|
ąŁč鹊čé ą░ą┐ąĮąŠčāčé ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čüąĖąĮčģčĆąŠąĮąĮčŗą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü SPI, ąĖ ąĖą╗ą╗čÄčüčéčĆąĖčĆčāąĄčé, ą║ą░ą║ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ąĄą│ąŠ čü ą┐ąŠą╝ąŠčēčīčÄ ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą│ąŠ čćąĖą┐ą░ FT2232H. ą£ąĖą║čĆąŠčüčģąĄą╝ą░ FT2232H ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ąĖ čćč鹥ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą▓ SPI serial EEPROM (ą┐ąĄčĆąĄą▓ąŠą┤ AN_114 [1]).
[1. ąÆą▓ąĄą┤ąĄąĮąĖąĄ]
ą£ąĖą║čĆąŠčüčģąĄą╝čŗ FT2232H ąĖ FT4232H čŹč鹊 ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą│ąŠ ą╝ąŠčüčéą░ USB (USB 2.0 Hi-Speed, 480 ą╝ąĄą│ą░ą▒ąĖčé/čüąĄą║), ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗąĄ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą╝ąĄąČą┤čā ą║ąŠą╝ą┐čīčÄč鹥čĆąŠą╝ ąĖ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝ UART/FIFO. ą×ąĮąĖ ą╝ąŠą│čāčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ąĮą░ čĆą░ą▒ąŠčéčā ą▓ čĆąĄąČąĖą╝ąĄ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ čü ą┐ąŠą╝ąŠčēčīčÄ ą▓čüčéčĆąŠąĄąĮąĮąŠą╣ čüąĖčüč鹥ą╝čŗ MPSSE (MultiProtocol Synchronous Serial Engine). ąŻ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ FT2232H ąĮą░ ą▒ąŠčĆčéčā 2 ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗčģ ą┐ąŠčĆčéą░, ą║ąŠč鹊čĆčŗąĄ ąŠą▒ą░ ą╝ąŠąČąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī č湥čĆąĄąĘ MPSSE, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ čā ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ FT4232H č鹊ą╗čīą║ąŠ ą║ą░ąĮą░ą╗čŗ A ąĖ B ą╝ąŠąČąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī č湥čĆąĄąĘ MPSSE (ą┐ąŠą┤čĆąŠą▒ąĮčŗą╣ ą┐ąĄčĆąĄą▓ąŠą┤ ą┤ą░čéą░čłąĖčéą░ FT2232H čüą╝. ą▓ čüčéą░čéčīąĄ [2]).
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ č鹥čģąĮąŠą╗ąŠą│ąĖąĖ MPSSE ą╝ąŠąČąĄčé čāą┐čĆąŠčüčéąĖčéčī čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓ (ą║ąŠą│ą┤ą░ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ ąĖąĘ USB ą▓ SPI, I2C, JTAG, ąĖ čé. ą┤.). ąÆ čŹč鹊ą╝ ą░ą┐ąĮąŠčāč鹥 ą┐ąŠą║ą░ąĘą░ąĮąŠ, ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī MPSSE FT2232H ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ čłąĖąĮąĄ SPI. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐čĆąĖą╝ąĄčĆ čüčģąĄą╝čŗ (čüą╝. čĆąĖčü. 3) ąĖ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗą╣ ą║ąŠą┤ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┐čĆąĖą╝ąĄčĆą░ (čüą╝. čĆą░ąĘą┤ąĄą╗ 3) ą┤ą╗čÅ čüą▓ąŠąĄą╣ čüąŠą▒čüčéą▓ąĄąĮąĮąŠą╣ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĖą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ą┐čĆąĖą╝ąĄčĆ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┤ą╗čÅ ąĖą╗ą╗čÄčüčéčĆą░čåąĖąĖ ą┐čĆąŠčåąĄčüčüą░, ąĖ ą┤ą╗čÅ ąĮąĄą│ąŠ ąĮąĄ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčéčüčÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ čüąŠ čüč鹊čĆąŠąĮčŗ ą║ąŠą╝ą┐ą░ąĮąĖąĖ FTDI.
ąŚą┤ąĄčüčī ą┐ąŠą║ą░ąĘą░ąĮąŠ, ą║ą░ą║ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī FT2232H ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ ą┤ą░ąĮąĮčŗčģ ąŠčé čģąŠčüčéą░ PC ą▓ serial EEPROM č湥čĆąĄąĘ čłąĖąĮčā ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ SPI. ą×ą▒čüčāąČą┤ą░ąĄą╝čŗąĄ č鹥ą╝čŗ:
ŌĆó ą×ą▒ąĘąŠčĆ ąŠą▒ą╝ąĄąĮą░ č湥čĆąĄąĘ SPI [3].
ŌĆó ą¤čĆąĖą╝ąĄčĆ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ ą╝ąŠčüčéą░ USB ą║ ąĖąĮč鹥čĆč乥ą╣čüčā SPI serial EEPROM čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ FT2232H.
ŌĆó ą¤čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ ąĮą░ C++, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĄą│ąŠ ą║ą░ą║ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī FT2232H ą▓ čĆąĄąČąĖą╝ąĄ SPI.
ŌĆó ąöąĖą░ą│čĆą░ą╝ą╝čŗ čüąĖą│ąĮą░ą╗ąŠą▓ ąŠčüčåąĖą╗ą╗ąŠą│čĆą░čäą░, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĖąĄ čåąĖą║ą╗čŗ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ č湥čĆąĄąĘ SPI.
1.2. ą×ą▒ąĘąŠčĆ ąĖąĮč鹥čĆč乥ą╣čüą░ SPI. SPI (ą░ą▒ą▒čĆąĄą▓ąĖą░čéčāčĆą░ ąŠčé Serial to Peripheral Interface) čŹč鹊 čüąĖąĮčģčĆąŠąĮąĮą░čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮą░čÅ čłąĖąĮą░, čĆą░ą▒ąŠčéą░čÄčēą░čÅ ą┐ąŠ ą┐čĆąĖąĮčåąĖą┐čā master/slave (ąĮą░ čłąĖąĮąĄ ąĖą╝ąĄąĄčéčüčÅ ąŠą┤ąĮąŠ ą│ą╗ą░ą▓ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ master ąĖ ąŠą┤ąĮąŠ ąĖą╗ąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ slave), ą║ąŠč鹊čĆą░čÅ čüąŠčüč鹊ąĖčé ąŠą▒čŗčćąĮąŠ ąĖąĘ 4 čüąĖą│ąĮą░ą╗ąŠą▓. SPI master ąĖąĮąĖčåąĖąĖčĆčāąĄčé ą▓čüąĄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ą┤ą░ąĮąĮčŗčģ ą┐ąŠ čłąĖąĮąĄ. ąĪ ą┐ąŠą╝ąŠčēčīčÄ ą╝ąŠčüčéą░ ąĮą░ FT2232H ą┐ąŠą╗ąĮąŠą┤čāą┐ą╗ąĄą║čüąĮčŗąĄ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą╝ąŠą│čāčé ą▒čŗčéčī ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮčŗ ąĮą░ čüą║ąŠčĆąŠčüčéąĖ ą┤ąŠ 30 ą╝ąĄą│ą░ą▒ąĖčé/čüąĄą║. ąöą╗ąĖąĮą░ ą▒ąĖčéą░ SPI ąĮąĄ čäąĖą║čüąĖčĆąŠą▓ą░ąĮą░. ą×ą▒čŗčćąĮą░čÅ čüąĖčüč鹥ą╝ą░ SPI ąĖčüą┐ąŠą╗čīąĘčāąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ čüąĖą│ąĮą░ą╗čŗ, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗąĄ ąĮą░ čĆąĖčü. 1.
SCLK ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ čéą░ą║čéčŗ, ą║ąŠč鹊čĆčŗąĄ master ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┤ą╗čÅ slave.
MOSI ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą▓čŗčģąŠą┤ ą┤ą░ąĮąĮčŗčģ čüąŠ čüč鹊čĆąŠąĮčŗ master (MOSI čŹč鹊 ą░ą▒ą▒čĆąĄą▓ąĖą░čéčāčĆą░ ąŠčé Master Out Slave In, čé. ąĄ. ą▓čŗčģąŠą┤ ą┤ą░ąĮąĮčŗčģ ą│ą╗ą░ą▓ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ ą▓čģąŠą┤ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ).
MISO ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą▓čģąŠą┤ ą┤ą░ąĮąĮčŗčģ čüąŠ čüč鹊čĆąŠąĮčŗ master (MISO čŹč鹊 ą░ą▒ą▒čĆąĄą▓ąĖą░čéčāčĆą░ ąŠčé Master In Slave Out, čé. ąĄ. ą▓čģąŠą┤ ą┤ą░ąĮąĮčŗčģ ą│ą╗ą░ą▓ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ ą▓čŗčģąŠą┤ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ).
CS ą▓čŗą▒ąŠčĆą║ą░ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (Chip Select), ą▓čŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗, ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝čŗą╣ master.
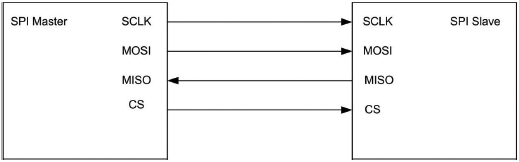
ąĀąĖčü. 1. ąöąĖą░ą│čĆą░ą╝ą╝ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖą╣ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╣ čüąĖčüč鹥ą╝čŗ SPI.
FT2232H ą▓čüąĄą│ą┤ą░ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ SPI master. ąÜ ąĮąĄą╝čā ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ slave-čāčüčéčĆąŠą╣čüčéą▓ čü ą┐ąŠą╝ąŠčēčīčÄ ą┐ąĄčĆąĄą║ą╗čÄčćą░čÄčēąĄą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą▓čŗą▒ąŠčĆą║ąĖ CS, ą║ąŠč鹊čĆčŗą╣ č乊čĆą╝ąĖčĆčāąĄčé master. ą¤ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą▓ ąŠą▒ąŠąĖčģ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅčģ č湥čĆąĄąĘ čüąĖą│ąĮą░ą╗čŗ MOSI ąĖ MISO, čüąĖąĮčģčĆąŠąĮąĮąŠ čü čéą░ą║čéą░ą╝ąĖ, ą┐ąŠčüčéčāą┐ą░čÄčēąĖą╝ąĖ ąŠčé master č湥čĆąĄąĘ čüąĖą│ąĮą░ą╗ SCLK. ąÆ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čüą┐ąŠčüąŠą▒ą░ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ slave-čāčüčéčĆąŠą╣čüčéą▓ą░ ą┤ą░ąĮąĮčŗąĄ ą╝ąŠą│čāčé ą┐ąŠčüčŗą╗ą░čéčīčüčÅ č湥čĆąĄąĘ SPI ą┐ąŠ čĆą░ąĘąĮąŠą╝čā - ą╗ąĖą▒ąŠ čüčéą░čĆčłąĖą╝ ą▒ąĖč鹊ą╝ (MSB) ą▓ą┐ąĄčĆąĄą┤, ą╗ąĖą▒ąŠ ą╝ą╗ą░ą┤čłąĖą╝ ą▒ąĖč鹊ą╝ (LSB) ą▓ą┐ąĄčĆąĄą┤. Slave-čāčüčéčĆąŠą╣čüčéą▓ą░ ą╝ąŠą│čāčé ąĖą╝ąĄčéčī ą▓čģąŠą┤čŗ ą▓čŗą▒ąŠčĆą║ąĖ ą╗ąĖą▒ąŠ čü ą░ą║čéąĖą▓ąĮčŗą╝ ą╗ąŠą│. 0, ą╗ąĖą▒ąŠ čü ą░ą║čéąĖą▓ąĮčŗą╝ ą╗ąŠą│. 1 (ąŠą┤ąĮą░ą║ąŠ čéčĆą░ą┤ąĖčåąĖąŠąĮąĮąŠ čćą░čēąĄ ą▓čüąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą░ą║čéąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 0). ąØą░ čĆąĖčü. 2 ą┐ąŠą║ą░ąĘą░ąĮ ą┐čĆąĖą╝ąĄčĆ ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ čüąĖą│ąĮą░ą╗ąŠą▓ SPI (čāčüčéčĆąŠą╣čüčéą▓ąŠ SPI ąĖčüą┐ąŠą╗čīąĘčāąĄčé čĆąĄąČąĖą╝ SPI Mode 0 čü ą░ą║čéąĖą▓ąĮčŗą╝ čüąĖą│ąĮą░ą╗ąŠą╝ ą▓čŗą▒ąŠčĆą║ąĖ ą╗ąŠą│. 0).
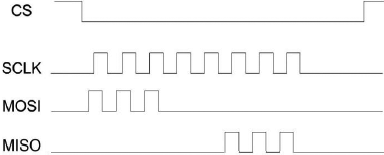
ąĀąĖčü. 2. ą¤čĆąĖą╝ąĄčĆ ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ ą▓čĆąĄą╝ąĄąĮąĖ čüąĖą│ąĮą░ą╗ąŠą▓ SPI.
ążą░ąĘą░ čüąĖą│ąĮą░ą╗ą░ čéą░ą║č鹊ą▓ SCLK (clock phase, CPHA) ąĖ ąĖčģ ą┐ąŠą╗čÅčĆąĮąŠčüčéčī (clock polarity, CPOL) ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé 4 čāąĮąĖą║ą░ą╗čīąĮčŗčģ čĆąĄąČąĖą╝ą░ čĆą░ą▒ąŠčéčŗ SPI, ąĖąĘą▓ąĄčüčéąĮčŗčģ ą║ą░ą║ Mode 0, Mode 1, Mode 2 ąĖ Mode 3. ąóą░ą▒ą╗ąĖčåą░ 1 čüčāą╝ą╝ą░čĆąĮąŠ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹčéąĖ čĆąĄąČąĖą╝čŗ čäą░ąĘčŗ/ą┐ąŠą╗čÅčĆąĮąŠčüčéąĖ.
ąöą╗čÅ CPOL=0 ą▒ą░ąĘąŠą▓čŗą╣ (ąĮąĄ ą░ą║čéąĖą▓ąĮčŗą╣) čāčĆąŠą▓ąĄąĮčī SCLK čŹč鹊 ą╗ąŠą│. 0. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ:
ŌĆó ąÜąŠą│ą┤ą░ CPHA=0, ą┤ą░ąĮąĮčŗąĄ ą▒čāą┤čāčé čüčćąĖčéčŗą▓ą░čéčīčüčÅ (č湥čĆąĄąĘ MISO) ą┐ąŠ ąĮą░čĆą░čüčéą░ąĮąĖčÄ čüąĖą│ąĮą░ą╗ą░ SCLK, ąĖ ą▓čŗą┤ą▓ąĖą│ą░čéčīčüčÅ ąĮą░čĆčāąČčā (č湥čĆąĄąĘ MOSI) ą┐ąŠ čüą┐ą░ą┤čā čāčĆąŠą▓ąĮčÅ SCLK.
ŌĆó ąÜąŠą│ą┤ą░ CPHA=1, ą┤ą░ąĮąĮčŗąĄ ą▒čāą┤čāčé čüčćąĖčéčŗą▓ą░čéčīčüčÅ (č湥čĆąĄąĘ MISO) ą┐ąŠ čüą┐ą░ą┤čā čüąĖą│ąĮą░ą╗ą░ SCLK, ąĖ ą▓čŗą┤ą▓ąĖą│ą░čéčīčüčÅ ąĮą░čĆčāąČčā (č湥čĆąĄąĘ MOSI) ą┐ąŠ ąĮą░čĆą░čüčéą░ąĮąĖčÄ čāčĆąŠą▓ąĮčÅ SCLK.
ąöą╗čÅ CPOL=1 ą▒ą░ąĘąŠą▓čŗą╣ (ąĮąĄ ą░ą║čéąĖą▓ąĮčŗą╣) čāčĆąŠą▓ąĄąĮčī SCLK čŹč鹊 ą╗ąŠą│. 1. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ:
ŌĆó ąÜąŠą│ą┤ą░ CPHA=0, ą┤ą░ąĮąĮčŗąĄ ą▒čāą┤čāčé čüčćąĖčéčŗą▓ą░čéčīčüčÅ (č湥čĆąĄąĘ MISO) ą┐ąŠ čüą┐ą░ą┤čā čāčĆąŠą▓ąĮčÅ SCLK, ąĖ ą▓čŗą┤ą▓ąĖą│ą░čéčīčüčÅ ąĮą░čĆčāąČčā (č湥čĆąĄąĘ MOSI) ą┐ąŠ ąĮą░čĆą░čüčéą░ąĮąĖčÄ čāčĆąŠą▓ąĮčÅ SCLK.
ŌĆó ąÜąŠą│ą┤ą░ CPHA=1, ą┤ą░ąĮąĮčŗąĄ ą▒čāą┤čāčé čüčćąĖčéčŗą▓ą░čéčīčüčÅ (č湥čĆąĄąĘ MISO) ą┐ąŠ ąĮą░čĆą░čüčéą░ąĮąĖčÄ čāčĆąŠą▓ąĮčÅ SCLK, ąĖ ą▓čŗą┤ą▓ąĖą│ą░čéčīčüčÅ ąĮą░čĆčāąČčā (č湥čĆąĄąĘ MOSI) ą┐ąŠ čüą┐ą░ą┤čā čāčĆąŠą▓ąĮčÅ SCLK.
ąóą░ą▒ą╗ąĖčåą░ 1. ąĀąĄąČąĖą╝čŗ, ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčēąĖąĄ čäą░ąĘčā ąĖ ą┐ąŠą╗čÅčĆąĮąŠčüčéčī čéą░ą║č鹊ą▓ SCLK.
| Mode |
CPOL |
CPHA |
| 0 |
0 |
0 |
| 1 |
0 |
1 |
| 2 |
1 |
0 |
| 3 |
1 |
1 |
ąĢčüčéčī ąĮąĄą║ąŠąĄ ąĘą░čéčĆčāą┤ąĮąĄąĮąĖąĄ ą▓ č鹊ą╝, čćč鹊 ąŠą▒ą╝ąĄąĮ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü SPI slave ą╝ąŠąČąĄčé ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ čĆą░ąĘą╗ąĖčćąĮčŗą╝ąĖ čüą┐ąŠčüąŠą▒ą░ą╝ąĖ (4 čĆąĄąČąĖą╝ą░, 2 ą▓ą░čĆąĖą░ąĮčéą░ ą┐ąŠčĆčÅą┤ą║ą░ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą▒ąĖčé), ą┐ąŠčŹč鹊ą╝čā ą┐čĆąĖ čĆą░ą▒ąŠč鹥 čü ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ čéčĆąĄą▒čāąĄčéčüčÅ čéčēą░č鹥ą╗čīąĮąŠąĄ ąĖąĘčāč湥ąĮąĖąĄ ą┤ą░čéą░čłąĖčéą░ slave, čćč鹊ą▒čŗ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą▓čŗą▒čĆą░čéčī čĆąĄąČąĖą╝ SPI. ą£ąĖą║čĆąŠčüčģąĄą╝čŗ FT2232H ąĖ FT4232H ą╝ąŠą│čāčé ą░ą┐ą┐ą░čĆą░čéąĮąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī č鹊ą╗čīą║ąŠ čĆąĄąČąĖą╝čŗ 0 ąĖ 2 ąĖąĘ-ąĘą░ ąŠą│čĆą░ąĮąĖč湥ąĮąĖą╣ čüąĖčüč鹥ą╝čŗ MPSSE.
1.3. ą”ąŠą║ąŠą╗ąĄą▓ą║ą░ ą▓čŗą▓ąŠą┤ąŠą▓ FT2232H/FT4232H SPI. ąóą░ą▒ą╗ąĖčåą░ 2 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą╝ąĄčüč鹊 čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖčÅ (ąĮąŠą╝ąĄčĆ ą▓čŗą▓ąŠą┤ą░ ąĮą░ ą║ąŠčĆą┐čāčüąĄ čćąĖą┐ą░) ąĖ čäčāąĮą║čåąĖčÄ čüąĖą│ąĮą░ą╗ąŠą▓ SPI ą┤ą╗čÅ ą║ą░ąĮą░ą╗ąŠą▓ A ąĖ B ą╝ąĖą║čĆąŠčüčģąĄą╝ FT2232H ąĖ FT4232H.
| ąÆčŗą▓. FT2232H |
ąÆčŗą▓. FT4232H |
ąśą╝čÅ |
ążčāąĮą║čåąĖčÅ MPSSE |
ąóąĖą┐ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| Channel A |
| 16 |
16 |
ADBUS0 |
SCLK |
ąÆčŗčģąŠą┤ |
ąóą░ą║čéčŗ ą┤ą╗čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ. |
| 17 |
17 |
ADBUS1 |
DO (MOSI) |
ąÆčŗčģąŠą┤ |
ąÆčŗčģąŠą┤ ą┤ą░ąĮąĮčŗčģ master. |
| 18 |
18 |
ADBUS2 |
DI (MISO) |
ąÆčģąŠą┤ |
ąÆčģąŠą┤ ą┤ą░ąĮąĮčŗčģ master. |
| 19 |
19 |
ADBUS3 |
CS |
ąÆčŗčģąŠą┤ |
ąÆčŗą▒ąŠčĆą║ą░ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ slave. |
| Channel B |
| 38 |
26 |
BDBUS0 |
SCLK |
ąÆčŗčģąŠą┤ |
ąóą░ą║čéčŗ ą┤ą╗čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ. |
| 39 |
27 |
BDBUS1 |
DO (MOSI) |
ąÆčŗčģąŠą┤ |
ąÆčŗčģąŠą┤ ą┤ą░ąĮąĮčŗčģ master. |
| 40 |
28 |
BDBUS2 |
DI (MISO) |
ąÆčģąŠą┤ |
ąÆčģąŠą┤ ą┤ą░ąĮąĮčŗčģ master. |
| 41 |
29 |
BDBUS3 |
CS |
ąÆčŗčģąŠą┤ |
ąÆčŗą▒ąŠčĆą║ą░ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ slave. |
ąóą░ą▒ą╗ąĖčåą░ 2. ą”ąŠą║ąŠą╗ąĄą▓ą║ą░ čüąĖą│ąĮą░ą╗ąŠą▓ SPI ą╝ąĖą║čĆąŠčüčģąĄą╝ FT2232H ąĖ FT4232H.
[2. ą¤čĆąĖą╝ąĄčĆ čüčģąĄą╝čŗ SPI]
ą£ąĖą║čĆąŠčüčģąĄą╝ą░ FT2232H ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ą║ 93LC56 Serial SPI EEPROM ą║ąŠą╝ą┐ą░ąĮąĖąĖ Microchip. ąØą░ čĆąĖčü. 3 ą┐ąŠą║ą░ąĘą░ąĮą░ čāą┐čĆąŠčēąĄąĮąĮą░čÅ čüčģąĄą╝ą░ čüąŠąĄą┤ąĖąĮąĄąĮąĖą╣ (ą▒ąĄąĘ čüąĖą│ąĮą░ą╗ąŠą▓ USB, ą┐ąĖčéą░ąĮąĖčÅ ąĖ čé. ą┐.). ąöą╗čÅ ą┐čĆąŠčüč鹊čéčŗ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓čŗą▓ąŠą┤čŗ SPI ą║ą░ąĮą░ą╗ą░ A. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ ą┐ąŠ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ą╝ čüą╝ ą▓ ą┤ą░čéą░čłąĖčéą░čģ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ čüą║ą░čćą░čéčī čü čüą░ą╣čéą░ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣ FTDI ąĖ Microchip (ąĖą╗ąĖ ą╝ąŠąČąĮąŠ čüą║ą░čćą░čéčī ą░čĆčģąĖą▓ [5] ą▓ą╝ąĄčüč鹥 čü ą┐čĆąĖą╝ąĄčĆąŠą╝ ą║ąŠą┤ą░).
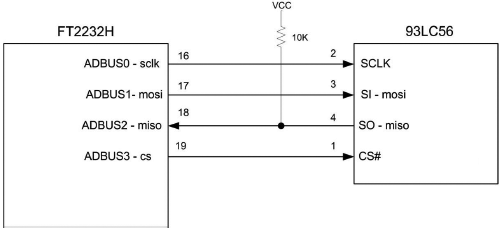
ąĀąĖčü. 3. ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ FT2232H ą║ 93LC56 EEPROM.
[3. ą¤čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ]
ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░, ą║ąŠč鹊čĆčŗą╣ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé FT2232H ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą▓ čĆąĄąČąĖą╝ąĄ SPI. ąÆ ąĮąĄą╝ čüąĮą░čćą░ą╗ą░ ą┐čĆąŠą▓ąĄčĆčÅąĄčéčüčÅ, čćč鹊 ąĄčüčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ FTDI Hi Speed device (čŹč鹊 ąĖ ąĄčüčéčī ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ FT2232H), ąĖ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čéąĖą┐ą░ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ: FT2232H ąĖą╗ąĖ FT4232H. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠčüčŗą╗ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čā č湥čĆąĄąĘ SPI čüč鹥čĆąĄčéčī ą▓čüąĄ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ EEPROM, ąĖ ąĘą░č鹥ą╝ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą▓ EEPROM čüą╗ąŠą▓ąŠ ą┤ą╗ąĖąĮąŠą╣ 16 ą▒ąĖčé.
ą¤ąŠčüą╗ąĄ ą║ą░ąČą┤ąŠą│ąŠ čåąĖą║ą╗ą░ ąĘą░ą┐ąĖčüąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čüč湥čéčćąĖą║ ą░ą┤čĆąĄčüą░ EEPROM ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ, ąĖ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ čüč湥čéčćąĖą║ ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗčģ ą┤ą░ąĮąĮčŗčģ. ąĪą╗ąĄą┤čāčÄčēą░čÅ ąĘą░ą┐ąĖčüčī ą▒čāą┤ąĄčé ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮą░ ą▓ čüą╗ąĄą┤čāčÄčēčāčÄ ą┐ąŠ ą┐ąŠčĆčÅą┤ą║čā čÅč湥ą╣ą║čā ą┐ą░ą╝čÅčéąĖ EEPROM.
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čāą┤čāčé ąĘą░ą┐ąĖčüą░ąĮčŗ 128 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ, ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą▒čāą┤ąĄčé čüčćąĖčéčŗą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ ąŠą▒čĆą░čéąĮąŠ ąĖ ą┐čĆąŠą▓ąĄčĆčÅčéčī, ąĮą░čüą║ąŠą╗čīą║ąŠ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ąĘą░ą┐ąĖčüą░ąĮčŗ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠ 128 ą░ą┤čĆąĄčüą░ą╝ čÅč湥ąĄą║ ą┐ą░ą╝čÅčéąĖ.
ą¤čĆąŠčåąĄčüčüčŗ čü ąĘą░ą┐ąĖčüčīčÄ/čćč鹥ąĮąĖąĄą╝ 128 ą▒ą░ą╣čé ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠą▓č鹊čĆąĄąĮčŗ ą┐čāč鹥ą╝ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ LoopCntr ą┐čĆąŠą│čĆą░ą╝ą╝čŗ.
ą¤čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčé FTCSPI dll, ąĖ čéčĆąĄą▒čāąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čüčĆąĄą┤čŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ Microsoft Visual Studio 2008 C++ (ąĖą╗ąĖ ą▒ąŠą╗ąĄąĄ čüą▓ąĄąČąĄą╣ ą▓ąĄčĆčüąĖąĖ). ąśčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą┐čĆąŠąĄą║čéą░ ą╝ąŠąČąĮąŠ čüą║ą░čćą░čéčī ą▓ ą░čĆčģąĖą▓ąĄ FT2232HS_SPI.zip čü čüą░ą╣čéą░ FTDI. ąöą╗čÅ čüą▓ąŠąĄą╣ čĆą░ą▒ąŠčéčŗ ą║ąŠą┤ čéčĆąĄą▒čāąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ FTDI D2XX, ą║ąŠč鹊čĆčŗą╣ čéą░ą║ąČąĄ ą╝ąŠąČąĮąŠ čüą║ą░čćą░čéčī čü čüą░ą╣čéą░ FTDI. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ API ą┤čĆą░ą╣ą▓ąĄčĆą░ D2XX API ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ D2XX ProgrammerŌĆÖs Guide [4].
// SPITEST.cpp: ą║ąŠąĮčüąŠą╗čīąĮąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ VC++.
// ąŁč鹊 ą┐čĆąŠąĄą║čé ą┐čĆąĖą╝ąĄčĆą░, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĖą╣ ą║ą░ąĮą░ą╗ A ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ FT2232H ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░
// ą║ SPI EEPROM 93C56. ą£čŗ ą┐ąŠčüčŗą╗ą░ąĄą╝ 16 čüą╗ąŠą▓ ą┤ą░ąĮąĮčŗčģ ą▓ 93C56 ąĖ čćąĖčéą░ąĄą╝ ąĖčģ ąŠą▒čĆą░čéąĮąŠ,
// ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé čāą▓ąĖą┤ąĄčéčī čĆąĄąĘčāą╗čīčéą░čé č鹥čüčéą░ ą▓ ą║ąŠą╝ą░ąĮą┤ąĮąŠą╝ čĆąĄąČąĖą╝ąĄ.
#include "stdafx.h"
#include < windows.h >
#include "FTD2XX.h"
#include < stdlib.h >
// ąöąĄą║ą╗ą░čĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą┤ą╗čÅ 93C56:
#define MemSize 16 // ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗąĄ ąĮčāąČąĮąŠ ą┐ąŠčüą╗ą░čéčī
const BYTE SPIDATALENGTH = 11; //3 ą▒ąĖčéą░ ą║ąŠą╝ą░ąĮą┤čŗ + 8 ą▒ąĖčé ą░ą┤čĆąĄčüą░
const BYTE READ = '\xC0'; //110xxxxx
const BYTE WRITE = '\xA0'; //101xxxxx
const BYTE WREN = '\x98'; //10011xxx
const BYTE ERAL = '\x90'; //10010xxx
// ąöąĄą║ą╗ą░čĆą░čåąĖąĖ ą┤ą╗čÅ ą║ąŠą╝ą░ąĮą┤čŗ BAD:
const BYTE AA_ECHO_CMD_1 = '\xAA';
const BYTE AB_ECHO_CMD_2 = '\xAB';
const BYTE BAD_COMMAND_RESPONSE = '\xFA';
//ąöąĄą║ą╗ą░čĆą░čåąĖąĖ ą┤ą╗čÅ ą║ąŠą╝ą░ąĮą┤ MPSSE:
const BYTE MSB_RISING_EDGE_CLOCK_BYTE_OUT = '\x10';
const BYTE MSB_FALLING_EDGE_CLOCK_BYTE_OUT = '\x11';
const BYTE MSB_RISING_EDGE_CLOCK_BIT_OUT = '\x12';
const BYTE MSB_FALLING_EDGE_CLOCK_BIT_OUT = '\x13';
const BYTE MSB_RISING_EDGE_CLOCK_BYTE_IN = '\x20';
const BYTE MSB_RISING_EDGE_CLOCK_BIT_IN = '\x22';
const BYTE MSB_FALLING_EDGE_CLOCK_BYTE_IN = '\x24';
const BYTE MSB_FALLING_EDGE_CLOCK_BIT_IN = '\x26';
// ąĪčéą░čéčāčü, ąŠą┐čĆąĄą┤ąĄą╗čÅąĄą╝čŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ D2XX, čćč鹊ą▒čŗ ą┐ąŠą║ą░ąĘą░čéčī čĆąĄąĘčāą╗čīčéą░čé ąŠą┐ąĄčĆą░čåąĖąĖ:
FT_STATUS ftStatus;
// ąæčāč乥čĆ, ą│ą┤ąĄ čüąŠą┤ąĄčƹȹ░čéčüčÅ ą║ąŠą╝ą░ąĮą┤čŗ MPSSE ąĖ ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ą▓ FT2232H:
BYTE OutputBuffer[512];
// ąæčāč乥čĆ, ą│ą┤ąĄ čüąŠą┤ąĄčƹȹ░čéčüčÅ ą▒ą░ą╣čéčŗ ą┤ą░ąĮąĮčŗčģ, ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ ąĖąĘ FT2232H:
BYTE InputBuffer[512];
// ąŚąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ ą┤ąĄą╗ąĖč鹥ą╗čÅ čéą░ą║č鹊ą▓, čćą░čüč鹊čéą░ SCL = 60/((1+29)*2) = 1 ą£ąōčå
DWORD dwClockDivisor = 29;
// ąśąĮą┤ąĄą║čü ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ą▒čāč乥čĆą░:
DWORD dwNumBytesToSend = 0;
// ąĪč湥čéčćąĖą║ąĖ ą▒ą░ą╣čé:
DWORD dwNumBytesSent = 0, dwNumBytesRead = 0, dwNumInputBuffer = 0;
BYTE ByteDataRead;
WORD MemAddress = 0x00;
WORD i=0;
WORD DataOutBuffer[MemSize];
WORD DataInBuffer[MemSize];
// ąŁčéą░ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI.
void SPI_CSEnable()
{
// ą×ą┤ąĮą░ ą║ąŠą╝ą░ąĮą┤ą░ 0x80 ąĘą░ą╣ą╝ąĄčé 0.2 ą╝ą║čü, ą┐ąŠą▓č鹊čĆčÅąĄą╝ ąĄčæ 5 čĆą░ąĘ, čćč鹊ą▒čŗ ąŠčüčéą░čéčīčüčÅ ą▓ čŹč鹊ą╣
// čüąĖčéčāą░čåąĖąĖ ą▓ č鹥č湥ąĮąĖąĄ 1 ą╝ą║čü.
for(int loop=0; loop < 5; loop++)
{
OutputBuffer[dwNumBytesToSend++] = '\x80'; // ą║ąŠą╝ą░ąĮą┤ą░ GPIO ą┤ą╗čÅ ADBUS
OutputBuffer[dwNumBytesToSend++] = '\x08'; // ą┐ąĄčĆąĄą▓ąŠą┤ CS ą▓ ą╗ąŠą│. 1, MOSI ąĖ SCLK ą▓ ą╗ąŠą│. 0
OutputBuffer[dwNumBytesToSend++] = '\x0b'; // bit3:CS, bit2:MISO, bit1:MOSI, bit0:SCLK
}
}
// ąŁčéą░ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĘą░ą┐čĆąĄčēąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ čāčüčéčĆąŠą╣čüčéą▓ą░ SPI.
void SPI_CSDisable()
{
// ą×ą┤ąĮą░ ą║ąŠą╝ą░ąĮą┤ą░ 0x80 ąĘą░ą╣ą╝ąĄčé 0.2 ą╝ą║čü, ą┐ąŠą▓č鹊čĆčÅąĄą╝ ąĄčæ 5 čĆą░ąĘ, čćč鹊ą▒čŗ ąŠčüčéą░čéčīčüčÅ ą▓ čŹč鹊ą╣
// čüąĖčéčāą░čåąĖąĖ ą▓ č鹥č湥ąĮąĖąĄ 1 ą╝ą║čü.
for(int loop=0; loop < 5; loop++)
{
OutputBuffer[dwNumBytesToSend++] = '\x80'; // ą║ąŠą╝ą░ąĮą┤ą░ GPIO ą┤ą╗čÅ ADBUS
OutputBuffer[dwNumBytesToSend++] = '\x00'; // ą┐ąĄčĆąĄą▓ąŠą┤ CS, MOSI ąĖ SCLK ą▓ ą╗ąŠą│. 0
OutputBuffer[dwNumBytesToSend++] = '\x0b'; // bit3:CS, bit2:MISO, bit1:MOSI, bit0:SCLK
}
}
// ąŁčéą░ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ą║ąŠą╝ą░ąĮą┤čŗ ą▓ 93C56 EEPROM.
FT_STATUS WriteEECmd(FT_HANDLE ftHandle, BYTE command)
{
dwNumBytesSent=0;
SPI_CSEnable();
//SPIDATALENGTH = 11, čŹč鹊 ą╝ąŠąČąĮąŠ ą┐ąŠą┤ąĄą╗ąĖčéčī ąĮą░ 8+3 ą▒ąĖčéą░
OutputBuffer[dwNumBytesToSend++] = MSB_FALLING_EDGE_CLOCK_BIT_OUT;
OutputBuffer[dwNumBytesToSend++] = 7; //7+1 = 8
OutputBuffer[dwNumBytesToSend++] = command;
OutputBuffer[dwNumBytesToSend++] = MSB_FALLING_EDGE_CLOCK_BIT_OUT;
OutputBuffer[dwNumBytesToSend++] = SPIDATALENGTH - (8+1);
OutputBuffer[dwNumBytesToSend++] = '\xff';
SPI_CSDisable();
// ą×čéą┐čĆą░ą▓ą║ą░ ą║ąŠą╝ą░ąĮą┤čŗ ą▓ MPSSE:
ftStatus = FT_Write(ftHandle, OutputBuffer, dwNumBytesToSend, &dwNumBytesSent);
dwNumBytesToSend = 0; // ą×čćąĖčüčéą║ą░ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ą▒čāč乥čĆą░
return ftStatus;
}
// ąŁčéą░ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ SPI.
BOOL SPI_Initial(FT_HANDLE ftHandle)
{
DWORD dwCount;
ftStatus = FT_ResetDevice(ftHandle); // ąĪą▒čĆąŠčü čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
// ąĪąĮą░čćą░ą╗ą░ ąŠčćąĖčēą░ąĄčéčüčÅ ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░ USB ą┐čāč鹥ą╝ ą▓čŗčćąĖčéčŗą▓ą░ąĮąĖčÅ ą▓čüąĄčģ čüčéą░čĆčŗčģ ą┤ą░ąĮąĮčŗčģ
// ąĖąĘ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ FT2232H.
// ą¤ąŠą╗čāč湥ąĮąĖąĄ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▒ą░ą╣čé ą▓ ą▒čāč乥čĆąĄ ą┐čĆąĖąĄą╝ą░ FT2232H:
ftStatus |= FT_GetQueueStatus(ftHandle, &dwNumInputBuffer);
if ((ftStatus == FT_OK) && (dwNumInputBuffer > 0))
{
// ą¦č鹥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ FT2232H:
ftStatus |= FT_Read(ftHandle, InputBuffer, dwNumInputBuffer, &dwNumBytesRead);
}
// ąŻčüčéą░ąĮąŠą▓ą║ą░ čĆą░ąĘą╝ąĄčĆą░ ąĘą░ą┐čĆąŠčüą░ USB (request transfer size):
ftStatus |= FT_SetUSBParameters(ftHandle, 65535, 65535);
// ąŚą░ą┐čĆąĄčé čüąĖą╝ą▓ąŠą╗ąŠą▓ čüąŠą▒čŗčéąĖčÅ ąĖ ąŠčłąĖą▒ą║ąĖ (event and error characters):
ftStatus |= FT_SetChars(ftHandle, false, 0, false, 0);
// ąŻčüčéą░ąĮąŠą▓ą║ą░ čéą░ą╣ą╝ą░čāč鹊ą▓ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ ą┤ą╗čÅ FT2232H ąĮą░ 3 čüąĄą║čāąĮą┤čŗ:
ftStatus |= FT_SetTimeouts(ftHandle, 3000, 3000);
// ąŻčüčéą░ąĮąŠą▓ą║ą░ čéą░ą╣ą╝ąĄčĆą░ ąĘą░ą┤ąĄčƹȹ║ąĖ (latency timer):
ftStatus |= FT_SetLatencyTimer(ftHandle, 1);
// ąĪą▒čĆąŠčü ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░:
ftStatus |= FT_SetBitMode(ftHandle, 0x0, 0x00);
// ąĀą░ąĘčĆąĄčłąĖčéčī čĆąĄąČąĖą╝ MPSSE:
ftStatus |= FT_SetBitMode(ftHandle, 0x0, 0x02);
if (ftStatus != FT_OK)
{
printf("fail on initialize FT2232H device ! \n");
return false;
}
Sleep(50); // ąŠąČąĖą┤ą░ąĮąĖąĄ 50 ą╝čü, čćč鹊ą▒čŗ ą▓čüąĄ ąČąĄą╗ąĄąĘąŠ USB ą▒čŗą╗ąŠ ą│ąŠč鹊ą▓ąŠ ą║ čĆą░ą▒ąŠč鹥
//////////////////////////////////////////////////////////////////
// ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ąĖąĮč鹥čĆč乥ą╣čüą░ MPSSE ąŠčéą┐čĆą░ą▓ą║ąŠą╣ "ą┐ą╗ąŠčģąŠą╣" ą║ąŠą╝ą░ąĮą┤čŗ &xAA*
//////////////////////////////////////////////////////////////////
dwNumBytesToSend = 0;
OutputBuffer[dwNumBytesToSend++] = '\xAA'; // ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄ BAD command &xAA*
// ą×čéą┐čĆą░ą▓ą║ą░ ą║ąŠą╝ą░ąĮą┤ BAD:
ftStatus = FT_Write(ftHandle, OutputBuffer, dwNumBytesToSend, &dwNumBytesSent);
dwNumBytesToSend = 0; // ąŠčćąĖčüčéą║ą░ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ą▒čāč乥čĆą░
do
{
// ą¤ąŠą╗čāč湥ąĮąĖąĄ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▒ą░ą╣čé ą▓ąŠ ą▓čģąŠą┤ąĮąŠą╝ ą▒čāč乥čĆąĄ čāčüčéčĆąŠą╣čüčéą▓ą░:
ftStatus = FT_GetQueueStatus(ftHandle, &dwNumInputBuffer);
// ą¤ąŠą▓č鹊čĆąĄąĮąĖąĄ čåąĖą║ą╗ą░, ą┐ąŠą║ą░ ąĮąĄ ą┐ąŠčÅą▓čÅčéčüčÅ ą┤ą░ąĮąĮčŗąĄ ąĖą╗ąĖ ąĮąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čéą░ą╣ą╝ą░čāčé:
}while ((dwNumInputBuffer == 0) && (ftStatus == FT_OK));
bool bCommandEchod = false;
// ąĪčćąĖčéčŗą▓ą░ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą▓čģąŠą┤ąĮąŠą│ąŠ ą▒čāč乥čĆą░:
ftStatus = FT_Read(ftHandle, InputBuffer, dwNumInputBuffer, &dwNumBytesRead);
for (dwCount = 0; dwCount < (dwNumBytesRead - 1); dwCount++)
{
// ą¤čĆąŠą▓ąĄčĆą║ą░: ą┐čĆąĖąĮčÅčéą░ ą╗ąĖ ą║ąŠą╝ą░ąĮą┤ą░ Bad ąĖ čŹčģąŠ ą║ąŠą╝ą░ąĮą┤čŗ:
if ((InputBuffer[dwCount] == BYTE('\xFA')) && (InputBuffer[dwCount+1] == BYTE('\xAA')))
{
bCommandEchod = true;
break;
}
}
if (bCommandEchod == false)
{
// ą×čłąĖą▒ą║ą░, ąĮąĄ ą┐ąŠą╗čāčćąĖą╗ąŠčüčī ą┐čĆąĖąĮčÅčéčī čŹčģąŠ ą║ąŠą╝ą░ąĮą┤čŗ, čüą▒ąŠą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ
// ąĖąĮč鹥čĆč乥ą╣čüą░ MPSSE.
printf("fail to synchronize MPSSE with command '0xAA' \n");
return false;
}
//////////////////////////////////////////////////////////////////
// ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ąĖąĮč鹥čĆč乥ą╣čüą░ MPSSE ąŠčéą┐čĆą░ą▓ą║ąŠą╣ "ą┐ą╗ąŠčģąŠą╣" ą║ąŠą╝ą░ąĮą┤čŗ &xAB*
//////////////////////////////////////////////////////////////////
//dwNumBytesToSend = 0; // ąŠčćąĖčüčéą║ą░ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ą▒čāč乥čĆą░
OutputBuffer[dwNumBytesToSend++] = '\xAB'; // ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄ BAD command &xAB*
// ą×čéą┐čĆą░ą▓ą║ą░ ą║ąŠą╝ą░ąĮą┤ BAD:
ftStatus = FT_Write(ftHandle, OutputBuffer, dwNumBytesToSend, &dwNumBytesSent);
dwNumBytesToSend = 0; // ąŠčćąĖčüčéą║ą░ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ą▒čāč乥čĆą░
do
{
// ą¤ąŠą╗čāč湥ąĮąĖąĄ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▒ą░ą╣čé ą▓ąŠ ą▓čģąŠą┤ąĮąŠą╝ ą▒čāč乥čĆąĄ čāčüčéčĆąŠą╣čüčéą▓ą░:
ftStatus = FT_GetQueueStatus(ftHandle, &dwNumInputBuffer);
// ą¤ąŠą▓č鹊čĆąĄąĮąĖąĄ čåąĖą║ą╗ą░, ą┐ąŠą║ą░ ąĮąĄ ą┐ąŠčÅą▓čÅčéčüčÅ ą┤ą░ąĮąĮčŗąĄ ąĖą╗ąĖ ąĮąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čéą░ą╣ą╝ą░čāčé:
}while ((dwNumInputBuffer == 0) && (ftStatus == FT_OK));
bCommandEchod = false;
// ąĪčćąĖčéčŗą▓ą░ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą▓čģąŠą┤ąĮąŠą│ąŠ ą▒čāč乥čĆą░:
ftStatus = FT_Read(ftHandle, InputBuffer, dwNumInputBuffer, &dwNumBytesRead);
for (dwCount = 0;dwCount < (dwNumBytesRead - 1); dwCount++)
{
// ą¤čĆąŠą▓ąĄčĆą║ą░: ą┐čĆąĖąĮčÅčéą░ ą╗ąĖ ą║ąŠą╝ą░ąĮą┤ą░ Bad ąĖ čŹčģąŠ ą║ąŠą╝ą░ąĮą┤čŗ:
if ((InputBuffer[dwCount] == BYTE('\xFA')) && (InputBuffer[dwCount+1] == BYTE( '\xAB')))
{
bCommandEchod = true;
break;
}
}
if (bCommandEchod == false)
{
// ą×čłąĖą▒ą║ą░, ąĮąĄ ą┐ąŠą╗čāčćąĖą╗ąŠčüčī ą┐čĆąĖąĮčÅčéčī čŹčģąŠ ą║ąŠą╝ą░ąĮą┤čŗ, čüą▒ąŠą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ
// ąĖąĮč鹥čĆč乥ą╣čüą░ MPSSE.
printf("fail to synchronize MPSSE with command '0xAB' \n");
return false;
}
////////////////////////////////////////////////////////////////////
// ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ MPSSE ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ čü EEPROM č湥čĆąĄąĘ SPI
////////////////////////////////////////////////////////////////////
// ąŚą░ą┐čĆąĄčé ą┤ąĄą╗ąĖč鹥ą╗čÅ čéą░ą║č鹊ą▓ ą┤ą╗čÅ master clock = 60 ą£ąōčå:
OutputBuffer[dwNumBytesToSend++] = '\x8A';
// ąÆčŗą║ą╗čÄč湥ąĮąĖąĄ ą░ą┤ą░ą┐čéąĖą▓ąĮąŠą│ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ
OutputBuffer[dwNumBytesToSend++] = '\x97';
// ąŚą░ą┐čĆąĄčé 3 phase data clock:
OutputBuffer[dwNumBytesToSend++] = '\x8D';
// ą×čéą┐čĆą░ą▓ą║ą░ ą┐ąŠą┤ą│ąŠč鹊ą▓ą╗ąĄąĮąĮčŗčģ ą║ąŠą╝ą░ąĮą┤:
ftStatus = FT_Write(ftHandle, OutputBuffer, dwNumBytesToSend, &dwNumBytesSent);
dwNumBytesToSend = 0; //ąŠčćąĖčüčéą║ą░ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ą▒čāč乥čĆą░
// ąÜąŠą╝ą░ąĮą┤ą░ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖą╣ ą╝ą╗ą░ą┤čłąĖčģ 8 ą▓čŗą▓ąŠą┤ąŠą▓,
// čćč鹊ą▒čŗ ąĮą░čüčéčĆąŠąĖčéčī ą▓čüąĄ ą▒ąĖčéčŗ ą║ą░ą║ ą▓čŗčģąŠą┤čŗ:
OutputBuffer[dwNumBytesToSend++] = '\x80';
// ąŻčüčéą░ąĮąŠą▓ą║ą░ SDA, SCL ą▓ ą╗ąŠą│. 1, WP ąĘą░ą┐čĆąĄčēąĄąĮ, SCLK, DO, GPIOL0 ąĮą░ ą▒ąĖč鹥 &*:
OutputBuffer[dwNumBytesToSend++] = '\x00';
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ą▓čŗą▓ąŠą┤ąŠą▓ SCLK, DO, GPIOL0 ą║ą░ą║ ą▓čŗčģąŠą┤ąŠą▓ čü ą▒ąĖč鹊ą╝ **,
// ą┤čĆčāą│ąĖąĄ ą▓čŗą▓ąŠą┤čŗ ą║ą░ą║ ą▓čģąŠą┤čŗ čü ą▒ąĖč鹊ą╝ &*
OutputBuffer[dwNumBytesToSend++] = '\x0b';
// ąóą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ SCLK ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ čü ą┤ąĄą╗ąĖč鹥ą╗ąĄą╝ ąĮą░ 5 ą┐ąŠ č乊čĆą╝čāą╗ąĄ:
// SCLK freq = 60 ą£ąōčå /((1 + [(1 +ValueH*256) OR ValueL])*2)
// ąÜąŠą╝ą░ąĮą┤ą░ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┤ąĄą╗ąĖč鹥ą╗čÅ:
OutputBuffer[dwNumBytesToSend++] = '\x86';
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ValueL (ą╝ą╗ą░ą┤čłąĖą╣ ą▒ą░ą╣čé) ą┤ąĄą╗ąĖč鹥ą╗čÅ čéą░ą║č鹊ą▓:
OutputBuffer[dwNumBytesToSend++] = BYTE(dwClockDivisor & '\xFF');
// ąŻčüčéą░ąĮąŠą▓ą║ą░ ValueH (čüčéą░čĆčłąĖą╣ ą▒ą░ą╣čé) ą┤ąĄą╗ąĖč鹥ą╗čÅ čéą░ą║č鹊ą▓:
OutputBuffer[dwNumBytesToSend++] = BYTE(dwClockDivisor >> 8);
// ą×čéą┐čĆą░ą▓ą║ą░ ą║ąŠą╝ą░ąĮą┤:
ftStatus = FT_Write(ftHandle, OutputBuffer, dwNumBytesToSend, &dwNumBytesSent);
dwNumBytesToSend = 0; // ąŠčćąĖčüčéą║ą░ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ą▒čāč乥čĆą░
Sleep(20); // ąĘą░ą┤ąĄčƹȹ║ą░
// ąÆčŗą║ą╗čÄč湥ąĮąĖąĄ ą┐ąĄčéą╗ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ąĘą░čåąĖą║ą╗ąĖą▓ą░ąĮąĖčÅ čü ą▓čŗčģąŠą┤ą░ ąĮą░ ą▓čģąŠą┤ (loop back).
// ąÜąŠą╝ą░ąĮą┤ą░ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ loop back (čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ TDI - TDO):
OutputBuffer[dwNumBytesToSend++] = '\x85';
// ą×čéą┐čĆą░ą▓ą║ą░ ą║ąŠą╝ą░ąĮą┤:
ftStatus = FT_Write(ftHandle, OutputBuffer, dwNumBytesToSend, &dwNumBytesSent);
dwNumBytesToSend = 0; // ąŠčćąĖčüčéą║ą░ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ą▒čāč乥čĆą░
Sleep(30); // ąĘą░ą┤ąĄčƹȹ║ą░
printf("SPI initial successful\n");
return true;
}
// ąŁčéą░ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ąŠą┤ąĮąŠą│ąŠ čüą╗ąŠą▓ą░ ą┤ą░ąĮąĮčŗčģ
// čü ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮčŗą╝ ą┤ąŠčüčéčāą┐ąŠą╝ ą┐ąŠ čāą║ą░ąĘą░ąĮąĮąŠą╝čā ą░ą┤čĆąĄčüčā.
BOOL SPI_WriteByte2RandomAddr(FT_HANDLE ftHandle, WORD address,WORD bdata)
{
dwNumBytesSent=0;
SPI_CSEnable();
// ą×čéą┐čĆą░ą▓ą║ą░ ą║ąŠą╝ą░ąĮą┤čŗ WRITE (ąĘą░ą┐ąĖčüčī):
OutputBuffer[dwNumBytesToSend++] = MSB_FALLING_EDGE_CLOCK_BIT_OUT;
OutputBuffer[dwNumBytesToSend++] = 2;
OutputBuffer[dwNumBytesToSend++] = WRITE;
// ą×čéą┐čĆą░ą▓ą║ą░ ą░ą┤čĆąĄčüą░:
OutputBuffer[dwNumBytesToSend++] = MSB_FALLING_EDGE_CLOCK_BIT_OUT;
OutputBuffer[dwNumBytesToSend++] = 7;
OutputBuffer[dwNumBytesToSend++] = (BYTE)(address);
// ą×čéą┐čĆą░ą▓ą║ą░ ą┤ą░ąĮąĮčŗčģ:
OutputBuffer[dwNumBytesToSend++] = MSB_FALLING_EDGE_CLOCK_BYTE_OUT;
OutputBuffer[dwNumBytesToSend++] = 1;
OutputBuffer[dwNumBytesToSend++] = 0; // ą┤ą╗ąĖąĮą░ ą┤ą░ąĮąĮčŗčģ 0x0001 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą▒čāą┤ąĄčé
// ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ 2 ą▒ą░ą╣čéą░ ą┤ą░ąĮąĮčŗčģ
OutputBuffer[dwNumBytesToSend++] = bdata >> 8; // ą▓čŗą▓ąŠą┤ čüčéą░čĆčłąĄą│ąŠ ą▒ą░ą╣čéą░
OutputBuffer[dwNumBytesToSend++] = bdata & 0xff; // ą▓čŗą▓ąŠą┤ ą╝ą╗ą░ą┤čłąĄą│ąŠ ą▒ą░ą╣čéą░
SPI_CSDisable();
// ą×čéą┐čĆą░ą▓ą║ą░ ą║ąŠą╝ą░ąĮą┤čŗ MPSSE:
ftStatus = FT_Write(ftHandle, OutputBuffer, dwNumBytesToSend, &dwNumBytesSent);
dwNumBytesToSend = 0; // ąŠčćąĖčüčéą║ą░ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ą▒čāč乥čĆą░
return ftStatus;
}
// ąŁčéą░ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ąŠą┤ąĮąŠą│ąŠ čüą╗ąŠą▓ą░ ą┤ą░ąĮąĮčŗčģ
// čü ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮčŗą╝ ą┤ąŠčüčéčāą┐ąŠą╝ ą┐ąŠ čāą║ą░ąĘą░ąĮąĮąŠą╝čā ą░ą┤čĆąĄčüčā:
BOOL SPI_ReadByteRandomAddr(FT_HANDLE ftHandle, WORD address, WORD* bdata)
{
dwNumBytesSent=0;
SPI_CSEnable();
// ą×čéą┐čĆą░ą▓ą║ą░ ą║ąŠą╝ą░ąĮą┤čŗ READ (čćč鹥ąĮąĖąĄ):
OutputBuffer[dwNumBytesToSend++] = MSB_FALLING_EDGE_CLOCK_BIT_OUT;
OutputBuffer[dwNumBytesToSend++] = 2;
OutputBuffer[dwNumBytesToSend++] = READ;
// ą×čéą┐čĆą░ą▓ą║ą░ ą░ą┤čĆąĄčüą░:
OutputBuffer[dwNumBytesToSend++] = MSB_FALLING_EDGE_CLOCK_BIT_OUT;
OutputBuffer[dwNumBytesToSend++] = 7;
OutputBuffer[dwNumBytesToSend++] = (BYTE)(address);
// ą¦č鹥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ:
OutputBuffer[dwNumBytesToSend++] = MSB_FALLING_EDGE_CLOCK_BYTE_IN;
OutputBuffer[dwNumBytesToSend++] = '\x01';
OutputBuffer[dwNumBytesToSend++] = '\x00'; // ą┤ą╗ąĖąĮą░ ą┤ą░ąĮąĮčŗčģ 0x0001 ąŠąĘąĮą░čćą░ąĄčé,
// čćč鹊 ą▒čāą┤ąĄčé ą▓ą┤ą▓ąĖą│ą░čéčīčüčÅ 2 ą▒ą░ą╣čéą░
SPI_CSDisable();
// ą×čéą┐čĆą░ą▓ą║ą░ ą║ąŠą╝ą░ąĮą┤čŗ MPSSE:
ftStatus = FT_Write(ftHandle, OutputBuffer, dwNumBytesToSend, &dwNumBytesSent);
dwNumBytesToSend = 0; // ąŠčćąĖčüčéą║ą░ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ą▒čāč乥čĆą░
// ą¦č鹥ąĮąĖąĄ 2 ą▒ą░ą╣čé ąĖąĘ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ čāčüčéčĆąŠą╣čüčéą▓ą░:
ftStatus = FT_Read(ftHandle, InputBuffer, 2, &dwNumBytesRead);
*bdata = (InputBuffer[0] < < 8) + InputBuffer[1];
return ftStatus;
}
int _tmain(int argc, _TCHAR* argv[])
{
FT_HANDLE ftdiHandle;
DWORD numDevs;
FT_DEVICE_LIST_INFO_NODE *devInfo;
ftStatus = FT_CreateDeviceInfoList(&numDevs);
if (ftStatus == FT_OK)
printf("Number of devices is %d\n",numDevs);
else
return 1;
if (numDevs > 0)
{
// ąÆčŗą┤ąĄą╗ąĄąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ ą┐ąŠą┤ čģčĆą░ąĮąĖą╗ąĖčēąĄ čüą┐ąĖčüą║ą░ ąĮą░ ąŠčüąĮąŠą▓ą░ąĮąĖąĖ
// ą║ąŠą╗ąĖč湥čüčéą▓ą░ čāčüčéčĆąŠą╣čüčéą▓ numDevs:
devInfo = (FT_DEVICE_LIST_INFO_NODE*)malloc(sizeof(FT_DEVICE_LIST_INFO_NODE)*numDevs);
// ą¤ąŠą╗čāč湥ąĮąĖąĄ čüą┐ąĖčüą║ą░ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒ čāčüčéčĆąŠą╣čüčéą▓ą░čģ:
ftStatus = FT_GetDeviceInfoList(devInfo,&numDevs);
if (ftStatus == FT_OK)
{
for (i = 0; i < numDevs; i++)
{
printf("Dev %d:\n",i);
printf(" Flags=0x%x\n",devInfo[i].Flags);
printf(" Type=0x%x\n",devInfo[i].Type);
printf(" ID=0x%x\n",devInfo[i].ID);
printf(" LocId=0x%x\n",devInfo[i].LocId);
printf(" SerialNumber=%s\n",devInfo[i].SerialNumber);
printf(" Description=%s\n",devInfo[i].Description);
printf(" ftHandle=0x%x\n",devInfo[i].ftHandle);
}
}
}
else
return 1;
ftStatus = FT_Open(0,&ftdiHandle);
if (ftStatus != FT_OK)
{
printf("Can't open FT2232H device! \n");
return 1;
}
else
{
// ą¤ąŠčĆčé čāčüčéčĆąŠą╣čüčéą▓ą░ ą▒čŗą╗ čāčüą┐ąĄčłąĮąŠ ąŠčéą║čĆčŗčé.
printf("Successfully open FT2232H device! \n");
}
if(SPI_Initial(ftdiHandle) == TRUE)
{
byte ReadByte = 0;
// ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ą▒čāč乥čĆą░:
for(i=0; i < MemSize; i++)
DataOutBuffer[i] = i;
// ą¤ąĄčĆą▓ąŠąĮą░čćą░ą╗čīąĮą░čÅ ąŠčćąĖčüčéą║ą░ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ USB ą┐ąĄčĆąĄą┤ ąŠą┐ąĄčĆą░čåąĖąĄą╣ čćč鹥ąĮąĖčÅ.
// ą¤ąŠą╗čāč湥ąĮąĖąĄ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą▒ą░ą╣čé ą▓ ą▒čāč乥čĆąĄ ą┐čĆąĖąĄą╝ą░ čāčüčéčĆąŠą╣čüčéą▓ą░:
ftStatus = FT_GetQueueStatus(ftdiHandle, &dwNumInputBuffer);
if ((ftStatus == FT_OK) && (dwNumInputBuffer > 0))
{
// ą¦č鹥ąĮąĖąĄ ą▓čüąĄčģ ą▒ą░ą╣čé ąĖąĘ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░:
FT_Read(ftdiHandle, InputBuffer, dwNumInputBuffer, &dwNumBytesRead);
}
WriteEECmd(ftdiHandle, WREN);
WriteEECmd(ftdiHandle, ERAL);
Sleep(20);
for(i=0; i < MemSize; i++)
{
SPI_WriteByte2RandomAddr(ftdiHandle, i,DataOutBuffer[i]);
Sleep(2);
printf("Write data %d to address %d\n",DataOutBuffer[i],i);
}
Sleep(20);
for(i=0; i < MemSize; i++)
{
SPI_ReadByteRandomAddr(ftdiHandle, i,&DataInBuffer[i]);
printf("Read data from address %d = %d\n",i,DataInBuffer[i]);
}
getchar(); // ąŠąČąĖą┤ą░čéčī ąĮą░ąČą░čéąĖčÅ ą║ą╗ą░ą▓ąĖčłąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝...
}
FT_Close(ftdiHandle);
return 0;
}
3.2. ą×čüčåąĖą╗ą╗ąŠą│čĆą░ą╝ą╝čŗ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ. ąĪą║čĆąĖąĮčłąŠčéčŗ ąĮąĖąČąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé ą▓ąĖą┤ čüąĖą│ąĮą░ą╗ąŠą▓ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ SPI. ą×ąĮąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą┤ą╗čÅ ąĖą╗ą╗čÄčüčéčĆą░čåąĖąĖ čĆą░ą▒ąŠčéčŗ ą║ąŠą╝ą░ąĮą┤ WRITE ąĖ READ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ ą╝ąĄąČą┤čā čģąŠčüč鹊ą╝ PC, FT2232H ąĖ 93LC56 EEPROM.
ąĀąĖčü. 4 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čā ąĘą░ą┐ąĖčüąĖ (101), ą▓čŗą┤ą░ą▓ą░ąĄą╝čāčÄ č湥čĆąĄąĘ MOSI, ąĘą░ ą║ąŠč鹊čĆąŠą╣ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ čćąĖčüą╗ąŠ 3, ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝ąŠąĄ ą┐ąŠ ą░ą┤čĆąĄčüčā 3.
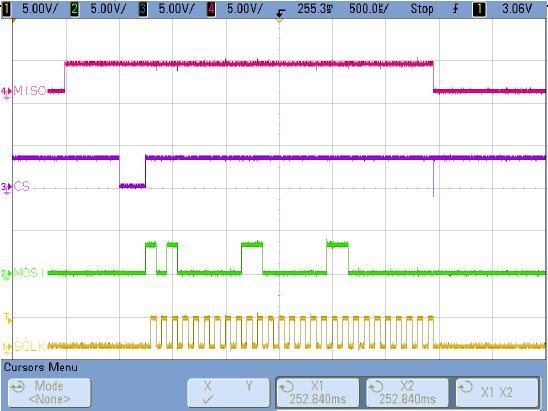
ąĀąĖčü. 4. ąŚą░ą┐ąĖčüčī (WRITE) čćąĖčüą╗ą░ 3 ą┐ąŠ ą░ą┤čĆąĄčüčā 3.
ąĀąĖčü. 5 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čā čćč鹥ąĮąĖčÅ (110), ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čāčÄ č湥čĆąĄąĘ MOSI, ąĘą░ ą║ąŠč鹊čĆąŠą╣ ąĖą┤ąĄčé ą░ą┤čĆąĄčü 3. ąØą░ čüąĖą│ąĮą░ą╗ąĄ MISO ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ čćč鹥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ (3).
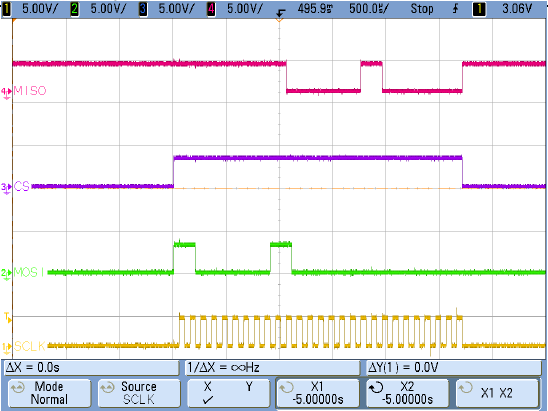
ąĀąĖčü. 5. ą¦č鹥ąĮąĖąĄ (READ) čćąĖčüą╗ą░ 3 ą┐ąŠ ą░ą┤čĆąĄčüčā 3.
[ąĪčüčŗą╗ą║ąĖ]
1. AN_114 Interfacing FT2232H Hi-Speed Devices To SPI Bus site:ftdichip.com.
2. FT2232H: ą┤ą▓čāčģą║ą░ąĮą░ą╗čīąĮą░čÅ ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮą░čÅ USB ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą┤ą╗čÅ I/O.
3. ąśąĮč鹥čĆč乥ą╣čü SPI.
4. FTDI: čüą┐čĆą░ą▓ąŠčćąĮąĖą║ ą┐ąŠ čäčāąĮą║čåąĖčÅą╝ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ D2XX.
5. 170804AN_114-FTDI.ZIP - ą┤ą░čéą░čłąĖčéčŗ, ą┐čĆąĖą╝ąĄčĆčŗ ą║ąŠą┤ą░, ą┤čĆą░ą╣ą▓ąĄčĆ ą┤ą╗čÅ FT2232H ąĖ FT4232H. |



