|
ą£ąŠą┤čāą╗čī USB-CAN SYSTEC electronic 3204001 Rev.03 (USB-CANmodul Series) ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ ą║ąŠą╝ą┐čīčÄč鹥čĆ ąĖąĮč乊čĆą╝ą░čåąĖąĖ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü CAN (ą║ąŠąĮąĮąĄą║č鹊čĆ DB9 ą┐ą░ą┐ą░). ą£ąŠą┤čāą╗čī ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā č湥čĆąĄąĘ USB (č湥čĆąĄąĘ čĆą░ąĘčŖąĄą╝ USB čéąĖą┐ B ąĖą╗ąĖ miniUSB čéąĖą┐ B).

[ąŻčüčéą░ąĮąŠą▓ą║ą░]
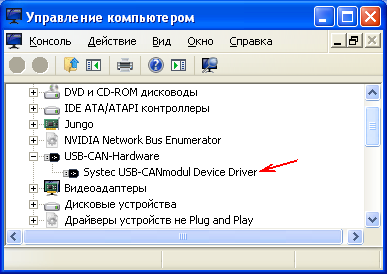
ąĪą║ą░čćą░ą╣č鹥 ą┤čĆą░ą╣ą▓ąĄčĆ SO-387_V4.15.ZIP [1]. ąØąĄ ą┐ąŠą┤ą║ą╗čÄčćą░čÅ ą┐ąŠą║ą░ ą╝ąŠą┤čāą╗čī ą┐ąŠ USB, ąĘą░ą┐čāčüčéąĖč鹥 čāčüčéą░ąĮąŠą▓čēąĖą║ setup.exe. ąÆ ą┐čĆąŠčåąĄčüčüąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒čāą┤ąĄčé ą▓čŗą▓ąĄą┤ąĄąĮąŠ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖąĄ, čćč鹊 ą┐ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą▓ąŠąĘą╝ąŠąČąĮąŠ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ firmware (ą┐čĆąŠčłąĖą▓ą║ąĖ) ą╝ąŠą┤čāą╗čÅ. ą×ą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ą┐čĆąŠčłąĖą▓ą║ąĖ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą╝ąĖą│ą░ąĮąĖąĄą╝ ą║čĆą░čüąĮąŠą│ąŠ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ čü čćą░čüč鹊č鹊ą╣ 4 ąōčå ąĖ čüą║ą▓ą░ąČąĮąŠčüčéčīčÄ 1/3, ą▓ąŠ ą▓čĆąĄą╝čÅ čŹč鹊ą│ąŠ ą┐čĆąŠčåąĄčüčüą░ ąĮąĄ ąŠčéą║ą╗čÄčćą░ą╣č鹥 ąŠčé ą╝ąŠą┤čāą╗čÅ čłąĮčāčĆ USB, ąĖąĮą░č湥 ą╝ąŠąČąĄč鹥 ąĖčüą┐ąŠčĆčéąĖčéčī ą╝ąŠą┤čāą╗čī USB-CAN. ąöąŠąČą┤ąĖč鹥čüčī ąŠą║ąŠąĮčćą░ąĮąĖčÅ ą┐čĆąŠčåąĄčüčüą░ čāčüčéą░ąĮąŠą▓ą║ąĖ, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥 ą╝ąŠą┤čāą╗čī ą┐ąŠ USB. ąŚą░ą┐čāčüčéąĖčéčüčÅ ą╝ą░čüč鹥čĆ čāčüčéą░ąĮąŠą▓ą║ąĖ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖčÅ Windows, čāą║ą░ąČąĖč鹥 ąĄą╝čā čāčüčéą░ąĮąŠą▓ąĖčéčī ą┤čĆą░ą╣ą▓ąĄčĆ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ. ą¤ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ čā ąÆą░čü ą▓ čüąĖčüč鹥ą╝ąĄ ą┐ąŠčÅą▓ąĖčéčüčÅ ąĮąŠą▓ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ USB-CAN-Hardware -> Systec USB-CANmodul Device Driver.
ąÆ ą┐ą░ąĮąĄą╗ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čéą░ą║ąČąĄ ą┐ąŠčÅą▓ąĖčéčüčÅ ąŠčüąĮą░čüčéą║ą░ USB-CANmodul Control, ą║ąŠč鹊čĆą░čÅ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čāą┐čĆą░ą▓ą╗čÅčéčī ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ USB CAN ą░ą┤ą░ą┐č鹥čĆąŠą▓. ą×čüąĮą░čüčéą║ą░ ą╝ąŠąČąĄčé ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ ą┤ą╗čÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĮąŠą╝ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ (DevNr.), čćč鹊ą▒čŗ ąĮą░ ąŠą┤ąĮąŠą╝ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ ą╝ąŠą│ą╗ąĖ čĆą░ą▒ąŠčéą░čéčī ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ USB CAN ą░ą┤ą░ą┐č鹥čĆąŠą▓.

ąöą╗čÅ ą┐čĆąŠčüą╝ąŠčéčĆą░ ą┤ą░ąĮąĮčŗčģ ą▓ čüčŗčĆąŠą╝ ą▓ąĖą┤ąĄ (ą║ąŠč鹊čĆčŗąĄ ą┐ąŠčüą╗ą░ąĮčŗ ą▓ ą░ą┤ą░ą┐č鹥čĆ ą┐ąŠ CAN) ąĖ ąŠčéą┐čĆą░ą▓ą║ąĖ ą┐ą░ą║ąĄč鹊ą▓ ąĖą╝ąĄąĄčéčüčÅ čāčéąĖą╗ąĖčéą░ PCANView (USBCAN).
[ąĀą░ą▒ąŠčéą░ čü ą╝ąŠą┤čāą╗ąĄą╝ ą▓ Visual Studio ąĮą░ C#]
ą×čüąĮąŠą▓ąĮą░čÅ čĆą░ą▒ąŠčéą░ čü ą╝ąŠą┤čāą╗ąĄą╝ USB CAN ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčüčÅ č湥čĆąĄąĘ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā USBCAN32.DLL (USBCAN-library), ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčāčÄ ą║ąŠą╝ą┐ą░ąĮąĖąĄą╣ SYSTEC. ąśą╝ąĄčÄčéčüčÅ čéą░ą║ąČąĄ ą┐čĆąĖą╝ąĄčĆčŗ ą│ąŠč鹊ą▓ąŠą│ąŠ ą║ąŠą┤ą░ ąĖ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ, čüą╝. USB-CANmodul Utilities -> Manuals ąĖ Sources. ąæąŠą╗čīčłąĖąĮčüčéą▓ąŠ čäčāąĮą║čåąĖą╣ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ čéąĖą┐ą░ UCANRET, ą▓ ą║ąŠč鹊čĆąŠą╝ čüąŠą┤ąĄčƹȹĖčéčüčÅ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ. ąĀą░čüčłąĖčäčĆąŠą▓ą║ą░ čŹč鹊ą│ąŠ ą║ąŠą┤ą░ ąŠą┤ąĖąĮą░ą║ąŠą▓ą░čÅ ą┤ą╗čÅ ą▓čüąĄčģ čäčāąĮą║čåąĖą╣. ąÆ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ, ą┐ąŠą╝ąĖą╝ąŠ čüąĖąĮčéą░ą║čüąĖčüą░ čäčāąĮą║čåąĖą╣, ą┐ąŠą║ą░ąĘą░ąĮčŗ čéą░ą║ąČąĄ ąĘąĮą░č湥ąĮąĖčÅ ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą║ą░ąČą┤ąŠą╣ čäčāąĮą║čåąĖąĖ, ąĖ ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ ą║ąŠą┤čŗ ąŠčłąĖą▒ą║ąĖ.
ąĪ ą║ąŠą┤ąŠą╝ ąĮą░ Visual basic .NET, Managed C++ ąĖ C# ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąŠą╣ USBCAN32.DLL ą╝ąŠąČąĮąŠ ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ č湥čĆąĄąĘ dll-ąŠą▒ąĄčĆčéą║čā UcanDotNET.dll. ą¦č鹊ą▒čŗ ą▓ąŠčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąŠą╣ UcanDotNET.dll, čüą║ąŠą┐ąĖčĆčāą╣č鹥 ąĄčæ ą▓ ą║ąŠčĆąĄąĮčī ą┐čĆąŠąĄą║čéą░ ąĖ ą┤ąŠą▒ą░ą▓čīč鹥 ąĮą░ ąĮąĄčæ čüčüčŗą╗ą║čā (ą╝ąĄąĮčÄ ą¤čĆąŠąĄą║čé -> ąöąŠą▒ą░ą▓ąĖčéčī čüčüčŗą╗ą║čā... -> ą┐ąĄčĆąĄą╣ą┤ąĖč鹥 ąĮą░ ąĘą░ą║ą╗ą░ą┤ą║čā ą×ą▒ąĘąŠčĆ -> ą▓čŗą▒ąĄčĆąĖč鹥 čäą░ą╣ą╗ UcanDotNET.dll). ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą┐ąŠčÅą▓ąĖčéčüčÅ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čäčāąĮą║čåąĖčÅą╝ąĖ USBCAN32.DLL, ąĮąŠ ąĮąĄ ąĮą░ą┐čĆčÅą╝čāčÄ, ą░ č湥čĆąĄąĘ ąŠą▒čŖąĄą║čé ą║ą╗ą░čüčüą░ USBcanServer. ąöąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ ą┐ąŠ čŹč鹊ą╝čā ą║ą╗ą░čüčüčā ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┤ąŠą║čāą╝ąĄąĮč鹥 "USB-CANmodul GW-001, GW-002, 3004006, 32040xx, 34040xx Systems Manual" (čäą░ą╣ą╗ L-487e_22.pdf, ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ą░ą┐ą║ąĄ USB-CANmodul Utility Disk\Docu ą┐ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ USB CAN ą╝ąŠą┤čāą╗čÅ).
ąÜčĆą░čéą║ąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ą╝ąĄč鹊ą┤ąŠą▓ USBcanServer
| int USBcanServer.GetFwVersion() |
ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ą▓ąĄčĆčüąĖčÄ firmware ą╝ąŠą┤čāą╗čÅ USB CAN |
| int USBcanServer.GetUserDllVersion() |
ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ą▓ąĄčĆčüąĖčÄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ USBCAN |
| byte USBcanServer.InitHardware(byte bDeviceNr_p = USBCAN_ANY_MODULE) |
ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé USB CAN čāčüčéčĆąŠą╣čüčéą▓ąŠ čü čāą║ą░ąĘą░ąĮąĮčŗą╝ ąĮąŠą╝ąĄčĆąŠą╝ (USBCAN_ANY_MODULE ąŠąĘąĮą░čćą░ąĄčé ą┐ąĄčĆą▓čŗą╣ ą┐ąŠą┐ą░ą▓čłąĖą╣čüčÅ ą╝ąŠą┤čāą╗čī) |
| byte USBcanServer.Shutdown() |
ąŠčéą║ą╗čÄčćą░ąĄčé ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ, ą║ąŠč鹊čĆąŠąĄ čĆą░ąĮąĄąĄ ą▒čŗą╗ąŠ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąŠ ą╝ąĄč鹊ą┤ąŠą╝ InitHardware() ąĖą╗ąĖ InitCan(). ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ DLL_INIT. |
| byte USBcanServer.InitCan (ą┐ą░čĆą░ą╝ąĄčéčĆčŗ) |
ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé čüą┐ąĄčåąĖčäąĖčćąĮčŗą╣ ą║ą░ąĮą░ą╗ CAN ąĮą░ čāčüčéčĆąŠą╣čüčéą▓ąĄ. |
| byte USBcanServer.ResetCan (byte pbChannel_p) |
čüą▒čĆą░čüčŗą▓ą░čÄčé ą║ą░ąĮą░ą╗ CAN ąĮą░ čāčüčéčĆąŠą╣čüčéą▓ąĄ. |
| byte USBcanServer.GetHardwareInfo (ą┐ą░čĆą░ą╝ąĄčéčĆčŗ) |
ą▓ąŠąĘą▓čĆą░čēą░ąĄčé čĆą░čüčłąĖčĆąĄąĮąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ ą░ą┐ą┐ą░čĆą░čéčāčĆąĄ čāčüčéčĆąŠą╣čüčéą▓ą░. |
| byte USBcanServer.GetStatus (ą┐ą░čĆą░ą╝ąĄčéčĆčŗ) |
ą▓ąŠąĘą▓čĆą░čēą░ąĄčé čüčéą░čéčāčü ąŠčłąĖą▒ą║ąĖ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ CAN. |
| byte USBcanServer.SetBaudrate (ą┐ą░čĆą░ą╝ąĄčéčĆčŗ) |
ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ čüą║ąŠčĆąŠčüčéąĖ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ CAN. |
| byte USBcanServer.SetAcceptance (ą┐ą░čĆą░ą╝ąĄčéčĆčŗ) |
ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ čäąĖą╗čīčéčĆą░ ą┐čĆąĖąĮąĖą╝ą░ąĄą╝čŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ CAN. |
| byte USBcanServer.ReadCanMsg (ą┐ą░čĆą░ą╝ąĄčéčĆčŗ) |
čćąĖčéą░ąĄčé ąŠą┤ąĮąŠ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ CAN-čüąŠąŠą▒čēąĄąĮąĖą╣ ąĖąĘ ą▒čāč乥čĆą░ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ CAN. |
| byte USBcanServer.WriteCanMsg (ą┐ą░čĆą░ą╝ąĄčéčĆčŗ) |
ą┐ąĄčĆąĄą┤ą░ąĄčé ąŠą┤ąĮąŠ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ CAN-čüąŠąŠą▒čēąĄąĮąĖą╣ č湥čĆąĄąĘ čāą║ą░ąĘą░ąĮąĮčŗą╣ ą║ą░ąĮą░ą╗ CAN. |
| byte USBcanServer.GetMsgCount (ą┐ą░čĆą░ą╝ąĄčéčĆčŗ) |
čćąĖčéą░ąĄčé čüč湥čéčćąĖą║ąĖ čüąŠąŠą▒čēąĄąĮąĖą╣ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ CAN. |
| String USBcanServer.GetCanStatusMessage (ą┐ą░čĆą░ą╝ąĄčéčĆ) |
ą▓ąŠąĘą▓čĆą░čēą░ąĄčé čüčéčĆąŠą║ąŠą▓ąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ ą║ąŠą┤ą░ čüčéą░čéčāčüą░. |
| String USBcanServer.GetBaudrateMessage (ą┐ą░čĆą░ą╝ąĄčéčĆčŗ) |
ą▓ąŠąĘą▓čĆą░čēą░ąĄčé čüčéčĆąŠą║čā, čüąŠą┤ąĄčƹȹ░čēčāčÄ ąĘąĮą░č湥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆąŠą▓ BTR. |
| String USBcanServer.GetBaudrateExMessage (ą┐ą░čĆą░ą╝ąĄčéčĆ) |
ą▓ąŠąĘą▓čĆą░čēą░ąĄčé čüčéčĆąŠą║čā, čüąŠą┤ąĄčƹȹ░čēčāčÄ čāą║ą░ąĘą░ąĮąĮčāčÄ čüą║ąŠčĆąŠčüčéčī. |
| SetDebugMode (&HC0000306, ".\MyLogFile.log") |
ąĘą░ą┐čāčüą║ čĆąĄąČąĖą╝ą░ ąĘą░ą┐ąĖčüąĖ ą┤ąĖą░ą│ąĮąŠčüčéąĖč湥čüą║ąĖčģ ąŠčéą╗ą░ą┤ąŠčćąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣ ą▓ č鹥ą║čüč鹊ą▓čŗą╣ ą╗ąŠą│. |
ąÜčĆą░čéą║ąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ callback-čüąŠą▒čŗčéąĖą╣ USBcanServer
| event USBcanServer.CanMsgReceivedEvent (ą║ą░ąĮą░ą╗) |
ą┐čĆąĖąĮčÅč鹊 CAN-čüąŠąŠą▒čēąĄąĮąĖąĄ. |
| event USBcanServer.InitHwEvent() |
čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąŠ. |
| event USBcanServer.InitCanEvent(ą║ą░ąĮą░ą╗) |
čāą║ą░ąĘą░ąĮąĮčŗą╣ ą║ą░ąĮą░ą╗ CAN ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ. |
| event USBcanServer.StatusEvent(ą║ą░ąĮą░ą╗) |
ą┐ąŠą╝ąĄąĮčÅą╗čüčÅ čüčéą░čéčāčü ąŠčłąĖą▒ą║ąĖ ą║ą░ąĮą░ą╗ą░ CAN. |
| event USBcanServer.DeinitCanEvent(ą║ą░ąĮą░ą╗) |
ą▓čŗą║ą╗čÄč湥ąĮ ą║ą░ąĮą░ą╗ CAN. |
| event USBcanServer.DeinitHwEvent() |
čāčüčéčĆąŠą╣čüčéą▓ąŠ CAN ą▓čŗą║ą╗čÄč湥ąĮąŠ. |
| event USBcanServer.ConnectEvent() |
ą║ ą┐ąŠčĆčéčā USB ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ąĮąŠą▓ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ. |
| event USBcanServer.DisconnectEvent() |
ąŠčé ą┐ąŠčĆčéą░ USB ą▒čŗą╗ąŠ ąŠčéą║ą╗čÄč湥ąĮąŠ čĆą░ąĮąĄąĄ ą▓čŗą║ą╗čÄč湥ąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ. |
| event USBcanServer.FatalDisconnectEvent() |
ąŠčé ą┐ąŠčĆčéą░ USB ą▒čŗą╗ąŠ ąŠčéą║ą╗čÄč湥ąĮąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▒ąĄąĘ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠą│ąŠ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ. |
ąöą░ą╗ąĄąĄ čĆą░čüčüą╝ąŠčéčĆąĄąĮ ą┐čĆąŠčåąĄčüčü čüąŠąĘą┤ą░ąĮąĖčÅ ą┐čĆąŠčüč鹥ą╣čłąĄą│ąŠ ą┐čĆąŠąĄą║čéą░ ąĮą░ C#, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĄą│ąŠ USBCAN32.DLL ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü ą╝ąŠą┤čāą╗ąĄą╝ USB-CAN ą░ą┤ą░ą┐č鹥čĆąŠą╝ SYSTEC, ą┐ąŠ čłą░ą│ą░ą╝. ą¤ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 čā ąÆą░čü čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┤čĆą░ą╣ą▓ąĄčĆ USB-CAN ą░ą┤ą░ą┐č鹥čĆą░, ąĖ ąŠąĮ ąĮąŠčĆą╝ą░ą╗čīąĮąŠ čĆą░ą▒ąŠčéą░ąĄčé čü čāčéąĖą╗ąĖč鹊ą╣ PcanView (USBCAN).
1. ąĪąŠąĘą┤ą░ą╣č鹥 ą▓ Visual Studio C# ą┐čĆąŠąĄą║čé ą┤ą╗čÅ GUI ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ pkrc_m_CAN.
2. ąĪą║ąŠą┐ąĖčĆčāą╣č鹥 UcanDotNET.dll ą▓ ą║ąŠčĆąĄąĮčī ą┐čĆąŠąĄą║čéą░, ą┤ąŠą▒ą░ą▓čīč鹥 ąĮą░ ąĮąĄą│ąŠ čüčüčŗą╗ą║čā čüčüčŗą╗ą║čā ą▓ ą┐čĆąŠąĄą║č鹥.
3. ąÆ ą╝ąŠą┤čāą╗ąĄ Form1.cs ą┤ąŠą▒ą░ą▓čīč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ UcanDotNET.dll:
using UcanDotNET;
4. ąĪąŠąĘą┤ą░ą╣č鹥 菹║ąĘąĄą╝ą┐ą╗čÅčĆ ą║ą╗ą░čüčüą░ USBcanServer. ąŁč鹊 ą╝ąŠąČąĮąŠ čüą┤ąĄą╗ą░čéčī ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĖ ą║ą╗ą░čüčüą░ č乊čĆą╝čŗ:
namespace MyApp_CAN
{
public partial class Form1 : Form
{
USBcanServer CANsrv = new USBcanServer();
...
5. ąÆčŗąĘąŠą▓ąĖč鹥 InitHardware ą▒ąĄąĘ ą┐ą░čĆą░ą╝ąĄčéčĆą░ (ą▓čŗąĘąŠą▓ ą▒ąĄąĘ ą┐ą░čĆą░ą╝ąĄčéčĆą░ č鹊 ąČąĄ čüą░ą╝ąŠąĄ, čćč鹊 ąĖ čü ą┐ą░čĆą░ą╝ąĄčéčĆąŠą╝ USBCAN_ANY_MODULE, čé. ąĄ. ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┐ąĄčĆą▓čŗą╣ ąĮą░ą╣ą┤ąĄąĮąĮčŗą╣ ą╝ąŠą┤čāą╗čī SYSTEC). ąÆčŗąĘą▓ą░čéčī InitHardware ą╝ąŠąČąĮąŠ ą▓ čüąŠą▒čŗčéąĖąĖ ąĘą░ą│čĆčāąĘą║ąĖ č乊čĆą╝čŗ Form1_Load:
bRet = CANsrv.InitHardware();
if (USBCAN_SUCCESSFUL != bRet)
{
applog.write("InitHardware error");
return;
}
6. ąÆčŗąĘąŠą▓ąĖč鹥 InitCan čü ąĮčāąČąĮčŗą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ, ąĮą░ą┐čĆąĖą╝ąĄčĆ:
bRet = CANsrv.InitCan(USBCAN_CHANNEL_CH0,
USBCAN_BAUD_125kBit,
USBCAN_BAUDEX_USE_BTR01,
USBCAN_AMR_ALL,
USBCAN_ACR_ALL,
kUcanModeNormal,
USBCAN_OCR_DEFAULT);
if ( USBCAN_SUCCESSFUL != bRet)
{
applog.write("InitCan error");
return;
}
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ USB CAN SYSTEC ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčéčüčÅ ąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą║ą░ąĮą░ą╗ą░ 0, čüą║ąŠčĆąŠčüčéčī 125 ą║ą▒ąĖčé, ą╝ą░čüą║ąĖ ą┐čĆąĖąĄą╝ą░ AMR ąĖ ACR ąĮą░čüčéčĆąŠąĄąĮčŗ ąĮą░ ą┐čĆąĖąĄą╝ ą▓čüąĄčģ čüąŠąŠą▒čēąĄąĮąĖą╣ (čäąĖą╗čīčéčĆą░čåąĖčÅ ą┐ąŠ ą░ą┤čĆąĄčüčā ąŠčéą║ą╗čÄč湥ąĮą░). ąØą░ąĘąĮą░č湥ąĮąĖąĄ ąŠčüčéą░ą╗čīąĮčŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą┐ąŠą║ą░ ąĮąĄ ą┐ąŠąĮčÅą╗. ą¤ąŠčüą╗ąĄ čāčüą┐ąĄčłąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ InitCan ąĮą░ čāčüčéčĆąŠą╣čüčéą▓ąĄ ą│ą░čüąĮąĄčé ą║čĆą░čüąĮčŗą╣ čüą▓ąĄč鹊ą┤ąĖąŠą┤ State.
 |
 |
| ąĪą▓ąĄč鹊ą┤ąĖąŠą┤ čüčéą░čéčāčüą░ USB CAN 3204001 |
ąĪą▓ąĄč鹊ą┤ąĖąŠą┤ čüčéą░čéčāčüą░ USB CAN GW-002 |
7. ą¤čĆąĖ ąĘą░ą║čĆčŗčéąĖąĖ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĮčāąČąĮąŠ ą┤ąŠą▒ą░ą▓ąĖčéčī ą▓čŗąĘąŠą▓ Shutdown. ąŁč鹊 ą╝ąŠąČąĮąŠ čüą┤ąĄą╗ą░čéčī ą▓ čüąŠą▒čŗčéąĖąĖ ąĘą░ą║čĆčŗčéąĖąĖ č乊čĆą╝čŗ:
private void Form1_FormClosed (object sender, FormClosedEventArgs e)
{
bRet = CANsrv.Shutdown();
if (USBCAN_SUCCESSFUL != bRet)
{
applog.write("Shutdown error");
}
applog.write("[EXIT]");
}
8. ąöą╗čÅ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ ą┐ąŠ ą║ą░ąĮą░ą╗čā CAN ąĮčāąČąĮąŠ ą┤ąŠą▒ą░ą▓ąĖčéčī ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ čüąŠą▒čŗčéąĖčÅ CanMsgReceivedEvent. ąöąŠą▒ą░ą▓čīč鹥 čüą╗ąĄą┤čāčÄčēąĖą╣ ąŠą┐ąĄčĆą░č鹊čĆ ą▓ Form1_Load:
CANsrv.CanMsgReceivedEvent += new USBcanServer.CanMsgReceivedEventEventHandler(CANsrv_CanMsgReceivedEvent);
ąś ąĄčēąĄ ą┤ąŠą▒ą░ą▓čīč鹥 ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ čüąŠą▒čŗčéąĖčÅ ą┐čĆąĖąĄą╝ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ CANsrv_CanMsgReceivedEvent:
private void CANsrv_CanMsgReceivedEvent(byte bChannel_p)
{
applog.write("Data arrived");
}
ąöą╗čÅ čāą┐čĆąŠčēąĄąĮąĮąŠą│ąŠ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖčÅ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 čüą╗ąĄą┤čāčÄčēąĖąĄ čłą░ą│ąĖ:
- ą▓ ą║ąŠą┤ąĄ Form1_Load ąĮą░ą┐ąĄčćą░čéą░ą╣č鹥 CANsrv. (ą▓ ą║ąŠąĮčåąĄ ą┐ąŠčüčéą░ą▓čīč鹥 č鹊čćą║čā);
- ąĮą░ąČą╝ąĖč鹥 Ctrl+Space, ąĖąĘ ą┐ąŠčÅą▓ąĖą▓čłąĄą│ąŠčüčÅ čüą┐ąĖčüą║ą░ ą╝ąĄč鹊ą┤ąŠą▓ ąĖ čüąŠą▒čŗčéąĖą╣ ą▓čŗą▒ąĄčĆąĖč鹥 CanMsgReceivedEvent;
- ą┤ąŠą┐ąĄčćą░čéą░ą╣č鹥 ą┐čĆąŠą▒ąĄą╗, + ąĖ =. ą¤ąŠčÅą▓ąĖčéčüčÅ ą┐ąŠą┤čüą║ą░ąĘą║ą░ ą▓ ą▓ąĖą┤ąĄ č鹥ą║čüčéą░:
"new USBcanServer.CanMsgReceivedEventEventHandler(CANsrv_CanMsgReceivedEvent); (ąØą░ąČą╝ąĖč鹥 ą║ą╗ą░ą▓ąĖčłčā TAB ą┤ą╗čÅ ą▓čüčéą░ą▓ą║ąĖ)"
- ąĮą░ąČą╝ąĖč鹥 ą║ą╗ą░ą▓ąĖčłčā TAB, ąĖ ą▓ ą║ąŠą┤ąĄ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▒čāą┤ąĄčé čüąŠąĘą┤ą░ąĮą░ čüčéčĆąŠą║ą░:
CANsrv.CanMsgReceivedEvent += new USBcanServer.CanMsgReceivedEventEventHandler(CANsrv_CanMsgReceivedEvent);
ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ąŠčüčéą░ąĮąĄčéčüčÅ ą▓čĆčāčćąĮčāčÄ čüąŠąĘą┤ą░čéčī ą┐čĆąŠčåąĄą┤čāčĆčā CANsrv_CanMsgReceivedEvent.
9. ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ą┤ą░ąĮąĮčŗąĄ ąĖąĘ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą▓čŗąĘąŠą▓ąĖč鹥 ą▓ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĄ CANsrv_CanMsgReceivedEvent čäčāąĮą║čåąĖčÄ ReadCanMsg.
private void CANsrv_CanMsgReceivedEvent(byte bChannel_p)
{
byte channel = USBCAN_CHANNEL_CH0;
UcanDotNET.USBcanServer.tCanMsgStruct[] msg = new UcanDotNET.USBcanServer.tCanMsgStruct[10];
int pdwCount_p = 0;
applog.write("Data arrived");
bRet = CANsrv.ReadCanMsg(ref channel, ref msg, ref pdwCount_p);
}
ą¤ąŠčüą╗ąĄ čāčüą┐ąĄčłąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ (bRet == USBCAN_SUCCESSFUL) ą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ channel ą▒čāą┤ąĄčé ąĮąŠą╝ąĄčĆ ą║ą░ąĮą░ą╗ą░, ą┐ąŠ ą║ąŠč鹊čĆąŠą╝čā ą┐čĆąĖąĮčÅč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ, ą▓ ą╝ą░čüčüąĖą▓ąĄ msg ą▒čāą┤čāčé čüąŠą┤ąĄčƹȹ░čéčīčüčÅ čüą░ą╝ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą░ ą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ pdwCount_p ą▒čāą┤ąĄčé ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąĖąĮčÅčéčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣.
10. ą¦č鹊ą▒čŗ ąŠčéą┐čĆą░ą▓ąĖčéčī čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐ąŠ CAN, ąĮčāąČąĮąŠ ą▓čŗąĘą▓ą░čéčī ą╝ąĄč鹊ą┤ WriteCanMsg. ą¤čĆąĖą╝ąĄčĆ ąŠčéą┐čĆą░ą▓ą║ąĖ ąŠą┤ąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą▓ ą║ąŠč鹊čĆąŠą╝ ą╝ąŠąČąĮąŠ ą┐ąĄčĆąĄą┤ą░čéčī 8 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ (ą┤ą░ąĮąĮčŗąĄ ą▒ąĄčĆčāčéčüčÅ ąĖąĘ ą╝ą░čüčüąĖą▓ą░ byte msgdata [8]):
byte channel = USBCAN_CHANNEL_CH0;
UcanDotNET.USBcanServer.tCanMsgStruct[] msg = new UcanDotNET.USBcanServer.tCanMsgStruct[1];
msg[0].m_bData = new byte[8];
int pdwCount_p = 0;
//ąĘą░ą┐ąŠą╗ąĮčÅąĄą╝ ą┐ąŠą╗čÅ tCanMsgStruct
for (byte dataidx = 0; dataidx < 8; dataidx++)
msg[0].m_bData[dataidx] = msgdata[dataidx];
msg[0].m_bDLC = 8; //CAN data length code, ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ
msg[0].m_bFF = USBCAN_MSG_FF_STD; //CAN frame format, č乊čĆą╝ą░čé čäčĆąĄą╣ą╝ą░
msg[0].m_dwID = 0x0101; //ą░ą┤čĆąĄčü CAN ą┤ą╗čÅ ą┐čĆąĖąĄą╝ąĮąĖą║ą░
msg[0].m_dwTime = 10; //ą▓čĆąĄą╝čÅ čéą░ą╣ą╝ą░čāčéą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ą░čģ
bRet = CANsrv.WriteCanMsg(channel, ref msg, ref pdwCount_p);
ąÆčŗą┐ąŠą╗ąĮąĄąĮąĖąĄ čłą░ą│ąŠą▓ 1..10 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗą╣ čäčāąĮą║čåąĖąŠąĮą░ą╗ ą┤ą╗čÅ čĆą░ą▒ąŠč湥ą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą░ą┤ą░ą┐č鹥čĆą░ USB CAN SYSTEC. ą£ąŠąČąĮąŠ ą┐čĆąĖąĮąĖą╝ą░čéčī ąĖ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ ą┐ąŠ ą║ą░ąĮą░ą╗čā CAN čü ąĮčāąČąĮąŠą╣ čüą║ąŠčĆąŠčüčéčīčÄ.
[ąöąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ čüąŠą▒čŗčéąĖą╣]
ąöą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ą┐ąŠą╗ąĮąŠčäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠą╗ąĄąĘąĮąŠ ą┤ąŠą▒ą░ą▓ąĖčéčī ąŠą▒čĆą░ą▒ąŠčéą║čā ą┤čĆčāą│ąĖčģ čüąŠą▒čŗčéąĖą╣ - ąŠčéą║ą╗čÄč湥ąĮąĖąĄ ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ USB CAN ą░ą┤ą░ą┐č鹥čĆą░ ą┐ąŠ ą┐ąŠčĆčéčā USB ą║ąŠą╝ą┐čīčÄč鹥čĆą░, ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čüčéą░čéčāčüą░ čäąĖąĘąĖč湥čüą║ąŠą╣ ą╗ąĖąĮąĖąĖ čüą▓čÅąĘąĖ CAN (ą║ąŠč鹊čĆą░čÅ ą▓čŗčģąŠą┤ąĖčé ąĮą░ čĆą░ąĘčŖąĄą╝ DB9 ą░ą┤ą░ą┐č鹥čĆą░), ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ąĖ ą┤ąĄąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ąĖąĮč鹥čĆč乥ą╣čüą░ ąŠą▒ą╝ąĄąĮą░ čü ą░ą┤ą░ą┐č鹥čĆąŠą╝. ąÜčĆąŠą╝ąĄ ą▓čŗčłąĄąŠą┐ąĖčüą░ąĮąĮąŠą│ąŠ čüąŠą▒čŗčéąĖčÅ CanMsgReceivedEvent, ą║ą╗ą░čüčü USBcanServer ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čéą░ą║ąČąĄ čüąŠą▒čŗčéąĖčÅ InitCanEvent, StatusEvent, DeinitCanEvent, DeinitHwEvent, ConnectEvent, DisconnectEvent, FatalDisconnectEvent (čüą╝. čéą░ą▒ą╗ąĖčåčā callback-čüąŠą▒čŗčéąĖą╣). ą×čüąŠą▒ąĄąĮąĮąŠ ą┐ąŠą╗ąĄąĘąĮčŗ čüąŠą▒čŗčéąĖčÅ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ (FatalDisconnectEvent) ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ (ConnectEvent) ą┐ąŠ USB, čéą░ą║ ą║ą░ą║ ąŠąĮąĖ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą▓ąŠčüčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčī čĆą░ą▒ąŠčéčā ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą▒ąĄąĘ ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ą░, ąĄčüą╗ąĖ ą░ą┤ą░ą┐č鹥čĆ USB CAN ą▒čŗą╗ čüą╗čāčćą░ą╣ąĮąŠ ąŠčéą║ą╗čÄč湥ąĮ ąŠčé ą║ąŠą╝ą┐čīčÄč鹥čĆą░.
ąöąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄ čüąŠą▒čŗčéąĖą╣ ą▓ 菹║ąĘąĄą╝ą┐ą╗čÅčĆ ą║ą╗ą░čüčüą░ CANsrv ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ą▓ąŠ ą▓čĆąĄą╝čÅ čüčéą░čĆčéą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą▓ ą║ąŠąĮčüčéčĆčāą║č鹊čĆąĄ č乊čĆą╝čŗ ąĖą╗ąĖ ą▓ ą║ąŠąĮčüčéčĆčāą║č鹊čĆąĄ ą║ą╗ą░čüčüą░, čĆą░ą▒ąŠčéą░čÄčēąĄą│ąŠ čü USBcanServer).
//ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄ čüąŠą▒čŗčéąĖą╣
CANsrv.InitCanEvent += new USBcanServer.InitCanEventEventHandler (CANsrv_InitCanEvent);
CANsrv.StatusEvent += new USBcanServer.StatusEventEventHandler (CANsrv_StatusEvent);
CANsrv.DeinitCanEvent += new USBcanServer.DeinitCanEventEventHandler (CANsrv_DeinitCanEvent);
CANsrv.DeinitHwEvent += new USBcanServer.DeinitHwEventEventHandler (CANsrv_DeinitHwEvent);
USBcanServer.ConnectEvent += new USBcanServer.ConnectEventEventHandler (USBcanServer_ConnectEvent);
USBcanServer.DisconnectEvent += new USBcanServer.DisconnectEventEventHandler (USBcanServer_DisconnectEvent);
CANsrv.FatalDisconnectEvent += new USBcanServer.FatalDisconnectEventEventHandler(CANsrv_FatalDisconnectEvent);
CANsrv.CanMsgReceivedEvent += new USBcanServer.CanMsgReceivedEventEventHandler(CANsrv_CanMsgReceivedEvent);
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ - ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĖ čüąŠą▒čŗčéąĖą╣ ConnectEvent ąĖ DisconnectEvent ąŠą▒čŖčÅą▓ą╗čÅčÄčéčüčÅ ą┐čĆąĖą▓čÅąĘą░ąĮąĮčŗą╝ąĖ ą║ ą║ą╗ą░čüčüčā, ą░ ąĮąĄ ą║ 菹║ąĘąĄą╝ą┐ą╗čÅčĆčā ą║ą╗ą░čüčüą░, čéą░ą║ ą║ą░ą║ ąŠąĮąĖ ąŠą▒čŖčÅą▓ą╗ąĄąĮčŗ čü ą░čéčĆąĖą▒čāč鹊ą╝ static. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĄčüą╗ąĖ čā ąÆą░čü ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ ą▒čāą┤čāčé ąĮąĄčüą║ąŠą╗čīą║ąŠ 菹║ąĘąĄą╝ą┐ą╗čÅčĆąŠą▓ ą║ą╗ą░čüčüą░ USBcanServer, č鹊 ąŠąĮąĖ ą▒čāą┤čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąŠą▒čēąĖąĄ ą┤ą╗čÅ ą▓čüąĄčģ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĖ čüąŠą▒čŗčéąĖą╣ ConnectEvent ąĖ DisconnectEvent.
[ąĪąŠąĘą┤ą░ąĮąĖąĄ čäą░ą╣ą╗ą░ ąŠčéą╗ą░ą┤ą║ąĖ (debug file) ąĖąĘ DLL]
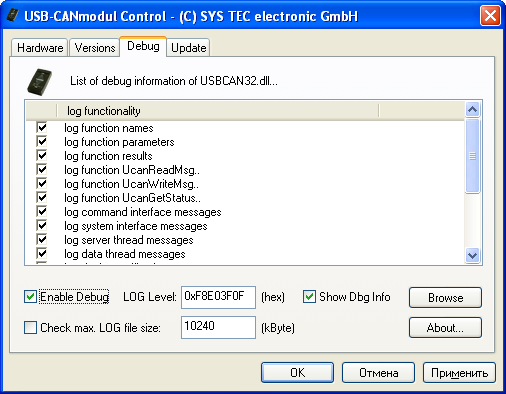
ąĢčüą╗ąĖ ą┐čĆąĖ čĆą░ą▒ąŠč鹥 ą┐čĆąŠą│čĆą░ą╝ą╝, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĖčģ DLL SYSTEC, ą▓ąŠąĘąĮąĖą║ą░čÄčé ą┐čĆąŠą▒ą╗ąĄą╝čŗ čü ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝, č鹊 ą╝ąŠąČąĮąŠ čüąŠąĘą┤ą░čéčī ą╗ąŠą│ ąŠčéą╗ą░ą┤ą║ąĖ ąĖąĘ USBCAN32.DLL. ąŁč鹊čé čäą░ą╣ą╗ ąĮčāąČąĮąŠ ą▓čüąĄą│ą┤ą░ ąŠčéą┐čĆą░ą▓ą╗čÅčéčī ą▓ čüą╗čāąČą▒čā ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ SYSTEC ą┐ąŠ email, čćč鹊ą▒čŗ ąÆą░ą╝ ą┐ąŠą╝ąŠą│ą╗ąĖ čĆą░ąĘąŠą▒čĆą░čéčīčüčÅ ą▓ ą┐čĆąŠą▒ą╗ąĄą╝ąĄ. ą¦č鹊ą▒čŗ ą░ą║čéąĖą▓ąĖąĘąĖčĆąŠą▓ą░čéčī čŹčéčā ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī, ąĘą░ą┐čāčüčéąĖč鹥 ą░ą┐ą┐ą╗ąĄčé USB-CANmodul Control ąĖąĘ ą¤ą░ąĮąĄą╗ąĖ ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ Windows. ą¤čĆąĖ ąĘą░ą┐čāčüą║ąĄ ą┐ąŠčÅą▓ąĖčéčüčÅ ąŠą║ąĮąŠ, ą║ąŠč鹊čĆąŠąĄ ą┐čĆąĄą┤ą╗ąŠąČąĖčé ą▓čŗą▒čĆą░čéčī čāč湥čéąĮčāčÄ ąĘą░ą┐ąĖčüčī, ąŠčé ąĖą╝ąĄąĮąĖ ą║ąŠč鹊čĆąŠą╣ ą▒čāą┤ąĄčé ąĘą░ą┐čāčēąĄąĮą░ čāčéąĖą╗ąĖčéą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ą×ą▒čÅąĘą░č鹥ą╗čīąĮąŠ ą▓čŗą▒ąĄčĆąĖč鹥 čāč湥čéąĮčāčÄ ąĘą░ą┐ąĖčüčī ą░ą┤ą╝ąĖąĮąĖčüčéčĆą░č鹊čĆą░, ąĖ čüąĮąĖą╝ąĖč鹥 ą│ą░ą╗ąŠčćą║čā "ąŚą░čēąĖčéąĖčéčī ą║ąŠą╝ą┐čīčÄč鹥čĆ ąŠčé ąĮąĄčüą░ąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą┤ąĄą╣čüčéą▓ąĖą╣ ...".

ą¤ąĄčĆąĄą╣ą┤ąĖč鹥 ąĮą░ ąĘą░ą║ą╗ą░ą┤ą║čā Debug, ą▓ąĮąĖąĘčā ą┐ąŠčüčéą░ą▓čīč鹥 ą│ą░ą╗ąŠčćą║čā Enable Debug. ąÆ čüą┐ąĖčüą║ąĄ log functionality ą╝ąŠąČąĮąŠ ą▓čŗą▒čĆą░čéčī, čćč鹊 ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüčŗą▓ą░čéčīčüčÅ ą▓ ą╗ąŠą│. ąÜąĮąŠą┐ą║čā Browse ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čāą║ą░ąĘą░čéčī ą╝ąĄčüč鹊čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą╗ąŠą│-čäą░ą╣ą╗ą░ (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą╝ąĄčüč鹊 ąĮą░ąĘąĮą░č湥ąĮąŠ ąĮą░ ą┐ą░ą┐ą║čā ą┤ąŠą║čāą╝ąĄąĮč鹊ą▓ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ). ą¤ąŠčüą╗ąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čāčüčéą░ąĮąŠą▓ąŠą║ ąĮą░ąČą╝ąĖč鹥 ą║ąĮąŠą┐ą║čā ą¤čĆąĖą╝ąĄąĮąĖčéčī ąĖ ą×ąÜ.
ąĪąŠąĘą┤ą░ą▓ą░ąĄą╝čŗą╣ čäą░ą╣ą╗ ą╗ąŠą│ą░ ą┐ąŠą╗čāčćąĖčé ąĖą╝čÅ USBCAN_XXXXXXXX_YYYYYY_ZZZ.LOG. ąŚą┤ąĄčüčī XXXXXXXX ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ą┤ą░čéčā čüąŠąĘą┤ą░ąĮąĖčÅ ą▓ č乊čĆą╝ą░č鹥 YYYYMMDD (ą│ąŠą┤, ą╝ąĄčüčÅčå, ą┤ąĄąĮčī), YYYYYY čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą▓čĆąĄą╝ąĄąĮąĖ čüąŠąĘą┤ą░ąĮąĖčÅ ą▓ č乊čĆą╝ą░č鹥 HHMMSS (čćą░čü, ą╝ąĖąĮčāčéą░, čüąĄą║čāąĮą┤ą░), ZZZ ąĖą╝čÅ čĆą░ą▒ąŠčéą░čÄčēąĄą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čŹč鹊ą╣ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ čāą╝ąĄąĮčīčłą░ąĄčé ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ, ą┐ąŠč鹊ą╝čā čćč鹊 čäčāąĮą║čåąĖąĖ API ą▓čŗą┐ąŠą╗ąĮčÅčÄčé ą▒ąŠą╗čīčłąĄ ą║ąŠą┤ą░ ą┤ą╗čÅ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠčéą╗ą░ą┤ąŠčćąĮąŠą│ąŠ ą▓čŗą▓ąŠą┤ą░. ąŻą╝ąĄąĮčīčłąĖčéčī ąĘą░čéčĆą░čéčŗ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąŠąČąĮąŠ, ąĄčüą╗ąĖ čāą▒čĆą░čéčī ą│ą░ą╗ąŠčćą║ąĖ čü ąĮąĄą║ąŠč鹊čĆčŗčģ čüąŠčģčĆą░ąĮčÅąĄą╝čŗčģ ą▓ ą╗ąŠą│ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ąŠą┤ąĮą░ą║ąŠ ąĖą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ą┐čĆąĖ čŹč鹊ą╝ ą▓ ą╗ąŠą│-čäą░ą╣ą╗ąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī čāą┐čāčēąĄąĮą░ ą▓ą░ąČąĮą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ.
ą¤ąŠ ą╝ąĄčĆąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čäą░ą╣ą╗ ą╗ąŠą│ą░ ąŠčéą╗ą░ą┤ą║ąĖ ą▒čāą┤ąĄčé čāą▓ąĄą╗ąĖčćąĖą▓ą░čéčīčüčÅ ą▓ čĆą░ąĘą╝ąĄčĆąĄ. ą£ąŠąČąĮąŠ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░čéčī ąŠą┐čåąĖčÄ ŌĆ£Check max. LOG file sizeŌĆØ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą║ąŠą┤ USBCAN32.DLL ą▒čāą┤ąĄčé ą╝ąŠąĮąĖč鹊čĆąĖčéčī čĆą░ąĘą╝ąĄčĆ čäą░ą╣ą╗ą░ ąŠčéą╗ą░ą┤ą║ąĖ. ąĢčüą╗ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ą╗ąŠą│ą░ ą▒čāą┤ąĄčé ą┐čĆąĄą▓čŗčłąĄąĮ, č鹊 ą┐čĆąĄą┤čŗą┤čāčēąĖąĄ (čüčéą░čĆčŗąĄ) ąĘą░ą┐ąĖčüąĖ ąŠčéą╗ą░ą┤ą║ąĖ ą▒čāą┤čāčé čāą┤ą░ą╗ąĄąĮčŗ. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čĆą░ąĘą╝ąĄčĆ debug file ąĘą░ą┤ą░ąĮ ą▓ 10240 ą║ąĖą╗ąŠą▒ą░ą╣čé (ą┐ąŠčĆčÅą┤ą║ą░ 10 ą╝ąĄą│ą░ą▒ą░ą╣čé).
ąØą░čćąĖąĮą░čÅ čü ą▓ąĄčĆčüąĖąĖ V3.11 USBCAN-library, ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą╝ąŠąČąĄčé ą▓čŗąĘą▓ą░čéčī čäčāąĮą║čåąĖčÄ UcanSetDebugMode() ą┤ą╗čÅ ą░ą║čéąĖą▓ąĖąĘą░čåąĖąĖ čŹč鹊ą╣ ąŠą┐čåąĖąĖ. ą¤ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ čüą╝. ą▓ čüąĄą║čåąĖąĖ 2.3.2.1 ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ąĮą░ ą╝ąŠą┤čāą╗ąĖ GW-001, GW-002, 3004006, 32040xx, 34040xx (USB-CANmodul GW-001, GW-002, 3004006, 32040xx, 34040xx Systems Manual) [1].
[ąśąĮą┤ąĖą║ą░čåąĖąŠąĮąĮčŗąĄ čüą▓ąĄč鹊ą┤ąĖąŠą┤čŗ čüčéą░čéčāčüą░ USB-CANmodul]
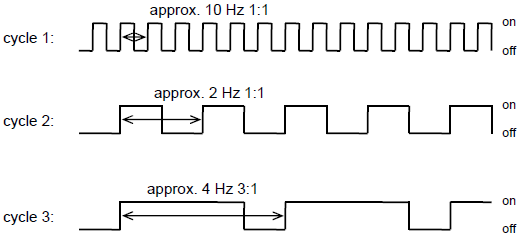
ąĪąŠčüč鹊čÅąĮąĖąĄ ą║ą░ąČą┤ąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ ą╝ąŠą┤čāą╗čÅ USB-CANmodul ąŠč鹊ą▒čĆą░ąČą░čÄčéčüčÅ ą┤ą▓čāą╝čÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ą╝ąĖ, ą║čĆą░čüąĮčŗą╝ ąĖ ąĘąĄą╗ąĄąĮčŗą╝ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ą╝ąĖ. ą¦č鹊ą▒čŗ ąŠčéą┤ąĄą╗ąĖčéčī čĆą░ąĘąĮčŗąĄ čüąŠčüč鹊čÅąĮąĖčÅ, ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ čĆą░ąĘąĮčŗą╣ čģą░čĆą░ą║č鹥čĆ čåąĖą║ą╗ąŠą▓ ą╝ąĖą│ą░ąĮąĖčÅ (blinking cycle). Cycle 1 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čćą░čüč鹊ą╝čā ą╝ąĖą│ą░ąĮąĖčÄ čü čćą░čüč鹊č鹊ą╣ ą┐čĆąĖą╝ąĄčĆąĮąŠ 10 ąōčå, ą│ą┤ąĄ ą▓čĆąĄą╝čÅ ą▓čŗą║ą╗čÄč湥ąĮąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ čĆą░ą▓ąĮąŠ ą▓ą║ą╗čÄč湥ąĮąĮąŠą╝čā. Cycle 2 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą╝ąĄą┤ą╗ąĄąĮąĮąŠą╝čā ą╝ąĖą│ą░ąĮąĖčÄ čü čćą░čüč鹊č鹊ą╣ ą┐čĆąĖą╝ąĄčĆąĮąŠ 2 ąōčå, ą│ą┤ąĄ ą▓čĆąĄą╝čÅ ą▓čŗą║ą╗čÄč湥ąĮąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ čéą░ą║ąČąĄ čĆą░ą▓ąĮąŠ ą▓ą║ą╗čÄč湥ąĮąĮąŠą╝čā. Cycle 3 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą╝ąĖą│ą░ąĮąĖčÄ čü čćą░čüč鹊č鹊ą╣ ą┐čĆąĖą╝ąĄčĆąĮąŠ 4 ąōčå, ą│ą┤ąĄ ą▓čĆąĄą╝čÅ ą▓čŗą║ą╗čÄč湥ąĮąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ ą▓ 3 čĆą░ąĘą░ ą╝ąĄąĮčīčłąĄ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ.
ą”ąĖą║ą╗čŗ ą╝ąĖą│ą░ąĮąĖčÅ ą╝ąŠą│čāčé čüąŠąŠą▒čēą░čéčī ąŠ čéą░ą║ąĖčģ čüąŠą▒čŗčéąĖčÅčģ, ą║ą░ą║ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ (firmware), ąĘą░ą┐ąĖčüąĖ ą▓ ą╗ąŠą│, čüąŠčüč鹊čÅąĮąĖąĄ ąŠčłąĖą▒ą║ąĖ ąĮą░ ą║ą░ąĮą░ą╗ąĄ, ąĮąĄą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą╝ ą║ą░ą▒ąĄą╗ąĄ USB ąĖ čé. ą┐. ą¤ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ čüą╝. ą▓ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ USB-CANmodul GW-001, GW-002, 3004006, 32040xx, 34040xx Systems Manual [1].
[ąĪčüčŗą╗ą║ąĖ]
1. ąöčĆą░ą╣ą▓ąĄčĆ, ą┐ą░ą║ąĄčé ą┐čĆąĖą╝ąĄčĆąŠą▓ ąĖ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ USB-CANmodul Utility Disk.
2. ąśąĮč鹥čĆč乥ą╣čü CAN ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ ARM AT91SAM7X256. |




ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ
ą×čłąĖą▒ą║ą░ CS0123 ąØąĄčé ą┐ąĄčĆąĄą│čĆčāąČąĄąĮąĮąŠą│ąŠ ą╝ąĄč鹊ą┤ą░ ą┤ą╗čÅ "USBcan_CanMsgRe ceivedEvent", ą║ąŠč鹊čĆčŗą╣ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą┤ąĄą╗ąĄą│ą░čéčā "USBcanServer.CanMsgReceivedE ventEventHandle r".
IDE0060 ąŻą┤ą░ą╗ąĖčéčī ąĮąĄąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ "bChannel_p", ąĄčüą╗ąĖ ąŠąĮ ąĮąĄ čÅą▓ą╗čÅąĄčéčüčÅ čćą░čüčéčīčÄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄą╝ąŠą│ ąŠ ąŠą▒čēąĄą┤ąŠčüčéčāą┐ąĮąŠą│ąŠ API.
microsin: čüąĄą╣čćą░čü ąĮąĄ ą╝ąŠą│čā ą┐ąŠą┤čüą║ą░ąĘą░čéčī, ą▓ č湥ą╝ ą┐čĆąŠą▒ą╗ąĄą╝ą░, ąŠč湥ąĮčī ą┤ą░ą▓ąĮąŠ ą┐ąĖčüą░ą╗čüčÅ čŹč鹊čé ą║ąŠą┤. ąÆąŠąĘą╝ąŠąČąĮąŠ, čćč鹊 ą┐ąŠą╝ąĄąĮčÅą╗ąŠčüčī API. ą¤ąŠčüą╝ąŠčéčĆąĖč鹥 ą▓ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ, ą║ą░ą║ąĖąĄ ąĄčüčéčī ą┤ąŠčüčéčāą┐ąĮčŗąĄ ą╝ąĄč鹊ą┤čŗ čā ą║ą╗ą░čüčüą░.
microsin: ą▓ C++ ąŠą┤ąĮąŠ ąĖ č鹊 ąČąĄ ąĖą╝čÅ čäčāąĮą║čåąĖąĖ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┐ąŠ-čĆą░ąĘąĮąŠą╝čā, čü čĆą░ąĘąĮčŗą╝ ąĮą░ą▒ąŠčĆąŠą╝ ą░čĆą│čāą╝ąĄąĮč鹊ą▓. ąŁčéą░ čäąĖčćą░ ąŠą▒čŖąĄą║čéąĮąŠ-ąŠčĆąĖąĄąĮčéąĖčĆąŠą▓ą░ąĮąĮąŠą│ ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖ čÅ ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ą░ (overloading). ąöą▓ąĄ ą▓ąĄčĆčüąĖąĖ ąŠą┤ąĮąŠą╣ ąĖ č鹊ą╣ ąČąĄ čäčāąĮą║čåąĖąĖ ą▓ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ - ąĮą░ą▓ąĄčĆąĮčÅą║ą░ ąĖą╝ąĄąĮąĮąŠ čŹč鹊čé čüą╗čāčćą░ą╣.
bRet = CANsrv.InitHardware();
if (USBCAN_SUCCESS FUL != bRet)
{
applog.write("InitHardware error");
return;
}
ąĪčéčāą┤ąĖčÅ čĆčāą│ą░ąĄčéčüčÅ ąĮą░ ąĖą╝ąĄąĮą░ bRet, USBCAN_SUCCESSF UL, applog. ąØąĄ ą┐ąŠą┤čüą║ą░ąČąĄč鹥, ą┐ąŠč湥ą╝čā ąĖčģ ąĮąĄ ą▓ąĖą┤ąĖčé ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆ?
RSS ą╗ąĄąĮčéą░ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĄą▓ čŹč鹊ą╣ ąĘą░ą┐ąĖčüąĖ