčĆčüąĖąĖ FreeRTOS V10.4.0 čā ą║ą░ąČą┤ąŠą╣ ąĘą░ą┤ą░čćąĖ ą▒čŗą╗ąŠ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ("notification value"), ąĖ ą▓čüąĄ API-čäčāąĮą║čåąĖąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čĆą░ą▒ąŠčéą░ą╗ąĖ ąĮą░ čŹč鹊ą╝ ąĘąĮą░č湥ąĮąĖąĖ. ąŚą░ą╝ąĄąĮą░ ąŠą┤ąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĮą░ ą╝ą░čüčüąĖą▓ čéą░ą║ąĖčģ ąĘąĮą░č湥ąĮąĖą╣ ą┐ąŠčéčĆąĄą▒ąŠą▓ą░ą╗ą░ ąĮąŠą▓ąŠą│ąŠ ąĮą░ą┐ąŠčĆą░ API-čäčāąĮą║čåąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│ą╗ąĖ ą▒čŗ ą░ą┤čĆąĄčüąŠą▓ą░čéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓ čŹč鹊ą╝ ą╝ą░čüčüąĖą▓ąĄ. xTaskNotify() čŹč鹊 ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮą░čÅ API-čäčāąĮą║čåąĖčÅ, ąĖ ąŠąĮą░ ąŠčüčéą░ą╗ą░čüčī ą┤ą╗čÅ ąŠą▒čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ, čĆą░ą▒ąŠčéą░čÅ čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓ ą╝ą░čüčüąĖą▓ąĄ čü ąĖąĮą┤ąĄą║čüąŠą╝ 0. ąÆčŗąĘąŠą▓ xTaskNotify() 菹║ą▓ąĖą▓ą░ą╗ąĄąĮč鹥ąĮ ą▓čŗąĘąŠą▓čā xTaskNotifyIndexed() čü ą┐ą░čĆą░ą╝ąĄčéčĆąŠą╝ uxIndexToNotify, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ą▓ 0.
ąĢčüą╗ąĖ ą▒čŗą╗ąŠ ą┐ąŠą╗čāč湥ąĮąŠ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ (ą▓ą║ą╗čÄčćą░čÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ čāąČąĄ ąŠąČąĖą┤ą░čÄčé, ą║ąŠą│ą┤ą░ xTaskNotifyWait ą▒čŗą╗ą░ ą▓čŗąĘą▓ą░ąĮą░), č鹊 čäčāąĮą║čåąĖčÅ pdPASS, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ pdFAIL.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
uxIndexToWaitOn: ąĖąĮą┤ąĄą║čü ą▓ ą╝ą░čüčüąĖą▓ąĄ ąĘąĮą░č湥ąĮąĖą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ, ąŠčéą║čāą┤ą░ ą▓čŗąĘą▓ą░ąĮą░ čäčāąĮą║čåąĖčÅ. ąØą░ ąĘąĮą░č湥ąĮąĖąĖ ą┐ąŠ čŹč鹊ą╝čā ąĖąĮą┤ąĄą║čüčā ąĘą░ą┤ą░čćą░ ą▒čāą┤ąĄčé ąČą┤ą░čéčī ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ. ąŚąĮą░č湥ąĮąĖąĄ uxIndexToWaitOn ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą╝ąĄąĮčīčłąĄ ąĘąĮą░č湥ąĮąĖčÅ ąŠą┐čåąĖąĖ configTASK_NOTIFICATION_ARRAY_ENTRIES. ąŻ čäčāąĮą║čåąĖąĖ xTaskNotifyWait() ąĮąĄčé čŹč鹊ą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░, ąĖ ąŠąĮą░ ą▓čüąĄą│ą┤ą░ ąČą┤ąĄčé ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą┐ąŠ ąĖąĮą┤ąĄą║čüčā 0.
ulBitsToClearOnEntry: ą▒ąĖčéčŗ, ą║ąŠč鹊čĆčŗąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ ulBitsToClearOnEntry, ą▒čāą┤čāčé ąŠčćąĖčēąĄąĮčŗ ą▓ ąĘąĮą░č湥ąĮąĖąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓čŗąĘčŗą▓ą░čÄčēąĄą╣ čäčāąĮą║čåąĖąĖ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ ąĘą░ą┤ą░čćą░ ą┐čĆąŠą▓ąĄčĆąĖčé, ąĮą░čģąŠą┤čÅčéčüčÅ ą╗ąĖ ą║ą░ą║ąĖąĄ-ą╗ąĖą▒ąŠ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ ąĖ ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ ąĘą░ą▒ą╗ąŠą║ąĖčĆčāąĄčéčüčÅ, ąĄčüą╗ąĖ čéą░ą║ąĖčģ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖą╣ ąĮąĄ ą▒čŗą╗ąŠ. ąŻčüčéą░ąĮąŠą▓ą║ą░ ulBitsToClearOnEntry ą▓ ULONG_MAX (ąĄčüą╗ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ limits.h) ąĖą╗ąĖ ą▓ 0xffffffffUL (ąĄčüą╗ąĖ limits.h ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ) ą┤ą░čüčé čŹčäč乥ą║čé čüą▒čĆąŠčüą░ ą▓ 0 ąĘąĮą░č湥ąĮąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ. ąŻčüčéą░ąĮąŠą▓ą║ą░ ulBitsToClearOnEntry ą▓ 0 ąŠčüčéą░ą▓ąĖčé ąĮąĄąĖąĘą╝ąĄąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ.
ulBitsToClearOnExit: ąĄčüą╗ąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ąŠąČąĖą┤ą░ąĄčé ąŠą▒čĆą░ą▒ąŠčéą║ąĖ, ąĖą╗ąĖ ą┐ąŠą╗čāč湥ąĮąŠ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ ą▓čŗąĘčŗą▓ą░čÄčēą░čÅ čäčāąĮą║čåąĖčÅ ą▓čŗą╣ą┤ąĄčé ąĖąĘ čäčāąĮą║čåąĖąĖ xTaskGenericNotifyWait(), č鹊 ąĘąĮą░č湥ąĮąĖąĄ čāą▓ąĄą┤ąŠą╝ą╗ąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ (čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ API-čäčāąĮą║čåąĖąĖ xTaskNotify()) ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮąŠ ąŠą▒čĆą░čéąĮąŠ čü ą┐ąŠą╝ąŠčēčīčÄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ pulNotificationValue. ąóąŠą│ą┤ą░ ą╗čÄą▒čŗąĄ ą▒ąĖčéčŗ, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗąĄ ą▓ ulBitsToClearOnExit, ą▒čāą┤čāčé ąŠčćąĖčēąĄąĮčŗ ą▓ ąĘąĮą░č湥ąĮąĖąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ (ąŠą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 *pulNotificationValue čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┐ąĄčĆąĄą┤ ąŠčćąĖčüčéą║ąŠą╣ ą╗čÄą▒čŗčģ ą▒ąĖčé). ąŻčüčéą░ąĮąŠą▓ą║ą░ ulBitsToClearOnExit ą▓ ULONG_MAX (ąĄčüą╗ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ limits.h) ąĖą╗ąĖ ą▓ 0xffffffffUL (ąĄčüą╗ąĖ limits.h ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ) ą┤ą░ąĄčé čŹčäč乥ą║čé čüą▒čĆąŠčüą░ ą▓ 0 ąĘąĮą░č湥ąĮąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ ą┐ąĄčĆąĄą┤ ą▓čŗčģąŠą┤ąŠą╝ ąĖąĘ čäčāąĮą║čåąĖąĖ. ąŻčüčéą░ąĮąŠą▓ą║ą░ ulBitsToClearOnExit ą▓ 0 ąŠčüčéą░ą▓ąĖčé ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ ąĮąĄąĖąĘą╝ąĄąĮąĮčŗą╝ ą┐čĆąĖ ą▓čŗčģąŠą┤ąĄ ąĖąĘ čäčāąĮą║čåąĖąĖ (ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąĘąĮą░č湥ąĮąĖąĄ, ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠąĄ ąĮą░čĆčāąČčā ą▓ pulNotificationValue, ą▒čāą┤ąĄčé čüąŠą▓ą┐ą░ą┤ą░čéčī čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ).
pulNotificationValue: ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąŠą▒čĆą░čéąĮąŠ ąĖąĘ čäčāąĮą║čåąĖąĖ ąĘąĮą░č湥ąĮąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠąĄ ąŠą▒čĆą░čéąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ ąĮąĄ ą▒čāą┤ąĄčé ąĘą░ą▓ąĖčüąĄčéčī ąŠčé ąŠčćąĖčüčéą║ąĖ ą╗čÄą▒čŗčģ ą▒ąĖčé, ą║ąŠč鹊čĆčŗąĄ ąĮąĄąĮčāą╗ąĄą▓čŗąĄ ą▓ ulBitsToClearOnExit.
xTicksToWait: ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ, ą║ąŠč鹊čĆąŠąĄ ąĘą░ą┤ą░čćą░ ą┤ąŠą╗ąČąĮą░ ąČą┤ą░čéčī ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Blocked ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ, ąĄčüą╗ąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ąĄčēąĄ ąĮąĄ ą┐ąŠčüčéčāą┐ąĖą╗ąŠ, ą║ąŠą│ą┤ą░ ą▒čŗą╗ą░ ą▓čŗąĘą▓ą░ąĮą░ xTaskGenericNotifyWait(). ąÆ čüąŠčüč鹊čÅąĮąĖąĖ Blocked ąĘą░ą┤ą░čćą░ ąĮąĄ ą▒čāą┤ąĄčé ą┐ąŠčéčĆąĄą▒ą╗čÅčéčī ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ. ąÆčĆąĄą╝čÅ ąŠąČąĖą┤ą░ąĮąĖčÅ ąĘą░ą┤ą░ąĄčéčüčÅ ą▓ čéąĖą║ą░čģ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čÅą┤čĆą░, ąĖ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą╝ą░ą║čĆąŠčü pdMS_TO_TICKS(ąĘąĮą░č湥ąĮąĖąĄ_ą▓_ą╝čü) ą┤ą╗čÅ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ą░čģ ą▓ čéąĖą║ąĖ čüąĖčüč鹥ą╝čŗ. ąĢčüą╗ąĖ čāą║ą░ąĘą░čéčī ąĘąĮą░č湥ąĮąĖąĄ portMAX_DELAY, č鹊 ąĘą░ą┤ą░čćą░ ą▒čāą┤ąĄčé ąČą┤ą░čéčī ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▒ąĄąĘ čéą░ą╣ą╝ą░čāčéą░ (ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠ ą┤ąŠą╗ą│ąŠ).
void vTaskGenericNotifyGiveFromISR (TaskHandle_t xTaskToNotify,
UBaseType_t uxIndexToNotify,
BaseType_t *pxHigherPriorityTaskWoken);
ąÆąĄčĆčüąĖčÅ xTaskNotifyGiveIndexed(), ą║ąŠč鹊čĆčāčÄ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĖąĘ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (ISR). ą¦č鹊ą▒čŗ čŹčéą░ čäčāąĮą║čåąĖčÅ ą▒čŗą╗ą░ ą┤ąŠčüčéčāą┐ąĮą░, ąŠą┐čåąĖčÅ configUSE_TASK_NOTIFICATIONS ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░, ą╗ąĖą▒ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą║ą░ą║ 1. ą¤ąŠą┤čĆąŠą▒ąĮąŠ ą┐čĆąŠ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čć čüą╝. [10].
ąŻ ą║ą░ąČą┤ąŠą╣ ąĘą░ą┤ą░čćąĖ ąĄčüčéčī ą┐čĆąĖą▓ą░čéąĮčŗą╣ ą╝ą░čüčüąĖą▓ ąĘąĮą░č湥ąĮąĖą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ("notification values", ąĖą╗ąĖ ŌĆśnotificationsŌĆÖ), ą║ą░ąČą┤ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čŹč鹊 32-bit ą▒ąĖčéąĮąŠąĄ ą▒ąĄąĘąĘąĮą░ą║ąŠą▓ąŠąĄ čåąĄą╗ąŠąĄ (uint32_t). ąÜąŠąĮčüčéą░ąĮčéą░ configTASK_NOTIFICATION_ARRAY_ENTRIES čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĖąĮą┤ąĄą║čüąŠą▓ ą▓ čŹč鹊ą╝ ą╝ą░čüčüąĖą▓ąĄ, ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ąĄčüą╗ąĖ ąŠąĮą░ ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░, ą┐čĆąĖąĮąĖą╝ą░ąĄčéčüčÅ čĆą░ą▓ąĮąŠą╣ 1 (ą┤ą╗čÅ ąŠą▒čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ). ąöąŠ ą▓ąĄčĆčüąĖąĖ FreeRTOS V10.4.0 ą▒čŗą╗ąŠ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĮą░ ąĘą░ą┤ą░čćčā.
ąĪąŠą▒čŗčéąĖčÅ (events) ą╝ąŠą│čāčé ą▒čŗčéčī ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ ąŠčé ąŠą┤ąĮąŠą╣ ąĘą░ą┤ą░čćąĖ ą║ ą┤čĆčāą│ąŠą╣ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮąŠą│ąŠ ąŠą▒čŖąĄą║čéą░. ą¤čĆąĖą╝ąĄčĆčŗ čéą░ą║ąĖčģ ąŠą▒čŖąĄą║č鹊ą▓ - ąŠč湥čĆąĄą┤ąĖ, čüąĄą╝ą░č乊čĆčŗ, ą╝čīčÄč鹥ą║čüčŗ ąĖ ą│čĆčāą┐ą┐čŗ čüąŠą▒čŗčéąĖą╣ (event groups). ą×ą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ (task notifications) čŹč鹊 ą╝ąĄč鹊ą┤ ą┐čĆčÅą╝ąŠą╣ ąŠčéą┐čĆą░ą▓ą║ąĖ čüąŠą▒čŗčéąĖčÅ ą▓ ąĘą░ą┤ą░čćčā ą▒ąĄąĘ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ čéą░ą║ąŠą│ąŠ ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮąŠą│ąŠ ąŠą▒čŖąĄą║čéą░.
ą×ą┐ąŠą▓ąĄčēąĄąĮąĖąĄ (čāą▓ąĄą┤ąŠą╝ą╗ąĄąĮąĖąĄ, notification), ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮąŠąĄ ą▓ ąĘą░ą┤ą░čćčā, ą╝ąŠąČąĄčé ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą┤ąĄą╣čüčéą▓ąĖąĄ (action), čéą░ą║ąŠąĄ ą║ą░ą║ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ, ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčī ąĖą╗ąĖ ąĖąĮą║čĆąĄą╝ąĄąĮčé ąŠą┤ąĮąŠą│ąŠ ąĖąĘ ąĘąĮą░č湥ąĮąĖą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ (task notifications) ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ą┤ą░ąĮąĮčŗčģ ą▓ ąĘą░ą┤ą░čćčā, ąĖą╗ąĖ ą▓ ą║ą░č湥čüčéą▓ąĄ ą╗ąĄą│ą║ąĖčģ ąĖ ą▒čŗčüčéčĆčŗčģ ą┤ą▓ąŠąĖčćąĮčŗčģ čüąĄą╝ą░č乊čĆąŠą▓ ąĖą╗ąĖ čüąĄą╝ą░č乊čĆąŠą▓ čüąŠ čüč湥čéčćąĖą║ąŠą╝.
ą£ą░ą║čĆąŠčü vTaskNotifyGiveIndexedFromISR() ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ, ą║ąŠą│ą┤ą░ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą║ą░ą║ ąŠą▒ą╗ąĄą│č湥ąĮąĮčŗą╣ ąĖ čāčüą║ąŠčĆąĄąĮąĮčŗą╣ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčé ą┤ą▓ąŠąĖčćąĮąŠą│ąŠ čüąĄą╝ą░č乊čĆą░ ąĖą╗ąĖ čüąĄą╝ą░č乊čĆą░ čüąŠ čüč湥čéčćąĖą║ąŠą╝. ąĀąĄą░ą╗čīąĮčŗąĄ čüąĄą╝ą░č乊čĆčŗ FreeRTOS ą▓čŗą┤ą░čÄčéčüčÅ ąĖąĘ ISR čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ API-čäčāąĮą║čåąĖąĖ xSemaphoreGiveFromISR(), ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮąŠąĄ ą┤ąĄą╣čüčéą▓ąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ąĘą░ą┤ą░čćąĖ čü ą┐ąŠą╝ąŠčēčīčÄ vTaskNotifyGiveIndexedFromISR().
ąÜąŠą│ą┤ą░ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéą░ ą┤ą▓ąŠąĖčćąĮąŠą│ąŠ čüąĄą╝ą░č乊čĆą░ ąĖą╗ąĖ čüąĄą╝ą░č乊čĆą░ čüąŠ čüč湥čéčćąĖą║ąŠą╝, ąŠą┐ąŠą▓ąĄčēą░ąĄą╝ą░čÅ ąĘą░ą┤ą░čćą░ ą┤ąŠą╗ąČąĮą░ ąČą┤ą░čéčī ą┐ąŠą╗čāč湥ąĮąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čü ą┐ąŠą╝ąŠčēčīčÄ ą▓čŗąĘąŠą▓ą░ API-čäčāąĮą║čåąĖąĖ ulTaskNotificationTakeIndexed() ą▓ą╝ąĄčüč鹊 API-čäčāąĮą║čåąĖąĖ xTaskNotifyWaitIndexed().
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą║ą░ąČą┤ąŠąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą▓ ą╝ą░čüčüąĖą▓ąĄ čĆą░ą▒ąŠčéą░ąĄčé ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ - ąĘą░ą┤ą░čćą░ ąĘą░ ąŠą┤ąĖąĮ čĆą░ąĘ ą╝ąŠąČąĄčé ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ąĮą░ ąŠą┤ąĮąŠą╝ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĖ ą▓ ą╝ą░čüčüąĖą▓ąĄ, ąĖ ąĮąĄ ą▒čāą┤ąĄčé čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮą░ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄą╝, ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╝ ą▓ ą╝ą░čüčüąĖą▓ ą┐ąŠ ą┤čĆčāą│ąŠą╝čā ąĖąĮą┤ąĄą║čüčā.
ąśąĮč乊čĆą╝ą░čåąĖčÅ ą┤ą╗čÅ ąŠą▒čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ: ą┤ąŠ ą▓ąĄčĆčüąĖąĖ FreeRTOS V10.4.0 čā ą║ą░ąČą┤ąŠą╣ ąĘą░ą┤ą░čćąĖ ą▒čŗą╗ąŠ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ("notification value"), ąĖ ą▓čüąĄ API-čäčāąĮą║čåąĖąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čĆą░ą▒ąŠčéą░ą╗ąĖ ąĮą░ čŹč鹊ą╝ ąĘąĮą░č湥ąĮąĖąĖ. ąŚą░ą╝ąĄąĮą░ ąŠą┤ąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĮą░ ą╝ą░čüčüąĖą▓ čéą░ą║ąĖčģ ąĘąĮą░č湥ąĮąĖą╣ ą┐ąŠčéčĆąĄą▒ąŠą▓ą░ą╗ą░ ąĮąŠą▓ąŠą│ąŠ ąĮą░ą┐ąŠčĆą░ API-čäčāąĮą║čåąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│ą╗ąĖ ą▒čŗ ą░ą┤čĆąĄčüąŠą▓ą░čéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓ čŹč鹊ą╝ ą╝ą░čüčüąĖą▓ąĄ. xTaskNotifyFromISR() čŹč鹊 ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮą░čÅ API-čäčāąĮą║čåąĖčÅ, ąĖ ąŠąĮą░ ąŠčüčéą░ą╗ą░čüčī ą┤ą╗čÅ ąŠą▒čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ, čĆą░ą▒ąŠčéą░čÅ čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓ ą╝ą░čüčüąĖą▓ąĄ čü ąĖąĮą┤ąĄą║čüąŠą╝ 0. ąÆčŗąĘąŠą▓ xTaskNotifyGiveFromISR() 菹║ą▓ąĖą▓ą░ą╗ąĄąĮč鹥ąĮ ą▓čŗąĘąŠą▓čā xTaskNotifyGiveIndexedFromISR() čü ą┐ą░čĆą░ą╝ąĄčéčĆąŠą╝ uxIndexToNotify, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ą▓ 0.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
xTaskToNotify: ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĘą░ą┤ą░čćąĖ, ą║ąŠč鹊čĆą░čÅ ąŠą┐ąŠą▓ąĄčēą░ąĄčéčüčÅ. ąöąĄčüą║čĆąĖą┐č鹊čĆ ąĘą░ą┤ą░čćąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ąŠąĘą▓čĆą░čēąĄąĮ ąĖąĘ API-čäčāąĮą║čåąĖąĖ xTaskCreate(), ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ąĘą░ą┤ą░čćąĖ, ąĖ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ čĆą░ą▒ąŠčéą░čÄčēąĄą╣ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ąĘą░ą┤ą░čćąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╗čāč湥ąĮ ą▓čŗąĘąŠą▓ąŠą╝ xTaskGetCurrentTaskHandle().
uxIndexToNotify: ąĖąĮą┤ąĄą║čü ą▓ ą╝ą░čüčüąĖą▓ąĄ ąĘąĮą░č湥ąĮąĖą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čåąĄą╗ąĄą▓ąŠą╣ ąĘą░ą┤ą░čćąĖ, ą║čāą┤ą░ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ. ąŚąĮą░č湥ąĮąĖąĄ uxIndexToNotify ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą╝ąĄąĮčīčłąĄ, č湥ą╝ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐čåąĖąĖ configTASK_NOTIFICATION_ARRAY_ENTRIES. ąŻ xTaskNotifyGiveFromISR() ąĮąĄčé čéą░ą║ąŠą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░, ąĖ ąŠąĮą░ ą▓čüąĄą│ą┤ą░ čłą╗ąĄčé ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą┐ąŠ ąĖąĮą┤ąĄą║čüčā 0.
pxHigherPriorityTaskWoken: vTaskNotifyGiveFromISR() čāčüčéą░ąĮąŠą▓ąĖčé *pxHigherPriorityTaskWoken ą▓ pdTRUE, ąĄčüą╗ąĖ ąŠčéą┐čĆą░ą▓ą║ą░ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą▓čŗą▓ąŠą┤čā ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ Blocked ąĘą░ą┤ą░čćąĖ, ą║ąŠč鹊čĆąŠą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ, ąĖ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĮą░čÅ ąĘą░ą┤ą░čćą░ ąĖą╝ąĄąĄčé ą┐čĆąĖąŠčĆąĖč鹥čé ą▓čŗčłąĄ, č湥ą╝ ąĘą░ą┤ą░čćą░, ą║ąŠč鹊čĆą░čÅ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé. ąĢčüą╗ąĖ vTaskNotifyGiveFromISR() čāčüčéą░ąĮąŠą▓ąĖčé čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą▓ pdTRUE, č鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĘą░ą┐čĆąŠčłąĄąĮąŠ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░ ą┤ąŠ ą▓čŗčģąŠą┤ą░ ąĖąĘ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąÜą░ą║ ąĖą╝ąĄąĮąĮąŠ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčéčüčÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░ ąĖąĘ ISR, ąĘą░ą▓ąĖčüąĖčé ąŠčé ą║ąŠąĮą║čĆąĄčéąĮąŠą│ąŠ ą┐ąŠčĆčéą░ FreeRTOS, čüą╝. čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╝čā ą┐ąŠčĆčéčā.
uint32_t ulTaskGenericNotifyTake (UBaseType_t uxIndexToWaitOn,
BaseType_t xClearCountOnExit,
TickType_t xTicksToWait);
ą×ąČąĖą┤ą░ąĄčé ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ ą┐čĆčÅą╝ąŠą│ąŠ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ ą┐ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝čā ąĖąĮą┤ąĄą║čüčā ą▓ ą╝ą░čüčüąĖą▓ąĄ ąĘąĮą░č湥ąĮąĖą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ, ą░ąĮą░ą╗ąŠą│ąĖčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÄ čüąĄą╝ą░č乊čĆą░ čüąŠ čüč湥čéčćąĖą║ąŠą╝. ą¦č鹊ą▒čŗ čŹčéą░ čäčāąĮą║čåąĖčÅ ą▒čŗą╗ą░ ą┤ąŠčüčéčāą┐ąĮą░, ąŠą┐čåąĖčÅ configUSE_TASK_NOTIFICATIONS ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą▓ 1. ą¤ąŠą┤čĆąŠą▒ąĮąŠ ą┐čĆąŠ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čć čüą╝. [10].
ąŻ ą║ą░ąČą┤ąŠą╣ ąĘą░ą┤ą░čćąĖ ąĄčüčéčī ą┐čĆąĖą▓ą░čéąĮčŗą╣ ą╝ą░čüčüąĖą▓ ąĘąĮą░č湥ąĮąĖą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ("notification values", ąĖą╗ąĖ ŌĆśnotificationsŌĆÖ), ą║ą░ąČą┤ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čŹč鹊 32-bit ą▒ąĖčéąĮąŠąĄ ą▒ąĄąĘąĘąĮą░ą║ąŠą▓ąŠąĄ čåąĄą╗ąŠąĄ (uint32_t). ąÜąŠąĮčüčéą░ąĮčéą░ configTASK_NOTIFICATION_ARRAY_ENTRIES čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĖąĮą┤ąĄą║čüąŠą▓ ą▓ čŹč鹊ą╝ ą╝ą░čüčüąĖą▓ąĄ, ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ąĄčüą╗ąĖ ąŠąĮą░ ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░, ą┐čĆąĖąĮąĖą╝ą░ąĄčéčüčÅ čĆą░ą▓ąĮąŠą╣ 1 (ą┤ą╗čÅ ąŠą▒čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ). ąöąŠ ą▓ąĄčĆčüąĖąĖ FreeRTOS V10.4.0 ą▒čŗą╗ąŠ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĮą░ ąĘą░ą┤ą░čćčā.
ąĪąŠą▒čŗčéąĖčÅ (events) ą╝ąŠą│čāčé ą▒čŗčéčī ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ ąŠčé ąŠą┤ąĮąŠą╣ ąĘą░ą┤ą░čćąĖ ą║ ą┤čĆčāą│ąŠą╣ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮąŠą│ąŠ ąŠą▒čŖąĄą║čéą░. ą¤čĆąĖą╝ąĄčĆčŗ čéą░ą║ąĖčģ ąŠą▒čŖąĄą║č鹊ą▓ - ąŠč湥čĆąĄą┤ąĖ, čüąĄą╝ą░č乊čĆčŗ, ą╝čīčÄč鹥ą║čüčŗ ąĖ ą│čĆčāą┐ą┐čŗ čüąŠą▒čŗčéąĖą╣ (event groups). ą×ą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ (task notifications) čŹč鹊 ą╝ąĄč鹊ą┤ ą┐čĆčÅą╝ąŠą╣ ąŠčéą┐čĆą░ą▓ą║ąĖ čüąŠą▒čŗčéąĖčÅ ą▓ ąĘą░ą┤ą░čćčā ą▒ąĄąĘ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ čéą░ą║ąŠą│ąŠ ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮąŠą│ąŠ ąŠą▒čŖąĄą║čéą░.
ą×ą┐ąŠą▓ąĄčēąĄąĮąĖąĄ (čāą▓ąĄą┤ąŠą╝ą╗ąĄąĮąĖąĄ, notification), ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮąŠąĄ ą▓ ąĘą░ą┤ą░čćčā, ą╝ąŠąČąĄčé ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą┤ąĄą╣čüčéą▓ąĖąĄ (action), čéą░ą║ąŠąĄ ą║ą░ą║ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ, ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčī ąĖą╗ąĖ ąĖąĮą║čĆąĄą╝ąĄąĮčé ąŠą┤ąĮąŠą│ąŠ ąĖąĘ ąĘąĮą░č湥ąĮąĖą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ (task notifications) ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ą┤ą░ąĮąĮčŗčģ ą▓ ąĘą░ą┤ą░čćčā, ąĖą╗ąĖ ą▓ ą║ą░č湥čüčéą▓ąĄ ą╗ąĄą│ą║ąĖčģ ąĖ ą▒čŗčüčéčĆčŗčģ ą┤ą▓ąŠąĖčćąĮčŗčģ čüąĄą╝ą░č乊čĆąŠą▓ ąĖą╗ąĖ čüąĄą╝ą░č乊čĆąŠą▓ čüąŠ čüč湥čéčćąĖą║ąŠą╝.
ążčāąĮą║čåąĖčÅ ulTaskNotifyTakeIndexed() ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮą░ ą┤ą╗čÅ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ, ą║ąŠą│ą┤ą░ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą║ą░ą║ ąŠą▒ą╗ąĄą│č湥ąĮąĮčŗą╣ ąĖ čāčüą║ąŠčĆąĄąĮąĮčŗą╣ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčé ą┤ą▓ąŠąĖčćąĮąŠą│ąŠ čüąĄą╝ą░č乊čĆą░ ąĖą╗ąĖ čüąĄą╝ą░č乊čĆą░ čüąŠ čüč湥čéčćąĖą║ąŠą╝. ąĀąĄą░ą╗čīąĮčŗąĄ čüąĄą╝ą░č乊čĆčŗ FreeRTOS ą▒ąĄčĆčāčéčüčÅ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ API-čäčāąĮą║čåąĖąĖ xSemaphoreTake(), ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮąŠąĄ ą┤ąĄą╣čüčéą▓ąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ąĘą░ą┤ą░čćąĖ čü ą┐ąŠą╝ąŠčēčīčÄ ulTaskNotifyTakeIndexed().
ąÜąŠą│ą┤ą░ ąĘą░ą┤ą░čćą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ ą┤ą▓ąŠąĖčćąĮąŠą│ąŠ čüąĄą╝ą░č乊čĆą░ ąĖą╗ąĖ čüąĄą╝ą░č乊čĆą░ čüąŠ čüč湥čéčćąĖą║ąŠą╝, ą┤čĆčāą│ąĖąĄ ąĘą░ą┤ą░čćąĖ ą┤ąŠą╗ąČąĮčŗ ą┐ąŠčüčŗą╗ą░čéčī ąĄą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą╝ą░ą║čĆąŠčüą░ xTaskNotifyGiveIndexed(), ąĖą╗ąĖ čäčāąĮą║čåąĖąĖ xTaskNotifyIndex(), ą▓ ą║ąŠč鹊čĆčŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆ eAction čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ąĘąĮą░č湥ąĮąĖąĄ eIncrement.
ulTaskNotifyTakeIndexed() ą╝ąŠąČąĄčé ą╗ąĖą▒ąŠ ą┐čĆąĖ ą▓čŗčģąŠą┤ąĄ ąŠčćąĖčüčéąĖčéčī ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ ą▓ 0 ą┐ąŠ ąĖąĮą┤ąĄą║čüčā, ąĘą░ą┤ą░ąĮąĮąŠą╝čā ą┐ą░čĆą░ą╝ąĄčéčĆąŠą╝ uxIndexToWaitOn (ą▓ čéą░ą║ąŠą╝ čüą╗čāčćą░ąĄ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čĆą░ą▒ąŠčéą░ąĄčé ą▓ ą║ą░č湥čüčéą▓ąĄ ą┤ą▓ąŠąĖčćąĮąŠą│ąŠ čüąĄą╝ą░č乊čĆą░), ą╗ąĖą▒ąŠ ą┤ąĄą║čĆąĄą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčī ą┐čĆąĖ ą▓čŗčģąŠą┤ąĄ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ (ą▓ čéą░ą║ąŠą╝ čüą╗čāčćą░ąĄ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ čüąĄą╝ą░č乊čĆ čüąŠ čüč湥čéčćąĖą║ąŠą╝).
ąŚą░ą┤ą░čćą░ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ulTaskNotifyTakeIndexed() ą┤ą╗čÅ (ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠą╣) ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ąĮą░ ąŠąČąĖą┤ą░ąĮąĖąĖ ąĮąĄąĮčāą╗ąĄą▓ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ. ąŚą░ą┤ą░čćą░ ąĮąĄ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄčé ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ, ą║ąŠą│ą┤ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĮąŠą╝ (Blocked) čüąŠčüč鹊čÅąĮąĖąĖ.
ąÆ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ xTaskNotifyWaitIndexed() čüą┤ąĄą╗ą░ąĄčé ą▓ąŠąĘą▓čĆą░čé, ą║ąŠą│ą┤ą░ ąŠąČąĖą┤ą░ąĄčéčüčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ, čäčāąĮą║čåąĖčÅ ulTaskNotifyTakeIndexed() ą┤ąĄą╗ą░ąĄčé ą▓ąŠąĘą▓čĆą░čé, ą║ąŠą│ą┤ą░ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ ąĮąĄąĮčāą╗ąĄą▓ąŠąĄ.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą║ą░ąČą┤ąŠąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą▓ ą╝ą░čüčüąĖą▓ąĄ čĆą░ą▒ąŠčéą░ąĄčé ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ - ąĘą░ą┤ą░čćą░ ąĘą░ ąŠą┤ąĖąĮ čĆą░ąĘ ą╝ąŠąČąĄčé ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ąĮą░ ąŠą┤ąĮąŠą╝ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĖ ą▓ ą╝ą░čüčüąĖą▓ąĄ, ąĖ ąĮąĄ ą▒čāą┤ąĄčé čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮą░ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄą╝, ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╝ ą▓ ą╝ą░čüčüąĖą▓ ą┐ąŠ ą┤čĆčāą│ąŠą╝čā ąĖąĮą┤ąĄą║čüčā.
ąśąĮč乊čĆą╝ą░čåąĖčÅ ą┤ą╗čÅ ąŠą▒čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ: ą┤ąŠ ą▓ąĄčĆčüąĖąĖ FreeRTOS V10.4.0 čā ą║ą░ąČą┤ąŠą╣ ąĘą░ą┤ą░čćąĖ ą▒čŗą╗ąŠ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ("notification value"), ąĖ ą▓čüąĄ API-čäčāąĮą║čåąĖąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čĆą░ą▒ąŠčéą░ą╗ąĖ ąĮą░ čŹč鹊ą╝ ąĘąĮą░č湥ąĮąĖąĖ. ąŚą░ą╝ąĄąĮą░ ąŠą┤ąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĮą░ ą╝ą░čüčüąĖą▓ čéą░ą║ąĖčģ ąĘąĮą░č湥ąĮąĖą╣ ą┐ąŠčéčĆąĄą▒ąŠą▓ą░ą╗ą░ ąĮąŠą▓ąŠą│ąŠ ąĮą░ą┐ąŠčĆą░ API-čäčāąĮą║čåąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│ą╗ąĖ ą▒čŗ ą░ą┤čĆąĄčüąŠą▓ą░čéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓ čŹč鹊ą╝ ą╝ą░čüčüąĖą▓ąĄ. ulTaskNotifyTake() čŹč鹊 ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮą░čÅ API-čäčāąĮą║čåąĖčÅ, ąĖ ąŠąĮą░ ąŠčüčéą░ą╗ą░čüčī ą┤ą╗čÅ ąŠą▒čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ, čĆą░ą▒ąŠčéą░čÅ čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓ ą╝ą░čüčüąĖą▓ąĄ čü ąĖąĮą┤ąĄą║čüąŠą╝ 0. ąÆčŗąĘąŠą▓ ulTaskNotifyTake() 菹║ą▓ąĖą▓ą░ą╗ąĄąĮč鹥ąĮ ą▓čŗąĘąŠą▓čā ulTaskNotifyTakeIndexed() čü ą┐ą░čĆą░ą╝ąĄčéčĆąŠą╝ uxIndexToWaitOn, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ą▓ 0.
ążčāąĮą║čåąĖčÅ ą▓ąŠąĘą▓čĆą░čéąĖčé ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖą╣ ąĘą░ą┤ą░čćąĖ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ ąŠąĮ ą▒čāą┤ąĄčé ąŠčćąĖčēąĄąĮ ą▓ 0 ąĖą╗ąĖ ą┤ąĄą║čĆąĄą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮ (čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ xClearCountOnExit).
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
uxIndexToWaitOn: ąĖąĮą┤ąĄą║čü ą▓ ą╝ą░čüčüąĖą▓ąĄ ąĘąĮą░č湥ąĮąĖą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓čŗąĘčŗą▓ą░čÄčēąĄą╣ ąĘą░ą┤ą░čćąĖ, ąĮą░ ą║ąŠč鹊čĆąŠą╝ ąŠąĮą░ ąČą┤ąĄčé ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čü ąĮąĄąĮčāą╗ąĄą▓čŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝. ą¤ą░čĆą░ą╝ąĄčéčĆ uxIndexToWaitOn ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą╝ąĄąĮčīčłąĄ ąĘąĮą░č湥ąĮąĖčÅ ąŠą┐čåąĖąĖ configTASK_NOTIFICATION_ARRAY_ENTRIES. ąŻ xTaskNotifyTake() ąĮąĄčé čŹč鹊ą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░, ąĖ ąŠąĮą░ ą▓čüąĄą│ą┤ą░ ąČą┤ąĄčé ąŠą┐ąŠą▓ąĄčēąĄąĮąĖą╣ ą┐ąŠ ąĖąĮą┤ąĄą║čüčā 0.
xClearCountOnExit: ąĄčüą╗ąĖ xClearCountOnExit čĆą░ą▓ąĄąĮ pdFALSE, č鹊 ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ ą┤ąĄą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓čŗčģąŠą┤ ąĖąĘ čäčāąĮą║čåąĖąĖ. ą¤čĆąĖ čéą░ą║ąŠą╝ čüą┐ąŠčüąŠą▒ąĄ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čĆą░ą▒ąŠčéą░ąĄčé ą┐ąŠą┤ąŠą▒ąĮąŠ čüąĄą╝ą░č乊čĆčā čüąŠ čüč湥čéčćąĖą║ąŠą╝. ąĢčüą╗ąĖ ąČąĄ xClearCountOnExit ąĮąĄ pdFALSE, č鹊 ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čć ąŠčćąĖčēą░ąĄčéčüčÅ ą▓ 0 ą┐čĆąĖ ą▓čŗčģąŠą┤ąĄ ąĖąĘ čäčāąĮą║čåąĖąĖ. ąÆ čéą░ą║ąŠą╝ čüą╗čāčćą░ąĄ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą┤ą▓ąŠąĖčćąĮčŗą╣ čüąĄą╝ą░č乊čĆ.
xTicksToWait: ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠč鹊čĆąŠąĄ ąĘą░ą┤ą░čćą░ ą┤ąŠą╗ąČąĮą░ ąČą┤ą░čéčī ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Blocked, ą║ąŠą│ą┤ą░ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čüčéą░ąĮąĄčé ą▒ąŠą╗čīčłąĄ 0, ąĄčüą╗ąĖ ą┐čĆąĖ ą▓čŗąĘąŠą▓ąĄ ulTaskNotifyTake() ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĮąĄ ą▒čŗą╗ąŠ ą▒ąŠą╗čīčłąĄ 0. ąÆ čüąŠčüč鹊čÅąĮąĖąĖ Blocked ąĘą░ą┤ą░čćą░ ąĮąĄ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄčé ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ. ąÆčĆąĄą╝čÅ ąŠąČąĖą┤ą░ąĮąĖčÅ ąĘą░ą┤ą░ąĄčéčüčÅ ą▓ čéąĖą║ą░čģ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čÅą┤čĆą░, ąĖ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą╝ą░ą║čĆąŠčü pdMS_TO_TICKS(ąĘąĮą░č湥ąĮąĖąĄ_ą▓_ą╝čü) ą┤ą╗čÅ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ą░čģ ą▓ čéąĖą║ąĖ čüąĖčüč鹥ą╝čŗ. ąĢčüą╗ąĖ čāą║ą░ąĘą░čéčī ąĘąĮą░č湥ąĮąĖąĄ portMAX_DELAY, č鹊 ąĘą░ą┤ą░čćą░ ą▒čāą┤ąĄčé ąČą┤ą░čéčī ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▒ąĄąĘ čéą░ą╣ą╝ą░čāčéą░ (ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠ ą┤ąŠą╗ą│ąŠ).
BaseType_t xTaskGenericNotifyStateClear (TaskHandle_t xTask,
UBaseType_t uxIndexToClear);
ą¦č鹊ą▒čŗ čŹčéą░ čäčāąĮą║čåąĖčÅ ą▒čŗą╗ą░ ą┤ąŠčüčéčāą┐ąĮą░, ąŠą┐čåąĖčÅ configUSE_TASK_NOTIFICATIONS ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ 1. ą¤ąŠą┤čĆąŠą▒ąĮąŠ ą┐čĆąŠ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čć čüą╝. [10].
ąŻ ą║ą░ąČą┤ąŠą╣ ąĘą░ą┤ą░čćąĖ ąĄčüčéčī ą┐čĆąĖą▓ą░čéąĮčŗą╣ ą╝ą░čüčüąĖą▓ ąĘąĮą░č湥ąĮąĖą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ("notification values", ąĖą╗ąĖ ŌĆśnotificationsŌĆÖ), ą║ą░ąČą┤ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čŹč鹊 32-bit ą▒ąĖčéąĮąŠąĄ ą▒ąĄąĘąĘąĮą░ą║ąŠą▓ąŠąĄ čåąĄą╗ąŠąĄ (uint32_t). ąÜąŠąĮčüčéą░ąĮčéą░ configTASK_NOTIFICATION_ARRAY_ENTRIES čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĖąĮą┤ąĄą║čüąŠą▓ ą▓ čŹč鹊ą╝ ą╝ą░čüčüąĖą▓ąĄ, ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ąĄčüą╗ąĖ ąŠąĮą░ ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░, ą┐čĆąĖąĮąĖą╝ą░ąĄčéčüčÅ čĆą░ą▓ąĮąŠą╣ 1 (ą┤ą╗čÅ ąŠą▒čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ). ąöąŠ ą▓ąĄčĆčüąĖąĖ FreeRTOS V10.4.0 ą▒čŗą╗ąŠ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĮą░ ąĘą░ą┤ą░čćčā.
ąĢčüą╗ąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ ą┐ąŠ ąĖąĮą┤ąĄą║čüčā ą▓ ą╝ą░čüčüąĖą▓ąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖą╣, č鹊 ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą┐ąŠ čŹč鹊ą╝čā ąĖąĮą┤ąĄą║čüčā čüčćąĖčéą░ąĄčéčüčÅ "ąŠąČąĖą┤ą░čÄčēąĖą╝" (pending) ą┤ąŠ č鹥čģ ą┐ąŠčĆ, ą┐ąŠą║ą░ ąŠąĮąŠ ąĮąĄ ą▒čāą┤ąĄčé čÅą▓ąĮąŠ ą┐čĆąŠčćąĖčéą░ąĮąŠ ąĖą╗ąĖ čüą▒čĆąŠčłąĄąĮąŠ ą┐ąŠą╗čāčćą░čÄčēąĄą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ąĘą░ą┤ą░č湥ą╣ (receiving task). xTaskNotifyStateClearIndexed() čŹč鹊 ą╝ą░ą║čĆąŠčü, ą║ąŠč鹊čĆčŗą╣ ąŠčćąĖčēą░ąĄčé ąŠąČąĖą┤ą░čÄčēąĄąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą▒ąĄąĘ čćč鹥ąĮąĖčÅ ąĘąĮą░č湥ąĮąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ. ąŚąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą┐ąŠ č鹊ą╝čā ąČąĄ čüą░ą╝ąŠą╝čā ąĖąĮą┤ąĄą║čüčā ąĮąĖ ąĖąĘą╝ąĄąĮčÅąĄčéčüčÅ. ąŻčüčéą░ąĮąŠą▓ą║ą░ xTask ą▓ NULL ąŠčćąĖčüčéąĖčé čüąŠčüč鹊čÅąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą┤ą╗čÅ ą▓čŗąĘčŗą▓ą░čÄčēąĄą╣ ąĘą░ą┤ą░čćąĖ.
ąśąĮč乊čĆą╝ą░čåąĖčÅ ą┤ą╗čÅ ąŠą▒čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ: ą┤ąŠ ą▓ąĄčĆčüąĖąĖ FreeRTOS V10.4.0 čā ą║ą░ąČą┤ąŠą╣ ąĘą░ą┤ą░čćąĖ ą▒čŗą╗ąŠ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ("notification value"), ąĖ ą▓čüąĄ API-čäčāąĮą║čåąĖąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čĆą░ą▒ąŠčéą░ą╗ąĖ ąĮą░ čŹč鹊ą╝ ąĘąĮą░č湥ąĮąĖąĖ. ąŚą░ą╝ąĄąĮą░ ąŠą┤ąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĮą░ ą╝ą░čüčüąĖą▓ čéą░ą║ąĖčģ ąĘąĮą░č湥ąĮąĖą╣ ą┐ąŠčéčĆąĄą▒ąŠą▓ą░ą╗ą░ ąĮąŠą▓ąŠą│ąŠ ąĮą░ą┐ąŠčĆą░ API-čäčāąĮą║čåąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│ą╗ąĖ ą▒čŗ ą░ą┤čĆąĄčüąŠą▓ą░čéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓ čŹč鹊ą╝ ą╝ą░čüčüąĖą▓ąĄ. xTaskNotifyStateClear() čŹč鹊 ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮą░čÅ API-čäčāąĮą║čåąĖčÅ, ąĖ ąŠąĮą░ ąŠčüčéą░ą╗ą░čüčī ą┤ą╗čÅ ąŠą▒čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ, čĆą░ą▒ąŠčéą░čÅ čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓ ą╝ą░čüčüąĖą▓ąĄ čü ąĖąĮą┤ąĄą║čüąŠą╝ 0. ąÆčŗąĘąŠą▓ xTaskNotifyStateClear() 菹║ą▓ąĖą▓ą░ą╗ąĄąĮč鹥ąĮ ą▓čŗąĘąŠą▓čā xTaskNotifyStateClearIndexed() čü ą┐ą░čĆą░ą╝ąĄčéčĆąŠą╝ uxIndexToNotify, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ą▓ 0.
ążčāąĮą║čåąĖčÅ ą▓ąŠąĘą▓čĆą░čéąĖčé pdTRUE, ąĄčüą╗ąĖ čüąŠčüč鹊čÅąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ ą▒čŗą╗ąŠ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ eNotWaitingNotification, ąĖąĮą░č湥 ą▓ąŠąĘą▓čĆą░čéąĖčé pdFALSE.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
xTask: ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĘą░ą┤ą░čćąĖ RTOS, čüąŠčüč鹊čÅąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą┤ą╗čÅ ą║ąŠč鹊čĆąŠą╣ ąŠčćąĖčēą░ąĄčéčüčÅ. ąŻčüčéą░ąĮąŠą▓ąĖč鹥 xTask ą▓ NULL ą┤ą╗čÅ ąŠčćąĖčüčéą║ąĖ čüąŠčüč鹊čÅąĮąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą┤ą╗čÅ ą▓čŗąĘčŗą▓ą░čÄčēąĄą╣ ąĘą░ą┤ą░čćąĖ. ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ ąĘą░ą┤ą░čćąĖ čüąŠąĘą┤ą░ą╣č鹥 ąĄčæ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ xTaskCreate(), ąĖ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ą┐ą░čĆą░ą╝ąĄčéčĆ pxCreatedTask, ą╗ąĖą▒ąŠ čüąŠąĘą┤ą░ą╣č鹥 ąĘą░ą┤ą░čćčā čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ xTaskCreateStatic() ąĖ čüąŠčģčĆą░ąĮąĖč鹥 ąĄčæ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ą╗ąĖą▒ąŠ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ąĖą╝čÅ ąĘą░ą┤ą░čćąĖ ą▓ ą▓čŗąĘąŠą▓ąĄ xTaskGetHandle().
uxIndexToClear: ąĖąĮą┤ąĄą║čü ą▓ ą╝ą░čüčüąĖą▓ąĄ ąĘąĮą░č湥ąĮąĖą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čåąĄą╗ąĄą▓ąŠą╣ ąĘą░ą┤ą░čćąĖ ą┤ą╗čÅ ą┐čĆąĖą╝ąĄąĮčÅąĄą╝ąŠą│ąŠ ą┤ąĄą╣čüčéą▓ąĖčÅ. ąØą░ą┐čĆąĖą╝ąĄčĆ, čāčüčéą░ąĮąŠą▓ą║ą░ uxIndexToClear ą▓ 1 ąŠčćąĖčüčéąĖčé čüąŠčüč鹊čÅąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą┐ąŠ ąĖąĮą┤ąĄą║čüčā 1 ą▓ ą╝ą░čüčüąĖą▓ąĄ. ą¤ą░čĆą░ą╝ąĄčéčĆ uxIndexToClear ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą╝ąĄąĮčīčłąĄ ąĘąĮą░č湥ąĮąĖčÅ ąŠą┐čåąĖąĖ configTASK_NOTIFICATION_ARRAY_ENTRIES. ąŻ ulTaskNotifyStateClear() ąĮąĄčé čéą░ą║ąŠą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░, ąĖ ąŠąĮą░ ą▓čüąĄą│ą┤ą░ čĆą░ą▒ąŠčéą░ąĄčé čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą┐ąŠ ąĖąĮą┤ąĄą║čüčā 0.
uint32_t ulTaskGenericNotifyValueClear (TaskHandle_t xTask,
UBaseType_t uxIndexToClear,
uint32_t ulBitsToClear);
ą¦č鹊ą▒čŗ čŹčéą░ čäčāąĮą║čåąĖčÅ ą▒čŗą╗ą░ ą┤ąŠčüčéčāą┐ąĮą░, ąŠą┐čåąĖčÅ configUSE_TASK_NOTIFICATIONS ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ 1. ą¤ąŠą┤čĆąŠą▒ąĮąŠ ą┐čĆąŠ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čć čüą╝. [10].
ąŻ ą║ą░ąČą┤ąŠą╣ ąĘą░ą┤ą░čćąĖ ąĄčüčéčī ą┐čĆąĖą▓ą░čéąĮčŗą╣ ą╝ą░čüčüąĖą▓ ąĘąĮą░č湥ąĮąĖą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ("notification values", ąĖą╗ąĖ ŌĆśnotificationsŌĆÖ), ą║ą░ąČą┤ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čŹč鹊 32-bit ą▒ąĖčéąĮąŠąĄ ą▒ąĄąĘąĘąĮą░ą║ąŠą▓ąŠąĄ čåąĄą╗ąŠąĄ (uint32_t). ąÜąŠąĮčüčéą░ąĮčéą░ configTASK_NOTIFICATION_ARRAY_ENTRIES čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĖąĮą┤ąĄą║čüąŠą▓ ą▓ čŹč鹊ą╝ ą╝ą░čüčüąĖą▓ąĄ, ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ąĄčüą╗ąĖ ąŠąĮą░ ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░, ą┐čĆąĖąĮąĖą╝ą░ąĄčéčüčÅ čĆą░ą▓ąĮąŠą╣ 1 (ą┤ą╗čÅ ąŠą▒čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ). ąöąŠ ą▓ąĄčĆčüąĖąĖ FreeRTOS V10.4.0 ą▒čŗą╗ąŠ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĮą░ ąĘą░ą┤ą░čćčā.
ulTaskNotifyValueClearIndexed() ąŠčćąĖčüčéąĖčé ą▒ąĖčéčŗ ą▓ ąĘąĮą░č湥ąĮąĖąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą╝ą░čüčüąĖą▓ą░ ąĘą░ą┤ą░čćąĖ (ąĘą░ą┤ą░čćą░ čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą╝ xTask), ąĘą░ą┤ą░ąĮąĮčŗąĄ ą▒ąĖč鹊ą▓ąŠą╣ ą╝ą░čüą║ąŠą╣ ulBitsToClear. ąŚąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓ ą╝ą░čüčüąĖą▓ąĄ čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ąĖąĮą┤ąĄą║čüąŠą╝ uxIndexToClear.
ąśąĮč乊čĆą╝ą░čåąĖčÅ ą┤ą╗čÅ ąŠą▒čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ: ą┤ąŠ ą▓ąĄčĆčüąĖąĖ FreeRTOS V10.4.0 čā ą║ą░ąČą┤ąŠą╣ ąĘą░ą┤ą░čćąĖ ą▒čŗą╗ąŠ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ("notification value"), ąĖ ą▓čüąĄ API-čäčāąĮą║čåąĖąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čĆą░ą▒ąŠčéą░ą╗ąĖ ąĮą░ čŹč鹊ą╝ ąĘąĮą░č湥ąĮąĖąĖ. ąŚą░ą╝ąĄąĮą░ ąŠą┤ąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĮą░ ą╝ą░čüčüąĖą▓ čéą░ą║ąĖčģ ąĘąĮą░č湥ąĮąĖą╣ ą┐ąŠčéčĆąĄą▒ąŠą▓ą░ą╗ą░ ąĮąŠą▓ąŠą│ąŠ ąĮą░ą┐ąŠčĆą░ API-čäčāąĮą║čåąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│ą╗ąĖ ą▒čŗ ą░ą┤čĆąĄčüąŠą▓ą░čéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓ čŹč鹊ą╝ ą╝ą░čüčüąĖą▓ąĄ. ulTaskNotifyValueClear() čŹč鹊 ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮą░čÅ API-čäčāąĮą║čåąĖčÅ, ąĖ ąŠąĮą░ ąŠčüčéą░ą╗ą░čüčī ą┤ą╗čÅ ąŠą▒čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ, čĆą░ą▒ąŠčéą░čÅ čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓ ą╝ą░čüčüąĖą▓ąĄ čü ąĖąĮą┤ąĄą║čüąŠą╝ 0. ąÆčŗąĘąŠą▓ ulTaskNotifyValueClear() 菹║ą▓ąĖą▓ą░ą╗ąĄąĮč鹥ąĮ ą▓čŗąĘąŠą▓čā ulTaskNotifyValueClearIndexed() čü ą┐ą░čĆą░ą╝ąĄčéčĆąŠą╝ uxIndexToClear, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ą▓ 0.
ążčāąĮą║čåąĖčÅ ą▓ąŠąĘą▓čĆą░čéąĖčé ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čäčāąĮą║čåąĖąĖ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ ą▒čāą┤čāčé ąŠčćąĖčēąĄąĮčŗ ą▒ąĖčéčŗ, ąĘą░ą┤ą░ąĮąĮčŗąĄ ą╝ą░čüą║ąŠą╣ ulBitsToClear.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
xTask: ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĘą░ą┤ą░čćąĖ RTOS, ą┤ą╗čÅ ą║ąŠč鹊čĆąŠą╣ ąŠčćąĖčēą░čÄčéčüčÅ ą▒ąĖčéčŗ ą▓ ąŠą┤ąĮąŠą╝ ąĖąĘ ąĄčæ ąĘąĮą░č湥ąĮąĖą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ. ąŻčüčéą░ąĮąŠą▓ąĖč鹥 xTask ą▓ NULL ą┤ą╗čÅ ąŠčćąĖčüčéą║ąĖ ą▒ąĖčé ą▓ ąĘąĮą░č湥ąĮąĖąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓čŗąĘčŗą▓ą░čÄčēąĄą╣ ąĘą░ą┤ą░čćąĖ. ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ ąĘą░ą┤ą░čćąĖ čüąŠąĘą┤ą░ą╣č鹥 ąĄčæ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ xTaskCreate(), ąĖ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ą┐ą░čĆą░ą╝ąĄčéčĆ pxCreatedTask, ą╗ąĖą▒ąŠ čüąŠąĘą┤ą░ą╣č鹥 ąĘą░ą┤ą░čćčā čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ xTaskCreateStatic() ąĖ čüąŠčģčĆą░ąĮąĖč鹥 ąĄčæ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ą╗ąĖą▒ąŠ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ąĖą╝čÅ ąĘą░ą┤ą░čćąĖ ą▓ ą▓čŗąĘąŠą▓ąĄ xTaskGetHandle().
uxIndexToClear: ąĖąĮą┤ąĄą║čü ą▓ ą╝ą░čüčüąĖą▓ąĄ ąĘąĮą░č湥ąĮąĖą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čåąĄą╗ąĄą▓ąŠą╣ ąĘą░ą┤ą░čćąĖ, ą│ą┤ąĄ ą▒ąĖčéčŗ ąŠčćąĖčēą░čÄčéčüčÅ. ą¤ą░čĆą░ą╝ąĄčéčĆ uxIndexToClear ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą╝ąĄąĮčīčłąĄ ąĘąĮą░č湥ąĮąĖčÅ ąŠą┐čåąĖąĖ configTASK_NOTIFICATION_ARRAY_ENTRIES. ąŻ ulTaskNotifyValueClear() ąĮąĄčé čéą░ą║ąŠą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░, ąĖ ąŠąĮą░ ą▓čüąĄą│ą┤ą░ čĆą░ą▒ąŠčéą░ąĄčé čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą┐ąŠ ąĖąĮą┤ąĄą║čüčā 0.
ulBitsToClear: ą▒ąĖč鹊ą▓ą░čÅ ą╝ą░čüą║ą░ ą┤ą╗čÅ č鹥čģ ą▒ąĖčé, ą║ąŠč鹊čĆčŗąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠčćąĖčēąĄąĮčŗ ą▓ ąĘąĮą░č湥ąĮąĖąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ xTask. ąŻčüčéą░ąĮąŠą▓ą║ą░ ą▒ąĖčéą░ ą▓ 1 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ąŠčćąĖčüčéą║ąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą▒ąĖčéą░ ą▓ ąĘąĮą░č湥ąĮąĖąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ. ąŻčüčéą░ąĮąŠą▓ą║ą░ ulBitsToClear ą▓ 0xffffffff (UINT_MAX ąĮą░ 32-ą▒ąĖčéąĮąŠą╣ ą░čĆčģąĖč鹥ą║čéčāčĆąĄ) ąŠčćąĖčüčéąĖčé ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓ 0. ąŻčüčéą░ąĮąŠą▓ą║ą░ ulBitsToClear ą▓ 0 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ąĘą░ą┐čĆąŠčüčā ąĘąĮą░č湥ąĮąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ ą▒ąĄąĘ ąŠčćąĖčüčéą║ąĖ ąĄą│ąŠ ą▒ąĖčé.
void vTaskSetTimeOutState (TimeOut_t* const pxTimeOut) PRIVILEGED_FUNCTION;
ąŚą░čģą▓ą░čéčŗą▓ą░ąĄčé č鹥ą║čāčēąĄąĄ ą▓čĆąĄą╝čÅ ą┤ą╗čÅ ą▒čāą┤čāčēąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čüąŠą▓ą╝ąĄčüčéąĮąŠ čü xTaskCheckForTimeOut().
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
pxTimeOut: čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ąŠą▒čŖąĄą║čé čéą░ą╣ą╝ą░čāčéą░, ą▓ ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé ąĘą░čģą▓ą░č湥ąĮąŠ č鹥ą║čāčēąĄąĄ ą▓čĆąĄą╝čÅ. ąŚą░čģą▓ą░č湥ąĮąĮąŠąĄ ą▓čĆąĄą╝čÅ ą▓ą║ą╗čÄčćą░ąĄčé čüč湥čéčćąĖą║ čéąĖą║ą░ ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čĆą░ąĘ, ą║ąŠą│ą┤ą░ čüč湥čéčćąĖą║ čéąĖą║ąŠą▓ ą┐ąĄčĆąĄą┐ąŠą╗ąĮčÅą╗čüčÅ čü ą╝ąŠą╝ąĄąĮčéą░ ą┐ąĄčĆą▓ąŠą╣ ąĘą░ą│čĆčāąĘą║ąĖ čüąĖčüč鹥ą╝čŗ.
BaseType_t xTaskCheckForTimeOut (TimeOut_t *const pxTimeOut,
TickType_t *const pxTicksToWait);
ą×ą┐čĆąĄą┤ąĄą╗čÅąĄčé, ą┐čĆąŠčłą╗ąŠ ą╗ąĖ pxTicksToWait čéąĖą║ąŠą▓ čü ą╝ąŠą╝ąĄąĮčéą░ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠč鹊čĆąŠąĄ ą▒čŗą╗ąŠ ąĘą░čģą▓ą░č湥ąĮąŠ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą▓čŗąĘąŠą▓ą░ vTaskSetTimeOutState(). ąŚą░čģą▓ą░č湥ąĮąĮąŠąĄ ą▓čĆąĄą╝čÅ ą▓ą║ą╗čÄčćą░ąĄčé čüč湥čéčćąĖą║ čéąĖą║ąŠą▓ ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čüč湥čéčćąĖą║ą░ čéąĖą║ąŠą▓. ą¤ąŠą┤čĆąŠą▒ąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ čäčāąĮą║čåąĖąĖ xTaskCheckForTimeOut čüą╝. ą▓ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ [11].
ąÆąŠąĘą▓čĆą░čéąĖčé pdTRUE, ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłąĄą╗ čéą░ą╣ą╝ą░čāčé, ąĖąĮą░č湥 ą▓ąĄčĆąĮąĄčé pdFALSE ąĖ pxTicksToWait ąŠą▒ąĮąŠą▓ąĖčéčüčÅ, čćč鹊ą▒čŗ ąŠčéčĆą░ąĘąĖčéčī ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąŠčüčéą░ą▓čłąĖčģčüčÅ čéąĖą║ąŠą▓.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
pxTimeOut: čüąŠčüč鹊čÅąĮąĖąĄ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠč鹊čĆąŠąĄ ą▒čŗą╗ąŠ čĆą░ąĮąĄąĄ ąĘą░čģą▓ą░č湥ąĮąŠ čü ą┐ąŠą╝ąŠčēčīčÄ vTaskSetTimeOutState. ąĢčüą╗ąĖ čéą░ą╣ą╝ą░čāčé ąĄčēąĄ ąĮąĄ ą┐čĆąŠąĖąĘąŠčłąĄą╗, č鹊 čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠ čŹč鹊ą╝čā čāą║ą░ąĘą░č鹥ą╗čÄ ąŠą▒ąĮąŠą▓ąĖčéčüčÅ, čćč鹊ą▒čŗ ąŠčéčĆą░ąĘąĖčéčī č鹥ą║čāčēąĖą╣ čüčéą░čéčāčü čéą░ą╣ą╝ą░čāčéą░.
pxTicksToWait: ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéąĖą║ąŠą▓ ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ čéą░ą╣ą╝ą░čāčéą░. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ pxTicksToWait čéąĖą║ąŠą▓ ą┐ąĄčĆąĄą┤ą░ąĮąŠ čü ą╝ąŠą╝ąĄąĮčéą░ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ pxTimeOut (ą╗ąĖą▒ąŠ čü ą┐ąŠą╝ąŠčēčīčÄ vTaskSetTimeOutState(), ą╗ąĖą▒ąŠ čü ą┐ąŠą╝ąŠčēčīčÄ xTaskCheckForTimeOut()), č鹊 ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čéą░ą╣ą╝ą░čāčé. ąĢčüą╗ąĖ čéą░ą╣ą╝ą░čāčé ąĮąĄ ą┐čĆąŠąĖąĘąŠčłąĄą╗, č鹊 pxTicksToWait ąŠą▒ąĮąŠą▓ąĖčéčüčÅ, čćč鹊ą▒čŗ ąŠčéčĆą░ąĘąĖčéčī ąŠčüčéą░ą▓čłąĄąĄčüčÅ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéąĖą║ąŠą▓.
BaseType_t xTaskCatchUpTicks (TickType_t xTicksToCatchUp) PRIVILEGED_FUNCTION;
ążčāąĮą║čåąĖčÅ ą║ąŠčĆčĆąĄą║čéąĖčĆčāąĄčé ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ čéąĖą║ąŠą▓ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą║ąŠą┤ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ čāą┤ąĄčƹȹĖą▓ą░ąĄčé ąŠčéą║ą╗čÄč湥ąĮąĮčŗą╝ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓ č鹥č湥ąĮąĖąĄ ą┤ą╗ąĖč鹥ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, čćč鹊 ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ ą┐čĆąŠą┐čāčüą║čā ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čéąĖą║ąŠą▓.
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┐ąŠą┤ąŠą▒ąĮą░ vTaskStepTick(), ąŠą┤ąĮą░ą║ąŠ, ą▓ ąŠčéą╗ąĖčćąĖąĄ ąŠčé vTaskStepTick(), čäčāąĮą║čåąĖčÅ xTaskCatchUpTicks() ą╝ąŠąČąĄčé ą┐ąĄčĆąĄą╝ąĄčüčéąĖčéčī čüč湥čéčćąĖą║ čéąĖą║ąŠą▓ ą▓ą┐ąĄčĆąĄą┤ ąĘą░ ą▓čĆąĄą╝čÅ, ąĮą░ ą║ąŠč鹊čĆąŠą╝ ąĘą░ą┤ą░čćą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗą▓ąĄą┤ąĄąĮą░ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ (čüąŠčüč鹊čÅąĮąĖčÅ Blocked). ąŁč鹊 ąĘąĮą░čćąĖčé, čćč鹊 ąĘą░ą┤ą░čćąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ą▓čŗą▓ąĄą┤ąĄąĮčŗ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ą┐čĆąĖ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĖ čüč湥čéčćąĖą║ą░ čéąĖą║ąŠą▓.
ążčāąĮą║čåąĖčÅ ą▓ąĄčĆąĮąĄčé pdTRUE, ąĄčüą╗ąĖ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ čüč湥čéčćąĖą║ą░ čéąĖą║ąŠą▓ ą▓ą┐ąĄčĆąĄą┤ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą▓čŗčģąŠą┤čā ąĘą░ą┤ą░čćąĖ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ąĖ ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮąŠ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░. ąśąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ pdFALSE.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
xTicksToCatchUp: ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čéąĖą║ąŠą▓, ą║ąŠč鹊čĆąŠąĄ ą▒čŗą╗ąŠ ą┐čĆąŠą┐čāčēąĄąĮąŠ ąĖąĘ-ąĘą░ ąĘą░ą┐čĆąĄčéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĮąĄ ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ, čéą░ą║ čćč鹊 ąŠąĮąŠ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗčćąĖčüą╗ąĄąĮąŠ ą▓čĆčāčćąĮčāčÄ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąŠą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
[ą£ą░ą║čĆąŠčüčŗ]
tskKERNEL_VERSION_NUMBER
tskKERNEL_VERSION_MAJOR
tskKERNEL_VERSION_MINOR
tskKERNEL_VERSION_BUILD
tskMPU_REGION_READ_ONLY
tskMPU_REGION_READ_WRITE
tskMPU_REGION_EXECUTE_NEVER
tskMPU_REGION_NORMAL_MEMORY
tskMPU_REGION_DEVICE_MEMORY
tskDEFAULT_INDEX_TO_NOTIFY
tskNO_AFFINITY
tskIDLE_PRIORITY ą×ą┐čĆąĄą┤ąĄą╗čÅąĄčé ą┐čĆąĖąŠčĆąĖč鹥čé, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ąĘą░ą┤ą░č湥ą╣ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle task). ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą╝ąĄąĮčÅčéčī ąĮąĄ čüą╗ąĄą┤čāąĄčé.
taskYIELD() ą╝ą░ą║čĆąŠčü ą┤ą╗čÅ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠą│ąŠ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą║ąŠąĮč鹥ą║čüčéą░.
taskENTER_CRITICAL() ą╝ą░ą║čĆąŠčü ą┤ą╗čÅ ą┐ąŠą╝ąĄčéą║ąĖ ąĮą░čćą░ą╗ą░ ą║čĆąĖčéąĖč湥čüą║ąŠą│ąŠ čĆąĄą│ąĖąŠąĮą░ ą║ąŠą┤ą░. ąÆ ą║čĆąĖčéąĖč湥čüą║ąŠą╝ čĆąĄą│ąĖąŠąĮąĄ ą║ąŠą┤ąĄ ąĮąĄ ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ ą▓čŗč鹥čüąĮčÅčÄčēąĄąĄ (preemptive) ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: taskENTER_CRITICAL/taskEXIT_CRITICAL ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čüč鹥ą║ą░ (ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┐ąŠčĆčéą░) ą┐ąŠčŹč鹊ą╝čā čüą╗ąĄą┤čāąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čü ąŠčüč鹊čĆąŠąČąĮąŠčüčéčīčÄ!
taskENTER_CRITICAL_FROM_ISR()
taskENTER_CRITICAL_ISR()
taskEXIT_CRITICAL() ą╝ą░ą║čĆąŠčü ą┤ą╗čÅ ą┐ąŠą╝ąĄčéą║ąĖ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą║čĆąĖčéąĖč湥čüą║ąŠą│ąŠ čĆąĄą│ąĖąŠąĮą░ ą║ąŠą┤ą░. ąÆ ą║čĆąĖčéąĖč湥čüą║ąŠą╝ čĆąĄą│ąĖąŠąĮąĄ ą║ąŠą┤ąĄ ąĮąĄ ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ ą▓čŗč鹥čüąĮčÅčÄčēąĄąĄ (preemptive) ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: taskENTER_CRITICAL/taskEXIT_CRITICAL ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čüč鹥ą║ą░ (ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┐ąŠčĆčéą░) ą┐ąŠčŹč鹊ą╝čā čüą╗ąĄą┤čāąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čü ąŠčüč鹊čĆąŠąČąĮąŠčüčéčīčÄ!
taskEXIT_CRITICAL_FROM_ISR(x)
taskEXIT_CRITICAL_ISR()
taskDISABLE_INTERRUPTS() ą╝ą░ą║čĆąŠčü ą┤ą╗čÅ ąĘą░ą┐čĆąĄčéą░ ą▓čüąĄčģ ą╝ą░čüą║ąĖčĆčāąĄą╝čŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣.
taskENABLE_INTERRUPTS() ą╝ą░ą║čĆąŠčü ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ MCU.
taskSCHEDULER_SUSPENDED
taskSCHEDULER_NOT_STARTED
taskSCHEDULER_RUNNING
vTaskDelayUntil (pxPreviousWakeTime, xTimeIncrement)
xTaskNotify (xTaskToNotify, ulValue, eAction)
xTaskNotifyIndexed( xTaskToNotify, uxIndexToNotify, ulValue, eAction)
xTaskNotifyAndQuery (xTaskToNotify, ulValue, eAction, pulPreviousNotifyValue)
ą¤ąŠą┤čĆąŠą▒ąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖą╣ ąĘą░ą┤ą░čć čüą╝. ą▓ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ [10].
xTaskNotifyAndQueryIndexed() ą▓čŗą┐ąŠą╗ąĮčÅąĄčé č鹊 ąČąĄ ą┤ąĄą╣čüčéą▓ąĖąĄ, čćč鹊 ąĖ xTaskNotifyIndexed(), ąŠą┤ąĮą░ą║ąŠ čü ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄą╝, čćč鹊 ąŠąĮ čéą░ą║ąČąĄ ą▓ąŠąĘą▓čĆą░čéąĖčé ą┐čĆąĄą┤čŗą┤čāčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĘą░ą┤ą░čćąĖ-čüčāą▒čŖąĄą║čéą░ (ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓ ą╝ąŠą╝ąĄąĮčé ą▓čŗąĘąŠą▓ą░ čäčāąĮą║čåąĖąĖ, ą░ ąĮąĄ ą┐čĆąĖ ą▓ąŠąĘą▓čĆą░č鹥 ąĖąĘ čäčāąĮą║čåąĖąĖ) ą▓ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╝ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ pulPreviousNotifyValue.
xTaskNotifyAndQuery() ą▓čŗą┐ąŠą╗ąĮčÅąĄčé č鹊 ąČąĄ ą┤ąĄą╣čüčéą▓ąĖąĄ, čćč鹊 ąĖ xTaskNotify(), ąŠą┤ąĮą░ą║ąŠ čü ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄą╝, čćč鹊 čéą░ą║ąČąĄ ą▓ąŠąĘą▓čĆą░čéąĖčé ą┐čĆąĄą┤čŗą┤čāčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ-čüčāą▒čŖąĄą║čéą░ (ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓ ą╝ąŠą╝ąĄąĮčé ą▓čŗąĘąŠą▓ą░ čäčāąĮą║čåąĖąĖ, ą░ ąĮąĄ ą┐čĆąĖ ą▓ąŠąĘą▓čĆą░č鹥 ąĖąĘ čäčāąĮą║čåąĖąĖ) ą▓ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╝ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ pulPreviousNotifyValue.
xTaskNotifyAndQueryIndexed (xTaskToNotify,
uxIndexToNotify,
ulValue,
eAction,
pulPreviousNotifyValue)
xTaskNotifyFromISR (xTaskToNotify,
ulValue,
eAction,
pxHigherPriorityTaskWoken)
xTaskNotifyIndexedFromISR (xTaskToNotify,
uxIndexToNotify,
ulValue,
eAction,
pxHigherPriorityTaskWoken)
xTaskNotifyAndQueryIndexedFromISR (xTaskToNotify,
uxIndexToNotify,
ulValue,
eAction,
pulPreviousNotificationValue,
pxHigherPriorityTaskWoken)
ą¤ąŠą┤čĆąŠą▒ąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖą╣ ąĘą░ą┤ą░čć čüą╝. ą▓ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ [10].
xTaskNotifyAndQueryIndexedFromISR() ą▓čŗą┐ąŠą╗ąĮčÅąĄčé č鹊 ąČąĄ ą┤ąĄą╣čüčéą▓ąĖąĄ, čćč鹊 ąĖ xTaskNotifyIndexedFromISR() čü ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄą╝, čćč鹊 čéą░ą║ąČąĄ ą▓ąŠąĘą▓čĆą░čéąĖčé ą┐čĆąĄą┤čŗą┤čāčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ-čüčāą▒čŖąĄą║čéą░ (ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓ ą╝ąŠą╝ąĄąĮčé ą▓čŗąĘąŠą▓ą░ čäčāąĮą║čåąĖąĖ, ą░ ąĮąĄ ą┐čĆąĖ ą▓čŗčģąŠą┤ąĄ ąĖąĘ čäčāąĮą║čåąĖąĖ) ą▓ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╝ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ pulPreviousNotifyValue.
xTaskNotifyAndQueryFromISR() ą▓čŗą┐ąŠą╗ąĮčÅąĄčé č鹊 ąČąĄ ą┤ąĄą╣čüčéą▓ąĖąĄ, čćč鹊 ąĖ xTaskNotifyFromISR() čü ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄą╝, čćč鹊 čéą░ą║ąČąĄ ą▓ąŠąĘą▓čĆą░čéąĖčé ą┐čĆąĄą┤čŗą┤čāčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ-čüčāą▒čŖąĄą║čéą░ (ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓ ą╝ąŠą╝ąĄąĮčé ą▓čŗąĘąŠą▓ą░ čäčāąĮą║čåąĖąĖ, ą░ ąĮąĄ ą┐čĆąĖ ą▓čŗčģąŠą┤ąĄ ąĖąĘ čäčāąĮą║čåąĖąĖ) ą▓ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╝ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ pulPreviousNotifyValue.
xTaskNotifyAndQueryFromISR (xTaskToNotify,
ulValue,
eAction,
pulPreviousNotificationValue,
pxHigherPriorityTaskWoken)
xTaskNotifyWait (ulBitsToClearOnEntry,
ulBitsToClearOnExit,
pulNotificationValue,
xTicksToWait)
xTaskNotifyWaitIndexed (uxIndexToWaitOn,
ulBitsToClearOnEntry,
ulBitsToClearOnExit,
pulNotificationValue,
xTicksToWait)
xTaskNotifyGive (xTaskToNotify)
ą×čéą┐čĆą░ą▓ą╗čÅąĄčé ą┐čĆčÅą╝ąŠąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą▓ ą╝ą░čüčüąĖą▓ ąĘąĮą░č湥ąĮąĖą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čåąĄą╗ąĄą▓ąŠą╣ ąĘą░ą┤ą░čćąĖ ą┐ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝čā ąĖąĮą┤ąĄą║čüčā, čćč鹊 čĆą░ą▒ąŠčéą░ąĄčé ą┐ąŠą┤ąŠą▒ąĮąŠ čüąĄą╝ą░č乊čĆčā čüąŠ čüč湥čéčćąĖą║ąŠą╝. ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ ą┐čĆąŠ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čć čüą╝. ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ [10].
ą¦č鹊ą▒čŗ čŹč鹊čé ą╝ą░ą║čĆąŠčü ą▒čŗą╗ ą┤ąŠčüčéčāą┐ąĄąĮ, ąŠą┐čåąĖčÅ configUSE_TASK_NOTIFICATIONS ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą║ą░ą║ 1.
ąŻ ą║ą░ąČą┤ąŠą╣ ąĘą░ą┤ą░čćąĖ ąĄčüčéčī ą┐čĆąĖą▓ą░čéąĮčŗą╣ ą╝ą░čüčüąĖą▓ ąĘąĮą░č湥ąĮąĖą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ("notification values", ąĖą╗ąĖ ŌĆśnotificationsŌĆÖ), ą║ą░ąČą┤ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čŹč鹊 32-bit ą▒ąĖčéąĮąŠąĄ ą▒ąĄąĘąĘąĮą░ą║ąŠą▓ąŠąĄ čåąĄą╗ąŠąĄ (uint32_t). ąÜąŠąĮčüčéą░ąĮčéą░ configTASK_NOTIFICATION_ARRAY_ENTRIES čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĖąĮą┤ąĄą║čüąŠą▓ ą▓ čŹč鹊ą╝ ą╝ą░čüčüąĖą▓ąĄ, ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ąĄčüą╗ąĖ ąŠąĮą░ ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░, ą┐čĆąĖąĮąĖą╝ą░ąĄčéčüčÅ čĆą░ą▓ąĮąŠą╣ 1 (ą┤ą╗čÅ ąŠą▒čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ). ąöąŠ ą▓ąĄčĆčüąĖąĖ FreeRTOS V10.4.0 ą▒čŗą╗ąŠ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĮą░ ąĘą░ą┤ą░čćčā.
ąĪąŠą▒čŗčéąĖčÅ (events) ą╝ąŠą│čāčé ą▒čŗčéčī ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ ąŠčé ąŠą┤ąĮąŠą╣ ąĘą░ą┤ą░čćąĖ ą║ ą┤čĆčāą│ąŠą╣ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮąŠą│ąŠ ąŠą▒čŖąĄą║čéą░. ą¤čĆąĖą╝ąĄčĆčŗ čéą░ą║ąĖčģ ąŠą▒čŖąĄą║č鹊ą▓ - ąŠč湥čĆąĄą┤ąĖ, čüąĄą╝ą░č乊čĆčŗ, ą╝čīčÄč鹥ą║čüčŗ ąĖ ą│čĆčāą┐ą┐čŗ čüąŠą▒čŗčéąĖą╣ (event groups). ą×ą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ (task notifications) čŹč鹊 ą╝ąĄč鹊ą┤ ą┐čĆčÅą╝ąŠą╣ ąŠčéą┐čĆą░ą▓ą║ąĖ čüąŠą▒čŗčéąĖčÅ ą▓ ąĘą░ą┤ą░čćčā ą▒ąĄąĘ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ čéą░ą║ąŠą│ąŠ ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮąŠą│ąŠ ąŠą▒čŖąĄą║čéą░.
ą×ą┐ąŠą▓ąĄčēąĄąĮąĖąĄ (čāą▓ąĄą┤ąŠą╝ą╗ąĄąĮąĖąĄ, notification), ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮąŠąĄ ą▓ ąĘą░ą┤ą░čćčā, ą╝ąŠąČąĄčé ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą┤ąĄą╣čüčéą▓ąĖąĄ (action), čéą░ą║ąŠąĄ ą║ą░ą║ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ, ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčī ąĖą╗ąĖ ąĖąĮą║čĆąĄą╝ąĄąĮčé ąŠą┤ąĮąŠą│ąŠ ąĖąĘ ąĘąĮą░č湥ąĮąĖą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ (task notifications) ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ą┤ą░ąĮąĮčŗčģ ą▓ ąĘą░ą┤ą░čćčā, ąĖą╗ąĖ ą▓ ą║ą░č湥čüčéą▓ąĄ ą╗ąĄą│ą║ąĖčģ ąĖ ą▒čŗčüčéčĆčŗčģ ą┤ą▓ąŠąĖčćąĮčŗčģ čüąĄą╝ą░č乊čĆąŠą▓ ąĖą╗ąĖ čüąĄą╝ą░č乊čĆąŠą▓ čüąŠ čüč湥čéčćąĖą║ąŠą╝.
xTaskNotifyGiveIndexed() čŹč鹊 ą╝ą░ą║čĆąŠčü, ąŠą▒ą╗ąĄą│čćą░čÄčēąĖą╣ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖą╣, ą║ąŠą│ą┤ą░ ąŠąĮąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą║ą░ą║ ąŠą▒ą╗ąĄą│č湥ąĮąĮą░čÅ ąĖ ą▒čŗčüčéčĆą░čÅ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ą░ ą┤ą▓ąŠąĖčćąĮčŗą╝ čüąĄą╝ą░č乊čĆą░ą╝ ąĖą╗ąĖ čüąĄą╝ą░č乊čĆą░ą╝ čüąŠ čüč湥čéčćąĖą║ąŠą╝. ąĀąĄą░ą╗čīąĮčŗąĄ čüąĄą╝ą░č乊čĆčŗ FreeRTOS ą▓čŗą┤ą░čÄčéčüčÅ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ API-čäčāąĮą║čåąĖąĖ xSemaphoreGive(), ąĖ ą▓ą╝ąĄčüč鹊 čŹč鹊ą│ąŠ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮčŗą╣ čäčāąĮą║čåąĖąŠąĮą░ą╗ ą┤ąŠčüčéąĖą│ą░ąĄčéčüčÅ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░č湥 čü ą┐ąŠą╝ąŠčēčīčÄ xTaskNotifyGiveIndexed().
ąÜąŠą│ą┤ą░ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéą░ ą┤ą▓ąŠąĖčćąĮąŠą│ąŠ čüąĄą╝ą░č乊čĆą░ ąĖą╗ąĖ čüąĄą╝ą░č乊čĆą░ čüąŠ čüč湥čéčćąĖą║ąŠą╝, ąŠą┐ąŠą▓ąĄčēą░ąĄą╝ą░čÅ ąĘą░ą┤ą░čćą░ ą┤ąŠą╗ąČąĮą░ ąČą┤ą░čéčī ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čü ą┐ąŠą╝ąŠčēčīčÄ ą▓čŗąĘąŠą▓ą░ API-čäčāąĮą║čåąĖąĖ ulTaskNotificationTakeIndexed() ą▓ą╝ąĄčüč鹊 API-čäčāąĮą║čåąĖąĖ xTaskNotifyWaitIndexed().
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą║ą░ąČą┤ąŠąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą▓ ą╝ą░čüčüąĖą▓ąĄ čĆą░ą▒ąŠčéą░ąĄčé ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ - ąĘą░ą┤ą░čćą░ ąĘą░ ąŠą┤ąĖąĮ čĆą░ąĘ ą╝ąŠąČąĄčé ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ąĮą░ ąŠą┤ąĮąŠą╝ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĖ ą▓ ą╝ą░čüčüąĖą▓ąĄ, ąĖ ąĮąĄ ą▒čāą┤ąĄčé čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮą░ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄą╝, ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╝ ą▓ ą╝ą░čüčüąĖą▓ ą┐ąŠ ą┤čĆčāą│ąŠą╝čā ąĖąĮą┤ąĄą║čüčā.
ąśąĮč乊čĆą╝ą░čåąĖčÅ ą┤ą╗čÅ ąŠą▒čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ: ą┤ąŠ ą▓ąĄčĆčüąĖąĖ FreeRTOS V10.4.0 čā ą║ą░ąČą┤ąŠą╣ ąĘą░ą┤ą░čćąĖ ą▒čŗą╗ąŠ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ("notification value"), ąĖ ą▓čüąĄ API-čäčāąĮą║čåąĖąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čĆą░ą▒ąŠčéą░ą╗ąĖ ąĮą░ čŹč鹊ą╝ ąĘąĮą░č湥ąĮąĖąĖ. ąŚą░ą╝ąĄąĮą░ ąŠą┤ąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĮą░ ą╝ą░čüčüąĖą▓ čéą░ą║ąĖčģ ąĘąĮą░č湥ąĮąĖą╣ ą┐ąŠčéčĆąĄą▒ąŠą▓ą░ą╗ą░ ąĮąŠą▓ąŠą│ąŠ ąĮą░ą┐ąŠčĆą░ API-čäčāąĮą║čåąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│ą╗ąĖ ą▒čŗ ą░ą┤čĆąĄčüąŠą▓ą░čéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓ čŹč鹊ą╝ ą╝ą░čüčüąĖą▓ąĄ. xTaskNotifyGive() čŹč鹊 ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮą░čÅ API-čäčāąĮą║čåąĖčÅ, ąĖ ąŠąĮą░ ąŠčüčéą░ą╗ą░čüčī ą┤ą╗čÅ ąŠą▒čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ, čĆą░ą▒ąŠčéą░čÅ čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą▓ ą╝ą░čüčüąĖą▓ąĄ čü ąĖąĮą┤ąĄą║čüąŠą╝ 0. ąÆčŗąĘąŠą▓ xTaskNotifyGive() 菹║ą▓ąĖą▓ą░ą╗ąĄąĮč鹥ąĮ ą▓čŗąĘąŠą▓čā xTaskNotifyGiveIndexed() čü ą┐ą░čĆą░ą╝ąĄčéčĆąŠą╝ uxIndexToNotify, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ą▓ 0.
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ: ą╝ą░ą║čĆąŠčü xTaskNotifyGive() ą┤ąĄą╗ą░ąĄčé ą▓čŗąĘąŠą▓ xTaskNotify() čü ą┐ą░čĆą░ą╝ąĄčéčĆąŠą╝ eAction, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ą▓ ąĘąĮą░č湥ąĮąĖąĄ eIncrement - ą┐ąŠčŹč鹊ą╝čā ą▓čüąĄą│ą┤ą░ ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ pdPASS.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ
xTaskToNotify: ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąŠą┐ąŠą▓ąĄčēą░ąĄą╝ąŠą╣ ąĘą░ą┤ą░čćąĖ. ąöąĄčüą║čĆąĖą┐č鹊čĆ ąĘą░ą┤ą░čćąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ąŠąĘą▓čĆą░čēąĄąĮ ąĖąĘ ą▓čŗąĘąŠą▓ą░ API-čäčāąĮą║čåąĖąĖ xTaskCreate() ą┐čĆąĖ čüąŠąĘą┤ą░ąĮąĖąĖ ąĘą░ą┤ą░čćąĖ, ąĖ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ č鹥ą║čāčēąĄą╣ čĆą░ą▒ąŠčéą░čÄčēąĄą╣ ąĘą░ą┤ą░čćąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╗čāč湥ąĮ ą▓čŗąĘąŠą▓ąŠą╝ xTaskGetCurrentTaskHandle().
uxIndexToNotify: ąĖąĮą┤ąĄą║čü, ą┐ąŠ ą║ąŠč鹊čĆąŠą╝čā ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą▓ ą╝ą░čüčüąĖą▓ ąĘąĮą░č湥ąĮąĖą╣ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ čåąĄą╗ąĄą▓ąŠą╣ ąĘą░ą┤ą░čćąĖ. ą¤ą░čĆą░ą╝ąĄčéčĆ uxIndexToNotify ą┤ąŠą╗ąČąĮąĄ ą▒čŗčéčī ą╝ąĄąĮčīčłąĄ ąĘąĮą░č湥ąĮąĖčÅ ąŠą┐čåąĖąĖ configTASK_NOTIFICATION_ARRAY_ENTRIES. ąŻ ą╝ą░ą║čĆąŠčüą░ xTaskNotifyGive() ąĮąĄčé čŹč鹊ą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░, ąĖ ąŠąĮ ą▓čüąĄą│ą┤ą░ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą┐ąŠ ąĖąĮą┤ąĄą║čüčā 0.
xTaskNotifyGiveIndexed (xTaskToNotify, uxIndexToNotify)
vTaskNotifyGiveFromISR (xTaskToNotify, pxHigherPriorityTaskWoken)
vTaskNotifyGiveIndexedFromISR (xTaskToNotify, uxIndexToNotify, pxHigherPriorityTaskWoken)
ulTaskNotifyTake (xClearCountOnExit, xTicksToWait)
ulTaskNotifyTakeIndexed (uxIndexToWaitOn, xClearCountOnExit, xTicksToWait)
xTaskNotifyStateClear (xTask)
xTaskNotifyStateClearIndexed (xTask, uxIndexToClear)
ulTaskNotifyValueClear (xTask, ulBitsToClear)
ulTaskNotifyValueClearIndexed (xTask, uxIndexToClear, ulBitsToClear)
[ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čéąĖą┐ąŠą▓]
typedefstruct tskTaskControlBlock *TaskHandle_t
typedefBaseType_t (*TaskHookFunction_t)(void *)
typedefvoid (*TlsDeleteCallbackFunction_t)(int, void *) ą┐čĆąŠč鹊čéąĖą┐ callback-čäčāąĮą║čåąĖąĖ čāą┤ą░ą╗ąĄąĮąĖčÅ čāą║ą░ąĘą░č鹥ą╗čÅ ąĮą░ ą╗ąŠą║ą░ą╗čīąĮąŠąĄ čģčĆą░ąĮąĖą╗ąĖčēąĄ.
[ą¤ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ]
enum eTaskState ąĘąĮą░č湥ąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ ąĘą░ą┤ą░čćąĖ, ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ eTaskGetState.
ąŚąĮą░č湥ąĮąĖčÅ:
eRunning = 0
eReady
eBlocked
eSuspended
eDeleted
eInvalid
enum eNotifyAction
ąŚąĮą░č湥ąĮąĖčÅ:
eNoAction = 0
eSetBits
eIncrement
eSetValueWithOverwrite
eSetValueWithoutOverwrite
enum eSleepModeStatus ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ eTaskConfirmSleepModeStatus().
ąŚąĮą░č湥ąĮąĖčÅ:
eAbortSleep = 0
eStandardSleep
eNoTasksWaitingTimeout
[ąĪą╗ąŠą▓ą░čĆąĖą║]
IPC Inter-Processor Call, ąŠčĆą│ą░ąĮąĖąĘą░čåąĖčÅ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖčÅ ą╝ąĄąČą┤čā ą┐čĆąŠčåąĄčüčüąŠčĆą░ą╝ąĖ (ąĘą░ą┤ą░čćą░ą╝ąĖ). ąÆąĮąĖą╝ą░ąĮąĖąĄ: ą▓ ą┤ą░ąĮąĮąŠą╝ ą║ąŠąĮč鹥ą║čüč鹥 IPC ąĮąĄ ąŠąĘąĮą░čćą░ąĄčé Inter-Process Communication, čćč鹊 ą╝ąŠąČąĮąŠ ąŠą▒ąĮą░čĆčāąČąĖčéčī ą▓ ą┤čĆčāą│ąĖčģ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčŗčģ čüąĖčüč鹥ą╝ą░čģ.
ISR Interrupt Service Routine, ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
MCU MicroController Unit, ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ.
MPU Memory Protection Unit, ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ą▒ą╗ąŠą║ ąĘą░čēąĖčéčŗ ą┐ą░ą╝čÅčéąĖ.
SMP Symmetric Multiprocessing, ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ąŠą┤ą░ čü ą┐ąŠą╝ąŠčēčīčÄ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą┐čĆąŠčåąĄčüčüąŠčĆąĮčŗčģ čÅą┤ąĄčĆ.
TCB Task Control Block, čüčéčĆčāą║čéčāčĆą░ ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ čüą╗čāąČąĄą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąĘą░ą┤ą░čćąĖ.
[ąĪčüčŗą╗ą║ąĖ]
1. ESP-IDF System API FreeRTOS site:docs.espressif.com.
2. ESP-IDF FreeRTOS SMP.
3. ESP32: čäčāąĮą║čåąĖąĖ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ FreeRTOS.
4. ąŻčüčéą░ąĮąŠą▓ą║ą░ čüčĆąĄą┤čŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ESP-IDF ą┤ą╗čÅ ESP32.
5. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐čĆąŠąĄą║čéą░ ESP-IDF.
6. ESP-IDF FreeRTOS SMP.
7. Hook Functions site:freertos.org.
8. configSUPPORT_STATIC_ALLOCATION site:freertos.org.
9. FreeRTOS: ą║ą░ą║ ą┐ąŠą╗čāčćąĖčéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ąĘą░ą│čĆčāąĘą║ąĄ ą┐čĆąŠčåąĄčüčüąŠčĆą░.
10. FreeRTOS: ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čć.
11. FreeRTOS: čäčāąĮą║čåąĖčÅ xTaskCheckForTimeOut.
12. FreeRTOS: ą┐čĆą░ą║čéąĖč湥čüą║ąŠąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ, čćą░čüčéčī 1 (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĘą░ą┤ą░čćą░ą╝ąĖ).
13. ESP32 Inter-Processor Call.
14. FreeRTOS: čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ą░ą╝čÅčéčīčÄ. |



