|
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čüąŠą▒čĆą░ąĮ ąĮą░ ą╝ą░ą║ąĄčéąĮąŠą╣ ą┐ą╗ą░č鹥 AT91SAM7X [1] ąĖ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čüąŠą▒ąŠą╣ USB-čāčüčéčĆąŠą╣čüčéą▓ąŠ CDC (ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╣ COM-ą┐ąŠčĆčé). ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą╝ąŠąČąĄčé ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ čāą┐čĆą░ą▓ą╗čÅčéčī 8 čłą░ą│ąŠą▓čŗą╝ąĖ ą┤ą▓ąĖą│ą░č鹥ą╗čÅą╝ąĖ, ąŠčéą║ą╗ąĖą║ą░čÅčüčī ąĮą░ ą┐čĆąŠčüčéčŗąĄ č鹥ą║čüč鹊ą▓čŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ.
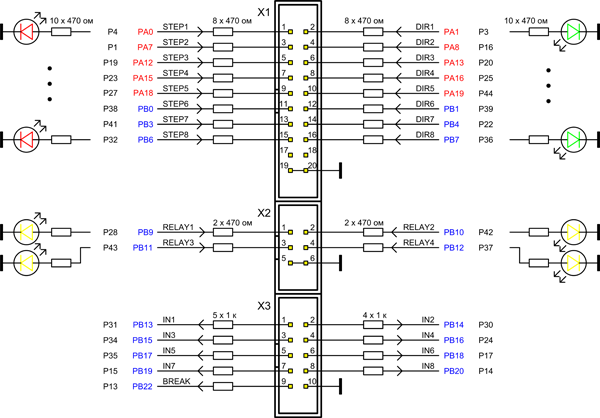
ąĪąĖą│ąĮą░ą╗čŗ STEPn ąĖ DIRn ą▓čŗčĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮąŠ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čłą░ą│ąŠą▓ąŠą│ąŠ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ, ąĖ ą┐ąŠą┤ą░čÄčéčüčÅ ąĮą░ čüąĖą╗ąŠą▓čŗąĄ ą╝ąŠą┤čāą╗ąĖ, čüąŠą▒čĆą░ąĮąĮčŗąĄ ąĮą░ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ TB6560HQ (čüąĖą╗ąŠą▓čŗąĄ čäą░ąĘčŗ ą┤ą╗čÅ čłą░ą│ąŠą▓ąŠą│ąŠ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ č乊čĆą╝ąĖčĆčāąĄčé ąĖą╝ąĄąĮąĮąŠ čŹčéą░ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░).
ąĢčüčéčī čéą░ą║ąČąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čāą┐čĆą░ą▓ą╗čÅčéčī č湥čéčŗčĆčīą╝čÅ čüąĖą╗ąŠą▓čŗą╝ąĖ čĆąĄą╗ąĄ (čüąĖą│ąĮą░ą╗čŗ RELAY1..RELAY4). ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, ąĖą╝ąĄčÄčéčüčÅ 8 ą▓čģąŠą┤ąŠą▓ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą┤ą░čéčćąĖą║ąŠą▓ (IN1..IN8) - ą║ąŠąĮčåąĄą▓čŗčģ ą▓čŗą║ą╗čÄčćą░č鹥ą╗ąĄą╣, ą┐ąŠ čüąĖą│ąĮą░ą╗čā ą║ąŠč鹊čĆčŗčģ ą╝ąŠč鹊čĆ ą╝ąŠąČąĄčé ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčīčüčÅ. ąóą░ą║ąČąĄ ąĄčüčéčī ąŠą┤ąĖąĮ ąŠą▒čēąĖą╣ ą░ą▓ą░čĆąĖą╣ąĮčŗą╣ čüąĖą│ąĮą░ą╗ BREAK, ą║ąŠč鹊čĆčŗą╣ ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą▓čĆą░čēąĄąĮąĖąĄ čüčĆą░ąĘčā ą▓čüąĄčģ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╣.
ąÜąŠą╝ą░ąĮą┤čŗ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čłą░ą│ąŠą▓čŗą╝ąĖ ą┤ą▓ąĖą│ą░č鹥ą╗čÅą╝ąĖ ąĖ čĆąĄą╗ąĄ ą╝ąŠąČąĮąŠ ą┐ąŠą┤ą░ą▓ą░čéčī ąŠą▒čŗčćąĮąŠą╣ č鹥čĆą╝ąĖąĮą░ą╗čīąĮąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣ (putty, HyperTerminal, TerraTerm, SecureCRT ąĖ čé. ą┐.).
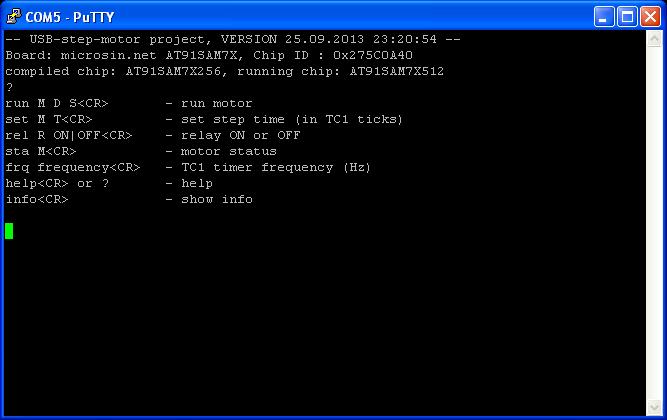
ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ:
run M D S
ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ąĘą░ą┐čāčüą║ą░ąĄčé ą▓čĆą░čēąĄąĮąĖąĄ ą┤ą▓ąĖą│ą░č鹥ą╗čÅ M (1..8) ą▓ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ D (L ąĖą╗ąĖ R) ąĮą░ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čłą░ą│ąŠą▓ S (0..65000). ąĢčüą╗ąĖ S čĆą░ą▓ąĮąŠ 0, č鹊 ą┤ą▓ąĖą│ą░č鹥ą╗čī ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┐ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ č鹥ą║čāčēąĄą│ąŠ čłą░ą│ą░.
set M T
ąÜąŠą╝ą░ąĮą┤ą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą┐ąĄčĆąĖąŠą┤ą░ čüąĖą│ąĮą░ą╗ą░ STEP ą╝ąŠč鹊čĆą░ M ąĮą░ ą▓čĆąĄą╝čÅ T. ą¦ąĖčüą╗ąŠ T čāą║ą░ąĘčŗą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéąĖą║ąŠą▓ čéą░ą╣ą╝ąĄčĆą░, ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé 5 ą┤ąŠ 6500, čćč鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą┐ąĄčĆąĖąŠą┤ą░ STEP ąŠčé 50 ą┤ąŠ 65000 ą╝ą║čü.
rel R ON
rel R OFF
ąÜąŠą╝ą░ąĮą┤ą░ ą▓čŗą┤ą░ąĄčé ą╗ąŠą│. 1 ą┤ą╗čÅ ą▓ą║ą╗čÄč湥ąĮąĖčÅ čĆąĄą╗ąĄ R (ąĄčüą╗ąĖ čāą║ą░ąĘą░ąĮąŠ ON).
ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, ąĖą╝ąĄčÄčéčüčÅ 8 ą▓čģąŠą┤ąŠą▓ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą┤ą░čéčćąĖą║ąŠą▓ (IN1..IN8) - ą║ąŠąĮčåąĄą▓čŗčģ ą▓čŗą║ą╗čÄčćą░č鹥ą╗ąĄą╣, ą┐ąŠ čüąĖą│ąĮą░ą╗čā ą║ąŠč鹊čĆčŗčģ ą╝ąŠč鹊čĆ ą╝ąŠąČąĄčé ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčīčüčÅ. ąóą░ą║ąČąĄ ąĄčüčéčī ąŠą┤ąĖąĮ ąŠą▒čēąĖą╣ ą░ą▓ą░čĆąĖą╣ąĮčŗą╣ čüąĖą│ąĮą░ą╗ BREAK, ą║ąŠč鹊čĆčŗą╣ ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą▓čĆą░čēąĄąĮąĖąĄ čüčĆą░ąĘčā ą▓čüąĄčģ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╣.
sta M
ąÜąŠą╝ą░ąĮą┤ą░ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčé čüčéą░čéčāčü ą╝ąŠč鹊čĆą░ M - ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▓čŗą┤ą░ąĄčé ą▓ ąŠčéą▓ąĄčé ąŠčüčéą░ą▓čłąĄąĄčüčÅ ą┤ąŠ ąŠčüčéą░ąĮąŠą▓ą║ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čłą░ą│ąŠą▓ ąĖ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓čĆą░čēąĄąĮąĖčÅ.
frq frequency
ąŻčüčéą░ąĮąŠą▓ą║ą░ čćą░čüč鹊čéčŗ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ TC1, ą║ąŠč鹊čĆčŗą╣ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī čłą░ą│ąŠą▓ STEPn ą▓čüąĄčģ čłą░ą│ąŠą▓čŗčģ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╣ čåąĄą╗ąĖą║ąŠą╝. ą¤ąĄčĆąĖąŠą┤ čéą░ą╣ą╝ąĄčĆą░ TC1 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąŠą┤ąĮąŠą╣ ąĄą┤ąĖąĮąĖčåąĄ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ čłą░ą│ą░.
help ąĖą╗ąĖ ?
ąÆčŗą┤ą░čćą░ ą┐ąŠą┤čüą║ą░ąĘą║ąĖ ą┐ąŠ ą║ąŠą╝ą░ąĮą┤ą░ą╝.
info
ąÆčŗą┤ą░čćą░ ąŠą▒čēąĄą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ čüąŠčüč鹊čÅąĮąĖčÄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ - č鹥ą║čāčēąĖąĄ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ąĖ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓čüąĄčģ čłą░ą│ąŠą▓čŗčģ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╣, čćą░čüč鹊čéą░ čéą░ą╣ą╝ąĄčĆą░ TC1, ą▓čĆąĄą╝čÅ čĆą░ą▒ąŠčéčŗ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
[ąöą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ą┐ąĄčĆąĄą┤ą░ąĄčé ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▓ ą║ąŠą╝ą┐čīčÄč鹥čĆ]
ąĢčüą╗ąĖ čüąĖą│ąĮą░ą╗ ąĮą░ ą▓čģąŠą┤ąĄ BREAK ą┐ąĄčĆąĄčłąĄą╗ ąĖąĘ ą╗ąŠą│. 0 ą▓ ą╗ąŠą│. 1, č鹊 ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ąĄčĆąĄą┤ą░ąĄčé BH, ą░ ąĄčüą╗ąĖ čŹč鹊čé čüąĖą│ąĮą░ą╗ ą┐ąĄčĆąĄčłąĄą╗ ąĖąĘ ą╗ąŠą│. 1 ą▓ ą╗ąŠą│. 0, č鹊 ą┐ąĄčĆąĄą┤ą░ąĄčé BL, ąĖ ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą▓čüąĄ čłą░ą│ąŠą▓čŗąĄ ą┤ą▓ąĖą│ą░č鹥ą╗ąĖ.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čéą░ą║ąČąĄ čüąŠąŠą▒čēą░ąĄčé ąŠą▒ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅčģ čüąŠčüč鹊čÅąĮąĖčÅ ą║ąŠąĮčåąĄą▓čŗčģ ą▓čŗą║ą╗čÄčćą░č鹥ą╗ąĄą╣ (ą┤ą░čéčćąĖą║ąŠą▓, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ ą║ ą▓čģąŠą┤ą░ą╝ IN1..IN8) čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝: DML, DMH. ąŚą┤ąĄčüčī M ąĮąŠą╝ąĄčĆ ą┤ą░čéčćąĖą║ą░, ą░ L ąĖ H ŌĆō č鹥ą║čāčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą▓čģąŠą┤ą░ ą┤ą░čéčćąĖą║ą░ (ąĮąĖąĘą║ąĖą╣ ąĖ ą▓čŗčüąŠą║ąĖą╣ čāčĆąŠą▓ąĮąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ).
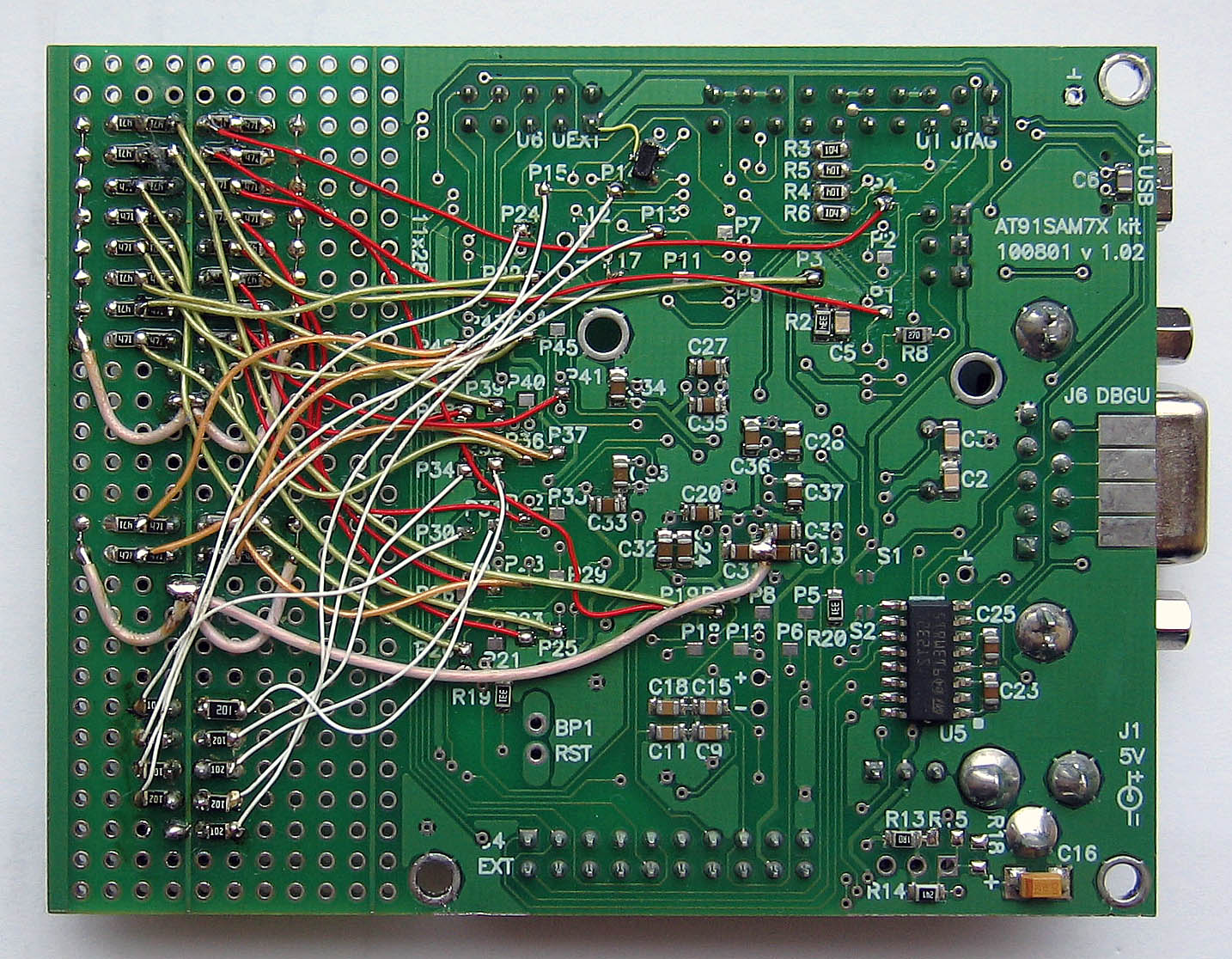
[ąĪčģąĄą╝ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░]
ąĪčģąĄą╝čŗ ą║ą░ą║ čéą░ą║ąŠą▓ąŠą╣ ąĮąĄčé, čéą░ą║ ą║ą░ą║ ą▓čüčÅ ąŠčüąĮąŠą▓ąĮą░čÅ ąŠą▒ą▓čÅąĘą║ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čāąČąĄ ąĖą╝ąĄąĄčéčüčÅ ąĮą░ ą╝ą░ą║ąĄčéąĮąŠą╣ ą┐ą╗ą░č鹥 AT91SAM7X. ąØą░ ą╝ą░ą║ąĄčéąĮąŠąĄ ą┐ąŠą╗ąĄ ąĮą░ą┐ą░čÅąĮčŗ č鹊ą╗čīą║ąŠ ą║ąŠąĮąĮąĄą║č鹊čĆčŗ, čĆąĄąĘąĖčüč鹊čĆčŗ ąĖ ąĖąĮą┤ąĖą║ą░čåąĖąŠąĮąĮčŗąĄ čüą▓ąĄč鹊ą┤ąĖąŠą┤čŗ. ąĪąĖą╗ąŠą▓čŗąĄ ą╝ąŠą┤čāą╗ąĖ čłą░ą│ąŠą▓čŗčģ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╣ ą┐ąŠą┤ą║ą╗čÄčćą░čÄčéčüčÅ č湥čĆąĄąĘ ą║ąŠąĮąĮąĄą║č鹊čĆ X1, č湥čĆąĄąĘ X2 ą┐ąŠą┤ą║ą╗čÄčćą░čÄčéčüčÅ ą║ą╗čÄčćąĖ ą┤ą╗čÅ čĆąĄą╗ąĄ, č湥čĆąĄąĘ X3 ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą┤ą░čéčćąĖą║ąĖ (ą┐čĆąŠčüčéčŗąĄ ąĘą░ą╝čŗą║ą░č鹥ą╗ąĖ ąĮą░ ąĘąĄą╝ą╗čÄ, GND).
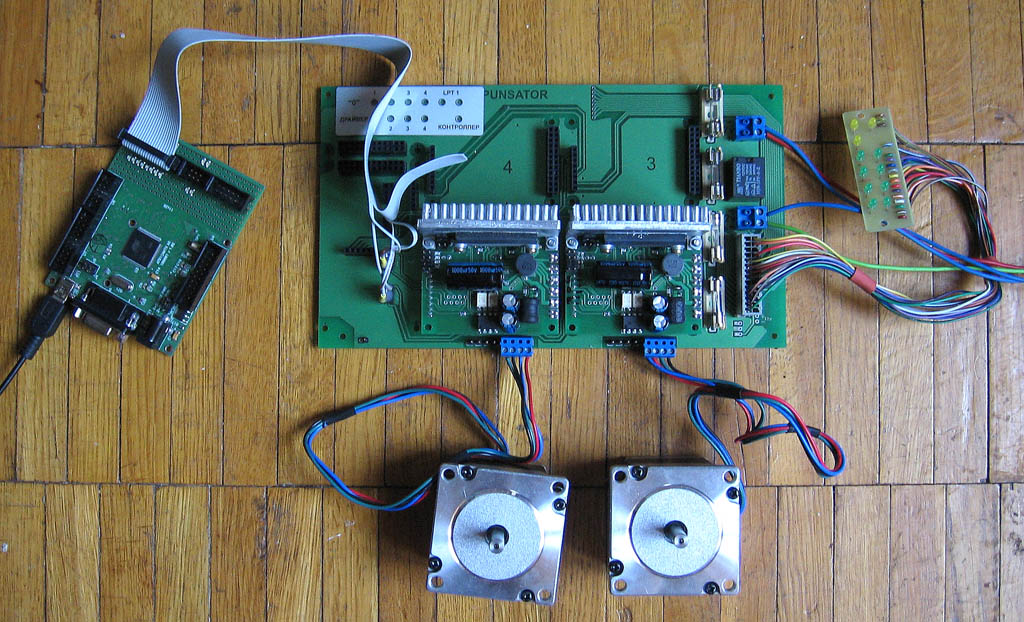
ąØą░ č乊č鹊 ą┐ąŠą║ą░ąĘą░ąĮčŗ ą║ąŠąĮąĮąĄą║č鹊čĆčŗ ąĖ ą╝ąŠąĮčéą░ąČ USB-ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čłą░ą│ąŠą▓čŗčģ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╣.
[ąĪčüčŗą╗ą║ąĖ]
1. ą£ą░ą║ąĄčéąĮą░čÅ ą┐ą╗ą░čéą░ AT91SAM7X.
2. 130926usbstepmotor-public.zip - ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą┐čĆąŠąĄą║čéą░. |