ą×čüąĮąŠą▓ąĮčŗąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░:
ŌĆó ąĀąĄą░ą╗ąĖąĘčāąĄčé čüčéą░ąĮą┤ą░čĆčé CAN V2.0B ąĮą░ čüą║ąŠčĆąŠčüčéąĖ 1 ą╝ąĄą│ą░ą▒ąĖčé/čüąĄą║:
[ąóąĖą┐čŗ ą║ąŠčĆą┐čāčüąŠą▓ ]
18-ą▓čŗą▓ąŠą┤ąĮčŗą╣ PDIP/SOIC
20-ą▓čŗą▓ąŠą┤ąĮčŗą╣ TSSOP
20-ą▓čŗą▓ąŠą┤ąĮčŗą╣ 4x4 QFN*
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ *: ą┐ąŠą┤ ą┤ąŠąĮčŗčłą║ąŠą╝ ą║ąŠčĆą┐čāčüą░ QFN20 ąĖą╝ąĄąĄčéčüčÅ č鹥ą┐ą╗ąŠąŠčéą▓ąŠą┤čÅčēą░čÅ ą╝ąĄčéą░ą╗ą╗ąĖč湥čüą║ą░čÅ ą┐ą╗ąŠčēą░ą┤ą║ą░, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮą░čÅ ą┤ą╗čÅ ą┐ą░ą╣ą║ąĖ Exposed Thermal Pad (EP, čüą╝. ą┤ą░čéą░čłąĖčé [1]).
[ą×ą▒čēąĄąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ]
ą£ąĖą║čĆąŠčüčģąĄą╝ą░ MCP2515 čŹč鹊 čüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╣, ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čüąĄčéąĖ Controller Area Network (CAN ), čĆąĄą░ą╗ąĖąĘčāčÄčēąĖą╣ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖčÄ CAN ą▓ąĄčĆčüąĖąĖ 2.0B. ą£ąŠąČąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ąĖ ą┐čĆąĖąĮąĖą╝ą░čéčī ą║ą░ą║ čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ, čéą░ą║ ąĖ čĆą░čüčłąĖčĆąĄąĮąĮčŗąĄ čäčĆąĄą╣ą╝čŗ ą┤ą░ąĮąĮčŗčģ, čéą░ą║ ąĖ čäčĆąĄą╣ą╝čŗ remote. ąŻ MCP2515 ąĖą╝ąĄąĄčéčüčÅ 2 ą╝ą░čüą║ąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ (acceptance mask) ąĖ 6 čäąĖą╗čīčéčĆąŠą▓ (acceptance filter), ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ąŠčéą▒čĆą░čüčŗą▓ą░ąĮąĖčÅ ąĮąĄąČąĄą╗ą░č鹥ą╗čīąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣, čćč鹊 čāą╝ąĄąĮčīčłą░ąĄčé ąĮą░ą│čĆčāąĘą║čā ąĮą░ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ. ąĪ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ MCP2515 čüąŠąĄą┤ąĖąĮčÅąĄčéčüčÅ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü SPI [3].
MCP2515 čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊ą▒čŗ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ čāą┐čĆąŠčüčéąĖčéčī ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, čéčĆąĄą▒čāčÄčēąĖąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ CAN-čłąĖąĮąĄ. ą¤čĆąŠčüčéą░čÅ ą▒ą╗ąŠą║-čüčģąĄą╝ą░ MCP2515 ą┐ąŠą║ą░ąĘą░ąĮą░ ąĮą░ čĆąĖčü. 1-1. ąŻčüčéčĆąŠą╣čüčéą▓ąŠ čüąŠčüč鹊ąĖčé ąĖąĘ 3 ąŠčüąĮąŠą▓ąĮčŗčģ ą▒ą╗ąŠą║ąŠą▓:
1 . ą£ąŠą┤čāą╗čī CAN, ą║ąŠč鹊čĆčŗą╣ ą▓ą║ą╗čÄčćą░ąĄčé ą▓ čüąĄą▒čÅ čüąĖčüč鹥ą╝čā ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ CAN, ą╝ą░čüą║ąĖ, čäąĖą╗čīčéčĆčŗ, ą▒čāč乥čĆčŗ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░.2 . ąøąŠą│ąĖą║ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖ čĆąĄą│ąĖčüčéčĆčŗ, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ čĆą░ą▒ąŠčéčŗ čü ąĮąĖą╝.3 . ąæą╗ąŠą║ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ SPI.
ąĀąĖčü. 1-1. ąæą╗ąŠą║-čüčģąĄą╝ą░ MCP2515.
ą¤čĆąĖą╝ąĄčĆ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čüąĄčéąĖ čü čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ MCP2515 ą┐ąŠą║ą░ąĘą░ąĮ ąĮą░ čĆąĖčü. 1-2.
ąĀąĖčü. 1-2. ą¤čĆąĖą╝ąĄčĆ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąŠą▒ą╝ąĄąĮą░ ą┐ąŠ čłąĖąĮąĄ CAN ąĮą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░čģ MCP2515.
ą£ąŠą┤čāą╗čī CAN . ą£ąŠą┤čāą╗čī CAN ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą▓čüąĄ čäčāąĮą║čåąĖąĖ ą┐čĆąĖąĄą╝ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ čüąŠąŠą▒čēąĄąĮąĖą╣ ą┐ąŠ čłąĖąĮąĄ CAN. ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą┐čāč鹥ą╝ ą┐ąĄčĆą▓ąŠąĮą░čćą░ą╗čīąĮąŠą╣ ąĘą░ą│čĆčāąĘą║ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą▒čāč乥čĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĖ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓. ą¤ąĄčĆąĄą┤ą░čćą░ ąĖąĮąĖčåąĖąĖčĆčāąĄčéčüčÅ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą▒ąĖč鹊ą▓ čĆąĄą│ąĖčüčéčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü SPI, ąĖą╗ąĖ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą▓čŗą▓ąŠą┤ąŠą▓ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąĪčéą░čéčāčü ąĖ ąŠčłąĖą▒ą║ąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąŠą▓ąĄčĆąĄąĮčŗ čćč鹥ąĮąĖąĄą╝ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓. ąøčÄą▒ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ, ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ąĮą░ čłąĖąĮąĄ CAN, čäąĖą╗čīčéčĆčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ, ą┤ąŠą╗ąČąĮąŠ ą╗ąĖ ąŠąĮąŠ ą▒čŗčéčī ą┐ąŠą╝ąĄčēąĄąĮąŠ ą▓ ąŠą┤ąĖąĮ ąĖąĘ ą┤ą▓čāčģ ą▒čāč乥čĆąŠą▓ ą┐čĆąĖąĄą╝ą░.
ąøąŠą│ąĖą║ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ . ąæą╗ąŠą║ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą╣ ą╗ąŠą│ąĖą║ąĖ čāą┐čĆą░ą▓ą╗čÅąĄčé ąĮą░čüčéčĆąŠą╣ą║ąŠą╣ ąĖ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄą╝ MCP2515 ą┐čāč鹥ą╝ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖčÅ čü ą┤čĆčāą│ąĖą╝ąĖ ą▒ą╗ąŠą║ą░ą╝ąĖ čü čåąĄą╗čīčÄ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ.
ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ ą▓čŗą▓ąŠą┤čŗ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čāą▓ąĄą╗ąĖčćąĖčéčī ą│ąĖą▒ą║ąŠčüčéčī ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąŁč鹊 ąŠą┤ąĖąĮ ą╝ąĮąŠą│ąŠčäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗą╣ ą▓čŗą▓ąŠą┤ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (ą║ą░ą║ ąĖ čüą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ ą▓čŗą▓ąŠą┤čŗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ) ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ąĖąĘ ą┐čĆąĖąĄą╝ąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓, čćč鹊 ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ąĖąĮą┤ąĖą║ą░čåąĖąĖ ąŠ č鹊ą╝, čćč鹊 ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊, ąĖ ąĘą░ą│čĆčāąČąĄąĮąŠ ą▓ ąŠą┤ąĖąĮ ąĖąĘ ą┐čĆąĖąĄą╝ąĮčŗčģ ą▒čāč乥čĆąŠą▓. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čüą┐ąĄčåąĖą░ą╗čīąĮčŗčģ ą▓čŗą▓ąŠą┤ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĮąĄ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ. ąÆčŗą▓ąŠą┤ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ, ą║ą░ą║ ąĖ čĆąĄą│ąĖčüčéčĆčŗ čüčéą░čéčāčüą░ (ą┤ąŠčüčéčāą┐ąĮčŗąĄ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü SPI), čéą░ą║ąČąĄ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą╝ąŠą╝ąĄąĮčé ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ ą┤ąŠą┐čāčüčéąĖą╝ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ.
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ąĖą╝ąĄąĄčéčüčÅ 3 ą▓čŗą▓ąŠą┤ą░ ą┤ą╗čÅ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠą│ąŠ ąĘą░ą┐čāčüą║ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą║ąŠč鹊čĆąŠąĄ ą▒čŗą╗ąŠ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ąĘą░ą│čĆčāąČąĄąĮąŠ ą▓ ąŠą┤ąĖąĮ ąĖąĘ čéčĆąĄčģ čĆąĄą│ąĖčüčéčĆąŠą▓ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čŹčéąĖčģ ą▓čŗą▓ąŠą┤ąŠą▓ ąĮąĄ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ, čéą░ą║ ą║ą░ą║ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░čéčī ąŠčéą┐čĆą░ą▓ą║čā čüąŠąŠą▒čēąĄąĮąĖčÅ ą╝ąŠąČąĮąŠ čéą░ą║ąČąĄ č湥čĆąĄąĘ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖąĄ čĆąĄą│ąĖčüčéčĆčŗ, ą┤ąŠčüčéčāą┐ąĮčŗąĄ č湥čĆąĄąĘ SPI.
ąæą╗ąŠą║ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ SPI . ąŻą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ MCP2515 č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü SPI. ąŚą░ą┐ąĖčüčī ąĖą╗ąĖ čćč鹥ąĮąĖąĄ ą▓čüąĄčģ čĆąĄą│ąĖčüčéčĆąŠą▓ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ąĖ ą║ąŠą╝ą░ąĮą┤ą░ą╝ąĖ ąĘą░ą┐ąĖčüąĖ ąĖ čćč鹥ąĮąĖčÅ SPI ą▓ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ čüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗą╝ ą║ąŠą╝ą░ąĮą┤ą░ą╝ SPI.
ąóą░ą▒ą╗ąĖčåą░ 1-1. ą×ą┐ąĖčüą░ąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ MCP2515.
ąśą╝čÅ ąóąĖą┐1 ą×ą┐ąĖčüą░ąĮąĖąĄ ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮą░čÅ čäčāąĮą║čåąĖčÅ
TXCAN
O
ąÆčŗčģąŠą┤ ą┐ąĄčĆąĄą┤ą░čćąĖ čłąĖąĮčŗ CAN.
-
RXCAN
I
ąÆčģąŠą┤ ą┐čĆąĖąĄą╝ą░ čłąĖąĮčŗ CAN.
-
CLKOUT
O
ąóą░ą║č鹊ą▓čŗą╣ ą▓čŗčģąŠą┤ čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╝ ą┐čĆąĄčüą║ą░ą╗ąĄčĆąŠą╝.
ąĪąĖą│ąĮą░ą╗ ąĮą░čćą░ą╗ą░ čäčĆąĄą╣ą╝ą░ (SOF).
/TX0RTS
I
ąĪąĖą│ąĮą░ą╗ RTS ą┤ą╗čÅ ą▒čāč乥čĆą░ TXB02 .
ą”ąĖčäčĆąŠą▓ąŠą╣ ą▓čģąŠą┤ ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ2 .
/TX1RTS
I
ąĪąĖą│ąĮą░ą╗ RTS ą┤ą╗čÅ ą▒čāč乥čĆą░ TXB12 .
/TX2RTS
ąĪąĖą│ąĮą░ą╗ RTS ą┤ą╗čÅ ą▒čāč乥čĆą░ TXB22 .
OSC2
O
ąÆčŗą▓ąŠą┤ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░ (ą▓čŗčģąŠą┤ ą│ąĄąĮąĄčĆą░č鹊čĆą░).
-
OSC1
I
ąÆčŗą▓ąŠą┤ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░ (ą▓čģąŠą┤ ą│ąĄąĮąĄčĆą░č鹊čĆą░).
ąÆčģąŠą┤ ą┤ą╗čÅ ą┐ąŠą┤ą░čćąĖ ą▓ąĮąĄčłąĮąĄą│ąŠ čéą░ą║č鹊ą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░.
VSS
P
ą×ą▒čēąĖą╣ ą┐čĆąŠą▓ąŠą┤ ą┤ą╗čÅ čüąĖą│ąĮą░ą╗ąŠą▓ ą╗ąŠą│ąĖą║ąĖ ąĖ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░.
-
/RX1BF
O
ąÆčŗčģąŠą┤ ą┤ą╗čÅ ą▓čŗą┤ą░čćąĖ čüąĖą│ąĮą░ą╗ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ čüąŠą▒čŗčéąĖčÄ ą┐čĆąĖąĄą╝ą░ ą▒čāč乥čĆą░ RXB1.
ą”ąĖčäčĆąŠą▓ąŠą╣ ą▓čŗčģąŠą┤ ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ.
/RX0BF
O
ąÆčŗčģąŠą┤ ą┤ą╗čÅ ą▓čŗą┤ą░čćąĖ čüąĖą│ąĮą░ą╗ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ čüąŠą▒čŗčéąĖčÄ ą┐čĆąĖąĄą╝ą░ ą▒čāč乥čĆą░ RXB0.
/INT
O
ąÆčŗčģąŠą┤ ą┤ą╗čÅ ą┐ąŠą┤ą░čćąĖ čüąĖą│ąĮą░ą╗ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
-
SCK
I
ąÆčģąŠą┤ čéą░ą║č鹊ą▓ ąĖąĮč鹥čĆč乥ą╣čüą░ SPI.
-
SI
I
ąÆčģąŠą┤ ą┤ą░ąĮąĮčŗčģ ąĖąĮč鹥čĆč乥ą╣čüą░ SPI (MOSI).
-
SO
O
ąÆčŗčģąŠą┤ ą┤ą░ąĮąĮčŗčģ ąĖąĮč鹥čĆč乥ą╣čüą░ SPI (MISO).
-
/CS
I
ąĪąĖą│ąĮą░ą╗ ą▓čŗą▒ąŠčĆą║ąĖ ą┤ą╗čÅ ąĖąĮč鹥čĆč乥ą╣čüą░ SPI.
-
/RESET
I
ąÆčģąŠą┤ čüą▒čĆąŠčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░, ą░ą║čéąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 0.
-
VDD
P
+ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ.
-
NC - ąØąĖą║čāą┤ą░ ąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ (ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą▓čŗą▓ąŠą┤). -
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ 1: ą▓ čüč鹊ą╗ą▒čåąĄ "ąóąĖą┐" ą┐ąŠą║ą░ąĘą░ąĮ čéąĖą┐ ą▓čŗą▓ąŠą┤ą░. O ąŠąĘąĮą░čćą░ąĄčé ą▓čŗčģąŠą┤, I ąŠąĘąĮą░čćą░ąĄčé ą▓čģąŠą┤, P ąŠąĘąĮą░čćą░ąĄčé ą▓čŗą▓ąŠą┤ ą┐ąĖčéą░ąĮąĖčÅ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ 2: ąĮą░ čŹč鹊ą╝ ą▓čŗą▓ąŠą┤ąĄ ąĖą╝ąĄąĄčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą▓ąĄčĆčģąĮąĖą╣ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖą╣ čĆąĄąĘąĖčüč鹊čĆ (pull-up, ą▓č鹊čĆąŠą╣ ąĄą│ąŠ ą║ąŠąĮąĄčå čüąŠąĄą┤ąĖąĮąĄąĮ čü VDD ) ąĮą░ 100 ą║ą×ą╝ (ąĮąŠą╝ąĖąĮą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ).
[ąæčāč乥čĆčŗ, ą╝ą░čüą║ąĖ, čäąĖą╗čīčéčĆčŗ ą┐čĆąĖąĄą╝ą░ ąĖ ą▒čāč乥čĆčŗ ą┐ąĄčĆąĄą┤ą░čćąĖ ]
ąŻ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ MCP2515 ąĖą╝ąĄąĄčéčüčÅ 3 ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ 2 ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░, 2 ą╝ą░čüą║ąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ (acceptance mask, ą┐ąŠ ąŠą┤ąĮąŠą╣ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐čĆąĄą╝ąĮąŠą│ąŠ ą▒čāč乥čĆą░) ąĖ ą▓čüąĄą│ąŠ 6 čäąĖą╗čīčéčĆąŠą▓ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ (acceptance filter). ąØą░ čĆąĖčü. 1-3 ą┐ąŠą║ą░ąĘą░ąĮą░ ą▒ą╗ąŠą║-ą┤ąĖą░ą│čĆą░ą╝ą╝ą░ čŹčéąĖčģ ą▒čāč乥čĆąŠą▓ ąĖ ąĖčģ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ čüąĖčüč鹥ą╝ąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░.
ąĀąĖčü. 1-3. ąæą╗ąŠą║-ą┤ąĖą░ą│čĆą░ą╝ą╝ą░ ą▒čāč乥čĆąŠą▓ ąĖ čüąĖčüč鹥ą╝čŗ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ CAN.
[ą¤ąŠą┤čüąĖčüč鹥ą╝ą░ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ CAN ]
CAN protocol engine čüąŠčüč鹊ąĖčé ąĖąĘ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗčģ ą▒ą╗ąŠą║ąŠą▓, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗčģ ąĮą░ čĆąĖčü. 1-4.
ąĀąĖčü. 1-4. ąæą╗ąŠą║-čüčģąĄą╝ą░ ą┐ąŠą┤čüąĖčüč鹥ą╝čŗ CAN.
ąÉą▓č鹊ą╝ą░čé ą║ąŠąĮąĄčćąĮčŗčģ čüąŠčüč鹊čÅąĮąĖą╣ ą┐čĆąŠč鹊ą║ąŠą╗ą░ . ąĪąĄčĆą┤čåąĄą╝ ą┐ąŠą┤čüąĖčüč鹥ą╝čŗ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ CAN čÅą▓ą╗čÅąĄčéčüčÅ ą░ą▓č鹊ą╝ą░čé ą║ąŠąĮąĄčćąĮčŗčģ čüąŠčüč鹊čÅąĮąĖą╣ (Finite State Machine, FSM ). ąŁčéą░ FSM ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čüąŠą▒ąŠą╣ čüąĄą║ą▓ąĄąĮčüąĄčĆ, ą║ąŠč鹊čĆčŗą╣ čāą┐čĆą░ą▓ą╗čÅąĄčé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╝ ą┐ąŠč鹊ą║ąŠą╝ ą┤ą░ąĮąĮčŗčģ ą╝ąĄąČą┤čā čĆąĄą│ąĖčüčéčĆą░ą╝ąĖ čüą┤ą▓ąĖą│ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ/ą┐čĆąĖąĄą╝ą░ (TX/RX shift register), čĆąĄą│ąĖčüčéčĆąŠą╝ ą║ąŠąĮčéčĆąŠą╗čīąĮąŠą╣ čüčāą╝ą╝čŗ (CRC register) ąĖ čüąĖą│ąĮą░ą╗ą░ą╝ąĖ čłąĖąĮčŗ. FSM čéą░ą║ąČąĄ čāą┐čĆą░ą▓ą╗čÅąĄčé ą╗ąŠą│ąĖą║ąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąŠčłąĖą▒ąŠą║ (Error Management Logic, EML) ąĖ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮčŗą╝ąĖ ą┐ąŠč鹊ą║ą░ą╝ąĖ ą┤ą░ąĮąĮčŗčģ ą╝ąĄąČą┤čā čĆąĄą│ąĖčüčéčĆą░ą╝ąĖ čüą┤ą▓ąĖą│ą░ TX/RX ąĖ ą▒čāč乥čĆą░ą╝ąĖ. FSM ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 ą┐čĆąŠčåąĄčüčüčŗ ą┐čĆąĖąĄą╝ą░, ą░čĆą▒ąĖčéčĆą░ąČą░, ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖąĖ ąŠą▒ ąŠčłąĖą▒ą║ą░ ą▓čŗą┐ąŠą╗ąĮčÅčÄčéčüčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą┐čĆąŠč鹊ą║ąŠą╗ąŠą╝ CAN. ąÉą▓č鹊ą╝ą░čéąĖč湥čüą║ą░čÅ čĆąĄčéčĆą░ąĮčüą╝ąĖčüčüąĖčÅ čüąŠąŠą▒čēąĄąĮąĖą╣ ą┐ąŠ čłąĖąĮąĄ čéą░ą║ąČąĄ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ FSM.
ą¤čĆąŠą▓ąĄčĆą║ą░ ą║ąŠąĮčéčĆąŠą╗čīąĮąŠą╣ čüčāą╝ą╝čŗ . ąĀąĄą│ąĖčüčéčĆ Cyclic Redundancy Check (CRC ) ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą║ąŠą┤, ą║ąŠč鹊čĆčŗą╣ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą╗ąĖą▒ąŠ ą┐ąŠčüą╗ąĄ ą┐ąŠą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (Control Field, ą┤ą╗čÅ čüąŠąŠą▒čēąĄąĮąĖą╣ čü 0 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ) ą╗ąĖą▒ąŠ ą┐ąŠčüą╗ąĄ ą┐ąŠą╗čÅ ą┤ą░ąĮąĮčŗčģ (Data Field), ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ ą┐ąŠą╗čÅ CRC ą▓čģąŠą┤čÅčēąĖčģ čüąŠąŠą▒čēąĄąĮąĖą╣.
ąøąŠą│ąĖą║ą░ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąŠčłąĖą▒ąŠą║ . Error Management Logic (EML) ąŠčéą▓ąĄčćą░ąĄčé ąĘą░ ąŠą▒čĆą░ą▒ąŠčéą║čā ąŠčéą║ą░ąĘąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ą░ CAN. ąŻ ąĮąĄčæ ąĄčüčéčī 2 čüč湥čéčćąĖą║ą░: čüč湥čéčćąĖą║ ąŠčłąĖą▒ąŠą║ ą┐čĆąĖąĄą╝ą░ (Receive Error Counter, REC) ąĖ čüč湥čéčćąĖą║ ąŠčłąĖą▒ąŠą║ ą┐ąĄčĆąĄą┤ą░čćąĖ (Transmit Error Counter, TEC), ą║ąŠč鹊čĆčŗąĄ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāčÄčéčüčÅ ąĖ ą┤ąĄą║čĆąĄą╝ąĄąĮčéąĖčĆčāčÄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ą░ą╝ąĖ ąŠčé ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą┐ąŠč鹊ą║ą░ ą▒ąĖčé. ąØą░ ą▒ą░ąĘąĄ ąĘąĮą░č湥ąĮąĖą╣ čŹčéąĖčģ čüč湥čéčćąĖą║ąŠą▓ ąŠčłąĖą▒ąŠą║ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą╝ąĄąČą┤čā čüąŠčüč鹊čÅąĮąĖčÅą╝ąĖ error-active, error-passive ąĖą╗ąĖ bus-off.
ąøąŠą│ąĖą║ą░ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą▒ąĖčé . Bit Timing Logic (BTL) ą╝ąŠąĮąĖč鹊čĆąĖčé ą▓čģąŠą┤ čłąĖąĮčŗ CAN, ąĖ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ čłąĖąĮąĄ ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą┐čĆąŠč鹊ą║ąŠą╗ąŠą╝ CAN. BTL čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆčāąĄčéčüčÅ ą┐ąŠ ą┐ąĄčĆąĄčģąŠą┤ą░ą╝ čłąĖąĮčŗ recessive-to-dominant ą▓ ą╝ąŠą╝ąĄąĮčéčŗ ąĮą░čćą░ą╗ą░ čäčĆąĄą╣ą╝ą░ Start-of-Frame (ąČąĄčüčéą║ą░čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ) ąĖ ą┐ąŠ ą╗čÄą▒ąŠą╝čā ą┐ąĄčĆąĄčģąŠą┤čā recessive-to-dominant ąĮą░ čłąĖąĮąĄ, ąĄčüą╗ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN čüą░ą╝ ąĮąĄ ą┐ąĄčĆąĄą┤ą░ąĄčé ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ ą▒ąĖčé (čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ). BTL ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čéą░ą║ąČąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗąĄ čüąĄą│ą╝ąĄąĮčéčŗ ą▓čĆąĄą╝ąĄąĮąĖ, čćč鹊ą▒čŗ ą║ąŠą╝ą┐ąĄąĮčüąĖčĆąŠą▓ą░čéčī ąĘą░ą┤ąĄčƹȹ║ąĖ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖčÅ (propagation delay time), čüą┤ą▓ąĖą│ąĖ čäą░ąĘčŗ, ąĖ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ č鹊čćą║ąĖ ą▓čŗą▒ąŠčĆą║ąĖ ą▓ ąĖąĮč鹥čĆą▓ą░ą╗ąĄ ą▒ąĖčéą░. ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ BTL ąĘą░ą▓ąĖčüąĖčé ąŠčé čüą║ąŠčĆąŠčüčéąĖ (baud rate) ąĖ ą▓ąĮąĄčłąĮąĖčģ čäąĖąĘąĖč湥čüą║ąĖčģ ąĘą░ą┤ąĄčƹȹĄą║ ą┐ąŠ čłąĖąĮąĄ.
ą¦č鹊 čéą░ą║ąŠąĄ čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╣ ąĖ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ ą▒ąĖčéčŗ . ąĀąĄčåąĄčüčüąĖą▓ąĮčŗą╣ ąĖ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ ą▓ ą┐čĆąŠč鹊ą║ąŠą╗ąĄ CAN ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą║ą░ą║ ą░ąĮą░ą╗ąŠą│ąĖ čüąĖą│ąĮą░ą╗ąŠą▓ ą╗ąŠą│. 1 ąĖ ą╗ąŠą│. 0 ą▓ čåąĖčäčĆąŠą▓ąŠą╣ č鹥čģąĮąĖą║ąĄ, čé. ąĄ. ąŠąĮąĖ čéą░ą║ ąČąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ą┐ąĄčĆąĄą┤ą░čÄčé čåąĖčäčĆąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ, ą║ą░ą║ ą╗ąŠą│. 1. ąĖ ą╗ąŠą│. 0. ą×ą┤ąĮą░ą║ąŠ ą▓ ąŠčéą╗ąĖčćąĖąĄ ąŠčé ąŠą▒čŗčćąĮčŗčģ ą╗ąŠą│. 1 ąĖ ą╗ąŠą│. 0 čüąĖą│ąĮą░ą╗čŗ "čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╣" ąĖ "ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣" ąĖą╝ąĄčÄčé ąŠčüąŠą▒ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▓ č鹊ą╝ čüą╝čŗčüą╗ąĄ, čćč鹊 ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ ą▒ąĖčé ą╝ąŠąČąĄčé ą┐ąĄčĆąĄąŠą┐čĆąĄą┤ąĄą╗čÅčéčī ąĘąĮą░č湥ąĮąĖąĄ čĆąĄčåąĄčüčüąĖą▓ąĮąŠą│ąŠ ą▒ąĖčéą░ (ąŠčéčüčÄą┤ą░ ąĖ ą┐ąŠčłą╗ąŠ ąĮą░ąĘą▓ą░ąĮąĖąĄ ą▒ąĖč鹊ą▓: čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╣ ąĖ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣). ą¤čĆąĖ čŹč鹊ą╝ čäąĖąĘąĖč湥čüą║ąĖą╣ čüą╝čŗčüą╗ čŹčéąĖčģ čüąĖą│ąĮą░ą╗ąŠą▓ ąŠą▒čŗčćąĮąŠ ą┐čĆąĖą▓čÅąĘčŗą▓ą░ąĄčéčüčÅ ą║ čüčĆąĄą┤ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čłąĖąĮčŗ CAN čü čāč湥č鹊ą╝ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čāčüą╗ąŠą▓ąĖčÅ čĆąĄčåąĄčüčüąĖą▓ąĮąŠčüčéąĖ/ą┤ąŠą╝ąĖąĮą░ąĮčéąĮąŠčüčéąĖ.
ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ čüąĖą│ąĮą░ą╗ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ čüą▓ąĄč鹊ą╝ ą┐ąŠ ąŠą┐č鹊ą▓ąŠą╗ąŠą║ąŠąĮąĮąŠą╝čā ą║ą░ą▒ąĄą╗čÄ, č鹊 čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╝ čāčĆąŠą▓ąĮąĄą╝ ą╝ąŠąČąĄčé čüčćąĖčéą░čéčīčüčÅ ąŠčéčüčāčéčüčéą▓ąĖąĄ čüą▓ąĄčéą░ ą▓ ą║ą░ą▒ąĄą╗ąĄ, ą░ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╝ - ąĮą░ą╗ąĖčćąĖąĄ čüą▓ąĄčéą░. ąÉąĮą░ą╗ąŠą│ąĖčćąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ąĮą░ą╗ąĖčćąĖąĄ čüąĖą│ąĮą░ą╗ą░ čĆą░ą┤ąĖąŠą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░ ą╝ąŠąČąĄčé čüčćąĖčéą░čéčīčüčÅ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╝ ą▒ąĖč鹊ą╝, ą░ ąŠčéčüčāčéčüčéą▓ąĖąĄ čüąĖą│ąĮą░ą╗ą░ - čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╝. ąóą░ą║ąČąĄ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą▓čŗčģąŠą┤ąŠą▓ čü ąŠčéą║čĆčŗčéčŗą╝ ą║ąŠą╗ą╗ąĄą║č鹊čĆąŠą╝ (čüč鹊ą║ąŠą╝), č鹊ą│ą┤ą░ čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╝ ą▒čāą┤ąĄčé ą╗ąŠą│. 1, ą░ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╝ ą╗ąŠą│. 0. ąÆąŠ ą▓čüąĄčģ čŹčéąĖčģ ą┐čĆąĖą╝ąĄčĆą░čģ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ą┐ąĄčĆąĄą║čĆčŗą▓ą░ąĄčé (ą┐ąĄčĆąĄąĮą░ąĘąĮą░čćą░ąĄčé) čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī, čćč鹊 ąĖą╝ąĄąĄčé ą▓ą░ąČąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▓ čĆą░ąĘčĆąĄčłąĄąĮąĖąĖ ą║ąŠą╗ą╗ąĖąĘąĖą╣ ąĮą░ čłąĖąĮąĄ CAN (ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. ąÆąĖą║ąĖą┐ąĄą┤ąĖčÄ).
[ążčĆąĄą╣ą╝ čüąŠąŠą▒čēąĄąĮąĖčÅ CAN ]
MCP2515 ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ čäčĆąĄą╣ą╝čŗ ą┤ą░ąĮąĮčŗčģ, čĆą░čüčłąĖčĆąĄąĮąĮčŗąĄ čäčĆąĄą╣ą╝čŗ ą┤ą░ąĮąĮčŗčģ ąĖ čäčĆąĄą╣ą╝čŗ remote (čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ąĖ čĆą░čüčłąĖčĆąĄąĮąĮčŗąĄ), ą║ą░ą║ čŹč鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą▓ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ čüčéą░ąĮą┤ą░čĆčéą░ CAN 2.0B.
Standard Data Frame . ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čäčĆąĄą╣ą╝ ą┤ą░ąĮąĮčŗčģ CAN ą┐ąŠą║ą░ąĘą░ąĮ ąĮą░ čĆąĖčü. 2-1. ąÜą░ą║ ąĖ ą▓čüąĄ ą┤čĆčāą│ąĖąĄ čäčĆąĄą╣ą╝čŗ, čŹč鹊čé čäčĆąĄą╣ą╝ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü ą▒ąĖčéą░ ąĮą░čćą░ą╗ą░ čäčĆąĄą╣ą╝ą░ (Start-Of-Frame, SOF ), ą║ąŠč鹊čĆčŗą╣ ąĖą╝ąĄąĄčé ą┤ąŠą╝ąĖąĮą░ąĮčéąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ąĖ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▓čŗą┐ąŠą╗ąĮąĖčéčī ąČąĄčüčéą║čāčÄ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÄ ą▓čüąĄčģ čāąĘą╗ąŠą▓ ąĮą░ čłąĖąĮąĄ CAN.
ąĀąĖčü. 2-1. ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čäčĆąĄą╣ą╝ ą┤ą░ąĮąĮčŗčģ CAN.
ą¤ąŠčÅčüąĮąĄąĮąĖčÅ ą║ čĆąĖčü. 2-1: Start-of-Frame, End-of-Frame ąĮą░čćą░ą╗ąŠ ąĖ ą║ąŠąĮąĄčå čäčĆąĄą╣ą╝ą░ (SOF/EOF). ID10..ID0 ą▒ąĖčéčŗ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░. RTR ą▒ąĖčé Remote Transmission Request, ąĘą░ą┐čĆąŠčü ą┐ąĄčĆąĄą┤ą░čćąĖ čü ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮąŠą│ąŠ ąŠą║ąŠąĮčćą░ąĮąĖčÅ. IDE ą▒ąĖčé Identifier Extension, ą▒ąĖčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čéąĖą┐ą░ čäčĆąĄą╣ą╝ą░ - čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ąĖą╗ąĖ čĆą░čüčłąĖčĆąĄąĮąĮčŗą╣. RB0 čĆą░čüčłąĖčäčĆąŠą▓čŗą▓ą░ąĄčéčüčÅ ą║ą░ą║ Reserved Bit Zero, čé. ąĄ. ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ąĮčāą╗ąĄą▓ąŠą╣ ą▒ąĖčé. DLC3..DLC0 ąĘą┤ąĄčüčī čüąŠą┤ąĄčƹȹĖčéčüčÅ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ ą▓ čüąŠąŠą▒čēąĄąĮąĖąĖ (Data Length Code). CRC Del čŹč鹊 ą▒ąĖčé CRC Delimiter, ą▒ąĖčé čĆą░ąĘą┤ąĄą╗ąĖč鹥ą╗čÅ CRC. Ack Slot Bit ą▒ąĖčé čüą╗ąŠčéą░ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ, ACK Del čŹč鹊 ACK Delimiter, ą▒ąĖčé čĆą░ąĘą┤ąĄą╗ąĖč鹥ą╗čÅ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ. IFS čĆą░čüčłąĖčäčĆąŠą▓čŗą▓ą░ąĄčéčüčÅ ą║ą░ą║ InterFrame Space, čé. ąĄ. ą┐čĆąŠą╝ąĄąČčāč鹊ą║ ą╝ąĄąČą┤čā čäčĆąĄą╣ą╝ą░ą╝ąĖ.
ąŚą░ SOF ąĖą┤ąĄčé ą┐ąŠą╗ąĄ ą░čĆą▒ąĖčéčĆą░ąČą░, čüąŠčüč鹊čÅčēąĄąĄ ąĖąĘ 12 ą▒ąĖčé: ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ąĖąĘ 11 ą▒ąĖčé, ąĖ ą▒ąĖčé ąĘą░ą┐čĆąŠčüą░ ą┐ąĄčĆąĄą┤ą░čćąĖ čü ą┤ą░ą╗čīąĮąĄą╣ č鹊čćą║ąĖ (Remote Transmission Request, RTR). ąæąĖčé RTR ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ąŠčéą┤ąĄą╗čÅčéčī ą┤čĆčāą│ ąŠčé ą┤čĆčāą│ą░ čäčĆąĄą╣ą╝ ą┤ą░ąĮąĮčŗčģ (ą▒ąĖčé RTR čÅą▓ą╗čÅąĄčéčüčÅ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╝) ąŠčé čäčĆąĄą╣ą╝ą░ remote (ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą▒ąĖčé RTR čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╣).
ąŚą░ ą┐ąŠą╗ąĄą╝ ą░čĆą▒ąĖčéčĆą░ąČą░ ąĖą┤ąĄčé ą┐ąŠą╗ąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (control field), čüąŠčüč鹊čÅčēąĄąĄ ąĖąĘ 6 ą▒ąĖčé. ą¤ąĄčĆą▓čŗą╣ ą▒ąĖčé čŹč鹊ą│ąŠ ą┐ąŠą╗čÅ čŹč鹊 ą▒ąĖčé čĆą░čüčłąĖčĆąĄąĮąĖčÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (Identifier Extension, IDE), ą║ąŠč鹊čĆčŗą╣ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╝, čćč鹊ą▒čŗ ąĘą░ą┤ą░čéčī čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čäčĆąĄą╣ą╝. ąĪą╗ąĄą┤čāčÄčēąĖą╣ ą▒ąĖčé, ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ąĮčāą╗ąĄą▓ąŠą╣ ą▒ąĖčé (Reserved Bit Zero, RB0), ą▓ ą┐čĆąŠč鹊ą║ąŠą╗ąĄ CAN ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮ ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą║ą░ą║ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣. ą×čüčéą░ą╗čīąĮčŗąĄ 4 ą▒ąĖčéą░ ą┐ąŠą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüąŠą┤ąĄčƹȹ░čé ą▒ąĖčéčŗ ą┤ą╗ąĖąĮčŗ ą┤ą░ąĮąĮčŗčģ (Data Length Code, DLC), ą║ąŠč鹊čĆčŗąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ (0..8), ą║ąŠč鹊čĆąŠąĄ čüąŠą┤ąĄčƹȹĖčéčüčÅ ą▓ čüąŠąŠą▒čēąĄąĮąĖąĖ.
ą¤ąŠčüą╗ąĄ ą┐ąŠą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖą┤ąĄčé ą┐ąŠą╗ąĄ ą┤ą░ąĮąĮčŗčģ, čüąŠą┤ąĄčƹȹ░čēąĖąĄ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čāčÄ ą┐ąŠą╗ąĄąĘąĮčāčÄ ąĮą░ą│čĆčāąĘą║čā, ąĖ ąĄą│ąŠ ą┤ą╗ąĖąĮą░ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐ąŠą╗ąĄą╝ DLC (0..8 ą▒ą░ą╣čé).
ąŚą░ ą┐ąŠą╗ąĄą╝ ą┤ą░ąĮąĮčŗčģ ąĖą┤ąĄčé ą┐ąŠą╗ąĄ ą║ąŠąĮčéčĆąŠą╗čīąĮąŠą╣ čüčāą╝ą╝čŗ (Cyclic Redundancy Check, CRC), ą║ąŠč鹊čĆąŠąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ąŠą║ ą┐ąĄčĆąĄą┤ą░čćąĖ. ą¤ąŠą╗ąĄ CRC čüąŠą┤ąĄčƹȹĖčé 15-ą▒ąĖčéąĮčāčÄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą║ąŠąĮčéčĆąŠą╗čīąĮąŠą╣ čüčāą╝ą╝čŗ, ąĘą░ ą║ąŠč鹊čĆąŠą╣ ąĖą┤ąĄčé čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╣ ą▒ąĖčé čĆą░ąĘą┤ąĄą╗ąĖč鹥ą╗čÅ ą║ąŠąĮčéčĆąŠą╗čīąĮąŠą╣ čüčāą╝ą╝čŗ (CRC Delimiter).
ą¤ąŠčüą╗ąĄą┤ąĮąĄąĄ ą┐ąŠą╗ąĄ čüąŠčüč鹊ąĖčé ąĖąĘ ą┤ą▓čāčģą▒ąĖčéąĮąŠą│ąŠ ą┐ąŠą╗čÅ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ (Acknowledge, ACK). ąÆąŠ ą▓čĆąĄą╝čÅ ą▒ąĖč鹊ą▓ąŠą│ąŠ čüą╗ąŠčéą░ ACK, ą┐ąĄčĆąĄą┤ą░čÄčēąĖą╣ čāąĘąĄą╗ ą┐ąŠčüčŗą╗ą░ąĄčé čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╣ ą▒ąĖčé. ąøčÄą▒ąŠą╣ čāąĘąĄą╗, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĖąĮčÅą╗ ą▒ąĄąĘąŠčłąĖą▒ąŠčćąĮčŗą╣ čäčĆąĄą╣ą╝, ą┐ąŠą┤čéą▓ąĄčƹȹ┤ą░ąĄčé ą║ąŠčĆčĆąĄą║čéąĮčŗą╣ ą┐čĆąĖąĄą╝ čäčĆąĄą╣ą╝ą░ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ ąŠą▒čĆą░čéąĮąŠ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮąŠą│ąŠ ą▒ąĖčéą░ (ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé č鹊ą│ąŠ, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą╗ąĖ čŹč鹊čé čāąĘąĄą╗ ą┐čĆąĖąĮčÅčéčī čŹč鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĖą╗ąĖ ąĮąĄčé). ąĀąĄčåąĄčüčüąĖą▓ąĮčŗą╣ čĆą░ąĘą┤ąĄą╗ąĖč鹥ą╗čī ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ (recessive acknowledge delimiter) ąĘą░ą▓ąĄčĆčłą░ąĄčé ą┐ąŠą╗ąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ, ąĖ ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąĄčĆąĄąĘą░ą┐ąĖčüą░ąĮ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╝ ą▒ąĖč鹊ą╝.
Extended Data Frame (čĆą░čüčłąĖčĆąĄąĮąĮčŗą╣ čäčĆąĄą╣ą╝ ą┤ą░ąĮąĮčŗčģ). ąÆ čĆą░čüčłąĖčĆąĄąĮąĮąŠą╝ čäčĆąĄą╣ą╝ąĄ ą┤ą░ąĮąĮčŗčģ CAN, ą┐ąŠą║ą░ąĘą░ąĮąĮąŠą╝ ąĮą░ čĆąĖčü. 2-2, ąĘą░ ą▒ąĖč鹊ą╝ SOF ąĖą┤ąĄčé ą┐ąŠą╗ąĄ ą░čĆą▒ąĖčéčĆą░ąČą░, ą║ąŠč鹊čĆąŠąĄ čüąŠčüč鹊ąĖčé ąĖąĘ 32 ą▒ąĖčé. ą¤ąĄčĆą▓čŗąĄ 11 čŹč鹊 čüčéą░čĆčłąĖąĄ ą▒ąĖčéčŗ (Most Significant bits, MSB, čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╣ ą▒ą░ąĘąŠą▓čŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ, Base-lD) ą┐ąŠą╗ąĮąŠą│ąŠ 29-ą▒ąĖčéąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░. ąŚą░ čŹčéąĖą╝ąĖ 11 ą▒ąĖčéą░ą╝ąĖ ąĖą┤ąĄčé ą▒ąĖčé ąĘą░ą╝ąĄąĮčŗ ąĘą░ą┐čĆąŠčüą░ ą┤ą░ą╗čīąĮąĄą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ (Substitute Remote Request, SRR), ą║ąŠč鹊čĆčŗą╣ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą║ą░ą║ čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╣. ąŚą░ ą▒ąĖč鹊ą╝ SRR ąĖą┤ąĄčé ą▒ąĖčé lDE, ą║ąŠč鹊čĆčŗą╣ čéą░ą║ąČąĄ čÅą▓ą╗čÅąĄčéčüčÅ čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╝, ąŠąĮ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, čćč鹊 čŹč鹊 čĆą░čüčłąĖčĆąĄąĮąĮčŗą╣ čäčĆąĄą╣ą╝ CAN.
ąĀąĖčü. 2-2. ąĀą░čüčłąĖčĆąĄąĮąĮčŗą╣ čäčĆąĄą╣ą╝ ą┤ą░ąĮąĮčŗčģ CAN.
ąĪą╗ąĄą┤čāąĄčé ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 ąĄčüą╗ąĖ ą░čĆą▒ąĖčéčĆą░ąČ ąŠčüčéą░ąĄčéčüčÅ ąĮąĄ čĆą░ąĘčĆąĄčłąĄąĮąĮčŗą╝ ą┐ąŠčüą╗ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ąĄčĆą▓čŗčģ 11 ą▒ąĖčé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░, ąĖ ąŠą┤ąĖąĮ ąĖąĘ čāąĘą╗ąŠą▓, ą▓ąŠą▓ą╗ąĄč湥ąĮąĮčŗčģ ą▓ ą░čĆą▒ąĖčéčĆą░ąČ, ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čäčĆąĄą╣ą╝ (čüąŠčüč鹊čÅčēąĖą╣ ąĖąĘ 11 ą▒ąĖčéąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░), č鹊 čŹč鹊čé čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čäčĆąĄą╣ą╝ ą▓čŗąĖą│čĆą░ąĄčé ą░čĆą▒ąĖčéčĆą░ąČ čłąĖąĮčŗ CAN, ą┐ąŠč鹊ą╝čā čćč鹊 ąŠąĮ ą▓čüčéą░ą▓ąĖčé ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ ą▒ąĖčé lDE. ąóą░ą║ąČąĄ ą▒ąĖčé SRR ą▓ čĆą░čüčłąĖčĆąĄąĮąĮąŠą╝ čäčĆąĄą╣ą╝ąĄ CAN ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╝, čćč鹊ą▒čŗ ą┐ąŠąĘą▓ąŠą╗ąĖčéčī ą▓čüčéą░ą▓ą║čā ą┤ąŠą╝ąĖąĮą░ąĮčéąĮąŠą│ąŠ ą▒ąĖčéą░ RTR čāąĘą╗ąŠą╝, ą║ąŠč鹊čĆčŗą╣ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čäčĆąĄą╣ą╝ remote.
ąŚą░ ą▒ąĖčéą░ą╝ąĖ SRR ąĖ lDE ąĖą┤čāčé ąŠčüčéą░ą╗čīąĮčŗąĄ 18 ą▒ąĖčé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (Extended lD) ąĖ ą▒ąĖčé ąĘą░ą┐čĆąŠčüą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖąĘ ą┤ą░ą╗čīąĮąĄą│ąŠ ąŠą║ąŠąĮčćą░ąĮąĖčÅ (remote transmission request bit).
ą¦č鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī ą┐ąĄčĆąĄą┤ą░čćčā čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ ąĖ čĆą░čüčłąĖčĆąĄąĮąĮčŗčģ čäčĆąĄą╣ą╝ąŠą▓ ą┐ąŠ ąŠą▒čēąĄą╣ čüąĄčéąĖ CAN, 29-ą▒ąĖčéąĮčŗą╣ čĆą░čüčłąĖčĆąĄąĮąĮčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüąŠąŠą▒čēąĄąĮąĖčÅ čĆą░ąĘą┤ąĄą╗ąĄąĮ ąĮą░ 11-ą▒ąĖčéąĮčāčÄ (ą│ą┤ąĄ ąĮą░čģąŠą┤čÅčéčüčÅ čüčéą░čĆčłąĖąĄ ą▒ąĖčéčŗ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░) ąĖ 18-ą▒ąĖčéąĮčāčÄ (ą│ą┤ąĄ ąĮą░čģąŠą┤čÅčéčüčÅ ą╝ą╗ą░ą┤čłąĖąĄ ą▒ąĖčéčŗ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░) čüąĄą║čåąĖąĖ. ąŁč鹊 čĆą░ąĘą┤ąĄą╗ąĄąĮąĖąĄ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 ą▒ąĖčé lDE ą╝ąŠąČąĄčé ąŠčüčéą░ą▓ą░čéčīčüčÅ ą▓ č鹊ą╣ ąČąĄ ą┐ąŠąĘąĖčåąĖąĖ ą▒ąĖčéą░ ą┤ą╗čÅ ąŠą▒ąŠąĖčģ čéąĖą┐ąŠą▓ čäčĆąĄą╣ą╝ą░ - čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ąĖ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ.
ąŚą░ ą┐ąŠą╗ąĄą╝ ą░čĆą▒ąĖčéčĆą░ąČą░ čüą╗ąĄą┤čāąĄčé ą┐ąŠą╗ąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖąĘ 6 ą▒ąĖčé. ą¤ąĄčĆą▓čŗąĄ 2 ą▒ąĖčéą░ čŹč鹊ą│ąŠ ą┐ąŠą╗čÅ ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮčŗ, ąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╝ąĖ. ą×čüčéą░ą╗čīąĮčŗąĄ 4 ą▒ąĖčéą░ ą┐ąŠą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čŹč鹊 ą▒ąĖčéčŗ DLC, ą║ąŠč鹊čĆčŗąĄ ąĘą░ą┤ą░čÄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ, čüąŠą┤ąĄčƹȹ░čēąĖčģčüčÅ ą▓ čüąŠąŠą▒čēąĄąĮąĖąĖ.
ą×čüčéą░ą╗čīąĮą░čÅ čćą░čüčéčī čäčĆąĄą╣ą╝ą░ (ą┐ąŠą╗ąĄ ą┤ą░ąĮąĮčŗčģ, ą┐ąŠą╗ąĄ CRC, ą┐ąŠą╗ąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ, end-of-frame ąĖ čĆą░ąĘą┤ąĄą╗ąĖč鹥ą╗čī) čüą║ąŠąĮčüčéčĆčāąĖčĆąŠą▓ą░ąĮčŗ č鹊čćąĮąŠ čéą░ą║ ąČąĄ, ą║ą░ą║ ąĖ čā čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ čäčĆąĄą╣ą╝ą░ ą┤ą░ąĮąĮčŗčģ (čüą╝. čüąĄą║čåąĖčÄ "Standard Data Frame").
Remote Frame (čäčĆąĄą╣ą╝ ą┤ą░ąĮąĮčŗčģ ąĘą░ą┐čĆąŠčüą░ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā čü ą┤ą░ą╗čīąĮąĄą╣ čüč鹊čĆąŠąĮčŗ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ). ą×ą▒čŗčćąĮąŠ ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą┐ąŠ ą░ą▓č鹊ąĮąŠą╝ąĮąŠą╝čā ą┐čĆąĖąĮčåąĖą┐čā, ąĮą░ ąŠčüąĮąŠą▓ąĄ čāąĘą╗ą░-ąĖčüč鹊čćąĮąĖą║ą░ ą┤ą░ąĮąĮčŗčģ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, čäčĆąĄą╣ą╝ ą┤ą░ąĮąĮčŗčģ ą┐ąŠčüčéčāą┐ą░ąĄčé ąŠčé ą┤ą░čéčćąĖą║ą░, ą║ąŠą│ą┤ą░ ąĖą╝ąĄčÄčéčüčÅ ą▓ ąĮą░ą╗ąĖčćąĖąĖ ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ). ą×ą┤ąĮą░ą║ąŠ ąĄčüčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī, čćč鹊ą▒čŗ čāąĘąĄą╗-ą┐ąŠą╗čāčćą░č鹥ą╗čī ąĘą░ą┐čĆąŠčüąĖą╗ ą┤ą╗čÅ čüąĄą▒čÅ ą┤ą░ąĮąĮčŗąĄ ąŠčé čāąĘą╗ą░-ąĖčüč鹊čćąĮąĖą║ą░. ą¦č鹊ą▒čŗ ą▓čŗą┐ąŠą╗ąĮąĖčéčī čŹč鹊, čāąĘąĄą╗-ą┐ąŠą╗čāčćą░č鹥ą╗čī ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé čäčĆąĄą╣ą╝ remote čü ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝, čüąŠą▓ą┐ą░ą┤ą░čÄčēąĖą╝ čü ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝ čéčĆąĄą▒čāąĄą╝ąŠą│ąŠ čäčĆąĄą╣ą╝ą░ ą┤ą░ąĮąĮčŗčģ. ą¤ąŠą┤čģąŠą┤čÅčēąĖą╣ ąĖčüč鹊čćąĮąĖą║ ą┤ą░ąĮąĮčŗčģ ą▓ ąŠčéą▓ąĄčé ąĮą░ ąĘą░ą┐čĆąŠčü (čŹč鹊čé ąĘą░ą┐čĆąŠčü ąĖ ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ remote frame request) ąŠčéą┐čĆą░ą▓ąĖčé čäčĆąĄą╣ą╝ ą┤ą░ąĮąĮčŗčģ.
ąĀąĖčü. 2-3. ążčĆąĄą╣ą╝ remote čłąĖąĮčŗ CAN.
ąĢčüčéčī 2 čĆą░ąĘą╗ąĖčćąĖčÅ ą╝ąĄąČą┤čā čäčĆąĄą╣ą╝ąŠą╝ remote (ą┐ąŠą║ą░ąĘą░ąĮ ąĮą░ čĆąĖčü. 2-3) ąĖ čäčĆąĄą╣ą╝ąŠą╝ ą┤ą░ąĮąĮčŗčģ. ąÆąŠ-ą┐ąĄčĆą▓čŗčģ, ą▒ąĖčé RTR ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄčåąĄčüčüąĖą▓ąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ, ąĖ ą▓ąŠ-ą▓č鹊čĆčŗčģ, ąĘą┤ąĄčüčī ąĮąĄčé ą┐ąŠą╗čÅ ą┤ą░ąĮąĮčŗčģ. ą¤čĆąĖ čŹč鹊ą╝ čüąŠą▒čŗčéąĖąĖ čäčĆąĄą╣ą╝ ą┤ą░ąĮąĮčŗčģ ąĖ čäčĆąĄą╣ą╝ remote čü č鹥ą╝ ąČąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝ ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ, čéą░ą║ čćč鹊 čäčĆąĄą╣ą╝ ą┤ą░ąĮąĮčŗčģ ą▓čŗąĖą│čĆą░ąĄčé ą░čĆą▒ąĖčéčĆą░ąČ, ą┐ąŠčüą║ąŠą╗čīą║čā ąĘą░ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝ ąĖą┤ąĄčé ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ ą▒ąĖčé RTR. ą¤čĆąĖ čéą░ą║ąŠą╝ ą╝ąĄč鹊ą┤ąĄ ąŠą▒ą╝ąĄąĮą░ čāąĘąĄą╗, ą║ąŠč鹊čĆčŗą╣ ąŠčéą┐čĆą░ą▓ąĖą╗ čäčĆąĄą╣ą╝ remote, ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą┐ąŠą╗čāčćąĖčé čéčĆąĄą▒čāąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ.
[ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąŠčłąĖą▒ąŠą║ ą┐čĆąŠč鹊ą║ąŠą╗ą░ CAN ]
Error Frame . ążčĆąĄą╣ą╝ ąŠčłąĖą▒ą║ąĖ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą╗čÄą▒čŗą╝ čāąĘą╗ąŠą╝ čłąĖąĮčŗ CAN, ą║ąŠč鹊čĆčŗą╣ ą┤ąĄč鹥ą║čéąĖčĆčāąĄčé ąŠčłąĖą▒ą║čā ąĮą░ čłąĖąĮąĄ. ążčĆąĄą╣ą╝ ąŠčłąĖą▒ą║ąĖ (error frame), ą┐ąŠą║ą░ąĘą░ąĮąĮčŗą╣ ąĮą░ čĆąĖčü. 2-4, čüąŠčüč鹊ąĖčé ąĖąĘ 2 ą┐ąŠą╗ąĄą╣: čäą╗ą░ą│ ąŠčłąĖą▒ą║ąĖ, ąĘą░ ą║ąŠč鹊čĆčŗą╝ čüą╗ąĄą┤čāąĄčé ą┐ąŠą╗ąĄ čĆą░ąĘą┤ąĄą╗ąĖč鹥ą╗čÅ ąŠčłąĖą▒ą║ąĖ. ąŚą┤ąĄčüčī ąĖą╝ąĄąĄčéčüčÅ 2 čéąĖą┐ą░ ą┐ąŠą╗ąĄą╣ čäą╗ą░ą│ą░ ąŠčłąĖą▒ą║ąĖ. ąóąĖą┐ ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝ąŠą│ąŠ ą┐ąŠą╗čÅ čäą╗ą░ą│ą░ ąŠčłąĖą▒ą║ąĖ ąĘą░ą▓ąĖčüąĖčé ąŠčé čüčéą░čéčāčüą░ ąŠčłąĖą▒ą║ąĖ č鹊ą│ąŠ čāąĘą╗ą░, ą║ąŠč鹊čĆčŗą╣ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┐ąŠą╗ąĄ čäą╗ą░ą│ą░ ąŠčłąĖą▒ą║ąĖ. ąØąĖąČąĄ ąŠą┐ąĖčüą░ąĮčŗ čéąĖą┐čŗ ą┐ąŠą╗ąĄą╣ čäą╗ą░ą│ą░ ąŠčłąĖą▒ą║ąĖ.
ąĀąĖčü. 2-4: Active Error Frame CAN.
ąĀą░ąĘą╗ąĖčćą░čÄčé 2 čéąĖą┐ą░ čüąŠčüč鹊čÅąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ čāąĘą╗ą░ - čāąĘąĄą╗ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą░ą║čéąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ ąĖ čāąĘąĄą╗ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą┐ą░čüčüąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ. ąŻąĘąĄą╗ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą░ą║čéąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ č鹊ą╝ čüą╗čāčćą░ąĄ, ąĄčüą╗ąĖ ąĄą│ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ čüč湥čéčćąĖą║ąĖ ąŠčłąĖą▒ąŠą║ ąĘą░čüčéą░ą▓ąĖą╗ąĖ čāąĘąĄą╗ ą┐ąĄčĆąĄą╣čéąĖ ą▓ čŹč鹊 čüąŠčüč鹊čÅąĮąĖąĄ. ąŻąĘąĄą╗ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą┐ą░čüčüąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ č鹊ą╝ čüą╗čāčćą░ąĄ, ą║ąŠą│ą┤ą░ ąĄą│ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ čüč湥čéčćąĖą║ąĖ ąĮąĄ ąĘą░čüčéą░ą▓ą╗čÅčÄčé ą┐ąĄčĆąĄą╣čéąĖ ą▓ ą░ą║čéąĖą▓ąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ąŠčłąĖą▒ą║ąĖ, ąĮąŠ čāąĘąĄą╗ ąŠą▒ąĮą░čĆčāąČąĖą╗ ąŠčłąĖą▒ą║čā ąĮą░ čłąĖąĮąĄ. ąó. ąĄ. ą░ą║čéąĖą▓ąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ąŠčłąĖą▒ą║ąĖ čāąĘą╗ą░ čŹč鹊 ą║ąŠą│ą┤ą░ ąŠąĮ ą▓ąĮčāčéčĆąĖ čüąĄą▒čÅ ąŠą▒ąĮą░čĆčāąČąĖą╗ ąŠčłąĖą▒ą║čā, ą░ ą┐ą░čüčüąĖą▓ąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ąŠčłąĖą▒ą║ąĖ čŹč鹊 č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ čāąĘąĄą╗ ąŠą▒ąĮą░čĆčāąČąĖą╗ ąŠčłąĖą▒ą║čā čüąĮą░čĆčāąČąĖ.
ąÉą║čéąĖą▓ąĮčŗąĄ ąŠčłąĖą▒ą║ąĖ . ąĢčüą╗ąĖ čāąĘąĄą╗ ą┐ąĄčĆąĄčłąĄą╗ ą▓ ą░ą║čéąĖą▓ąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ąŠčłąĖą▒ą║ąĖ, č鹊 ąŠąĮ ą┐čĆąĄčĆčŗą▓ą░ąĄčé ą┐ąĄčĆąĄą┤ą░čćčā č鹥ą║čāčēąĄą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą│ąĄąĮąĄčĆą░čåąĖąĄą╣ čäą╗ą░ą│ą░ active error. ąŁč鹊čé čäą╗ą░ą│ active error čüąŠčüč鹊ąĖčé ąĖąĘ 6 ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗčģ ą▒ąĖčé, ą║ąŠč鹊čĆčŗąĄ čüą╗ąĄą┤čāčÄčé ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝. ąŁčéą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą▒ąĖčé ąĮą░čĆčāčłą░ąĄčé ą┐čĆąĖąĮčåąĖą┐ ą▒ąĖčé-čüčéą░čäčäąĖąĮą│ą░. ąÆčüąĄ ą┤čĆčāą│ąĖąĄ čāąĘą╗čŗ ąĮą░ čłąĖąĮąĄ čĆą░čüą┐ąŠąĘąĮą░čÄčé čŹčéčā ąŠčłąĖą▒ą║čā ą▒ąĖčé-čüčéą░čäčäąĖąĮą│ą░, ąĖ ą║ą░ą║ čĆąĄąĘčāą╗čīčéą░čé čüą░ą╝ąĖ ą│ąĄąĮąĄčĆąĖčĆčāčÄčé čäčĆąĄą╣ą╝čŗ ąŠčłąĖą▒ą║ąĖ, ą║ąŠč鹊čĆčŗąĄ ąĮą░ąĘčŗą▓ą░čÄčéčüčÅ čäą╗ą░ą│ą░ą╝ąĖ čŹčģą░ ąŠčłąĖą▒ą║ąĖ (error echo flags).
ą¤ąŠą╗ąĄ čäą╗ą░ą│ą░ čŹčģą░ ąŠčłąĖą▒ą║ąĖ čüąŠčüč鹊ąĖčé ąĖąĘ čüą╗ąĄą┤čāčÄčēąĖčģ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗčģ ą▒ąĖčé, ąŠčé 6 ą┤ąŠ 12 čłčéčāą║ (ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝čŗčģ ąŠą┤ąĮąĖą╝ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĖą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ čāąĘą╗ąŠą▓). ą¤ąŠą╗ąĄ čĆą░ąĘą┤ąĄą╗ąĖč鹥ą╗čÅ ąŠčłąĖą▒ą║ąĖ (8 čüą╗ąĄą┤čāčÄčēąĖčģ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ čĆąĄčåąĄčüčüąĖą▓ąĮčŗčģ ą▒ąĖčé) ąĘą░ą▓ąĄčĆčłą░čÄčé čäčĆąĄą╣ą╝ ąŠčłąĖą▒ą║ąĖ. ą¤ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÄ čäčĆąĄą╣ą╝ą░ ąŠčłąĖą▒ą║ąĖ ą░ą║čéąĖą▓ąĮąŠčüčéčī čłąĖąĮčŗ ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ą▓ ąĮąŠčĆą╝ą░ą╗čīąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ, ąĖ čāąĘąĄą╗, ą┐ąĄčĆąĄą┤ą░čćą░ ą║ąŠč鹊čĆąŠą│ąŠ ą▒čŗą╗ą░ ą┐čĆąĄčĆą▓ą░ąĮą░, ą┐čŗčéą░ąĄčéčüčÅ ąŠčéą┐čĆą░ą▓ąĖčéčī ąŠą▒ąŠčĆą▓ą░ąĮąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čäą╗ą░ą│ąĖ čŹčģą░ ąŠčłąĖą▒ą║ąĖ ąŠą▒čŗčćąĮąŠ ą▓ąŠąĘąĮąĖą║ą░čÄčé, ą║ąŠą│ą┤ą░ ą╗ąŠą║ą░ą╗ąĖąĘąŠą▓ą░ąĮąĮąŠąĄ ąĮą░čĆčāčłąĄąĮąĖąĄ ą▓ą╗ąĖčÅąĄčé ąĮą░ ąŠą┤ąĖąĮ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čāąĘą╗ąŠą▓ (ąĮąŠ ąĮąĄ ąĮą░ ą▓čüąĄ), čćč鹊ą▒čŗ ąŠąĮąĖ ąŠčéą┐čĆą░ą▓ąĖą╗ąĖ čäą╗ą░ą│ ąŠčłąĖą▒ą║ąĖ. ą×čüčéą░ą╗čīąĮčŗąĄ čāąĘą╗čŗ ą│ąĄąĮąĄčĆąĖčĆčāčÄčé čäą╗ą░ą│ąĖ ąŠčłąĖą▒ą║ąĖ ą▓ ąŠčéą▓ąĄčé (čŹčģąŠ) ąĮą░ ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮčŗą╣ ąĖčüč鹊čćąĮąĖą║ čäą╗ą░ą│ą░ ąŠčłąĖą▒ą║ąĖ.
ą¤ą░čüčüąĖą▓ąĮčŗąĄ ąŠčłąĖą▒ą║ąĖ. ąĢčüą╗ąĖ čāąĘąĄą╗, ąĮą░čģąŠą┤čÅčēąĖą╣čüčÅ ą▓ ą┐ą░čüčüąĖą▓ąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ ąŠčłąĖą▒ą║ąĖ, ąŠą▒ąĮą░čĆčāąČąĖą╗ ąŠčłąĖą▒ą║čā čłąĖąĮčŗ, č鹊 čāąĘąĄą╗ ą┐ąĄčĆąĄą┤ą░ąĄčé čäą╗ą░ą│ ą┐ą░čüčüąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ (error-passive flag), ąĘą░ ą║ąŠč鹊čĆčŗą╝ ąĖą┤ąĄčé ą┐ąŠą╗ąĄ čĆą░ąĘą┤ąĄą╗ąĖč鹥ą╗čÅ ąŠčłąĖą▒ą║ąĖ. ążą╗ą░ą│ ą┐ą░čüčüąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ čüąŠčüč鹊ąĖčé ąĖąĘ 6 čüą╗ąĄą┤čāčÄčēąĖčģ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ čĆąĄčåąĄčüčüąĖą▓ąĮčŗčģ ą▒ąĖčé. ążčĆąĄą╣ą╝ ąŠčłąĖą▒ą║ąĖ ą┤ą╗čÅ čāąĘą╗ą░ ą┐ą░čüčüąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ čüąŠčüč鹊ąĖčé ąĖąĘ 14 čĆąĄčåąĄčüčüąĖą▓ąĮčŗčģ ą▒ąĖčé. ą¤ąŠ čŹč鹊ą╣ ą┐čĆąĖčćąĖąĮąĄ, ąĄčüą╗ąĖ ąŠčłąĖą▒ą║ą░ čłąĖąĮčŗ ąĮąĄ ąŠą▒ąĮą░čĆčāąČąĄąĮą░ čāąĘą╗ąŠą╝ ą░ą║čéąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ ąĖą╗ąĖ ą┐ąĄčĆąĄą┤ą░čÄčēąĖą╝ čāąĘą╗ąŠą╝, č鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčīčüčÅ, ą┐ąŠč鹊ą╝čā čćč鹊 ą▒ąĖčéčŗ čäą╗ą░ą│ą░ ą┐ą░čüčüąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ ąĮąĖą║ą░ą║ ąĮąĄ ą▓ą╗ąĖčÅčÄčé ąĮą░ čłąĖąĮčā.
ąĢčüą╗ąĖ ą┐ąĄčĆąĄą┤ą░čÄčēąĖą╣ čāąĘąĄą╗ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé čäą╗ą░ą│ ą┐ą░čüčüąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ, č鹊 čŹč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ č鹊ą╝čā, čćč鹊 ą┤čĆčāą│ąĖąĄ čāąĘą╗čŗ čüą│ąĄąĮąĄčĆąĖčĆčāčÄčé čäčĆąĄą╣ą╝čŗ ąŠčłąĖą▒ą║ąĖ ąĖąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 ąŠą▒ąĮą░čĆčāąČą░čé ąĮą░čĆčāčłąĄąĮąĖąĄ ą▒ąĖčé-čüčéą░čäčäąĖąĮą│ą░. ą¤ąŠčüą╗ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ čäčĆąĄą╣ą╝ą░ ąŠčłąĖą▒ą║ąĖ, čāąĘąĄą╗ ą┐ą░čüčüąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ ą┤ąŠą╗ąČąĄąĮ ą┐ąŠą┤ąŠąČą┤ą░čéčī 6 čüą╗ąĄą┤čāčÄčēąĖčģ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ čĆąĄčåąĄčüčüąĖą▓ąĮčŗčģ ą▒ąĖčé ą┐ąĄčĆąĄą┤ ą┐ąŠą┐čŗčéą║ąŠą╣ ą┐ąŠą▓č鹊čĆąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčīčüčÅ ą║ ąŠą▒ą╝ąĄąĮčā ą┐ąŠ čłąĖąĮąĄ.
ąĀą░ąĘą┤ąĄą╗ąĖč鹥ą╗čī ąŠčłąĖą▒ą║ąĖ čüąŠčüč鹊ąĖčé ąĖąĘ 8 čĆąĄčåąĄčüčüąĖą▓ąĮčŗčģ ą▒ąĖčé, ąĖ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čāąĘą╗ą░ą╝ čłąĖąĮčŗ ą┐ąŠčüą╗ąĄ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ ą┐ąĄčĆąĄąĘą░ą┐čāčüčéąĖčéčī ąŠą▒ą╝ąĄąĮ ą┐ąŠ čłąĖąĮąĄ čü čćąĖčüč鹊ą│ąŠ ą╗ąĖčüčéą░.
ążčĆąĄą╣ą╝ ą┐ąĄčĆąĄą│čĆčāąĘą║ąĖ (Overload Frame). ążčĆąĄą╣ą╝ ą┐ąĄčĆąĄą│čĆčāąĘą║ąĖ, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗą╣ ąĮą░ čĆąĖčü. 2-5, ąĖą╝ąĄąĄčé č鹊čé ąČąĄ č乊čĆą╝ą░čé, čćč鹊 ąĖ čäčĆąĄą╣ą╝ ą░ą║čéąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ. ą×ą┤ąĮą░ą║ąŠ čäčĆąĄą╣ą╝ ą┐ąĄčĆąĄą│čĆčāąĘą║ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮ č鹊ą╗čīą║ąŠ ą▓ ą┐čĆąŠą╝ąĄąČčāčéą║ąĄ ą╝ąĄąČą┤čā čäčĆąĄą╣ą╝ą░ą╝ąĖ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čäčĆąĄą╣ą╝ ą┐ąĄčĆąĄą│čĆčāąĘą║ąĖ ą╝ąŠąČąĮąŠ ąŠčéą╗ąĖčćąĖčéčī ąŠčé čäčĆąĄą╣ą╝ą░ ąŠčłąĖą▒ą║ąĖ (čäčĆąĄą╣ą╝ ąŠčłąĖą▒ą║ąĖ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ).
ąĀąĖčü. 2-5. Overload Frame CAN.
ążčĆąĄą╣ą╝ ą┐ąĄčĆąĄą│čĆčāąĘą║ąĖ čüąŠčüč鹊ąĖčé ąĖąĘ 2 ą┐ąŠą╗ąĄą╣: čäą╗ą░ą│ ą┐ąĄčĆąĄą│čĆčāąĘą║ąĖ, ąĘą░ ą║ąŠč鹊čĆčŗą╝ ąĖą┤ąĄčé čĆą░ąĘą┤ąĄą╗ąĖč鹥ą╗čī ą┐ąĄčĆąĄą│čĆčāąĘą║ąĖ. ążą╗ą░ą│ ą┐ąĄčĆąĄą│čĆčāąĘą║ąĖ čüąŠčüč鹊ąĖčé ąĖąĘ 6 ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗčģ ą▒ąĖčé, ąĘą░ ą║ąŠč鹊čĆčŗą╝ąĖ ąĖą┤čāčé čäą╗ą░ą│ąĖ ą┐ąĄčĆąĄą│čĆčāąĘą║ąĖ, ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝čŗąĄ ą┤čĆčāą│ąĖą╝ąĖ čāąĘą╗ą░ą╝ąĖ (ąĖ, ą║ą░ą║ ąĖ ą┤ą╗čÅ čäą╗ą░ą│ą░ ą░ą║čéąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ, ą┤ą░čÄčé ą╝ą░ą║čüąĖą╝čāą╝ 12 ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗčģ ą▒ąĖčé). ąĀą░ąĘą┤ąĄą╗ąĖč鹥ą╗čī ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ čüąŠčüč鹊ąĖčé ąĖąĘ 8 čĆąĄčåąĄčüčüąĖą▓ąĮčŗčģ ą▒ąĖčé. ążčĆąĄą╣ą╝ ą┐ąĄčĆąĄą│čĆčāąĘą║ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮ čāąĘą╗ąŠą╝ ą▓ 2 čüą╗čāčćą░čÅčģ:
1 . ąŻąĘąĄą╗ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ą╗ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ ą▒ąĖčé ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮąŠą│ąŠ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ ą╝ąĄąČą┤čā čäčĆąĄą╣ą╝ą░ą╝ąĖ, čćč鹊 ąĮąĄ ą┤ąŠą┐čāčüčéąĖą╝ąŠ. ąśčüą║ą╗čÄč湥ąĮąĖąĄ ąĖąĘ čŹč鹊ą│ąŠ ą┐čĆą░ą▓ąĖą╗ą░: ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ ą▒ąĖčé ą▒čŗą╗ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮ ą▓ąŠ ą▓čĆąĄą╝čÅ čéčĆąĄčéčīąĄą│ąŠ ą▒ąĖčéą░ IFS. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┐čĆąĖąĄą╝ąĮąĖą║ąĖ ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāčÄčé čŹč鹊 ą║ą░ą║ SOF (ąĮą░čćą░ą╗ąŠ čäčĆąĄą╣ą╝ą░).2 . ąśąĘ-ąĘą░ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ čāčüą╗ąŠą▓ąĖą╣, ą║ąŠą│ą┤ą░ čāąĘąĄą╗ ą▓čüąĄ ąĄčēąĄ ąĮąĄ ą╝ąŠąČąĄčé ąĮą░čćą░čéčī ą┐čĆąĖąĮąĖą╝ą░čéčī čüą╗ąĄą┤čāčÄčēąĄąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ąŠąĮ ąĮąĄ čāčüą┐ąĄą╗ ąŠą▒čĆą░ą▒ąŠčéą░čéčī ą┐čĆąĄą┤čŗą┤čāčēąĖą╣ ą┐čĆąĖąĮčÅčéčŗą╣ čäčĆąĄą╣ą╝). ąŻąĘąĄą╗ ą╝ąŠąČąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą╝ą░ą║čüąĖą╝čāą╝ 2 ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ čäčĆąĄą╣ą╝ą░ ą┐ąĄčĆąĄą│čĆčāąĘą║ąĖ, čćč鹊ą▒čŗ ąĘą░ą┤ąĄčƹȹ░čéčī ąĮą░čćą░ą╗ąŠ ą┐čĆąĖąĄą╝ą░ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čüą╗čāčćą░ą╣ 2 ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąŠąĖąĘąŠą╣čéąĖ čü MCP2515 ąĖąĘ-ąĘą░ ąŠč湥ąĮčī ą╝ą░ą╗čŗčģ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ ąĘą░ą┤ąĄčƹȹĄą║.
ą¤čĆąŠą╝ąĄąČčāč鹊čćąĮąŠąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ (Interframe Space) . ąŁč鹊čé ąĖąĮč鹥čĆą▓ą░ą╗ ą▓čĆąĄą╝ąĄąĮąĖ ąŠčéą┤ąĄą╗čÅąĄčé ą┤čĆčāą│ ąŠčé ą┤čĆčāą│ą░ ą┐čĆąĄą┤čŗą┤čāčēąĖą╣ čäčĆąĄą╣ą╝ (ą╗čÄą▒ąŠą│ąŠ čéąĖą┐ą░) ąŠčé ą┐ąŠčüą╗ąĄą┤čāčÄčēąĄą│ąŠ čäčĆąĄą╣ą╝ą░ ą┤ą░ąĮąĮčŗčģ ąĖą╗ąĖ čäčĆąĄą╣ą╝ą░ remote. ą¤čĆąŠą╝ąĄąČčāč鹊čćąĮąŠąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ čüąŠčüč鹊ąĖčé ąĖąĘ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 3 čĆąĄčåąĄčüčüąĖą▓ąĮčŗčģ ą▒ąĖčé, ą║ąŠč鹊čĆčŗąĄ ąĮą░ąĘčŗą▓ą░čÄčéčüčÅ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą╝ ą┐ąĄčĆąĄčĆčŗą▓ą░ (Intermission). ąŁč鹊 ą┤ą░ąĄčé čāąĘą╗ą░ą╝ ą▓čĆąĄą╝čÅ ąĮą░ ą▓ąĮčāčéčĆąĄąĮąĮčÄčÄ ąŠą▒čĆą░ą▒ąŠčéą║čā ą┐ąĄčĆąĄą┤ ąĮą░čćą░ą╗ąŠą╝ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ čäčĆąĄą╣ą╝ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ. ą¤ąŠčüą╗ąĄ intermission čłąĖąĮą░ ąŠčüčéą░ąĄčéčüčÅ ą▓ čĆąĄčåąĄčüčüąĖą▓ąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ (bus idle), ą┐ąŠą║ą░ ąĮąĄ ąĮą░čćąĮąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░.
[ą¤ąĄčĆąĄą┤ą░čćą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ]
ąæčāč乥čĆčŗ ą┐ąĄčĆąĄą┤ą░čćąĖ . ąÆ čāčüčéčĆąŠą╣čüčéą▓ąĄ MCP2515 čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ 3 ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąÜą░ąČą┤čŗą╣ ąĖąĘ ąĮąĖčģ ąĘą░ąĮąĖą╝ą░ąĄčé 14 ą▒ą░ą╣čé SRAM, ąĖ ąŠč鹊ą▒čĆą░ąČą░ąĄčéčüčÅ ąĮą░ ą║ą░čĆčéčā ą┐ą░ą╝čÅčéąĖ čāčüčéčĆąŠą╣čüčéą▓ą░.
ą¤ąĄčĆą▓čŗą╣ ą▒ą░ą╣čé TXBnCTRL, čŹč鹊 čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ čĆąĄą│ąĖčüčéčĆ, čüą▓čÅąĘą░ąĮąĮčŗą╣ čü ą▒čāč乥čĆąŠą╝ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąśąĮč乊čĆą╝ą░čåąĖčÅ ą▓ čŹč鹊ą╝ čĆąĄą│ąĖčüčéčĆąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čāčüą╗ąŠą▓ąĖčÅ, ą┐čĆąĖ ą║ąŠč鹊čĆčŗčģ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮąŠ, ąĖ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čüčéą░čéčāčü ą┐ąĄčĆąĄą┤ą░čćąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ (čüą╝. čĆąĄą│ąĖčüčéčĆ TXRTSCTRL).
5 ą▒ą░ą╣čé ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ąĖ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓, ą░ čéą░ą║ąČąĄ ą┤čĆčāą│ąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą░čĆą▒ąĖčéčĆą░ąČą░ (čüą╝. čĆąĄą│ąĖčüčéčĆčŗ TXBnSIDL, TXBnEID8, TXBnEID0, TXBnDLC). ą¤ąŠčüą╗ąĄą┤ąĮąĖąĄ 8 ą▒ą░ą╣čé ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮčŗ ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ (čüą╝. čĆąĄą│ąĖčüčéčĆ TXBnDm).
ąöą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĘą░ą│čĆčāąČąĄąĮčŗ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ čĆąĄą│ąĖčüčéčĆčŗ TXBnSIDH, TXBnSIDL ąĖ TXBnDLC. ąĢčüą╗ąĖ ą▓ čüąŠąŠą▒čēąĄąĮąĖąĖ ą┐čĆąĖčüčāčéčüčéą▓čāčÄčé ą▒ą░ą╣čéčŗ ą┤ą░ąĮąĮčŗčģ, č鹊 čéą░ą║ąČąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĘą░ą│čĆčāąČąĄąĮčŗ čĆąĄą│ąĖčüčéčĆčŗ TXBnDm. ąĢčüą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čĆą░čüčłąĖčĆąĄąĮąĮčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ, č鹊 čéą░ą║ąČąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĘą░ą│čĆčāąČąĄąĮčŗ čĆąĄą│ąĖčüčéčĆčŗ TXBnEIDm, ąĖ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé TXBnSIDL.EXIDE.
ą¤ąĄčĆąĄą┤ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ čüąŠąŠą▒čēąĄąĮąĖčÅ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┤ąŠą╗ąČąĄąĮ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī ą▒ąĖčé CANINTE.TXInE, čćč鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī ąĖą╗ąĖ ąĘą░ą┐čĆąĄčéąĖčéčī ą│ąĄąĮąĄčĆą░čåąĖčÄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓ ą╝ąŠą╝ąĄąĮčé ąŠą║ąŠąĮčćą░ąĮąĖčÅ ąŠčéą┐čĆą░ą▓ą║ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▒ąĖčé TXBnCTRL.TXREQ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠčćąĖčēąĄąĮ (ą┐ąŠą║ą░ąĘčŗą▓ą░čÅ č鹥ą╝ čüą░ą╝čŗą╝, čćč鹊 ą▒čāč乥čĆ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĮąĄ ąŠąČąĖą┤ą░ąĄčé ą┐ąĄčĆąĄą┤ą░čćąĖ) ą┐ąĄčĆąĄą┤ ąĘą░ą┐ąĖčüčīčÄ ą▓ ą▒čāč乥čĆ ą┐ąĄčĆąĄą┤ą░čćąĖ.
ą¤čĆąĖąŠčĆąĖč鹥čé ą┐ąĄčĆąĄą┤ą░čćąĖ (Transmit Priority) . ą¤čĆąĖąŠčĆąĖč鹥čé ą┐ąĄčĆąĄą┤ą░čćąĖ ąŠčéąĮąŠčüąĖčéčüčÅ ą║ ą┐čĆąĖąŠčĆąĖčéąĖąĘą░čåąĖąĖ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ MCP2515 ą┤ą╗čÅ čüąŠąŠą▒čēąĄąĮąĖą╣, ąŠąČąĖą┤ą░čÄčēąĖčģ ą┐ąĄčĆąĄą┤ą░čćčā. ąŁč鹊 ąĮąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé čüčģąĄą╝čŗ ą┐čĆąĖąŠčĆąĖčéąĖąĘą░čåąĖąĖ ą░čĆą▒ąĖčéčĆą░ąČą░, ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą▓ ą┐čĆąŠč鹊ą║ąŠą╗ CAN, ąĖ ąĮąĄ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ čüą▓čÅąĘą░ąĮąŠ čü ąĮąĖą╝.
ą¤ąĄčĆąĄą┤ ąŠčéą┐čĆą░ą▓ą║ąŠą╣ SOF čüčĆą░ą▓ąĮąĖą▓ą░čÄčéčüčÅ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ ą┐čĆąĖąŠčĆąĖč鹥čéčŗ ą▓čüąĄčģ ą▒čāč乥čĆąŠą▓ ą┐ąĄčĆąĄą┤ą░čćąĖ. ą¤ąĄčĆą▓čŗą╝ ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ č鹊čé ą▒čāč乥čĆ, čā ą║ąŠč鹊čĆąŠą│ąŠ čüą░ą╝čŗą╣ ą▓čŗčüąŠą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ čā ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ 0 ą┐čĆąĖąŠčĆąĖč鹥čé ą▓čŗčłąĄ, č湥ą╝ čā ą▒čāč乥čĆą░ 1, č鹊 ą▒čāč乥čĆ 0 ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ ą┐ąĄčĆą▓čŗą╝.
ąĢčüą╗ąĖ 2 ą▒čāč乥čĆą░ ąĖą╝ąĄčÄčé ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╣ ąĮą░čüčéčĆąŠąĄąĮąĮčŗą╣ ą┐čĆąĖąŠčĆąĖč鹥čé, č鹊 ą▒čāč乥čĆ čü čüą░ą╝čŗą╝ ą▒ąŠą╗čīčłąĖą╝ ą┐ąŠčĆčÅą┤ą║ąŠą▓čŗą╝ ąĮąŠą╝ąĄčĆąŠą╝ ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ ą┐ąĄčĆą▓čŗą╝. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą▒čāč乥čĆ ą┐ąĄčĆąĄą┤ą░čćąĖ 1 ąĖą╝ąĄąĄčé č鹊čé ąČąĄ ą┐čĆąĖąŠčĆąĖč鹥čé, čćč鹊 ąĖ ą▒čāč乥čĆ ą┐ąĄčĆąĄą┤ą░čćąĖ 0, č鹊 ą▒čāč乥čĆ 1 ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ ą┐ąĄčĆą▓čŗą╝.
ąÆčüąĄą│ąŠ ąĖą╝ąĄąĄčéčüčÅ 4 čāčĆąŠą▓ąĮčÅ ą┐čĆąĖąŠčĆąĖč鹥čéą░ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąĢčüą╗ąĖ ą┐ąŠą╗ąĄ TXBnCTRL.TXP[1:0] ą┤ą╗čÅ ą║ą░ą║ąŠą│ąŠ-č鹊 ąŠčéą┤ąĄą╗čīąĮąŠą│ąŠ ą▒čāč乥čĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 11, č鹊 čā čŹč鹊ą│ąŠ ą▒čāč乥čĆą░ čüą░ą╝čŗą╣ ą▓čŗčüąŠą║ąĖą╣ ą▓ąŠąĘą╝ąŠąČąĮčŗą╣ ą┐čĆąĖąŠčĆąĖč鹥čé ąŠčéą┐čĆą░ą▓ą║ąĖ. ąĢčüą╗ąĖ ą┐ąŠą╗ąĄ TXBnCTRL.TXP[1:0] ą▒čāč乥čĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 00, č鹊 čŹč鹊čé ą▒čāč乥čĆ ąĖą╝ąĄąĄčé čüą░ą╝čŗą╣ ąĮąĖąĘą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé (ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╝ ąĖąĘ ą▓čüąĄčģ ąŠąČąĖą┤ą░čÄčēąĖčģ).
ąśąĮąĖčåąĖą░čåąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ . ą¦č鹊ą▒čŗ ąĘą░ą┐čāčüčéąĖčéčī ą┐ąĄčĆąĄą┤ą░čćčā čüąŠąŠą▒čēąĄąĮąĖčÅ, ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé TXBnCTRL.TXREQ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠą│ąŠ ą▒čāč乥čĆą░. ąŁč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮąŠ čüą╗ąĄą┤čāčÄčēąĖą╝ąĖ čüą┐ąŠčüąŠą▒ą░ą╝ąĖ:
ŌĆó ąŚą░ą┐ąĖčüčīčÄ čĆąĄą│ąĖčüčéčĆą░ č湥čĆąĄąĘ SPI
ąĢčüą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćą░ ąĖąĮąĖčåąĖąĖčĆčāąĄčéčüčÅ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü SPI, č鹊 ą▒ąĖčé TXREQ ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ čü ą▒ąĖčéą░ą╝ąĖ ą┐čĆąĖąŠčĆąĖč鹥čéą░ TXP.
ąÜąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé TXBnCTRL.TXREQ, ą▒ąĖčéčŗ TXBnCTRL.ABTF, TXBnCTRL.MLOA ąĖ TXBnCTRL.TXERR ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčćąĖčēą░čÄčéčüčÅ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čāčüčéą░ąĮąŠą▓ą║ą░ ą▒ąĖčéą░ TXBnCTRL.TXREQ ąĮąĄ ąĖąĮąĖčåąĖąĖčĆčāąĄčé ą┐ąĄčĆąĄą┤ą░čćčā čüąŠąŠą▒čēąĄąĮąĖčÅ. ąŁč鹊 ą┐čĆąŠčüč鹊 ą┐ąŠą╝ąĄčćą░ąĄčé ą▒čāč乥čĆ čüąŠąŠą▒čēąĄąĮąĖčÅ, čćč鹊 ąŠąĮ ą│ąŠč鹊ą▓ ą║ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąĀąĄą░ą╗čīąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ąĮą░čćąĮąĄčéčüčÅ, ą║ąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠą▒ąĮą░čĆčāąČąĖčé ą┤ąŠčüčéčāą┐ąĮąŠčüčéčī čłąĖąĮčŗ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ.
ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┐ąĄčĆąĄą┤ą░čćą░ čāčüą┐ąĄčłąĮąŠ ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī, ą▒ąĖčé TXBnCTRL.TXREQ ąŠčćąĖčēą░ąĄčéčüčÅ, ą▒ąĖčé CANINTF.TXnIF čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ, ąĖ ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮ ą▓ąĮąĄčłąĮąĖą╣ čüąĖą│ąĮą░ą╗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé CANINTE.TXnIE.
ąĢčüą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐ąŠč鹥čĆą┐ąĄą╗ą░ ąĮąĄčāą┤ą░čćčā, č鹊 ą▒ąĖčé TXBnCTRL.TXREQ ąŠčüčéą░ąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝. ąŁč鹊 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠčüčéą░ąĄčéčüčÅ ą▓ ąŠąČąĖą┤ą░ąĮąĖąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ, ąĖ ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąŠą┤ąĖąĮ ąĖąĘ čüą╗ąĄą┤čāčÄčēąĖčģ čäą╗ą░ą│ąŠą▓ čüąŠą▒čŗčéąĖą╣:
ŌĆó ąĢčüą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĮą░čćą░ą╗ąŠ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčīčüčÅ, ąĮąŠ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ čüąŠą▒čŗčéąĖąĄ ąŠčłąĖą▒ą║ąĖ, č鹊 ą▒čāą┤čāčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▒ąĖčéčŗ TXBnCTRL.TXERR ąĖ CANINTF.MERRF, ąĖ ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ ą▓ąĮąĄčłąĮąĄąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ /INT, ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé CANINTE.MERRE.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮ čĆąĄąČąĖą╝ One-Shot (ą▒ąĖč鹊ą╝ CANCTRL.OSM), č鹊 ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗąĄ ą▓čŗčłąĄ čāčüą╗ąŠą▓ąĖčÅ ą▓čüąĄ ąĄčēąĄ ąŠčüčéą░čÄčéčüčÅ ą▓ čüąĖą╗ąĄ. ą×ą┤ąĮą░ą║ąŠ ą▒ąĖčé TXREQ ą▒čāą┤ąĄčé ąŠčćąĖčēąĄąĮ, ąĖ ąĮąĄ ą▒čāą┤ąĄčé ą┐čĆąĄą┤ą┐čĆąĖąĮąĖą╝ą░čéčīčüčÅ ą┐ąŠą┐čŗčéą║ą░ ąŠčéą┐čĆą░ą▓ąĖčéčī čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓č鹊čĆąŠą╣ čĆą░ąĘ.
ąĀąĄąČąĖą╝ One-Shot . ąĀąĄąČąĖą╝ ąŠą┤ąĖąĮąŠčćąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ (One-Shot mode) ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 ą▒čāą┤ąĄčé ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮą░ č鹊ą╗čīą║ąŠ ąŠą┤ąĮą░ ą┐ąŠą┐čŗčéą║ą░ ąŠčéą┐čĆą░ą▓ąĖčéčī čüąŠąŠą▒čēąĄąĮąĖąĄ. ą×ą▒čŗčćąĮąŠ, ąĄčüą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ CAN ą┐čĆąŠąĖą│čĆą░ą╗ąŠ ą░čĆą▒ąĖčéčĆą░ąČ, ąĖą╗ąĖ ąĄčüą╗ąĖ ąĄą│ąŠ ą┐ąĄčĆąĄą┤ą░čćą░ ą▒čŗą╗ą░ čāąĮąĖčćč鹊ąČąĄąĮą░ čäčĆąĄą╣ą╝ąŠą╝ ąŠčłąĖą▒ą║ąĖ, č鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą┐ąŠą▓č鹊čĆąĮąŠ. ąÜąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮ čĆąĄąČąĖą╝ One-Shot, č鹊 ą┐ąŠą┐čŗčéą║ą░ ąŠčéą┐čĆą░ą▓ąĖčéčī čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čāą┤ąĄčé ą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮą░ č鹊ą╗čīą║ąŠ 1 čĆą░ąĘ, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ą┐čĆąŠąĖą│čĆčŗčłą░ ą░čĆą▒ąĖčéčĆą░ąČą░ ąĖą╗ąĖ ąŠčłąĖą▒ą║ąĖ čäčĆąĄą╣ą╝ą░.
ąĀąĄąČąĖą╝ One-Shot čéčĆąĄą▒čāąĄčéčüčÅ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī ą▓čĆąĄą╝ąĄąĮą░ čüą╗ąŠč鹊ą▓ ą▓ ą┤ąĄč鹥čĆą╝ąĖąĮąĖčĆąŠą▓ą░ąĮąĮčŗčģ čüąĖčüč鹥ą╝ą░čģ, čéą░ą║ąĖčģ ą║ą░ą║ TTCAN.
ąÆčŗą▓ąŠą┤čŗ TXnRTS . ąØąŠąČą║ąĖ TXnRTS čŹč鹊 ą▓čŗą▓ąŠą┤čŗ ą▓čģąŠą┤ą░, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
ŌĆó ąÆčģąŠą┤čŗ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ąĘą░ą┐čĆąŠčüą░ ąĮą░ ąŠčéą┐čĆą░ą▓ą║čā (Request-to-send, RTS), čćč鹊 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗą╣ čüą┐ąŠčüąŠą▒ ąĘą░ą┐čāčüą║ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĖąĘ ą╗čÄą▒ąŠą│ąŠ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ.
ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ čŹčéąĖčģ ą▓čŗą▓ąŠą┤ąŠą▓ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ čĆąĄą│ąĖčüčéčĆąŠą╝ TXRTSCTRL (čüą╝. čĆąĄą│ąĖčüčéčĆ TXBnSIDH). ąĀąĄą│ąĖčüčéčĆ TXRTSCTRL ą╝ąŠąČąĄčé ą▒čŗčéčī ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮ, ą║ąŠą│ą┤ą░ MCP2515 ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ (Configuration mode, čüą╝. čüąĄą║čåąĖčÄ "ąĀąĄąČąĖą╝čŗ čĆą░ą▒ąŠčéčŗ"). ąĢčüą╗ąĖ ą▓čŗą▓ąŠą┤čŗ TXnRTS čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą║ą░ą║ ą▓čģąŠą┤čŗ RTS, č鹊 ąŠąĮąĖ ąŠč鹊ą▒čĆą░ąČą░čÄčéčüčÅ ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé TXBnCTRL.TXREQ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąæąĖčé TXREQ ąĘą░čēąĄą╗ą║ąĖą▓ą░ąĄčéčüčÅ ą┐ąŠ čüą┐ą░ą┤čā čāčĆąŠą▓ąĮčÅ (ą┐ąĄčĆąĄčģąŠą┤ ą▓ ą╗ąŠą│. 0) ąĮą░ ą▓čŗą▓ąŠą┤ąĄ TXnRTS. ąÆčŗą▓ąŠą┤čŗ TXnRTS ą▒čŗą╗ąĖ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮčŗ, čćč鹊ą▒čŗ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĮą░čćą░čéčī ą┐ąĄčĆąĄą┤ą░čćčā čüąŠąŠą▒čēąĄąĮąĖčÅ, ą║ąŠą│ą┤ą░ ą▓čŗą▓ąŠą┤ RXnBF ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ ą╗ąŠą│. 0.
ąÆčŗą▓ąŠą┤čŗ TXnRTS ąĖą╝ąĄčÄčé ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ ą▓ąĄčĆčģąĮąĖąĄ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖąĄ čĆąĄąĘąĖčüč鹊čĆčŗ (pull-up) čü ąĮąŠą╝ąĖąĮą░ą╗čīąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ 100 ą║ą×ą╝.
ą×ą▒čĆčŗą▓ ą┐ąĄčĆąĄą┤ą░čćąĖ . ąŻą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą╝ąŠąČąĄčé ąĘą░ą┐čĆąŠčüąĖčéčī ą┐čĆąĄčĆą▓ą░čéčī ą┐ąĄčĆąĄą┤ą░čćčā čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą▒čāč乥čĆą░ ą┐čāč鹥ą╝ ąŠčćąĖčüčéą║ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą▒ąĖčéą░ TXBnCTRL.TXREQ.
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠčłąĄąĮ ąŠą▒čĆčŗą▓ ą▓čüąĄčģ ąŠąČąĖą┤ą░čÄčēąĖčģ ąŠčéą┐čĆą░ą▓ą║ąĖ čüąŠąŠą▒čēąĄąĮąĖą╣ ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ CANCTRL.ABAT. ąŁč鹊čé ą▒ąĖčé ąöą×ąøą¢ąĢąØ ą▒čŗčéčī čüą▒čĆąŠčłąĄąĮ (ąŠą▒čŗčćąĮąŠ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┐čĆąŠą▓ąĄčĆąĄąĮąŠ, čćč鹊 ą▒ąĖčéčŗ TXREQ ąŠčćąĖčēąĄąĮčŗ), čćč鹊ą▒čŗ ą┐čĆąŠą┤ąŠą╗ąČąĖčéčī ąŠčéą┐čĆą░ą▓ą║čā čüąŠąŠą▒čēąĄąĮąĖą╣. ążą╗ą░ą│ TXBnCTRL.ABTF ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ č鹊ą╗čīą║ąŠ ą▓ č鹊ą╝ čüą╗čāčćą░ąĄ, ąĄčüą╗ąĖ ąŠą▒čĆčŗą▓ ą▒čŗą╗ ąĘą░ą┐čĆąŠčłąĄąĮ č湥čĆąĄąĘ ą▒ąĖčé CANCTRL.ABAT. ą×ą▒čĆčŗą▓ čüąŠąŠą▒čēąĄąĮąĖčÅ čüą▒čĆąŠčüąŠą╝ ą▒ąĖčéą░ TXREQ ąØąĢ ą¤ąĀąśąÆąĢąöąĢąó ą║ čāčüčéą░ąĮąŠą▓ą║ąĄ ą▒ąĖčéą░ ABTF.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ 1: čüąŠąŠą▒čēąĄąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ą▓ č鹊čé ą╝ąŠą╝ąĄąĮčé, ą║ąŠą│ą┤ą░ ą▒čŗą╗ ąĘą░ą┐čĆąŠčłąĄąĮ ąŠą▒čĆčŗą▓, ą┐čĆąŠą┤ąŠą╗ąČą░čé čüą▓ąŠčÄ ą┐ąĄčĆąĄą┤ą░čćčā. ąĢčüą╗ąĖ ą╝ąŠą╝ąĄąĮčé ąĮą░čćą░ą╗ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ ąĘą░ą┐čĆąŠčüą░ ąĮą░ ąŠą▒čĆčŗą▓ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĮąĄ ą▓čŗą┐ąŠą╗ąĮąĖą╗ąŠ čāčüą┐ąĄčłąĮčāčÄ ą┐ąĄčĆąĄą┤ą░čćčā (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą┐čĆąŠąĖą│čĆą░ą╗ąŠ ą░čĆą▒ąĖčéčĆą░ąČ, ąĖą╗ąĖ ą▒čŗą╗ąŠ ą┐čĆąĄčĆą▓ą░ąĮąŠ čäčĆąĄą╣ą╝ąŠą╝ ąŠčłąĖą▒ą║ąĖ), č鹊 č鹊ą│ą┤ą░ ą▓ ąŠčéą▓ąĄčé ąĮą░ ąĘą░ą┐čĆąŠčü ąŠą▒čĆčŗą▓ą░ ą┐ąĄčĆąĄą┤ą░čćą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▒čāą┤ąĄčé ąŠą▒ąŠčĆą▓ą░ąĮą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ 2: ą║ąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮ čĆąĄąČąĖą╝ One-Shot, ąĄčüą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ą┐čĆąĄčĆą▓ą░ąĮąŠ ąĖąĘ-ąĘą░ ąŠčłąĖą▒ą║ąĖ čäčĆąĄą╣ą╝ą░ ąĖą╗ąĖ ą┐čĆąŠąĖą│čĆčŗčłą░ ą░čĆą▒ąĖčéčĆą░ąČą░, č鹊 ą▒ąĖčé TXBnCTRL.ABTF ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ.
ąĀąĖčü. 3-1. ąÉą╗ą│ąŠčĆąĖčéą╝ ąŠčéą┐čĆą░ą▓ą║ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ.
[ą×ą┐ąĖčüą░ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ ą┐ąĄčĆąĄą┤ą░čćąĖ ]
ąØąĖąČąĄ ą▓ąŠ ą▓čĆąĄąĘą║ą░čģ ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ąŠą┐ąĖčüą░ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ ąĖ ą║ą░ąČą┤ąŠą│ąŠ ąĖąĘ ąĖčģ ąŠčéą┤ąĄą╗čīąĮčŗčģ ą▒ąĖčé. ą¤ąŠą┤ ą║ą░ąČą┤čŗą╝ ą▒ąĖč鹊ą╝ ą┐čĆąĖą▓ąĄą┤ąĄąĮą░ ąĄą│ąŠ ą╗ąĄą│ąĄąĮą┤ą░, čüąŠčüč鹊čÅčēą░čÅ ąĖąĘ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ čüąĖą╝ą▓ąŠą╗ąŠą▓:
ąĪąĖą╝ą▓ąŠą╗ ąøąĄą│ąĄąĮą┤ą░
R
ą¦ąĖčéą░ąĄą╝čŗą╣ ą▒ąĖčé.
W
ąŚą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗą╣ ą▒ąĖčé.
U
ąØąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮčŗą╣ ą▒ąĖčé, čćąĖčéą░ąĄčéčüčÅ ą║ą░ą║ 0.
-n
ąŚąĮą░č湥ąĮąĖąĄ ą▓ ą╝ąŠą╝ąĄąĮčé POR (Power On Reset, ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ), n = 0 ąĖą╗ąĖ 1.
1
ąæąĖčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ.
0
ąæąĖčé čüą▒čĆąŠčłąĄąĮ.
x
ąĪąŠčüč鹊čÅąĮąĖąĄ ą▒ąĖčéą░ ąĮąĄ ąĖąĘą▓ąĄčüčéąĮąŠ.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé - ABTF MLOA TXERR TXREQ - TXP1 TXP0
ąøąĄą│ąĄąĮą┤ą░
U-0
R-0
R-0
R-0
R/W-0
U-0
R/W-0
R/W-0
7 ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ, čćąĖčéą░ąĄčéčüčÅ ą║ą░ą║ 0.
6 , ABTF : ą▒ąĖčé čäą╗ą░ą│ą░ ąŠą▒čĆčŗą▓ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ (Message Aborted Flag).
1 čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ąŠą▒ąŠčĆą▓ą░ąĮąŠ.
5 , MLOA : čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐čĆąŠąĖą│čĆą░ą╗ąŠ ą░čĆą▒ąĖčéčĆą░ąČ (Message Lost Arbitration).
1 čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐čĆąĖ ą┐ąŠą┐čŗčéą║ąĄ ąŠčéą┐čĆą░ą▓ą║ąĖ ą┐čĆąŠąĖą│čĆą░ą╗ąŠ ą░čĆą▒ąĖčéčĆą░ąČ.
4 , TXERR : ą▒čŗą╗ą░ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮą░ ąŠčłąĖą▒ą║ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ (Transmission Error Detected).
1 ą┐čĆąŠąĖąĘąŠčłą╗ą░ ąŠčłąĖą▒ą║ą░ čłąĖąĮčŗ ą┐čĆąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ.
3 , TXREQ : ą▒ąĖčé ąĘą░ą┐čĆąŠčüą░ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā čüąŠąŠą▒čēąĄąĮąĖčÅ (Message Transmit Request).
1 ą▒čāč乥čĆ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ąŠąČąĖą┤ą░ąĄčé ą┐ąĄčĆąĄą┤ą░čćąĖ. ąŻą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čŹč鹊čé ą▒ąĖčé, čćč鹊ą▒čŗ ą▓čŗčüčéą░ą▓ąĖčéčī ąĘą░ą┐čĆąŠčü ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā čüąŠąŠą▒čēąĄąĮąĖčÅ. ąŁč鹊čé ą▒ąĖčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčćąĖčüčéąĖčéčüčÅ, ą║ąŠą│ą┤ą░ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ.
2 ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ, čćąĖčéą░ąĄčéčüčÅ ą║ą░ą║ 0.
1-0 , TXP[1:0] : ą▒ąĖčéčŗ ą┐čĆąĖąŠčĆąĖč鹥čéą░ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ (Transmit Buffer Priority).
11 čüą░ą╝čŗą╣ ą▓čŗčüąŠą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé čüąŠąŠą▒čēąĄąĮąĖčÅ.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé - - B2RTS B1RTS B0RTS B2RTSM B1RTSM B0RTSM
ąøąĄą│ąĄąĮą┤ą░
U-0
U-0
R-x
R-x
R-x
R/W-0
R/W-0
R/W-0
7-6 čŹčéąĖ ą▒ąĖčéčŗ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ, čćąĖčéą░čÄčéčüčÅ ą║ą░ą║ 0.
5 , B2RTS : čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ /TX2RTS (/TX2RTS Pin State).
4 , B1RTS : ą▒ąĖčé čüąŠčüč鹊čÅąĮąĖčÅ ą▓čŗą▓ąŠą┤ą░ /TX1RTX (/TX1RTX Pin State).
3 , B0RTS : ą▒ąĖčé čüąŠčüč鹊čÅąĮąĖčÅ ą▓čŗą▓ąŠą┤ą░ /TX0RTS (/TX0RTS Pin State).
- ąÆ čĆąĄąČąĖą╝ąĄ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą▓čģąŠą┤ą░ (Digital Input mode) ą▓ ą▒ąĖč鹥 BnRTS (n=0..2) ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮ čāčĆąŠą▓ąĄąĮčī ą▓čģąŠą┤ą░ /TXnRTS.
2 , B2RTSM : ą▒ąĖčé čĆąĄąČąĖą╝ą░ ą▓čŗą▓ąŠą┤ą░ /TX2RTS.
1 , B1RTSM : ą▒ąĖčé čĆąĄąČąĖą╝ą░ ą▓čŗą▓ąŠą┤ą░ /TX1RTS.
0 , B0RTSM : ą▒ąĖčé čĆąĄąČąĖą╝ą░ ą▓čŗą▓ąŠą┤ą░ /TX0RTS.
1 ą▓čŗą▓ąŠą┤ BnRTSM (n=0..2) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĘą░ą┐čĆąŠčüą░ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā ą▒čāč乥čĆą░ TXB0 (ą┐ąŠ čüą┐ą░ą┤čā čāčĆąŠą▓ąĮčÅ).
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé SID[10:3]
ąøąĄą│ąĄąĮą┤ą░
R/W-x
7-0 , SID[10:3] : ą▒ąĖčéčŗ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé SID[2:0] - EXIDE - EID[17:16]
ąøąĄą│ąĄąĮą┤ą░
R/W-x
R/W-x
R/W-x
R/W-x
R/W-x
7-5 , SID[2:0] : ą▒ąĖčéčŗ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ.
4 ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ, čćąĖčéą░ąĄčéčüčÅ ą║ą░ą║ 0.
3 , EXIDE : ą▒ąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čĆą░čüčłąĖčĆąĄąĮąĮąŠą╣ ą░ą┤čĆąĄčüą░čåąĖąĖ (Extended Identifier Enable).
1 čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ čü čĆą░čüčłąĖčĆąĄąĮąĮčŗą╝ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝.
2 ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ, čćąĖčéą░ąĄčéčüčÅ ą║ą░ą║ 0.
1-0 , EID[17:16] : ą▒ąĖčéčŗ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé EID[15:8]
ąøąĄą│ąĄąĮą┤ą░
R/W-x
7-0 , EID[15:8] : ą▒ąĖčéčŗ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé EID[7:0]
ąøąĄą│ąĄąĮą┤ą░
R/W-x
7-0 , EID[7:0] : ą▒ąĖčéčŗ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé - RTR - - DLC[3:0]
ąøąĄą│ąĄąĮą┤ą░
U-0
R/W-x
R/W-x
R/W-x
R/W-x
7 ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ, čćąĖčéą░ąĄčéčüčÅ ą║ą░ą║ 0.
6 , RTR : ą▒ąĖčé ąĘą░ą┐čĆąŠčüą░ ą┐ąĄčĆąĄą┤ą░čćąĖ čü ą┤ą░ą╗čīąĮąĄą│ąŠ ąŠą║ąŠąĮčćą░ąĮąĖčÅ (Remote Transmission Request).
1 ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ čüąŠą┤ąĄčƹȹĖčé čäčĆąĄą╣ą╝ remote.
5-4 ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮčŗąĄ ą▒ąĖčéčŗ, čćąĖčéą░čÄčéčüčÅ ą║ą░ą║ 0.
3-0 , DLC[3:0] : ą▒ąĖčéčŗ ą┤ą╗ąĖąĮčŗ čüąŠąŠą▒čēąĄąĮąĖčÅ (Data Length Code). ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ, ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗčģ ą▓ čüąŠąŠą▒čēąĄąĮąĖąĖ (ąŠčé 0 ą┤ąŠ 8 ą▒ą░ą╣čé).
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĄčüčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čāčüčéą░ąĮąŠą▓ąĖčéčī ą┐ąŠą╗ąĄ DLC ąĘąĮą░č湥ąĮąĖąĄą╝, ą║ąŠč鹊čĆąŠąĄ ą▒ąŠą╗čīčłąĄ 8, ąĮąŠ ą▓čüąĄ čĆą░ą▓ąĮąŠ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮąŠ č鹊ą╗čīą║ąŠ 8 ą▒ą░ą╣čé ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé TXBnDm[7:0]
ąøąĄą│ąĄąĮą┤ą░
R/W-x
7-0 , TXBnDm7:TXBnDm0 : ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ m ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ n (Transmit Buffer n Data Field Bytes)
[ą¤čĆąĖąĄą╝ čüąŠąŠą▒čēąĄąĮąĖčÅ ]
RXB1 , RXB0 , MAB . ąŻ MCP2515 ąĖą╝ąĄąĄčéčüčÅ ą┤ą▓ą░ ą┐ąŠą╗ąĮčŗčģ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ RXBn, čü ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ čäąĖą╗čīčéčĆą░ą╝ąĖ ą▓ ą║ą░ąČą┤ąŠą╝. ążąĖą╗čīčéčĆčŗ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ąŠčéą▒čĆą░čüčŗą▓ą░čéčī ąĮąĄąČąĄą╗ą░č鹥ą╗čīąĮčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąóą░ą║ąČąĄ ąĖą╝ąĄąĄčéčüčÅ ąŠčéą┤ąĄą╗čīąĮčŗą╣ ą▒čāč乥čĆ čüą▒ąŠčĆą║ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ MAB (čĆą░čüčłąĖčäčĆąŠą▓čŗą▓ą░ąĄčéčüčÅ ą║ą░ą║ Message Assembly Buffer), ą║ąŠč鹊čĆčŗą╣ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ čéčĆąĄčéąĖą╣ ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░ (čüą╝. čĆąĖčü. 4-2).
ąĀąĖčü. 4-2. ąæą╗ąŠą║-ą┤ąĖą░ą│čĆą░ą╝ą╝ą░ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą║ čüąŠąŠą▒čēąĄąĮąĖčÅą╝, ą┐čĆąĖąĮčÅčéčŗą╝ ą▓ MAB, čüąĮą░čćą░ą╗ą░ ą┐čĆąĖą║ą╗ą░ą┤čŗą▓ą░čÄčéčüčÅ ą╝ą░čüą║ąĖ ąĖ čäąĖą╗čīčéčĆčŗ ą▒čāč乥čĆą░ RXB0. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, č鹊ą╗čīą║ąŠ ą▓ ąŠą┤ąĮąŠą╝ čäąĖą╗čīčéčĆąĄ ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖąĄ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ čüąŠą▓ą┐ą░ą┤ą░ąĄčé čü ąŠą▒ąŠąĖą╝ąĖ RXF0 ąĖ RXF2, č鹊 ą▒čāą┤ąĄčé čāčćč鹥ąĮąŠ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖąĄ ą┤ą╗čÅ RXF0, ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąŠ ą▓ ą▒čāč乥čĆ RXB0).
ąśąĘ čŹčéąĖčģ čéčĆąĄčģ ą▒čāč乥čĆąŠą▓ ą┐čĆąĖąĄą╝ą░ MAB ą▓čüąĄą│ą┤ą░ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčé ą┐čĆąĖąĄą╝ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ čü čłąĖąĮčŗ CAN. MAB ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčé čüą▒ąŠčĆą║čā ą▓čüąĄčģ ą┐čĆąĖąĮąĖą╝ą░ąĄą╝čŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣. ąĪąŠą▒čĆą░ąĮąĮčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▒čāą┤čāčé ą┐ąĄčĆąĄą┤ą░ąĮčŗ ą▓ ą▒čāč乥čĆčŗ RXBn (čüą╝. čĆąĄą│ąĖčüčéčĆčŗ RXBnSIDH, RXBnSIDL, RXBnEID8, RXBnEID0, RXBnDLC, RXBnDm) č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▒čāą┤čāčé čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčéčī ą║čĆąĖč鹥čĆąĖčÄ ą┤ąŠą┐čāčüčéąĖą╝ąŠčüčéąĖ (ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ čäąĖą╗čīčéčĆą░ą╝ąĖ).
ąÜą░ąČą┤čŗą╣ ąĖąĘ ą┤ą▓čāčģ ą▒čāč乥čĆąŠą▓ ą┐čĆąĖąĄą╝ą░ RXB0 ąĖ RXB1 ą╝ąŠą│čāčé ą┐ąŠą╗čāčćąĖčéčī č湥čĆąĄąĘ MAB ą┐ąŠą╗ąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠčé ą┐ąŠą┤čüąĖčüč鹥ą╝čŗ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░. ąŻą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą╝ąŠąČąĄčé ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ ą║ ąŠą┤ąĮąŠą╝čā ąĖąĘ ą▒čāč乥čĆąŠą▓, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą┤čĆčāą│ąŠą╣ ą▒čāč乥čĆ ą▒čāą┤ąĄčé ą┤ąŠčüčéčāą┐ąĄąĮ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĖą╗ąĖ ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ čĆą░ąĮąĄąĄ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┐ąŠą╗ąĮąŠąĄ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ MAB ą┐ąĄčĆąĄą╝ąĄčēą░ąĄčéčüčÅ ą▓ ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 ąĖ ą┐čĆąŠčłą╗ąŠ čäąĖą╗čīčéčĆą░čåąĖčÄ. ąŁč鹊 ąĘąĮą░čćąĖčé, čćč鹊 ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čéąĖą┐ą░ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ (čüčéą░ąĮą┤ą░čĆčéąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĖą╗ąĖ čĆą░čüčłąĖčĆąĄąĮąĮąŠąĄ) ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą┐čĆąĖąĮčÅčéčŗčģ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą▓čüąĄ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄąĘą░ą┐ąĖčüą░ąĮąŠ čüąŠą┤ąĄčƹȹĖą╝čŗą╝ MAB. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą▓čüąĄčģ čĆąĄą│ąĖčüčéčĆąŠą▓ ą▒čāč乥čĆą░ ą┤ąŠą╗ąČąĮąŠ čüčćąĖčéą░čéčīčüčÅ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąĮčŗą╝, ą║ąŠą│ą┤ą░ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 ą╗čÄą▒ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ.
ążą╗ą░ą│ąĖ ą┐čĆąĖąĄą╝ą░ / ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ . ąÜąŠą│ą┤ą░ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐ąĄčĆąĄą╝ąĄčēą░ąĄčéčüčÅ ą▓ ą╗čÄą▒ąŠą╣ ąĖąĘ ą▒čāč乥čĆąŠą▓ ą┐čĆąĖąĄą╝ą░, čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé CANINTF.RXnIF. ąŁč鹊čé ą▒ąĖčé ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠčćąĖčēąĄąĮ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝, čćč鹊ą▒čŗ ą┐ąŠąĘą▓ąŠą╗ąĖčéčī ąĮąŠą▓ąŠą╝čā čüąŠąŠą▒čēąĄąĮąĖčÄ ą▒čŗčéčī ą┐ąŠą╝ąĄčēąĄąĮąĮčŗą╝ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒čāč乥čĆ. ąŁč鹊čé ą▒čāč乥čĆ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐ąŠąĘąĖčéąĖą▓ąĮčāčÄ ąŠą▒čĆą░čéąĮčāčÄ čüą▓čÅąĘčī, ą┤ą░čÄčēčāčÄ ą│ą░čĆą░ąĮčéąĖčÄ, čćč鹊 čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĘą░ą▓ąĄčĆčłąĖą╗ ą▓čŗą▒ąŠčĆą║čā čüąŠąŠą▒čēąĄąĮąĖčÅ ąĖąĘ ą▒čāč乥čĆą░ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ MCP2515 ą┐ąŠą┐čŗčéą░ąĄčéčüčÅ ąĘą░ą│čĆčāąĘąĖčéčī ąĮąŠą▓ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓ č鹊čé ąČąĄ ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░.
ąĢčüą╗ąĖ ą▒ąĖčé CANINTE.RXnIE čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 ąĮą░ ą▓čŗą▓ąŠą┤ąĄ /INT ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮ čüąĖą│ąĮą░ą╗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĖą╣ ą┐čĆąĖąĄą╝ ą┤ąŠą┐čāčüčéąĖą╝ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąÆ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ čüą▓čÅąĘą░ąĮąĮčŗą╣ ą▓čŗą▓ąŠą┤ RXnBF ą▓čŗą┤ą░čüčé ąĮą░ ą▓čŗčģąŠą┤ąĄ ą╗ąŠą│. 0, ąĄčüą╗ąĖ ąŠąĮ ą▒čŗą╗ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą▓čŗą▓ąŠą┤ ąĖąĮą┤ąĖą║ą░čåąĖąĖ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░. ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. čüąĄą║čåąĖčÄ "ąÆčŗą▓ąŠą┤čŗ RX0BF ąĖ RX1BF".
ą¤čĆąĖąŠčĆąĖč鹥čé ą┐čĆąĖąĄą╝ą░ . ąŻ ą▒čāč乥čĆą░ RXB0 ąĄčüčéčī ą┐čĆąĖą▓čÅąĘą░ąĮąĮčŗąĄ ą║ ąĮąĄą╝čā ą╝ą░čüą║ą░ ąĖ 2 čäąĖą╗čīčéčĆą░ ą┤ąŠą┐čāčüčéąĖą╝ąŠčüčéąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąóą░ą║ąČąĄ čā ą▒čāč乥čĆą░ RXB0 ą┐čĆąĖąŠčĆąĖč鹥čé ą┐čĆąĖąĄą╝ą░ ą▓čŗčłąĄ, ą┐ąŠčŹč鹊ą╝čā ą┐čĆąĖąĮčÅč鹊ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ čüąĮą░čćą░ą╗ą░ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ ą┐ąŠ ą╝ą░čüą║ąĄ ąĖ čäąĖą╗čīčéčĆą░ą╝ ą▒čāč乥čĆą░ RXB0.
ąæčāč乥čĆ RXB1 ąĖą╝ąĄąĄčé ą┐čĆąĖąŠčĆąĖč鹥čé ąĮąĖąČąĄ, ąĖ ą║ ąĮąĄą╝čā ą┐čĆąĖą▓čÅąĘą░ąĮčŗ ąŠą┤ąĮą░ ą╝ą░čüą║ą░ ąĖ 4 čäąĖą╗čīčéčĆą░ ą┤ąŠą┐čāčüčéąĖą╝ąŠčüčéąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąÆ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ č鹊ą╝čā, čćč鹊 ą║ čüąŠąŠą▒čēąĄąĮąĖčÄ čüąĮą░čćą░ą╗ą░ ą┐čĆąĖą║ą╗ą░ą┤čŗą▓ą░čÄčéčüčÅ ą╝ą░čüą║ą░ ąĖ čäąĖą╗čīčéčĆčŗ RXB0, ą╝ąĄąĮčīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čäąĖą╗čīčéčĆąŠą▓ ą┤ąŠą┐čāčüčéąĖą╝ąŠčüčéąĖ ą▓ RXB0 ą┤ąĄą╗ą░čÄčé ąĄą│ąŠ ą▒ąŠą╗ąĄąĄ čüčéčĆąŠą│ąĖą╝ ą▓ ą┐čĆąŠą▓ąĄčĆą║ąĄ, ąĖ čŹč鹊 ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé ąĮą░ą╗ąĖčćąĖąĄ ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąŠą│ąŠ ą┐čĆąĖąŠčĆąĖč鹥čéą░ ą┤ą╗čÅ ą▒čāč乥čĆą░ RXB0.
ąÜąŠą│ą┤ą░ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐čĆąĖąĮčÅč鹊, ą▒ąĖčéčŗ [3:0] čĆąĄą│ąĖčüčéčĆą░ RXBnCTRL ą┐ąŠą║ą░ąČčāčé ąĮąŠą╝ąĄčĆ čäąĖą╗čīčéčĆą░ ą┤ąŠą┐čāčüčéąĖą╝ąŠčüčéąĖ, ą║ąŠč鹊čĆčŗą╣ čĆą░ąĘčĆąĄčłąĖą╗ ą┐čĆąĖąĄą╝, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé č鹊ą│ąŠ, ą▒čŗą╗ąŠ ą╗ąĖ čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠą▒čŗčćąĮčŗą╝, ąĖą╗ąĖ ąŠąĮąŠ ą▒čŗą╗ąŠ remote-ąĘą░ą┐čĆąŠčüąŠą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ.
ąĀąĄąČąĖą╝ ą┐čĆąŠą╗ąŠąĮą│ą░čåąĖąĖ ą▒čāč乥čĆą░ RXB0 . ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ čĆąĄą│ąĖčüčéčĆ RXB0CTRL ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ čéą░ą║, čćč鹊 ąĄčüą╗ąĖ RXB0 čüąŠą┤ąĄčƹȹĖčé ą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ, ąĖ ą┐čĆąĖ čŹč鹊ą╝ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 ą┤čĆčāą│ąŠąĄ ą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ, č鹊 ąĮąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ąŠčłąĖą▒ą║ą░ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ, ąĖ ąĮąŠą▓ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐čĆąŠčüč鹊 ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąŠ ą▓ ą▒čāč乥čĆ RXB1, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ą║čĆąĖč鹥čĆąĖčÅ ą┤ąŠą┐čāčüčéąĖą╝ąŠčüčéąĖ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą┤ą╗čÅ ą▒čāč乥čĆą░ RXB1.
ąæąĖčéčŗ RXM čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčé čüą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ čĆąĄąČąĖą╝čŗ ą┐čĆąĖąĄą╝ą░. ą×ą▒čŗčćąĮąŠ čŹčéąĖ ą▒ąĖčéčŗ ąŠčćąĖčēąĄąĮčŗ (ą▓ ąĮąĖčģ ąĘą░ą┐ąĖčüą░ąĮąŠ 00), čćč鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī ą┐čĆąĖąĄą╝ ą▓čüąĄčģ ą┤ąŠą┐čāčüčéąĖą╝čŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣, ą║ą░ą║ čŹč鹊 ąĮą░čüčéčĆąŠąĄąĮąŠ čäąĖą╗čīčéčĆą░ą╝ąĖ ą┤ąŠą┐čāčüčéąĖą╝ąŠčüčéąĖ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┐čĆąĖąĮčÅčéčī ą╗ąĖ čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ąĖą╗ąĖ čĆą░čüčłąĖčĆąĄąĮąĮčŗąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą▒ąĖč鹊ą╝ RFXnSIDL.EXIDE ą▓ čĆąĄą│ąĖčüčéčĆąĄ čäąĖą╗čīčéčĆą░ ą┤ąŠą┐čāčüčéąĖą╝ąŠčüčéąĖ.
ąĢčüą╗ąĖ ą▒ąĖčéčŗ RXBnCTRL.RXM čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ 01 ąĖą╗ąĖ 10, č鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ ą▒čāą┤ąĄčé ą┐čĆąĖąĮąĖą╝ą░čéčī č鹊ą╗čīą║ąŠ čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ąĖą╗ąĖ č鹊ą╗čīą║ąŠ čĆą░čüčłąĖčĆąĄąĮąĮčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ. ąĢčüą╗ąĖ čā čäąĖą╗čīčéčĆą░ ą┤ąŠą┐čāčüčéąĖą╝ąŠčüčéąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé RFXnSIDL.EXIDE, čéą░ą║ čćč鹊 ąŠąĮ ąĮąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čĆąĄąČąĖą╝čā, ąĮą░čüčéčĆąŠąĄąĮąĮąŠą╝čā ą▒ąĖčéą░ą╝ąĖ RXBnCTRL.RXM, č鹊 ą┐čĆąĖąĄą╝ąĮčŗą╣ čäąĖą╗čīčéčĆ ą▒čāą┤ąĄčé čüčćąĖčéą░čéčīčüčÅ ą▒ąĄčüą┐ąŠą╗ąĄąĘąĮčŗą╝. ąŁčéąĖ ą┤ą▓ą░ čĆąĄąČąĖą╝ą░ ą▒ąĖčé RXBnCTRL.RXM ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ čüąĖčüč鹥ą╝ą░čģ, ą│ą┤ąĄ ąĘą░čĆą░ąĮąĄąĄ ąĖąĘą▓ąĄčüčéąĮąŠ, čćč鹊 ąĮą░ čłąĖąĮąĄ CAN ą┐čĆąĖčüčāčéčüčéą▓čāčÄčé č鹊ą╗čīą║ąŠ čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ąĖą╗ąĖ č鹊ą╗čīą║ąŠ čĆą░čüčłąĖčĆąĄąĮąĮčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ.
ąĢčüą╗ąĖ ą▒ąĖčéčŗ RXBnCTRL.RXM čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ 11, č鹊 ą▒čāč乥čĆ ą▒čāą┤ąĄčé ą┐čĆąĖąĮąĖą╝ą░čéčī ą▓čüąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé č鹊ą│ąŠ, čćč鹊 ąĮą░čüčéčĆąŠąĄąĮąŠ čäąĖą╗čīčéčĆą░ą╝ąĖ ą┤ąŠą┐čāčüčéąĖą╝ąŠčüčéąĖ. ąóą░ą║ąČąĄ ąĄčüą╗ąĖ ą▓ čüąŠąŠą▒čēąĄąĮąĖąĖ ąĖą╝ąĄąĄčéčüčÅ ąŠčłąĖą▒ą║ą░ ą┤ąŠ EOF (ą┤ąŠ ą║ąŠąĮčåą░ čäčĆąĄą╣ą╝ą░), č鹊 ą┐ąŠčĆčåąĖčÅ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą║ąŠč鹊čĆą░čÅ ą▒čŗą╗ą░ čüąŠą▒čĆą░ąĮą░ ą▓ MAB ą┤ąŠ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ čäčĆąĄą╣ą╝ą░ ą▒čāą┤ąĄčé ąĘą░ą│čĆčāąČąĄąĮą░ ą▓ ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░. ąŁč鹊čé čĆąĄąČąĖą╝ ąĖą╝ąĄąĄčé ąĮąĄą║ąŠč鹊čĆąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ ąŠčéą╗ą░ą┤ą║ąĖ čüąĖčüč鹥ą╝čŗ CAN, ąĖ ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ čĆąĄą░ą╗čīąĮčŗčģ čĆą░ą▒ąŠčćąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ 菹║čüą┐ą╗čāą░čéą░čåąĖąĖ čüąĖčüč鹥ą╝ CAN.
ąĪąĖą│ąĮą░ą╗ SOF . ąĢčüą╗ąĖ čŹč鹊 čĆą░ąĘčĆąĄčłąĄąĮąŠ, č鹊 ą┐čĆąĖ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖąĖ ąĮą░čćą░ą╗ą░ čäčĆąĄą╣ą╝ą░ (Start-of-Frame, SOF) ąĮą░ ą▓čŗą▓ąŠą┤ąĄ SOF ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ čüąĖą│ąĮą░ą╗, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ąĮą░čćą░ą╗čā ą║ą░ąČą┤ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą║ą░ą║ čŹč鹊 ą▒čŗą╗ąŠ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąŠ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ ą┐čĆąĖąĄą╝ą░ RXCAN.
ąÆčŗą▓ąŠą┤ RXCAN ą╝ąŠąĮąĖč鹊čĆąĖčé čüąŠčüč鹊čÅąĮąĖąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ čłąĖąĮčŗ, čćč鹊ą▒čŗ ą┐ąŠą╣ą╝ą░čéčī ą┐ąĄčĆąĄą┐ą░ą┤ ą┐ąĄčĆąĄčģąŠą┤ą░ čłąĖąĮčŗ ąĖąĘ čĆąĄčåąĄčüčüąĖą▓ąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ ą▓ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮąŠąĄ. ąĢčüą╗ąĖ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ąŠčüčéą░ąĄčéčüčÅ ą┤ąŠ č鹊čćą║ąĖ ą▓čŗą▒ąŠčĆą║ąĖ, č鹊 MCP2515 ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčé čŹč鹊 ą║ą░ą║ SOF, ąĖ ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮ ąĖą╝ą┐čāą╗čīčü čüąĖą│ąĮą░ą╗ą░ SOF. ąĢčüą╗ąĖ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ąĮąĄ čüąŠčģčĆą░ąĮąĖą╗ąŠčüčī ą┤ąŠ č鹊čćą║ąĖ ą▓čŗą▒ąŠčĆą║ąĖ, č鹊 MCP2515 ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčé čŹč鹊 ą║ą░ą║ ą▓čŗą▒čĆąŠčü ą┐ąŠą╝ąĄčģąĖ ąĮą░ čłąĖąĮąĄ, ąĖ čüąĖą│ąĮą░ą╗ SOF ąĮąĄ ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮ. ąĀąĖčü. 4-1 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÄ SOF ąĖ čäąĖą╗čīčéčĆą░čåąĖčÄ ą┐ąŠą╝ąĄčģ, ą┐čĆąĖą╝ąĄąĮčÅąĄą╝čāčÄ ą┐čĆąĖ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĖ ąĮą░čćą░ą╗ą░ čäčĆąĄą╣ą╝ą░.
ąĀąĖčü. 4-1. ąĪąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÅ ąŠ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖąĖ ąĮą░čćą░ą╗ą░ čäčĆąĄą╣ą╝ą░.
ąĀąĄąČąĖą╝ One-Shot ąĖčüą┐ąŠą╗čīąĘčāąĄčé čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÄ SOF ą┤ą╗čÅ čüąĖčüč鹥ą╝ TTCAN. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą╝ąŠąČąĄčé ąŠą┐čĆą░čłąĖą▓ą░čéčī ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąŠą▒ą░ čüąĖą│ąĮą░ą╗ą░ ą▓čŗą▓ąŠą┤ąŠą▓ RXCAN ąĖ SOF, ąĖ ą┐ąŠ ąĮąĖą╝ ąĘą░čĆą░ąĮąĄąĄ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░čéčī ąĮą░ą╗ąĖčćąĖąĄ čäąĖąĘąĖč湥čüą║ąĖčģ ą┐čĆąŠą▒ą╗ąĄą╝ čü ą║ąŠčĆąŠčéą║ąĖą╝ąĖ ą▓čŗą▒čĆąŠčüą░ą╝ąĖ ą┐ąŠą╝ąĄčģ ąĮą░ čłąĖąĮąĄ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ čŹčéąĖ ą┐čĆąŠą▒ą╗ąĄą╝čŗ ą╝ąŠą│čāčé ą┐ąŠą▓ą╗ąĖčÅčéčī ąĮą░ ąŠą▒ą╝ąĄąĮ ą┐ąŠ čłąĖąĮąĄ CAN.
ąÆčŗą▓ąŠą┤čŗ /RX0BF ąĖ /RX1BF . ąÆ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ ą▓čŗą▓ąŠą┤čā /INT, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čüąĖą│ąĮą░ą╗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčé ą╝ąĮąŠą│ąĖčģ čĆą░ąĘąĮčŗčģ čüąŠą▒čŗčéąĖą╣, ąĖą╝ąĄčÄčéčüčÅ čéą░ą║ąČąĄ čüąĖą│ąĮą░ą╗čŗ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ąĮąŠą│ąŠ ą▒čāč乥čĆą░ (/RX0BF ąĖ /RX1BF), čćč鹊 ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ąĖąĮą┤ąĖčåąĖčĆąŠą▓ą░ąĮąĖčÅ č鹊ą│ąŠ, čćč鹊 ą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 ą▓ ą▒čāč乥čĆ RXB0 ąĖą╗ąĖ RXB1 čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ. ąÆčŗą▓ąŠą┤čŗ /RX0BF ąĖ /RX1BF ąĖą╝ąĄčÄčé čéčĆąĖ čĆą░ąĘąĮčŗčģ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ (čćč鹊 ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ čĆąĄą│ąĖčüčéčĆąŠą╝ BFPCTRL):
1. ąŚą░ą┐čĆąĄčēąĄąĮąŠ.
ąĪąŠčüč鹊čÅąĮąĖąĄ "ąĘą░ą┐čĆąĄčēąĄąĮąŠ" ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī, ą║ąŠą│ą┤ą░ ąŠčćąĖčēąĄąĮ ą▒ąĖčé BFPCTRL.BnBFE, ą┐čĆąĖ čŹč鹊ą╝ ą▓čŗą▓ąŠą┤ /RXnBF ą▒čāą┤ąĄčé ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą▓čŗčüąŠą║ąŠą│ąŠ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅ. ąÆčŗą▓ąŠą┤ /RXnBF ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą╗ąĖą▒ąŠ ą┤ą╗čÅ čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖąĖ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą▒čāč乥čĆą░, ą╗ąĖą▒ąŠ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą║ą░ą║ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čåąĖčäčĆąŠą▓ąŠą╣ ą▓čŗčģąŠą┤. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĖ čüąŠčüč鹊čÅąĮąĖąĄ čŹčéąĖčģ ą▓čŗą▓ąŠą┤ąŠą▓ ą┤ąŠčüčéčāą┐ąĮąŠ č湥čĆąĄąĘ čĆąĄą│ąĖčüčéčĆ BFPCTRL. ąÜąŠą│ą┤ą░ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ čĆąĄąČąĖą╝ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüąĖą│ąĮą░ą╗ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖč鹊ą▓ BFPCTRL.BxBFE ąĖ BFPCTRL.BxBFM), čŹčéąĖ ą▓čŗą▓ąŠą┤čŗ ąĖą╝ąĄčÄčé ą░ą║čéąĖą▓ąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 0, ąĖ ąŠąĮąĖ ą┐čĆąĖą▓čÅąĘą░ąĮčŗ ą║ ą▒ąĖčéčā CANINTF.RXnIF ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą▒čāč乥čĆą░. ąÜąŠą│ą┤ą░ čŹč鹊čé ą▒ąĖčé ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ ą╗ąŠą│. 1 ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ ąĖąĘ ą▒čāč乥čĆąŠą▓ ą┐čĆąĖąĄą╝ą░ (ą┐ąŠą║ą░ąĘčŗą▓ą░čÅ č鹥ą╝ čüą░ą╝čŗą╝, čćč鹊 ą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ąĘą░ą│čĆčāąČąĄąĮąŠ ą▓ ą▒čāč乥čĆ), č鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▓čŗą▓ąŠą┤ RXBnBF ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 0. ąÜąŠą│ą┤ą░ ą▒ąĖčé CANINTF.RXnIF ąŠčćąĖčēą░ąĄčéčüčÅ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▓čŗą▓ąŠą┤ čüąĖą│ąĮą░ą╗ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ ą╗ąŠą│. 1, ąĖ ąŠčüčéą░ąĮąĄčéčüčÅ ą▓ čŹč鹊ą╝ čüąŠčüč鹊čÅąĮąĖąĖ, ą┐ąŠą║ą░ ą▓ ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░ ąĮąĄ ą▒čāą┤ąĄčé ąĘą░ą│čĆčāąČąĄąĮąŠ ąĮąŠą▓ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ.
ąÜąŠą│ą┤ą░ ą▓čŗą▓ąŠą┤čŗ /RXnBF čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą║ą░ą║ čåąĖčäčĆąŠą▓čŗąĄ ą▓čŗčģąŠą┤čŗ, ą▒ąĖčé BFPCTRL.BxBFM ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠčćąĖčēąĄąĮ, ąĖ ą▒ąĖčé BFPCTRL.BnBFE ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┤ą╗čÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą▒čāč乥čĆą░. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą▒ąĖč鹊ą╝ BFPCTRL.BnBFS. ąŚą░ą┐ąĖčüčī ą╗ąŠą│. 1 ą▓ ą▒ąĖčé BnBFS ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ č鹊ą╝čā, čćč鹊 ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝ ą▓čŗčģąŠą┤ąĄ /RXnBF ą┐ąŠčÅą▓ąĖčéčüčÅ ą╗ąŠą│. 1, ą░ ąĘą░ą┐ąĖčüčī ą╗ąŠą│. 0 ą▓ ą▒ąĖčé BnBFS ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą▓čŗą▓ąŠą┤čā ąĮą░ ą▓čŗčģąŠą┤ąĄ /RXnBF ą╗ąŠą│. 0. ąÜąŠą│ą┤ą░ ą▓čŗą▓ąŠą┤čŗ /RXnBF ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓ čéą░ą║ąŠą╝ čĆąĄąČąĖą╝ąĄ, čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ ą┤ąŠą╗ąČąĮąŠ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą║ąŠą╝ą░ąĮą┤čŗ Bit Modify SPI, čćč鹊ą▒čŗ ą┐čĆąĄą┤ąŠčéą▓čĆą░čéąĖčéčī ą┐ąŠčÅą▓ą╗ąĄąĮąĖąĄ ą▓čŗą▒čĆąŠčüąŠą▓ ąĮą░ ą┤čĆčāą│ąŠą╝ ą▓čŗą▓ąŠą┤ąĄ /RXnBF.
ąóą░ą▒ą╗ąĖčåą░ 4-1. ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓ /RXnBF.
BnBFE BnBFM BnBFS ąĪąŠčüč鹊čÅąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓
0
x
x
ąŚą░ą┐čĆąĄčēąĄąĮąŠ, ą▓čŗčģąŠą┤čŗ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą▓čŗčüąŠą║ąŠą│ąŠ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅ.
1
1
x
ąÆčŗą┤ą░čćą░ čüąĖą│ąĮą░ą╗ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ ą▒čāč乥čĆą░.
1
0
0
ą”ąĖčäčĆąŠą▓ąŠą╣ ą▓čŗčģąŠą┤ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąŠą│. 0.
1
0
1
ą”ąĖčäčĆąŠą▓ąŠą╣ ą▓čŗčģąŠą┤ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąŠą│. 1.
ąĀąĖčü. 4-3. ąæą╗ąŠą║-ą┤ąĖą░ą│čĆą░ą╝ą╝ą░ ą░ą╗ą│ąŠčĆąĖčéą╝ą░ ą┐čĆąĖąĄą╝ą░.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé - RXM1 RXM0 - RXRTR BUKT BUKT1 FILHIT0
ąøąĄą│ąĄąĮą┤ą░
U-0
R/W-0
R/W-0
U-0
R-0
R/W-0
R-0
R-0
7 ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ, čćąĖčéą░ąĄčéčüčÅ ą║ą░ą║ 0.
6-5, RXM[1:0] : ą▒ąĖčéčŗ čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░.
11 ą╝ą░čüą║ąĖ/čäąĖą╗čīčéčĆčŗ ąŠčéą║ą╗čÄč湥ąĮčŗ; ą▒čāą┤ąĄčé ą┐čĆąĖąĮčÅč鹊 ą╗čÄą▒ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ.
4 ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ, čćąĖčéą░ąĄčéčüčÅ ą║ą░ą║ 0.
3, RXRTR : Received Remote Transfer Request.
1 ą┐čĆąĖąĮčÅčé ąĘą░ą┐čĆąŠčü ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā ąŠčé ą┤čĆčāą│ąŠą│ąŠ ą┐ąĖčĆą░ čüąĄčéąĖ (Remote Transfer Request).
2, BUKT : ą▒ąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąŠą╗ąŠąĮą│ą░čåąĖąĖ ą▒čāč乥čĆą░ RXB0 (Rollover Enable).
1 ą┐čĆąĖ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖąĖ ąĮąŠą▓ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┤ą╗čÅ ą▒čāč乥čĆą░ RXB0 čüčéą░čĆąŠąĄ, ąĮąĄ ąŠą▒čĆą░ą▒ąŠčéą░ąĮąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ č鹊ą╝ ąČąĄ ą▒čāč乥čĆąĄ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąŠ ą▓ ą▒čāč乥čĆ RXB1, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ą┤čĆčāą│ąĖčģ čāčüą╗ąŠą▓ąĖą╣ (ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé č鹊ą│ąŠ, ąĘą░ą┐ąŠą╗ąĮąĄąĮ ą╗ąĖ ą▒čāč乥čĆ RXB1, ąĖ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čüąŠčüč鹊čÅąĮąĖčÅ ąĄą│ąŠ čäąĖą╗čīčéčĆąŠą▓).
1, BUKT1 : ą║ąŠą┐ąĖčÅ ą▒ąĖčéą░ BUKT, ą┤ąŠčüčéčāą┐ąĮą░čÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ (ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ąĮčāčéčĆąĖ MCP2515).
0, FILHIT0 : ą▒ąĖčé čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÅ čäąĖą╗čīčéčĆą░ (Filter Hit bit) - ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ąŠą╣ čäąĖą╗čīčéčĆ ą┤ąŠą┐čāčüčéąĖą╝ąŠčüčéąĖ čĆą░ąĘčĆąĄčłąĖą╗ ą┐čĆąĖąĄą╝ čüąŠąŠą▒čēąĄąĮąĖčÅ.
1 Acceptance Filter 1 (RXF1)
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ą┐čĆąŠą╗ąŠąĮą│ą░čåąĖčÅ čü ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄą╝ ą┤ą░ąĮąĮčŗčģ ąĖąĘ RXB0 ą▓ RXB1, č鹊 ą▒ąĖčé FILHIT ą▒čāą┤ąĄčé ąŠčéčĆą░ąČą░čéčī čäąĖą╗čīčéčĆ, ą║ąŠč鹊čĆčŗą╣ čĆą░ąĘčĆąĄčłąĖą╗ ą┐čĆąĖąĄą╝ ąĮąŠą▓ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé - RXM1 RXM0 - RXRTR FILHIT2 FILHIT1 FILHIT0
ąøąĄą│ąĄąĮą┤ą░
U-0
R/W-0
R/W-0
U-0
R-0
R-0
R-0
R-0
7 ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ, čćąĖčéą░ąĄčéčüčÅ ą║ą░ą║ 0.
6-5, RXM[1:0] : ą▒ąĖčéčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆąĄąČąĖą╝ą░ą╝ąĖ čĆą░ą▒ąŠčéčŗ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ (Receive Buffer Operating mode).
11 ą╝ą░čüą║ąĖ/čäąĖą╗čīčéčĆčŗ ąŠčéą║ą╗čÄč湥ąĮčŗ; ą▒čāą┤ąĄčé ą┐čĆąĖąĮčÅč鹊 ą╗čÄą▒ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ.
4 ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ, čćąĖčéą░ąĄčéčüčÅ ą║ą░ą║ 0.
3, RXRTR : ą┐čĆąĖąĮčÅčé ąĘą░ą┐čĆąŠčü ą┐ąĄčĆąĄą┤ą░čćąĖ ąŠčé ą┤čĆčāą│ąŠą│ąŠ ą┐ąĖčĆą░ čüąĄčéąĖ (Received Remote Transfer Request).
1 ą┐čĆąĖąĮčÅčé ąĘą░ą┐čĆąŠčü ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā ąŠčé ą┤čĆčāą│ąŠą│ąŠ ą┐ąĖčĆą░ čüąĄčéąĖ (Remote Transfer Request).
2-0, FILHIT[2:0] : ą▒ąĖčéčŗ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÅ čäąĖą╗čīčéčĆą░ (Filter Hit bits) - ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé, ą║ą░ą║ąŠą╣ čäąĖą╗čīčéčĆ ą┤ąŠą┐čāčüčéąĖą╝ąŠčüčéąĖ čĆą░ąĘčĆąĄčłąĖą╗ ą┐čĆąĖąĄą╝ čüąŠąŠą▒čēąĄąĮąĖčÅ.
101 = Acceptance Filter 5 (RXF5)
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé - - B1BFS B0BFS B1BFE B0BFE B1BFM B0BFM
ąøąĄą│ąĄąĮą┤ą░
U-0
U-0
R/W-0
R/W-0
R/W-0
R/W-0
R/W-0
R/W-0
7-6 ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ, čćąĖčéą░čÄčéčüčÅ ą║ą░ą║ 0.
5, B1BFS : ą▒ąĖčé čüąŠčüč鹊čÅąĮąĖčÅ ą▓čŗą▓ąŠą┤ą░ /RX1BF (č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą▓čŗčģąŠą┤ą░). ą¦ąĖčéą░ąĄčéčüčÅ ą║ą░ą║ 0, ą║ąŠą│ą┤ą░ /RX1BF čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą▓čŗčģąŠą┤ čüąĖą│ąĮą░ą╗ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
4, B0BFS : ą▒ąĖčé čüąŠčüč鹊čÅąĮąĖčÅ ą▓čŗą▓ąŠą┤ą░ /RX0BF (č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą▓čŗčģąŠą┤ą░). ą¦ąĖčéą░ąĄčéčüčÅ ą║ą░ą║ 0, ą║ąŠą│ą┤ą░ /RX0BF čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą▓čŗčģąŠą┤ čüąĖą│ąĮą░ą╗ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
3, B1BFE : ą▒ąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čäčāąĮą║čåąĖąĖ ą▓čŗą▓ąŠą┤ą░ /RX1BF.
1 čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮąŠ, ąĄą│ąŠ čĆą░ą▒ąŠčćąĖą╣ čĆąĄąČąĖą╝ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą▒ąĖč鹊ą╝ B1BFM.
2, B0BFE : ą▒ąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čäčāąĮą║čåąĖąĖ ą▓čŗą▓ąŠą┤ą░ /RX0BF.
1 čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮąŠ, ąĄą│ąŠ čĆą░ą▒ąŠčćąĖą╣ čĆąĄąČąĖą╝ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą▒ąĖč鹊ą╝ B0BFM.
1, B1BFM : ą▒ąĖčé čĆą░ą▒ąŠč湥ą│ąŠ čĆąĄąČąĖą╝ą░ ą▓čŗą▓ąŠą┤ą░ /RX1BF.
1 ą▓čŗą▓ąŠą┤ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ ą▓čŗčģąŠą┤ čüąĖą│ąĮą░ą╗ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠą│ą┤ą░ ą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĘą░ą│čĆčāąČąĄąĮ ą▓ ą▒čāč乥čĆ RXB1.
0, B0BFM : ą▒ąĖčé čĆą░ą▒ąŠč湥ą│ąŠ čĆąĄąČąĖą╝ą░ ą▓čŗą▓ąŠą┤ą░ /RX0BF.
1 ą▓čŗą▓ąŠą┤ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ ą▓čŗčģąŠą┤ čüąĖą│ąĮą░ą╗ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠą│ą┤ą░ ą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĘą░ą│čĆčāąČąĄąĮ ą▓ ą▒čāč乥čĆ RXB0.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé SID[10:3]
ąøąĄą│ąĄąĮą┤ą░
R-x
7-0, SID[10:3] : ą▒ąĖčéčŗ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░. ąÆ čŹčéąĖčģ ą▒ąĖčéą░čģ čüąŠą┤ąĄčƹȹ░čéčüčÅ 8 čüčéą░čĆčłąĖčģ ą▒ąĖčé čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé SID[2:0] SRR IDE - EID[17:16]
ąøąĄą│ąĄąĮą┤ą░
R-x
R-x
R-x
U-0
R-x
7-5, SID[2:0] : ą▒ąĖčéčŗ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░. ąÆ čŹčéąĖčģ ą▒ąĖčéą░čģ čüąŠą┤ąĄčƹȹ░čéčüčÅ 3 ą╝ą╗ą░ą┤čłąĖčģ ą▒ąĖčéą░ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ.
4, SRR : ą▒ąĖčé ąĘą░ą┐čĆąŠčüą░ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ čäčĆąĄą╣ą╝ą░ remote (Standard Frame Remote Transmit Request), ą┤ąŠą┐čāčüčéąĖą╝ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ ą▒ąĖčé IDE = 0.
1 ą┐čĆąĖąĮčÅčé Standard Frame Remote Transmit Request.
3, IDE : ą▒ąĖčé čäą╗ą░ą│ą░ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (Extended Identifier Flag). ąŁč鹊čé ą▒ąĖčé ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ąŠą╣ čäčĆąĄą╣ą╝ ą▒čŗą╗ ą┐čĆąĖąĮčÅčé: čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ąĖą╗ąĖ čĆą░čüčłąĖčĆąĄąĮąĮčŗą╣.
1 ą▒čŗą╗ ą┐čĆąĖąĮčÅčé čĆą░čüčłąĖčĆąĄąĮąĮčŗą╣ čäčĆąĄą╣ą╝ (Extended Frame).
2 ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ, čćąĖčéą░ąĄčéčüčÅ ą║ą░ą║ 0.
1-0, EID[17:16] : ą▒ąĖčéčŗ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (Extended Identifier). ąŁčéąĖ ą▒ąĖčéčŗ čüąŠą┤ąĄčƹȹ░čé 2 čüą░ą╝čŗčģ čüčéą░čĆčłąĖčģ ą▒ąĖčéą░ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé EID[15:8]
ąøąĄą│ąĄąĮą┤ą░
R-x
7-0, EID[15:8] : ąæąĖčéčŗ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (Extended Identifier). ąŚą┤ąĄčüčī čģčĆą░ąĮčÅčéčüčÅ ą▒ąĖčéčŗ 15..8 čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé EID[7:0]
ąøąĄą│ąĄąĮą┤ą░
R-x
7-0, EID[7:0] : ąæąĖčéčŗ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (Extended Identifier). ąŚą┤ąĄčüčī čģčĆą░ąĮčÅčéčüčÅ ą╝ą╗ą░ą┤čłąĖąĄ 8 ą▒ąĖčé čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé - RTR RB1 RB0 DLC[3:0]
ąøąĄą│ąĄąĮą┤ą░
R-x
R-x
R-x
R-x
R-x
7 ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ, čćąĖčéą░ąĄčéčüčÅ ą║ą░ą║ 0.
6, RTR : ą▒ąĖčé ąĘą░ą┐čĆąŠčüą░ ą┐ąĄčĆąĄą┤ą░čćąĖ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ čäčĆąĄą╣ą╝ą░ (Extended Frame Remote Transmission Request), ą┤ąŠą┐čāčüčéąĖą╝ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ RXBnSIDL.IDE=1.
1 ą▒čŗą╗ ą┐čĆąĖąĮčÅčé Extended Frame Remote Transmit Request.
5, RB1: ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą▒ąĖčé 1.
4, RB0: ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą▒ąĖčé 0.
3-0, DLC[3:0] : ą▒ąĖčéčŗ ą║ąŠą┤ą░ ą┤ą╗ąĖąĮčŗ ą┤ą░ąĮąĮčŗčģ (Data Length Code). ą¤ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ą▓ ą┐čĆąĖąĮčÅč鹊ą╝ čüąŠąŠą▒čēąĄąĮąĖąĖ.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé RBnD[7:0]
ąøąĄą│ąĄąĮą┤ą░
R-x
7-0, RBnD7:RBnD0 : ą▒ą░ą╣čé m ą┐ąŠą╗čÅ ą┤ą░ąĮąĮčŗčģ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ n (Receive Buffer n Data Field Bytes m). ąŁč鹊 8 ą▒ą░ą╣čé, čüąŠą┤ąĄčƹȹ░čēąĖčģ ą┐ąŠą╗ąĄąĘąĮčāčÄ ąĮą░ą│čĆčāąĘą║čā ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ.
ążąĖą╗čīčéčĆčŗ ąĖ ą╝ą░čüą║ąĖ ą┐čĆąĖąĄą╝ą░ . ążąĖą╗čīčéčĆčŗ ą┤ąŠą┐čāčüčéąĖą╝ąŠčüčéąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĖ ą╝ą░čüą║ąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī - ąĮčāąČąĮąŠ ą╗ąĖ ą┐čĆąĖąĮčÅčéčī ąĖą╗ąĖ ąŠčéą▒čĆąŠčüąĖčéčī čüąŠąŠą▒čēąĄąĮąĖąĄ, čüąŠą▒čĆą░ąĮąĮąŠąĄ ą▓ MAB. ąĢčüą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ čüčćąĖčéą░ąĄčéčüčÅ ą┤ąŠą┐čāčüčéąĖą╝čŗą╝, č鹊 ąŠąĮąŠ ą▒čāą┤ąĄčé ąĘą░ą│čĆčāąČąĄąĮąŠ ą▓ ąŠą┤ąĖąĮ ąĖąĘ ą▒čāč乥čĆąŠą▓ ą┐čĆąĖąĄą╝ą░ (čüą╝. čĆąĖčü. 4-5). ąÜą░ą║ č鹊ą╗čīą║ąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 ą▓ MAB, ą┐ąŠą╗čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ čüčĆą░ą▓ąĮąĖą▓ą░čÄčéčüčÅ čüąŠ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ čäąĖą╗čīčéčĆą░. ąĢčüą╗ąĖ ąŠą▒ąĮą░čĆčāąČąĄąĮąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĄ (čé. ąĄ. ąŠą▒ąĮą░čĆčāąČąĄąĮąŠ ą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ), č鹊 čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čāą┤ąĄčé ąĘą░ą│čĆčāąČąĄąĮąŠ ą▓ ąŠą┤ąĖąĮ ąĖąĘ ą▒čāč乥čĆąŠą▓ ą┐čĆąĖąĄą╝ą░.
ążąĖą╗čīčéčĆą░čåąĖčÅ ą┐ąŠ ą▒ą░ą╣čéą░ą╝ ą┤ą░ąĮąĮčŗčģ . ąÜąŠą│ą┤ą░ ą┐čĆąĖąĮąĖą╝ą░čÄčéčüčÅ čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ čäčĆąĄą╣ą╝čŗ ą┤ą░ąĮąĮčŗčģ (čā ą║ąŠč鹊čĆčŗčģ 11-ą▒ąĖčéąĮčŗąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ), MCP2515 ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĮą░ą║ą╗ą░ą┤čŗą▓ą░ąĄčé 16 ą▒ąĖčé ą╝ą░čüąŠą║ ąĖ čäąĖą╗čīčéčĆąŠą▓, ąŠą▒čŗčćąĮąŠ čüą▓čÅąĘą░ąĮąĮčŗčģ čü čĆą░čüčłąĖčĆąĄąĮąĮčŗą╝ąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ą╝ąĖ, ąĮą░ ą┐ąĄčĆą▓čŗąĄ 16 ą▒ąĖčé ą┐ąŠą╗čÅ ą┤ą░ąĮąĮčŗčģ (ą▒ą░ą╣čéčŗ ą┤ą░ąĮąĮčŗčģ 0 ąĖ 1). ąØą░ čĆąĖčü. 4-4 ą┐ąŠą║ą░ąĘą░ąĮąŠ, ą║ą░ą║ ą╝ą░čüą║ąĖ ąĖ čäąĖą╗čīčéčĆčŗ ą┐čĆąĖą║ą╗ą░ą┤čŗą▓ą░čÄčéčüčÅ ą┤ą╗čÅ čĆą░čüčłąĖčĆąĄąĮąĮčŗčģ ąĖ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ čäčĆąĄą╣ą╝ąŠą▓ ą┤ą░ąĮąĮčŗčģ.
ąĀąĖčü. 4-4: ą£ą░čüą║ąĖ ąĖ čäąĖą╗čīčéčĆčŗ, ą┐čĆąĖą║ą╗ą░ą┤čŗą▓ą░ąĄą╝čŗąĄ ą║ čäčĆąĄą╣ą╝ą░ą╝ CAN.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ *: ą┤ą▓ą░ čüčéą░čĆčłąĖčģ ą▒ąĖčéą░ (EID17 ąĖ EID16) ą╝ą░čüą║ąĖ ąĖ čäąĖą╗čīčéčĆą░ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ.
ążąĖą╗čīčéčĆą░čåąĖčÅ ą┐ąŠ ą▒ą░ą╣čéą░ą╝ ą┤ą░ąĮąĮčŗčģ čüąĮąĖąČą░ąĄčé ąĮą░ą│čĆčāąĘą║čā ąĮą░ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐čĆąĖ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą▓čŗčüąŠą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗčģ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓, ą║ąŠą│ą┤ą░ ąŠąĮąĖ ąŠčüčāčēąĄčüčéą▓ą╗čÅčÄčé čäąĖą╗čīčéčĆą░čåąĖčÄ ą┐ąŠ čüčéą░čĆčłąĄą╝čā ą▒ą░ą╣čéčā ą┤ą░ąĮąĮčŗčģ (ą║ą░ą║ ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą▓ ą┐čĆąŠč鹊ą║ąŠą╗ąĄ DeviceNetŌäó).
ąĪąŠą▓ą┐ą░ą┤ąĄąĮąĖąĄ čü čäąĖą╗čīčéčĆąŠą╝ . ą£ą░čüą║ąĖ čäąĖą╗čīčéčĆą░ (čüą╝. čĆąĄą│ąĖčüčéčĆčŗ RXMnSIDH, RXMnSIDL, RXMnEID8, RXMnEID0) ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą║ą░ą║ąĖąĄ ą▒ąĖčéčŗ ą▓ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąĄ ą┤ąŠą╗ąČąĮčŗ čüąŠą▓ą┐ą░ą┤ą░čéčī čü ą▒ąĖčéą░ą╝ąĖ čäąĖą╗čīčéčĆąŠą▓. ąóą░ą▒ą╗ąĖčåą░ ąĖčüčéąĖąĮąĮąŠčüčéąĖ ą▓ čéą░ą▒ą╗ąĖčåąĄ 4-2 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ ą║ą░ąČą┤čŗą╣ ą▒ąĖčé ą▓ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąĄ čüčĆą░ą▓ąĮąĖą▓ą░ąĄčéčüčÅ čü ą╝ą░čüą║ą░ą╝ąĖ ąĖ čäąĖą╗čīčéčĆą░ą╝ąĖ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą┤ąŠą╗ąČąĮąŠ ą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗčéčī ą┐ąŠą╝ąĄčēąĄąĮąŠ ą▓ ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░. ą£ą░čüą║ą░ ą▓ čüčāčēąĮąŠčüčéąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, ą║ą░ą║ąŠą╣ ąĖąĘ ą▒ąĖč鹊ą▓ čäąĖą╗čīčéčĆą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čäąĖą╗čīčéčĆą░čåąĖąĖ. ąĢčüą╗ąĖ ą╗čÄą▒ąŠą╣ ą▒ąĖčé ą▓ ą╝ą░čüą║ąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0, č鹊 čŹč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąĮąĖ ąŠą┤ąĖąĮ ąĖąĘ ą▒ąĖč鹊ą▓ čäąĖą╗čīčéčĆą░ ąĮąĄ ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ, čéą░ą║ čćč鹊 čüąŠąŠą▒čēąĄąĮąĖčÅ ą▒čāą┤ąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐čĆąĖąĮčÅč鹊, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čüąŠčüč鹊čÅąĮąĖčÅ ą▒ąĖč鹊ą▓ čäąĖą╗čīčéčĆą░.
ąóą░ą▒ą╗ąĖčåą░ 4-2. ąóą░ą▒ą╗ąĖčåą░ ąĖčüčéąĖąĮąĮąŠčüčéąĖ čäąĖą╗čīčéčĆą░/ą╝ą░čüą║ąĖ.
ąæąĖčé ąæąĖčé ąæąĖčé ID ą¤čĆąĖąĮčÅčéčī ąĖą╗ąĖ ąŠčéą▒čĆąŠčüąĖčéčī
0
x
x
ą¤čĆąĖąĮčÅčéčī
1
0
0
ą¤čĆąĖąĮčÅčéčī
1
0
1
ą×čéą▒čĆąŠčüąĖčéčī
1
1
0
ą×čéą▒čĆąŠčüąĖčéčī
1
1
1
ą¤čĆąĖąĮčÅčéčī
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: X ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąĮąĄ ąĖą╝ąĄąĄčé ąĘąĮą░č湥ąĮąĖčÅ.
ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ ą▒ą╗ąŠą║-ą┤ąĖą░ą│čĆą░ą╝ą╝ąĄ ą▒čāč乥čĆąŠą▓ ą┐čĆąĖąĄą╝ą░ (čĆąĖčü. 4-2), čäąĖą╗čīčéčĆčŗ ą┤ąŠą┐čāčüčéąĖą╝ąŠčüčéąĖ RXF0 ąĖ RXF1 (ąĖ ą╝ą░čüą║ą░ čäąĖą╗čīčéčĆą░ RXM0) čüą▓čÅąĘą░ąĮčŗ RXB0. ążąĖą╗čīčéčĆčŗ RXF2, RXF3, RXF4, RXF5 ąĖ ą╝ą░čüą║ą░ RXM1 čüą▓čÅąĘą░ąĮą░ čü RXB1.
ąæąĖčéčŗ FILHIT . ążąĖą╗čīčéčĆ, ą║ąŠč鹊čĆčŗą╣ čüąŠą▓ą┐ą░ą╗ čü ą┐čĆąĖąĮčÅčéčŗą╝ čüąŠąŠą▒čēąĄąĮąĖąĄą╝, ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą┐ąŠ ą▒ąĖčéą░ą╝ FILHIT ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝ čĆąĄą│ąĖčüčéčĆąĄ RXBnCTRL. ąŁč鹊 ą▒ąĖčé RXB0CTRL.FILHIT0 ą┤ą╗čÅ ą▒čāč乥čĆą░ 0, ąĖ ą▒ąĖčéčŗ RXB1CTRL.FILHIT[2:0] ą┤ą╗čÅ ą▒čāč乥čĆą░ 1 (čüą╝. ą▓ąŠ ą▓čĆąĄąĘą║ą░čģ ąŠą┐ąĖčüą░ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ RXB0CTRL ąĖ RXB1CTRL).
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: 000 ąĖ 001 ą╝ąŠą│čāčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé BUKT ą▓ čĆąĄą│ąĖčüčéčĆąĄ RXB0CTRL, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čüąŠąŠą▒čēąĄąĮąĖčÅą╝ ąĖąĘ ą▒čāč乥čĆą░ RXB0 ą┐ąĄčĆąĄą╝ąĄčüčéąĖčéčīčüčÅ ą▓ ą▒čāč乥čĆ RXB1.
RXB0CTRL čüąŠą┤ąĄčƹȹĖčé 2 ą║ąŠą┐ąĖąĖ ą▒ąĖčéą░ BUKT ąĖ ą▒ąĖčéą░ FILHIT[0].
ąÜąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄ ą▒ąĖčéą░ BUKT čĆą░ąĘčĆąĄčłą░ąĄčé čŹčéąĖ 3 ą▒ąĖčéą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐ąŠą┤ąŠą▒ąĮąŠ ą▒ąĖčéą░ą╝ RXB1CTRL.FILHIT, ąĖ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┐ąŠą┐ą░ą┤ą░ąĮąĖčÅ ą▓ čäąĖą╗čīčéčĆčŗ RXF0 ąĖ RXF1, ą╗ąĖą▒ąŠ ą┤ą╗čÅ RXB0, ą╗ąĖą▒ąŠ ą┤ą╗čÅ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą▓ RXB1 ą┐čĆąĖ ą┐čĆąŠą╗ąŠąĮą│ą░čåąĖąĖ ą▒čāč乥čĆą░ RXB0.
111 Acceptance Filter 1 (RXB1)
ąĢčüą╗ąĖ ą▒ąĖčé BUKT ąŠčćąĖčēąĄąĮ, č鹊 ąĘą┤ąĄčüčī ąĖą╝ąĄąĄčéčüčÅ 6 ą║ąŠą┤ąŠą▓, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ 6 čäąĖą╗čīčéčĆą░ą╝. ąĢčüą╗ąĖ ą▒ąĖčé BUKT čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 6 ą║ąŠą┤ąŠą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé 6 čäąĖą╗čīčéčĆą░ą╝, ą┐ą╗čÄčü 2 ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ ą║ąŠą┤ą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé RXF0 ąĖ RXF1, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą▒čāč乥čĆą░ RXB0 ą▓ ą▒čāč乥čĆ RXB1 (ą┐čĆąŠą╗ąŠąĮą│ą░čåąĖčÅ RXB0).
ąĪąŠą▓ą┐ą░ą┤ąĄąĮąĖąĄ čü ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ čäąĖą╗čīčéčĆą░ą╝ąĖ . ąĢčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖąĄ čü ąŠą┤ąĮąĖą╝ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĖą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ čäąĖą╗čīčéčĆąŠą▓, ą▒ąĖčéčŗ FILHIT ą▒čāą┤čāčé ą║ąŠą┤ąĖčĆąŠą▓ą░čéčī ą┤ą▓ąŠąĖčćąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ čäąĖą╗čīčéčĆ čü čüą░ą╝čŗą╝ ą╝ą░ą╗čŗą╝ ąĮąŠą╝ąĄčĆąŠą╝, ą┤ą╗čÅ ą║ąŠč鹊čĆąŠą│ąŠ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖąĄ čü čüąŠąŠą▒čēąĄąĮąĖąĄą╝. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čüąŠą▓ą┐ą░ą┤ąĄąĮąĖčÄ čü čäąĖą╗čīčéčĆą░ą╝ąĖ RXF2 ąĖ RXF4, č鹊 ą▓ ą▒ąĖčéčŗ FILHIT ą▒čāą┤ąĄčé ąĘą░ą│čĆčāąČąĄąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ RXF2. ąŁč鹊 ą▓ čüčāčēąĮąŠčüčéąĖ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčé ą┐čĆąĖąŠčĆąĖčéąĖąĘą░čåąĖčÄ čäąĖą╗čīčéčĆąŠą▓ ą┤ąŠą┐čāčüčéąĖą╝ąŠčüčéąĖ čéą░ą║, čćč鹊 čäąĖą╗čīčéčĆčŗ čü ą╝ąĄąĮčīčłąĖą╝ ąĮąŠą╝ąĄčĆąŠą╝ ąĖą╝ąĄčÄčé ą┐čĆąĖąŠčĆąĖč鹥čé ą▓čŗčłąĄ. ąĪąŠąŠą▒čēąĄąĮąĖčÅ čüčĆą░ą▓ąĮąĖą▓ą░čÄčéčüčÅ čü čäąĖą╗čīčéčĆą░ą╝ąĖ ą▓ ą┐ąŠčĆčÅą┤ą║ąĄ ąŠč湥čĆąĄą┤ąĮąŠčüčéąĖ - ąŠčé ą╝ą╗ą░ą┤čłąĄą│ąŠ ąĮąŠą╝ąĄčĆą░ čäąĖą╗čīčéčĆą░ ą║ čüčéą░čĆčłąĄą╝čā. ąŁč鹊 čéą░ą║ąČąĄ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čāą┤ąĄčé ą┐čĆąĖąĮčÅč鹊 č鹊ą╗čīą║ąŠ ą▓ ąŠą┤ąĖąĮ ą▒čāč乥čĆ. ąóą░ą║ąŠą╣ ą┐čĆąĖąĮčåąĖą┐ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé, čćč鹊 ą▒čāč乥čĆ RXB0 ąĖą╝ąĄąĄčé ą┐čĆąĖąŠčĆąĖč鹥čé ą▓čŗčłąĄ, č湥ą╝ ą▒čāč乥čĆ RXB1.
ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą╝ą░čüąŠą║ ąĖ čäąĖą╗čīčéčĆąŠą▓ . ąĀąĄą│ąĖčüčéčĆčŗ ą╝ą░čüą║ąĖ ąĖ čäąĖą╗čīčéčĆąŠą▓ ą╝ąŠą│čāčé ą▒čŗčéčī ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮčŗ č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ MCP2515 ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ (Configuration mode, čüą╝. čĆą░ąĘą┤ąĄą╗ "ąĀąĄąČąĖą╝čŗ čĆą░ą▒ąŠčéčŗ").
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čĆąĄą│ąĖčüčéčĆčŗ ą╝ą░čüą║ąĖ ąĖ čäąĖą╗čīčéčĆąŠą▓ čćąĖčéą░čÄčéčüčÅ ą║ą░ą║ 0, ą║ąŠą│ą┤ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ MCP2515 ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą╗čÄą▒ąŠą╝ čĆąĄąČąĖą╝ąĄ, ą║čĆąŠą╝ąĄ čĆąĄąČąĖą╝ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
ąĀąĖčü. 4-5. ą¤čĆąĖąĮčåąĖą┐ čĆą░ą▒ąŠčéčŗ ą╝ą░čüą║ąĖ ąĖ čäąĖą╗čīčéčĆąŠą▓, ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčēąĖčģ ą┤ąŠą┐čāčüčéąĖą╝ąŠčüčéčī ą┐čĆąĖąĮąĖą╝ą░ąĄą╝ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé SID[10:3]
ąøąĄą│ąĄąĮą┤ą░
R/W-x
7-0, SID[10:3] : ą▒ąĖčéčŗ čäąĖą╗čīčéčĆą░ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (Standard Identifier Filter). ąŚą┤ąĄčüčī čģčĆą░ąĮčÅčéčüčÅ ą▒ąĖčéčŗ čäąĖą╗čīčéčĆą░, ąĮą░ą║ą╗ą░ą┤čŗą▓ą░ąĄą╝čŗąĄ ąĮą░ ą▒ąĖčéčŗ [10:3] ą┐ąŠčĆčåąĖąĖ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé SID[2:0] - EXIDE - EID[17:16]
ąøąĄą│ąĄąĮą┤ą░
R/W-x
U-0
R/W-x
U-0
R/W-x
7-5, SID[2:0] : ą▒ąĖčéčŗ čäąĖą╗čīčéčĆą░ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (Standard Identifier Filter). ąŚą┤ąĄčüčī čģčĆą░ąĮčÅčéčüčÅ ą▒ąĖčéčŗ čäąĖą╗čīčéčĆą░, ąĮą░ą║ą╗ą░ą┤čŗą▓ą░ąĄą╝čŗąĄ ąĮą░ ą▒ąĖčéčŗ [2:0] ą┐ąŠčĆčåąĖąĖ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ.
4 ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ, čćąĖčéą░ąĄčéčüčÅ ą║ą░ą║ 0.
3, EXIDE : ą▒ąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (Extended Identifier Enable).
1 čäąĖą╗čīčéčĆ ą┐čĆąĖą║ą╗ą░ą┤čŗą▓ą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą║ čĆą░čüčłąĖčĆąĄąĮąĮčŗą╝ čäčĆąĄą╣ą╝ą░ą╝.
2 ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ, čćąĖčéą░ąĄčéčüčÅ ą║ą░ą║ 0.
1-0, EID[17:16] : ą▒ąĖčéčŗ čäąĖą╗čīčéčĆą░ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (Extended Identifier Filter). ąŚą┤ąĄčüčī čģčĆą░ąĮčÅčéčüčÅ ą▒ąĖčé čäąĖą╗čīčéčĆą░, ąĮą░ą║ą╗ą░ą┤čŗą▓ą░ąĄą╝čŗąĄ ąĮą░ ą▒ąĖčéčŗ [17:16] ą┐ąŠčĆčåąĖąĖ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé EID[15:8]
ąøąĄą│ąĄąĮą┤ą░
R/W-x
7-0, EID[15:8] : ą▒ąĖčéčŗ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (Extended Identifier). ąÆ čŹčéąĖčģ ą▒ąĖčéą░čģ čģčĆą░ąĮčÅčéčüčÅ ą▒ąĖčéčŗ, ą┐čĆąĖą║ą╗ą░ą┤čŗą▓ą░ąĄą╝čŗąĄ ą║ ą▒ąĖčéą░ą╝ [15:8] ą┐ąŠčĆčåąĖąĖ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ, ąĖą╗ąĖ ą║ ą▒ą░ą╣čéčā 0 ą▓ ą┐čĆąĖąĮčÅčéčŗčģ ą┤ą░ąĮąĮčŗčģ, ąĄčüą╗ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ RXM=00 ąĖ EXIDE=0.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé EID[7:0]
ąøąĄą│ąĄąĮą┤ą░
R/W-x
7-0, EID[7:0] : ą▒ąĖčéčŗ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (Extended Identifier). ąÆ čŹčéąĖčģ ą▒ąĖčéą░čģ čģčĆą░ąĮčÅčéčüčÅ ą▒ąĖčéčŗ, ą┐čĆąĖą║ą╗ą░ą┤čŗą▓ą░ąĄą╝čŗąĄ ą║ ą▒ąĖčéą░ą╝ [7:0] ą┐ąŠčĆčåąĖąĖ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ, ąĖą╗ąĖ ą║ ą▒ą░ą╣čéčā 1 ą▓ ą┐čĆąĖąĮčÅčéčŗčģ ą┤ą░ąĮąĮčŗčģ, ąĄčüą╗ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ RXM=00 ąĖ EXIDE=0.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé SID[10:3]
ąøąĄą│ąĄąĮą┤ą░
R/W-0
7-0, SID[10:3] : ą▒ąĖčéčŗ ą╝ą░čüą║ąĖ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (Standard Identifier Mask). ąÆ čŹčéąĖčģ ą▒ąĖčéą░čģ čģčĆą░ąĮčÅčéčüčÅ ą▒ąĖčéčŗ ą╝ą░čüą║ąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖą║ą╗ą░ą┤čŗą▓ą░čÄčéčüčÅ ą║ ą▒ąĖčéą░ą╝ [10:3] ą┐ąŠčĆčåąĖąĖ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé SID[2:0] - - - EID[17:16]
ąøąĄą│ąĄąĮą┤ą░
R/W-0
U-0
U-0
U-0
R/W-0
7-5, SID[2:0] : ą▒ąĖčéčŗ ą╝ą░čüą║ąĖ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (Standard Identifier Mask). ąÆ čŹčéąĖčģ ą▒ąĖčéą░čģ čģčĆą░ąĮčÅčéčüčÅ ą▒ąĖčéčŗ ą╝ą░čüą║ąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖą║ą╗ą░ą┤čŗą▓ą░čÄčéčüčÅ ą║ ą▒ąĖčéą░ą╝ [2:0] ą┐ąŠčĆčåąĖąĖ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ.
4-2 ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ, čćąĖčéą░čÄčéčüčÅ ą║ą░ą║ 0.
1-0, EID[17:16] : ą▒ąĖčéčŗ ą╝ą░čüą║ąĖ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (Extended Identifier Mask). ąÆ čŹčéąĖčģ ą▒ąĖčéą░čģ čģčĆą░ąĮčÅčéčüčÅ ą▒ąĖčéčŗ ą╝ą░čüą║ąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖą║ą╗ą░ą┤čŗą▓ą░čÄčéčüčÅ ą║ ą▒ąĖčéą░ą╝ [17:16] ą┐ąŠčĆčåąĖąĖ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé EID[15:8]
ąøąĄą│ąĄąĮą┤ą░
R/W-0
7-0, EID[15:8] : ą▒ąĖčéčŗ ą╝ą░čüą║ąĖ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (Extended Identifier Mask). ąÆ čŹčéąĖčģ ą▒ąĖčéą░čģ čģčĆą░ąĮčÅčéčüčÅ ą▒ąĖčéčŗ ą╝ą░čüą║ąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖą║ą╗ą░ą┤čŗą▓ą░čÄčéčüčÅ ą║ ą▒ąĖčéą░ą╝ [15:8] ą┐ąŠčĆčåąĖąĖ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąĢčüą╗ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą▒ąĖčéčŗ RXM=00 ąĖ EXIDE=0, č鹊 čŹčéąĖ ą▒ąĖčéčŗ ą┐čĆąĖą║ą╗ą░ą┤čŗą▓ą░čÄčéčüčÅ ą║ ą▒ą░ą╣čéčā 0 ą┐čĆąĖąĮčÅčéčŗčģ ą┤ą░ąĮąĮčŗčģ.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé EID[7:0]
ąøąĄą│ąĄąĮą┤ą░
R/W-0
7-0, EID[7:0] : ą▒ąĖčéčŗ ą╝ą░čüą║ąĖ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (Extended Identifier Mask). ąÆ čŹčéąĖčģ ą▒ąĖčéą░čģ čģčĆą░ąĮčÅčéčüčÅ ą▒ąĖčéčŗ ą╝ą░čüą║ąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖą║ą╗ą░ą┤čŗą▓ą░čÄčéčüčÅ ą║ ą▒ąĖčéą░ą╝ [7:0] ą┐ąŠčĆčåąĖąĖ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąĢčüą╗ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą▒ąĖčéčŗ RXM=00 ąĖ EXIDE=0, č鹊 čŹčéąĖ ą▒ąĖčéčŗ ą┐čĆąĖą║ą╗ą░ą┤čŗą▓ą░čÄčéčüčÅ ą║ ą▒ą░ą╣čéčā 1 ą┐čĆąĖąĮčÅčéčŗčģ ą┤ą░ąĮąĮčŗčģ.
[ąśąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ čłąĖąĮčŗ CAN ]
ąÆčüąĄ čāąĘą╗čŗ, ą┐čĆąĖčüčāčéčüčéą▓čāčÄčēąĖąĄ ąĮą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ čłąĖąĮąĄ CAN, ą┤ąŠą╗ąČąĮčŗ ąĖą╝ąĄčéčī ąŠą┤ąĖąĮą░ą║ąŠą▓čāčÄ ąĮąŠą╝ąĖąĮą░ą╗čīąĮčāčÄ čüą║ąŠčĆąŠčüčéčī ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ (bit rate). ą¤čĆąŠč鹊ą║ąŠą╗ CAN ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┐čĆąĖąĮčåąĖą┐ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ą▒ąĄąĘ ą▓ąŠąĘą▓čĆą░čéą░ ą║ ąĮčāą╗čÄ NRZ (Non Return to Zero), ą║ąŠč鹊čĆčŗą╣ ąĮąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▓čüčéą░ą▓ą║čā čéą░ą║č鹊ą▓ ą▓ ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čéą░ą║čéčŗ ą┐čĆąĖąĄą╝ą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą┐čĆąĖąĮąĖą╝ą░čÄčēąĖą╝ąĖ čāąĘą╗ą░ą╝ąĖ, ąĖ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮčŗ čü čéą░ą║čéą░ą╝ąĖ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░.
ąÆčüąĄ ą│ąĄąĮąĄčĆą░č鹊čĆčŗ ąĖ ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą╝ąŠą│čāčé ąŠčéą╗ąĖčćą░čéčīčüčÅ ąŠčé čāąĘą╗ą░ ą║ čāąĘą╗čā, čéą░ą║ čćč鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ ą┤ąŠą╗ąČąĄąĮ ąĖą╝ąĄčéčī ąĮąĄą║čāčÄ čäą░ąĘąŠą▓čāčÄ ą░ą▓č鹊ą┐ąŠą┤čüčéčĆąŠą╣ą║čā čćą░čüč鹊čéčŗ (Phase Lock Loop, PLL) ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą┐ąĄčĆąĄą┐ą░ą┤ąŠą▓ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ąĮąĖą║ą░. ą¤ąŠčüą║ąŠą╗čīą║čā ą┤ą░ąĮąĮčŗąĄ ą║ąŠą┤ąĖčĆčāčÄčéčüčÅ ą┐ąŠ ą┐čĆąĖąĮčåąĖą┐čā NRZ, č鹊 ąĮčāąČąĮąŠ ą┐čĆąĖą╝ąĄąĮčÅčéčī ą▓čüčéą░ą▓ą║čā ą▒ąĖčéą░ (čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╣ ą▒ąĖčé-čüčéą░čäčäąĖąĮą│), čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 ą┐ąĄčĆąĄą┐ą░ą┤ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąĮąĄ čĆąĄąČąĄ č湥ą╝ ą║ą░ąČą┤čŗąĄ 6 ą▒ąĖč鹊ą▓čŗčģ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓, čćč鹊ą▒čŗ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÄ čåąĖčäčĆąŠą▓ąŠą╣ ą░ą▓č鹊ą┐ąŠą┤čüčéčĆąŠą╣ą║ąĖ čćą░čüč鹊čéčŗ (Digital Phase Lock Loop, DPLL).
ążąŠčĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ą▒ąĖč鹊ą▓čŗčģ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ ą▓ MCP2515 čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čüąĖčüč鹥ą╝čŗ DPLL, ą║ąŠč鹊čĆą░čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čü ą┐čĆąĖčģąŠą┤čÅčēąĖą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ, ą░ čéą░ą║ąČąĄ ą┤ą╗čÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ ąĮąŠą╝ąĖąĮą░ą╗čīąĮčŗčģ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ. DPLL čĆą░ąĘą▒ąĖą▓ą░ąĄčé ą║ą░ąČą┤čŗą╣ ą▒ąĖč鹊ą▓čŗą╣ ąĖąĮč鹥čĆą▓ą░ą╗ ąĮą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ čüąĄą│ą╝ąĄąĮč鹊ą▓, ą┐ąŠčüčéčĆąŠąĄąĮąĮčŗčģ ąĮą░ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗčģ ąĖąĮč鹥čĆą▓ą░ą╗ą░čģ ą▓čĆąĄą╝ąĄąĮąĖ, čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗčģ ą║ą▓ą░ąĮč鹊ą▓ ą▓čĆąĄą╝ąĄąĮąĖ (Time Quanta, čüąŠą║čĆą░čēąĄąĮąĮąŠ TQ).
ążčāąĮą║čåąĖąĖ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čłąĖąĮčŗ, ą▓čŗą┐ąŠą╗ąĮčÅąĄą╝čŗąĄ ą▓ąŠ čäčĆąĄą╣ą╝ąĄ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒ąĖčéą░ (čéą░ą║ąĖąĄ ą║ą░ą║ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ čü ą╗ąŠą║ą░ą╗čīąĮčŗą╝ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą╝, čüąĄč鹥ą▓ąŠą╣ ą║ąŠą╝ą┐ąĄąĮčüą░čåąĖąĖ ąĘą░ą┤ąĄčƹȹ║ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ č鹊čćą║ąĖ ą▓čŗą▒ąŠčĆą║ąĖ ą┤ą░ąĮąĮčŗčģ), ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą╣ ą╗ąŠą│ąĖą║ąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ DPLL.
ąÆčĆąĄą╝čÅ ą▒ąĖčéą░ CAN . ąÆčüąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮą░ čłąĖąĮąĄ CAN ą┤ąŠą╗ąČąĮčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąŠą┤ąĖąĮą░ą║ąŠą▓čāčÄ čüą║ąŠčĆąŠčüčéčī čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą▒ąĖčé (bit rate). ą×ą┤ąĮą░ą║ąŠ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ, čćč鹊ą▒čŗ čā ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓ ą▒čŗą╗ą░ ą░ą▒čüąŠą╗čÄčéąĮąŠ ąŠą┤ąĮą░ ąĖ čéą░ ąČąĄ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ą│ą╗ą░ą▓ąĮąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░. ąöą╗čÅ čĆą░ąĘąĮčŗčģ čćą░čüč鹊čé ąŠčéą┤ąĄą╗čīąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ bit rate ą┐ąŠą┤čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ ąĮą░čüčéčĆąŠą╣ą║ąŠą╣ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ čüą║ąŠčĆąŠčüčéąĖ (Baud Rate Prescaler), ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą║ą▓ą░ąĮč鹊ą▓ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ ą║ą░ąČą┤ąŠą╝ čüąĄą│ą╝ąĄąĮč鹥.
ąÆčĆąĄą╝čÅ ą▒ąĖčéą░ CAN čüčéčĆąŠąĖčéčüčÅ ąĖąĘ ąĮąĄ ą┐ąĄčĆąĄą║čĆčŗą▓ą░čÄčēąĖčģčüčÅ čüąĄą│ą╝ąĄąĮč鹊ą▓. ąÜą░ąČą┤čŗą╣ ąĖąĘ čŹčéąĖčģ čüąĄą│ą╝ąĄąĮč鹊ą▓ čüčéčĆąŠąĖčéčüčÅ ąĖčģ čåąĄą╗ąŠą│ąŠ čćąĖčüą╗ą░ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ, ąĮą░ąĘčŗą▓ą░ąĄą╝čŗčģ Time Quanta (TQ), ą║ą░ą║ ą▒čāą┤ąĄčé ąŠą▒čŖčÅčüąĮąĄąĮąŠ ą┤ą░ą╗ąĄąĄ ą▓ čŹč鹊ą╝ ą┤ąŠą║čāą╝ąĄąĮč鹥. ąØąŠą╝ąĖąĮą░ą╗čīąĮą░čÅ čüą║ąŠčĆąŠčüčéčī (Nominal Bit Rate, NBR) ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĄą╣ CAN ą║ą░ą║ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ąĖčé ą▓ čüąĄą║čāąĮą┤čā, ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗčģ ąĖą┤ąĄą░ą╗čīąĮčŗą╝ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ąŠą╝ ą▒ąĄąĘ čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ. ąŁč鹊 ąŠą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą▓čŗčĆą░ąČąĄąĮąĖąĄą╝:
NBR = fbit = 1/tbit ąÆčŗčĆą░ąČąĄąĮąĖąĄ 5-1
ąØąŠą╝ąĖąĮą░ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ ą▒ąĖčéą░ . ąØąŠą╝ąĖąĮą░ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ ą▒ąĖčéą░ (Nominal Bit Time, NBT) tbit čüčéčĆąŠąĖčéčüčÅ ąĖąĘ ąĮąĄ ą┐ąĄčĆąĄą║čĆčŗą▓ą░čÄčēąĖčģčüčÅ čüąĄą│ą╝ąĄąĮč鹊ą▓ (čĆąĖčü. 5-1). ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, NBT čŹč鹊 čüčāą╝ą╝ą░ čüą╗ąĄą┤čāčÄčēąĖčģ čüąĄą│ą╝ąĄąĮč鹊ą▓ ą▓čĆąĄą╝ąĄąĮąĖ:
tbit = tSyncSeg + tPropSeg + tPS1 + tPS2
ąĀąĖčü. 5-1. ąĪąĄą│ą╝ąĄąĮčéčŗ ą▓čĆąĄą╝ąĄąĮąĖ ą▒ąĖčéą░ čłąĖąĮčŗ CAN.
ąĪ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą╝ NBT čüą▓čÅąĘą░ąĮčŗ č鹊čćą║ą░ ą▓čŗą▒ąŠčĆą║ąĖ (sample point), čłąĖčĆąĖąĮą░ čüą║ą░čćą║ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (Synchronization Jump Width, SJW) ąĖ ą▓čĆąĄą╝čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĖąĮč乊čĆą╝ą░čåąĖąĖ (Information Processing Time, IPT), čćč鹊 ą▒čāą┤ąĄčé čĆą░čüčüą╝ąŠčéčĆąĄąĮąŠ ą┤ą░ą╗ąĄąĄ.
ąĪąĄą│ą╝ąĄąĮčé čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ . Synchronization Segment (SyncSeg) čŹč鹊 ą┐ąĄčĆą▓čŗą╣ čüąĄą│ą╝ąĄąĮčé ą▓ NBT, ąĖ ąŠąĮ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čāąĘą╗ąŠą▓ ąĮą░ čłąĖąĮąĄ CAN. ą×ąČąĖą┤ą░ąĄą╝čŗąĄ ą┐ąĄčĆąĄą┐ą░ą┤čŗ ą▒ąĖčé ą┤ąŠą╗ąČąĮčŗ ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī ą▓ ąĖąĮč鹥čĆą▓ą░ą╗ąĄ SyncSeg. ąŁč鹊čé čüąĄą│ą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ čäąĖą║čüąĖčĆąŠą▓ą░ąĮ, ąĖ čĆą░ą▓ąĄąĮ 1 TQ.
ąĪąĄą│ą╝ąĄąĮčé čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖčÅ . Propagation Segment (PropSeg) čüčāčēąĄčüčéą▓čāąĄčé ą┤ą╗čÅ ą║ąŠą╝ą┐ąĄąĮčüą░čåąĖąĖ čäąĖąĘąĖč湥čüą║ąĖčģ ąĘą░ą┤ąĄčƹȹĄą║ ą╝ąĄąČą┤čā čāąĘą╗ą░ą╝ąĖ. ąŚą░ą┤ąĄčƹȹ║ą░ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖčÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą║ą░ą║ ą┤ą▓ąŠą╣ąĮą░čÅ čüčāą╝ą╝ą░ ą▓čĆąĄą╝ąĄąĮąĖ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ ą┐ąŠ ą┐čĆąŠą▓ąŠą┤ą░ą╝ čłąĖąĮčŗ CAN, ą▓ą║ą╗čÄčćą░čÅ ąĘą░ą┤ąĄčƹȹ║ąĖ, ą▓ąĮąŠčüąĖą╝čŗąĄ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ čłąĖąĮčŗ. ą¤ą░čĆą░ą╝ąĄčéčĆ PropSeg ą╝ąŠąČąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčīčüčÅ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 1..8 TQ.
ąĪąĄą│ą╝ąĄąĮčé čäą░ąĘčŗ 1 ąĖ čüąĄą│ą╝ąĄąĮčé čäą░ąĘčŗ 2 . ąöą▓ą░ čüąĄą│ą╝ąĄąĮčéą░ čäą░ąĘčŗ PS1 ąĖ PS2 ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą║ąŠą╝ą┐ąĄąĮčüą░čåąĖąĖ ąŠčłąĖą▒ąŠą║ čäą░ąĘčŗ ąĮą░ čłąĖąĮąĄ. PS1 ą╝ąŠąČąĄčé ą▒čŗčéčī čāą┤ą╗ąĖąĮąĄąĮ (ąĖą╗ąĖ PS2 ą╝ąŠąČąĄčé ą▒čŗčéčī čāą║ąŠčĆąŠč湥ąĮ) ą┐ąĄčĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĄą╣. PS1 ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ ą▓ ąĖąĮč鹥čĆą▓ą░ą╗ąĄ 1..8 TQ, ąĖ PS2 ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ ą▓ ąĖąĮč鹥čĆą▓ą░ą╗ąĄ 2..8 TQ.
ąóąŠčćą║ą░ ą▓čŗą▒ąŠčĆą║ąĖ . Sample point (č鹊čćą║ą░ ą▓čŗą▒ąŠčĆą║ąĖ, ąĖą╗ąĖ č鹊čćą║ą░ ąŠčåąĖčäčĆąŠą▓ą║ąĖ čüąĖą│ąĮą░ą╗ą░) čŹč鹊 ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ ą▓ąĮčāčéčĆąĖ ą▒ąĖčéą░, ą┐ąŠ ą║ąŠč鹊čĆąŠą╝čā čćąĖčéą░ąĄčéčüčÅ ąĖ ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčéčüčÅ ą╗ąŠą│ąĖč湥čüą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī čüąĖą│ąĮą░ą╗ą░. ąóąŠčćą║ą░ ą▓čŗą▒ąŠčĆą║ąĖ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą║ąŠąĮčåąĄ ąĖąĮč鹥čĆą▓ą░ą╗ą░ PS1. ąśčüą║ą╗čÄč湥ąĮąĖąĄ ąĖąĘ čŹč鹊ą│ąŠ ą┐čĆą░ą▓ąĖą╗ą░ - ą║ąŠą│ą┤ą░ čĆąĄąČąĖą╝ ą▓čŗą▒ąŠčĆą║ąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą║ąĖ 3 čĆą░ąĘą░ ąĮą░ 1 ą▒ąĖčé. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ, ą┐ąŠą║ą░ ą▒ąĖčé ą▓čüąĄ ąĄčēąĄ ąŠčåąĖčäčĆąŠą▓čŗą▓ą░ąĄčéčüčÅ ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖąĖ PS1, ą┤ąĄą╗ą░čÄčéčüčÅ ąĄčēąĄ 2 ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą▓čŗą▒ąŠčĆą║ąĖ ąĮą░ ą┐ąŠą╗ąŠą▓ąĖąĮą░čģ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ TQ ą┤ąŠ ąŠą║ąŠąĮčćą░ąĮąĖčÅ PS1, ą┐čĆąĖ čŹč鹊ą╝ ąĘąĮą░č湥ąĮąĖąĄ ą┐čĆąŠčćąĖčéą░ąĮąĮąŠą│ąŠ ą▒ąĖčéą░ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐ąŠ ą╝ą░ąČąŠčĆąĖčéą░čĆąĮąŠą╝čā ą┐čĆąĖąĮčåąĖą┐čā.
ąÆčĆąĄą╝čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĖąĮč乊čĆą╝ą░čåąĖąĖ . Information Processing Time (IPT) čŹč鹊 ą▓čĆąĄą╝čÅ, čéčĆąĄą▒čāąĄą╝ąŠąĄ ą╗ąŠą│ąĖą║ąŠą╣ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čāčĆąŠą▓ąĮčÅ ąŠčåąĖčäčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą▒ąĖčéą░ čłąĖąĮčŗ. IPT ąĮą░čćąĖąĮą░ąĄčéčüčÅ ą▓ č鹊čćą║ąĄ ą▓čŗą▒ąŠčĆą║ąĖ, ąĖąĘą╝ąĄčĆčÅąĄčéčüčÅ ą▓ ąĄą┤ąĖąĮąĖčåą░čģ TQ, ąĖ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąŠ ąĮą░ ąĘąĮą░č湥ąĮąĖąĖ 2 TQ ą┤ą╗čÅ ą╝ąŠą┤čāą╗čÅ Microchip CAN. ą¤ąŠčüą║ąŠą╗čīą║čā PS2 čéą░ą║ąČąĄ ąĮą░čćąĖąĮą░ąĄčéčüčÅ ą▓ č鹊čćą║ąĄ ą▓čŗą▒ąŠčĆą║ąĖ, ąĖ čŹč鹊 ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ čüąĄą│ą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ ą▒ąĖčéą░, č鹊 čéčĆąĄą▒čāąĄčéčüčÅ, čćč鹊ą▒čŗ PS2 ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąĮąĄ ą▒čŗą╗ąŠ ą╝ąĄąĮčīčłąĄ, č湥ą╝ IPT. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
PS2min = IPT = 2TQ
ą©ąĖčĆąĖąĮą░ čüą║ą░čćą║ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ . Synchronization Jump Width (SJW) ą┐ąŠą┤čüčéčĆą░ąĖą▓ą░ąĄčé čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā ą▒ąĖčé, ą║ą░ą║ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ, ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 1..4 TQ (ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĄą╣), čćč鹊ą▒čŗ čüąŠčģčĆą░ąĮčÅčéčī čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÄ čü ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗą╝ čüąŠąŠą▒čēąĄąĮąĖąĄą╝. ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ą▒ąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░ąĄčéčüčÅ ą▓ čŹč鹊ą╝ ą┤ąŠą║čāą╝ąĄąĮč鹥 ą┤ą░ą╗ąĄąĄ.
ąÜą▓ą░ąĮčé ą▓čĆąĄą╝ąĄąĮąĖ (Time Quantum). ąÜą░ąČą┤čŗą╣ ąĖąĘ čüąĄą│ą╝ąĄąĮč鹊ą▓ ą▓čĆąĄą╝ąĄąĮąĖ čüąŠčüčéą░ą▓ą╗čÅąĄčé ą▓čĆąĄą╝čÅ ą▒ąĖčéą░, ąĖ čüąŠčüč鹊ąĖčé ąĖąĘ čåąĄą╗ąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗčģ ąĄą┤ąĖąĮąĖčå ą▓čĆąĄą╝ąĄąĮąĖ, ąĮą░ąĘčŗą▓ą░ąĄą╝čŗčģ Time Quanta (TQ). ąöą╗ąĖąĮą░ ą║ą░ąČą┤ąŠą│ąŠ ąĖąĮč鹥čĆą▓ą░ą╗ą░ Time Quantum ą▒ą░ąĘąĖčĆčāąĄčéčüčÅ ąĮą░ ą┐ąĄčĆąĖąŠą┤ąĄ ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ (tOSC). ąæą░ąĘąŠą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ TQ čĆą░ąĮąŠ ą┤ą▓ąŠą╣ąĮąŠą╝čā ą┐ąĄčĆąĖąŠą┤čā ą│ąĄąĮąĄčĆą░č鹊čĆą░. ąØą░ čĆąĖčü. 5-2 ą┐ąŠą║ą░ąĘą░ąĮąŠ, ą║ą░ą║ ą┐ąĄčĆąĖąŠą┤ ą▒ąĖčéą░ ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ąĖąĘ TOSC ąĖ TQ. ąöą╗ąĖąĮą░ TQ čĆą░ą▓ąĮą░ ąŠą┤ąĮąŠą╝čā ą┐ąĄčĆąĖąŠą┤čā čéą░ą║č鹊ą▓ (tBRPCLK), čćč鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ ąĮą░čüčéčĆąŠą╣ą║ąŠą╣ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░, čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝ąŠą│ąŠ Baud Rate Prescaler (BRP). ąöą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą║ą▓ą░ąĮčéą░ ą▓čĆąĄą╝ąĄąĮąĖ TQ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗčćąĖčüą╗ąĄąĮą░ ą┐ąŠ ą▓čŗčĆą░ąČąĄąĮąĖčÄ 5-2:
TQ = 2*BRP*TOSC = 2*BRP/FOSC ąÆčŗčĆą░ąČąĄąĮąĖąĄ 5-2
ąŚą┤ąĄčüčī BRP čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ą║ą░ą║ čŹč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ ąŠą┐ąĖčüą░ąĮąĖąĖ čĆąĄą│ąĖčüčéčĆą░ CNF1.
ąĀąĖčü. 5-2. TQ ąĖ ą┐ąĄčĆąĖąŠą┤ ą▒ąĖčéą░.
[ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ]
ą¦č鹊ą▒čŗ ą║ąŠą╝ą┐ąĄąĮčüąĖčĆąŠą▓ą░čéčī čüą┤ą▓ąĖą│ąĖ čäą░ąĘčŗ ą╝ąĄąČą┤čā čćą░čüč鹊čéą░ą╝ąĖ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą▓ ą║ą░ąČą┤ąŠą│ąŠ ąĖąĘ čāąĘą╗ąŠą▓ ąĮą░ čłąĖąĮąĄ, ą║ą░ąČą┤čŗą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą┤ąŠą╗ąČąĄąĮ ąĖą╝ąĄčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░čéčīčüčÅ čü čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą┐ąĄčĆąĄą┐ą░ą┤ąŠą╝ ą┐čĆąĖčģąŠą┤čÅčēąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░. ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ čŹč鹊 ą┐čĆąŠčåąĄčüčü, čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮčŗą╣ čäčāąĮą║čåąĖąĄą╣ DPLL.
ąÜąŠą│ą┤ą░ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮ ą┐ąĄčĆąĄą┐ą░ą┤ ą▓ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ, ą╗ąŠą│ąĖą║ą░ ą▒čāą┤ąĄčé čüčĆą░ą▓ąĮąĖą▓ą░čéčī ą╝ąĄčüč鹊 ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą┐ąĄčĆąĄą┐ą░ą┤ą░ čü ąŠąČąĖą┤ą░ąĄą╝čŗą╝ ą▓čĆąĄą╝ąĄąĮąĄą╝ (SyncSeg). ąŚą░č鹥ą╝ čüčģąĄą╝ą░ ą▒čāą┤ąĄčé ą┐čĆąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą┐ąŠą┤čüčéčĆą░ąĖą▓ą░čéčī ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ PS1 ąĖ PS2.
ąöą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ 2 ą╝ąĄčģą░ąĮąĖąĘą╝ą░:
1. ą¢ąĄčüčéą║ą░čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ.
ą¢ąĄčüčéą║ą░čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ . ąóą░ą║ąŠą╣ ą╝ąĄčģą░ąĮąĖąĘą╝ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐ąĄčĆąĄą┐ą░ą┤ recessive-to-dominant ą▓ąŠ ą▓čĆąĄą╝čÅ ąŠąČąĖą┤ą░ąĮąĖčÅ čłąĖąĮčŗ (BUS IDLE, čé. ąĄ. ąĮą░ čłąĖąĮąĄ ąĮąĄčé čüąĖą│ąĮą░ą╗ąŠą▓), čćč鹊 ąŠąĘąĮą░čćą░ąĄčé ąĮą░čćą░ą╗ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ. ą¤ąŠčüą╗ąĄ ąČąĄčüčéą║ąŠą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čüč湥čéčćąĖą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ą▒ąĖčéą░ ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ą░čÄčéčüčÅ čü SyncSeg.
ą¢ąĄčüčéą║ą░čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ č鹊ą╝čā, čćč鹊 ą┐ąĄčĆąĄą┐ą░ą┤ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ąĮčāčéčĆąĖ čüąĄą│ą╝ąĄąĮčéą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą┐ąĄčĆąĄąĘą░ą│čĆčāąČąĄąĮąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą▒ąĖčéą░. ą¤ąŠ ą┐čĆą░ą▓ąĖą╗ą░ą╝ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ, ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ąČąĄčüčéą║ą░čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ, č鹊 ą▓ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąĖąĮč鹥čĆą▓ą░ą╗ą░ ą▒ąĖčéą░ ąĮąĄ ą▒čāą┤ąĄčé ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī ą┐ąĄčĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ.
ą¤ąĄčĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ (čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ). ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 čŹč鹊ą│ąŠ ą╝ąĄčģą░ąĮąĖąĘą╝ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ąĖąĮč鹥čĆą▓ą░ą╗ PS1 ą╝ąŠąČąĄčé ą▒čŗčéčī čāą┤ą╗ąĖąĮąĄąĮ, ąĖą╗ąĖ PS2 ą╝ąŠąČąĄčé ą▒čŗčéčī čāą║ąŠčĆąŠč湥ąĮ. ąÆąĄą╗ąĖčćąĖąĮą░ čāą║ąŠčĆą░čćąĖą▓ą░ąĮąĖčÅ ąĖą╗ąĖ čāą┤ą╗ąĖąĮąĄąĮąĖčÅ čüąĄą│ą╝ąĄąĮč鹊ą▓ čäą░ąĘčŗ ą▒čāč乥čĆą░ ąŠą│čĆą░ąĮąĖč湥ąĮą░ ą▓ąĄčĆčģąĮąĖą╝ ą┐čĆąĄą┤ąĄą╗ąŠą╝, ąĘą░ą┤ą░ą▓ą░ąĄą╝čŗą╝ čłąĖčĆąĖąĮąŠą╣ čłą░ą│ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (Synchronization Jump Width, SJW).
ąÆąĄą╗ąĖčćąĖąĮą░ SJW ą▒čāą┤ąĄčé ą┤ąŠą▒ą░ą▓ą╗ąĄąĮą░ ą║ PS1 ąĖą╗ąĖ ą▓čŗčćč鹥ąĮą░ ąĖąĘ PS2 (čüą╝. čĆąĖčü. 5-3). SJW ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čåąĖą║ą╗ąĖč湥čüą║čāčÄ čäąĖą╗čīčéčĆą░čåąĖčÄ DPLL. ąśąĮč鹥čĆą▓ą░ą╗ SJW ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 1..4 TQ.
ąæąĄąĘ čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (e = 0)
ąĀąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ą┐ąŠ ą╝ąĄą┤ą╗ąĄąĮąĮąŠą╝čā ą┐ąĄčĆąĄą┤ą░čéčćąĖą║čā (e > 0)
ąĀąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ą┐ąŠ ą▒čŗčüčéčĆąŠą╝čā ą┐ąĄčĆąĄą┤ą░čéčćąĖą║čā (e < 0)
ąĀąĖčü. 5-3. ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ ą▒ąĖčéą░.
ą×čłąĖą▒ą║ąĖ čäą░ąĘčŗ . ą£ąĄč鹊ą┤ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ NRZ ąĮąĄ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé ą▓čüčéą░ą▓ą║ąĖ ą▓ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ ą▒ąĖčé. ąśąĮč乊čĆą╝ą░čåąĖčÅ ąŠčé čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĖ ą▓čŗą┤ąĄą╗čÅąĄčéčüčÅ ą┐ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░ą╝ recessive-to-dominant ąĮą░ čłąĖąĮąĄ. ąĪą▓ąŠą╣čüčéą▓ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░, ą║ąŠč鹊čĆąŠąĄ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą╝ą░ą║čüąĖą╝čāą╝ ą║ąŠą╗ąĖč湥čüčéą▓ą░ čüą╗ąĄą┤čāčÄčēąĖčģ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ąŠą┤ąĖąĮą░ą║ąŠą▓čŗčģ ą▒ąĖčé (bitstuffing, ą▒ąĖčé-čüčéą░čäčäąĖąĮą│, čé. ąĄ. ą▓čüčéą░ą▓ą║ą░ ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮčŗčģ ą┐ąŠ čāčĆąŠą▓ąĮčÄ ą▒ąĖčé) ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 ą▓ č鹥č湥ąĮąĖąĄ čäčĆąĄą╣ą╝ą░ ą┐ąŠč鹊ą║ ą▒ąĖčé ą▒čāą┤ąĄčé čüąŠą┤ąĄčƹȹ░čéčī ą┐ąĄčĆąĄą┐ą░ą┤čŗ, ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┤ą╗čÅ čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ.
ą×čłąĖą▒ą║ą░ čäą░ąĘčŗ ąĮą░ ą┐ąĄčĆąĄą┐ą░ą┤ąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐ąŠąĘąĖčåąĖąĄą╣ ą┐ąĄčĆąĄą┐ą░ą┤ą░ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ SyncSeg, ąĖ čŹčéą░ ąŠčłąĖą▒ą║ą░ ąĖąĘą╝ąĄčĆčÅąĄčéčüčÅ ą▓ ąĖąĮč鹥čĆą▓ą░ą╗ą░čģ TQ. ą×čłąĖą▒ą║ą░ čäą░ąĘčŗ, ąĖąĘą╝ąĄčĆčÅąĄą╝ą░čÅ ą▓ ąĄą┤ąĖąĮąĖčåą░čģ TQ, ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
ŌĆó e = 0, ąĄčüą╗ąĖ ą┐ąĄčĆąĄą┐ą░ą┤ ą┐ąŠą┐ą░ą┤ą░ąĄčé ą▓ ąĖąĮč鹥čĆą▓ą░ą╗ čüąĄą│ą╝ąĄąĮčéą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (SYNCSEG).
e = 0 , ąĮąĄčé ąŠčłąĖą▒ą║ąĖ čäą░ąĘčŗ. ąÜąŠą│ą┤ą░ e=0, č鹊 ąŠčłąĖą▒ą║ą░ čäą░ąĘčŗ ąŠčéčüčāčéčüčéą▓čāąĄčé. ąĢčüą╗ąĖ ą╝ą░ą│ąĮąĖčéčāą┤ą░ ąŠčłąĖą▒ą║ąĖ čäą░ąĘčŗ ą╝ąĄąĮčīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮą░ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮąŠą╝čā ąĘąĮą░č湥ąĮąĖčÄ SJW, č鹊 čŹčäč乥ą║čé ąŠčé čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ č鹊čé ąČąĄ čüą░ą╝čŗą╣, čćč鹊 ąĖ ąŠčé ąČąĄčüčéą║ąŠą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ.
e > 0 , ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮą░čÅ ąŠčłąĖą▒ą║ą░ čäą░ąĘčŗ. ąĢčüą╗ąĖ ą▓ąĄą╗ąĖčćąĖąĮą░ ąŠčłąĖą▒ą║ąĖ ą▒ąŠą╗čīčłąĄ SJW, ąĄčüą╗ąĖ ąŠčłąĖą▒ą║ą░ čäą░ąĘčŗ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮą░, č鹊 PS1 čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčéčüčÅ ąĮą░ ą▓ąĄą╗ąĖčćąĖąĮčā, čĆą░ą▓ąĮčāčÄ SJW.
e < 0 , ąŠčéčĆąĖčåą░č鹥ą╗čīąĮą░čÅ ąŠčłąĖą▒ą║ą░ čäą░ąĘčŗ. ąĢčüą╗ąĖ ą▓ąĄą╗ąĖčćąĖąĮą░ ąŠčłąĖą▒ą║ąĖ čäą░ąĘčŗ ą▒ąŠą╗čīčłąĄ, č湥ą╝ čłąĖčĆąĖąĮą░ čłą░ą│ą░ čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ, ąĖ ąŠčłąĖą▒ą║ą░ čäą░ąĘčŗ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮą░, č鹊 PS2 čāą║ąŠčĆą░čćąĖą▓ą░ąĄčéčüčÅ ąĮą░ ą▓ąĄą╗ąĖčćąĖąĮčā, čĆą░ą▓ąĮčāčÄ SJW.
ą¤čĆą░ą▓ąĖą╗ą░ čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ:
1 . ąöą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ č鹊ą╗čīą║ąŠ ą╗ąĖčłčī ą┐ąĄčĆąĄą┐ą░ą┤čŗ čāčĆąŠą▓ąĮčÅ recessive-to-dominant.2 . ąĀą░ąĘčĆąĄčłą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąŠą┤ąĮą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ą▓ ąŠą┤ąĮąŠą╝ ąĖąĮč鹥čĆą▓ą░ą╗ąĄ ą▒ąĖčéą░.3 . ą¤ąĄčĆąĄą┐ą░ą┤ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ ąĘąĮą░č湥ąĮąĖąĄ, ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ąĮą░ ą┐čĆąĄą┤čŗą┤čāčēąĄą╣ č鹊čćą║ąĄ ą▓čŗą▒ąŠčĆą║ąĖ (čĆą░ąĮąĄąĄ ą┐čĆąŠčćąĖčéą░ąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĮą░ čłąĖąĮąĄ) ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé ąĘąĮą░č湥ąĮąĖčÅ čłąĖąĮčŗ, ą║ąŠč鹊čĆąŠąĄ čüą╗ąĄą┤čāąĄčé čüčĆą░ąĘčā ąĘą░ ą┐ąĄčĆąĄą┐ą░ą┤ąŠą╝.4 . ą¤ąĄčĆąĄą┤ą░čÄčēąĖą╣ čāąĘąĄą╗ ąĮąĄ čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆčāąĄčéčüčÅ ą┐čĆąĖ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠą╣ čäą░ąĘąĄ ąŠčłąĖą▒ą║ąĖ (e > 0).5 . ąĢčüą╗ąĖ ą░ą▒čüąŠą╗čÄčéąĮą░čÅ ą▓ąĄą╗ąĖčćąĖąĮą░ ąŠčłąĖą▒ą║ąĖ čäą░ąĘčŗ ą▒ąŠą╗čīčłąĄ SJW, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čüąĄą│ą╝ąĄąĮčé čäą░ąĘčŗ ą▒čāą┤ąĄčé ą┐ąŠą┤čüčéčĆąŠąĄąĮ ąĮą░ ą▓ąĄą╗ąĖčćąĖąĮčā, čĆą░ą▓ąĮčāčÄ SJW.
ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ čüąĄą│ą╝ąĄąĮč鹊ą▓ ą▓čĆąĄą╝ąĄąĮąĖ . ąöą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čüąĄą│ą╝ąĄąĮč鹊ą▓ ą▓čĆąĄą╝ąĄąĮąĖ ąĮčāąČąĮąŠ čüąŠą▒ą╗čÄą┤ą░čéčī čüą╗ąĄą┤čāčÄčēąĖąĄ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ:
ŌĆó PropSeg + PS1 >= PS2
ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĖčéčī, čćč鹊 čüą║ąŠčĆąŠčüčéčī 125 ą║ąōčå č鹊 čü čćą░čüč鹊č鹊ą╣ ą║ą▓ą░čĆčåą░ FOSC = 20 ą£ąōčå ąĮčāąČąĮąŠ:
TOSC = 50 ąĮčü, ą▓čŗą▒ąŠčĆ BRP[5:0] = 04h, č鹊ą│ą┤ą░ TQ = 500 ąĮčü. ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī 125 ą║ąōčå, ą▓čĆąĄą╝čÅ ą▒ąĖčéą░ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ą▓ąĮąŠ 16 TQ.
ą×ą▒čŗčćąĮąŠ ą▓čŗą▒ąŠčĆą║ą░ ą▒ąĖčéą░ ą┤ąŠą╗ąČąĮą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī ąĮą░ ąĖąĮč鹥čĆą▓ą░ą╗ąĄ 60-70% ą▓čĆąĄą╝ąĄąĮąĖ ą▒ąĖčéą░, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ čüąĖčüč鹥ą╝čŗ. ąóą░ą║ąČąĄ ąŠą▒čŗčćąĮąŠ TDELAY čĆą░ą▓ąĮą░ 1..2 TQ.
SyncSeg = 1 TQ ąĖ PropSeg = 2 TQ. ą¦č鹊ą▒čŗ čāčüčéą░ąĮąŠą▓ąĖčéčī PS1 = 7 TQ, ąĮčāąČąĮąŠ ą┐ąŠą╝ąĄčüčéąĖčéčī ą▓čŗą▒ąŠčĆą║čā ą▓ ą╝ąŠą╝ąĄąĮčé 10 TQ ą┐ąŠčüą╗ąĄ ą┐ąĄčĆąĄčģąŠą┤ą░. ąŁč鹊 ąŠčüčéą░ą▓ą╗čÅąĄčé 6 TQ ą┤ą╗čÅ PS2.
ą¤ąŠčüą║ąŠą╗čīą║čā PS2 = 6, č鹊 ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą┐čĆą░ą▓ąĖą╗ą░ą╝ąĖ SJW ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą╝ą░ą║čüąĖą╝čāą╝ 4 TQ. ą×ą┤ąĮą░ą║ąŠ ą▒ąŠą╗čīčłąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ SJW ąŠą▒čŗčćąĮąŠ ąĮčāąČąĮąŠ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ ą│ąĄąĮąĄčĆą░čåąĖčÅ čéą░ą║č鹊ą▓ čĆą░ąĘąĮčŗčģ čāąĘą╗ąŠą▓ ąĮąĄ č鹊čćąĮą░ ąĖą╗ąĖ ąĮąĄčüčéą░ą▒ąĖą╗čīąĮą░, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą║ąĄčĆą░ą╝ąĖč湥čüą║ąĖčģ čĆąĄąĘąŠąĮą░č鹊čĆąŠą▓. ąóą░ą║ čćč鹊 ą┤ą╗čÅ SJW ąŠą▒čŗčćąĮąŠ ą┤ąŠčüčéą░č鹊čćąĮąŠ ąĘąĮą░č湥ąĮąĖčÅ 1.
ąöąŠą┐čāčüą║ ąĮą░ ą┐ąŠą│čĆąĄčłąĮąŠčüčéčī čćą░čüč鹊čéčŗ ą│ąĄąĮąĄčĆą░č鹊čĆą░ . ąÆčŗčĆą░ą▒ąŠčéą░ąĮąŠ 菹╝ą┐ąĖčĆąĖč湥čüą║ąŠąĄ ą┐čĆą░ą▓ąĖą╗ąŠ, čćč鹊 čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą║ č鹊čćąĮąŠčüčéąĖ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ ą▒ąĖčéą░ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé čüčéą░ą▓ąĖčéčī ą║ąĄčĆą░ą╝ąĖč湥čüą║ąĖąĄ čĆąĄąĘąŠąĮą░č鹊čĆčŗ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ, ą│ą┤ąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čüą║ąŠčĆąŠčüčéąĖ ą┤ąŠ 125 ą║ąĖą╗ąŠą▒ąĖčé/čüąĄą║. ąöą╗čÅ ą┐ąŠą╗ąĮąŠą│ąŠ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░ čüą║ąŠčĆąŠčüč鹥ą╣ čłąĖąĮčŗ ą┐čĆąŠč鹊ą║ąŠą╗ą░ CAN čéčĆąĄą▒čāąĄčéčüčÅ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░. ąöąŠą┐čāčüą║ą░ąĄčéčüčÅ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ čāčģąŠą┤ čćą░čüč鹊čéčŗ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ąŠčé čāąĘą╗ą░ ą║ čāąĘą╗čā 1.7%.
[ąĀąĄą│ąĖčüčéčĆčŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▒ąĖčéą░ ]
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗąĄ čĆąĄą│ąĖčüčéčĆčŗ CNF1, CNF2, CNF3 čāą┐čĆą░ą▓ą╗čÅčÄčé ąĖąĮč鹥čĆą▓ą░ą╗ą░ą╝ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą╗čÅ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą▒ąĖčé ąĖąĮč鹥čĆč乥ą╣čüą░ čłąĖąĮčŗ CAN. ąŁčéąĖ čĆąĄą│ąĖčüčéčĆčŗ ą╝ąŠąČąĮąŠ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░čéčī č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ MCP2515 ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ (Configuration mode, čüą╝. čĆą░ąĘą┤ąĄą╗ "ąĀąĄąČąĖą╝čŗ čĆą░ą▒ąŠčéčŗ").
CNF1 . ąæąĖčéčŗ BRP[5:0] čāą┐čĆą░ą▓ą╗čÅčÄčé ą┐čĆąĄčüą║ą░ą╗ąĄčĆąŠą╝ čüą║ąŠčĆąŠčüčéąĖ (Baud Rate Prescaler). ąŁčéąĖ ą▒ąĖčéčŗ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčé ą┤ą╗ąĖąĮčā TQ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą▓čģąŠą┤ąĮąŠą╣ čćą░čüč鹊čéčŗ OSC1, čü ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą╣ ą┤ą╗ąĖąĮąŠą╣ TQ, čĆą░ą▓ąĮąŠą╣ 2 TOSC (ą║ąŠą│ą┤ą░ BRP[5:0] = b000000). ąæąĖčéčŗ SJW[1:0] ą▓čŗą▒ąĖčĆą░čÄčé čłąĖčĆąĖąĮčā čłą░ą│ą░ čĆąĄčüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą▓ ąĄą┤ąĖąĮąĖčåą░čģ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ TQ.
CNF2 . ąæąĖčéčŗ PRSEG[2:0] čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčé ą┤ą╗ąĖąĮčā (ą▓ ąĄą┤ąĖąĮąĖčåą░čģ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ TQ) čüąĄą│ą╝ąĄąĮčéą░ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖčÅ. ąæąĖčéčŗ PHSEG1[2:0] čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčé ą┤ą╗ąĖąĮčā PS1 (čéą░ą║ąČąĄ ą▓ ąĄą┤ąĖąĮąĖčåą░čģ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ TQ).
ąæąĖčé SAM čāą┐čĆą░ą▓ą╗čÅąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ ą▓čŗą▒ąŠčĆąŠą║ ąŠčåąĖčäčĆąŠą▓ą║ąĖ čüąĖą│ąĮą░ą╗ą░ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ RXCAN. ąĢčüą╗ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčī čŹč鹊čé ą▒ąĖčé ą▓ 1, č鹊 č鹊ą│ą┤ą░ čüąĖą│ąĮą░ą╗ ą┐čĆąĖąĄą╝ą░ ą▒čāą┤ąĄčé ąŠą┐čĆą░čłąĖą▓ą░čéčīčüčÅ 3 čĆą░ąĘą░: ą┤ą▓ą░ąČą┤čŗ ąĮą░ ąĖąĮč鹥čĆą▓ą░ą╗ąĄ TQ/2 ą┐ąĄčĆąĄą┤ č鹊čćą║ąŠą╣ ą▓čŗą▒ąŠčĆą║ąĖ ąĖ ąŠą┤ąĖąĮ čĆą░ąĘ ąĮą░ ąŠą▒čŗčćąĮąŠą╣ č鹊čćą║ąĄ ą▓čŗą▒ąŠčĆą║ąĖ (ą║ąŠč鹊čĆą░čÅ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą║ąŠąĮčåąĄ ąĖąĮč鹥čĆą▓ą░ą╗ą░ PS1). ąŚąĮą░č湥ąĮąĖąĄ čāčĆąŠą▓ąĮčÅ čłąĖąĮčŗ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐ąŠ ą╝ą░ąČąŠčĆąĖčéą░čĆąĮąŠą╝čā ą┐čĆąĖąĮčåąĖą┐čā. ąĢčüą╗ąĖ ą▒ąĖčé SAM čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0, č鹊 ą▓čŗą▓ąŠą┤ RXCAN ąŠą┐čĆą░čłąĖą▓ą░ąĄčéčüčÅ ąŠą┤ąĖąĮ čĆą░ąĘ ą▓ č鹊čćą║ąĄ ą▓čŗą▒ąŠčĆą║ąĖ.
ąæąĖčé BTLMODE čāą┐čĆą░ą▓ą╗čÅąĄčé č鹥ą╝, ą║ą░ą║ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┤ą╗ąĖąĮą░ PS2. ąĢčüą╗ąĖ čŹč鹊čé ą▒ąĖčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1, č鹊 ą┤ą╗ąĖąĮą░ PS2 ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą▒ąĖčéą░ą╝ąĖ PHSEG2[2:0] čĆąĄą│ąĖčüčéčĆą░ CNF3. ąĢčüą╗ąĖ ąČąĄ ą▒ąĖčé BTLMODE čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0, č鹊 ą┤ą╗ąĖąĮą░ PS2 ą▒ąŠą╗čīčłąĄ, č湥ą╝ PS1 ąĖ ą▓čĆąĄą╝čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĖąĮč乊čĆą╝ą░čåąĖąĖ (ą║ąŠč鹊čĆąŠąĄ ą┤ą╗čÅ MCP2515 čäąĖą║čüąĖčĆąŠą▓ą░ąĮąŠ ąĮą░ ąĘąĮą░č湥ąĮąĖąĖ 2 TQ).
CNF3 . ąæąĖčéčŗ PHSEG2[2:0] čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčé ą┤ą╗ąĖąĮčā PS2 (ą▓ ąĄą┤ąĖąĮąĖčåą░čģ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ TQ), ąĄčüą╗ąĖ ą▒ąĖčé CNF2.BTLMODE čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1. ąĢčüą╗ąĖ ą▒ąĖčé BTLMODE čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0, č鹊 ą▒ąĖčéčŗ PHSEG2[2:0] ąĮąĄ ąŠą║ą░ąĘčŗą▓ą░čÄčé ąĮąĖą║ą░ą║ąŠą│ąŠ ą▓ą╗ąĖčÅąĮąĖčÅ.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé SJW[1:0] BRP[5:0]
ąøąĄą│ąĄąĮą┤ą░
R/W-0
R/W-0
7-6, SJW[1:0] : čłąĖčĆąĖąĮą░ čłą░ą│ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (Synchronization Jump Width Length).
11 čłąĖčĆąĖąĮą░ = 4 TQ
5-0, BRP[5:0] : ą▒ąĖčéčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆąŠą╝ čüą║ąŠčĆąŠčüčéąĖ (Baud Rate Prescaler). TQ = 2*(BRP+1)/FOSC.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé BTLMODE SAM PHSEG1[2:0] PRSEG[2:0]
ąøąĄą│ąĄąĮą┤ą░
R/W-0
R/W-0
R/W-0
R/W-0
7, BTLMODE : ą▒ąĖčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ą╗ąĖąĮąŠą╣ PS2 (PS2 Bit Time Length).
1 ą┤ą╗ąĖąĮą░ PS2 ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą▒ąĖčéą░ą╝ąĖ PHSEG22:PHSEG20 čĆąĄą│ąĖčüčéčĆą░ CNF3.
6, SAM : ą▒ąĖčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ č鹊čćą║ąĖ ą▓čŗą▒ąŠčĆą║ąĖ (Sample Point Configuration).
1 ą▓čģąŠą┤ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ąŠą┐čĆą░čłąĖą▓ą░ąĄčéčüčÅ 3 čĆą░ąĘą░ ą▓ąŠąĘą╗ąĄ č鹊čćą║ąĖ ą▓čŗą▒ąŠčĆą║ąĖ.
5-3, PHSEG1[2:0] : ą▒ąĖčéčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ą╗ąĖąĮąŠą╣ ąĖąĮč鹥čĆą▓ą░ą╗ą░ PS1 (PS1 Length). PS1 = (PHSEG1+1)*TQ.
2-0, PRSEG[2:0] : ą▒ąĖčéčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ą╗ąĖąĮąŠą╣ čüąĄą│ą╝ąĄąĮčéą░ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖčÅ (Propagation Segment Length). PropSeg = (PRSEG+1)*TQ.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé SOF WAKFIL - - - PHSEG2[2:0]
ąøąĄą│ąĄąĮą┤ą░
R/W-0
R/W-0
U-0
U-0
U-0
R/W-0
7, SOF : ą▒ąĖčé čüąĖą│ąĮą░ą╗ą░ ąĮą░čćą░ą╗ą░ čäčĆąĄą╣ą╝ą░ (Start-of-Frame signal bit). ąĢčüą╗ąĖ CANCTRL.CLKEN = 0, ą▒ąĖčé SOF ąĮąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ ą▓ą╗ąĖčÅąĮąĖčÅ. ąĢčüą╗ąĖ CANCTRL.CLKEN = 1, č鹊:
1 ą▓čŗą▓ąŠą┤ CLKOUT čĆą░ąĘčĆąĄčłąĄąĮ ą┤ą╗čÅ čüąĖą│ąĮą░ą╗ą░ SOF.
6, WAKFIL : ą▒ąĖčé čäąĖą╗čīčéčĆą░ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (Wake-up Filter).
1 čäąĖą╗čīčéčĆ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ čĆą░ąĘčĆąĄčłąĄąĮ.
5-3 ą▒ąĖčéčŗ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ, čćąĖčéą░čÄčéčüčÅ ą║ą░ą║ 0.
2-0, PHSEG2[2:0] : čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ą╗ąĖąĮąŠą╣ PS2. PS2 = (PHSEG2+1)*TQ. ą£ąĖąĮąĖą╝ą░ą╗čīąĮąŠ ą┤ąŠą┐čāčüčéąĖą╝ą░čÅ ą┤ą╗ąĖąĮą░ ą┤ą╗čÅ PS2 čĆą░ą▓ąĮą░ 2TQ.
[ąöąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ąŠčłąĖą▒ąŠą║ ]
ą¤čĆąŠč鹊ą║ąŠą╗ CAN ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĖąĘąŠčēčĆąĄąĮąĮčŗąĄ ą╝ąĄčģą░ąĮąĖąĘą╝čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąĮą░ą╗ąĖčćąĖčÅ ąŠčłąĖą▒ąŠą║. ą£ąŠąČąĮąŠ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░čéčī čüą╗ąĄą┤čāčÄčēąĖąĄ ąŠčłąĖą▒ą║ąĖ.
CRC Error . ą¤čĆąŠą▓ąĄčĆą║ą░ ą║ąŠąĮčéčĆąŠą╗čīąĮąŠą╣ čüčāą╝ą╝čŗ (Cyclic Redundancy Check, CRC): ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ ą▓čŗčćąĖčüą╗čÅąĄčé čüą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ ą┐čĆąŠą▓ąĄčĆąŠčćąĮčŗąĄ ą▒ąĖčéčŗ ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ ąĮą░čćąĖąĮą░čÅ ąŠčé SOF ąĖ ąĘą░ą║ą░ąĮčćąĖą▓ą░čÅ ą┐ąŠą╗ąĄą╝ ą┤ą░ąĮąĮčŗčģ. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą▒ąĖčé CRC ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ ą┐ąŠą╗ąĄ CRC čäčĆąĄą╣ą╝ą░. ą¤čĆąĖąĮąĖą╝ą░čÄčēąĖą╣ čāąĘąĄą╗ čéą░ą║ąČąĄ ą▓čŗčćąĖčüą╗čÅąĄčé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą▒ąĖčé CRC ą┐ąŠ č鹊ą╣ ąČąĄ čüą░ą╝ąŠą╣ č乊čĆą╝čāą╗ąĄ, čćč鹊 ąĖ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║, ąĖ čüčĆą░ą▓ąĮąĖą▓ą░ąĄčé ą▓čŗčćąĖčüą╗ąĄąĮąĮčāčÄ CRC čü ą┐čĆąĖąĮčÅč鹊ą╣. ąĢčüą╗ąĖ ąŠą▒ąĮą░čĆčāąČąĄąĮąŠ ąĮąĄčüąŠą▓ą┐ą░ą┤ąĄąĮąĖąĄ, č鹊 ą┐čĆąŠąĖąĘąŠčłą╗ą░ ąŠčłąĖą▒ą║ą░ CRC, ąĖ č鹊ą│ą┤ą░ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ čäčĆąĄą╣ą╝ ąŠčłąĖą▒ą║ąĖ. ą¤ąĄčĆąĄą┤ą░čćą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐ąŠą▓č鹊čĆčÅąĄčéčüčÅ.
Acknowledge Error . ąÆ ą┐ąŠą╗ąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ ą┐čĆąŠą▓ąĄčĆčÅąĄčé, ąĮą░čģąŠą┤ąĖčéčüčÅ ą╗ąĖ čéą░ą╝ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ ą▒ąĖčé (ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ ą▒ąĖčé ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┐čĆąĖąĄą╝ąĮąĖą║ąŠą╝ čüąŠąŠą▒čēąĄąĮąĖčÅ, č鹊ą│ą┤ą░ ą║ą░ą║ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ ą┐ąŠčüčŗą╗ą░ąĄčé čŹč鹊čé ą▒ąĖčé ą║ą░ą║ čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╣). ąĢčüą╗ąĖ ą▓ ą┐ąŠą╗ąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ąŠčéčüčāčéčüčéą▓čāąĄčé ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ ą▒ąĖčé, č鹊 ąĘąĮą░čćąĖčé ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮčŗą╣ čāąĘąĄą╗ ąĮąĄ ą┐čĆąĖąĮčÅą╗ ą║ąŠčĆčĆąĄą║čéąĮąŠ čäčĆąĄą╣ą╝. ąÜą░ą║ čüą╗ąĄą┤čüčéą▓ąĖąĄ ą▓ąŠąĘąĮąĖą║ą░ąĄčé ąŠčłąĖą▒ą║ą░ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ (acknowledge error), ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ čäčĆąĄą╣ą╝ ąŠčłąĖą▒ą║ąĖ ąĖ ą┐ąĄčĆąĄą┤ą░čćą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐ąŠą▓č鹊čĆčÅąĄčéčüčÅ.
Form Error . ąĢčüą╗ąĖ čāąĘąĄą╗ ą┤ąĄč鹥ą║čéąĖčĆčāąĄčé ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ ą▒ąĖčé ą▓ ąŠą┤ąĮąŠą╝ ąĖąĘ 4 čüąĄą│ą╝ąĄąĮč鹊ą▓, ą│ą┤ąĄ ąĄą│ąŠ ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī - ą▓ą║ą╗čÄčćą░čÅ ą║ąŠąĮąĄčå čäčĆąĄą╣ą╝ą░ end-of-frame (EOF), ą┐čĆąŠą╝ąĄąČčāč鹊ą║ ą╝ąĄąČą┤čā čäčĆąĄą╣ą╝ą░ą╝ąĖ interframe space (IFS), čĆą░ąĘą┤ąĄą╗ąĖč鹥ą╗čī ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ (acknowledge delimiter) ąĖą╗ąĖ čĆą░ąĘą┤ąĄą╗ąĖč鹥ą╗čī CRC, č鹊 č鹊ą│ą┤ą░ ą▓ąŠąĘąĮąĖą║ą░ąĄčé ąŠčłąĖą▒ą║ą░ č乊čĆą╝čŗ, ąĖ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ąŠčłąĖą▒ą║ą░ čäčĆąĄą╣ą╝ą░. ą¤ąĄčĆąĄą┤ą░čćą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐ąŠą▓č鹊čĆčÅąĄčéčüčÅ.
Bit Error . ą×čłąĖą▒ą║ą░ ą▒ąĖčéą░ ą▓ąŠąĘąĮąĖą║ą░ąĄčé, ąĄčüą╗ąĖ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ ą┤ąĄč鹥ą║čéąĖčĆčāąĄčé ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ą▒ąĖčéą░, ąĮąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ č鹊ą╝čā, ą║ąŠč鹊čĆčŗą╣ ą▒čŗą╗ ą┐ąŠčüą╗ą░ąĮ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą┐ąĄčĆąĄą┤ą░ą▓ą░ą╗čüčÅ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ ą▒ąĖčé, ąĮąŠ ą▒čŗą╗ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮ čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╣, ąĖą╗ąĖ ą▒čŗą╗ ą┐ąĄčĆąĄą┤ą░ąĮ čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╣ ą▒ąĖčé, ąĮąŠ ąĮą░ čłąĖąĮąĄ ą▓ą╝ąĄčüč鹊 ąĮąĄą│ąŠ ą▒čŗą╗ ąŠą▒ąĮą░čĆčāąČąĄąĮ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ ą▒ąĖčé).
ąśčüą║ą╗čÄč湥ąĮąĖąĄ ąĖą╝ąĄąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą┐ąŠą╗čÅ ą░čĆą▒ąĖčéčĆą░ąČą░ ąĖ čüą╗ąŠčéą░ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ: ąĄčüą╗ąĖ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ ą┐ąŠčüčŗą╗ą░ąĄčé čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╣ ą▒ąĖčé, ąĖ ą┤ąĄč鹥ą║čéąĖčĆčāąĄčé ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣, č鹊 ąĮąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ąŠčłąĖą▒ą║ą░ ą▒ąĖčéą░, ą┐ąŠč鹊ą╝čā čćč鹊 čŹč鹊 ąĮąŠčĆą╝ą░ą╗čīąĮčŗąĄ čüąĖčéčāą░čåąĖąĖ ą░čĆą▒ąĖčéčĆą░ąČą░ ąĖ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ą▓ ą┐čĆąŠč鹊ą║ąŠą╗ąĄ CAN.
Stuff Error . ąĢčüą╗ąĖ ą▓ ą┐čĆąŠą╝ąĄąČčāčéą║ąĄ ą╝ąĄąČą┤čā ąĮą░čćą░ą╗ąŠą╝ čäčĆąĄą╣ą╝ą░ (start-of-frame, SOF) ąĖ čĆą░ąĘą┤ąĄą╗ąĖč鹥ą╗ąĄą╝ CRC, ąŠą▒ąĮą░čĆčāąČąĄąĮąŠ 6 čüą╗ąĄą┤čāčÄčēąĖčģ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ą▒ąĖčé ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠą╣ ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ, č鹊 ąĮą░čĆčāčłąĄąĮąŠ ą┐čĆą░ą▓ąĖą╗ąŠ ą▒ąĖčé-čüčéą░čäčäąĖąĮą│ą░. ąóąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąŠčłąĖą▒ą║ą░ ą▒ąĖčé-čüčéą░čäčäąĖąĮą│ą░ ąĖ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ąŠčłąĖą▒ą║ą░ čäčĆąĄą╣ą╝ą░. ą¤ąĄčĆąĄą┤ą░čćą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐ąŠą▓č鹊čĆčÅąĄčéčüčÅ.
ąĪąŠčüč鹊čÅąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ . ą¤čĆąŠ ąŠą▒ąĮą░čĆčāąČąĄąĮąĮčŗąĄ ąŠčłąĖą▒ą║ąĖ ą▓čüąĄ ą┤čĆčāą│ąĖąĄ čāąĘą╗čŗ čüąĄčéąĖ CAN čāąĘąĮą░čÄčé č湥čĆąĄąĘ ą│ąĄąĮąĄčĆą░čåąĖčÄ ąĖ ą┐ąŠą╗čāč湥ąĮąĖąĄ čäčĆąĄą╣ą╝ąŠą▓ ąŠčłąĖą▒ą║ąĖ (error frame, čüą╝. čĆąĖčü. 2-4). ą¤ąĄčĆąĄą┤ą░čćą░ čäčĆąĄą╣ą╝ą░ ąŠčłąĖą▒ąŠčćąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĄčéčüčÅ, ąĖ čŹč鹊čé čäčĆąĄą╣ą╝ ą┐ąŠą▓č鹊čĆčÅąĄčéčüčÅ, ą║ą░ą║ č鹊ą╗čīą║ąŠ čŹč鹊 čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▓ąŠąĘą╝ąŠąČąĮčŗą╝. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, ą║ą░ąČą┤čŗą╣ čāąĘąĄą╗ CAN ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ąŠą┤ąĮąŠą╝ ąĖąĘ 3 čüąŠčüč鹊čÅąĮąĖą╣ ąŠčłąĖą▒ą║ąĖ, ą║ą░ąČą┤ąŠąĄ ąĖąĘ ą║ąŠč鹊čĆčŗčģ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąĘąĮą░č湥ąĮąĖčÄ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ čüč湥čéčćąĖą║ąŠą▓ ąŠčłąĖą▒ąŠą║:
1 . Error-active (čüąŠčüč鹊čÅąĮąĖąĄ ą░ą║čéąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ).2 . Error-passive (čüąŠčüč鹊čÅąĮąĖąĄ ą┐ą░čüčüąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ).3 . Bus-off (čłąĖąĮą░ ą▓čŗą║ą╗čÄč湥ąĮą░, čŹč鹊 ąŠčéąĮąŠčüąĖčéčüčÅ č鹊ą╗čīą║ąŠ ą║ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║čā).
ąĪąŠčüč鹊čÅąĮąĖąĄ error-active čŹč鹊 ąŠą▒čŗčćąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ, ą║ąŠą│ą┤ą░ čāąĘąĄą╗ ą╝ąŠąČąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī čüąŠąŠą▒čēąĄąĮąĖčÅ ąĖ čäčĆąĄą╣ą╝čŗ ą░ą║čéąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ (ą┐ąŠčüčéčĆąŠąĄąĮąĮąŠą│ąŠ ąĖąĘ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗčģ ą▒ąĖčé, čüą╝. čĆąĖčü. 2-4) ą▒ąĄąĘ ą║ą░ą║ąĖčģ-ą╗ąĖą▒ąŠ ąŠą│čĆą░ąĮąĖč湥ąĮąĖą╣.
ąÆ čüąŠčüč鹊čÅąĮąĖąĖ error-passive ą╝ąŠą│čāčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčīčüčÅ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĖ čäčĆąĄą╣ą╝čŗ ą┐ą░čüčüąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ (čüąŠčüč鹊čÅčēąĖąĄ ąĖąĘ čĆąĄčåąĄčüčüąĖą▓ąĮčŗčģ ą▒ąĖčé).
ąĪąŠčüč鹊čÅąĮąĖąĄ bus-off ą▓čĆąĄą╝ąĄąĮąĮąŠ ą┤ąĄą╗ą░ąĄčé ąĮąĄą▓ąŠąĘą╝ąŠąČąĮčŗą╝ ą┤ą╗čÅ čāąĘą╗ą░ čāčćą░čüčéą▓ąŠą▓ą░čéčī ą▓ ąŠą▒ą╝ąĄąĮąĄ ą┐ąŠ čłąĖąĮąĄ. ąÆąŠ ą▓čĆąĄą╝čÅ čŹč鹊ą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĮąĄ ą╝ąŠą│čāčé ąĮąĖ ą┐čĆąĖąĮąĖą╝ą░čéčīčüčÅ, ąĮąĖ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčīčüčÅ. ąóąŠą╗čīą║ąŠ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ąĖ ą╝ąŠą│čāčé ą┐ąĄčĆąĄą╣čéąĖ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ bus-off.
ąĀąĄąČąĖą╝čŗ ąŠčłąĖą▒ą║ąĖ ąĖ čüč湥čéčćąĖą║ąĖ ąŠčłąĖą▒ąŠą║ . ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ MCP2515 čüąŠą┤ąĄčƹȹĖčé 2 čüč湥čéčćąĖą║ą░ ąŠčłąĖą▒ąŠą║: čüč湥čéčćąĖą║ ąŠčłąĖą▒ąŠą║ ą┐čĆąĖąĄą╝ą░ Receive Error Counter, čĆąĄą│ąĖčüčéčĆ REC ąĖ čüč湥čéčćąĖą║ ąŠčłąĖą▒ąŠą║ ą┐ąĄčĆąĄą┤ą░čćąĖ Transmit Error Counter, čĆąĄą│ąĖčüčéčĆ TEC. ąŚąĮą░č湥ąĮąĖčÅ čŹčéąĖčģ ąŠą▒ąŠąĖčģ čüč湥čéčćąĖą║ąŠą▓ ą╝ąŠąČąĄčé ą┐čĆąŠčćąĖčéą░čéčī čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ. ąŁčéąĖ čüč湥čéčćąĖą║ąĖ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāčÄčéčüčÅ / ą┤ąĄą║čĆąĄą╝ąĄąĮčéąĖčĆčāčÄčéčüčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čüąŠ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĄą╣ čłąĖąĮčŗ CAN.
MCP2515 ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ error-active, ąĄčüą╗ąĖ ąĘąĮą░č湥ąĮąĖąĄ ąŠą▒ąŠąĖčģ čüč湥čéčćąĖą║ąŠą▓ ą╝ąĄąĮčīčłąĄ 128, ą┐čĆąĄą┤ąĄą╗ą░ error-passive. ąÆ čüąŠčüč鹊čÅąĮąĖąĄ error-passive MCP2515 ą┐ąĄčĆąĄčģąŠą┤ąĖčé, ąĄčüą╗ąĖ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĖąĮ ąĖąĘ čüč湥čéčćąĖą║ąŠą▓ ąŠčłąĖą▒ąŠą║ čĆą░ą▓ąĄąĮ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄ 128.
ąÆ čüąŠčüč鹊čÅąĮąĖąĄ bus-off ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ąĄčĆąĄčģąŠą┤ąĖčé, ąĄčüą╗ąĖ TEC ą┐čĆąĄą▓čŗčłą░ąĄčé 255, ą┐čĆąĄą┤ąĄą╗ bus-off. ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąŠčüčéą░ąĄčéčüčÅ ą▓ čŹč鹊ą╝ čüąŠčüč鹊čÅąĮąĖąĖ, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ą┐čĆąĖąĮčÅčéą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ čłąĖąĮčŗ (bus-off recovery sequence). Bus-off recovery sequence čüąŠčüč鹊ąĖčé ąĖąĘ 128 ą┐ąĄčĆąĄą┤ą░čć čüą╗ąĄą┤čāčÄčēąĖčģ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ 11 ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ čĆąĄčåąĄčüčüąĖą▓ąĮčŗčģ ą▒ąĖčé (čüą╝. čĆąĖčü. 6-1).
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ MCP2515, ą┐ąĄčĆąĄą╣ą┤ąĄčé ą▓ bus-off, ąŠąĮ ą▓ąŠčüčüčéą░ąĮąŠą▓ąĖčéčüčÅ ąŠą▒čĆą░čéąĮąŠ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ error-active ą▒ąĄąĘ ą║ą░ą║ąŠą│ąŠ-ą╗ąĖą▒ąŠ ą▓ą╝ąĄčłą░č鹥ą╗čīčüčéą▓ą░ čüąŠ čüč鹊čĆąŠąĮčŗ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ąĄčüą╗ąĖ čłąĖąĮą░ ąŠčüčéą░ąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle) ąĮą░ ą▓čĆąĄą╝čÅ 128 * 11 ą▒ąĖčé. ąĢčüą╗ąĖ čŹč鹊 ąĮąĄąČąĄą╗ą░č鹥ą╗čīąĮąŠ, č鹊 čéą░ą║ą░čÅ čüąĖčéčāą░čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą░ą┤čĆąĄčüąŠą▓ą░ąĮą░ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║čā ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ąĀąĖčü. 6-1: ąöąĖą░ą│čĆą░ą╝ą╝ą░ ą┐ąĄčĆąĄčģąŠą┤ąŠą▓ ą╝ąĄąČą┤čā čüąŠčüč鹊čÅąĮąĖčÅą╝ąĖ čĆąĄąČąĖą╝ąŠą▓ ąŠčłąĖą▒ą║ąĖ.
ąóąĄą║čāčēąĖą╣ čĆąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ MCP2515 ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ č湥čĆąĄąĘ čĆąĄą│ąĖčüčéčĆ EFLG.
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ąĄčüčéčī ą▒ąĖčé čäą╗ą░ą│ą░ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ąŠ čüąŠčüč鹊čÅąĮąĖąĖ ąŠčłąĖą▒ą║ąĖ (error state warning flag, EFLG:EWARN), ą║ąŠč鹊čĆčŗą╣ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ, ąĄčüą╗ąĖ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĖąĮ ąĖąĘ čüč湥čéčćąĖą║ąŠą▓ ąŠčłąĖą▒ąŠą║ ą┐čĆąĄą▓čŗčüąĖčé ą╗ąĖą╝ąĖčé 96. ąæąĖčé EWARN čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ąĄčüą╗ąĖ ąŠą▒ą░ čüč湥čéčćąĖą║ą░ ąŠčłąĖą▒ąŠą║ čüčéą░ąĮčāčé ą╝ąĄąĮčīčłąĄ 96.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé TEC[7:0]
ąøąĄą│ąĄąĮą┤ą░
R-0
7-0, TEC[7:0] : ą▒ąĖčéčŗ čüč湥čéčćąĖą║ą░ ąŠčłąĖą▒ąŠą║ ą┐ąĄčĆąĄą┤ą░čćąĖ (Transmit Error Count).
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé REC[7:0]
ąøąĄą│ąĄąĮą┤ą░
R-0
7-0, REC[7:0] : ą▒ąĖčéčŗ čüč湥čéčćąĖą║ą░ ąŠčłąĖą▒ąŠą║ ą┐čĆąĖąĄą╝ą░ (Receive Error Count).
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé RX1OVR RX0OVR TXBO TXEP RXEP TXWAR RXWAR EWARN
ąøąĄą│ąĄąĮą┤ą░
R/W-0
R/W-0
R-0
R-0
R-0
R-0
R-0
R-0
7, RX1OVR : ą▒ąĖčé čäą╗ą░ą│ą░ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ 1 (Receive Buffer 1 Overflow Flag). ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą▒čāč乥čĆąŠą╝ RXB1 ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 ą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ, ąĖ CANINTF.RX1IF=1. ąæąĖčé RX1OVR ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą▒čĆąŠčłąĄąĮ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝.
6, RX0OVR : ą▒ąĖčé čäą╗ą░ą│ą░ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ 0 (Receive Buffer 0 Overflow Flag). ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą▒čāč乥čĆąŠą╝ RXB0 ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 ą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ, ąĖ CANINTF.RX0IF=1. ąæąĖčé RX0OVR ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą▒čĆąŠčłąĄąĮ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝.
5, TXBO : ą▒ąĖčé čäą╗ą░ą│ą░ ąŠčłąĖą▒ą║ąĖ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ čłąĖąĮčŗ (Bus-Off Error Flag). ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ TEC ą┤ąŠčüčéąĖą│ą░ąĄčé ąĘąĮą░č湥ąĮąĖčÅ 255. ąĪą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ą┐ąŠčüą╗ąĄ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ čłąĖąĮčŗ (bus recovery sequence).
4, TXEP : ą▒ąĖčé čäą╗ą░ą│ą░ ą┐ą░čüčüąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ (Transmit Error-Passive Flag). ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ TEC čĆą░ą▓ąĄąĮ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄ 128. ąĪą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ TEC ą╝ąĄąĮčīčłąĄ 128.
3, RXEP : ą▒ąĖčé čäą╗ą░ą│ą░ ą┐ą░čüčüąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ ą┐čĆąĖąĄą╝ą░ (Receive Error-Passive Flag). ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ REC čĆą░ą▓ąĄąĮ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄ 128. ąĪą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ REC ą╝ąĄąĮčīčłąĄ 128.
2, TXWAR : ą▒ąĖčé čäą╗ą░ą│ą░ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ąŠą▒ ąŠčłąĖą▒ą║ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ (Transmit Error Warning Flag). ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ TEC čĆą░ą▓ąĄąĮ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄ 96. ąĪą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ TEC ą╝ąĄąĮčīčłąĄ 96.
1, RXWAR : ą▒ąĖčé čäą╗ą░ą│ą░ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ąŠą▒ ąŠčłąĖą▒ą║ąĄ ą┐čĆąĖąĄą╝ą░ (Receive Error Warning Flag). ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ REC čĆą░ą▓ąĄąĮ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄ 96. ąĪą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ REC ą╝ąĄąĮčīčłąĄ 96.
0, EWARN : ą▒ąĖčé čäą╗ą░ą│ą░ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ąŠą▒ ąŠčłąĖą▒ą║ąĄ (Error Warning Flag). ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ TEC ąĖą╗ąĖ REC čĆą░ą▓ąĄąĮ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄ 96 (čé. ąĄ. ą║ąŠą│ą┤ą░ TXWAR ąĖą╗ąĖ RXWAR = 1). ąĪą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ąŠą▒ą░ čüč湥čéčćąĖą║ą░, ąĖ REC, ąĖ TEC ą╝ąĄąĮčīčłąĄ 96.
[ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ]
ąŻ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ MCP2515 ąĄčüčéčī 8 ąĖčüč鹊čćąĮąĖą║ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąĀąĄą│ąĖčüčéčĆ CANINTE čüąŠą┤ąĄčƹȹĖčé ąŠčéą┤ąĄą╗čīąĮčŗąĄ ą▒ąĖčéčŗ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ąĖąĘ ąĖčüč鹊čćąĮąĖą║ąŠą▓. ąĀąĄą│ąĖčüčéčĆ CANINTF čüąŠą┤ąĄčƹȹĖčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą▒ąĖčéčŗ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ąĖąĘ ąĖčüč鹊čćąĮąĖą║ąŠą▓. ąÜąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ą▓čŗą▓ąŠą┤ /INT (ą▓čŗčģąŠą┤) ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ą▓ ąĮąĖąĘą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ MCP2515, ąĖ ąŠčüčéą░ąĄčéčüčÅ ą▓ ąĮąĖąĘą║ąŠą╝ čāčĆąŠą▓ąĮąĄ, ą┐ąŠą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĮąĄ ą▒čāą┤ąĄčé ąŠčćąĖčēąĄąĮąŠ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčćąĖčēąĄąĮąŠ, ąĄčüą╗ąĖ ą┐čĆąĄąŠą▒ą╗ą░ą┤ą░ąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÄ čāčüą╗ąŠą▓ąĖąĄ.
ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ, čćč鹊ą▒čŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ą░čüčī ą║ąŠą╝ą░ąĮą┤ą░ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĖ ą▒ąĖčéą░ (Bit Modify) ą┤ą╗čÅ čüą▒čĆąŠčüą░ ą▒ąĖč鹊ą▓ čäą╗ą░ą│ą░ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CANINTF ą▓ą╝ąĄčüč鹊 ąŠą▒čŗčćąĮčŗčģ ąŠą┐ąĄčĆą░čåąĖą╣ ąĘą░ą┐ąĖčüąĖ. ąŁč鹊 ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé ąĮąĄąČąĄą╗ą░č鹥ą╗čīąĮąŠąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą┤čĆčāą│ąŠą│ąŠ čäą╗ą░ą│ą░, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą┐ąŠą╝ąĄąĮčÅčéčīčüčÅ ą▓ąŠ ą▓čĆąĄą╝čÅ ą║ąŠą╝ą░ąĮą┤čŗ ąĘą░ą┐ąĖčüąĖ (Write), čćč鹊 ą┐ąŠč鹥ąĮčåąĖą░ą╗čīąĮąŠ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ č鹊ą╝čā, čćč鹊 ą║ą░ą║ąŠąĄ-č鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠą┐čāčēąĄąĮąŠ.
ąĪą╗ąĄą┤čāąĄčé ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 čäą╗ą░ą│ąĖ CANINTF čćąĖčéą░čÄčéčüčÅ/ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ, ąĖ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąĖ čāčüčéą░ąĮąŠą▓ą║ąĄ ą╗čÄą▒ąŠą│ąŠ ąĖąĘ čäą╗ą░ą│ąŠą▓ CANINTF, ąĄčüą╗ąĖ čŹč鹊 čĆą░ąĘčĆąĄčłąĄąĮąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ą▒ąĖč鹊ą╝ CANINTE.
ąæąĖčéčŗ ą║ąŠą┤ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ . ąśčüč鹊čćąĮąĖą║ ąŠąČąĖą┤ą░čÄčēąĄą│ąŠ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▒ąĖčéą░ą╝ąĖ CANSTAT.ICOD (ą║ąŠą┤ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ), čćč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ąŠ ą▓čĆąĄąĘą║ąĄ čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ CANSTAT. ą¤čĆąĖ čüąŠą▒čŗčéąĖąĖ, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, /INT ąŠčüčéą░ąĮąĄčéčüčÅ ą▓ ą╗ąŠą│. 0, ą┐ąŠą║ą░ ą▓čüąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĮąĄ ą▒čāą┤čāčé čüą▒čĆąŠčłąĄąĮčŗ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝. ąæąĖčéčŗ CANSTAT.ICOD ą▒čāą┤čāčé ąŠčéčĆą░ąČą░čéčī ą║ąŠą┤ ą┤ą╗čÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čü čüą░ą╝čŗą╝ ą▓čŗčüąŠą║ąŠą┐čĆąĖąŠčĆąĖč鹥čéąĮčŗą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄą╝, ą║ąŠč鹊čĆąŠąĄ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ąŠąČąĖą┤ą░ąĄčé čüą▓ąŠąĄą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖąŠčĆąĖč鹥ąĘąĖčĆčāčÄčéčüčÅ ą▓ąĮčāčéčĆąĖ MCP2515 čéą░ą║, čćč鹊 č湥ą╝ ą╝ąĄąĮčīčłąĄ ąĘąĮą░č湥ąĮąĖąĄ ICOD, č鹥ą╝ ą▓čŗčłąĄ ą┐čĆąĖąŠčĆąĖč鹥čé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą▒čŗą╗ąŠ ąŠčćąĖčēąĄąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čü čüą░ą╝čŗą╝ ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝, ą▒ąĖčéą░ą╝ąĖ ICOD ą▒čāą┤ąĄčé ąŠč鹊ą▒čĆą░ąČą░čéčīčüčÅ ą║ąŠą┤ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ąĖąĘ čüą░ą╝čŗčģ ą┐čĆąĖąŠčĆąĖč鹥čéąĮčŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ąŠąČąĖą┤ą░čÄčēąĖčģ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ (ąĄčüą╗ąĖ čéą░ą║ąĖąĄ ąĖą╝ąĄčÄčéčüčÅ, čüą╝. čéą░ą▒ą╗ąĖčåčā 7-1). ąæąĖčéą░ą╝ąĖ ICOD ąŠčéčĆą░ąČą░čÄčéčüčÅ č鹊ą╗čīą║ąŠ č鹥 ąĖčüč鹊čćąĮąĖą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ čüą▓čÅąĘą░ąĮčŗ čü čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ąĖ ą▒ąĖčéą░ą╝ąĖ čĆąĄą│ąĖčüčéčĆą░ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ CANINTE.
ąóą░ą▒ą╗ąĖčåą░ 7-1: ą║ą░ą║ ą┤ąĄą║ąŠą┤ąĖčĆčāčÄčéčüčÅ ą▒ąĖčéčŗ ICOD[2:0].
ICOD[2:0] ąöą▓ąŠąĖčćąĮąŠąĄ ą▓čŗčĆą░ąČąĄąĮąĖąĄ
000
/ERRŌĆó/WAKŌĆó/TX0ŌĆó/TX1ŌĆó/TX2ŌĆó/RX0ŌĆó/RX1
001
ERR
010
/ERRŌĆóWAK
011
/ERRŌĆó/WAKŌĆóTX0
100
/ERRŌĆó/WAKŌĆó/TX0ŌĆóTX1
101
/ERRŌĆó/WAKŌĆó/TX0ŌĆó/TX1ŌĆóTX2
110
/ERRŌĆó/WAKŌĆó/TX0ŌĆó/TX1ŌĆó/TX2ŌĆóRX0
111
/ERRŌĆó/WAKŌĆó/TX0ŌĆó/TX1ŌĆó/TX2ŌĆó/RX0ŌĆóRX1
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: /ERR čüą▓čÅąĘą░ąĮąŠ čü CANINTE, ERRIE .
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ . ąÜąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ (CANINTE.TXnIE=1), ą▒čāą┤ąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčīčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą╝ /INT, ą║ą░ą║ č鹊ą╗čīą║ąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒čāč乥čĆ ą┐ąĄčĆąĄą┤ą░čćąĖ ąŠą┐čāčüč鹊賹Ėą╗čüčÅ ąĖ ą│ąŠč鹊ą▓ ą║ ąĘą░ą│čĆčāąĘą║ąĄ ąĮąŠą▓ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąæąĖčé CANINTF.TXnIF ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, čćč鹊ą▒čŗ ą┐ąŠą║ą░ąĘą░čéčī ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąŁč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčćąĖčēą░ąĄčéčüčÅ čüą▒čĆąŠčüąŠą╝ ą▒ąĖčéą░ TXnIF.
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąĖąĄą╝ą░ . ąÜąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąĖąĄą╝ą░ (CANINTE.RXnIE=1), ą▒čāą┤ąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčīčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą╝ /INT, ą║ą░ą║ č鹊ą╗čīą║ąŠ ą▒čāą┤ąĄčé čāčüą┐ąĄčłąĮąŠ ą┐čĆąĖąĮčÅč鹊 ąĖ ąĘą░ą│čĆčāąČąĄąĮąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░. ąŁč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą░ą║čéąĖą▓ąĖąĘąĖčĆčāąĄčéčüčÅ čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą╗čÅ EOF. ąæąĖčé CANINTF.RXnIF ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, čćč鹊ą▒čŗ ą┐ąŠą║ą░ąĘą░čéčī ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąŁč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčćąĖčēą░ąĄčéčüčÅ čüą▒čĆąŠčüąŠą╝ ą▒ąĖčéą░ RXnIF.
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčłąĖą▒ą║ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ . ąÜąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąŠčłąĖą▒ą║ą░ ą┐čĆąĖ ą┐ąĄčĆąĄą┤ą░č湥 ąĖą╗ąĖ ą┐čĆąĖąĄą╝ąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ, čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čäą╗ą░ą│ ąŠčłąĖą▒ą║ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ (CANINTF.MERRF) ąĖ, ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé CANINTE.MERRE, ą▒čāą┤ąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčīčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą╝ /INT. ąŁč鹊 ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąŠ ą┤ą╗čÅ čāą┐čĆąŠčēąĄąĮąĖčÅ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čüą║ąŠčĆąŠčüčéąĖ čłąĖąĮčŗ čüąŠą▓ą╝ąĄčüčéąĮąŠ čü čĆąĄąČąĖą╝ąŠą╝ "č鹊ą╗čīą║ąŠ ą┐čĆąŠčüą╗čāčłąĖą▓ą░ąĮąĖąĄ" (Listen-Only mode).
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┤ą╗čÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠčé ą░ą║čéąĖą▓ąĮąŠčüčéąĖ čłąĖąĮčŗ (Bus Activity Wake-up). ąÜąŠą│ą┤ą░ MCP2515 ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ čüąĮą░ (Sleep mode), ąĖ čĆą░ąĘčĆąĄčłąĄąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ą┐ąŠ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ čłąĖąĮčŗ (CANINTE.WAKIE=1), ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą╝ /INT, ąĖ ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé CANINTF.WAKIF, ąĄčüą╗ąĖ ą▒čŗą╗ą░ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮą░ ą░ą║čéąĖą▓ąĮąŠčüčéčī čłąĖąĮčŗ CAN. ąŁč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą▓čŗčģąŠą┤čā MCP2515 ąĖąĘ čĆąĄąČąĖą╝ą░ čüąĮą░. ąŁč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ąŠčćąĖčüčéą║ąŠą╣ ą▒ąĖčéą░ WAKIF.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: MCP2515 ą┐čĆąŠą▒čāąČą┤ą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą▓ čĆąĄąČąĖą╝ Listen-Only.
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčłąĖą▒ą║ąĖ . ąÜąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčłąĖą▒ą║ąĖ (CANINTE.ERRIE=1), ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą╝ /INT, ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ ąĖą╗ąĖ ąĄčüą╗ąĖ ąĖąĘą╝ąĄąĮąĖčéčüčÅ čüąŠčüč鹊čÅąĮąĖąĄ ąŠčłąĖą▒ą║ąĖ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░ ąĖą╗ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ą░. ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆą░ čäą╗ą░ą│ąŠą▓ ąŠčłąĖą▒ą║ąĖ (Error Flag, EFLG) ą┐ąŠą║ą░ąČąĄčé ąŠą┤ąĮąŠ ąĖąĘ čüą╗ąĄą┤čāčÄčēąĖčģ čāčüą╗ąŠą▓ąĖą╣.
ą¤ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ąĄ . ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé, ą║ąŠą│ą┤ą░ MAB čüąŠą▒čĆą░ą╗ ą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ą┐čĆąĖąĮčÅč鹊ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ (čŹč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅąĄčé ą║čĆąĖč鹥čĆąĖčÄ čäąĖą╗čīčéčĆąŠą▓ ą┤ąŠą┐čāčüčéąĖą╝ąŠčüčéąĖ) ąĖ ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĮąĄčé čüą▓ąŠą▒ąŠą┤ąĮčŗčģ ą▒čāč乥čĆąŠą▓ ą┐čĆąĖąĄą╝ą░, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ čäąĖą╗čīčéčĆčā. ąóąŠą│ą┤ą░ ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé EFLG.RXnOVR, čćč鹊ą▒čŗ ą┐ąŠą║ą░ąĘą░čéčī čüąŠą▒čŗčéąĖąĄ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ. ąŁč鹊čé ą▒ąĖčé ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠčćąĖčēąĄąĮ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝.
ą¤čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖąĄ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ . ąĪč湥čéčćąĖą║ REC ą┤ąŠčüčéąĖą│ ą┐čĆąĄą┤ąĄą╗ą░ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ąŠą▒ ąŠčłąĖą▒ą║ąĄ 96.
ą¤čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░ . ąĪč湥čéčćąĖą║ TEC ą┤ąŠčüčéąĖą│ ą┐čĆąĄą┤ąĄą╗ą░ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ąŠą▒ ąŠčłąĖą▒ą║ąĄ 96.
ą¤čĆąĖąĄą╝ąĮąĖą║ ą▓ ERROR-PASSIVE . ąĪč湥čéčćąĖą║ REC ą┐čĆąĄą▓čŗčüąĖą╗ ą┐čĆąĄą┤ąĄą╗ error-passive 127, ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ąĄčĆąĄčłąĄą╗ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ error-passive.
ą¤ąĄčĆąĄą┤ą░čéčćąĖą║ ą▓ ERROR-PASSIVE . ąĪč湥čéčćąĖą║ TEC ą┐čĆąĄą▓čŗčüąĖą╗ ą┐čĆąĄą┤ąĄą╗ error-passive 127, ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ąĄčĆąĄčłąĄą╗ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ error-passive.
BUS-OFF . ąĪč湥čéčćąĖą║ TEC ą┤ąŠčüčéąĖą│ ąĘąĮą░č湥ąĮąĖčÅ 255, ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąĄčĆąĄčłą╗ąŠ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ ąŠčé čłąĖąĮčŗ.
ą¤ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ . ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĮą░ą┐čĆčÅą╝čāčÄ čüą▓čÅąĘą░ąĮčŗ čü ąŠą┤ąĮąĖą╝ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĖą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ čäą╗ą░ą│ąŠą▓ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CANINTF. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠąČąĖą┤ą░čÄčé ąŠą▒čĆą░ą▒ąŠčéą║ąĖ, ą┐ąŠą║ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąŠą┤ąĖąĮ ąĖąĘ čäą╗ą░ą│ąŠą▓. ąÜą░ą║ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ąĖąĘ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝, čŹč鹊čé čäą╗ą░ą│ ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą▒čĆąŠčłąĄąĮ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé čüąĮčÅč鹊 čāčüą╗ąŠą▓ąĖąĄ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé MERRE WAKIE ERRIE TX2IE TX1IE TX0IE RX1IE RX0IE
ąøąĄą│ąĄąĮą┤ą░
R/W-0
R/W-0
R/W-0
R/W-0
R/W-0
R/W-0
R/W-0
R/W-0
7, MERRE : ą▒ąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ (Message Error Interrupt Enable). 1 čĆą░ąĘčĆąĄčłąĄąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčé ąŠčłąĖą▒ą║ąĖ ą┐čĆąĖ ą┐čĆąĖąĄą╝ąĄ ąĖą╗ąĖ ą┐ąĄčĆąĄą┤ą░č湥 čüąŠąŠą▒čēąĄąĮąĖčÅ, 0 ąĘą░ą┐čĆąĄčēąĄąĮąŠ.
6, WAKIE : ą▒ąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (Wake-up Interrupt Enable). 1 čĆą░ąĘčĆąĄčłąĄąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčé ą░ą║čéąĖą▓ąĮąŠčüčéąĖ čłąĖąĮčŗ CAN, 0 ąĘą░ą┐čĆąĄčēąĄąĮąŠ.
5, ERRIE : ą▒ąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ (Error Interrupt Enable, čĆąĄą│ąĖčüčéčĆąŠą╝ EFLG ą┤ąĄą║ąŠą┤ąĖčĆčāčÄčéčüčÅ ąĮąĄčüą║ąŠą╗čīą║ąŠ ąĖčüč鹊čćąĮąĖą║ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ). 1 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čüąŠčüč鹊čÅąĮąĖčÅ EFLG, 0 ąĘą░ą┐čĆąĄčēąĄąĮąŠ.
4, TX2IE : ą▒ąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ ąŠą┐čāčüč鹊賹ĄąĮąĖčÄ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ 2 (Transmit Buffer 2 Empty Interrupt Enable). 1 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ ąŠą┐čāčüč鹊賹ĄąĮąĖčÄ ą▒čāč乥čĆą░ TXB2, 0 ąĘą░ą┐čĆąĄčēąĄąĮąŠ.
3, TX1IE : ą▒ąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ ąŠą┐čāčüč鹊賹ĄąĮąĖčÄ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ 1 (Transmit Buffer 1 Empty Interrupt Enable). 1 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ ąŠą┐čāčüč鹊賹ĄąĮąĖčÄ ą▒čāč乥čĆą░ TXB1, 0 ąĘą░ą┐čĆąĄčēąĄąĮąŠ.
2, TX0IE : ą▒ąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ ąŠą┐čāčüč鹊賹ĄąĮąĖčÄ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ 0 (Transmit Buffer 0 Empty Interrupt Enable). 1 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ ąŠą┐čāčüč鹊賹ĄąĮąĖčÄ ą▒čāč乥čĆą░ TXB0, 0 ąĘą░ą┐čĆąĄčēąĄąĮąŠ.
1, RX1IE : ą▒ąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÄ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ 1 (Receive Buffer 1 Full Interrupt Enable). 1 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ą║ąŠą│ą┤ą░ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐čĆąĖąĮčÅč鹊 ą▓ RXB1, 0 ąĘą░ą┐čĆąĄčēąĄąĮąŠ.
0, RX0IE : ą▒ąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÄ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ 0 (Receive Buffer 0 Full Interrupt Enable). 1 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ą║ąŠą│ą┤ą░ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐čĆąĖąĮčÅč鹊 ą▓ RXB0, 0 ąĘą░ą┐čĆąĄčēąĄąĮąŠ.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé MERRF WAKIF ERRIF TX2IF TX1IF TX0IF RX1IF RX0IF
ąøąĄą│ąĄąĮą┤ą░
R/W-0
R/W-0
R/W-0
R/W-0
R/W-0
R/W-0
R/W-0
R/W-0
7, MERRF : čäą╗ą░ą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ (Message Error Interrupt Flag).
6, WAKIF : čäą╗ą░ą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (Wake-up Interrupt Flag).
5, ERRIF : čäą╗ą░ą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ (Error Interrupt Flag), ąĖčüč鹊čćąĮąĖą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ąĄą║ąŠą┤ąĖčĆčāčÄčéčüčÅ čüąŠą┤ąĄčƹȹĖą╝čŗą╝ čĆąĄą│ąĖčüčéčĆą░ EFLG.
4, TX2IF : čäą╗ą░ą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ 2 (Transmit Buffer 2 Empty Interrupt Flag).
3, TX1IF : čäą╗ą░ą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ 1 (Transmit Buffer 1 Empty Interrupt Flag).
2, TX0IF : čäą╗ą░ą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ 0 (Transmit Buffer 0 Empty Interrupt Flag).
1, RX1IF : čäą╗ą░ą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ 1 (Receive Buffer 1 Full Interrupt Flag).
0, RX0IF : čäą╗ą░ą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ 0 (Receive Buffer 0 Full Interrupt Flag).
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą║ą░ąČą┤čŗą╣ ąĖąĘ čŹčéąĖčģ čäą╗ą░ą│ąŠą▓ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąŠčćąĖčēąĄąĮ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝, čćč鹊ą▒čŗ čāčüą╗ąŠą▓ąĖąĄ čüąŠą▒čŗčéąĖčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▒čŗą╗ąŠ čüą▒čĆąŠčłąĄąĮąŠ. ąĢčüą╗ąĖ čäą╗ą░ą│ = 1, č鹊 ąŠąČąĖą┤ą░ąĄčéčüčÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ąĄčüą╗ąĖ 0 č鹊 ąĮąĄčé ąŠąČąĖą┤ą░čÄčēąĄą│ąŠ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
[ąōąĄąĮąĄčĆą░č鹊čĆ ]
MCP2515 čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ ą▓ čĆą░čüč湥č鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čüąŠą▓ą╝ąĄčüčéąĮąŠ čü ą║ą▓ą░čĆčåąĄą▓čŗą╝ ąĖą╗ąĖ ą║ąĄčĆą░ą╝ąĖč湥čüą║ąĖą╝ čĆąĄąĘąŠąĮą░č鹊čĆąŠą╝, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝ ą╝ąĄąČą┤čā ą▓čŗą▓ąŠą┤ą░ą╝ąĖ OSC1 ąĖ OSC2. ąōąĄąĮąĄčĆą░č鹊čĆ MCP2515 čéčĆąĄą▒čāąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą║čĆąĖčüčéą░ą╗ą╗ą░ čü ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮčŗą╝ čüčĆąĄąĘąŠą╝. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą║čĆąĖčüčéą░ą╗ą╗ą░ čü ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╝ čüčĆąĄąĘąŠą╝ ą╝ąŠąČąĄčé ą┤ą░čéčī čāčģąŠą┤ čćą░čüč鹊čéčŗ ąĘą░ ą┐čĆąĄą┤ąĄą╗čŗ, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╝ ą║čĆąĖčüčéą░ą╗ą╗ą░. ąĪčéą░ąĮą┤ą░čĆčéąĮą░čÅ čüčģąĄą╝ą░ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ą┐ąŠą║ą░ąĘą░ąĮą░ ąĮą░ čĆąĖčü. 8-1.
ąĀąĖčü. 8-1. ąĀą░ą▒ąŠčéą░ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ąŠčé ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ ąĖą╗ąĖ ą║ąĄčĆą░ą╝ąĖč湥čüą║ąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
(1) ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ą▓ą║ą╗čÄč湥ąĮąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆ (RS) ą╝ąŠąČąĄčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą║ą▓ą░čĆčåąĄą▓ čü čéąĖą┐ąŠą╝ čüčĆąĄąĘą░ AT (AT strip-cut). (2) ąĀąĄąĘąĖčüč鹊čĆ ąŠą▒čĆą░čéąĮąŠą╣ čüą▓čÅąĘąĖ (RF), ąĖą╝ąĄąĄčé ąŠą▒čŗčćąĮčŗą╣ ąĮąŠą╝ąĖąĮą░ą╗ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 2 .. 10 ą£ą×ą╝.
MCP2515 ą╝ąŠąČąĄčé čéą░ą║ąČąĄ čāą┐čĆą░ą▓ą╗čÅčéčīčüčÅ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą║ ą▓čŗą▓ąŠą┤čā OSC1, ą║ą░ą║ čŹč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 8-2 ąĖ čĆąĖčü. 8-3.
ąĀąĖčü. 8-2. ąĀą░ą▒ąŠčéą░ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
(1) ą£ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čĆąĄąĘąĖčüč鹊čĆ, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╣ ąĮą░ ąĘąĄą╝ą╗čÄ, čćč鹊ą▒čŗ čāą╝ąĄąĮčīčłąĖčéčī čłčāą╝čŗ ą▓ čüąĖčüč鹥ą╝ąĄ. ąŁč鹊 ą╝ąŠąČąĄčé čāą▓ąĄą╗ąĖčćąĖčéčī ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝čŗą╣ č鹊ą║. (2) ąöąŠą╗ąČąĮčŗ ą▒čŗčéčī čāčćč鹥ąĮčŗ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ čüą║ą▓ą░ąČąĮąŠčüčéąĖ čéą░ą║č鹊ą▓ (Duty cycle), čüą╝. čéą░ą▒ą╗ąĖčåčā 12-1 ą┤ą░čéą░čłąĖčéą░ [1].
ąĀąĖčü. 8-3. ąĪčģąĄą╝ą░ ą▓ąĮąĄčłąĮąĄą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ą┤ą╗čÅ ą║ą▓ą░čĆčåąĄą▓ čü ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╝ čéąĖą┐ąŠą╝ čüčĆąĄąĘą░(1).
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (1): ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čāčćč鹥ąĮčŗ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ čüą║ą▓ą░ąČąĮąŠčüčéąĖ čéą░ą║č鹊ą▓ (Duty cycle), čüą╝. čéą░ą▒ą╗ąĖčåčā 12-1 ą┤ą░čéą░čłąĖčéą░ [1].
ąóą░ą╣ą╝ąĄčĆ ąĘą░ą┐čāčüą║ą░ ą│ąĄąĮąĄčĆą░č鹊čĆą░ . ąÆ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ MCP2515 ąĖčüą┐ąŠą╗čīąĘčāąĄčé Oscillator Start-up Timer (OST), ą║ąŠč鹊čĆčŗą╣ čāą┤ąĄčƹȹĖą▓ą░ąĄčé MCP2515 ą▓ čüąŠčüč鹊čÅąĮąĖąĖ čüą▒čĆąŠčüą░ (Reset), čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 ą│ąĄąĮąĄčĆą░č鹊čĆ čüčéą░ą▒ąĖą╗ąĖąĘąĖčĆčāąĄčé čüą▓ąŠčÄ čćą░čüč鹊čéčā ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą▓ąĮčāčéčĆąĄąĮąĮąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĖąĘą╝ąĄąĮąĖčéčüčÅ ąĮą░ čĆą░ą▒ąŠč湥ąĄ. OST ąŠčüčéą░ąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Reset ąĮą░ ą┐ąĄčĆą▓čŗąĄ 128 čéą░ą║č鹊ą▓ OSC1 ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ, ąĖą╗ąĖ ą┐ąŠčüą╗ąĄ čüąŠą▒čŗčéąĖčÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąĖąĘ čĆąĄąČąĖą╝ą░ čüąĮą░ (Sleep mode). ąĪą╗ąĄą┤čāąĄčé ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 ąĮąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮčŗ ąŠą┐ąĄčĆą░čåąĖąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ SPI, ą┐ąŠą║ą░ ąĮąĄ ąĖčüč鹥č湥čé ą▓čĆąĄą╝čÅ čéą░ą╣ą╝ąĄčĆą░ OST.
ąÆčŗą▓ąŠą┤ CLKOUT . ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ čüąĖčüč鹥ą╝čŗ ą▓ čåąĄą╗čÅčģ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ ą│ą╗ą░ą▓ąĮąŠą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓ čüąĖčüč鹥ą╝čŗ, ąĖą╗ąĖ ą┤ą╗čÅ ą┤čĆčāą│ąĖčģ čāčüčéčĆąŠą╣čüčéą▓ ą▓ čüąĖčüč鹥ą╝ąĄ. ąŻ ą▓čŗą▓ąŠą┤ą░ CLKOUT ąĄčüčéčī ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą┤ąĄą╗ąĖčéčī čćą░čüč鹊čéčā FOSC ąĮą░ 1, 2, 4 ąĖ 8. ążčāąĮą║čåąĖčÅ CLKOUT čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ čü ą▓čŗą▒ąŠčĆąŠą╝ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ č湥čĆąĄąĘ čĆąĄą│ąĖčüčéčĆ CANCNTRL.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą┤ąŠą┐čāčüčéąĖą╝ą░čÅ čćą░čüč鹊čéą░ ąĮą░ CLKOUT čĆą░ą▓ąĮą░ 25 ą£ąōčå (čüą╝. čéą░ą▒ą╗ąĖčåčā 13-5 ą┤ą░čéą░čłąĖčéą░ [1]).
ąöą╗čÅ č鹊čćąĮąŠą╣ ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĮą░ čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ čćą░čüč鹊čéčŗ CAN čģąŠčĆąŠčłąŠ ą┐ąŠą┤čģąŠą┤čÅčé ą║ą▓ą░čĆčåčŗ čü čćą░čüč鹊čéą░ą╝ąĖ 4, 8, 12, 16 ą£ąōčå. ąöą╗čÅ čĆą░čüč湥čéą░ ąĘąĮą░č湥ąĮąĖą╣ čĆąĄą│ąĖčüčéčĆąŠą▓ CNF1, CNF2, CNF3 ą┐ąŠą┤ ą▓čŗą▒čĆą░ąĮąĮčŗą╣ ą║ą▓ą░čĆčå ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąŠąĮą╗ą░ą╣ąĮ-ą║ą░ą╗čīą║čāą╗čÅč鹊čĆ [5]. ąóą░ą╝ ąĮąĄčé ąĖą╝ąĄąĮąĮąŠ čćąĖą┐ą░ MCP2515, ąŠą┤ąĮą░ą║ąŠ ąĄčüčéčī MCP2510, ąĮą░čüčéčĆąŠą╣ą║ąĖ ą║ąŠč鹊čĆąŠą│ąŠ čüąŠą▓ą╝ąĄčüčéąĖą╝čŗ čü MCP2515.
ąÆ čéą░ą▒ą╗ąĖčåą░čģ 8-1 ąĖ 8-2 ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ čĆąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖąĖ ą┐ąŠ ą▓čŗą▒ąŠčĆčā ąĄą╝ą║ąŠčüč鹥ą╣ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆąŠą▓ ą┤ą╗čÅ ą║ąĄčĆą░ą╝ąĖč湥čüą║ąĖčģ ąĖ ą║ą▓ą░čĆčåąĄą▓čŗčģ čĆąĄąĘąŠąĮą░č鹊čĆąŠą▓. ą×ą▒čēąĖąĄ čāą║ą░ąĘą░ąĮąĖčÅ ą┐ąŠ ą▓čŗą▒ąŠčĆčā ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆąŠą▓: čāą║ą░ąĘą░ąĮąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ąĄą╝ą║ąŠčüč鹥ą╣ ą▒čŗą╗ąĖ ą┐čĆąŠą▓ąĄčĆąĄąĮčŗ ą║ą░ą║ ą▒ą░ąĘąŠą▓čŗąĄ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ąĖ čĆą░ą▒ąŠčéčŗ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąŚąĮą░č湥ąĮąĖčÅ ąĮąĄ ą▒čŗą╗ąĖ ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮčŗ. ą£ąŠą│čāčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčīčüčÅ čĆą░ąĘąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆąŠą▓, čćč鹊ą▒čŗ ą┤ąŠčüčéąĖčćčī ą║ą░č湥čüčéą▓ąĄąĮąĮčŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ čāčüą╗ąŠą▓ąĖą╣. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ą┐čĆąŠč鹥čüčéąĖčĆąŠą▓ą░čéčī ą│ąĄąĮąĄčĆą░č鹊čĆ ą┐čĆąĖ čĆą░ąĘąĮčŗčģ ąŠąČąĖą┤ą░ąĄą╝čŗčģ ąĘąĮą░č湥ąĮąĖčÅčģ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ VDD ą▓ąŠ ą▓čüąĄą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆ čŹą║čüą┐ą╗čāą░čéą░čåąĖąĖ. ąĪą╝. čéą░ą║ąČąĄ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą┐čĆąĖą╝ąĄčćą░ąĮąĖčÅ (1)..(4).
ąóą░ą▒ą╗ąĖčåą░ 8-1. ąÆčŗą▒ąŠčĆ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆąŠą▓ ą┤ą╗čÅ ą║ąĄčĆą░ą╝ąĖč湥čüą║ąĖčģ čĆąĄąĘąŠąĮą░č鹊čĆąŠą▓.
ąóąĖą┐ąĖčćąĮčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ąĄą╝ą║ąŠčüčéąĖ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆąŠą▓
ąĀąĄąČąĖą╝ ą¦ą░čüč鹊čéą░ OSC1 OSC2
HS
8 ą£ąōčå
27 ą┐ąż
27 ą┐ąż
16 ą£ąōčå
22 ą┐ąż
22 ą┐ąż
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖčüčī čĆąĄąĘąŠąĮą░č鹊čĆčŗ:
4.0 ą£ąōčå
8.0 ą£ąōčå
16.0 ą£ąōčå
ąóą░ą▒ą╗ąĖčåą░ 8-2. ąÆčŗą▒ąŠčĆ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆąŠą▓ ą┤ą╗čÅ ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░.
ąóąĖą┐ąĖčćąĮčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ąĄą╝ą║ąŠčüčéąĖ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆąŠą▓
ąóąĖą┐ ą│ąĄąĮąĄčĆą░č鹊čĆą░(1)(4) ą¦ą░čüč鹊čéą░ ą║ą▓ą░čĆčåą░(2) OSC1 OSC2
HS
4 ą£ąōčå
27 ą┐ąż
27 ą┐ąż
8 ą£ąōčå
22 ą┐ąż
22 ą┐ąż
20 ą£ąōčå
15 ą┐ąż
15 ą┐ąż
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖčüčī ą║ą▓ą░čĆčåčŗ(3) :
4.0 ą£ąōčå
8.0 ą£ąōčå
20.0 ą£ąōčå
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
(1) ąźąŠčéčÅ ą┐ąŠą▓čŗčłąĄąĮąĮą░čÅ ąĄą╝ą║ąŠčüčéčī čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčé čüčéą░ą▒ąĖą╗čīąĮąŠčüčéčī ą│ąĄąĮąĄčĆą░č鹊čĆą░, čŹč鹊 čéą░ą║ąČąĄ čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčé ąĖ ą▓čĆąĄą╝čÅ ąĘą░ą┐čāčüą║ą░ ą│ąĄąĮąĄčĆą░č鹊čĆą░. (2) ą¤ąŠčüą║ąŠą╗čīą║čā čā čĆąĄąĘąŠąĮą░č鹊čĆą░/ą║ą▓ą░čĆčåą░ ąĄčüčéčī čüąŠą▒čüčéą▓ąĄąĮąĮčŗąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ą┐čĆąŠą║ąŠąĮčüčāą╗čīčéąĖčĆąŠą▓ą░čéčīčüčÅ čā ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ čĆąĄąĘąŠąĮą░č鹊čĆą░/ą║ą▓ą░čĆčåą░ ąĮą░ ą┐čĆąĄą┤ą╝ąĄčé ą┐ąŠą╗čāč湥ąĮąĖčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ ąĘąĮą░č湥ąĮąĖą╣ ą┤ą╗čÅ ą▓ąĮąĄčłąĮąĖčģ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓. (3) ą£ąŠąČąĄčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčīčüčÅ čĆąĄąĘąĖčüč鹊čĆ RS, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą┐ąĄčĆąĄą│čĆčāąĘą║ąĖ ą║čĆąĖčüčéą░ą╗ą╗ą░ čü ąĮąĖąĘą║ąĖą╝ čĆą░ą▒ąŠčćąĖą╝ čāčĆąŠą▓ąĮąĄą╝ čüąĖą│ąĮą░ą╗ą░. (4) ąÆčüąĄą│ą┤ą░ ą┐čĆąŠą▓ąĄčĆčÅą╣č鹥 ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ą┐čĆąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅčģ VDD ąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ, ąŠąČąĖą┤ą░ąĄą╝čŗčģ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ.
ąÆčŗą▓ąŠą┤ CLKOUT čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą░ą║čéąĖą▓ąĮčŗą╝ ą┐čĆąĖ čüą▒čĆąŠčüąĄ čüąĖčüč鹥ą╝čŗ ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąŠčüčéą░ąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą▓čŗą┤ą░čćąĖ čüą░ą╝ąŠą╣ ąĮąĖąĘą║ąŠą╣ čćą░čüč鹊čéčŗ (ą┤ąĄą╗ąĄąĮąĖąĄą╝ ąĮą░ 8), čéą░ą║ čćč鹊 čŹč鹊 ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ąÜąŠą│ą┤ą░ ą▓čŗčüčéą░ą▓ą╗ąĄąĮ ąĘą░ą┐čĆąŠčü ąĮą░ čĆąĄąČąĖą╝ čüąĮą░ (Sleep mode), MCP2515 ą▓čŗą┤ą░čüčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ 16 čéą░ą║č鹊ą▓ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ CLKOUT ą┐ąĄčĆąĄą┤ ą▓čģąŠą┤ąŠą╝ ą▓ čĆąĄąČąĖą╝ čüąĮą░. ąÆ čüąŠčüč鹊čÅąĮąĖąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ (Idle) ą▓čŗą▓ąŠą┤ą░ CLKOUT (ą║ąŠą│ą┤ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ čüąĮą░) ąĮą░ ąĄą│ąŠ ą▓čŗčģąŠą┤ąĄ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ą╗ąŠą│. 0. ąÜąŠą│ą┤ą░ čäčāąĮą║čåąĖčÅ CLKOUT ąĘą░ą┐čĆąĄčēąĄąĮą░ (CANCNTRL.CLKEN=0), ą▓čŗą▓ąŠą┤ CLKOUT ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą▓čŗčüąŠą║ąŠą│ąŠ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅ (ąĄą│ąŠ ą▓čŗčģąŠą┤ąĮąŠą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ąŠčéą║ą╗čÄč湥ąĮ).
ążčāąĮą║čåąĖčÅ CLKOUT čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮą░ čéą░ą║, čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 ą▓čĆąĄą╝ąĄąĮą░ thCLKOUT ąĖ tlCLKOUT čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ, ą║ąŠą│ą┤ą░ čĆą░ą▒ąŠčéą░ CLKOUT čĆą░ąĘčĆąĄčłąĄąĮą░, ąĘą░ą┐čĆąĄčēąĄąĮą░ ąĖą╗ąĖ ąĖąĘą╝ąĄąĮčÅąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░.
[ąĪą▒čĆąŠčü ]
MCP2515 čĆą░ąĘą╗ąĖčćą░ąĄčé ą┤ą▓ą░ čüą┐ąŠčüąŠą▒ą░ čüą▒čĆąŠčüą░:
1 . Hardware Reset (ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ čüą▒čĆąŠčü) - ąĮąĖąĘą║ąĖą╝ čāčĆąŠą▓ąĮąĄą╝ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ /RESET.2 . SPI Reset - ą┐ąŠą┤ą░č湥ą╣ ą║ąŠą╝ą░ąĮą┤čŗ Reset č湥čĆąĄąĘ SPI.
ążčāąĮą║čåąĖąŠąĮą░ą╗ ąŠą▒ąŠąĖčģ ą▓ąĖą┤ąŠą▓ čüą▒čĆąŠčüą░ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮč鹥ąĮ. ąÆą░ąČąĮąŠ ąŠčüčāčēąĄčüčéą▓ąĖčéčī ąŠą┤ąĖąĮ ąĖąĘ čŹčéąĖčģ čüą┐ąŠčüąŠą▒ąŠą▓ čüą▒čĆąŠčüą░ ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ, čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī ą┐ąĄčĆąĄčģąŠą┤ ą╗ąŠą│ąĖą║ąĖ ąĖ čĆąĄą│ąĖčüčéčĆąŠą▓ ą▓ čüą▓ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ. ąÉą┐ą┐ą░čĆą░čéąĮčŗą╣ čüą▒čĆąŠčü ą╝ąŠąČąĮąŠ ąŠčüčāčēąĄčüčéą▓ąĖčéčī ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ, ą┐čāč鹥ą╝ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ RC-čåąĄą┐ąŠčćą║ąĖ ą║ ą▓čŗą▓ąŠą┤čā /RESET pin (čüą╝. čĆąĖčü. 9-1). ąŚąĮą░č湥ąĮąĖčÅ čŹą╗ąĄą╝ąĄąĮč鹊ą▓ čåąĄą┐ąŠčćą║ąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čéą░ą║ąĖąĄ, čćč鹊ą▒čŗ ąĖą╝ą┐čāą╗čīčü ą╗ąŠą│. 0 ą▒čŗą╗ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčīčÄ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 2 ą╝ą║čü ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ VDD ą┤ąŠčüčéąĖą│ąĮąĄčé čüą▓ąŠąĄą│ąŠ čĆą░ą▒ąŠč湥ą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ, ą║ą░ą║ čŹč鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ 菹╗ąĄą║čéčĆąĖč湥čüą║ąĖą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ (tRL).
ąĀąĖčü. 9-1: ą¤čĆąĖą╝ąĄčĆ čüčģąĄą╝čŗ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĖ čüą▒čĆąŠčüą░ čü ą┐ąŠą╝ąŠčēčīčÄ ą▓ą▓ąŠą┤ą░ /RESET.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
(1) ąöąĖąŠą┤ D ą┐ąŠą╝ąŠą│ą░ąĄčé ą▒čŗčüčéčĆąŠ čĆą░ąĘčĆčÅą┤ąĖčéčī ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆ, ą║ąŠą│ą┤ą░ ą┐ą░ą┤ą░ąĄčé čāčĆąŠą▓ąĄąĮčī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ VDD (ą▓čŗą║ą╗čÄč湥ąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ). (2) R1 = 1..10 ą║ą×ą╝ ąŠą│čĆą░ąĮąĖčćąĖčé ąĖą╝ą┐čāą╗čīčü č鹊ą║ą░, ą▓č鹥ą║ą░čÄčēąĖą╣ ą▓ ą▓čŗą▓ąŠą┤ /RESET ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆą░ C, ą║ąŠą│ą┤ą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ /RESET čāą┐ą░ą┤ąĄčé ąĖąĘ-ąĘą░ čĆą░ąĘčĆčÅą┤ą░ čüčéą░čéąĖč湥čüą║ąŠą│ąŠ 菹╗ąĄą║čéčĆąĖč湥čüčéą▓ą░ (Electrostatic Discharge, ESD) ąĖą╗ąĖ ąŠčé ą┐ąĄčĆąĄąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ (Electrical Overstress, EOS).
[ąĀąĄąČąĖą╝čŗ čĆą░ą▒ąŠčéčŗ ]
ąŻ MCP2515 ąĄčüčéčī 5 čĆąĄąČąĖą╝ąŠą▓ čĆą░ą▒ąŠčéčŗ:
1. Configuration mode
ąĀą░ą▒ąŠčćąĖą╣ čĆąĄąČąĖą╝ ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ č湥čĆąĄąĘ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆ CANCTRL.REQOP (čüą╝. ą▓ąŠ ą▓čĆąĄąĘą║ąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ CANCTRL). ąÜąŠą│ą┤ą░ ą╝ąĄąĮčÅčÄčéčüčÅ čĆąĄąČąĖą╝čŗ, č鹊 čĆąĄąČąĖą╝ ą▓ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĮąĄ ą┐ąŠą╝ąĄąĮčÅąĄčéčüčÅ, ą┐ąŠą║ą░ ąĮąĄ ąĘą░ą▓ąĄčĆčłą░čéčüčÅ ą▓čüąĄ ąŠąČąĖą┤ą░čÄčēąĖąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąŚą░ą┐čĆąŠčłąĄąĮąĮčŗą╣ čĆąĄąČąĖą╝ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠą▓ąĄčĆąĄąĮ čćč鹥ąĮąĖąĄą╝ ą▒ąĖč鹊ą▓ CANSTAT.OPMODE (čüą╝. ą▓ąŠ ą▓čĆąĄąĘą║ąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ CANSTAT).
Configuration Mode . ą¤ąĄčĆąĄą┤ ą░ą║čéąĖą▓ąĖąĘą░čåąĖąĄą╣ MCP2515 ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ. ąŁč鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ č鹊ą╗čīą║ąŠ ą▓ čĆąĄąČąĖą╝ąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ MCP2515. ąĀąĄąČąĖą╝ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ, čüą▒čĆąŠčüąĄ, ąĖą╗ąĖ ą▓ ąĮąĄą│ąŠ ą╝ąŠąČąĮąŠ ą▓ąŠą╣čéąĖ ąĖąĘ ą╗čÄą▒ąŠą│ąŠ ą┤čĆčāą│ąŠą│ąŠ čĆąĄąČąĖą╝ą░ ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčé CANTRL.REQOP ą▓ ąĘąĮą░č湥ąĮąĖąĄ 100. ąÜąŠą│ą┤ą░ ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮ ą▓čģąŠą┤ ą▓ čĆąĄąČąĖą╝ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ą▓čüąĄ čüč湥čéčćąĖą║ąĖ ąŠčłąĖą▒ąŠą║ ąŠčćąĖčēą░čÄčéčüčÅ. ąóąŠą╗čīą║ąŠ ą▓ čĆąĄąČąĖą╝ąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą╝ąŠąČąĮąŠ ąĖąĘą╝ąĄąĮąĖčéčī čüą╗ąĄą┤čāčÄčēąĖąĄ čĆąĄą│ąĖčüčéčĆčŗ:
ŌĆó CNF1, CNF2, CNF3
Sleep Mode . ąŻ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ MCP2515 ąĖą╝ąĄąĄčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čĆąĄąČąĖą╝ čüąĮą░, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ą╝ąĖąĮąĖą╝ąĖąĘą░čåąĖąĖ č鹊ą║ą░ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░. ąśąĮč鹥čĆč乥ą╣čü SPI ąŠčüčéą░ąĄčéčüčÅ ą░ą║čéąĖą▓ąĮčŗą╝ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ, ą┤ą░ąČąĄ ą║ąŠą│ą┤ą░ MCP2515 ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ čüąĮą░, ą┐ąŠąĘą▓ąŠą╗čÅčÅ ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ ą║ čüąŠą┤ąĄčƹȹĖą╝ąŠą╝čā čĆąĄą│ąĖčüčéčĆąŠą▓.
ą¦č鹊ą▒čŗ ą▓ąŠą╣čéąĖ ą▓ čĆąĄąČąĖą╝ čüąĮą░, ą▓ čĆąĄą│ąĖčüčéčĆąĄ CANCTRL čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą▒ąĖčéčŗ ąĘą░ą┐čĆąŠčüą░ čüą╝ąĄąĮčŗ čĆąĄąČąĖą╝ą░ (REQOP[2:0]). ąæąĖčéčŗ CANSTAT.OPMODE ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé č鹥ą║čāčēąĖą╣ čĆą░ą▒ąŠčćąĖą╣ čĆąĄąČąĖą╝. ąŁčéąĖ ą▒ąĖčéčŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮčŗ ą┐ąŠčüą╗ąĄ ąŠčéą┐čĆą░ą▓ą║ąĖ ą║ąŠą╝ą░ąĮą┤čŗ Sleep ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā MCP2515. MCP2515 ąŠčüčéą░ąĄčéčüčÅ ą░ą║čéąĖą▓ąĮčŗą╝ ąĖ ąĮąĄ ą▓ąŠą╣ą┤ąĄčé ą▓ čĆąĄąČąĖą╝ čüąĮą░, ą┐ąŠą║ą░ čŹčéąĖ ą▒ąĖčéčŗ ąĮąĄ ą┐ąŠą║ą░ąČčāčé ą▓čģąŠą┤ ą▓ čĆąĄąČąĖą╝ čüąĮą░.
ąÜąŠą│ą┤ą░ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╝ čĆąĄąČąĖą╝ąĄ čüąĮą░, ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (wake-up interrupt) ąŠčüčéą░ąĄčéčüčÅ ą░ą║čéąĖą▓ąĮčŗą╝ (ąĄčüą╗ąĖ ąŠąĮąŠ ą▒čŗą╗ąŠ čĆą░ąĘčĆąĄčłąĄąĮąŠ). ąŁč鹊 čüą┤ąĄą╗ą░ąĮąŠ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čéą░ą║ąČąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╝ąĄčēąĄąĮ ą▓ čĆąĄąČąĖą╝ čüąĮą░, ąĖ čĆą░ąĘą▒čāąČąĄąĮ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ MCP2515, ą║ąŠą│ą┤ą░ ąŠąĮ ąŠą▒ąĮą░čĆčāąČąĖčé ą░ą║čéąĖą▓ąĮąŠčüčéčī ąĮą░ čłąĖąĮąĄ.
ąÜąŠą│ą┤ą░ MCP2515 ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ čüąĮą░, ąŠąĮ ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüą▓ąŠą╣ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ. MCP2515 ą┐čĆąŠčüąĮąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ąĮą░ čłąĖąĮąĄ ąŠą▒ąĮą░čĆčāąČąĖčéčüčÅ ą░ą║čéąĖą▓ąĮąŠčüčéčī, ąĖą╗ąĖ ą║ąŠą│ą┤ą░ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü SPI čāčüčéą░ąĮąŠą▓ąĖčé ą▒ąĖčé CANINTF.WAKIF ą┤ą╗čÅ "ą│ąĄąĮąĄčĆą░čåąĖąĖ" ą┐ąŠą┐čŗčéą║ąĖ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (ą▒ąĖčé CANINTE.WAKIE čéą░ą║ąČąĄ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, čćč鹊ą▒čŗ ą▓ąŠąĘąĮąĖą║ą╗ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ, wake-up interrupt).
ąÆ čĆąĄąČąĖą╝ąĄ čüąĮą░ MCP2515 ą▓čŗą▓ąŠą┤ TXCAN ą▒čāą┤ąĄčé ąŠčüčéą░ą▓ą░čéčīčüčÅ ą▓ čĆąĄčåąĄčüčüąĖą▓ąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ.
ążčāąĮą║čåąĖąĖ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ . ąÆ čĆąĄąČąĖą╝ąĄ čüąĮą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ MCP2515 ą▒čāą┤ąĄčé ą╝ąŠąĮąĖč鹊čĆąĖčéčī čüą▓ąŠą╣ ą▓čģąŠą┤ RXCAN ąĮą░ ą┐čĆąĄą┤ą╝ąĄčé ąŠą▒ąĮą░čĆčāąČąĄąĮąĖčÅ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ čłąĖąĮčŗ. ąĢčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé CANINTE.WAKIE, č鹊 ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐čĆąŠčüąĮąĄčéčüčÅ ąĖ čüą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ą¤ąŠčüą║ąŠą╗čīą║čā ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ ą▒čŗą╗ ą▓čŗą║ą╗čÄč湥ąĮ ą▓ čĆąĄąČąĖą╝ąĄ čüąĮą░, ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ ąĮąĄą║ąŠč鹊čĆąŠąĄ ą▓čĆąĄą╝čÅ ąĮą░ ąĘą░ą┐čāčüą║ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ąĖ ą▓ąŠąĘą▓čĆą░čéą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ, ą║ąŠą│ą┤ą░ ąŠąĮ čüąĮąŠą▓ą░ čüą╝ąŠąČąĄčé ą┐čĆąĖąĮąĖą╝ą░čéčī čüąŠąŠą▒čēąĄąĮąĖčÅ. ąŁč鹊 ą▓čĆąĄą╝čÅ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ čéą░ą╣ą╝ąĄčĆąŠą╝ ąĘą░ą┐čāčüą║ą░ ą│ąĄąĮąĄčĆą░č鹊čĆą░ (Oscillator Start-up Timer, OST), ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ čĆą░ą▓ąĮčŗą╝ 128 TOSC.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐čĆąŠąĖą│ąĮąŠčĆąĖčĆčāąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą▓čŗą▓ąĄą╗ąŠ ąĄą│ąŠ ąĄą│ąŠ ąĖąĘ čĆąĄąČąĖą╝ą░ čüąĮą░, ą║ą░ą║ ąĖ ą▓čüąĄ ą┤čĆčāą│ąĖąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąŠčģąŠą┤ąĖą╗ąĖ, ą┐ąŠą║ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĄčēąĄ ąĮąĄ ą┐čĆąŠą▒čāą┤ąĖą╗čüčÅ ą┤ąŠ ą║ąŠąĮčåą░. ą¤ąŠčüą╗ąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąŠą║ą░ąČąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ "č鹊ą╗čīą║ąŠ ą┐čĆąŠčüą╗čāčłąĖą▓ą░ąĮąĖąĄ" (Listen-Only mode). ąŻą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┤ąŠą╗ąČąĄąĮ čāčüčéą░ąĮąŠą▓ąĖčéčī ąĮąŠčĆą╝ą░ą╗čīąĮčŗą╣ čĆąĄąČąĖą╝ (Normal mode) ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ MCP2515 čüą╝ąŠąČąĄčé ąŠą▒ą╝ąĄąĮąĖą▓ą░čéčīčüčÅ ą┤ą░ąĮąĮčŗą╝ąĖ ą┐ąŠ čłąĖąĮąĄ.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ čäąĖą╗čīčéčĆą░ ąĮąĖąĘą║ąŠą╣ čćą░čüč鹊čéčŗ ą┐ąŠ ą▓čģąŠą┤čā RXCAN, ą┐ąŠą║ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╝ čĆąĄąČąĖą╝ąĄ čüąĮą░. ąŁčéą░ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐čĆąĄą┤ąŠčéą▓čĆą░čēąĄąĮąĖčÅ ą╗ąŠąČąĮąŠą│ąŠ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąĖąĘ-ąĘą░ ą║ąŠčĆąŠčéą║ąĖčģ ą▓čŗą▒čĆąŠčüąŠą▓ ą┐ąŠą╝ąĄčģ ąĮą░ čüąĖą│ąĮą░ą╗čīąĮčŗčģ ą┐čĆąŠą▓ąŠą┤ą░čģ čłąĖąĮčŗ CAN. ąæąĖčé CNF3.WAKFIL čĆą░ąĘčĆąĄčłą░ąĄčé ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēą░ąĄčé čĆą░ą▒ąŠčéčā čŹč鹊ą│ąŠ čäąĖą╗čīčéčĆą░.
Listen-Only Mode . ąĀąĄąČąĖą╝ "č鹊ą╗čīą║ąŠ ą┐čĆąŠčüą╗čāčłąĖą▓ą░ąĮąĖąĄ" (Listen-Only mode) ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé MCP2515 ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐čĆąĖąĮąĖą╝ą░čéčī ą░ą▒čüąŠą╗čÄčéąĮąŠ ą▓čüąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ (ą▓ą║ą╗čÄčćą░čÅ ąŠčłąĖą▒ąŠčćąĮčŗąĄ) ą┐čāč鹥ą╝ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą▒ąĖčé RXBnCTRL.RXM[1:0]. ąŁč鹊čé čĆąĄąČąĖą╝ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ čüąĮąĖč乥čĆą░ / ą╝ąŠąĮąĖč鹊čĆąĖąĮą│ą░ čłąĖąĮčŗ CAN, ąĖą╗ąĖ ą┤ą╗čÅ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čüą║ąŠčĆąŠčüčéąĖ ąŠą▒ą╝ąĄąĮą░ ą┐ąŠ čłąĖąĮąĄ CAN ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ čü "ą│ąŠčĆčÅčćąĖą╝" ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄą╝ ą║ čłąĖąĮąĄ.
ąöą╗čÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą│ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čüą║ąŠčĆąŠčüčéąĖ čłąĖąĮčŗ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ, čćč鹊ą▒čŗ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 2 ą┤čĆčāą│ąĖčģ čāąĘą╗ą░ čłąĖąĮčŗ ąŠą▒ą╝ąĄąĮąĖą▓ą░ą╗ąĖčüčī ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣. ą¤čĆąĖ čŹč鹊ą╝ čüą║ąŠčĆąŠčüčéčī ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ čŹą╝ą┐ąĖčĆąĖč湥čüą║ąĖ, ą┐ąŠą┤ą▒ąŠčĆąŠą╝ čĆą░ąĘąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣ ąĮą░čüčéčĆąŠą╣ą║ąĖ čüą║ąŠčĆąŠčüčéąĖ, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤čāčé ą▒ąĄąĘ ąŠčłąĖą▒ąŠą║ ą┐čĆąĖąĮąĖą╝ą░čéčīčüčÅ čüąŠąŠą▒čēąĄąĮąĖčÅ.
ąĀąĄąČąĖą╝ ą┐čĆąŠčüą╗čāčłą║ąĖ (Listen-Only mode) čÅą▓ą╗čÅąĄčéčüčÅ "čéąĖčģąĖą╝" ą▓ č鹊ą╝ čüą╝čŗčüą╗ąĄ, čćč鹊 ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ąĮąĄ ą┐ąĄčĆąĄą┤ą░ąĄčé ą▓ąŠąŠą▒čēąĄ ąĮąĖą║ą░ą║ąĖčģ čüąŠąŠą▒čēąĄąĮąĖą╣ (ą▓ą║ą╗čÄčćą░čÅ čäą╗ą░ą│ąĖ ąŠčłąĖą▒ąŠą║ ąĖą╗ąĖ čüąĖą│ąĮą░ą╗čŗ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ). ąÆ čĆąĄąČąĖą╝ąĄ ą┐čĆąŠčüą╗čāčłą║ąĖ ą▒čāą┤čāčé ą┐čĆąĖąĮčÅčéčŗ ą║ą░ą║ ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ, čéą░ą║ ąĖ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĖ ąŠčłąĖą▒ąŠčćąĮčŗąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ, ąĮąĄ ą▓ąĘąĖčĆą░čÅ ąĮąĖ ąĮą░ ą║ą░ą║ąĖąĄ čäąĖą╗čīčéčĆčŗ ąĖ ą╝ą░čüą║ąĖ, ąĖą╗ąĖ ąĮą░čüčéčĆąŠą╣ą║ąĖ čĆąĄąČąĖą╝ąŠą▓ ą▒čāč乥čĆą░ (RXMn, ą▒ąĖčéčŗ Receive Buffer mode). ąĪč湥čéčćąĖą║ąĖ ąŠčłąĖą▒ąŠą║ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąŠčüą╗čāčłą║ąĖ čüą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ ąĖ ą┤ąĄą░ą║čéąĖą▓ąĖčĆčāčÄčéčüčÅ. ąĀąĄąČąĖą╝ ą┐čĆąŠčüą╗čāčłą║ąĖ ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖč鹊ą▓ ąĘą░ą┐čĆąŠčüą░ čüą╝ąĄąĮčŗ čĆąĄąČąĖą╝ą░ čĆąĄą│ąĖčüčéčĆą░ CANCTRL.
Loopback Mode . ąĀąĄąČąĖą╝ąĄ ąĘą░ą║ąŠą╗čīčåąŠą▓čŗą▓ą░ąĮąĖčÅ (Loopback mode) ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčī ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ ą┐ąĄčĆąĄčüčŗą╗ą║ąĖ ąĖąĘ ą▒čāč乥čĆąŠą▓ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ ą▒čāč乥čĆčŗ ą┐čĆąĖąĄą╝ą░, ą▒ąĄąĘ čĆąĄą░ą╗čīąĮąŠą╣ ą┐ąĄčĆąĄčüčŗą╗ą║ąĖ čüąŠąŠą▒čēąĄąĮąĖą╣ ą┐ąŠ čłąĖąĮąĄ CAN. ąŁč鹊čé čĆąĄąČąĖą╝ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ąĖ ą┐čĆąŠą▓ąĄčĆą║ąĖ čüąĖčüč鹥ą╝čŗ.
ąÆ čĆąĄąČąĖą╝ąĄ ąĘą░ą║ąŠą╗čīčåąŠą▓čŗą▓ą░ąĮąĖčÅ ą▒ąĖčé ACK ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ, ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čüą╝ąŠąČąĄčé ą┐čĆąĖąĮąĖą╝ą░čéčī čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠčé čüą░ą╝ąŠą│ąŠ čüąĄą▒čÅ, ą║ą░ą║ ą▒čāą┤č鹊 čŹč鹊 ą▒čŗą╗ąĖ ą▒čŗ čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠčé ą┤čĆčāą│ąŠą│ąŠ čāąĘą╗ą░ čłąĖąĮčŗ CAN. Loopback mode, ą║ą░ą║ ąĖ čĆąĄąČąĖą╝ ą┐čĆąŠčüą╗čāčłą║ąĖ, čÅą▓ą╗čÅąĄčéčüčÅ "čéąĖčģąĖą╝", čé. ąĄ. ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą┐ąŠ čłąĖąĮąĄ CAN ąĮąĄ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčīčüčÅ ąĮąĖą║ą░ą║ąĖčģ čüąŠąŠą▒čēąĄąĮąĖą╣ (ą▓ą║ą╗čÄčćą░čÅ čäą╗ą░ą│ąĖ ąŠčłąĖą▒ą║ąĖ ąĖą╗ąĖ čüąĖą│ąĮą░ą╗čŗ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ). ąÆčŗą▓ąŠą┤ TXCAN ą▒čāą┤ąĄčé ąŠčüčéą░ą▓ą░čéčīčüčÅ ą▓ čĆąĄčåąĄčüčüąĖą▓ąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ.
ążąĖą╗čīčéčĆčŗ ąĖ ą╝ą░čüą║ąĖ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ, čćč鹊ą▒čŗ ą┐ąŠąĘą▓ąŠą╗ąĖčéčī ą┐ąŠą┐ą░ą┤ą░čéčī ą▓ ą▒čāč乥čĆčŗ ą┐čĆąĖąĄą╝ą░ č鹊ą╗čīą║ąŠ ąŠčéą┤ąĄą╗čīąĮčŗą╝ čüąŠąŠą▒čēąĄąĮąĖčÅą╝. ą£ą░čüą║ąĖ ą╝ąŠą│čāčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ąŠ ą▓čüąĄ ąĮčāą╗ąĖ, čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ą┐čĆąĖąĄą╝ ą▓čüąĄčģ čüąŠąŠą▒čēąĄąĮąĖą╣. Loopback ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖč鹊ą▓ ąĘą░ą┐čĆąŠčüą░ čüą╝ąĄąĮčŗ čĆąĄąČąĖą╝ą░ čĆąĄą│ąĖčüčéčĆą░ CANCTRL.
Normal Mode . ąØąŠčĆą╝ą░ą╗čīąĮčŗą╣ čĆąĄąČąĖą╝ čŹč鹊 čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čĆą░ą▒ąŠčćąĖą╣ čĆąĄąČąĖą╝ MCP2515. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą░ą║čéąĖą▓ąĮąŠ ą╝ąŠąĮąĖč鹊čĆąĖčé ą▓čüąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĮą░ čłąĖąĮąĄ ąĖ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą▒ąĖčéčŗ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ (Acknowledge bits), čäčĆąĄą╣ą╝čŗ ąŠčłąĖą▒ą║ąĖ (error frames), ąĖ čé. ą┤. ąóą░ą║ąČąĄ č鹊ą╗čīą║ąŠ ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ MCP2515 ą▒čāą┤ąĄčé čüą░ą╝ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐ąŠ čłąĖąĮąĄ CAN.
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé REQOP[2:0] ABAT OSM CLKEN CLKPRE[1:0]
ąøąĄą│ąĄąĮą┤ą░
R/W-1
R/W-0
R/W-0
R/W-0
R/W-0
R/W-1
R/W-1
7-5, REQOP[2:0] : ą▒ąĖčéčŗ ąĘą░ą┐čĆąŠčüą░ čüą╝ąĄąĮčŗ čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ (Request Operation mode).
000 čāčüčéą░ąĮąŠą▓ą║ą░ Normal mode
ąÆčüąĄ ą┤čĆčāą│ąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ ą▒ąĖčé REQOP ąĮąĄą┤ąŠą┐čāčüčéąĖą╝čŗ, ąĖ ąĮąĄ ą┤ąŠą╗ąČąĮčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ. ą¤ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ REQOP = 111.
4, ABAT : ą▒ąĖčé ąŠčéą╝ąĄąĮčŗ ą▓čüąĄčģ ąŠąČąĖą┤ą░čÄčēąĖčģ ą┐ąĄčĆąĄą┤ą░čć (Abort All Pending Transmissions.
1 ąĘą░ą┐čĆąŠčü ąĮą░ ąŠčéą╝ąĄąĮčā ą▓čüąĄčģ ąŠąČąĖą┤ą░čÄčēąĖčģ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒čāč乥čĆąŠą▓.
3, OSM : ą▒ąĖčé ąŠą┤ąĮąŠą║čĆą░čéąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ (One-Shot mode).
1 čĆą░ąĘčĆąĄčłąĄąĮąŠ. ąöą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▒čāą┤ąĄčé ą┐čĆąĄą┤ą┐čĆąĖąĮčÅčéą░ č鹊ą╗čīą║ąŠ ąŠą┤ąĮą░ ą┐ąŠą┐čŗčéą║ą░, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ąĮą░ą╗ąĖčćąĖčÅ ąŠčłąĖą▒ąŠą║.
2, CLKEN : ą▒ąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą▓čŗą▓ąŠą┤ą░ čéą░ą║č鹊ą▓ CLKOUT (CLKOUT Pin Enable).
1 ą▓čŗą▓ąŠą┤ CLKOUT čĆą░ąĘčĆąĄčłąĄąĮ.
1-0, CLKPRE[1:0] : ą▒ąĖčéčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆąŠą╝ CLKOUT (CLKOUT Pin Prescaler).
00 FCLKOUT = System Clock/1
Ōä¢ čĆą░ąĘčĆčÅą┤ąŠą▓
7
6
5
4
3
2
1
0
ąśą╝ąĄąĮą░ ą▒ąĖčé OPMOD[2:0] - ICOD[2:0] -
ąøąĄą│ąĄąĮą┤ą░
R-1
R-0
R-0
U-0
R-0
U-0
7-5, OPMOD[2:0] : ą▒ąĖčéčŗ ąĖąĮą┤ąĖą║ą░čåąĖąĖ č鹥ą║čāčēąĄą│ąŠ čĆą░ą▒ąŠč湥ą│ąŠ čĆąĄąČąĖą╝ą░ (Operation mode).
000 čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ Normal mode
4 ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ, čćąĖčéą░ąĄčéčüčÅ ą║ą░ą║ 0.
3-1, ICOD[2:0] : ą▒ąĖčéčŗ čäą╗ą░ą│ąŠą▓ ą║ąŠą┤ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (Interrupt Flag Code).
000 ąĮąĄčé ąŠąČąĖą┤ą░čÄčēąĄą│ąŠ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ
0 ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ, čćąĖčéą░ąĄčéčüčÅ ą║ą░ą║ 0.
[ąÜą░čĆčéą░ čĆąĄą│ąĖčüčéčĆąŠą▓ ]
ąÉą┤čĆąĄčüą░čåąĖčÅ čĆąĄą│ąĖčüčéčĆąŠą▓ MCP2515 ą┐ąŠą║ą░ąĘą░ąĮą░ ą▓ čéą░ą▒ą╗ąĖčåąĄ 11-1. ąÉą┤čĆąĄčüą░ ą║ą░ąČą┤ąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐ąŠ čüč鹊ą╗ą▒čåčā (čüčéą░čĆčłąĖą╣ ąĮąĖą▒ą▒ą╗ ą░ą┤čĆąĄčüą░) ąĖ čüčéčĆąŠą║ąĄ (ą╝ą╗ą░ą┤čłąĖą╣ ąĮąĖą▒ą▒ą╗ ą░ą┤čĆąĄčüą░) čéą░ą▒ą╗ąĖčåčŗ. ąĀą░čüą┐ąŠą╗ąŠąČąĄąĮąĖąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ ąĮą░ ą║ą░čĆč鹥 ą░ą┤čĆąĄčüąĮąŠą│ąŠ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ čüą┤ąĄą╗ą░ąĮąŠ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊ą▒čŗ ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░čéčī ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┤ąŠčüčéčāą┐ ą┐čĆąĖ čćč鹥ąĮąĖąĖ ąĖą╗ąĖ ąĘą░ą┐ąĖčüąĖ ą┤ą░ąĮąĮčŗčģ. ąØąĄą║ąŠč鹊čĆčŗąĄ čüą┐ąĄčåąĖčäąĖčćąĮčŗąĄ čĆąĄą│ąĖčüčéčĆčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖ čüčéą░čéčāčüą░ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčī ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮčāčÄ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖčÄ ą▒ąĖčé čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą║ąŠą╝ą░ąĮą┤čŗ SPI Bit Modify. ąĀąĄą│ąĖčüčéčĆčŗ, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čŹčéčā ą║ąŠą╝ą░ąĮą┤čā, ą┐ąŠą║ą░ąĘą░ąĮčŗ ą▓ čüąĄčĆčŗčģ čÅč湥ą╣ą║ą░čģ čéą░ą▒ą╗ąĖčåčŗ. ą×ą▒ąĘąŠčĆ ą▓čüąĄčģ čĆąĄą│ąĖčüčéčĆąŠą▓ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ MCP2515 ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą▓ čéą░ą▒ą╗ąĖčåąĄ 11-2.
ąóą░ą▒ą╗ąĖčåą░ 11-1. ąÜą░čĆčéą░ ą░ą┤čĆąĄčüąĮąŠą│ąŠ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ CAN-ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ MCP2515.
LO HI
0000
0001
0010
0011
0100
0101
0110
0111
0000
RXF0SIDH
RXF3SIDH
RXM0SIDH
TXB0CTRL
TXB1CTRL
TXB2CTRL
RXB0CTRL
RXB1CTRL
0001
RXF0SIDL
RXF3SIDL
RXM0SIDL
TXB0SIDH
TXB1SIDH
TXB2SIDH
RXB0SIDH
RXB1SIDH
0010
RXF0EID8
RXF3EID8
RXM0EID8
TXB0SIDL
TXB1SIDL
TXB2SIDL
RXB0SIDL
RXB1SIDL
0011
RXF0EID0
RXF3EID0
RXM0EID0
TXB0EID8
TXB1EID8
TXB2EID8
RXB0EID8
RXB1EID8
0100
RXF1SIDH
RXF4SIDH
RXM1SIDH
TXB0EID0
TXB1EID0
TXB2EID0
RXB0EID0
RXB1EID0
0101
RXF1SIDL
RXF4SIDL
RXM1SIDL
TXB0DLC
TXB1DLC
TXB2DLC
RXB0DLC
RXB1DLC
0110
RXF1EID8
RXF4EID8
RXM1EID8
TXB0D0
TXB1D0
TXB2D0
RXB0D0
RXB1D0
0111
RXF1EID0
RXF4EID0
RXM1EID0
TXB0D1
TXB1D1
TXB2D1
RXB0D1
RXB1D1
1000
RXF2SIDH
RXF5SIDH
CNF3
TXB0D2
TXB1D2
TXB2D2
RXB0D2
RXB1D2
1001
RXF2SIDL
RXF5SIDL
CNF2
TXB0D3
TXB1D3
TXB2D3
RXB0D3
RXB1D3
1010
RXF2EID8
RXF5EID8
CNF1
TXB0D4
TXB1D4
TXB2D4
RXB0D4
RXB1D4
1011
RXF2EID0
RXF5EID0
CANINTE
TXB0D5
TXB1D5
TXB2D5
RXB0D5
RXB1D5
1100
BFPCTRL
TEC
CANINTF
TXB0D6
TXB1D6
TXB2D6
RXB0D6
RXB1D6
1101
TXRTSCTRL
REC
EFLG
TXB0D7
TXB1D7
TXB2D7
RXB0D7
RXB1D7
1110
CANSTAT
1111
CANCTRL
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ: LO čŹč鹊 ą╝ą╗ą░ą┤čłąĖą╣ ąĮąĖą▒ą▒ą╗ ą░ą┤čĆąĄčüą░, HI čŹč鹊 čüčéą░čĆčłąĖą╣ ąĮąĖą▒ą▒ą╗ ą░ą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆą░. ąĀąĄą│ąĖčüčéčĆčŗ, ąĮą░čģąŠą┤čÅčēąĖąĄčüčÅ ą▓ čÅč湥ą╣ą║ą░čģ čü čüąĄčĆčŗą╝ č乊ąĮąŠą╝, ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą╝ą░ąĮąĖą┐čāą╗ąĖčĆąŠą▓ą░čéčī ąŠčéą┤ąĄą╗čīąĮčŗą╝ąĖ čüą▓ąŠąĖą╝ąĖ ą▒ąĖčéą░ą╝ąĖ ą║ąŠą╝ą░ąĮą┤ąŠą╣ Bit Modify. ąĀąĄą│ąĖčüčéčĆčŗ, ą║ąŠč鹊čĆčŗąĄ čĆą░ąĘą╝ąĄčēąĄąĮčŗ ą▓ ąŠčĆą░ąĮąČąĄą▓čŗčģ čÅč湥ą╣ą║ą░čģ (ą╝ą░čüą║ąĖ ąĖ čäąĖą╗čīčéčĆčŗ ą┐čĆąĖąĄą╝ą░), ą╝ąŠąČąĮąŠ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░čéčī ąĖ čćąĖčéą░čéčī č鹊ą╗čīą║ąŠ ą▓ čĆąĄąČąĖą╝ąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ą▓ ą┤čĆčāą│ąĖčģ čĆąĄąČąĖą╝ą░čģ ąŠąĮąĖ čćąĖčéą░čÄčéčüčÅ ą║ą░ą║ 0.
ąóą░ą▒ą╗ąĖčåą░ 11-2. ą×ą▒čēą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą┐ąŠ čĆąĄą│ąĖčüčéčĆą░ą╝ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ CAN-ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ MCP2515.
ąśą╝čÅ ąÉą┤čĆąĄčü (hex) ąæąĖčé 7 ąæąĖčé 6 ąæąĖčé 5 ąæąĖčé 4 ąæąĖčé 3 ąæąĖčé 2 ąæąĖčé 1 ąæąĖčé 0 POR/RST
BFPCTRL
0C
-
-
B1BFS
B0BFS
B1BFE
B0BFE
B1BFM
B0BFM
--00 0000
TXRTSCTRL
0D
-
-
B2RTS
B1RTS
B0RTS
B2RTSM
B1RTSM
B0RTSM
--xx x000
CANSTAT
xE
OPMOD2
OPMOD1
OPMOD0
-
ICOD2
ICOD1
ICOD0
-
100- 000-
CANCTRL
xF
REQOP2
REQOP1
REQOP0
ABAT
OSM
CLKEN
CLKPRE1
CLKPRE0
1110 0111
TEC
1C
ąĪč湥čéčćąĖą║ ąŠčłąĖą▒ąŠą║ ą┐ąĄčĆąĄą┤ą░čćąĖ
0000 0000
REC
1D
ąĪč湥čéčćąĖą║ ąŠčłąĖą▒ąŠą║ ą┐čĆąĖąĄą╝ą░
0000 0000
CNF3
28
SOF
WAKFIL
-
-
-
PHSEG22
PHSEG21
PHSEG20
00-- -000
CNF2
29
BTLMODE
SAM
PHSEG12
PHSEG11
PHSEG10
PRSEG2
PRSEG1
PRSEG0
0000 0000
CNF1
2A
SJW1
SJW0
BRP5
BRP4
BRP3
BRP2
BRP1
BRP0
0000 0000
CANINTE
2B
MERRE
WAKIE
ERRIE
TX2IE
TX1IE
TX0IE
RX1IE
RX0IE
0000 0000
CANINTF
2C
MERRF
WAKIF
ERRIF
TX2IF
TX1IF
TX0IF
RX1IF
RX0IF
0000 0000
EFLG
2D
RX1OVR
RX0OVR
TXBO
TXEP
RXEP
TXWAR
RXWAR
EWARN
0000 0000
TXB0CTRL
30
-
ABTF
MLOA
TXERR
TXREQ
-
TXP1
TXP0
-000 0-00
TXB1CTRL
40
-
ABTF
MLOA
TXERR
TXREQ
-
TXP1
TXP0
-000 0-00
TXB2CTRL
50
-
ABTF
MLOA
TXERR
TXREQ
-
TXP1
TXP0
-000 0-00
RXB0CTRL
60
-
RXM1
RXM0
-
RXRTR
BUKT
BUKT
FILHIT0
-00- 0000
RXB1CTRL
70
-
RXM1
RXM0
-
RXRTR
FILHIT2
FILHIT1
FILHIT0
-00- 0000
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓ čüč鹊ą╗ą▒čåąĄ POR/RST ą┤ą░ąĮčŗ ąĘąĮą░č湥ąĮąĖčÅ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ / čüą▒čĆąŠčüąĄ.
[ąśąĮč鹥čĆč乥ą╣čü SPI ]
MCP2515 čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ ą┤ą╗čÅ ą┐čĆčÅą╝ąŠą│ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ ą┐ąŠčĆčéčā Serial Peripheral Interface [3] (SPI), ą║ąŠč鹊čĆčŗą╣ ąĖą╝ąĄąĄčéčüčÅ ą┐čĆą░ą║čéąĖč湥čüą║ąĖ ą▓ąŠ ą▓čüąĄčģ ą╝ąŠą┤ąĄą╗čÅčģ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓, ąĖ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čĆąĄąČąĖą╝čŗ Mode 0,0 ąĖ Mode 1,1. ąÜąŠą╝ą░ąĮą┤čŗ ąĖ ą┤ą░ąĮąĮčŗąĄ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ą▓ MCP2515 č湥čĆąĄąĘ ą▓čŗą▓ąŠą┤ SI (ą▓ č鹥čĆą╝ąĖąĮąŠą╗ąŠą│ąĖąĖ SPI čŹč鹊 čüąĖą│ąĮą░ą╗ MOSI), čü čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄą╝ ą┤ą░ąĮąĮčŗčģ ą┐ąŠ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠą╝čā ą┐ąĄčĆąĄą┐ą░ą┤čā čüąĖą│ąĮą░ą╗ą░ SCK. ąöą░ąĮąĮčŗąĄ ą▓čŗą▓ąŠą┤čÅčéčüčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ąĖąĘ MCP2515 č湥čĆąĄąĘ ą▓čŗą▓ąŠą┤ SO (ą▓ č鹥čĆą╝ąĖąĮąŠą╗ąŠą│ąĖąĖ SPI čŹč鹊 ą▓čŗą▓ąŠą┤ MISO) ą┐ąŠ čüą┐ą░ą┤čā čüąĖą│ąĮą░ą╗ą░ SCK. ąÆčŗą▓ąŠą┤ ą▓čŗą▒ąŠčĆą║ąĖ /CS ą┤ąŠą╗ąČąĄąĮ čāą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąŠą│. 0 ą▓ąŠ ą▓čĆąĄą╝čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą╗čÄą▒ąŠą╣ ąŠą┐ąĄčĆą░čåąĖąĖ ą┐ąŠ čłąĖąĮąĄ SPI. ąóą░ą▒ą╗ąĖčåą░ 12-1 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▒ą░ą╣čéčŗ ąĖąĮčüčéčĆčāą║čåąĖąĖ ą┤ą╗čÅ ą▓čüąĄčģ ąŠą┐ąĄčĆą░čåąĖą╣. ąöąĖą░ą│čĆą░ą╝ą╝čŗ ą▓čģąŠą┤ąĮčŗčģ ąĖ ą▓čŗčģąŠą┤ąĮčŗčģ čüąĖą│ąĮą░ą╗ąŠą▓ čüą╝. ąĮą░ čĆąĖčü. 12-10 ąĖ čĆąĖčü. 12-11 ą┤ą╗čÅ ąŠą▒ąŠąĖčģ čĆąĄąČąĖą╝ąŠą▓ Mode 0,0 ąĖ Mode 1,1.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: MCP2515 ąŠąČąĖą┤ą░ąĄčé, čćč鹊ą▒čŗ ą┐ąĄčĆą▓čŗą╣ ą▒ą░ą╣čé ą┐ąŠčüą╗ąĄ ą░ą║čéąĖą▓ą░čåąĖąĖ /CS (ą┐ąŠčÅą▓ą╗ąĄąĮąĖąĄ ą╗ąŠą│. 0) ą┐ąĄčĆą▓čŗą╝ ą┐čĆąĖčłąĄą┤čłąĖą╝ ą▒ą░ą╣č鹊ą╝ ą▒čāą┤ąĄčé ą▒ą░ą╣čé ąĖąĮčüčéčĆčāą║čåąĖąĖ/ą║ąŠą╝ą░ąĮą┤čŗ. ą¤čĆąĖ čŹč鹊ą╝ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 /CS ą┤ąŠą╗ąČąĄąĮ ą┐ąĄčĆąĄą╣čéąĖ ą▓ ą╗ąŠą│. 1 ąĖ čüąĮąŠą▓ą░ ą┐ąĄčĆąĄą╣čéąĖ ą▓ ą╗ąŠą│. 0 ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤čĆčāą│ąŠą╣ ą║ąŠą╝ą░ąĮą┤čŗ.
ąóą░ą▒ą╗ąĖčåą░ 12-1. ąØą░ą▒ąŠčĆ ąĖąĮčüčéčĆčāą║čåąĖą╣ (ą║ąŠą╝ą░ąĮą┤) SPI MCP2515.
ąśąĮčüčéčĆčāą║čåąĖčÅ ążąŠčĆą╝ą░čé ą×ą┐ąĖčüą░ąĮąĖąĄ
RESET
1100 0000 ąĪą▒čĆą░čüčŗą▓ą░ąĄčé ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ čĆąĄą│ąĖčüčéčĆčŗ ą▓ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĖ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čĆąĄąČąĖą╝ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
READ
0000 0011 ą¦ąĖčéą░ąĄčé ą┤ą░ąĮąĮčŗąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ ąĮą░čćąĖąĮą░čÅ čü ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ą░ą┤čĆąĄčüą░.
READ RX BUFFER
1001 0nm0 ą¤čĆąĖ čćč鹥ąĮąĖąĖ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ čüąĮąĖąČą░ąĄčé ąĮą░ą│čĆčāąĘą║čā ąĮą░ SPI ą┐ąŠ čüčĆą░ą▓ąĮąĄąĮąĖčÄ čü ąŠą▒čŗčćąĮąŠą╣ ą║ąŠą╝ą░ąĮą┤ąŠą╣ READ, ą┐ąŠčüą║ąŠą╗čīą║čā ą░ą┤čĆąĄčü ąĘą░ą┤ą░ąĄčéčüčÅ ą┐čĆčÅą╝ąŠ ą▓ ą║ąŠą╝ą░ąĮą┤ąĄ ą▓ ąŠą┤ąĮąŠą╝ ąĖąĘ 4 ą╝ąĄčüčé, čāą║ą░ąĘčŗą▓ą░ąĄą╝čŗčģ č湥čĆąĄąĘ n ąĖ m. ą¤čĆąĖ čŹč鹊ą╝ čüą▓čÅąĘą░ąĮąĮčŗą╣ čäą╗ą░ą│ ą┐čĆąĖąĄą╝ą░ (CANINTF.RXnIF) ąŠčćąĖčüčéąĖčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąŠčüą╗ąĄ ą┐ąĄčĆąĄčģąŠą┤ą░ /CS ą▓ ą╗ąŠą│. 1.
WRITE
0000 0010 ąŚą░ą┐ąĖčüčŗą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą▓ čĆąĄą│ąĖčüčéčĆčŗ ąĮą░čćąĖąĮą░čÅ čü ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ą░ą┤čĆąĄčüą░.
LOAD TX BUFFER
0100 0abc ą¤čĆąĖ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖąĖ ą▒čāč乥čĆąŠą▓ ą┐ąĄčĆąĄą┤ą░čćąĖ čüąĮąĖąČą░ąĄčé ąĮą░ą│čĆčāąĘą║čā ąĮą░ SPI ą┐ąŠ čüčĆą░ą▓ąĮąĄąĮąĖčÄ čü ąŠą▒čŗčćąĮąŠą╣ ą║ąŠą╝ą░ąĮą┤ąŠą╣ WRITE, ą┐ąŠčüą║ąŠą╗čīą║čā ą░ą┤čĆąĄčü ą▒čāč乥čĆą░ ąĘą░ą┤ą░ąĄčéčüčÅ čüčĆą░ąĘčā ą▓ ą║ąŠą╝ą░ąĮą┤ąĄ, ą▓ ąŠą┤ąĮąŠ ąĖąĘ 6 ą╝ąĄčüčé, čćč鹊 ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą▒ąĖčéą░ą╝ąĖ a, b, c.
RTS
1000 0def ąśąĮčüčéčĆčāą║čéąĖčĆčāąĄčé ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĮą░čćą░čéčī ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ ą╗čÄą▒čŗčģ ą▒čāč乥čĆąŠą▓. ąŻčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ ą▒ąĖčé d ąĘą░ą┤ą░ąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī TXB2, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ ą▒ąĖčé e ąĘą░ą┤ą░ąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī TXB1, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ ą▒ąĖčé f ąĘą░ą┤ą░ąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī TXB0.
READ STATUS
1010 0000 ąÜąŠą╝ą░ąĮą┤ą░ ą┤ą╗čÅ ą▒čŗčüčéčĆąŠą│ąŠ ąŠą┐čĆąŠčüą░, ą║ąŠč鹊čĆą░čÅ čćąĖčéą░ąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▒ąĖčé čüčéą░čéčāčüą░ ą┤ą╗čÅ ąŠą┐ąĄčĆą░čåąĖą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░.
RX STATUS
1011 0000 ąÜąŠą╝ą░ąĮą┤ą░ ą▒čŗčüčéčĆąŠą│ąŠ ąŠą┐čĆąŠčüą░, ą║ąŠč鹊čĆą░čÅ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čüąŠą▓ą┐ą░ą┤ąĄąĮąĖąĄ čäąĖą╗čīčéčĆą░ ąĖ čéąĖą┐ (standard, extended ąĖ/ąĖą╗ąĖ remote) ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ.
BIT MODIFY
0000 0101 ą¤ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ čāčüčéą░ąĮąŠą▓ąĖčéčī ąĖą╗ąĖ ąŠčćąĖčüčéąĖčéčī ąŠčéą┤ąĄą╗čīąĮčŗąĄ ą▒ąĖčéčŗ ą▓ čāą║ą░ąĘą░ąĮąĮąŠą╝ čĆąĄą│ąĖčüčéčĆąĄ. ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĮąĄ ą▓čüąĄ čĆąĄą│ąĖčüčéčĆčŗ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą┐ąŠą▒ąĖčéąĮčāčÄ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖčÄ čü čŹč鹊ą╣ ą║ąŠą╝ą░ąĮą┤ąŠą╣. ąÆčŗą┐ąŠą╗ąĮąĄąĮąĖąĄ čŹč鹊ą╣ ą║ąŠą╝ą░ąĮą┤čŗ čü čĆąĄą│ąĖčüčéčĆą░ą╝ąĖ, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ą┐ąŠą▒ąĖčéąĮčāčÄ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖčÄ, ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ ą┐čĆąĖą╝ąĄąĮąĖčé ą╝ą░čüą║čā ą╝ą░ąĮąĖą┐čāą╗čÅčåąĖąĖ ą▒ąĖčéą░ą╝ąĖ FFh. ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ čüą┐ąĖčüą║ą░ čĆąĄą│ąĖčüčéčĆąŠą▓, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĖčģ ą┐ąŠą▒ąĖčéąĮčāčÄ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖčÄ, čüą╝. čĆą░ąĘą┤ąĄą╗ "ąÜą░čĆčéą░ čĆąĄą│ąĖčüčéčĆąŠą▓".
ąśąĮčüčéčĆčāą║čåąĖčÅ čüą▒čĆąŠčüą░ RESET ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐ąŠą▓č鹊čĆąĮąŠą╣ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓ MCP2515 ąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ čĆąĄąČąĖą╝ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ (Configuration mode). ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┤ą╗čÅ ąĖąĮč鹥čĆč乥ą╣čüą░ SPI č鹊čé ąČąĄ čäčāąĮą║čåąĖąŠąĮą░ą╗, čćč鹊 ąĖ ą▓čŗą▓ąŠą┤ čüą▒čĆąŠčüą░ /RESET.
ąśąĮčüčéčĆčāą║čåąĖčÅ RESET čÅą▓ą╗čÅąĄčéčüčÅ ąŠą┤ąĮąŠą▒ą░ą╣čéąĮąŠą╣, ą║ąŠč鹊čĆą░čÅ čéčĆąĄą▒čāąĄčé ą▓čŗą▒ąŠčĆą║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ąĄčĆąĄą▓ąŠą┤ąŠą╝ /CS ą▓ ą╗ąŠą│. 0, ąŠčéą┐čĆą░ą▓ą║ąĖ ą▒ą░ą╣čéą░ ąĖąĮčüčéčĆčāą║čåąĖąĖ ąĖ ąĘą░č鹥ą╝ ą┐ąĄčĆąĄą▓ąŠą┤ą░ /CS ą▓ ą╗ąŠą│. 1. ąØą░čüč鹊čÅč鹥ą╗čīąĮąŠ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą┐ąŠčüą╗ą░čéčī ą║ąŠą╝ą░ąĮą┤čā Reset (ąĖą╗ąĖ ą▓čŗą┤ą░čéčī ąĖą╝ą┐čāą╗čīčü ą╗ąŠą│. 0 ąĮą░ ą▓čŗą▓ąŠą┤ RESET) ą║ą░ą║ čćą░čüčéčī ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ.
ąśąĮčüčéčĆčāą║čåąĖčÅ READ ąĮą░čćąĖąĮą░ąĄčéčüčÅ ą┐ąĄčĆąĄą▓ąŠą┤ąŠą╝ ą▓čŗą▓ąŠą┤ą░ /CS ą▓ ą╗ąŠą│. 0. ąŚą░č鹥ą╝ ą┐ąŠčüčŗą╗ą░ąĄčéčüčÅ ąĖąĮčüčéčĆčāą║čåąĖčÅ READ, ąĘą░ ą║ąŠč鹊čĆąŠą╣ čüą╗ąĄą┤čāąĄčé 8-ą▒ąĖčéąĮčŗą╣ ą░ą┤čĆąĄčü (A7..A0). ąöą░ą╗ąĄąĄ ą┤ą░ąĮąĮčŗąĄ, čüąŠčģčĆą░ąĮąĄąĮąĮčŗąĄ ą▓ čĆąĄą│ąĖčüčéčĆąĄ, ą▓čŗą┤ą▓ąĖą│ą░čÄčéčüčÅ ąĖąĘ MCP2515 č湥čĆąĄąĘ ą▓čŗą▓ąŠą┤ SO.
ąÆąĮčāčéčĆąĄąĮąĮąĖą╣ čāą║ą░ąĘą░č鹥ą╗čī ą░ą┤čĆąĄčüą░ (Address Pointer) ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ čü ą║ą░ąČą┤čŗą╝ čüą╗ąĄą┤čāčÄčēąĖą╝ ą▓čŗą┤ą▓ąĖą│ą░ąĄą╝čŗą╝ ą▒ą░ą╣č鹊ą╝. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą╝ąŠąČąĮąŠ ą┐čĆąŠčćąĖčéą░čéčī čüą╗ąĄą┤čāčÄčēąĖą╣, čüąŠčüąĄą┤ąĮąĖą╣ ą┐ąŠ ą░ą┤čĆąĄčüčā čĆąĄą│ąĖčüčéčĆ, ąĄčüą╗ąĖ ą┐čĆąŠą┤ąŠą╗ąČą░čéčī ą▓čŗą┤ą░ą▓ą░čéčī ąĖą╝ą┐čāą╗čīčüčŗ SCK. ąóą░ą║ąĖą╝ ą╝ąĄč鹊ą┤ąŠą╝ ą╝ąŠąČąĮąŠ ą┐čĆąŠčćąĖčéą░čéčī ą╗čÄą▒ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüą╗ąĄą┤čāčÄčēąĖčģ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ą┐ąŠ ą░ą┤čĆąĄčüčā čĆąĄą│ąĖčüčéčĆąŠą▓. ą×ą┐ąĄčĆą░čåąĖčÅ čćč鹥ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĄčéčüčÅ ą┐ąĄčĆąĄą▓ąŠą┤ąŠą╝ ą▓čŗą▓ąŠą┤ą░ /CS ą▓ ą╗ąŠą│. 1 (čüą╝. čĆąĖčü. 12-2).
ąĀąĖčü. 12-2. ąśąĮčüčéčĆčāą║čåąĖčÅ čćč鹥ąĮąĖčÅ (READ).
ąśąĮčüčéčĆčāą║čåąĖčÅ READ RX BUFFER (čĆąĖčü. 12-3) ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüą┐ąŠčüąŠą▒ ą▒čŗčüčéčĆąŠą╣ ą░ą┤čĆąĄčüą░čåąĖąĖ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░. ąŁčéą░ ąĖąĮčüčéčĆčāą║čåąĖčÅ čāą╝ąĄąĮčīčłą░ąĄčé ąĘą░čéčĆą░čéčŗ čĆąĄčüčāčĆčüąŠą▓, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü čłąĖąĮąŠą╣ SPI, ą┤ąŠ ąŠą┤ąĮąŠą│ąŠ ą▒ą░ą╣čéą░, čüąŠą┤ąĄčƹȹ░čēąĄą│ąŠ ą▓ čüąĄą▒ąĄ ąĖ ą║ąŠą╝ą░ąĮą┤čā, ąĖ ą░ą┤čĆąĄčü. ąöą╗čÅ ą▒ą░ą╣čéą░ ą║ąŠą╝ą░ąĮą┤čŗ ąĖą╝ąĄąĄčéčüčÅ 4 ą▓ąŠąĘą╝ąŠąČąĮčŗčģ ąĘąĮą░č湥ąĮąĖčÅ, ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčēąĖčģ čāčüčéą░ąĮąŠą▓ą║čā čāą║ą░ąĘą░č鹥ą╗čÅ ą░ą┤čĆąĄčüą░. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą▒ą░ą╣čé ą║ąŠą╝ą░ąĮą┤čŗ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ, ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▓čŗą┤ą▓ąĖą│ą░ąĄčé ąĮą░čĆčāąČčā ą▒ą░ą╣čéčŗ ą┐ąŠ ąĘą░ą┤ą░ąĮąĮąŠą╝čā ą░ą┤čĆąĄčüčā čĆąĄą│ąĖčüčéčĆą░ č鹊čćąĮąŠ čéą░ą║ ąČąĄ, ą║ą░ą║ čŹč鹊 ą▒čŗą╗ąŠ ą▒čŗ čü ąĖąĮčüčéčĆčāą║čåąĖąĄą╣ READ ą┐ąŠčüą╗ąĄ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą▒ą░ą╣čéą░ ą░ą┤čĆąĄčüą░ (čé. ąĄ. čéą░ą║ąČąĄ ą┤ąŠčüčéčāą┐ąĄąĮ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┤ąŠčüčéčāą┐ ą║ čĆąĄą│ąĖčüčéčĆą░ą╝). ąśąĮčüčéčĆčāą║čåąĖčÅ READ RX BUFFER ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ čüąĮąĖąČą░ąĄčé ąĮą░ą│čĆčāąĘą║čā ąĮą░ SPI ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ ąŠčćąĖčüčéą║ąŠą╣ čüą▓čÅąĘą░ąĮąĮąŠą│ąŠ čäą╗ą░ą│ą░ ą┐čĆąĖąĄą╝ą░ (CANINTF.RXnIF), ą║ąŠą│ą┤ą░ /CS ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖąĖ ą║ąŠą╝ą░ąĮą┤čŗ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ ą╗ąŠą│. 1.
ąĀąĖčü. 12-3. ąśąĮčüčéčĆčāą║čåąĖčÅ čćč鹥ąĮąĖčÅ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ (READ RX BUFFER).
ąśąĮčüčéčĆčāą║čåąĖčÅ ąĘą░ą┐ąĖčüąĖ ąĮą░čćąĖąĮą░ąĄčéčüčÅ ą┐ąĄčĆąĄą▓ąŠą┤ąŠą╝ ą▓čŗą▓ąŠą┤ą░ /CS ą▓ ą╗ąŠą│. 0. ąŚą░č鹥ą╝ ą┐ąŠčüčŗą╗ą░ąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ą░ WRITE, ąĘą░ ą║ąŠč鹊čĆąŠą╣ ąĖą┤ąĄčé ą░ą┤čĆąĄčü ąĖ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 1 ą▒ą░ą╣čé ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ.
ą£ąŠąČąĮąŠ ąĘą░ą┐ąĖčüčŗą▓ą░čéčī čüą╗ąĄą┤čāčÄčēąĖąĄ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ą┐ąŠ ą░ą┤čĆąĄčüčā čĆąĄą│ąĖčüčéčĆčŗ, ąĄčüą╗ąĖ ą┐čĆąŠą┤ąŠą╗ąČą░čéčī ą▓čŗą┤ą▓ąĖą│ą░čéčī ą▒ą░ą╣čéčŗ ą┤ą░ąĮąĮčŗčģ, ą┐ąŠą║ą░ /CS čāą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ ą╗ąŠą│. 0. ąöą░ąĮąĮčŗąĄ ą▒čāą┤čāčé čĆąĄą░ą╗čīąĮąŠ ąĘą░ą┐ąĖčüčŗą▓ą░čéčīčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆ ą┐ąŠ čäčĆąŠąĮčéčā ąĮą░čĆą░čüčéą░ąĮąĖčÅ SCK ą┤ą╗čÅ ą▒ąĖčéą░ D0. ąĢčüą╗ąĖ čüąĖą│ąĮą░ą╗ /CS ą┐ąĄčĆąĄčłąĄą╗ ą▓ ą╗ąŠą│. 1 ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ ąĘą░ą│čĆčāąČąĄąĮčŗ ą▓čüąĄ 8 ą▒ąĖčé, ąŠą┐ąĄčĆą░čåąĖčÅ ąĘą░ą┐ąĖčüąĖ ą▒čāą┤ąĄčé ą┐čĆąĄčĆą▓ą░ąĮą░ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą▒ą░ą╣čéą░ ą┤ą░ąĮąĮčŗčģ, ąĖ čĆą░ąĮąĄąĄ ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗąĄ ą▒ą░ą╣čéčŗ ąŠą║ą░ąČčāčéčüčÅ ą┐čĆąĖ čŹč鹊ą╝ ąĘą░ą┐ąĖčüą░ąĮąĮčŗą╝ąĖ. ą¤ąŠą┤čĆąŠą▒ąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ą┤ąĖą░ą│čĆą░ą╝ą╝ą░čģ čüąĖą│ąĮą░ą╗ąŠą▓ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąĘą░ą┐ąĖčüąĖ čüą╝. ąĮą░ čĆąĖčü. 12-4.
ąĀąĖčü. 12-4. ąśąĮčüčéčĆčāą║čåąĖčÅ ąĘą░ą┐ąĖčüąĖ ą▒ą░ą╣čéą░ (WRITE).
ąśąĮčüčéčĆčāą║čåąĖčÅ LOAD TX BUFFER (čĆąĖčü. 12-5) čāčüčéčĆą░ąĮčÅąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ 8-ą▒ąĖčéąĮąŠą│ąŠ ą░ą┤čĆąĄčüą░, čéčĆąĄą▒čāąĄą╝ąŠą│ąŠ ą┐čĆąĖ ąŠą▒čŗčćąĮąŠą╣ ą║ąŠą╝ą░ąĮą┤ąĄ Write. ąŁčéą░ 8-ą▒ąĖčéąĮą░čÅ ąĖąĮčüčéčĆčāą║čåąĖčÅ ą▒čŗčüčéčĆąŠ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čāą║ą░ąĘą░č鹥ą╗čī ą░ą┤čĆąĄčüą░ ą▓ ąŠą┤ąĮąŠ ąĖąĘ 6 ą▓ąŠąĘą╝ąŠąČąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĘą░ą│čĆčāąĘąĖčéčī ą░ą┤čĆąĄčü ID ąĖą╗ąĖ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ą╗čÄą▒ąŠą│ąŠ ąĖąĘ 3 ą▒čāč乥čĆąŠą▓ ą┐ąĄčĆąĄą┤ą░čćąĖ.
ąĀąĖčü. 12-5. ąśąĮčüčéčĆčāą║čåąĖčÅ ąĘą░ą│čĆčāąĘą║ąĖ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ (LOAD TX BUFFER).
ąÜąŠą╝ą░ąĮą┤ą░ RTS ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▒čāč乥čĆąŠą▓ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąĪąĮą░čćą░ą╗ą░, ą║ą░ą║ ąŠą▒čŗčćąĮąŠ, ą▓čŗą▓ąŠą┤ /CS ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ą▓ ą╗ąŠą│. 0. ą¤ąŠč鹊ą╝ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą▒ą░ą╣čé ą║ąŠą╝ą░ąĮą┤čŗ RTS. ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 12-6, ą┐ąŠčüą╗ąĄą┤ąĮąĖąĄ 3 ą▒ąĖčéą░ čŹč鹊ą╣ ą║ąŠą╝ą░ąĮą┤čŗ ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé, ą║ą░ą║ąŠą╣ ą▒čāč乥čĆ (ąĖą╗ąĖ ą▒čāč乥čĆčŗ) ą┐ąĄčĆąĄą┤ą░čćąĖ čĆą░ąĘčĆąĄčłąĄąĮčŗ ą║ ąŠčéą┐čĆą░ą▓ą║ąĄ.
ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ čāčüčéą░ąĮąŠą▓ąĖčé ą▒ąĖčé TxBnCTRL.TXREQ ą┤ą╗čÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą▒čāč乥čĆą░ (ą▒čāč乥čĆąŠą▓). ą×ą┤ąĮąŠą╣ ą║ąŠą╝ą░ąĮą┤ąŠą╣ ą╝ąŠąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ą╗čÄą▒čŗąĄ ąĖąĘ čŹčéąĖčģ čéčĆąĄčģ ą▒ąĖčé. ąĢčüą╗ąĖ ą║ąŠą╝ą░ąĮą┤ą░ RTS ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čü nnn=000, č鹊 ąŠąĮą░ ą▒čāą┤ąĄčé ą┐čĆąŠąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░ąĮą░.
ąĀąĖčü. 12-6. ąśąĮčüčéčĆčāą║čåąĖčÅ ąĘą░ą┐čĆąŠčüą░ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā (REQUEST-TO-SEND, RTS).
ąÜąŠą╝ą░ąĮą┤ą░ READ STATUS ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠą┤ąĮąŠą╣ ąĖąĮčüčéčĆčāą║čåąĖąĄą╣ ą▒čŗčüčéčĆąŠ ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ ą║ čćą░čüč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╝ ą▒ąĖčéą░ą╝ čüąŠčüč鹊čÅąĮąĖčÅ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ. MCP2515 ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ ą┐ąĄčĆąĄą▓ąŠą┤ąŠą╝ ą▓čŗą▓ąŠą┤ą░ /CS ą▓ ą╗ąŠą│. 0, ąĘą░č鹥ą╝ ą┐ąŠčüčŗą╗ą░ąĄčéčüčÅ ą▒ą░ą╣čé ą║ąŠą╝ą░ąĮą┤čŗ Read Status, ą║ą░ą║ čŹč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 12-8. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą▒čŗą╗ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ ą▒ą░ą╣čé ą║ąŠą╝ą░ąĮą┤čŗ, MCP2515 ą▓ąĄčĆąĮąĄčé 8 ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗąĄ čüąŠą┤ąĄčƹȹ░čé čüąŠčüč鹊čÅąĮąĖąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ąĢčüą╗ąĖ ą┐ąŠčüą╗ąĄ ą┐ąĄčĆą▓ąŠą│ąŠ ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠą│ąŠ ą▒ą░ą╣čéą░ ą▒čāą┤čāčé ą┐ąŠčüčŗą╗ą░čéčīčüčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čéą░ą║čéčŗ SCK, č鹊 MCP2515 ą┐čĆąŠą┤ąŠą╗ąČąĖčé ą▓čŗą▓ąŠą┤ąĖčéčī ą▒ąĖčéčŗ čüčéą░čéčāčüą░, ą┐ąŠą║ą░ /CS čāą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ ą╗ąŠą│. 0 ąĖ ą┐ąŠčüčéčāą┐ą░čÄčé čéą░ą║čéčŗ SCK.
ąÜą░ąČą┤čŗą╣ ą▒ąĖčé čüąŠčüč鹊čÅąĮąĖčÅ, ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮčŗą╣ čŹč鹊ą╣ ą║ąŠą╝ą░ąĮą┤ąŠą╣, ą╝ąŠąČąĄčé čéą░ą║ąČąĄ ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╣ ą║ąŠą╝ą░ąĮą┤ąŠą╣ čćč鹥ąĮąĖčÅ Read čü čāą║ą░ąĘą░ąĮąĖąĄą╝ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą░ą┤čĆąĄčüą░.
ąĀąĖčü. 12-8. ąśąĮčüčéčĆčāą║čåąĖčÅ čćč鹥ąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (READ STATUS).
ąÜąŠą╝ą░ąĮą┤ą░ RX STATUS (čĆąĖčü. 12-9) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą▒čŗčüčéčĆąŠą│ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ, ą║ą░ą║ąŠą╣ čäąĖą╗čīčéčĆ ą┐čĆąŠą┐čāčüčéąĖą╗ čüąŠąŠą▒čēąĄąĮąĖąĄ, ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ą║ą░ą║ąŠą│ąŠ čéąĖą┐ą░ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 (standard, extended, remote). ą¤ąŠčüą╗ąĄ ąŠčéą┐čĆą░ą▓ą║ąĖ ą▒ą░ą╣čéą░ ą║ąŠą╝ą░ąĮą┤čŗ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą▓ąŠąĘą▓čĆą░čéąĖčé 8 ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ, čüąŠą┤ąĄčƹȹ░čēąĖąĄ čüčéą░čéčāčü. ąĢčüą╗ąĖ ą▒čāą┤ąĄčé ą▓čŗą┤ą░ąĮąŠ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čéą░ą║č鹊ą▓ ą┐ąŠčüą╗ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ 8 ą▒ąĖčé, č鹊 ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐čĆąŠą┤ąŠą╗ąČąĖčé ą▓čŗą▓ąŠą┤ąĖčéčī č鹥 ąČąĄ ą▒ąĖčéčŗ čüčéą░čéčāčüą░, ą┐ąŠą║ą░ /CS ąŠčüčéą░ąĄčéčüčÅ ą▓ ą╗ąŠą│. 0 ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ čéą░ą║čéčŗ SCK.
ąĀąĖčü. 12-9. ąśąĮčüčéčĆčāą║čåąĖčÅ čćč鹥ąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ (RX STATUS).
ąÜąŠą╝ą░ąĮą┤ą░ BIT MODIFY ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čāčüčéą░ąĮąŠą▓ą║ąĖ ąĖą╗ąĖ ąŠčćąĖčüčéą║ąĖ ąŠčéą┤ąĄą╗čīąĮčŗčģ ą▒ąĖčé ą▓ ą▓čŗą▒čĆą░ąĮąĮąŠą╝ čĆąĄą│ąĖčüčéčĆąĄ čüčéą░čéčāčüą░ ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą┤ąŠčüčéčāą┐ąĮą░ ąĮąĄ ą┤ą╗čÅ ą▓čüąĄčģ čĆąĄą│ąĖčüčéčĆąŠą▓, čüą╝. čĆą░ąĘą┤ąĄą╗ "ąÜą░čĆčéą░ čĆąĄą│ąĖčüčéčĆąŠą▓", čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą║ą░ą║ąĖąĄ čĆąĄą│ąĖčüčéčĆčŗ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ čŹč鹊ą╣ ą║ąŠą╝ą░ąĮą┤čŗ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ Bit Modify ąĮą░ čĆąĄą│ąĖčüčéčĆą░čģ, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé čäčāąĮą║čåąĖąŠąĮą░ą╗ ą┐ąŠą▒ąĖčéąĮąŠą╣ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĖ, ą▒čāą┤čāčé čĆą░ą▒ąŠčéą░čéčī čéą░ą║, ą║ą░ą║ ąĄčüą╗ąĖ ą▒čŗ ą▒čŗą╗ą░ čāą║ą░ąĘą░ąĮą░ ą▒ąĖč鹊ą▓ą░čÅ ą╝ą░čüą║ą░ FFh. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗ąĖčé ą┐ąĄčĆąĄąĘą░ą┐ąĖčüą░čéčī čĆąĄą│ąĖčüčéčĆ čåąĄą╗ąĖą║ąŠą╝, ą░ ąĮąĄ ą╝ąĄąĮčÅčéčī ąŠčéą┤ąĄą╗čīąĮčŗąĄ ą▒ąĖčéčŗ.
ąĀąĖčü. 12-7: ąśąĮčüčéčĆčāą║čåąĖčÅ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĖ ą▒ąĖčéą░ (BIT MODIFY).
ąÜą░ą║ ąŠą▒čŗčćąĮąŠ, čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ ą┐ąĄčĆąĄą▓ąŠą┤ąŠą╝ /CS ą▓ ą╗ąŠą│. 0, ąĖ ąĘą░č鹥ą╝ ą┐ąŠčüčŗą╗ą░ąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ą░ Bit Modify. ąŚą░ čŹč鹊ą╣ ą║ąŠą╝ą░ąĮą┤ąŠą╣ ąĖą┤ąĄčé ą░ą┤čĆąĄčü čĆąĄą│ąĖčüčéčĆą░, ą▒ą░ą╣čé ą╝ą░čüą║ąĖ, ąĖ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╝ ąĖą┤ąĄčé ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ.
ąæą░ą╣čé ą╝ą░čüą║ąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, ą║ą░ą║ąĖąĄ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ ą▒čāą┤ąĄčé čĆą░ąĘčĆąĄčłąĄąĮąŠ ąĖąĘą╝ąĄąĮąĖčéčī. ąĢą┤ąĖąĮąĖčåą░ ą▓ ą╝ą░čüą║ąĄ ą┐ąŠąĘą▓ąŠą╗ąĖčé ąĖąĘą╝ąĄąĮąĖčéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé, ą░ ąĮąŠą╗čī ąĮąĄ ą┐ąŠąĘą▓ąŠą╗ąĖčé.
ąæą░ą╣čé ą┤ą░ąĮąĮčŗčģ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, ą║ą░ą║ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮąŠ ą▓ čĆą░ąĘčĆąĄčłąĄąĮąĮčŗąĄ ą┤ą╗čÅ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĖ ą▒ąĖčéčŗ. ąĢą┤ąĖąĮąĖčåą░ ą▓ ą▒ą░ą╣č鹥 ą┤ą░ąĮąĮčŗčģ čāčüčéą░ąĮąŠą▓ąĖčé ą▒ąĖčé, ąĖ ąĮąŠą╗čī čüą▒čĆąŠčüąĖčé ą▒ąĖčé - ą┤ą╗čÅ č鹥čģ ą▒ąĖčé, čā ą║ąŠč鹊čĆčŗčģ ą╝ą░čüą║ąŠą╣ ą▒čŗą╗ąŠ čĆą░ąĘčĆąĄčłąĄąĮąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ (ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╝ čĆą░ąĘčĆčÅą┤ąĄ ą╝ą░čüą║ąĖ čüč鹊ąĖčé 1). ą¤čĆąĖą╝ąĄčĆ, ą║ą░ą║ čŹč鹊 čĆą░ą▒ąŠčéą░ąĄčé, čüą╝. ąĮą░ čĆąĖčü. 12-1).
ąĀąĖčü. 12-1. ąĀą░ą▒ąŠčéą░ ą║ąŠą╝ą░ąĮą┤čŗ Bit Modify.
ąĀąĖčü. 12-10. ąöąĖą░ą│čĆą░ą╝ą╝ą░ čüąĖą│ąĮą░ą╗ąŠą▓ ąĮą░ ą▓čģąŠą┤ąĄ ąĖąĮč鹥čĆč乥ą╣čüą░ SPI.
ąĀąĖčü. 12-11. ąöąĖą░ą│čĆą░ą╝ą╝ą░ čüąĖą│ąĮą░ą╗ąŠą▓ ąĮą░ ą▓čŗčģąŠą┤ąĄ ąĖąĮč鹥čĆč乥ą╣čüą░ SPI.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┐ąŠą┤čĆąŠą▒ąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ą║ąŠčĆą┐čāčüą░čģ, ą╝ą░čĆą║ąĖčĆąŠą▓ą║ąĄ ąĖ čĆąĄą▓ąĖąĘąĖčÅčģ ą║čĆąĖčüčéą░ą╗ą╗ąŠą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ MCP2515 čüą╝. ą▓ ą┤ą░čéą░čłąĖč鹥 [1].
ąŚą┤ąĄčüčī MCP2515 ą┐ąŠą┤ą║ą╗čÄč湥ąĮ č湥čĆąĄąĘ SPI1, ąĖ ąŠą▒ą╝ąĄąĮ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┐čĆąŠčüčéčŗą╝ ą╝ąĄč鹊ą┤ąŠą╝, ą┐ąŠ ąŠą┐čĆąŠčüčā (ą▒ąĄąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąĖ DMA). ąöą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ąĖ ą┐ą░ą║ąĄčéą░ą╝ąĖ CAN (ą▒ąĄąĘ čĆą░čüčłąĖčĆąĄąĮąĮčŗčģ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓). ąØą░ ą┐čĆąĖąĄą╝ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą▓ą░ ą▒čāč乥čĆą░ RXB0 ąĖ RXB1 (ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąŠą╗ąŠąĮą│ą░čåąĖąĖ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ RXB0 ą┐čāč鹥ą╝ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą▓ RXB1). ąØą░ ą┐ąĄčĆąĄą┤ą░čćčā ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą▒čāč乥čĆ TXB0, ą▒čāč乥čĆčŗ ą┐ąĄčĆąĄą┤ą░čćąĖ TXB1 ąĖ TXB2 ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ (čéą░ą║ čüą┤ąĄą╗ą░ąĮąŠ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ čüčéčĆąŠą│ąŠ čāą┐ąŠčĆčÅą┤ąŠčćąĖą▓ą░čéčī ą┐ąĄčĆąĄą┤ą░čćčā ą┐ą░ą║ąĄč鹊ą▓).
[mcp2515.h ]
#ifndef __MCP2515__ #define __MCP2515__
#include "common/AT91SAM7X256.h" #include "common/projtypes.h"
//------------------------ąÜąŠą╝ą░ąĮą┤čŗ CAN ą║ąŠąĮčéčĆąŠą╗ąĄčĆą░ MCP2510 #define MCP_RESET 0xC0 // ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ #define MCP_READ 0x03 // čćč鹥ąĮąĖąĄ #define MCP_WRITE 0x02 // ąĘą░ą┐ąĖčüčī #define MCP_RTS 0x80 // ąĘą░ą┐čĆąŠčü ąĮą░ ąŠčéą┐čĆą░ą▓ą║čā #define MCP_LOAD_TX_BUFFER 0x40 // ą¤ąĄčĆąĄą┤ą░čéčī ą▒čāč乥čĆ TXB0, TXB1 ąĖą╗ąĖ TXB2 #define MCP_READ_RX_BUFFER 0x92 // ą¤čĆąŠčćąĖčéą░čéčī ą▒čāč乥čĆ RXB0 ąĖą╗ąĖ RXB1 #define MCP_READ_STATUS 0xA0 // ą¤čĆąŠčćąĖčéą░čéčī čüčéą░čéčāčü #define MCP_BIT_MODIFY 0x05 // ąĖąĘą╝ąĄąĮąĖčéčī ą▒ąĖčé //------------------------ą£ą░čüą║ąĖ ą▒ąĖčé čĆąĄą│ąĖčüčéčĆą░ CANINTF #define MCP_CANINTF_TX0IF_MASK (1 << 2) //------------------------ą£ą░čüą║ąĖ čĆąĄąĘčāą╗čīčéą░čéą░ ą║ąŠą╝ą░ąĮą┤čŗ READ STAUS #define MCP_READ_STAT_RX0IF_MASK (1 << 0) #define MCP_READ_STAT_RX1IF_MASK (1 << 1) //------------------------ą£ą░čüą║ąĖ ą┤ą╗čÅ ą║ąŠą╝ą░ąĮą┤čŗ READ RX BUFFER #define MCP_READ_RXB0 (0 << 2) #define MCP_READ_RXB1 (1 << 2) //------------------------ą£ą░čüą║ąĖ ą┤ą╗čÅ čĆąĄą│ąĖčüčéčĆą░ RXB0CTRL #define MCP_RXB0CTRL_RXM_STANDARD_ID (1 << 5) #define MCP_RXB0CTRL_BUKT (1 << 2) //------------------------ą£ą░čüą║ą░ ą┤ą╗čÅ ą║ąŠą╝ą░ąĮą┤čŗ LOAD TX BUFFER #define MCP_LOAD_TXB0 (1 << 0)
//-----------------------ąĀąĄą│ąĖčüčéčĆčŗ CAN ą║ąŠąĮčéčĆąŠą╗ąĄčĆą░ MCP2510 #define MCP_CNF1 0x2A #define MCP_CNF2 0x29 #define MCP_CNF3 0x28 #define MCP_CANCTRL 0x6F // čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (xF) #define MCP_CANSTAT 0x0E // čĆąĄą│ąĖčüčéčĆ čüčéą░čéčāčüą░ (xE) #define MCP_CANINTF 0x2C // čĆąĄą│ąĖčüčéčĆ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ #define MCP_EFLG 0x2D // čäą╗ą░ą│ąĖ ąŠčłąĖą▒ąŠą║ #define MCP_REC 0x1D //-----------------------ą¤čĆąĖąĄą╝ RXB0 #define MCP_RXB0CTRL 0x60 #define MCP_RXB0SIDH 0x61 // ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ID #define MCP_RXB0SIDL 0x62 // ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ID #define MCP_RXM0SIDH 0x20 // ąĪčéą░ąĮą┤ą░čĆčéąĮą░čÅ ą╝ą░čüą║ą░ (čüčéą░čĆčłąĖą╣ ą▒ą░ą╣čé) #define MCP_RXM0SIDL 0x21 // ąĪčéą░ąĮą┤ą░čĆčéąĮą░čÅ ą╝ą░čüą║ą░ (ą╝ą╗ą░ą┤čłąĖą╣ ą▒ą░ą╣čé) #define MCP_RXF0SIDH 0x00 // ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čäąĖą╗čīčéčĆ 0 (čüčéą░čĆčłąĖą╣ ą▒ą░ą╣čé) #define MCP_RXF0SIDL 0x01 // ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čäąĖą╗čīčéčĆ 0 (ą╝ą╗ą░ą┤čłąĖą╣ ą▒ą░ą╣čé) #define MCP_RXF1SIDH 0x04 // ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čäąĖą╗čīčéčĆ 1 (čüčéą░čĆčłąĖą╣ ą▒ą░ą╣čé) #define MCP_RXF1SIDL 0x05 // ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čäąĖą╗čīčéčĆ 1 (ą╝ą╗ą░ą┤čłąĖą╣ ą▒ą░ą╣čé) #define MCP_RXB0DLC 0x65 // ą┤ą╗ąĖąĮą░ ą┐ąŠčüčŗą╗ą║ąĖ //-----------------------ą¤čĆąĖąĄą╝ RXB1 #define MCP_RXB1CTRL 0x70 #define MCP_RXB1SIDH 0x71 // ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ID #define MCP_RXB1SIDL 0x72 // ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ID #define MCP_RXM1SIDH 0x24 // ąĪčéą░ąĮą┤ą░čĆčéąĮą░čÅ ą╝ą░čüą║ą░ (čüčéą░čĆčłąĖą╣ ą▒ą░ą╣čé) #define MCP_RXM1SIDL 0x25 // ąĪčéą░ąĮą┤ą░čĆčéąĮą░čÅ ą╝ą░čüą║ą░ (ą╝ą╗ą░ą┤čłąĖą╣ ą▒ą░ą╣čé) #define MCP_RXF2SIDH 0x08 // ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čäąĖą╗čīčéčĆ (čüčéą░čĆčłąĖą╣ ą▒ą░ą╣čé) #define MCP_RXF2SIDL 0x09 // ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čäąĖą╗čīčéčĆ (ą╝ą╗ą░ą┤čłąĖą╣ ą▒ą░ą╣čé) #define MCP_RXF3SIDH 0x10 // ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čäąĖą╗čīčéčĆ (čüčéą░čĆčłąĖą╣ ą▒ą░ą╣čé) #define MCP_RXF3SIDL 0x11 // ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čäąĖą╗čīčéčĆ (ą╝ą╗ą░ą┤čłąĖą╣ ą▒ą░ą╣čé) #define MCP_RXF4SIDH 0x14 // ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čäąĖą╗čīčéčĆ (čüčéą░čĆčłąĖą╣ ą▒ą░ą╣čé) #define MCP_RXF4SIDL 0x15 // ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čäąĖą╗čīčéčĆ (ą╝ą╗ą░ą┤čłąĖą╣ ą▒ą░ą╣čé) #define MCP_RXF5SIDH 0x18 // ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čäąĖą╗čīčéčĆ (čüčéą░čĆčłąĖą╣ ą▒ą░ą╣čé) #define MCP_RXF5SIDL 0x19 // ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čäąĖą╗čīčéčĆ (ą╝ą╗ą░ą┤čłąĖą╣ ą▒ą░ą╣čé) #define MCP_RXB1DLC 0x75 // ą┤ą╗ąĖąĮą░ ą┐ąŠčüčŗą╗ą║ąĖ //-----------------------ą¤ąĄčĆąĄą┤ą░čćą░ TXB0 #define MCP_TXB0CTRL 0x30 #define MCP_TXB0SIDH 0x31 // ID #define MCP_TXB0SIDL 0x32 // ID #define MCP_TXB0DLC 0x35 // ą┤ą╗ąĖąĮą░ ą┐ąŠčüčŗą╗ą║ąĖ #define MCP_TEC 0x1C #define MCP_port AT91C_BASE_PIOA #define MCP_RESET_pin (1 << 21) #define MCP_CS_pin (1 << 25) #define MCP_PCS 1 #define MCP_NPCS (((~(1 << MCP_PCS))&0x0F) << 16) #define EXT_CAN_TX_BUFF_MASK (EXT_CAN_TX_BUFF_SIZE-1) #define MCP_DESELECT() {MCP_port->PIO_SODR = MCP_CS_pin;} void mcp_read_block (void * buf, u8 adress, u8 len);
u8 mcp_receive_message (TCandata * rmsg, u8 bufmask);void mcp_send_message (TCandata * tmsg, u8 bufmask);
u8 mcp_read_reg (u8 adress);void mcp_modify_reg_bit (u8 address, u8 bitmask, bool bitval);void mcp_write_reg (u8 address, u8 data);
u8 mcp_read_status (void );bool mcp_init (u32 mask, u32 filtr, u8 speed);#endif //__MCP2515__
[mcp2515.c ]
#include "common/lib_AT91SAM7X256.h" #include "mcp2515.h" #include "pins.h" #include "vars.h"
u8 mcp_read_reg (u8 address)
{
// čćč鹥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░
MCP_SELECT();
AT91C_BASE_SPI1-> SPI_TDR = MCP_NPCS| MCP_READ;
while (! (AT91C_BASE_SPI1-> SPI_SR & AT91C_SPI_TXEMPTY));
AT91C_BASE_SPI1-> SPI_TDR = MCP_NPCS| address;
while (! (AT91C_BASE_SPI1-> SPI_SR & AT91C_SPI_TXEMPTY));
AT91C_BASE_SPI1-> SPI_TDR = MCP_NPCS|0x00 ;
while (! (AT91C_BASE_SPI1-> SPI_SR & AT91C_SPI_TXEMPTY));
MCP_DESELECT();
return AT91C_BASE_SPI1-> SPI_RDR;
}
void mcp_modify_reg_bit (u8 address, u8 bitmask, bool bitval)
{
// ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖčÅ ą▒ąĖčéą░ čĆąĄą│ąĖčüčéčĆą░
MCP_SELECT();
AT91C_BASE_SPI1-> SPI_TDR = MCP_NPCS| MCP_BIT_MODIFY;
while (! (AT91C_BASE_SPI1-> SPI_SR & AT91C_SPI_TXEMPTY));
AT91C_BASE_SPI1-> SPI_TDR = MCP_NPCS| address;
while (! (AT91C_BASE_SPI1-> SPI_SR & AT91C_SPI_TXEMPTY));
AT91C_BASE_SPI1-> SPI_TDR = MCP_NPCS| bitmask;
while (! (AT91C_BASE_SPI1-> SPI_SR & AT91C_SPI_TXEMPTY));
AT91C_BASE_SPI1-> SPI_TDR = MCP_NPCS| (bitval?0xFF:0x00 );
while (! (AT91C_BASE_SPI1-> SPI_SR & AT91C_SPI_TXEMPTY));
MCP_DESELECT();
}
void mcp_write_reg (u8 adress, u8 data)
{
// ąĘą░ą┐ąĖčüčī ą▓ čĆąĄą│ąĖčüčéčĆ
MCP_SELECT();
AT91C_BASE_SPI1-> SPI_TDR = MCP_NPCS| MCP_WRITE;
while (! (AT91C_BASE_SPI1-> SPI_SR & AT91C_SPI_TXEMPTY));
AT91C_BASE_SPI1-> SPI_TDR = MCP_NPCS| adress;
while (! (AT91C_BASE_SPI1-> SPI_SR & AT91C_SPI_TXEMPTY));
AT91C_BASE_SPI1-> SPI_TDR = MCP_NPCS| data;
while (! (AT91C_BASE_SPI1-> SPI_SR & AT91C_SPI_TXEMPTY));
MCP_DESELECT();
}
u8 mcp_read_status (void )
{
// čćč鹥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ čüčéą░čéčāčüą░
MCP_SELECT();
AT91C_BASE_SPI1-> SPI_TDR = MCP_NPCS| MCP_READ_STATUS;
while (! (AT91C_BASE_SPI1-> SPI_SR & AT91C_SPI_TXEMPTY));
AT91C_BASE_SPI1-> SPI_TDR = MCP_NPCS|0x00 ;
while (! (AT91C_BASE_SPI1 -> SPI_SR & AT91C_SPI_TXEMPTY));
MCP_DESELECT();
return AT91C_BASE_SPI1-> SPI_RDR;
}
void mcp_COM (u8 cmd)
{
// ą┐ąĄčĆąĄą┤ą░čćą░ ą║ąŠą╝ą░ąĮą┤čŗ
MCP_SELECT();
AT91C_BASE_SPI1-> SPI_TDR = MCP_NPCS| cmd;
while (! (AT91C_BASE_SPI1-> SPI_SR & AT91C_SPI_TXEMPTY));
MCP_DESELECT();
}
u8 mcp_receive_message (TCandata * rmsg, u8 bufmask)
{
u8 DLC;
DLC = mcp_read_reg(MCP_RXB0DLC);
MCP_SELECT();
//ąÆčŗą┤ą░čćą░ ąĖąĮčüčéčĆčāą║čåąĖąĖ READ RX BUFFER ą┤ą╗čÅ ą▒čāč乥čĆą░ RXB0:
AT91C_BASE_SPI1-> SPI_TDR = MCP_NPCS| MCP_READ_RX_BUFFER| bufmask;
while (! (AT91C_BASE_SPI1-> SPI_SR & AT91C_SPI_TXEMPTY));
for (u8 bytecnt=0 ; bytecnt < 8 ; bytecnt++ )
{
AT91C_BASE_SPI1-> SPI_TDR = MCP_NPCS|0 ;
while (! (AT91C_BASE_SPI1-> SPI_SR & AT91C_SPI_TXEMPTY));
if (bytecnt < DLC)
(* rmsg).d8[bytecnt] = AT91C_BASE_SPI1-> SPI_RDR;
else
(* rmsg).d8[bytecnt] = 0 ;
}
MCP_DESELECT();
mcp_write_reg(MCP_CANINTF, 0x00 );
return DLC;
}
void mcp_send_message (TCandata * tmsg, u8 bufmask)
{
//ą×čćąĖčüčéą║ą░ ą▒ąĖčéą░ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ ą▒čāč乥čĆą░:
mcp_modify_reg_bit(MCP_CANINTF, MCP_CANINTF_TX0IF_MASK, false );
MCP_SELECT();
//ąÆčŗą┤ą░čćą░ ą║ąŠą╝ą░ąĮą┤čŗ LOAD TX BUFFER ą┤ą╗čÅ ą▒čāč乥čĆą░ TXB0:
AT91C_BASE_SPI1-> SPI_TDR = MCP_NPCS| MCP_LOAD_TX_BUFFER| bufmask;
while (! (AT91C_BASE_SPI1-> SPI_SR & AT91C_SPI_TXEMPTY));
for (u8 bytecnt=0 ; bytecnt < 8 ; bytecnt++ )
{
AT91C_BASE_SPI1-> SPI_TDR= MCP_NPCS| tmsg-> d8[bytecnt];
while (! (AT91C_BASE_SPI1-> SPI_SR & AT91C_SPI_TXEMPTY));
}
MCP_DESELECT();
//ąÆčŗą┤ą░čćą░ ąĘą░ą┐čĆąŠčüą░ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā TXB0:
mcp_COM(MCP_RTS+1 );
}
void mcp_read_block (void * buf, u8 adress, u8 len)
{
MCP_SELECT();
//ąÆčŗą┤ą░čćą░ ąĖąĮčüčéčĆčāą║čåąĖąĖ READ:
AT91C_BASE_SPI1-> SPI_TDR = MCP_NPCS| MCP_READ;
while (! (AT91C_BASE_SPI1-> SPI_SR & AT91C_SPI_TXEMPTY));
//ąÆčŗą┤ą░čćą░ ą░ą┤čĆąĄčüą░:
AT91C_BASE_SPI1-> SPI_TDR = MCP_NPCS| adress;
while (! (AT91C_BASE_SPI1-> SPI_SR & AT91C_SPI_TXEMPTY));
//ą¦č鹥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝:
for (int cnt=0 ; cnt < len; cnt++ )
{
AT91C_BASE_SPI1-> SPI_TDR = MCP_NPCS|0x00 ;
while (! (AT91C_BASE_SPI1-> SPI_SR & AT91C_SPI_TXEMPTY));
((u8* )buf)[cnt] = AT91C_BASE_SPI1-> SPI_RDR;
}
MCP_DESELECT();
}
static void Init_SPI1 (void )
{
AT91C_BASE_SPI1-> SPI_CR = AT91C_SPI_SPIDIS; // ąŚą░ą┐čĆąĄčé SPI1
AT91F_PIO_CfgPeriph(AT91C_BASE_PIOA, // ąæą░ąĘąŠą▓čŗą╣ ą░ą┤čĆąĄčü PIO ą┤ą╗čÅ SPI1
0 , // Peripheral A
((unsigned int ) AT91C_PA23_SPI1_MOSI) |
((unsigned int ) AT91C_PA29_SPI1_NPCS3)|
((unsigned int ) AT91C_PA24_SPI1_MISO) |
((unsigned int ) AT91C_PA22_SPI1_SPCK));
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ PMC: čĆą░ąĘčĆąĄčłąĖčéčī čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ SPI
AT91F_SPI1_CfgPMC();
AT91C_BASE_SPI1-> SPI_CR = AT91C_SPI_SWRST; // ą¤čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čüą▒čĆąŠčü
AT91C_BASE_SPI1-> SPI_CR = AT91C_SPI_SPIEN; // SPI1 čĆą░ąĘčĆąĄčłąĄąĮ
AT91C_BASE_SPI1-> SPI_CSR[MCP_PCS] = (AT91C_SPI_CPOL+ AT91C_SPI_BITS_8 + (10 << 8 ));
//ąØą░čüčéčĆąŠą╣ą║ą░ čĆąĄąČąĖą╝ą░ SPI, ąĖ ą▓ č鹊ą╝ čćąĖčüą╗ąĄ ąĖ čüą║ąŠčĆąŠčüčéąĖ (5).
//ąĪą║ąŠčĆąŠčüčéčī (čćą░čüč鹊čéą░) SPI = 47396571/5 = 9.48 ą£ąōčå. ąæąŠą╗čīčłąĄ 10 ą£ąōčå
// ą┤ąĄą╗ą░čéčī ąĮąĄą╗čīąĘčÅ (čüąŠą│ą╗ą░čüąĮąŠ ą┤ą░čéą░čłąĖčéčā ąĮą░ MCP2515).
AT91C_BASE_SPI1-> SPI_CSR[0 ] = (AT91C_SPI_CPOL+ AT91C_SPI_BITS_8 + (5 << 8 ));
AT91C_BASE_SPI1-> SPI_CSR[1 ] = (AT91C_SPI_CPOL+ AT91C_SPI_BITS_8 + (5 << 8 ));
AT91C_BASE_SPI1-> SPI_CSR[2 ] = (AT91C_SPI_CPOL+ AT91C_SPI_BITS_8 + (5 << 8 ));
AT91C_BASE_SPI1-> SPI_CSR[3 ] = (AT91C_SPI_CPOL+ AT91C_SPI_BITS_8 + (5 << 8 ));
AT91F_SPI_CfgMode(AT91C_BASE_SPI1,AT91C_SPI_MSTR+ AT91C_SPI_PS_VARIABLE);
}
bool mcp_init (u32 mask, u32 filtr, u8 speed)
{
// ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ CAN ąĖ ąĘą░ą┤ą░ąĮąĖąĄ ą╝ą░čüą║ąĖ ąĖ čäąĖą╗čīčéčĆą░ ą░ą┤čĆąĄčüą░ ąĖ čüą║ąŠčĆąŠčüčéąĖ
int i;
AT91F_PIO_CfgOutput (MCP_port, MCP_RESET_pin);
AT91F_PIO_SetOutput (MCP_port, MCP_RESET_pin);
AT91F_PIO_CfgOutput (MCP_port, MCP_CS_pin);
AT91F_PIO_SetOutput (MCP_port, MCP_CS_pin);
Init_SPI1(); // ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ SPI
/* // ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ čüą▒čĆąŠčü ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ AT91F_PIO_ClearOutput (MCP_port, MCP_RESET_pin) ; for (i=1; i < 2500; i++); //ąĘą░ą┤ąĄčƹȹ║ą░ AT91F_PIO_SetOutput (MCP_port, MCP_RESET_pin) ; */
//for (i=1; i < 2500; i++); //ąĘą░ą┤ąĄčƹȹ║ą░
mcp_COM(MCP_RESET); //ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ą░ MCP2515
//for (i=1; i < 2500; i++); //ąĘą░ą┤ąĄčƹȹ║ą░
bool configmode = false ;
for (i=50 ; i; i-- )
{
configmode = (0x80== mcp_read_reg(MCP_CANSTAT));
if (configmode)
break ;
}
if (! configmode)
return false ;
// SJW[1:0]=00b ą┐čĆčŗąČąŠą║ ą┐ąŠą┤čüčéčĆąŠą╣ą║ąĖ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą▒ąĖčéą░ ąĮčāą╗ąĄą▓ąŠą╣
// BTLMODE=1b ą┤ą╗ąĖąĮą░ PS2 ąŠą┐čĆąĄą┤ą╗čÅąĄčéčüčÅ ą▒ąĖčéą░ą╝ąĖ PHSEG22:PHSEG20 čĆąĄą│ąĖčüčéčĆą░ CNF3
// SAM=0b ą▓čģąŠą┤ ą┐čĆąĖąĄą╝ąĮąĖą║ą░ ąŠą┐čĆą░čłąĖą▓ą░ąĄčéčüčÅ 1 čĆą░ąĘ ą▓ č鹊čćą║ąĄ ą▓čŗą▒ąŠčĆą║ąĖ
// SOF=0 ąĮą░ ą▓čŗą▓ąŠą┤ CLKOUT ą▓čŗą▓ąŠą┤čÅčéčüčÅ čéą░ą║č鹊ą▓čŗąĄ ąĖą╝ą┐čāą╗čīčüčŗ (ąŠąĮąĖ ąĮąĄ ąĮčāąČąĮčŗ)
// WAKFIL=0 čäąĖą╗čīčéčĆ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąĘą░ą┐čĆąĄčēąĄąĮ
//ąØą░čüčéčĆąŠą╣ą║ąĖ čüą║ąŠčĆąŠčüčéąĖ 125ąÜ:
mcp_write_reg(MCP_CNF1,0x07 ); //SJW[1:0]=00b, BRP[5:0]=00111b
mcp_write_reg(MCP_CNF2,0x90 ); //BTLMODE=1b, SAM=0b, PHSEG1[2:0]=010b, PRSEG[2:0]=000b
mcp_write_reg(MCP_CNF3,0x02 ); //SOF=0, WAKFIL=0, PHSEG2[2:0]=010b
/* //ąØą░čüčéčĆąŠą╣ą║ąĖ čüą║ąŠčĆąŠčüčéąĖ 25ąÜ: mcp_write_reg(MCP_CNF1,0x0F); //SJW[1:0]=00b, BRP[5:0]=01111b mcp_write_reg(MCP_CNF2,0xBA); //BTLMODE=1b, SAM=0b, PHSEG1[2:0]=111b, PRSEG[2:0]=010b mcp_write_reg(MCP_CNF3,0x07); //SOF=0, WAKFIL=0, PHSEG2[2:0]=111b */
//---------ąŻčüčéą░ąĮąŠą▓ą║ą░ ą╝ą░čüą║ąĖ ąĖ čäąĖą╗čīčéčĆą░ ą▒čāč乥čĆą░ RXB0:
mcp_write_reg(MCP_RXF0SIDH, filtr >> 3 );
mcp_write_reg(MCP_RXF0SIDL, filtr << 5 );
mcp_write_reg(MCP_RXF1SIDH, 0 );
mcp_write_reg(MCP_RXF1SIDL, 0 );
mcp_write_reg(MCP_RXM0SIDH, mask >> 3 );
mcp_write_reg(MCP_RXM0SIDL, mask << 5 );
//---------ąŻčüčéą░ąĮąŠą▓ą║ą░ ą╝ą░čüą║ąĖ ąĖ čäąĖą╗čīčéčĆą░ ą▒čāč乥čĆą░ RXB1:
mcp_write_reg(MCP_RXF2SIDH, filtr >> 3 );
mcp_write_reg(MCP_RXF2SIDL, filtr << 5 );
mcp_write_reg(MCP_RXF3SIDH, 0 );
mcp_write_reg(MCP_RXF3SIDL, 0 );
mcp_write_reg(MCP_RXF4SIDH, 0 );
mcp_write_reg(MCP_RXF4SIDL, 0 );
mcp_write_reg(MCP_RXF5SIDH, 0 );
mcp_write_reg(MCP_RXF5SIDL, 0 );
mcp_write_reg(MCP_RXM1SIDH, mask >> 3 );
mcp_write_reg(MCP_RXM1SIDL, mask << 5 );
//---------ąŻčüčéą░ąĮąŠą▓ą║ą░ ID ąĖ DLC ą▒čāč乥čĆą░ TXB0:
mcp_write_reg(MCP_TXB0SIDH, (CAN_UP_OUT_ID_START+ Device_number) >> 3 );
mcp_write_reg(MCP_TXB0SIDL, (CAN_UP_OUT_ID_START+ Device_number) << 5 );
mcp_write_reg(MCP_TXB0DLC, 8 );
//---------ą¤čĆąŠą▓ąĄčĆąŠčćąĮąŠąĄ čćč鹥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆąŠą▓
//mcp_read_block(&A00_03, 0x00, sizeof(TA00_03));
//mcp_read_block(&A20_23, 0x20, sizeof(TA20_23));
//---------ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą╝ą░čüą║ąĖ ąĖ čäąĖą╗čīčéčĆą░ ą┤ą╗čÅ SID
// ąŚą┤ąĄčüčī ą▓ą║ą╗čÄčćą░ąĄčéčüčÅ ą┐čĆąĖąĄą╝ č鹊ą╗čīą║ąŠ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓, ąĖ ą▓ą║ą╗čÄčćą░ąĄčéčüčÅ
// čĆąĄąČąĖą╝ ą┐čĆąŠą╗ąŠąĮą│ą░čåąĖąĖ ą▒čāč乥čĆą░ RXB0:
mcp_write_reg(MCP_RXB0CTRL, MCP_RXB0CTRL_RXM_STANDARD_ID| MCP_RXB0CTRL_BUKT);
//----------------ą┐ąĄčĆąĄą▓ąŠą┤ ą▓ normal
mcp_write_reg(MCP_CANCTRL, 0x00 );
return true ;
}
[ąĪčüčŗą╗ą║ąĖ ]
1 . MCP2515 Stand-Alone CAN Controller with SPI Interface site:microchip.com .2 . MCP2515 - CAN ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ site:pro-diod.ru .3 . ąśąĮč鹥čĆč乥ą╣čü SPI .4 . CAN Bit Time Calculation .5 . CAN Bus Bit Timing Calculator .



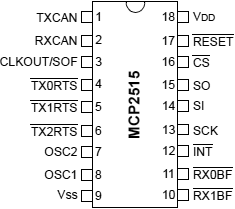
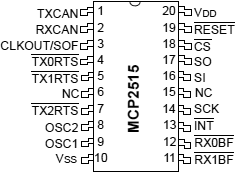
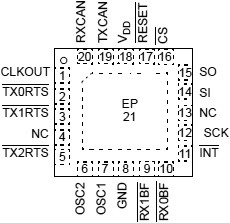
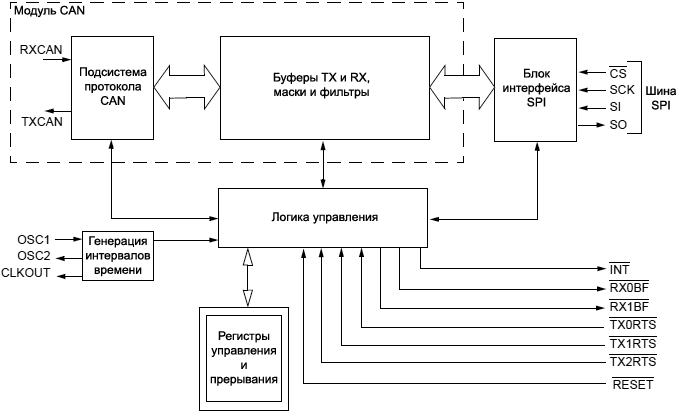
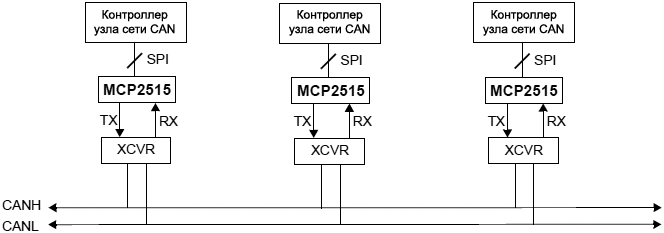
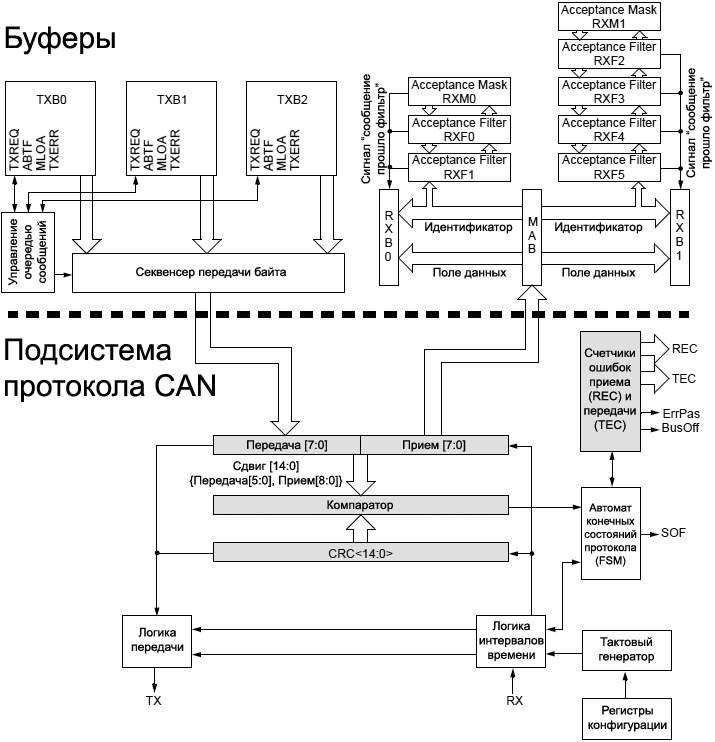
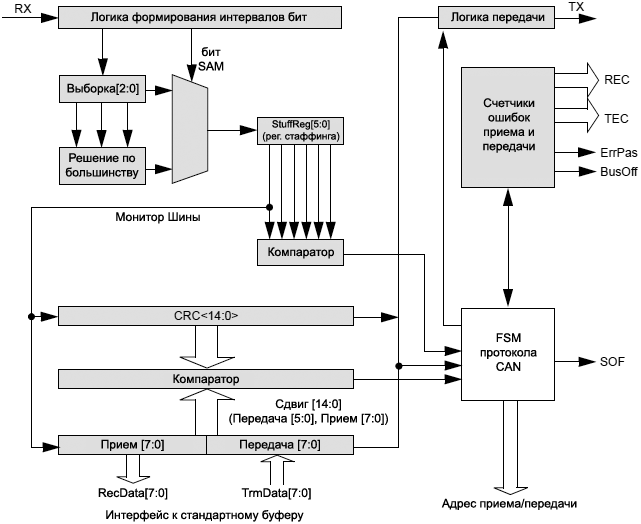

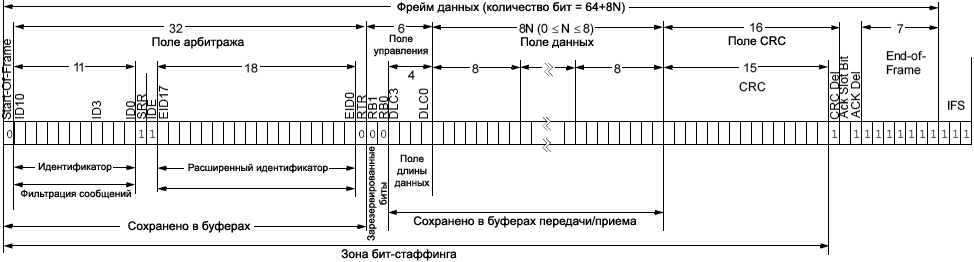
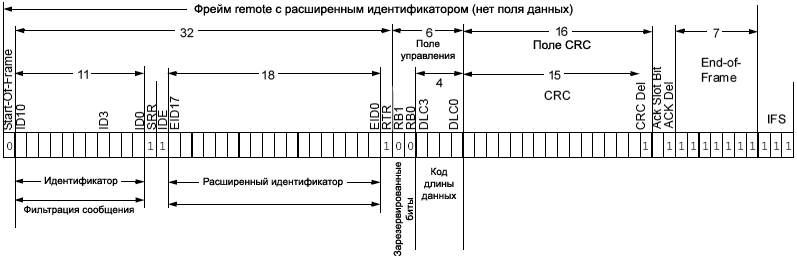
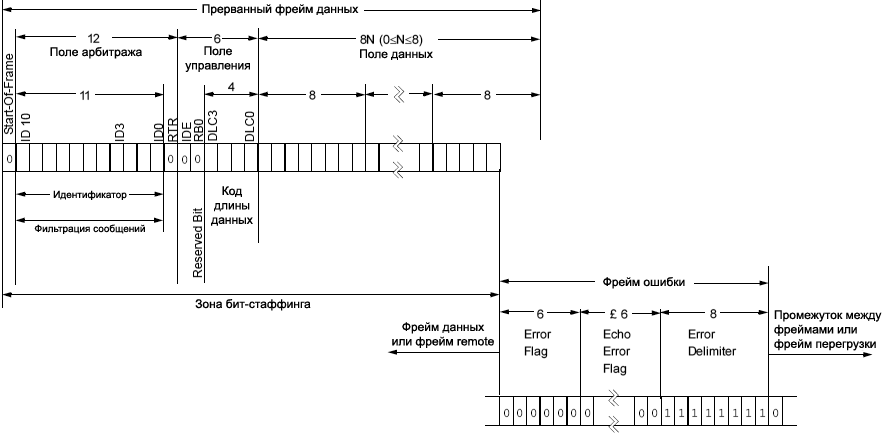
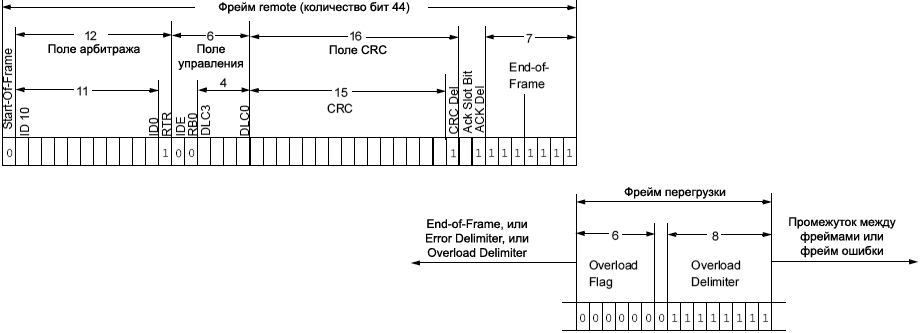
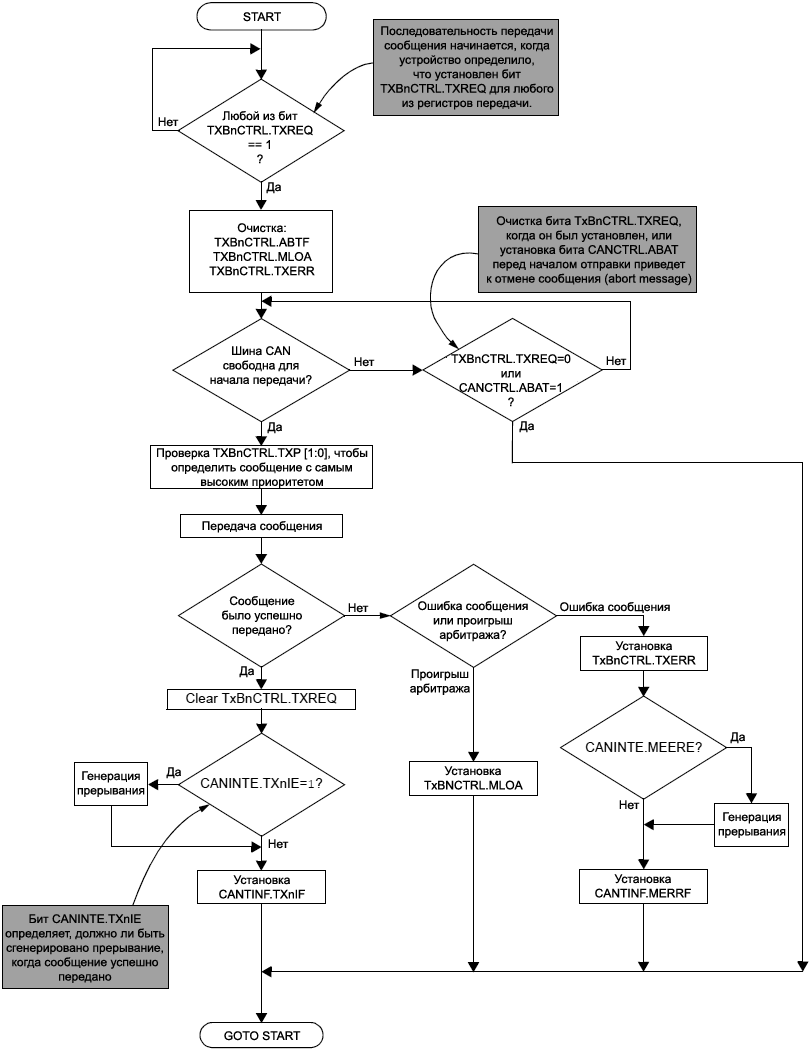
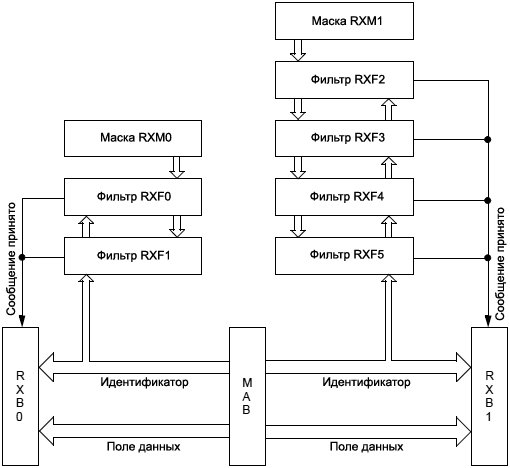
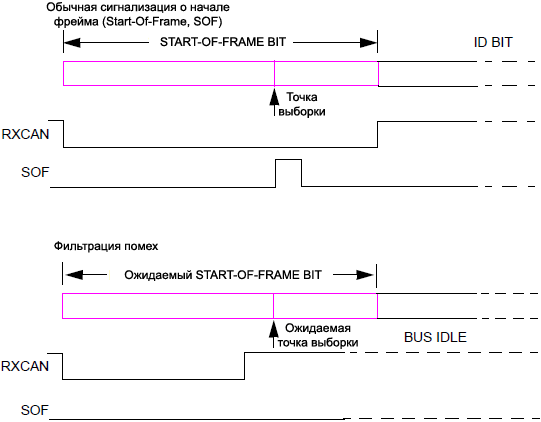
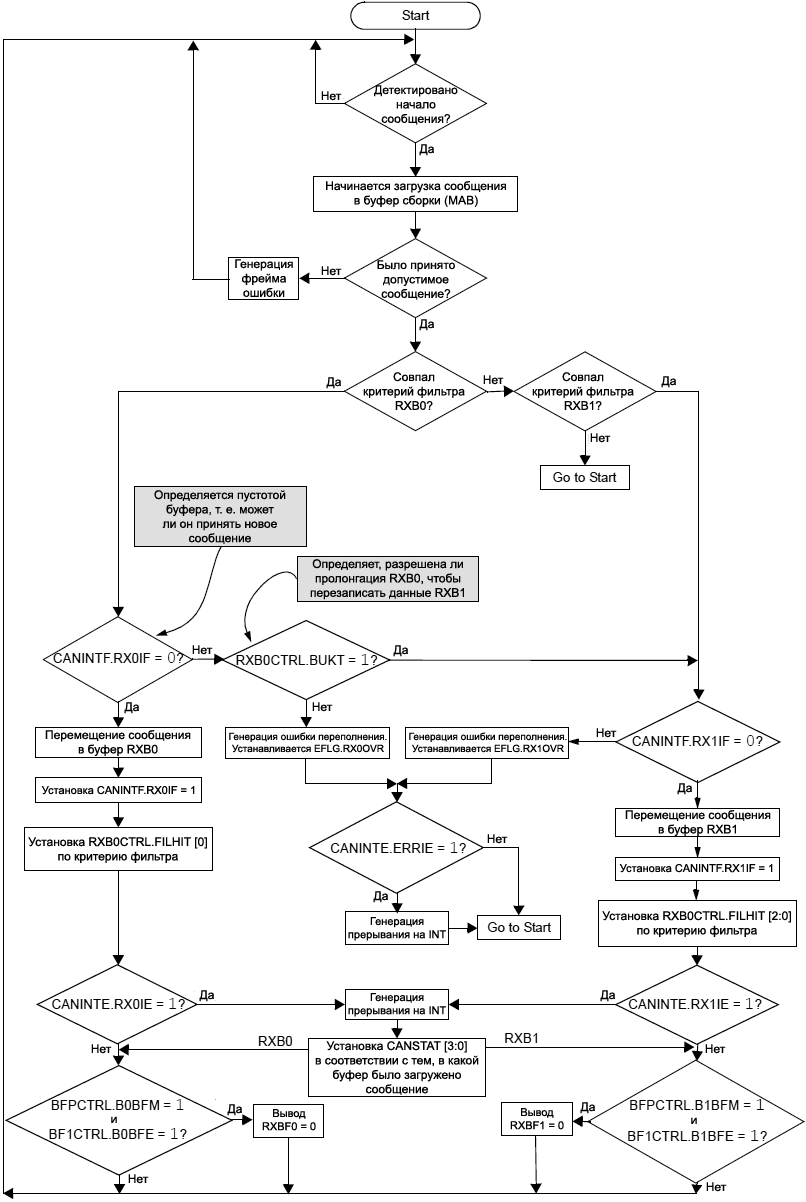
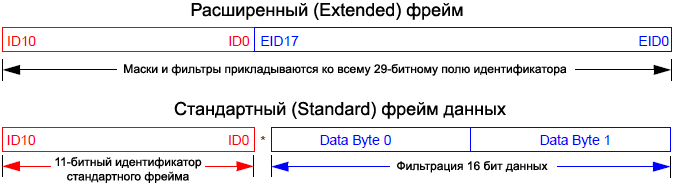
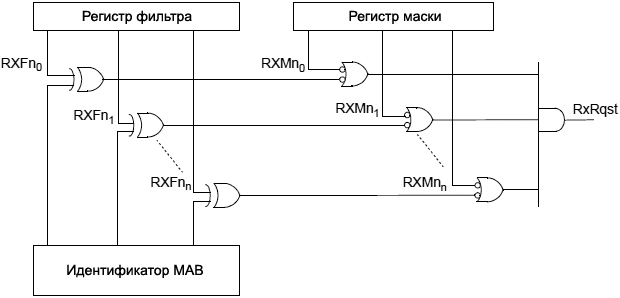

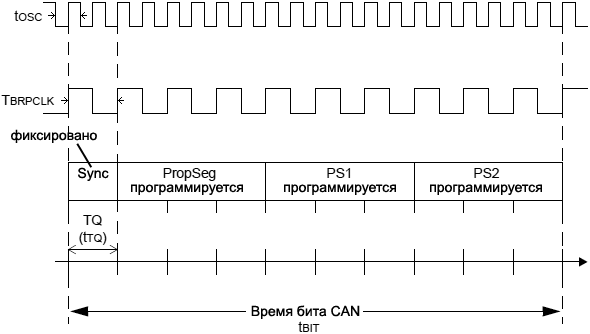
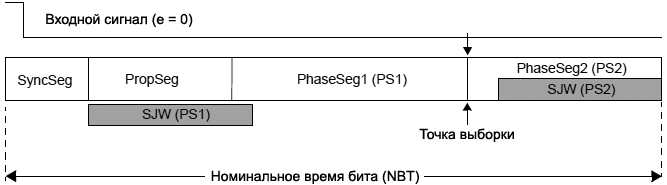
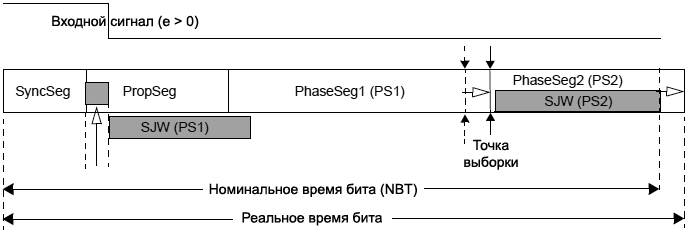
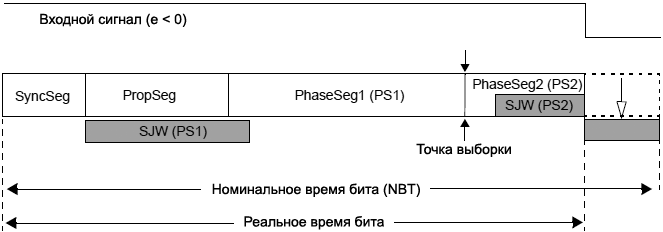
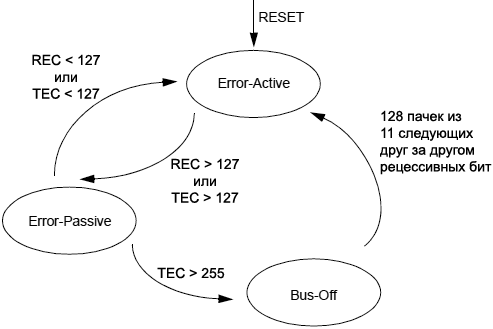




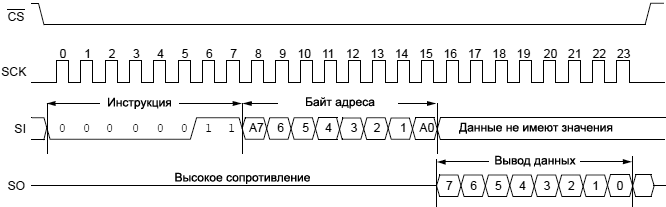
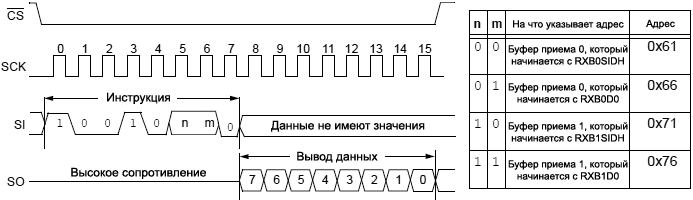

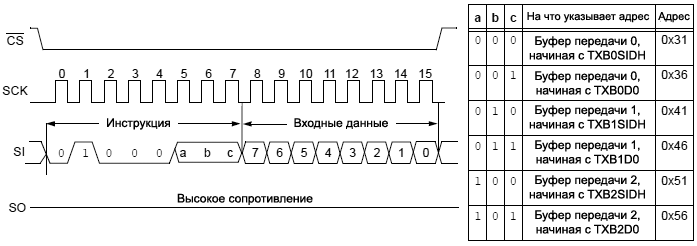
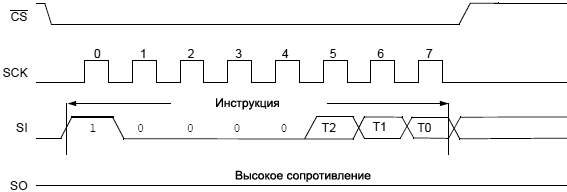

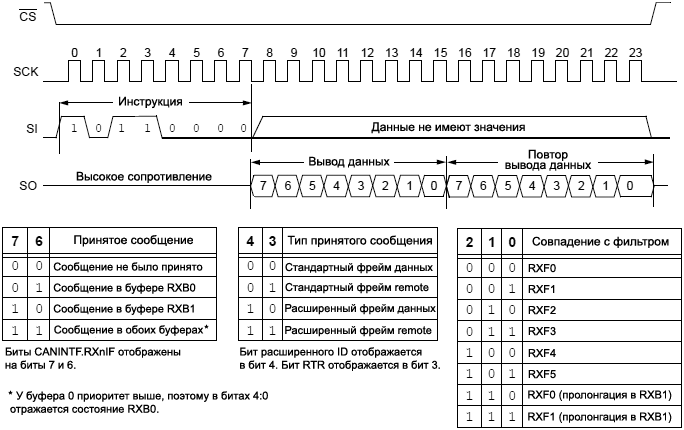

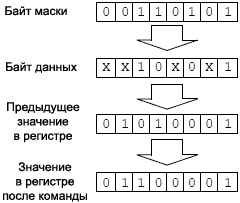
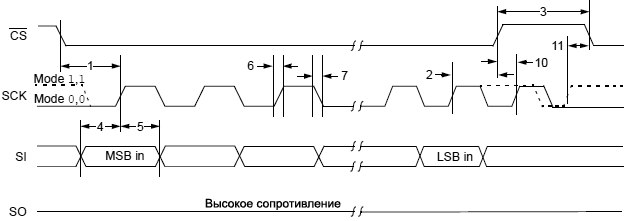
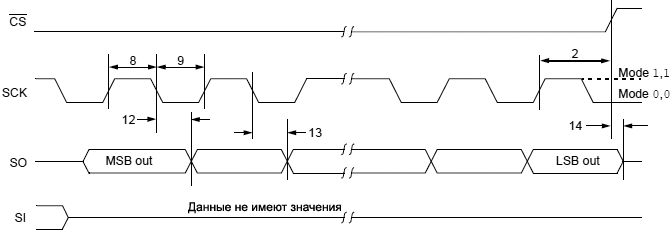
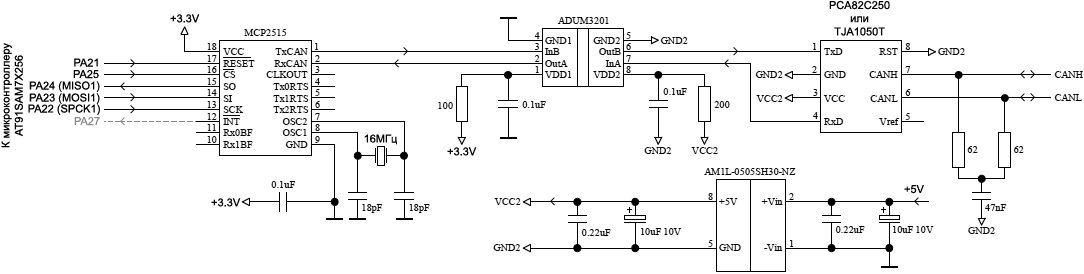

ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ
RSS ą╗ąĄąĮčéą░ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĄą▓ čŹč鹊ą╣ ąĘą░ą┐ąĖčüąĖ