|
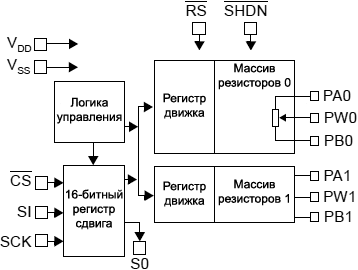
ą£ąĖą║čĆąŠčüčģąĄą╝čŗ MCP41XXX/MCP42XXX ą║ąŠą╝ą┐ą░ąĮąĖąĖ Microschip čŹč鹊 菹╗ąĄą║čéčĆąŠąĮąĮčŗą╣ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆ, čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü SPI. ąŻ ąĮąĄą│ąŠ ą╝ąŠąČąĄčé ą▒čŗčéčī 1 ąĖą╗ąĖ 2 ą║ą░ąĮą░ą╗ą░ ąĖ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą▓čģąŠą┤čŗ ą┤ą╗čÅ čüą▒čĆąŠčüą░, ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ, ą░ čéą░ą║ąČąĄ čåąĖčäčĆąŠą▓ąŠą╣ ą▓čŗčģąŠą┤ ą┤ą╗čÅ ą║ą░čüą║ą░ą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą║ąĖčģ čāčüčéčĆąŠą╣čüčéą▓ ą▓ čåąĄą┐ąŠčćą║čā ą┐ąŠ ą┤ą░ąĮąĮčŗą╝ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą░ąĮą░ą╗ąŠą▓ ąĖ ąĮą░ą╗ąĖčćąĖąĄ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ ą▓čŗą▓ąŠą┤ąŠą▓ ąĘą░ą▓ąĖčüąĖčé ąŠčé čéąĖą┐ą░ ą║ąŠčĆą┐čāčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░).
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĘą┤ąĄčüčī ą┤ą░ąĮ ą┐ąĄčĆąĄą▓ąŠą┤ ą┤ą░čéą░čłąĖčéą░ [1] čü ą░ą║čåąĄąĮč鹊ą╝ ąĮą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ąĖ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ. ąóą░ą▒ą╗ąĖčåčŗ čü 菹╗ąĄą║čéčĆąĖč湥čüą║ąĖą╝ąĖ, ą┐čĆąĄą┤ąĄą╗čīąĮąŠ ą┤ąŠą┐čāčüčéąĖą╝čŗą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ ą┤ąĖą░ą│čĆą░ą╝ą╝ ą▓čĆąĄą╝ąĄąĮąĖ čüą╝. ą▓ ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮąŠą╝ ą┤ą░čéą░čłąĖč鹥.
[ą×čüąĮąŠą▓ąĮčŗąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░]
ŌĆó ąŻ ą║ą░ąČą┤ąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░ ąĖą╝ąĄąĄčéčüčÅ 256 ą┐ąŠą╗ąŠąČąĄąĮąĖą╣ "ą┤ą▓ąĖąČą║ą░".
ŌĆó ąŚąĮą░č湥ąĮąĖčÅ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅ ą╝ąŠą│čāčé ą▒čŗčéčī 10 k╬®, 50 k╬® ąĖ 100 k╬®.
ŌĆó ąĢčüčéčī ąŠą┤ąĮąŠą║ą░ąĮą░ą╗čīąĮčŗąĄ ąĖ ą┤ą▓čāčģą║ą░ąĮą░ą╗čīąĮčŗąĄ ą▓ąĄčĆčüąĖąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ.
ŌĆó ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü SPI (čĆąĄąČąĖą╝čŗ 0,0 ąĖ 1,1).
ŌĆó ąśąĮč鹥ą│čĆą░ą╗čīąĮą░čÅ ąĮąĄą╗ąĖąĮąĄą╣ąĮąŠčüčéčī (INL) ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮą░čÅ ąĮąĄą╗ąĖąĮąĄą╣ąĮąŠčüčéčī (DNL) čüąŠčüčéą░ą▓ą╗čÅčÄčé ┬▒1 ą▓ąĄčü ą╝ą╗ą░ą┤čłąĄą│ąŠ čĆą░ąĘčĆčÅą┤ą░ (LSB).
ŌĆó ą¤čĆąĖą╝ąĄąĮąĄąĮą░ č鹥čģąĮąŠą╗ąŠą│ąĖą╣ Low power CMOS, ą▓ čüčéą░čéąĖč湥čüą║ąŠą╝ čĆąĄąČąĖą╝ąĄ č鹊ą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čüąŠčüčéą░ą▓ą╗čÅąĄčé ą╝ą░ą║čüąĖą╝čāą╝ 1 ╬╝A.
ŌĆó ąØąĄčüą║ąŠą╗čīą║ąŠ ą╝ąĖą║čĆąŠčüčģąĄą╝ ą╝ąŠą│čāčé ą▒čŗčéčī čüąŠąĄą┤ąĖąĮąĄąĮčŗ ą▓ ąŠą┤ąĮčā čåąĄą┐ąŠčćą║čā ą║ą░čüą║ą░ą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąŠ ą┐ąĄčĆąĄą┤ą░č湥 ą┤ą░ąĮąĮčŗčģ.
ŌĆó ą×ą┤ąĮąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ (2.7 .. 5.5V).
ŌĆó ąśąĮą┤čāčüčéčĆąĖą░ą╗čīąĮąŠąĄ ąĖčüą┐ąŠą╗ąĮąĄąĮąĖąĄ ą┤ą╗čÅ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ č鹥ą╝ą┐ąĄčĆą░čéčāčĆ: -40┬░ .. +85┬░C.
ŌĆó ąĀą░čüčłąĖčĆąĄąĮąĮčŗą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ: -40┬░ .. +125┬░C.
ŌĆó ążčāąĮą║čåąĖčÅ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ ąŠčéą║čĆčŗą▓ą░čÄčé čüčģąĄą╝čŗ ą┤ą╗čÅ ą▓čüąĄčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓ ą┤ą╗čÅ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ 菹║ąŠąĮąŠą╝ąĖąĖ 菹ĮąĄčĆą│ąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ.
ąóąŠą╗čīą║ąŠ ą┤ą╗čÅ ą┤ą▓čāčģą║ą░ąĮą░ą╗čīąĮčŗčģ ą▓ąĄčĆčüąĖą╣ MCP42XXX:
ŌĆó ąÉą┐ą┐ą░čĆą░čéąĮčŗąĄ ą▓čŗą▓ąŠą┤čŗ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ ~SHDN, čüą▒čĆąŠčüą░ ~RS ąĖ ą▓čŗčģąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ SO.
ąÆąĄčĆčüąĖąĖ MCP41XXX čÅą▓ą╗čÅčÄčéčüčÅ ąŠą┤ąĮąŠą║ą░ąĮą░ą╗čīąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ, ą┐ąŠčüčéą░ą▓ą╗čÅąĄą╝čŗą╝ąĖ ą▓ 8-ą▓čŗą▓ąŠą┤ąĮčŗčģ ą║ąŠčĆą┐čāčüą░čģ PDIP ąĖą╗ąĖ SOIC. ąÆąĄčĆčüąĖąĖ MCP42XXX čüąŠą┤ąĄčƹȹ░čé 2 ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗčģ ą║ą░ąĮą░ą╗ą░ ą▓ 14-ą▓čŗą▓ąŠą┤ąĮčŗčģ ą║ąŠčĆą┐čāčüą░čģ PDIP, SOIC ąĖą╗ąĖ TSSOP. ą¤ąŠąĘąĖčåąĖčÅ "ą┤ą▓ąĖąČą║ą░" čĆąĄąĘąĖčüč鹊čĆąŠą▓ MCP41XXX/42XXX ą╝ąĄąĮčÅąĄčéčüčÅ ą┐ąŠ ą╗ąĖąĮąĄą╣ąĮąŠą╝čā ąĘą░ą║ąŠąĮčā ąĖ ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ SPI. ążčāąĮą║čåąĖčÅ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ (shutdown), ą░ą║čéąĖą▓ąĖčĆčāąĄą╝ą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ, čĆą░ą▒ąŠčéą░ąĄčé čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊 ą▓čŗą▓ąŠą┤ A ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░ ąŠčéą║ą╗čÄčćą░ąĄčéčüčÅ, ąĖ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ "ą┤ą▓ąĖąČąŠą║" W ą┐ąŠą┤čüąŠąĄą┤ąĖąĮčÅąĄčéčüčÅ ą║ ą▓čŗą▓ąŠą┤čā B. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą┤ą▓čāčģą║ą░ąĮą░ą╗čīąĮčŗąĄ ą▓ąĄčĆčüąĖąĖ 菹╗ąĄą║čéčĆąŠąĮąĮąŠą│ąŠ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░ MCP42XXX ąĖą╝ąĄčÄčé ą▓čŗą▓ąŠą┤ ~SHDN, ą║ąŠč鹊čĆčŗą╣ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé čéčā ąČąĄ čäčāąĮą║čåąĖčÄ, ąĮąŠ ą░ą┐ą┐ą░čĆą░čéąĮąŠ. ąÆąŠ ą▓čĆąĄą╝čÅ čĆąĄąČąĖą╝ą░ shutdown čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆą░ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą┤ą▓ąĖąČą║ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮąŠ, ąĖ č鹊ą│ą┤ą░ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆ ą▓ąĄčĆąĮąĄčéčüčÅ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ shutdown ą▓ ąĮąŠą▓ąŠąĄ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ą┤ą▓ąĖąČą║ą░.
ąöą▓ąĖąČąŠą║ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ą▓ čüčĆąĄą┤ąĮčÄčÄ ą┐ąŠąĘąĖčåąĖčÄ 80h ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ. ąÆčŗą▓ąŠą┤ ~RS (reset, čüą▒čĆąŠčü, ą┤ąŠčüčéčāą┐ąĄąĮ č鹊ą╗čīą║ąŠ ą▓ ą┤ą▓čāčģą║ą░ąĮą░ą╗čīąĮčŗčģ ą▓ąĄčĆčüąĖčÅčģ MCP42XXX) čĆąĄą░ą╗ąĖąĘčāąĄčé ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ čüą▒čĆąŠčü, ą▓ąŠąĘą▓čĆą░čēą░čÅ ą┤ą▓ąĖąČąŠą║ čĆąĄąĘąĖčüč鹊čĆą░ ą▓ čüčĆąĄą┤ąĮąĄąĄ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ.
ąśąĮč鹥čĆč乥ą╣čü SPI ą╝ąĖą║čĆąŠčüčģąĄą╝ ą▓ąĄčĆčüąĖą╣ MCP42XXX ąĖą╝ąĄąĄčé 2 čüąĖą│ąĮą░ą╗ą░ SI ąĖ SO (ą▓čģąŠą┤ ąĖ ą▓čŗčģąŠą┤), ą┐ąŠąĘą▓ąŠą╗čÅčÅ ą║ą░čüą║ą░ą┤ąĖčĆąŠą▓ą░čéčī ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ čāčüčéčĆąŠą╣čüčéą▓.
ąĪąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅ ą║ą░ąĮą░ą╗ąŠą▓ MCP42XXX ąŠčéą╗ąĖčćą░čÄčéčüčÅ ąĮąĄ ą▒ąŠą╗čīčłąĄ, č湥ą╝ ąĮą░ 1%.
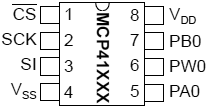
ą”ąŠą║ąŠą╗ąĄą▓ą║ą░ ą║ąŠčĆą┐čāčüąŠą▓ PDIP8, SOIC8:
ą”ąŠą║ąŠą╗ąĄą▓ą║ą░ ą║ąŠčĆą┐čāčüąŠą▓ PDIP14, SOIC14, TSSOP14:

[ą×ą┐ąĖčüą░ąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓]
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
PB0,
PB1 |
ąÆčŗą▓ąŠą┤ B ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░. ąÜą╗ąĄą╝ą╝ą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░, ą║ąŠč鹊čĆą░čÅ ąŠą▒čŗčćąĮąŠ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ ąĘąĄą╝ą╗ąĄ. |
PA0,
PA1 |
ąÆčŗą▓ąŠą┤ A ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░. ąÜą╗ąĄą╝ą╝ą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░, ąĮą░ ą║ąŠč鹊čĆčāčÄ ąŠą▒čŗčćąĮąŠ ą┐ąŠą┤ą░ąĄčéčüčÅ čĆąĄą│čāą╗ąĖčĆčāąĄą╝čŗą╣ čüąĖą│ąĮą░ą╗. |
PW0,
PW1 |
"ąöą▓ąĖąČąŠą║" ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░/ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░. |
| ~CS |
ąŁč鹊 ą▓čŗą▓ąŠą┤ ą▓čģąŠą┤ą░ ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą║ąĖ ą┐ąŠčĆčéą░ SPI (chip select), ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ą║ąŠą╝ą░ąĮą┤čŗ ąĖ ą┤ą░ąĮąĮčŗčģ ą▓ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░ ąĖ ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĘą░ą│čĆčāąČąĄąĮąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ą▓ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ čüą┤ą▓ąĖą│ą░ ą▓ čĆąĄą│ąĖčüčéčĆ (ąĖą╗ąĖ čĆąĄą│ąĖčüčéčĆčŗ) ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░ (ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆąŠą▓). ąĪąĖą│ąĮą░ą╗ čŹč鹊ą│ąŠ ą▓čŗą▓ąŠą┤ą░ ą┐čĆąŠčģąŠą┤ąĖčé č湥čĆąĄąĘ čéčĆąĖą│ą│ąĄčĆ ą©ą╝ąĖčéčéą░. |
| SCK |
ąŁč鹊 ą▓čŗą▓ąŠą┤ ą▓čģąŠą┤ą░ čéą░ą║č鹊ą▓ ą┐ąŠčĆčéą░ SPI, ąĖ ąŠąĮ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą╣ ąĘą░ą│čĆčāąĘą║ąĖ ą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝čā ą║ąŠą╝ą░ąĮą┤čŗ ąĖ ą┤ą░ąĮąĮčŗčģ. ąöą░ąĮąĮčŗąĄ ą▓ą┤ą▓ąĖą│ą░čÄčéčüčÅ ą▓ ą▓čŗą▓ąŠą┤ SI ą┐ąŠ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠą╝čā ą┐ąĄčĆąĄą┐ą░ą┤čā SCK (0 -> 1), ąĖ ą▓čŗčģąŠą┤čÅčé ąĮą░čĆčāąČčā č湥čĆąĄąĘ ą▓čŗą▓ąŠą┤ SO ą┐ąŠ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą╝čā ą┐ąĄčĆąĄą┐ą░ą┤čā SCK (1 -> 0). ąŁč鹊čé ą▓čŗą▓ąŠą┤ ą░ą║čéąĖą▓ąĖąĘąĖčĆčāąĄčéčüčÅ čüąĖą│ąĮą░ą╗ąŠą▓ ą▓čŗą▓ąŠą┤ą░ ~CS (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą┐ąŠčćčéąĖ ąĮąĄ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄčé č鹊ą║, ąĄčüą╗ąĖ ą▓čŗą▓ąŠą┤ SCK ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ ~CS čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 1). ąĪąĖą│ąĮą░ą╗ čü ą▓čŗą▓ąŠą┤ą░ SCK ą┐čĆąŠčģąŠą┤ąĖčé č湥čĆąĄąĘ čéčĆąĖą│ą│ąĄčĆ ą©ą╝ąĖčéčéą░. |
| SI |
ąŁč鹊 ą▓čģąŠą┤ ą┤ą╗čÅ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ą┐ąŠčĆčéą░ SPI. ąæą░ą╣čéčŗ ą║ąŠą╝ą░ąĮą┤čŗ ąĖ ą┤ą░ąĮąĮčŗčģ ą▓ą┤ą▓ąĖą│ą░čÄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░ č湥čĆąĄąĘ čŹč鹊čé ą▓čŗą▓ąŠą┤. ąöąĄą╣čüčéą▓ąĖąĄ ą▓čģąŠą┤ą░ SI čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čüąĖą│ąĮą░ą╗ąŠą╝ ą▓čŗą▓ąŠą┤ą░ ~CS (ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ąĮąĄ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄčé č鹊ą║ ąĖ ąĮąĄ čĆąĄą░ą│ąĖčĆčāąĄčé ąĮą░ ą▓čģąŠą┤ąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ, ą║ąŠą│ą┤ą░ ąŠąĮąĖ ą╝ąĄąĮčÅčÄčéčüčÅ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ SI, ąĄčüą╗ąĖ ą▓čŗą▓ąŠą┤ ~CS ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą╗ąŠą│. 1). ąĪąĖą│ąĮą░ą╗ ąĮą░ ą▓čŗą▓ąŠą┤ SI ą┐čĆąŠčģąŠą┤ąĖčé č湥čĆąĄąĘ čéčĆąĖą│ą│ąĄčĆ ą©ą╝ąĖčéčéą░. |
| SO |
ąŁč鹊 ą▓čŗčģąŠą┤ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ą┐ąŠčĆčéą░ SPI, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗą╣ ą┤ą╗čÅ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą╝ąĖą║čĆąŠčüčģąĄą╝ ą▓ čåąĄą┐ąŠčćą║čā. ąöą░ąĮąĮčŗąĄ ą▓čŗą┤ą▓ąĖą│ą░čÄčéčüčÅ ąĮą░čĆčāąČčā č湥čĆąĄąĘ ą▓čŗą▓ąŠą┤ SO ą┐ąŠ čüą┐ą░ą┤čā čüąĖą│ąĮą░ą╗ą░ čéą░ą║č鹊ą▓ SCK. ąÆčŗčģąŠą┤ SO čÅą▓ą╗čÅąĄčéčüčÅ ą┤ą▓čāčģčéą░ą║čéąĮčŗą╝, ąĖ ąŠąĮ ąĮąĄ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čéčĆąĄčéčīąĄ čüąŠčüč鹊čÅąĮąĖąĄ, ą║ąŠą│ą┤ą░ ąĮą░ ą▓čģąŠą┤ąĄ ~CS ą╗ąŠą│. 1. ąĢčüą╗ąĖ ąĮą░ ~CS ą╗ąŠą│. 1, č鹊 ąĮą░ ą▓čŗčģąŠą┤ąĄ SO ą▒čāą┤ąĄčé ą╗ąŠą│. 0. |
| ~RS |
ąŁč鹊 ą▓čģąŠą┤ čüą▒čĆąŠčüą░, ą║ąŠč鹊čĆčŗą╣ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆąŠą▓ ą▓ čüčĆąĄą┤ąĮąĄąĄ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ (ą║ąŠą┤ 80h), ąĄčüą╗ąĖ ąĮą░ čŹč鹊ą╝ ą▓čŗą▓ąŠą┤ąĄ ą┐ąŠčÅą▓ąĖą╗čüčÅ ą╗ąŠą│. 0 ąĮą░ ą▓čĆąĄą╝čÅ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 150 ąĮčü. ąŁč鹊čé ą▓čŗą▓ąŠą┤ ąĮąĄ ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄčéčüčÅ ą▓ ą╗ąŠą│. 0, ą║ąŠą│ą┤ą░ ~CS ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄčéčüčÅ ą▓ ą╗ąŠą│. 0. ą£ąŠąČąĮąŠ ą┐ąĄčĆąĄą║ą╗čÄčćąĖčéčī ą▓čģąŠą┤ čüą▒čĆąŠčüą░, ą║ąŠą│ą┤ą░ ~SHDN ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą╗ąŠą│. 0. ą¦č鹊ą▒čŗ čüąĮąĖąĘąĖčéčī ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ č鹊ą║ą░, ą▓čģąŠą┤ čüą▒čĆąŠčüą░ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠą┤čéčÅąĮčāčé ą║ ą╗ąŠą│. 1 č湥čĆąĄąĘ čĆąĄąĘąĖčüč鹊čĆ pull-up. ą¤čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčī čŹč鹊ą╣ čüčģąĄą╝čŗ ą┐ąŠą║ą░ąĘą░ąĮą░ ąĮą░ čĆąĖčü. 2-12 ą┤ą░čéą░čłąĖčéą░ [1]. ąŁč鹊čé ą▓čŗą▓ąŠą┤ ą▒čāą┤ąĄčé ą┐ąŠčéčĆąĄą▒ą╗čÅčéčī ąĮąĄąČąĄą╗ą░č鹥ą╗čīąĮčŗą╣ č鹊ą║, ą║ąŠą│ą┤ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ąĮą░ čāčĆąŠą▓ąĮąĄ ą╝ąĄąČą┤čā ą╗ąŠą│. 0 ąĖ ą╗ąŠą│. 1, ą┐ąŠčŹč鹊ą╝čā ąĮąĄ ąŠčüčéą░ą▓ą╗čÅą╣č鹥 ą▓čģąŠą┤ čüą▒čĆąŠčüą░ ą▓ ą┐ąŠą┤ą▓ąĄčłąĄąĮąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ. |
| ~SHDN |
ąŁč鹊 ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ą▓čģąŠą┤ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ, čüąĮą░ą▒ąČąĄąĮąĮčŗą╣ čéčĆąĖą│ą│ąĄčĆąŠą╝ ą©ą╝ąĖčéčéą░. ąĢčüą╗ąĖ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ čŹč鹊čé ą▓čŗą▓ąŠą┤ ą▓ ą╗ąŠą│. 0, č鹊 ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ 菹ĮąĄčĆą│ąŠčüą▒ąĄčĆąĄą│ą░čÄčēąĖą╣ čĆąĄąČąĖą╝, ą▓ ą║ąŠč鹊čĆąŠą╝ ą▓čŗą▓ąŠą┤ A ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓ ąŠčéą║ą╗čÄčćą░ąĄčéčüčÅ, ą░ ą▓čŗą▓ąŠą┤čŗ B ąĖ W ąĘą░ą╝čŗą║ą░čÄčéčüčÅ ą┤čĆčāą│ ąĮą░ ą┤čĆčāą│ą░. ąÆčģąŠą┤ ~SHDN ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ą┐ąĄčĆąĄčģąŠą┤ąĖčéčī ą▓ ą╗ąŠą│. 0, ą║ąŠą│ą┤ą░ ą▓čŗą▓ąŠą┤ ~CS ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą╗ąŠą│. 0. ą¦č鹊ą▒čŗ ą╝ąĖąĮąĖą╝ąĖąĘąĖčĆąŠą▓ą░čéčī ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ 菹ĮąĄčĆą│ąĖąĖ, čŹč鹊čé ą▓čŗą▓ąŠą┤ ą┤ąŠą╗ąČąĄąĮ ąĖą╝ąĄčéčī ą▓ąĄčĆčģąĮčÄčÄ ą┐ąŠą┤čéčÅąČą║čā (čĆąĄąĘąĖčüč鹊čĆ pull-up). ą¤čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčī čŹč鹊ą╣ čüčģąĄą╝čŗ ą┐ąŠą║ą░ąĘą░ąĮą░ ąĮą░ čĆąĖčü. 2-12 ą┤ą░čéą░čłąĖčéą░ [1]. ąŁč鹊čé ą▓čŗą▓ąŠą┤ ą▒čāą┤ąĄčé ą┐ąŠčéčĆąĄą▒ą╗čÅčéčī ąĮąĄąČąĄą╗ą░č鹥ą╗čīąĮčŗą╣ č鹊ą║, ą║ąŠą│ą┤ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ąĮą░ čāčĆąŠą▓ąĮąĄ ą╝ąĄąČą┤čā ą╗ąŠą│. 0 ąĖ ą╗ąŠą│. 1, ą┐ąŠčŹč鹊ą╝čā ąĮąĄ ąŠčüčéą░ą▓ą╗čÅą╣č鹥 ą▓čģąŠą┤ čüą▒čĆąŠčüą░ ą▓ ą┐ąŠą┤ą▓ąĄčłąĄąĮąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ. |
| VSS |
GND, ąĘąĄą╝ą╗čÅ, ą╝ąĖąĮčāčü ą┐ąĖčéą░ąĮąĖčÅ ąĖ ąŠą▒čēąĖą╣ ą┐čĆąŠą▓ąŠą┤ ą┤ą╗čÅ ą▓čüąĄčģ čåąĖčäčĆąŠą▓čŗčģ čüąĖą│ąĮą░ą╗ąŠą▓. |
| VDD |
+ ą┐ąĖčéą░ąĮąĖčÅ. |
[4.0. ąśąĮč乊čĆą╝ą░čåąĖčÅ ą┐ąŠ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÄ]
ąŻčüčéčĆąŠą╣čüčéą▓ą░ MCP41XXX/MCP42XXX čŹč鹊 ąŠą┤ąĮąŠą║ą░ąĮą░ą╗čīąĮčŗąĄ ąĖ ą┤ą▓čāčģą║ą░ąĮą░ą╗čīąĮčŗąĄ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆčŗ čü 256 ą┐ąŠą╗ąŠąČąĄąĮąĖčÅą╝ąĖ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ą╝ąĄčüč鹊 ąŠą▒čŗčćąĮčŗčģ ą╝ąĄčģą░ąĮąĖč湥čüą║ąĖčģ. ąöąŠčüčéčāą┐ąĮčŗ ąĮąŠą╝ąĖąĮą░ą╗čŗ 10 ą║ą×ą╝, 50 ą║ą×ą╝ ąĖ 100 ą║ą×ą╝. ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 4-1, ą║ą░ąČą┤čŗą╣ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆ ą┐ąŠčüčéčĆąŠąĄąĮ ąĖąĘ ą║ą░ą║ ą╝ą░čüčüąĖą▓ ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄą╝čŗčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓, čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ 8-ą▒ąĖčéąĮčŗą╝ (ąŠčéčüčÄą┤ą░ 256 ą┐ąŠąĘąĖčåąĖą╣) čĆąĄą│ąĖčüčéčĆąŠą╝ ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗą╣ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ "ą┤ą▓ąĖąČą║ą░". ąØąŠą╝ąĖąĮą░ą╗čīąĮąŠąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą┤ą▓ąĖąČą║ą░ čüąŠčüčéą░ą▓ą╗čÅąĄčé 52 ą×ą╝ ą┤ą╗čÅ 10 ą║ą×ą╝ ą▓ąĄčĆčüąĖąĖ, 125 ą×ą╝ ą┤ą╗čÅ 50 ą║ą×ą╝ ą▓ąĄčĆčüąĖąĖ ąĖ 100 ą║ą×ą╝ ą▓ąĄčĆčüąĖąĖ. ąöą╗čÅ ą┤ą▓čāčģą║ą░ąĮą░ą╗čīąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ čĆą░ąĘą╗ąĖčćąĖčÅ ą┐ąŠ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÄ ą╝ąĄąČą┤čā ą║ą░ąĮą░ą╗ą░ą╝ąĖ čüąŠčüčéą░ą▓ą╗čÅąĄčé ąĮąĄ ą▒ąŠą╗ąĄąĄ 1%. ąĪąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą╝ąĄąČą┤čā ą┤ą▓ąĖąČą║ąŠą╝ ąĖ ą╗čÄą▒čŗą╝ ąĖąĘ ą║čĆą░ą╣ąĮąĖčģ ą▓čŗą▓ąŠą┤ąŠą▓ čĆąĄąĘąĖčüč鹊čĆą░ ą╗ąĖąĮąĄą╣ąĮąŠ ą╝ąĄąĮčÅąĄčéčüčÅ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ąĘąĮą░č湥ąĮąĖčÅ, čüąŠčģčĆą░ąĮąĄąĮąĮąŠąĄ ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą┤ą░ąĮąĮčŗčģ. ąÜąŠą┤ 00h čüąŠąĄą┤ąĖąĮčÅąĄčé ą┤ą▓ąĖąČąŠą║ W čü ą▓čŗą▓ąŠą┤ąŠą╝ B. ą¤ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ą▓čüąĄ čĆąĄą│ąĖčüčéčĆčŗ ą┤ą░ąĮąĮčŗčģ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĘą░ą│čĆčāąČą░čÄčéčüčÅ čüčĆąĄą┤ąĮąĖą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ (80h). ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüą┐ąŠčüąŠą▒ ąĘą░ą│čĆčāąĘąĖčéčī ą┤ą░ąĮąĮčŗąĄ ą▓ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ą┐ąĄčĆąĄą╝ąĄčüčéąĖčéčī ąĖčģ ą▓ čĆąĄą│ąĖčüčéčĆčŗ ą┤ą░ąĮąĮčŗčģ. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü čéą░ą║ąČąĄ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąĄčĆąĄą▓ąĄčüčéąĖ ąŠčéą┤ąĄą╗čīąĮčŗąĄ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆčŗ ą▓ čĆąĄąČąĖą╝ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ (shutdown mode) ą┤ą╗čÅ ą╝ąĖąĮąĖą╝ąĖąĘą░čåąĖąĖ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čŹąĮąĄčĆą│ąĖąĖ. ąÆčŗą▓ąŠą┤ ~SHDN ą╝ąŠąČąĄčé čéą░ą║ąČąĄ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą▓ąŠą┤ą░ ą▓čüąĄčģ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆąŠą▓ ą▓ shutdown mode (ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ą╝ąŠąČąĮąŠ ąĘą░ą┤ą░ą▓ą░čéčī shutdown mode ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮąŠ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ąĖąĘ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆąŠą▓), ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą▓čŗą▓ąŠą┤ ~RS ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆąŠą▓ ą▓ čüčĆąĄą┤ąĮąĄąĄ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ mid-scale (80h).
Shutdown ąŠčéą║ą╗čÄčćą░ąĄčé ą▓čŗą▓ąŠą┤ A ąĖ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčé ą┤ą▓ąĖąČąŠą║ W ą║ ą▓čŗą▓ąŠą┤čā B, ą▒ąĄąĘ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ čĆąĄą│ąĖčüčéčĆąŠą▓ ą┤ą░ąĮąĮčŗčģ.
ąÜąŠą│ą┤ą░ čĆą░ąĘą▓ąŠą┤ąĖčéčüčÅ ą┐ąĄčćą░čéąĮą░čÅ ą┐ą╗ą░čéą░ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čåąĖčäčĆąŠą▓čŗčģ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆąŠą▓, ą┤ąŠą╗ąČąĮčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▒ą╗ąŠą║ąĖčĆčāčÄčēąĖąĄ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆčŗ. ą×ąĮąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą▒ą╗ąĖąĘą║ąŠ ą║ ą▓čŗą▓ąŠą┤ą░ą╝ ą┐ąĖčéą░ąĮąĖčÅ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ. ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆ ąĮąŠą╝ąĖąĮą░ą╗ąŠą╝ 0.1 ą╝ą║ąż. ą”ąĖčäčĆąŠą▓čŗąĄ ąĖ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗąĄ ą┐čĆąŠą▓ąŠą┤ąĮąĖą║ąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ čāą┤ą░ą╗ąĄąĮčŗ ą┤čĆčāą│ ąŠčé ą┤čĆčāą│ą░ ąĮą░ ą┐ą╗ą░č鹥, ąČąĄą╗ą░č鹥ą╗čīąĮąŠ, čćč鹊ą▒čŗ ąĮąĄ ą▒čŗą╗ąŠ ą┐čĆąŠą▓ąŠą┤ąĮąĖą║ąŠą▓ ą┐ąŠą┤ ą║ąŠčĆą┐čāčüąŠą╝ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ąĖą╗ąĖ ą┐ąŠą┤ ą║ąŠčĆą┐čāčüąŠą╝ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆą░. ą×čüąŠą▒ąŠąĄ ą▓ąĮąĖą╝ą░ąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāą┤ąĄą╗ąĄąĮąŠ ą┐čĆąŠą▓ąŠą┤ąĮąĖą║ą░ą╝ čü ą▓čŗčüąŠą║ąŠčćą░čüč鹊čéąĮčŗą╝ąĖ čüąĖą│ąĮą░ą╗ą░ą╝ąĖ (čéą░ą║ąĖąĄ ą║ą░ą║ čüąĖą│ąĮą░ą╗čŗ čéą░ą║č鹊ą▓), čćč鹊ą▒čŗ ąŠąĮąĖ ą║ą░ą║ ą╝ąŠąČąĮąŠ ą┤ą░ą╗čīčłąĄ ą┐čĆąŠčģąŠą┤ąĖą╗ąĖ ąŠčé ą┐čĆąŠą▓ąŠą┤ąĮąĖą║ąŠą▓ čü ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╝ąĖ čüąĖą│ąĮą░ą╗ą░ą╝ąĖ. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╣ ąĘą░ą╗ąĖą▓ą║ąĖ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ, čćč鹊ą▒čŗ čāą┤ąĄčƹȹĖą▓ą░čéčī ą┐ąŠč鹥ąĮčåąĖą░ą╗ ąĘąĄą╝ą╗ąĖ ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╝ ą┤ą╗čÅ ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓ ąĮą░ ą┐ą╗ą░č鹥.
4.1. ąĀąĄąČąĖą╝čŗ čĆą░ą▒ąŠčéčŗ. ą¤čĆąĖą╗ąŠąČąĄąĮąĖčÅ čü čåąĖčäčĆąŠą▓čŗą╝ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆąŠą╝ ą╝ąŠąČąĮąŠ ą┐ąŠą┤ąĄą╗ąĖčéčī ąĮą░ 2 ą║ą░č鹥ą│ąŠčĆąĖąĖ: čĆąĄąČąĖą╝ čĆąĄąŠčüčéą░čéą░ ąĖ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░, ąĖą╗ąĖ čĆąĄąČąĖą╝ ą┤ąĄą╗ąĖč鹥ą╗čÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ.
4.1.1. ąĀąĄąČąĖą╝ čĆąĄąŠčüčéą░čéą░čéą░. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ ą┤ą▓čāčģą▓čŗą▓ąŠą┤ąĮčŗą╣ čĆąĄąĘąĖčüčéąĖą▓ąĮčŗą╣ 菹╗ąĄą╝ąĄąĮčé (ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆ). ąØąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą▓čŗą▓ąŠą┤ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüąŠąĄą┤ąĖąĮąĄąĮ čü ą┤ą▓ąĖąČą║ąŠą╝, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 4-2. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čüą╝ąĄąĮą░ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ ą▓čŗą▓ąŠą┤ąŠą▓ A ąĖ B ąĮąĄ ą▓ą╗ąĖčÅąĄčé ąĮą░ čĆą░ą▒ąŠčéčā ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░ ą▓ čĆąĄąČąĖą╝ąĄ čĆąĄąŠčüčéą░čéą░ (čüą╝ąĄąĮą░ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ ą┐čĆąŠčüč鹊 ą┐ąŠą╝ąĄąĮčÅąĄčé ą┤ąĄą╣čüčéą▓ąĖąĄ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗčģ ą║ąŠą┤ąŠą▓).
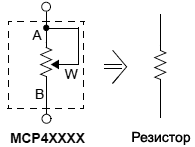
ąĀąĖčü. 4-2. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čĆąĄąŠčüčéą░čéą░ čü ą┤ą▓čāą╝čÅ ą▓čŗą▓ąŠą┤ą░ą╝ąĖ. ąĀą░ą▒ąŠčéą░ąĄčé ą▓ čüčģąĄą╝ąĄ ą║ą░ą║ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗą╣ čĆąĄąĘąĖčüčéąĖą▓ąĮčŗą╣ 菹╗ąĄą╝ąĄąĮčé, čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą║ąŠč鹊čĆąŠą│ąŠ ą╝ąĄąĮčÅąĄčéčüčÅ ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą║ąŠą┤ą░.
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą╝ąĄąĮčÅčéčī ąŠą▒čēąĄąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą╝ąĄąČą┤čā ą┤ą▓čāą╝čÅ čāąĘą╗ą░ą╝ąĖ čüčģąĄą╝čŗ. ą×ą▒čēąĄąĄ ąĖąĘą╝ąĄčĆąĄąĮąĮąŠąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą▒čāą┤ąĄčé ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╝ ą┤ą╗čÅ ą║ąŠą┤ą░ 00h, ą║ąŠą│ą┤ą░ ą┤ą▓ąĖąČąŠą║ W čüąŠąĄą┤ąĖąĮąĄąĮ čü ą▓čŗą▓ąŠą┤ąŠą╝ A, ąĖ ą┐ąĄčĆąĄą╝ąĄčüčéąĖą╗čüčÅ ą║ ą▓čŗą▓ąŠą┤čā B. ąĪąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą┐čĆąĖ čŹč鹊ą╝ ą▒čāą┤ąĄčé čĆą░ą▓ąĮąŠ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÄ ą┤ą▓ąĖąČą║ą░, čćč鹊 čüąŠčüčéą░ą▓ąĖčé čéąĖą┐ąĖčćąĮąŠ 52╬® ą┤ą╗čÅ 10 k╬® čāčüčéčĆąŠą╣čüčéą▓ MCP4X010, 125╬® ą┤ą╗čÅ 50 k╬® (MCP4X050) ąĖ 100 k╬® (MCP4X100) čāčüčéčĆąŠą╣čüčéą▓. ąöą╗čÅ 10 k╬® čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ąĄčü ą╝ą╗ą░ą┤čłąĄą│ąŠ čĆą░ąĘčĆčÅą┤ą░ čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ 39.0625╬® (ąĄčüą╗ąĖ ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĖčéčī ąŠą▒čēąĄąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ 10 k╬®). ąĪąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą▒čāą┤ąĄčé čĆą░čüčéąĖ ą┐čĆąĖ čāą▓ąĄą╗ąĖč湥ąĮąĖąĖ ą║ąŠą┤ą░, ąĖ ą▒čāą┤ąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╝ 9985.94╬® ą┤ą╗čÅ ą║ąŠą┤ą░ FFh. ąöą▓ąĖąČąŠą║ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą▒čāą┤ąĄčé čüąŠąĄą┤ąĖąĮąĄąĮ ąĮą░ą┐čĆčÅą╝čāčÄ čü č鹊čćą║ąŠą╣ B čüč鹥ą║ą░ čĆąĄąĘąĖčüč鹊čĆąŠą▓.
ąÆ čüąŠčüč鹊čÅąĮąĖąĖ 00h ąŠą▒čēąĄąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą▒čāą┤ąĄčé čĆą░ą▓ąĮąŠ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÄ ą┤ą▓ąĖąČą║ą░ W. ą¦č鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖčÅ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ čüą╗ąĄą┤čāąĄčé ąŠą│čĆą░ąĮąĖčćąĖčéčī č鹊ą║ č湥čĆąĄąĘ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗą╣ čåąĖčäčĆąŠą▓ąŠą╣ čĆąĄąĘąĖčüč鹊čĆ ąĘąĮą░č湥ąĮąĖąĄą╝ 1 mA.
ąöą╗čÅ ą┤ą▓čāčģą║ą░ąĮą░ą╗čīąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ čĆą░ąĘąĮąĖčåą░ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅ č鹊č湥ą║ A ąĖ B ą╝ąĄąČą┤čā ą║ą░ąĮą░ą╗ą░ą╝ąĖ čüąŠčüčéą░ą▓ąĖčé ą╝ąĄąĮčīčłąĄ 1%. ą×ą┤ąĮą░ą║ąŠ ą╝ąĄąČą┤čā čĆą░ąĘąĮčŗą╝ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ą╝ąĖ ąĮąĄčüąŠą▓ą┐ą░ą┤ąĄąĮąĖąĄ ą╝ąŠąČąĄčé čüąŠčüčéą░ą▓ą╗čÅčéčī ą┤ąŠ 30%.
ąÆ čĆąĄąČąĖą╝ąĄ čĆąĄąŠčüčéą░čéą░ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ąĖą╝ąĄąĄčé ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮčŗą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé. ąśąĘą╝ąĄąĮąĄąĮąĖąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą╝ąĄąČą┤čā ą┤ą▓ąĖąČą║ąŠą╝ ąĖ ą║čĆą░ą╣ąĮąĖą╝ ą▓čŗą▓ąŠą┤ąŠą╝ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 2-8 ą┤ą░čéą░čłąĖčéą░ [1]. ąØą░ąĖą▒ąŠą╗čīčłąĄąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ąĖąĘ-ąĘą░ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ą▒čāą┤čāčé ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī ą┤ą╗čÅ 6% ą║ąŠą┤ąŠą▓ (ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 00h .. 0Fh) ąĖąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅ ą┤ą▓ąĖąČą║ą░ ą▓ą╗ąĖčÅąĄčé ąĮą░ ąŠą▒čēąĄąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ. ąöą╗čÅ ąŠčüčéą░ą▓čłąĖčģčüčÅ ą║ąŠą┤ąŠą▓ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╝ ą▒čāą┤ąĄčé ą▓ą║ą╗ą░ą┤ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮąŠą│ąŠ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ ą╝ą░čüčüąĖą▓ą░ čĆąĄąĘąĖčüč鹊čĆąŠą▓ RAB, ą║ąŠč鹊čĆčŗą╣ ąŠą▒čŗčćąĮąŠ čüąŠčüčéą░ą▓ą╗čÅąĄčé 800 ppm/┬░C.
4.1.2. ąĀąĄąČąĖą╝ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░. ąÆ čĆąĄąČąĖą╝ąĄ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░ ą▓čüąĄ 3 ą▓čŗą▓ąŠą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ąŠą┤ą║ą╗čÄčćą░čÄčéčüčÅ ą║ čĆą░ąĘąĮčŗą╝ č鹊čćą║ą░ą╝ čüčģąĄą╝čŗ. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą╝ąĄąĮčÅčéčī ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ąĮą░ ą┤ą▓ąĖąČą║ąĄ (ą▓čŗčģąŠą┤ąĄ) ą┐čĆąŠą┐ąŠčĆčåąĖąŠąĮą░ą╗čīąĮąŠ ą║ąŠą┤čā. ąŁč鹊čé čĆąĄąČąĖą╝ ąĖąĮąŠą│ą┤ą░ ąĮą░ąĘčŗą▓ą░čÄčé čĆąĄąČąĖą╝ąŠą╝ ą┤ąĄą╗ąĖč鹥ą╗čÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ą¤ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ ąĮą░čüčéčĆą░ąĖą▓ą░ąĄą╝ąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą╝ąĄąČą┤čā ą┤ą▓čāą╝čÅ č鹊čćą║ą░ą╝ąĖ, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 4-3. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ ą▓čŗą▓ąŠą┤ąŠą▓ A ąĖ B ąĮąĄ ą▓ą╗ąĖčÅąĄčé ąĮą░ čĆą░ą▒ąŠčéčā (čüą╝ąĄąĮą░ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ ą┐čĆąŠčüč鹊 ą┐ąŠą╝ąĄąĮčÅąĄčé ą┤ąĄą╣čüčéą▓ąĖąĄ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗčģ ą║ąŠą┤ąŠą▓).
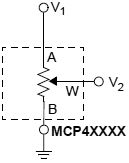
ąĀąĖčü. 4-3. ąĀąĄąČąĖą╝ ą┤ąĄą╗ąĖč鹥ą╗čÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ (ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░).
ąÆ čŹč鹊ą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čüąŠąŠčéąĮąŠčłąĄąĮąĖąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╝ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą╝ čāčüčéčĆąŠą╣čüčéą▓ą░. ąĪąŠą▓ą┐ą░ą┤ąĄąĮąĖąĄ ą┐ąŠ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮąŠą╝čā ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéčā čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖą╣ RAB ąĖ RWB čüąŠčüčéą░ą▓ą╗čÅąĄčé 1 ppm/┬░C (ąĖąĘą╝ąĄčĆąĄąĮąŠ ą┤ą╗čÅ ą║ąŠą┤ą░ 80h). ąöą╗čÅ ą║ąŠą┤ąŠą▓ čü ą╝ąĄąĮčīčłąĖą╝ąĖ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą┤ą▓ąĖąČą║ą░ ą▒čāą┤ąĄčé ą┤ąŠą╝ąĖąĮąĖčĆąŠą▓ą░čéčī. ąĀąĖčü. 2-3 ą┤ą░čéą░čłąĖčéą░ [1] ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹčäč乥ą║čé č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮąŠą│ąŠ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ ą┤ą▓ąĖąČą║ą░. ąÆčŗčłąĄ ą╝ą╗ą░ą┤čłąĖčģ ą║ąŠą┤ąŠą▓ čŹč鹊čé čĆąĖčüčāąĮąŠą║ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, č鹊 70% čüąŠčüč鹊čÅąĮąĖą╣ ą┤ą░čüčé č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą╝ąĄąĮčīčłąĄ 5 ppm/┬░C. 30% čüąŠčüč鹊čÅąĮąĖą╣ ą┤ą░ą┤čāčé ppm/┬░C ą╝ąĄąĮčīčłąĄ 1.
4.2. ąóąĖą┐ąŠą▓čŗąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ
4.2.1. ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗąĄ čāčüąĖą╗ąĖč鹥ą╗ąĖ čü ąĮąĄčüąĖą╝ą╝ąĄčéčĆąĖčćąĮčŗą╝ ą▓čŗčģąŠą┤ąŠą╝. ą¤ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆčŗ čćą░čüč鹊 ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą┤ą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ čāčĆąŠą▓ąĮąĄą╣ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĖą╗ąĖ čāčüąĖą╗ąĄąĮąĖčÅ. ąĪčģąĄą╝čŗ čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╝ čāčüąĖą╗ąĄąĮąĖąĄą╝ ąĮą░ ąŠčüąĮąŠą▓ąĄ čåąĖčäčĆąŠą▓čŗčģ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆąŠą▓ ą╝ąŠą│čāčé ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ čĆą░ąĘąĮčŗą╝ąĖ čüą┐ąŠčüąŠą▒ą░ą╝ąĖ. ą¤čĆąĖą╝ąĄčĆ ąĖąĮą▓ąĄčĆčéąĖčĆčāčÄčēąĄą│ąŠ čāčüąĖą╗ąĖč鹥ą╗čÅ čü ąŠą┤ąĮąĖą╝ ąĖčüč鹊čćąĮąĖą║ąŠą╝ ą┐ąĖčéą░ąĮąĖčÅ ą┐ąŠą║ą░ąĘą░ąĮ ąĮą░ čĆąĖčü. 4-4. ąśąĘ-ąĘą░ ą▓čŗčüąŠą║ąŠą│ąŠ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅ čāčüąĖą╗ąĖč鹥ą╗čÅ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą┤ą▓ąĖąČą║ą░ ąĮąĄ čāčćą░čüčéą▓čāąĄčé ą▓ ą┐ąĄčĆąĄą┤ą░č鹊čćąĮąŠą╣ čäčāąĮą║čåąĖąĖ.
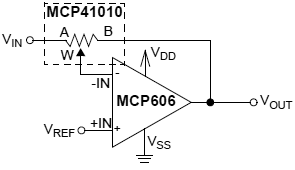
VOUT = -VIN * (RB/RA) + VREF * (1 + RB/RA)
ąŚą┤ąĄčüčī:
RAB*(256 ŌĆō Dn) RAB * Dn
RA = -------------- RB = --------
256 256
RAB = ąŠą▒čēąĄąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą║ą░ąĮą░ą╗ą░
Dn = ąĮą░čüčéčĆąŠą╣ą║ą░ ą┤ą▓ąĖąČą║ą░ (Dn = 0 .. 255)
ąĀąĖčü. 4-4. ąśąĮą▓ąĄčĆčéąĖčĆčāčÄčēąĖą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╣ čāčüąĖą╗ąĖč鹥ą╗čī čü ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮčŗą╝ ą┐ąĖčéą░ąĮąĖąĄą╝.
ąöą╗čÅ ąĮąĄ ąĖąĮą▓ąĄčĆčéąĖčĆčāčÄčēąĄą│ąŠ čāčüąĖą╗ąĖč鹥ą╗čÅ čü ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮčŗą╝ ą┐ąĖčéą░ąĮąĖąĄą╝ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮą░ čüčģąĄą╝ą░ ąĮą░ čĆąĖčü. 4-5.
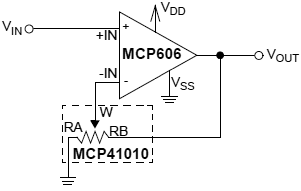
VOUT = VIN * (1 + RB/RA)
ąŚą┤ąĄčüčī:
RAB*(256 ŌĆō Dn) RAB * Dn
RA = -------------- RB = --------
256 256
RAB = ąŠą▒čēąĄąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą║ą░ąĮą░ą╗ą░
Dn = ąĮą░čüčéčĆąŠą╣ą║ą░ ą┤ą▓ąĖąČą║ą░ (Dn = 0 .. 255)
ąĀąĖčü. 4-5. ąØąĄ ąĖąĮą▓ąĄčĆčéąĖčĆčāčÄčēąĖą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╣ čāčüąĖą╗ąĖč鹥ą╗čī čü ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮčŗą╝ ą┐ąĖčéą░ąĮąĖąĄą╝.
ą¦č鹊ą▒čŗ čŹčéąĖ čüčģąĄą╝čŗ čĆą░ą▒ąŠčéą░ą╗ąĖ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čāč湥čüčéčī ąĮąĄą║ąŠč鹊čĆčŗąĄ ą╝ąŠą╝ąĄąĮčéčŗ. ąöą╗čÅ ą╗ąĖąĮąĄą╣ąĮąŠą╣ čĆą░ą▒ąŠčéčŗ čüąĖą│ąĮą░ą╗čŗ ąĮą░ ą▓čģąŠą┤ąĄ ąĖ ą▓čŗčģąŠą┤ąĄ ąĮąĄ ą┤ąŠą╗ąČąĮčŗ čāčģąŠą┤ąĖčéčī ąĘą░ ą┐čĆąĄą┤ąĄą╗čŗ čāčĆąŠą▓ąĮąĄą╣ ą▓čŗą▓ąŠą┤ąŠą▓ VSS ąĖ VDD ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░ ąĖ ąĮąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐čĆąĄą▓čŗčłąĄąĮčŗ ą┐čĆąĄą┤ąĄą╗čŗ ą▓čģąŠą┤ąĮčŗčģ ąĖ ą▓čŗčģąŠą┤ąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮąŠą│ąŠ čāčüąĖą╗ąĖč鹥ą╗čÅ. ąĪčģąĄą╝ą░ ąĮą░ čĆąĖčü. 4-4 čéčĆąĄą▒čāąĄčé ą▓ąĖčĆčéčāą░ą╗čīąĮąŠą╣ ąĘąĄą╝ą╗ąĖ ąĖą╗ąĖ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┤ą╗čÅ ąĮąĄ ąĖąĮą▓ąĄčĆčéąĖčĆčāčÄčēąĄą│ąŠ čāčüąĖą╗ąĖč鹥ą╗čÅ. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒čĆą░čéąĖč鹥čüčī ą║ ą░ą┐ąĮąŠčāčéčā 682 "Using Single-Supply Operational Amplifiers in Embedded Systems" (DS00682). ą¤čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ąĖą╗ąĖ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ čüą▒čĆąŠčüą░ (~RS), čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▓ čüčĆąĄą┤ąĮąĄąĄ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ, ą║ąŠą│ą┤ą░ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą┐ą╗ąĄčć RA ąĖ RB čĆą░ą▓ąĮčŗ. ąØą░ ąŠčüąĮąŠą▓ąĄ ą┐ąĄčĆąĄą┤ą░č鹊čćąĮąŠą╣ čäčāąĮą║čåąĖąĖ čüčģąĄą╝čŗ čāčüąĖą╗ąĄąĮąĖąĄ čüąŠčüčéą░ą▓ąĖčé 1. ąÜąŠą│ą┤ą░ ą║ąŠą┤ čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčéčüčÅ, ą┤ą▓ąĖąČąŠą║ ą┐ąĄčĆąĄą╝ąĄčēą░ąĄčéčüčÅ ą▓ čüč鹊čĆąŠąĮčā ą▓čŗą▓ąŠą┤ą░ A, ąĖ čāčüąĖą╗ąĄąĮąĖąĄ čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčéčüčÅ. ąĪąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ą║ąŠą│ą┤ą░ ą┤ą▓ąĖąČąŠą║ ą┐ąĄčĆąĄą╝ąĄčēą░ąĄčéčüčÅ ą║ ą▓čŗą▓ąŠą┤čā B, čāčüąĖą╗ąĄąĮąĖąĄ čāą╝ąĄąĮčīčłą░ąĄčéčüčÅ. ąĀąĖčü. 4-6 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹčéčā ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčī. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ ąĮą░ ą┐čüąĄą▓ą┤ąŠ-ą╗ąŠą│ą░čĆąĖčäą╝ąĖč湥čüą║ąŠąĄ čāčüąĖą╗ąĄąĮąĖąĄ ą▓ąŠą║čĆčāą│ ą┤ąĄčüčÅčéąĖčćąĮąŠą│ąŠ ą║ąŠą┤ą░ 128. ą¤ąŠ ą╝ąĄąĮąĄ ą┐čĆąĖą▒ą╗ąĖąČąĄąĮąĖčÅ ą┤ą▓ąĖąČą║ą░ ą║ ą╗čÄą▒ąŠą╝čā ąĖąĘ ą▓čŗą▓ąŠą┤ąŠą▓ ą║čĆčāčéąĖąĘąĮą░ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čāčüąĖą╗ąĄąĮąĖčÅ čĆąĄąĘą║ąŠ ą▓ąŠąĘčĆą░čüčéą░ąĄčé. ąśąĘ-ąĘą░ ąĮąĄčüąŠą▓ą┐ą░ą┤ąĄąĮąĖčÅ ą▓ąĄą╗ąĖčćąĖąĮ RA ąĖ RB ą┤ą╗čÅ ą║čĆą░ą╣ąĮąĖčģ čüčéą░čĆčłąĖčģ ąĖ ą╝ą╗ą░ą┤čłąĖčģ ą║ąŠą┤ąŠą▓ ą╝ą░ą╗ąŠąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą┐ąŠąĘąĖčåąĖąĖ ą┤ą▓ąĖąČą║ą░ ąŠč湥ąĮčī čüąĖą╗čīąĮąŠ ą▓ą╗ąĖčÅąĄčé ąĮą░ čāčüąĖą╗ąĄąĮąĖčÅ. ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 4-3, čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ čāčüąĖą╗ąĄąĮąĖčÅ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé 0.1 ą┤ąŠ 10.
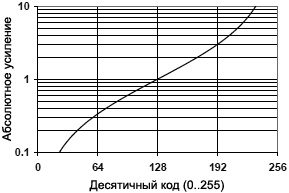
ąĀąĖčü. 4-6. ąŚą░ą▓ąĖčüąĖą╝ąŠčüčéčī čāčüąĖą╗ąĄąĮąĖčÅ ąŠčé ą║ąŠą┤ą░ ą┤ą╗čÅ čüčģąĄą╝ ąĖąĮą▓ąĄčĆčéąĖčĆčāčÄčēąĄą│ąŠ ąĖ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮąŠą│ąŠ čāčüąĖą╗ąĖč鹥ą╗ąĄą╣.
4.2.2. ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╣ ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗą╣ čāčüąĖą╗ąĖč鹥ą╗čī. ą¤čĆąĖą╝ąĄčĆ čāčüąĖą╗ąĖč鹥ą╗čÅ čü ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗą╝ ą▓čģąŠą┤ąŠą╝, ą│ą┤ąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čåąĖčäčĆąŠą▓čŗąĄ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆčŗ, ą┐ąŠą║ą░ąĘą░ąĮ ąĮą░ čĆąĖčü. 4-7. ąöą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą┐ąĄčĆąĄą┤ą░č鹊čćąĮąŠą╣ čäčāąĮą║čåąĖąĖ ą▓ ąŠą▒ą░ ą║ą░ąĮą░ą╗ą░ čĆąĄąĘąĖčüč鹊čĆą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮčŗ ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╝ ą║ąŠą┤ąŠą╝. ąóąŠčćąĮąŠąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĄ ą┐ąŠ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÄ ą╝ąĄąČą┤čā ą║ą░ąĮą░ą╗ą░ą╝ąĖ čüą┤ą▓ąŠąĄąĮąĮąŠą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąŠ ą║ą░ą║ ą┤ąŠčüč鹊ąĖąĮčüčéą▓ąŠ ą┤ą╗čÅ čŹč鹊ą╣ čüčģąĄą╝čŗ. ąŁčéą░ čüčģąĄą╝ą░ ą┐ąŠą║ą░ąČąĄčé čéą░ą║ąČąĄ čüčéą░ą▒ąĖą╗čīąĮčāčÄ čĆą░ą▒ąŠčéčā ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ąĖąĘ-ąĘą░ ąĮąĖąĘą║ąŠą│ąŠ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮąŠą│ąŠ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░. ąØą░ čĆąĖčü. 4-6 čéą░ą║ąČąĄ ą┐ąŠą║ą░ąĘą░ąĮą░ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčī ą╝ąĄąČą┤čā čāčüąĖą╗ąĄąĮąĖąĄą╝ ąĖ ą║ąŠą┤ąŠą╝ ą┤ą╗čÅ čŹč鹊ą╣ čüčģąĄą╝čŗ. ąÜąŠą│ą┤ą░ ą┤ą▓ąĖąČąŠą║ ą┐čĆąĖą▒ą╗ąĖąČą░ąĄčéčüčÅ ą║ ą╗čÄą▒ąŠą╝čā ąĖąĘ ą▓čŗą▓ąŠą┤ąŠą▓ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░, čü ą║ą░ąČą┤čŗą╝ ąĮąŠą▓čŗą╝ čłą░ą│ąŠą╝ čāčüąĖą╗ąĄąĮąĖąĄ ą╝ąĄąĮčÅąĄčéčüčÅ ąŠč湥ąĮčī ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ, ą┐ąŠčŹč鹊ą╝čā čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą╝ąĄąĮčÅčéčī ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé čāčüąĖą╗ąĄąĮąĖčÅ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ą╝ąĄąČą┤čā 0.1 ąĖ 10.
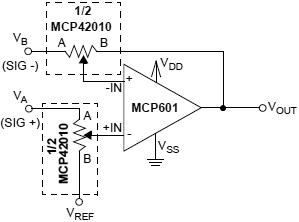
VOUT = (VA - VB) * RB/RA
ąŚą┤ąĄčüčī:
RAB*(256 ŌĆō Dn) RAB * Dn
RA = -------------- RB = --------
256 256
RAB = ąŠą▒čēąĄąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą║ą░ąĮą░ą╗ą░
Dn = ąĮą░čüčéčĆąŠą╣ą║ą░ ą┤ą▓ąĖąČą║ą░ (Dn = 0 .. 255)
ąŚą░ą╝ąĄčćą░ąĮąĖąĄ: čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅ ą║ą░ąĮą░ą╗ąŠą▓ RAB ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠą┤ąĖąĮą░ą║ąŠą▓čŗąĄ (ą║ą░ąĮą░ą╗čŗ ąĖąĘ ąŠą┤ąĮąŠą│ąŠ ą║ąŠčĆą┐čāčüą░ MCP42XXX).
ąĀąĖčü. 4-7. ąöąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčŗą╣ čāčüąĖą╗ąĖč鹥ą╗čī čü ąŠą┤ąĮąŠą┐ąŠą╗čÅčĆąĮčŗą╝ ą┐ąĖčéą░ąĮąĖąĄą╝.
4.2.3. ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ą░čÅ ą┐ąŠą┤čüčéčĆąŠą╣ą║ą░ čüą╝ąĄčēąĄąĮąĖčÅ. ąöą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą│ą┤ąĄ čéčĆąĄą▒čāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠąĄ ąŠą┐ąŠčĆąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ, ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüčģąĄą╝čā ąĮą░ čĆąĖčü. 4-8. ąŁčéą░ čüčģąĄą╝ą░ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠąĄ ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░ (ą┤ąĄą╗ąĖč鹥ą╗čÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ) čü ą┤ą▓čāą╝čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╝ąĖ čĆąĄąĘąĖčüč鹊čĆą░ą╝ąĖ ąĖ ą▒čāč乥čĆąĮčŗą╝ čāčüąĖą╗ąĖč鹥ą╗ąĄą╝. ąŁč鹊 čüąŠąĘą┤ą░ąĄčé ą╗ąĖąĮąĄą╣ąĮčāčÄ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčī ą╝ąĄąČą┤čā ą▓čŗčģąŠą┤ąĮčŗą╝ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╝ ą║ąŠą┤ąŠą╝. ąĀąĄąĘąĖčüč鹊čĆčŗ R1 ąĖ R2 ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čāą╝ąĄąĮčīčłąĄąĮąĖčÅ ąĖą╗ąĖ čāą▓ąĄą╗ąĖč湥ąĮąĖčÅ ą▓ąĄčüą░ čłą░ą│ą░ čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ. ą¤ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆ ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ čĆą░ą▒ąŠčéą░ąĄčé čüčéą░ą▒ąĖą╗čīąĮąŠ ą┐čĆąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅčģ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ. ąóąĄą╝ą┐ąĄčĆą░čéčāčĆąĮą░čÅ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčī čŹč鹊ą╣ čüčģąĄą╝čŗ ą┐ąŠą║ą░ąĘą░ąĮą░ ąĮą░ čĆąĖčü. 2-3 ą┤ą░čéą░čłąĖčéą░ [1]. ąĪą░ą╝čŗąĄ ą┐ą╗ąŠčģąĖąĄ ą┐ąŠą║ą░ąĘą░č鹥ą╗ąĖ ą┤ą╗čÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮąŠą╣ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ą▒čāą┤čāčé ą┤ą╗čÅ ąĮąĖąČąĮąĖčģ ąĖ ą▓ąĄčĆčģąĮąĖčģ ą║ąŠą┤ąŠą▓ ąĖąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 ąĮą░čćąĖąĮą░ąĄčé ąŠą║ą░ąĘčŗą▓ą░čéčī ą▓ą╗ąĖčÅąĮąĖąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą┤ą▓ąĖąČą║ą░. R1 ąĖ R2 čéą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą│čĆą░ąĮąĖčå ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ą╝ąŠąČąĄčé ą▒čŗčéčī čüąĮąĖąČąĄąĮą░ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čŹčéąĖčģ ą║čĆą░ą╣ąĮąĖčģ ą║ąŠą┤ąŠą▓.
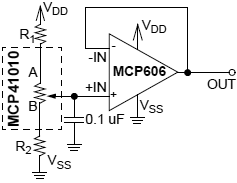
ąĀąĖčü. 4-8. ąØąŠą╝ąĖąĮą░ą╗čŗ R1 ąĖ R2 ą╝ąĄąĮčÅčÄčé čĆą░ąĘčĆąĄčłą░čÄčēčāčÄ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī čüčģąĄą╝čŗ ąĖ ą┐čĆąĄą┤ąĄą╗čŗ čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ.
4.3. ąÆčŗčćąĖčüą╗ąĄąĮąĖąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖą╣. ąÜąŠą│ą┤ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāčÄčéčüčÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░, ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ ą▓čŗčĆą░ąČąĄąĮąĖčÅ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖą╣. ąÜąŠą┤ 00h čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą║čĆą░ą╣ąĮąĄą╝čā ą┐ąŠą╗ąŠąČąĄąĮąĖčÄ ą┤ą▓ąĖąČą║ą░ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą▒ą╗ąĖąĘą║ąŠ ą║ ą▓čŗą▓ąŠą┤čā B, ąŠčüčéą░ą▓ą╗čÅčÅ č鹊ą╗čīą║ąŠ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą┤ą▓ąĖąČą║ą░. ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ą║ąŠą┤ąŠą▓ ą▒ą╗ąĖąĘą║ąŠ ą║ FFh ą┐čĆąĖą▒ą╗ąĖąČą░čÄčé ą┤ą▓ąĖąČąŠą║ ą║ ą▓čŗą▓ąŠą┤čā A ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░. ąÆčŗčĆą░ąČąĄąĮąĖčÅ ąĮą░ čĆąĖčü. 4-9 ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖą╣ ą┐ą╗ąĄčć.
RWA(Dn) = (RAB * (256 - Dn) / 256) + RW
RWB(Dn) = (RAB * Dn / 256) + RW
ąŚą┤ąĄčüčī:
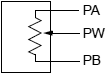
PA ąĮąŠąČą║ą░ A ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░
PB ąĮąŠąČą║ą░ B ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░
PW ą┤ą▓ąĖąČąŠą║ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░
RWA čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą╝ąĄąČą┤čā ą▓čŗą▓ąŠą┤ąŠą╝ A ąĖ ą┤ą▓ąĖąČą║ąŠą╝
RWB čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą╝ąĄąČą┤čā ą▓čŗą▓ąŠą┤ąŠą╝ B ąĖ ą┤ą▓ąĖąČą║ąŠą╝
RAB ąŠą▒čēąĄąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ čĆąĄąĘąĖčüč鹊čĆą░ (10 k╬®, 50 k╬® ąĖą╗ąĖ 100 k╬®)
RW čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą┤ą▓ąĖąČą║ą░
Dn 8-ą▒ąĖčéąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░ n
ąĀąĖčü. 4-9. ąĪąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą┐ą╗ąĄčć ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░ čÅą▓ą╗čÅąĄčéčüčÅ čäčāąĮą║čåąĖąĄą╣ ą║ąŠą┤ą░. ąĪą╗ąĄą┤čāąĄčé ąĘą░ą╝ąĄčéąĖčéčī, čćč鹊 ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ čŹčéąĖčģ ą▓čŗčĆą░ąČąĄąĮąĖą╣ ą┤ą╗čÅ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ čüčģąĄą╝ čāčüąĖą╗ąĖč鹥ą╗ąĄą╣ čü ąŠą▒čĆą░čéąĮąŠą╣ čüą▓čÅąĘčīčÄ (ą║ą░ą║ ąĮą░ čĆąĖčü. 4-4 ąĖ 4-5) čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ ą┤ą▓ąĖąČą║ą░ ą╝ąŠąČąĮąŠ ąŠą┐čāčüčéąĖčéčī ąĖąĘ-ąĘą░ ą▓čŗčüąŠą║ąŠą│ąŠ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅ čāčüąĖą╗ąĖč鹥ą╗čÅ.
ąĀąĖčü. 4-10 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆąĖą╝ąĄčĆ ą▓čŗčćąĖčüą╗ąĄąĮąĖą╣ ą┤ą╗čÅ 10 k╬® ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░.
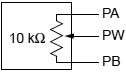
R = 10 k╬®
ąÜąŠą┤ = C0h = 192
RWA(Dn) = (RAB * (256 - Dn) / 256) + RW
RWA(C0h) = (10k╬® * (256 - 192) / 256) + 52╬® = 2552╬®
RWB(Dn) = (RAB * Dn / 256) + RW
RWB(C0h) = (10k╬® * 192 / 256) + 52╬® = 7552╬®
ąĀąĖčü. 4-10. ą¤čĆąĖą╝ąĄčĆ čĆą░čüč湥č鹊ą▓ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅ.
[5.0. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü]
ą×ą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ ą╝ąĄąČą┤čā ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ ąĖ čåąĖčäčĆąŠą▓čŗą╝ čĆąĄąĘąĖčüč鹊čĆąŠą╝ MCP41XXX/42XXX ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ č湥čĆąĄąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü SPI. ąŁč鹊čé ąĖąĮč鹥čĆč乥ą╣čü ąĖčüą┐ąŠą╗čīąĘčāąĄčé 3 ą║ąŠą╝ą░ąĮą┤čŗ:
1. ąŚą░ą┐ąĖčüčī ąĮąŠą▓ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą▓ čĆąĄą│ąĖčüčéčĆ (čĆąĄą│ąĖčüčéčĆčŗ) ą┤ą░ąĮąĮčŗčģ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░.
2. ą¤ąĄčĆąĄą▓ąŠą┤ ą║ą░ąĮą░ą╗ą░ ą▓ ąĮąĖąĘą║ąŠą┐ąŠčéčĆąĄą▒ą╗čÅčÄčēąĖą╣ čĆąĄąČąĖą╝ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ (low power shutdown mode).
3. ąÜąŠą╝ą░ąĮą┤ą░ NOP (No Operation, ą┐čāčüčéą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ).
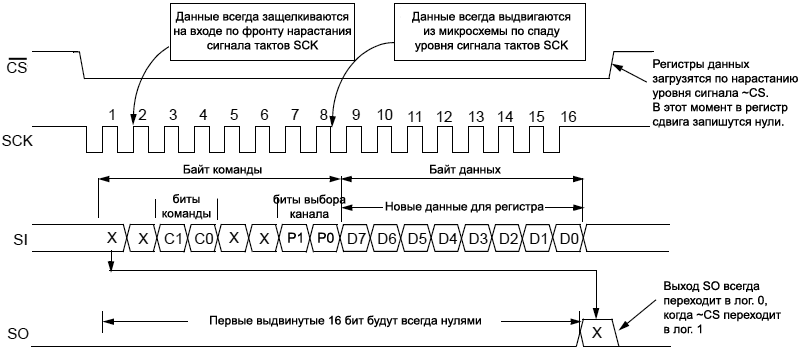
ąÆčŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą╗čÄą▒ąŠą╣ ą║ąŠą╝ą░ąĮą┤čŗ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐ąĄčĆąĄą▓ąŠą┤ąŠą╝ čüąĖą│ąĮą░ą╗ą░ ~CS ą▓ ą╗ąŠą│. 0, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ą▓ą┤ą▓ąĖą│ą░ąĄčéčüčÅ ą▒ą░ą╣čé ą║ąŠą╝ą░ąĮą┤čŗ, ąĘą░ ą║ąŠč鹊čĆčŗą╝ ąĖą┤ąĄčé ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ. ąŁčéąĖ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠą┐ą░ą┤ą░čÄčé ą▓ 16-ą▒ąĖčéąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░. ąÜąŠą╝ą░ąĮą┤ą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čüąĖą│ąĮą░ą╗ ~CS ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ą▓ ą╗ąŠą│. 1. ąöą░ąĮąĮčŗąĄ ą▓ą┤ą▓ąĖą│ą░čÄčéčüčÅ č湥čĆąĄąĘ ą▓čŗą▓ąŠą┤ SI ą┐ąŠ čüą┐ą░ą┤čā čéą░ą║č鹊ą▓ SCK, ąĖ ą▓čŗą┤ą▓ąĖą│ą░čÄčéčüčÅ ąĮą░ ą▓čŗčģąŠą┤ č湥čĆąĄąĘ ą▓čŗą▓ąŠą┤ SO, čüą╝. čĆąĖčü. 5-1.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĮąĄ ą▓čüąĄ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ąĖą╝ąĄčÄčé ą▓čŗą▓ąŠą┤ SO, čŹč鹊 ąĘą░ą▓ąĖčüąĖčé ąŠčé ą║ąŠčĆą┐čāčüą░.

ąĀąĖčü. 5.1. ąöąĖą░ą│čĆą░ą╝ą╝ą░ čüąĖą│ąĮą░ą╗ąŠą▓ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ąĖąĮčüčéčĆčāą║čåąĖą╣ ąĖą╗ąĖ ą┤ą░ąĮąĮčŗčģ ą▓ čåąĖčäčĆąŠą▓ąŠą╣ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ ą║ čĆąĖčü. 5-1: ąĘąĮą░č湥ąĮąĖčÅ ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ, ą┐ąŠą╝ąĄč湥ąĮąĮčŗčģ ą║čĆąĄčüčéąĖą║ąŠą╝ X, ąĮąĄ ąĖą╝ąĄčÄčé ąĘąĮą░č湥ąĮąĖčÅ. ąÆčüąĄą│ą┤ą░ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĮą░čåąĄą╗ąŠ ą┐ąŠą┤ąĄą╗ąĄąĮąĮąŠąĄ ąĮą░ 16 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéą░ą║č鹊ą▓, ą║ąŠą│ą┤ą░ čüąĖą│ąĮą░ą╗ ~CS ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą╗ąŠą│. 0, ąĖąĮą░č湥 ą║ąŠą╝ą░ąĮą┤čŗ ąĮąĄ ą▒čāą┤čāčé ą┐čĆąĖąĮčÅčéčŗ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą▓čŗčģąŠą┤ ą┤ą░ąĮąĮčŗčģ SO ą┤ąŠčüčéčāą┐ąĄąĮ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą┤ą▓čāčģą║ą░ąĮą░ą╗čīąĮąŠą╣ ą▓ąĄčĆčüąĖąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ MCP42XXX. ąöą╗čÅ ąŠą┤ąĮąŠą║ą░ąĮą░ą╗čīąĮąŠą╣ ą▓ąĄčĆčüąĖąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ MCP41XXX ą▒ąĖčé P1 ąĮąĄ ąĖą╝ąĄąĄčé ąĘąĮą░č湥ąĮąĖčÅ.
ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéą░ą║č鹊ą▓ (ą┐ąĄčĆąĄą┐ą░ą┤ąŠą▓ ąŠčé 0 -> 1), ą┐ąŠą║ą░ čüąĖą│ąĮą░ą╗ ~CS ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą╗ąŠą│. 0, ąĖ ąŠą▒ąŠčĆą▓ąĄčé ą▓čüąĄ ą║ąŠą╝ą░ąĮą┤čŗ, ąĄčüą╗ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąĖčłąĄą┤čłąĖčģ čéą░ą║č鹊ą▓ ąĮąĄ ą▒čāą┤ąĄčé ą┤ąĄą╗ąĖčéčīčüčÅ ąĮą░čåąĄą╗ąŠ ąĮą░ 16.
5.1. ąæą░ą╣čé ą║ąŠą╝ą░ąĮą┤čŗ. ą¤ąĄčĆą▓čŗą╣ ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╣ ą▒ą░ą╣čé ą▓čüąĄą│ą┤ą░ ą▒ą░ą╣čé ą║ąŠą╝ą░ąĮą┤čŗ, ąĘą░ ą║ąŠč鹊čĆčŗą╝ ąĖą┤ąĄčé ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ. ąæą░ą╣čé ą║ąŠą╝ą░ąĮą┤čŗ čüąŠą┤ąĄčƹȹĖčé 2 ą▒ąĖčéą░ ą▓čŗą▒ąŠčĆą░ ą║ąŠą╝ą░ąĮą┤čŗ ąĖ 2 ą▒ąĖčéą░ ą▓čŗą▒ąŠčĆą░ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░. ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą▒ąĖčé ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ (ą▒ąĖčéčŗ 'donŌĆÖt care', čé. ąĄ. ąĮąĄ ąĖą╝ąĄąĄčé ąĘąĮą░č湥ąĮąĖčÅ). ąæąĖčéčŗ ą▓čŗą▒ąŠčĆą░ ą║ąŠą╝ą░ąĮą┤ čüčāą╝ą╝ą░čĆąĮąŠ ąŠą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ąĮą░ čĆąĖčü. 5-2. ąæąĖčéčŗ ą▓čŗą▒ąŠčĆą░ ą║ąŠą╝ą░ąĮą┤čŗ C1 ąĖ C0 (ą▒ąĖčéčŗ 4:5) ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé, ą║ą░ą║ą░čÅ ą║ąŠą╝ą░ąĮą┤ą░ ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮą░. ąĢčüą╗ąĖ ą▒ąĖčéčŗ ą║ąŠą╝ą░ąĮą┤ ąŠą▒ą░ 0 ąĖą╗ąĖ 1, č鹊 ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ą║ąŠą╝ą░ąĮą┤ą░ NOP, ą║ą░ą║ č鹊ą╗čīą║ąŠ ąĘą░ą│čĆčāąČąĄąĮčŗ ą▓čüąĄ 16 ą▒ąĖčé. ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąŠą╗ąĄąĘąĮą░ ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ą║ąŠą│ą┤ą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą╝ąĖą║čĆąŠčüčģąĄą╝ čüąŠąĄą┤ąĖąĮąĄąĮčŗ ą▓ čåąĄą┐ąŠčćą║čā. ąÜąŠą│ą┤ą░ ą▒ąĖčéčŗ ą║ąŠą╝ą░ąĮą┤čŗ 01, č鹊 ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ą║ąŠą╝ą░ąĮą┤ą░ čü 8 ą▒ąĖčéą░ą╝ąĖ, ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╝ąĖ ą▓ ą▒ą░ą╣č鹥 ą┤ą░ąĮąĮčŗčģ. ąöą░ąĮąĮčŗąĄ ą▒čāą┤čāčé ąĘą░ą┐ąĖčüą░ąĮčŗ ą▓ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ą▒ąĖčéą░ą╝ąĖ ą▓čŗą▒ąŠčĆą░ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░. ąĢčüą╗ąĖ ą▒ąĖčéčŗ ą║ąŠą╝ą░ąĮą┤čŗ 10, č鹊 ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ą║ąŠą╝ą░ąĮą┤ą░ shutdown ąĮą░ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░čģ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ čŹčéąĖą╝ąĖ ą▒ąĖčéą░ą╝ąĖ ą▓čŗą▒ąŠčĆą░ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░.
ąöą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ MCP42XXX ą▒ąĖčéčŗ ą▓čŗą▒ąŠčĆą░ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░ P1 ąĖ P0 (ą▒ąĖčéčŗ 0:1) ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé, ąĮą░ ą║ą░ą║ąĖąĄ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆčŗ ą┤ąĄą╣čüčéą▓čāąĄčé ą║ąŠą╝ą░ąĮą┤ą░. ąĪąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēą░čÅ ą╗ąŠą│. 1 ą▓ ą┐ąŠąĘąĖčåąĖąĖ ąŠą▒ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ą░ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą╗ąŠą│. 0 ąŠą▒ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą║ąŠą╝ą░ąĮą┤ą░ ąĮąĄ ą▒čāą┤ąĄčé ą▓ą╗ąĖčÅčéčī ąĮą░ čŹč鹊čé ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆ (čüą╝. čĆąĖčü. 5-2).
| D15 |
D14 |
D13 |
D12 |
D11 |
D10 |
D9 |
D8 |
| X |
X |
C1 |
C0 |
X |
X |
P1 |
P2 |
ąĀąĖčü. 5-2. ążąŠčĆą╝ą░čé ą▒ą░ą╣čéą░ ą║ąŠą╝ą░ąĮą┤čŗ.
ąæąĖčéčŗ C1C0 ąĘą░ą┤ą░čÄčé ą║ąŠą╝ą░ąĮą┤čā:
| C1 |
C0 |
ąÜąŠą╝ą░ąĮą┤ą░ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
0 |
None |
ą¤čāčüčéą░čÅ ą║ąŠą╝ą░ąĮą┤ą░ (ąĮąĄ ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮąŠ ąĮąĖą║ą░ą║ąĖčģ ą┤ąĄą╣čüčéą▓ąĖą╣). |
| 0 |
1 |
Write Data |
ąÆ čĆąĄą│ąĖčüčéčĆ ą┤ą░ąĮąĮčŗčģ ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░ (ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ čüąŠčüč鹊čÅąĮąĖąĄą╝ ą▒ąĖčé P1P0) ą▒čāą┤čāčé ąĘą░ą┐ąĖčüą░ąĮąŠ 8 ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗąĄ ąĖą┤čāčé ąĘą░ ą║ąŠą╝ą░ąĮą┤ąŠą╣ (D7..D0). |
| 1 |
0 |
Shutdown |
ą¤ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆčŗ, ą▓čŗą▒čĆą░ąĮąĮčŗąĄ ą▒ąĖčéą░ą╝ąĖ P1P0, ą▒čāą┤čāčé ą┐ąĄčĆąĄą▓ąĄą┤ąĄąĮčŗ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ "ą▓čŗą║ą╗čÄč湥ąĮąŠ" (Shutdown Mode). ąæąĖčéčŗ ą┤ą░ąĮąĮčŗčģ (D7..D0) ą┤ą╗čÅ čŹč鹊ą╣ ą║ąŠą╝ą░ąĮą┤čŗ ąĮąĄ ąĖą╝ąĄčÄčé ąĘąĮą░č湥ąĮąĖčÅ. |
| 1 |
1 |
None |
ą¤čāčüčéą░čÅ ą║ąŠą╝ą░ąĮą┤ą░ (ąĮąĄ ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮąŠ ąĮąĖą║ą░ą║ąĖčģ ą┤ąĄą╣čüčéą▓ąĖą╣). |
ąæąĖčéčŗ P1P0 ą▓čŗą▒ąĖčĆą░čÄčé ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆčŗ:
| P1 |
P0 |
ąÆčŗą▒ąŠčĆ ą║ą░ąĮą░ą╗ą░ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆąŠą▓ |
| 0 |
0 |
ą¤čāčüč鹊ą╣ ą▓čŗą▒ąŠčĆ: ą║ąŠą╝ą░ąĮą┤ą░ ąĮąĄ ą┐ąŠą▓ą╗ąĖčÅąĄčé ąĮą░ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆąŠą▓. |
| 0 |
1 |
ąÜąŠą╝ą░ąĮą┤ą░ ą▓čŗą┐ąŠą╗ąĮąĖčéčüčÅ ą┤ą╗čÅ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░ 0. |
| 1 |
0 |
ąÜąŠą╝ą░ąĮą┤ą░ ą▓čŗą┐ąŠą╗ąĮąĖčéčüčÅ ą┤ą╗čÅ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░ 1. |
| 1 |
1 |
ąÜąŠą╝ą░ąĮą┤ą░ ą▓čŗą┐ąŠą╗ąĮąĖčéčüčÅ ą┤ą╗čÅ ąŠą▒ąŠąĖčģ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆąŠą▓. |
5.2. ąŚą░ą┐ąĖčüčī ą┤ą░ąĮąĮčŗčģ ą▓ čĆąĄą│ąĖčüčéčĆčŗ. ąÜąŠą│ą┤ą░ ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĘą░ą┐ąĖčüą░ąĮčŗ ą▓ ąŠą┤ąĖąĮ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čĆąĄą│ąĖčüčéčĆąŠą▓ ą┤ą░ąĮąĮčŗčģ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░, ąĘą░ ą║ąŠą╝ą░ąĮą┤ąŠą╣ ąĘą░ą┐ąĖčüąĖ ąĖą┤ąĄčé ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ čü ąĮąŠą▓čŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝. ąÜąŠą╝ą░ąĮą┤ą░ ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ ą▒ąĖčéą░ą╝ąĖ C1C0, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ąĖ ą▓ 01. ąæąĖčéčŗ ą▓čŗą▒ąŠčĆą░ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░ P1 ąĖ P0 ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ąĮąŠą▓ąŠą╝čā ąĘąĮą░č湥ąĮąĖčÄ ąĘą░ą┐ąĖčüą░čéčīčüčÅ ą▓ potentiometer 0, potentiometer 1 (ąĖą╗ąĖ ą▓ ąĮąĖčģ ąŠą▒ą░) ąŠą┤ąĮąŠą╣ ą║ąŠą╝ą░ąĮą┤ąŠą╣. ąøąŠą│. 1 ą╗ąĖą▒ąŠ ą┤ą╗čÅ P1, ą╗ąĖą▒ąŠ ą┤ą╗čÅ P0 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ąĘą░ą┐ąĖčüąĖ ą┤ą░ąĮąĮčŗčģ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čĆąĄą│ąĖčüčéčĆ ą┤ą░ąĮąĮčŗčģ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░, ąĖ ą╗ąŠą│. 0 ąĮąĄ ąŠą║ą░ąČąĄčé ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ, ą┤ą░ąĮąĮčŗąĄ čŹč鹊ą│ąŠ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░ ąĮąĄ ą┐ąŠą╝ąĄąĮčÅąĄčéčüčÅ. ąĪą╝. čüčāą╝ą╝ą░čĆąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ č乊čĆą╝ą░čéą░ ą║ąŠą╝ą░ąĮą┤čŗ ąĮą░ čĆąĖčü. 5-2.
5.3. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ Shutdown. ąÜąŠą╝ą░ąĮą┤ą░ shutdown ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąĄčĆąĄą▓ąĄčüčéąĖ čüčģąĄą╝čā ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą▓ čĆąĄąČąĖą╝ ąĮąĖąĘą║ąŠą│ąŠ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ č鹊ą║ą░ (power-saving mode). ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą▓čŗą▓ąŠą┤čŗ ąŠčéą║ą╗čÄč湥ąĮčŗ, ąĖ ąĮąŠąČą║ąĖ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░ B ąĖ W ąĘą░ą╝ą║ąĮčāčéčŗ ą┤čĆčāą│ ąĮą░ ą┤čĆčāą│ą░. ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą▒ąĖčéčŗ ą║ąŠą╝ą░ąĮą┤čŗ C1C0 čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ 10. ąæąĖčéčŗ ą▓čŗą▒ąŠčĆą░ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░ P1 ąĖ P0 ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą▓čŗą║ą╗čÄčćąĖčéčī ą║ą░ąČą┤čŗą╣ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ą┤čĆčāą│ ąŠčé ą┤čĆčāą│ą░. ąĢčüą╗ąĖ ą╗ąĖą▒ąŠ P1, ą╗ąĖą▒ąŠ P0 ą▓ ą╗ąŠą│. 1, č鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ čĆąĄąČąĖą╝ shutdown. ąøąŠą│. 0 ą┤ą╗čÅ P1 ąĖą╗ąĖ P0 ąĮąĄ ąŠą║ą░ąČąĄčé čŹčäč乥ą║čéą░. 8 ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗąĄ ąĖą┤čāčé ąĘą░ ą║ąŠą╝ą░ąĮą┤ąŠą╣, ą▓čüąĄ ąĄčēąĄ ąĮčāąČąĮčŗ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą║ąŠą╝ą░ąĮą┤čŗ shutdown, ąĮąŠ ąĖčģ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ąĮąĄ ąĖą╝ąĄąĄčé ąĘąĮą░č湥ąĮąĖčÅ. ąĪą╝. čüčāą╝ą╝ą░čĆąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ č乊čĆą╝ą░čéą░ ą║ąŠą╝ą░ąĮą┤čŗ ąĮą░ čĆąĖčü. 5-2.
ąÜą░ą║ č鹊ą╗čīą║ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆ ą▓ąŠčłąĄą╗ ą▓ čĆąĄąČąĖą╝ shutdown, ąŠąĮ ą▒čāą┤ąĄčé ąŠčüčéą░ą▓ą░čéčīčüčÅ ą▓ ąĮąĄą╝, ą┐ąŠą║ą░ ąĮąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čüą╗ąĄą┤čāčÄčēąĄąĄ:
ŌĆó ąØąŠą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĘą░ą┐ąĖčüą░ąĮąŠ ą▓ čĆąĄą│ąĖčüčéčĆ ą┤ą░ąĮąĮčŗčģ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆą░, ą┐čĆąĖ čŹč鹊ą╝ ą▓čŗą▓ąŠą┤ ~SHDN ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓ ą╗ąŠą│. 1. ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ą▒čāą┤ąĄčé ąŠčüčéą░ą▓ą░čéčīčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ shutdown ą┤ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░ 0 -> ąĮą░ ą▓čŗą▓ąŠą┤ąĄ ~CS, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓čŗą╣ą┤ąĄčé ąĖąĘ čĆąĄąČąĖą╝ą░ shutdown, ąĖ ąĮąŠą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮąŠ ą▓ čĆąĄą│ąĖčüčéčĆ (čĆąĄą│ąĖčüčéčĆčŗ) ą┤ą░ąĮąĮčŗčģ. ąĢčüą╗ąĖ ą▓čŗą▓ąŠą┤ ~SHDN ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą╗ąŠą│. 0, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĮčÅč鹊 ąĮąŠą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, č鹊 čĆąĄą│ąĖčüčéčĆčŗ ą▓čüąĄ-čéą░ą║ąĖ ą┐ąŠą╗čāčćą░čé ąĮąŠą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąĮąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠčüčéą░ąĮąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ shutdown. ąŁč鹊čé čüčåąĄąĮą░čĆąĖą╣ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé, čćč鹊 ą┐čĆąĖąĮčÅčéą░ ą┤ąŠą┐čāčüčéąĖą╝ą░čÅ ą║ąŠą╝ą░ąĮą┤ą░. ąĢčüą╗ąĖ ą┐čĆąĖąĮčÅčéą░ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝ą░čÅ ą║ąŠą╝ą░ąĮą┤ą░, č鹊 ąŠąĮą░ ą▒čāą┤ąĄčé ąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░ąĮą░, ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠčüčéą░ąĮąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ shutdown.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĖąĮąŠą│ą┤ą░ čā ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ąĮąĄčé ą▓čŗą▓ąŠą┤ą░ ~SHDN, č鹊ą│ą┤ą░ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 ąŠąĮ ą▓čüąĄą│ą┤ą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąŠą│. 0. ąŁč鹊 ąĘą░ą▓ąĖčüąĖčé ąŠčé ą║ąŠčĆą┐čāčüą░ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ - ąĄčüą╗ąĖ ą║ąŠčĆą┐čāčü ąĖą╝ąĄąĄčé 8 ą▓čŗą▓ąŠą┤ąŠą▓, č鹊 ąĮąĄčé ąĮąĄ č鹊ą╗čīą║ąŠ ą▓čŗą▓ąŠą┤ą░ ~SHDN, ąĮąŠ čéą░ą║ąČąĄ ąĮąĄčé ą▓čŗą▓ąŠą┤ąŠą▓ ~SHDN ąĖ čüą▒čĆąŠčüą░ ~RS. ą¤ąŠčŹč鹊ą╝čā ą▓čüąĄ, čćč鹊 ąĮą░ą┐ąĖčüą░ąĮąŠ ą┤ą░ą╗čīčłąĄ, ą║ čŹčéąĖą╝ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ą╝ ąĮąĄ ąŠčéąĮąŠčüąĖčéčīčüčÅ.
ąóą░ą║ąČąĄ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ą▓čŗą▓ąŠą┤ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ (shutdown pin) ąĖ ą▓čŗą▓ąŠą┤ čüą▒čĆąŠčüą░ (reset pin) ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖąĘ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ. ą¦č鹊ą▒čŗ čüą┤ąĄą╗ą░čéčī čŹč鹊, čüąĮą░čćą░ą╗ą░ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓čŗą┤ą░ąĮ ąĖą╝ą┐čāą╗čīčü ą╗ąŠą│. 0 ąĮą░ ą▓čŗą▓ąŠą┤ąĄ ą▓čŗą▒ąŠčĆą║ąĖ. ąöą╗čÅ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čāčüčéčĆąŠą╣čüčéą▓ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąŠą▒čēąĄą│ąŠ ą▓čŗą▓ąŠą┤ ~SHDN ąĖą╗ąĖ RESET ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čü ą┐ąŠą╝ąŠčēčīčÄ ą▓čŗą▒ąŠčĆą║ąĖ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ ą▓čŗą▓ąĄčüčéąĖ ąĖąĘ shutdown č鹊ą╗čīą║ąŠ ąĮčāąČąĮčāčÄ ą╝ąĖą║čĆąŠčüčģąĄą╝čā. ąĪą╝. čĆąĖčü. 1-3 ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ čüąĖą│ąĮą░ą╗ąŠą▓. ąĪ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠą╣ ą┐ąŠą┤ą░č湥ą╣ ąĖą╝ą┐čāą╗čīčüą░ ą▓čŗą▒ąŠčĆą║ąĖ ą╝ąŠąČąĄčé ą▓ąŠąĘąĮąĖą║ąĮčāčéčī ąŠą┤ąĮą░ ąĖąĘ čüąĖčéčāą░čåąĖą╣ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖąĘ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ shutdown:
ŌĆó ąØą░ ą▓čŗą▓ąŠą┤ąĄ ~RS ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ ąĖą╝ą┐čāą╗čīčü ą╗ąŠą│. 0 ąĮą░ ą▓čĆąĄą╝čÅ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 150 ąĮčü, ą┐čĆąĖ čŹč鹊ą╝ ~SHDN ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓ ą╗ąŠą│. 1. ąĢčüą╗ąĖ ą▓čŗą▓ąŠą┤ ~SHDN ą▓ ą╗ąŠą│. 0, č鹊 čĆąĄą│ąĖčüčéčĆčŗ ą▓čüąĄ ąĄčēąĄ ą▒čāą┤čāčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ čüčĆąĄą┤ąĮąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąĮąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠčüčéą░ąĮąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ shutdown. ąŁč鹊 čāčüą╗ąŠą▓ąĖąĄ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé, čćč鹊 ~CS ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą╗ąŠą│. 1, čéą░ą║ ą║ą░ą║ ą┐ąĄčĆąĄą▓ąŠą┤ ą▓čŗą▓ąŠą┤ą░ ~RS ą▓ ą╗ąŠą│. 0 ą┐čĆąĖ ą▓čŗą▓ąŠą┤ąĄ ~CS ą▓ ą╗ąŠą│. 0 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝ąŠą╝čā čüąŠčüč鹊čÅąĮąĖčÄ, ąĖ čĆąĄąĘčāą╗čīčéą░čéčŗ ą▒čāą┤čāčé ąĮąĄą┐čĆąĄą┤čüą║ą░ąĘčāąĄą╝čŗ.
ŌĆó ą¤ąĄčĆąĄą┐ą░ą┤ 0 -> 1 ąĮą░ ą▓čŗą▓ąŠą┤ąĄ ~SHDN, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąŠąĖąĘąŠčłąĄą╗ ą┐ąŠčüą╗ąĄ čāčĆąŠą▓ąĮčÅ ą╗ąŠą│. 0 ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 100 ąĮčü, ą║ąŠą│ą┤ą░ ą▓čŗą▓ąŠą┤ ~CS ą▒čŗą╗ ą▓ ą╗ąŠą│. 1. ą¤ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ~SHDN ą▓ ą╗ąŠą│. 0, ą║ąŠą│ą┤ą░ ~CS ą▓ ą╗ąŠą│. 0 čŹč鹊 ąĮąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ąĮąĄą┐čĆąĄą┤čüą║ą░ąĘčāąĄą╝čŗą╝ čĆąĄąĘčāą╗čīčéą░čéą░ą╝.
ŌĆó ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ą▓čŗą║ą╗čÄč湥ąĮąŠ ąĖ ą┐ąŠč鹊ą╝ čüąĮąŠą▓ą░ ą▓ą║ą╗čÄč湥ąĮąŠ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ą▓čŗą▓ąŠą┤ ~SHDN ą▓čüąĄą│ą┤ą░ ą┐ąĄčĆąĄą▓ąĄą┤ąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓ čĆąĄąČąĖą╝ shutdown, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé č鹊ą│ąŠ, ą┐ąĄčĆąĄą▓ąĄą┤ąĄąĮ ą╗ąĖ ą┐ąŠč鹥ąĮčåąĖąŠą╝ąĄčéčĆ ą▓ čĆąĄąČąĖą╝ shutdown ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╣ ą║ąŠą╝ą░ąĮą┤ąŠą╣.
ąÜąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓čŗą║ą╗čÄč湥ąĮąŠ, čĆąĄą│ąĖčüčéčĆčŗ ą┤ą░ąĮąĮčŗčģ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą▓ čüčĆąĄą┤ąĮąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ (80h). ąĪčģąĄą╝ą░ čüą▒čĆąŠčüą░ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą│ą░čĆą░ąĮčéąĖąĖ, čćč鹊 ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ąŠąĮąŠ ąŠą║ą░ąČąĄčéčüčÅ ą▓ ąĖąĘą▓ąĄčüčéąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ.
5.8. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ MCP41XXX/42XXX ą▓ SPI Mode 11. ą£ąŠąČąĮąŠ čĆą░ą▒ąŠčéą░čéčī čü čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ ą▓ čĆąĄąČąĖą╝ą░čģ SPI 00 ąĖ 11. ąĀą░ąĘąĮąĖčåą░ ą╝ąĄąČą┤čā čŹčéąĖą╝ąĖ čĆąĄąČąĖą╝ą░ą╝ąĖ č鹊ą╗čīą║ąŠ ą▓ č鹊ą╝, čćč鹊 ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čĆąĄąČąĖą╝ 11, čéą░ą║čéčŗ ąŠčüčéą░čÄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąŠą│. 1, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą▓ čĆąĄąČąĖą╝ąĄ 00 čéą░ą║čéčŗ ąŠčüčéą░čÄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ ą▓ ą╗ąŠą│. 0. ąÆ ąŠą▒ąŠąĖčģ čĆąĄąČąĖą╝ą░ ą┤ą░ąĮąĮčŗąĄ ą▓ą┤ą▓ąĖą│ą░čÄčéčüčÅ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ č湥čĆąĄąĘ ą▓čģąŠą┤ SI ą┐ąŠ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮčŗą╝ ą┐ąĄčĆąĄą┐ą░ą┤ą░ą╝ SCK, ąĖ ą▓čŗą┤ą▓ąĖą│ą░čÄčéčüčÅ ąĮą░čĆčāąČčā č湥čĆąĄąĘ ą▓čŗą▓ąŠą┤ SO ą┐ąŠ čüą┐ą░ą┤ą░ą╝ čāčĆąŠą▓ąĮčÅ SCK. ą×ą┐ąĄčĆą░čåąĖąĖ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čĆąĄąČąĖą╝ą░ 00 ą┐ąŠą║ą░ąĘą░ąĮčŗ ąĮą░ čĆąĖčü. 5-1. ą¤čĆąĖą╝ąĄčĆ ąĮą░ čĆąĖčü. 5-5 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čĆąĄąČąĖą╝ 11.
ąĀąĖčü. 5-5. ąöąĖą░ą│čĆą░ą╝ą╝ą░ čüąĖą│ąĮą░ą╗ąŠą▓ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą▓ čĆąĄąČąĖą╝ąĄ SPI Mode 11.
ąŚą┤ąĄčüčī ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐čĆąĖą╝ąĄčĆ ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ MCP41010. ąóą░ą║ąČąĄ čüą╝. ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą┐čĆąŠąĄą║čéą░ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ąĖąĘ čüčéą░čéčīąĖ [2].
/** \file spi.c
* ą¤čĆąŠčüč鹊ą╣ ą║ąŠą┤ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ AVR SPI,
* čĆą░ą▒ąŠčéą░čÄčēąĖą╣ ą┐ąŠ ąŠą┐čĆąŠčüčā (polling, čé. ąĄ. ą▒ąĄąĘ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣)
*/
/**
* ąśąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé AVR SPI ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čāą║ą░ąĘą░ąĮąĮčŗą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ.
* \param setup čŹč鹊 ąŠą┐čåąĖąĖ SPI, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą╝ą░čüą║ąŠą╣, čüąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠą╣
* ąĖąĘ SPIMODE*, *_FIRST, CLOCKDIV*.
*/
void spi_init(uint8_t setup)
{
SPI_DDR |= (1 << SPI_MOSI_BIT)|(1 << SPI_SCK_BIT)|(1 << SPI_CS_BIT);
SPCR = (1 << SPE)|(1 << MSTR)|setup;
}
/**
* ą¤ąŠčüčŗą╗ą░ąĄčé ąŠą┤ąĖąĮ ą▒ą░ą╣čé č湥čĆąĄąĘ SPI čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ąŠą┐čĆąŠčüą░.
* \param data ą▒ą░ą╣čé ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ
*/
void spi_send_byte(uint8_t data)
{
SPDR = data;
while(!(SPSR & (1 << SPIF)));
}
/** \file MCP41010.h
*/
#define MCP41010_CS_PORT PORTB
#define MCP41010_CS_DDR DDRB
#define MCP41010_CS_BIT PB2
#define MCP41010_CS_HI() MCP41010_CS_PORT |= (1 << MCP41010_CS_BIT)
#define MCP41010_CS_LO() MCP41010_CS_PORT &= ~(1 << MCP41010_CS_BIT)
//ą£ą░čüą║ąĖ ą┤ą╗čÅ ą▒ą░ą╣čéą░ ą║ąŠą╝ą░ąĮą┤čŗ MCP44010:
#define MCP_POTENTIOMETER0 0x01
#define MCP_POTENTIOMETER1 0x02
#define MCP_WRITE 0x10
#define MCP_SHUTDOWN 0x20
/** \file MCP41010.c
*
* ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ 菹╗ąĄą║čéčĆąŠąĮąĮčŗą╝ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗą╝ čĆąĄąĘąĖčüč鹊čĆąŠą╝ MCP41010.
* ąśčüą┐ąŠą╗čīąĘčāąĄčé ąŠą┤ąĮąŠčüč鹊čĆąŠąĮąĮčÄčÄ ą┐ąĄčĆąĄą┤ą░čćčā ą┤ą░ąĮąĮčŗčģ č湥čĆąĄąĘ SPI.
*/
#include "MCP41010.h"
#include < util/delay.h >
#include "spi.h"
void mcp41010_init (void)
{
//ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ąĮąŠąČą║ąĖ ą▓čŗą▒ąŠčĆą║ąĖ:
MCP41010_CS_DDR |= (1 << MCP41010_CS_BIT);
MCP41010_CS_HI();
}
void mcp41010_write (u8 val)
{
MCP41010_CS_LO();
//_delay_us(2);
spi_send_byte(MCP_WRITE|MCP_POTENTIOMETER0);
spi_send_byte(val);
//_delay_us(2);
MCP41010_CS_HI();
}
//////////////////////////////////////////////
// ą¤čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ:
//////////////////////////////////////////////
...
/* ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ SPI */
spi_init(SPIMODE2);
/* ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ AD9833 */
ad9833_init();
/* ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ MCP41010 */
mcp41010_init();
...
mcp41010_write(147);
[ąĪčüčŗą╗ą║ąĖ]
1. MCP41XXX/42XXX Single/Dual Digital Potentiometer with SPIŌäó Interface site:microchip.com.
2. AD9833: ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ čüąĖą│ąĮą░ą╗ąŠą▓. |




ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ
RSS ą╗ąĄąĮčéą░ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĄą▓ čŹč鹊ą╣ ąĘą░ą┐ąĖčüąĖ