ąŚą┤ąĄčüčī ą┐čĆąĖą▓ąĄą┤ąĄąĮ čĆą░ąĘą┤ąĄą╗ ą┤ą░čéą░čłąĖčéą░ Atmel [1], ą┐ąŠčüą▓čÅčēąĄąĮąĮčŗą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā CAN ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░čģ ARM7 ąĮą░ čÅą┤čĆąĄ ARM7TDMI. ą¤čĆąĖą╝ąĄčĆ ą┐čĆą░ą║čéąĖč湥čüą║ąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĖąĮč鹥čĆč乥ą╣čüą░ CAN ą▓ čŹčéąĖčģ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░čģ čüą╝. ą▓ čüčéą░čéčīąĄ [2].
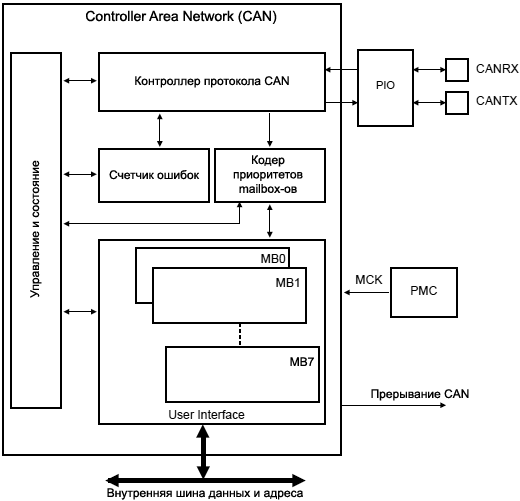
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▓čüąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ, čéčĆąĄą▒čāąĄą╝čŗąĄ ą┤ą╗čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ ą┐ąŠ ą┐čĆąŠč鹊ą║ąŠą╗čā CAN, ą║ą░ą║ ąŠąĮ ą▒čŗą╗ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ Robert Bosch GmbH, čüčéą░ąĮą┤ą░čĆčé CAN ISO/11898A (2.0 Part A ąĖ 2.0 Part B) ą┤ą╗čÅ ą▓čŗčüąŠą║ąĖčģ čüą║ąŠčĆąŠčüč鹥ą╣ ąĖ ISO/11519-2 ą┤ą╗čÅ ąĮąĖąĘą║ąĖčģ čüą║ąŠčĆąŠčüč鹥ą╣. ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą╝ąŠąČąĄčé ąŠą▒čĆą░ą▒ąŠčéą░čéčī ą▓čüąĄ čéąĖą┐čŗ čäčĆąĄą╣ą╝ąŠą▓ (Data, Remote, Error ąĖ Overload), ąĖ ą┤ąŠčüčéąĖčćčī čüą║ąŠčĆąŠčüč鹥ą╣ ąŠą▒ą╝ąĄąĮą░ ą┤ąŠ 1 Mbit/sec.
ąÜ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā CAN ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┤ąŠčüčéčāą┐ č湥čĆąĄąĘ čĆąĄą│ąĖčüčéčĆčŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. ąĀąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ 8 ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗčģ ąŠą▒čŖąĄą║č鹊ą▓ čüąŠąŠą▒čēąĄąĮąĖą╣ (čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗąĄ ą┐ąŠčćč鹊ą▓čŗąĄ čÅčēąĖą║ąĖ, mailbox).
ąøčÄą▒ąŠą╣ mailbox ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą▒ą╗ąŠą║ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ (ą┤ą░ąČąĄ ąĮąĄą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą▒čāč乥čĆčŗ). ąöą╗čÅ ą┐čĆąĖąĄą╝ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣ ąŠą┤ąĖąĮ ąĖą╗ąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ ąŠą▒čŖąĄą║č鹊ą▓ čüąŠąŠą▒čēąĄąĮąĖą╣ ą╝ąŠą│čāčé ą▒čŗčéčī ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮčŗ ą▒ąĄąĘ čāčćą░čüčéąĖčÅ ą▓ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĖ ą▒čāč乥čĆą░. ąÜąŠą│ą┤ą░ ą▒čāč乥čĆ ąĘą░ą┐ąŠą╗ąĮčÅąĄčéčüčÅ, ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. ąÆ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĄą╣ mailbox, ą┐ąĄčĆą▓ąŠąĄ ą┐čĆąĖąĮčÅč鹊ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąŠ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN, ą┐ąŠą║ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĮąĄ ą┐ąŠą┤čéą▓ąĄčĆą┤ąĖčé ąĄą│ąŠ, ąĖą╗ąĖ čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčéą▒čĆąŠčłąĄąĮąŠ ąĮąŠą▓čŗą╝ąĖ ą┐čĆąĖąĮčÅčéčŗą╝ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅą╝ąĖ.
ąøčÄą▒ąŠą╣ mailbox ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ. ą×ą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐ąĄčĆąĄą┤ą░čÄčēąĖčģ mailbox-ąŠą▓. ą¤čĆąĖąŠčĆąĖč鹥čé ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┤ą░ąĮ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ mailbox ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ.
ąÆąĮčāčéčĆąĄąĮąĮąĖą╣ 16-ą▒ąĖčéąĮčŗą╣ čéą░ą╣ą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąĖą▓čÅąĘą║ąĖ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ą║ ą║ą░ąČą┤ąŠą╝čā ą┐čĆąĖąĮčÅč鹊ą╝čā ąĖ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮąŠą╝čā čüąŠąŠą▒čēąĄąĮąĖčÄ. ąŁč鹊čé čéą░ą╣ą╝ąĄčĆ ąĮą░čćąĖąĮą░ąĄčé čüč湥čé čü ą╝ąŠą╝ąĄąĮčéą░ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN. ąŁč鹊čé čüč湥čéčćąĖą║ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą▒čĆąŠčłąĄąĮ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝ ąĖą╗ąĖ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąŠčüą╗ąĄ ą┐čĆąĖąĄą╝ą░ ą▓ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ mailbox, ą║ąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ Time Triggered Mode.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ Time Triggered Communication (TTC).
ąĀąĖčü. 36-1. ąæą╗ąŠą║-čüčģąĄą╝ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN.
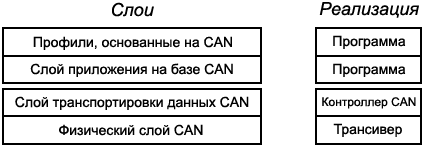
ąĀąĖčü. 36-2. ąæą╗ąŠą║-ą┤ąĖą░ą│čĆą░ą╝ą╝ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ CAN.
[ą×čé č湥ą│ąŠ ąĘą░ą▓ąĖčüąĖčé čĆą░ą▒ąŠčéą░ CAN ]
ą¤ąŠčĆčéčŗ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ . ąÆčŗą▓ąŠą┤čŗ, ą║ąŠč鹊čĆčŗą╝ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ąŠą▒ą╝ąĄąĮąĖą▓ą░ąĄčéčüčÅ ą┤ą░ąĮąĮčŗą╝ąĖ čü ą▓ąĮąĄčłąĮąĖą╝ ą╝ąĖčĆąŠą╝ (čüą╝. čéą░ą▒ą╗ąĖčåčā 36-1), ą╝ąŠą│čāčé ą▒čŗčéčī ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąĖčĆąŠą▓ą░ąĮčŗ čü ą┐ąŠčĆčéą░ą╝ąĖ (ą▓čŗą▓ąŠą┤ą░ą╝ąĖ) ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (ąĮąŠąČą║ąĖ GPIO). ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčüčé ą┤ąŠą╗ąČąĄąĮ čüąĮą░čćą░ą╗ą░ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ PIO, čćč鹊ą▒čŗ ą┐čĆąĖčüą▓ąŠąĖčéčī ąĮčāąČąĮčŗąĄ ą▓čŗą▓ąŠą┤čŗ CAN ą║ čüą▓ąŠąĄą╣ čäčāąĮą║čåąĖąĖ ą║ą░ą║ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ CAN. ąĢčüą╗ąĖ čüąĖą│ąĮą░ą╗čŗ CAN ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝, č鹊 ąŠąĮąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮčŗ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ PIO ą┤ą╗čÅ ą┤čĆčāą│ąĖčģ čåąĄą╗ąĄą╣.
ąóą░ą▒ą╗ąĖčåą░ 36-1. ąÆčŗą▓ąŠą┤čŗ čüąĖą│ąĮą░ą╗ąŠą▓ CAN čā ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ AT91SAM7X (AT91SAM7X128, AT91SAM7X256, AT91SAM7X512).
ąśą╝čÅ ą×ą┐ąĖčüą░ąĮąĖąĄ ą¤ąŠčĆčé ąÆčŗą▓ąŠą┤čŗ ą║ąŠčĆą┐čāčüą░ LQFP100
CANRX ąĪąĖą│ąĮą░ą╗ ą┐čĆąĖąĄą╝ą░
PA19
46
CANTX ąĪąĖą│ąĮą░ą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ
PA20
47
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖąĄą╝ . ą¤ąĄčĆąĄą┤ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ CAN ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüčé ą┤ąŠą╗ąČąĄąĮ čüąĮą░čćą░ą╗ą░ čĆą░ąĘčĆąĄčłąĖčéčī čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN čü ą┐ąŠą╝ąŠčēčīčÄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ (Power Management Controller, PMC). ąöą╗čÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN ąĖą╝ąĄąĄčéčüčÅ čĆąĄąČąĖą╝ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ (Low-power Mode): ąĄčüą╗ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÄ ąĮąĄ ąĮčāąČąĮąŠ čĆą░ą▒ąŠčéą░čéčī č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü CAN, č鹊 čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ CAN ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ, ąĖ ą▓ą┐ąŠčüą╗ąĄą┤čüčéą▓ąĖąĖ ąĘą░ą┐čāčēąĄąĮąŠ čüąĮąŠą▓ą░, ą║ąŠą│ą┤ą░ CAN ąŠą┐čÅčéčī ą┐ąŠčéčĆąĄą▒čāąĄčéčüčÅ. ą¤ąĄčĆąĄą┤ ąŠčüčéą░ąĮąŠą▓ą║ąŠą╣ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąĄčĆąĄą▓ąĄą┤ąĄąĮ ą▓ čĆąĄąČąĖą╝ Low-power ą┤ą╗čÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ č鹥ą║čāčēąĄą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąöą╗čÅ ą▓čŗčģąŠą┤ą░ ąĖąĘ čĆąĄąČąĖą╝ą░ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čüąĮą░čćą░ą╗ą░ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ, ąĖ ą┐ąŠč鹊ą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ąĘą░ą┐čĆąĄčéąĖčéčī Low-power Mode ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN.
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ . ąĪąĖą│ąĮą░ą╗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ CAN ą╝ąŠąČąĄčé ą▒čŗčéčī čüąŠąĄą┤ąĖąĮąĄąĮ čü ąŠą┤ąĮąĖą╝ ąĖąĘ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ ąĖčüč鹊čćąĮąĖą║ąŠą▓ ą┐čĆąŠą┤ą▓ąĖąĮčāč鹊ą│ąŠ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (Advanced Interrupt Controller, AIC). ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ CAN čéčĆąĄą▒čāąĄčé ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ AIC. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ąĮąĄ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╗ąĖąĮąĖčÄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ CAN ą▓ čĆąĄąČąĖą╝ąĄ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą║ ą┐ąĄčĆąĄą┐ą░ą┤čā.
ą¤čĆą░ą║čéąĖč湥čüą║ąĖą╣ ą┐čĆąĖą╝ąĄčĆ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čüą╝. ą▓ čüčéą░čéčīąĄ [2].
[ą×ą▒ąĘąŠčĆ ą┐čĆąŠč鹊ą║ąŠą╗ą░ CAN ]
Controller Area Network (CAN) čÅą▓ą╗čÅąĄčéčüčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╝ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą╝ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ čü ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ ą│ą╗ą░ą▓ąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ ąĮą░ čłąĖąĮąĄ (multi-master), ą║ąŠč鹊čĆčŗą╣ čŹčäč乥ą║čéąĖą▓ąĮąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ čü ąŠč湥ąĮčī ą▓čŗčüąŠą║ąĖą╝ čāčĆąŠą▓ąĮąĄą╝ ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéąĖ ąĮą░ čüą║ąŠčĆąŠčüčéčÅčģ ą┤ąŠ 1 Mbit/s ą▓ą║ą╗čÄčćąĖč鹥ą╗čīąĮąŠ.
ą¤čĆąŠč鹊ą║ąŠą╗ CAN ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé 4 čĆą░ąĘą╗ąĖčćąĮčŗąĄ čéąĖą┐ą░ čäčĆąĄą╣ą╝ą░:
Data : čŹčéąĖ čäčĆąĄą╣ą╝čŗ ą┐ąĄčĆąĄąĮąŠčüčÅčé ą┤ą░ąĮąĮčŗąĄ ą╝ąĄąČą┤čā čāąĘą╗ą░ą╝ąĖ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░ ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░. ą¤ąŠą╗ąĮą░čÅ ą┤ą╗ąĖąĮą░ čäčĆąĄą╣ą╝ą░ čüąŠčüčéą░ą▓ą╗čÅąĄčé 108 ą┤ą╗čÅ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ čäčĆąĄą╣ą╝ą░ ąĖ 128 ą▒ąĖčé ą┤ą╗čÅ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ čäčĆąĄą╣ą╝ą░.Remote : čāąĘąĄą╗ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą╝ąŠąČąĄčé ąĘą░ą┐čĆąŠčüąĖčéčī ą┤ą░ąĮąĮčŗčģ ąĖąĘ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čāč鹥ą╝ ąŠčéą┐čĆą░ą▓ą║ąĖ čäčĆąĄą╣ą╝ą░ remote čü ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝, ą║ąŠč鹊čĆčŗą╣ čüąŠą▓ą┐ą░ą┤ą░ąĄčé čü ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝ čéčĆąĄą▒čāąĄą╝ąŠą│ąŠ čäčĆąĄą╣ą╝ą░ ą┤ą░ąĮąĮčŗčģ. ąŚą░č鹥ą╝ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čāąĘąĄą╗ ą┤ą░ąĮąĮčŗčģ ąĖčüč鹊čćąĮąĖą║ą░ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé čäčĆąĄą╣ą╝ data ą║ą░ą║ ąŠčéą▓ąĄčé ąĮą░ ąĘą░ą┐čĆąŠčü čŹč鹊ą│ąŠ čāąĘą╗ą░.Error : čäčĆąĄą╣ą╝ error ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą╗čÄą▒čŗą╝ čāąĘą╗ąŠą╝, ą║ąŠą│ą┤ą░ ąŠąĮ ą┤ąĄč鹥ą║čéąĖčĆčāąĄčé ąŠčłąĖą▒ą║čā čłąĖąĮčŗ.Overload : čŹč鹊čé čäčĆąĄą╣ą╝ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĘą░ą┤ąĄčƹȹ║čā ą╝ąĄąČą┤čā ą┐čĆąĄą┤čŗą┤čāčēąĖą╝ ąĖ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖą╝ čäčĆąĄą╣ą╝ą░ą╝ąĖ data ąĖą╗ąĖ remote.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ Atmel CAN ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┤ą╗čÅ CPU ą┐ąŠą╗ąĮčŗą╣ čäčāąĮą║čåąĖąŠąĮą░ą╗ ą┐čĆąŠč鹊ą║ąŠą╗ą░ CAN V2.0 Part A ąĖ V2.0 Part B. ąŁč鹊 ą╝ąĖąĮąĖą╝ąĖąĘąĖčĆčāąĄčé ąĮą░ą│čĆčāąĘą║čā CPU ą┐čĆąĖ ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮąĖąĖ ąŠą▒ą╝ąĄąĮą░ ą┐ąŠ čłąĖąĮąĄ. ąĪą╗ąŠą╣ čüą▓čÅąĘąĖ čāčĆąŠą▓ąĮčÅ ą┤ą░ąĮąĮčŗčģ (Data Link Layer) ąĖ čćą░čüčéčī čäąĖąĘąĖč湥čüą║ąŠą│ąŠ čüą╗ąŠčÅ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüą░ą╝ąĖą╝ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ CAN.
CPU čćąĖčéą░ąĄčé ąĖą╗ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ąĖą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ č湥čĆąĄąĘ mailbox-čŗ. ąöą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ mailbox ąĮą░ąĘąĮą░čćą░ąĄčéčüčÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ. ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN čüąŠąĘą┤ą░ąĄčé ąĖą╗ąĖ ą┤ąĄą║ąŠą┤ąĖčĆčāąĄčé čüąŠąŠą▒čēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ, čćč鹊ą▒čŗ ą┐ąŠčüčéčĆąŠąĖčéčī ąĖą╗ąĖ ąŠą▒čĆą░ą▒ąŠčéą░čéčī čäčĆąĄą╣ą╝čŗ data čłąĖąĮčŗ. ążčĆąĄą╣ą╝čŗ remote, error ąĖ overload ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ CAN ą┐ąŠą┤ ąŠą▒čēąĖą╝ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ą×čĆą│ą░ąĮąĖąĘą░čåąĖčÅ mailbox . ą£ąŠą┤čāą╗čī CAN ąĖą╝ąĄąĄčé 8 ą▒čāč乥čĆąŠą▓, ą║ąŠč鹊čĆčŗąĄ ąĮą░ąĘčŗą▓ą░čÄčéčüčÅ mailbox-ą░ą╝ąĖ. ąöą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą░ą║čéąĖą▓ąĮąŠą│ąŠ mailbox-ą░ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ, ą║ąŠč鹊čĆčŗą╣ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčā CAN. ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ čüąŠąŠą▒čēąĄąĮąĖčÅ ą╝ąŠą│čāčé čüąŠą▓ą┐ą░ą┤ą░čéčī čüąŠ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝ čäčĆąĄą╣ą╝ą░ ąĖą╗ąĖ čĆą░čüčłąĖčĆąĄąĮąĮčŗą╝ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝ čäčĆąĄą╣ą╝ą░. ąŁčéąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčéčüčÅ ą┐ąĄčĆą▓čŗą╣ čĆą░ąĘ ą┐čĆąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ CAN, ąĮąŠ ą╝ąŠą│čāčé ą▒čŗčéčī ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ čĆąĄą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčīčüčÅ ą┐ąŠąĘąČąĄ, čéą░ą║ čćč鹊 mailbox ą╝ąŠąČąĄčé ąŠą▒čüą╗čāąČąĖą▓ą░čéčī ąĮąŠą▓ąŠąĄ čüąĄą╝ąĄą╣čüčéą▓ąŠ čüąŠąŠą▒čēąĄąĮąĖą╣. ąØąĄčüą║ąŠą╗čīą║ąŠ mailbox-ąŠą▓ ą╝ąŠą│čāčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ čü ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╝ ID.
ąÜą░ąČą┤čŗą╣ mailbox ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąĄą╝ą░ ąĖą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ą┤čĆčāą│ąĖčģ mailbox-ąŠą▓. ąóąĖą┐ mailbox-ą░ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐ąŠą╗ąĄą╝ MOT ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MMRx .
ą¤čĆąŠčåąĄą┤čāčĆą░ ą┐čĆąĖąĄą╝ą░ ąĖą╗ąĖ ąŠčéą▒čĆą░čüčŗą▓ą░ąĮąĖčÅ čüąŠąŠą▒čēąĄąĮąĖčÅ . ąĢčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą┐ąŠą╗ąĄ MIDE ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MIDx , č鹊 mailbox ą╝ąŠąČąĄčé ąŠą▒čĆą░ą▒ąŠčéą░čéčī čĆą░čüčłąĖčĆąĄąĮąĮčŗą╣ č乊čĆą╝ą░čé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░; ąĖąĮą░č湥 mailbox ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ č乊čĆą╝ą░čé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┐čĆąĖąĮčÅč鹊 ąĮąŠą▓ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ, ąĄą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ (ID) ą╝ą░čüą║ąĖčĆčāąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ CAN_MAMx ąĖ čüčĆą░ą▓ąĮąĖą▓ą░ąĄčéčüčÅ čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ CAN_MIDx. ąĢčüą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐čĆąĖąĮčÅč鹊 (ą▓ č鹊ą╝ čüą╝čŗčüą╗ąĄ, čćč鹊 ąĮąĄ ąŠčéčäąĖą╗čīčéčĆąŠą▓ą░ąĮąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝), čŹč鹊čé ID čüąŠąŠą▒čēąĄąĮąĖčÅ ą║ąŠą┐ąĖčĆčāąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆ CAN_MIDx.
ąĀąĖčü. 36-3. ą¤čĆąŠčåąĄą┤čāčĆą░ čäąĖą╗čīčéčĆą░čåąĖąĖ ą┐čĆąĖąĄą╝ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ.
ąĢčüą╗ąĖ mailbox ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čüąŠąŠą▒čēąĄąĮąĖą╣ (čüąĄą╝ąĄą╣čüčéą▓ą░ čüąŠąŠą▒čēąĄąĮąĖą╣) čü čĆą░ąĘąĮčŗą╝ąĖ ID, č鹊 ą╝ą░čüą║ą░ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MAMx ą┤ąŠą╗ąČąĮą░ ą╝ą░čüą║ąĖčĆąŠą▓ą░čéčī ąĮčāą╗čÅą╝ąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ čćą░čüčéčī ą▓ čüąĄą╝ąĄą╣čüčéą▓ąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ ID. ąÜą░ą║ č鹊ą╗čīą║ąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐čĆąĖąĮčÅč鹊, ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░čéčī ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą▒ąĖčéčŗ ą▓ CAN_MIDx. ą¦č鹊ą▒čŗ čāčüą║ąŠčĆąĖčéčī ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ, ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą▒ąĖčéčŗ ą│čĆčāą┐ą┐ąĖčĆčāčÄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ čüąĄą╝ąĄą╣čüčéą▓ą░ (family ID register, CAN_MFIDx ).
ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ čüą╗ąĄą┤čāčÄčēąĖąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ąŠą┤ąĮąĖą╝ ąĖ č鹥ą╝ ąČąĄ mailbox-ąŠą╝
ID0 101000100100010010000100 0 11 00b ID1 101000100100010010000100 0 11 01b ID2 101000100100010010000100 0 11 10b ID3 101000100100010010000100 0 11 11b ID4 101000100100010010000100 1 11 00b ID5 101000100100010010000100 1 11 01b ID6 101000100100010010000100 1 11 10b ID7 101000100100010010000100 1 11 11b
č鹊 CAN_MIDx ąĖ CAN_MAMx čŹč鹊ą│ąŠ mailbox-ą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮčŗ čüą╗ąĄą┤čāčÄčēąĖą╝ąĖ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ (ąĮą░ą┐ąŠą╝ąĮčÄ, čćč鹊 x čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąĮąŠą╝ąĄčĆčā mailbox-ą░ ąŠčé 0 ą┤ąŠ 7):
CAN_MIDx = 001 101000100100010010000100 x 11 xxb CAN_MAMx = 001 111111111111111111111111 0 11 00b
ąĢčüą╗ąĖ mailbox ą┐čĆąĖą╝ąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ čü ID6, č鹊 CAN_MIDx ąĖ CAN_MFIDx čāčüčéą░ąĮąŠą▓čÅčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
CAN_MIDx = 001 101000100100010010000100 1 11 10b CAN_MFIDx = 000 000000000000000000000000 0 01 10b
ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MFIDx ąĮą░čģąŠą┤ąĖčéčüčÅ ąĮąŠą╝ąĄčĆ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ ą│čĆčāą┐ą┐ąĄ, ą▓ ą┤ą░ąĮąĮąŠą╝ ą┐čĆąĖą╝ąĄčĆąĄ čŹč鹊 ą▒čāą┤ąĄčé čćąĖčüą╗ąŠ ąŠčé 0 ą┤ąŠ 7, ą┐ąŠčüą║ąŠą╗čīą║čā ąĘą░ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąŠ 3 ą▒ąĖčéą░ ą░ą┤čĆąĄčüą░.
ąŁčéčā ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čāą┤ąŠą▒ąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ą▒čŗčüčéčĆąŠą│ąŠ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ą░ą┤čĆąĄčüą░ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąĢčüą╗ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ čüą▓čÅąČąĄčé ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ čü ą║ą░ąČą┤čŗą╝ ID čüąŠąŠą▒čēąĄąĮąĖčÅ, č鹊 ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĖ ą╝ąŠąČąĮąŠ ą┐ąŠą╝ąĄčüčéąĖčéčī ą▓ ą╝ą░čüčüąĖą▓ čāą║ą░ąĘą░č鹥ą╗ąĄą╣ ąĮą░ čäčāąĮą║čåąĖčÄ:
void (* pHandler[8 ])(void );
ąÜąŠą│ą┤ą░ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄčéčüčÅ, č鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ CAN_MFIDx, ąĖ ąĘą┤ąĄčüčī čāąČąĄ ąĮąĄ ąĮčāąČąĮąŠ ą┐čĆąŠą▓ąĄčĆčÅčéčī ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą▒ąĖčéčŗ:
unsigned int MFID0_register;
// Get_CAN_MFID0_Register() ą▓ąĄčĆąĮąĄčé ąĘąĮą░č湥ąĮąĖąĄ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ CAN_MFID0:
MFID0_register = Get_CAN_MFID0_Register();
pHandler[MFID0_register]();
Mailbox ą┐čĆąĖąĄą╝ą░ . ąÜąŠą│ą┤ą░ ą╝ąŠą┤čāą╗čī CAN ą┐čĆąĖąĮąĖą╝ą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ, ąŠąĮ čüą╝ąŠčéčĆąĖčé ąĮą░ ą┐ąĄčĆą▓čŗą╣ ą┤ąŠčüčéčāą┐ąĮčŗą╣ mailbox ą┐ąŠ ą┐ąŠčĆčÅą┤ą║čā, ąĮą░čćąĖąĮą░čÅ čü čüą░ą╝ąŠą│ąŠ ą╝ą░ą╗ąŠą│ąŠ ąĮąŠą╝ąĄčĆą░, ąĖ čüčĆą░ą▓ąĮąĖą▓ą░ąĄčé ąĄą│ąŠ ID čü ID ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąĢčüą╗ąĖ čéą░ą║ąŠą╣ mailbox ąĮą░ą╣ą┤ąĄąĮ, č鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ ąĄą│ąŠ čĆąĄą│ąĖčüčéčĆą░čģ ą┤ą░ąĮąĮčŗčģ. ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, čŹč鹊čé mailbox ąĘą░ą┐čĆąĄčēą░ąĄčéčüčÅ ąĮą░ čüč鹊ą╗čīą║ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, ą┐ąŠą║ą░ ą┐čĆąĖąĮčÅč鹊ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĮąĄ ą▒čāą┤ąĄčé ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝, ąĖą╗ąĖ ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤čāčé ą┐čĆąĖąĮčÅčéčŗ ąĮąŠą▓čŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ čü č鹥ą╝ ąČąĄ ID, č鹊ą│ą┤ą░ čŹčéąĖ ąĮąŠą▓čŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ čü č鹥ą╝ ąČąĄ ID ą┐ąĄčĆąĄąĘą░ą┐ąĖčłčāčé čĆą░ąĮąĄąĄ ą┐čĆąĖąĮčÅčéčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ (ą┐čĆąĖąĄą╝ čü ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčīčÄ).
ą£ąŠąČąĮąŠ čéą░ą║ąČąĄ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī mailbox ą▓ ą┐ąŠčéčĆąĄą▒ąĖč鹥ą╗čīčüą║ąŠą╝ čĆąĄąČąĖą╝ąĄ (Consumer Mode). ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą┐ąŠčüą╗ąĄ ą║ą░ąČą┤ąŠą│ąŠ ąĘą░ą┐čĆąŠčüą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒čāą┤ąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ čäčĆąĄą╣ą╝ remote. ą¤ąĄčĆą▓čŗą╣ ą┐čĆąĖąĮčÅčéčŗą╣ ąŠčéą▓ąĄčé čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ čĆąĄą│ąĖčüčéčĆą░čģ ą┤ą░ąĮąĮčŗčģ.
ąØąĄčüą║ąŠą╗čīą║ąŠ mailbox-ąŠą▓ ą╝ąŠą│čāčé ą▒čŗčéčī čüąŠąĄą┤ąĖąĮąĄąĮčŗ ą▓ čåąĄą┐ąŠčćą║čā ą┤ą╗čÅ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░. ą×ąĮąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ čü ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╝ ID ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąĄą╝ą░, ą║čĆąŠą╝ąĄ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ mailbox, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąĄą╝ą░ čü ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčīčÄ (Receive with Overwrite Mode). ąŁč鹊čé ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ mailbox ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▒čāč乥čĆą░.
ąóąĖą┐ mailbox ą┐čĆąĖąĄą╝ą░ ą×ą┐ąĖčüą░ąĮąĖąĄ
Receive
ą¤ąĄčĆą▓ąŠąĄ ą┐čĆąĖąĮčÅč鹊ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮąŠ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ ą┤ą░ąĮąĮčŗčģ mailbox. ąöą░ąĮąĮčŗąĄ ąŠčüčéą░čÄčéčüčÅ ą┤ąŠčüčéčāą┐ąĮčŗą╝ąĖ ąĖ ąĮąĄčéčĆąŠąĮčāčéčŗą╝ąĖ (ąĮąĄ ą▒čāą┤čāčé ą┐ąĄčĆąĄąĘą░ą┐ąĖčüą░ąĮčŗ), ą┐ąŠą║ą░ ąĮąĄ ą┐ąŠčüčéčāą┐ąĖčé ąĮąŠą▓čŗą╣ ąĘą░ą┐čĆąŠčü ąĮą░ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ.
Receive with overwrite
ą¤ąŠčüą╗ąĄą┤ąĮąĄąĄ ą┐čĆąĖąĮčÅč鹊ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮąŠ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ ą┤ą░ąĮąĮčŗčģ mailbox. ąÜą░ąČą┤ąŠąĄ ąĮąŠą▓ąŠąĄ ą┐ąŠčüčéčāą┐ą░čÄčēąĄąĄ (ąĄčüą╗ąĖ ąŠąĮąŠ ą┐čĆąĖąĮčÅč鹊 ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝ ąĖ ąĮą░čüčéčĆąŠąĄąĮąĮąŠą╣ ą╝ą░čüą║ąŠą╣) čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčŗą▓ą░čéčī ą┐čĆąĄą┤čŗą┤čāčēąĄąĄ. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą┐čĆąŠą▓ąĄčĆąĖčéčī ą┐čĆąĖ čćč鹥ąĮąĖąĖ čĆąĄą│ąĖčüčéčĆąŠą▓ ą┤ą░ąĮąĮčŗčģ, ą▒čŗą╗ąŠ ą╗ąĖ ą┐ąĄčĆąĄąĘą░ą┐ąĖčüą░ąĮčŗ ą┤ą░ąĮąĮčŗąĄ ąĮąŠą▓čŗą╝ čüąŠąŠą▒čēąĄąĮąĖąĄą╝.
Consumer
Mailbox ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé čäčĆąĄą╣ą╝ remote. ą¤čĆąĖąĮčÅčéčŗą╣ ąŠčéą▓ąĄčé čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą┤ą░ąĮąĮčŗčģ mailbox. ąŁč鹊 čĆą░čüčłąĖčĆčÅąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą┐čĆąĖąĄą╝ą░. ąöą░ąĮąĮčŗąĄ ąŠčüčéą░čÄčéčüčÅ ą┤ąŠčüčéčāą┐ąĮčŗą╝ąĖ ą┤ąŠ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ąĘą░ą┐čĆąŠčüą░ ąĮą░ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ.
Mailbox ą┐ąĄčĆąĄą┤ą░čćąĖ . ąÜąŠą│ą┤ą░ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ čüąŠąŠą▒čēąĄąĮąĖąĄ, ą┤ą╗ąĖąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĖ ąĄą│ąŠ ą┤ą░ąĮąĮčŗąĄ ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ą▓ ą┐ąĄčĆąĄą┤ą░čÄčēąĖą╣ mailbox čü ą║ąŠčĆčĆąĄą║čéąĮčŗą╝ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝. ąöą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąĄčĆąĄą┤ą░čÄčēąĄą│ąŠ mailbox ąĮą░ąĘąĮą░čćą░ąĄčéčüčÅ ą┐čĆąĖąŠčĆąĖč鹥čé. ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ą▓ ą┐ąĄčĆą▓čāčÄ ąŠč湥čĆąĄą┤čī čüąŠąŠą▒čēąĄąĮąĖąĄ čü čüą░ą╝čŗą╝ ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ (ą┐čĆąĖąŠčĆąĖč鹥čé ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ ą▓ ą┐ąŠą╗ąĄ PRIOR čĆąĄą│ąĖčüčéčĆą░ CAN_MMRx ).
ąóą░ą║ąČąĄ ąĄčüčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī mailbox ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąŠą┤čÄčüąĄčĆą░ (Producer Mode). ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą║ąŠą│ą┤ą░ ą┐čĆąĖąĮčÅčé čäčĆąĄą╣ą╝ remote, č鹊 ą┤ą░ąĮąĮčŗąĄ mailbox-ą░ ą▒čāą┤čāčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ. ą¤čāč鹥ą╝ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čŹč鹊ą│ąŠ čĆąĄąČąĖą╝ą░ ą┐čĆąŠą┤čÄčüąĄčĆ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ mailbox ą▓ą╝ąĄčüč鹊 ą┤ą▓čāčģ: ąŠą┤ąĖąĮ ą┤ą╗čÅ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čäčĆąĄą╣ą╝ą░, ąĖ ąŠą┤ąĖąĮ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ąŠčéą▓ąĄčéą░.
ąóąĖą┐ mailbox ą┐ąĄčĆąĄą┤ą░čćąĖ ą×ą┐ąĖčüą░ąĮąĖąĄ
Transmit
ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ, čüąŠčģčĆą░ąĮąĄąĮąĮąŠąĄ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ ą┤ą░ąĮąĮčŗčģ mailbox, ą▒čāą┤ąĄčé ą┐čŗčéą░čéčīčüčÅ ą▓čŗąĖą│čĆą░čéčī ą░čĆą▒ąĖčéčĆą░ąČ čłąĖąĮčŗ - ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ąĖą╗ąĖ ą┐ąŠąĘąČąĄ, čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą▒ą╗ąŠą║ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĄą╝ (Time Management Unit) ąĖą╗ąĖ ą▒ąĄąĘ ąĮąĄą│ąŠ. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą▒čāą┤ąĄčé ąŠą┐ąŠą▓ąĄčēąĄąĮąŠ ąŠ č鹊ą╝, čćč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ ąĖą╗ąĖ ąŠą▒ąŠčĆą▓ą░ąĮąŠ (abort).
Producer
ąĪąŠąŠą▒čēąĄąĮąĖąĄ, ą┐ąŠą┤ą│ąŠč鹊ą▓ą╗ąĄąĮąĮąŠąĄ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ ą┤ą░ąĮąĮčŗčģ mailbox, ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ ą┐ąŠčüą╗ąĄ ą┐čĆąĖąĄą╝ą░ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ čäčĆąĄą╣ą╝ą░ remote. ąŁč鹊 čĆą░čüčłąĖčĆčÅąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ.
ąæą╗ąŠą║ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ . ąÆ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāčÄčēąĖą╣čüčÅ 16-ą▒ąĖčéąĮčŗą╣ čéą░ą╣ą╝ąĄčĆ. ąĪč湥čéčćąĖą║ ą▓ ąĮąĄą╝ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą┐ąŠ čéą░ą║čéą░ą╝ ą▒ąĖčé čłąĖąĮčŗ CAN. ąóą░ą╣ą╝ąĄčĆ čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ą▓ą╝ąĄčüč鹥 čü čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN (ą║ąŠą│ą┤ą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▒ąĖčé CANEN ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MR ). ąĪč湥čéčćąĖą║ čéą░ą╣ą╝ąĄčĆą░ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčćąĖčēą░ąĄčéčüčÅ ą▓ čüą╗ąĄą┤čāčÄčēąĖčģ čüą╗čāčćą░čÅčģ:
ŌĆó ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░.CAN_SR ).CAN_MSR ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣_ąĮąŠą╝ąĄčĆ_mailbox ).
ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą╝ąŠąČąĄčé čéą░ą║ąČąĄ čüą▒čĆąŠčüąĖčéčī ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čéą░ą╣ą╝ąĄčĆ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ TIMRST ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_TCR . ąóąĄą║čāčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čéą░ą╣ą╝ąĄčĆą░ ą▓čüąĄą│ą┤ą░ ą┤ąŠčüčéčāą┐ąĮąŠ ą┐čāč鹥ą╝ čćč鹥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░ CAN_TIM .
ąÜąŠą│ą┤ą░ čéą░ą╣ą╝ąĄčĆ ą┐čĆąĖ čüą▓ąŠą▒ąŠą┤ąĮąŠą╝ čüč湥č鹥 ą┐ąĄčĆąĄčģąŠą┤ąĖčé ąŠčé ąĘąĮą░č湥ąĮąĖčÅ FFFFh ą║ 0000h, č鹊 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_SR čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ čäą╗ą░ą│ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ TOVF (Timer Overflow). ąæąĖčé TOVF ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_SR ąŠčćąĖčēą░ąĄčéčüčÅ ą┐čĆąĖ čćč鹥ąĮąĖąĖ čĆąĄą│ąĖčüčéčĆą░ CAN_SR. ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_IMR , ą╝ąŠąČąĄčé ą▒čŗčéčī čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąĖ čāčüčéą░ąĮąŠą▓ą║ąĄ ą▒ąĖčéą░ TOVF.
ąÆ čüąĄčéąĖ CAN ąĮąĄą║ąŠč鹊čĆčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ CAN ą╝ąŠą│čāčé ąĖą╝ąĄčéčī čüč湥čéčćąĖą║, čā ą║ąŠč鹊čĆąŠą│ąŠ čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčī ą▒ąŠą╗čīčłąĄ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą╝ąŠąČąĄčé čéą░ą║ąČąĄ čĆąĄčłąĖčéčī ąĘą░ą╝ąŠčĆąŠąĘąĖčéčī ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čüč湥čéčćąĖą║ čéą░ą╣ą╝ąĄčĆą░, ą║ąŠą│ą┤ą░ ąŠąĮ ą┤ąŠčüčéąĖą│ąĮąĄčé FFFFh, ąĖ ąČą┤ą░čéčī čāčüą╗ąŠą▓ąĖčÅ ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ą░ ąŠčé ą┤čĆčāą│ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ąŁčéą░ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ TIMFRZ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MR. ąĀąĄą│ąĖčüčéčĆ CAN_TIM ąĘą░ą╝ąŠčĆąŠąĘąĖčéčüčÅ ąĮą░ ąĘąĮą░č湥ąĮąĖąĖ FFFFh. ąĀą░ąĮąĄąĄ ąŠą┐ąĖčüą░ąĮąĮčŗąĄ čāčüą╗ąŠą▓ąĖčÅ ąŠčćąĖčüčéą║ąĖ čüč湥čéčćąĖą║ą░ ą┐ąĄčĆąĄąĘą░ą┐čāčüčéčÅčé čéą░ą╣ą╝ąĄčĆ. ąĪčĆą░ą▒ąŠčéą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ (TOVF).
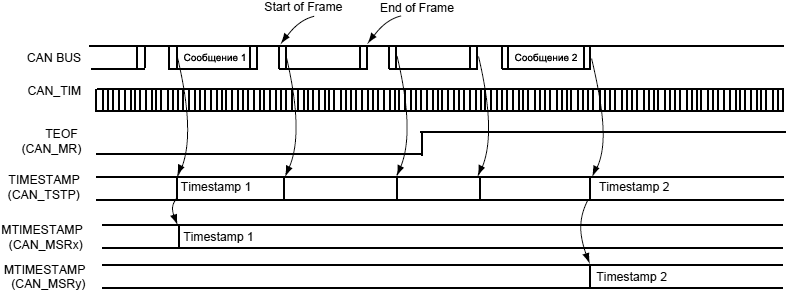
ą¦č鹊ą▒čŗ ąŠčéčüą╗ąĄąČąĖą▓ą░čéčī ą░ą║čéąĖą▓ąĮąŠčüčéčī čłąĖąĮčŗ CAN, čĆąĄą│ąĖčüčéčĆ CAN_TIM ą║ąŠą┐ąĖčĆčāąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆ CAN_TIMESTP ą┐ąŠčüą╗ąĄ ą║ą░ąČą┤ąŠą│ąŠ ąĮą░čćą░ą╗ą░ čäčĆąĄą╣ą╝ą░ ąĖą╗ąĖ ąŠą║ąŠąĮčćą░ąĮąĖčÅ čäčĆąĄą╣ą╝ą░, ąĖ ą║ąŠą│ą┤ą░ čüčĆą░ą▒ąŠčéą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ TSTP. ąĢčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé TEOF ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MR, č鹊 ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ ąĘą░čģą▓ą░čéčŗą▓ą░ąĄčéčüčÅ ą┐ąŠ ą║ą░ąČą┤ąŠą╝čā ąŠą║ąŠąĮčćą░ąĮąĖčÄ čäčĆąĄą╣ą╝ą░, ąĖąĮą░č湥 ąĘąĮą░č湥ąĮąĖąĄ ą▒čāą┤ąĄčé ąĘą░čģą▓ą░čéčŗą▓ą░čéčīčüčÅ ą▓ ąĮą░čćą░ą╗ąĄ čäčĆąĄą╣ą╝ą░ (Start Of Frame). ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ą╝ą░čüą║ąĖ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_IMR, ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ą║ąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé TSTP ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_SR. ąæąĖčé TSTP ąŠčćąĖčēą░ąĄčéčüčÅ čćč鹥ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ CAN_SR.
ąæą╗ąŠą║ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą▓ ąŠą┤ąĮąŠą╝ ąĖąĘ ą┤ą▓čāčģ čüą╗ąĄą┤čāčÄčēąĖčģ čĆąĄąČąĖą╝ąŠą▓:
ŌĆó Timestamping: ąĘąĮą░č湥ąĮąĖąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░ ąĘą░čģą▓ą░čéčŗą▓ą░ąĄčéčüčÅ ąĮą░ ą║ą░ąČą┤ąŠą╝ ąĮą░čćą░ą╗ąĄ čäčĆąĄą╣ą╝ą░ ąĖą╗ąĖ ąĮą░ ą║ą░ąČą┤ąŠą╝ ą║ąŠąĮčåąĄ čäčĆąĄą╣ą╝ą░.
ąĀąĄąČąĖą╝ Timestamping čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ąŠčćąĖčüčéą║ąŠą╣ ą┐ąŠą╗čÅ TTM ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MR. ąĀąĄąČąĖą╝ Time Triggered čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą┐ąŠą╗čÅ TTM ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MR.
[ąĪčéą░ąĮą┤ą░čĆčéąĮčŗąĄ čäčāąĮą║čåąĖąĖ CAN 2.0 ]
ąÆčüąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ ąĮą░ čłąĖąĮąĄ CAN ą┤ąŠą╗ąČąĮčŗ ąĖą╝ąĄčéčī ąŠą┤ąĖąĮą░ą║ąŠą▓čāčÄ čüą║ąŠčĆąŠčüčéčī ą▒ąĖčé ąĖ ą┤ą╗ąĖąĮčā ą▒ąĖčéą░. ąØą░ čĆą░ąĘąĮčŗčģ čéą░ą║č鹊ą▓čŗčģ čćą░čüč鹊čéą░čģ ąŠčéą┤ąĄą╗čīąĮčŗčģ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ čüą║ąŠčĆąŠčüčéčī ą▒ąĖčé ą┐ąŠą┤čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ čüąĄą│ą╝ąĄąĮč鹊ą▓ ą▓čĆąĄą╝ąĄąĮąĖ.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą▒ąĖčéą░ . ąĪčéą░ąĮą┤ą░čĆčé ą┐čĆąŠč鹊ą║ąŠą╗ą░ CAN ą┤ąĄą╗ąĖčé ąĮąŠą╝ąĖąĮą░ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ ą▒ąĖčéą░ ąĮą░ 4 čĆą░ąĘąĮčŗčģ čüąĄą│ą╝ąĄąĮčéą░:
ąĀąĖčü. 36-4. ąĀą░ąĘą┤ąĄą╗ąĄąĮąĖąĄ ą▓čĆąĄą╝ąĄąĮąĖ ą▒ąĖčé čłąĖąĮčŗ CAN.
TIME QUANTUM : ą║ą▓ą░ąĮčé ą▓čĆąĄą╝ąĄąĮąĖ (TIME QUANTUM, TQ) čŹč鹊 čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮą░čÅ ąĄą┤ąĖąĮąĖčåą░ ą▓čĆąĄą╝ąĄąĮąĖ, ą▓čŗčćąĖčüą╗ąĄąĮąĮą░čÅ ąŠčé ą┐ąĄčĆąĖąŠą┤ą░ MCK. ą×ą▒čēąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ TIME QUANTA ą▓ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą▒ąĖčéą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ ąŠčé 8 ą┤ąŠ 25.
SYNC SEG : čüąĄą│ą╝ąĄąĮčé čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ. ąŁčéą░ čćą░čüčéčī ą▒ąĖčé ą▓čĆąĄą╝ąĄąĮąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čĆą░ąĘą╗ąĖčćąĮčŗčģ čāąĘą╗ąŠą▓ čłąĖąĮčŗ. ą×ąČąĖą┤ą░ąĄčéčüčÅ, čćč鹊 ą┐ąĄčĆąĄą┐ą░ą┤ čüąĖą│ąĮą░ą╗ą░ ą┐ąŠčÅą▓ąĖčéčüčÅ ą▓ čŹč鹊ą╝ čüąĄą│ą╝ąĄąĮč鹥 ą▓čĆąĄą╝ąĄąĮąĖ. ąĢą│ąŠ ą┤ą╗ąĖąĮą░ čĆą░ą▓ąĮą░ 1 TQ.
PROP SEG : čüąĄą│ą╝ąĄąĮčé čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖčÅ. ąŁčéą░ čćą░čüčéčī ą▓čĆąĄą╝ąĄąĮąĖ ą▒ąĖčéą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠą╝ą┐ąĄąĮčüą░čåąĖąĖ čäąĖąĘąĖč湥čüą║ąŠą╣ ąĘą░ą┤ąĄčƹȹ║ąĖ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ čüąĄčéąĖ. ąŁč鹊 ą┤ą▓ąŠą╣ąĮą░čÅ čüčāą╝ą╝ą░ ą▓čĆąĄą╝ąĄąĮąĖ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ ą┐ąŠ čłąĖąĮąĄ, ąĘą░ą┤ąĄčƹȹ║ąĖ ą▓čģąŠą┤ąĮąŠą│ąŠ ą║ąŠą╝ą┐ą░čĆą░č鹊čĆą░ ąĖ ąĘą░ą┤ąĄčƹȹ║ąĖ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░. ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ ąŠčé 1 ą┤ąŠ 8 TQ.
ąŁč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą▓ ą┐ąŠą╗ąĄ PROPAG čĆąĄą│ąĖčüčéčĆą░ ąĮą░čüčéčĆąŠą╣ą║ąĖ čüą║ąŠčĆąŠčüčéąĖ CAN (CAN Baudrate Register, CAN_BR ).
PHASE SEG1 , PHASE SEG2 : čüąĄą│ą╝ąĄąĮčéčŗ čäą░ąĘčŗ 1 ąĖ 2. ąŁč鹊 čüąĄą│ą╝ąĄąĮčéčŗ čäą░ąĘčŗ ą▒čāč乥čĆą░, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą┤ą╗čÅ ą║ąŠą╝ą┐ąĄąĮčüą░čåąĖąĖ ąŠčłąĖą▒ąŠą║ čäą░ąĘčŗ ą┐ąĄčĆąĄą┐ą░ą┤ąŠą▓. ąŁčéąĖ čüąĄą│ą╝ąĄąĮčéčŗ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąŠą┤ą╗ąĄąĮčŗ (PHASE SEG1) ąĖą╗ąĖ čāą║ąŠčĆąŠč湥ąĮčŗ (PHASE SEG2) ą┐čĆąĖ čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ. PHASE SEG1 ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ ąŠčé 1 ą┤ąŠ 8 TQ. PHASE SEG2 ą▒čāą┤ąĄčé ą┤ą╗ąĖąĮąŠą╣ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ą▓čĆąĄą╝ąĄąĮąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĖąĮč乊čĆą╝ą░čåąĖąĖ (Information Processing Time, IPT), ąĖ ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▒ąŠą╗čīčłąĄ č湥ą╝ ą┤ą╗ąĖąĮą░ PHASE SEG1.
ąŁčéąĖ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ ą┐ąŠą╗čÅčģ PHASE1 ąĖ PHASE2 čĆąĄą│ąĖčüčéčĆą░ ąĮą░čüčéčĆąŠą╣ą║ąĖ čüą║ąŠčĆąŠčüčéąĖ CAN (CAN_BR).
IPT : ą▓čĆąĄą╝čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĖąĮč乊čĆą╝ą░čåąĖąĖ. ąÆčĆąĄą╝čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĖąĮč乊čĆą╝ą░čåąĖąĖ (Information Processing Time, IPT) čŹč鹊 ą▓čĆąĄą╝čÅ, čéčĆąĄą▒čāąĄą╝ąŠąĄ ą┤ą╗čÅ ą╗ąŠą│ąĖą║ąĖ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī čāčĆąŠą▓ąĄąĮčī ą▒ąĖčéą░ ą▓ąŠ ą▓čĆąĄą╝čÅ ą▓čŗą▒ąŠčĆą║ąĖ čüąĖą│ąĮą░ą╗ą░ ąĮą░ čłąĖąĮąĄ ą┤ą░ąĮąĮčŗčģ. ąśąĮč鹥čĆą▓ą░ą╗ IPT ąĮą░čćąĖąĮą░ąĄčéčüčÅ ąĮą░ č鹊čćą║ąĄ ą▓čŗą▒ąŠčĆą║ąĖ, ąĖąĘą╝ąĄčĆčÅąĄčéčüčÅ ą▓ TQ ąĖ ąĘą░čäąĖą║čüąĖčĆąŠą▓ą░ąĮ ąĮą░ ą▓ąĄą╗ąĖčćąĖąĮąĄ 2 TQ ą┤ą╗čÅ Atmel CAN. ą¤ąŠčüą║ąŠą╗čīą║čā PHASE SEG2 čéą░ą║ąČąĄ ąĮą░čćąĖąĮą░ąĄčéčüčÅ ą▓ č鹊čćą║ąĄ ą▓čŗą▒ąŠčĆą║ąĖ ąĖ ą▓ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╝ čüąĄą│ą╝ąĄąĮč鹥 ą▓čĆąĄą╝ąĄąĮąĖ ą▒ąĖčéą░, č鹊 PHASE SEG2 ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą╝ąĄąĮčīčłąĄ IPT.
SAMPLE POINT : č鹊čćą║ą░ ą▓čŗą▒ąŠčĆą║ąĖ. ąóąŠčćą║ą░ ą▓čŗą▒ąŠčĆą║ąĖ čŹč鹊 ą╝ąŠą╝ąĄąĮčé ą▓ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠą│ą┤ą░ čāčĆąŠą▓ąĄąĮčī čüąĖą│ąĮą░ą╗ą░ ąĮą░ čłąĖąĮąĄ čüčćąĖčéčŗą▓ą░ąĄčéčüčÅ ąĖ ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčéčüčÅ ą║ą░ą║ ąĘąĮą░č湥ąĮąĖąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą▒ąĖčéą░. ą£ąĄčüč鹊 čŹč鹊ą│ąŠ ą╝ąŠą╝ąĄąĮčéą░ ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖąĖ PHASE_SEG1.
SJW : čłąĖčĆąĖąĮą░ ą┐čĆčŗąČą║ą░ čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ. ąŁč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą┐čĆąĄą┤ąĄą╗ čāą┤ą╗ąĖąĮąĄąĮąĖčÅ ąĖą╗ąĖ čāą║ąŠčĆą░čćąĖą▓ą░ąĮąĖčÅ čüąĄą│ą╝ąĄąĮč鹊ą▓ čäą░ąĘčŗ.
SJW ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ ą┤ąŠ ą╝ąĖąĮąĖą╝čāą╝ą░ PHASE SEG1 ąĖ 4 TQ.
ąĢčüą╗ąĖ ą┐ąŠą╗ąĄ SMP ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_BR čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ, č鹊 ą┐čĆąĖčģąŠą┤čÅčēąĖą╣ ą┐ąŠč鹊ą║ ą▒ąĖčé ąŠčåąĖčäčĆąŠą▓čŗą▓ą░ąĄčéčüčÅ čéčĆąĖ čĆą░ąĘą░ ąĘą░ ą┐ąŠą╗ąŠą▓ąĖąĮčā ą┐ąĄčĆąĖąŠą┤ą░ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ CAN, čåąĄąĮčéčĆąĖčĆčāčÅčüčī ąĮą░ č鹊čćą║ąĄ ą▓čŗą▒ąŠčĆą║ąĖ.
ąÆ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ CAN ą┤ą╗ąĖąĮą░ ą▒ąĖčéą░ ąĮą░ čłąĖąĮąĄ CAN ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ BRP, PROPAG, PHASE1 ąĖ PHASE2.
tBIT = tCSC + tPRS + tPHS1 + tPHS2
ąÜą▓ą░ąĮčé ą▓čĆąĄą╝ąĄąĮąĖ (TQ) ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ą┐ąŠ čüą╗ąĄą┤čāčÄčēąĄą╣ č乊čĆą╝čāą╗ąĄ:
tCSC = (BRP + 1) / MCK
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┐ąŠą╗ąĄ BRP ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ field [1, 0x7F], ąĮą░ą┐čĆąĖą╝ąĄčĆ ąĘąĮą░č湥ąĮąĖąĄ BRP = 0 ąĮąĄ ą┤ąŠą┐čāčüčéąĖą╝ąŠ.
tPRS = tCSC * (PROPAG + 1) tPHS1 = tCSC * (PHASE1 + 1) tPHS2 = tCSC * (PHASE2 + 1)
ą¦č鹊ą▒čŗ ą║ąŠą╝ą┐ąĄąĮčüąĖčĆąŠą▓ą░čéčī čüą┤ą▓ąĖą│ąĖ čäą░ąĘčŗ ą╝ąĄąČą┤čā ą│ąĄąĮąĄčĆą░č鹊čĆą░ą╝ąĖ čéą░ą║č鹊ą▓ ąŠčéą┤ąĄą╗čīąĮčŗčģ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ ąĮą░ čłąĖąĮąĄ, ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą┤ąŠą╗ąČąĄąĮ čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░čéčīčüčÅ ą┐ąŠ ą╗čÄą▒ąŠą╝čā čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝čā ą┐ąĄčĆąĄą┐ą░ą┤čā čüąĖą│ąĮą░ą╗ą░ č鹥ą║čāčēąĄą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąĀąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ čāą║ąŠčĆą░čćąĖą▓ą░ąĄčé ąĖą╗ąĖ čāą┤ą╗ąĖąĮčÅąĄčé ą▓čĆąĄą╝čÅ ą▒ąĖčéą░ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊ą▒čŗ ą┐ąŠąĘąĖčåąĖčÅ č鹊čćą║ąĖ ąŠčåąĖčäčĆąŠą▓ą║ąĖ čüąĖą│ąĮą░ą╗ą░ (č鹊čćą║ą░ ą▓čŗą▒ąŠčĆą║ąĖ) čüą┤ą▓ąĖą│ą░ą╗ą░čüčī ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĮčŗą╝ ą┐ąĄčĆąĄą┐ą░ą┤ąŠą╝. ą¤čĆčŗąČąŠą║ čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (SJW) ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ, ąĮą░ ą║ąŠč鹊čĆąŠąĄ ą┐ąĄčĆąĖąŠą┤ ą▒ąĖčéą░ ą╝ąŠąČąĄčé ą▒čŗčéčī čāą║ąŠčĆąŠč湥ąĮ ąĖą╗ąĖ čāą┤ą╗ąĖąĮąĄąĮ ą┐čĆąĖ čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ.
tSJW = tCSC * (SJW + 1)
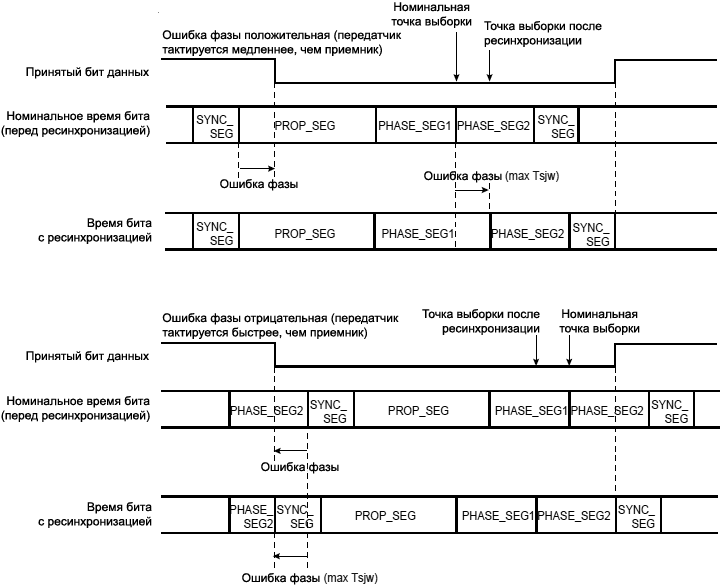
ąĀąĖčü. 36-5. ąÆčĆąĄą╝ąĄąĮąĮčŗąĄ ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ ą▒ąĖčé čłąĖąĮčŗ CAN.
MCK = 48 ą£ąōčå
ąĪą║ąŠčĆąŠčüčéčī CAN = 500 kbit/s => ą▓čĆąĄą╝čÅ ą▒ąĖčéą░ = 2 us
ą×ą▒čēąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą▓ą░ąĮčéą░ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą▒ąĖčéą░ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ ą╝ąĄąČą┤čā 8 ąĖ 25. ąĢčüą╗ąĖ ą╝čŗ čäąĖą║čüąĖčĆčāąĄą╝ ą▓čĆąĄą╝čÅ ą▒ąĖčéą░ ąĮą░ ąĘąĮą░č湥ąĮąĖąĖ 16, č鹊 ą║ą▓ą░ąĮčé ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąŠą╗čāčćąĖčéčüčÅ:
Tcsc = 1 ą║ą▓ą░ąĮčé ą▓čĆąĄą╝ąĄąĮąĖ = ą▓čĆąĄą╝čÅ ą▒ąĖčéą░ / 16 = 125 nscsc x MCK) - 1 = 5
ąÆčĆąĄą╝čÅ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖčÅ ą▓ čüąĄą│ą╝ąĄąĮč鹥 čüą▓čÅąĘąĖ čĆą░ą▓ąĮąŠ ą┤ą▓ąŠą╣ąĮąŠą╣ čüčāą╝ą╝ąĄ čüąŠčüčéą░ą▓ą╗čÅčÄčēąĖčģ ąĘą░ą┤ąĄčƹȹ║ąĖ ąĮą░ ą▓čüąĄą╝ ą┐čāčéąĖ čüąĖą│ąĮą░ą╗ą░ ą┐ąŠ čłąĖąĮąĄ, ąĘą░ą┤ąĄčƹȹ║ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ąĖ ąĘą░ą┤ąĄčƹȹ║ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░:
Tprs = 2 * (50+30+110) ns = 380 ns = 3 Tcscprs /Tcsc - 1 = 2
ą×čüčéą░ą▓čłąĄąĄčüčÅ ą▓čĆąĄą╝čÅ ą┤ą╗čÅ ą┤ą▓čāčģ čüąĄą│ą╝ąĄąĮč鹊ą▓ čäą░ąĘčŗ:
Tphs1 + Tphs2 = ą▓čĆąĄą╝čÅ ą▒ąĖčéą░ - Tcsc - Tprs = (16 - 1 - 3)Tcscphs1 + Tphs2 = 12 Tcsc
ąśąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 čŹč鹊 čćąĖčüą╗ąŠ č湥čéąĮąŠąĄ, ą╝čŗ ą▓čŗą▒ąĖčĆą░ąĄą╝ Tphs2 = Tphs1 (ąĖąĮą░č湥 ą╝čŗ ą┤ąŠą╗ąČąĮčŗ ą▓čŗą▒čĆą░čéčī Tphs2 = Tphs1 + Tcsc )
Tphs1 = Tphs2 = (12/2) Tcsc = 6 Tcsc phs1 /Tcsc - 1 = 5
ą¤čĆčŗąČąŠą║ čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮ ąĘąĮą░č湥ąĮąĖąĄą╝ ą╝ąĄąČą┤čā 1 Tcsc ąĖ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ ąĖąĘ 4 Tcsc ąĖ Tphs1 . ą£čŗ ą▓čŗą▒ąĄčĆąĄą╝ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ:
Tsjw = Min(4 Tcsc ,Tphs1 ) = 4 Tcsc sjw /Tcsc - 1 = 3
ą×ą║ąŠąĮčćą░č鹥ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ čĆąĄą│ąĖčüčéčĆą░ čüą║ąŠčĆąŠčüčéąĖ: CAN_BR = 0x00053255
ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ąĮą░ čłąĖąĮąĄ CAN . ąĀą░ąĘą╗ąĖčćą░čÄčé ą┤ą▓ą░ čéąĖą┐ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ: "ąČąĄčüčéą║ą░čÅ" ą▓ ą╝ąŠą╝ąĄąĮčé ąĮą░čćą░ą╗ą░ čäčĆąĄą╣ą╝ą░, ąĖ "čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ" ą▓ąĮčāčéčĆąĖ čäčĆąĄą╣ą╝ą░. ą¤ąŠčüą╗ąĄ ąČąĄčüčéą║ąŠą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą▓čĆąĄą╝čÅ ą▒ąĖčéą░ ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖąĖ čüąĄą│ą╝ąĄąĮčéą░ SYNC_SEG segment, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ąĖą╝ąĄčÄčēąĄą╣čüčÅ ąŠčłąĖą▒ą║ąĖ čäą░ąĘčŗ. ąĀąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ čāą╝ąĄąĮčīčłąĄąĮąĖčÄ ąĖą╗ąĖ čāą▓ąĄą╗ąĖč湥ąĮąĖčÄ ą▓čĆąĄą╝ąĄąĮąĖ ą▒ąĖčéą░ čéą░ą║, čćč鹊 ą┐ąŠąĘąĖčåąĖčÅ ą▓čŗą▒ąŠčĆą║ąĖ čüą┤ą▓ąĖą│ą░ąĄčéčüčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĮčŗą╝ąĖ ą┐ąĄčĆąĄą┐ą░ą┤ąŠą╝ čüąĖą│ąĮą░ą╗ą░.
ąŁčäč乥ą║čé čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ č鹊čé ąČąĄ, čćč鹊 ąĖ čā ąČąĄčüčéą║ąŠą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ, ą║ąŠą│ą┤ą░ ą▓ąĄą╗ąĖčćąĖąĮą░ ąŠčłąĖą▒ą║ąĖ čäą░ąĘčŗ ąĮą░ ą┐ąĄčĆąĄą┐ą░ą┤ąĄ ą┤ą░ąĄčé čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÄ ą╝ąĄąĮčīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮąŠą╣ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ą▓ąĄą╗ąĖčćąĖąĮąĄ čłąĖčĆąĖąĮčŗ ą┐čĆčŗąČą║ą░ čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (tSJW ).
ąÜąŠą│ą┤ą░ ą▓ąĄą╗ąĖčćąĖąĮą░ ąŠčłąĖą▒ą║ąĖ čäą░ąĘčŗ ą▒ąŠą╗čīčłąĄ, č湥ą╝ čłąĖčĆąĖąĮą░ ą┐čĆčŗąČą║ą░ čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ, ąĖ
ŌĆó ąŠčłąĖą▒ą║ą░ čäą░ąĘčŗ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮą░, č鹊ą│ą┤ą░ PHASE_SEG1 čāą┤ą╗ąĖąĮčÅąĄčéčüčÅ ąĮą░ ą▓ąĄą╗ąĖčćąĖąĮčā, čĆą░ą▓ąĮčāčÄ čłąĖčĆąĖąĮąĄ ą┐čĆčŗąČą║ą░ čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ.
ąĀąĖčü. 36-6. ąĀąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ CAN.
ąĀąĄąČąĖą╝ Autobaud . ążčāąĮą║čåąĖčÅ ą░ą▓č鹊ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čüą║ąŠčĆąŠčüčéąĖ (autobaud) čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠą╗čÅ ABM ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MR. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN č鹊ą╗čīą║ąŠ čüą╗čāčłą░ąĄčé čüąĖą│ąĮą░ą╗čŗ ąĮą░ čłąĖąĮąĄ ą▒ąĄąĘ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ą┐čĆąĖąĮčÅčéčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣. ą¤čĆąĖ čŹč鹊ą╝ ąŠą▒ąĮąŠą▓ą╗čÅčÄčéčüčÅ čäą╗ą░ą│ąĖ ąŠčłąĖą▒ąŠą║. ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ą▓čĆąĄą╝ąĄąĮąĖ ą▒ąĖčéą░ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠą┤čüčéčĆąŠąĄąĮčŗ, ą┐ąŠą║ą░ ąŠčłąĖą▒ą║ąĖ ąĮąĄ ąĖčüč湥ąĘąĮčāčé (čé. ąĄ. ą┐ąŠą║ą░ ąĮąĄ ąĮą░ą╣ą┤ąĄąĮą░ čģąŠčĆąŠčłą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ). ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ čüč湥čéčćąĖą║ ąŠčłąĖą▒ąŠą║ ąĘą░ą╝ąŠčĆą░ąČąĖą▓ą░ąĄčéčüčÅ. ą¦č鹊ą▒čŗ ą┐ąĄčĆąĄą╣čéąĖ ąŠą▒čĆą░čéąĮąŠ ą▓ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čĆąĄąČąĖą╝, ą▒ąĖčé ABM ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MR ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠčćąĖčēąĄąĮ.
ąöąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ąŠčłąĖą▒ąŠą║ . ąśą╝ąĄąĄčéčüčÅ 5 čĆą░ąĘą╗ąĖčćąĮčŗčģ čéąĖą┐ąŠą▓ ąŠčłąĖą▒ąŠą║, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ čÅą▓ą╗čÅčÄčéčüčÅ ą▓ąĘą░ąĖą╝ąŠąĖčüą║ą╗čÄčćą░čÄčēąĖą╝ąĖ. ąÜą░ąČą┤ą░čÅ ąŠčłąĖą▒ą║ą░ ą║ą░čüą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą║ čüą┐ąĄčåąĖčäąĖčćąĮčŗą╝ ą┐ąŠą╗čÅą╝ čäčĆąĄą╣ą╝ą░ ą┤ą░ąĮąĮčŗčģ CAN (ąŠą▒čĆą░čéąĖč鹥čüčī ą║ čüčéą░ąĮą┤ą░čĆčéčā Bosch CAN):
ŌĆó ą×čłąĖą▒ą║ą░ CRC (ą▒ąĖčé CERR ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_SR): čü ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄą╝ CRC ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ ą▓čŗčćąĖčüą╗čÅąĄčé ą║ąŠąĮčéčĆąŠą╗čīąĮčāčÄ čüčāą╝ą╝čā ą┤ą╗čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą▒ąĖčé ąŠčé ą▒ąĖčéą░ ąĮą░čćą░ą╗ą░ čäčĆąĄą╣ą╝ą░ (Start of Frame bit) ą┤ąŠ ąŠą║ąŠąĮčćą░ąĮąĖčÅ ą┐ąŠą╗čÅ ą┤ą░ąĮąĮčŗčģ. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą▒ąĖčé CRC ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ ą┐ąŠą╗ąĄ CRC čäčĆąĄą╣ą╝ą░ Data ąĖą╗ąĖ Remote.
ąöą╗čÅ ą░ą▒čüčéčĆą░ą│ąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠčé čüčĆąĄą┤čŗ ą┐ąĄčĆąĄą┤ą░čćąĖ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅ CAN ąĖąĘą▒ąĄą│ą░ąĄčé ąŠą┐ąĖčüčŗą▓ą░čéčī ą┤ą▓ąŠąĖčćąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą║ą░ą║ ┬½0┬╗ ąĖ ┬½1┬╗. ąÆą╝ąĄčüč鹊 čŹč鹊ą│ąŠ ą┐čĆąĖą╝ąĄąĮčÅčÄčéčüčÅ č鹥čĆą╝ąĖąĮčŗ ┬½čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╣┬╗ ąĖ ┬½ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣┬╗, ą┐čĆąĖ čŹč鹊ą╝ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 ą┐čĆąĖ ą┐ąĄčĆąĄą┤ą░č湥 ąŠą┤ąĮąĖą╝ čāąĘą╗ąŠą╝ čüąĄčéąĖ čĆąĄčåąĄčüčüąĖą▓ąĮąŠą│ąŠ ą▒ąĖčéą░, ą░ ą┤čĆčāą│ąĖą╝ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮąŠą│ąŠ, ą┐čĆąĖąĮčÅčé ą▒čāą┤ąĄčé ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ ą▒ąĖčé. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┐čĆąĖ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ąĮą░ čĆą░ą┤ąĖąŠą║ą░ąĮą░ą╗ąĄ ąŠčéčüčāčéčüčéą▓ąĖąĄ čüąĖą│ąĮą░ą╗ą░ ąŠąĘąĮą░čćą░ąĄčé čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╣ ą▒ąĖčé, ą░ ąĮą░ą╗ąĖčćąĖąĄ ŌĆö ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣; č鹊ą│ą┤ą░ ą║ą░ą║ ą▓ čéąĖą┐ąĖčćąĮąŠą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┐čĆąŠą▓ąŠą┤ąĮąŠą╣ čüąĄčéąĖ čĆąĄčåąĄčüčüąĖą▓ ą▒čŗą▓ą░ąĄčé ą┐čĆąĖ ąĮą░ą╗ąĖčćąĖąĖ čüąĖą│ąĮą░ą╗ą░, ą░ ą┤ąŠą╝ąĖąĮą░ąĮčé, čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ, ą┐čĆąĖ ąŠčéčüčāčéčüčéą▓ąĖąĖ. ąĪčéą░ąĮą┤ą░čĆčé čüąĄčéąĖ čéčĆąĄą▒čāąĄčé ąŠčé ┬½čäąĖąĘąĖč湥čüą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ┬╗, čäą░ą║čéąĖč湥čüą║ąĖ, ąĄą┤ąĖąĮčüčéą▓ąĄąĮąĮąŠą│ąŠ čāčüą╗ąŠą▓ąĖčÅ: čćč鹊ą▒čŗ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ ą▒ąĖčé ą╝ąŠą│ ą┐ąŠą┤ą░ą▓ąĖčéčī čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╣, ąĮąŠ ąĮąĄ ąĮą░ąŠą▒ąŠčĆąŠčé. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą▓ ąŠą┐čéąĖč湥čüą║ąŠą╝ ą▓ąŠą╗ąŠą║ąĮąĄ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮąŠą╝čā ą▒ąĖčéčā ą┤ąŠą╗ąČąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓ąŠą▓ą░čéčī ┬½čüą▓ąĄčé┬╗, ą░ čĆąĄčåąĄčüčüąĖą▓ąĮąŠą╝čā ŌĆö ┬½č鹥ą╝ąĮąŠčéą░┬╗. ąÆ 菹╗ąĄą║čéčĆąĖč湥čüą║ąŠą╝ ą┐čĆąŠą▓ąŠą┤ąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī čéą░ą║: čĆąĄčåąĄčüčüąĖą▓ąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ŌĆö ą▓čŗčüąŠą║ąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ąĮą░ ą╗ąĖąĮąĖąĖ (ąŠčé ąĖčüč鹊čćąĮąĖą║ą░ čü ą▒ąŠą╗čīčłąĖą╝ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄą╝), ą┤ąŠą╝ąĖąĮą░ąĮčéąĮąŠąĄ ŌĆö ąĮąĖąĘą║ąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ (ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ čāąĘąĄą╗ čüąĄčéąĖ ┬½ą┐ąŠą┤čéčÅą│ąĖą▓ą░ąĄčé┬╗ ą╗ąĖąĮąĖčÄ ąĮą░ ąĘąĄą╝ą╗čÄ). ąĢčüą╗ąĖ ą╗ąĖąĮąĖčÅ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄčåąĄčüčüąĖą▓ąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ, ą┐ąĄčĆąĄą▓ąĄčüčéąĖ ąĄčæ ą▓ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮąŠąĄ ą╝ąŠąČąĄčé ą╗čÄą▒ąŠą╣ čāąĘąĄą╗ čüąĄčéąĖ (ą▓ą║ą╗čÄčćąĖą▓ čüą▓ąĄčé ą▓ ąŠą┐č鹊ą▓ąŠą╗ąŠą║ąĮąĄ ąĖą╗ąĖ ąĘą░ą║ąŠčĆąŠčéąĖą▓ ą▓čŗčüąŠą║ąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ). ąØą░ąŠą▒ąŠčĆąŠčé ŌĆö ąĮąĄą╗čīąĘčÅ (ą▓ą║ą╗čÄčćąĖčéčī č鹥ą╝ąĮąŠčéčā ąĮąĄą╗čīąĘčÅ).
ąöčĆčāą│ąŠą╣ ą┐čĆąĖą╝ąĄčĆ - ąŠčĆą│ą░ąĮąĖąĘą░čåąĖčÅ ą▓čŗčģąŠą┤ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ čü ąŠčéą║čĆčŗčéčŗą╝ ą║ąŠą╗ą╗ąĄą║č鹊čĆąŠą╝ (čüč鹊ą║ąŠą╝). ąöą╗čÅ čŹč鹊ą│ąŠ čüą╗čāčćą░čÅ čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╝ ą▒čāą┤ąĄčé ą▒ąĖčé čü čāčĆąŠą▓ąĮąĄą╝ ą╗ąŠą│. 1 (ą║ąŠą│ą┤ą░ ą▓čŗčģąŠą┤ąĮąŠą╣ ą║ą╗čÄčć ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĘą░ą║čĆčŗčé), ą░ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╝ ą▒čāą┤ąĄčé ą▒ąĖčé čü čāčĆąŠą▓ąĮąĄą╝ ą╗ąŠą│. 0 (ą║ąŠą│ą┤ą░ ą▓čŗčģąŠą┤ąĮąŠą╣ ą║ą╗čÄčć ą┤čĆą░ą╣ą▓ąĄčĆą░ ąŠčéą║čĆčŗčé).
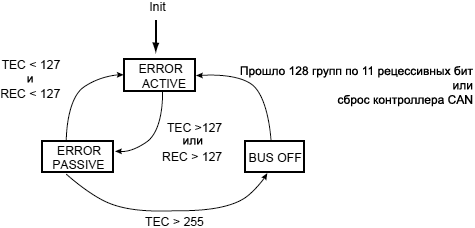
ą×ą│čĆą░ąĮąĖč湥ąĮąĖąĄ ąŠčłąĖą▒ąŠą║ (Fault Confinement). ą¦č鹊ą▒čŗ ąŠčéą┤ąĄą╗ąĖčéčī ą┤čĆčāą│ ąŠčé ą┤čĆčāą│ą░ ą▓čĆąĄą╝ąĄąĮąĮčŗąĄ ąĖ ą┐ąŠčüč鹊čÅąĮąĮčŗąĄ ąŠčéą║ą░ąĘčŗ, ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ąĖą╝ąĄąĄčé ą┤ą▓ą░ čüč湥čéčćąĖą║ą░ ąŠčłąĖą▒ąŠą║: REC (Receive Error Counter, čüč湥čéčćąĖą║ ąŠčłąĖą▒ąŠą║ ą┐čĆąĖąĄą╝ą░) ąĖ TEC (Transmit Error Counter, čüč湥čéčćąĖą║ ąŠčłąĖą▒ąŠą║ ą┐ąĄčĆąĄą┤ą░čćąĖ). ąŁčéąĖ ą┤ą▓ą░ čüč湥čéčćąĖą║ą░ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāčÄčéčüčÅ ą┐čĆąĖ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĖ ąŠčłąĖą▒ąŠą║, ąĖ ą┤ąĄą║čĆąĄą╝ąĄąĮčéąĖčĆčāčÄčéčüčÅ ą┐čĆąĖ ą║ąŠčĆčĆąĄą║čéąĮčŗčģ ą┐ąĄčĆąĄą┤ą░čćą░čģ ąĖą╗ąĖ ą┐čĆąĖąĄą╝ą░čģ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ. ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ąĘąĮą░č湥ąĮąĖą╣ čüč湥čéčćąĖą║ąŠą▓ ą╝ąĄąĮčÅąĄčéčüčÅ čüąŠčüč鹊čÅąĮąĖąĄ čāąĘą╗ą░: ąĮą░čćą░ą╗čīąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN ą▒čāą┤ąĄčé Error Active, čŹč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą╝ąŠąČąĄčé ąŠčéą┐čĆą░ą▓ąĖčéčī čäą╗ą░ą│ąĖ Error Active. ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą╝ąĄąĮčÅąĄčé čüąŠčüč鹊čÅąĮąĖąĄ ąĮą░ Error Passive, ąĄčüą╗ąĖ ąĄčüčéčī ąĮą░ą║ąŠą┐ą╗ąĄąĮąĖąĄ ąŠčłąĖą▒ąŠą║. ąĢčüą╗ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN č鹥čĆą┐ąĖčé ąŠčéą║ą░ąĘ, ąĖą╗ąĖ ąĄčüą╗ąĖ ąĄčüčéčī 菹║čüčéčĆąĄą╝ą░ą╗čīąĮąŠąĄ ąĮą░ą║ąŠą┐ą╗ąĄąĮąĖąĄ ąŠčłąĖą▒ąŠą║, č鹊 čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ ą▓čŗą║ą╗čÄč湥ąĮąĖąĄ čłąĖąĮčŗ, Bus Off.
ąĀąĖčü. 36-7. ąĀąĄąČąĖą╝ ąŠčłąĖą▒ą║ąĖ ą╗ąĖąĮąĖąĖ (Line Error Mode).
ąŻąĘąĄą╗ Error Active ą┐čĆąĖąĮąĖą╝ą░ąĄčé čāčćą░čüčéąĖąĄ ą▓ ąŠą▒ą╝ąĄąĮąĄ ą┐ąŠ čłąĖąĮąĄ, ąĖ ą┐ąŠčüčŗą╗ą░ąĄčé čäčĆąĄą╣ą╝ ą░ą║čéąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ, ą║ąŠą│ą┤ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą┤ąĄč鹥ą║čéąĖčĆčāąĄčé ąŠčłąĖą▒ą║čā.
ąŻąĘąĄą╗ Error Passive ąĮąĄ ą╝ąŠąČąĄčé ąŠčéą┐čĆą░ą▓ą╗čÅčéčī čäčĆąĄą╣ą╝ ą░ą║čéąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ. ą×ąĮ ą┐čĆąĖąĮąĖą╝ą░ąĄčé čāčćą░čüčéąĖąĄ ą▓ ąŠą▒ą╝ąĄąĮąĄ ą┐ąŠ čłąĖąĮąĄ, ąĮąŠ ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ąŠčłąĖą▒ą║ą░, ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ čäčĆąĄą╣ą╝ ą┐ą░čüčüąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ. ąóą░ą║ąČąĄ, ą┐ąŠčüą╗ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ, ą▒ą╗ąŠą║ Error Passive ąČą┤ąĄčé ą┐ąĄčĆąĄą┤ ąĮą░čćą░ą╗ąŠą╝ ą▒čāą┤čāčēąĄą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ.
ąæą╗ąŠą║čā Bus Off ąĮąĄ ą┐ąŠąĘą▓ąŠą╗ąĄąĮąŠ ąĮąĖą║ą░ą║ ą▓ą╗ąĖčÅčéčī ąĮą░ čłąĖąĮčā.
ąöą╗čÅ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ ąŠčłąĖą▒ąŠą║ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ ą┤ą▓ą░ čüč湥čéčćąĖą║ą░ ąŠčłąĖą▒ąŠą║ (TEC ąĖ REC). ąŁčéąĖ čüč湥čéčćąĖą║ąĖ ą┤ąŠčüčéčāą┐ąĮčŗ č湥čĆąĄąĘ čĆąĄą│ąĖčüčéčĆ CAN_ECR . ąĪąŠčüč鹊čÅąĮąĖąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠą▒ąĮąŠą▓ą╗čÅąĄčéčüčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ čŹčéąĖčģ čüč湥čéčćąĖą║ąŠą▓. ąĢčüą╗ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Error Active, č鹊 čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▒ąĖčé ERRA ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_SR. ąæčāą┤ąĄčé ąĘą░ą║ą░ąĘą░ąĮ ąĘą░ą┐čāčüą║ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ąĄčüą╗ąĖ ąŠąĮąŠ ąĮąĄ ąĘą░ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąŠ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_IMR. ąĢčüą╗ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą▓ čĆąĄąČąĖą╝ąĄ Error Passive, č鹊 čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▒ąĖčé ERRP ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_SR, ąĖ ąŠčüčéą░ąĄčéčüčÅ ąĘą░ą║ą░ąĘą░ąĮąĮčŗą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ąĄčüą╗ąĖ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_IMR čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé ERRP. ąĢčüą╗ąĖ CAN ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ Bus Off, č鹊 čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▒ąĖčé BOFF ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_SR. ąÜą░ą║ ąĖ ą┤ą╗čÅ ą▒ąĖč鹊ą▓ ERRP ąĖ ERRA, ąŠąČąĖą┤ą░ąĄčéčüčÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą┐ąŠą║ą░ ą▒ąĖčé BOFF čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_IMR.
ąÜąŠą│ą┤ą░ ąŠą┤ąĖąĮ ąĖąĘ čüč湥čéčćąĖą║ąŠą▓ ąŠčłąĖą▒ąŠą║ ą┐čĆąĄą▓čŗčüąĖčé ąĘąĮą░č湥ąĮąĖąĄ 96, čāą▓ąĄą╗ąĖčćąĖą▓ą░čÄčēą░čÅčüčÅ čüą║ąŠčĆąŠčüčéčī ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ ąŠčłąĖą▒ąŠą║ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▒ąĖč鹊ą╝ WARN ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_SR, ąĮąŠ čāąĘąĄą╗ ąŠčüčéą░ąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Error Active. ąĪąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠąČąĖą┤ą░ąĄčé ąŠą▒čĆą░ą▒ąŠčéą║ąĖ, ą║ąŠą│ą┤ą░ čŹč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_IMR.
ą¤čĆąŠ ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĄ ąŠčłąĖą▒ąŠą║ (fault confinement) ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. čüą┐ąĄčåąĖčäąĖą║ą░čåąĖčÄ čüčéą░ąĮą┤ą░čĆčéą░ Bosch CAN v2.0.
ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ . ąæąĖčéčŗ WARN, BOFF, ERRA ąĖ ERRP (ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_SR) ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčé č鹥ą║čāčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ čłąĖąĮčŗ represent CAN, ąĖ čŹčéąĖ ą▒ąĖčéčŗ ąĮąĄ čĆą░ą▒ąŠčéą░čÄčé ą┐ąŠ ą┐čĆąĖąĮčåąĖą┐čā ąĘą░čēąĄą╗ą║ąĖ. ąŁčéąĖ ą▒ąĖčéčŗ ąĮą░ą┐čĆčÅą╝čāčÄ ąŠčéčĆą░ąČą░čÄčé č鹥ą║čāčēąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ čüč湥čéčćąĖą║ąŠą▓ TEC ąĖ REC (ąĮą░čģąŠą┤čÅčēąĖčģčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_ECR ), ą║ą░ą║ čŹč鹊 ąŠą┐ąĖčüą░ąĮąŠ ą▓ ą┐čĆąĄą┤čŗą┤čāčēąĄą╣ čüąĄą║čåąĖąĖ "ą×ą│čĆą░ąĮąĖč湥ąĮąĖąĄ ąŠčłąĖą▒ąŠą║ (Fault Confinement)".
ąØą░ ą▒ą░ąĘąĄ čŹč鹊ą│ąŠ, ąĄčüą╗ąĖ čŹčéąĖ ą▒ąĖčéčŗ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą║ą░ą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąĖą╣ ą║ąŠą┤ ą╝ąŠąČąĄčé ą▓ąŠą╣čéąĖ ą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĖ ąĮąĄ čāą▓ąĖą┤ąĄčéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą▓ čĆąĄą│ąĖčüčéčĆąĄ čüčéą░čéčāčüą░, ąĄčüą╗ąĖ čüč湥čéčćąĖą║ąĖ TEC ąĖ REC ą┐ąŠą╝ąĄąĮčÅą╗ąĖ čüą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ. ąÜąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠčłąĄą╗ ą▓čģąŠą┤ ą▓ čĆąĄąČąĖą╝ Bus Off, ąĄą┤ąĖąĮčüčéą▓ąĄąĮąĮčŗą╣ čüą┐ąŠčüąŠą▒ ą▓čŗą╣čéąĖ ąĖąĘ čŹč鹊ą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ - 128 ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖą╣ 11 ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ čĆąĄčåąĄčüčüąĖą▓ąĮčŗčģ ą▒ąĖčé, ąĖą╗ąĖ čüą▒čĆąŠčü ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN.
ąÆ čĆąĄąČąĖą╝ąĄ Error Active ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┐čĆąŠčćąĖčéą░ąĄčé:
ERRA = 1
ąÆ čĆąĄąČąĖą╝ąĄ Error Passive ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┐čĆąŠčćąĖčéą░ąĄčé:
ERRA = 0
ąÆ čĆąĄąČąĖą╝ąĄ Bus Off ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┐čĆąŠčćąĖčéą░ąĄčé:
ERRA = 0
ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąĖą╣ ą║ąŠą┤ čü čåąĄą╗čīčÄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ CAN ą┤ąŠą╗ąČąĄąĮ čüą┤ąĄą╗ą░čéčī čüą╗ąĄą┤čāčÄčēąĄąĄ:
ŌĆó ąÆ ą║ą░ąČą┤čŗą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ čĆą░ąĘčĆąĄčłą░čéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░.
ą¤ąĄčĆąĄą│čĆčāąĘą║ą░ (Overload). ą¤ąĄčĆąĄą│čĆčāąĘą║ą░ čäčĆąĄą╣ą╝ą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą┤ą╗čÅ ąĘą░ą┐čĆąŠčüą░ čāąĘą╗ąŠą╝ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ąĘą░ą┤ąĄčƹȹ║ąĖ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ čäčĆąĄą╣ą╝ą░ Data ąĖą╗ąĖ Remote ("Request overload frame", ąĘą░ą┐čĆąŠčü ą┐ąĄčĆąĄą│čĆčāąĘą║ąĖ čäčĆąĄą╣ą╝ą░) ąĖą╗ąĖ ą┤ą╗čÅ čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖąĖ ąŠą▒ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ čāčüą╗ąŠą▓ąĖčÅčģ ąŠčłąĖą▒ą║ąĖ ("Reactive overload frame", čĆąĄą░ą║čéąĖą▓ąĮą░čÅ ą┐ąĄčĆąĄą│čĆčāąĘą║ą░ čäčĆąĄą╣ą╝ą░), čćč鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ čüą▓čÅąĘą░ąĮąŠ čü ą┐ąŠą╗ąĄą╝ ą┐ąĄčĆąĄčĆčŗą▓ą░ (intermission).
ążčĆąĄą╣ą╝čŗ čĆąĄą░ą║čéąĖą▓ąĮąŠą╣ ą┐ąĄčĆąĄą│čĆčāąĘą║ąĖ ą┐ąŠčüčŗą╗ą░čÄčéčüčÅ ą┐ąŠčüą╗ąĄ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čüą╗ąĄą┤čāčÄčēąĖčģ čāčüą╗ąŠą▓ąĖą╣ ąŠčłąĖą▒ąŠą║:
ŌĆó ąöąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮąŠą│ąŠ ą▒ąĖčéą░ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆą▓čŗčģ ą┤ą▓čāčģ ą▒ąĖčé ą┐ąŠą╗čÅ ą┐ąĄčĆąĄčĆčŗą▓ą░ (intermission).
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą╝ąŠąČąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ąĘą░ą┐čĆąŠčü čäčĆąĄą╣ą╝ą░ ą┐ąĄčĆąĄą│čĆčāąĘą║ąĖ (overload frame) ą┐ąŠčüą╗ąĄ ą║ą░ąČą┤ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ, ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮąŠą│ąŠ ą▓ ąŠą┤ąĖąĮ ąĖąĘ ą┐ąŠčćč鹊ą▓čŗčģ čÅčēąĖą║ąŠą▓ (mailbox) ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN. ąŁčéą░ čäčāąĮą║čåąĖčÅ čĆą░ąĘčĆąĄčłąĄąĮą░ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ OVL ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MR.
ążčĆąĄą╣ą╝čŗ čĆąĄą░ą║čéąĖą▓ąĮąŠą╣ ą┐ąĄčĆąĄą│čĆčāąĘą║ąĖ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ CAN ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ, ą┤ą░ąČąĄ ąĄčüą╗ąĖ ą▒ąĖčé OVL ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MR ąĮąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ. ążą╗ą░ą│ ą┐ąĄčĆąĄą│čĆčāąĘą║ąĖ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ č鹊čćąĮąŠ čéą░ą║ąĖą╝ ąČąĄ čüą┐ąŠčüąŠą▒ąŠą╝, ą║ą░ą║ ąĖ čäą╗ą░ą│ ąŠčłąĖą▒ą║ąĖ, ąĮąŠ čüč湥čéčćąĖą║ąĖ ąĮąĄ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ.
[ąĀąĄąČąĖą╝ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ (Low-power Mode) ]
ąÆ čĆąĄąČąĖą╝ąĄ Low-power ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ąĮąĄ ą╝ąŠąČąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ąĖą╗ąĖ ą┐čĆąĖąĮąĖą╝ą░čéčī čüąŠąŠą▒čēąĄąĮąĖčÅ. ąÆčüąĄ ą┐ąŠčćč鹊ą▓čŗąĄ čÅčēąĖą║ąĖ (mailbox) ąĮąĄ ą░ą║čéąĖą▓ąĮčŗ.
ąÆ čĆąĄąČąĖą╝ąĄ Low-power čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąĖą│ąĮą░ą╗ SLEEP ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_SR; ąĖąĮą░č湥 čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąĖą│ąĮą░ą╗ WAKEUP ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_SR. ąŁčéąĖ ą┤ą▓ą░ ą┐ąŠą╗čÅ ą▓ąĘą░ąĖą╝ąŠąĖčüą║ą╗čÄčćą░čÄčēąĖąĄ, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ čüąŠčüč鹊čÅąĮąĖčÅ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN (ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ąŠą▒ą░ ą▒ąĖčéą░ WAKEUP ąĖ SLEEP ąĘą░ą╗ąĖą┐ą░čÄčé ą▓ čüąŠčüč鹊čÅąĮąĖąĖ 0). ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ čĆąĄąČąĖą╝ Low-power ąĘą░ą┐čĆąĄčēąĄąĮ ąĖ ą▒ąĖčé WAKEUP ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_SR čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ 11 čüą╗ąĄą┤čāčÄčēąĖčģ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ čĆąĄčåąĄčüčüąĖą▓ąĮčŗčģ ą▒ąĖčé ąĮą░ čłąĖąĮąĄ.
ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ Low-power Mode . ą¤čĆąŠą│čĆą░ą╝ą╝ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą╝ąŠąČąĄčé čĆą░ąĘčĆąĄčłąĖčéčī čĆąĄąČąĖą╝ Low-power čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ LPM ą▓ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╝ čĆąĄą│ąĖčüčéčĆąĄ CAN_MR. ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą▓ąŠą╣ą┤ąĄčé ą▓ čĆąĄąČąĖą╝ Low-power, ą║ą░ą║ č鹊ą╗čīą║ąŠ ą▒čāą┤čāčé ą┐ąĄčĆąĄą┤ą░ąĮčŗ ą▓čüąĄ ąŠąČąĖą┤ą░čÄčēąĖąĄ ąŠčéą┐čĆą░ą▓ą║ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ.
ąÜąŠą│ą┤ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą▓čģąŠą┤ąĖčé ą▓ čĆąĄąČąĖą╝ Low-power, čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ čüąĖą│ąĮą░ą╗ SLEEP ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_SR. ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ą╝ą░čüą║ąĖ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_IMR, ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąĖ čāčüčéą░ąĮąŠą▓ą║ąĄ ą▒ąĖčéą░ SLEEP.
ąĪąĖą│ąĮą░ą╗ SLEEP ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_SR ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčćąĖčēą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé WAKEUP. ąĪąĖą│ąĮą░ą╗ WAKEUP ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčćąĖčēą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ SLEEP čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ.
ą¤čĆąĖąĄą╝ ąĘą░ą┐čĆąĄčēąĄąĮ, ą║ąŠą│ą┤ą░ čüąĖą│ąĮą░ą╗ SLEEP čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ ą╗ąŠą│. 1 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_SR. ąÆą░ąČąĮąŠ ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 čüąŠąŠą▒čēąĄąĮąĖčÅ čü ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝, č湥ą╝ ą┐ąŠčüą╗ąĄą┤ąĮąĄąĄ ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠą╗čāč湥ąĮčŗ ą╝ąĄąČą┤čā ą▓čŗą┤ą░č湥ą╣ ą║ąŠą╝ą░ąĮą┤čŗ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ LPM ąĖ ą▓čģąŠą┤ąŠą╝ ą▓ čĆąĄąČąĖą╝ Low-power.
ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮ ą▓čģąŠą┤ ą▓ čĆąĄąČąĖą╝ Low-power, čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą║ą╗čÄč湥ąĮąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄą╝ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ (Power Management Controller, PMC). ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą▒čāą┤ąĄčé ą┐ąŠčéčĆąĄą▒ą╗čÅčéčī č鹊ą╗čīą║ąŠ čüčéą░čéąĖč湥čüą║ąĖą╣ č鹊ą║.
ąĪč湥čéčćąĖą║ąĖ ąŠčłąĖą▒ąŠą║ ąĘą░ą┐čĆąĄčēąĄąĮčŗ, ą║ąŠą│ą┤ą░ čüąĖą│ąĮą░ą╗ SLEEP čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▓ ą╗ąŠą│.1.
ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊ą▒čŗ ą▓ąŠą╣čéąĖ ą▓ čĆąĄąČąĖą╝ Low-power, ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ąŠą╗ąČąĮą░:
ŌĆó ąŻčüčéą░ąĮąŠą▓ąĖčéčī ą┐ąŠą╗ąĄ LPM ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MR.
ą¤ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ SLEEP ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą║ą╗čÄč湥ąĮą░ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN. ąŁč鹊 ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄą╝ PMC.
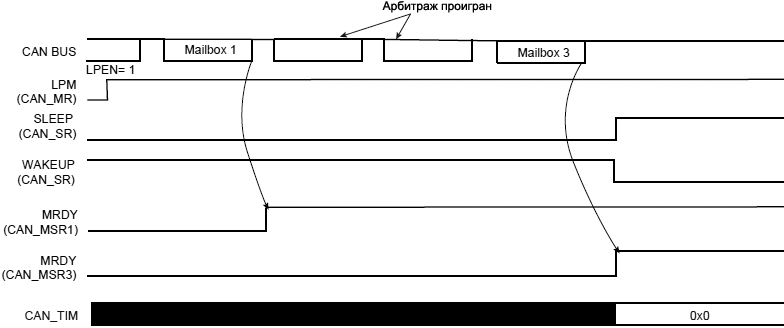
ąĀąĖčü. 36-8. ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ Low-power Mode.
ąÆčŗčģąŠą┤ ąĖąĘ Low-power Mode . ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą╝ąŠąČąĄčé ą┐čĆąŠčüąĮčāčéčīčüčÅ ą┐ąŠčüą╗ąĄ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ąĮą░ čłąĖąĮąĄ CAN. ąöąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ čłąĖąĮčŗ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą▓ąĮąĄčłąĮąĖą╝ ą╝ąŠą┤čāą╗ąĄą╝, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čüčéčĆąŠąĄąĮ ą▓ čćąĖą┐ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąÜąŠą│ą┤ą░ ą┐ąŠą╗čāč湥ąĮąŠ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ąŠą▒ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ čłąĖąĮčŗ CAN, ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ąĘą░ą┐čĆąĄčēą░ąĄčé čĆąĄąČąĖą╝ Low-power ą┐čāč鹥ą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN.
ą¦č鹊ą▒čŗ ąĘą░ą┐čĆąĄčéąĖčéčī čĆąĄąČąĖą╝ Low-power, ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ąŠą╗ąČąĮą░:
ŌĆó ąĀą░ąĘčĆąĄčłąĖčéčī čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN. ąŁč鹊 ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄą╝ PMC.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆčāąĄčéčüčÅ čüą░ą╝ąŠčüč鹊čÅč鹥ą╗čīąĮąŠ ą┐ąŠ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ čłąĖąĮčŗ ą┐čāč鹥ą╝ ą┐čĆąŠą▓ąĄčĆą║ąĖ 11 ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ "čĆąĄčåąĄčüčüąĖą▓ąĮčŗčģ" ą▒ąĖčé. ąÜą░ą║ č鹊ą╗čīą║ąŠ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ą┐čĆąŠąĖąĘąŠčłą╗ą░, čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ čäą╗ą░ą│ WAKEUP ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_SR.
ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ą╝ą░čüą║ąĖ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_IMR, ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąĖ čāčüčéą░ąĮąŠą▓ą║ąĄ ą▒ąĖčéą░ WAKEUP. ąæąĖčé SLEEP ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_SR ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ą▓ ą╗ąŠą│. 0, ą║ąŠą│ą┤ą░ ą▒ąĖčé WAKEUP čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ ą╗ąŠą│. 1. ąś ąĮą░ąŠą▒ąŠčĆąŠčé, čüąĖą│ąĮą░ą╗ WAKEUP ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüą▒čĆąŠčüąĖčéčüčÅ ą▓ ą╗ąŠą│. 0, ą║ąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▓ ą╗ąŠą│. 1 ą▒ąĖčé SLEEP.
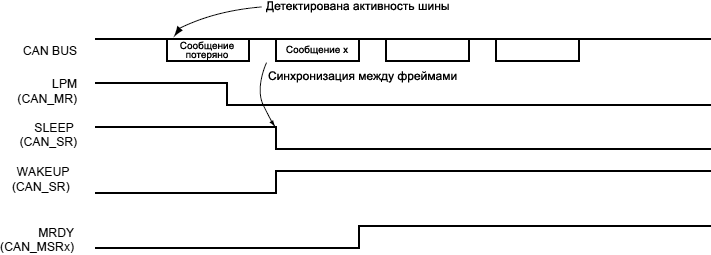
ąĢčüą╗ąĖ ą┐ąŠ čłąĖąĮąĄ ąĮąĄ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čüąŠąŠą▒čēąĄąĮąĖąĄ, č鹊ą│ą┤ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą╝ąŠąČąĄčé ąŠčéą┐čĆą░ą▓ąĖčéčī čüąŠąŠą▒čēąĄąĮąĖą╣ ąĮą░ 11 ą▒ąĖčé ą┐ąŠąĘąČąĄ ąĘą░ą┐čĆąĄčéą░ čĆąĄąČąĖą╝ą░ Low-power.
ąĢčüą╗ąĖ ąĖą╝ąĄąĄčéčüčÅ ą░ą║čéąĖą▓ąĮąŠčüčéčī ąĮą░ čłąĖąĮąĄ, ą║ąŠą│ą┤ą░ čĆąĄąČąĖą╝ Low-power ąĘą░ą┐čĆąĄčēąĄąĮ, č鹊 ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆčāąĄčéčüčÅ ą┐ąŠ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ čłąĖąĮčŗ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╝ ą╝ąĄąČą║ą░ą┤čĆąŠą▓ąŠą╝ ą┐čĆąŠą╝ąĄąČčāčéą║ąĄ. ą¤čĆąĄą┤čŗą┤čāčēąĄąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ č鹥čĆčÅąĄčéčüčÅ (čüą╝. čĆąĖčü. 36-9).
ąĀąĖčü. 36-9. ąŚą░ą┐čĆąĄčé Low-power Mode.
[ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN ]
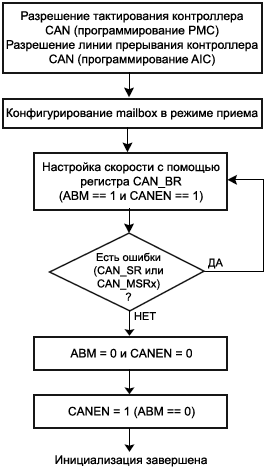
ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ąĘą░ą┐čĆąĄčēąĄąĮ. ąÉą║čéąĖą▓ąĖąĘą░čåąĖčÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĘą░ą┐čāčēąĄąĮą░ čü ą┐ąŠą╝ąŠčēčīčÄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ (Power Management Controller, PMC), ąĖ ą╗ąĖąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮą░ čü ą┐ąŠą╝ąŠčēčīčÄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (AIC).
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ čüąĄčéąĖ CAN. ąĀąĄą│ąĖčüčéčĆ CAN_BR ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé č鹊čćą║čā ą▓čŗą▒ąŠčĆą║ąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĖąŠą┤ą░ ą▓čĆąĄą╝ąĄąĮąĖ ą▒ąĖčéą░. CAN_BR ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN čĆą░ąĘčĆąĄčłąĄąĮ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ CANEN ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MR.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ CANEN ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MR. ąØą░ čŹč鹊ą╣ čüčéą░ą┤ąĖąĖ ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ ą╝ą░čłąĖąĮą░ čüąŠčüč鹊čÅąĮąĖą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, čüč湥čéčćąĖą║ąĖ ąŠčłąĖą▒ąŠą║ čüą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ ą▓ 0, čäą╗ą░ą│ąĖ ąŠčłąĖą▒ąŠą║ čüą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ ą▓ 0.
ąÜą░ą║ č鹊ą╗čīą║ąŠ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN čĆą░ąĘčĆąĄčłąĄąĮ, čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ čłąĖąĮčŗ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüą║ą░ąĮąĖčĆąŠą▓ą░ąĮąĖąĄą╝ 11 čĆąĄčåąĄčüčüąĖą▓ąĮčŗčģ ą▒ąĖčé. ąæąĖčé WAKEUP ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_SR ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ 1, ą║ąŠą│ą┤ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ąĘą░čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ą╗čüčÅ (WAKEUP ąĖ SLEEP ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ ą╗ąŠą│. 0 čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░).
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą╝ąŠąČąĄčé ąĮą░čćą░čéčī ą┐čĆąŠčüą╗čāčłąĖą▓ą░čéčī čüąĄčéčī ą▓ čĆąĄąČąĖą╝ąĄ Autobaud. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ čüč湥čéčćąĖą║ąĖ ąŠčłąĖą▒ą║ąĖ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮčŗ, ąĖ mailbox ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąĄą╝ą░ (Receive Mode). ą¤čāč鹥ą╝ čüą║ą░ąĮąĖčĆąŠą▓ą░ąĮąĖčÅ čäą╗ą░ą│ąŠą▓ ąŠčłąĖą▒ąŠą║ ąĘąĮą░č湥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ CAN_BR čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆčāąĄčéčüčÅ čü čüąĄčéčīčÄ. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą▒čāą┤ąĄčé ąŠą▒ąĮą░čĆčāąČąĄąĮąŠ ąŠčéčüčāčéčüčéą▓ąĖąĄ ąŠčłąĖą▒ąŠą║, ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĘą░ą┐čĆąĄčēą░ąĄčé čĆąĄąČąĖą╝ Autobaud ąŠčćąĖčüčéą║ąŠą╣ ą▒ąĖčéą░ ABM ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MR.
ąĀąĖčü. 36-10. ąÆąŠąĘą╝ąŠąČąĮą░čÅ ą┐čĆąŠčåąĄą┤čāčĆą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ.
[ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN ]
ąśą╝ąĄąĄčéčüčÅ 2 čéąĖą┐ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ą×ą┤ąĖąĮ čéąĖą┐ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čüą▓čÅąĘą░ąĮ čü ą┐ąŠą╗čāč湥ąĮąĖąĄą╝ čüąŠąŠą▒čēąĄąĮąĖčÅ, ąĖ ą┤čĆčāą│ąŠą╣ čéąĖą┐ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąŠčłąĖą▒ą║ąĖ ąĖą╗ąĖ čüą▓čÅąĘą░ąĮąĮčŗąĄ čü čüąĖčüč鹥ą╝ąŠą╣ ąĖčüč鹊čćąĮąĖą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ąÆčüąĄ ąĖčüč鹊čćąĮąĖą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą╝ąŠą│čāčé ą╝ą░čüą║ąĖčĆąŠą▓ą░čéčīčüčÅ ąĘą░ą┐ąĖčüčīčÄ ą╗ąŠą│. 1 ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą┐ąŠą╗čÅ čĆąĄą│ąĖčüčéčĆą░ CAN_IDR (ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąĖąĄ ąŠąĘąĮą░čćą░ąĄčé ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ). ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą╝ąŠą│čāčé ą▒čŗčéčī ą┤ąĄą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮčŗ (čĆą░ąĘčĆąĄčłąĄąĮčŗ) ąĘą░ą┐ąĖčüčīčÄ ą╗ąŠą│. 1 ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą┐ąŠą╗čÅ čĆąĄą│ąĖčüčéčĆą░ CAN_IER . ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ą▓čüąĄ ąĖčüč鹊čćąĮąĖą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĘą░ą┐čĆąĄčēąĄąĮčŗ (ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮčŗ). ąóąĄą║čāčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą╝ą░čüą║ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠą▓ąĄčĆąĄąĮąŠ čćč鹥ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ CAN_IMR .
ą¦č鹥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ CAN_SR ą┤ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ ą▓čüąĄčģ ąĖčüč鹊čćąĮąĖą║ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ąĪą╗ąĄą┤čāčÄčēąĖąĄ čüąŠą▒čŗčéąĖčÅ ą╝ąŠą│čāčé ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░čéčī ąŠą┤ąĮąŠ ąĖąĘ ą┤ą▓čāčģ ą▓ąĖą┤ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣:
ŌĆó ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, čüą▓čÅąĘą░ąĮąĮąŠąĄ čü ąŠą▒čŖąĄą║č鹊ą╝ čüąŠąŠą▒čēąĄąĮąĖčÅ
- ąöą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ąŠčüčéčāą┐ąĮčŗ čĆąĄą│ąĖčüčéčĆčŗ ą┤ą░ąĮąĮčŗčģ ą▓ ąŠą▒čŖąĄą║č鹥 ą┐ąŠčćč鹊ą▓ąŠą│ąŠ čÅčēąĖą║ą░. ąÆ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąĄą╝ą░ (Receive Mode) ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 ąĮąŠą▓ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ. ąÆ čĆąĄąČąĖą╝ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ (Transmit - Mode) čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ čāčüą┐ąĄčłąĮąŠ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ.
ŌĆó ąĪąĖčüč鹥ą╝ąĮčŗąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ
- ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ Bus off: ą╝ąŠą┤čāą╗čī CAN ą▓ąŠčłąĄą╗ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ čłąĖąĮčŗ.
ąÆčüąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčćąĖčēą░čÄčéčüčÅ ą┐čāč鹥ą╝ ąŠčćąĖčüčéą║ąĖ ąĖčģ ąĖčüč鹊čćąĮąĖą║ą░, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčé ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čüč湥čéčćąĖą║ą░ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čéą░ą╣ą╝ąĄčĆą░ ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ. ąŁčéąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčćąĖčēą░čÄčéčüčÅ čćč鹥ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ CAN_SR.
[ą×ą▒čĆą░ą▒ąŠčéą║ą░ čüąŠąŠą▒čēąĄąĮąĖą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN ]
ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą┐čĆąĖąĄą╝ą░ . ąöą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąŠčćč鹊ą▓čŗčģ čÅčēąĖą║ąŠą▓ (mailbox) čü čåąĄą╗čīčÄ ą┐čĆąĖąĄą╝ą░ čüąŠąŠą▒čēąĄąĮąĖą╣ ą┤ąŠčüčéčāą┐ąĮąŠ 2 čĆąĄąČąĖą╝ą░ - čĆąĄąČąĖą╝ ą┐čĆąĖąĄą╝ą░ (Receive Mode) ąĖ čĆąĄąČąĖą╝ ą┐čĆąĖąĄą╝ą░ čü ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčīčÄ (Receive with Overwrite Mode). ąÆ Receive Mode ą┐ąĄčĆą▓ąŠąĄ ą┐čĆąĖąĮčÅč鹊ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą┤ą░ąĮąĮčŗčģ mailbox. ąÆ Receive with Overwrite Mode ą┐ąŠčüą╗ąĄą┤ąĮąĄąĄ ą┐čĆąĖąĮčÅč鹊ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ mailbox.
ą¤čĆąŠčüč鹊ą╣ mailbox ą┐čĆąĖąĄą╝ą░ . Mailbox ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ Receive Mode, ą║ą░ą║ č鹊ą╗čīą║ąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ ą┐ąŠą╗ąĄ MOT ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MMRx. ą¤ąĄčĆąĄą┤ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ Receive Mode ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüąŠąŠą▒čēąĄąĮąĖčÅ (Message ID) ąĖ ą╝ą░čüą║ą░ ą┤ąŠą┐čāčüčéąĖą╝ąŠčüčéąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ (Message Acceptance Mask).
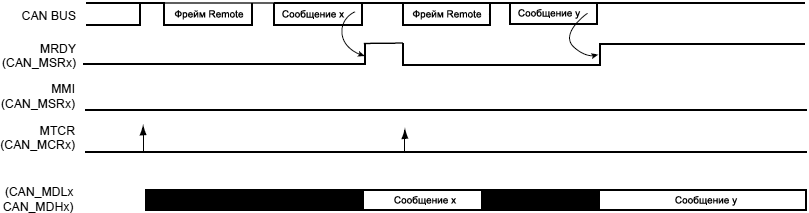
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ Receive Mode čĆą░ąĘčĆąĄčłąĄąĮ, čäą╗ą░ą│ MRDY ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MSR ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčćąĖčēą░ąĄčéčüčÅ, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ą┐čĆąĖąĮčÅč鹊 ą┐ąĄčĆą▓ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ. ąÜąŠą│ą┤ą░ ą┐ąĄčĆą▓ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 mailbox, čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čäą╗ą░ą│ MRDY. ą¤čĆąĖ čāčüčéą░ąĮąŠą▓ą║ąĄ čäą╗ą░ą│ą░ MRDY ą▒čāą┤ąĄčé ąŠąČąĖą┤ą░čéčī ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. ąŁč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąŠ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čäą╗ą░ą│ą░ mailbox ą▓ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╝ čĆąĄą│ąĖčüčéčĆąĄ CAN_IMR.
ąöą░ąĮąĮčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą┤ą░ąĮąĮčŗčģ mailbox, ą┐ąŠą║ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĮąĄ ąŠą┐ąŠą▓ąĄčüčéąĖčé, čćč鹊 ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą┐čĆąĖąĮčÅčéčŗčģ ą┤ą░ąĮąĮčŗčģ ąŠą║ąŠąĮč湥ąĮą░. ąŁč鹊 ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ąĘą░ą┐čĆąŠčüąŠą╝ ąĮąŠą▓ąŠą╣ ą║ąŠą╝ą░ąĮą┤čŗ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ čü čāčüčéą░ąĮąŠą▓ą║ąŠą╣ čäą╗ą░ą│ą░ MTCR ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MCRx. ąŁč鹊 ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčćąĖčüčéąĖčé čäą╗ą░ą│ MRDY.
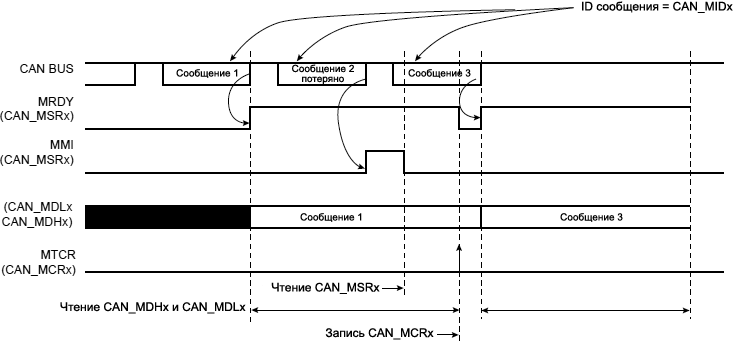
ążą╗ą░ą│ MMI ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MSRx ąŠą┐ąŠą▓ąĄčüčéąĖčé ą┐čĆąŠą│čĆą░ą╝ą╝čā, čćč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ą┐ąŠč鹥čĆčÅąĮąŠ mailbox-ąŠą╝. ąŁč鹊čé čäą╗ą░ą│ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▒čŗą╗ąĖ ą┐čĆąĖąĮčÅčéčŗ, ąĮąŠ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čäą╗ą░ą│ MRDY ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MSRx. ąŁč鹊čé čäą╗ą░ą│ ąŠčćąĖčēą░ąĄčéčüčÅ čćč鹥ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ CAN_MSR. Mailbox, ąĮą░čüčéčĆąŠąĄąĮąĮčŗą╣ ą▓ Receive Mode, ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░ąĄčé ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčī ą┐ąĄčĆą▓ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĮąŠą▓čŗą╝ąĖ, ą┐ąŠą║ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čäą╗ą░ą│ MRDY ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MSRx. ąĪą╝. čĆąĖčü. 36-11.
ąĀąĖčü. 36-11. Mailbox ą┐čĆąĖąĄą╝ą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓ čüą╗čāčćą░ąĄ ą░čĆčģąĖč鹥ą║čéčāčĆčŗ ARM, čĆąĄą│ąĖčüčéčĆčŗ CAN_MSRx, CAN_MDLx, CAN_MDHx ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮčŗ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ąĖąĮčüčéčĆčāą║čåąĖąĖ LDM ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░.
ą¤ąŠčćč鹊ą▓čŗą╣ čÅčēąĖą║ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąĄą╝ą░ čü ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčīčÄ (Receive with Overwrite Mailbox). ąöą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ čŹč鹊ą│ąŠ čĆąĄąČąĖą╝ą░ čéą░ą║ąČąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąŠą╗čÅ MOT čĆąĄą│ąĖčüčéčĆą░ CAN_MMRx. ąóą░ą║ąČąĄ ą┐ąĄčĆąĄą┤ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ ą┐čĆąĖąĄą╝ą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüąŠąŠą▒čēąĄąĮąĖčÅ (Message ID) ąĖ ą╝ą░čüą║ą░ ą┤ąŠą┐čāčüčéąĖą╝ąŠčüčéąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ (Message Acceptance Mask).
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┐čĆąĖąĄą╝ čĆą░ąĘčĆąĄčłąĄąĮ, čäą╗ą░ą│ MRDY ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MSR ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčćąĖčēą░ąĄčéčüčÅ, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ą┐čĆąĖąĮčÅč鹊 ą┐ąĄčĆą▓ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ. ąÜąŠą│ą┤ą░ ą┐ąĄčĆą▓ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 mailbox, čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čäą╗ą░ą│ MRDY. ą¤čĆąĖ čāčüčéą░ąĮąŠą▓ą║ąĄ čäą╗ą░ą│ą░ MRDY ą▒čāą┤ąĄčé ąŠąČąĖą┤ą░čéčī ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. ąŁč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąŠ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čäą╗ą░ą│ą░ mailbox ą▓ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╝ čĆąĄą│ąĖčüčéčĆąĄ CAN_IMR.
ąĢčüą╗ąĖ ąĮąŠą▓ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊, ą║ąŠą│ą┤ą░ čäą╗ą░ą│ MRDY čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 čŹč鹊 ąĮąŠą▓ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮąŠ ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą┤ą░ąĮąĮčŗčģ mailbox, ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčŗą▓ą░čÅ čüčéą░čĆąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ. ążą╗ą░ą│ MMI ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MSRx ąŠą┐ąŠą▓ąĄčüčéąĖčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ, čćč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ąŠčéą▒čĆąŠčłąĄąĮąŠ mailbox-ąŠą╝. ąŁč鹊čé čäą╗ą░ą│ ąŠčćąĖčēą░ąĄčéčüčÅ čćč鹥ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ CAN_MSR.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą╝ąŠąČąĄčé čüąŠčģčĆą░ąĮąĖčéčī ąĮąŠą▓ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ ą┤ą░ąĮąĮčŗčģ CAN (čŹč鹊 čĆąĄą│ąĖčüčéčĆčŗ CAN_MDHx ąĖ CAN_MDLx), ą║ąŠą│ą┤ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĖčģ čüčćąĖčéčŗą▓ą░ąĄčé. ą¦č鹊ą▒čŗ ą┐čĆąŠą▓ąĄčĆąĖčéčī, čćč鹊 CAN_MDHx ąĖ CAN_MDLx ąĮąĄ ą┐čĆąĖąĮą░ą┤ą╗ąĄąČą░čé čĆą░ąĘą╗ąĖčćąĮčŗą╝ čüąŠąŠą▒čēąĄąĮąĖčÅą╝, ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąŠą▓ąĄčĆąĖčéčī ą┐ąŠą╗ąĄ MMI ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MSRx ą┐ąĄčĆąĄą┤ ąĖ ą┐ąŠčüą╗ąĄ čćč鹥ąĮąĖčÅ CAN_MDHx ąĖ CAN_MDLx. ąĢčüą╗ąĖ čäą╗ą░ą│ MMI čāčüčéą░ąĮąŠą▓ąĖą╗čüčÅ ąŠą┐čÅčéčī ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čĆąĄą│ąĖčüčéčĆčŗ ą┤ą░ąĮąĮčŗčģ ą▒čŗą╗ąĖ ą┐čĆąŠčćąĖčéą░ąĮčŗ, ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ąŠą╗ąČąĮą░ ą┐ąĄčĆąĄčćąĖčéą░čéčī čĆąĄą│ąĖčüčéčĆčŗ CAN_MDHx ąĖ CAN_MDLx (čüą╝. čĆąĖčü. 36-12).
ąĀąĖčü. 36-12. ą¤ąŠčćč鹊ą▓čŗą╣ čÅčēąĖą║, čĆą░ą▒ąŠčéą░čÄčēąĖą╣ ąĮą░ ą┐čĆąĖąĄą╝ čü ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčīčÄ (Receive with Overwrite Mailbox).
ąĪąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą┐ąŠčćč鹊ą▓čŗčģ čÅčēąĖą║ąŠą▓ ą▓ čåąĄą┐ąŠčćą║čā (Chaining Mailboxes). ąØąĄčüą║ąŠą╗čīą║ąŠ mailbox-ąŠą▓ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ą▒čāč乥čĆą░, čĆą░ąĘą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ąĮą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ čüąŠąŠą▒čēąĄąĮąĖą╣ čü ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╝ ID. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ mailbox čü čüą░ą╝čŗą╝ ą╝ą░ą╗ąĄąĮčīą║ąĖą╝ ąĮąŠą╝ąĄčĆąŠą╝ ą▒čāą┤ąĄčé ąŠą▒čĆą░ą▒ąŠčéą░ąĮ ą┐ąĄčĆą▓čŗą╝. ąÆ čĆąĄąČąĖą╝ą░čģ ąŠą▒čŗčćąĮąŠą│ąŠ ą┐čĆąĖąĄą╝ą░ ąĖ ą┐čĆąĖąĄą╝ą░ čü ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčīčÄ, ą┐ąŠą╗ąĄ PRIOR ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MMRx ąĮąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹčäč乥ą║čéą░. ąĢčüą╗ąĖ Mailbox 0 ąĖ Mailbox 5 ą┐čĆąĖąĮčÅą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ čü ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╝ ID, č鹊 ą┐ąĄčĆą▓ąŠąĄ ąĖąĘ čŹčéąĖčģ ą┤ą▓čāčģ čüąŠąŠą▒čēąĄąĮąĖą╣ ą▒čāą┤ąĄčé ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą▓ Mailbox 0, ąĖ ą▓č鹊čĆąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čāą┤ąĄčé ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą▓ Mailbox 5. Mailbox 0 ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąŠčüč鹊ą│ąŠ ą┐čĆąĖąĄą╝ą░ (Receive Mode, čé. ąĄ. čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą┐ąĄčĆą▓ąŠąĄ ą┐čĆąĖąĮčÅč鹊ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ) ąĖ Mailbox 5 ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąĄą╝ą░ čü ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčīčÄ (Receive with Overwrite Mode). Mailbox 0 ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąĄą╝ą░ čü ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčīčÄ, ąĖąĮą░č湥 ą▓čüąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐ąŠą┐ą░ą┤čāčé ą▓ čŹč鹊čé mailbox, ąĖ Mailbox 5 ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą▒čāą┤ąĄčé ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčīčüčÅ.
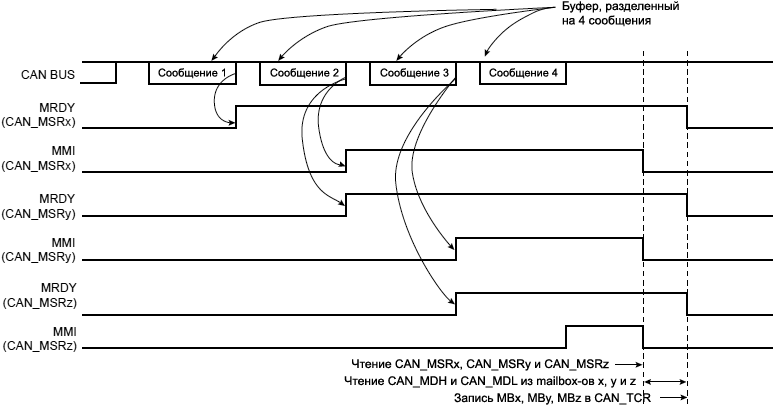
ąĢčüą╗ąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ mailbox-ąŠą▓ čüąŠąĄą┤ąĖąĮčÅčÄčéčüčÅ ą▓ čåąĄą┐ąŠčćą║čā ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ą▒čāč乥čĆą░ čü čĆą░ąĘą┤ąĄą╗ąĄąĮąĖąĄą╝ ąĮą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ čüąŠąŠą▒čēąĄąĮąĖą╣, č鹊 ą▓čüąĄ mailbox-čŗ, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ (čā ą║ąŠč鹊čĆąŠą│ąŠ čüą░ą╝čŗą╣ ą▒ąŠą╗čīčłąŠą╣ ą┐ąŠčĆčÅą┤ą║ąŠą▓čŗą╣ ąĮąŠą╝ąĄčĆ) ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąĄą╝ą░. ą¤ąĄčĆą▓ąŠąĄ ą┐čĆąĖąĮčÅč鹊ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐ąŠą┐ą░ą┤ąĄčé ą▓ ą┐ąĄčĆą▓čŗą╣ mailbox, ą▓č鹊čĆąŠąĄ ą▒čāą┤ąĄčé ąŠčéą║ą╗ąŠąĮąĄąĮąŠ ą┐ąĄčĆą▓čŗą╝ ąĖ ą┐ąŠą┐ą░ą┤ąĄčé ą▓ąŠ ą▓č鹊čĆąŠą╣ mailbox, ąĖ čé. ą┤., čéą░ą║ čćč鹊 ą┐ąŠčüą╗ąĄą┤ąĮąĄąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čāą┤ąĄčé ą┐čĆąĖąĮčÅč鹊 ą┐ąŠčüą╗ąĄą┤ąĮąĖą╝ mailbox ąĖ ą▒čāą┤ąĄčé ąŠčéą║ą╗ąŠąĮąĄąĮąŠ ą┐čĆąĄą┤čŗą┤čāčēąĖą╝ (čüą╝. čĆąĖčü. 36-13).
ąĀąĖčü. 36-13. ąĪąŠąĄą┤ąĖąĮąĄąĮąĖąĄ 3 ą┐ąŠčćč鹊ą▓čŗčģ čÅčēąĖą║ąŠą▓ ą▓ čåąĄą┐ąŠčćą║čā, čćč鹊ą▒čŗ čĆą░ąĘą┤ąĄą╗ąĖčéčī ą┐čĆąĖąĮąĖą╝ą░ąĄą╝čŗą╣ ą▒čāč乥čĆ ąĮą░ 3 čüąŠąŠą▒čēąĄąĮąĖčÅ.
ąĢčüą╗ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą┐ąŠčćč鹊ą▓čŗčģ čÅčēąĖą║ąŠą▓ ąĮąĄą┤ąŠčüčéą░č鹊čćąĮąŠąĄ (čāčüčéą░ąĮąŠą▓ąĖą╗čüčÅ čäą╗ą░ą│ MMI ą▓ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╝ mailbox), ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ą┐čĆąŠčćąĖčéą░čéčī ą▓čüąĄ ą┤ą░ąĮąĮčŗąĄ, ą┐čĆąĖąĮčÅčéčŗąĄ ą▓ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╝ mailbox, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ą▓čüąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ čĆą░ąĘą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą▒čāč乥čĆą░ (čüą╝. čĆąĖčü. 36-14).
ąĀąĖčü. 36-14. ąĪąŠąĄą┤ąĖąĮąĄąĮąĖąĄ 3 ą┐ąŠčćč鹊ą▓čŗčģ čÅčēąĖą║ąŠą▓ ą▓ čåąĄą┐ąŠčćą║čā, čćč鹊ą▒čŗ čĆą░ąĘą┤ąĄą╗ąĖčéčī ą┐čĆąĖąĮąĖą╝ą░ąĄą╝čŗą╣ ą▒čāč乥čĆ ąĮą░ 4 čüąŠąŠą▒čēąĄąĮąĖčÅ.
ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ . ąöą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ mailbox ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ (Transmit Mode) čéą░ą║ąČąĄ čéčĆąĄą▒čāąĄčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēą░čÅ ąĮą░čüčéčĆąŠą╣ą║ą░ ą┐ąŠą╗čÅ MOT čĆąĄą│ąĖčüčéčĆą░ CAN_MMRx. ąóą░ą║ąČąĄ čéčĆąĄą▒čāąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ąĖčéčī Message ID ąĖ Message Acceptance mask, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą┐ąŠą╗čāčćą░č鹥ą╗čÅ čüąŠąŠą▒čēąĄąĮąĖčÅ.
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čĆąĄąČąĖą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ čĆą░ąĘčĆąĄčłąĄąĮ, ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čäą╗ą░ą│ MRDY ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MSR, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮą░ ą┐ąĄčĆą▓ą░čÅ ą║ąŠą╝ą░ąĮą┤ą░. ąÜąŠą│ą┤ą░ čäą╗ą░ą│ MRDY čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą╝ąŠąČąĄčé ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖčéčī čüąŠąŠą▒čēąĄąĮąĖąĄ ą║ ąŠčéą┐čĆą░ą▓ą║ąĄ ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ čĆąĄą│ąĖčüčéčĆąŠą▓ CAN_MDx. ąĪąŠąŠą▒čēąĄąĮąĖąĄ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮąŠ, ą║ą░ą║ č鹊ą╗čīą║ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĘą░ą┐čĆąŠčüąĖčé ą║ąŠą╝ą░ąĮą┤čā ą┐ąĄčĆąĄą┤ą░čćąĖ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ MTCR, ąĖ čāčüčéą░ąĮąŠą▓ąĖčé ą┤ą╗ąĖąĮčā čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MCRx.
ążą╗ą░ą│ MRDY ąŠčüčéą░ąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ 0 čéą░ą║ ą┤ąŠą╗ą│ąŠ, ą┐ąŠą║ą░ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĮąĄ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ ąĖą╗ąĖ ąĄą│ąŠ ą┐ąĄčĆąĄą┤ą░čćą░ ąŠą▒ąŠčĆą▓ą░ąĮą░. ąÆą░ąČąĮąŠ ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 ąĮąĄą╗čīąĘčÅ ąŠą▒čĆą░čēą░čéčīčüčÅ ą║ čĆąĄą│ąĖčüčéčĆą░ą╝ ą┤ą░ąĮąĮčŗčģ mailbox, ą┐ąŠą║ą░ čäą╗ą░ą│ MRDY ąŠčćąĖčēąĄąĮ. ąÜąŠą│ą┤ą░ čäą╗ą░ą│ MRDY čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ, ą▒čāą┤ąĄčé ąŠąČąĖą┤ą░čéčī čüą▓ąŠąĄą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ mailbox. ąŁč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąŠ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ čäą╗ą░ą│ą░ mailbox ą▓ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╝ čĆąĄą│ąĖčüčéčĆąĄ CAN_IMR.
ą£ąŠąČąĮąŠ čéą░ą║ąČąĄ ąŠčéą┐čĆą░ą▓ąĖčéčī čäčĆąĄą╣ą╝ remote čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ MRTR ą▓ą╝ąĄčüč鹊 čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠą╗čÅ MDLC. ą×čéą▓ąĄčé ąĮą░ čäčĆąĄą╣ą╝ remote ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ ą┤čĆčāą│ąĖą╝ mailbox-ąŠą╝ ą┐čĆąĖąĄą╝ą░. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą┐ąŠčéčĆąĄą▒ąĖč鹥ą╗čī ą┤ą░ąĮąĮčŗčģ, ąĮąŠ čü ą┐ąŠą╝ąŠčēčīčÄ ą┤ą▓čāčģ mailbox-ąŠą▓. ą£ąŠąČąĮąŠ ąŠą▒čĆą░ą▒ąŠčéą░čéčī 菹╝ąĖčüčüąĖčÄ čäčĆąĄą╣ą╝ą░ remote ąĖ ą┐čĆąĖąĄą╝ ąŠčéą▓ąĄčéą░, ąĖčüą┐ąŠą╗čīąĘčāčÅ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ mailbox, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąŠčéčĆąĄą▒ąĖč鹥ą╗čÅ (Consumer Mode). ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. čüąĄą║čåąĖčÄ "ą×ą▒čĆą░ą▒ąŠčéą║ą░ čäčĆąĄą╣ą╝ąŠą▓ Remote".
ąØąĄčüą║ąŠą╗čīą║ąŠ čüąŠąŠą▒čēąĄąĮąĖą╣ ą▓ ąŠą┤ąĮąŠ ąĖ č鹊 ąČąĄ ą▓čĆąĄą╝čÅ ą╝ąŠą│čāčé ą║ąŠąĮą║čāčĆąĖčĆąŠą▓ą░čéčī ąĘą░ ą┤ąŠčüčéčāą┐ ą║ čłąĖąĮąĄ, č鹊ą│ą┤ą░ ąĘą░ą┤ąĄą╣čüčéą▓čāąĄčéčüčÅ ą░čĆą▒ąĖčéčĆą░ąČ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┐ąĄčĆą▓čŗą╝ ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ čü čüą░ą╝čŗą╝ ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝. ąØąĄčüą║ąŠą╗čīą║ąŠ ą║ąŠą╝ą░ąĮą┤ ąĘą░ą┐čĆąŠčüąŠą▓ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā ą╝ąŠą│čāčé ą▒čŗčéčī čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮčŗ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖč鹊ą▓ MBx ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_TCR. ą¤čĆąĖąŠčĆąĖč鹥čé ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ ą▓ ą┐ąŠą╗ąĄ PRIOR čĆąĄą│ąĖčüčéčĆą░ CAN_MMRx. ą¤čĆąĖąŠčĆąĖč鹥čé 0 čŹč鹊 čüą░ą╝čŗą╣ ą▓čŗčüąŠą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé, ą┐čĆąĖąŠčĆąĖč鹥čé 15 čüą░ą╝čŗą╣ ąĮąĖąĘą║ąĖą╣. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą╝ąŠąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī čćą░čüčéčī ID čüąŠąŠą▒čēąĄąĮąĖčÅ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠą╗čÅ PRIOR. ąĢčüą╗ąĖ ą┤ą▓ą░ mailbox-ą░ ąĖą╝ąĄčÄčé ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╣ ą┐čĆąĖąŠčĆąĖč鹥čé, č鹊 čüąĮą░čćą░ą╗ą░ ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĖąĘ mailbox čü ą╝ąĄąĮčīčłąĖą╝ ą┐ąŠčĆčÅą┤ą║ąŠą▓čŗą╝ ąĮąŠą╝ąĄčĆąŠą╝. ąóą░ą║ čćč鹊 ąĄčüą╗ąĖ mailbox 0 ąĖ mailbox 5 ąĖą╝ąĄčÄčé ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╣ ą┐čĆąĖąŠčĆąĖč鹥čé, ąĖ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąĖą╝ąĄčÄčé ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ, č鹊 čüąĮą░čćą░ą╗ą░ ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĖąĘ mailbox 0.
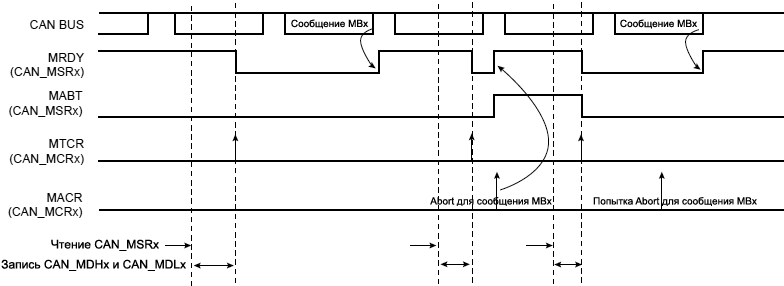
ąŻčüčéą░ąĮąŠą▓ą║ą░ ą▒ąĖčéą░ MACR ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MCRx ąŠą▒čĆčŗą▓ą░ąĄčé ą┐ąĄčĆąĄą┤ą░čćčā. ą¤ąĄčĆąĄą┤ą░č湥 ąĮąĄčüą║ąŠą╗čīą║ąĖčģ mailbox-ąŠą▓ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĄčĆą▓ą░ąĮą░ ąĘą░ą┐ąĖčüčīčÄ ą┐ąŠą╗ąĄą╣ MBx ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MACR. ąĢčüą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ, ą║ąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą║ąŠą╝ą░ąĮą┤ą░ ąŠą▒čĆčŗą▓ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ, č鹊 ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēą░ąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ MRDY, ąĮąŠ ąĮąĄ ą▒ąĖčéą░ MABT ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MSRx. ąśąĮą░č湥, ąĄčüą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĮąĄ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ, č鹊 ą▒ąĖčéčŗ MRDY ąĖ MABT čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MSR.
ąÜąŠą│ą┤ą░ ą░čĆą▒ąĖčéčĆą░ąČ ąĮą░ čłąĖąĮąĄ ą┐ąŠč鹥čĆčÅąĮ ą┤ą╗čÅ čüąŠąŠą▒čēąĄąĮąĖčÅ mailbox-ą░, ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą┐čŗčéą░ąĄčéčüčÅ ą▓čŗąĖą│čĆą░čéčī čüą╗ąĄą┤čāčÄčēąĖą╣ ą░čĆą▒ąĖčéčĆą░ąČ čłąĖąĮčŗ čü čéą░ą║ąĖą╝ ąČąĄ čüąŠąŠą▒čēąĄąĮąĖąĄą╝, ąĄčüą╗ąĖ ąĮąĄą│ąŠ ą▓čüąĄ ąĄčēąĄ ąĄčüčéčī čüą░ą╝čŗą╣ ą▓čŗčüąŠą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé. ąĪąŠąŠą▒čēąĄąĮąĖčÅ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ąĖ ą┐čĆąĄą┤ą┐čĆąĖąĮąĖą╝ą░ąĄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ą░čÅ ą┐ąŠą▓č鹊čĆąĮą░čÅ ą┐ąĄčĆąĄąŠčéą┐čĆą░ą▓ą║ą░, ą┐ąŠą║ą░ ą┤ą╗čÅ ąĮąĖčģ ąĮąĄ ą▒čāą┤ąĄčé ą▓čŗąĖą│čĆą░ąĮ ą░čĆą▒ąĖčéčĆą░ąČ čłąĖąĮčŗ. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąĄčēąĄąĮą░ ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ DRPT ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MR. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąĄčüą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĮąĄ ą▒čŗą╗ąŠ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ ą┐ąĄčĆą▓čŗą╣ čĆą░ąĘ ąĖ ą┐ąĄčĆąĄą┤ą░ąĮąŠ čéčĆą░ąĮčüąĖą▓ąĄčĆčā CAN, č鹊 ąŠąĮąŠ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠą▒čĆčŗą▓ą░ąĄčéčüčÅ. ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ čäą╗ą░ą│ MABT ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MSRx ą┤ąŠ čüą╗ąĄą┤čāčÄčēąĄą╣ ą║ąŠą╝ą░ąĮą┤čŗ ą┐ąĄčĆąĄą┤ą░čćąĖ.
ąØą░ čĆąĖčü. 36-15 ą┐ąŠą║ą░ąĘą░ąĮąŠ, ą║ą░ą║ ą┤ąĄą╗ą░čÄčéčüčÅ 3 ą┐ąŠą┐čŗčéą║ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ MBx (MRDY ą▓ MBx čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0).
ą¤ąĄčĆą▓ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ MBx ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ, ą▓č鹊čĆąŠąĄ ąŠą▒ąŠčĆą▓ą░ąĮąŠ ąĖ ą┤ą╗čÅ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą┤ąĄą╗ą░ąĄčéčüčÅ ą┐ąŠą┐čŗčéą║ą░ ąŠą▒ąŠčĆą▓ą░čéčī ą┐ąĄčĆąĄą┤ą░čćčā, ąĮąŠ čüą╗ąĖčłą║ąŠą╝ ą┐ąŠąĘą┤ąĮąŠ, ą┐ąŠč鹊ą╝čā čćč鹊 ąŠąĮąŠ čāąČąĄ ą▒čŗą╗ąŠ ą┐ąĄčĆąĄą┤ą░ąĮąŠ čéčĆą░ąĮčüąĖą▓ąĄčĆčā CAN.
ąĀąĖčü. 36-15. ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ.
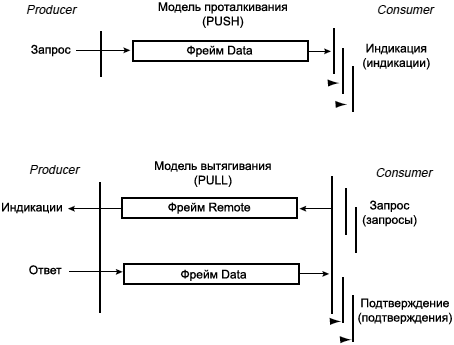
ą×ą▒čĆą░ą▒ąŠčéą║ą░ čäčĆąĄą╣ą╝ąŠą▓ Remote . ą£ąŠą┤ąĄą╗čī ą┐čĆąŠą┤čÄčüąĄčĆą░ / ą┐ąŠčéčĆąĄą▒ąĖč鹥ą╗čÅ (Producer / consumer) čŹčäč乥ą║čéąĖą▓ąĮą░ ą▓ ą║ąŠąĮč鹥ą║čüč鹥 ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čłąĖčĆąŠą║ąŠą▓ąĄčēą░č鹥ą╗čīąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣. ą£ąŠą┤ąĄą╗čī ą┐čĆąŠčéą░ą╗ą║ąĖą▓ą░ąĮąĖčÅ (push) ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐čĆąŠą┤čÄčüąĄčĆčā ą▓čŗą┐ąŠą╗ąĮčÅčéčī čłąĖčĆąŠą║ąŠą▓ąĄčēą░ąĮąĖąĄ ą┤ą╗čÅ čüąŠąŠą▒čēąĄąĮąĖą╣; ą╝ąŠą┤ąĄą╗čī ą▓čŗčéčÅą│ąĖą▓ą░ąĮąĖčÅ (pull) ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠčéčĆąĄą▒ąĖč鹥ą╗čÄ ąĘą░ą┐čĆą░čłąĖą▓ą░čéčī čüąŠąŠą▒čēąĄąĮąĖčÅ.
ąĀąĖčü. 36-16. ą£ąŠą┤ąĄą╗čī Producer / Consumer.
ąÆ čĆąĄąČąĖą╝ąĄ Pull ą┐ąŠčéčĆąĄą▒ąĖč鹥ą╗čī ą┐ąŠčüčŗą╗ą░ąĄčé čäčĆąĄą╣ą╝ remote ą┐čĆąŠą┤čÄčüąĄčĆčā. ąÜąŠą│ą┤ą░ ą┐čĆąŠą┤čÄčüąĄčĆ ą┐ąŠą╗čāčćąĖą╗ čäčĆąĄą╣ą╝ remote, ąŠąĮ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ąŠčéą▓ąĄčé, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĖąĮčÅčé ąŠą┤ąĮąĖą╝ ąĖą╗ąĖ ą╝ąĮąŠą│ąĖą╝ąĖ ą┐ąŠčéčĆąĄą▒ąĖč鹥ą╗čÅą╝ąĖ. ą¤čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą┐ąĄčĆąĄą┤ą░čÄčēąĖčģ ąĖ ą┐čĆąĖąĮąĖą╝ą░čÄčēąĖčģ mailbox-ąŠą▓ ą┐ąŠčéčĆąĄą▒ąĖč鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ą▓čŗą┤ąĄą╗ąĖčéčī 2 mailbox-ą░, ąŠą┤ąĖąĮ ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ čäčĆąĄą╣ą╝ąŠą▓ remote, ąĖ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĖąĮ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąĄą╝ą░, čćč鹊ą▒čŗ ąĘą░čģą▓ą░čéčŗą▓ą░čéčī ąŠčéą▓ąĄčé ą┐čĆąŠą┤čÄčüąĄčĆą░. ąóą░ ąČąĄ čüą░ą╝ą░čÅ čüčéčĆčāą║čéčāčĆą░ ą┐čĆąĖą║ą╗ą░ą┤čŗą▓ą░ąĄčéčüčÅ ąĖ ą║ ą┐čĆąŠą┤čÄčüąĄčĆčā: ąŠą┤ąĖąĮ mailbox ą┐čĆąĖąĄą╝ą░ čéčĆąĄą▒čāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ čäčĆąĄą╣ą╝ą░ remote, ąĖ ąŠą┤ąĖąĮ ą┐ąĄčĆąĄą┤ą░čÄčēąĖą╣ mailbox čéčĆąĄą▒čāąĄčéčüčÅ ą┤ą╗čÅ ąŠčéą▓ąĄčéą░.
Mailbox-čŗ ą╝ąŠą│čāčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąŠą┤čÄčüąĄčĆą░ (Producer) ąĖą╗ąĖ ą┐ąŠčéčĆąĄą▒ąĖč鹥ą╗čÅ (Consumer). ąĢą┤ąĖąĮčüčéą▓ąĄąĮąĮčŗą╣ mailbox ą╝ąŠąČąĄčé ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī čäčĆąĄą╣ą╝ remote ąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčī ąŠčéą▓ąĄčé. ąĪ 8 mailbox-ą░ą╝ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą╝ąŠąČąĄčé ąŠą▒čĆą░ą▒ąŠčéą░čéčī 8 ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗčģ ą┐čĆąŠą┤čÄčüąĄčĆąŠą▓ / ą┐ąŠčéčĆąĄą▒ąĖč鹥ą╗ąĄą╣.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐čĆąŠą┤čÄčüąĄčĆą░ . Mailbox ą▓ čĆąĄąČąĖą╝ąĄ Producer čéčĆąĄą▒čāąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąŠą╗čÅ MOT ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MMRx. ą¤ąĄčĆąĄą┤ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ ą┐čĆąĖąĄą╝ą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĮą░čüčéčĆąŠąĄąĮčŗ Message ID ąĖ ą╝ą░čüą║ąĖ Message Acceptance.
ą¤ąŠčüą╗ąĄ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čĆąĄąČąĖą╝ą░ Producer čäą╗ą░ą│ MRDY ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MSR ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ, ą┐ąŠą║ą░ ąĮąĄ ą┐ąŠčÅą▓ąĖčéčüčÅ ą┐ąĄčĆą▓ą░čÅ ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąĄčĆąĄąĮąŠčüą░ ą┤ą░ąĮąĮčŗčģ. ą¤čĆąŠą│čĆą░ą╝ą╝ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠą┤ą│ąŠčéą░ą▓ą╗ąĖą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ čĆąĄą│ąĖčüčéčĆąŠą▓ CAN_MDHx ąĖ CAN_MDLx, ąĘą░č鹥ą╝ ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ MTCR ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MCRx. ąöą░ąĮąĮčŗąĄ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ą┐ąŠčüą╗ąĄ ą┐čĆąĖąĄą╝ą░ čäčĆąĄą╣ą╝ą░ remote, ą║ą░ą║ č鹊ą╗čīą║ąŠ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą▓čŗąĖą│čĆčŗčł ą░čĆą▒ąĖčéčĆą░ąČą░ čłąĖąĮčŗ.
ążą╗ą░ą│ MRDY ąŠčüčéą░ąĄčéčüčÅ ą▓ 0, ą┐ąŠą║ą░ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĮąĄ ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ ąĖą╗ąĖ ąŠą▒ąŠčĆą▓ą░ąĮąŠ. ąØąĄą╗čīąĘčÅ ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčī ą┤ąŠčüčéčāą┐ ą║ čĆąĄą│ąĖčüčéčĆą░ą╝ ą┤ą░ąĮąĮčŗčģ, ą┐ąŠą║ą░ čäą╗ą░ą│ MRDY ąŠčćąĖčēąĄąĮ. ąÜąŠą│ą┤ą░ čäą╗ą░ą│ MRDY čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ, ą▒čāą┤ąĄčé ą▓čŗčüčéą░ą▓ą╗ąĄąĮ ąĘą░ą┐čĆąŠčü ąĮą░ ąŠą▒čĆą░ą▒ąŠčéą║čā ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąŁč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąŠ (ąĘą░ą┐čĆąĄčēąĄąĮąŠ) ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čäą╗ą░ą│ąŠą╝ mailbox-ą░ ą▓ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╝ čĆąĄą│ąĖčüčéčĆąĄ CAN_IMR.
ąĢčüą╗ąĖ čäčĆąĄą╣ą╝ remote ą▒čŗą╗ ą┐čĆąĖąĮčÅčé, ą║ąŠą│ą┤ą░ ąĮąĄčé ą│ąŠč鹊ą▓čŗčģ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ (čāčüčéą░ąĮąŠą▓ąĖą╗čüčÅ čüąĖą│ąĮą░ą╗ MRDY ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MSRx), č鹊 čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ čüąĖą│ąĮą░ą╗ MMI ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MSRx. ąŁč鹊čé ą▒ąĖčé ąŠčćąĖčēą░ąĄčéčüčÅ čćč鹥ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ CAN_MSRx.
ą¤ąŠą╗ąĄ MRTR ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MSRx ąĮąĖč湥ą│ąŠ ąĮąĄ ąŠąĘąĮą░čćą░ąĄčé. ą×ąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ ąĮą░čüčéčĆąŠąĄąĮčŗ čĆąĄąČąĖą╝čŗ ąŠą▒čŗčćąĮąŠą│ąŠ ą┐čĆąĖąĄą╝ą░ ąĖą╗ąĖ ą┐čĆąĖąĄą╝ą░ čü ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčīčÄ.
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┐čĆąĖąĮčÅčé čäčĆąĄą╣ą╝ remote, mailbox čäčāąĮą║čåąĖąŠąĮąĖčĆčāąĄčé ą║ą░ą║ ą┐ąĄčĆąĄą┤ą░čÄčēąĖą╣ mailbox. ą¤ąĄčĆą▓čŗą╝ ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ čü čüą░ą╝čŗą╝ ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝. ą¤ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą▒ąŠčĆą▓ą░ąĮąŠ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ MACR ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MCR. ąĪą╝. čüąĄą║čåąĖčÄ ą▓čŗčłąĄ "ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ".
ąĀąĖčü. 36-17. ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą┐čĆąŠą┤čÄčüąĄčĆą░.
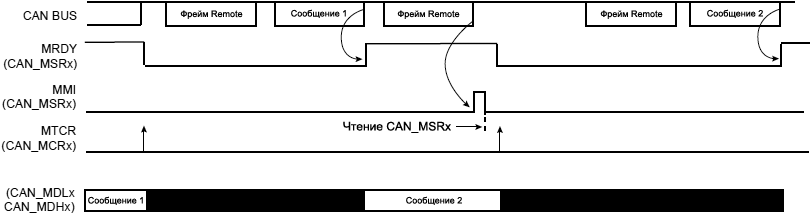
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐ąŠčéčĆąĄą▒ąĖč鹥ą╗čÅ (Consumer). ąöą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ mailbox ą▓ čĆąĄąČąĖą╝ąĄ Consumer ąĮčāąČąĮąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą┐ąŠą╗ąĄ MOT ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MMRx. ąóą░ą║ąČąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĮą░čüčéčĆąŠąĄąĮčŗ Message ID ąĖ ą╝ą░čüą║ąĖ Message Acceptance ą┐ąĄčĆąĄą┤ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ ą┐čĆąĖąĄą╝ą░.
ą¤ąŠčüą╗ąĄ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čĆąĄąČąĖą╝ą░ Consumer čäą╗ą░ą│ MRDY ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MSR ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ, ą┐ąŠą║ą░ ąĮąĄ ą┐ąŠčÅą▓ąĖčéčüčÅ ą┐ąĄčĆą▓ą░čÅ ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąĄčĆąĄąĮąŠčüą░ ą┤ą░ąĮąĮčŗčģ. ą¤čĆąŠą│čĆą░ą╝ą╝ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠčüčŗą╗ą░ąĄčé remote frame ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ MTCR ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MCRx, ąĖą╗ąĖ ą▒ąĖčéą░ MBx ą▓ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╝ čĆąĄą│ąĖčüčéčĆąĄ CAN_TCR. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąŠą┐ąŠą▓ąĄčēą░ąĄčéčüčÅ ąŠą▒ ąŠčéą▓ąĄč鹥 čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ MRDY ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MSRx. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą┐čĆąŠčćąĖčéą░čéčī čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┤ą░ąĮąĮčŗčģ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ CAN_MDHx ąĖ CAN_MDLx. ąÜąŠą│ą┤ą░ čäą╗ą░ą│ MRDY čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ, ą▒čāą┤ąĄčé ą▓čŗčüčéą░ą▓ą╗ąĄąĮ ąĘą░ą┐čĆąŠčü ąĮą░ ąŠą▒čĆą░ą▒ąŠčéą║čā ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąŁč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąŠ (ąĘą░ą┐čĆąĄčēąĄąĮąŠ) ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čäą╗ą░ą│ąŠą╝ mailbox-ą░ ą▓ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╝ čĆąĄą│ąĖčüčéčĆąĄ CAN_IMR.
ąæąĖčé MRTR ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MCRx ąĮąĖč湥ą│ąŠ ąĮąĄ ąŠąĘąĮą░čćą░ąĄčé. ą×ąĮ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ ąĮą░čüčéčĆąŠąĄąĮ čĆąĄąČąĖą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ.
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čäčĆąĄą╣ą╝ remote ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ, mailbox čäčāąĮą║čåąĖąŠąĮąĖčĆčāąĄčé ą║ą░ą║ ą┐čĆąĖąĮąĖą╝ą░čÄčēąĖą╣ mailbox. ą¤ąĄčĆą▓ąŠąĄ ą┐čĆąĖąĮčÅč鹊ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ ą┤ą░ąĮąĮčŗčģ mailbox-ą░. ąĢčüą╗ąĖ ą┤čĆčāą│ąĖąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗąĄ ą┤ą╗čÅ čŹč鹊ą│ąŠ mailbox, ą▒čŗą╗ąĖ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ, ą║ąŠą│ą┤ą░ čäą╗ą░ą│ MRDY čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MSRx, č鹊 ąŠąĮąĖ ą▒čāą┤čāčé ą┐ąŠč鹥čĆčÅąĮčŗ. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąŠą▒ čŹč鹊ą╝ ą▒čāą┤ąĄčé ąŠą┐ąŠą▓ąĄčēąĄąĮąŠ čćč鹥ąĮąĖąĄą╝ ą┐ąŠą╗čÅ MMI ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MSRx. ą×ą┐ąĄčĆą░čåąĖčÅ čćč鹥ąĮąĖčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčćąĖčüčéąĖčé čäą╗ą░ą│ MMI.
ąĢčüą╗ąĖ ą┐čĆąŠą┤čÄčüąĄčĆ ąŠčéą▓ąĄčćą░ąĄčé ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ čüąŠąŠą▒čēąĄąĮąĖčÅą╝, čā ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą┤ąĖąĮ mailbox ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ąŠčéčĆąĄą▒ąĖč鹥ą╗čÅ, 0 ąĖą╗ąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ mailbox-ąŠą▓ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąŠčüč鹊ą│ąŠ ą┐čĆąĖąĄą╝ą░ ąĖ ąŠą┤ąĖąĮ mailbox ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąĄą╝ą░ čü ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčīčÄ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ mailbox ą┐ąŠčéčĆąĄą▒ąĖč鹥ą╗čÅ ą┤ąŠą╗ąČąĄąĮ ąĖą╝ąĄčéčī ąĮąŠą╝ąĄčĆ ą╝ąĄąĮčīčłąĄ, č湥ą╝ ąĮąŠą╝ąĄčĆ mailbox-ą░ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąĄą╝ą░ čü ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčīčÄ. ąÜąŠą╝ą░ąĮą┤ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą╝ąŠąČąĄčé čüčĆą░ą▒ąŠčéą░čéčī ą┤ą╗čÅ ą▓čüąĄčģ mailbox-ąŠą▓ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą┐ąŠą╗ąĄą╣ MBx ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_TCR.
ąĀąĖčü. 36-18. ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą┐ąŠčéčĆąĄą▒ąĖč鹥ą╗čÅ.
[ąĀąĄąČąĖą╝čŗ ą┤ąĖą░ą│čĆą░ą╝ą╝ ą▓čĆąĄą╝ąĄąĮąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN ]
ąĪ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ 16-ą▒ąĖčéąĮąŠą│ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čéą░ą╣ą╝ąĄčĆą░, čüč湥čéčćąĖą║ ą║ąŠč鹊čĆąŠą│ąŠ čĆą░ą▒ąŠčéą░ąĄčé ą▓ čĆąĄąČąĖą╝ąĄ čüą▓ąŠą▒ąŠą┤ąĮąŠą│ąŠ čüč湥čéą░, ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ąŠą┤ąĖąĮ ąĖąĘ ą┤ą▓čāčģ čüą╗ąĄą┤čāčÄčēąĖčģ čĆąĄąČąĖą╝ąŠą▓ čĆą░ą▒ąŠčéčŗ čü ą┐čĆąĖą▓čÅąĘą║ąŠą╣ ą║ąŠ ą▓čĆąĄą╝ąĄąĮąĖ:
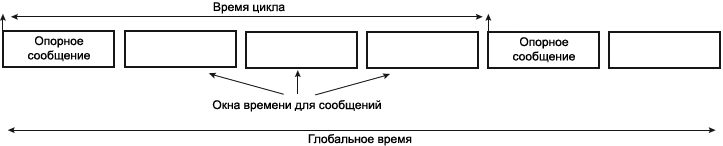
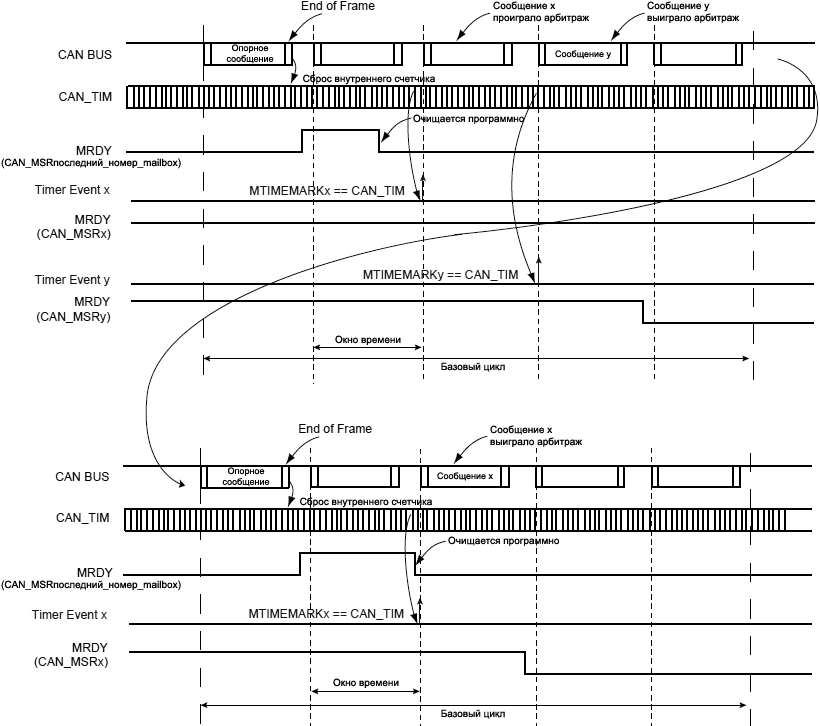
ŌĆó Timestamping Mode : ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čéą░ą╣ą╝ąĄčĆą░ ąĘą░čģą▓ą░čéčŗą▓ą░ąĄčéčüčÅ ą▓ ą╝ąŠą╝ąĄąĮčé ąĮą░čćą░ą╗ą░ čäčĆąĄą╣ą╝ą░ (Start Of Frame, SoF) ąĖą╗ąĖ ąŠą║ąŠąĮčćą░ąĮąĖčÅ čäčĆąĄą╣ą╝ą░ (End Of Frame, EoF).Time Triggered Mode : ąŠą┐ąĄčĆą░čåąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ mailbox-ą░ čüčĆą░ą▒ąŠčéą░ąĄčé, ą║ąŠą│ą┤ą░ čüč湥čéčćąĖą║ čéą░ą╣ą╝ąĄčĆą░ ą┤ąŠčüčéąĖą│ąĮąĄčé čéčĆąĖą│ą│ąĄčĆą░ mailbox-ą░.
Timestamping Mode čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ąŠčćąĖčüčéą║ąŠą╣ ą▒ąĖčéą░ TTM ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MR. Time Triggered Mode čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ TTM ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MR.
Timestamping Mode . ąÜą░ąČą┤čŗą╣ mailbox ąĖą╝ąĄąĄčé čüą▓ąŠąĄ čüąŠą▒čüčéą▓ąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ (timestamp). ąÜą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ąĖą╗ąĖ ą┐čĆąĖąĮąĖą╝ą░ąĄčéčüčÅ č湥čĆąĄąĘ mailbox, 16-ą▒ąĖčéąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ MTIMESTAMP ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_TIMESTP ą┐ąĄčĆąĄą╝ąĄčēą░ąĄčéčüčÅ ą▓ ą╝ą╗ą░ą┤čłąĖąĄ ą▒ąĖčéčŗ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ CAN_MSRx. ąŚąĮą░č湥ąĮąĖąĄ, ą┐čĆąŠčćąĖčéą░ąĮąĮąŠąĄ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MSRx čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąĘąĮą░č湥ąĮąĖčÄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čéą░ą╣ą╝ąĄčĆą░ ą▓ ą╝ąŠą╝ąĄąĮčé ąĮą░čćą░ą╗ą░ čäčĆąĄą╣ą╝ą░ (SoF) ąĖą╗ąĖ (EoF), ą║ąŠą│ą┤ą░ čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ mailbox-ąŠą╝.
ąĀąĖčü. 36-19. Mailbox Timestamp.
Time Triggered Mode . ąÆ čĆąĄąČąĖą╝ąĄ Time Triggered ą▒ą░ąĘąŠą▓čŗąĄ čåąĖą║ą╗čŗ ą╝ąŠą│čāčé ą▒čŗčéčī čĆą░ąĘą┤ąĄą╗ąĄąĮčŗ ąĮą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ ąŠą║ąŠąĮ ą▓čĆąĄą╝ąĄąĮąĖ. ąæą░ąĘąŠą▓čŗą╣ čåąĖą║ą╗ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü čŹčéą░ą╗ąŠąĮąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąÜą░ąČą┤ąŠąĄ ą▓čĆąĄą╝čÅ ąŠą║ąĮą░ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ąŠčé čŹčéą░ą╗ąŠąĮąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ, ąŠą┐ąĄčĆą░čåąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ąŠą╗ąČąĮą░ ą┐čĆąŠąĖąĘąŠą╣čéąĖ ą▓ąĮčāčéčĆąĖ ą┐čĆąĄą┤ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ąŠą║ąĮą░ ą▓čĆąĄą╝ąĄąĮąĖ. Mailbox ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ą▓čŗąĖą│čĆą░čéčī ą░čĆą▒ąĖčéčĆą░ąČ ą▓ ą┐čĆąĄą┤čŗą┤čāčēąĄą╝ ąŠą║ąĮąĄ ą▓čĆąĄą╝ąĄąĮąĖ, ąĖ čŹč鹊 ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐ąŠą▓č鹊čĆąĄąĮąŠ, ąĄčüą╗ąĖ ą░čĆą▒ąĖčéčĆą░ąČ ą┐ąŠč鹥čĆčÅąĮ ą▓ ąŠą║ąĮąĄ ą▓čĆąĄą╝ąĄąĮąĖ.
ąĀąĖčü. 36-20. ą¤čĆąĖąĮčåąĖą┐ čĆą░ą▒ąŠčéčŗ Time Triggered Mode.
ąĀąĄąČąĖą╝ Time Trigger čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą┐ąŠą╗čÅ TTM ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MR. ąÆ čĆąĄąČąĖą╝ąĄ Time Triggered, ą║ą░ą║ ąĖ ą▓ čĆąĄąČąĖą╝ąĄ Timestamp, ą┐ąŠą╗ąĄ CAN_TIMESTP ąĘą░čģą▓ą░čéčŗą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖčÅ čüč湥čéčćąĖą║ą░ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čéą░ą╣ą╝ąĄčĆą░, ąĮąŠ ą┐ąŠą╗čÅ MTIMESTAMP ą▓ čĆąĄą│ąĖčüčéčĆą░čģ CAN_MSRx ąĮąĄ ą░ą║čéąĖą▓ąĮčŗ ąĖ ą▒čāą┤čāčé ą┐čĆąŠčćąĖčéą░ąĮčŗ ą║ą░ą║ 0.
ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ą┐ąŠ ąŠą┐ąŠčĆąĮąŠą╝čā čüąŠąŠą▒čēąĄąĮąĖčÄ . ąÆ čĆąĄąČąĖą╝ąĄ Time Triggered čüč湥čéčćąĖą║ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čéą░ą╣ą╝ąĄčĆą░ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ąĮąŠą▓ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄčéčüčÅ ą▓ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ mailbox. ąŁč鹊čé čüą▒čĆąŠčü ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐ąŠčüą╗ąĄ ą┐čĆąĖąĄą╝ą░ ąŠą║ąŠąĮčćą░ąĮąĖčÅ čäčĆąĄą╣ą╝ą░ (EoF) ą┐ąŠ čäčĆąŠąĮčéčā ąĮą░čĆą░čüčéą░ąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ MRDY ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MSRx. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÄ čüč湥čéčćąĖą║ą░ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čéą░ą╣ą╝ąĄčĆą░ čü ą┐čĆąĖąĄą╝ąŠą╝ ąŠą┐ąŠčĆąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĖ ąĮą░čćą░ą╗ąŠą╝ ąĮąŠą▓ąŠą│ąŠ ąŠą║ąĮą░ ą▓čĆąĄą╝ąĄąĮąĖ.
ą¤ąĄčĆąĄą┤ą░čćą░ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ ąŠą║ąĮą░ ą▓čĆąĄą╝ąĄąĮąĖ . ą£ąĄčéą║ą░ ą▓čĆąĄą╝ąĄąĮąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ mailbox. ąŁč鹊 ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ 16-ą▒ąĖčéąĮčŗą╝ ą┐ąŠą╗ąĄą╝ MTIMEMARK ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MMRx. ąØą░ ą║ą░ąČą┤ąŠą╝ čéą░ą║č鹊ą▓ąŠą╝ čåąĖą║ą╗ąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čéą░ą╣ą╝ąĄčĆą░ ąĘąĮą░č湥ąĮąĖąĄ CAN_TIM čüčĆą░ą▓ąĮąĖą▓ą░ąĄčéčüčÅ čü ą╝ąĄčéą║ąŠą╣ ą▓čĆąĄą╝ąĄąĮąĖ ą║ą░ąČą┤ąŠą│ąŠ mailbox. ąÜąŠą│ą┤ą░ čüč湥čéčćąĖą║ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čéą░ą╣ą╝ąĄčĆą░ ą┤ąŠčüčéąĖą│ą░ąĄčé ąĘąĮą░č湥ąĮąĖčÅ MTIMEMARK, ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ čüąŠą▒čŗčéąĖąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čéą░ą╣ą╝ąĄčĆą░ ą┤ą╗čÅ mailbox.
ąÆ čĆąĄąČąĖą╝ąĄ Time Triggered ąŠą┐ąĄčĆą░čåąĖąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĘą░ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ, ą┐ąŠą║ą░ ąĮąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čüąŠą▒čŗčéąĖąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čéą░ą╣ą╝ąĄčĆą░ ą┤ą╗čÅ mailbox. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠą┤ą│ąŠčéą░ą▓ą╗ąĖą▓ą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ MTCR ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MCRx. ąĪąŠąŠą▒čēąĄąĮąĖąĄ ąĮąĄ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ, ą┐ąŠą║ą░ ąĘąĮą░č湥ąĮąĖąĄ CAN_TIM ą╝ąĄąĮčīčłąĄ č湥ą╝ ąĘąĮą░č湥ąĮąĖąĄ MTIMEMARK, ąĘą░ą┤ą░ąĮąĮąŠąĄ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MMRx.
ąĢčüą╗ąĖ ąŠą┐ąĄčĆą░čåąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ąŠč鹥čĆą┐ąĄą╗ą░ ąĮąĄčāą┤ą░čćčā, ąĮą░ą┐čĆąĖą╝ąĄčĆ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐ąŠč鹥čĆčÅą╗ąŠ ą░čĆą▒ąĖčéčĆą░ąČ čłąĖąĮčŗ ąĖ čüą╗ąĄą┤čāčÄčēą░čÅ ą┐ąŠą┐čŗčéą║ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ąŠčéą║ą╗ą░ą┤čŗą▓ą░ąĄčéčüčÅ ą┤ąŠ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ čüąŠą▒čŗčéąĖčÅ čéčĆąĖą│ą│ąĄčĆą░ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čéą░ą╣ą╝ąĄčĆą░. ąŁč鹊 ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░ąĄčé ąŠčé ą┐ąĄčĆąĄą║čĆčŗčéąĖčÅ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ąŠą║ąĮą░ ą▓čĆąĄą╝ąĄąĮąĖ, ąĮąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓čüąĄ ąĄčēąĄ ąŠąČąĖą┤ą░ąĄčé ąŠčéą┐čĆą░ą▓ą║ąĖ ąĖ ą▒čāą┤ąĄčé ą┐ąŠą▓č鹊čĆąĮąŠ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╝ ąŠą║ąĮąĄ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠą│ą┤ą░ CAN_TIM čüčéą░ąĮąĄčé čĆą░ą▓ąĮčŗą╝ ąĘąĮą░č湥ąĮąĖčÄ MTIMEMARK. ąóą░ą║ąČąĄ ą╝ąŠąČąĮąŠ ą┐čĆąĄą┤ąŠčéą▓čĆą░čéąĖčéčī ą┐ąŠą▓č鹊čĆ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą┐ąŠą╗čÅ DRPT ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MR.
ą×čüčéą░ąĮąŠą▓ą║ą░ čüč湥čéčćąĖą║ą░ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čéą░ą╣ą╝ąĄčĆą░ . ąÆąĮčāčéčĆąĄąĮąĮąĖą╣ čéą░ą╣ą╝ąĄčĆ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą╝ąŠčĆąŠąČąĄąĮ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ TIMFRZ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MR. ąŁč鹊 ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░ąĄčé ąĮąĄąŠąČąĖą┤ą░ąĮąĮąŠąĄ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░, ą║ąŠą│ą┤ą░ ąŠąĮ ą┤ąŠčüčéąĖą│ą░ąĄčé ąĘąĮą░č湥ąĮąĖčÅ FFFFh. ąÜąŠą│ą┤ą░ čéą░ą║ąŠąĄ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé, čŹč鹊 ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĘą░ą╝ąŠčĆąŠąĘąĖčé čéą░ą╣ą╝ąĄčĆ ą┤ąŠ ą▓čŗą┤ą░čćąĖ ąĮąŠą▓ąŠą│ąŠ čüą▒čĆąŠčüą░, ą╗ąĖą▒ąŠ ą┤ąŠ ą┐čĆąĖąĄą╝ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ mailbox ąĖą╗ąĖ ą╗čÄą▒ąŠą╣ ą┤čĆčāą│ąŠą╣ ąŠą┐ąĄčĆą░čåąĖąĖ, čüą▒čĆą░čüčŗą▓ą░čÄčēąĄą╣ čüč湥čéčćąĖą║. ąæąĖčé TOVF ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_SR čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ čüč湥čéčćąĖą║ ąĘą░ą╝ąŠčĆą░ąČąĖą▓ą░ąĄčéčüčÅ. ąæąĖčé TOVF ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_SR ąŠčćąĖčēą░ąĄčéčüčÅ čćč鹥ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ CAN_SR. ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_IMR, ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ą║ąŠą│ą┤ą░ TOVF čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ.
ąĀąĖčü. 36-21. ążčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ čĆąĄąČąĖą╝ą░ Time Triggered.
[ąśąĮč鹥čĆč乥ą╣čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN ]
ąóą░ą▒ą╗ąĖčåą░ 36-2. ąÜą░čĆčéą░ ą░ą┤čĆąĄčüąŠą▓ čĆąĄą│ąĖčüčéčĆąŠą▓ (čüą╝ąĄčēąĄąĮąĖčÅ čāą║ą░ąĘą░ąĮčŗ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ąĮą░čćą░ą╗čīąĮąŠą│ąŠ ą░ą┤čĆąĄčüą░ 0xFFFD0000).
ąĪą╝ąĄčēąĄąĮąĖąĄ ąĀąĄą│ąĖčüčéčĆ ąśą╝čÅ ąöąŠčüčéčāą┐ ąĪą▒čĆąŠčü
0x0000
Mode Register (čĆąĄą│ąĖčüčéčĆ čĆąĄąČąĖą╝ą░)
CAN_MR
R/W
0
0x0004
Interrupt Enable Register (čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣)
CAN_IER
W
-
0x0008
Interrupt Disable Register (ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣)
CAN_IDR
W
-
0x000C
Interrupt Mask Register (čĆąĄą│ąĖčüčéčĆ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣)
CAN_IMR
R
0
0x0010
Status Register (čüąŠčüč鹊čÅąĮąĖąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░)
CAN_SR
R
0
0x0014
Baudrate Register (ąĮą░čüčéčĆąŠą╣ą║ą░ čüą║ąŠčĆąŠčüčéąĖ)
CAN_BR
R/W
0
0x0018
Timer Register (čéą░ą╣ą╝ąĄčĆ)
CAN_TIM
R
0
0x001C
Timestamp Register (čĆąĄą│ąĖčüčéčĆ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ)
CAN_TIMESTP
R
0
0x0020
Error Counter Register (čüč湥čéčćąĖą║ąĖ ąŠčłąĖą▒ąŠą║)
CAN_ECR
R
0
0x0024
Transfer Command Register (čĆąĄą│ąĖčüčéčĆ ą║ąŠą╝ą░ąĮą┤čŗ ą┐ąĄčĆąĄąĮąŠčüą░ ą┤ą░ąĮąĮčŗčģ)
CAN_TCR
W
-
0x0028
Abort Command Register (čĆąĄą│ąĖčüčéčĆ ąŠą▒čĆčŗą▓ą░ ą┐ąĄčĆąĄąĮąŠčüą░ ą┤ą░ąĮąĮčŗčģ)
CAN_ACR
W
-
0x0100 .. 0x01FC ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ - - -
0x0200
Mailbox 0 Mode Register (čĆąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ ą┐ąŠčćč鹊ą▓ąŠą│ąŠ čÅčēąĖą║ą░)
CAN_MMR0
R/W
0
0x0204
Mailbox 0 Acceptance Mask Register (ą╝ą░čüą║ą░ ą┤ą╗čÅ čäąĖą╗čīčéčĆą░čåąĖąĖ ą│čĆčāą┐ą┐čŗ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ čüąŠąŠą▒čēąĄąĮąĖą╣)
CAN_MAM0
R/W
0
0x0208
Mailbox 0 ID Register (ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐ąŠčćč鹊ą▓ąŠą│ąŠ čÅčēąĖą║ą░)
CAN_MID0
R/W
0
0x020C
Mailbox 0 Family ID Register (ą┐ąŠčĆčÅą┤ą║ąŠą▓čŗą╣ ąĮąŠą╝ąĄčĆ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ ą│čĆčāą┐ą┐ąĄ, ą▓čŗą┤ąĄą╗ąĄąĮąĮąŠą╣ ą╝ą░čüą║ąŠą╣)
CAN_MFID0
R
0
0x0210
Mailbox 0 Status Register (čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠčćč鹊ą▓ąŠą│ąŠ čÅčēąĖą║ą░)
CAN_MSR0
R
0
0x0214
Mailbox 0 Data Low Register (ą╝ą╗ą░ą┤čłą░čÅ ą┐ąŠą╗ąŠą▓ąĖąĮą░ čĆąĄą│ąĖčüčéčĆąŠą▓ ą┤ą░ąĮąĮčŗčģ)
CAN_MDL0
R/W
0
0x0218
Mailbox 0 Data High Register (čüčéą░čĆčłą░čÅ ą┐ąŠą╗ąŠą▓ąĖąĮą░ čĆąĄą│ąĖčüčéčĆąŠą▓ ą┤ą░ąĮąĮčŗčģ)
CAN_MDH0
R/W
0
0x021C
Mailbox 0 Control Register (čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ)
CAN_MCR0
W
-
0x0220
Mailbox 1 Mode Register (čĆąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ ą┐ąŠčćč鹊ą▓ąŠą│ąŠ čÅčēąĖą║ą░)
CAN_MMR1
R/W
0
...
...
...
...
...
0x131C
Mailbox 7 Control Register (čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ)
CAN_MCR7
W
-
// ***************************************************************************** // ąĪčéčĆčāą║čéčāčĆą░, ąŠčéčĆą░ąČą░čÄčēą░čÅ ą░ą┤čĆąĄčüąĮąŠąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ CAN ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ ARM7 // ***************************************************************************** typedef struct _AT91S_CAN {
AT91_REG CAN_MR; // Mode Register
AT91_REG CAN_IER; // Interrupt Enable Register
AT91_REG CAN_IDR; // Interrupt Disable Register
AT91_REG CAN_IMR; // Interrupt Mask Register
AT91_REG CAN_SR; // Status Register
AT91_REG CAN_BR; // Baudrate Register
AT91_REG CAN_TIM; // Timer Register
AT91_REG CAN_TIMESTP; // Time Stamp Register
AT91_REG CAN_ECR; // Error Counter Register
AT91_REG CAN_TCR; // Transfer Command Register
AT91_REG CAN_ACR; // Abort Command Register
AT91_REG Reserved0[52 ]; //
AT91_REG CAN_VR; // Version Register
AT91_REG Reserved1[64 ]; //
AT91S_CAN_MB CAN_MB0; // CAN Mailbox 0
AT91S_CAN_MB CAN_MB1; // CAN Mailbox 1
AT91S_CAN_MB CAN_MB2; // CAN Mailbox 2
AT91S_CAN_MB CAN_MB3; // CAN Mailbox 3
AT91S_CAN_MB CAN_MB4; // CAN Mailbox 4
AT91S_CAN_MB CAN_MB5; // CAN Mailbox 5
AT91S_CAN_MB CAN_MB6; // CAN Mailbox 6
AT91S_CAN_MB CAN_MB7; // CAN Mailbox 7
AT91S_CAN_MB CAN_MB8; // CAN Mailbox 8
AT91S_CAN_MB CAN_MB9; // CAN Mailbox 9
AT91S_CAN_MB CAN_MB10; // CAN Mailbox 10
AT91S_CAN_MB CAN_MB11; // CAN Mailbox 11
AT91S_CAN_MB CAN_MB12; // CAN Mailbox 12
AT91S_CAN_MB CAN_MB13; // CAN Mailbox 13
AT91S_CAN_MB CAN_MB14; // CAN Mailbox 14
AT91S_CAN_MB CAN_MB15; // CAN Mailbox 15
} AT91S_CAN, * AT91PS_CAN;
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čā ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ AT91SAM7X128, AT91SAM7X256, AT91SAM7X512 ąĖą╝ąĄčÄčéčüčÅ č鹊ą╗čīą║ąŠ mailbox 0..7.
[ą×ą▒čēąĖąĄ čĆąĄą│ąĖčüčéčĆčŗ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ]
ąĀąĄą│ąĖčüčéčĆ čĆąĄąČąĖą╝ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN. ąĀąĄą│ąĖčüčéčĆ čĆą░ą▒ąŠčéą░ąĄčé ąĖ ąĮą░ čćč鹥ąĮąĖąĄ, ąĖ ąĮą░ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
- - - - - RXSYNC - - - - - - - -
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
- - - - - - - - DRPT TIMFRZ TTM TEOF OVL ABM LPM CANEN
CANEN : CAN Controller Enable (čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN).
LPM : Disable/Enable Low Power Mode (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆąĄąČąĖą╝ąŠą╝ 菹║ąŠąĮąŠą╝ąĖąĖ 菹ĮąĄčĆą│ąĖąĖ).
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą▓čģąŠą┤ąĖčé ą▓ Low Power Mode, ą║ą░ą║ č鹊ą╗čīą║ąŠ ą▓čüąĄ ąŠąČąĖą┤ą░čÄčēąĖąĄ ąŠčéą┐čĆą░ą▓ą║ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▒čŗą╗ąĖ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ.
ABM : Disable/Enable Autobaud/Listen mode (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆąĄąČąĖą╝ąŠą╝ ą┐čĆąŠčüą╗čāčłąĖą▓ą░ąĮąĖčÅ ą░ą▓č鹊ą┤ąĄč鹥ą║čéą░ čüą║ąŠčĆąŠčüčéąĖ).
OVL : Disable/Enable Overload Frame (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ čäčĆąĄą╣ą╝ą░ ą┐ąĄčĆąĄą│čĆčāąĘą║ąĖ).
TEOF : Timestamp messages at each end of Frame (ą║ąŠą│ą┤ą░ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą╝ąĄčéą║čā ą▓čĆąĄą╝ąĄąĮąĖ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ čäčĆąĄą╣ą╝ą░).
TTM : Disable/Enable Time Triggered Mode (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆąĄąČąĖą╝ąŠą╝ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÅ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ).
TIMFRZ : Enable Timer Freeze (čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ąŠčüčéą░ąĮąŠą▓ą║ąĖ čéą░ą╣ą╝ąĄčĆą░).
DRPT : Disable Repeat (ąĘą░ą┐čĆąĄčé ą┐ąŠą▓č鹊čĆą░).
RXSYNC : Reception Synchronization Stage (čüčéą░ą┤ąĖčÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą┐čĆąĖąĄą╝ą░, ąĮąĄ čćąĖčéą░ąĄą╝ąŠąĄ ą┐ąŠą╗ąĄ). ąŁč鹊 ą┐ąŠą╗ąĄ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī čüčéą░ą┤ąĖčÄ ą┐čĆąĖąĄą╝ą░ ą╝ą░ą║čĆąŠčÅč湥ą╣ą║ąĖ (ą┐čĆąĄą┤ąĮą░ąĘąĮą░čćą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąŠčéą╗ą░ą┤ą║ąĖ).
RXSYNC Reception Synchronization Stage
0
ąĪąĖą│ąĮą░ą╗ ą┐čĆąĖąĄą╝ą░ čü ą┤ą▓ąŠą╣ąĮčŗą╝ąĖ čüčéą░ą┤ąĖčÅą╝ąĖ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (2 ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮčŗčģ ą┐ąĄčĆąĄą┐ą░ą┤ą░).
1
ąĪąĖą│ąĮą░ą╗ ą┐čĆąĖąĄą╝ą░ čü ą┤ą▓ąŠą╣ąĮčŗą╝ąĖ čüčéą░ą┤ąĖčÅą╝ąĖ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (1 ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮčŗą╣ ą┐ąĄčĆąĄą┐ą░ą┤ ąĖ 1 ąŠčéčĆąĖčåą░č鹥ą╗čīąĮčŗą╣).
2
ąĪąĖą│ąĮą░ą╗ ą┐čĆąĖąĄą╝ą░ čü ąŠą┤ąĖąĮąŠčćąĮąŠą╣ čüčéą░ą┤ąĖąĄą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮčŗą╣ ą┐ąĄčĆąĄą┐ą░ą┤).
ą┤čĆčāą│ąŠąĄ
ąĪąĖą│ąĮą░ą╗ ą┐čĆąĖąĄą╝ą░ ą▒ąĄąĘ čüčéą░ą┤ąĖąĖ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ.
ąĀąĄą│ąĖčüčéčĆ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ čüąŠą▒čŗčéąĖčÅą╝. ąĀąĄą│ąĖčüčéčĆ čĆą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
- - - BERR FERR AERR SERR CERR TSTP TOVF WAKEUP SLEEP BOFF ERRP WARN ERRA
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
- - - - - - - - MB7 MB6 MB5 MB4 MB3 MB2 MB1 MB0
ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ ąŠą┐ąĖčüą░ąĮąĖąĄ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą▒ąĖč鹊ą▓. ąŚą░ą┐ąĖčüčī 0 ą▓ ą▒ąĖčé ąĮąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ ą▓ą╗ąĖčÅąĮąĖčÅ, ąĘą░ą┐ąĖčüčī 1 čĆą░ąĘčĆąĄčłą░ąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ.
MBx : Mailbox x Interrupt Enable (čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠčćč鹊ą▓ąŠą│ąŠ čÅčēąĖą║ą░ x).
ERRA : Error Active Mode Interrupt Enable (čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čĆąĄąČąĖą╝ą░ Error Active).
WARN : Warning Limit Interrupt Enable (čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ą┐čĆąĄą▓čŗčłąĄąĮąĖčÅ ą╗ąĖą╝ąĖčéą░ čüč湥čéčćąĖą║ąŠą▓ TEC ąĖ REC).
ERRP : Error Passive Mode Interrupt Enable (čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čĆąĄąČąĖą╝ą░ Error Passive).
BOFF : Bus Off Mode Interrupt Enable (čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čĆąĄąČąĖą╝ą░ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ čłąĖąĮčŗ).
SLEEP : Sleep Interrupt Enable (čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čüąĮą░).
WAKEUP : Wakeup Interrupt Enable (čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ).
TOVF : Timer Overflow Interrupt Enable (čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĖ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░ CAN).
TSTP : TimeStamp Interrupt Enable (čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ).
CERR : CRC Error Interrupt Enable (čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ CRC).
SERR : Stuffing Error Interrupt Enable (čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ ą▓čüčéą░ą▓ą║ąĖ ą┐čāčüč鹊ą│ąŠ ą▒ąĖčéą░).
AERR : Acknowledgment Error Interrupt Enable (čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ).
FERR : Form Error Interrupt Enable (čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ č乊čĆą╝čŗ).
BERR : Bit Error Interrupt Enable (čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ ą▒ąĖčéą░).
ąĀąĄą│ąĖčüčéčĆ ąĘą░ą┐čĆąĄčéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ čüąŠą▒čŗčéąĖčÅą╝. ąĀąĄą│ąĖčüčéčĆ čĆą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
- - - BERR FERR AERR SERR CERR TSTP TOVF WAKEUP SLEEP BOFF ERRP WARN ERRA
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
- - - - - - - - MB7 MB6 MB5 MB4 MB3 MB2 MB1 MB0
ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ ąŠą┐ąĖčüą░ąĮąĖąĄ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą▒ąĖč鹊ą▓. ąŚą░ą┐ąĖčüčī 0 ą▓ ą▒ąĖčé ąĮąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ ą▓ą╗ąĖčÅąĮąĖčÅ, ąĘą░ą┐ąĖčüčī 1 ąĘą░ą┐čĆąĄčēą░ąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ.
MBx : Mailbox x Interrupt Disable (ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠčćč鹊ą▓ąŠą│ąŠ čÅčēąĖą║ą░ x).
ERRA : Error Active Mode Interrupt Disable (ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čĆąĄąČąĖą╝ą░ Error Active).
WARN : Warning Limit Interrupt Disable (ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ą┐čĆąĄą▓čŗčłąĄąĮąĖčÅ ą╗ąĖą╝ąĖčéą░ čüč湥čéčćąĖą║ąŠą▓ TEC ąĖ REC).
ERRP : Error Passive Mode Interrupt Disable (ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čĆąĄąČąĖą╝ą░ Error Passive).
BOFF : Bus Off Mode Interrupt Disable (ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čĆąĄąČąĖą╝ą░ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ čłąĖąĮčŗ).
SLEEP : Sleep Interrupt Disable (ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čüąĮą░).
WAKEUP : Wakeup Interrupt Disable (ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ).
TOVF : Timer Overflow Interrupt Disable (ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĖ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░ CAN).
TSTP : TimeStamp Interrupt Disable (ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ).
CERR : CRC Error Interrupt Disable (ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ CRC).
SERR : Stuffing Error Interrupt Disable (ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ ą▓čüčéą░ą▓ą║ąĖ ą┐čāčüč鹊ą│ąŠ ą▒ąĖčéą░).
AERR : Acknowledgment Error Interrupt Disable (ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ).
FERR : Form Error Interrupt Disable (ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ č乊čĆą╝čŗ).
BERR : Bit Error Interrupt Disable (ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ ą▒ąĖčéą░).
ąĀąĄą│ąĖčüčéčĆ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┐ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ čüąŠą▒čŗčéąĖčÅą╝. ąĀąĄą│ąĖčüčéčĆ čĆą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ čćč鹥ąĮąĖąĄ.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
- - - BERR FERR AERR SERR CERR TSTP TOVF WAKEUP SLEEP BOFF ERRP WARN ERRA
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
- - - - - - - - MB7 MB6 MB5 MB4 MB3 MB2 MB1 MB0
ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ ąŠą┐ąĖčüą░ąĮąĖąĄ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą▒ąĖč鹊ą▓. ą¤čĆąŠčćąĖčéą░ąĮąĮčŗą╣ 0 ą▓ ą▒ąĖč鹥 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĘą░ą┐čĆąĄčēąĄąĮąŠ, ą┐čĆąŠčćąĖčéą░ąĮąĮą░čÅ 1 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čĆą░ąĘčĆąĄčłąĄąĮąŠ.
MBx : Mailbox x Interrupt Mask (ą╝ą░čüą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠčćč鹊ą▓ąŠą│ąŠ čÅčēąĖą║ą░ x).
ERRA : Error Active Mode Interrupt Mask (ą╝ą░čüą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čĆąĄąČąĖą╝ą░ Error Active).
WARN : Warning Limit Interrupt Mask (ą╝ą░čüą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ą┐čĆąĄą▓čŗčłąĄąĮąĖčÅ ą╗ąĖą╝ąĖčéą░ čüč湥čéčćąĖą║ąŠą▓ TEC ąĖ REC).
ERRP : Error Passive Mode Interrupt Mask (ą╝ą░čüą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čĆąĄąČąĖą╝ą░ Error Passive).
BOFF : Bus Off Mode Interrupt Mask (ą╝ą░čüą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čĆąĄąČąĖą╝ą░ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ čłąĖąĮčŗ).
SLEEP : Sleep Interrupt Mask (ą╝ą░čüą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čüąĮą░).
WAKEUP : Wakeup Interrupt Mask (ą╝ą░čüą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ).
TOVF : Timer Overflow Interrupt Mask (ą╝ą░čüą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĖ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░ CAN).
TSTP : TimeStamp Interrupt Mask (ą╝ą░čüą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ).
CERR : CRC Error Interrupt Mask (ą╝ą░čüą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ CRC).
SERR : Stuffing Error Interrupt Mask (ą╝ą░čüą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ ą▓čüčéą░ą▓ą║ąĖ ą┐čāčüč鹊ą│ąŠ ą▒ąĖčéą░).
AERR : Acknowledgment Error Interrupt Mask (ą╝ą░čüą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ).
FERR : Form Error Interrupt Mask (ą╝ą░čüą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ č乊čĆą╝čŗ).
BERR : Bit Error Interrupt Mask (ą╝ą░čüą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ ą▒ąĖčéą░).
ąĀąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ (čüčéą░čéčāčüą░) CAN. ąĀąĄą│ąĖčüčéčĆ čĆą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ čćč鹥ąĮąĖąĄ.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
OVLSY TBSY RBSY BERR FERR AERR SERR CERR TSTP TOVF WAKEUP SLEEP BOFF ERRP WARN ERRA
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
- - - - - - - - MB7 MB6 MB5 MB4 MB3 MB2 MB1 MB0
ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ ąŠą┐ąĖčüą░ąĮąĖąĄ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą▒ąĖč鹊ą▓. ą¤čĆąŠčćąĖčéą░ąĮąĮčŗą╣ 0 ą▓ ą▒ąĖč鹥 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąĮąĄ ą▒čŗą╗ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ čüąŠą▒čŗčéąĖčÅ, ą┐čĆąŠčćąĖčéą░ąĮąĮą░čÅ 1 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čüąŠą▒čŗčéąĖąĄ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ.
MBx : Mailbox x Event (ą▒čŗą╗ąŠ ą╗ąĖ čüąŠą▒čŗčéąĖąĄ, čüą▓čÅąĘą░ąĮąĮąŠąĄ čü ą┐ąŠčćč鹊ą▓čŗą╝ čÅčēąĖą║ąŠą╝ x). ąĪąŠą▒čŗčéąĖčÅ čüą▓čÅąĘą░ąĮčŗ čü ą┐ąŠą╗čÅą╝ąĖ MRDY, MABT čĆąĄą│ąĖčüčéčĆą░ CAN_MSRx.
ERRA : Error Active Mode (čĆąĄąČąĖą╝ Error Active).
ąŁč鹊čé čäą╗ą░ą│ ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĘąĮą░č湥ąĮąĖą╣ čüč湥čéčćąĖą║ąŠą▓ TEC ąĖ REC. ą×ąĮ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ čāąĘąĄą╗ ąĮąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ąĮąĖ ą▓ čĆąĄąČąĖą╝ąĄ Error Passive, ąĮąĖ ą▓ čĆąĄąČąĖą╝ąĄ Bus Off.
ąŁč鹊čé čäą╗ą░ą│ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ čāą║ą░ąĘą░ąĮąĮąŠąĄ ą▓čŗčłąĄ čāčüą╗ąŠą▓ąĖąĄ ąĮąĄ čüąŠą▒ą╗čÄą┤ą░ąĄčéčüčÅ. ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. čüąĄą║čåąĖčÄ "ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ".
WARN : Warning Limit (ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖąĄ ą╗ąĖą╝ąĖčéą░ čüč湥čéčćąĖą║ąŠą▓ TEC ąĖ REC).
ąŻčüčéą░ąĮąŠą▓ą║ą░ čŹč鹊ą│ąŠ čäą╗ą░ą│ą░ ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĘąĮą░č湥ąĮąĖčÅ čüč湥čéčćąĖą║ąŠą▓ TEC ąĖ REC. ą×ąĮ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ, ą║ąŠą│ą┤ą░ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĖąĮ ąĖąĘ čŹčéąĖčģ čüč湥čéčćąĖą║ąŠą▓ ą┐čĆąĄą▓čŗčüąĖčé ąĘąĮą░č湥ąĮąĖąĄ 96.
ąŁč鹊čé čäą╗ą░ą│ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ čāą║ą░ąĘą░ąĮąĮąŠąĄ ą▓čŗčłąĄ čāčüą╗ąŠą▓ąĖąĄ ąĮąĄ čüąŠą▒ą╗čÄą┤ą░ąĄčéčüčÅ. ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. čüąĄą║čåąĖčÄ "ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ".
ERRP : Error Passive Mode (čĆąĄąČąĖą╝ Error Passive).
ąŻčüčéą░ąĮąŠą▓ą║ą░ čŹč鹊ą│ąŠ čäą╗ą░ą│ą░ ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĘąĮą░č湥ąĮąĖčÅ čüč湥čéčćąĖą║ąŠą▓ TEC ąĖ REC. ą×ąĮ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ, ą║ąŠą│ą┤ą░ čüč湥čéčćąĖą║ TEC ą▒ąŠą╗čīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĄąĮ 128 (ą┤ąĄčüčÅčéąĖčćąĮąŠąĄ), ąĖą╗ąĖ ą║ąŠą│ą┤ą░ čüč湥čéčćąĖą║ REC ą▒ąŠą╗čīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĄąĮ 128 (ą┤ąĄčüčÅčéąĖčćąĮąŠąĄ).
ąŁč鹊čé čäą╗ą░ą│ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ čāą║ą░ąĘą░ąĮąĮąŠąĄ ą▓čŗčłąĄ čāčüą╗ąŠą▓ąĖąĄ ąĮąĄ čüąŠą▒ą╗čÄą┤ą░ąĄčéčüčÅ. ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. čüąĄą║čåąĖčÄ "ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ".
BOFF : Bus Off Mode (čĆąĄąČąĖą╝ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ čłąĖąĮčŗ).
ąŻčüčéą░ąĮąŠą▓ą║ą░ čŹč鹊ą│ąŠ čäą╗ą░ą│ą░ ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĘąĮą░č湥ąĮąĖčÅ čüč湥čéčćąĖą║ą░ TEC. ąŻąĘąĄą╗ čüąĄčéąĖ ą▓čŗą║ą╗čÄčćąĖčé čüą▓ąŠąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ čłąĖąĮąĄ, ą║ąŠą│ą┤ą░ ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ TEC ą▒ąŠą╗čīčłąĖąĄ ąĖą╗ąĖ čĆą░ą▓ąĮąŠ 256 (ą┤ąĄčüčÅčéąĖčćąĮąŠąĄ).
ąŁč鹊čé čäą╗ą░ą│ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ čāą║ą░ąĘą░ąĮąĮąŠąĄ ą▓čŗčłąĄ čāčüą╗ąŠą▓ąĖąĄ ąĮąĄ čüąŠą▒ą╗čÄą┤ą░ąĄčéčüčÅ. ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. čüąĄą║čåąĖčÄ "ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ".
SLEEP : CAN controller in Low power Mode (ąĮą░čģąŠą┤ąĖčéčüčÅ ą╗ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ).
ąŁč鹊čé čäą╗ą░ą│ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ąĘą░ą┐čĆąĄčēą░ąĄčéčüčÅ čĆąĄąČąĖą╝ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ.
WAKEUP : CAN controller is not in Low power Mode (ąĮą░čģąŠą┤ąĖčéčüčÅ ą╗ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą▓ ą░ą║čéąĖą▓ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ).
ąÜąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čüąŠą▒čŗčéąĖąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (WAKEUP), ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆčāąĄčéčüčÅ čü ą░ą║čéąĖą▓ąĮąŠčüčéčīčÄ ąĮą░ čłąĖąĮąĄ. ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮčŗ ąĖą╗ąĖ ą┐čĆąĖąĮčÅčéčŗ. ąóą░ą║čéčŗ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┤ąŠčüčéčāą┐ąĮčŗ, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čüąŠą▒čŗčéąĖąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ. ąŁč鹊čé čäą╗ą░ą│ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüą▒čĆąŠčüąĖčéčüčÅ, ą║ąŠą│ą┤ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą▓ąŠą╣ą┤ąĄčé ą▓ čĆąĄąČąĖą╝ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ (Low Power mode, čĆąĄąČąĖą╝ čüąĮą░).
TOVF : Timer Overflow (ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░ CAN).
ąŁč鹊čé čäą╗ą░ą│ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčćąĖčüčéąĖčéčüčÅ čćč鹥ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ CAN_SR.
TSTP : TimeStamp (ą╝ąĄčéą║ą░ ą▓čĆąĄą╝ąĄąĮąĖ).
ąŁč鹊čé čäą╗ą░ą│ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčćąĖčüčéąĖčéčüčÅ čćč鹥ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ CAN_SR.
CERR : Mailbox CRC Error (ąŠčłąĖą▒ą║ą░ CRC ą┐ąŠčćč鹊ą▓ąŠą│ąŠ čÅčēąĖą║ą░).
ą×čłąĖą▒ą║ą░ CRC ą┤ąĄč鹥ą║čéąĖčĆčāąĄčéčüčÅ ą┐ąŠ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╝čā ą┐čĆąĖąĄą╝čā.
ąŁč鹊čé čäą╗ą░ą│ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčćąĖčüčéąĖčéčüčÅ čćč鹥ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ CAN_SR.
SERR : Mailbox Stuffing Error (ąŠčłąĖą▒ą║ą░ ą▓čüčéą░ą▓ą║ąĖ ą┐čāčüč鹊ą│ąŠ ą▒ąĖčéą░ ą┐ąŠčćč鹊ą▓ąŠą│ąŠ čÅčēąĖą║ą░).
ą×čłąĖą▒ą║ą░ č乊čĆą╝čŗ čüąĖą│ąĮą░ą╗ą░ ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ č鹊ą╝čā, čćč鹊 ąŠą▒ąĮą░čĆčāąČąĖą▓ą░ąĄčéčüčÅ ą▒ąŠą╗čīčłąĄ 5 čüą╗ąĄą┤čāčÄčēąĖčģ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ą▒ąĖčé ą▓ ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠą╣ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ.
ąŁč鹊čé čäą╗ą░ą│ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčćąĖčüčéąĖčéčüčÅ čćč鹥ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ CAN_SR.
AERR : Acknowledgment Error (ąŠčłąĖą▒ą║ą░ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ).
ą×čłąĖą▒ą║ą░ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ąĮąĄ ą▒čŗą╗ ąŠą▒ąĮą░čĆčāąČąĄąĮ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ ą▒ąĖčé ą▓ čüą╗ąŠč鹥 ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ.
ąŁč鹊čé čäą╗ą░ą│ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčćąĖčüčéąĖčéčüčÅ čćč鹥ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ CAN_SR.
FERR : Form Error (ąŠčłąĖą▒ą║ą░ č乊čĆą╝čŗ).
ą×čłąĖą▒ą║ą░ č乊čĆą╝čŗ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąĖąĘ-ąĘą░ ąĮą░čĆčāčłąĄąĮąĖčÅ ą▓ ąŠą┤ąĮąŠą╝ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąĄ čüą╗ąĄą┤čāčÄčēąĖčģ ą┐ąŠą╗ąĄą╣ ą▒ąĖčéą░:
ąĀą░ąĘą┤ąĄą╗ąĖč鹥ą╗čī CRC
ąŁč鹊čé čäą╗ą░ą│ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčćąĖčüčéąĖčéčüčÅ čćč鹥ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ CAN_SR.
BERR : Bit Error (ąŠčłąĖą▒ą║ą░ ą▒ąĖčéą░).
ążą╗ą░ą│ ąŠčłąĖą▒ą║ąĖ ą▒ąĖčéą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ąĘąĮą░č湥ąĮąĖąĄ ą▒ąĖčéą░, ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄą╝ąŠąĄ ąĮą░ ą╗ąĖąĮąĖąĖ, ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé ąĘąĮą░č湥ąĮąĖčÅ čĆąĄą░ą╗čīąĮąŠ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮąŠą│ąŠ ą▒ąĖčéą░.
ąŁč鹊čé čäą╗ą░ą│ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčćąĖčüčéąĖčéčüčÅ čćč鹥ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ CAN_SR.
RBSY : Receiver busy (ąĘą░ąĮčÅč鹊čüčéčī ą┐čĆąĖąĄą╝ąĮąĖą║ą░).
ąŁč鹊čé ą▒ąĖčé ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĘą░ąĮčÅč鹊čüčéčī ą┐čĆąĖąĄą╝ąĮąĖą║ą░. ą×ąĮ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą░ą┐ą┐ą░čĆą░čéąĮąŠ, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ CAN ą▓čŗčćąĖčéčŗą▓ą░ąĄčé ąĖą╗ąĖ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄčé čäčĆąĄą╣ą╝ (čäčĆąĄą╣ą╝ ą╝ąŠąČąĄčé ą▒čŗčéčī čéąĖą┐ą░ remote, data, overload ąĖą╗ąĖ error). ąæąĖčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ CAN ąĮąĖč湥ą│ąŠ ąĮąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄčé.
TBSY : Transmitter busy (ąĘą░ąĮčÅč鹊čüčéčī ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░).
ąŁč鹊čé ą▒ąĖčé ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĘą░ąĮčÅč鹊čüčéčī ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░. ą×ąĮ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą░ą┐ą┐ą░čĆą░čéąĮąŠ, ą║ąŠą│ą┤ą░ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé čüąĖą│ąĮą░ą╗ čäčĆąĄą╣ą╝ą░ (čäčĆąĄą╣ą╝ ą╝ąŠąČąĄčé ą▒čŗčéčī čéąĖą┐ą░ remote, data, overload ąĖą╗ąĖ error). ąæąĖčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ CAN ąĮąĖč湥ą│ąŠ ąĮąĄ ą┐ąĄčĆąĄą┤ą░ąĄčé.
OVLSY : Overload busy (ąĘą░ąĮčÅč鹊čüčéčī ą┐ąĄčĆąĄą│čĆčāąĘą║ąĖ).
ąŁč鹊čé čäą╗ą░ą│ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüą▒čĆąŠčüąĖčéčüčÅ, ą║ąŠą│ą┤ą░ čłąĖąĮą░ ąĮąĄ ą┐ąĄčĆąĄą┤ą░ąĄčé čäčĆąĄą╣ą╝ ą┐ąĄčĆąĄą│čĆčāąĘą║ąĖ (overload frame).
ąĀąĄą│ąĖčüčéčĆ ąĮą░čüčéčĆąŠą╣ą║ąĖ čüą║ąŠčĆąŠčüčéąĖ (baudrate) CAN. ąĀąĄą│ąĖčüčéčĆ čĆą░ą▒ąŠčéą░ąĄčé ąĖ ąĮą░ čćč鹥ąĮąĖąĄ, ąĖ ąĮą░ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
- - - - - - - SMP - BRP
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
- - SJW - PROPAG - PHASE1 - PHASE2
ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ ąŠą┐ąĖčüą░ąĮąĖąĄ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠą╗ąĄą╣ čĆąĄą│ąĖčüčéčĆą░. ąøčÄą▒čŗąĄ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĖ čŹčéąĖčģ ą┐ąŠą╗ąĄą╣ ą┤ąŠą╗ąČąĮčŗ ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčīčüčÅ, ą║ąŠą│ą┤ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ąĘą░ą┐čĆąĄčēąĄąĮ. ą¦č鹊ą▒čŗ ą▓čŗčćąĖčüą╗ąĖčéčī čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą╗čÅ ą▒ąĖčéą░, čüą╝. čüąĄą║čåąĖčÄ "ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą▒ąĖčéą░".
PHASE2 : ą▓čĆąĄą╝čÅ čüąĄą│ą╝ąĄąĮčéą░ čäą░ąĘčŗ 2.
ąŁčéą░ čäą░ąĘą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠą╝ą┐ąĄąĮčüą░čåąĖąĖ ąŠčłąĖą▒ą║ąĖ čäą░ąĘčŗ ą┐ąĄčĆąĄą┐ą░ą┤ą░ čüąĖą│ąĮą░ą╗ą░.
tPHS2 = tCSC ├Ś (PHASE2 + 1)
ąÆąĮąĖą╝ą░ąĮąĖąĄ: ąĘąĮą░č湥ąĮąĖąĄ PHASE2 ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ą▓ąĮąŠ 0.
PHASE1 : ą▓čĆąĄą╝čÅ čüąĄą│ą╝ąĄąĮčéą░ čäą░ąĘčŗ 1.
ąŁčéą░ čäą░ąĘą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠą╝ą┐ąĄąĮčüą░čåąĖąĖ ąŠčłąĖą▒ą║ąĖ čäą░ąĘčŗ ą┐ąĄčĆąĄą┐ą░ą┤ą░ čüąĖą│ąĮą░ą╗ą░.
tPHS1 = tCSC ├Ś (PHASE1 + 1)
PROPAG : ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ čüąĄą│ą╝ąĄąĮčéą░ čüąĄčéąĖ CAN.
ąŁčéą░ čćą░čüčéčī ą▓čĆąĄą╝ąĄąĮąĖ ą▒ąĖčéą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠą╝ą┐ąĄąĮčüą░čåąĖąĖ ą▓čĆąĄą╝ąĄąĮąĖ čäąĖąĘąĖč湥čüą║ąŠą╣ ąĘą░ą┤ąĄčƹȹ║ąĖ ą▓ čüąĄčéąĖ CAN.
tPRS = tCSC ├Ś (PROPAG + 1)
SJW : čłąĖčĆąĖąĮą░ ą┐čĆčŗąČą║ą░ ą┐ąĄčĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (Re-synchronization jump width).
ąŁč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą║ąŠą╝ą┐ąĄąĮčüąĖčĆąŠą▓ą░čéčī čüą┤ą▓ąĖą│ čäą░ąĘčŗ ą╝ąĄąČą┤čā čéą░ą║č鹊ą▓čŗą╝ąĖ ą│ąĄąĮąĄčĆą░č鹊čĆą░ą╝ąĖ čĆą░ąĘąĮčŗčģ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ ąĮą░ čłąĖąĮąĄ. ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┤ąŠą╗ąČąĄąĮ ą┐ąĄčĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░čéčīčüčÅ ąĮą░ ą║ą░ąČą┤ąŠą╝ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝ ą┐ąĄčĆąĄą┐ą░ą┤ąĄ čüąĖą│ąĮą░ą╗ą░ č鹥ą║čāčēąĄą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ. ą©ąĖčĆąĖąĮą░ ą┐čĆčŗąČą║ą░ čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ąĘą░ą┤ą░ąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéą░ą║č鹊ą▓ ą▓ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą▒ąĖčéą░, ąĮą░ ą║ąŠč鹊čĆąŠąĄ ą▓ ą┐čĆąŠčåąĄčüčüąĄ čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą▒ąĖčéą░ ą╝ąŠąČąĄčé ą▒čŗčéčī čāą║ąŠčĆąŠč湥ąĮą░ ąĖą╗ąĖ čāą┤ą╗ąĖąĮąĄąĮą░.
tSJW = tCSC ├Ś (SJW + 1)
BRP : Baudrate Prescaler (ąĮą░čüčéčĆąŠą╣ą║ą░ ą┐čĆąĄą┤ą┤ąĄą╗ąĖč鹥ą╗čÅ čüą║ąŠčĆąŠčüčéąĖ).
ąŁč鹊 ą┐ąŠą╗ąĄ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ą┐ąĄčĆąĖąŠą┤ čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ CAN, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą║ą░ąČą┤ąŠą│ąŠ ąŠčéą┤ąĄą╗čīąĮąŠą│ąŠ ą▒ąĖčéą░.
tCSC = (BRP + 1) Ōüä MCK
ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠą╗čÅ BRP ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 0x01 .. 0x7F], čé. ąĄ. ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐čĆąĖ BRP = 0 ą▒čāą┤ąĄčé ąĮąĄ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░ąĮąĮčŗą╝.
SMP : Sampling Mode (čĆąĄąČąĖą╝ ąŠčåąĖčäčĆąŠą▓ą║ąĖ čüąĖą│ąĮą░ą╗ą░).
SMP Sampling Mode ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĘą░ą┐čĆąĄčēą░ąĄčéčüčÅ, ąĄčüą╗ąĖ BRP = 0.
ąĀąĄą│ąĖčüčéčĆ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░ CAN. ąĀąĄą│ąĖčüčéčĆ čĆą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ čćč鹥ąĮąĖąĄ.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
- - - - - - - - - - - - - - - -
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
TIMER
TIMER : ąĘąĮą░č湥ąĮąĖčÅ ą▒ąĖčé čŹč鹊ą│ąŠ ą┐ąŠą╗čÅ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčé čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čüč湥čéčćąĖą║ą░ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čéą░ą╣ą╝ąĄčĆą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN.
ąĀąĄą│ąĖčüčéčĆ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ CAN. ąĀąĄą│ąĖčüčéčĆ čĆą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ čćč鹥ąĮąĖąĄ.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
- - - - - - - - - - - - - - - -
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
MTIMESTAMP
MTIMESTAMP : ąĘąĮą░č湥ąĮąĖčÅ ą▒ąĖčé čŹč鹊ą│ąŠ ą┐ąŠą╗čÅ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčé čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čüč湥čéčćąĖą║ą░ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čéą░ą╣ą╝ąĄčĆą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ.
ąĢčüą╗ąĖ ą▒ąĖčé TEOF ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MR čüą▒čĆąŠčłąĄąĮ, č鹊 ąĘąĮą░č湥ąĮąĖąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čéą░ą╣ą╝ąĄčĆą░/čüč湥čéčćąĖą║ą░ CAN ąĘą░čģą▓ą░čéčŗą▓ą░ąĄčéčüčÅ ą▓ ą┐ąŠą╗ąĄ MTIMESTAMP ą┐ąŠ ąĮą░čćą░ą╗čā ą║ą░ąČą┤ąŠą│ąŠ čäčĆąĄą╣ą╝ą░ (start of frame, SoF). ąśąĮą░č湥 ąĘąĮą░č湥ąĮąĖąĄ ąĘą░čģą▓ą░čéčŗą▓ą░ąĄčéčüčÅ ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖąĖ ą║ą░ąČą┤ąŠą│ąŠ čäčĆąĄą╣ą╝ą░ (end of frame, EoF). ąÜąŠą│ą┤ą░ ąĘąĮą░č湥ąĮąĖąĄ ąĘą░čģą▓ą░č湥ąĮąŠ, ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_SR čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čäą╗ą░ą│ TSTP. ąĢčüą╗ąĖ ą╝ą░čüą║ą░ ą┤ą╗čÅ ą▒ąĖčéą░ TSTP ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_IMR čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░, č鹊 ą▒čāą┤ąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčīčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ ą┐čĆąĖ čāčüčéą░ąĮąŠą▓ą║ąĄ čäą╗ą░ą│ą░ TSTP ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_SR. ąŁč鹊čé čäą╗ą░ą│ ąŠčćąĖčēą░ąĄčéčüčÅ ą┐čĆąĖ čćč鹥ąĮąĖąĖ čĆąĄą│ąĖčüčéčĆą░ CAN_SR.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čĆąĄą│ąĖčüčéčĆ CAN_TIMESTP čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ CAN ąĘą░ą┐čĆąĄčēą░ąĄčéčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ ą▒ąĖčéą░ CANEN ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MR.
ąĀąĄą│ąĖčüčéčĆ čüč湥čéčćąĖą║ąŠą▓ ąŠčłąĖą▒ąŠą║ CAN. ąĀąĄą│ąĖčüčéčĆ čĆą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ čćč鹥ąĮąĖąĄ.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
- - - - - - - - TEC
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
- - - - - - - - REC
REC : Receive Error Counter (čüč湥čéčćąĖą║ ąŠčłąĖą▒ąŠą║ ą┐čĆąĖąĄą╝ą░).
ąÜąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ąŠą┐čĆąĄą┤ąĄą╗ąĖą╗ ąŠčłąĖą▒ą║čā, REC čāą▓ąĄą╗ąĖčćąĖčéčüčÅ ąĮą░ 1, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ čüą╗čāčćą░čÅ, ą║ąŠą│ą┤ą░ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮą░ ąŠčłąĖą▒ą║ą░ ą▒ąĖčéą░ (BIT ERROR) ą┐čĆąĖ ąŠčéą┐čĆą░ą▓ą║ąĄ čäą╗ą░ą│ą░ ą░ą║čéąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ (ACTIVE ERROR FLAG) ąĖą╗ąĖ čäą╗ą░ą│ą░ ą┐ąĄčĆąĄą│čĆčāąĘą║ąĖ (OVERLOAD FLAG).
ąÜąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ą┤ąĄč鹥ą║čéąĖčĆčāąĄčé ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ ą▒ąĖčé ą║ą░ą║ ą┐ąĄčĆą▓čŗą╣ ą▒ąĖčé ą┐ąŠčüą╗ąĄ ąŠčéą┐čĆą░ą▓ą║ąĖ ERROR FLAG, REC čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčéčüčÅ ąĮą░ 8.
ąÜąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ą┤ąĄč鹥ą║čéąĖčĆčāąĄčé BIT ERROR, ą║ąŠą│ą┤ą░ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ACTIVE ERROR FLAG, REC čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčéčüčÅ ąĮą░ 8.
ąøčÄą▒ąŠą╣ čāąĘąĄą╗ ą┤ąŠą┐čāčüą║ą░ąĄčé ą┤ąŠ 7 čüą╗ąĄą┤čāčÄčēąĖčģ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗčģ ą▒ąĖčé ą┐ąŠčüą╗ąĄ ąŠčéą┐čĆą░ą▓ą║ąĖ ACTIVE ERROR FLAG, PASSIVE ERROR FLAG ąĖą╗ąĖ OVERLOAD FLAG. ą¤ąŠčüą╗ąĄ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ 14-ą│ąŠ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮąŠą│ąŠ ą▒ąĖčéą░ (ą▓ čüą╗čāčćą░ąĄ ACTIVE ERROR FLAG ąĖą╗ąĖ OVERLOAD FLAG), ąĖą╗ąĖ ą┐ąŠčüą╗ąĄ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ 8-ą│ąŠ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮąŠą│ąŠ ą▒ąĖčéą░, ąĘą░ ą║ąŠč鹊čĆčŗą╝ čüą╗ąĄą┤čāąĄčé PASSIVE ERROR FLAG, ąĖ ą┐ąŠčüą╗ąĄ ą║ą░ąČą┤ąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ ą▓ąŠčüčīą╝ąĖ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗčģ ą▒ąĖčé, ą║ą░ąČą┤čŗą╣ ą┐čĆąĖąĄą╝ąĮąĖą║ čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčé REC ąĮą░ 8.
ą¤ąŠčüą╗ąĄ čāčüą┐ąĄčłąĮąŠą│ąŠ ą┐čĆąĖąĄą╝ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ REC čāą╝ąĄąĮčīčłą░ąĄčéčüčÅ ąĮą░ 1, ąĄčüą╗ąĖ ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ ą▒čŗą╗ąŠ ą╝ąĄąČą┤čā 1 ąĖ 127. ąĢčüą╗ąĖ REC ą▒čŗą╗ čĆą░ą▓ąĄąĮ 0, č鹊 ąŠąĮ ąŠčüčéą░ąĮąĄčéčüčÅ čĆą░ą▓ąĮčŗą╝ 0, ąĖ ąĄčüą╗ąĖ ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ ą▒čŗą╗ąŠ ą▒ąŠą╗čīčłąĄ 127, č鹊 ąŠąĮ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▓ ąĘąĮą░č湥ąĮąĖąĄ ą╝ąĄąČą┤čā 119 ąĖ 127.
TEC : Transmit Error Counter (čüč湥čéčćąĖą║ ąŠčłąĖą▒ąŠą║ ą┐ąĄčĆąĄą┤ą░čćąĖ).
ąÜąŠą│ą┤ą░ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ ą┐ąŠčüčŗą╗ą░ąĄčé ERROR FLAG, TEC čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčéčüčÅ ąĮą░ 8, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ čüą╗ąĄą┤čāčÄčēąĖčģ čüą╗čāčćą░ąĄą▓:
ŌĆó ą¤ąĄčĆąĄą┤ą░čéčćąĖą║ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ error passive, ąĖ ą┤ąĄč鹥ą║čéąĖčĆčāąĄčé ACKNOWLEDGMENT ERROR, ą┐ąŠč鹊ą╝čā čćč鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮąŠą│ąŠ ą▒ąĖčéą░ ACK ąĮąĄ čüčĆą░ą▒ąŠčéą░ą╗ąŠ ą┐čĆąĖ ąŠčéą┐čĆą░ą▓ą║ąĄ čüą▓ąŠąĄą│ąŠ PASSIVE ERROR FLAG.
ąÜąŠą│ą┤ą░ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ ą┤ąĄč鹥ą║čéąĖčĆčāąĄčé BIT ERROR, ą║ąŠą│ą┤ą░ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ACTIVE ERROR FLAG ąĖą╗ąĖ OVERLOAD FLAG, TEC čāą▓ąĄą╗ąĖčćąĖčéčüčÅ ąĮą░ 8.
ąøčÄą▒ąŠą╣ čāąĘąĄą╗ ą┤ąŠą┐čāčüą║ą░ąĄčé ą┤ąŠ 7 čüą╗ąĄą┤čāčÄčēąĖčģ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗčģ ą▒ąĖčé ą┐ąŠčüą╗ąĄ ąŠčéą┐čĆą░ą▓ą║ąĖ ACTIVE ERROR FLAG, PASSIVE ERROR FLAG ąĖą╗ąĖ OVERLOAD FLAG. ą¤ąŠčüą╗ąĄ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ 14-ą│ąŠ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮąŠą│ąŠ ą▒ąĖčéą░ (ą▓ čüą╗čāčćą░ąĄ ACTIVE ERROR FLAG ąĖą╗ąĖ OVERLOAD FLAG), ąĖą╗ąĖ ą┐ąŠčüą╗ąĄ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ 8-ą│ąŠ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮąŠą│ąŠ ą▒ąĖčéą░, ąĘą░ ą║ąŠč鹊čĆčŗą╝ čüą╗ąĄą┤čāąĄčé PASSIVE ERROR FLAG, ąĖ ą┐ąŠčüą╗ąĄ ą║ą░ąČą┤ąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ ą▓ąŠčüčīą╝ąĖ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗčģ ą▒ąĖčé, ą║ą░ąČą┤čŗą╣ ą┐čĆąĖąĄą╝ąĮąĖą║ čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčé REC ąĮą░ 8.
ą¤ąŠčüą╗ąĄ ą║ą░ąČą┤ąŠą╣ čāčüą┐ąĄčłąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ TEC čāą╝ąĄąĮčīčłą░ąĄčéčüčÅ ąĮą░ 1, ąĄčüą╗ąĖ ąŠąĮ ą┐ąŠą║ą░ ąĮąĄ čĆą░ą▓ąĄąĮ 0.
ąĀąĄą│ąĖčüčéčĆ ą║ąŠą╝ą░ąĮą┤čŗ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ CAN (Transfer Command Register). ąĀąĄą│ąĖčüčéčĆ čĆą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
TIMRST - - - - - - - - - - - - - - -
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
- - - - - - - - MB7 MB6 MB5 MB4 MB3 MB2 MB1 MB0
ąĀąĄą│ąĖčüčéčĆ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ąĘą░ą┐čĆąŠčüąŠą▓ ąĮą░ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ. ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ ąŠą┐ąĖčüą░ąĮąĖąĄ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą▒ąĖč鹊ą▓ čĆąĄą│ąĖčüčéčĆą░.
MBx : Transfer Request for Mailbox x (ąĘą░ą┐čĆąŠčü ąĮą░ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą┐ąŠčćč鹊ą▓ąŠą│ąŠ čÅčēąĖą║ą░ x).
ąóąĖą┐ mailbox ą┐čĆąĖąĄą╝ą░ ą×ą┐ąĖčüą░ąĮąĖąĄ
Receive
ąÆ mailbox ą▒čāą┤ąĄčé ą┐čĆąĖąĮčÅč鹊 čüą╗ąĄą┤čāčÄčēąĄąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ.
Receive with overwrite
Mailbox ąĘą░ą┐čāčüčéąĖčé ąĮąŠą▓čŗą╣ ą┐čĆąĖąĄą╝.
Transmit
Mailbox ąĘą░ą┐čāčüčéąĖčé ąŠčéą┐čĆą░ą▓ą║čā ą┤ą░ąĮąĮčŗčģ čéą░ą║ ą▒čŗčüčéčĆąŠ, ąĮą░čüą║ąŠą╗čīą║ąŠ čŹč鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ (ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą░čĆą▒ąĖčéčĆą░ąČąĄą╝ čłąĖąĮčŗ ąĖ ą┐čĆąĖąŠčĆąĖč鹥čéą░ą╝ąĖ mailbox-ąŠą▓).
Consumer
Mailbox ąŠčéą┐čĆą░ą▓ąĖčé čäčĆąĄą╣ą╝ remote.
Producer
Mailbox ąŠčéą┐čĆą░ą▓ąĖčé ą┐ąŠą┤ą│ąŠč鹊ą▓ą╗ąĄąĮąĮčŗąĄ ą▓ ąĮąĄą╝ ą┤ą░ąĮąĮčŗčģ ą┐ąŠčüą╗ąĄ ą┐čĆąĖąĄą╝ą░ čäčĆąĄą╣ą╝ą░ remote ąŠčé ą┐ąŠčéčĆąĄą▒ąĖč鹥ą╗čÅ (consumer).
ąŁčéąĖ čäą╗ą░ą│ąĖ ąŠčćąĖčēą░čÄčé čäą╗ą░ą│ąĖ MRDY ąĖ MABT ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝ čĆąĄą│ąĖčüčéčĆąĄ CAN_MSRx.
ąÜąŠą│ą┤ą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ mailbox-ąŠą▓ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąĘą░ą┐čĆą░čłąĖą▓ą░čÄčé ą┐ąĄčĆąĄą┤ą░čćčā, č鹊 čüąŠąŠą▒čēąĄąĮąĖčÅ ąĖąĘ ąĮąĖčģ ą▒čāą┤čāčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ ą▓ ą┐ąŠčĆčÅą┤ą║ąĄ ąŠč湥čĆąĄą┤ąĮąŠčüčéąĖ ąĮą░čćąĖąĮą░čÅ čü mailbox čü čüą░ą╝čŗą╝ ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝. ąĢčüą╗ąĖ čā ąĮąĄčüą║ąŠą╗čīą║ąĖčģ mailbox-ąŠą▓ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╣ ą┐čĆąĖąŠčĆąĖč鹥čé, č鹊 mailbox čü čüą░ą╝čŗą╝ ą╝ą░ą╗ąĄąĮčīą║ąĖą╝ ąĮąŠą╝ąĄčĆąŠą╝ ąŠčéą┐čĆą░ą▓ąĖčé čüą▓ąŠąĖ ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆą▓čŗą╝ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, MB0 ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ čĆą░ąĮčīčłąĄ MB1).
TIMRST : Timer Reset (čüą▒čĆąŠčü čéą░ą╣ą╝ąĄčĆą░ CAN).
ąĪą▒čĆą░čüčŗą▓ą░ąĄčé čüč湥čéčćąĖą║ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čéą░ą╣ą╝ąĄčĆą░ CAN. ąĢčüą╗ąĖ čüč湥čéčćąĖą║ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čéą░ą╣ą╝ąĄčĆą░ ąĘą░ą╝ąŠčĆąŠąČąĄąĮ, č鹊 čŹčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ąĘą░ąĮąŠą▓ąŠ čĆą░ąĘčĆąĄčłąĖčé ąĄą│ąŠ čüč湥čé. ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąŠą╗ąĄąĘąĮą░ ą▓ čĆąĄąČąĖą╝ąĄ Time Triggered.
ąĀąĄą│ąĖčüčéčĆ ą║ąŠą╝ą░ąĮą┤čŗ ąŠą▒čĆčŗą▓ą░ CAN (CAN Abort Command Register). ąĀąĄą│ąĖčüčéčĆ čĆą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
- - - - - - - - - - - - - - - -
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
- - - - - - - - MB7 MB6 MB5 MB4 MB3 MB2 MB1 MB0
ąĀąĄą│ąĖčüčéčĆ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ąĘą░ą┐čĆąŠčüąŠą▓ ąĮą░ ąŠą▒čĆčŗą▓ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ.
MBx : Abort Request for Mailbox x (ąĘą░ą┐čĆąŠčü ąĮą░ ąŠą▒čĆčŗą▓ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą┐ąŠčćč鹊ą▓ąŠą│ąŠ čÅčēąĖą║ą░ x).
ąóąĖą┐ mailbox ą×ą┐ąĖčüą░ąĮąĖąĄ
Receive
ąØąĄ ąŠą║ą░ąČąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ ą┤ąĄą╣čüčéą▓ąĖčÅ.
Receive with overwrite
ąØąĄ ąŠą║ą░ąČąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ ą┤ąĄą╣čüčéą▓ąĖčÅ.
Transmit
ą×čéą╝ąĄąĮąĖčé ą┐ąĄčĆąĄą┤ą░čćčā, ąĄčüą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĄčēąĄ ąĮąĄ ą▒čŗą╗ąŠ ą┐ąĄčĆąĄą┤ą░ąĮąŠ čéčĆą░ąĮčüąĖą▓ąĄčĆąŠą╝ CAN.
Consumer
ą×čéą╝ąĄąĮąĖčé č鹥ą║čāčēčāčÄ ą┐ąĄčĆąĄą┤ą░čćčā ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą▒čŗą╗ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ čäčĆąĄą╣ą╝ remote.
Producer
ą×čéą╝ąĄąĮąĖčé č鹥ą║čāčēčāčÄ ą┐ąĄčĆąĄą┤ą░čćčā. ąĪą╗ąĄą┤čāčÄčēąĖą╣ čäčĆąĄą╣ą╝ remote ąĮąĄ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ.
ąŁč鹊 ą┤ąĄą╗ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮčŗą╝ čāčüčéą░ąĮąŠą▓ąĖčéčī ą┐ąŠą╗ąĄ MACR (ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MCRx) ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ mailbox.
[ąĀąĄą│ąĖčüčéčĆčŗ mailbox-ąŠą▓ ]
// ***************************************************************************** // ąĪčéčĆčāą║čéčāčĆą░, ąŠčéčĆą░ąČą░čÄčēą░čÅ ą░ą┤čĆąĄčüąĮąŠąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ čĆąĄą│ąĖčüčéčĆąŠą▓ mailbox // ***************************************************************************** typedef struct _AT91S_CAN_MB {
AT91_REG CAN_MB_MMR; // MailBox Mode Register
AT91_REG CAN_MB_MAM; // MailBox Acceptance Mask Register
AT91_REG CAN_MB_MID; // MailBox ID Register
AT91_REG CAN_MB_MFID; // MailBox Family ID Register
AT91_REG CAN_MB_MSR; // MailBox Status Register
AT91_REG CAN_MB_MDL; // MailBox Data Low Register
AT91_REG CAN_MB_MDH; // MailBox Data High Register
AT91_REG CAN_MB_MCR; // MailBox Control Register
} AT91S_CAN_MB, * AT91PS_CAN_MB;
ąĀąĄą│ąĖčüčéčĆ čĆąĄąČąĖą╝ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐ąŠčćč鹊ą▓ąŠą│ąŠ čÅčēąĖą║ą░ (CAN Message Mode Register). ąĀą░ą▒ąŠčéą░ąĄčé ąĖ ąĮą░ čćč鹥ąĮąĖąĄ, ąĖ ąĮą░ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
- - - - - MOT - - - - PRIOR
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
MTIMEMARK
MTIMEMARK : Mailbox Timemark (ą╝ąĄčéą║ą░ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąŠčćč鹊ą▓ąŠą│ąŠ čÅčēąĖą║ą░).
ąŁč鹊 ą┐ąŠą╗ąĄ ą░ą║čéąĖą▓ąĮąŠ ą▓ čĆąĄąČąĖą╝ąĄ Time Triggered. ą×ą┐ąĄčĆą░čåąĖąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ąŠą┐čāčüą║ą░čÄčéčüčÅ, ą║ąŠą│ą┤ą░ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čüč湥čéčćąĖą║ čéą░ą╣ą╝ąĄčĆą░ ą┤ąŠčüčéąĖą│ąĮąĄčé ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ mailbox. ąĪą╝. čüąĄą║čåąĖčÄ "ą¤ąĄčĆąĄą┤ą░čćą░ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ ąŠą║ąĮą░ ą▓čĆąĄą╝ąĄąĮąĖ".
ąÆ čĆąĄąČąĖą╝ąĄ Timestamp ąĘąĮą░č湥ąĮąĖąĄ MTIMEMARK čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ 0.
PRIOR : Mailbox Priority (ą┐čĆąĖąŠčĆąĖč鹥čé ą┐ąŠčćč鹊ą▓ąŠą│ąŠ čÅčēąĖą║ą░).
ąŁč鹊 ą┐ąŠą╗ąĄ ąĮąĖą║ą░ą║ ąĮąĄ ą▓ą╗ąĖčÅąĄčé ą▓ čĆąĄąČąĖą╝ą░čģ ąŠą▒čŗčćąĮąŠą│ąŠ ą┐čĆąĖąĄą╝ą░ ąĖą╗ąĖ ą┐čĆąĖąĄą╝ą░ čü ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčīčÄ. ąÆ čŹčéąĖčģ čĆąĄąČąĖą╝ą░čģ ą┐ąĄčĆą▓čŗą╝ ą▒čāą┤ąĄčé ąŠą▒čĆą░ą▒ąŠčéą░ąĮ mailbox čü čüą░ą╝čŗą╝ ą╝ą░ą╗ąĄąĮčīą║ąĖą╝ ą┐ąŠčĆčÅą┤ą║ąŠą▓čŗą╝ ąĮąŠą╝ąĄčĆąŠą╝.
ąÜąŠą│ą┤ą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ mailbox-ąŠą▓ ą┐čŗčéą░čÄčéčüčÅ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą┐ąĄčĆąĄą┤ą░čéčī čüąŠąŠą▒čēąĄąĮąĖąĄ, č鹊 čüąĮą░čćą░ą╗ą░ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī čüąŠąŠą▒čēąĄąĮąĖąĄ mailbox čü čüą░ą╝čŗą╝ ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝. ąĢčüą╗ąĖ čā ąĮąĄčüą║ąŠą╗čīą║ąĖčģ mailbox-ąŠą▓ ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╣ ą┐čĆąĖąŠčĆąĖč鹥čé, č鹊 čüąĮą░čćą░ą╗ą░ ą▒čāą┤ąĄčé ąŠą▒čĆą░ą▒ąŠčéą░ąĮ mailbox čü čüą░ą╝čŗą╝ ą╝ą░ą╗ąĄąĮčīą║ąĖą╝ ą┐ąŠčĆčÅą┤ą║ąŠą▓čŗą╝ ąĮąŠą╝ąĄčĆąŠą╝ (ąĮą░ą┐čĆąĖą╝ąĄčĆ MB0 ą▒čāą┤ąĄčé ąŠą▒čĆą░ą▒ąŠčéą░ąĮ ą┐ąĄčĆąĄą┤ MB1, ąĄčüą╗ąĖ čā ąĮąĖčģ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╣ ą┐čĆąĖąŠčĆąĖč鹥čé).
MOT : Mailbox Object Type (čéąĖą┐ ą┐ąŠčćč鹊ą▓ąŠą│ąŠ čÅčēąĖą║ą░).
ąŁč鹊 ą┐ąŠą╗ąĄ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ mailbox. ąÆčüąĄ mailbox-čŗ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāčÄčéčüčÅ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ą┤čĆčāą│ ąŠčé ą┤čĆčāą│ą░. ąöą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ mailbox ą▓ąŠąĘą╝ąŠąČąĮąŠ ąĮą░čüčéčĆąŠąĖčéčī ąŠą┤ąĖąĮ ąĖąĘ 5 ąĄą│ąŠ čéąĖą┐ąŠą▓:
MOT ąóąĖą┐ mailbox
000
Mailbox ąĘą░ą┐čĆąĄčēąĄąĮ. ąŁč鹊 ąĮąĄ ą┤ą░ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī mailbox ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ąĖą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą╗čÄą▒čŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣.
001
ąĀąĄąČąĖą╝ ąŠą▒čŗčćąĮąŠą│ąŠ ą┐čĆąĖąĄą╝ą░. ąĢčüą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 ąĖ čĆąĄą│ąĖčüčéčĆčŗ ą┤ą░ąĮąĮčŗčģ mailbox ąĘą░ą┐ąŠą╗ąĮąĄąĮčŗ, č鹊 ą▓čüąĄ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▒čāą┤čāčé ąŠčéą▒čĆą░čüčŗą▓ą░čéčīčüčÅ čŹčéąĖą╝ mailbox.
010
ąĀąĄąČąĖą╝ ą┐čĆąĖąĄą╝ą░ čü ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčīčÄ. ąĢčüą╗ąĖ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 ąŠč湥čĆąĄą┤ąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ, ą║ąŠą│ą┤ą░ ą▓ mailbox čāąČąĄ ąĮą░čģąŠą┤čÅčéčüčÅ ąĮąĄ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┐čĆąĄą┤čŗą┤čāčēąĄą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ, č鹊 ą┤ą░ąĮąĮčŗąĄ ąĮąŠą▓ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐ąĄčĆąĄąĘą░ą┐ąĖčłčāčé čüčéą░čĆčŗąĄ.
011
Mailbox čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ.
100
Consumer Mailbox (ą┐ąŠčćč鹊ą▓čŗą╣ čÅčēąĖą║ ą┐ąŠčéčĆąĄą▒ąĖč鹥ą╗čÅ). Mailbox čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░, ąĮąŠ ą▓ąĄą┤ąĄčé čüąĄą▒čÅ ą║ą░ą║ ą┐ąĄčĆąĄą┤ą░čÄčēąĖą╣ mailbox, ąĮą░ą┐čĆąĖą╝ąĄčĆ ąŠąĮ ą┐ąĄčĆąĄą┤ą░ąĄčé čäčĆąĄą╣ą╝ remote ąĖ ąČą┤ąĄčé ąŠčéą▓ąĄčéą░ ąĮą░ ąĮąĄą│ąŠ.
101
Producer Mailbox (ą┐ąŠčćč鹊ą▓čŗą╣ čÅčēąĖą║ ą┐čĆąŠą┤čÄčüąĄčĆą░). Mailbox čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ, ąĮąŠ čéą░ą║ąČąĄ ą▓ąĄą┤ąĄčé čüąĄą▒čÅ ą║ą░ą║ ą┐čĆąĖąĄą╝ąĮčŗą╣ mailbox, ąĮą░ą┐čĆąĖą╝ąĄčĆ ąŠąĮ ąČą┤ąĄčé ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ čäčĆąĄą╣ą╝ą░ remote ą┐ąĄčĆąĄą┤ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ čüą▓ąŠąĄą│ąŠ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ.
11x ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ.
ąĀąĄą│ąĖčüčéčĆ čäąĖą╗čīčéčĆą░čåąĖąĖ čüąŠąŠą▒čēąĄąĮąĖą╣ ą┐ąŠ ą╝ą░čüą║ąĄ (CAN Message Acceptance Mask Register). ąĀąĄą│ąĖčüčéčĆ čĆą░ą▒ąŠčéą░ąĄčé ąĖ ąĮą░ čćč鹥ąĮąĖąĄ, ąĖ ąĮą░ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
- - MIDE MIDvA MIDvB
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
MIDvB
ąöą╗čÅ ą┐čĆąĄą┤ąŠčéą▓čĆą░čēąĄąĮąĖčÅ ą║ąŠąĮą║čāčĆąĄąĮčéąĮąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░ ą║ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╝čā čÅą┤čĆčā CAN ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ąĘą░ą┐čĆąĄčéąĖčéčī mailbox ą┐ąĄčĆąĄą┤ ąĘą░ą┐ąĖčüčīčÄ ą▓ čĆąĄą│ąĖčüčéčĆčŗ CAN_MAMx.
MIDvB : ą▒ąĖčéčŗ čäąĖą╗čīčéčĆčāčÄčēąĄą╣ ą╝ą░čüą║ąĖ ą▓ čĆą░čüčłąĖčĆąĄąĮąĮąŠą╝ čĆąĄąČąĖą╝ąĄ čäčĆąĄą╣ą╝ą░ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąĖ mailbox.
ą£ą░čüą║ą░ čäąĖą╗čīčéčĆą░čåąĖąĖ (acceptance mask), ąĮą░ą║ą╗ą░ą┤čŗą▓ą░ąĄą╝ą░čÅ ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ ą┐ąŠą╗ąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ IDvB ą▓ mailbox-ąĄ.
MIDvA : ą▒ąĖčéčŗ čäąĖą╗čīčéčĆčāčÄčēąĄą╣ ą╝ą░čüą║ąĖ ą┤ą╗čÅ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąĖ čäčĆąĄą╣ą╝ą░.
ą£ą░čüą║ą░ čäąĖą╗čīčéčĆą░čåąĖąĖ (acceptance mask), ąĮą░ą║ą╗ą░ą┤čŗą▓ą░ąĄą╝ą░čÅ ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ ą┐ąŠą╗ąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ IDvA ą▓ mailbox-ąĄ.
MIDE : Identifier Version (ą▓ąĄčĆčüąĖčÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░).
0 = ąŠą▒čŗčćąĮčŗą╣ čĆąĄąČąĖą╝ ą░ą┤čĆąĄčüą░čåąĖąĖ, ą║ąŠą│ą┤ą░ ą┤ą╗čÅ čäąĖą╗čīčéčĆą░čåąĖąĖ čüąŠąŠą▒čēąĄąĮąĖą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüčĆą░ą▓ąĮąĄąĮąĖąĄ IDvA (ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ CAN_MIDx) čü čĆąĄąĘčāą╗čīčéą░č鹊ą╝ ąŠą┐ąĄčĆą░čåąĖąĖ ąĮą░ą╗ąŠąČąĄąĮąĖčÅ ą╝ą░čüą║ąĖ MIDvA (ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ CAN_MAMx) ąĮą░ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ IDvA ą▓ ą┐čĆąĖąĮčÅč鹊ą╝ čüąŠąŠą▒čēąĄąĮąĖąĖ.
ąĀąĄą│ąĖčüčéčĆ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąĖ čüąŠąŠą▒čēąĄąĮąĖą╣ (CAN Message ID Register). ąĀąĄą│ąĖčüčéčĆ čĆą░ą▒ąŠčéą░ąĄčé ąĖ ąĮą░ čćč鹥ąĮąĖąĄ, ąĖ ąĮą░ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
- - MIDE MIDvA MIDvB
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
MIDvB
ąöą╗čÅ ą┐čĆąĄą┤ąŠčéą▓čĆą░čēąĄąĮąĖčÅ ą║ąŠąĮą║čāčĆąĄąĮčéąĮąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░ ą║ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╝čā čÅą┤čĆčā CAN ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ąĘą░ą┐čĆąĄčéąĖčéčī mailbox ą┐ąĄčĆąĄą┤ ąĘą░ą┐ąĖčüčīčÄ ą▓ čĆąĄą│ąĖčüčéčĆčŗ CAN_MIDx.
MIDvB : Complementary bits for identifier in extended frame mode (ą║ąŠą╝ą┐ą╗ąĄą╝ąĄąĮčéą░čĆąĮčŗąĄ ą▒ąĖčéčŗ ą┤ą╗čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąĖ mailbox ą▓ čĆą░čüčłąĖčĆąĄąĮąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ą░ą┤čĆąĄčüą░čåąĖąĖ čäčĆąĄą╣ą╝ą░).
ąĢčüą╗ąĖ MIDE ąŠčćąĖčēąĄąĮ, č鹊 ąĘąĮą░č湥ąĮąĖąĄ MIDvB čĆą░ą▓ąĮąŠ 0.
MIDvA : Identifier for standard frame mode (č鹊 ąČąĄ čüą░ą╝ąŠąĄ, ąĮąŠ ą┤ą╗čÅ ąŠą▒čŗčćąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░ čäčĆąĄą╣ą╝ą░).
MIDE : Identifier Version (ą▓ąĄčĆčüąĖčÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░).
ąŁč鹊čé ą▒ąĖčé ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą▓ąĄčĆčüąĖčÄ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄą╝čŗčģ ą▓ mailbox čüąŠąŠą▒čēąĄąĮąĖą╣. ąĢčüą╗ąĖ čŹč鹊čé ą▒ąĖčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 mailbox ąĖą╝ąĄąĄčé ą┤ąĄą╗ąŠ čü čüąŠąŠą▒čēąĄąĮąĖčÅą╝ąĖ ą┐ąŠ čüčéą░ąĮą┤ą░čĆčéčā ą▓ąĄčĆčüąĖąĖ 2.0 Part B; ąĖąĮą░č湥 mailbox ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ąĄčĆčüąĖąĖ 2.0 Part A.
ąĀąĄą│ąĖčüčéčĆ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąĖ čüąŠąŠą▒čēąĄąĮąĖą╣ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ čüąĄą╝ąĄą╣čüčéą▓ą░, ąŠą│čĆą░ąĮąĖč湥ąĮąĮąŠą│ąŠ ą│čĆčāą┐ą┐ąŠą╣ čü ą┐ąŠą╝ąŠčēčīčÄ ą╝ą░čüą║ąĖ (CAN Message Family ID Register). ąĀąĄą│ąĖčüčéčĆ čĆą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ čćč鹥ąĮąĖąĄ.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
- - - MFID
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
MFID
MFID : Family ID (ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ čüąĄą╝ąĄą╣čüčéą▓ą░).
ąŁč鹊 ą┐ąŠą╗ąĄ čüąŠą┤ąĄčƹȹĖčé čüą╗ąĖčÅąĮąĖąĄ ą▒ąĖčé čĆąĄą│ąĖčüčéčĆą░ CAN_MIDx, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┐ą░ą╗ąĖ ą┐ąŠą┤ ą╝ą░čüą║čā čĆąĄą│ąĖčüčéčĆą░ CAN_MAMx. ąÜąŠčĆąŠč湥 ą│ąŠą▓ąŠčĆčÅ, čŹč鹊 ą┐ąŠą╗ąĄ čüąŠą┤ąĄčƹȹĖčé ą┐ąŠčĆčÅą┤ą║ąŠą▓čŗą╣ ąĮąŠą╝ąĄčĆ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ čüąŠąŠą▒čēąĄąĮąĖą╣ čüčĆąĄą┤ąĖ ą▓čüąĄčģ ą▓ąŠąĘą╝ąŠąČąĮčŗčģ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ čüąŠąŠą▒čēąĄąĮąĖą╣ ą▓ ą│čĆčāą┐ą┐ąĄ, ą▓čŗą┤ąĄą╗ąĄąĮąĮąŠą╣ ą╝ą░čüą║ąŠą╣.
ą¤ąŠą╗ąĄ MFID ą┐ąŠą╗ąĄąĘąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ čüąŠąŠą▒čēąĄąĮąĖą╣, ą┐ąŠč鹊ą╝čā čćč鹊 ąĄą│ąŠ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ą░ą║ ąĖąĮą┤ąĄą║čü ą▓ ą╝ą░čüčüąĖą▓ąĄ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą▓ ą╝ą░čüčüąĖą▓ąĄ čāą║ą░ąĘą░č鹥ą╗ąĄą╣ ąĮą░ čäčāąĮą║čåąĖąĖ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąŠą▓).
ą¤čĆąĖą╝ąĄčĆ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠą╗čÅ MFID ą┐čĆąĖ ą┐čĆąĖąĄą╝ąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ:
CAN_MIDx = 0x305A4321 CAN_MAMx = 0x3FF0F0FF CAN_MFIDx = 0x000000A3
ąĀąĄą│ąĖčüčéčĆ čüčéą░čéčāčüą░ čüąŠąŠą▒čēąĄąĮąĖčÅ (CAN Message Status Register). ąĀąĄą│ąĖčüčéčĆ čĆą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ čćč鹥ąĮąĖąĄ.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
- - - - - - - MMI MRDY MABT - MRTR MDLC
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
MTIMESTAMP
ąŁčéąĖ ą┐ąŠą╗čÅ čĆąĄą│ąĖčüčéčĆą░ ąŠą▒ąĮąŠą▓ą╗čÅčÄčéčüčÅ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐čĆąĖąĮčÅč鹊 ąĖą╗ąĖ ąĄą│ąŠ ą┐ąĄčĆąĄą┤ą░čćą░ ąŠą▒ąŠčĆą▓ą░ąĮą░.
MMI ąŠčćąĖčēą░ąĄčéčüčÅ ą┐čāč鹥ą╝ čćč鹥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░ CAN_MSRx.
MRDY, MABT ąŠčćąĖčēą░čÄčéčüčÅ ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ MTCR ąĖą╗ąĖ MACR ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MCRx.
ą¤čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖąĄ: čüąŠčüč鹊čÅąĮąĖąĄ MRTR ąĖ MDLC čćą░čüčéąĖčćąĮąŠ ąĘą░ą▓ąĖčüąĖčé ąŠčé čéąĖą┐ą░ mailbox (ąŠčé ą┐ąŠą╗čÅ MOT čĆąĄą│ąĖčüčéčĆą░ CAN_MMRx).
MTIMESTAMP : Timer value (ąĘąĮą░č湥ąĮąĖąĄ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ čéą░ą╣ą╝ąĄčĆą░).
ąŁč鹊 ą┐ąŠą╗ąĄ ąŠą▒ąĮąŠą▓ą╗čÅąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ ąĘą░ą┐čĆąĄčēąĄąĮčŗ ąŠą┐ąĄčĆą░čåąĖąĖ čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ąĘą░ą┐čāčüą║ąŠą╝ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (time-triggered operations, ąŠčćąĖčēąĄąĮ ą▒ąĖčé TTM ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MR). ąĢčüą╗ąĖ ą┐ąŠą╗ąĄ TEOF ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MR ąŠčćąĖčēąĄąĮąŠ, TIMESTAMP ą▒čāą┤ąĄčé ąĘąĮą░č湥ąĮąĖąĄą╝ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čéą░ą╣ą╝ąĄčĆą░ ą▓ ą╝ąŠą╝ąĄąĮčé ąĮą░čćą░ą╗ą░ čäčĆąĄą╣ą╝ą░ (start of frame, SoF) ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą┐čĆąĖąĮčÅč鹊ą│ąŠ ąĖą╗ąĖ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮąŠą│ąŠ č湥čĆąĄąĘ čŹč鹊čé mailbox čüąŠąŠą▒čēąĄąĮąĖčÅ. ąĢčüą╗ąĖ ą┐ąŠą╗ąĄ TEOF ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MR čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ, TIMESTAMP ą▒čāą┤ąĄčé ąĘąĮą░č湥ąĮąĖąĄą╝ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čéą░ą╣ą╝ąĄčĆą░ ą▓ ą╝ąŠą╝ąĄąĮčé ą║ąŠąĮčåą░ čäčĆąĄą╣ą╝ą░ (end of frame, EoF) ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą┐čĆąĖąĮčÅč鹊ą│ąŠ ąĖą╗ąĖ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮąŠą│ąŠ č湥čĆąĄąĘ čŹč鹊čé mailbox čüąŠąŠą▒čēąĄąĮąĖčÅ.
ąÆ čĆąĄąČąĖą╝ąĄ Time Triggered ąĘąĮą░č湥ąĮąĖąĄ MTIMESTAMP čĆą░ą▓ąĮąŠ 0.
MDLC : Mailbox Data Length Code (ą║ąŠą┤ ą┤ą╗ąĖąĮčŗ ą┤ą░ąĮąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖčÅ).
ąóąĖą┐ mailbox ą×ą┐ąĖčüą░ąĮąĖąĄ
Receive
ąöą╗ąĖąĮą░ ą┐ąĄčĆą▓ąŠą│ąŠ ą┐čĆąĖąĮčÅč鹊ą│ąŠ ą▓ mailbox čüąŠąŠą▒čēąĄąĮąĖčÅ.
Receive with overwrite
ąöą╗ąĖąĮą░ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą┐čĆąĖąĮčÅč鹊ą│ąŠ ą▓ mailbox čüąŠąŠą▒čēąĄąĮąĖčÅ.
Transmit
ąØąĄ ąŠą║ą░ąČąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ ą▓ą╗ąĖčÅąĮąĖčÅ.
Consumer
ąöą╗ąĖąĮą░ ą┐čĆąĖąĮčÅč鹊ą│ąŠ ą▓ mailbox čüąŠąŠą▒čēąĄąĮąĖčÅ.
Producer
ąöą╗ąĖąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅ mailbox, ą║ąŠč鹊čĆąŠąĄ ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ ą┐ąŠčüą╗ąĄ ą┐čĆąĖąĄą╝ą░ čäčĆąĄą╣ą╝ą░ remote.
MRTR : Mailbox Remote Transmission Request (ąĘą░ą┐čĆąŠčü ą┐ąĄčĆąĄą┤ą░čćąĖ čüąŠ čüč鹊čĆąŠąĮčŗ ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮąŠą╣ č鹊čćą║ąĖ).
ąóąĖą┐ mailbox ą×ą┐ąĖčüą░ąĮąĖąĄ
Receive
ą¤ąĄčĆą▓čŗą╣ ą┐čĆąĖąĮčÅčéčŗą╣ čäčĆąĄą╣ą╝ ąĖą╝ąĄąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ ą▒ąĖčé RTR.
Receive with overwrite
ą¤ąŠčüą╗ąĄą┤ąĮąĖą╣ ą┐čĆąĖąĮčÅčéčŗą╣ čäčĆąĄą╣ą╝ ąĖą╝ąĄąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ ą▒ąĖčé RTR.
Transmit
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ.
Consumer
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ. ą¤ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠą╗čÅ MOT ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MMR, ą┐ąŠą╗ąĄ MRTR čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ 1.
Producer
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ. ą¤ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠą╗čÅ MOT ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MMR, ą┐ąŠą╗ąĄ MRTR čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ą▓ 0.
MABT : Mailbox Message Abort (ąŠą▒čĆčŗą▓ ą┐ąĄčĆąĄą┤ą░čćąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ).
ąÜąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé MABT, čüčĆą░ą▒ąŠčéą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ (ąĄčüą╗ąĖ ąŠąĮąŠ čĆą░ąĘčĆąĄčłąĄąĮąŠ).
0 = ą┐čĆąĄą┤čŗą┤čāčēą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ąĮąĄ ą▒čŗą╗ą░ ąŠą▒ąŠčĆą▓ą░ąĮą░.
ąŁč鹊 čäą╗ą░ą│ ąŠčćąĖčēą░ąĄčéčüčÅ ąĘą░ą┐ąĖčüčīčÄ ą▓ čĆąĄą│ąĖčüčéčĆ CAN_MCRx.
ąóąĖą┐ mailbox ą×ą┐ąĖčüą░ąĮąĖąĄ
Receive
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ.
Receive with overwrite
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ.
Transmit
ą¤čĆąĄą┤čŗą┤čāčēą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ą▒čŗą╗ą░ ąŠą▒ąŠčĆą▓ą░ąĮą░.
Consumer
ąŚą░ą┐čĆąŠčü ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā čäčĆąĄą╣ą╝ą░ remote ą▒čŗą╗ ąŠą▒ąŠčĆą▓ą░ąĮ.
Producer
ą×čéą▓ąĄčé ąĮą░ čäčĆąĄą╣ą╝ remote ą▒čŗą╗ ąŠą▒ąŠčĆą▓ą░ąĮ.
MRDY : Mailbox Ready (ą│ąŠč鹊ą▓ąĮąŠčüčéčī ą┐ąŠčćč鹊ą▓ąŠą│ąŠ čÅčēąĖą║ą░).
ąÜąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé MRDY, čüčĆą░ą▒ąŠčéą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ (ąĄčüą╗ąĖ ąŠąĮąŠ čĆą░ąĘčĆąĄčłąĄąĮąŠ).
0 = čĆąĄą│ąĖčüčéčĆčŗ ą┤ą░ąĮąĮčŗčģ mailbox (čĆąĄą│ąĖčüčéčĆčŗ CAN_MDLx, CAN_MDHx) ąĮąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮčŗ ąĖą╗ąĖ ąĘą░ą┐ąĖčüą░ąĮčŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ (ąŠąĮąĖ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮčŗ).
ąŁč鹊čé čäą╗ą░ą│ ąŠčćąĖčēą░ąĄčéčüčÅ ąĘą░ą┐ąĖčüčīčÄ ą▓ čĆąĄą│ąĖčüčéčĆ CAN_MCRx.
ąóąĖą┐ mailbox ą×ą┐ąĖčüą░ąĮąĖąĄ
Receive
ąÜą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĮąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 čü ą╝ąŠą╝ąĄąĮčéą░ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą┐čĆąŠčåąĄčüčüą░ ą┐ąĄčĆąĄąĮąŠčüą░ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąöą░ąĮąĮčŗąĄ ą┐ąĄčĆą▓ąŠą│ąŠ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čäčĆąĄą╣ą╝ą░ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮčŗ ąĖąĘ čĆąĄą│ąĖčüčéčĆąŠą▓ ą┤ą░ąĮąĮčŗčģ čÅčēąĖą║ą░ (CAN_MDLx ąĖ CAN_MDHx). ą¤ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠą╗čÅ MOT ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MMRx ą▒ąĖčé MRDY čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ą▓ 0.
Receive with overwrite
ąÜą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĖąĮ čäčĆąĄą╣ą╝ ą▒čŗą╗ ą┐čĆąĖąĮčÅčé čü ą╝ąŠą╝ąĄąĮčéą░ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą┐čĆąŠčåąĄčüčüą░ ą┐ąĄčĆąĄąĮąŠčüą░ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąöą░ąĮąĮčŗąĄ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čäčĆąĄą╣ą╝ą░ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮčŗ ąĖąĘ čĆąĄą│ąĖčüčéčĆąŠą▓ ą┤ą░ąĮąĮčŗčģ čÅčēąĖą║ą░ (CAN_MDLx ąĖ CAN_MDHx). ą¤ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠą╗čÅ MOT ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MMRx ą▒ąĖčé MRDY čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ą▓ 0.
Transmit
ąöą░ąĮąĮčŗąĄ mailbox ą▒čŗą╗ąĖ ą┐ąĄčĆąĄą┤ą░ąĮčŗ. ą¤ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠą╗čÅ MOT ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MMRx ą▒ąĖčé MRDY čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ 1.
Consumer
ąÜą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĮąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 čü ą╝ąŠą╝ąĄąĮčéą░ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą┐čĆąŠčåąĄčüčüą░ ą┐ąĄčĆąĄąĮąŠčüą░ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąöą░ąĮąĮčŗąĄ ą┐ąĄčĆą▓ąŠą│ąŠ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮčŗ ąĖąĘ čĆąĄą│ąĖčüčéčĆąŠą▓ ą┤ą░ąĮąĮčŗčģ čÅčēąĖą║ą░ (CAN_MDLx ąĖ CAN_MDHx). ą¤ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠą╗čÅ MOT ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MMRx ą▒ąĖčé MRDY čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ą▓ 0.
Producer
ąæčŗą╗ ą┐čĆąĖąĮčÅčé čäčĆąĄą╣ą╝ remote, ą┤ą░ąĮąĮčŗąĄ mailbox ą▒čŗą╗ąĖ ą┐ąĄčĆąĄą┤ą░ąĮčŗ. ą¤ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠą╗čÅ MOT ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MMRx ą▒ąĖčé MRDY čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ 1.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĄčüčéčī ąĮąĄ ąŠą┐ąĖčüą░ąĮąĮą░čÅ ą▓ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ą┐čĆąŠą▒ą╗ąĄą╝ą░ čü ą▒ąĖč鹊ą╝ MRDY, ą║ąŠą│ą┤ą░ čÅčēąĖą║ ąĖąĮč鹥ąĮčüąĖą▓ąĮąŠ čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā (ą┐ąŠą╗ąĄ MOT ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MMRx čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ ąĘąĮą░č湥ąĮąĖąĄ 3). ąĢčüą╗ąĖ ąŠč湥ąĮčī ąĖąĮč鹥ąĮčüąĖą▓ąĮąŠ čćąĖčéą░čéčī čĆąĄą│ąĖčüčéčĆ CAN_MSRx ą▓ ąŠąČąĖą┤ą░ąĮąĖąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ MRDY, č鹊 ąŠąĮ ąŠąĮ ąŠą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĮčŗą╝ (ąĮą░ą▓čüąĄą│ą┤ą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ 0). ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ ą┐čĆąŠ čŹčéčā ą┐čĆąŠą▒ą╗ąĄą╝čā ąĖ ąĄčæ čĆąĄčłąĄąĮąĖąĄ čüą╝. [3].
MMI : Mailbox Message Ignored (ą▒čŗą╗ąŠ ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░ąĮąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ).
ą×čćąĖčēą░ąĄčéčüčÅ čćč鹥ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ CAN_MSRx.
ąóąĖą┐ mailbox ą×ą┐ąĖčüą░ąĮąĖąĄ
Receive
ąŻčüčéą░ąĮąŠą▓ąĖčéčüčÅ, ą║ąŠą│ą┤ą░ ą▒čŗą╗ąĖ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 2 čüąŠąŠą▒čēąĄąĮąĖčÅ, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗąĄ ą┤ą╗čÅ mailbox. ą¤ąĄčĆą▓ąŠąĄ ą┤ąŠčüčéčāą┐ąĮąŠ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ ą┤ą░ąĮąĮčŗčģ mailbox. ąÆč鹊čĆąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ą┐čĆąŠąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░ąĮąŠ. ąÆ ą┤ą░ąĮąĮąŠą╝ čüą╗čāčćą░ąĄ ą┤čĆčāą│ąŠą╣ mailbox čü ą╝ąĄąĮčīčłąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ ą╝ąŠą│ ą▒čŗ ą┐čĆąĖąĮčÅčéčī čŹč鹊 ą▓č鹊čĆąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ.
Receive with overwrite
ąŻčüčéą░ąĮąŠą▓ąĖčéčüčÅ, ą║ąŠą│ą┤ą░ ą▒čŗą╗ąĖ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 2 čüąŠąŠą▒čēąĄąĮąĖčÅ, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗąĄ ą┤ą╗čÅ mailbox. ą¤ąŠčüą╗ąĄą┤ąĮąĄąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┤ąŠčüčéčāą┐ąĮąŠ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ ą┤ą░ąĮąĮčŗčģ mailbox, ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆą▓ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▒čŗą╗ąĖ ą┐ąŠč鹥čĆčÅąĮčŗ.
Transmit
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ.
Consumer
Mailbox-ąŠą╝ ą▒čŗą╗ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ čäčĆąĄą╣ą╝ remote, ąĮąŠ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 ąĮąĄčüą║ąŠą╗čīą║ąŠ čüąŠąŠą▒čēąĄąĮąĖą╣. ą¤ąĄčĆą▓ąŠąĄ ąĖąĘ ąĮąĖčģ ą┤ąŠčüčéčāą┐ąĮąŠ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ ą┤ą░ąĮąĮčŗčģ mailbox. ąöčĆčāą│ąĖąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▒čŗą╗ąĖ ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░ąĮčŗ. ąÆ ą┤ą░ąĮąĮąŠą╝ čüą╗čāčćą░ąĄ ą┤čĆčāą│ąĖąĄ mailbox-čŗ čü ą╝ąĄąĮčīčłąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ ą╝ąŠą│ą╗ąĖ ą▒čŗ ą┐čĆąĖąĮčÅčéčī čŹčéąĖ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ.
Producer
ąæčŗą╗ ą┐čĆąĖąĮčÅčé čäčĆąĄą╣ą╝ remote, ąĮąŠ ąĮąĄ ą▒čŗą╗ąŠ ą┤ą░ąĮąĮčŗčģ, ą┤ąŠčüčéčāą┐ąĮčŗčģ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ.
ą£ą╗ą░ą┤čłąĖą╣ čĆąĄą│ąĖčüčéčĆ ą┤ą░ąĮąĮčŗčģ ą┐ąŠčćč鹊ą▓ąŠą│ąŠ čÅčēąĖą║ą░ (CAN Message Data Low Register). ąĀąĄą│ąĖčüčéčĆ čĆą░ą▒ąŠčéą░ąĄčé ąĖ ąĮą░ čćč鹥ąĮąĖąĄ, ąĖ ąĮą░ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
MDL
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
MDL
MDL: Message Data Low Value (ą╝ą╗ą░ą┤čłą░čÅ ą┐ąŠą╗ąŠą▓ąĖąĮą░ ą┤ą░ąĮąĮčŗčģ mailbox).
ąÜąŠą│ą┤ą░ ą┐ąŠą╗ąĄ MRDY čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MSRx, ą╝ą╗ą░ą┤čłąĖąĄ 32 ą▒ąĖčéą░ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮčŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąśąĮą░č湥 ąĘąĮą░č湥ąĮąĖąĄ MDL ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąŠ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ CAN čü čåąĄą╗čīčÄ ąŠčéą┐čĆą░ą▓ą║ąĖ ąĖą╗ąĖ ą┐čĆąĖąĄą╝ą░ ąĮąŠą▓ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ.
ąÆ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąĄą╝ą░ čü ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčīčÄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą╝ąŠąČąĄčé ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░čéčī ąĘąĮą░č湥ąĮąĖąĄ MDL, ą║ąŠą│ą┤ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čćąĖčéą░ąĄčé MDH ąĖ MDL. ą¦č鹊ą▒čŗ ą┐čĆąŠą▓ąĄčĆąĖčéčī, čćč鹊 MDH ąĖ MDL ąĮąĄ ą┐čĆąĖąĮą░ą┤ą╗ąĄąČą░čé čĆą░ąĘąĮčŗą╝ čüąŠąŠą▒čēąĄąĮąĖčÅą╝, ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąŠą▓ąĄčĆąĖčéčī ą┐ąŠą╗ąĄ MMI ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MSRx. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ąŠą╗ąČąĮą░ ąĘą░ąĮąŠą▓ąŠ ą┐ąĄčĆąĄčćąĖčéą░čéčī čĆąĄą│ąĖčüčéčĆčŗ CAN_MDH ąĖ CAN_MDL, ą║ąŠą│ą┤ą░ ą▒ąĖčé MMI ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MSRx čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ.
ąæą░ą╣čéčŗ ą┐čĆąĖąĮąĖą╝ą░čÄčéčüčÅ / ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą┐ąŠ čłąĖąĮąĄ CAN ą▓ čüą╗ąĄą┤čāčÄčēąĄą╝ ą┐ąŠčĆčÅą┤ą║ąĄ:
1. CAN_MDL[7:0]
ąĪčéą░čĆčłąĖą╣ čĆąĄą│ąĖčüčéčĆ ą┤ą░ąĮąĮčŗčģ ą┐ąŠčćč鹊ą▓ąŠą│ąŠ čÅčēąĖą║ą░ (CAN Message Data High Register). ąĀąĄą│ąĖčüčéčĆ čĆą░ą▒ąŠčéą░ąĄčé ąĖ ąĮą░ čćč鹥ąĮąĖąĄ, ąĖ ąĮą░ ąĘą░ą┐ąĖčüčī. ąÆčüąĄ č鹊 ąČąĄ čüą░ą╝ąŠąĄ, čćč鹊 ą┤ą╗čÅ ą╝ą╗ą░ą┤čłąĄą│ąŠ čĆąĄą│ąĖčüčéčĆą░, č鹊ą╗čīą║ąŠ ąĘą┤ąĄčüčī ąĮą░čģąŠą┤ąĖčéčüčÅ ą┐ąŠą╗ąŠą▓ąĖąĮą░ ą┤ą░ąĮąĮčŗčģ MDH.
ąĀąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüąŠąŠą▒čēąĄąĮąĖąĄą╝ (CAN Message Control Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
- - - - - - - - MTCR MACR - MRTR MDLC
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
- - - - - - - - - - - - - - - -
MDLC : Mailbox Data Length Code (ą║ąŠą┤ ą┤ą╗ąĖąĮčŗ ą┤ą░ąĮąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖčÅ).
ąóąĖą┐ mailbox ą×ą┐ąĖčüą░ąĮąĖąĄ
Receive
ąØąĄ ąŠą║ą░ąČąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ ą▓ą╗ąĖčÅąĮąĖčÅ.
Receive with overwrite
ąØąĄ ąŠą║ą░ąČąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ ą▓ą╗ąĖčÅąĮąĖčÅ.
Transmit
ąöą╗ąĖąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅ mailbox.
Consumer
ąØąĄ ąŠą║ą░ąČąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ ą▓ą╗ąĖčÅąĮąĖčÅ.
Producer
ąöą╗ąĖąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅ mailbox, ą║ąŠč鹊čĆąŠąĄ ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ ą┐ąŠčüą╗ąĄ ą┐čĆąĖąĄą╝ą░ čäčĆąĄą╣ą╝ą░ remote.
MRTR : Mailbox Remote Transmission Request (ąĘą░ą┐čĆąŠčü ą┐ąĄčĆąĄą┤ą░čćąĖ čüąŠ čüč鹊čĆąŠąĮčŗ ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮąŠą╣ č鹊čćą║ąĖ).
ąóąĖą┐ mailbox ą×ą┐ąĖčüą░ąĮąĖąĄ
Receive
ąØąĄ ąŠą║ą░ąČąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ ą▓ą╗ąĖčÅąĮąĖčÅ.
Receive with overwrite
ąØąĄ ąŠą║ą░ąČąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ ą▓ą╗ąĖčÅąĮąĖčÅ.
Transmit
ąŻčüčéą░ąĮąŠą▓ąĖčé ą▒ąĖčé RTR ą▓ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮąŠą╝ čäčĆąĄą╣ą╝ąĄ.
Consumer
ąØąĄ ąŠą║ą░ąČąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ ą▓ą╗ąĖčÅąĮąĖčÅ, ą▒ąĖčé RTR ą▓ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠą╝ čäčĆąĄą╣ą╝ąĄ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ.
Producer
ąØąĄ ąŠą║ą░ąČąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ ą▓ą╗ąĖčÅąĮąĖčÅ.
ąĪąĖčéčāą░čåąĖąĖ čü ą┐ąŠčéčĆąĄą▒ąĖč鹥ą╗ąĄą╝ (consumer) ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ čéąĖą┐ą░ mailbox ą▓ Consumer. ąŁč鹊 čéčĆąĄą▒čāąĄčé č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠą│ąŠ mailbox.
ąóą░ą║ąČąĄ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī 2 mailbox-ą░, ąŠą┤ąĖąĮ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░, ą┤čĆčāą│ąŠą╣ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąæąĖčéčŗ MRTR ąĖ MTCR ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ.
MACR : Abort Request for Mailbox x (ąĘą░ą┐čĆąŠčü ąŠą▒čĆčŗą▓ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┤ą╗čÅ mailbox x).
ąóąĖą┐ mailbox ą×ą┐ąĖčüą░ąĮąĖąĄ
Receive
ąØąĄ ąŠą║ą░ąČąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ ą▓ą╗ąĖčÅąĮąĖčÅ.
Receive with overwrite
ąØąĄ ąŠą║ą░ąČąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ ą▓ą╗ąĖčÅąĮąĖčÅ.
Transmit
ą×čéą╝ąĄąĮąĖčé ąĘą░ą┐čĆąŠčü ą┐ąĄčĆąĄą┤ą░čćąĖ, ąĄčüą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĄčēąĄ ąĮąĄ ą▒čŗą╗ąŠ ą┐ąĄčĆąĄą┤ą░ąĮąŠ čéčĆą░ąĮčüąĖą▓ąĄčĆčā CAN.
Consumer
ą×čéą╝ąĄąĮąĖčé č鹥ą║čāčēčāčÄ ą┐ąĄčĆąĄą┤ą░čćčā ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ ą▒čŗą╗ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ čäčĆąĄą╣ą╝ remote.
Producer
ą×čéą╝ąĄąĮąĖčé č鹥ą║čāčēčāčÄ ą┐ąĄčĆąĄą┤ą░čćčā. ąĪą╗ąĄą┤čāčÄčēąĖą╣ čäčĆąĄą╣ą╝ remote ąĮąĄ ą▒čāą┤ąĄčé ąŠą▒čĆą░ą▒ąŠčéą░ąĮ.
ą£ąŠąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ą┐ąŠą╗ąĄ MACR ą┤ą╗čÅ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ mailbox-ąŠą▓ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ, čāčüčéą░ąĮąŠą▓ąĖą▓ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_ACR.
MTCR : Mailbox Transfer Command (ą║ąŠą╝ą░ąĮą┤ą░ ą┤ą╗čÅ mailbox ąĮą░čćą░čéčī ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ).
ąóąĖą┐ mailbox ą×ą┐ąĖčüą░ąĮąĖąĄ
Receive
ąĀą░ąĘčĆąĄčłą░ąĄčé ą┐čĆąĖąĄą╝ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ.
Receive with overwrite
ąÆčŗąĘčŗą▓ą░ąĄčé čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖąĄ ąĮąŠą▓ąŠą│ąŠ ą┐čĆąĖąĄą╝ą░.
Transmit
ą¤čĆąĖą▓ąĄą┤ąĄčé ą║ ąŠčéą┐čĆą░ą▓ą║ąĄ ą┤ą░ąĮąĮčŗčģ, ą┐ąŠą┤ą│ąŠč鹊ą▓ą╗ąĄąĮąĮčŗčģ ą▓ mailbox, čéą░ą║ ą▒čŗčüčéčĆąŠ, ąĮą░čüą║ąŠą╗čīą║ąŠ čŹč鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ.
Consumer
ą×čéą┐čĆą░ą▓ąĖčé čäčĆąĄą╣ą╝ remote.
Producer
ą×čéą┐čĆą░ą▓ąĖčé ą┤ą░ąĮąĮčŗąĄ, ą┐ąŠą┤ą│ąŠč鹊ą▓ą╗ąĄąĮąĮčŗąĄ ą▓ mailbox, ą┐ąŠčüą╗ąĄ ą┐čĆąĖąĄą╝ą░ čäčĆąĄą╣ą╝ąĄ remote ąŠčé Consumer.
ąŁč鹊čé čäą╗ą░ą│ ąŠčćąĖčüčéąĖčé čäą╗ą░ą│ąĖ MRDY ąĖ MABT ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MSRx.
ąÜąŠą│ą┤ą░ ą▒čŗą╗ąŠ ąĘą░ą┐čĆąŠčłąĄąĮąŠ ą┐ąĄčĆąĄą┤ą░čéčī ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ mailbox-ąŠą▓, č鹊 ąŠąĮąĖ ą▒čāą┤čāčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčīčüčÅ ą┐ąŠ ąŠč湥čĆąĄą┤ąĖ. Mailbox čü čüą░ą╝čŗą╝ ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ ą▒čāą┤ąĄčé ąŠą▒čĆą░ą▒ąŠčéą░ąĮ ą▓ ą┐ąĄčĆą▓čāčÄ ąŠč湥čĆąĄą┤čī. ąĢčüą╗ąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ mailbox-ąŠą▓ ąĖą╝ąĄčÄčé ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╣ ą┐čĆąĖąŠčĆąĖč鹥čé, č鹊 čüąĮą░čćą░ą╗ą░ ą▒čāą┤ąĄčé ąŠą▒čĆą░ą▒ąŠčéą░ąĮ mailbox čü čüą░ą╝čŗą╝ ą╝ą░ą╗ąĄąĮčīą║ąĖą╝ ą┐ąŠčĆčÅą┤ą║ąŠą▓čŗą╝ ąĮąŠą╝ąĄčĆąŠą╝ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, MB0 ą▒čāą┤ąĄčé ąŠą▒čĆą░ą▒ąŠčéą░ąĮ ą┐ąĄčĆąĄą┤ MB1, ąĄčüą╗ąĖ čā ąĮąĖčģ ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╣ ą┐čĆąĖąŠčĆąĖč鹥čé).
ą£ąŠąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī MTCR ą┤ą╗čÅ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ mailbox-ąŠą▓ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ čĆąĄą│ąĖčüčéčĆą░ CAN_TCR.
[ąĪčüčŗą╗ą║ąĖ ]
1 . ARM-based Flash MCU SAM7X512 / SAM7X256 / SAM7X128 DATASHEET site:atmel.com .2 . ąśąĮč鹥čĆč乥ą╣čü CAN ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ ARM AT91SAM7X256 .3 . AT91SAM7: ą┐čĆąŠą▒ą╗ąĄą╝ą░ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ MRDY ą▓ čĆąĄą│ąĖčüčéčĆąĄ čüčéą░čéčāčüą░ CAN mailbox .