|
ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖą╣ ąĖąĮč鹥čĆą▓ą░ą╗čīąĮčŗą╣ čéą░ą╣ą╝ąĄčĆ (Periodic Interval Timer, PIT) ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░čģ ARM7 ąŠą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ, ąĖą╗ąĖ ąŠčéčüč湥čéą░ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ. ą×ąĮ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ čü čåąĄą╗čīčÄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ č鹊čćąĮąŠčüčéąĖ ąĖ čŹčäč乥ą║čéąĖą▓ąĮąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ.
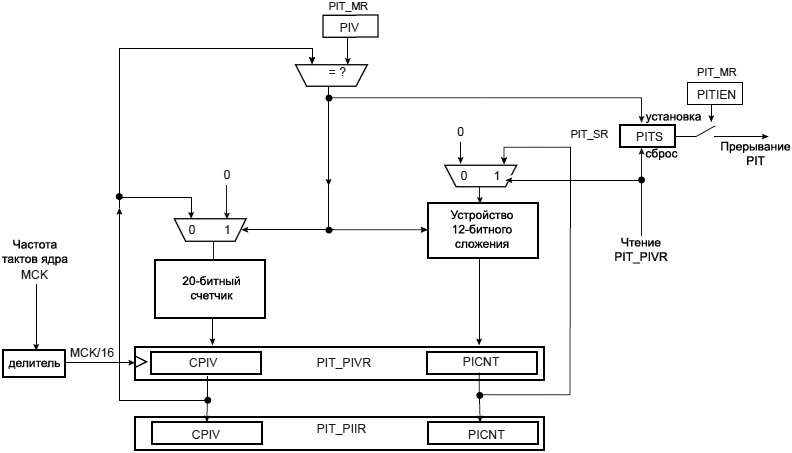
ąĀąĖčü. 15-1. ąæą╗ąŠą║-čüčģąĄą╝ą░ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ PIT.
ą¦ą░čēąĄ ą▓čüąĄą│ąŠ PIT ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčŗą╝ąĖ čüąĖčüč鹥ą╝ą░ą╝ąĖ. PIT ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╣ ą┐ąĄčĆąĄą┐ąŠą╗ąĮčÅąĄą╝čŗą╣ čüč湥čéčćąĖą║ čü ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čüą▒čĆąŠčüą░ ą┐čĆąĖ čćč鹥ąĮąĖąĖ. ąĪč湥čéčćąĖą║ ą┐ąŠčüčéčĆąŠąĄąĮ ąĮą░ ąŠčüąĮąŠą▓ąĄ 2 čüč湥čéčćąĖą║ąŠą▓: 20-ą▒ąĖčéąĮčŗą╣ CPIV ąĖ 12-ą▒ąĖčéąĮčŗą╣ Periodic Interval Counter, PICNT. ą×ą▒ą░ čüč湥čéčćąĖą║ą░ čĆą░ą▒ąŠčéą░čÄčé ąĮą░ čćą░čüč鹊č鹥 Master Clock / 16.
ą¤ąĄčĆą▓čŗą╣ 20-ą▒ąĖčéąĮčŗą╣ čüč湥čéčćąĖą║ CPIV ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ ąŠčé 0 ą┤ąŠ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ, ą║ąŠč鹊čĆąŠąĄ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ ą┐ąŠą╗ąĄ PIV čĆąĄą│ąĖčüčéčĆą░ čĆąĄąČąĖą╝ą░ (Mode Register, PIT_MR). ąÜąŠą│ą┤ą░ čüč湥čéčćąĖą║ CPIV ą┤ąŠčüčéąĖą│ą░ąĄčé čŹč鹊ą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ, ąŠąĮ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ą▓ 0, ąĖ ą▓ čŹč鹊čé ą╝ąŠą╝ąĄąĮčé ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčé čüč湥čéčćąĖą║ PICNT. ąæąĖčé čüąŠčüč鹊čÅąĮąĖčÅ PITS ą▓ čĆąĄą│ąĖčüčéčĆąĄ Status Register (PIT_SR) čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ąĖ čŹč鹊 ą╝ąŠąČąĄčé ą▓čŗąĘą▓ą░čéčī čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ąĄčüą╗ąĖ ąŠąĮąŠ čĆą░ąĘčĆąĄčłąĄąĮąŠ (čäą╗ą░ą│ąŠą╝ PITIEN ą▓ čĆąĄą│ąĖčüčéčĆąĄ PIT_MR).
ąŚą░ą┐ąĖčüčī ąĮąŠą▓ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ PIV ą▓ čĆąĄą│ąĖčüčéčĆ PIT_MR ąĮąĄ čüą▒čĆą░čüčŗą▓ą░ąĄčé ąĖ ąĮąĄ ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ą░ąĄčé čüč湥čéčćąĖą║ąĖ.
ąÜąŠą│ą┤ą░ CPIV ąĖ PICNT ą┐ąŠą╗čāč湥ąĮčŗ čćč鹥ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ ąĖąĮč鹥čĆą▓ą░ą╗ą░ (Periodic Interval Value Register, PIT_PIVR), čüč湥čéčćąĖą║ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ (PICNT) čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ąĖ čäą╗ą░ą│ PITS ąŠčćąĖčēą░ąĄčéčüčÅ, čćč鹊 čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąŚąĮą░č湥ąĮąĖąĄ PICNT ą┤ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖčģ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓, ą║ąŠč鹊čĆąŠąĄ ą┐čĆąŠčłą╗ąŠ čü ą╝ąŠą╝ąĄąĮčéą░ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ čćč鹥ąĮąĖčÅ PIT_PIVR.
ąÜąŠą│ą┤ą░ ąĘąĮą░č湥ąĮąĖčÅ CPIV ąĖ PICNT ą┐ąŠą╗čāč湥ąĮčŗ čćč鹥ąĮąĖąĄą╝ PIT_PIIR, čŹč鹊 ąĮąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓ą╗ąĖčÅąĮąĖąĄ ąĮąĖ ąĮą░ čüč湥čéčćąĖą║ąĖ CPIV ąĖ PICNT, ąĮąĖ ąĮą░ ą▒ąĖčé PITS. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┐čĆąŠčäą░ą╣ą╗ąĄčĆ ą╝ąŠąČąĄčé čćąĖčéą░čéčī PIT_PIIR ą▒ąĄąĘ ąŠčćąĖčüčéą║ąĖ ąŠąČąĖą┤ą░čÄčēąĄą│ąŠ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ ąŠčćąĖčüčéąĖčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čćč鹥ąĮąĖąĄą╝ PIT_PIVR.
PIT ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮ ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēąĄąĮ ąĘą░ą┐ąĖčüčīčÄ ą▒ąĖčéą░ PITEN ą▓ čĆąĄą│ąĖčüčéčĆąĄ PIT_MR (ą┐čĆąĖ čüą▒čĆąŠčüąĄ PIT ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĘą░ą┐čĆąĄčēąĄąĮ). ąæąĖčé PITEN čüčéą░ąĮąŠą▓ąĖčéčüčÅ čŹčäč乥ą║čéąĖą▓ąĮčŗą╝ č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ CPIV čĆą░ą▓ąĮąŠ 0. ąØą░ čĆąĖčü. 15-2 ąĖą╗ą╗čÄčüčéčĆąĖčĆąŠą▓ą░ąĮ ą┐čĆąŠčåąĄčüčü čüč湥čéą░ PIT. ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą▒ąĖčéą░ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ PIT (PITEN= 0), CPIV ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé čüč湥čé ą┤ąŠ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ ąĘąĮą░č湥ąĮąĖčÅ ą▓ ą┐ąŠą╗ąĄ PIV, ąĖ ąĘą░č鹥ą╝ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ. PIT čüąĮąŠą▓ą░ ąĮą░čćąĮąĄčé čüč湥čé č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ ąŠą┐čÅčéčī ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé PITEN.
PIT ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ čÅą┤čĆąŠ ą▓čģąŠą┤ąĖčé ą▓ čĆąĄąČąĖą╝ ąŠčéą╗ą░ą┤ą║ąĖ (debug state).
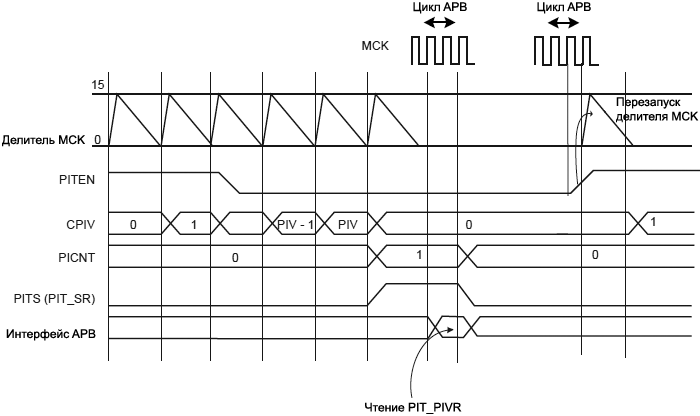
ąĀąĖčü. 15-2. ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ/ąĘą░ą┐čĆąĄčé PIT čü ą┐ąŠą╝ąŠčēčīčÄ ą▒ąĖčéą░ PITEN.
[ąśąĮč鹥čĆč乥ą╣čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PIT]
ąÆ čéą░ą▒ą╗ąĖčåąĄ ą┐ąŠą║ą░ąĘą░ąĮ ąŠą▒čēąĖą╣ čüą┐ąĖčüąŠą║ ą▓čüąĄčģ čĆąĄą│ąĖčüčéčĆąŠą▓, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ ą║ PIT. ąĪą╝ąĄčēąĄąĮąĖąĄ ą░ą┤čĆąĄčüąŠą▓ čĆąĄą│ąĖčüčéčĆąŠą▓ ąŠčéčüčćąĖčéčŗą▓ą░ąĄčéčüčÅ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą░ą┤čĆąĄčüą░ 0xFFFFFD30.
ąóą░ą▒ą╗ąĖčåą░ 15-1. ąĀąĄą│ąĖčüčéčĆčŗ PIT.
| ąĪą╝ąĄčēąĄąĮąĖąĄ |
ąĀąĄą│ąĖčüčéčĆ |
ąśą╝čÅ |
ąöąŠčüčéčāą┐ |
ąĪą▒čĆąŠčü |
| 0x0000 |
Mode Register (čĆąĄą│ąĖčüčéčĆ čĆąĄąČąĖą╝ą░) |
PIT_MR |
R/W |
0x000FFFFF |
| 0x0004 |
Status Register (čĆąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ) |
PIT_SR |
R |
0x00000000 |
| 0x0008 |
Periodic Interval Value Register (ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ąŠą▓) |
PIT_PIVR |
R |
0x00000000 |
| 0x000C |
Periodic Interval Image Register (ąŠą▒čĆą░ąĘ čüč湥čéčćąĖą║ąŠą▓) |
PIT_PIIR |
R |
0x00000000 |
ąĀąĄą│ąĖčüčéčĆ čĆąĄąČąĖą╝ą░ PIT (Periodic Interval Timer Mode Register). ąĀą░ą▒ąŠčéą░ąĄčé ąĖ ąĮą░ čćč鹥ąĮąĖąĄ, ąĖ ąĮą░ ąĘą░ą┐ąĖčüčī.
| 31 |
30 |
29 |
28 |
27 |
26 |
25 |
24 |
23 |
22 |
21 |
20 |
19 |
18 |
17 |
16 |
| - |
- |
- |
- |
- |
- |
PITIEN |
PITEN |
- |
- |
- |
- |
PIV |
| 15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| PIV |
PIV: Periodic Interval Value (ą▓ąĄą╗ąĖčćąĖąĮą░ ąĖąĮč鹥čĆą▓ą░ą╗ą░ ą┐ąĄčĆąĖąŠą┤ą░ čüč湥čéą░). ą×ą┐čĆąĄą┤ąĄą╗čÅąĄčé ąĘąĮą░č湥ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ čüčĆą░ą▓ąĮąĖą▓ą░ąĄčéčüčÅ čü ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ 20-ą▒ąĖčéąĮčŗą╝ čüč湥čéčćąĖą║ąŠą╝ ąĖąĮč鹥čĆą▓ą░ą╗ą░ (CPIV). ą¤ąĄčĆąĖąŠą┤ čĆą░ą▓ąĄąĮ (PIV + 1).
PITEN: Period Interval Timer Enabled (čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ PIT).
0 = čĆą░ą▒ąŠčéą░ PIT ą▒čāą┤ąĄčé ąĘą░ą┐čĆąĄčēąĄąĮą░, ą║ą░ą║ č鹊ą╗čīą║ąŠ čüč湥čéčćąĖą║ CPIV ą┤ąŠčüčéąĖą│ąĮąĄčé ą┐čĆąĖ čüč湥č鹥 ą┤ąŠ ąĘąĮą░č湥ąĮąĖčÅ, ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą▓ ą┐ąŠą╗ąĄ PIV.
1 = PIT čĆą░ąĘčĆąĄčłąĄąĮ.
PITIEN: Periodic Interval Timer Interrupt Enable (čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ PIT).
0 = čāčüčéą░ąĮąŠą▓ą║ą░ ą▒ąĖčéą░ PITS ą▓ čĆąĄą│ąĖčüčéčĆąĄ PIT_SR ąĮąĄ ą▓čŗąĘąŠą▓ąĄčé ą│ąĄąĮąĄčĆą░čåąĖčÄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
1 = čāčüčéą░ąĮąŠą▓ą║ą░ ą▒ąĖčéą░ PITS ą▓ čĆąĄą│ąĖčüčéčĆąĄ PIT_SR ąĘą░ą┐čāčüčéąĖčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ PIT.
ąĀąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ PIT (Periodic Interval Timer Status Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ čćč鹥ąĮąĖąĄ, ąĖ čüąŠą┤ąĄčƹȹĖčé č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą▒ąĖčé PITS.
| 31 |
30 |
29 |
28 |
27 |
26 |
25 |
24 |
23 |
22 |
21 |
20 |
19 |
18 |
17 |
16 |
| - |
- |
- |
- |
- |
- |
- |
- |
- |
- |
- |
- |
- |
- |
- |
- |
| 15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| - |
- |
- |
- |
- |
- |
- |
- |
- |
- |
- |
- |
- |
- |
- |
PITS |
PITS: Periodic Interval Timer Status (ą▒ąĖčé čüąŠčüč鹊čÅąĮąĖčÅ PIT).
0 = čüč湥čéčćąĖą║ PIT ąĮąĄ ą┤ąŠčüčéąĖą│ ąĘąĮą░č湥ąĮąĖčÅ PIV ą┐ąŠčüą╗ąĄ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ čćč鹥ąĮąĖčÅ PIT_PIVR.
1 = čüč湥čéčćąĖą║ PIT ą┐čĆąĖ čüč湥č鹥 ą┤ąŠčüčéąĖą│ ąĘąĮą░č湥ąĮąĖčÅ PIV ą┐ąŠčüą╗ąĄ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ čćč鹥ąĮąĖčÅ PIT_PIVR.
ąŚąĮą░č湥ąĮąĖčÅ čüč湥čéčćąĖą║ąŠą▓ PIT (Periodic Interval Timer Value Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ čćč鹥ąĮąĖąĄ.
| 31 |
30 |
29 |
28 |
27 |
26 |
25 |
24 |
23 |
22 |
21 |
20 |
19 |
18 |
17 |
16 |
| PICNT |
CPIV |
| 15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| CPIV |
ą¦č鹥ąĮąĖąĄ čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ąŠčćąĖčüčéąĖčé ą▒ąĖčé PITS ą▓ čĆąĄą│ąĖčüčéčĆąĄ PIT_SR.
CPIV: Current Periodic Interval Value. ąÆąŠąĘą▓čĆą░čéąĖčé č鹥ą║čāčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ PIT.
PICNT: Periodic Interval Counter. ąÆąŠąĘą▓čĆą░čéąĖčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖčģ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓, ąĮą░čćąĖąĮą░čÅ ąŠčé ą╝ąŠą╝ąĄąĮčéą░ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ čćč鹥ąĮąĖčÅ PIT_PIVR.
ąĀąĄą│ąĖčüčéčĆ ąŠą▒čĆą░ąĘą░ čüč湥čéčćąĖą║ąŠą▓ PIT (Periodic Interval Timer Image Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ čćč鹥ąĮąĖąĄ.
| 31 |
30 |
29 |
28 |
27 |
26 |
25 |
24 |
23 |
22 |
21 |
20 |
19 |
18 |
17 |
16 |
| PICNT |
CPIV |
| 15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
CPIV
|
CPIV: Current Periodic Interval Value. ąÆąŠąĘą▓čĆą░čéąĖčé č鹥ą║čāčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ PIT.
PICNT: Periodic Interval Counter. ąÆąŠąĘą▓čĆą░čéąĖčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖčģ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓, ąĮą░čćąĖąĮą░čÅ ąŠčé ą╝ąŠą╝ąĄąĮčéą░ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ čćč鹥ąĮąĖčÅ PIT_PIVR.
[ąĪčüčŗą╗ą║ąĖ]
1. ARM-based Flash MCU SAM7X512 / SAM7X256 / SAM7X128 DATASHEET site:atmel.com. |



