ąÆ ą┐ąŠąĖčüą║ąĄ ąĮąĄą┤ąŠčĆąŠą│ąĖčģ, čłąĖčĆąŠą║ąŠ ą┤ąŠčüčéčāą┐ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą░čāą┤ąĖąŠ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą╗čÅ ąĮą░čāčćąĮčŗčģ ąĖ čéą▓ąŠčĆč湥čüą║ąĖčģ ąĘą░ą┤ą░čć ą┐ą╗ą░čéč乊čĆą╝ą░ Arduino ą║ą░ąČąĄčéčüčÅ čāą┤ąŠą▒ąĮąŠą╣ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąŠą╣ čüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą░čāą┤ąĖąŠą┐čĆąŠčåąĄčüčüčĆą░. ąØąĄčüą╝ąŠčéčĆčÅ ąĮą░ č鹊čé čäą░ą║čé, čćč鹊 ą┐ą╗ą░čéčŗ Arduino ąŠą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖ čüąŠą┐čĆčÅąČąĄąĮąĖčÅ čü ą┤čĆčāą│ąĖą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ, čā ąĮąĖčģ ąĮą░ ą▒ąŠčĆčéčā ąĖą╝ąĄčÄčéčüčÅ ąÉą”ą¤ ąĖ ą”ąÉą¤ (10-ą▒ąĖčéąĮčŗą╣, ą╝ąĮąŠą│ąŠą║ą░ąĮą░ą╗čīąĮčŗą╣ ADC ąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą║ą░ąĮą░ą╗ąŠą▓ ą©ąśą£, ą┐ąŠąĘą▓ąŠą╗čÅčÄčēąĖčģ ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░čéčī DAC ), čéą░ą║ čćč鹊 ą╝ąŠąČąĮąŠ čü ą┐ąŠą╝ąŠčēčīčÄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ Arduino ąĘą░čģą▓ą░čéčŗą▓ą░čéčī ąĘą▓čāą║ąŠą▓čŗąĄ čüąĖą│ąĮą░ą╗čŗ ąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčī ąĖčģ - ą║ąŠąĮąĄčćąĮąŠ, čü ą▓ąĄčüčīą╝ą░ čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖą╝ąĖ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅą╝ąĖ. ąÆ čŹč鹊ą╣ čüčéą░čéčīąĄ ą░ą▓č鹊čĆčŗ (ą┐ąĄčĆąĄą▓ąŠą┤ [1]) ą░ąĮą░ą╗ąĖąĘąĖčĆčāčÄčé ą░čĆčģąĖč鹥ą║čéčāčĆčā Arduino/AVR čü čåąĄą╗čīčÄ ą┐ąŠąĮčÅčéčī, čćč鹊 ą╝ąŠąČąĮąŠ čüą┤ąĄą╗ą░čéčī ąĖ ą║ą░ą║ąĖąĄ ąĄčüčéčī ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ ą┐ą╗ą░čéč乊čĆą╝čŗ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü ąŠą▒čĆą░ą▒ąŠčéą║ąŠą╣ čüąĖą│ąĮą░ą╗ąŠą▓ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ. ąæčŗą╗ąŠ ąŠčåąĄąĮąĄąĮąŠ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ąĮąĄą║ąŠč鹊čĆčŗčģ ąŠą▒čēąĖčģ ą░ą╗ą│ąŠčĆąĖčéą╝ąŠą▓ DSP , ąĖ ą┐ąŠą║ą░ąĘą░ąĮčŗ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ ąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐ą╗ą░čéč乊čĆą╝čŗ Arduino ą▓ čŹč鹊ą╝ ą║ąŠąĮč鹥ą║čüč鹥.
[ąÆą▓ąĄą┤ąĄąĮąĖąĄ ]
ąśą╝ąĄąĮąĄą╝ Arduino ąĮą░ąĘą▓ą░ąĮ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ ą┐čĆąŠąĄą║čé, ą║ąŠč鹊čĆčŗą╣ čüčéą░čĆč鹊ą▓ą░ą╗ ą▓ 2005 ą│ąŠą┤čā. ą”ąĄą╗čīčÄ čŹč鹊ą│ąŠ ą┐čĆąŠąĄą║čéą░ ą▒čŗą╗ąŠ čāą┐čĆąŠčüčéąĖčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ čĆą░ąĘą╗ąĖčćąĮčŗčģ 菹╗ąĄą║čéčĆąĖč湥čüą║ąĖčģ/菹╗ąĄą║čéčĆąŠąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą║ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā. ą¤čĆąŠąĄą║čé čĆą░ąĘą▓ąĖą▓ą░ą╗čüčÅ ąŠčé Processing software IDE 1 (2001) ąĖ Wiring software and hardware prototyping platform 2 (2003). ąÉą┐ą┐ą░čĆą░čéąĮąŠąĄ, ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ąĖ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ ą┤ąĖąĘą░ą╣ąĮą░ ą▒čŗą╗ą░ ąŠą┐čāą▒ą╗ąĖą║ąŠą▓ą░ąĮą░ ą┐ąŠą┤ čüą▓ąŠą▒ąŠą┤ąĮčŗą╝ąĖ ą╗ąĖčåąĄąĮąĘąĖčÅą╝ąĖ (Creative Commons BYSA 2.5, GPL/LGPL ąĖ CC BY-SA 3.0, čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ). ąÆąŠą║čĆčāą│ ą┐čĆąŠąĄą║čéą░ čĆą░ąĘčĆąŠčüą╗ąŠčüčī ą▒ąŠą╗čīčłąŠąĄ čüąŠąŠą▒čēąĄčüčéą▓ąŠ, ą▒čŗą╗ą░ ąĮą░ą║ąŠą┐ą╗ąĄąĮą░ ą▒ąŠą│ą░čéą░čÅ ą▒ą░ąĘą░ ą║ąŠą┤ą░ ąĖ čĆą░ąĘčĆą░ą▒ąŠč鹊ą║, čćč鹊 ą▒ą╗ą░ą│ąŠą┐čĆąĖčÅčéąĮąŠ ą┐ąŠą▓ą╗ąĖčÅą╗ąŠ ąĮą░ ą┐čĆąĖą▓ą╗ąĄč湥ąĮąĖąĄ ąĖ ą┐ąŠą┤ą┤ąĄčƹȹ║čā ąĮąŠą▓čŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣ ą┐ą╗ą░čéč乊čĆą╝čŗ. ąÆ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ą┤ąŠčüčéčāą┐ąĮąŠ ą╝ąĮąŠąČąĄčüčéą▓ąŠ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą┐ąŠą┤ ą▒čĆąĄąĮą┤ąŠą╝ Arduino, ąŠčé ąŠą│čĆą░ąĮąĖč湥ąĮąĮčŗčģ ą┐ąŠ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčÅą╝ 8-ą▒ąĖčéąĮčŗčģ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ AVR ą┤ąŠ ą┐ąŠą╗ąĮąŠčåąĄąĮąĮčŗčģ 32-ą▒ąĖčéąĮčŗčģ ARM CPU. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, ąĄčüčéčī ąĖ ą┤čĆčāą│ąĖąĄ ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ą░ Arduino ą┤ą╗čÅ ą░ą║ą░ą┤ąĄą╝ąĖč湥čüą║ąŠą│ąŠ ąĖ čéą▓ąŠčĆč湥čüą║ąŠą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ - ą╝ąŠą▒ąĖą╗čīąĮąŠčüčéčī (ą┐ąŠčüą║ąŠą╗čīą║čā ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą╝ąŠčēąĮčŗą╣ ąĖčüč鹊čćąĮąĖą║ ą┐ąĖčéą░ąĮąĖčÅ, čéą░ą║ čćč鹊 ą╝ąŠąČąĮąŠ ą┐ąĖčéą░čéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠčé ą▒ą░čéą░čĆąĄą╣ ąĮąĄčüą║ąŠą╗čīą║ąŠ čćą░čüąŠą▓, ąĄčüą╗ąĖ ąĮąĄ ą┤ąĮąĄą╣ - ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą▓ą░čĆąĖą░ąĮčéą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ), čĆą░čüčłąĖčĆčÅąĄą╝ąŠčüčéčī (ą┐ąŠčüą║ąŠą╗čīą║čā ą▒čŗą╗ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ čüčéą░ąĮą┤ą░čĆčéąĖąĘąŠą▓ą░ąĮąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą▓ ą▓ąĖą┤ąĄ čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗčģ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ čłąĖą╗ą┤ąŠą▓), ąĖ čåąĄąĮą░ (čäąĖčĆą╝ąĄąĮąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ čüč鹊čÅčé ą┐ąŠčĆčÅą┤ą║ą░ 20 ą┤ąŠą╗ą╗ą░čĆąŠą▓ ąĪą©ąÉ, ą░ ą║ąĖčéą░ą╣čüą║ąĖąĄ ą┐ą╗ą░čéčŗ Arduino ą╝ąŠą│čāčé čüč鹊ąĖčéčī ąŠą║ąŠą╗ąŠ 1..2 ą┤ąŠą╗ą╗ą░čĆą░ [6]).
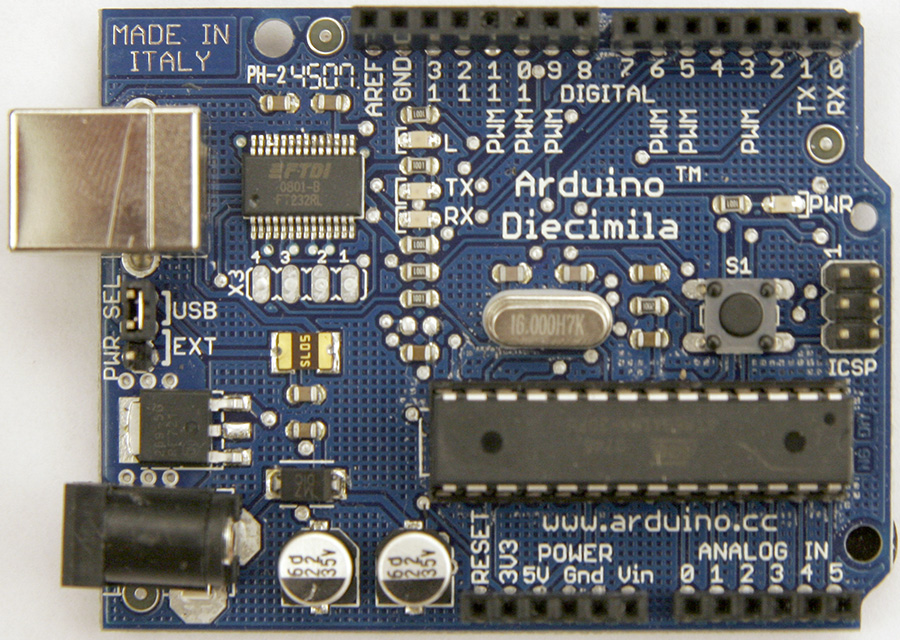
Arduino Diecimila
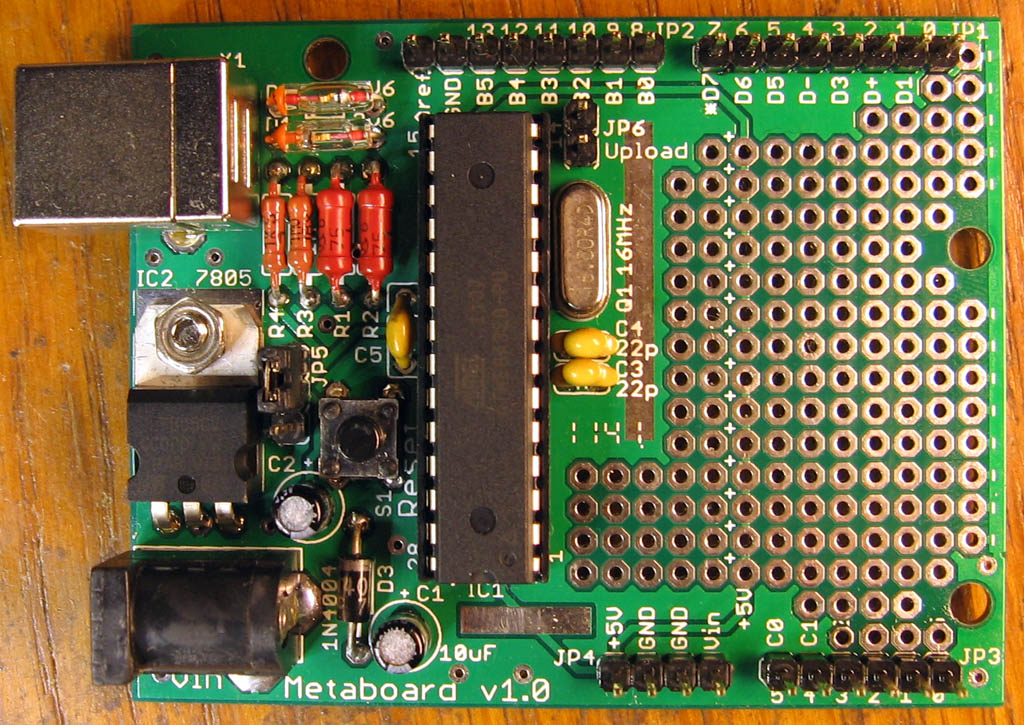
Metaboard
Arduino
ąØąĄčüą╝ąŠčéčĆčÅ ąĮą░ ą▓čüąĄ čŹčéąĖ ą┤ąŠčüč鹊ąĖąĮčüčéą▓ą░, ą┐ą╗ą░čéč乊čĆą╝ą░ Arduino ąĖą╝ąĄąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ ą┐ąŠ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą▓ čüčĆą░ą▓ąĮąĄąĮąĖąĖ čüąŠ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░ą╝ąĖ, ą┤ąŠčüčéčāą┐ąĮčŗą╝ąĖ ąĮą░ čĆčŗąĮą║ąĄ, ą║ą░ą║ ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┐čĆąŠčåąĄčüčüąŠčĆčŗ DSP, čéą░ą║ąĖąĄ ą║ą░ą║ Blackfin 32-bit RISC ą║ąŠą╝ą┐ą░ąĮąĖąĖ Analog Device, ąĖ ąŠčüąĮąŠą▓ą░ąĮąĮčŗąĄ ąĮą░ FPGA ą┐čĆąŠčåąĄčüčüąŠčĆčŗ ą║ąŠą╝ą┐ą░ąĮąĖąĖ Xilinx čüąĄą╝ąĄą╣čüčéą▓ą░ Virtex-7. ąÆ čŹč鹊ą╣ čĆą░ą▒ąŠč鹥 ą░ą▓č鹊čĆčŗ čüčéčĆąĄą╝ąĖą╗ąĖčüčī ą┐ąŠą║ą░ąĘą░čéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐ą╗ą░čéč乊čĆą╝, ąŠčüąĮąŠą▓ą░ąĮąĮčŗčģ ąĮą░ Arduino, ą┤ą╗čÅ ąĘą░ą┤ą░čć ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĘą▓čāą║ą░ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ čüą┤ąĄą╗ą░čéčī ą▒ąŠą╗ąĄąĄ č湥čéą║ąĖąĄ ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą┐čĆąĖ ą▓čŗą▒ąŠčĆąĄ ą┐ą╗ą░čéč乊čĆą╝ ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ. ą¤čĆąĖą╝ąĄčĆčŗ ą║ąŠą┤ą░ ą╝ąŠąČąĮąŠ čüą║ą░čćą░čéčī ąĮą░ čüčéčĆą░ąĮąĖčćą║ąĄ IME/USP Computer Music Group webpage (http://compmus.ime.usp.br/en/arduino ).
Arduino 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčéą░ą╗čīąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗čüčÅ ą║ą░ą║ ą┐čĆąŠčåąĄčüčüąŠčĆ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĘą▓čāą║ą░ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ - ą┤ą╗čÅ ąŠčåąĖčäčĆąŠą▓ą║ąĖ ąĘą▓čāą║ą░ ąĖ čüąĖą│ąĮą░ą╗ąŠą▓ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čü čŹčäč乥ą║čéąĖą▓ąĮąŠą╣ čüą║ąŠčĆąŠčüčéčīčÄ 15.125 ą║ąōčå [2], čćč鹊 ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖą╗ąŠ ą▒ą░ąĘąŠą▓čŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą┤ą╗čÅ ąĖčüčüą╗ąĄą┤ąŠą▓ą░ąĮąĖą╣. ąóą░ą║ąČąĄ ą░čāą┤ąĖąŠą┤čĆą░ą╣ą▓ąĄčĆ ALSA ą▒čŗą╗ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ąĮą░ ą┐ą╗ą░č鹥 Arduino Duemilanove [3] ą┤ą╗čÅ ą┐ąŠą╗ąĮąŠą┤čāą┐ą╗ąĄą║čüąĮąŠą╣ ą╝ąŠąĮąŠč乊ąĮąĖč湥čüą║ąŠą╣ 8-ą▒ąĖčéąĮąŠą╣ ąĘą▓čāą║ąŠą▓ąŠą╣ ą║ą░čĆčéčŗ 44.1 ą║ąōčå ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ GNU/Linux.
[ąÆąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą┐ą╗ą░čéč乊čĆą╝čŗ AVR ]
ą¦č鹊ą▒čŗ čü ą┐ąŠą╝ąŠčēčīčÄ ą┐čĆąŠčåąĄčüčüąŠčĆą░ AVR, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ ą▓ čüą░ą╝čŗčģ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĮčŗčģ ą┐ą╗ą░čéą░čģ Arduino, ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī ąĖ ą▓čŗą▓ąŠą┤ąĖčéčī ąĘą▓čāą║, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ č湥čéą║ąŠ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą┐ą╗ą░čéč乊čĆą╝čŗ. ąÆ čŹč鹊ą╝ ąĖčüčüą╗ąĄą┤ąŠą▓ą░ąĮąĖąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗čüčÅ Arduino Duemilanove čü ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ AVR ATmega328P ą║ąŠą╝ą┐ą░ąĮąĖąĖ Atmel, čüą░ą╝ą░čÅ čüąŠą▓čĆąĄą╝ąĄąĮąĮą░čÅ ą▓ąĄčĆčüąĖčÅ čŹč鹊ą╣ ą┐ą╗ą░čéč乊čĆą╝čŗ. ąŁč鹊 8-ą▒ąĖčéąĮąŠąĄ RISC čÅą┤čĆąŠ, čĆą░ą▒ąŠčéą░čÄčēąĄąĄ ąĮą░ ą▒ą░ąĘąŠą▓ąŠą╣ čćą░čüč鹊č鹥 16 ą£ąōčå, čü ąŠą▒čŖąĄą╝ąŠą╝ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ (FLASH) 32 ą║ąĖą╗ąŠą▒ą░ą╣čéą░ ąĖ ąŠą┐ąĄčĆą░čéąĖą▓ąĮąŠą╣ ą┐ą░ą╝čÅčéčīčÄ 2 ą║ąĖą╗ąŠą▒ą░ą╣čéą░.
ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ . ąĪąĖą│ąĮą░ą╗čŗ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ ą╗ąĖą▒ąŠ ąĮą░ą┐čĆčÅą╝čāčÄ ąŠčé ą│ąĄąĮąĄčĆą░č鹊čĆą░, ą╗ąĖą▒ąŠ čćą░čüč鹊čéą░ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ą┐čĆąŠčģąŠą┤ąĖčé č湥čĆąĄąĘ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą┤ąĄą╗ąĖč鹥ą╗čī čćą░čüč鹊čéčŗ. ąóą░ą║č鹊ą▓čŗąĄ čćą░čüč鹊čéčŗ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čÄčé čĆą░ą▒ąŠčéčā CPU, ADC, čāąĘą╗ąŠą▓ ą┤ąŠčüčéčāą┐ą░ ą║ ą┐ą░ą╝čÅčéąĖ ąĖ ą┤čĆčāą│ąĖčģ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ ąĖ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąōąĄąĮąĄčĆą░č鹊čĆąŠą╝ čéą░ą║č鹊ą▓čŗčģ čüąĖą│ąĮą░ą╗ąŠą▓ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗ąĖą▒ąŠ ą║ą▓ą░čĆčåąĄą▓čŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ, ą╗ąĖą▒ąŠ RC-ą│ąĄąĮąĄčĆą░č鹊čĆ. ąśąĘ ąĄą│ąŠ čćą░čüč鹊čéčŗ ą▓čŗčĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ čüąĖčüč鹥ą╝ąĮą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ (system clock) ąĖ čćą░čüč鹊čéą░ ą┤ą╗čÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąŠą┤čüąĖčüč鹥ą╝čŗ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (I/O clock). ą¤ąŠčüą╗ąĄą┤ąĮčÅčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ADC ąĖ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░. ąöą╗čÅ ąĮąĄą║ąŠč鹊čĆčŗčģ čćą░čüč鹥ą╣ čüąĖčüč鹥ą╝čŗ ą╝ąŠąČąĮąŠ ą▓čŗą▒čĆą░čéčī čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā, ą░ čéą░ą║ąČąĄ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąĘą░ą┤ą░ą▓ą░čéčī ąĘąĮą░č湥ąĮąĖčÅ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ (ą┤ąĄą╗ąĖč鹥ą╗čī, č湥čĆąĄąĘ ą║ąŠč鹊čĆčŗą╣ ą┐čĆąŠčģąŠą┤ąĖčé čćą░čüč鹊čéą░ ą│ąĄąĮąĄčĆą░č鹊čĆą░). ąÆ čŹč鹊ą╣ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĄ ą░ą▓č鹊čĆčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ čéą░ą╣ą╝ąĄčĆą░ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čćą░čüč鹊č鹊ą╣ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą©ąśą£ (PWM) ą┐čĆąĖ ą▓čŗą▓ąŠą┤ąĄ ąĘą▓čāą║ą░, ą║ą░ą║ ą▒čāą┤ąĄčé ąŠą┐ąĖčüą░ąĮąŠ ą┤ą░ą╗ąĄąĄ.
ąĀąĄą│ąĖčüčéčĆčŗ ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ . ąÆčŗčćąĖčüą╗ąĖč鹥ą╗čīąĮąŠąĄ čÅą┤čĆąŠ CPU ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čüąŠčüč鹊ąĖčé ą▒ą╗ąŠą║ą░ ą░čĆąĖčäą╝ąĄčéąĖą║ąĖ ąĖ ą╗ąŠą│ąĖą║ąĖ, ą║ąŠč鹊čĆčŗą╣ čĆą░ą▒ąŠčéą░ąĄčé čü 32 čĆąĄą│ąĖčüčéčĆą░ą╝ąĖ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčēąĖą╝ąĖ ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣, ą░ čéą░ą║ąČąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčēąĖąĄ ą┐ąŠč鹊ą║ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ąŠą╝ą░ąĮą┤ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▒čŗčüčéčĆąŠą╣ ą┤ąĄą▓ąĖą░čåąĖąĖ ą┐ąŠč鹊ą║ą░ ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ą▓ąĄą┤ąĄąĮąŠ ą┐ąŠ čĆą░ąĘą╗ąĖčćąĮčŗą╝ čüąŠą▒čŗčéąĖčÅą╝ ą▓ čüąĖčüč鹥ą╝ąĄ. ąÆ ąĮą░čłąĄą╝ čüą╗čāčćą░ąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▓čŗą┐ąŠą╗ąĮąĖčéčī ąĮą░ ąĮąĖąĘą║ąŠą╝ čāčĆąŠą▓ąĮąĄ ąĮąĄą║ąŠč鹊čĆčŗąĄ čāčćą░čüčéą║ąĖ ą║ąŠą┤ą░ čü čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠą╣ čćą░čüč鹊č鹊ą╣.
ąóą░ą╣ą╝ąĄčĆčŗ/čüč湥čéčćąĖą║ąĖ . ąóą░ą╣ą╝ąĄčĆ, ąĖą╗ąĖ čüč湥čéčćąĖą║, čŹč鹊 čĆąĄą│ąĖčüčéčĆ, ą║ąŠč鹊čĆčŗą╣ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčé čüą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čü ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ (ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą╣) čćą░čüč鹊č鹊ą╣. ąÜąŠą│ą┤ą░ čüč湥čéčćąĖą║ ą┐čĆąĖ ą┤ąŠčüčéąĖą│ą░ąĄčé čüą▓ąŠąĄą│ąŠ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ, ąŠąĮ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ą▓ 0, ąĖ čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆčāąĄčé ąŠą▒ čŹč鹊ą╝ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄą╝ (overflow interrupt), ą▓ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĄ ą║ąŠč鹊čĆąŠą│ąŠ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮčŗ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ čäčāąĮą║čåąĖąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ.
ąóą░ą╣ą╝ąĄčĆčŗ ą▓ą░ąČąĮčŗ ą▓ ą║ąŠąĮč鹥ą║čüč鹥 DSP, ą┐ąŠč鹊ą╝čā čćč鹊 ąŠąĮąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé čéčĆą░ą┤ąĖčåąĖąŠąĮąĮčŗą╣ čüą┐ąŠčüąŠą▒ ą▓čŗą┐ąŠą╗ąĮąĖčéčī čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ąĘą░ą┤ą░čćąĖ DSP, ą║ą░ą║ ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖą╣ ąĘą░ą┐čāčüą║ čäčāąĮą║čåąĖąĖ ąŠčåąĖčäčĆąŠą▓ą║ąĖ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ (čćč鹊 ą▒čāą┤ąĄčé ąĘą░ą┐ąŠą╗ąĮčÅčéčī ą▓čģąŠą┤ąĮąŠą╣ ą▒čāč乥čĆ ą┤ą░ąĮąĮčŗčģ), ąĖ ą▓čŗą▓ąŠą┤ ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą©ąśą£ (PWM), ą║ąŠč鹊čĆčŗą╣ ą┐ąŠčüą╗ąĄ čäąĖą╗čīčéčĆą░ ąĮąĖąĘą║ąŠą╣ čćą░čüč鹊čéčŗ (ążąØą¦, ąŠą▒čŗčćąĮčŗą╣ ąĖąĮč鹥ą│čĆą░č鹊čĆ) ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠą╗čāčćąĖčéčī ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ čüąĖą│ąĮą░ą╗. ąŻ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ATmega328P ąĖą╝ąĄąĄčéčüčÅ ą┤ą▓ą░ 8-ą▒ąĖčéąĮčŗčģ čüč湥čéčćąĖą║ą░ ąĖ ąŠą┤ąĖąĮ 16-ą▒ąĖčéąĮčŗą╣ čüč湥čéčćąĖą║, ąĖ čā ą║ą░ąČą┤ąŠą│ąŠ čüą▓ąŠą╣ ąĮą░ą▒ąŠčĆ ą▓ąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣, ąĮąŠ ą▓čüąĄ ąŠąĮąĖ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą©ąśą£.
ą¤ąŠčĆčéčŗ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (GPIO) . ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ ą╝ąŠą│čāčé ą┐ąŠą╗čāčćą░čéčī čåąĖčäčĆąŠą▓čŗąĄ čüąĖą│ąĮą░ą╗čŗ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ą╝ąĖčĆą░ ąĖ ą▓čŗą▓ąŠą┤ąĖčéčī ąĮą░čĆčāąČčā čüą▓ąŠąĖ čüąŠą▒čüčéą▓ąĄąĮąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ č湥čĆąĄąĘ ą┐ąŠčĆčéčŗ GPIO (General Purpose Input/Output), ą║ąŠč鹊čĆčŗąĄ ą▓ čüą╗čāčćą░ąĄ ą┐ą╗ą░čé Arduino čāą┤ąŠą▒ąĮąŠ ą▓čŗą▓ąĄą┤ąĄąĮčŗ ąĮą░ ą▓ąĮąĄčłąĮąĖąĄ ą║ąŠąĮčéą░ą║čéčŗ, čćč鹊 ąŠą▒ą╗ąĄą│čćą░ąĄčé ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą┤čĆčāą│ąĖčģ ą▓ąĮąĄčłąĮąĖčģ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ ąĖ ą┐ą╗ą░čé. ąŁčéąĖ ą▓čŗą▓ąŠą┤čŗ ą║ąŠąĮčéą░ą║č鹊ą▓ (ą┐ąŠčĆčéčŗ) ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮčŗ (čćč鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą▓ą▓ąŠą┤čā čåąĖčäčĆąŠą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ąŠą▓) ąĖ ąĘą░ą┐ąĖčüą░ąĮčŗ (čćč鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą▓čŗą▓ąŠą┤čā čåąĖčäčĆąŠą▓čŗčģ čüąĖą│ąĮą░ą╗ąŠą▓). ąĢčüą╗ąĖ ą┐ąŠčĆčéčŗ ą┐čĆąĖą▓čÅąĘą░ąĮčŗ ą║ ą║ą░ąĮą░ą╗ą░ą╝ ą▓čģąŠą┤ą░ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ADC, č鹊 čüąĖą│ąĮą░ą╗ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ą▓ąĄą┤ąĄąĮ ą▓ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╣ č乊čĆą╝ąĄ (ąŠčåąĖčäčĆąŠą▓ą░ąĮ) ąĖ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮ ą▓ čåąĖčäčĆąŠą▓čāčÄ č乊čĆą╝čā.
ąÆ ą┐čĆąĖąĮčåąĖą┐ąĄ ą▓čŗą▓ąŠą┤čŗ ą┐ąŠčĆč鹊ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮčŗ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü ą┤ą▓ąŠąĖčćąĮčŗą╝ąĖ čüąĖą│ąĮą░ą╗ą░ą╝ąĖ (ą╗ąŠą│. 0, ą╗ąŠą│. 1), ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĮčŗą╝ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ąĖ čāčĆąŠą▓ąĮčÅą╝ąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ (ą▒ą╗ąĖąĘą║ąĖą╝ąĖ ą║ 0V ąĖ ą▒ą╗ąĖąĘą║ąĖą╝ąĖ ą║ 5V, čĆą░ąĘą┤ąĄą╗čÅąĄą╝čŗą╝ąĖ ą┐ąŠ ą┐ąŠčĆąŠą│ąŠą▓ąŠą╣ ą▓ąĄą╗ąĖčćąĖąĮąĄ ą┐čĆąĖą╝ąĄčĆąĮąŠ 2V čü ąĮąĄą║ąŠč鹊čĆčŗą╝ąĖ ą┤ąĄą▓ąĖą░čåąĖčÅą╝ąĖ). ąØąĄčüą╝ąŠčéčĆčÅ ąĮą░ čŹč鹊, ą▓čŗą▓ąŠą┤čŗ GPIO ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮčŗ čāą┤ąŠą▒ąĮčŗą╝ąĖ ą╝ąĄčģą░ąĮąĖąĘą╝ą░ą╝ąĖ ą┤ą╗čÅ ąŠčåąĖčäčĆąŠą▓ą║ąĖ ąŠą│čĆą░ąĮąĖč湥ąĮąĮčŗčģ ą┐ąŠ čāčĆąŠą▓ąĮčÄ ą▓čģąŠą┤ąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓, ąĖ čéą░ą║ąČąĄ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čüąĖą│ąĮą░ą╗čŗ čĆą░ąĘąĮąŠą╣ č乊čĆą╝čŗ čü ą┐ąŠą╝ąŠčēčīčÄ ą©ąśą£ ąĖ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čäąĖą╗čīčéčĆą░ ążąØą¦. ąŁčéąĖ ą╝ąĄčģą░ąĮąĖąĘą╝čŗ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ą░ąĮą░ą╗ąŠą│ąŠ-čåąĖčäčĆąŠą▓ąŠą╣ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čī (analog-to-digital converter, ADC) ąĖ ą╝ąŠą┤čāą╗čī čłąĖčĆąŠčéąĮąŠ-ąĖą╝ą┐čāą╗čīčüąĮąŠą╣ ą╝ąŠą┤čāą╗čÅčåąĖąĖ (pulse-width modulation, PWM), čĆą░ą▒ąŠčéą░ ą║ąŠč鹊čĆčŗčģ ą▒čāą┤ąĄčé čĆą░čüčüą╝ąŠčéčĆąĄąĮą░ ą┤ą░ą╗ąĄąĄ.
ą¤ą░ą╝čÅčéčī . ąŻ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĄčüčéčī 3 ąŠčéą┤ąĄą╗čīąĮčŗčģ ąŠą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĖ čĆą░ą▒ąŠčćąĖčģ ą┤ą░ąĮąĮčŗčģ:
ąóąĖą┐ ą┐ą░ą╝čÅčéąĖ ąĀą░ąĘą╝ąĄčĆ (ą║ąĖą╗ąŠą▒ą░ą╣čé) ąŁąĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčī ąÆčĆąĄą╝čÅ ąĘą░ą┐ąĖčüąĖ (ą▓ čéą░ą║čéą░čģ CPU) Max ą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čåąĖą║ą╗ąŠą▓ ąĘą░ą┐ąĖčüčī/čüčéąĖčĆą░ąĮąĖąĄ
FLASH
32
ą┤ą░
-
10000
SRAM
2
ąĮąĄčé
2
ąĮąĄ ąŠą│čĆą░ąĮąĖč湥ąĮąŠ
EEPROM
1
ą┤ą░
30
100000
ąÆ ą┐ą░ą╝čÅčéąĖ FLASH čģčĆą░ąĮąĖčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĖ ą║ą░ą║ąĖąĄ-ą╗ąĖą▒ąŠ ą║ąŠąĮčüčéą░ąĮčéčŗ, SRAM čģčĆą░ąĮąĖčé ąĖąĘą╝ąĄąĮčÅąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą▓ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅčģ, ąĖ EEPROM ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝ą░čÅ ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝ą░čÅ ą┐ą░ą╝čÅčéčī ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ ą║ą░ą║ąĖčģ-ą╗ąĖą▒ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą╝ąĄąČą┤čā čĆą░ą▒ąŠčćąĖą╝ąĖ čüąĄčüčüąĖčÅą╝ąĖ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čĆą░ąĘą╝ąĄčĆ ą┐ą░ą╝čÅčéąĖ SRAM ąĘą░ą┤ą░ąĄčé ąČąĄčüčéą║ąĖąĄ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ ąĮą░ ą╝ąĮąŠą│ąĖąĄ ą░ą╗ą│ąŠčĆąĖčéą╝čŗ DSP. ąØą░ą┐čĆąĖą╝ąĄčĆ, čéą░ą▒ą╗ąĖčåą░ ąĮą░ 512 č鹊č湥ą║, ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮą░čÅ ąĘą░čĆą░ąĮąĄąĄ ą▓čŗčćąĖčüą╗ąĄąĮąĮčŗą╝ąĖ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ č乊čĆą╝čŗ čüąĖąĮčāčüąŠąĖą┤ą░ą╗čīąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░, ąĘą░ą╣ą╝ąĄčé 25% ą▓čüąĄą│ąŠ ą┤ąŠčüčéčāą┐ąĮąŠą│ąŠ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░. ą¤ąŠ čŹč鹊ą╣ ą┐čĆąĖčćąĖąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĮč鹥čĆąĄčüąĮčŗą╝ čģčĆą░ąĮąĖčéčī ą║ąŠąĮčüčéą░ąĮčéčŗ ą┐ąŠą┤ąŠą▒ąĮąŠą│ąŠ čĆąŠą┤ą░ ą▓ ą┐ą░ą╝čÅčéąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ ą▓čüčÅą║ąĖą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ąĄčüčéčī ąĮąĄčģą▓ą░čéą║ą░ ąŠą┐ąĄčĆą░čéąĖą▓ąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ.
ąÆą▓ąŠą┤ ąĘą▓čāą║ą░ čü ą┐ąŠą╝ąŠčēčīčÄ ADC . ąöą░ąĮąĮčŗąĄ ą╝ąŠą│čāčé ą┐ąŠčüčéčāą┐ą░čéčī ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čĆą░ąĘąĮčŗą╝ąĖ čüą┐ąŠčüąŠą▒ą░ą╝ąĖ, ąĖ ą▒ą░ąĘąŠą▓čŗą╝ ą╝ąĄč鹊ą┤ąŠą╝ ą┤ą╗čÅ ą▓ą▓ąŠą┤ą░ ąŠčåąĖčäčĆąŠą▓ąŠą║ ąĘą▓čāą║ą░ čÅą▓ą╗čÅąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ADC, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą║ ą▓ąĮąĄčłąĮąĖą╝ ą▓čŗą▓ąŠą┤ą░ą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąóą░ą║ąČąĄ ą╝ąŠąČąĮąŠ ą▓ą▓ąŠą┤ąĖčéčī ąĘą▓čāą║ąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ č湥čĆąĄąĘ 1 čĆą░ąĘčĆčÅą┤ ą┐ąŠčĆčéą░ GPIO, ąĮą░čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą║ą░ą║ ą▓čģąŠą┤. ą¤ąĄčĆą▓čŗą╣ čüą┐ąŠčüąŠą▒, čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ADC, ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▒ąŠą╗ąĄąĄ č鹊čćąĮąŠ ąŠčåąĖčäčĆąŠą▓čŗą▓ą░čéčī čüąĖą│ąĮą░ą╗ (ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ čāčĆąŠą▓ąĄąĮčī čüąĖą│ąĮą░ą╗ą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝ ąŠčé 0V ą┤ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĖčüč鹊čćąĮąĖą║ą░ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮ ą▓ čåąĖčäčĆąŠą▓čāčÄ č乊čĆą╝čā čü čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ 8 ąĖą╗ąĖ 10 ą▒ąĖčé) ąĖ ą┐ąŠą╝ąĄčēą░čéčī ą┤ą░ąĮąĮčŗąĄ ąĄą│ąŠ ą▓čŗą▒ąŠčĆą║ąĖ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ą▓ čÅč湥ą╣ą║ąĖ ą┐ą░ą╝čÅčéąĖ. ąÆč鹊čĆąŠą╣ čüą┐ąŠčüąŠą▒ ą╝ąŠąČąĄčé čćąĖčéą░čéčī ą┐ąŠ ąŠą┤ąĮąŠą╝čā ą▒ąĖčéčā ą▓ ą║ą░ąČą┤ąŠą╣ ą▓čŗą▒ąŠčĆą║ąĄ, ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÅ čüąĖą│ąĮą░ą╗ ą║ą░ą║ 0 ąĖą╗ąĖ 1 ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹊ą│ąŠ, ąĮąĖąČąĄ ą╗ąĖ ą▓čŗčłąĄ čāčĆąŠą▓ąĄąĮčī čüąĖą│ąĮą░ą╗ą░ ąĘą░ą┤ą░ąĮąĮąŠą│ąŠ ą┐ąŠčĆąŠą│ą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą║ąŠą╝ą┐ą░čĆą░č鹊čĆą░).
ąØą░čłą░ ąĮą░čüčéčĆąŠą╣ą║ą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ą░ ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ADC ą┤ą╗čÅ ąŠčåąĖčäčĆąŠą▓ą║ąĖ ąĘą▓čāą║ą░. ąóą░ą║ąŠą╣ ą▓čŗą▒ąŠčĆ ą▒čŗą╗ čüą┤ąĄą╗ą░ąĮ ą┐ąŠč鹊ą╝čā, čćč鹊 čüąĖą│ąĮą░ą╗ ą╝ąŠąČąĮąŠ ą┐ąŠčćčéąĖ ąĮą░ą┐čĆčÅą╝čāčÄ ą┐ąŠą┤ą░ą▓ą░čéčī ąĮą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ (ą▒ąĄąĘ ą▓čüčÅą║ąĖčģ čüą╗ąŠąČąĮčŗčģ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ čüčģąĄą╝), ąĖ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ąĮą░čāčćąĖčéčīčüčÅ čāčćąĖčéčŗą▓ą░čéčī ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą▓ čŹč鹊ą╝ ą║čĆąĖčéąĖč湥čüą║ąŠą╝ čłą░ą│ąĄ čåąĄą┐ąŠčćą║ąĖ čåąĖčäčĆąŠą▓ąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĘą▓čāą║ą░.
ąÆčüčéčĆąŠąĄąĮąĮčŗą╣ ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ADC ąĖčüą┐ąŠą╗čīąĘčāąĄčé čüčģąĄą╝čā ą▓čŗą▒ąŠčĆą║ąĖ ąĖ čģčĆą░ąĮąĄąĮąĖčÅ, ą║ąŠč鹊čĆą░čÅ čāą┤ąĄčƹȹĖą▓ą░ąĄčé ą▓čģąŠą┤ąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ąĮą░ ą┐ąŠčüč鹊čÅąĮąĮąŠą╝ čāčĆąŠą▓ąĮąĄ ą┤ąŠ ąŠą║ąŠąĮčćą░ąĮąĖčÅ ą┐čĆąŠčåąĄčüčüą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ ą▓ čåąĖčäčĆąŠą▓čāčÄ č乊čĆą╝čā. ADC čĆą░ą▒ąŠčéą░ąĄčé ą┐ąŠ ą┐čĆąĖąĮčåąĖą┐čā ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┐čĆąĖą▒ą╗ąĖąČąĄąĮąĖčÅ, čüčĆą░ą▓ąĮąĖą▓ą░čÅ ąŠą┐ąŠčĆąĮčŗąĄ čāčĆąŠą▓ąĮąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čü ą▓čģąŠą┤ąĮčŗą╝ čüąĖą│ąĮą░ą╗ąŠą╝ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąŠčåąĖčäčĆąŠą▓ą║ąĖ čü č鹊čćąĮąŠčüčéčīčÄ ą┤ąŠ 10 ą▒ąĖčé. ąĢčüą╗ąĖ čéčĆąĄą▒čāąĄčéčüčÅ ą┐ąŠą▓čŗčłąĄąĮąĮą░čÅ čüą║ąŠčĆąŠčüčéčī ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ, č鹊 ą╝ąŠąČąĮąŠ ą┐ąŠąČąĄčĆčéą▓ąŠą▓ą░čéčī č鹊čćąĮąŠčüčéčīčÄ, čćąĖčéą░čÅ č鹊ą╗čīą║ąŠ 8 ą▒ąĖčé ąŠčåąĖčäčĆąŠą▓ą║ąĖ čü ąŠčéą▒čĆą░čüčŗą▓ą░ąĮąĖąĄą╝ 2 ą╝ą╗ą░ą┤čłąĖčģ ą▒ąĖčé ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ. ąÆčĆąĄą╝čÅ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ ą▓ čåąĖčäčĆąŠą▓čāčÄ č乊čĆą╝čā ąĘą░ąĮąĖą╝ą░ąĄčé ą▓čĆąĄą╝čÅ ąŠčé 13 ą┤ąŠ 250 ą╝ą║čü, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ čéą░ą║ąČąĄ ą▓ą╗ąĖčÅčÄčé ąĮą░ č鹊čćąĮąŠčüčéčī čĆąĄąĘčāą╗čīčéą░čéą░.
ąÜą░ą║ čāąČąĄ čāą┐ąŠą╝ąĖąĮą░ą╗ąŠčüčī čĆą░ąĮąĄąĄ, ą╝ąĄčģą░ąĮąĖąĘą╝ ADC ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▓čŗą┤ąĄą╗ąĄąĮąĮąŠąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ, čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī ąĮąĄąĘą░ą▓ąĖčüąĖą╝čāčÄ čĆą░ą▒ąŠčéčā ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ą░ąĮą░ą╗ąŠą│-čåąĖčäčĆą░ ąŠčé ą┤čĆčāą│ąĖčģ čāąĘą╗ąŠą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąóą░ą║ąČąĄ ą┐čĆąŠčåąĄčüčü ąĘą░ą┐čāčüą║ą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čāčēąĄąĮ ą▓čĆčāčćąĮčāčÄ (ą┐ąŠ ąĘą░ą┐čĆąŠčüčā ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą▓ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░) ąĖą╗ąĖ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ (ąĮąŠą▓ąŠąĄ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ ąĘą░ą┐čāčüčéąĖčéčüčÅ čüą░ą╝ąŠ, ą║ą░ą║ č鹊ą╗čīą║ąŠ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ č鹥ą║čāčēąĄąĄ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ).
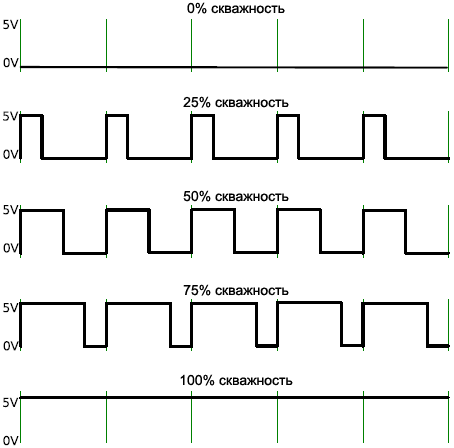
ąÆčŗą▓ąŠą┤ ąĘą▓čāą║ą░ čü ą┐ąŠą╝ąŠčēčīčÄ ą©ąśą£ (PWM) . ąÜą░ą║ č鹊ą╗čīą║ąŠ ą▓čģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ ąŠčåąĖčäčĆąŠą▓ą░ąĮ ąĖ ąŠą▒čĆą░ą▒ąŠčéą░ąĮ, ąŠą┤ąĮąĖą╝ ąĖąĘ čüą┐ąŠčüąŠą▒ąŠą▓ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░čéčī ąĄą│ąŠ ą▓ ą░ąĮą░ą╗ąŠą│ąŠą▓čāčÄ č乊čĆą╝čā ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▒ą╗ąŠą║ą░ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą©ąśą£ (pulse-width modulation, PWM, čłąĖčĆąŠčéąĮąŠ-ąĖą╝ą┐čāą╗čīčüąĮą░čÅ ą╝ąŠą┤čāą╗čÅčåąĖčÅ). ąŁč鹊čé ą▒ą╗ąŠą║ ą╝ąŠąČąĄčé ą▓čŗą▓ąŠą┤ąĖčéčī ą©ąśą£ ąĮą░ ąĮąĄą║ąŠč鹊čĆčŗąĄ ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗąĄ ą▓čŗą▓ąŠą┤čŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ąĘą░ ą║ąŠč鹊čĆčŗą╝ąĖ ą┤ą╗čÅ čüą│ą╗ą░ąČąĖą▓ą░ąĮąĖčÅ ąĖą╝ą┐čāą╗čīčüąŠą▓ ą©ąśą£ ą┤ąŠą╗ąČąĮą░ čüč鹊čÅčéčī čüčģąĄą╝ą░ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╣ čäąĖą╗čīčéčĆą░čåąĖąĖ. ążąŠčĆą╝ą░ ą©ąśą£ ą║ąŠą┤ąĖčĆčāąĄčé ąĮčāąČąĮčāčÄ ą░ą╝ą┐ą╗ąĖčéčāą┤čā čüąĖą│ąĮą░ą╗ą░ čü ą┐ąŠą╝ąŠčēčīčÄ čüąŠąŠčéąĮąŠčłąĄąĮąĖčÅ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüč鹥ą╣ ąĖą╝ą┐čāą╗čīčüąŠą▓ ą╗ąŠą│. 0 ąĖ ą╗ąŠą│. 1 čüą▓ąŠąĄą│ąŠ ą▓čŗčģąŠą┤ą░. ąĪąŠąŠčéąĮąŠčłąĄąĮąĖąĄ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą╗ąŠą│. 1 čüąĖą│ąĮą░ą╗ą░ ą©ąśą£ ą║ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĄą│ąŠ ą┐ąĄčĆąĖąŠą┤ą░ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą▓čŗčģąŠą┤ąĮąŠą╣ čāčĆąŠą▓ąĄąĮčī - č湥ą╝ ą╝ąĄąĮčīčłąĄ čŹč鹊 čüąŠąŠčéąĮąŠčłąĄąĮąĖąĄ, č鹥ą╝ ą╝ąĄąĮčīčłąĄ čāčĆąŠą▓ąĄąĮčī, čüą╝. čĆąĖčü. 1a. ąÆčŗčģąŠą┤ąĮčŗąĄ ąĖą╝ą┐čāą╗čīčüčŗ ą©ąśą£ ąĖą╝ąĄčÄčé ą▓ ą╗ąŠą│. 0 ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ąŠą║ąŠą╗ąŠ 0V, ą▓ ą╗ąŠą│. 1 ąŠą║ąŠą╗ąŠ 5V. ąĢčüą╗ąĖ ą┐čĆąĖąĮčÅčéčī ąĘą░ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ąĖą╝ą┐čāą╗čīčüą░ ą╗ąŠą│. 1 ą▓čĆąĄą╝čÅ T1, ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĖąŠą┤ą░ ąĘą░ T, č鹊 čāčĆąŠą▓ąĄąĮčī ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą©ąśą£ Uout , ą┐ąŠą╗čāčćą░ąĄą╝ąŠą│ąŠ ą┐ąŠčüą╗ąĄ čäąĖą╗čīčéčĆą░, ą╝ąŠąČąĮąŠ ą▓čŗčćąĖčüą╗ąĖčéčī ą┐ąŠ č乊čĆą╝čāą╗ąĄ:
5V * T1 Uout = ------- T
ąĀąĖčü. 1a. ą¤čĆąĖą╝ąĄčĆčŗ č乊čĆą╝čŗ čüąĖą│ąĮą░ą╗ą░ ą©ąśą£. ąøąĄą▓ąŠąĄ ą▓čŗčĆą░ą▓ąĮąĖą▓ą░ąĮąĖąĄ ąĖą╝ą┐čāą╗čīčüąŠą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čĆąĄąČąĖą╝čā Fast PWM.
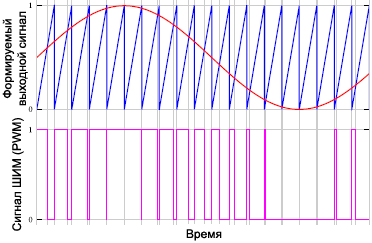
ąØąĖąČąĄ ąĮą░ čĆąĖčüčāąĮą║ąĄ ą┐ąŠą║ą░ąĘą░ąĮ ą┐čĆąĖą╝ąĄčĆ ą░ą┐čĆąŠą║čüąĖą╝ą░čåąĖąĖ čü ą┐ąŠą╝ąŠčēčīčÄ ą©ąśą£ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ čüąĖąĮčāčüąŠąŠą▒čĆą░ąĘąĮąŠą╣ č乊čĆą╝čŗ.
ąĀąĖčü. 1b. ąÜą░ą║ čĆą░ą▒ąŠčéą░ąĄčé ą©ąśą£ ą▓ ą║ą░č湥čüčéą▓ąĄ čåąĖčäčĆąŠ-ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čÅ (DAC).
ąŚą░ą▓ąĄčĆčłą░čÄčēą░čÅ čüčéą░ą┤ąĖčÅ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╣ čäąĖą╗čīčéčĆą░čåąĖąĖ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą©ąśą£ ąĮčāąČąĮą░ ą┤ą╗čÅ čāą┤ą░ą╗ąĄąĮąĖčÅ ą▓čŗčüąŠą║ąŠčćą░čüč鹊čéąĮčŗčģ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ ą╝ąŠą┤čāą╗čÅčåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖčüčāčéčüčéą▓čāčÄčé ą▓ ą▓čŗčģąŠą┤ąĮąŠą╝ čüąĖą│ąĮą░ą╗ąĄ ą©ąśą£. ąĪ ą┐ąŠą╝ąŠčēčīčÄ čäąĖą╗čīčéčĆą░ ą▒čāą┤ąĄčé čĆąĄą║ąŠąĮčüčéčĆčāąĖčĆąŠą▓ą░ąĮ ąŠą│čĆą░ąĮąĖč湥ąĮąĮčŗą╣ čćą░čüč鹊čéąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĘą▓čāą║ąŠą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░. ąÆ ąĮą░čłąĄą╝ čüą╗čāčćą░ąĄ čäąĖą╗čīčéčĆą░čåąĖčÅ ą▒čŗą╗ą░ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ą┐ąŠ čāą┐čĆąŠčēąĄąĮąĮąŠą╣ čüčģąĄą╝ąĄ, čü ą┐ąŠą╝ąŠčēčīčÄ ąĖąĮč鹥ą│čĆąĖčĆčāčÄčēąĄą╣ RC-čåąĄą┐ąŠčćą║ąĖ, ą║ąŠč鹊čĆą░čÅ ą▒čŗą╗ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą╝ąĄąČą┤čā ą▓čŗčģąŠą┤ąĮčŗą╝ ą┐ąŠčĆč鹊ą╝ ąĖ ąŠą▒čŗčćąĮčŗą╝ ą┤ąĖąĮą░ą╝ąĖą║ąŠą╝.
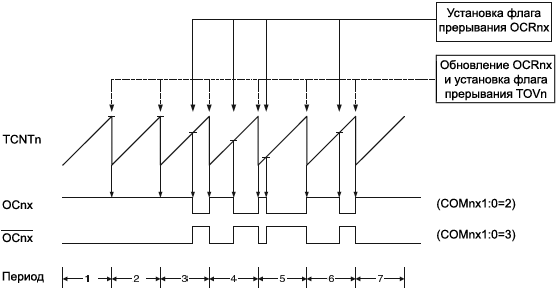
ąæą╗ąŠą║ PWM (ą©ąśą£) ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą▓ čĆą░ąĘą╗ąĖčćąĮčŗčģ čĆąĄąČąĖą╝ą░čģ, ą║ąŠč鹊čĆčŗąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé čüą┐ąŠčüąŠą▒ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąŠą╗čāčćą░ąĄą╝ąŠą╣ ą▓čŗčģąŠą┤ąĮąŠą╣ ą▓ąĄą╗ąĖčćąĖąĮčŗ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ąĘąĮą░č湥ąĮąĖčÅ čüč湥čéčćąĖą║ą░ ąĖ ą┐čĆąĖąĮčåąĖą┐ą░ ąĄą│ąŠ čĆą░ą▒ąŠčéčŗ. ąÆ čĆąĄąČąĖą╝ąĄ Fast PWM ą▓čŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ ą©ąśą£ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ ą╗ąŠą│. 1 ą▓ ąĮą░čćą░ą╗ąĄ čåąĖą║ą╗ą░, ąĖ čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą╗ąŠą│. 0 ą▓čüčÅą║ąĖą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ąŠą┐ąŠčĆąĮą░čÅ ą▓ąĄą╗ąĖčćąĖąĮą░ čüč湥čéą░ čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą╝ąĄąĮčīčłąĄ, č湥ą╝ ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ (čüą╝. čĆąĖčü. 2). ąŻ čŹč鹊ą│ąŠ čĆąĄąČąĖą╝ą░ ąĄčüčéčī ąĮąĄą┤ąŠčüčéą░č鹊ą║ ą▓ č鹊ą╝, čćč鹊 ą▓čŗčģąŠą┤ąĮčŗąĄ ąĖą╝ą┐čāą╗čīčüčŗ ą▓čŗčĆąŠą▓ąĮąĄąĮčŗ ą┐ąŠ ą╗ąĄą▓ąŠą╝čā ą║čĆą░čÄ ą┐ąŠą╗ąĮąŠą│ąŠ čåąĖą║ą╗ą░ ą©ąśą£. ąŁčéą░ ą┐čĆąŠą▒ą╗ąĄą╝ą░ čāčüčéčĆą░ąĮąĄąĮą░ ą▓ čĆąĄąČąĖą╝ąĄ Phase correct čåąĄąĮąŠą╣ čāą╝ąĄąĮčīčłąĄąĮąĖčÅ ą▓ 2 čĆą░ąĘą░ ą▓čŗčģąŠą┤ąĮąŠą╣ čćą░čüč鹊čéčŗ ą╝ąŠą┤čāą╗čÅčåąĖąĖ ą©ąśą£. ą¤čĆąĖąĮčåąĖą┐ čĆąĄąČąĖą╝ą░ ą║ąŠčĆčĆąĄą║čéąĮąŠą╣ čäą░ąĘčŗ ąŠčüąĮąŠą▓ą░ąĮ ąĮą░ č鹊ą╝, čćč鹊 čüč湥čéčćąĖą║ čüčćąĖčéą░ąĄčé ą┐ąŠąŠč湥čĆąĄą┤ąĮąŠ č鹊 ą▓ą▓ąĄčĆčģ, č鹊 ą▓ąĮąĖąĘ, ą▓ą╝ąĄčüč鹊 č鹊ą│ąŠ, čćč鹊ą▒čŗ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ą▓ ąĖčüčģąŠą┤ąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠ ą┤ąŠčüčéąĖąČąĄąĮąĖčÄ ą┐čĆąĄą┤ąĄą╗ą░ čüč湥čéą░.
ąĀąĖčü. 2. ążąŠčĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čŗčģąŠą┤ąĮčŗčģ ąĖą╝ą┐čāą╗čīčüąŠą▓ ą©ąśą£ ą▓ čĆąĄąČąĖą╝ąĄ Fast PWM. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ ąŠą┐ąŠčĆąĮąŠą│ąŠ ą┐ąŠčĆąŠą│ą░ čüč湥čéą░ ą╝ąĄąĮčÅąĄčé čüąŠąŠčéąĮąŠčłąĄąĮąĖąĄ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą©ąśą£.
ą¦ą░čüč鹊čéą░ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ąĖą╝ą┐čāą╗čīčüąŠą▓ ą©ąśą£ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą▓čŗą▒čĆą░ąĮąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ, ą║ąŠč鹊čĆą░čÅ ą┐čĆąĖčģąŠą┤ąĖčé ąĮą░ ą▓čģąŠą┤ čüč湥čéčćąĖą║ą░ ą▒ą╗ąŠą║ą░ PWM, ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ ą┤ąĄą╗ąĄąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░, čĆą░ąĘčĆčÅą┤ąĮąŠčüčéąĖ čüč湥čéčćąĖą║ą░ ą▓ ą▒ąĖčéą░čģ ąĖ ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░ PWM. ąĢčüą╗ąĖ ą┐čĆąĖąĮčÅčéčī ąĘą░ b čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčī čüč湥čéčćąĖą║ą░, ąĘą░ Fclock čćą░čüč鹊čéčā čéą░ą║č鹊ą▓, p ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą┤ąĄą╗ąĄąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░, č鹊 čćą░čüč鹊čéą░ ą©ąśą£ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗčćąĖčüą╗ąĄąĮą░ ą┐ąŠ č乊čĆą╝čāą╗ąĄ Fclock / (p*2b ). ąŁč鹊 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĮą░ą╝ čüą┐ąŠčüąŠą▒ ą▓čŗą▓ąŠą┤ą░ ąŠą▒čĆą░ą▒ąŠčéą░ąĮąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ č鹊ą╣ ąČąĄ ąĖąĮčäčĆą░čüčéčĆčāą║čéčāčĆčŗ ą┐ą╗ą░ąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖčģ ą┤ąĄą╣čüčéą▓ąĖą╣, čćč鹊 ą┐čĆąĖą╝ąĄąĮčÅą╗ąĖčüčī ą┤ą╗čÅ ąŠą┐čĆąŠčüą░ ąĘąĮą░č湥ąĮąĖą╣ ADC, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čüąŠą▒čŗčéąĖąĄ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą▓čŗą▒ąŠčĆą║ąĄ čüąĖą│ąĮą░ą╗ą░ ą║ ąŠą▒čĆą░ą▒ąŠčéą║ąĄ.
ąóą░ą║ąČąĄ ąŠą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čĆą░ąĘą╝ąĄčĆ ą┤ąĖą░ą┐ą░ąĘąŠąĮ čüč湥čéą░ čüč湥čéčćąĖą║ą░ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čĆą░ąĘčĆąĄčłą░čÄčēčāčÄ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī DAC ąĮą░ ąŠčüąĮąŠą▓ąĄ ą©ąśą£, čéą░ą║ ą║ą░ą║ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čüą║ą▓ą░ąČąĮąŠčüčéąĖ č乊čĆą╝ąĖčĆčāąĄą╝čŗčģ ąĖą╝ą┐čāą╗čīčüąŠą▓ ą©ąśą£ ąĘą░ą▓ąĖčüąĖčé ąŠčé čüąŠąŠčéąĮąŠčłąĄąĮąĖčÅ č鹥ą║čāčēąĄą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ čüč湥čéčćąĖą║ą░ ąĖ ąĄą│ąŠ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ čüč湥čéą░. ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ ą┐čĆąŠ ą▓čŗą▒ąŠčĆ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ PWM ą▒čāą┤ąĄčé čĆą░čüčüą║ą░ąĘą░ąĮąŠ ą┤ą░ą╗ąĄąĄ.
[ą×ą▒čĆą░ą▒ąŠčéą║ą░ čüąĖą│ąĮą░ą╗ą░ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ ]
ąÜąŠąĮąĄčćąĮąŠ, ą│ą╗ą░ą▓ąĮąŠąĄ ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĄ ą┤ą╗čÅ DSP ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ čüąŠčüčéą░ą▓ą╗čÅąĄčé ą┤ąŠčüčéčāą┐ąĮąŠąĄ ą▓čĆąĄą╝čÅ ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▓čŗą▒ąŠčĆąŠą║ čüąĖą│ąĮą░ą╗ą░: ąŠąĮąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą▓ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą▓ ą╝ąŠą╝ąĄąĮčé, ą║ąŠą│ą┤ą░ ą┐ąŠčéčĆąĄą▒čāčÄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ą┐čĆąŠąĖą│čĆčŗą▓ą░ąĮąĖčÅ, ąĖąĮą░č湥 ą▓ ąĘą▓čāčćą░ąĮąĖąĖ ą▒čāą┤čāčé ąĮą░ą▒ą╗čÄą┤ą░čéčīčüčÅ čēąĄą╗čćą║ąĖ ąĖ ą┤čĆčāą│ąĖąĄ ąĮąĄąČąĄą╗ą░č鹥ą╗čīąĮčŗąĄ ą░čĆč鹥čäą░ą║čéčŗ. ą×ą┤ąĖąĮ ą┐čĆąŠčģąŠą┤ ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣, čüąŠčüč鹊čÅčēąĖą╣ ąĖąĘ ą░ąĮą░ą╗ąĖąĘą░ ą▓čŗą▒ąŠčĆą║ąĖ, ąĄčæ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĖ čĆą░čüč湥čéą░ ąĘąĮą░č湥ąĮąĖčÅ ąĮąŠą▓ąŠą╣ ą▓čŗą▒ąŠčĆą║ąĖ, ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ čåąĖą║ą╗ąŠą╝ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▓čŗą▒ąŠčĆą║ąĖ DSP. ą£ąĮąŠą│ąĖąĄ ą░ą╗ą│ąŠčĆąĖčéą╝čŗ, č鹥ą╝ ąĮąĄ ą╝ąĄąĮąĄąĄ, ąŠą┐ąĄčĆąĖčĆčāčÄčé ą▒ą╗ąŠą║ą░ą╝ąĖ ą▓čŗą▒ąŠčĆąŠą║, ą┐ąŠčéčĆąĄą▒ą╗čÅčÅ ąĮą░ ą▓čģąŠą┤ąĄ ąĖ ą┐ąŠčüčéą░ą▓ą╗čÅčÅ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą▒ą╗ąŠą║ ą▓čŗą▒ąŠčĆąŠą║ čåąĖčäčĆąŠą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą▓ ą║ą░ąČą┤ąŠą╝ ą┐čĆąŠčģąŠą┤ąĄ. ąĢčüą╗ąĖ ą▒ą╗ąŠą║ ą┤ą░ąĮąĮčŗčģ čüąŠčüč鹊ąĖčé ąĖąĘ N ą▓čŗą▒ąŠčĆąŠą║, ąĖ čüą║ąŠčĆąŠčüčéčī čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą▓čŗą▒ąŠčĆąŠą║ čüąŠčüčéą░ą▓ą╗čÅąĄčé R ąōąĄčĆčå, č鹊 ą┐ąĄčĆąĖąŠą┤ ą▒ą╗ąŠą║ą░ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ DSP čüąŠčüčéą░ą▓ąĖčé TDSP = N/R čüąĄą║čāąĮą┤.
ą¦č鹊ą▒čŗ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī čéą░ą║ąŠą╣ ą░ą╗ą│ąŠčĆąĖčéą╝ ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ, ą░ą▓č鹊čĆčŗ ąĮą░čłą╗ąĖ čüą┐ąŠčüąŠą▒ (1) ąĮą░ą║ą░ą┐ą╗ąĖą▓ą░čéčī ą▓čŗą▒ąŠčĆą║ąĖ ą▓ ą▒čāč乥čĆąĄ, (2) ą┐ą╗ą░ąĮąĖčĆąŠą▓ą░čéčī ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖąĄ ą▓čŗąĘąŠą▓čŗ čäčāąĮą║čåąĖąĖ, ą║ąŠč鹊čĆą░čÅ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą▓čŗą▒ąŠčĆą║ąĖ ą▓ čŹč鹊ą╝ ą▒čāč乥čĆąĄ, ąĖ (3) ą▓čŗą▓ąŠą┤ąĖčéčī ąĖąĘą╝ąĄąĮąĄąĮąĮčŗąĄ ą▓čŗą▒ąŠčĆą║ąĖ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ ą▓čĆąĄą╝čÅ. ą¤čĆąĖą╝ąĄąĮčÅą╗ąĖčüčī čüą╗ąĄą┤čāčÄčēąĖąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ čāąĘą╗čŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░: ADC ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░, čüč湥čéčćąĖą║ąĖ ąĖ ąĖčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ ą▓čŗą┐ąŠą╗ąĮčÅąĄą╝čŗčģ ąĘą░ą┤ą░čć, ąĖ PWM ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ ą┐ąŠą╗čāč湥ąĮąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ Arduino ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čäčāąĮą║čåąĖčÄ loop(), ą║ąŠč鹊čĆą░čÅ ą┐ąŠą▓č鹊čĆąĮąŠ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ, ąĖ ą│ą┤ąĄ ą░ą▓č鹊čĆčŗ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ą╗ąĖ ąŠą▒čĆą░ą▒ąŠčéą║čā ą▒ą╗ąŠą║ą░ ą┤ą░ąĮąĮčŗčģ, ą║ąŠą│ą┤ą░ ąŠąĮąĖ čüčéą░ąĮąŠą▓čÅčéčüčÅ ą┤ąŠčüčéčāą┐ąĮčŗ.
ą£ąĄčģą░ąĮąĖąĘą╝ PWM ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čü čćą░čüč鹊č鹊ą╣ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čüč湥čéčćąĖą║ą░, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐ą╗ą░ąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ąĘą░ą┐čāčüą║ą░ čäčāąĮą║čåąĖąĖ ą▓ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖąĄ ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ. ąÆ ąĮą░čłąĄą╝ ą┐čĆąŠąĄą║č鹥 ą╝čŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖ čŹč鹊čé ą╝ąĄčģą░ąĮąĖąĘą╝ ą┤ą╗čÅ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąŠą│ąŠ čćč鹥ąĮąĖčÅ ą▓čŗą▒ąŠčĆąŠą║ ąĖąĘ ADC, ąĖ ąĮą░ą║ą░ą┐ą╗ąĖą▓ą░ąĮąĖčÅ ąĖčģ ą▓ ą▒čāč乥čĆąĄ, ąĖ ą┐čĆąĖ čŹč鹊ą╝ ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░ą╗ąĖ ąĘą░ą┐ąĖčüčī ąŠą▒čĆą░ą▒ąŠčéą░ąĮąĮčŗčģ ą▓čŗą▒ąŠčĆąŠą║ ąĖąĘ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ čåąĖą║ą╗ą░ DSP ą▓ ą▓čŗčģąŠą┤ąĮąŠą╣ ą▒čāč乥čĆ PWM. ąÆ č鹊ą╣ ąČąĄ čäčāąĮą║čåąĖąĖ ą▓čüčÅą║ąĖą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą▒čāč乥čĆ ą┐ąŠą╗ąŠąĮ ąĖ ą│ąŠč鹊ą▓ ą║ ąŠą▒čĆą░ą▒ąŠčéą║ąĄ, čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ čäą╗ą░ą│, ąĖ čäčāąĮą║čåąĖčÅ loop() ąĮą░čćąĖąĮą░ąĄčé ąŠą▒čĆą░ą▒ąŠčéą║čā ą▒čāč乥čĆą░.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ąĮąĄą║ąŠč鹊čĆčŗčģ ą║čĆąĖčéąĖčćąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ č鹥čĆą╝ąĖąĮ "ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ" ą╝ąŠąČąĄčé ąŠąĘąĮą░čćą░čéčī, čćč鹊 ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐čĆąĄčĆą▓ą░ąĮąŠ ą▓čüčÅą║ąĖą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ąĄą│ąŠ ą▓čĆąĄą╝čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ąĘą░ą║ąŠąĮčćąĖą╗ąŠčüčī. ąÆ čüą╗čāčćą░ąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ čåąĖčäčĆąŠą▓ąŠą│ąŠ ąĘą▓čāą║ą░, ąĄčüą╗ąĖ ąĮąĖą║ą░ą║ą░čÅ ą▓čŗčģąŠą┤ąĮą░čÅ ą▓čŗą▒ąŠčĆą║ą░ ąĮąĄ ą╝ąŠą│ą╗ą░ ą▒čŗ ą▒čŗčéčī ą▓čŗčćąĖčüą╗ąĄąĮą░, ą┐čĆąĄąČą┤ąĄ č湥ą╝ ą░ą┐ą┐ą░čĆą░čéąĮčŗąĄ čüčĆąĄą┤čüčéą▓ą░ ą┐ąŠą┐čŗčéą░čÄčéčüčÅ ą┐čĆąŠčćąĖčéą░čéčī ąĄčæ, č鹊 ą▓ ą▓ąŠčüą┐čĆąŠąĖąĘą▓ąŠą┤ąĖą╝ąŠą╝ ąĘą▓čāą║ąĄ ą▒čāą┤čāčé čüą╗čŗčłąĮčŗ ą┐ą░čĆą░ąĘąĖčéąĮčŗąĄ ą░čĆč鹥čäą░ą║čéčŗ, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé č鹊ą│ąŠ, ą▒čŗą╗ąŠ ą╗ąĖ ą┐čĆąĄčĆą▓ą░ąĮąŠ ą▓čŗčćąĖčüą╗ąĄąĮąĖąĄ ąĖą╗ąĖ ąĮąĄčé. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą░ą▓č鹊čĆčŗ ą┐ąŠą┐čŗčéą░ą╗ąĖčüčī ąĖąĘą╝ąĄčĆąĖčéčī ą▓čĆąĄą╝čÅ, ą║ąŠč鹊čĆąŠąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą┤ą╗čÅ ąŠčüąĮąŠą▓ąĮąŠą│ąŠ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ ąĖ čüčĆą░ą▓ąĮąĖčéčī ąĄą│ąŠ čü ą┐ąĄčĆąĖąŠą┤ąŠą╝ čåąĖą║ą╗ą░ DSP, ąĖ ąĮąĄ čāčćąĖčéčŗą▓ą░ą╗ąĖ, čćč鹊 ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé, ąĄčüą╗ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ąŠą║ą░ąČąĄčéčüčÅ ąĮąĄą┤ąŠčüčéą░č鹊čćąĮąŠ.
ąĪąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą▓čüąĄčģ 菹╗ąĄą╝ąĄąĮč鹊ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą▓ ąŠą┤ąĮąŠ čåąĄą╗ąŠąĄ čÅą▓ą╗čÅąĄčéčüčÅ ą▓ąŠą┐čĆąŠčüąŠą╝ ą▓čŗą▒ąŠčĆą░ ą┐čĆą░ą▓ąĖą╗čīąĮčŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čĆą░ąĘą╗ąĖčćąĮčŗčģ čćą░čüč鹥ą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ADC . ą¤čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ ADC ąĘą░ąĮąĖą╝ą░ąĄčé ą┐čĆąĖą╝ąĄčĆąĮąŠ 14.5 čéą░ą║č鹊ą▓čŗčģ ą┐ąĄčĆąĖąŠą┤ąŠą▓ ADC, ą▓ą║ą╗čÄčćą░čÅ ą▓čĆąĄą╝čÅ ą▓čŗą▒ąŠčĆą║ąĖ-čģčĆą░ąĮąĄąĮąĖčÅ. ąĢčüą╗ąĖ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ CPU čĆą░ą▓ąĮą░ 16 ą£ąōčå, ąĖ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ ADC ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ąĮą░ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą┤ąĄą╗ąĄąĮąĖčÅ p, č鹊 ą┐ąĄčĆąĖąŠą┤ čéą░ą║č鹊ą▓ ADC čĆą░ą▓ąĄąĮ p/16 ąĖ ą┐ąĄčĆąĖąŠą┤ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ čüąŠčüčéą░ą▓ą╗čÅąĄčé Tconv = (14:5 * p)/16. ąØąĖąČąĄ ą▓ čéą░ą▒ą╗ąĖčåąĄ ą╝ąŠąČąĮąŠ čāą▓ąĖą┤ąĄčéčī č鹥ąŠčĆąĄčéąĖč湥čüą║ąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąĄčĆąĖąŠą┤ą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ Tconv ą┤ą╗čÅ ą▓čüąĄčģ ąĘąĮą░č湥ąĮąĖą╣ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░, ąĖ čéą░ą║ąČąĄ čĆąĄąĘčāą╗čīčéą░čéčŗ ~Tconv ąĖąĘą╝ąĄčĆąĄąĮąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░. ąóą░ą║ąČąĄ ą▓ čéą░ą▒ą╗ąĖčåąĄ ą┐ąŠą║ą░ąĘą░ąĮą░ čĆąĄą░ą╗čīąĮą░čÅ čćą░čüč鹊čéą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ~fconv = 1/~Tconv .
ą¤čĆąĄčüą║ą░ą╗ąĄčĆ ADC Tconv (ą╝ą║čü) ~Tconv (ą╝ą║čü) ~fconv (ą║ąōčå)
2
1.8125
12.61
79.302
4
3.625
16.06
62.266
8
7.25
19.76
50.607
16
14.5
20.52
48.732
32
29
34.80
28.735
64
58
67.89
14.729
128
116
114.85
8.707
ąŁčéąĖ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą▒čŗą╗ąĖ čüą┤ąĄą╗ą░ąĮčŗ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ micros() ąĖąĘ API ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ Arduino, čā ą║ąŠč鹊čĆąŠą╣ čĆą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī čüąŠčüčéą░ą▓ą╗čÅąĄčé ąŠą║ąŠą╗ąŠ 4 ą╝ą║čü. ąŁč鹊 ą╝ąŠąČąĄčé ąŠą▒čŖčÅčüąĮąĖčéčī č鹊čé čäą░ą║čé, čćč鹊 ąĖą╝ąĄčÄčéčüčÅ ąŠčéą╗ąĖčćąĖčÅ ąĖąĘą╝ąĄčĆąĄąĮąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ąŠčé ąŠąČąĖą┤ą░ąĄą╝ąŠą│ąŠ ą┤ą╗čÅ ąĮąĖąČąĮąĖčģ ąĘąĮą░č湥ąĮąĖą╣ ą┤ąĄą╗ąĖč鹥ą╗čÅ čćą░čüč鹊čéčŗ. ąæčŗą╗ą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮą░ 8-ą▒ąĖčéąĮą░čÅ ą░ą┐čĆąŠą║čüąĖą╝ą░čåąĖčÅ, ąĖ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ 10-ą▒ąĖą▒ąĮąŠą╣ ą░ą┐čĆąŠą║čüąĖą╝ą░čåąĖąĖ ą╝čŗ ą╝ąŠąČąĄą╝ ąŠąČąĖą┤ą░čéčī ąĖąĘą┤ąĄčƹȹ║ąĖ 25% ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ.
ąÆą░ąČąĮąŠ ąĘą░ą╝ąĄčéąĖčéčī, čćč鹊 ą▓čŗą▒ąŠčĆ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ADC ąŠą│čĆą░ąĮąĖčćąĖą▓ą░ąĄčé čüą║ąŠčĆąŠčüčéčī ąŠčåąĖčäčĆąŠą▓ą║ąĖ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░. ą¤ąŠčüą║ąŠą╗čīą║čā ąĮą░čłą░ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čüč湥čéčćąĖą║ą░ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą▓čŗą▒ąŠčĆąŠą║ ąŠčé ADC, č鹊 ą┐ąĄčĆąĖąŠą┤ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ADC ą╝ąŠąČąĄčé ą▒čŗčéčī ą╝ąĄąĮčīčłąĄ, č湥ą╝ ą┐ąĄčĆąĖąŠą┤ čåąĖą║ą╗ą░ PWM. ąøčÄą▒ąŠą╣ ą▓čŗą▒ąŠčĆ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ č鹊ą╝čā, čćč鹊 čćą░čüč鹊čéą░ ąŠčåąĖčäčĆąŠą▓ą║ąĖ ąŠą║ą░ąČąĄčéčüčÅ ą▓čŗčłąĄ, č湥ą╝ čćą░čüč鹊čéą░ čåąĖą║ą╗ąŠą▓ PWM, čćč鹊 ą┤ąŠą┐čāčüčéąĖą╝ąŠ, ąŠą┤ąĮą░ą║ąŠ čüąĮąĖąČąĄąĮąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ prescaler čüąĮąĖąĘąĖčé ą║ą░č湥čüčéą▓ąŠ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ.
PWM . ąÜą░ą║ ą╝čŗ čāąČąĄ ą▓čŗčÅčüąĮąĖą╗ąĖ, čćą░čüč鹊čéą░ čÅą┤čĆą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░ 16 ą£ąōčå, ąĖ 8-ą▒ąĖčéąĮčŗą╣ čüč湥čéčćąĖą║ čü ąĘąĮą░č湥ąĮąĖąĄą╝ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ p ą┤ą░ąĄčé čćą░čüč鹊čéčā ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ foverflow = 106 /(p * 24 ) ąōčå. ąØąĖąČąĄ ą╝čŗ ą╝ąŠąČąĄą╝ čāą▓ąĖą┤ąĄčéčī ą▓ čéą░ą▒ą╗ąĖčåąĄ čćą░čüč鹊čéčŗ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┤ą╗čÅ ą▓čüąĄčģ ą▓ąŠąĘą╝ąŠąČąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░:
ą¤čĆąĄčüą║ą░ą╗ąĄčĆ PWM fincr (ą║ąōčå) foverflow (ąōčå)
1
16.000
62500
8
2.000
7812
32
500
1953
64
250
976
128
125
488
256
62.5
244
1024
15.625
61
ąÆčŗą▒ąŠčĆ ąĘąĮą░č湥ąĮąĖą╣ ą┤ą╗čÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆąŠą▓ PWM ąĖ ADC ąĮą░ą┐čĆčÅą╝čāčÄ ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé čćą░čüč鹊čéčā ąŠčåąĖčäčĆąŠą▓ą║ąĖ ąĮą░čłąĄą╣ čüąĖčüč鹥ą╝čŗ DSP. ąĢčüą╗ąĖ ą╝čŗ čāčüčéą░ąĮąŠą▓ąĖą╝ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ ADC čéą░ą║, čćč鹊ą▒čŗ ą┐ąĄčĆąĖąŠą┤ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ADC ą▒čŗą╗ ą╝ąĄąĮčīčłąĄ, č湥ą╝ ą┐ąĄčĆąĖąŠą┤ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čüč湥čéčćąĖą║ą░ PWM, ąĖ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆčāąĄą╝ čćč鹥ąĮąĖčÅ ąĖąĘ ą▓čģąŠą┤ą░ čü ąĘą░ą┐ąĖčüčÅą╝ąĖ ąĮą░ ą▓čŗčģąŠą┤, č鹊 č鹊ą│ą┤ą░ ą┤ą╗čÅ čćą░čüč鹊č鹊ą╣ ąŠčåąĖčäčĆąŠą▓ą║ąĖ čüąĖčüč鹥ą╝čŗ DSP čüčéą░ąĮąĄčé čćą░čüč鹊čéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┐ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čüč湥čéčćąĖą║ą░ PWM.
ąöą╗čÅ ą┐ąŠą┤čüąĖčüč鹥ą╝čŗ PWM ą░ą▓č鹊čĆčŗ ą▓čŗą▒čĆą░ą╗ąĖ čĆąĄąČąĖą╝ Fast PWM čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ 1 ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ą┤ą╗čÅ 8-ą▒ąĖčéąĮąŠą│ąŠ čüč湥čéčćąĖą║ą░. ąŁč鹊 ą┤ą░ą╗ąŠ čćą░čüč鹊čéčā ą▓čŗą▒ąŠčĆąŠą║ 62500 ąōčå, čćč鹊 ą┤ąŠčüčéą░č鹊čćąĮąŠ ą┤ą╗čÅ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖčÅ ąĘą▓čāą║ąŠą▓ąŠą│ąŠ čüą┐ąĄą║čéčĆą░. ąóąĄą╝ ąĮąĄ ą╝ąĄąĮąĄąĄ, ąĄčüą╗ąĖ ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ ą▒ąŠą╗čīčłąĄ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣, ą╝ąŠąČąĮąŠ ąĖčüą║čāčüčüčéą▓ąĄąĮąĮąŠ čüąĮąĖąĘąĖčéčī čćą░čüč鹊čéčā č鹊ą╗čīą║ąŠ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄą╝ ą▓čŗą▒ąŠčĆą║ąĖ ąĮą░ ą▓čģąŠą┤ąĄ / ą▓čŗą▓ąŠą┤ąĄ ą▓čŗą▒ąŠčĆą║ąĖ ą▓ ąĮąĄą║ąŠč鹊čĆąŠą╣ čćą░čüčéąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąöą╗čÅ č鹥čüč鹊ą▓ ą░ą▓č鹊čĆčŗ ą▓čŗą▒čĆą░ą╗ąĖ čüąĮąĖąČąĄąĮąĖąĄ čćą░čüč鹊čéčŗ ąŠčåąĖčäčĆąŠą▓ą║ąĖ ąĮą░ą┐ąŠą╗ąŠą▓ąĖąĮčā, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ą▒ąŠą╗čīčłąĄ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą║ąŠąĮąĄčćąĮčŗą╣ ą▓čŗą▒ąŠčĆ čćą░čüč鹊čéčŗ ąŠčåąĖčäčĆąŠą▓ą║ąĖ ąŠčüčéą░ąĮąŠą▓ąĖą╗čüčÅ ąĮą░ čćą░čüč鹊č鹥 31250 ąōčå, čćč鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą┐ąĄčĆąĖąŠą┤čā ą▓čŗą▒ąŠčĆą║ąĖ 32 ą╝ą║čü.
ąÜąŠą│ą┤ą░ ą▒čŗą╗ąĖ ą▓čŗą▒čĆą░ąĮčŗ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ čĆą░ąĘą╝ąĄčĆą░ čüč湥čéčćąĖą║ą░ PWM ąĖ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ PWM, ąŠčüčéą░ą╗ąŠčüčī č鹊ą╗čīą║ąŠ ą▓čŗą▒čĆą░čéčī ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ADC. ąÜą░ą║ čāąČąĄ čāą┐ąŠą╝ąĖąĮą░ą╗ąŠčüčī, ą┤ąŠčüčéą░č鹊čćąĮąŠ ą▓čŗą▒čĆą░čéčī čéą░ą║ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ąŠą▒ąĄčüą┐ąĄčćąĖčé ą┐ąĄčĆąĖąŠą┤ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ADC ą╝ąĄąĮčīčłąĄ, č湥ą╝ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗą╣ ą┐ąĄčĆąĖąŠą┤ ą▓čŗą▒ąŠčĆą║ąĖ čüąĖčüč鹥ą╝čŗ. ąæčŗą╗ąŠ ą▓čŗą▒čĆą░ąĮąŠ 8-ą▒ąĖčéąĮąŠąĄ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ, čćč鹊ą▒čŗ čüąŠąŠčéą▓ąĄčéčüčéą▓ąŠą▓ą░čéčī čĆą░ąĘčĆąĄčłą░čÄčēąĄą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ PWM, ąĖ čāą╝ąĄąĮčīčłąĖčéčī ą▓čĆąĄą╝čÅ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ. ąóą░ą║ąČąĄ ą▒čŗą╗ąŠ ą▓čŗą▒čĆą░ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ 8 ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ADC, čü ąĖąĘą╝ąĄčĆąĄąĮąĮčŗą╝ ą▓čĆąĄą╝ąĄąĮąĄą╝ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ 19.76 ą╝ą║čü, čćč鹊 ą▓ čüčĆą░ą▓ąĮąĄąĮąĖąĖ čü ą┐ąĄčĆąĖąŠą┤ąŠą╝ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ 32 ą╝ą║čü ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ąĖąĘ ADC ą▒čāą┤ąĄčé ąĘą░ą┐čĆąŠčłąĄąĮą░ ą▓čģąŠą┤ąĮą░čÅ ą▓čŗą▒ąŠčĆą║ą░.
ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮ ą║ąŠą┤ ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (interrupt service routine, ISR) čäčāąĮą║čåąĖąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ DSP. ą¤ąĄčĆąĄą╝ąĄąĮąĮą░čÅ x čŹč鹊 ą▓čģąŠą┤ąĮąŠą╣ ą▒čāč乥čĆ, ąĖą╝čÅ ADCH ą┐čĆąĖą▓čÅąĘą░ąĮąŠ ą║ čĆąĄą│ąĖčüčéčĆčā ADC, čāą┤ąĄčƹȹĖą▓ą░čÄčēąĄą╝čā ą▓čģąŠą┤ąĮčāčÄ ą▓čŗą▒ąŠčĆą║čā ąŠčåąĖčäčĆąŠą▓ą░ąĮąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░, ąĖą╝čÅ OCR2A čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čĆąĄą│ąĖčüčéčĆčā ą│ąĄąĮąĄčĆą░čåąĖąĖ ą▓čŗčģąŠą┤ą░ PWM ąĖ y čŹč鹊 ą▓čŗčģąŠą┤ąĮąŠą╣ ą▒čāč乥čĆ.
// ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ Timer2, ąĘą░ą┐čāčüą║ą░čÄčēąĖą╣čüčÅ čü čćą░čüč鹊č鹊ą╣ 62.5 ą║ąōčå
ISR(TIMER2_OVF_vect)
{
static boolean div = false ;
div = ! div; // čŹč鹊 ą┤ąĄą╗ąĖčé čćą░čüč鹊čéčā ą┐ąŠą┐ąŠą╗ą░ą╝ ą┤ąŠ 31.25 ą║ąōčå
if (div)
{
// 1. ą¦ąĖčéą░ąĄą╝ ą▓čģąŠą┤ąĮčāčÄ ą▓čŗą▒ąŠčĆą║čā čüąĖą│ąĮą░ą╗ą░ ąĖąĘ ADC:
x[ind] = ADCH;
// 2. ąŚą░ą┐ąĖčüčŗą▓ą░ąĄą╝ ą▓čŗčģąŠą┤ąĮčāčÄ ą▓čŗą▒ąŠčĆą║čā ą▓ ą▒ą╗ąŠą║ PWM:
OCR2A = y[(ind- MIN_DELAY)& (BUFFER_SIZE- 1 )];
// 3. ą¤čĆąŠą▓ąĄčĆą║ą░ ą┤ąŠčüčéčāą┐ąĮąŠčüčéąĖ ąĮąŠą▓ąŠą│ąŠ ą▒ą╗ąŠą║ą░ ą▓čŗą▒ąŠčĆąŠą║ čüąĖą│ąĮą░ą╗ą░:
if ((ind & (BLOCK_SIZE - 1 )) == 0 )
{
rind = (ind- BLOCK_SIZE) & (BUFFER_SIZE- 1 );
dsp_block = true ;
}
// 4. ąśąĮą║čĆąĄą╝ąĄąĮčé ąĖąĮą┤ąĄą║čüąŠą▓ ą▒čāč乥čĆą░ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ:
ind++ ;
ind &= BUFFER_SIZE - 1 ;
// 5. ąŚą░ą┐čāčüą║ ąĮąŠą▓ąŠą│ąŠ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ADC:
sbi(ADCSRA,ADSC);
}
}
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ ąĮą░ čłą░ą│ 3, ą│ą┤ąĄ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┐čĆąŠą▓ąĄčĆą║ą░ - ąĄčüą╗ąĖ ą▓čģąŠą┤ąĮąŠą╣ ąĖąĮą┤ąĄą║čü ą┤ąĄą╗ąĖčéčüčÅ ąĮą░ čĆą░ąĘą╝ąĄčĆ ą▒ą╗ąŠą║ą░, č鹊 čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ąĖąĮą┤ąĄą║čü čćč鹥ąĮąĖčÅ rind ąĖ čäą╗ą░ą│ąŠą╝ dsp_block čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆčāąĄčéčüčÅ, čćč鹊 ąĮąŠą▓čŗą╣ ą▒ą╗ąŠą║ ą┤ą░ąĮąĮčŗčģ ą│ąŠč鹊ą▓ ą┤ą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣ DSP. ą£ąĄąČą┤čā č鹥ą╝ čäčāąĮą║čåąĖčÅ loop() čĆą░ą▒ąŠčéą░ąĄčé ą▓ č乊ąĮąŠą▓ąŠą╝ čĆąĄąČąĖą╝ąĄ, ąĖ čāą▓ąĖą┤ąĖčé čŹč鹊čé čüąĖą│ąĮą░ą╗, ąĖ ą┐ąŠ ąĮąĄą╝čā ąĘą░ą┐čāčüčéąĖčé ąŠą▒čĆą░ą▒ąŠčéą║čā ą▒ą╗ąŠą║ą░. ąÆ ąĘą░ą║ą╗čÄč湥ąĮąĖąĄ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāčÄčéčüčÅ ąĖąĮą┤ąĄą║čüčŗ ą▒čāč乥čĆąŠą▓, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ąĘą░ą┐čāčüą║ ąĮąŠą▓ąŠą│ąŠ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ADC ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ sbi().
ąÉąĮą░ą╗ąĖąĘ čüą║ąŠčĆąŠčüčéąĖ čĆą░ą▒ąŠčéčŗ . ąæčŗą╗ąŠ ąĖąĮč鹥čĆąĄčüąĮąŠ ąŠčåąĄąĮąĖčéčī ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖąĄ ą┐ą╗ą░čéčŗ Arduino ą┤ą╗čÅ ąŠą▒čŗčćąĮčŗčģ ąĘą░ą┤ą░čć ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĘą▓čāą║ą░, čćč鹊ą▒čŗ ą┐ąŠąĮčÅčéčī, ąĮą░ čćč鹊 čüą┐ąŠčüąŠą▒ąĮčŗ ąĄą│ąŠ ą▓čŗčćąĖčüą╗ąĖč鹥ą╗čīąĮčŗąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ. ą×čüąŠą▒ąĄąĮąĮąŠ ąĖąĮč鹥čĆąĄčüąĮąŠ ą▒čŗą╗ąŠ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą▓čŗčüąŠą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗčģ ąŠą┐ąĄčĆą░čåąĖą╣ DSP. ąØą░ą┐čĆąĖą╝ąĄčĆ, čüą║ąŠą╗čīą║ąŠ ą╝ąŠąČąĮąŠ ą▓čŗą▓ąĄčüčéąĖ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ čüąĖąĮčāčüąŠąĖą┤ ą┤ą╗čÅ čüąĖąĮč鹥ąĘą░ ąĘą▓čāą║ą░ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ, ą░ ąĮąĄ ą┐čĆąŠčüč鹊 čüą║ąŠą╗čīą║ąŠ ą╝ąŠąČąĮąŠ čüą┤ąĄą╗ą░čéčī čāą╝ąĮąŠąČąĄąĮąĖą╣ ąĖ čüą╗ąŠąČąĄąĮąĖą╣ ą╝ąĄąČą┤čā čüą╗ąĄą┤čāčÄčēąĖą╝ąĖ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ą▒ą╗ąŠą║ą░ą╝ąĖ ą┤ą░ąĮąĮčŗčģ DSP (ą┤ą░ąČąĄ ąĄčüą╗ąĖ ąĖąĘ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ čüą╗ąĄą┤čāąĄčé ą┐ąĄčĆą▓ąŠąĄ).
ąØąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą▓ąŠąĘąĮąĖą║ą╗ąĖ ą▓ąŠą┐čĆąŠčüčŗ, čüą╗ąĄą┤čāčÄčēąĖąĄ ąĖąĘ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣ ą┐čĆąĖ čĆą░ą▒ąŠč鹥 ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ:
ŌĆó ąÜą░ą║ąŠąĄ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąŠą┐ąĄčĆą░čåąĖą╣ DSP ą╝ąŠąČąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ?
ąöą╗čÅ ąŠčéą▓ąĄčéą░ ąĮą░ čŹčéąĖ ą▓ąŠą┐čĆąŠčüčŗ ą▒čŗą╗ąĖ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ 3 čĆą░ąĘąĮčŗčģ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ DSP, čćč鹊 ąŠą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą▓ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ čüąĄą║čåąĖčÅčģ. ąæčŗą╗ ą▓čŗą▒čĆą░ąĮ ą░ą┤ą┤ąĖčéąĖą▓ąĮčŗą╣ čüąĖąĮč鹥ąĘ, čüą▓ąĄčĆčéą║ą░ ą▓ ą┤ąŠą╝ąĄąĮąĄ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ ą▒čŗčüčéčĆąŠąĄ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ ążčāčĆčīąĄ (ąæą¤ąż, FFT).
[ąÉą┤ą┤ąĖčéąĖą▓ąĮčŗą╣ čüąĖąĮč鹥ąĘ ]
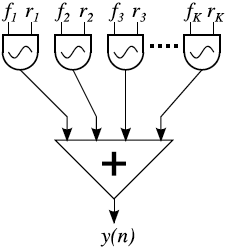
ąŁč鹊 ą╝ąĄč鹊ą┤ ą║ąŠąĮčüčéčĆčāąĖčĆąŠą▓ą░ąĮąĖčÅ čüą╗ąŠąČąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą┐čāč鹥ą╝ čüą╗ąŠąČąĄąĮąĖčÅ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ ą▒ą░ąĘąŠą▓čŗčģ ą┐čĆąŠčüčéčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓ (čüą╝. čĆąĖčü. 3). ąŁčéą░ č鹥čģąĮąĖą║ą░ čłąĖčĆąŠą║ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čüąĖąĮč鹥ąĘą░ ąĮąŠą▓čŗčģ ąĘą▓čāą║ąŠą▓, ą║ą░ą║ ąĖ ą┐ąŠą▓č鹊čĆąĮąŠą│ąŠ čüąĖąĮč鹥ąĘą░ čüąĖą│ąĮą░ą╗ąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ ąŠą▒čĆą░ą▒ąŠčéą░ąĮčŗ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, čüą┐ąĄą║čéčĆą░ą╗čīąĮčŗą╝ąĖ ą╝ąĄč鹊ą┤ą░ą╝ąĖ).
ąĀąĖčü. 3. ąÉą┤ą┤ąĖčéąĖą▓ąĮčŗą╣ čüąĖąĮč鹥ąĘ: ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▒ą░ąĘąŠą▓čŗčģ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą▓ čü ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗą╝ąĖ čäą░ąĘąŠą╣ (fi) ąĖ ą░ą╝ą┐ą╗ąĖčéčāą┤ąŠą╣ (ri) ą║ąŠą╝ą▒ąĖąĮąĖčĆčāčÄčéčüčÅ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ ą┤ą╗čÅ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čüą╗ąŠąČąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░.
ąÆčŗčüąŠą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗą╣ ą║ąŠą┤ ą┤ą╗čÅ ą┐čĆąŠčüč鹊ą│ąŠ ą░ą┤ą┤ąĖčéąĖą▓ąĮąŠą│ąŠ čüąĖąĮč鹥ąĘą░ ą╝ąŠąČąĮąŠ čāą▓ąĖą┤ąĄčéčī ąĮąĖąČąĄ:
for (n = 0 ; n < N; n++ )
{
angle = 2.0 * M_PI * t;
y[n] = 0.0 ;
for (k = 0 ; k < numFreqs; k++ )
y[n] += r[k]* sin(f[k] * angle);
t += 1.0 / SR;
}
ą¤čĆą░ą║čéąĖč湥čüą║ą░čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ąĖč鹥čĆą░čåąĖąĖ čåąĖą║ą╗ą░ čü ą┐ąŠą╝ąŠčēčīčÄ čéą░ą▒ą╗ąĖčåčŗ čüąĖąĮčāčüąŠą▓:
ind[k] = (ind[k]+ f[k]) & (SINETABLE_SIZE- 1 );
y[n& (BUFFER_SIZE- 1 )] += sine[ind[k]] >> pad;
[ąĪą▓ąĄčĆčéą║ą░ ą▓ ą┤ąŠą╝ąĄąĮąĄ ą▓čĆąĄą╝ąĄąĮąĖ ]
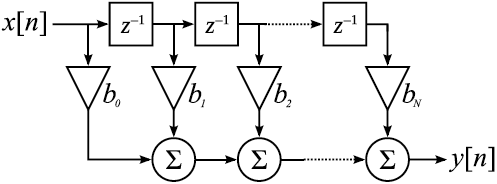
ąŻą╝ąĮąŠąČąĄąĮąĖąĄ čćą░čüč鹊čéąĮąŠą╣ ąŠą▒ą╗ą░čüčéąĖ čüą┐ąĄą║čéčĆąŠą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čüą▓ąĄčĆčéą║ąĄ ą▓ ą┤ąŠą╝ąĄąĮąĄ ą▓čĆąĄą╝ąĄąĮąĖ čüąĖą│ąĮą░ą╗ąŠą▓, ąĖ čéą░ą║ą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ ą┤ąŠą┐čāčüą║ą░ąĄčéčüčÅ ą┤ą╗čÅ ąĮąĄą║ąŠč鹊čĆčŗčģ č鹥čģąĮąĖą║ čäąĖą╗čīčéčĆą░čåąĖąĖ čćą░čüč鹊čé. ąĪą▓ąĄčĆčéą║ą░ ą▓ ą┤ąŠą╝ąĄąĮąĄ ą▓čĆąĄą╝ąĄąĮąĖ čłąĖčĆąŠą║ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ą░čÅ č鹥čģąĮąĖą║ą░ ą▓ąŠ ą╝ąĮąŠą│ąĖčģ ą║ąŠą╝ą┐čīčÄč鹥čĆąĮčŗčģ ą╝čāąĘčŗą║ą░ą╗čīąĮčŗčģ ą░ą╗ą│ąŠčĆąĖčéą╝ą░čģ, ą▒čāą┤čāčćąĖ ąŠčüąŠą▒ąĄąĮąĮąŠ čŹčäč乥ą║čéąĖą▓ąĮąŠą╣ ą┐čĆąĖ ą╝ą░ą╗ąŠą╝ ą┐ąŠčĆčÅą┤ą║ąĄ N čäąĖą╗čīčéčĆą░. ą×ą▒čēą░čÅ čüčģąĄą╝ą░ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ čüą▓ąĄčĆčéą║ąĖ ą┐ąŠą║ą░ąĘą░ąĮą░ ąĮą░ čĆąĖčü. 4.
ąĀąĖčü. 4. ąĪą▓ąĄčĆčéą║ą░ ą▓ ą┤ąŠą╝ąĄąĮąĄ ą▓čĆąĄą╝ąĄąĮąĖ: ą▓čģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ x[n] čüą▓ąŠčĆą░čćąĖą▓ą░ąĄčéčüčÅ čü ąŠčéą▓ąĄč鹊ą╝ ąĖą╝ą┐čāą╗čīčüą░ čäąĖą╗čīčéčĆą░ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ą╝ąĖ bi, čćč鹊ą▒čŗ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą▓čŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ y[n]. ąŁč鹊 ąŠą▒čēą░čÅ čüčģąĄą╝ą░ FIR čäąĖą╗čīčéčĆą░čåąĖąĖ (FIR ąŠąĘąĮą░čćą░ąĄčé finite impulse response, čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╣ čäąĖą╗čīčéčĆ čü ą║ąŠąĮąĄčćąĮąŠą╣ ąĖą╝ą┐čāą╗čīčüąĮąŠą╣ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąŠą╣, ąÜąśąź-čäąĖą╗čīčéčĆ).
ąÆčŗčüąŠą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗą╣ ą║ąŠą┤ ą┤ą╗čÅ čüą▓ąĄčĆčéą║ąĖ ą▓ ą┤ąŠą╝ąĄąĮąĄ ą▓čĆąĄą╝ąĄąĮąĖ, čĆąĄą░ą╗ąĖąĘčāčÄčēąĄą╣ FIR čäąĖą╗čīčéčĆ ą┐ąŠčĆčÅą┤ą║ą░ N:
for (k = 0 ; k < N; k++ )
y[n] += b[k]* x[n- k];
ą¤čĆąĖą╝ąĄčĆ ą┐čĆą░ą║čéąĖč湥čüą║ąŠą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ:
for (int n = 0 ; n < N; n++ )
{
int yn = 0 , xtmp;
for (int i = 0 ; i < order ; i++ )
{
xtmp = 127 - TMOD(x, n- i, BUFFER_SIZE);
yn += xtmp * 10 / 100 ;
}
LIMIT(yn ); // ą┐čĆąĄą┤ąĄą╗ a +- 127
TMOD(y, n, BUFFER_SIZE) = 127 + yn;
}
[ąæčŗčüčéčĆąŠąĄ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ ążčāčĆčīąĄ ]
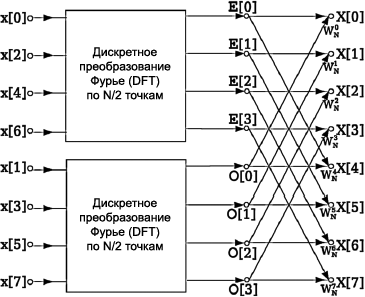
ąæą¤ąż (Fast Fourier Transform, FFT) čŹč鹊 čāą╝ąĮą░čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ čéčĆą░ą┤ąĖčåąĖąŠąĮąĮąŠą│ąŠ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ążčāčĆčīąĄ, ą┐ąŠąĘą▓ąŠą╗čÅčÄčēą░čÅ čüąĮąĖąĘąĖčéčī čüą╗ąŠąČąĮąŠčüčéčī ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣ čü O(n2) ą┤ąŠ O(n log(n)), ą│ą┤ąĄ n čŹč鹊 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čŗą▒ąŠčĆąŠą║ čüąĖą│ąĮą░ą╗ą░ ą▓ ą┤ąŠą╝ąĄąĮąĄ ą▓čĆąĄą╝ąĄąĮąĖ, ąĖą╗ąĖ, 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮąŠ, čćąĖčüą╗ąŠ ą║ąŠąĮč鹥ą╣ąĮąĄčĆąŠą▓ čćą░čüč鹊čéčŗ, ą║ąŠč鹊čĆčŗąĄ ąŠą┐ąĖčüčŗą▓ą░čÄčé čüą┐ąĄą║čéčĆ čćą░čüč鹊čé čüąĖą│ąĮą░ą╗ą░ ą┐ąŠčüą╗ąĄ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ążčāčĆčīąĄ. ąÉą╗ą│ąŠčĆąĖčéą╝ FFT ąŠčüąĮąŠą▓ą░ąĮ ąĮą░ čüą▓ąŠą╣čüčéą▓ąĄ ąĖąĘą▒čŗč鹊čćąĮąŠčüčéąĖ ąĖ čüąĖą╝ą╝ąĄčéčĆąĖąĖ ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮčŗčģ čłą░ą│ąŠą▓ ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣ ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ąŠ ą╝ąĮąŠą│ąĖčģ ąŠą▒čĆą░ą▒ąŠčéą║ą░čģ čüąĖą│ąĮą░ą╗ąŠą▓. ą×ą▒čēčāčÄ čüčģąĄą╝čā FFT ą╝ąŠąČąĮąŠ čāą▓ąĖą┤ąĄčéčī ąĮą░ čĆąĖčü. 5.
ąĀąĖčü. 5. FFT ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┐čĆąĖąĮčåąĖą┐ "čĆą░ąĘą┤ąĄą╗čÅą╣ ąĖ ą▓ą╗ą░čüčéą▓čāą╣", čüąŠčģčĆą░ąĮčÅčÅ ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮčŗąĄ čĆąĄąĘčāą╗čīčéą░čéčŗ ą┤ą╗čÅ čāčüą║ąŠčĆąĄąĮąĖčÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ čüą┐ąĄą║čéčĆą░ čüąĖą│ąĮą░ą╗ą░. ąĀąĖčüčāąĮąŠą║ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąŠą┤ąĖąĮ čłą░ą│ 8-č鹊č湥čćąĮąŠą│ąŠ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ FFT, ą║ą░ą║ čĆąĄąĘčāą╗čīčéą░čéčŗ ą┐čĆąĖą▓čÅąĘčŗą▓ą░čÄčéčüčÅ ą║ ą║ąŠąĮč鹥ą╣ąĮąĄčĆą░ą╝ čćą░čüč鹊čé čüą┐ąĄą║čéčĆą░.
#include < math.h > #include < avr/io.h > #include < avr/delay.h >
#define SWAP(a,b) tempr=(a);(a)=(b);(b)=tempr
#define NP 128 float data[NP];
//ą¤čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ int ą▓ ASCII čü ą┐ąŠą╝ąŠčēčīčÄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ avrlib: char * itoa ( int value, char * string, int radix );
#include "lcd.c"
void four1 (float data[], int nn, int isign)
{
int n,mmax,m,j,istep,i;
/* double */ float wtemp,wr,wpr,wpi,wi,theta;
float tempr,tempi;
n= nn < < 1 ;
j= 1 ;
for (i= 1 ; i < n; i+= 2 )
{
if (j > i)
{
SWAP(data[j],data[i]);
SWAP(data[j+ 1 ],data[i+ 1 ]);
}
m= n >> 1 ;
while (m >= 2 && j > m)
{
j -= m;
m >>= 1 ;
}
j += m;
}
mmax= 2 ;
while (n > mmax)
{
istep= mmax < < 1 ;
theta= isign* (6.28318530717959 / mmax);
wtemp= sin(0.5 * theta);
wpr = - 2.0 * wtemp* wtemp;
wpi= sin(theta);
wr= 1.0 ;
wi= 0.0 ;
for (m= 1 ; m < mmax; m+= 2 )
{
for (i= m; i < = n; i+= istep)
{
j= i+ mmax;
tempr= wr* data[j]- wi* data[j+ 1 ];
tempi= wr* data[j+ 1 ]+ wi* data[j];
data[j]= data[i]- tempr;
data[j+ 1 ]= data[i+ 1 ]- tempi;
data[i] += tempr;
data[i+ 1 ] += tempi;
}
wr= (wtemp= wr)* wpr- wi* wpi+ wr;
wi= wi* wpr+ wtemp* wpi+ wi;
}
mmax= istep;
}
}
void realft (float data[], int n, int isign)
{
int i,i1,i2,i3,i4,np3;
float c1= 0.5 ,c2,h1r,h1i,h2r,h2i;
/*double*/ float wr,wi,wpr,wpi,wtemp,theta;
theta= 3.141592653589793 / (float ) (n>> 1 );
if (isign == 1 )
{
c2 = - 0.5 ;
four1(data,n>> 1 ,1 );
}
else
{
c2= 0.5 ;
theta = - theta;
}
wtemp= sin(0.5 * theta);
wpr = - 2.0 * wtemp* wtemp;
wpi= sin(theta);
wr= 1.0 + wpr;
wi= wpi;
np3= n+ 3 ;
for (i= 2 ; i < = (n>> 2 ); i++ )
{
i4= 1 + (i3= np3- (i2= 1 + (i1= i+ i- 1 )));
h1r= c1* (data[i1]+ data[i3]);
h1i= c1* (data[i2]- data[i4]);
h2r = - c2* (data[i2]+ data[i4]);
h2i= c2* (data[i1]- data[i3]);
data[i1]= h1r+ wr* h2r- wi* h2i;
data[i2]= h1i+ wr* h2i+ wi* h2r;
data[i3]= h1r- wr* h2r+ wi* h2i;
data[i4] = - h1i+ wr* h2i+ wi* h2r;
wr= (wtemp= wr)* wpr- wi* wpi+ wr;
wi= wi* wpr+ wtemp* wpi+ wi;
}
if (isign == 1 )
{
data[1 ] = (h1r= data[1 ])+ data[2 ];
data[2 ] = h1r- data[2 ];
}
else
{
data[1 ]= c1* ((h1r= data[1 ])+ data[2 ]);
data[2 ]= c1* (h1r- data[2 ]);
four1(data,n>> 1 ,- 1 );
}
}
int main (void )
{
unsigned char buf[10 ];
int i,j;
float per;
per= 4. ;
LCDInit();
for (j= 1 ; j < = 10 ; j++ )
{
LCDCommand(1 );
LCDString(itoa(j,buf,10 ));
for (i= 1 ; i < = NP; i++ )
data[i]= cos(2.0 * 3.141592654 * (i- 1 )/ per);
realft(data,NP,1 );
}
LCDCommand(LCD_Line2);
LCDString("Done." );
while (1 );
return 0 ;
}
[ąÉąĮą░ą╗ąĖąĘ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ ]
ąÜą░ąČą┤čŗą╣ ąĖąĘ 3 ą▓čŗčłąĄčāą┐ąŠą╝čÅąĮčāčéčŗčģ ą░ą╗ą│ąŠčĆąĖčéą╝ąŠą▓ ąĖą╝ąĄąĄčé čĆą░ąĘąĮčāčÄ ą▓čŗčćąĖčüą╗ąĖč鹥ą╗čīąĮčāčÄ čüč鹊ąĖą╝ąŠčüčéčī ą▓ ą║ąŠąĮč鹥ą║čüč鹥 ą║ąŠą╗ąĖč湥čüčéą▓ą░ ąŠą┐ąĄčĆą░čåąĖą╣ čü čåąĄą╗čŗą╝ąĖ čćąĖčüą╗ą░ą╝ąĖ ąĖ čü čćąĖčüą╗ą░ą╝ąĖ čü ą┐ą╗ą░ą▓ą░čÄčēąĄą╣ č鹊čćą║ąŠą╣, ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ čćč鹥ąĮąĖą╣ ąĖ ąĘą░ą┐ąĖčüąĄą╣ ą┐ą░ą╝čÅčéąĖ.
ąĪ č鹊čćą║ąĖ ąĘčĆąĄąĮąĖčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĘą▓čāą║ą░ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ ąĮą░ Arduino, čŹčéąĖ ą░ą╗ą│ąŠčĆąĖčéą╝čŗ ą┐ąŠą║ą░ąĘą░ą╗ąĖ čüčéą░ą▓čÅčé ąĄčüč鹥čüčéą▓ąĄąĮąĮčŗąĄ ą▓ąŠą┐čĆąŠčüčŗ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĖą╝ąŠčüčéąĖ ąĖčģ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ:
ŌĆó ąÉą┤ą┤ąĖčéąĖą▓ąĮčŗą╣ čüąĖąĮč鹥ąĘ: ą║ą░ą║ąŠąĄ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą▓ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ąĮąŠą▓ąŠą╣ č乊čĆą╝čŗ čüąĖą│ąĮą░ą╗ą░ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ?
ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮčŗ ą┐ąŠą╗čāč湥ąĮąĮčŗąĄ čĆąĄąĘčāą╗čīčéą░čéčŗ.
ąÉą┤ą┤ąĖčéąĖą▓ąĮčŗą╣ čüąĖąĮč鹥ąĘ . ąÆ ąĮą░čćą░ą╗ąĄ čåąĖą║ą╗ą░ DSP ą░ą╗ą│ąŠčĆąĖčéą╝ ą░ą┤ą┤ąĖčéąĖą▓ąĮąŠą│ąŠ čüąĖąĮč鹥ąĘą░ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą▓, ąĖ čüčĆąĄą┤ąĮąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▓čĆąĄą╝ąĄąĮąĖ čüąĖąĮč鹥ąĘą░č鹊čĆą░ ą▒čŗą╗ąŠ ą▓ąĘčÅč鹊 ąĖąĘ ą▒ąŠą╗čīčłąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣. ąæčŗą╗ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮčŗ čĆą░ąĘą╝ąĄčĆčŗ ą▒ą╗ąŠą║ąŠą▓ 32, 64 b 128 ą▓čŗą▒ąŠčĆąŠą║ (ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąŠą║ą░ąĘą░ą╗ąŠčüčī ąĮąĄą▓ąŠąĘą╝ąŠąČąĮąŠ ąŠą▒čĆą░ą▒ąŠčéą░čéčī ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ) ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą▓ čāą▓ąĄą╗ąĖčćąĖą▓ą░ą╗ąŠčüčī, ą┐ąŠą║ą░ ąĮąĄ ą▒čŗą╗ ą┤ąŠčüčéąĖą│ąĮčāčé ą┐čĆąĄą┤ąĄą╗ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąĄčĆąĖąŠą┤ą░ čåąĖą║ą╗ą░ DSP.
ąĪąĮą░čćą░ą╗ą░ ą▒čŗą╗ąŠ ąĖčüą┐čĆąŠą▒ąŠą▓ą░ąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čüčéčĆčāą║čéčāčĆ čåąĖą║ą╗ą░. ąśąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 čåąĖą║ą╗čŗ čéčĆąĄą▒ąŠą▓ą░ą╗ąĖ ąĖąĮą║čĆąĄą╝ąĄąĮčéą░ ąĖ ą┐čĆąŠą▓ąĄčĆą║ąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ąĮą░ ą║ą░ąČą┤ąŠą╣ ąĖč鹥čĆą░čåąĖąĖ, ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąŠą┤ąĮąŠą│ąŠ čåąĖą║ą╗ą░ ą╝ąŠąČąĄčé ąŠą║ą░ąĘčŗą▓ą░čéčī ą▒ąŠą╗čīčłąŠąĄ ą▓ą╗ąĖčÅąĮąĖąĄ ąĮą░ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą▓, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ą░ą┤ą┤ąĖčéąĖą▓ąĮąŠą│ąŠ čüąĖąĮč鹥ąĘą░ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ čü ą┐ąŠą╝ąŠčēčīčÄ Arduino.
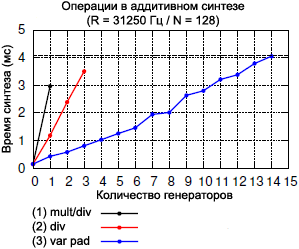
ąÆ ą╗čÄą▒ąŠą╝ ą░ą╗ą│ąŠčĆąĖčéą╝ąĄ DSP, ą║ąŠč鹊čĆčŗą╣ čĆą░ą▒ąŠčéą░ąĄčé čü ą▒ą╗ąŠą║ąŠą╝ ą▓čŗą▒ąŠčĆąŠą║, ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ąĄčüčéčī čģąŠčéčÅ ą▒čŗ ąŠą┤ąĖąĮ čåąĖą║ą╗, ą║ąŠč鹊čĆčŗą╣ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą▓čüąĄ ą▓čŗą▒ąŠčĆą║ąĖ ą▓ ą▒ą╗ąŠą║ąĄ. ąŁč鹊čé čåąĖą║ą╗ ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéčĆą░ąĮąĄąĮ čåąĄąĮąŠą╣ ą┐ąĄčĆąĄą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą┤ą╗ąĖąĮą░ ą▒ą╗ąŠą║ą░ ą╝ąĄąĮčÅąĄčéčüčÅ, čćč鹊 ąŠč湥ąĮčī ąĮąĄčāą┤ąŠą▒ąĮąŠ. ą×ą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▒ąŠą╗čīčłąĄ čåąĖą║ą╗ąŠą▓, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą▓ ą░ą┤ą┤ąĖčéąĖą▓ąĮąŠą╝ čüąĖąĮč鹥ąĘąĄ ą┤ą╗čÅ čüčāą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čĆąĄąĘčāą╗čīčéą░č鹊ą▓ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą▓. ąæčŗą╗ą░ ąĖčüčüą╗ąĄą┤ąŠą▓ą░ąĮą░ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ą░ čāą┤ą░ą╗ąĄąĮąĖčÅ čŹč鹊ą│ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čåąĖą║ą╗ą░, ą┐čāč鹥ą╝ čÅą▓ąĮąŠą│ąŠ ąĮą░ą┐ąĖčüą░ąĮąĖčÅ čüčāą╝ą╝čŗ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą▓. ąØą░ čĆąĖčü. 6 ą┐ąŠą║ą░ąĘą░ąĮąŠ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą▓, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ čåąĖą║ą╗ą░ ąĖ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝ąŠą│ąŠ ą║ąŠą┤ą░ (inline). ą¤čāč鹥ą╝ čāą┤ą░ą╗ąĄąĮąĖčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čåąĖą║ą╗ą░ ą┐ąŠčÅą▓ąĖą╗ą░čüčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čāą▓ąĄą╗ąĖčćąĖčéčī ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą▓ čü 8 ą┤ąŠ 13 ąĖą╗ąĖ 14 ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čĆą░ąĘą╝ąĄčĆą░ ą▒ą╗ąŠą║ą░.
ąĀąĖčü. 6. ąĀąĄąĘčāą╗čīčéą░čéčŗ ą░ą┤ą┤ąĖčéąĖą▓ąĮąŠą│ąŠ čüąĖąĮč鹥ąĘą░ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ čåąĖą║ą╗ąŠą▓ (ą▓ąĄčĆčģąĮčÅčÅ čćą░čüčéčī čĆąĖčüčāąĮą║ą░) ąĖ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝ąŠą│ąŠ, inline-ą║ąŠą┤ą░ (ąĮąĖąČąĮčÅčÅ čćą░čüčéčī čĆąĖčüčāąĮą║ą░).
ą¤čĆąĖ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čŹč鹊ą│ąŠ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčéą░ čüąĮą░čćą░ą╗ą░ ą▒čŗą╗ą░ čüą┤ąĄą╗ą░ąĮą░ ą┐ąŠą┐čŗčéą║ą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüčéą░ąĮą┤ą░čĆčéąĮčāčÄ API-čäčāąĮą║čåąĖčÄ sin(). ą¤ąŠčüą║ąŠą╗čīą║čā čŹč鹊 ąŠą║ą░ąĘą░ą╗ąŠčüčī ąĮąĄą┐čĆąĖą╝ąĄąĮąĖą╝ąŠ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ, č鹊 ą▒čŗą╗ čüą┤ąĄą╗ą░ąĮ č乊ą║čāčü ąĮą░ čéą░ą▒ą╗ąĖčćąĮčāčÄ čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ čüąĖąĮčāčüą░. ąÆ čŹč鹊ą╝ ą╝ąĄčüč鹥 čüčéą░ą╗ąŠ ąĘą░ą╝ąĄčéąĮąŠ, čćč鹊 ą┤ą░ąČąĄ čüą░ą╝ąŠąĄ ą╝ą░ą╗ąŠąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą╝ąŠąČąĄčé ąŠą║ą░ąĘą░čéčī ą▒ąŠą╗čīčłąŠąĄ ą▓ą╗ąĖčÅąĮąĖąĄ ąĮą░ ą┐ąŠą╗čāč湥ąĮąĮčŗąĄ čĆąĄąĘčāą╗čīčéą░čéčŗ. ą¤ąŠčŹč鹊ą╝čā ą▒čŗą╗ąŠ čĆąĄčłąĄąĮąŠ ą┐čĆąŠč鹥čüčéąĖčĆąŠą▓ą░čéčī ąĮąĄą║ąŠč鹊čĆčŗąĄ ąĮąĄąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ ąŠčéą╗ąĖčćą░čÄčēąĖąĄčüčÅ ą┤čĆčāą│ ąŠčé ą┤čĆčāą│ą░ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąĖ čüąŠčüčéą░ą▓ąĖčéčī ą┤ą╗čÅ ąĮąĖčģ ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ.
ąöą▓ą░ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ą▒čŗą╗ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąŠ ą┤ą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ ąĘąĮą░č湥ąĮąĖčÅ ą║ą░ąČą┤ąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░: čäą░ąĘą░ ąĖ ą░ą╝ą┐ą╗ąĖčéčāą┤ą░. ążą░ąĘą░ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ą╗ą░čüčī ą┐ąŠ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÄ ąĖąĮą┤ąĄą║čüą░ ą┐čĆąĖ čćč鹥ąĮąĖąĖ ąĖąĘ čéą░ą▒ą╗ąĖčåčŗ čüąĖąĮčāčüą░, ąĖ ą░ą╝ą┐ą╗ąĖčéčāą┤ą░ čāą╝ąĮąŠąČą░ą╗ą░čüčī ąĮą░ čĆąĄąĘčāą╗čīčéą░čé, ą▓čŗą▒čĆą░ąĮąĮčŗą╣ ąĖąĘ čŹč鹊ą╣ čéą░ą▒ą╗ąĖčåčŗ. ą×ą┐ąĄčĆą░čåąĖąĖ čü ą┐ą╗ą░ą▓ą░čÄčēąĄą╣ č鹊čćą║ąŠą╣ čéą░ą║ąČąĄ ąŠą║ą░ąĘą░ą╗ąĖčüčī čüą╗ąĖčłą║ąŠą╝ ą┤ąŠčĆąŠą│ąĖą╝ąĖ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ, ą┐ąŠčŹč鹊ą╝čā ą▒čŗą╗ąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ 3 čüą┐ąŠčüąŠą▒ą░ čāą╝ąĮąŠąČąĄąĮąĖčÅ ą░ą╝ą┐ą╗ąĖčéčāą┤čŗ: (1) ą┐čāč鹥ą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąŠą┤ąĮąŠą│ąŠ čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮąŠą│ąŠ čāą╝ąĮąŠąČąĄąĮąĖčÅ ąĖ ąŠą┤ąĮąŠą│ąŠ čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮąŠą│ąŠ ą┤ąĄą╗ąĄąĮąĖčÅ (2 čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮčŗąĄ ąŠą┐ąĄčĆą░čåąĖąĖ), (2) ą┐čāč鹥ą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąŠą┤ąĮąŠą│ąŠ čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮąŠą│ąŠ ą┤ąĄą╗ąĄąĮąĖčÅ (1 čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ), ąĖ (3) ą┐čāč鹥ą╝ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą│ąŠ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┤ą▓ąŠąĖčćąĮąŠą│ąŠ ą║ąŠą┤ą░ ąĮąĄąĘąĮą░čćą░čēąĄą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐ąŠčĆą░ąĘčĆčÅą┤ąĮąŠą│ąŠ ą┤ąĄą╗ąĄąĮąĖčÅ ąĖą╗ąĖ čāą╝ąĮąŠąČąĄąĮąĖčÅ ąĮą░ čćąĖčüą╗ą░ ą▓ čüč鹥ą┐ąĄąĮąĖ čćąĖčüą╗ą░ 2. ąØą░ čĆąĖčü. 7 ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓čĆąĄą╝čÅ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠąĄ ą┤ą╗čÅ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ ą░ą┤ą┤ąĖčéąĖą▓ąĮąŠą│ąŠ čüąĖąĮč鹥ąĘą░ ą┤ą╗čÅ čŹčéąĖčģ ą▓ą░čĆąĖą░ąĮč鹊ą▓. ą¤čāč鹥ą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąŠą┐ąĄčĆą░čåąĖą╣ ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ (čü ą╝ąĄąĮąĄąĄ č鹊čćąĮčŗą╝ąĖ čĆąĄąĘčāą╗čīčéą░čéą░ą╝ąĖ) ąĖ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝ąŠą│ąŠ ą║ąŠą┤ą░ ą▒čŗą╗ąŠ čāą▓ąĄą╗ąĖč湥ąĮąŠ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą▓ ąŠčé 3 (ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖčüčī 2 čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮčŗąĄ ąŠą┐ąĄčĆą░čåąĖąĖ ąĖ čåąĖą║ą╗ for) ą┤ąŠ 15 (ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖčüčī ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ ąĖ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗą╣ ą║ąŠą┤).
ąĀąĖčü. 7. ąÆčĆąĄą╝čÅ, ą║ąŠč鹊čĆąŠąĄ ąĘą░ąĮčÅą╗ ą░ą╗ą│ąŠčĆąĖčéą╝ ą░ą┤ą┤ąĖčéąĖą▓ąĮąŠą│ąŠ čüąĖąĮč鹥ąĘą░ čü čĆą░ąĘą╝ąĄčĆąŠą╝ ą▒ą╗ąŠą║ą░ 128 ą▓čŗą▒ąŠčĆąŠą║, čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čĆą░ąĘąĮąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ąĖ ą▓ąĖą┤ąŠą▓ ąŠą┐ąĄčĆą░čåąĖą╣, ąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą▓.
ąĪą▓ąĄčĆčéą║ą░ ą▓ ą┤ąŠą╝ąĄąĮąĄ ą▓čĆąĄą╝ąĄąĮąĖ . ąÆč鹊čĆąŠą╣ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčé - ą┐ąŠą┐čŗčéą║ą░ čāąĘąĮą░čéčī ą║ą░ą║ąŠą╣ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ FIR-čäąĖą╗čīčéčĆą░ ą╝ąŠąČąĮąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą╗čÅ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą░ą╗ą│ąŠčĆąĖčéą╝ąŠą▓ čüą▓ąĄčĆčéą║ąĖ ą▓ ą┤ąŠą╝ąĄąĮąĄ ą▓čĆąĄą╝ąĄąĮąĖ. ąæčŗą╗ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ čåąĖą║ą╗ čäąĖą╗čīčéčĆą░čåąĖąĖ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čĆą░ąĘąĮčŗčģ čéąĖą┐ąŠą▓ ąŠą┐ąĄčĆą░čåąĖą╣ ą┤ą╗čÅ čāą╝ąĮąŠąČąĄąĮąĖčÅ ą║ą░ąČą┤ąŠą│ąŠ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ ąĮą░ ąĘąĮą░č湥ąĮąĖčÅ ą▓čŗą▒ąŠčĆąŠą║: (1) ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąŠą┤ąĮąŠą│ąŠ čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮąŠą│ąŠ čāą╝ąĮąŠąČąĄąĮąĖčÅ ąĖ ąŠą┤ąĮąŠą│ąŠ čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮąŠą│ąŠ ą┤ąĄą╗ąĄąĮąĖčÅ, (2) ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą│ąŠ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▒ąĖčé, ąĖ (3) ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąČąĄčüčéą║ąŠ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą║ąŠąĮčüčéą░ąĮčéą░ą╝ąĖ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▒ąĖčé. ąĀąĄąĘčāą╗čīčéą░čéčŗ ą║ą░ąČą┤ąŠą│ąŠ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčéą░ ą┐ąŠą║ą░ąĘą░ąĮčŗ ąĮą░ čĆąĖčü. 8. ąŁčéąĖ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčéčŗ ąĘą░ą┐čāčüą║ą░ą╗ąĖčüčī čü čćą░čüč鹊č鹊ą╣ ą▓čŗą▒ąŠčĆą║ąĖ 31250 ąōčå ąĖ čĆą░ąĘą╝ąĄčĆą░ą╝ąĖ ą▒ą╗ąŠą║ąŠą▓ ą┐ąŠ 32, 64, 128 ąĖ 256 ą▓čŗą▒ąŠčĆąŠą║ čüąĖą│ąĮą░ą╗ą░.
ąĀąĄąĘčāą╗čīčéą░čéčŗ ąŠą┐čÅčéčī ą┐ąŠą║ą░ąĘą░ą╗ąĖ, čćč鹊 ą┤ą░ąČąĄ ą╝ą░ą╗čŗąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┐čĆąĖą▓ąŠą┤čÅčé ą║ ą▒ąŠą╗čīčłąĖą╝ čĆą░ąĘą╗ąĖčćąĖčÅą╝ ą▓ ą▓čŗčćąĖčüą╗ąĖč鹥ą╗čīąĮąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ. ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąŠčüčī čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮąŠąĄ ą┤ąĄą╗ąĄąĮąĖąĄ, č鹊 ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ ą┐ąŠą╗čāč湥ąĮąĮčŗą╣ ą┐ąŠčĆčÅą┤ąŠą║ čäąĖą╗čīčéčĆą░ ą▒čŗą╗ 1, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą┐čĆąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╝ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĖ ą┐ąŠčĆčÅą┤ąŠą║ ą▓ąŠąĘčĆąŠčü ą┤ąŠ 7 ąĖ čü ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄą╝ čü ą┐ąŠą╝ąŠčēčīčÄ ą║ąŠąĮčüčéą░ąĮčé ą┐ąŠą╗čāčćąĖą╗ąŠčüčī ą┤ąŠčüčéąĖčćčī ą┐ąŠčĆčÅą┤ą║ą░ čäąĖą╗čīčéčĆą░ 13 ąĖą╗ąĖ 14 ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čĆą░ąĘą╝ąĄčĆą░ ą▒ą╗ąŠą║ą░.
ąĀąĖčü. 8. ą×ą┐ąĄčĆą░čåąĖčÅ čüą▓ąĄčĆčéą║ąĖ ą▓ ą┤ąŠą╝ąĄąĮąĄ ą▓čĆąĄą╝ąĄąĮąĖ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ 2 čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮčŗčģ ąŠą┐ąĄčĆą░čåąĖą╣ (ą▓ąĄčĆčģąĮčÅčÅ čćą░čüčéčī čĆąĖčüčāąĮą║ą░), ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą│ąŠ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖčÅ (čüčĆąĄą┤ąĮčÅčÅ čćą░čüčéčī čĆąĖčüčāąĮą║ą░) ąĖ ą┐ąŠčüč鹊čÅąĮąĮąŠą│ąŠ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖčÅ (ąĮąĖąČąĮčÅčÅ čćą░čüčéčī čĆąĖčüčāąĮą║ą░).
FFT . ąóčĆąĄčéąĖą╣ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčé ąĘą░ą║ą╗čÄčćą░ą╗čüčÅ ą▓ ą┐ąŠą╗čāč湥ąĮąĖąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ ą┤ą╗ąĖąĮčŗ FFT, ą║ąŠč鹊čĆčāčÄ ą╝ąŠąČąĮąŠ ą▓čŗčćąĖčüą╗ąĖčéčī ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ čü ą┐ąŠą╝ąŠčēčīčÄ Arduino. ąÉ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą▒čŗą╗ą░ ą▓čŗą▒čĆą░ąĮą░ čüčéą░ąĮą┤ą░čĆčéąĮą░čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ FFT ą▒ąĄąĘ ą┤ą░ą╗čīąĮąĄą╣čłąĖčģ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖą╣.
ą×ą║ą░ąĘą░ą╗ąŠčüčī, čćč鹊 ą▓čŗčćąĖčüą╗ąĄąĮąĖąĄ FFT čü č鹊ą╣ ąČąĄ čćą░čüč鹊č鹊ą╣ ą▓čŗą▒ąŠčĆąŠą║, ą║ąŠč鹊čĆą░čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ą░čüčī ą▓ ą┤čĆčāą│ąĖčģ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčéą░čģ (31250 ąōčå) ą▒čŗą╗ąŠ ąĮąĄą▓ąŠąĘą╝ąŠąČąĮąŠ, čéą░ą║ čćč鹊 ą▒čŗą╗ąĖ ą┐ąŠą┤čüčéčĆąŠąĄąĮčŗ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ čĆą░ą▒ąŠčéčŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, čćč鹊ą▒čŗ ą┤ąŠčüčéąĖčćčī čüąŠčüč鹊čÅąĮąĖčÅ, ą║ąŠą│ą┤ą░ ą▒čŗą╗ ą┐ąŠą╗čāč湥ąĮ čĆą░čüčłąĖčĆąĄąĮąĮčŗą╣ ą┐ąĄčĆąĖąŠą┤ čåąĖą║ą╗ą░ DSP ą┤ą╗čÅ č鹊ą│ąŠ ąČąĄ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▓čŗą▒ąŠčĆąŠą║, ąĖ FFT čüčéą░ą╗ ą▓čŗą┐ąŠą╗ąĮąĖą╝čŗą╝. ą¤čāč鹥ą╝ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠč鹊čĆąŠąĄ čéčĆą░čéąĖčéčüčÅ ąĮą░ ą▓čŗčćąĖčüą╗ąĄąĮąĖąĄ FFT ą┤ą╗čÅ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▓čŗą▒ąŠčĆąŠą║, ą▒čŗą╗ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ, čćč鹊 ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ čćą░čüč鹊čéą░ FFT ą┤ą╗čÅ ą▒ą╗ąŠą║ą░ ąĖąĘ 256 ą▓čŗą▒ąŠčĆąŠą║ ą▒čāą┤ąĄčé ąŠą║ąŠą╗ąŠ 2335 ąōčå. ąæą╗ąĖąČą░ą╣čłą░čÅ čćą░čüč鹊čéą░ ą┤ąŠčüčéąĖąČąĖą╝ą░ čāą▓ąĄą╗ąĖč湥ąĮąĖąĄą╝ ąĘąĮą░č湥ąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ PWM ą┤ąŠ 32, čŹčéąĖą╝ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą╝ ą▒čŗą╗ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ čćą░čüč鹊čéą░ ą▓čŗą▒ąŠčĆąŠą║ ąŠą║ąŠą╗ąŠ 1953 ąōčå.
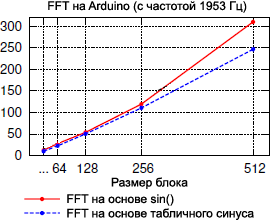
ąØą░ čĆąĖčü. 9 ą┐ąŠą║ą░ąĘą░ąĮ ą░ąĮą░ą╗ąĖąĘ ą▓čĆąĄą╝ąĄąĮąĖ FFT ąĮą░ čćą░čüč鹊č鹥 ą▓čŗą▒ąŠčĆąŠą║ 1953 ą┤ą╗čÅ čĆą░ąĘą╗ąĖčćąĮčŗčģ čĆą░ąĘą╝ąĄčĆąŠą▓ ą▒ą╗ąŠą║ą░ ąĖ ą┤ą▓čāčģ čĆąĄą░ą╗ąĖąĘą░čåąĖą╣: čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ API-čäčāąĮą║čåąĖąĖ sin() ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ čĆą░čüčüčćąĖčéą░ąĮąĮąŠą╣ čéą░ą▒ą╗ąĖčåčŗ čüąĖąĮčāčüąŠą▓. ąÆ čŹč鹊ą╝ čüčåąĄąĮą░čĆąĖąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ą▒ą╗ąŠą║ą░, ą┤ą╗čÅ ą║ąŠč鹊čĆąŠą│ąŠ FFT ą╝ąŠąČąĮąŠ čĆą░čüčüčćąĖčéą░čéčī ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ, čüąŠčüčéą░ą▓ąĖą╗ 256 ą▓čŗą▒ąŠčĆąŠą║. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą┤ą░ąČąĄ ą║ąŠą│ą┤ą░ ą▓čŗą┐ąŠą╗ąĮčÅą╗ą░čüčī ąŠą┐ąĄčĆą░čåąĖčÅ FFT ą┤ą╗čÅ čĆą░ąĘą╝ąĄčĆąŠą▓ ą▒ą╗ąŠą║ą░ ą╝ąĄąĮčīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮąŠą│ąŠ 256, ąĮąĄ ąŠčüčéą░ą▓ą░ą╗ąŠčüčī ą▓čĆąĄą╝ąĄąĮąĖ ą▓čŗą┐ąŠą╗ąĮąĖčéčī čćč鹊-č鹊 ąĄčēąĄ čü čŹčéąĖą╝ąĖ čĆąĄąĘčāą╗čīčéą░čéą░ą╝ąĖ ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĮąĄą╗čīąĘčÅ ą┐čĆąĖą╝ąĄąĮąĖčéčī ą░ą┤ą┤ąĖčéąĖą▓ąĮčŗą╣ čüąĖąĮč鹥ąĘ ą┤ą╗čÅ čüąĖą│ąĮą░ą╗ą░, ą┐ąŠčüą║ąŠą╗čīą║čā ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą▓, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī, ą▒čŗą╗ąŠ 14 (čü ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĄą╝ čéąĖą┐ą░ ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ąŠą┐ąĄčĆą░čåąĖą╣), ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ąĘą┤ąĄčüčī ą▒čāą┤ąĄčé ąĮčāąČąĮąŠ č鹊 ąČąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą▓, čćč鹊 ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čŗą▒ąŠčĆąŠą║ čüąĖą│ąĮą░ą╗ą░ ą▓ ąĘą░ą┤ą░ąĮąĮąŠą╝ čĆą░ąĘą╝ąĄčĆąĄ ą▒ą╗ąŠą║ą░.
ąĀąĖčü. 9. ąÆčĆąĄą╝čÅ, ą║ąŠč鹊čĆąŠąĄ ąĘą░ąĮąĖą╝ą░ąĄčé ą▓čŗčćąĖčüą╗ąĄąĮąĖąĄ ą▒čŗčüčéčĆąŠą│ąŠ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ążčāčĆčīąĄ (FFT) ąĮą░ Arduino ą┤ą╗čÅ čĆą░ąĘąĮčŗčģ čĆą░ąĘą╝ąĄčĆąŠą▓ ą▒ą╗ąŠą║ą░. ąÜčĆą░čüąĮą░čÅ ą╗ąĖąĮąĖčÅ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą▒ąĖą▒ą╗ąĖąŠč鹥čćąĮąŠą╣ čäčāąĮą║čåąĖąĖ sin(), ąĖ čüąĖąĮčÅčÅ ą╗ąĖąĮąĖčÅ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ ąĮą░ čéą░ą▒ą╗ąĖčćąĮąŠą╣ čäčāąĮą║čåąĖąĖ čüąĖąĮčāčüą░.
ą¤ąŠ čĆąĄąĘčāą╗čīčéą░čéą░ą╝ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮč鹊ą▓ čüčéą░ą╗ąŠ ą┐ąŠąĮčÅčéąĮąŠ, čćč鹊 ą┤ąĄčéą░ą╗ąĖ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą░ą╗ą│ąŠčĆąĖčéą╝ąŠą▓, čéą░ą║ąĖąĄ ą║ą░ą║ ą▓čŗą▒ąŠčĆ čéąĖą┐ą░ ą┤ą░ąĮąĮčŗčģ ąĖ ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĖ čéąĖą┐ ąŠą┐ąĄčĆą░čåąĖą╣ ą┐čĆąĖą▓ąŠą┤čÅčé ą║ ą▒ąŠą╗čīčłąĖą╝ čĆą░ąĘą╗ąĖčćąĖčÅą╝ ą┐ąŠ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčÅą╝ ąĖ ą║ą░č湥čüčéą▓čā ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣. ąØą░ą┐čĆąĖą╝ąĄčĆ, čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮąŠąĄ čāą╝ąĮąŠąČąĄąĮąĖąĄ ąĖ ą┤ąĄą╗ąĄąĮąĖąĄ ąŠčéąĮąĖą╝ą░čÄčé ą▓ 2 čĆą░ąĘą░ ą▒ąŠą╗čīčłąĄ ą▓čĆąĄą╝ąĄąĮąĖ, č湥ą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čåąĄą╗ąŠčćąĖčüą╗ąĄąĮąĮąŠą│ąŠ čüčāą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čåąĖą║ą╗ąŠą▓, ą║ą░ą║ ąŠą║ą░ąĘą░ą╗ąŠčüčī, č鹊ąČąĄ ąĖą╝ąĄąĄčé ą▒ąŠą╗čīčłąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ. ąÆ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮč鹥 čü ą░ą┤ą┤ąĖčéąĖą▓ąĮčŗą╝ čüąĖąĮč鹥ąĘąŠą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą▓ ą▒čŗą╗ąŠ ą┐ąŠčćčéąĖ čāą┤ą▓ąŠąĄąĮąŠ ąĘą░ą╝ąĄąĮąŠą╣ čåąĖą║ą╗ąŠą▓ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗą╝ (inline) ą║ąŠą┤ąŠą╝. ąĪą┐ąŠčüąŠą▒ čĆą░ą▒ąŠčéčŗ čü ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗą╝ąĖ čéą░ą║ąČąĄ čüąĖą╗čīąĮąŠ ą▓ą╗ąĖčÅąĄčé ąĮą░ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčī.
[ąĪčüčŗą╗ą║ąĖ ]
1 . Real time digital audio processing using Arduino (Andre Jucovsky Bianchi, Marcelo Queiroz, Computer Science Department University of Sao Paulo) site:www.ime.usp.br .2 . Arduino Realtime Audio Processing site:interface.khm.de .3 . Audio Arduino ŌĆō an ALSA (Advanced Linux Sound Architecture) audio driver for FTDI-based Arduinos site:vbn.aau.dk .4 . AVR336: ą┤ąĄą║ąŠą┤ąĄčĆ ąĘą▓čāą║ąŠą▓ąŠą│ąŠ č乊čĆą╝ą░čéą░ ADPCM .5 . AVR223: Digital Filters with AVR (čåąĖčäčĆąŠą▓čŗąĄ čäąĖą╗čīčéčĆčŗ ąĮą░ AVR) .6 . Arduino: čćč鹊 čéą░ą╝ ą▓ąĮčāčéčĆąĖ? (FAQ) .7 . Digital Sound Processing for on the Arduino site:github.com .8 . Blackfin ADSP-BF538 .9 . ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ DSP čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą╗čÅ Arduino .10 . AVR335: čåąĖčäčĆąŠą▓ąŠą╣ čĆąĄą║ąŠčĆą┤ąĄčĆ ąĘą▓čāą║ą░ ąĮą░ AVR ąĖ DataFlash .







ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ
microsin: Arduino-ą┐ą╗ą░čéčŗ čüąĄą╣čćą░čü čĆą░ąĘąĮčŗąĄ ą▒čŗą▓ą░čÄčé, ąĄčüčéčī ą┤ą░ąČąĄ ąĮą░ ą┤ąŠą▓ąŠą╗čīąĮąŠ ą╝ąŠčēąĮčŗčģ ą┐čĆąŠčåąĄčüčüąŠčĆą░čģ STM32 ąĖ ARM. ąØąŠ ą║ąŠąĮąĄčćąĮąŠ ą╗čāčćčłąĄ ą▓čüąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ ąĮčŗąĄ DSP ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ.
RSS ą╗ąĄąĮčéą░ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĄą▓ čŹč鹊ą╣ ąĘą░ą┐ąĖčüąĖ