|
ąÆ čŹč鹊ą╣ čüčéą░čéčīąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐ąĄčĆąĄą▓ąŠą┤ čĆą░ąĘą┤ąĄą╗ą░ "Device Driver Manager" ąĖąĘ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ "VisualDSP++ 5.0 Device Drivers and System Services Manual for Blackfin┬« Processors" [1]. ą×ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą╝ąŠą┤ąĄą╗ąĖ ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ą║ąŠą╝ą┐ą░ąĮąĖąĖ Analog Devices, ą║ąŠč鹊čĆą░čÅ ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ - ą║ą░ą║ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ąĖ, ą▓čüčéčĆąŠąĄąĮąĮčŗą╝ąĖ ą▓ ą┐čĆąŠčåąĄčüčüąŠčĆ Blackfin, čéą░ą║ ąĖ ą▓ąĮąĄčłąĮąĖą╝ąĖ. ąÜ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ ą╝ąŠą│čāčé ąŠčéąĮąŠčüąĖčéčīčüčÅ, ą║ ą┐čĆąĖą╝ąĄčĆčā, ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ąĖąĮč鹥čĆč乥ą╣čüčŗ SPORT ąĖą╗ąĖ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü PPI. ąÜ ą▓ąĮąĄčłąĮąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ ąŠčéąĮąŠčüčÅčéčüčÅ čāčüčéčĆąŠą╣čüčéą▓ą░, ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝čŗąĄ ą║ ą┐čĆąŠčåąĄčüčüąŠčĆčā čüąĮą░čĆčāąČąĖ, ąĮą░ą┐čĆąĖą╝ąĄčĆ ąÉą”ą¤, ą”ąÉą¤, ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ ą║ąŠą┤ąĄą║ąŠą▓, čĆą░čüčłąĖčĆąĖč鹥ą╗čī ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ ąĖ čé. ą┤.
ąĀą░čüčüą╝ą░čéčĆąĖą▓ą░čÄčéčüčÅ ą▓ąŠą┐čĆąŠčüčŗ, čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ą┐ąŠ ąŠčéą┤ąĄą╗čīąĮčŗą╝ čĆą░ąĘą┤ąĄą╗ą░ą╝:
ą×ą▒ąĘąŠčĆ ą╝ąŠą┤ąĄą╗ąĖ ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░. ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąŠ ąŠą▒čēąĄąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠą│ąŠ ą╝ąŠą┤ąĄą╗čīčÄ, ąĖ ą║čĆą░čéą║ąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ą▓čüąĄą╣ ą░čĆčģąĖč鹥ą║čéčāčĆčŗ ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░.
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓. ą×ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ, ą║ą░ą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐čĆąĖą╝ąĄčĆčÅčÄčé ą╝ąŠą┤ąĄą╗čī ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ąĖ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓čāčÄčé čü ąĮąĄą╣, ą▓ą║ą╗čÄčćą░čÅ ą╝ąĄč鹊ą┤čŗ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĖ ą┐ąŠč鹊ą║ąŠą▓ ą┤ą░ąĮąĮčŗčģ, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ą╝ąŠą┤ąĄą╗čīčÄ.
ąöąĖąĘą░ą╣ąĮ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓. ą×ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ, ą║ą░ą║ čĆą░ą▒ąŠčéą░ąĄčé ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąĖ ąĄą│ąŠ ąĖąĮč鹥čĆč乥ą╣čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ API. ą¤čĆąĖą▓ąĄą┤ąĄąĮąŠ ąŠą┐ąĖčüą░ąĮąĖąĄ ąŠčéą▓ąĄč鹊ą▓ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ ąĮą░ ą▓čŗąĘąŠą▓čŗ API, ąĖ ą║ą░ą║ ąŠąĮ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓čāąĄčé čü čäąĖąĘąĖč湥čüą║ąĖą╝ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ąĖ.
ąöąĖąĘą░ą╣ąĮ ą┤čĆą░ą╣ą▓ąĄčĆą░ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ą×ą┐ąĖčüą░ąĮąŠ, ą║ą░ą║ ą╝ąŠąČąĮąŠ čüą░ą╝ąŠą╝čā ąĮą░ą┐ąĖčüą░čéčī ą┤čĆą░ą╣ą▓ąĄčĆ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, čćč鹊ą▒čŗ ąŠąĮ ą▒čŗą╗ čüąŠą▓ą╝ąĄčüčéąĖą╝ čü ą╝ąŠą┤ąĄą╗čīčÄ ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓, ąĖ ą║ą░ą║ ą┤čĆą░ą╣ą▓ąĄčĆ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓čāąĄčé čü ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓.
ąśąĮč鹥čĆč乥ą╣čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ (API) ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓. ą×ą┐ąĖčüą░ąĮąĖąĄ čäčāąĮą║čåąĖą╣ API ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓.
ą¤čāą▒ą╗ąĖčćąĮčŗąĄ čéąĖą┐čŗ ą┤ą░ąĮąĮčŗčģ ąĖ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓. ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ čéą░ą▒ą╗ąĖčåčŗ čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ ą▓čüąĄčģ čüčéčĆčāą║čéčāčĆ ą┤ą░ąĮąĮčŗčģ ąĖ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖą╣.
ąśąĮč鹥čĆč乥ą╣čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ (API) ą┤čĆą░ą╣ą▓ąĄčĆą░ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ą×ą┐ąĖčüą░ąĮąĖąĄ čäčāąĮą║čåąĖą╣ API, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖčÅ ą╝ąĄąČą┤čā ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓ ąĖ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░.
ąÆ čüąŠčüčéą░ą▓ąĄ čüąĖčüč鹥ą╝čŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ VisualDSP++ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą┐čĆąĖą╝ąĄčĆčŗ ą║ąŠą┤ą░ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ PPI ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ UART. ą¤čĆąĖą╝ąĄčĆčŗ ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé, ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╝ąŠą┤ąĄą╗čī ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░, ą║ą░ą║ ąĖ ą┤čĆą░ą╣ą▓ąĄčĆčŗ čāčüčéčĆąŠą╣čüčéą▓ ą║ąŠą╝ą┐ą░ąĮąĖąĖ Analog Devices ą▓ą╝ąĄčüč鹥 čü ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ čüąĖčüč鹥ą╝ąĮčŗą╝ąĖ čüą╗čāąČą▒ą░ą╝ąĖ. ą¤čĆąĖą╝ąĄčĆčŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĖčģ ą┤čĆą░ą╣ą▓ąĄčĆčŗ čāčüčéčĆąŠą╣čüčéą▓, čüą╝. ą▓ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ Blackfin/EZ-Kits. ąśčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą┤ą╗čÅ ą▓čüąĄčģ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗčģ ą║ąŠą╝ą┐ą░ąĮąĖąĄą╣ Analog Devices ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ čüą╝. ą▓ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ Blackfin/Lib/Src/Driver.
ŌłÜ ąĪąĖčüč鹥ą╝ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ VisualDSP++ ą┐ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą▓ą╝ąĄčüč鹥 čü ą│ąŠč鹊ą▓čŗą╝ąĖ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅą╝ąĖ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ ą┤ą╗čÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ čāčüčéčĆąŠą╣čüčéą▓ ą┐čĆąŠčåąĄčüčüąŠčĆą░ (ąĖ ą┤ą░ąČąĄ ą┤ą╗čÅ ąĮąĄą║ąŠč鹊čĆčŗčģ ą▓ąĮąĄčłąĮąĖčģ čāčüčéčĆąŠą╣čüčéą▓) ąĖ ą┐čĆąĖą╝ąĄčĆą░ą╝ąĖ ąĖčģ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ. ą¤ąŠą┤čĆąŠą▒ąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ą┐ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÄ ąŠčéą┤ąĄą╗čīąĮčŗčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓, ą▓ą║ą╗čÄčćą░čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ ą║ąŠą╝ą░ąĮą┤ (command ID), ą║ąŠą┤čŗ čüąŠą▒čŗčéąĖą╣ (event codes), ą║ąŠą┤čŗ ą▓ąŠąĘą▓čĆą░čéą░ (return codes), ą┐čĆąĖą╝ąĄčĆčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĖ čé. ą┤. čüą╝. ą▓ ąŠčéą┤ąĄą╗čīąĮčŗčģ čäą░ą╣ą╗ą░čģ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ, ąĮą░čģąŠą┤čÅčēąĖčģčüčÅ ą▓ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ Blackfin/docs/drivers ą║ąŠčĆąĮąĄą▓ąŠą│ąŠ ą║ą░čéą░ą╗ąŠą│ą░ ąĖąĮčüčéą░ą╗ą╗čÅčåąĖąĖ VisualDSP++.
ąśąĮč鹥čĆč乥ą╣čü ą╝ąĄąČą┤čā ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝ ąĖ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ (API) ą┐čĆąŠčüčé, ąĮąĄą┐čĆąŠčéąĖą▓ąŠčĆąĄčćąĖą▓ ąĖ ąĘąĮą░ą║ąŠą╝ ą▒ąŠą╗čīčłąĖąĮčüčéą▓čā ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüč鹊ą▓, ą║ąŠč鹊čĆčŗąĄ čĆą░ąĮąĄąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ą║ąŠą╝ą┐ą░ąĮąĖąĖ Analog Device (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā ąĪąĖčüč鹥ą╝ąĮčŗčģ ąĪą╗čāąČą▒ [2]). ąźąŠčéčÅ ąĖą╝ąĄčÄčéčüčÅ ąĮąĄą║ąŠč鹊čĆčŗąĄ ąĮą░ą║ą╗ą░ą┤ąĮčŗąĄ čĆą░čüčģąŠą┤čŗ ą┤ą╗čÅ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ čüčéą░ąĮą┤ą░čĆčéąĖąĘą░čåąĖąĖ API, ą▓čŗąĖą│čĆčŗčł ąŠčé čāąĮąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ą╝ąŠą┤ąĄą╗ąĖ ą┤ą░ą╗ąĄą║ąŠ ą┐ąĄčĆąĄą▓ąĄčłąĖą▓ą░ąĄčé ą▓čüąĄ ąĮąĄąĘąĮą░čćąĖč鹥ą╗čīąĮčŗąĄ čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ąĮąĄą╣ ąĮąĄčāą┤ąŠą▒čüčéą▓ą░. ą£ąŠą┤ąĄą╗čī ą┤ąĄą╗ą░ąĄčé ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą┐čĆąŠčüč鹊ą╣ ą┐čĆąŠčåąĄą┤čāčĆčā čüąŠąĘą┤ą░ąĮąĖčÅ ąĮąŠą▓ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░, ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĖąĘąŠą╗ąĖčĆąŠą▓ą░čéčī ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąŠčé čüą┐ąĄčåąĖčäąĖą║ąĖ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą░ą┐ą┐ą░čĆą░čéąĮčŗąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ąČąĄą╗ąĄąĘą░.
ąØąĄ ąŠąČąĖą┤ą░ąĄčéčüčÅ, čćč鹊 čŹčéą░ ą╝ąŠą┤ąĄą╗čī ą▒čāą┤ąĄčé ą┐ąŠą╗ąĮąŠčüčéčīčÄ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠą╣. ąÆąŠąĘą╝ąŠąČąĮąŠ, čćč鹊 ą┐ąŠčÅą▓čÅčéčüčÅ čāčüčéčĆąŠą╣čüčéą▓ą░, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ čāą┤ą░čüčéčüčÅ čāą╗ąŠąČąĖčéčī ą▓ čĆą░ą╝ą║ąĖ ą┐čĆąĄą┤ą╗ą░ą│ą░ąĄą╝ąŠą╣ ą╝ąŠą┤ąĄą╗ąĖ, ąĖą╗ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÄ ąĮčāąČąĮąŠ čĆą░ą▒ąŠčéą░čéčī čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ąĮąĄą║ąĖą╝ čāąĮąĖą║ą░ą╗čīąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĖ čé. ą┤. ą”ąĄą╗čīčÄ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ą╝ąŠą┤ąĄą╗ąĖ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ ąĖ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čäąĖąĘąĖč湥čüą║ąĖčģ čāčüčéčĆąŠą╣čüčéą▓ ą▒čŗą╗ąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĄ ą┐čĆąŠčüč鹊ą│ąŠ, čŹčäč乥ą║čéąĖą▓ąĮąŠą│ąŠ čĆą░ą▒ąŠč湥ą│ąŠ ąŠą║čĆčāąČąĄąĮąĖčÅ, ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī ąĮą░ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ą┐čĆąĖą╝ąĄąĮčÅąĄą╝ąŠą│ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆą░. ąóą░ą║ą░čÅ čüąĖčüč鹥ą╝ą░ ą┤ąŠą╗ąČąĮą░ ąŠą▒ą╗ąĄą│čćąĖčéčī ą┐ąŠčĆčéąĖčĆčāąĄą╝ąŠčüčéčī ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĮą░ čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą╝ąŠą┤ąĄą╗ąĖ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓.
ąÆąĄčüčī ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą╝ąŠą┤ąĄą╗ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ ą┐čĆąĖą║ą╗ą░ą┤čŗą▓ą░ąĄčéčüčÅ čĆą░ąĘą╗ąĖčćąĮčŗą╝ ą┤ąĖčüčéčĆąĖą▒čāčéąĖą▓ą░ą╝ čüąĖčüč鹥ą╝čŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ VisualDSP. ąÆąŠą▓čüąĄ ąĮąĄ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ, čćč鹊 čŹč鹊čé ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą║ą░ą║-č鹊 ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ, ąŠą┤ąĮą░ą║ąŠ ąĄą│ąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĄ ą┤ą░ąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą╗čāčćčłąĄ čĆą░ąĘąŠą▒čĆą░čéčīčüčÅ, ą║ą░ą║ čĆą░ą▒ąŠčéą░ąĄčé ą║ąŠą┤.
ąóąĄčĆą╝ąĖąĮčŗ "ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓" ąĖ "ą┤čĆą░ą╣ą▓ąĄčĆ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░" ąŠčéąĮąŠčüčÅčéčüčÅ ą║ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╝ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░ą╝ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ą║ąŠą╝ą┐ą░ąĮąĖąĖ Analog Devices. ąóąĄčĆą╝ąĖąĮ "ąöčĆą░ą╣ą▓ąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ą░" ą▓ čŹč鹊ą╣ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ąŠčéąĮąŠčüąĖčéčüčÅ ą║ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓.
[ą×ą▒ąĘąŠčĆ ą╝ąŠą┤ąĄą╗ąĖ ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░]
ą£ąŠą┤ąĄą╗čī ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ą┐ąŠčüčéčĆąŠąĄąĮą░ ąĮą░ ąŠčüąĮąŠą▓ąĄ ąĖąĄčĆą░čĆčģąĖąĖ. ąØą░ čĆąĖčü. 10-1 ą┐ąŠą║ą░ąĘą░ąĮčŗ čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ ą┤ąĖąĘą░ą╣ąĮą░ čüąĖčüč鹥ą╝čŗ.

ąĀąĖčü. 10-1. ąöąĖąĘą░ą╣ąĮ ąĖ ąĖąĄčĆą░čĆčģąĖčÅ čüąĖčüč鹥ą╝čŗ ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░.
ąØą░ čĆąĖčüčāąĮą║ąĄ 10-1 ą┐ąŠą║ą░ąĘą░ąĮčŗ čüą╗ąĄą┤čāčÄčēąĖąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ:
ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ. ąźąŠčéčÅ čŹč鹊 ąŠą▒čŗčćąĮąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, čŹč鹊čé ą▒ą╗ąŠą║ ą╝ąŠąČąĄčé ąŠčéąĮąŠčüąĖčéčīčüčÅ ą║ ą╗čÄą▒ąŠą╝čā ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╝čā ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčā, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĮąŠ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čéčī ą║ą░ą║ ą║ą╗ąĖąĄąĮčé čüą╗čāąČą▒ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ (čŹč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī čéą░ą║ąČąĄ ą┐ąŠč鹊ą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ VDK). ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą║ą╗ąĖąĄąĮčé ąĮąĄ ąĖą╝ąĄąĄčé ąĄą┤ąĖąĮąŠą│ąŠ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠą│ąŠ ą▒ą╗ąŠą║ą░. ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąČąĄčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī ą╗čÄą▒ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą╗ąĖąĄąĮč鹊ą▓. ąó. ąĄ. ą║ą╗ąĖąĄąĮč鹊ą╝ ą╝ąŠąČąĄčé ą▒čŗčéčī ą║ą░ą║ ąĄą┤ąĖąĮčüčéą▓ąĄąĮąĮąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, čéą░ą║ ąĖ ą┐ąŠč鹊ą║ąĖ (ąĘą░ą┤ą░čćąĖ) RTOS-čüąĖčüč鹥ą╝ (ąĮą░ą┐čĆąĖą╝ąĄčĆ VDK).
RTOS. ąØąĄą║ąŠč鹊čĆčŗąĄ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčé čüą╗čāąČą▒čŗ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčŗčģ čüąĖčüč鹥ą╝ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (real-time operating system, RTOS). ą£ąŠą┤ąĄą╗čī ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ąĮąĄ ąŠčéąĮąŠčüąĖčéčüčÅ ą║ ą║ą░ą║ąŠą╣-č鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╣ RTOS, ąĖ čéą░ą║ąČąĄ ąŠąĮą░ ąĮąĄ čéčĆąĄą▒čāąĄčé ą┐čĆąĖčüčāčéčüčéą▓ąĖčÅ RTOS. ą£ąŠą┤ąĄą╗čī ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ąĮąĄ čéčĆąĄą▒čāąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░ ąĖą╗ąĖ čüąĄčĆą▓ąĖčüąŠą▓ ąŠčé RTOS. ąØąĄą║ąŠč鹊čĆčŗąĄ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčŗąĄ čüąĖčüč鹥ą╝čŗ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ čéčĆąĄą▒čāčÄčé ąŠčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, čćč鹊ą▒čŗ ąŠąĮąĖ čĆą░ą▒ąŠčéą░ą╗ąĖ čü ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ č湥čĆąĄąĘ API-čäčāąĮą║čåąĖąĖ RTOS. ąÆ čŹčéąĖčģ čüąĖčüč鹥ą╝ą░čģ RTOS ą┐čĆąŠčüč鹊 čĆą░čüčüą╝ą░čéčĆąĖą▓ą░ąĄčéčüčÅ ą║ą░ą║ ą║ą╗ąĖąĄąĮčé ą┤ą╗čÅ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓.
Device Manager (ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓). ąŁč鹊čé ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ ą║ąŠą╝ą┐ąŠąĮąĄąĮčé ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąŠą┤ąĮčā č鹊čćą║čā ą┤ąŠčüčéčāą┐ą░ ą║ ą╝ąŠą┤ąĄą╗ąĖ ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░. ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┤ą╗čÅ čŹč鹊ą╣ čåąĄą╗ąĖ čüą▓ąŠą╣ API. ąÆčüąĄ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖąĄ ą╝ąĄąČą┤čā ą║ą╗ąĖąĄąĮč鹊ą╝ ąĖ ąöčĆą░ą╣ą▓ąĄčĆą░ą╝ąĖ ąŻčüčéčĆąŠą╣čüčéą▓ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ č湥čĆąĄąĘ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓. ąÆ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠą╝čā API, ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 ą║ą╗ąĖąĄąĮčé ą┤ąĄą╗ą░ąĄčé ą▓čŗąĘąŠą▓čŗ ą║ čŹč鹊ą╝čā API ą▓ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ, ą▓čŗą┐ąŠą╗ąĮčÅčÄčéčüčÅ ą▓čüąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą╝ąĄąČą┤čā čüą╗čāąČą▒ą░ą╝ąĖ, ąĖ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą┐ąŠą┤čüąĖčüč鹥ą╝ą░ DMA ą┤ą╗čÅ ą▓čüąĄčģ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ (č湥čĆąĄąĘ čüąĖčüč鹥ą╝ąĮčŗąĄ čüą╗čāąČą▒čŗ ą£ąĄąĮąĄą┤ąČąĄčĆą░ DMA [3]) ą┤ą╗čÅ č鹥čģ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčé DMA.
ążąĖąĘąĖč湥čüą║ąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ. ąöčĆą░ą╣ą▓ąĄčĆčŗ čäąĖąĘąĖč湥čüą║ąĖčģ čāčüčéčĆąŠą╣čüčéą▓ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé čäčāąĮą║čåąĖąŠąĮą░ą╗ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čäąĖąĘąĖč湥čüą║ąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą╗čÄą▒ąŠąĄ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ąĮą░čüčéčĆąŠąĄą║ čĆąĄą│ąĖčüčéčĆąŠą▓, čāčüčéą░ąĮąŠą▓ą║ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ čé. ą┤.). ążąĖąĘąĖč湥čüą║ąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ ąŠčéą▓ąĄčćą░čÄčé ąĘą░ ą┐čĆąĖą▓čÅąĘą║čā ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąŠčłąĖą▒ą║ąĖ ą┤ą╗čÅ čüą▓ąŠąĖčģ čāčüčéčĆąŠą╣čüčéą▓ ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ ąŠą▒čĆą░ą▒ąŠčéą║čā ąŠčłąĖą▒ąŠą║. ąĢčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ čüąĖčüč鹥ą╝ąŠą╣ DMA ą┤ą╗čÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓, č鹊 čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ą╝ąĄčģą░ąĮąĖąĘą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą│ąŠ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ ąĖą╗ąĖ ąĮąĄą║ąĖą╣ ą┐ąŠą┤ąŠą▒ąĮčŗą╣ ą╝ąĄčģą░ąĮąĖąĘą╝, čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝.
System Services (ąĪąĖčüč鹥ą╝ąĮčŗąĄ ąĪą╗čāąČą▒čŗ). ąÜąŠą╝ą┐ąŠąĮąĄąĮčé ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ąČąĄčüčéą║ąŠ ą┐ąŠą╗ą░ą│ą░ąĄčéčüčÅ ąĮą░ čäčāąĮą║čåąĖąŠąĮą░ą╗, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄą╝čŗą╣ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąŠą╣ ąĪąĖčüč鹥ą╝ąĮčŗčģ ąĪą╗čāąČą▒. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą£ąĄąĮąĄą┤ąČąĄčĆ ą¤čĆąĄčĆčŗą▓ą░ąĮąĖą╣ [4], ąĖ ąĄčüą╗ąĖ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ, čéą░ą║ąČąĄ ą£ąĄąĮąĄą┤ąČąĄčĆ DMA [3] ąĖ ą£ąĄąĮąĄą┤ąČąĄčĆ DCB [5] (čüą╗čāąČą▒čŗ ąŠčéą╗ąŠąČąĄąĮąĮčŗą╣ čäčāąĮą║čåąĖą╣ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░). ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéčī ąĪąĖčüč鹥ą╝ąĮčŗčģ ąĪą╗čāąČą▒ čéą░ą║ąČąĄ ą┤ąŠčüčéčāą┐ąĮą░ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čäąĖąĘąĖč湥čüą║ąĖą╝ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ąĖ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┤čĆą░ą╣ą▓ąĄčĆ UART ą┤ąŠą╗ąČąĄąĮ ąĘąĮą░čéčī čćą░čüč鹊čéčā čéą░ą║č鹊ą▓ SCLK, čćč鹊ą▒čŗ UART čĆą░ą▒ąŠčéą░ą╗ ąĮą░ ąĮčāąČąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ (baud rate). ą¦ąĄčĆąĄąĘ čüą╗čāąČą▒čā čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ (power management service), čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ UART ą╝ąŠąČąĄčé ąĘą░ą┐čĆą░čłąĖą▓ą░čéčī č鹥ą║čāčēčāčÄ čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā SCLK.
ąś ą╝ąŠą┤ąĄą╗čī ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░, ąĖ ąĪąĖčüč鹥ą╝ąĮčŗąĄ ąĪą╗čāąČą▒čŗ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮčŗ ą║ą░ą║ ą┐ąŠčĆčéąĖčĆčāąĄą╝čŗąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ. ą×ąĮąĖ ąĮą░ą┐ąĖčüą░ąĮčŗ ą│ą╗ą░ą▓ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ąĮą░ čÅąĘčŗą║ąĄ C, čü ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄą╝ ą║ąŠą┤ą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░ ą┤ą╗čÅ ąĮąĄą║ąŠč鹊čĆčŗčģ ą║čĆąĖčéąĖč湥čüą║ąĖčģ čüąĄą║čåąĖą╣ ą░ą╗ą│ąŠčĆąĖčéą╝ą░. ąóą░ą║ čćč鹊 ą┐čĆąŠą│čĆą░ą╝ą╝ą░, ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓čāčÄčēą░čÅ čü ą╝ąŠą┤ąĄą╗čīčÄ ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ąĖ ąĪąĖčüč鹥ą╝ąĮčŗą╝ąĖ ąĪą╗čāąČą▒ą░ą╝ąĖ, ą┤ąŠą╗ąČąĮą░ ą┐čĆąĖą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ ą╝ąŠą┤ąĄą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ąŠą┤ą░ C (C run-time model), čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ čüąŠą│ą╗ą░čłąĄąĮąĖą╣ ąŠ ą▓čŗąĘąŠą▓ą░čģ, ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ąĖ čé. ą┐. ą¤čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĖ čäąĖąĘąĖč湥čüą║ąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą╝ąŠą│čāčé ą▒čŗčéčī ąĮą░ą┐ąĖčüą░ąĮčŗ ąĮą░ čÅąĘčŗą║ąĄ C ąĖą╗ąĖ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ. ąÆąĄąĘą┤ąĄ, ą│ą┤ąĄ čŹč鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ, čāčüčéčĆą░ąĮčÅą╗ą░čüčī ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčī ąŠčé čéčāą╗č湥ą╣ąĮą░ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąĖčüą┐ąŠą╗ąĮčÅąĄą╝ąŠą│ąŠ ą║ąŠą┤ą░. ąĪąĖčüč鹥ą╝ą░ ą▓ą║ą╗čÄčćą░ąĄčé ą▓ čüąĄą▒čÅ čäą░ą╣ą╗čŗ, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ čéčĆąĄą▒čāčÄčéčüčÅ, ąĮąŠ ąŠą▒čüą╗čāąČąĖą▓ą░čÄčé ą╝ąŠą┤ąĄą╗čī ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ ą┐čĆąĖą╝ąĄąĮčÅąĄą╝ąŠą│ąŠ čéčāą╗č湥ą╣ąĮą░ (run-time libraries). ą£ąŠą┤ąĄą╗čī ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ąĖ ąĪąĖčüč鹥ą╝ąĮčŗąĄ ąĪą╗čāąČą▒čŗ ą╝ąŠą│čāčé ą▒čŗčéčī čüąŠą▒čĆą░ąĮčŗ ąĖ ąĘą░ą┐čāčēąĄąĮčŗ ą▓ ą╗čÄą▒čŗčģ ąĖąĘą▓ąĄčüčéąĮčŗčģ čüąĖčüč鹥ą╝ą░čģ čüą▒ąŠčĆą║ąĖ ą║ąŠą┤ą░ (čéčāą╗č湥ą╣ąĮ), ąŠą┤ąĮą░ą║ąŠ ą│ą╗ą░ą▓ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čüąĖčüč鹥ą╝čŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ VisualDSP++.
ąØąĖ ą╝ąŠą┤ąĄą╗čīčÄ ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░, ąĮąĖ ąĪąĖčüč鹥ą╝ąĮčŗą╝ąĖ ąĪą╗čāąČą▒ą░ą╝ąĖ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠąĄ ą▓čŗą┤ąĄą╗ąĄąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ (malloc). ąĪčéą░čéąĖč湥čüą║ąŠąĄ ą▓čŗą┤ąĄą╗ąĄąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ čüą▓ąĄą┤ąĄąĮąŠ ą║ ą╝ąĖąĮąĖą╝čāą╝čā, ąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ą░čÅ ą▓čŗą┤ąĄą╗ąĄąĮąĮą░čÅ ą┐ą░ą╝čÅčéčī ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą▓ ą╝ąŠą┤ąĄą╗čī ąöčĆą░ą╣ą▓ąĄčĆąŠą▓ ąŻčüčéčĆąŠą╣čüčéą▓ ąĖ ąĪąĖčüč鹥ą╝ąĮčŗąĄ ąĪą╗čāąČą▒čŗ č湥čĆąĄąĘ ą▓čŗąĘąŠą▓ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāčÄčēąĖčģ čäčāąĮą║čåąĖą╣ ą▓ ą║ą╗ąĖąĄąĮč鹥 (ą┐ąŠč鹊ą║ąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ). ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čŗą┤ąĄą╗čÅąĄą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ (ąĖ ąĖąĘ ą║ą░ą║ąŠą╣ ąŠą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ ąŠąĮą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗą┤ąĄą╗ąĄąĮą░) ą┤ą╗čÅ ą╝ąŠą┤ąĄą╗ąĖ ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ąĖ ąĪąĖčüč鹥ą╝ąĮčŗčģ ąĪą╗čāąČą▒.
[ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓]
ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé č鹊čćą║čā ą┤ąŠčüčéčāą┐ą░ ą║ ą╝ąŠą┤ąĄą╗ąĖ ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░ (čé. ąĄ. ą║ čüą▓čÅąĘą║ąĄ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ + ą┤čĆą░ą╣ą▓ąĄčĆ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░). ąöą╗čÅ čŹč鹊ą╣ čåąĄą╗ąĖ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé API ą┤ą╗čÅ ą║ą╗ąĖąĄąĮčéą░ (ą┐ąŠą┤ ą║ą╗ąĖąĄąĮč鹊ą╝ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ ą║ąŠą┤ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĖą╗ąĖ ą║ąŠą┤ ą┐ąŠč鹊ą║ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ).
ą×ą▒ąĘąŠčĆ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓. API ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ čüąŠčüč鹊ąĖčé ąĖąĘ čüą╗ąĄą┤čāčÄčēąĖčģ čäčāąĮą║čåąĖą╣:
adi_dev_Init. ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░ (ą┐ą░ą╝čÅčéčī) ąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ąĄą│ąŠ.
adi_dev_Terminate. ą×čüą▓ąŠą▒ąŠąČą┤ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ąĖ ąĘą░ą║čĆčŗą▓ą░ąĄčé ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ą░.
adi_dev_Open. ą×čéą║čĆčŗą▓ą░ąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ.
adi_dev_Control. ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆčŗ čāčüčéčĆąŠą╣čüčéą▓ą░.
adi_dev_Read. ą¦ąĖčéą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖą╗ąĖ čüčéą░ą▓ąĖčé ą▓ ąŠč湥čĆąĄą┤čī ą▒čāč乥čĆčŗ ą┐čĆąĖąĄą╝ą░ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░.
adi_dev_Write. ąŚą░ą┐ąĖčüčŗą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖą╗ąĖ čüčéą░ą▓ąĖčé ą▓ ąŠč湥čĆąĄą┤čī ą▒čāč乥čĆčŗ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░.
adi_dev_Close. ąŚą░ą║čĆčŗą▓ą░ąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ.
ąÆ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÄ čäčāąĮą║čåąĖą╣ API ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓, ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čäčāąĮą║čåąĖčÄ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ ą┤ą╗čÅ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓. ą¦ą░čüč鹊 ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ąĖą╗ąĖ čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ąĖą╝ąĄąĄčé ą┤ąĄą╗ąŠ čü (ą░čüąĖąĮčģčĆąŠąĮąĮčŗą╝ąĖ) čüąŠą▒čŗčéąĖčÅą╝ąĖ, ą║ąŠč鹊čĆčŗąĄ ąĮčāąČąĮąŠ ą┐ąĄčĆąĄą┤ą░čéčī ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ. ąĪąŠą▒čŗčéąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠąČąĖą┤ą░ąĄą╝čŗą╝, ą║ą░ą║ ąĮą░ą┐čĆąĖą╝ąĄčĆ čüąŠą▒čŗčéąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▒čāč乥čĆą░ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖą╗ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮąĄąŠąČąĖą┤ą░ąĮąĮčŗą╝, ą║ą░ą║ ąĮą░ą┐čĆąĖą╝ąĄčĆ ą│ąĄąĮąĄčĆą░čåąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ąŠčłąĖą▒ą║ąĖ. ą× ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖąĖ ą▓čüąĄčģ čüąŠą▒čŗčéąĖą╣ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÄ čüąŠąŠą▒čēą░ąĄčé ą▓čŗąĘąŠą▓ callback-čäčāąĮą║čåąĖąĖ (čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝ą░čÅ čäčāąĮą║čåąĖčÅ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░). Callback-čäčāąĮą║čåąĖčÅ čŹč鹊 ą┐čĆąŠčüč鹊 čäčāąĮą║čåąĖčÅ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ, ą║ąŠč鹊čĆčāčÄ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ą▓čŗąĘčŗą▓ą░ąĄčé ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĄą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ čüąŠą▒čŗčéąĖąĖ.
ąóąĄąŠčĆąĖčÅ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ. ą£ąŠą┤ąĄą╗čī ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ą┐ąŠčüčéčĆąŠąĄąĮą░ ą▓ąŠą║čĆčāą│ ą║ąŠąĮčåąĄą┐čåąĖąĖ, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąŠ ą┤ą╗čÅ ą▓ą▓ąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ ą▓ čüąĖčüč鹥ą╝čā ąĖ/ąĖą╗ąĖ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ ąĖąĘ čüąĖčüč鹥ą╝čŗ. ąÆ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąĄ čüąĖčüč鹥ą╝ ąĮąĄą║ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą▓ą▓ąŠą┤ą░ ą┤ą░ąĮąĮčŗčģ ą▓ čüąĖčüč鹥ą╝čā (ą│ą┤ąĄ čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠą▒čĆą░ą▒ąŠčéą░ąĮčŗ), ąĖ ą┤čĆčāą│ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓čŗą▓ąŠą┤ąĖčé ąŠą▒čĆą░ą▒ąŠčéą░ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĖąĘ čüąĖčüč鹥ą╝čŗ. ąóą░ą║ąČąĄ čćą░čüč鹊 ąĮąĄčüą║ąŠą╗čīą║ąŠ čāčüčéčĆąŠą╣čüčéą▓ čĆą░ą▒ąŠčéą░čÄčé ą▓ čüąĖčüč鹥ą╝ąĄ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ. ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐čĆąŠčüč鹊ą╣ ąĖ ąĄą┤ąĖąĮąŠąŠą▒čĆą░ąĘąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü, ąĮąĄ ąĘą░ą▓ąĖčüčÅčēąĖą╣ ąŠčé ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą░ą║čéąĖą▓ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ, ąĖ ąŠčé ą┐ąŠą┤čĆąŠą▒ąĮąŠčüč鹥ą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖčÅ čü ą║ą░ąČą┤čŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝.
ąöą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗą╣ ą▓ą┤ą▓ąĖą│ą░čÄčéčüčÅ č湥čĆąĄąĘ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖą╗ąĖ ą▓čŗą┤ą▓ąĖą│ą░čÄčéčüčÅ č湥čĆąĄąĘ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮą░čĆčāąČčā, ąĖąĮą║ą░ą┐čüčāą╗ąĖčĆčāčÄčéčüčÅ ą▓ ą▒čāč乥čĆąĄ. API ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé 3 čĆą░ąĘąĮčŗąĄ čéąĖą┐ą░ ą▒čāč乥čĆą░:
ŌĆó ą×ą┤ąĮąŠą╝ąĄčĆąĮčŗąĄ ą▒čāč乥čĆčŗ ADI_DEV_1D_BUFFER
ŌĆó ąöą▓čāą╝ąĄčĆąĮčŗąĄ ą▒čāč乥čĆčŗ ADI_DEV_2D_BUFFER
ŌĆó ąÜąŠą╗čīčåąĄą▓čŗąĄ ą▒čāč乥čĆčŗ (ą░ą▓č鹊ą▒čāč乥čĆčŗ) ADI_DEV_CIRCULAR_BUFFER
ąśąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 čäąĖąĘąĖč湥čüą║ąŠąĄ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ čüą▓čÅąĘą░ąĮąŠ čüąŠ ąĘąĮą░čćąĖč鹥ą╗čīąĮčŗą╝ąĖ ą▓čŗčćąĖčüą╗ąĖč鹥ą╗čīąĮčŗą╝ąĖ ąĘą░čéčĆą░čéą░ą╝ąĖ, ą╝ąĄąČą┤čā ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╝ąĖ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéą░ą╝ąĖ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ č鹊ą╗čīą║ąŠ čāą║ą░ąĘą░č鹥ą╗ąĖ ąĮą░ ą▒čāč乥čĆčŗ. API ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čéąĖą┐ ą┤ą░ąĮąĮčŗčģ ADI_DEV_BUFFER ą║ą░ą║ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ąŠą▒čŖąĄą┤ąĖąĮąĄąĮąĖąĄ (union) ąŠą┤ąĮąŠą╝ąĄčĆąĮąŠą│ąŠ ą▒čāč乥čĆą░, ą┤ą▓čāą╝ąĄčĆąĮąŠą│ąŠ ą▒čāč乥čĆą░ ąĖ ą║ąŠą╗čīčåąĄą▓ąŠą│ąŠ ą▒čāč乥čĆą░. ąźąŠčéčÅ ą║ą░ąČą┤čŗą╣ ąĖąĘ čŹčéąĖčģ čéąĖą┐ąŠą▓ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ ą┐ąŠ-čĆą░ąĘąĮąŠą╝čā, ąĮąĄčé ąĘąĮą░čćąĖč鹥ą╗čīąĮčŗčģ ąŠčéą╗ąĖčćąĖą╣ ą▓ ąŠą▒čĆą░ą▒ąŠčéą║ąĄ, čéą░ą║ čćč鹊 ą▓ čŹč鹊ą╣ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ąŠąĮąĖ ą▓čüąĄ ą▓ą╝ąĄčüč鹥 čāą┐ąŠą╝ąĖąĮą░čÄčéčüčÅ ą┐čĆąŠčüč鹊 ą║ą░ą║ ą▒čāč乥čĆ.
ą×ą▒čŗčćąĮąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ą▒čāč乥čĆčŗ č湥čĆąĄąĘ API-čäčāąĮą║čåąĖąĖ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓, ą│ą┤ąĄ ą▒čāč乥čĆčŗ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ąĖ ąĘą░č鹥ą╝ čüąĮąŠą▓ą░ ą┤ąĄą╗ą░čÄčéčüčÅ ą┤ąŠčüčéčāą┐ąĮčŗą╝ąĖ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ążčāąĮą║čåąĖčÅ adi_dev_Write ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čāčüčéčĆąŠą╣čüčéą▓čā ą▒čāč乥čĆčŗ, ą║ąŠč鹊čĆčŗąĄ čüąŠą┤ąĄčƹȹ░čé ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ č湥čĆąĄąĘ čāčüčéčĆąŠą╣čüčéą▓ąŠ. ąĪąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ čäčāąĮą║čåąĖčÅ adi_dev_Read ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čāčüčéčĆąŠą╣čüčéą▓čā ą▒čāč乥čĆčŗ, ą║ąŠč鹊čĆčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĘą░ą┐ąŠą╗ąĮčÅąĄčé ą┐čĆąĖčģąŠą┤čÅčēąĖą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ.
ąæčāč乥čĆčŗ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą▓ č鹊ą╝ ą┐ąŠčĆčÅą┤ą║ąĄ, ą▓ ą║ąŠč鹊čĆąŠą╝ ąŠąĮąĖ ą▒čŗą╗ąĖ ą┐ąŠą╗čāč湥ąĮčŗ. ąæčāč乥čĆčŗ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗąĄ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĮąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą║ą░ą║ąŠą│ąŠ-č鹊 čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠą│ąŠ čĆą░ąĘą╝ąĄčĆą░; ą║ą░ąČą┤čŗą╣ ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮčŗą╣ ą▒čāč乥čĆ ą╝ąŠąČąĄčé ąĖą╝ąĄčéčī ą╗čÄą▒ąŠą╣ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą║ą░ą║ ąŠą┤ąĮąŠą╝ąĄčĆąĮčŗąĄ, čéą░ą║ ąĖ ą┤ą▓čāą╝ąĄčĆąĮčŗąĄ ą▒čāč乥čĆčŗ. ąÜąŠą╗čīčåąĄą▓čŗąĄ ą▒čāč乥čĆčŗ ą▒ąŠą╗ąĄąĄ čüą╗ąŠąČąĮčŗąĄ (ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. ą▓čĆąĄąĘą║čā "ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĄ ą▒čāč乥čĆąŠą▓ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░").
ą¤ąĄčĆąĄą┤ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ (ąĖą╗ąĖ ą║ą╗ąĖąĄąĮčé) ą┤ąŠą╗ąČąĮąŠ čüąĮą░čćą░ą╗ą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓. ąÜą╗ąĖąĄąĮčé ą┤ąĄą╗ą░ąĄčé čŹč鹊 ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ adi_dev_Init, ą▓ ą║ąŠč鹊čĆčāčÄ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▒ą╗ąŠą║ ą┐ą░ą╝čÅčéąĖ, ą║ąŠč鹊čĆčŗą╣ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ čüą▓ąŠąĄą╣ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ. ąÜą╗ąĖąĄąĮčé čĆąĄčłą░ąĄčé, ą║ą░ą║ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ (ąĖ ą║ą░ą║ą░čÅ ąŠą▒ą╗ą░čüčéčī ą┐ą░ą╝čÅčéąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, SRAM ąĖą╗ąĖ SDRAM) čüą╗ąĄą┤čāąĄčé ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ą£ąĄąĮąĄą┤ąČąĄčĆčā ąŻčüčéčĆąŠą╣čüčéą▓; č湥ą╝ ą▒ąŠą╗čīčłąĄ ą┐ą░ą╝čÅčéąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąŠ, č鹥ą╝ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čäąĖąĘąĖč湥čüą║ąĖčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčéą║čĆčŗč鹊 ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ.
ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ čéčĆąĄą▒čāąĄčé ą┤ą╗čÅ čüąĄą▒čÅ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮčŗą╣ ą▒ą╗ąŠą║ ą┐ą░ą╝čÅčéąĖ, ą║ąŠč鹊čĆčāčÄ ą┤ąĄą╗ąĖčé ą▓ąĮčāčéčĆąĖ čüąĄą▒čÅ ąĮą░ 2 čćą░čüčéąĖ. ą×ą┤ąĮą░ čćą░čüčéčī čŹč鹊 ą▒ą░ąĘąŠą▓ą░čÅ ą┐ą░ą╝čÅčéčī, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ą░čÅ ą£ąĄąĮąĄą┤ąČąĄčĆčā ąŻčüčéčĆąŠą╣čüčéą▓ ą┤ą╗čÅ ąĖąĮąĖčåąĖą░čåąĖąĖ čüą░ą╝ąŠą│ąŠ čüąĄą▒čÅ, ąĖ ą┤čĆčāą│ą░čÅ čćą░čüčéčī ą┐ą░ą╝čÅčéąĖ čéčĆąĄą▒čāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ n ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąŠčéą║čĆčŗčéčŗčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓. ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ ą╝ą░ą║čĆąŠčüčŗ (ADI_DEV_BASE_MEMORY ąĖ ADI_DEV_DEVICE_MEMORY), čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ (ą▓ ą▒ą░ą╣čéą░čģ), čéčĆąĄą▒čāąĄą╝ąŠąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ą┤ą╗čÅ ą▒ą░ąĘąŠą▓ąŠą╣ ą┐ą░ą╝čÅčéąĖ ąĖ ą┤ą╗čÅ ąŠčéą║čĆčŗčéčŗčģ ą┤ąŠą▒ą░ą▓ą╗čÅąĄą╝čŗčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓.
ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą║ą╗ąĖąĄąĮčé čģąŠč湥čé ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓, ąĖ ąĮčāąČąĮąŠ ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠąĄ ąŠčéą║čĆčŗčéąĖąĄ 4 ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓, č鹊 čéčĆąĄą▒čāąĄą╝ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ ą▓ ą▒ą░ą╣čéą░čģ ą▒čāą┤ąĄčé ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
ADI_DEV_BASE_MEMORY+(ADI_DEV_DEVICE_MEMORY*4))
ąæčāą┤čāčćąĖ ą▓čŗąĘą▓ą░ąĮąĮąŠą╣, čäčāąĮą║čåąĖčÅ adi_dev_Init(), ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčāčÄ ą┐ą░ą╝čÅčéčī. ąÜą░ą║ ąĖ ą▓čüąĄ čäčāąĮą║čåąĖąĖ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓, čäčāąĮą║čåąĖčÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą▓ąĄčĆąĮąĄčé ą║ąŠą┤, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠą║ą░ąČąĄčé čüą┐ąĄčåąĖčäąĖč湥čüą║čāčÄ ąŠčłąĖą▒ą║čā, ą▓ąŠąĘąĮąĖą║čłčāčÄ ą┐čĆąĖ ą▓čŗąĘąŠą▓ąĄ čäčāąĮą║čåąĖąĖ. ąÆčüąĄ API-čäčāąĮą║čåąĖąĖ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ ą▓ąŠąĘą▓čĆą░čéčÅčé ą║ąŠą┤ ADI_DEV_RESULT_SUCCESS, ąĄčüą╗ąĖ ą▓čŗąĘąŠą▓ čäčāąĮą║čåąĖąĖ ą▒čŗą╗ ąĘą░ą▓ąĄčĆčłąĄąĮ čāčüą┐ąĄčłąĮąŠ. ąÆčüąĄ ą║ąŠą┤čŗ ą▓ąŠąĘą▓čĆą░čéą░ ą┐ąŠ ąŠčłąĖą▒ą║ąĄ ąĖą╝ąĄčÄčé ąĖą╝ąĄąĮą░ ą▓ąĖą┤ą░ ADI_DEV_RESULT_XXXX.
ąÆ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ ą║ąŠą┤čā ą▓ąŠąĘą▓čĆą░čéą░ čäčāąĮą║čåąĖčÅ adi_dev_Init() ą▓ąŠąĘą▓čĆą░čéąĖčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą┤ąĄčƹȹ░ąĮąŠ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ, ąĖ čģąĄąĮą┤ą╗ ąĮą░ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠą▓ąĄčĆąĄąĮąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ, čćč鹊ą▒čŗ čāą▒ąĄą┤ąĖčéčīčüčÅ ą▓ č鹊ą╝, čćč鹊 ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠ ą╝ąŠąČąĄčé čāą┐čĆą░ą▓ą╗čÅčéčī ąĘą░ą┐čĆąŠčłąĄąĮąĮčŗą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓.
ąöčĆčāą│ąŠą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ, ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗą╣ ą▓ čäčāąĮą║čåąĖčÄ adi_dev_Init(), čŹč鹊 ą┐ą░čĆą░ą╝ąĄčéčĆ ą║čĆąĖčéąĖč湥čüą║ąŠą│ąŠ čĆąĄą│ąĖąŠąĮą░. ąÜąŠą│ą┤ą░ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąĘą░čēąĖčéąĖčéčī ą║čĆąĖčéąĖč湥čüą║ąĖą╣ čĆąĄą│ąĖąŠąĮ ą║ąŠą┤ą░, ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ąĖ ą▓čüąĄ čäąĖąĘąĖč湥čüą║ąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą┐ąŠą╗ą░ą│ą░čÄčéčüčÅ ąĮą░ čüąĖčüč鹥ą╝ąĮčāčÄ čüą╗čāąČą▒čā ą£ąĄąĮąĄą┤ąČąĄčĆą░ ą¤čĆąĄčĆčŗą▓ą░ąĮąĖą╣ [4], čćč鹊ą▒čŗ ąĘą░čēąĖčéąĖčéčī ą║čĆąĖčéąĖč湥čüą║ąĖą╣ ą║ąŠą┤. ą¤ą░čĆą░ą╝ąĄčéčĆ ą║čĆąĖčéąĖč湥čüą║ąŠą│ąŠ čĆąĄą│ąĖąŠąĮą░ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ adi_dev_Init(), ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ąŠąĮ ą▓ąĮčāčéčĆąĄąĮąĮąĄ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ čäčāąĮą║čåąĖčÄ adi_int_EnterCriticalRegion(). ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. ą▓čĆąĄąĘą║čā čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ adi_int_Init ąĮą░ čüčéčĆą░ąĮąĖčćą║ąĄ [4].
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: č鹥ą║čāčēą░čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ čüąĖčüč鹥ą╝ąĮčŗčģ čüą╗čāąČą▒ ąĖ VDK ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▓ą╗ąŠąČąĄąĮąĮčŗąĄ ą║čĆąĖčéąĖč湥čüą║ąĖąĄ čĆąĄą│ąĖąŠąĮčŗ, ą┐ąŠčŹč鹊ą╝čā ą▓ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ ą║čĆąĖčéąĖč湥čüą║ąŠą│ąŠ ą║ąŠą┤ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮ ą╗čÄą▒ąŠą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ. ąó. ąĄ. ąŠą▒čŗčćąĮąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ VisualDSP ąĖą╗ąĖ VDK ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▓čŗąĘą▓ą░čéčī adi_int_Init čü ą┐ą░čĆą░ą╝ąĄčéčĆąŠą╝ NULL ą┤ą╗čÅ ą║čĆąĖčéąĖč湥čüą║ąŠą╣ čüąĄą║čåąĖąĖ ą║ąŠą┤ą░. ąĢčüą╗ąĖ ąČąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ RTOS, ąŠčéą╗ąĖčćą░čÄčēą░čÅčüčÅ ąŠčé VDK, ąĖą╗ąĖ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓ą╗ąŠąČąĄąĮąĮčŗąĄ ą║čĆąĖčéąĖč湥čüą║ąŠąĄ ąŠą▒ą╗ą░čüčéąĖ, č鹊 ąĘąĮą░č湥ąĮąĖąĄ ą▓ čŹč鹊ą╝ ą┐ą░čĆą░ą╝ąĄčéčĆąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą║čĆąĖčéąĖč湥čüą║ąĖčģ čüąĄą║čåąĖą╣ ą║ąŠą┤ą░ ą▓ čŹč鹊ą╣ RTOS ąĖą╗ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ.
ąÜąŠą│ą┤ą░ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą▒ąŠą╗čīčłąĄ ąĮąĄ ąĮčāąČąĄąĮ, ą║ą╗ąĖąĄąĮčé ą╝ąŠąČąĄčé ąĘą░ą▓ąĄčĆčłąĖčéčī ąĄą│ąŠ ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ adi_dev_Terminate(). ąÆ čŹčéčā čäčāąĮą║čåąĖčÄ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ čģąĄąĮą┤ą╗ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆčŗą╣ ą▒čŗą╗ čĆą░ąĮąĄąĄ ą┐ąŠą╗čāč湥ąĮ ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ adi_dev_Init(). ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąĘą░ą║čĆčŗą▓ą░ąĄčé ą╗čÄą▒čŗąĄ ąŠčéą║čĆčŗčéčŗąĄ čäąĖąĘąĖč湥čüą║ąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ ąĘą░č鹥ą╝ ą┤ąĄą╗ą░ąĄčé ą▓ąŠąĘą▓čĆą░čé. ą¤ąŠčüą╗ąĄ ą▓čŗčģąŠą┤ą░ ąĖ čäčāąĮą║čåąĖąĖ adi_dev_Terminate() ą║ą╗ąĖąĄąĮčé ą╝ąŠąČąĄčé ą┐ąŠą▓č鹊čĆąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čéčā ą┐ą░ą╝čÅčéčī, ą║ąŠč鹊čĆą░čÅ ą▒čŗą╗ą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮą░ ą┤ą╗čÅ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ adi_dev_Init(). ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą▒čŗą╗ ąĘą░ą▓ąĄčĆčłąĄąĮ, ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ API ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ ą┐ąŠą▓č鹊čĆąĮąŠ.
ŌłÜ ąÆąŠ ą╝ąĮąŠą│ąĖčģ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ čüąĖčüč鹥ą╝ą░čģ čĆą░ą▒ąŠčéą░ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ąĘą░ą▓ąĄčĆčłą░ąĄčéčüčÅ.
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą▒čŗą╗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ, ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ą╗ąĖąĄąĮčé ą┤ąŠą╗ąČąĄąĮ čüąĮą░čćą░ą╗ą░ ą▓čŗąĘą▓ą░čéčī API-čäčāąĮą║čåąĖčÄ adi_dev_Open() ą┤ą╗čÅ ąŠčéą║čĆčŗčéąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░. ąÜą╗ąĖąĄąĮčé ą┐ąĄčĆąĄą┤ą░ąĄčé ą▓ ąĮąĄčæ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░, ą║ąŠč鹊čĆčŗą╣ ąĮą░ą┤ąŠ ąŠčéą║čĆčŗčéčī (ą┐ą░čĆą░ą╝ąĄčéčĆ pEntryPoint), ąĮąŠą╝ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░, ą║ąŠč鹊čĆąŠąĄ ąĮą░ą┤ąŠ ąŠčéą║čĆčŗčéčī (ą┐ą░čĆą░ą╝ąĄčéčĆ DevNumber; ąŠąĮ ąĮčāąČąĄąĮ, ą┐ąŠč鹊ą╝čā čćč鹊 ąŠą┤ąĮąŠčéąĖą┐ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą▓ ą┐čĆąŠčåąĄčüčüąŠčĆąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ, čéą░ą║ čćč鹊 ąŠąĮąĖ ąĮčāą╝ąĄčĆčāčÄčéčüčÅ ą┐ąŠ ą┐ąŠčĆčÅą┤ą║čā, ąĮą░čćąĖąĮą░čÅ čü 0 - ąĮą░ą┐čĆąĖą╝ąĄčĆ SPI0, SPI1 ąĖ čé. ą┤.), ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ (inbound, outbound ąĖą╗ąĖ both), ąĖ čé. ą┤. ąÜą╗ąĖąĄąĮčé čéą░ą║ąČąĄ ą┐ąĄčĆąĄą┤ą░ąĄčé čģąĄąĮą┤ą╗ ąĮą░ čüą╗čāąČą▒čā DMA ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓ ąĖ čäąĖąĘąĖč湥čüą║ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝. ąŁč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░ą▓ąĄąĮ NULL, ąĄčüą╗ąĖ ą║ą╗ąĖąĄąĮčé ąĘąĮą░ąĄčé, čćč鹊 čŹč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé DMA.
ą¤ą░čĆą░ą╝ąĄčéčĆ pDeviceHandle čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ ą╝ąĄčüč鹊 ą▓ ą┐ą░ą╝čÅčéąĖ, ą║čāą┤ą░ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ą░ čüąŠčģčĆą░ąĮąĖčé čģąĄąĮą┤ą╗ ąĮą░ ąŠčéą║čĆčŗą▓ą░ąĄą╝čŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░. ąÆčüąĄ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖąĄ ą▓čŗąĘąŠą▓čŗ API ą┤ą╗čÅ čŹč鹊ą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┤ąŠą╗ąČąĮčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čŹč鹊čé čģąĄąĮą┤ą╗. ClientHandle čŹč鹊 ą┐ą░čĆą░ą╝ąĄčéčĆ, ą║ąŠč鹊čĆčŗą╣ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą┐ąĄčĆąĄą┤ą░ąĄčé ąŠą▒čĆą░čéąĮąŠ ą║ą╗ąĖąĄąĮčéčā ą┐čĆąĖ ą║ą░ąČą┤ąŠą╝ ą▓čŗąĘąŠą▓ąĄ callback-čäčāąĮą║čåąĖąĖ ą║ą╗ąĖąĄąĮčéą░.
ąÆ čäčāąĮą║čåąĖčÄ adi_dev_Open() ąĄčēąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ 2 ą┤čĆčāą│ąĖčģ ą┐ą░čĆą░ą╝ąĄčéčĆą░. ą×ąĮąĖ čéą░ą║ąČąĄ čüą▓čÅąĘą░ąĮčŗ čü čäčāąĮą║čåąĖąĄą╣ callback. ą¤ą░čĆą░ą╝ąĄčéčĆ DCBHandle čŹč鹊 čģąĄąĮą┤ą╗ ąĮą░ čüą╗čāąČą▒čā ąŠčéą╗ąŠąČąĄąĮąĮčŗčģ čäčāąĮą║čåąĖą╣ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ (ą£ąĄąĮąĄą┤ąČąĄčĆ DCB [5]), ą║ąŠč鹊čĆą░čÅ ą┤ąŠą╗ąČąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą▓čŗąĘąŠą▓ą░ ą║ą╗ąĖąĄąĮčéčüą║ąŠą╣ callback-čäčāąĮą║čåąĖąĖ. ąĢčüą╗ąĖ DCBHandle ąĮąĄ NULL, č鹊 ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čāą║ą░ąĘą░ąĮąĮčāčÄ čüą╗čāąČą▒čā ąŠčéą╗ąŠąČąĄąĮąĮčŗčģ čäčāąĮą║čåąĖą╣ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ ą┤ą╗čÅ ą▓čüąĄčģ ąĘą░ą┐čāčüą║ąŠą▓ callback čŹč鹊ą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ąĢčüą╗ąĖ ąČąĄ čāą║ą░ąĘą░ąĮąŠ DCBHandle čĆą░ą▓ąĮčŗą╝ NULL, ą▓čüąĄ ą▓čŗąĘąŠą▓čŗ callback ą▒čāą┤čāčé ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮčŗą╝ąĖ (live); čŹč鹊 ąŠąĘąĮą░čćą░čÄčé, čćč鹊 ąĖčģ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ąĮąĄ ą▒čāą┤ąĄčé ąŠčéą╗ąŠąČąĄąĮąŠ ąĮą░ ą╝ąĄąĮąĄąĄ ą┐čĆąĖąŠčĆąĖč鹥čéąĮčŗą╣ ą║ąŠą┤, ąĖ ąŠąĮąĖ ą▒čāą┤čāčé čüčĆą░ąĘčā ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ ą▓ ą║ąŠąĮč鹥ą║čüč鹥 ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (ąŠą▒čŗčćąĮąŠ čŹč鹊 ISR, čĆą░ą▒ąŠčéą░čÄčēąĖą╣ ąĮą░ ą║ą░ą║ąŠą╝-č鹊 čāčĆąŠą▓ąĮąĄ ą┐čĆąĖąŠčĆąĖč鹥čéą░ IVG). ą¤ą░čĆą░ą╝ąĄčéčĆ ClientCallback čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ callback-čäčāąĮą║čåąĖčÄ ą║ą╗ąĖąĄąĮčéą░.
Callback-čäčāąĮą║čåąĖčÅ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą▓ ąŠčéą▓ąĄčé ąĮą░ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖąĄ ą░čüąĖąĮčģčĆąŠąĮąĮčŗčģ čüąŠą▒čŗčéąĖą╣, čü ą║ąŠč鹊čĆčŗą╝ąĖ ąĖą╝ąĄąĄčé ą┤ąĄą╗ąŠ ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░. ąÜą░ą║ čāąČąĄ ąŠą┐ąŠą╝ąĖąĮą░ą╗ąŠčüčī, ąĮąĄą║ąŠč鹊čĆčŗąĄ čüąŠą▒čŗčéąĖčÅ ą╝ąŠą│čāčé ą▒čŗčéčī ąŠąČąĖą┤ą░ąĄą╝čŗą╝ąĖ, ą║ą░ą║ ąĮą░ą┐čĆąĖą╝ąĄčĆ ąŠą┐čāčüč鹊賹ĄąĮąĖąĄ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ą░čćąĖ, ąĖ ąĮąĄą║ąŠč鹊čĆčŗąĄ čüąŠą▒čŗčéąĖčÅ ą╝ąŠą│čāčé ą▒čŗčéčī ąĮąĄąŠąČąĖą┤ą░ąĮąĮčŗą╝ąĖ, ą║ą░ą║ ąĮą░ą┐čĆąĖą╝ąĄčĆ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖąĄ ąŠčłąĖą▒ą║ąĖ čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝. ąØąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čéąĖą┐ą░ čüąŠą▒čŗčéąĖčÅ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ą▓čŗąĘčŗą▓ą░ąĄčé callback-čäčāąĮą║čåąĖčÄ ą┤ą╗čÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą║ą╗ąĖąĄąĮčéą░ ąŠ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖąĖ čüąŠą▒čŗčéąĖčÅ.
ą¤ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ ąĮąĄ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ adi_dev_Open(). ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┐čĆąŠčüč鹊 ąŠčéą║čĆčŗą▓ą░ąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ; ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ą╝ąŠąČąĄčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčīčüčÅ ąĮąĄą║ąŠąĄ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ, čćč鹊ą▒čŗ ą╝ąŠą│ ąĮą░čćą░čéčīčüčÅ ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ č湥čĆąĄąĘ čāčüčéčĆąŠą╣čüčéą▓ąŠ.
ążčāąĮą║čåąĖčÅ adi_dev_Control() ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ/ąĘą░ą┐čĆąĄčéą░ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ č湥čĆąĄąĘ čāčüčéčĆąŠą╣čüčéą▓ąŠ. ą¤čĆąĖ ąŠčéą║čĆčŗčéąĖąĖ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāčÄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄą║ąŠč鹊čĆčŗą╝ąĖ ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ąĖ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ. ąĢčüą╗ąĖ čŹčéąĖ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠą┤čģąŠą┤čÅčé ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, č鹊 čüąŠ čüč鹊čĆąŠąĮčŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠčéčĆąĄą▒čāčÄčéčüčÅ čüąŠą▓čüąĄą╝ ąĮąĄąĘąĮą░čćąĖč鹥ą╗čīąĮčŗąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ, ąĖą╗ąĖ ąŠąĮąĖ čüąŠą▓čüąĄą╝ ąĮąĄ ą┐ąŠčéčĆąĄą▒čāčÄčéčüčÅ. ąÆ ą┤čĆčāą│ąĖčģ čüą╗čāčćą░čÅčģ, ą║ąŠą│ą┤ą░ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĮąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčé ą┐ąŠčéčĆąĄą▒ąĮąŠčüčéčÅą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ čéčĆąĄą▒čāąĄčéčüčÅ ąĮąĄą║ąŠč鹊čĆąŠąĄ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ. ąöą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ąĮą░čüčéčĆąŠą╣ą║ąĖ, ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą║ą░ą║ąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ čüąĄą╣čćą░čü ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮą░ čäčāąĮą║čåąĖčÅ adi_dev_Control().
ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┐ąŠą╗čāčćą░ąĄčé ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ DeviceHandle (čāą║ą░ąĘčŗą▓ą░čÄčēąĖą╣ ąĮą░ ąŠčéą║čĆčŗč鹊ąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ, čüą╝. ą▓čĆąĄąĘą║čā "ą×čéą║čĆčŗčéąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░"), ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą║ąŠą╝ą░ąĮą┤čŗ (command ID, ą║ąŠč鹊čĆčŗą╣ ąĘą░ą┤ą░ąĄčé ą┤ąĄą╣čüčéą▓ąĖąĄ - čāčüčéą░ąĮąŠą▓ąĖčéčī ą┐ą░čĆą░ą╝ąĄčéčĆčŗ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖą╗ąĖ ąĖčģ ą┐čĆąŠčćąĖčéą░čéčī), ąĖ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ąŠą▒ą╗ą░čüčéčī ą┐ą░ą╝čÅčéąĖ, ą│ą┤ąĄ čüąŠą┤ąĄčƹȹĖčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄą╝ąŠą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░ (ąĖą╗ąĖ ą║čāą┤ą░ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ čüčćąĖčéą░ąĮąĮąŠą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░). ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ąĮąĄą║ąŠč鹊čĆčŗąĄ čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ; ąŠą┤ąĮą░ą║ąŠ čäąĖąĘąĖč湥čüą║ąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ čüą▓ąŠą▒ąŠą┤ąĮčŗ ą▓ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĖąĖ čüą▓ąŠąĖčģ čüąŠą▒čüčéą▓ąĄąĮąĮčŗčģ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ ą║ąŠą╝ą░ąĮą┤ ą┐ąŠą╝ąĖą╝ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┤čĆą░ą╣ą▓ąĄčĆ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą╝ąŠąČąĄčé čüąŠąĘą┤ą░čéčī command ID, čćč鹊ą▒čŗ čāčüčéą░ąĮąŠą▓ąĖčéčī čāčĆąŠą▓ąĄąĮčī ą│čĆąŠą╝ą║ąŠčüčéąĖ ąĮą░ ą▓čŗčģąŠą┤ąĄ.
ŌłÜ ąĀą░ąĘčĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąŠą▓ąĄčĆąĖčéčī ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ ą┐ąŠ čäąĖąĘąĖč湥čüą║ąŠą╝čā ą┤čĆą░ą╣ą▓ąĄčĆčā, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą║ą░ą║ąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą╝ąŠąČąĮąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī, ąĖ ą║ą░ą║ąĖąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą╝ąŠąČąĮąŠ ą▓čŗą▒čĆą░čéčī.
ąØąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé č鹊ą│ąŠ, ą║ą░ą║ąĖąĄ ąĮčāąČąĮąŠ čüą┤ąĄą╗ą░čéčī ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┤ą╗čÅ ą║ą╗ąĖąĄąĮčéą░, ąŠąĮ ą┤ąŠą╗ąČąĄąĮ čüą┤ąĄą╗ą░čéčī (ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝) 2 ą▓čŗąĘąŠą▓ą░ čäčāąĮą║čåąĖąĖ adi_dev_Control(). ąŁčéąĖ ą▓čŗąĘąŠą▓čŗ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčé ą╝ąĄč鹊ą┤ čĆą░ą▒ąŠčéčŗ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ (čüą╝. ą▓čĆąĄąĘą║čā ąĮąĖąČąĄ), ąĖ čĆą░ąĘčĆąĄčłą░čÄčé ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░.
ąÆąŠąĘą╝ąŠąČąĮčŗąĄ ą╝ąĄč鹊ą┤čŗ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖąĖ ADI_DEV_MODE, ą║ąŠč鹊čĆąŠąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čäą░ą╣ą╗ąĄ adi_dev.h (ą┐ą░ą┐ą║ą░ Blackfin\include\drivers ą▓ ą║ą░čéą░ą╗ąŠą│ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ VisualDSP++ 5.0):
typedef enum { /* ą£ąĄč鹊ą┤čŗ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ (Dataflow) */
ADI_DEV_MODE_UNDEFINED, /* ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ */
ADI_DEV_MODE_CIRCULAR, /* ą║ąŠą╗čīčåąĄą▓ąŠą╣ ą▒čāč乥čĆ */
ADI_DEV_MODE_CHAINED, /* čåąĄą┐ąŠčćą║ą░ ą▒čāč乥čĆąŠą▓ */
ADI_DEV_MODE_CHAINED_LOOPBACK, /* čåąĄą┐ąŠčćą║ą░ čü ą░ą▓č鹊ą┐ąĄčĆąĄčģąŠą┤ąŠą╝ ąĮą░ ąĮą░čćą░ą╗ąŠ čåąĄą┐ąŠčćą║ąĖ */
ADI_DEV_MODE_SEQ_CHAINED, /* ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī čåąĄą┐ąŠč湥ą║ ą▒čāč乥čĆąŠą▓ */
ADI_DEV_MODE_SEQ_CHAINED_LOOPBACK /* ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī čåąĄą┐ąŠč湥ą║ čü ą┐ąĄčĆąĄčģąŠą┤ąŠą╝ ąĮą░ ąĮą░čćą░ą╗ąŠ */
} ADI_DEV_MODE;
ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé 3 ą╝ąĄč鹊ą┤ą░ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ: circular (ą║ąŠą╗čīčåąĄą▓ąŠą╣ ąĖą╗ąĖ ą░ą▓č鹊ą▒čāč乥čĆ), chained (čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą▒čāč乥čĆąŠą▓ ą▓ čåąĄą┐ąŠčćą║čā) ąĖ chained with loopback (čåąĄą┐ąŠčćą║ą░ ą▒čāč乥čĆąŠą▓ čü ą▓ąŠąĘą▓čĆą░č鹊ą╝ ąĮą░ ąĮą░čćą░ą╗ąŠ čåąĄą┐ąŠčćą║ąĖ). ą¤ąĄčĆąĄą┤ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĄą╝ ą┤ą╗čÅ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ ą║ą░ą║ąĖčģ-ą╗ąĖą▒ąŠ ą▒čāč乥čĆąŠą▓ ąĖą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ, ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ąĖąĮč乊čĆą╝ąĖčĆąŠą▓ą░čéčī ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ąŠą▒ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╝ ą╝ąĄč鹊ą┤ąĄ čĆą░ą▒ąŠčéčŗ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ adi_dev_Control() čü ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝ ą║ąŠą╝ą░ąĮą┤čŗ ADI_DEV_CMD_SET_DATAFLOW_METHOD. ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą╝ąĄč鹊ą┤ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ ą▒čŗą╗ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ, ą║ą╗ąĖąĄąĮčé ą┤ąŠą╗ąČąĄąĮ ą╝ąŠąČąĄčé ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓čģąŠą┤čÅčēąĖąĄ ą▒čāč乥čĆčŗ (ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ adi_dev_Read) ąĖą╗ąĖ ąĖčüčģąŠą┤čÅčēąĖąĄ ą▒čāč乥čĆčŗ (ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ adi_dev_Write).
ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 10-2, ą╝ąĄč鹊ą┤ ą║ąŠą╗čīčåąĄą▓ąŠą│ąŠ ą┐ąŠč鹊ą║ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąŠą┤ąĖąĮ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄą╝čŗą╣ ą┤ą╗čÅ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ ą║ąŠą╗čīčåąĄą▓ąŠą╣ ą▒čāč乥čĆ, ą┐čĆąĖ čŹč鹊ą╝ ą┐čĆąĄą┤ą┐ąŠą╗ą░ą│ą░ąĄčéčüčÅ, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▒čŗą╗ąŠ ąŠčéą║čĆčŗč鹊 ą┤ą╗čÅ ąŠą┤ąĮąŠąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮąŠą│ąŠ čéčĆą░čäąĖą║ą░.
ąĀąĖčü. 10-2. ąĀą░ą▒ąŠčéą░ ą║ąŠą╗čīčåąĄą▓ąŠą│ąŠ ą▒čāč乥čĆą░ (ą░ą▓č鹊ą▒čāč乥čĆ).
ąÜąŠą│ą┤ą░ ą£ąĄąĮąĄą┤ąČąĄčĆčā ąŻčüčéčĆąŠą╣čüčéą▓ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą║ąŠą╗čīčåąĄą▓ąŠą╣ ą▒čāč乥čĆ, ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĖąĮč乊čĆą╝ąĖčĆčāąĄčé ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąŠ č鹊ą╝, čüą║ąŠą╗čīą║ąŠ ąĮą░čģąŠą┤ąĖčéčüčÅ ą┐ąŠą┤ą▒čāč乥čĆąŠą▓ ą▓ąĮčāčéčĆąĖ ą║ąŠą╗čīčåąĄą▓ąŠą│ąŠ ą▒čāč乥čĆą░; ą┤ą▓ą░ ą┐ąŠą┤ą▒čāč乥čĆą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čéčĆą░ą┤ąĖčåąĖąŠąĮąĮąŠą╣ čüčģąĄą╝čŗ ą┤ą▓ąŠą╣ąĮąŠą╣ ą▒čāč乥čĆąĖąĘą░čåąĖąĖ (ping-pong), čģąŠčéčÅ ą┐čĆąŠčåąĄčüčüąŠčĆčŗ Blackfin ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ą╗čÄą▒ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąŠą┤ą▒čāč乥čĆąŠą▓. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ čéą░ą║ąČąĄ ą│ąŠą▓ąŠčĆąĖčé ą£ąĄąĮąĄą┤ąČąĄčĆčā ąŻčüčéčĆąŠą╣čüčéą▓, ą║ąŠą│ą┤ą░ ąŠąĮąŠ čģąŠč湥čé ą▓čŗąĘą▓ą░čéčī callback ą▓ąŠ ą▓čĆąĄą╝čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą║ąŠą╗čīčåąĄą▓ąŠą│ąŠ ą▒čāč乥čĆą░.
ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ 3 ąŠą┐čåąĖąĖ ą┤ą╗čÅ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąŠą▒ ąŠą▒čĆą░ą▒ąŠčéą║ąĄ ą▒čāč乥čĆą░: ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą▓čŗąĘčŗą▓ą░čéčī callback, callback ą┐ąŠčüą╗ąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąŠą┤ą▒čāč乥čĆą░ ąĖ callback ą┐ąŠčüą╗ąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▓čüąĄą│ąŠ ą▒čāč乥čĆą░. ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ąĮą░čćąĖąĮą░ąĄčé ąŠą▒čĆą░ą▒ąŠčéą║čā ąŠčé ąĮą░čćą░ą╗ą░ ą▒čāč乥čĆą░. ąŻčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ čüą┐ąŠčüąŠą▒ąŠą╝ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąŠą┐ąŠą▓ąĄčēą░ąĄčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐čāč鹥ą╝ ą▓čŗąĘąŠą▓ą░ callback-čäčāąĮą║čåąĖąĖ, ą║ąŠą│ą┤ą░ ąĘą░ą▓ąĄčĆčłą░ąĄčéčüčÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąŠą┤ą▒čāč乥čĆą░, ąĖą╗ąĖ ą║ąŠą│ą┤ą░ ą▒čŗą╗ ąŠą▒čĆą░ą▒ąŠčéą░ąĮ ą▓ąĄčüčī ą▒čāč乥čĆ čåąĄą╗ąĖą║ąŠą╝. ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čŗą╗ ą┤ąŠčüčéąĖą│ąĮčāčé ą║ąŠąĮąĄčå ą▒čāč乥čĆą░, ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ą░ąĄčé ąŠą▒čĆą░ą▒ąŠčéą║čā čü ąĮą░čćą░ą╗ą░ ą▒čāč乥čĆą░, ąĖ ą┐čĆąŠčåąĄčüčü čåąĖą║ą╗ąĖč湥čüą║ąĖ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčéčüčÅ.
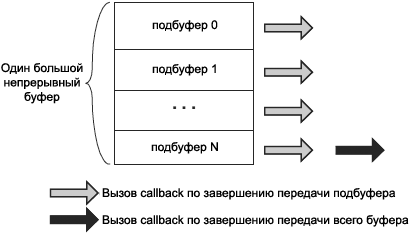
ąØą░ čĆąĖčü. 10-3 ą┐ąŠą║ą░ąĘą░ąĮ ą╝ąĄč鹊ą┤ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ čü čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄą╝ ą▒čāč乥čĆąŠą▓ ą▓ čåąĄą┐ąŠčćą║čā (chained dataflow), ą│ą┤ąĄ ą┤ą╗čÅ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ ąŠą┤ąĖąĮ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąŠą┤ąĮąŠą╝ąĄčĆąĮčŗčģ ąĖ/ąĖą╗ąĖ ą┤ą▓čāą╝ąĄčĆąĮčŗčģ ą▒čāč乥čĆąŠą▓. ą£ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąŠ ą╗čÄą▒ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒čāč乥čĆąŠą▓; ą▒čāč乥čĆčŗ ą╝ąŠą│čāčé ą▒čŗčéčī ą╗čÄą▒čŗčģ čĆą░ąĘą╝ąĄčĆąŠą▓, ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ ąĖ č鹊ą│ąŠ ąČąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą║ą░ą║ ąŠą┤ąĮąŠą╝ąĄčĆąĮčŗąĄ, čéą░ą║ ąĖ ą┤ą▓čāą╝ąĄčĆąĮčŗąĄ ą▒čāč乥čĆčŗ. ąóąŠą╗čīą║ąŠ ąŠą┤ąĖąĮ ąĖąĘ ą▓čüąĄčģ ą▒čāč乥čĆąŠą▓, ąĖą╗ąĖ ą▓čüąĄ ą▒čāč乥čĆčŗ, ąĖą╗ąĖ ąĮąĖą║ą░ą║ąŠą╣ ąĖąĘ ą▒čāč乥čĆąŠą▓ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠą╝ąĄč湥ąĮčŗ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą▓čŗąĘąŠą▓ą░ callback-čäčāąĮą║čåąĖąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ą║ąŠą│ą┤ą░ ą▒čāč乥čĆ ą▒čŗą╗ ąŠą▒čĆą░ą▒ąŠčéą░ąĮ. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą▒čāč乥čĆčŗ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ - ą╗ąĖą▒ąŠ ą┤ąŠ, ą╗ąĖą▒ąŠ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ ą▒čŗą╗ąŠ čĆą░ąĘčĆąĄčłąĄąĮ. ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé ąŠą▒čĆą░ą▒ąŠčéą║čā ą▒čāč乥čĆąŠą▓ ą▓ č鹊ą╝ ą┐ąŠčĆčÅą┤ą║ąĄ, ą▓ ą║ą░ą║ąŠą╝ ąŠąĮąĖ ą▒čŗą╗ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą┤ą╗čÅ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓.

ąĀąĖčü. 10-3. ąĪąŠąĄą┤ąĖąĮąĄąĮąĮčŗąĄ ą▓ čåąĄą┐ąŠčćą║čā ą▒čāč乥čĆčŗ (chained dataflow).
ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą╝ąĄč鹊ą┤ chained dataflow, ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą┤ą░čéčī ą║ąŠą╝ą░ąĮą┤čā ą£ąĄąĮąĄą┤ąČąĄčĆčā ąŻčüčéčĆąŠą╣čüčéą▓ čĆą░ą▒ąŠčéą░čéčī ą▓ čüąĖąĮčģčĆąŠąĮąĮąŠą╝ čĆąĄąČąĖą╝ąĄ. ą×ą▒čŗčćąĮąŠ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ čĆą░ą▒ąŠčéą░ąĄčé ą▓ ą░čüąĖąĮčģčĆąŠąĮąĮąŠą╝ čĆąĄąČąĖą╝ąĄ, ą║ąŠą│ą┤ą░ čäčāąĮą║čåąĖąĖ adi_dev_Read ąĖ adi_dev_Write čüčĆą░ąĘčā ą┤ąĄą╗ą░čÄčé ą▓ąŠąĘą▓čĆą░čé ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ ą▒čŗą╗ąĖ ąŠą▒čĆą░ą▒ąŠčéą░ąĮčŗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗąĄ ąĖą╝ąĖ ą▒čāč乥čĆčŗ. ąÆ čüąĖąĮčģčĆąŠąĮąĮąŠą╝ čĆąĄąČąĖą╝ąĄ čäčāąĮą║čåąĖąĖ adi_dev_Read ąĖ adi_dev_Write ąĮąĄ ą▓ąŠąĘą▓čĆą░čéčÅčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤čāčé ąŠą▒čĆą░ą▒ąŠčéą░ąĮčŗ ą▓čüąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗąĄ ąĖą╝ąĖ ą▒čāč乥čĆčŗ. ąźąŠčéčÅ čüąĖąĮčģčĆąŠąĮąĮčŗą╣ čĆąĄąČąĖą╝ čĆąĄą┤ą║ąŠ ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ čüąĖčüč鹥ą╝ą░čģ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą▓čüąĄ-čéą░ą║ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čéą░ą║čāčÄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī.
ąØą░ čĆąĖčü. 10-4 ą┐ąŠą║ą░ąĘą░ąĮ ą╝ąĄč鹊ą┤ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ čü čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄą╝ ą▒čāč乥čĆąŠą▓ ą▓ čåąĄą┐ąŠčćą║čā, ą║ąŠą│ą┤ą░ ą┐ąŠčüą╗ąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą▒čāč乥čĆą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ąŠąĘą▓čĆą░čé ąĮą░ ąĮą░čćą░ą╗ąŠ čåąĄą┐ąŠčćą║ąĖ (chained dataflow with loopback). ą×ąĮ ą┐ąŠčģąŠąČ ąĮą░ ą╝ąĄč鹊ą┤ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ chained dataflow, ąŠčéą╗ąĖčćąĖąĄ č鹊ą╗čīą║ąŠ ą▓ č鹊ą╝, čćč鹊 ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą┐ąŠčüą╗ąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą▒čāč乥čĆą░ ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ą║ ąŠą▒čĆą░ą▒ąŠčéą║ąĄ ą┐ąĄčĆą▓ąŠą│ąŠ ą▒čāč乥čĆą░ ą▓ čåąĄą┐ąŠčćą║ąĄ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠą╣ čāčüčéčĆąŠą╣čüčéą▓čā. ąóą░ą║ąŠą╣ ą╝ąĄč鹊ą┤ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ čŹčäč乥ą║čéąĖą▓ąĮąŠ čüąŠąĘą┤ą░ąĄčé ą▒ąĄčüą║ąŠąĮąĄčćąĮčŗą╣ čåąĖą║ą╗ ąĖąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą▒čāč乥čĆąŠą▓. ą¤čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą╝ąĄč鹊ą┤ą░ chained with loopback ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ą▒čāč乥čĆčŗ ą▓ąŠ ą▓čĆąĄą╝čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ, ą┐ąŠąĘą▓ąŠą╗čÅčÅ ą£ąĄąĮąĄą┤ąČąĄčĆčā ąŻčüčéčĆąŠą╣čüčéą▓ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī ą▒čāč乥čĆčŗ, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ąĮąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčéčī ą£ąĄąĮąĄą┤ąČąĄčĆčā ąŻčüčéčĆąŠą╣čüčéą▓ ąĮąĖą║ą░ą║ąĖąĄ ą▒čāč乥čĆčŗ. ą¤čĆąĖ čéą░ą║ąŠą╝ ą╝ąĄč鹊ą┤ąĄ čĆą░ą▒ąŠčéčŗ, čéą░ą║ ąČąĄ ąĖ ą║ą░ą║ čü ą╝ąĄč鹊ą┤ąŠą╝ chained dataflow, ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ąŠą┤ąĮąŠą│ąŠ ą▒čāč乥čĆą░ ą▓ čåąĄą┐ąŠčćą║ąĄ, ą┤ą╗čÅ ą▓čüąĄčģ ą▒čāč乥čĆąŠą▓ čåąĄą┐ąŠčćą║ąĖ, ąĖą╗ąĖ ąĮąĖ ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ ą▒čāč乥čĆą░ čåąĄą┐ąŠčćą║ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┤ą░ąĮąŠ ąĘą░ą┐čāčüą║ą░čéčī ą▓čŗąĘąŠą▓ čäčāąĮą║čåąĖąĖ callback ą┤ą╗čÅ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.

ąĀąĖčü. 10-4. ąĪąŠąĄą┤ąĖąĮąĄąĮąĮčŗąĄ ą▓ čåąĄą┐ąŠčćą║čā ą▒čāč乥čĆčŗ čü ą▓ąŠąĘą▓čĆą░č鹊ą╝ ąĮą░ ąĮą░čćą░ą╗ąŠ (Loopback).
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čŗą╗ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą╝ąĄč鹊ą┤ čĆą░ą▒ąŠčéčŗ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ, ą┐čĆą░ą▓ąĖą╗čīąĮąŠ ą┐ąŠą┤ą│ąŠč鹊ą▓ą╗ąĄąĮčŗ ą▓čüąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗąĄ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▒čāč乥čĆčŗ (čüą╝. ą▓čĆąĄąĘą║čā "ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĄ ą▒čāč乥čĆąŠą▓ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░"), ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ čĆą░ąĘčĆąĄčłą░ąĄčé ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ ą▓čŗąĘąŠą▓ąŠą╝ čäčāąĮą║čåąĖąĖ adi_dev_Control čü ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝ ą║ąŠą╝ą░ąĮą┤čŗ ADI_DEV_CMD_SET_DATAFLOW. ą¤ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ čüčéą░čĆčéčāąĄčé ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ, čéą░ą║ čćč鹊 ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 ąĄčüą╗ąĖ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüąĖąĮčģčĆąŠąĮąĮčŗą╣ čĆąĄąČąĖą╝, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ą░ ą▒čŗą╗ąĖ ąŠčéą║čĆčŗčéčŗ ą┤ą╗čÅ ą▓čģąŠą┤čÅčēąĖčģ ąĖą╗ąĖ ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗčģ ą┤ą░ąĮąĮčŗčģ čü ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗą╝ąĖ ą▒čāč乥čĆą░ą╝ąĖ, ąĖą╗ąĖ ą▓ ą┐čĆąŠčéąĖą▓ąĮąŠą╝ čüą╗čāčćą░ąĄ ą┤ą░ąĮąĮčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠč鹥čĆčÅąĮčŗ.
ąæčāč乥čĆčŗ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ č湥čĆąĄąĘ ą▓čŗąĘąŠą▓čŗ API-čäčāąĮą║čåąĖą╣ adi_dev_Read ąĖ adi_dev_Write. ążčāąĮą║čåąĖčÅ adi_dev_Read ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▒čāč乥čĆčŗ ą┤ą╗čÅ ą▓čģąŠą┤čÅčēąĖčģ ą┤ą░ąĮąĮčŗčģ, adi_dev_Write ą┤ą╗čÅ ąĖčüčģąŠą┤čÅčēąĖčģ ą┤ą░ąĮąĮčŗčģ. ąÜą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ą║ą╗ąĖąĄąĮčé ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▒čāč乥čĆčŗ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ č湥čĆąĄąĘ čŹčéąĖ ą▓čŗąĘąŠą▓čŗ API ąĘą░ą▓ąĖčüąĖčé čü ąĮąĄą▒ąŠą╗čīčłąĖą╝ąĖ čĆą░ąĘą╗ąĖčćąĖčÅą╝ąĖ ąŠčé ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ą╝ąĄč鹊ą┤ą░ čĆą░ą▒ąŠčéčŗ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ (čüą╝. ą▓čĆąĄąĘą║čā "ą£ąĄč鹊ą┤čŗ čĆą░ą▒ąŠčéčŗ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ").
ąÜąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą║ąŠą╗čīčåąĄą▓ąŠą│ąŠ ą╝ąĄč鹊ą┤ą░ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ (circular dataflow), ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┤čĆą░ą╣ą▓ąĄčĆčā čāčüčéčĆąŠą╣čüčéą▓ą░ ąŠą┤ąĖąĮ ąĖ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą▒čāč乥čĆ ą┤ą╗čÅ ą▓čģąŠą┤čÅčēąĖčģ ą┤ą░ąĮąĮčŗčģ ąĖ/ąĖą╗ąĖ ąŠą┤ąĖąĮ ąĖ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą▒čāč乥čĆ ą┤ą╗čÅ ąĖčüčģąŠą┤čÅčēąĖčģ ą┤ą░ąĮąĮčŗčģ. ąöą░ąĮąĮčŗąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗčģ ą▒čāč乥čĆąŠą▓ čāą║ą░ąĘčŗą▓ą░čÄčé ąĮą░ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮčŗąĄ čāčćą░čüčéą║ąĖ ą┐ą░ą╝čÅčéąĖ, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ąŠą┤ąĮą░ą║ąŠ ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ ą┐ąŠą┤ą▒čāč乥čĆą░ą╝, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ čģąŠč湥čé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī.
ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĖą╝, čćč鹊 ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ čģąŠč湥čé ąŠą▒čĆą░ą▒ąŠčéą░čéčī ą┤ą░ąĮąĮčŗąĄ ą▓ ąĖąĮą║čĆąĄą╝ąĄąĮčéą░čģ ą┐ąŠ 512 ą▒ą░ą╣čé, ąĖ čģąŠč湥čé čĆą░ą▒ąŠčéą░čéčī čéčĆą░ą┤ąĖčåąĖąŠąĮąĮčŗą╝ čüą┐ąŠčüąŠą▒ąŠą╝ "ping-pong" (2 ą┐ąŠą┤ą▒čāč乥čĆą░). ąóąŠą│ą┤ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┤čĆą░ą╣ą▓ąĄčĆčā čāčüčéčĆąŠą╣čüčéą▓ą░ 1 ą▒čāč乥čĆ ą┤ą░ąĮąĮčŗčģ čĆą░ąĘą╝ąĄčĆąŠą╝ 1024 ą▒ą░ą╣čéą░, čüąŠčüč鹊čÅčēąĖą╣ ąĖąĘ 2 ą┐ąŠą┤ą▒čāč乥čĆąŠą▓, ą║ą░ąČą┤čŗą╣ ą┐ąŠ 512 ą▒ą░ą╣čé. ąóą░ą║ąĖą╝ čüą┐ąŠčüąŠą▒ąŠą╝ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą╝ąŠą│čāčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮčŗ ą┤ą▓ą░ ą┐ąŠą┤ą▒čāč乥čĆą░ - čü ąŠą┤ąĮąĖą╝ ą┐ąŠą┤ą▒čāč乥čĆąŠą╝ ąĖąĘ 512 ą▒ą░ą╣čé čĆą░ą▒ąŠčéą░ąĄčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ, ą░ čü ą┤čĆčāą│ąĖą╝ ą┐ąŠą┤ą▒čāč乥čĆąŠą╝ ąĖąĘ 512 ą▒ą░ą╣čé čĆą░ą▒ąŠčéą░ąĄčé ą┤čĆą░ą╣ą▓ąĄčĆ.
ąöčĆčāą│ąŠą╣ ą┐čĆąĖą╝ąĄčĆ - ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ čģąŠč湥čé ąŠą▒čĆą░ą▒ąŠčéą░čéčī čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą║ą░ą┤čĆ ą▓ąĖą┤ąĄąŠ č乊čĆą╝ą░čéą░ NTSC (525 čüčéčĆąŠą║, ąĮą░ ą║ą░ąČą┤čāčÄ ą┐ąŠ 1716 ą▒ą░ą╣čé). ąæčāč乥čĆ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ ą┤ą╗čÅ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓, ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĮąĄą┐čĆąĄčĆčŗą▓ąĮčŗą╝ ą║čāčüą║ąŠą╝ ą┐ą░ą╝čÅčéąĖ čĆą░ąĘą╝ąĄčĆąŠą╝ 900900 ą▒ą░ą╣čé (525 * 1716). ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąŠą┤ą▒čāč乥čĆąŠą▓ ą▒čāą┤ąĄčé 525. ąØąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé č鹊ą│ąŠ, čüą║ąŠą╗čīą║ąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąŠ ą┐ąŠą┤ą▒čāč乥čĆąŠą▓, čü ą╝ąĄč鹊ą┤ąŠą╝ ą║ąŠą╗čīčåąĄą▓ąŠą│ąŠ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ (circular dataflow), ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ ąŠą┤ąĖąĮ ą▒čāč乥čĆ, ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÄ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ąĮčāąČąĮąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčéčī čāčüčéčĆąŠą╣čüčéą▓čā ą┤čĆčāą│ąŠą╣ ą▒čāč乥čĆ, ą┐ąŠčüą║ąŠą╗čīą║čā ąŠą┤ąĖąĮ ąĖ č鹊čé ąČąĄ ą▒čāč乥čĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠ.
ąÜąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą╝ąĄč鹊ą┤ą░ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ čü čåąĄą┐ąŠčćą║ąŠą╣ ą▒čāč乥čĆąŠą▓ (chained dataflow), ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąŠ ą╗čÄą▒ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąŠą┤ąĮąŠą╝ąĄčĆąĮčŗčģ ąĖ ą┤ą▓čāą╝ąĄčĆąĮčŗčģ ą▒čāč乥čĆąŠą▓. ąæčāč乥čĆčŗ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ą╗ąĖą▒ąŠ ą┐ąŠ ąŠą┤ąĮąŠą╝čā, ą╗ąĖą▒ąŠ čüčĆą░ąĘčā ąĮąĄčüą║ąŠą╗čīą║ąŠ, č湥čĆąĄąĘ ąŠą┤ąĖąĮ ą▓čŗąĘąŠą▓ą░ adi_dev_Read ąĖ/ąĖą╗ąĖ ąŠą┤ąĖąĮ ą▓čŗąĘąŠą▓ adi_dev_Write. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ąöčĆą░ą╣ą▓ąĄčĆčā ąŻčüčéčĆąŠą╣čüčéą▓ą░ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą▒čāč乥čĆčŗ ą▓ ą╗čÄą▒ąŠąĄ ą▓čĆąĄą╝čÅ ą┤ąŠ (ąĖą╗ąĖ ą┤ą░ąČąĄ ą┐ąŠčüą╗ąĄ) ą╝ąŠą╝ąĄąĮčéą░ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ. ą¤čĆąĄą┤ą┐ąŠą╗ąŠąČąĖą╝, čćč鹊 ąöčĆą░ą╣ą▓ąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ą░ čĆą░ą▒ąŠčéą░ąĄčé ą▓ ą░čüąĖąĮčģčĆąŠąĮąĮąŠą╝ čĆąĄąČąĖą╝ąĄ, č鹊ą│ą┤ą░ ą╗čÄą▒ąŠą╣ ąŠą┤ąĖąĮ ąĖąĘ ą▒čāč乥čĆąŠą▓, ąĖą╗ąĖ ąĮąĖą║ą░ą║ąŠą╣ ąĖąĘ ą▒čāč乥čĆąŠą▓, ąĖą╗ąĖ ą▓čüąĄ ą▒čāč乥čĆčŗ, ąĖą╗ąĖ č鹊ą╗čīą║ąŠ ąĮąĄą║ąŠč鹊čĆčŗąĄ ąĖąĘ ąĮąĖčģ, ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠą╝ąĄč湥ąĮčŗ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ callback, ą║ąŠą│ą┤ą░ ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĘą░ą▓ąĄčĆčłąĖą╗ ąĄą│ąŠ ąŠą▒čĆą░ą▒ąŠčéą║čā. ąÜą░ąČą┤čŗą╣ ą▒čāč乥čĆ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮąŠą│ąŠ čĆą░ąĘą╝ąĄčĆą░, ąĖ ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ ąĖ č鹊ą│ąŠ ąČąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą║ą░ą║ ąŠą┤ąĮąŠą╝ąĄčĆąĮčŗąĄ, čéą░ą║ ąĖ ą┤ą▓čāą╝ąĄčĆąĮčŗąĄ ą▒čāč乥čĆčŗ.
ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĄ ą▒čāč乥čĆąŠą▓ ą┤ą╗čÅ ą╝ąĄč鹊ą┤ą░ ą┐ąŠč鹊ą║ą░ čü čåąĄą┐ąŠčćą║ąŠą╣ ą▒čāč乥čĆąŠą▓ ąĖ ą┐ąĄčĆąĄčģąŠą┤ąŠą╝ ąŠčé ą║ąŠąĮčåą░ ą║ ąĮą░čćą░ą╗čā čåąĄą┐ąŠčćą║ąĖ (chained-with-loopback dataflow) ąĖą┤ąĄąĮčéąĖčćąĮąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÄ ą▒čāč乥čĆąŠą▓ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĖčģ ą╝ąĄč鹊ą┤ chained dataflow, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ č鹊ą│ąŠ, čćč鹊 ą▒čāč乥čĆčŗ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ ąĘą░ą┐čĆąĄčēąĄąĮ.
ąÜąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▒ąŠą╗čīčłąĄ ąĮąĄ ąĮčāąČąĮąŠ ą┤ą╗čÅ ą║ą╗ąĖąĄąĮčéą░, č鹊 ąŠąĮąŠ ąĘą░ą║čĆčŗą▓ą░ąĄčéčüčÅ ą▓čŗąĘąŠą▓ąŠą╝ API-čäčāąĮą║čåąĖąĖ adi_dev_Close. ą×ąĮą░ ąĘą░ą▓ąĄčĆčłą░ąĄčé ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ, ąĄčüą╗ąĖ ąŠąĮ ą▒čŗą╗ čĆą░ąĘčĆąĄčłąĄąĮ, ąĖ ąŠčüą▓ąŠą▒ąŠąČą┤ą░ąĄčé ą▓čüąĄ čĆąĄčüčāčĆčüčŗ, ą▓ą║ą╗čÄčćą░čÅ DMA ąĖ ą┤čĆčāą│ąĖąĄ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ąöčĆą░ą╣ą▓ąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓ą░. ąĢčüą╗ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÄ ąĮčāąČąĮąŠ ąŠą┐čÅčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ąŠąĮąŠ ą▒čŗą╗ąŠ ąĘą░ą║čĆčŗč鹊, ąŠąĮąŠ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčéą║čĆčŗč鹊 ą┐ąŠą▓č鹊čĆąĮąŠ ą▓čŗąĘąŠą▓ąŠą╝ API-čäčāąĮą║čåąĖąĖ adi_dev_Open.
ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą▓čŗąĘčŗą▓ą░ąĄčé callback-čäčāąĮą║čåąĖčÄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, čćč鹊ą▒čŗ ąŠą┐ąŠą▓ąĄčüčéąĖčéčī ą║ą╗ąĖąĄąĮčéą░ ąŠ ą┐čĆąŠąĖčüčģąŠą┤čÅčēąĖčģ čüąŠą▒čŗčéąĖčÅčģ. ąĪąŠą▒čŗčéąĖčÅ ą▒čŗą▓ą░čÄčé ąŠąČąĖą┤ą░ąĄą╝čŗąĄ (čéą░ą║ąĖąĄ ą║ą░ą║ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▒čāč乥čĆą░) ąĖą╗ąĖ ąĮąĄąŠąČąĖą┤ą░ąĮąĮčŗąĄ (čéą░ą║ąĖąĄ ą║ą░ą║ ąŠčłąĖą▒ą║ą░ ąĮą░ ą░ą┐ą┐ą░čĆą░čéčāčĆąĄ čāčüčéčĆąŠą╣čüčéą▓ą░). ą×ą▒čŗčćąĮąŠ callback-čäčāąĮą║čåąĖčÅ ą║ą╗ąĖąĄąĮčéą░ ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░ąĮą░ ą║ą░ą║ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮčŗą╣ ąŠą┐ąĄčĆą░č鹊čĆ switch ąĮą░ čÅąĘčŗą║ąĄ C, ą▓ąŠą▓ą╗ąĄą║ą░čÅ ą┐ąŠą┤čģąŠą┤čÅčēčāčÄ ąŠą▒čĆą░ą▒ąŠčéą║čā, ą║ą░ą║ą░čÅ čéčĆąĄą▒čāąĄčéčüčÅ ą┤ą╗čÅ ąĖą╝ąĄčÄčēąĄą│ąŠčüčÅ čéąĖą┐ą░ čüąŠą▒čŗčéąĖčÅ. ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ čüąŠą▒čŗčéąĖą╣, ąĖ čäąĖąĘąĖč湥čüą║ąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą╝ąŠą│čāčé ą┤ąŠą▒ą░ą▓ąĖčéčī ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čüąŠą▒čŗčéąĖčÅ, ą║ąŠč鹊čĆčŗąĄ čéčĆąĄą▒čāčÄčéčüčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗čÅąĄą╝ąŠą│ąŠ ąĖą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░.
ą¤ąŠčüą║ąŠą╗čīą║čā ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąĖ čäąĖąĘąĖč湥čüą║ąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą┐ąŠą╗ą░ą│ą░čÄčéčüčÅ ąĮą░ čüąĖčüč鹥ą╝ąĮčŗąĄ čüąĄčĆą▓ąĖčüčŗ, č鹊 čŹčéąĖ čüąĄčĆą▓ąĖčüčŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮčŗ ą┐ąĄčĆąĄą┤ ąŠčéą║čĆčŗčéąĖąĄą╝ ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą║ąŠą│ą┤ą░ ąŠčéą║čĆčŗą▓ą░ąĄčéčüčÅ ąöčĆą░ą╣ą▓ąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ą░, č鹊 ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąĮčāąČą┤ą░ąĄčéčüčÅ ą▓ čģąĄąĮą┤ą╗ą░čģ ą║ čüą╗čāąČą▒ąĄ ąŠčéą╗ąŠąČąĄąĮąĮčŗčģ čäčāąĮą║čåąĖą╣ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ (čģąĄąĮą┤ą╗ ą£ąĄąĮąĄą┤ąČąĄčĆą░ DCB [5]) ąĖ ą║ čüą╗čāąČą▒ą░ą╝ DMA (čģąĄąĮą┤ą╗ ą£ąĄąĮąĄą┤ąČąĄčĆą░ DMA) - ąĄčüą╗ąĖ ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĖčéčī, čćč鹊 ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ąĖ DCB, ąĖ DMA. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čģąŠčĆąŠčłąĄą╣ ą┐čĆą░ą║čéąĖą║ąŠą╣ ą▒čāą┤ąĄčé ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī ąĖ ąŠčéą║čĆčŗčéčī čüąĖčüč鹥ą╝ąĮčŗąĄ čüą╗čāąČą▒čŗ ą┐ąĄčĆąĄą┤ ąŠčéą║čĆčŗčéąĖąĄą╝ ą╗čÄą▒ąŠą│ąŠ ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░. ąĪą╝. "ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ" ąĖ "ąŚą░ą▓ąĄčĆčłąĄąĮąĖąĄ" ą▓ čüčéą░čéčīąĄ [2] ą┤ą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ čāčüčéčĆąŠą╣čüčéą▓ ąĖ čüąĖčüč鹥ą╝ąĮčŗą╝ čüą╗čāąČą▒ą░ą╝.
ą£ąŠą│čāčé ą▒čŗčéčī čüąŠąĘą┤ą░ąĮčŗ čéą░ą║ąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ, ą║ąŠč鹊čĆčŗąĄ ą▓čŗąĘčŗą▓ą░čÄčé ą┤čĆčāą│ąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┐ą╗ą░čéą░ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ Blackfin EZ-KIT Lite čüąŠą┤ąĄčƹȹĖčé ą░čāą┤ąĖąŠą║ąŠą┤ąĄą║ AD1836. ąŁč鹊čé ą║ąŠą┤ąĄą║ ąĖą╝ąĄąĄčé ąĖąĮč鹥čĆč乥ą╣čü čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖ čüčéą░čéčāčüą░, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ ą┐ąŠčĆčéčā SPI, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą░čāą┤ąĖąŠą┤ą░ąĮąĮčŗąĄ AD1836 ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčéčüčÅ čāčüčéčĆąŠą╣čüčéą▓čā ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą╣ ą╗ąĖąĮąĖąĖ čüą▓čÅąĘąĖ (ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ SPORT). ąĢčüą╗ąĖ čüąĖčüč鹥ą╝ą░ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮą░ čéą░ą║, čćč鹊 ą║ąŠą┤ąĄą║ AD1836 čŹč鹊 č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ čāčüčéčĆąŠą╣čüčéą▓ąŠ, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠąĄ ą║ ą┐čĆąŠčåąĄčüčüąŠčĆčā, č鹊 ąŠą┤ąĖąĮ čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĮą░ą┐ąĖčüą░ąĮ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ SPI ąĖ SPORT.
ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠ ą┤čĆą░ą╣ą▓ąĄčĆ AD1836 ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĄčĆą░čĆčģąĖč湥čüą║ąĖ ąĮą░čģąŠą┤ąĖčéčīčüčÅ ąĮą░ą┤ ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ąĖ SPI ąĖ SPORT, ą┤ąĄą╗ą░čÅ ą▓čŗąĘąŠą▓čŗ ą▓ čŹčéąĖ čäąĖąĘąĖč湥čüą║ąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą┐ąŠ ą╝ąĄčĆąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ. ąŁč鹊 ąŠčüąŠą▒ąĄąĮąĮąŠ ą▓ąĄčĆąĮąŠ, ąĄčüą╗ąĖ ą┤čĆčāą│ąĖąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ čéą░ą║ąČąĄ čüąŠą▓ą╝ąĄčüčéąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą┐ąŠčĆčé SPI (ąĮą░ą┐čĆąĖą╝ąĄčĆ, čĆą░ąĘąĮčŗąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ SPI ąĖ SPORT ą╝ąŠą│čāčé čāą┐čĆą░ą▓ą╗čÅčéčīčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ AD1836). ąóą░ą║ąĖą╝ ą╝ąĄč鹊ą┤ąŠą╝ ą▓ ą▓ąĖą┤ąĄ čüč鹥ą║ą░ ą╝ąŠą│čāčé ą▒čŗčéčī čüąŠąĘą┤ą░ąĮčŗ ą▒ąŠą╗ąĄąĄ čüą╗ąŠąČąĮčŗąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ, čéą░ą║ąĖąĄ ą║ą░ą║ ą┤čĆą░ą╣ą▓ąĄčĆ AD1836 ąĖą╗ąĖ ą┤čĆą░ą╣ą▓ąĄčĆ čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ čüč鹥ą║ą░ TCP/IP, ąĮą░čģąŠą┤čÅčēąĄą│ąŠčüčÅ ą┐ąŠą▓ąĄčĆčģ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ Ethernet.
ą¤čĆąĖąĮčÅčéąĖąĄ čĆąĄčłąĄąĮąĖčÅ ąŠ ą▓čŗą▒ąŠčĆąĄ ą╝ąĄč鹊ą┤ą░ ą┤ą╗čÅ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ. ą¤čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ąöčĆą░ą╣ą▓ąĄčĆąŠą▓ ąŻčüčéčĆąŠą╣čüčéą▓ ąĮčāąČąĮąŠ ą▓ą┤čāą╝čćąĖą▓ąŠ ą▓čŗą▒ąĖčĆą░čéčī ą╝ąĄč鹊ą┤ ą┤ą╗čÅ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą║ą░ąČą┤čŗą╝ ąöčĆą░ą╣ą▓ąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓ą░. ąØąĄą║ąŠč鹊čĆčŗą╝ čéąĖą┐ą░ą╝ ą┤ą░ąĮąĮčŗčģ čāą┤ąŠą▒ąĮąĄąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąŠą┤ąĖąĮ ą╝ąĄč鹊ą┤ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ, ąĖ ą┤ą╗čÅ ąĮąĄą║ąŠč鹊čĆčŗčģ - ą┤čĆčāą│ąŠą╣ ą╝ąĄč鹊ą┤ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ. ąÜą░ą║ ąŠą▒čēąĄąĄ ą│čĆčāą▒ąŠąĄ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ąÆčŗ ą╝ąŠąČąĄč鹥 čĆą░čüčüą╝ąŠčéčĆąĄčéčī čüą╗ąĄą┤čāčÄčēąĖąĄ čüąĖčéčāą░čåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą╝ąŠą│čāčé ą▓čŗą▒čĆą░čéčī ą┐ąŠą┤čģąŠą┤čÅčēąĖą╣ ą╝ąĄč鹊ą┤ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░.
ą”ąĄą┐ąŠčćą║ą░ ą▒čāč乥čĆąŠą▓ ą▒ąĄąĘ ą┐ąĄčĆąĄčģąŠą┤ą░ ą▓ ąĮą░čćą░ą╗ąŠ čåąĄą┐ąŠčćą║ąĖ. ą£ąĄč鹊ą┤ ą┐ąŠč鹊ą║ą░ chained-without-loopback ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ, ąŠčüąĮąŠą▓ą░ąĮąĮčŗčģ ąĮą░ ą┐ą░ą║ąĄčéą░čģ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ ąĖ/ąĖą╗ąĖ ą┐čĆąĖąĮčÅčéčŗ ą┐čĆąĄčĆčŗą▓ąĖčüč鹊 (ąĮąĄ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ, ąĮąĄ ą┐ąŠčüč鹊čÅąĮąĮąŠ), ąĖą╗ąĖ "ą▒čŗčüčéčĆčŗą╝ąĖ" ą┐ąĄčĆąĄčüčŗą╗ą║ą░ą╝ąĖ (burst). ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą░ąĮąĮčŗąĄ ąŠčé č鹥čĆą╝ąĖąĮą░ą╗ą░ UART, ą┤ą░ąĮąĮčŗąĄ Ethernet, ąĖ čéčĆą░čäąĖą║ USB čćą░čüč鹊 ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą╝ąĄč鹊ą┤ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ čü čåąĄą┐ąŠčćą║ąŠą╣ ą▒čāč乥čĆąŠą▓ ą▒ąĄąĘ ą┐ąĄčĆąĄčģąŠą┤ą░ ąĮą░ ąĮą░čćą░ą╗ąŠ (chained-without-loopback).
ą”ąĄą┐ąŠčćą║ą░ ą▒čāč乥čĆąŠą▓ čü ą┐ąĄčĆąĄčģąŠą┤ąŠą╝ ą▓ ąĮą░čćą░ą╗ąŠ čåąĄą┐ąŠčćą║ąĖ. ą£ąĄč鹊ą┤ ą┐ąŠč鹊ą║ą░ chained-with-loopback ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ąĖą▓čłąĖčģčüčÅ, ą┐čĆąŠą┤ąŠą╗ąČąĖč鹥ą╗čīąĮčŗčģ ąĖ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖčģ ą┐ąĄčĆąĄčüčŗą╗ąŠą║ ą┤ą░ąĮąĮčŗčģ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čü ą┐ąĄčĆąĄą┤ą░č湥ą╣ ą░čāą┤ąĖąŠ ąĖ ą▓ąĖą┤ąĄąŠ čćą░čüč鹊 ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą╝ąĄč鹊ą┤ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ chained-with-loopback. ąĪ čŹčéąĖą╝ ą╝ąĄč鹊ą┤ąŠą╝ ą▒čāč乥čĆčŗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ ą▓ąŠ ą▓čĆąĄą╝čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĖ ąöčĆą░ą╣ą▓ąĄčĆąŠą▓ ąŻčüčéčĆąŠą╣čüčéą▓. ąśąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐ąĄčĆąĄčģąŠą┤ ą▓ ąĮą░čćą░ą╗ąŠ, ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÄ ąĮąĖą║ąŠą│ą┤ą░ ą▒ąŠą╗čīčłąĄ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčéčī ą┤čĆą░ą╣ą▓ąĄčĆčā ą▒čāč乥čĆčŗ, ą┐ąŠčüą║ąŠą╗čīą║čā ą┤čĆą░ą╣ą▓ąĄčĆ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐čĆąŠą║čĆčāčćąĖą▓ą░ąĄčé ąŠą┤ąĖąĮ ąĖ č鹊čé ąČąĄ ą▒čāč乥čĆ.
ąÜąŠą╗čīčåąĄą▓ąŠą╣ ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ ą▒ąĄąĘ čåąĄą┐ąŠčćą║ąĖ. ą¤čĆąĖ ą┐ąĄčĆąĄą┤ą░č湥 ą░čāą┤ąĖąŠ ąĖą╗ąĖ ą▓ąĖą┤ąĄąŠ ąĮą░čüč鹊čÅč鹥ą╗čīąĮąŠ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ąŠą╗čīčåąĄą▓ąŠą╣ čĆąĄąČąĖą╝, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī čēąĄą╗čćą║ąŠą▓ ąĖ ą┐čĆąŠą┐ą░ą┤ą░ąĮąĖą╣ ąĘą▓čāą║ą░ ąĖą╗ąĖ ąĖčüą║ą░ąČąĄąĮąĖą╣ ąĖąĘąŠą▒čĆą░ąČąĄąĮąĖčÅ. ą£ąĄč鹊ą┤ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ ą┐ąŠ ą║ąŠą╗čīčåčā ą▒ąĄąĘ čåąĄą┐ąŠčćą║ąĖ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ ą┐ąŠčüč鹊čÅąĮąĮčŗčģ, ą┐čĆąŠą┤ąŠą╗ąČąĖč鹥ą╗čīąĮčŗčģ ą┐ąĄčĆąĄą┤ą░čćąĖ, ą│ą┤ąĄ ą▓čüąĄ ą┤ą░ąĮąĮčŗąĄ čāą╝ąĄčēą░čÄčéčüčÅ ą▓ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮčŗą╣ ą▒ą╗ąŠą║ ą┐ą░ą╝čÅčéąĖ čĆą░ąĘą╝ąĄčĆąŠą╝ 64 ą║ąĖą╗ąŠą▒ą░ą╣čéą░ ą╝ą░ą║čüąĖą╝čāą╝. ą×čüąŠą▒ąĄąĮąĮąŠ čŹč鹊 ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ ą░čāą┤ąĖąŠ ą┐čĆąĖ čāčüą╗ąŠą▓ąĖąĖ čĆą░ąĘą╝ąĄčĆą░ ą▒čāč乥čĆą░ ą┤ąŠ 64 ą║ąĖą╗ąŠą▒ą░ą╣čé, čćč鹊 ąĖąĘą▒ą░ą▓ą╗čÅąĄčé ąŠčé ąĮą░ą║ą╗ą░ą┤ąĮčŗčģ čĆą░čüčģąŠą┤ąŠą▓ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ ą╝ąĄč鹊ą┤ą░ čåąĄą┐ąŠčćą║ąĖ ą▒čāč乥čĆąŠą▓ (chained-with-loopback). ą×ą▒čŗčćąĮąŠ ą┤ą░ąĮąĮčŗąĄ ą▓ąĖą┤ąĄąŠ ąĮąĄ ą┐ąŠą┤čģąŠą┤čÅčé ą┤ą╗čÅ ą║ąŠą╗čīčåąĄą▓ąŠą│ąŠ ą┐ąŠč鹊ą║ą░ ą▒ąĄąĘ čåąĄą┐ąŠčćą║ąĖ, ą┐ąŠč鹊ą╝čā čćč鹊 ą▓ąĖą┤ąĄąŠą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ą║ą░ą┤čĆą░ čćą░čüč鹊 ąĮąĄ čāą╝ąĄčēą░čÄčéčüčÅ ą▓ ą▒čāč乥čĆ čĆą░ąĘą╝ąĄčĆąŠą╝ 64 ą║ąĖą╗ąŠą▒ą░ą╣čéą░.
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ čü ą┐ąĄčĆąĄčģąŠą┤ąŠą╝ ąĮą░ ąĮą░čćą░ą╗ąŠ ąĖ ą▒ąĄąĘ ą┐ąĄčĆąĄčģąŠą┤ą░ ąĮą░ ąĮą░čćą░ą╗ąŠ. ąóą░ą║ąĖąĄ ą╝ąĄč鹊ą┤čŗ ą┐ąŠą┤čģąŠą┤čÅčé č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓, čĆąĄą░ą╗ąĖąĘčāčÄčēąĖčģ ą┐ąŠą╗čāą┤čāą┐ą╗ąĄą║čüąĮčŗąĄ, ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą┐čĆąŠč鹊ą║ąŠą╗čŗ čüą▓čÅąĘąĖ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┤ą╗čÅ ąĖąĮč鹥čĆč乥ą╣čüą░ I2C (TWI) ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗąĄ ą╝ąĄč鹊ą┤čŗ ą┐ąŠč鹊ą║ą░, čćč鹊ą▒čŗ č鹊čćąĮąŠ ą┐ą╗ą░ąĮąĖčĆąŠą▓ą░čéčī čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ ą▓ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą╝ ą┐ąŠčĆčÅą┤ą║ąĄ.
ąĪčéčĆčāą║čéčāčĆą░ ą┤ą░ąĮąĮčŗčģ ADI_DEV_1D_BUFFER ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą╗ąĖąĮąĄą╣ąĮąŠą│ąŠ ą╝ą░čüčüąĖą▓ą░ ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗą╣ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąöčĆą░ą╣ą▓ąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ą░. ą¤čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĘą░ą┐ąŠą╗ąĮčÅčÄčé čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą┐ąŠą╗čÅ ą▓ ą▒čāč乥čĆąĄ, ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąŠą┐ąĖčüčŗą▓ą░čÄčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░. ąöą╗čÅ ąŠą┤ąĮąŠą╝ąĄčĆąĮčŗčģ ą▒čāč乥čĆąŠą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĘą░ą┐ąŠą╗ąĮčÅčÄčé čüą╗ąĄą┤čāčÄčēąĖąĄ ą┐ąŠą╗čÅ ą▓ čüčéčĆčāą║čéčāčĆąĄ ADI_DEV_1D_BUFFER:
Data. ąĢčüą╗ąĖ ą▒čāč乥čĆ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ čäčāąĮą║čåąĖąĖ adi_dev_Write(), č鹊 čŹč鹊 ą┐ąŠą╗ąĄ čüąŠą┤ąĄčƹȹĖčé ąĮą░čćą░ą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü ą┤ą░ąĮąĮčŗčģ (Data čŹč鹊 čāą║ą░ąĘą░č鹥ą╗čī), ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝čŗčģ ąĮą░čĆčāąČčā ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░. ąĢčüą╗ąĖ ą▒čāč乥čĆ ą▒čŗą╗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ ą┤ą╗čÅ čäčāąĮą║čåąĖąĖ adi_dev_Read(), č鹊 čŹč鹊 ą┐ąŠą╗ąĄ čüąŠą┤ąĄčƹȹĖčé ąĮą░čćą░ą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü ąŠą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ, ą║čāą┤ą░ ąöčĆą░ą╣ą▓ąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮčÅčéčī ą┤ą░ąĮąĮčŗąĄ, ą┐čĆąĖąĮčÅčéčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ čüąĮą░čĆčāąČąĖ.
ElementCount. ąŁč鹊 ą┐ąŠą╗ąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ 菹╗ąĄą╝ąĄąĮč鹊ą▓, ąĮą░ ą║ąŠč鹊čĆąŠąĄ čāą║ą░ąĘčŗą▓ą░ąĄčé ą┐ąŠą╗ąĄ Data.
ElementWidth. ąŁč鹊 ą┐ąŠą╗ąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čłąĖčĆąĖąĮčā (ą▓ ą▒ą░ą╣čéą░čģ) ą║ą░ąČą┤ąŠą│ąŠ 菹╗ąĄą╝ąĄąĮčéą░ ą┤ą░ąĮąĮčŗčģ.
CallbackParameter. ąŁč鹊 čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┐ą░čĆą░ą╝ąĄčéčĆ čäčāąĮą║čåąĖąĖ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąĢčüą╗ąĖ ąĘą┤ąĄčüčī čāą║ą░ąĘą░ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ NULL, č鹊 ąöčĆą░ą╣ą▓ąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ąĮąĄ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓čŗąĘąŠą▓ callback ą┐ąŠčüą╗ąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▒čāč乥čĆą░. ąĢčüą╗ąĖ ąČąĄ ąĘą┤ąĄčüčī ąĮąĄ NULL, č鹊 ąöčĆą░ą╣ą▓ąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ąĘą░ą┐čāčüčéąĖčé callback-čäčāąĮą║čåąĖčÄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čāč乥čĆ ą▒čŗą╗ ąŠą▒čĆą░ą▒ąŠčéą░ąĮ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝, ą┐čĆąĖ čŹč鹊ą╝ ą▓ callback-čäčāąĮą║čåąĖčÄ čéčĆąĄčéčīąĖą╝ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą╝ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ CallbackParameter.
pNext. ąŁč鹊 ą┐ąŠą╗ąĄ čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ čüą╗ąĄą┤čāčÄčēąĖą╣ ąŠą┤ąĮąŠą╝ąĄčĆąĮčŗą╣ ą▒čāč乥čĆ ą▓ čåąĄą┐ąŠčćą║ąĄ, ąĄčüą╗ąĖ čéą░ą║ąŠą▓ąŠą╣ ąĖą╝ąĄąĄčéčüčÅ. ąĢčüą╗ąĖ ąĘą┤ąĄčüčī NULL, č鹊 čŹč鹊čé ą▒čāč乥čĆ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą▓ čåąĄą┐ąŠčćą║ąĄ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ ą┤ą╗čÅ čäčāąĮą║čåąĖą╣ adi_dev_Read() ąĖą╗ąĖ adi_dev_Write(). ąĢčüą╗ąĖ ąĮąĄ NULL, č鹊 čŹč鹊 ą┐ąŠą╗ąĄ čüąŠą┤ąĄčƹȹĖčé ą░ą┤čĆąĄčü čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ąŠą┤ąĮąŠą╝ąĄčĆąĮąŠą│ąŠ ą▒čāč乥čĆą░ ą▓ čåąĄą┐ąŠčćą║ąĄ ą▒čāč乥čĆąŠą▓, ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠą╣ ą▓ čäčāąĮą║čåąĖčÄ adi_dev_Read() ąĖą╗ąĖ adi_dev_Write().
pAdditionalInfo. ąŁč鹊 ą┐ąŠą╗ąĄ čüąŠą┤ąĄčƹȹĖčé ąĘąĮą░č湥ąĮąĖąĄ, ąĘą░ą▓ąĖčüčÅčēąĄąĄ ąŠčé ą┤čĆą░ą╣ą▓ąĄčĆą░. ą×ąĮąŠ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠą╝ ąöčĆą░ą╣ą▓ąĄčĆąŠą▓ ąŻčüčéčĆąŠą╣čüčéą▓. ąśąĮč乊čĆą╝ą░čåąĖčÄ ąŠ č鹊ą╝, ą║ą░ą║ čŹč鹊 ą┐ąŠą╗ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ąČą┤čŗą╝ ąŠčéą┤ąĄą╗čīąĮčŗą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝, ą╝ąŠąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ąĖąĘ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ą┐ąŠ čŹč鹊ą╝čā ą┤čĆą░ą╣ą▓ąĄčĆčā (ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ąĄ .../Blackfin/docs).
ąÜąŠą│ą┤ą░ ą▒čāč乥čĆčŗ ą▒čŗą╗ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą┤ą╗čÅ ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░ č湥čĆąĄąĘ čäčāąĮą║čåąĖąĖ adi_dev_Read() ąĖą╗ąĖ adi_dev_Write(), ąĮąĄą║ąŠč鹊čĆčŗąĄ ąöčĆą░ą╣ą▓ąĄčĆčŗ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ąĮąĄ čéčĆąĄą▒čāčÄčé ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ čüą╗ąĄą┤čāčÄčēąĖčģ ą┐ąŠą╗ąĄą╣:
ProcessedFlag. ąØąĄą║ąŠč鹊čĆčŗąĄ ąöčĆą░ą╣ą▓ąĄčĆčŗ ąŻčüčéčĆąŠą╣čüčéą▓ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčé čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą▓ TRUE ą┐ąŠčüą╗ąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▒čāč乥čĆą░. ąśąĮč乊čĆą╝ą░čåąĖčÄ ąŠ č鹊ą╝, ą║ą░ą║ čŹč鹊 ą┐ąŠą╗ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ąČą┤čŗą╝ ąŠčéą┤ąĄą╗čīąĮčŗą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝, ą╝ąŠąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ąĖąĘ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ą┐ąŠ čŹč鹊ą╝čā ą┤čĆą░ą╣ą▓ąĄčĆčā (ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ąĄ .../Blackfin/docs).
ProcessedElementCount. ąØąĄą║ąŠč鹊čĆčŗąĄ ąöčĆą░ą╣ą▓ąĄčĆčŗ ąŻčüčéčĆąŠą╣čüčéą▓ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčé čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą▓ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ 菹╗ąĄą╝ąĄąĮč鹊ą▓, ąŠą▒čĆą░ą▒ąŠčéą░ąĮąĮčŗčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą▒čāč乥čĆą░. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ čüąĄč鹥ą▓ąŠą╝čā ą┤čĆą░ą╣ą▓ąĄčĆčā ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ ą▒čāč乥čĆ čĆą░ąĘą╝ąĄčĆąŠą╝ 100 ą▒ą░ą╣čé čäčāąĮą║čåąĖąĄą╣ adi_dev_Read(), ą┤ą╗čÅ ą▓čģąŠą┤čÅčēąĄą│ąŠ ą┐ą░ą║ąĄčéą░, ą║ąŠč鹊čĆčŗą╣ čüąŠą┤ąĄčƹȹĖčé č鹊ą╗čīą║ąŠ 75 ą▒ą░ą╣čéą░ ą┤ą░ąĮąĮčŗčģ, ą┤čĆą░ą╣ą▓ąĄčĆ ą╝ąŠąČąĄčé čāčüčéą░ąĮąŠą▓ąĖčéčī čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą▓ čćąĖčüą╗ąŠ 75. ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ąŠąĘąĮą░čćą░čéčī, čćč鹊 čģąŠčéčÅ ą▒čŗą╗ąŠ ąĘą░ą┐čĆąŠčłąĄąĮąŠ 100 ą▒ą░ą╣čé, ąĖą╝ąĄąĄčéčüčÅ ą▓ ąĮą░ą╗ąĖčćąĖąĖ ą▓čüąĄą│ąŠ ą╗ąĖčłčī 75 ą▒ą░ą╣čé. ąśąĮč乊čĆą╝ą░čåąĖčÄ ąŠ č鹊ą╝, ą║ą░ą║ čŹč鹊 ą┐ąŠą╗ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ąČą┤čŗą╝ ąŠčéą┤ąĄą╗čīąĮčŗą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝, ą╝ąŠąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ąĖąĘ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ą┐ąŠ čŹč鹊ą╝čā ą┤čĆą░ą╣ą▓ąĄčĆčā (ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ąĄ .../Blackfin/docs).
ąØą░ą┐čĆąĖą╝ąĄčĆ, čüą╗ąĄą┤čāčÄčēąĖą╣ čäčĆą░ą│ą╝ąĄąĮčé ą║ąŠą┤ą░ ą┐ąŠą┤ą│ąŠčéą░ą▓ą╗ąĖą▓ą░ąĄčé ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąŠą┤ąĖąĮąŠčćąĮčŗą╣ ą▒čāč乥čĆ ąĖąĘ 128 菹╗ąĄą╝ąĄąĮč鹊ą▓, ą║ą░ąČą┤čŗą╣ čĆą░ąĘą╝ąĄčĆąŠą╝ 16 ą▒ąĖčé ą┤ą╗čÅ čäčāąĮą║čåąĖąĖ adi_dev_Read(). ąöčĆą░ą╣ą▓ąĄčĆ ą▓čŗąĘąŠą▓ąĄčé callback-čäčāąĮą║čåąĖčÄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ą║ąŠą│ą┤ą░ ą▒čāč乥čĆ ą▒čāą┤ąĄčé ąŠą▒čĆą░ą▒ąŠčéą░ąĮ, ą┐ąĄčĆąĄą┤ą░ą▓ą░čÅ ąĘąĮą░č湥ąĮąĖąĄ 0x12345678 ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ callback-čäčāąĮą║čåąĖąĖ.
#define SAMPLES_PER_BUFFER (128) // ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čŗą▒ąŠčĆąŠą║ (菹╗ąĄą╝ąĄąĮč鹊ą▓)
// ą▓ ą▒čāč乥čĆąĄ ą┤ą░ąĮąĮčŗčģ
static u16 Data[SAMPLES_PER_BUFFER];// čģčĆą░ąĮąĖą╗ąĖčēąĄ ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ
static ADI_DEV_1D_BUFFER Buffer; // ą░ą║čéčāą░ą╗čīąĮčŗą╣ ą▒čāč乥čĆ
// čüąŠąĘą┤ą░ąĮąĖąĄ ą▒čāč乥čĆą░ ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝
Buffer.Data = Data;
Buffer.ElementCount = SAMPLES_PER_BUFFER;
Buffer.ElementWidth = 2;
Buffer.CallbackParameter = (void *)0x12345678; // ą┐ą░čĆą░ą╝ąĄčéčĆ pArg = 0x12345678 ą┤ą╗čÅ
// callback-čäčāąĮą║čåąĖąĖ
Buffer.pNext = NULL; // č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą▒čāč乥čĆ ą▓ čåąĄą┐ąŠčćą║ąĄ
// ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĄ ą▒čāč乥čĆą░ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░, čćč鹊ą▒čŗ ąŠąĮ ąĘą░ą┐ąŠą╗ąĮąĖą╗ ąĄą│ąŠ ą┤ą░ąĮąĮčŗą╝ąĖ:
Result = adi_dev_Read(Handle, ADI_DEV_1D, (ADI_DEV_BUFFER*)&Buffer);
ąĪą╗ąĄą┤čāčÄčēąĖą╣ čäčĆą░ą│ą╝ąĄąĮčé ą║ąŠą┤ą░ ą┐ąŠą┤ą│ąŠčéą░ą▓ą╗ąĖą▓ą░ąĄčé ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┤ą╗čÅ čäčāąĮą║čåąĖąĖ adi_dev_Read() čåąĄą┐ąŠčćą║čā ąĖąĘ 4 ą▒čāč乥čĆąŠą▓, ą║ą░ąČą┤čŗą╣ ąĖąĘ ą║ąŠč鹊čĆčŗčģ ąŠą┐ąĖčüą░ąĮ ą║ą░ą║ 128 菹╗ąĄą╝ąĄąĮč鹊ą▓, ą║ą░ąČą┤čŗą╣ ą┐ąŠ 32 ą▒ąĖčéą░ ą┤ą░ąĮąĮčŗčģ. ąöčĆą░ą╣ą▓ąĄčĆ ąĘą░ą┐čāčüčéąĖčé callback-čäčāąĮą║čåąĖčÄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą║ą░ąČą┤ąŠą│ąŠ ą▒čāč乥čĆą░, ą┐ąĄčĆąĄą┤ą░ą▓ą░čÅ ą░ą┤čĆąĄčü ą▒čāč乥čĆą░, ą║ąŠč鹊čĆčŗą╣ ą▒čŗą╗ ąŠą▒čĆą░ą▒ąŠčéą░ąĮ, ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ą┤ą╗čÅ callback-čäčāąĮą║čåąĖąĖ.
#define NUM_BUFFERS (4) // ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą▒čāč乥čĆąŠą▓
#define SAMPLES_PER_BUFFER (128) // ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čŗą▒ąŠčĆąŠą║ (菹╗ąĄą╝ąĄąĮč鹊ą▓) ą▓ ą▒čāč乥čĆąĄ ą┤ą░ąĮąĮčŗčģ
static u32 Data[NUM_BUFFERS*SAMPLES_PER_BUFFER];
// čģčĆą░ąĮąĖą╗ąĖčēąĄ ą┤ą╗čÅ ą░ą║čéčāą░ą╗čīąĮčŗčģ ą▒čāč乥čĆąŠą▓
static ADI_DEV_1D_BUFFER Buffer[NUM_BUFFERS];
// čüąŠąĘą┤ą░ąĮąĖąĄ ą▒čāč乥čĆąŠą▓ ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝:
for (u32 i = 0; i < NUM_BUFFERS; i++)
{
Buffer[i].Data = &Data[i * SAMPLES_PER_BUFFER];
Buffer[i].ElementCoun = SAMPLES_PER_BUFFER;
Buffer[i].ElementWid = 4;
Buffer[i].CallbackParameter = &Buffer[i]; // ą┐čĆąĖ ąĘą░ą┐čāčüą║ąĄ callback-čäčāąĮą║čåąĖąĖ ąĄčæ
Buffer[i].pNext = &Buffer[i+1]; // ą┐ą░čĆą░ą╝ąĄčéčĆ, pArg ą▒čāą┤ąĄčé čĆą░ą▓ąĄąĮ ą░ą┤čĆąĄčüčā
// ą▒čāč乥čĆą░ ą▓ čåąĄą┐ąŠčćą║ąĄ
}
Buffer[NUM_BUFFERS - 1].pNext = NULL; // ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ čåąĄą┐ąŠčćą║ąĖ ą▒čāč乥čĆąŠą▓
// ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĄ ą▒čāč乥čĆąŠą▓ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░, čćč鹊ą▒čŗ ąŠąĮ ąĘą░ą┐ąŠą╗ąĮąĖą╗ ąĖčģ ą┤ą░ąĮąĮčŗą╝ąĖ:
Result = adi_dev_Read(Handle, ADI_DEV_1D, (ADI_DEV_BUFFER*)Buffer);
ąĪčéčĆčāą║čéčāčĆą░ ą┤ą░ąĮąĮčŗčģ ADI_DEV_2D_BUFFER ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┤ą▓čāą╝ąĄčĆąĮąŠą│ąŠ ą╝ą░čüčüąĖą▓ą░ ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗą╣ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąöčĆą░ą╣ą▓ąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ą░. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĘą░ą┐ąŠą╗ąĮčÅąĄčé čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ čŹč鹊ą╣ čüčéčĆčāą║čéčāčĆčŗ, čćč鹊ą▒čŗ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąŠą┐ąĖčüą░čéčī ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░. ąöą╗čÅ ą┤ą▓čāą╝ąĄčĆąĮčŗčģ ą▒čāč乥čĆąŠą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĘą░ą┐ąŠą╗ąĮčÅąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ ą┐ąŠą╗čÅ čüčéčĆčāą║čéčāčĆčŗ ADI_DEV_2D_BUFFER:
Data. ąĢčüą╗ąĖ ą▒čāč乥čĆ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ čäčāąĮą║čåąĖąĖ adi_dev_Write(), č鹊 čŹč鹊 ą┐ąŠą╗ąĄ čüąŠą┤ąĄčƹȹĖčé ąĮą░čćą░ą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü ą┤ą░ąĮąĮčŗčģ (Data čŹč鹊 čāą║ą░ąĘą░č鹥ą╗čī), ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝čŗčģ ąĮą░čĆčāąČčā ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░. ąĢčüą╗ąĖ ą▒čāč乥čĆ ą▒čŗą╗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ ą┤ą╗čÅ čäčāąĮą║čåąĖąĖ adi_dev_Read(), č鹊 čŹč鹊 ą┐ąŠą╗ąĄ čüąŠą┤ąĄčƹȹĖčé ąĮą░čćą░ą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü ąŠą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ, ą║čāą┤ą░ ąöčĆą░ą╣ą▓ąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮčÅčéčī ą┤ą░ąĮąĮčŗąĄ, ą┐čĆąĖąĮčÅčéčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ čüąĮą░čĆčāąČąĖ.
ElementWidth. ąŁč鹊 ą┐ąŠą╗ąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čłąĖčĆąĖąĮčā (ą▓ ą▒ą░ą╣čéą░čģ) ą║ą░ąČą┤ąŠą│ąŠ 菹╗ąĄą╝ąĄąĮčéą░ ą┤ą░ąĮąĮčŗčģ.
XCount. ąŁč鹊 ą┐ąŠą╗ąĄ ąĘą░ą┤ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ 菹╗ąĄą╝ąĄąĮč鹊ą▓ - čüč鹊ą╗ą▒čåąŠą▓.
XModify. ąŁč鹊 ą┐ąŠą╗ąĄ ąĘą░ą┤ą░ąĄčé ą▒ą░ą╣č鹊ą▓čŗą╣ ąĖąĮą║čĆąĄą╝ąĄąĮčé ą░ą┤čĆąĄčüą░ (ą┐ąĄčĆąĄčģąŠą┤ ą┐ąŠ ą▒čāč乥čĆčā) ą┐ąŠčüą╗ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą║ą░ąČą┤ąŠą│ąŠ čüč鹊ą╗ą▒čåą░.
YCount. ąŁč鹊 ą┐ąŠą╗ąĄ ąĘą░ą┤ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ 菹╗ąĄą╝ąĄąĮč鹊ą▓ - čüčéčĆąŠą║.
YModify. ąŁč鹊 ą┐ąŠą╗ąĄ ąĘą░ą┤ą░ąĄčé ą▒ą░ą╣č鹊ą▓čŗą╣ ąĖąĮą║čĆąĄą╝ąĄąĮčé ą░ą┤čĆąĄčüą░ (ą┐ąĄčĆąĄčģąŠą┤ ą┐ąŠ ą▒čāč乥čĆčā) ą┐ąŠčüą╗ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą║ą░ąČą┤ąŠą╣ čüčéčĆąŠą║ąĖ.
CallbackParameter. ąŁč鹊 čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┐ą░čĆą░ą╝ąĄčéčĆ čäčāąĮą║čåąĖąĖ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąĢčüą╗ąĖ ąĘą┤ąĄčüčī čāą║ą░ąĘą░ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ NULL, č鹊 ąöčĆą░ą╣ą▓ąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ąĮąĄ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓čŗąĘąŠą▓ callback ą┐ąŠčüą╗ąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▒čāč乥čĆą░. ąĢčüą╗ąĖ ąČąĄ ąĘą┤ąĄčüčī ąĮąĄ NULL, č鹊 ąöčĆą░ą╣ą▓ąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ąĘą░ą┐čāčüčéąĖčé callback-čäčāąĮą║čåąĖčÄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čāč乥čĆ ą▒čŗą╗ ąŠą▒čĆą░ą▒ąŠčéą░ąĮ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝, ą┐čĆąĖ čŹč鹊ą╝ ą▓ callback-čäčāąĮą║čåąĖčÄ čéčĆąĄčéčīąĖą╝ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą╝ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ CallbackParameter.
pNext. ąŁč鹊 ą┐ąŠą╗ąĄ čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ čüą╗ąĄą┤čāčÄčēąĖą╣ ąŠą┤ąĮąŠą╝ąĄčĆąĮčŗą╣ ą▒čāč乥čĆ ą▓ čåąĄą┐ąŠčćą║ąĄ, ąĄčüą╗ąĖ čéą░ą║ąŠą▓ąŠą╣ ąĖą╝ąĄąĄčéčüčÅ. ąĢčüą╗ąĖ ąĘą┤ąĄčüčī NULL, č鹊 čŹč鹊čé ą▒čāč乥čĆ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą▓ čåąĄą┐ąŠčćą║ąĄ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ ą┤ą╗čÅ čäčāąĮą║čåąĖą╣ adi_dev_Read() ąĖą╗ąĖ adi_dev_Write(). ąĢčüą╗ąĖ ąĮąĄ NULL, č鹊 čŹč鹊 ą┐ąŠą╗ąĄ čüąŠą┤ąĄčƹȹĖčé ą░ą┤čĆąĄčü čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą┤ą▓čāą╝ąĄčĆąĮąŠą│ąŠ ą▒čāč乥čĆą░ ą▓ čåąĄą┐ąŠčćą║ąĄ ą▒čāč乥čĆąŠą▓, ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠą╣ ą▓ čäčāąĮą║čåąĖčÄ adi_dev_Read() ąĖą╗ąĖ adi_dev_Write().
pAdditionalInfo. ąŁč鹊 ą┐ąŠą╗ąĄ čüąŠą┤ąĄčƹȹĖčé ąĘąĮą░č湥ąĮąĖąĄ, ąĘą░ą▓ąĖčüčÅčēąĄąĄ ąŠčé ą┤čĆą░ą╣ą▓ąĄčĆą░. ą×ąĮąŠ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠą╝ ąöčĆą░ą╣ą▓ąĄčĆąŠą▓ ąŻčüčéčĆąŠą╣čüčéą▓. ąśąĮč乊čĆą╝ą░čåąĖčÄ ąŠ č鹊ą╝, ą║ą░ą║ čŹč鹊 ą┐ąŠą╗ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ąČą┤čŗą╝ ąŠčéą┤ąĄą╗čīąĮčŗą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝, ą╝ąŠąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ąĖąĘ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ą┐ąŠ čŹč鹊ą╝čā ą┤čĆą░ą╣ą▓ąĄčĆčā (ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ąĄ .../Blackfin/docs).
ąÜąŠą│ą┤ą░ ą▒čāč乥čĆčŗ ą▒čŗą╗ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą┤ą╗čÅ ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░ č湥čĆąĄąĘ čäčāąĮą║čåąĖąĖ adi_dev_Read() ąĖą╗ąĖ adi_dev_Write(), ąĮąĄą║ąŠč鹊čĆčŗąĄ ąöčĆą░ą╣ą▓ąĄčĆčŗ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ąĮąĄ čéčĆąĄą▒čāčÄčé ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ čüą╗ąĄą┤čāčÄčēąĖčģ ą┐ąŠą╗ąĄą╣:
ProcessedFlag. ąØąĄą║ąŠč鹊čĆčŗąĄ ąöčĆą░ą╣ą▓ąĄčĆčŗ ąŻčüčéčĆąŠą╣čüčéą▓ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčé čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą▓ TRUE ą┐ąŠčüą╗ąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▒čāč乥čĆą░. ąśąĮč乊čĆą╝ą░čåąĖčÄ ąŠ č鹊ą╝, ą║ą░ą║ čŹč鹊 ą┐ąŠą╗ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ąČą┤čŗą╝ ąŠčéą┤ąĄą╗čīąĮčŗą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝, ą╝ąŠąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ąĖąĘ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ą┐ąŠ čŹč鹊ą╝čā ą┤čĆą░ą╣ą▓ąĄčĆčā (ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ąĄ .../Blackfin/docs).
ProcessedElementCount. ąØąĄą║ąŠč鹊čĆčŗąĄ ąöčĆą░ą╣ą▓ąĄčĆčŗ ąŻčüčéčĆąŠą╣čüčéą▓ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčé čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą▓ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ 菹╗ąĄą╝ąĄąĮč鹊ą▓, ąŠą▒čĆą░ą▒ąŠčéą░ąĮąĮčŗčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą▒čāč乥čĆą░. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ čüąĄč鹥ą▓ąŠą╝čā ą┤čĆą░ą╣ą▓ąĄčĆčā ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ ą▒čāč乥čĆ čĆą░ąĘą╝ąĄčĆąŠą╝ 100 ą▒ą░ą╣čé čäčāąĮą║čåąĖąĄą╣ adi_dev_Read(), ą┤ą╗čÅ ą▓čģąŠą┤čÅčēąĄą│ąŠ ą┐ą░ą║ąĄčéą░, ą║ąŠč鹊čĆčŗą╣ čüąŠą┤ąĄčƹȹĖčé č鹊ą╗čīą║ąŠ 75 ą▒ą░ą╣čéą░ ą┤ą░ąĮąĮčŗčģ, ą┤čĆą░ą╣ą▓ąĄčĆ ą╝ąŠąČąĄčé čāčüčéą░ąĮąŠą▓ąĖčéčī čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą▓ čćąĖčüą╗ąŠ 75. ąŁč鹊 ą┤ąŠą╗ąČąĮąŠ ąŠąĘąĮą░čćą░čéčī, čćč鹊 čģąŠčéčÅ ą▒čŗą╗ąŠ ąĘą░ą┐čĆąŠčłąĄąĮąŠ 100 ą▒ą░ą╣čé, ąĖą╝ąĄąĄčéčüčÅ ą▓ ąĮą░ą╗ąĖčćąĖąĖ ą▓čüąĄą│ąŠ ą╗ąĖčłčī 75 ą▒ą░ą╣čé. ąśąĮč乊čĆą╝ą░čåąĖčÄ ąŠ č鹊ą╝, ą║ą░ą║ čŹč鹊 ą┐ąŠą╗ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ąČą┤čŗą╝ ąŠčéą┤ąĄą╗čīąĮčŗą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝, ą╝ąŠąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ąĖąĘ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ą┐ąŠ čŹč鹊ą╝čā ą┤čĆą░ą╣ą▓ąĄčĆčā (ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ąĄ .../Blackfin/docs).
ąØą░ą┐čĆąĖą╝ąĄčĆ, čüą╗ąĄą┤čāčÄčēąĖą╣ čäčĆą░ą│ą╝ąĄąĮčé ą║ąŠą┤ą░ ą┐ąŠą┤ą│ąŠčéą░ą▓ą╗ąĖą▓ą░ąĄčé ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┤ą╗čÅ čäčāąĮą║čåąĖąĖ adi_dev_Write() ą┐ą░čĆčā ą┤ą▓čāą╝ąĄčĆąĮčŗčģ ą▒čāč乥čĆąŠą▓, čćč鹊ą▒čŗ ąŠąĮąĖ ą▒čŗą╗ąĖ ą┐ąĄčĆąĄą┤ą░ąĮčŗ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ ąĮą░čĆčāąČčā. ąÜą░ąČą┤čŗą╣ ą▒čāč乥čĆ ąŠą┐ąĖčüčŗą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ą║ą░ą┤čĆą░ ą▓ąĖą┤ąĄąŠ č乊čĆą╝ą░čéą░ NTSC ITU-656. ąÜą░ąČą┤čŗą╣ ą║ą░ą┤čĆ čüąŠą┤ąĄčƹȹĖčé 525 čüčéčĆąŠą║, ą▓ ą║ą░ąČą┤ąŠą╣ čüčéčĆąŠą║ąĄ ąĖą╝ąĄąĄčéčüčÅ 1716 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ. ąöčĆą░ą╣ą▓ąĄčĆ ą▓čŗąĘąŠą▓ąĄčé callback-čäčāąĮą║čåąĖčÄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ą║ąŠą│ą┤ą░ ą▒čāą┤ąĄčé ąŠą▒čĆą░ą▒ąŠčéą░ąĮ ą║ą░ąČą┤čŗą╣ ą▒čāč乥čĆ, ą┐ąĄčĆąĄą┤ą░ą▓ą░čÅ ą░ą┤čĆąĄčü ą▒čāč乥čĆą░, ą║ąŠč鹊čĆčŗą╣ ą▒čŗą╗ č鹊ą╗čīą║ąŠ čćč鹊 ąŠą▒čĆą░ą▒ąŠčéą░ąĮ, ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ callback-čäčāąĮą║čåąĖąĖ.
#define NUM_BUFFERS (2) // ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒čāč乥čĆąŠą▓
#define NUM_FRAMES (2) // ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą░ą┤čĆąŠą▓
#define COLUMNS (1716) // ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüč鹊ą╗ą▒čåąŠą▓
#define ROWS (525) // ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüčéčĆąŠą║
static u8 Frames[NUM_FRAMES][COLUMNS * ROWS]; // čģčĆą░ąĮąĖą╗ąĖčēąĄ ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ
static ADI_DEV_2D_BUFFER Buffer[NUM_BUFFERS]; // ą░ą║čéčāą░ą╗čīąĮčŗąĄ ą▒čāč乥čĆčŗ
// čüąŠąĘą┤ą░ąĮąĖąĄ ą▒čāč乥čĆąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą▒čāą┤ąĄčé ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī ą┤čĆą░ą╣ą▓ąĄčĆ:
for (u32 i = 0; i < NUM_BUFFERS; i++)
{
Buffer[i].Data = &Frames[i][0];
Buffer[i].ElementWidth = 2;
Buffer[i].XCount = (COLUMNS >> 1);
Buffer[i].XModify = 2;
Buffer[i].YCount = ROWS;
Buffer[i].YModify = 2;
Buffer[i].CallbackParameter = &Buffer[i]; // ą┐čĆąĖ ąĘą░ą┐čāčüą║ąĄ callback-čäčāąĮą║čåąĖąĖ
// ąĄčæ ą░čĆą│čāą╝ąĄąĮčé pArg = ą░ą┤čĆąĄčüčā ą▒čāč乥čĆą░
Buffer[i].pNext = &Buffer[i+1];
}
Buffer[NUM_BUFFERS - 1].pNext = NULL; // ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ čåąĄą┐ąŠčćą║ąĖ ą▒čāč乥čĆąŠą▓
// ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĄ ą▒čāč乥čĆąŠą▓ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░, čćč鹊ą▒čŗ ąŠąĮ ąŠčéą┐čĆą░ą▓ąĖą╗ ąĖčģ:
Result = adi_dev_Write(Handle, ADI_DEV_2D, (ADI_DEV_BUFFER*)Buffer);
ąĪčéčĆčāą║čéčāčĆą░ ADI_DEV_CIRCULAR_BUFFER ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą║ąŠą╗čīčåąĄą▓čŗą╝ ą╝ąĄč鹊ą┤ąŠą╝. ą¤čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĘą░ą┐ąŠą╗ąĮčÅčÄčé čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą┐ąŠą╗čÅ ą▓ čŹč鹊ą╣ čüčéčĆčāą║čéčāčĆąĄ, čćč鹊ą▒čŗ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąŠą┐ąĖčüą░čéčī ą┤ą░ąĮąĮčŗąĄ ą▒čāč乥čĆą░ ą┤ą╗čÅ ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░.
ąöą╗čÅ ą║ąŠą╗čīčåąĄą▓čŗčģ ą▒čāč乥čĆąŠą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĘą░ą┐ąŠą╗ąĮčÅąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ ą┐ąŠą╗čÅ čüčéčĆčāą║čéčāčĆčŗ ADI_DEV_CIRCULAR_BUFFER:
Data. ąĢčüą╗ąĖ ą▒čāč乥čĆ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ čäčāąĮą║čåąĖąĖ adi_dev_Write(), č鹊 čŹč鹊 ą┐ąŠą╗ąĄ čüąŠą┤ąĄčƹȹĖčé ąĮą░čćą░ą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü ą┤ą░ąĮąĮčŗčģ (Data čŹč鹊 čāą║ą░ąĘą░č鹥ą╗čī), ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝čŗčģ ąĮą░čĆčāąČčā ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░. ąĢčüą╗ąĖ ą▒čāč乥čĆ ą▒čŗą╗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ ą┤ą╗čÅ čäčāąĮą║čåąĖąĖ adi_dev_Read(), č鹊 čŹč鹊 ą┐ąŠą╗ąĄ čüąŠą┤ąĄčƹȹĖčé ąĮą░čćą░ą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü ąŠą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ, ą║čāą┤ą░ ąöčĆą░ą╣ą▓ąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮčÅčéčī ą┤ą░ąĮąĮčŗąĄ, ą┐čĆąĖąĮčÅčéčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ čüąĮą░čĆčāąČąĖ.
ElementWidth. ąŁč鹊 ą┐ąŠą╗ąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čłąĖčĆąĖąĮčā (ą▓ ą▒ą░ą╣čéą░čģ) ą║ą░ąČą┤ąŠą│ąŠ 菹╗ąĄą╝ąĄąĮčéą░ ą┤ą░ąĮąĮčŗčģ.
SubBufferCount. ąŁč鹊 ą┐ąŠą╗ąĄ ąĘą░ą┤ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąŠą┤ą▒čāč乥čĆąŠą▓, ąĮą░ ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ąĄą╗ąĄąĮčŗ ą┤ą░ąĮąĮčŗąĄ ą▒čāč乥čĆą░.
SubBufferElementCount. ąŁč鹊 ą┐ąŠą╗ąĄ ąĘą░ą┤ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ 菹╗ąĄą╝ąĄąĮč鹊ą▓ ą▓ ą║ą░ąČą┤ąŠą╝ ą┐ąŠą┤ą▒čāč乥čĆąĄ.
CallbackType. ąŁč鹊 ą┐ąŠą╗ąĄ ąĘą░ą┤ą░ąĄčé, ą║ą░ą║ ą┤ąŠą╗ąČąĮą░ ą▓čŗąĘčŗą▓ą░čéčīčüčÅ callback-čäčāąĮą║čåąĖčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ąĖ ą▓ ąĮąĄą╝ ą╝ąŠą│čāčé ą▒čŗčéčī čüą╗ąĄą┤čāčÄčēąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ:
ŌĆó ADI_DEV_CIRC_NO_CALLBACK - ąĮąĄčé ą▓čŗąĘąŠą▓ąŠą▓ callback-čäčāąĮą║čåąĖąĖ.
ŌĆó ADI_DEV_CIRC_SUB_BUFFER - ą▓čŗąĘąŠą▓ callback-čäčāąĮą║čåąĖąĖ ą┐ąŠčüą╗ąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąŠą┤ą▒čāč乥čĆą░.
ŌĆó ADI_DEV_CIRC_FULL_BUFFER - ą▓čŗąĘąŠą▓ callback-čäčāąĮą║čåąĖąĖ č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▓čüąĄą│ąŠ ą▒čāč乥čĆą░ čåąĄą╗ąĖą║ąŠą╝.
pAdditionalInfo. ąŁč鹊 ą┐ąŠą╗ąĄ čüąŠą┤ąĄčƹȹĖčé ąĘąĮą░č湥ąĮąĖąĄ, ąĘą░ą▓ąĖčüčÅčēąĄąĄ ąŠčé ą┤čĆą░ą╣ą▓ąĄčĆą░. ą×ąĮąŠ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠą╝ ąöčĆą░ą╣ą▓ąĄčĆąŠą▓ ąŻčüčéčĆąŠą╣čüčéą▓. ąśąĮč乊čĆą╝ą░čåąĖčÄ ąŠ č鹊ą╝, ą║ą░ą║ čŹč鹊 ą┐ąŠą╗ąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ąČą┤čŗą╝ ąŠčéą┤ąĄą╗čīąĮčŗą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝, ą╝ąŠąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ąĖąĘ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ą┐ąŠ čŹč鹊ą╝čā ą┤čĆą░ą╣ą▓ąĄčĆčā (ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ąĄ .../Blackfin/docs).
ąØą░ą┐čĆąĖą╝ąĄčĆ, čüą╗ąĄą┤čāčÄčēąĖą╣ čäčĆą░ą│ą╝ąĄąĮčé ą║ąŠą┤ą░ ą┐ąŠą┤ą│ąŠčéą░ą▓ą╗ąĖą▓ą░ąĄčé ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┤ą╗čÅ čäčāąĮą║čåąĖąĖ adi_dev_Write() ą║ąŠą╗čīčåąĄą▓ąŠą╣ ą▒čāč乥čĆ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĮą░čĆčāąČčā č湥čĆąĄąĘ ąöčĆą░ą╣ą▓ąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ą░. ąæčāč乥čĆ ąŠą┐ąĖčüą░ąĮ ą║ą░ą║ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮčŗą╣ ą▒ą╗ąŠą║ ą┐ą░ą╝čÅčéąĖ ąĖąĘ 1024 ą▒ą░ą╣čé, ą┐ąŠą┤ąĄą╗ąĄąĮąĮčŗą╣ ąĮą░ 8 ą┐ąŠą┤ą▒čāč乥čĆąŠą▓ čĆą░ąĘą╝ąĄčĆąŠą╝ ą┐ąŠ 128 ą▒ą░ą╣čé ą║ą░ąČą┤čŗą╣. ąöčĆą░ą╣ą▓ąĄčĆ ą▓čŗąĘąŠą▓ąĄčé callback-čäčāąĮą║čåąĖčÄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąŠą┤ą▒čāč乥čĆą░. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ čĆą░ąĘčĆąĄčłąĄąĮ, ą┤čĆą░ą╣ą▓ąĄčĆ čü ą┐ąŠą▓č鹊čĆąĄąĮąĖčÅą╝ąĖ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą║ąŠą╗čīčåąĄą▓ąŠą╣ ą▒čāč乥čĆ, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ.
#define SUB_BUFFERS (8)
#define SUB_BUFFER_ELEMENTS (128)
static u8 Data[SUB_BUFFERS * SUB_BUFFER_ELEMENTS]; // čģčĆą░ąĮąĖą╗ąĖčēąĄ ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ
static ADI_DEV_CIRCULAR_BUFFER Buffer; // ą░ą║čéčāą░ą╗čīąĮčŗą╣ ą▒čāč乥čĆ
// čüąŠąĘą┤ą░ąĮąĖąĄ ą▒čāč乥čĆą░ ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝
Buffer.Data = Data;
Buffer.ElementWidth = 1;
Buffer.SubBufferCount = SUB_BUFFERS;
Buffer.SubBufferElementCount = SUB_BUFFER_ELEMENTS;
Buffer.CallbackType = ADI_DEV_CIRC_SUB_BUFFER;
// ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĄ ą▒čāč乥čĆą░ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░, čćč鹊ą▒čŗ ąŠąĮ ąŠą┐čĆą░ą▓ą╗čÅą╗ ą┤ą░ąĮąĮčŗąĄ:
Result = adi_dev_Write(Handle, ADI_DEV_CIRC, (ADI_DEV_BUFFER*)&Buffer);
ąĪčéčĆčāą║čéčāčĆą░ ADI_DEV_SEQ_1D_BUFFER ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ, ąŠą┤ąĮąŠą╝ąĄčĆąĮąŠą│ąŠ (ą╗ąĖąĮąĄą╣ąĮąŠą│ąŠ) ą╝ą░čüčüąĖą▓ą░ ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗą╣ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąöčĆą░ą╣ą▓ąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ą░. ą¤ąŠą┤ąŠą▒ąĮąŠ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ ąŠą┤ąĮąŠą╝ąĄčĆąĮčŗą╝ ą▒čāč乥čĆą░ą╝, ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĘą░ą┐ąŠą╗ąĮčÅąĄčé čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą┐ąŠą╗čÅ čüčéčĆčāą║čéčāčĆčŗ, čćč鹊ą▒čŗ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąŠą┐ąĖčüą░čéčī ą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░. ążą░ą║čéąĖč湥čüą║ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąŠą┤ąĮąŠą╝ąĄčĆąĮčŗą╣ ą▒čāč乥čĆ čŹč鹊 čāčĆąĄąĘą░ąĮąĮčŗą╣ ą▓ą░čĆąĖą░ąĮčé čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ąŠą┤ąĮąŠą╝ąĄčĆąĮąŠą│ąŠ ą▒čāč乥čĆą░, čü ą┐ąŠą╗ąĄą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ, ą┤ąŠą▒ą░ą▓ą╗ąĄąĮąĮąŠą╝ ą▓ ą║ąŠąĮąĄčå čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ą▒čāč乥čĆą░. ąöą╗čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ąŠą┤ąĮąŠą╝ąĄčĆąĮčŗčģ ą▒čāč乥čĆąŠą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĘą░ą┐ąŠą╗ąĮčÅąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ ą┐ąŠą╗čÅ čüčéčĆčāą║čéčāčĆčŗ ADI_DEV_SEQ_1D_BUFFER:
Buffer. ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒čāč乥čĆ, ąĖą┤ąĄąĮčéąĖčćąĮčŗą╣ ą┐ąŠą╗čÄ Data čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ąŠą┤ąĮąŠą╝ąĄčĆąĮąŠą│ąŠ ą▒čāč乥čĆą░, ą║ąŠč鹊čĆčŗą╣ ąĘą░ą┐ąŠą╗ąĮčÅąĄčéčüčÅ č鹊čćąĮąŠ čéą░ą║ ąČąĄ (čüą╝. ą▓čĆąĄąĘą║čā "ąĪąŠąĘą┤ą░ąĮąĖąĄ ąŠą┤ąĮąŠą╝ąĄčĆąĮčŗčģ ą▒čāč乥čĆąŠą▓ (1D)").
Direction. ąŁč鹊 ą┐ąŠą╗ąĄ ąĘą░ą┐ąŠą╗ąĮčÅąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ąĖ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ ą┐ąŠ ą▓čŗą▒ąŠčĆčā:
ŌĆó ADI_DEV_DIRECTION_INBOUND ŌĆō čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą▒čāč乥čĆčā ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ, ą┐čĆąĖąĮąĖą╝ą░ąĄą╝čŗčģ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝.
ŌĆó ADI_DEV_DIRECTION_OUTBOUND ŌĆō čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą▒čāč乥čĆčā ą┤ą╗čÅ ą┤ą░ąĮąĮčŗčģ, ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗčģ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝.
ąĪą╗ąĄą┤čāčÄčēąĖą╣ čäčĆą░ą│ą╝ąĄąĮčé ą║ąŠą┤ą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čåąĄą┐ąŠčćą║čā ąĖąĘ 2 ą▒čāč乥čĆąŠą▓. ą¤ąĄčĆą▓čŗą╣ ąĖ čéčĆąĄčéąĖą╣ ą▒čāč乥čĆčŗ ąŠą┐ąĖčüčŗą▓ą░čÄčé ą┤ą░ąĮąĮčŗąĄ, ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝, ąĖ ą▓č鹊čĆąŠą╣ ąĖ č湥čéą▓ąĄčĆčéčŗą╣ ą▒čāč乥čĆčŗ ąŠą┐ąĖčüčŗą▓ą░čÄčé ą┤ą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖąĮąĖą╝ą░čÄčéčüčÅ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝. ąöčĆą░ą╣ą▓ąĄčĆ ą▓čŗąĘąŠą▓ąĄčé callback-čäčāąĮą║čåąĖčÄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čāą┤ąĄčé ąŠą▒čĆą░ą▒ąŠčéą░ąĮ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą▒čāč乥čĆ ą▓ čåąĄą┐ąŠčćą║ąĄ, ą┐ąĄčĆąĄą┤ą░ą▓ą░čÅ ą░ą┤čĆąĄčü ą▒čāč乥čĆą░, ą║ąŠč鹊čĆčŗą╣ ą▒čŗą╗ č鹊ą╗čīą║ąŠ čćč鹊 ąŠą▒čĆą░ą▒ąŠčéą░ąĮ, ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ą┤ą╗čÅ callback-čäčāąĮą║čåąĖąĖ.
#define ELEMENT_WIDTH (1) // čłąĖčĆąĖąĮą░ 菹╗ąĄą╝ąĄąĮčéą░ ą┤ą░ąĮąĮčŗčģ ą▓ ą▒ą░ą╣čéą░čģ
#define NUM_BUFFERS (2) // ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒čāč乥čĆąŠą▓
#define INBOUND_ELEMENTS (64) // ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čćąĖčéą░ąĄą╝čŗčģ 菹╗ąĄą╝ąĄąĮč鹊ą▓
#define OUTBOUND_ELEMENTS (2) // ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄą╝čŗčģ 菹╗ąĄą╝ąĄąĮč鹊ą▓
static u32 InboundData[INBOUND_ELEMENTS]; // ą▓čģąŠą┤čÅčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ
static u32 OutboundData[OUTBOUND_ELEMENTS]; // ąĖčüčģąŠą┤čÅčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ
static ADI_DEV_SEQ_1D_BUFFER SeqBuffer[NUM_BUFFERS]; // ą░ą║čéčāą░ą╗čīąĮčŗąĄ ą▒čāč乥čĆčŗ
// čüąŠąĘą┤ą░ąĮąĖąĄ ąĖčüčģąŠą┤čÅčēąĄą│ąŠ ą▒čāč乥čĆą░ ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝:
SeqBuffer[0].Buffer.Data = OutboundData;
SeqBuffer[0].Buffer.ElementCount = OUTBOUND_ELEMENTS;
SeqBuffer[0].Buffer.ElementWidth = ELEMENT_WIDTH;
SeqBuffer[0].Buffer.CallbackParameter = NULL; // ąĮąĄčé ą▓čŗąĘąŠą▓ą░ callback-čäčāąĮą║čåąĖąĖ
SeqBuffer[0].Buffer.pNext = (ADI_DEV_1D_BUFFER*)&SeqBuffer[1];
SeqBuffer[0].Direction = ADI_DEV_DIRECTION_OUTBOUND;
// čüąŠąĘą┤ą░ąĮąĖąĄ ą▓čģąŠą┤čÅčēąĄą│ąŠ ą▒čāč乥čĆą░ ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝:
SeqBuffer[1].Buffer.Data = InboundData;
SeqBuffer[1].Buffer.ElementCount = INBOUND_ELEMENTS;
SeqBuffer[1].Buffer.ElementWidth = ELEMENT_WIDTH;
SeqBuffer[1].Buffer.CallbackParameter = &SeqBuffer[1]; // callback
SeqBuffer[1].Buffer.pNext = NULL; // ą║ąŠąĮąĄčå čåąĄą┐ąŠčćą║ąĖ
SeqBuffer[1].Direction = ADI_DEV_DIRECTION_INBOUND;
// ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĄ ą▒čāč乥čĆąŠą▓ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░:
Result = adi_dev_SequentialIO(Handle, ADI_DEV_SEQ_1D, (ADI_DEV_BUFFER *)SeqBuffer);
[ąöąĖąĘą░ą╣ąĮ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓]
ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąŠą┤ąĮčā č鹊čćą║čā ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ ą║ ą╝ąŠą┤ąĄą╗ąĖ ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░. ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÄ API ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü ąöčĆą░ą╣ą▓ąĄčĆą░ą╝ąĖ ąŻčüčéčĆąŠą╣čüčéą▓. ąÆčüąĄ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖąĄ ą╝ąĄąČą┤čā ą║ą╗ąĖąĄąĮč鹊ą╝ ąĖ ąöčĆą░ą╣ą▓ąĄčĆą░ą╝ąĖ ąŻčüčéčĆąŠą╣čüčéą▓ ą┐čĆąŠąĖčüčģąŠą┤čÅčé č湥čĆąĄąĘ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ - ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ą┐čĆčÅą╝čāčÄ čü čäąĖąĘąĖč湥čüą║ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝. ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ čéą░ą║ąČąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▓čüąĄ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ DMA - ą┐ąŠčüčéą░ąĮąŠą▓ą║ą░ ą▓ ąŠč湥čĆąĄą┤čī, ąĘą░čåąĖą║ą╗ąĖą▓ą░ąĮąĖąĄ ąĖ čé. ą┤. - ą┤ą╗čÅ č鹥čģ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé DMA.
ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅą╝ ąŠą▒čŗčćąĮąŠ ąĮąĄ ąĮčāąČąĮąŠ ą┐ąŠąĮąĖą╝ą░čéčī ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ ą┐ąŠ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĄ ąĖ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓. ąÆ čŹč鹊ą╝ čĆą░ąĘą┤ąĄą╗ąĄ ą┤ą░ąĮą░ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą┤ą╗čÅ č鹥čģ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣, ą║ąŠč鹊čĆčŗąĄ čģąŠč鹥ą╗ąĖ ą▒čŗ ą▓čüąĄ-čéą░ą║ąĖ ą│ą╗čāą▒ąČąĄ čĆą░ąĘąŠą▒čĆą░čéčīčüčÅ ą▓ ą┤ąĖąĘą░ą╣ąĮąĄ. ąŁč鹊čé čĆą░ąĘą┤ąĄą╗ ą▒čāą┤ąĄčé čćą░čüčéąĖčćąĮąŠ ą┐ąŠą╗ąĄąĘąĄąĮ ą┤ą╗čÅ č鹥čģ, ą║č鹊 ą┐ąĖčłąĄčé čäąĖąĘąĖč湥čüą║ąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ, ąĖ ą┐ąŠąĮą░ą┤ąŠą▒ąĖą╗ą░čüčī ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą┐čĆąĖ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĄ čäąĖąĘąĖč湥čüą║ąĖčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓.
ą£ą░ą║čĆąŠčüčŗ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąĖ čüčéčĆčāą║čéčāčĆčŗ ą┤ą░ąĮąĮčŗčģ, čüąŠąĘą┤ą░ąĮąĮčŗąĄ ą┤ą╗čÅ API ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓, čÅą▓ą╗čÅčÄčéčüčÅ ą║ą╗čÄč湊ą╝ ą║ ą┐ąŠąĮąĖą╝ą░ąĮąĖčÄ ąĄą│ąŠ ą┤ąĖąĘą░ą╣ąĮą░. API ą┤ą╗čÅ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ ąŠą┐ąĖčüą░ąĮąŠ ą▓ čäą░ą╣ą╗ąĄ adi_dev.h, ą║ąŠč鹊čĆčŗą╣ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ Blackfin/Include/Drivers ą║ą░čéą░ą╗ąŠą│ą░ čāčüčéą░ąĮąŠą▓ą║ąĖ VisualDSP++.
ąĀą░ąĘą┤ąĄą╗ "ą¤čāą▒ą╗ąĖčćąĮčŗąĄ čéąĖą┐čŗ ą┤ą░ąĮąĮčŗčģ ąĖ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓" čüąŠą┤ąĄčƹȹĖčé čéą░ą▒ą╗ąĖčåčŗ ą┤ą╗čÅ ą▓čüąĄčģ čüčéčĆčāą║čéčāčĆ ą┤ą░ąĮąĮčŗčģ ąĖ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖą╣, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓.
ą£ą░ą║čĆąŠčüčŗ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ. ąÆ ą┐ąĄčĆą▓ąŠą╣ čüąĄą║čåąĖąĖ čäą░ą╣ą╗ą░ adi_dev.h ąĮą░čģąŠą┤čÅčéčüčÅ ą╝ą░ą║čĆąŠčüčŗ, ą║ąŠč鹊čĆčŗąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓. ąŁčéąĖ ą╝ą░ą║čĆąŠčüčŗ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą╗ąĖąĄąĮč鹊ą╝, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, čüą║ąŠą╗čīą║ąŠ ą┐ą░ą╝čÅčéąĖ ąĮą░ą┤ąŠ ą▓čŗą┤ąĄą╗ąĖčéčī ą┤ą╗čÅ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ čü ą┐ąŠą╝ąŠčēčīčÄ čäčāąĮą║čåąĖąĖ adi_dev_Init.
ą£ą░ą║čĆąŠčü ADI_DEV_BASE_MEMORY ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé, ą║ąŠč鹊čĆąŠąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą┤ą╗čÅ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓. ą£ą░ą║čĆąŠčü ADI_DEV_DEVICE_MEMORY ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé, ą║ąŠč鹊čĆąŠąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą£ąĄąĮąĄą┤ąČąĄčĆčā ąŻčüčéčĆąŠą╣čüčéą▓ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą║ą░ąČą┤čŗą╝ čäąĖąĘąĖč湥čüą║ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝. ąÜąŠą│ą┤ą░ ą┐ą░ą╝čÅčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą┤ą╗čÅ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓, ą║ą╗ąĖąĄąĮčé ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüą╗ąĄą┤čāčÄčēąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ (n čĆą░ą▓ąĮąŠ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╝čā ą║ąŠą╗ąĖč湥čüčéą▓čā ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąŠčéą║čĆčŗčéčŗčģ ą▓ čüąĖčüč鹥ą╝ąĄ čäąĖąĘąĖč湥čüą║ąĖčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓):
ADI_DEV_BASE_MEMORY + (n * ADI_DEV_DEVICE_MEMORY)
ąźąĄąĮą┤ą╗čŗ. ąöą░ą╗ąĄąĄ ą▓ čäą░ą╣ą╗ąĄ adi_dev.h ąĮą░čģąŠą┤čÅčéčüčÅ ąŠą┐ąĄčĆą░č鹊čĆčŗ typedef ą┤ą╗čÅ čĆą░ąĘą╗ąĖčćąĮčŗčģ handle-čéąĖą┐ąŠą▓, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓. ą×ą▒čŗčćąĮąŠ čģąĄąĮą┤ą╗čŗ čŹč鹊 čāą║ą░ąĘą░č鹥ą╗ąĖ ąĮą░ čüčéčĆčāą║čéčāčĆčŗ ą┤ą░ąĮąĮčŗčģ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą▓ąĮčāčéčĆąĖ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓. ą×ąĮąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ čüą╝čŗčüą╗ąŠą▓ąŠą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąĖ ą┤ą░ąĮąĮčŗčģ, ąŠčéąĮąŠčüčÅčēąĖčģčüčÅ ą║ čāčüčéčĆąŠą╣čüčéą▓čā, čćč鹊ą▒čŗ ąŠąĮąĖ ą╝ąŠą│ą╗ąĖ ą▒čŗčéčī ą▒čŗčüčéčĆąŠ ąŠą▒čĆą░ą▒ąŠčéą░ąĮčŗ.
ą¤ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą╝ąĄč鹊ą┤ą░ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ. ąöą░ą╗ąĄąĄ ą▓ čäą░ą╣ą╗ąĄ adi_dev.h file ąĖą╝ąĄčÄčéčüčÅ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ą┤ą╗čÅ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓ ą╝ąĄč鹊ą┤ąŠą▓ ą┐ąŠč鹊ą║ąŠą▓ ą┤ą░ąĮąĮčŗčģ, ąĖ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĖąĄ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ. ąŁčéąĖ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ąĮąĄ čĆą░čüčłąĖčĆčÅčÄčéčüčÅ čäąĖąĘąĖč湥čüą║ąĖą╝ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ąĖ.
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ ą║ąŠą╝ą░ąĮą┤ (Command ID). ąÆ čüą╗ąĄą┤čāčÄčēąĄą╣ čüąĄą║čåąĖąĖ čäą░ą╣ą╗ą░ adi_dev.h ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ command ID, ą║ąŠč鹊čĆčŗąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓. ąŁčéąĖ command ID ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą▓ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ č湥čĆąĄąĘ čäčāąĮą║čåąĖčÄ adi_dev_Control.
ążąĖąĘąĖč湥čüą║ąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą╝ąŠą│čāčé ą┤ąŠą▒ą░ą▓ąĖčéčī ą╗čÄą▒ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ command ID, ą║ąŠč鹊čĆčŗąĄ ą▒čāą┤čāčé ąŠčéąĮąŠčüąĖčéčīčüčÅ ą║ ąĖčģ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝čā čāčüčéčĆąŠą╣čüčéą▓čā. ążąĖąĘąĖč湥čüą║ąĖ ą┤čĆą░ą╣ą▓ąĄčĆčŗ ąĮą░čćąĖąĮą░čÄčé ą┤ąŠą▒ą░ą▓ą╗čÅčéčī čüą▓ąŠąĖ command ID, ąĮą░čćąĖąĮą░čÅ ąŠčé čüčéą░čĆč鹊ą▓ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ą║ąŠą┤ąŠą▓ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░.
ąóą░ą║ąČąĄ ą▓ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮą░ čüčéčĆčāą║čéčāčĆą░ ą┤ą░ąĮąĮčŗčģ, ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčēą░čÅ ą┐ą░čĆčā ą║ąŠą╝ą░ąĮą┤ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. ąŁč鹊 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąŠ ą┐čĆąŠčüč鹊 ą┤ą╗čÅ čāą┤ąŠą▒čüčéą▓ą░, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą║ą╗ąĖąĄąĮčéą░ą╝ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī čéą░ą▒ą╗ąĖčåčā ą║ąŠą╝ą░ąĮą┤ ą▓ čäčāąĮą║čåąĖčÄ adi_dev_Control, ą▓ą╝ąĄčüč鹊 č鹊ą│ąŠ, čćč鹊ą▒čŗ ą▓čŗąĘčŗą▓ą░čéčī adi_dev_Control ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ ąŠčéą┤ąĄą╗čīąĮąŠą╣ ą║ąŠą╝ą░ąĮą┤čŗ (čüą╝. ą▓čĆąĄąĘą║čā čü ąŠą┐ąĖčüą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ adi_dev_Control).
ąĪąŠą▒čŗčéąĖčÅ callback. ąĪą╗ąĄą┤čāčÄčēą░čÅ čüąĄą║čåąĖčÅ ą▓ čäą░ą╣ą╗ąĄ adi_dev.h čüąŠą┤ąĄčƹȹĖčé ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ą┤ą╗čÅ čüąŠą▒čŗčéąĖą╣ callback. ąÜąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čüąŠą▒čŗčéąĖąĄ, ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ callback-čäčāąĮą║čåąĖčÅ ą║ą╗ąĖąĄąĮčéą░, ąĖ čéčāą┤ą░ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄ ąĖąĘ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ, čģą░čĆą░ą║č鹥čĆąĖąĘčāčÄčēąĄąĄ čüąŠą▒čŗčéąĖąĄ.
ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ąĮąĄą║ąŠč鹊čĆčŗąĄ ąŠą▒čēąĖąĄ čüąŠą▒čŗčéąĖčÅ. ąÜą░ą║ ąĖ čü ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ą╝ąĖ ą║ąŠą╝ą░ąĮą┤ (command ID), čäąĖąĘąĖč湥čüą║ąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą╝ąŠą│čāčé ą┤ąŠą▒ą░ą▓ąĖčéčī čüą▓ąŠąĖ čüąŠą▒čüčéą▓ąĄąĮąĮčŗąĄ čüąŠą▒čŗčéąĖčÅ callback, ąĮą░čćąĖąĮą░čÅ ąŠčé čüčéą░čĆč鹊ą▓ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ ą║ąŠą┤ąŠą▓ ą┤čĆą░ą╣ą▓ąĄčĆą░.
ąÜąŠą┤čŗ ą▓ąŠąĘą▓čĆą░čéą░. ąĪą╗ąĄą┤čāčÄčēą░čÅ čüąĄą║čåąĖčÅ čäą░ą╣ą╗ą░ adi_dev.h čüąŠą┤ąĄčƹȹĖčé ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ą┤ą╗čÅ ą║ąŠą┤ąŠą▓ ą▓ąŠąĘą▓čĆą░čéą░. ąÆčüąĄ čäčāąĮą║čåąĖąĖ API ą▓ ą£ąĄąĮąĄą┤ąČąĄčĆąĄ ąŻčüčéčĆąŠą╣čüčéą▓ ą▓ąŠąĘą▓čĆą░čéčÅčé ą║ąŠą┤, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĖą╣ ą║ą░ą║ą░čÅ ąŠčłąĖą▒ą║ą░ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ą┐čĆąĖ ą▓čŗąĘąŠą▓ąĄ čäčāąĮą║čåąĖąĖ (ąĄčüą╗ąĖ ą▓ąŠąĘą▓čĆą░čēąĄąĮ ą║ąŠą┤, čĆą░ą▓ąĮčŗą╣ 0, č鹊 ą▓čŗąĘąŠą▓ API-čäčāąĮą║čåąĖąĖ čüčćąĖčéą░ąĄčéčüčÅ čāčüą┐ąĄčłąĮčŗą╝). ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ąĮąĄą║ąŠč鹊čĆčŗą╣ ąŠą▒čēąĖą╣ ąĮą░ą▒ąŠčĆ ą║ąŠą┤ąŠą▓ ą▓ąŠąĘą▓čĆą░čéą░. ąóąŠčćąĮąŠ čéą░ą║ ąČąĄ, ą║ą░ą║ ąĖ ą┤ą╗čÅ command ID ąĖ čüąŠą▒čŗčéąĖą╣ callback, čäąĖąĘąĖč湥čüą║ąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą╝ąŠą│čāčé ą┤ąŠą▒ą░ą▓ąĖčéčī čüą▓ąŠąĖ čüąŠą▒čüčéą▓ąĄąĮąĮčŗąĄ ą║ąŠą┤čŗ ą▓ąŠąĘą▓čĆą░čéą░, ąĮą░čćąĖąĮą░čÅ ąŠčé čüčéą░čĆč鹊ą▓ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ ą║ąŠą┤ąŠą▓ ą┤čĆą░ą╣ą▓ąĄčĆą░.
ą×ą┐čåąĖąĖ callback ą║ąŠą╗čīčåąĄą▓čŗčģ ą▒čāč乥čĆąŠą▓. ąĪą╗ąĄą┤čāčÄčēą░čÅ čüąĄą║čåąĖčÅ čäą░ą╣ą╗ą░ adi_dev.h čüąŠą┤ąĄčƹȹĖčé ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ą┤ą╗čÅ čéąĖą┐ą░ callback ąĘą░ą┐čĆąŠčüąŠą▓ ą║ą╗ąĖąĄąĮčéą░, ą║ąŠą│ą┤ą░ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą╝ąĄč鹊ą┤ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ čü ą║ąŠą╗čīčåąĄą▓čŗą╝ ą▒čāč乥čĆąŠą╝.
ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĖąĄ ą£ąĄąĮąĄą┤ąČąĄčĆčā ąŻčüčéčĆąŠą╣čüčéą▓, čćč鹊 ąĮąĄ ąĮčāąČąĮąŠ ą┤ąĄą╗ą░čéčī ą▓čŗąĘąŠą▓čŗ callback, ą┤ąĄą╗ą░čéčī ą▓čŗąĘąŠą▓ callback ą┐ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÄ ą┐ąŠą┤ą▒čāč乥čĆą░, ąĖą╗ąĖ ą┤ąĄą╗ą░čéčī callback ą┐ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▓čüąĄą│ąŠ ą▒čāč乥čĆą░.
ąóąĖą┐čŗ ą▒čāč乥čĆą░ ą┤ą░ąĮąĮčŗčģ. ąĪčéčĆčāą║čéčāčĆčŗ ą┤ą░ąĮąĮčŗčģ ADI_DEV_1D_BUFFER, ADI_DEV_2D_BUFFER ąĖ ADI_DEV_CIRCULAR_BUFFER ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ ą▒čāč乥čĆąŠą▓ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░. ąÆ ą▓ąĄčĆčģąĮąĄą╣ čćą░čüčéąĖ čŹčéąĖčģ čüčéčĆčāą║čéčāčĆ ą┤ą░ąĮąĮčŗčģ ąĄčüčéčī ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮą░čÅ ąŠą▒ą╗ą░čüčéčī, ą║ąŠč鹊čĆą░čÅ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąöčĆą░ą╣ą▓ąĄčĆą░ą╝ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ ą║ ą╝ą░ą╗ąĄąĮčīą║ąŠą╣ ąŠą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą╣ ą║ ą║ą░ąČą┤ąŠą╝čā ą▒čāč乥čĆčā. ąÜą░ą║ (ąĄčüą╗ąĖ čŹč鹊 čéčĆąĄą▒čāąĄčéčüčÅ) ąöčĆą░ą╣ą▓ąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čŹčéčā ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮčāčÄ ąŠą▒ą╗ą░čüčéčī - ąĘą░ą▓ąĖčüąĖčé ąŠčé čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ąĄčüą╗ąĖ čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ DMA ą┐ąĄčĆąĖč乥čĆąĖąĖ, č鹊 ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čŹčéčā ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮčāčÄ ąŠą▒ą╗ą░čüčéčī ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ DMA, ąŠą┐ąĖčüčŗą▓ą░čÄčēąĄą│ąŠ ą▒čāč乥čĆ. ąŁč鹊čé ą┤ąĄčüą║čĆąĖą┐č鹊čĆ, ą▓ čüą▓ąŠčÄ ąŠč湥čĆąĄą┤čī, ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą£ąĄąĮąĄą┤ąČąĄčĆčā DMA čüąĖčüč鹥ą╝ąĮčŗčģ čüą╗čāąČą▒, čćč鹊ą▒čŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī DMA ą┤ą╗čÅ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ, ą║ą░ą║ ąŠą┐ąĖčüą░ąĮąŠ ą▓ čüčéčĆčāą║čéčāčĆąĄ ą▒čāč乥čĆą░.
ąĢčüą╗ąĖ čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA, č鹊 čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čŹčéčā ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮčāčÄ ąŠą▒ą╗ą░čüčéčī ą┤ą╗čÅ ą╗čÄą▒čŗčģ čåąĄą╗ąĄą╣ - ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąŠč湥čĆąĄą┤čīčÄ ąĖą╗ąĖ ą┤ą╗čÅ ą║ą░ą║ąŠą│ąŠ-č鹊 ą╝ąĄčģą░ąĮąĖąĘą╝ą░ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ą┐čĆąĖ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĖ ą┤ą░ąĮąĮčŗčģ.
ąóą░ą║ąČąĄ ą▓ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ąĖą╝ąĄąĄčéčüčÅ čüčéčĆčāą║čéčāčĆą░ ą┤ą░ąĮąĮčŗčģ ADI_DEV_BUFFER, ą║ąŠč鹊čĆą░čÅ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ąŠą▒čŖąĄą┤ąĖąĮąĄąĮąĖąĄ ąŠą┤ąĮąŠą╝ąĄčĆąĮąŠą│ąŠ, ą┤ą▓čāą╝ąĄčĆąĮąŠą│ąŠ ąĖ ą║ąŠą╗čīčåąĄą▓ąŠą│ąŠ ą▒čāč乥čĆąŠą▓. ąŁč鹊čé čéąĖą┐ ą┤ą░ąĮąĮčŗčģ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ čāą┤ąŠą▒ąĮčŗą╣ ą╝ąĄč鹊ą┤ čüčüčŗą╗ą░čéčīčüčÅ ąĮą░ ą▒čāč乥čĆ ąŠą▒čēąĖą╝ ą╝ąĄč鹊ą┤ąŠą╝, ą▒ąĄąĘ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ąĘąĮą░čéčī, ą║ą░ą║ąŠą│ąŠ ąĖą╝ąĄąĮąĮąŠ čéąĖą┐ą░ čŹč鹊čé ą▒čāč乥čĆ. API-čäčāąĮą║čåąĖąĖ adi_dev_Read ąĖ adi_dev_Write ąĖčüą┐ąŠą╗čīąĘčāčÄčé čéąĖą┐ ą┤ą░ąĮąĮčŗčģ ADI_DEV_BUFFER, ą║ąŠą│ą┤ą░ ą▒čāč乥čĆ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ čŹčéąĖ čäčāąĮą║čåąĖąĖ.
ąóąŠčćą║ą░ ą▓čģąŠą┤ą░ ą▓ čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ. ąĪą╗ąĄą┤čāčÄčēą░čÅ čüąĄą║čåąĖčÅ čäą░ą╣ą╗ą░ adi_dev.h čüąŠą┤ąĄčƹȹĖčé čüčéčĆčāą║čéčāčĆčā ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆą░čÅ ąŠą┐ąĖčüčŗą▓ą░ąĄčé č鹊čćą║čā ą▓čģąŠą┤ą░ ą▓ čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ. ąĪčéčĆčāą║čéčāčĆą░ ADI_DEV_PDD_ENTRY_POINT čŹč鹊 ą┐čĆąŠčüč鹊 čéąĖą┐ ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗą╣ čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ čäčāąĮą║čåąĖąĖ ą▓ čäąĖąĘąĖč湥čüą║ąŠą╝ ą┤čĆą░ą╣ą▓ąĄčĆąĄ, ą║ąŠč鹊čĆčŗąĄ ą▓čŗąĘčŗą▓ą░čÄčéčüčÅ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓.
ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ API-čäčāąĮą║čåąĖą╣. ą¤ąŠčüą╗ąĄą┤ąĮčÅčÅ čüąĄą║čåąĖčÅ čäą░ą╣ą╗ą░ adi_dev.h ąŠą┐ąĖčüčŗą▓ą░ąĄčé ą▓čŗąĘąŠą▓čŗ API ą▓ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓. ąÜą░ąČą┤ą░čÅ čäčāąĮą║čåąĖčÅ ąĘą┤ąĄčüčī ą┤ąĄą║ą╗ą░čĆąĖčĆčāąĄčéčüčÅ čü čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą▓čŗąĘąŠą▓ą░. ąÜą░ąČą┤ą░čÅ čäčāąĮą║čåąĖčÅ ąŠą┐ąĖčüą░ąĮą░ ą┐ąŠą┤čĆąŠą▒ąĮąŠ ą▓ čĆą░ąĘą┤ąĄą╗ąĄ "ąśąĮč鹥čĆč乥ą╣čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ (API) ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓".
ąÆąĄčüčī ą║ąŠą┤ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ čüąŠčüčĆąĄą┤ąŠč鹊č湥ąĮ ą▓ čäą░ą╣ą╗ąĄ adi_dev.c. ąŁč鹊čé čäą░ą╣ą╗ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ Blackfin/Lib/Src/Drivers.
ąĪčéčĆčāą║čéčāčĆčŗ ą┤ą░ąĮąĮčŗčģ. ąŚą┤ąĄčüčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ č鹊ą╗čīą║ąŠ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čüčéčĆčāą║čéčāčĆčŗ ą┤ą░ąĮąĮčŗčģ ADI_DEV_MANAGER ąĖ ADI_DEV_DEVICE. ąŁčéąĖ čüčéčĆčāą║čéčāčĆčŗ čüąŠą┤ąĄčƹȹ░čé ą▓čüąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗ ą┤ą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ąĮčāąČąĮčŗ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čüą░ą╝ąŠą│ąŠ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čäąĖąĘąĖč湥čüą║ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝.
ąĪčéą░čéąĖč湥čüą║ąĖąĄ ą┤ą░ąĮąĮčŗąĄ. ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąĄą┤ąĖąĮčüčéą▓ąĄąĮąĮąŠąĄ ą╝ąĄčüč鹊 ą┤ą╗čÅ čĆą░ąĘą╝ąĄčēąĄąĮąĖčÅ čüčéą░čéąĖč湥čüą║ąĖčģ ą┤ą░ąĮąĮčŗčģ. ąŁą╗ąĄą╝ąĄąĮčé InitialDeviceSettings ą║ąŠą┐ąĖčĆčāąĄčéčüčÅ ą▓ čüčéčĆčāą║čéčāčĆ ADI_DEV_DEVICE, ą║ąŠą│ą┤ą░ ąŠčéą║čĆčŗą▓ą░ąĄčéčüčÅ čāčüčéčĆąŠą╣čüčéą▓ąŠ. ąŁčé ąŠą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▒čŗčüčéčĆčŗą╣ ąĖ ąĖ čŹčäč乥ą║čéąĖą▓ąĮčŗą╣ čüą┐ąŠčüąŠą▒ ą┤ą╗čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ čüčéčĆčāą║čéčāčĆčŗ ą▒ąĄąĘ ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮąŠą│ąŠ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąŠą╗čÅ.
ąöąĄą║ą╗ą░čĆą░čåąĖąĖ čüčéą░čéąĖč湥čüą║ąĖčģ čäčāąĮą║čåąĖą╣. ąŁčéą░ čüąĄą║čåąĖčÅ ą┤ąĄą║ą╗ą░čĆąĖčĆčāąĄčé čüčéą░čéąĖč湥čüą║ąĖąĄ čäčāąĮą║čåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓ ą£ąĄąĮąĄą┤ąČąĄčĆąĄ ąŻčüčéčĆąŠą╣čüčéą▓. ąÜą░ąČą┤ą░čÅ ąĖąĘ ąĮąĖčģ ąŠą┐ąĖčüą░ąĮą░ ą▓ čüą╗ąĄą┤čāčÄčēąĖčģ čüąĄą║čåąĖčÅčģ. ąōą╗ąŠą▒ą░ą╗čīąĮąŠ ą┤ąĄą║ą╗ą░čĆąĖčĆčāčÄčéčüčÅ č鹊ą╗čīą║ąŠ čäčāąĮą║čåąĖąĖ API; ą▓čüąĄ ą┤čĆčāą│ąĖąĄ čäčāąĮą║čåąĖąĖ čÅą▓ą╗čÅčÄčéčüčÅ ą┤ą╗čÅ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ čüčéą░čéąĖč湥čüą║ąĖą╝ąĖ.
[ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ API]
ąÆ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ąŠą┐ąĖčüą░ąĮąĖąĄ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéąĖ, ą▓čŗą┐ąŠą╗ąĮčÅąĄą╝ąŠą╣ ą║ą░ąČą┤ąŠą╣ ąĖąĘ API-čäčāąĮą║čåąĖą╣ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓. ąÆąŠčé čŹčéąĖ čäčāąĮą║čåąĖąĖ:
ŌĆó adi_dev_Init
ŌĆó adi_dev_Open
ŌĆó adi_dev_Close
ŌĆó adi_dev_Read
ŌĆó adi_dev_Write
ŌĆó adi_dev_Control
ąöą╗čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ ą┐ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ čäčāąĮą║čåąĖą╣ ąĖ ąĖčģ ą┐čĆąŠč鹊čéąĖą┐ą░ą╝ čüą╝. čĆą░ąĘą┤ąĄą╗ "ąśąĮč鹥čĆč乥ą╣čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ (API) ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓".
adi_dev_Init. ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓. ąöą╗čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░čģ čäčāąĮą║čåąĖąĖ ąĖ ą║ąŠą┤ą░čģ ą▓ąŠąĘą▓čĆą░čéą░ čüą╝. ąĄčæ ąŠą┐ąĖčüą░ąĮąĖąĄ ą▓ąŠ ą▓čĆąĄąĘą║ąĄ adi_dev_Init.
ą×ą▒čĆą░ą▒ąŠčéą║ą░ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü ą┐čĆąŠą▓ąĄčĆą║ąĖ, ą┤ąŠčüčéą░č鹊čćąĮąŠ ą╗ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓. ąŚą░č鹥ą╝ čäčāąĮą║čåąĖčÅ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, čüą║ąŠą╗čīą║ąŠ čäąĖąĘąĖč湥čüą║ąĖčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąČąĮąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī ąŠčüčéą░ą▓čłąĄą╣čüčÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠą╣ ą┐ą░ą╝čÅčéčīčÄ.
ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ čāą║ą░ąĘą░č鹥ą╗ąĖ ą║čĆąĖčéąĖč湥čüą║ąŠą│ąŠ čĆąĄą│ąĖąŠąĮą░, ąĖ čüčéčĆčāą║čéčāčĆą░ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĄčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ ą║ą░ą║ ą┤ąŠčüčéčāą┐ąĮąŠąĄ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ čäčāąĮą║čåąĖčÅ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓ ą▓čŗąĘčŗą▓ą░čÄčēąĖą╣ ą║ąŠą┤.
adi_dev_Open. ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠčéą║čĆčŗčéąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī. ąöą╗čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░čģ čäčāąĮą║čåąĖąĖ ąĖ ą║ąŠą┤ą░čģ ą▓ąŠąĘą▓čĆą░čéą░ čüą╝. ąĄčæ ąŠą┐ąĖčüą░ąĮąĖąĄ ą▓ąŠ ą▓čĆąĄąĘą║ąĄ adi_dev_Open.
ą×ą▒čĆą░ą▒ąŠčéą║ą░ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü ąĮą░čģąŠąČą┤ąĄąĮąĖčÅ čüą▓ąŠą▒ąŠą┤ąĮąŠą╣ čüčéčĆčāą║čéčāčĆčŗ ADI_DEV_DEVICE, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝. ąÉą┤čĆąĄčü čüčéčĆčāą║čéčāčĆčŗ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠą╣ ą║ą╗ąĖąĄąĮč鹊ą╝ čÅč湥ą╣ą║ąĄ ą┐ą░ą╝čÅčéąĖ ą║ą░ą║ čģąĄąĮą┤ą╗ ąĮą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ.
ąĪčéčĆčāą║čéčāčĆą░ ADI_DEV_DEVICE ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčéčüčÅ ąĖ ąĘą░ą┐ąŠą╗ąĮčÅąĄčéčüčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣, ąŠą┐ąĖčüčŗą▓ą░čÄčēąĄą╣ čāčüčéčĆąŠą╣čüčéą▓ąŠ.
ąÜą░ą║ č鹊ą╗čīą║ąŠ čüčéčĆčāą║čéčāčĆą░ ADI_DEV_DEVICE ą▒čŗą╗ą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮą░, ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą▓čŗąĘčŗą▓ą░ąĄčé čäčāąĮą║čåąĖčÄ adi_pdd_Open čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░. ąŚą░ą┐čāčüą║ą░ąĄčéčüčÅ ą║ąŠą┤ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░, ą║ąŠč鹊čĆčŗą╣ ą┤ąĄą╗ą░ąĄčé ą▓čüąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠąĄ, čćč鹊ą▒čŗ ąŠčéą║čĆčŗčéčī čāą┐čĆą░ą▓ą╗čÅąĄą╝ąŠąĄ ąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠ. ąĢčüą╗ąĖ čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ąĮąĄ ą╝ąŠąČąĄčé ąŠčéą║čĆčŗčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ, č鹊 ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąŠčüą▓ąŠą▒ąŠąČą┤ą░ąĄčé čüčéčĆčāą║čéčāčĆčā ADI_DEV_DEVICE, ąĖ ą┐ąĄčĆąĄą┤ą░ąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą║ąŠą┤ ą▓ąŠąĘą▓čĆą░čéą░ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ąĖąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 ą║ąŠą┤čŗ ą▓ąŠąĘą▓čĆą░čéą░ ą╝ąŠą│čāčé ą▒čŗčéčī čĆą░čüčłąĖčĆąĄąĮčŗ čäąĖąĘąĖč湥čüą║ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝, ą║ąŠą┤ ą▓ąŠąĘą▓čĆą░čéą░ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖą╝, ąŠą┐ąĖčüčŗą▓ą░čÄčēąĖą╝ ą║ą░ą║ąĖąĄ-ą╗ąĖą▒ąŠ ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ ą┐čĆąĖčćąĖąĮčŗ ąŠčłąĖą▒ą║ąĖ ą┐čĆąĖ ąŠčéą║čĆčŗčéąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░.
ąĢčüą╗ąĖ čäąĖąĘąĖč湥čüą║ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▒čŗą╗ąŠ ą║ąŠčĆčĆąĄą║čéąĮąŠ ąŠčéą║čĆčŗč鹊, č鹊 ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓čāąĄčé čü čäąĖąĘąĖč湥čüą║ąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą╗ąĖ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╣ DMA. ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ą░ čüąŠčģčĆą░ąĮčÅąĄčé čŹčéčā ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą▓ čüčéčĆčāą║čéčāčĆąĄ ADI_DEV_DEVICE.
adi_dev_Close. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝, ą║ąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▒ąŠą╗čīčłąĄ ąĮąĄ ąĮčāąČąĮąŠ. ąöą╗čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░čģ čäčāąĮą║čåąĖąĖ ąĖ ą║ąŠą┤ą░čģ ą▓ąŠąĘą▓čĆą░čéą░ čüą╝. ąĄčæ ąŠą┐ąĖčüą░ąĮąĖąĄ ą▓ąŠ ą▓čĆąĄąĘą║ąĄ adi_dev_Close.
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▒čŗą╗ ą┐čĆąŠą▓ąĄčĆąĄąĮ, ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░čÅ, čćč鹊 čĆą░ąĘčĆąĄčłąĄąĮą░ ą┐čĆąŠą▓ąĄčĆą║ą░ ąĮą░ ąŠčłąĖą▒ą║čā, čäčāąĮą║čåąĖčÅ ą▓čŗąĘčŗą▓ą░ąĄčé čäčāąĮą║čåąĖčÄ adi_pdd_Control čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ čćč鹊ą▒čŗ ąŠčüčéą░ąĮąŠą▓ąĖčéčī ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ ą▒čŗą╗ ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ąĘą░ą║čĆčŗą▓ą░čÄčéčüčÅ ą╗čÄą▒čŗąĄ ąŠčéą║čĆčŗčéčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ą║ą░ąĮą░ą╗čŗ DMA. ąŚą░č鹥ą╝ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ čäčāąĮą║čåąĖčÅ adi_pdd_Close čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░, čćč鹊ą▒čŗ ą▓čŗą║ą╗čÄčćąĖčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖ ąŠčüą▓ąŠą▒ąŠą┤ąĖčéčī ą╗čÄą▒čŗąĄ čĆąĄčüčāčĆčüčŗ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ čäąĖąĘąĖč湥čüą║ąĖą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝. ąś ą▓ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ čüčéčĆčāą║čéčāčĆą░ ADI_DEV_DEVICE ą┐ąŠą╝ąĄčćą░ąĄčéčüčÅ ą║ą░ą║ ąĘą░ą║čĆčŗčéą░čÅ, čéą░ą║ čćč鹊 ąŠąĮą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ą┐ąŠčüą╗ąĄą┤čüčéą▓ąĖąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮą░ ą┐ąŠą▓č鹊čĆąĮąŠ.
adi_dev_Read. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝, čćč鹊ą▒čŗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī čāčüčéčĆąŠą╣čüčéą▓čā ą▒čāč乥čĆčŗ, ą║čāą┤ą░ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠą╝ąĄčēąĄąĮčŗ ą┐čĆąĖčģąŠą┤čÅčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ. ą¤čĆąĄą┤ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠ ą┐čĆąŠą▓ąĄčĆą║ą░ ąŠčłąĖą▒ąŠą║ čĆą░ąĘčĆąĄčłąĄąĮą░, č鹊ą│ą┤ą░ ą▓ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąĮą░čćąĖąĮą░ąĄčéčüčÅ ą┐čĆąŠą▓ąĄčĆą║ąŠą╣ čģąĄąĮą┤ą╗ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮą░ ą┐čĆąĄą┤ą╝ąĄčé č鹊ą│ąŠ, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠ ąŠčéą║čĆčŗč鹊 ą┤ą╗čÅ ą▓čģąŠą┤čÅčēąĄą│ąŠ (ąĖą╗ąĖ ą┤ą╗čÅ ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮąŠą│ąŠ) čéčĆą░čäąĖą║ą░, ąĖ čćč鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą╝ąĄč鹊ą┤ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ. ąĢčüą╗ąĖ ą╝ąĄč鹊ą┤ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ ąĄčēąĄ ąĮąĄ ąĘą░ą┤ą░ąĮ, č鹊 ą£ąĄąĮąĄą┤ąČąĄčĆčā ąŻčüčéčĆąŠą╣čüčéą▓ ąĮąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąŠ ą┤ąŠčüčéą░č鹊čćąĮąŠ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, čćč鹊 ą┤ąĄą╗ą░čéčī ą┤ą░ą╗čīčłąĄ čü čŹčéąĖą╝ ą▒čāč乥čĆąŠą╝. ąöą╗čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░čģ čäčāąĮą║čåąĖąĖ ąĖ ą║ąŠą┤ą░čģ ą▓ąŠąĘą▓čĆą░čéą░ čüą╝. ąĄčæ ąŠą┐ąĖčüą░ąĮąĖąĄ ą▓ąŠ ą▓čĆąĄąĘą║ąĄ adi_dev_Read.
ą¤ą░čĆą░ą╝ąĄčéčĆ pBuffer, ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗą╣ ą▓ čŹčéčā čäčāąĮą║čåąĖčÄ, ą╝ąŠąČąĄčé čāą║ą░ąĘčŗą▓ą░čéčī ąĮą░ ąŠą┤ąĖąĮąŠčćąĮčŗą╣ ą▒čāč乥čĆ ąĖą╗ąĖ čåąĄą┐ąŠčćą║čā ą▒čāč乥čĆąŠą▓. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, ąĄčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA, č鹊 ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮą░čÅ ąŠą▒ą╗ą░čüčéčī ą┤ą░ąĮąĮčŗčģ ą▓ čüčéčĆčāą║čéčāčĆąĄ ą┤ą░ąĮąĮčŗčģ ą▒čāč乥čĆą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░. ą×ą▒ąŠ ą▓čüąĄčģ čŹčéąĖčģ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéčÅčģ ąĘą░ą▒ąŠčéąĖčéčüčÅ čüčéą░čéąĖč湥čüą║ą░čÅ čäčāąĮą║čåąĖčÅ PrepareBufferList, ąŠą┐ąĖčüą░ąĮąĮą░čÅ ąĮąĖąČąĄ.
ąÜą░ą║ č鹊ą╗čīą║ąŠ čüą┐ąĖčüąŠą║ ą▒čāč乥čĆąŠą▓ ą┐ąŠą┤ą│ąŠč鹊ą▓ą╗ąĄąĮ, ą┐čĆąŠą▓ąĄčĆčÅąĄčéčüčÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA. ąĢčüą╗ąĖ ą┤ą░, č鹊 ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą£ąĄąĮąĄą┤ąČąĄčĆ DMA, čćč鹊ą▒čŗ ą┐ąŠčüčéą░ą▓ąĖčéčī ą▓ ąŠč湥čĆąĄą┤čī ą▒čāč乥čĆčŗ ąĮą░ ą┐ąŠą┤čģąŠą┤čÅčēąĄą╝ ą║ą░ąĮą░ą╗ąĄ DMA, ąĖčüą┐ąŠą╗čīąĘčāčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą╝ąĄč鹊ą┤ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĖ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ - čüą▓čÅąĘą░ąĮąĮčŗąĄ ą▓ čåąĄą┐ąŠčćą║čā ą┤ąĄčüą║čĆąĖą┐č鹊čĆčŗ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą£ąĄąĮąĄą┤ąČąĄčĆčā DMA č湥čĆąĄąĘ ą▓čŗąĘąŠą▓ čäčāąĮą║čåąĖąĖ adi_dma_Queue, ąĖ ą║ąŠą╗čīčåąĄą▓čŗąĄ ą▒čāč乥čĆčŗ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ č湥čĆąĄąĘ čäčāąĮą║čåąĖčÄ adi_dma_Buffer. ąĢčüą╗ąĖ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╣ DMA ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ, č鹊 ą▒čāč乥čĆčŗ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ąĮą░ą┐čĆčÅą╝čāčÄ ą║ čäąĖąĘąĖč湥čüą║ąŠą╝čā ą┤čĆą░ą╣ą▓ąĄčĆčā čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ adi_pdd_Read. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą║ąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA, čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ čŹą║čüčéčĆąĄą╝ą░ą╗čīąĮąŠ ą┐čĆąŠčüčé, ą┐ąŠč鹊ą╝čā čćč鹊 ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą▓čüąĄ ą▒čāč乥čĆčŗ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░.
ąÆ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ ą┤ąĄą╗ą░ąĄčéčüčÅ ą┐čĆąŠą▓ąĄčĆą║ą░, čćč鹊ą▒čŗ ą┐ąŠčüą╝ąŠčéčĆąĄčéčī, ą║ą░ą║ čĆą░ą▒ąŠčéą░ąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ - ą▓ čüąĖąĮčģčĆąŠąĮąĮąŠą╝ ąĖą╗ąĖ ą░čüąĖąĮčģčĆąŠąĮąĮąŠą╝ čĆąĄąČąĖą╝ąĄ. ąĢčüą╗ąĖ čĆą░ą▒ąŠčéą░ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą▓ ą░čüąĖąĮčģčĆąŠąĮąĮąŠą╝ čĆąĄąČąĖą╝ąĄ (ąĮą░ąĖą▒ąŠą╗ąĄąĄ čćą░čüčéčŗą╣ čüą╗čāčćą░ą╣ ą┤ą╗čÅ RTOS ąĖ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓čāčÄčēąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣), č鹊 čäčāąĮą║čåąĖčÅ adi_dev_Read ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą▓ąŠąĘą▓čĆą░čéąĖčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓ ą▓čŗąĘčŗą▓ą░čÄčēąĖą╣ ą║ąŠą┤ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąĢčüą╗ąĖ ąČąĄ čĆą░ą▒ąŠčéą░ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą▓ čüąĖąĮčģčĆąŠąĮąĮąŠą╝ čĆąĄąČąĖą╝ąĄ, č鹊 čäčāąĮą║čåąĖčÅ adi_dev_Read ąČą┤ąĄčé, ą┐ąŠą║ą░ ą▒čāč乥čĆ (ąĖą╗ąĖ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą▒čāč乥čĆ ą▓ čüą┐ąĖčüą║ąĄ ą▒čāč乥čĆąŠą▓, ąĄčüą╗ąĖ ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ąĘą░ą┤ą░ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▒čāč乥čĆąŠą▓) ąĮąĄ ą▒čāą┤ąĄčé ąŠą▒čĆą░ą▒ąŠčéą░ąĮ, ąĖ č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ. ąś ąŠą┐čÅčéčī, čā čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĮąĄčé ąĘąĮą░ąĮąĖą╣ ąŠ č鹊ą╝, ą║ą░ą║ąŠą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čĆąĄąČąĖą╝ čĆą░ą▒ąŠčéčŗ - čüąĖąĮčģčĆąŠąĮąĮčŗą╣ ąĖą╗ąĖ ą░čüąĖąĮčģčĆąŠąĮąĮčŗą╣ (č鹊čćąĮąĄąĄ ą│ąŠą▓ąŠčĆčÅ, čäąĖąĘąĖč湥čüą║ąŠą╝čā ą┤čĆą░ą╣ą▓ąĄčĆčā čŹč鹊 ąĘąĮą░čéčī ąĮąĄ ąĮčāąČąĮąŠ).
adi_dev_Write. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓ąĖčĆčéčāą░ą╗čīąĮąŠ čĆą░ą▒ąŠčéą░ąĄčé ąĖą┤ąĄąĮčéąĖčćąĮąŠ čäčāąĮą║čåąĖąĖ adi_dev_Read, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ č鹊ą│ąŠ, čćč鹊 ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮą░ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą▓ ąŠą▒čĆą░čéąĮąŠą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ. ąöą╗čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░čģ čäčāąĮą║čåąĖąĖ ąĖ ą║ąŠą┤ą░čģ ą▓ąŠąĘą▓čĆą░čéą░ čüą╝. ąĄčæ ąŠą┐ąĖčüą░ąĮąĖąĄ ą▓ąŠ ą▓čĆąĄąĘą║ąĄ adi_dev_Write.
adi_dev_Control. ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą║ąŠą╝ą░ąĮą┤ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ąŠčéąĮąŠčüčÅčēąĖčģčüčÅ ą║ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░. ąÜą░ą║ ąĖ ą▓čüąĄ API-čäčāąĮą║čåąĖąĖ, ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮą░ ą┐čĆąŠą▓ąĄčĆą║ą░ ąŠčłąĖą▒ąŠą║, ąĮą░ ą▓čģąŠą┤ąĄ ą▓ čäčāąĮą║čåąĖčÄ ą▒čāą┤ąĄčé ą┐čĆąŠą▓ąĄčĆąĄąĮ čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░. ąöą╗čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░čģ čäčāąĮą║čåąĖąĖ ąĖ ą║ąŠą┤ą░čģ ą▓ąŠąĘą▓čĆą░čéą░ čüą╝. ąĄčæ ąŠą┐ąĖčüą░ąĮąĖąĄ ą▓ąŠ ą▓čĆąĄąĘą║ąĄ adi_dev_Control.
ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą▓ąĮčāčéčĆąĖ čäčāąĮą║čåąĖąĖ adi_dev_Control ąŠčüąĮąŠą▓ą░ąĮą░ ąĮą░ command ID, ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠą╝ ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░. ąØąĄą║ąŠč鹊čĆčŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓, ą░ ąĮąĄą║ąŠč鹊čĆčŗąĄ č鹊ą╗čīą║ąŠ čäąĖąĘąĖč湥čüą║ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝, ąĖ ą┤čĆčāą│ąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ čéčĆąĄą▒čāčÄčé čüąŠą▓ą╝ąĄčüčéąĮąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĖ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓, ąĖ čäąĖąĘąĖč湥čüą║ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝. ą¦č鹊ą▒čŗ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą▓čüąĄ čŹč鹊, ą▒ą╗ąŠą║ ą║ąŠą┤ą░ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮ ą║ą░ą║ ąŠą┐ąĄčĆą░č鹊čĆ switch čÅąĘčŗą║ą░ C. ąÜą░ąČą┤ą░čÅ ą║ąŠą╝ą░ąĮą┤ą░ ą£ąĄąĮąĄą┤ąČąĄčĆčā ąŻčüčéčĆąŠą╣čüčéą▓ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ ąŠčéą┤ąĄą╗čīąĮąŠą╣ ą▓ąĄčéą║ąŠą╣ ąŠą┐ąĄčĆą░č鹊čĆą░ switch.
ąÜąŠą│ą┤ą░ ą┐ąĄčĆąĄą┤ą░ąĮą░ ą║ąŠą╝ą░ąĮą┤ą░, ą║ąŠč鹊čĆčāčÄ ą┤ąŠą╗ąČąĄąĮ ąŠą▒čĆą░ą▒ąŠčéą░čéčī ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓, č鹊 ąŠąĮ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą║ąŠą╝ą░ąĮą┤čā ąĖ ąĘą░č鹥ą╝ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čäą╗ą░ą│, čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆčāčÅ čŹčéąĖą╝, ąĮčāąČąĮąŠ ą╗ąĖ ą┐ąĄčĆąĄą┤ą░čéčī ąŠą▒čĆą░ą▒ąŠčéą║čā ą║ąŠą╝ą░ąĮą┤čŗ ąĮąĖąČąĄ, ą║ čäąĖąĘąĖč湥čüą║ąŠą╝čā ą┤čĆą░ą╣ą▓ąĄčĆčā. ąÜąŠą│ą┤ą░ ąŠą▒čĆą░ą▒ąŠčéą║ą░ čüą┐čāčüą║ą░ąĄčéčüčÅ ąĮąĖąČąĄ ą▓ čäčāąĮą║čåąĖąĖ, ąĄčüą╗ąĖ ąĮčāąČąĮąŠ ą┐ąĄčĆąĄą┤ą░čéčī ą║ąŠą╝ą░ąĮą┤čā ą▓ čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ, č鹊 ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ čäčāąĮą║čåąĖčÅ adi_pdd_Control čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░, ąĖ ą║ąŠą┤ ą▓ąŠąĘą▓čĆą░čéą░ ąĖąĘ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮ ąŠą▒čĆą░čéąĮąŠ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą║ą░ąČą┤ąŠą╝čā čäąĖąĘąĖč湥čüą║ąŠą╝čā ą┤čĆą░ą╣ą▓ąĄčĆčā čĆą░čüčłąĖčĆąĖčéčī čüą┐ąĖčüąŠą║ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ ą║ąŠą╝ą░ąĮą┤ (command ID), ąĖ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čüąŠąĘą┤ą░čéčī čüą▓ąŠąĖ čüąŠą▒čüčéą▓ąĄąĮąĮčŗąĄ čāąĮąĖą║ą░ą╗čīąĮčŗąĄ command ID, ą║ąŠč鹊čĆčŗą╝ąĖ ą╝ąŠąČąĄčé čāą┐čĆą░ą▓ą╗čÅčéčī ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ.
ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ:
ADI_DEV_CMD_GET_2D_SUPPORT. ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ą▓čāą╝ąĄčĆąĮąŠąĄ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ. ąØą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░čģ Blackfin, ąĄčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA, č鹊 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą┤ą▓čāą╝ąĄčĆąĮąŠąĄ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ. ąĢčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA, č鹊 ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ čäąĖąĘąĖč湥čüą║ąŠą╝čā ą┤čĆą░ą╣ą▓ąĄčĆčā, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą╝ąŠąČąĄčé ą╗ąĖ čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī ą┤ą▓čāą╝ąĄčĆąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ.
ADI_DEV_CMD_SET_SYNCHRONOUS. ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą▓ąŠą┤ą░ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ ą▓ čüąĖąĮčģčĆąŠąĮąĮčŗą╣ čĆąĄąČąĖą╝ ą┤ą╗čÅ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą║ąŠą╝ą░ąĮą┤čŗ ąĘą░ą║ą╗čÄčćą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą▓ čāčüčéą░ąĮąŠą▓ą║ąĄ čäą╗ą░ą│ą░ ą▓ čüčéčĆčāą║čéčāčĆąĄ ADI_DEV_DEVICE. ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ čäąĖąĘąĖč湥čüą║ąŠą╝čā ą┤čĆą░ą╣ą▓ąĄčĆčā, čéą░ą║ ą║ą░ą║ ą▓čüčÅ čüąĖąĮčģčĆąŠąĮąĮą░čÅ ą░ą║čéąĖą▓ąĮąŠčüčéčī čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓. ąĪą║čĆčŗčéąĖąĄ čüąĖąĮčģčĆąŠąĮąĮąŠčüčéąĖ ąŠčé čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą┤ą░ąĄčé č鹊 ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ąŠ, čćč鹊 ą┤ą╗čÅ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ąĘą░ą▒ąŠčéąĖčéčīčüčÅ (ąĮąĄ ąĮą░ą┤ąŠ ąĖą╝ąĄčéčī ą┤ą╗čÅ čŹč鹊ą│ąŠ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ) ąŠ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ ąĖą╗ąĖ ą░čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ čĆąĄąČąĖą╝ąŠą▓. ążąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊ą▒čŗ ą╗čāčćčłąĄ ą▓čüąĄą│ąŠ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąŠą▓ą░čéčī čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝.
ADI_DEV_CMD_SET_DATAFLOW_METHOD. ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą╝ąĄč鹊ą┤ą░ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ąĢčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA, č鹊 ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąĮąĄ ą┐čĆąĄą┤ą┐čĆąĖąĮąĖą╝ą░ąĄčé ąĮąĖą║ą░ą║ąĖčģ ą┤ąĄą╣čüčéą▓ąĖą╣, ą║čĆąŠą╝ąĄ ą║ą░ą║ ąŠą▒čĆą░ą▒ąŠčéą║čā ą╝ąĄč鹊ą┤ą░ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą║ąŠą╝ą░ąĮą┤čŗ ą▓ čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ č湥čĆąĄąĘ čäčāąĮą║čåąĖčÄ adi_pdd_Control. ąĢčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA, č鹊 ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗą╝ čĆąĄą│ąĖčüčéčĆąŠą╝ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ DMA, ąŠą▒ąĮąŠą▓ą╗čÅąĄčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ąĖ ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ąĖ, ą┐ąŠą┤čģąŠą┤čÅčēąĖą╝ąĖ ą┤ą╗čÅ ą╝ąĄč鹊ą┤ą░ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, ą║ą░ą║ č鹊ą╗čīą║ąŠ ą╝ąĄč鹊ą┤ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝, ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąŠčéą║čĆčŗą▓ą░ąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą░ąĮą░ą╗ąŠą▓ DMA, čéčĆąĄą▒čāąĄą╝ąŠąĄ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░. ąĪ čäąĖąĘąĖč湥čüą║ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ ą┐čĆąŠąĖčüčģąŠą┤ąĖ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖąĄ č湥čĆąĄąĘ čäčāąĮą║čåąĖčÄ adi_pdd_Control, čü ą║ąŠč鹊čĆąŠą╣ ąĘą░ą┤ą░ąĄčéčüčÅ, ą║ą░ą║ąŠą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ DMA ąĖ ą║ą░ą║ąŠą╣ ąĮąŠą╝ąĄčĆ ą║ą░ąĮą░ą╗ą░ ąĮą░ąĘąĮą░čćą░ąĄčéčüčÅ čāčüčéčĆąŠą╣čüčéą▓čā ą┤ą╗čÅ ą▓čģąŠą┤čÅčēąĖčģ ąĖ/ąĖą╗ąĖ ąĖčüčģąŠą┤čÅčēąĖčģ ą┤ą░ąĮąĮčŗčģ. ąŚą░č鹥ą╝ ą║ ą£ąĄąĮąĄą┤ąČąĄčĆčā DMA ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┤ąŠčüčéčāą┐ ą┤ą╗čÅ ąŠčéą║čĆčŗčéąĖčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ ą║ą░ąĮą░ą╗ąŠą▓ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ čĆąĄąČąĖą╝ą░čģ, čéą░ą║ąĖčģ ą║ą░ą║ ą║ąŠą╗čīčåąĄą▓čŗąĄ ąĖą╗ąĖ čåąĄą┐ąŠč湥čćąĮčŗąĄ ą┤ąĄčüą║čĆąĖą┐č鹊čĆčŗ. ąĢčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠčéą║čĆčŗč鹊 čü ą╝ąĄč鹊ą┤ąŠą╝ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ ADI_DEV_MODE_CHAINED_LOOPBACK, č鹊 ą£ąĄąĮąĄą┤ąČąĄčĆ DMA čéą░ą║ąČąĄ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čüčéčĆčāą║čéčāčĆą░ ADI_DEV_DEVICE ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĮąŠą╣ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣, ą║ą░ą║ąĖąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ ąĖ ą║ą░ą║ąĖąĄ ą║ą░ąĮą░ą╗čŗ ąŠčéą║čĆčŗčéčŗ ąĖą╗ąĖ ąĘą░ą║čĆčŗčéčŗ, ą▓ ą║ą░ą║ąĖčģ čĆą░ą▒ąŠčćąĖčģ čĆąĄąČąĖą╝ą░čģ ąŠąĮąĖ ąĮą░čģąŠą┤čÅčéčüčÅ ąĖ čé. ą┤.
ADI_DEV_CMD_SET_DATAFLOW. ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą▓čŗą┤ą░ąĄčéčüčÅ, čćč鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī ąĖą╗ąĖ ąĘą░ą┐čĆąĄčéąĖčéčī ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ č湥čĆąĄąĘ čāčüčéčĆąŠą╣čüčéą▓ąŠ. ąøąŠą│ąĖą║ą░, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ą░čÅ ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēąĄąĮąĖčÅ ą┐ąŠč鹊ą║ą░ ą┤ąŠą▓ąŠą╗čīąĮąŠ čüą╗ąŠąČąĮą░, ąĖ ąĖąĘąŠą╗ąĖčĆąŠą▓ą░ąĮą░ ą▓ čüčéą░čéąĖč湥čüą║ąŠą╣ čäčāąĮą║čåąĖąĖ SetDataflow (čüą╝. ą┤ą░ą╗ąĄąĄ ąĄčæ ąŠą┐ąĖčüą░ąĮąĖąĄ).
ADI_DEV_CMD_SET_STREAMING. ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą▓čŗą┤ą░ąĄčéčüčÅ ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ąĖą╗ąĖ ąĘą░ą┐čĆąĄčéą░ čĆąĄąČąĖą╝ą░ čüčéčĆąĖą╝ąĖąĮą│ą░ ą┤ą╗čÅ ąöčĆą░ą╣ą▓ąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ą░. ą¦č鹊ą▒čŗ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą┐ąŠąĮčÅčéčī, čćč鹊 ą▓ą╗ąĄč湥čé ąĘą░ čüąŠą▒ąŠą╣ čĆąĄąČąĖą╝ čüčéčĆąĖą╝ąĖąĮą│ą░, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĘąĮą░ą║ąŠą╝čŗ čü ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčīčÄ čüčéčĆąĖą╝ąĖąĮą│ą░ čüąĖčüč鹥ą╝ąĮąŠą╣ čüą╗čāąČą▒čŗ ą£ąĄąĮąĄą┤ąČąĄčĆą░ DMA [3]. ąźąŠčéčÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ DMA ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ, čćč鹊ą▒čŗ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ą╗ąŠ čüčéčĆąĖą╝ąĖąĮą│, ą▓čüąĄ-čéą░ą║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ čü ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ DMA ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąĘą░ą┤ąĄą╣čüčéą▓čāčÄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ čüčéčĆąĖą╝ąĖąĮą│ą░ ą£ąĄąĮąĄą┤ąČąĄčĆą░ DMA.
ąÜąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮ čĆąĄąČąĖą╝ čüčéčĆąĖą╝ąĖąĮą│ą░, čāčüčéčĆąŠą╣čüčéą▓ąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ čéą░ą║, čćč鹊ą▒čŗ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī ą▓čģąŠą┤čÅčēąĖąĄ ąĖ/ąĖą╗ąĖ ąĖčüčģąŠą┤čÅčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ ą║ą░ą║ ą┐čĆąŠą┤ąŠą╗ąČą░čÄčēąĖą╣čüčÅ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮčŗą╣ ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ. ą×ą▒čŗčćąĮąŠ čŹč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┤čĆą░ą╣ą▓ąĄčĆčā čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ąĖ ą┐čĆąĖąĮąĖą╝ą░čéčī ą┤ą░ąĮąĮčŗąĄ č湥čĆąĄąĘ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮą░ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą▓ąŠąĘą╝ąŠąČąĮąŠą╣ čüą║ąŠčĆąŠčüčéąĖ. ą¦č鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čĆąĄąČąĖą╝ čüčéčĆąĖą╝ąĖąĮą│ą░ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓, ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆąĄąĮąĖąĄ čüą╗ąĄą┤čāčÄčēąĖčģ čāčüą╗ąŠą▓ąĖą╣:
ŌĆó ąŻ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓čüąĄą│ą┤ą░ ąĄčüčéčī ą▒čāč乥čĆčŗ ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ, ąĖ ąŠąĮąŠ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą┐ąŠą┐ą░ą┤ą░ąĄčé ą▓ čüąĖčéčāą░čåąĖčÄ, ą║ąŠą│ą┤ą░ ą▒čāč乥čĆčŗ ąĘą░ą║ąŠąĮčćąĖą╗ąĖčüčī. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé čāčüčéčĆąŠą╣čüčéą▓ą░ą╝, ą║ąŠč鹊čĆčŗąĄ ąŠčéą║čĆčŗčéčŗ ą┤ą╗čÅ ą▓čģąŠą┤čÅčēąĖčģ ąĖą╗ąĖ ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗčģ ą┐ąŠč鹊ą║ąŠą▓ ą┤ą░ąĮąĮčŗčģ, čćč鹊 ą▓čüąĄą│ą┤ą░ ąĄčüčéčī ą▒čāč乥čĆčŗ ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ą┐čĆąĖąĮąĖą╝ą░ąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ, ąĖ čćč鹊 ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓, ąŠčéą║čĆčŗčéčŗčģ ą┤ą╗čÅ ąĖčüčģąŠą┤čÅčēąĖčģ ąĖą╗ąĖ ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮčŗčģ ą┐ąŠč鹊ą║ąŠą▓ ą┤ą░ąĮąĮčŗčģ čéą░ą║ąČąĄ ą▓čüąĄą│ą┤ą░ ąĄčüčéčī ą▒čāč乥čĆ, ąŠčéą║čāą┤ą░ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą┤ą░ąĮąĮčŗąĄ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░.
ŌĆó ąöąĖą░ą│čĆą░ą╝ą╝čŗ ą▓čĆąĄą╝ąĄąĮąĖ čĆą░ą▒ąŠčéčŗ čüąĖčüč鹥ą╝čŗ čüą┐čĆąŠąĄą║čéąĖčĆąŠą▓ą░ąĮčŗ čéą░ą║, čćč鹊 ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąČąĄčé ą┐ąŠą┤čéą▓ąĄčĆą┤ąĖčéčī ąĖ ąŠą▒čĆą░ą▒ąŠčéą░čéčī callback-ąĖ ą┤ą╗čÅ ą▒čāč乥čĆą░ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮ ą▓čŗąĘąŠą▓ callback ą┤ą╗čÅ ą┤čĆčāą│ąŠą│ąŠ ą▒čāč乥čĆą░ č鹊ą│ąŠ ąČąĄ čüą░ą╝ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ č鹊ą│ąŠ ąČąĄ čüą░ą╝ąŠą│ąŠ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ (ą▓čģąŠą┤čÅčēąĄą│ąŠ ąĖą╗ąĖ ąĖčüčģąŠą┤čÅčēąĄą│ąŠ). ąŁčéąĖ čāčüą╗ąŠą▓ąĖčÅ ą╝ąŠąČąĮąŠ ą┤ąŠą▓ąŠą╗čīąĮąŠ ą╗ąĄą│ą║ąŠ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ą▓ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąĄ čüąĖčüč鹥ą╝.
ąĪčéą░čéąĖč湥čüą║ąĖąĄ čäčāąĮą║čåąĖąĖ. ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ąŠą┐ąĖčüą░ąĮąĖąĄ čüčéą░čéąĖč湥čüą║ąĖčģ čäčāąĮą║čåąĖą╣ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą▓ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĄ API-čäčāąĮą║čåąĖą╣.
PDDCallback. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą▓ ąŠčéą▓ąĄčé ąĮą░ čüąŠą▒čŗčéąĖčÅ ąĖąĘ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░. ą¤ąŠčüą╗ąĄ ą┐čĆąŠą▓ąĄčĆą║ąĖ ąĮą░ ąŠčłąĖą▒ą║čā čģąĄąĮą┤ą╗ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ (ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮą░ ą┐čĆąŠą▓ąĄčĆą║ą░ ąŠčłąĖą▒ąŠą║) ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą┐čĆąŠčüč鹊 ą┐ąĄčĆąĄą┤ą░ąĄčé čŹčéąĖ čüąŠą▒čŗčéąĖčÅ ąŠą▒čĆą░čéąĮąŠ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą▓ čŹč鹊ą╣ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ (ąĖ čäčāąĮą║čåąĖąĖ DMACallback) ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąĮą░ą┐čĆčÅą╝čāčÄ ą▓čŗąĘąŠą▓ąĄčé callback-čäčāąĮą║čåąĖčÄ ą║ą╗ąĖąĄąĮčéą░, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé č鹊ą│ąŠ, ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮčŗą╣ čŹč鹊 (live) callback, ąĖą╗ąĖ ąĮąĄčé. ąŁč鹊 ą╝ąŠąČąĮąŠ čüą┤ąĄą╗ą░čéčī, čéą░ą║ ą║ą░ą║ čäąĖąĘąĖč湥čüą║ąŠą╝čā ą┤čĆą░ą╣ą▓ąĄčĆčā ą┐ąĄčĆąĄą┤ą░ąĮ čģąĄąĮą┤ą╗ ąĮą░ čüą╗čāąČą▒čā ąŠčéą╗ąŠąČąĄąĮąĮčŗčģ čäčāąĮą║čåąĖą╣ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ (čüą╝. ą£ąĄąĮąĄą┤ąČąĄčĆ DCB [5]) ą║ą░ą║ čćą░čüčéčī čäčāąĮą║čåąĖąĖ adi_pdd_Open.
ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüą╗čāąČą▒ą░ ąŠčéą╗ąŠąČąĄąĮąĮčŗčģ čäčāąĮą║čåąĖą╣ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░, č鹊 ąĘą░ą┐čāčüą║ čäčāąĮą║čåąĖąĖ PDDCallback ą▓ ą£ąĄąĮąĄą┤ąČąĄčĆąĄ ąŻčüčéčĆąŠą╣čüčéą▓ ąŠčéą║ą╗ą░ą┤čŗą▓ą░ąĄčéčüčÅ čäąĖąĘąĖč湥čüą║ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝. ąóą░ą║ąĖą╝ ą╝ąĄč鹊ą┤ąŠą╝ čäčāąĮą║čåąĖčÅ PDDCallback ą╝ąŠąČąĄčé ąĮą░ą┐čĆčÅą╝čāčÄ ą▓čŗąĘą▓ą░čéčī callback-čäčāąĮą║čåąĖčÄ ą║ą╗ąĖąĄąĮčéą░.
DMACallback. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą▓ ąŠčéą▓ąĄčé ąĮą░ čüąŠą▒čŗčéąĖčÅ DMA ąĖąĘ ą£ąĄąĮąĄą┤ąČąĄčĆą░ DMA ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA. ąĢčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮą░ ą┐čĆąŠą▓ąĄčĆą║ą░ ąŠčłąĖą▒ąŠą║, č鹊 čüąĮą░čćą░ą╗ą░ ą▒čāą┤ąĄčé ą┐čĆąŠą▓ąĄčĆąĄąĮ čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░. ąŚą░č鹥ą╝ čŹčéą░ čäčāąĮą║čåąĖčÅ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čüąŠą▒čŗčéąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ, ąĖ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ąŠą▒čĆą░ą▒ąŠčéą║čā, ąŠčüąĮąŠą▓čŗą▓ą░čÅčüčī ąĮą░ čéąĖą┐ąĄ čüąŠą▒čŗčéąĖčÅ.
ąĢčüą╗ąĖ čüąŠą▒čŗčéąĖąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą▒čŗą╗ ąŠą▒čĆą░ą▒ąŠčéą░ąĮ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ, č鹊 ąŠą▒ąĮąŠą▓ą╗čÅčÄčéčüčÅ ą┐ąŠą╗čÅ čäą╗ą░ą│ą░ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĖ čüč湥čéčćąĖą║ą░ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▓ ą▒čāč乥čĆąĄ. ąŚą░č鹥ą╝ ą▓ąŠą▓ą╗ąĄą║ą░ąĄčéčüčÅ callback-čäčāąĮą║čåąĖčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, čćč鹊ą▒čŗ ąŠą┐ąŠą▓ąĄčüčéąĖčéčī ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąŠ čüąŠą▒čŗčéąĖąĖ.
ąĢčüą╗ąĖ čüąŠą▒čŗčéąĖąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ąŠą▒čĆą░ą▒ąŠčéą║ą░ DMA čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ą╗ą░ čüąŠą▒čŗčéąĖąĄ ADI_DEV_EVENT_SUBBUFFER_PROCESSED, č鹊 čäčāąĮą║čåąĖčÅ ą┤ąĄą╗ą░ąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▓čŗąĘąŠą▓ callback ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ąŠą▒čŖčÅą▓ą╗čÅčÅ čŹčéąĖą╝ ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐ąŠą┤ą▒čāč乥čĆą░. ąĢčüą╗ąĖ čüąŠą▒čŗčéąĖąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ąŠą▒čĆą░ą▒ąŠčéą║ą░ DMA čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ą╗ą░ čüąŠą▒čŗčéąĖąĄ ADI_DEV_EVENT_BUFFER_PROCESSED, č鹊 čäčāąĮą║čåąĖčÅ ą┤ąĄą╗ą░ąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▓čŗąĘąŠą▓ callback ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ąŠą▒čŖčÅą▓ą╗čÅčÅ čŹčéąĖą╝ ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▓čüąĄą│ąŠ ą▒čāč乥čĆą░.
ą£ąĄąĮąĄą┤ąČąĄčĆ DMA čüąŠąŠą▒čēą░ąĄčé ąŠą▒ ą░čüąĖąĮčģčĆąŠąĮąĮčŗčģ ąŠčłąĖą▒ą║ą░čģ DMA č湥čĆąĄąĘ ą╝ąĄčģą░ąĮąĖąĘą╝ callback. ąŁčéąĖ ąŠčłąĖą▒ą║ąĖ, ą▓ čüą▓ąŠčÄ ąŠč湥čĆąĄą┤čī, ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ąŠą▒čĆą░čéąĮąŠ ą║ą╗ąĖąĄąĮčéčā č湥čĆąĄąĘ ąĄą│ąŠ callback-čäčāąĮą║čåąĖčÄ.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą▓ čŹč鹊ą╣ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ (ąĖ ą▓ čäčāąĮą║čåąĖąĖ PDDCallback) ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą▓čŗąĘčŗą▓ą░ąĄčé callback-čäčāąĮą║čåąĖčÄ ą║ą╗ąĖąĄąĮčéą░ ąĮą░ą┐čĆčÅą╝čāčÄ, ąĮąĄ ąĘą░ą▒ąŠčéčÅčüčī ąŠ č鹊ą╝, ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮčŗą╣ (live) ą╗ąĖ čŹč鹊 callback ąĖą╗ąĖ ąĮąĄčé. ąŁč鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ ą▒ą╗ą░ą│ąŠą┤ą░čĆčÅ č鹊ą╝čā, čćč鹊 ą£ąĄąĮąĄą┤ąČąĄčĆčā DMA ą┐ąĄčĆąĄą┤ą░ąĮ čģąĄąĮą┤ą╗ ąĮą░ čüą╗čāąČą▒čā ąŠčéą╗ąŠąČąĄąĮąĮčŗčģ čäčāąĮą║čåąĖą╣ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ (ą£ąĄąĮąĄą┤ąČąĄčĆ DCB [5]) ą║ą░ą║ čćą░čüčéčī čäčāąĮą║čåąĖąĖ adi_dma_Open. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüą╗čāąČą▒ą░ ąŠčéą╗ąŠąČąĄąĮąĮčŗčģ ąŠą▒čĆą░čéąĮčŗčģ ą▓čŗąĘąŠą▓ąŠą▓, č鹊 ąĘą░ą┐čāčüą║ čäčāąĮą║čåąĖąĖ DMACallback ą▓ ą£ąĄąĮąĄą┤ąČąĄčĆąĄ ąŻčüčéčĆąŠą╣čüčéą▓ ą▒čāą┤ąĄčé ąŠčéą╗ąŠąČąĄąĮ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ DMA. ąóą░ą║ąĖą╝ čüą┐ąŠčüąŠą▒ąŠą╝ čäčāąĮą║čåąĖčÅ dmaCallback ą╝ąŠąČąĄčé ąĮą░ą┐čĆčÅą╝čāčÄ ą▓čŗąĘą▓ą░čéčī callback-čäčāąĮą║čåąĖčÄ ą║ą╗ąĖąĄąĮčéą░.
PrepareBufferList. ążčāąĮą║čåąĖčÅ ą┐ąŠą┤ą│ąŠčéą░ą▓ą╗ąĖą▓ą░ąĄčé čüą┐ąĖčüąŠą║ ąĖąĘ ąŠą┤ąĮąŠą│ąŠ ą▒čāč乥čĆą░ ąĖą╗ąĖ čüą┐ąĖčüąŠą║ ąĖąĘ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą▒čāč乥čĆąŠą▓ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ ą£ąĄąĮąĄą┤ąČąĄčĆąĄ DMA (ą▓ č鹊ą╝ čüą╗čāčćą░ąĄ, ą║ąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA) ąĖą╗ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čäąĖąĘąĖč湥čüą║ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ (ą║ąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA).
ążčāąĮą║čåąĖčÅ ąĮą░čćąĖąĮą░ąĄčé čĆą░ą▒ąŠčéčā čü ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠą╗čÅ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĄą╣ DMA. ą¤ąŠčüą║ąŠą╗čīą║čā ąĖą╝ąĄčÄčéčüčÅ ąŠčéą┤ąĄą╗čīąĮčŗąĄ čüčéčĆčāą║čéčāčĆčŗ ą┤ą╗čÅ ą║ąŠą╗čīčåąĄą▓čŗčģ ą▒čāč乥čĆąŠą▓, ąŠą┤ąĮąŠą╝ąĄčĆąĮčŗčģ ą▒čāč乥čĆąŠą▓ ąĖ ą┤ą▓čāą╝ąĄčĆąĮčŗčģ ą▒čāč乥čĆąŠą▓, č鹊 ą║ą░ąČą┤ą░čÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠą▒čĆą░ą▒ąŠčéą░ąĮą░ ą┐ąŠ-čüą▓ąŠąĄą╝čā.
ąĢčüą╗ąĖ ą┐ąĄčĆąĄą┤ą░ąĮ ą║ąŠą╗čīčåąĄą▓ąŠą╣ ą▒čāč乥čĆ, č鹊 čäčāąĮą║čåąĖčÅ ą┐čĆąĄą┤ą┐ąŠą╗ą░ą│ą░ąĄčé, čćč鹊 ąĘą┤ąĄčüčī ąĄčüčéčī č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą▒čāč乥čĆ ą▓ čüą┐ąĖčüą║ąĄ ą▒čāč乥čĆąŠą▓. ąöą╗čÅ čāčüčéčĆąŠą╣čüčéą▓, ąŠčéą║čĆčŗčéčŗčģ čü ą╝ąĄč鹊ą┤ąŠą╝ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ ADI_DEV_MODE_CIRCULAR, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą▒čāč乥čĆ, čéą░ą║ čćč鹊 čŹč鹊 ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ čüą┐čĆą░ą▓ąĄą┤ą╗ąĖą▓ąŠ. ążčāąĮą║čåąĖčÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĄą╣ DMA ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ, ąĮą░čģąŠą┤čÅčēąĖą╝ąĖčüčÅ ą▓ čüčéčĆčāą║čéčāčĆąĄ ą║ąŠą╗čīčåąĄą▓ąŠą│ąŠ ą▒čāč乥čĆą░. ąĀąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĄą╣ DMA čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┐ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ čåąĖą║ą╗ą░ą╝, ąĄčüą╗ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ čģąŠč湥čé ą▓čŗąĘčŗą▓ą░čéčī callback, ą║ąŠą│ą┤ą░ ąĘą░ą▓ąĄčĆčłąĄąĮą░ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąŠą┤ą▒čāč乥čĆą░, ąĖą╗ąĖ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┐ąŠ ą▓ąĮąĄčłąĮąĖą╝ čåąĖą║ą╗ą░, ąĄčüą╗ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ čģąŠč湥čé ą▓čŗąĘčŗą▓ą░čéčī callback ą┐čĆąĖ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▓čüąĄą│ąŠ ą▒čāč乥čĆą░, ąĖą╗ąĖ ąĮąĖč湥ą│ąŠ ąĮąĄ ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ callback, ąĄčüą╗ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÄ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ąĮąĄ ąĮčāąČąĮąŠ. ąĀą░ąĘą╝ąĄčĆ čüą╗ąŠą▓ą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ąĮą░ čłąĖčĆąĖąĮčā 菹╗ąĄą╝ąĄąĮčéą░ ą┤ą░ąĮąĮčŗčģ ą▓ ą▒čāč乥čĆąĄ, ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┐ąŠą╗ąĄ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ąŚą░č鹥ą╝ čäčāąĮą║čåąĖčÅ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓ ą▓čŗąĘčŗą▓ą░čÄčēąĖą╣ ą║ąŠą┤.
ąĢčüą╗ąĖ ą▓ čäčāąĮą║čåąĖčÄ ą┐ąĄčĆąĄą┤ą░ąĮ ąŠą┤ąĮąŠą╝ąĄčĆąĮčŗą╣ ąĖą╗ąĖ ą┤ą▓čāą╝ąĄčĆąĮčŗą╣ čéąĖą┐ ą▒čāč乥čĆą░, ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą▒čāč乥čĆąŠą▓ čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčéčüčÅ čü ąĮąĄą║ąŠč鹊čĆčŗą╝ąĖ ąĖčüą║ą╗čÄč湥ąĮąĖčÅą╝ąĖ.
ąöą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠą│ąŠ ą▒čāč乥čĆą░ ąŠčćąĖčēą░čÄčéčüčÅ ą┐ąŠą╗čÅ čäą╗ą░ą│ą░ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĖ čüč湥čéčćąĖą║ą░ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▓ čüčéčĆčāą║čéčāčĆąĄ ą▒čāč乥čĆą░. ąĢčüą╗ąĖ čäąĖąĘąĖč湥čüą║ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA, č鹊 ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮą░čÅ ąŠą▒ą╗ą░čüčéčī ą▓ ąĮą░čćą░ą╗ąĄ ą║ą░ąČą┤ąŠą╣ čüčéčĆčāą║čéčāčĆčŗ ą▒čāč乥čĆą░ ą┐čĆąĄąŠą▒čĆą░ąĘčāąĄčéčüčÅ ą▓ ą╝ąŠą┤ąĄą╗čī ą▒ąŠą╗čīčłąŠą│ąŠ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░ (large model descriptor). ąöąĄčüą║čĆąĖą┐č鹊čĆ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ ą▓ čüčéčĆčāą║čéčāčĆąĄ ą▒čāč乥čĆą░, ą▓ą║ą╗čÄčćą░čÅ čéą░ą║ąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ, ą║ą░ą║ čĆą░ąĘą╝ąĄčĆ ą▒čāč乥čĆą░, čłąĖčĆąĖąĮą░ 菹╗ąĄą╝ąĄąĮčéą░, ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ, ąŠą┤ąĮąŠą╝ąĄčĆąĮčŗą╣ ą▒čāč乥čĆ ąĖą╗ąĖ ą┤ą▓čāą╝ąĄčĆąĮčŗą╣, ąĖ čé. ą┤. ąöąĄčüą║čĆąĖą┐č鹊čĆ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą▒čāč乥čĆą░ ą▓ čåąĄą┐ąŠčćą║ąĄ ąŠą▒ąĮąŠą▓ą╗čÅąĄčéčüčÅ ą┤ą╗čÅ čāą║ą░ąĘą░ąĮąĖčÅ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą▒čāč乥čĆą░ ą▓ čåąĄą┐ąŠčćą║ąĄ. ą¤ąŠčüą╗ąĄą┤ąĮąĖą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą▓ čåąĄą┐ąŠčćą║ąĄ, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╝čā ą▒čāč乥čĆčā ą▓ čåąĄą┐ąŠčćą║ąĄ, ąŠą▒ąĮąŠą▓ą╗čÅąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄą╝ NULL ą┤ą╗čÅ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą┤ąĄčüą║čĆąĖą┐č鹊čĆą░. ą¤ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čåąĄą┐ąŠčćą║ą░ ą▒čāč乥čĆąŠą▓ ąŠą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą╣. ąÆčüąĄ ą▒čāč乥čĆčŗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮčŗ ą┐čĆą░ą▓ąĖą╗čīąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĖ ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮą░čÅ ąŠą▒ą╗ą░čüčéčī ą▓ ą║ą░ąČą┤ąŠą╝ ą▒čāč乥čĆąĄ čüąŠą┤ąĄčƹȹĖčé ą┤ąĄčüą║čĆąĖą┐č鹊čĆ DMA ą┤ą╗čÅ čŹč鹊ą│ąŠ ą▒čāč乥čĆą░, ą║ąŠč鹊čĆčŗą╣ ą▓ čüą▓ąŠčÄ ąŠč湥čĆąĄą┤čī čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ DMA ą┤ą╗čÅ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą▒čāč乥čĆą░ ą▓ čåąĄą┐ąŠčćą║ąĄ.
ąś ąĮą░ą║ąŠąĮąĄčå, ąĄčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠčéą║čĆčŗč鹊 ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░ ąĖ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA, ą┐ąŠ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ ą▓ čåąĄą┐ąŠčćą║ąĄ ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ callback ąĖąĘ ą£ąĄąĮąĄą┤ąČąĄčĆą░ DMA ą║ ą£ąĄąĮąĄą┤ąČąĄčĆčā ąŻčüčéčĆąŠą╣čüčéą▓. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą£ąĄąĮąĄą┤ąČąĄčĆčā ąŻčüčéčĆąŠą╣čüčéą▓ ą┐ąŠą╗čāčćąĖčéčī ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ, ą║ąŠą│ą┤ą░ ąŠą▒čĆą░ą▒ąŠčéą░ąĮ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą▒čāč乥čĆ, čéą░ą║ čćč鹊ą▒čŗ ąŠąĮ čüą╝ąŠą│ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ąŠą▒ąĮąŠą▓ąĖčéčī ą┐ąŠą╗čÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ. ą¤ąŠčüą╗ąĄą┤ąĮąĖą╣ ą┤ąĄčüą║čĆąĖą┐č鹊čĆ čéą░ą║ąČąĄ ą┤ąĄą╣čüčéą▓čāąĄčé ą║ą░ą║ čéčĆąĖą│ą│ąĄčĆ, ą║ąŠč鹊čĆčŗą╣ čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ čäčāąĮą║čåąĖčÅ adi_dev_Read ąĖą╗ąĖ adi_dev_Write ą▓ąŠąĘą▓čĆą░čēą░ąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąŠą▒čĆą░čéąĮąŠ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ.
SetDataflow. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą▓ ąŠčéą▓ąĄčé ąĮą░ ą║ąŠą╝ą░ąĮą┤čā ADI_DEV_CMD_SET_DATAFLOW, ą┐čĆąĖąĮčÅčéčāčÄ API-čäčāąĮą║čåąĖąĄą╣ adi_dev_Control. ąÆ ąŠčéą▓ąĄčé čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēą░ąĄčéčüčÅ ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čäą╗ą░ą│ąŠą╝.
ążčāąĮą║čåąĖčÅ SetDataflow ąĮą░čćąĖąĮą░ąĄčé ąŠą▒čĆą░ą▒ąŠčéą║čā čü ą┐čĆąŠą▓ąĄčĆą║ąĖ, čćč鹊 čüąĖčüč鹥ą╝ą░ ąĮąĄ ą┐čŗčéą░ąĄčéčüčÅ čĆą░ąĘčĆąĄčłąĖčéčī ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ, ą║ąŠą│ą┤ą░ ąŠąĮ čāąČąĄ čĆą░ąĘčĆąĄčłąĄąĮ, ąĖą╗ąĖ ąĘą░ą┐čĆąĄčéąĖčéčī ą┐ąŠč鹊ą║, ą║ąŠą│ą┤ą░ ąŠąĮ čāąČąĄ ąĘą░ą┐čĆąĄčēąĄąĮ. ąĢčüą╗ąĖ čŹčéčā ą┐čĆąŠą▓ąĄčĆą║čā ąĮąĄ ą▓čŗą┐ąŠą╗ąĮčÅčéčī, č鹊 DMA ąĖ/ąĖą╗ąĖ čäąĖąĘąĖč湥čüą║ąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą╝ąŠą│čāčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ąŠčłąĖą▒ą║ąĖ.
ąÜąŠą│ą┤ą░ ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ ąĘą░ą┐čĆąĄčēąĄąĮ, čäčāąĮą║čåąĖčÅ čüąĮą░čćą░ą╗ą░ ą▓čŗąĘčŗą▓ą░ąĄčé čäčāąĮą║čåąĖčÄ adi_pdd_Control čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░, čćč鹊ą▒čŗ ąĘą░ą┐čĆąĄčéąĖčéčī ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ. ąĢčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╣ DMA, ą▓ą░ąČąĮąŠ čüąĮą░čćą░ą╗ą░ ąĘą░ą┐čĆąĄčéąĖčéčī ą┐ąŠč鹊ą║ ąĮą░ čāčüčéčĆąŠą╣čüčéą▓ąĄ ą┐ąĄčĆąĄą┤ ą▓čŗą║ą╗čÄč湥ąĮąĖąĄą╝ DMA. ąÜą░ą║ č鹊ą╗čīą║ąŠ čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ąĘą░ą┐čĆąĄčéąĖą╗ ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ, ąĘą░ą║čĆčŗą▓ą░čÄčéčüčÅ ą╗čÄą▒čŗąĄ ą║ą░ąĮą░ą╗čŗ DMA, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ ąŠčéą║čĆčŗčéčŗ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░. ąŁč鹊 ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą▓čŗąĘąŠą▓ąŠą╝ ą£ąĄąĮąĄą┤ąČąĄčĆą░ DMA.
ąÜąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ, ąĄčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA, čäčāąĮą║čåąĖčÅ čüąĮą░čćą░ą╗ą░ čĆą░ąĘčĆąĄčłą░ąĄčé ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ ąĮą░ ą║ą░ąĮą░ą╗ą░čģ DMA ą▓čŗąĘąŠą▓ąŠą╝ ą£ąĄąĮąĄą┤ąČąĄčĆą░ DMA, čćč鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ ąĮą░ ą║ą░ąĮą░ą╗ąĄ ąĖą╗ąĖ ą║ą░ąĮą░ą╗ą░čģ, ą║ąŠč鹊čĆčŗąĄ ąŠčéą║čĆčŗą▓ą░čÄčéčüčÅ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░. ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čŗą╗ čĆą░ąĘčĆąĄčłąĄąĮ ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ ąĮą░ ą║ą░ąĮą░ą╗ą░čģ DMA, čäčāąĮą║čåąĖčÅ ą▓čŗąĘčŗą▓ą░ąĄčé čäčāąĮą║čåąĖčÄ adi_pdd_Control čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░, čćč鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ.
[ąöąĖąĘą░ą╣ąĮ ą┤čĆą░ą╣ą▓ąĄčĆą░ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░]
ążąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ čŹč鹊 čéą░ čćą░čüčéčī ą┤čĆą░ą╣ą▓ąĄčĆą░, ą║ąŠč鹊čĆą░čÅ čāą┐čĆą░ą▓ą╗čÅąĄčé ą░ą┐ą┐ą░čĆą░čéčāčĆąŠą╣ čāčüčéčĆąŠą╣čüčéą▓ą░. ąóąŠą╗čīą║ąŠ čā čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĄčüčéčī ąĘąĮą░ąĮąĖčÅ ąŠ čĆąĄą│ąĖčüčéčĆą░čģ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖ čüčéą░čéčāčüą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ ą┐ąŠą╗čÅčģ ą▓ čŹčéąĖčģ čĆąĄą│ąĖčüčéčĆą░čģ. ąÆ ąŠčéą╗ąĖčćąĖąĄ ąŠčé ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆčŗą╣ ąŠą┤ąĖąĮ ą▓ąŠ ą▓čüąĄą╣ čüąĖčüč鹥ą╝ąĄ, ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗čÄą▒ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čäąĖąĘąĖč湥čüą║ąĖčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ ą▓ ąŠą┤ąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ.
ą¤ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ č鹊ą╗čīą║ąŠ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąŠą▒ą╝ąĄąĮąĖą▓ą░ąĄčéčüčÅ čüąŠąŠą▒čēąĄąĮąĖčÅą╝ąĖ ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ čü čäąĖąĘąĖč湥čüą║ąĖą╝ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓. ą¤čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĮąĖą║ąŠą│ą┤ą░ ąĮą░ą┐čĆčÅą╝čāčÄ ąĮąĄ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓čāčÄčé čü čäąĖąĘąĖč湥čüą║ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝, ąĖą╗ąĖ ąĮą░ąŠą▒ąŠčĆąŠčé. ą×ą┤ąĮą░ą║ąŠ ąĖą╝ąĄąĄčéčüčÅ ą░ąĮą░ą╗ąŠą│ąĖčćąĮą░čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ - ą║ą░ą║ čĆą░ą▒ąŠčéą░ąĄčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ čü ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓, ą┐čĆąĖą╝ąĄčĆąĮąŠ čéą░ą║ąĖą╝ ąČąĄ ąŠą▒čĆą░ąĘąŠą╝ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ čāą┐čĆą░ą▓ą╗čÅąĄčé čäąĖąĘąĖč湥čüą║ąĖą╝ąĖ ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ąĖ. ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąŠčéą║čĆčŗą▓ą░ąĄčé čäąĖąĘąĖč湥čüą║ąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ čāčüčéčĆąŠą╣čüčéą▓, čāą┐čĆą░ą▓ą╗čÅąĄčé ąĖą╝ąĖ, ąĘą░ą║čĆčŗą▓ą░ąĄčé ąĖčģ čéą░ą║ ąČąĄ, ą║ą░ą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąŠčéą║čĆčŗą▓ą░ąĄčé, ąĘą░ą║čĆčŗą▓ą░ąĄčé ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąĖ čāą┐čĆą░ą▓ą╗čÅąĄčé ąĖą╝.
ąÜą░ąČą┤čŗą╣ čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ą▓ čüąĖčüč鹥ą╝ąĄ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ą┤čĆčāą│ąĖčģ čäąĖąĘąĖč湥čüą║ąĖčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ ą▓ čüąĖčüč鹥ą╝ąĄ. ąźąŠčéčÅ ą▓ čüąĖčüč鹥ą╝ąĄ ą╝ąŠą│čāčé ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ čüčāčēąĄčüčéą▓ąŠą▓ą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čäąĖąĘąĖč湥čüą║ąĖčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓, ąĮąĄčüą║ąŠą╗čīą║ąŠ čäąĖąĘąĖč湥čüą║ąĖčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ ąĮąĄ ą╝ąŠą│čāčé čāą┐čĆą░ą▓ą╗čÅčéčī ąŠą┤ąĮąĖą╝ ąĖ č鹥ą╝ ąČąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝.
ąÆ ąŠčüąĮąŠą▓ąĮąŠą╝ čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ čāą┐čĆą░ą▓ą╗čÅąĄčé ą▓čüąĄą╝ąĖ 菹║ąĘąĄą╝ą┐ą╗čÅčĆą░ą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ čüąĖčüč鹥ą╝ąĄ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ čā ą┐čĆąŠčåąĄčüčüąŠčĆą░ (ąĖ ą▓ čüąĖčüč鹥ą╝ąĄ) ąĖą╝ąĄąĄčéčüčÅ 4 čäąĖąĘąĖč湥čüą║ąĖčģ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┐ąŠčĆčéą░ (SPORT), č鹊 ąŠą┤ąĖąĮ čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ą┤ą╗čÅ ą┐ąĄčĆąĖč乥čĆąĖąĖ SPORT ą╝ąŠąČąĄčé čāą┐čĆą░ą▓ą╗čÅčéčī ą▓čüąĄą╝ąĖ č湥čéčŗčĆčīą╝čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╝ąĖ ą┐ąŠčĆčéą░ą╝ąĖ, ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮąŠ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ąĖ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ.
ążąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ąŠčéą▓ąĄčćą░ąĄčé ąĘą░ ą┐ąŠą┤čåąĄą┐ą╗ąĄąĮąĖąĄ ą╗čÄą▒ąŠą│ąŠ ąĖ ą▓čüąĄčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ą║ąŠč鹊čĆčŗąĄ ąĮčāąČąĮčŗ ą┤ą╗čÅ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ą£ąĮąŠą│ąĖąĄ čäąĖąĘąĖč湥čüą║ąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą│ąĄąĮąĄčĆąĖčĆčāčÄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą╗čÅ čüąŠą▒čŗčéąĖą╣ ąŠčłąĖą▒ą║ąĖ. ąŁčéąĖ čüąŠą▒čŗčéąĖčÅ ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčéčüčÅ čäąĖąĘąĖč湥čüą║ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ ąĖ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ąŠą▒čĆą░čéąĮąŠ ąĮą░ą▓ąĄčĆčģ č湥čĆąĄąĘ ą╝ąĄčģą░ąĮąĖąĘą╝ čäčāąĮą║čåąĖą╣ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ (callback). ą£ąĄąĮąĄą┤ąČąĄčĆ ą¤čĆąĄčĆčŗą▓ą░ąĮąĖą╣ [4] ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐čĆąŠčüč鹊ą╣, ą┐čĆčÅą╝ąŠą╗ąĖąĮąĄą╣ąĮčŗą╣ ą╝ąĄčģą░ąĮąĖąĘą╝, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▓čüąĄčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąŁč鹊 čāą┐čĆąŠčēą░ąĄčé ąĘą░ą┤ą░čćčā ą┐ąŠčĆčéąĖčĆąŠą▓ą░ąĮąĖčÅ ąöčĆą░ą╣ą▓ąĄčĆąŠą▓ ąŻčüčéčĆąŠą╣čüčéą▓ą░ ąĮą░ čĆą░ąĘą╗ąĖčćąĮčŗąĄ čĆą░ą▒ąŠčćąĖąĄ ąŠą║čĆčāąČąĄąĮąĖčÅ (ą┐čĆąŠčåąĄčüčüąŠčĆčŗ), čüąĖčüč鹥ą╝čŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ ąŠą┐ąĄčĆą░čåąĖąŠąĮąĮčŗąĄ čüąĖčüč鹥ą╝čŗ.
ąĢčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA, č鹊 čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ čüąĖą╗čīąĮąŠ čāą┐čĆąŠčēą░ąĄčéčüčÅ, ą┐ąŠčüą║ąŠą╗čīą║čā ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąŠą▒čŗčćąĮąŠ čāą┐čĆą░ą▓ą╗čÅąĄčé ą▓čüąĄą╝ąĖ ą┐čĆąŠčåąĄčüčüą░ą╝ąĖ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖčÅ čü DMA, ą▒ąĄąĘ ą║ą░ą║ąŠą│ąŠ-ą╗ąĖą▒ąŠ čāčćą░čüčéąĖčÅ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░. ąÜąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąŠčéą║čĆčŗą▓ą░ąĄčéčüčÅ, ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓čāąĄčé čü čäąĖąĘąĖč湥čüą║ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ čü čåąĄą╗čīčÄ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA. ąĢčüą╗ąĖ čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ čüąŠąŠą▒čēą░ąĄčé, čćč鹊 ą┤ą░, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ, č鹊 ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ čāą┐čĆą░ą▓ą╗čÅąĄčé ą▓čüąĄą╣ ą░ą║čéąĖą▓ąĮąŠčüčéčīčÄ DMA (čéą░ą║ąŠą╣ ą║ą░ą║ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĄ ą▒čāč乥čĆąŠą▓ ą┤ą░ąĮąĮčŗčģ, ą╝ąĄčģą░ąĮąĖąĘą╝ callback ąĖ čé. ą┤.) č湥čĆąĄąĘ API ą£ąĄąĮąĄą┤ąČąĄčĆą░ DMA [3]. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą▓čŗąĘčŗą▓ą░ąĄčé čäčāąĮą║čåąĖąĖ adi_pdd_Read ąĖ adi_pdd_Write čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA. ążąĖąĘąĖč湥čüą║ąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA, ąŠč湥ąĮčī ą┐čĆąŠčüčéčŗ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ.
ąöą╗čÅ čāčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA, čäąĖąĘąĖč湥čüą║ąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą▓čüąĄ ąĄčēąĄ ą╝ąŠą│čāčé ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░čéčī ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ą░ ą£ąĄąĮąĄą┤ąČąĄčĆą░ DMA, ą┐ąŠč鹊ą╝čā čćč鹊 DMA ą┐ąŠ ą┐ą░ą╝čÅčéąĖ (MDMA) ą╝ąŠąČąĄčé ą▒čŗčéčī čŹčäč乥ą║čéąĖą▓ąĮąŠą╣ čüčéčĆą░č鹥ą│ąĖąĄą╣ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ čāčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╣ ą▓ą▓ąŠą┤/ą▓čŗą▓ąŠą┤. ąĢčüą╗ąĖ ąĮą░ąĘąĮą░č湥ąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąŠčéą╗ąŠąČąĄąĮąĮčŗčģ čäčāąĮą║čåąĖą╣ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ (deferred callbacks), č鹊 čäąĖąĘąĖč湥čüą║ąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ 菹║čüą║ą╗čĹʹĖą▓ąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčé čüą╗čāąČą▒čŗ ą£ąĄąĮąĄą┤ąČąĄčĆą░ DCB (deferred callback manager), čćč鹊ą▒čŗ ą▓čŗčüčéą░ą▓ą╗čÅčéčī ą▓čŗąĘąŠą▓čŗ callback-ąŠą▓ ą▓ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓. ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą£ąĄąĮąĄą┤ąČąĄčĆčā DCB čüą╝. čüčéą░čéčīčÄ [5].
ąŻ čäąĖąĘąĖč湥čüą║ąĖčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ ąĄčüčéčī čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╣ API, ą║ ą║ąŠč鹊čĆąŠą╝čā ąŠą▒čĆą░čēą░ąĄčéčüčÅ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓. ąÆ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ čüąĄą║čåąĖčÅ ąŠą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ čŹč鹊čé API ąĖ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéčī, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄą╝ą░čÅ čäąĖąĘąĖč湥čüą║ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝.
ą×ą┐ąĖčüą░ąĮąĖąĄ API čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░. API čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą░ąĮą░ą╗ąŠą│ąĖčćąĮąŠ API ą╝ąĄąČą┤čā ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓ ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝, čéą░ą║ čćč鹊 ą╝ąŠąČąĮąŠ ą┐čĆąĖą▓ąĄčüčéąĖ ą░ąĮą░ą╗ąŠą│ąĖčÄ ą╝ąĄąČą┤čā čäčāąĮą║čåąĖčÅą╝ąĖ API čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĖ čäčāąĮą║čåąĖčÅą╝ąĖ API ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ adi_dev_Init. ążčāąĮą║čåąĖąĖ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ čüąĮą░ą▒ąČąĄąĮčŗ ą┐čĆąĄčäąĖą║čüąŠą╝ adi_pdd ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝ąŠą╝ čäą░ą╣ą╗ąĄ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ (adi_dev.h).
ążčāąĮą║čåąĖąĖ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖąĮą║ą░ą┐čüčāą╗ąĖčĆąŠą▓ą░ąĮčŗ ą▓ čüčéčĆčāą║čéčāčĆąĄ ADI_DEV_PDD_ENTRY_POINT. ąÜą░ąČą┤čŗą╣ čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ čŹą║čüą┐ąŠčĆčéąĖčĆčāąĄčé č鹊čćą║čā ą▓čģąŠą┤ą░ ą▓ čüčéčĆčāą║čéčāčĆčā. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░ąĄčé ą░ą┤čĆąĄčü čŹč鹊ą╣ čüčéčĆčāą║čéčāčĆčŗ ą▓ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą║ą░ą║ čćą░čüčéčī ą▓čŗąĘąŠą▓ą░ čäčāąĮą║čåąĖąĖ adi_dev_Open. ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓, ą▓ čüą▓ąŠčÄ ąŠč湥čĆąĄą┤čī, ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čŹčéčā čüčéčĆčāą║čéčāčĆčā ą┤ą╗čÅ ą▓čŗąĘąŠą▓ą░ ąŠčéą┤ąĄą╗čīąĮčŗčģ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░. ąŁč鹊čé ą╝ąĄčģą░ąĮąĖąĘą╝ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ čäąĖąĘąĖč湥čüą║ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆą░ą╝ čüčāčēąĄčüčéą▓ąŠą▓ą░čéčī ą▓ ąŠą┤ąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ ą▒ąĄąĘ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ ą┐čĆąŠą▒ą╗ąĄą╝ čü ą║ąŠąĮčäą╗ąĖą║č鹊ą╝ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ą░ ąĖą╝ąĄąĮ.
ąÆ API čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĖą╝ąĄąĄčéčüčÅ 5 čäčāąĮą║čåąĖą╣. ąŁčéąĖ čäčāąĮą║čåąĖąĖ ąŠą┐ąĖčüą░ąĮčŗ ą▓ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ ą▓čĆąĄąĘą║ą░čģ.
adi_pdd_Open. ą×čéą║čĆčŗą▓ą░ąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ.
adi_pdd_Close. ąŚą░ą║čĆčŗą▓ą░ąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ.
adi_pdd_Read. ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▒čāč乥čĆčŗ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░.
adi_pdd_Write. ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▒čāč乥čĆčŗ, čüąŠą┤ąĄčƹȹ░čēąĖąĄ ą┤ą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ąŠą╗ąČąĮąŠ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī.
adi_pdd_Control. ąÜąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ.
ą¤ąŠą┤ą║ą╗čÄčćą░ąĄą╝čŗą╣ čäą░ą╣ą╗ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ("xxx.h"). API ą┤ą╗čÅ čäąĖąĘąĖč湥čüą║ąĖčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą▓ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝ąŠą╝ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ adi_dev.h ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓. ą×ą┤ąĮą░ą║ąŠ čäąĖąĘąĖč湥čüą║ąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą╝ąŠą│čāčé čĆą░čüčłąĖčĆąĖčéčī ąĮąĄą║ąŠč鹊čĆčŗąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąĖ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ ą║ąŠą╝ą░ąĮą┤ (command ID), ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ čüąŠą▒čŗčéąĖą╣ (event ID) ąĖ ą║ąŠą┤čŗ ą▓ąŠąĘą▓čĆą░čéą░ ą╝ąŠą│čāčé ą▒čŗčéčī čüąŠąĘą┤ą░ąĮčŗ ą║ą░ąČą┤čŗą╝ čäąĖąĘąĖč湥čüą║ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝. ąŁčéąĖ čĆą░čüčłąĖčĆčÅąĄą╝čŗąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąŠą┐ąĖčüą░ąĮčŗ ą▓ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ čüąĄą║čåąĖčÅčģ. ąŁčéąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąŠą▒čŗčćąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčéčüčÅ ą▓ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝ąŠą╝ čäą░ą╣ą╗ąĄ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄą╝ąŠą╝ čäąĖąĘąĖč湥čüą║ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┤čĆą░ą╣ą▓ąĄčĆ PPI, ą║ąŠą┤ ą║ąŠč鹊čĆąŠą│ąŠ čĆą░ąĘą╝ąĄčēąĄąĮ ą▓ čäą░ą╣ą╗ąĄ adi_ppi.c, ąĖą╝ąĄąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝čŗą╣ čäą░ą╣ą╗ adi_ppi.h. ąóąŠą╗čīą║ąŠ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čŹč鹊ą│ąŠ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝ąŠą│ąŠ čäą░ą╣ą╗ą░ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ čĆą░čüčłąĖčĆčÅąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ, ą┤ąĄą╗ą░čÅ ą┤ąŠčüčéčāą┐ąĮčŗą╝ čŹč鹊 čĆą░čüčłąĖčĆąĄąĮąĖąĄ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ą¤čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ąŠą╗ąČąĮčŗ ą┐ąŠą┤ą║ą╗čÄčćą░čéčī čäą░ą╣ą╗ adi_dev.h ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░, ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮ. ąØą░ą┐čĆąĖą╝ąĄčĆ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĄąĄ čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ PPI, ą┤ąŠą╗ąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī čäą░ą╣ą╗čŗ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░ adi_dev.h ąĖ adi_ppi.h. ążą░ą╣ą╗ adi_dev.h ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ ąĖ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝čŗąĄ čäą░ą╣ą╗čŗ čäąĖąĘąĖč湥čüą║ąĖčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ ą┤ą╗čÅ ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗčģ ą║ąŠą╝ą┐ą░ąĮąĖąĄą╣ Analog Devices ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ Blackfin/Include/Drivers čüąĖčüč鹥ą╝čŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ VisualDSP++.
ąĀą░čüčłąĖčĆčÅąĄą╝čŗąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ. ążąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ą╝ąŠąČąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī čüąŠą▒čüčéą▓ąĄąĮąĮčŗąĄ čĆą░čüčłąĖčĆąĄąĮąĖčÅ ą┤ą╗čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ command ID, event ID ąĖ ą║ąŠą┤ąŠą▓ ą▓ąŠąĘą▓čĆą░čéą░ ą▓ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ č鹥ą╝, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝ąŠą╝ čäą░ą╣ą╗ąĄ adi_dev.h ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓.
ążąĖąĘąĖč湥čüą║ąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą╝ąŠą│čāčé čüąŠąĘą┤ą░čéčī ą╗čÄą▒ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ ą║ąŠą╝ą░ąĮą┤ (command ID). ą¤čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą╝ąŠą│čāčé ą▓čŗą┤ą░ą▓ą░čéčī čŹčéąĖ ą║ąŠą╝ą░ąĮą┤čŗ (ą┐ąŠą┤čüčéą░ą▓ą╗čÅčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ command ID) č湥čĆąĄąĘ API-čäčāąĮą║čåąĖčÄ adi_dev_Control ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓. ąÜąŠą│ą┤ą░ čäčāąĮą║čåąĖčÅ adi_dev_Control ą▓ąĖą┤ąĖčé čĆą░čüčłąĖčĆąĄąĮąĮčŗą╣ command ID, ąŠąĮą░ ą▓čŗąĘčŗą▓ą░ąĄčé čäčāąĮą║čåąĖčÄ adi_pdd_Control čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░, ą┐ąĄčĆąĄą┤ą░ą▓ą░čÅ ąĄą╣ č鹥 ą┐ą░čĆą░ą╝ąĄčéčĆčŗ, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝. ąŁč鹊 ą┤ą░ąĄčé ą┤ą╗čÅ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąŠą┐čåąĖčÄ ą┐ąŠ čüąŠąĘą┤ą░ąĮąĖčÄ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ ą║ąŠą╝ą░ąĮą┤ (command ID), ąŠčéąĮąŠčüčÅčēąĖčģčüčÅ ą║ čāą┐čĆą░ą▓ą╗čÅąĄą╝ąŠą╝čā čāčüčéčĆąŠą╣čüčéą▓čā.
ąØą░ą┐čĆąĖą╝ąĄčĆ, čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ą┤ą╗čÅ DAC ą╝ąŠąČąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ command ID, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠąĘą▓ąŠą╗čÅčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÄ čāčüčéą░ąĮąŠą▓ąĖčéčī ąĖą╗ąĖ ą┐čĆąŠčćąĖčéą░čéčī čāčĆąŠą▓ąĄąĮčī čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ ą│čĆąŠą╝ą║ąŠčüčéąĖ ą┤ą╗čÅ DAC.
ą¤ąŠą┤ąŠą▒ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ čäąĖąĘąĖč湥čüą║ąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą╝ąŠą│čāčé čüąŠąĘą┤ą░čéčī ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ čüąŠą▒čŗčéąĖą╣ (event ID), ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░čéčī ąŠą▒čĆą░čéąĮąŠ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ. ążąĖąĘąĖč湥čüą║ąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą╝ąŠą│čāčé čüąŠąĘą┤ą░čéčī ą╗čÄą▒ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ event ID. ążąĖąĘąĖč湥čüą║ąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą╝ąŠą│čāčé ą┐ąŠčüą╗ą░čéčī čŹčéąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ čüąŠą▒čŗčéąĖą╣ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ č湥čĆąĄąĘ ą╝ąĄčģą░ąĮąĖąĘą╝ callback ą║ ą£ąĄąĮąĄą┤ąČąĄčĆčā ąŻčüčéčĆąŠą╣čüčéą▓. ąÜąŠą│ą┤ą░ ą▓ čäčāąĮą║čåąĖčÄ PDDCallback ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ ą▒čŗą╗ ą┐ąĄčĆąĄą┤ą░ąĮ čĆą░čüčłąĖčĆąĄąĮąĮčŗą╣ event ID, č鹊 ąŠąĮ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ čüčÅ ą▓ą╝ąĄčüč鹥 čü ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ ą┐ąĄčĆąĄą┤ą░ąĮčŗ ą▓ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓, ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ č湥čĆąĄąĘ ąĄą│ąŠ čäčāąĮą║čåąĖčÄ callback. ąŁč鹊 ą┤ą░ąĄčé čäąĖąĘąĖč湥čüą║ąŠą╝čā ą┤čĆą░ą╣ą▓ąĄčĆčā ąŠą┐čåąĖčÄ čüąŠąĘą┤ą░čéčī ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ event ID, ąŠčéčĆą░ąČą░čÄčēąĖąĄ ą┐čĆąŠąĖčüčģąŠą┤čÅčēąĄąĄ ą▓ ą║ąŠąĮą║čĆąĄčéąĮąŠą╝ čāą┐čĆą░ą▓ą╗čÅąĄą╝ąŠą╝ čāčüčéčĆąŠą╣čüčéą▓ąĄ, ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą┐ąŠą╗čāčćąĖčéčī čŹčéąĖ čüąŠą▒čŗčéąĖčÅ. ąØą░ą┐čĆąĖą╝ąĄčĆ, čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ, ą║ąŠč鹊čĆčŗą╣ čāą┐čĆą░ą▓ą╗čÅąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠą╝, ą░ąĮą░ą╗ąĖąĘąĖčĆčāčÄčēąĖą╝ čāčĆąŠą▓ąĄąĮčī čüąĖą│ąĮą░ą╗ą░, ą╝ąŠąČąĄčé čüąŠąĘą┤ą░čéčī čüąŠą▒čŗčéąĖąĄ, ąŠą┐ąŠą▓ąĄčēą░čÄčēąĄąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąŠ č鹊ą╝, čćč鹊 čāčĆąŠą▓ąĄąĮčī čüąĖą│ąĮą░ą╗ą░ ą┤ąŠčüčéąĖą│ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą╣ ą▓ąĄą╗ąĖčćąĖąĮčŗ.
ążąĖąĘąĖč湥čüą║ąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ čéą░ą║ąČąĄ ą╝ąŠą│čāčé ą▓ąŠąĘą▓čĆą░čéąĖčéčī čĆą░čüčłąĖčĆąĄąĮąĮčŗąĄ ą║ąŠą┤čŗ ąŠčłąĖą▒ą║ąĖ. ążąĖąĘąĖč湥čüą║ąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą╝ąŠą│čāčé čüąŠąĘą┤ą░čéčī ą╗čÄą▒ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ ą║ąŠą┤ąŠą▓ ą▓ąŠąĘą▓čĆą░čéą░. ąŁčéąĖ ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą╝ąŠą│čāčé ą▓ąŠąĘą▓čĆą░čéąĖčéčī čŹčéąĖ ą║ąŠą┤čŗ ą▓ ąŠčéą▓ąĄčé ąĮą░ ą╗čÄą▒ąŠą╣ ą▓čŗąĘąŠą▓ API-čäčāąĮą║čåąĖąĖ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĖąĘ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓. ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄčé ą║ąŠą┤ ą▓ąŠąĘą▓čĆą░čéą░ ADI_DEV_RESULT_SUCCESS. ąøčÄą▒čŗąĄ ą┤čĆčāą│ąĖąĄ ą║ąŠą┤čŗ, ąĮąĄ čĆą░ą▓ąĮčŗąĄ ADI_DEV_RESULT_SUCCESS, ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāčÄčéčüčÅ ą║ą░ą║ ąŠčłąĖą▒ą║ą░.
ąÜąŠą│ą┤ą░ API-čäčāąĮą║čåąĖčÅ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą▓ąŠąĘą▓čĆą░čéąĖą╗ą░ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ, ąĮąĄ čĆą░ą▓ąĮčŗą╣ ADI_DEV_RESULT_SUCCESS, ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą┐ąĄčĆąĄą┤ą░ąĄčé ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ ąŠą▒čĆą░čéąĮąŠ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą║ą░ą║ ą║ąŠą┤ ą▓ąŠąĘą▓čĆą░čéą░ ąĖąĘ API-čäčāąĮą║čåąĖąĖ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓, č湥ą╝ čüąŠąŠą▒čēą░ąĄčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÄ ąŠą▒ ąŠčłąĖą▒ą║ąĄ, ą▓ąŠąĘąĮąĖą║čłąĄą╣ ą▓ čäąĖąĘąĖč湥čüą║ąŠą╝ ą┤čĆą░ą╣ą▓ąĄčĆąĄ. ąŁč鹊 ą┤ą░ąĄčé čäąĖąĘąĖč湥čüą║ąŠą╝čā ą┤čĆą░ą╣ą▓ąĄčĆčā ąŠą┐čåąĖčÄ čüąŠąĘą┤ą░ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ ą║ąŠą┤ąŠą▓ ą▓ąŠąĘą▓čĆą░čéą░, ąŠčéčĆą░ąČą░čÄčēąĖčģ ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ ąŠčłąĖą▒ą║ąĖ, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ą║ąŠąĮą║čĆąĄčéąĮčŗą╝ čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝.
ąØą░ą┐čĆąĖą╝ąĄčĆ, čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ą╝ąŠąČąĄčé ą▓ąŠąĘą▓čĆą░čéąĖčéčī čāąĮąĖą║ą░ą╗čīąĮčŗą╣ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ ą▓ ąŠčéą▓ąĄčé ąĮą░ ą║ąŠą╝ą░ąĮą┤čā, ą▓ą╗ąĖčÅčÄčēčāčÄ ąĮą░ ą┐ą░čĆą░ą╝ąĄčéčĆ čāčüčéčĆąŠą╣čüčéą▓ą░. ąÆąŠąĘą▓čĆą░čēąĄąĮąĮčŗą╣ čäąĖąĘąĖč湥čüą║ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮ ąĮą░ čāčĆąŠą▓ąĄąĮčī ą▓čŗčłąĄ (č湥čĆąĄąĘ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÄ), čćč鹊 čüąŠąŠą▒čēąĖčé ą┐ąŠą┤čĆąŠą▒ąĮčāčÄ ą┐čĆąĖčćąĖąĮčā ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ.
ążą░ą╣ą╗ adi_dev.h file čüąŠą┤ąĄčƹȹĖčé čüčéą░čĆč鹊ą▓čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖą╣, ą┐čĆąĖą╝ąĄąĮčÅąĄą╝čŗčģ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 čŹčéąĖ ąĘąĮą░č湥ąĮąĖčÅ ą║ą░ą║ čüčéą░čĆč鹊ą▓čŗąĄ ą┤ą╗čÅ ą▓čüąĄčģ command ID, event ID ąĖ ą║ąŠą┤ąŠą▓ ą▓ąŠąĘą▓čĆą░čéą░.
ADI_DEV_PDD_ENTRY_POINT. ąŁč鹊 čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝ą░čÅ č鹊čćą║ą░ ą▓čģąŠą┤ą░ ą▓ čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ. ążčāąĮą║čåąĖčÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą┤ąŠą╗ąČąĮą░ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą┤ąĄą║ą╗ą░čĆą░čåąĖčÄ č鹊čćą║ąĖ ą▓čģąŠą┤ą░ ą▓ ą┤čĆą░ą╣ą▓ąĄčĆ. ąŁč鹊 ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą║ą░ą║ ą│ą╗ąŠą▒ą░ą╗čīąĮą░čÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ, ą░ą┤čĆąĄčü č鹊čćą║ąĖ ą▓čģąŠą┤ą░ ą▓ čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░ąĄčé ą░ą┤čĆąĄčü č鹊čćą║ąĖ ą▓čģąŠą┤ą░ ą▓ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓, ą║ąŠą│ą┤ą░ ąŠčéą║čĆčŗą▓ą░ąĄčéčüčÅ čāčüčéčĆąŠą╣čüčéą▓ąŠ. ąØą░ą┐čĆąĖą╝ąĄčĆ, čüčéčĆąŠą║ą░:
extern ADI_DEV_PDD_ENTRY_POINT PPIEntryPoint; // č鹊čćą║ą░ ą▓čģąŠą┤ą░ ą▓ ą┤čĆą░ą╣ą▓ąĄčĆ PPI
ą▓ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝ąŠą╝ čäą░ą╣ą╗ąĄ ą┤čĆą░ą╣ą▓ąĄčĆą░ PPI ąĖąĮč乊čĆą╝ąĖčĆčāąĄčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░čéčī ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ PPIEntryPoint ą║ą░ą║ ą┐ą░čĆą░ą╝ąĄčéčĆ č鹊čćą║ąĖ ą▓čģąŠą┤ą░ ą▓ ą▓čŗąĘąŠą▓ čäčāąĮą║čåąĖąĖ adi_dev_Open, ą║ąŠą│ą┤ą░ ąŠčéą║čĆčŗą▓ą░ąĄčéčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ PPI.
ążą░ą╣ą╗ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ("xxx.c"). ąÆčüąĄ čäčāąĮą║čåąĖąĖ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░, ą▓ą║ą╗čÄčćą░čÅ čäčāąĮą║čåąĖąĖ API čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░, ąŠą▒čŖčÅą▓ą╗ąĄąĮčŗ čüčéą░čéąĖč湥čüą║ąĖą╝ąĖ, čéą░ą║ čćč鹊 ąŠąĮąĖ ąĮąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ąĮąĖą║ą░ą║ąŠą╝čā ą▓ąĮąĄčłąĮąĄą╝čā ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╝čā ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčā. ąōą╗ąŠą▒ą░ą╗čīąĮąŠą╣ čćą░čüčéčīčÄ ą║ąŠą┤ą░ ąĖą╗ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ čÅą▓ą╗čÅąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą░ą┤čĆąĄčü č鹊čćą║ąĖ ą▓čģąŠą┤ą░. ąóąŠčćą║ą░ ą▓čģąŠą┤ą░ čŹč鹊 ą┐čĆąŠčüč鹊 čüčéčĆčāą║čéčāčĆą░, ą║ąŠč鹊čĆą░čÅ čüąŠą┤ąĄčƹȹĖčé ą░ą┤čĆąĄčüą░ API-čäčāąĮą║čåąĖą╣ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╝ ą┐ąŠčĆčÅą┤ą║ąĄ:
ADI_DEV_PDD_ENTRY_POINT PPIEntryPoint =
{
adi_pdd_Open,
adi_pdd_Close,
adi_pdd_Read,
adi_pdd_Write,
adi_pdd_Control
};
ąśčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą┤ą╗čÅ ą▓čüąĄčģ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗčģ ą║ąŠą╝ą┐ą░ąĮąĖąĄą╣ Analog Devices čäąĖąĘąĖč湥čüą║ąĖčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ čĆą░ąĘą╝ąĄčēąĄąĮčŗ ą▓ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ Blackfin/Lib/Src/Drivers.
ąÆąĄčüčī ą║ąŠą┤ ą▓ čäą░ą╣ą╗ąĄ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čŹčéąĖčģ ą┐čÅčéąĖ API-čäčāąĮą║čåąĖą╣ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░. ąŁčéąĖ čäčāąĮą║čåąĖąĖ ąĖ ąĖčģ ą╗ąŠą│ąĖą║ą░ ąŠą┐ąĖčüą░ąĮčŗ ą▓ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ čüąĄą║čåąĖčÅčģ ąĖ ą▓čĆąĄąĘą║ą░čģ. ąÆčüąĄ API-čäčāąĮą║čåąĖąĖ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą▓ąŠąĘą▓čĆą░čēą░čÄčé ą║ąŠą┤ ąŠčłąĖą▒ą║ąĖ. ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą┐čĆąŠą▓ąĄčĆčÅąĄčé ą║ąŠą┤ ą▓ąŠąĘą▓čĆą░čéą░ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ API-čäčāąĮą║čåąĖąĖ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░. ąĢčüą╗ąĖ čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ą▓ąĄčĆąĮąĄčé ą║ąŠą┤, ąŠčéą╗ąĖčćą░čÄčēąĖą╣čüčÅ ąŠčé ADI_DEV_RESULT_SUCCESS, č鹊 ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 ą┐čĆąŠąĖąĘąŠčłą╗ą░ ąŠčłąĖą▒ą║ą░ ą║ą░ą║ąŠą│ąŠ-č鹊 čéąĖą┐ą░.
v ąØą░ą┐ąŠą┤ąŠą▒ąĖąĄ č鹊ą│ąŠ, ą║ą░ą║ čŹč鹊 čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ ą▓ ą£ąĄąĮąĄą┤ąČąĄčĆąĄ ąŻčüčéčĆąŠą╣čüčéą▓, ąĮą░čüč鹊čÅč鹥ą╗čīąĮąŠ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą┤ą╗čÅ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą┐čĆąŠą▓ąĄčĆą║čā ąŠčłąĖą▒ąŠą║ ąĮąĄą║ąŠč鹊čĆčŗčģ čéąĖą┐ąŠą▓, ąĖą┤ąĄą░ą╗čīąĮąŠ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą╝ą░ą║čĆąŠčüą░ ADI_DEV_DEBUG. ąÜą░ą║ ą╝ąĖąĮąĖą╝čāą╝, ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐čĆąŠą▓ąĄčĆąĄąĮ čģąĄąĮą┤ą╗ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ (ADI_DEV_PDD_HANDLE) ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ API.
adi_pdd_Open. ążčāąĮą║čåąĖčÅ adi_pdd_Open ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓ ą▓ ąŠčéą▓ąĄčé ąĮą░ ą▓čŗąĘąŠą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ adi_dev_Open. ąØą░ąĘąĮą░č湥ąĮąĖąĄ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ąŠčéą║čĆčŗčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ. ąöą╗čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ ąĖ ą║ąŠą┤ą░ą╝ ą▓ąŠąĘą▓čĆą░čéą░ čüą╝. ą▓čĆąĄąĘą║čā adi_pdd_Open.
ążčāąĮą║čåąĖčÅ adi_pdd_Open čüąĮą░čćą░ą╗ą░ ą┤ąŠą╗ąČąĮą░ ą┐čĆąŠą▓ąĄčĆąĖčéčī, čćč鹊 ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄą╝ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ąŠčüčéčāą┐ąĮąŠ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĖ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄą╝ąŠąĄ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ. ąæčāą┤čāčé ą▓ąŠąĘą▓čĆą░čēąĄąĮčŗ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą║ąŠą┤čŗ ąŠčłąĖą▒ą║ąĖ, ąĄčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄą┤ąŠčüčéčāą┐ąĮąŠ ąĖą╗ąĖ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čāą║ą░ąĘą░ąĮąĮąŠąĄ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ.
ąŻą┐čĆą░ą▓ą╗čÅąĄą╝ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčéčüčÅ ąĖ ąŠčćąĖčēą░ąĄčéčüčÅ (flush) ąŠčé ąŠčüčéą░ą▓čłąĖčģčüčÅ ą║čāčüą║ąŠą▓ ą┤ą░ąĮąĮčŗčģ ąĖą╗ąĖ ąŠąČąĖą┤ą░čÄčēąĖčģ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ą¤ąŠą┤čåąĄą┐ą╗čÅąĄčéčüčÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą╗čÄą▒čŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą║ąŠč鹊čĆčŗčģ ąĮčāąČąĮą░ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü čāčüčéčĆąŠą╣čüčéą▓ąŠą╝. ąöą╗čÅ čāčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA, ąŠą▒čŗčćąĮąŠ ąĮčāąČąĮąŠ ą┐ąŠą┤čåąĄą┐ąĖčéčī č鹊ą╗čīą║ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčłąĖą▒ą║ąĖ. ąöą╗čÅ ą┐ąŠą┤čåąĄą┐ą╗ąĄąĮąĖčÅ ą▓čüąĄčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą£ąĄąĮąĄą┤ąČąĄčĆ ą¤čĆąĄčĆčŗą▓ą░ąĮąĖą╣ [4] ą▓ čüąŠčüčéą░ą▓ąĄ ąĪąĖčüč鹥ą╝ąĮčŗčģ ąĪą╗čāąČą▒. ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ/ąĘą░ą┐čĆąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ č湥čĆąĄąĘ čüąĖčüč鹥ą╝ąĮčŗą╣ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (system interrupt controller, SIC) čéą░ą║ąČąĄ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ č湥čĆąĄąĘ ą▓čŗąĘąŠą▓čŗ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ą¤čĆąĄčĆčŗą▓ą░ąĮąĖą╣.
ążąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ čüąŠčģčĆą░ąĮčÅąĄčé čģąĄąĮą┤ą╗ ąĮą░ čüą╗čāąČą▒čā ąŠą▒čĆą░čéąĮčŗčģ ą▓čŗąĘąŠą▓ąŠą▓ čäčāąĮą║čåąĖą╣ (callback service handle). ąĢčüą╗ąĖ ąĮąĄ NULL (čćč鹊 ąŠąĘąĮą░čćą░ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąŠčéą╗ąŠąČąĄąĮąĮąŠą│ąŠ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░), č鹊 čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ąĘą░ą┐čāčüą║ą░ąĄčé ą▓čüąĄ callback-ąĖ č湥čĆąĄąĘ čüą╗čāąČą▒čā, ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāąĄą╝čāčÄ č湥čĆąĄąĘ čģąĄąĮą┤ą╗ čüą╗čāąČą▒čŗ ąŠą▒čĆą░čéąĮčŗčģ ą▓čŗąĘąŠą▓ąŠą▓. ąĢčüą╗ąĖ NULL (ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 callbacks-ąĖ ąĘą░ą┐čāčüą║ą░čÄčéčüčÅ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ąĖ ąĖčģ ąĘą░ą┐čāčüą║ ąĮąĄ ą▒čāą┤ąĄčé ąŠčéą╗ąŠąČąĄąĮ), č鹊 čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ą▓čŗąĘčŗą▓ą░ąĄčé callback-čäčāąĮą║čåąĖčÄ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ ąĮą░ą┐čĆčÅą╝čāčÄ, ą║ąŠą│ą┤ą░ ą┐ąŠčüčŗą╗ą░čÄčéčüčÅ čüąŠą▒čŗčéąĖčÅ.
ążąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ čéą░ą║ąČąĄ čüąŠčģčĆą░ąĮčÅąĄčé ąĘąĮą░č湥ąĮąĖąĄ ADI_DEV_PDD_HANDLE ą▓ čÅč湥ą╣ą║ąĄ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠą╣ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓. ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą┐ąĄčĆąĄą┤ą░ąĄčé čŹč鹊čé čģąĄąĮą┤ą╗ ąŠą▒čĆą░čéąĮąŠ čäąĖąĘąĖč湥čüą║ąŠą╝čā ą┤čĆą░ą╣ą▓ąĄčĆčā ą▓ąŠ ą▓čüąĄčģ ą┤čĆčāą│ąĖčģ ą▓čŗąĘąŠą▓ą░čģ API.
ążčāąĮą║čåąĖčÅ adi_pdd_Open ą▓ąĄčĆąĮąĄčé ADI_DEV_RESULT_SUCCESS ą▓ čüą╗čāčćą░ąĄ čüą▓ąŠąĄą│ąŠ čāčüą┐ąĄčłąĮąŠą│ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ.
adi_pdd_Control. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓ ą▓ ąŠčéą▓ąĄčé ąĮą░ ą▓čŗąĘąŠą▓ čäčāąĮą║čåąĖąĖ adi_dev_Control ąĖąĘ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąØą░ąĘąĮą░č湥ąĮąĖąĄ adi_pdd_Control - ąŠą▒čĆą░ą▒ąŠčéą░čéčī ą║ąŠą╝ą░ąĮą┤čŗ, ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░, ą┐ąŠčüčŗą╗ą░ąĄą╝čŗąĄ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓ ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝. ąØą░ą┐ąŠą┤ąŠą▒ąĖąĄ ą▓čüąĄčģ API-čäčāąĮą║čåąĖą╣, ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮą░ ą┐čĆąŠą▓ąĄčĆą║ą░ ąŠčłąĖą▒ąŠą║, č鹊 ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐čĆąŠą▓ąĄčĆčÅąĄčé ąĮą░ ą▓čģąŠą┤ąĄ čģąĄąĮą┤ą╗ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░. ąöą╗čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ ąĖ ą║ąŠą┤ą░ą╝ ą▓ąŠąĘą▓čĆą░čéą░ čüą╝. ą▓čĆąĄąĘą║čā adi_pdd_Control.
ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą▓ čäčāąĮą║čåąĖąĖ adi_pdd_Control ą▒ą░ąĘąĖčĆčāąĄčéčüčÅ ąĮą░ command ID, ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠą╝ ą▓ ą║ą░č湥čüčéą▓ąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░. ąŚąĮą░č湥ąĮąĖčÅ command ID ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ą▓ čäą░ą╣ą╗ąĄ adi_dev.h ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓. ąÜą░ą║ ą╝ąĖąĮąĖą╝čāą╝, čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ą┤ąŠą╗ąČąĄąĮ ąŠą▒čĆą░ą▒ąŠčéą░čéčī čüą╗ąĄą┤čāčÄčēąĖąĄ ą║ąŠą╝ą░ąĮą┤čŗ:
ŌĆó ADI_DEV_CMD_SET_DATAFLOW ŌĆō ą▓ą║ą╗čÄčćą░ąĄčé ąĖ ą▓čŗą║ą╗čÄčćą░ąĄčé ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ č湥čĆąĄąĘ čāčüčéčĆąŠą╣čüčéą▓ąŠ.
ŌĆó ADI_DEV_CMD_GET_PERIPHERAL_DMA_SUPPORT ŌĆō ąŠčéą▓ąĄčćą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄą╝ TRUE ąĖą╗ąĖ FALSE, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹊ą│ąŠ, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA. ąĢčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA, č鹊 čäčāąĮą║čåąĖčÅ adi_pdd_Control čéą░ą║ąČąĄ ą┐ąŠą┤ą│ąŠčéą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┤ą╗čÅ ąŠčéą▓ąĄčéą░ ąĮą░ čüą╗ąĄą┤čāčÄčēąĖąĄ command ID:
ŌĆó ADI_DEV_CMD_GET_INBOUND_DMA_PMAP_ID ŌĆō ąŠčéą▓ąĄčćą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄą╝ ą▓čģąŠą┤čÅčēąĄą│ąŠ DMA peripheral map (PMAP) ą┤ą╗čÅ ąĖą╝ąĄčÄčēąĄą│ąŠčüčÅ čāčüčéčĆąŠą╣čüčéą▓ą░.
ŌĆó ADI_DEV_CMD_GET_OUTBOUND_DMA_PMAP_ID ŌĆō ąŠčéą▓ąĄčćą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄą╝ ąĖčüčģąŠą┤čÅčēąĄą│ąŠ DMA peripheral map (PMAP) ą┤ą╗čÅ ąĖą╝ąĄčÄčēąĄą│ąŠčüčÅ čāčüčéčĆąŠą╣čüčéą▓ą░.
ąÆ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąĄ čüą╗čāčćą░ąĄą▓ čäčāąĮą║čåąĖčÅ adi_pdd_Control čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ čüčéčĆąŠąĖčéčüčÅ ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ ąŠą┐ąĄčĆą░č鹊čĆą░ switch čÅąĘčŗą║ą░ C. ąÜą░ąČą┤ą░čÅ ą║ąŠą╝ą░ąĮą┤ą░, ąŠ ą║ąŠč鹊čĆąŠą╣ ąĘą░ą▒ąŠčéąĖčéčüčÅ ą┤čĆą░ą╣ą▓ąĄčĆ, ą▓ą║ą╗čÄčćą░ąĄčé čéčĆąĄą▒čāąĄą╝čŗąĄ command ID, ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗąĄ ą▓čŗčłąĄ, ąĖ ą╗čÄą▒čŗąĄ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ command ID, čüąŠąĘą┤ą░ąĮąĮčŗąĄ čüą░ą╝ąĖą╝ čäąĖąĘąĖč湥čüą║ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝, ąĖ ąŠąĮą░ ą┐ąŠčüčéčāą┐ą░ąĄčé ąĮą░ ą▓čģąŠą┤ ąŠą┐ąĄčĆą░č鹊čĆą░ switch. ąĢčüą╗ąĖ čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ą┐ąŠą╗čāčćą░ąĄčé command ID, ą║ąŠč鹊čĆčŗą╣ ąĮąĄ ą┐ąŠąĮąĖą╝ą░ąĄčé, č鹊 ąŠąĮ ąŠą▒čŗčćąĮąŠ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ą║ąŠą┤ ADI_DEV_RESULT_NOT_SUPPORTED.
adi_pdd_Read. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓ ą▓ ąŠčéą▓ąĄčé ąĮą░ ą▓čŗąĘąŠą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ adi_dev_Read. ąØą░ąĘąĮą░č湥ąĮąĖąĄ adi_pdd_Read - ąĘą░ą┐ąŠą╗ąĮąĖčéčī ą▒čāč乥čĆčŗ ą▓čģąŠą┤čÅčēąĖą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖąĮčÅčéčŗ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░. ąÆąŠ ą▓čüąĄčģ API-čäčāąĮą║čåąĖčÅčģ, ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮą░ ą┐čĆąŠą▓ąĄčĆą║ą░ ąŠčłąĖą▒ąŠą║, ą║ąŠą┤ čäčāąĮą║čåąĖąĖ ą┐čĆąŠą▓ąĄčĆčÅąĄčé čģąĄąĮą┤ą╗ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĮą░ ą▓čģąŠą┤ąĄ čäčāąĮą║čåąĖąĖ. ąöą╗čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ ąĖ ą║ąŠą┤ą░ą╝ ą▓ąŠąĘą▓čĆą░čéą░ čüą╝. ą▓čĆąĄąĘą║čā adi_pdd_Read.
ąöą╗čÅ čāčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA, ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąŠą▒čüą╗čāąČąĖą▓ą░ąĄčé ą┐ąŠčüčéą░ąĮąŠą▓ą║čā ą▓ ąŠč湥čĆąĄą┤čī ą▓čüąĄčģ ą▒čāč乥čĆąŠą▓ ąĖ ą┐čĆąĖąĄą╝. ąÜą░ą║ čĆąĄąĘčāą╗čīčéą░čé, ąĄčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA, čäčāąĮą║čåąĖčÅ adi_pdd_Read ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą▒čāą┤ąĄčé ą▓čŗąĘčŗą▓ą░čéčīčüčÅ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓, ąĖ ąŠčé čŹč鹊ą╣ čäčāąĮą║ąĖąĖ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ąĮąĖą║ą░ą║ąŠą│ąŠ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░. ąŁč鹊 ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ čāą┐čĆąŠčēą░ąĄčé čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆčŗąĄ ąĖą╝ąĄčÄčé ą┐ąŠą┤ą┤ąĄčƹȹ║čā DMA ą┐čĆąŠčåąĄčüčüąŠčĆą░. ążąĖąĘąĖč湥čüą║ąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA, ą▓čüąĄ ąĄčēąĄ čéčĆąĄą▒čāčÄčé ąĮą░ą╗ąĖčćąĖčÅ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ, ąĮąŠ ą▓ ąĮąĄą╣ ąĮčāąČąĮąŠ ą┐čĆąŠčüč鹊 ą▓ąĄčĆąĮčāčéčī ą║ąŠą┤ ADI_DEV_RESULT_NOT_SUPPORTED, ą┐ąŠč鹊ą╝čā čćč鹊 čŹčéą░ čäčāąĮą║čåąĖčÅ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą┤ąŠą╗ąČąĮą░ ą▓čŗąĘčŗą▓ą░čéčīčüčÅ.
ąöą╗čÅ čāčüčéčĆąŠą╣čüčéą▓, čā ą║ąŠč鹊čĆčŗčģ ąĮąĄčé ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA, čäčāąĮą║čåąĖčÅ adi_pdd_Read ą┐ąĄčĆąĄą┤ą░ąĄčé ąŠą┤ąĖąĮ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒čāč乥čĆąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ą▓čģąŠą┤čÅčēąĖčģ ą┤ą░ąĮąĮčŗčģ. ążąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ą╝ąŠąČąĄčé ą▓čŗą▒čĆą░čéčī ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮčāčÄ ąŠą▒čĆą░ą▒ąŠčéą║čā čŹčéąĖčģ ą▒čāč乥čĆąŠą▓, ąĖą╗ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ą╗ąŠą│ąĖą║čā ą┤ą╗čÅ ąŠč湥čĆąĄą┤ąĖ ąĖą╗ąĖ ą║ą░ą║ąŠą╣-č鹊 čüčéą░ą┤ąĖąĖ ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čŹčéąĖčģ ą▒čāč乥čĆąŠą▓ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ ą▓čĆąĄą╝čÅ. ą×ą┤ąĮą░ą║ąŠ ąŠčé čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ čéčĆąĄą▒čāąĄčéčüčÅ, čćč鹊ą▒čŗ ąŠąĮ ąŠą▒čĆą░ą▒ąŠčéą░ą╗ ą▒čāč乥čĆčŗ ą▓ č鹊ą╝ ą┐ąŠčĆčÅą┤ą║ąĄ, ą▓ ą║ą░ą║ąŠą╝ ąŠąĮ ąĖčģ ą┐ąŠą╗čāčćąĖą╗.
ąöą╗čÅ ąĮąĄą║ąŠč鹊čĆčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮąĄą▓ąŠąĘą╝ąŠąČąĮčŗą╝ ąĖą╗ąĖ ąĮąĄą┐čĆą░ą║čéąĖčćąĮčŗą╝ ą┐ąŠą╗ąĮąŠąĄ ąĘą░ą┐ąŠą╗ąĮąĄąĮąĖąĄ ą▒čāč乥čĆą░ ą┤ą░ąĮąĮčŗą╝ąĖ. ąöą╗čÅ ą┐čĆąĖą╝ąĄčĆą░ čĆą░čüčüą╝ąŠčéčĆąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆ Ethernet. ąöčĆą░ą╣ą▓ąĄčĆ Ethernet ąŠą▒čŗčćąĮąŠ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą┐ą░ą║ąĄčéčŗ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī čĆą░ąĘąĮčŗą╝ąĖ ą┐ąŠ ą┤ą╗ąĖąĮąĄ. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą╝ąŠąČąĄčé ąĘąĮą░čéčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ą┐ą░ą║ąĄčéą░ Ethernet, ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ą┤čĆą░ą╣ą▓ąĄčĆ čü ą▒čāč乥čĆą░ą╝ąĖ, čĆą░ąĘą╝ąĄčĆąŠą╝ čĆą░ą▓ąĮčŗą╝ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╝čā čĆą░ąĘą╝ąĄčĆčā ą┐ą░ą║ąĄčéą░. ąŚą░č鹥ą╝ čŹč鹊čé ą┤čĆą░ą╣ą▓ąĄčĆ ą╝ąŠąČąĄčé ą┐čĆąĖąĮčÅčéčī ą┐ą░ą║ąĄčé ąĖąĘ čüąĄčéąĖ, ą║ąŠč鹊čĆčŗą╣ ą╝ąĄąĮčīčłąĄ, č湥ą╝ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ ą┐ą░ą║ąĄčéą░. ąæčŗą╗ąŠ ą▒čŗ ąĮąĄą┐čĆą░ą║čéąĖčćąĮčŗą╝ ą┤ą╗čÅ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąČą┤ą░čéčī, ą┐ąŠą║ą░ ą┐ąŠčüčéčāą┐čÅčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą┐ą░ą║ąĄčéčŗ ąĖ ą▒čāč乥čĆ ą▒čāą┤ąĄčé ąĘą░ą┐ąŠą╗ąĮąĄąĮ ą┐ąŠą╗ąĮąŠčüčéčīčÄ, ąĖ č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ąĮą░čćą░čéčī ąŠą▒čĆą░ą▒ąŠčéą║čā ą▒čāč乥čĆą░. ąóą░ą║ čćč鹊 čā čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĄčüčéčī ąŠą┐čåąĖčÅ čüą░ą╝ąŠą╝čā ą┐čĆąĖąĮčÅčéčī čĆąĄčłąĄąĮąĖąĄ, ą║ąŠą│ą┤ą░ ąŠą▒čĆą░ą▒ąŠčéą░čéčī ą▒čāč乥čĆ. ąŻ ą║ą░ąČą┤ąŠą│ąŠ ą▒čāč乥čĆą░ ąĄčüčéčī ą┐ąŠą╗ąĄ čäą╗ą░ą│ą░ "ąŠą▒čĆą░ą▒ąŠčéą░ąĮ", ąĖ ą┐ąŠą╗ąĄ ąŠą▒čĆą░ą▒ąŠčéą░ąĮąĮąŠą│ąŠ čĆą░ąĘą╝ąĄčĆą░, ą║ąŠč鹊čĆčŗąĄ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ, ą▒ą░ąĘąĖčĆčāčÅčüčī ąĮą░ č鹊ą╝, ą║ąŠą│ą┤ą░ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 čĆąĄčłąĄąĮąĖčÅ ąŠą▒ ąŠą▒čĆą░ą▒ąŠčéą║ąĄ ą▒čāč乥čĆą░, ąĖ čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ čāąĘąĮą░čéčī, čüą║ąŠą╗čīą║ąŠ ą┐ąŠą╗ąĄąĘąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą▒čāč乥čĆąĄ.
ąóą░ą║ąČąĄ ą╗čÄą▒ąŠą╣ ą▒čāč乥čĆ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╝ąĄč湥ąĮ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ą║ąŠą│ą┤ą░ ą▒čāč乥čĆ ąĘą░ą▓ąĄčĆčłąĖą╗ čüą▓ąŠčÄ ąŠą▒čĆą░ą▒ąŠčéą║čā. ąĢčüą╗ąĖ ą▒čāč乥čĆ ąĮąĄ ą┐ąŠą╝ąĄč湥ąĮ ą┤ą╗čÅ callback, č鹊 čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ąĮąĄ ąŠą┐ąŠą▓ąĄčüčéąĖčé ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąŠ ą╝ąŠą╝ąĄąĮč鹥 ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▒čāč乥čĆą░. ą×ą┤ąĮą░ą║ąŠ ąĄčüą╗ąĖ ą▒čāč乥čĆ ą┐ąŠą╝ąĄč湥ąĮ ą┤ą╗čÅ ą▓čŗąĘąŠą▓ą░ callback, č鹊 ą║ą░ą║ č鹊ą╗čīą║ąŠ ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą▒čāč乥čĆą░, čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéą░ąĮąŠą▓ąĖčé čäą╗ą░ą│ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĖ ą┐ąŠą╗ąĄ ąŠą▒čĆą░ą▒ąŠčéą░ąĮąĮąŠą│ąŠ čĆą░ąĘą╝ąĄčĆą░, ąĖ ąŠą┐ąŠą▓ąĄčüčéąĖčé ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ą░ č湥čĆąĄąĘ ąĄą│ąŠ callback-čäčāąĮą║čåąĖčÄ, ą║ąŠč鹊čĆą░čÅ ą▒čŗą╗ą░ ą┐ąĄčĆąĄą┤ą░ąĮą░ čäąĖąĘąĖč湥čüą║ąŠą╝čā ą┤čĆą░ą╣ą▓ąĄčĆčā ą┐čĆąĖ ą▓čŗąĘąŠą▓ąĄ adi_pdd_Open, čćč鹊 ą▒čāč乥čĆ ąĘą░ą▓ąĄčĆčłąĖą╗ čüą▓ąŠčÄ ąŠą▒čĆą░ą▒ąŠčéą║čā.
adi_pdd_Write. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓ ą▓ ąŠčéą▓ąĄčé ąĮą░ ą▓čŗąĘąŠą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ adi_dev_Write. ąØą░ąĘąĮą░č湥ąĮąĖąĄ adi_pdd_Write - ą┐ąĄčĆąĄą┤ą░čéčī ą┤ą░ąĮąĮčŗąĄ ą▓ ą▒čāč乥čĆąĄ ąĮą░čĆčāąČčā č湥čĆąĄąĘ čāčüčéčĆąŠą╣čüčéą▓ąŠ. ąÆąŠ ą▓čüąĄčģ API-čäčāąĮą║čåąĖčÅčģ, ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮą░ ą┐čĆąŠą▓ąĄčĆą║ą░ ąŠčłąĖą▒ąŠą║, ą║ąŠą┤ čäčāąĮą║čåąĖąĖ ą┐čĆąŠą▓ąĄčĆčÅąĄčé čģąĄąĮą┤ą╗ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĮą░ ą▓čģąŠą┤ąĄ čäčāąĮą║čåąĖąĖ. ąöą╗čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ ąĖ ą║ąŠą┤ą░ą╝ ą▓ąŠąĘą▓čĆą░čéą░ čüą╝. ą▓čĆąĄąĘą║čā adi_pdd_Write.
ąÜą░ą║ ąĖ ą▓ čüą╗čāčćą░ąĄ čü adi_pdd_Read, ą┤ą╗čÅ č鹥čģ čāčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA, ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąŠą▒čüą╗čāąČąĖą▓ą░ąĄčé ą┐ąŠčüčéą░ąĮąŠą▓ą║čā ą▓ ąŠč湥čĆąĄą┤čī ą▓čüąĄčģ ą▒čāč乥čĆąŠą▓ ąĖ ą┐ąĄčĆąĄą┤ą░čćčā. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥, ąĄčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA, č鹊 čäčāąĮą║čåąĖčÅ adi_pdd_Write ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓, ąĖ ąŠčé ąĮąĄčæ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ąĮąĖą║ą░ą║ąŠą│ąŠ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░. ąŁč鹊 ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ čāą┐čĆąŠčēą░ąĄčé čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆčŗąĄ ąĖą╝ąĄčÄčé ą┐ąŠą┤ą┤ąĄčƹȹ║čā DMA ą┐čĆąŠčåąĄčüčüąŠčĆą░. ążąĖąĘąĖč湥čüą║ąĖąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA, ą▓čüąĄ ąĄčēąĄ čéčĆąĄą▒čāčÄčé ąĮą░ą╗ąĖčćąĖčÅ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ, ąĮąŠ ą▓ ąĮąĄą╣ ąĮčāąČąĮąŠ ą┐čĆąŠčüč鹊 ą▓ąĄčĆąĮčāčéčī ą║ąŠą┤ ADI_DEV_RESULT_NOT_SUPPORTED, ą┐ąŠč鹊ą╝čā čćč鹊 čŹčéą░ čäčāąĮą║čåąĖčÅ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą┤ąŠą╗ąČąĮą░ ą▓čŗąĘčŗą▓ą░čéčīčüčÅ.
ąöą╗čÅ čāčüčéčĆąŠą╣čüčéą▓, čā ą║ąŠč鹊čĆčŗčģ ąĮąĄčé ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ DMA, čäčāąĮą║čåąĖčÅ adi_pdd_Write ą┐ąĄčĆąĄą┤ą░ąĄčé ąŠą┤ąĖąĮ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒čāč乥čĆąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ąĮą░čĆčāąČčā č湥čĆąĄąĘ čāčüčéčĆąŠą╣čüčéą▓ąŠ. ążąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ą╝ąŠąČąĄčé ą▓čŗą▒čĆą░čéčī ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮčāčÄ ąŠą▒čĆą░ą▒ąŠčéą║čā čŹčéąĖčģ ą▒čāč乥čĆąŠą▓, ąĖą╗ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ą╗ąŠą│ąĖą║čā ą┤ą╗čÅ ąŠč湥čĆąĄą┤ąĖ ąĖą╗ąĖ ą║ą░ą║ąŠą╣-č鹊 čüčéą░ą┤ąĖąĖ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ čŹčéąĖčģ ą▒čāč乥čĆąŠą▓ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ ą▓čĆąĄą╝čÅ. ą×ą┤ąĮą░ą║ąŠ ąŠčé čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ čéčĆąĄą▒čāąĄčéčüčÅ, čćč鹊ą▒čŗ ąŠąĮ ąŠą▒čĆą░ą▒ąŠčéą░ą╗ ą▒čāč乥čĆčŗ ą▓ č鹊ą╝ ą┐ąŠčĆčÅą┤ą║ąĄ, ą▓ ą║ą░ą║ąŠą╝ ąŠąĮ ąĖčģ ą┐ąŠą╗čāčćąĖą╗.
ąŻ ą║ą░ąČą┤ąŠą│ąŠ ą▒čāč乥čĆą░ ąĄčüčéčī ą┐ąŠą╗ąĄ čäą╗ą░ą│ą░ "ąŠą▒čĆą░ą▒ąŠčéą░ąĮąŠ", ąĖ ą┐ąŠą╗ąĄ ąŠą▒čĆą░ą▒ąŠčéą░ąĮąĮąŠą│ąŠ čĆą░ąĘą╝ąĄčĆą░, ą║ąŠč鹊čĆčŗąĄ čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé, ą║ąŠą│ą┤ą░ ąŠąĮ čĆąĄčłą░ąĄčé, čćč鹊 ą▒čāč乥čĆ ąŠą▒čĆą░ą▒ąŠčéą░ąĮ ąĖ ą║ą░ą║ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ą░ąĮąĮčŗčģ ą▒čŗą╗ąŠ ą┐ąĄčĆąĄą┤ą░ąĮąŠ č湥čĆąĄąĘ čāčüčéčĆąŠą╣čüčéą▓ąŠ. ąÆ ąŠčéą╗ąĖčćąĖąĄ ąŠčé čüą╗čāčćą░čÅ adi_pdd_Read, ąŠąČąĖą┤ą░ąĄčéčüčÅ čćč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮąŠ ą▓čüąĄ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą▒čāč乥čĆą░.
ąóą░ą║ąČąĄ ą╗čÄą▒ąŠą╣ ą▒čāč乥čĆ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╝ąĄč湥ąĮ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ą║ąŠą│ą┤ą░ ą▒čāč乥čĆ ąĘą░ą▓ąĄčĆčłąĖą╗ čüą▓ąŠčÄ ąŠą▒čĆą░ą▒ąŠčéą║čā. ąĢčüą╗ąĖ ą▒čāč乥čĆ ąĮąĄ ą┐ąŠą╝ąĄč湥ąĮ ą┤ą╗čÅ callback, č鹊 čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ ąĮąĄ ąŠą┐ąŠą▓ąĄčüčéąĖčé ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąŠ ą╝ąŠą╝ąĄąĮč鹥 ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▒čāč乥čĆą░. ą×ą┤ąĮą░ą║ąŠ ąĄčüą╗ąĖ ą▒čāč乥čĆ ą┐ąŠą╝ąĄč湥ąĮ ą┤ą╗čÅ ą▓čŗąĘąŠą▓ą░ callback, č鹊 ą║ą░ą║ č鹊ą╗čīą║ąŠ ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą▒čāč乥čĆą░, čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ čāčüčéą░ąĮąŠą▓ąĖčé čäą╗ą░ą│ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĖ ą┐ąŠą╗ąĄ ąŠą▒čĆą░ą▒ąŠčéą░ąĮąĮąŠą│ąŠ čĆą░ąĘą╝ąĄčĆą░, ąĖ ąŠą┐ąŠą▓ąĄčüčéąĖčé ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ą░ č湥čĆąĄąĘ ąĄą│ąŠ callback-čäčāąĮą║čåąĖčÄ, ą║ąŠč鹊čĆą░čÅ ą▒čŗą╗ą░ ą┐ąĄčĆąĄą┤ą░ąĮą░ čäąĖąĘąĖč湥čüą║ąŠą╝čā ą┤čĆą░ą╣ą▓ąĄčĆčā ą┐čĆąĖ ą▓čŗąĘąŠą▓ąĄ adi_pdd_Open, čćč鹊 ą▒čāč乥čĆ ąĘą░ą▓ąĄčĆčłąĖą╗ čüą▓ąŠčÄ ąŠą▒čĆą░ą▒ąŠčéą║čā.
adi_pdd_Close. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓ ą▓ ąŠčéą▓ąĄčé ąĮą░ ą▓čŗąĘąŠą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ adi_dev_Close. ąĢčæ ąĮą░ąĘąĮą░č湥ąĮąĖąĄ - ą║ąŠčĆčĆąĄą║čéąĮąŠ ą▓čŗą║ą╗čÄčćąĖčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ ąĄą│ąŠ ą▓ čĆąĄąČąĖą╝ ąŠąČąĖą┤ą░ąĮąĖčÅ. ąÆąŠ ą▓čüąĄčģ API-čäčāąĮą║čåąĖčÅčģ, ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮą░ ą┐čĆąŠą▓ąĄčĆą║ą░ ąŠčłąĖą▒ąŠą║, ą║ąŠą┤ čäčāąĮą║čåąĖąĖ ą┐čĆąŠą▓ąĄčĆčÅąĄčé čģąĄąĮą┤ą╗ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĮą░ ą▓čģąŠą┤ąĄ čäčāąĮą║čåąĖąĖ. ąöą╗čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ ąĖ ą║ąŠą┤ą░ą╝ ą▓ąŠąĘą▓čĆą░čéą░ čüą╝. ą▓čĆąĄąĘą║čā adi_pdd_Close.
ą¤ąŠčüą╗ąĄ ą┐čĆąŠą▓ąĄčĆą║ąĖ čģąĄąĮą┤ą╗ą░ ą┤čĆą░ą╣ą▓ąĄčĆą░ čäčāąĮą║čåąĖčÅ adi_pdd_Close ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą┐ąĄčĆąĄą┤ą░čćčā ąĖ ą┐čĆąĖąĄą╝ ą┤ą░ąĮąĮčŗčģ, ąĄčüą╗ąĖ ąŠąĮąĖ ąĄčēąĄ ąĮąĄ ą▒čŗą╗ąĖ ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ, čéą░ą║ ą║ą░ą║ ą╝ąŠąČąĄčé ą▒čŗčéčī, ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą▓čŗąĘą▓ą░ą╗ąŠ adi_dev_Close, ą║ąŠą│ą┤ą░ ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ ą▒čŗą╗ čĆą░ąĘčĆąĄčłąĄąĮ.
ążčāąĮą║čåąĖčÅ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓ čĆąĄąČąĖą╝ ąŠčüčéą░ąĮąŠą▓ą║ąĖ (idle) ąĖ ąŠčüčéą░ą▓ą╗čÅąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ, ąĖąĘ ą║ąŠč鹊čĆąŠą│ąŠ ąŠąĮąŠ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčéą║čĆčŗč鹊 čüąĮąŠą▓ą░, ąĄčüą╗ąĖ ą║ąŠą│ą┤ą░-ąĮąĖą▒čāą┤čī ą┐ąŠąĘąČąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÄ ą┐ąŠąĮą░ą┤ąŠą▒ąĖčéčüčÅ ąŠčéą║čĆčŗčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ. ą×čüą▓ąŠą▒ąŠąČą┤ą░čÄčéčüčÅ ą▓čüąĄ čĆąĄčüčāčĆčüčŗ, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ ą▓čŗą┤ąĄą╗ąĄąĮčŗ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą▒čŗą╗ąŠ ą┐ąŠą┤čåąĄą┐ą╗ąĄąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčłąĖą▒ą║ąĖ ą┐čĆąĖ ą▓čŗąĘąŠą▓ąĄ adi_pdd_Open, č鹊 ąŠąĮąŠ ąŠčüą▓ąŠą▒ąŠąČą┤ą░ąĄčéčüčÅ ą▓ čćą░čüčéąĖ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░ adi_pdd_Close.
[ąśąĮč鹥čĆč乥ą╣čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ (API) ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓]
ąÆ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ąŠą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ąĖąĮč鹥čĆč乥ą╣čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓. API ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą▓ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝ąŠą╝ čäą░ą╣ą╗ąĄ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░ adi_dev.h.
ążčāąĮą║čåąĖčÅ adi_dev_Close() ąĘą░ą║čĆčŗą▓ą░ąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ. ą¤ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ąĄčüą╗ąĖ ąŠąĮ ąĮąĄ ą▒čŗą╗ ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ąŠą▒čĆą░čéąĮąŠ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ. ą¦č鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ čüąĮąŠą▓ą░ ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ ą║ čāčüčéčĆąŠą╣čüčéą▓čā ą┐ąŠčüą╗ąĄ ą▓čŗąĘąŠą▓ą░ adi_dev_Close, ąĮčāąČąĮąŠ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ąŠčéą║čĆčŗčéčī ąĄą│ąŠ ą▓čŗąĘąŠą▓ąŠą╝ adi_dev_Open.
u32 adi_dev_Close (ADI_DEV_DEVICE_HANDLE DeviceHandle);
ąÉčĆą│čāą╝ąĄąĮčé:
| DeviceHandle |
ąźąĄąĮą┤ą╗, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░. |
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
| ADI_DEV_RESULT_SUCCESS |
ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ą▒čŗą╗ąŠ čāčüą┐ąĄčłąĮąŠ ąĘą░ą║čĆčŗč鹊. |
| ADI_DEV_RESULT_BAD_DEVICE_HANDLE |
ąźąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮąĄ ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāąĄčé ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ. |
| ADI_DEV_RESULT_DMA_ERROR |
ą¤čĆąĖ ąĘą░ą║čĆčŗčéąĖąĖ DMA čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐čĆąŠąĖąĘąŠčłą╗ą░ ąŠčłąĖą▒ą║ą░. |
| xxx |
ąŚą░ą▓ąĖčüčÅčēąĖą╣ ąŠčé čéąĖą┐ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ąŠą┤ ą▓ąŠąĘą▓čĆą░čéą░. |
ążčāąĮą║čåąĖčÅ adi_dev_Control() čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĖą╗ąĖ čüčćąĖčéčŗą▓ą░ąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░.
u32 adi_dev_Control (ADI_DEV_DEVICE_HANDLE DeviceHandle,
u32 Command,
void *pArg);
ąÉčĆą│čāą╝ąĄąĮčéčŗ:
| DeviceHandle |
ąźąĄąĮą┤ą╗, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░. |
| Command |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą║ąŠą╝ą░ąĮą┤čŗ. |
| pArg |
ąÉą┤čĆąĄčü ą┐ą░čĆą░ą╝ąĄčéčĆą░, ąĘą░ą▓ąĖčüčÅčēąĄą│ąŠ ąŠčé ą║ąŠą╝ą░ąĮą┤čŗ. |
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
| ADI_DEV_RESULT_SUCCESS |
ążčāąĮą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮą░ čāčüą┐ąĄčłąĮąŠ. |
| ADI_DEV_RESULT_BAD_DEVICE_HANDLE |
ąźąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮąĄ ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāąĄčé ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ. |
| ADI_DEV_RESULT_DMA_ERROR |
ą¤čĆąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĖ ą£ąĄąĮąĄą┤ąČąĄčĆą░ DMA ą▒čŗą╗ąŠ čüąŠąŠą▒čēąĄąĮąŠ ąŠą▒ ąŠčłąĖą▒ą║ąĄ. |
| ADI_DEV_RESULT_NOT_SUPPORTED |
ąÜąŠą╝ą░ąĮą┤ą░ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ. |
| xxx |
ąŚą░ą▓ąĖčüčÅčēąĖą╣ ąŠčé čéąĖą┐ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ąŠą┤ ą▓ąŠąĘą▓čĆą░čéą░. |
ążčāąĮą║čåąĖčÅ adi_dev_Init() čüąŠąĘą┤ą░ąĄčé ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ą┤ą╗čÅ ąĮąĄą│ąŠ ą┐ą░ą╝čÅčéčī. ą×ą▒čŗčćąĮąŠ čŹčéą░ čäčāąĮą║čåąĖčÅ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ąŠą┤ąĖąĮ čĆą░ąĘ, ą▓ąŠ ą▓čĆąĄą╝čÅ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ čüąĖčüč鹥ą╝čŗ.
u32 adi_dev_Init (void *pMemory,
size_t MemorySize,
u32 *pMaxDevices,
ADI_DEV_MANAGER_HANDLE *pManagerHandle,
void *pEnterCriticalParam);
ąÉčĆą│čāą╝ąĄąĮčéčŗ:
| pMemory |
ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ąŠą▒ą╗ą░čüčéčī čüčéą░čéąĖč湥čüą║ąŠą╣ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓. |
| MemorySize |
ąĀą░ąĘą╝ąĄčĆ ą┐ą░ą╝čÅčéąĖ ą▓ ą▒ą░ą╣čéą░čģ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠą╣ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓. |
| pMaxDevices |
ą¤čĆąĖ ą▓čŗčģąŠą┤ąĄ ąĖąĘ čäčāąĮą║čåąĖąĖ ą▓ čŹčéčā čÅč湥ą╣ą║čā ą▒čāą┤ąĄčé ąĘą░ą┐ąĖčüą░ąĮąŠ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ąŠčéą║čĆčŗčéčŗčģ čāčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĄčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ąĮą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠą╝ ą┤ą╗čÅ ąĮąĄą│ąŠ ąŠą▒čŖąĄą╝ąĄ ą┐ą░ą╝čÅčéąĖ. |
| pManagerHandle |
ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ čÅč湥ą╣ą║čā ą┐ą░ą╝čÅčéąĖ, ą║čāą┤ą░ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮ čģąĄąĮą┤ą╗ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓. |
| pEnterCriticalParam |
ą¤ą░čĆą░ą╝ąĄčéčĆ, ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮ ą▓ čäčāąĮą║čåąĖčÄ, ąĘą░čēąĖčēą░čÄčēčāčÄ ą║čĆąĖčéąĖč湥čüą║ąĖą╣ čĆąĄą│ąĖąŠąĮ ą║ąŠą┤ą░. |
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
| ADI_DEV_RESULT_SUCCESS |
ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą▒čŗą╗ čāčüą┐ąĄčłąĮąŠ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ. |
| ADI_DEV_RESULT_NO_MEMORY |
ąæčŗą╗ąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąŠ ąĮąĄą┤ąŠčüčéą░č鹊čćąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓. |
ążčāąĮą║čåąĖčÅ adi_dev_Open() ąŠčéą║čĆčŗą▓ą░ąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ. ąśąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāčÄčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ čüčéčĆčāą║čéčāčĆčŗ, čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝, čāčüčéčĆąŠą╣čüčéą▓ąŠ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ąĖ ą┐ąŠą┤ą│ąŠčéą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ.
u32 adi_dev_Open (ADI_DEV_MANAGER_HANDLE ManagerHandle,
ADI_DEV_PDD_ENTRY_POINT *pEntryPoint,
u32 DeviceNumber,
void *ClientHandle,
ADI_DEV_DEVICE_HANDLE *pDeviceHandle,
ADI_DEV_DIRECTION Direction,
ADI_DMA_MANAGER_HANDLE DMAHandle,
ADI_DCB_HANDLE DCBHandle,
ADI_DCB_CALLBACK_FN ClientCallback);
ąÉčĆą│čāą╝ąĄąĮčéčŗ:
| ManagerHandle |
ąźąĄąĮą┤ą╗ ąĮą░ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆčŗą╣ čāą┐čĆą░ą▓ą╗čÅąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠą╝. |
| pEntryPoint |
ąÉą┤čĆąĄčü č鹊čćą║ąĖ ą▓čģąŠą┤ą░ ą▓ čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ. |
| DeviceNumber |
ą¦ąĖčüą╗ąŠ, ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčēąĄąĄ ąĖąĮą┤ąĄą║čü ą▓ "čéą░ą▒ą╗ąĖčåąĄ" ą┤ąŠčüčéčāą┐ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ čéą░ą║ąŠą│ąŠ čéąĖą┐ą░ ą▓ čüąĖčüč鹥ą╝ąĄ. ą×ąĮąŠ čāą║ą░ąĘčŗą▓ą░ąĄčé ą║ąŠąĮą║čĆąĄčéąĮčŗą╣ 菹║ąĘąĄą╝ą┐ą╗čÅčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą▓ąĖą┤ą░. ąóą░ą║ąČąĄ čüą╝. čéą░ą║ąČąĄ čĆą░ąĘą┤ąĄą╗ "ąÆąĖčĆčéčāą░ą╗čīąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ ąĖąĮą┤ąĄą║čüą░čåąĖčÅ čāčüčéčĆąŠą╣čüčéą▓" ą▓ čüčéą░čéčīąĄ [6]. |
| ClientHandle |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ, ąŠą┐čĆąĄą┤ąĄą╗čÅąĄą╝čŗą╣ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝. ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą┐ąĄčĆąĄą┤ą░čüčé čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ąŠą▒čĆą░čéąĮąŠ ą║ą╗ąĖąĄąĮčéčā ą▓ ą║ą░č湥čüčéą▓ąĄ ą░čĆą│čāą╝ąĄąĮčéą░ callback-čäčāąĮą║čåąĖąĖ. |
| pDeviceHandle |
ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčāčÄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝ čÅč湥ą╣ą║čā ą┐ą░ą╝čÅčéąĖ, ą║čāą┤ą░ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ čüąŠčģčĆą░ąĮąĖčé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ, ąŠą┐čĆąĄą┤ąĄą╗čÅąĄą╝čŗą╣ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓. ąÆčüąĄ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖąĄ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ ą┤ą╗čÅ čŹč鹊ą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ čü ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓, ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą║ą╗ąĖąĄąĮč鹊ą╝, ą▓ą║ą╗čÄčćą░čÄčé ą▓ čüąĄą▒čÅ čŹč鹊čé čģąĄąĮą┤ą╗. |
| Direction |
ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ą░: ą▓čģąŠą┤čÅčēąĄąĄ, ąĖčüčģąŠą┤čÅčēąĄąĄ ąĖą╗ąĖ ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮąŠąĄ (ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖąĄ ADI_DEV_DIRECTION). |
| DMAHandle |
ąźąĄąĮą┤ą╗ čüą╗čāąČą▒čŗ ą£ąĄąĮąĄą┤ąČąĄčĆą░ DMA, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čŹč鹊ą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (ąĘą┤ąĄčüčī ą╝ąŠąČąĄčé ą▒čŗčéčī čāą║ą░ąĘą░ąĮąŠ NULL, ąĄčüą╗ąĖ DMA ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ). |
| DCBHandle |
ąźąĄąĮą┤ą╗ ąĮą░ čüą╗čāąČą▒čā ąŠčéą╗ąŠąČąĄąĮąĮčŗčģ čäčāąĮą║čåąĖą╣ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ (ą£ąĄąĮąĄą┤ąČąĄčĆ DCB). ąĢčüą╗ąĖ ąĘą┤ąĄčüčī čāą║ą░ąĘą░ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ NULL, č鹊 ą▓čüąĄ ą▓čŗąĘąŠą▓čŗ callback-čäčāąĮą║čåąĖąĖ ą▒čāą┤čāčé ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮčŗą╝ąĖ (live). |
| ClientCallback |
ąÉą┤čĆąĄčü ą║ą╗ąĖąĄąĮčéčüą║ąŠą╣ callback-čäčāąĮą║čåąĖąĖ. |
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
| ADI_DEV_RESULT_SUCCESS |
ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ą▒čŗą╗ąŠ čāčüą┐ąĄčłąĮąŠ ąŠčéą║čĆčŗč鹊. |
| ADI_DEV_RESULT_BAD_MANAGER_HANDLE |
ąźąĄąĮą┤ą╗ ąĮąĄ čāą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓. |
| ADI_DEV_RESULT_NO_MEMORY |
ąØąĄą┤ąŠčüčéą░č鹊čćąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ ą┤ą╗čÅ ąŠčéą║čĆčŗčéąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░. |
| ADI_DEV_RESULT_DEVICE_IN_USE |
ąŻčüčéčĆąŠą╣čüčéą▓ąŠ čāąČąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ. |
| xxx |
ąŚą░ą▓ąĖčüčÅčēąĖą╣ ąŠčé čéąĖą┐ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ąŠą┤ ą▓ąŠąĘą▓čĆą░čéą░. |
ążčāąĮą║čåąĖčÅ adi_dev_Read() čćąĖčéą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖą╗ąĖ čüčéą░ą▓ąĖčé ą▓ ąŠč湥čĆąĄą┤čī ą▒čāč乥čĆčŗ ą┐čĆąĖąĄą╝ą░ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░.
u32 adi_dev_Read (ADI_DEV_DEVICE_HANDLE DeviceHandle,
ADI_DEV_BUFFER_TYPE BufferType,
ADI_DEV_BUFFER *pBuffer);
ąÉčĆą│čāą╝ąĄąĮčéčŗ:
| DeviceHandle |
ąźąĄąĮą┤ą╗, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░. |
| BufferType |
ąśą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāąĄčé čéąĖą┐ ą▒čāč乥čĆą░: ąŠą┤ąĮąŠą╝ąĄčĆąĮčŗą╣, ą┤ą▓čāą╝ąĄčĆąĮčŗą╣ ąĖą╗ąĖ ą║ąŠą╗čīčåąĄą▓ąŠą╣ (čüą╝. ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖąĄ ADI_DEV_BUFFER_TYPE). |
| pBuffer |
ąÉą┤čĆąĄčü ą▒čāč乥čĆą░ ąĖą╗ąĖ ą┐ąĄčĆą▓ąŠą│ąŠ ą▒čāč乥čĆą░ ą▓ čåąĄą┐ąŠčćą║ąĄ (čüą╝. ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ADI_DEV_BUFFER). |
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
| ADI_DEV_RESULT_SUCCESS |
ążčāąĮą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮą░ čāčüą┐ąĄčłąĮąŠ. |
| ADI_DEV_RESULT_BAD_DEVICE_HANDLE |
ąźąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮąĄ ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāąĄčé ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ. |
| ADI_DEV_RESULT_DMA_ERROR |
ą¤čĆąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĖ ą£ąĄąĮąĄą┤ąČąĄčĆą░ DMA ą▒čŗą╗ąŠ čüąŠąŠą▒čēąĄąĮąŠ ąŠą▒ ąŠčłąĖą▒ą║ąĄ. |
| ADI_DEV_RESULT_DATAFLOW_UNDEFINED |
ą¤ąŠą║ą░ ąĮąĄ ą▒čŗą╗ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čéąĖą┐ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ. |
| xxx |
ąŚą░ą▓ąĖčüčÅčēąĖą╣ ąŠčé čéąĖą┐ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ąŠą┤ ą▓ąŠąĘą▓čĆą░čéą░. |
ążčāąĮą║čåąĖčÅ adi_dev_Terminate() ąŠčüą▓ąŠą▒ąŠąČą┤ą░ąĄčé ą▓čüčÄ ą┐ą░ą╝čÅčéčī, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čāčÄ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓, ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą┐ąŠč鹊ą║ąĖ ą┤ą░ąĮąĮčŗčģ, ąĘą░ą║čĆčŗą▓ą░ąĄčé ą▓čüąĄ ąŠčéą║čĆčŗčéčŗąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ čāčüčéčĆąŠą╣čüčéą▓ ąĖ ąĘą░ą▓ąĄčĆčłą░ąĄčé ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓.
u32 adi_dev_Terminate (ADI_DEV_MANAGER_HANDLE ManagerHandle);
ąÉčĆą│čāą╝ąĄąĮčé:
| ManagerHandle |
ąźąĄąĮą┤ą╗ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓. |
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ:
| ADI_DEV_RESULT_SUCCESS |
ążčāąĮą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮą░ čāčüą┐ąĄčłąĮąŠ. |
ążčāąĮą║čåąĖčÅ adi_dev_Write() ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ, ąĖą╗ąĖ čüčéą░ą▓ąĖčé ą▓ ąŠč湥čĆąĄą┤čī ą▒čāč乥čĆčŗ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░.
u32 adi_dev_Write (ADI_DEV_DEVICE_HANDLE DeviceHandle,
ADI_DEV_BUFFER_TYPE BufferType,
ADI_DEV_BUFFER *pBuffer);
ąÉčĆą│čāą╝ąĄąĮčé:
| DeviceHandle |
ąźąĄąĮą┤ą╗, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░. |
| BufferType |
ąśą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāąĄčé čéąĖą┐ ą▒čāč乥čĆą░: ąŠą┤ąĮąŠą╝ąĄčĆąĮčŗą╣, ą┤ą▓čāą╝ąĄčĆąĮčŗą╣ ąĖą╗ąĖ ą║ąŠą╗čīčåąĄą▓ąŠą╣ (čüą╝. ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖąĄ ADI_DEV_BUFFER_TYPE). |
| pBuffer |
ąÉą┤čĆąĄčü ą▒čāč乥čĆą░ ąĖą╗ąĖ ą┐ąĄčĆą▓ąŠą│ąŠ ą▒čāč乥čĆą░ ą▓ čåąĄą┐ąŠčćą║ąĄ (čüą╝. ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ADI_DEV_BUFFER). |
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
| ADI_DEV_RESULT_SUCCESS |
ążčāąĮą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮą░ čāčüą┐ąĄčłąĮąŠ. |
| ADI_DEV_RESULT_BAD_DEVICE_HANDLE |
ąźąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮąĄ ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāąĄčé ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ. |
| ADI_DEV_RESULT_DMA_ERROR |
ą¤čĆąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĖ ą£ąĄąĮąĄą┤ąČąĄčĆą░ DMA ą▒čŗą╗ąŠ čüąŠąŠą▒čēąĄąĮąŠ ąŠą▒ ąŠčłąĖą▒ą║ąĄ. |
| ADI_DEV_RESULT_DATAFLOW_UNDEFINED |
ą¤ąŠą║ą░ ąĮąĄ ą▒čŗą╗ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čéąĖą┐ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ. |
| xxx |
ąŚą░ą▓ąĖčüčÅčēąĖą╣ ąŠčé čéąĖą┐ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ąŠą┤ ą▓ąŠąĘą▓čĆą░čéą░. |
[ą¤čāą▒ą╗ąĖčćąĮčŗąĄ čéąĖą┐čŗ ą┤ą░ąĮąĮčŗčģ ąĖ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓]
ąÆ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą┐čāą▒ą╗ąĖčćąĮčŗąĄ čüčéčĆčāą║čéčāčĆčŗ ą┤ą░ąĮąĮčŗčģ ąĖ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ čüą╗čāąČą▒ąŠą╣ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓.
ADI_DEV_BUFFER_TYPE. ąŁč鹊 ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāą║ą░ąĘą░ąĮąĖčÅ čéąĖą┐ą░ ą▒čāč乥čĆą░, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠą│ąŠ ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░. ąÆ čéą░ą▒ą╗ąĖčåąĄ 10-1 ąŠą┐ąĖčüą░ąĮčŗ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_DEV_BUFFER_TYPE.
ąóą░ą▒ą╗ąĖčåą░ 10-1. ADI_DEV_BUFFER_TYPE.
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| ADI_DEV_BUFFER_UNDEFINED |
ąØąĄąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ čéąĖą┐. |
| ADI_DEV_1D |
ą×ą┤ąĮąŠą╝ąĄčĆąĮčŗą╣ ą▒čāč乥čĆ. |
| ADI_DEV_2D |
ąöą▓čāą╝ąĄčĆąĮčŗą╣ ą▒čāč乥čĆ. |
| ADI_DEV_CIRC |
ąÜąŠą╗čīčåąĄą▓ąŠą╣ ą▒čāč乥čĆ. |
| ADI_DEV_SEQ_1D |
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąŠą┤ąĮąŠą╝ąĄčĆąĮčŗą╣ ą▒čāč乥čĆ. |
| ADI_DEV_SWITCH |
ą¤ąĄčĆąĄą║ą╗čÄčćą░ąĄą╝čŗą╣ ą▒čāč乥čĆ. |
| ADI_DEV_UPDATE_SWITCH |
ąæčāč乥čĆ ą┤ą╗čÅ čåąĄą┐ąŠčćą║ąĖ čü čüčāčēąĄčüčéą▓čāčÄčēąĖą╝ ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄą╝čŗą╝ ą▒čāč乥čĆąŠą╝. |
| ADI_DEV_BUFFER_SKIP |
ą¤čĆąŠą┐čāčüčéąĖčéčī čŹč鹊čé ą▒čāč乥čĆ ąĖ ą║ą░ąĮą░ą╗ DMA (ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ čü ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ DMA). |
| ADI_DEV_BUFFER_TABLE |
ąóą░ą▒ą╗ąĖčåą░ ą▒čāč乥čĆąŠą▓. |
| ADI_DEV_BUFFER_END |
ąÜąŠąĮąĄčå ą╝ą░čüčüąĖą▓ą░ ą▒čāč乥čĆąŠą▓. |
ADI_DEV_MODE. ąŁč鹊 ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāą║ą░ąĘą░ąĮąĖčÅ ą╝ąĄč鹊ą┤ą░ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ą░. ąÆ čéą░ą▒ą╗ąĖčåąĄ 10-2 ąŠą┐ąĖčüą░ąĮčŗ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_DEV_MODE.
ąóą░ą▒ą╗ąĖčåą░ 10-2. ADI_DEV_MODE.
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| ADI_DEV_MODE_UNDEFINED |
ąØąĄąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ čĆąĄąČąĖą╝. |
| ADI_DEV_MODE_CIRCULAR |
ąÜąŠą╗čīčåąĄą▓ąŠą╣ ą▒čāč乥čĆ. |
| ADI_DEV_MODE_CHAINED |
ą”ąĄą┐ąŠčćą║ą░ ą▒čāč乥čĆąŠą▓. |
| ADI_DEV_MODE_CHAINED_LOOPBACK |
ą”ąĄą┐ąŠčćą║ą░ ą▒čāč乥čĆąŠą▓ čü ą┐ąĄčĆąĄčģąŠą┤ąŠą╝ ą▓ ąĮą░čćą░ą╗ą░ čåąĄą┐ąŠčćą║ąĖ. |
| ADI_DEV_MODE_SEQ_CHAINED |
ą”ąĄą┐ąŠčćą║ą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą▒čāč乥čĆąŠą▓. |
| ADI_DEV_MODE_SEQ_CHAINED_LOOPBACK |
ą”ąĄą┐ąŠčćą║ą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą▒čāč乥čĆąŠą▓ čü ą┐ąĄčĆąĄčģąŠą┤ąŠą╝ ą▓ ąĮą░čćą░ą╗ąŠ čåąĄą┐ąŠčćą║ąĖ. |
ADI_DEV_DIRECTION. ąŁč鹊 ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāą║ą░ąĘą░ąĮąĖčÅ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ. ąÆ čéą░ą▒ą╗ąĖčåąĄ 10-3 ąŠą┐ąĖčüą░ąĮčŗ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ADI_DEV_DIRECTION.
ąóą░ą▒ą╗ąĖčåą░ 10-3. ADI_DEV_DIRECTION.
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| ADI_DEV_DIRECTION_UNDEFINED |
ąØąĄąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ. |
| ADI_DEV_DIRECTION_INBOUND |
ąÆčģąŠą┤čÅčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ (čćč鹥ąĮąĖąĄ). |
| ADI_DEV_DIRECTION_OUTBOUND |
ąśčüčģąŠą┤čÅčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ (ąĘą░ą┐ąĖčüčī). |
| ADI_DEV_DIRECTION_BIDIRECTIONAL |
ą×ą▒ą░ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (ąĖ čćč鹥ąĮąĖąĄ, ąĖ ąĘą░ą┐ąĖčüčī). |
ąĪąŠą▒čŗčéąĖčÅ callback. ążą░ą╣ą╗ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝ąŠą│ąŠ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░ adi_dev.h ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ čüąŠą┤ąĄčƹȹĖčé ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ą┤ą╗čÅ čüąŠą▒čŗčéąĖą╣ ąŠą▒čĆą░čéąĮčŗčģ ą▓čŗąĘąŠą▓ąŠą▓ čäčāąĮą║čåąĖą╣ (callback events), ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī čĆą░čüčłąĖčĆąĄąĮčŗ čäąĖąĘąĖč湥čüą║ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ (physical device driver, PDD).
ąØą░čćą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖą╣, ąŠčéąĮąŠčüčÅčēąĖčģčüčÅ ą║ ą£ąĄąĮąĄą┤ąČąĄčĆčā ąŻčüčéčĆąŠą╣čüčéą▓, čĆą░ą▓ąĮąŠ 0x40000000. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą▓ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ services.h ą┐ąŠą┤ ąĖą╝ąĄąĮąĄą╝ ADI_DEV_ENUMERATION_START. ąÆ čéą░ą▒ą╗ąĖčåąĄ 10-4 ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ą┤ą╗čÅ čüąŠą▒čŗčéąĖą╣ čäčāąĮą║čåąĖą╣ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░.
ąóą░ą▒ą╗ąĖčåą░ 10-4. Callback Events.
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| ADI_DEV_EVENT_START |
0x40000000 - ąĮą░čćą░ą╗čīąĮą░čÅ č鹊čćą║ą░ |
| ADI_DEV_EVENT_BUFFER_PROCESSED |
0x0001 - ąĘą░ą▓ąĄčĆčłąĄąĮą░ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą▒čāč乥čĆą░ |
| ADI_DEV_EVENT_SUB_BUFFER_PROCESSED |
0x0002 - ąĘą░ą▓ąĄčĆčłąĄąĮą░ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą║ąŠą╗čīčåąĄą▓ąŠą│ąŠ ą┐ąŠą┤ą▒čāč乥čĆą░ |
| ADI_DEV_EVENT_DMA_ERROR_INTERRUPT |
0x0003 - ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ DMA čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ą╗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčłąĖą▒ą║ąĖ |
ąÜąŠą┤čŗ ą▓ąŠąĘą▓čĆą░čéą░. ążą░ą╣ą╗ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝ąŠą│ąŠ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░ adi_dev.h ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ čüąŠą┤ąĄčƹȹĖčé ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ą┤ą╗čÅ ą║ąŠą┤ąŠą▓ ą▓ąŠąĘą▓čĆą░čéą░ ąĖąĘ čäčāąĮą║čåąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī čĆą░čüčłąĖčĆąĄąĮčŗ čäąĖąĘąĖč湥čüą║ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ (physical device driver, PDD).
ąØą░čćą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖą╣, ąŠčéąĮąŠčüčÅčēąĖčģčüčÅ ą║ ą£ąĄąĮąĄą┤ąČąĄčĆčā ąŻčüčéčĆąŠą╣čüčéą▓, čĆą░ą▓ąĮąŠ 0x40000000. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą▓ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ services.h ą┐ąŠą┤ ąĖą╝ąĄąĮąĄą╝ ADI_DEV_ENUMERATION_START. ąÆ čéą░ą▒ą╗ąĖčåąĄ 10-5 ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ą┤ą╗čÅ ą║ąŠą┤ąŠą▓ ą▓ąŠąĘą▓čĆą░čéą░ (Result Codes).
ąóą░ą▒ą╗ąĖčåą░ 10-5. Result Codes.
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| ADI_DEV_RESULT_SUCCESS |
ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą║ąŠą┤ čāčüą┐ąĄčłąĮąŠą│ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ = 0 |
| ADI_DEV_RESULT_FAILED |
ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą║ąŠą┤ ąĮąĄčāą┤ą░čćąĮąŠą│ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ = 1 |
| ADI_DEV_RESULT_START |
0x40000000 - ąĮą░čćą░ą╗čīąĮą░čÅ č鹊čćą║ą░ |
| ADI_DEV_RESULT_NOT_SUPPORTED |
ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéčī ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ |
| ADI_DEV_RESULT_DEVICE_IN_USE |
ąŻčüčéčĆąŠą╣čüčéą▓ąŠ čāąČąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ |
| ADI_DEV_RESULT_NO_MEMORY |
ąöą╗čÅ ąŠą┐ąĄčĆą░čåąĖąĖ ąĮąĄą┤ąŠčüčéą░č鹊čćąĮąŠ ą┐ą░ą╝čÅčéąĖ |
| ADI_DEV_RESULT_NOT_USED_1 |
ąæąŠą╗čīčłąĄ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ |
| ADI_DEV_RESULT_BAD_DEVICE_NUMBER |
ą×čłąĖą▒ąŠčćąĮčŗą╣ ąĮąŠą╝ąĄčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ |
| ADI_DEV_RESULT_DIRECTION_NOT_SUPPORTED |
ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ |
| ADI_DEV_RESULT_BAD_DEVICE_HANDLE |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╣ čģąĄąĮą┤ą╗ čāčüčéčĆąŠą╣čüčéą▓ą░ |
| ADI_DEV_RESULT_BAD_MANAGER_HANDLE |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╣ čģąĄąĮą┤ą╗ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ |
| ADI_DEV_RESULT_BAD_PDD_HANDLE |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝čŗą╣ čģąĄąĮą┤ą╗ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ |
| ADI_DEV_RESULT_INVALID_SEQUENCE |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ą░čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą║ąŠą╝ą░ąĮą┤ |
| ADI_DEV_RESULT_ATTEMPTED_READ_ON_OUTBOUND_DEVICE |
ąĪą┤ąĄą╗ą░ąĮą░ ą┐ąŠą┐čŗčéą║ą░ čćč鹥ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ čü ąĖčüčģąŠą┤čÅčēąĖą╝ ą┐ąŠč鹊ą║ąŠą╝ ą┤ą░ąĮąĮčŗčģ |
| ADI_DEV_RESULT_ATTEMPTED_WRITE_ON_INBOUND_DEVICE |
ąĪą┤ąĄą╗ą░ąĮą░ ą┐ąŠą┐čŗčéą║ą░ ąĘą░ą┐ąĖčüąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ čü ą▓čģąŠą┤čÅčēąĖą╝ ą┐ąŠč鹊ą║ąŠą╝ ą┤ą░ąĮąĮčŗčģ |
| ADI_DEV_RESULT_DATAFLOW_UNDEFINED |
ąØąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą╝ąĄč鹊ą┤ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ |
| ADI_DEV_RESULT_DATAFLOW_INCOMPATIBLE |
ą×ą┐ąĄčĆą░čåąĖčÅ ąĮąĄčüąŠą▓ą╝ąĄčüčéąĖą╝ą░ čü ą╝ąĄč鹊ą┤ąŠą╝ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ |
| ADI_DEV_RESULT_BUFFER_TYPE_INCOMPATIBLE |
ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čéą░ą║ąŠą╣ čéąĖą┐ ą▒čāč乥čĆą░ |
| ADI_DEV_RESULT_NOT_USED_2 |
ąæąŠą╗čīčłąĄ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ |
| ADI_DEV_RESULT_CANT_HOOK_INTERRUPT |
ąØąĄ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą┐ąŠą┤čåąĄą┐ąĖčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ |
| ADI_DEV_RESULT_CANT_UNHOOK_INTERRUPT |
ąØąĄ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ąŠčéčåąĄą┐ąĖčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ |
| ADI_DEV_RESULT_NON_TERMINATED_LIST |
ąĪą┐ąĖčüąŠą║ ą▒čāč乥čĆąŠą▓ ąĮąĄ ąĘą░ą║ą░ąĮčćąĖą▓ą░ąĄčéčüčÅ ąĮą░ NULL |
| ADI_DEV_RESULT_NO_CALLBACK_FUNCTION_SUPPLIED |
ąöą╗čÅ čäčāąĮą║čåąĖąĖ Open ąĮąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮą░ callback-čäčāąĮą║čåąĖčÅ |
| ADI_DEV_RESULT_REQUIRES_UNIDIRECTIONAL_DEVICE |
ąóčĆąĄą▒čāąĄčéčüčÅ ąŠą┤ąĮąŠąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ |
| ADI_DEV_RESULT_REQUIRES_BIDIRECTIONAL_DEVICE |
ąóčĆąĄą▒čāąĄčéčüčÅ ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ |
| ADI_DEV_RESULT_TWI_LOCKED |
TWI ąĘą░ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮ ą┤čĆčāą│ąŠą╣ ąŠą┐ąĄčĆą░čåąĖąĄą╣ |
| ADI_DEV_RESULT_REQUIRES_TWI_CONFIG_TABLE |
ąöą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ TWI čéčĆąĄą▒čāąĄčéčüčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮą░čÅ čéą░ą▒ą╗ąĖčåą░ |
| ADI_DEV_RESULT_CMD_NOT_SUPPORTED |
ąÜąŠą╝ą░ąĮą┤ą░ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ |
| ADI_DEV_RESULT_INVALID_REG_ADDRESS |
ąöąŠčüčéčāą┐ ą║ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝ąŠą╝čā ą░ą┤čĆąĄčüčā čĆąĄą│ąĖčüčéčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ |
| ADI_DEV_RESULT_INVALID_REG_FIELD |
ąöąŠčüčéčāą┐ ą║ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝ąŠą╝čā ą╝ąĄčüčéčā čĆą░čüą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠą╗čÅ čĆąĄą│ąĖčüčéčĆą░ |
| ADI_DEV_RESULT_INVALID_REG_FIELD_DATA |
ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąŠ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ ą┐ąŠą╗čÅ čĆąĄą│ąĖčüčéčĆą░ |
| ADI_DEV_RESULT_ATTEMPT_TO_WRITE_READONLY_REG |
ą¤ąŠą┐čŗčéą║ą░ ąĘą░ą┐ąĖčüąĖ ą▓ čĆąĄą│ąĖčüčéčĆ, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗą╣ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ |
| ADI_DEV_RESULT_ATTEMPT_TO_ACCESS_RESERVE_AREA |
ą¤ąŠą┐čŗčéą║ą░ ą┤ąŠčüčéčāą┐ą░ ą▓ ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮčāčÄ ąŠą▒ą╗ą░čüčéčī |
| ADI_DEV_RESULT_ACCESS_TYPE_NOT_SUPPORTED |
ąóąĖą┐ ą┤ąŠčüčéčāą┐ą░, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝, ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ |
| ADI_DEV_RESULT_DATAFLOW_NOT_ENABLED |
ąÆ čüąĖąĮčģčĆąŠąĮąĮąŠą╝ čĆąĄąČąĖą╝ąĄ - čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ ą┐ąĄčĆąĄą┤ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖąĄą╝ ą▒čāč乥čĆąŠą▓. |
| ADI_DEV_RESULT_BAD_DIRECTION_FIELD |
ąĀąĄąČąĖą╝ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (Sequential I/O) - ą▒čāč乥čĆčŗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą▓ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ |
| ADI_DEV_RESULT_BAD_IVG |
ąæčŗą╗ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮčŗą╣ ąĮąŠą╝ąĄčĆ IVG |
| ADI_DEV_RESULT_SWITCH_BUFFER_PAIR_INVALID |
ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮą░ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝ą░čÅ ą┐ą░čĆą░ ą▒čāč乥čĆąŠą▓ čü ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄą╝/ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄą╝ ą┤ą╗čÅ ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄą╝ąŠą│ąŠ čéąĖą┐ą░ ą▒čāč乥čĆą░ |
| ADI_DEV_RESULT_DMA_CHANNEL_UNAVAILABLE |
ąØąĄčé ą┤ąŠčüčéčāą┐ąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ DMA ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą║ąŠą╝ą░ąĮą┤čŗ/ą▒čāč乥čĆą░ |
| ADI_DEV_RESULT_ATTEMPTED_BUFFER_TABLE_NESTING |
ąØąĄ čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ą▓ą║ą╗ą░ą┤čŗą▓ą░čéčī ą┤čĆčāą│ ą▓ ą┤čĆčāą│ą░ čéą░ą▒ą╗ąĖčåčŗ ą▒čāč乥čĆąŠą▓ |
Command ID. ążą░ą╣ą╗ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝ąŠą│ąŠ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░ adi_dev.h ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓ čüąŠą┤ąĄčƹȹĖčé ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ą┤ą╗čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ ą║ąŠą╝ą░ąĮą┤ (command ID), ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī čĆą░čüčłąĖčĆąĄąĮčŗ čäąĖąĘąĖč湥čüą║ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ (physical device driver, PDD).
ąØą░čćą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖą╣, ąŠčéąĮąŠčüčÅčēąĖčģčüčÅ ą║ ą£ąĄąĮąĄą┤ąČąĄčĆčā ąŻčüčéčĆąŠą╣čüčéą▓, čĆą░ą▓ąĮąŠ 0x40000000. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą▓ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ services.h ą┐ąŠą┤ ąĖą╝ąĄąĮąĄą╝ ADI_DEV_ENUMERATION_START. ąÆ čéą░ą▒ą╗ąĖčåąĄ 10-6 ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮčŗ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖčÅ ą┤ą╗čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ ą║ąŠą╝ą░ąĮą┤.
ąóą░ą▒ą╗ąĖčåą░ 10-6. Command ID.
| ąśą╝čÅ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ąŚąĮą░č湥ąĮąĖąĄ |
| ADI_DEV_CMD_START |
ADI_DEV_ENUMERATION_START |
0x40000000 |
| ADI_DEV_CMD_UNDEFINED |
ąØąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ |
|
| ADI_DEV_CMD_END |
ąÜąŠąĮąĄčå čéą░ą▒ą╗ąĖčåčŗ ą║ąŠą╝ą░ąĮą┤ |
NULL |
| ADI_DEV_CMD_PAIR |
ąæčŗą╗ą░ ą┐ąĄčĆąĄą┤ą░ąĮą░ ąŠą┤ąĮą░ ą┐ą░čĆą░ ą║ąŠą╝ą░ąĮą┤ |
ADI_DEV_CMD_VALUE_PAIR |
| ADI_DEV_CMD_TABLE |
ąóą░ą▒ą╗ąĖčåą░ ą┐ą░čĆ ą║ąŠą╝ą░ąĮą┤ |
ADI_DEV_CMD_VALUE_PAIR |
| ADI_DEV_CMD_SET_DATAFLOW |
ąĀą░ąĘčĆąĄčłąĖčéčī/ąĘą░ą┐čĆąĄčéąĖčéčī ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ |
TRUE/FALSE |
| ADI_DEV_CMD_SET_DATAFLOW_METHOD |
ąŻčüčéą░ąĮąŠą▓ąĖčéčī ą╝ąĄč鹊ą┤ ą┐ąŠč鹊ą║ą░ |
TRUE/FALSE |
| ADI_DEV_CMD_NOT_USED_1 |
ąæąŠą╗čīčłąĄ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ |
|
| ADI_DEV_CMD_SET_SYNCHRONOUS |
ąŻčüčéą░ąĮąŠą▓ąĖčéčī ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ čüąĖąĮčģčĆąŠąĮąĮčŗą╣ ą▓ą▓ąŠą┤/ą▓čŗą▓ąŠą┤ |
TRUE/FALSE |
| ADI_DEV_CMD_NOT_USED_2 |
ąæąŠą╗čīčłąĄ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ |
|
| ADI_DEV_CMD_SET_STREAMING |
ąŻčüčéą░ąĮąŠą▓ąĖčéčī čĆąĄąČąĖą╝ čüčéčĆąĖą╝ąĖąĮą│ą░ |
TRUE/FALSE |
| ADI_DEV_CMD_GET_MAX_INBOUND_SIZE |
ą¤ąŠą╗čāčćąĖčéčī čĆą░ąĘą╝ąĄčĆ čüą░ą╝ąŠą│ąŠ ą▒ąŠą╗čīčłąŠą│ąŠ ą▓čģąŠą┤čÅčēąĄą│ąŠ ą┐ą░ą║ąĄčéą░ |
u32* |
| ADI_DEV_CMD_GET_MAX_OUTBOUND_SIZE |
ą¤ąŠą╗čāčćąĖčéčī čĆą░ąĘą╝ąĄčĆ čüą░ą╝ąŠą│ąŠ ą▒ąŠą╗čīčłąŠą│ąŠ ąĖčüčģąŠą┤čÅčēąĄą│ąŠ ą┐ą░ą║ąĄčéą░ |
u32* |
| ADI_DEV_CMD_GET_PERIPHERAL_DMA_SUPPORT |
ą×ą┐čĆąŠčüąĖčéčī, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ DMA ą┐čĆąŠčåąĄčüčüąŠčĆą░ |
u32* |
| ADI_DEV_CMD_GET_INBOUND_DMA_PMAP_ID |
ą¤ąŠą╗čāčćąĖčéčī ąĘąĮą░č湥ąĮąĖąĄ DMA PMAP ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┤ą╗čÅ ą▓čģąŠą┤čÅčēąĖčģ ą┤ą░ąĮąĮčŗčģ |
ADI_DMA_PMAP* |
| ADI_DEV_CMD_GET_OUTBOUND_DMA_PMAP_ID |
ą¤ąŠą╗čāčćąĖčéčī ąĘąĮą░č湥ąĮąĖąĄ DMA PMAP ą┤ą╗čÅ ąĖčüčģąŠą┤čÅčēąĖčģ ą┤ą░ąĮąĮčŗčģ |
ADI_DMA_PMAP* |
| ADI_DEV_CMD_SET_INBOUND_DMA_CHANNEL_ID |
ąŻčüčéą░ąĮąŠą▓ąĖčéčī ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą║ą░ąĮą░ą╗ą░ DMA ą┤ą╗čÅ ą▓čģąŠą┤čÅčēąĄą│ąŠ DMA |
ADI_DMA_CHANNEL_ID |
| ADI_DEV_CMD_GET_INBOUND_DMA_CHANNEL_ID |
ą¤ąŠą╗čāčćąĖčéčī ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą║ą░ąĮą░ą╗ą░ DMA ą┤ą╗čÅ ą▓čģąŠą┤čÅčēąĄą│ąŠ DMA |
ADI_DMA_CHANNEL_ID* |
| ADI_DEV_CMD_SET_OUTBOUND_DMA_CHANNEL_ID |
ąŻčüčéą░ąĮąŠą▓ąĖčéčī ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą║ą░ąĮą░ą╗ą░ DMA ą┤ą╗čÅ ąĖčüčģąŠą┤čÅčēąĄą│ąŠ DMA |
ADI_DMA_CHANNEL_ID |
| ADI_DEV_CMD_GET_OUTBOUND_DMA_CHANNEL_ID |
ą¤ąŠą╗čāčćąĖčéčī ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą║ą░ąĮą░ą╗ą░ DMA ą┤ą╗čÅ ąĖčüčģąŠą┤čÅčēąĄą│ąŠ DMA |
ADI_DMA_CHANNEL_ID* |
| ADI_DEV_CMD_GET_2D_SUPPORT |
ą×ą┐čĆąŠčüąĖčéčī, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ą▓čāą╝ąĄčĆąĮčŗąĄ (2D) ą┐ąĄčĆąĄą┤ą░čćąĖ |
u32* |
| ADI_DEV_CMD_SET_ERROR_REPORTING |
ąĀą░ąĘčĆąĄčłąĖčéčī/ąĘą░ą┐čĆąĄčéąĖčéčī čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠą▒ ąŠčłąĖą▒ą║ą░čģ |
TRUE/FALSE |
| ADI_DEV_CMD_FREQUENCY_CHANGE_PROLOG |
ą×ą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ąŠ ą┐čĆąĄą┤čüč鹊čÅčēąĄą╣ čüą╝ąĄąĮąĄ čćą░čüč鹊čéčŗ čÅą┤čĆą░/čłąĖąĮčŗ |
ADI_DEV_FREQUENCIES* |
| ADI_DEV_CMD_FREQUENCY_CHANGE_EPILOG |
ą×ą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ąŠ ą▓čüčéčāą┐ąĖą▓čłąĖčģ ą▓ čüąĖą╗čā ąĮąŠą▓čŗčģ čćą░čüč鹊čéą░čģ čÅą┤čĆą░/čłąĖąĮčŗ |
ADI_DEV_FREQUENCIES* |
| ADI_DEV_CMD_REGISTER_READ |
ą¦č鹥ąĮąĖąĄ ąŠą┤ąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ |
ADI_DEV_ACCESS_REGISTER* |
| ADI_DEV_CMD_REGISTER_FIELD_READ |
ą¦č鹥ąĮąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą┐ąŠą╗čÅ čĆąĄą│ąĖčüčéčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ |
ADI_DEV_ACCESS_REGISTER_FIELD* |
| ADI_DEV_CMD_REGISTER_TABLE_READ |
ą¦č鹥ąĮąĖąĄ čéą░ą▒ą╗ąĖčåčŗ ą▓čŗą▒čĆą░ąĮąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ą░ |
ADI_DEV_ACCESS_REGISTER* |
| ADI_DEV_CMD_REGISTER_FIELD_TABLE_READ |
ą¦č鹥ąĮąĖąĄ čéą░ą▒ą╗ąĖčåčŗ ą┐ąŠą╗ąĄą╣ ą▓čŗą▒čĆą░ąĮąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ą░ |
ADI_DEV_ACCESS_REGISTER_FIELD* |
| ADI_DEV_CMD_REGISTER_BLOCK_READ |
ą¦č鹥ąĮąĖąĄ ą▒ą╗ąŠą║ą░ ąĮą░čģąŠą┤čÅčēąĖčģčüčÅ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ čĆąĄą│ąĖčüčéčĆąŠą▓ |
ADI_DEV_ACCESS_REGISTER_BLOCK* |
| ADI_DEV_CMD_REGISTER_WRITE |
ąŚą░ą┐ąĖčüčī ą▓ ąŠą┤ąĖąĮ čĆąĄą│ąĖčüčéčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ |
ADI_DEV_ACCESS_REGISTER* |
| ADI_DEV_CMD_REGISTER_FIELD_WRITE |
ąŚą░ą┐ąĖčüčī ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ ą┐ąŠą╗ąĄ čĆąĄą│ąĖčüčéčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░ |
ADI_DEV_ACCESS_REGISTER_FIELD* |
| ADI_DEV_CMD_REGISTER_TABLE_WRITE |
ąŚą░ą┐ąĖčüčī ą▓ čéą░ą▒ą╗ąĖčåčā ą▓čŗą▒čĆą░ąĮąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ą░ |
ADI_DEV_ACCESS_REGISTER |
| ADI_DEV_CMD_REGISTER_FIELD_TABLE_WRITE |
ąŚą░ą┐ąĖčüčī ą▓ čéą░ą▒ą╗ąĖčåčā ą┐ąŠą╗ąĄą╣ ą▓čŗą▒čĆą░ąĮąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ą░ |
ADI_DEV_ACCESS_REGISTER_FIELD* |
| ADI_DEV_CMD_REGISTER_BLOCK_WRITE |
ąŚą░ą┐ąĖčüčī ą▓ ą▒ą╗ąŠą║ ąĮą░čģąŠą┤čÅčēąĖčģčüčÅ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ čĆąĄą│ąĖčüčéčĆąŠą▓ |
ADI_DEV_ACCESS_REGISTER_BLOCK* |
| ADI_DEV_CMD_UPDATE_1D_DATA_POINTER |
ą×ą▒ąĮąŠą▓ąĖčéčī čāą║ą░ąĘą░č鹥ą╗čī ą┤ą░ąĮąĮčŗčģ ą▓ ąŠą┤ąĮąŠą╝ 1D ą▒čāč乥čĆąĄ |
ADI_DEV_1D_BUFFER* |
| ADI_DEV_CMD_UPDATE_2D_DATA_POINTER |
ą×ą▒ąĮąŠą▓ąĖčéčī čāą║ą░ąĘą░č鹥ą╗čī ą┤ą░ąĮąĮčŗčģ ą▓ ąŠą┤ąĮąŠą╝ 2D ą▒čāč乥čĆąĄ |
ADI_DEV_2D_BUFFER* |
| ADI_DEV_CMD_UPDATE_SEQ_1D_DATA_POINTER |
ą×ą▒ąĮąŠą▓ąĖčéčī čāą║ą░ąĘą░č鹥ą╗čī ą┤ą░ąĮąĮčŗčģ ą▓ ąŠą┤ąĮąŠą╝ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą╝ 1D ą▒čāč乥čĆąĄ |
ADI_DEV_SEQ_1D_BUFFER* |
| ADI_DEV_CMD_GET_INBOUND_DMA_CURRENT_ADDRESS |
ą¤ąŠą╗čāčćąĖčéčī č鹥ą║čāčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ ą░ą┤čĆąĄčüą░ ą▓čģąŠą┤čÅčēąĄą│ąŠ DMA |
u32* |
| ADI_DEV_CMD_GET_OUTBOUND_DMA_CURRENT_ADDRESS |
ą¤ąŠą╗čāčćąĖčéčī č鹥ą║čāčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ ą░ą┤čĆąĄčüą░ ąĖčüčģąŠą┤čÅčēąĄą│ąŠ DMA |
u32* |
ADI_DEV_1D_BUFFER. ąĪčéčĆčāą║čéčāčĆą░ ą┤ą░ąĮąĮčŗčģ ADI_DEV_1D_BUFFER ąŠą┐ąĖčüčŗą▓ą░ąĄčé ąŠą▒čŗčćąĮčŗą╣ ąŠą┤ąĮąŠą╝ąĄčĆąĮčŗą╣ ą▒čāč乥čĆ. ąÆ čéą░ą▒ą╗ąĖčåąĄ 10-7 ąŠą┐ąĖčüą░ąĮčŗ ą┐ąŠą╗čÅ čŹč鹊ą╣ čüčéčĆčāą║čéčāčĆčŗ.
ąóą░ą▒ą╗ąĖčåą░ 10-7. ADI_DEV_1D_BUFFER.
| ąśą╝čÅ |
ąóąĖą┐ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| Reserved |
char[ADI_DEV_RESERVED_SIZE] |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čäąĖąĘąĖč湥čüą║ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝. |
| Data |
void* |
ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┤ą░ąĮąĮčŗąĄ. |
| ElementCount |
u32 |
ąĪč湥čéčćąĖą║ 菹╗ąĄą╝ąĄąĮč鹊ą▓ ą┤ą░ąĮąĮčŗčģ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ąŠą▒čēąĖą╣ čĆą░ąĘą╝ąĄčĆ ą┐ąĄčĆąĄą┤ą░čćąĖ 64 ą║ąĖą╗ąŠą▒ą░ą╣čéą░. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüą╝. čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ą┐ąŠ ą░ą┐ą┐ą░čĆą░čéčāčĆąĄ ą┐čĆąŠčåąĄčüčüąŠčĆą░. |
| ElementWidth |
u32 |
ą©ąĖčĆąĖąĮą░ ąŠą┤ąĮąŠą│ąŠ 菹╗ąĄą╝ąĄąĮčéą░ ą┤ą░ąĮąĮčŗčģ (ą▓ ą▒ą░ą╣čéą░čģ). |
| CallbackParameter |
void* |
ąŚąĮą░č湥ąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ą┤ą╗čÅ callback-čäčāąĮą║čåąĖąĖ (čäą╗ą░ą│ / pArg). |
| ProcessedFlag |
volatile u32 |
ążą╗ą░ą│ "ąŠą▒čĆą░ą▒ąŠčéą░ąĮąŠ". |
| ProcessedElementCount |
u32 |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ąŠą▒čĆą░ą▒ąŠčéą░ąĮąĮčŗčģ ą▒ą░ą╣čé. |
| pNext |
struct adi_dev_1d_buffer* |
ąĪą╗ąĄą┤čāčÄčēąĖą╣ ą▒čāč乥čĆ. |
| pAdditionalInfo |
void* |
ąŚą░ą▓ąĖčüčÅčēąĖą╣ ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ. |
ADI_DEV_2D_BUFFER. ąĪčéčĆčāą║čéčāčĆą░ ą┤ą░ąĮąĮčŗčģ ADI_DEV_2D_BUFFER ąŠą┐ąĖčüčŗą▓ą░ąĄčé ąŠą▒čŗčćąĮčŗą╣ ą┤ą▓čāą╝ąĄčĆąĮčŗą╣ ą▒čāč乥čĆ. ąÆ čéą░ą▒ą╗ąĖčåąĄ 10-8 ąŠą┐ąĖčüą░ąĮčŗ ą┐ąŠą╗čÅ čŹč鹊ą╣ čüčéčĆčāą║čéčāčĆčŗ.
ąóą░ą▒ą╗ąĖčåą░ 10-8. ADI_DEV_2D_BUFFER.
| ąśą╝čÅ |
ąóąĖą┐ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| Reserved |
char[ADI_DEV_RESERVED_SIZE] |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čäąĖąĘąĖč湥čüą║ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝. |
| Data |
void* |
ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┤ą░ąĮąĮčŗąĄ. |
| ElementWidth |
u32 |
ą©ąĖčĆąĖąĮą░ ąŠą┤ąĮąŠą│ąŠ 菹╗ąĄą╝ąĄąĮčéą░ ą┤ą░ąĮąĮčŗčģ (ą▓ ą▒ą░ą╣čéą░čģ). |
| XCount |
u32 |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čüč鹊ą╗ą▒čåąŠą▓. |
| XModify |
s32 |
ąŚąĮą░č湥ąĮąĖąĄ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĖ ą┐ąŠ X (ą▓ ą▒ą░ą╣čéą░čģ). |
| YCount |
u32 |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čüčéčĆąŠą║. |
| YModify |
s32 |
ąŚąĮą░č湥ąĮąĖąĄ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĖ ą┐ąŠ Y (ą▓ ą▒ą░ą╣čéą░čģ). |
| CallbackParameter |
void* |
ąŚąĮą░č湥ąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ą┤ą╗čÅ callback-čäčāąĮą║čåąĖąĖ (čäą╗ą░ą│ / pArg). |
| ProcessedFlag |
volatile u32 |
ążą╗ą░ą│ "ąŠą▒čĆą░ą▒ąŠčéą░ąĮąŠ". |
| ProcessedElementCount |
u32 |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ąŠą▒čĆą░ą▒ąŠčéą░ąĮąĮčŗčģ ą▒ą░ą╣čé. |
| pNext |
struct adi_dev_2d_buffer* |
ąĪą╗ąĄą┤čāčÄčēąĖą╣ ą▒čāč乥čĆ. |
| pAdditionalInfo |
void* |
ąŚą░ą▓ąĖčüčÅčēąĖą╣ ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ. |
ADI_DEV_CIRCULAR_BUFFER. ąĪčéčĆčāą║čéčāčĆą░ ą┤ą░ąĮąĮčŗčģ ADI_DEV_CIRCULAR_BUFFER ąŠą┐ąĖčüčŗą▓ą░ąĄčé ąŠą▒čŗčćąĮčŗą╣ ą║ąŠą╗čīčåąĄą▓ąŠą╣ ą▒čāč乥čĆ. ąÆ čéą░ą▒ą╗ąĖčåąĄ 10-9 ąŠą┐ąĖčüą░ąĮčŗ ą┐ąŠą╗čÅ čŹč鹊ą╣ čüčéčĆčāą║čéčāčĆčŗ.
ąóą░ą▒ą╗ąĖčåą░ 10-9. ADI_DEV_CIRCULAR_BUFFER.
| ąśą╝čÅ |
ąóąĖą┐ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| Reserved |
char[ADI_DEV_RESERVED_SIZE] |
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čäąĖąĘąĖč湥čüą║ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝. |
| Data |
void* |
ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┤ą░ąĮąĮčŗąĄ. |
| SubBufferCount |
u32 |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ąŠą┤ą▒čāč乥čĆąŠą▓. |
| SubBufferElementCount |
u32 |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ 菹╗ąĄą╝ąĄąĮč鹊ą▓ ą┤ą░ąĮąĮčŗčģ ą▓ ą┐ąŠą┤ą▒čāč乥čĆąĄ. |
| ElementWidth |
u32 |
ą©ąĖčĆąĖąĮą░ ąŠą┤ąĮąŠą│ąŠ 菹╗ąĄą╝ąĄąĮčéą░ ą┤ą░ąĮąĮčŗčģ (ą▓ ą▒ą░ą╣čéą░čģ). |
| CallbackType |
ADI_DEV_CIRCULAR_CALLBACK |
ąĪą▓ąĖčć čéąĖą┐ą░ callback ą║ąŠą╗čīčåąĄą▓ąŠą│ąŠ ą▒čāč乥čĆą░. |
| pAdditionalInfo |
void* |
ąŚą░ą▓ąĖčüčÅčēąĖą╣ ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ. |
ADI_DEV_SEQ_1D_BUFFER. ąĪčéčĆčāą║čéčāčĆą░ ą┤ą░ąĮąĮčŗčģ ADI_DEV_SEQ_1D_BUFFER ąŠą┐ąĖčüčŗą▓ą░ąĄčé ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąŠą┤ąĮąŠą╝ąĄčĆąĮčŗą╣ ą▒čāč乥čĆ. ąÆ čéą░ą▒ą╗ąĖčåąĄ 10-10 ąŠą┐ąĖčüą░ąĮčŗ ą┐ąŠą╗čÅ čŹč鹊ą╣ čüčéčĆčāą║čéčāčĆčŗ.
ąóą░ą▒ą╗ąĖčåą░ 10-10. ADI_DEV_SEQ_1D_BUFFER.
| ąśą╝čÅ |
ąóąĖą┐ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| BufferType |
ADI_DEV_BUFFER_TYPE |
ąóąĖą┐ ą▒čāč乥čĆą░. |
| pDirection |
union ADI_DEV_BUFFER |
ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą▒čāč乥čĆ ą▓čŗčłąĄčāą║ą░ąĘą░ąĮąĮąŠą│ąŠ čéąĖą┐ą░. |
ADI_DEV_BUFFER_PAIR. ąĪčéčĆčāą║čéčāčĆą░ ą┤ą░ąĮąĮčŗčģ ADI_DEV_BUFFER_PAIR ąŠą┐ąĖčüčŗą▓ą░ąĄčé ą┐ą░čĆąĮčŗą╣ ą▒čāč乥čĆ. ąÆ čéą░ą▒ą╗ąĖčåąĄ 10-11 ąŠą┐ąĖčüą░ąĮčŗ ą┐ąŠą╗čÅ čŹč鹊ą╣ čüčéčĆčāą║čéčāčĆčŗ.
ąóą░ą▒ą╗ąĖčåą░ 10-11. ADI_DEV_BUFFER_PAIR.
| ąśą╝čÅ |
ąóąĖą┐ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| Buffer |
ADI_DEV_1D_BUFFER |
ąæčāč乥čĆ. |
| Direction |
ADI_DEV_DIRECTION |
ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ. |
ADI_DEV_DMA_INFO. ąĪčéčĆčāą║čéčāčĆą░ ą┤ą░ąĮąĮčŗčģ ADI_DEV_DMA_INFO čģčĆą░ąĮąĖčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą║ą░ąĮą░ą╗ą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ DMA. ąÆ čéą░ą▒ą╗ąĖčåąĄ 10-12 ąŠą┐ąĖčüą░ąĮčŗ ą┐ąŠą╗čÅ čŹč鹊ą╣ čüčéčĆčāą║čéčāčĆčŗ.
ąóą░ą▒ą╗ąĖčåą░ 10-12. ADI_DEV_DMA_INFO.
| ąśą╝čÅ |
ąóąĖą┐ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| MappingID |
ADI_DMA_PMAP |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┐čĆąĖą▓čÅąĘą║ąĖ ą┐ąĄčĆąĖč乥čĆąĖąĖ ą║ DMA. |
| ChannelHandle |
ADI_DMA_CHANNEL_HANDLE |
ąźąĄąĮą┤ą╗ ąĮą░ čŹč鹊čé ą║ą░ąĮą░ą╗ DMA. |
| SwitchModeFlag |
u8 |
ążą╗ą░ą│ čüčéą░čéčāčüą░ čĆąĄąČąĖą╝ą░ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ (TRUE ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ). |
| pSwitchHead |
ADI_DMA_DESCRIPTOR_UNION* |
ąōąŠą╗ąŠą▓ą░ ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄą╝ąŠą╣ čåąĄą┐ąŠčćą║ąĖ ą▒čāč乥čĆąŠą▓. |
| pNext |
struct ADI_DEV_DMA_INFO* |
ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆčāą║čéčāčĆčā, čüąŠą┤ąĄčƹȹ░čēčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą║ą░ąĮą░ą╗ą░ DMA. |
ADI_DEV_DMA_ACCESS. ąĪčéčĆčāą║čéčāčĆą░ ą┤ą░ąĮąĮčŗčģ ADI_DEV_DMA_ACCESS ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ ą║ ą┤ą░ąĮąĮčŗą╝ ą▓čģąŠą┤čÅčēąĖčģ ąĖ ąĖčüčģąŠą┤čÅčēąĖčģ čåąĄą┐ąŠč湥ą║ DMA. ąÆ čéą░ą▒ą╗ąĖčåąĄ 10-13 ąŠą┐ąĖčüą░ąĮčŗ ą┐ąŠą╗čÅ čŹč鹊ą╣ čüčéčĆčāą║čéčāčĆčŗ.
ąóą░ą▒ą╗ąĖčåą░ 10-13. ADI_DEV_DMA_ACCESS.
| ąśą╝čÅ |
ąóąĖą┐ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| DmaChannelCount |
u8 |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą░ąĮą░ą╗ąŠą▓ DMA ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. |
| pData |
void* |
ąØą░čćą░ą╗ąŠ ą╝ąĄčüčéą░ ą┤ą╗čÅ ą╝ą░čüčüąĖą▓ą░ čüą▓čÅąĘą░ąĮąĮčŗčģ čü DMA ą┤ą░ąĮąĮčŗčģ. |
ADI_DEV_FREQUENCIES. ąĪčéčĆčāą║čéčāčĆą░ ą┤ą░ąĮąĮčŗčģ ADI_DEV_FREQUENCIES čüąŠą┤ąĄčƹȹĖčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅą╝ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ. ąÆ čéą░ą▒ą╗ąĖčåąĄ 10-14 ąŠą┐ąĖčüą░ąĮčŗ ą┐ąŠą╗čÅ čŹč鹊ą╣ čüčéčĆčāą║čéčāčĆčŗ.
ąóą░ą▒ą╗ąĖčåą░ 10-14. ADI_DEV_FREQUENCIES.
| ąśą╝čÅ |
ąóąĖą┐ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| CoreClock |
u32 |
ąóą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ čÅą┤čĆą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░ (CCLK). |
| SystemClock |
u32 |
ąóą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ čüąĖčüč鹥ą╝ąĮąŠą╣ čłąĖąĮčŗ (SCLK). |
ADI_DEV_ACCESS_REGISTER. ąóąĖą┐ ą┤ą░ąĮąĮčŗčģ ADI_DEV_ACCESS_REGISTER ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ ą║ ąŠą┤ąĖąĮąŠčćąĮąŠą╝čā čĆąĄą│ąĖčüčéčĆčā čāčüčéčĆąŠą╣čüčéą▓ą░, ąĮą░čģąŠą┤čÅčēąĄą╝čāčüčÅ ą▓ąĮąĄ ą║čĆąĖčüčéą░ą╗ą╗ą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░. ąÆ čéą░ą▒ą╗ąĖčåąĄ 10-15 ąŠą┐ąĖčüą░ąĮčŗ ą┐ąŠą╗čÅ čŹč鹊ą╣ čüčéčĆčāą║čéčāčĆčŗ.
ąóą░ą▒ą╗ąĖčåą░ 10-15. ADI_DEV_ACCESS_REGISTER.
| ąśą╝čÅ |
ąóąĖą┐ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| Address |
u16 |
ąÉą┤čĆąĄčü čĆąĄą│ąĖčüčéčĆą░ čāčüčéčĆąŠą╣čüčéą▓ą░. |
| Data |
u16 |
ąöą░ąĮąĮčŗąĄ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ą▓ čĆąĄą│ąĖčüčéčĆ, ąĖą╗ąĖ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ ą┤ą░ąĮąĮčŗąĄ. |
ADI_DEV_ACCESS_REGISTER_BLOCK. ąóąĖą┐ ą┤ą░ąĮąĮčŗčģ ADI_DEV_ACCESS_REGISTER_BLOCK ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ ą║ ą▒ą╗ąŠą║čā ąĮą░čģąŠą┤čÅčēąĖčģčüčÅ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ čĆąĄą│ąĖčüčéčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ąĮąĄ ą║čĆąĖčüčéą░ą╗ą╗ą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░. ąÆ čéą░ą▒ą╗ąĖčåąĄ 10-16 ąŠą┐ąĖčüą░ąĮčŗ ą┐ąŠą╗čÅ čŹč鹊ą╣ čüčéčĆčāą║čéčāčĆčŗ.
ąóą░ą▒ą╗ąĖčåą░ 10-16. ADI_DEV_ACCESS_REGISTER_BLOCK.
| ąśą╝čÅ |
ąóąĖą┐ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| Count |
u32 |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čĆąĄą│ąĖčüčéčĆąŠą▓, ą║ ą║ąŠč鹊čĆčŗą╝ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┤ąŠčüčéčāą┐. |
| Address |
u16 |
ąØą░čćą░ą╗čīąĮčŗą╣ ą░ą┤čĆąĄčü ą▒ą╗ąŠą║ą░ čĆąĄą│ąĖčüčéčĆąŠą▓. |
| pData |
u16* |
ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą╝ą░čüčüąĖą▓ ą┤ą░ąĮąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓ ą╗ąĖą▒ąŠ ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ, ą╗ąĖą▒ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ. |
ADI_DEV_ACCESS_REGISTER_FIELD. ąóąĖą┐ ą┤ą░ąĮąĮčŗčģ ADI_DEV_ACCESS_REGISTER_FIELD ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ ą║ ą┐ąŠą╗čÅą╝ čĆąĄą│ąĖčüčéčĆąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ąĮąĄ ą║čĆąĖčüčéą░ą╗ą╗ą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░. ąÆ čéą░ą▒ą╗ąĖčåąĄ 10-17 ąŠą┐ąĖčüą░ąĮčŗ ą┐ąŠą╗čÅ čŹč鹊ą╣ čüčéčĆčāą║čéčāčĆčŗ.
ąóą░ą▒ą╗ąĖčåą░ 10-17. ADI_DEV_ACCESS_REGISTER_FIELD.
| ąśą╝čÅ |
ąóąĖą┐ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| Address |
u16 |
ąÉą┤čĆąĄčü čĆąĄą│ąĖčüčéčĆą░, ą║ ą║ąŠč鹊čĆąŠą╝čā ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┤ąŠčüčéčāą┐. |
| Field |
u16 |
ą¤ąŠą╗ąĄ čĆąĄą│ąĖčüčéčĆą░, ą║ ą║ąŠč鹊čĆąŠą╝čā ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┤ąŠčüčéčāą┐ (čüą╝. ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄą╝čŗą╣ čäą░ą╣ą╗ ą┤čĆą░ą╣ą▓ąĄčĆą░). |
| Data |
u16 |
ąöą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ą╗ąĖą▒ąŠ ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ą▓ ą┐ąŠą╗ąĄ čĆąĄą│ąĖčüčéčĆą░, ą╗ąĖą▒ąŠ ą┐čĆąŠčćąĖčéą░ąĮčŗ ąŠčéčéčāą┤ą░. |
ADI_DEV_BUFFER. ą×ą▒čŖąĄą┤ąĖąĮąĄąĮąĖąĄ (union) ADI_DEV_BUFFER ąŠą┐ąĖčüčŗą▓ą░ąĄčé ąŠą▒čŖąĄą┤ąĖąĮąĄąĮąĖąĄ ą▓čüąĄčģ čéąĖą┐ąŠą▓ ą▒čāč乥čĆąŠą▓. ąÆ čéą░ą▒ą╗ąĖčåąĄ 10-18 ąŠą┐ąĖčüą░ąĮčŗ ą┐ąŠą╗čÅ čŹč鹊ą│ąŠ ąŠą▒čŖąĄą┤ąĖąĮąĄąĮąĖčÅ.
ąóą░ą▒ą╗ąĖčåą░ 10-18. ADI_DEV_BUFFER.
| ąśą╝čÅ |
ąóąĖą┐ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| OneD |
ADI_DEV_1D_BUFFER |
ą×ą┤ąĮąŠą╝ąĄčĆąĮčŗą╣ ą▒čāč乥čĆ. |
| TwoD |
ADI_DEV_2D_BUFFER |
ąöą▓čāą╝ąĄčĆąĮčŗą╣ ą▒čāč乥čĆ. |
| Circular |
ADI_DEV_CIRCULAR_BUFFER |
ąÜąŠą╗čīčåąĄą▓ąŠą╣ ą▒čāč乥čĆ. |
| Seq1D |
ADI_DEV_SEQ_1D_BUFFER |
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąŠą┤ąĮąŠą╝ąĄčĆąĮčŗą╣ ą▒čāč乥čĆ. |
| BufferPair |
ADI_DEV_BUFFER_PAIR |
ą¤ą░čĆą░ ą▒čāč乥čĆąŠą▓. |
[ąśąĮč鹥čĆč乥ą╣čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ (API) ą┤čĆą░ą╣ą▓ąĄčĆą░ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░]
ąÆ čŹč鹊ą╝ čĆą░ąĘą┤ąĄą╗ąĄ ąŠą┐ąĖčüą░ąĮ ąĖąĮč鹥čĆč乥ą╣čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą╝ąĄąČą┤čā ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓ ąĖ ą║ą░ąČą┤čŗą╝ čäąĖąĘąĖč湥čüą║ąĖą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝. API čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ą▓ čäą░ą╣ą╗ąĄ adi_dev.h.
ążčāąĮą║čåąĖčÅ adi_pdd_Close() ąĘą░ą║čĆčŗą▓ą░ąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ. ą¤ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ąĄčüą╗ąĖ ąŠąĮ ąĮąĄ ą▒čŗą╗ čāąČąĄ ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ąŠą▒čĆą░čéąĮąŠ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle state).
u32 adi_pdd_Close (ADI_PDD_DEVICE_HANDLE PDDHandle);
ąÉčĆą│čāą╝ąĄąĮčé:
| PDDHandle |
ąźąĄąĮą┤ą╗, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░. |
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
| ADI_DEV_RESULT_SUCCESS |
ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ą▒čŗą╗ąŠ čāčüą┐ąĄčłąĮąŠ ąĘą░ą║čĆčŗč鹊. |
| xxx |
ąŚą░ą▓ąĖčüčÅčēąĖą╣ ąŠčé čéąĖą┐ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ąŠą┤ ą▓ąŠąĘą▓čĆą░čéą░. |
ążčāąĮą║čåąĖčÅ adi_pdd_Control() čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĖą╗ąĖ čüčćąĖčéčŗą▓ą░ąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░.
u32 adi_pdd_Control (ADI_DEV_PDD_HANDLE PDDHandle,
u32 Command,
void *pArg);
ąÉčĆą│čāą╝ąĄąĮčéčŗ:
| PDDHandle |
ąźąĄąĮą┤ą╗, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░. |
| Command |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą║ąŠą╝ą░ąĮą┤čŗ. |
| pArg |
ąÉą┤čĆąĄčü ą┐ą░čĆą░ą╝ąĄčéčĆą░, ąĘą░ą▓ąĖčüčÅčēąĄą│ąŠ ąŠčé ą║ąŠą╝ą░ąĮą┤čŗ. |
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
| ADI_DEV_RESULT_SUCCESS |
ążčāąĮą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮą░ čāčüą┐ąĄčłąĮąŠ. |
| ADI_DEV_RESULT_NOT_SUPPORTED |
ąÜąŠą╝ą░ąĮą┤ą░ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ. |
| xxx |
ąŚą░ą▓ąĖčüčÅčēąĖą╣ ąŠčé čéąĖą┐ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ąŠą┤ ą▓ąŠąĘą▓čĆą░čéą░. |
ążčāąĮą║čåąĖčÅ adi_pdd_Open() ąŠčéą║čĆčŗą▓ą░ąĄčé čäąĖąĘąĖč湥čüą║ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ. ą¤čĆąĖ čŹč鹊ą╝ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāčÄčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ čüčéčĆčāą║čéčāčĆčŗ ą┤ą░ąĮąĮčŗčģ, čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝, čāčüčéčĆąŠą╣čüčéą▓ąŠ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ąĖ ą┐ąŠą┤ą│ąŠčéą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ.
u32 adi_ppd_Open (ADI_DEV_MANAGER_HANDLE ManagerHandle,
u32 DeviceNumber,
ADI_DEV_DEVICE_HANDLE DeviceHandle,
ADI_DEV_PDD_HANDLE *pPDDHandle,
ADI_DEV_DIRECTION Direction,
void *pEnterCriticalParam,
ADI_DMA_MANAGER_HANDLE DMAHandle,
ADI_DCB_HANDLE DCBHandle,
ADI_DCB_CALLBACK_FN DMCallback);
ąÉčĆą│čāą╝ąĄąĮčéčŗ:
| ManagerHandle |
ąźąĄąĮą┤ą╗ ąĮą░ ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆčŗą╣ čāą┐čĆą░ą▓ą╗čÅąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠą╝. |
| DeviceNumber |
ą¦ąĖčüą╗ąŠ, ąĮą░čćąĖąĮą░čÄčēąĄąĄčüčÅ čü 0, ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčēąĄąĄ ąĖąĮą┤ąĄą║čü ą▓ "čéą░ą▒ą╗ąĖčåąĄ" ą┤ąŠčüčéčāą┐ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ čéą░ą║ąŠą│ąŠ čéąĖą┐ą░ ą▓ čüąĖčüč鹥ą╝ąĄ. ą×ąĮąŠ čāą║ą░ąĘčŗą▓ą░ąĄčé ą║ąŠąĮą║čĆąĄčéąĮčŗą╣ 菹║ąĘąĄą╝ą┐ą╗čÅčĆ čāčüčéčĆąŠą╣čüčéą▓ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą▓ąĖą┤ą░. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą▓ ą┐čĆąŠčåąĄčüčüąŠčĆąĄ ąĖą╝ąĄąĄčéčüčÅ 4 ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┐ąŠčĆčéą░, č鹊 ąŠąĮąĖ ą┐ąŠą╗čāčćą░čÄčé ąĖąĮą┤ąĄą║čüčŗ ąŠčé 0 ą┤ąŠ 3. |
| ClientHandle |
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ, ąŠą┐čĆąĄą┤ąĄą╗čÅąĄą╝čŗą╣ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝. ą£ąĄąĮąĄą┤ąČąĄčĆ ąŻčüčéčĆąŠą╣čüčéą▓ ą┐ąĄčĆąĄą┤ą░čüčé čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ąŠą▒čĆą░čéąĮąŠ ą║ą╗ąĖąĄąĮčéčā ą▓ ą║ą░č湥čüčéą▓ąĄ ą░čĆą│čāą╝ąĄąĮčéą░ callback-čäčāąĮą║čåąĖąĖ. |
| DeviceHandle |
ą¤ą░čĆą░ą╝ąĄčéčĆ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗą╣ ą£ąĄąĮąĄą┤ąČąĄčĆąŠą╝ ąŻčüčéčĆąŠą╣čüčéą▓, ą║ąŠč鹊čĆčŗą╣ čāąĮąĖą║ą░ą╗čīąĮąŠ ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāąĄčé čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ą╗čÅ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓. |
| pPDDHandle |
ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą╝ąĄčüč鹊 ą▓ ą┐ą░ą╝čÅčéąĖ, ą║čāą┤ą░ čäąĖąĘąĖč湥čüą║ąĖą╣ ą┤čĆą░ą╣ą▓ąĄčĆ čüąŠčģčĆą░ąĮąĖą╗ čģąĄąĮą┤ą╗, čāąĮąĖą║ą░ą╗čīąĮąŠ ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāčÄčēąĖą╣ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ą╗čÅ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░. |
| Direction |
ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ą░: ą▓čģąŠą┤čÅčēąĄąĄ, ąĖčüčģąŠą┤čÅčēąĄąĄ ąĖą╗ąĖ ą┤ą▓čāąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĮąŠąĄ (ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖąĄ ADI_DEV_DIRECTION). |
| pEnterCriticalParam |
ą¤ą░čĆą░ą╝ąĄčéčĆ, ą║ąŠč鹊čĆčŗą╣ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ čäčāąĮą║čåąĖčÄ, ąĘą░čēąĖčēą░čÄčēčāčÄ ą║čĆąĖčéąĖč湥čüą║ąĖąĄ ąŠą▒ą╗ą░čüčéąĖ ą║ąŠą┤ą░. |
| DMAHandle |
ąźąĄąĮą┤ą╗ čüą╗čāąČą▒čŗ ą£ąĄąĮąĄą┤ąČąĄčĆą░ DMA, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čŹč鹊ą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (ąĘą┤ąĄčüčī ą╝ąŠąČąĄčé ą▒čŗčéčī čāą║ą░ąĘą░ąĮąŠ NULL, ąĄčüą╗ąĖ DMA ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ). |
| DCBHandle |
ąźąĄąĮą┤ą╗ ąĮą░ čüą╗čāąČą▒čā ąŠčéą╗ąŠąČąĄąĮąĮčŗčģ čäčāąĮą║čåąĖą╣ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░ (ą£ąĄąĮąĄą┤ąČąĄčĆ DCB). ąĢčüą╗ąĖ ąĘą┤ąĄčüčī čāą║ą░ąĘą░ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ NULL, č鹊 ą▓čüąĄ ą▓čŗąĘąŠą▓čŗ callback-čäčāąĮą║čåąĖąĖ ą▒čāą┤čāčé ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮčŗą╝ąĖ (live). |
| DMCallback |
ąÉą┤čĆąĄčü callback-čäčāąĮą║čåąĖąĖ ą£ąĄąĮąĄą┤ąČąĄčĆą░ ąŻčüčéčĆąŠą╣čüčéą▓. |
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
| ADI_DEV_RESULT_SUCCESS |
ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ą▒čŗą╗ąŠ čāčüą┐ąĄčłąĮąŠ ąŠčéą║čĆčŗč鹊. |
| ADI_DEV_RESULT_DEVICE_IN_USE |
ąŻčüčéčĆąŠą╣čüčéą▓ąŠ čāąČąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ. |
| xxx |
ąŚą░ą▓ąĖčüčÅčēąĖą╣ ąŠčé čéąĖą┐ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ąŠą┤ ą▓ąŠąĘą▓čĆą░čéą░. |
ążčāąĮą║čåąĖčÅ adi_pdd_Read() ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▒čāč乥čĆčŗ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ą▓čģąŠą┤čÅčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ. ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą┤ą╗čÅ č鹥čģ čāčüčéčĆąŠą╣čüčéą▓, čā ą║ąŠč鹊čĆčŗčģ ąĄčüčéčī ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ DMA.
u32 adi_pdd_Read (ADI_DEV_PDD_HANDLE PDDHandle,
ADI_DEV_BUFFER_TYPE BufferType,
ADI_DEV_BUFFER *pBuffer);
ąÉčĆą│čāą╝ąĄąĮčéčŗ:
| PDDHandle |
ąźąĄąĮą┤ą╗, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░. |
| BufferType |
ąśą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāąĄčé čéąĖą┐ ą▒čāč乥čĆą░: ąŠą┤ąĮąŠą╝ąĄčĆąĮčŗą╣, ą┤ą▓čāą╝ąĄčĆąĮčŗą╣ ąĖą╗ąĖ ą║ąŠą╗čīčåąĄą▓ąŠą╣ (čüą╝. ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖąĄ ADI_DEV_BUFFER_TYPE). |
| pBuffer |
ąÉą┤čĆąĄčü ą▒čāč乥čĆą░ ąĖą╗ąĖ ą┐ąĄčĆą▓ąŠą│ąŠ ą▒čāč乥čĆą░ ą▓ čåąĄą┐ąŠčćą║ąĄ (čüą╝. ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ADI_DEV_BUFFER). |
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
| ADI_DEV_RESULT_SUCCESS |
ążčāąĮą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮą░ čāčüą┐ąĄčłąĮąŠ. |
| ADI_DEV_RESULT_BAD_PDD_HANDLE |
ąźąĄąĮą┤ą╗ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĮąĄ ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāąĄčé ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ. |
| xxx |
ąŚą░ą▓ąĖčüčÅčēąĖą╣ ąŠčé čéąĖą┐ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ąŠą┤ ą▓ąŠąĘą▓čĆą░čéą░. |
ążčāąĮą║čåąĖčÅ adi_pdd_Write() ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▒čāč乥čĆčŗ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░, čćč鹊ą▒čŗ ą┐ąĄčĆąĄą┤ą░čéčī ąĮą░čĆčāąČčā ąĖčüčģąŠą┤čÅčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ. ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą┤ą╗čÅ č鹥čģ čāčüčéčĆąŠą╣čüčéą▓, čā ą║ąŠč鹊čĆčŗčģ ąĄčüčéčī ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ DMA.
u32 adi_pdd_Write (ADI_DEV_PDD_HANDLE PDDHandle,
ADI_DEV_BUFFER_TYPE BufferType,
ADI_DEV_BUFFER *pBuffer);
ąÉčĆą│čāą╝ąĄąĮčéčŗ:
| PDDHandle |
ąźąĄąĮą┤ą╗, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░. |
| BufferType |
ąśą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāąĄčé čéąĖą┐ ą▒čāč乥čĆą░: ąŠą┤ąĮąŠą╝ąĄčĆąĮčŗą╣, ą┤ą▓čāą╝ąĄčĆąĮčŗą╣ ąĖą╗ąĖ ą║ąŠą╗čīčåąĄą▓ąŠą╣ (čüą╝. ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĖąĄ ADI_DEV_BUFFER_TYPE). |
| pBuffer |
ąÉą┤čĆąĄčü ą▒čāč乥čĆą░ ąĖą╗ąĖ ą┐ąĄčĆą▓ąŠą│ąŠ ą▒čāč乥čĆą░ ą▓ čåąĄą┐ąŠčćą║ąĄ (čüą╝. ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ADI_DEV_BUFFER). |
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ:
| ADI_DEV_RESULT_SUCCESS |
ążčāąĮą║čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮą░ čāčüą┐ąĄčłąĮąŠ. |
| ADI_DEV_RESULT_BAD_PDD_HANDLE |
ąźąĄąĮą┤ą╗ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ąĮąĄ ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāąĄčé ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ. |
| xxx |
ąŚą░ą▓ąĖčüčÅčēąĖą╣ ąŠčé čéąĖą┐ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą║ąŠą┤ ą▓ąŠąĘą▓čĆą░čéą░. |
[ąĪčüčŗą╗ą║ąĖ]
1. VisualDSP++ 5.0 Device Drivers and System Services Manual for Blackfin® Processors site:analog.com.
2. VDK: ą┤čĆą░ą╣ą▓ąĄčĆčŗ čāčüčéčĆąŠą╣čüčéą▓ ąĖ čüąĖčüč鹥ą╝ąĮčŗąĄ čüą╗čāąČą▒čŗ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą▓ Blackfin.
3. VDK: ą╝ąĄąĮąĄą┤ąČąĄčĆ DMA.
4. VDK: ą╝ąĄąĮąĄą┤ąČąĄčĆ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣.
5. VDK: ą╝ąĄąĮąĄą┤ąČąĄčĆ ąŠčéą╗ąŠąČąĄąĮąĮčŗčģ čäčāąĮą║čåąĖą╣ ąŠą▒čĆą░čéąĮąŠą│ąŠ ą▓čŗąĘąŠą▓ą░.
6. VDK: čüą╗čāąČą▒ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠčĆčéą░ą╝ąĖ. |



