|
ąÜąŠą╝ą┐ą░ąĮąĖčÅ FTDI čĆąĄą░ą╗ąĖąĘąŠą▓ą░ą╗ą░ ą▓ čüą▓ąŠąĖčģ čćąĖą┐ą░čģ ą░ą┐ą┐ą░čĆą░čéąĮčāčÄ č鹥čģąĮąŠą╗ąŠą│ąĖčÄ Multi-Protocol Synchronous Serial Engine, čüąŠą║čĆą░čēąĄąĮąĮąŠ MPSSE. MPSSE ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą│ąĖą▒ą║ąŠąĄ čüčĆąĄą┤čüčéą▓ąŠ čüąŠą┐čĆčÅąČąĄąĮąĖčÅ čüąĖąĮčģčĆąŠąĮąĮčŗčģ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ čü ą┐ąŠčĆč鹊ą╝ USB. "Multi-Protocol" ą▓ ąĮą░ąĘą▓ą░ąĮąĖąĖ MPSSE ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą▓ąŠąĘą╝ąŠąČąĮą░ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ą╝ąĮąŠąČąĄčüčéą▓ą░ čüąĖąĮčģčĆąŠąĮąĮčŗčģ ą┐ąŠą┐čāą╗čÅčĆąĮčŗčģ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓, čéą░ą║ąĖčģ ą║ą░ą║ SPI, I2C ąĖ JTAG. ążąŠčĆą╝ą░čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĖ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ čéą░ą║č鹊ą▓ ą╝ąŠąČąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī čĆą░ąĘą╗ąĖčćąĮčŗą╝ąĖ čüą┐ąŠčüąŠą▒ą░ą╝ąĖ, čćč鹊 ą▓ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąĄ čüą╗čāčćą░ąĄą▓ ą╝ąŠąČąĄčé čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆąĖčéčī čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝ ą╗čÄą▒čŗčģ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓. ąÆ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ ą▓čŗą▓ąŠą┤ą░ą╝ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ą┤ąŠčüčéčāą┐ąĮčŗ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ GPIO. ąÆ čŹč鹊ą╝ ą┤ąŠą║čāą╝ąĄąĮč鹥 (ą┐ąĄčĆąĄą▓ąŠą┤ ą░ą┐ąĮąŠčāčéą░ AN_135 [1]) ąŠą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ą▒ą░ąĘąŠą▓čŗąĄ ą╝ąĄč鹊ą┤čŗ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ MPSSE ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ, ąĖ ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāčÄčéčüčÅ ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┤ąŠčüčéčāą┐ąĮčŗąĄ čĆąĄąČąĖą╝čŗ čĆą░ą▒ąŠčéčŗ.
[ąóčĆąĄą▒čāąĄą╝čŗąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ]
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ MPSSE čéčĆąĄą▒čāąĄčé ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗčģ čüčĆąĄą┤čüčéą▓:
1. ą£ąĖą║čĆąŠčüčģąĄą╝ą░ FTDI FT-čüąĄčĆąĖąĖ, ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĮą░čÅ MPSSE. ąØą░ ą╝ąŠą╝ąĄąĮčé ą┐čāą▒ą╗ąĖą║ą░čåąĖąĖ ą░ą┐ąĮąŠčāčéą░ [1] ą║ąŠą╝ą┐ą░ąĮąĖčÅ FTDI ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖą╗ą░ čéčĆąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ čü ą▒ą╗ąŠą║ąŠą╝ MPSSE:
a. FT2232D ŌĆō USB 2.0 Full-Speed Dual UART/FIFO čü ąŠą┤ąĮąĖą╝ ą▒ą╗ąŠą║ąŠą╝ MPSSE (6Mbps ą╝ą░ą║čüąĖą╝čāą╝).
b. FT2232H ŌĆō USB 2.0 Hi-Speed Dual UART/FIFO čü ą┤ą▓čāą╝čÅ ą▒ą╗ąŠą║ą░ą╝ąĖ MPSSE (ą┐ąŠ 30Mbps ą║ą░ąČą┤čŗą╣, ą╝ą░ą║čüąĖą╝čāą╝).
c. FT4232H ŌĆō USB 2.0 Hi-Speed Quad UART čü ą┤ą▓čāą╝čÅ ą▒ą╗ąŠą║ą░ą╝ąĖ MPSSE (ą┐ąŠ 30Mbps ą║ą░ąČą┤čŗą╣, ą╝ą░ą║čüąĖą╝čāą╝).
2. ąöčĆą░ą╣ą▓ąĄčĆčŗ čāčüčéčĆąŠą╣čüčéą▓ą░ FTDI D2XX:
a. ąóčĆąĄą▒čāąĄčéčüčÅ ą┐ąŠčüą╗ąĄą┤ąĮčÅčÅ ą▓ąĄčĆčüąĖčÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ą░ D2XX. ąŁč鹊čé ą┤čĆą░ą╣ą▓ąĄčĆ ą┤ąŠčüčéčāą┐ąĄąĮ ą┤ą╗čÅ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčŗčģ čüąĖčüč鹥ą╝. ąöą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą┐ąŠčüąĄčéąĖč鹥 čüčéčĆą░ąĮąĖčćą║čā [2]. ąØą░ ą╝ąŠą╝ąĄąĮčé čüąŠąĘą┤ą░ąĮąĖčÅ ą┐ąĄčĆąĄą▓ąŠą┤ą░ [1] 190918 ą┤ą╗čÅ ą▓čüąĄčģ ą▓ąĄčĆčüąĖą╣ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčŗčģ čüąĖčüč鹥ą╝ Windows ąŠčé Windows XP ą┤ąŠ Windows 10 (ą║ą░ą║ 32-ą▒ąĖčéąĮčŗčģ, čéą░ą║ ąĖ 64-ą▒ąĖčéąĮčŗčģ ą▓ąĄčĆčüąĖą╣) čüčāčēąĄčüčéą▓ąŠą▓ą░ą╗ ą┤ą╗čÅ ąĘą░ą║ą░čćą║ąĖ ąĄą┤ąĖąĮčŗą╣ ą┐ą░ą║ąĄčé ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ CDM v2.12.28 WHQL Certified.zip, ą│ą┤ąĄ ąĮą░čģąŠą┤ąĖą╗ąĖčüčī ą┤čĆą░ą╣ą▓ąĄčĆčŗ VCP ąĖ D2XX, ą░ čéą░ą║ąČąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ DLL ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü čäčāąĮą║čåąĖčÅą╝ąĖ API D2XX [3].
3. ąöąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ:
a. ąöą░čéą░čłąĖčé ąĮą░ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ čćąĖą┐ FTDI FT-čüąĄčĆąĖąĖ čü ą▒ą╗ąŠą║ąŠą╝ MPSSE.
b. ąĀčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ą┐ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÄ D2XX [3].
c. ąÉą┐ąĮąŠčāčé AN_108 (ąĖą╗ąĖ čüą╝. ąĄą│ąŠ ą┐ąĄčĆąĄą▓ąŠą┤ [4]).
ąźąŠčéčÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗąĄ ąĮą░ čüą░ą╣č鹥 FTDI ą┐čĆąĖą╝ąĄčĆčŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ čüą┐ąĄčåąĖčäąĖčćąĮčŗ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ SPI, I2C ąĖ JTAG, čćą░čüč鹊 ą┐čĆąŠčēąĄ ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ ą║ MPSSE ąĮą░ą┐čĆčÅą╝čāčÄ č湥čĆąĄąĘ ą▓čŗąĘąŠą▓čŗ D2XX. ąÆ čŹč鹊ą╣ čüčéą░čéčīąĄ ą║ą░ą║ čĆą░ąĘ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čÄčéčüčÅ ą┐čĆąĖą╝ąĄčĆčŗ čéą░ą║ąĖčģ ą▓čŗąĘąŠą▓ąŠą▓.
ą¤čĆąĖą╝ąĄčĆčŗ ą║ąŠą┤ą░, čüąŠą┤ąĄčƹȹ░čēąĖąĄčüčÅ ą▓ čŹč鹊ą╝ ą┤ąŠą║čāą╝ąĄąĮč鹥, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮčŗ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąĖ, ąĖ FTDI ąĮąĄ ąĮąĄčüąĄčé ąĮąĖą║ą░ą║ąŠą╣ ąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠčüčéąĖ ąĖ ąĮąĄ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé ą┐čĆą░ą▓ąĖą╗čīąĮąŠčüčéčī čŹč鹊ą│ąŠ ą║ąŠą┤ą░.
ąĀąĄąČąĖą╝čŗ Master/Slave. MPSSE ą▓čüąĄą│ą┤ą░ čÅą▓ą╗čÅąĄčéčüčÅ master-ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ ą┤ą╗čÅ ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą│ąĄąĮąĄčĆąĖčĆčāčÄčéčüčÅ čéą░ą║čéčŗ, čéčĆąĄą▒čāąĄą╝čŗąĄ čüąĖą│ąĮą░ą╗čŗ ąĖąĮč鹥čĆč乥ą╣čüą░ ąĖ čüąĖą│ąĮą░ą╗čŗ ą▓čŗą▒ąŠčĆą║ąĖs. MPSSE ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé ą▓ čĆąĄąČąĖą╝ąĄ slave.
[ąÉą┐ą┐ą░čĆą░čéąĮčŗąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ]
ąśą╝ąĄąĄčéčüčÅ 4 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ ą▓čŗą▓ąŠą┤ą░ ą▓ ą║ą░ąČą┤ąŠą╝ ą║ą░ąĮą░ą╗ąĄ MPSSE ą▓ą╝ąĄčüč鹥 čü ąĮą░ą▒ąŠčĆąŠą╝ ą▓čŗą▓ąŠą┤ąŠą▓ GPIO. ąóą░ą▒ą╗ąĖčåą░ 2.1 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čĆą░ąĘą╗ąĖčćąĮčŗąĄ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą▓čŗą▓ąŠą┤ąŠą▓.
ąóą░ą▒ą╗ąĖčåą░ 2.1. ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓ MPSSE.
ąśą╝čÅ čüąĖą│ąĮą░ą╗ą░
|
FT2232H
|
FT4232H
|
FT2232D |
| Channel A |
Channel B |
Channel A |
Channel B |
Channel A |
| TDI/DO |
17 |
39 |
17 |
27 |
23 |
| TDO/DI |
18 |
40 |
18 |
28 |
22 |
| TCK/SK |
16 |
38 |
16 |
26 |
24 |
| TMS/CS |
19 |
41 |
19 |
29 |
21 |
| GPIOL0 |
21 |
43 |
21 |
30 |
20 |
| GPIOL1 |
22 |
44 |
22 |
32 |
19 |
| GPIOL2 |
23 |
45 |
23 |
33 |
17 |
| GPIOL3 |
24 |
46 |
24 |
34 |
16 |
| GPIOH0 |
26 |
48 |
- |
- |
15 |
| GPIOH1 |
27 |
52 |
- |
- |
13 |
| GPIOH2 |
28 |
53 |
- |
- |
12 |
| GPIOH3 |
29 |
54 |
- |
- |
11 |
| GPIOH4 |
30 |
55 |
- |
- |
- |
| GPIOH5 |
32 |
57 |
- |
- |
- |
| GPIOH6 |
33 |
58 |
- |
- |
- |
| GPIOH7 |
34 |
59 |
- |
- |
- |
MPSSE ą╝ąŠąČąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą┐ąŠčćčéąĖ ą╗čÄą▒ąŠą│ąŠ čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░. ąóą░ą▒ą╗ąĖčåą░ 2.2 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ąĘąĮą░č湥ąĮąĖąĄ čüąĖą│ąĮą░ą╗ąŠą▓ ą┤ą╗čÅ ąĮą░ąĖą▒ąŠą╗ąĄąĄ ą┐ąŠą┐čāą╗čÅčĆąĮčŗčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ SPI, I2C ąĖ JTAG, ą░ čéą░ą║ąČąĄ čüąĖą│ąĮą░ą╗čŗ GPIO, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą╗čāčćą░čÄčé ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčāčÄ čäčāąĮą║čåąĖčÄ.
ąóą░ą▒ą╗ąĖčåą░ 2.2. ą¤čĆąĖčüą▓ą░ąĖą▓ą░ąĮąĖąĄ čüąĖą│ąĮą░ą╗ąŠą▓ ą┐ąŠą┐čāą╗čÅčĆąĮčŗčģ čüąĖąĮčģčĆąŠąĮąĮčŗčģ čłąĖąĮ.
ąĪąĖą│ąĮą░ą╗ MPSSE
|
ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ SPI
|
ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ I2C |
ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ JTAG |
| TDI/DO (ą▓čŗą▓ąŠą┤ ą┤ą░ąĮąĮčŗčģ) |
MOSI |
SDA(1) |
TDI(2) |
| TDO/DI (ą▓ą▓ąŠą┤ ą┤ą░ąĮąĮčŗčģ) |
MISO |
SDA(1) |
TDO(2) |
| TCK/SK (čéą░ą║čéčŗ) |
SCLK |
SCK |
TCK |
| TMS/CS (ą▓čŗą▒ąŠčĆą║ą░) |
CS |
ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ |
TMS |
| GPIOL0 |
ą┤ąŠčüčéčāą┐ąĮąŠ |
| GPIOL1 |
WAIT(4) ąĖą╗ąĖ STOPCLK(3)(4) |
| GPIOL2 |
ą┤ąŠčüčéčāą┐ąĮąŠ |
| GPIOL3 |
ą┤ąŠčüčéčāą┐ąĮąŠ |
RTCK(3)(4) |
| GPIOH0 |
ą┤ąŠčüčéčāą┐ąĮąŠ |
| GPIOH1 |
ą┤ąŠčüčéčāą┐ąĮąŠ |
| GPIOH2 |
ą┤ąŠčüčéčāą┐ąĮąŠ |
| GPIOH3 |
ą┤ąŠčüčéčāą┐ąĮąŠ |
| GPIOH4 |
ą┤ąŠčüčéčāą┐ąĮąŠ |
| GPIOH5 |
ą┤ąŠčüčéčāą┐ąĮąŠ |
| GPIOH6 |
ą┤ąŠčüčéčāą┐ąĮąŠ |
| GPIOH7 |
ą┤ąŠčüčéčāą┐ąĮąŠ |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
(1) ąÆčŗą▓ąŠą┤čŗ DI ąĖ DO ąĮčāąČąĮąŠ čüąŠąĄą┤ąĖąĮąĖčéčī ą▓ą╝ąĄčüč鹥, čćč鹊ą▒čŗ čüąŠąĘą┤ą░čéčī ą┐ąŠą╗ąĮčŗą╣ čüąĖą│ąĮą░ą╗ SDA ą┤ą╗čÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ I2C/TWI. ąÆčŗą▓ąŠą┤ DO čéčĆąĄą▒čāąĄčéčüčÅ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą║ą░ą║ ą▓čģąŠą┤ ą║čĆąŠą╝ąĄ čüą╗čāčćą░čÅ, ą║ąŠą│ą┤ą░ ąĖą┤ąĄčé ą┐ąĄčĆąĄą┤ą░čćą░ - čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą║ąŠąĮčäą╗ąĖą║čéą░ ą▓čŗčģąŠą┤ąŠą▓ ą┐čĆąĖ ą┐ąĄčĆąĄą┤ą░č湥 ą┤ą░ąĮąĮčŗčģ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠą╝.
(2) ąśą╝ąĄąĮą░ čüąĖą│ąĮą░ą╗ąŠą▓ ą┤ą░ąĮčŗ ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ čåąĄą┐ąŠčćą║ąĄ JTAG. TDI čŹč鹊 ą▓čģąŠą┤ ą┤ą╗čÅ ą┐ąĄčĆą▓ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ čåąĄą┐ąŠčćą║ąĄ JTAG; čüąĖą│ąĮą░ą╗ MPSSE DO ą▒čāą┤ąĄčé ą┐ąŠą┤ą║ą╗čÄčćą░čéčīčüčÅ ą║ TDI. TDO čŹč鹊 ą▓čŗčģąŠą┤ ąĖąĘ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ čåąĄą┐ąŠčćą║ąĄ JTAG; čüąĖą│ąĮą░ą╗ MPSSE DI ą▒čāą┤ąĄčé ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ TDO.
(3) ąóąŠą╗čīą║ąŠ ą┤ą╗čÅ ą╝ąĖą║čĆąŠčüčģąĄą╝ FT2232H ąĖ FT4232H.
(4) ąŁčéąĖ ą▓čŗą▓ąŠą┤čŗ ą┤ąŠčüčéčāą┐ąĮčŗ ą┤ą╗čÅ GPIO ąĄčüą╗ąĖ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą║ąŠą╝ą░ąĮą┤čŗ MPSSE, ą║ąŠč鹊čĆčŗąĄ ąĘą░ą┤ąĄą╣čüčéą▓čāčÄčé čŹčéąĖ ą▓čŗą▓ąŠą┤čŗ.
[ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čŗąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ]
ąÜą░ąČą┤čŗą╣ čéąĖą┐ ąĖąĮč鹥čĆč乥ą╣čüą░ čéčĆąĄą▒čāąĄčé ą┤ą╗čÅ čüąĄą▒čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ čāąĮąĖą║ą░ą╗čīąĮčŗčģ čüčģąĄą╝ąĮčŗčģ čĆąĄčłąĄąĮąĖą╣. ąśąĘ-ąĘą░ čéą░ą║ąŠą│ąŠ čĆą░ąĘąĮąŠąŠą▒čĆą░ąĘąĖčÅ ąĘą┤ąĄčüčī ąĮąĄą╗čīąĘčÅ čĆą░čüčüą╝ąŠčéčĆąĄčéčī ą║ą░ąČą┤čŗą╣ ą║ąŠąĮą║čĆąĄčéąĮčŗą╣ čüą╗čāčćą░ą╣. ąöą░ą╗ąĄąĄ ą┐ąŠą║ą░ąĘą░ąĮčŗ ąĮąĄą║ąŠč鹊čĆčŗąĄ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čéčī ą║ą░ą║ ąŠčéą┐čĆą░ą▓ąĮčāčÄ č鹊čćą║čā ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ą║ą░ąČą┤ąŠą│ąŠ ąĖąĘ ą┐ąŠą┐čāą╗čÅčĆąĮčŗčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓.
ąöčĆą░ą╣ą▓ąĄčĆčŗ čüąĖą│ąĮą░ą╗ąŠą▓ I/O ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ FTDI USB (Hi-Speed devices FT2232H ąĖ FT4232H) čĆą░ą▒ąŠčéą░čÄčé čü čāčĆąŠą▓ąĮčÅą╝ąĖ ą╗ąŠą│ąĖą║ąĖ 3.3V. ąśčģ ą▓čģąŠą┤čŗ ą┤ąŠą┐čāčüą║ą░čÄčé čāčĆąŠą▓ąĮąĖ ą╗ąŠą│ąĖą║ąĖ 5V (5V-tolerant), čé. ąĄ. ąĖčģ ą╝ąŠąČąĮąŠ ąĮą░ą┐čĆčÅą╝čāčÄ ą┐ąŠą┤ą║ą╗čÄčćą░čéčī ą║ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ čü ąĖąĮč鹥čĆč乥ą╣čüąŠą╝, ą│ą┤ąĄ ą┤ąĄą╣čüčéą▓čāčÄčé čāčĆąŠą▓ąĮąĖ 5V. ąöą╗čÅ ą┐ąŠą╗ąĮąŠčüą║ąŠčĆąŠčüčéąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ FTDI USB (Full-Speed device FT2232D) ąĖąĮč鹥čĆč乥ą╣čü I/O čĆą░ą▒ąŠčéą░ąĄčé čü čāčĆąŠą▓ąĮčÅą╝ąĖ ą╗ąŠą│ąĖą║ąĖ, ąŠą┐čĆąĄą┤ąĄą╗čÅąĄą╝čŗą╝ąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝ VCCIO. ąĪą╗ąĄą┤čāąĄčé ą▓ąĮąĖą╝ą░č鹥ą╗čīąĮąŠ ąĖąĘčāčćąĖčéčī ą▓čüąĄ ą┤ą░čéą░čłąĖčéčŗ ą┐čĆąĖą╝ąĄąĮčÅąĄą╝čŗčģ čāčüčéčĆąŠą╣čüčéą▓, čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéčī ą┐ąŠčĆąŠą│ąŠą▓ čāčĆąŠą▓ąĮąĄą╣ I/O ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą┤ąŠą┐čāčüčéąĖą╝čŗčģ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣.
SPI ŌĆō Single Slave. ą¤čĆąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĖ ąŠą┤ąĮąŠą│ąŠ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ SPI-čāčüčéčĆąŠą╣čüčéą▓ą░ čüčāčēąĄčüčéą▓čāąĄčé ą▓ąĘą░ąĖą╝ąŠčüą▓čÅąĘčī čüąĖą│ąĮą░ą╗ąŠą▓ ąŠą┤ąĖąĮ-ą║-ąŠą┤ąĮąŠą╝čā. ąŻ ąĮąĄą║ąŠč鹊čĆčŗčģ SPI-čāčüčéčĆąŠą╣čüčéą▓ ąĮąĄčé ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓čģąŠą┤ąĮčŗčģ ąĖ ą▓čŗčģąŠą┤ąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓ ą┤ą░ąĮąĮčŗčģ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąÉą”ą¤ ą╝ąŠąČąĄčé ąĮąĄ ąĖą╝ąĄčéčī čüąĖą│ąĮą░ą╗ą░ ą▓ą▓ąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ MOSI, ą░ čā ą”ąÉą¤ ą╝ąŠąČąĄčé ąĮąĄ ą▒čŗčéčī čüąĖą│ąĮą░ą╗ą░ ą▓čŗą▓ąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ MISO. ąĪąĖą│ąĮą░ą╗čŗ čćąĖą┐ąŠą▓ FTx232D/FTx232DH čüąĮą░ą▒ąČąĄąĮčŗ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ąĖ čĆąĄąĘąĖčüč鹊čĆą░ą╝ąĖ ą▓ąĄčĆčģąĮąĄą╣ ą┐ąŠą┤čéčÅąČą║ąĖ (pull-up), ą┐ąŠčŹč鹊ą╝čā ąĄčüą╗ąĖ ąŠąĮąĖ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ, č鹊 ą╝ąŠą│čāčé ąŠčüčéą░ą▓ą░čéčīčüčÅ ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝ąĖ.
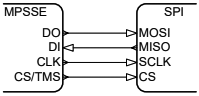
ąĀąĖčü. 2.1. ą¤čĆąĖą╝ąĄčĆ čüčģąĄą╝čŗ SPI čü ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄą╝ ąŠą┤ąĮąŠą│ąŠ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (Single Slave).
ąĪąĖą│ąĮą░ą╗ ą▓čŗą▒ąŠčĆą║ąĖ (chip select, CS) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ąĖąĮč鹥čĆč乥ą╣čüą░ slave-čāčüčéčĆąŠą╣čüčéą▓ą░. ąÜąŠą│ą┤ą░ ąĮą░ čłąĖąĮąĄ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ SPI, ąĄą│ąŠ ą▓čŗą▒ąŠčĆą║ą░ ą╝ąŠąČąĄčé ąĮą░ą┐čĆčÅą╝čāčÄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ą║ ą░ą║čéąĖą▓ąĮąŠą╝čā čāčĆąŠą▓ąĮčÄ ą▓čŗą▒ąŠčĆą║ąĖ ąĖąĮč鹥čĆč乥ą╣čüą░. ąØąĄą║ąŠč鹊čĆčŗąĄ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ SPI čéčĆąĄą▒čāčÄčé ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą┐ąŠą┤ą░čćąĖ ąĖą╝ą┐čāą╗čīčüą░ ą▓čŗą▒ąŠčĆą║ąĖ.
SPI ŌĆō Multiple Slaves. ąØąĄčüą║ąŠą╗čīą║ąŠ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ SPI (multiple SPI slaves) čüąŠą▓ą╝ąĄčüčéąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčé čüąĖą│ąĮą░ą╗čŗ ą▓čģąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ, ą▓čŗčģąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ ąĖ čéą░ą║č鹊ą▓. ą×ą┤ąĮą░ą║ąŠ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ slave-čāčüčéčĆąŠą╣čüčéą▓ą░ čéčĆąĄą▒čāąĄčéčüčÅ ąŠčéą┤ąĄą╗čīąĮčŗą╣ čüąĖą│ąĮą░ą╗ ą▓čŗą▒ąŠčĆą║ąĖ (chip select, CS). ąöą╗čÅ ą▓čŗą▒ąŠčĆą║ąĖ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╗čÄą▒ąŠą╣ ą┤ąŠčüčéčāą┐ąĮčŗą╣ čüąĖą│ąĮą░ą╗ GPIO, ą▓ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╝čā čüąĖą│ąĮą░ą╗čā MPSSE CS, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ą░ą║ ąĄčēąĄ ąŠą┤ąĖąĮ čüąĖą│ąĮą░ą╗ ą▓čŗą▒ąŠčĆą║ąĖ. ąÆ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ ąĮą░ čłąĖąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą░ą║čéąĖą▓ąĮčŗą╝ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ. ą¤čĆąŠą│čĆą░ą╝ą╝ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ąŠą╗ąČąĮą░ ąŠčéčüą╗ąĄąČąĖą▓ą░čéčī, ą║ą░ą║ąŠąĄ ąĖąĘ SPI slave čāčüčéčĆąŠą╣čüčéą▓ąŠ čĆą░ąĘčĆąĄčłąĄąĮąŠ ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ.
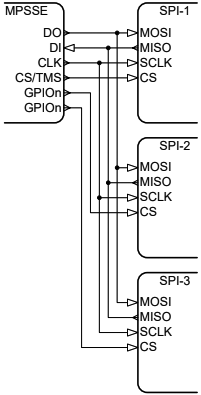
ąĀąĖčü. 2.2. ą¤čĆąĖą╝ąĄčĆ čüčģąĄą╝čŗ SPI čü ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄą╝ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ (Multiple Slaves).
ąÜą░ą║ ąĖ čüąŠ čüą╗čāčćą░ąĄą╝ ąĄą┤ąĖąĮčüčéą▓ąĄąĮąĮąŠą│ąŠ slave-čāčüčéčĆąŠą╣čüčéą▓ą░, ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ čüąĖą│ąĮą░ą╗čŗ DO ąĖ DI ą╝ąŠąČąĮąŠ ąŠčüčéą░ą▓ąĖčéčī ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝ąĖ.
I2C ŌĆō Single Slave. I2C čŹč鹊 ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮą░čÅ, ą┐ąŠą╗čāą┤čāą┐ą╗ąĄą║čüąĮą░čÅ čüčģąĄą╝ą░ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ. ąźąŠčéčÅ ą┐ąŠą╗ąĮą░čÅ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ master-čāčüčéčĆąŠą╣čüčéą▓ ąĮą░ čłąĖąĮąĄ, MPSSE ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī čĆąĄąČąĖą╝ č鹊ą╗čīą║ąŠ čü ąŠą┤ąĮąĖą╝ ą╝ą░čüč鹥čĆąŠą╝. ą¤ąŠą┤čćąĖąĮąĄąĮąĮčŗčģ čüčéčĆąŠą╣čüčéą▓ ą╝ąŠąČąĄčé ą▒čŗčéčī ą║ą░ą║ ąŠą┤ąĮąŠ, čéą░ą║ ąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ. ąØąĖąČąĄ ąĮą░ čĆąĖčü. 2.3 ą┐ąŠą║ą░ąĘą░ąĮ čüą╗čāčćą░ąĄ čü ąŠą┤ąĮąĖą╝ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ I2C (Single Slave).
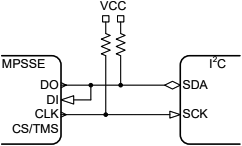
ąĀąĖčü. 2.3. ą¤čĆąĖą╝ąĄčĆ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ąŠą┤ąĮąŠą│ąŠ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ I2C (Single Slave).
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠąĮą░ą┤ąŠą▒čÅčéčüčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čłą░ą│ąĖ ą┤ą╗čÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ MPSSE DO, čćč鹊ą▒čŗ ąĮąĄ ą┤ąŠą┐čāčüčéąĖčéčī ą║ąŠąĮčäą╗ąĖą║čéą░ ą▓čŗčģąŠą┤ąŠą▓ ąĮą░ čłąĖąĮąĄ.
ąÆąŠąĘą╝ąŠąČąĮčŗ ąĖ ą┤čĆčāą│ąĖąĄ čüčģąĄą╝čŗ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ, ąŠą┤ąĮą░ą║ąŠ ąĖčģ čĆą░čüčüą╝ąŠčéčĆąĄąĮąĖąĄ ą▓čŗčģąŠą┤ąĖčé ąĘą░ čĆą░ą╝ą║ąĖ čŹč鹊ą│ąŠ ą┤ąŠą║čāą╝ąĄąĮčéą░.
I2C ŌĆō Multiple Slaves. ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ čłąĖąĮąĄ I2C ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čāčüčéčĆąŠą╣čüčéą▓ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊 ą▓čüąĄ čüąĖą│ąĮą░ą╗čŗ čüąŠąĄą┤ąĖąĮčÅčÄčéčüčÅ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ.
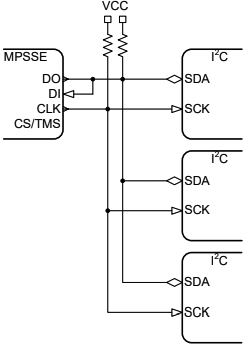
ąĀąĖčü. 2.4. ą¤čĆąĖą╝ąĄčĆ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ I2C (Multiple Slaves).
ąÜą░ą║ ąĖ ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĮą░ čłąĖąĮąĄ ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ master-čāčüčéčĆąŠą╣čüčéą▓ąŠ (čćąĖą┐ą░ FTDI), ąĖ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░ MPSSE DO čéčĆąĄą▒čāąĄčéčüčÅ ą┐ąĄčĆąĄą║ą╗čÄčćą░čéčī, čćč鹊ą▒čŗ ąĮąĄ ą▒čŗą╗ąŠ ą║ąŠąĮčäą╗ąĖą║čéą░ ą▓čŗčģąŠą┤ąŠą▓ ąĮą░ čłąĖąĮąĄ.
JTAG. ąĀąĄą░ą╗ąĖąĘą░čåąĖąĖ JTAG čģąŠčĆąŠčłąŠ ąŠą┐ąĖčüą░ąĮčŗ ą▓ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ IEEE 1149.1. DO ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ ą┐ąĄčĆą▓ąŠą╝čā čüąĖą│ąĮą░ą╗čā JTAG TAP TDI ą▓ čåąĄą┐ąŠčćą║ąĄ. ą¤ąĄčĆą▓čŗą╣ JTAG TDO čüąŠąĄą┤ąĖąĮčÅąĄčéčüčÅ čüąŠ ą▓č鹊čĆčŗą╝ JTAG TDI. ąóą░ą║ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčéčüčÅ ą┤ą╗čÅ ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓ ą▓ čåąĄą┐ąŠčćą║ąĄ JTAG. ą¤ąŠčüą╗ąĄą┤ąĮąĖą╣ TDO ą▒čāą┤ąĄčé ą┐ąŠą┤ą║ą╗čÄčćą░čéčīčüčÅ ą║ąŠ ą▓čģąŠą┤čā MPSSE DI. ąĪąĖą│ąĮą░ą╗čŗ TCK ąĖ TMS čüąŠąĄą┤ąĖąĮčÅčÄčéčüčÅ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ ą┤ą╗čÅ ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓ JTAG TAP devices.

ąĀąĖčü. 2.5. JTAG - ą┐čĆąĖą╝ąĄčĆ čüčģąĄą╝čŗ čü ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ TAP.
ą¦ą░čüč鹊 čü čåąĄą╗čīčÄ čĆą░ąĘą▒ąĖąĄąĮąĖčÅ ą┤ą╗ąĖąĮąĮąŠą╣ čåąĄą┐ąŠčćą║ąĖ JTAG ą┐čĆąĖą╝ąĄąĮčÅčÄčéčüčÅ ą┤čĆčāą│ąĖąĄ čüčģąĄą╝čŗ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ. ąŁčéąĖ čüą╗čāčćą░ąĖ ą▓čŗčģąŠą┤čÅčé ąĘą░ čĆą░ą╝ą║ąĖ ąŠą┐ąĖčüą░ąĮąĖčÅ ą▓ čŹč鹊ą╝ ą┤ąŠą║čāą╝ąĄąĮč鹥.
[ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░]
ąÆčüąĄ ą║ąŠą╝ą░ąĮą┤čŗ MPSSE, ą║ą░ą║ ąĖ ąŠą▒čēąĖąĄ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ čü FTDI MPSSE, ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą┐ąŠ čłąĖąĮąĄ USB ąŠčé ą║ąŠą╝ą┐čīčÄč鹥čĆą░-čģąŠčüčéą░ ą║ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ FT-čüąĄčĆąĖąĖ. ąöą╗čÅ čŹč鹊ą│ąŠ čéčĆąĄą▒čāčÄčéčüčÅ ą▓čŗąĘąŠą▓čŗ D2XX API, ąĖ ą▓čüąĄ ą║ąŠą╝ą░ąĮą┤čŗ MPSSE č乊čĆą╝ąĖčĆčāčÄčéčüčÅ ą┐ąŠčüčĆąĄą┤čüčéą▓ąŠą╝ ą▓čŗąĘąŠą▓ąŠą▓ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ (čüą╝. ą▓čŗčłąĄ čĆą░ąĘą┤ąĄą╗ "ąóčĆąĄą▒čāąĄą╝čŗąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ").
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čüč乊čĆą╝ąĖčĆąŠą▓ą░ąĮą░ čéčĆąĄą▒čāąĄą╝ą░čÅ čüčģąĄą╝ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖą╣, ąĮčāąČąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčīčüčÅ, ą║ą░ą║ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī MPSSE ą┤ą╗čÅ čĆąĄą░ą╗čīąĮąŠą│ąŠ ąŠą▒ą╝ąĄąĮą░ čü čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ (target device) ąĖą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ. ąØąĖąČąĄ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░ąĄčéčüčÅ, ą║ą░ą║ąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąĮčāąČąĮąŠ ą┤ą╗čÅ čŹč鹊ą│ąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī.
ą¤ąŠčĆčÅą┤ąŠą║ ą▒ąĖčé ąĖ ą┤ą╗ąĖąĮą░ ą┤ą░ąĮąĮčŗčģ (MSB/LSB ąĖ Data Length). ąÜąŠą╝ą░ąĮą┤čŗ MPSSE ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāčÄčé ąŠą▒ą╝ąĄąĮ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ąĖ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ, ą║ąŠą│ą┤ą░ ą┐ąĄčĆą▓čŗą╝ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą╗ąĖą▒ąŠ čüčéą░čĆčłąĖą╣ ą▒ąĖčé (MSB), ą╗ąĖą▒ąŠ ą╝ą╗ą░ą┤čłąĖą╣ (LSB). ą¤čĆąŠą║ąŠąĮčüčāą╗čīčéąĖčĆčāą╣č鹥čüčī čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ ą┐čĆąŠč鹊ą║ąŠą╗ą░ čāą┐čĆą░ą▓ą╗čÅąĄą╝ąŠą╣ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ, ą▓ ą║ą░ą║ąŠą╝ ą┐ąŠčĆčÅą┤ą║ąĄ čüą╗ąĄą┤čāąĄčé ą┐ąŠčüčŗą╗ą░čéčī ą▒ąĖčéčŗ ą┤ą░ąĮąĮčŗčģ. ąÆą░ąČąĮąŠ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąĮčāąČąĮčāčÄ ą║ąŠą╝ą░ąĮą┤čā MPSSE, čćč鹊ą▒čŗ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą▒čŗą╗ąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝.
ąÜąŠą╝ą░ąĮą┤čŗ MPSSE ąĘą░ą┤ą░čÄčéčüčÅ ą▓ ą▒ą░ą╣čéą░čģ, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ąŠčĆąĖąĄąĮčéą░čåąĖąĖ čåąĄą╗ąĄą▓ąŠą│ąŠ čāą┐čĆą░ą▓ą╗čÅąĄą╝ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (target device). ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ 93C46D EEPROM čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ ą┤ą╗čÅ 16-ą▒ąĖčéąĮąŠą╣ ąŠčĆąĖąĄąĮčéą░čåąĖąĖ, č鹊 ą▒ą░ą╣čé 0 ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą┐ąĄčĆą▓čŗą╝ ąĖąĘ ąŠč湥čĆąĄą┤ąĖ MPSSE, ąĖ ąŠąĮ ą▒čāą┤ąĄčé čüą░ą╝čŗą╝ ąĘąĮą░čćą░čēąĖą╝ ą▒ąĖč鹊ą╝ ą▓ 16-ą▒ąĖčéąĮąŠą╝ čüą╗ąŠą▓ąĄ (ą▒ą░ą╣čéčŗ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ čü ą┐ąŠčĆčÅą┤ą║ąŠą╝ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ big endian). ąæą░ą╣čé 1 ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮ čüą╗ąĄą┤čāčÄčēąĖą╝, ąĖ ąŠąĮ čüčéą░ąĮąĄčé ą╝ą╗ą░ą┤čłąĖą╝ ąĘąĮą░čćą░čēąĖą╝ ą▒ą░ą╣č鹊ą╝ ą▓ 16-ą▒ąĖčéąĮąŠą╝ čüą╗ąŠą▓ąĄ.
ąĪčāčēąĄčüčéą▓čāčÄčé ą║ą░ą║ ą▒ą░ą╣čé-ąŠčĆąĖąĄąĮčéąĖčĆąŠą▓ą░ąĮąĮčŗąĄ, čéą░ą║ ąĖ ą▒ąĖčé-ąŠčĆąĖąĄąĮčéąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ MPSSE, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ą┐čĆąĖčüą┐ąŠčüąŠą▒ąĖčéčīčüčÅ ą║ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ąĮąĄ čĆą░ą▒ąŠčéą░čéčī čü 8-ą▒ąĖčéąĮčŗą╝ąĖ ąĖąĮą║čĆąĄą╝ąĄąĮčéą░ą╝ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ ą┤ą░ąĮąĮčŗčģ.
ą¦ą░čüč鹊čéą░ čéą░ą║č鹊ą▓. ąÜą░ą║ ąĖ čü ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ, ą▓ą░ąČąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąĮąĄ č鹊ą╗čīą║ąŠ čüą║ąŠčĆąŠčüčéčī (čćą░čüč鹊čéčā) čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ąĖą╝ą┐čāą╗čīčüąŠą▓ čéą░ą║č鹊ą▓, ąĮąŠ čéą░ą║ąČąĄ ąĖčģ ą░ą║čéąĖą▓ąĮčŗąĄ ą┐ąĄčĆąĄą┐ą░ą┤čŗ ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ ą┤čĆčāą│ąĖą╝ čüąĖą│ąĮą░ą╗ą░ą╝. ąó. ąĄ. ąĮą░ ą║ą░ą║ąĖčģ ą┐ąĄčĆąĄą┐ą░ą┤ą░čģ (čüą┐ą░ą┤, ąĮą░čĆą░čüčéą░ąĮąĖąĄ) čāčĆąŠą▓ąĮčÅ čéą░ą║č鹊ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ FTx232H/FTx232D ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ąĖ ą┐čĆąĖąĮąĖą╝ą░čéčī ą┤ą░ąĮąĮčŗąĄ.
FT2232D čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ ą▒ą░ąĘąŠą▓ąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹥 12 ą£ąōčå. 16-ą▒ąĖčéąĮčŗą╣ ą┤ąĄą╗ąĖč鹥ą╗čī čćą░čüč鹊čéčŗ (Divisor), ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ, čĆą░čüčüčćąĖčéčŗą▓ą░ąĄčéčüčÅ ą┐ąŠ čüą╗ąĄą┤čāčÄčēąĄą╣ č乊čĆą╝čāą╗ąĄ:
12 ą£ąōčå
ąĪą║ąŠčĆąŠčüčéčī ą┤ą░ąĮąĮčŗčģ = -----------------
(1 + Divisor) * 2
16-ą▒ąĖčéąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ Divisor ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé 0x0000 ą┤ąŠ 0xFFFF ą┐ąŠą║čĆčŗą▓ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą╝ąĄąČą┤čā 6 ą£ąōčå ąĖ 92 ąōčå.
ą£ąĖą║čĆąŠčüčģąĄą╝čŗ FT2232H ąĖ FT4232H (FTx232H), čĆą░ą▒ąŠčéą░čÄčēąĖąĄ ąĮą░ ą▒ą░ąĘąŠą▓ąŠą╣ čćą░čüč鹊č鹥 60 ą£ąōčå, ą▓ 5 čĆą░ąĘ ą▒čŗčüčéčĆąĄąĄ FT2232D. ąöą╗čÅ ąĮąĖčģ č乊čĆą╝čāą╗ą░ čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ čüą╗ąĄą┤čāčÄčēą░čÅ:
60 ą£ąōčå
ąĪą║ąŠčĆąŠčüčéčī ą┤ą░ąĮąĮčŗčģ = -----------------
(1 + Divisor) * 2
16-ą▒ąĖčéąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ Divisor ą╝ąĖą║čĆąŠčüčģąĄą╝ FTx232H ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé 0x0000 ą┤ąŠ 0xFFFF ą┐ąŠą║čĆčŗą▓ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą╝ąĄąČą┤čā 30 ą£ąōčå ąĖ ą┐čĆąĖą╝ąĄčĆąĮąŠ 460 ąōčå.
ąŻ ą╝ąĖą║čĆąŠčüčģąĄą╝ FTx232H čéą░ą║ąČąĄ ąĄčüčéčī ąŠą┐čåąĖčÅ ą┤ąĄą╗ąĄąĮąĖčÅ ąĮą░ 5. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąŠąĮą░ čĆą░ąĘčĆąĄčłąĄąĮą░, čćč鹊ą▒čŗ čüąŠčģčĆą░ąĮąĖčéčī čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéčī čü FT2232D. ąÜąŠą│ą┤ą░ ą░ą║čéąĖą▓ąĮą░ ąŠą┐čåąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą│ąŠ ą┤ąĄą╗ąĄąĮąĖčÅ ąĮą░ 5, ą┤ą╗čÅ čĆą░čüč湥čéą░ čüą║ąŠčĆąŠčüčéąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č乊čĆą╝čāą╗ą░ ą┤ą╗čÅ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ FT2232D.
ąÉą║čéąĖą▓ąĮčŗąĄ ą┐ąĄčĆąĄą┐ą░ą┤čŗ čéą░ą║č鹊ą▓. ąöą░ąĮąĮčŗąĄ ąŠą▒čŗčćąĮąŠ ą▓ą┤ą▓ąĖą│ą░čÄčéčüčÅ ąĖ ą▓čŗą┤ą▓ąĖą│ą░čÄčéčüčÅ ą┐ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░ą╝ čāčĆąŠą▓ąĮčÅ čéą░ą║č鹊ą▓. ąöą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖą╗ąĖ ą┐čĆąĖąĄą╝ą░ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą╗ąĖą▒ąŠ čüą┐ą░ą┤ (ąŠčé ą╗ąŠą│. 1 ą║ ą╗ąŠą│. 0), ą╗ąĖą▒ąŠ ąĮą░čĆą░čüčéą░ąĮąĖąĄ (ąŠčé ą╗ąŠą│. 0 ą║ ą╗ąŠą│. 1) čāčĆąŠą▓ąĮčÅ čüąĖą│ąĮą░ą╗ą░ čéą░ą║č鹊ą▓. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ą┐ąŠą╗čāčćą░ąĄčéčüčÅ 6 ą▓ąŠąĘą╝ąŠąČąĮčŗčģ ą▓ą░čĆąĖą░ąĮč鹊ą▓, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗčģ ą▓ čéą░ą▒ą╗ąĖčåąĄ 3.1.
ąóą░ą▒ą╗ąĖčåą░ 3.1. ą¤ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĖ ą┐ąĄčĆąĄą┐ą░ą┤čŗ čéą░ą║č鹊ą▓.
| ą¤ąĄčĆąĄą┐ą░ą┤ čéą░ą║č鹊ą▓ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ |
ą¤ąĄčĆąĄą┐ą░ą┤ čéą░ą║č鹊ą▓ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░
|
ąĪąŠčüč鹊čÅąĮąĖąĄ čéą░ą║č鹊ą▓ ą▓ čĆąĄąČąĖą╝ąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ |
| ążčĆąŠąĮčé Ōåæ |
ążčĆąŠąĮčé Ōåæ |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ąŠ |
| ążčĆąŠąĮčé Ōåæ |
ąĪą┐ą░ą┤ |
ąøąŠą│. 0 |
| ąĪą┐ą░ą┤ Ōåō |
ążčĆąŠąĮčé Ōåæ |
ąøąŠą│. 1 |
| ąĪą┐ą░ą┤ Ōåō |
ąĪą┐ą░ą┤ Ōåō |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ąŠ |
| ążčĆąŠąĮčé Ōåæ |
ąØąĄčé ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ |
ąøąŠą│. 0 |
| ąĪą┐ą░ą┤ Ōåō |
ąØąĄčé ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ |
ąøąŠą│. 1 |
| ąØąĄčé ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ |
ążčĆąŠąĮčé Ōåæ |
ąøąŠą│. 0 |
| ąØąĄčé ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ |
ąĪą┐ą░ą┤ Ōåō |
ąøąŠą│. 1 |
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą▓ąŠąĘą╝ąŠąČąĮčŗ ą║ą░ą║ ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗąĄ, čéą░ą║ ąĖ ąŠą┤ąĮąŠąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗąĄ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ.
ąØą░ ąŠčüąĮąŠą▓ąĄ čŹč鹊ą╣ čéą░ą▒ą╗ąĖčåčŗ ąĖ ą┤ą░čéą░čłąĖčéą░ ąĮą░ čåąĄą╗ąĄą▓ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüčé ą▓čŗą▒ąĖčĆą░ąĄčé, ą║ą░ą║ąĖąĄ ą┐ąĄčĆąĄą┐ą░ą┤čŗ ąĮčāąČąĮčŗ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ. ąÆ ą▓čŗčłąĄčāą┐ąŠą╝čÅąĮčāč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ 93C46D ą┤ą░ąĮąĮčŗąĄ EEPROM ą▓ą┤ą▓ąĖą│ą░čÄčéčüčÅ ąĖ ą▓čŗą┤ą▓ąĖą│ą░čÄčéčüčÅ ą┐ąŠ čäčĆąŠąĮčéčā ąĮą░čĆą░čüčéą░ąĮąĖčÅ čéą░ą║č鹊ą▓. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ MPSSE ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą┐ąŠ čüą┐ą░ą┤čā čéą░ą║č鹊ą▓ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗ąĖčé čüčéą░ą▒ąĖą╗ąĖąĘąĖčĆąŠą▓ą░čéčīčüčÅ ą┤ą░ąĮąĮčŗą╝ ąĮą░ čłąĖąĮąĄ ą▓ ą╝ąŠą╝ąĄąĮčé ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ čäčĆąŠąĮčéą░ ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ čéą░ą║č鹊ą▓.
ąóą░ą║čéčŗ ą▒ąĄąĘ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ. ą£ąŠą│čāčé ą▒čŗčéčī ą▓čŗą┤ą░ąĮčŗ ą║ąŠą╝ą░ąĮą┤čŗ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüąĖą│ąĮą░ą╗ą░ čéą░ą║č鹊ą▓ ą▒ąĄąĘ ą║ą░ą║ąŠą╣-ą╗ąĖą▒ąŠ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ. ąöąŠčüčéčāą┐ąĮčŗ ąŠą┐čåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčé ą│ąĄąĮąĄčĆą░čåąĖčÄ čéą░ą║č鹊ą▓ čüąĖą│ąĮą░ą╗ąŠą╝ GPIO, ąĖą╗ąĖ ą┐čĆąŠčüčéčŗą╝ čāą║ą░ąĘą░ąĮąĖąĄą╝ ąĮčāąČąĮąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝čŗčģ ąĖą╝ą┐čāą╗čīčüąŠą▓ čéą░ą║č鹊ą▓.
3-čäą░ąĘąĮąŠąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ (č鹊ą╗čīą║ąŠ ą┤ą╗čÅ FT2232H ąĖ FT4232H). ąöą╗čÅ I2C ą┤ą░ąĮąĮčŗąĄ ą┤ąŠčüčéčāą┐ąĮčŗ ą┤ą╗čÅ target ąĮą░ ąŠą▒ąŠąĖčģ ą┐ąĄčĆąĄą┐ą░ą┤ą░čģ čéą░ą║č鹊ą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ SCK. ąśąĘą╝ąĄąĮąĄąĮąĖąĄ čāčĆąŠą▓ąĮčÅ ą┤ą░ąĮąĮčŗčģ SDA ą┐čĆąŠąĖčüčģąŠą┤ąĖčé č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ ąĮą░ čüąĖą│ąĮą░ą╗ąĄ čéą░ą║č鹊ą▓ SCK ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 0.
ą×čüąŠą▒ąĄąĮąĮąŠčüčéąĖ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ JTAG. ąÆ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ čüąĖą│ąĮą░ą╗ą░ą╝ in/out ą┤ą░ąĮąĮčŗčģ ąĖ čéą░ą║čéą░ą╝, JTAG čéčĆąĄą▒čāąĄčé č湥čéą▓ąĄčĆč鹊ą│ąŠ čüąĖą│ąĮą░ą╗ą░ TMS, čāčĆąŠą▓ąĮąĖ ą║ąŠč鹊čĆąŠą│ąŠ ąŠčüčāčēąĄčüčéą▓ą╗čÅčÄčé ąĮą░ą▓ąĖą│ą░čåąĖčÄ ą┐ąŠ ą╝ą░čłąĖąĮąĄ čüąŠčüč鹊čÅąĮąĖą╣ IEEE 1149.1. MPSSE ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé TMS ą║ą░ą║ ąĮąĄą║ąĖą╣ ą▓č鹊čĆąŠą╣ ą▓čŗčģąŠą┤ ą┤ą░ąĮąĮčŗčģ. ą”ąĄą┐ąŠčćą║ą░ ą║ąŠą╝ą░ąĮą┤, ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝čŗčģ ą▓ MPSSE, čüąŠčüč鹊ąĖčé ą║ą░ą║ ąĖąĘ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ, čéą░ą║ ąĖ ąĖąĮčüčéčĆčāą║čåąĖą╣ ą▓čŗą▓ąŠą┤ą░ TMS.
ąÆčüąĄ ąŠą▒ą╝ąĄąĮčŗ ą┤ą░ąĮąĮčŗą╝ąĖ JTAG ąŠčüčāčēąĄčüčéą▓ą╗čÅčÄčéčüčÅ čü ą┐ąĄčĆąĄą┤ą░č湥ą╣ ą┐ąĄčĆą▓čŗą╝ ą╝ą╗ą░ą┤čłąĄą│ąŠ ą▒ąĖčéą░ (LSB). ąöą░ąĮąĮčŗąĄ ą▓ą┤ą▓ąĖą│ą░čÄčéčüčÅ ą▓ Test Access Port (TAP) ą┐ąŠ čäčĆąŠąĮčéčā ąĮą░čĆą░čüčéą░ąĮąĖčÅ čéą░ą║č鹊ą▓ TCK, čéą░ą║ čćč鹊 MPSSE ą┤ąŠą╗ąČąĮą░ ą▓čŗč鹊ą╗ą║ąĮčāčéčī ą┤ą░ąĮąĮčŗąĄ ąĮą░čĆčāąČčā ą┐ąŠ čüą┐ą░ą┤čā čāčĆąŠą▓ąĮčÅ čéą░ą║č鹊ą▓. ąöą░ąĮąĮčŗąĄ ą▓čŗą┤ą▓ąĖą│ą░čÄčéčüčÅ ąĖčģ TAP ą┐ąŠ čüą┐ą░ą┤čā čāčĆąŠą▓ąĮčÅ čéą░ą║č鹊ą▓ TCK, ą┐ąŠčŹč鹊ą╝čā MPSSE ą┤ąŠą╗ąČąĮą░ ą▓ą▓ąĄčüčéąĖ ą┤ą░ąĮąĮčŗąĄ ąĮą░ čäčĆąŠąĮč鹥 ąĮą░čĆą░čüčéą░ąĮąĖčÅ čéą░ą║č鹊ą▓ TCK. ąØą░čćą░ą╗čīąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ (ą║ą░ą║ ąĖ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ ąĮą░ čłąĖąĮąĄ) čéą░ą║č鹊ą▓ TCK - ą╗ąŠą│. 1.
ąÉą┤ą░ą┐čéąĖą▓ąĮąŠąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ čŹč鹊 čüčĆąĄą┤čüčéą▓ąŠ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą┐čĆąĖ ą│ąĄąĮąĄčĆą░čåąĖąĖ TCK ą┤ą╗čÅ ąĮąĄą║ąŠč鹊čĆčŗčģ target MCU. ąĪąĖą│ąĮą░ą╗ RTCK (return clock) čŹč鹊 ą▓čģąŠą┤, ą┐ąŠ ą║ąŠč鹊čĆąŠą╝čā MPSSE ą┐ąŠą┤čüčéčĆą░ąĖą▓ą░ąĄčé ą▓čŗčģąŠą┤ TCK ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ čćą░čüč鹊č鹥 JTAG TAP. ą×ą▒čŗčćąĮąŠ čŹčéą░ čäčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░čģ ąĮą░ čÅą┤čĆąĄ ARM.
ą¤čĆąĖą╝ąĄčĆ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą╣ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ FT2232H čüą╝. ą▓ ą░ą┐ąĮąŠčāč鹥 "AN_129 Interfacing FTDI USB Hi-Speed Devices to a JTAG TAP" (ą┐ąĄčĆąĄą▓ąŠą┤ čŹč鹊ą│ąŠ ą░ą┐ąĮąŠčāčéą░ čüą╝. ą▓ čüčéą░čéčīąĄ [5]).
ąØą░čćą░ą╗čīąĮčŗąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą▓čŗą▓ąŠą┤ąŠą▓. ąÆą░ąČąĮąŠ ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 ą│ąĄąĮąĄčĆą░čåąĖčÅ čéą░ą║č鹊ą▓ ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĮą░čćą░ą╗čīąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ ą▓čŗčģąŠą┤ą░ SK. ąōąĄąĮąĄčĆą░čåąĖčÅ čéą░ą║č鹊ą▓ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čéą░ą▒ą╗ąĖčåąĄą╣ 3.2.
ąóą░ą▒ą╗ąĖčåą░ 3.2. ąøąŠą│ąĖč湥čüą║ąĖąĄ čāčĆąŠą▓ąĮąĖ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąĖą╝ą┐čāą╗čīčüą░ čéą░ą║č鹊ą▓.
| ąØą░čćą░ą╗čīąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ SK/TCK |
ąōąĄąĮąĄčĆąĖčĆčāąĄą╝čŗą╣ ąĖą╝ą┐čāą╗čīčü čéą░ą║č鹊ą▓ |
| 0 |
0 ŌåÆ 1 ŌåÆ 0 |
| 1 |
1 ŌåÆ 0 ŌåÆ 1 |
ą¤ąĄčĆąĄą┤ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ ąĖą╗ąĖ ą┐čĆąĖąĄą╝ąŠą╝ ą╗čÄą▒čŗčģ ą┤ą░ąĮąĮčŗčģ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ 4 ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗčģ ą▓čŗą▓ąŠą┤ą░ MPSSE ąĖ ą╗čÄą▒čŗąĄ čüąĖą│ąĮą░ą╗čŗ GPIO, čćč鹊ą▒čŗ čā ąĮąĖčģ ą▒čŗą╗ąĖ ą┐čĆą░ą▓ąĖą╗čīąĮčŗąĄ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ąĖ ąĄčüą╗ąĖ čŹč鹊 ą▓čŗčģąŠą┤, č鹊 čā ąĮąĄą│ąŠ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą┐čĆą░ą▓ąĖą╗čīąĮąŠąĄ ąĮą░čćą░ą╗čīąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÄ ą┤ą░ąĮąĮčŗčģ čüą╝. čüąĄą║čåąĖčÄ "2.2 Clock Operation" ą░ą┐ąĮąŠčāčéą░ AN_108 (ąĖą╗ąĖ čüą╝. ąĄą│ąŠ ą┐ąĄčĆąĄą▓ąŠą┤ [4], čüąĄą║čåąĖčÅ "ąĀą░ą▒ąŠčéą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ").
ąæąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠąĄ ąŠą▒čüčāąČą┤ąĄąĮąĖąĄ čłą░ą│ąŠą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ MPSSE ąĖ ąŠą▒ą╝ąĄąĮą░ č湥čĆąĄąĘ ąĮąĄčæ ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ą▓ čüąĄą║čåąĖąĖ "ą¤čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ" ą┤ą░ą╗ąĄąĄ.
ąĀą░ąĘą╝ąĄčĆčŗ ą▒čāč乥čĆąŠą▓. ąöą░ąĮąĮčŗąĄ ąĖ ą║ąŠą╝ą░ąĮą┤čŗ MPSSE čüą╝ąĄčłąĖą▓ą░čÄčéčüčÅ ą▓ ąŠą┤ąĮąŠą╝ ą▒čāč乥čĆąĄ, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮąĖąČąĄ ą▓ čéą░ą▒ą╗ąĖčåąĄ 3.3. ą£ąŠąČąĮąŠ ąŠčéą┐čĆą░ą▓ąĖčéčī ą▓ MPSSE ąĮąĄčüą║ąŠą╗čīą║ąŠ ą║ąŠą╝ą░ąĮą┤ č湥čĆąĄąĘ ąŠą┤ąĖąĮ ą▓čŗąĘąŠą▓ FT_Write. ąæčāč乥čĆčŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ čĆą░ąĘą╝ąĄčĆą░, čćč鹊ą▒čŗ ą▓ ąĮąĖčģ ą┐ąŠą╝ąĄčüčéąĖą╗ą░čüčī čüą░ą╝ą░čÅ ą▒ąŠą╗čīčłą░čÅ ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÅ ą║ąŠą╝ą░ąĮą┤ ąĖ ą┤ą░ąĮąĮčŗčģ ą▓ ąŠą┤ąĮąŠą╝ ą▓čŗąĘąŠą▓ąĄ.
ąóą░ą▒ą╗ąĖčåą░ 3.3. ąÆčŗą┤ąĄą╗ąĄąĮąĖąĄ čĆą░ąĘą╝ąĄčĆą░ ą▒čāč乥čĆą░.
| ąóąĖą┐ ą┤ą░ąĮąĮčŗčģ |
ąöą╗ąĖąĮą░ (ą▓ ą▒ą░ą╣čéą░čģ) |
| ąÜąŠą╝ą░ąĮą┤ą░ (opcode) |
1 |
| ąöą╗ąĖąĮą░ ą┤ą░ąĮąĮčŗčģ |
2 |
| ąöą░ąĮąĮčŗąĄ, ą┐ąŠą╗ąĄąĘąĮą░čÅ ąĮą░ą│čĆčāąĘą║ą░ |
ąŠčé 1 ą┤ąŠ 65536 |
| ąÆčüąĄą│ąŠ |
ąŠčé 4 ą┤ąŠ 65539 |
[ą¤čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ]
ąÆąĄčüčī ąŠą▒ą╝ąĄąĮ čü MPSSE ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ č湥čĆąĄąĘ FTDI D2XX API, ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą┤ąŠą║čāą╝ąĄąĮč鹊ą╝ "D2XX ProgrammerŌĆÖs Guide" ą║ąŠą╝ą┐ą░ąĮąĖąĖ FTDI. ą¤ąĄčĆąĄą▓ąŠą┤ čŹč鹊ą│ąŠ ą┤ąŠą║čāą╝ąĄąĮčéą░ čüą╝. ą▓ čüčéą░čéčīąĄ [3].
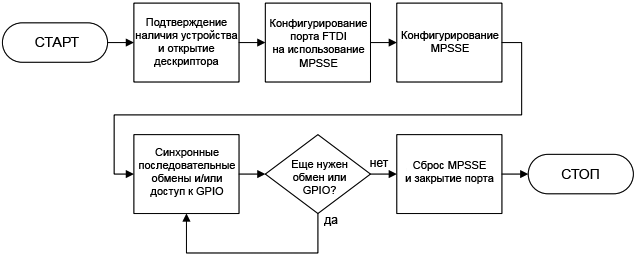
ąĀąĖčü. 4.1. ąÉą╗ą│ąŠčĆąĖčéą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ MPSSE.
ąĪą╗ąĄą┤čāčÄčēąĖąĄ čüąĄą║čåąĖąĖ ąŠą┐ąĖčüčŗą▓ą░čÄčé čéčĆąĄą▒čāąĄą╝čŗąĄ čłą░ą│ąĖ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ MPSSE ąĖ ąŠą▒ą╝ąĄąĮą░ čü ąĮąĄą╣.
ą¤ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ąĮą░ą╗ąĖčćąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ ąŠčéą║čĆčŗčéąĖąĄ ąĄą│ąŠ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░. ą¤ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ąĮą░čćą░čéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī MPSSE, ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ąŠą╗ąČąĮą░ ąĮą░ą╣čéąĖ ą▓ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ čģąŠčüčéą░, čüą║ąŠą╗čīą║ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ą║ ąĮąĄą╝čā USB-čāčüčéčĆąŠą╣čüčéą▓ FT-čüąĄčĆąĖąĖ, ąĖ ą┐ąŠčüą╗ąĄ ąĮčāąČąĮąŠ ą▓čŗą▒čĆą░čéčī ąŠą┤ąĮąŠ ąĖąĘ čŹčéąĖčģ čāčüčéčĆąŠą╣čüčéą▓. ąŁčéąĖ ą┤ąĄą╣čüčéą▓ąĖčÅ ą▓čŗą┐ąŠą╗ąĮčÅčÄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ąĖ ą▓čŗąĘąŠą▓ą░ą╝ąĖ D2XX API:
1. FT_CreateDeviceInfoList ŌĆō čŹč鹊čé ą▓čŗąĘąŠą▓ ą▓ąŠąĘą▓čĆą░čéąĖčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ ą║ čüąĖčüč鹥ą╝ąĄ čāčüčéčĆąŠą╣čüčéą▓ FT-čüąĄčĆąĖąĖ. ąÆą░ąČąĮąŠ ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 ą▓ čŹč鹊 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čģąŠą┤ąĖčé ą║ą░ąČą┤čŗą╣ ą┐ąŠčĆčé ą╝ąĮąŠą│ąŠą┐ąŠčĆč鹊ą▓ąŠą│ąŠ čćąĖą┐ą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, čā ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ FT2232H čéą░ą║ąĖčģ ą┐ąŠčĆč鹊ą▓ ą┤ą▓ą░).
2. FT_GetDeviceInfoList ąĖą╗ąĖ FT_GetDeviceInfoListDetail ŌĆō ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹊ą│ąŠ, ą║ą░ą║ čŹč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, ą▓čŗąĘąŠą▓ ą▓ąŠąĘą▓čĆą░čéąĖčéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ ą║ą░ąČą┤ąŠą╝čā ąĖąĘ ą┤ąŠčüčéčāą┐ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓. ąśąĮč乊čĆą╝ą░čåąĖčÅ ą▓ą║ą╗čÄčćą░ąĄčé ąĖą╝čÅ čāčüčéčĆąŠą╣čüčéą▓ą░, ą║ą░ą║ąŠą╣ čŹč鹊 ą┐ąŠčĆčé (ąĮą░ą┐čĆąĖą╝ąĄčĆ ŌĆ£FT2232H AŌĆØ ąĖą╗ąĖ ŌĆ£FT2232H BŌĆØ), USB Location ID, USB Serial Number, ąĖ ąĮą░ąĖą▒ąŠą╗ąĄąĄ ą▓ą░ąČąĮčŗą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ USB (USB Handle).
3. FT_Open ąĖą╗ąĖ FT_OpenEx ŌĆō ą║ą░ą║ č鹊ą╗čīą║ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą┐ąŠčĆčéą░, ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ąŠčéą║čĆčŗčéčī ą┐ąŠčĆčé, ąĖčüą┐ąŠą╗čīąĘčāčÅ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ, ą┐ąŠą╗čāč湥ąĮąĮčŗą╣ ąĮą░ čłą░ą│ąĄ 2.
ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠčĆčéą░ FTDI ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ MPSSE. ą¤ąŠčüą╗ąĄ ąŠčéą║čĆčŗčéąĖčÅ ą┐ąŠčĆčéą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą╝ąŠąČąĮąŠ ą▒čāą┤ąĄčé čĆą░ąĘčĆąĄčłąĖčéčī MPSSE. ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ čüąŠčüč鹊ąĖčé ąĖąĘ čüą╗ąĄą┤čāčÄčēąĖčģ čłą░ą│ąŠą▓:
1. FT_ResetDevice ŌĆō čüą▒čĆąŠčü ą┐ąĄčĆąĖč乥čĆąĖąĖ ą┐ąŠčĆčéą░ FTDI.
2. FT_SetUSBParameters ŌĆō ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗčģ čĆą░ąĘą╝ąĄčĆąŠą▓ ą┐ąĄčĆąĄą┤ą░čć USB. ąŚąĮą░č湥ąĮąĖąĄ čĆą░ąĘą╝ąĄčĆą░ ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ąŠčé 64 ą▒ą░ą╣čé ą┤ąŠ 64 ą║ąĖą╗ąŠą▒ą░ą╣čé, ąĖ čŹč鹊 ąĘą░ą▓ąĖčüąĖčé ąŠčé ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗąĄ ąĮčāąČąĮąŠ ą┐ąĄčĆąĄą┤ą░čéčī ąĖą╗ąĖ ą┐čĆąĖąĮčÅčéčī. ą£ąŠąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ąŠčéą┤ąĄą╗čīąĮčŗąĄ čĆą░ąĘą╝ąĄčĆčŗ ą▓čģąŠą┤ąĮčŗčģ ąĖ ą▓čŗčģąŠą┤ąĮčŗčģ ą┐ąĄčĆąĄą┤ą░čć.
3. FT_SetChars ŌĆō ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé čüąĖą╝ą▓ąŠą╗čŗ čüąŠą▒čŗčéąĖčÅ ąĖ ąŠčłąĖą▒ą║ąĖ (event, error characters). ąæąŠą╗čīčłąĖąĮčüčéą▓ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ąĘą░ą┐čĆąĄčēą░čÄčé ą╗čÄą▒čŗąĄ čüąĖą╝ą▓ąŠą╗čŗ čüąŠą▒čŗčéąĖčÅ ąĖ ąŠčłąĖą▒ą║ąĖ.
4. FT_SetTimeouts ŌĆō ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé čéą░ą╣ą╝ą░čāčéčŗ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ ą▓ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ą░čģ. ąŁčéąĖ čéą░ą╣ą╝ą░čāčéčŗ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĘą░ą┐čĆąĄčēąĄąĮčŗ, čćč鹊 ąŠą▒čŗčćąĮąŠ ą┤ą░ąĄčé ą┤čĆą░ą╣ą▓ąĄčĆčā čāčüčéčĆąŠą╣čüčéą▓ą░ čłą░ąĮčü ąĖąĘą▒ąĄąČą░čéčī ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ.
5. FT_SetLatencyTimer ŌĆō ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé ą▓ąĄą╗ąĖčćąĖąĮčā ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą╗čÅ ąŠąČąĖą┤ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┤ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ ąĮąĄą┐ąŠą╗ąĮąŠą│ąŠ ą┐ą░ą║ąĄčéą░ USB ąŠčé ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ąŠą▒čĆą░čéąĮąŠ čģąŠčüčéčā. ąöą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą║ąŠč鹊čĆčŗąĄ čéčĆąĄą▒čāčÄčé ą▒čŗčüčéčĆąŠą│ąŠ ąŠčéą▓ąĄčéą░ ąŠčé ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, čāčüčéą░ąĮąŠą▓ąĖč鹥 čéą░ą╣ą╝ąĄčĆ latency ą▓ ąĮąĖąĘą║ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ.
6. FT_SetFlowControl ŌĆō čüą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 RTS/CTS flow control, čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī čćč鹊 ą┤čĆą░ą╣ą▓ąĄčĆ ąĮąĄ ą▒čāą┤ąĄčé ą▓čŗčüčŗą╗ą░čéčī ąĘą░ą┐čĆąŠčüčŗ IN, ąĄčüą╗ąĖ ą▒čāč乥čĆ ąĮąĄ ą╝ąŠąČąĄčé ą┐čĆąĖąĮčÅčéčī ą┤ą░ąĮąĮčŗąĄ.
7. FT_SetBitMode ŌĆō mode = 0, mask = 0 ŌĆō čüą▒čĆąŠčü ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ MPSSE. ąÆčŗą┐ąŠą╗ąĮčÅąĄčé ąŠą▒čēąĖą╣ čüą▒čĆąŠčü MPSSE, ąĮąŠ ąĮąĄ čüą░ą╝ąŠą│ąŠ ą┐ąŠčĆčéą░.
8. FT_SetBitMode ŌĆō mode = 2, mask = 0 ŌĆō čĆą░ąĘčĆąĄčłą░ąĄčé ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ MPSSE. ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čŗą▓ąŠą┤ą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą┐ąŠąĘąČąĄ ą║ąŠą╝ą░ąĮą┤ą░ą╝ąĖ MPSSE.
ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ MPSSE. ąØą░čćąĖąĮą░čÅ čü čŹč鹊ą│ąŠ ą╝ąŠą╝ąĄąĮčéą░ MPSSE ą│ąŠč鹊ą▓ą░ ą║ ą┐čĆąĖąĄą╝čā ą║ąŠą╝ą░ąĮą┤ (ą║ąŠą┤ ąŠą┐ąĄčĆą░čåąĖąĖ, op-code). ąÜąŠą╝ą░ąĮą┤čŗ MPSSE čüąŠčüč鹊čÅčé ąĖąĘ ą║ąŠą┤ą░ ąŠą┐ąĄčĆą░čåąĖąĖ, ąĘą░ ą║ąŠč鹊čĆčŗą╝ ąĖą┤čāčé ąŠą┤ąĖąĮ ąĖą╗ąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓. ąÜąŠą┤čŗ ąŠą┐ąĄčĆą░čåąĖąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ ą░ą┐ąĮąŠčāč鹥 AN_108 (čüą╝. ą┐ąĄčĆąĄą▓ąŠą┤ čŹč鹊ą│ąŠ ą░ą┐ąĮąŠčāčéą░ ą▓ čüčéą░čéčīąĄ [4]). ążčāąĮą║čåąĖčÅ FT_Write ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ą║ąŠą╝ą░ąĮą┤ ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą▓ MPSSE. ą×čéą▓ąĄčéčŗ ąŠčé MPSSE ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čćąĖčéą░ąĄčé čü ą┐ąŠą╝ąŠčēčīčÄ čäčāąĮą║čåąĖąĖ FT_Read.
ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠą╣ ą║ąŠą╝ą░ąĮą┤čŗ (Bad Command Detection). ąĢčüą╗ąĖ ą▒čŗą╗ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮą░čÅ ą║ąŠą╝ą░ąĮą┤ą░, č鹊 MPSSE ą▓ąŠąĘą▓čĆą░čéąĖčé ąĘąĮą░č湥ąĮąĖąĄ 0xFA, ąĘą░ ą║ąŠč鹊čĆčŗą╝ ąĖą┤ąĄčé ą▒ą░ą╣čé, ą║ąŠč鹊čĆčŗą╣ ą▓čŗąĘą▓ą░ą╗ čüąŠčüč鹊čÅąĮąĖąĄ bad command.
ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī bad command detection ą║ą░ą║ ą╝ąĄč鹊ą┤ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ąĘą░čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮą░ ą╗ąĖ MPSSE čü ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ą¤čāč鹥ą╝ ąŠčéą┐čĆą░ą▓ą║ąĖ ąŠčłąĖą▒ąŠčćąĮąŠą╣ ą║ąŠą╝ą░ąĮą┤čŗ ąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ ąŠčéą▓ąĄčéą░ 0xFA ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą╝ąŠąČąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą▓ąŠąĘą╝ąŠąČąĄąĮ ąĖą╗ąĖ ąĮąĄčé ąŠą▒ą╝ąĄąĮ čü MPSSE.
MPSSE Setup. ąÜąŠą│ą┤ą░ čüą▓čÅąĘčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░, MPSSE ą┤ąŠą╗ąČąĮą░ č鹥ą┐ąĄčĆčī ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ ąĮą░ čćą░čüč鹊čéčā čéą░ą║č鹊ą▓, ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ ą▓čŗą▓ąŠą┤ąŠą▓ ąĖ ąĮą░čćą░ą╗čīąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓. MPSSE ą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░čģ FT2232H ąĖ FT4232H Hi-Speed USB ąĖą╝ąĄčÄčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ, ą║ąŠč鹊čĆčŗąĄ ąĮą░ą┤ąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī: Divide clock by 5 (ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠąĄ ą┤ąĄą╗ąĄąĮąĖąĄ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ ąĮą░ 5), 3-phase data clocking (čéčĆąĄčģčäą░ąĘąĮąŠąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ) ąĖ JTAG adaptive clocking (ą░ą┤ą░ą┐čéąĖą▓ąĮąŠąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ JTAG). ąźąŠčéčÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą╝ąŠą│čāčé ą┐ąŠą┤ąŠą╣čéąĖ ą║ ą║ą░ą║ąŠą╝čā-č鹊 ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÄ, ą▓čüąĄą│ą┤ą░ čģąŠčĆąŠčłąĄą╣ ą┐čĆą░ą║čéąĖą║ąŠą╣ ą▒čāą┤ąĄčé čÅą▓ąĮąŠ ąĘą░ą┤ą░čéčī ą▓čüąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ, ąŠčéą┐čĆą░ą▓ąĖą▓ ą║ąŠą┤čŗ ąŠą┐ąĄčĆą░čåąĖą╣ ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ąĖą╗ąĖ ąĘą░ą┐čĆąĄčéą░ ą║ą░ąČą┤ąŠą╣ ąĖąĘ čŹčéąĖčģ čäčāąĮą║čåąĖą╣.
ą×ą▒ą╝ąĄąĮ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą▓čüąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ, ą╝ąŠąČąĮąŠ ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčī ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ čü ą▓ąĮąĄčłąĮąĖą╝ąĖ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ.
ąĪ čåąĄą╗čīčÄ ą┤ąĖą░ą│ąĮąŠčüčéąĖą║ąĖ MPSSE ą╝ąŠąČąĮąŠ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ ą▓ čĆąĄąČąĖą╝ ąĘą░čåąĖą║ą╗ąĖą▓ą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ čüąŠ ą▓čģąŠą┤ą░ ąĮą░ ą▓čŗčģąŠą┤ (loop-back mode). ąöą░ąĮąĮčŗąĄ, ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝čŗąĄ č湥čĆąĄąĘ ą▓čŗą▓ąŠą┤ DO, ą▒čāą┤čāčé ą▓ąĮčāčéčĆąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐čĆąĖčģąŠą┤ąĖčéčī ąĮą░ ą▓čŗą▓ąŠą┤ DI.
ąś ą▓ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╝ čĆąĄąČąĖą╝ąĄ (normal mode), ąĖ ą▓ čĆąĄąČąĖą╝ąĄ loop-back, ąĄčüčéčī 32 ą▓ą░čĆąĖą░ąĮčéą░ ą▓čŗą▒ąŠčĆą░, ą║ą░ą║ ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ąĖą╗ąĖ ą┐čĆąĖąĮąĖą╝ą░čÄčéčüčÅ, ąĖą╗ąĖ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ/ą┐čĆąĖąĮąĖą╝ą░čÄčéčüčÅ. ąÆčŗą▒ąŠčĆ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ op-code ąĘą░ą▓ąĖčüąĖčé ąŠčé čüą╗ąĄą┤čāčÄčēąĄą│ąŠ:
- ą¤ąŠčĆčÅą┤ąŠą║ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą▒ąĖčé: ą┐ąĄčĆą▓čŗą╝ ąĖą┤ąĄčé MSB ąĖą╗ąĖ LSB. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ą║ą░ąČą┤čŗą╣ ą▒ą░ą╣čé ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčīčüčÅ ą▓ ąĘą░ą┤ą░ąĮąĮąŠą╝ ą┐ąŠčĆčÅą┤ą║ąĄ ą▒ąĖčé. ąĢčüą╗ąĖ ą┤ą░ąĮąĮčŗąĄ čüąŠčüč鹊čÅčé ąĖąĘ ą▒ąŠą╗ąĄąĄ č湥ą╝ 8 ą▒ąĖčé, ąŠčüąŠą▒ąŠąĄ ą▓ąĮąĖą╝ą░ąĮąĖąĄ čüą╗ąĄą┤čāąĄčé čāą┤ąĄą╗čÅčéčī č鹊ą╝čā, ą▓ ą║ą░ą║ąŠą╝ ą┐ąŠčĆčÅą┤ą║ąĄ ą▒čāą┤čāčé ą┐ąŠą╝ąĄčēąĄąĮčŗ ą▒ą░ą╣čéčŗ ą▓ ą▒čāč乥čĆ.
- ąÜą░ą║ ą▒čāą┤ąĄčé ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčīčüčÅ ąŠą▒ą╝ąĄąĮ: č鹊ą╗čīą║ąŠ ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ, č鹊ą╗čīą║ąŠ ąĖčģ ą┐čĆąĖąĄą╝, ąĖą╗ąĖ ąČąĄ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čćą░ ąĖ ą┐čĆąĖąĄą╝.
- ą¤ąĄčĆąĄą┤ą░čćą░ ą┐ąŠ ąĮą░čĆą░čüčéą░ąĮąĖčÄ čāčĆąŠą▓ąĮčÅ čéą░ą║č鹊ą▓ ąĖą╗ąĖ ą┐ąŠ čüą┐ą░ą┤čā; ą┐čĆąĖąĄą╝ ą┐ąŠ ąĮą░čĆą░čüčéą░ąĮąĖčÄ čāčĆąŠą▓ąĮčÅ čéą░ą║č鹊ą▓ ąĖą╗ąĖ ą┐ąŠ čüą┐ą░ą┤čā.
ąÜąŠą╝ą░ąĮą┤čŗ ą▓ ą▒čāč乥čĆąĄ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą▓ą╝ąĄčüč鹥 čü FT_Write, ąŠą▒čŗčćąĮąŠ ą┤ąŠą╗ąČąĮčŗ čüąŠą┐čĆąŠą▓ąŠąČą┤ą░čéčīčüčÅ FT_GetStatus ąĖ FT_Read, čćč鹊ą▒čŗ ą┐čĆąŠčćąĖčéą░čéčī ąŠčéą▓ąĄčé ąŠčé ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░.
[ąöąŠčüčéčāą┐ ą║ GPIO]
ąŻ ą║ą░ąČą┤ąŠą│ąŠ čćąĖą┐ą░ FTDI, ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĮąŠą│ąŠ MPSSE, ąĄčüčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▓čŗą▓ąŠą┤ąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ą░ą║ ą┐ąŠčĆčéčŗ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (general purpose input/output, čüąŠą║čĆą░čēąĄąĮąĮąŠ GPIO), ą║ą░ą║ ą▒čŗą╗ąŠ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ 2.2. ąÜą░ą║ ąĖ ą▓ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą╝ ąŠą▒ą╝ąĄąĮąĄ ą┤ą░ąĮąĮčŗą╝ąĖ, ą┤ą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ ąĮąŠąČąĄą║ GPIO, ą▓čŗą▓ąŠą┤ą░ ąĘąĮą░č湥ąĮąĖą╣ ąĖ ąĘą░ą┐čĆąŠčüą░ ąŠčé MPSSE čüąŠčüč鹊čÅąĮąĖčÅ čāčĆąŠą▓ąĮąĄą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ FT_Write. ą¤ąŠčüą╗ąĄ ą▓čŗą┤ą░čćąĖ ą▓ MPSSE ą║ąŠą╝ą░ąĮą┤čŗ ŌĆ£read GPIOŌĆØ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ FT_Read ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ, ąŠčéčĆą░ąČą░čÄčēąĖčģ čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓ GPIO.
[ąŚą░ą║čĆčŗčéąĖąĄ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░]
ąÜąŠą│ą┤ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĖą╗ąŠ ą▓čüąĄ ąŠą▒ą╝ąĄąĮčŗ ą┤ą░ąĮąĮčŗą╝ąĖ čü ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝, ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░ą║čĆčŗčé ą┤ąĄčüą║čĆąĖą┐č鹊čĆ (handle) čāčüčéčĆąŠą╣čüčéą▓ą░ FTDI. ąźąŠčéčÅ čŹč鹊 ąĮąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ą┤ąĄą╗ą░čéčī čÅą▓ąĮąŠ, čģąŠčĆąŠčłąĄą╣ ą┐čĆą░ą║čéąĖą║ąŠą╣ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ ąĘą░ą║čĆčŗčéąĖąĄą╝ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ čüą▒čĆąŠčüąĖčéčī čüąĮą░čćą░ą╗ą░ MPSSE, ą┐ąŠą╝ąĄčüčéąĖą▓ ą┐ąŠčĆčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle state). ąŚą░ą║čĆčŗčéąĖąĄ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą▓čŗąĘąŠą▓ąŠą╝ FT_Close.
ąÜąŠą┤ ą┐čĆąĖą╝ąĄčĆą░, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗą╣ ąĮąĖąČąĄ, čüą╗ąĄą┤čāąĄčé ą┐čĆąŠčåąĄą┤čāčĆąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ, ąŠą┐ąĖčüą░ąĮąĮąŠą╣ ą▓čŗčłąĄ ą▓ čĆą░ąĘą┤ąĄą╗ąĄ "ą¤čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ". ą×ąĮ ą┐čĆą░ą║čéąĖč湥čüą║ąĖ čüąŠą▓ą┐ą░ą┤ą░ąĄčé čü ą║ąŠą┤ąŠą╝ ą┐čĆąĖą╝ąĄčĆą░ ąĖąĘ čüčéą░čéčīąĖ [5].
ąźąŠčéčÅ ąĘą┤ąĄčüčī ąŠą┐ąĖčüą░ąĮą░ ąŠą▒čēą░čÅ ąĮą░čüčéčĆąŠą╣ą║ą░ FTDI MPSSE, ą▓ ą┐čĆąĖą▓ąĄą┤ąĄąĮąĮąŠą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą║ąŠą┤ čüč乊ą║čāčüąĖčĆąŠą▓ą░ąĮ ąĮą░ ąŠą┤ąĮąŠą╝ ąĮą░ą▒ąŠčĆąĄ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓. ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ FTDI D2XX ąĖ čĆą░čüčüčćąĖčéą░ąĮ ąĮą░ FT2232H, ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗ąĄą│ą║ąŠ ą┐ąŠčĆčéąĖčĆąŠą▓ą░ąĮ ąĮą░ ą┤čĆčāą│ąŠą╣ čćąĖą┐ FTDI, ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĮčŗą╣ MPSSE. ą×ąĮ ąĮą░ą┐ąĖčüą░ąĮ ą▓ ą╗ąĖąĮąĄą╣ąĮąŠą╝ čüčéąĖą╗ąĄ čü čåąĄą╗čīčÄ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąĖ čĆąĄą░ą╗čīąĮčŗčģ ą▒ą░ą╣čé, ą║ąŠč鹊čĆčŗąĄ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ą▓ MPSSE, ąĖ čćč鹊ą▒čŗ ą╗ąĄą│č湥 ą▒čŗą╗ąŠ čĆą░ąĘąŠą▒čĆą░čéčīčüčÅ čü čĆąĄąĘčāą╗čīčéąĖčĆčāčÄčēąĖą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ, ą┐čĆąŠčćąĖčéą░ąĮąĮčŗą╝ąĖ ąĖąĘ MPSSE. ą×ą┤ąĖąĮ ą▓čŗąĘąŠą▓ FT_Write ą╝ąŠąČąĄčé ą▓ čĆąĄą░ą╗čīąĮąŠčüčéąĖ čüąŠą┤ąĄčƹȹ░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą║ąŠą╝ą░ąĮą┤ ąĖ ą░čĆą│čāą╝ąĄąĮč鹊ą▓.
ą¤ąĄčĆą▓ą░čÅ čüąĄą║čåąĖčÅ ą║ąŠą┤ą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗąĄ ą▒čāą┤čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą░ą╗ąĄąĄ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ:
int _tmain(int argc, _TCHAR* argv[])
{
// -----------------------------------------------------------
// ą¤ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ
// -----------------------------------------------------------
FT_HANDLE ftHandle; // ąöąĄčüą║čĆąĖą┐č鹊čĆ čāčüčéčĆąŠą╣čüčéą▓ą░ FTDI.
FT_STATUS ftStatus; // ąĀąĄąĘčāą╗čīčéą░čé ą║ą░ąČą┤ąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ D2XX.
DWORD dwNumDevs; // ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čāčüčéčĆąŠą╣čüčéą▓ ą▓ čüąĖčüč鹥ą╝ąĄ.
unsigned int uiDevIndex = 0xF; // ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ą▓ čüą┐ąĖčüą║ąĄ, ą║ąŠč鹊čĆąŠąĄ ą╝čŗ
// ą▒čāą┤ąĄą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī.
BYTE byOutputBuffer[65536]; // ąæčāč乥čĆ ą▓čŗą▓ąŠą┤ą░, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗą╣ ą┤ą╗čÅ
// čģčĆą░ąĮąĄąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤ ąĖ ą┤ą░ąĮąĮčŗčģ MPSSE, ą║ąŠč鹊čĆčŗąĄ
// ą▒čāą┤čāčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ ą▓ FT2232H.
BYTE byInputBuffer[65536]; // ąæčāč乥čĆ ą▓ą▓ąŠą┤ą░, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗą╣ ą┤ą╗čÅ
// čģčĆą░ąĮąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ, ą┐čĆąŠčćąĖčéą░ąĮąĮčŗčģ ąĖąĘ FT2232H.
DWORD dwCount = 0; // ą×ą▒čēąĖą╣ ąĖąĮą┤ąĄą║čü čåąĖą║ą╗ą░.
DWORD dwNumBytesToSend = 0; // ąśąĮą┤ąĄą║čü ą▒čāč乥čĆą░ ą▓čŗą▓ąŠą┤ą░.
DWORD dwNumBytesSent = 0; // ąĪč湥čéčćąĖą║ čĆąĄą░ą╗čīąĮąŠ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮčŗčģ ą▒ą░ą╣čé,
// ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ FT_Write.
DWORD dwNumBytesToRead = 0; // ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé, ą┤ąŠčüčéčāą┐ąĮčŗčģ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ
// ą▓ ą▒čāč乥čĆąĄ ą▓ą▓ąŠą┤ą░.
DWORD dwNumBytesRead = 0; // ąĪč湥čéčćąĖą║ čĆąĄą░ą╗čīąĮąŠ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗčģ ą▒ą░ą╣čé, ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ
// ą▓ FT_Read.
DWORD dwClockDivisor = 0x05DB; // ąŚąĮą░č湥ąĮąĖąĄ ą┤ąĄą╗ąĖč鹥ą╗čÅ čéą░ą║č鹊ą▓, čćą░čüč鹊čéą░ SCL
// = 60/((1+0x05DB)*2) (ą£ąōčå) = 1 ą£ąōčå.
[ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ FTDI]
ą¤čĆąŠą▓ąĄčĆą║ą░, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ąŠčüčéčāą┐ąĮąŠ, ąĖ ąŠčéą║čĆčŗčéąĖąĄ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░:
// -----------------------------------------------------------------------
// ąĢčüčéčī ą╗ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗąĄ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā čāčüčéčĆąŠą╣čüčéą▓ą░ FTDI?
// -----------------------------------------------------------------------
printf("Checking for FTDI devices...\n");
ftStatus = FT_CreateDeviceInfoList(&dwNumDevs);
// ą¤ąŠą╗čāč湥ąĮąĖąĄ ą║ąŠą╗ąĖč湥čüčéą▓ą░ čāčüčéčĆąŠą╣čüčéą▓ FTDI:
if (ftStatus != FT_OK) // ąÜąŠą╝ą░ąĮą┤ą░ ą▓čŗą┐ąŠą╗ąĮąĖą╗ą░čüčī čāčüą┐ąĄčłąĮąŠ?
{
printf("Error in getting the number of devices\n");
return 1; // ąÆčŗčģąŠą┤ ą┐ąŠ ąŠčłąĖą▒ą║ąĄ.
}
if (dwNumDevs < 1) // ąĢčüčéčī čāčüčéčĆąŠą╣čüčéą▓ą░ FTDI?
{
printf("There are no FTDI devices installed\n");
return 1; // ąÆčŗčģąŠą┤, ąĄčüą╗ąĖ ąĮąĖ ąŠą┤ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮąĄ ąŠą▒ąĮą░čĆčāąČąĄąĮąŠ.
}
// ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ąĮą░ą╣ą┤ąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ ąŠąĘąĮą░čćą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąŠčĆč鹊ą▓
// ą▓ čāčüčéčĆąŠą╣čüčéą▓ąĄ FTDI. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą║ čüąĖčüč鹥ą╝ąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ąŠą┤ąĮą░ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░
// FT2232H, č鹊 ą▓ dwNumDevs ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ 2, ą┐ąŠč鹊ą╝čā čćč鹊 čā FT2232H
// ą┤ą▓ą░ ą┐ąŠčĆčéą░: A ąĖ B. ąŻ FT4232H ą┐ąŠčĆč鹊ą▓ 4, ą┐ąŠčŹč鹊ą╝čā ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ 4.
printf("%d FTDI devices found \
- the count includes individual ports on a single chip\n", dwNumDevs);
// -----------------------------------------------------------------------
// ą×čéą║čĆčŗčéąĖąĄ ą┐ąŠčĆčéą░. ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 ą┐ąĄčĆą▓ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ
// čŹč鹊 FT2232H ąĖą╗ąĖ FT4232H. ąÜą░ą║ąŠąĄ ąĖą╝ąĄąĮąĮąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ, ą╝ąŠąČąĮąŠ
// čāąĘąĮą░čéčī ą▓čŗąĘąŠą▓ą░ą╝ąĖ API D2XX - ąĄčüčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐čĆąŠčćąĖčéą░čéčī ąŠą┐ąĖčüą░ąĮąĖąĄ
// čāčüčéčĆąŠą╣čüčéą▓ą░, ąĄą│ąŠ čĆą░ąĘą╝ąĄčēąĄąĮąĖąĄ ąĮą░ čłąĖąĮąĄ, čüąĄčĆąĖą╣ąĮčŗąĄ ąĮąŠą╝ąĄčĆą░ ąĖ čé. ą┤. ąŁč鹊 ą╝ąŠąČąĮąŠ
// čüą┤ąĄą╗ą░čéčī ą┐ąĄčĆąĄą┤ ąŠčéą║čĆčŗčéąĖąĄą╝ ą┐ąŠčĆčéą░.
// -----------------------------------------------------------------------
printf("\nAssume first device has the MPSSE and open it...\n");
ftStatus = FT_Open(0, &ftHandle);
if (ftStatus != FT_OK)
{
printf("Open Failed with error %d\n", ftStatus);
return 1; // ąÆčŗčģąŠą┤ ą┐ąŠ ąŠčłąĖą▒ą║ąĄ.
}
ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠčĆčéą░ FTDI ąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ MPSSE:
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą┐ąŠčĆčéą░:
printf("\nConfiguring port for MPSSE use...\n");
ftStatus |= FT_ResetDevice(ftHandle); // ąĪą▒čĆąŠčü čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
// ą×čćąĖčüčéą║ą░ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ USB ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ FT2232H ą┐čāč鹥ą╝
// ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ ą▓čüąĄčģ ąĄčæ čüčéą░čĆčŗčģ ą┤ą░ąĮąĮčŗčģ:
ftStatus |= FT_GetQueueStatus(ftHandle, &dwNumBytesToRead);
// ą¤ąŠą╗čāč湥ąĮąĖąĄ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▒ą░ą╣čé ą▓ ą▒čāč乥čĆąĄ ą┐čĆąĖąĄą╝ą░ FT2232H:
if ((ftStatus == FT_OK) && (dwNumBytesToRead > 0))
// ą¦č鹥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ FT2232H:
FT_Read(ftHandle, &byInputBuffer, dwNumBytesToRead, &dwNumBytesRead);
// ąŻčüčéą░ąĮąŠą▓ą║ą░ čĆą░ąĘą╝ąĄčĆą░ ąĘą░ą┐čĆąŠčüąŠą▓ ą┐ąĄčĆąĄą┤ą░čć ąĮą░ 64 ą║ąĖą╗ąŠą▒ą░ą╣čéą░:
ftStatus |= FT_SetUSBParameters(ftHandle, 65536, 65535);
// ąŚą░ą┐čĆąĄčé čüąĖą╝ą▓ąŠą╗ąŠą▓ čüąŠą▒čŗčéąĖą╣ ąĖ ąŠčłąĖą▒ąŠą║ (event, error characters):
ftStatus |= FT_SetChars(ftHandle, false, 0, false, 0);
// ąŻčüčéą░ąĮąŠą▓ą║ą░ čéą░ą╣ą╝ą░čāč鹊ą▓ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ ą▓ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ą░čģ:
ftStatus |= FT_SetTimeouts(ftHandle, 0, 5000);
// ąŻčüčéą░ąĮąŠą▓ą║ą░ čéą░ą╣ą╝ąĄčĆą░ ą╗ą░č鹥ąĮčéąĮąŠčüčéąĖ ąĮą░ 1 ą╝čü (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čüč鹊čÅą╗ąŠ 16 ą╝čü):
ftStatus |= FT_SetLatencyTimer(ftHandle, 1);
// ąÆą║ą╗čÄč湥ąĮąĖąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠč鹊ą║ąŠą╝ (flow control) ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ
// IN-ąĘą░ą┐čĆąŠčüąŠą▓:
ftStatus |= FT_SetFlowControl(ftHandle, FT_FLOW_RTS_CTS, 0x00, 0x00);
// ąĪą▒čĆąŠčü ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░:
ftStatus |= FT_SetBitMode(ftHandle, 0x0, 0x00);
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čĆąĄąČąĖą╝ą░ MPSSE:
ftStatus |= FT_SetBitMode(ftHandle, 0x0, 0x02);
if (ftStatus != FT_OK)
{
printf("Error in initializing the MPSSE %d\n", ftStatus);
FT_Close(ftHandle);
return 1; // ąÆčŗčģąŠą┤ ą┐ąŠ ąŠčłąĖą▒ą║ąĄ.
}
// ąØąĄą▒ąŠą╗čīčłąŠąĄ ąŠąČąĖą┤ą░ąĮąĖąĄ, čćč鹊ą▒čŗ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą┐čĆąĖčłą╗ą░ ą▓ ą│ąŠč鹊ą▓ąĮąŠčüčéčī
// ąĖ ąĘą░čĆą░ą▒ąŠčéą░ą╗ą░:
Sleep(50);
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĖąĘ ą▓čŗąĘąŠą▓ąŠą▓ API D2XX ąĘąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ftStatus ą╝ąŠąČąĮąŠ ą┐čĆąŠą▓ąĄčĆčÅčéčī ą║ą░ą║ ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮąŠ (ą┐ąŠčüą╗ąĄ ą║ą░ąČą┤ąŠą│ąŠ ą▓čŗąĘąŠą▓ą░), ąĖą╗ąĖ ą║ą░ą║ ąĖč鹊ą│ąŠą▓čŗą╣ čĆąĄąĘčāą╗čīčéą░čé ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą┐čĆąĄą┤čŗą┤čāčēąĖčģ ą▓čŗąĘąŠą▓ąŠą▓ API. ąÆ ąŠčüčéą░ą╗čīąĮąŠą╣ čćą░čüčéąĖ čŹč鹊ą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┐čĆąĖą╝ąĄčĆą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ftStatus ą┐čĆąŠą▓ąĄčĆčÅąĄčéčüčÅ ąĮąĄ ą▓čüąĄą│ą┤ą░, čćč鹊ą▒čŗ čāą┐čĆąŠčüčéąĖčéčī ą┐ąŠąĮąĖą╝ą░ąĮąĖąĄ ą║ąŠą┤ą░ - ą║ą░ą║ą░čÅ ąĘą░ą┤ą░čćą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą║ą░ąČą┤ąŠą╣ čüčéčĆąŠą║ąŠą╣.
[ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ MPSSE]
ąÆ čŹč鹊ą╣ č鹊čćą║ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ MPSSE ą│ąŠč鹊ą▓ą░ ą║ ą┐ąŠą╗čāč湥ąĮąĖčÄ ą║ąŠą╝ą░ąĮą┤. ąÜą░ąČą┤ą░čÅ ą║ąŠą╝ą░ąĮą┤ą░ čüąŠčüč鹊ąĖčé ąĖąĘ op-code, ąĘą░ ą║ąŠč鹊čĆčŗą╝ ąĖą┤čāčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąĖą╗ąĖ ą┤ą░ąĮąĮčŗąĄ. ąöą╗čÅ čÅčüąĮąŠčüčéąĖ ą║ą░ąČą┤ą░čÅ ą║ąŠą╝ą░ąĮą┤ą░ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą▓ MPSSE ą▓ ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮąŠą╝ ą▓čŗąĘąŠą▓ąĄ FT_Write. ąØą░ ą┐čĆą░ą║čéąĖą║ąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▒ąŠą╗ąĄąĄ čāą┤ąŠą▒ąĮčŗą╝ ą║ąŠą╝ą▒ąĖąĮąĖčĆąŠą▓ą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą║ąŠą╝ą░ąĮą┤ ą▓ ąŠą┤ąĮąŠą╝ ą▓čŗąĘąŠą▓ąĄ FT_Write.
ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ą┐ąŠ ą╝ąĄč鹊ą┤čā ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ "ą┐ą╗ąŠčģąŠą╣ ą║ąŠą╝ą░ąĮą┤čŗ" (Bad Command Detection):
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ loop-back:
byOutputBuffer[dwNumBytesToSend++] = 0x84;
ftStatus = FT_Write(ftHandle,
byOutputBuffer,
dwNumBytesToSend,
&dwNumBytesSent);
// ą¤ąŠą╗čāč湥ąĮąĖąĄ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▒ą░ą╣čé ą▓ ą▒čāč乥čĆąĄ ą┐čĆąĖąĄą╝ą░ FT2232H:
ftStatus = FT_GetQueueStatus(ftHandle, &dwNumBytesToRead);
// ą¤čĆąŠą▓ąĄčĆą║ą░ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░, ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐čāčüčéčŗą╝:
if (dwNumBytesToRead != 0)
{
printf("Error - MPSSE receive buffer should be empty\n", ftStatus);
// ąĪą▒čĆąŠčü ą┐ąŠčĆčéą░ ą┤ą╗čÅ ąĘą░ą┐čĆąĄčéą░ MPSSE:
FT_SetBitMode(ftHandle, 0x0, 0x00);
FT_Close(ftHandle); // ąŚą░ą║čĆčŗčéąĖąĄ ą┐ąŠčĆčéą░ USB.
return 1; // ąÆčŗčģąŠą┤ ą┐ąŠ ąŠčłąĖą▒ą║ąĄ.
}
// -----------------------------------------------------------
// ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čü čüąŠčüč鹊čÅąĮąĖąĄą╝ MPSSE ą┐čāč鹥ą╝ ąŠčéą┐čĆą░ą▓ą║ąĖ
// ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠą│ąŠ opcode (0xAB), ąĮą░ ą║ąŠč鹊čĆčŗą╣ MPSSE ąŠčéą▓ąĄčéąĖčé
// "Bad Command" (0xFA), ąĘą░ ą║ąŠč鹊čĆčŗą╝ ą▒čāą┤ąĄčé ąĖą┤čéąĖ čŹč鹊čé
// ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮčŗą╣ opcode.
// -----------------------------------------------------------
dwNumBytesToSend = 0; // ąĪą▒čĆąŠčü ąĖąĮą┤ąĄą║čüą░ ą▒čāč乥čĆą░.
byOutputBuffer[dwNumBytesToSend++] = 0xAB;
ftStatus = FT_Write(ftHandle,
byOutputBuffer,
dwNumBytesToSend,
&dwNumBytesSent);
// ą”ąĖą║ą╗, ą┐ąŠą║ą░ ą▓ ą▒čāč乥čĆąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮąĄ ą┐ąŠčÅą▓čÅčéčüčÅ ą┤ą░ąĮąĮčŗąĄ,
// ąĖą╗ąĖ ąĮąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čéą░ą╣ą╝ą░čāčé:
do
{
// ą¤ąŠą╗čāč湥ąĮąĖąĄ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▒ą░ą╣čé ą▓ ą▒čāč乥čĆąĄ ą┐čĆąĖąĄą╝ą░ čāčüčéčĆąŠą╣čüčéą▓ą░:
ftStatus = FT_GetQueueStatus(ftHandle, &dwNumBytesToRead);
} while ((dwNumBytesToRead == 0) && (ftStatus == FT_OK));
bool bCommandEchod = false;
// ąÆčŗčćąĖčéčŗą▓ą░ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą▓čģąŠą┤ąĮąŠą│ąŠ ą▒čāč乥čĆą░:
ftStatus = FT_Read(ftHandle,
&byInputBuffer,
dwNumBytesToRead,
&dwNumBytesRead);
for (dwCount = 0; dwCount < dwNumBytesRead - 1; dwCount++)
{
// ą¤čĆąŠą▓ąĄčĆą║ą░ - ą┐ąŠą╗čāč湥ąĮ ą╗ąĖ ąŠčéą▓ąĄčé ąĮą░ Bad command:
if ((byInputBuffer[dwCount] == 0xFA) && (byInputBuffer[dwCount+1] == 0xAB))
{
bCommandEchod = true;
break;
}
}
if (bCommandEchod == false)
{
printf("Error in synchronizing the MPSSE\n");
FT_Close(ftHandle);
return 1; // ąÆčŗčģąŠą┤ ą┐ąŠ ąŠčłąĖą▒ą║ąĄ.
}
// ąŚą░ą┐čĆąĄčé ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ loop-back:
dwNumBytesToSend = 0; // ąĪą▒čĆąŠčü ąĖąĮą┤ąĄą║čüą░ ą▒čāč乥čĆą░.
byOutputBuffer[dwNumBytesToSend++] = 0x85;
ftStatus = FT_Write(ftHandle,
byOutputBuffer,
dwNumBytesToSend,
&dwNumBytesSent);
dwNumBytesToSend = 0; // ąĪą▒čĆąŠčü ąĖąĮą┤ąĄą║čüą░ ą▒čāč乥čĆą░.
// ą¤ąŠą╗čāč湥ąĮąĖąĄ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▒ą░ą╣čé ą▓ ą▒čāč乥čĆąĄ ą┐čĆąĖąĄą╝ą░ FT2232H:
ftStatus = FT_GetQueueStatus(ftHandle, &dwNumBytesToRead);
// ą¤čĆąŠą▓ąĄčĆą║ą░ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░, ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐čāčüčéčŗą╝:
if (dwNumBytesToRead != 0)
{
printf("Error - MPSSE receive buffer should be empty\n", ftStatus);
// ąĪą▒čĆąŠčü ą┐ąŠčĆčéą░ ą┤ą╗čÅ ąĘą░ą┐čĆąĄčéą░ MPSSE:
FT_SetBitMode(ftHandle, 0x0, 0x00);
FT_Close(ftHandle); // ąŚą░ą║čĆčŗčéąĖąĄ ą┐ąŠčĆčéą░ USB.
return 1; // ąÆčŗčģąŠą┤ ą┐ąŠ ąŠčłąĖą▒ą║ąĄ.
}
ąØą░čüčéčĆąŠą╣ą║ą░ MPSSE:
// -----------------------------------------------------------
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ąĮą░čüčéčĆąŠąĄą║ MPSSE ą┤ą╗čÅ JTAG.
// -----------------------------------------------------------
dwNumBytesToSend = 0; // ąĪą▒čĆąŠčü ąĖąĮą┤ąĄą║čüą░ ą▒čāč乥čĆą░.
// ąØą░čüčéčĆąŠą╣ą║ą░ čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖčģ Hi-Speed (HS) ą║ąŠą╝ą░ąĮą┤ FTx232H.
// ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ 60 ą£ąōčå master clock (ąĘą░ą┐čĆąĄčé ą┤ąĄą╗ąĄąĮąĖčÅ ąĮą░ 5):
byOutputBuffer[dwNumBytesToSend++] = 0x8A;
// ąÆčŗą║ą╗čÄč湥ąĮąĖąĄ adaptive clocking (čŹč鹊 ą╝ąŠąČąĄčé ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ ą┤ą╗čÅ ARM):
byOutputBuffer[dwNumBytesToSend++] = 0x97;
// ąŚą░ą┐čĆąĄčé čéčĆąĄčģčäą░ąĘąĮąŠą│ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ:
byOutputBuffer[dwNumBytesToSend++] = 0x8D;
// ą×čéą┐čĆą░ą▓ą║ą░ HS-ą║ąŠą╝ą░ąĮą┤:
ftStatus = FT_Write(ftHandle,
byOutputBuffer,
dwNumBytesToSend,
&dwNumBytesSent);
// ąŻčüčéą░ąĮąŠą▓ą║ą░ čćą░čüč鹊čéčŗ TCK.
// TCK = 60MHz /((1 + [(1 +0xValueH*256) OR 0xValueL])*2)
dwNumBytesToSend = 0; // ąĪą▒čĆąŠčü ąĖąĮą┤ąĄą║čüą░ ą▒čāč乥čĆą░.
// ąÜąŠą╝ą░ąĮą┤ą░ čāčüčéą░ąĮąŠą▓ą║ąĖ clock divisor:
byOutputBuffer[dwNumBytesToSend++] = '\x86';
// ą£ą╗ą░ą┤čłąĖą╣ ą▒ą░ą╣čé 0xValueL ąĮą░čüčéčĆąŠą╣ą║ąĖ clock divisor:
byOutputBuffer[dwNumBytesToSend++] = dwClockDivisor & 0xFF;
// ąĪčéą░čĆčłąĖą╣ ą▒ą░ą╣čé 0xValueH ąĮą░čüčéčĆąŠą╣ą║ąĖ clock divisor:
byOutputBuffer[dwNumBytesToSend++] = (dwClockDivisor >> 8) & 0xFF;
// ą×čéą┐čĆą░ą▓ą║ą░ ą║ąŠą╝ą░ąĮą┤čŗ čāčüčéą░ąĮąŠą▓ą║ąĖ clock divisor:
ftStatus = FT_Write(ftHandle,
byOutputBuffer,
dwNumBytesToSend,
&dwNumBytesSent);
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ąĮą░čćą░ą╗čīąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ ąĮąŠąČąĄą║ ąĖąĮč鹥čĆč乥ą╣čüą░ MPSSE.
// ą£ą╗ą░ą┤čłąĖą╣ ą▒ą░ą╣čé ąĘą░ą┤ą░ąĄčé ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓
// ąĖ ą▓čŗčģąŠą┤ąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ.
//---------------------------------------------------
// ąÆčŗą▓ąŠą┤ ąĪąĖą│ąĮą░ą╗ ąØą░ą┐čĆ. ąÜąŠąĮčä. ąØą░čć. čüąŠčüčé. ąÜąŠąĮčä.
//---------------------------------------------------
// ADBUS0 TCK/SK output 1 high 1
// ADBUS1 TDI/DO output 1 low 0
// ADBUS2 TDO/DI input 0 0
// ADBUS3 TMS/CS output 1 high 1
// ADBUS4 GPIOL0 output 1 low 0
// ADBUS5 GPIOL1 output 1 low 0
// ADBUS6 GPIOL2 output 1 high 1
// ADBUS7 GPIOL3 output 1 high 1
dwNumBytesToSend = 0; // ąĪą▒čĆąŠčü ąĖąĮą┤ąĄą║čüą░ ą▒čāč乥čĆą░.
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ ą╝ą╗ą░ą┤čłąĄą│ąŠ ą▒ą░ą╣čéą░ ą┐ąŠčĆčéą░ MPSSE:
byOutputBuffer[dwNumBytesToSend++] = 0x80;
// ąØą░čćą░ą╗čīąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ, ą║ą░ą║ ą▓ čéą░ą▒ą╗ąĖčåąĄ ą▓čŗčłąĄ:
byOutputBuffer[dwNumBytesToSend++] = 0xC9;
// ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ, ą║ą░ą║ ą▓ čéą░ą▒ą╗ąĖčåąĄ ą▓čŗčłąĄ:
byOutputBuffer[dwNumBytesToSend++] = 0xFB;
// ą×čéą┐čĆą░ą▓ą║ą░ ą║ąŠą╝ą░ąĮą┤čŗ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą╝ą╗ą░ą┤čłąĄą│ąŠ ą▒ą░ą╣čéą░ MPSSE:
ftStatus = FT_Write(ftHandle,
byOutputBuffer,
dwNumBytesToSend,
&dwNumBytesSent);
// ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą┐ąŠčüą║ąŠą╗čīą║čā ą▓ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ čüąĄą║čåąĖčÅčģ ą║ąŠą┤ą░
// ą┤ą░ąĮąĮčŗąĄ ą▒čāą┤čāčé čéą░ą║čéąĖčĆąŠą▓ą░čéčīčüčÅ ą┐ąŠ čäčĆąŠąĮčéčā ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ čéą░ą║č鹊ą▓ TCK,
// č鹊 ąĮą░čćą░ą╗čīąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ TCK ą▓čŗą▒čĆą░ąĮąŠ ą║ą░ą║ ą╗ąŠą│. 1. ąśą╝ą┐čāą╗čīčü čéą░ą║č鹊ą▓
// ą▒čāą┤ąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčīčüčÅ 1-0-1. ąó. ąĄ. ą┤ą╗čÅ ąĮą░čłąĄą│ąŠ ą┐čĆąĖą╝ąĄčĆą░ ą┤ą░ąĮąĮčŗąĄ
// ą▒čāą┤čāčé ąĖąĘą╝ąĄąĮčÅčéčīčüčÅ ą┐ąŠ čäčĆąŠąĮčéčā ąĮą░čĆą░čüčéą░ąĮąĖčÅ TCK. ąŁč鹊 ą┤ą░čüčé ą┤ąŠčüčéą░č鹊čćąĮąŠ
// ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą╗čÅ čüčéą░ą▒ąĖą╗ąĖąĘą░čåąĖąĖ ą┤ą░ąĮąĮčŗčģ, ą║ąŠą│ą┤ą░ ąŠąĮąĖ ą▒čāą┤čāčé ą┐čĆąĖąĮąĖą╝ą░čéčīčüčÅ
// ą▓ąĮąĄčłąĮąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ą┐ąŠ čüą┐ą░ą┤čā čāčĆąŠą▓ąĮčÅ TCK.
// ą¤čĆąŠą┤ąŠą╗ąČąĄąĮąĖąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĮą░čćą░ą╗čīąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ ąĮąŠąČąĄą║ ąĖąĮč鹥čĆč乥ą╣čüą░
// MPSSE. ąŚą┤ąĄčüčī čāąČąĄ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ čüčéą░čĆčłąĖą╣ ą▒ą░ą╣čé, ą║ąŠč鹊čĆčŗą╣
// ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ.
//---------------------------------------------------
// ąÆčŗą▓ąŠą┤ ąĪąĖą│ąĮą░ą╗ ąØą░ą┐čĆ. ąÜąŠąĮčä. ąØą░čć. čüąŠčüčé. ąÜąŠąĮčä.
//---------------------------------------------------
// ACBUS0 GPIOH0 input 0 0
// ACBUS1 GPIOH1 input 0 0
// ACBUS2 GPIOH2 input 0 0
// ACBUS3 GPIOH3 input 0 0
// ACBUS4 GPIOH4 input 0 0
// ACBUS5 GPIOH5 input 0 0
// ACBUS6 GPIOH6 input 0 0
// ACBUS7 GPIOH7 input 0 0
dwNumBytesToSend = 0; // ąĪą▒čĆąŠčü ąĖąĮą┤ąĄą║čüą░ ą▒čāč乥čĆą░.
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ čüčéą░čĆčłąĄą│ąŠ ą▒ą░ą╣čéą░ ą┐ąŠčĆčéą░ MPSSE:
byOutputBuffer[dwNumBytesToSend++] = 0x82;
// ąØą░čćą░ą╗čīąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ, ą║ą░ą║ ą▓ čéą░ą▒ą╗ąĖčåąĄ ą▓čŗčłąĄ:
byOutputBuffer[dwNumBytesToSend++] = 0x00;
// ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ, ą║ą░ą║ ą▓ čéą░ą▒ą╗ąĖčåąĄ ą▓čŗčłąĄ:
byOutputBuffer[dwNumBytesToSend++] = 0x00;
// ą×čéą┐čĆą░ą▓ą║ą░ ą║ąŠą╝ą░ąĮą┤čŗ ąĮą░čüčéčĆąŠą╣ą║ąĖ čüčéą░čĆčłąĄą│ąŠ ą▒ą░ą╣čéą░ MPSSE:
ftStatus = FT_Write(ftHandle,
byOutputBuffer,
dwNumBytesToSend,
&dwNumBytesSent);
// ą×čćąĖčüčéą║ą░ ą▒čāč乥čĆąŠą▓ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░ (ąĮąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ):
memset(byOutputBuffer, 0, sizeof(byOutputBuffer));
memset(byInputBuffer, 0, sizeof(byInputBuffer));
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ:
// ąóąŠą╗čīą║ąŠ ą┐ąĄčĆąĄą┤ą░čćą░, ą┐čĆąĖąĄą╝ą░ ąĮąĄčé. ąÆčŗą▓ąŠą┤ ą┐ąŠ čäčĆąŠąĮčéčā ąĮą░čĆą░čüčéą░ąĮąĖčÅ TCK,
// ą▓ą▓ąŠą┤ą░ ąĮąĄčé, MSB ąĖą┤ąĄčé ą┐ąĄčĆą▓čŗą╝, ą▓čŗą┤ą▓ąĖą│ą░ąĄčéčüčÅ ąĘą░ą┤ą░ąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ
// ą▒ą░ą╣čé:
dwNumBytesToSend = 0; // ąĪą▒čĆąŠčü ąĖąĮą┤ąĄą║čüą░ ą▒čāč乥čĆą░.
byOutputBuffer[dwNumBytesToSend++] = 0x10;
// ąöą╗ąĖąĮą░ ą▓ ą▒ą░ą╣čéą░čģ Length čĆą░ą▓ąĮą░ 0x0001 + 1.
byOutputBuffer[dwNumBytesToSend++] = 0x01; // Length L
byOutputBuffer[dwNumBytesToSend++] = 0x00; // Length H
// ąöą░ąĮąĮčŗąĄ 0xA50F:
byOutputBuffer[dwNumBytesToSend++] = 0xA5;
byOutputBuffer[dwNumBytesToSend++] = 0x0F;
// ą×čéą┐čĆą░ą▓ą║ą░:
ftStatus = FT_Write(ftHandle,
byOutputBuffer,
dwNumBytesToSend,
&dwNumBytesSent);
// ą×ąČąĖą┤ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ąĖ ą┐ąŠą╗čāč湥ąĮąĖčÅ
// čüčéą░čéčāčüą░ ąŠčé ą┤čĆą░ą╣ą▓ąĄčĆą░ (čüą╝. čāčüčéą░ąĮąŠą▓ą║čā čéą░ą╣ą╝ąĄčĆą░
// ą╗ą░č鹥ąĮčéąĮąŠčüčéąĖ ą▓čŗčłąĄ):
Sleep(2);
// ą¤ąŠą╗čāč湥ąĮąĖąĄ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▒ą░ą╣čé ą▓ ą▒čāč乥čĆąĄ ą┐čĆąĖąĄą╝ą░ FT2232H:
ftStatus = FT_GetQueueStatus(ftHandle, &dwNumBytesToRead);
// ą¤čĆąŠą▓ąĄčĆą║ą░ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░, ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐čāčüčéčŗą╝, ą┐ąŠč鹊ą╝čā
// čćč鹊 ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮą░čÅ ą║ąŠą╝ą░ąĮą┤ą░ ąĮąĄ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ą╗ą░ ą▓ą▓ąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ:
if (dwNumBytesToRead != 0)
{
printf("Error - MPSSE receive buffer should be empty\n", ftStatus);
// ąĪą▒čĆąŠčü ą┐ąŠčĆčéą░ ą┤ą╗čÅ ąĘą░ą┐čĆąĄčéą░ MPSSE:
FT_SetBitMode(ftHandle, 0x0, 0x00);
FT_Close(ftHandle); // ąŚą░ą║čĆčŗčéąĖąĄ ą┐ąŠčĆčéą░ USB.
return 1; // ąÆčŗčģąŠą┤ ą┐ąŠ ąŠčłąĖą▒ą║ąĄ.
}
// ą¤ą░čāąĘą░ čü ąŠąČąĖą┤ą░ąĮąĖąĄą╝ ąĮą░ąČą░čéąĖčÅ ąĮą░ ą║ą╗ą░ą▓ąĖčłčā:
printf("Press < Enter > to continue\n");
getchar();
ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 5.1, č湥čéčŗčĆąĄ ąŠčüąĮąŠą▓ąĮčŗčģ čüąĖą│ąĮą░ą╗ą░ FTDI MPSSE čüąŠą▓ą┐ą░ą┤ą░čÄčé čü ąŠąČąĖą┤ą░ąĄą╝čŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝. ą£ąŠą┤čāą╗čī FT2232H ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗čüčÅ čéą░ą║, čćč鹊 TDI/DO ą▒čŗą╗ čüąŠąĄą┤ąĖąĮąĄąĮ čü TDO/DI, ąĖ ą▒čŗą╗ąĖ čüą┤ąĄą╗ą░ąĮčŗ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ą┤ą╗čÅ ą┐ąĖčéą░ąĮąĖčÅ ąŠčé čłąĖąĮčŗ USB. ąĪąĖą│ąĮą░ą╗čŗ DATA ąĖ CLK, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗąĄ ąĮą░ čĆąĖčü. 5.1, ą┤čāą▒ą╗ąĖčĆčāčÄčé TDI/DO ąĖ TCK/SK čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ. ą×ą▒ą░ ąŠąĮąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą║ą░ą║ ą▓čģąŠą┤čŗ ą┤ą╗čÅ čäčāąĮą║čåąĖąĖ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ SPI ą▓ ąŠčüčåąĖą╗ą╗ąŠą│čĆą░č乥.
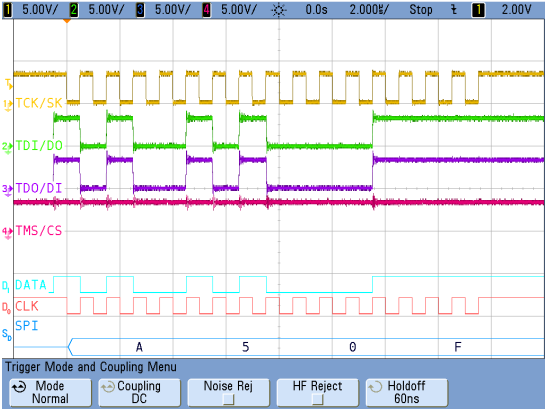
ąĀąĖčü. 5.1. ą×čüčåąĖą╗ą╗ąŠą│čĆą░ą╝ą╝ą░ čĆąĄąČąĖą╝ą░, ą▓ ą║ąŠč鹊čĆąŠą╝ ą┤ą░ąĮąĮčŗąĄ č鹊ą╗čīą║ąŠ ą▓čŗą▓ąŠą┤čÅčéčüčÅ.
ąØą░ ąŠčüčåąĖą╗ą╗ąŠą│čĆą░ą╝ą╝ąĄ čģąŠčĆąŠčłąŠ ą▓ąĖą┤ąĮąŠ, čćč鹊 ą┤ą░ąĮąĮčŗąĄ TDI/DO ą▓čŗą┤ą▓ąĖą│ą░čÄčéčüčÅ ą┐ąŠ čäčĆąŠąĮčéčā ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ čéą░ą║č鹊ą▓ TCK/SK. ąŁč鹊 ą┤ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čüčćąĖčéą░čéčī čāčüčéą░ąĮąŠą▓ąĖą▓čłąĖąĄčüčÅ ą┤ą░ąĮąĮčŗąĄ ą▓ąĮąĄčłąĮąĖą╝ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ą▓ ą╝ąŠą╝ąĄąĮčé čüą╗ąĄą┤čāčÄčēąĄą│ąŠ čüą┐ą░ą┤ą░ čāčĆąŠą▓ąĮčÅ čéą░ą║č鹊ą▓.
// ąóąĄą┐ąĄčĆčī ą▓čŗą┐ąŠą╗ąĮąĖą╝ ą║ąŠą╝ą░ąĮą┤čā čü ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░č湥ą╣ ąĖ ą┐čĆąĖąĄą╝ąŠą╝
// ą▓ą╝ąĄčüč鹊 ą┐čĆąĄą┤čŗą┤čāčēąĄą╣ ą║ąŠą╝ą░ąĮą┤čŗ, ą│ą┤ąĄ ą▒čŗą╗ą░ č鹊ą╗čīą║ąŠ ą┐ąĄčĆąĄą┤ą░čćą░.
// ąÆčŗą▓ąŠą┤ ą┐ąŠ čäčĆąŠąĮčéčā čéą░ą║č鹊ą▓, ą▓ą▓ąŠą┤ ą┐ąŠ čüą┐ą░ą┤čā, MSB ąĖą┤ąĄčé ą┐ąĄčĆą▓čŗą╝,
// čéą░ą║čéąĖčĆčāąĄčéčüčÅ ąĘą░ą┤ą░ąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé:
dwNumBytesToSend = 0; // ąĪą▒čĆąŠčü ąĖąĮą┤ąĄą║čüą░ ą▒čāč乥čĆą░.
byOutputBuffer[dwNumBytesToSend++] = 0x34;
// Length = 0x0001 + 1
byOutputBuffer[dwNumBytesToSend++] = 0x01; // Length L
byOutputBuffer[dwNumBytesToSend++] = 0x00; // Length H
// ąöą░ąĮąĮčŗąĄ 0xA50F:
byOutputBuffer[dwNumBytesToSend++] = 0xA5;
byOutputBuffer[dwNumBytesToSend++] = 0x0F;
// ą×čéą┐čĆą░ą▓ą║ą░ ą║ąŠą╝ą░ąĮą┤čŗ:
ftStatus = FT_Write(ftHandle,
byOutputBuffer,
dwNumBytesToSend,
&dwNumBytesSent);
// ą×ąČąĖą┤ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ąĖ ą┐ąŠą╗čāč湥ąĮąĖčÅ
// čüčéą░čéčāčüą░ ąŠčé ą┤čĆą░ą╣ą▓ąĄčĆą░ (čüą╝. čāčüčéą░ąĮąŠą▓ą║čā čéą░ą╣ą╝ąĄčĆą░
// ą╗ą░č鹥ąĮčéąĮąŠčüčéąĖ ą▓čŗčłąĄ):
Sleep(2);
// ą¤čĆąŠą▓ąĄčĆą║ą░ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ - ą▓ ąĮąĄą╝ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┤ą░ąĮąĮčŗąĄ, ąĘą░ą║ąŠą╗čīčåąŠą▓ą░ąĮąĮčŗąĄ
// ąŠą▒čĆą░čéąĮąŠ. ą¤ąŠą╗čāč湥ąĮąĖąĄ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▒ą░ą╣čé ą▓ ą▒čāč乥čĆąĄ ą┐čĆąĖąĄą╝ą░:
ftStatus = FT_GetQueueStatus(ftHandle, &dwNumBytesToRead);
// ą¦č鹥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ:
FT_Read(ftHandle,
&byInputBuffer,
dwNumBytesToRead,
&dwNumBytesRead);
// ąÆ ą▒čāč乥čĆąĄ ą┐čĆąĖąĄą╝ą░ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī 2 ą▒ą░ą╣čéą░. ąĢčüą╗ąĖ ąĮąĄ čéą░ą║, č鹊 ąŠčłąĖą▒ą║ą░:
if (dwNumBytesToRead != 2)
{
printf("Error - MPSSE receive buffer should have the");
printf(" looped-back data\n");
// ąĪą▒čĆąŠčü ą┐ąŠčĆčéą░ ą┤ą╗čÅ ąĘą░ą┐čĆąĄčéą░ MPSSE:
FT_SetBitMode(ftHandle, 0x0, 0x00);
FT_Close(ftHandle); // ąŚą░ą║čĆčŗčéąĖąĄ ą┐ąŠčĆčéą░ USB.
return 1; // ąÆčŗčģąŠą┤ ą┐ąŠ ąŠčłąĖą▒ą║ąĄ.
}
printf("The correct number of bytes have been received\n");
// ą¤ąĄčĆąĄą┤ą░ąĮąĮčŗąĄ ąĖ ą┐čĆąĖąĮčÅčéčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┤ąŠą╗ąČąĮčŗ čüąŠą▓ą┐ą░ą┤ą░čéčī.
for(dwCount = 0; dwCount < dwNumBytesRead; dwCount++)
{
// ąÆčŗą▓ąŠą┤ąĖą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĮą░čćąĖąĮą░čÄčéčüčÅ ą▓ ą▒čāč乥čĆąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ čü čÅč湥ą╣ą║ąĖ 3,
// ą┐ąŠčüą╗ąĄ opcode ąĖ length.
if (byInputBuffer[dwCount] != byOutputBuffer[dwCount + 3])
{
printf("Error - Data received does not match data output\n");
// ąĪą▒čĆąŠčü ą┐ąŠčĆčéą░ ą┤ą╗čÅ ąĘą░ą┐čĆąĄčéą░ MPSSE:
FT_SetBitMode(ftHandle, 0x0, 0x00);
FT_Close(ftHandle); // ąŚą░ą║čĆčŗčéąĖąĄ ą┐ąŠčĆčéą░ USB.
return 1; // ąÆčŗčģąŠą┤ ą┐ąŠ ąŠčłąĖą▒ą║ąĄ.
}
}
printf("The input data matches the output data\n");
ąĀąĖčü. 5.2 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé č鹥 ąČąĄ čüąĖą│ąĮą░ą╗čŗ, ą║ą░ą║ ąĖ ąĮą░ čĆąĖčü. 5.1. ąĪąĖą│ąĮą░ą╗ ą┤ą░ąĮąĮčŗčģ TDI/DO čéą░ą║ąČąĄ čüąŠąĄą┤ąĖąĮąĄąĮ čü TDO/DI, ą┤ą░ąĮąĮčŗąĄ ą▓ą┤ą▓ąĖą│ą░čÄčéčüčÅ ą▓ MPSSE ą┐ąŠ čüą┐ą░ą┤čā čāčĆąŠą▓ąĮčÅ čéą░ą║č鹊ą▓. ą×č湥ą▓ąĖą┤ąĮąŠ, čćč鹊 ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ čüąŠą▓ą┐ą░ą┤ą░čÄčé čü č鹥ą╝ąĖ, čćč鹊 ą▒čŗą╗ąĖ ą┐čĆąŠčćąĖčéą░ąĮčŗ ąĖąĘ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ MPSSE.

ąĀąĖčü. 5.2. ą×čüčåąĖą╗ą╗ąŠą│čĆą░ą╝ą╝ą░ čĆąĄąČąĖą╝ą░, ą▓ ą║ąŠč鹊čĆąŠą╝ ą┤ą░ąĮąĮčŗąĄ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąĖ ą▓čŗą▓ąŠą┤čÅčéčüčÅ, ąĖ ą▓ą▓ąŠą┤čÅčéčüčÅ.
// ą¤ą░čāąĘą░ čü ąŠąČąĖą┤ą░ąĮąĖąĄą╝ ąĮą░ąČą░čéąĖčÅ ąĮą░ ą║ą╗ą░ą▓ąĖčłčā:
printf("Press < Enter > to continue\n");
getchar();
// ą×čćąĖčüčéą║ą░ ą▒čāč乥čĆąŠą▓ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░ (ąĮąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ):
memset(byOutputBuffer, 0, sizeof(byOutputBuffer));
memset(byInputBuffer, 0, sizeof(byInputBuffer));
[ąöąŠčüčéčāą┐ ą║ GPIO]
ąØąŠąČą║ąĖ ą┐ąŠčĆč鹊ą▓ FTDI MPSSE, ą║ ą║ąŠč鹊čĆčŗą╝ ąĮąĄ ą┐čĆąĖą▓čÅąĘą░ąĮčŗ čüą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ čäčāąĮą║čåąĖąĖ, ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ-čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗąĄ ą┐ąŠčĆčéčŗ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ (GPIO). ąŁč鹊 ą▓ą║ą╗čÄčćą░ąĄčé ą╗čÄą▒ąŠą╣ čüąĖą│ąĮą░ą╗ ą▓čŗą▒ąŠčĆą║ąĖ (chip select, CS), ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗą╣ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ SPI. ąŻčüčéą░ąĮąŠą▓ą║ą░ ą▓ ą╗ąŠą│. 1 ąĖ ą╗ąŠą│. 0 ą╗čÄą▒ąŠą│ąŠ ąĖąĘ čŹčéąĖčģ ą▓čŗą▓ąŠą┤ąŠą▓ ą┤ąĄą╗ą░ąĄčéčüčÅ ąŠą┤ąĮąĖą╝ ąĖ č鹥ą╝ ąČąĄ čüą┐ąŠčüąŠą▒ąŠą╝. ąĢčüą╗ąĖ čāą┐čĆą░ą▓ą╗čÅčéčī čŹčéąĖą╝ąĖ ą▓čŗą▓ąŠą┤ą░ą╝ąĖ ą┐ąŠ ąŠčéą┤ąĄą╗čīąĮąŠčüčéąĖ, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą┤ą░ą╗ąĄąĄ, č鹊 ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ čŹčéąĖčģ čüąĖą│ąĮą░ą╗ąŠą▓ GPIO, ą║ąŠč鹊čĆą░čÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┤ąŠčüčéąĖą│ąĮčāčéą░, ąŠą│čĆą░ąĮąĖč湥ąĮą░ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ ą┤ą░ąĮąĮčŗčģ ą┐ąŠ čłąĖąĮąĄ USB ą▓ ąŠčéą┤ąĄą╗čīąĮąŠą╣ čéčĆą░ąĮąĘą░ą║čåąĖąĖ, ą┐čĆąĖ ą║ą░ąČą┤ąŠą╝ ą▓čŗąĘąŠą▓ąĄ FT_Write. ąŁč鹊 ą║ą░ą║ čĆą░ąĘ č鹊čé čüą╗čāčćą░ą╣, ą║ąŠą│ą┤ą░ ą│ąŠčĆą░ąĘą┤ąŠ ą▓čŗą│ąŠą┤ąĮąĄąĄ čüąŠąĄą┤ąĖąĮąĖčéčī ą▓ ąŠą┤ąĮčā ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą║ąŠą╝ą░ąĮą┤ MPSSE, čćč鹊ą▒čŗ ąĖąĘ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ąŠčéą┐čĆą░ą▓ąĖčéčī ąŠą┤ąĮąĖą╝ ą▓čŗąĘąŠą▓ąŠą╝ FT_Write. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą╝ąŠąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ą▓čŗą▒ąŠčĆą║čā CS, ą┐ąĄčĆąĄą┤ą░čéčī ą┤ą░ąĮąĮčŗąĄ ąĖ čüąĮčÅčéčī ą▓čŗą▒ąŠčĆą║čā CS ą▓ ąŠą┤ąĮąŠą╝ ą▓čŗąĘąŠą▓ąĄ FT_Write.
ąÜąŠą┤, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗą╣ ąĮąĖąČąĄ, ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą┐čĆąŠčüčéčāčÄ ąŠą┐ąĄčĆą░čåąĖčÄ read-modify-write ą┤ą╗čÅ ą│ą░čĆą░ąĮčéąĖąĖ, čćč鹊 ą▓čüąĄ ą┤čĆčāą│ąĖąĄ ą▒ąĖčéčŗ ąŠčüčéą░ąĮčāčéčüčÅ ąĮąĄčéčĆąŠąĮčāčéčŗą╝ąĖ.
// ą¦č鹥ąĮąĖąĄ ą╝ą╗ą░ą┤čłąĄą│ąŠ ą▒ą░ą╣čéą░ GPIO.
// *************************************************************
// ąśąĘą╝ąĄąĮąĄąĮąĖąĄ ą┐ąĄčĆąĄą┐ą░ą┤ą░ ąĮą░ čüą┐ą░ą┤ čāčĆąŠą▓ąĮčÅ čéčĆąĖą│ą│ąĄčĆą░ ą║ą░ąĮą░ą╗ą░ 4 (TMS/CS)
// *************************************************************
// ą¤ąŠą╗čāč湥ąĮąĖąĄ ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ: ą▓ąŠąĘą▓čĆą░čé čüąŠčüč鹊čÅąĮąĖčÅ ą▓čŗą▓ąŠą┤ąŠą▓ - ą╗ąĖą▒ąŠ ą▓čģąŠą┤ąŠą▓,
// ą╗ąĖą▒ąŠ ą▓čŗčģąŠą┤ąŠą▓, ą▓ ą╝ą╗ą░ą┤čłąĄą╝ ą▒ą░ą╣č鹥 MPSSE:
dwNumBytesToSend = 0; // ąĪą▒čĆąŠčü ąĖąĮą┤ąĄą║čüą░ ą▒čāč乥čĆą░.
byOutputBuffer[dwNumBytesToSend++] = 0x81;
// ą¦č鹥ąĮąĖąĄ ą╝ą╗ą░ą┤čłąĄą│ąŠ ą▒ą░ą╣čéą░ GPIO:
ftStatus = FT_Write(ftHandle,
byOutputBuffer,
dwNumBytesToSend,
&dwNumBytesSent);
// ą×ąČąĖą┤ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ąĖ ą┐ąŠą╗čāč湥ąĮąĖčÅ
// čüčéą░čéčāčüą░ ąŠčé ą┤čĆą░ą╣ą▓ąĄčĆą░ (čüą╝. čāčüčéą░ąĮąŠą▓ą║čā čéą░ą╣ą╝ąĄčĆą░
// ą╗ą░č鹥ąĮčéąĮąŠčüčéąĖ ą▓čŗčłąĄ):
Sleep(2);
// ą×ą┐čĆąŠčü čüčéą░čéčāčüą░ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░, ą▓ ąĮąĄą╝ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠą┤ąĖąĮ ą▒ą░ą╣čé:
ftStatus = FT_GetQueueStatus(ftHandle, &dwNumBytesToRead);
// ą¦č鹥ąĮąĖąĄ ą▒ą░ą╣čéą░:
ftStatus |= FT_Read(ftHandle,
&byInputBuffer,
dwNumBytesToRead,
&dwNumBytesRead);
if ((ftStatus != FT_OK) & (dwNumBytesToRead != 1))
{
printf("Error - GPIO cannot be read\n");
// ąĪą▒čĆąŠčü ą┐ąŠčĆčéą░ ą┤ą╗čÅ ąĘą░ą┐čĆąĄčéą░ MPSSE:
FT_SetBitMode(ftHandle, 0x0, 0x00);
FT_Close(ftHandle); // ąŚą░ą║čĆčŗčéąĖąĄ ą┐ąŠčĆčéą░ USB.
return 1; // ąÆčŗčģąŠą┤ ą┐ąŠ ąŠčłąĖą▒ą║ąĄ.
}
// ąæčāč乥čĆ ą▓ą▓ąŠą┤ą░ čüąŠą┤ąĄčƹȹĖčé č鹊ą╗čīą║ąŠ 1 ą▒ą░ą╣čé ą▓ čÅč湥ą╣ą║ąĄ 0 ą▒čāč乥čĆą░:
printf("The GPIO low-byte = 0x%X\n", byInputBuffer[0]);
// ą×ąČąĖą┤ą░ąĮąĖčÅ ąĮą░ąČą░čéąĖčÅ ą║ą╗ą░ą▓ąĖčłąĖ ą┤ą╗čÅ ą┐čĆąŠą┤ąŠą╗ąČąĄąĮąĖčÅ:
printf("Press < Enter > to continue\n");
getchar();
// ą£ąŠą┤ąĖčäąĖą║ą░čåąĖčÅ ą┤ą░ąĮąĮčŗčģ GPIO (č鹊ą╗čīą║ąŠ TMS/CS) ąĖ ąŠčéą┐čĆą░ą▓ą║ą░
// ąĖčģ ąŠą▒čĆą░čéąĮąŠ ąĮą░ ą▓čŗą▓ąŠą┤čŗ ą┐ąŠčĆčéą░. ąÜąŠą╝ą░ąĮą┤ą░ čāčüčéą░ąĮąŠą▓ą║ąĖ
// ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ ą╝ą╗ą░ą┤čłąĄą│ąŠ ą▒ą░ą╣čéą░ ą┐ąŠčĆčéą░ MPSSE:
dwNumBytesToSend = 0; // ąĪą▒čĆąŠčü ąĖąĮą┤ąĄą║čüą░ ą▒čāč乥čĆą░.
byOutputBuffer[dwNumBytesToSend++] = 0x80;
// ąæčāą┤ąĄčé ąĖąĘą╝ąĄąĮąĄąĮ ą▓ 0 č鹊ą╗čīą║ąŠ čĆą░ąĘčĆčÅą┤ TMS/CS:
byOutputBuffer[dwNumBytesToSend++] = byInputBuffer[0] & 0xF7;
// ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čüąĄ ąĄčēąĄ ąĮčāąČąĮą░ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ ąŠą┐ąĄčĆą░čåąĖąĖ
// ąĘą░ą┐ąĖčüąĖ GPIO:
byOutputBuffer[dwNumBytesToSend++] = 0xFB;
// ą×čéą┐čĆą░ą▓ą║ą░ ą║ąŠą╝ą░ąĮą┤čŗ:
ftStatus = FT_Write(ftHandle,
byOutputBuffer,
dwNumBytesToSend,
// ą×ąČąĖą┤ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ąĖ ą┐ąŠą╗čāč湥ąĮąĖčÅ
// čüčéą░čéčāčüą░ ąŠčé ą┤čĆą░ą╣ą▓ąĄčĆą░ (čüą╝. čāčüčéą░ąĮąŠą▓ą║čā čéą░ą╣ą╝ąĄčĆą░
// ą╗ą░č鹥ąĮčéąĮąŠčüčéąĖ ą▓čŗčłąĄ):
Sleep(2);
ąĀąĖčü. 5.3 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹčäč乥ą║čé ąŠčé čćč鹥ąĮąĖčÅ ą╝ą╗ą░ą┤čłąĄą│ąŠ ą▒ą░ą╣čéą░ GPIO, ą┐ąĄčĆąĄą▓ąŠą┤ ą▒ąĖčéą░ 3 (TMS/CS) ą▓ ą╗ąŠą│. 0 ąĖ ąĘą░ą┐ąĖčüąĖ ą┐čĆąŠčćąĖčéą░ąĮąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ąŠą▒čĆą░čéąĮąŠ ą▓ ą┐ąŠčĆčé GPIO.
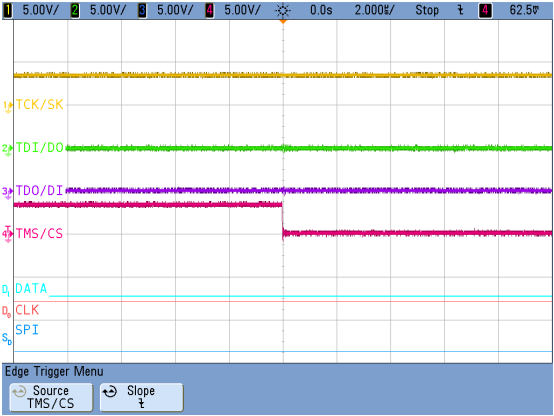
ąĀąĖčü. 5.3. ą×čüčåąĖą╗ą╗ąŠą│čĆą░ą╝ą╝ą░, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēą░čÅ čĆąĄąĘčāą╗čīčéą░čé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆą░ąĘčĆčÅą┤ąŠą╝ GPIO.
[ąŚą░ą║čĆčŗčéąĖąĄ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░]
ąÜąŠą│ą┤ą░ ą▓čüąĄ čäčāąĮą║čåąĖąĖ ąĘą░ą▓ąĄčĆčłąĄąĮčŗ, FTDI MPSSE ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüą▒čĆąŠčłąĄąĮą░ ąĖ ąĘą░ą┐čĆąĄčēąĄąĮą░. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ąĘą░ą║čĆčŗą▓ą░ąĄčéčüčÅ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ (handle) ą┐ąŠčĆčéą░ FT2232H, č湥ą╝ ą┐ąŠčĆčé ąŠčüą▓ąŠą▒ąŠąČą┤ą░ąĄčéčüčÅ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ ą┤čĆčāą│ąŠą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ.
// -----------------------------------------------------------
// ąŚą░ą║čĆčŗą▓ą░ąĄą╝ ąĖ ą▓čŗą║ą╗čÄčćą░ąĄą╝ ą▓čüąĄ, čćč鹊 ą▒čŗą╗ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąŠ
// -----------------------------------------------------------
printf("\nAN_135 example program executed successfully.\n");
// ą¤ą░čāąĘą░ čü ąŠąČąĖą┤ą░ąĮąĖąĄą╝ ąĮą░ąČą░čéąĖčÅ ąĮą░ ą║ą╗ą░ą▓ąĖčłčā:
printf("Press < Enter > to continue\n");
getchar();
FT_SetBitMode(ftHandle, 0x0, 0x00); // ąĪą▒čĆąŠčü MPSSE
FT_Close(ftHandle); // ąŚą░ą║čĆčŗčéąĖąĄ ą┐ąŠčĆčéą░
return 0; // ąŻčüą┐ąĄčłąĮąŠąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ
ą¤ąŠ čüčüčŗą╗ą║ą░ą╝ [6 .. 9] čüą╝. ąŠą┐ąĖčüą░ąĮąĖčÅ ą┤čĆčāą│ąĖčģ ą┐čĆą░ą║čéąĖč湥čüą║ąĖčģ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖą╣ čćąĖą┐ąŠą▓ ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ FTDI.
[ąĪčüčŗą╗ą║ąĖ]
1. AN_135 FTDI MPSSE Basics site:ftdichip.com.
2. D2XX Direct Drivers site:ftdichip.com.
3. FTDI: čüą┐čĆą░ą▓ąŠčćąĮąĖą║ ą┐ąŠ čäčāąĮą║čåąĖčÅą╝ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ D2XX.
4. FTDI: ą║ąŠą╝ą░ąĮą┤ąĮčŗą╣ ą┐čĆąŠčåąĄčüčüąŠčĆ MPSSE ąĖ čĆąĄąČąĖą╝čŗ 菹╝čāą╗čÅčåąĖąĖ čłąĖąĮčŗ čģąŠčüčéą░.
5. ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ JTAG TAP č湥čĆąĄąĘ FT2232H.
6. AN_113 Interfacing FT2232H Hi-Speed Devices To I2C Bus site:ftdichip.com.
7. AN_114 Interfacing FT2232H Hi-Speed Devices To SPI Bus site:ftdichip.com.
8. AN_129 Interfacing FT2232H Hi-Speed Devices to a JTAG TAP site:ftdichip.com.
9. TN_109 Instructions On Including The FTD2xx DLL In A VS2008 Project site:ftdichip.com. |



