|
ąĪą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ą╗ ąĖ ąĘą░ą┐čāčüčéąĖą╗ ą┐čĆąŠčüč鹥ą╣čłąĖą╣ ą┐čĆąŠąĄą║čé ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ CANopen ąĖąĘ ą┐čĆąĖą╝ąĄčĆąŠą▓ IAR (basic-microcanopen-project). ą¤čĆąŠąĄą║čé ąĘą░čĆą░ą▒ąŠčéą░ą╗ čüčĆą░ąĘčā, ąŠą┤ąĮą░ą║ąŠ ą┤ą╗čÅ ą┤ą░ą╗čīąĮąĄą╣čłąĖčģ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮč鹊ą▓ ą┐ąŠąĮą░ą┤ąŠą▒ąĖą╗čüčÅ ą╝ą░čüč鹥čĆ čüąĄčéąĖ CANopen ąĖ čāčéąĖą╗ąĖčéčŗ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüą╗ąŠą▓ą░čĆąĄą╣ (OD) ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓. ąØą░čłąĄą╗ ąĖąĮč鹥čĆąĄčüąĮčŗą╣ ą▒ąĄčüą┐ą╗ą░čéąĮčŗą╣ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖą╣ - CanFestival [2]. ąŚą┤ąĄčüčī ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐ąĄčĆąĄą▓ąŠą┤ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ąĖąĘ čäą░ą╣ą╗ą░ manual_en.pdf (The CanFestival CANopen stack manual site:automforge.net). ąØąĄąĘąĮą░ą║ąŠą╝čāčÄ č鹥čĆą╝ąĖąĮąŠą╗ąŠą│ąĖčÄ ąĖ ą░ą▒ą▒čĆąĄą▓ąĖą░čéčāčĆčŗ čüą╝. ą▓ [1].
[ą¦č鹊 čéą░ą║ąŠąĄ CANfestival]
ąĢčüą╗ąĖ ą║čĆą░čéą║ąŠ, č鹊 čŹč鹊 čüč鹥ą║ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓ CANopen čü ąŠčéą║čĆčŗčéčŗą╝ ąĖčüčģąŠą┤ąĮčŗą╝ ą║ąŠą┤ąŠą╝, čüą▓ąŠą▒ąŠą┤ąĮčŗą╣ ąŠčé ą▓čŗą┐ą╗ą░čé ą┐čĆąĖ ą║ąŠą╝ą╝ąĄčĆč湥čüą║ąŠą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ (OpenSource LGPL ąĖ GPL). ąĢčüą╗ąĖ č鹊čćąĮąĄąĄ, č鹊 čŹč鹊 čäčĆąĄą╣ą╝ą▓ąŠčĆą║ (čĆą░ą▒ąŠčćą░čÅ čüčĆąĄą┤ą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ) ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗčģ (slave) ąĖ ą│ą╗ą░ą▓ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ čüąĄčéąĖ CANopen. ąÆ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ CanFestival čüč乊ą║čāčüąĖčĆąŠą▓ą░ąĮ ąĮą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĖ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠą╣ ą┐ą╗ą░čéč乊čĆą╝čŗ ANSI-C čüč鹥ą║ą░ CANopen, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĮąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ąĮą░ PC (Windows, Linux), ą╝ąĄąČą┐čĆąŠčåąĄčüčüąĮąŠą│ąŠ ąŠą▒ą╝ąĄąĮą░ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ (Real-time IPC) ąĖ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░čģ (ą┤ą░ąČąĄ ąĮą░ ą┐ą╗ą░čéč乊čĆą╝ą░čģ AVR ąĖ 8051). ą¦č鹊 ą▓ ąĮąĄą╝ ąĄčüčéčī:
ąśąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖą╣. ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą┐ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ čü ąĮąĄą║ąŠč鹊čĆčŗą╝ ąĮą░ą▒ąŠčĆąŠą╝ ą│ąŠč鹊ą▓čŗčģ ąĖąĮčüčéčĆčāą╝ąĄąĮč鹊ą▓:
1. Object Dictionary editor GUI. ąŁč鹊 ą│čĆą░čäąĖč湥čüą║ąĖą╣ ąĖąĮč鹥čĆč乥ą╣čü ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ WxPython Model-View-Controler, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠą╝ąŠą│ą░ąĄčé ą▓ ąĘą░ą┤ą░č湥 ą│ąĄąĮąĄčĆą░čåąĖąĖ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ ą┤ą╗čÅ OD ą║ą░ąČą┤ąŠą│ąŠ čāąĘą╗ą░ čüąĄčéąĖ.
2. ąĪą║čĆąĖą┐čé configure, ą┐ąŠąĘą▓ąŠą╗čÅčÄčēąĖą╣ ąÆą░ą╝ ą▓čŗą▒čĆą░čéčī ąŠą┐čåąĖąĖ ą▓čĆąĄą╝ąĄąĮąĖ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ, čéą░ą║ąĖąĄ ą║ą░ą║ čåąĄą╗ąĄą▓ąŠą╣ CPU/HOST, ą┤čĆą░ą╣ą▓ąĄčĆčŗ CAN ąĖ TIMER. ąŁč鹊čé čüą║čĆąĖą┐čé ąĮąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ čüąĖčüč鹥ą╝ąŠą╣ autoconf, ąŠąĮ čüą┤ąĄą╗ą░ąĮ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓.
ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ ą╝ąĮąŠą│ąĖčģ ą┐ą╗ą░čéč乊čĆą╝. ąśčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ąĮą░ą┐ąĖčüą░ąĮ ąĮą░ C-ANSI. ąöčĆą░ą╣ą▓ąĄčĆ ąĖ ą┐čĆąĖą╝ąĄčĆčŗ ą║ąŠą┤ą░ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąĄčĆąĄąĮąĄčüąĄąĮčŗ ąĮą░ ą╝ąĮąŠą│ąĖąĄ čåąĄą╗ąĄą▓čŗąĄ ą┐ą╗ą░čéč乊čĆą╝čŗ ąĖ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆčŗ. Unix-čüąŠą▓ą╝ąĄčüčéąĖą╝čŗąĄ ąĖąĮč鹥čĆč乥ą╣čüčŗ ą┤ąŠą╗ąČąĮčŗ ą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčīčüčÅ ąĖ čĆą░ą▒ąŠčéą░čéčī ąĮą░ ą╗čÄą▒ąŠą╣ čüąĖčüč鹥ą╝ąĄ Unix (ą┐čĆąŠą▓ąĄčĆčÅą╗ąŠčüčī ąĮą░ GNU/Linux ąĖ GNU/FreeBSD).
ąĪčéą░ąĮą┤ą░čĆčéčŗ CANopen. ąÆ CanFestival čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ ąŠčüąĮąŠą▓ąĮčŗąĄ čüčéą░ąĮą┤ą░čĆčéčŗ DS-301 [5], DS-302, DS-305.
DS-301: ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ čäčāąĮą║čåąĖąĖ ą┤ąŠą╗ąČąĮčŗ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčéčī čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝ DS301 V.4.02, 13 č乥ą▓čĆą░ą╗čÅ 2002 [5].
1. NMT master ąĖ slave.
2. Heartbeat consumer ąĖ producer.
3. NodeGuard slave reponder ąĖ basic master ą▒ąĄąĘ čéčĆąĄą║ąĖąĮą│ą░.
4. ąĪą╗čāąČą▒ą░ SYNC.
5. ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ ąŠą▒ą╝ąĄąĮą░ SDO ą╝ąĄąČą┤čā čüąĄčĆą▓ąĄčĆąŠą╝ ąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ ą║ą╗ąĖąĄąĮčéą░ą╝ąĖ, čüąĄą│ą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮąĮą░čÅ (segmented) ąĖ čāčüą║ąŠčĆąĄąĮąĮą░čÅ (expedited).
6. PDO: čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ąŠą▒čŖąĄą║č鹊ą▓ TPDO ąĖ RPDO ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ čéąĖą┐čā ą┐ąĄčĆąĄą┤ą░čćąĖ.
7. ą¤ąŠą▒ąĖčéąĮąŠąĄ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖąĄ ąŠą▒čŖąĄą║č鹊ą▓ (ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ) ąĮą░ PDO (PDO-mapping).
8. EMCY: ąŠčéą┐čĆą░ą▓ą║ą░, ąĖ ą┐čĆąĖąĄą╝ ąĖ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĮąĖąĄ ąŠą▒čŖąĄą║č鹊ą▓ ą░ą▓ą░čĆąĖąĖ (emergency objects).
9. ąóąĖą┐čŗ ą┤ą░ąĮąĮčŗčģ: ąĘąĮą░č湥ąĮąĖčÅ čü čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčīčÄ ąŠčé 8 ą┤ąŠ 64 ą▒ąĖčé, čüčéčĆąŠą║ąĖ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ą┤ą╗ąĖąĮčŗ.
DS-302: č鹊ą╗čīą║ąŠ ą║čĆą░čéą║ą░čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ DCF.
DS-305: ą┐ąŠą╗ąĮą░čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ LSS, ąŠą┤ąĮą░ą║ąŠ ąŠąĮą░ čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ą▓ ą╝ąŠą╝ąĄąĮčé ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ. ą×ą┐čåąĖąŠąĮą░ą╗čīąĮąŠ ą╝ąŠąČąĮąŠ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ čĆą░ąĘčĆąĄčłąĖčéčī čüą╗čāąČą▒čā FastScan LSS.
[ąæčŗčüčéčĆčŗą╣ čüčéą░čĆčé]
ąöą╗čÅ čĆą░ą▒ąŠčéčŗ ąÆą░ą╝ ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ ąŠą▒čŗčćąĮčŗą╣ ą║ąŠą╝ą┐čīčÄč鹥čĆ (Linux, FreeBSB, Windows) čü čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ą┐ą░ą║ąĄč鹊ą╝ Python (čÅ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ą╗ Python 2.7) ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąŠą╣ wxPython ą▓ąĄčĆčüąĖąĖ (ą╝ąĖąĮąĖą╝ą░ą╗čīąĮą░čÅ ą▓ąĄčĆčüąĖčÅ 2.6.3, čÅ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ą╗ 3.0). ąóą░ą║ąČąĄ ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ ą┐ą░ą║ąĄčé Gnosis xml tools (ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ą┐čĆąŠąĄą║č鹥 čü ą┐ąŠą╝ąŠčēčīčÄ Makefile, ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. "ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ Dictionary Editor GUI").
ąöą╗čÅ čĆą░ą▒ąŠčéčŗ CANfestival ąĮčāąČąĮąŠ čüą╗ąĄą┤čāčÄčēąĄąĄ:
1. ąĀą░ą▒ąŠčćą░čÅ čüčéą░ąĮčåąĖčÅ ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ Linux, FreeBSD, Cygwin (GNU toolchain).
2. ąÜąŠą╝ą┐ąĖą╗čÅč鹊čĆ GNU C (gcc) ąĖą╗ąĖ ą╗čÄą▒ąŠą╣ ą┤čĆčāą│ąŠą╣ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆ čÅąĘčŗą║ą░ ANSI-C ą┤ą╗čÅ ąÆą░čłąĄą╣ čåąĄą╗ąĄą▓ąŠą╣ ą┐ą╗ą░čéč乊čĆą╝čŗ.
3. Xpdf ąĖ ąŠčäąĖčåąĖą░ą╗čīąĮčŗą╣ čäą░ą╣ą╗ 301_v04000201.pdf ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą║ąŠąĮč鹥ą║čüčéąĮąŠą╣ ą┐ąŠą┤čüą║ą░ąĘą║ąĖ ą▓ GUI.
4. GNU Make.
5. Bash ąĖ sed.
ąöą╗čÅ čéčĆą░ą┤ąĖčåąĖąŠąĮąĮąŠą╣ ą┐ą╗ą░čéč乊čĆą╝čŗ win32 ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ čüą╗ąĄą┤čāčÄčēąĄąĄ:
1. Visual Studio Express 2005 ąĖą╗ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČą░čÅ ąĖ ą┐čĆąŠą┤ą▓ąĖąĮčāčéą░čÅ ą▓ąĄčĆčüąĖčÅ.
2. Microsoft platform SDK (čéčĆąĄą▒čāąĄčéčüčÅ Genuine Advantage).
3. Cygwin (č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ).
4. MinGW/MSYS.
ąÜą░ą║ ą┐ąŠą╗čāčćąĖčéčī CanFestival. ą¢ąĄą╗ą░č鹥ą╗čīąĮąŠ ą▓čüąĄą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī CVS, čŹč鹊 čüą░ą╝čŗą╣ ą╗čāčćčłąĖą╣ čüą┐ąŠčüąŠą▒ ą┐ąŠą╗čāčćąĖčéčī ą┐ąŠą┤ą┤ąĄčƹȹ║čā ąŠčé čüąŠąŠą▒čēąĄčüčéą▓ą░ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąŠą▓:
cvs -d:pserver:anonymous@lolitech.dyndns.org:/canfestival login
(ą┐čĆąŠčüč鹊 ąĮą░ąČą╝ąĖč鹥 Enter, ą▒ąĄąĘ ą▓ą▓ąŠą┤ą░ ą┐ą░čĆąŠą╗čÅ). ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą╗ąŠą│ąĖąĮą░ ą▓ą▓ąĄą┤ąĖč鹥 ą║ąŠą╝ą░ąĮą┤čā:
cvs -z3 -d:pserver:anonymous@lolitech.dyndns.org:/canfestival co -P CanFestival-3
ąØą░ąĘąĮą░č湥ąĮąĖąĄ čäą░ą╣ą╗ąŠą▓ ąĖ ą┐ą░ą┐ąŠą║. ąØąĖąČąĄ ą▓ čéą░ą▒ą╗ąĖčåąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ čāą┐čĆąŠčēąĄąĮąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ąĮą░ąĘąĮą░č湥ąĮąĖąĄ čĆą░ąĘą╗ąĖčćąĮčŗčģ čäą░ą╣ą╗ąŠą▓ CanFestival.
| ąÜą░čéą░ą╗ąŠą│ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| ./src |
ąśčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ čüč鹥ą║ą░ CANopen (ą║ąŠą┤ ANSI-C). |
| ./include |
ąŁą║čüą┐ąŠčĆčéąĖčĆčāąĄą╝čŗąĄ čäą░ą╣ą╗čŗ ąĘą░ą│ąŠą╗ąŠą▓ą║ąŠą▓. |
| ./drivers |
ąśąĮč鹥čĆč乥ą╣čüčŗ ą║ čĆą░ąĘą╗ąĖčćąĮčŗą╝ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝ ą┐ą╗ą░čéč乊čĆą╝ą░ą╝. |
| ./drivers/unix |
ąśąĮč鹥čĆč乥ą╣čü ą║ čüčĆąĄą┤ą░ą╝ čüąĖčüč鹥ą╝ Linux ąĖ Cygwin. |
| ./drivers/win32 |
ąśąĮč鹥čĆč乥ą╣čü ą║ čüąĖčüč鹥ą╝ąĄ Win32. |
| ./drivers/timers_xeno |
ąóą░ą╣ą╝ąĄčĆčŗ/ą┐ąŠč鹊ą║ąĖ Xenomai (č鹊ą╗čīą║ąŠ Linux). |
| ./drivers/timers_rtai |
ąóą░ą╣ą╝ąĄčĆčŗ/ą┐ąŠč鹊ą║ąĖ Rtai (č鹊ą╗čīą║ąŠ Linux). |
| ./drivers/timers_kernel |
ąóą░ą╣ą╝ąĄčĆčŗ/ą┐ąŠč鹊ą║ąĖ čÅą┤čĆą░ Linux. |
| ./drivers/timers_unix |
ąóą░ą╣ą╝ąĄčĆčŗ/ą┐ąŠč鹊ą║ąĖ Posix (Linux, Cygwin). |
| ./drivers/can_virtual_kernel |
ąĪąĖą╝čāą╗čÅčåąĖčÅ čüąĄčéąĖ CAN ąĮą░ čāčĆąŠą▓ąĮąĄ čÅą┤čĆą░ (Fake CAN network, kernel space). |
| ./drivers/can_serial |
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ č鹊čćą║ą░-č鹊čćą║ą░ ąĖ čģą░ą▒ PTY (č鹊ą╗čīą║ąŠ čüąĖčüč鹥ą╝čŗ *nix). |
| ./drivers/can_peak_linux |
ąśąĮč鹥čĆč乥ą╣čü ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ PeakSystem CAN. |
| ./drivers/can_peak_win32 |
ąśąĮč鹥čĆč乥ą╣čü PeakSystem PCAN-Light. |
| ./drivers/can_uvccm_win32 |
ąśąĮč鹥čĆč乥ą╣čü RS232 CAN-uVCCM ąŠčé ą║ąŠą╝ą┐ą░ąĮąĖąĖ Acacetus. |
| ./drivers/can_virtual |
ąĪąĖą╝čāą╗čÅčåąĖčÅ čüąĄčéąĖ CAN (Fake CAN network, čüąĖčüč鹥ą╝čŗ Linux, Cygwin). |
| ./drivers/can_vcom |
ąśąĮč鹥čĆč乥ą╣čü VScom VSCAN. |
| ./drivers/hcs12 |
ą¤ąŠą╗ąĮčŗą╣ čåąĄą╗ąĄą▓ąŠą╣ ąĖąĮč鹥čĆč乥ą╣čü HCS12. |
| ./examples |
ą¤čĆąĖą╝ąĄčĆčŗ. |
| ./examples/TestMasterSlave |
ąóąĄčüčé 2 čāąĘą╗ąŠą▓, NMT SYNC SDO PDO, win32+unix. |
| ./examples/TestMasterSlaveLSS |
ąóąĄčüčé 3 čāąĘą╗ąŠą▓, NMT SYNC SDO PDO LSS, win32+unix. |
| ./examples/TestMasterMicroMod |
1 čāąĘąĄą╗, čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ ą╝ąŠą┤čāą╗ąĄą╝ Peak I/O Module, unix. |
| ./examples/gene_SYNC_HCS12 |
ą¤čĆąŠčüč鹊 ąŠčéą┐čĆą░ą▓ą║ą░ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖčģ čüąŠąŠą▒čēąĄąĮąĖą╣ SYNC ąĮą░ HCS12. |
| ./examples/win32test |
ąŚą░ą┐čĆąŠčü ąĮąĄą║ąŠč鹊čĆąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ DS301 [5] ąŠčé čāąĘą╗ą░ (win32). |
| ./objdictgen |
ąōčĆą░čäąĖč湥čüą║ąĖą╣ ąĖąĮč鹥čĆč乥ą╣čü čĆąĄą┤ą░ą║č鹊čĆą░ OD (Object Dictionary editor GUI). |
| ./objdictgen/config |
ą¤čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ą┐čĆąŠčäąĖą╗ąĖ OD (Pre-defined OD profiles). |
| ./objdictgen/examples |
ąØąĄą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖą╝ąĄčĆčŗ/č鹥čüčéčŗ OD. |
| ./doc |
ąśčüčģąŠą┤ąĮąĖą║ąĖ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ. |
ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ CanFestival ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ ą┐ąŠą║ą░ąĘą░ąĮą░ ąĮą░ ą┤ąĖą░ą│čĆą░ą╝ą╝ąĄ:

ąśąĮč鹥čĆč乥ą╣čüčŗ CAN ą┤ą╗čÅ CanFestival. ą¤ąŠčüą║ąŠą╗čīą║čā ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ CAN ąĖ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čĆąĄą░ą╗ąĖąĘčāčÄčé ą▒čāč乥čĆ FIFO, ą▓ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ CanFestival ąŠčéą┐čĆą░ą▓ą║ą░ čüąŠąŠą▒čēąĄąĮąĖą╣ čüčćąĖčéą░ąĄčéčüčÅ ąĮąĄą▒ą╗ąŠą║ąĖčĆčāčÄčēąĄą╣ ąŠą┐ąĄčĆą░čåąĖąĄą╣.
ą¦č鹊ą▒čŗ ą┐čĆąĄą┤ąŠčéą▓čĆą░čéąĖčéčī čĆąĄąĄąĮčéčĆą░ąĮčéąĮčŗąĄ ą▓čŗąĘąŠą▓čŗ čüč鹥ą║ą░, čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ą┐čĆąĖąĄą╝ą░ čüąŠąŠą▒čēąĄąĮąĖą╣ čā ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ ąĖ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ čüą┤ąĄą╗ą░ąĮą░ ą┐ąŠ-čĆą░ąĘąĮąŠą╝čā:
ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą▓ąĘą░ąĖą╝ąĮąŠ ąĖčüą║ą╗čÄčćą░čÄčēąĖą╣ čéą░ą╣ą╝ąĄčĆ ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ CAN:

ą×ą┐ąĄčĆą░čåąĖąŠąĮąĮą░čÅ čüąĖčüč鹥ą╝ą░ ą┤ąŠą╗ąČąĮą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ą┐ąŠč鹊ą║ ą┐čĆąĖąĄą╝ą░, ą┐ąŠč鹊ą║ čéą░ą╣ą╝ąĄčĆą░ ąĖ ą╝čīčÄč鹥ą║čü. ą¤čĆąĖąĄą╝ CAN ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą║ą░ą║ ą▒ą╗ąŠą║ąĖčĆčāčÄčēą░čÅ ą┐ąŠč鹊ą║ ąŠą┐ąĄčĆą░čåąĖčÅ.

ą¤ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ čüąŠą▒čŗčéąĖą╣ CanFestival. ąŻąĘąĄą╗ CANopen ą┤ąŠą╗ąČąĄąĮ ąĖą╝ąĄčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▓čŗą┐ąŠą╗ąĮčÅčéčī ąŠčéą║ą╗ą░ą┤čŗą▓ą░ąĄą╝čŗąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ą░čÅ ą▓čŗą┤ą░čćą░ ą┐ą░ą║ąĄč鹊ą▓ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (SYNC), ą│ąĄąĮąĄčĆą░čåąĖčÅ heartbeat ąĖą╗ąĖ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĮąĖąĄ čéą░ą╣ą╝ą░čāčéą░ SDO čéčĆąĄą▒čāąĄčé čāčüčéą░ąĮąŠą▓ą║ąĖ ąĮąĄą║ąŠč鹊čĆčŗčģ ąĘą░ą┐ą╗ą░ąĮąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą┤ąĄą╣čüčéą▓ąĖą╣ ("ą▒čāą┤ąĖą╗čīąĮąĖą║", alarm), ą║ąŠč鹊čĆčŗąĄ ą▒čāą┤čāčé ą▓čŗą┐ąŠą╗ąĮąĄąĮčŗ ą┐ąŠąĘąČąĄ, ą▓ ąĮčāąČąĮčŗą╣ ą╝ąŠą╝ąĄąĮčé.
ą×ą▒čŗčćąĮąŠ čā ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĮąĄčé ą┤ąŠčüčéą░č鹊čćąĮąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ čüą▓ąŠą▒ąŠą┤ąĮčŗčģ čéą░ą╣ą╝ąĄčĆąŠą▓, čćč鹊ą▒čŗ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ąŠą▒čüą╗čāąČąĖčéčī ą▓čüąĄ čäčāąĮą║čåąĖąĖ CANopen. ąÜčĆąŠą╝ąĄ čŹč鹊ą│ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ ą┤ą░ąĮąĮčŗąĄ CanFestival ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠą▓čĆąĄąČą┤ąĄąĮčŗ čĆąĄąĄąĮčéčĆą░ąĮčéąĮčŗą╝ąĖ ą▓čŗąĘąŠą▓ą░ą╝ąĖ.
ąöą╗čÅ čĆąĄčłąĄąĮąĖčÅ ą┐ąŠą┤ąŠą▒ąĮčŗčģ ą┐čĆąŠą▒ą╗ąĄą╝ ą▓ CanFestival čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╣ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ (micro-scheduler, ą╝ąŠą┤čāą╗čī timer.c). ą×ąĮ ąĖčüą┐ąŠą╗čīąĘčāąĄčé č鹊ą╗čīą║ąŠ 1 čéą░ą╣ą╝ąĄčĆ ą┤ą╗čÅ čüąĖą╝čāą╗čÅčåąĖąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čéą░ą╣ą╝ąĄčĆąŠą▓, čćč鹊 ąŠą▒čüą╗čāąČąĖą▓ą░ąĄčé čéą░ą▒ą╗ąĖčåčā alarm ąĖ ą▓čŗąĘčŗą▓ą░ąĄčé alarm-čŗ ą▓ ąĮčāąČąĮąŠąĄ ą▓čĆąĄą╝čÅ.
ą¤ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ą╝ąŠąČąĄčé ąŠą▒čĆą░ą▒ąŠčéą░čéčī ą║ąŠčĆąŠčéą║ąĖąĄ ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ čü čāč湥č鹊ą╝ ąŠą│čĆą░ąĮąĖč湥ąĮąĖą╣, ąĮą░ą║ą╗ą░ą┤čŗą▓ą░ąĄą╝čŗčģ ą░ą┐ą┐ą░čĆą░čéčāčĆąŠą╣ čéą░ą╣ą╝ąĄčĆą░ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąÆ ą║ą░č湥čüčéą▓ąĄ ą┐čĆąĖą╝ąĄčĆą░: ąĄčüą╗ąĖ čüč湥čéčćąĖą║ čéą░ą╣ą╝ąĄčĆą░ ąĖą╝ąĄąĄčé čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčī 16 ą▒ąĖčé, ąĖ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ čéą░ą╣ą╝ąĄčĆą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čü ą┐ąĄčĆąĖąŠą┤ąŠą╝ 4 ą╝ą║čü, č鹊 ą┐čĆąĄą┤ąĄą╗čīąĮčŗą╣ ąĖąĮč鹥čĆą▓ą░ą╗ ą▓čĆąĄą╝ąĄąĮąĖ čüč湥čéą░ čüąŠčüčéą░ą▓ąĖčé 0.26 čüąĄą║čāąĮą┤. ąĪą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ, ą┤ą╗ąĖąĮąĮčŗąĄ ąĖąĮč鹥čĆą▓ą░ą╗čŗ (long alarm) ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠą▒čĆą░ą▒ąŠčéą░ąĮčŗ ą┐ąŠ čćą░čüčéčÅą╝.

ąöąĖą░ą│čĆą░ą╝ą╝ą░ ą▓čŗčłąĄ ąĖą╗ą╗čÄčüčéčĆąĖčĆčāąĄčé ą┤ą╗ąĖąĮąĮčŗą╣ ąĖąĮč鹥čĆą▓ą░ą╗ ą▓čĆąĄą╝ąĄąĮąĖ (Alarm A) ąĖ ą║ąŠčĆąŠčéą║ąĖąĄ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖąĄ ąĖąĮč鹥čĆą▓ą░ą╗čŗ (ą¤ąĄčĆąĖąŠą┤ Alarm B), ą│ą┤ąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĖąĮč鹥čĆą▓ą░ą╗ą░ ą▓čĆąĄą╝ąĄąĮąĖ A > ą┐čĆąĄą┤ąĄą╗čīąĮąŠą│ąŠ ąĖąĮč鹥čĆą▓ą░ą╗ą░ ą▓čĆąĄą╝ąĄąĮąĖ čéą░ą╣ą╝ąĄčĆą░ (ą┤ąĖą░ą┐ą░ąĘąŠąĮ čüč湥čéą░) > ąĘąĮą░č湥ąĮąĖčÅ ąĖąĮč鹥čĆą▓ą░ą╗ą░ ą▓čĆąĄą╝ąĄąĮąĖ B. ąŚąĮą░č湥ąĮąĖčÅ t0 .. t8 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé ąĘąĮą░č湥ąĮąĖčÅą╝ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąĖą┤čāčēąĖčģ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ą▓čŗąĘąŠą▓ąŠą▓ setTimer. t1 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮčŗą╣ ą▓čŗąĘąŠą▓ TimeDispatch, čćč鹊 ą┤ąĄą╗ą░ąĄčé č乊čĆą╝ąĖčĆčāąĄą╝čŗą╣ ąĖąĮč鹥čĆą▓ą░ą╗ ą┤ąŠą╗čīčłąĄ, č湥ą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮ čüč湥čéą░ čéą░ą╣ą╝ąĄčĆą░. ąØą░ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĖ ą┤ą╗ąĖąĮąĮąŠą│ąŠ ąĖąĮč鹥čĆą▓ą░ą╗ą░ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖąĖ t1 ą▓čŗąĘąŠą▓ TimeDispatch ąĮąĄ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą▓čŗąĘąŠą▓čā callback-čäčāąĮą║čåąĖąĖ, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÄ alarm.

ąÜąŠą╝ą┐ąĖą╗čÅčåąĖčÅ ąĖ ąĖąĮčüčéą░ą╗ą╗čÅčåąĖčÅ. ąÆčŗąĘąŠą▓ąĖč鹥 ./conigure -help čćč鹊ą▒čŗ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī ą┤ąŠčüčéčāą┐ąĮčŗąĄ ąŠą┐čåąĖąĖ ą▓čĆąĄą╝ąĄąĮąĖ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ. ą¤ąŠčüą╗ąĄ ąĘą░ą┐čāčüą║ą░ ą║ąŠą╝ą░ąĮą┤čŗ ./conigure čü ąŠą┐čåąĖčÅą╝ąĖ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ, ąŠčéąĮąŠčüčÅčēąĖą╝ąĖčüčÅ ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ ą┐ą╗ą░čéč乊čĆą╝ąĄ, ą┐čĆąŠčüč鹊 ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ą║ąŠą╝ą░ąĮą┤čā make.
./configure [čüą┐ąĖčüąŠą║ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗčģ ąŠą┐čåąĖą╣]
make
make install
[ąŻąĘąĄą╗ CANopen ą┤ą╗čÅ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╣ Linux]
./configure --timers=unix
ą¦č鹊ą▒čŗ ąĘą░ą┐čāčüčéąĖčéčī čāąĘąĄą╗ CANopen ąĮą░ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ Linux, ąÆą░ą╝ ą┐ąŠčéčĆąĄą▒čāąĄčéčüčÅ:
1. ąĀą░ą▒ąŠčćąĖą╣ ą┤ąĖčüčéčĆąĖą▒čāčéąĖą▓ Linux.
2. ą×ą┤ąĖąĮ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ Peak system PC CAN, ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆ Peak Linux ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ ą▓ąĄčĆčüąĖąĖ.
[ąŻąĘąĄą╗ CANopen ą┤ą╗čÅ Real-Time Linux]
ąöą╗čÅ Linux Xenomai:
./configure --timers=xeno
ąöą╗čÅ Linux Rtai:
./configure --timers=rtai
ą¦č鹊ą▒čŗ ąĘą░ą┐čāčüčéąĖčéčī čāąĘąĄą╗ CANopen ąĮą░ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ PC ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ Linux, ąÆą░ą╝ ą┐ąŠąĮą░ą┤ąŠą▒čÅčéčüčÅ:
1. ąĀą░ą▒ąŠčćąĖą╣ ą┤ąĖčüčéčĆąĖą▒čāčéąĖą▓ Linux čü čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ą┐ą░čéč湥ą╝ XENOMAI (2.1 ąĖą╗ąĖ ą▒ąŠą╗ąĄąĄ ąĮąŠą▓čŗą╝) ąĖą╗ąĖ RTAI (3.6).
2. ą×ą┤ąĖąĮ ąĖą╗ąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ Peak system PC CAN, ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆ Peak Real Time Linux ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ ą▓ąĄčĆčüąĖąĖ.
[ąŻąĘąĄą╗ CANopen ąĮą░ Linux, čĆą░ą▒ąŠčéą░čÄčēąĖą╣ ąĮą░ čāčĆąŠą▓ąĮąĄ čÅą┤čĆą░]
ą¦č鹊ą▒čŗ ąĘą░ą┐čāčüčéąĖčéčī čāąĘąĄą╗ CANopen ąĮą░ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ PC ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ Linux, čĆą░ą▒ąŠčéą░čÄčēąĖą╣ ą▓ kernel space, ąÆą░ą╝ ą┐ąŠąĮą░ą┤ąŠą▒čÅčéčüčÅ:
1. ąĀą░ą▒ąŠčćąĖą╣ ą┤ąĖčüčéčĆąĖą▒čāčéąĖą▓ Linux, čüąŠą▒čĆą░ąĮąĮčŗą╣ ąĖąĘ 2.6.x.x kernel sources.
2. ąöčĆą░ą╣ą▓ąĄčĆ ą║ą░čĆčéčŗ CAN, čüąŠą▓ą╝ąĄčüčéąĖą╝čŗą╣ čü CanFestival.
[ąŻčüčéčĆąŠą╣čüčéą▓ą░ CAN]
ąØą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ CAN ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēą░čÅ ąŠą┐čåąĖčÅ čüą║čĆąĖą┐čéą░ conigure:
Peak systems
./configure --can=peak_linux
ąśąĮč鹥čĆč乥ą╣čü PeakSystems CAN ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ ą║ą░ą║ ąĖąĮč鹥čĆč乥ą╣čü CAN ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ąĄčüą╗ąĖ ą▓ čüąĖčüč鹥ą╝ąĄ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ libpcan. ąŚą░ą│čĆčāąĘąĖč鹥 ą┤čĆą░ą╣ą▓ąĄčĆ čü čüą░ą╣čéą░ http://www.peak-system.com/linux, ąĖ čüą╗ąĄą┤čāą╣č鹥 ąĖąĮčüčéčĆčāą║čåąĖčÅą╝ ą┐ąŠ čāčüčéą░ąĮąŠą▓ą║ąĄ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą▓ ąÆą░čłąĄą╣ čüąĖčüč鹥ą╝ąĄ.
Socket-Can (http://socketcan.berlios.de)
Serial
ąöčĆą░ą╣ą▓ąĄčĆ CAN serial čĆąĄą░ą╗ąĖąĘčāąĄčé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ 1:1 ą╝ąĄąČą┤čā 2 čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ CAN. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąÆčŗ ą╝ąŠąČąĄč鹥 čüąŠąĄą┤ąĖąĮąĖčéčī 2 ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ CANFestival č湥čĆąĄąĘ ą║ą░ą▒ąĄą╗čī NULL modem.
ąóą░ą║ąČąĄ čü čŹčéąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ ą┐ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čģą░ą▒, čü ą┐ąŠą╝ąŠčēčīčÄ ą║ąŠč鹊čĆąŠą│ąŠ ą╝ąŠąČąĮąŠ čüąŠąĄą┤ąĖąĮąĖčéčī ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ ą┤ąŠ 16 ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ CANFestival, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ąĮą░ ąŠą┤ąĮąŠą╝ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ PC, čü ąŠą┐čåąĖąŠąĮą░ą╗čīąĮčŗą╝ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄą╝ čü ą┤čĆčāą│ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ CAN. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┤čĆą░ą╣ą▓ąĄčĆ serial. ąŁč鹊čé čģą░ą▒ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ptys (pseudo ttys), ą┤ąŠčüčéčāą┐ąĮčŗą╣ ąĮą░ čüąĖčüč鹥ą╝ą░čģ *nix.
LinCan
ąÆąĖčĆčéčāą░ą╗čīąĮčŗąĄ ąĖąĮč鹥čĆč乥ą╣čüčŗ CAN (ą┤ą╗čÅ č鹥čüčéą░/ąŠčéą╗ą░ą┤ą║ąĖ)
./configure --can=virtual
ąĖą╗ąĖ, ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą▓ kernel space:
./configure --can=kernel_virtual
ąÆąĖčĆčéčāą░ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü CAN ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą║ą░ąĮą░ą╗čŗ Unix (pipes) ą┤ą╗čÅ čŹą╝čāą╗čÅčåąĖąĖ ą▓ąĖčĆčéčāą░ą╗čīąĮąŠą╣ čüąĄčéąĖ CAN. ąÜą░ąČą┤ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ, ą▓čŗą┤ą░ąĮąĮąŠąĄ ąĖąĘ čāąĘą╗ą░, ą┐ąŠą▓č鹊čĆčÅąĄčéčüčÅ ą┤ą╗čÅ ą▓čüąĄčģ ą┤čĆčāą│ąĖčģ čāąĘą╗ąŠą▓. ąĪąĄą╣čćą░čü čŹč鹊 čäčāąĮą║čåąĖąŠąĮąĖčĆčāąĄčé č鹊ą╗čīą║ąŠ čü čāąĘą╗ą░ą╝ąĖ, čĆą░ą▒ąŠčéą░čÄčēąĖą╝ąĖ ą▓ ąŠą┤ąĮąŠą╝ ą┐čĆąŠčåąĄčüčüąĄ, ąĖ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ čĆą░ą▒ąŠčéą░ ą▓ čüąĖčüč鹥ą╝ą░čģ Xenomai ąĖą╗ąĖ RTAI.
VScom
ą¤ąŠčüą╗ąĄ ą▓čŗą┤ą░čćąĖ čŹč鹊ą╣ ą║ąŠą╝ą░ąĮą┤čŗ ą░čĆčģąĖą▓ VSCAN API ą▒čāą┤ąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĘą░ą│čĆčāąČąĄąĮ ąĖ čĆą░čüą┐ą░ą║ąŠą▓ą░ąĮ (čéčĆąĄą▒čāąĄčéčüčÅ unzip). ąĪą┐ąĖčüąŠą║ ą┤ąŠčüčéčāą┐ąĮčŗčģ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ ą░ą┤ą░ą┐č鹥čĆąŠą▓ čüą╝. ąĮą░ čüą░ą╣č鹥 www.vscom.de.
[ąĪą╗čāąČą▒čŗ LSS]
Canfestival ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čüą╗čāąČą▒čŗ LSS, ąĮąŠ ąŠąĮąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮčŗ ąĮą░ čŹčéą░ą┐ąĄ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ, čü ą┐ąŠčüą╗ąĄą┤čāčÄčēąĄą╣ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĄą╣.
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮą░ čüą╗čāąČą▒ą░ FastScan LSS.
./configure --enable-lss --enable-lss-fs
[ąÜąŠą┤, čĆą░ą▒ąŠčéą░čÄčēąĖą╣ ą▓ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (User space)]
ąŻčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ ą┐ą░ą║ąĄčé CanFestival ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐čĆąĖą╝ąĄčĆ /example/TestMasterSlave.
TestMasterSlave. ąæąĖą▒ą╗ąĖąŠč鹥ą║ąŠą╣ ą┤čĆą░ą╣ą▓ąĄčĆą░ CAN čÅą▓ą╗čÅąĄčéčüčÅ libcanfestival_can_virtual.so., ą║ąŠč鹊čĆą░čÅ ą▒čāą┤ąĄčé ą┐čĆąŠčüč鹊 ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī čüąŠąŠą▒čēąĄąĮąĖčÅ CAN č湥čĆąĄąĘ ą║ą░ąĮą░ą╗čŗ Unix ą╝ąĄąČą┤čā čāąĘą╗ą░ą╝ąĖ Master ąĖ Slave.
ąÆčŗ čéą░ą║ąČąĄ ą╝ąŠąČąĄč鹥 čāą║ą░ąĘą░čéčī ą┤čĆčāą│ąŠą╣ ąĖąĮč鹥čĆč乥ą╣čü CAN ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┐ąŠčĆčéčŗ CAN. ąöčĆčāą│ąŠą╣ ą┐čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąĖąĮč鹥čĆč乥ą╣čü Peak dual PCMCIA (ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ąĖ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ čü ąŠą┐čåąĖąĄą╣ --can=peak):
TestMasterSlave -l libcanfestival_can_peak.so -s 40 -m 41
ąĢčüą╗ąĖ čüą╗čāąČą▒čŗ LSS čĆą░ąĘčĆąĄčłąĄąĮčŗ, č鹊 čéą░ą║ąČąĄ ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┐čĆąĖą╝ąĄčĆ ą▓ /example/TestMasterSlaveLSS. ąŁč鹊 čĆą░ą▒ąŠčéą░ąĄčé čéą░ą║ ąČąĄ, ą║ą░ą║ ąĖ TestMasterSlave, ą║čĆąŠą╝ąĄ čäą░ą║čéą░, čćč鹊 ąĘą┤ąĄčüčī 2 čāąĘą╗ą░ ą▒ąĄąĘ ą┤ąŠą┐čāčüčéąĖą╝čŗčģ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ nodeID, čćč鹊ą▒čŗ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖąĄ čāąĘą╗ąŠą▓ ą╝ąŠą│ą╗ąŠ ą▒čŗčéčī ąĮą░čüčéčĆąŠąĄąĮąŠ čüą╗čāąČą▒ą░ą╝ąĖ LSS. ąĢčüą╗ąĖ ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ čĆą░ąĘčĆąĄčłąĄąĮą░ čüą╗čāąČą▒ą░ FastScan, č鹊 čŹč鹊čé ą┐čĆąĖą╝ąĄčĆ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĄčæ.
[ąÜąŠą┤, čĆą░ą▒ąŠčéą░čÄčēąĖą╣ ą▓ čĆąĄąČąĖą╝ąĄ čÅą┤čĆą░ (Kernel space)]
example/kerneltest. ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ą▒ą░ąĘąĖčĆčāąĄčéčüčÅ ąĮą░ TestMasterSlave, ąĖ ąĖą╝ąĄąĄčé č鹊čé ąČąĄ čäčāąĮą║čåąĖąŠąĮą░ą╗. ąŚą┤ąĄčüčī čéą░ą║ąČąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆ CAN. ą¤ąŠčüą╗ąĄ čāčüą┐ąĄčłąĮąŠą╣ ąĖąĮčüčéą░ą╗ą╗čÅčåąĖąĖ ąÆčŗ ą╝ąŠąČąĄč鹥 ą▓čüčéą░ą▓ąĖčéčī ą╝ąŠą┤čāą╗čī, ąĄčüą╗ąĖ ą▓ą▓ąĄą┤ąĄč鹥 ą║ąŠą╝ą░ąĮą┤čā:
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą╝ąŠą┤čāą╗ąĄą╝ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ č湥čĆąĄąĘ ą┐čĆąŠčüčéčāčÄ ą║ąŠąĮčüąŠą╗čī 'canf_ktest_console' ą║ąŠč鹊čĆą░čÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░/ąŠčüčéą░ąĮąŠą▓ą║ąĖ ąŠčéą┐čĆą░ą▓ą║ąĖ ą┤ą░ąĮąĮčŗčģ.
[ą”ąĄą╗ąĄą▓čŗąĄ čüąĖčüč鹥ą╝čŗ Windows]
ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ CanFestival ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮą░ ąĖ ąĘą░ą┐čāčēąĄąĮą░ ąĮą░ ą┐ą╗ą░čéč乊čĆą╝ąĄ Windows. ąöą╗čÅ čŹč鹊ą│ąŠ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ą░ą║ čüčĆąĄą┤čā ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ąŠą┤ą░ Cygwin, čéą░ą║ ąĖ čéčĆą░ą┤ąĖčåąĖąŠąĮąĮčāčÄ win32.
ąÜą░ą║ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčī Object Dictionary Editor GUI, čüą╝. čĆą░ąĘą┤ąĄą╗ "ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ Object Dictionary Editor GUI".
Cygwin ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąŠ čüą╗ąĄą┤čāčÄčēąĖą╝ąĖ ą┐ą░ą║ąĄčéą░ą╝ąĖ:
1. gcc
2. unzip
3. wget
4. make
ąÆ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ č鹊ą╗čīą║ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ CAN ą║ąŠą╝ą┐ą░ąĮąĖąĖ PeakSystems čü ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąŠą╣ PcanLight. ą¤ąŠčŹč鹊ą╝čā ą║čĆąŠą╝ąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ Cygwin ą┐ąŠčéčĆąĄą▒čāąĄčéčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ Peak CAN. ąŚą░ą│čĆčāąĘąĖč鹥 ą┤čĆą░ą╣ą▓ąĄčĆ čü čüą░ą╣čéą░ http://www.peak-system.com/themen/download_gb.html ąĖ čüą╗ąĄą┤čāą╣č鹥 ąĖąĮčüčéčĆčāą║čåąĖčÅą╝ ą┐ąŠ čāčüčéą░ąĮąŠą▓ą║ąĄ ąĮą░ ąÆą░čłąĄą╣ čüąĖčüč鹥ą╝ąĄ.
[ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ąĖ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÅ Cygwin]
ą×čéą║čĆąŠą╣č鹥 č鹥čĆą╝ąĖąĮą░ą╗ Cygwin ąĖ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 čüą╗ąĄą┤čāčÄčēąĖąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ:
a) ą×ą┤ąĖąĮ čāąĘąĄą╗ čü PcanLight ąĖ ą░ą┤ą░ą┐č鹥čĆąŠą╝ Peak CAN-USB adapter. ąŚą░ą│čĆčāąĘąĖč鹥 zip-čäą░ą╣ą╗ PCAN-Light ą┤ą╗čÅ ąÆą░čłąĄą│ąŠ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖčÅ:
wget http://www.peak-system.com/files/usb.zip
ąĀą░čüą┐ą░ą║čāą╣č鹥 čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čŹč鹊ą│ąŠ ąĘą░ą│čĆčāąČąĄąĮąĮąŠą│ąŠ ą░čĆčģąĖą▓ą░ ą▓ ą┤ąŠą╝ą░čłąĮąĖą╣ ą║ą░čéą░ą╗ąŠą│ (cygwin home), čŹč鹊 čüąŠąĘą┤ą░čüčé ą┤ąĖčĆąĄą║č鹊čĆąĖčÄ Disk:
ąĪą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 CanFestival3, ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖą▓ ą┐čāčéčī ąĮą░ ąČąĄą╗ą░ąĄą╝čāčÄ čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ PcanLight:
cd CanFestival -3
export PCAN_INCLUDE=~/Disk/PCAN-Light/Api/
export PCAN_HEADER=Pcan_usb.h
export PCAN_LIB=~/Disk/PCAN-Light/Lib/Visual\ C++/Pcan_usb.lib
./configure --can=peak_win32
make
ą¦č鹊ą▒čŗ ą┐čĆąŠą▓ąĄčüčéąĖ č鹥čüčé, čā ąÆą░čü ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┤čĆčāą│ąŠą╣ čāąĘąĄą╗ CanFestival, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╣ ą║ą░ą▒ąĄą╗ąĄą╝ CAN.
cp ~/Disk/PCAN-Light/Pcan_usb.dll .
./examples/TestMasterSlave/TestMasterSlave \
-l drivers/can\_peak\_win32/cygcan\_peak\_win32.dll \
-S 500K -M none
ąŚą░č鹥ą╝ ąĮą░ ą┤čĆčāą│ąŠą╝ čāąĘą╗ąĄ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ą║ąŠą╝ą░ąĮą┤čā:
./TestMasterSlave -l my_driver.so -S none -M 500K
ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą╝ąĄąČą┤čā čāąĘą╗ą░ą╝ąĖ master ąĖ slave ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąŠą▒ą╝ąĄąĮ čüąŠąŠą▒čēąĄąĮąĖčÅą╝ąĖ.
b) ąöą▓ą░ čāąĘą╗ą░ čü PcanLight ąĖ ą░ą┤ą░ą┐č鹥čĆąŠą╝ Peak dual PCMCIA-CAN. ąŚą░ą│čĆčāąĘąĖč鹥 zip-čäą░ą╣ą╗ PCAN-Light ą┤ą╗čÅ ąÆą░čłąĄą│ąŠ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖčÅ:
wget http://www.peak-system.com/files/pccard.zip
ąĀą░čüą┐ą░ą║čāą╣č鹥 čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čŹč鹊ą│ąŠ ąĘą░ą│čĆčāąČąĄąĮąĮąŠą│ąŠ ą░čĆčģąĖą▓ą░ ą▓ ą┤ąŠą╝ą░čłąĮąĖą╣ ą║ą░čéą░ą╗ąŠą│ (cygwin home), čŹč鹊 čüąŠąĘą┤ą░čüčé ą┤ąĖčĆąĄą║č鹊čĆąĖčÄ Disk:
ąĪą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 CanFestival3 čü ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĄą╝ ą┐čāčéąĖ ą┤ąŠ ąČąĄą╗ą░ąĄą╝ąŠą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ PcanLight:
export PCAN_INCLUDE=~/Disk/PCAN-Light/Api/
export PCAN_HEADER=Pcan_pcc.h
export PCAN_LIB=~/Disk/PCAN-Light/Lib/Visual\ C++/Pcan_pcc.lib
export PCAN2_HEADER=Pcan_2pcc.h
export PCAN2_LIB=~/Disk/PCAN-Light/Lib/Visual\ C++/Pcan_2pcc.lib
ą¦č鹊ą▒čŗ ą┐čĆąŠą▓ąĄčüčéąĖ č鹥čüčé, čüąŠąĄą┤ąĖąĮąĖč鹥 ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ ąŠą▒ą░ ą┐ąŠčĆčéą░ CAN ą║ą░čĆčéčŗ PCMCIA. ąØąĄ ąĘą░ą▒čāą┤čīč鹥 ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī č鹥čĆą╝ąĖąĮąĖčĆčāčÄčēąĖą╣ čĆąĄąĘąĖčüč鹊čĆ 120 ą×ą╝.
cp ~/Disk/PCAN-Light/Pcan_pcc.dll .
cp ~/Disk/PCAN-Light/Pcan_2pcc.dll .
./examples/TestMasterSlave/TestMasterSlave \
-l drivers/can_peak_win32/cygcan_peak_win32.dll
ą¤čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąŠą▒ą╝ąĄąĮ čüąŠąŠą▒čēąĄąĮąĖčÅą╝ąĖ ą╝ąĄąČą┤čā čāąĘą╗ą░ą╝ąĖ master ąĖ slave, ąŠą▒ą░ ą▓ąĮčāčéčĆąĖ ą┐čĆąŠčåąĄčüčüą░ TestMasterSlave.
ąÆąŠ ą▓čĆąĄą╝čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čéčĆąĄą▒čāąĄčéčüčÅ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮą░čÅ ąĖąĮčüčéą░ą╗ą╗čÅčåąĖčÅ Cygwin, čćč鹊ą▒čŗ čüąŠąĘą┤ą░čéčī čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖąĄ čäą░ą╣ą╗čŗ ąĘą░ą│ąŠą╗ąŠą▓ą║ąŠą▓ (config.h ąĖ cancfg.h). ąÜą░ą║ č鹊ą╗čīą║ąŠ čŹčéąĖ čäą░ą╣ą╗čŗ čüąŠąĘą┤ą░ąĮčŗ, ą▒ąŠą╗čīčłąĄ cygwin ąĮąĄ ąĮčāąČąĄąĮ.
ążą░ą╣ą╗čŗ ą┐čĆąŠąĄą║čéą░ ąĖ čĆąĄčłąĄąĮąĖčÅ (solution) ą▒čŗą╗ąĖ čüąŠąĘą┤ą░ąĮčŗ ąĖ ą┐čĆąŠč鹥čüčéąĖčĆąŠą▓ą░ąĮčŗ ą▓ čüčĆąĄą┤ąĄ Visual Studio Express 2005. ąŻą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 čā ąÆą░čü čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ Microsoft Platform SDK, ą║ą░ą║ čŹč鹊 čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą┐ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ čāčüčéą░ąĮąŠą▓ą║ąĖ Visual Studio.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čü ą┐ąŠą╝ąŠčēčīčÄ cygwin. ąĪą╗ąĄą┤čāą╣č鹥 ąĖąĮčüčéčĆčāą║čåąĖčÅą╝ "ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ąĖ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÅ Cygwin" ąĖąĘ ą▓čĆąĄąĘą║ąĖ "ąĪčĆąĄą┤ą░ CYGWIN", ąĮąŠ ąĮąĄ ą▓čŗąĘčŗą▓ą░ą╣č鹥 make ąĖ ąĮąĄ ą┤ąĄą╗ą░ą╣č鹥 č鹥čüčéčŗ, ą┐čĆąŠčüč鹊 ą▓čŗą┐ąŠą╗ąĮąĖč鹥 čłą░ą│ąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ. ąŁčéąĖ čłą░ą│ąĖ čüąŠąĘą┤ą░ą┤čāčé ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗąĄ čäą░ą╣ą╗čŗ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ąÆą░čłąĖą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┤ą╗čÅ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠą╣ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ CAN.
ąÜąŠą╝ą┐ąĖą╗čÅčåąĖčÅ ą▓ Visual Studio. ąÆčŗ ą╝ąŠąČąĄč鹥 ą╗ąĖą▒ąŠ ąĘą░ą│čĆčāąĘąĖčéčī ąŠčéą┤ąĄą╗čīąĮčŗą╣ čäą░ą╣ą╗ ą┐čĆąŠąĄą║čéą░ "*.vcproj", ą╗ąĖą▒ąŠ ąĘą░ą│čĆčāąĘąĖčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ ą┐čĆąŠąĄą║čé čĆąĄčłąĄąĮąĖčÅ CanFestival-3.vc9.sln (ą┤ą╗čÅ Visual Studio 2009) ąĖą╗ąĖ CanFestival-3.vc10.sln (ą┤ą╗čÅ Visual Studio 2010). ąĪąĮą░čćą░ą╗ą░ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 čüą▒ąŠčĆą║čā ą┐čĆąŠąĄą║čéą░ CanFestival-3.
1>------ ą¤ąĄčĆąĄčüčéčĆąŠąĄąĮąĖąĄ ą▓čüąĄčģ čäą░ą╣ą╗ąŠą▓ ąĮą░čćą░č鹊: ą┐čĆąŠąĄą║čé: CanFestival-3, ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ: Debug Win32 ------
1>ąĪą▒ąŠčĆą║ą░ ąĮą░čćą░čéą░ 31.05.2017 15:16:01.
1>_PrepareForClean:
1> ążą░ą╣ą╗ "Debug\CanFestival-3.lastbuildstate" čāą┤ą░ą╗čÅąĄčéčüčÅ.
1>InitializeBuildStatus:
1> ąĪąŠąĘą┤ą░ąĮąĖąĄ "Debug\CanFestival-3.unsuccessfulbuild", čéą░ą║ ą║ą░ą║ ą▒čŗą╗ąŠ ąĘą░ą┤ą░ąĮąŠ "AlwaysCreate".
1>ClCompile:
1> win32.c
1> timers_win32.c
1> timer.c
1> sync.c
1> states.c
1> sdo.c
1> pdo.c
1> objacces.c
1> nmtSlave.c
1> nmtMaster.c
1> lss.c
1> lifegrd.c
1>c:\asm\canfestival-3-8bfe0ac00cdb\src\lifegrd.c(231): warning C4550: ą▓čŗčćąĖčüą╗ąĄąĮąĖąĄ ą▓čŗčĆą░ąČąĄąĮąĖčÅ
ą┤ą░ąĄčé čäčāąĮą║čåąĖčÄ, ą▓ ą║ąŠč鹊čĆąŠą╣ ąŠčéčüčāčéčüčéą▓čāąĄčé čüą┐ąĖčüąŠą║ ą░čĆą│čāą╝ąĄąĮč鹊ą▓
1> emcy.c
1> dcf.c
1>c:\asm\canfestival-3-8bfe0ac00cdb\src\dcf.c(106): warning C4101: node: ąĮąĄąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĮą░čÅ
ą╗ąŠą║ą░ą╗čīąĮą░čÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ
1> ąĪąŠąĘą┤ą░ąĮąĖąĄ ą║ąŠą┤ą░...
1>Link:
1> ąĪąŠąĘą┤ą░ąĄčéčüčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ Debug\CanFestival-3.lib ąĖ ąŠą▒čŖąĄą║čé Debug\CanFestival-3.exp
1> CanFestival-3.vc10.vcxproj -> C:\asm\CanFestival-3-8bfe0ac00cdb\Debug\CanFestival-3.dll
1>FinalizeBuildStatus:
1> ążą░ą╣ą╗ "Debug\CanFestival-3.unsuccessfulbuild" čāą┤ą░ą╗čÅąĄčéčüčÅ.
1> ą×ą▒čĆą░čēąĄąĮąĖąĄ ą║ "Debug\CanFestival-3.lastbuildstate".
1>
1>ą¤ąŠčüčéčĆąŠąĄąĮąĖąĄ čāčüą┐ąĄčłąĮąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąŠ.
1>
1>ąŚą░čéčĆą░č湥ąĮąĮąŠąĄ ą▓čĆąĄą╝čÅ: 00:00:04.54
========== ą¤ąĄčĆąĄčüčéčĆąŠąĄąĮąĖąĄ ą▓čüąĄčģ: čāčüą┐ąĄčłąĮąŠ: 1, čü ąŠčłąĖą▒ą║ą░ą╝ąĖ: 0, ą┐čĆąŠą┐čāčēąĄąĮąŠ: 0 ==========
a) PcanLight ąĖ ą┐čĆąŠąĄą║čé can_peak_win32 project. ąÆčŗą▒čĆą░ąĮąĮčŗąĄ čäą░ą╣ą╗čŗ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ Pcan_xxx.lib ąĖ ąĖąĮąŠą│ą┤ą░ Pcan_2xxx.lib ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┤ąŠą▒ą░ą▓ą╗ąĄąĮčŗ ą▓ ą┐čĆąŠąĄą║čé can_peak_win32 ą┐ąĄčĆąĄą┤ čüą▒ąŠčĆą║ąŠą╣ DLL.
ąóąĄčüčéąĖčĆąŠą▓ą░ąĮąĖąĄ: čüą║ąŠą┐ąĖčĆčāą╣č鹥 ąĖąĮąŠą│ą┤ą░ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ (ąĮą░ą┐čĆąĖą╝ąĄčĆ Pcan_Nxxx.lib) ą▓ ą┤ąĖčĆąĄą║č鹊čĆąĖčÄ Release ąĖą╗ąĖ Debug, ąĖ ąĘą░ą┐čāčüčéąĖč鹥 ą┐čĆąŠą│čĆą░ą╝ą╝čā č鹥čüčéą░:
TestMasterSlave.exe -l can_peak_win32.dll
ąŚą░ą│čĆčāąĘąĖč鹥 MSYS ą┐ąŠ čüčüčŗą╗ą║ąĄ from : http://sourceforge.net/project/showfiles.php?group_id=2435:
1. MSYS-1.0.10.exe.
2. MinGW-5.1.3.exe.
3. mingwPORT (ą▓ ą║ąŠč鹊čĆąŠą╝ čüąŠą┤ąĄčƹȹĖčéčüčÅ wget-1.9.1).
ąŚą░ą│čĆčāąĘąĖč鹥 ą┤čĆą░ą╣ą▓ąĄčĆ ą┐ąŠ čüčüčŗą╗ą║ąĄ http://www.peak-system.com/themen/download_gb.html ąĖ čüą╗ąĄą┤čāą╣č鹥 ąĖąĮčüčéčĆčāą║čåąĖčÅą╝ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą▓ ąÆą░čłąĄą╣ čüąĖčüč鹥ą╝ąĄ. ąóčĆąĄą▒čāąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą║ą░ MSYS, MingW ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą┤ą╗čÅ ąÆą░čłąĄą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ Peak CAN. ą×čéą║čĆąŠą╣č鹥 č鹥čĆą╝ąĖąĮą░ą╗ MSYS, ąĖ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 čüą╗ąĄą┤čāčÄčēąĖąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ:
ŌĆó ąĀą░čüą┐ą░ą║čāą╣č鹥 wget-1.9.1-mingwPORT.tar.bz2.
ŌĆó ąĪą║ąŠą┐ąĖčĆčāą╣č鹥 wget.exe ą▓ c:\msys\1.0\bin\.
ŌĆó ąŚą░ą┐čāčüčéąĖč鹥 MSYS, ąĖ ą┐čĆąŠą▓ąĄčĆčīč鹥, čćč鹊 čäą░ą╣ą╗ /etc/fstab čüąŠą┤ąĄčƹȹĖčé čüčéčĆąŠą║čā c:/MinGW /mingw.
ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ąĖ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÅ MSYS. ąśąĮčüčéčĆčāą║čåąĖąĖ ą┤ą╗čÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą┐ąŠčćčéąĖ č鹥 ąČąĄ čüą░ą╝čŗąĄ, ą║ą░ą║ ą▒čŗą╗ąĖ ą┤ą╗čÅ CYGWIN.
a) ą×ą┤ąĖąĮ čāąĘąĄą╗ čü PcanLight ąĖ ą░ą┤ą░ą┐č鹥čĆąŠą╝ Peak CAN-USB. ąŚą░ą│čĆčāąĘąĖč鹥 zip-čäą░ą╣ą╗ PCAN-Light ą┤ą╗čÅ ąÆą░čłąĄą╣ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ:
wget http://www.peak-system.com/files/usb.zip
ąĀą░čüą┐ą░ą║čāą╣č鹥 ąĄą│ąŠ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą▓ ą┤ąŠą╝ą░čłąĮąĖą╣ ą║ą░čéą░ą╗ąŠą│ (MSYS home), čŹč鹊 čüąŠąĘą┤ą░čüčé ą┤ąĖčĆąĄą║č鹊čĆąĖčÄ Disk:
ąĪą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 CanFestival3, ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖą▓ ą┐čāčéčī ą┤ąŠ ąĮčāąČąĮąŠą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ PcanLight:
cd CanFestival-3
export PCAN_INCLUDE=~/Disk/PCAN-Light/Api/
export PCAN_HEADER=Pcan_usb.h
export PCAN_LIB=~/Disk/PCAN-Light/Lib/Visual\ C++/Pcan_usb.lib
./configure --can=peak_win32
make
ąöą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ čā ąÆą░čü ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┤čĆčāą│ąŠą╣ čāąĘąĄą╗ CanFestival, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╣ ą║ą░ą▒ąĄą╗ąĄą╝ CAN.
cp ~/Disk/PCAN-Light/Pcan_usb.dll .
./examples/TestMasterSlave/TestMasterSlave \
-l drivers/can_peak_win32/cygcan_peak_win32.dll \
-S 500K -M none
ąŚą░č鹥ą╝ ąĮą░ ą┤čĆčāą│ąŠą╝ čāąĘą╗ąĄ ą▓čŗą┐ąŠą╗ąĮąĖč鹥:
./TestMasterSlave -l my_driver.so -S none -M 500K -m 0
ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą╝ąĄąČą┤čā čāąĘą╗ą░ą╝ąĖ master ąĖ slave ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąŠą▒ą╝ąĄąĮ čüąŠąŠą▒čēąĄąĮąĖčÅą╝ąĖ.
b) ąöą▓ą░ čāąĘą╗ą░ čü PcanLight ąĖ ą░ą┤ą░ą┐č鹥čĆąŠą╝ Peak dual PCMCIA-CAN. ąŚą░ą│čĆčāąĘąĖč鹥 zip-čäą░ą╣ą╗ PCAN-Light ą┤ą╗čÅ ąÆą░čłąĄą│ąŠ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖčÅ:
wget http://www.peak-system.com/files/pccard.zip
ąĀą░čüą┐ą░ą║čāą╣č鹥 čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čŹč鹊ą│ąŠ ąĘą░ą│čĆčāąČąĄąĮąĮąŠą│ąŠ ą░čĆčģąĖą▓ą░ ą▓ ą┤ąŠą╝ą░čłąĮąĖą╣ ą║ą░čéą░ą╗ąŠą│ (MSYS home), čŹč鹊 čüąŠąĘą┤ą░čüčé ą┤ąĖčĆąĄą║č鹊čĆąĖčÄ Disk:
ąĪą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 CanFestival3 čü ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĄą╝ ą┐čāčéąĖ ą┤ąŠ ąĮčāąČąĮąŠą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ PcanLight:
export PCAN_INCLUDE=~/Disk/PCAN-Light/Api/
export PCAN_HEADER=Pcan_pcc.h
export PCAN_LIB=~/Disk/PCAN-Light/Lib/Visual\ C++/Pcan_pcc.lib
export PCAN2_HEADER=Pcan_2pcc.h
export PCAN2_LIB=~/Disk/PCAN-Light/Lib/Visual\ C++/Pcan_2pcc.lib
ą¦č鹊ą▒čŗ ą┐čĆąŠą▓ąĄčüčéąĖ č鹥čüčé, čüąŠąĄą┤ąĖąĮąĖč鹥 ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ ąŠą▒ą░ ą┐ąŠčĆčéą░ CAN ą║ą░čĆčéčŗ PCMCIA. ąØąĄ ąĘą░ą▒čāą┤čīč鹥 ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī č鹥čĆą╝ąĖąĮąĖčĆčāčÄčēąĖą╣ čĆąĄąĘąĖčüč鹊čĆ 120 ą×ą╝.
cp ~/Disk/PCAN-Light/Pcan_pcc.dll ~.
cp ~/Disk/PCAN-Light/Pcan_2pcc.dll ~.
./examples/TestMasterSlave/TestMasterSlave \
-l drivers/can\_peak\_win32/cygcan\_peak\_win32.dll -m 0 -s 1
ą¤čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąŠą▒ą╝ąĄąĮ čüąŠąŠą▒čēąĄąĮąĖčÅą╝ąĖ ą╝ąĄąČą┤čā čāąĘą╗ą░ą╝ąĖ master ąĖ slave, ąŠą▒ą░ ą▓ąĮčāčéčĆąĖ ą┐čĆąŠčåąĄčüčüą░ TestMasterSlave.
ąŁčéąĖ ą┐čĆąĖą╝ąĄčĆčŗ č鹥čüčéąĖčĆąŠą▓ą░ą╗ąĖčüčī ąĮą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ MC9S12DG255, čüą╝ąŠąĮčéąĖčĆąŠą▓ą░ąĮąĮąŠą╝ ąĮą░ ą┐ą╗ą░č鹥 Elektronikladen HCS12 T-board.
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ąĄčüčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čĆą░ąĘą╗ąĖčćąĖą╣ ą▓ ą╝ąŠą┤čāą╗ąĄ MSCAN ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ 68HC12 ąĖ HCS12. ąöą╗čÅ HC12 ąÆčŗ ą┤ąŠą╗ąČąĮčŗ ą░ą┤ą░ą┐čéąĖčĆąŠą▓ą░čéčī ą┤čĆą░ą╣ą▓ąĄčĆ, ą║ąŠč鹊čĆčŗą╣ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖą╗ąĖ ą┤ą╗čÅ HCS12. ą×ą┐ąĖčüą░ąĮąĖąĄ čĆą░ąĘą╗ąĖčćąĖą╣ MSCAN HC12/HCS12 čüą╝. ą░ą┐ąĮąŠčāčé AN2011/D ąŠčé Motorola.
ą×ą┐čåąĖčÅ configure:
ą¦č鹊ą▒čŗ ąĘą░ą┐čāčüčéąĖčéčī čāąĘąĄą╗ CANopen ąĮą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ Motorola MC9S12DP256, ąÆą░ą╝ ąĮčāąČąĮąŠ:
1. ąÜąŠą╝ą┐ąĖą╗čÅč鹊čĆ GNU gcc ą┤ą╗čÅ HC11, HC12, HCS12: m6811 -elf. ąŚą░ą│čĆčāąĘąĖč鹥 čĆąĄą╗ąĖąĘ 3.1 ą┐ąŠ čüčüčŗą╗ą║ąĄ http://m68hc11.serveftp.org/m68hc11_pkg_rpm.php.
2. ą¤ą╗ą░čéą░, ąĮą░ ą║ąŠč鹊čĆąŠą╣ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čŹč鹊čé čćąĖą┐. ąĀą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖ T-board ąŠčé Electronikladen.
3. ąÜą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 40 ą║ąĖą╗ąŠą▒ą░ą╣čé ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝.
4. ąśąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖą╣ ą┤ą╗čÅ ą┐čĆąŠčłąĖą▓ą║ąĖ ą┐ą░ą╝čÅčéąĖ (čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖ ą┤ąŠčĆąŠą│ąŠą╣ ąŠčéą╗ą░ą┤čćąĖą║ Lauterbach).
ąŚą░ą┐čāčüą║ čāąĘą╗ą░ HCS12. ąĪą║ąŠą╝ą┐ąĖą╗ąĖčĆčāą╣č鹥 Canfestival:
./configure --target=hcs12
ąÆąŠą╣ą┤ąĖč鹥 ą▓ ą┐ą░ą┐ą║čā ą┐čĆąĖą╝ąĄčĆą░ HCS12 ąĖ ąĘą░ą┐čāčüčéąĖč鹥 ą║ąŠą╝ą░ąĮą┤čā:
ą¤čĆąŠčłąĖą▓ą║ą░ ą┐ą░ą╝čÅčéąĖ. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 ą┤ą╗čÅ čŹč鹊ą│ąŠ č鹊, čćč鹊 ąÆą░ą╝ ą▒ąŠą╗čīčłąĄ ą┐ąŠą┤čģąŠą┤ąĖčé, ąĮą░ą┐čĆąĖą╝ąĄčĆ ąĘą░ą│čĆčāąĘčćąĖą║. ąĢčüą╗ąĖ čā ąÆą░čü ąĄčüčéčī debugger Lauterbach, č鹊 ą╝ąŠąČąĄč鹥 ąĘą░ą│čĆčāąĘąĖčéčī čäą░ą╣ą╗ bash: trace32_flash_programmer.cmm. ą×ąĮ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ąĘą░ą│čĆčāąĘąĖčé elf-čäą░ą╣ą╗.
ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ ą║ąŠąĮčüąŠą╗ąĖ RS232. ą¤ąŠą┤ą║ą╗čÄčćąĖč鹥 portS(TxD0) HCS12 ą║ ą║ąŠąĮčüąŠą╗ąĖ, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ąĮą░ 19200 ą▒ąŠą┤, 8N1, č湥čĆąĄąĘ čćąĖą┐ MAX232, čćč鹊ą▒čŗ ą┐čĆąĖą▓ąĄčüčéąĖ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĄ 菹╗ąĄą║čéčĆąĖč湥čüą║ąĖąĄ čāčĆąŠą▓ąĮąĖ čüąĖą│ąĮą░ą╗ąŠą▓. ąØą░ Linux ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čāčéąĖą╗ąĖčéčā minicom. ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮčüąŠą╗ąĖ ą┐ąŠą╗ąĄąĘąĮąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ čüąŠąŠą▒čēąĄąĮąĖą╣, ąĮąŠ čŹč鹊 ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ.
ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ čüąĄčéąĖ CAN. ą¤ąŠą┤ą║ą╗čÄčćąĖč鹥 ą┐ąŠčĆčé CAN0 (ą▓čŗą▓ąŠą┤čŗ PM0, PM1) ą║ čüąĄčéąĖ č湥čĆąĄąĘ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN. ąØą░ ą┐ą╗ą░č鹥 čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąŠą▓ ą▓ ą║ą░č湥čüčéą▓ąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗čüčÅ čćąĖą┐ PCA82C250. ąöą╗čÅ ąĘą░ą┐čāčüą║ą░ čāąĘą╗ą░ ąĮą░ąČą╝ąĖč鹥 ą║ąĮąŠą┐ą║čā čüą▒čĆąŠčüą░ ąĮą░ ąÆą░čłąĄą╣ ą┐ą╗ą░č鹥 HCS12.
[ą¤čĆąĖą╝ąĄčĆčŗ ąĖ č鹥čüčé-ą┐čĆąŠą│čĆą░ą╝ą╝čŗ]
ą¤ą░ą┐ą║ą░ examples čüąŠą┤ąĄčƹȹĖčé ąĮąĄą║ąŠč鹊čĆčŗąĄ č鹥čüč鹊ą▓čŗąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, ą║ąŠč鹊čĆčŗąĄ ąÆčŗ ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐čĆąĖą╝ąĄčĆąŠą▓ ą┤ą╗čÅ čüą▓ąŠąĖčģ čüąŠą▒čüčéą▓ąĄąĮąĮčŗčģ čĆą░ąĘčĆą░ą▒ąŠč鹊ą║.
ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čāąĘąĄą╗, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčī ąĮąĄą║ąŠč鹊čĆčŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, ą▓ą▓ąĄą┤ąĄąĮąĮčŗąĄ č湥čĆąĄąĘ stdin. ąĪ čŹčéąĖą╝ ą┐čĆąĖą╝ąĄčĆąŠą╝ ąÆčŗ ą╝ąŠąČąĄč鹥:
1. ą¤čĆąŠčüą║ą░ąĮąĖčĆąŠą▓ą░čéčī čüąĄčéčī (čüą▒čĆąŠčüąĖčéčī ą▓čüąĄ čāąĘą╗čŗ, ąĖ ąŠč鹊ą▒čĆą░ąĘąĖčéčī čüąŠąŠą▒čēąĄąĮąĖąĄ bootup čāąĘą╗ą░).
2. ąŚą░ą┐čāčüčéąĖčéčī (start) / ąŠčüčéą░ąĮąŠą▓ąĖčéčī (stop) / čüą▒čĆąŠčüąĖčéčī (reset) ą┤ą░ą╗čīąĮąĖą╣ čāąĘąĄą╗ čüąĄčéąĖ.
3. ą¤ąŠą╗čāčćąĖčéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ ą┤ą░ą╗čīąĮąĄą╝čā čāąĘą╗čā čüąĄčéąĖ.
4. ą¤čĆąŠčćąĖčéą░čéčī / ąĘą░ą┐ąĖčüą░čéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ 菹╗ąĄą╝ąĄąĮčé ą┤ą░ą╗čīąĮąĄą│ąŠ čāąĘą╗ą░ čüąĄčéąĖ.
ąŻąĘąĄą╗ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čāčēąĄąĮ ą║ą░ą║ master ąĖą╗ąĖ ą║ą░ą║ slave. ą×čéą╗ąĖčćąĖąĄ č鹊ą╗čīą║ąŠ ą▓ č鹊ą╝, čćč鹊 ą║ąŠą│ą┤ą░ ąĘą░ą┐čāčüą║ ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮ ą║ą░ą║ master, ą▓čüąĄ čāąĘą╗čŗ čüąĄčéąĖ čüą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ.
ą¤ąĄčĆą▓ąŠą╣ ą║ąŠą╝ą░ąĮą┤ąŠą╣ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą║ąŠą╝ą░ąĮą┤ą░ "load". ąöą╗čÅ ą┐ąŠą┤čüą║ą░ąĘą║ąĖ ą┐ąŠ ą║ąŠą╝ą░ąĮą┤ą░ą╝ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ą║ąŠą╝ą░ąĮą┤čā help, ąŠč鹊ą▒čĆą░ąĘąĖčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╣ 菹║čĆą░ąĮ:
****************************************************************************
* CANOpenShell *
* *
* ą×ąæą»ąŚąÉąóąĢąøą¼ąØąÉą» ąÜą×ą£ąÉąØąöąÉ (ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐ąĄčĆą▓ąŠą╣) *
* load#CanLibraryPath,channel,baudrate,nodeid,type (0:slave, 1:master) *
* *
* ąĪąĢąóą¼: (ąĄčüą╗ąĖ nodeid=0x00, č鹊 broadcast) *
* ssta#nodeid : ąĘą░ą┐čāčüą║ čāąĘą╗ą░ *
* ssto#nodeid : ąŠčüčéą░ąĮąŠą▓ą║ą░ čāąĘą╗ą░ *
* srst#nodeid : čüą▒čĆąŠčü čāąĘą╗ą░ *
* scan : čüą▒čĆąŠčü ą▓čüąĄčģ čāąĘą╗ąŠą▓ ąĖ ą┐ąĄčćą░čéčī čüąŠąŠą▒čēąĄąĮąĖčÅ, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠčłąĄą╗ bootup čāąĘą╗ą░ *
* wait#seconds : ąĘą░čüąĮčāčéčī ąĮą░ n čüąĄą║čāąĮą┤ *
* *
* SDO: (čĆą░ąĘą╝ąĄčĆ ą▓ ą▒ą░ą╣čéą░čģ) *
* info#nodeid *
* rsdo#nodeid,index,subindex : ą┐čĆąŠčćąĖčéą░čéčī sdo *
* ex : rsdo#42,1018,01 *
* wsdo#nodeid,index,subindex,size,data : ąĘą░ą┐ąĖčüą░čéčī sdo *
* ex : wsdo#42,6200,01,01,FF *
* *
* ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓čüąĄ čćąĖčüą╗ą░ čāą║ą░ąĘčŗą▓ą░čÄčéčüčÅ ą▓ hex *
* *
* help : ą▒čāą┤ąĄčé ąŠč鹊ą▒čĆą░ąČąĄąĮ čŹč鹊čé 菹║čĆą░ąĮ *
* quit : ą▓čŗčģąŠą┤ ąĖąĘ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ *
****************************************************************************
ą¤čĆąĖą╝ąĄčĆ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą╣ ą║ąŠą╝ą░ąĮą┤čŗ ąĘą░ą┐čāčüą║ą░ (ąĘą░ą┐čāčüą║ čāąĘą╗ą░ ą║ą░ą║ slave c ąĮąŠą╝ąĄčĆąŠą╝ čāąĘą╗ą░ nodeid 8, čüą║ąŠčĆąŠčüčéčī 125K ąĮą░ ą║ą░ąĮą░ą╗ąĄ 32):
./CANOpenShell load#libcanfestival_can_peak_linux.so,32,125K,8,0
ą¤čĆąĖą╝ąĄčĆ ą┐čĆąŠą┤ą▓ąĖąĮčāč鹊ą╣ ą║ąŠą╝ą░ąĮą┤čŗ:
./CANOpenShell load#libcanfestival_can_peak_linux.so,32,125K,8,1 \
help \
wait#5 \
wsdo#42,6200,01,01,FF
ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ąĘą░ą┐čāčüčéąĖčé čāąĘąĄą╗ ą▓ čĆąĄąČąĖą╝ąĄ master čü ąĮąŠą╝ąĄčĆąŠą╝ čāąĘą╗ą░ 8 ąĮą░ čüą║ąŠčĆąŠčüčéąĖ 125K ą║ą░ąĮą░ą╗ą░ 32, ąŠč鹊ą▒čĆą░ąĘąĖčé ą╝ąĄąĮčÄ ą┐ąŠą┤čüą║ą░ąĘą║ąĖ, ą┐ąŠą┤ąŠąČą┤ąĄčé 5 čüąĄą║čāąĮą┤ ą┤ą╗čÅ NMT bootup čāąĘą╗ą░, ąĖ ąĘą░ą┐ąĖčłąĄčé ąĘąĮą░č湥ąĮąĖąĄ FF ą┐ąŠ ąĖąĮą┤ąĄą║čüčā 6200, čüčāą▒ąĖąĮą┤ąĄą║čüčā 01 ą▓ ą┤ą░ą╗čīąĮąĖą╣ čāąĘąĄą╗ čüąĄčéąĖ čü ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝ 42.
ąŁč鹊 ą┐čĆąŠčüč鹊ą╣ ą┐čĆąĖą╝ąĄčĆ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ąĮą░ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ PC. ąĀąĄą░ą╗ąĖąĘčāąĄčé 2 čāąĘą╗ą░ CANopen ą▓ ąŠą┤ąĮąŠą╝ ąĖ č鹊ą╝ ąČąĄ ą┐čĆąŠčåąĄčüčüąĄ, master ąĖ slave. ą×ą▒ą░ čāąĘą╗ą░ ąŠčüčāčēąĄčüčéą▓ą╗čÅčÄčé ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖąĄ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝, ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ ąŠą▒ą╝ąĄąĮąĖą▓ą░čÅčüčī čüąŠąŠą▒čēąĄąĮąĖčÅą╝ąĖ NMT, SYNC, SDO ąĖ PDO. Master ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé ą│ąĄąĮąĄčĆą░č鹊čĆ čüąĄčĆą┤čåąĄą▒ąĖąĄąĮąĖą╣ (heartbeat producer) čü ąĖąĮč鹥čĆą▓ą░ą╗ąŠą╝ 1000 ą╝čü ą┤ą╗čÅ slave node-id 0x02 čü ą┐ąŠą╝ąŠčēčīčÄ ą║čĆą░čéą║ąŠą│ąŠ DCF.
**************************************************************
* TestMasterSlave *
* *
* A simple example for PC. It does implement 2 CanOpen *
* nodes in the same process. A master and a slave. Both *
* communicate together, exchanging periodically NMT, SYNC, *
* SDO and PDO. Master configure heartbeat producer time *
* at 1000 ms for slave node-id 0x02 by concise DCF. *
* *
* Usage: *
* ./TestMasterSlave [OPTIONS] *
* *
* OPTIONS: *
* -l : Can library ["libcanfestival_can_virtual.so"] *
* *
* Slave: *
* -s : bus name ["0"] *
* -S : 1M,500K,250K,125K,100K,50K,20K,10K,none(disable) *
* *
* Master: *
* -m : bus name ["1"] *
* -M : 1M,500K,250K,125K,100K,50K,20K,10K,none(disable) *
* *
**************************************************************
ąŚą░ą╝ąĄčćą░ąĮąĖčÅ ą┐ąŠ ą┐ąŠą▓ąŠą┤čā ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čüąŠą║čĆą░čēąĄąĮąĮąŠą│ąŠ DCF: ą▓ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ master ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé ą▓čĆąĄą╝čÅ 1000 ą╝čü heartbeat producer ą┤ą╗čÅ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāąĘą╗ą░ čü ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝ 0x02 ą┐ąŠ čüąŠą║čĆą░čēąĄąĮąĮąŠą╝čā DCF ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą┐čĆąŠčäąĖą╗ąĄą╝ DS-302. ąśąĮą┤ąĄą║čü 0x1F22, sub-ąĖąĮą┤ąĄą║čü 0x00 master OD čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą║ąŠą╗ąĖč湥čüčéą▓čā 菹╗ąĄą╝ąĄąĮč鹊ą▓. ą×ąĮąŠ čĆą░ą▓ąĮąŠ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╝čā ą▓ąŠąĘą╝ąŠąČąĮąŠą╝čā nodeId (127). Sub-ąĖąĮą┤ąĄą║čü čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ Node-ID čāčüčéčĆąŠą╣čüčéą▓ą░, ą║ąŠč鹊čĆąŠą╝čā ą┐čĆąĖąĮą░ą┤ą╗ąĄąČąĖčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ.
ąöą╗čÅ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖčÅ ą▒ąŠą╗čīčłąĄą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣ slave, ąĘąĮą░č湥ąĮąĖąĄ sub-ąĖąĮą┤ąĄą║čüą░ 0x02 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┤ą▓ąŠąĖčćąĮčŗą╝ ą┐ąŠč鹊ą║ąŠą╝ ą┤ą░ąĮąĮčŗčģ (little-endian) čüąŠ čüą╗ąĄą┤čāčÄčēąĄą╣ čüčéčĆčāą║čéčāčĆąŠą╣:
(UNS32) ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┐ąĖčüąĄą╣
(UNS16) ąĖąĮą┤ąĄą║čü ą┐ą░čĆą░ą╝ąĄčéčĆą░ 1
(UNS8) sub-ąĖąĮą┤ąĄą║čü ą┐ą░čĆą░ą╝ąĄčéčĆą░ 1
(UNS32) čĆą░ąĘą╝ąĄčĆ ą┤ą░ąĮąĮčŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆą░ 1
(DOMAIN) ą┤ą░ąĮąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ 1
(UNS16) ąĖąĮą┤ąĄą║čü ą┐ą░čĆą░ą╝ąĄčéčĆą░ 2
(UNS8) sub-ąĖąĮą┤ąĄą║čü ą┐ą░čĆą░ą╝ąĄčéčĆą░ 2
(UNS32) čĆą░ąĘą╝ąĄčĆ ą┤ą░ąĮąĮčŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆą░ 2
(DOMAIN) ą┤ą░ąĮąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ 2
....
(UNS16) ąĖąĮą┤ąĄą║čü ą┐ą░čĆą░ą╝ąĄčéčĆą░ n
(UNS8) sub-ąĖąĮą┤ąĄą║čü ą┐ą░čĆą░ą╝ąĄčéčĆą░ n
(UNS32) čĆą░ąĘą╝ąĄčĆ ą┤ą░ąĮąĮčŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆą░ n
(DOMAIN) ą┤ą░ąĮąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ n
ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čŹč鹊čé ą┤ą▓ąŠąĖčćąĮčŗą╣ ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ heartbeat producer ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą╗ąĄą┤čāčÄčēąĖą╝:
0100000017100002000000e803
ąŻąĘąĄą╗ slave ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ čüčĆą░ąĘčā ą┐ąĄčĆąĄą┤ ą▓čģąŠą┤ąŠą╝ Master ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Pre_operational.
ąŁč鹊 ą┐čĆąŠčüč鹊ą╣ ą┐čĆąĖą╝ąĄčĆ čāąĘą╗ą░ CANopen, ą║ąŠč鹊čĆčŗą╣ č鹊ą╗čīą║ąŠ čåąĖą║ą╗ąĖč湥čüą║ąĖ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ SYNC. ąŚą┤ąĄčüčī ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčéčüčÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą┐ą╗ą░čéčŗ HCS12.
ą¤čĆąĖą╝ąĄčĆ ąŠčüąĮąŠą▓ą░ąĮ ąĮą░ TestMasterSlave, ą║ąŠč鹊čĆčŗą╣ ą▒čŗą╗ ąĮąĄąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆąĄąĮąĖčÅ čéčĆąĄą▒ąŠą▓ą░ąĮąĖą╣ ą┐ąŠ čĆą░ą▒ąŠč鹥 ąĮą░ čāčĆąŠą▓ąĮąĄ čÅą┤čĆą░. ąÆčüąĄ čĆą░ą▒ąŠčéą░ąĄčé čéą░ą║ ąČąĄ, ą║ą░ą║ ąĖ TestMasterSlave, ąĮąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ąĮą░ čāčĆąŠą▓ąĮąĄ čÅą┤čĆą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ąŠąĮąĖ ąŠč鹊ą▒čĆą░ąČą░čÄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ąŠą╣ dmesg). ą¤čĆąĖą╝ąĄčĆ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ ą║ą░ą║ ą▓ąĮąĄčłąĮąĖą╣ ą╝ąŠą┤čāą╗čī čÅą┤čĆą░, čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮčŗą╣ ą║ą░ą║ čüąĖą╝ą▓ąŠą╗čīąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ. ąśą╝ąĄąĄčéčüčÅ shell-čüą║čĆąĖą┐čé insert.sh, ą║ąŠč鹊čĆčŗą╣ ą▓čüčéą░ą▓ą╗čÅąĄčé ą╝ąŠą┤čāą╗čī ąĖ čüąŠąĘą┤ą░ąĄčé ąĮąŠą▓čŗą╣ čäą░ą╣ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░ /dev/canf_ktest (ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ą║ąŠą╝ą░ąĮą┤ ą▓ ą╝ąŠą┤čāą╗čī). ąöą╗čÅ čĆąĄą░ą╗čīąĮąŠą╣ ąŠčéą┐čĆą░ą▓ą║ąĖ ą║ąŠą╝ą░ąĮą┤ ąÆčŗ ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐čĆąŠčüčéčāčÄ ą║ąŠąĮčüąŠą╗čī čü ąĖą╝ąĄąĮąĄą╝ 'canf_ktest_console'. ąŁč鹊čé ą╝ąŠą┤čāą╗čī ąĘą░ą▓ąĖčüąĖčé ąŠčé ą┤čĆčāą│ąŠą│ąŠ ąŠčéą┤ąĄą╗čīąĮąŠą│ąŠ ą╝ąŠą┤čāą╗čÅ canfestival.ko, ą│ą┤ąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ čüč鹥ą║ CanOpen čü čéčĆąĄą▒čāąĄą╝čŗą╝ąĖ 菹║čüą┐ąŠčĆčéąĖčĆčāąĄą╝čŗą╝ąĖ čäčāąĮą║čåąĖčÅą╝ąĖ. ą£ąŠą┤čāą╗čī canfestival.ko ąĘą░ą▓ąĖčüąĖčé ąŠčé ą╝ąŠą┤čāą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą║ą░čĆčéčŗ CAN, ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą▒čāą┤ąĄčé ąĘą░ą│čĆčāąČąĄąĮ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆ CAN. ą¤ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ą╝ąŠą┤čāą╗ąĄą╣ (ą║ąŠą╝ą░ąĮą┤ąŠą╣ make install) ą▓čüąĄ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čĆą░ąĘčĆąĄčłą░čÄčéčüčÅ čÅą┤čĆąŠą╝. ąöą╗čÅ ąĘą░ą┐čāčüą║ą░ ą┐čĆąĖą╝ąĄčĆą░ ą▓ą▓ąĄą┤ąĖč鹥 ą║ąŠą╝ą░ąĮą┤čā:
ąŁč鹊čé čüą║čĆąĖą┐čé ąĘą░ą┐čāčüčéąĖčé čéčĆąĄą▒čāąĄą╝čŗąĄ ą╝ąŠą┤čāą╗ąĖ, ąŠč鹊ą▒čĆą░ąĘąĖčé ą║ąŠąĮčüąŠą╗čī, ąĖ ą┐čĆąĖ ą▓čŗčģąŠą┤ąĄ ąĖąĘ ą║ąŠąĮčüąŠą╗ąĖ čāą┤ą░ą╗ąĖčé ą╝ąŠą┤čāą╗ąĖ ąĖąĘ čÅą┤čĆą░.
****************************************************************
* TestMasterMicroMod *
* *
* ą¤čĆąŠčüč鹊ą╣ ą┐čĆąĖą╝ąĄčĆ ą┤ą╗čÅ PC. *
* ą£ą░čüč鹥čĆ CanOpen, ą║ąŠč鹊čĆčŗą╣ čāą┐čĆą░ą▓ą╗čÅąĄčé ą╝ąŠą┤čāą╗ąĄą╝ MicroMod: *
* - ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčé čéąĖą┐ ą┐ąĄčĆąĄą┤ą░čćąĖ TPDO 1 ą╝ąŠą┤čāą╗čÅ *
* - ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčé čéąĖą┐ ą┐ąĄčĆąĄą┤ą░čćąĖ RPDO 1 ą╝ąŠą┤čāą╗čÅ *
* - ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčé ą┐ąĄčĆąĖąŠą┤ hearbeatbeat ą╝ąŠą┤čāą╗čÅ *
* - ąĘą░ą┐čĆąĄčēą░ąĄčé ą┤čĆčāą│ąĖąĄ ąŠą▒čŖąĄą║čéčŗ TPDO *
* - čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ ą▓ operational *
* - ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ SYNC *
* - ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé RPDO 1 ą▓ Micromod (čåąĖčäčĆąŠą▓ąŠą╣ ą▓čŗčģąŠą┤) *
* - čüą╗čāčłą░ąĄčé TPDO 1 Micromod-ą░ (čåąĖčäčĆąŠą▓ąŠą╣ ą▓čģąŠą┤) *
* - ąŠč鹊ą▒čĆą░ąČą░ąĄčé ą▒ąĖčéčŗ RPDO 1 (čåąĖčäčĆąŠą▓ąŠą╣ ą▓čģąŠą┤) *
* *
* ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ: *
* ./TestMasterMicroMod [ą×ą¤ą”ąśąś] *
* *
* ą×ą¤ą”ąśąś: *
* -l : ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ CAN ["libcanfestival_can_virtual.so"] *
* *
* Slave: *
* -i : č乊čĆą╝ą░čé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ Slave Node id [0x01 , 0x7F] *
* *
* Master: *
* -m : ąĖą╝čÅ čłąĖąĮčŗ ["1"] *
* -M : 1M,500K,250K,125K,100K,50K,20K,10K *
* *
****************************************************************
**************************************************************
* TestMasterSlaveLSS *
* *
* ą¤čĆąĖą╝ąĄčĆ LSS ą┤ą╗čÅ PC. ąĀąĄą░ą╗ąĖąĘčāąĄčé 3 čāąĘą╗ą░ CanOpen ą▓ ąŠą┤ąĮąŠą╝ *
* ą┐čĆąŠčåąĄčüčüąĄ, master ąĖ 2 slave. ąÆčüąĄ čāąĘą╗čŗ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓čāčÄčé *
* ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝, ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ ąŠą▒ą╝ąĄąĮąĖą▓ą░čÅčüčī čüąŠąŠą▒čēąĄąĮąĖčÅą╝ąĖ NMT, *
* SYNC, SDO ąĖ PDO. Master ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé ą▓čĆąĄą╝čÅ heartbeat *
* producer ąĮą░ 1000 ą╝čü ą┤ą╗čÅ slave-čāčüčéčĆąŠą╣čüčéą▓ čü ą┐ąŠą╝ąŠčēčīčÄ *
* čüąŠą║čĆą░čēąĄąĮąĮąŠą│ąŠ DCF. *
* *
* ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ: *
* ./TestMasterSlaveLSS [ą×ą¤ą”ąśąś] *
* *
* ą×ą¤ą”ąśąś: *
* -l : ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ CAN ["libcanfestival_can_virtual.so"] *
* *
* SlaveA: *
* -a : ąĖą╝čÅ čłąĖąĮčŗ ["0"] *
* -A : 1M,500K,250K,125K,100K,50K,20K,10K,none(disable) *
* *
* SlaveB: *
* -b : ąĖą╝čÅ čłąĖąĮčŗ ["1"] *
* -B : 1M,500K,250K,125K,100K,50K,20K,10K,none(disable) *
* *
* Master: *
* -m : ąĖą╝čÅ čłąĖąĮčŗ ["2"] *
* -M : 1M,500K,250K,125K,100K,50K,20K,10K,none(disable) *
* *
**************************************************************
ąöą╗čÅ ąĘą░ą┐čĆąŠčüą░ čüą╗čāąČą▒ LSS ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čäčāąĮą║čåąĖčÅ configNetworkNode. ą×ąĮą░ čĆą░ą▒ąŠčéą░ąĄčé ą┐ąŠą┤ąŠą▒ąĮąŠ writeNetworkDict ąĖ ąĖą╝ąĄąĄčé čüą╗ąĄą┤čāčÄčēąĖą╣ ą┐čĆąŠč鹊čéąĖą┐:
UNS8 configNetworkNode (CO_Data* d,
UNS8 command,
void *dat1,
void* dat2,
LSSCallback_t Callback);
FastScan čŹč鹊 čüą┐ąĄčåąĖą░ą╗čīąĮą░čÅ čüą╗čāąČą▒ą░ LSS, ą║ąŠč鹊čĆą░čÅ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆąŠą▓ą░čéčī slave-čāąĘą╗čŗ, ą┤ą░ąČąĄ ąĄčüą╗ąĖ čā ąĮąĖčģ ąĮąĄčé ą┤ąŠą┐čāčüčéąĖą╝čŗčģ nodeID. ąŁčéą░ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖčÅ ąŠčüąĮąŠą▓ą░ąĮą░ ąĮą░ ą░ą┤čĆąĄčüąĄ LSS, čüąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠą╝ ą┐ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčā ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ (vendor ID), ą║ąŠą┤čā ąĖąĘą┤ąĄą╗ąĖčÅ (product code), ąĮąŠą╝ąĄčĆčā čĆąĄą▓ąĖąĘąĖąĖ (revision number) ąĖ čüąĄčĆąĖą╣ąĮąŠą╝čā ąĮąŠą╝ąĄčĆčā (serial number). ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüą╝. ą┤ąŠą║čāą╝ąĄąĮčé DS305.
ąÉą┤čĆąĄčü LSS ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĘą▓ąĄčüč鹥ąĮ čćą░čüčéąĖčćąĮąŠ ą╗ąĖą▒ąŠ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąĮąĄąĖąĘą▓ąĄčüč鹥ąĮ. ą¦č鹊ą▒čŗ ą┐čĆąĄą┤čüčéą░ą▓ąĖčéčī čŹč鹊čé čäą░ą║čé ą▓ Canfestival, čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖ čüčéčĆčāą║čéčāčĆčā lss_fs_transfer_t. ą¤ą░čĆą░ą╝ąĄčéčĆ FS_LSS_ID čŹč鹊 ą╝ą░čüčüąĖą▓ ąĖąĘ 4 菹╗ąĄą╝ąĄąĮč鹊ą▓, ą│ą┤ąĄ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ čŹčéąĖ 4 čüąŠčüčéą░ą▓ą╗čÅčÄčēąĖčģ ą░ą┤čĆąĄčüą░ LSS. ąöčĆčāą│ąŠą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ FS_BitChecked čŹč鹊 čéą░ą║ąČąĄ ą╝ą░čüčüąĖą▓, ąĖ ąŠąĮ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ č鹊ą╝, ą║ą░ą║ ą╝ąĮąŠą│ąŠ ą▒ąĖčé ą▓ ą║ą░ąČą┤ąŠą╝ 菹╗ąĄą╝ąĄąĮč鹥 ą░ą┤čĆąĄčüą░ LSS ąĮąĄ ąĖąĘą▓ąĄčüčéąĮčŗ (UNKNOWN). ąĪą╗ąĄą┤čāčÄčēąĖą╣ ą┐čĆąĖą╝ąĄčĆ ą▓ąĘčÅčé ąĖąĘ TestMasterSlaveLSS, ą│ą┤ąĄ ąĮąĄ ąĖąĘą▓ąĄčüčéąĮčŗ č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄą┤ąĮąĖąĄ 2 čåąĖčäčĆčŗ (8 ą▒ąĖčé) vendor ID ąĖ product code, ąĖ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąĮąĄ ąĖąĘą▓ąĄčüčéąĮčŗ revision number ąĖ serial number.
lss_fs_transfer_t lss_fs;
/* VendorID ąĖ ProductCode čćą░čüčéąĖčćąĮąŠ ąĮąĄąĖąĘą▓ąĄčüčéąĮčŗ,
ą║čĆąŠą╝ąĄ ą┐ąŠčüą╗ąĄą┤ąĮąĖčģ 2 čåąĖčäčĆ (8 ą▒ąĖčé). */
lss_fs.FS_LSS_ID[0]=Vendor_ID;
lss_fs.FS_BitChecked[0]=8;
lss_fs.FS_LSS_ID[1]=Product_Code;
lss_fs.FS_BitChecked[1]=8;
/* serialNumber ąĖ RevisionNumber ąĮąĄąĖąĘą▓ąĄčüčéąĮčŗ,
ąĮą░ą┐čĆąĖą╝ąĄčĆ ąĮąĄąĖąĘą▓ąĄčüčéąĮčŗ 8 čåąĖčäčĆ (32 ą▒ąĖčéą░). */
lss_fs.FS_BitChecked[2]=32;
lss_fs.FS_BitChecked[3]=32;
res=configNetworkNode(&d,LSS_IDENT_FASTSCAN,&lss_fs,0,CheckLSSAndContinue);
[ąĀą░ąĘčĆą░ą▒ąŠčéą║ą░ ąĮąŠą▓ąŠą│ąŠ čāąĘą╗ą░]
ąźąŠčĆąŠčłąĄą╣ ąĖą┤ąĄąĄą╣ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗąĄ ą┐čĆąĖą╝ąĄčĆčŗ ą║ą░ą║ ą▒ą░ąĘčā ą┤ą╗čÅ ąÆą░čłąĄą│ąŠ ąĮąŠą▓ąŠą│ąŠ čāąĘą╗ą░. ąóą░ą║ąČąĄ ąÆčŗ ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗąĄ čäą░ą╣ą╗čŗ *.od ą║ą░ą║ ą▒ą░ąĘčā ą┤ą╗čÅ čüą╗ąŠą▓ą░čĆčÅ ąŠą▒čŖąĄą║č鹊ą▓ (OD) ąÆą░čłąĄą│ąŠ ąĮąŠą▓ąŠą│ąŠ čāąĘą╗ą░.
ąĪąŠąĘą┤ą░ąĮąĖąĄ ąĮąŠą▓ąŠą│ąŠ čāąĘą╗ą░ CANopen ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čüą╗ąŠą▓ą░čĆčÅ ąŠą▒čŖąĄą║č鹊ą▓ (Object Dictionary, OD) čŹč鹊ą│ąŠ čāąĘą╗ą░. ąöą╗čÅ čŹč鹊ą╣ čåąĄą╗ąĖ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī C-čäą░ą╣ą╗. ąŁč鹊čé čäą░ą╣ą╗ čüąŠą┤ąĄčƹȹĖčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą▓čüąĄčģ ąĘą░ą┐ąĖčüąĄą╣ (菹╗ąĄą╝ąĄąĮč鹊ą▓) čüą╗ąŠą▓ą░čĆčÅ, ąĮąĄą║ąŠč鹊čĆčāčÄ čéą░ą▒ą╗ąĖčåčā ąĖąĮą┤ąĄą║čüąŠą▓, ą║ąŠč鹊čĆą░čÅ ą┐ąŠą╝ąŠą│ą░ąĄčé čüč鹥ą║čā ą┐ąŠą╗čāčćąĖčéčī ą┐čĆčÅą╝ąŠą╣ ą┤ąŠčüčéčāą┐ ą║ ąĮąĄą║ąŠč鹊čĆčŗą╝ ąĘą░ą┐ąĖčüčÅą╝ čüą╗ąŠą▓ą░čĆčÅ.
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ Object Dictionary Editor GUI. Object Dictionary Editor čŹč鹊 ą│čĆą░čäąĖč湥čüą║ąĖą╣ ąĖąĮč鹥čĆč乥ą╣čü Phyton-ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ WxPython, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ C-čäą░ą╣ą╗ą░, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠą│ąŠ ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ąĮąŠą▓ąŠą│ąŠ čāąĘą╗ą░ CANopen.
ąĪąĮą░čćą░ą╗ą░ ąÆą░ą╝ ąĮčāąČąĮąŠ ąĘą░ą│čĆčāąĘąĖčéčī ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčī ą╝ąŠą┤čāą╗ąĖ Gnosis XML. ąŁčéą░ ą┐čĆąŠčåąĄą┤čāčĆą░ ą░ą▓č鹊ą╝ą░čéąĖąĘąĖčĆąŠą▓ą░ąĮą░ ą┐čĆą░ą▓ąĖą╗ąŠą╝ ąĖąĘ Makefile.
ąóąĄą┐ąĄčĆčī ąÆčŗ ą╝ąŠąČąĄč鹥 ąĘą░ą┐čāčüčéąĖčéčī čĆąĄą┤ą░ą║č鹊čĆ:
python objdictedit.py [čäą░ą╣ą╗ (ąĖą╗ąĖ čäą░ą╣ą╗čŗ) *.od]
ąŻčüčéą░ąĮąŠą▓ąĖč鹥 čüčĆąĄą┤čā Python (ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ą▓ąĄčĆčüąĖąĖ 2.4, čÅ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ą╗ Python 2.7) ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā wxPython (ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ą▓ąĄčĆčüąĖąĖ 2.6.3.2, čÅ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ą╗ wxPython3). ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ Cygwin ą╝ąŠą│čāčé čāčüčéą░ąĮąŠą▓ąĖčéčī čāčéąĖą╗ąĖčéčŗ Gnosis XML čéą░ą║ąĖą╝ ąČąĄ čüą┐ąŠčüąŠą▒ąŠą╝, ą║ą░ą║ ąĖ ą▓ Linux. ą¤čĆąŠčüč鹊 ą▓čŗąĘąŠą▓ąĖč鹥 make.
ąöčĆčāą│ąĖą╝ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅą╝ ą┐ąŠčéčĆąĄą▒čāąĄčéčüčÅ ąĘą░ą│čĆčāąĘąĖčéčī ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčī Gnosis XML ą▓čĆčāčćąĮčāčÄ. ąŚą░ą│čĆčāąĘąĖč鹥 ą┐ąŠčüą╗ąĄą┤ąĮčÄčÄ ą▓ąĄčĆčüąĖčÄ ą┐ąŠ čüčüčŗą╗ą║ą░ą╝:
http://freshmeat.net/projects/gnosisxml/
http://www.gnosis.cx/download/
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čÅ čüą║ą░čćą░ą╗ ą┐ąŠ ą┐ąĄčĆą▓ąŠą╣ čüčüčŗą╗ą║ąĄ ą░čĆčģąĖą▓ gnosisXML.zip, ąĖ čĆą░čüą┐ą░ą║ąŠą▓ą░ą╗ ąŠčéčéčāą┤ą░ ą┐ą░ą┐ą║čā gnosis ą▓ ą║ą░čéą░ą╗ąŠą│ C:\Python27\Lib\. ąŻčüčéą░ąĮąŠą▓ą║ą░ Gnosis XML ąĮą░ čŹč鹊ą╝ ąĘą░ą▓ąĄčĆčłąĄąĮą░.
ąŚą░ą│čĆčāąĘąĖč鹥 ą░čĆčģąĖą▓ CanFestival ąĖ čĆą░čüą┐ą░ą║čāą╣č鹥 ąĄą│ąŠ. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 ą¤čĆąŠą▓ąŠą┤ąĮąĖą║ (Windows File Explorer), čćč鹊ą▒čŗ ą┐ąĄčĆąĄą╣čéąĖ ą▓ ą║ą░čéą░ą╗ąŠą│ CanFestival3\objdicgten, ąĖ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 ą┤ą▓ąŠą╣ąĮąŠą╣ ą║ą╗ąĖą║ ąĮą░ objdictedit.py. ą×čéą║čĆąŠąĄčéčüčÅ ą│čĆą░čäąĖč湥čüą║ąĖą╣ ąĖąĮč鹥čĆč乥ą╣čü, ą│ą┤ąĄ ąÆčŗ ą╝ąŠąČąĄč鹥 čüąŠąĘą┤ą░ą▓ą░čéčī ąĮąŠą▓čŗąĄ ąĖ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī ą│ąŠč鹊ą▓čŗąĄ čüą╗ąŠą▓ą░čĆąĖ OD. ążą░ą╣ą╗čŗ čüą╗ąŠą▓ą░čĆąĄą╣ čģčĆą░ąĮčÅčéčüčÅ ą▓ čäą░ą╣ą╗ą░čģ čü čĆą░čüčłąĖčĆąĄąĮąĖąĄą╝ *.od, čéą░ą║ąČąĄ ąĖčģ ą╝ąŠąČąĮąŠ 菹║čüą┐ąŠčĆčéąĖčĆąŠą▓ą░čéčī ą▓ čäą░ą╣ą╗čŗ *.eds.
[ą¤čĆąŠą▒ą╗ąĄą╝čŗ ąĘą░ą┐čāčüą║ą░ Object Dictionary editor GUI]
ąÜ čüąŠąČą░ą╗ąĄąĮąĖčÄ, ą╝ąĮąĄ ąĮąĄ čāą┤ą░ą╗ąŠčüčī ąĘą░ą┐čāčüčéąĖčéčī čĆąĄą┤ą░ą║č鹊čĆ (čüą║čĆąĖą┐čé objdictedit.py) čü ą┐ąŠčüą╗ąĄą┤ąĮąĄą╣ ąĮą░ ą╝ąŠą╝ąĄąĮčé ąĮą░ą┐ąĖčüą░ąĮąĖčÅ čüčéą░čéčīąĖ ą▓ąĄčĆčüąĖąĄą╣ Python (python-3.6.1) ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ wxPhyton (wxPython-4.0.0a1-cp36) - ąĖąĘ-ąĘą░ ąĘąĮą░čćąĖč鹥ą╗čīąĮčŗčģ ąĖąĘą╝ąĄąĮąĄąĮąĖą╣ ą▓ čüąĖąĮčéą░ą║čüąĖčüąĄ čÅąĘčŗą║ą░. ąöą╗čÅ Phyton čŹč鹊 ąŠą▒čŗčćąĮąŠąĄ ą┤ąĄą╗ąŠ... ą¤čĆąĖčłą╗ąŠčüčī ą┐ąŠą┤ą▒ąĖčĆą░čéčī ą▓ąĄčĆčüąĖąĖ, ąĖ čāą┤ą░ą╗ąŠčüčī ąĘą░ą┐čāčüčéąĖčéčī čüą║čĆąĖą┐čé čĆąĄą┤ą░ą║č鹊čĆą░ ąĮą░ Phyton 2.7.13 (python-2.7.amd64.msi) ąĖ wxPhyton 3.0 (wxPython3.0-win64-3.0.2.0-py27.exe), čüą╝. ą░čĆčģąĖą▓ [4].
1. ą×čłąĖą▒ą║ą░ "ImportError: No module named 'wx'" - ąĮąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ wxPython. ąĀąĄčłąĄąĮąĖąĄ: čāčüčéą░ąĮąŠą▓ąĖč鹥 ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā wxPython.
2. ą×čłąĖą▒ą║ą░ "ImportError: No module named '__version__'" - ą┐čĆąŠą▒ą╗ąĄą╝ą░ čü ąĮąĄčüąŠąŠčéą▓ąĄčéčüą▓ąĖčÅą╝ąĖ ą▓ąĄčĆčüąĖą╣ Python ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ wxPython. ąĀąĄčłąĄąĮąĖąĄ: čāčüčéą░ąĮąŠą▓ąĖč鹥 Phyton 2.7 ąĖ wxPhyton 3.0, ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąĮą░čüčéčĆąŠą╣č鹥 ą┐čāčéąĖ ąĘą░ą┐čāčüą║ą░ ą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ąŠą║čĆčāąČąĄąĮąĖčÅ %Path%. ą×ą┐čĆąĄą┤ąĄą╗ąĖč鹥 ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ ąŠą║čĆčāąČąĄąĮąĖčÅ PYTHONHOME ąĖ PYTHONPATH, ąĮą░čüčéčĆąŠąĄąĮąĮčŗąĄ ąĮą░ ą║ąŠčĆąĮąĄą▓ąŠą╣ ą║ą░čéą░ą╗ąŠą│ Python ąĖ ą┐ą░ą┐ą║čā Lib, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą▓ąŠčé čéą░ą║:
PYTHONHOME C:\Python27
PYTHONPATH C:\Python27\Lib
3. ą×čłąĖą▒ą║ą░ "ImportError: No module named gnosis.xml.pickle" - ąĮąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ Gnosis XML. ąĀąĄčłąĄąĮąĖąĄ - čāčüčéą░ąĮąŠą▓ąĖč鹥 čŹčéčā ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā ą┤ą╗čÅ Phyton. ą» čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ą╗ ąĖąĘ ą┐ą░ą║ąĄčéą░ gnosisXML.zip (čüą╝. ą░čĆčģąĖą▓ [4]).
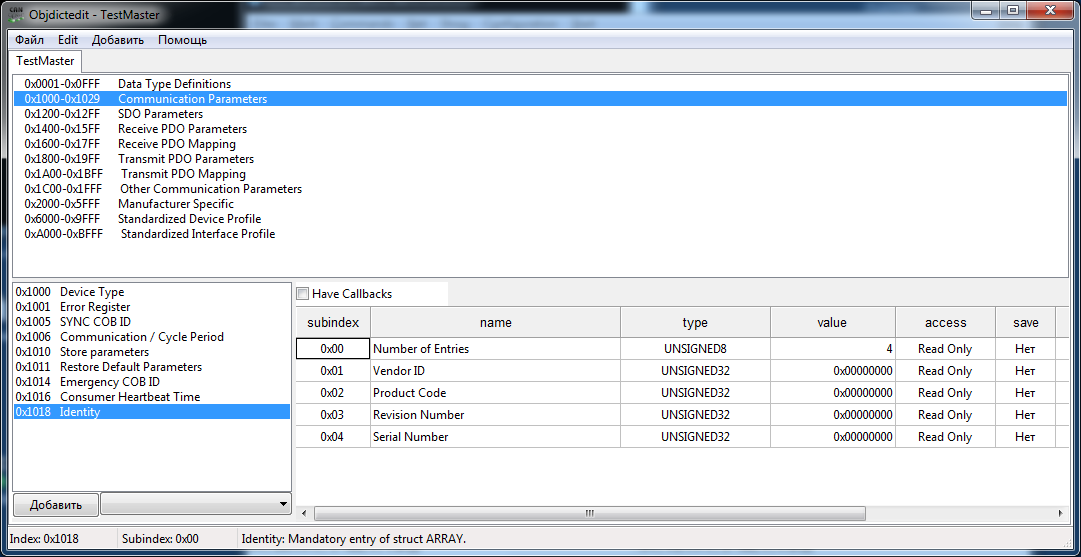
ąōą╗ą░ą▓ąĮąŠąĄ ąŠą║ąĮąŠ OD editor. ąĀąĄą┤ą░ą║č鹊čĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čłą░ą▒ą╗ąŠąĮ čéąĖą┐ą░ Model-View-Controller. ąÆąĄčĆčģąĮčÅčÅ čćą░čüčéčī ąŠą║ąĮą░ čüąŠą┤ąĄčƹȹĖčé čüą┐ąĖčüąŠą║, ą▓ ą║ąŠč鹊čĆąŠą╝ ąÆčŗ ą╝ąŠąČąĄč鹥 ą▓čŗą▒čĆą░čéčī čüąĄą║čåąĖčÄ čüą╗ąŠą▓ą░čĆčÅ. ąØąĖąČąĮčÅčÅ ą╗ąĄą▓ą░čÅ čćą░čüčéčī ąŠą║ąĮą░ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čüą┐ąĖčüąŠą║ ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ąĖąĮą┤ąĄą║čüą░ ą▓ čŹč鹊ą╝ čüą╗ąŠą▓ą░čĆąĄ, ą░ ą┐čĆą░ą▓ą░čÅ ąĮąĖąČąĮčÅčÅ čćą░čüčéčī ą┐ąĄčĆąĄčćąĖčüą╗čÅąĄčé čĆąĄą┤ą░ą║čéąĖčĆčāąĄą╝čŗąĄ sub-ąĖąĮą┤ąĄą║čüčŗ.
ąĪąŠąĘą┤ą░ąĮąĖąĄ ąĮąŠą▓ąŠą│ąŠ čāąĘą╗ą░. ąÆčŗą▒ąĄčĆąĖč鹥 ą▓ ą╝ąĄąĮčÄ File -> New, ąŠčéą║čĆąŠąĄčéčüčÅ ąŠą║ąĮąŠ ą┤ąĖą░ą╗ąŠą│ą░ "Create a new Node". ąÆ ą▓čŗą┐ą░ą┤ą░čÄčēąĄą╝ čüą┐ąĖčüą║ąĄ Type: ą▓čŗą▒ąĄčĆąĖč鹥 čéąĖą┐ čüąŠąĘą┤ą░ą▓ą░ąĄą╝ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, master (ą│ą╗ą░ą▓ąĮčŗą╣ čāąĘąĄą╗ čüąĄčéąĖ) ąĖą╗ąĖ slave (ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╣ čāąĘąĄą╗). ąÆ ą┐ąŠčÅą▓ąĖą▓čłąĄą╝čüčÅ ąŠą║ąĮąĄ ą┤ąĖą░ą╗ąŠą│ą░ ą▓ą▓ąĄą┤ąĖč鹥 ąĖą╝čÅ čāąĘą╗ą░ (ą┐ąŠą╗ąĄ ą▓ą▓ąŠą┤ą░ Name:), ąĮą░ą┐čĆąĖą╝ąĄčĆ MyMaster. ąÆ ą▓čŗą┐ą░ą┤ą░čÄčēąĄą╝ čüą┐ąĖčüą║ąĄ Profile: ą▓čŗą▒ąĄčĆąĖč鹥 ąČąĄą╗ą░ąĄą╝čŗą╣ ą┐čĆąŠčäąĖą╗čī čāčüčéčĆąŠą╣čüčéą▓ą░ (ąĄčüą╗ąĖ ą┐ąŠą║ą░ ąĮąĄ čĆą░ąĘą▒ąĖčĆą░ąĄč鹥čüčī, čćč鹊 čŹč鹊 čéą░ą║ąŠąĄ, č鹊 ą┤ą╗čÅ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓čŗą▒ąĄčĆąĖč鹥 ą┐čĆąŠčüč鹥ą╣čłąĖą╣ ą▓ą░čĆąĖą░ąĮčé DS-401, čŹč鹊 ąŠą▒čŗčćąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░). ąöą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ master ą▓čŗą▒ąĄčĆąĖč鹥 None. ą¤ąŠą╗ąĄ ą▓ą▓ąŠą┤ą░ Description ąĮąĄ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠąĄ, ąĄą│ąŠ ą╝ąŠąČąĮąŠ ąŠčüčéą░ą▓ąĖčéčī ą┐čāčüčéčŗą╝, ą╗ąĖą▒ąŠ ą┤ąŠą▒ą░ą▓ąĖčéčī čéčāą┤ą░ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮčāčÄ čüčéčĆąŠą║čā ąŠą┐ąĖčüą░ąĮąĖčÅ.

ąÆ ą┐čĆą░ą▓ąŠą╣ čćą░čüčéąĖ ąŠą║ąĮą░ ą┤ąĖą░ą╗ąŠą│ą░ ąĖą╝ąĄčÄčéčüčÅ ą│ą░ą╗ąŠčćą║ąĖ, ąĮą░čüčéčĆą░ąĖą▓ą░čÄčēąĖąĄ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čäčāąĮą║čåąĖąĖ:
Network Management: ąĘą┤ąĄčüčī čĆą░ą┤ąĖąŠą║ąĮąŠą┐ą║ą░ą╝ąĖ ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ ą┐čĆąŠč鹊ą║ąŠą╗ą░ NMT ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüąĄčéčīčÄ. ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ NMT, č鹊 ą▓čŗą▒ąĄčĆąĖč鹥 Node Guarding ąĖą╗ąĖ Heartbit (čćą░čēąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ Heartbit), ąĖąĮą░č湥 ąŠčüčéą░ą▓čīč鹥 ą▓ą░čĆąĖą░ąĮčé None.
Options: DS-302 Profile. ąŁčéą░ ą│ą░ą╗ąŠčćą║ą░ čĆą░ąĘčĆąĄčłą░ąĄčé ą┐ąŠą┤ą┤ąĄčƹȹ║čā ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗčģ čāčüčéčĆąŠą╣čüčéą▓ CANopen (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐čĆąŠčåąĄą┤čāčĆąŠą╣ ąĘą░ą│čĆčāąĘą║ąĖ, čāčüčéčĆąŠą╣čüčéą▓ą░ čü ą╝ąŠą┤ąĖčäąĖčåąĖčĆčāąĄą╝čŗą╝ čģčĆą░ąĮąĖą╗ąĖčēąĄą╝ ąĖąĮč乊čĆą╝ą░čåąĖąĖ EDS ąĖ DCF). ąÆ ą┐čĆąŠčüčéčŗčģ čüą╗čāčćą░čÅčģ čŹčéą░ ąŠą┐čåąĖčÅ ąĮąĄ ąĮčāąČąĮą░.
Options: Generate SYNC. ąĀą░ąĘčĆąĄčłą░ąĄčé ą│ąĄąĮąĄčĆą░čåąĖčÄ ą┐ą░ą║ąĄč鹊ą▓ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ. ąĢčüą╗ąĖ ąĮąĄ ąĘąĮą░ąĄč鹥, čćč鹊 čŹč鹊, č鹊 ą│ą░ą╗ąŠčćą║čā ąĮąĄ čüčéą░ą▓čīč鹥.
Options: Emergency support. ąĀą░ąĘčĆąĄčłą░ąĄčé ą┐ąŠą┤ą┤ąĄčƹȹ║čā ąŠą┐ąŠą▓ąĄčēąĄąĮąĖą╣ ąŠ čüąŠą▒čŗčéąĖčÅčģ ąŠčłąĖą▒ąŠą║ (ą░ą▓ą░čĆąĖą╣). ąÆ ą┐čĆąŠčüčéčŗčģ čüą╗čāčćą░čÅčģ čŹčéčā ą│ą░ą╗ąŠčćą║čā ą╝ąŠąČąĮąŠ ąĮąĄ čüčéą░ą▓ąĖčéčī.
Options: Save Configuration. ą¤ąŠ ąĖą┤ąĄąĄ čŹčéą░ ąŠą┐čåąĖčÅ ą┤ąŠą╗ąČąĮą░ čĆą░ąĘčĆąĄčłą░čéčī čāčüčéčĆąŠą╣čüčéą▓čā čüąŠčģčĆą░ąĮčÅčéčī ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čüą▓ąŠąĄą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą▓ 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ. ąÆ ą╝ąŠąĄą╝ čĆąĄą┤ą░ą║č鹊čĆąĄ čŹčéą░ ąŠą┐čåąĖčÅ ą┐ąŠč湥ą╝čā-č鹊 ą▓čüąĄą│ą┤ą░ ą▒čŗą╗ą░ čüąĄčĆąĄąĮčīą║ąŠą╣ ąĖ ąĮąĄ ą▓čŗą▒čĆą░ąĮąĮąŠą╣ (ą▓ą║ą╗čÄčćąĖčéčī ąĄčæ ąĮąĄą╗čīąĘčÅ).
ąŚą░ą║ąŠąĮčćąĖą▓ čĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ąŠą┐čåąĖą╣ ą┤ąĖą░ą╗ąŠą│ą░, ą║ą╗ąĖą║ąĮąĖč鹥 OK.
ąĀąĄą┤ą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ čāąĘą╗ą░. ą£ąĄąĮčÄ Edit ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠčéčĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī ąŠčüąĮąŠą▓ąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠą┐ąĖčüą░ąĮąĖčÅ čāąĘą╗ą░ (Node infos) ąĖ ą┐čĆąŠčäąĖą╗ąĖ čāąĘą╗ą░.

ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą║ čüąŠąČą░ą╗ąĄąĮąĖčÄ, ą┐čāąĮą║čé ą╝ąĄąĮčÄ "Node infos" čā ą╝ąĄąĮčÅ ą┐ąŠ ąĮąĄą┐ąŠąĮčÅčéąĮąŠą╣ ą┐čĆąĖčćąĖąĮąĄ ąĮąĄ čĆą░ą▒ąŠčéą░ą╗ ąĖąĘ-ąĘą░ ąŠčłąĖą▒ą║ąĖ ąĖą╗ąĖ ą▓ čüą║čĆąĖą┐č鹥 Python, ąĖą╗ąĖ ą▓ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ wxPython "Assert failure" failed at ..\..\src\common\sizer.cpp(1401) in wxGridSizer::DoInsert(): too many items ...".
ą£ąŠąČąĮąŠ ąŠčéčĆąĄą┤ą░ą║čéąĖčĆąŠą▓ą░čéčī ą┐čĆąŠčäąĖą╗čī čāčüčéčĆąŠą╣čüčéą▓ą░, ąĮą░ą┐čĆąĖą╝ąĄčĆ DS-401 (ą┐čĆąŠčäąĖą╗čī čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ą▓ąŠą┤ą░-ą▓čŗą▓ąŠą┤ą░):
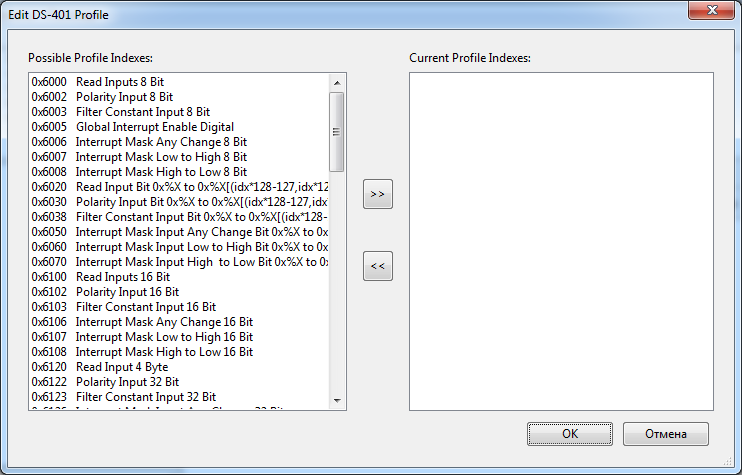
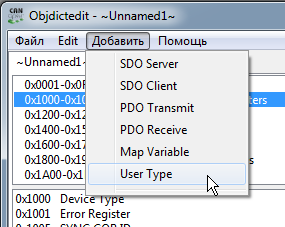
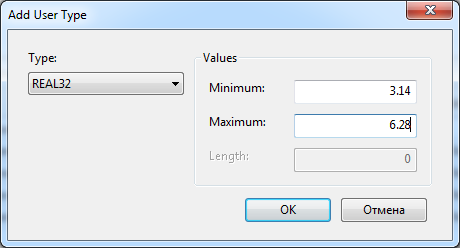
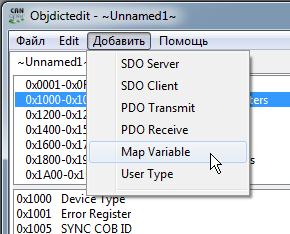
ą£ąĄąĮčÄ Add ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┤ąŠą▒ą░ą▓ąĖčéčī ąŠą▒čŖąĄą║čéčŗ PDO ąĖ SDO, ą░ čéą░ą║ąČąĄ čéąĖą┐čŗ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, ąĘą░ą┤ą░ą▓ą░čéčī ąĖčģ ą┐čĆąĄą┤ąĄą╗čīąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ. ąöą╗čÅ čüčéčĆąŠą║ ą╝ąŠąČąĮąŠ ąĘą░ą┤ą░ą▓ą░čéčī ą┐čĆąĄą┤ąĄą╗čīąĮčāčÄ ą┤ą╗ąĖąĮčā čüčéčĆąŠą║ąĖ.
ą×č鹊ą▒čĆą░ąČąĄąĮąĖąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ. ąöąŠą▒ą░ą▓čīč鹥 ą▓ čüą╗ąŠą▓ą░čĆčī OD čüą▓ąŠąĖ ąŠą▒čŖąĄą║čéčŗ ąĖ ąŠč鹊ą▒čĆą░ąČąĄąĮąĮčŗąĄ ąĮą░ ąĮąĖčģ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ąĪą▒ąŠčĆą║ą░ OD. ąóąĄą┐ąĄčĆčī ą▓čüąĄ ą│ąŠč鹊ą▓ąŠ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüą╗ąŠą▓ą░čĆčÅ ąŠą▒čŖąĄą║č鹊ą▓. ą£ąŠąČąĮąŠ ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖčéčī čüą╗ąŠą▓ą░čĆčī ą▓ ą▓ąĖą┤ąĄ ą╝ąŠą┤čāą╗čÅ (čäą░ą╣ą╗čŗ *.c/*.h) ą┤ą╗čÅ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░, ą║ąŠč鹊čĆčŗą╣ ąÆčŗ ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥 ą║ ą┐čĆąŠąĄą║čéčā čāąĘą╗ą░, ąĖ čéą░ą║ąČąĄ ą▓ ą▓ąĖą┤ąĄ čäą░ą╣ą╗ą░ ąŠą┐ąĖčüą░ąĮąĖčÅ čŹą╗ąĄą║čéčĆąŠąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ *.EDS, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĮąŠ ąĘą░ą│čĆčāąĘąĖčéčī ą║ą░ą║ ąŠą┐ąĖčüą░ąĮąĖąĄ čāąĘą╗ą░ ą▓ ą╝ą░čüč鹥čĆ čüąĄčéąĖ CANopen.
ą£ąŠą┤čāą╗čī ąĮą░ čÅąĘčŗą║ąĄ C ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą┐čāąĮą║č鹊ą╝ ą╝ąĄąĮčÄ File -> Build Dictionary, ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ą┐ąŠčÅą▓čÅčéčüčÅ ą┤ą▓ą░ čäą░ą╣ą╗ą░ čü čĆą░čüčłąĖčĆąĄąĮąĖčÅą╝ąĖ *.c ąĖ *.h (ąĄčüą╗ąĖ čäą░ą╣ą╗ ą┐čĆąŠąĄą║čéą░ ąĮą░ąĘčŗą▓ą░ą╗čüčÅ MyMaster, č鹊 čäą░ą╣ą╗čŗ ą┐ąŠą╗čāčćą░čé ąĖą╝ąĄąĮą░ MyMaster.c ąĖ MyMaster.h). ąĪąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ EDS-čäą░ą╣ą╗ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą┐čāąĮą║č鹊ą╝ ą╝ąĄąĮčÄ File -> Export to EDS file.

[ąĪčüčŗą╗ą║ąĖ]
1. ą×ą▒ąĘąŠčĆ ą┐čĆąŠč鹊ą║ąŠą╗ą░ CANopen.
2. CanFestival site:canfestival.org.
3. The CanFestival CANopen stack manual site:automforge.net.
4. 170525CANopen.zip - ą┤ąĖčüčéčĆąĖą▒čāčéąĖą▓čŗ, ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ.
5. CiA301: čüą╗ąŠą╣ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĖ ą┐čĆąŠčäąĖą╗čī ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ CANopen. |