|
ą£ąĖą║čĆąŠčüčģąĄą╝ą░ L3G4200D ą║ąŠą╝ą┐ą░ąĮąĖąĖ STMicroelectronics (ST) ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čüąŠą▒ąŠą╣ ą╝ąĖąĮąĖą░čéčÄčĆąĮčŗą╣ čüą▓ąĄčĆčģčüčéą░ą▒ąĖą╗čīąĮčŗą╣ ą┤ą░čéčćąĖą║ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖą╣ ą▓ 3D ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ, ąĖąĘą│ąŠč鹊ą▓ą╗ąĄąĮąĮčŗą╣ ą┐ąŠ MEMS č鹥čģąĮąŠą╗ąŠą│ąĖąĖ. ą×ąĮ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą│ąĖčĆąŠčüą║ąŠą┐ ą▓ ą░ą▓ąĖąŠąĮąĖą║ąĄ, ą░ą▓č鹊ą╝ąŠą▒ąĖą╗čīąĮąŠą╣ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮąŠčüčéąĖ ąĖ ą┤čĆčāą│ąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ, ą║ąŠč鹊čĆčŗąĄ čéčĆąĄą▒čāčÄčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ąŠą▒čŖąĄą║čéą░ ą▓ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ. ąöą░ą╗ąĄąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐ąĄčĆąĄą▓ąŠą┤ ą┤ą░čéą░čłąĖčéą░ L3G4200D, ąĮąĄą┐ąŠąĮčÅčéąĮčŗąĄ č鹥čĆą╝ąĖąĮčŗ ąĖ čüąŠą║čĆą░čēąĄąĮąĖčÅ čüą╝. ą▓ čĆą░ąĘą┤ąĄą╗ąĄ ąĪą╗ąŠą▓ą░čĆąĖą║, ą▓ ą║ąŠąĮčåąĄ čüčéą░čéčīąĖ.
[ą×čüąĮąŠą▓ąĮčŗąĄ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéąĖ čüąĄąĮčüąŠčĆą░ L3G4200D]
ŌĆó ąóčĆąĖ ą▓čŗą▒ąĖčĆą░ąĄą╝čŗąĄ ą┐ąŠą╗ąĮčŗąĄ čłą║ą░ą╗čŗ (250/500/2000 dps).
ŌĆó ą”ąĖčäčĆąŠą▓čŗąĄ ą▓čŗčģąŠą┤ąĮčŗąĄ ąĖąĮč鹥čĆč乥ą╣čüčŗ I2C ąĖ SPI.
ŌĆó 16-ą▒ąĖčéąĮčŗąĄ ą▓čŗčģąŠą┤ąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ.
ŌĆó ąÆčüčéčĆąŠąĄąĮąĮčŗą╣ čüąĄąĮčüąŠčĆ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ, čü ą║ąŠč鹊čĆąŠą│ąŠ ą╝ąŠąČąĮąŠ čüčćąĖčéą░čéčī 8-ą▒ąĖčéąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ.
ŌĆó ąöą▓ą░ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ ą▓čŗčģąŠą┤ąĮčŗčģ čüąĖą│ąĮą░ą╗ą░ (ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĖ ą│ąŠč鹊ą▓ąĮąŠčüčéčī ą┤ą░ąĮąĮčŗčģ).
ŌĆó ąÆčüčéčĆąŠąĄąĮąĮčŗąĄ čäąĖą╗čīčéčĆčŗ ążąØą¦ ąĖ ążąÆą¦, ą┐ąŠą╗ąŠčüčā ą┐čĆąŠą┐čāčüą║ą░ąĮąĖčÅ ą║ąŠč鹊čĆčŗčģ ą╝ąŠąČąĮąŠ ą▓čŗą▒čĆą░čéčī.
ŌĆó ą¦čĆąĄąĘą▓čŗčćą░ą╣ąĮąŠ ą▓čŗčüąŠą║ą░čÅ čüčéą░ą▒ąĖą╗čīąĮąŠčüčéčī ą┐ąŠą║ą░ąĘą░ąĮąĖą╣ ą┐ąŠ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ ąĖ ą▓čĆąĄą╝ąĄąĮąĖ.
ŌĆó ą©ąĖčĆąŠą║ąĖą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą┐ąĖčéą░čÄčēąĖčģ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣ 2.4V .. 3.6V.
ŌĆó ąÆčģąŠą┤čŗ ąĖ ą▓čŗčģąŠą┤čŗ (IO), čüąŠą▓ą╝ąĄčüčéąĖą╝čŗąĄ čü ąĮąĖąĘą║ąŠą▓ąŠą╗čīčéąĮąŠą╣ ą╗ąŠą│ąĖą║ąŠą╣ (1.8V).
ŌĆó ąÆčüčéčĆąŠąĄąĮąĮčŗąĄ čĆąĄąČąĖą╝čŗ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ (power-down) ąĖ čüąĮą░ (sleep).
ŌĆó ąÆčüčéčĆąŠąĄąĮąĮčŗą╣ FIFO.
ŌĆó ąÆčŗčüąŠą║ą░čÅ čāčüč鹊ą╣čćąĖą▓ąŠčüčéčī ą║ čāą┤ą░čĆą░ą╝ ąĖ ą▓ąĖą▒čĆą░čåąĖčÅą╝.
ŌĆó ąĀą░čüčłąĖčĆąĄąĮąĮčŗą╣ čĆą░ą▒ąŠčćąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ (-40┬░C .. +85┬░C).
ŌĆó ą£ąĖąĮąĖą░čéčÄčĆąĮčŗą╣ ą┐ą╗ą░čüčéą╝ą░čüčüąŠą▓čŗą╣ ą║ąŠčĆą┐čāčü LGA-16 (4x4x1.1 mm).
ŌĆó ąŻą┐ą░ą║ąŠą▓ą║ą░ čüąŠą▓ą╝ąĄčüčéąĖą╝ą░ čüąŠ čüčéą░ąĮą┤ą░čĆčéą░ą╝ąĖ ECOPACK┬« RoHS ąĖ "Green".
ą×ą▒ą╗ą░čüčéąĖ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ L3G4200D:
ŌĆó ąśą│čĆčŗ ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ą▓ąŠą┤ą░ ą┤ą╗čÅ čüąĖčüč鹥ą╝ ą▓ąĖčĆčéčāą░ą╗čīąĮąŠą╣ čĆąĄą░ą╗čīąĮąŠčüčéąĖ.
ŌĆó ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ą▓ąĖąČąĄąĮąĖąĄą╝, ąĖąĮč鹥čĆč乥ą╣čüčŗ MMI.
ŌĆó ąĪąĖčüč鹥ą╝čŗ ąĮą░ą▓ąĖą│ą░čåąĖąĖ GPS.
ŌĆó ą¤čĆąĖą▒ąŠčĆčŗ ąĖ čĆąŠą▒ąŠč鹊č鹥čģąĮąĖą║ą░.
[ą×ą▒čēąĄąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ L3G4200D]
L3G4200D čÅą▓ą╗čÅąĄčéčüčÅ čéčĆąĄčģąŠčüąĄą▓čŗą╝ ą┤ą░čéčćąĖą║ąŠą╝ čāą│ą╗ąŠą▓čŗčģ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖą╣ čü ąĮąĖąĘą║ąĖą╝ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝, ąŠą▒ą╗ą░ą┤ą░čÄčēąĖą╝ čéą░ą║ąČąĄ čćčĆąĄąĘą▓čŗčćą░ą╣ąĮąŠą╣ čüčéą░ą▒ąĖą╗čīąĮąŠčüčéčīčÄ ąĮčāą╗ąĄą▓ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ąĖ ą▓čŗčüąŠą║ąŠą╣ č鹊čćąĮąŠčüčéčīčÄ ą┐ąŠą║ą░ąĘą░ąĮąĖą╣, ą║ąŠč鹊čĆą░čÅ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą┐čĆąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅčģ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ąĖ ą┤ą╗ąĖč鹥ą╗čīąĮąŠą╣ čĆą░ą▒ąŠč鹥 ą┤ą░čéčćąĖą║ą░. ąÆ ą╝ąĖą║čĆąŠčüčģąĄą╝čā, ą║čĆąŠą╝ąĄ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠą│ąŠ 菹╗ąĄą╝ąĄąĮčéą░, ą▓čüčéčĆąŠąĄąĮ ąĖąĮč鹥čĆč乥ą╣čü I2C/SPI, č湥čĆąĄąĘ ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĮąŠ ą┐ąĄčĆąĄą┤ą░čéčī ą▓ąŠ ą▓ąĮąĄčłąĮąĖą╣ ą╝ąĖčĆ čüą║ąŠčĆąŠčüčéčī ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čāą│ą╗ą░ ą┐ąŠ čéčĆąĄą╝ ąŠčüčÅą╝ (čŹč鹊čé ąĖąĮč鹥čĆč乥ą╣čü ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ ą▓ąĮąĄčłąĮąĄą╝čā ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā). ą¦čāą▓čüčéą▓ąĖč鹥ą╗čīąĮčŗą╣ 菹╗ąĄą╝ąĄąĮčé ą┤ą░čéčćąĖą║ą░ ąĖąĘą│ąŠč鹊ą▓ą╗ąĄąĮ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą╣ ą╝ąĖą║čĆąŠą╝ąĄčģą░ąĮąĖč湥čüą║ąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ, čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąĮąŠą╣ STMicroelectronics, čćč鹊ą▒čŗ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ąĖąĮąĄčĆčåąĖąŠąĮąĮčŗąĄ čüąĄąĮčüąŠčĆčŗ ąĖ ą░ą║čéčāą░č鹊čĆčŗ ąĮą░ ą║čĆąĄą╝ąĮąĖąĄą▓čŗčģ ą┐ą╗ą░čüčéąĖąĮą░čģ. ąÆąĮąĄčłąĮąĖą╣ čåąĖčäčĆąŠą▓ąŠą╣ ąĖąĮč鹥čĆč乥ą╣čü čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą┐ąŠ CMOS-č鹥čģąĮąŠą╗ąŠą│ąĖąĖ, ą┐ąŠąĘą▓ąŠą╗čÅčÄčēąĄą╣ čüąŠąĘą┤ą░čéčī ą▓čŗčüąŠą║ąŠąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą┤ąĖąĘą░ą╣ąĮ, ąĮą░ąĖą╗čāčćčłąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ą┐ąŠą┤čüčéčĆąŠąĄąĮąĮčŗą╣ ą┐ąŠą┤ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠą│ąŠ 菹╗ąĄą╝ąĄąĮčéą░ ą┤ą░čéčćąĖą║ą░. L3G4200D ąĖą╝ąĄąĄčé ą┐ąŠą╗ąĮčŗąĄ čłą║ą░ą╗čŗ ┬▒250/┬▒500/┬▒2000 dps, ąĖ ą╝ąŠąČąĄčé ąĖąĘą╝ąĄčĆčÅčéčī čüą║ąŠčĆąŠčüčéčī ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čāą│ą╗ą░ ą▓ ą▓čŗą▒čĆą░ąĮąĮąŠą╣ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ą┐ąŠą╗ąŠčüąĄ čćą░čüč鹊čé. L3G4200D ą▓čŗą┐čāčüą║ą░ąĄčéčüčÅ ą▓ ą┐ą╗ą░čüčéą╝ą░čüčüąŠą▓ąŠą╝ ą║ąŠčĆą┐čāčüąĄ land grid array (LGA) ąĖ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆ -40┬░C .. +85┬░C.
ąóą░ą▒ą╗ąĖčåą░ 1. ąÆą░čĆąĖą░ąĮčéčŗ ą┐ąŠčüčéą░ą▓ą║ąĖ L3G4200D.
| ąÜąŠą┤ ąĘą░ą║čāą┐ą║ąĖ |
ąóąĄą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣
ą┤ąĖą░ą┐ą░ąĘąŠąĮ (oC) |
ąÜąŠčĆą┐čāčü |
ąŻą┐ą░ą║ąŠą▓ą║ą░ |
| L3G4200D |
-40 .. +85 |
LGA-16 (4x4x1.1 mm) |
ąøąŠč鹊ą║ (tray) |
| L3G4200DTR |
-40 .. +85 |
LGA-16 (4x4x1.1 mm) |
ąøąĄąĮčéą░ ąĖ ą╗ąĖąĮąĄą╣ą║ąĖ (tape and reel) |
[1. ąæą╗ąŠą║-čüčģąĄą╝ą░ ąĖ ąŠą┐ąĖčüą░ąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓ L3G4200D]

ąĀąĖčü.1. ąæą╗ąŠą║-čüčģąĄą╝ą░ L3G4200D
ą¤ąŠčÅčüąĮąĄąĮąĖčÅ ą║ ą▒ą╗ąŠą║-čüčģąĄą╝ąĄ:
MUX ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆ čüąĖą│ąĮą░ą╗ąŠą▓.
CHARGE AMP čāčüąĖą╗ąĖč鹥ą╗čī ąĘą░čĆčÅą┤ą░.
MIXER čüą╝ąĄčüąĖč鹥ą╗čī.
LOW-PASS FILTER čäąĖą╗čīčéčĆ ąĮąĖąĘą║ąŠą╣ čćą░čüč鹊čéčŗ, ążąØą¦.
ADC1 ą░ąĮą░ą╗ąŠą│ąŠ-čåąĖčäčĆąŠą▓ąŠą╣ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čī (ąÉą”ą¤) ą┤ą╗čÅ čüąĖą│ąĮą░ą╗ąŠą▓ čü ą┤ą░čéčćąĖą║ąŠą▓ čāą│ą╗ąŠą▓ąŠą│ąŠ čāčüą║ąŠčĆąĄąĮąĖčÅ.
DIGITAL FILTERING ą▒ą╗ąŠą║ čåąĖčäčĆąŠą▓ąŠą╣ čäąĖą╗čīčéčĆą░čåąĖąĖ.
I2C, SPI ą▒ą╗ąŠą║ ą▓ąĮąĄčłąĮąĖčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓.
CS, SCL/SPC, SDA/SDO/SDI, SDO ą▓ąĮąĄčłąĮąĖąĄ čüąĖą│ąĮą░ą╗čīąĮčŗąĄ ą╗ąĖąĮąĖąĖ čåąĖčäčĆąŠą▓čŗčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓.
DRIVING MASS čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮą░čÅ ą║ čāčüą║ąŠčĆąĄąĮąĖčÅą╝ ą╝ą░čüčüą░.
Feedback loop ą┐ąĄčéą╗čÅ ąŠą▒čĆą░čéąĮąŠą╣ čüą▓čÅąĘąĖ.
TEMPERATURE SENSOR č鹥čĆą╝ąŠą┤ą░čéčćąĖą║.
ADC2 ą░ąĮą░ą╗ąŠą│ąŠ-čåąĖčäčĆąŠą▓ąŠą╣ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čī (ąÉą”ą¤) ą┤ą╗čÅ čüąĖą│ąĮą░ą╗ą░ čü č鹥čĆą╝ąŠą┤ą░čéčćąĖą║ą░.
REFERENCE ąĖčüč鹊čćąĮąĖą║ ąŠą┐ąŠčĆąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░.
TRIMMING CIRCUITS čāąĘą╗čŗ ą┐ąŠą┤čüčéčĆąŠą╣ą║ąĖ.
FIFO ą▒čāč乥čĆ ą▓čŗčģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ čü ą┤ą░čéčćąĖą║ą░ čāą│ą╗ąŠą▓čŗčģ čāčüą║ąŠčĆąĄąĮąĖą╣.
CLOCK & PHASE GENERATOR ą│ąĄąĮąĄčĆą░č鹊čĆ čéą░ą║č鹊ą▓ ąĖ čäą░ąĘ.
CONTROL LOGIC & INTERRUPT GEN čāą┐čĆą░ą▓ą╗čÅčÄčēą░čÅ ą╗ąŠą│ąĖą║ą░ ąĖ ą│ąĄąĮąĄčĆą░čåąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣.
INT1, DRDY/INT2 ą▓ąĮąĄčłąĮąĖąĄ ą▓čŗčģąŠą┤ąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ąĘą░ą▓ąĄą┤ąĄąĮčŗ ąĮą░ čģąŠčüčé (čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ) ą┤ą╗čÅ ą▓čŗą┤ą░čćąĖ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąĖą╗ąĖ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ.
ąÆąĖą▒čĆą░čåąĖčÅ ąĖąĘą╝ąĄčĆąĖč鹥ą╗čīąĮąŠą╣ čüčéčĆčāą║čéčāčĆčŗ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ čüčģąĄą╝ąŠą╣ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą▓ čåąĖą║ą╗ąĄ ąŠą▒čĆą░čéąĮąŠą╣ čüą▓čÅąĘąĖ. ąśąĘą╝ąĄčĆčÅąĄą╝čŗą╣ čüąĖą│ąĮą░ą╗ čäąĖą╗čīčéčĆčāąĄčéčüčÅ ąĖ ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą║ą░ą║ čåąĖčäčĆąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ.
1.1. ą×ą┐ąĖčüą░ąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓
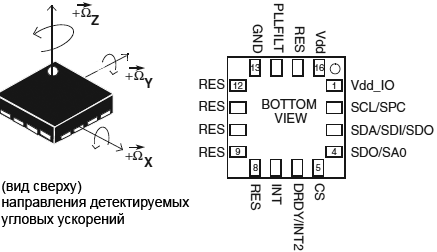
ąĀąĖčü. 2. ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą▓ ą▓ąĮąĄčłąĮąĖą╝ ą▓čŗą▓ąŠą┤ą░ą╝ ą║ąŠčĆą┐čāčüą░.
ąóą░ą▒ą╗ąĖčåą░ 2. ą×ą┐ąĖčüą░ąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓.
| Ōä¢ ą▓čŗą▓. |
ąśą╝čÅ |
ąóąĖą┐ |
ążčāąĮą║čåąĖčÅ |
| 1 |
Vdd_IO |
PWR |
ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ ą┤ą╗čÅ ą┐ąŠčĆč鹊ą▓ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░. |
| 2 |
SCL
SPC |
I
I |
ąóą░ą║čéčŗ I2C.
ąóą░ą║čéčŗ SPI. |
| 3 |
SDA
SDI
SDO |
I/O
I
O |
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ I2C.
ąÆčģąŠą┤ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ SPI.
ąÆčŗčģąŠą┤ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ SPI ą▓ 3-ą┐čĆąŠą▓ąŠą┤ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ. |
| 4 |
SDO
SA0 |
O
I |
ąÆčŗčģąŠą┤ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ SPI.
LSB-ą▒ąĖčé ą░ą┤čĆąĄčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░ I2C. |
| 5 |
CS |
I |
ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ SPI, ą▓čŗą▒ąŠčĆ čĆąĄąČąĖą╝ą░ ąĖąĮč鹥čĆč乥ą╣čüą░ (I2C/SPI) ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ (ąŠą┐ąĖčüą░ąĮąĖąĄ čüą╝. ą┤ą░ą╗ąĄąĄ). |
| 6 |
DRDY/INT2 |
O |
ąĪąĖą│ąĮą░ą╗ ą│ąŠč鹊ą▓ąĮąŠčüčéąĖ ą┤ą░ąĮąĮčŗčģ (Data Ready)/ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčé FIFO. |
| 7 |
INT1 |
O |
ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. |
| 8 |
Reserved |
|
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ, ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥 ą║ GND. |
| 9 |
Reserved |
|
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ, ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥 ą║ GND. |
| 10 |
Reserved |
|
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ, ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥 ą║ GND. |
| 11 |
Reserved |
|
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ, ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥 ą║ GND. |
| 12 |
Reserved |
|
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ, ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥 ą║ GND. |
| 13 |
GND |
PWR |
ą×ą▒čēąĖą╣ ą┐čĆąŠą▓ąŠą┤ ą┤ą╗čÅ ą▓čüąĄčģ čüąĖą│ąĮą░ą╗ąŠą▓, 0V ą┐ąĖčéą░ąĮąĖčÅ. |
| 14 |
PLLFILT |
A |
ąÆąĮąĄčłąĮąĖąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ ą┤ą╗čÅ čäąĖą╗čīčéčĆą░ PLL (čüą╝. čĆąĖčü. 3). |
| 15 |
Reserved |
|
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ, ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥 ą║ Vdd. |
| 16 |
Vdd |
PWR |
ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ. |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ ą║ čéą░ą▒ą╗ąĖčåąĄ:
I čåąĖčäčĆąŠą▓ąŠą╣ ą▓čģąŠą┤.
O čåąĖčäčĆąŠą▓ąŠą╣ ą▓čŗčģąŠą┤.
I/O ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╣ čåąĖčäčĆąŠą▓ąŠą╣ čüąĖą│ąĮą░ą╗ (čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą▓čģąŠą┤, čéą░ą║ ąĖ ą║ą░ą║ ą▓čŗčģąŠą┤).
PWR čłąĖąĮą░ ą┐ąĖčéą░ąĮąĖčÅ.
A ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą▓čŗą▓ąŠą┤ (ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą▓ąĮąĄčłąĮąĖčģ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ ą┤ą╗čÅ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ ążąØą¦).
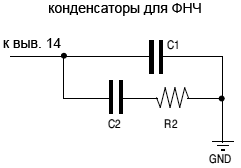
ąĀąĖčü. 3. ąĪčģąĄą╝ą░ ą▓ąĮąĄčłąĮąĄą│ąŠ ążąØą¦
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ 14 PLLFILT čĆą░ą▓ąĮąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÄ ą┐ąĖčéą░ąĮąĖčÅ Vdd.
ąóą░ą▒ą╗ąĖčåą░ 3. ąØąŠą╝ąĖąĮą░ą╗čŗ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ ą┤ą╗čÅ ążąØą¦
| ąÜąŠą╝ą┐ąŠąĮąĄąĮčé |
ąØąŠą╝ąĖąĮą░ą╗ |
| C1 |
10 nF ┬▒ 10 % |
| ąĪ2 |
470 nF ┬▒ 10 % |
| R2 |
10 ą║ą×ą╝ ┬▒ 10 % |
[2. ą£ąĄčģą░ąĮąĖč湥čüą║ąĖąĄ ąĖ 菹╗ąĄą║čéčĆąĖč湥čüą║ąĖąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ]
2.1 ą£ąĄčģą░ąĮąĖč湥čüą║ąĖąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ
ąóą░ą▒ą╗ąĖčåą░ 4. ą£ąĄčģą░ąĮąĖč湥čüą║ąĖąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ, ą┐čĆąĖą▓ąĄą┤ąĄąĮąĮčŗąĄ ą┤ą╗čÅ Vdd=3V ąĖ T=25┬░C, ąĄčüą╗ąĖ ąĮąĄ čāą║ą░ąĘą░ąĮąŠ čćč鹊-č鹊 ą┤čĆčāą│ąŠąĄ(1).
| ą£ąĮąĄą╝ąŠąĮąĖą║ą░ |
ą¤ą░čĆą░ą╝ąĄčéčĆ |
ąŻčüą╗ąŠą▓ąĖčÅ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ |
Min. |
Typ.(2) |
ą£ą░čģ. |
ąĢą┤ąĖąĮąĖčåčŗ |
| FS |
ąöąĖą░ą┐ą░ąĘąŠąĮ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ |
ąÆčŗą▒ąĖčĆą░ąĄčéčüčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ |
|
┬▒250
┬▒500
┬▒2000 |
|
dps |
| So |
ą¦čāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéčī |
FS = 250 dps
FS = 500 dps
FS = 2000 dps |
|
8.75
17.5
70 |
|
mdps/digit |
| SoDr |
ąśąĘą╝ąĄąĮąĄąĮąĖąĄ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ |
-40oC .. +85oC |
|
┬▒2 |
|
% |
| DVoff |
ą”ąĖčäčĆąŠą▓ąŠą╣ čāčĆąŠą▓ąĄąĮčī ąĮčāą╗čÅ |
FS = 250 dps
FS = 500 dps
FS = 2000 dps |
|
┬▒10
┬▒15
┬▒75 |
|
dps |
| OffDr |
ąśąĘą╝ąĄąĮąĄąĮąĖąĄ čāčĆąŠą▓ąĮčÅ ąĮčāą╗čÅ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ(3) |
FS = 250 dps
FS = 2000 dps |
|
┬▒0.03
┬▒0.04 |
|
dps/oC |
| NL |
ąØąĄą╗ąĖąĮąĄą╣ąĮąŠčüčéčī(4) |
ąÉą┐ą┐čĆąŠą║čüąĖą╝ą░čåąĖčÅ ą║ ą┐čĆčÅą╝ąŠą╣ ą╗ąĖąĮąĖąĖ |
|
0.2 |
|
% FS |
| DST |
ąśąĘą╝ąĄąĮąĄąĮąĖąĄ ą▓čŗčģąŠą┤ą░ ą┐čĆąĖ čüą░ą╝ąŠč鹥čüčéąĖčĆąŠą▓ą░ąĮąĖąĖ |
FS = 250 dps
FS = 500 dps
FS = 2000 dps |
|
130
200
530 |
|
dps |
| Rn |
ąŻčĆąŠą▓ąĄąĮčī čłčāą╝ą░ (rate noise density) |
BW = 50 ąōčå |
|
0.03 |
|
dps/sqrt(ąōčå) |
| ODR |
ąĪą║ąŠčĆąŠčüčéčī ąŠčåąĖčäčĆąŠą▓ą║ąĖ (digital output data rate) |
|
|
100/200/
400/800 |
|
ąōčå |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
1. ąöą░čéčćąĖą║ ą║ą░ą╗ąĖą▒čĆąŠą▓ą░ą╗čüčÅ ąĮą░ ąĘą░ą▓ąŠą┤ąĄ ą┐čĆąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ Vdd=3V. ąĀą░ą▒ąŠčćąĖą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą┐ąĖčéą░čÄčēąĖčģ ąĮą░ą┐čĆčÅąČąĄąĮąĖą╣ čāą║ą░ąĘą░ąĮ ą▓ čéą░ą▒ą╗ąĖčåąĄ 5.
2. ąóąĖą┐ąĖčćąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ (Typ.) ąĮąĄ ą│ą░čĆą░ąĮčéąĖčĆčāčÄčéčüčÅ.
3. ą£ąĖąĮąĖą╝ą░ą╗čīąĮčŗąĄ ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ (Min. ąĖ Max.) ą▒čŗą╗ąĖ ą▓čŗčćąĖčüą╗ąĄąĮčŗ ąĮą░ ąŠčüąĮąŠą▓ą░ąĮąĖąĖ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ąĮą░ ą│ąĖčĆąŠčüą║ąŠą┐ą░čģ, ąĮą░čģąŠą┤čÅčēąĖčģčüčÅ ą▓ č鹥ą║čāčēąĄą╝ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ąĄ.
4. ąōą░čĆą░ąĮčéąĖčĆčāąĄčéčüčÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąŠą╣ ą┤ą░čéčćąĖą║ą░.
2.2. ąŁą╗ąĄą║čéčĆąĖč湥čüą║ąĖąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ
ąóą░ą▒ą╗ąĖčåą░ 5. ąŁą╗ąĄą║čéčĆąĖč湥čüą║ąĖąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ, ą┐čĆąĖą▓ąĄą┤ąĄąĮąĮčŗąĄ ą┤ą╗čÅ Vdd=3V ąĖ T=25┬░C, ąĄčüą╗ąĖ ąĮąĄ čāą║ą░ąĘą░ąĮąŠ čćč鹊-č鹊 ą┤čĆčāą│ąŠąĄ(1).
| ą£ąĮąĄą╝ąŠąĮąĖą║ą░ |
ą¤ą░čĆą░ą╝ąĄčéčĆ |
ąŻčüą╗ąŠą▓ąĖčÅ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ |
Min. |
Typ.(2) |
ą£ą░čģ. |
ąĢą┤ąĖąĮąĖčåčŗ |
| Vdd |
ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ |
|
2.4 |
3.0 |
3.6 |
V |
| Vdd_IO |
ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ ą┐ąŠčĆč鹊ą▓ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░(3) |
|
1.71 |
|
Vdd+0.1 |
V |
| Idd |
ąóąŠą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ |
|
|
6.1 |
|
mA |
| IddSL |
ąóąŠą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą▓ čĆąĄąČąĖą╝ąĄ čüąĮą░ (SLeep mode)(4) |
ąÆčŗą▒ąĖčĆą░ąĄčéčüčÅ č湥čĆąĄąĘ čåąĖčäčĆąŠą▓ąŠą╣ ąĖąĮč鹥čĆč乥ą╣čü |
|
1.5 |
|
mA |
| IddPdn |
ąóąŠą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ (Power DowN mode) |
ąÆčŗą▒ąĖčĆą░ąĄčéčüčÅ č湥čĆąĄąĘ čåąĖčäčĆąŠą▓ąŠą╣ ąĖąĮč鹥čĆč乥ą╣čü |
|
0.005 |
|
mA |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
1. ąöą░čéčćąĖą║ ą║ą░ą╗ąĖą▒čĆąŠą▓ą░ą╗čüčÅ ąĮą░ ąĘą░ą▓ąŠą┤ąĄ ą┐čĆąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ Vdd=3V.
2. ąóąĖą┐ąĖčćąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ (Typ.) ąĮąĄ ą│ą░čĆą░ąĮčéąĖčĆčāčÄčéčüčÅ.
3. ą£ąŠąČąĮąŠ ąŠčéą║ą╗čÄčćąĖčéčī ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ Vdd čü čüąŠčģčĆą░ąĮąĄąĮąĖąĄą╝ Vdd_IO, ą┐čĆąĖ čŹč鹊ą╝ ąĮąĄ ą▒čāą┤ąĄčé ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮčŗ čłąĖąĮčŗ ąŠą▒ą╝ąĄąĮą░. ą¤čĆąĖ čŹč鹊ą╝ ąĖąĘą╝ąĄčĆąĖč鹥ą╗čīąĮą░čÅ čćą░čüčéčī ą▒čāą┤ąĄčé ąŠčéą║ą╗čÄč湥ąĮą░.
4. ąśąĘ čĆąĄąČąĖą╝ą░ čüąĮą░ (Sleep mode) ą╝ąŠąČąĮąŠ ą▒čŗčüčéčĆąĄąĄ ą┐ąĄčĆąĄą╣čéąĖ ą▓ čĆą░ą▒ąŠčćąĖą╣ čĆąĄąČąĖą╝, č湥ą╝ ąĖąĘ čĆąĄąČąĖą╝ą░ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ (power-down mode).
2.3. ąóąĄą╝ą┐ąĄčĆą░čéčāčĆąĮčŗąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ čüąĄąĮčüąŠčĆą░
ąóą░ą▒ą╗ąĖčåą░ 6. ąóąĄą╝ą┐ąĄčĆą░čéčāčĆąĮčŗąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ, ą┐čĆąĖą▓ąĄą┤ąĄąĮąĮčŗąĄ ą┤ą╗čÅ Vdd=3V ąĖ T=25┬░C, ąĄčüą╗ąĖ ąĮąĄ čāą║ą░ąĘą░ąĮąŠ čćč鹊-č鹊 ą┤čĆčāą│ąŠąĄ(1).
| ą£ąĮąĄą╝ąŠąĮąĖą║ą░ |
ą¤ą░čĆą░ą╝ąĄčéčĆ |
ąŻčüą╗ąŠą▓ąĖčÅ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ |
Min. |
Typ.(2) |
ą£ą░čģ. |
ąĢą┤ąĖąĮąĖčåčŗ |
| TSDr |
ąŻčģąŠą┤ ąĘąĮą░č湥ąĮąĖčÅ ą▓čŗčģąŠą┤ą░ čü ą┤ą░čéčćąĖą║ą░ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ. |
|
|
-1 |
|
oC/digit |
| TODr |
ąĪą║ąŠčĆąŠčüčéčī ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ |
|
|
1 |
|
ąōčå |
| Top |
ąĀą░ą▒ąŠčćąĖą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ č鹥ą╝ą┐ąĄčĆą░čéčāčĆ |
|
-40 |
|
+85 |
oC |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
1. ąöą░čéčćąĖą║ ą║ą░ą╗ąĖą▒čĆąŠą▓ą░ą╗čüčÅ ąĮą░ ąĘą░ą▓ąŠą┤ąĄ ą┐čĆąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ Vdd=3V.
2. ąóąĖą┐ąĖčćąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ (Typ.) ąĮąĄ ą│ą░čĆą░ąĮčéąĖčĆčāčÄčéčüčÅ.
2.4. ąźą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ
2.4.1. SPI - serial peripheral interface
ą¤čĆąĖą▓ąĄą┤ąĄąĮčŗ ąŠą▒čŗčćąĮčŗąĄ čĆą░ą▒ąŠčćąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ Vdd ąĖ Top. ąØą░ čłąĖąĮąĄ SPI ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ L3G4200D čÅą▓ą╗čÅąĄčéčüčÅ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ (SPI slave).
ąóą░ą▒ą╗ąĖčåą░ 7. ąśąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą╗čÅ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI
| ą£ąĮąĄą╝ąŠąĮąĖą║ą░ |
ą¤ą░čĆą░ą╝ąĄčéčĆ |
ąŚąĮą░č湥ąĮąĖąĄ |
ąĢą┤ąĖąĮąĖčåčŗ |
| Min. |
Max. |
| tc(SPC) |
ąöą╗ąĖč鹥ą╗čīąĮąŠčüčéčī čåąĖą║ą╗ą░ čéą░ą║č鹊ą▓ SPI |
100 |
|
ąĮąĪ |
| fc(SPC) |
ą¦ą░čüč鹊čéą░ čéą░ą║č鹊ą▓ SPI |
|
10 |
ą£ąōčå |
tsu(CS)
th(CS)
tsu(SI)
th(SI)
tv(SO)
th(SO)
tdis(SO) |
ąÆčĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ CS (setup time)
ąÆčĆąĄą╝čÅ čāą┤ąĄčƹȹ░ąĮąĖčÅ CS (hold time)
ąÆčĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▓čģąŠą┤ą░ SDI (setuh time)
ąÆčĆąĄą╝čÅ čāą┤ąĄčƹȹ░ąĮąĖčÅ ą▓čģąŠą┤ą░ SDI (hold time)
ąÆčĆąĄą╝čÅ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠą│ąŠ ą▓čŗčģąŠą┤ą░ SDO (valid output)
ąÆčĆąĄą╝čÅ čāą┤ąĄčƹȹ░ąĮąĖčÅ ą▓čŗčģąŠą┤ą░ SDO (hold time)
ąÆčĆąĄą╝čÅ ąĘą░ą┐čĆąĄčéą░ ą▓čŗčģąŠą┤ą░ SDO (disable time) |
5
8
5
15
6
|
50
50 |
ąĮąĪ |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ 1: ąĘąĮą░č湥ąĮąĖčÅ ą│ą░čĆą░ąĮčéąĖčĆčāčÄčéčüčÅ ąĮą░ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹥 SPI 10 ą£ąōčå čü 4 ąĖ 3 čüąĖą│ąĮą░ą╗ą░ą╝ąĖ ąĮą░ ąŠčüąĮąŠą▓ą░ąĮąĖąĖ čĆąĄąĘčāą╗čīčéą░č鹊ą▓ čĆą░čüč湥č鹊ą▓. ąÆ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ąĄ ąĘąĮą░č湥ąĮąĖčÅ ąĮąĄ ą┐čĆąŠą▓ąĄčĆčÅčÄčéčüčÅ.

ąĀąĖčü. 4. ąÆčĆąĄą╝ąĄąĮąĮčŗąĄ ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ SPI slave
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą▒čŗą╗ąĖ čüą┤ąĄą╗ą░ąĮčŗ ą▓ č鹊čćą║ą░čģ 0.2 ąĖ 0.8 ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ Vdd_IO, ą║ą░ą║ ą┤ą╗čÅ ą▓čģąŠą┤ąŠą▓, čéą░ą║ ąĖ ą┤ą╗čÅ ą▓čŗčģąŠą┤ąŠą▓.
2.4.2. I2C ąĖąĮč鹥čĆč乥ą╣čü
ą¤čĆąĖą▓ąĄą┤ąĄąĮčŗ ąŠą▒čŗčćąĮčŗąĄ čĆą░ą▒ąŠčćąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ Vdd ąĖ Top. ąØą░ čłąĖąĮąĄ I2C ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ L3G4200D čÅą▓ą╗čÅąĄčéčüčÅ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ (slave).
ąóą░ą▒ą╗ąĖčåą░ 8. ąśąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą╗čÅ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ I2C
| ą£ąĮąĄą╝ąŠąĮąĖą║ą░ |
ą¤ą░čĆą░ą╝ąĄčéčĆ |
I2C standard mode(1) |
I2C fast mode(1) |
ąĢą┤ąĖąĮąĖčåčŗ |
| Min |
Max |
Min |
Max |
| f(SCL) |
ąóą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ SCL |
0 |
100 |
0 |
400 |
ą║ąōčå |
tW(SCLL)
tW(SCLH) |
ąÆčĆąĄą╝čÅ ą╗ąŠą│. 0 SCL
ąÆčĆąĄą╝čÅ ą╗ąŠą│. 1 SCL |
4.7
4.0 |
|
1.3
0.6 |
|
ą╝ą║ąĪ |
| tSU(SDA) |
ąÆčĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ SDA (setup time) |
250 |
|
100 |
|
ąĮąĪ |
| th(SDA) |
ąÆčĆąĄą╝čÅ čāą┤ąĄčƹȹ░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ SDA (hold time) |
0 |
3.45 |
0 |
0.9 |
ą╝ą║ąĪ |
tr(SDA), tr(SCL)
tf(SDA), tf(SCL) |
ąÆčĆąĄą╝čÅ ąĮą░čĆą░čüčéą░ąĮąĖčÅ SDA ąĖ SCL
ąÆčĆąĄą╝čÅ čüą┐ą░ą┤ą░ SDA ąĖ SCL |
|
1000
300 |
20+0.1Cb(2) |
300 |
ąĮąĪ |
th(ST)
tSU(SR)
tSU(SP) |
ąÆčĆąĄą╝čÅ čāą┤ąĄčƹȹ░ąĮąĖčÅ čüąŠą▒čŗčéąĖčÅ START
ąÆčĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ąŠą▓č鹊čĆąĮąŠą│ąŠ čüąŠą▒čŗčéąĖčÅ START
ąÆčĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ čüąŠą▒čŗčéąĖčÅ STOP |
4
4.7
4 |
|
0.6 |
|
ą╝ą║ąĪ |
| tW(SP:SR) |
ąÆčĆąĄą╝čÅ čüą▓ąŠą▒ąŠą┤ąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ čłąĖąĮčŗ ą╝ąĄąČą┤čā čüąŠą▒čŗčéąĖčÅą╝ąĖ START ąĖ STOP |
4.7 |
|
1.3 |
|
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
1. I2C standard mode - čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čüą║ąŠčĆąŠčüčéąĮąŠą╣ čĆąĄąČąĖą╝ I2C, fast mode - čāčüą║ąŠčĆąĄąĮąĮčŗą╣ čĆąĄąČąĖą╝. ąöą░ąĮąĮčŗąĄ ąŠčüąĮąŠą▓ą░ąĮčŗ ąĮą░ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅčģ čüčéą░ąĮą┤ą░čĆčéą░ ą┐čĆąŠč鹊ą║ąŠą╗ą░ I2C, ąĖ ąŠąĮąĖ ąĮąĄ č鹥čüčéąĖčĆčāčÄčéčüčÅ ą▓ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ąĄ.
2. Cb = ą┐ąŠą╗ąĮą░čÅ ąĄą╝ą║ąŠčüčéčī ąŠą┤ąĮąŠą│ąŠ ą┐čĆąŠą▓ąŠą┤ą░ čłąĖąĮčŗ ą▓ ą┐ąĖą║ąŠčäą░čĆą░ą┤ą░čģ (pF).

ąĀąĖčü. 5. ąÆčĆąĄą╝ąĄąĮąĮčŗąĄ ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ I2C slave
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą┤ą╗čÅ čüąĖą│ąĮą░ą╗ąŠą▓ SDA ąĖ SDC ą▒čŗą╗ąĖ čüą┤ąĄą╗ą░ąĮčŗ ą▓ č鹊čćą║ą░čģ 0.2 ąĖ 0.8 ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ Vdd_IO.
2.5. ą¤čĆąĄą┤ąĄą╗čīąĮčŗąĄ ą░ą▒čüąŠą╗čÄčéąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ (Absolute maximum ratings)
ąĪčéčĆąĄčüčüąŠą▓čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĄą▓čŗčłą░čÄčé ąĘąĮą░č湥ąĮąĖčÅ ą▓ čéą░ą▒ą╗ąĖčåąĄ "Absolute maximum ratings" ą╝ąŠą│čāčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ąĮąĄąŠą▒čĆą░čéąĖą╝ąŠą╝čā ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖčÄ čāčüčéčĆąŠą╣čüčéą▓ą░. ą¤čĆąĄą┤ąĄą╗čīąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ č鹊ą╗čīą║ąŠ ą▓ ą║ą░č湥čüčéą▓ąĄ čĆąĄą╣čéąĖąĮą│ą░, ąĖ ąĮąĄ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ čĆą░ą▒ąŠčéą░ čāčüčéčĆąŠą╣čüčéą▓ą░ čü čéą░ą║ąĖą╝ąĖ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ. ąĀą░ą▒ąŠčéą░ ą▓ čāčüą╗ąŠą▓ąĖčÅčģ ą┐čĆąĄą┤ąĄą╗čīąĮčŗčģ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣ ą╝ąŠąČąĄčé ą┐ąŠą▓ą╗ąĖčÅčéčī ąĮą░ ąĮą░ą┤ąĄąČąĮąŠčüčéčī čāčüčéčĆąŠą╣čüčéą▓ą░.
ąóą░ą▒ą╗ąĖčåą░ 9. Absolute maximum ratings
| ą£ąĮąĄą╝ąŠąĮąĖą║ą░ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ
ąĘąĮą░č湥ąĮąĖąĄ |
ąĢą┤ąĖąĮąĖčåčŗ |
| Vdd |
ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ |
-0.3 .. 4.8 |
V |
| TSTG |
ąöąĖą░ą┐ą░ąĘąŠąĮ č鹥ą╝ą┐ąĄčĆą░čéčāčĆ ą┐čĆąĖ čģčĆą░ąĮąĄąĮąĖąĖ |
-40 .. +125 |
oC |
| Sg |
ąŻčüą║ąŠčĆąĄąĮąĖąĄ g ą┤ą╗čÅ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ 0.1 ą╝ąĪ |
10,000 |
g |
| ESD |
ąŚą░čēąĖčéą░ ąŠčé čüčéą░čéąĖč湥čüą║ąŠą│ąŠ 菹╗ąĄą║čéčĆąĖč湥čüčéą▓ą░ |
2 (HBM) |
kV |
 |
ąŁč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠ ą║ čāą┤ą░čĆą░ą╝, ąĖ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠąĄ ąŠą▒čĆą░čēąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖčÅą╝ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ |
 |
ąŁč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠ ą║ ESD, ąĖ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠąĄ ąŠą▒čĆą░čēąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖčÅą╝ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ |
2.6. ąśčüą┐ąŠą╗čīąĘčāąĄą╝ą░čÅ č鹥čĆą╝ąĖąĮąŠą╗ąŠą│ąĖčÅ
2.6.1. ą¦čāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéčī
ąōąĖčĆąŠčüą║ąŠą┐ ą┐ąŠ čüą║ąŠčĆąŠčüčéąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čāą│ą╗ą░ čÅą▓ą╗čÅąĄčéčüčÅ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝, ą║ąŠč鹊čĆąŠąĄ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮčŗąĄ ą▓čŗčģąŠą┤ąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ ą┐ąŠą▓ąŠčĆąŠčéą░ ą┐čĆąŠčéąĖą▓ čćą░čüąŠą▓ąŠą╣ čüčéčĆąĄą╗ą║ąĖ ą▓ąŠą║čĆčāą│ ąĖąĘą╝ąĄčĆčÅąĄą╝čŗčģ ąŠčüąĄą╣. ą¦čāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéčī ąŠą┐ąĖčüčŗą▓ą░ąĄčé čāčüąĖą╗ąĄąĮąĖąĄ čüąĄąĮčüąŠčĆą░ ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ąĘą░ą┤ą░ąĮąĖąĄą╝ čāčüą║ąŠčĆąĄąĮąĖčÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĮą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ čāą│ąŠą╗. ą£ąĖą║čĆąŠčüčģąĄą╝ą░ čüą┐čĆąŠąĄą║čéąĖčĆąŠą▓ą░ąĮą░ čéą░ą║, čćč鹊 ąĖąĘą╝ąĄčĆčÅąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ąĖąĘą╝ąĄąĮčÅčÄčéčüčÅ ąŠč湥ąĮčī ąĮąĄąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ čü č鹥č湥ąĮąĖąĄą╝ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ ą┐ąŠą┤ ą▓ąŠąĘą┤ąĄą╣čüčéą▓ąĖąĄą╝ ąĖąĘą╝ąĄąĮąĄąĮąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ.
2.6.2. ąØčāą╗ąĄą▓ąŠą╣ čāčĆąŠą▓ąĄąĮčī (Zero-rate level)
ąØčāą╗ąĄą▓ąŠą╣ čāčĆąŠą▓ąĄąĮčī ąŠą┐ąĖčüčŗą▓ą░ąĄčé čĆąĄą░ą╗čīąĮčŗąĄ ą▓čŗčģąŠą┤ąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ, ą║ąŠą│ą┤ą░ ąĮąĄčé čāą│ą╗ąŠą▓čŗčģ ąĖąĘą╝ąĄąĮąĄąĮąĖą╣. ąŻčĆąŠą▓ąĄąĮčī ąĮčāą╗čÅ ą┤ą╗čÅ č鹊čćąĮčŗčģ MEMS-čüąĄąĮčüąŠčĆąŠą▓ ą▓ ąĮąĄą║ąŠč鹊čĆčŗčģ čüą╗čāčćą░čÅčģ čÅą▓ą╗čÅąĄčéčüčÅ čĆąĄąĘčāą╗čīčéą░č鹊ą╝ čüčéčĆąĄčüčüąŠą▓čŗčģ ąĮą░ą│čĆčāąĘąŠą║ ąĮą░ čüąĄąĮčüąŠčĆ ąĖ, čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čāčĆąŠą▓ąĄąĮčī ąĮčāą╗čÅ ą╝ąŠąČąĄčé ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ ąĖąĘą╝ąĄąĮčÅčéčīčüčÅ ą┐ąŠčüą╗ąĄ ą╝ąŠąĮčéą░ąČą░ čüąĄąĮčüąŠčĆą░ ąĮą░ ą┐ąĄčćą░čéąĮčāčÄ ą┐ą╗ą░čéčā ąĖą╗ąĖ ą┐ąŠčüą╗ąĄ ą▓ąŠąĘą┤ąĄą╣čüčéą▓ąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ ą╝ąĄčģą░ąĮąĖč湥čüą║ąĖčģ ąĮą░ą│čĆčāąĘąŠą║. ąÜą░ą║ ąĖ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéčī, čāčĆąŠą▓ąĄąĮčī ąĮčāą╗čÅ čéą░ą║ąČąĄ ąŠč湥ąĮčī ą╝ą░ą╗ąŠ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą▓čĆąĄą╝ąĄąĮąĖ čĆą░ą▒ąŠčéčŗ ąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ.
2.6.3. ąĪčéą░ą▒ąĖą╗čīąĮąŠčüčéčī ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ
ąæą╗ą░ą│ąŠą┤ą░čĆčÅ čāąĮąĖą║ą░ą╗čīąĮąŠą╣ č鹥čģąĮąŠą╗ąŠą│ąĖąĖ ąĖ ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮąŠą╝čā ą┤ąĖąĘą░ą╣ąĮčā ą│ąĖčĆąŠčüą║ąŠą┐čŗ ą║ąŠą╝ą┐ą░ąĮąĖąĖ ST ą╝ąŠą│čāčé ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī ą┐čĆąĄą▓ąŠčüčģąŠą┤ąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ ą╝ąĄčģą░ąĮąĖč湥čüą║ąŠą╣ ą╝ą░čüčüčŗ MEMS ąĖ ą║ą░č湥čüčéą▓ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ ASIC, čćč鹊 čĆą░čüą┐čĆąŠčüčéčĆą░ąĮčÅąĄčéčüčÅ ąĮą░ ą▒ąĄčüą┐čĆąĄčåąĄą┤ąĄąĮčéąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī čüčéą░ą▒ąĖą╗čīąĮąŠčüčéąĖ ą▓ čĆą░ą▒ąŠč鹥 ą┐ąŠ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ ąĖ ą▓čĆąĄą╝ąĄąĮąĖ.
ą¤ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ čāčģąŠą┤ą░ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĖ ąĮčāą╗ąĄą▓ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ L3G4200D ą┐čĆąĄą▓ąŠčüčģąŠą┤ąĖčé ąĖą╝ąĄčÄčēąĖąĄčüčÅ ąĮą░ čĆčŗąĮą║ąĄ ą░ąĮą░ą╗ąŠą│ąĖ ą▓ ą┤ąĄčüčÅčéą║ąĖ čĆą░ąĘ. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ čāčüčéčĆą░ąĮąĖčéčī ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéčī ą▓ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ ą║ąŠą╝ą┐ąĄąĮčüą░čåąĖčÅčģ ąĖ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĄ ąĖ ą╝ąŠąČąĄčé čāčüą║ąŠčĆąĖčéčī ą▓čŗčģąŠą┤ ąĮą░ čĆčŗąĮąŠą║ ą│ąŠč鹊ą▓ąŠą╣ ą┐čĆąŠą┤čāą║čåąĖąĖ, čāą┐čĆąŠčüčéąĖčéčī čĆą░ąĘčĆą░ą▒ąŠčéą║čā, ą┐ąŠą╗čāčćąĖčéčī ą▓čŗčüąŠą║ąĖąĄ 菹║čüą┐ą╗čāą░čéą░čåąĖąŠąĮąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ąĖ ą▓ ą║ąŠąĮąĄčćąĮąŠą╝ čüč湥č鹥 čüąŠčģčĆą░ąĮąĖčéčī ą┤ąĄąĮčīą│ąĖ.
2.7. ąśąĮč乊čĆą╝ą░čåąĖčÅ ą┐ąŠ ą┐ą░ą╣ą║ąĄ
ąÜąŠčĆą┐čāčü LGA čüąŠą▓ą╝ąĄčüčéąĖą╝ čüąŠ čüčéą░ąĮą┤ą░čĆčéą░ą╝ąĖ ECOPACK┬«, RoHS ąĖ "Green". ą×ąĮ ą║ą▓ą░ą╗ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮ ą┐ąŠ č鹥ą┐ą╗ąŠą▓ąŠą╝čā čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÄ ą┤ą╗čÅ ą┐ą░ą╣ą║ąĖ ą┐ąŠ čüčéą░ąĮą┤ą░čĆčéčā JEDEC J-STD-020.
ą¤čĆąĖ ą┐ą░ą╣ą║ąĄ ąŠčüčéą░ą▓čīč鹥 ą▓čŗą▓ąŠą┤ "pin 1 Indicator" ąĮąĄą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╝.
ą¤ąŠčüą░ą┤ąŠčćąĮąŠąĄ ą╝ąĄčüč鹊 (Land pattern) ąĖ čĆąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖąĖ ą┐ąŠ ą┐ą░ą╣ą║ąĄ ą╝ąŠąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ąĮą░ čüą░ą╣č鹥 www.st.com [1].
[3. ą×čüąĮąŠą▓ąĮčŗąĄ čåąĖčäčĆąŠą▓čŗąĄ ą▒ą╗ąŠą║ąĖ L3G4200D]
3.1. ąæą╗ąŠą║-čüčģąĄą╝ą░

ąĀąĖčü. 6. ąæą╗ąŠą║-čüčģąĄą╝ą░ L3G4200D
3.2. ąæčāč乥čĆ FIFO
ąÆ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ L3G4200D ąĖą╝ąĄąĄčéčüčÅ ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ 32-čüą╗ąŠč鹊ą▓čŗą╣, 16-ą▒ąĖčéąĮčŗą╣ ą▒čāč乥čĆ ą┤ą░ąĮąĮčŗčģ FIFO ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ąĖąĘ čéčĆąĄčģ ą▓čŗčģąŠą┤ąĮčŗčģ ą║ą░ąĮą░ą╗ąŠą▓: čāą║ą╗ąŠąĮąĄąĮąĖąĄ (yaw), ą┐ąŠą┤ą░čćą░ (pitch) ąĖ čüą║ą░čé (roll). ąŁč鹊čé ą▒čāč乥čĆ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé 菹║ąŠąĮąŠą╝ąĖčéčī ąĮą░ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĖ ą▓ čüąĖčüč鹥ą╝ąĄ, čéą░ą║ ą║ą░ą║ čģąŠčüčéčā (čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą╝čā ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā) ąĮąĄ ąĮčāąČąĮąŠ ą┐ąŠčüč鹊čÅąĮąĮąŠ ąŠą┐čĆą░čłąĖą▓ą░čéčī čüąĄąĮčüąŠčĆ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ. ąÆą╝ąĄčüč鹊 čŹč鹊ą│ąŠ čģąŠčüčé ą╝ąŠąČąĄčé ą┐čĆąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą▓čŗą▓ąŠą┤ąĖčéčīčüčÅ ąĖąĘ čüąĮą░ ąĖ ą▒čŗčüčéčĆąŠ čüčćąĖčéčŗą▓ą░čéčī ąĘąĮą░čćąĖą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĖąĘ FIFO. ąŁč鹊čé ą▒čāč乥čĆ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą▓ 5 čĆą░ąĘą╗ąĖčćąĮčŗčģ čĆąĄąČąĖą╝ą░čģ. ąÜą░ąČą┤čŗą╣ čĆąĄąČąĖą╝ ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ ą▒ąĖčéą░ą╝ąĖ FIFO_MODE ą▓ čĆąĄą│ąĖčüčéčĆąĄ FIFO_CTRL_REG. ą£ąŠą│čāčé ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮčŗ čüąŠą▒čŗčéąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▒čāč乥čĆą░ (watermark level), FIFO_empty ąĖą╗ąĖ FIFO_Full, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▓čŗą┤ą░ą▓ą░čéčī čüąĖą│ąĮą░ą╗ ąĮą░ ą▓čŗą▓ąŠą┤ DRDY/INT2 (ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ č湥čĆąĄąĘ CTRL_REG3), ąĖ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ čüąŠą▒čŗčéąĖąĖ ą┤ąŠčüčéčāą┐ąĮą░ ą▓ FIFO_SRC_REG. ąĪąĖą│ąĮą░ą╗ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĖą╗ąĖ ą▓čŗą▓ąŠą┤ą░ ąĄą│ąŠ ąĖąĘ čüąĮą░. ąŻčĆąŠą▓ąĄąĮčī ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▒čāč乥čĆą░ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą▒ąĖčéą░ą╝ąĖ WTM4:0 ą▓ čĆąĄą│ąĖčüčéčĆąĄ FIFO_CTRL_REG.
3.2.1. Bypass mode
ąÆ čĆąĄąČąĖą╝ąĄ ą▒ą░ą╣ą┐ą░čü ą▒čāč乥čĆ FIFO ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé, ąĖ ą┐ąŠ čŹč鹊ą╣ ą┐čĆąĖčćąĖąĮąĄ ąŠčüčéą░ąĄčéčüčÅ ą┐čāčüčéčŗą╝. ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 7, ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┐ąĄčĆą▓čŗą╣ ą░ą┤čĆąĄčü. ą×čüčéą░ą╗čīąĮčŗąĄ čüą╗ąŠčéčŗ FIFO ą┐čāčüčéčŗ (empty). ąÜąŠą│ą┤ą░ ą┐ąŠčüčéčāą┐čÅčé ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ, č鹊 čüčéą░čĆčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▒čāą┤čāčé ą┐ąĄčĆąĄąĘą░ą┐ąĖčüą░ąĮčŗ.
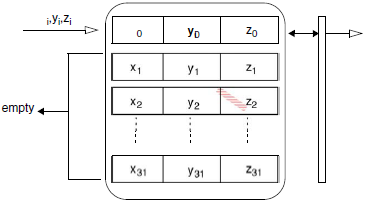
ąĀąĖčü. 7. ąĀą░ą▒ąŠčéą░ FIFO ą▓ čĆąĄąČąĖą╝ąĄ Bypass
3.2.2. FIFO mode
ąÆ čĆąĄąČąĖą╝ąĄ FIFO ą┤ą░ąĮąĮčŗąĄ ą▓čüąĄčģ 3 ą║ą░ąĮą░ą╗ąŠą▓ čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą▓ FIFO. ą£ąŠąČąĄčé ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ (ą▒ąĖč鹊ą╝ I2_WMK ą▓ čĆąĄą│ąĖčüčéčĆąĄ CTRL_REG3) ą┐ąŠ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÄ ą▒čāč乥čĆą░ ą┤ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ čāčĆąŠą▓ąĮčÅ (watermark interrupt). ąŻčĆąŠą▓ąĄąĮčī ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▓ ą▒ąĖčéą░čģ WTM 4:0 čĆąĄą│ąĖčüčéčĆą░ FIFO_CTRL_REG. FIFO ą┐čĆąŠą┤ąŠą╗ąČąĖčé ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖąĄ, ą┐ąŠą║ą░ ąĮąĄ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĖčéčüčÅ (32 čüą╗ąŠčéą░ 16-ą▒ąĖčéąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ą║ą░ąĮą░ą╗ąŠą▓ yaw, pitch ąĖ roll). ąÜąŠą│ą┤ą░ FIFO ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĖčéčüčÅ, ą┤ąŠ čüą▒ąŠčĆ ą┤ą░ąĮąĮčŗčģ čü ą▓čģąŠą┤ąĮčŗčģ ą║ą░ąĮą░ą╗ąŠą▓ ąŠčüčéą░ąĮąŠą▓ąĖčéčüčÅ. ą¦č鹊ą▒čŗ ą▓ąŠąĘąŠą▒ąĮąŠą▓ąĖčéčī čüą▒ąŠčĆ ą┤ą░ąĮąĮčŗčģ, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąĘą░ą┐ąĖčüą░čéčī čĆąĄą│ąĖčüčéčĆ FIFO_CTRL_REG ąĖ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ FIFO ą▓ čĆąĄąČąĖą╝ bypass. ąĀą░ą▒ąŠčéą░ čĆąĄąČąĖą╝ą░ FIFO ą┐ąŠą║ą░ąĘą░ąĮą░ ąĮą░ čĆąĖčü. 8.
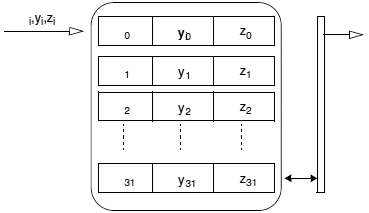
ąĀąĖčü. 8. ąĀą░ą▒ąŠčéą░ čĆąĄąČąĖą╝ą░ FIFO
3.2.3. ą¤ąŠč鹊ą║ąŠą▓čŗą╣ čĆąĄąČąĖą╝ (Stream mode)
ąŁč鹊čé čĆąĄąČąĖą╝ čĆą░ą▒ąŠčéą░ąĄčé čéą░ą║ ąČąĄ, ą║ą░ą║ ąĖ čĆąĄąČąĖą╝ FIFO, ąŠčéą╗ąĖčćąĖąĄ č鹊ą╗čīą║ąŠ ą▓ č鹊ą╝, čćč鹊 ą┐ąŠ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖąĖ FIFO (32 čüą╗ąŠčéą░ 16-ą▒ąĖčéąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ą║ą░ąĮą░ą╗ąŠą▓ yaw, pitch ąĖ roll) čüčéą░čĆčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▒čāą┤čāčé ąŠčéą▒čĆą░čüčŗą▓ą░čéčīčüčÅ ą┐ąŠ ą╝ąĄčĆąĄ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ ąĮąŠą▓čŗčģ ą┤ą░ąĮąĮčŗčģ. ąÜą░ą║ ąĖ ą▓ čĆąĄąČąĖą╝ąĄ FIFO, ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮčŗ čüąŠą▒čŗčéąĖčÅ watermark level ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čüąĖą│ąĮą░ą╗ąŠą╝ ąĮą░ ąĮąŠąČą║ąĄ DRDY/INT2 (ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ č湥čĆąĄąĘ CTRL_REG3). Stream mode ą┐ąŠą║ą░ąĘą░ąĮ ąĮą░ čĆąĖčü. 9.
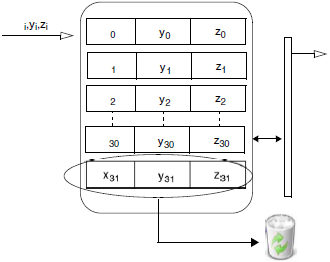
ąĀąĖčü. 9. ąĀą░ą▒ąŠčéą░ čĆąĄąČąĖą╝ą░ Stream mode
3.2.4. Bypass-to-stream mode
ąÆ čĆąĄąČąĖą╝ąĄ bypass-to-stream FIFO ąĮą░čćąĖąĮą░ąĄčé čĆą░ą▒ąŠčéčā ą▓ čĆąĄąČąĖą╝ąĄ bypass, ąĖ ą║ą░ą║ č鹊ą╗čīą║ąŠ ąĮą░čüčéčāą┐ąĖčé čüąŠą▒čŗčéąĖąĄ (ąŠčéąĮąŠčüčÅčēąĄąĄčüčÅ ą║ čüąŠą▒čŗčéąĖčÅą╝, ąĘą░ą┤ą░ąĮąĮčŗą╝ ą▓ čĆąĄą│ąĖčüčéčĆąĄ INT1_CFG), FIFO ąĮą░čćąĮąĄčé čĆą░ą▒ąŠčéą░čéčī ą▓ stream mode (čüą╝. čĆąĖčü. 10).
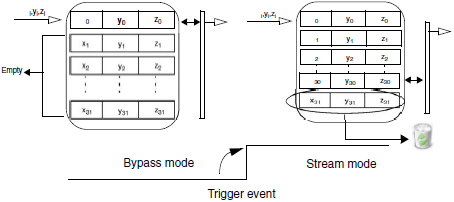
ąĀąĖčü. 10. ąĀą░ą▒ąŠčéą░ čĆąĄąČąĖą╝ą░ Bypass-to-stream
ą¤ąŠčÅčüąĮąĄąĮąĖąĄ ą║ čĆąĖčüčāąĮą║čā: Trigger event ąŠąĘąĮą░čćą░ąĄčé čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖąĄ čüąŠą▒čŗčéąĖčÅ, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮą░čüčéčĆąŠąĄąĮąŠ ąĮą░ ą│ąĄąĮąĄčĆą░čåąĖčÄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą╗čÅ čģąŠčüčéą░.
3.2.5. Stream-to-FIFO mode
ąÆ čĆąĄąČąĖą╝ąĄ Stream-to-FIFO ą┤ą░ąĮąĮčŗąĄ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ą║ą░ąĮą░ą╗ąŠą▓ yaw, pitch ąĖ roll čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą▓ FIFO. ąĪąŠą▒čŗčéąĖąĄ watermark interrupt ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮąŠ ąĮą░ ąĮąŠąČą║ąĄ DRDY/INT2 ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ I2_WTM ą▓ čĆąĄą│ąĖčüčéčĆąĄ CTRL_REG3. ąÜą░ą║ ąĖ ą▓ ą┤čĆčāą│ąĖčģ čĆąĄąČąĖą╝ą░čģ, čŹč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čüčĆą░ą▒ąŠčéą░ąĄčé, ą║ąŠą│ą┤ą░ FIFO ąĘą░ą┐ąŠą╗ąĮąĖčéčüčÅ ą┤ąŠ čāčĆąŠą▓ąĮčÅ, ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ ą▒ąĖčéą░ą╝ąĖ WTM4:0 ą▓ čĆąĄą│ąĖčüčéčĆąĄ FIFO_CTRL_REG. FIFO ą┐čĆąŠą┤ąŠą╗ąČąĖčé ąĘą░ą┐ąŠą╗ąĮčÅčéčī čüą▓ąŠąĖ čÅč湥ą╣ą║ąĖ (32 čüą╗ąŠčéą░ 16-ą▒ąĖčéąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ą║ą░ąĮą░ą╗ąŠą▓ yaw, pitch ąĖ roll) ą┤ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ. ąÜąŠą│ą┤ą░ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé, FIFO ąŠčéą▒čĆąŠčüąĖčé čüčéą░čĆčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┐čĆąĖ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖąĖ ąĮąŠą▓čŗčģ ą┤ą░ąĮąĮčŗčģ. ą¤čĆąĖ ąĮą░čüčéčāą┐ą╗ąĄąĮąĖąĖ čüąŠą▒čŗčéąĖą╣ (čüą▓čÅąĘą░ąĮąĮčŗčģ čü čĆąĄą│ąĖčüčéčĆąŠą╝ INT1_CFG) FIFO ąĮą░čćąĮąĄčé čĆą░ą▒ąŠčéą░čéčī ą▓ čĆąĄąČąĖą╝ąĄ FIFO (čüą╝. čĆąĖčü. 11).
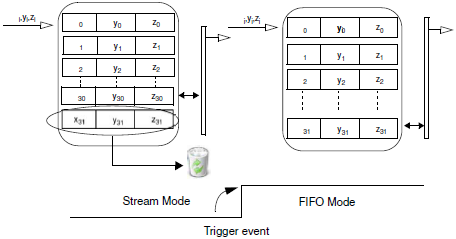
ąĀąĖčü. 11. ąĀą░ą▒ąŠčéą░ čĆąĄąČąĖą╝ą░ Stream-to-FIFO
3.2.6. ą¤ąŠą╗čāč湥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĖąĘ FIFO
ąöą░ąĮąĮčŗąĄ FIFO čüčćąĖčéčŗą▓ą░čÄčéčüčÅ ąĖąĘ čĆąĄą│ąĖčüčéčĆąŠą▓ OUT_X, OUT_Y ąĖ OUT_Z. ąÜąŠą│ą┤ą░ FIFO ą▓ ą┐ąŠč鹊ą║ąŠą▓ąŠą╝ čĆąĄąČąĖą╝ąĄ (stream), ą▓ čĆąĄąČąĖą╝ąĄ čéčĆąĖą│ą│ąĄčĆą░ ąĖą╗ąĖ FIFO, ąŠą┐ąĄčĆą░čåąĖčÅ čćč鹥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆąŠą▓ OUT_X, OUT_Y ąĖą╗ąĖ OUT_Z ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┤ą░ąĮąĮčŗąĄ, čüąŠčģčĆą░ąĮąĄąĮąĮčŗąĄ ą▓ FIFO. ąÜą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą┤ą░ąĮąĮčŗąĄ ą┐čĆąŠčćąĖčéą░ąĮčŗ ąĖąĘ FIFO, čüą░ą╝čŗąĄ čüčéą░čĆčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą║ą░ąĮą░ą╗ąŠą▓ pitch, roll ąĖ yaw ą┐ąŠą╝ąĄčēą░čÄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆčŗ OUT_X, OUT_Y ąĖ OUT_Z, ąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮčŗ ąŠą▒ąĄ ąŠą┐ąĄčĆą░čåąĖąĖ čćč鹥ąĮąĖčÅ - ąŠą┤ąĖąĮąŠčćąĮąŠąĄ čćč鹥ąĮąĖąĄ (single read) ąĖ čāčüą║ąŠčĆąĄąĮąĮąŠąĄ čćč鹥ąĮąĖąĄ (read_burst, X,Y ąĖ Z čü ą░ą▓č鹊ąĖąĮą║čĆąĄą╝ąĄąĮč鹊ą╝ ą░ą┤čĆąĄčüą░). ąÆ čĆąĄąČąĖą╝ąĄ read_burst, ą║ąŠą│ą┤ą░ ą┤ą░ąĮąĮčŗąĄ ą┐čĆąŠčćąĖčéą░ąĮčŗ ąĖąĘ OUT_Z_H, čüąĖčüč鹥ą╝ą░ čüąĮąŠą▓ą░ ąĮą░čćąĮąĄčé čćč鹥ąĮąĖąĄ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą░ą┤čĆąĄčüčā OUT_X_L.
[4. ąŻą║ą░ąĘą░ąĮąĖčÅ ą┐ąŠ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÄ]
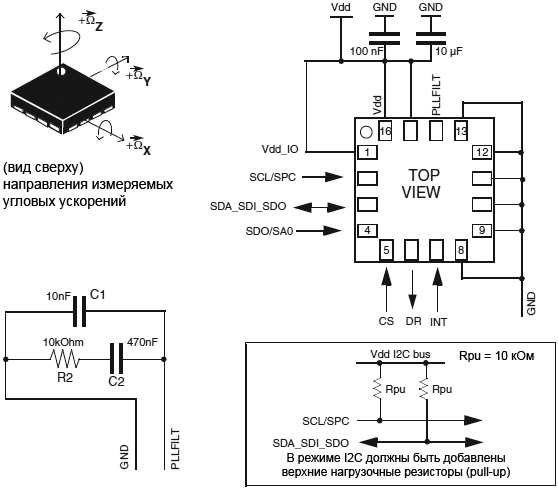
ąĀąĖčü. 12. ąŁą╗ąĄą║čéčĆąĖč湥čüą║ąĖąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ L3G4200D ąĖ ąĮąŠą╝ąĖąĮą░ą╗čŗ ą▓ąĮąĄčłąĮąĖčģ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓
ąĀą░ąĘą▓čÅąĘčŗą▓ą░čÄčēąĖąĄ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆčŗ ą┐ąŠ ą┐ąĖčéą░ąĮąĖčÄ (ą║ąĄčĆą░ą╝ąĖč湥čüą║ąĖąĄ ąĮą░ 100 nF ąĖą╗ąĖ ą┐ąŠą╗ąĖčŹčüč鹥čĆąŠą▓čŗąĄ 10 uF) ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆą░ąĘą╝ąĄčēąĄąĮčŗ ą║ą░ą║ ą╝ąŠąČąĮąŠ ą▒ą╗ąĖąČąĄ ą║ čāčüčéčĆąŠą╣čüčéą▓čā (ą║ą░ą║ ąĖ ą┤ąĄą╗ą░čÄčé ąŠą▒čŗčćąĮąŠ ąĮą░ ą┐čĆą░ą║čéąĖą║ąĄ). ąĢčüą╗ąĖ čłąĖąĮčŗ ą┐ąĖčéą░ąĮąĖčÅ Vdd ąĖ Vdd_IO ąĮąĄ čüąŠąĄą┤ąĖąĮąĄąĮčŗ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝, č鹊 ąŠčéą┤ąĄą╗čīąĮčŗąĄ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆčŗ ą╝ąĄąČą┤čā Vdd - ąĘąĄą╝ą╗čÅ ąĖ Vdd_IO - ąĘąĄą╝ą╗čÅ (čü čéą░ą║ąĖą╝ąĖ ąČąĄ ąĮąŠą╝ąĖąĮą░ą╗ą░ą╝ąĖ) čéą░ą║ąČąĄ ą┤ąŠą╗ąČąĮčŗ čĆą░ąĘą╝ąĄčēą░čéčīčüčÅ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą▒ą╗ąĖąĘą║ąŠ ą║ čāčüčéčĆąŠą╣čüčéą▓čā.
ąÆ ą╝ąĖą║čĆąŠčüčģąĄą╝ąĄ L3G4200D ąĖą╝ąĄąĄčéčüčÅ čāąĘąĄą╗ PLL (phase locked loop) ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ (ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠą│ąŠ ą┤ą░čéčćąĖą║ą░). ąöą╗čÅ čŹč鹊ą│ąŠ ąĮą░ ąĮąŠąČą║čā PLLFILT ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┤ąŠą▒ą░ą▓ą╗ąĄąĮčŗ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆčŗ ąĖ čĆąĄąĘąĖčüč鹊čĆčŗ (ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 12) - čćč鹊ą▒čŗ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ążąØą¦ ą▓č鹊čĆąŠą│ąŠ ą┐ąŠčĆčÅą┤ą║ą░ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ PLL. ąÆ čéą░ą▒ą╗ąĖčåąĄ 3 ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ ąĮąŠą╝ąĖąĮą░ą╗čŗ ą┤ąĄčéą░ą╗ąĄą╣ ążąØą¦ PLL.
[5. ą”ąĖčäčĆąŠą▓čŗąĄ ąĖąĮč鹥čĆč乥ą╣čüčŗ]
ąÆčüčéčĆąŠąĄąĮąĮčŗąĄ ą▓ L3G4200D čĆąĄą│ąĖčüčéčĆčŗ ą┤ąŠčüčéčāą┐ąĮčŗ ą║ą░ą║ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü I2C, čéą░ą║ ąĖ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü SPI - ą┐ąŠ ą▓čŗą▒ąŠčĆčā ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ. ą¤ąŠčüą╗ąĄą┤ąĮąĖą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą▓ 3- ąĖą╗ąĖ 4-ą┐čĆąŠą▓ąŠą┤ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ.
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ąĖąĮč鹥čĆč乥ą╣čüčŗ ą┐čĆąĖą▓čÅąĘą░ąĮčŗ ą║ ąŠą┤ąĮąĖą╝ ąĖ č鹥ą╝ ąČąĄ ąĮąŠąČą║ą░ą╝ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ. ą¦č鹊ą▒čŗ ą▓čŗą▒čĆą░čéčī ą▓ą░čĆąĖą░ąĮčé čĆą░ą▒ąŠčéčŗ čü ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ I2C, ąĮą░ ą▓čŗą▓ąŠą┤ CS ąĮčāąČąĮąŠ ą┐ąŠą┤ą░čéčī ą╗ąŠą│. 1 (ąĮą░ą┐čĆąĖą╝ąĄčĆ, CS ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ čłąĖąĮąĄ ą┐ąĖčéą░ąĮąĖčÅ Vdd_IO).
ąóą░ą▒ą╗ąĖčåą░ 11. ą×ą┐ąĖčüą░ąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░
| Ōä¢ ą▓čŗą▓. |
ąśą╝čÅ |
ąóąĖą┐ |
ą×ą┐ąĖčüą░ąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ |
| 2 |
SCL
SPC |
I
I |
ąóą░ą║čéčŗ I2C.
ąóą░ą║čéčŗ SPI. |
| 3 |
SDA
SDI
SDO |
I/O
I
O |
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ I2C.
ąÆčģąŠą┤ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ SPI.
ąÆčŗčģąŠą┤ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ SPI ą▓ 3-ą┐čĆąŠą▓ąŠą┤ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ. |
| 4 |
SDO
SA0 |
O
I |
ąÆčŗčģąŠą┤ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ SPI.
LSB-ą▒ąĖčé ą░ą┤čĆąĄčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░ I2C. |
| 5 |
CS |
I |
ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ SPI (SPI enable), ą▓čŗą▒ąŠčĆ čĆąĄąČąĖą╝ą░ ąĖąĮč鹥čĆč乥ą╣čüą░ (I2C/SPI) ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ (1: čĆąĄąČąĖą╝ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ SPI, čĆą░ąĘčĆąĄčłąĄąĮą░ čĆą░ą▒ąŠčéą░ I2C; 0: čĆąĄąČąĖą╝ ąŠą▒ą╝ąĄąĮą░ SPI, I2C ąĘą░ą┐čĆąĄčēąĄąĮ). |
5.1. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü I2C
ą£ąĖą║čĆąŠčüčģąĄą╝ą░ L3G4200D ąĮą░ čłąĖąĮąĄ I2C čÅą▓ą╗čÅąĄčéčüčÅ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ (slave). I2C čāčüčéčĆąŠąĄąĮą░ čéą░ą║, čćč鹊 ą╝ąŠąČąĄčé ąĘą░ą┐ąĖčüčŗą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ ą▓ čĆąĄą│ąĖčüčéčĆčŗ, čćčīąĄ čüąŠą┤ąĄčƹȹ░ąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī čéą░ą║ąČąĄ ą┐čĆąŠčćąĖčéą░ąĮąŠ ąŠą▒čĆą░čéąĮąŠ. ąĪąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēą░čÅ č鹥čĆą╝ąĖąĮąŠą╗ąŠą│ąĖčÅ I2C ą┐čĆąĖą▓ąĄą┤ąĄąĮą░ ą▓ čéą░ą▒ą╗ąĖčåąĄ ąĮąĖąČąĄ.
ąóą░ą▒ą╗ąĖčåą░ 12. ąóąĄčĆą╝ąĖąĮčŗ I2C
| ąóąĄčĆą╝ąĖąĮ |
ążčāąĮą║čåąĖčÅ |
| Transmitter (čéčĆą░ąĮčüą╝ąĖčéč鹥čĆ, ą┐ąĄčĆąĄą┤ą░čéčćąĖą║) |
ąŻčüčéčĆąŠą╣čüčéą▓ąŠ, ą║ąŠč鹊čĆąŠąĄ ą┐ąĄčĆąĄą┤ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą┐ąŠ čłąĖąĮąĄ. |
| Receiver (ą┐čĆąĖąĄą╝ąĮąĖą║) |
ąŻčüčéčĆąŠą╣čüčéą▓ąŠ, ą║ąŠč鹊čĆąŠąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą┐ąŠ čłąĖąĮąĄ. |
| Master (ą╝ą░čüč鹥čĆ, čģąŠčüčé) |
ąōą╗ą░ą▓ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮą░ čłąĖąĮąĄ, ą║ąŠč鹊čĆąŠąĄ ąĮą░čćąĖąĮą░ąĄčé ą┐ąĄčĆąĄą┤ą░čćčā, ą│ąĄąĮąĄčĆąĖčĆčāąĄčé čéą░ą║č鹊ą▓čŗąĄ čüąĖą│ąĮą░ą╗čŗ ąĖ ąĘą░ą▓ąĄčĆčłą░ąĄčé ą┐čĆąŠčåąĄčüčü ą┐ąĄčĆąĄą┤ą░čćąĖ. |
| Slave (ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ) |
ąŻčüčéčĆąŠą╣čüčéą▓ąŠ, ą░ą┤čĆąĄčüąŠą▓ą░ąĮąĮąŠąĄ ą╝ą░čüč鹥čĆąŠą╝ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ. |
ąśą╝ąĄąĄčéčüčÅ ą┤ą▓ą░ čüąĖą│ąĮą░ą╗ą░, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü čłąĖąĮąŠą╣ I2C: ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ čéą░ą║čéčŗ (serial clock line, SCL) ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ (serial data line, SDA). ąĪąĖą│ąĮą░ą╗ SDA čÅą▓ą╗čÅąĄčéčüčÅ ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗą╝, ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ąĖ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü. ą×ą▒ą░ čüąĖą│ąĮą░ą╗ą░ SDA ąĖ SCL ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąŠą┤čéčÅąĮčāčéčŗ ą║ čłąĖąĮąĄ Vdd_IO č湥čĆąĄąĘ ą▓ąĮąĄčłąĮąĖąĄ ąĮą░ą│čĆčāąĘąŠčćąĮčŗąĄ čĆąĄąĘąĖčüč鹊čĆčŗ (pull-up). ąÜąŠą│ą┤ą░ čłąĖąĮą░ čüą▓ąŠą▒ąŠą┤ąĮą░, č鹊 ąŠą▒ą░ čüąĖą│ąĮą░ą╗ą░ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąŠą│. 1.
ąśąĮč鹥čĆč乥ą╣čü I2C čüąŠą▓ą╝ąĄčüčéąĖą╝ čüąŠ čüčéą░ąĮą┤ą░čĆčéą░ą╝ąĖ ą▒čŗčüčéčĆąŠą│ąŠ čĆąĄąČąĖą╝ą░ (fast mode, čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ 400 ą║ąōčå) ąĖ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░.
5.1.1. ąÜą░ą║ čĆą░ą▒ąŠčéą░ąĄčé I2C
ąóčĆą░ąĮąĘą░ą║čåąĖąĖ ąĮą░ čłąĖąĮąĄ ąĮą░čćąĖąĮą░čÄčéčüčÅ čü čüąĖą│ąĮą░ą╗ą░ START (ST). ąĪąŠą▒čŗčéąĖąĄ START ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą║ą░ą║ ą┐ąĄčĆąĄčģąŠą┤ SDA ąŠčé čüąŠčüč鹊čÅąĮąĖčÅ HIGH ą║ čüąŠčüč鹊čÅąĮąĖčÄ LOW (ą┐ąŠą┤ HIGH ąĖ LOW ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░čÄčéčüčÅ čüąŠčüč鹊čÅąĮąĖčÅ ą╗ąŠą│. 1 ąĖ ą╗ąŠą│. 0 čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ), ą║ąŠą│ą┤ą░ SCL ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ HIGH. ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ START ą▒čŗą╗ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮ ą╝ą░čüč鹥čĆąŠą╝ čłąĖąĮčŗ, čłąĖąĮą░ čüčćąĖčéą░ąĄčéčüčÅ ąĘą░ąĮčÅč鹊ą╣. ąĪą╗ąĄą┤čāčÄčēąĖą╣ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą┐ąŠčüą╗ąĄ čüąŠą▒čŗčéąĖčÅ START, ąĖ ąŠąĮ čüąŠą┤ąĄčƹȹĖčé ą░ą┤čĆąĄčü ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ ą┐ąĄčĆą▓čŗčģ 7 ą▒ąĖčéą░čģ, ąĖ 8 ą▒ąĖčé ą│ąŠą▓ąŠčĆąĖčé, ą▒čāą┤ąĄčé ą╝ą░čüč鹥čĆ ą┐ąŠą╗čāčćą░čéčī ą┤ą░ąĮąĮčŗąĄ ąŠčé ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖą╗ąĖ ąČąĄ ą┤ą░ąĮąĮčŗąĄ ą▒čāą┤čāčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčīčüčÅ ą▓ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ. ąÜąŠą│ą┤ą░ ą░ą┤čĆąĄčü ą┐ąĄčĆąĄą┤ą░ąĮ, č鹊 ą║ą░ąČą┤ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠąĄ ą║ čŹč鹊ą╣ čłąĖąĮąĄ ą▓ čüąĖčüč鹥ą╝ąĄ, čüčĆą░ą▓ąĮąĖą▓ą░ąĄčé ą┐ąĄčĆą▓čŗąĄ 7 ą▒ąĖčé ą┐ąŠčüą╗ąĄ čüąŠą▒čŗčéąĖčÅ START čüąŠ čüą▓ąŠąĖą╝ čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╝ ą░ą┤čĆąĄčüąŠą╝. ąĢčüą╗ąĖ ą░ą┤čĆąĄčüą░ čüąŠą▓ą┐ą░ą╗ąĖ, č鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, čćč鹊 ąĖą╝ąĄąĮąĮąŠ čü ąĮąĖą╝ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī ą╝ą░čüč鹥čĆ (čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĮą░ ąŠą┤ąĮąŠą╣ čłąĖąĮąĄ I2C ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ą┤ąŠ 8 čāčüčéčĆąŠą╣čüčéą▓ čü čĆą░ąĘąĮčŗą╝ ą░ą┤čĆąĄčüąŠą╝).
ąÉą┤čĆąĄčü ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (slave address, SAD), čüą▓čÅąĘą░ąĮąĮčŗą╣ čü L3G4200D, čĆą░ą▓ąĄąĮ 110100xb. ąØąŠąČą║ą░ SDO ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ąĘą░ą┤ą░čéčī ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ LSB ą▒ąĖčé (ą║ąŠč鹊čĆčŗą╣ ą┐ąŠą╝ąĄč湥ąĮ x) ą░ą┤čĆąĄčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░. ąĢčüą╗ąĖ ąĮą░ SDO ą╗ąŠą│. 1 (ąĮą░ą┐čĆąĖą╝ąĄčĆ, SDO ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ čłąĖąĮąĄ ą┐ąĖčéą░ąĮąĖčÅ), č鹊 ą▒ąĖčé LSB ą░ą┤čĆąĄčüą░ 1, ąĖ ą░ą┤čĆąĄčü ą▒čāą┤ąĄčé 1101001b. ąś ąĮą░ąŠą▒ąŠčĆąŠčé, ąĄčüą╗ąĖ ąĮą░ SDO ą┐ąŠą┤ą░ąĮ ą╗ąŠą│. 0 (ąŠąĮ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ ąĘąĄą╝ą╗ąĄ), č鹊 LSB ą▒čāą┤ąĄčé čĆą░ą▓ąĄąĮ 0, ą░ą┤čĆąĄčü ą▒čāą┤ąĄčé 1101000b. ąŁč鹊čé ą╝ąĄč鹊ą┤ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ąĮą░ ąŠą┤ąĮčā čłąĖąĮčā I2C ą┤ą▓ą░ čĆą░ąĘąĮčŗčģ ą│ąĖčĆąŠčüą║ąŠą┐ą░ L3G4200D.
ą¤ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ ą┐ąŠ čłąĖąĮąĄ I2C čéčĆąĄą▒čāąĄčé ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ (acknowledge). ąöą╗čÅ čŹč鹊ą│ąŠ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ ą┤ąŠą╗ąČąĄąĮ ąŠčüą▓ąŠą▒ąŠą┤ąĖčéčī ą╗ąĖąĮąĖčÄ SDA ą▓ąŠ ą▓čĆąĄą╝čÅ ąĖą╝ą┐čāą╗čīčüą░ acknowledge. ą¤čĆąĖąĄą╝ąĮąĖą║ ą┤ąŠą╗ąČąĄąĮ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ SDA ą▓ čüąŠčüč鹊čÅąĮąĖąĄ LOW, ąĖ čāą┤ąĄčƹȹĖą▓ą░čéčī ąĄčæ ą▓ čéą░ą║ąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ ą┐ąŠ ą▓čĆąĄą╝čÅ HIGH čüąŠčüč鹊čÅąĮąĖčÅ ąĖą╝ą┐čāą╗čīčüą░ čéą░ą║čéą░ ą┤ą╗čÅ ą▒ąĖčéą░ acknowledge. ą¤čĆąĖąĄą╝ąĮąĖą║, ą║ąŠč鹊čĆčŗą╣ ą▒čŗą╗ ą░ą┤čĆąĄčüąŠą▓ą░ąĮ, ą┤ąŠą╗ąČąĄąĮ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ą▓čŗą┤ą░ą▓ą░čéčī čéą░ą║ąŠąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄ ą║ą░ąČą┤ąŠą│ąŠ ą┐čĆąĖąĮčÅč鹊ą│ąŠ ą▒ą░ą╣čéą░ ą┤ą░ąĮąĮčŗčģ.
I2C, ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ą▓ L3G4200D, ą▓ąĄą┤ąĄčé čüąĄą▒čÅ ą║ą░ą║ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ, čéą░ą║ čćč鹊 L3G4200D ą┤ąŠą╗ąČąĮąŠ ą┐čĆąĖą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ čéą░ą║ąŠą│ąŠ ąČąĄ ą┐čĆąŠč鹊ą║ąŠą╗ą░. ą¤ąŠčüą╗ąĄ čüąŠą▒čŗčéąĖčÅ START (ST), ą╝ą░čüč鹥čĆąŠą╝ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą░ą┤čĆąĄčü ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą▒čŗą╗ ą▓ąŠąĘą▓čĆą░čēąĄąĮ čüąĖą│ąĮą░ą╗ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ąŠčé ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (slave acknowledge, SAK), 8-ą▒ąĖčéąĮą░čÅ čćą░čüčéčī ą░ą┤čĆąĄčüą░ čüčćąĖčéą░ąĄčéčüčÅ ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠą╣. ąæąĖčé 7 LSB ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čĆąĄą░ą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü čĆąĄą│ąĖčüčéčĆą░, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ MSB čĆą░ąĘčĆąĄčłą░ąĄčé ą░ą▓č鹊ąĖąĮą║čĆąĄą╝ąĄąĮčé ą░ą┤čĆąĄčüą░. ąĢčüą╗ąĖ MSB ą▓ ą┐ąŠą╗ąĄ SUB čĆą░ą▓ąĄąĮ 1, č鹊 SUB (ą░ą┤čĆąĄčü čĆąĄą│ąĖčüčéčĆą░) ą▒čāą┤ąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčīčüčÅ, čćč鹊ą▒čŗ ą┐ąŠąĘą▓ąŠą╗ąĖčéčī ą┐čĆąŠčćąĖčéą░čéčī/ąĘą░ą┐ąĖčüą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ.
ąÜą░ą║ čāąČąĄ ą▒čŗą╗ąŠ čāą┐ąŠą╝čÅąĮčāč鹊, ą░ą┤čĆąĄčü ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĘą░ą▓ąĄčĆčłą░ąĄčéčüčÅ ą▒ąĖč鹊ą╝ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ (read/write bit). ąĢčüą╗ąĖ čŹč鹊čé ą▒ąĖčé 1, (čćč鹥ąĮąĖąĄ, read), ą┐ąŠą▓č鹊čĆčÅčÄčēąĄąĄčüčÅ čüąŠą▒čŗčéąĖąĄ čüčéą░čĆčéą░ (REPEATED START, SR) ą┤ąŠą╗ąČąĮąŠ ą▓čŗą┤ą░ą▓ą░čéčīčüčÅ ą┐ąŠčüą╗ąĄ ą┤ą▓čāčģ ą▒ą░ą╣čé čüčāą▒ą░ą┤čĆąĄčüą░; ąĄčüą╗ąĖ čŹč鹊čé ą▒ąĖčé 0 (ąĘą░ą┐ąĖčüčī, write), č鹊 ą╝ą░čüč鹥čĆ ą┐ąĄčĆąĄą┤ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą║ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą╝čā čāčüčéčĆąŠą╣čüčéą▓čā ą▓ ąĮąĄąĖąĘą╝ąĄąĮąĮąŠą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ. ąóą░ą▒ą╗ąĖčåą░ 13 ąŠą┐ąĖčüčŗą▓ą░ąĄčé, ą║ą░ą║ čüąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ ą┐ą░čéč鹥čĆąĮčŗ SAD+read/write bit, ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą▓čüąĄ ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
ąóą░ą▒ą╗ąĖčåą░ 13. ą¤ą░čéč鹥čĆąĮčŗ (ą┤ą░ąĮąĮčŗąĄ) SAD+read/write (čćč鹥ąĮąĖąĄ/ąĘą░ą┐ąĖčüčī)
| ąÜąŠą╝ą░ąĮą┤ą░ |
SAD[6:1] |
SAD[0]=SDO |
R/W |
SAD+R/W |
| Read |
110100 |
0 |
1 |
11010001 (D1h) |
| Write |
110100 |
0 |
0 |
11010000 (D0h) |
| Read |
110100 |
1 |
1 |
11010011 (D3h) |
| Write |
110100 |
1 |
0 |
11010010 (D2h) |
ąóą░ą▒ą╗ąĖčåą░ 14. ą¤ąĄčĆąĄą┤ą░čćą░, ą║ąŠą│ą┤ą░ ą╝ą░čüč鹥čĆ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ąŠą┤ąĖąĮ ą▒ą░ą╣čé ą▓ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ
| Master |
ST |
SAD + W |
|
SUB |
|
DATA |
|
SP |
| Slave |
|
|
SAK |
|
SAK |
|
SAK |
|
ąóą░ą▒ą╗ąĖčåą░ 15. ą¤ąĄčĆąĄą┤ą░čćą░, ą║ąŠą│ą┤ą░ ą╝ą░čüč鹥čĆ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▒ą░ą╣čé ą▓ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ
| Master |
ST |
SAD + W |
|
SUB |
|
DATA |
|
DATA |
|
SP |
| Slave |
|
|
SAK |
|
SAK |
|
SAK |
|
SAK |
|
ąóą░ą▒ą╗ąĖčåą░ 16. ą¤ąĄčĆąĄą┤ą░čćą░, ą║ąŠą│ą┤ą░ ą╝ą░čüč鹥čĆ ą┐ąŠą╗čāčćą░ąĄčé (čćąĖčéą░ąĄčé) ąŠą┤ąĖąĮ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░
| Master |
ST |
SAD + W |
|
SUB |
|
SR |
SAD+R |
|
|
NMAK |
SP |
| Slave |
|
|
SAK |
|
SAK |
|
|
SAK |
DATA |
|
|
ąóą░ą▒ą╗ąĖčåą░ 17. ą¤ąĄčĆąĄą┤ą░čćą░, ą║ąŠą│ą┤ą░ ą╝ą░čüč鹥čĆ ą┐ąŠą╗čāčćą░ąĄčé (čćąĖčéą░ąĄčé) ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░
| Master |
ST |
SAD + W |
|
SUB |
|
SR |
SAD+R |
|
|
MAK |
|
MAK |
|
NMAK |
SP |
| Slave |
|
|
SAK |
|
SAK |
|
|
SAK |
DATA |
|
DATA |
|
DATA |
|
|
ąöą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą┐ąŠą▒ą░ą╣čéąĮąŠ (DATA). ąÜą░ąČą┤ą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ čüąŠą┤ąĄčƹȹĖčé 8 ą▒ąĖčé. ąŚą░ ąŠą┤ąĖąĮ čéčĆą░ąĮčüč乥čĆ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮąŠ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé. ąöą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ čüčéą░čĆčłąĖą╝ ą▒ąĖč鹊ą╝ (MSB) ą▓ą┐ąĄčĆąĄą┤. ąĢčüą╗ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ ąĮąĄ ą╝ąŠąČąĄčé ą┐čĆąĖąĮčÅčéčī ą┤čĆčāą│ąŠą╣ ą┐ąŠą╗ąĮčŗą╣ ą▒ą░ą╣čé, ą┐ąŠą║ą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą▓ ą┐čĆąĖąĄą╝ąĮąĖą║ąĄ ą║ą░ą║ą░čÅ-č鹊 ą┤čĆčāą│ą░čÅ čäčāąĮą║čåąĖčÅ, č鹊 ą┐čĆąĖąĄą╝ąĮąĖą║ ą┤ąŠą╗ąČąĄąĮ čāą┤ąĄčƹȹ░čéčī čéą░ą║č鹊ą▓čāčÄ ą╗ąĖąĮąĖčÄ SCL ą▓ čüąŠčüč鹊čÅąĮąĖąĖ LOW, čćč鹊ą▒čŗ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ. ą¤ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ ą┐čĆąŠą┤ąŠą╗ąČąĖčéčüčÅ č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĄą╝ąĮąĖą║ ą▒čāą┤ąĄčé ą│ąŠč鹊ą▓ ą║ ą┤čĆčāą│ąŠą╝čā ą▒ą░ą╣čéčā ąĖ ąŠčüą▓ąŠą▒ąŠą┤ąĖčé ą╗ąĖąĮąĖčÄ ą┤ą░ąĮąĮčŗčģ. ąĢčüą╗ąĖ ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮąĄ ą┐ąŠą┤čéą▓ąĄčĆą┤ąĖą╗ slave address (ą║ ą┐čĆąĖą╝ąĄčĆčā, ą┐čĆąĖąĄą╝ąĮąĖą║ ą┐ąŠą║ą░ ąĮąĄ ą╝ąŠąČąĄčé ą┐čĆąĖąĮčÅčéčī ą┐ąŠ ą┐čĆąĖčćąĖąĮąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ą░ą║ąĖčģ-č鹊 ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ čäčāąĮą║čåąĖą╣ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ) ą╗ąĖąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ SDA ą┤ąŠą╗ąČąĮą░ ąŠčüčéą░ą▓ą░čéčīčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ HIGH, ąŠčéą┐čāčēąĄąĮąĮąŠą╣ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝. ą£ą░čüč鹥čĆ ą╝ąŠąČąĄčé ąŠą▒ąŠčĆą▓ą░čéčī ą┐ąĄčĆąĄą┤ą░čćčā. ą¤ąĄčĆąĄčģąŠą┤ ąŠčé LOW ą║ HIGH ąĮą░ ą╗ąĖąĮąĖąĖ SDA, ą║ąŠą│ą┤ą░ SCL ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ HIGH, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą║ą░ą║ čüąŠą▒čŗčéąĖąĄ STOP. ąÜą░ąČą┤ą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĘą░ą▓ąĄčĆčłąĄąĮą░ čüąŠą▒čŗčéąĖąĄą╝ STOP (SP).
ą¦č鹊ą▒čŗ ą┐čĆąŠčćąĖčéą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▒ą░ą╣č鹊ą▓, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąĘą░ą┐ąŠą╗ąĮąĖčéčī MSB ą┐ąŠą╗čÅ čüčāą▒ą░ą┤čĆąĄčüą░. ąöčĆčāą│ąĖą╝ąĖ čüą╗ąŠą▓ą░ą╝ąĖ, ą┐ąŠą╗ąĄ SUB(7) ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ą▓ąĮąŠ 1, ą┐čĆąĖ čŹč鹊ą╝ SUB(6-0) ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčé ą░ą┤čĆąĄčü ą┐ąĄčĆą▓ąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░, ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé ą┐čĆąŠčćąĖčéą░ąĮ.
ąÆ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĮąŠą╝ č乊čĆą╝ą░č鹥 ąŠą▒ą╝ąĄąĮą░ MAK ąŠąĘąĮą░čćą░ąĄčé "master acknowledge" (ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ą┤ą╗čÅ ą╝ą░čüč鹥čĆą░) NMAK ąŠąĘąĮą░čćą░ąĄčé "no master acknowledge" (ąĮąĄčé ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ą┤ą╗čÅ ą╝ą░čüč鹥čĆą░).
5.2. ą©ąĖąĮą░ ąĖąĮč鹥čĆč乥ą╣čüą░ SPI
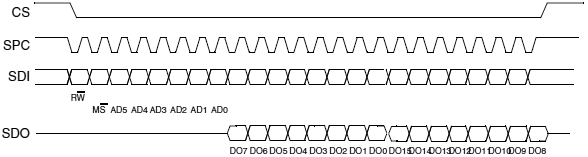
L3G4200D čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ čłąĖąĮąĄ SPI čéą░ą║ąČąĄ ą║ą░ą║ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ. SPI ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĘą░ą┐ąĖčüčŗą▓ą░čéčī ąĖ čćąĖčéą░čéčī čĆąĄą│ąĖčüčéčĆčŗ čāčüčéčĆąŠą╣čüčéą▓ą░. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü SPI ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠą▒ą╝ąĄąĮąĖą▓ą░čéčīčüčÅ ą┤ą░ąĮąĮčŗą╝ąĖ čü ą▓ąĮąĄčłąĮąĖą╝ ą╝ąĖčĆąŠą╝ č湥čĆąĄąĘ 4 ą┐čĆąŠą▓ąŠą┤ą░: CS, SPC, SDI ąĖ SDO.
ąĀąĖčü. 13. ą¤čĆąŠč鹊ą║ąŠą╗ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ SPI
CS čÅą▓ą╗čÅąĄčéčüčÅ čüąĖą│ąĮą░ą╗ąŠą╝ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠčĆčéą░, ąĖ ąŠąĮ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą╝ą░čüč鹥čĆąŠą╝ SPI. ą×ąĮ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ąĮą░ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 0 ą▓ ąĮą░čćą░ą╗ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ, ąĖ ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ą║ ą╗ąŠą│. 1 ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ. SPC čŹč鹊 čüąĖą│ąĮą░ą╗ čéą░ą║č鹊ą▓, ąĖ ąŠąĮ čéą░ą║ąČąĄ ą▓čŗą┤ą░ąĄčéčüčÅ ą╝ą░čüč鹥čĆąŠą╝ SPI. ąóą░ą║čéčŗ ą┐ąĄčĆąĄčüčéą░čÄčé ą▓čŗą┤ą░ą▓ą░čéčīčüčÅ, ą║ąŠą│ą┤ą░ CS ą▓ ą╗ąŠą│. 1, (ą┐ąĄčĆąĄą┤ą░čćąĖ ąĮąĄčé). ąĪąĖą│ąĮą░ą╗čŗ SDI ąĖ SDO čÅą▓ą╗čÅčÄčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ą▓čģąŠą┤ąŠą╝ ąĖ ą▓čŗčģąŠą┤ąŠą╝ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ. ąŁčéąĖ čüąĖą│ąĮą░ą╗čŗ ą┤ą░ąĮąĮčŗčģ ą╝ąĄąĮčÅčÄčé čüą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠ čüą┐ą░ą┤čā čāčĆąŠą▓ąĮčÅ (ą┐ąĄčĆąĄčģąŠą┤čā ąŠčé ą╗ąŠą│. 1 ą║ ą╗ąŠą│. 0) čéą░ą║č鹊ą▓ SPC, ąĖ ą┤ąŠą╗ąČąĮčŗ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčīčüčÅ ą┐ąŠ čäčĆąŠąĮčéčā (ą┐ąĄčĆąĄčģąŠą┤čā ąŠčé ą╗ąŠą│. 0 ą║ ą╗ąŠą│. 1) čéą░ą║č鹊ą▓ SPC.
ą×ą▒ąĄ ą║ąŠą╝ą░ąĮą┤čŗ, ą║ą░ą║ čćč鹥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░ čéą░ą║ ąĖ ąĘą░ą┐ąĖčüąĖ čĆąĄą│ąĖčüčéčĆą░ ąĘą░ą▓ąĄčĆčłą░čÄčéčüčÅ ąĘą░ 16 ąĖą╝ą┐čāą╗čīčüąŠą▓ čéą░ą║č鹊ą▓ SPC, ąĖą╗ąĖ ąĘą░ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé čāą╝ąĮąŠąČąĄąĮąĮąŠąĄ ąĮą░ 8 ą▓ čüą╗čāčćą░ąĄ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą▒ą░ą╣čé. ąöą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą▒ąĖčéą░ čĆą░ą▓ąĮą░ ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąĄąČą┤čā ą┤ą▓čāą╝čÅ čüą┐ą░ą┤ą░ą╝ąĖ čüąĖą│ąĮą░ą╗ą░ SPC. ą¤ąĄčĆą▓čŗą╣ ą▒ąĖčé (ą▒ąĖčé 0) ąĮą░čćąĖąĮą░ąĄčéčüčÅ ą┐ąŠ ą┐ąĄčĆą▓ąŠą╝čā čüą┐ą░ą┤čā SPC ą┐ąŠčüą╗ąĄ čüą┐ą░ą┤ą░ CS, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą▒ąĖčé (ą▒ąĖčé 15, ą▒ąĖčé 23 ąĖ čé. ą┤.), ąĮą░čćąĖąĮą░ąĄčéčüčÅ ą┐ąŠ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╝čā čüą┐ą░ą┤čā SPC čüčĆą░ąĘčā ą┐ąĄčĆąĄą┤ ąĮą░čĆą░čüčéą░ąĮąĖąĄą╝ čāčĆąŠą▓ąĮčÅ CS.
Bit 0: ą▒ąĖčé čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ (RW bit). ąÜąŠą│ą┤ą░ 0, ą┤ą░ąĮąĮčŗąĄ DI(7:0) ą▒čāą┤čāčé ąĘą░ą┐ąĖčüą░ąĮčŗ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ. ąÜąŠą│ą┤ą░ 1, ą┤ą░ąĮąĮčŗąĄ DO(7:0) ą▒čāą┤čāčé ą┐čĆąŠčćąĖčéą░ąĮčŗ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░. ąÆ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╝ čüą╗čāčćą░ąĄ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ čāą┐čĆą░ą▓ą╗čÅąĄčé ą▓čŗčģąŠą┤ąŠą╝ SDO ą┐čĆąĖ ąĮą░čćą░ą╗ąĄ ą▒ąĖčéą░ 8.
Bit 1: MS bit (Multiple Send). ąÜąŠą│ą┤ą░ 0, č鹊 ą░ą┤čĆąĄčü ąŠčüčéą░ąĄčéčüčÅ ąĮąĄąĖąĘą╝ąĄąĮąĮčŗą╝ ą┐čĆąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą║ąŠą╝ą░ąĮą┤ą░čģ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ. ąÜąŠą│ą┤ą░ 1, č鹊 ą░ą┤čĆąĄčü ą▒čāą┤ąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčīčüčÅ ą┐čĆąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą║ąŠą╝ą░ąĮą┤ą░čģ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ.
Bit 2-7: ą░ą┤čĆąĄčü AD(5:0). ąŁč鹊 ą┐ąŠą╗ąĄ ą░ą┤čĆąĄčüą░ ąĖąĮą┤ąĄą║čüąĖčĆčāąĄą╝ąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░.
Bit 8-15: ą┤ą░ąĮąĮčŗąĄ DI(7:0) (čĆąĄąČąĖą╝ ąĘą░ą┐ąĖčüąĖ). ąŁč鹊 ą┤ą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ (MSB ąĖą┤ąĄčé ą┐ąĄčĆą▓čŗą╝).
Bit 8-15: ą┤ą░ąĮąĮčŗąĄ DO(7:0) (čĆąĄąČąĖą╝ čćč鹥ąĮąĖčÅ). ąŁč鹊 ą┤ą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ čćąĖčéą░čÄčéčüčÅ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░ (MSB ąĖą┤ąĄčé ą┐ąĄčĆą▓čŗą╝).
ą¤čĆąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą║ąŠą╝ą░ąĮą┤ą░čģ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ, ą┤ąŠą▒ą░ą▓ą╗čÅčÄčéčüčÅ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖąĄ ą▒ą╗ąŠą║ąĖ ą┐ąŠ 8 ą┐ąĄčĆąĖąŠą┤ąŠą▓ čéą░ą║č鹊ą▓. ąÜąŠą│ą┤ą░ MS bit čĆą░ą▓ąĄąĮ 0, č鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą░ą┤čĆąĄčü ąŠčüčéą░ąĄčéčüčÅ č鹊čé ąČąĄ čüą░ą╝čŗą╣ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą▒ą╗ąŠą║ą░. ąÜąŠą│ą┤ą░ MS bit čĆą░ą▓ąĄąĮ 1, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ ą░ą┤čĆąĄčü ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ čü ą║ą░ąČą┤čŗą╝ ąĮąŠą▓čŗą╝ ą▒ą╗ąŠą║ąŠą╝.
ążčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ąĖ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ čüąĖą│ąĮą░ą╗ąŠą▓ SDI ąĖ SDO ąŠčüčéą░čÄčéčüčÅ ąĮąĄąĖąĘą╝ąĄąĮąĮčŗą╝ąĖ.
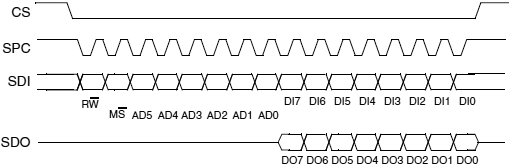
5.2.1. SPI read (čćč鹥ąĮąĖąĄ)
ąĀąĖčü. 14. ą¤čĆąŠč鹊ą║ąŠą╗ čćč鹥ąĮąĖčÅ SPI
ąÜąŠą╝ą░ąĮą┤ą░ SPI read ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ąĘą░ 16 čéą░ą║č鹊ą▓čŗčģ ąĖą╝ą┐čāą╗čīčüąŠą▓. ąÜąŠą╝ą░ąĮą┤ą░ čćč鹥ąĮąĖčÅ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą▒ą░ą╣čé ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą┐čāč鹥ą╝ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖčÅ ą▒ą╗ąŠą║ąŠą▓ ą┐ąŠ 8 čéą░ą║č鹊ą▓čŗčģ ąĖą╝ą┐čāą╗čīčüąŠą▓ ą║ ą┐čĆąĄą┤čŗą┤čāčēąĖą╝ ą▒ą╗ąŠą║ą░ą╝.
Bit 0: READ bit, čĆą░ą▓ąĮčŗą╣ 1.
Bit 1: MS bit. ąÜąŠą│ą┤ą░ 0, č鹊 ą░ą┤čĆąĄčü ąĮąĄ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ; ą║ąŠą│ą┤ą░ 1, č鹊 ą┐čĆąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čćč鹥ąĮąĖčÅčģ ą░ą┤čĆąĄčü ą▒čāą┤ąĄčé ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčīčüčÅ.
Bit 2-7: ą░ą┤čĆąĄčü AD(5:0). ąŁč鹊 ą┐ąŠą╗ąĄ ą░ą┤čĆąĄčüą░ ąĖąĮą┤ąĄą║čüąĖčĆčāąĄą╝ąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░.
Bit 8-15: ą┤ą░ąĮąĮčŗąĄ DO(7:0) (čĆąĄąČąĖą╝ čćč鹥ąĮąĖčÅ). ąŁč鹊 ą┤ą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ čćąĖčéą░čÄčéčüčÅ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░ (MSB ąĖą┤ąĄčé ą┐ąĄčĆą▓čŗą╝).
Bit 16-... : ą┤ą░ąĮąĮčŗąĄ DO(...-8). ą¤ąŠčüą╗ąĄą┤čāčÄčēąĖąĄ ą▒ą░ą╣čéčŗ ą┤ą░ąĮąĮčŗčģ ą┐čĆąĖ čćč鹥ąĮąĖąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą▒ą░ą╣čé.
ąĀąĖčü. 15. ą¤čĆąŠč鹊ą║ąŠą╗ čćč鹥ąĮąĖčÅ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą▒ą░ą╣čé SPI (ą┐čĆąĖą╝ąĄčĆ ą┤ą╗čÅ 2 ą▒ą░ą╣čé)
5.2.2. SPI write (ąĘą░ą┐ąĖčüčī)
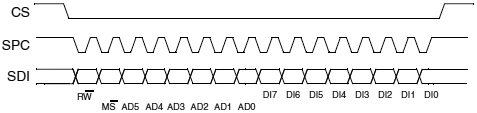
ąĀąĖčü. 16. ą¤čĆąŠč鹊ą║ąŠą╗ ąĘą░ą┐ąĖčüąĖ SPI
ąÜąŠą╝ą░ąĮą┤ą░ SPI write ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ąĘą░ 16 čéą░ą║č鹊ą▓čŗčģ ąĖą╝ą┐čāą╗čīčüąŠą▓. ąÜąŠą╝ą░ąĮą┤ą░ ąĘą░ą┐ąĖčüąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą▒ą░ą╣čé ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą┐čāč鹥ą╝ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖčÅ ą▒ą╗ąŠą║ąŠą▓ ą┐ąŠ 8 čéą░ą║č鹊ą▓čŗčģ ąĖą╝ą┐čāą╗čīčüąŠą▓ ą║ ą┐čĆąĄą┤čŗą┤čāčēąĖą╝ ą▒ą╗ąŠą║ą░ą╝.
Bit 0: WRITE bit, čĆą░ą▓ąĮčŗą╣ 0.
Bit 1: MS bit. ąÜąŠą│ą┤ą░ 0, č鹊 ą░ą┤čĆąĄčü ąĮąĄ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ; ą║ąŠą│ą┤ą░ 1, č鹊 ą┐čĆąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ąĘą░ą┐ąĖčüčÅčģ ą░ą┤čĆąĄčü ą▒čāą┤ąĄčé ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčīčüčÅ.
Bit 2-7: ą░ą┤čĆąĄčü AD(5:0). This is the address field of the indexed register.
Bit 8-15: ą┤ą░ąĮąĮčŗąĄ DI(7:0) (čĆąĄąČąĖą╝ ąĘą░ą┐ąĖčüąĖ). ąŁč鹊 ą┤ą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ (MSB ąĖą┤ąĄčé ą┐ąĄčĆą▓čŗą╝).
Bit 16-... : ą┤ą░ąĮąĮčŗąĄ DI(...-8). ą¤ąŠčüą╗ąĄą┤čāčÄčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ ą┐čĆąĖ ąĘą░ą┐ąĖčüąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą▒ą░ą╣čé.
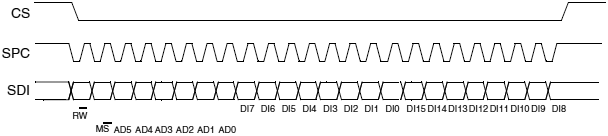
ąĀąĖčü. 17. ą¤čĆąŠč鹊ą║ąŠą╗ ąĘą░ą┐ąĖčüąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą▒ą░ą╣čé SPI (ą┐čĆąĖą╝ąĄčĆ ą┤ą╗čÅ 2 ą▒ą░ą╣čé)
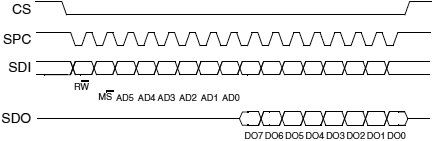
5.2.3. SPI read ą▓ 3-ą┐čĆąŠą▓ąŠą┤ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ
ąÆ čéčĆąĄčģą┐čĆąŠą▓ąŠą┤ąĮčŗą╣ čĆąĄąČąĖą╝ (3-wire mode) ą╝ąŠąČąĮąŠ ą▓ąŠą╣čéąĖ, ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčī ą▓ čĆąĄą│ąĖčüčéčĆąĄ CTRL_REG2 ą▒ąĖčé SIM (SPI serial interface mode selection, ą▓čŗą▒ąŠčĆ čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ ąĖąĮč鹥čĆč乥ą╣čüą░ SPI) ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 1.
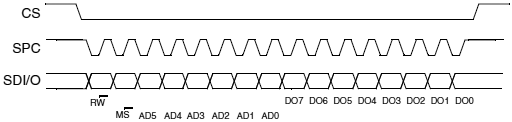
ąĀąĖčü. 18. ą¤čĆąŠč鹊ą║ąŠą╗ čćč鹥ąĮąĖčÅ SPI ą▓ 3-ą┐čĆąŠą▓ąŠą┤ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ
ąÜąŠą╝ą░ąĮą┤ą░ SPI read ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮą░ ąĘą░ 16 čéą░ą║č鹊ą▓čŗčģ ąĖą╝ą┐čāą╗čīčüąŠą▓:
Bit 0: READ bit, čĆą░ą▓ąĮčŗą╣ 1.
Bit 1: MS bit. ąÜąŠą│ą┤ą░ 0, č鹊 ą░ą┤čĆąĄčü ąĮąĄ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ; ą║ąŠą│ą┤ą░ 1, č鹊 ą┐čĆąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čćč鹥ąĮąĖčÅčģ ą░ą┤čĆąĄčü ą▒čāą┤ąĄčé ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčīčüčÅ.
Bit 2-7: ą░ą┤čĆąĄčü AD(5:0). ąŁč鹊 ą┐ąŠą╗ąĄ ą░ą┤čĆąĄčüą░ ąĖąĮą┤ąĄą║čüąĖčĆčāąĄą╝ąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░.
Bit 8-15: ą┤ą░ąĮąĮčŗąĄ DO(7:0) (čĆąĄąČąĖą╝ čćč鹥ąĮąĖčÅ). ąŁč鹊 ą┤ą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ čćąĖčéą░čÄčéčüčÅ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░ (MSB ąĖą┤ąĄčé ą┐ąĄčĆą▓čŗą╝).
ąÆ 3-ą┐čĆąŠą▓ąŠą┤ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ą┤ąŠčüčéčāą┐ąĮą░ čéą░ą║ąČąĄ ą║ąŠą╝ą░ąĮą┤ą░ čćč鹥ąĮąĖčÅ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą▒ą░ą╣čé (multiple read command).
[6. ąÜą░čĆčéą░ čĆąĄą│ąĖčüčéčĆąŠą▓ L3G4200D (Output register mapping)]
ąóą░ą▒ą╗ąĖčåą░ ąĮąĖąČąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüą┐ąĖčüąŠą║ 8-ą▒ąĖčéąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓, ą▓čüčéčĆąŠąĄąĮąĮčŗčģ ą▓ L3G4200D, ą▓ą╝ąĄčüč鹥 čü ąĖčģ ą░ą┤čĆąĄčüą░ą╝ąĖ.
ąóą░ą▒ą╗ąĖčåą░ 18. ąÜą░čĆčéą░ ą┐ą░ą╝čÅčéąĖ čĆąĄą│ąĖčüčéčĆąŠą▓
| ąśą╝čÅ |
ąóąĖą┐ |
ąÉą┤čĆąĄčü čĆąĄą│ąĖčüčéčĆą░ |
ąŚąĮą░č湥ąĮąĖąĄ
ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ |
| Hex |
Binary |
| ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
- |
00-0E |
- |
- |
| WHO_AM_I |
r |
0F |
0001111 |
11010011 |
| ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ |
- |
10-1F |
- |
- |
| CTRL_REG1 |
rw |
20 |
0100000 |
00000111 |
| CTRL_REG2 |
rw |
21 |
0100001 |
00000000 |
| CTRL_REG3 |
rw |
22 |
0100010 |
00000000 |
| CTRL_REG4 |
rw |
23 |
0100011 |
00000000 |
| CTRL_REG5 |
rw |
24 |
0100100 |
00000000 |
| REFERENCE |
rw |
25 |
0100101 |
00000000 |
| OUT_TEMP |
r |
26 |
0100110 |
output |
| STATUS_REG |
r |
27 |
0100111 |
output |
| OUT_X_L |
r |
28 |
0101000 |
output |
| OUT_X_H |
r |
29 |
0101001 |
output |
| OUT_Y_L |
r |
2A |
0101010 |
output |
| OUT_Y_H |
r |
2B |
0101011 |
output |
| OUT_Z_L |
r |
2C |
0101100 |
output |
| OUT_Z_H |
r |
2D |
0101101 |
output |
| FIFO_CTRL_REG |
rw |
2E |
0101110 |
00000000 |
| FIFO_SRC_REG |
r |
2F |
0101111 |
output |
| INT1_CFG |
rw |
30 |
0110000 |
00000000 |
| INT1_SRC |
r |
31 |
0110001 |
output |
| INT1_TSH_XH |
rw |
32 |
0110010 |
00000000 |
| INT1_TSH_XL |
rw |
33 |
0110011 |
00000000 |
| INT1_TSH_YH |
rw |
34 |
0110100 |
00000000 |
| INT1_TSH_YL |
rw |
35 |
0110101 |
00000000 |
| INT1_TSH_ZH |
rw |
36 |
0110110 |
00000000 |
| INT1_TSH_ZL |
rw |
37 |
0110111 |
00000000 |
| INT1_DURATION |
rw |
38 |
0111000 |
00000000 |
ąĀąĄą│ąĖčüčéčĆčŗ, ą┐ąŠą╝ąĄč湥ąĮąĮčŗąĄ ą║ą░ą║ ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ, ąĮąĄą╗čīąĘčÅ ąĖąĘą╝ąĄąĮčÅčéčī. ąŚą░ą┐ąĖčüčī ą▓ čŹčéąĖ čĆąĄą│ąĖčüčéčĆčŗ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ąĮąĄąŠą▒čĆą░čéąĖą╝ąŠą╝čā ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĖčÄ čāčüčéčĆąŠą╣čüčéą▓ą░.
ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆąŠą▓, ą║ąŠč鹊čĆąŠąĄ ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ ą┐čĆąĖ čüčéą░čĆč鹥 čüąĖčüč鹥ą╝čŗ, ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ąĖąĘą╝ąĄąĮčÅčéčīčüčÅ. ą×ąĮąĖ čüąŠą┤ąĄčƹȹ░čéčī ąĘąĮą░č湥ąĮąĖčÅ, ąŠčéą║ą░ą╗ąĖą▒čĆąŠą▓ą░ąĮąĮčŗąĄ ąĮą░ ąĘą░ą▓ąŠą┤ąĄ. ąśčģ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą▒čāą┤ąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą┐čĆąĖ ą┐ąŠą┤ą░č湥 ą┐ąĖčéą░ąĮąĖčÅ ąĮą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ.
[7. ą×ą┐ąĖčüą░ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆąŠą▓]
ąŻčüčéčĆąŠą╣čüčéą▓ąŠ čüąŠą┤ąĄčƹȹĖčé ąĮą░ą▒ąŠčĆ čĆąĄą│ąĖčüčéčĆąŠą▓, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĄą│ąŠ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄą╝ ąĖ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ čāčüą║ąŠčĆąĄąĮąĖčÅ. ąÉą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆąŠą▓, čüąŠčüč鹊čÅčēąĖąĄ ąĖąĘ 7 ą▒ąĖč鹊ą▓, ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąĖ ąĖčģ ąĖ ąĘą░ą┐ąĖčüąĖ ą┤ą░ąĮąĮčŗčģ č湥čĆąĄąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü.
7.1. WHO_AM_I (0Fh)
ąóą░ą▒ą╗ąĖčåą░ 19. ąĀąĄą│ąĖčüčéčĆ WHO_AM_I (ą║č鹊 čÅ)

ąŁč鹊 čĆąĄą│ąĖčüčéčĆ, ą║ąŠč鹊čĆčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāąĄčé čüą░ą╝ąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ L3G4200D.
7.2. CTRL_REG1 (20h)
ąóą░ą▒ą╗ąĖčåą░ 20. ąĀąĄą│ąĖčüčéčĆ CTRL_REG1

ąóą░ą▒ą╗ąĖčåą░ 21. ą×ą┐ąĖčüą░ąĮąĖąĄ ą▒ąĖč鹊ą▓ čĆąĄą│ąĖčüčéčĆą░ CTRL_REG1
DR1-DR0 ąÆčŗą▒ąŠčĆ čüą║ąŠčĆąŠčüčéąĖ ą▓čŗčģąŠą┤ąĮąŠą╣ ąŠčåąĖčäčĆąŠą▓ą║ąĖ čüąĖą│ąĮą░ą╗ą░ (Output Data Rate, ODR). ąĪą╝. čéą░ą▒ą╗ąĖčåčā 22.
BW1-BW0 ąÆčŗą▒ąŠčĆ ą┐ąŠą╗ąŠčüčŗ ą┐čĆąŠą┐čāčüą║ą░ąĮąĖčÅ. ąĪą╝. čéą░ą▒ą╗ąĖčåčā 22.
PD ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čĆąĄąČąĖą╝ą░ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ (Power Down). ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: čĆąĄąČąĖą╝ power down, 1: ąĮąŠčĆą╝ą░ą╗čīąĮčŗą╣ čĆąĄąČąĖą╝ ąĖą╗ąĖ čĆąĄąČąĖą╝ čüąĮą░).
Zen ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ ąŠčüąĖ Z. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 1 (0: ąŠčüčī Z ąĘą░ą┐čĆąĄčēąĄąĮą░, 1: čĆą░ąĘčĆąĄčłąĄąĮą░).
Yen ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ ąŠčüąĖ Y. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 1 (0: ąŠčüčī Y ąĘą░ą┐čĆąĄčēąĄąĮą░, 1: čĆą░ąĘčĆąĄčłąĄąĮą░).
Xen ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ ąŠčüąĖ X. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 1 (0: ąŠčüčī X ąĘą░ą┐čĆąĄčēąĄąĮą░, 1: čĆą░ąĘčĆąĄčłąĄąĮą░).
DR < 1:0 > ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▓čŗą▒ąŠčĆą░ ODR (čüą║ąŠčĆąŠčüčéčī ą▓čŗčģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ). BW < 1:0 > ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą░ ą┐ąŠą╗ąŠčüčŗ ą┐čĆąŠą┐čāčüą║ą░ąĮąĖčÅ (Cut-Off, čćą░čüč鹊čéą░ čüčĆąĄąĘą░ čåąĖčäčĆąŠą▓ąŠą│ąŠ čäąĖą╗čīčéčĆą░). ąÆ čüą╗ąĄą┤čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄ ą┐ąŠą║ą░ąĘą░ąĮčŗ ą▓čüąĄ čĆąĄąĘčāą╗čīčéąĖčĆčāčÄčēąĖąĄ čćą░čüč鹊čéčŗ ą▓ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ ą▒ąĖč鹊ą▓ DR ąĖ BW.
ąóą░ą▒ą╗ąĖčåą░ 22. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ DR ąĖ BW
| DR1DR0 |
BW1BW0 |
ODR (ąōčå) |
Cut-Off |
| 00 |
00 |
100 |
12.5 |
| 01 |
25 |
| 10 |
| 11 |
| 01 |
00 |
200 |
12.5 |
| 01 |
25 |
| 10 |
50 |
| 11 |
70 |
| 10 |
00 |
400 |
20 |
| 01 |
25 |
| 10 |
50 |
| 11 |
110 |
| 11 |
00 |
800 |
30 |
| 01 |
35 |
| 10 |
50 |
| 11 |
110 |
ąÜąŠą╝ą▒ąĖąĮą░čåąĖąĖ PD, Zen, Yen, Xen ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ čĆą░ąĘąĮčŗąĄ čĆąĄąČąĖą╝čŗ (power down, ą▓čŗą║ą╗čÄč湥ąĮąĖąĄ / normal, čĆą░ą▒ąŠčćąĖą╣ čĆąĄąČąĖą╝ / sleep mode, čĆąĄąČąĖą╝ čüąĮą░) ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čüąŠ čüą╗ąĄą┤čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄą╣.
ąóą░ą▒ą╗ąĖčåą░ 23. ąÆčŗą▒ąŠčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čĆąĄąČąĖą╝ą░ ą┐ąĖčéą░ąĮąĖčÅ
| ąĀąĄąČąĖą╝ |
PD |
Zen |
Yen |
Xen |
| Power down (ą┐ąĖčéą░ąĮąĖąĄ ą▓čŗą║ą╗čÄč湥ąĮąŠ) |
0 |
- |
- |
- |
| Sleep (čĆąĄąČąĖą╝ čüąĮą░) |
1 |
0 |
0 |
0 |
| ąØąŠčĆą╝ą░ą╗čīąĮčŗą╣ čĆą░ą▒ąŠčćąĖą╣ čĆąĄąČąĖą╝ |
1 |
- |
- |
- |
7.3. CTRL_REG2 (21h)
ąóą░ą▒ą╗ąĖčåą░ 24. ąĀąĄą│ąĖčüčéčĆ CTRL_REG2

ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ 1: ąĘąĮą░č湥ąĮąĖąĄ ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ, ąĖ ą┤ą░ą╗ąĄąĄ ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ąĖąĘą╝ąĄąĮčÅčéčīčüčÅ.
ąóą░ą▒ą╗ąĖčåą░ 25. ą×ą┐ąĖčüą░ąĮąĖąĄ ą▒ąĖč鹊ą▓ čĆąĄą│ąĖčüčéčĆą░ CTRL_REG2
HPM1-HPM0 ąÆčŗą▒ąŠčĆ čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ ążąÆą¦. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 00, čüą╝. čéą░ą║ąČąĄ čéą░ą▒ą╗ąĖčåčā 26.
HPCF3-HPCF0 ąÆčŗą▒ąŠčĆ čćą░čüč鹊čéčŗ čüčĆąĄąĘą░ ążąÆą¦, čüą╝. čéą░ą▒ą╗ąĖčåčā 27.
ąóą░ą▒ą╗ąĖčåą░ 26. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čĆąĄąČąĖą╝ą░ ążąÆą¦
| HPM1 |
HPM0 |
ąĀąĄąČąĖą╝ ążąÆą¦ |
| 0 |
0 |
ąØąŠčĆą╝ą░ą╗čīąĮčŗą╣ čĆąĄąČąĖą╝ (čüą▒čĆąŠčü čćč鹥ąĮąĖąĄą╝ HP_RESET_FILTER) |
| 0 |
1 |
ąöą╗čÅ čäąĖą╗čīčéčĆą░čåąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąŠą▒čĆą░ąĘčåąŠą▓čŗą╣ čüąĖą│ąĮą░ą╗ (reference signal) |
| 1 |
0 |
ąØąŠčĆą╝ą░ą╗čīąĮčŗą╣ čĆąĄąČąĖą╝ |
| 1 |
1 |
ąÉą▓č鹊čüą▒čĆąŠčü ą┐ąŠ čüąŠą▒čŗčéąĖčÄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ |
ąóą░ą▒ą╗ąĖčåą░ 27. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čćą░čüč鹊čéčŗ čüčĆąĄąĘą░ ążąÆą¦ (ąōčå)
| HPCF3..0 |
ODR = 100 ąōčå |
ODR = 200 ąōčå |
ODR = 400 ąōčå |
ODR = 800 ąōčå |
| 0000 |
8 |
15 |
30 |
56 |
| 0001 |
4 |
8 |
15 |
30 |
| 0010 |
2 |
4 |
8 |
15 |
| 0011 |
1 |
2 |
4 |
8 |
| 0100 |
0.5 |
1 |
2 |
4 |
| 0101 |
0.2 |
0.5 |
1 |
2 |
| 0110 |
0.1 |
0.2 |
0.5 |
1 |
| 0111 |
0.05 |
0.1 |
0.2 |
0.5 |
| 1000 |
0.02 |
0.05 |
0.1 |
0.2 |
| 1001 |
0.01 |
0.02 |
0.05 |
0.1 |
7.4. CTRL_REG3 (22h)
ąóą░ą▒ą╗ąĖčåą░ 28. ąĀąĄą│ąĖčüčéčĆ CTRL_REG3

ąóą░ą▒ą╗ąĖčåą░ 29. ą×ą┐ąĖčüą░ąĮąĖąĄ ą▒ąĖč鹊ą▓ čĆąĄą│ąĖčüčéčĆą░ CTRL_REG3
I1_Int1 ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ INT1. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĘą░ą┐čĆąĄčēąĄąĮąŠ; 1: čĆą░ąĘčĆąĄčłąĄąĮąŠ).
I1_Boot ąĪčéą░čéčāčü ąĘą░ą│čĆčāąĘą║ąĖ ą┤ąŠčüčéčāą┐ąĄąĮ ąĮą░ INT1. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĘą░ą┐čĆąĄčēąĄąĮąŠ; 1: čĆą░ąĘčĆąĄčłąĄąĮąŠ).
H_Lactive ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą░ą║čéąĖą▓ąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ INT1. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ą╗ąŠą│. 1; 1: ą╗ąŠą│. 0).
PP_OD ąÆčŗą▒ąŠčĆ čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ ą▓čŗčģąŠą┤ą░ Push-Pull (ą┤ą▓čāčģčéą░ą║čéąĮčŗą╣ ą║ą╗čÄčć) / Open drain (ąŠčéą║čĆčŗčéčŗą╣ čüč鹊ą║). ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: Push-Pull; 1: Open drain).
I2_DRDY ąÆčŗą▓ąŠą┤ čüąŠčüč鹊čÅąĮąĖčÅ Data Ready ąĮą░ DRDY/INT2. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĘą░ą┐čĆąĄčēąĄąĮąŠ; 1: čĆą░ąĘčĆąĄčłąĄąĮąŠ).
I2_WTM ąÆčŗą▓ąŠą┤ čüąŠą▒čŗčéąĖčÅ FIFO Watermark interrupt (ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÄ ąĘą░ą┤ą░ąĮąĮąŠą│ąŠ čāčĆąŠą▓ąĮčÅ FIFO) ąĮą░ DRDY/INT2. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĘą░ą┐čĆąĄčēąĄąĮąŠ; 1: čĆą░ąĘčĆąĄčłąĄąĮąŠ).
I2_ORun ąÆčŗą▓ąŠą┤ čüąŠą▒čŗčéąĖčÅ FIFO Overrun interrupt (ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąĖ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĖ ą▒čāč乥čĆą░ FIFO) ąĮą░ DRDY/INT2. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĘą░ą┐čĆąĄčēąĄąĮąŠ; 1: čĆą░ąĘčĆąĄčłąĄąĮąŠ).
I2_Empty ąÆčŗą▓ąŠą┤ čüąŠą▒čŗčéąĖčÅ FIFO Empty interrupt (ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ą║ąŠą│ą┤ą░ FIFO ąŠą┐čāčüč鹥ą╗) ąĮą░ DRDY/INT2. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĘą░ą┐čĆąĄčēąĄąĮąŠ; 1: čĆą░ąĘčĆąĄčłąĄąĮąŠ).
7.5. CTRL_REG4 (23h)
ąóą░ą▒ą╗ąĖčåą░ 30. ąĀąĄą│ąĖčüčéčĆ CTRL_REG4

ąóą░ą▒ą╗ąĖčåą░ 31. ą×ą┐ąĖčüą░ąĮąĖąĄ ą▒ąĖč鹊ą▓ čĆąĄą│ąĖčüčéčĆą░ CTRL_REG4
BDU Block Data Update (ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ą▒ą╗ąŠą║ą░ ą┤ą░ąĮąĮčŗčģ). ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠąĄ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ; 1: ą▓čŗčģąŠą┤ąĮčŗąĄ čĆąĄą│ąĖčüčéčĆčŗ ąĮąĄ ą▒čāą┤čāčé ąŠą▒ąĮąŠą▓ą╗ąĄąĮčŗ, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤čāčé ą┐čĆąŠčćąĖčéą░ąĮčŗ čüčéą░čĆčłąĖą╣ ąĖ ą╝ą╗ą░ą┤čłąĖą╣ ą▒ą░ą╣čéčŗ).
BLE ąÆčŗą▒ąŠčĆ č乊čĆą╝ą░čéą░ ą┤ą░ąĮąĮčŗčģ Big/Little Endian. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ą┤ą░ąĮąĮčŗąĄ ą╝ą╗ą░ą┤čłąĖą╣ ą▒ą░ą╣čé ą┐ąŠ ą╝ąĄąĮčīčłąĄą╝čā ą░ą┤čĆąĄčüčā; 1: ą┤ą░ąĮąĮčŗąĄ čüčéą░čĆčłąĖą╣ ą▒ą░ą╣čé ą┐ąŠ ą╝ąĄąĮčīčłąĄą╝čā ą░ą┤čĆąĄčüčā).
FS1-FS0 ąÆčŗą▒ąŠčĆ ą┐ąŠą╗ąĮąŠą╣ čłą║ą░ą╗čŗ. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 00 (00: 250 dps; 01: 500 dps; 10: 2000 dps; 11: 2000 dps).
ST1-ST0 ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čĆąĄąČąĖą╝ą░ čüą░ą╝ąŠč鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 00 (00: čüą░ą╝ąŠč鹥čüčéąĖčĆąŠą▓ą░ąĮąĖąĄ ąĘą░ą┐čĆąĄčēąĄąĮąŠ, ą┤čĆčāą│ąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ čüą╝. ą▓ čéą░ą▒ą╗ąĖčåąĄ 32).
SIM ąÆčŗą▒ąŠčĆ čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ SPI. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: 4-ą┐čĆąŠą▓ąŠą┤ąĮčŗą╣ čĆąĄąČąĖą╝, 1: 3-ą┐čĆąŠą▓ąŠą┤ąĮčŗą╣ čĆąĄąČąĖą╝).
ąóą░ą▒ą╗ąĖčåą░ 32. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čĆąĄąČąĖą╝ą░ čüą░ą╝ąŠč鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ
| ST1 |
ST0 |
ąĀąĄąČąĖą╝ čüą░ą╝ąŠč鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ |
| 0 |
0 |
ąØąŠčĆą╝ą░ą╗čīąĮčŗą╣ čĆąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ (čüą░ą╝ąŠč鹥čüčéąĖčĆąŠą▓ą░ąĮąĖąĄ ąĘą░ą┐čĆąĄčēąĄąĮąŠ) |
| 0 |
1 |
ąĪą░ą╝ąŠč鹥čüčéąĖčĆąŠą▓ą░ąĮąĖąĄ 0 (+)(1) |
| 1 |
0 |
-- |
| 1 |
1 |
ąĪą░ą╝ąŠč鹥čüčéąĖčĆąŠą▓ą░ąĮąĖąĄ 1 (-)(1) |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ 1: ąĘąĮą░ą║ DST (ą░ą▒čüąŠą╗čÄčéąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▓ čéą░ą▒ą╗ąĖčåąĄ 4).
7.6. CTRL_REG5 (24h)
ąóą░ą▒ą╗ąĖčåą░ 33. ąĀąĄą│ąĖčüčéčĆ CTRL_REG5

ąóą░ą▒ą╗ąĖčåą░ 34. ą×ą┐ąĖčüą░ąĮąĖąĄ ą▒ąĖč鹊ą▓ čĆąĄą│ąĖčüčéčĆą░ CTRL_REG5
BOOT ą¤ąĄčĆąĄąĘą░ą│čĆčāąĘąĖčéčī čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ą░ą╝čÅčéąĖ. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĮąŠčĆą╝ą░ą╗čīąĮčŗą╣ čĆąĄąČąĖą╝, 1: ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘąĖčéčī ą┐ą░ą╝čÅčéčī).
FIFO_EN ąĀą░ąĘčĆąĄčłąĖčéčī FIFO. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: FIFO ąĘą░ą┐čĆąĄčēąĄąĮ, 1: FIFO čĆą░ąĘčĆąĄčłąĄąĮ).
HPen ąĀą░ąĘčĆąĄčłąĖčéčī ążąÆą¦. (0: HPF ąĘą░ą┐čĆąĄčēąĄąĮ, 1: HPF čĆą░ąĘčĆąĄčłąĄąĮ).
INT1_Sel1-INT1_Sel0 ąÆčŗą▒ąŠčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ INT1. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (čüą╝. čĆąĖčü. 19).
Out_Sel1-Out_Sel0 ąÆčŗą▒ąŠčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą▓čŗčģąŠą┤ą░. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (čüą╝. čĆąĖčü. 19).
ąĀąĖčü. 19. ąæą╗ąŠą║-čüčģąĄą╝ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ INT1_Sel ąĖ Out_Sel
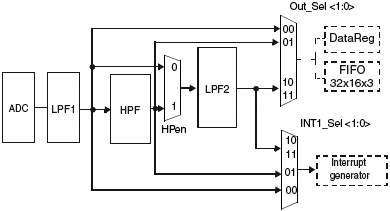
ąóą░ą▒ą╗ąĖčåą░ 35. ąŻčüčéą░ąĮąŠą▓ą║ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ Out_Sel
| Hpen |
OUT_SEL1 |
OUT_SEL0 |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| x |
0 |
0 |
ąöą░ąĮąĮčŗąĄ ą▓ DataReg ąĖ FIFO ąĮąĄ ą┐čĆąŠčģąŠą┤čÅčé č湥čĆąĄąĘ ążąÆą¦ (ąĮąĄ čäąĖą╗čīčéčĆčāčÄčéčüčÅ).
|
| x |
0 |
1 |
ąöą░ąĮąĮčŗąĄ ą▓ DataReg ąĖ FIFO čäąĖą╗čīčéčĆčāčÄčéčüčÅ č湥čĆąĄąĘ ążąÆą¦. |
| 0 |
1 |
x |
ąöą░ąĮąĮčŗąĄ ą▓ DataReg ąĖ FIFO čäąĖą╗čīčéčĆčāčÄčéčüčÅ ążąØą¦ LPF2.
|
| 1 |
1 |
x |
ąöą░ąĮąĮčŗąĄ ą▓ DataReg ąĖ FIFO čäąĖą╗čīčéčĆčāčÄčéčüčÅ ążąÆą¦ ąĖ ążąØą¦ LPF2. |
ąóą░ą▒ą╗ąĖčåą░ 36. ąŻčüčéą░ąĮąŠą▓ą║ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ INT_SEL
| Hpen |
INT_SEL1 |
INT_SEL0 |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| x |
0 |
0 |
ąöą╗čÅ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ąĮąĄčäąĖą╗čīčéčĆąŠą▓ą░ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ.
|
| x |
0 |
1 |
ąöą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą░ąĮąĮčŗąĄ, ą┐čĆąŠčłąĄą┤čłąĖąĄ č湥čĆąĄąĘ ążąÆą¦. |
| 0 |
1 |
x |
ąöą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą░ąĮąĮčŗąĄ, ą┐čĆąŠčłąĄą┤čłąĖąĄ č湥čĆąĄąĘ ążąØą¦.
|
| 1 |
1 |
x |
ąöą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą░ąĮąĮčŗąĄ, ą┐čĆąŠčłąĄą┤čłąĖąĄ č湥čĆąĄąĘ ążąÆą¦ ąĖ ążąØą¦. |
7.7. REFERENCE/DATACAPTURE (25h)
ąóą░ą▒ą╗ąĖčåą░ 37. ąĀąĄą│ąĖčüčéčĆ REFERENCE

ąóą░ą▒ą╗ąĖčåą░ 38. ą×ą┐ąĖčüą░ąĮąĖąĄ ą▒ąĖč鹊ą▓ čĆąĄą│ąĖčüčéčĆą░ REFERENCE
Ref7-Ref0 ą×ą▒čĆą░ąĘčåąŠą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0.
7.8. OUT_TEMP (26h)
ąóą░ą▒ą╗ąĖčåą░ 39. ąĀąĄą│ąĖčüčéčĆ OUT_TEMP

ąóą░ą▒ą╗ąĖčåą░ 40. ą×ą┐ąĖčüą░ąĮąĖąĄ ą▒ąĖč鹊ą▓ čĆąĄą│ąĖčüčéčĆą░ OUT_TEMP
Temp7-Temp0 ąöą░ąĮąĮčŗąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ.
7.9. STATUS_REG (27h)
ąóą░ą▒ą╗ąĖčåą░ 41. ąĀąĄą│ąĖčüčéčĆ STATUS_REG

ąóą░ą▒ą╗ąĖčåą░ 42. ą×ą┐ąĖčüą░ąĮąĖąĄ ą▒ąĖč鹊ą▓ čĆąĄą│ąĖčüčéčĆą░ STATUS_REG
ZYXOR ą¤ąŠč鹥čĆčÅ (ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ) ą┤ą░ąĮąĮčŗčģ (data overrun) ą┐ąŠ ąŠčüčÅą╝ X, Y, Z. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĮąĄ ą▒čŗą╗ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ, 1: ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄąĘą░ą┐ąĖčüą░ą╗ąĖ čüčéą░čĆčŗąĄ, ą┐čĆąĖč湥ą╝ čüčéą░čĆčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĄčēąĄ ąĮąĄ ą▒čŗą╗ąĖ čüčćąĖčéą░ąĮčŗ).
ZOR ą¤ąŠč鹥čĆčÅ (ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ) ą┤ą░ąĮąĮčŗčģ (data overrun) ą┐ąŠ ąŠčüąĖ Z. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĮąĄ ą▒čŗą╗ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ, 1: ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄąĘą░ą┐ąĖčüą░ą╗ąĖ čüčéą░čĆčŗąĄ, ą┐čĆąĖč湥ą╝ čüčéą░čĆčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĄčēąĄ ąĮąĄ ą▒čŗą╗ąĖ čüčćąĖčéą░ąĮčŗ).
YOR ą¤ąŠč鹥čĆčÅ (ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ) ą┤ą░ąĮąĮčŗčģ (data overrun) ą┐ąŠ ąŠčüąĖ Y. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĮąĄ ą▒čŗą╗ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ, 1: ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄąĘą░ą┐ąĖčüą░ą╗ąĖ čüčéą░čĆčŗąĄ, ą┐čĆąĖč湥ą╝ čüčéą░čĆčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĄčēąĄ ąĮąĄ ą▒čŗą╗ąĖ čüčćąĖčéą░ąĮčŗ).
XOR ą¤ąŠč鹥čĆčÅ (ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ) ą┤ą░ąĮąĮčŗčģ (data overrun) ą┐ąŠ ąŠčüąĖ X. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĮąĄ ą▒čŗą╗ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ, 1: ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄąĘą░ą┐ąĖčüą░ą╗ąĖ čüčéą░čĆčŗąĄ, ą┐čĆąĖč湥ą╝ čüčéą░čĆčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĄčēąĄ ąĮąĄ ą▒čŗą╗ąĖ čüčćąĖčéą░ąĮčŗ).
ZYXDA ąöąŠčüčéčāą┐ąĮčŗ ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠ ąŠčüčÅą╝ X, Y, Z. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĮąŠą▓čŗčģ ą┤ą░ąĮąĮčŗčģ ą┐ąŠą║ą░ ąĮąĄčé, 1: ą┤ąŠčüčéčāą┐ąĮčŗ ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ).
ZDA ąöąŠčüčéčāą┐ąĮčŗ ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠ ąŠčüąĖ Z. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĮąŠą▓čŗčģ ą┤ą░ąĮąĮčŗčģ ą┐ąŠą║ą░ ąĮąĄčé, 1: ą┤ąŠčüčéčāą┐ąĮčŗ ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ).
YDA ąöąŠčüčéčāą┐ąĮčŗ ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠ ąŠčüąĖ Y. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĮąŠą▓čŗčģ ą┤ą░ąĮąĮčŗčģ ą┐ąŠą║ą░ ąĮąĄčé, 1: ą┤ąŠčüčéčāą┐ąĮčŗ ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ).
XDA ąöąŠčüčéčāą┐ąĮčŗ ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠ ąŠčüąĖ X. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĮąŠą▓čŗčģ ą┤ą░ąĮąĮčŗčģ ą┐ąŠą║ą░ ąĮąĄčé, 1: ą┤ąŠčüčéčāą┐ąĮčŗ ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ).
7.10. OUT_X_L (28h), OUT_X_H (29h)
ąŻą│ą╗ąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ čāčüą║ąŠčĆąĄąĮąĖčÅ ą┐ąŠ ąŠčüąĖ X. ąŚąĮą░č湥ąĮąĖąĄ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąŠ ą║ą░ą║ čćąĖčüą╗ąŠ čüąŠ ąĘąĮą░ą║ąŠą╝ ą▓ č乊čĆą╝ą░č鹥 ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┤ąŠ 2.
7.11. OUT_Y_L (2Ah), OUT_Y_H (2Bh)
ąŻą│ą╗ąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ čāčüą║ąŠčĆąĄąĮąĖčÅ ą┐ąŠ ąŠčüąĖ Y. ąŚąĮą░č湥ąĮąĖąĄ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąŠ ą║ą░ą║ čćąĖčüą╗ąŠ čüąŠ ąĘąĮą░ą║ąŠą╝ ą▓ č乊čĆą╝ą░č鹥 ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┤ąŠ 2.
7.12. OUT_Z_L (2Ch), OUT_Z_H (2Dh)
ąŻą│ą╗ąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ čāčüą║ąŠčĆąĄąĮąĖčÅ ą┐ąŠ ąŠčüąĖ Z. ąŚąĮą░č湥ąĮąĖąĄ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąŠ ą║ą░ą║ čćąĖčüą╗ąŠ čüąŠ ąĘąĮą░ą║ąŠą╝ ą▓ č乊čĆą╝ą░č鹥 ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┤ąŠ 2.
7.13. FIFO_CTRL_REG (2Eh)
ąóą░ą▒ą╗ąĖčåą░ 43. ąĀąĄą│ąĖčüčéčĆ FIFO_CTRL_REG

ąóą░ą▒ą╗ąĖčåą░ 44. ą×ą┐ąĖčüą░ąĮąĖąĄ ą▒ąĖč鹊ą▓ čĆąĄą│ąĖčüčéčĆą░ FIFO_CTRL_REG
FM2-FM0 ąÆčŗą▒ąŠčĆ čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ FIFO. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 00 (čüą╝. čéą░ą▒ą╗ąĖčåčā 45).
WTM4-WTM0 ą¤ąŠčĆąŠą│ čāčĆąŠą▓ąĮčÅ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ FIFO (watermark).
ąóą░ą▒ą╗ąĖčåą░ 45. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čĆąĄąČąĖą╝ą░ FIFO
| FM2 |
FM1 |
FM0 |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
0 |
0 |
ąĀąĄąČąĖą╝ bypass (ą▒ąĄąĘ FIFO).
|
| 0 |
0 |
1 |
ąĀąĄąČąĖą╝ FIFO. |
| 0 |
1 |
0 |
ą¤ąŠč鹊ą║ąŠą▓čŗą╣ čĆąĄąČąĖą╝ (stream mode).
|
| 0 |
1 |
1 |
ąĀąĄąČąĖą╝ Stream-to-FIFO. |
| 1 |
0 |
0 |
ąĀąĄąČąĖą╝ Bypass-to-Stream. |
7.14. FIFO_SRC_REG (2Fh)
ąóą░ą▒ą╗ąĖčåą░ 46. ąĀąĄą│ąĖčüčéčĆ FIFO_SRC_REG

ąóą░ą▒ą╗ąĖčåą░ 47. ą×ą┐ąĖčüą░ąĮąĖąĄ ą▒ąĖč鹊ą▓ čĆąĄą│ąĖčüčéčĆą░ FIFO_SRC_REG
WTM ąĪčéą░čéčāčü čāčĆąŠą▓ąĮčÅ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ (0: FIFO ąĘą░ą┐ąŠą╗ąĮąĄąĮ ą╝ąĄąĮčīčłąĄ, č湥ą╝ čāčĆąŠą▓ąĄąĮčī WTM, 1: čāčĆąŠą▓ąĄąĮčī ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ čĆą░ą▓ąĄąĮ ąĖą╗ąĖ ą▓čŗčłąĄ WTM).
OVRN ąæąĖčé čüąŠčüč鹊čÅąĮąĖčÅ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ (overrun, 0: FIFO ąĮąĄ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąĘą░ą┐ąŠą╗ąĮąĄąĮ, 1: FIFO ąĘą░ą┐ąŠą╗ąĮąĄąĮ ą┐ąŠą╗ąĮąŠčüčéčīčÄ).
EMPTY ąæąĖčé, ąŠąĘąĮą░čćą░čÄčēąĖą╣ ą┐čāčüč鹊čéčā FIFO (0: FIFO ąĮąĄ ą┐čāčüčé, 1: FIFO ą┐čāčüčé).
FSS4-FSS1 ąĪąŠčģčĆą░ąĮąĄąĮąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ą┤ą░ąĮąĮčŗčģ FIFO.
7.15. INT1_CFG (30h)
ąóą░ą▒ą╗ąĖčåą░ 48. ąĀąĄą│ąĖčüčéčĆ INT1_CFG

ąóą░ą▒ą╗ąĖčåą░ 49. ą×ą┐ąĖčüą░ąĮąĖąĄ ą▒ąĖč鹊ą▓ čĆąĄą│ąĖčüčéčĆą░ INT1_CFG
AND/OR ąÆčŗą▒ąŠčĆ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ ąś/ąśąøąś ą┤ą╗čÅ čüąŠą▒čŗčéąĖą╣ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ą┤ą╗čÅ čüąŠą▒čŗčéąĖą╣ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÅ ąśąøąś, OR; 1: ą┤ą╗čÅ čüąŠą▒čŗčéąĖą╣ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÅ ąś, AND).
LIR ąŚą░čēąĄą╗ą║ąĖą▓ą░ąĮąĖąĄ ąĘą░ą┐čĆąŠčüą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (Latch Interrupt Request). ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĘą░ą┐čĆąŠčü ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĮąĄ ąĘą░ą┐ąŠą╝ąĖąĮą░ąĄčéčüčÅ, 1: ąĘą░ą┐čĆąŠčü ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĘą░ą┐ąŠą╝ąĖąĮą░ąĄčéčüčÅ). ą×čćąĖčēą░ąĄčéčüčÅ čćč鹥ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ INT1_SRC.
ZHIE ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖ čüąŠą▒čŗčéąĖąĖ Z high. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, 1: čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠą│ą┤ą░ ąĖąĘą╝ąĄčĆąĄąĮąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī čāčüą║ąŠčĆąĄąĮąĖčÅ ą▓čŗčłąĄ, č湥ą╝ ą┐čĆąĄą┤čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ ą┐ąŠčĆąŠą│).
ZLIE ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖ čüąŠą▒čŗčéąĖąĖ Z low. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, 1: čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠą│ą┤ą░ ąĖąĘą╝ąĄčĆąĄąĮąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī čāčüą║ąŠčĆąĄąĮąĖčÅ ą╝ąĄąĮčīčłąĄ, č湥ą╝ ą┐čĆąĄą┤čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ ą┐ąŠčĆąŠą│).
YHIE ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖ čüąŠą▒čŗčéąĖąĖ Y high. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, 1: čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠą│ą┤ą░ ąĖąĘą╝ąĄčĆąĄąĮąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī čāčüą║ąŠčĆąĄąĮąĖčÅ ą▓čŗčłąĄ, č湥ą╝ ą┐čĆąĄą┤čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ ą┐ąŠčĆąŠą│).
YLIE ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖ čüąŠą▒čŗčéąĖąĖ Y low. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, 1: čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠą│ą┤ą░ ąĖąĘą╝ąĄčĆąĄąĮąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī čāčüą║ąŠčĆąĄąĮąĖčÅ ą╝ąĄąĮčīčłąĄ, č湥ą╝ ą┐čĆąĄą┤čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ ą┐ąŠčĆąŠą│).
XHIE ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖ čüąŠą▒čŗčéąĖąĖ X high. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, 1: čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠą│ą┤ą░ ąĖąĘą╝ąĄčĆąĄąĮąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī čāčüą║ąŠčĆąĄąĮąĖčÅ ą▓čŗčłąĄ, č湥ą╝ ą┐čĆąĄą┤čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ ą┐ąŠčĆąŠą│).
XLIE ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖ čüąŠą▒čŗčéąĖąĖ X low. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, 1: čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠą│ą┤ą░ ąĖąĘą╝ąĄčĆąĄąĮąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī čāčüą║ąŠčĆąĄąĮąĖčÅ ą╝ąĄąĮčīčłąĄ, č湥ą╝ ą┐čĆąĄą┤čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ ą┐ąŠčĆąŠą│).
7.16. INT1_SRC (31h)
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ ą┤ą╗čÅ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ąóą░ą▒ą╗ąĖčåą░ 50. ąĀąĄą│ąĖčüčéčĆ INT1_SRC

ąóą░ą▒ą╗ąĖčåą░ 51. ą×ą┐ąĖčüą░ąĮąĖąĄ ą▒ąĖč鹊ą▓ čĆąĄą│ąĖčüčéčĆą░ INT1_SRC
IA ąÉą║čéąĖą▓ąĮąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ (Interrupt Active). ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĮąĄ ą▒čŗą╗ąŠ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, 1: čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ ąŠą┤ąĮąŠ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣).
ZH Z high. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĮąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, 1: ą┐čĆąŠąĖąĘąŠčłą╗ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčé ą▓čŗčüąŠą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ čāčüą║ąŠčĆąĄąĮąĖčÅ ą┐ąŠ ąŠčüąĖ Z).
ZL Z low. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĮąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, 1: ą┐čĆąŠąĖąĘąŠčłą╗ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčé ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ čāčüą║ąŠčĆąĄąĮąĖčÅ ą┐ąŠ ąŠčüąĖ Z).
YH Y high. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĮąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, 1: ą┐čĆąŠąĖąĘąŠčłą╗ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčé ą▓čŗčüąŠą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ čāčüą║ąŠčĆąĄąĮąĖčÅ ą┐ąŠ ąŠčüąĖ Y).
YL Y low. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĮąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, 1: ą┐čĆąŠąĖąĘąŠčłą╗ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčé ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ čāčüą║ąŠčĆąĄąĮąĖčÅ ą┐ąŠ ąŠčüąĖ Y).
XH X high. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĮąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, 1: ą┐čĆąŠąĖąĘąŠčłą╗ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčé ą▓čŗčüąŠą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ čāčüą║ąŠčĆąĄąĮąĖčÅ ą┐ąŠ ąŠčüąĖ X).
XL X low. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĮąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, 1: ą┐čĆąŠąĖąĘąŠčłą╗ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčé ąĮąĖąĘą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ čāčüą║ąŠčĆąĄąĮąĖčÅ ą┐ąŠ ąŠčüąĖ X).
ąĀąĄą│ąĖčüčéčĆ, ąŠą▒ąŠąĘąĮą░čćą░čÄčēąĖą╣ ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ. ą¦č鹥ąĮąĖąĄ ą┐ąŠ čŹč鹊ą╝čā ą░ą┤čĆąĄčüčā ąŠčćąĖčēą░ąĄčé ą▒ąĖčé IA čĆąĄą│ąĖčüčéčĆą░ INT1_SRC (čéą░ą║ąČąĄ čüą▒čĆą░čüčŗą▓ą░ąĄčé ą▓ąŠąĘąĮąĖą║ą░čÄčēąĖą╣ ą┐ąŠ čüąŠą▒čŗčéąĖčÄ čüąĖą│ąĮą░ą╗ ąĮą░ ąĮąŠąČą║ąĄ INT1), ąĖ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠą▒ąĮąŠą▓ąĖčéčī ą┤ą░ąĮąĮčŗąĄ ą▓ čĆąĄą│ąĖčüčéčĆąĄ INT1_SRC, ąĄčüą╗ąĖ ą▓čŗą▒čĆą░ąĮą░ ąŠą┐čåąĖčÅ čü ąĘą░čēąĄą╗ą║ąĖą▓ą░ąĮąĖąĄą╝ ą┤ą░ąĮąĮčŗčģ.
7.17. INT1_THS_XH (32h)
ąóą░ą▒ą╗ąĖčåą░ 52. ąĀąĄą│ąĖčüčéčĆ INT1_THS_XH

ąóą░ą▒ą╗ąĖčåą░ 53. ą×ą┐ąĖčüą░ąĮąĖąĄ ą▒ąĖč鹊ą▓ čĆąĄą│ąĖčüčéčĆą░ INT1_THS_XH
THSX14-THSX9 ą¤ąŠčĆąŠą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 00000000.
7.18. INT1_THS_XL (33h)
ąóą░ą▒ą╗ąĖčåą░ 54. ąĀąĄą│ąĖčüčéčĆ INT1_THS_XL

ąóą░ą▒ą╗ąĖčåą░ 55. ą×ą┐ąĖčüą░ąĮąĖąĄ ą▒ąĖč鹊ą▓ čĆąĄą│ąĖčüčéčĆą░ INT1_THS_XL
THSX7-THSX0 ą¤ąŠčĆąŠą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 00000000.
7.19. INT1_THS_YH (34h)
ąóą░ą▒ą╗ąĖčåą░ 56. ąĀąĄą│ąĖčüčéčĆ INT1_THS_YH

ąóą░ą▒ą╗ąĖčåą░ 57. ą×ą┐ąĖčüą░ąĮąĖąĄ ą▒ąĖč鹊ą▓ čĆąĄą│ąĖčüčéčĆą░ INT1_THS_YH
THSY14-THSY9 ą¤ąŠčĆąŠą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 00000000.
7.20. INT1_THS_YL (35h)
ąóą░ą▒ą╗ąĖčåą░ 58. ąĀąĄą│ąĖčüčéčĆ INT1_THS_YL

ąóą░ą▒ą╗ąĖčåą░ 59. ą×ą┐ąĖčüą░ąĮąĖąĄ ą▒ąĖč鹊ą▓ čĆąĄą│ąĖčüčéčĆą░ INT1_THS_YL
THSY7-THSY0 ą¤ąŠčĆąŠą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 00000000.
7.21. INT1_THS_ZH (36h)
ąóą░ą▒ą╗ąĖčåą░ 60. ąĀąĄą│ąĖčüčéčĆ INT1_THS_ZH

ąóą░ą▒ą╗ąĖčåą░ 61. ą×ą┐ąĖčüą░ąĮąĖąĄ ą▒ąĖč鹊ą▓ čĆąĄą│ąĖčüčéčĆą░ INT1_THS_ZH
THSZ14-THSZ9 ą¤ąŠčĆąŠą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 00000000.
7.22. INT1_THS_ZL (37h)
ąóą░ą▒ą╗ąĖčåą░ 62. ąĀąĄą│ąĖčüčéčĆ INT1_THS_ZL

ąóą░ą▒ą╗ąĖčåą░ 63. ą×ą┐ąĖčüą░ąĮąĖąĄ ą▒ąĖč鹊ą▓ čĆąĄą│ąĖčüčéčĆą░ INT1_THS_ZL
THSZ7-THSZ0 ą¤ąŠčĆąŠą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 00000000.
7.23. INT1_DURATION (38h)
ąóą░ą▒ą╗ąĖčåą░ 64. ąĀąĄą│ąĖčüčéčĆ INT1_DURATION

ąóą░ą▒ą╗ąĖčåą░ 65. ą×ą┐ąĖčüą░ąĮąĖąĄ ą▒ąĖč鹊ą▓ čĆąĄą│ąĖčüčéčĆą░ INT1_DURATION
D6-D0 ąŚąĮą░č湥ąĮąĖąĄ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0000000. ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčé ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčāčÄ čĆą░čüą┐ąŠąĘąĮą░ą▓ą░ąĄą╝čāčÄ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī čüąŠą▒čŗčéąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ą©ą░ą│ąĖ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ąĘą░ą▓ąĖčüčÅčé ąŠčé ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ODR.
WAIT ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 0 (0: ąĘą░ą┐čĆąĄčé, 1: čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ). ą×ąĘąĮą░čćą░ąĄčé čüą╗ąĄą┤čāčÄčēąĄąĄ: Wait 0: ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą▓ąŠąĘąĮąĖą║ą░ąĄčé ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ, ąĄčüą╗ąĖ čüąĖą│ąĮą░ą╗ ą┐ąĄčĆąĄčüąĄą║ą░ąĄčé ą▓čŗą▒čĆą░ąĮąĮčŗą╣ ą┐ąŠčĆąŠą│, Wait 1: ąĄčüą╗ąĖ čüąĖą│ąĮą░ą╗ ą┐ąĄčĆąĄčüąĄą║ą░ąĄčé ą▓čŗą▒čĆą░ąĮąĮčŗą╣ ą┐ąŠčĆąŠą│, ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čāą┤ąĄčé ąŠčéčüčćąĖčéą░ąĮąŠ ąĘą░ą┤ą░ąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čŗą▒ąŠčĆąŠą║ (ąĘą░ą┐ąĖčüą░ąĮąŠ ą▓ ą▒ąĖčéčŗ D6 .. D0 čĆąĄą│ąĖčüčéčĆą░ INT1_DURATION) ąĮą░ ą▓čŗą▒čĆą░ąĮąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ ą┤ą░ąĮąĮčŗčģ ODR.
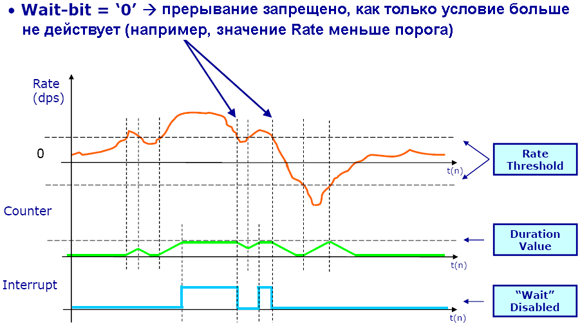
ąĀąĖčü. 20. Wait ąĘą░ą┐čĆąĄčēąĄąĮ

ąĀąĖčü. 21. Wait čĆą░ąĘčĆąĄčłąĄąĮ
[8. ąśąĮč乊čĆą╝ą░čåąĖčÅ ąŠą▒ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╝ ą║ąŠčĆą┐čāčüąĄ]
ą¦č鹊ą▒čŗ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆąĖčéčī čĆą░ąĘąĮčŗą╝ 菹║čüą┐ą╗čāą░čéą░čåąĖąŠąĮąĮčŗą╝ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝, ą║ąŠą╝ą┐ą░ąĮąĖčÅ ST ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé L3G4200D ą▓ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą▓ą░čĆąĖą░ąĮčéą░čģ ą║ąŠčĆą┐čāčüąŠą▓ ECOPACK┬«. ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ECOPACK┬«, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čéčĆąĄą▒ąŠą▓ą░ąĮąĖą╣ ąĖ čüčéą░čéčāčü ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░ ą┤ąŠčüčéčāą┐ąĮčŗ ąĮą░ čüą░ą╣č鹥 www.st.com [1]. ECOPACK čÅą▓ą╗čÅąĄčéčüčÅ č鹊čĆą│ąŠą▓ąŠą╣ ą╝ą░čĆą║ąŠą╣ ą║ąŠą╝ą┐ą░ąĮąĖąĖ ST.
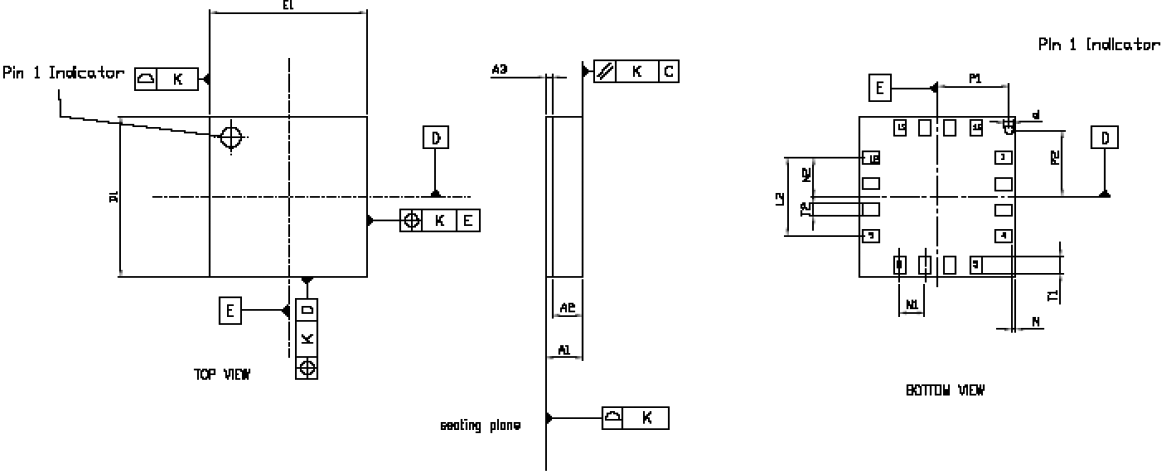
ąĀąĖčü. 22. LGA-16: ą╝ąĄčģą░ąĮąĖč湥čüą║ąĖąĄ ą┤ą░ąĮąĮčŗąĄ ąĖ čĆą░ąĘą╝ąĄčĆčŗ ą║ąŠčĆą┐čāčüą░
| ąĀą░ąĘą╝ąĄčĆ |
mm |
 |
| Min. |
Typ. |
Max. |
| A1 |
|
|
1.100 |
| A2 |
|
0.855 |
|
| A3 |
|
0.200 |
|
| d |
|
0.300 |
|
| D1 |
3.850 |
4.000 |
4.150 |
| E1 |
3.850 |
4.000 |
4.150 |
| L2 |
|
1.950 |
|
| M |
|
0.100 |
|
| N1 |
|
0.650 |
|
| N2 |
|
0.975 |
|
| P1 |
|
1.750 |
|
| P2 |
|
1.525 |
|
| T1 |
|
0.400 |
|
| T2 |
|
0.300 |
|
| k |
|
0.050 |
|
[ąĪą╗ąŠą▓ą░čĆąĖą║]
ASIC application-specific integrated circuit, ąĖąĮč鹥ą│čĆą░ą╗čīąĮą░čÅ čüčģąĄą╝ą░ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ. ą×čéąĮąŠčüąĖčéčüčÅ ą║ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╝čā ą░ą┐ą┐ą░čĆą░čéąĮąŠą╝čā čāčüčéčĆąŠą╣čüčéą▓čā ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ.
CMOS Complementary metalŌĆōoxideŌĆōsemiconductor, č鹥čģąĮąŠą╗ąŠą│ąĖčÅ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░ ąĖąĮč鹥ą│čĆą░ą╗čīąĮčŗčģ ą┐ąŠą╗čāą┐čĆąŠą▓ąŠą┤ąĮąĖą║ąŠą▓čŗčģ ą╝ąĖą║čĆąŠčüčģąĄą╝.
dps degree per second, čüą║ąŠą╗čīą║ąŠ ą│čĆą░ą┤čāčüąŠą▓ ą▓ čüąĄą║čāąĮą┤čā - ąĄą┤ąĖąĮąĖčåą░ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ čāą│ą╗ąŠą▓ąŠą╣ čüą║ąŠčĆąŠčüčéąĖ.
ECOPACK┬« ą┤ąŠą▒čĆąŠą▓ąŠą╗čīąĮą░čÅ čüčéčĆą░č鹥ą│ąĖč湥čüą║ą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą║ąŠą╝ą┐ą░ąĮąĖąĖ ST, ąĮą░čćą░čéą░čÅ ą▓ 2000 ą│ąŠą┤čā ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ čāą┤ą░ą╗ąĖčéčī ąĘą░ą│čĆčÅąĘąĮąĄąĮąĖąĄ ąĖ ąŠą┐ą░čüąĮčŗąĄ ą▓ąĄčēąĄčüčéą▓ą░ ąŠčé ą▓čüąĄčģ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ąĄąĮąĮčŗčģ ą╗ąĖąĮąĖą╣. ąŁč鹊 ą║čĆą░ąĄčāą│ąŠą╗čīąĮčŗą╣ ą║ą░ą╝ąĄąĮčī ą▓ čüčéčĆą░č鹥ą│ąĖąĖ ą║ąŠą╝ą┐ą░ąĮąĖąĖ ST čü čåąĄą╗čīčÄ ą▒čŗčéčī ą╗ąĖą┤ąĄčĆąŠą╝ ą▓ ą┐ąĄčĆąĄčģąŠą┤ąĄ ą║ ą▒ąĄąĘą▓čĆąĄą┤ąĮąŠą╣ ą┤ą╗čÅ ąŠą║čĆčāąČą░čÄčēąĄą╣ čüčĆąĄą┤čŗ čāą┐ą░ą║ąŠą▓ą║ąĄ ą┤ąĄčéą░ą╗ąĄą╣ ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝. ąÆ ą║ąŠąĮč鹥ą║čüč鹥 čŹč鹊ą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ST čĆą░ąĘą▓ąĖą▓ą░ąĄčé č鹥čģąĮąĖč湥čüą║ąĖąĄ čĆąĄčłąĄąĮąĖčÅ ą╝ąĖčĆąŠą▓ąŠą│ąŠ ą║ą╗ą░čüčüą░ - čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąĮčŗąĄ, čćč鹊ą▒čŗ ą┐čĆąŠą│čĆąĄčüčüąĖą▓ąĮąŠ čāą┤ą░ą╗ąĖčéčī čéčÅąČąĄą╗čŗąĄ ą╝ąĄčéą░ą╗ą╗čŗ ąĖ ą│ą░ą╗ąŠą│ąĄąĮčŗ ąĖąĘ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░.
ESD Electrostatic discharge - čĆą░ąĘčĆčÅą┤ čüčéą░čéąĖč湥čüą║ąŠą│ąŠ 菹╗ąĄą║čéčĆąĖč湥čüčéą▓ą░.
FIFO čüč鹥ą║ ą┐ą░ą╝čÅčéąĖ (ą▒čāč乥čĆ), čĆą░ą▒ąŠčéą░čÄčēąĖą╣ ą┐ąŠ ą┐čĆąĖąĮčåąĖą┐čā ą┐ąĄčĆą▓čŗą╣ ą▓ąŠčłąĄą╗, ą┐ąĄčĆą▓čŗą╣ ą▓čŗčłąĄą╗ (First Input, First Output, FIFO).
Green ąĘąĄą╗ąĄąĮčŗą╣, ąŠą▒ąŠąĘąĮą░čćą░ąĄčé čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆąĄąĮąĖąĄ čüčéą░ąĮą┤ą░čĆčéą░ą╝ 菹║ąŠą╗ąŠą│ąĖčćąĮąŠčüčéąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤čüčéą▓ą░.
I2C čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü, čćą░čüč鹊 ą┐čĆąĖą╝ąĄąĮčÅąĄą╝čŗą╣ ą▓ ą▒čŗč鹊ą▓ąŠą╣ ąĖ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮąŠą╣ ą░ą┐ą┐ą░čĆą░čéčāčĆąĄ.
LSB, MSB least significant bit (čüą░ą╝čŗą╣ ą╝ą╗ą░ą┤čłąĖą╣ ą▒ąĖčé), most significant bit (čüą░ą╝čŗą╣ čüčéą░čĆčłąĖą╣ ą▒ąĖčé).
MEMS Micro-Electro-Mechanical Systems, ą╝ąĖą║čĆąŠčŹą╗ąĄą║čéčĆąŠąĮąĮčŗąĄ ą╝ąĄčģą░ąĮąĖč湥čüą║ąĖąĄ čüąĖčüč鹥ą╝čŗ - ąŠą▒čēąĄąĄ ąŠą▒ąŠąĘąĮą░č湥ąĮąĖąĄ č鹥čģąĮąŠą╗ąŠą│ąĖą╣, čüąŠąĘą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ą╝ąĖąĮąĖą░čéčÄčĆąĖąĘą░čåąĖąĖ 菹╗ąĄą║čéčĆąŠą╝ąĄčģą░ąĮąĖč湥čüą║ąĖčģ 菹╗ąĄą╝ąĄąĮč鹊ą▓ čĆą░ą┤ąĖąŠą░ą┐ą┐ą░čĆą░čéčāčĆčŗ.
MMI man-machine interface - ąĖąĮč鹥čĆč乥ą╣čü ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖčÅ ą╝ąĄąČą┤čā č湥ą╗ąŠą▓ąĄą║ąŠą╝ ąĖ ą╝ą░čłąĖąĮąŠą╣.
PLL, phase locked loop - ążąÉą¤ą¦, čäą░ąĘąŠą▓ą░čÅ ą░ą▓č鹊ą┐ąŠą┤čüčéčĆąŠą╣ą║ą░ čćą░čüč鹊čéčŗ.
RoHS Restriction of Hazardous Substances - ą┤ąĖčĆąĄą║čéąĖą▓ą░, ąŠą│čĆą░ąĮąĖčćąĖą▓ą░čÄčēą░čÅ čüąŠą┤ąĄčƹȹ░ąĮąĖąĄ ą▓čĆąĄą┤ąĮčŗčģ ą▓ąĄčēąĄčüčéą▓, ą▒čŗą╗ą░ ą┐čĆąĖąĮčÅčéą░ ąĢą▓čĆąŠą┐ąĄą╣čüą║ąĖą╝ čüąŠčĹʹŠą╝ ą▓ č乥ą▓čĆą░ą╗ąĄ 2003 ą│ąŠą┤ą░.
SAD Slave ADdress, ą░ą┤čĆąĄčü ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮą░ čłąĖąĮąĄ I2C.
SPI čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü, čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĮčŗą╣ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą▓ąĮąĄčłąĮąĖčģ ą╝ąĖą║čĆąŠčüčģąĄą╝ ą║ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ą╝.
ążąØą¦, LPF, ążąÆą¦, HPF čäąĖą╗čīčéčĆčŗ ąĮąĖąĘą║ąĖčģ čćą░čüč鹊čé (Low Pass Filter) ąĖ ą▓čŗčüąŠą║ąĖčģ čćą░čüč鹊čé (High Pass Filter).
[ąĪčüčŗą╗ą║ąĖ]
1. L3G4200D site:st.com.
2. ąÆčŗą▒ąŠčĆ ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┤ą░čéčćąĖą║ąŠą▓ ą┤ą▓ąĖąČąĄąĮąĖčÅ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą£ąŁą£ąĪ site:russianelectronics.ru.
3. L3G4200D Breakout: ą┐ąĄčĆąĄčģąŠą┤ąĮą░čÅ ą┐ą╗ą░čéą░ ą┤ą╗čÅ čéčĆąĄčģąŠčüąĄą▓ąŠą│ąŠ ą│ąĖčĆąŠčüą║ąŠą┐ą░. |