|
ąŚą░ ą┐ąŠčüą╗ąĄą┤ąĮąĖąĄ ą│ąŠą┤čŗ Linux čüčéą░ą╗ą░ ą┐ąŠą┐čāą╗čÅčĆąĮčŗą╝ ą▓čŗą▒ąŠčĆąŠą╝ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ ąĮąĄ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čĆčŗąĮą║ą░ PC ąĖ čüąĄčĆą▓ąĄčĆąŠą▓, ąĮąŠ čéą░ą║ąČąĄ ąĖ ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ čāčüčéčĆąŠą╣čüčéą▓ - ą▓ čćą░čüčéąĮąŠčüčéąĖ ą┤ą╗čÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąŠą╣ 菹╗ąĄą║čéčĆąŠąĮąĖą║ąĖ, ą╝ą░čĆčłčĆčāčéąĖąĘą░č鹊čĆąŠą▓ ąĖ čüąĄč鹥ą▓čŗčģ ą║ąŠą╝ą╝čāčéą░č鹊čĆąŠą▓, ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ąśąĮč鹥čĆąĮąĄčéą░, ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ąĖ ą░ą▓č鹊ą╝ąŠą▒ąĖą╗čīąĮąŠą╣ 菹╗ąĄą║čéčĆąŠąĮąĖą║ąĖ.
ąöąŠčüč鹊ąĖąĮčüčéą▓ąŠ Embedded Linux ą▓ č鹊ą╝, čćč鹊 ąŠąĮą░ čüą▓ąŠą▒ąŠą┤ąĮą░ ąŠčé ą╗ąĖčåąĄąĮąĘąĖąŠąĮąĮčŗčģ ąŠčéčćąĖčüą╗ąĄąĮąĖą╣, ą┐ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ čü ąŠčéą║čĆčŗčéčŗą╝ ąĖčüčģąŠą┤ąĮčŗą╝ ą║ąŠą┤ąŠą╝, ąĖ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ą║ąŠą╝ą┐ą░ą║čéąĮąŠąĄ čĆąĄčłąĄąĮąĖąĄ, ą┤ą░čÄčēąĄąĄ ąĮą░ą┤ąĄąČąĮčāčÄ ąŠčüąĮąŠą▓čā ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ą┐čĆąŠąĄą║čéą░ ąĖ ąĄą│ąŠ čĆą░ąĘą▓ąĖčéąĖčÅ ą▓ ą▒čāą┤čāčēąĄą╝. Linux čŹč鹊 ą┐ąŠą╗ąĮąŠčäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮą░čÅ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮą░čÅ čüąĖčüč鹥ą╝ą░ (OS), čü ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ čĆą░ąĘą╗ąĖčćąĮčŗčģ čüčéą░ąĮą┤ą░čĆč鹊ą▓ čüąĄč鹥ą▓čŗčģ čüąŠąĄą┤ąĖąĮąĄąĮąĖą╣ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓ čäą░ą╣ą╗ąŠą▓čŗčģ čüąĖčüč鹥ą╝ - ąŠč湥ąĮčī ą▓ą░ąČąĮąŠąĄ čéčĆąĄą▒ąŠą▓ą░ąĮąĖąĄ ą┤ą╗čÅ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ čüąĖčüč鹥ą╝, ą┐ąŠč鹊ą╝čā čćč鹊 ąĖą╝ čéčĆąĄą▒čāąĄčéčüčÅ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī "čüąŠąĄą┤ąĖąĮčÅčéčīčüčÅ ąĖ ą▓čŗčćąĖčüą╗čÅčéčī ą▓ąĄąĘą┤ąĄ ąĖ ą▓čüąĄą│ą┤ą░", ą▓ ą╗čÄą▒čŗčģ čĆą░ą▒ąŠčćąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ.
ą¤ąŠčüą║ąŠą╗čīą║čā Linux ąĖą╝ąĄąĄčé ą╝ąŠą┤čāą╗čīąĮčāčÄ čüčéčĆčāą║čéčāčĆčā, ąŠąĮą░ ą╗ąĄą│ą║ąŠ čāąČąĖą╝ą░ąĄčéčüčÅ ą┐čāč鹥ą╝ čāą┤ą░ą╗ąĄąĮąĖčÅ ąĄčæ ą┐čĆąŠą│čĆą░ą╝ą╝-čāčéąĖą╗ąĖčé, ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░ą╗čīąĮčŗčģ čüčĆąĄą┤čüčéą▓ ąĖ ą┤čĆčāą│ąĖčģ čüąĖčüč鹥ą╝ąĮčŗčģ čüąĄčĆą▓ąĖčüąŠą▓, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ąĮčāąČąĮčŗ ą▓ čåąĄą╗ąĄą▓ąŠą╝ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝ąŠą╝ ąŠą║čĆčāąČąĄąĮąĖąĖ, ą│ą┤ąĄ čĆą░ą▒ąŠčéą░ąĄčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ. ąŁč鹊 ąŠč湥ą▓ąĖą┤ąĮąŠąĄ ą┤ąŠčüč鹊ąĖąĮčüčéą▓ąŠ ą┤ą╗čÅ ą║ąŠą╝ą┐ą░ąĮąĖą╣, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĖčģ Linux ąĮą░ čĆčŗąĮą║ąĄ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ čāčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆąŠąĄ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▒čŗčüčéčĆąĄąĄ ą▓čŗą▓ąŠą┤ąĖčéčī ą┐čĆąŠą┤čāą║čåąĖčÄ ąĮą░ čĆčŗąĮąŠą║, čü ą┤ąŠčüčéą░č鹊čćąĮąŠą╣ ą│ąĖą▒ą║ąŠčüčéčīčÄ ąĖ ąĮą░ą┤ąĄąČąĮąŠčüčéčīčÄ.
ąöą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąŠą▓ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ čüčéčŗą║ąŠą▓ą║ą░ ą░čĆčģąĖč鹥ą║čéčāčĆ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ Blackfin ąĖ uClinux ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ąĖąĮč鹥čĆąĄčü. ą¤čĆąŠčåąĄčüčüąŠčĆčŗ Blackfin [2] ą║ąŠą╝ą▒ąĖąĮąĖčĆčāčÄčé ą▓ čüąĄą▒ąĄ ą▓čŗčćąĖčüą╗ąĖč鹥ą╗čīąĮčāčÄ ą╝ąŠčēčī DSP ąĖ čäčāąĮą║čåąĖąŠąĮą░ą╗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓, čćč鹊 čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅąĄčé čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ čåąĖčäčĆąŠą▓ąŠą│ąŠ ąĘą▓čāą║ą░ ąĖ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣. ąÜąŠą╝ą▒ąĖąĮą░čåąĖčÅ čÅą┤čĆą░ DSP čü čéčĆą░ą┤ąĖčåąĖąŠąĮąĮąŠą╣ ą░čĆčģąĖč鹥ą║čéčāčĆąŠą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĮą░ ąŠą┤ąĮąŠą╝ čćąĖą┐ąĄ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĖąĘą▒ąĄąČą░čéčī ąŠą│čĆą░ąĮąĖč湥ąĮąĖą╣, čüą╗ąŠąČąĮąŠčüčéąĖ ąĖ ą▓čŗčüąŠą║ąŠą╣ čüč鹊ąĖą╝ąŠčüčéąĖ čéčĆą░ą┤ąĖčåąĖąŠąĮąĮčŗčģ ą│ąĄč鹥čĆąŠą│ąĄąĮąĮčŗčģ ą╝ąĮąŠą│ąŠą┐čĆąŠčåąĄčüčüąŠčĆąĮčŗčģ čüąĖčüč鹥ą╝.
ąÆčüąĄ ą┐čĆąŠčåąĄčüčüąŠčĆčŗ Blackfin ą║ąŠą╝ą▒ąĖąĮąĖčĆčāčÄčé ą▓ ąŠą┤ąĮąŠą╣ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╣ ą░čĆčģąĖč鹥ą║čéčāčĆąĄ, čüą┐ąĄčåąĖą░ą╗čīąĮąŠ čüą┐čĆąŠąĄą║čéąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ą┐ąŠą┤ čåąĄą╗ąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąĖą│ąĮą░ą╗ąŠą▓, čü ą┤ąŠčüč鹊ąĖąĮčüčéą▓ą░ą╝ąĖ ąĮą░ą▒ąŠčĆą░ ąĖąĮčüčéčĆčāą║čåąĖą╣ čüčéąĖą╗čÅ RISC ąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčÅą╝ąĖ čüąĖčüč鹥ą╝čŗ ą║ąŠą╝ą░ąĮą┤ čéąĖą┐ą░ "ąŠą┤ąĮą░ ąĖąĮčüčéčĆčāą║čåąĖčÅ / ą╝ąĮąŠą│ąŠ ą┤ą░ąĮąĮčŗčģ (Single-Instruction Multiple-Data, SIMD), ą┐ąŠąĘą▓ąŠą╗čÅčÄčēąĖą╣ čāą┐čĆąŠčüčéąĖčéčī čüąŠąĘą┤ą░ąĮąĖąĄ ą╝čāą╗čīčéąĖą╝ąĄą┤ąĖą╣ąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣. ą»ą┤čĆąŠ Micro Signal Architecture (MSA) ąĖ ą┤ą▓ąŠą╣ąĮąŠą╣ ą▒ą╗ąŠą║ ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣ MAC (Multiply Accumulator, čāą╝ąĮąŠąČąĄąĮąĖąĄ čü ąĮą░ą║ąŠą┐ą╗ąĄąĮąĖąĄą╝), ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąĮą░čÅ ąōą░čĆą▓ą░čĆą┤čüą║ą░čÅ ą░čĆčģąĖč鹥ą║čéčāčĆą░, ą║ąŠč鹊čĆą░čÅ ą▒čŗą╗ą░ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮą░ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ąĮąĄ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮčŗčģ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮčŗčģ ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣, ą░ čéą░ą║ąČąĄ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą┐čĆąĖąĮčåąĖą┐ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĖ ą┐ąŠč鹊ą║ą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĖ ąŠą┐ąĄčĆą░čåąĖąĖ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠą│ąŠ ą╝ą░ąĮąĖą┐čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ ą▒ąĖčéą░ą╝ąĖ - ą▓čüąĄ čŹč鹊 ą░ą║čéąĖą▓ąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ OS. ą×ą▒ą░ ą▒ą╗ąŠą║ą░ MAC ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ ąŠą┐ąĄčĆą░čåąĖčÅčģ ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣, ąĘą░ąĮąĖą╝ą░čÄčēąĖčģ ąŠą┤ąĖąĮ ąĖą╗ąĖ ą┤ą▓ą░ čåąĖą║ą╗ą░ ąĮą░ ąĖąĮčüčéčĆčāą║čåąĖčÄ, čćč鹊 ą┤ą░ąĄčé čłąĖčĆąŠą║čāčÄ ą┐ąŠą╗ąŠčüčā ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┤ą░ąĮąĮčŗčģ. ąØą░ą┐čĆąĖą╝ąĄčĆ čüčāčēąĄčüčéą▓čāąĄčé ąĖąĮčüčéčĆčāą║čåąĖčÅ ą┤ą▓ąŠą╣ąĮąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ MAC Blackfin:
R3 = (A1 += R7.H * R6.H), R2 = (A0 += R7.L * R6.L);
ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 1 ąĮąĖąČąĄ, ąŠą┤ąĮąŠčÅą┤ąĄčĆąĮčŗąĄ ą┐čĆąŠčåąĄčüčüąŠčĆčŗ Blackfin ąĖą╝ąĄčÄčé 2 ą▒ąŠą╗čīčłąĖčģ ą▒ą╗ąŠą║ą░ ą▓čüčéčĆąŠąĄąĮąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ, ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čÄčēąĖčģ čłąĖčĆąŠą║ąŠą┐ąŠą╗ąŠčüąĮčŗą╣ ą┤ąŠčüčéčāą┐ čüąŠ čüč鹊čĆąŠąĮčŗ čÅą┤čĆą░ (čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝ą░čÅ ą┐ą░ą╝čÅčéčī L1). ąŁčéąĖ ą▒ą╗ąŠą║ąĖ ą┐ą░ą╝čÅčéąĖ ą┤ąŠčüčéčāą┐ąĮčŗ ą┤ą╗čÅ čÅą┤čĆąĄ ąĮą░ ą┐ąŠą╗ąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ, ą▒ąĄąĘ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ ąĘą░ą┤ąĄčƹȹĄą║ (ąĮą░ čćą░čüč鹊čéą░čģ ą┤ąŠ 756 ą£ąōčå). ąŁčéąĖ ą┤ą▓ą░ ą▒ą╗ąŠą║ą░ ą┐ą░ą╝čÅčéąĖ ąĮą░čģąŠą┤čÅčéčüčÅ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ čĆčÅą┤ąŠą╝ čü čÅą┤čĆąŠą╝ ą┐čĆąŠčåąĄčüčüąŠčĆą░, ąĖ ąĄčæ ą╝ąŠąČąĮąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą╗ąĖą▒ąŠ ą║ą░ą║ ą┐ą░ą╝čÅčéčī ą┤ą░ąĮąĮčŗčģ ąĖą╗ąĖ ąĖąĮčüčéčĆčāą║čåąĖą╣, ą╗ąĖą▒ąŠ ą║ą░ą║ ą║čŹčł [3].
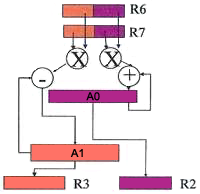
ąĀąĖčü. 1. ą×ą┤ąĮąŠčÅą┤ąĄčĆąĮčŗą╣ ą┐čĆąŠčåąĄčüčüąŠčĆ Blackfin.
ąÜąŠą│ą┤ą░ ąĖą╝ąĄąĄčéčüčÅ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą║čŹčł, č鹊 čüą║ąŠčĆąŠčüčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ąŠą┤ą░ ąĖąĘ "ą▓ąĮąĄčłąĮąĄą╣" ą┐ą░ą╝čÅčéąĖ SDRAM ą▒čāą┤ąĄčé ą┐ąŠčćčéąĖ ąĮą░ č鹊ą╝ ąČąĄ čüą░ą╝ąŠą╝ čāčĆąŠą▓ąĮąĄ, ą║ą░ą║ ąĖ čüą║ąŠčĆąŠčüčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ąŠą┤ą░ ąĖąĘ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ L1. ąŁčéą░ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąŠčüąŠą▒ąĄąĮąĮąŠ čģąŠčĆąŠčłąŠ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ čÅą┤čĆą░ uClinux, ą║ąŠč鹊čĆąŠąĄ ąĮąĄ ą┐ąŠą╝ąĄčēą░ąĄčéčüčÅ čåąĄą╗ąĖą║ąŠą╝ ą▓ąŠ ą▓ąĮčāčéčĆąĄąĮąĮčÄčÄ ą┐ą░ą╝čÅčéčī Blackfin. ąóą░ą║ąČąĄ ą┐čĆąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĖ ąĮą░ čÅąĘčŗą║ąĄ C ąĘą░ą▒ąŠčéčā ąŠą▒ ąŠą┐čéąĖą╝ąĖąĘą░čåąĖąĖ ą┤ąŠčüčéčāą┐ą░ ą║ ą┐ą░ą╝čÅčéąĖ ą╝ąŠąČąĮąŠ ą┐ąĄčĆąĄą╗ąŠąČąĖčéčī ąĮą░ ą║čŹčł čüąĖčüč鹥ą╝čŗ.
ąĪčāčēąĄčüčéą▓čāąĄčé ą╝ąĮąŠąČąĄčüčéą▓ąŠ ą║ąŠą╝ą╝ąĄčĆč湥čüą║ąĖčģ ąĖ ąĮąĄą║ąŠą╝ą╝ą╝ąĄčĆč湥čüą║ąĖčģ č乊čĆą║ąŠą▓ čÅą┤ąĄčĆ ąĖ ą┤ąĖčüčéčĆąĖą▒čāčéąĖą▓ąŠą▓ Linux. ą×ą┤ąĮąŠ ąĖąĘ čüą┐ąĄčåąĖą░ą╗čīąĮčŗčģ ąŠčéą▓ąĄčéą▓ą╗ąĄąĮąĖą╣ - čÅą┤čĆąŠ uClinux (www.uclinux.org). ąŁč鹊 ą┐ąŠčĆčé čÅą┤čĆą░ Linux, čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąĮčŗą╣ ą┤ą╗čÅ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╣ čüąŠą▓ą╝ąĄčüčéąĖą╝ąŠčüčéąĖ, ą▒ąĄąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▒ą╗ąŠą║ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéčīčÄ (Memory Management Unit, MMU).
ąźąŠčéčÅ ą┐ą░čéčć čÅą┤čĆą░ uClinux ą▒čŗą╗ąŠ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮ ą▓ ąŠčäąĖčåąĖą░ą╗čīąĮąŠąĄ čÅą┤čĆąŠ Linux 2.6.x, ąĮą░ąĖą▒ąŠą╗ąĄąĄ čüą▓ąĄąČčāčÄ ą▓ąĄčĆčüąĖčÄ uClinux ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ąĮą░ čüčéčĆą░ąĮąĖčćą║ąĄ uClinux Project Page ąĖ Blackfin/uClinux Project Page (www.blackfin.uclinux.org). ąĪčāčēąĄčüčéą▓čāčÄčé ą┐ą░čéčćąĖ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą║ąŠą╝ą╝ąĄčĆč湥čüą║ąĖą╝ąĖ ą▓ąĄčĆčüąĖčÅą╝ąĖ Linux, čüąŠą┤ąĄčƹȹ░čēąĖąĄ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čāą╗čāčćčłąĄąĮąĖčÅ, čüčĆąĄą┤čüčéą▓ą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ąĖ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ, ą║ąŠč鹊čĆčŗąĄ ą┤ą░čÄčé ą╗ąĖčåąĄąĮąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╝ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅą╝ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ą░ ą▓ ą▓ąĖą┤ąĄ čāčüą║ąŠčĆąĄąĮąĖčÅ čüąŠąĘą┤ą░ąĮąĖčÅ ą╝ąŠčēąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ąĮą░ ąŠčüąĮąŠą▓ąĄ uClinux.
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ www.uclinux.org ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ą╝ ą┤ąĖčüčéčĆąĖą▒čāčéąĖą▓ uClinux, ą║ąŠč鹊čĆčŗą╣ ą▓ą║ą╗čÄčćą░ąĄčé čéčĆąĖ čĆą░ąĘąĮčŗčģ čÅą┤čĆą░ (2.0.x, 2.4.x, 2.6.x) ą▓ą╝ąĄčüč鹥 čü čéčĆąĄą▒čāąĄą╝čŗą╝ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ą╝ąĖ, čüąĄčĆą▓ąĖčüąĮčŗą╣ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖą╣, ą▒ą░ąĘąŠą▓čŗąĄ ąŠą▒ąŠą╗ąŠčćą║ąĖ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ (Linux shells) ąĖ čłąĖčĆąŠą║ąĖą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ ą┐čĆąŠą│čĆą░ą╝ą╝, čéą░ą║ąĖčģ ą║ą░ą║ ą▓ąĄą▒-čüąĄčĆą▓ąĄčĆ, ą░čāą┤ąĖąŠą┐ą╗ąĄąĄčĆ, čÅąĘčŗą║ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ ą│čĆą░čäąĖč湥čüą║čāčÄ čāčéąĖą╗ąĖčéčā ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ. ąĢčüčéčī čéą░ą║ąČąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, čüą┐ąĄčåąĖą░ą╗čīąĮąŠ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąĮčŗąĄ čü čāč湥č鹊ą╝ čéčĆąĄą▒ąŠą▓ą░ąĮąĖą╣ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ ąĖ čŹčäč乥ą║čéąĖą▓ąĮąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čĆąĄčüčāčĆčüąŠą▓.
ą×ą┤ąĖąĮ ąĖąĘ ą┐čĆąĖą╝ąĄčĆąŠą▓ - busybox [4], ą┤ą▓ąŠąĖčćąĮąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ą╗čÅ ą╝ąĮąŠąČąĄčüčéą▓ąĄąĮąĮąŠą│ąŠ ąĘą░ą┐čāčüą║ą░, ą▓ ą║ąŠč鹊čĆąŠą╝ čüąŠą┤ąĄčƹȹĖčéčüčÅ čäčāąĮą║čåąĖąŠąĮą░ą╗ ą╝ąĮąŠąČąĄčüčéą▓ą░ ą┐čĆąŠą│čĆą░ą╝ą╝. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ busybox čüą╗ąĖąĮą║ąŠą▓ą░ąĮ čü ls ąĖ čüąŠą┤ąĄčƹȹĖčé ą║ąŠą┤ ls, č鹊 ąŠąĮ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą║ąŠą╝ą░ąĮą┤ą░ ls. ąÆčŗą│ąŠą┤ą░ ąŠčé čéą░ą║ąŠą│ąŠ ą┐ąŠą┤čģąŠą┤ą░ ą▓ č鹊ą╝, čćč鹊 busybox čüąŠčģčĆą░ąĮčÅąĄčé ąĮąĄą║ąŠč鹊čĆčŗąĄ ąĮą░ą║ą╗ą░ą┤ąĮčŗąĄ čĆą░čüčģąŠą┤čŗ ą┤ą╗čÅ čāąĮąĖą║ą░ą╗čīąĮčŗčģ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║, ąĖ čŹčéąĖ ą╝ą░ą╗ąĄąĮčīą║ąĖąĄ ą╝ąŠą┤čāą╗ąĖ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąŠą▒čēąĖą╣ ą║ąŠą┤. ąÆ čåąĄą╗ąŠą╝ ą┤ąĖčüčéčĆąĖą▒čāčéąĖą▓ uClinux ą▒ąŠą╗ąĄąĄ č湥ą╝ ą░ą┤ąĄą║ą▓ą░č鹥ąĮ ą┤ą╗čÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ąŠą▒čĆą░ąĘą░ Linux ą▓ čåąĄą╗čÅčģ ą┐ąŠčüčéčĆąŠąĄąĮąĖčÅ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, čéą░ą║ąŠą│ąŠ ą║ą░ą║ čĆąŠčāč鹥čĆ, ą▒ąĄąĘ ąĮą░ą┐ąĖčüą░ąĮąĖčÅ ą║ą░ą║ąĖčģ-ą╗ąĖą▒ąŠ čüčéčĆąŠą║ ą║ąŠą┤ą░.
ąØąĄčüą╝ąŠčéčĆčÅ ąĮą░ č鹊, čćč鹊 Linux ąĮąĄ ą▒čŗą╗ą░ ąĖąĘąĮą░čćą░ą╗čīąĮąŠ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮą░ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ąŠ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ čüąĖčüč鹥ą╝ą░čģ, ąŠąĮą░ ąĮą░čłą╗ą░ čüą▓ąŠąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ ą▓ ą▒ąŠą╗čīčłąŠą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąĄ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ čāčüčéčĆąŠą╣čüčéą▓. ąØą░čćąĖąĮą░čÅ čü čĆąĄą╗ąĖąĘą░ čÅą┤čĆą░ ą▓ąĄčĆčüąĖąĖ 2.0.x ąĖ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ ą║ąŠą╝ą╝ąĄčĆč湥čüą║ąŠą╣ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ Linux ąĮą░ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ ą┐čĆąŠčåąĄčüčüąŠčĆą░čģ, ą▓ąĖą┤ąĄąĮ ą▓ąĘčĆčŗą▓ąŠąŠą▒čĆą░ąĘąĮčŗą╣ čĆąŠčüčé ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ ą▓ąŠ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ čāčüčéčĆąŠą╣čüčéą▓ą░čģ čŹč鹊ą╣ OS.
ą¤ąŠčćčéąĖ ą║ą░ąČą┤čŗą╣ ą┤ąĄąĮčī ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ ąĮąŠą▓ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖą╗ąĖ ą│ą░ą┤ąČąĄčé, ą║ąŠč鹊čĆąŠąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé Linux ą▓ ą║ą░č湥čüčéą▓ąĄ čüą▓ąŠąĄą╣ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ, čćč鹊 ą▓ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąĄ čüą╗čāčćą░ąĄą▓ ąŠčüčéą░ąĄčéčüčÅ ąĮąĄąĘą░ą╝ąĄč湥ąĮąĮčŗą╝ ą║ąŠąĮąĄčćąĮčŗą╝ąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅą╝ąĖ. ąĪąĄą│ąŠą┤ąĮčÅ ą▒ąŠą╗čīčłąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ąŠčüčéčāą┐ąĮčŗčģ čłąĖčĆąŠą║ąŠą┐ąŠą╗ąŠčüąĮčŗčģ ą╝ą░čĆčłčĆčāčéąĖąĘą░č鹊čĆąŠą▓, čäą░ą╣ąĄčĆą▓ąŠą╗ąŠą▓, č鹊č湥ą║ ą┤ąŠčüčéčāą┐ą░ Wi-Fi ąĖ ą┤ą░ąČąĄ ą┐ą╗ąĄąĄčĆčŗ DVD ą┐čĆąĖą╝ąĄąĮčÅčÄčé ą┤ą╗čÅ čüą▓ąŠąĄą╣ čĆą░ą▒ąŠčéčŗ Linux (čüą╝. ą┐čĆąĖą╝ąĄčĆčŗ Linux-čāčüčéčĆąŠą╣čüčéą▓ [5]). ą×ą┐ąĄčĆą░čåąĖąŠąĮąĮą░čÅ čüąĖčüč鹥ą╝ą░ uClinux, čéą░ą║ ąČąĄ ą║ą░ą║ ąĖ Linux, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▒ąŠą╗čīčłąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ ą┤ą╗čÅ ą╗čÄą▒ąŠą│ąŠ čüąŠčĆčéą░ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖčÅ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓. ąĢčüą╗ąĖ čāč湥čüčéčī, čćč鹊 čäą░ą║čéąĖč湥čüą║ąĖ Linux ąĮąĄ čéčĆąĄą▒čāąĄčé ą╗ąĖčåąĄąĮąĘąĖąŠąĮąĮčŗčģ ąŠčéčćąĖčüą╗ąĄąĮąĖą╣, č鹊 čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą┐ąŠąĮčÅčéąĮąŠ, ą┐ąŠč湥ą╝čā ą╝ąĮąŠą│ąĖąĄ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ ą▓čŗą▒ąĖčĆą░čÄčé Linux ą┤ą╗čÅ čüą▓ąŠąĖčģ čāčüčéčĆąŠą╣čüčéą▓.
[Linux ąĮą░ DSP-ą┐čĆąŠčåąĄčüčüąŠčĆą░čģ]
ąÆ ą┐čĆąŠčłą╗ąŠą╝ DSP ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖčüčī ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝ čüą┐ąĄą║čéčĆąĄ čüą┐ąĄčåąĖą░ą╗čīąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą▓ą║ą╗čÄčćą░čÄčēąĖčģ ąĘą▓čāą║ąŠą▓čŗąĄ ą║ą░čĆčéčŗ, ą╝ąŠą┤ąĄą╝čŗ, čāčüčéčĆąŠą╣čüčéą▓ą░ č鹥ą╗ąĄą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ, ą╝ąĄą┤ąĖčåąĖąĮčüą║ąŠąĄ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖąĄ ąĖ ąĮąĄą║ąŠč鹊čĆčŗąĄ ą▓ąĖą┤čŗ ą▓ąŠąĄąĮąĮčŗčģ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖą╣ ąĖ ą┤čĆčāą│ąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą│ą┤ąĄ ą┐čĆąĖą╝ąĄąĮčÅą╗ą░čüčī čćąĖčüčéą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ čüąĖą│ąĮą░ą╗ąŠą▓. ąŁčéąĖ DSP-čüąĖčüč鹥ą╝čŗ čüą┐ąĄčåąĖą░ą╗čīąĮąŠ čĆą░ąĘčĆą░ą▒ą░čéčŗą▓ą░ą╗ąĖčüčī ą┤ą╗čÅ čüą▓ąŠąĄą╣ ą┐čĆąĖą║ą╗ą░ą┤ąĮąŠą╣ ąĘą░ą┤ą░čćąĖ čü čāč湥č鹊ą╝ ąČąĄčüčéą║ąĖčģ ąŠą│čĆą░ąĮąĖč湥ąĮąĖą╣ ą┐ąŠ čüč鹊ąĖą╝ąŠčüčéąĖ ąĖ čĆą░ąĘą╝ąĄčĆą░ą╝.
ą¤ąŠ ą╝ąĄčĆąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┐čĆąŠčåąĄčüčüąŠčĆčŗ DSP čüčéą░ąĮąŠą▓ąĖą╗ąĖčüčī ą▒ąŠą╗ąĄąĄ ą╝ąŠčēąĮčŗą╝ąĖ ąĖ ą│ąĖą▒ą║ąĖą╝ąĖ, čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčÅ čĆą░čüčéčāčēąĖąĄ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą▓ ą▓ąŠąĄąĮąĮąŠą╣ č鹥čģąĮąĖą║ąĄ, ą╝ąĄą┤ąĖčåąĖąĮąĄ ąĖ čüą▓čÅąĘąĮąŠą╝ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖąĖ, ąŠąĮąĖ ą▓čüąĄ ąĄčēąĄ ąĮąĄ ąŠą▒ą╗ą░ą┤ą░ą╗ąĖ ą┤ąŠčüčéą░č鹊čćąĮčŗą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ čĆąĄčüčāčĆčüąŠą▓ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą▓ ą┐čĆąŠą┤ą▓ąĖąĮčāčéčŗčģ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčŗčģ čüąĖčüč鹥ą╝ą░čģ. ąŁčéąĖ čéčĆą░ą┤ąĖčåąĖąŠąĮąĮčŗąĄ DSP ą▒čŗą╗ąĖ ąŠč湥ąĮčī ą╝ąŠčēąĮčŗą╝ąĖ ąĖ ą│ąĖą▒ą║ąĖą╝ąĖ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ąĮąŠ ą▓čüąĄ ąĄčēąĄ ą╝ąŠą│ą╗ąĖ ą▒čŗčéčī ą┤ąŠą▓ąŠą╗čīąĮąŠ ą┤ąŠčĆąŠą│ąĖą╝ąĖ. ąóą░ą║ąĖąĄ DSP čćą░čüč鹊 ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą╣ ą║ą╗ą░čüč鹥čĆąĮąŠą╣ ą░ą┐ą┐ą░čĆą░čéčāčĆąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąĖą│ąĮą░ą╗ąŠą▓, ą│ą┤ąĄ ąĮąĄ ąĮčāąČąĄąĮ ąĘą░ą┐čāčüą║ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčŗčģ čüąĖčüč鹥ą╝ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ Linux ąĮą░ čüą░ą╝ąŠą╝ DSP. ą¤čĆąĖčćąĖąĮą░ ąĘą┤ąĄčüčī ą▓ č鹊ą╝, čćč鹊 čäą░ą║čéąĖč湥čüą║ąĖ ą▓ čŹčéąĖčģ čüąĖčüč鹥ą╝ą░čģ DSP ą┐ąŠą╗čāčćą░ąĄčé čüą▓ąŠąĖ ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąŠčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą▓ čéą░ą║ąĖąĄ DSP ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ "ą▒ą░ąĘąŠą▓ą░čÅ" čüąĖčüč鹥ą╝ąĮą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┤ą░ąĮąĮčŗčģ.
ąĪ ą▒čŗčüčéčĆčŗą╝ čĆą░ąĘą▓ąĖčéąĖąĄą╝ čĆčŗąĮą║ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ą╝čāą╗čīčéąĖą╝ąĄą┤ąĖą░ ąĖ čüą╝ą░čĆčéč乊ąĮąŠą▓ ą┐ąŠčÅą▓ąĖą╗ąĖčüčī DSP ąĮąŠą▓ąŠą│ąŠ čéąĖą┐ą░. ąĀą░ąĮąĄąĄ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗąĄ čüąĖčüč鹥ą╝čŗ čĆą░ąĘčĆą░ą▒ą░čéčŗą▓ą░ą╗ąĖčüčī čéą░ą║, čćč鹊 DSP čĆą░ą▒ąŠčéą░ą╗ ą║ą░ą║ čüąŠą┐čĆąŠčåąĄčüčüąŠčĆ ą▓ą╝ąĄčüč鹥 čü ą┤čĆčāą│ąĖą╝ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą╝ (ą┐čĆąŠčåąĄčüčüąŠčĆ čģąŠčüčéą░), ą▓čŗą┐ąŠą╗ąĮčÅčÄčēąĖą╝ čüąĄčĆą▓ąĖčüąĮčŗąĄ čäčāąĮą║čåąĖąĖ. ąÆ čéą░ą║ąŠą╝ čüčåąĄąĮą░čĆąĖąĖ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮą░čÅ čüąĖčüč鹥ą╝ą░ čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ čģąŠčüčé-ą┐čĆąŠčåąĄčüčüąŠčĆąĄ, ąĖ ąŠą▒čĆą░ą▒ąŠčéą║ą░ čüąĖą│ąĮą░ą╗ąŠą▓ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą▓ ą┐čĆąŠčåąĄčüčüąŠčĆąĄ DSP. ąóą░ą║ąŠą╣ ą┤ą▓čāčģą┐čĆąŠčåąĄčüčüąŠčĆąĮčŗą╣ ą┤ąĖąĘą░ą╣ąĮ ąĮąĄą╗čīąĘčÅ ą┐čĆąĖąĘąĮą░čéčī ąŠą┐čéąĖą╝ą░ą╗čīąĮčŗą╝, ąŠąĮ ąĮąĄ čŹčäč乥ą║čéąĖą▓ąĄąĮ ą▓ ą┐ą╗ą░ąĮąĄ čāą┤ąŠą▒čüčéą▓ą░ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ, čåąĄąĮčŗ, ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝ąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ ąĖ čĆą░ąĘą╝ąĄčĆą░ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ. ą£ąŠąČąĄčé ą▒čŗčéčī ą┤čĆčāą│ąŠą╣ ą┐ąŠą┤čģąŠą┤ - ą┐ąĄčĆąĄą┤ąĄą╗ą║ą░ čéčĆą░ą┤ąĖčåąĖąŠąĮąĮąŠą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░ DSP, čćč鹊ą▒čŗ ąŠąĮ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅą╗ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝ čüąŠą▓čĆąĄą╝ąĄąĮąĮčŗčģ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčŗčģ čüąĖčüč鹥ą╝, ąĖ ą╝ąĄąČą┤čā č鹥ą╝ čüąŠčģčĆą░ąĮčÅą╗ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą░čĆčģąĖč鹥ą║čéčāčĆčŗ DSP.
ąŁč鹊čé ą┐ąŠą┤čģąŠą┤ ą▒čŗą╗ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ą╝ąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░ Blackfin - ąŠąĮąĖ čüą┤ąĄą╗ą░ą╗ąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░ čü ą┐čĆąŠą┤ą▓ąĖąĮčāčéčŗą╝ąĖ čäčāąĮą║čåąĖčÅą╝ąĖ DSP ąĮą░ ąŠčüąĮąŠą▓ąĄ ąōą░čĆą▓ą░čĆą┤čüą║ąŠą╣ ą░čĆčģąĖč鹥ą║čéčāčĆčŗ čü ąŠčĆč鹊ą│ąŠąĮą░ą╗čīąĮčŗą╝ ąĮą░ą▒ąŠčĆąŠą╝ ą║ąŠą╝ą░ąĮą┤ ą▓ čüčéąĖą╗ąĄ RISC. ąóą░ą║ąČąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ą┐čĆąŠą┤ą▓ąĖąĮčāčéą░čÅ ą░ą┤čĆąĄčüą░čåąĖčÅ, čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čüč鹥ą║ąŠą╝ ąĖ ą┐čĆąĖą▓ąĖą╗ąĄą│ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ čĆąĄąČąĖą╝čŗ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ąŠą┤ą░. ąóą░ą║ąŠą╣ ą┐čĆąŠčåąĄčüčüąŠčĆ čāąČąĄ ąĮąĄ ą┐čĆąŠčüč鹊 DSP, čŹč鹊 ą╝ąŠčēąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ, čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčÄčēąĄąĄ čłąĖčĆąŠą║ąŠą╝čā čüą┐ąĄą║čéčĆčā ąĖąĮą┤čāčüčéčĆąĖą░ą╗čīąĮčŗčģ, ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗčģ ąĖ ą╝čāą╗čīčéąĖą╝ąĄą┤ąĖą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣.
ąÆ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ čü ą╝ąŠčēąĮąŠčüčéčīčÄ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ Linux ąŠčéą║čĆčŗą▓ą░čÄčéčüčÅ ą▒ąĄąĘą│čĆą░ąĮąĖčćąĮčŗąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ. ąóąĄą╝ ąĮąĄ ą╝ąĄąĮąĄąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĖ ąŠą▒čŗčćąĮčŗčģ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ ąĮąĄ čüą┐čÅčé ąĖ čĆą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čÄčé ąĮąŠą▓čŗąĄ ą┐čĆąŠčåąĄčüčüąŠčĆčŗ ą┤ą╗čÅ ą┐ąŠčüčéą░ą▓ą║ąĖ ąĖčģ ąĮą░ č鹊čé ąČąĄ čĆčŗąĮąŠą║. ąĀą░ąĘčĆą░ą▒ąŠčéą║ą░ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ ąĖą┤ąĄčé ą┐ąŠ ą┐čĆąĖąĮčåąĖą┐čā ą┐čÅčéąĖ 'P': price, performance, power consumption, peripherals ąĖ penguins (čåąĄąĮą░, ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčī, ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝ą░čÅ ą╝ąŠčēąĮąŠčüčéčī, čĆą░čüčłąĖčĆąĄąĮąĖąĄ ą┐ąĄčĆąĖč乥čĆąĖąĖ ąĖ ą┐ąĖąĮą│ą▓ąĖąĮčŗ).
[ąĀą░ąĘą╗ąĖčćąĖčÅ ą╝ąĄąČą┤čā Linux ąĖ uClinux]
ą¤ąŠčüą║ąŠą╗čīą║čā Linux ąĖ uClinux ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé čäąĖą╗ąŠčüąŠčäąĖčÄ UNIX ą▓ ą┐ą╗ą░ąĮąĄ ą╝ąĮąŠą│ąŠą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąŠą╣, ą╝ąĮąŠą│ąŠąĘą░ą┤ą░čćąĮąŠą╣ OS, čÅą┤čĆąŠ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąĄą┤ą┐čĆąĖąĮčÅčéčī čüą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ ą╝ąĄčĆčŗ ą┤ą╗čÅ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą│ąŠ ąĖ ą▒ąĄąĘąŠą┐ą░čüąĮąŠą│ąŠ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ čéčŗčüčÅčćąĖ ą┐čĆąŠčåąĄčüčüąŠą▓ ąŠčé čĆą░ąĘąĮčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣ ą▓ ąŠą┤ąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ. ą£ąŠą┤ąĄą╗čī ą▒ąĄąĘąŠą┐ą░čüąĮąŠčüčéąĖ UNIX, ą┐ąŠčüą╗ąĄ ą║ąŠč鹊čĆąŠą╣ ą▒čŗą╗ą░ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮą░ Linux, ąĘą░čēąĖčēą░ąĄčé ą║ą░ąČą┤čŗą╣ ą┐čĆąŠčåąĄčüčü ą▓ ąĄą│ąŠ čüąŠą▒čüčéą▓ąĄąĮąĮąŠą╝ čĆą░ą▒ąŠč湥ą╝ ąŠą║čĆčāąČąĄąĮąĖąĖ, čü ąŠčéą┤ąĄą╗čīąĮčŗą╝ čćą░čüčéąĮčŗą╝ ą░ą┤čĆąĄčüąĮčŗą╝ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠą╝. ąÜą░ąČą┤čŗą╣ ą┐čĆąŠčåąĄčüčü čéą░ą║ąČąĄ ąĘą░čēąĖčēąĄąĮ ąŠčé ą┐čĆąŠčåąĄčüčüąŠą▓, ąĘą░ą┐čāčēąĄąĮąĮčŗčģ ą┤čĆčāą│ąĖą╝ąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅą╝ąĖ.
ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, čüąĖčüč鹥ą╝ą░ ą▓ąĖčĆčéčāą░ą╗čīąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ (Virtual Memory, VM) ąĮą░ą║ą╗ą░ą┤čŗą▓ą░ąĄčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ąĮą░ ą▒ą╗ąŠą║ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ (Memory Management Unit, MMU), ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą│ąŠ ą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ ąĖ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮčŗčģ čĆąĄą│ąĖąŠąĮąŠą▓ ą┐ą░ą╝čÅčéąĖ ąĮą░ ą┐ą░ą╝čÅčéčī čćą░čüčéąĮąŠą│ąŠ ą┐čĆąŠčåąĄčüčüą░.
ąØąĄą║ąŠč鹊čĆčŗąĄ ą┐čĆąŠčåąĄčüčüąŠčĆčŗ, ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ Blackfin, ąĮąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ą┐ąŠą╗ąĮąŠčåąĄąĮąĮčŗą╣ MMU. ąŁčéąĖ ą┐čĆąŠčåąĄčüčüąŠčĆčŗ ą▒ąŠą╗ąĄąĄ čŹčäč乥ą║čéąĖą▓ąĮčŗ ą▓ ą┐ą╗ą░ąĮąĄ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝ąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ, ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ ą┤ąĄčłąĄą▓ą╗ąĄ ąĖ ąĖąĮąŠą│ą┤ą░ ąĖą╝ąĄčÄčé ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║čāčÄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčī. ąöą░ąČąĄ ąĮą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░čģ, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĖčģ ą▓ąĖčĆčéčāą░ą╗čīąĮčāčÄ ą┐ą░ą╝čÅčéčī, ąĮąĄą║ąŠč鹊čĆčŗąĄ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ čüąĖčüč鹥ą╝ ą┐čĆąĄą┤ą┐ąŠčćąĖčéą░čÄčé ą▓čŗą▒ąŠčĆ ąĘą░ą┐čāčüą║ą░ čüą▓ąŠąĄą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĮą░ uClinux, ą┐ąŠč鹊ą╝čā čćč鹊 uClinux ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ ą▒čŗčüčéčĆąĄąĄ, č湥ą╝ ąŠą▒čŗčćąĮą░čÅ Linux ąĮą░ č鹊ą╝ ąČąĄ ą┐čĆąŠčåąĄčüčüąŠčĆąĄ. ąĀą░ą▒ąŠčéą░ MMU ą╝ąŠąČąĄčé ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčéčī ąĘąĮą░čćąĖč鹥ą╗čīąĮčŗąĄ čĆą░čüčģąŠą┤čŗ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ.
ąöą░ąČąĄ ą║ąŠą│ą┤ą░ MMU ąĖą╝ąĄąĄčéčüčÅ, ąŠąĮ ąĖąĮąŠą│ą┤ą░ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ čüąĖčüč鹥ą╝ą░čģ čü ąČąĄčüčéą║ąĖą╝ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅą╝ąĖ ąĮą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą┤ąĄą╣čüčéą▓ąĖą╣ ą║ąŠą┤ą░ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ (RTOS). ą¤ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░ ąĖ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖąĄ ą╝ąĄąČą┤čā ą┐čĆąŠčåąĄčüčüą░ą╝ąĖ (Inter Process Communication, IPC) ą╝ąŠą│čāčé čéą░ą║ąČąĄ čĆą░ą▒ąŠčéą░čéčī ąĮą░ uClinux ą▓ ąĮąĄčüą║ąŠą╗čīą║ąŠ čĆą░ąĘ ą▒čŗčüčéčĆąĄąĄ.
ąöą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ Linux ąĮą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░čģ ą▒ąĄąĘ ą▒ą╗ąŠą║ą░ MMU, ą▓ uClinux čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ čüą╗ąĄą┤čāčÄčēąĖąĄ ą║ąŠą╝ą┐čĆąŠą╝ąĖčüčüčŗ:
1. ą×čéčüčāčéčüčéą▓čāąĄčé čĆąĄą░ą╗čīąĮą░čÅ ąĘą░čēąĖčéą░ ą┐ą░ą╝čÅčéąĖ (čüą▒ąŠą╣ąĮčŗą╣ ą┐čĆąŠčåąĄčüčü ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ą┐ąŠą╗ąĮąŠą╝čā ąŠčéą║ą░ąĘčā čüąĖčüč鹥ą╝čŗ).
2. ąØąĄčé ą▓ąĄčéą▓ą╗ąĄąĮąĖčÅ čüąĖčüč鹥ą╝ąĮčŗčģ ą▓čŗąĘąŠą▓ąŠą▓ (fork system call).
3. ąĢčüčéčī č鹊ą╗čīą║ąŠ ą┐čĆąŠčüč鹊ąĄ ą▓čŗą┤ąĄą╗ąĄąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ.
4. ąóą░ą║ąČąĄ ąĄčüčéčī ą┤čĆčāą│ąĖąĄ ąĮąĄąĘąĮą░čćąĖč鹥ą╗čīąĮčŗąĄ ąŠčéą╗ąĖčćąĖčÅ ąŠčé ąŠą▒čŗčćąĮąŠą╣ OS Linux.
ą×čéčüčāčéčüčéą▓ąĖąĄ ąĘą░čēąĖčéčŗ ą┐ą░ą╝čÅčéąĖ ąĮąĄ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čĆąĄą░ą╗čīąĮąŠą╣ ą┐čĆąŠą▒ą╗ąĄą╝čŗ ą▓ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąĄ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ čüąĖčüč鹥ą╝. Linux ąŠč湥ąĮčī čüčéą░ą▒ąĖą╗čīąĮą░čÅ ą┐ą╗ą░čéč乊čĆą╝ą░, ą▓ čćą░čüčéąĮąŠčüčéąĖ ą┤ą╗čÅ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ čāčüčéčĆąŠą╣čüčéą▓, ą│ą┤ąĄ čüą▒ąŠąĖ ą¤ą× ąĮą░ą▒ą╗čÄą┤ą░čÄčéčüčÅ čĆąĄą┤ą║ąŠ. ąöą░ąČąĄ ą▓ ąŠčüąĮąŠą▓ą░ąĮąĮčŗčģ ąĮą░ MMU čüąĖčüč鹥ą╝ą░čģ Linux ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗąĄ ą▒ą░ą│ąĖ ą▓ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ čÅą┤čĆą░ čüąĖčüč鹥ą╝čŗ ą╝ąŠą│čāčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ąŠčéą║ą░ąĘčā ą▓čüąĄą╣ čüąĖčüč鹥ą╝čŗ ą▓ čåąĄą╗ąŠą╝. ą¤ąŠčüą║ąŠą╗čīą║čā čā Blackfin ąĄčüčéčī ąĘą░čēąĖčéą░ ą┐ą░ą╝čÅčéąĖ, ąĮąŠ ąĮąĄčé ą▓ąĖčĆčéčāą░ą╗čīąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ, čüąĖčüč鹥ą╝ą░ Blackfin/uClinux ąĖą╝ąĄąĄčé ą╗čāčćčłčāčÄ ąĘą░čēąĖčéčā, č湥ą╝ ą┤čĆčāą│ąĖąĄ čüąĖčüč鹥ą╝čŗ ą▒ąĄąĘ MMU, ąĖ ąŠąĮą░ ąĮąĄ ą▒čāą┤ąĄčé "ą┐ą░ą┤ą░čéčī" čéą░ą║ ąČąĄ čćą░čüč鹊, ą║ą░ą║ uClinux, čĆą░ą▒ąŠčéą░čÄčēą░čÅ ąĮą░ ą┤čĆčāą│ąĖčģ ą┐čĆąŠčåąĄčüčüąŠčĆą░čģ.
ąĢčüčéčī ą┤ą▓ą░ ąĮą░ąĖą▒ąŠą╗ąĄąĄ ąŠą▒čēąĖčģ ą┐čĆąĖąĮčåąĖą┐ąĖą░ą╗čīąĮčŗčģ ą┐čĆąĖčćąĖąĮčŗ ą┐ą░ą┤ąĄąĮąĖčÅ uClinux - ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ čüč鹥ą║ą░ ąĖ ąŠą▒čĆą░čēąĄąĮąĖąĄ ą┐ąŠ ąĮčāą╗ąĄą▓ąŠą╝čā čāą║ą░ąĘą░č鹥ą╗čÄ.
ą¤ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ čüč鹥ą║ą░. ąÜąŠą│ą┤ą░ Linux čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ ą░čĆčģąĖč鹥ą║čéčāčĆąĄ čü ą┐ąŠą╗ąĮąŠą╣ ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ MMU, ą▒ą╗ąŠą║ MMU ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝ą░ą╝ Linux ą▓ ąŠą▒čēąĄą╝ ąĮąĄ ąŠą│čĆą░ąĮąĖč湥ąĮąĮčŗą╣ čüč鹥ą║ ąĖ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ ą║čāčćąĖ. ąŁč鹊 čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ ąĘą░ čüč湥čé ą▓ąĖčĆčéčāą░ą╗ąĖąĘą░čåąĖąĖ čäąĖąĘąĖč湥čüą║ąŠą╣ ą┐ą░ą╝čÅčéąĖ. ą×ą┤ąĮą░ą║ąŠ čā ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ čüąĖčüč鹥ą╝ Linux ą▓ ąĮą░ą╗ąĖčćąĖąĖ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ SDRAM, ąĖ ąĮąĄčé SWAP (čäą░ą╣ą╗ą░ ą┐ąŠą┤ą║ą░čćą║ąĖ), ą┐ąŠčŹč鹊ą╝čā ąŠąĮąĖ ąĮąĄ ą▒čāą┤čāčé "ąĮąĄ ąŠą│čĆą░ąĮąĖč湥ąĮąĮčŗą╝ąĖ" ą┐ąŠ čĆąĄčüčāčĆčüą░ą╝ ą┐ą░ą╝čÅčéąĖ.
ą¤čĆąŠą│čĆą░ą╝ą╝čŗ, ą│ą┤ąĄ ąĄčüčéčī čāč鹥čćą║ą░ ą┐ą░ą╝čÅčéąĖ, ą▓čüąĄ ąĄčēąĄ ą╝ąŠą│čāčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ą║čĆą░čģčā ą▓čüąĄą╣ čüąĖčüč鹥ą╝čŗ Linux čüąŠ ą▓čüčéčĆąŠąĄąĮąĮčŗą╝ ą▒ą╗ąŠą║ąŠą╝ MMU. ą¤ąŠčüą║ąŠą╗čīą║čā uClinux ąĮąĄ ą╝ąŠąČąĄčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī ą▓ąĖčĆčéčāą░ą╗čīąĮčāčÄ ą┐ą░ą╝čÅčéčī, ąŠąĮą░ ą▓čŗą┤ąĄą╗čÅąĄčé ąŠą▒ą╗ą░čüčéčī čüč鹥ą║ą░ ą▓ ą║ąŠąĮčåąĄ ąŠą▒ą╗ą░čüčéąĖ ą┤ą░ąĮąĮčŗčģ ą▓ąŠ ą▓čĆąĄą╝čÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝ąŠą│ąŠ ą║ąŠą┤ą░. ąĢčüą╗ąĖ čüč鹥ą║ ąĮą░ uClinux ą▓čŗčĆąŠčü ą┤ąŠ čüą╗ąĖčłą║ąŠą╝ ą▒ąŠą╗čīčłąŠą│ąŠ čĆą░ąĘą╝ąĄčĆą░, č鹊 ąŠąĮ ą┐ąĄčĆąĄąĘą░ą┐ąĖčłąĄčé čüčéą░čéąĖč湥čüą║ąĖąĄ ą┤ą░ąĮąĮčŗąĄ ąĖ ąŠą▒ą╗ą░čüčéąĖ ą║ąŠą┤ą░. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║, ą║ąŠč鹊čĆčŗą╣ čĆą░ąĮąĄąĄ ąĮąĄ ąŠą▒čĆą░čēą░ą╗ ą▓ąĮąĖą╝ą░ąĮąĖčÅ ąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čüč鹥ą║ą░ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ, ą┤ąŠą╗ąČąĄąĮ č鹥ą┐ąĄčĆčī ąĘąĮą░čéčī ąŠ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅčģ čüč鹥ą║ą░ ą║ ą┐ą░ą╝čÅčéąĖ.
ąŻ Blackfin/uClinux ąĄčüčéčī ąŠą┐čåąĖčÅ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░, čćč鹊ą▒čŗ ą▓čüčéčĆąŠąĖčéčī ą▓ ą║ąŠą┤ ą┐čĆąŠą▓ąĄčĆą║čā čüč鹥ą║ą░. ąĢčüą╗ąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ąŠą┐čåąĖčÅ fstack-limit-symbol=_stack_start, č鹊 ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆ ą┤ąŠą▒ą░ą▓ąĖčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╣ ą║ąŠą┤, ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé ą┐čĆąŠą▓ąĄčĆčÅčéčī, čćč鹊 čüč鹥ą║ ąĮąĄ ą▓čŗčłąĄą╗ ąĘą░ ą┐čĆąĄą┤ąĄą╗čŗ ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░. ąŁč鹊 ą▒čāą┤ąĄčé ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 ąĮąĄ ą▒čāą┤čāčé ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī čüą╗čāčćą░ą╣ąĮčŗąĄ ą┐ą░ą┤ąĄąĮąĖčÅ čüąĖčüč鹥ą╝čŗ ąĖąĘ-ąĘą░ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖą╣ ą┤ą░ąĮąĮčŗčģ ą┐ą░ą╝čÅčéąĖ ąĖąĘ-ąĘą░ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čüč鹥ą║ą░. ąÜąŠą│ą┤ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąŠ ą▓ čŹč鹊ą╣ ąŠą┐čåąĖąĄą╣ ąĖ ą┐čĆąĄą▓čŗčüąĖą╗ąŠ čüą▓ąŠą╣ ą╗ąĖą╝ąĖčé čüč鹥ą║ą░, ąŠąĮąŠ ą║ąŠčĆčĆąĄą║čéąĮąŠ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ. ąóąŠą│ą┤ą░ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ ą╝ąŠąČąĄčé čāą▓ąĄą╗ąĖčćąĖčéčī čĆą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą▓ąŠ ą▓čĆąĄą╝čÅ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ, ąĖą╗ąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ ąĘą░ą┐čāčüą║ą░ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ čü ą┐ąŠą╝ąŠčēčīčÄ čāčéąĖą╗ąĖčéčŗ flthdr. ąÆ čüąĖčüč鹥ą╝ą░čģ, ąĮą░čģąŠą┤čÅčēąĖčģčüčÅ ą▓ ą┐čĆąŠčåąĄčüčüąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░, ą┐čĆąŠą▓ąĄčĆą║ą░ čüč鹥ą║ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗ąĖą▒ąŠ čāą┤ą░ą╗ąĄąĮą░ (čćč鹊 ą┐ąŠą▓čŗčüąĖčé ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčī ąĖ čāą╝ąĄąĮčīčłąĖčé čĆą░ąĘą╝ąĄčĆ ą║ąŠą┤ą░), ą╗ąĖą▒ąŠ ąŠčüčéą░ą▓ą╗ąĄąĮą░ ą┤ą╗čÅ čāą▓ąĄą╗ąĖč湥ąĮąĖčÅ čāčüč鹊ą╣čćąĖą▓ąŠčüčéąĖ.
ą×ą▒čĆą░čēąĄąĮąĖąĄ ą┐ąŠ null-čāą║ą░ąĘą░č鹥ą╗čÄ. Blackfin MMU ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čćą░čüčéąĖčćąĮčāčÄ ąĘą░čēąĖčéčā ą┐ą░ą╝čÅčéąĖ, ąĖ ą╝ąŠąČąĄčé ąŠčéą┤ąĄą╗ąĖčéčī ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ąŠčé ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ čÅą┤čĆą░ (ą║ąŠą┤ą░, čĆą░ą▒ąŠčéą░čÄčēąĄą│ąŠ ą▓ čĆąĄąČąĖą╝ąĄ supervisor). ąØą░ Blackfin/uClinux ą┐ąĄčĆą▓čŗąĄ 4 ą║ąĖą╗ąŠą▒ą░ą╣čéą░ ą┐ą░ą╝čÅčéąĖ, ąĮą░čćąĖąĮą░čÅ čü ą░ą┤čĆąĄčüą░ NULL, ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ ą▓ ą║ą░č湥čüčéą▓ąĄ ą▒čāč乥čĆą░ ą┤ą╗čÅ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮčŗčģ čĆą░ąĘąĖą╝ąĄąĮąŠą▓ą░ąĮąĖą╣ čāą║ą░ąĘą░č鹥ą╗čÅ (čé. ąĄ. ą┤ą╗čÅ ąŠą▒čĆą░čēąĄąĮąĖą╣ ą┐ąŠ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠą╝čā ą░ą┤čĆąĄčüčā). ąĢčüą╗ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąĮąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╣ čāą║ą░ąĘą░č鹥ą╗čī (čéčĆą░ą┤ąĖčåąĖąŠąĮąĮą░čÅ ąŠčłąĖą▒ą║ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüčéą░), č湥čĆąĄąĘ ą║ąŠč鹊čĆčŗą╣ ąŠąĮąŠ ą┐čĆąŠčćąĖčéą░ąĄčé ąĖą╗ąĖ ąĘą░ą┐ąĖčłąĄčé ą┐ąĄčĆą▓čŗąĄ 4k ą┐ą░ą╝čÅčéąĖ, č鹊 ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĘą░ą▓ąĖčüąĮąĄčé. ąŁč鹊 ąŠą▒ąĄčüą┐ąĄčćąĖčé ą╝ąĄąĮčīčłčāčÄ ą▓ąĄčĆąŠčÅčéąĮąŠčüčéčī čüą╗čāčćą░ą╣ąĮčŗčģ ą┐ą░ą┤ąĄąĮąĖą╣ čüąĖčüč鹥ą╝čŗ ąĖąĘ ąĘą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĮąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗčģ čāą║ą░ąĘą░č鹥ą╗ąĄą╣. ąöčĆčāą│ąĖąĄ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ uClinux ąĮą░čćąĮčāčé ąĘą░ą┐ąĖčüčŗą▓ą░čéčī ą┐ąŠą▓ąĄčĆčģ čÅą┤čĆą░.
ąÆč鹊čĆąŠą╣ ą╝ąŠą╝ąĄąĮčé ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▒ąŠą╗ąĄąĄ ą┐čĆąŠą▒ą╗ąĄą╝ą░čéąĖčćąĮčŗą╣. ąÆ ą¤ą×, ąĮą░ą┐ąĖčüą░ąĮąĮąŠą╝ ą┤ą╗čÅ UNIX ąĖą╗ąĖ Linux, čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ ąĖąĮąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāčÄčé čüąĖčüč鹥ą╝ąĮčŗą╣ ą▓čŗąĘąŠą▓ fork (ą┤ąŠčüą╗ąŠą▓ąĮąŠ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ą║ą░ą║ "ą▓ąĖą╗ą║ą░", ąĖą╗ąĖ "ą▓ąĄčéą▓ą╗ąĄąĮąĖąĄ"), ą║ąŠą│ą┤ą░ čģąŠčéčÅčé čćč鹊-ąĮąĖą▒čāą┤čī ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ. ąÆčŗąĘąŠą▓ fork() ą┤ąĄą╗ą░ąĄčé č鹊čćąĮčāčÄ ą║ąŠą┐ąĖčÄ ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮąŠą│ąŠ ą┐čĆąŠčåąĄčüčüą░ ąĖ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ąĄą│ąŠ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ čü ąŠčĆąĖą│ąĖąĮą░ą╗ąŠą╝. ą¦č鹊ą▒čŗ čüą┤ąĄą╗ą░čéčī čŹč鹊 čŹčäč乥ą║čéąĖą▓ąĮąŠ, ąŠąĮ ąĖčüą┐ąŠą╗čīąĘčāąĄčé MMU ą┤ą╗čÅ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ ąŠčé čĆąŠą┤ąĖč鹥ą╗čīčüą║ąŠą│ąŠ ą┐čĆąŠčåąĄčüčüą░ ąĮą░ ą┤ąŠč湥čĆąĮąĖą╣, ąĖ ą║ąŠą┐ąĖčĆčāąĄčé č鹊ą╗čīą║ąŠ č鹥 ąŠą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ, ą▓ ą║ąŠč鹊čĆčŗąĄ ą┤ąŠč湥čĆąĮąĖą╣ ą┐čĆąŠčåąĄčüčü ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą┤ą░ąĮąĮčŗčģ.
ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, uClinux ąĮąĄ ą╝ąŠąČąĄčé ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī čüąĖčüč鹥ą╝ąĮčŗą╣ ą▓čŗąĘąŠą▓ fork(). ą×ą┤ąĮą░ą║ąŠ ąŠąĮą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé vfork(), čüą┐ąĄčåąĖą░ą╗čīąĮčāčÄ ą▓ąĄčĆčüąĖčÄ fork(), ą▓ ą║ąŠč鹊čĆąŠą╝ čĆąŠą┤ąĖč鹥ą╗čīčüą║ąĖą╣ ą┐čĆąŠčåąĄčüčü ą┐čĆąĖąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ą┐ąŠą║ą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą┤ąŠč湥čĆąĮąĖą╣ ą┐čĆąŠčåąĄčüčü. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ą░, ą║ąŠč鹊čĆą░čÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čüąĖčüč鹥ą╝ąĮčŗą╣ ą▓čŗąĘąŠą▓ fork(), ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮą░ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ą╝ąĄčüč鹊 čŹč鹊ą│ąŠ vfork() ąĖą╗ąĖ ą┐ąŠč鹊ą║ąŠą▓ POSIX, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé uClinux, ą┐ąŠč鹊ą╝čā čćč鹊 ąŠąĮąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ąŠą▒čēąĄąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ, ą▓ą║ą╗čÄčćą░čÅ čüč鹥ą║.
ąóčĆąĄčéąĖą╣ ą╝ąŠą╝ąĄąĮčé - ąŠą▒čŗčćąĮąŠ ąĮąĄčé ą┐čĆąŠą▒ą╗ąĄą╝čŗ čü ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ malloc ą▓ čüąĖčüč鹥ą╝ąĄ uClinux, ąŠą┤ąĮą░ą║ąŠ ą▓ ąĮąĄą║ąŠč鹊čĆčŗčģ čüą╗čāčćą░čÅčģ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮčŗ ąĮąĄą║ąŠč鹊čĆčŗąĄ ąĮąĄąĘąĮą░čćąĖč鹥ą╗čīąĮčŗąĄ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĖ. ąÆčŗą┤ąĄą╗ąĄąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ ą▓ uClinux ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠč湥ąĮčī ą▒čŗčüčéčĆčŗą╝, ąĮąŠ čü ą┤čĆčāą│ąŠą╣ čüč鹊čĆąŠąĮčŗ ą┐čĆąŠčåąĄčüčü ą╝ąŠąČąĄčé ą▓čŗą┤ąĄą╗ąĖčéčī ą▓čüčÄ ą┤ąŠčüčéčāą┐ąĮčāčÄ ą┐ą░ą╝čÅčéčī. ą¤ąŠčüą║ąŠą╗čīą║čā ą┐ą░ą╝čÅčéčī ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą┤ąĄą╗ąĄąĮą░ č鹊ą╗čīą║ąŠ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮčŗą╝ąĖ ą▒ą╗ąŠą║ą░ą╝ąĖ, č鹊 čäčĆą░ą│ą╝ąĄąĮčéą░čåąĖčÅ ą┐ą░ą╝čÅčéąĖ ą╝ąŠąČąĄčé ąĖąĮąŠą│ą┤ą░ čüąŠąĘą┤ą░čéčī ą┐čĆąŠą▒ą╗ąĄą╝čā.
ąæąŠą╗čīčłąĖąĮčüčéą▓ąŠ ą¤ą×, ą┤ąŠčüčéčāą┐ąĮąŠą│ąŠ ą┤ą╗čÅ Linux ąĖą╗ąĖ UNIX (ą║ąŠą╗ą╗ąĄą║čåąĖčÄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ąĮą░ čüą░ą╣č鹥 freshmeat.net) ą╝ąŠąČąĮąŠ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī ą┐ąŠą┤ uClinux. ąöą╗čÅ ąŠčüčéą░ą╗čīąĮčŗčģ ą┐čĆąŠą│čĆą░ą╝ą╝ ąĖ čāčéąĖą╗ąĖčé čéčĆąĄą▒čāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąĮąĄąĘąĮą░čćąĖč鹥ą╗čīąĮčŗąĄ čāčüąĖą╗ąĖčÅ ą┐ąŠ ą┐ąŠčĆčéąĖčĆąŠą▓ą░ąĮąĖčÄ ąĖą╗ąĖ ą┐ąŠą┤čüčéčĆąŠą╣ą║ąĄ ą║ąŠą┤ą░. ąóąŠą╗čīą║ąŠ ąŠč湥ąĮčī ą╝ą░ą╗ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ ąĮąĄ ąĘą░čĆą░ą▒ąŠčéą░čÄčé ąĮą░ uClinux, ąĖ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ čéą░ą║ąĖčģ ą┐čĆąŠą│čĆą░ą╝ą╝ ąĮąĄ ąĮčāąČąĮčŗ ą┤ą╗čÅ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣.
[ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓ čüčĆąĄą┤ąĄ uClinux]
ąÜąŠą│ą┤ą░ ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ ą░ą┐ą┐ą░čĆą░čéąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ą┤ą╗čÅ ą┐čĆąŠąĄą║čéą░, čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ ą┤ąŠą╗ąČąĮčŗ čéčēą░č鹥ą╗čīąĮąŠ ąŠą▒ąŠčüąĮąŠą▓čŗą▓ą░čéčī čüą▓ąŠą╣ ą▓čŗą▒ąŠčĆ, ąŠčĆąĖąĄąĮčéąĖčĆčāčÅčüčī ąĮąĄ č鹊ą╗čīą║ąŠ ąĮą░ čåąĄąĮčā ąĖ ą┤ąŠčüčéčāą┐ąĮąŠčüčéčī ą║ąŠą╝ą┐ą╗ąĄą║čéčāčÄčēąĖčģ, ąĮąŠ čéą░ą║ąČąĄ ąĖ ąĮą░ ąĮą░ą╗ąĖčćąĖąĄ ą┤ąŠčüčéčāą┐ąĮčŗčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čü ąĖčüčģąŠą┤ąĮčŗą╝ ą║ąŠą┤ąŠą╝ ąĖ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ, ą░ čéą░ą║ąČąĄ ąĮą░ čüčĆąĄą┤čüčéą▓ą░ ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ, ą║ąŠč鹊čĆčŗąĄ ą┤ąĄą╗ą░čÄčé ąČąĖąĘąĮčī ą┐čĆąŠčēąĄ. ąó. ąĄ. čāą┐čĆąŠčēą░čÄčé ąŠčéą╗ą░ą┤ą║čā čÅą┤čĆą░, ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓, čåąĄą╗ąĄą▓čŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣. ą×čüąŠą▒ąĄąĮąĮąŠ čŹč鹊 ą▓ą░ąČąĮąŠ ą┐čĆąĖ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĄ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ąŠčéą║čĆčŗč鹊ą│ąŠ čüąŠčäčéą░, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ "ą║ą░ą║ ąĄčüčéčī", ą▒ąĄąĘ ą║ą░ą║ąĖčģ-ą╗ąĖą▒ąŠ ą│ą░čĆą░ąĮčéąĖą╣. ąöąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐ąŠąĮčÅčéąĮą░čÅ ą╝ąĄč鹊ą┤ąĖą║ą░ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą╗čÅ čÅą┤čĆą░, ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓, ą▒ąĖą▒ą╗ąĖąŠč鹥ą║, ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓ ąĮą░ą╗ąĖčćąĖąĖ čāą┤ąŠą▒ąĮčŗą╣ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖą╣ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ąĖ ąŠčéą╗ą░ą┤ą║ąĖ.
Linux Test Project (LTP) [6] ą╝ąŠąČąĮąŠ čĆą░čüčüą╝ąŠčéčĆąĄčéčī ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐čĆąĖą╝ąĄčĆą░ čüąŠą▓ą╝ąĄčüčéąĮąŠą│ąŠ ą┐čĆąŠąĄą║čéą░, ąĘą░ą┐čāčēąĄąĮąĮąŠą│ąŠ SGI ąĖ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝ąŠą│ąŠ IBM, čåąĄą╗čī ą║ąŠč鹊čĆąŠą│ąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ąĮą░ą▒ąŠčĆčŗ č鹥čüč鹊ą▓ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ą╝ ąŠčéą║čĆčŗč鹊ą│ąŠ ą¤ą×, ą║ąŠč鹊čĆčŗąĄ ąŠą▒ąĄčüą┐ąĄčćą░čé ąĮą░ą┤ąĄąČąĮąŠčüčéčī ąĖ čāčüč鹊ą╣čćąĖą▓ąŠčüčéčī Linux. ąóąĄčüčéčŗ LTP čüąŠą┤ąĄčƹȹ░čé ąĮą░ą▒ąŠčĆ ąĖąĮčüčéčĆčāą╝ąĄąĮč鹊ą▓ ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ čÅą┤čĆą░ Linux ąĖ ąĄą│ąŠ čäčāąĮą║čåąĖą╣. ąÜąŠą╝ą┐ą░ąĮąĖčÅ Analog Devices, Inc. čüą┐ąŠąĮčüąĖčĆąŠą▓ą░ą╗ą░ ą┐ąŠčĆčéąĖčĆąŠą▓ą░ąĮąĖąĄ LTP ąĮą░ ą░čĆčģąĖč鹥ą║čéčāčĆčŗ, čĆą░ą▒ąŠčéą░čÄčēąĖąĄ ąĮą░ uClinux.
ą¤čĆą░ą▓ąĖą╗ąŠ "Trust is good, control is better" ("ą┤ąŠą▓ąĄčĆčÅą╣, ąĮąŠ ą┐čĆąŠą▓ąĄčĆčÅą╣") ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ ąĮąĄ č鹊ą╗čīą║ąŠ ą║ čÅą┤čĆčā, ąĮąŠ ąĖ ą║ąŠ ą▓čüąĄą╝ ą┤čĆčāą│ąĖą╝ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░ą╝, ą┐čĆąĖą╝ąĄąĮčÅąĄą╝čŗą╝ ą▓ ą┐čĆąŠčåąĄčüčüąĄ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ, ąŠąĮąĖ č鹊ąČąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐čĆąŠč鹥čüčéąĖčĆąŠą▓ą░ąĮčŗ. ąĢčüą╗ąĖ ąÆčŗ ąĮąĄ ą╝ąŠąČąĄč鹥 ą┤ąŠą▓ąĄčĆčÅčéčī čüą▓ąŠąĄą╝čā ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆčā ąĖą╗ąĖ ąŠčéą╗ą░ą┤čćąĖą║čā, č鹊 ą┐čĆąŠąĖą│čĆą░ą╗ąĖ. Blackfin/uClinux ąĖčüą┐ąŠą╗čīąĘčāąĄčé DejaGnu [7] ą┤ą╗čÅ čāą┐čĆąŠčēąĄąĮąĖčÅ ąĖ ą░ą▓č鹊ą╝ą░čéąĖąĘąĖčĆąŠą▓ą░ąĮąĖčÅ ą▒ąŠą╗ąĄąĄ 44000 č鹥čüč鹊ą▓ čéčāą╗č湥ą╣ąĮą░, ą┐čĆąŠą▓ąĄčĆą║ąĖ ąĖčģ ąŠąČąĖą┤ą░ąĄą╝čŗčģ čĆąĄąĘčāą╗čīčéą░č鹊ą▓ ąĘą░ą┐čāčüą║ą░, ą║ąŠą│ą┤ą░ ąŠąĮąĖ čĆą░ą▒ąŠčéą░čÄčé ąĮą░ čåąĄą╗ąĄą▓ąŠą╣ ą░ą┐ą┐ą░čĆą░čéčāčĆąĄ. ąÆ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ čŹčéąĖą╝ č鹥čüčéą░ą╝, ą▓ą║ą╗čÄč湥ąĮąĮčŗą╝ ą▓ ą┐ą░ą║ąĄčé Blackfin/uClinux, ąĄčüčéčī čéą░ą║ąČąĄ ą░ą▓č鹊ą╝ą░čéąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗąĄ čüčéčĆąĄčüčü-č鹥čüčéčŗ čÅą┤čĆą░ ąĖ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĖąĄ čüą║čĆąĖą┐čéčŗ. ąÆčüąĄ čŹčéąĖ č鹥čüčéčŗ ą╝ąŠąČąĮąŠ ą╗ąĄą│ą║ąŠ ą▓ąŠčüą┐čĆąŠąĖąĘą▓ąĄčüčéąĖ, ą┐ąŠč鹊ą╝čā čćč鹊 ąŠąĮąĖ čģąŠčĆąŠčłąŠ ąĘą░ą┤ąŠą║čāą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮčŗ.
ąóąĖą┐ąŠą▓ą░čÅ čüčĆąĄą┤ą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ąĮą░ uClinux čüąŠčüč鹊ąĖčé ąĖąĘ ą┤ąĄčłąĄą▓ąŠą╣ ą┐ą╗ą░čéčŗ Blackfin STAMP board [8], GNU Compiler Collection [9] (ą║čĆąŠčüčü-ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆ gcc) ąĖ binutils (ą╗ąĖąĮą║ąĄčĆ, ą░čüčüąĄą╝ą▒ą╗ąĄčĆ, ąĖ čé. ą┤.) ą┤ą╗čÅ ą┐čĆąŠčåąĄčüčüąŠčĆą░ Blackfin. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ąĮčāąČąĮčŗ ąĮąĄą║ąŠč鹊čĆčŗąĄ ąĖąĮčüčéčĆčāą╝ąĄąĮčéčŗ GNU ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ awk, sed, make, bash ... ą┐ą╗čÄčü tcl/tk, čģąŠčéčÅ ąŠąĮąĖ ąŠą▒čŗčćąĮąŠ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą▓ą╝ąĄčüč鹥 čü ą┤ąĄčüą║č鹊ą┐-ą▓ąĄčĆčüąĖąĄą╣ ą┤ąĖčüčéčĆąĖą▒čāčéąĖą▓ą░ Linux.
ąÆčüąĄ ąĖčüčģąŠą┤ąĮčŗąĄ ą║ąŠą┤čŗ ąĖ ąĖąĮčüčéčĆčāą╝ąĄąĮčéčŗ (ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆ binutils, ąŠčéą╗ą░ą┤čćąĖą║ gnu), ą║ąŠč鹊čĆčŗąĄ ąĮčāąČąĮčŗ ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ čĆą░ą▒ąŠč湥ą│ąŠ čÅą┤čĆą░ uClinux ąĮą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░čģ Blackfin, ą╝ąŠąČąĮąŠ čüą▓ąŠą▒ąŠą┤ąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ąĮą░ čüą░ą╣č鹥 blackfin.uclinux.org. ąöą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┤ą▓ąŠąĖčćąĮčŗčģ ą┐ą░ą║ąĄč鹊ą▓ rpms ąĮčāąČąĄąĮ ą┤ąĖčüčéčĆąĖą▒čāčéąĖą▓ Linux ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ RedHat ąĖą╗ąĖ SuSE. ąŻ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąŠą▓, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ą╝ąŠą│čāčé čāčüčéą░ąĮąŠą▓ąĖčéčī Linux ąĮą░ čüą▓ąŠą╣ PC, ąĄčüčéčī ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ą░.
Cooperative Linux (coLinux) [10] čŹč鹊 ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ąĮąŠą▓ąŠąĄ čüčĆąĄą┤čüčéą▓ąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ čüąĄčĆą▓ąĖčüąŠą▓ Linux ąĮą░ čģąŠčüč鹥 Windows. ą×ąĮąŠ čāąČąĄ ąĄčüčéčī ą▓ ą▓ąĖą┤ąĄ čĆąĄčłąĄąĮąĖčÅ "ąĖąĘ ą║ąŠčĆąŠą▒ą║ąĖ", ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĮąŠ čüą▓ąŠą▒ąŠą┤ąĮąŠ ąĘą░ą│čĆčāąĘąĖčéčī ą┐ąŠ čüčüčŗą╗ą║ąĄ [11]. ąŁč鹊čé ą┐ą░ą║ąĄčé ą┐ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ čü ą┐ąŠą╗ąĮčŗą╝ ą┤ąĖčüčéčĆąĖą▒čāčéąĖą▓ąŠą╝ Blackfin uClinux, ą▓ą║ą╗čÄčćą░čÅ ą▓čüąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ąĖ ą│čĆą░čäąĖč湥čüą║ąĖą╣ ąĖąĮčüčéą░ą╗ą╗čÅč鹊čĆ ą▓ čüčéąĖą╗ąĄ Windows.
ą¤ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ąŠą║čĆčāąČąĄąĮąĖčÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ąĖ čĆą░čüą┐ą░ą║ąŠą▓ą║ąĖ ą┤ąĖčüčéčĆąĖą▒čāčéąĖą▓ą░ uClinux ą╝ąŠąČąĄčé ąĮą░čćą░čéčīčüčÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ą░.
ąĪąĮą░čćą░ą╗ą░ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą│čĆą░čäąĖč湥čüą║čāčÄ čāčéąĖą╗ąĖčéčā ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, čćč鹊ą▒čŗ ą▓čŗą▒čĆą░čéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą┐ą░ą║ąĄčé ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą┐ą╗ą░čéčŗ (Board Support Package, BSP) ą┤ą╗čÅ čüą▓ąŠąĄą╣ čåąĄą╗ąĄą▓ąŠą╣ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗe. ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą┐ą╗ą░čéč乊čĆą╝čŗ ą▓ą║ą╗čÄčćą░čÄčé STAMP ą┤ą╗čÅ BF533, BF537 ąĖą╗ąĖ EZ-KIT ą┤ą╗čÅ Dual Core Blackfin BF561. ąöčĆčāą│ąĖąĄ ą┤ąĄčĆąĖą▓ą░čéąĖą▓čŗ Blackfin, ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ BF531, BF532, BF536 ąĖą╗ąĖ BF534, ąĮąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ, ąĮąŠ čéą░ą║ąČąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ, ąŠą┤ąĮą░ą║ąŠ ą┤ą╗čÅ ąĮąĖčģ ąĮąĄčé ą│ąŠč鹊ą▓ąŠą│ąŠ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮąŠą│ąŠ čäą░ą╣ą╗ą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ.
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čÅą┤čĆąŠ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ ąĖ čāčüą┐ąĄčłąĮąŠ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąŠ, ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą┐ąŠą╗ąĮąŠčäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠąĄ čÅą┤čĆąĄ Linux ąĖ ąŠą▒čĆą░ąĘ čäą░ą╣ą╗ąŠą▓ąŠą╣ čüąĖčüč鹥ą╝čŗ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ąĘą░ą│čĆčāąĘąĖčéčī ąĖ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ąĖą╗ąĖ ą┐čĆąŠčłąĖčéčī č湥čĆąĄąĘ NFS, tftp ąĖą╗ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ Kermit ąĮą░ čåąĄą╗ąĄą▓ąŠą╝ ąČąĄą╗ąĄąĘąĄ čü ą┐ąŠą╝ąŠčēčīčÄ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą│ąŠ ąĮą░ ąĮąĄą╝ ąĘą░ą│čĆčāąĘčćąĖą║ą░ u-boot [12]. ą¤ąŠčüą╗ąĄ čāčüą┐ąĄčłąĮąŠą│ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ čŹč鹊ą│ąŠ ą┐čĆąŠčåąĄčüčüą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠą┤ąŠą╗ąČąĄąĮą░ ą┤ą░ą╗čīąĮąĄą╣čłą░čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ą░.
ąóčĆą░ą┤ąĖčåąĖąŠąĮąĮąŠ ą┐ąĄčĆą▓čŗą╝ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąĮčŗą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ą░ "Hello World", ą┐čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ ą║ąŠč鹊čĆąŠą╣ ą┐ąŠą║ą░ąĘą░ąĮ ąĮąĖąČąĄ.
#include < stdio.h >
int main ()
{
printf ("Hello, World\n");
return 0;
}
ąĪąŠčģčĆą░ąĮąĖč鹥 čŹč鹊 č鹥ą║čüčé ą▓ čäą░ą╣ą╗ hello.c ąĖ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆčāą╣č鹥 ąĄą│ąŠ ąĮą░ PC čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░:
bfin-uclinux-gcc -Wl,-elf2flt hello.c -o hello
ą¤ąŠą╗čāčćąĖčéčüčÅ ą▓čŗčģąŠą┤ąĮąŠą╣ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗą╣ čäą░ą╣ą╗ 'hello'.
ąÜąŠą│ą┤ą░ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąĮą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┤ąŠą╗ąČąĮą░ ąĘą░ą┐čāčüą║ą░čéčīčüčÅ ąĮą░ uClinux, č鹊 ą┤ąŠą╗ąČąĄąĮ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆ -bfin-uclinux-gcc. ąśčüą┐ąŠą╗ąĮčÅąĄą╝čŗą╣ ą║ąŠą┤ ą╗ąĖąĮą║čāąĄčéčüčÅ ą▓ą╝ąĄčüč鹥 čü runtime-ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąŠą╣ uClibc. uClibc čŹč鹊 ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ C ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ čüąĖčüč鹥ą╝ Linux. ą×ąĮą░ ąĮą░ą╝ąĮąŠą│ąŠ ą╝ąĄąĮčīčłąĄ, č湥ą╝ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ GNU C, ąŠą┤ąĮą░ą║ąŠ ą┐ąŠčćčéąĖ ą▓čüąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąŠą╣ glibc, čéą░ą║ąČąĄ ąŠčéą╗ąĖčćąĮąŠ čĆą░ą▒ąŠčéą░čÄčé ąĖ čü ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąŠą╣ uClibc.
ąæąĖą▒ą╗ąĖąŠč鹥čćąĮčŗąĄ ą▓čŗąĘąŠą▓čŗ čäčāąĮą║čåąĖą╣ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ printf() ą▓ąŠą▓ą╗ąĄą║ą░čÄčé čüąĖčüč鹥ą╝ąĮčŗą╣ ą▓čŗąĘąŠą▓, ą│ąŠą▓ąŠčĆčÅ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ ąĮą░ą┐ąĄčćą░čéą░čéčī čüčéčĆąŠą║čā ą▓ stdout (čŹč鹊 ą║ąŠąĮčüąŠą╗čī). ą×ą┐čåąĖčÅ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ elf2flt ą│ąŠą▓ąŠčĆąĖčé ą╗ąĖąĮą║ąĄčĆčā ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą┐ą╗ąŠčüą║ąĖą╣ ą┤ą▓ąŠąĖčćąĮčŗą╣ čäą░ą╣ą╗ (flat binary) - elf2flt ą┐čĆąĄąŠą▒čĆą░ąĘčāąĄčé ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą╗ąĖąĮą║ąŠą▓ą░ąĮąĮčŗą╣ čäą░ą╣ą╗ ELF-ąŠą▒čŖąĄą║čéą░, čüąŠąĘą┤ą░ąĮąĮčŗą╣ čéčāą╗č湥ą╣ąĮąŠą╝, ą▓ čäą░ą╣ą╗ binary flat (BFLT) ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ą╝ąĄčüč鹥 čü uClinux.
ąĪą╗ąĄą┤čāčÄčēąĖą╣ čłą░ą│ - ąĘą░ą│čĆčāąĘą║ą░ 'hello' ą▓ čåąĄą╗ąĄą▓ąŠąĄ ąČąĄą╗ąĄąĘąŠ. ąöą╗čÅ čŹč鹊ą│ąŠ ąĄčüčéčī ą╝ąĮąŠą│ąŠ čüą┐ąŠčüąŠą▒ąŠą▓. ą×ą┤ąĖąĮ ąĖąĘ čāą┤ąŠą▒ąĮčŗčģ - ą┐ąŠą╝ąĄčüčéąĖčéčī 'hello' ą▓ NFS ąĖą╗ąĖ SAMBA 菹║čüą┐ąŠčĆčéąĖčĆčāąĄą╝čŗą╣ čäą░ą╣ą╗ ąĮą░ čģąŠčüč鹥 čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ąĖ čüą╝ąŠąĮčéąĖčĆąŠą▓ą░čéčī ąŠą▒čēąĖą╣ ą║ą░čéą░ą╗ąŠą│ (share) ąĮą░ čåąĄą╗ąĄą▓ąŠą╣ čüąĖčüč鹥ą╝ąĄ uClinux. ąöčĆčāą│ąĖąĄ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓čŗ - ą┐ąŠą╝ąĄčüčéąĖčéčī 'hello' ą▓ ą║ąŠčĆąĮąĄą▓ąŠą╣ ą║ą░čéą░ą╗ąŠą│ web-čüąĄčĆą▓ąĄčĆą░ ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ąŠą╝ą░ąĮą┤čā wget ąĮą░ čåąĄą╗ąĄą▓ąŠą╣ ą┐ą╗ą░č鹥. ąśą╗ąĖ ą┐čĆąŠčüč鹊 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ftp ąĖą╗ąĖ tftp ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝ąŠą│ąŠ čäą░ą╣ą╗ą░.
ąöą╗čÅ čŹč鹊ą│ąŠ ą┐čĆąŠčüč鹊ą│ąŠ ą┐čĆąĖą╝ąĄčĆą░ ąŠčéą╗ą░ą┤ą║ą░ ąĮąĄ ąĮčāąČąĮą░, ąŠą┤ąĮą░ą║ąŠ ą┐ąŠ ą╝ąĄčĆąĄ čĆąŠčüčéą░ čüą╗ąŠąČąĮąŠčüčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ čüčéą░ąĮčāčé ą▓ą░ąČąĮčŗ ą┤ąŠčüčéčāą┐ąĮčŗąĄ ąĖąĮčüčéčĆčāą╝ąĄąĮčéčŗ ąŠčéą╗ą░ą┤ą║ąĖ. ąśąĮąŠą│ą┤ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐čĆąŠčüč鹊 ąĘą░ą▓ąĄčĆčłą░ąĄčéčüčÅ ą┐ąŠčüą╗ąĄ čüą▓ąŠąĄą│ąŠ ąĘą░ą┐čāčüą║ą░, ą▒ąĄąĘ ą▓čŗą▓ąŠą┤ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠą▒ ąŠčłąĖą▒ą║ąĄ. ą¤čĆąĖčćąĖąĮ čéą░ą║ąŠą│ąŠ ą┐ąŠą▓ąĄą┤ąĄąĮąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠąĄ ą╝ąĮąŠąČąĄčüčéą▓ąŠ, ąĮąŠ čćą░čēąĄ ą▓čüąĄą│ąŠ ąŠčłąĖą▒ą║ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┤ąŠą▓ąŠą╗čīąĮąŠ ą┐čĆąŠčüč鹊ą╣, ąĮą░ą┐čĆąĖą╝ąĄčĆ ąĮąĄą╗čīąĘčÅ ąŠčéą║čĆčŗčéčī čäą░ą╣ą╗, ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖ čé. ą┐.
ąŻčéąĖą╗ąĖčéą░ strace čŹč鹊 ąĖąĮčüčéčĆčāą╝ąĄąĮčé ąŠčéą╗ą░ą┤ą║ąĖ, ą║ąŠč鹊čĆčŗą╣ ą▓ą▓ąŠą┤ąĖčé ąĮą░ ą┐ąĄčćą░čéčī čéčĆą░čüčüąĖčĆąŠą▓ą║čā ą▓čüąĄčģ čüąĖčüč鹥ą╝ąĮčŗčģ ą▓čŗąĘąŠą▓ąŠą▓, čüą┤ąĄą╗ą░ąĮąĮčŗčģ ą┤čĆčāą│ąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣. ąĪąĖčüč鹥ą╝ąĮčŗąĄ ą▓čŗąĘąŠą▓čŗ ąĖ čüąĖą│ąĮą░ą╗čŗ čŹč鹊 čüąŠą▒čŗčéąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąŠąĖčüčģąŠą┤čÅčé ąĮą░ ąĖąĮč鹥čĆč乥ą╣čüąĄ user/kernel (ą╝ąĄąČą┤čā ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čīčüą║ąĖą╝ ą║ąŠą┤ąŠą╝ ąĖ čÅą┤čĆąŠą╝ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ). ą¤ąŠą┤čĆąŠą▒ąĮąŠąĄ ąĖčüčüą╗ąĄą┤ąŠą▓ą░ąĮąĖąĄ čŹč鹊ą│ąŠ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖčÅ ąŠč湥ąĮčī ą┐ąŠą╗ąĄąĘąĮąŠ ą┤ą╗čÅ ąĖąĘąŠą╗čÅčåąĖąĖ ą▒ą░ą│ą░, ą┐čĆąŠą▓ąĄčĆą║ąĖ ą║ąŠčĆčĆąĄą║čéąĮąŠčüčéąĖ ą┐ąŠą▓ąĄą┤ąĄąĮąĖčÅ ą║ąŠą┤ą░ ąĖ ą┐ąŠą┐čŗč鹊ą║ ąŠčéčüą╗ąĄą┤ąĖčéčī ą║ąŠąĮą║čāčĆąĄąĮčåąĖčÄ ąĘą░ ą┤ąŠčüčéčāą┐ ą║ čĆąĄčüčāčĆčüčā (capture race conditions).
ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ strace ąĮąĄ ą┤ą░ąĄčé ą▒čŗčüčéčĆčŗą╣ čĆąĄąĘčāą╗čīčéą░čé, čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ ą╝ąŠą│čāčé čüą╗ąĄą┤ąŠą▓ą░čéčī čéąĖą┐ąŠą▓ąŠą╣ ą┐čĆąŠčåąĄą┤čāčĆąĄ ą▓čüąĄčģ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąŠą▓ Linux - ą▓čüčéą░ą▓ąĖčéčī ą▓ ą║ąŠą┤ ąŠą┐ąĄčĆą░č鹊čĆčŗ printf ąĖą╗ąĖ printk, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ą┐ąĄčĆąĄą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░čéčī ąĖ ąĘą░ąĮąŠą▓ąŠ ąĘą░ą┐čāčüčéąĖčéčī ą┐čĆąŠą│čĆą░ą╝ą╝čā, čćč鹊ą▒čŗ ą▓čŗčÅčüąĮąĖčéčī ą┐čĆąŠą▒ą╗ąĄą╝čā ą▓ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĖ ą║ąŠą┤ą░.
ąśąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 čéą░ą║ąŠą╣ čéčĆą░ą┤ąĖčåąĖąŠąĮąĮčŗą╣ ą╝ąĄč鹊ą┤ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą╗ąĖčłą║ąŠą╝ čāč鹊ą╝ąĖč鹥ą╗čīąĮčŗą╝, ą┐čĆąĖą╝ąĄąĮčÅčÄčé čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ąŠčéą╗ą░ą┤čćąĖą║ Linux (Linux GNU Debugger, GDB) čü ąĄą│ąŠ ą│čĆą░čäąĖč湥čüą║ąĖą╝ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝. GDB ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą┐ąŠčłą░ą│ąŠą▓ąŠąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ, ąŠą▒čĆą░čéąĮčāčÄ čéčĆą░čüčüąĖčĆąŠą▓ą║čā, č鹊čćą║ąĖ ąŠčüčéą░ąĮąŠą▓ą░ (breakpoints), č鹊čćą║ąĖ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĮąĖčÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ (watchpoints), ą┐čĆąŠčüą╝ąŠčéčĆ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ, ąĖ čé. ą┤. ąĢčüčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▓ą░čĆąĖą░ąĮč鹊ą▓ čāčüčéčĆąŠąĖčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ gdb ą║ gdbserver ąĮą░ čåąĄą╗ąĄą▓ąŠą╣ ą┐ą╗ą░č鹥. Gdb ą╝ąŠąČąĄčé ą┐ąŠą┤ą║ą╗čÄčćą░čéčīčüčÅ č湥čĆąĄąĘ Ethernet, Serial ąĖą╗ąĖ JTAG (rproxy). ąöą╗čÅ ąŠčéą╗ą░ą┤ą║ąĖ ąĮą░ čāčĆąŠą▓ąĮąĄ čÅą┤čĆą░, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓, čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī kgdb Blackfin patch ą┤ą╗čÅ ąŠčéą╗ą░ą┤čćąĖą║ą░ gdb.
ąĢčüą╗ąĖ čåąĄą╗ąĄą▓ąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé ąĖąĘ-ąĘą░ čüą║čĆčŗč鹊ą╣ ąĮąĄ čŹčäč乥ą║čéąĖą▓ąĮąŠčüčéąĖ, č鹊 ą║ą╗čÄč湥ą▓ąŠą╣ čüą┐ąŠčüąŠą▒ čĆąĄčłąĖčéčī ą┐čĆąŠą▒ą╗ąĄą╝čā čŹč鹊 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐čĆąŠčäąĖą╗ąĖčĆąŠą▓čēąĖą║ ą║ąŠą┤ą░. OProfile čŹč鹊 čüąĖčüč鹥ą╝ąĮčŗą╣ ą┐čĆąŠčäą░ą╣ą╗ąĄčĆ ą┤ą╗čÅ ą┤ą╗čÅ čüąĖčüč鹥ą╝ ąĮą░ ąŠčüąĮąŠą▓ąĄ Linux, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░čéčī ą┐čĆąŠčäąĖą╗ąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čüąĄą│ąŠ ą▓čŗą┐ąŠą╗ąĮčÅčÄčēąĄą│ąŠčüčÅ ą║ąŠą┤ą░ čü ąĮąĖąĘą║ąĖą╝ąĖ ąĮą░ą║ą╗ą░ą┤ąĮčŗą╝ąĖ čĆą░čüčģąŠą┤ą░ą╝ąĖ. OProfile ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą░ą┐ą┐ą░čĆą░čéąĮčŗąĄ čüč湥čéčćąĖą║ąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ CPU, čćč鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī ą┐čĆąĖčäąĖą╗ąĖčĆąŠą▓ą░ąĮąĖąĄ čĆą░ąĘąĮąŠą╣ ąĖąĮč鹥čĆąĄčüčāčÄčēąĄą╣ čüčéą░čéąĖčüčéąĖą║ąĖ, čéą░ą║ąČąĄ ą▓ą║ą╗čÄčćą░čÅ ą┐čĆąŠčäą░ą╣ą╗ąĖąĮą│ ąĘą░čéčĆą░čé ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ. ą¤čĆąŠčäąĖą╗ąĖčĆčāąĄčéčüčÅ ą▓ąĄčüčī ą║ąŠą┤: ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ą╝ąŠą┤čāą╗ąĖ čÅą┤čĆą░, čüą░ą╝ąŠ čÅą┤čĆąŠ, ąŠą▒čēąĖąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ, ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ.
ąÜąŠą╝ą┐ąĖą╗čÅč鹊čĆ Blackfin gcc ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąŠč湥ąĮčī čģąŠčĆąŠčłčāčÄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčī ą▓ čüčĆą░ą▓ąĮąĄąĮąĖąĖ čü ą┤čĆčāą│ąĖą╝ąĖ ą┤ąŠčüčéčāą┐ąĮčŗą╝ąĖ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░ą╝ąĖ (čüą╝. GCC Code-Size Benchmark Environment, CSiBE [13]). ąØąŠ ąĖąĮąŠą│ą┤ą░ ą╝ąŠąČąĄčé ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčīčüčÅ ą▓čŗą┐ąŠą╗ąĮąĖčéčī čĆčāčćąĮčāčÄ ąŠą┐čéąĖą╝ąĖąĘą░čåąĖčÄ, čćč鹊ą▒čŗ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░čéčī ą▓čüąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ąĮą░ą▒ąŠčĆą░ ąĖąĮčüčéčĆčāą║čåąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą░čĆčģąĖč鹥ą║čéčāčĆą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░. ąŚą┤ąĄčüčī ąĄčüčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓: ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓čüčéčĆą░ąĖą▓ą░ąĮąĖąĄ ą║ąŠą┤ą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░ (inline assembly), ą╝ą░ą║čĆąŠčüčŗ ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░ ąĖą╗ąĖ ą▓čŗąĘčŗą▓ą░ąĄą╝čŗą╣ ąĖąĘ C ą║ąŠą┤ ąĮą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ.
ą¤čĆąĖą╝ąĄčĆ: ą║ąŠą┤ ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░, ą▓čŗąĘčŗą▓ą░ąĄą╝čŗą╣ ąĖąĘ C. ą¦č鹊ą▒čŗ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĮą░ C ą╝ąŠą│ą╗ą░ ą▓čŗąĘą▓ą░čéčī čäčāąĮą║čåąĖčÄ, ąĮą░ą┐ąĖčüą░ąĮąĮčāčÄ ąĮą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ, ą┐čĆąŠą│čĆą░ą╝ą╝ą░ C ą┤ąŠą╗ąČąĮą░ ąĘąĮą░čéčī ąĖą╝čÅ čäčāąĮą║čåąĖąĖ. ąöą╗čÅ čŹč鹊ą│ąŠ ą┐čĆąŠč鹊čéąĖą┐ čäčāąĮą║čåąĖąĖ ą┤ąĄą║ą╗ą░čĆąĖčĆčāąĄčéčüčÅ č湥čĆąĄąĘ external.
extern int minimum (int, int);
ąÆ čäą░ą╣ą╗ąĄ ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊 ąČąĄ čüą░ą╝ąŠąĄ ąĖą╝čÅ čäčāąĮą║čåąĖąĖ ą▓ ą▓ąĖą┤ąĄ ą╝ąĄčéą║ąĖ ąĮą░ ą░ą┤čĆąĄčüąĄ ą┐ąĄčĆąĄčģąŠą┤ą░, ą║čāą┤ą░ ą┐ąŠą┐ą░ą┤ą░ąĄčé ą▓ąĄčéą▓ą╗ąĄąĮąĖąĄ ą┐čĆąĖ ą▓čŗąĘąŠą▓ąĄ čäčāąĮą║čåąĖąĖ. ąśą╝ąĄąĮą░, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ą▓ C, ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓ ą║ąŠą┤ąĄ ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░ čü ą╗ąĖą┤ąĖčĆčāčÄčēąĖą╝ čüąĖą╝ą▓ąŠą╗ąŠą╝ ąĮąĖąČąĮąĄą│ąŠ ą┐ąŠą┤č湥čĆą║ąĖą▓ą░ąĮąĖčÅ. ąØą░ą┐čĆąĖą╝ąĄčĆ, čéą░ą║ čäčāąĮą║čåąĖčÅ minimum ą▒čāą┤ąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ąĮą░ čÅąĘčŗą║ąĄ ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░:
.global _minimum;
__minimum:
R0 = MIN(R0, R1);
RTS; /* ą▓ąŠąĘą▓čĆą░čé ąĖąĘ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ (ReTurn Subroutine) */
ąÆ ą║ąŠą┤ąĄ ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░ ąĖą╝čÅ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┤ąĄą║ą╗ą░čĆąĖčĆąŠą▓ą░ąĮąŠ čü ą┐ąŠą╝ąŠčēčīčÄ ą┤ąĖčĆąĄą║čéąĖą▓čŗ .global; ą▒ą╗ą░ą│ąŠą┤ą░čĆčÅ čŹč鹊ą╝čā ą░čüčüąĄą╝ą▒ą╗ąĄčĆ ąĖ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆ ąĘąĮą░čÄčé, čćč鹊 čäčāąĮą║čåąĖčÅ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮą░ ą▓ ą┤čĆčāą│ąŠą╝ čäą░ą╣ą╗ąĄ.
ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ čĆąĄą│ąĖčüčéčĆčŗ R0 ąĖ R1 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé ą┐ąĄčĆą▓ąŠą╝čā ąĖ ą▓č鹊čĆąŠą╝čā ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ čäčāąĮą║čåąĖąĖ. ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čäčāąĮą║čåąĖąĖ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ R0. ąĀą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┤ąŠą▓ąŠą╗čīąĮčŗ čéą░ą║ąŠą╣ čāą┤ąŠą▒ąĮąŠą╣ runtime-ą╝ąŠą┤ąĄą╗čīčÄ C ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ą▓ ą░čĆčģąĖč鹥ą║čéčāčĆąĄ.
ąØąĄ č鹊ą╗čīą║ąŠ ą░čĆąĖčäą╝ąĄčéąĖą║ą░ čü ą┐ą╗ą░ą▓ą░čÄčēąĄą╣ č鹊čćą║ąŠą╣ (Blackfin ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą░ą┐ą┐ą░čĆą░čéąĮąŠ ą┐ą╗ą░ą▓ą░čÄčēčāčÄ č鹊čćą║čā), ąĮąŠ ąĖ ą▓čüčÅ čåąĖčäčĆąŠą▓ą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ čüąĖą│ąĮą░ą╗ąŠą▓ čĆąĄą░ą╗ąĖąĘčāąĄčéčüčÅ ąĮą░ ą░čĆąĖčäą╝ąĄčéąĖą║ąĄ čü čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠą╣ č鹊čćą║ąŠą╣ (frac). ąÜ čüąŠąČą░ą╗ąĄąĮąĖčÄ, čÅąĘčŗą║ C ąĮąĄ ąĖą╝ąĄąĄčé ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ čéąĖą┐ą░ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠą╣ č鹊čćą║ąĖ ą┤ą╗čÅ ą┤čĆąŠą▒ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ. ą×ą┤ąĮą░ą║ąŠ ą┤čĆąŠą▒ąĮčŗąĄ ąŠą┐ąĄčĆą░čåąĖąĖ ą╝ąŠą│čāčé ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ ąĮą░ C ą┐čāč鹥ą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮąŠą╣ ą░čĆąĖčäą╝ąĄčéąĖą║ąĖ. ąæąŠą╗čīčłąĖąĮčüčéą▓ąŠ ą┤čĆąŠą▒ąĮčŗčģ ąŠą┐ąĄčĆą░čåąĖą╣ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ ąĘą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ čłą░ą│ąŠą▓, ąĖ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ąĘą░ąĮąĖą╝ą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ąŠą┐ąĄčĆą░č鹊čĆąŠą▓ C ą┤ą╗čÅ ąŠą┤ąĮąŠą╣ ąŠą┐ąĄčĆą░čåąĖąĖ, čćč鹊 čāčüą╗ąŠąČąĮčÅąĄčé ąĖčģ čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ ąĮą░ ąŠą▒čŗčćąĮąŠą╝ ą┐čĆąŠčåąĄčüčüąŠčĆąĄ.
ą¤čĆąŠčåąĄčüčüąŠčĆčŗ DSP ąĮą░ą┐čĆčÅą╝čāčÄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ąŠą┤ąĮąŠčåąĖą║ą╗ąŠą▓čāčÄ ą┤čĆąŠą▒ąĮčāčÄ ą░čĆąĖčäą╝ąĄčéąĖą║čā čü čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠą╣ č鹊čćą║ąŠą╣ (fract) ąĖ čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮčāčÄ ą░čĆąĖčäą╝ąĄčéąĖą║čā, ą┐čĆąĖ čŹč鹊ą╝ frac ą░čĆąĖčäą╝ąĄčéąĖą║ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ čĆąĄą░ą╗čīąĮąŠą╣ čåąĖčäčĆąŠą▓ąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĄ čüąĖą│ąĮą░ą╗ąŠą▓, ąĖ čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮą░čÅ ą░čĆąĖčäą╝ąĄčéąĖą║ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čéą░ą║ąĖčģ ąŠą┐ąĄčĆą░čåąĖą╣ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ą║ą░ą║ ą▓čŗčćąĖčüą╗ąĄąĮąĖąĄ ą░ą┤čĆąĄčüą░ ą┐ą░ą╝čÅčéąĖ, čüč湥čéčćąĖą║ąĖ čåąĖą║ą╗ą░ ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čģąŠą┤ąŠą╝ ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣.
ą¦ąĖčüą╗ąŠą▓ąŠą╣ č乊čĆą╝ą░čé ą┤čĆąŠą▒ąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ čüąŠ ąĘąĮą░ą║ąŠą╝ čü čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠą╣ č鹊čćą║ąŠą╣ čāčćąĖčéčŗą▓ą░ąĄčé ą▓čüąĄ ą▓ąĖą┤čŗ ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣ čüąĖą│ąĮą░ą╗čīąĮąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ, ą┐ąŠč鹊ą╝čā čćč鹊 čü ąĮąĖą╝ čüą╗ąŠąČąĮąŠ ą┤ąŠčüčéąĖą│ąĮčāčéčī ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┤čĆąŠą▒ąĮąŠą│ąŠ čĆąĄąĘčāą╗čīčéą░čéą░. ą¤čĆąĖčćąĖąĮą░ ą▓ č鹊ą╝, čćč鹊 ą┐čĆąĖ čāą╝ąĮąŠąČąĄąĮąĖąĖ ą┤čĆąŠą▒ąĮąŠą│ąŠ ąĮą░ ą┤čĆąŠą▒ąĮąŠąĄ čćąĖčüąĄą╗ čü ą╝ą░ą╗čŗą╝ąĖ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ čĆąĄąĘčāą╗čīčéą░čé ą▒čāą┤ąĄčé ą╗ąĖą▒ąŠ ąŠą▒čĆąĄąĘą░ąĮ, ą╗ąĖą▒ąŠ ąŠą║čĆčāą│ą╗ąĄąĮ.
ąĪą░ą╝ąŠąĄ ą▒ąŠą╗čīčłąŠąĄ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠąĄ frac čćąĖčüą╗ąŠ 0.99999, ąĖ čüą░ą╝ąŠąĄ ą▒ąŠą╗čīčłąŠąĄ ą┐ąŠ ą╝ąŠą┤čāą╗čÄ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠąĄ čćąĖčüą╗ąŠ -1.0 (ą┐ąŠą╗ąĮą░čÅ čłą║ą░ą╗ą░ frac). ąöą╗čÅ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ frac ąŠą▒čĆą░čéąĮąŠ ą▓ čåąĄą╗ąŠąĄ čćąĖčüą╗ąŠ frac ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāą╝ąĮąŠąČąĄąĮąŠ ąĮą░ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą╝ą░čüčłčéą░ą▒ąĖčĆąŠą▓ą░ąĮąĖčÅ, čćč鹊ą▒čŗ čĆąĄąĘčāą╗čīčéą░čé ą▒čŗą╗ ą▓čüąĄą│ą┤ą░ ą╝ąĄąČą┤čā ┬▒2^(N-1) ą┤ą╗čÅ čåąĄą╗čŗčģ čćąĖčüąĄą╗ čüąŠ ąĘąĮą░ą║ąŠą╝ ąĖ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ą┤ąŠ 2^(N) ą┤ą╗čÅ čåąĄą╗čŗčģ čćąĖčüąĄą╗ ą▒ąĄąĘ ąĘąĮą░ą║ą░.
ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą┤ąĖčüčéčĆąĖą▒čāčéąĖą▓ uClinux čüąŠą┤ąĄčƹȹĖčé ą▒ąŠą│ą░čéčŗą╣ ąĮą░ą▒ąŠčĆ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ C ą┤ą╗čÅ čüąČą░čéąĖčÅ ą┤ą░ąĮąĮčŗčģ, ą║čĆąĖą┐č鹊ą│čĆą░čäąĖąĖ ąĖ ą┤čĆčāą│ąĖčģ čåąĄą╗ąĄą╣ (openssl, libpcap, libldap, libm, libdes, libaes, zlib, libpng, libjpeg, ncurses ąĖ čé. ą┤.) ąöąĖčüčéčĆąĖą▒čāčéąĖą▓ Blackfin/uClinux [11] ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą▓ą║ą╗čÄčćą░ąĄčé ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ libaudio, libao, libSTL, flac, tremor, libid3tag, mpfr ąĖ čé. ą┐.
ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ Blackfin/uClinux ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ą╗ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā DSP ą▓ uClinux, ą│ą┤ąĄ ąĮą░čģąŠą┤čÅčéčüčÅ čéčēą░č鹥ą╗čīąĮąŠ ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĮčŗąĄ čäčāąĮą║čåąĖąĖ čü ąĮąĖąĘą║ąĖą╝ąĖ ąĘą░čéčĆą░čéą░ą╝ąĖ MIPS ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▓čüąĄčģ ą▓ąĖą┤ąŠą▓ ąŠą▒čēąĖčģ ą░ą╗ą│ąŠčĆąĖčéą╝ąŠą▓ čüąĖą│ąĮą░ą╗čīąĮąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ, čéą░ą║ąŠą╣ ą║ą░ą║ ą║ąŠąĮą▓ąŠą╗čÄčåąĖčÅ, FFT, DCT ąĖ čäąĖą╗čīčéčĆčŗ IIR/FIR.
ąĪą╗ąĄą┤čāčÄčēąĖą╝ čłą░ą│ąŠą╝ ą▓ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĄ ą╝ąŠą│čāčé ą▒čŗčéčī čüą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ą╗čÅ čåąĄą╗ąĄą▓ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖą╗ąĖ ą┐ąŠčĆčéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą│ąŠ čüąŠčäčéą░. ąØąĄą║ąŠč鹊čĆą░čÅ čćą░čüčéčī čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ą▓ čüą║čĆąĖą┐čéą░čģ shell ąĖą╗ąĖ čÅąĘčŗą║ą░čģ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čéąĖą┐ą░ Perl ąĖą╗ąĖ Python. ąóą░ą╝ ą│ą┤ąĄ ąĄčüčéčī ąŠčüąŠą▒čŗąĄ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą║ čüą║ąŠčĆąŠčüčéąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ, ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ čÅąĘčŗą║ C. ąÆą╝ąĄčüč鹥 čü 菹║čüčéčĆą░ąŠčĆą┤ąĖąĮą░čĆąĮąŠą╣ ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓ ąĖ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ Linux ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą╝ąŠčēąĮčāčÄ čüčĆąĄą┤čā ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ąĮąŠą▓čŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣.
[ą¤čĆąĖą╝ąĄčĆ čćč鹥ąĮąĖčÅ čüąĄąĮčüąŠčĆą░ ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖčÅ]
ą¤čĆąŠčåąĄčüčüąŠčĆčŗ DSP ąŠą▒čŗčćąĮąŠą╝ ąŠč湥ąĮčī čģąŠčĆąŠčłąŠ čüą▒ą░ą╗ą░ąĮčüąĖčĆąŠą▓ą░ąĮčŗ ą┐ąŠ ą▓ą▓ąŠą┤čā/ą▓čŗą▓ąŠą┤čā ą┤ą░ąĮąĮčŗčģ. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąŠąĮąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé čĆą░ąĘąĮąŠąŠą▒čĆą░ąĘąĮčŗąĄ ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮčŗąĄ ą▓ą░čĆąĖą░ąĮčéčŗ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ąĖ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮčŗčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓. ąŁčéąĖ ąĖąĮč鹥čĆč乥ą╣čüčŗ čüą┐čĆąŠąĄą║čéąĖčĆąŠą▓ą░ąĮčŗ ą▒čŗčéčī ąĖą┤ąĄą░ą╗čīąĮčŗą╝ąĖ ą▓ ą║ąŠąĮč鹥ą║čüč鹥 čĆą░ąĘą│čĆčāąĘą║ąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ąŠčé ą╗ąĖčłąĮąĖčģ ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣, ąŠčüčéą░ą▓ą╗čÅčÅ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ ąĮą░ ą░čĆąĖčäą╝ąĄčéąĖč湥čüą║ąĖąĄ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ čüąĄčĆą▓ąĖčüąĮąŠą│ąŠ ą║ąŠą┤ą░ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ, ą║ąŠą│ą┤ą░ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ ą┐ąŠčüčéčāą┐ą░čÄčé ąĖą╗ąĖ ą▓čŗą▓ąŠą┤čÅčéčüčÅ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ.
ąÆ ą║ą░č湥čüčéą▓ąĄ ą┐čĆąĖą╝ąĄčĆą░ čéą░ą║ąŠą╣ ąĖą┤ąĄą░ą╗čīąĮąŠą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą╝ąŠąČąĮąŠ ą┐čĆąĖą▓ąĄčüčéąĖ ą┐čĆąŠčåąĄčüčüąŠčĆ Blackin, čā ą║ąŠč鹊čĆąŠą│ąŠ ąĄčüčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą│ąĖą▒ą║ąĖčģ, ąĮąĄ ąĘą░ą▓ąĖčüčÅčēąĖčģ ą┤čĆčāą│ ąŠčé ą┤čĆčāą│ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐čĆčÅą╝ąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░ ą║ ą┐ą░ą╝čÅčéąĖ (Direct Memory Access, DMA). ąóčĆą░ąĮąĘą░ą║čåąĖąĖ DMA ą┐ąŠ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÄ ą┤ą░ąĮąĮčŗčģ ą╝ąŠą│čāčé ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī ą╝ąĄąČą┤čā ąŠą▒ą╗ą░čüčéčÅą╝ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ ąĖ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĖą╝ąĖ čäčāąĮą║čåąĖčÄ DMA. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą┐ąĄčĆąĄą┤ą░čćąĖ DMA ą╝ąŠą│čāčé ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮčŗ ą╝ąĄąČą┤čā ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĄą╣ DMA ą┐ąĄčĆąĖč乥čĆąĖąĄą╣ ąĖ ą▓ąĮąĄčłąĮąĖą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ ą┐ą░ą╝čÅčéąĖ, ą▓ą║ą╗čÄčćą░čÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ SDRAM ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą░čüąĖąĮčģčĆąŠąĮąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ.
ą¤čĆąŠčåąĄčüčüąŠčĆ Blackfin čüčĆąĄą┤ąĖ ą┤čĆčāą│ąĖčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü (Parallel Peripheral Interface, PPI), ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĮąŠ ąĮą░ą┐čĆčÅą╝čāčÄ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą║ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮčŗą╝ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čÅą╝ D/A ąĖ A/D (ą”ąÉą¤ ąĖ ąÉą”ą¤), ą▓ąĖą┤ąĄąŠ ą║ąŠą┤ąĄčĆčŗ ąĖ ą┤ąĄą║ąŠą┤ąĄčĆčŗ ITU-R-601/656, ąĖ ą┤čĆčāą│ąĖąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ, čéą░ą║ąĖąĄ ą║ą░ą║ čüąĄąĮčüąŠčĆčŗ CMOS ą║ą░ą╝ąĄčĆčŗ. PPI čüąŠčüč鹊ąĖčé ąĖąĘ ą▓čŗą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą▓čŗą▓ąŠą┤ą░ čéą░ą║č鹊ą▓, ą┤ąŠ 3 ą▓čŗą▓ąŠą┤ąŠą▓ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čäčĆąĄą╣ą╝ą░ ąĖ ą┤ąŠ 16 ą▓čŗą▓ąŠą┤ąŠą▓ ą┤ą░ąĮąĮčŗčģ.
ąØą░ čĆąĖčü. 2 ąĮąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮ ą┐čĆąĖą╝ąĄčĆ ą┐čĆąŠčüč鹊ą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ čüąĄąĮčüąŠčĆą░ ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖą╣ CMOS ą║ ą┐čĆąŠčåąĄčüčüąŠčĆčā Blackfin, ą▒ąĄąĘ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓.
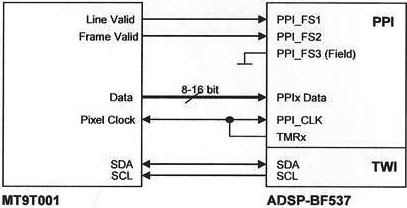
ąĀąĖčü. 2. ąĪčģąĄą╝ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ Micron CMOS Camera Sensor.
ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐čĆąĖą╝ąĄčĆ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ ą┐čĆąŠčüč鹊ą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, ą║ąŠč鹊čĆą░čÅ čćąĖčéą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ąĖąĘ čŹč鹊ą│ąŠ čüąĄąĮčüąŠčĆą░. ąÜąŠą┤ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé, čćč鹊 ą┤čĆą░ą╣ą▓ąĄčĆ PPI čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮ ą▓ čüąŠčüčéą░ą▓ čÅą┤čĆą░ OS ąĖą╗ąĖ ąĘą░ą│čĆčāąČąĄąĮ ą║ą░ą║ ą╝ąŠą┤čāą╗čī čÅą┤čĆą░. ąĢčüčéčī ą┤ą▓ą░ čĆą░ąĘąĮčŗčģ ą┤čĆą░ą╣ą▓ąĄčĆą░ PPI: ąŠą▒čŗčćąĮčŗą╣ ą┐ąŠą╗ąĮąŠčäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆ, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĖą╣ čĆą░ąĘą╗ąĖčćąĮčŗąĄ čĆą░ą▒ąŠčćąĖąĄ čĆąĄąČąĖą╝čŗ PPI (ppi.c), ąĖ ą┐čĆąŠčüč鹊ą╣ PPI Frame Capture Driver (adsp-ppifcd.c). ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗čüčÅ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą▓ą░čĆąĖą░ąĮčé.
#define WIDTH 1280
#define HEIGHT 1024
// put_image_png: ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ čüčŗčĆčŗčģ ą┤ą░ąĮąĮčŗčģ ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖčÅ
// ą▓ čäą░ą╣ą╗ č乊čĆą╝ą░čéą░ PNG ąĖ ąĘą░ą┐ąĖčüčī ąĄą│ąŠ ą▓ stdout.
static void put_image_png (char *image, int width, int height)
{
int y;
char *p;
png_infop info_ptr;
png_structp png_ptr;
png_ptr = png_create_write_struct (PNG_LIBPNG_VER_STRING,
NULL, NULL, NULL);
info_ptr = png_create_info_struct (png_ptr);
png_init_io (png_ptr, stdout);
png_set_IHDR (png_ptr, info_ptr, width, height,
8, PNG_COLOR_TYPE_GRAY, PNG_INTERLACE_NONE,
PNG_COMPRESSION_TYPE_DEFAULT,
PNG_FILTER_TYPE_DEFAULT);
png_write_info (png_ptr, info_ptr);
p = image;
for (y=0; y < height; y++)
{
png_write_row (png_ptr, p);
p += width;
}
png_write_end (png_ptr, info_ptr);
png_destroy_write_struct (&png_ptr, &info_ptr);
}
int main (int argc, char *argv[])
{
int fd;
char *buffer;
// ąÆčŗą┤ąĄą╗ąĄąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ čüčŗčĆčŗčģ ą┤ą░ąĮąĮčŗčģ ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖčÅ:
buffer = (char*)malloc(WIDTH*HEIGHT);
// ą×čéą║čĆčŗčéąĖąĄ /dev/ppi:
fd = open ("/dev/ppi0", O_RDONLY, 0);
if (-1 == fd)
{
printf ("ąØąĄ ą┐ąŠą╗čāčćąĖą╗ąŠčüčī ąŠčéą║čĆčŗčéčī /dev/ppi\n");
free (buffer);
exit (1);
}
ioctl (fd, CMD_PPI_SET_PIXELS_PER_LINE, WIDTH);
ioctl (fd, CMD_PPI_SET_PIXELS_PER_FRAME, HEIGHT);
// ą¦č鹥ąĮąĖąĄ čüčŗčĆčŗčģ ą┤ą░ąĮąĮčŗčģ ą║ą░čĆčéąĖąĮą║ąĖ č湥čĆąĄąĘ PPI:
read (fd, buffer, WIDTH*HEIGHT);
put_image_png (buffer, WIDTH, HEIGHT);
close (fd); // ąĘą░ą║čĆčŗčéąĖąĄ PPI
free (buffer);
return 0;
}
ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąŠčéą║čĆčŗą▓ą░ąĄčé ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ PPI, ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ ą┐ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÄ ą▓ą▓ąŠą┤ąŠą╝/ą▓čŗą▓ąŠą┤ąŠą╝ (I/O controls, ioctls), čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ č鹊č湥ą║ ąĮą░ čüčéčĆąŠą║čā ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░čģą▓ą░čéčŗą▓ą░ąĄą╝čŗčģ čüčéčĆąŠą║. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąĄą╗ą░ąĄčé čüąĖčüč鹥ą╝ąĮčŗą╣ ą▓čŗąĘąŠą▓ čćč鹥ąĮąĖčÅ, ąĖ ą┤čĆą░ą╣ą▓ąĄčĆ ą▓ąĘą▓ąŠą┤ąĖčé čéčĆą░ąĮąĘą░ą║čåąĖčÄ DMA. ąØą░čćą░ą╗ąŠ ąĮąŠą▓ąŠą│ąŠ čäčĆąĄą╣ą╝ą░ ą┤ąĄč鹥ą║čéąĖčĆčāąĄčéčüčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ PPI ą┐čāč鹥ą╝ ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░ čüąĖąĮčģčĆąŠąĖą╝ą┐čāą╗čīčüąŠą▓ čüčéčĆąŠą║ąĖ ąĖ ą║ą░ą┤čĆą░.
ąĪą┐ąĄčåąĖą░ą╗čīąĮą░čÅ ą║ąŠčĆčĆąĄą╗čÅčåąĖčÅ ą╝ąĄąČą┤čā ą┤ą▓čāą╝čÅ čüąĖą│ąĮą░ą╗ą░ą╝ąĖ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░čćą░ą╗ąŠ čäčĆąĄą╣ą╝ą░ ąĖ ąĘą░ą┐čāčüą║ą░ąĄčé čéčĆą░ąĮąĘą░ą║čåąĖčÄ DMA čü ąĘą░čģą▓ą░č鹊ą╝ ąĘą░ą┤ą░ąĮąĮąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ č鹊č湥ą║ ąĮą░ čüčéčĆąŠą║čā. ą¤ąŠą┤čüąĖčüč鹥ą╝ą░ DMA čüąŠčģčĆą░ąĮčÅąĄčé ą┐čĆąĖčģąŠą┤čÅčēąĖąĄ ą▓čŗą▒ąŠčĆą║ąĖ ą┐ąŠ ą░ą┤čĆąĄčüčā, ą▓čŗą┤ąĄą╗ąĄąĮąĮąŠą╝čā ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝. ą¤ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ąŠą┤ą░ ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ.
ą¤ąŠčüą╗ąĄ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ čĆą░čüčéčĆą░ ąŠąĮąĖ ą║ąŠąĮą▓ąĄčĆčéąĖčĆčāčÄčéčüčÅ ą▓ č乊čĆą╝ą░čé PNG (Portable Network Graphic), ą│ą┤ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ libpng, ą▓ą║ą╗čÄč湥ąĮąĮą░čÅ ą▓ ą┤ąĖčüčéčĆąĖą▒čāčéąĖą▓ uClinux. ąĪą║ąŠąĮą▓ąĄčĆčéąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ąŠą▒čĆą░ąĘ ąĘą░č鹥ą╝ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą▓ stdout. ąĢčüą╗ąĖ ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĖčéčī, čćč鹊 čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝čŗą╣ ą║ąŠą┤ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ readimg, č鹊 čüą╗ąĄą┤čāčÄčēą░čÅ ą║ąŠą╝ą░ąĮą┤ąĮą░čÅ čüčéčĆąŠą║ą░ ą▓čŗą┐ąŠą╗ąĮąĖčé ą┐čĆąŠą│čĆą░ą╝ą╝čā ąĖ ąĘą░ą┐ąĖčłąĄčé ą║ą░čĆčéąĖąĮą║čā ą▓ čäą░ą╣ą╗:
readimg > myimage.png
I2C/TWI. ąÆąĖą┤ąĄąŠ, ą░čāą┤ąĖąŠ ąĖ čüąĄąĮčüąŠčĆčŗ ąĮąĄą┐ąŠą┤ą▓ąĖąČąĮčŗčģ ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖą╣ (č乊č鹊ą║ą░ą╝ąĄčĆčŗ) čłąĖčĆąŠą║ąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčé I2C-čüąŠą▓ą╝ąĄčüčéąĖą╝čŗą╣ ą┤ą▓čāčģą┐čĆąŠą▓ąŠą┤ąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü (Two Wire Interface, TWI) ą▓ ą║ą░č湥čüčéą▓ąĄ čłąĖąĮčŗ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čüąĖčüč鹥ą╝čŗ. ą©ąĖąĮą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┤ą░ąĄčé ą┤ąŠčüčéčāą┐ ą║ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ čĆąĄą│ąĖčüčéčĆą░ą╝ čāą┐čĆą░ą▓ą╗čÅąĄą╝ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ čüąŠ čüč鹊čĆąŠąĮčŗ ą╝ą░čüč鹥čĆą░ čłąĖąĮčŗ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą╝ąŠąČąĮąŠ čāą┐čĆą░ą▓ą╗čÅčéčī čÅčĆą║ąŠčüčéčīčÄ ąĖ ą┤čĆčāą│ąĖą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ). ą×ą▒čŗčćąĮąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ I2C čāą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ čÅą┤čĆą░. ą×ą┤ąĮą░ą║ąŠ čéą░ą║ąČąĄ ąĄčüčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┤ąŠčüčéčāą┐ą░ ą║ąŠ ą▓čüąĄą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ ąĖąĘ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü /dev. ąĪą╗ąĄą┤čāčÄčēąĖą╣ ą┐čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ ąĘą░ą┐ąĖčüą░čéčī ąĘąĮą░č湥ąĮąĖąĄ 0x248 ą▓ čĆąĄą│ąĖčüčéčĆ 9 ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ I2C, ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą░ą┤čĆąĄčüąŠą╝ I2C_DEVID:
#define I2C_DEVID (0xB8 >> 1)
#define I2C_DEVICE "/dev/i2c-0"
extern int i2c_write_register (char, unsigned char, unsigned char, unsigned short);
i2c_write_register (I2C_DEVICE, I2C_DEVID, 9, 0x0248);
#define I2C_SLAVE_ADDR 0x38
int i2c_write_register (char *device,
unsigned char client,
unsigned char reg,
unsigned short value)
{
int addr = I2C_SLAVE_ADDR;
char msg_data[32];
struct i2c_msg msg = {addr, 0, 0, msg_data};
struct i2c_rdwr_ioctl_data rdwr = {&msg, 1};
int fd, i;
if ( (fd = open (device, O_RDWR)) < 0 )
{
fprintf (stderr, "ą×čłąĖą▒ą║ą░, ąĮąĄą╗čīąĘčÅ ąŠčéą║čĆčŗčéčī %s\n", device);
exit (1);
}
if ( ioctl (fd, I2C_SLAVE, addr) < 0 )
{
fprintf (stderr, "ą×čłąĖą▒ą║ą░, ąĮąĄą╗čīąĘčÅ ą┐čĆąĖą▓čÅąĘą░čéčī ą░ą┤čĆąĄčü %x\n", addr);
close (fd);
exit (2);
}
msg.len = 3;
msg.flags = 0;
msg.data[0] = reg;
msg.data[2] = (0xFF & value);
msg.data[1] = (value >> 8);
msg.addr = client;
if ( ioctl (fd, I2C_RDWR, &rdwr) < 0 )
{
fprintf (stderr, "ą×čłąĖą▒ą║ą░, ąĮąĄą╗čīąĘčÅ ąĘą░ą┐ąĖčüą░čéčī ą▓ I2C\n", addr);
close (fd);
exit (3);
}
close (fd);
return 0;
}
[ąÜčĆąŠčüčü-ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÅ]
ąĪąĖą╗ą░ Linux ą▓ ąĮąĄąĖčüč鹊čēąĖą╝ąŠą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąĄ ą│ąŠč鹊ą▓čŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą┐ąŠčüčéą░ą▓ą╗čÅąĄą╝čŗčģ ą┐ąŠą┤ čĆą░ąĘąĮčŗą╝ąĖ ąŠčéą║čĆčŗčéčŗą╝ąĖ ą╗ąĖčåąĄąĮąĘąĖčÅą╝ąĖ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą║čĆąŠčüčü-ą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮčŗ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ąĮą░ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝ąŠą╣ čüąĖčüč鹥ą╝ąĄ uClinux.
Linux ąĖą╗ąĖ UNIX ąĮąĄ ąĄą┤ąĖąĮčüčéą▓ąĄąĮąĮą░čÅ ą┐ą╗ą░čéč乊čĆą╝ą░, ąĄčüčéčī čłąĖčĆąŠą║ąĖą╣ ą▓čŗą▒ąŠčĆ ą┐ąŠą┤ąŠą▒ąĮčŗčģ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčŗčģ čüąĖčüč鹥ą╝. ąæąŠą╗čīčłąĖąĮčüčéą▓ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐ąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ ą▓ ą▓ąĖą┤ąĄ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ ą▓ą╝ąĄčüč鹥 čü čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╝ čüą║čĆąĖą┐č鹊ą╝ 'configure'. ąŁč鹊 shell-čüą║čĆąĖą┐čé, ą║ąŠč鹊čĆčŗą╣ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░ą┐čāčēąĄąĮ ą┤ą╗čÅ čĆą░čüą┐ąŠąĘąĮą░ą▓ą░ąĮąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ č鹥ą║čāčēąĄą╣ čüąĖčüč鹥ą╝čŗ, čćč鹊ą▒čŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖčüčī ą║ąŠčĆčĆąĄą║čéąĮčŗąĄ ąŠą┐čåąĖąĖ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░, ą┐čāčéąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ ąĖ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖčÅ.
ąÜąŠą│ą┤ą░ ąĮąĄčé čüą║čĆąĖą┐čéą░ configure, čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ ą╝ąŠąČąĄčé ą▓čĆčāčćąĮčāčÄ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░čéčī Makefile, čćč鹊ą▒čŗ ą┤ąŠą▒ą░ą▓ąĖčéčī ą▓ ąĮąĄą│ąŠ čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą┤ą╗čÅ čåąĄą╗ąĄą▓ąŠą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░, ąĖą╗ąĖ ą╝ąŠąČąĄčé ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░čéčī čŹč鹊 ą▓ ą┤ąĖčüčéčĆąĖą▒čāčéąĖą▓ uClinux ( ą┐ąŠą┤čĆąŠą▒ąĮčŗąĄ ąĖąĮčüčéčĆčāą║čåąĖąĖ ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ [14]). ąĪą║čĆąĖą┐čé configure ąŠą▒čŗčćąĮąŠ ą▒ąŠą╗čīčłąŠą╣, ąĖ čéčĆąĄą▒čāąĄčé ą╝ąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą╗čÅ čüą▓ąŠąĄą│ąŠ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ. ąÜąŠą│ą┤ą░ čŹč鹊čé čüą║čĆąĖą┐čé čüąŠąĘą┤ą░ąĮ ąĖąĘ čüą▓ąĄąČąĄą│ąŠ čĆąĄą╗ąĖąĘą░ autoconf, ąŠąĮ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī ąĮą░ Blackfin/uClinux čü ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╝ąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅą╝ąĖ ąĖą╗ąĖ ą┤ą░ąČąĄ ą▒ąĄąĘ ą║ą░ą║ąĖčģ-ą╗ąĖą▒ąŠ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖą╣.
ąĪą║čĆąĖą┐čé configure ąĖąĘ ą┐ą░ą║ąĄčéą░ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čāčēąĄąĮ ą┤ą╗čÅ ą║čĆąŠčüčü-ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ čüą╗ąĄą┤čāčÄčēąĄą╣ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąŠą╣:
CC='bfin-uclinux-gcc ŌĆōO2 -Wl,-elf2flt' ./configure --host=bfin-uclinux --build=i686-linux
ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠ:
./configure --host=bfin-uclinux --build=i686-linux LDFLAGS='-Wl,-elf2flt' CFLAGS=-O2
ąĢčüčéčī ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 2 čüąŠą▒čŗčéąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ąŠčüčéą░ąĮąŠą▓ąĖčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ čüą║čĆąĖą┐čéą░: (1) ąĮąĄą║ąŠč鹊čĆčŗąĄ čäą░ą╣ą╗čŗ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ čüą║čĆąĖą┐č鹊ą╝, čüą╗ąĖčłą║ąŠą╝ čüčéą░čĆčŗąĄ, ąĖą╗ąĖ (2) ąŠčéčüčāčéčüčéą▓čāčÄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ąĖąĮčüčéčĆčāą╝ąĄąĮčéčŗ ąĖą╗ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ. ąÆąŠąĘą╝ąŠąČąĮąŠ, čćč鹊 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗąĄ čüą║čĆąĖą┐čéčŗ čüą╗ąĖčłą║ąŠą╝ čüčéą░čĆčŗąĄ ą┤ą╗čÅ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą│ąŠ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ąĮą░ bfin-uclinux, ąĖą╗ąĖ ąŠąĮąĖ ąĮąĄ čĆą░čüą┐ąŠąĘąĮą░čÄčé bfin-uclinux ą║ą░ą║ ą▓ąŠąĘą╝ąŠąČąĮčāčÄ čåąĄą╗čī ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ. ąĀą░ąĘčĆą░ą▒ąŠčéčćąĖą║čā ąĮčāąČąĮąŠ ąĘą░ą╝ąĄąĮąĖčéčī config.sub ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĄą╣ ą▓ąĄčĆčüąĖąĄą╣ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą▓ ą░ą║čéčāą░ą╗čīąĮąŠą╝ ąĖčüčģąŠą┤ąĮąŠą╝ ą║ą░čéą░ą╗ąŠą│ąĄ gcc). ąóąŠą╗čīą║ąŠ ą▓ ąŠč湥ąĮčī čĆąĄą┤ą║ąĖčģ čüą╗čāčćą░čÅčģ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÅ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ čüą║čĆąĖą┐č鹊ą╝ configure.in, ą▓čĆčāčćąĮčāčÄ ąĮą░ą┐ąĖčüą░ąĮąĮąŠą╝ ą░ą▓č鹊čĆąŠą╝ ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╝ čāčéąĖą╗ąĖč鹊ą╣ autoconf. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ čäą░ą╣ą╗ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮąŠ ą┤ą╗čÅ čāą┤ą░ą╗ąĄąĮąĖčÅ ąĖą╗ąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čüčéčĆąŠą║, ą│ą┤ąĄ ąĮą░ą▒ą╗čÄą┤ą░ąĄčéčüčÅ ąŠčłąĖą▒ą║ą░.
[Network Oscilloscope Demo]
ąöąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ čüąĄč鹥ą▓ąŠą│ąŠ ąŠčüčåąĖą╗ą╗ąŠą│čĆą░čäą░ Network Oscilloscope Demo, ą┐ąŠą║ą░ąĘą░ąĮąĮąŠąĄ ąĮą░ čĆąĖčü. [3], ąŠčüąĮąŠą▓ą░ąĮąŠ ąĮą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ VoIP Linphone Application ąĖą╗ąĖ Networked Audio Player, ą▓ą║ą╗čÄč湥ąĮąĮąŠą╝ ą▓ ą┤ąĖčüčéčĆąĖą▒čāčéąĖą▓ Blackfin/uClinux. ąØą░ąĘąĮą░č湥ąĮąĖąĄ Network Oscilloscope Project - ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆąŠą▓ą░čéčī ą┐čĆąŠčüč鹊ą╣ remote GUI (Graphical User Interface, ą│čĆą░čäąĖč湥čüą║ąĖą╣ ąĖąĮč鹥čĆč乥ą╣čü ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ) ą╝ąĄčģą░ąĮąĖąĘą╝ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ą╗čÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ ąŠą▒čēąĄą│ąŠ ą┤ąŠčüčéčāą┐ą░ ą║ ą┤ą░ąĮąĮčŗą╝, čĆą░čüą┐čĆąŠčüčéčĆą░ąĮčÅąĄą╝čŗą╝ ą┐ąŠ čüąĄčéąĖ TCP/IP. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, čŹč鹊 ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčé ąĖąĮč鹥ą│čĆą░čåąĖčÄ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ open source ą┐čĆąŠąĄą║č鹊ą▓ ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ ą║ą░ą║ čüą▒ąŠčĆąŠčćąĮčŗčģ ą▒ą╗ąŠą║ąŠą▓ ąŠą┤ąĮąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ąØą░ą┐čĆąĖą╝ąĄčĆ gnuplot, čāčéąĖą╗ąĖčéą░ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĖ ą┤ą╗čÅ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ čäą░ą╣ą╗ą░, ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠčüčéčĆąŠąĄąĮąĖčÅ ą│čĆą░čäąĖą║ąŠą▓, ąĖ thttpd, ą▓ąĄą▒-čüąĄčĆą▓ąĄčĆ čü ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ CGI (Common Gateway Interface), ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĘą░ą┐čĆąŠčüąŠą▓ HTTP. CGI ąŠą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝čŗčģ ą▓ąĄą▒-čüčéčĆą░ąĮąĖčå. ąŁč鹊 ą┐čĆąŠčüč鹊ą╣ ą┐čĆąŠč鹊ą║ąŠą╗ ą┤ą╗čÅ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ ą╝ąĄąČą┤čā č乊čĆą╝ą░ą╝ąĖ WEB ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣. ąĪą║čĆąĖą┐čé CGI ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮą░ą┐ąĖčüą░ąĮ ąĮą░ ą╗čÄą▒ąŠą╝ čÅąĘčŗą║ąĄ, ą▓ą║ą╗čÄčćą░čÅ C/C++, ą┐čĆąŠčćąĖčéą░ąĮ č湥čĆąĄąĘ stdin, ąĘą░ą┐ąĖčüą░ąĮ ą▓ stdout, čü ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄą╝ čćč鹥ąĮąĖčÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ ąŠą║čĆčāąČąĄąĮąĖčÅ.
Network Oscilloscope čĆą░ą▒ąŠčéą░ąĄčé čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝. ą¤ąŠą┤ą║ą╗čÄčćą░ąĄą╝čŗą╣ č湥čĆąĄąĘ čüąĄčéčī web-ą▒čĆą░čāąĘąĄčĆ čüąŠąĄą┤ąĖąĮčÅąĄčéčüčÅ čü HTTP-čüąĄčĆą▓ąĄčĆąŠą╝, čĆą░ą▒ąŠčéą░čÄčēąĖą╝ ąĮą░ uClinux, ą│ą┤ąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ čüą║čĆąĖą┐čé CGI. ąæčĆą░čāąĘąĄčĆ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčé č湥čĆąĄąĘ čüą║čĆąĖą┐čé ąĘą░ą┐čāčüą║ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ. ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ąĖąĘ č乊čĆą╝čŗ HTML, čéą░ą║ąĖąĄ ą║ą░ą║ čćą░čüč鹊čéą░ ąŠčåąĖčäčĆąŠą▓ą║ąĖ (sample frequency), ąĮą░čüčéčĆąŠą╣ą║ąĖ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÅ (trigger settings) ąĖ ąŠą┐čåąĖąĖ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝čā č湥čĆąĄąĘ čĆą░ą▒ąŠč湥ąĄ ąŠą║čĆčāąČąĄąĮąĖąĄ. ąÆčŗąĘą▓ą░ąĮąĮą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąŠčåąĖčäčĆąŠą▓čŗą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ č湥čĆąĄąĘ SPI ą▓ąĮąĄčłąĮąĄą│ąŠ ąÉą”ą¤ (ADC), ąĖčüą┐ąŠą╗čīąĘčāčÅ ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ uLinux (adsp-spiadc.c).
ą¤čĆąĖčģąŠą┤čÅčēąĖąĄ ą▓čŗą▒ąŠčĆą║ąĖ čüąĖą│ąĮą░ą╗ą░ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ąĖ čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą▓ čäą░ą╣ą╗. ąŚą░č鹥ą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ CGI ąĘą░ą┐čāčüą║ą░ąĄčé čāčéąĖą╗ąĖčéčā gnuplot ą║ą░ą║ ą┐čĆąŠčåąĄčüčü, ąĖ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčé ą│ąĄąĮąĄčĆą░čåąĖčÄ ą║ą░čĆčéąĖąĮą║ąĖ PNG ąĖą╗ąĖ JPEG ąĮą░ ąŠčüąĮąŠą▓ąĄ ąŠčåąĖčäčĆąŠą▓ą░ąĮąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ąĖ ąĮą░čüčéčĆąŠąĄą║ č乊čĆą╝čŗ. WEB-čüąĄčĆą▓ąĄčĆ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą▓čŗą▓ąŠą┤ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ CGI, ąĖ čéčāąĮąĮąĄą╗ąĖčĆčāąĄčé ąĖčģ web-ą▒čĆą░čāąĘąĄčĆčā, ą║ąŠč鹊čĆčŗą╣ ąŠč鹊ą▒čĆą░ąČą░ąĄčé ą│čĆą░čäąĖą║ čüąĖą│ąĮą░ą╗ą░ ą║ą░ą║ čüčéčĆą░ąĮąĖčćą║čā HTML.
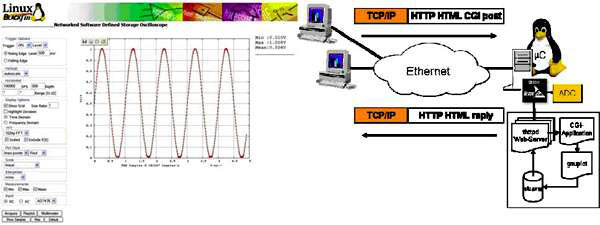
ąĀąĖčü. 3. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ Network Oscilloscope Demo.
ą¤čĆąŠčüčéą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĮą░ čÅąĘčŗą║ąĄ C ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą▓ ąŠčéą▓ąĄčé ąĮą░ ąĘą░ą┐čĆąŠčü CGI.
#include < stdio.h >
#include < stdlib.h >
#include < string.h >
int main (void)
{
print("Content-type: text/html\n\n");
print("< html>< head>< title>CGI DEMO< /title>< /head>\n");
print("< body bgcolor=\"#FFFFFF\">\n");
print("< h1>Hello CGI World!< /h1>\n");
print("ąĢčüą╗ąĖ ąÆčŗ čüą╝ąŠą│ą╗ąĖ ą┐čĆąŠčćąĖčéą░čéčī čŹč鹊, č鹊 CGI čĆą░ą▒ąŠčéą░ąĄčé.\n");
print("< /body>< /html>\n");
fflush(stdout);
return 0;
}
[uClinux ą▓ ą║ą░č湥čüčéą▓ąĄ RTOS]
ą¤ąŠčüą║ąŠą╗čīą║čā Linux ąĖąĘąĮą░čćą░ą╗čīąĮąŠ ą▒čŗą╗ą░ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮą░ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ čüąĄčĆą▓ąĄčĆą░ ąĖ ą┤ąĄčüą║č鹊ą┐ą░, ą│ą┤ąĄ ąĮąĄčé čüą┐ąĄčåąĖą░ą╗čīąĮčŗčģ čéčĆąĄą▒ąŠą▓ą░ąĮąĖą╣ ą║ čĆąĄą░ą╗-čéą░ą╣ą╝čā, ą║ą░ą║ čā čüčĆą░ą▓ąĮąĖą╝čŗčģ ą┐ąŠ čüą╗ąŠąČąĮąŠčüčéąĖ ąĖ čĆą░ąĘą╝ąĄčĆčā ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčŗčģ čüąĖčüč鹥ą╝. ąóąĄą╝ ąĮąĄ ą╝ąĄąĮąĄąĄ Linux, ąĖ ą▓ čćą░čüčéąĮąŠčüčéąĖ uClinux ąĖą╝ąĄąĄčé ąŠčéą╗ąĖčćąĮčŗąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą┐ąŠ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ "ą╝čÅą│ą║ąŠą│ąŠ čĆąĄą░ą╗čéą░ą╣ą╝ą░". ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čģąŠčéčÅ Linux ąĖą╗ąĖ uClinux ąĮąĄ ą╝ąŠąČąĄčé ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčāčÄ ąĘą░ą┤ąĄčƹȹ║čā ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖą╗ąĖ čĆąĄą░ą║čåąĖąĖ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░ ą▓ čüčĆą░ą▓ąĮąĄąĮąĖąĖ čü ą┤čĆčāą│ąĖą╝ąĖ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčŗą╝ąĖ čüąĖčüč鹥ą╝ą░ą╝ąĖ ą┐ąŠą┤ąŠą▒ąĮąŠą╣ čüą╗ąŠąČąĮąŠčüčéąĖ, ąŠąĮą░ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąŠč湥ąĮčī čģąŠčĆąŠčłąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ. ąĢčüą╗ąĖ ąĮčāąČąĄąĮ čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╣ "ąČąĄčüčéą║ąĖą╣ čĆąĄą░ą╗čéą░ą╣ą╝" ąŠčé čüąĖčüč鹥ą╝čŗ, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčīčüčÅ ą┐čĆąĄą┤čüą║ą░ąĘčāąĄą╝čŗą╝ ą▓čĆąĄą╝ąĄąĮąĄą╝ ąĘą░ą┤ąĄčƹȹ║ąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖą╗ąĖ čĆąĄą░ą║čåąĖąĖ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░ ąĘą░ą┤ą░čć, č鹊 čŹč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ą┤ąŠčüčéąĖą│ąĮčāč鹊 ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ čüą┐ąŠčüąŠą▒ą░ą╝ąĖ:
1) ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣ RTOS ą▓ č乊čĆą╝ąĄ ąĮąĖąČąĄą╗ąĄąČą░čēąĄą│ąŠ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą│ąŠ čÅą┤čĆą░ real-time, čéą░ą║ąŠą│ąŠ ą║ą░ą║ RT-Linux (čüą╝. čüą░ą╣čé rtlinux.org) ąĖą╗ąĖ RTAI (čüą░ą╣čé rtai.org). ą×ą▒ą░ čŹčéąĖčģ čĆąĄčłąĄąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ąĮąĄą▒ąŠą╗čīčłąŠąĄ real-time kernel, ą║ąŠč鹊čĆąŠąĄ ąĘą░ą┐čāčüą║ą░ąĄčé Linux ą║ą░ą║ ąĘą░ą┤ą░čćčā čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ čü ąĮąĖąĘą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝. ą¤čĆąŠą│čĆą░ą╝ą╝čŗ, ą║ąŠč鹊čĆčŗą╝ čéčĆąĄą▒čāąĄčéčüčÅ ą┐čĆąĄą┤čüą║ą░ąĘčāąĄą╝ąŠąĄ ą▓čĆąĄą╝čÅ čĆąĄą░ą║čåąĖąĖ ąĮą░ čüąŠą▒čŗčéąĖčÅ, čĆą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ąĮą░ real-time kernel, ąĖ ąŠąĮąĖ čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ą║ąŠą┤ąĖčĆčāčÄčéčüčÅ ą┤ą╗čÅ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ čåąĄą╗ąĄą╣ čĆąĄą░ą╗čéą░ą╣ą╝ą░. ąÆčüąĄ ą┤čĆčāą│ąĖąĄ ąĘą░ą┤ą░čćąĖ ąĖ čüąĄčĆą▓ąĖčüčŗ čĆą░ą▒ąŠčéą░čÄčé ą┐ąŠą▓ąĄčĆčģ Linux kernel, ąĖ ą╝ąŠą│čāčé čāčéąĖą╗ąĖąĘąĖčĆąŠą▓ą░čéčī ą▓čüąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄą╝čŗą╣ Linux čäčāąĮą║čåąĖąĖ. ąóą░ą║ąŠą╣ ą┐ąŠą┤čģąŠą┤ ą╝ąŠąČąĄčé ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī ą┤ąĄč鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĮčāčÄ ą╗ą░č鹥ąĮčéąĮąŠčüčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čü čüąŠčģčĆą░ąĮąĄąĮąĖąĄą╝ ą│ąĖą▒ą║ąŠčüčéąĖ ąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣ Linux.
2) ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣ RTOS ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ Xenomai [15]. Xenomai čŹč鹊 real-time čäčĆąĄą╣ą╝ą▓ąŠčĆą║ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ, ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓čāčÄčēąĖą╣ čü Linux kernel, čćč鹊ą▒čŗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī čłąĖčĆąŠą║čāčÄ, ą┐čĆąĄą┤čüą║ą░ąĘčāąĄą╝čāčÄ ą┐ąŠą┤ą┤ąĄčƹȹ║čā ąĖąĮč鹥čĆč乥ą╣čüą░ ąČąĄčüčéą║ąŠą│ąŠ čĆąĄą░ą╗čéą░ą╣ą╝ą░ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, čü ą│ą╗ą░ą┤ą║ąŠą╣ ąĖąĮč鹥ą│čĆą░čåąĖąĄą╣ ą▓ čĆą░ą▒ąŠč湥ąĄ ąŠą║čĆčāąČąĄąĮąĖąĄ GNU/Linux. ążčĆąĄą╣ą╝ą▓ąŠčĆą║ ą▒ą░ąĘąĖčĆčāąĄčéčüčÅ ąĮą░ ą░ą▒čüčéčĆą░ą║čéąĮąŠą╝ čÅą┤čĆąĄ RTOS nucleus, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ą┐ąŠčüčéčĆąŠąĄąĮąĖčÅ ą╗čÄą▒ąŠą│ąŠ ą▓ąĖą┤ą░ real-time ąĖąĮč鹥čĆč乥ą╣čüąŠą▓. ą»ą┤čĆąŠ 菹║čüą┐ąŠčĆčéąĖčĆčāąĄčé ąĮą░ą▒ąŠčĆ čéčĆą░ą┤ąĖčåąĖąŠąĮąĮčŗčģ čüąĄčĆą▓ąĖčüąŠą▓ RTOS. ąøčÄą▒ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ 菹║ąĘąĄą╝ą┐ą╗čÅčĆąŠą▓ RTOS, čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗčģ "skins", ą╝ąŠąČąĮąŠ čüąŠą▒čĆą░čéčī ą┐ąŠą▓ąĄčĆčģ nucleus, ą┐čĆąĖ čŹč鹊ą╝ ą║ą░ąČą┤čŗą╣ 菹║ąĘąĄą╝ą┐ą╗čÅčĆ ą╝ąŠąČąĄčé ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī čüą▓ąŠą╣ čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖą╣ ąĖąĮč鹥čĆč乥ą╣čü ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, č湥čĆąĄąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čüą╗čāąČą▒ ąŠą┤ąĮąŠą│ąŠ čéčĆą░ą┤ąĖčåąĖąŠąĮąĮąŠą│ąŠ čÅą┤čĆą░. ą×čéą┤ąĄą╗čīąĮąŠ ąŠčé čüą▓ąŠąĄą│ąŠ čéčĆą░ą┤ąĖčåąĖąŠąĮąĮąŠą│ąŠ ąĖ POSIX ąĖąĮč鹥čĆč乥ą╣čüąŠą▓, Xenomai čéą░ą║ąČąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé 菹╝čāą╗čÅč鹊čĆčŗ ą┤ą╗čÅ VxWorks, VRTX, pSOS+ ąĖ uITRON. ąóąĄą╝, ą║ąŠą╝čā ąĮčāąČąĮąŠ čāąĘąĮą░čéčī ą▒ąŠą╗čīčłąĄ ąŠą▒ čŹč鹊ą╝ ą┐čĆąŠąĄą║č鹥, ą╝ąŠąČąĮąŠ ąŠą▒čĆą░čéąĖčéčīčüčÅ ą║ ąŠąĮą╗ą░ą╣ąĮ-ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ [15].
ą¤ąĄčĆą▓ąŠąĮą░čćą░ą╗čīąĮčŗą╣ ą┐ąŠčĆčé ą┤ą╗čÅ Blackfin ą▓ą║ą╗čÄč湥ąĮąĮčŗą╣ ą▓ Xenomai v2.1, ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé ą╗ą░č鹥ąĮčéąĮąŠčüčéčī ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░ ą┤ą╗čÅ čüą░ą╝ąŠą│ąŠ čģčāą┤čłąĄą│ąŠ čüą╗čāčćą░čÅ ąĮą░ Blackfin BF533 ąĮąĄą╝ąĮąŠą│ąŠ ą╝ąĄąĮčīčłąĄ 50 ą╝ą║čü ą┐ąŠą┤ ąĮą░ą│čĆčāąĘą║ąŠą╣, čü ąŠąČąĖą┤ą░ąĄą╝čŗą╝ ą▓ ą▒čāą┤čāčēąĄą╝ čāą╗čāčćčłąĄąĮąĖąĄą╝ 10..20 ą╝ą║čü.
Xenomai ąĖ RTAI ąĖčüą┐ąŠą╗čīąĘčāčÄčé Adeos [16] ą║ą░ą║ ąĮąĖąČąĄą╗ąĄąČą░čēąĖą╣ čüą╗ąŠą╣ ą░ą▒čüčéčĆą░ą║čåąĖąĖ ąŠčé ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ (Hardware Abstraction Layer, HAL). Adeos ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé čĆąĄą░ą╗čéą░ą╣ą╝ ą┤ą╗čÅ čÅą┤čĆą░ Linux. ąŚą┤ąĄčüčī ą╝ąŠąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐čĆąĖąŠčĆąĖč鹥ąĘąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą┤ąŠą╝ąĄąĮąŠą▓ O/S, čüčāčēąĄčüčéą▓čāčÄčēąĖčģ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąĮą░ ąŠą┤ąĮąŠą╝ ąČąĄą╗ąĄąĘąĄ, ąĖ čüą▓čÅąĘčŗą▓ą░čÄčēąĖčģčüčÅ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ č湥čĆąĄąĘ ą║ąŠąĮą▓ąĄą╣ąĄčĆ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣.
Xenomai, ą║ą░ą║ ąĖ Adeos, ą▒čŗą╗ą░ ą┐ąŠčĆčéąĖčĆąŠą▓ą░ąĮą░ ąĮą░ ą░čĆčģąĖč鹥ą║čéčāčĆčā Blackfin ą░ą▓č鹊čĆąŠą╝ Philippe Gerum, ą║ąŠč鹊čĆčŗą╣ ą▓ąĄą┤ąĄčé ąŠą▒ą░ čŹčéąĖčģ ą┐čĆąŠąĄą║čéą░. ąŁčéą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ą░ ą▒čŗą╗ą░ ą▓ ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠą╣ čüč鹥ą┐ąĄąĮąĖ čüą┐ąŠąĮčüąĖčĆąŠą▓ą░ąĮą░ OpenWide, čüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆčāčÄčēąĄą╝čüčÅ ąĮą░ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ ąĖ real-time čĆąĄčłąĄąĮąĖčÅčģ ą┤ą╗čÅ Linux [17].
ąóąĄą╝ ąĮąĄ ą╝ąĄąĮąĄąĄ ą▓ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąĄ čüą╗čāčćą░ąĄą▓ ąČąĄčüčéą║ąĖą╣ čĆąĄą░ą╗čéą░ą╣ą╝ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ, ą▓ čćą░čüčéąĮąŠčüčéąĖ ąŠčé ą┐ąŠčéčĆąĄą▒ąĖč鹥ą╗čīčüą║ąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ą╝čāą╗čīčéąĖą╝ąĄą┤ąĖą░, ą│ą┤ąĄ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ ą┐ąŠ čĆąĄą░ą║čåąĖąĖ ą▓ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ąĖą║čéčāčÄčéčüčÅ čāą┤ąŠą▒čüčéą▓ąŠą╝ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, ąĘą░ą┤ąĄčƹȹ║ą░ą╝ąĖ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ ą▓ąĖą┤ąĄąŠ ąĖ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝ąĖ ą║ą░č湥čüčéą▓ąĄąĮąĮąŠą│ąŠ ą┐čĆąŠąĖą│čĆčŗą▓ą░ąĮąĖčÅ ąĘą▓čāą║ą░. ążąĖąĘąĖč湥čüą║ąĖ ą┤ąĄč鹥ą║čéąĖčĆčāąĄą╝čŗąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ąĘą░ą┤ąĄčƹȹ║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ ąĖąĮč鹥čĆč乥ą╣čüąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą╝ąŠą│čāčé ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤, čćč鹊 ąĮąĄ čüąŠčüčéą░ą▓ą╗čÅąĄčé ą┐čĆąŠą▒ą╗ąĄą╝ ą┤ą╗čÅ čéą░ą║ąĖčģ ą▒čŗčüčéčĆčŗčģ čćąĖą┐ąŠą▓, ą║ą░ą║ ą┐čĆąŠčåąĄčüčüąŠčĆ Blackfin. ąÆ ąĮąŠą▓ąŠą╝ čüčéą░ą▒ąĖą╗čīąĮąŠą╝ čĆąĄą╗ąĖąĘąĄ Linux kernel 2.6.x čŹčéąĖ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ čāą╗čāčćčłąĄąĮčŗ čü ą┐ąŠčÅą▓ą╗ąĄąĮąĖąĄą╝ ąĮąŠą▓ąŠą│ąŠ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░ O(1).
ąĀąĖčü. 4 ąĖ 5 ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą║ąŠąĮč鹥ą║čüčéą░ ą┤ą╗čÅ čÅą┤čĆą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ Linux 2.6.x, čĆą░ą▒ąŠčéą░čÄčēąĄą│ąŠ ąĮą░ Blackfin/uClinux:
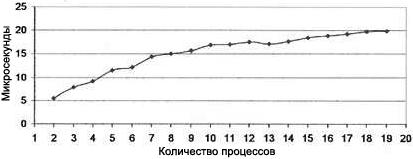
ąĀąĖčü. 4. ąŚą░ą▓ąĖčüąĖą╝ąŠčüčéčī ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą║ąŠąĮč鹥ą║čüčéą░ ąŠčé ą║ąŠą╗ąĖč湥čüčéą▓ą░ čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą┐ąŠč鹊ą║ąŠą▓.
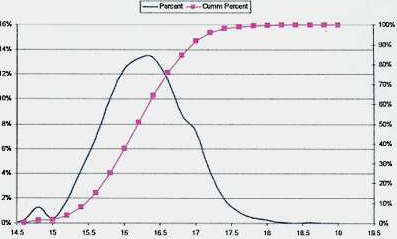
ąĀąĖčü. 5. ąŚą░ą▓ąĖčüąĖą╝ąŠčüčéčī čüčĆąĄą┤ąĮąĄą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ąŠčé ąĘą░ą│čĆčāąČąĄąĮąĮąŠčüčéąĖ čüąĖčüč鹥ą╝čŗ.
ąÆčĆąĄą╝čÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą║ąŠąĮč鹥ą║čüčéą░ ą▒čŗą╗ąŠ ąĖąĘą╝ąĄčĆąĄąĮąŠ čü ą┐ąŠą╝ąŠčēčīčÄ lat_ctx ąŠčé lmbench. ą¤čĆąŠčåąĄčüčüčŗ čüąŠąĄą┤ąĖąĮąĄąĮčŗ ą▓ ą║ąŠą╗čīčåąŠ čü ą┐ąŠą╝ąŠčēčīčÄ ą║ą░ąĮą░ą╗ąŠą▓ Unix (pipes). ąÜą░ąČą┤čŗą╣ ą┐čĆąŠčåąĄčüčü čćąĖčéą░ąĄčé č鹊ą║ąĄąĮ ąĖąĘ čüą▓ąŠąĄą│ąŠ ą║ą░ąĮą░ą╗ą░, ą╝ąŠąČąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčī ą║ą░ą║čāčÄ-č鹊 čĆą░ą▒ąŠčéčā, ąĖ ąĘą░č鹥ą╝ ąĘą░ą┐ąĖčüčŗą▓ą░čéčī č鹊ą║ąĄąĮ ą▓ čüą╗ąĄą┤čāčÄčēąĖą╣ ą┐čĆąŠčåąĄčüčü. ą¤ąŠ ą╝ąĄčĆąĄ čāą▓ąĄą╗ąĖč湥ąĮąĖčÅ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą┐čĆąŠčåąĄčüčüąŠą▓ čŹčäč乥ą║čé ąŠčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą║čŹčłą░ čüąĮąĖąČą░ąĄčéčüčÅ. ąöą╗čÅ 10 ą┐čĆąŠčåąĄčüčüąŠą▓ čüčĆąĄą┤ąĮąĄąĄ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą║ąŠąĮč鹥ą║čüčéą░ čüąŠčüčéą░ą▓ą╗čÅąĄčé 16.2 ą╝ą║čü, čüąŠ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╣ ą┤ąĄą▓ąĖą░čåąĖąĄą╣ .58, 95% ą▓čĆąĄą╝ąĄąĮąĖ, ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ 17 ą╝ą║čü.
[ąŚą░ą║ą╗čÄč湥ąĮąĖąĄ]
ą¤čĆąŠčåąĄčüčüąŠčĆčŗ Blackfin ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé čģąŠčĆąŠčłąĄąĄ čüąŠąŠčéąĮąŠčłąĄąĮąĖąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĖ čåąĄąĮčŗ (800 MMAC @ 400 ą£ąōčå ą┤ą╗čÅ čåąĄąĮčŗ ą╝ąĄąĮčīčłąĄ $5 ąĘą░ čćąĖą┐), ą┐čĆąŠą┤ą▓ąĖąĮčāčéčŗąĄ čäčāąĮą║čåąĖąĖ ą┐ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÄ ą┐ąĖčéą░ąĮąĖąĄą╝ ąĖ ą╝ą░ą╗ąĄąĮčīą║ąĖąĄ ą║ąŠčĆą┐čāčüą░ mini-BGA. ąŁč鹊 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąŠč湥ąĮčī čŹčäč乥ą║čéąĖą▓ąĮąŠąĄ ą▓ ą┐ą╗ą░ąĮąĄ čåąĄąĮčŗ ąĖ ą│ą░ą▒ą░čĆąĖč鹊ą▓ čĆąĄčłąĄąĮąĖąĄ, čü ąŠč湥ąĮčī ą╝ą░ą╗čŗą╝ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ 菹ĮąĄčĆą│ąĖąĖ, čćč鹊 ąŠč湥ąĮčī ą▓ą░ąČąĮąŠ ą┤ą╗čÅ ą┐ąĄčĆąĄąĮąŠčüąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓. ą¤čĆąŠą┤ą▓ąĖąĮčāčéčŗąĄ DSP-čäčāąĮą║čåąĖąĖ Blackfin ąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą╝čāą╗čīčéąĖą╝ąĄą┤ąĖą░ ą┐ąŠą┤ąŠą╣ą┤čāčé ąĮąĄ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ąĘą▓čāą║ą░ ąĖ ą▓ąĖą┤ąĄąŠ, ąĮąŠ čéą░ą║ąČąĄ ą┤ą╗čÅ ą╗čÄą▒ąŠą│ąŠ ą▓ąĖą┤ą░ ąĖąĮą┤čāčüčéčĆąĖą░ą╗čīąĮčŗčģ, ą░ą▓č鹊ą╝ąŠą▒ąĖą╗čīąĮčŗčģ ąĖ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓.
ąśąĮčüčéčĆčāą╝ąĄąĮčéčŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ čģąŠčĆąŠčłąŠ ą┐čĆąŠč鹥čüčéąĖčĆąŠą▓ą░ąĮčŗ, ąĘą░ą┤ąŠą║čāą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮčŗ ąĖ ą▓ą║ą╗čÄčćą░čÄčé ą▓čüąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠąĄ ą║ą░ą║ ą┤ą╗čÅ ą▒čŗčüčéčĆąŠą│ąŠ čüčéą░čĆčéą░, čéą░ą║ ąĖ čāčüą┐ąĄčłąĮąŠą│ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐čĆąŠąĄą║čéą░. ąöčĆčāą│ąŠąĄ ą┤ąŠčüč鹊ąĖąĮčüčéą▓ąŠ ąĖąĮč鹥ą│čĆą░čåąĖąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░ Blackfin čü uClinux - ą┤ąŠčüčéčāą┐ąĮąŠčüčéčī čłąĖčĆąŠą║ąŠą│ąŠ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓, ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ ąĖ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓, čćą░čüč鹊 ą▓ ąĖčüčģąŠą┤ąĮčŗčģ ą║ąŠą┤ą░čģ, ą║ą░ą║ čüą▓ąŠą▒ąŠą┤ąĮąŠąĄ ą¤ą×. ąÆ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąĄ čüą╗čāčćą░ąĄą▓ čéčĆąĄą▒čāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą▒ą░ąĘąŠą▓ą░čÅ ą║čĆąŠčüčü-ą║ąŠą╝ą┐ąĖą╗čÅčåąĖčÅ, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī čĆą░ą▒ąŠč湥ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ čĆąĄčłąĄąĮąĖąĄ.
ąÆ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ čüąŠ čüą║čĆąĖą┐č鹊ą▓čŗą╝ąĖ čÅąĘčŗą║ą░ą╝ąĖ Perl, Python ąĖ PHP, ą▒ą░ąĘą░ą╝ąĖ ą┤ą░ąĮąĮčŗčģ MySQL čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ ą┐ąŠą╗čāčćą░čÄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čĆą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čéčī ą┤ą░ąČąĄ čüą░ą╝čŗąĄ čéčĆąĄą▒ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą╝ąĮąŠą│ąŠčäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĘą░ ąŠč湥ąĮčī ą║ąŠčĆąŠčéą║ąĖą╣ ą┐čĆąŠą╝ąĄąČčāč鹊ą║ ą▓čĆąĄą╝ąĄąĮąĖ, čü ą┤ąŠčüčéą░č鹊čćąĮąŠą╣ ą▓čŗčćąĖčüą╗ąĖč鹥ą╗čīąĮąŠą╣ ą╝ąŠčēąĮąŠčüčéčīčÄ ąĖ ąĘą░ą┐ą░čüąŠą╝ ą┤ą╗čÅ čāą╗čāčćčłąĄąĮąĖą╣ ąĖ ą┤ąŠčĆą░ą▒ąŠč鹊ą║ ą▓ ą▒čāą┤čāčēąĄą╝.
[ąĪčüčŗą╗ą║ąĖ]
1. uClinux on the Blackfin DSP Architecture site:embedded.com.
2. Blackfin ADSP-BF538.
3. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą║čŹčłą░ ą▓ ą┐čĆąŠčåąĄčüčüąŠčĆą░čģ Blackfin.
4. BUSYBOX site:busybox.net.
5. LinuxDevices.com Archive site:linuxdevices.org.
6. Linux Test Project site:github.com.
7. DejaGnu site:gnu.org.
8. ADSP-BF537 STAMP Board Support Package site:analog.com.
9. GCC, the GNU Compiler Collection site:gcc.gnu.org.
10. Cooperative Linux site:colinux.org.
11. Blackfin Linux site:analog.com.
12. u-boot site:sourceforge.net.
13. GCC Code-Size Benchmark Environment site:szeged.github.io.
14. Blackfin/uClinux Documentation site:uclinux.org.
15. Xenomai Real-time system site:xenomai.org.
16. ADEOS Project Overview site:eorc.jaxa.jp.
17. Open Wide site:smile.eu. |



