|
ą¤čĆąĖą╝ąĄčĆ usb-device-cdc-serial-project (IAR) čģąŠčĆąŠčłąŠ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ ą▓čüčéčĆą░ąĖą▓ą░ąĮąĖčÅ ą▓ čüą▓ąŠąĄ čĆą░ąĘčĆą░ą▒ą░čéčŗą▓ą░ąĄą╝ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗ąĖčé čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī čāą┤ąŠą▒ąĮčāčÄ č鹥ą║čüč鹊ą▓čāčÄ ą║ąŠąĮčüąŠą╗čī čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčī ąŠčéą╗ą░ą┤ąŠčćąĮčŗą╣ ą▓ą▓ąŠą┤/ą▓čŗą▓ąŠą┤ (ą┤ą╗čÅ č湥ą│ąŠ ąŠą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčé DBGU), ą┐čĆąŠčüč鹊 čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą┐ąĄčĆąĄą┤ą░čćčā ą┤ą░ąĮąĮčŗčģ ą▒ąĄąĘ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą┐ąĖčüą░čéčī ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╣ čüąŠčäčé.

ąØą░ čĆąĖčüčāąĮą║ąĄ ą┐ąŠą║ą░ąĘą░ąĮ ąŠą▒čŗčćąĮčŗą╣, ą▓čüąĄą╝ ąĖąĘą▓ąĄčüčéąĮčŗą╣ ą┐ąĄčĆąĄčģąŠą┤ąĮąĖą║ USB-COM, ąĖ ą┐čĆąĖą╝ąĄčĆ usb-device-cdc-serial-project ąĖąĘąĮą░čćą░ą╗čīąĮąŠ ą▓ąĄą┤ąĄčé čüąĄą▒čÅ č鹊čćąĮąŠ čéą░ą║ ąČąĄ, ą║ą░ą║ čŹč鹊čé ą┐ąĄčĆąĄčģąŠą┤ąĮąĖą║. ą¤čĆąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąŠ USB ą┐ąĄčĆąĄčģąŠą┤ąĮąĖą║ą░ (ąĖą╗ąĖ ą╝ą░ą║ąĄčéąĮąŠą╣ ą┐ą╗ą░čéčŗ, ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮąŠą╣ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąĮčŗą╝ ą┐čĆąĖą╝ąĄčĆąŠą╝ usb-device-cdc-serial-project) ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā ą▓ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ Windows ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ USB-čāčüčéčĆąŠą╣čüčéą▓ąŠ ą║ą╗ą░čüčüą░ USB CDC, ą▓ąĖą┤ąĖą╝ąŠąĄ ą▓ čüąĖčüč鹥ą╝ąĄ ą║ą░ą║ ąŠą▒čŗčćąĮčŗą╣ COM-ą┐ąŠčĆčé, ą║ ą║ąŠč鹊čĆąŠą╝čā ą╝ąŠąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčīčüčÅ ą┐čĆąŠčüč鹊ą╣ č鹥čĆą╝ąĖąĮą░ą╗čīąĮąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣ (HyperTerminal, TerraTerm, SecureCRT, putty ąĖ ą┐čĆąŠčć.) ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ąĖą╗ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ą¤čĆąĖč湥ą╝ ąĮąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ, čćč鹊 ą▓ čāčüčéčĆąŠą╣čüčéą▓ąĄ USB CDC ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī 9-čłčéčŗčĆčīą║ąŠą▓čŗą╣ čĆą░ąĘčŖąĄą╝ DB9 male (čā čāčüčéčĆąŠą╣čüčéą▓ą░ USB CDC ą╝ąŠąČąĄčé ą▒čŗčéčī č鹊ą╗čīą║ąŠ čĆą░ąĘčŖąĄą╝ USB) - ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą▒čāą┤ąĄčé ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī čü ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣, ąĮą░čģąŠą┤čÅčēąĄą╣čüčÅ ą▓ąĮčāčéčĆąĖ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ USB CDC.
ą¤čĆąĖą╝ąĄčĆ, ąŠ ą║ąŠč鹊čĆąŠą╝ ąĖą┤ąĄčé čĆąĄčćčī (ą▓ čŹč鹊ą╣ čüčéą░čéčīąĄ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░ąĄčéčüčÅ ą┐čĆąŠąĄą║čé ą┤ą╗čÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ AT91SAM7X128, AT91SAM7X256 ąĖą╗ąĖ AT91SAM7X512, ąŠą┤ąĮą░ą║ąŠ ą▓čüąĄ čćč鹊 ąĮą░ą┐ąĖčüą░ąĮąŠ, ą▓ą┐ąŠą╗ąĮąĄ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ ą╗čÄą▒ąŠą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ Atmel čüąĄčĆąĖą╣ ARM7 ąĖ ARM9), ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ą░ą┐ą║ąĄ C:\Program Files\IAR Systems\Embedded Workbench 5.4\arm\examples\Atmel\at91sam7x-ek\usb-device-cdc-serial-project, ą░ ą▓čüąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ą▓ ą┐ą░ą┐ą║ąĄ C:\Program Files\IAR Systems\Embedded Workbench 5.4\arm\examples\Atmel\at91lib. ąöą░ą╗ąĄąĄ ą┤ą╗čÅ ą║čĆą░čéą║ąŠčüčéąĖ čŹčéąĖ ą┐ą░ą┐ą║ąĖ čÅ ą▒čāą┤čā ąĮą░ąĘčŗą▓ą░čéčī ą┐čĆąŠčüč鹊 ą║ą░ą║ usb-device-cdc-serial-project ąĖ at91lib.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąÆčŗ ą╝ąŠąČąĄč鹥 čüč鹊ą╗ą║ąĮčāčéčīčüčÅ čü ąĘą░ą▓ąĖčüą░ąĮąĖąĄą╝ ą┐čĆąĖ ą┐ąĄčĆąĄčéčŗą║ą░ąĮąĖąĖ ą║ą░ą▒ąĄą╗čÅ USB - ą▓ čäą░ą╣ą╗ąĄ at91lib\usb\device\core\USBD_UDP.c, ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ USBD_Write, ąĘą░ą▓ąĖčüą░ąĮąĖąĄ ą▓ ą╝ą░ą║čĆąŠčüąĄ SET_CSR - ą▒ąĄčüą║ąŠąĮąĄčćąĮčŗą╣ čåąĖą║ą╗ while ((AT91C_BASE_UDP -> UDP_CSR[endpoint] & (flags)) != (flags) );. ą¤čĆąŠą▒ą╗ąĄą╝čā ą╝ąŠąČąĮąŠ čĆąĄčłąĖčéčī, ąĘą░ą╝ąĄąĮąĖą▓ ą╝ą░ą║čĆąŠčü SET_CSR ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣, ą│ą┤ąĄ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ čéą░ą╣ą╝ą░čāčé ąŠąČąĖą┤ą░ąĮąĖčÅ.
[ąĪčéą░čĆčŗą╣ ą║ąŠą┤ USBD_UDP.c, ą║ąŠč鹊čĆčŗą╣ ą▓čŗąĘčŗą▓ą░ą╗ ąĘą░ą▓ąĖčüą░ąĮąĖąĄ]
#define SET_CSR(endpoint, flags)
{
volatile unsigned int reg;
reg = AT91C_BASE_UDP->UDP_CSR[endpoint] ;
reg |= REG_NO_EFFECT_1_ALL;
reg |= (flags);
AT91C_BASE_UDP->UDP_CSR[endpoint] = reg;
while ( (AT91C_BASE_UDP->UDP_CSR[endpoint] & (flags)) != (flags));
}
[ąØąŠą▓čŗą╣ ą║ąŠą┤, ąĘą░ą╝ąĄąĮčÅčÄčēąĖą╣ ą╝ą░ą║čĆąŠčü SET_CSR, ą▓ ą║ąŠč鹊čĆąŠą╝ ą▒ą░ą│ ąĖčüą┐čĆą░ą▓ą╗ąĄąĮ, ąĘą░ą▓ąĖčüą░ąĮąĖčÅ ąĮąĄčé]
//http://www.keil.com/forum/15376/
#define SET_CSR USBD_setCSR
boolean USBD_setCSR(unsigned char endpoint, unsigned int flags)
{
volatile unsigned int reg;
volatile unsigned int cnt = 100000;
reg = AT91C_BASE_UDP->UDP_CSR[endpoint] ;
reg |= REG_NO_EFFECT_1_ALL;
reg |= (flags);
AT91C_BASE_UDP->UDP_CSR[endpoint] = reg;
while ( cnt > 0)
{
if ((AT91C_BASE_UDP->UDP_CSR[endpoint] & (flags)) == flags)
{
break;
}
cnt--;
}
if (cnt > 0)
return 1;
else
return 0;
}
ą¤čĆąŠąĄą║čé ą┐čĆąĖą╝ąĄčĆą░ usb-device-cdc-serial-project ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čüąŠą▒ąŠą╣ ą┐čĆąŠčüč鹊ą╣ ą╝ąŠčüčé USB CDC <--> USART. ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čüą║ąŠą╝ą┐ąĖą╗ąĖčĆčāąĄč鹥 ą┐čĆąĖą╝ąĄčĆ ąĖ ąĘą░ą┐ąĖčłąĄč鹥 ąĄą│ąŠ ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ, ą╝ąŠąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćą░čéčī ą┐ąŠčĆčé USB ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā. ąÆąĮąĖą╝ą░ąĮąĖąĄ: čćč鹊ą▒čŗ čĆą░ą▒ąŠčéą░ą╗ą░ ą┐ąŠą┤čüąĖčüč鹥ą╝ą░ USB, čćą░čüč鹊čéą░ ą║ą▓ą░čĆčåą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆą░ą▓ąĮą░ 18.432 ą£ąōčå. ą¤ąŠčüą╗ąĄ ą┐ąĄčĆą▓ąŠą│ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā ąĮą░ čüąĖčüč鹥ą╝ąĄ Windows ą╝ą░čüč鹥čĆ čāčüčéą░ąĮąŠą▓ą║ąĖ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖčÅ ąĘą░ą┐čĆąŠčüąĖčé ą┤čĆą░ą╣ą▓ąĄčĆ ą┤ą╗čÅ ąĮąŠą▓ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖ ąĄą╝čā ąĮčāąČąĮąŠ ą┐čĆąŠčüč鹊 čüą║ąŠčĆą╝ąĖčéčī ąĖąĮč乊čĆą╝ą░čåąĖąŠąĮąĮčŗą╣ čäą░ą╣ą╗ at91lib\usb\device\cdc-serial\drv\6119.inf. ąóąĄą┐ąĄčĆčī ą▓ čüąĖčüč鹥ą╝ąĄ ąŠą▒ąĮą░čĆčāąČąĖčéčüčÅ čāčüčéčĆąŠą╣čüčéą▓ąŠ AT91 USB to Serial Converter (COM5), ąĖ čü ąĮąĖą╝ ą╝ąŠąČąĮąŠ čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ čü ąŠą▒čŗčćąĮčŗą╝ COM-ą┐ąŠčĆč鹊ą╝.

ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą▓ čüąĖčüč鹥ą╝ąĄ Windows XP ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╣ ą┐ąŠčĆčé ą┐ąŠčÅą▓ąĖą╗čüčÅ ą║ą░ą║ COM5, ąĮąŠ čåąĖčäčĆą░ 5 ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖ ą╗čÄą▒ąŠą╣ ą┤čĆčāą│ąŠą╣, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ąĮą░ą╗ąĖčćąĖčÅ ąĮąĄąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮąĮčŗčģ ą┐ąŠčĆč鹊ą▓ ą▓ ąÆą░čłąĄą╣ čüąĖčüč鹥ą╝ąĄ.
ąŁč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĖč湥ą│ąŠ ąŠčüąŠą▒ąĄąĮąĮąŠą│ąŠ ąĮąĄ ą┤ąĄą╗ą░ąĄčé, ą┐čĆąŠčüč鹊 čéčāą┐ąŠ ąĖ ą┐čĆąŠąĘčĆą░čćąĮąŠ ą┐ąĄčĆąĄą┤ą░ąĄčé ą▓čüąĄ ą┤ą░ąĮąĮčŗąĄ, ą┐ąŠą╗čāč湥ąĮąĮčŗąĄ ąŠčé USB CDC, ą▓ čäąĖąĘąĖč湥čüą║ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ USART ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ąĖ ąĮą░ąŠą▒ąŠčĆąŠčé - ą▓čüąĄ, čćč鹊 ą┐čĆąĖčģąŠą┤ąĖčé ąĮą░ USART, ą┐čĆąŠąĘčĆą░čćąĮąŠ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╣ COM-ą┐ąŠčĆčé USB CDC. ąÆčŗ ą╝ąŠąČąĄč鹥 čāą▒ąĄą┤ąĖčéčīčüčÅ ą▓ čŹč鹊ą╝ čüą░ą╝ąĖ, ąĄčüą╗ąĖ ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥čüčī ą║ ą┐ąŠčĆčéčā COM5 ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣ - č鹥čĆą╝ąĖąĮą░ą╗čīąĮčŗą╝ ą║ą╗ąĖąĄąĮč鹊ą╝ (TerraTerm, SecureCRT, putty ąĖ ą┐čĆąŠčć.), ąĖ ąĘą░ą╝ą║ąĮąĄč鹥 ą┤čĆčāą│ ąĮą░ ą┤čĆčāą│ą░ ąĮąŠąČą║ąĖ PIN_USART0_RXD ąĖ PIN_USART0_TXD (ą┐ąŠčĆčé PA0 ąĖ PA1, ąĮąŠąČą║ąĖ 81 ąĖ 82 ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ AT91SAM7512 ą▓ ą║ąŠčĆą┐čāčüąĄ LQFP100). ąÆčüąĄ, čćč鹊 ą▓čŗ ą▓ą▓ąĄą┤ąĄč鹥 ąĮą░ ą║ą╗ą░ą▓ąĖą░čéčāčĆąĄ ą▓ ąŠą║ąŠčłą║ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ č鹥čĆą╝ąĖąĮą░ą╗čīąĮąŠą│ąŠ ą║ą╗ąĖąĄąĮčéą░, ą┐čĆąĖ ąĘą░ą╝čŗą║ą░ąĮąĖąĖ PIN_USART0_RXD ąĮą░ PIN_USART0_TXD ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēą░čéčīčüčÅ ąŠą▒čĆą░čéąĮąŠ.
ąöą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐čĆąĖą╝ąĄčĆ usb-device-cdc-serial-project ą▓ čüą▓ąŠąĄą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ą║ą░ą║ čāą┐čĆą░ą▓ą╗čÅčÄčēčāčÄ ą║ąŠąĮčüąŠą╗čī ąĖą╗ąĖ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ, ą▓ąĄčüčī ą║ąŠą┤ ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ USART ąĮčāąČąĮąŠ ąŠčéą║ą╗čÄčćąĖčéčī (čüą╝. ąĖčüčģąŠą┤ąĮąĖą║ąĖ ą┐ąŠ čüčüčŗą╗ą║ąĄ [1]). ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ č湥čĆąĄąĘ USB CDC ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐ąŠ čüą▓ąŠąĄą╝čā čāčüą╝ąŠčéčĆąĄąĮąĖčÄ. ą×ą▒čēą░čÅ čüčéčĆčāą║čéčāčĆą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ firmware čćąĖą┐ą░ ą▓čŗą│ą╗čÅą┤ąĖčé ą┐čĆąĖą╝ąĄčĆąĮąŠ čéą░ą║:

ąóąĄčģąĮąĖą║ą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐ąŠčĆčéą░ CDC čüąŠčüč鹊ąĖčé ąĖąĘ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą┤čĆą░ą╣ą▓ąĄčĆą░, ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ.
[ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ CDCDSerialDriver]
ąŚą░ą┐čāčüą║ ą┤čĆą░ą╣ą▓ąĄčĆą░ USB CDC (CDCDSerialDriver) ą▓ firmware ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čåąĄą╗ąĄčüąŠąŠą▒čĆą░ąĘąĮąŠ ą┤ąĄą╗ą░čéčī ą▓ ą╝ąŠą╝ąĄąĮčé ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ąÆą░čłąĄą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ USB (ąĄčüą╗ąĖ ąÆą░čłąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ čāąČąĄ ąĘą░ą┐ąĖčéą░ąĮąŠ ąĖ ą┤ąĄą╗ą░ąĄčé ą║ą░ą║čāčÄ-č鹊 čĆą░ą▒ąŠčéčā ą┐ąŠą╝ąĖą╝ąŠ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ USB). ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą╝ąŠą╝ąĄąĮčéą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ čģąŠčüčéčā USB ą┤ą╗čÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╣ čüąĖą│ąĮą░ą╗, ąŠą┐ąŠą▓ąĄčēą░čÄčēąĖą╣ ąŠ ą╝ąŠą╝ąĄąĮč鹥 ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ. ą¤čĆąĖą╝ąĄčĆ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĖ čéą░ą║ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą╝ąŠąČąĮąŠ čāą▓ąĖą┤ąĄčéčī ąĮą░ čüčģąĄą╝ąĄ ą╝ą░ą║ąĄčéąĮąŠą╣ ą┐ą╗ą░čéčŗ AT91SAM7X (čüą╝. [2]), čĆąĄąĘąĖčüč鹊čĆčŗ R10 ąĖ R12 č乊čĆą╝ąĖčĆčāčÄčé čüąĖą│ąĮą░ą╗ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ čģąŠčüčéčā USB_PR (ąĘą░ą▓ąĄą┤ąĄąĮ ąĮą░ ą┐ąŠčĆčé ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ąĮą░čüčéčĆąŠąĄąĮąĮčŗą╣ ą║ą░ą║ ą▓čģąŠą┤). ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĮą░ą│čĆčāąĘąŠčćąĮčŗą╝ čĆąĄąĘąĖčüč鹊čĆąŠą╝ USB R11, čüąĖą│ąĮą░ą╗ USB_PUP (ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╣ ą║ ą┐ąŠčĆčéčā ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ąĮą░čüčéčĆąŠąĄąĮąĮąŠą╝čā ą║ą░ą║ ą▓čŗčģąŠą┤). ą¤čĆąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĖ USB ą║ąŠą┤ ą┤ąŠą╗ąČąĄąĮ ąĘą░ą┐čāčüčéąĖčéčī ą┤čĆą░ą╣ą▓ąĄčĆ USB CDC, ąĖ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī R11 ą║ +3.3 ą▓ąŠą╗čīčéą░ą╝, čćč鹊ą▒čŗ ą┤ą░čéčī čģąŠčüčéčā USB čüąĖą│ąĮą░ą╗ ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
") |
.") |
ąØą░ čüčģąĄą╝ą░čģ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ ą▓ą░čĆąĖą░ąĮčéčŗ čäąĖąĘąĖč湥čüą║ąŠą╣ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąŠčĆčéą░ USB. ąØą░ čüčģąĄą╝ąĄ čüą┐čĆą░ą▓ą░ čüąĖą│ąĮą░ą╗ "5V Bus Monitoring" čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čüąĖą│ąĮą░ą╗čā USB_PR, ą░ čüąĖą│ąĮą░ą╗ "Pullup Control" čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé USB_PUP (ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čéčĆą░ąĮąĘąĖčüč鹊čĆąŠą╝ čéčĆąĄą▒čāąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ąĖąĮą▓ąĄčĆčüąĖčÅ ą░ą║čéąĖą▓ąĮąŠą│ąŠ ą╗ąŠą│ąĖč湥čüą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ).
ąÆąŠčé ą┐čĆąŠčüč鹥ą╣čłąĖą╣ ą┐čĆąĖą╝ąĄčĆ ą▓ ą▓ąĖą┤ąĄ ą║čāčüą║ąŠą▓ ą║ąŠą┤ą░ (ą▒ąĄąĘ ą░ąĮą░ą╗ąĖąĘą░ - čćč鹊 ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ, ąĘą░čĆčÅą┤ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖą╗ąĖ čģąŠčüčé USB), ą║ąŠč鹊čĆčŗą╣ ą░ąĮą░ą╗ąĖąĘąĖčĆčāąĄčé čüąŠčüč鹊čÅąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░ USB_PR, ąĘą░ą┐čāčüą║ą░ąĄčé ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÄ USB CDC ąĖ čāą┐čĆą░ą▓ą╗čÅąĄčé čüąĖą│ąĮą░ą╗ąŠą╝ USB_PUP (ą║ąŠą┤ ą┤ą╗čÅ ą┐čĆąĖą╝ąĄčĆą░ čü ą╝ą░ą║ąĄčéąĮąŠą╣ ą┐ą╗ą░č鹊ą╣ AT91SAM7X, čüą╝. [2]).
//[ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąĮąŠąČąĄą║]
#define PIN_INT_USB {1 << 26, AT91C_BASE_PIOA, AT91C_ID_PIOA, PIO_INPUT, PIO_DEGLITCH}
#define PIN_USB_PULLUP {1 << 25, AT91C_BASE_PIOA, AT91C_ID_PIOA, PIO_OUTPUT_0, PIO_DEFAULT}
const Pin inINT_USB = PIN_INT_USB;
const Pin pinPullUp = PIN_USB_PULLUP;
//[ąØą░čćą░ą╗čīąĮą░čÅ ąĮą░čüčéčĆąŠą╣ą║ą░ ąĮąŠąČąĄą║ ą┐čĆąĖ ą┐ąŠą┤ą░č湥 ą┐ąĖčéą░ąĮąĖčÅ]
PIO_Configure(&inINT_USB, 1);
PIO_Configure(&pinPullUp, 1);
//[ą×ą┐čĆąŠčü čüąŠčüč鹊čÅąĮąĖčÅ ąĮąŠąČą║ąĖ ą▓ ą│ą╗ą░ą▓ąĮąŠą╝ čåąĖą║ą╗ąĄ, ąĖ ą┐ąŠą┐čŗčéą║ą░ ąĘą░ą┐čāčüą║ą░]
if (!PIO_Get(&inINT_USB))
{
//ą×ą▒ąĮą░čĆčāąČąĄąĮąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ čĆą░ąĘčŖąĄą╝čā USB
// ą╗ąĖą▒ąŠ ą║ąŠą╝ą┐čīčÄč鹥čĆą░, ą╗ąĖą▒ąŠ ąĘą░čĆčÅą┤ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░.
//ą¤ąŠą┤ą║ą╗čÄčćą░ąĄą╝ ąĮą░ą│čĆčāąĘąŠčćąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆ R11 ąĮą░ 1.5 ą║
PIO_Set(&outUSB_PULLUP);
CDCDSerialDriver_Initialize();
}
//[ą×ąČąĖą┤ą░ąĮąĖąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą▓ ą│ą╗ą░ą▓ąĮąŠą╝ čåąĖą║ą╗ąĄ]
usbsta = USBD_GetState();
if (usbsta >= USBD_STATE_CONFIGURED)
{
//ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ čāčüą┐ąĄčłąĮąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąŠ, ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ čĆą░ą▒ąŠčéčŗ
// ą▒čāč乥čĆąŠą▓ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ USB CDC ąĖ ąĘą░ą┐čāčüą║ ą┐ąŠą┤čüąĖčüč鹥ą╝,
// čĆą░ą▒ąŠčéą░čÄčēąĖčģ čü USB CDC ąĮą░ ą┐čĆąĖąĄą╝ ąĖ ą┐ąĄčĆąĄą┤ą░čćčā
inRXCDC = 0;
outRXCDC = 0;
inTXCDC = 0;
outTXCDC = 0;
TXCDCdone = true;
NeedInitCDCDSerialDriver_Read = true;
...
}
ąØą░ ą┤ąĖą░ą│čĆą░ą╝ą╝ąĄ ą┐ąŠą║ą░ąĘą░ąĮ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čŗą╣ ąŠą▒čēąĖą╣ ą┐čĆąĖąĮčåąĖą┐ ą┐čĆąŠčåąĄą┤čāčĆčŗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ USB CDC. ąŻčćą░čüč鹊ą║ ą║ąŠą┤ą░ ąŠčé ąØąÉą¦ąÉąøą× ą┤ąŠ ąÜą×ąØąĢą” ą┤ąŠą╗ąČąĄąĮ ą┐čĆąŠą║čĆčāčćąĖą▓ą░čéčīčüčÅ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ čåąĖą║ą╗ąĄ main ą┐čĆąŠą│čĆą░ą╝ą╝čŗ firmware ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ.

ąĢčüą╗ąĖ ą║ąŠą┤ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ USB ą┤ąŠą╗ąČąĄąĮ čĆą░ą▒ąŠčéą░čéčī ą▓čüąĄą│ą┤ą░, čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą║ąŠą│ą┤ą░ ąÆą░čłąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąĖčéą░ąĄčéčüčÅ ąŠčé USB, ąĖ čĆą░ą▒ąŠčéą░ąĄčé ą▓čüąĄą│ą┤ą░ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ), č鹊 č鹊ą│ą┤ą░ čüąĖą│ąĮą░ą╗čŗ USB_PR ąĖ USB_PUP ą╝ąŠą│čāčé čüąŠą▓čüąĄą╝ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ. ą¤čĆąŠčåąĄą┤čāčĆą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ USB ą┤ąŠą╗ąČąĮą░ ąĘą░ą┐čāčüą║ą░čéčīčüčÅ čüčĆą░ąĘčā ą┐ąĄčĆąĄą┤ ą│ą╗ą░ą▓ąĮčŗą╝ čåąĖą║ą╗ąŠą╝ main, ą░ąĮą░ą╗ąĖąĘ čüąĖą│ąĮą░ą╗ą░ USB_PR ąĮąĄ ąĮčāąČąĄąĮ. ąØą░ą│čĆčāąĘąŠčćąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆ R11 ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮą░ą▓čüąĄą│ą┤ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ čłąĖąĮąĄ +3.3 ą▓ąŠą╗čīčé - č鹊ą│ą┤ą░ ą┐ąŠčĆčé ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ USB_PUP čéą░ą║ąČąĄ ąĮąĄ ąĮčāąČąĄąĮ.
[ą¤ąĄčĆąĄą┤ą░čćą░ č湥čĆąĄąĘ USB CDC]
ąØąĄą▒ą╗ąŠą║ąĖčĆčāčÄčēą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ CDCDSerialDriver_Write (ą║ąŠą│ą┤ą░ ą┐ąŠčÅą▓ąĖą╗ąĖčüčī ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ ą│ą╗ą░ą▓ąĮąŠą╝ ą║ąŠą╗čīčåąĄą▓ąŠą╝ ą▒čāč乥čĆąĄ, ą▓ ąĮą░čłąĄą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą║ąŠą┤ą░ čŹč鹊 TXCDC), ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ čåąĄą╗ąĄčüąŠąŠą▒čĆą░ąĘąĮąŠ ąŠčéčüą╗ąĄąČąĖą▓ą░čéčī ą┐ąŠ čäčāąĮą║čåąĖąĖ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ (callback), ą▓ ąĮą░čłąĄą╝ ą┐čĆąĖą╝ąĄčĆąĄ čŹč鹊 TXCDCcompleted. ąÉą┤čĆąĄčü callback TXCDCcompleted ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą║ą░ą║ ąŠą┤ąĖąĮ ąĖąĘ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ čäčāąĮą║čåąĖąĖ CDCDSerialDriver_Write. ąØą░ąĘąĮą░č湥ąĮąĖąĄ ąŠčüčéą░ą╗čīąĮčŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąŠč湥ą▓ąĖą┤ąĮąŠ. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┐ąĄčĆąĄą┤ą░čćą░ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ, TXCDCcompleted ą▒čāą┤ąĄčé ąĘą░ą┐čāčēąĄąĮą░ ąĖ ą▓ąĘą▓ąĄą┤ąĄčé čäą╗ą░ą│ TXCDCdone, čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆčāčÄčēąĖą╣ ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąÆąĮąĖą╝ą░ąĮąĖąĄ! ążą╗ą░ąČąŠą║ TXCDCdone ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ čüą▒čĆąŠčłąĄąĮ ą┤ąŠ ą▓čŗąĘąŠą▓ą░ CDCDSerialDriver_Write, ąĖąĮą░č湥, ąĄčüą╗ąĖ čüą┤ąĄą╗ą░čéčī ąĮą░ąŠą▒ąŠčĆąŠčé, č鹊 čŹč鹊 ą╝ąŠąČąĄčé čüčéą░čéčī ą┐čĆąĖčćąĖąĮąŠą╣ čéčĆčāą┤ąĮąŠčāą╗ąŠą▓ąĖą╝ąŠą╣ ąŠčłąĖą▒ą║ąĖ - ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ (callback TXCDCcompleted) ą╝ąŠąČąĄčé čüčĆą░ą▒ąŠčéą░čéčī ą┤ąŠ čüą▒čĆąŠčüą░ čäą╗ą░ąČą║ą░ TXCDCdone, ąĖ ąĮąŠą▓ą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ą▒ąŠą╗čīčłąĄ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ąĮą░čćąĮąĄčéčüčÅ. ą¦č鹊ą▒čŗ ąĮąĄ ą▒čŗą╗ąŠ ą┐čāčéą░ąĮąĖčåčŗ: "ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ" ą▓ čŹč鹊ą╝ ą║ąŠąĮč鹥ą║čüč鹥 ąĮąĄ ąŠčéąĮąŠčüąĖčéčüčÅ ą║ č鹥čĆą╝ąĖąĮą░ą╝ USB (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą║ąŠą│ą┤ą░ ą│ąŠą▓ąŠčĆčÅčé ąŠ ą┐ąĄčĆąĄą┤ą░čćą░čģ Control, Interrupt, Isochronous, Bulk, č鹊 ąĖą╝ąĄčÄčé ą▓ ą▓ąĖą┤čā čüąŠą▓čüąĄą╝ ą┤čĆčāą│ąŠąĄ), ąĖą╝ąĄąĄčéčüčÅ ą▓ ą▓ąĖą┤čā ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čģąŠą┤ą░ ąŠčüąĮąŠą▓ąĮąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąØą░ ą┤ąĖą░ą│čĆą░ą╝ą╝ąĄ ą┐ąŠą║ą░ąĘą░ąĮ ą░ą╗ą│ąŠčĆąĖčéą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ. ąÜąŠą┤ ą╝ąĄąČą┤čā ą╝ąĄčéą║ą░ą╝ąĖ ąØąÉą¦ąÉąøą× ąĖ ą║ąŠąĮąĄčå ą┤ąŠą╗ąČąĄąĮ ą▓čŗąĘčŗą▓ą░čéčīčüčÅ ą▓ ą│ą╗ą░ą▓ąĮąŠą╝ čåąĖą║ą╗ąĄ main ą┐čĆąŠą│čĆą░ą╝ą╝čŗ firmware ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ.

ąŻą┐čĆąŠčēąĄąĮąĮčŗą╣ ą┐čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ:
//čĆą░ąĘą╝ąĄčĆ ą│ą╗ą░ą▓ąĮąŠą│ąŠ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ
#define TXCDC_BUF_SIZE 1024
#define TXCDC_BUF_MASK (TXCDC_BUF_SIZE-1)
//ą▓čĆąĄą╝ąĄąĮąĮčŗąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ
u16 txbytes_to_send, txbufcnt;
//ą▓čĆąĄą╝ąĄąĮąĮčŗą╣ ą▒čāč乥čĆ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ CDCDSerialDriver_Write
u8 txcdcbuf[TXCDC_BUF_SIZE];
//ą│ą╗ą░ą▓ąĮčŗą╣ ą║ąŠą╗čīčåąĄą▓ąŠą╣ ą▒čāč乥čĆ ą┐ąĄčĆąĄą┤ą░čćąĖ
u8 TXCDC[TXCDC_BUF_SIZE];
//ąĖąĮą┤ąĄą║čüčŗ ą▒čāč乥čĆą░ TXCDC ąĮą░ ą▓ą▓ąŠą┤ ąĖ ą▓čŗą▓ąŠą┤
u16 inTXCDC, outTXCDC;
//čäą╗ą░ąČąŠą║ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ
bool TXCDCdone;
//------------------------------------------------------------------------------
/// Callback ą┤ą╗čÅ CDCDSerialDriver_Write,
/// ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą┐čĆąĖ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ
//------------------------------------------------------------------------------
static void TXCDCcompleted (void *pArg,
unsigned char status,
unsigned int transferred,
unsigned int remaining)
{
//trace_LOG(trace_INFO, "TXCDCcompleted: %u\n\r", transferred);
TXCDCdone = true;
}
//[ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ, ą┐čĆąŠą║čĆčāčćąĖą▓ą░ąĄčéčüčÅ ą▓čüąĄą│ą┤ą░ ąĖąĘ ą│ą╗ą░ą▓ąĮąŠą│ąŠ čåąĖą║ą╗ą░]
//čāąĘąĮą░ąĄą╝, čüą║ąŠą╗čīą║ąŠ ąĄčüčéčī ą▒ą░ą╣čé ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ ą│ą╗ą░ą▓ąĮąŠą╝
// ą║ąŠą╗čīčåąĄą▓ąŠą╝ ą▒čāč乥čĆąĄ. ąÜąŠą┤ ą┤ą╗čÅ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ idxDiff čüą╝. ą▓ [3].
txbytes_to_send = idxDiff (inTXCDC, outTXCDC, TXCDC_BUF_SIZE);
//ąŠą│čĆą░ąĮąĖčćąĖą▓ą░ąĄą╝ čĆą░ąĘą╝ąĄčĆ ą▒ą╗ąŠą║ą░ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ
// čĆą░ąĘą╝ąĄčĆąŠą╝ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ (čģąŠčéčÅ, ą║ą░ą║ ąĮąĖ čüčéčĆą░ąĮąĮąŠ,
// ą▓čüąĄ čĆą░ą▒ąŠčéą░ąĄčé ąĮąŠčĆą╝ą░ą╗čīąĮąŠ ąĖ ą▒ąĄąĘ čŹč鹊ą│ąŠ)
if (txbytes_to_send > BOARD_USB_ENDPOINTS_MAXPACKETSIZE(CDCDSerialDriverDescriptors_DATAIN))
txbytes_to_send = BOARD_USB_ENDPOINTS_MAXPACKETSIZE(CDCDSerialDriverDescriptors_DATAIN);
//ąĄčüą╗ąĖ ą╝ąŠąČąĮąŠ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī (TXCDCdone), ąĖ ąĄčüčéčī čćč鹊 ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī (txbytes_to_send),
// čüą║ąŠą┐ąĖčĆčāąĄą╝ ą┤ą░ąĮąĮčŗąĄ ąĖąĘ ą║ąŠą╗čīčåąĄą▓ąŠą│ąŠ ą▒čāč乥čĆą░ TXCDC ą▓ txcdcbuf ąĖ ąĘą░ą┐čāčüčéąĖą╝ ą┐ąĄčĆąĄą┤ą░čćčā
if (TXCDCdone && (0 != txbytes_to_send))
{
for (txbufcnt = 0; txbufcnt {
txcdcbuf[txbufcnt] = TXCDC[outTXCDC++];
outTXCDC &= TXCDC_BUF_MASK;
}
TXCDCdone = false; //ąĘą░ą┐ąŠą╝ąĖąĮą░ąĄą╝, čćč鹊 ą┐ąĄčĆąĄą┤ą░čćą░ ąĘą░ą┐čāčēąĄąĮą░
CDCDSerialDriver_Write((void*)txcdcbuf, txbytes_to_send, TXCDCcompleted, 0);
}
ą¦č鹊ą▒čŗ čćč鹊-č鹊 ą┐ąĄčĆąĄą┤ą░čéčī ą▓ ą╗čÄą▒ąŠąĄ ą▓čĆąĄą╝čÅ, ąĮčāąČąĮąŠ ą┐čĆąŠčüč鹊 ą┐ąŠą╗ąŠąČąĖčéčī ą┤ą░ąĮąĮčŗąĄ ą┐ąŠą▒ą░ą╣čéąĮąŠ ą▓ ą║ąŠą╗čīčåąĄą▓ąŠą╣ ą▒čāč乥čĆ ą┐ąĄčĆąĄą┤ą░čćąĖ TXCDC ą┐ąŠ ąĖąĮą┤ąĄą║čüčā outTXCDC (ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ ą┐čĆąŠ č鹥čģąĮąĖą║čā čĆą░ą▒ąŠčéčŗ čü ą║ąŠą╗čīčåąĄą▓čŗą╝ ą▒čāč乥čĆąŠą╝ čüą╝. ą▓ [3]):
TXCDC[outTXCDC++] = 'A'; //ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮą░ A
outTXCDC &= TXCDC_BUF_MASK;
TXCDC[outTXCDC++] = 'B'; //ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮą░ B
outTXCDC &= TXCDC_BUF_MASK;
[ą¤čĆąĖąĄą╝ č湥čĆąĄąĘ USB CDC]
ąóąĄčģąĮąĖą║ą░ ąĮąĄą▒ą╗ąŠą║ąĖčĆčāčÄčēąĄą│ąŠ ą┐čĆąĖąĄą╝ą░ č湥čĆąĄąĘ CDC ąŠč湥ąĮčī ąĮą░ą┐ąŠą╝ąĖąĮą░ąĄčé č鹥čģąĮąĖą║čā ą┐ąĄčĆąĄą┤ą░čćąĖ. ąöą╗čÅ čŹč鹊ą│ąŠ čéą░ą║ąČąĄ ąĄčüčéčī čäčāąĮą║čåąĖčÅ ąĘą░ą┐čāčüą║ą░ ą┐čĆąĖąĄą╝ą░ CDCDSerialDriver_Read, ąĖ ąĘą░ą┐čāčüą║ą░ąĄą╝čŗą╣ ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖąĖ ą┐čĆąĖąĄą╝ą░ ą▒ą╗ąŠą║ą░ ą┤ą░ąĮąĮčŗčģ callback UsbCDCDataReceived. ąÉą┤čĆąĄčü callback UsbCDCDataReceived č鹊čćąĮąŠ čéą░ą║ ąČąĄ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ čäčāąĮą║čåąĖąĖ CDCDSerialDriver_Read. ąÆ ąĮą░čłąĄą╝ ą┐čĆąĖą╝ąĄčĆąĄ čäčāąĮą║čåąĖčÅ CDCDSerialDriver_Read ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ąĖąĮč鹥čĆč乥ą╣čüą░ USB, ą░ ą┐ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ ą┐čĆąĖąĄą╝ą░ ą▓ ą▓čŗąĘąŠą▓ąĄ UsbCDCDataReceived ąĘą░ą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą║ąŠą╗čīčåąĄą▓ąŠą╣ ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░ RXCDC. ąÆ ą┐čĆąŠčåąĄčüčüąĄ ąĘą░ą┐čāčüą║ą░ čāčćą░čüčéą▓čāąĄčé čäą╗ą░ą│ NeedInitCDCDSerialDriver_Read, čāčüčéą░ąĮąŠą▓ą║ą░ ą║ąŠč鹊čĆąŠą│ąŠ čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆčāąĄčé ąŠ č鹊ą╝, čćč鹊 č鹥ą║čāčēąĖą╣ ą┐čĆąĖąĄą╝ ąĘą░ą▓ąĄčĆčłąĄąĮ ąĖ ą┐ąŠčĆą░ ą┤ąĄą╗ą░čéčī ąĮąŠą▓čŗą╣ ąĘą░ą┐čāčüą║ ą┐čĆąĖąĄą╝ą░. ąØą░ ą┤ąĖą░ą│čĆą░ą╝ą╝ąĄ ą┐ąŠą║ą░ąĘą░ąĮ ą░ą╗ą│ąŠčĆąĖčéą╝ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ. ąÜąŠą┤ ą╝ąĄąČą┤čā ą╝ąĄčéą║ą░ą╝ąĖ ąØąÉą¦ąÉąøą× ąĖ ą║ąŠąĮąĄčå ą┤ąŠą╗ąČąĄąĮ ą▓čŗąĘčŗą▓ą░čéčīčüčÅ ą▓ ą│ą╗ą░ą▓ąĮąŠą╝ čåąĖą║ą╗ąĄ main ą┐čĆąŠą│čĆą░ą╝ą╝čŗ firmware ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ.

ąŻą┐čĆąŠčēąĄąĮąĮčŗą╣ ą┐čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ ą┐čĆąĖąĄą╝ą░:
#define CDCDATABUFFERSIZE \ BOARD_USB_ENDPOINTS_MAXPACKETSIZE(CDCDSerialDriverDescriptors_DATAIN)
//čĆą░ąĘą╝ąĄčĆ ą│ą╗ą░ą▓ąĮąŠą│ąŠ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░
#define RXCDC_BUF_SIZE 256
#define RXCDC_BUF_MASK (RXCDC_BUF_SIZE-1)
//ą▓čĆąĄą╝ąĄąĮąĮčŗą╣ ą▒čāč乥čĆ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ CDCDSerialDriver_Read
unsigned char usbCDCBuffer[CDCDATABUFFERSIZE];
//ą│ą╗ą░ą▓ąĮčŗą╣ ą║ąŠą╗čīčåąĄą▓ąŠą╣ ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░
u8 RXCDC[RXCDC_BUF_SIZE];
//ąĖąĮą┤ąĄą║čüčŗ ą▒čāč乥čĆą░ RXCDC ąĮą░ ą▓ą▓ąŠą┤ ąĖ ą▓čŗą▓ąŠą┤
u8 inRXCDC, outRXCDC;
//čäą╗ą░ąČąŠą║ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ą░
bool NeedInitCDCDSerialDriver_Read;
//------------------------------------------------------------------------------
/// Callback, ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĘą░ą┐čāčüą║ą░ąĄą╝čŗą╣ ą┐ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ ą┐čĆąĖąĄą╝ą░
/// ą▒ą╗ąŠą║ą░ ą┤ą░ąĮąĮčŗčģ USB CDC. ą¤čĆąĖąĮčÅčéčŗąĄ ą┤ą░ąĮąĮčŗąĄ čéčāą┐ąŠ ą║ąŠą┐ąĖčĆčāčÄčéčüčÅ
/// ą▓ ą│ą╗ą░ą▓ąĮčŗą╣ ą║ąŠą╗čīčåąĄą▓ąŠą╣ ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░ ą┐ąŠ ąĖąĮą┤ąĄą║čüčā inRXCDC,
/// ąŠčéą║čāą┤ą░ ą┐ąŠč鹊ą╝ ą┤ą░ąĮąĮčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą╗ąĄą│ą║ąŠ ą┐čĆąŠčćąĖčéą░ąĮčŗ ą┐ąŠ ąĖąĮą┤ąĄą║čüčā
/// outRXCDC.
//------------------------------------------------------------------------------
static void UsbCDCDataReceived(unsigned int unused,
unsigned char status,
unsigned int received,
unsigned int remaining)
{
char *bufpnt;
// Check that data has been received successfully
if (status == USBD_STATUS_SUCCESS)
{
bufpnt = (char*)usbCDCBuffer;
//trace_LOG(trace_INFO, "UsbDataReceived: %u\n\r", received);
while (received)
{
RXCDC[inRXCDC++] = *bufpnt;
inRXCDC &= RXCDC_BUF_SIZE;
bufpnt++;
received--;
}
// Check if bytes have been discarded
if ((received == CDCDATABUFFERSIZE) && (remaining > 0))
{
trace_LOG(trace_INFO,
"UsbDataReceived: %u bytes discarded\n\r",
remaining);
}
NeedInitCDCDSerialDriver_Read = true;
}
else
{
trace_LOG(trace_INFO, "UsbDataReceived: Transfer error\n\r");
}
}
//[ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą┐čĆąĖąĄą╝ą░, ą┐čĆąŠą║čĆčāčćąĖą▓ą░ąĄčéčüčÅ ą▓čüąĄą│ą┤ą░ ąĖąĘ ą│ą╗ą░ą▓ąĮąŠą│ąŠ čåąĖą║ą╗ą░]
if (NeedInitCDCDSerialDriver_Read)
{
NeedInitCDCDSerialDriver_Read = false;
CDCDSerialDriver_Read(usbCDCBuffer,
CDCDATABUFFERSIZE,
(TransferCallback) UsbCDCDataReceived,
0);
}
ą¤čĆąĖąĮąĖą╝ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮčŗ ąĖąĘ ą║ąŠą╗čīčåąĄą▓ąŠą│ąŠ ą▒čāč乥čĆą░ RXCDC ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą┐ąŠ ąĖąĮą┤ąĄą║čüčā outRXCDC, ą║ąŠą│ą┤ą░ čŹč鹊 čāą┤ąŠą▒ąĮąŠ (ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ ą┐čĆąŠ č鹥čģąĮąĖą║čā čĆą░ą▒ąŠčéčŗ čü ą║ąŠą╗čīčåąĄą▓čŗą╝ ą▒čāč乥čĆąŠą╝ čüą╝. ą▓ [3]). ąÆąĮąĖą╝ą░ąĮąĖąĄ! ąÜą░ą║ ąĖ ą▓ čüą╗čāčćą░ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ, čäą╗ą░ąČąŠą║ NeedInitCDCDSerialDriver_Read ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ čüą▒čĆąŠčłąĄąĮ ą┤ąŠ ą▓čŗąĘąŠą▓ą░ CDCDSerialDriver_Read, ąĖąĮą░č湥, ąĄčüą╗ąĖ čüą┤ąĄą╗ą░čéčī ąĮą░ąŠą▒ąŠčĆąŠčé, č鹊 čŹč鹊 ą╝ąŠąČąĄčé čüčéą░čéčī ą┐čĆąĖčćąĖąĮąŠą╣ čéčĆčāą┤ąĮąŠčāą╗ąŠą▓ąĖą╝ąŠą╣ ąŠčłąĖą▒ą║ąĖ - ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ (callback UsbCDCDataReceived) ą╝ąŠąČąĄčé čüčĆą░ą▒ąŠčéą░čéčī ą┤ąŠ čüą▒čĆąŠčüą░ čäą╗ą░ąČą║ą░ NeedInitCDCDSerialDriver_Read, ąĖ ąĮąŠą▓čŗą╣ ą┐čĆąĖąĄą╝ ą▒ąŠą╗čīčłąĄ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ąĮą░čćąĮąĄčéčüčÅ.
[ą×čéčüą╗ąĄąČąĖą▓ą░ąĮąĖąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ąĖ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ č鹥čĆą╝ąĖąĮą░ą╗ą░ ą║ ą▓ąĖčĆčéčāą░ą╗čīąĮąŠą╝čā COM-ą┐ąŠčĆčéčā]
ąÜąŠą│ą┤ą░ ą║ ą▓ąĖčĆčéčāą░ą╗čīąĮąŠą╝čā COM-ą┐ąŠčĆčéčā ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ č鹥čĆą╝ąĖąĮą░ą╗ą░ (HyperTerminal, SecureCRT, TerraTerm, putty ąĖą╗ąĖ ą░ąĮą░ą╗ąŠą│ąĖčćąĮą░čÅ), č鹊 čģąŠčüčé ą┐ąĄčĆąĄą┤ą░ąĄčé čāčüčéčĆąŠą╣čüčéą▓čā USB ąĘą░ą┐čĆąŠčü SETUP čü čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ą╝ą╗ą░ą┤čłąĖą╝ ą▒ąĖč鹊ą╝ (D0) ą▓ ą┐ąŠą╗ąĄ ąĘą░ą┐čĆąŠčüą░ wValue. ąÜąŠą│ą┤ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąŠčéą║ą╗čÄčćą░ąĄčéčüčÅ (ą┐čĆąĖ čŹč鹊ą╝ COM-ą┐ąŠčĆčé ąŠčüą▓ąŠą▒ąŠąČą┤ą░ąĄčéčüčÅ), č鹊 ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ č鹊čé ąČąĄ čüą░ą╝čŗą╣ ąĘą░ą┐čĆąŠčü, ąĮąŠ ą┐čĆąĖ čŹč鹊ą╝ ą╝ą╗ą░ą┤čłąĖą╣ ą▒ąĖčé ą▓ ą┐ąŠą╗ąĄ wValue čüą▒čĆąŠčłąĄąĮ. ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ąĖ ąŠčéą║ą╗čÄč湥ąĮąĖąĄ č鹥čĆą╝ąĖąĮą░ą╗čīąĮąŠą│ąŠ ą║ą╗ąĖąĄąĮčéą░ ą┐ąŠą╗ąĄąĘąĮąŠ ąŠčéčüą╗ąĄąČąĖą▓ą░čéčī ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ą▓čŗą┤ą░ą▓ą░čéčī ą┐čĆąĖą▓ąĄčéčüčéą▓ąĖąĄ ą▓ ą║ąŠąĮčüąŠą╗ąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, ąĖą╗ąĖ čćč鹊ą▒čŗ ą░ą║čéąĖą▓ąĖąĘąĖčĆąŠą▓ą░čéčī ą║ą░ą║čāčÄ-ą╗ąĖą▒ąŠ ą░ą┐ą┐ą░čĆą░čéčāčĆčā (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą▓ą║ą╗čÄčćą░čéčī ą▓ąĮąĄčłąĮąĖą╣ ą╝ąŠą┤ąĄą╝).
ąŚą░ą┐čĆąŠčüčŗ SETUP ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą▓ ą╝ąŠą┤čāą╗ąĄ CDCDSerialDriver.c ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣ CDCDSerialDriver_RequestHandler. ąĪąŠčüč鹊čÅąĮąĖąĄ ą▒ąĖčéą░ D0 ą▓ ą┐ąŠą╗ąĄ wValue (ą▒ąĖčé D0 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą┐ąŠą┤ą║ą╗čÄčćąĖą╗čüčÅ ąĖą╗ąĖ ąŠčéą║ą╗čÄčćąĖą╗čüčÅ č鹥čĆą╝ąĖąĮą░ą╗). ąóčāą┤ą░ ą╝ąŠąČąĮąŠ ą┤ąŠą▒ą░ą▓ąĖčéčī ąĮčāąČąĮčŗą╣ ą║ąŠą┤, ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé ąĘą░ą┐čāčüą║ą░čéčīčüčÅ ą┐čĆąĖ čüąŠą▒čŗčéąĖčÅčģ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ąĖą╗ąĖ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ č鹥čĆą╝ąĖąĮą░ą╗ą░, ą┐čĆąĖą╝ąĄčĆ:
//------------------------------------------------------------------------------
/// ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖąĄ ą┤ą╗čÅ ą║ą╗ą░čüčüą░ CDC ąĘą░ą┐čĆąŠčüčŗ SETUP. ąöąŠą╗ąČąĄąĮ
/// ą▓čŗąĘčŗą▓ą░čéčīčüčÅ ąĖąĘ ąĮąŠą▓ąŠą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą╝ąĄč鹊ą┤ą░ USBDCallbacks_RequestReceived().
/// param čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ 菹║ąĘąĄą╝ą┐ą╗čÅčĆ USBGenericRequest.
//------------------------------------------------------------------------------
void CDCDSerialDriver_RequestHandler(const USBGenericRequest *request)
{
TRACE_INFO_WP("NewReq ");
// Handle the request
switch (USBGenericRequest_GetRequest(request))
{
case CDCGenericRequest_SETLINECODING:
CDCDSerialDriver_SetLineCoding();
break;
case CDCGenericRequest_GETLINECODING:
CDCDSerialDriver_GetLineCoding();
break;
case CDCGenericRequest_SETCONTROLLINESTATE:
CDCDSerialDriver_SetControlLineState(
CDCSetControlLineStateRequest_ActivateCarrier(request),
CDCSetControlLineStateRequest_IsDtePresent(request));
//ąØąÉą¦ąÉąøą× ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĮąŠą│ąŠ ą║ąŠą┤ą░
if (CDCSetControlLineStateRequest_IsDtePresent(request))
{
//ą¤čĆąŠąĖąĘąŠčłą╗ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ ą▓ąĖčĆčéčāą░ą╗čīąĮąŠą╝čā COM-ą┐ąŠčĆčéčā ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣
// č鹥čĆą╝ąĖąĮą░ą╗čīąĮąŠą│ąŠ ą║ą╗ąĖąĄąĮčéą░ (putty).
ModemON();
Greeting();
}
else
{
//ąóąĄčĆą╝ąĖąĮą░ą╗čīąĮčŗą╣ ą║ą╗ąĖąĄąĮčé ąŠčéą║ą╗čÄčćąĖą╗čüčÅ.
ModemOFF();
}
//ąÜą×ąØąĢą” ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĮąŠą│ąŠ ą║ąŠą┤ą░
break;
default:
USBDDriver_RequestHandler(&(cdcdSerialDriver.usbdDriver), request);
break;
}
}
[ąóąĄčüčéąĖčĆąŠą▓ą░ąĮąĖąĄ]
ąÆ ą┐čĆąĖą╝ąĄčĆąĄ ą║ąŠą┤ą░ usb-device-cdc-serial-project-looped ą┐ąŠ čüčüčŗą╗ą║ąĄ [1] ą┐čĆąĖąĄą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ąĘą░ą║ąŠą╗čīčåąŠą▓ą░ąĮ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā čü čåąĄą╗čīčÄ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ. ą£ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░, ą║ąŠč鹊čĆčāčÄ ą┐ąŠą║ą░ąĘą░ą╗ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ [4], čüąŠčüčéą░ą▓ąĖą╗ą░ 11.26 ą║ąĖą╗ąŠą▒ą░ą╣čéą░/čüąĄą║ ą┐čĆąĖ ąĮą░čüčéčĆąŠą╣ą║ąĄ COM-ą┐ąŠčĆčéą░ USB CDC ąĮą░ čüą║ąŠčĆąŠčüčéčī 115200 ą▒ąŠą┤, 8 ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ, ą▒ąĄąĘ č湥čéąĮąŠčüčéąĖ, 1 čüč鹊ą┐-ą▒ąĖčé (čĆąĄą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī čüąŠčüčéą░ą▓ąĖą╗ą░ ą┐čĆąĖą╝ąĄčĆąĮąŠ 92240 ą▒ąĖčé/čüąĄą║). ą¤ąŠą╗čāčćąĖą╗ą░čüčī ą╝ąĄąĮčīčłąĄ 115200 ą▒ąĖčé/čüąĄą║ ąĖąĘ-ąĘą░ ąĮą░ą║ą╗ą░ą┤ąĮčŗčģ čĆą░čüčģąŠą┤ąŠą▓ ą┐čĆąĖ ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ąĄ ą┐čĆąĖąĄą╝ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ, ą░ čéą░ą║ ąČąĄ ąĖąĘ-ąĘą░ ąĮą░ą╗ąĖčćąĖčÅ čüčéą░čĆč鹊ą▓ąŠą│ąŠ ąĖ čüč鹊ą┐ąŠą▓ąŠą│ąŠ ą▒ąĖč鹊ą▓ ą▓ čäąĖąĘąĖč湥čüą║ąŠą╝ ą┐ąŠč鹊ą║ąĄ ą┤ą░ąĮąĮčŗčģ. ą£ąŠąČąĮąŠ ąĘą░ ąŠą┤ąĖąĮ čĆą░ąĘ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ą┐ąŠčĆčåąĖčÄ ą┤ą░ąĮąĮčŗčģ ą▒ą╗ąŠą║ąŠą╝ ą╗čÄą▒ąŠą│ąŠ čĆą░ąĘą╝ąĄčĆą░ ą┤ąŠ 4096 ą▒ą░ą╣čé.

AT91 USB CDC Driver Implementation (ą┐ąĄčĆąĄą▓ąŠą┤ ą┤ą░čéą░čłąĖčéą░ Atmel doc6269.pdf)
[1. ąÆą▓ąĄą┤ąĄąĮąĖąĄ]
ąÜą╗ą░čüčü USB Communication Device Class (CDC) ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą│ą╗ą░ą▓ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ą┤ą╗čÅ ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮąĖčÅ ą▓čüąĄčģ čéąĖą┐ąŠą▓ čüąĄč鹥ą▓čŗčģ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ ą┐ąŠ čłąĖąĮąĄ Universal Serial Bus (USB). ąŁč鹊čé ą║ą╗ą░čüčü ą┤ąĄą╗ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮčŗą╝ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī č鹥ą╗ąĄą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ č鹥ą╗ąĄč乊ąĮąŠą▓ ąĖ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗčģ ą╝ąŠą┤ąĄą╝ąŠą▓, ą░ čéą░ą║ąČąĄ čüąĄč鹥ą▓čŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ čéąĖą┐ą░ ą║ą░ą▒ąĄą╗čīąĮčŗčģ ąĖą╗ąĖ ADSL ą╝ąŠą┤ąĄą╝ąŠą▓.
ąÆ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ čāčüčéčĆąŠą╣čüčéą▓ąŠ CDC ą▓ą║ą╗čÄčćą░ąĄčé čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ ą┤ąŠą▓ąŠą╗čīąĮąŠ čüą╗ąŠąČąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓, ą║ą╗ą░čüčü CDC ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ ąŠč湥ąĮčī ą┐čĆąŠčüč鹊ą│ąŠ ą╝ąĄč鹊ą┤ą░ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ č湥čĆąĄąĘ USB. ąØą░ą┐čĆąĖą╝ąĄčĆ, čāčüčéčĆąŠą╣čüčéą▓ąŠ CDC ą╝ąŠąČąĄčé ą┐ąŠčÅą▓ąĖčéčīčüčÅ ąĮą░ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ ą║ą░ą║ virtual COM port (VCP, ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╣ COM-ą┐ąŠčĆčé), ą║ąŠč鹊čĆčŗą╣ ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ čāą┐čĆąŠčēą░ąĄčé ąĮą░ą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ ą┤ą╗čÅ ą║ąŠą╝ą┐čīčÄč鹥čĆą░ (ą¤ą× čģąŠčüčéą░).
ąÆ čŹč鹊ą╝ ą┤ąŠą║čāą╝ąĄąĮč鹥 ą┐ąŠą║ą░ąĘą░ąĮąŠ, ą║ą░ą║ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī CDC ąĮą░ ą┐ą╗ą░čéč乊čĆą╝ąĄ AT91 ARM┬« Thumb┬« ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ AT91 USB Framework ą║ąŠą╝ą┐ą░ąĮąĖąĖ Atmel. ąöą╗čÅ čŹč鹊ą╣ čåąĄą╗ąĖ ą▒čāą┤ąĄčé ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮą░ ą┐ąŠčłą░ą│ąŠą▓ą░čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ą┐čĆąĖą╝ąĄčĆą░ ą║ąŠąĮą▓ąĄčĆč鹥čĆą░ USB-to-Serial.
[2. ąöąŠą║čāą╝ąĄąĮčéčŗ, ą║ąŠč鹊čĆčŗąĄ čāą┐ąŠą╝čÅąĮčāčéčŗ ą▓ čüčéą░čéčīąĄ]
1. Universal Serial Bus Class Definitions for Communication Devices, Version 1.1, January 19, 1999.
2. Atmel Corp., AT91 USB Framework, 2006.
[3. ą×čüąĮąŠą▓čŗ Communication Device Class]
ąŁčéą░ čüąĄą║čåąĖčÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▒ą░ąĘąŠą▓čāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ Communication Device Class - ą║ąŠą│ą┤ą░ ąŠąĮ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, ą║ą░ą║ąĖąĄ ą┤ą╗čÅ ąĮąĄą│ąŠ ąĖą╝ąĄčÄčéčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆčŗ. ąöą░ąĄčéčüčÅ čéą░ą║ąČąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ą░čĆčģąĖč鹥ą║čéčāčĆčŗ.
3.1 ąØą░ąĘąĮą░č湥ąĮąĖąĄ CDC
CDC ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ - ą╝ąŠą┤ąĄą╝ąŠą▓ (čåąĖčäčĆąŠą▓čŗčģ ąĖ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗčģ), č鹥ą╗ąĄč乊ąĮąŠą▓ ąĖą╗ąĖ čüąĄč鹥ą▓čŗčģ čāčüčéčĆąŠą╣čüčéą▓ (čüąĄč鹥ą▓čŗąĄ ą░ą┤ą░ą┐č鹥čĆčŗ NIC). CDC čÅą▓ą╗čÅąĄčéčüčÅ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╣ čüčĆąĄą┤ąŠą╣, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĄą╣ čłąĖčĆąŠą║ąĖą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ čäąĖąĘąĖč湥čüą║ąĖčģ čüą╗ąŠąĄą▓ (xDSL, ATM, ąĖ čé. ą┐.) ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓.
ąÆ čŹč鹊ą╝ ą┤ąŠą║čāą╝ąĄąĮč鹥 CDC ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą║ąŠąĮą▓ąĄčĆč鹥čĆą░ USB ą▓ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé. ąóčĆą░ą┤ąĖčåąĖąŠąĮąĮčŗąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą┐ąŠčĆčéčŗ (čéą░ą║ąČąĄ ąĖąĘą▓ąĄčüčéąĮčŗąĄ ą║ą░ą║ COM ąĖą╗ąĖ RS-232) ą▓čüąĄ ąĄčēąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ąŠč湥ąĮčī čłąĖčĆąŠą║ąŠ, ąŠą┤ąĮą░ą║ąŠ čüąŠą▓čĆąĄą╝ąĄąĮąĮčŗąĄ ą║ąŠą╝ą┐čīčÄč鹥čĆčŗ PC (ąŠčüąŠą▒ąĄąĮąĮąŠ ąĮąŠčāčéą▒čāą║ąĖ) čüąĄą╣čćą░čü ą┐ąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ ą▒ąĄąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┐ąŠčĆč鹊ą▓. ą¤čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čī USB-to-serial ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą║ą░ą║ ą╝ąŠčüčé ą╝ąĄąČą┤čā čéčĆą░ą┤ąĖčåąĖąŠąĮąĮčŗą╝ RS-232 ąĖ ą┐ąŠčĆč鹊ą╝ USB.
[3.2 ąÉčĆčģąĖč鹥ą║čéčāčĆą░]
3.2.1 ąśąĮč鹥čĆč乥ą╣čüčŗ
ąĪčéą░ąĮą┤ą░čĆč鹊ą╝ CDC (CDC specification 1.1) ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą┤ą▓ą░ ąĖąĮč鹥čĆč乥ą╣čüą░. ą¤ąĄčĆą▓čŗą╣ ąĖąĘ ąĮąĖčģ, Communication Class Interface, ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝. ą×ąĮ ą▓ą║ą╗čÄčćą░ąĄčé ą▓ čüąĄą▒čÅ ąĘą░ą┐čĆąŠčüčŗ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖąĄą╝ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĄą│ąŠ ąŠčéą▓ąĄčéčŗ, ą░ čéą░ą║ąČąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąŠ čüąŠą▒čŗčéąĖčÅčģ. ąŁč鹊čé ąĖąĮč鹥čĆč乥ą╣čü ą╝ąŠąČąĄčé ąĖąĮąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čŗąĘąŠą▓ą░ą╝ąĖ, ąĮą░ą┐čĆąĖą╝ąĄčĆ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ąĖ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄą╝ čüąŠąĄą┤ąĖąĮąĄąĮąĖą╣, ą░ čéą░ą║ąČąĄ ą┤ą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĖčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓.
ąöčĆčāą│ąŠą╣ ąĖąĮč鹥čĆč乥ą╣čü ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą┤ą╗čÅ ą┐čĆąŠčüč鹊ą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ. ą×ąĮ ąĮąŠčüąĖčé ąĮą░ąĘą▓ą░ąĮąĖąĄ Data Class Interface. ąŁč鹊čé ąĖąĮč鹥čĆč乥ą╣čü ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüą┐ąŠčüąŠą▒ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ ą╝ąĄąČą┤čā ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ąĖ čģąŠčüč鹊ą╝ (ą║ąŠą╝ą┐čīčÄč鹥čĆąŠą╝). ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ čŹč鹊čé ąĖąĮč鹥čĆč乥ą╣čü čĆą░ąĘčĆąĄčłą░ąĄčé ą╝čāą╗čīčéąĖą┐ą╗ąĖčåąĖčĆąŠą▓ą░ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĖ ą║ąŠą╝ą░ąĮą┤ ą┐ąŠą▓ąĄčĆčģ ąŠą┤ąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░, ą┐čāč鹥ą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąŠą▒ąĄčĆč鹊ą║ (wrappers).
3.2.2 ąÜąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ (endpoints)
Communication Class Interface čéčĆąĄą▒čāąĄčé ą┤ą╗čÅ čüąĄą▒čÅ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĮčā ą║ąŠąĮąĄčćąĮčāčÄ č鹊čćą║čā, ą║ąŠč鹊čĆą░čÅ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮą░ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝. ąöą╗čÅ čŹč鹊ą│ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĮąŠą╝ąĄčĆ 0 (default control endpoint). ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ (čćč鹊 ąĮąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ) ą╝ąŠąČąĄčé ą▓čŗą┤ąĄą╗ąĄąĮą░ ą┤čĆčāą│ą░čÅ ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ ą┤ą╗čÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąŠ čüąŠą▒čŗčéąĖčÅčģ (events notification). ą×ą▒čŗčćąĮąŠ čŹč鹊 ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ čéąĖą┐ą░ Interrupt IN. ą¦č鹊ą▒čŗ ąĮąĄ ą▒čŗą╗ąŠ ą┐čāčéą░ąĮąĖčåčŗ: č鹥čĆą╝ąĖąĮ interrupt (ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ) ą▓ ą┤ą░ąĮąĮąŠą╝ ą║ąŠąĮč鹥ą║čüč鹥 ąŠąĘąĮą░čćą░ąĄčé ą┐čĆąŠčüč鹊 ąĮąĄą║čāčÄ čüčāčēąĮąŠčüčéčī ą┐čĆąŠč鹊ą║ąŠą╗ą░ USB (čŹč鹊 ąĮąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░).
ąöą╗čÅ Data Class Interface ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ ą▓ ą┐ą░čĆą░čģ ąŠą┤ąĮąŠą│ąŠ ąĖ č鹊ą│ąŠ ąČąĄ čéąĖą┐ą░. ąŁč鹊 ąĮčāąČąĮąŠ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą▓ ąŠą▒ąĄ čüč鹊čĆąŠąĮčŗ - Data IN (ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ čģąŠčüčéčā) ąĖ Data OUT (ąŠčé čģąŠčüčéą░ ą║ čāčüčéčĆąŠą╣čüčéą▓čā). ąöą╗čÅ čŹč鹊ą╣ čåąĄą╗ąĖ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ čéąĖą┐ą░ Bulk ąĖ Isochronous.
ąĀąĖčü. 3-1. ąÉčĆčģąĖč鹥ą║čéčāčĆą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą║ą╗ą░čüčüą░ CDC

ą¤ąŠą┤ Host ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ čģąŠčüčé USB (ą║ąŠą╝ą┐čīčÄč鹥čĆ). ąØą░ ą│ąŠą╗čāą▒ąŠą╝ č乊ąĮąĄ ą▓ čüčģąĄą╝ąĄ ą┐ąŠą║ą░ąĘą░ąĮčŗ čćą░čüčéąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░, čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮčŗąĄ ą▓ firmware ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ AT91. ą¤ąŠą┤ Device ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ čāčüčéčĆąŠą╣čüčéą▓ąŠ USB ą║ą╗ą░čüčüą░ CDC. Data Class Interface (Data IN, Data OUT) ąĖ Communication Class Interface (Control 0, Interrupt IN) - ą╗ąŠą│ąĖč湥čüą║ą░čÅ ą░ą▒čüčéčĆą░ą║čåąĖčÅ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓, čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ą▓ firmware ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐ąŠą▓ąĄčĆčģ ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║ UDP. Control 0 - čāą┐čĆą░ą▓ą╗čÅčÄčēą░čÅ ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ 0 (default control endpoint), Data IN, Data OUT, Interrupt IN - ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ UDP čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ čéąĖą┐ą░. Communication peripheral - ą░ą┐ą┐ą░čĆą░čéčāčĆą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüčéą░ čŹč鹊 čĆąĄą│ąĖčüčéčĆčŗ UDP), ą║ąŠč鹊čĆą░čÅ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčé ą┐ąŠą┤ą┤ąĄčƹȹ║čā ą┐čĆąŠč鹊ą║ąŠą╗ą░ USB.
3.2.3 ą£ąŠą┤ąĄą╗ąĖ
ą¦č鹊ą▒čŗ čāč湥čüčéčī ą▓čüąĄ čĆą░ąĘąĮąŠąŠą▒čĆą░ąĘąĖąĄ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą╝ąŠą┤ąĄą╗ąĄą╣. ą×ąĮąĖ ąŠą┐ąĖčüčŗą▓ą░čÄčé čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą▓ č鹥čĆą╝ąĖąĮą░čģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓, ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ ąĖ ąĘą░ą┐čĆąŠčüčŗ, ą║ąŠč鹊čĆčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ąŠą╗ąČąĮąŠ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčéčī ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čüą▓ąŠą╣ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ čĆąŠą╗ąĖ. ąŚą┤ąĄčüčī ą┐čĆąĖą▓ąĄą┤ąĄąĮ čüą┐ąĖčüąŠą║ ą╝ąŠą┤ąĄą╗ąĄą╣ ąĖąĘ CDC specification 1.1, čüą│čĆčāą┐ą┐ąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą┐ąŠ ąĖčģ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéąĖ (ąĮą░ąĘąĮą░č湥ąĮąĖčÄ čāčüčéčĆąŠą╣čüčéą▓):
POTS (Plain Old Telephone Service, čéčĆą░ą┤ąĖčåąĖąŠąĮąĮą░čÅ ą░ąĮą░ą╗ąŠą│ąŠą▓ą░čÅ č鹥ą╗ąĄč乊ąĮąĮą░čÅ čüą╗čāąČą▒ą░)
- Direct Line Control Model (ą╝ąŠą┤ąĄą╗čī ą┐čĆčÅą╝ąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą╗ąĖąĮąĖąĄą╣ čüą▓čÅąĘąĖ)
- Datapump Model (ą╝ąŠą┤ąĄą╗čī ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ)
- Abstract Control Model (ą░ą▒čüčéčĆą░ą║čéąĮą░čÅ ą╝ąŠą┤ąĄą╗čī čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ)
Telephone (č鹥ą╗ąĄč乊ąĮąĖčÅ)
- Telephone Control Model (ą╝ąŠą┤ąĄą╗čī čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ č鹥ą╗ąĄč乊ąĮąŠą╝)
ISDN (čüčéą░ąĮą┤ą░čĆčé čåąĖčäčĆąŠą▓ąŠą╣ č鹥ą╗ąĄč乊ąĮąĖąĖ)
- Multi-Channel Model (ą╝ąĮąŠą│ąŠą║ą░ąĮą░ą╗čīąĮą░čÅ ą╝ąŠą┤ąĄą╗čī)
- USB CAPI Model
Networking (čüąĄč鹥ą▓čŗąĄ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ)
ŌĆō Ethernet Networking Model (čüąĄč鹥ą▓ą░čÅ ą╝ąŠą┤ąĄą╗čī Ethernet)
- ATM Networking Control Model (čüąĄč鹥ą▓ą░čÅ ą╝ąŠą┤ąĄą╗čī čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ATM)
ąØąĄą║ąŠč鹊čĆčŗąĄ ąĖąĘ čŹčéąĖčģ ą╝ąŠą┤ąĄą╗ąĄą╣ ąĖ ąĖčģ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▒čāą┤ąĄčé ą┤ąĄčéą░ą╗čīąĮąŠ čĆą░čüčüą╝ąŠčéčĆąĄąĮčŗ ą▓ čŹč鹊ą╝ ą┤ąŠą║čāą╝ąĄąĮč鹥, ą║ą░ą║ ąĖ ą▓ąŠą┐čĆąŠčüčŗ ąĖčģ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ.
3.2.4 Class-Specific Descriptors (čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖąĄ ą┤ąĄčüą║čĆąĖą┐č鹊čĆčŗ ą║ą╗ą░čüčüą░ CDC)
ąśąĮč乊čĆą╝ą░čåąĖčÅ, ą║ą░čüą░čÄčēą░čÅčüčÅ ą║ą╗ą░čüčüą░ CDC, ąŠą┐ąĖčüą░ąĮą░ ą▓ Functional Descriptors (ą┤ąĄčüą║čĆąĖą┐č鹊čĆčŗ čäčāąĮą║čåąĖąĖ). ą×ąĮąĖ ąĘą░ą┤ą░čÄčé čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąĖąĮč鹥čĆč乥ą╣čüą░ - ą║ą░ą║ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓čŗąĘąŠą▓ą░ą╝ąĖ, čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą░čéčĆąĖą▒čāčéčŗ, čüą┐ąĄčåąĖčäąĖčćąĮčŗąĄ ą┤ą╗čÅ ą╝ąŠą┤ąĄą╗ąĖ.
ąóą░ą║ ą║ą░ą║ čüčéą░ąĮą┤ą░čĆčé CDC ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą╝ąĮąŠąČąĄčüčéą▓ąŠ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗčģ ą┤ąĄčüą║čĆąĖą┐č鹊čĆąŠą▓, ąŠąĮąĖ ąĘą┤ąĄčüčī ąĮąĄ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čÄčéčüčÅ. ąÆą╝ąĄčüč鹊 čŹč鹊ą│ąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą░čüą┐ąĄą║čéčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą║ą╗ą░čüčüą░ CDC.
3.3 Host Drivers (ą┤čĆą░ą╣ą▓ąĄčĆčŗ čģąŠčüčéą░)
ąæąŠą╗čīčłąĖąĮčüčéą▓ąŠ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčŗčģ čüąĖčüč鹥ą╝ (Operating Systems, OS) čüąĄą│ąŠą┤ąĮčÅ ą▓ą║ą╗čÄčćą░čÄčé ą▓ čüąĄą▒čÅ ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą┤ą╗čÅ čłąĖčĆąŠą║ąŠą│ąŠ čüą┐ąĄą║čéčĆą░ ą║ą╗ą░čüčüąŠą▓ USB. ąŁč鹊 čāą┐čĆąŠčēą░ąĄčé čĆą░ąĘčĆą░ą▒ąŠčéą║čā čāčüčéčĆąŠą╣čüčéą▓ą░ USB, ą┐ąŠčüą║ąŠą╗čīą║čā ą┐ąŠą╗ąŠą▓ąĖąĮčā čüą╗ąŠąČąĮąŠą╣ čĆą░ą▒ąŠčéčŗ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé čüąĖčüč鹥ą╝ąĮąŠąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ OS čģąŠčüčéą░. ą¤čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĖ ą╝ąŠą│čāčé čüą║ąŠąĮčåąĄąĮčéčĆąĖčĆąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ąĮą░ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ USB, ąĖ ąĖą╝ ąĮąĄ ąĮčāąČąĮąŠ čĆą░ąĘčĆą░ą▒ą░čéčŗą▓ą░čéčī čüą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą┤ą╗čÅ čģąŠčüčéą░.
ąŚą┤ąĄčüčī ą┐čĆąĖą▓ąĄą┤ąĄąĮ čüą┐ąĖčüąŠą║ čĆą░ąĘą╗ąĖčćąĮčŗčģ čĆąĄą░ą╗ąĖąĘą░čåąĖą╣ CDC, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ ąĮąĄą║ąŠč鹊čĆčŗą╝ąĖ OS:
ŌĆó Windows┬«
ŌĆō Abstract Control Model
ŌĆō Remote NDIS
ŌĆó Linux┬«
ŌĆō Abstract Control Model
ŌĆō Ethernet Model
[4. USB to Serial Converter (ą║ąŠąĮą▓ąĄčĆč鹥čĆ USB - ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé)]
ąŁčéą░ čüąĄą║čåąĖčÅ ąŠą┐ąĖčüčŗą▓ą░ąĄčé čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ ą║ąŠąĮą▓ąĄčĆč鹥čĆą░ USB-to-serial, čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą║ą╗ą░čüčüą░ CDC ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ AT91 USB Framework. ąŚą░ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéčÅą╝ąĖ ąŠą▒čĆą░čēą░ą╣č鹥čüčī ą║ ą┤ąŠą║čāą╝ąĄąĮčéčā Atmel Ōä¢ 6263 ą┤ą╗čÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ čäčĆąĄą╣ą╝ą▓ąŠčĆą║čā USB framework, ąĖ ą║ čüčéą░ąĮą┤ą░čĆčéčā CDC Specification 1.1 ąĖ USB Specification 2.0 ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ, čüą▓čÅąĘą░ąĮąĮąŠą╣ čü USB/CDC.
4.1 ą¤čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĖąĄ
ąØąĄčüą╝ąŠčéčĆčÅ ąĮą░ č鹊, čćč鹊 USB ą▓čüąĄ ą▒ąŠą╗čīčłąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ąĮąŠą▓čŗčģ ą┐čĆąŠą┤čāą║čéą░čģ, ą╝ąĮąŠą│ąŠ čüčéą░čĆčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą▓čüąĄ ąĄčēąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčé čéčĆą░ą┤ąĖčåąĖąŠąĮąĮčŗą╣ RS-232 (ą║ąŠč鹊čĆčŗą╣ čéą░ą║ąČąĄ ąĮą░ąĘčŗą▓ą░čÄčé COM-ą┐ąŠčĆčé) ą┤ą╗čÅ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ čü PC. ąŁč鹊čé čüčéą░čĆčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą▓čüąĄ ąĄčēąĄ čłąĖčĆąŠą║ąŠ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮ, ąŠą┤ąĮą░ą║ąŠ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣ ą║ąŠą╝ą┐čīčÄč鹥čĆąŠą▓ ąĖ ą╝ą░č鹥čĆąĖąĮčüą║ąĖčģ ą┐ą╗ą░čé ąĮą░čćą░ą╗ąĖ ą┐ąŠčüčéą░ą▓ą╗čÅčéčī čüą▓ąŠąĖ ą╝ą░čłąĖąĮčŗ ą▒ąĄąĘ COM-ą┐ąŠčĆčéą░. ąÜąŠąĮą▓ąĄčĆč鹥čĆ USB-to-serial ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮ ą┤ą╗čÅ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖčÅ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā ą▓ąĖčĆčéčāą░ą╗čīąĮąŠą│ąŠ COM-ą┐ąŠčĆčéą░ (virtual COM port), čĆą░ą▒ąŠčéą░čÄčēąĄą│ąŠ ą┐ąŠą▓ąĄčĆčģ USB, čćč鹊 ą┐ąŠąĘą▓ąŠą╗ąĖčéčī ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ąŠ čéčĆą░ą┤ąĖčåąĖąŠąĮąĮąŠą╝čā ąĖąĮč鹥čĆč乥ą╣čüčā RS-232.
ąÆąĖčĆčéčāą░ą╗čīąĮčŗą╣ COM-ą┐ąŠčĆčé ą╝ąŠąČąĄčé čéą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ USB-čāčüčéčĆąŠą╣čüčéą▓čā čüčéą░čĆčŗą╝ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ą╝ąĖ PC. ąŁč鹊 čéą░ą║ąČąĄ ą┐čĆąŠčüč鹊ą╣ ą╝ąĄč鹊ą┤ ą┤ą╗čÅ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ č湥čĆąĄąĘ USB, ą┐čĆąĖ ą║ąŠč鹊čĆąŠą╝ ąĮąĄ ąĮčāąČąĮąŠ ą┐ąĖčüą░čéčī čüąŠą▒čüčéą▓ąĄąĮąĮčŗąĄ ą┤čĆą░ą╣ą▓ąĄčĆą░ (ąĖ ąĖąĮąŠą│ą┤ą░ ąĮąĄ ąĮčāąČąĮąŠ ą┤ą░ąČąĄ ą┐ąĖčüą░čéčī ą¤ą× čģąŠčüčéą░).
ąĀąĖčü. 4-1. ą£ąŠčüčé ą╝ąĄąČą┤čā čéčĆą░ą┤ąĖčåąĖąŠąĮąĮčŗą╝ (Legacy Device, ą▓ ą║ąŠč鹊čĆąŠą╝ čüč鹊ąĖčé RS-232) čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ąĖ ą║ąŠą╝ą┐čīčÄč鹥čĆąŠą╝ čü ą║ąŠąĮą▓ąĄčĆč鹥čĆąŠą╝ USB-to-Serial

4.2 ąÉčĆčģąĖč鹥ą║čéčāčĆą░
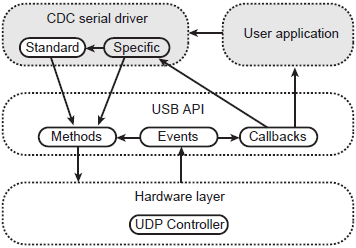
ąĪčĆąĄą┤ą░ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ AT91 USB Framework ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé API, ą║ąŠč鹊čĆąŠąĄ čāą┐čĆąŠčēą░ąĄčé čĆą░ąĘčĆą░ą▒ąŠčéą║čā ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ ą║ą╗ą░čüčüą░ USB čüąŠ čüč鹊čĆąŠąĮčŗ čāčüčéčĆąŠą╣čüčéą▓ą░ USB. ąÆ čŹč鹊ą╝ ą░ą┐ąĮąŠčāč鹥 ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐čĆąĖą╝ąĄčĆ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĮą░ ąŠčüąĮąŠą▓ąĄ AT91 USB Framework. ąØą░ čĆąĖčü. 4-2 ą┐ąŠą║ą░ąĘą░ąĮą░ ą░čĆčģąĖč鹥ą║čéčāčĆą░ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĮą░ ąŠčüąĮąŠą▓ąĄ čŹč鹊ą│ąŠ čäčĆąĄą╣ą╝ą▓ąŠčĆą║ą░.
ąĀąĖčü. 4-2. ąÉčĆčģąĖč鹥ą║čéčāčĆą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ AT91 USB Framework
4.3 ą£ąŠą┤ąĄą╗čī
ąĪčéą░ąĮą┤ą░čĆčé CDC ąĘą░ą┤ą░ąĄčé ą╝ąŠą┤ąĄą╗čī, ą║ąŠč鹊čĆą░čÅ ąŠčéą╗ąĖčćąĮąŠ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ ąĮą░čłąĄą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ: Abstract Control Model (ACM). ą×ąĮą░ čĆąĄą░ą╗ąĖąĘčāąĄčé ąĘą░ą┐čĆąŠčüčŗ ąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ, ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┤ą╗čÅ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ čü ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ RS-232.
Abstract Control Model čéčĆąĄą▒čāąĄčé ą┤ą▓čāčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓, Communication Class Interface ąĖ Data Class Interface. ąÜą░ąČą┤čŗą╣ ąĖąĘ ąĮąĖčģ ą┤ąŠą╗ąČąĄąĮ ąĖą╝ąĄčéčī ą┤ą▓ąĄ ą┐čĆąĖą▓čÅąĘą░ąĮąĮčŗąĄ ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ. ą¤ąŠčŹč鹊ą╝čā ąĮčāąČąĮąŠ ą▓čŗą┤ąĄą╗ąĖčéčī ąŠą┤ąĮčā ą║ąŠąĮąĄčćąĮčāčÄ č鹊čćą║čā, ą▓čŗą┤ąĄą╗ąĄąĮąĮčāčÄ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ (default Control endpoint 0) ąĖ ąŠą┤ąĮčā ą┤ą╗čÅ čāą▓ąĄą┤ąŠą╝ą╗ąĄąĮąĖą╣ ąŠ čüąŠą▒čŗčéąĖčÅčģ (ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮą░čÅ ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ čéąĖą┐ą░ Interrupt IN).
Data Class Interface čéą░ą║ąČąĄ ąĮčāąČą┤ą░ąĄčéčüčÅ ą▓ ą┤ą▓čāčģ ą║ąŠąĮąĄčćąĮčŗčģ č鹊čćą║ą░čģ, č湥čĆąĄąĘ ą║ąŠč鹊čĆčŗąĄ ą▒čāą┤čāčé ą┐ąĄčĆąĄąĮąŠčüąĖčéčīčüčÅ ą┤ą░ąĮąĮčŗąĄ ą║ čģąŠčüčéčā ąĖ ąŠčé čģąŠčüčéą░. ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, čŹčéąĖ ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ą╗ąĖą▒ąŠ čéąĖą┐ą░ Bulk, ą╗ąĖą▒ąŠ čéąĖą┐ą░ Isochronous. ąÆ čüą╗čāčćą░ąĄ ą║ąŠąĮą▓ąĄčĆč鹥čĆą░ USB-to-serial ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║ Bulk ą╝ąŠąČąĄčé ą▒čŗčéčī ą▒ąŠą╗ąĄąĄ ą┐ąŠą┤čģąŠą┤čÅčēąĖą╝, ą┐ąŠčüą║ąŠą╗čīą║čā ą▓ą░ąČąĮą░ ąĮą░ą┤ąĄąČąĮąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ, ąĖ ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ ąĮąĄ ą║čĆąĖčéąĖčćąĮą░ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ.
4.4 ąöąĄčüą║čĆąĖą┐č鹊čĆčŗ
ąöą╗čÅ ą║ąŠąĮą▓ąĄčĆč鹥čĆą░ USB-to-serial ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ą┤ąĄčüą║čĆąĖą┐č鹊čĆčŗ, čéą░ą║ąĖąĄ ą║ą░ą║ ąĮą░ą┐čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓ USB Specification 2.0. ąĪą╗ąĄą┤čāčÄčēąĖąĄ ą┐čĆąĖą╝ąĄčĆčŗ ą║ąŠą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāčÄčé čŹčéąĖ čüčéčĆčāą║čéčāčĆčŗ, ąŠą┐ąĖčüą░ąĮąĮčŗąĄ ą▓ ą░ą┐ąĮąŠčāč鹥 AT91 USB Framework.
ąöą╗čÅ ą┤ąĄčüą║čĆąĖą┐č鹊čĆąŠą▓, čüą┐ąĄčåąĖčäąĖčćąĮčŗčģ ą┤ą╗čÅ CDC, ąĮčāąČąĮčŗ ąĮąŠą▓čŗąĄ čéąĖą┐čŗ ą┤ą░ąĮąĮčŗčģ. ą×ą┤ąĮą░ą║ąŠ ąĖčģ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ čéčĆąĖą▓ąĖą░ą╗čīąĮą░, ą┐ąŠčüą║ąŠą╗čīą║čā ąŠąĮąĖ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąŠą┐ąĖčüą░ąĮčŗ ą▓ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ CDC. ąöąĄčéą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮčŗ (čāą║ą░ąĘą░ąĮčŗ ą║ąŠąĮą║čĆąĄčéąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ) č鹊ą╗čīą║ąŠ ąĘąĮą░č湥ąĮąĖčÅ, ąĮą░čģąŠą┤čÅčēąĖąĄčüčÅ ą▓ ą║ą░ąČą┤ąŠą╝ ą┤ąĄčüą║čĆąĖą┐č鹊čĆąĄ, čüą┐ąĖčüąŠą║ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗčģ čüčéčĆčāą║čéčāčĆ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą┐čĆąĖą╝ąĄčĆą░ čüą╗ąĄą┤čāčÄčēąĖą╣:
ŌĆó CDCHeaderDescriptor
ŌĆó CDCCallManagementDescriptor
ŌĆó CDCAbstractControlManagementDescriptor
ŌĆó CDCUnionDescriptor
4.4.1 Device Descriptor (ą┤ąĄčüą║čĆąĖą┐č鹊čĆ čāčüčéčĆąŠą╣čüčéą▓ą░)
The Device Descriptor ą┤ąŠą╗ąČąĄąĮ čāą║ą░ąĘą░čéčī ąĘąĮą░č湥ąĮąĖąĄ 02h ą▓ čüą▓ąŠąĄą╝ ą┐ąŠą╗ąĄ bDeviceClass, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą║ą╗ą░čüčüčā Communication Device Class. ąŁč鹊 ąĮčāąČąĮąŠ, čćč鹊ą▒čŗ ą┤čĆą░ą╣ą▓ąĄčĆ čģąŠčüčéą░ ą║ąŠčĆčĆąĄą║čéąĮąŠ ą┐čĆąŠą▓ąĄą╗ 菹Įčāą╝ąĄčĆą░čåąĖčÄ čāčüčéčĆąŠą╣čüčéą▓ą░: ą┐ąŠčüą║ąŠą╗čīą║čā čāčüčéčĆąŠą╣čüčéą▓ąŠ CDC čćą░čüč鹊 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▒ąŠą╗čīčłąĄ ąŠą┤ąĮąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░, ąŠąĮąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą╗ąŠą│ąĖč湥čüą║ąĖ čüą│čĆčāą┐ą┐ąĖčĆąŠą▓ą░ąĮčŗ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝, čćč鹊ą▒čŗ ąŠąĮąĖ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠ ąĮąĄ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░ą╗ąĖčüčī ą║ą░ą║ čĆą░ąĘą┤ąĄą╗čīąĮčŗąĄ.
ąöą╗čÅ CDC ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą║ąŠą┤čŗ ą┐ąŠą┤ą║ą╗ą░čüčüą░ (subclass codes) ąĖą╗ąĖ ą║ąŠą┤čŗ ą┐čĆąŠč鹊ą║ąŠą╗ą░ (protocol codes).
ąóą░ą║ ą▒čāą┤ąĄčé ą▓čŗą│ą╗čÅą┤ąĄčéčī ą┤ąĄčüą║čĆąĖą┐č鹊čĆ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ čüčéčĆčāą║čéčāčĆčŗ S_usb_device_descriptor structure ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ AT91 USB Framework:
const USBDeviceDescriptor deviceDescriptor =
{
sizeof(USBDeviceDescriptor),
USBGenericDescriptor_DEVICE,
USBDeviceDescriptor_USB2_00,
CDCDeviceDescriptor_CLASS,
CDCDeviceDescriptor_SUBCLASS,
CDCDeviceDescriptor_PROTOCOL,
BOARD_USB_ENDPOINTS_MAXPACKETSIZE(0),
CDCDSerialDriverDescriptors_VENDORID,
CDCDSerialDriverDescriptors_PRODUCTID,
CDCDSerialDriverDescriptors_RELEASE,
0, // ąĮąĄčé čüčéčĆąŠą║ąŠą▓ąŠą│ąŠ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ ą┤ą╗čÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ
1, // ąĖąĮą┤ąĄą║čü čüčéčĆąŠą║ąĖ ą┐čĆąŠą┤čāą║čéą░ čĆą░ą▓ąĄąĮ 1
0, // ąĮąĄčé čüčéčĆąŠą║ąŠą▓ąŠą│ąŠ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ ą┤ą╗čÅ čüąĄčĆąĖą╣ąĮąŠą│ąŠ ąĮąŠą╝ąĄčĆą░
1 // čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖą╝ąĄąĄčé č鹊ą╗čīą║ąŠ 1 ą▓ąŠąĘą╝ąŠąČąĮčāčÄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ
};
ą¤ąŠą╗čÅ Vendor ID (ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą▓ąĄąĮą┤ąŠčĆą░) ąĖ Product ID (ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐čĆąŠą┤čāą║čéą░) ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ ą┤ą╗čÅ ą┐čĆąŠčåąĄčüčüą░ 菹Įčāą╝ąĄčĆą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░. ąŚąĮą░č湥ąĮąĖąĄ Vendor ID ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÄ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĄą╣ USB-IF; ąĘąĮą░č湥ąĮąĖąĄ Product ID ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čī ąĮą░ąĘąĮą░čćą░ąĄčé čüą░ą╝. ąÆ ąĮą░čłąĄą╝ ą┐čĆąĖą╝ąĄčĆąĄ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ Atmel vendor ID (03EBh) ą▓ą╝ąĄčüč鹥 čü ąŠčéą┤ąĄą╗čīąĮčŗą╝ product ID (6119h).
4.4.2 Configuration Descriptor (ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ)
ą¤ąŠ ąĘą░ą┐čĆąŠčüčā čģąŠčüčéą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ configuration descriptor, ąĘą░ ą║ąŠč鹊čĆčŗą╝ąĖ ąĖą┤čāčé ą┤ąĄčüą║čĆąĖą┐č鹊čĆčŗ ąĖąĮč鹥čĆč乥ą╣čüą░, ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║ ąĖ ą┤ąĄčüą║čĆąĖą┐č鹊čĆčŗ, čüą┐ąĄčåąĖčäąĖčćąĮčŗąĄ ą┤ą╗čÅ ą║ą╗ą░čüčüą░ (interface, endpoint ąĖ class-specific descriptors). ąÆ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ čüčéą░ąĮą┤ą░čĆčé CDC ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čüą┐ąĄčåąĖą░ą╗čīąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣ ą┤ą╗čÅ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, čĆčÅą┤ čüą┐ąĄčåąĖčäąĖčćąĮčŗčģ ą┤ą╗čÅ ą║ą╗ą░čüčüą░ ą┤ąĄčüą║čĆąĖą┐č鹊čĆąŠą▓ čāą║ą░ąĘą░ąĮ. ą×ąĮąĖ čāą┐ąŠą╝čÅąĮčāčéčŗ ą║ą░ą║ Functional Descriptors (čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗąĄ ą┤ąĄčüą║čĆąĖą┐č鹊čĆčŗ), ąĖ ąĮąĄą║ąŠč鹊čĆčŗąĄ ąĖąĘ ąĮąĖčģ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ.
// ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ
{
sizeof(USBConfigurationDescriptor),
USBGenericDescriptor_CONFIGURATION,
sizeof(CDCDSerialDriverConfigurationDescriptors),
2, // ąÆ čŹč鹊ą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĄčüčéčī ą┤ą▓ą░ ąĖąĮč鹥čĆč乥ą╣čüą░
1, // ąŁč鹊 ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ Ōä¢1
0, // ąöą╗čÅ čŹč鹊ą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĮąĄčé čüčéčĆąŠą║ąŠą▓ąŠą│ąŠ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░
BOARD_USB_BMATTRIBUTES,
USBConfigurationDescriptor_POWER(100)
},
4.4.3 Communication Class Interface Descriptor (ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĖąĮč鹥čĆč乥ą╣čüą░ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮąŠą│ąŠ ą║ą╗ą░čüčüą░)
ą¤ąĄčĆą▓čŗą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĖąĮč鹥čĆč乥ą╣čüą░, ą║ąŠč鹊čĆčŗą╣ ąĖą┤ąĄčé ąĘą░ ą┤ąĄčüą║čĆąĖą┐č鹊čĆąŠą╝ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī Communication Class Interface descriptor. ą×ąĮ ą┤ąŠą╗ąČąĄąĮ čāą║ą░ąĘą░čéčī ą║ąŠą┤ Communication Class Interface (02h) ą▓ čüą▓ąŠąĄą╝ ą┐ąŠą╗ąĄ bInterfaceClass.
ąŚąĮą░č湥ąĮąĖąĄ bInterfaceSubClass ą▓čŗą▒ąĖčĆą░ąĄčé ą╝ąŠą┤ąĄą╗čī CDC, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čāčÄ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą▒čāą┤ąĄčé ą║ąŠą┤ 02h, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ Abstract Control Model.
ąś ąĮą░ą║ąŠąĮąĄčå, ąĮčāąČąĄąĮ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ ą║ąŠą┤ ą┐čĆąŠč鹊ą║ąŠą╗ą░. ą¤ąŠčüą║ąŠą╗čīą║čā ąŠąĮ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠąĮą▓ąĄčĆč鹥čĆą░ USB-to-serial, č鹊 ąŠąĮ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčüčéą░ą▓ą╗ąĄąĮ ą▓ ąĘąĮą░č湥ąĮąĖąĖ 0x00.
// ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ Communication class interface
{
sizeof(USBInterfaceDescriptor),
USBGenericDescriptor_INTERFACE,
0, // čŹč鹊 ąĖąĮč鹥čĆč乥ą╣čü Ōä¢0
0, // čŹč鹊 ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮą░čÅ ąĮą░čüčéčĆąŠą╣ą║ą░ Ōä¢0 ą┤ą╗čÅ čŹč鹊ą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░
1, // čŹč鹊čé ąĖąĮč鹥čĆč乥ą╣čü ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą║ąŠąĮąĄčćąĮčāčÄ č鹊čćą║čā 1
CDCCommunicationInterfaceDescriptor_CLASS,
CDCCommunicationInterfaceDescriptor_ABSTRACTCONTROLMODEL,
CDCCommunicationInterfaceDescriptor_NOPROTOCOL,
0 // ą┤ą╗čÅ čŹč鹊ą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ ąĮąĄčé čüčéčĆąŠą║ąŠą▓ąŠą│ąŠ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░
},
ąÆ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ Communication Class Interface ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤ą▓ąĄ ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ (ąŠą┤ąĮčā ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝, ąĖ ą┤čĆčāą│čāčÄ ą┤ą╗čÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąŠ čüąŠą▒čŗčéąĖčÅčģ), ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┤ąŠą╗ąČąĄąĮ ąĖą╝ąĄčéčī čüą▓ąŠąĄ ą┐ąŠą╗ąĄ bNumEndpoints čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ą▓ 0x01: default control endpoint 0 ąĮąĄ čüčćąĖčéą░ąĄčéčüčÅ.
4.4.4 Functional Descriptors (čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗąĄ ą┤ąĄčüą║čĆąĖą┐č鹊čĆčŗ)
ąŚą░ ą┤ąĄčüą║čĆąĖą┐č鹊čĆąŠą╝ ąĖąĮč鹥čĆč乥ą╣čüą░ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮąŠą│ąŠ ą║ą╗ą░čüčüą░ (Communication Class Interface Descriptor) ą┤ąŠą╗ąČąĮčŗ ąĖą┤čéąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗčģ ą┤ąĄčüą║čĆąĖą┐č鹊čĆąŠą▓ (Functional Descriptors). ą×ąĮąĖ ąĮčāąČąĮčŗ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąĮąĄą║ąŠč鹊čĆčŗčģ ą░čéčĆąĖą▒čāč鹊ą▓ čāčüčéčĆąŠą╣čüčéą▓ą░. ąĪčéčĆčāą║čéčāčĆą░ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠą│ąŠ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ čüąŠą┤ąĄčƹȹĖčé ą┤ą╗ąĖąĮčā ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░, čéąĖą┐ ąĖ ą┐ąŠą┤čéąĖą┐, ąĘą░ ą║ąŠč鹊čĆčŗą╝ąĖ ąĖą┤ąĄčé čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ.
ąŚąĮą░č湥ąĮąĖąĄ bDescriptorType ą▓čüąĄą│ą┤ą░ čĆą░ą▓ąĮąŠ CS_INTERFACE (24h), ą┐ąŠčüą║ąŠą╗čīą║čā CDC-čüą┐ąĄčåąĖčäąĖčćąĮčŗąĄ ą┤ąĄčüą║čĆąĖą┐č鹊čĆčŗ ą┐čĆąĖą║ą╗ą░ą┤čŗą▓ą░čÄčéčüčÅ č鹊ą╗čīą║ąŠ ą║ ąĖąĮč鹥čĆč乥ą╣čüą░ą╝. ąŚąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ ą┤ą▓čāčģ ą┤čĆčāą│ąĖčģ ą┐ąŠą╗ąĄą╣, bFunctionLength ąĖ bDescriptorSubType, ąĘą░ą▓ąĖčüčÅčé ąŠčé čäčāąĮą║čåąĖą╣.
4.4.4.1 Header (ąĘą░ą│ąŠą╗ąŠą▓ąŠą║)
ą¤ąĄčĆą▓čŗą╣ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą┤ąŠą╗ąČąĄąĮ ą▓čüąĄą│ą┤ą░ ą▒čŗčéčī čéąĖą┐ą░ Header Functional Descriptor (čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ čü ąĘą░ą│ąŠą╗ąŠą▓ą║ąŠą╝). ą×ąĮ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāą║ą░ąĘą░ąĮąĖčÅ ą▓ąĄčĆčüąĖąĖ CDC, ąĮą░ ą║ąŠč鹊čĆąŠą╣ ą▒ą░ąĘąĖčĆčāąĄčéčüčÅ čāčüčéčĆąŠą╣čüčéą▓ąŠ (č鹥ą║čāčēą░čÅ ą▓ąĄčĆčüąĖčÅ 1.1):
// Class-specific header functional descriptor
{
sizeof(CDCHeaderDescriptor),
CDCGenericDescriptor_INTERFACE,
CDCGenericDescriptor_HEADER,
CDCGenericDescriptor_CDC1_10
},
4.4.4.2 Call Management (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓čŗąĘąŠą▓ą░ą╝ąĖ)
ąöą░ą╗ąĄąĄ ąĖą┤ąĄčé Call Management Functional Descriptor. ą×ąĮ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą▓čŗąĘąŠą▓čŗ. ąĢčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ čüą░ą╝ąŠ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą▓čŗąĘąŠą▓čŗ, č鹊 ą┐ąĄčĆą▓čŗą╣ ą▒ąĖčé ą┐ąŠą╗čÅ bmCapabilities ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1. ąÆ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ąĘą░ą┐čĆąŠčüčŗ ąŠ ą▓čŗąĘąŠą▓ą░čģ ą╝ąŠą│čāčé ą▒čŗčéčī ą╝čāą╗čīčéąĖą┐ą╗ąĖčåąĖčĆąŠą▓ą░ąĮčŗ ą┐ąŠą▓ąĄčĆčģ data class interface ą▓ą╝ąĄčüč鹊 ąŠčéą┐čĆą░ą▓ą║ąĖ ąĖčģ č湥čĆąĄąĘ Control endpoint 0, ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▓č鹊čĆąŠą│ąŠ ą▒ąĖčéą░. ąÆ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čüąŠ čüčéą░ąĮą┤ą░čĆč鹊ą╝ CDC čāčüčéčĆąŠą╣čüčéą▓ąŠ, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĄąĄ Abstract Control
Model, ą┤ąŠą╗ąČąĮąŠ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī ą▓čŗąĘąŠą▓čŗ čüą░ą╝ąŠ, čéą░ą║ čćč鹊 ą▒ąĖčé D0 ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ. ą¤ąŠčüą╗ąĄą┤ąĮąĖą╣ ą▒ą░ą╣čé (bDataInterface) ąĮąĄ ą▒čāą┤ąĄčé ąĮąĖč湥ą│ąŠ ąŠą▒ąŠąĘąĮą░čćą░čéčī, ą┐ąŠčüą║ąŠą╗čīą║čā ąŠčćąĖčēąĄąĮ ą▒ąĖčé D1 ą▓ ą┐ąŠą╗ąĄ bmCapabilities.
// Class-specific call management functional descriptor
{
sizeof(CDCCallManagementDescriptor),
CDCGenericDescriptor_INTERFACE,
CDCGenericDescriptor_CALLMANAGEMENT,
CDCCallManagementDescriptor_SELFCALLMANAGEMENT,
0 // ąĮąĄčé čüą▓čÅąĘą░ąĮąĮąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┤ą░ąĮąĮčŗčģ
},
4.4.4.3 Abstract Control Management (ACM, ą░ą▒čüčéčĆą░ą║čéąĮą░čÅ ą╝ąŠą┤ąĄą╗čī čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ)
ą¤ąŠčüą║ąŠą╗čīą║čā ą║ąŠąĮą▓ąĄčĆč鹥čĆ USB-to-serial ąĖčüą┐ąŠą╗čīąĘčāąĄčé Abstract Control Model, ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ (Abstract Control Management Functional Descriptor) ą┤ą╗čÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ - ąĮą░ ą║ą░ą║ąĖčģ ąĘą░ą┐čĆąŠčüą░čģ/ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅčģ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ. ąöą╗čÅ čŹč鹊ą│ąŠ ą┐čĆąĖą╝ąĄčĆą░, ą┤čĆą░ą╣ą▓ąĄčĆ ą┤ąĄą╗ą░ąĄčé ą┐ąŠą┤ą┤ąĄčƹȹ║čā ą▓čüąĄčģ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ ąĘą░ą┐čĆąŠčüąŠą▓/ąŠą┐ąŠą▓ąĄčēąĄąĮąĖą╣ (requests/notification) ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ NetworkConnection; čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┐ąŠą╗ąĄ bmCapabilities ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ ąĘąĮą░č湥ąĮąĖąĄ 07h.
// Class-specific abstract control management functional descriptor
{
sizeof(CDCAbstractControlManagementDescriptor),
CDCGenericDescriptor_INTERFACE,
CDCGenericDescriptor_ABSTRACTCONTROLMANAGEMENT,
CDCAbstractControlManagementDescriptor_LINE
},
4.4.4.4 Union (ąŠą▒čŖąĄą┤ąĖąĮąĄąĮąĖąĄ)
ąś ąĮą░ą║ąŠąĮąĄčå, Union Functional Descriptor ą┤ąĄą╗ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮčŗą╝ čüą│čĆčāą┐ą┐ąĖčĆąŠą▓ą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ ą▓ ąŠą┤ąĮčā ą│ą╗ąŠą▒ą░ą╗čīąĮčāčÄ čäčāąĮą║čåąĖčÄ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ Communication Class Interface ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą║ą░ą║ ą│ą╗ą░ą▓ąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą▓ ą│čĆčāą┐ą┐ąĄ, ą░ Data Class Interface ą▒čāą┤ąĄčé ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╝ ą║ą░ą║ slave 0:
// Class-specific union functional descriptor čü ąŠą┤ąĮąĖą╝ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╝ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝
{
sizeof(CDCUnionDescriptor),
CDCGenericDescriptor_INTERFACE,
CDCGenericDescriptor_UNION,
0, // ąĮąŠą╝ąĄčĆ ą│ą╗ą░ą▓ąĮąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ (master interface) =0
1 // ą┐ąĄčĆą▓čŗą╣ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü (slave interface) =1
},
4.4.5 Notification Endpoint Descriptor (ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ)
ąÜą░ą║ ą▒čŗą╗ąŠ čüą║ą░ąĘą░ąĮąŠ čĆą░ąĮąĄąĄ, ą▓ ą╝ąŠą┤ąĄą╗ąĖ Abstract Control Model ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čŹą╗ąĄą╝ąĄąĮčé ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąŠ čüąŠą▒čŗčéąĖčÅčģ (notification) ąĮą░ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĄ Interrupt IN. ąÉčéčĆąĖą▒čāčéčŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą┤ą╗čÅ ąĮąĄčæ - ą░ą┤čĆąĄčü ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ ąĖ ąĖąĮč鹥čĆą▓ą░ą╗ ąŠą┐čĆąŠčüą░.
ąÜąŠą│ą┤ą░ ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ ą░ą┤čĆąĄčü ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ, ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čāčćč鹥ąĮą░ čüą┐ąĄčåąĖčäąĖą║ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ USB. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą╗čÅ čćąĖą┐ąŠą▓ AT91SAM7S ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ UDP ąĖą╝ąĄąĄčé č鹊ą╗čīą║ąŠ 4 ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ, ąŠą┤ąĮą░ ąĖąĘ ą║ąŠč鹊čĆčŗčģ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ default Control endpoint 0. ą¤ąŠčüą║ąŠą╗čīą║čā č鹊ą╗čīą║ąŠ 2 ąĖ 3 ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ąĖ ąĖą╝ąĄčÄčé ą┤ą▓ąŠą╣ąĮčŗąĄ ą▒ą░ąĮą║ąĖ FIFO, ą▒ąŠą╗ąĄąĄ ą╝čāą┤čĆąŠ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĖčģ ą┤ą╗čÅ Data Class Interface ąĖ ą┐ąŠčüą╗ąĄą┤ąĮčÄčÄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąŠ čüąŠą▒čŗčéąĖčÅčģ.
ąÆ ąĘą░ą║ą╗čÄč湥ąĮąĖąĄ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ čüą║ąŠčĆąŠčüčéčī ąŠą┐čĆąŠčüą░ (polling rate) ąĮą░ ąĖčüč鹊čćąĮąĖą║ąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąöą╗čÅ ąĮą░čłąĄą│ąŠ čüą╗čāčćą░čÅ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ USART. ą¤ąŠčüą║ąŠą╗čīą║čā čŹč鹊 ąĮąĄ ąŠč湥ąĮčī ą▒čŗčüčéčĆčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü, č鹊 čüą║ąŠčĆąŠčüčéčī ąŠą┐čĆąŠčüą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▒čŗčéčī ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ąĮąĖąĘą║ąŠą╣, čé. ąĄ. ąĘąĮą░č湥ąĮąĖąĄ bInterval ą╝ąŠąČąĄčé ą▒čŗčéčī ą▒ąŠą╗čīčłąĖą╝.
ąóą░ą║ ą▒čāą┤ąĄčé ą▓čŗą│ą╗čÅą┤ąĄčéčī notification endpoint descriptor, ąĘą░ą┤ą░ąĮąĮčŗą╣ ą▓ ąĮą░čłąĄą╝ ą┐čĆąĖą╝ąĄčĆąĄ firmware:
// ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ Notification endpoint descriptor
{
sizeof(USBEndpointDescriptor),
USBGenericDescriptor_ENDPOINT,
USBEndpointDescriptor_ADDRESS(USBEndpointDescriptor_IN,
CDCDSerialDriverDescriptors_NOTIFICATION),
USBEndpointDescriptor_INTERRUPT,
MIN(
BOARD_USB_ENDPOINTS_MAXPACKETSIZE(CDCDSerialDriverDescriptors_NOTIFICATION),
USBEndpointDescriptor_MAXINTERRUPTSIZE_FS
),
10 // ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ ą▒čāą┤ąĄčé ąŠą┐čĆą░čłąĖą▓ą░čéčīčüčÅ ąĮą░ ąĮą░ą╗ąĖčćąĖąĄ čüąŠą▒čŗčéąĖčÅ ą║ą░ąČą┤čŗąĄ 10 ą╝čü
},
4.4.6 Data Class Interface Descriptor (ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ąĖąĮč鹥čĆč乥ą╣čüą░ ą║ą╗ą░čüčüą░ ą┤ą░ąĮąĮčŗčģ)
ąŚą░ ą┤ąĄčüą║čĆąĖą┐č鹊čĆąŠą╝ Communication Class Interface ąĖ čüą▓čÅąĘą░ąĮąĮčŗą╝ąĖ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗą╝ąĖ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ą╝ąĖ ąĖ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ą╝ąĖ ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║ ąĖą┤ąĄčé Data Class Interface Descriptor. ąĪą░ą╝ ą┐ąŠ čüąĄą▒ąĄ Data Class Interface ąĖą╝ąĄąĄčé ąĖą┤čāčēąĖąĄ ąĘą░ ąĮąĖą╝ ą┤ą▓ą░ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ.
ąÜąŠą┤ Data Class Interface čĆą░ą▓ąĄąĮ 0Ah, ąĖ ąĘą┤ąĄčüčī ąĮąĄčé ą║ąŠą┤ą░ ą┐ąŠą┤ą║ą╗ą░čüčüą░ (subclass code). ąöąŠčüčéčāą┐ąĮčŗ ąĮąĄą║ąŠč鹊čĆčŗąĄ ą║ąŠą┤čŗ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓, ąĮąŠ ą▓ ąĮą░čłąĄą╝ ą┐čĆąĖą╝ąĄčĆąĄ ąŠąĮąĖ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ. ą×ą┤ąĮą░ą║ąŠ ą╝ąŠą│ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ v.42bis ą┐čĆąŠč鹊ą║ąŠą╗ ą┤ą╗čÅ čüąČą░čéąĖčÅ ą┤ą░ąĮąĮčŗčģ, ąĄčüą╗ąĖ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ čāčüčéą░čĆąĄą▓čłąĄąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ.
// ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ Data class interface
{
sizeof(USBInterfaceDescriptor),
USBGenericDescriptor_INTERFACE,
1, // čŹč鹊 ąĖąĮč鹥čĆč乥ą╣čü 1
0, // čŹč鹊 ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮą░čÅ čāčüčéą░ąĮąŠą▓ą║ą░ 0 ą┤ą╗čÅ čŹč鹊ą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░
2, // čŹč鹊čé ąĖąĮč鹥čĆč乥ą╣čü ąĖčüą┐ąŠą╗čīąĘčāąĄčé 2 ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ
CDCDataInterfaceDescriptor_CLASS,
CDCDataInterfaceDescriptor_SUBCLASS,
CDCDataInterfaceDescriptor_NOPROTOCOL,
0 // ą┤ą╗čÅ čŹč鹊ą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ ąĮąĄčé čüčéčĆąŠą║ąŠą▓ąŠą│ąŠ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░
},
4.4.7 Data IN & OUT Endpoint Descriptors (ą┤ąĄčüą║čĆąĖą┐č鹊čĆčŗ ą┤ą╗čÅ ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║ ą┤ą░ąĮąĮčŗčģ IN ąĖ OUT)
Data Class Interface čéčĆąĄą▒čāąĄčé ą┤ą▓ąĄ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ, čéą░ą║ čćč鹊 ą┤ą░ą╗ąĄąĄ ą┤ąŠą╗ąČąĮčŗ ąĖą┤čéąĖ ą┤ąĄčüą║čĆąĖą┐č鹊čĆčŗ ą║ąŠąĮąĄčćąĮčŗčģ č鹊č湥ą║ (Endpoint Descriptors). ą£čŗ čĆą░ąĮąĄąĄ čĆąĄčłąĖą╗ąĖ, čćč鹊 čŹč鹊 ą▒čāą┤čāčé ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ Bulk IN/OUT, ą┐ąŠčüą║ąŠą╗čīą║čā ąŠąĮąĖ ą▒ąŠą╗čīčłąĄ ą┐ąŠą┤čģąŠą┤čÅčé ą┤ą╗čÅ čŹč鹊ą│ąŠ čćą░čüčéąĮąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ąóą░ą║ ą║ą░ą║ ą░ą┤čĆąĄčüą░ 00h ąĖ 03h čāąČąĄ ąĘą░ąĮčÅčéčŗ ą┤ą╗čÅ default Control endpoint 0 ąĖ Interrupt IN notification endpoint čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ, č鹊 data OUT ąĖ IN endpoints ą┐ąŠą╗čāčćą░čé ą░ą┤čĆąĄčüą░ 01h ąĖ 02h.
ąÆąŠčé ą┤ą▓ą░ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ Data IN & OUT Endpoint:
// ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ Bulk-OUT endpoint
{
sizeof(USBEndpointDescriptor),
USBGenericDescriptor_ENDPOINT,
USBEndpointDescriptor_ADDRESS(USBEndpointDescriptor_OUT,
CDCDSerialDriverDescriptors_DATAOUT),
USBEndpointDescriptor_BULK,
MIN(BOARD_USB_ENDPOINTS_MAXPACKETSIZE(CDCDSerialDriverDescriptors_DATAOUT),
USBEndpointDescriptor_MAXBULKSIZE_FS),
0 // ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī 0 ą┤ą╗čÅ ą┐ąŠą╗ąĮąŠčüą║ąŠčĆąŠčüčéąĮčŗčģ (full-speed) bulk endpoints
},
// ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ Bulk-IN endpoint
{
sizeof(USBEndpointDescriptor),
USBGenericDescriptor_ENDPOINT,
USBEndpointDescriptor_ADDRESS(USBEndpointDescriptor_IN,
CDCDSerialDriverDescriptors_DATAIN),
USBEndpointDescriptor_BULK,
MIN(BOARD_USB_ENDPOINTS_MAXPACKETSIZE(CDCDSerialDriverDescriptors_DATAIN),
USBEndpointDescriptor_MAXBULKSIZE_FS),
0 // ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī 0 ą┤ą╗čÅ ą┐ąŠą╗ąĮąŠčüą║ąŠčĆąŠčüčéąĮčŗčģ (full-speed) bulk endpoints
},
4.4.8 String Descriptors (čüčéčĆąŠą║ąŠą▓čŗąĄ ą┤ąĄčüą║čĆąĖą┐č鹊čĆčŗ)
ąØąĄą║ąŠč鹊čĆčŗąĄ ą┤ąĄčüą║čĆąĖą┐č鹊čĆčŗ (čāčüčéčĆąŠą╣čüčéą▓ą░, ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ąĖąĮč鹥čĆč乥ą╣čüą░ ąĖ čé. ą┐.) ą╝ąŠą│čāčé čāą║ą░ąĘą░čéčī ąĖąĮą┤ąĄą║čü čüčéčĆąŠą║ąŠą▓ąŠą│ąŠ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ ą┤ą╗čÅ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĄą▓ ą┐ąŠ ąĖčģ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÄ. ąŁčéąĖ čüčéčĆąŠą║ąĖ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčéčüčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ (ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüč鹊ą╝ firmware čāčüčéčĆąŠą╣čüčéą▓ą░ USB), ąĖ ąŠąĮąĖ ąĮąĖą║ą░ą║ ąĮąĄ ą▓ą╗ąĖčÅčÄčé ąĮą░ čĆą░ą▒ąŠčéčā ą┤čĆą░ą╣ą▓ąĄčĆą░ (ąĮą░ ą▓čŗą▒ąŠčĆ ąĮą░čüčéčĆąŠąĄą║ ą┐čĆąĖ 菹Įčāą╝ąĄčĆą░čåąĖąĖ, ą║ ą┐čĆąĖą╝ąĄčĆčā) ą▓ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ ą┤ą╗čÅ čŹč鹊ą│ąŠ USB-čāčüčéčĆąŠą╣čüčéą▓ą░.
4.5 Class-specific Requests (ąĘą░ą┐čĆąŠčüčŗ, čüą┐ąĄčåąĖčäąĖčćąĮčŗąĄ ą┤ą╗čÅ ą║ą╗ą░čüčüą░)
ąĪčéą░ąĮą┤ą░čĆčé CDC ąĘą░ą┤ą░ąĄčé ąĮą░ą▒ąŠčĆ čüą┐ąĄčåąĖą░ą╗čīąĮčŗčģ ąĘą░ą┐čĆąŠčüąŠą▓ čŹč鹊ą│ąŠ ą║ą╗ą░čüčüą░ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓, čĆąĄą░ą╗ąĖąĘčāčÄčēąĖčģ Abstract Control Model. ąÆ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ąŠą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ą┤ąĄčéą░ą╗čīąĮąŠ čŹčéąĖ ąĘą░ą┐čĆąŠčüčŗ, ą▓ą║ą╗čÄčćą░čÅ ąĖčģ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąĖ čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ Abstract Control Model Serial Emulation ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąĘą░ą┐čĆąŠčüą░ą╝ ąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅą╝ čüą╝. čüąĄą║čåąĖčÄ 3.6.2.1 CDC specification 1.1.
4.5.1 SendEncapsulatedCommand, GetEncapsulatedResponse
4.5.1.1 ąØą░ąĘąĮą░č湥ąĮąĖąĄ
ąŁčéąĖ ą┤ą▓ą░ ąĘą░ą┐čĆąŠčüą░ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą║ąŠą│ą┤ą░ ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ čćą░čüčéąĮčŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čü communication class interface. ąöą╗čÅ virtual COM port čŹč鹊 ąĮąĄ č鹊čé čüą╗čāčćą░ą╣, čéą░ą║ čćč鹊 ąŠąĮąĖ ąĮąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ, ą┤ą░ąČąĄ ą┐čĆąĖ č鹊ą╝, čćč鹊 ąŠąĮąĖ ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠ ąŠą▒čÅąĘą░č鹥ą╗čīąĮčŗ. ą¤čĆą░ą║čéąĖč湥čüą║ąĖ čŹčéąĖ ąĘą░ą┐čĆąŠčüčŗ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą▒čāą┤čāčé ą┐čĆąĖąĮčÅčéčŗ.
4.5.2 SetCommFeature, GetCommFeature, ClearCommFeature
4.5.2.1 ąØą░ąĘąĮą░č湥ąĮąĖąĄ
ąŚą░ą┐čĆąŠčüčŗ Set/Get/ClearCommFeature ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĖ ąĮąĄą║ąŠč鹊čĆčŗčģ ą░čéčĆąĖą▒čāč鹊ą▓ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ, ą░ čéą░ą║ąČąĄ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖčģ ąĘąĮą░č湥ąĮąĖą╣.
ą¤ąĄčĆą▓čŗą╣ ą░čéčĆąĖą▒čāčé, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĖą╣čüčÅ ą▓ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ, čŹč鹊 ą║ąŠą┤ čüčéčĆą░ąĮčŗ Country Code. ąØąĄą║ąŠč鹊čĆčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ čĆą░ą▒ąŠčéą░čÄčé ą┐ąŠ-čĆą░ąĘąĮąŠą╝čā, ąĖą╗ąĖ ąĖą╝ąĄčÄčé čĆą░ąĘąĮčŗąĄ ąĘą░ą║ąŠąĮąĮčŗąĄ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čüčéčĆą░ąĮčŗ, ą│ą┤ąĄ ąŠąĮąĖ čĆą░ą▒ąŠčéą░čÄčé. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą║ąŠą┤ čüčéčĆą░ąĮčŗ ąĮčāąČąĄąĮ ą┤ą╗čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓. ą×ą┤ąĮą░ą║ąŠ, čŹč鹊 ąĮąĄ ąĮčāąČąĮąŠ ą┤ą╗čÅ ą║ąŠąĮą▓ąĄčĆč鹥čĆą░ USB-to-serial, ą┐ąŠčüą║ąŠą╗čīą║čā ąŠąĮ ąĮąĄ čüąŠąĄą┤ąĖąĮčÅąĄčéčüčÅ ą▓ ąĮą░čåąĖąŠąĮą░ą╗čīąĮąŠą╣ ąĖą╗ąĖ ąĘą░ą▓ąĖčüčÅčēąĄą╣ ąŠčé čüčéčĆą░ąĮčŗ čüąĄčéčīčÄ.
Abstract State (ą░ą▒čüčéčĆą░ą║čéąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ) čāčüčéčĆąŠą╣čüčéą▓ą░ ą╝ąŠąČąĮąŠ čéą░ą║ąČąĄ ąĖąĘą╝ąĄąĮąĖčéčī č湥čĆąĄąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čŹč鹊ą│ąŠ ąĘą░ą┐čĆąŠčüą░. ą¤ąĄčĆą▓ą░čÅ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéčī, ą║ąŠč鹊čĆčāčÄ ą╝ąŠąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī - ąĮčāąČąĮąŠ ą╗ąĖ ą╝čāą╗čīčéąĖą┐ą╗ąĖčåąĖčĆąŠą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ ąĖ ą▓čŗąĘąŠą▓čŗ č湥čĆąĄąĘ data class interface. ą¤ąŠčüą║ąŠą╗čīą║čā čŹč鹊 čāąČąĄ čāą║ą░ąĘą░ąĮąŠ ą▓ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠą╝ ą┤ąĄčüą║čĆąĖą┐č鹊čĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čŗąĘąŠą▓ąŠą╝ (čüą╝. čüąĄą║čåąĖčÄ 4.4.4.2), č鹊 ą▓ ąĮą░čłąĄą╝ ą┐čĆąĖą╝ąĄčĆąĄ čŹč鹊 ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ, čéą░ą║ ą║ą░ą║ ąĮąĄ ąĖą╝ąĄąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čüą╝čŗčüą╗ą░.
Idle state (čüąŠčüč鹊čÅąĮąĖąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ) čāčüčéčĆąŠą╣čüčéą▓ą░ ą╝ąŠąČąĮąŠ čéą░ą║ąČąĄ ą┐ąĄčĆąĄą║ą╗čÄčćąĖčéčī č湥čĆąĄąĘ čŹč鹊čé ąĘą░ą┐čĆąŠčü. ąÆ čüąŠčüč鹊čÅąĮąĖąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle) čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąĖąĮąĖą╝ą░čéčī ąĖą╗ąĖ ąŠčéą┐čĆą░ą▓ą╗čÅčéčī ą┤ą░ąĮąĮčŗąĄ ąŠčé čģąŠčüčéą░ ąĖ ą║ čģąŠčüčéčā.
4.5.3 SetLineCoding, GetLineCoding
4.5.3.1 ąØą░ąĘąĮą░č湥ąĮąĖąĄ
ąŁčéąĖ ą┤ą▓ą░ ąĘą░ą┐čĆąŠčüą░ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ čģąŠčüč鹊ą╝, čćč鹊ą▒čŗ ąĖąĘą╝ąĄąĮąĖčéčī ąĖą╗ąĖ ą┐čĆąŠčćąĖčéą░čéčī ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą╣ ą╗ąĖąĮąĖąĖ čüą▓čÅąĘąĖ, ą║ąŠč鹊čĆą░čÅ ą▓ą║ą╗čÄčćą░ąĄčé ą▓ čüąĄą▒čÅ:
ŌĆó Baudrate (čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ)
ŌĆó Number of stop bits (ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüč鹊ą┐-ą▒ąĖč鹊ą▓)
ŌĆó Parity check (ąĮą░ą╗ąĖčćąĖąĄ ą▒ąĖčéą░ ą║ąŠąĮčéčĆąŠą╗čÅ č湥čéąĮąŠčüčéąĖ)
ŌĆó Number of data bits (ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ)
ąÜąŠą│ą┤ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ č鹥čĆą╝ąĖąĮą░ą╗ą░ (ą¤ą× čģąŠčüčéą░ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ HyperTerminal) ą╝ąĄąĮčÅąĄčé čāčüčéą░ąĮąŠą▓ą║ąĖ COM-ą┐ąŠčĆčéą░, č鹊 ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ąĘą░ą┐čĆąŠčü SetLineCoding čü ąĮąŠą▓čŗą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ. ąźąŠčüčé ą╝ąŠąČąĄčé čéą░ą║ąČąĄ ąĘą░ą┐čĆąŠčüąĖčéčī č鹥ą║čāčēąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĘą░ą┐čĆąŠčüąŠą╝ GetLineCoding, ąĖ ąĮąĄ ą╝ąĄąĮčÅčéčī ąĖčģ, ąĄčüą╗ąĖ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą║ąŠčĆčĆąĄą║čéąĮčŗ.
4.5.3.2 ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ
ąÜąŠą│ą┤ą░ ą┐čĆąĖąĮčÅčé ąĘą░ą┐čĆąŠčü SET_LINE_CODING, č鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ąŠą╗ąČąĮąŠ čüąĮą░čćą░ą╗ą░ ą┐čĆąŠčćąĖčéą░čéčī ąĮąŠą▓čŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ, ą║ąŠč鹊čĆčŗąĄ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ čüčéčĆčāą║čéčāčĆąĄ ąĖąĘ 7 ą▒ą░ą╣čé (čŹčéą░ čüčéčĆčāą║čéčāčĆą░ ąŠą┐ąĖčüą░ąĮą░ ą▓ CDC specification 1.1, čüąĄą║čåąĖčÅ 6.2.13). ąŚą░č鹥ą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ąŠą╗ąČąĮąŠ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī čŹčéąĖ ąĮąŠą▓čŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą▓ ą┐ąŠčĆčé USART. ąöą╗čÅ čäčāąĮą║čåąĖąĖ USBD_Read ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮą░ čäčāąĮą║čåąĖčÅ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ (callback) čü čāą║ą░ąĘą░č鹥ą╗ąĄą╝ ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ ą║ ą┐čĆąĖąĮčÅčéčŗą╝ ą┤ą░ąĮąĮčŗą╝.
ąÜąŠą┤ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ąĘą░ą┐čĆąŠčüą░ GET_LINE_CODING ą┐čĆąŠčüč鹊 ą▓čŗąĘčŗą▓ą░ąĄčé čäčāąĮą║čåąĖčÄ USBD_Write ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ čģąŠčüčéčā č鹥ą║čāčēąĖčģ čāčüčéą░ąĮąŠą▓ąŠą║ USART.
ąĢčüčéčī ą┤ą▓ąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ č鹥ą║čāčēąĖčģ čāčüčéą░ąĮąŠą▓ąŠą║. ąØą░ąĖą▒ąŠą╗ąĄąĄ ąŠč湥ą▓ąĖą┤ąĮą░čÅ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī - čüąŠčģčĆą░ąĮčÅčéčī čāčüčéą░ąĮąŠą▓ą║ąĖ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ą▓ čĆąĄą│ąĖčüčéčĆčŗ USART, ąĖ čéą░ą║ąČąĄ ą┐ąŠą╗čāčćą░čéčī ąĖčģ ąŠčéčéčāą┤ą░. ąŁč鹊čé čüą┐ąŠčüąŠą▒ 菹║ąŠąĮąŠą╝ąĖčé ą╝ąĄčüč鹊 ą▓ ąŠą┐ąĄčĆą░čéąĖą▓ąĮąŠą╣ ą┐ą░ą╝čÅčéąĖ. ą×ą┤ąĮą░ą║ąŠ ąĖąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 ą┐ą░čĆą░ą╝ąĄčéčĆčŗ čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ąĮąĄ čéą░ą║, ą║ą░ą║ ąŠąĮąĖ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ ą▓ čüčéčĆčāą║čéčāčĆąĄ čüčéą░ąĮą┤ą░čĆčéą░ CDC, č鹊 ąŠąĮąĖ ą┤ąŠą╗ąČąĮčŗ čüąŠčüčéą░ą▓ą╗čÅčéčīčüčÅ ąĘą░ąĮąŠą▓ąŠ ą▓ ąĮčāąČąĮąŠą╝ č乊čĆą╝ą░č鹥 ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ąĘą░ą┐čĆąŠčüą░ GET_LINE_CODING. ąöčĆčāą│ąŠą╣ ą▓ą░čĆąĖą░ąĮčé - ą┤ą╗čÅ čāą┐čĆąŠčēąĄąĮąĖčÅ ą┤ąŠčüčéčāą┐ą░ čüąŠčģčĆą░ąĮčÅčéčī ą┐čĆąĖąĮčÅčéčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą▓ ą▓čŗą┤ąĄą╗ąĄąĮąĮąŠą╝ 菹║ąĘąĄą╝ą┐ą╗čÅčĆąĄ čüčéčĆčāą║čéčāčĆčŗ (ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą▓ ą┐ą░ą╝čÅčéąĖ), čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ą┤čĆą░ą╣ą▓ąĄčĆčā ą║ą╗ą░čüčüą░.
4.5.4 SetControlLineState
4.5.4.1 ąØą░ąĘąĮą░č湥ąĮąĖąĄ
ąŁč鹊čé ąĘą░ą┐čĆąŠčü ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čģąŠčüč鹊ą╝ ą┤ą╗čÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąŠ ą┤ą▓čāčģ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅčģ čüąŠčüč鹊čÅąĮąĖčÅ. ą¤ąĄčĆą▓čŗą╣ ą▒ąĖčé (D0) ą┐ąŠą╗čÅ wValue ą▓ ąĘą░ą┐čĆąŠčüąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ąĖą╗ąĖ ąĮąĄčé č鹥čĆą╝ąĖąĮą░ą╗ ą║ ą▓ąĖčĆčéčāą░ą╗čīąĮąŠą╝čā COM-ą┐ąŠčĆčéčā. ąæąĖčé D1 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą┤ąŠą╗ąČąĄąĮ ą╗ąĖ USART čĆą░ąĘčĆąĄčłąĖčéčī/ąĘą░ą┐čĆąĄčéąĖčéčī čüąĖą│ąĮą░ą╗ ąĮąĄčüčāčēąĄą╣ ą┤ą╗čÅ ąĮą░čćą░ą╗ą░/ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ.
ąØą░ ą┐čĆą░ą║čéąĖą║ąĄ ą║ąŠąĮą▓ąĄčĆč鹥čĆ USB-to-serial ą┤ąŠą╗ąČąĄąĮ čĆą░ą▒ąŠčéą░čéčī č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ čŹčéąĖ ą┤ą▓ą░ ą▒ąĖčéą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ čŗ 1. ąśąĮą░č湥, ąŠąĮ ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ąĖą╗ąĖ ą┐čĆąĖąĮąĖą╝ą░čéčī ą┤ą░ąĮąĮčŗąĄ.
4.5.4.2 ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ
ą¤ąŠčüą║ąŠą╗čīą║čā ąĘą░ą┐čĆąŠčü SET_CONTROL_LINE_STATE ąĮąĄ ąĖą╝ąĄąĄčé ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ (data payload), čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąŠčüč鹊 ą┐ąŠą┤čéą▓ąĄčĆą┤ąĖčéčī čŹč鹊čé ąĘą░ą┐čĆąŠčü ąŠą┐čĆą░ą▓ą║ąŠą╣ ZLP (zero-length packet, ą┐ą░ą║ąĄčé ąĮčāą╗ąĄą▓ąŠą╣ ą┤ą╗ąĖąĮčŗ), ąĖčüą┐ąŠą╗čīąĘčāčÅ čäčāąĮą║čåąĖčÄ USBD_Write čü ąĮčāą╗ąĄą▓ąŠą╣ ą┤ą╗ąĖąĮąŠą╣ ą┤ą░ąĮąĮčŗčģ.
ą¤ąĄčĆąĄą┤ čŹčéąĖą╝ ą┐ąŠą╗ąĄ wValue ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐čĆąŠą░ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąŠ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĮąŠą▓ąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ ą╗ąĖąĮąĖąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ą×ą┤ąĖąĮąŠčćąĮą░čÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ čéąĖą┐ą░ boolean ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ. ąĢčüą╗ąĖ ąŠą▒ą░ ą▒ąĖčéą░, ąĖ D0, ąĖ D1, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ 1, č鹊 ą║ąŠąĮą▓ąĄčĆč鹥čĆ ą┤ąŠą╗ąČąĄąĮ čĆą░ą▒ąŠčéą░čéčī ąĮąŠčĆą╝ą░ą╗čīąĮąŠ, čé. ąĄ. ą┤ąŠą╗ąČąĄąĮ ą┐ąĄčĆąĄčüčŗą╗ą░čéčī ą┤ą░ąĮąĮčŗąĄ ą╝ąĄąČą┤čā USART ąĖ čģąŠčüč鹊ą╝ USB. ąśąĮą░č湥 ą║ąŠąĮą▓ąĄčĆč鹥čĆ ą┤ąŠą╗ąČąĄąĮ ą┐ąĄčĆąĄčüčéą░čéčī čĆą░ą▒ąŠčéą░čéčī.
4.5.5 SendBreak
4.5.5.1 ąØą░ąĘąĮą░č湥ąĮąĖąĄ
ąŚą░ą┐čĆąŠčü SendBreak ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĖąĮčüčéčĆčāą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░, čćč鹊 ąĮčāąČąĮąŠ ą┐ąŠčüą╗ą░čéčī čüąĖą│ąĮą░ą╗ break čāą║ą░ąĘą░ąĮąĮąŠą╣ ą┤ą╗ąĖąĮčŗ ą┐ąŠ ą╗ąĖąĮąĖąĖ RS-232. ąŁč鹊čé čüąĖą│ąĮą░ą╗ ąĖąĮąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąĖą▓ą╗ąĄč湥ąĮąĖčÅ ą▓ąĮąĖą╝ą░ąĮąĖčÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą╣ ą╝ą░čłąĖąĮčŗ (ąŠą▒čŗčćąĮąŠ čģąŠčüčéą░ ąĮą░ ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮąŠą╝ ą║ąŠąĮčåąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ).
4.6 Notifications (ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ)
ą×ą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝, ą║ąŠą│ą┤ą░ ąĮą░čüčéčāą┐ą░ąĄčé čüąŠą▒čŗčéąĖąĄ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą╣ ą╗ąĖąĮąĖąĖ. ąÆ ąĮą░čłąĄą╝ ą┐čĆąĖą╝ąĄčĆąĄ čŹčéąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ č湥čĆąĄąĘ ą▓čŗą┤ąĄą╗ąĄąĮąĮčāčÄ ąŠčéą┤ąĄą╗čīąĮąŠ ą║ąŠąĮąĄčćąĮčāčÄ č鹊čćą║čā čéąĖą┐ą░ Interrupt IN. ąöą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąĖčüčāčéčüčéą▓ąŠą▓ą░čéčī čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╣ ąĘą░ą│ąŠą╗ąŠą▓ąŠą║ ą┐ąĄčĆąĄą┤ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąŠą╣. ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ ąĖą╝ąĄąĄčé č鹊čé ąČąĄ č乊čĆą╝ą░čé, čćč鹊 ąĖ ąĘą░ą┐čĆąŠčü SETUP, čéą░ą║ čćč鹊 ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čüčéčĆčāą║čéčāčĆą░ USBGenericRequest, ąĘą░ą┤ą░ąĮąĮą░čÅ ą▓ AT91 USB framework.
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ąŠą╗ąČąĮąŠ ą┐ąŠčüą╗ą░čéčī ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ čĆąĄą░ą╗čīąĮąŠ ą┐ąŠą╝ąĄąĮčÅą╗ąŠčüčī čüąŠčüč鹊čÅąĮąĖąĄ, ąĖ ąĮąĄą╗čīąĘčÅ ą┐ąŠčüčŗą╗ą░čéčī ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠ. ąØą░ ą┐čĆą░ą║čéąĖą║ąĄ čĆąĄą┤ą║ąŠ čüą╗čāčćą░ąĄčéčüčÅ ąŠčéčüčŗą╗ą║ą░ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖą╣, čéą░ą║ čćč鹊 čüą┐ąŠčĆą░ą┤ąĖč湥čüą║ą░čÅ ąŠčéą┐čĆą░ą▓ą║ą░ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖą╣ čüąĮąĖąĘąĖčé ąĮą░ą│čĆčāąĘą║čā ąĮą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖ čāą▓ąĄą╗ąĖčćąĖčé ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖąĄ.
4.6.1 NetworkConnection (čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ čü čüąĄčéčīčÄ)
4.6.1.1 ąØą░ąĘąĮą░č湥ąĮąĖąĄ
ą×ą┐ąŠą▓ąĄčēąĄąĮąĖąĄ NetworkConnection ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, čćč鹊ą▒čŗ čüą║ą░ąĘą░čéčī čģąŠčüčéčā, ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ąĖą╗ąĖ ąĮąĄčé ą║ąŠąĮąĮąĄą║č鹊čĆ ąĮą░ čüč鹊čĆąŠąĮąĄ RS-232. ąÆ čüą╗čāčćą░ąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ USART ąĮąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą┐ąŠą╗čāčćąĖčéčī čéą░ą║čāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ ą┤ą╗čÅ čŹč鹊ą│ąŠ ąŠčéą┤ąĄą╗čīąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čŹč鹊 ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą║ąŠąĮą▓ąĄčĆč鹥čĆąŠą╝ USB-to-serial.
4.6.2 ResponseAvailable (ą┤ąŠčüčéčāą┐ąĄąĮ ąŠčéą▓ąĄčé)
4.6.2.1 ąØą░ąĘąĮą░č湥ąĮąĖąĄ
ąŁč鹊 ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čāčüčéčĆąŠą╣čüčéą▓čā čüąŠąŠą▒čēąĖčéčī čģąŠčüčéčā, čćč鹊 ąĖą╝ąĄąĄčéčüčÅ ąŠčéą▓ąĄčé. ą×ą┤ąĮą░ą║ąŠ, ą║ą░ą║ čŹč鹊 čāąČąĄ ą▒čŗą╗ąŠ čāą║ą░ąĘą░ąĮąŠ čĆą░ąĮąĄąĄ, ąĘą░ą┐čĆąŠčü GetEncapsulatedResponse ąĮąĄ ąŠčéąĮąŠčüąĖčéčüčÅ ą║ ąĮą░čłąĄą╝čā ą┐čĆąĖą╝ąĄčĆčā (čüą╝. čüąĄą║čåąĖčÄ 4.5.1.1), čéą░ą║ čćč鹊 čŹč鹊 ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ąĮąĄ ąĖą╝ąĄąĄčé čüą╝čŗčüą╗ą░ (ąĖ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ).
4.6.3 SerialState (čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą╣ ą╗ąĖąĮąĖąĖ)
4.6.3.1 ąØą░ąĘąĮą░č湥ąĮąĖąĄ
ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ čĆąĄą│ąĖčüčéčĆ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą╗čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą╣ ą╗ąĖąĮąĖąĖ. ą×ąĮą░ ąŠą┐ąŠą▓ąĄčēą░ąĄčé čģąŠčüčé, čćč鹊 čüąŠčüč鹊čÅąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą╝ąĄąĮčÅą╗ąŠčüčī, ąĖą╗ąĖ ąŠ č鹊ą╝, čćč鹊 ą┐čĆąŠąĖąĘąŠčłą╗ąŠ čüąŠą▒čŗčéąĖąĄ. ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ čüąŠą▒čŗčéąĖčÅ:
ŌĆó Buffer overrun (ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ ą▒čāč乥čĆą░)
ŌĆó Parity error (ąŠčłąĖą▒ą║ą░ č湥čéąĮąŠčüčéąĖ)
ŌĆó Framing error (ąŠčłąĖą▒ą║ą░ čäčĆąĄą╣ą╝ą░)
ŌĆó Ring signal detection mechanism state (čüąŠčüč鹊čÅąĮąĖąĄ ą╝ąĄčģą░ąĮąĖąĘą╝ą░ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ ą▓čŗąĘąŠą▓ą░)
ŌĆó Break detection mechanism state (čüąŠčüč鹊čÅąĮąĖąĄ ą╝ąĄčģą░ąĮąĖąĘą╝ą░ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ Break)
ŌĆó Transmission carrier state (čüąŠčüč鹊čÅąĮąĖąĄ ąĮąĄčüčāčēąĄą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ)
ŌĆó Receiver carrier detection mechanism state (čüąŠčüč鹊čÅąĮąĖąĄ ą╝ąĄčģą░ąĮąĖąĘą╝ą░ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ąĮąĄčüčāčēąĄą╣ ą┐čĆąĖąĄą╝ą░)
ąØąĄą║ąŠč鹊čĆčŗąĄ ąĖąĘ čŹčéąĖčģ ąĘąĮą░č湥ąĮąĖą╣ ąŠčéąĮąŠčüčÅčéčüčÅ č鹊ą╗čīą║ąŠ ą║ ą╝ąŠą┤ąĄą╝čā - ring signal detection, transmission carrier state ąĖ receiver carrier detection.
4.6.3.2 ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ
ąŁč鹊 ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮą░ą┐čĆčÅą╝čāčÄ ą┐čĆąĖą▓čÅąĘą░ąĮąŠ ą║ čüąŠčüč鹊čÅąĮąĖčÄ čĆąĄą│ąĖčüčéčĆą░ čüčéą░čéčāčüą░ USART. ąś ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠ, ąŠąĮ čüąŠą┤ąĄčƹȹĖčé ą▓čüčÄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ. ąöą╗čÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čüčéą░čéčāčüąĄ USART ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ąĖ ą▓ čŹč鹊čé ą╝ąŠą╝ąĄąĮčé ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ čģąŠčüčéčā čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ.
ą¦č鹊ą▒čŗ ąŠčéą┐čĆą░ą▓ąĖčéčī ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ SERIAL_STATE, čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ąŠą╗ąČąĮąŠ čüąĮą░čćą░ą╗ą░ ą┐ąĄčĆąĄą┤ą░čéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ąĘą░ą│ąŠą╗ąŠą▓ąŠą║ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ. ąÜą░ą║ ą▒čŗą╗ąŠ čāą║ą░ąĘą░ąĮąŠ čĆą░ąĮąĄąĄ, č乊čĆą╝ą░čé čŹč鹊ą│ąŠ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░ ąĖą┤ąĄąĮčéąĖč湥ąĮ ąĘą░ą┐čĆąŠčüčā SETUP, čéą░ą║ čćč鹊 ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čŹą║ąĘąĄą╝ą┐ą╗čÅčĆ USBGenericRequest ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ. ąÆ čüą╗ąĄą┤čāčÄčēąĄą╝ ą┐čĆąĖą╝ąĄčĆąĄ ąĘą░ą┤ą░ąĮ typedef ą┤ą╗čÅ ą┐ąĄčĆąĄąĖą╝ąĄąĮąŠą▓ą░ąĮąĖčÅ USBGenericRequest ą▓ CDCNotificationHeader:
CDCNotificationHeader cdcNotificationHeader =
{
CDC_NOTIFICATION_TYPE,
CDC_NOTIFICATION_SERIAL_STATE,
0,
0,
0
};
ąśąĮč乊čĆą╝ą░čåąĖčÅ ąŠą▒ ą░ą║čéčāą░ą╗čīąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ ą┤ą▓čāčģ ą▒ą░ą╣čéą░čģ. ąśą╝ąĄčÄčé ąĘąĮą░č湥ąĮąĖąĄ č鹊ą╗čīą║ąŠ ą┐ąĄčĆą▓čŗąĄ 7 ą▒ąĖčé ą┐ąĄčĆą▓ąŠą│ąŠ ą▒ą░ą╣čéą░, ą▓čüąĄ ą┤čĆčāą│ąĖąĄ ą▒ąĖčéčŗ ą╝ąŠą│čāčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ 0. ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ąŠą╗ąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ą▒ąĖčéčŗ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü č鹥ą║čāčēąĖą╝ čüąŠčüč鹊čÅąĮąĖąĄą╝ USART, ąĖ ąĘą░č鹥ą╝ ąŠčéą┐čĆą░ą▓ąĖčéčī ą┤ą░ąĮąĮčŗąĄ čü ą┐ąŠą╝ąŠčēčīčÄ čäčāąĮą║čåąĖąĖ USBD_Write.
ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čĆą░ąĘą╝ąĄčĆą░ interrupt endpoint ąĘą░ą│ąŠą╗ąŠą▓ąŠą║ ąĖ ą┤ą░ąĮąĮčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮčŗ ą╗ąĖą▒ąŠ ąŠą┤ąĮąĖą╝ ą║čāčüą║ąŠą╝ (čĆą░ąĘą╝ąĄčĆ ą▒ąŠą╗čīčłąĄ 8 ą▒ą░ą╣čé), ą╗ąĖą▒ąŠ čĆą░ąĘą┤ąĄą╗čīąĮąŠ. ąÆ ą┐ąĄčĆą▓ąŠą╝ čüą╗čāčćą░ąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠčēąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī čüčéčĆčāą║čéčāčĆčā CDCSerialState, ą║ąŠč鹊čĆą░čÅ čüąŠą┤ąĄčƹȹĖčé čüčĆą░ąĘčā ąĖ ąĘą░ą│ąŠą╗ąŠą▓ąŠą║, ąĖ ą┐ąŠą╗ąĄąĘąĮčāčÄ ąĮą░ą│čĆčāąĘą║čā (ą┤ą░ąĮąĮčŗąĄ).
ąÆąŠ ą▓č鹊čĆąŠą╝ čüą╗čāčćą░ąĄ ą┐ąĄčĆąĄą┤ą░čćą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮą░ ą┤ą▓čāą╝čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╝ąĖ ą▓čŗąĘąŠą▓ą░ą╝ąĖ USBD_Write (ą┐ąŠčüą║ąŠą╗čīą║čā ąĘą░ą│ąŠą╗ąŠą▓ąŠą║ ąĖą╝ąĄąĄčé ą┤ą╗ąĖąĮčā 8 ą▒ą░ą╣čé). ą×ą┤ąĮą░ą║ąŠ, čćč鹊 ą╝ąŠąČąĄčé ąŠą║ą░ąĘą░čéčīčüčÅ ąĮąĄčāą┤ąŠą▒ąĮčŗą╝, ą┐ąĄčĆą▓ą░čÅ čćą░čüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ąŠą╗ąČąĮą░ ąĘą░ą▓ąĄčĆčłąĖčéčīčüčÅ, ą┐ąĄčĆąĄą┤ č鹥ą╝ ą║ą░ą║ ą▓č鹊čĆą░čÅ čćą░čüčéčī ą╝ąŠąČąĄčé ąĮą░čćą░čéčī ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčīčüčÅ. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą▓č鹊čĆąŠą╣ ą▓čŗąĘąŠą▓ ą┤ąŠą╗ąČąĄąĮ ą╗ąĖą▒ąŠ ą▒čŗčéčī čüą┤ąĄą╗ą░ąĮ ą▓ čäčāąĮą║čåąĖąĖ callback (čäčāąĮą║čåąĖčÅ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░), ą║ąŠč鹊čĆą░čÅ ą▒čāą┤ąĄčé ą▓čŗąĘą▓ą░ąĮą░ ą┐ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ ą┐ąĄčĆą▓ąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ, ąĖą╗ąĖ ą▓ čåąĖą║ą╗ąĄ ą┐čĆąŠą▓ąĄčĆą║ąĖ, čćč鹊 ą┐čĆąĖąĮčÅčé ą║ąŠą┤ ą▓ąŠąĘą▓čĆą░čéą░ USB_STATUS_SUCCESS (ąŠąĮ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ ą▒ąŠą╗čīčłąĄ ąĮąĄ ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮą░).
4.7 Main Application (ąŠčüąĮąŠą▓ąĮą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░)
ąĀą░ą▒ąŠčéą░ čäčāąĮą║čåąĖąĖ main ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čüąŠčüč鹊ąĖčé ą▓ č鹊ą╝, čćč鹊ą▒čŗ ąŠčüčāčēąĄčüčéą▓ąĖčéčī ą╝ąŠčüčé (bridge) ą╝ąĄąČą┤čā USART ąĖ USB. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┤ą░ąĮąĮčŗąĄ, ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ ąŠčé USART, ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮčŗ ą▓ USB, ąĖ ąĮą░ąŠą▒ąŠčĆąŠčé.
4.7.1 USB Operation (čĆą░ą▒ąŠčéą░ USB)
ą¦č鹥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠčüčéčāą┐ą░čÄčé ąŠčé čģąŠčüčéą░, ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ USBD_Read ą┤ą╗čÅ ą║ąŠčĆčĆąĄą║čéąĮąŠą╣ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ. ą¤ąŠčüą║ąŠą╗čīą║čā čŹč鹊 ą░čüąĖąĮčģčĆąŠąĮąĮą░čÅ čäčāąĮą║čåąĖčÅ, č鹊 ąŠąĮą░ ąĮąĄ ą▒ą╗ąŠą║ąĖčĆčāąĄčé ą┐ąŠč鹊ą║ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ. ąŁč鹊 ąĘąĮą░čćąĖčé, čćč鹊 ą┤čĆčāą│ąĖąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ (čéąĖą┐ą░ čćč鹥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ąĖąĘ USART) ą╝ąŠą│čāčé ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮčŗ ą▓ č鹊 ą▓čĆąĄą╝čÅ, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čéčĆą░ąĮčüč乥čĆ. ąÜą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▒čŗą╗ąĖ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ čģąŠčüč鹊ą╝, čéčĆą░ąĮčüč乥čĆ ąĘą░ą▓ąĄčĆčłą░ąĄčéčüčÅ ąĖ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ čüą▓čÅąĘą░ąĮąĮą░čÅ čü čŹčéąĖą╝ ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖčÅ callback. ąŁč鹊čé callback ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą┐ąĄčĆąĄąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐čĆąĖąĮčÅčéčŗčģ ą┤ą░ąĮąĮčŗčģ ą▓ USART.
ą¤ąŠčģąŠąČąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮą░ čäčāąĮą║čåąĖčÅ USBD_Write, ą║ą░ą║ č鹊ą╗čīą║ąŠ ąĖą╝ąĄčÄčéčüčÅ ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ, čéą░ą║ąČąĄ ą▒ąĄąĘ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąŠč鹊ą║ą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ. ą×ą┤ąĮą░ą║ąŠ ąĮąĄą╗čīąĘčÅ ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčī čüčĆą░ąĘčā ą┤ą▓ąĄ ąŠą┐ąĄčĆą░čåąĖąĖ ąĘą░ą┐ąĖčüąĖ ą▓ ąŠą┤ąĮąŠ ąĖ č鹊 ąČąĄ ą▓čĆąĄą╝čÅ, čéą░ą║ čćč鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┤ąŠą╗ąČąĮą░ ą┐čĆąŠą▓ąĄčĆčÅčéčī - ąĘą░ą▓ąĄčĆčłąĄąĮą░ ą╗ąĖ ą┐čĆąĄą┤čŗą┤čāčēą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░. ąŁč鹊 ą╝ąŠąČąĮąŠ čüą┤ąĄą╗ą░čéčī ą┐čāč鹥ą╝ ą░ąĮą░ą╗ąĖąĘą░ ą║ąŠą┤ą░ ą▓ąŠąĘą▓čĆą░čéą░ ą╝ąĄč鹊ą┤ą░ USBD_Write. ąĢčüą╗ąĖ ą▓ąĄčĆąĮčāą╗ąŠčüčī ąĘąĮą░č湥ąĮąĖąĄ USB_STATUS_LOCKED, č鹊 ą┐ąŠą║ą░ ąĄčēąĄ ą░ą║čéąĖą▓ąĮą░ ą┐čĆąĄą┤čŗą┤čāčēą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ąŠą╗ąČąĮąŠ ąĖą╝ąĄčéčī ą▒čāč乥čĆ ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ, ą┐ąŠą╗čāč湥ąĮąĮčŗčģ ąŠčé USART, ą┐ąŠą║ą░ ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ ąĮąĄ ąŠčüą▓ąŠą▒ąŠą┤ąĖčéčüčÅ čüąĮąŠą▓ą░.
4.7.2 USART Operation (čĆą░ą▒ąŠčéą░ USART)
ąÉą┐ą┐ą░čĆą░čéčāčĆčā USART, ąĖą╝ąĄčÄčēą░čÅčüčÅ ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ AT91, ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą▓čāą╝čÅ čĆą░ąĘąĮčŗą╝ąĖ čüą┐ąŠčüąŠą▒ą░ą╝ąĖ. ąÜą╗ą░čüčüąĖč湥čüą║ąĖą╣ ą╝ąĄč鹊ą┤ - čćąĖčéą░čéčī ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░čéčī ąŠą┤ąĖąĮ ą▒ą░ą╣čé ąĘą░ ąŠą┤ąĖąĮ čĆą░ąĘ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čĆąĄą│ąĖčüčéčĆčŗ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ.
ąæąŠą╗ąĄąĄ ą╝ąŠčēąĮčŗą╣ ą╝ąĄč鹊ą┤ ą┤ąŠčüčéčāą┐ąĄąĮ ą┤ą╗čÅ čćąĖą┐ąŠą▓ AT91SAM, ą┐čāč鹥ą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐čĆčÅą╝ąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░ ą║ ą┐ą░ą╝čÅčéąĖ (DMA Controller, PDC). ąÉą┐ą┐ą░čĆą░čéčāčĆą░ PDC ąĘą░ą▒ąŠčéąĖčéčüčÅ ąŠ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĖ ą┤ą░ąĮąĮčŗčģ ą╝ąĄąČą┤čā ą┐čĆąŠčåąĄčüčüąŠčĆąŠą╝, ą┐ą░ą╝čÅčéčīčÄ ąĖ ą┐ąĄčĆąĖč乥čĆąĖąĄą╣, čćč鹊 ąŠčüą▓ąŠą▒ąŠąČą┤ą░ąĄčé čÅą┤čĆąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┤čĆčāą│ąĖčģ ąĘą░ą┤ą░čć.
ą¤ąŠčüą║ąŠą╗čīą║čā čåąĄą╗čī čŹč鹊ą│ąŠ application note č鹊ą╗čīą║ąŠ ą║ąŠą╝ą┐ąŠąĮąĄąĮčé USB, ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ USART ąĘą┤ąĄčüčī ąĮąĄ ąŠą┐ąĖčüą░ąĮąŠ.
4.8 ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ
4.8.1 ążą░ą╣ą╗ąŠą▓ą░čÅ ą░čĆčģąĖč鹥ą║čéčāčĆą░
ąÆ ą┐čĆąĖą╝ąĄčĆąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠą╣ ą┤ą╗čÅ čŹč鹊ą│ąŠ application note, ą║ąŠą┤ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą┤ąĄą╗ąĖčéčüčÅ ąĮą░ čéčĆąĖ čäą░ą╣ą╗ą░:
ŌĆó at91lib\usb\common\cdc: ą┐ą░ą┐ą║ą░, čüąŠą┤ąĄčƹȹ░čēą░čÅ ą▓čüąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąĖ ą╝ąĄč鹊ą┤čŗ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ CDC.
ŌĆó CDCAbstractControlManagementDescriptor.h: čģąĄą┤ąĄčĆ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖą╣ CDC ACM.
ŌĆó CDCCallManagementDescriptor.h: čģąĄą┤ąĄčĆ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖą╣ CDC Call Management (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓čŗąĘąŠą▓ą░ą╝ąĖ CDC).
ŌĆó CDCCommunicationInterfaceDescriptor.h: čģąĄą┤ąĄčĆ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖą╣ Communication Interface.
ŌĆó CDCDataInterfaceDescriptor.h: čģąĄą┤ąĄčĆ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖą╣ Data Interface.
ŌĆó CDCDeviceDescriptor.h: ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┤ą╗čÅ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ CDC.
ŌĆó CDCGenericDescriptor.h: ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┤ą╗čÅ ą┤ąĄčüą║čĆąĖą┐č鹊čĆąŠą▓ CDC.
ŌĆó CDCGenericRequest.h: ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ąĘą░ą┐čĆąŠčüąŠą▓ CDC.
ŌĆó CDCHeaderDescriptor.h: ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┤ą╗čÅ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░ CDC.
ŌĆó CDCUnionDescriptor.h: ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┤ą╗čÅ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ ąŠą▒čŖąĄą┤ąĖąĮąĄąĮąĖčÅ CDC.
ŌĆó CDCLineCoding.h: ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┤ą╗čÅ ąĘą░ą┐čĆąŠčüąŠą▓ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ą╗ąĖąĮąĖąĖ CDC.
ŌĆó CDCLineCoding.c: ą╝ąĄč鹊ą┤čŗ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ąĘą░ą┐čĆąŠčüąŠą▓ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ą╗ąĖąĮąĖąĖ CDC.
ŌĆó CDCSetControlLineStateRequest.h: ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┤ą╗čÅ ąĘą░ą┐čĆąŠčüą░ CDC SetControlLineState.
ŌĆó CDCSetControlLineStateRequest.c: ą╝ąĄč鹊ą┤čŗ ą┤ą╗čÅ ąĘą░ą┐čĆąŠčüą░ CDC SetControlLineState.
ŌĆó at91lib\usb\device\cdc-serial: ą┐ą░ą┐ą║ą░ čüąŠ ą▓čüąĄą╝ąĖ čäą░ą╣ą╗ą░ą╝ąĖ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╝ąĖ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ CDC serial.
ŌĆó CDCSerialDriver.h: čģąĄą┤ąĄčĆ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą║ąŠąĮą▓ąĄčĆč鹥čĆą░ USB-to-serial.
ŌĆó CDCSerialDriver.c: ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą║ąŠąĮą▓ąĄčĆč鹥čĆą░ USB-to-serial.
ŌĆó CDCSerialDriverDescriptors.h: čģąĄą┤ąĄčĆ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆąŠą▓ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą║ąŠąĮą▓ąĄčĆč鹥čĆą░ USB-to-serial.
ŌĆó CDCSerialDriverDescriptors.c: ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą┤ąĄčüą║čĆąĖą┐č鹊čĆąŠą▓ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą║ąŠąĮą▓ąĄčĆč鹥čĆą░ USB-to-serial.
ŌĆó usb-device-cdc-serial-project: ą┐ą░ą┐ą║ą░ ą┤ą╗čÅ ą║ąŠą┤ą░ ąŠčüąĮąŠą▓ąĮąŠą│ąŠ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ (main application code).
ŌĆó main.c: ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą│ą╗ą░ą▓ąĮąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ą¤čĆąĖą╝ąĄčĆ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ą┐ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą▓ą╝ąĄčüč鹥 čü Makefile, ą┐čĆąĖą╝ąĄąĮčÅąĄą╝čŗą╝ ą┤ą╗čÅ čüą▒ąŠčĆą║ąĖ. ąöą╗čÅ čüą▒ąŠčĆą║ąĖ ąĮčāąČąĮą░ čāčéąĖą╗ąĖčéą░ GNU make, ą║ąŠč鹊čĆą░čÅ ą┤ąŠčüčéčāą┐ąĮą░ ąĮą░ www.GNU.org. ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ ąĖ ąŠą┐čåąĖčÅą╝ Makefile čüą╝. AT91 USB Device Framework application note.
ą¦č鹊ą▒čŗ čüąŠą▒čĆą░čéčī ą┐čĆąĖą╝ąĄčĆ ą║ąŠąĮą▓ąĄčĆč鹥čĆą░ USB-to-serial ą┐čĆąŠčüč鹊 ą▓ą▓ąĄą┤ąĖč鹥 "make" ą▓ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĄ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ usb-device-cdcserial-project, ą┐čĆąĖ čŹč鹊ą╝ ą▓ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╣ čüčéčĆąŠą║ąĄ ą╝ąŠąČąĮąŠ ą┤ąŠą▒ą░ą▓ąĖčéčī ą┤ą▓ą░ ą┐ą░čĆą░ą╝ąĄčéčĆą░: CHIP= ąĖ BOARD=, ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ čŹčéąĖčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ŌĆ£at91sam7s256ŌĆØ ąĖ ŌĆ£at91sam7s-ekŌĆØ, ąĮą░ą┐čĆąĖą╝ąĄčĆ:
make CHIP=at91sam7se512 BOARD=at91sam7se-ek
ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ čĆąĄąĘčāą╗čīčéąĖčĆčāčÄčēąĖą╣ ą┤ą▓ąŠąĖčćąĮčŗą╣ ą║ąŠą┤ ą▒čāą┤ąĄčé ąĮą░ąĘčŗą▓ą░čéčīčüčÅ usb-device-cdc-serial-project-at91sam7se-ekat91sam7se512-flash.bin, ąĖ ąŠąĮ ą▒čāą┤ąĄčé ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ą░ą┐ą║ąĄ usb-device-cdc-serial-project/bin.
4.9 ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ Generic Host Driver (čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆ čģąŠčüčéą░)
ąś Microsoft┬« Windows, ąĖ Linux ą┐ąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ čüąŠ ą▓čüčéčĆąŠąĄąĮąĮčŗą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čü USB-čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ą║ąŠąĮą▓ąĄčĆč鹥čĆą░ USB-to-serial. ąÆ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ąŠą┐ąĖčüčŗą▓ą░čÄčéčüčÅ čłą░ą│ąĖ, ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čŹč鹊ą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░.
4.9.1 Windows
ąÆ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ Microsoft Windows čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ USB serial driver ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ usbser.sys, ąĖ ąŠąĮ čÅą▓ą╗čÅąĄčéčüčÅ čćą░čüčéčīčÄ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ąĮą░ą▒ąŠčĆą░ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓. ąŁč鹊čé ą┤čĆą░ą╣ą▓ąĄčĆ čüčéą░ą╗ ą┤ąŠčüčéčāą┐ąĄąĮ ąĮą░čćąĖąĮą░čÅ čü Windows 98SE. ą×ą┤ąĮą░ą║ąŠ, ą▓ ąŠčéą╗ąĖčćąĖąĄ ąŠčé ą┤čĆčāą│ąĖčģ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ Mass Storage Devices (MSD), ą┤čĆą░ą╣ą▓ąĄčĆ usbser.sys ąĮąĄ ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ, ą║ąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ CDC ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ą▓ ą┐ąĄčĆą▓čŗą╣ čĆą░ąĘ.
4.9.1.1 Writing a Windows Driver File (ąĮą░ą┐ąĖčüą░ąĮąĖąĄ ąĖąĮč乊čĆą╝ą░čåąĖąŠąĮąĮąŠą│ąŠ čäą░ą╣ą╗ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą┤ą╗čÅ Windows)
ą¦č鹊ą▒čŗ Windows ą║ąŠčĆčĆąĄą║čéąĮąŠ čĆą░čüą┐ąŠąĘąĮą░ą╗ąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąĮą░ą┐ąĖčüą░čéčī ą┤ą╗čÅ ąĮąĄą│ąŠ .inf čäą░ą╣ą╗. Windows Driver Development Kit (DDK) čüąŠą┤ąĄčƹȹĖčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ čŹč鹊ą╣ č鹥ą╝ąĄ. ąöą╗čÅ ąĮą░čłąĄą│ąŠ ą┐čĆąĖą╝ąĄčĆą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą┐ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą▒ą░ąĘąŠą▓čŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆ, ą║ąŠč鹊čĆčŗą╣ ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ 6119.inf, ąĖ čŹč鹊čé čäą░ą╣ą╗ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░ąĄčéčüčÅ ąĘą┤ąĄčüčī ą┐ąŠą┤čĆąŠą▒ąĮąŠ.
ą¤ąĄčĆą▓ą░čÅ čüąĄą║čåąĖčÅ čäą░ą╣ą╗ą░ .inf ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüąĄą║čåąĖąĄą╣ [Version]. ą×ąĮą░ čüąŠą┤ąĄčƹȹĖčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ą▓ąĄčĆčüąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░, ą┐čĆąŠą▓ą░ą╣ą┤ąĄčĆąĄ, ą┤ą░č鹥 čĆąĄą╗ąĖąĘą░ ąĖ čé. ą┐.
[Version]
Signature="$Chicago$"
Class=Ports
ClassGuid={4D36E978-E325-11CE-BFC1-08002BE10318}
Provider=%ATMEL%
DriverVer=09/12/2006,1.1.1.1
ąÉčéčĆąĖą▒čāčé Signature čÅą▓ą╗čÅąĄčéčüčÅ ąŠą▒čÅąĘą░č鹥ą╗čīąĮčŗą╝ ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗ąĖą▒ąŠ ŌĆ£$Windows 95$ŌĆØ, ŌĆ£$Windows NT$ŌĆØ ąĖą╗ąĖ ŌĆ£$Chicago$ŌĆØ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹊ą╣ ą▓ąĄčĆčüąĖąĖ (ą▓ąĄčĆčüąĖą╣) ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ, ą║ąŠč鹊čĆčāčÄ ą┤čĆą░ą╣ą▓ąĄčĆ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé. ąŚąĮą░č湥ąĮąĖąĄ ŌĆ£$Chicago$ŌĆØ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čüą╗čāčćą░čÅ, ą║ąŠą│ą┤ą░ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ą▓čüąĄ ą▓ąĄčĆčüąĖąĖ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčŗčģ čüąĖčüč鹥ą╝ Windows. ą¤ąŠčüą║ąŠą╗čīą║čā ą▓ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą║ąŠąĮą▓ąĄčĆč鹥čĆ USB-to-serial ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ virtual COM port, č鹊 ą░čéčĆąĖą▒čāčé Class ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī "Ports". ąŚąĮą░č湥ąĮąĖąĄ ClassGuid ąĘą░ą▓ąĖčüąĖčé ąŠčé ą║ą╗ą░čüčüą░, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ. ąŚąĮą░č湥ąĮąĖąĄ Provider ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 čüčéčĆąŠą║ąŠą▓čŗą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą┤ą╗čÅ ą┐ąŠčüčéą░ą▓čēąĖą║ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ (ą┐čĆąŠą▓ą░ą╣ą┤ąĄčĆą░) ą▒čāą┤ąĄčé ąĘą░ą┤ą░ąĮ ą▓ ą▒čāą┤čāčēąĄą╝, ą┐ąŠą╝ąĄč湥ąĮąĮčŗą╣ čé菹│ąŠą╝ ATMEL. ąś ą▓ ąĘą░ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ č鹥ą│ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓ąĄčĆčüąĖčÄ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĖ ą┤ą░čéčā čĆąĄą╗ąĖąĘą░. ąöą╗čÅ ąĮąŠą╝ąĄčĆą░ ą▓ąĄčĆčüąĖąĖ ą║ą░ąČą┤ą░čÅ čåąĖčäčĆą░ čÅą▓ą╗čÅąĄčéčüčÅ ąĮąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠą╣, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ ą┐ąĄčĆą▓ąŠą╣ čåąĖčäčĆčŗ, ąŠą┤ąĮą░ą║ąŠ ąĄčüą╗ąĖ čŹč鹊čé č鹥ą│ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé, č鹊 ąŠąĮ ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐čāčüčéčŗą╝.
ąĪą╗ąĄą┤čāčÄčēąĖą╝ąĖ ąĖą┤čāčé ą┤ą▓ąĄ čüąĄą║čåąĖąĖ, [SourceDisksNames] ąĖ [SourceDisksFiles]. ą×ąĮąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ čāą║ą░ąĘą░ąĮąĖčÅ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗčģ ą┤ąĖčüą║ąŠą▓ ą┤ą╗čÅ ąĖąĮčüčéą░ą╗ą╗čÅčåąĖąĖ, ąĖ čĆą░ąĘą╝ąĄčēąĄąĮąĖčÅ ą║ą░ąČą┤ąŠą│ąŠ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠą│ąŠ čäą░ą╣ą╗ą░ ąĮą░ čŹčéąĖčģ ą┤ąĖčüą║ą░čģ.
[SourceDisksNames]
1="Windows Install CD"
[SourceDisksFiles]
usbser.sys=1
ą¤ąĄčĆą▓ą░čÅ čüąĄą║čåąĖčÅ ą┤ą░ąĄčé čüą┐ąĖčüąŠą║ ąĖą╝ąĄąĮ ąĖčüčģąŠą┤ąĮčŗčģ ą┤ąĖčüą║ąŠą▓, ąĮą░ ą║ąŠč鹊čĆčŗčģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé ąĮą░ą╣čéąĖ ąĮąĄą┤ąŠčüčéą░čÄčēąĖąĄ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ čäą░ą╣ą╗čŗ. ą¤ąŠčüą║ąŠą╗čīą║čā ą┤čĆą░ą╣ą▓ąĄčĆčā ąĮčāąČąĄąĮ čäą░ą╣ą╗ usbser.sys, ą║ąŠč鹊čĆčŗą╣ ąĄčüčéčī ąĮą░ ąĖąĮčüčéą░ą╗ą╗čÅčåąĖąŠąĮąĮąŠą╝ Windows CD, č鹊 čŹč鹊čé ą┤ąĖčüą║ ąĘą┤ąĄčüčī ąĖ čāą║ą░ąĘą░ąĮ. ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┤ąĖčüą║ą░ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāąĮąĖą║ą░ą╗čīąĮčŗą╝, ą▓ ą▓ąĖą┤ąĄ ąĮąĄąĮčāą╗ąĄą▓ąŠą╣ čåąĖčäčĆčŗ (ID = 1). ąÆč鹊čĆą░čÅ čüąĄą║čåąĖčÅ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ąĮą░ ą║ą░ą║ąŠą╝ ą┤ąĖčüą║ąĄ ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą║ą░ąČą┤čŗą╣ čäą░ą╣ą╗. ąÆ ąĮą░čłąĄą╝ čüą╗čāčćą░ąĄ, usbser.sys ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮą░ą╣ą┤ąĄąĮ ąĮą░ ą┤ąĖčüą║ąĄ 1 (ą║ąŠč鹊čĆčŗą╣ "Windows Install CD"). ą£ąŠąČąĄčé ą▒čŗčéčī čāą║ą░ąĘą░ąĮ ą┐ąŠą╗ąĮčŗą╣ ą┐čāčéčī (čćč鹊 ąĮąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ) ą┤ąŠ čäą░ą╣ą╗ą░ ąĮą░ CD.
ąóąĄą┐ąĄčĆčī čäą░ą╣ą╗ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą┤ąŠą╗ąČąĄąĮ čāą║ą░ąĘą░čéčī ą┐čāčéčī, ą║čāą┤ą░ ąĮčāąČąĮąŠ ąĘą░ą┐ąĖčüą░čéčī čüą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ čäą░ą╣ą╗čŗ, ąĖčüą┐ąŠą╗čīąĘčāčÅ čüąĄą║čåąĖčÄ [DestinationDirs].
[DestinationDirs]
DefaultDestDir=12
ą”ąĄą╗ąĄą▓ą░čÅ ą┤ąĖčĆąĄą║č鹊čĆąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆąŠą▓ą░ąĮą░ ą┐ąŠ čüą▓ąŠąĄą╝čā ID, ą║ąŠč鹊čĆčŗą╣ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą┤ą╗čÅ čüąĖčüč鹥ą╝čŗ. ID ą┤ą╗čÅ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ drivers čĆą░ą▓ąĄąĮ 12.
ąĪąĄą║čåąĖčÅ [Manufacturer] ą┐ąĄčĆąĄčćąĖčüą╗čÅąĄčé ą▓ąŠąĘą╝ąŠąČąĮčŗčģ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣ ą┤ą╗čÅ ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ čŹčéąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝. ąÆ ąĮą░čłąĄą╝ čüą╗čāčćą░ąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░ ATMEL, čéą░ą║ čćč鹊 čéčāčé ą▒čāą┤ąĄčé č鹊ą╗čīą║ąŠ čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ.
[Manufacturer]
%ATMEL%=AtmelMfg
ąÉčéčĆąĖą▒čāčé ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüčéčĆąŠą║ąŠą▓čŗą╝ č鹥ą│ąŠą╝; ąĄą│ąŠ ąĘąĮą░č湥ąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĖą╝ąĄąĮąĄą╝ čüąĄą║čåąĖąĖ Models, ą▓ ą║ąŠč鹊čĆąŠą╣ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą▓čüąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ąŠčé čŹč鹊ą│ąŠ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ. ąÆ ąĮą░čłąĄą╝ čüą╗čāčćą░ąĄ čüčéčĆąŠą║ą░ ą▒čāą┤ąĄčé AtmelMfg, ą║ąŠč鹊čĆą░čÅ čāą║ą░ąĘą░ąĮą░ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ čüąĄą║čåąĖąĖ.
ąÜą░ąČą┤ą░čÅ čüąĄą║čåąĖčÅ Models ą┤ąŠą╗ąČąĮą░ ą┐ąĄčĆąĄčćąĖčüą╗ąĖčéčī hardware ID ą║ą░ąČą┤ąŠą│ąŠ ąĖąĘ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ čāčüčéčĆąŠą╣čüčéą▓. ąöą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ USB hardware ID čüąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ąĖąĘ Vendor ID, Product ID ąĖ (čćč鹊 ąĮąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ) ąĖąĘ Device Release Number (ąĮąŠą╝ąĄčĆ čĆąĄą╗ąĖąĘą░ čāčüčéčĆąŠą╣čüčéą▓ą░). ąŁčéąĖ ąĘąĮą░č湥ąĮąĖčÅ ą▓čŗčćąĖčéčŗą▓ą░čÄčéčüčÅ ąĖąĘ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ čģąŠčüčéčā ąĮą░ čäą░ąĘąĄ 菹Įčāą╝ąĄčĆą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
[AtmelMfg]
%USBtoSerialConverter%=USBtoSer.Install,USB\VID_03EB&PID_6119
ąśą╝čÅ ą░čéčĆąĖą▒čāčéą░ čüąĮąŠą▓ą░ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąŠ ą▓ ą▓ąĖą┤ąĄ čüčéčĆąŠą║ąŠą▓ąŠą│ąŠ čé菹│ą░, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░. ąŚąĮą░č湥ąĮąĖąĄ čüąŠčüč鹊ąĖčé ąĖąĘ ąĖą╝ąĄąĮąĖ čüąĄą║čåąĖąĖ ąĖąĮčüčéą░ą╗ą╗čÅčåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ (USBtoSer.Install) ąĖ ąĖąĘ hardware ID. ąŚąĮą░č湥ąĮąĖąĄ hardware ID č鹊 ąČąĄ čüą░ą╝ąŠąĄ, ą║ą░ą║ čāą║ą░ąĘą░ąĮąŠ ą▓ čüąĄą║čåąĖąĖ 4.4.1čÄ
ąóąĄą┐ąĄčĆčī čäą░ą╣ą╗ .inf ą┤ąŠą╗ąČąĄąĮ ą┤ąĄčéą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī čüąĄą║čåąĖčÄ ąĖąĮčüčéą░ą╗ą╗čÅčåąĖąĖ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čĆą░ąĮąĄąĄ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ąÆ ąĮą░čłąĄą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą▒čāą┤ąĄčé č鹊ą╗čīą║ąŠ ąŠą┤ąĮą░ čüąĄą║čåąĖčÅ ąĖąĮčüčéą░ą╗ą╗čÅčåąĖąĖ, ą║ąŠč鹊čĆą░čÅ ąĮąŠčüąĖčé ąĖą╝čÅ USBtoSer.Install:
[USBtoSer.Install]
CopyFiles=USBtoSer.CopyFiles
AddReg=USBtoSer.AddReg
[USBtoSer.CopyFiles]
usbser.sys,,,0x00000002
[USBtoSer.AddReg]
HKR,,DevLoader,,*ntkern
HKR,,NTMPDriver,,usbser.sys
[USBtoSer.Install.Services]
AddService=usbser,0x00000002,USBtoSer.AddService
[USBtoSer.AddService]
DisplayName=%USBSer%
ServiceType=1r
StartType=3
ServiceBinary=%12%\usbser.sys
ąĪąĄą║čåąĖčÅ ąĖąĮčüčéą░ą╗ą╗čÅčåąĖąĖ čüąŠčüč鹊ąĖčé ąĖąĘ 5 čćą░čüč鹥ą╣. ąÆ ą┐ąĄčĆą▓ąŠą╣ čüąĄą║čåąĖąĖ čāą║ą░ąĘą░ąĮčŗ ąĖą╝ąĄąĮą░ ą┤ą▓čāčģ ą┤čĆčāą│ąĖčģ čüąĄą║čåąĖą╣: ąŠą┤ąĮą░ čüą┐ąĖčüą║ą░ čäą░ą╣ą╗ąŠą▓ ą┤ą╗čÅ ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖčÅ, ą┤čĆčāą│ą░čÅ ą┤ą╗čÅ ą║ą╗čÄč湥ą╣, ą║ąŠč鹊čĆčŗąĄ ąĮčāąČąĮąŠ ą┤ąŠą▒ą░ą▓ąĖčéčī ą▓ čĆąĄąĄčüčéčĆ Windows. ąöą╗čÅ ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĘą┤ąĄčüčī ąĖą╝ąĄąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ čäą░ą╣ą╗, usbser.sys; čäą╗ą░ą│ (0x00000002) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, čćč鹊ą▒čŗ čāą║ą░ąĘą░čéčī, čćč鹊 ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ąĮąĄ ą╝ąŠąČąĄčé ą┐čĆąŠą┐čāčüčéąĖčéčī ąĄą│ąŠ ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖąĄ. ąÜą╗čÄčćąĖ čĆąĄąĄčüčéčĆą░ ąĮčāąČąĮčŗ ąĮčāąČąĮčŗ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą▓ čüčéą░čĆčŗčģ ą▓ąĄčĆčüąĖčÅčģ Windows (ą║ą░ą║ ąĮą░ą┐čĆąĖą╝ąĄčĆ Windows 98). ąöą╗čÅ ąĮąŠą▓čŗčģ ą▓ąĄčĆčüąĖą╣ ąĮčāąČąĮčŗ čĆąĄą│ąĖčüčéčĆčŗ [USBtoSer.Install.Services] ą┤ą╗čÅ čüąĄčĆą▓ąĖčüąŠą▓ čÅą┤čĆą░; ą║ą░ąČą┤čŗą╣ čüąĄčĆą▓ąĖčü čĆąĄą░ą╗čīąĮąŠ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą▓ čüą▓ąŠąĄą╣ čüąŠą▒čüčéą▓ąĄąĮąĮąŠą╣ čüąĄą║čåąĖąĖ.
ąś ąĮą░ą║ąŠąĮąĄčå, ą┐ąŠčüą╗ąĄą┤ąĮčÅčÅ čüąĄą║čåąĖčÅ [Strings], ąĘą░ą┤ą░ąĄčé ą▓čüąĄ čüčéčĆąŠą║ąŠą▓čŗąĄ ą║ąŠąĮčüčéą░ąĮčéčŗ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą▓ čŹč鹊ą╝ čäą░ą╣ą╗ąĄ:
[Strings]
ATMEL="ATMEL Corp."
USBtoSerialConverter="AT91 USB to Serial Converter"
USBSer="USB Serial Driver"
4.9.1.2 ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆą░.
ąÜąŠą│ą┤ą░ ąĮąŠą▓ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą▓ ą┐ąĄčĆą▓čŗą╣ čĆą░ąĘ, Windows ąĖčēąĄčé ą┐ąŠą┤čģąŠą┤čÅčēąĖą╣ čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ą┤ą╗čÅ ąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ. ąś ąĄčüą╗ąĖ ąĮąĄ ąĮą░čģąŠą┤ąĖčé, č鹊 ą▓čŗą┤ą░ąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąĘą░ą┐čĆąŠčü - čćč鹊 ą┤ąĄą╗ą░čéčī? ąŁč鹊 ą║ą░ą║ čĆą░ąĘ čüą╗čāčćą░ą╣ ą║ąŠąĮą▓ąĄčĆč鹥čĆą░ USB-to-serial, ą┐ąŠčüą║ąŠą╗čīą║čā ąŠąĮ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé generic ą┤čĆą░ą╣ą▓ąĄčĆ. ąöą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░, čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ ą▓ ą┐čĆąĄą┤čŗą┤čāčēąĄą╣ čüąĄą║čåąĖąĖ, ą┤ą╗čÅ Windows ąĮčāąČąĮąŠ čāą║ą░ąĘą░čéčī, ą│ą┤ąĄ ąĄą│ąŠ ąĖčüą║ą░čéčī. ąŁč鹊 ą╝ąŠąČąĮąŠ čüą┤ąĄą╗ą░čéčī ą┐čāč鹥ą╝ ą▓čŗą▒ąŠčĆą░ ą▓č鹊čĆąŠą╣ ąŠą┐čåąĖąĖ, ŌĆ£Install from a list or specific locationŌĆØ, ą║ąŠą│ą┤ą░ ąĘą░ą┐čāčüčéąĖčéčüčÅ ą╝ą░čüč鹥čĆ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░. ą×ąĮ ąĘą░ą┐čĆąŠčüąĖčé ą┤ąĖčĆąĄą║č鹊čĆąĖčÄ, ą│ą┤ąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆ. ąŻą║ą░ąČąĖč鹥 ąĄą╝čā ą┐ą░ą┐ą║čā, ą│ą┤ąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ čäą░ą╣ą╗ 6119.inf. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ, Windows čĆą░čüą┐ąŠąĘąĮą░ąĄčé ą┤čĆą░ą╣ą▓ąĄčĆ ŌĆ£AT91 USB to Serial ConverterŌĆØ ąĖ ąŠč鹊ą▒čĆą░ąĘąĖčé ąĄą│ąŠ ą▓ čüą┐ąĖčüą║ąĄ ąöąĖčüą┐ąĄčéč湥čĆą░ ąŻčüčéčĆąŠą╣čüčéą▓.
ąÆąŠ ą▓čĆąĄą╝čÅ ąĖąĮčüčéą░ą╗ą╗čÅčåąĖąĖ ą╝ą░čüč鹥čĆ čéą░ą║ąČąĄ ąĘą░ą┐čĆąŠčüąĖčé čĆą░ąĘą╝ąĄčēąĄąĮąĖąĄ čäą░ą╣ą╗ą░ usbser.sys. ą×ą▒čŗčćąĮąŠ ąŠąĮ čāąČąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ čüąĖčüč鹥ą╝ąĄ, ąĖ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ą░ą┐ą║ąĄ "C:\Windows\System32\Drivers\". ąÆ ą┐čĆąŠčéąĖą▓ąĮąŠą╝ čüą╗čāčćą░ąĄ, ąĄą│ąŠ ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ąĮą░ Windows installation CD - ąĖąĮčüčéą░ą╗ą╗čÅčåąĖąŠąĮąĮąŠą╝ ą┤ąĖčüą║ąĄ Windows.
ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┤čĆą░ą╣ą▓ąĄčĆ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ čāčüčéą░ąĮąŠą▓ąĖą╗čüčÅ, ą▓ čüąĖčüč鹥ą╝ąĄ ą┐ąŠčÅą▓ąĖčéčüčÅ ąĮąŠą▓čŗą╣ COM ą┐ąŠčĆčé, ąĖ ąĄą│ąŠ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī, ą║ ą┐čĆąĖą╝ąĄčĆčā, ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ HyperTerminal.
4.9.2 Linux
Linux ąĖą╝ąĄąĄčé ą┤ą▓ą░ čĆą░ąĘą╗ąĖčćąĮčŗčģ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ (generic) ą┤čĆą░ą╣ą▓ąĄčĆą░, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤čģąŠą┤čÅčé ą┤ą╗čÅ ąĮą░čłąĄą│ąŠ ą║ąŠąĮą▓ąĄčĆč鹥čĆą░ USB-to-serial. ą¤ąĄčĆą▓čŗą╣ ąĖąĘ ąĮąĖčģ - ą┤čĆą░ą╣ą▓ąĄčĆ Abstract Control Model, čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąĮčŗą╣ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠą┤ąĄą╝ą░, ąĖ ąŠąĮ ą┐čĆąŠčüč鹊 ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ acm. ąöčĆčāą│ąŠą╣ ą┤čĆą░ą╣ą▓ąĄčĆ - ą┐čĆąŠčüč鹊ą╣ ą┤čĆą░ą╣ą▓ąĄčĆ "USB to serial", ąŠąĮ ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ usbserial.
ąĢčüą╗ąĖ ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ acm čüą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮą░ ą▓ čÅą┤čĆąĄ, Linux ą▒čāą┤ąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĘą░ą│čĆčāąČą░čéčī ąĄą│ąŠ. ąØąŠą▓ąŠąĄ č鹥čĆą╝ąĖąĮą░ą╗čīąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▒čāą┤ąĄčé čüąŠąĘą┤ą░ąĮąŠ ą┐ąŠą┤ ąĖą╝ąĄąĮąĄą╝ /dev/ttyACMx.
ąöčĆą░ą╣ą▓ąĄčĆ usbserial ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░ą│čĆčāąČąĄąĮ ą▓čĆčāčćąĮčāčÄ čü ą┐ąŠą╝ąŠčēčīčÄ ą║ąŠą╝ą░ąĮą┤čŗ modprobe, čü čāą║ą░ąĘą░ąĮąĖąĄą╝ vendor ID ąĖ product ID, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąĄ USB:
modprobe usbserial vendor=0x03EB product=0x6119
ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┤čĆą░ą╣ą▓ąĄčĆ ąĘą░ą│čĆčāąČąĄąĮ, ą┐ąŠčÅą▓ąĖčéčüčÅ ąĮąŠą▓ą░čÅ č鹥čĆą╝ąĖąĮą░ą╗čīąĮą░čÅ ąĘą░ą┐ąĖčüčī, ą║ąŠč鹊čĆą░čÅ ą▒čāą┤ąĄčé ąĮą░ąĘčŗą▓ą░čéčīčüčÅ /dev/ttyUSBx.
[ąĪčüčŗą╗ą║ąĖ]
1. ą¤čĆąĖą╝ąĄčĆčŗ ą┐čĆąĖąĄą╝ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ č湥čĆąĄąĘ ą▓ąĖčĆčéčāą░ą╗čīąĮčŗą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé USB CDC (ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą▓ ą▓ąĖą┤ąĄ ą┐čĆąŠąĄą║čéą░ IAR 5.50).
2. ąĪčģąĄą╝ą░ ą╝ą░ą║ąĄčéąĮąŠą╣ ą┐ą╗ą░čéčŗ AT91SAM7X.
3. ąĀą░ą▒ąŠčéą░ čü ą║ąŠą╗čīčåąĄą▓čŗą╝ ą▒čāč乥čĆąŠą╝.
4. ąæąĄčüą┐ą╗ą░čéąĮą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┤ą╗čÅ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┐ąŠčĆč鹊ą▓ COM Port Stress Test.
5. USB ą║ąŠąĮčüąŠą╗čī ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆą░ą┤ąĖąŠą╗čÄą▒ąĖč鹥ą╗čīčüą║ąĖą╝ąĖ ą┐čĆąĖą▒ąŠčĆą░ą╝ąĖ.
6. AT91SAM7X: ąĖąĮč鹥čĆč乥ą╣čü USB (UDP, USB Device Port). |




ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ
microsin: ąĮąĄ čüčéą░ą╗ą║ąĖą▓ą░ą╗čüčÅ. ą£ąŠąČąĄčé ą▒čŗčéčī, čā ąÆą░čü ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ą░ ąĖąĘ-ąĘą░ ąĘą░ą▓ąĖčüą░ąĮąĖčÅ?
RSS ą╗ąĄąĮčéą░ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĄą▓ čŹč鹊ą╣ ąĘą░ą┐ąĖčüąĖ