| L3G4200D: трехосевой цифровой гироскоп |
|
| Добавил(а) microsin | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
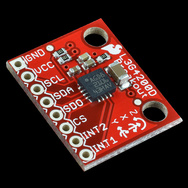
Микросхема L3G4200D компании STMicroelectronics (ST) представляет собой миниатюрный сверхстабильный датчик перемещений в 3D пространстве, изготовленный по MEMS технологии. Он может работать как гироскоп в авионике, автомобильной промышленности и других приложениях, которые требуют определения положения объекта в пространстве. Далее приведен перевод даташита L3G4200D, непонятные термины и сокращения см. в разделе Словарик, в конце статьи.
[Основные особенности сенсора L3G4200D] • Три выбираемые полные шкалы (250/500/2000 dps). Области применения L3G4200D: • Игры и устройства ввода для систем виртуальной реальности. [Общее описание L3G4200D] L3G4200D является трехосевым датчиком угловых перемещений с низким энергопотреблением, обладающим также чрезвычайной стабильностью нулевого уровня и высокой точностью показаний, которая сохраняется при изменениях температуры и длительной работе датчика. В микросхему, кроме чувствительного элемента, встроен интерфейс I2C/SPI, через который можно передать во внешний мир скорость изменения угла по трем осям (этот интерфейс используется для подключения к внешнему микроконтроллеру). Чувствительный элемент датчика изготовлен с использованием специальной микромеханической обработки, разработанной STMicroelectronics, чтобы выполнить инерционные сенсоры и актуаторы на кремниевых пластинах. Внешний цифровой интерфейс реализован по CMOS-технологии, позволяющей создать высокоинтегрированный дизайн, наилучшим образом подстроенный под характеристики чувствительного элемента датчика. L3G4200D имеет полные шкалы ±250/±500/±2000 dps, и может измерять скорость изменения угла в выбранной пользователем полосе частот. L3G4200D выпускается в пластмассовом корпусе land grid array (LGA) и может работать в диапазоне температур -40°C .. +85°C. Таблица 1. Варианты поставки L3G4200D.
[1. Блок-схема и описание выводов L3G4200D]
Рис.1. Блок-схема L3G4200D Пояснения к блок-схеме: MUX мультиплексор сигналов. Вибрация измерительной структуры обрабатывается схемой драйвера в цикле обратной связи. Измеряемый сигнал фильтруется и появляется на выходе как цифровые данные. 1.1. Описание выводов
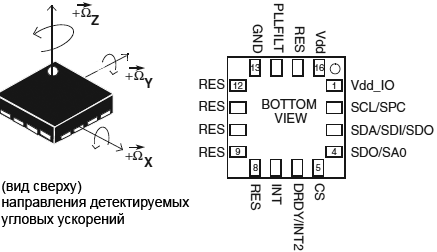
Рис. 2. Подключение в внешним выводам корпуса. Таблица 2. Описание выводов.
Примечания к таблице: I цифровой вход.
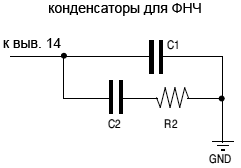
Рис. 3. Схема внешнего ФНЧ Примечание: максимально допустимое напряжение на выводе 14 PLLFILT равно напряжению питания Vdd. Таблица 3. Номиналы компонентов для ФНЧ
[2. Механические и электрические характеристики] 2.1 Механические характеристики Таблица 4. Механические характеристики, приведенные для Vdd=3V и T=25°C, если не указано что-то другое(1).
Примечания: 1. Датчик калибровался на заводе при напряжении питания Vdd=3V. Рабочий диапазон питающих напряжений указан в таблице 5. 2.2. Электрические характеристики Таблица 5. Электрические характеристики, приведенные для Vdd=3V и T=25°C, если не указано что-то другое(1).
Примечания: 1. Датчик калибровался на заводе при напряжении питания Vdd=3V. 2.3. Температурные характеристики сенсора Таблица 6. Температурные характеристики, приведенные для Vdd=3V и T=25°C, если не указано что-то другое(1).
Примечания: 1. Датчик калибровался на заводе при напряжении питания Vdd=3V. 2.4. Характеристики интерфейса обмена данными 2.4.1. SPI - serial peripheral interface Приведены обычные рабочие значения для Vdd и Top. На шине SPI микросхема L3G4200D является подчиненным устройством (SPI slave). Таблица 7. Интервалы времени для подчиненного устройства SPI
Примечание 1: значения гарантируются на тактовой частоте SPI 10 МГц с 4 и 3 сигналами на основании результатов расчетов. В производстве значения не проверяются.
Рис. 4. Временные диаграммы SPI slave Примечание: измерения были сделаны в точках 0.2 и 0.8 относительно Vdd_IO, как для входов, так и для выходов. 2.4.2. I2C интерфейс Приведены обычные рабочие значения для Vdd и Top. На шине I2C микросхема L3G4200D является подчиненным устройством (slave). Таблица 8. Интервалы времени для подчиненного устройства I2C
Примечания: 1. I2C standard mode - стандартный скоростной режим I2C, fast mode - ускоренный режим. Данные основаны на требованиях стандарта протокола I2C, и они не тестируются в производстве.
Рис. 5. Временные диаграммы I2C slave Примечание: измерения для сигналов SDA и SDC были сделаны в точках 0.2 и 0.8 относительно Vdd_IO. 2.5. Предельные абсолютные значения параметров (Absolute maximum ratings) Стрессовые значения, которые превышают значения в таблице "Absolute maximum ratings" могут привести к необратимому повреждению устройства. Предельные значения параметров приведены только в качестве рейтинга, и не подразумевается работа устройства с такими значениями. Работа в условиях предельных максимальных значений может повлиять на надежность устройства. Таблица 9. Absolute maximum ratings
2.6. Используемая терминология 2.6.1. Чувствительность Гироскоп по скорости изменения угла является устройством, которое положительные выходные значения для поворота против часовой стрелки вокруг измеряемых осей. Чувствительность описывает усиление сенсора и может быть определена заданием ускорения изменения на определенный угол. Микросхема спроектирована так, что измеряемые значения изменяются очень незначительно с течением времени и под воздействием изменений температуры. 2.6.2. Нулевой уровень (Zero-rate level) Нулевой уровень описывает реальные выходные данные, когда нет угловых изменений. Уровень нуля для точных MEMS-сенсоров в некоторых случаях является результатом стрессовых нагрузок на сенсор и, таким образом, уровень нуля может значительно изменяться после монтажа сенсора на печатную плату или после воздействия дополнительных механических нагрузок. Как и чувствительность, уровень нуля также очень мало зависит от времени работы и температуры. 2.6.3. Стабильность по времени и температуре Благодаря уникальной технологии и оптимизированному дизайну гироскопы компании ST могут гарантировать превосходные значения для механической массы MEMS и качество интерфейса ASIC, что распространяется на беспрецедентный уровень стабильности в работе по температуре и времени. По параметрам ухода чувствительности и нулевого уровня L3G4200D превосходит имеющиеся на рынке аналоги в десятки раз. Это позволяет пользователю устранить необходимость в последующих компенсациях и калибровке и может ускорить выход на рынок готовой продукции, упростить разработку, получить высокие эксплуатационные параметры и в конечном счете сохранить деньги. 2.7. Информация по пайке Корпус LGA совместим со стандартами ECOPACK®, RoHS и "Green". Он квалифицирован по тепловому сопротивлению для пайки по стандарту JEDEC J-STD-020. При пайке оставьте вывод "pin 1 Indicator" неподключенным. Посадочное место (Land pattern) и рекомендации по пайке можно получить на сайте www.st.com [1]. [3. Основные цифровые блоки L3G4200D] 3.1. Блок-схема
Рис. 6. Блок-схема L3G4200D 3.2. Буфер FIFO В микросхеме L3G4200D имеется встроенный 32-слотовый, 16-битный буфер данных FIFO для каждого из трех выходных каналов: уклонение (yaw), подача (pitch) и скат (roll). Этот буфер позволяет экономить на энергопотреблении в системе, так как хосту (управляющему микроконтроллеру) не нужно постоянно опрашивать сенсор для получения данных. Вместо этого хост может при необходимости выводиться из сна и быстро считывать значимые данные из FIFO. Этот буфер может работать в 5 различных режимах. Каждый режим выбирается битами FIFO_MODE в регистре FIFO_CTRL_REG. Могут быть разрешены события программируемого уровня заполнения буфера (watermark level), FIFO_empty или FIFO_Full, которые могут выдавать сигнал на вывод DRDY/INT2 (конфигурируется через CTRL_REG3), и информация о событии доступна в FIFO_SRC_REG. Сигнал может использоваться для прерывания микроконтроллера или вывода его из сна. Уровень заполнения буфера конфигурируется битами WTM4:0 в регистре FIFO_CTRL_REG. 3.2.1. Bypass mode В режиме байпас буфер FIFO не работает, и по этой причине остается пустым. Как показано на рис. 7, для каждого канала используется только первый адрес. Остальные слоты FIFO пусты (empty). Когда поступят новые данные, то старые данные будут перезаписаны.
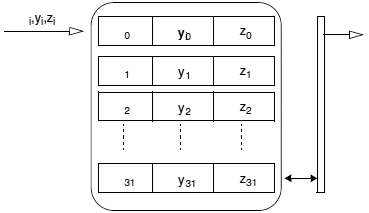
Рис. 7. Работа FIFO в режиме Bypass 3.2.2. FIFO mode В режиме FIFO данные всех 3 каналов сохраняются в FIFO. Может быть разрешено прерывание (битом I2_WMK в регистре CTRL_REG3) по заполнению буфера до определенного уровня (watermark interrupt). Уровень заполнения указывается в битах WTM 4:0 регистра FIFO_CTRL_REG. FIFO продолжит заполнение, пока не переполнится (32 слота 16-битных данных для каналов yaw, pitch и roll). Когда FIFO переполнится, до сбор данных с входных каналов остановится. Чтобы возобновить сбор данных, необходимо записать регистр FIFO_CTRL_REG и перевести FIFO в режим bypass. Работа режима FIFO показана на рис. 8.
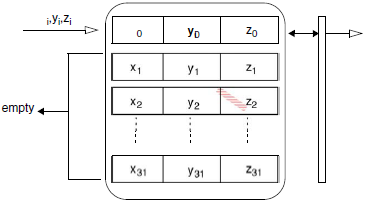
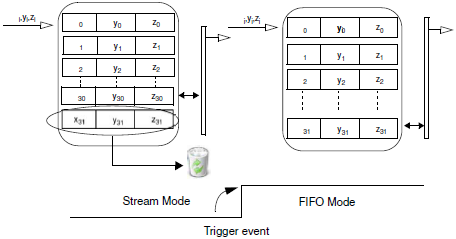
Рис. 8. Работа режима FIFO 3.2.3. Потоковый режим (Stream mode) Этот режим работает так же, как и режим FIFO, отличие только в том, что по заполнении FIFO (32 слота 16-битных данных каналов yaw, pitch и roll) старые данные будут отбрасываться по мере поступления новых данных. Как и в режиме FIFO, может быть запрограммированы события watermark level для генерации прерываний сигналом на ножке DRDY/INT2 (конфигурируется через CTRL_REG3). Stream mode показан на рис. 9.
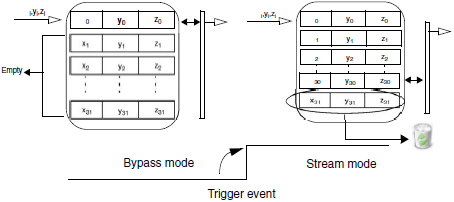
Рис. 9. Работа режима Stream mode 3.2.4. Bypass-to-stream mode В режиме bypass-to-stream FIFO начинает работу в режиме bypass, и как только наступит событие (относящееся к событиям, заданным в регистре INT1_CFG), FIFO начнет работать в stream mode (см. рис. 10).
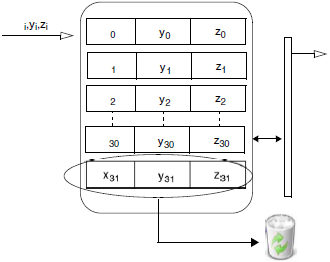
Рис. 10. Работа режима Bypass-to-stream Пояснение к рисунку: Trigger event означает срабатывание события, которое может быть настроено на генерацию прерывания для хоста. 3.2.5. Stream-to-FIFO mode В режиме Stream-to-FIFO данные измерений каналов yaw, pitch и roll сохраняются в FIFO. Событие watermark interrupt может быть разрешено на ножке DRDY/INT2 путем установки бита I2_WTM в регистре CTRL_REG3. Как и в других режимах, это прерывание сработает, когда FIFO заполнится до уровня, запрограммированного битами WTM4:0 в регистре FIFO_CTRL_REG. FIFO продолжит заполнять свои ячейки (32 слота 16-битных данных для каналов yaw, pitch и roll) до переполнения. Когда переполнение произойдет, FIFO отбросит старые данные при поступлении новых данных. При наступлении событий (связанных с регистром INT1_CFG) FIFO начнет работать в режиме FIFO (см. рис. 11).
Рис. 11. Работа режима Stream-to-FIFO 3.2.6. Получение данных из FIFO Данные FIFO считываются из регистров OUT_X, OUT_Y и OUT_Z. Когда FIFO в потоковом режиме (stream), в режиме триггера или FIFO, операция чтения регистров OUT_X, OUT_Y или OUT_Z предоставляет данные, сохраненные в FIFO. Каждый раз, когда данные прочитаны из FIFO, самые старые данные каналов pitch, roll и yaw помещаются в регистры OUT_X, OUT_Y и OUT_Z, и могут быть использованы обе операции чтения - одиночное чтение (single read) и ускоренное чтение (read_burst, X,Y и Z с автоинкрементом адреса). В режиме read_burst, когда данные прочитаны из OUT_Z_H, система снова начнет чтение информации по адресу OUT_X_L. [4. Указания по применению]
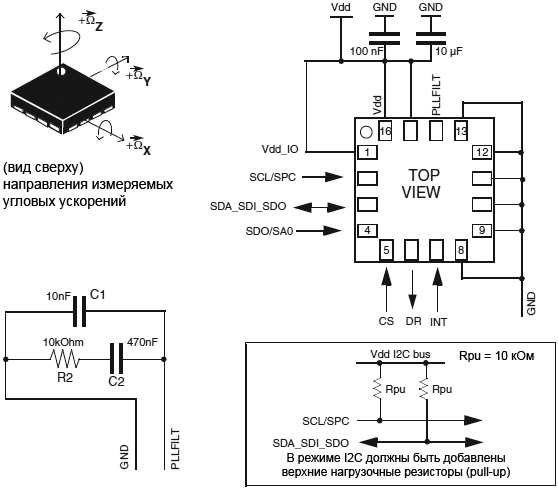
Рис. 12. Электрические соединения L3G4200D и номиналы внешних компонентов Развязывающие конденсаторы по питанию (керамические на 100 nF или полиэстеровые 10 uF) должны быть размещены как можно ближе к устройству (как и делают обычно на практике). Если шины питания Vdd и Vdd_IO не соединены друг с другом, то отдельные конденсаторы между Vdd - земля и Vdd_IO - земля (с такими же номиналами) также должны размещаться максимально близко к устройству. В микросхеме L3G4200D имеется узел PLL (phase locked loop) для синхронизации интерфейсов (внешнего и чувствительного датчика). Для этого на ножку PLLFILT должны быть добавлены конденсаторы и резисторы (как показано на рис. 12) - чтобы реализовать ФНЧ второго порядка для работы PLL. В таблице 3 приведены номиналы деталей ФНЧ PLL. [5. Цифровые интерфейсы] Встроенные в L3G4200D регистры доступны как через интерфейс I2C, так и через интерфейс SPI - по выбору пользователя. Последний может быть сконфигурирован программно для работы в 3- или 4-проводном режиме. Последовательные интерфейсы привязаны к одним и тем же ножкам микросхемы. Чтобы выбрать вариант работы с интерфейсом I2C, на вывод CS нужно подать лог. 1 (например, CS может быть подключен к шине питания Vdd_IO). Таблица 11. Описание выводов последовательного интерфейса
5.1. Последовательный интерфейс I2C Микросхема L3G4200D на шине I2C является подчиненным устройством (slave). I2C устроена так, что может записывать данные в регистры, чье содержание может быть также прочитано обратно. Соответствующая терминология I2C приведена в таблице ниже. Таблица 12. Термины I2C
Имеется два сигнала, связанные с шиной I2C: последовательные такты (serial clock line, SCL) и последовательные данные (serial data line, SDA). Сигнал SDA является двунаправленным, и используется для отправки и приема данных через интерфейс. Оба сигнала SDA и SCL должны быть подтянуты к шине Vdd_IO через внешние нагрузочные резисторы (pull-up). Когда шина свободна, то оба сигнала находятся в состоянии лог. 1. Интерфейс I2C совместим со стандартами быстрого режима (fast mode, частота тактов 400 кГц) и нормального режима. 5.1.1. Как работает I2C Транзакции на шине начинаются с сигнала START (ST). Событие START определено как переход SDA от состояния HIGH к состоянию LOW (под HIGH и LOW подразумеваются состояния лог. 1 и лог. 0 соответственно), когда SCL находится в HIGH. После того, как START был инициирован мастером шины, шина считается занятой. Следующий байт данных передается после события START, и он содержит адрес подчиненного устройства в первых 7 битах, и 8 бит говорит, будет мастер получать данные от подчиненного устройства или же данные будут передаваться в подчиненное устройство. Когда адрес передан, то каждое устройство, подключенное к этой шине в системе, сравнивает первые 7 бит после события START со своим собственным адресом. Если адреса совпали, то устройство определяет, что именно с ним будет работать мастер (таким образом, на одной шине I2C может быть подключено до 8 устройств с разным адресом). Адрес подчиненного устройства (slave address, SAD), связанный с L3G4200D, равен 110100xb. Ножка SDO может использоваться для того, чтобы задать последний LSB бит (который помечен x) адреса устройства. Если на SDO лог. 1 (например, SDO подключен к шине питания), то бит LSB адреса 1, и адрес будет 1101001b. И наоборот, если на SDO подан лог. 0 (он подключен к земле), то LSB будет равен 0, адрес будет 1101000b. Этот метод позволяет подключить на одну шину I2C два разных гироскопа L3G4200D. Передача данных по шине I2C требует обязательного подтверждения (acknowledge). Для этого передатчик должен освободить линию SDA во время импульса acknowledge. Приемник должен перевести SDA в состояние LOW, и удерживать её в таком состоянии по время HIGH состояния импульса такта для бита acknowledge. Приемник, который был адресован, должен обязательно выдавать такое подтверждения после каждого принятого байта данных. I2C, встроенный в L3G4200D, ведет себя как подчиненное устройство, так что L3G4200D должно придерживаться такого же протокола. После события START (ST), мастером отправляется адрес подчиненного устройства. Как только был возвращен сигнал подтверждения от подчиненного устройства (slave acknowledge, SAK), 8-битная часть адреса считается переданной. Бит 7 LSB представляет реальный адрес регистра, в то время как MSB разрешает автоинкремент адреса. Если MSB в поле SUB равен 1, то SUB (адрес регистра) будет автоматически инкрементироваться, чтобы позволить прочитать/записать несколько байт данных. Как уже было упомянуто, адрес подчиненного устройства завершается битом чтения/записи (read/write bit). Если этот бит 1, (чтение, read), повторяющееся событие старта (REPEATED START, SR) должно выдаваться после двух байт субадреса; если этот бит 0 (запись, write), то мастер передает данные к подчиненному устройству в неизменном направлении. Таблица 13 описывает, как составляются паттерны SAD+read/write bit, перечислены все возможные конфигурации. Таблица 13. Паттерны (данные) SAD+read/write (чтение/запись)
Таблица 14. Передача, когда мастер записывает один байт в подчиненное устройство
Таблица 15. Передача, когда мастер записывает несколько байт в подчиненное устройство
Таблица 16. Передача, когда мастер получает (читает) один байт данных из подчиненного устройства
Таблица 17. Передача, когда мастер получает (читает) несколько байт данных из подчиненного устройства
Данные передаются побайтно (DATA). Каждая передача данных содержит 8 бит. За один трансфер может быть передано бесконечное количество байт. Данные передаются старшим битом (MSB) вперед. Если приемник не может принять другой полный байт, пока выполняется в приемнике какая-то другая функция, то приемник должен удержать тактовую линию SCL в состоянии LOW, чтобы принудительно перевести передатчик в состояние ожидания. Передача данных продолжится только тогда, когда приемник будет готов к другому байту и освободит линию данных. Если приемник подчиненного устройства не подтвердил slave address (к примеру, приемник пока не может принять по причине выполнения каких-то внутренних функций в реальном времени) линия данных SDA должна оставаться в состоянии HIGH, отпущенной подчиненным устройством. Мастер может оборвать передачу. Переход от LOW к HIGH на линии SDA, когда SCL находится в состоянии HIGH, определен как событие STOP. Каждая передача данных должна быть завершена событием STOP (SP). Чтобы прочитать несколько байтов, необходимо заполнить MSB поля субадреса. Другими словами, поле SUB(7) должно быть равно 1, при этом SUB(6-0) представляют адрес первого регистра, который будет прочитан. В представленном формате обмена MAK означает "master acknowledge" (подтверждение для мастера) NMAK означает "no master acknowledge" (нет подтверждения для мастера). 5.2. Шина интерфейса SPI L3G4200D работает на шине SPI также как подчиненное устройство. SPI позволяет записывать и читать регистры устройства. Последовательный интерфейс SPI позволяет обмениваться данными с внешним миром через 4 провода: CS, SPC, SDI и SDO.
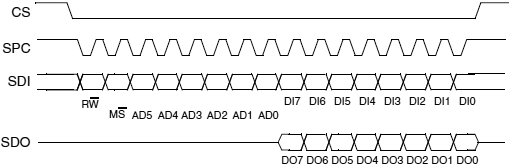
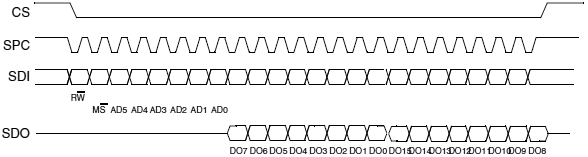
Рис. 13. Протокол чтения и записи SPI CS является сигналом разрешения работы последовательного порта, и он управляется мастером SPI. Он переходит на уровень лог. 0 в начале передачи, и возвращается к лог. 1 по окончании передачи. SPC это сигнал тактов, и он также выдается мастером SPI. Такты перестают выдаваться, когда CS в лог. 1, (передачи нет). Сигналы SDI и SDO являются соответственно входом и выходом последовательных данных. Эти сигналы данных меняют свое значение по спаду уровня (переходу от лог. 1 к лог. 0) тактов SPC, и должны обрабатываться по фронту (переходу от лог. 0 к лог. 1) тактов SPC. Обе команды, как чтения регистра так и записи регистра завершаются за 16 импульсов тактов SPC, или за количество байт умноженное на 8 в случае чтения/записи нескольких байт. Длительность бита равна времени между двумя спадами сигнала SPC. Первый бит (бит 0) начинается по первому спаду SPC после спада CS, в то время как последний бит (бит 15, бит 23 и т. д.), начинается по последнему спаду SPC сразу перед нарастанием уровня CS. Bit 0: бит чтения/записи (RW bit). Когда 0, данные DI(7:0) будут записаны в устройство. Когда 1, данные DO(7:0) будут прочитаны из устройства. В последнем случае микросхема управляет выходом SDO при начале бита 8. При нескольких командах чтения/записи, добавляются последующие блоки по 8 периодов тактов. Когда MS bit равен 0, то используемый адрес остается тот же самый для каждого блока. Когда MS bit равен 1, используемый для чтения/записи адрес инкрементируется с каждым новым блоком. Функционирование и поведение сигналов SDI и SDO остаются неизменными. 5.2.1. SPI read (чтение)
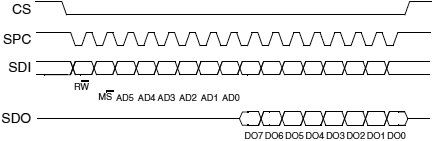
Рис. 14. Протокол чтения SPI Команда SPI read может быть выполнена за 16 тактовых импульсов. Команда чтения нескольких байт выполняется путем добавления блоков по 8 тактовых импульсов к предыдущим блокам. Bit 0: READ bit, равный 1.
Рис. 15. Протокол чтения нескольких байт SPI (пример для 2 байт) 5.2.2. SPI write (запись)
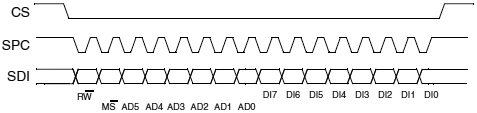
Рис. 16. Протокол записи SPI Команда SPI write может быть выполнена за 16 тактовых импульсов. Команда записи нескольких байт выполняется путем добавления блоков по 8 тактовых импульсов к предыдущим блокам. Bit 0: WRITE bit, равный 0.
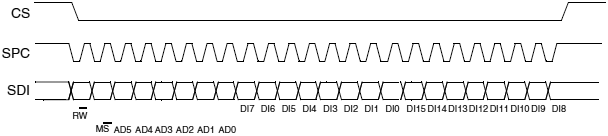
Рис. 17. Протокол записи нескольких байт SPI (пример для 2 байт) 5.2.3. SPI read в 3-проводном режиме В трехпроводный режим (3-wire mode) можно войти, если установить в регистре CTRL_REG2 бит SIM (SPI serial interface mode selection, выбор режима работы интерфейса SPI) в состояние лог. 1.
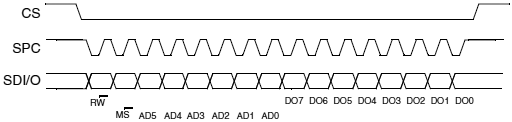
Рис. 18. Протокол чтения SPI в 3-проводном режиме Команда SPI read может быть выполнена за 16 тактовых импульсов: Bit 0: READ bit, равный 1. В 3-проводном режиме доступна также команда чтения нескольких байт (multiple read command). [6. Карта регистров L3G4200D (Output register mapping)] Таблица ниже предоставляет список 8-битных регистров, встроенных в L3G4200D, вместе с их адресами. Таблица 18. Карта памяти регистров
Регистры, помеченные как Зарезервировано, нельзя изменять. Запись в эти регистры может привести к необратимому повреждению устройства. Содержимое регистров, которое загружается при старте системы, не должно изменяться. Они содержать значения, откалиброванные на заводе. Их содержимое будет автоматически восстановлено при подаче питания на устройство. [7. Описание регистров] Устройство содержит набор регистров, которые используются для управления его поведением и для получения данных ускорения. Адреса регистров, состоящие из 7 битов, используются для идентификации их и записи данных через последовательный интерфейс. 7.1. WHO_AM_I (0Fh) Таблица 19. Регистр WHO_AM_I (кто я)
Это регистр, который идентифицирует само устройство L3G4200D. 7.2. CTRL_REG1 (20h) Таблица 20. Регистр CTRL_REG1
Таблица 21. Описание битов регистра CTRL_REG1 DR1-DR0 Выбор скорости выходной оцифровки сигнала (Output Data Rate, ODR). См. таблицу 22. DR < 1:0 > используется для установки выбора ODR (скорость выходных данных). BW < 1:0 > используется для выбора полосы пропускания (Cut-Off, частота среза цифрового фильтра). В следующей таблице показаны все результирующие частоты в комбинации битов DR и BW. Таблица 22. Конфигурационные установки DR и BW
Комбинации PD, Zen, Yen, Xen используются для установки устройства в разные режимы (power down, выключение / normal, рабочий режим / sleep mode, режим сна) в соответствии со следующей таблицей. Таблица 23. Выбор конфигурации режима питания
7.3. CTRL_REG2 (21h) Таблица 24. Регистр CTRL_REG2
Примечание 1: значение загружается при включении питания, и далее не должно изменяться. Таблица 25. Описание битов регистра CTRL_REG2 HPM1-HPM0 Выбор режима работы ФВЧ. Значение по умолчанию 00, см. также таблицу 26. Таблица 26. Конфигурация режима ФВЧ
Таблица 27. Конфигурация частоты среза ФВЧ (Гц)
7.4. CTRL_REG3 (22h) Таблица 28. Регистр CTRL_REG3
Таблица 29. Описание битов регистра CTRL_REG3 I1_Int1 Разрешение прерывания на выводе INT1. Значение по умолчанию 0 (0: запрещено; 1: разрешено). 7.5. CTRL_REG4 (23h) Таблица 30. Регистр CTRL_REG4
Таблица 31. Описание битов регистра CTRL_REG4 BDU Block Data Update (обновление блока данных). Значение по умолчанию 0 (0: непрерывное обновление; 1: выходные регистры не будут обновлены, пока не будут прочитаны старший и младший байты). Таблица 32. Конфигурация режима самотестирования
Примечание 1: знак DST (абсолютное значение в таблице 4). 7.6. CTRL_REG5 (24h) Таблица 33. Регистр CTRL_REG5
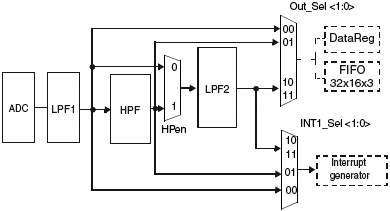
Таблица 34. Описание битов регистра CTRL_REG5 BOOT Перезагрузить содержимое памяти. Значение по умолчанию 0 (0: нормальный режим, 1: перезагрузить память). Рис. 19. Блок-схема конфигурации INT1_Sel и Out_Sel
Таблица 35. Установка конфигурации Out_Sel
Таблица 36. Установка конфигурации INT_SEL
7.7. REFERENCE/DATACAPTURE (25h) Таблица 37. Регистр REFERENCE
Таблица 38. Описание битов регистра REFERENCE Ref7-Ref0 Образцовое значение для генерирования прерывания. Значение по умолчанию 0. 7.8. OUT_TEMP (26h) Таблица 39. Регистр OUT_TEMP
Таблица 40. Описание битов регистра OUT_TEMP Temp7-Temp0 Данные температуры. 7.9. STATUS_REG (27h) Таблица 41. Регистр STATUS_REG
Таблица 42. Описание битов регистра STATUS_REG ZYXOR Потеря (переполнение) данных (data overrun) по осям X, Y, Z. Значение по умолчанию 0 (0: не было переполнения, 1: новые данные перезаписали старые, причем старые данные еще не были считаны). 7.10. OUT_X_L (28h), OUT_X_H (29h) Угловые данные ускорения по оси X. Значение представлено как число со знаком в формате дополнения до 2. 7.11. OUT_Y_L (2Ah), OUT_Y_H (2Bh) Угловые данные ускорения по оси Y. Значение представлено как число со знаком в формате дополнения до 2. 7.12. OUT_Z_L (2Ch), OUT_Z_H (2Dh) Угловые данные ускорения по оси Z. Значение представлено как число со знаком в формате дополнения до 2. 7.13. FIFO_CTRL_REG (2Eh) Таблица 43. Регистр FIFO_CTRL_REG
Таблица 44. Описание битов регистра FIFO_CTRL_REG FM2-FM0 Выбор режима работы FIFO. Значение по умолчанию 00 (см. таблицу 45). Таблица 45. Конфигурация режима FIFO
7.14. FIFO_SRC_REG (2Fh) Таблица 46. Регистр FIFO_SRC_REG
Таблица 47. Описание битов регистра FIFO_SRC_REG WTM Статус уровня заполнения (0: FIFO заполнен меньше, чем уровень WTM, 1: уровень заполнения равен или выше WTM). 7.15. INT1_CFG (30h) Таблица 48. Регистр INT1_CFG
Таблица 49. Описание битов регистра INT1_CFG AND/OR Выбор комбинации И/ИЛИ для событий прерывания. Значение по умолчанию 0 (0: для событий прерывания используется комбинация ИЛИ, OR; 1: для событий прерывания используется комбинация И, AND). 7.16. INT1_SRC (31h) Конфигурационный регистр для источника прерывания. Таблица 50. Регистр INT1_SRC
Таблица 51. Описание битов регистра INT1_SRC IA Активное прерывание (Interrupt Active). Значение по умолчанию 0 (0: не было сгенерировано прерывание, 1: сгенерировано одно или большее количество прерываний). Регистр, обозначающий источник прерывания, только для чтения. Чтение по этому адресу очищает бит IA регистра INT1_SRC (также сбрасывает возникающий по событию сигнал на ножке INT1), и позволяет обновить данные в регистре INT1_SRC, если выбрана опция с защелкиванием данных. 7.17. INT1_THS_XH (32h) Таблица 52. Регистр INT1_THS_XH
Таблица 53. Описание битов регистра INT1_THS_XH THSX14-THSX9 Порог прерывания. Значение по умолчанию 00000000. 7.18. INT1_THS_XL (33h) Таблица 54. Регистр INT1_THS_XL
Таблица 55. Описание битов регистра INT1_THS_XL THSX7-THSX0 Порог прерывания. Значение по умолчанию 00000000. 7.19. INT1_THS_YH (34h) Таблица 56. Регистр INT1_THS_YH
Таблица 57. Описание битов регистра INT1_THS_YH THSY14-THSY9 Порог прерывания. Значение по умолчанию 00000000. 7.20. INT1_THS_YL (35h) Таблица 58. Регистр INT1_THS_YL
Таблица 59. Описание битов регистра INT1_THS_YL THSY7-THSY0 Порог прерывания. Значение по умолчанию 00000000. 7.21. INT1_THS_ZH (36h) Таблица 60. Регистр INT1_THS_ZH
Таблица 61. Описание битов регистра INT1_THS_ZH THSZ14-THSZ9 Порог прерывания. Значение по умолчанию 00000000. 7.22. INT1_THS_ZL (37h) Таблица 62. Регистр INT1_THS_ZL
Таблица 63. Описание битов регистра INT1_THS_ZL THSZ7-THSZ0 Порог прерывания. Значение по умолчанию 00000000. 7.23. INT1_DURATION (38h) Таблица 64. Регистр INT1_DURATION
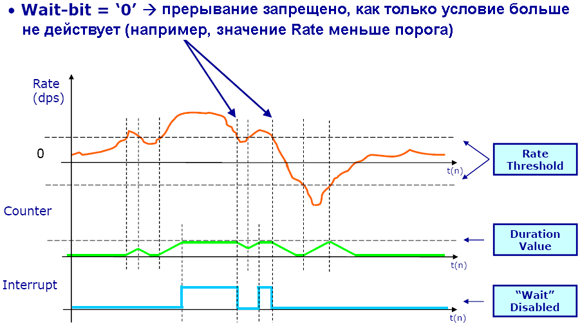
Таблица 65. Описание битов регистра INT1_DURATION D6-D0 Значение длительности. Значение по умолчанию 0000000. Устанавливают минимальную распознаваемую длительность события прерывания. Шаги длительности и максимальные значения зависят от выбранного ODR.
Рис. 20. Wait запрещен
Рис. 21. Wait разрешен [8. Информация об используемом корпусе] Чтобы удовлетворить разным эксплуатационным требованиям, компания ST предоставляет L3G4200D в различных вариантах корпусов ECOPACK®. Параметры ECOPACK®, определение требований и статус производства доступны на сайте www.st.com [1]. ECOPACK является торговой маркой компании ST.
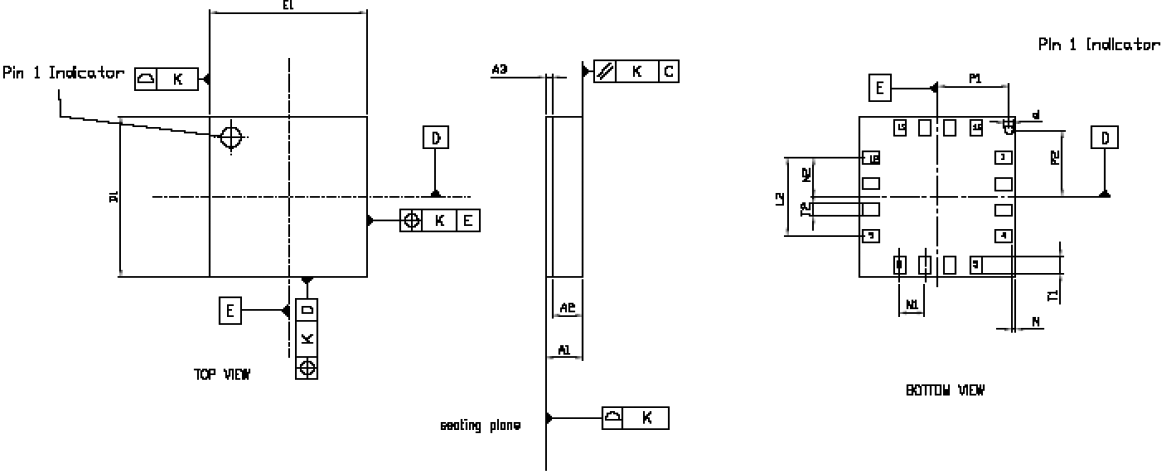
Рис. 22. LGA-16: механические данные и размеры корпуса
[Словарик] ASIC application-specific integrated circuit, интегральная схема специального назначения. Относится к внутреннему аппаратному устройству микросхемы. CMOS Complementary metal–oxide–semiconductor, технология производства интегральных полупроводниковых микросхем. dps degree per second, сколько градусов в секунду - единица измерения угловой скорости. ECOPACK® добровольная стратегическая программа компании ST, начатая в 2000 году для того, чтобы удалить загрязнение и опасные вещества от всех производственных линий. Это краеугольный камень в стратегии компании ST с целью быть лидером в переходе к безвредной для окружающей среды упаковке деталей и микросхем. В контексте этой программы ST развивает технические решения мирового класса - разработанные, чтобы прогрессивно удалить тяжелые металлы и галогены из производства. ESD Electrostatic discharge - разряд статического электричества. FIFO стек памяти (буфер), работающий по принципу первый вошел, первый вышел (First Input, First Output, FIFO). Green зеленый, обозначает удовлетворение стандартам экологичности производства. I2C стандартный последовательный интерфейс, часто применяемый в бытовой и промышленной аппаратуре. LSB, MSB least significant bit (самый младший бит), most significant bit (самый старший бит). MEMS Micro-Electro-Mechanical Systems, микроэлектронные механические системы - общее обозначение технологий, созданных для миниатюризации электромеханических элементов радиоаппаратуры. MMI man-machine interface - интерфейс взаимодействия между человеком и машиной. PLL, phase locked loop - ФАПЧ, фазовая автоподстройка частоты. RoHS Restriction of Hazardous Substances - директива, ограничивающая содержание вредных веществ, была принята Европейским союзом в феврале 2003 года. SAD Slave ADdress, адрес подчиненного устройства на шине I2C. SPI стандартный последовательный интерфейс, распространенный для подключения внешних микросхем к микроконтроллерам. ФНЧ, LPF, ФВЧ, HPF фильтры низких частот (Low Pass Filter) и высоких частот (High Pass Filter). [Ссылки] 1. L3G4200D site:st.com. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||