|
ąŚą┤ąĄčüčī ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐ąĄčĆąĄą▓ąŠą┤ čćą░čüčéąĖ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ [1], ą┐ąŠčüą▓čÅčēąĄąĮąĮąŠą╣ ąŠą┐ąĖčüą░ąĮąĖčÄ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ ą▒ą╗ąŠą║ą░ čłąĖąĮčŗ CAN, ą┤ąŠčüčéčāą┐ąĮąŠą│ąŠ ą▓ ą┐čĆąŠčåąĄčüčüąŠčĆą░čģ ADSP-BF538, ADSP-BF538F4, ADSP-BF538F8. ą¤čĆąĄą┤ą╗ą░ą│ą░ąĄą╝ąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąĄą┤ą┐ąŠą╗ą░ą│ą░ąĄčé, čćč鹊 čćąĖčéą░č鹥ą╗čī ąĘąĮą░ą║ąŠą╝ čüąŠ čüčéą░ąĮą┤ą░čĆč鹊ą╝ CAN (ąŠą▒čĆą░čēą░ą╣č鹥čüčī ą║ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ Version 2.0 CAN ą║ąŠą╝ą┐ą░ąĮąĖąĖ Robert Bosch GmbH).
ąĢčüą╗ąĖ CAN ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, č鹊 ą▓čŗą▓ąŠą┤čŗ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░ (CANTX ąĖ CANRX) ą╝ąŠąČąĮąŠ ąŠčüą▓ąŠą▒ąŠą┤ąĖčéčī ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ą░ą║ ąĮąŠąČą║ąĖ ą┐ąŠč鹊ą▓ GPIO (CANTX čĆą░ąĘą╝ąĄčēąĄąĮ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ PC0, CANRX ąĮą░ PC1, čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ ą┐ąŠčĆč鹊ą▓ ą▓ čüčéą░čéčīąĄ [2]).
ąÆčŗą▓ąŠą┤čŗ CAN ąĮą░ BGA ą║ąŠčĆą┐čāčüąĄ ą┐čĆąŠčåąĄčüčüąŠčĆą░ BC-316:
| ąÆčŗą▓ąŠą┤ |
ą©ą░čĆąĖą║ |
ążčāąĮą║čåąĖčÅ |
| CANTX/PC0 |
B12 |
ąĪąĖą│ąĮą░ą╗ ą┐ąĄčĆąĄą┤ą░čćąĖ CAN (ą▓čŗčģąŠą┤) |
| CANRX/PC1 |
B11 |
ąĪąĖą│ąĮą░ą╗ ą┐čĆąĖąĄą╝ą░ CAN (ą▓čģąŠą┤) |

ą×čüąĮąŠą▓ąĮčŗąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą╝ąŠą┤čāą╗čÅ CAN:
ŌĆó ąŻą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅąĄčé čüčéą░ąĮą┤ą░čĆčéčā CAN 2.0B (ą░ą║čéąĖą▓ąĮą░čÅ ą▓ąĄčĆčüąĖčÅ čüčéą░ąĮą┤ą░čĆčéą░).
ŌĆó ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé 2 ą▓ąĄčĆčüąĖąĖ CAN-ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓, standard (11 ą▒ąĖčé) ąĖ extended (29 ą▒ąĖčé).
ŌĆó ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čüą║ąŠčĆąŠčüčéąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ąŠ 1 ą╝ąĄą│ą░ą▒ąĖčéą░/čüąĄą║.
ŌĆó ąöąŠčüčéčāą┐ąĮąŠ 32 ą┐ąŠčćč鹊ą▓čŗčģ čÅčēąĖą║ą░ (mailbox): 8 ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā, 8 ąĮą░ ą┐čĆąĖąĄą╝, 16 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝čŗčģ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā ąĖą╗ąĖ ą┐čĆąĖąĄą╝.
ŌĆó ą×čéą┤ąĄą╗čīąĮą░čÅ ą╝ą░čüą║ą░ čäąĖą╗čīčéčĆą░ (acceptance mask) ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ mailbox.
ŌĆó ążąĖą╗čīčéčĆą░čåąĖčÅ ą┐ąŠ ą┤ą░ąĮąĮčŗą╝ (ą┐ąĄčĆą▓čŗą╝ ą┤ą▓čāą╝ ą▒ą░ą╣čéą░ą╝ ą▓ mailbox), čćč鹊 ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ čäąĖą╗čīčéčĆčāčÄčēąĄą╣ ą░ą┤čĆąĄčüą░čåąĖąĖ (acceptance filtering ą▓ čĆąĄąČąĖą╝ąĄ DeviceNetŌäó).
ŌĆó ąĀąĄą│ąĖčüčéčĆčŗ čüąŠčüč鹊čÅąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ (Error status) ąĖ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ.
ŌĆó ą£ąŠą┤čāą╗čī čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠą│ąŠ čüč湥čéčćąĖą║ą░.
ŌĆó ą£ąŠąČąĮąŠ čüčćąĖčéčŗą▓ą░čéčī čāčĆąŠą▓ąĄąĮčī ą▓čŗą▓ąŠą┤ąŠą▓ ą┐čĆąĖąĄą╝ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ.
ą£ąŠą┤čāą╗čī CAN ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čüąŠą▒ąŠą╣ ąĮąĖąĘą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗą╣ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą▓ ą║ąŠč鹊čĆčŗčģ čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ąĮąĄ ą┐čĆąĄą▓čŗčłą░ąĄčé 1 ą╝ąĄą│ą░ą▒ąĖčé/čüąĄą║. ąÆ ą┐čĆąŠč鹊ą║ąŠą╗ CAN ą▓čüčéčĆąŠąĄąĮą░ ą┐čĆąŠą▓ąĄčĆą║ą░ ą┤ą░ąĮąĮčŗčģ ąĮą░ CRC, čéčĆąĄą║ąĖąĮą│ čüąŠąŠą▒čēąĄąĮąĖą╣ ąŠą▒ ąŠčłąĖą▒ą║ą░čģ ąĖ ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĄ čĆą░ą▒ąŠč鹊čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ ąŠčéą║ą░ąĘą░ą▓čłąĄą│ąŠ čāąĘą╗ą░ čüąĄčéąĖ (fault node confinement) - ą▓čüąĄ čŹč鹊 ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąŠ ą┤ą╗čÅ ą┐ąŠą▓čŗčłąĄąĮąĖčÅ ąĮą░ą┤ąĄąČąĮąŠčüčéąĖ čüąĄčéąĖ, čćč鹊ą▒čŗ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčéčī čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ.
ążąĖąĘąĖč湥čüą║ąĖą╣ ąĖąĮč鹥čĆč乥ą╣čü čłąĖąĮčŗ CAN - ą┐čĆąŠčüčéą░čÅ ą┤ą▓čāčģą┐čĆąŠą▓ąŠą┤ąĮą░čÅ ą╗ąĖąĮąĖčÅ. ąØą░ čĆąĖčü. 19-1 ą▓ čüąĖą╝ą▓ąŠą╗ąĖč湥čüą║ąŠą╣ č乊čĆą╝ąĄ ą┐ąŠą║ą░ąĘą░ąĮąŠ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ ą┐čĆąŠčåąĄčüčüąŠčĆą░ čü čéčĆą░ąĮčüąĖą▓ąĄčĆąŠą╝ CAN (ąĮą░ą┐čĆąĖą╝ąĄčĆ TJA1041, TJA1050, PCA82C250, MCP2551 ąĖ čé. ą┐., čüą╝. čéą░ą║ąČąĄ [4]). ąÆčŗčģąŠą┤ ąĖ ą▓čģąŠą┤ ą┐čĆąŠčåąĄčüčüąŠčĆą░ Blackfin CANTX ąĖ CANRX ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ą║ ą▓čŗą▓ąŠą┤ą░ą╝ TX ąĖ RX čéčĆą░ąĮčüąĖą▓ąĄčĆą░ CAN. ąÆčŗą▓ąŠą┤čŗ CANTX ąĖ CANRX čĆą░ą▒ąŠčéą░čÄčé čü čāčĆąŠą▓ąĮčÅą╝ąĖ TTL, ąĖ ą┐ąŠą┤čģąŠą┤čÅčé ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü čéčĆą░ąĮčüąĖą▓ąĄčĆą░ą╝ąĖ čłąĖąĮčŗ CAN ą┐ąŠ čüčéą░ąĮą┤ą░čĆčéčā ISO/DIS 11898 ąĖą╗ąĖ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąĮąŠą╝čā ąĖąĮč鹥čĆč乥ą╣čüčā RS-485 (čüą╝. čéą░ą▒ą╗ąĖčåčā 19-1).

ąĀąĖčü. 19-1. ąĪąŠąĄą┤ąĖąĮąĄąĮąĖąĄ čü č乊čĆą╝ąĖčĆąŠą▓ą░č鹥ą╗ąĄą╝ čäąĖąĘąĖč湥čüą║ąĖčģ čāčĆąŠą▓ąĮąĄą╣ čłąĖąĮčŗ CAN (čéčĆą░ąĮčüąĖą▓ąĄčĆąŠą╝).
ąóą░ą▒ą╗ąĖčåą░ 19-1. ąĀąĄčåąĄčüčüąĖą▓ąĮčŗąĄ ąĖ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗąĄ čāčĆąŠą▓ąĮąĖ čüąĖą│ąĮą░ą╗ąŠą▓ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░.
| ąÆčŗą▓ąŠą┤ |
ąŻčĆąŠą▓ąĄąĮčī ąĮą░ ą▓čŗą▓ąŠą┤ąĄ |
ąŚąĮą░č湥ąĮąĖąĄ ąĮą░ čäąĖąĘąĖč湥čüą║ąŠą╣ ą╗ąĖąĮąĖąĖ čłąĖąĮčŗ CAN |
| CANTX |
ąøąŠą│. 0 (GND) |
ąöąŠą╝ąĖąĮą░ąĮčéąĮąŠąĄ |
| ąøąŠą│. 1 (VCCEXT) |
ąĀąĄčåąĄčüčüąĖą▓ąĮąŠąĄ |
| CANRX |
ąøąŠą│. 0 (GND) |
ąöąŠą╝ąĖąĮą░ąĮčéąĮąŠąĄ |
| ąøąŠą│. 1 (VCCEXT) |
ąĀąĄčåąĄčüčüąĖą▓ąĮąŠąĄ |
ą£ąŠą┤čāą╗čī CAN ą┐čĆąŠčåąĄčüčüąŠčĆą░ Blackfin ą╝ąŠąČąĄčé ą┐ąŠą┤ą║ą╗čÄčćą░čéčīčüčÅ ą║ CAN-čéčĆą░ąĮčüąĖą▓ąĄčĆą░ą╝, čĆą░ą▒ąŠčéą░čÄčēąĖą╝ čü ą╗ąŠą│ąĖč湥čüą║ąĖą╝ąĖ čāčĆąŠą▓ąĮčÅą╝ąĖ 3V ąĖą╗ąĖ 5V. ąÆčŗą▓ąŠą┤ CANRX ą┤ąŠą┐čāčüą║ą░ąĄčé ą┐ąŠą┤ą░čćčā TTL-čāčĆąŠą▓ąĮąĄą╣ čü ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝ 5V (5V tolerant), ąĮąĄčüą╝ąŠčéčĆčÅ ąĮą░ č鹊, čćč鹊 ą┐ąŠą┤čüąĖčüč鹥ą╝ą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ Blackfin ą┐ąĖčéą░ąĄčéčüčÅ ąŠčé ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ 3.3V (čłąĖąĮą░ ą┐ąĖčéą░ąĮąĖčÅ VDDEXT).
ąĪąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┤ą╗čÅ ą▓čŗčģąŠą┤ą░ CANTX čĆąĄčåąĄčüčüąĖą▓ąĮąŠąĄ (ą╗ąŠą│. 1). ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 CANTX ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąĖčĆčāąĄčéčüčÅ čü ą▓čŗą▓ąŠą┤ąŠą╝ čüąĖą│ąĮą░ą╗ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ SPORT. ąÆčŗčģąŠą┤ąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗ąŠą│. 0, ąĄčüą╗ąĖ ą▓ą╝ąĄčüč鹊 CAN ą▓čŗą▒čĆą░ąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ SPORT, čćč鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┤ą╗čÅ čüąŠčüč鹊čÅąĮąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░. ąÆčģąŠą┤ąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ CANRX ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ.
ąÉčĆčģąĖč鹥ą║čéčāčĆą░ ą╝ąŠą┤čāą╗čÅ CAN ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░ąĮą░ ą▓ąŠą║čĆčāą│ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ mailbox RAM ąĮą░ 32 čÅč湥ą╣ą║ąĖ. ąÜ mailbox ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ą┤ąŠčüčéčāą┐ č湥čĆąĄąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü CAN, ąĖą╗ąĖ č湥čĆąĄąĘ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ ą┤ąŠčüčéčāą┐ čüąŠ čüč鹊čĆąŠąĮčŗ čÅą┤čĆą░ CPU. ąÜą░ąČą┤čŗą╣ mailbox čüąŠčüč鹊ąĖčé ąĖąĘ ą▓ąŠčüčīą╝ąĖ 16-ą▒ąĖčéąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓ (čüą╝. ą┤ą░ą╗ąĄąĄ čĆą░ąĘą┤ąĄą╗ "ąźčĆą░ąĮąĖą╗ąĖčēąĄ ą┤ą░ąĮąĮčŗčģ"). ąöą░ąĮąĮčŗąĄ ą▓ čŹčéąĖčģ čĆąĄą│ąĖčüčéčĆą░čģ ą┐ąŠą┤ąĄą╗ąĄąĮčŗ ąĮą░ ą┐ąŠą╗čÅ, ą║ąŠč鹊čĆčŗąĄ ą▓ą║ą╗čÄčćą░čÄčé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą╝ąĄčéą║čā ą▓čĆąĄą╝ąĄąĮąĖ (time stamp), čüč湥čéčćąĖą║ ą▒ą░ą╣čé, ą┤ąŠ 8 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ, ą░ čéą░ą║ąČąĄ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▒ąĖčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ. ąÜą░ąČą┤čŗą╣ čāąĘąĄą╗ ąĮą░ čłąĖąĮąĄ CAN ą╝ąŠąĮąĖč鹊čĆąĖčé čüąŠąŠą▒čēąĄąĮąĖčÅ, ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗąĄ ą┐ąŠ čüąĄčéąĖ CAN. ąĢčüą╗ąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą▓ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠą╝ čüąŠąŠą▒čēąĄąĮąĖąĖ čüąŠą▓ą┐ą░ą╗ čü ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝ ą▓ ąŠą┤ąĮąŠą╝ ąĖąĘ mailbox, č鹊 ą╝ąŠą┤čāą╗čī ąĘąĮą░ąĄčé, čćč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąŠ ą┤ą╗čÅ ąĮąĄą│ąŠ, ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą┐čĆąĖąĮčÅčéčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ mailbox, čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆčāčÅ čģąŠčüčéčā ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄą╝ ąŠ čüąŠą▒čŗčéąĖąĖ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ čüąŠąŠą▒čēąĄąĮąĖčÅ.
ąĪąĄčéčī CAN ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąŠą┤ąĮčā ą┤ąĖčäč乥čĆąĄąĮčåąĖą░ą╗čīąĮčāčÄ ą┐ą░čĆčā ą┐čĆąŠą▓ąŠą┤ąŠą▓. ąÆčüąĄ čāąĘą╗čŗ ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą║ čŹč鹊ą╣ ą┐ą░čĆąĄ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ, ąĖ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą┐čĆąŠčüą╗čāčłąĖą▓ą░čÄčé ąĮą░ ąĮąĄą╣ čüąĖą│ąĮą░ą╗. ąÉčüąĖąĮčģčĆąŠąĮąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü CAN ąĮąĄ čéčĆąĄą▒čāąĄčé ąŠčéą┤ąĄą╗čīąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ čéą░ą║č鹊ą▓, ąŠą┤ąĮą░ą║ąŠ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ, čćč鹊ą▒čŗ ąĮą░čüčéčĆąŠą╣ą║ą░ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ čäčĆąĄą╣ą╝ąŠą▓ CAN (čüą║ąŠčĆąŠčüčéąĖ) ą▓čüąĄčģ čāąĘą╗ąŠą▓ čüąĄčéąĖ ą▒čŗą╗ą░ ąĖą┤ąĄąĮčéąĖčćąĮąŠą╣. ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą▓ ąŠą┤ąĮąŠą╝ ąĖąĘ 4 čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ čéąĖą┐ąŠą▓ čüąŠąŠą▒čēąĄąĮąĖą╣, ąĖą╗ąĖ čäčĆąĄą╣ą╝ąŠą▓. ąĪąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ą┤ąŠčüčéąĖą│ą░ąĄčéčüčÅ ą┐ąŠ čéčēą░č鹥ą╗čīąĮąŠ ą┐čĆąŠą┤čāą╝ą░ąĮąĮąŠą╣ čüčģąĄą╝ąĄ, ą▓čŗą┐ąŠą╗ąĮąĄąĮąĮąŠą╣ ą▓ ą║ą░ąČą┤ąŠą╝ ą┐čĆąĖąĄą╝ąĮąĖą║ąĄ CAN. ąÉčĆą▒ąĖčéčĆą░ąČ ąĮą░ čłąĖąĮąĄ čĆąĄą░ą╗ąĖąĘčāąĄčéčüčÅ ą┐ąŠ ą║ą░ąČą┤ąŠą╝čā ą▒ąĖčéčā čäčĆąĄą╣ą╝ą░. ąöą╗čÅ ą▓čüąĄą╣ čüąĄčéąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮą░čÅ ą┐ąŠą╗čÅčĆąĮąŠčüčéčī čāčĆąŠą▓ąĮčÅ čüąĖą│ąĮą░ą╗ąŠą▓ ą▓ čüąĄčéąĖ. ąÆčüąĄą╝ čāąĘą╗ą░ą╝ čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ą▓ ąĮą░čćą░ą╗ąĄ ąŠą┤ąĮąŠą│ąŠ ąĖ č鹊ą│ąŠ ąČąĄ čäčĆąĄą╣ą╝ą░, ąĮą░čćąĖąĮą░čÅ čü ąĖą╝ą┐čāą╗čīčüą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čäčĆąĄą╣ą╝ą░ (frame sync pulse).
ąÜąŠą│ą┤ą░ ą║ą░ąČą┤čŗą╣ čāąĘąĄą╗ ą┐ąĄčĆąĄą┤ą░ąĄčé ą▒ąĖčé, ąŠąĮ ą┐čĆąĖ čŹč鹊ą╝ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą┐čĆąŠą▓ąĄčĆčÅąĄčé, ąĮą░čģąŠą┤ąĖčéčüčÅ ą╗ąĖ čāčĆąŠą▓ąĄąĮčī ą▒ąĖčéą░ ąĮą░ čłąĖąĮąĄ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗą╝ ąĖą╝ čāčĆąŠą▓ąĮąĄą╝ ą▒ąĖčéą░. ąĢčüą╗ąĖ čŹč鹊 čéą░ą║, č鹊 ą┐ąĄčĆąĄą┤ą░čćą░ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčéčüčÅ. ąĢčüą╗ąĖ ąČąĄ ąĮąĄčé, č鹊 čŹč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┤čĆčāą│ąŠą╣ čāąĘąĄą╗ ą┐ąĄčĆąĄą┤ą░ą╗ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ ą▒ąĖčé, čéą░ą║ čćč鹊 ą┐ąĄčĆą▓čŗą╣ čāąĘąĄą╗ ą┐ąŠ čŹč鹊ą╝čā čäą░ą║čéčā ąĘąĮą░ąĄčé, čćč鹊 ąŠąĮ ą┐čĆąŠąĖą│čĆą░ą╗ ą░čĆą▒ąĖčéčĆą░ąČ, ąĖ ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą┐ąĄčĆąĄą┤ą░čćčā, ąŠčüą▓ąŠą▒ąŠąČą┤ą░čÅ čłąĖąĮčā ą┤ą╗čÅ ą┤čĆčāą│ąŠą│ąŠ čāąĘą╗ą░. ą¤čĆąŠčåąĄčüčü ą░čĆą▒ąĖčéčĆą░ąČą░ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčéčüčÅ, ą┐ąŠą║ą░ ąĮąĄ ąŠčüčéą░ąĮąĄčéčüčÅ ą┐ąĄčĆąĄą┤ą░čÄčēąĖą╝ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ čāąĘąĄą╗ ąĮą░ čłąĖąĮąĄ (čŹč鹊čé čāąĘąĄą╗ čüčćąĖčéą░ąĄčéčüčÅ ą▓čŗąĖą│čĆą░ą▓čłąĖą╝ ą░čĆą▒ąĖčéčĆą░ąČ čłąĖąĮčŗ CAN).
ąŁą╗ąĄą║čéčĆąĖč湥čüą║ąĖąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ą║ą░ąČą┤ąŠą╣ ą║ąŠąĮą║čĆąĄčéąĮąŠą╣ čüąĄčéąĖ ą╝ąŠą│čāčé ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ ąŠčéą╗ąĖčćą░čéčīčüčÅ, ą┐ąŠčŹč鹊ą╝čā ą░ą┐ą┐ą░čĆą░čéčāčĆą░ ąĖąĮč鹥čĆč乥ą╣čüą░ CAN ąŠą▒čŗčćąĮąŠ ą▓čüąĄą│ą┤ą░ ą┤ąĄą╗ąĖčéčüčÅ ąĮą░ 2 čćą░čüčéąĖ: ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ąĖ čéčĆą░ąĮčüąĖą▓ąĄčĆ CAN (čüą╝. čĆąĖčü. 19-1). ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠą┤ąĮąŠą╝čā ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī čĆą░ąĘąĮčŗąĄ čéąĖą┐čŗ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ ąĖ čüąĄč鹥ą╣ CAN. CAN-ą╝ąŠą┤čāą╗čī ą┐čĆąŠčåąĄčüčüąŠčĆą░ Blackfin ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé č鹊ą╗čīą║ąŠ čćą░čüčéčī ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąĪą░ą╝ ą┐čĆąŠč鹊ą║ąŠą╗ CAN, ąĄą│ąŠ čüčéą░ąĮą┤ą░čĆčéčŗ ąĖ čĆąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖąĖ ą▓ čŹč鹊ą╣ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ąĮąĄ ą┐čĆąĖą▓ąŠą┤čÅčéčüčÅ ąĖ ąĮąĄ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čÄčéčüčÅ. ą×ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ č鹊ą╗čīą║ąŠ č鹥 čćą░čüčéąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░, ą║ąŠč鹊čĆčŗąĄ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ čéčĆąĄą▒čāčÄčéčüčÅ ą┤ą╗čÅ ą┐ąŠąĮąĖą╝ą░ąĮąĖčÅ ąĖ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╝ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĖ, ą║ąŠč鹊čĆąŠąĄ čĆą░ą▒ąŠčéą░ąĄčé čü ą╝ąŠą┤čāą╗ąĄą╝ CAN.
[ążčāąĮą║čåąĖąĖ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ]
ą¤čĆąŠčåąĄčüčüąŠčĆ Blackfin ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüąŠčüč鹊čÅąĮąĖąĄ hibernate čü ąĮąĖąĘą║ąĖą╝ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ 菹ĮąĄčĆą│ąĖąĖ [3], ąĖ ą╝ąŠą┤čāą╗čī CAN čĆąĄą░ą╗ąĖąĘčāąĄčé ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ čĆąĄąČąĖą╝ čüąĮą░. ą¤ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą╝ąŠą┤čāą╗čÅ CAN ą▓ čŹčéąĖčģ ą┤ą▓čāčģ čĆąĄąČąĖą╝ą░čģ ąŠą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą▓ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ čüąĄą║čåąĖčÅčģ.
ą¤čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ CAN ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ Hibernate. ąÆ čüąŠčüč鹊čÅąĮąĖąĖ hibernate ą┐čĆąŠčåąĄčüčüąŠčĆą░ Blackfin, ą║ąŠą│ą┤ą░ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ VDDINT ą▓čŗą║ą╗čÄčćą░ąĄčé ą┐ąĖčéą░ąĮąĖąĄ čÅą┤čĆą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░, ąŠčéą║ą╗čÄčćą░čÄčéčüčÅ čéą░ą║čéčŗ čÅą┤čĆą░ ąĖ čüąĖčüč鹥ą╝ąĮąŠą╣ čłąĖąĮčŗ. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą║čĆąĖčüčéą░ą╗ą╗ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄčé ąŠč湥ąĮčī ą╝ą░ą╗čŗą╣ č鹊ą║ (ąŠą║ąŠą╗ąŠ 50 ą╝ą║ąÉ). ąŁč鹊čé č鹊ą║ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čüčģąĄą╝čŗ čĆąĄą│čāą╗čÅč鹊čĆą░ ą▓ ąŠąČąĖą┤ą░ąĮąĖąĖ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ąŠą▓ čüąŠą▒čŗčéąĖčÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (hibernate wake-up event). ą×ą┤ąĮąŠ ąĖąĘ čéą░ą║ąĖčģ čüąŠą▒čŗčéąĖą╣ - ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ ąĖąĘ-ąĘą░ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ąĮą░ čłąĖąĮąĄ CAN. ą¤ąŠčüą╗ąĄ ą▓čŗčģąŠą┤ą░ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ hibernate ą╝ąŠą┤čāą╗čī CAN ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ ą┐ąŠą▓č鹊čĆąĮąŠ.
ąöą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ čü ąĮąĖąĘą║ąĖą╝ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ ą▓ąĮąĄčłąĮąĖą╣ čéčĆą░ąĮčüąĖą▓ąĄčĆ čłąĖąĮčŗ CAN ąŠą▒čŗčćąĮąŠ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (standby mode) čü ą┐ąŠą╝ąŠčēčīčÄ ąŠą┤ąĮąŠą│ąŠ ąĖąĘ ą▓ąĮąĄčłąĮąĖčģ ą▓čŗą▓ąŠą┤ąŠą▓ ą┐ąŠčĆč鹊ą▓ GPIO ą┐čĆąŠčåąĄčüčüąŠčĆą░ Blackfin. ąÆ čĆąĄąČąĖą╝ąĄ standby čéčĆą░ąĮčüąĖą▓ąĄčĆ CAN ą┐ąŠčüč鹊čÅąĮąĮąŠ ą▓čŗą┤ą░ąĄčé čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 1 ąĮą░ ą▓čŗą▓ąŠą┤ CANRX ą╝ąŠą┤čāą╗čÅ CAN ą┐čĆąŠčåąĄčüčüąŠčĆą░. ąĢčüą╗ąĖ čéčĆą░ąĮčüąĖą▓ąĄčĆ ą┐ąŠčćčāą▓čüčéą▓ąŠą▓ą░ą╗ ą░ą║čéąĖą▓ąĮąŠčüčéčī čłąĖąĮčŗ CAN, č鹊 ąŠąĮ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé ą▓čŗą▓ąŠą┤ CANRX ą▓ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 0. ąŁč鹊 čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆčāąĄčé ą┐čĆąŠčåąĄčüčüąŠčĆčā Blackfin, čćč鹊 ą▒čŗą╗ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą░ą║čéąĖą▓ąĮąŠčüčéčī ąĮą░ čłąĖąĮąĄ CAN. ąĢčüą╗ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą▒čŗą╗ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ąĮą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ąĮą░ čłąĖąĮąĄ CAN ą║ą░ą║ čüąŠą▒čŗčéąĖčÅ ą▓čŗčģąŠą┤ą░ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ hibernate, č鹊 ąŠąĮ čĆąĄą░ą│ąĖčĆčāąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ (ą▓ą║ą╗čÄčćą░ąĄčéčüčÅ). ąśąĮą░č湥 ą░ą║čéąĖą▓ąĮąŠčüčéčī ąĮą░ ą▓čŗą▓ąŠą┤ąĄ CANRX ąĮąĖą║ą░ą║ ąĮąĄ ą┐ąŠą▓ą╗ąĖčÅąĄčé ąĮą░ čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąŠčåąĄčüčüąŠčĆą░.
ą¦č鹊ą▒čŗ čŹč鹊 ą▓čüąĄ čĆą░ą▒ąŠčéą░ą╗ąŠ, čĆąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ (VR_CTL) ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ čü čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ą▒ąĖč鹊ą╝ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠčé ąĖąĮč鹥čĆč乥ą╣čüą░ CAN (CAN wake-up enable bit). ąÆąŠčé čéąĖą┐ąŠą▓ą░čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī čüąŠą▒čŗčéąĖą╣ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čäčāąĮą║čåąĖąĖ CAN wake-up:
1. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 ą▓čŗą▓ąŠą┤ GPIO ą┐čĆąŠčåąĄčüčüąŠčĆą░, čćč鹊ą▒čŗ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ ą▓ąĮąĄčłąĮąĖą╣ čéčĆą░ąĮčüąĖą▓ąĄčĆ ą▓ čĆąĄąČąĖą╝ standby.
2. ąŚą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāą╣č鹥 čĆąĄą│ąĖčüčéčĆ VR_CTL ąĘąĮą░č湥ąĮąĖąĄą╝, ą│ą┤ąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠčé CAN (CANWE), ąĖ ą┐ąŠą╗ąĄ FREQ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 00.
CAN Sleep Mode. ąŻ ą╝ąŠą┤čāą╗čÅ CAN ąĄčüčéčī ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ čĆąĄąČąĖą╝ čüąĮą░. ąÆ čŹč鹊čé čĆąĄąČąĖą╝ ą╝ąŠą┤čāą╗čī ą▓ą▓ąŠą┤čÅčé čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ SMR ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_CONTROL. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┐čĆąŠąĖąĘąŠčłąĄą╗ ą▓čģąŠą┤ ą▓ čĆąĄąČąĖą╝ čüąĮą░, ą╝ąĮąŠą│ąĖąĄ ąĖąĘ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ čéą░ą║č鹊ą▓ ą╝ąŠą┤čāą╗čÅ CAN ą▓čŗą║ą╗čÄčćą░čÄčéčüčÅ, čćč鹊 čüąĮąĖąČą░ąĄčé ąŠą▒čēąĄąĄ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ. ąÜąŠą│ą┤ą░ ą╝ąŠą┤čāą╗čī CAN ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ sleep mode, ą▓čüąĄ ą┐ąŠą┐čŗčéą║ąĖ čćč鹥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆąŠą▓ CAN ą▓ąŠąĘą▓čĆą░čéčÅčé čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ CAN_INTR ą▓ą╝ąĄčüč鹊 ąŠą▒čŗčćąĮąŠą│ąŠ čüąŠą┤ąĄčƹȹ░ąĮąĖčÅ. ąÆčüąĄ ąĘą░ą┐ąĖčüąĖ ą▓ čĆąĄą│ąĖčüčéčĆčŗ, ą║čĆąŠą╝ąĄ čĆąĄą│ąĖčüčéčĆą░ CAN_INTR, ą▓ sleep mode ąĖą│ąĮąŠčĆąĖčĆčāčÄčéčüčÅ.
ąÆ čĆąĄąČąĖą╝ąĄ čüąĮą░ ą╝ą░ą╗ą░čÅ čćą░čüčéčī ą╝ąŠą┤čāą╗čÅ CAN ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé ą┐ąŠą╗čāčćą░čéčī čéą░ą║čéčŗ, čćč鹊ą▒čŗ ą┐ąŠąĘą▓ąŠą╗ąĖčéčī ą▓čŗčģąŠą┤ ąĖąĘ sleep mode. ąŚą░ą┐ąĖčüčī ą▓ čĆąĄą│ąĖčüčéčĆ CAN_INTR ąĘą░ą▓ąĄčĆčłą░ąĄčé sleep mode. ąĢčüą╗ąĖ ą▒ąĖčé WBA ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_CONTROL ą▒čŗą╗ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┐ąĄčĆąĄą┤ ą▓čģąŠą┤ąŠą╝ ą▓ sleep mode, č鹊 ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī ąĮą░ CANRX ąĘą░ą▓ąĄčĆčłą░ąĄčé sleep mode ą╝ąŠą┤čāą╗čÅ CAN.
[ąĀąĄą│ąĖčüčéčĆčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ CAN]
ąÆ ą│ą╗ą░ą▓ąĮąŠą╝ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą╝ čĆąĄą│ąĖčüčéčĆąĄ (CAN_CONTROL) čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗčģ ą║ąŠą╝ą░ąĮą┤ąĮčŗčģ ą▒ąĖčé. ąōą╗ąŠą▒ą░ą╗čīąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ čüčéą░čéčāčüą░ (CAN_STATUS) ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ čüąĖą│ąĮą░ą╗čŗ čüąŠčüč鹊čÅąĮąĖčÅ. ą¤ą░čĆą░ą╝ąĄčéčĆ čéą░ą╣ą╝ąĖąĮą│ą░ ą▒ąĖčé CAN ąĖ čüą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ čĆąĄąČąĖą╝ ą╝ąŠą┤čāą╗čÅ CAN ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ CAN_CLOCK ąĖ CAN_TIMING.
ąÆčüąĄ ąĘąĮą░č湥ąĮąĖčÅ čéą░ą╣ą╝ąĖąĮą│ą░ ą▒ąĖčé ą╝ąŠą│čāčé ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮčŗ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ čÅą┤čĆąŠ ą╝ąŠą┤čāą╗čÅ CAN ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. ą¤čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čüą▒čĆąŠčü (software reset) ąĮąĄ ą╝ąĄąĮčÅąĄčé ąĘąĮą░č湥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆąŠą▓ CAN_CLOCK ąĖ CAN_TIMING. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą▓čŗą┐ąŠą╗ąĮčÅčÄčēą░čÅčüčÅ ą┐ąĄčĆąĄą┤ą░čćą░ ą┐ąŠ čłąĖąĮąĄ CAN ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą▓čĆąĄąČą┤ąĄąĮą░ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄą╝ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ čéą░ą╣ą╝ąĖąĮą│ą░ ą▒ąĖčé ąĖą╗ąĖ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮąĖąĄą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čüą▒čĆąŠčüą░ (SRS=1 ą▓ CAN_CONTROL). ąĀąĄą│ąĖčüčéčĆčŗ CAN_CLOCK ąĖ CAN_TIMING ą▒ą╗ąŠą║ąĖčĆčāčÄčéčüčÅ ąĮą░ ąĘą░ą┐ąĖčüčī (ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ąĖčģ ąĮąĄ čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ), ąĄčüą╗ąĖ CCA=0 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_STATUS.
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą╝ąŠą┤čāą╗čī CAN čüąŠą┤ąĄčƹȹĖčé čäčāąĮą║čåąĖčÄ čĆąĄąČąĖą╝ą░ č鹥čüčéą░, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčāčÄ ą┤ą╗čÅ ąŠčéą╗ą░ą┤ą║ąĖ ą¤ą× ąĖ čüąĖčüč鹥ą╝čŗ CAN, čćč鹊 ą┤ąŠčüčéčāą┐ąĮąŠ č湥čĆąĄąĘ čĆąĄą│ąĖčüčéčĆ ąŠčéą╗ą░ą┤ą║ąĖ CAN (CAN_DEBUG).
ąØą░ čĆąĖčü. 19-2 ą┐ąŠą║ą░ąĘą░ąĮčŗ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗąĄ ą▒ąĖčéčŗ ą║ąŠą╝ą░ąĮą┤, čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮčŗąĄ ą▓ ą│ą╗ą░ą▓ąĮąŠą╝ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (CAN_CONTROL). ą¤ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ, čüą▒čĆąŠčüą░ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ąĖą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čüą▒čĆąŠčüą░ CAN čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▒ąĖčé CCR, ąĖ ą▓čüąĄ ąĄą│ąŠ ą┤čĆčāą│ąĖąĄ ą▒ąĖčéčŗ ąŠčćąĖčēą░čÄčéčüčÅ. ąÆąŠ ą▓čĆąĄą╝čÅ ą┤ąŠčüčéčāą┐ą░ ąĮą░ ąĘą░ą┐ąĖčüčī ą▓čüąĄ ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą▒ąĖčéčŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą▓ ą╗ąŠą│. 0.

ąĀąĖčü. 19-2. Master Control Register.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čāčüčéą░ąĮąŠą▓ą║ą░ ą▒ąĖčéą░ CCR ą▓čüąĄą│ąŠ ą╗ąĖčłčī ąŠą▒ąŠąĘąĮą░čćą░ąĄčé ą┐ąŠą┐čŗčéą║čā (ąĘą░ą┐čĆąŠčü) ą▓čģąŠą┤ą░ ą▓ čĆąĄąČąĖą╝ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ąŠą┤ąĮą░ą║ąŠ čĆąĄą░ą╗čīąĮąŠ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ą▒čāą┤ąĄčé ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé CCA (ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ čĆąĄąČąĖą╝ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ) ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_STATUS. ąśąĮąŠą│ą┤ą░, ą┐ąŠ ąĮąĄą║ąŠč鹊čĆčŗą╝ ąĮąĄ ą▓čŗčÅčüąĮąĄąĮąĮčŗą╝ ą┤ą╗čÅ ą╝ąĄąĮčÅ ą┐čĆąĖčćąĖąĮą░ą╝ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą║ąŠą│ą┤ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąŠčłąĖą▒ą║ąĖ, ąĄčüą╗ąĖ ąĮą░ čłąĖąĮąĄ CAN ą┐čĆąĖčüčāčéčüčéą▓čāčÄčé čüąĖą│ąĮą░ą╗čŗ, ąĮąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ č鹥ą║čāčēąĄą╣ ąĮą░čüčéčĆąŠą╣ą║ąĄ čéą░ą╣ą╝ąĖąĮą│ą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN), ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čüą▒čĆąŠčü ąĖąĮč鹥čĆč乥ą╣čüą░ CAN ą┐čĆąĖą▓ąŠą┤ąĖčé č鹊ą╗čīą║ąŠ ą║ čāčüčéą░ąĮąŠą▓ą║ąĄ ą▒ąĖčéą░ CCR, ąĮąŠ ą▒ąĖčé CCA ąĮąĄ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ. ąÆčŗą╣čéąĖ ąĖąĘ čŹč鹊ą╣ čüąĖčéčāą░čåąĖąĖ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┐čāč鹥ą╝ čäąĖąĘąĖč湥čüą║ąŠą│ąŠ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ ąŠčé čłąĖąĮčŗ CAN.
ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ąŠą┐ąĖčüą░ąĮąĖąĄ ą▒ąĖčé čĆąĄą│ąĖčüčéčĆą░ CAN_CONTROL.
CCR - CAN Configuration Mode Request.
ąĢčüą╗ąĖ ą┐ąŠą╗ąĄ TSEG1 čĆąĄą│ąĖčüčéčĆą░ CAN_TIMING ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąŠ ą▓ 0, č鹊 ą╝ąŠą┤čāą╗čī ąĮąĄ ą┐ąŠą║ąĖą┤ą░ąĄčé čĆąĄąČąĖą╝ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
ąĢčüą╗ąĖ čüč湥čéčćąĖą║ ąŠčłąĖą▒ąŠą║ CAN-ą╝ąŠą┤čāą╗čÅ čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąŠą╗čīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĄąĮ 256, č鹊 ą╝ąŠą┤čāą╗čī ą▓čģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ "bus-off" (ąŠčéą║ą╗čÄčćą░ąĄčéčüčÅ ąŠčé čłąĖąĮčŗ). ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ CAN Error Counter (CAN_CEC). ąÆ čŹč鹊ą╝ čüąŠčüč鹊čÅąĮąĖąĖ ą╝ąŠą┤čāą╗čÄ ąĮąĄ ą┤ąŠąĘą▓ąŠą╗čÅąĄčéčüčÅ ąĮąĖą║ą░ą║ ą▓ą╗ąĖčÅčéčī ąĮą░ čüąŠčüč鹊čÅąĮąĖąĄ čłąĖąĮčŗ, čé. ąĄ. ą▓čŗčģąŠą┤ąĮčŗąĄ ą┤čĆą░ą╣ą▓ąĄčĆčŗ ą▓čŗą║ą╗čÄč湥ąĮčŗ.
ąÆąŠ ą▓čĆąĄą╝čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĖąĘ bus-off ą▒ąĖčé ąĘą░ą┐čĆąŠčüą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣ (CCR = 1), čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ą╝ąŠą┤čāą╗čī čÅą┤čĆą░ CAN ąĮąĄ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčüčÅ ą║ čłąĖąĮąĄ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ. ąæąĖčé CCR ąĮąĄ ą╝ąŠąČąĄčé čüą▒čĆąŠčüąĖčéčīčüčÅ, ą┐ąŠą║ą░ ąĮąĄ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĖąĘ bus-off.
ąæąĖčé CCR čĆą░ą▒ąŠčéą░ąĄčé ą▓ąŠ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖąĖ čü ą▒ąĖč鹊ą╝ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ čĆąĄąČąĖą╝ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ (ą▒ąĖčé CCA ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_STATUS). ąæąĖčé CCR ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčćąĖčēąĄąĮ, ąĄčüą╗ąĖ ąŠąĮ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĖ ąŠčćąĖčēąĄąĮ ą▒ąĖčé CCA, ąĖ ą▒ąĖčé CCR ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ąĄčüą╗ąĖ ąŠąĮ ąŠčćąĖčēąĄąĮ ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé CCA.
1: ąĘą░ą┐čĆąŠčłąĄąĮ čĆąĄąČąĖą╝ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. ą¤ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ čŹč鹊čé čĆąĄąČąĖą╝ ą░ą║čéąĖą▓ąĄąĮ (CCR=1 ąĖ CCA=1). ą¤ą░čĆą░ą╝ąĄčéčĆčŗ čéą░ą╣ą╝ąĖąĮą│ą░ ą▒ąĖčéą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą┐ąĄčĆąĄą┤ ą▓čŗčģąŠą┤ąŠą╝ ąĖąĘ čŹč鹊ą│ąŠ čĆąĄąČąĖą╝ą░. ąöąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī ą▓ čĆąĄą│ąĖčüčéčĆ ą┐ą░čĆą░ą╝ąĄčéčĆą░ čéą░ą╣ą╝ąĖąĮą│ą░ ą▒ą╗ąŠą║ąĖčĆčāąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą╝ąŠą┤čāą╗čī CAN ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╝ čĆą░ą▒ąŠč湥ą╝ čĆąĄąČąĖą╝ąĄ (CCA == 0). ąĢčüą╗ąĖ čÅą┤čĆąŠ ą╝ąŠą┤čāą╗čÅ CAN ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ ąĮą░ čłąĖąĮąĄ CAN, č鹊 čŹčéą░ ąŠą┐ąĄčĆą░čåąĖčÅ ąĘą░ą▓ąĄčĆčłą░ąĄčéčüčÅ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą▒čāą┤ąĄčé ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮ čĆąĄąČąĖą╝ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ (CCA ą▓ ą░ą║čéąĖą▓ąĮąŠą╣ 1). ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ąČą┤ą░čéčī čāčüčéą░ąĮąŠą▓ą║ąĖ CCA ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčī ą┤ąŠčüčéčāą┐ ą║ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ čéą░ą╣ą╝ąĖąĮą│ą░ ą▒ąĖčé (čĆąĄą│ąĖčüčéčĆčŗ CAN_CLOCK ąĖ CAN_TIMING). ąÆąŠ ą▓čĆąĄą╝čÅ čĆąĄąČąĖą╝ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą╝ąŠą┤čāą╗čī ąĮąĄ ą┐čĆąŠčÅą▓ą╗čÅąĄčé ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ąĮą░ čłąĖąĮąĄ CAN. ąÆčŗčģąŠą┤ CANTX ąŠčüčéą░ąĄčéčüčÅ čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╝, ąĖ ą╝ąŠą┤čāą╗čī ąĮąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ąĖ ąĮąĄ ą┐ąĄčĆąĄą┤ą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖčÅ ąĖą╗ąĖ čäčĆąĄą╣ą╝čŗ ąŠčłąĖą▒ą║ąĖ. ą¤ąŠčüą╗ąĄ ą▓čŗčģąŠą┤ą░ ąĖąĘ čĆąĄąČąĖą╝ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą▓čüąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĖąĄ čĆąĄą│ąĖčüčéčĆčŗ čÅą┤čĆą░ CAN ąĖ čüč湥čéčćąĖą║ąĖ ąŠčłąĖą▒ąŠą║ CAN čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą▓ čüą▓ąŠąĖ ąĮą░čćą░ą╗čīąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ.
0: ąŠčéą╝ąĄąĮąĄąĮ ąĘą░ą┐čĆąŠčü ąĮą░ čĆąĄąČąĖą╝ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
CSR - CAN Suspend Mode Request.
ąæąĖčé CSR čĆą░ą▒ąŠčéą░ąĄčé ą▓ąŠ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖąĖ čü ą▒ąĖč鹊ą╝ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ čĆąĄąČąĖą╝ą░ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (suspend mode acknowledge, CSA ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_STATUS). ąæąĖčé CSR ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčćąĖčēąĄąĮ, ąĄčüą╗ąĖ ąŠąĮ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĖ ą▒ąĖčé CSA ąŠčćąĖčēąĄąĮ, ąĖ ą▒ąĖčé CSR ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ąĄčüą╗ąĖ ąŠąĮ ąŠčćąĖčēąĄąĮ ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé CSA.
1: ąĘą░ą┐čĆąŠčłąĄąĮ suspend mode (čĆąĄąČąĖą╝ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ). ąĢčüą╗ąĖ ą╝ąŠą┤čāą╗čī CAN ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ ąĮą░ čłąĖąĮąĄ CAN, č鹊 čŹčéą░ ąŠą┐ąĄčĆą░čåąĖčÅ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą▒čāą┤ąĄčé ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮ suspend mode (CSA ą▓ ą░ą║čéąĖą▓ąĮąŠą╣ 1). ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ąČą┤ą░čéčī čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ CSA. ąÆąŠ ą▓čĆąĄą╝čÅ suspend mode ą╝ąŠą┤čāą╗čī ąĮąĄ ą┐čĆąŠčÅą▓ą╗čÅąĄčé ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ąĮą░ čłąĖąĮąĄ CAN. ąÆčŗčģąŠą┤ CANTX ąŠčüčéą░ąĄčéčüčÅ čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╝, ąĖ ą╝ąŠą┤čāą╗čī ąĮąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ąĖ ąĮąĄ ą┐ąĄčĆąĄą┤ą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖčÅ ąĖą╗ąĖ čäčĆąĄą╣ą╝čŗ ąŠčłąĖą▒ą║ąĖ. ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ čüč湥čéčćąĖą║ąŠą▓ ąŠčłąĖą▒ąŠą║ CAN ąŠčüčéą░ąĄčéčüčÅ ąĮąĄąĖąĘą╝ąĄąĮąĮčŗą╝.
0: ąĘą░ą┐čĆąŠčü suspend mode ąŠčéą╝ąĄąĮąĄąĮ.
SMR - Sleep Mode Request.
ąÆ čĆąĄąČąĖą╝ąĄ čüąĮą░ (sleep mode) ąŠčéą║ą╗čÄčćą░ąĄčéčüčÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ąĮą░ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ CAN, čćč鹊 čüąĮąĖąČą░ąĄčé ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ č鹊ą║ą░. ą£ąŠą┤čāą╗čī ą╝ąŠąČąĄčé ą┐čĆąŠčüąĮčāčéčīčüčÅ ąŠčé ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ąĮą░ čłąĖąĮąĄ CAN ąĖą╗ąĖ ąŠčé ąĘą░ą┐ąĖčüąĖ ą▓ čĆąĄą│ąĖčüčéčĆ CAN_INTR. ąæąĖčé SMACK ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_INTR ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą░ą║čéąĖą▓ąĄąĮ sleep mode.
ą¦č鹊ą▒čŗ ą┤ąŠčüčéąĖčćčī čüą░ą╝ąŠą│ąŠ ą╗čāčćčłąĄą╣ 菹║ąŠąĮąŠą╝ąĖąĖ 菹ĮąĄčĆą│ąĖąĖ, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 čüąŠčüč鹊čÅąĮąĖąĄ hibernate, ąĖ čāčüčéą░ąĮąŠą▓ąĖč鹥 čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĮą░ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ ąŠčé ą░ą║čéąĖą▓ąĮąŠčüčéąĖ ąĮą░ čłąĖąĮąĄ CAN. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüą╝. ą▓čŗčłąĄ "ą¤čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ CAN ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ Hibernate".
1: ą╝ąŠą┤čāą╗čī ą▓čģąŠą┤ąĖčé ą▓ sleep mode ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī ąŠą┐ąĄčĆą░čåąĖčÅ ąĮą░ čłąĖąĮąĄ CAN.
0: ąĮąĄ ą▒čŗą╗ąŠ ąĘą░ą┐čĆąŠčüą░ ąĮą░ ą▓čģąŠą┤ ą▓ sleep mode.
WBA - Wake-Up on CAN Bus Activity.
1: ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖą╣ ą▓čŗčģąŠą┤ ąĖąĘ sleep mode, ąĄčüą╗ąĖ ą▒čŗą╗ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą╗čÄą▒ą░čÅ ą░ą║čéąĖą▓ąĮąŠčüčéčī ąĮą░ čłąĖąĮąĄ CAN.
0: ą╝ąŠą┤čāą╗čī ąŠčüčéą░ąĄčéčüčÅ ą▓ sleep mode, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čüąŠčüč鹊čÅąĮąĖčÅ čłąĖąĮčŗ CAN, ą┐ąŠą║ą░ čüą▒čĆąŠčłąĄąĮ SMR.
ABO - Auto Bus On.
1: ą┐ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐čĆąŠčåąĄą┤čāčĆčŗ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ bus-off ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖą╣ ą▓čģąŠą┤ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ bus active.
0: ą┐ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐čĆąŠčåąĄą┤čāčĆčŗ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ bus-off ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą▓čģąŠą┤ ą▓ čĆąĄąČąĖą╝ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
DNM - DeviceNet Mode.
ąĢčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮąŠ, č鹊 ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ čäąĖą╗čīčéčĆą░čåąĖčÅ ą┐čĆąĖąĄą╝ą░ (acceptance filtering) ą┐ąŠčüą╗ąĄ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąĄčĆą▓ąŠą│ąŠ ą▒ąĖčéą░ CRC, ąĖą╗ąĖ ą┐ąŠčüą╗ąĄ ą┐ąĄčĆą▓ąŠą│ąŠ ą┐čĆąĖąĮčÅč鹊ą│ąŠ ą▒ąĖčéą░ DLC.
1: čĆą░ąĘčĆąĄčłąĄąĮ DeviceNet mode (čäąĖą╗čīčéčĆą░čåąĖčÅ ą┐ąŠ ą▒ą░ą╣čéą░ą╝ ą┤ą░ąĮąĮčŗčģ). ąæąĖčéčŗ FDF ąĖ FMD ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_AMxxH ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé čäčāąĮą║čåąĖąŠąĮą░ą╗ čĆąĄąČąĖą╝ą░ DeviceNet. ąĪą╝. ą┤ą░ą╗ąĄąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ CAN Acceptance Mask (CAN_AMxx).
0: čüčéą░ąĮą┤ą░čĆčéąĮą░čÅ čäąĖą╗čīčéčĆą░čåąĖčÅ čüąŠąŠą▒čēąĄąĮąĖą╣ (acceptance filtering), ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄą╝ą░čÅ č鹊ą╗čīą║ąŠ ą┐ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčā.
SRS - Software Reset.
ąŁč鹊čé ą▒ąĖčé čĆąĄą│ąĖčüčéčĆą░ ą▓čüąĄą│ą┤ą░ čćąĖčéą░ąĄčéčüčÅ ą║ą░ą║ 0.
1: ąĖąĮąĖčåąĖąĖčĆčāąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čüą▒čĆąŠčü. ąÆčüąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ čāčüčéą░ąĮąŠą▓čÅčéčüčÅ ą▓ čüą▓ąŠąĖ ąĮą░čćą░ą╗čīąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ, ąĄčüą╗ąĖ ąĮąĄ čāą║ą░ąĘą░ąĮąŠ čćč鹊-č鹊 ą┤čĆčāą│ąŠąĄ ą▓ ąŠą┐ąĖčüą░ąĮąĖąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ čĆąĄą│ąĖčüčéčĆą░.
0: ąĮąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░.
ąĀąĄą│ąĖčüčéčĆ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ čüčéą░čéčāčüą░ (CAN_STATUS), ą┐ąŠą║ą░ąĘą░ąĮąĮčŗą╣ ąĮą░ čĆąĖčü. 19-3, ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čüąĖą│ąĮą░ą╗čŗ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ. ąŁč鹊čé čĆąĄą│ąĖčüčéčĆ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ (RO). ąŚą░ą┐ąĖčüčī ą▓ čĆąĄą│ąĖčüčéčĆ CAN_STATUS ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░.

ąĀąĖčü. 19-3. Global Status Register (RO, č鹊ą╗čīą║ąŠ čćč鹥ąĮąĖąĄ).
ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ąŠą┐ąĖčüą░ąĮąĖąĄ ą▒ąĖčé čĆąĄą│ąĖčüčéčĆą░ CAN_STATUS.
REC - Receive Mode.
1: čÅą┤čĆąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ CAN ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąĄą╝ą░.
0: čÅą┤čĆąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ CAN ąĮąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąĄą╝ą░.
RTM - Transmit Mode.
1: čÅą┤čĆąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ CAN ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ.
0: čÅą┤čĆąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ CAN ąĮąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ.
MBPTR - Mail Box Pointer.
ą¤čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ąĮąŠą╝ąĄčĆ mailbox č鹥ą║čāčēąĄą│ąŠ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ. ą¤ąŠčüą╗ąĄ čāčüą┐ąĄčłąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ čŹčéąĖ ą▒ąĖčéčŗ ąŠčüčéą░čÄčéčüčÅ ąĮąĄ ąĖąĘą╝ąĄąĮąĄąĮąĮčŗą╝ąĖ.
11111: čüąĄą╣čćą░čü ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓ mailbox 31.
...
...
00000: čüąĄą╣čćą░čü ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓ mailbox 0.
CCA - CAN Configuration Mode Acknowledge.
1: čÅą┤čĆąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ CAN ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
0: čÅą┤čĆąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ CAN ąĮąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
CSA - CAN Suspend Mode Acknowledge.
1: čÅą┤čĆąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ CAN ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ suspend mode.
0: čÅą┤čĆąŠ ą┐čĆąŠč鹊ą║ąŠą╗ą░ CAN ąĮąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ suspend mode.
SMA - Sleep Mode Acknowledge.
ąæąĖčé SMA ą▓čüąĄą│ą┤ą░ čćąĖčéą░ąĄčéčüčÅ ą║ą░ą║ 0. ąĢčüą╗ąĖ ą╝ąŠą┤čāą╗čī CAN ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ sleep mode, čćč鹥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ CAN_STATUS ą▓ąŠąĘą▓čĆą░čéąĖčé čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆą░ CAN_INTR.
1: ą╝ąŠą┤čāą╗čī ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ sleep mode. ąÆčüąĄ čéą░ą║čéčŗ ą▓čŗą║ą╗čÄč湥ąĮčŗ.
0: ą╝ąŠą┤čāą╗čī ąĮąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ sleep mode.
EBO - CAN Error Bus-Off Mode.
1: čüč湥čéčćąĖą║ ąŠčłąĖą▒ąŠą║ ą┐ąĄčĆąĄą┤ą░čćąĖ TXECNT ą┤ąŠčüčéąĖą│ ą┐čĆąĄą┤ąĄą╗ą░ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ ąŠčé čłąĖąĮčŗ 256 (bus-off limit).
0: ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ ąŠčłąĖą▒ąŠą║ ą┐ąĄčĆąĄą┤ą░čćąĖ TXECNT ą╝ąĄąĮčīčłąĄ 256.
EP - CAN Error Passive Mode.
1: ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĖąĮ ąĖąĘ čüč湥čéčćąĖą║ąŠą▓ ąŠčłąĖą▒ąŠą║ (RXECNT ąĖ TXECNT) ą┤ąŠčüčéąĖą│ ą┐ą░čüčüąĖą▓ąĮąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ąŠčłąĖą▒ąŠą║ 128.
0: ąĘąĮą░č湥ąĮąĖąĄ ąŠą▒ąŠąĖčģ čüč湥čéčćąĖą║ąŠą▓ ąŠčłąĖą▒ąŠą║ (RXECNT ąĖ TXECNT) ąĮąĖąČąĄ 128.
WR - CAN Receive Warning Flag.
1: ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ ąŠčłąĖą▒ąŠą║ ą┐čĆąĖąĄą╝ą░ (RXECNT) ą┤ąŠčüčéąĖą│ ą┐čĆąĄą┤ąĄą╗ą░ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ (warning limit).
0: ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ ąŠčłąĖą▒ąŠą║ ą┐čĆąĖąĄą╝ą░ (RXECNT) ąĮąĖąČąĄ ą┐čĆąĄą┤ąĄą╗ą░ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ (warning limit).
WT - CAN Transmit Warning Flag.
1: ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ ąŠčłąĖą▒ąŠą║ ą┐ąĄčĆąĄą┤ą░čćąĖ (TXECNT) ą┤ąŠčüčéąĖą│ ą┐čĆąĄą┤ąĄą╗ą░ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ (warning limit).
0: ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ ąŠčłąĖą▒ąŠą║ ą┐ąĄčĆąĄą┤ą░čćąĖ (TXECNT) ąĮąĖąČąĄ ą┐čĆąĄą┤ąĄą╗ą░ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ (warning limit).
ąĀąĄą│ąĖčüčéčĆ CAN_CLOCK (čĆąĖčü. 19-4) ąĮąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé čüą░ą╝ ą┐ąŠ čüąĄą▒ąĄ ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą▒ąĖčé CAN. ą×ąĮ ąĘą░ą┤ą░ąĄčé ą║ą▓ą░ąĮčé ą▓čĆąĄą╝ąĄąĮąĖ ą▒ąĖčéą░ (time quantum, TQ), č乊čĆą╝ąĖčĆčāąĄą╝čŗą╣ ąĖąĘ čćą░čüč鹊čéčŗ čüąĖčüč鹥ą╝ąĮąŠą╣ čłąĖąĮčŗ (SCLK). ąśąĘ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą║ą▓ą░ąĮč鹊ą▓ ą▓čĆąĄą╝ąĄąĮąĖ č乊čĆą╝ąĖčĆčāąĄčéčüčÅ ą▒ąĖčé CAN, čćč鹊 čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čĆąĄą│ąĖčüčéčĆąŠą╝ CAN_TIMING.

ąĀąĖčü. 19-4. CAN Clock Register.
ąÜą▓ą░ąĮčé ą▓čĆąĄą╝ąĄąĮąĖ ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ą┐ąŠ č乊čĆą╝čāą╗ąĄ:
TQ = (BRP + 1)/SCLK
BRP. ąźąŠčéčÅ ą┐ąŠą╗ąĄ BRP ą╝ąŠąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ą▓ ą╗čÄą▒ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąŠą┤ąĮą░ą║ąŠ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ, čćč鹊ą▒čŗ ąŠąĮąŠ ą▒čŗą╗ąŠ ą▒ąŠą╗čīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮąŠ 4. ąÜąŠą│ą┤ą░ BRP < 4, ąĮą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ čéą░ą╣ą╝ąĖąĮą│ą░ ą▒ąĖčéą░ ąĮą░ą║ą╗ą░ą┤čŗą▓ą░čÄčéčüčÅ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ.
ąÆčüąĄ čāąĘą╗čŗ čłąĖąĮčŗ CAN ą┤ąŠą╗ąČąĮčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąŠą┤ąĖąĮą░ą║ąŠą▓čāčÄ čüą║ąŠčĆąŠčüčéčī ą▒ąĖčé (bit rate, ą▒ąĖčéčĆąĄą╣čé).
ąØąĄ ą╝ąŠą┤ąĖčäąĖčåąĖčĆčāą╣č鹥 čĆąĄą│ąĖčüčéčĆ CAN_CLOCK ą▓ąŠ ą▓čĆąĄą╝čÅ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ ąĖąĮč鹥čĆč乥ą╣čüą░ CAN (CCA == 0). ąöą╗čÅ čŹč鹊ą╣ čåąĄą╗ąĖ ą▓čüąĄą│ą┤ą░ ą▓čģąŠą┤ąĖč鹥 ą▓ čĆąĄąČąĖą╝ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ (CCR == 1, CCA == 1). ąŚą░ą┐ąĖčüąĖ ą▓ čŹč鹊čé čĆąĄą│ąĖčüčéčĆ ąĮąĄ ąŠą║ą░ąĘčŗą▓ą░čÄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░, ą║ąŠą│ą┤ą░ ą╝ąŠą┤čāą╗čī CAN ąĮąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
ą¤čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čüą▒čĆąŠčü ąĮąĄ ą▓ą╗ąĖčÅąĄčé ąĮą░ čŹč鹊čé čĆąĄą│ąĖčüčéčĆ (ą┐ąŠčüą╗ąĄ ąĮąĄą│ąŠ ą▓čüąĄ ąĘąĮą░č湥ąĮąĖčÅ ąŠčüčéą░čÄčéčüčÅ ąĮąĄąĖąĘą╝ąĄąĮąĮčŗą╝ąĖ).
ąØą░ ąŠčüąĮąŠą▓ąĄ ą║ą▓ą░ąĮčéą░ ą▓čĆąĄą╝ąĄąĮąĖ (time quantum, TQ) ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝ąŠą│ąŠ ą┐čĆąĄčüą║ą░ą╗ąĄčĆąŠą╝ BRP ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_CLOCK, čĆąĄą│ąĖčüčéčĆ CAN_TIMING (čĆąĖčü. 19-5) čāą┐čĆą░ą▓ą╗čÅąĄčé ąĮąŠą╝ąĖąĮą░ą╗čīąĮčŗą╝ ą▓čĆąĄą╝ąĄąĮąĄą╝ ą▒ąĖčéą░ ąĖ č鹊čćą║ąŠą╣ ą▓čŗą▒ąŠčĆą║ąĖ ąŠčéą┤ąĄą╗čīąĮčŗčģ ą▒ąĖčé ą▓ ą┐čĆąŠč鹊ą║ąŠą╗ąĄ CAN.

ąĀąĖčü. 19-5. CAN Timing Register (RO, č鹊ą╗čīą║ąŠ čćč鹥ąĮąĖąĄ).
ąĀąĖčü. 19-6 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé 3 čäą░ąĘčŗ ą▒ąĖčéą░ CAN: čüąĄą│ą╝ąĄąĮčé čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ, čüąĄą│ą╝ąĄąĮčé ą┐ąĄčĆąĄą┤ č鹊čćą║ąŠą╣ ą▓čŗą▒ąŠčĆą║ąĖ čāčĆąŠą▓ąĮčÅ (sample point) ąĖ čüąĄą│ą╝ąĄąĮčé ą┐ąŠčüą╗ąĄ č鹊čćą║ąĖ ą▓čŗą▒ąŠčĆą║ąĖ čāčĆąŠą▓ąĮčÅ.

ąĀąĖčü. 19-6. ąóčĆąĖ čäą░ąĘčŗ ą▒ąĖčéą░ CAN.
ąĪąĄą│ą╝ąĄąĮčé čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ąĘą░čäąĖą║čüąĖčĆąŠą▓ą░ąĮ ąĮą░ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąŠą┤ąĮąŠą│ąŠ ą║ą▓ą░ąĮčéą░ TQ. ą×ąĮ čéčĆąĄą▒čāąĄčéčüčÅ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čāąĘą╗ąŠą▓ ąĮą░ čłąĖąĮąĄ. ąÆčüąĄ ą┐ąĄčĆąĄą┐ą░ą┤čŗ čāčĆąŠą▓ąĮčÅ čüąĖą│ąĮą░ą╗ą░ ąŠąČąĖą┤ą░čÄčéčüčÅ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ čŹč鹊ą│ąŠ čüąĄą│ą╝ąĄąĮčéą░.
TSEG1, TSEG2. ą¤ąŠą╗čÅ TSEG1 ąĖ TSEG2 ąĘą░ą┤ą░čÄčé ąĖąĘ čüą║ąŠą╗čīą║ąĖčģ TQ čüąŠčüč鹊ąĖčé ą▒ąĖčé CAN, čćč鹊 ą▓ą╗ąĖčÅąĄčé ąĮą░ čüą║ąŠčĆąŠčüčéčī CAN (bit rate). ąØąŠą╝ąĖąĮą░ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ ą▒ąĖčéą░ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐ąŠ č乊čĆą╝čāą╗ąĄ:
tBIT = TQ x (1 + (1 + TSEG1) + (1 + TSEG2))
ąöą╗čÅ ą▒ąĄąĘąŠą┐ą░čüąĮąŠą│ąŠ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ ą▓ čäąĖąĘąĖč湥čüą║ąĖčģ čüąĄčéčÅčģ č鹊čćą║ą░ ą▓čŗą▒ąŠčĆą║ąĖ ą┤ą░ąĮąĮčŗčģ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ ą┐ąŠą╗ąĄą╝ TSEG1. ą¤ąŠą╗ąĄ TSEG2 čģčĆą░ąĮąĖčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą▓ą░ąĮč鹊ą▓ TQ, ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗčģ ą┤ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ ą▒ąĖčéą░. ą¦ą░čüč鹊 čüą░ą╝ą░čÅ ą╗čāčćčłą░čÅ ąĮą░ą┤ąĄąČąĮąŠčüčéčī ą┤ąŠčüčéąĖą│ą░ąĄčéčüčÅ čü č鹊čćą║ą░ą╝ąĖ ą▓čŗą▒ąŠčĆą║ąĖ, ąĮą░čģąŠą┤čÅčēąĖą╝ąĖčüčÅ ą▓ ą▓ąĄčĆčģąĮąĄą╝ 80% ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ą▓čĆąĄą╝ąĄąĮąĖ ą▒ąĖčéą░. ąØąĄ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 č鹊čćą║ąĖ ą▓čŗą▒ąŠčĆą║ąĖ ąĮąĖąČąĄ 50%. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, TSEG1 ą▓čüąĄą│ą┤ą░ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▒ąŠą╗čīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮąŠ TSEG2.
ą£ąŠą┤čāą╗čī CAN ą┐čĆąŠčåąĄčüčüąŠčĆą░ Blackfin ąĮąĄ ą┤ąĄą╗ą░ąĄčé čĆą░ąĘą╗ąĖčćąĖą╣ ą╝ąĄąČą┤čā čüąĄą│ą╝ąĄąĮč鹊ą╝ čĆą░čüą┐čĆąŠčüčéčĆą░ąĮąĄąĮąĖčÅ (propagation segment) ąĖ čüąĄą│ą╝ąĄąĮč鹊ą╝ čäą░ąĘčŗ 1 (phase segment 1), ą║ą░ą║ čŹč鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ čüčéą░ąĮą┤ą░čĆč鹊ą╝. ąŚąĮą░č湥ąĮąĖąĄ TSEG1 ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąŠ ą┐ąŠą║čĆčŗą▓ą░čéčī ąŠą▒ą░ čŹčéąĖčģ ąĖąĮč鹥čĆą▓ą░ą╗ą░ ą▓čĆąĄą╝ąĄąĮąĖ. ąŚąĮą░č湥ąĮąĖąĄ TSEG2 ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čüąĄą│ą╝ąĄąĮčé čäą░ąĘčŗ 2 (phase segment 2).
SJW. ąĢčüą╗ąĖ ą╝ąŠą┤čāą╗čī CAN ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą┐ąĄčĆąĄą┐ą░ą┤ recessive -> dominant ą▓ąĮąĄ čüąĄą│ą╝ąĄąĮčéą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ, č鹊 ąŠąĮ ą╝ąŠąČąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąĄčĆąĄą╝ąĄčüčéąĖčéčī č鹊čćą║čā ą▓čŗą▒ąŠčĆą║ąĖ čéą░ą║, čćč鹊ą▒čŗ ą▒ąĖčé CAN ą▓čüąĄ ąĄčēąĄ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ą╗čüčÅ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ. ą¤ąŠą╗ąĄ čüą║ą░čćą║ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (synchronization jump width, SJW) ąĘą░ą┤ą░ąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą▓ą░ąĮč鹊ą▓ TQ, ą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ ą┤ą╗čÅ čéą░ą║ąŠą╣ ą┐ąŠą┐čŗčéą║ąĖ ą┐ąŠą▓č鹊čĆąĮąŠą╣ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ. ąŚąĮą░č湥ąĮąĖąĄ SJW ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąĄą▓čŗčłą░čéčī TSEG2 ąĖą╗ąĖ TSEG1:
SJW Ōēż TSEG2 Ōēż TSEG1
ąÆ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ čŹč鹊ą╝čā čäčāąĮą┤ą░ą╝ąĄąĮčéą░ą╗čīąĮąŠą╝čā ą┐čĆą░ą▓ąĖą╗čā, ą┐ąŠą╗ąĄ TSEG2 čéą░ą║ąČąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▒ąŠą╗čīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĖąĮč乊čĆą╝ą░čåąĖąĖ (information processing time, IPT). ąŁč鹊 ą▓čĆąĄą╝čÅ, čéčĆąĄą▒čāąĄą╝ąŠąĄ ą┤ą╗čÅ ą╗ąŠą│ąĖą║ąĖ, čćč鹊ą▒čŗ čüą┤ąĄą╗ą░čéčī ą▓čŗą▒ąŠčĆą║čā CANRX. ąØą░ ą╝ąŠą┤čāą╗ąĄ CAN ą┐čĆąŠčåąĄčüčüąŠčĆą░ Blackfin čŹč鹊 ą▓čĆąĄą╝čÅ čüąŠčüčéą░ą▓ą╗čÅąĄčé 3 čéą░ą║čéą░ SCLK. ą¤ąŠ čŹč鹊ą╣ ą┐čĆąĖčćąĖąĮąĄ TSEG2 ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ą▓ąĮąŠ 0. ąĢčüą╗ąĖ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ čéą░ą║č鹊ą▓ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0, č鹊 TSEG2 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▒ąŠą╗čīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮąŠ 3. ąĢčüą╗ąĖ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1, ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ TSEG2 ą▒čāą┤ąĄčé 2.
SAM. ąĪ ąŠčćąĖčēąĄąĮąĮčŗą╝ ą▒ąĖč鹊ą╝ SAM čāčĆąŠą▓ąĄąĮčī CANRX ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ ą┐ąŠčüą╗ąĄ ąĖčüč鹥č湥ąĮąĖčÅ TSEG1. ąĢčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé SAM, č鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ čéčĆąŠą╣ąĮą░čÅ ą▓čŗą▒ąŠčĆą║ą░ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ čü čćą░čüč鹊č鹊ą╣ SCLK. ąĀąĄąĘčāą╗čīčéąĖčĆčāčÄčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ ą▒ąĖčéą░ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą┐ąŠ ą╝ą░ąČąŠčĆąĖčéą░čĆąĮąŠą╝čā ą┐čĆąĖąĮčåąĖą┐čā ąŠčé ąĘąĮą░č湥ąĮąĖą╣ čŹčéąĖčģ čéčĆąĄčģ ą▓čŗą▒ąŠčĆąŠą║. ąÆčüąĄą│ą┤ą░ ąŠčüčéą░ą▓ą╗čÅą╣č鹥 ą▒ąĖčé SAM ąŠčćąĖčēąĄąĮąĮčŗą╝, ąĄčüą╗ąĖ ąĘąĮą░č湥ąĮąĖąĄ BRP ą╝ąĄąĮčīčłąĄ 4.
ąØąĄ ą╝ąŠą┤ąĖčäąĖčåąĖčĆčāą╣č鹥 čŹč鹊čé čĆąĄą│ąĖčüčéčĆ ą▓ąŠ ą▓čĆąĄą╝čÅ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╣ čĆą░ą▒ąŠčéčŗ ą╝ąŠą┤čāą╗čÅ CAN. ąöą╗čÅ čŹč鹊ą╣ čåąĄą╗ąĖ ą▓čüąĄą│ą┤ą░ ą▓čģąŠą┤ąĖč鹥 ą▓ čĆąĄąČąĖą╝ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. ąŚą░ą┐ąĖčüčī ą▓ čŹč鹊čé čĆąĄą│ąĖčüčéčĆ ąĮąĄ ą┤ą░ąĄčé čŹčäč乥ą║čéą░, ąĄčüą╗ąĖ ą╝ąŠą┤čāą╗čī CAN ąĮąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
ą¤čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čüą▒čĆąŠčü ąĮąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓ą╗ąĖčÅąĮąĖčÅ ąĮą░ čŹč鹊čé čĆąĄą│ąĖčüčéčĆ (ą┐ąŠčüą╗ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čüą▒čĆąŠčüą░ ą▓čüąĄ ąĘąĮą░č湥ąĮąĖčÅ ą▓ ąĮąĄą╝ ąŠčüčéą░čÄčéčüčÅ ąĮąĄąĖąĘą╝ąĄąĮąĮčŗą╝ąĖ).
ąØąĖąČąĄ ą┤ą░ąĮ ą┐čĆąĖą╝ąĄčĆ ąĮą░čüčéčĆąŠą╣ą║ąĖ čĆąĄą│ąĖčüčéčĆąŠą▓ CAN_CONTROL ąĖ CAN_TIMING ą┤ą╗čÅ čćą░čüč鹊čéčŗ čłąĖąĮčŗ SCLK=50 ą£ąōčå. ążčāąĮą║čåąĖčÅ Init_CAN_Timing ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą┐ą░čĆą░ą╝ąĄčéčĆ speed, ą│ą┤ąĄ čāą║ą░ąĘą░ąĮą░ čüą║ąŠčĆąŠčüčéčī ą▓ ą║ąĖą╗ąŠą▒ąĖčéą░čģ/čüąĄą║. ąŚąĮą░č湥ąĮąĖąĄ speed ą╝ąŠąČąĄčé ą┐čĆąĖąĮąĖą╝ą░čéčī ąĘąĮą░č湥ąĮąĖąĄ ąĖąĘ čĆčÅą┤ą░ čüą║ą░ąĮą┤ą░čĆčéąĮčŗčģ čüą║ąŠčĆąŠčüč鹥ą╣ 1000, 800, 500, 250, 125, 100, 50, 20, 10 ą║ąĖą╗ąŠą▒ąĖčé/čüąĄą║.
typedef struct
{
u16 speed; // ąĪą║ąŠčĆąŠčüčéčī, ą║ąĖą╗ąŠą▒ąĖčé/čüąĄą║.
u16 can_clock; // ąŚąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ čĆąĄą│ąĖčüčéčĆą░ CAN_CLOCK.
u16 can_timing; // ąŚąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ čĆąĄą│ąĖčüčéčĆą░ CAN_TIMING.
}TCanParam;
// ąóą░ą▒ą╗ąĖčåą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą┤ą╗čÅ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ čüą║ąŠčĆąŠčüč鹥ą╣ CAN ąĖ čćą░čüč鹊čéčŗ SCLK = 50 ą£ąōčå,
// ą▓čŗčćąĖčüą╗ąĄąĮąĮą░čÅ ąĮą░ čĆąĄčüčāčĆčüąĄ http://www.bittiming.can-wiki.info/ [5]:
static const TCanParam canparam [] =
{
{1000, 0x0004, 0x0007}, //Sample Point 90%
{ 800, 0, 0},
{ 500, 0x0009, 0x0007}, //Sample Point 90%
{ 250, 0x0013, 0x0007}, //Sample Point 90%
//{ 250, 0x0018, 0x0005}, //Sample Point 87.5%
//{ 125, 0x0018, 0x001C}, //Sample Point 90%
{ 125, 0x0027, 0x0007}, //Sample Point 90%
//{ 125, 0x0031, 0x0005}, //Sample Point 87.5%
{ 100, 0x0031, 0x0007}, //Sample Point 90%
{ 50, 0x0063, 0x0007}, //Sample Point 90%
//{ 50, 0x007C, 0x0005}, //Sample Point 87.5%
//{ 25, 0x007C, 0x001C}, //Sample Point 87.5%
{ 25, 0x00C7, 0x0007}, //Sample Point 90%
//{ 25, 0x00F9, 0x0005}, //Sample Point 87.5%
{ 20, 0x00F9, 0x0007}, //Sample Point 90%
{ 10, 0x01F3, 0x0007}, //Sample Point 90%
//{ 10, 0x0270, 0x0005}, //Sample Point 87.5%
{ 0, 0, 0}
};
/*********************************************************************************
** ążčāąĮą║čåąĖčÅ Init_CAN_Timing - ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčé čĆąĄą│ąĖčüčéčĆčŗ CAN_TIMING ąĖ CAN_CLOCK. **
** ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗąĄ ą║ąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé, ą║ą░ą║ ą▓čŗčćąĖčüą╗ąĖčéčī ą┐ąŠą╗ąĄ BRP ą┐ąŠ ąĖąĘą▓ąĄčüčéąĮąŠą╣ **
** čćą░čüč鹊č鹥 SCLK value (ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. ą│ą╗ą░ą▓čā CAN ą▓ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╝ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąĄ). **
** ąÆąĄčĆąĮąĄčé false, ąĄčüą╗ąĖ speed (čāą║ą░ąĘą░ąĮą░ ą▓ ą║ąĖą╗ąŠą▒ąĖčéą░čģ/čüąĄą║) ąĮąĄ ąĮą░ą╣ą┤ąĄąĮą░ ą▓ čéą░ą▒ą╗ąĖčåąĄ **
** čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ čćą░čüč鹊čé canparam. **
*********************************************************************************/
static bool Init_CAN_Timing(u16 speed)
{
// ąÆčģąŠą┤ ą▓ čĆąĄąČąĖą╝ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ CAN (čāčüčéą░ąĮąŠą▓ą║ą░ CCR):
*pCAN_CONTROL = CCR;
while(0 == (*pCAN_STATUS & CCA))
{
// ą”ąĖą║ą╗ ąŠąČąĖą┤ą░ąĮąĖčÅ ą▓čģąŠą┤ą░ ą▓ čĆąĄąČąĖą╝ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
ssync();
}
/* ===================================================
* ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ą▓čĆąĄą╝ąĄąĮąĖ ą▒ąĖčéą░, ą┐čĆąĖą╝ąĄčĆ čĆą░čüč湥čéą░:
*
* CAN_TIMING : SJW = 3, TSEG2 = 3, TSEG1 = 4
* SJW <= TSEG2 <= TSEG1
* ===================================================
* CAN_CLOCK : ą┐čĆąĄčüą║ą░ą╗ąĄčĆ (BRP)
* ===================================================
* ąöą╗čÅ 500 ą║ąōčå CAN Clock :: tBIT = 2 ą╝ą║čü
* ===================================================
* tBIT = TQ * (1 + (TSEG1 + 1) + (TSEG2 + 1))
* 2e-6 = TQ * (1 + 5 + 4) * TQ = 2e-7
*
* TQ = (BRP+1) / SCLK
* 2e-7 = (BRP+1) / 112.5e6
* (BRP+1) = 22.5
* BRP = 21.5 = ~22 = CAN_CLOCK
* ==================================================*/
int idx = 0;
bool result = false;
while (canparam[idx].speed)
{
if (canparam[idx].speed == speed)
{
*pCAN_TIMING = canparam[idx].can_timing;
*pCAN_CLOCK = canparam[idx].can_clock;
ssync();
result = true;
break;
}
idx++;
}
// ąÆčŗčģąŠą┤ ąĖąĘ čĆąĄąČąĖą╝ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ CAN (ąŠčćąĖčüčéą║ą░ CCR):
*pCAN_CONTROL = 0;
while(*pCAN_STATUS & CCA)
{
// ą”ąĖą║ą╗ ąŠąČąĖą┤ą░ąĮąĖčÅ ą▓čŗčģąŠą┤ą░ ąĖąĘ čĆąĄąČąĖą╝ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
ssync();
}
return result;
}
ą¤ąŠčüą╗ąĄ ą▓čŗąĘąŠą▓ą░ Init_CAN_Timing ąŠčüčéą░ąĮąĄčéčüčÅ ąĮą░čüčéčĆąŠąĖčéčī čÅčēąĖą║ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░ ąĖ (ą┐čĆąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ) ąŠą▒čĆą░ą▒ąŠčéą║čā ąĖčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (ąŠą▒ čŹč鹊ą╝ ą┤ą░ą╗ąĄąĄ), ąĖ ą╝ąŠą┤čāą╗čī CAN ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą│ąŠč鹊ą▓ ą║ čĆą░ą▒ąŠč鹥.

ąÆ ą╝ąŠą┤čāą╗ąĄ CAN ąĄčüčéčī č鹥čüč鹊ą▓čŗą╣ čĆąĄąČąĖą╝, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗą╣ ą┤ą╗čÅ ąŠčéą╗ą░ą┤ą║ąĖ ą¤ą× ąĖ čüąĖčüč鹥ą╝čŗ CAN. ąØąĖąČąĄ ą▓ ą╗ąĖčüčéąĖąĮą│ąĄ 19-1 ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐čĆąĖą╝ąĄčĆ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čäčāąĮą║čåąĖąĖ ąŠčéą╗ą░ą┤ą║ąĖ CAN.
ą¤čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ ą╝ąŠą┤čāą╗čī CAN ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮąĄ čüąŠą▓ą╝ąĄčüčéąĖą╝ čüąŠ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĄą╣ CAN. ąÆčüąĄ č鹥čüč鹊ą▓čŗąĄ čĆąĄąČąĖą╝čŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮčŗ ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēąĄąĮčŗ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ ą╝ąŠą┤čāą╗čī ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ (CCA=1 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_STATUS) ąĖą╗ąĖ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (suspend mode, CSA = 1 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_STATUS).
CDE. ąæąĖčé CDE ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠčüčéčāą┐ą░ ą║ąŠ ą▓čüąĄą╝ čäčāąĮą║čåąĖčÅą╝ ąŠčéą╗ą░ą┤ą║ąĖ. ąŁč鹊čé ą▒ąĖčé ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ č鹥čüč鹊ą▓ąŠą│ąŠ čĆąĄąČąĖą╝ą░, ąĖ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮ ą┐ąĄčĆąĄą┤ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖą╝ąĖ ąĘą░ą┐ąĖčüčÅą╝ąĖ ą▓ čĆąĄą│ąĖčüčéčĆ CAN_DEBUG. ąÜąŠą│ą┤ą░ ą▒ąĖčé CDE ąŠčćąĖčēąĄąĮ, ą▓čüąĄ čäčāąĮą║čåąĖąĖ ąŠčéą╗ą░ą┤ą║ąĖ ąĘą░ą┐čĆąĄčēąĄąĮčŗ.
ąøąĖčüčéąĖąĮą│ 19-1. ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čäčāąĮą║čåąĖą╣ ąŠčéą╗ą░ą┤ą║ąĖ (CAN Debug) ąĮą░ čÅąĘčŗą║ąĄ C:
#include < cdefBF538.h>
/* ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ debug mode, CDE ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┐ąĄčĆąĄą┤ č鹥ą╝,
ą║ą░ą║ ą╝ąŠą│čāčé ą▒čŗčéčī ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮčŗ ą┤čĆčāą│ąĖąĄ čäą╗ą░ą│ąĖ ą▓ čĆąĄą│ąĖčüčéčĆąĄ: */
*pCAN_DEBUG |= CDE;
/* ąŻčüčéą░ąĮąŠą▓ą║ą░ čäą╗ą░ą│ąŠą▓ ąŠčéą╗ą░ą┤ą║ąĖ: */
*pCAN_DEBUG &= ~DTO;
*pCAN_DEBUG |= MRB | MAA | DIL;
/* ąŚą░ą┐čāčüą║ ą║ąŠą┤ą░ ą▓ č鹥čüč鹊ą▓ąŠą╝ čĆąĄąČąĖą╝ąĄ: */
...
/* ąŚą░ą┐čĆąĄčé debug mode: */
*pCAN_DEBUG &= ~CDE;
ąÜąŠą│ą┤ą░ ą▒ąĖčé CDE čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 čĆą░ąĘčĆąĄčłąĄąĮčŗ ąĘą░ą┐ąĖčüąĖ ą▓ ą┤čĆčāą│ąĖąĄ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ CAN_DEBUG. ąŁč鹊 čéą░ą║ąČąĄ čĆą░ąĘčĆąĄčłą░ąĄčé čäčāąĮą║čåąĖąĖ, ąĮąĄ čüąŠą▓ą╝ąĄčüčéąĖą╝čŗąĄ čüąŠ čüčéą░ąĮą┤ą░čĆč鹊ą╝ CAN:
ŌĆó ąĀąĄą│ąĖčüčéčĆčŗ čéą░ą╣ą╝ąĖąĮą│ą░ ą▒ąĖčé ą╝ąŠąČąĮąŠ ą┐ąŠą╝ąĄąĮčÅčéčī ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé, ąĮąĄ č鹊ą╗čīą║ąŠ ą▓ čĆąĄąČąĖą╝ąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. ąŁč鹊 ą▓ą║ą╗čÄčćą░ąĄčé čĆąĄą│ąĖčüčéčĆčŗ CAN_CLOCK ąĖ CAN_TIMING.
ŌĆó ąöąŠą┐čāčüą║ą░ąĄčéčüčÅ ąĘą░ą┐ąĖčüčī ą▓ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗą╣ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆ ąŠčłąĖą▒ąŠą║ ą┐ąĄčĆąĄą┤ą░čćąĖ/ą┐čĆąĖąĄą╝ą░ CAN_CEC.
MRB. ąæąĖčé ąŠą▒čĆą░čéąĮąŠą│ąŠ čćč鹥ąĮąĖčÅ čĆąĄąČąĖą╝ą░ (mode read back, MRB) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ read back mode. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ, ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠąĄ ą┐ąŠ čłąĖąĮąĄ CAN (ąĖą╗ąĖ č湥čĆąĄąĘ ą▓ąĮčāčéčĆąĄąĮąĮčÄčÄ ą┐ąĄčéą╗čÄ ąĘą░čåąĖą║ą╗ąĖą▓ą░ąĮąĖčÅ ą▓čŗčģąŠą┤ą░ ąĮą░ ą▓čģąŠą┤, čĆąĄąČąĖą╝ internal loop back) ą┐čĆąĖąĮąĖą╝ą░ąĄčéčüčÅ ąŠą▒čĆą░čéąĮąŠ ąĮą░ą┐čĆčÅą╝čāčÄ ą▓ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░. ą¤ąŠčüą╗ąĄ ą║ąŠčĆčĆąĄą║čéąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ ą╗ąŠą│ąĖą║ą░ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąĄą│ąŠ ą║ą░ą║ ąĮąŠčĆą╝ą░ą╗čīąĮąŠ ą┐čĆąĖąĮčÅč鹊ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┤ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐čĆąŠč鹥čüčéąĖčĆąŠą▓ą░čéčī čäčāąĮą║čåąĖąĖ CAN ą▒ąĄąĘ ą▓ąĮąĄčłąĮąĖčģ čāčüčéčĆąŠą╣čüčéą▓ (ą▒ąĄąĘ ą▓ąĮąĄčłąĮąĄą│ąŠ čéčĆą░ąĮčüąĖą▓ąĄčĆą░ ąĖ ą▒ąĄąĘ ą▓ąĮąĄčłąĮąĄą│ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ čäąĖąĘąĖč湥čüą║ąŠą╣ čüąĄčéąĖ CAN).
MAA. ąæąĖčé čĆąĄąČąĖą╝ą░ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą│ąŠ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ (mode auto acknowledge, MAA) ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą╝ąŠą┤čāą╗čÄ CAN ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čüąŠą▒čüčéą▓ąĄąĮąĮąŠąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ą▓ąŠ ą▓čĆąĄą╝čÅ čüą╗ąŠčéą░ ACK čäčĆąĄą╣ą╝ą░ CAN. ąØąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą▓ąĮąĄčłąĮąĖčģ čāčüčéčĆąŠą╣čüčéą▓ ąĖą╗ąĖ ą▓ąĮąĄčłąĮąĖčģ čüąŠąĄą┤ąĖąĮąĄąĮąĖą╣, čćč鹊ą▒čŗ ą┐čĆąŠčćąĖčéą░čéčī ąŠą▒čĆą░čéąĮąŠ ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ, ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░. ąÆ čĆąĄąČąĖą╝ąĄ auto acknowledge ą╝ąŠą┤čāą╗čī ą┐ąŠčüčŗą╗ą░ąĄčé ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ čüą░ą╝ čüąĄą▒ąĄ. ąŁč鹊 ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąŠ ą┐ąŠčÅą▓ą╗čÅčéčīčüčÅ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ CANTX, ąĄčüą╗ąĖ DIL=1 ąĖ DTO=0. ąĢčüą╗ąĖ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī č鹊ą╗čīą║ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄ, č鹊 čŹčéąĖ ą▒ąĖčéčŗ č鹥čüč鹊ą▓ąŠą│ąŠ čĆąĄąČąĖą╝ą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ ąĘąĮą░č湥ąĮąĖčÅ DIL=0 ąĖ DTO=1.
DIL. ąæąĖčé ąĘą░ą┐čĆąĄčéą░ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ąŠą▒čĆą░čéąĮąŠą╣ ą┐ąĄčéą╗ąĖ (disable internal loop, DIL) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī čüąŠąĄą┤ąĖąĮąĖčéčī ą▓ąĮčāčéčĆąĖ ą╝ąŠą┤čāą╗čÅ ą▓čŗčģąŠą┤ ą┐ąĄčĆąĄą┤ą░čéčćąĖą║ą░ čüąŠ ą▓čģąŠą┤ąŠą╝ ą┐čĆąĖąĄą╝ąĮąĖą║ą░.
DTO. ąæąĖčé ąĘą░ą┐čĆąĄčéą░ ą▓čŗčģąŠą┤ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ (disable transmit output, DTO) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, čćč鹊ą▒čŗ ąĘą░ą┐čĆąĄčéąĖčéčī ą▓čŗčģąŠą┤ CANTX. ąÜąŠą│ą┤ą░ čŹč鹊čé ą▒ąĖčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ąĮą░ ą▓čŗą▓ąŠą┤ CANTX ą┐ąŠčüč鹊čÅąĮąĮąŠ ą▓čŗą▓ąŠą┤čÅčéčüčÅ čĆąĄčåąĄčüčüąĖą▓ąĮčŗąĄ ą▒ąĖčéčŗ.
DRI. ąæąĖčé ąĘą░ą┐čĆąĄčéą░ ą▓čģąŠą┤ą░ ą┐čĆąĖąĄą╝ą░ (disable receive input, DRI) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, čćč鹊ą▒čŗ ąĘą░ą┐čĆąĄčéąĖčéčī ą▓čģąŠą┤ CANRX. ąÜąŠą│ą┤ą░ čŹč鹊čé ą▒ąĖčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ ą╗ąŠą│ąĖą║ą░ ą┐čĆąĖąĮąĖą╝ą░ąĄčé čĆąĄčåąĄčüčüąĖą▓ąĮčŗąĄ ą▒ąĖčéčŗ, ąĖą╗ąĖ ą┐čĆąĖąĮąĖą╝ą░ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ą▓ąĮčāčéčĆąĖ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ čüą╗čāčćą░ąĄ, ą║ąŠą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄąĄ ąĘą░čåąĖą║ą╗ąĖą▓ą░ąĮąĖąĄ čü ą▓čŗčģąŠą┤ą░ ąĮą░ ą▓čģąŠą┤ (DIL=0). ąÆ ą╗čÄą▒ąŠą╝ čüą╗čāčćą░ąĄ čüąĖą│ąĮą░ą╗čŗ ąĮą░ ą▓čģąŠą┤ąĄ CANRX ąĖą│ąĮąŠčĆąĖčĆčāčÄčéčüčÅ.
DEC. ąæąĖčé ąĘą░ą┐čĆąĄčéą░ čüč湥čéčćąĖą║ąŠą▓ ąŠčłąĖą▒ąŠą║ (disable error counters, DEC) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĘą░ą┐čĆąĄčéą░ čüč湥čéčćąĖą║ąŠą▓ ąŠčłąĖą▒ąŠą║ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_CEC. ąÜąŠą│ą┤ą░ čŹč鹊čé ą▒ąĖčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, CAN_CEC čģčĆą░ąĮąĖčé čüą▓ąŠąĖ č鹥ą║čāčēąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ, ąĖ ąĮąĄ čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ąĖąĮą║čĆąĄą╝ąĄąĮčé ąĖą╗ąĖ ą┤ąĄą║čĆąĄą╝ąĄąĮčé čüč湥čéčćąĖą║ąŠą▓ ąŠčłąĖą▒ąŠą║. ąŁč鹊čé čĆąĄąČąĖą╝ ąĮąĄ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅąĄčé čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ CAN.
ąŚą░ą┐ąĖčüąĖ ą▓ čüč湥čéčćąĖą║ąĖ ąŠčłąĖą▒ąŠą║ ą┤ąŠą╗ąČąĮčŗ ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčīčüčÅ č鹊ą╗čīą║ąŠ ą▓ debug mode. ąöąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐čĆąĖąĄą╝ą░ ą╝ąŠą│čāčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ąĮąĄą┐čĆąĄą┤čüą║ą░ąĘčāąĄą╝čŗą╝ ąĘąĮą░č湥ąĮąĖčÅą╝. ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĮąŠ ąĘą░ą┐ąĖčüą░čéčī ą▓ čüč湥čéčćąĖą║ąĖ ąŠčłąĖą▒ąŠą║, čĆą░ą▓ąĮąŠ 255. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ ąŠčłąĖą▒ąŠą║ 256, ą║ąŠč鹊čĆąŠąĄ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ ą┐ąĄčĆąĄą▓ąĄą┤ąĄčé ą╝ąŠą┤čāą╗čī CAN ą▓ čüąŠčüč鹊čÅąĮąĖąĄ bus-off, ąĮąĄą╗čīąĘčÅ ąĘą░ą┐ąĖčüą░čéčī ą▓ čüč湥čéčćąĖą║ąĖ ąŠčłąĖą▒ąŠą║.
ąóą░ą▒ą╗ąĖčåą░ 19-2 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąŠą▒čēąĖąĄ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ ą▒ąĖčé č鹥čüč鹊ą▓ąŠą│ąŠ čĆąĄąČąĖą╝ą░.
ąóą░ą▒ą╗ąĖčåą░ 19-2. ąóąĄčüč鹊ą▓čŗąĄ čĆąĄąČąĖą╝čŗ ą╝ąŠą┤čāą╗čÅ CAN.
| MRB |
MAA |
DIL |
DTO |
DRI |
CDE |
ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ |
| x |
x |
x |
x |
x |
0 |
ąØąŠčĆą╝ą░ą╗čīąĮčŗą╣ čĆąĄąČąĖą╝, ąĮąĄ čĆąĄąČąĖą╝ ąŠčéą╗ą░ą┤ą║ąĖ. |
| 0 |
x |
x |
x |
x |
x |
ąØąĄ čćąĖčéą░čéčī ąŠą▒čĆą░čéąĮąŠ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ. |
| 1 |
0 |
1 |
0 |
0 |
1 |
ąØąŠčĆą╝ą░ą╗čīąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ą┐ąŠ čłąĖąĮąĄ CAN. ą×ą▒čĆą░čéąĮąŠąĄ čćč鹥ąĮąĖąĄ. ąóčĆąĄą▒čāąĄčéčüčÅ ą▓ąĮąĄčłąĮąĄąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. |
| 1 |
1 |
1 |
0 |
0 |
1 |
ąØąŠčĆą╝ą░ą╗čīąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ą┐ąŠ čłąĖąĮąĄ CAN. ą×ą▒čĆą░čéąĮąŠąĄ čćč鹥ąĮąĖąĄ. ąØąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą▓ąĮąĄčłąĮąĄąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ą¤ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĖ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą┐ąŠ čłąĖąĮąĄ CAN. ąĀą░ąĘčĆąĄčłąĄąĮ ą▓čģąŠą┤ CANRX. |
| 1 |
1 |
0 |
0 |
0 |
1 |
ąØąŠčĆą╝ą░ą╗čīąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ą┐ąŠ čłąĖąĮąĄ CAN. ą×ą▒čĆą░čéąĮąŠąĄ čćč鹥ąĮąĖąĄ. ąØąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą▓ąĮąĄčłąĮąĄąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ą¤ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĖ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą┐ąŠ čłąĖąĮąĄ CAN. ąÆčģąŠą┤ CANRX ąĖ ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ ą┐ąĄčéą╗čÅ čü ą▓čŗčģąŠą┤ą░ ąĮą░ ą▓čģąŠą┤ čĆą░ąĘčĆąĄčłąĄąĮčŗ (ąŠą┐ąĄčĆą░čåąĖčÅ ąśąøąś ąĮą░ą┤ čüąĖą│ąĮą░ą╗ą░ą╝ąĖ TX ąĖ TX). |
| 1 |
1 |
0 |
0 |
1 |
1 |
ąØąŠčĆą╝ą░ą╗čīąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ą┐ąŠ čłąĖąĮąĄ CAN. ą×ą▒čĆą░čéąĮąŠąĄ čćč鹥ąĮąĖąĄ. ąØąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą▓ąĮąĄčłąĮąĄąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ą¤ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĖ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą┐ąŠ čłąĖąĮąĄ CAN. ąÆčģąŠą┤ CANRX ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ. ąÆąĮčāčéčĆąĄąĮąĮčÅčÅ ą┐ąĄčéą╗čÅ čü ą▓čŗčģąŠą┤ą░ ąĮą░ ą▓čģąŠą┤ čĆą░ąĘčĆąĄčłąĄąĮą░. |
| 1 |
1 |
0 |
1 |
1 |
1 |
ąØąĄčé ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ąŠ čłąĖąĮąĄ CAN. ą×ą▒čĆą░čéąĮąŠąĄ čćč鹥ąĮąĖąĄ. ąØąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą▓ąĮąĄčłąĮąĄąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ą¤ąŠ čłąĖąĮąĄ CAN ąĮąĄ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ąĮąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ, ąĮąĖ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ. ąÆčģąŠą┤ CANRX ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ. ąÆąĮčāčéčĆąĄąĮąĮčÅčÅ ą┐ąĄčéą╗čÅ čü ą▓čŗčģąŠą┤ą░ ąĮą░ ą▓čģąŠą┤ čĆą░ąĘčĆąĄčłąĄąĮą░. |
[ąźčĆą░ąĮąĖą╗ąĖčēąĄ ą┤ą░ąĮąĮčŗčģ]
ąÆčüąĄ ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ CAN ą┤ą░ąĮąĮčŗąĄ čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą▓ mailbox RAM. ąŚą┤ąĄčüčī ąĄčüčéčī ą▓ąŠčüąĄą╝čī 16-ą▒ąĖčéąĮčŗčģ čüą╗ąŠą▓ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ąĖąĘ 32 mailbox.
ąŚąĮą░č湥ąĮąĖčÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (ą▒ą░ąĘąŠą▓ą░čÅ ąĖ čĆą░čüčłąĖčĆąĄąĮąĮą░čÅ čćą░čüčéčī), ą▒ąĖčé čĆą░čüčłąĖčĆąĄąĮąĖčÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (identifier extension, IDE), ą▒ąĖčé ąĘą░ą┐čĆąŠčüą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ą╗čīąĮąĄą│ąŠ ąŠą║ąŠąĮčćą░ąĮąĖčÅ (remote transmission request, RTR), ą║ąŠą┤ ą┤ą╗ąĖąĮčŗ ą┤ą░ąĮąĮčŗčģ (data length code, DLC) ąĖ ą┐ąŠą╗ąĄ ą┤ą░ąĮąĮčŗčģ ą║ą░ąČą┤ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą╝ąŠąČąĮąŠ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ą▓ ąŠą▒ą╗ą░čüčéąĖ mailbox (čüą╝. čĆąĖčü. 19-7). ąæąĖčé substitute remote request (SRR, ą▓čüąĄą│ą┤ą░ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą║ą░ą║ čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╣) ąĖ ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą▒ąĖčéčŗ R0 ąĖ R1 (ą▓čüąĄą│ą┤ą░ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ą║ą░ą║ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗąĄ) ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą│ąĄąĮąĄčĆąĖčĆčāčÄčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣.
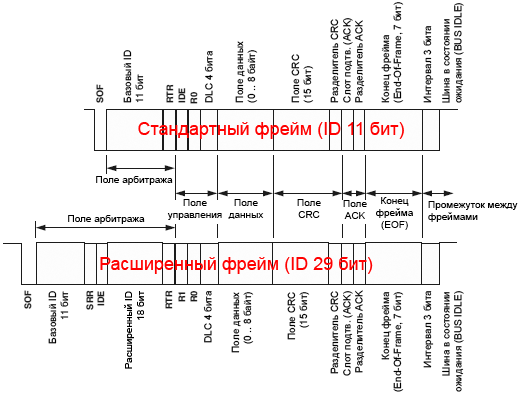
ąĀąĖčü. 19-7. ążąŠčĆą╝ą░čéčŗ čüąŠąŠą▒čēąĄąĮąĖčÅ CAN.
[ąĀąĄą│ąĖčüčéčĆčŗ čüą╗ąŠą▓ą░ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ mailbox]
ąÜą░ąČą┤čŗą╣ mailbox čüąŠčüč鹊ąĖčé ąĖąĘ 8 čüą╗ąŠą▓ ąĖ ą▓ą║ą╗čÄčćą░ąĄčé:
ŌĆó 29-ą▒ąĖčéąĮčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ (ą▒ą░ąĘąŠą▓ą░čÅ čćą░čüčéčī ą┐ą╗čÄčü čĆą░čüčłąĖčĆąĄąĮąĮą░čÅ čćą░čüčéčī).
ŌĆó ąæąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą╝ą░čüą║ąĖ čäąĖą╗čīčéčĆą░čåąĖąĖ (acceptance mask enable, AME).
ŌĆó ąæąĖčé ąĘą░ą┐čĆąŠčüą░ ą┐ąĄčĆąĄą┤ą░čćąĖ čü ą┤ą░ą╗čīąĮąĄą│ąŠ ąŠą║ąŠąĮčćą░ąĮąĖčÅ (remote transmission request, RTR).
ŌĆó ąæąĖčé čĆą░čüčłąĖčĆąĄąĮąĖčÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (identifier extension, IDE).
ŌĆó ąÜąŠą┤ ą┤ą╗ąĖąĮčŗ čüąŠąŠą▒čēąĄąĮąĖčÅ (data length code, DLC).
ŌĆó ąöąŠ 8 ą▒ą░ą╣čé ą┤ą╗čÅ ą┐ąŠą╗čÅ ą┤ą░ąĮąĮčŗčģ.
ŌĆó ąöą▓ą░ ą▒ą░ą╣čéą░ ą┤ą╗čÅ ąĘąĮą░č湥ąĮąĖčÅ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ (time stamp value, TSV).
ąĪčéą░čĆčłąĖąĄ 12 ą▒ąĖčé čüą╗ąŠą▓ą░ 4 ą║ą░ąČą┤ąŠą│ąŠ mailbox ą┐ąŠą╝ąĄč湥ąĮčŗ ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮčŗą╝ąĖ. ąŁčéąĖ ą▒ąĖčéčŗ ą▓čüąĄą│ą┤ą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ 0.
ąĢčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮą░ ąŠą┐čåąĖčÅ čäąĖą╗čīčéčĆą░čåąĖąĖ ą┐ąŠ ą┐ąŠą╗čÄ ą┤ą░ąĮąĮčŗčģ (DNM=1 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_CONTROL ąĖ FDF=1 čü čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ acceptance mask), č鹊 ą▒ąĖčéčŗ [15:0] čüą╗ąŠą▓ą░ 6 (ExtId) ą┐ąŠą▓č鹊čĆąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ ą║ąŠą┤ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ (acceptance code, DFC) ą┤ą╗čÅ ą┐ąŠą╗čÅ čäąĖą╗čīčéčĆą░čåąĖąĖ ą┤ą░ąĮąĮčŗčģ.
ąØąĖąČąĄ ą▓ąŠ ą▓čĆąĄąĘą║ą░čģ ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ąŠą┐ąĖčüą░ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ mailbox. ąæčāą║ą▓čŗ xx ąĘą░ą╝ąĄąĮčÅčÄčéčüčÅ ąĮą░ ąĘąĮą░č湥ąĮąĖąĄ ąĮąŠą╝ąĄčĆą░ mailbox ąŠčé 00 ą┤ąŠ 31. ąÆ ąĖą╝ąĄąĮą░čģ ą▒ąĖčé n ąĘą░ą╝ąĄąĮčÅąĄčéčüčÅ ąĮą░ čćąĖčüą╗ąŠ ąŠčé 0 ą┤ąŠ 31.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čĆąĄą│ąĖčüčéčĆčŗ mailbox čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ ą║ą░ą║ RAM, ąĖ čā ąĮąĖčģ ąĮąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░. ą¤ąŠčŹč鹊ą╝čā ą║ą░ąČą┤čŗą╣ mailbox ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą▒čĆąŠčłąĄąĮ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ą┐ąĄčĆąĄą┤ ąĄą│ąŠ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą▒ąĖčéą░ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MCx.
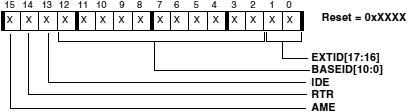
ąĀąĖčü. 19-8. Mailbox Identifier Word 7 (ą░ą┤čĆąĄčüą░ MMR-čĆąĄą│ąĖčüčéčĆąŠą▓ čüą╝. ą▓ čéą░ą▒ą╗ąĖčåąĄ 19-3).
ąóą░ą▒ą╗ąĖčåą░ 19-3. ąÉą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆąŠą▓ Mailbox Identifier Word 7.
| ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
MMR-ą░ą┤čĆąĄčü |
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
MMR-ą░ą┤čĆąĄčü |
| CAN_MB00_ID1 |
0xFFC0 2C1C |
CAN_MB16_ID1 |
0xFFC0 2E1C |
| CAN_MB01_ID1 |
0xFFC0 2C3C |
CAN_MB17_ID1 |
0xFFC0 2E3C |
| CAN_MB02_ID1 |
0xFFC0 2C5C |
CAN_MB18_ID1 |
0xFFC0 2E5C |
| CAN_MB03_ID1 |
0xFFC0 2C7C |
CAN_MB19_ID1 |
0xFFC0 2E7C |
| CAN_MB04_ID1 |
0xFFC0 2C9C |
CAN_MB20_ID1 |
0xFFC0 2E9C |
| CAN_MB05_ID1 |
0xFFC0 2CBC |
CAN_MB21_ID1 |
0xFFC0 2EBC |
| CAN_MB06_ID1 |
0xFFC0 2CDC |
CAN_MB22_ID1 |
0xFFC0 2EDC |
| CAN_MB07_ID1 |
0xFFC0 2CFC |
CAN_MB23_ID1 |
0xFFC0 2EFC |
| CAN_MB08_ID1 |
0xFFC0 2D1C |
CAN_MB24_ID1 |
0xFFC0 2F1C |
| CAN_MB09_ID1 |
0xFFC0 2D3C |
CAN_MB25_ID1 |
0xFFC0 2F3C |
| CAN_MB10_ID1 |
0xFFC0 2D5C |
CAN_MB26_ID1 |
0xFFC0 2F5C |
| CAN_MB11_ID1 |
0xFFC0 2D7C |
CAN_MB27_ID1 |
0xFFC0 2F7C |
| CAN_MB12_ID1 |
0xFFC0 2D9C |
CAN_MB28_ID1 |
0xFFC0 2F9C |
| CAN_MB13_ID1 |
0xFFC0 2DBC |
CAN_MB29_ID1 |
0xFFC0 2FBC |
| CAN_MB14_ID1 |
0xFFC0 2DDC |
CAN_MB30_ID1 |
0xFFC0 2FDC |
| CAN_MB15_ID1 |
0xFFC0 2DFC |
CAN_MB31_ID1 |
0xFFC0 2FFC |
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆąŠą▓ CAN_MBxxID1:
AME - Acceptance Mask Enable.
1: čĆą░ąĘčĆąĄčłą░ąĄčé ą╝ą░čüą║čā čäąĖą╗čīčéčĆą░čåąĖąĖ ą┐ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčā ą┤ą╗čÅ ą┐čĆąĖčģąŠą┤čÅčēąĖčģ čüąŠąŠą▒čēąĄąĮąĖą╣ (ą▓ąŠąĘą╝ąŠąČąĄąĮ ą┐čĆąĖąĄą╝ ą┐ąŠ ą│čĆčāą┐ą┐ąĄ ą░ą┤čĆąĄčüąŠą▓).
0: čĆą░ąĘčĆąĄčłą░ąĄčé čäąĖą╗čīčéčĆą░čåąĖčÄ ą┐ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčā (ą┐ąŠą╗ąĮąŠąĄ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░).
RTR - Remote Transmission Request.
1: čĆą░ąĘčĆąĄčłą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓ ą▓ąĖą┤ąĄ čäčĆąĄą╣ą╝ą░ remote.
0: čĆą░ąĘčĆąĄčłą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓ ą▓ąĖą┤ąĄ čäčĆąĄą╣ą╝ą░ ą┤ą░ąĮąĮčŗčģ.
IDE - Identifier Extension.
1: čĆą░ąĘčĆąĄčłą░ąĄčé 29-ą▒ąĖčéąĮčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ.
0: čĆą░ąĘčĆąĄčłą░ąĄčé 11-ą▒ąĖčéąĮčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ.

ąĀąĖčü. 19-9. Mailbox Identifier Word 6 (ą░ą┤čĆąĄčüą░ MMR-čĆąĄą│ąĖčüčéčĆąŠą▓ čüą╝. ą▓ čéą░ą▒ą╗ąĖčåąĄ 19-4).
EXTID - čŹč鹊 ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą▒ąĖčéčŗ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ 29-ą▒ąĖčéąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ.
ąóą░ą▒ą╗ąĖčåą░ 19-4. ąÉą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆąŠą▓ Mailbox Identifier Word 6.
| ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
MMR-ą░ą┤čĆąĄčü |
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
MMR-ą░ą┤čĆąĄčü |
| CAN_MB00_ID0 |
0xFFC0 2C18 |
CAN_MB16_ID0 |
0xFFC0 2E18 |
| CAN_MB01_ID0 |
0xFFC0 2C38 |
CAN_MB17_ID0 |
0xFFC0 2E38 |
| CAN_MB02_ID0 |
0xFFC0 2C58 |
CAN_MB18_ID0 |
0xFFC0 2E58 |
| CAN_MB03_ID0 |
0xFFC0 2C78 |
CAN_MB19_ID0 |
0xFFC0 2E78 |
| CAN_MB04_ID0 |
0xFFC0 2C98 |
CAN_MB20_ID0 |
0xFFC0 2E98 |
| CAN_MB05_ID0 |
0xFFC0 2CB8 |
CAN_MB21_ID0 |
0xFFC0 2EB8 |
| CAN_MB06_ID0 |
0xFFC0 2CD8 |
CAN_MB22_ID0 |
0xFFC0 2ED8 |
| CAN_MB07_ID0 |
0xFFC0 2CF8 |
CAN_MB23_ID0 |
0xFFC0 2EF8 |
| CAN_MB08_ID0 |
0xFFC0 2D18 |
CAN_MB24_ID0 |
0xFFC0 2F18 |
| CAN_MB09_ID0 |
0xFFC0 2D38 |
CAN_MB25_ID0 |
0xFFC0 2F38 |
| CAN_MB10_ID0 |
0xFFC0 2D58 |
CAN_MB26_ID0 |
0xFFC0 2F58 |
| CAN_MB11_ID0 |
0xFFC0 2D78 |
CAN_MB27_ID0 |
0xFFC0 2F78 |
| CAN_MB12_ID0 |
0xFFC0 2D98 |
CAN_MB28_ID0 |
0xFFC0 2F98 |
| CAN_MB13_ID0 |
0xFFC0 2DB8 |
CAN_MB29_ID0 |
0xFFC0 2FB8 |
| CAN_MB14_ID0 |
0xFFC0 2DD8 |
CAN_MB30_ID0 |
0xFFC0 2FD8 |
| CAN_MB15_ID0 |
0xFFC0 2DF8 |
CAN_MB31_ID0 |
0xFFC0 2FF8 |

ąĀąĖčü. 19-10. Mailbox Identifier Word 5 (ą░ą┤čĆąĄčüą░ MMR-čĆąĄą│ąĖčüčéčĆąŠą▓ čüą╝. ą▓ čéą░ą▒ą╗ąĖčåąĄ 19-5).
TSV - ą╝ąĄčéą║ą░ ą▓čĆąĄą╝ąĄąĮąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ.
ąóą░ą▒ą╗ąĖčåą░ 19-5. ąÉą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆąŠą▓ Mailbox Identifier Word 5.
| ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
MMR-ą░ą┤čĆąĄčü |
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
MMR-ą░ą┤čĆąĄčü |
| CAN_MB00_TIMESTAMP |
0xFFC0 2C14 |
CAN_MB16_TIMESTAMP |
0xFFC0 2E14 |
| CAN_MB01_TIMESTAMP |
0xFFC0 2C34 |
CAN_MB17_TIMESTAMP |
0xFFC0 2E34 |
| CAN_MB02_TIMESTAMP |
0xFFC0 2C54 |
CAN_MB18_TIMESTAMP |
0xFFC0 2E54 |
| CAN_MB03_TIMESTAMP |
0xFFC0 2C74 |
CAN_MB19_TIMESTAMP |
0xFFC0 2E74 |
| CAN_MB04_TIMESTAMP |
0xFFC0 2C94 |
CAN_MB20_TIMESTAMP |
0xFFC0 2E94 |
| CAN_MB05_TIMESTAMP |
0xFFC0 2CB4 |
CAN_MB21_TIMESTAMP |
0xFFC0 2EB4 |
| CAN_MB06_TIMESTAMP |
0xFFC0 2CD4 |
CAN_MB22_TIMESTAMP |
0xFFC0 2ED4 |
| CAN_MB07_TIMESTAMP |
0xFFC0 2CF4 |
CAN_MB23_TIMESTAMP |
0xFFC0 2EF4 |
| CAN_MB08_TIMESTAMP |
0xFFC0 2D14 |
CAN_MB24_TIMESTAMP |
0xFFC0 2F14 |
| CAN_MB09_TIMESTAMP |
0xFFC0 2D34 |
CAN_MB25_TIMESTAMP |
0xFFC0 2F34 |
| CAN_MB10_TIMESTAMP |
0xFFC0 2D54 |
CAN_MB26_TIMESTAMP |
0xFFC0 2F54 |
| CAN_MB11_TIMESTAMP |
0xFFC0 2D74 |
CAN_MB27_TIMESTAMP |
0xFFC0 2F74 |
| CAN_MB12_TIMESTAMP |
0xFFC0 2D94 |
CAN_MB28_TIMESTAMP |
0xFFC0 2F94 |
| CAN_MB13_TIMESTAMP |
0xFFC0 2DB4 |
CAN_MB29_TIMESTAMP |
0xFFC0 2FB4 |
| CAN_MB14_TIMESTAMP |
0xFFC0 2DD4 |
CAN_MB30_TIMESTAMP |
0xFFC0 2FD4 |
| CAN_MB15_TIMESTAMP |
0xFFC0 2DF4 |
CAN_MB31_TIMESTAMP |
0xFFC0 2FF4 |
ąøčÄą▒ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ DLC, ą▒ąŠą╗čīčłąĄąĄ 8, ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ čéą░ą║ ąČąĄ, ą║ą░ą║ ąĘąĮą░č湥ąĮąĖąĄ 8.

ąĀąĖčü. 19-11. Mailbox Identifier Word 4 (ą░ą┤čĆąĄčüą░ MMR-čĆąĄą│ąĖčüčéčĆąŠą▓ čüą╝. ą▓ čéą░ą▒ą╗ąĖčåąĄ 19-6).
DLC - ą┤ą╗ąĖąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ ą▒ą░ą╣čéą░čģ.
ąóą░ą▒ą╗ąĖčåą░ 19-6. ąÉą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆąŠą▓ Mailbox Identifier Word 4.
| ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
MMR-ą░ą┤čĆąĄčü |
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
MMR-ą░ą┤čĆąĄčü |
| CAN_MB00_LENGTH |
0xFFC0 2C10 |
CAN_MB16_LENGTH |
0xFFC0 2E10 |
| CAN_MB01_LENGTH |
0xFFC0 2C30 |
CAN_MB17_LENGTH |
0xFFC0 2E30 |
| CAN_MB02_LENGTH |
0xFFC0 2C50 |
CAN_MB18_LENGTH |
0xFFC0 2E50 |
| CAN_MB03_LENGTH |
0xFFC0 2C70 |
CAN_MB19_LENGTH |
0xFFC0 2E70 |
| CAN_MB04_LENGTH |
0xFFC0 2C90 |
CAN_MB20_LENGTH |
0xFFC0 2E90 |
| CAN_MB05_LENGTH |
0xFFC0 2CB0 |
CAN_MB21_LENGTH |
0xFFC0 2EB0 |
| CAN_MB06_LENGTH |
0xFFC0 2CD0 |
CAN_MB22_LENGTH |
0xFFC0 2ED0 |
| CAN_MB07_LENGTH |
0xFFC0 2CF0 |
CAN_MB23_LENGTH |
0xFFC0 2EF0 |
| CAN_MB08_LENGTH |
0xFFC0 2D10 |
CAN_MB24_LENGTH |
0xFFC0 2F10 |
| CAN_MB09_LENGTH |
0xFFC0 2D30 |
CAN_MB25_LENGTH |
0xFFC0 2F30 |
| CAN_MB10_LENGTH |
0xFFC0 2D50 |
CAN_MB26_LENGTH |
0xFFC0 2F50 |
| CAN_MB11_LENGTH |
0xFFC0 2D70 |
CAN_MB27_LENGTH |
0xFFC0 2F70 |
| CAN_MB12_LENGTH |
0xFFC0 2D90 |
CAN_MB28_LENGTH |
0xFFC0 2F90 |
| CAN_MB13_LENGTH |
0xFFC0 2DB0 |
CAN_MB29_LENGTH |
0xFFC0 2FB0 |
| CAN_MB14_LENGTH |
0xFFC0 2DD0 |
CAN_MB30_LENGTH |
0xFFC0 2FD0 |
| CAN_MB15_LENGTH |
0xFFC0 2DF0 |
CAN_MB31_LENGTH |
0xFFC0 2FF0 |
ą¤ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ CAN ąŠą▒ą╝ąĄąĮąĖą▓ą░ąĄčéčüčÅ ą┤ą░ąĮąĮčŗą╝ąĖ čéą░ą║, čćč鹊 čüą░ą╝čŗą╣ "ąĘąĮą░čćą░čēąĖą╣" ą▒ą░ą╣čé (ą║ąŠč鹊čĆčŗą╣ čģčĆą░ąĮąĖčéčüčÅ ą┐ąŠ čüą░ą╝ąŠą╝čā čüčéą░čĆčłąĄą╝čā ą░ą┤čĆąĄčüčā) ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą┐ąĄčĆą▓čŗą╝. ą¤ąŠ čŹč鹊ą╣ ą┐čĆąĖčćąĖąĮąĄ čĆąĄą│ąĖčüčéčĆčŗ CAN_MBxx_DATAx ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą║ą░ą║ ąĄčüą╗ąĖ ą▒čŗ čüčéą░čĆčłąĖą╣ ą▒ą░ą╣čé ą▒čŗą╗ ą┐ąĄčĆą▓čŗą╝. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą┐ąĄčĆąĄą┤ą░ąĮ ąĖą╗ąĖ ą┐čĆąĖąĮčÅčé č鹊ą╗čīą║ąŠ 1 ą▒ą░ą╣čé (DLC = 1), č鹊 ąŠąĮ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ čüą░ą╝čŗą╣ ąĘąĮą░čćą░čēąĖą╣ ą▒ą░ą╣čé čĆąĄą│ąĖčüčéčĆą░ CAN_MBxx_DATA3. ąĢčüą╗ąĖ ą┐ąĄčĆąĄą┤ą░ąĮčŗ ąĖą╗ąĖ ą┐čĆąĖąĮčÅčéčŗ ą┤ą▓ą░ ą▒ą░ą╣čéą░, č鹊 ąŠąĮąĖ čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą▓ čüčéą░čĆčłčāčÄ ąĖ ą╝ą╗ą░ą┤čłčāčÄ ą┐ąŠą╗ąŠą▓ąĖąĮčŗ CAN_MBxx_DATA3. ąĪą╝. čĆąĖčüčāąĮą║ąĖ 19-12, 19-13, 19-14 ąĖ 19-15. ą¤ąŠąĮą░čćą░ą╗čā čŹč鹊 ą▓ąĮąŠčüčéąĖčé ąĖąĘą▓ąĄčüčéąĮčāčÄ ą┐čāčéą░ąĮąĖčåčā, ą▒čāą┤čīč鹥 ą▓ąĮąĖą╝ą░č鹥ą╗čīąĮčŗ!
ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮ ą║ąŠą┤, ą║ąŠč鹊čĆčŗą╣ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé ą┐čĆąŠą│ąĮąŠąĘąĖčĆčāąĄą╝čŗą╣ ą┐ąŠčĆčÅą┤ąŠą║ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą▒ą░ą╣čé ąĖ ą▓ ą┐ą░ą╝čÅčéąĖ, ąĖ ą┐čĆąĖ ą┐ąĄčĆąĄą┤ą░č湥 - ą┐ąĄčĆą▓čŗą╣ ą▒ą░ą╣čé ą▓ ą┐ą░ą╝čÅčéąĖ (ą┐ąŠ čüą░ą╝ąŠą╝čā ą╝ą╗ą░ą┤čłąĄą╝čā ą░ą┤čĆąĄčüčā) ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą┐ąĄčĆą▓čŗą╝:
// ą×ą▒čŖąĄą┤ąĖąĮąĄąĮąĖąĄ ą┤ą╗čÅ ą┐ąĄčĆąĄčüčéą░ąĮąŠą▓ą║ąĖ ą▒ą░ą╣čé:
typedef union
{
u16 d16;
u8 d8[2];
}TCanDataSwap;
////////////////////////////////////////////////////////////////////
// ążčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā ą▓ąŠčüąĄą╝čī čÅčēąĖą║ąŠą▓ 24..31. ąÆąĄčĆąĮąĄčé true,
// ąĄčüą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćą░ ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī čāčüą┐ąĄčłąĮąŠ ąĖ false, ąĄčüą╗ąĖ ą┐ąĄčĆąĄą┤ą░čéčī
// ąĮąĄ čāą┤ą░ą╗ąŠčüčī, ą┐ąŠč鹊ą╝čā čćč鹊 ą▓čüąĄ čŹčéąĖ ą▓ąŠčüąĄą╝čī čÅčēąĖą║ąŠą▓ ąĘą░ąĮčÅčéčŗ ą┐ąĄčĆąĄą┤ą░č湥ą╣.
// ąæą░ą╣čéčŗ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą▓ č鹊ą╝ ąČąĄ ą┐ąŠčĆčÅą┤ą║ąĄ, ą║ą░ą║ ąŠąĮąĖ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ ą┐ą░ą╝čÅčéąĖ
// ą┐ąŠ ą░ą┤čĆąĄčüčā data.
bool canTX (u8* data)
{
// ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ čĆąĄą│ąĖčüčéčĆ DATA0 ąĮą░ą╣ą┤ąĄąĮąĮąŠą│ąŠ čüą▓ąŠą▒ąŠą┤ąĮąŠą│ąŠ
// ą┐ąĄčĆąĄą┤ą░čÄčēąĄą│ąŠ čÅčēąĖą║ą░ CAN_MBxx:
volatile u16 *pCAN_Ptr;
// ą¤ąŠąĖčüą║ čüą▓ąŠą▒ąŠą┤ąĮąŠą│ąŠ čÅčēąĖą║ą░ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ:
s16 boxnum;
u16 boxmask = 0x0100; // ą╝ą░čüą║ą░ ą▒ąĖčéą░ čÅčēąĖą║ą░ 24 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_TRS2
u16 boxmaskfinded = 0;
for (boxnum=24; boxnum<32; boxnum++)
{
if (0==(*pCAN_TRS2 & boxmask))
{
boxmaskfinded = boxmask;
break;
}
boxmask <= 1;
}
if (boxmaskfinded)
{
pCAN_Ptr = (u16*)CAN_MB00_DATA0 + (0x10 * boxnum);
TCanDataSwap tmp;
// ąŚą░ą┐ąŠą╗ąĮąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą▓ ąĮą░ą╣ą┤ąĄąĮąĮąŠą╝ čÅčēąĖą║ąĄ:
tmp.d8[1] = *data++;
tmp.d8[0] = *data++;
*(pCAN_Ptr + 6) = tmp.d16;
tmp.d8[1] = *data++;
tmp.d8[0] = *data++;
*(pCAN_Ptr + 4) = tmp.d16;
tmp.d8[1] = *data++;
tmp.d8[0] = *data++;
*(pCAN_Ptr + 2) = tmp.d16;
tmp.d8[1] = *data++;
tmp.d8[0] = *data++;
*(pCAN_Ptr + 0) = tmp.d16;
// ąŚą░ą┐čāčüą║ ą┐ąĄčĆąĄą┤ą░čćąĖ:
*pCAN_TRS2 = boxmaskfinded;
}
return (0!=boxmaskfinded);
}
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 čŹčéą░ čäčāąĮą║čåąĖčÅ ąĮąĄ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą┐ąŠčĆčÅą┤ąŠą║ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ 8-ą▒ą░ą╣čéąĮčŗčģ ą┐ą░ą║ąĄč鹊ą▓ ą▓ č鹊ą╝ čüą╗čāčćą░ąĄ, ąĄčüą╗ąĖ ą┐čĆąĖ ą▓čģąŠą┤ąĄ ą▓ čäčāąĮą║čåąĖčÄ ąĮąĄą║ąŠč鹊čĆčŗąĄ čÅčēąĖą║ąĖ ą▒čŗą╗ąĖ ąĘą░ąĮčÅčéčŗ. ąöą╗čÅ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą┐ąŠčĆčÅą┤ą║ą░ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą┐ą░ą║ąĄč鹊ą▓ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥 ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą┐ąĄčĆąĄą┤ą░čÄčēąĖą╣ čÅčēąĖą║.
[CAN_MBxx_DATA3, ą┐ąĄčĆą▓čŗą╣ ąĖ ą▓č鹊čĆąŠą╣ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗąĄ ą▒ą░ą╣čéčŗ]

ąĀąĖčü. 19-12. Mailbox Identifier Word 3 (ą░ą┤čĆąĄčüą░ MMR-čĆąĄą│ąĖčüčéčĆąŠą▓ čüą╝. ą▓ čéą░ą▒ą╗ąĖčåąĄ 19-7).
ąóą░ą▒ą╗ąĖčåą░ 19-7. ąÉą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆąŠą▓ Mailbox Identifier Word 3.
| ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
MMR-ą░ą┤čĆąĄčü |
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
MMR-ą░ą┤čĆąĄčü |
| CAN_MB00_DATA3 |
0xFFC0 2C0C |
CAN_MB16_DATA3 |
0xFFC0 2E0C |
| CAN_MB01_DATA3 |
0xFFC0 2C2C |
CAN_MB17_DATA3 |
0xFFC0 2E2C |
| CAN_MB02_DATA3 |
0xFFC0 2C4C |
CAN_MB18_DATA3 |
0xFFC0 2E4C |
| CAN_MB03_DATA3 |
0xFFC0 2C6C |
CAN_MB19_DATA3 |
0xFFC0 2E6C |
| CAN_MB04_DATA3 |
0xFFC0 2C8C |
CAN_MB20_DATA3 |
0xFFC0 2E8C |
| CAN_MB05_DATA3 |
0xFFC0 2CAC |
CAN_MB21_DATA3 |
0xFFC0 2EAC |
| CAN_MB06_DATA3 |
0xFFC0 2CCC |
CAN_MB22_DATA3 |
0xFFC0 2ECC |
| CAN_MB07_DATA3 |
0xFFC0 2CEC |
CAN_MB23_DATA3 |
0xFFC0 2EEC |
| CAN_MB08_DATA3 |
0xFFC0 2D0C |
CAN_MB24_DATA3 |
0xFFC0 2F0C |
| CAN_MB09_DATA3 |
0xFFC0 2D2C |
CAN_MB25_DATA3 |
0xFFC0 2F2C |
| CAN_MB10_DATA3 |
0xFFC0 2D4C |
CAN_MB26_DATA3 |
0xFFC0 2F4C |
| CAN_MB11_DATA3 |
0xFFC0 2D6C |
CAN_MB27_DATA3 |
0xFFC0 2F6C |
| CAN_MB12_DATA3 |
0xFFC0 2D8C |
CAN_MB28_DATA3 |
0xFFC0 2F8C |
| CAN_MB13_DATA3 |
0xFFC0 2DAC |
CAN_MB29_DATA3 |
0xFFC0 2FAC |
| CAN_MB14_DATA3 |
0xFFC0 2DCC |
CAN_MB30_DATA3 |
0xFFC0 2FCC |
| CAN_MB15_DATA3 |
0xFFC0 2DEC |
CAN_MB31_DATA3 |
0xFFC0 2FEC |
[CAN_MBxx_DATA2, čéčĆąĄčéąĖą╣ ąĖ č湥čéą▓ąĄčĆčéčŗą╣ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗąĄ ą▒ą░ą╣čéčŗ]

ąĀąĖčü. 19-13. Mailbox Identifier Word 2 (ą░ą┤čĆąĄčüą░ MMR-čĆąĄą│ąĖčüčéčĆąŠą▓ čüą╝. ą▓ čéą░ą▒ą╗ąĖčåąĄ 19-8).
ąóą░ą▒ą╗ąĖčåą░ 19-8. ąÉą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆąŠą▓ Mailbox Identifier Word 2.
| ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
MMR-ą░ą┤čĆąĄčü |
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
MMR-ą░ą┤čĆąĄčü |
| CAN_MB00_DATA2 |
0xFFC0 2C08 |
CAN_MB16_DATA2 |
0xFFC0 2E08 |
| CAN_MB01_DATA2 |
0xFFC0 2C28 |
CAN_MB17_DATA2 |
0xFFC0 2E28 |
| CAN_MB02_DATA2 |
0xFFC0 2C48 |
CAN_MB18_DATA2 |
0xFFC0 2E48 |
| CAN_MB03_DATA2 |
0xFFC0 2C68 |
CAN_MB19_DATA2 |
0xFFC0 2E68 |
| CAN_MB04_DATA2 |
0xFFC0 2C88 |
CAN_MB20_DATA2 |
0xFFC0 2E88 |
| CAN_MB05_DATA2 |
0xFFC0 2CA8 |
CAN_MB21_DATA2 |
0xFFC0 2EA8 |
| CAN_MB06_DATA2 |
0xFFC0 2CC8 |
CAN_MB22_DATA2 |
0xFFC0 2EC8 |
| CAN_MB07_DATA2 |
0xFFC0 2CE8 |
CAN_MB23_DATA2 |
0xFFC0 2EE8 |
| CAN_MB08_DATA2 |
0xFFC0 2D08 |
CAN_MB24_DATA2 |
0xFFC0 2F08 |
| CAN_MB09_DATA2 |
0xFFC0 2D28 |
CAN_MB25_DATA2 |
0xFFC0 2F28 |
| CAN_MB10_DATA2 |
0xFFC0 2D48 |
CAN_MB26_DATA2 |
0xFFC0 2F48 |
| CAN_MB11_DATA2 |
0xFFC0 2D68 |
CAN_MB27_DATA2 |
0xFFC0 2F68 |
| CAN_MB12_DATA2 |
0xFFC0 2D88 |
CAN_MB28_DATA2 |
0xFFC0 2F88 |
| CAN_MB13_DATA2 |
0xFFC0 2DA8 |
CAN_MB29_DATA2 |
0xFFC0 2FA8 |
| CAN_MB14_DATA2 |
0xFFC0 2DC8 |
CAN_MB30_DATA2 |
0xFFC0 2FC8 |
| CAN_MB15_DATA2 |
0xFFC0 2DE8 |
CAN_MB31_DATA2 |
0xFFC0 2FE8 |
[CAN_MBxx_DATA1, ą┐čÅčéčŗą╣ ąĖ čłąĄčüč鹊ą╣ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗąĄ ą▒ą░ą╣čéčŗ]

ąĀąĖčü. 19-14. Mailbox Identifier Word 1 (ą░ą┤čĆąĄčüą░ MMR-čĆąĄą│ąĖčüčéčĆąŠą▓ čüą╝. ą▓ čéą░ą▒ą╗ąĖčåąĄ 19-9).
ąóą░ą▒ą╗ąĖčåą░ 19-9. ąÉą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆąŠą▓ Mailbox Identifier Word 1.
| ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
MMR-ą░ą┤čĆąĄčü |
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
MMR-ą░ą┤čĆąĄčü |
| CAN_MB00_DATA1 |
0xFFC0 2C04 |
CAN_MB16_DATA1 |
0xFFC0 2E04 |
| CAN_MB01_DATA1 |
0xFFC0 2C24 |
CAN_MB17_DATA1 |
0xFFC0 2E24 |
| CAN_MB02_DATA1 |
0xFFC0 2C44 |
CAN_MB18_DATA1 |
0xFFC0 2E44 |
| CAN_MB03_DATA1 |
0xFFC0 2C64 |
CAN_MB19_DATA1 |
0xFFC0 2E64 |
| CAN_MB04_DATA1 |
0xFFC0 2C84 |
CAN_MB20_DATA1 |
0xFFC0 2E84 |
| CAN_MB05_DATA1 |
0xFFC0 2CA4 |
CAN_MB21_DATA1 |
0xFFC0 2EA4 |
| CAN_MB06_DATA1 |
0xFFC0 2CC4 |
CAN_MB22_DATA1 |
0xFFC0 2EC4 |
| CAN_MB07_DATA1 |
0xFFC0 2CE4 |
CAN_MB23_DATA1 |
0xFFC0 2EE4 |
| CAN_MB08_DATA1 |
0xFFC0 2D04 |
CAN_MB24_DATA1 |
0xFFC0 2F04 |
| CAN_MB09_DATA1 |
0xFFC0 2D24 |
CAN_MB25_DATA1 |
0xFFC0 2F24 |
| CAN_MB10_DATA1 |
0xFFC0 2D44 |
CAN_MB26_DATA1 |
0xFFC0 2F44 |
| CAN_MB11_DATA1 |
0xFFC0 2D64 |
CAN_MB27_DATA1 |
0xFFC0 2F64 |
| CAN_MB12_DATA1 |
0xFFC0 2D84 |
CAN_MB28_DATA1 |
0xFFC0 2F84 |
| CAN_MB13_DATA1 |
0xFFC0 2DA4 |
CAN_MB29_DATA1 |
0xFFC0 2FA4 |
| CAN_MB14_DATA1 |
0xFFC0 2DC4 |
CAN_MB30_DATA1 |
0xFFC0 2FC4 |
| CAN_MB15_DATA1 |
0xFFC0 2DE4 |
CAN_MB31_DATA1 |
0xFFC0 2FE4 |
[CAN_MBxx_DATA0, čüąĄą┤čīą╝ąŠą╣ ąĖ ą▓ąŠčüčīą╝ąŠą╣ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗąĄ ą▒ą░ą╣čéčŗ]

ąĀąĖčü. 19-15. Mailbox Identifier Word 0 (ą░ą┤čĆąĄčüą░ MMR-čĆąĄą│ąĖčüčéčĆąŠą▓ čüą╝. ą▓ čéą░ą▒ą╗ąĖčåąĄ 19-10).
ąóą░ą▒ą╗ąĖčåą░ 19-10. ąÉą┤čĆąĄčüą░ čĆąĄą│ąĖčüčéčĆąŠą▓ Mailbox Identifier Word 0.
| ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
MMR-ą░ą┤čĆąĄčü |
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
MMR-ą░ą┤čĆąĄčü |
| CAN_MB00_DATA0 |
0xFFC0 2C00 |
CAN_MB16_DATA0 |
0xFFC0 2E00 |
| CAN_MB01_DATA0 |
0xFFC0 2C20 |
CAN_MB17_DATA0 |
0xFFC0 2E20 |
| CAN_MB02_DATA0 |
0xFFC0 2C40 |
CAN_MB18_DATA0 |
0xFFC0 2E40 |
| CAN_MB03_DATA0 |
0xFFC0 2C60 |
CAN_MB19_DATA0 |
0xFFC0 2E60 |
| CAN_MB04_DATA0 |
0xFFC0 2C80 |
CAN_MB20_DATA0 |
0xFFC0 2E80 |
| CAN_MB05_DATA0 |
0xFFC0 2CA0 |
CAN_MB21_DATA0 |
0xFFC0 2EA0 |
| CAN_MB06_DATA0 |
0xFFC0 2CC0 |
CAN_MB22_DATA0 |
0xFFC0 2EC0 |
| CAN_MB07_DATA0 |
0xFFC0 2CE0 |
CAN_MB23_DATA0 |
0xFFC0 2EE0 |
| CAN_MB08_DATA0 |
0xFFC0 2D00 |
CAN_MB24_DATA0 |
0xFFC0 2F00 |
| CAN_MB09_DATA0 |
0xFFC0 2D20 |
CAN_MB25_DATA0 |
0xFFC0 2F20 |
| CAN_MB10_DATA0 |
0xFFC0 2D40 |
CAN_MB26_DATA0 |
0xFFC0 2F40 |
| CAN_MB11_DATA0 |
0xFFC0 2D60 |
CAN_MB27_DATA0 |
0xFFC0 2F60 |
| CAN_MB12_DATA0 |
0xFFC0 2D80 |
CAN_MB28_DATA0 |
0xFFC0 2F80 |
| CAN_MB13_DATA0 |
0xFFC0 2DA0 |
CAN_MB29_DATA0 |
0xFFC0 2FA0 |
| CAN_MB14_DATA0 |
0xFFC0 2DC0 |
CAN_MB30_DATA0 |
0xFFC0 2FC0 |
| CAN_MB15_DATA0 |
0xFFC0 2DE0 |
CAN_MB31_DATA0 |
0xFFC0 2FE0 |
ą¤čĆąĖąĄą╝ąĮčŗąĄ mailbox ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą▓čĆąĄą╝ąĄąĮąĮčŗą╣ ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░, ą║ąŠč鹊čĆčŗąĄ ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ č鹊ą╗čīą║ąŠ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą║ąŠą┤ą░ DLC čüąŠąŠą▒čēąĄąĮąĖčÅ. ąöą╗čÅ ą║ąŠą┤ąŠą▓ DLC ą╝ąĄąĮčīčłąĄ 8 čüą░ą╝čŗąĄ ą╝ą╗ą░ą┤čłąĖąĄ ą▒ą░ą╣čéčŗ ąĮąĄ ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ, ąĖ čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą▓ ą┐čĆąĖąĮąĖą╝ą░čÄčēąĄą╝ mailbox. ąæčāą┤čāčé ą┤ąŠą┐čāčüčéąĖą╝čŗ č鹊ą╗čīą║ąŠ ą┤ą░ąĮąĮčŗąĄ, ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ąŠč鹊čĆčŗčģ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą┐ąŠą╗ąĄą╝ DLC.
ą¤čĆąŠą│čĆą░ą╝ą╝ą░ ą┤ąŠą╗ąČąĮą░ ą┐čĆąŠą▓ąĄčĆčÅčéčī ą║ąŠą┤ DLC ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą║ą░ą║ąĖąĄ čćąĖčéą░čéčī ą▒ą░ą╣čéčŗ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ CAN_MBxx_DATAx.
[ą×ą▒ą╗ą░čüčéčī mailbox]
ąæąŠą╗čīčłąĖąĮčüčéą▓ąŠ CAN mailbox, ąĮąŠ ąĮąĄ ą▓čüąĄ, ą╝ąŠąČąĮąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā ąĖą╗ąĖ ą┐čĆąĖąĄą╝. ąŻ ą║ą░ąČą┤ąŠą│ąŠ mailbox ąĄčüčéčī ą╝ą░čüą║ą░ čäąĖą╗čīčéčĆą░čåąĖąĖ ą┐ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčā (acceptance mask). Mailbox 31 čŹč鹊 mailbox čüąŠ čüą░ą╝čŗą╝ čüčéą░čĆčłąĖą╝ ąĮąŠą╝ąĄčĆąŠą╝.
ąóąĖą┐čŗ mailbox. Mailbox-čŗ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ. 8 mailbox-ąŠą▓ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮčŗ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ, ąĄčēąĄ 8 č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░, ąĖ ąŠčüčéą░ą╗čīąĮčŗąĄ 16 ą╝ąŠąČąĮąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā ąĖą╗ąĖ ą┐čĆąĖąĄą╝. ąóąŠą╗čīą║ąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄą╝čŗąĄ mailbox ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé čäčāąĮą║čåąĖčÄ čäčĆąĄą╣ą╝ą░ ąĘą░ą┐čĆąŠčüą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ąŠčé ą┤ą░ą╗čīąĮąĄą│ąŠ ąŠą║ąŠąĮčćą░ąĮąĖčÅ (remote frame-request). ą×ą▒ą╗ą░čüčéčī čĆąĄą│ąĖčüčéčĆąŠą▓ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ mailbox čüąŠčüč鹊ąĖčé ąĖąĘ čĆąĄą│ąĖčüčéčĆąŠą▓:
ŌĆó CAN_MC1 ąĖ CAN_MC2 (čĆąĄą│ąĖčüčéčĆčŗ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ mailbox).
ŌĆó CAN_MD1 ąĖ CAN_MD2 (čĆąĄą│ąĖčüčéčĆčŗ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ mailbox).
ŌĆó CAN_TA1 ąĖ CAN_TA2 (čĆąĄą│ąĖčüčéčĆčŗ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ).
ŌĆó CAN_AA1 ąĖ CAN_AA2 (čĆąĄą│ąĖčüčéčĆčŗ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ abort).
ŌĆó CAN_TRS1 ąĖ CAN_TRS2 (čĆąĄą│ąĖčüčéčĆčŗ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĘą░ą┐čĆąŠčüą░ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ).
ŌĆó CAN_TRR1 ąĖ CAN_TRR2 (čĆąĄą│ąĖčüčéčĆčŗ čüą▒čĆąŠčüą░ ąĘą░ą┐čĆąŠčüą░ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ).
ŌĆó CAN_RMP1 ąĖ CAN_RMP2 (čĆąĄą│ąĖčüčéčĆčŗ ąŠąČąĖą┤ą░čÄčēąĖčģ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĖąĮčÅčéčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣).
ŌĆó CAN_RML1 ąĖ CAN_RML2 (čĆąĄą│ąĖčüčéčĆčŗ ą┐čĆąĖąĮčÅčéčŗčģ, ąĮąŠ ąĮąĄ ąŠą▒čĆą░ą▒ąŠčéą░ąĮąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣).
ŌĆó CAN_RFH1 ąĖ CAN_RFH2 (čĆąĄą│ąĖčüčéčĆčŗ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ remote frame).
ŌĆó CAN_OPSS1 ąĖ CAN_OPSS2 (čĆąĄą│ąĖčüčéčĆčŗ ąĘą░čēąĖčéčŗ ąŠčé ą┐ąĄčĆąĄąĘą░ą┐ąĖčüąĖ / ąŠą┤ąĖąĮąŠčćąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ).
ŌĆó CAN_MBIM1 ąĖ CAN_MBIM2 (čĆąĄą│ąĖčüčéčĆčŗ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ mailbox).
ŌĆó CAN_MBTIF1 and CAN_MBTIF2 (čĆąĄą│ąĖčüčéčĆčŗ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ mailbox).
ŌĆó CAN_MBRIF1 and CAN_MBRIF2 (čĆąĄą│ąĖčüčéčĆčŗ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ mailbox).
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ mailbox. ąĀąĄą│ąĖčüčéčĆčŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ mailbox (CAN_MCx) ąĖ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ mailbox (CAN_MDx) ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāčÄčé ąŠčüąĮąŠą▓ąĮąŠąĄ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ mailbox-ąŠą▓ CAN. ąÜą░ąČą┤čŗą╣ mailbox ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮąŠ čĆą░ąĘčĆąĄčłąĄąĮ ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēąĄąĮ.
ąĀąĄą│ąĖčüčéčĆčŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ mailbox (CAN_MCx) ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ąĖą╗ąĖ ąĘą░ą┐čĆąĄčéą░ ą║ą░ąČą┤ąŠą│ąŠ mailbox. ąĀąĄą│ąĖčüčéčĆčŗ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ mailbox (CAN_MDx) ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé, ą║ą░ą║ąĖąĄ mailbox ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ, ą░ ą║ą░ą║ąĖąĄ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░. ąĢčüą╗ąĖ ą▒ąĖčé MCn ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MCx čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0, č鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ mailbox čü ąĮąŠą╝ąĄčĆąŠą╝ n ą▒čāą┤ąĄčé ąĘą░ą┐čĆąĄčēąĄąĮ. Mailbox ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░ą┐čĆąĄčēąĄąĮ ą┐ąĄčĆąĄą┤ ąĘą░ą┐ąĖčüčīčÄ ąĄą│ąŠ ą╗čÄą▒ąŠą│ąŠ ą┐ąŠą╗čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░. ąĪą╝. čĆąĖčüčāąĮą║ąĖ 19-16 ąĖ Figure 19-17.
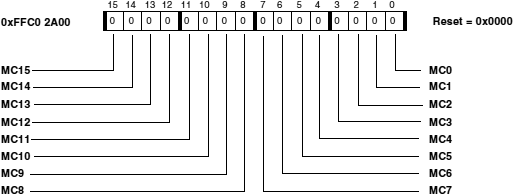
ąĀąĖčü. 19-16. Mailbox Configuration Register 1 (ą┤ą╗čÅ ą▓čüąĄčģ ą▒ąĖčé 0: mailbox ąĘą░ą┐čĆąĄčēąĄąĮ, 1: čĆą░ąĘčĆąĄčłąĄąĮ).

ąĀąĖčü. 19-17. Mailbox Configuration Register 2 (ą┤ą╗čÅ ą▓čüąĄčģ ą▒ąĖčé 0: mailbox ąĘą░ą┐čĆąĄčēąĄąĮ, 1: čĆą░ąĘčĆąĄčłąĄąĮ).
ąØąĄ ąĘą░ą┐ąĖčüčŗą▓ą░ą╣č鹥 ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ąŠą▒čŖąĄą║čéą░ čüąŠąŠą▒čēąĄąĮąĖčÅ, ą┐ąŠą║ą░ mailbox čĆą░ąĘčĆąĄčłąĄąĮ ą┤ą╗čÅ ą╝ąŠą┤čāą╗čÅ CAN (ą║ąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé CAN_MCx). Mailbox-čŗ, ą║ąŠč鹊čĆčŗąĄ ąĘą░ą┐čĆąĄčēąĄąĮčŗ, ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ CPU ą║ą░ą║ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮą░čÅ ą▒čŗčüčéčĆą░čÅ ą┐ą░ą╝čÅčéčī.
ąĢčüą╗ąĖ mailbox ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ, č鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ (MCn) ąĖ čĆąĄą│ąĖčüčéčĆąĄ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (MDn) ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé ąĘą░ą┐čĆąŠčüą░ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā (TRSn).
ą¦č鹊ą▒čŗ ąĘą░ą┐čĆąĄčéąĖčéčī ą┐ąĄčĆąĄą┤ą░čÄčēąĖą╣ mailbox, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ ąĘą░ą┐čĆąŠčüą░ čüą▒čĆąŠčüą░ ą┐ąĄčĆąĄą┤ą░čćąĖ (CAN_TRRx) ąĖ čĆąĄą│ąĖčüčéčĆą░ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĘą░ą┐čĆąŠčüą░ ą┐ąĄčĆąĄą┤ą░čćąĖ (CAN_TRSx) ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüąĮą░čćą░ą╗ą░ čüą▒čĆąŠčłąĄąĮčŗ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣. ąŻčüčéą░ąĮąŠą▓ą║ą░ ą▒ąĖčéą░ TRRn čĆąĄą│ąĖčüčéčĆą░ CAN_TRRx ąĖ ą▒ąĖčéą░
TRSn čĆąĄą│ąĖčüčéčĆą░ CAN_TRSx ą░ ąĘą░ą┐čĆąĄčēąĄąĮąĮąŠą╝ mailbox ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ąĮąĄąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝čā ą┐ąŠą▓ąĄą┤ąĄąĮąĖčÄ ą╝ąŠą┤čāą╗čÅ CAN.
ąĢčüą╗ąĖ mailbox ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ (MDn=1 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MDx), ąĖ ąŠąĮ ąĘą░ą┐čĆąĄčēąĄąĮ, č鹊 ą┐čĆąĖąĮąĖą╝ą░ąĄą╝ąŠąĄ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé čüąŠąŠą▒čēąĄąĮąĖąĄ ą┤ą╗čÅ čŹč鹊ą│ąŠ čÅčēąĖą║ą░ č鹥čĆčÅąĄčéčüčÅ, ą┤ą░ąČąĄ ąĄčüą╗ąĖ ąĖą╝ąĄąĄčéčüčÅ ą┤čĆčāą│ąŠą╣ mailbox, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ąĮą░ ą┐čĆąĖąĄą╝ čüąŠąŠą▒čēąĄąĮąĖčÅ čü čéą░ą║ąĖą╝ ąČąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝. ąŁč鹊 ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé, ąĄčüą╗ąĖ mailbox ąĘą░ą┐čĆąĄčēą░ąĄčéčüčÅ (MCn=0 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MCx) ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ ą╗ąŠą│ąĖą║ą░ čäąĖą╗čīčéčĆą░čåąĖąĖ (acceptance filtering) ąĘą░ą▓ąĄčĆčłąĖčé ąŠą▒čĆą░ą▒ąŠčéą║čā ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ąĖ ą┐ąĄčĆąĄą┤ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄą╝ ą┐čĆąĖąĄą╝ą░ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ.
ąĀąĄą│ąĖčüčéčĆčŗ CAN_MD1 ąĖ CAN_MD2 ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ ą║ą░ąČą┤ąŠą│ąŠ mailbox. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ mailbox-čŗ 7 .. 0 čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ąĮą░ ą┐čĆąĖąĄą╝, ąĖ mailbox-čŗ 31 .. 8 čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā. ąŚą░ą┐ąĖčüčī 1 ą▓ ą▒ąĖčé MDn ą┤ą╗čÅ mailbox-ąŠą▓ 23 .. 8 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ mailbox ąĮą░ ą┐čĆąĖąĄą╝. Mailbox-čŗ 31 .. 24 ą▓čüąĄą│ą┤ą░ čĆą░ą▒ąŠčéą░čÄčé ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā. ąØąĄ ąĘą░ą┐ąĖčüčŗą▓ą░ą╣č鹥 ą▓ MDn, ąĄčüą╗ąĖ mailbox čĆą░ąĘčĆąĄčłąĄąĮ (ą║ąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ MCn). ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┐ąĄčĆąĄą┤ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄą╝ MDn čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ mailbox n ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░ą┐čĆąĄčēąĄąĮ.
ą¤ąŠčüą╗ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čüą▒čĆąŠčüą░ ą▒ąĖčéčŗ CAN_MD1 ąĖ CAN_MD2 ąŠčćąĖčēą░čÄčéčüčÅ, ą║čĆąŠą╝ąĄ ą▒ąĖčé 7ŌĆō0 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MD1.
ąæąĖčéčŗ 7ŌĆō0 ą▓ CAN_MD1 ąĖ ą▒ąĖčéčŗ 15ŌĆō8 ą▓ CAN_MD2 ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮčŗ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ.
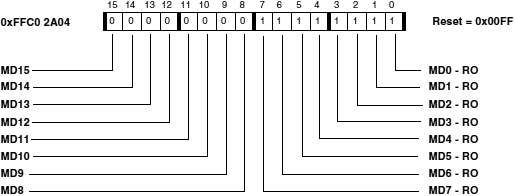
ąĀąĖčü. 19-18. Mailbox Direction Register 1 (ą┤ą╗čÅ ą▓čüąĄčģ ą▒ąĖčé 0: mailbox čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā, 1: mailbox čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĮą░ ą┐čĆąĖąĄą╝).
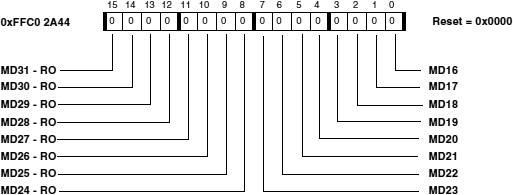
ąĀąĖčü. 19-19. Mailbox Direction Register 2 (ą┤ą╗čÅ ą▓čüąĄčģ ą▒ąĖčé 0: mailbox čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā, 1: mailbox čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĮą░ ą┐čĆąĖąĄą╝).
[ąøąŠą│ąĖą║ą░ ą┐čĆąĖąĄą╝ą░]
ąĢčüą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐čĆąĖąĮčÅč鹊 ą┐ąŠ čłąĖąĮąĄ CAN, ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣ čüčĆą░ą▓ąĮąĄąĮąĖčÅ ą▒čŗą╗ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą┐ąŠą┤čģąŠą┤čÅčēąĖą╣ mailbox, č鹊 čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ čåąĄąĮčéčĆ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖčÅ čüąŠąŠą▒čēąĄąĮąĖčÅ (matching message center). ą¤ąŠą╗ąĮąŠčüčéčīčÄ ą┐čĆąĖąĮčÅčéčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ, ą▒ąĖčé RTR ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (IDE) čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą▓ ą┐ąĄčĆą▓čŗąĄ ą┤ą▓ą░ čüą╗ąŠą▓ą░ mailbox-ą░ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗą╣ ą▒ąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čäąĖą╗čīčéčĆčāčÄčēąĄą╣ ą╝ą░čüą║ąĖ (acceptance mask enable, AME) čŹč鹊ą│ąŠ mailbox ąĮąĄ ą╝ąĄąĮčÅąĄčéčüčÅ. ąĢčüą╗ąĖ ą┐čĆąĖąĮčÅč鹊 ą▒ą░ąĘąŠą▓ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ, č鹊 čĆą░čüčłąĖčĆąĄąĮąĮą░čÅ čćą░čüčéčī ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ mailbox čéą░ą║ąČąĄ ąĮąĄ ąĖąĘą╝ąĄąĮąĖčéčüčÅ. ąŚąĮą░č湥ąĮąĖąĄ DLC ąĖ ąĘąĮą░č湥ąĮąĖąĄ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ čüąŠčģčĆą░ąĮčÅčéčüčÅ ą▓ čüą╗ąĄą┤čāčÄčēąĖąĄ 2 čüą╗ąŠą▓ą░, ąĖ ą┐čĆąĖąĮčÅčéčŗąĄ ą┤ą░ąĮąĮčŗąĄ čüąŠčģčĆą░ąĮčÅčéčüčÅ ą▓ čüą╗ąŠą▓ą░čģ 3 .. 0 čŹč鹊ą│ąŠ mailbox. ą¤ąŠą╗ąĮąŠąĄ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ą▒čāč乥čĆą░ ą┐čĆąĖąĄą╝ą░ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ mailbox ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ąĘąĮą░č湥ąĮąĖčÅ DLC ą▓ ą┐čĆąĖąĮčÅč鹊ą╝ čüąŠąŠą▒čēąĄąĮąĖąĖ. ąóąŠą╗čīą║ąŠ č鹥 ą▒ą░ą╣čéčŗ ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą┐ąŠą╗ąĄą╝ DLC, čüąŠą┤ąĄčƹȹ░čé ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ, čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ąŠčüčéą░ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ mailbox ą▒čāą┤ąĄčé ąĮąĄąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝. ąĪą╝. čĆąĖčüčāąĮą║ąĖ 19-18 ąĖ 19-19 ą▓ąŠ ą▓čĆąĄąĘą║ąĄ "ąĀąĄą│ąĖčüčéčĆčŗ CAN Mailbox Configuration (CAN_MCx) ąĖ Direction (CAN_MDx)".
ąØąĖąČąĄ ąĮą░ ą║ą░čĆčéąĖąĮą║ąĄ ą┐ąŠą║ą░ąĘą░ąĮą░ ą╗ąŠą│ąĖą║ą░ ą┐čĆąĖąĄą╝ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ mailbox xx (ąĘąĮą░č湥ąĮąĖąĄ xx čŹč鹊 ąĮąŠą╝ąĄčĆ čÅčēąĖą║ą░, ąŠąĮ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčé 00 ą┤ąŠ 23).
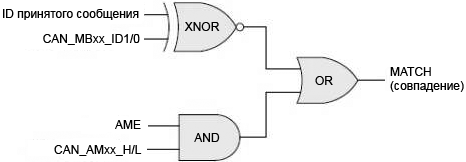
ąŚą┤ąĄčüčī XNOR ąŠą┐ąĄčĆą░čåąĖčÅ ąĖčüą║ą╗čÄčćą░čÄčēąĄąĄ ąśąøąś-ąØąĢ, AND ąŠą┐ąĄčĆą░čåąĖčÅ ąś, OR ąŠą┐ąĄčĆą░čåąĖčÅ ąśąøąś. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą╗ąŠą│ąĖą║ą░ ą┐čĆąĖąĄą╝ą░ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēą░čÅ:
- ąĢčüą╗ąĖ AME=0, č鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čāą┤ąĄčé ą┐čĆąĖąĮčÅč鹊 č鹊ą╗čīą║ąŠ ą▓ č鹊ą╝ čüą╗čāčćą░ąĄ, ą║ąŠą│ą┤ą░ ID ą▓ ą┐čĆąĖąĮčÅč鹊ą╝ čüąŠąŠą▒čēąĄąĮąĖąĖ ą┐ąŠą╗ąĮąŠčüčéčīčÄ čüąŠą▓ą┐ą░ą┤ą░ąĄčé čü ID, ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮąŠą╝ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ CAN_MBxx_ID1 ąĖ CAN_MBxx_ID0 (ą║ąŠąĮąĄčćąĮąŠ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čéąĖą┐ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ - čüąŠ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ 11-ą▒ąĖčéąĮčŗą╝ ID ąĖą╗ąĖ čĆą░čüčłąĖčĆąĄąĮąĮčŗą╝ 29-ą▒ąĖčéąĮčŗą╝).
- ąĢčüą╗ąĖ AME=1, č鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĖąĮčÅč鹊 čéą░ą║ąČąĄ ą▓ č鹊ą╝ čüą╗čāčćą░ąĄ, ąĄčüą╗ąĖ ą╝ą░čüą║ą░ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ CAN_AMxx_H ąĖ CAN_AMxx_L čĆą░ąĘčĆąĄčłą░ąĄčé ą┐čĆąĖąĄą╝ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąøąŠą│ąĖą║ą░ ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ čüą╗ąĄą┤čāčēą░čÅ - ąĄčüą╗ąĖ ą▓ ą╝ą░čüą║ąĄ ą▒ąĖčé čĆą░ą▓ąĄąĮ 1, č鹊 čŹč鹊čé ą▒ąĖčé ą▓ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗čÄą▒čŗą╝ (ąŠąĮ ąĮąĄ ą┐čĆąŠą▓ąĄčĆčÅąĄčéčüčÅ ąĮą░ čüčéčĆąŠą│ąŠąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĄ). ąĢčüą╗ąĖ ąČąĄ ą▒ąĖčé ą▓ ą╝ą░čüą║ąĄ čĆą░ą▓ąĄąĮ 0, č鹊 ą┤ą╗čÅ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ čŹč鹊čé ą▒ąĖčé ID ą▓ čüąŠąŠą▒čēąĄąĮąĖąĖ ą┤ąŠą╗ąČąĄąĮ č鹊čćąĮąŠ čüąŠą▓ą┐ą░ą┤ą░čéčī čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ ą▒ąĖčéą░ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ CAM_MB_xxID1 ąĖ CAM_MB_xxID0.
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ čüąŠčģčĆą░ąĮąĄąĮąŠ ą▓ mailbox, čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ąŠąČąĖą┤ą░ąĮąĖčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ (receive message pending, RMPn ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_RMPx register), ąĖ ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąĖąĄą╝ą░ mailbox (ąĄčüą╗ąĖ čŹč鹊 čĆą░ąĘčĆąĄčłąĄąĮąŠ).
Acceptance Filter/Data Acceptance Filter. ąÜą░ąČą┤čŗą╣ ą┐čĆąĖčģąŠą┤čÅčēąĖą╣ čäčĆąĄą╣ą╝ ą┤ą░ąĮąĮčŗčģ čüčĆą░ą▓ąĮąĖą▓ą░ąĄčéčüčÅ čüąŠ ą▓čüąĄą╝ąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ą╝ąĖ, čüąŠčģčĆą░ąĮąĄąĮąĮčŗą╝ąĖ ą▓ ą░ą║čéąĖą▓ąĮčŗčģ ą┐čĆąĖąĮąĖą╝ą░čÄčēąĖčģ mailbox (MDn=1 ąĖ MCn=1), ąĖ čüąŠ ą▓čüąĄčģ ą░ą║čéąĖą▓ąĮčŗčģ ą┐ąĄčĆąĄą┤ą░čÄčēąĖčģ mailbox, čā ą║ąŠč鹊čĆčŗčģ čĆą░ąĘčĆąĄčłąĄąĮą░ čäčāąĮą║čåąĖčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĘą░ą┐čĆąŠčüą░ ą┐ąĄčĆąĄą┤ą░čćąĖ ąŠčé ą┤ą░ą╗čīąĮąĄą│ąŠ čāąĘą╗ą░ čüąĄčéąĖ (remote frame handling feature). ąĢčüą╗ąĖ acceptance filter ąĮą░čłąĄą╗ čüąŠą▓ą┐ą░ą┤ą░čÄčēąĖą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ, čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┤ą░ąĮąĮčŗčģ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čäčĆąĄą╣ą╝ą░ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ čŹč鹊čé mailbox, ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą┐čĆąĖąĮčÅčéčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣, ąŠąČąĖą┤ą░čÄčēąĖčģ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ (receive message pending register, CAN_RMPx). ą¤čĆąĖąĮčÅč鹊ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ čĆą░ąĘ, ą┤ą░ąČąĄ ąĄčüą╗ąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐čĆąĖąĮąĖą╝ą░čÄčēąĖčģ mailbox ąĖą╝ąĄčÄčé čéą░ą║ąŠą╣ ąČąĄ čüąŠą▓ą┐ą░ą┤ą░čÄčēąĖą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ. ą¦č鹊ą▒čŗ ąĖąĘą╝ąĄąĮąĖčéčī čéą░ą║ąŠąĄ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čÅčēąĖą║ąĖ ą║ą░ą║ ąĮą░ą┤ąĄąČąĮčŗą╣ ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░, ąĮčāąČąĮąŠ čāčüčéą░ąĮąŠą▓ąĖčéčī ą▒ąĖčéčŗ OPSSxx (xx čŹč鹊 ąĮąŠą╝ąĄčĆ čÅčēąĖą║ą░ ąŠčé 00 ą┤ąŠ 23) ą▓ čĆąĄą│ąĖčüčéčĆą░čģ CAN_OPSS1 ąĖ CAN_OPSS2. ąĢčüą╗ąĖ č鹥ą║čāčēąĖą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ąĮąĄ čüąŠą▓ą┐ą░ą┤ą░ąĄčé ąĮąĖ čü ąŠą┤ąĮąĖą╝ mailbox, č鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ąĮąĄ čüąŠčģčĆą░ąĮąĖčéčüčÅ. ąæąĖčé RMPn ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą▒čĆąŠčłąĄąĮ ą▓ 0.
ąĢčüą╗ąĖ ą┤ą╗čÅ čŹč鹊ą│ąŠ mailbox ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 ą▓č鹊čĆąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ, ąĖ ą▒ąĖčé RMPn čāąČąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ąĖ ą▒ąĖčé ąĘą░čēąĖčéčŗ ąŠčé ą┐ąĄčĆąĄąĘą░ą┐ąĖčüąĖ (overwrite protection, OPSSn) ąĮąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą┐ąŠč鹥čĆąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ (receive message lost, RMLn). ąĢčüą╗ąĖ ą▒ąĖčé OPSSn čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 ą┐čĆąŠą▓ąĄčĆčÅčÄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ mailbox-čŗ.
ąĢčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮą░ acceptance mask, č鹊 ą║ą░ąČą┤čŗą╣ ą▒ąĖčé ą┐čĆąĖąĮčÅč鹊ą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ ą╗ąŠą│ąĖą║ąŠą╣ čüčĆą░ą▓ąĮąĄąĮąĖčÅ, ąĄčüą╗ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą▓ acceptance mask čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1.
ąóą░ą▒ą╗ąĖčåą░ 19-11. Mailbox, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ čäąĖą╗čīčéčĆą░čåąĖąĖ čü ą┐ąŠą╝ąŠčēčīčÄ Acceptance Mask.
| MCn |
MDn |
RFHn |
Mailbox n |
ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣ |
| 0 |
x |
x |
ąśą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ |
Mailbox n ąĘą░ą┐čĆąĄčēąĄąĮ. |
| 1 |
0 |
0 |
Mailbox n čĆą░ąĘčĆąĄčłąĄąĮ, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā. ą×ą▒čĆą░ą▒ąŠčéą║ą░ čäčĆąĄą╣ą╝ąŠą▓ remote ąĘą░ą┐čĆąĄčēąĄąĮą░. |
| 1 |
0 |
1 |
ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ |
Mailbox n čĆą░ąĘčĆąĄčłąĄąĮ, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā. ą×ą▒čĆą░ą▒ąŠčéą║ą░ čäčĆąĄą╣ą╝ąŠą▓ remote čĆą░ąĘčĆąĄčłąĄąĮą░. |
| 1 |
1 |
x |
ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ |
Mailbox n čĆą░ąĘčĆąĄčłąĄąĮ, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĮą░ ą┐čĆąĖąĄą╝. |
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ acceptance mask ą╝ąŠąČąĮąŠ ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮąŠ čĆą░ąĘčĆąĄčłąĖčéčī/ąĘą░ą┐čĆąĄčéąĖčéčī ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ mailbox.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čĆąĄą│ąĖčüčéčĆčŗ acceptance mask čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ ą║ą░ą║ RAM, ąĖ čā ąĮąĖčģ ąĮąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░. ą¤ąŠčŹč鹊ą╝čā ą║ą░ąČą┤ą░čÅ acceptance mask ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüą▒čĆąŠčłąĄąĮą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ą┐ąĄčĆąĄą┤ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ AME čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ mailbox.
ąĀąĄą│ąĖčüčéčĆčŗ acceptance mask CAN_AMxxH ąĖ CAN_AMxxL ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ čäąĖą╗čīčéčĆą░čåąĖąĖ čüąŠąŠą▒čēąĄąĮąĖą╣ ą┐ąŠ ąĖčģ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčā.
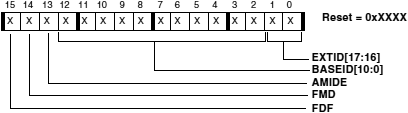
ąĀąĖčü. 19-20. Acceptance Mask Register (H). ąÉą┤čĆąĄčüą░ MMR-čĆąĄą│ąĖčüčéčĆąŠą▓ čüą╝. ą▓ čéą░ą▒ą╗ąĖčåąĄ 19-12.
ąóą░ą▒ą╗ąĖčåą░ 19-12. ąÉą┤čĆąĄčüą░ Mask Register (H).
| ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
MMR-ą░ą┤čĆąĄčü |
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
MMR-ą░ą┤čĆąĄčü |
| CAN_AM00H |
0xFFC0 2B04 |
CAN_AM16H |
0xFFC0 2B84 |
| CAN_AM01H |
0xFFC0 2B0C |
CAN_AM17H |
0xFFC0 2B8C |
| CAN_AM02H |
0xFFC0 2B14 |
CAN_AM18H |
0xFFC0 2B94 |
| CAN_AM03H |
0xFFC0 2B1C |
CAN_AM19H |
0xFFC0 2B9C |
| CAN_AM04H |
0xFFC0 2B24 |
CAN_AM20H |
0xFFC0 2BA4 |
| CAN_AM05H |
0xFFC0 2B2C |
CAN_AM21H |
0xFFC0 2BAC |
| CAN_AM06H |
0xFFC0 2B34 |
CAN_AM22H |
0xFFC0 2BB4 |
| CAN_AM07H |
0xFFC0 2B3C |
CAN_AM23H |
0xFFC0 2BBC |
| CAN_AM08H |
0xFFC0 2B44 |
CAN_AM24H |
0xFFC0 2BC4 |
| CAN_AM09H |
0xFFC0 2B4C |
CAN_AM25H |
0xFFC0 2BCC |
| CAN_AM10H |
0xFFC0 2B54 |
CAN_AM26H |
0xFFC0 2BD4 |
| CAN_AM11H |
0xFFC0 2B5C |
CAN_AM27H |
0xFFC0 2BDC |
| CAN_AM12H |
0xFFC0 2B64 |
CAN_AM28H |
0xFFC0 2BE4 |
| CAN_AM13H |
0xFFC0 2B6C |
CAN_AM29H |
0xFFC0 2BEC |
| CAN_AM14H |
0xFFC0 2B74 |
CAN_AM30H |
0xFFC0 2BF4 |
| CAN_AM15H |
0xFFC0 2B7C |
CAN_AM31H |
0xFFC0 2BFC |
ąĢčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮ čĆąĄąČąĖą╝ DeviceNet (ą▒ąĖčé DNM=1 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_CONTROL), ąĖ mailbox ąĮą░čüčéčĆąŠąĄąĮ ą┤ą╗čÅ čäąĖą╗čīčéčĆą░čåąĖąĖ ą┐ąŠ ą┐ąŠą╗čÄ ą┤ą░ąĮąĮčŗčģ, č鹊 čäąĖą╗čīčéčĆą░čåąĖčÅ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┐ąŠ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╝čā ID čüąŠąŠą▒čēąĄąĮąĖčÅ ąĖ ą┐ąŠ ą┐ąŠą╗čÄ ą┤ą░ąĮąĮčŗčģ. ążąĖą╗čīčéčĆą░čåąĖčÅ ą┐ąŠ ą┐ąŠą╗čÄ ą┤ą░ąĮąĮčŗčģ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮą░ ą╗ąĖą▒ąŠ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą┐ąĄčĆą▓ąŠą│ąŠ ą▒ą░ą╣čéą░, ą╗ąĖą▒ąŠ ą┤ą╗čÅ ą┐ąĄčĆą▓čŗčģ ą┤ą▓čāčģ ą▒ą░ą╣čé, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ 19-13.
ąóą░ą▒ą╗ąĖčåą░ 19-13. ążąĖą╗čīčéčĆą░čåąĖčÅ ą┐ąŠ ą┐ąŠą╗čÄ ą┤ą░ąĮąĮčŗčģ.
FDF
ążąĖą╗čīčéčĆ ą┐ąŠ ą┐ąŠą╗čÄ ą┤ą░ąĮąĮčŗčģ |
FMD
ą¤ąŠą╗ąĮą░čÅ ą╝ą░čüą║ą░ ą┐ąŠą╗čÅ ą┤ą░ąĮąĮčŗčģ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| 0 |
0 |
ą¤ąŠ ą┐ąŠą╗čÄ ą┤ą░ąĮąĮčŗčģ čäąĖą╗čīčéčĆą░čåąĖčÅ ąĮąĄ čĆą░ąĘčĆąĄčłąĄąĮą░. |
| 0 |
1 |
ąØąĄą┤ąŠą┐čāčüčéąĖą╝ąŠ, FMD ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ą▓ąĮąŠ 0, ąĄčüą╗ąĖ FDF čĆą░ą▓ąĮąŠ 0. |
| 1 |
0 |
ążąĖą╗čīčéčĆą░čåąĖčÅ č鹊ą╗čīą║ąŠ ą┐ąŠ ą┐ąĄčĆą▓ąŠą╝čā ą▒ą░ą╣čéčā ą┤ą░ąĮąĮčŗčģ. |
| 1 |
1 |
ążąĖą╗čīčéčĆą░čåąĖčÅ ą┐ąŠ ą┐ąĄčĆą▓čŗą╝ ą┤ą▓čāą╝ ą▒ą░ą╣čéą░ą╝ ą┤ą░ąĮąĮčŗčģ. |

ąĀąĖčü. 19-21. Acceptance Mask Register (L). ąÉą┤čĆąĄčüą░ MMR-čĆąĄą│ąĖčüčéčĆąŠą▓ čüą╝. ą▓ čéą░ą▒ą╗ąĖčåąĄ 19-14.
ąóą░ą▒ą╗ąĖčåą░ 19-14. ąÉą┤čĆąĄčüą░ Mask Register (L).
| ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
MMR-ą░ą┤čĆąĄčü |
ąśą╝čÅ čĆąĄą│ąĖčüčéčĆą░ |
MMR-ą░ą┤čĆąĄčü |
| CAN_AM00L |
0xFFC0 2B00 |
CAN_AM16L |
0xFFC0 2B80 |
| CAN_AM01L |
0xFFC0 2B08 |
CAN_AM17L |
0xFFC0 2B88 |
| CAN_AM02L |
0xFFC0 2B10 |
CAN_AM18L |
0xFFC0 2B90 |
| CAN_AM03L |
0xFFC0 2B18 |
CAN_AM19L |
0xFFC0 2B98 |
| CAN_AM04L |
0xFFC0 2B20 |
CAN_AM20L |
0xFFC0 2BA0 |
| CAN_AM05L |
0xFFC0 2B28 |
CAN_AM21L |
0xFFC0 2BA8 |
| CAN_AM06L |
0xFFC0 2B30 |
CAN_AM22L |
0xFFC0 2BB0 |
| CAN_AM07L |
0xFFC0 2B38 |
CAN_AM23L |
0xFFC0 2BB8 |
| CAN_AM08L |
0xFFC0 2B40 |
CAN_AM24L |
0xFFC0 2BC0 |
| CAN_AM09L |
0xFFC0 2B48 |
CAN_AM25L |
0xFFC0 2BC8 |
| CAN_AM10L |
0xFFC0 2B50 |
CAN_AM26L |
0xFFC0 2BD0 |
| CAN_AM11L |
0xFFC0 2B58 |
CAN_AM27L |
0xFFC0 2BD8 |
| CAN_AM12L |
0xFFC0 2B60 |
CAN_AM28L |
0xFFC0 2BE0 |
| CAN_AM13L |
0xFFC0 2B68 |
CAN_AM29L |
0xFFC0 2BE8 |
| CAN_AM14L |
0xFFC0 2B70 |
CAN_AM30L |
0xFFC0 2BF0 |
| CAN_AM15L |
0xFFC0 2B78 |
CAN_AM31L |
0xFFC0 2BF8 |
ąØą░ čĆąĖčüčāąĮą║ą░čģ 19-20 ąĖ 19-21 ą┐ąŠą║ą░ąĘą░ąĮą░ ą║ą░čĆčéą░ ą▒ąĖčé čĆąĄą│ąĖčüčéčĆąŠą▓ acceptance mask (CAN_AMxxH ąĖ CAN_AMxxL).
Acceptance-čäąĖą╗čīčéčĆą░čåąĖčÅ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ, čćč鹊ą▒čŗ ą┐ąŠąĘą▓ąŠą╗ąĖčéčī ą│čĆčāą┐ą┐ąĖčĆąŠą▓ą░čéčī čüąŠąŠą▒čēąĄąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą▓ čåąĄąĮčéčĆ čüąŠąŠą▒čēąĄąĮąĖą╣.
ą¤čĆąĖčłąĄą┤čłąĄąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ mailbox čü čüą░ą╝čŗą╝ čüčéą░čĆčłąĖą╝ ąĮąŠą╝ąĄčĆąŠą╝, čā ą║ąŠč鹊čĆąŠą│ąŠ čüąŠą▓ą┐ą░ą╗ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ. ąĢčüą╗ąĖ čŹč鹊čé mailbox čāąČąĄ čüąŠą┤ąĄčƹȹĖčé ąĮąĄ ąŠą▒čĆą░ą▒ąŠčéą░ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ (RMPn=1 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_RMPx), č鹊 ą┤ą░ą╗čīąĮąĄą╣čłąĄąĄ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą▒ąĖčéą░ ąĘą░čēąĖčéčŗ ąŠčé ą┐ąĄčĆąĄąĘą░ą┐ąĖčüąĖ (overwrite protection, OPSSn). ą¤čĆąĖčłąĄą┤čłąĖą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čüčĆą░ą▓ąĮąĖą▓ą░ąĄčéčüčÅ čü čüąŠčģčĆą░ąĮąĄąĮąĮčŗą╝ ą▓ RAM, ąĖ ą▒ąĖčéčŗ, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ą┤ąŠą╗ąČąĮčŗ čüčĆą░ą▓ąĮąĖą▓ą░čéčīčüčÅ, ą╝ą░čüą║ąĖčĆčāčÄčéčüčÅ. ąøąŠą│. 1 ą▓ acceptance mask ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąĮąĄ ąĖą╝ąĄąĄčé ąĘąĮą░č湥ąĮąĖąĄ, čüąŠą▓ą┐ą░ą╗ čŹč鹊čé ą▒ąĖčé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░, ąĖą╗ąĖ ąĮąĄčé, ąĖ ą╗ąŠą│. 0 ą▓ acceptance mask ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čéčĆąĄą▒čāąĄčéčüčÅ č鹊čćąĮąŠąĄ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖąĄ čŹč鹊ą│ąŠ ą▒ąĖčéą░ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░. ąæąĖčéčŗ ą╝ą░čüą║ąĖ ą▒ą░ąĘąŠą▓ąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą▓ ą▒ąĖčéą░čģ 12 .. 2 čĆąĄą│ąĖčüčéčĆąŠą▓ acceptance mask (CAN_AMxxH), ąĖ ą▒ąĖčéčŗ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą▓ ą▒ąĖčéą░čģ 1, 0 čĆąĄą│ąĖčüčéčĆą░ CAN_AMxxH ąĖ 15 .. 0 čĆąĄą│ąĖčüčéčĆą░ CAN_AMxxL. ąæąĖčé 13 čĆąĄą│ąĖčüčéčĆą░ CAN_AMxxH čÅą▓ą╗čÅąĄčéčüčÅ ą▒ąĖč鹊ą╝ ą╝ą░čüą║ąĖ ą┤ą╗čÅ ą▒ąĖčéą░ čĆą░čüčłąĖčĆąĄąĮąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (acceptance mask identifier extension, AMIDE).
ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī ą▓čüąĄ ą▒ąĖčéčŗ acceptance mask. ą×ą▒ą╗ą░čüčéčī acceptance mask čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ą║ą░ą║ ąŠčéą┤ąĄą╗čīąĮą░čÅ ą╝ą░čüą║ą░ čäąĖą╗čīčéčĆą░čåąĖąĖ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ mailbox, čéą░ą║ čćč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą║ą░ą║ ą┤ą╗čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čüą▒čĆąŠčüą░, čéą░ą║ąĖ ą┤ą╗čÅ čüą▒čĆąŠčüą░ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ą▒čāą┤ąĄčé ąĮąĄąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ (ą┤ą╗čÅ čüą▒čĆąŠčüą░ ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ), ą╗ąĖą▒ąŠ ąĮąĄ ąĖąĘą╝ąĄąĮąĖą▓čłąĖą╝čüčÅ (ąĄčüą╗ąĖ čŹč鹊 ą▒čŗą╗ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čüą▒čĆąŠčü). ąĢčüą╗ąĖ acceptance mask čĆą░ąĘčĆąĄčłąĄąĮą░ (AME=1 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ mailbox), č鹊 ąŠąĮą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮą░.
ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆą░ acceptance mask ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮąŠ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ mailbox ąĘą░ą┐čĆąĄčēąĄąĮ.
ąĪą╗ąĄą┤čāčÄčēąĖąĄ čüąĄą║čåąĖąĖ ąŠą┐ąĖčüčŗą▓ą░čÄčé čĆąĄą│ąĖčüčéčĆčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ąŠą╝ ą╝ąŠą┤čāą╗čÅ CAN.
ąæąĖčéčŗ ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą┐čĆąĖąĮčÅčéčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣, ąŠąČąĖą┤ą░čÄčēąĖčģ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ (receive message pending, CAN_RMPx) ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ č鹊ą╗čīą║ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣ ą╝ąŠą┤čāą╗čÅ CAN. ąæąĖčé RMPn ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą▓ mailbox n ąĮą░čģąŠą┤ąĖčéčüčÅ čüąŠąŠą▒čēąĄąĮąĖąĄ, ąŠąČąĖą┤ą░čÄčēąĄąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ. ą×čćąĖčüčéą║ą░ ą▒ąĖčé RMPn čĆą░ą▒ąŠčéą░ąĄčé ą┐ąŠ ą┐čĆąĖąĮčåąĖą┐čā "ąĘą░ą┐ąĖčüą░čéčī ąĄą┤ąĖąĮąĖčćą║čā ą┤ą╗čÅ čüą▒čĆąŠčüą░" (write-1-to-clear, W1C). ą×čćąĖčüčéą║ą░ ą▒ąĖčéą░ RMPn čéą░ą║ąČąĄ ąŠčćąĖčüčéąĖčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą┐ąŠč鹥čĆčÅąĮąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ (receive message lost, RMLn) ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_RMLx. ąæąĖčé RMPn ą╝ąŠąČąĄčé čāčüčéą░ąĮąŠą▓ąĖčéčī ą▒ąĖčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ mailbox (MBRIFn) ą▓ čĆąĄą│ąĖčüčéčĆąĄ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ mailbox (CAN_MBRIFx), ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ MBIMn ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (CAN_MBIMx). ążą╗ą░ą│ MBRIFn ąĖąĮąĖčåąĖąĖčĆčāąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ mailbox.
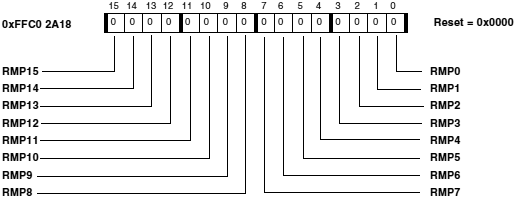
ąĀąĖčü. 19-22. Receive Message Pending Register 1 (ą▓čüąĄ ą▒ąĖčéčŗ čéąĖą┐ą░ W1C).
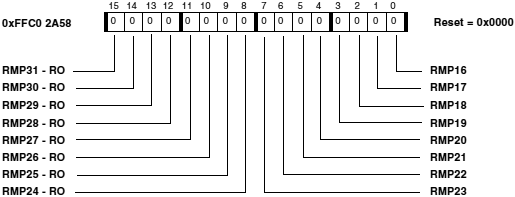
ąĀąĖčü. 19-23. Receive Message Pending Register 2 (ą▓čüąĄ ą▒ąĖčéčŗ čéąĖą┐ą░ W1C).
RMPxx - čŹč鹊čé ą▒ąĖčé ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą▓ čÅčēąĖą║ąĄ xx ąĮą░čģąŠą┤ąĖčéčüčÅ čüąŠąŠą▒čēąĄąĮąĖąĄ, ąŠąČąĖą┤ą░čÄčēąĄąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ.
ąæąĖčéčŗ ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą┐ąŠč鹥čĆčÅąĮąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣ (CAN_RMLx) ą╝ąŠą│čāčé ą▒čŗčéčī č鹊ą╗čīą║ąŠ čüą▒čĆąŠčłąĄąĮčŗ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ąĖ ą╝ąŠą│čāčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣. ąŁčéąĖ ą▒ąĖčéčŗ ą╝ąŠąČąĮąŠ ąŠčćąĖčüčéąĖčéčī ąĘą░ą┐ąĖčüčīčÄ 1 ą▓ ą▒ąĖčé RMPn čĆąĄą│ąĖčüčéčĆą░ CAN_RMPx. ąŚą░ą┐ąĖčüčī ą▓ čĆąĄą│ąĖčüčéčĆ CAN_RMLx ąĮąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░.
ąĢčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąŠą┤ąĖąĮ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_RMLx, č鹊 čéą░ą║ąČąĄ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé čüąŠčüč鹊čÅąĮąĖčÅ ą┐ąŠč鹥čĆčÅąĮąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╝ čĆąĄą│ąĖčüčéčĆąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (CAN_GIS). ąĢčüą╗ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_GIM čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 čéą░ą║ąČąĄ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čäą╗ą░ą│ ą┐ąŠč鹥čĆąĖ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ (RMLIF) ą▓ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╝ čĆąĄą│ąĖčüčéčĆąĄ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (CAN_GIF).
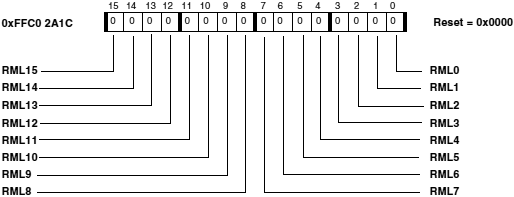
ąĀąĖčü. 19-24. Receive Message Lost Register 1.
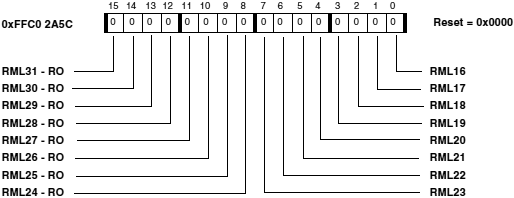
ąĀąĖčü. 19-25. Receive Message Lost Register 2.
RMLxx - ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ąĮąĄ čāčüą┐ąĄą╗ ąŠą▒čĆą░ą▒ąŠčéą░čéčī ą┐čĆąĄą┤čŗą┤čāčēąĄąĄ ąĘą░ą┐ąĖčüą░ąĮąĮąŠąĄ ą▓ čŹč鹊čé čÅčēąĖą║ čüąŠąŠą▒čēąĄąĮąĖąĄ, čüčéą░čĆąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ą┐ąŠč鹥čĆčÅąĮąŠ ąĖ ą┐ąĄčĆąĄąĘą░ą┐ąĖčüą░ąĮąŠ ąĮąŠą▓čŗą╝.
OPSSxx. ąĢčüą╗ąĖ ą┤ą╗čÅ mailbox ą┐čĆąĖąĮčÅč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ, ąĖ ą▓ čŹč鹊ą╝ mailbox ą▓čüąĄ ąĄčēąĄ čüąŠą┤ąĄčƹȹ░čéčüčÅ ą┐čĆąĖąĮčÅčéčŗąĄ, ąĮąŠ ąĮąĄ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ (RMPn=1), č鹊 ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ čĆąĄčłąĖčéčī, ą║ą░ą║ ą┐ąŠčüčéčāą┐ą░čéčī čü čéą░ą║ąĖą╝ čüčéą░čĆčŗą╝ čüąŠąŠą▒čēąĄąĮąĖąĄą╝ - ą┤ąŠą╗ąČąĮąŠ ą╗ąĖ ąŠąĮąŠ ą▒čŗčéčī ą┐ąĄčĆąĄąĘą░ą┐ąĖčüą░ąĮąŠ ąĮąŠą▓čŗą╝ čüąŠąŠą▒čēąĄąĮąĖąĄą╝, ąĖą╗ąĖ ąĮąĄčé. ąĢčüą╗ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ąĘą░čēąĖčéčŗ ąŠčé ą┐ąĄčĆąĄąĘą░ą┐ąĖčüąĖ čüą▒čĆąŠčłąĄąĮ (OPSSn=0), č鹊 čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé ą┐ąŠč鹥čĆąĖ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ (RMLn), ąĖ čĆą░ąĮąĄąĄ čüąŠčģčĆą░ąĮąĄąĮąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄąĘą░ą┐ąĖčüą░ąĮąŠ.
ąĢčüą╗ąĖ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą┤ą╗čÅ mailbox, ąĖ čŹč鹊čé mailbox ą▓čüąĄ ąĄčēąĄ čüąŠą┤ąĄčƹȹĖčé ąĮąĄ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ (RMPn=1, OPSSn=1), č鹊 ą┐čĆąŠą▓ąĄčĆčÅčÄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ mailbox-čŗ ąĮą░ ą┤čĆčāą│ąŠąĄ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖąĄ čü ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝ čüąŠąŠą▒čēąĄąĮąĖčÅ.
ąĪą╝čŗčüą╗ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ ąĘą░čēąĖčéčŗ ąŠčé ą┐ąĄčĆąĄąĘą░ą┐ąĖčüąĖ / ąŠą┤ąĮąŠą║čĆą░čéąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ (CAN_OPSSx) ąĘą░ą▓ąĖčüąĖčé ąŠčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ mailbox. ąĢčüą╗ąĖ mailbox čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą┐čĆąĖąĄą╝ąĮčŗą╣, č鹊 čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ OPSSn ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčéčüčÅ ą║ą░ą║ ą▒ąĖčé ąĘą░čēąĖčéčŗ ąŠčé ą┐ąĄčĆąĄąĘą░ą┐ąĖčüąĖ (OPSSn). ąĢčüą╗ąĖ mailbox čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą┐ąĄčĆąĄą┤ą░čÄčēąĖą╣, č鹊 OPSSn ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆčāąĄčéčüčÅ ą║ą░ą║ ą▒ąĖčé čĆąĄąČąĖą╝ą░ ąŠą┤ąĮąŠą║čĆą░čéąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ (single shot transmission mode, OPSSn). ąŁčéąĖ ą▒ąĖčéčŗ ą╝ąŠą│čāčé ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮčŗ č鹊ą╗čīą║ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą╝. ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą┐ąŠ ą┐ąĖčéą░ąĮąĖčÄ ąĖą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čüą▒čĆąŠčüą░ ą▓čüąĄ ą▒ąĖčéčŗ ąŠčćąĖčēą░čÄčéčüčÅ.

ąĀąĖčü. 19-26. Overwrite Protection/Single Shot Transmission Register 1.
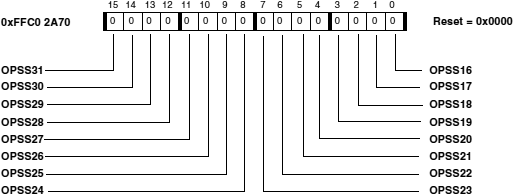
ąĀąĖčü. 19-27. Overwrite Protection/Single Shot Transmission Register 2.
ąĢčüą╗ąĖ ąĖąĘą╝ąĄąĮąĄąĮą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ mailbox (ąĖąĘą╝ąĄąĮąĄąĮ ą┐čĆąĖąĄą╝ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā, ąĖą╗ąĖ ąĮą░ąŠą▒ąŠčĆąŠčé), č鹊 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ CAN_OPSSx ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ą░ą┤ą░ą┐čéąĖčĆąŠą▓ą░ąĮąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝.
ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą▒ąĖčé CAN_OPSSx ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ąĖąĘą╝ąĄąĮčÅčéčīčüčÅ, ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ mailbox.
ąŚą░čēąĖčéą░ ąŠčé ą┐ąĄčĆąĄąĘą░ą┐ąĖčüąĖ ąĮąĄ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ, ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮą░ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ remote frame. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ mailbox ą▓čüąĄą│ą┤ą░ ą┐ąĄčĆąĄąĘą░ą┐ąĖčłąĄčéčüčÅ ą┐čĆąĖčłąĄą┤čłąĖą╝ čüąŠąŠą▒čēąĄąĮąĖąĄą╝.
ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐čĆąĖą╝ąĄčĆ ąĮą░čüčéčĆąŠą╣ą║ąĖ čÅčēąĖą║ąŠą▓ 0..7 ąĮą░ ą┐čĆąĖąĄą╝. ążčāąĮą║čåąĖčÅ Init_CAN_RX_mailboxes ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčé čÅčēąĖą║ąĖ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü 11-ą▒ąĖčéąĮčŗą╝ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝, ą╝ą░čüą║ą░ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą┐čĆąĖąĄą╝ą░ ąŠąĮ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ čäčāąĮą║čåąĖčÄ č湥čĆąĄąĘ ą┐ą░čĆą░ą╝ąĄčéčĆ rxIDmask.
void Init_CAN_RX_mailmoxes (u16 rxIDmask)
{
volatile u16 *pCAN_Ptr;
//////////////////////////////////////////////////////////////////////////////
// ąØą░čüčéčĆąŠą╣ą║ą░ ą┐čĆąĖąĄą╝ąĮčŗčģ čÅčēąĖą║ąŠą▓.
// ą»čēąĖą║ąĖ 0-7 čĆą░ą▒ąŠčéą░čÄčé č鹊ą╗čīą║ąŠ ąĮą░ ą┐čĆąĖąĄą╝,
// ą▒čāą┤ąĄą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĖčģ.
// ąŚą░ą┐čĆąĄčéąĖą╝ čÅčēąĖą║ąĖ 0-7, ąĄčüą╗ąĖ ąŠąĮąĖ ą▒čŗą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮčŗ:
*pCAN_MC1 = 0x0000;
// ąØą░čüčéčĆąŠąĖą╝ ą╝ą░čüą║čā ą┐čĆąĖąĄą╝ą░ ą┤ą╗čÅ 11-ą▒ąĖčéąĮčŗčģ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓:
for (boxnum = 0; boxnum < 8; boxnum++)
{
// ąŻčüčéą░ąĮąŠą▓ąĖą╝ ą╝ą░čüą║čā ą┐čĆąĖąĄą╝ą░:
pCAN_Ptr = (u16*)CAN_AM00H + (4 * boxnum);
*pCAN_Ptr = msgIDrxmask << 2;
pCAN_Ptr = (u16*)CAN_AM00L + (4 * boxnum);
*pCAN_Ptr = 0;
// ąĀą░ąĘčĆąĄčłąĖą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą╝ą░čüą║ąĖ ą┐čĆąĖąĄą╝ą░:
pCAN_Ptr = (u16*)CAN_MB00_ID1 + (0x10 * boxnum);
*pCAN_Ptr = AME;
// ąĀą░ąĘčĆąĄčłąĖą╝ ąĘą░čēąĖčéčā ą┐čĆąĖąĄą╝ą░ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ OSS:
pCAN_Ptr = (u16*)CAN_OPSS1;
*pCAN_Ptr |= (1 << boxnum);
}
u32 Result;
while(1)
{
u32 ivg;
// ąÆą░čĆąĖą░ąĮčé ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĮą░ č鹥ą║čāčēąĖą╣ IVG:
//Result = adi_int_SICGetIVG(ADI_INT_CAN_RX, &ivg);
// ąÆą░čĆąĖą░ąĮčé ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĮą░ čüą▓ąŠą▒ąŠą┤ąĮčŗą╣ IVG13:
Result = adi_int_SICSetIVG(ADI_INT_CAN_RX, ADI_INT_IVG_13);
if (ADI_INT_RESULT_SUCCESS != Result)
break;
// ąÆą░čĆąĖą░ąĮčé ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĮą░ č鹥ą║čāčēąĖą╣ IVG:
//Result = adi_int_CECHook(ivg, canRXhandler, NULL, FALSE);
// ąÆą░čĆąĖą░ąĮčé ąĮą░čüčéčĆąŠą╣ą║ąĖ ąĮą░ čüą▓ąŠą▒ąŠą┤ąĮčŗą╣ IVG13:
Result = adi_int_CECHook(ADI_INT_IVG_13, canRXhandler, NULL, FALSE);
if (ADI_INT_RESULT_SUCCESS != Result)
break;
Result = adi_int_SICEnable(ADI_INT_CAN_RX);
if (ADI_INT_RESULT_SUCCESS != Result)
break;
// ąØą░čüčéčĆąŠą╣ą║ą░ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┐čĆąĖąĄą╝ą░ ąĮą░ čÅčēąĖą║ąĖ 0-7:
pCAN_Ptr = (u16*)CAN_MBIM1;
for (boxnum = 0; boxnum<8; boxnum++)
{
// ąĀą░ąĘčĆąĄčłąĖą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ čÅčēąĖą║ąŠą▓:
*pCAN_Ptr |= (1<<boxnum);
}
break;
}
if (ADI_INT_RESULT_SUCCESS != Result)
{
umsg("ą×čłąĖą▒ą║ą░ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ CAN RX");
}
// ąĀą░ąĘčĆąĄčłąĖą╝ čÅčēąĖą║ąĖ 0-7:
*pCAN_MC1 = 0x00FF;
}
ąŚą┤ąĄčüčī canRXhandler čŹč鹊 ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ CAN (ą┐čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ čüą╝. ą┤ą░ą╗ąĄąĄ).
[ąøąŠą│ąĖą║ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ]
ą¤ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ą▓ mailbox, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā. ą¤ąŠčüą╗ąĄ ąĘą░ą┐ąĖčüąĖ ą┤ą░ąĮąĮčŗčģ ąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą▓ RAM-ąŠą▒ą╗ą░čüčéčī mailbox, čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠčéą┐čĆą░ą▓ąĖčéčüčÅ, ąĄčüą╗ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ąĘą░ą┐čĆąŠčüą░ ą┐ąĄčĆąĄą┤ą░čćąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ąĖ mailbox čĆą░ąĘčĆąĄčłąĄąĮ. ąĀąĄą│ąĖčüčéčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░č湥ą╣ ą┐ąŠą┤ąĄą╗ąĄąĮ ąĮą░ 2 čĆąĄą│ąĖčüčéčĆą░: čĆąĄą│ąĖčüčéčĆ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĘą░ą┐čĆąŠčüą░ ą┐ąĄčĆąĄą┤ą░čćąĖ (CAN_TRSx) ąĖ čĆąĄą│ąĖčüčéčĆ čüą▒čĆąŠčüą░ ąĘą░ą┐čĆąŠčüą░ ą┐ąĄčĆąĄą┤ą░čćąĖ (CAN_TRRx).
ąĢčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▒ąŠą╗ąĄąĄ ąŠą┤ąĮąŠą│ąŠ ąĘą░ą┐čĆąŠčüą░ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā (pending transmit request), ąŠą▒čŖąĄą║čéčŗ čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ čéą░ą║, ą║ą░ą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą╗ąŠą│ąĖą║ąŠą╣ ą┐čĆąĖąŠčĆąĖč鹥čéą░ ą┐ąĄčĆąĄą┤ą░čćąĖ.
ąÜąŠą│ą┤ą░ ą┐ąĄčĆąĄą┤ą░čćą░ ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮą░ čāčüą┐ąĄčłąĮąŠ, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą▒ąĖčéčŗ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_TRSx ąĖ čĆąĄą│ąĖčüčéčĆąĄ CAN_TRRx ąŠčćąĖčēą░čÄčéčüčÅ, ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ.
ąŻą┐čĆą░ą▓ą╗čÅčÄčēąĖąĄ ą▒ąĖčéčŗ ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĖą╗ąĖ čüą▒čĆąŠčüą░ ąĘą░ą┐čĆąŠčüą░ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā (TRS ąĖ TRR čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ) ą╝ąŠąČąĮąŠ ąĘą░ą┐ąĖčüčŗą▓ą░čéčī ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ.
ą¤ąŠą▓č鹊čĆąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ (Retransmission). ą×ą▒čŗčćąĮąŠ č鹥ą║čāčēąĖą╣ ąŠą▒čŖąĄą║čé čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą┐ąŠą▓č鹊čĆąĮąŠ ą▓ čüą╗čāčćą░ąĄ ą┐ąŠč鹥čĆąĖ ą░čĆą▒ąĖčéčĆą░ąČą░ ąĖą╗ąĖ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ čäčĆąĄą╣ą╝ą░ ąŠčłąĖą▒ą║ąĖ ąĮą░ ą╗ąĖąĮąĖąĖ čłąĖąĮčŗ CAN. ąĢčüą╗ąĖ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ąŠąČąĖą┤ą░čÄčé ąŠčéą┐čĆą░ą▓ą║ąĖ ą▒ąŠą╗čīčłąĄ ąŠą┤ąĮąŠą│ąŠ ąŠą▒čŖąĄą║čéą░ čüąŠąŠą▒čēąĄąĮąĖčÅ, č鹊 ą┐ąĄčĆą▓čŗą╝ ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ ąŠą▒čŖąĄą║čé čü čüą░ą╝čŗą╝ ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝. ą¤čĆąĖąŠčĆąĖč鹥čé ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓. ą×ą▒ąŠčĆą▓ą░ąĮąĮąŠąĄ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐ąĄčĆąĄąĘą░ą┐čāčüčéąĖčéčüčÅ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ čü ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝.
ąĪąŠąŠą▒čēąĄąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐čĆąŠčåąĄčüčüąĄ ą┐ąŠą┤ą│ąŠč鹊ą▓ą║ąĖ, ąĮąĄ ąĘą░ą╝ąĄąĮčÅąĄčéčüčÅ ą┤čĆčāą│ąĖą╝ čüąŠąŠą▒čēąĄąĮąĖąĄą╝, ąĘą░ą┐ąĖčüą░ąĮąĮčŗą╝ ą▓ mailbox. ąĪąŠąŠą▒čēąĄąĮąĖąĄ ą▓ ą┐čĆąŠčåąĄčüčüąĄ ą┐ąŠą┤ą│ąŠč鹊ą▓ą║ąĖ ą║ąŠą┐ąĖčĆčāąĄčéčüčÅ ą▓ąŠ ą▓čĆąĄą╝ąĄąĮąĮčŗą╣ ą▒čāč乥čĆ ą┐ąĄčĆąĄą┤ą░čćąĖ, ą║ąŠą│ą┤ą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ąĘą░ą┐čĆąŠčü ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā ą┤ą╗čÅ ą╝ąŠą┤čāą╗čÅ čÅą┤čĆą░ CAN. ąĪąŠąŠą▒čēąĄąĮąĖąĄ ąĮąĄ ąĘą░ą╝ąĄąĮčÅąĄčéčüčÅ, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé čāčüą┐ąĄčłąĮąŠ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ, ą┐ąŠą║ą░ ą┐ąŠč鹥čĆčÅąĮ ą░čĆą▒ąĖčéčĆą░ąČ ąĮą░ čłąĖąĮąĄ CAN, ąĖą╗ąĖ ąĮą░ čłąĖąĮąĄ CAN ą┐ąŠčÅą▓ąĖą╗čüčÅ čäčĆąĄą╣ą╝ ąŠčłąĖą▒ą║ąĖ.
ą×ą┤ąĮąŠą║čĆą░čéąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ (Single Shot Transmission). ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čäčāąĮą║čåąĖčÅ ąŠą┤ąĮąŠą║čĆą░čéąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ (OPSSn=1), č鹊 ą▒ąĖčé ąĘą░ą┐čĆąŠčüą░ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā (TRSn) ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_TRSx ąŠčćąĖčüčéąĖčéčüčÅ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čüąŠąŠą▒čēąĄąĮąĖąĄ čāčüą┐ąĄčłąĮąŠ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ. ąæąĖčé TRSn čéą░ą║ąČąĄ ąŠčćąĖčēą░ąĄčéčüčÅ, ąĄčüą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćą░ ąŠą▒ąŠčĆą▓ą░ąĮą░ ąĖąĘ-ąĘą░ ą┐ąŠč鹥čĆąĖ ą░čĆą▒ąĖčéčĆą░ąČą░ ąĖą╗ąĖ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ čäčĆąĄą╣ą╝ą░ ąŠčłąĖą▒ą║ąĖ ąĮą░ čłąĖąĮąĄ CAN. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┐ąĄčĆąĄą┤ą░čćą░ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĮąĄ ą▒čāą┤ąĄčé ą┐ąŠą▓č鹊čĆąĄąĮą░ ą▓ čüą╗čāčćą░ąĄ ą┐ąŠč鹥čĆąĖ ą░čĆą▒ąĖčéčĆą░ąČą░ ąĖą╗ąĖ ąŠčłąĖą▒ą║ąĖ ąĮą░ čłąĖąĮąĄ CAN.
ą¤ąŠčüą╗ąĄ čāčüą┐ąĄčłąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé TAn ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_TAx, ąĖ ą┐ąŠčüą╗ąĄ ąŠą▒čĆčŗą▓ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé AAn.
ą¤čĆąĖąŠčĆąĖč鹥čé ą┐ąĄčĆąĄą┤ą░čć ąĮą░ ąŠčüąĮąŠą▓ąĄ ąĮąŠą╝ąĄčĆą░ mailbox. ąĢčüą╗ąĖ ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ ąŠąČąĖą┤ą░ąĮąĖąĖ ą▒ąŠą╗čīčłąĄ ąŠą┤ąĮąŠą│ąŠ ąĘą░ą┐čĆąŠčüą░ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā, č鹊 ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐ąĄčĆąĄą┤ą░čćąĖ ąĮą░čćąĮąĄčéčüčÅ čü čüą░ą╝ąŠą│ąŠ čüčéą░čĆčłąĄą│ąŠ ą┐ąŠ ąĮąŠą╝ąĄčĆčā, čĆą░ąĘčĆąĄčłąĄąĮąĮąŠą│ąŠ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā mailbox, ą┐čĆąŠą┤ąŠą╗ąČą░čÅčüčī ąĮą░ ą▒ąŠą╗ąĄąĄ ąĮąĖąĘą║ąĖčģ ą┐ąŠ ąĮąŠą╝ąĄčĆčā, čĆą░ąĘčĆąĄčłąĄąĮąĮčŗčģ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā mailbox. ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüą╗ąĄą┤čāčÄčēąĄąĄ ąŠąČąĖą┤ą░čÄčēąĄąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ąĖąĘ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ čĆąĄą│ąĖčüčéčĆąŠą▓ CAN_TRSx, CAN_TRRx, CAN_MDx ąĖ CAN_MCx. ąŁč鹊čé čāą║ą░ąĘą░č鹥ą╗čī ą┤ąŠčüčéčāą┐ąĄąĮ č湥čĆąĄąĘ 1 čåąĖą║ą╗ ą┐ąŠčüą╗ąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąŠą┤ąĮąŠą│ąŠ ąĖąĘ čŹčéąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĮąŠą▓čŗą╣ čāą║ą░ąĘą░č鹥ą╗čī ą▒čŗčüčéčĆąŠ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą║ąŠą┐ąĖčĆčāąĄčéčüčÅ ą▓ąŠ ą▓čĆąĄą╝ąĄąĮąĮčŗą╣ ą▒čāč乥čĆ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąŁč鹊 ąŠą▒čŗčćąĮąŠ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ąŠ ą▓čĆąĄą╝čÅ ąŠą▒ą╗ą░čüčéąĖ ą┐ąĄčĆąĄčĆčŗą▓ą░ (intermission field) čüąŠąŠą▒čēąĄąĮąĖčÅ CAN. ą¤ąŠčüą╗ąĄ ą│ąĄąĮąĄčĆą░čåąĖąĖ čŹč鹊ą│ąŠ čāą║ą░ąĘą░č鹥ą╗čÅ ą▓čüąĄ čüą╗ąĄą┤čāčÄčēąĖąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą▓ ąŠą▒ą╗ą░čüčéąĖ mailbox ąĖą│ąĮąŠčĆąĖčĆčāčÄčéčüčÅ ą┤ąŠ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ čüąŠą▒čŗčéąĖčÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čāą║ą░ąĘą░č鹥ą╗čÅ.
[ąĀąĄą│ąĖčüčéčĆčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░č湥ą╣]
ąĢčüą╗ąĖ ąĄčüčéčī čüąŠąŠą▒čēąĄąĮąĖąĄ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ, č鹊 čüąĮą░čćą░ą╗ą░ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ mailbox ą║ą░ą║ ą┐ąĄčĆąĄą┤ą░čÄčēąĖą╣. ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┤ą░ąĮąĮčŗąĄ čüąŠčģčĆą░ąĮąĄąĮčŗ ą▓ čŹč鹊čé mailbox, ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮą░ ą┐ąĄčĆąĄą┤ą░čćą░ ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą▒ąĖčéą░ ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĘą░ą┐čĆąŠčüą░ ą┐ąĄčĆąĄą┤ą░čćąĖ (CAN_TRSx). ąŚą░ą┐čĆąŠčłąĄąĮąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą▒ąŠčĆą▓ą░ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ą▒ąĖč鹊ą╝ ą▓ čĆąĄą│ąĖčüčéčĆąĄ čüą▒čĆąŠčüą░ ąĘą░ą┐čĆąŠčüą░ ą┐ąĄčĆąĄą┤ą░čćąĖ (CAN_TRRx).
ąæąĖčéčŗ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_TRSx ą╝ąŠą│čāčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ CPU ąĖ čüą▒čĆąŠčłąĄąĮčŗ / čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣ ą╝ąŠą┤čāą╗čÅ CAN. ąæąĖčéčŗ CAN_TRSx čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ąĘą░ą┐ąĖčüčīčÄ 1. ąŚą░ą┐ąĖčüčī 0 ąĮąĄ ą┤ą░ąĄčé čŹčäč乥ą║čéą░. ą×ąĮąĖ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą╝ąŠą┤čāą╗ąĄą╝ CAN ą▓ čüą╗čāčćą░ąĄ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ ąĘą░ą┐čĆąŠčüą░ remote frame (ąĖą╗ąĖ ą▓ čĆąĄąČąĖą╝ąĄ auto-transmit). ąŁč鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ mailbox-ąŠą▓ ą┐čĆąĖąĄą╝ą░/ą┐ąĄčĆąĄą┤ą░čćąĖ, ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮą░ čäčāąĮą║čåąĖčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ remote frame (RFHn=1). ąĢčüą╗ąĖ TRSn=1, č鹊 ą┤ąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą┤ąŠčüčéčāą┐ ąŠčéą║ą╗ąŠąĮčÅąĄčéčüčÅ (ąĮąŠ ąĮąĄ ą▒ą╗ąŠą║ąĖčĆčāąĄčéčüčÅ), ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ n ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ. ąØąĄčüą║ąŠą╗čīą║ąŠ ą▒ąĖčé CAN_TRSx ą╝ąŠą│čāčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ, ąĖ čüą▒čĆąŠčłąĄąĮčŗ ą╗ąĖą▒ąŠ ą┐ąŠčüą╗ąĄ čāčüą┐ąĄčłąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ, ą╗ąĖą▒ąŠ ą┐ąŠčüą╗ąĄ ąŠą▒ąŠčĆą▓ą░ąĮąĮąŠą╣.
ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ąĖą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čüą▒čĆąŠčüą░ ą▓čüąĄ ą▒ąĖčéčŗ CAN_TRSx ąŠčćąĖčēą░čÄčéčüčÅ. ąæąĖčéčŗ CAN_TRSx čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čÄčēąĖčģ mailbox ąĖ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ mailbox. ąŚąĮą░č湥ąĮąĖąĄ TRSn ą┤ą╗čÅ ą┐čĆąĖąĮąĖą╝ą░čÄčēąĖčģ mailbox ą▓čüąĄą│ą┤ą░ čćąĖčéą░ąĄčéčüčÅ ą║ą░ą║ 0.
ąöąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī ą▓ mailbox ą▓ąŠąĘą╝ąŠąČąĄąĮ, ą┤ą░ąČąĄ ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé TRSn. ą×ą┤ąĮą░ą║ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą▓ čéą░ą║ąŠą╝ mailbox ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ąĮąĄąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗą╝ ą┤ą░ąĮąĮčŗą╝.
ąŻčüčéą░ąĮąŠą▓ą║ą░ TRSn, ą║ąŠą│ą┤ą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ mailbox ąĘą░ą┐čĆąĄčēąĄąĮ (MCn=0) ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ąŠčłąĖą▒ąŠčćąĮąŠą╝čā ą┐ąŠą▓ąĄą┤ąĄąĮąĖčÄ.
ąØąĄąŠąČąĖą┤ą░ąĮąĮąŠąĄ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ čéą░ą║ąČąĄ ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ, ąĄčüą╗ąĖ mailbox ąĘą░ą┐čĆąĄčēą░ąĄčéčüčÅ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé TRSn čüą▒čĆąŠčüąĖčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣.
ą¤ąĄčĆąĄą┤ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ TRSn čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ mailbox ą┤ąŠą╗ąČąĄąĮ čüąŠą┤ąĄčƹȹ░čéčī ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ.
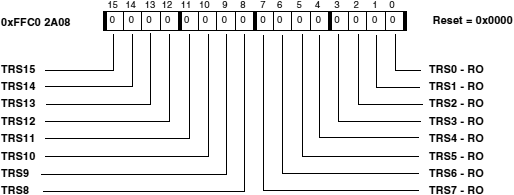
ąĀąĖčü. 19-28. Transmission Request Set Register 1.
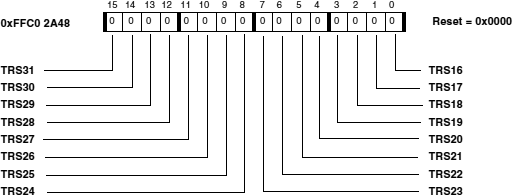
ąĀąĖčü. 19-29. Transmission Request Set Register 2.
ąæąĖčéčŗ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ CAN_TRRx ą╝ąŠą│čāčé ą▒čŗčéčī č鹊ą╗čīą║ąŠ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝, ąĖ čüą▒čĆąŠčłąĄąĮčŗ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣. ąæąĖčéčŗ CAN_TRR čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ąĘą░ą┐ąĖčüčīčÄ 1. ąŚą░ą┐ąĖčüčī 0 ąĮąĄ ą┤ą░ąĄčé čŹčäč乥ą║čéą░. ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą┐ąŠ ą▓ą║ą╗čÄč湥ąĮąĖčÄ ą┐ąĖčéą░ąĮąĖčÅ ąĖą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čüą▒čĆąŠčüą░ ą▓čüąĄ ą▒ąĖčéčŗ ąŠčćąĖčēą░čÄčéčüčÅ.
ąĢčüą╗ąĖ ą▒ąĖčé TRRn čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 ą┤ąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ mailbox ąŠčéą║ą╗ąŠąĮčÅąĄčéčüčÅ, ąĮąŠ ąĮąĄ ą▒ą╗ąŠą║ąĖčĆčāąĄčéčüčÅ. ąĢčüą╗ąĖ ą▒ąĖčé TRRn čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ąĖ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ą┐ąŠą║ą░ ąĮąĄ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ ą┐ąĄčĆąĄą┤ą░čćą░, ą║ąŠč鹊čĆą░čÅ ą▒čŗą╗ą░ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮą░ ą▒ąĖč鹊ą╝ TRSn, č鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ąĘą░ą┐čĆąŠčü ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ąŠčéą╝ąĄąĮčÅąĄčéčüčÅ. ąĢčüą╗ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ, ą▒ąĖčéčŗ CAN_TRSx ąĖ CAN_TRRx ąŠčüčéą░čÄčéčüčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ąĖ ą┤ąŠ č鹥čģ ą┐ąŠčĆ, ą┐ąŠą║ą░ ą┐ąĄčĆąĄą┤ą░čćą░ ąĮąĄ ąŠą▒ąŠčĆą▓ąĄčéčüčÅ ąĖą╗ąĖ ąĮąĄ ą▒čāą┤ąĄčé čāčüą┐ąĄčłąĮąŠ ąĘą░ą▓ąĄčĆčłąĄąĮą░. ąæąĖčé ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ąŠą▒čĆčŗą▓ą░ (abort acknowledge, AAn), ąĖą╗ąĖ ą▒ąĖčé ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ (transmit acknowledge, TAn) ąĮąĄ ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ą┐ąŠą║ą░ ąĮąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čüą╗ąĄą┤čāčÄčēąĄąĄ:
ŌĆó ąŻčüą┐ąĄčłąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░.
ŌĆó Abort ąĖąĘ-ąĘą░ ą┐ąŠč鹥čĆąĖ ą░čĆą▒ąĖčéčĆą░ąČą░.
ŌĆó ą×ą▒ąĮą░čĆčāąČąĄąĮąĖąĄ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ ąĮą░ čłąĖąĮąĄ CAN.
ąĢčüą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćą░ ą▒čŗą╗ą░ čāčüą┐ąĄčłąĮą░čÅ, č鹊 čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ (TAn). ąĢčüą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćą░ ą▒čŗą╗ą░ ąŠą▒ąŠčĆą▓ą░ąĮą░, č鹊 čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ąŠą▒čĆčŗą▓ą░ (AAn). ąÆ ąŠą▒ąŠąĖčģ čüą╗čāčćą░čÅčģ čüą▒čĆąŠčüčÅčéčüčÅ TRSn ąĖ TRRn.
ąĪąŠčüč鹊čÅąĮąĖąĄ ą▒ąĖčé TRR ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮąŠ ąĖąĘ ą▒ąĖčé CAN_TRSx. ąĢčüą╗ąĖ CAN_TRSx čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ąĖ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┐ąĄčĆąĄą┤ą░čćą░, č鹊 CAN_TRRx ą╝ąŠąČąĮąŠ čüą▒čĆąŠčüąĖčéčī č鹊ą╗čīą║ąŠ ą┤ąĄą╣čüčéą▓ąĖčÅą╝ąĖ, ąŠą┐ąĖčüą░ąĮąĮčŗą╝ąĖ ą▓čŗčłąĄ. ąĢčüą╗ąĖ ą▒ąĖčé CAN_TRSx čüą▒čĆąŠčłąĄąĮ, ąĖ ą▒ąĖčé CAN_TRRx čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 čŹč鹊 ąĮąĄ ą┤ą░ąĄčé čŹčäč乥ą║čéą░, ą┐ąŠčüą║ąŠą╗čīą║čā ą▒ąĖčé CAN_TRRx ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ čüą▒čĆąŠčüąĖčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣.
ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ąĖą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čüą▒čĆąŠčüą░ ą▓čüąĄ ą▒ąĖčéčŗ ą▓ CAN_TRRx ąŠčćąĖčēą░čÄčéčüčÅ. ąæąĖčéčŗ CAN_TRRx čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čÄčēąĖčģ mailbox ąĖ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ mailbox. ąŚąĮą░č湥ąĮąĖąĄ TRRn ą┤ą╗čÅ ą┐čĆąĖąĄą╝ąĮąŠą│ąŠ mailbox ą▓čüąĄą│ą┤ą░ čćąĖčéą░ąĄčéčüčÅ ą║ą░ą║ 0.
ąæąĖčé TRRn ąĮąĄ ą┤ąŠą╗ąČąĄąĮ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčīčüčÅ, ąĄčüą╗ąĖ ąĘą░ą┐čĆąĄčēąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ mailbox (MCn=0).
ąæąĖčé TRRn ąĮąĄ ą┤ąŠą╗ąČąĄąĮ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčīčüčÅ, ąĄčüą╗ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé TRSn ąĮąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ.
ą×ą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄą╝ąŠąĄ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐čĆąŠą┤ąŠą╗ąČąĖčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčīčüčÅ, ąĄčüą╗ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą▒ąĖčéčŗ TRSn ąĖ TRRn čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ, ą┐ąŠč鹊ą╝čā čćč鹊 abort ąĘą░ą┐čĆąŠčłąĄąĮ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝. ąóąĄą║čāčēą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĘą░ą▓ąĄčĆčłą░ąĄčéčüčÅ, ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé TAn čĆąĄą│ąĖčüčéčĆą░ CAN_TAx, ąĖą╗ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé AAn čĆąĄą│ąĖčüčéčĆą░ CAN_AAx.
ą¤ąĄčĆąĄą┤ą░čćą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ąŠą▒čĆčŗą▓ą░ąĄčéčüčÅ, ąĄčüą╗ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ mailbox ą▓čĆąĄą╝ąĄąĮąĮąŠ ąĘą░ą┐čĆąĄčēąĄąĮ, ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé TRRn ą┤ą╗čÅ čŹč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ (TRSn ąĖ TRRn čüą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ, AAn čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ).

ąĀąĖčü. 19-30. Transmission Request Reset Register 1.
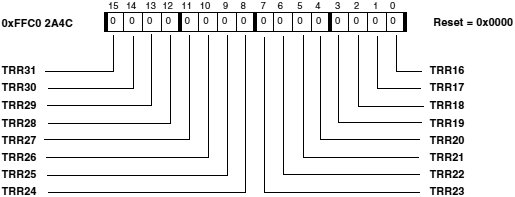
ąĀąĖčü. 19-31. Transmission Request Reset Register 2.
ąĀąĄą│ąĖčüčéčĆ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ąŠą▒čĆčŗą▓ą░ (abort acknowledge, CAN_AAx) ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą▒čŗą╗ą░ ą╗ąĖ ąŠą▒ąŠčĆą▓ą░ąĮą░ ą┐ąĄčĆąĄą┤ą░čćą░. ąĢčüą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ mailbox n ą▒čŗą╗ą░ ąŠą▒ąŠčĆą▓ą░ąĮą░, č鹊 čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé AAn. ą×čćąĖčüčéą║ą░ ą▒ąĖčé AAn čĆą░ą▒ąŠčéą░ąĄčé ą┐ąŠ ą┐čĆąĖąĮčåąĖą┐čā "ąĘą░ą┐ąĖčüą░čéčī 1, čćč鹊ą▒čŗ čüą▒čĆąŠčüąĖčéčī" (write-1-to-clear, W1C). ąŚą░ą┐ąĖčüčī 0 ąĮąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹčäč乥ą║čéą░. ąæąĖčé ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ąŠą▒čĆčŗą▓ą░ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ AAn, ąĄčüą╗ąĖ ą▒ąĖčé TRSn čüąĮąŠą▓ą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ. ąĢčüą╗ąĖ mailbox ąĘą░ą┐čĆąĄčēąĄąĮ (čüą▒čĆąŠčłąĄąĮ MCn), čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé AAn ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_AAx čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 čŹč鹊čé ą▒ąĖčé ąŠčüčéą░ąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝. ąæąĖčé AAn ą╝ąŠąČąĮąŠ ąŠčćąĖčüčéąĖčéčī č鹊ą╗čīą║ąŠ ąĘą░ą┐ąĖčüčīčÄ ą▓ ąĮąĄą│ąŠ 1.
ąŻčüčéą░ąĮąŠą▓ą║ą░ ą▒ąĖčéą░ ą▓ CAN_AAx čāčüčéą░ąĮąŠą▓ąĖčé čäą╗ą░ą│ (AAIS) ą▓ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╝ čĆąĄą│ąĖčüčéčĆąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (CAN_GIS). ąĢčüą╗ąĖ ą▒ąĖčé ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ AAIM čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ (AAIM=1 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čĆą░ąĘčĆąĄčłąĄąĮąŠ), č鹊 čéą░ą║ąČąĄ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą▓ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╝ čĆąĄą│ąĖčüčéčĆąĄ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (CAN_GIF), ąĖ ą▒čāą┤ąĄčé ą▓čŗčüčéą░ą▓ą╗ąĄąĮąŠ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ.
ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ąĖą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čüą▒čĆąŠčüą░ ą▓čüąĄ ą▒ąĖčéčŗ CAN_AAx ąŠčćąĖčēą░čÄčéčüčÅ.
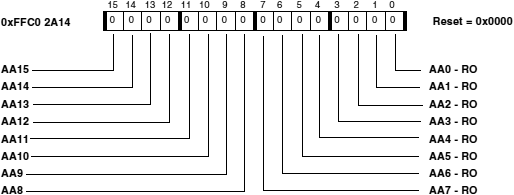
ąĀąĖčü. 19-32. Abort Acknowledge Register 1 (ą▓čüąĄ ą▒ąĖčéčŗ čéąĖą┐ą░ W1C).

ąĀąĖčü. 19-33. Abort Acknowledge Register 2 (ą▓čüąĄ ą▒ąĖčéčŗ čéąĖą┐ą░ W1C).
ąæąĖčé AAn ąĮąĄ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ąĄčüą╗ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé TRSn čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣. ąæąĖčé AAn čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé TRSn.
ąĀąĄą│ąĖčüčéčĆ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ (transmission acknowledge, CAN_TAx) ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ąĘą░ą▓ąĄčĆčłąĖą╗ą░čüčī ą╗ąĖ čāčüą┐ąĄčłąĮąŠ ą┐ąĄčĆąĄą┤ą░čćą░. ąĢčüą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓ mailbox n ą▒čŗą╗ąŠ čāčüą┐ąĄčłąĮąŠ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ, č鹊 čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ (TAn). ąæąĖčéčŗ TAn ąŠčćąĖčēą░čÄčéčüčÅ ą┐ąŠ ą┐čĆąĖąĮčåąĖą┐čā "ąĘą░ą┐ąĖčüą░čéčī 1, čćč鹊ą▒čŗ čüą▒čĆąŠčüąĖčéčī" (write-1-to-clear, W1C). ąŚą░ą┐ąĖčüčī 0 ąĮąĄ ą┤ą░ąĄčé čŹčäč乥ą║čéą░. ąæąĖčé TAn čéą░ą║ąČąĄ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ąĄčüą╗ąĖ TRSn čüąĮąŠą▓ą░ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ. ąĢčüą╗ąĖ mailbox ąĘą░ą┐čĆąĄčēąĄąĮ (MCn čüą▒čĆąŠčłąĄąĮ) ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_TAx, č鹊 čŹč鹊čé ą▒ąĖčé ąŠčüčéą░ąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝. ąæąĖčé TAn ą╝ąŠąČąĮąŠ ąŠčćąĖčüčéąĖčéčī č鹊ą╗čīą║ąŠ ąĘą░ą┐ąĖčüčīčÄ ą▓ ąĮąĄą│ąŠ 1.
ąŻčüčéą░ąĮąŠą▓ą║ą░ ą▒ąĖčéą░ ą▓ CAN_TA čāčüčéą░ąĮąŠą▓ąĖčé čäą╗ą░ą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ mailbox (MBTIFn), ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (MBIMn ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MBIMx). MBIMn=1 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čĆą░ąĘčĆąĄčłąĄąĮąŠ.
ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ąĖą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čüą▒čĆąŠčüą░ ą▓čüąĄ ą▒ąĖčéčŗ CAN_TAx ąŠčćąĖčēą░čÄčéčüčÅ.
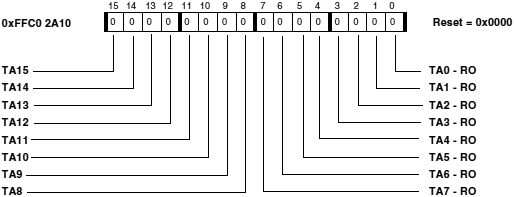
ąĀąĖčü. 19-34. Transmission Acknowledge Register 1 (ą▓čüąĄ ą▒ąĖčéčŗ čéąĖą┐ą░ W1C).
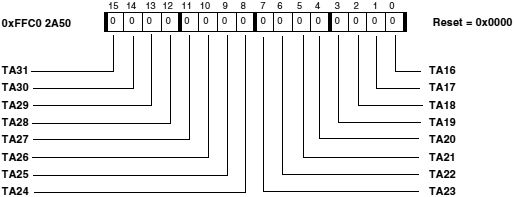
ąĀąĖčü. 19-35. Transmission Acknowledge Register 2 (ą▓čüąĄ ą▒ąĖčéčŗ čéąĖą┐ą░ W1C).
ąæąĖčé TAn ąĮąĄ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ąĄčüą╗ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé TRSn čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣. ąæąĖčé TAn čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé TRSn, ąĖą╗ąĖ ąĘą░ą┐ąĖčüčīčÄ 1 ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ ą┐ąŠąĘąĖčåąĖčÄ ą▒ąĖčéą░.
ą£ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čäčāąĮą║čåąĖčÅ ą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ąĘą░ą┐čĆąĄčéą░ mailbox ą┐čāč鹥ą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░ ą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ąĘą░ą┐čĆąĄčéą░ mailbox (CAN_MBTD). ąĢčüą╗ąĖ mailbox čĆą░ąĘčĆąĄčłąĄąĮ, ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā, č鹊 ą┤ąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī ą▓ ąĄą│ąŠ ą┐ąŠą╗čÅ ą┤ą░ąĮąĮčŗčģ ąŠčéą║ą╗ąŠąĮčÅąĄčéčüčÅ. ąĢčüą╗ąĖ čŹč鹊čé mailbox ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ remote frame, č鹊 ą┐ąŠą╗ąĄ ą┤ą░ąĮąĮčŗčģ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąŠą▒ąĮąŠą▓ą╗ąĄąĮąŠ ą▒ąĄąĘ ą┐ąŠč鹥čĆąĖ ą▓čģąŠą┤čÅčēąĄą│ąŠ čäčĆąĄą╣ą╝ą░ remote request ąĖ ą▒ąĄąĘ ąŠčéą┐čĆą░ą▓ą║ąĖ ą┐čĆąŠčéąĖą▓ąŠčĆąĄčćąĖą▓čŗčģ ą┤ą░ąĮąĮčŗčģ.
ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄą╝čŗą╣ mailbox ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮ ą▓ ą▒ąĖčéčŗ 4 .. 0 čĆąĄą│ąĖčüčéčĆą░ CAN_MBTD, ąĖ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé TDR čŹč鹊ą│ąŠ mailbox. ąĪąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čäą╗ą░ą│ TDA mailbox čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣.
ąĢčüą╗ąĖ mailbox čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā (MDn=0), ąĖ čäą╗ą░ą│ TDA čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą╝ą░čłąĖąĮąŠą╣ ą║ąŠąĮąĄčćąĮčŗčģ čüąŠčüč鹊čÅąĮąĖą╣ (FSM), č鹊 čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ąŠą╗ąĄ ą┤ą░ąĮąĮčŗčģ čŹč鹊ą│ąŠ mailbox ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą▒ąĮąŠą▓ą╗ąĄąĮąŠ. ąĢčüą╗ąĖ ą┐ąŠčüčéčāą┐ąĖą╗ ą▓čģąŠą┤čÅčēąĖą╣ čäčĆąĄą╣ą╝ remote-ąĘą░ą┐čĆąŠčüą░, ą║ąŠą│ą┤ą░ čŹč鹊čé mailbox ą▓čĆąĄą╝ąĄąĮąĮąŠ ąĘą░ą┐čĆąĄčēąĄąĮ, č鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé TRSn čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ FSM ąĖ DLC ą▓čģąŠą┤čÅčēąĄą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĘą░ą┐ąĖčłąĄčéčüčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ mailbox. ą×ą┤ąĮą░ą║ąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĮąĄ ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ, ą┐ąŠą║ą░ ąĘą░ą┐čĆąŠčü ą▓čĆąĄą╝ąĄąĮąĮąŠ ąĘą░ą┐čĆąĄčéą░ ąĮąĄ ą▒čāą┤ąĄčé čüą▒čĆąŠčłąĄąĮ.
ąĢčüą╗ąĖ mailbox čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĮą░ ą┐čĆąĖąĄą╝ (MDn=1), č鹊 čäą╗ą░ą│ TDA čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ FSM, ąĖ mailbox ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ąĮąĄ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ. ąĢčüą╗ąĖ ąĄčüčéčī ą▓čģąŠą┤čÅčēąĄąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┤ą╗čÅ ąĘą░ą┐čĆąŠčłąĄąĮąĮąŠą│ąŠ mailbox n (ąĮąŠą╝ąĄčĆ mailbox n ąĖą┤ąĄąĮčéąĖč湥ąĮ ąĮąŠą╝ąĄčĆčā ą▓čĆąĄą╝ąĄąĮąĮąŠ ąĘą░ą┐čĆąĄčēąĄąĮąĮąŠą│ąŠ mailbox), č鹊 ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ ą╗ąŠą│ąĖą║ą░ ąČą┤ąĄčé ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐čĆąĖąĄą╝ą░, ąĖą╗ąĖ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ čłąĖąĮčŗ CAN, ąĖą╗ąĖ ą┐ąŠą║ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čäą╗ą░ą│ TDA. ąĢčüą╗ąĖ čäą╗ą░ą│ TDA čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 mailbox ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąĘą░ą┐čĆąĄčēąĄąĮ (MCn=0) ą▒ąĄąĘ čĆąĖčüą║ą░ ą┐ąŠč鹥čĆąĖ ą▓čģąŠą┤čÅčēąĄą│ąŠ čäčĆąĄą╣ą╝ą░. ąŚą░ą┐čĆąŠčü ą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ąĘą░ą┐čĆąĄčéą░ (TDR) ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą▒čĆąŠčłąĄąĮ ą┐čĆąĖ ą┐ąĄčĆą▓ąŠą╣ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ.
ąĢčüą╗ąĖ čäą╗ą░ą│ TDA ą┤ą╗čÅ mailbox čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣, č鹊 ą╝ąŠąČąĮąŠ ąŠą▒ąĮąŠą▓ą╗čÅčéčī č鹊ą╗čīą║ąŠ ą┐ąŠą╗čÅ ą┤ą░ąĮąĮčŗčģ ą▓ čŹč鹊ą╝ mailbox (ą┐ąŠčüą╗ąĄą┤ąĮąĖąĄ 8 ą▒ą░ą╣čé mailbox). ąöąŠčüčéčāą┐ ą║ čāą┐čĆą░ą▓ą╗čÅčÄčēąĖą╝ ą▒ąĖčéą░ą╝ ąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčā ąŠčéą║ą╗ąŠąĮčÅąĄčéčüčÅ.
ąÆčĆąĄą╝ąĄąĮąĮąŠ ąĘą░ą┐čĆąĄčēąĄąĮąĮčŗą╣ mailbox ąĖą│ąĮąŠčĆąĖčĆčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ, ą┐ąŠą║ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ąĘą░ą┐čĆąŠčüą░.

ąĀąĖčü. 19-36. Temporary Mailbox Disable Register.
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą▒ąĖčéčŗ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MBTD ą▓čüąĄą│ą┤ą░ čćąĖčéą░čÄčéčüčÅ ą║ą░ą║ 0. ąÜąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąĘą░ą┐ąĖčüčī ą▓ čĆąĄą│ąĖčüčéčĆ CAN_MBTD, ą▓čüąĄą│ą┤ą░ ąĘą░ą┐ąĖčüčŗą▓ą░ą╣č鹥 čŹčéąĖ ą▒ąĖčéčŗ ą║ą░ą║ 0.
ąÉą▓č鹊ą╝ą░čéąĖč湥čüą║ą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ čäčĆąĄą╣ą╝ąŠą▓ remote ą╝ąŠąČąĄčé ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮą░/ąĘą░ą┐čĆąĄčēąĄąĮą░ čāčüčéą░ąĮąŠą▓ą║ąŠą╣/čüą▒čĆąŠčüąŠą╝ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą▒ąĖčéą░ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ remote frame (CAN_RFHx).
ążčĆąĄą╣ą╝čŗ remote čŹč鹊 čäčĆąĄą╣ą╝čŗ ą┤ą░ąĮąĮčŗčģ ą▒ąĄąĘ ą┐ąŠą╗čÅ ą┤ą░ąĮąĮčŗčģ ąĖ čü čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ ą▒ąĖč鹊ą╝ RTR. ą¤ąŠą╗ąĄ ą┤ą╗ąĖąĮčŗ ą┤ą░ąĮąĮčŗčģ čŹč鹊ą│ąŠ čäčĆąĄą╣ą╝ą░ čĆą░ą▓ąĮąŠ DLC čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ čäčĆąĄą╣ą╝ą░ remote. DLC ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąŠ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 0 .. 15. ąŚąĮą░č湥ąĮąĖąĄ DLC, ą▒ąŠą╗čīčłąĄąĄ 8, ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ čéą░ą║ ąČąĄ, ą║ą░ą║ ąĘąĮą░č湥ąĮąĖąĄ 8. ążčĆąĄą╣ą╝ remote čüąŠą┤ąĄčƹȹĖčé:
ŌĆó ąæąĖčéčŗ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░.
ŌĆó ąæąĖčéčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (čé. ąĄ. ą║ąŠą┤ ą┤ą╗ąĖąĮčŗ ą┤ą░ąĮąĮčŗčģ).
ŌĆó ąæąĖčé ąĘą░ą┐čĆąŠčüą░ remote-ą┐ąĄčĆąĄą┤ą░čćąĖ (RTR).
ążčĆąĄą╣ą╝čŗ remote ą╝ąŠą│čāčé ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čéčī č鹊ą╗čīą║ąŠ č鹥 mailbox-čŗ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ąĖ ą┐ąĄčĆąĄą┤ą░čÄčēąĖą╝ąĖ, ąĖ ą┐čĆąĖąĄą╝ąĮčŗą╝ąĖ (čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ mailbox-čŗ čü ąĮąŠą╝ąĄčĆą░ą╝ąĖ 8 .. 23).
ąÆčüąĄ čåąĄąĮčéčĆčŗ čüąŠąŠą▒čēąĄąĮąĖčÅ ą╝ąŠą│čāčé ą┐čĆąĖąĮąĖą╝ą░čéčī ąĖ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ąĘą░ą┐čĆąŠčüčŗ ąĘą░ą┐čĆąŠčüčŗ čäčĆąĄą╣ą╝ą░ remote. ą×ąĮąĖ ą╝ąŠą│čāčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčéą┐čĆą░ą▓ą╗čÅčéčī ąĘą░ą┐čĆąŠčü čäčĆąĄą╣ą╝ą░ remote ą┤čĆčāą│ąŠą╝čā čāąĘą╗čā ąĖ ąŠčéą▓ąĄčćą░čéčī ąĮą░ ą▓čģąŠą┤čÅčēąĖąĄ ąĘą░ą┐čĆąŠčüčŗ remote.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 mailbox čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖą╗ąĖ ą┐čĆąĖąĄą╝ą░, ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĄą│ąŠ ą▒ąĖčé MCn ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ mailbox. ąŚą░ą┐čĆąĄčēąĄąĮąĮčŗą╣ mailbox ąĮąĄ ą┐ąĄčĆąĄą┤ą░ąĄčé ąĖ ąĮąĄ ą┐čĆąĖąĮąĖą╝ą░ąĄčé ąĮąĖą║ą░ą║ąĖčģ čüąŠąŠą▒čēąĄąĮąĖą╣.

ąĀąĖčü. 19-37. Remote Frame Handling Register 1.

ąĀąĖčü. 19-38. Remote Frame Handling Register 2.
ąöąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī ą▓ ą▒ąĖčé RFHn ąŠčéą║ą╗ąŠąĮčÅąĄčéčüčÅ (ąĮąŠ ąĮąĄ ą▒ą╗ąŠą║ąĖčĆčāąĄčéčüčÅ), ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ mailbox n. ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ą╝ąŠąČąĄčé č鹊ą╗čīą║ąŠ čćąĖčéą░čéčī ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░čéčī čĆąĄą│ąĖčüčéčĆ CAN_RFHx. ąĢčüą╗ąĖ ą▒ąĖčé RFHn čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 čäčāąĮą║čåąĖčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čäčĆąĄą╣ą╝ą░ remote čĆą░ąĘčĆąĄčłąĄąĮą░ ą┤ą╗čÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ mailbox.
ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ąĖą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čüą▒čĆąŠčüą░ ą▓čüąĄ ą▒ąĖčéčŗ ąŠčćąĖčēą░čÄčéčüčÅ.
ą£ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ ąŠčłąĖą▒ąŠčćąĮąŠąĄ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ, ą║ąŠą│ą┤ą░ ą▒ąĖčé RFHn ąĖąĘą╝ąĄąĮčÅąĄčéčüčÅ, ąĖ ą▓ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ mailbox.
ąöą╗ąĖąĮą░ čäčĆąĄą╣ą╝ą░ ą┤ą░ąĮąĮčŗčģ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą┐ąŠą╗ąĄą╝ DLC čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ čäčĆąĄą╣ą╝ą░ remote. ąĢčüą╗ąĖ ą┐čĆąĖąĮčÅčé čäčĆąĄą╣ą╝ remote, č鹊 DLC čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ mailbox ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą┐čĆąĖąĮčÅčéčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝.
ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮ ą┐čĆąĖą╝ąĄčĆ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐ąĄčĆąĄą┤ą░čÄčēąĖčģ čÅčēąĖą║ąŠą▓ 24..31. ążčāąĮą║čåąĖčÅ Init_CAN_TX_mailboxes ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčé čÅčēąĖą║ąĖ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü 11-ą▒ąĖčéąĮčŗą╝ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą╝, ąŠąĮ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą▓ ąĮąĄčæ č湥čĆąĄąĘ ą┐ą░čĆą░ą╝ąĄčéčĆ msgIDtx.
void Init_CAN_TX_mailmoxes (u16 msgIDtx)
{
volatile u16 *pCAN_Ptr;
//////////////////////////////////////////////////////////////////////////////
// ąØą░čüčéčĆąŠą╣ą║ą░ ą┐ąĄčĆąĄą┤ą░čÄčēąĖčģ čÅčēąĖą║ąŠą▓.
// ą»čēąĖą║ąĖ 24-31 čĆą░ą▒ąŠčéą░čÄčé č鹊ą╗čīą║ąŠ ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā,
// ą▒čāą┤ąĄą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĖčģ:
s16 boxnum;
for (boxnum = 24; boxnum<32; boxnum++)
{
pCAN_Ptr = (unsigned short *)CAN_MB00_DATA0 + (0x10 * boxnum);
*(pCAN_Ptr + 8) = 8; // ąĘą░ą┐ąĖčüčī 8 ą▓ LENGTH
*(pCAN_Ptr + 10) = 0; // ąĘą░ą┐ąĖčüčī 0 ą▓ TIMESTAMP
*(pCAN_Ptr + 12) = 0; // ąĘą░ą┐ąĖčüčī 0 ą▓ ID0
*(pCAN_Ptr + 14) = (msgIDtx << 2);// ąĘą░ą┐ąĖčüčī msgID ą▓ ID1
}
// ąĀą░ąĘčĆąĄčłąĖą╝ čÅčēąĖą║ąĖ 24-31:
*pCAN_MC2 = 0xFF00;
}
ą¤ąŠčüą╗ąĄ ą▓čŗąĘąŠą▓ą░ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ čÅčēąĖą║ąĖ 24..31 ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą│ąŠč鹊ą▓čŗ ą║ čĆą░ą▒ąŠč鹥 ąĮą░ ą┐ąĄčĆąĄą┤ą░čćčā. ąÜą░ą║ ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčī ą┐ąĄčĆąĄą┤ą░čćčā, ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ ą┐čĆąĖą╝ąĄčĆąĄ ą║ąŠą┤ą░ ą▓čĆąĄąĘą║ąĖ "ąĀąĄą│ąĖčüčéčĆčŗ CAN Mailbox Data (CAN_MBxx_DATAx)".
[ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ CAN]
ą£ąŠą┤čāą╗čī CAN ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé 3 ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ: ą┤ą▓ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ mailbox (ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąĖąĄą╝ą░ mailbox MBRIRQ ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ mailbox MBTIRQ), ąĖ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ GIRQ. ąŚąĮą░č湥ąĮąĖčÅ čŹčéąĖčģ čéčĆąĄčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čéą░ą║ąČąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮąŠ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣.
ąĀąĄą│ąĖčüčéčĆ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ CAN (CAN_INTR) čģčĆą░ąĮąĖčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅčģ CAN.
ąæąĖčé čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ, ą┐ąŠą║ą░ ą░ą║čéąĖą▓ąĮą░ ą╗ąĖąĮąĖčÅ ą▓čŗą▓ąŠą┤ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąÆčüąĄ ą▒ąĖčéčŗ CAN_INTR ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮčŗ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ (read only, RO). ąöąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī ą▓ čŹč鹊čé čĆąĄą│ąĖčüčéčĆ ąĮąĄ ą┤ą░ąĄčé čŹčäč乥ą║čéą░ (ąĖčüą║ą╗čÄč湥ąĮąĖąĄ: čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ wake up, ąĄčüą╗ąĖ ą▒čŗą╗ ą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮ ą▓čģąŠą┤ ą▓ sleep mode). ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ąĖą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čüą▒čĆąŠčüą░ ą▓čüąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčćąĖčēą░čÄčéčüčÅ.
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ CAN_INTR ą▓čüąĄą│ą┤ą░ čćąĖčéą░čÄčéčüčÅ ą║ą░ą║ 0. ąÜąŠą│ą┤ą░ čŹč鹊čé čĆąĄą│ąĖčüčéčĆ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ, ą▓čüąĄą│ą┤ą░ ąĘą░ą┐ąĖčüčŗą▓ą░ą╣č鹥 čŹčéąĖ ą▒ąĖčéčŗ ą║ą░ą║ 0.
ąĪ čåąĄą╗čīčÄ č鹥čüčéą░ ąĘąĮą░č湥ąĮąĖčÅ ą▒ąĖčé ą▓čģąŠą┤ą░ (CANRX) ąĖ ą▓čŗčģąŠą┤ą░ (CANTX) ą╝ąŠą│čāčé ą▒čŗčéčī čéą░ą║ąČąĄ ą┐čĆąŠčćąĖčéą░ąĮčŗ. ąŁčéąĖ ą┤ą▓ą░ ą▒ąĖčéą░ ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé č鹥ą║čāčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓ CANRX ąĖ CANTX čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ, ą▓ č鹊čé ą╝ąŠą╝ąĄąĮčé, ą║ąŠą│ą┤ą░ čŹč鹊čé čĆąĄą│ąĖčüčéčĆ ą▒čŗą╗ ą┐čĆąŠčćąĖčéą░ąĮ.

ąĀąĖčü. 19-39. CAN Interrupt Register.
ąæąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ CAN_INTR:
ŌĆó Serial Input From CAN Bus Line From Transceiver (CANRX).
ąŁč鹊čé ą▒ąĖčé č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ.
1: č鹥ą║čāčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĮą░ čłąĖąĮąĄ CAN čĆąĄčåąĄčüčüąĖą▓ąĮąŠąĄ.
0: č鹥ą║čāčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĮą░ čłąĖąĮąĄ CAN ą┤ąŠą╝ąĖąĮą░ąĮčéąĮąŠąĄ.
ŌĆó Serial Output to CAN Bus Line to Transceiver (CANTX).
ąŁč鹊čé ą▒ąĖčé č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ.
1: ą▓čŗą▓ąŠą┤ ąĮą░ čłąĖąĮčā CAN čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╣.
0: ą▓čŗą▓ąŠą┤ ąĮą░ čłąĖąĮčā CAN ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣.
ŌĆó Global Interrupt Output (GIRQ).
1: čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĖąĮ čäą╗ą░ą│ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_GIF.
0: ąĮąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĮąĖ ąŠą┤ąĖąĮ ąĖąĘ čäą╗ą░ą│ąŠą▓ čĆąĄą│ąĖčüčéčĆą░ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ŌĆó Sleep Mode Acknowledge (SMACK).
1: ą╝ąŠą┤čāą╗čī CAN ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čŹąĮąĄčĆą│ąĖąĖ (čĆąĄąČąĖą╝ čüąĮą░, sleep mode).
0: čĆąĄąČąĖą╝ čüąĮą░ ąĮąĄ ą░ą║čéąĖą▓ąĄąĮ.
ŌĆó Mailbox Transmit Interrupt Output (MBTIRQ).
1: čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĖąĮ čäą╗ą░ą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ čĆąĄą│ąĖčüčéčĆąĄ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ CAN_MBTIFx.
0: ą▓ čĆąĄą│ąĖčüčéčĆąĄ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ CAN_MBTIFx ąĮąĖ ąŠą┤ąĖąĮ čäą╗ą░ą│ ąĮąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ.
ŌĆó Mailbox Receive Interrupt Output (MBRIRQ).
1: čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĖąĮ čäą╗ą░ą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ ą▓ čĆąĄą│ąĖčüčéčĆąĄ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ CAN_MBRIFx.
0: ą▓ čĆąĄą│ąĖčüčéčĆąĄ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ CAN_MBRIFx ąĮąĖ ąŠą┤ąĖąĮ čäą╗ą░ą│ ąĮąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ.
[ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ mailbox]
ąÜą░ąČą┤čŗą╣ ąĖąĘ 32 mailbox-ąŠą▓ ą╝ąŠą┤čāą╗čÅ CAN ą╝ąŠąČąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą║ą░ą║ čĆąĄąĘčāą╗čīčéą░čé ąŠą┤ąĮąŠą│ąŠ ąĖąĘ ą┤ą▓čāčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ mailbox. ąŁčéąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝ąĖ ą┐čĆąĖąĄą╝ą░ ąĖą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ mailbox.
ążą╗ą░ą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ (MBTIFn) ąĖą╗ąĖ ą┐čĆąĖąĄą╝ą░ (MBRIFn) mailbox ą╝ąŠąČąĄčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé MBIMn ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ mailbox (CAN_MBIMx).
ąĢčüą╗ąĖ mailbox čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą┐čĆąĖąĄą╝ąĮčŗą╣, č鹊 čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čäą╗ą░ą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (MBRIFn) ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┐čĆąĖąĮčÅč鹊ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ čüąŠčģčĆą░ąĮąĄąĮąŠ ą▓ mailbox n. ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čäčāąĮą║čåąĖčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čäčĆąĄą╣ą╝ą░ remote, č鹊 čäą╗ą░ą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ąĘą░ą┐čĆąŠčłąĄąĮąĮčŗą╣ čäčĆąĄą╣ą╝ ą┤ą░ąĮąĮčŗčģ čüąŠčģčĆą░ąĮąĄąĮ ą▓ mailbox. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąĖąĄą╝ą░ mailbox (MBRIFn) ą▓čüąĄą│ą┤ą░ ą▓čŗčüčéą░ą▓ą╗čÅąĄčéčüčÅ, ąĄčüą╗ąĖ ąĮąŠą▓ąŠąĄ ą┐čĆąĖąĮčÅč鹊ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĘą░ą┐ąĖčüą░ąĮąŠ ą▓ mailbox n, ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé MBIMn.
ąĢčüą╗ąĖ mailbox čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą┐ąĄčĆąĄą┤ą░čÄčēąĖą╣, č鹊 čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čäą╗ą░ą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ (MBTIFn) ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓ mailbox n ą║ąŠčĆčĆąĄą║čéąĮąŠ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ. ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čäčāąĮą║čåąĖčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čäčĆąĄą╣ą╝ą░ remote, č鹊 čäą╗ą░ą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ąĘą░ą┐čĆąŠčłąĄąĮąĮčŗą╣ čäčĆąĄą╣ą╝ ą┤ą░ąĮąĮčŗčģ ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ ąĖąĘ čŹč鹊ą│ąŠ mailbox.
ąĀąĄą│ąĖčüčéčĆčŗ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ mailbox (CAN_MBIMx) čāą┐čĆą░ą▓ą╗čÅčÄčé č鹥ą╝, ą▒čāą┤ąĄčé ąĖą╗ąĖ ąĮąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čäą╗ą░ą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ mailbox. ąöą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ mailbox ąĖą╝ąĄąĄčéčüčÅ 1 čäą╗ą░ą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąŁč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čĆąĖąĄą╝ą░ ąĖą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ąĮą░čüčéčĆąŠą╣ą║ąĖ čĆąĄą│ąĖčüčéčĆą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. ąĢčüą╗ąĖ ą▒ąĖčé MBIMn čĆą░ą▓ąĄąĮ 1, č鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ, ąĄčüą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ čāčüą┐ąĄčłąĮąŠ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ (ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čÄčēąĄą│ąŠ mailbox) ąĖą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 ą▒ąĄąĘ ąŠčłąĖą▒ąŠą║ (ą┤ą╗čÅ ą┐čĆąĖąĄą╝ąĮąŠą│ąŠ mailbox). ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ąĖą╗ąĖ ą┐ąŠčüą╗ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čüą▒čĆąŠčüą░ ą▓čüąĄ ą▒ąĖčéčŗ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąŠčćąĖčēą░čÄčéčüčÅ, ąĖ ą▓čüąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠą║ą░ąĘčŗą▓ą░čÄčéčüčÅ ąĘą░ą┐čĆąĄčēąĄąĮčŗ.
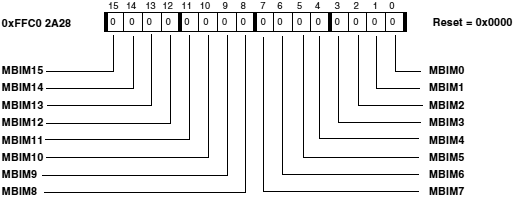
ąĀąĖčü. 19-40. Mailbox Interrupt Mask Register 1.
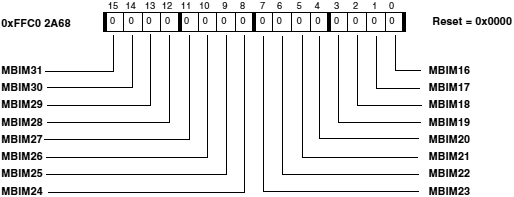
ąĀąĖčü. 19-41. Mailbox Interrupt Mask Register 2.
ążą╗ą░ą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ (MBTIFn) ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ mailbox (CAN_MBTIFx) čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ, ąĄčüą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ą║ąŠčĆčĆąĄą║čéąĮąŠ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąŠ ąĖąĘ mailbox, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé MBIMn, ąĖ mailbox čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą┐ąĄčĆąĄą┤ą░čÄčēąĖą╣. ąĢčüą╗ąĖ mailbox čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą┐čĆąĖąĄą╝ąĮčŗą╣ (MDn=1), ąĖą╗ąĖ ąĄčüą╗ąĖ mailbox ąĘą░ą┐čĆąĄčēąĄąĮ (MCn=0), č鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ (MBTIFn) ąŠčüčéą░ąĮąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝.
ąæąĖčé MBTIFn ą╝ąŠąČąĮąŠ čüą▒čĆąŠčüąĖčéčī ąĘą░ą┐ąĖčüčīčÄ 1 (ąŠą┐ąĄčĆą░čåąĖčÅ W1C) ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ ą┐ąŠąĘąĖčåąĖčÄ ą▒ąĖčéą░. ąŚą░ą┐ąĖčüčī 0 ąĮąĄ ą┤ą░ąĄčé čŹčäč乥ą║čéą░. ąæąĖčé MBTIFn čéą░ą║ąČąĄ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ąĄčüą╗ąĖ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ą▒ąĖčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ mailbox (MCn) ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MCx, ąĖą╗ąĖ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ mailbox (CAN_MBIMx).
ąÆčŗčģąŠą┤ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ mailbox (MBTIRQ) ą░ą║čéąĖą▓ąĄąĮ, ą┐ąŠą║ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĖąĮ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MBTIFx.
ąĢčüą╗ąĖ ą▒ąĖčé ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ mailbox (MDn) ąĖąĘą╝ąĄąĮčÅąĄčéčüčÅ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čāčüčéą░ąĮąŠą▓ąĖą╗čüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé MBTIFn, č鹊 ąĘąĮą░č湥ąĮąĖąĄ ą▒ąĖčéą░ MBTIFn čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé MBRIFn ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MBRIFx.

ąĀąĖčü. 19-42. Mailbox Transmit Interrupt Flag Register 1.
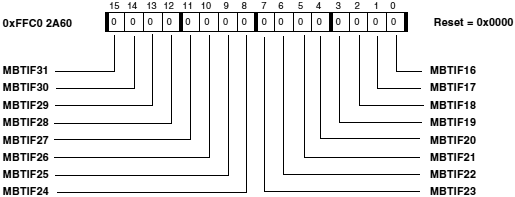
ąĀąĖčü. 19-43. Mailbox Transmit Interrupt Flag Register 2.
ąæąĖčé čäą╗ą░ą│ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ (MBRIFn) ą▓ čĆąĄą│ąĖčüčéčĆąĄ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ mailbox (CAN_MBRIFx) čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ, ąĄčüą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ą║ąŠčĆčĆąĄą║čéąĮąŠ ą┐čĆąĖąĮčÅč鹊 ąĖ čüąŠčģčĆą░ąĮąĄąĮąŠ ą▓ mailbox n, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé MBIMn, ąĖ mailbox čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą┐čĆąĖąĮąĖą╝ą░čÄčēąĖą╣. ąĢčüą╗ąĖ mailbox čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą┐ąĄčĆąĄą┤ą░čÄčēąĖą╣(MDn=0), ąĖą╗ąĖ mailbox ąĘą░ą┐čĆąĄčēąĄąĮ (MCn=0), č鹊 ą▒ąĖčé MBRIFn ą▓ čĆąĄą│ąĖčüčéčĆąĄ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ mailbox ąŠčüčéą░ąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝.
ążą╗ą░ą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ (MBRIFn) ą╝ąŠąČąĄčé ą▒čŗčéčī čüą▒čĆąŠčłąĄąĮ ąĘą░ą┐ąĖčüčīčÄ 1 (ąŠą┐ąĄčĆą░čåąĖčÅ W1C) ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ ą┐ąŠąĘąĖčåąĖčÄ ą▒ąĖčéą░. ąŚą░ą┐ąĖčüčī 0 ąĮąĄ ą┤ą░ąĄčé čŹčäč乥ą║čéą░. ąæąĖčé MBRIFn čéą░ą║ąČąĄ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ąĄčüą╗ąĖ čüą▒čĆąŠčłąĄąĮ ą▒ąĖčé MCn ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ mailbox (CAN_MCx), ąĖą╗ąĖ ąĄčüą╗ąĖ čüą▒čĆąŠčłąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé MBIMn ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ mailbox.
ąÆčŗčģąŠą┤ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ mailbox (MBRIRQ) ąŠčüčéą░ąĄčéčüčÅ ą░ą║čéąĖą▓ąĮčŗą╝, ą┐ąŠą║ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĖąĮ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_MBRIFx.
ąĢčüą╗ąĖ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ mailbox (MDn) ąĖąĘą╝ąĄąĮąĄąĮąŠ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé MBRIFn, ąĘąĮą░č湥ąĮąĖąĄ MBRIFn čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé MBTIFn čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ.
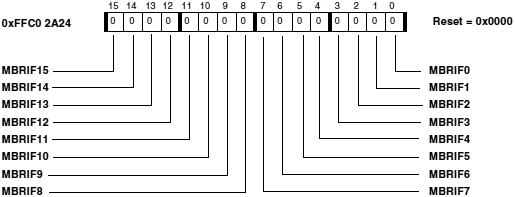
ąĀąĖčü. 19-44. Mailbox Receive Interrupt Flag Register 1.
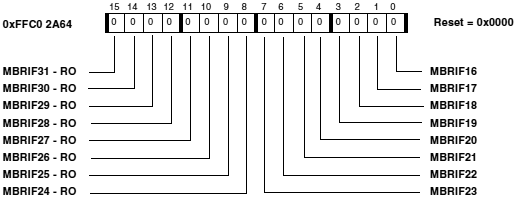
ąĀąĖčü. 19-45. Mailbox Receive Interrupt Flag Register 2.
ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ ą┤ą╗čÅ mailbox 0..7. ą×čüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┐čĆąĖąĄą╝ čüąŠąŠą▒čēąĄąĮąĖą╣ čüąŠ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ 11-ą▒ąĖčéąĮčŗą╝ ąĖą┤ąĄąĮčéčäąĖą║ą░č鹊čĆąŠą╝.
typedef union
{
u16 d16;
u8 d8[2];
}TCanDataSwap;
typedef struct
{
u16 id;
u8 data[8];
}TCanPacket;
#define CANRXBUFSIZE 8
#define CANRXBUFMASK (CANRXBUFSIZE-1)
// ąÜąŠą╗čīčåąĄą▓ąŠą╣ ą▒čāč乥čĆ ą┐čĆąĖąĄą╝ą░:
TCanPacket canrxbuf[CANRXBUFSIZE];
// ąśąĮą┤ąĄą║čüčŗ ą║ąŠą╗čīčåąĄą▓ąŠą│ąŠ ą▒čāč乥čĆą░:
u8 canInIdx, canOutIdx;
// ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░ ą┤ą╗čÅ čÅčēąĖą║ąŠą▓ MB00..MB07. ą¤čĆąĖąĮčÅčéčŗąĄ ą┤ą░ąĮąĮčŗąĄ
// ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ą▓ ą║ąŠą╗čīčåąĄą▓ąŠą╣ ą▒čāč乥čĆ canrxbuf.
static ADI_INT_HANDLER (canRXhandler)
{
// ą¤ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą┤ą╗čÅ čäą╗ą░ą│ąŠą▓, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēą░čÅ, ą▓ ą║ą░ą║ąŠą╝
// čÅčēąĖą║ąĄ ą╗ąĄąČąĖčé ą┐čĆąĖąĮčÅč鹊ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ:
u16 flags;
// ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┤ą░ąĮąĮčŗąĄ čÅčēąĖą║ą░:
volatile u16 *pCAN_Ptr;
// ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠą╗ąĄąĘąĮąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ ą▓ ą║ąŠą╗čīčåąĄą▓ąŠą╝
// ą▒čāč乥čĆąĄ (ą╝ąĄčüč鹊 čüąŠčģčĆą░ąĮąĄąĮąĖčÅ 8 ą▒ą░ą╣čé ą┐čĆąĖąĮčÅčéčŗčģ ą┤ą░ąĮąĮčŗčģ):
u8 *pData;
// ąĪčéčĆčāą║čéčāčĆą░ ą┤ą╗čÅ ą┐ąĄčĆąĄčüčéą░ąĮąŠą▓ą║ąĖ ą▒ą░ą╣čé:
TCanDataSwap tmp;
flags = *pCAN_MBRIF1;
if (flags)
{
// ą×ą▒čĆą░ą▒ąŠčéą║ą░ mailbox ą┐čĆąĖąĄą╝ą░. ąÆ ą║ą░ą║ąŠą╝ mailbox ą╗ąĄąČąĖčé čüąŠąŠą▒čēąĄąĮąĖąĄ?
u16 boxnum;
u16 flagmask;
for (boxnum=0; boxnum < 8; boxnum++)
{
flagmask = 1 << boxnum;
if (flags & flagmask)
{
// ąÆ čŹč鹊ą╝ mailbox čćč鹊-č鹊 ąĄčüčéčī. ąĪąŠčģčĆą░ąĮąĖą╝ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ
// ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ:
pCAN_Ptr = (u16*)CAN_MB00_ID1 + (0x10 * boxnum);
canrxbuf[canInIdx].id = (*pCAN_Ptr >> 2) & 0x7FF;
// ąĪąŠčģčĆą░ąĮąĖą╝ ą┤ą░ąĮąĮčŗąĄ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ:
pCAN_Ptr = (u16*)CAN_MB00_DATA0 + (0x10 * boxnum);
pData = canrxbuf[canInIdx].data;
tmp.d16 = *(pCAN_Ptr + 6);
*pData++ = tmp.d8[1];
*pData++ = tmp.d8[0];
tmp.d16 = *(pCAN_Ptr + 4);
*pData++ = tmp.d8[1];
*pData++ = tmp.d8[0];
tmp.d16 = *(pCAN_Ptr + 2);
*pData++ = tmp.d8[1];
*pData++ = tmp.d8[0];
tmp.d16 = *(pCAN_Ptr + 0);
*pData++ = tmp.d8[1];
*pData++ = tmp.d8[0];
canInIdx++;
canInIdx &= CANRXBUFMASK;
*pCAN_MBRIF1 = flagmask;
*pCAN_RMP1 = flagmask;
}
}
}
// ą×čüčéą░ą╗čīąĮčŗąĄ čÅčēąĖą║ąĖ ąĮą░čü ąĮąĄ ąĖąĮč鹥čĆąĄčüčāčÄčé:
flags = *pCAN_MBRIF2;
if (flags)
{
*pCAN_MBRIF2 = flags;
*pCAN_RMP2 = flags;
}
return(ADI_INT_RESULT_PROCESSED);
}
[ąōą╗ąŠą▒ą░ą╗čīąĮąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ]
ąÆ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝ ąŠčé mailbox-ąŠą▓ ą╝ąŠą┤čāą╗čī CAN ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą│ą╗ąŠą▒ą░ą╗čīąĮąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. ąĢčüčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čüąŠą▒čŗčéąĖą╣ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░čéčī čŹč鹊 ą│ą╗ąŠą▒ą░ą╗čīąĮąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. ąōą╗ąŠą▒ą░ą╗čīąĮąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ, ąĄčüą╗ąĖ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ąĮąĄą║ąŠč鹊čĆčŗčģ ą▒ąĖčé čüąŠčüč鹊čÅąĮąĖčÅ ą╝ąŠą┤čāą╗čÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ CAN. ąÜą░ąČą┤čŗą╣ ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą╝ąŠąČąĮąŠ ą╝ą░čüą║ąĖčĆąŠą▓ą░čéčī ą┐ąŠ ąŠčéą┤ąĄą╗čīąĮąŠčüčéąĖ. ąÆčüąĄ ą▒ąĖčéčŗ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčüčéą░čÄčéčüčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝ąĖ, ą┐ąŠą║ą░ ąŠąĮąĖ ąĮąĄ ąŠčćąĖčēąĄąĮčŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣, ąĖą╗ąĖ ą┐ąŠą║ą░ ąĮąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čüą▒čĆąŠčü.
ąÆąĮčāčéčĆąĖ ą║ąŠą┤ą░ ISR ąĘą░čēąĄą╗ą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠčćąĖčēąĄąĮą░ ąŠą┐ąĄčĆą░čåąĖąĄą╣ W1C ą┤ą╗čÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą▒ąĖčéą░ čĆąĄą│ąĖčüčéčĆą░ CAN_GIS. ąŁč鹊 ąŠčćąĖčüčéąĖčé čüą▓čÅąĘą░ąĮąĮčŗą╣ ą▒ąĖčé ą▓ ąŠą▒ąŠąĖčģ čĆąĄą│ąĖčüčéčĆą░čģ CAN_GIS ąĖ CAN_GIF.
ąśčüč鹊čćąĮąĖą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ:
ŌĆó ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĘą░ą┐čĆąĄčéą░ ą┤ąŠčüčéčāą┐ą░ (Access Denied Interrupt ADIM, ADIS, ADIF).
1: ą┐čĆąŠąĖąĘąŠčłąĄą╗ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĖąĮ ą┤ąŠčüčéčāą┐ ą║ mailbox RAM, ą║ąŠą│ą┤ą░ ą┤ą░ąĮąĮčŗąĄ ąŠą▒ąĮąŠą▓ą╗čÅčÄčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣.
0: ą▓čüąĄ ą┤ąŠčüčéčāą┐čŗ ą▓ mailbox RAM ą┤ąŠą┐čāčüčéąĖą╝čŗ.
ŌĆó External Trigger Output Interrupt (EXTIM, EXTIS, EXTIF).
1: ą┐čĆąŠąĖąĘąŠčłą╗ąŠ čüąŠą▒čŗčéąĖąĄ ą▓ąĮąĄčłąĮąĄą│ąŠ čéčĆąĖą│ą│ąĄčĆą░.
0: ąĮąĄ ą▒čŗą╗ąŠ čüąŠą▒čŗčéąĖčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ čéčĆąĖą│ą│ąĄčĆą░.
ŌĆó Universal Counter Exceeded Interrupt (UCEIM, UCEIS, UCEIF).
ąæčŗą╗ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠą│ąŠ čüč湥čéčćąĖą║ą░ (ą▓ čĆąĄąČąĖą╝ąĄ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ time stamp ąĖą╗ąĖ ą▓ čĆąĄąČąĖą╝ąĄ čüč湥čéčćąĖą║ą░ čüąŠą▒čŗčéąĖą╣ event counter), ąĖą╗ąĖ čüč湥čéčćąĖą║ ą┤ąŠčüčéąĖą│ ąĘąĮą░č湥ąĮąĖčÅ 0x0000 (ą▓ čĆąĄąČąĖą╝ąĄ čüč鹊čĆąŠąČąĄą▓ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░, watchdog mode).
1: ą▒čŗą╗ ą┐čĆąĄą▓čŗčłąĄąĮ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮčŗą╣ čüč湥čéčćąĖą║.
0: čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮčŗą╣ čüč湥čéčćąĖą║ ąĮąĄ ą▒čŗą╗ ą┐čĆąĄą▓čŗčłąĄąĮ.
ŌĆó Receive Message Lost Interrupt (RMLIM, RMLIS, RMLIF).
ąæčŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą┤ą╗čÅ mailbox, ą║ąŠč鹊čĆčŗą╣ čāąČąĄ čüąŠą┤ąĄčƹȹĖčé ąĮąĄ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ. ąŻčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĖąĮ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą┐ąŠč鹥čĆčÅąĮąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣ (CAN_RMLx). ąĢčüą╗ąĖ ą▒ąĖčé ą▓ CAN_GIS (ąĖ CAN_GIF) čüą▒čĆąŠčłąĄąĮ, ąĖ ąĄčüčéčī ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĖąĮ ą▓čüąĄ ąĄčēąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╣ ą▒ąĖčé ą▓ CAN_RML, č鹊 ą▒ąĖčé ą▓ CAN_GIS (ąĖ CAN_GIF) čüąĮąŠą▓ą░ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ. ąÆąĮčāčéčĆąĄąĮąĮąĖą╣ čüąĖą│ąĮą░ą╗ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą░ą║čéąĖą▓ąĄąĮ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĮąŠą▓čŗą╣ ą▒ąĖčé ą▓ CAN_RML.
1: ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĮąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ą┐ąŠč鹥čĆčÅąĮąŠ.
0: ąĮąĄ ą▒čŗą╗ąŠ čüąŠą▒čŗčéąĖą╣ ą┐ąŠč鹥čĆčÅąĮąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣.
ŌĆó Abort Acknowledge Interrupt (AAIM, AAIS, AAIF).
ąæčŗą╗ čāčüą┐ąĄčłąĮčŗą╣ ąŠą▒čĆčŗą▓ ąĘą░ą┐čĆąŠčłąĄąĮąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąæčŗą╗ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĖąĮ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆą░čģ CAN_AAx. ąĢčüą╗ąĖ ą▒ąĖčé ą▓ CAN_GIS (ąĖ CAN_GIF) čüą▒čĆąŠčłąĄąĮ, ąĖ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĖąĮ ą▒ąĖčé ą▓ CAN_AAx ą▓čüąĄ ąĄčēąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 ą▒ąĖčé CAN_GIS (ąĖ CAN_GIF) čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čüąĮąŠą▓ą░. ąÆąĮčāčéčĆąĄąĮąĮąĖą╣ čüąĖą│ąĮą░ą╗ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą░ą║čéąĖą▓ąĄąĮ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĮąŠą▓čŗą╣ ą▒ąĖčé ą▓ CAN_AAx.
1: ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĖąĮ ąĘą░ą┐čĆąŠčü ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒čŗą╗ čāčüą┐ąĄčłąĮąŠ ąŠą▒ąŠčĆą▓ą░ąĮ.
0: ąĮąĄ ą▒čŗą╗ąŠ ąŠą▒ąŠčĆą▓ą░ąĮąĮčŗčģ ą┐ąĄčĆąĄą┤ą░čć.
ŌĆó Access to Unimplemented Address Interrupt (UIAIM, UIAIS, UIAIF).
ąæčŗą╗ ą┤ąŠčüčéčāą┐ CPU ą┐ąŠ ą░ą┤čĆąĄčüčā, ą║ąŠč鹊čĆčŗą╣ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą▓ ą╝ąŠą┤čāą╗ąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
1: ąŠą▒ąĮą░čĆčāąČąĄąĮ ą┤ąŠčüčéčāą┐ ą┐ąŠ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮąŠą╝čā ą░ą┤čĆąĄčüčā.
0: ąĮąĄ ą▒čŗą╗ąŠ ąŠą▒ąĮą░čĆčāąČąĄąĮ ą┤ąŠčüčéčāą┐ ą║ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮąŠą╝čā ą░ą┤čĆąĄčüčā.
ŌĆó Wake-up Interrupt (WUIM, WUIS, WUIF).
1: ą╝ąŠą┤čāą╗čī CAN ą▓čŗčłąĄą╗ ąĖąĘ sleep mode, ą┐ąŠč鹊ą╝čā čćč鹊 ą▒čŗą╗ą░ ąŠą▒ąĮą░čĆčāąČąĄąĮą░ ą░ą║čéąĖą▓ąĮąŠčüčéčī ąĮą░ čłąĖąĮąĄ CAN.
0: čüąŠą▒čŗčéąĖąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąĮąĄ ą░ą║čéąĖą▓ąĮąŠ.
ŌĆó Bus-Off Interrupt (BOIM, BOIS, BOIF).
ą£ąŠą┤čāą╗čī CAN ą▓ąŠčłąĄą╗ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ ąŠčé čłąĖąĮčŗ (bus-off). ąŁč鹊čé ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą░ą║čéąĖą▓ąĄąĮ, ąĄčüą╗ąĖ čüąŠčüč鹊čÅąĮąĖąĄ čÅą┤čĆą░ CAN ą╝ąĄąĮčÅąĄčéčüčÅ ąŠčé ąĮąŠčĆą╝ą░ą╗čīąĮąŠą│ąŠ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓ čĆąĄąČąĖą╝ bus-off. ąĢčüą╗ąĖ ą▒ąĖčé ą▓ CAN_GIS (ąĖ CAN_GIF) čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ąĖ čĆąĄąČąĖą╝ bus-off ą▓čüąĄ ąĄčēąĄ ą░ą║čéąĖą▓ąĄąĮ, č鹊 čŹč鹊čé ą▒ąĖčé čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ąĘą░ąĮąŠą▓ąŠ. ąĢčüą╗ąĖ ą╝ąŠą┤čāą╗čī ą▓čŗčłąĄą╗ ąĖąĘ čĆąĄąČąĖą╝ą░ bus-off, ą▒ąĖčé ą▓ CAN_GIS (ąĖ CAN_GIF) ąŠčüčéą░ąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝.
1: ą╝ąŠą┤čāą╗čī CAN ą▓ąŠčłąĄą╗ ą▓ čĆąĄąČąĖą╝ bus-off.
0: ą╝ąŠą┤čāą╗čī CAN ąĮąĄ ą▓ąŠčłąĄą╗ ą▓ čĆąĄąČąĖą╝ bus-off.
ŌĆó Error-Passive Interrupt (EPIM, EPIS, EPIF).
ą£ąŠą┤čāą╗čī CAN ą▓ąŠčłąĄą╗ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą┐ą░čüčüąĖą▓ąĮąŠą╣ ąŠčłąĖą▒ą║ąĖ (error-passive). ąŁč鹊čé ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą░ą║čéąĖą▓ąĄąĮ, ąĄčüą╗ąĖ čüąŠčüč鹊čÅąĮąĖąĄ ą╝ąŠą┤čāą╗čÅ CAN ą╝ąĄąĮčÅąĄčéčüčÅ ąŠčé čĆąĄąČąĖą╝ą░ error-active ąĮą░ čĆąĄąČąĖą╝ error-passive. ąĢčüą╗ąĖ ą▒ąĖčé ą▓ CAN_GIS (ąĖ CAN_GIF) čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ąĖ čĆąĄąČąĖą╝ error-passive ą▓čüąĄ ąĄčēąĄ ą░ą║čéąĖą▓ąĄąĮ, č鹊 čŹč鹊čé ą▒ąĖčé ąĮąĄ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čüąĮąŠą▓ą░. ąĢčüą╗ąĖ ą╝ąŠą┤čāą╗čī ą┐ąŠą║ąĖą┤ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ čĆąĄąČąĖą╝ą░ error-passive, č鹊 ą▒ąĖčé ą▓ CAN_GIS (ąĖ CAN_GIF) ąŠčüčéą░ąĮąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝.
1: ą╝ąŠą┤čāą╗čī CAN ą▓ čĆąĄąČąĖą╝ąĄ error-passive.
0: ą╝ąŠą┤čāą╗čī CAN ąĮąĄ ą▓ąŠčłąĄą╗ ą▓ čĆąĄąČąĖą╝ error-passive.
ŌĆó Error Warning Receive Interrupt (EWRIM, EWRIS, EWRIF).
ąĪč湥čéčćąĖą║ ąŠčłąĖą▒ąŠą║ ą┐čĆąĖąĄą╝ą░ CAN (RXECNT) ą┤ąŠčüčéąĖą│ ą┐čĆąĄą┤ąĄą╗ą░ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ (warning limit). ąĢčüą╗ąĖ ą▒ąĖčé ą▓ CAN_GIS (ąĖ CAN_GIF) čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ, ąĖ čĆąĄąČąĖą╝ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ąŠą▒ ąŠčłąĖą▒ą║ą░čģ ą▓čüąĄ ąĄčēąĄ ą░ą║čéąĖą▓ąĄąĮ, č鹊 čŹč鹊čé ą▒ąĖčé ąĮąĄ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čüąĮąŠą▓ą░. ąĢčüą╗ąĖ ą╝ąŠą┤čāą╗čī ą┐ąŠą║ąĖąĮąĄčé čĆąĄąČąĖą╝ error warning, č鹊 ą▒ąĖčé ą▓ CAN_GIS (ąĖ CAN_GIF) ąŠčüčéą░ąĮąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝.
1: ą▒čŗą╗ ą┐čĆąĄą▓čŗčłąĄąĮ čāčĆąŠą▓ąĄąĮčī ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ą┤ą╗čÅ čüč湥čéčćąĖą║ą░ ąŠčłąĖą▒ąŠą║ ą┐čĆąĖąĄą╝ą░ CAN.
0: ąĮąĄ ą▒čŗą╗ ą┐čĆąĄą▓čŗčłąĄąĮ čāčĆąŠą▓ąĄąĮčī ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ą┤ą╗čÅ čüč湥čéčćąĖą║ą░ ąŠčłąĖą▒ąŠą║ ą┐čĆąĖąĄą╝ą░ CAN.
ŌĆó Error Warning Transmit Interrupt (EWTIM, EWTIS, EWTIF).
ąĪč湥čéčćąĖą║ ąŠčłąĖą▒ąŠą║ ą┐ąĄčĆąĄą┤ą░čćąĖ CAN (TXECNT) ą┤ąŠčüčéąĖą│ ą┐čĆąĄą┤ąĄą╗ą░ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ (warning limit). ąĢčüą╗ąĖ ą▒ąĖčé ą▓ CAN_GIS (ąĖ CAN_GIF) čüą▒čĆąŠčłąĄąĮ, ąĖ čĆąĄąČąĖą╝ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ąŠą▒ ąŠčłąĖą▒ą║ąĄ ą▓čüąĄ ąĄčēąĄ ą░ą║čéąĖą▓ąĄąĮ, č鹊 čŹč鹊čé ą▒ąĖčé ąĮąĄ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čüąĮąŠą▓ą░. ąĢčüą╗ąĖ ą╝ąŠą┤čāą╗čī ą┐ąŠą║ąĖąĮąĄčé čĆąĄąČąĖą╝ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ąŠą▒ ąŠčłąĖą▒ą║ą░čģ, č鹊 ą▒ąĖčé CAN_GIS (ąĖ CAN_GIF) ąŠčüčéą░ąĮąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝. ą¤ąŠčüą╗ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čüą▒čĆąŠčüą░ ą▓čüąĄ ą▒ąĖčéčŗ ą▓ CAN_GIF, CAN_GIS ąĖ CAN_GIM ąŠčćąĖčēą░čÄčéčüčÅ.
1: ą▒čŗą╗ ą┐čĆąĄą▓čŗčłąĄąĮ čāčĆąŠą▓ąĄąĮčī ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ą┤ą╗čÅ čüč湥čéčćąĖą║ą░ ąŠčłąĖą▒ąŠą║ ą┐ąĄčĆąĄą┤ą░čćąĖ CAN.
0: ąĮąĄ ą▒čŗą╗ ą┐čĆąĄą▓čŗčłąĄąĮ čāčĆąŠą▓ąĄąĮčī ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ą┤ą╗čÅ čüč湥čéčćąĖą║ą░ ąŠčłąĖą▒ąŠą║ ą┐ąĄčĆąĄą┤ą░čćąĖ CAN.
ąøąŠą│ąĖą║ą░ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąøąŠą│ąĖą║ą░ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ čü čéčĆąĄą╝čÅ čĆąĄą│ąĖčüčéčĆą░ą╝ąĖ:
ŌĆó ąĀąĄą│ąĖčüčéčĆ ą╝ą░čüą║ąĖ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (CAN_GIM), ą│ą┤ąĄ ą║ą░ąČą┤čŗą╣ ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą╝ąŠąČąĮąŠ čĆą░ąĘčĆąĄčłąĖčéčī ąĖą╗ąĖ ąĘą░ą┐čĆąĄčéąĖčéčī ą┐ąŠ ąŠčéą┤ąĄą╗čīąĮąŠčüčéąĖ.
ŌĆó ąĀąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (CAN_GIS).
ŌĆó ąĀąĄą│ąĖčüčéčĆ čäą╗ą░ą│ąŠą▓ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (CAN_GIF).
ąæąĖčéčŗ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą▓ą╗ąĖčÅčÄčé č鹊ą╗čīą║ąŠ ąĮą░ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆą░ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (CAN_GIF). ąæąĖčéčŗ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_GIS ą▓čüąĄą│ą┤ą░ čāčüčéą░ąĮąŠą▓čÅčéčüčÅ, ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ čüąŠą▒čŗčéąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ą▒ąĖč鹊ą▓ ą╝ą░čüą║ąĖ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą▒ąĖčéčŗ čüąŠčüč鹊čÅąĮąĖčÅ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ąŠą┐čĆąŠčüą░ ąĮą░ą╗ąĖčćąĖčÅ čüąŠą▒čŗčéąĖą╣ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (ą▒ąĄąĘ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠą│ąŠ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣). ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą▒čāą┤ąĄčé ą▓čŗčüčéą░ą▓ą╗ąĄąĮąŠ č鹊ą╗čīą║ąŠ ą▓ č鹊ą╝ čüą╗čāčćą░ąĄ, ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ čäą╗ą░ą│ąŠą▓ CAN_GIF. ąōą╗ąŠą▒ą░ą╗čīąĮąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčüčéą░ąĄčéčüčÅ ą░ą║čéąĖą▓ąĮčŗą╝, ą┐ąŠą║ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĖąĮ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ CAN_GIF.
ąÜą░ąČą┤čŗą╣ ąĖčüč鹊čćąĮąĖą║ ą┤ą╗čÅ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (GIRQ) ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮąŠ čĆą░ąĘčĆąĄčłąĄąĮ ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēąĄąĮ čü ą┐ąŠą╝ąŠčēčīčÄ čĆąĄą│ąĖčüčéčĆą░ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╣ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (CAN_GIM). ąĢčüą╗ąĖ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_GIM čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą╗čÅ GIRQ čĆą░ąĘčĆąĄčłąĄąĮ. ąĪčéą░čĆčłąĖąĄ ą▒ąĖčéčŗ (15 .. 11) ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ, ąĖ ą▓čüąĄą│ą┤ą░ čćąĖčéą░čÄčéčüčÅ ą║ą░ą║ 0. ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ąĖą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čüą▒čĆąŠčüą░ ą▓čüąĄ ą▒ąĖčéčŗ ąŠčćąĖčēą░čÄčéčüčÅ, ą┐ąŠčŹč鹊ą╝čā ą▓čüąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ ąĘą░ą┐čĆąĄčēąĄąĮčŗ.

ąĀąĖčü. 19-46. Global Interrupt Mask Register.
ąĢčüą╗ąĖ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čüąŠą▒čŗčéąĖąĄ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, č鹊 čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (CAN_GIS), ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╣ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (CAN_GIM). ąĢčüą╗ąĖ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_GIS ąŠčćąĖčēąĄąĮ, ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ čüąŠą▒čŗčéąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčüčéą░ąĄčéčüčÅ ą░ą║čéąĖą▓ąĮčŗą╝, č鹊 čŹč鹊čé ą▒ąĖčé ąĮąĄ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čüąĮąŠą▓ą░. ąĢčüą╗ąĖ ą▒ąĖčé ą▓ CAN_GIS ąŠčćąĖčēąĄąĮ, č鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą▓ CAN_GIF čéą░ą║ąČąĄ ąŠčćąĖčēą░ąĄčéčüčÅ (ąĄčüą╗ąĖ ąŠąĮ ą▒čŗą╗ čĆą░ąĮąĄąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ).
ąæąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_GIS ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčćąĖčēąĄąĮ ąĘą░ą┐ąĖčüčīčÄ 1 (ąŠą┐ąĄčĆą░čåąĖčÅ W1C) ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ ą┐ąŠąĘąĖčåąĖčÄ ą▒ąĖčéą░. ąŚą░ą┐ąĖčüčī 0 ąĮąĄ ą┤ą░ąĄčé čŹčäč乥ą║čéą░. ąĪčéą░čĆčłąĖąĄ ą▒ąĖčéčŗ (15 .. 11) ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ, ąĖ ą▓čüąĄą│ą┤ą░ čćąĖčéą░čÄčéčüčÅ ą║ą░ą║ 0. ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ąĖą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čüą▒čĆąŠčüą░ ą▓čüąĄ ą▒ąĖčéčŗ ąŠčćąĖčēą░čÄčéčüčÅ.

ąĀąĖčü. 19-47. Global Interrupt Status Register (ą▓čüąĄ ą▒ąĖčéčŗ čéąĖą┐ą░ W1C).
ąĢčüą╗ąĖ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čüąŠą▒čŗčéąĖąĄ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, č鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ čäą╗ą░ą│ąŠą▓ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (CAN_GIF) čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ č鹊ą╗čīą║ąŠ ą▓ č鹊ą╝ čüą╗čāčćą░ąĄ, ąĄčüą╗ąĖ čéą░ą║ąČąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą╝ą░čüą║ąĖ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (CAN_GIM). ąĢčüą╗ąĖ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_GIF ąŠčćąĖčēąĄąĮ, ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ čüąŠą▒čŗčéąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓čüąĄ ąĄčēąĄ ą░ą║čéąĖą▓ąĮąŠ, č鹊 čŹč鹊čé ą▒ąĖčé ąĮąĄ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ąĘą░ąĮąŠą▓ąŠ.
ąĢčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĖąĮ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ čäą╗ą░ą│ąŠą▓ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, č鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčüčéą░ąĄčéčüčÅ ą░ą║čéąĖą▓ąĮčŗą╝. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčüčéą░ąĄčéčüčÅ ą░ą║čéąĖą▓ąĮčŗą╝ ą┤ąŠ č鹥čģ ą┐ąŠčĆ, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤čāčé ąŠčćąĖčēąĄąĮčŗ ą▓čüąĄ ą▒ąĖčéčŗ ą▓ CAN_GIF.
ąæąĖčéčŗ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓ CAN_GIF ą╝ąŠąČąĮąŠ ąŠčćąĖčüčéąĖčéčī ą┐ąŠ ąŠčéą┤ąĄą╗čīąĮąŠčüčéąĖ ąĘą░ą┐ąĖčüčīčÄ 1 (ąŠą┐ąĄčĆą░čåąĖčÅ W1C) ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ ą┐ąŠąĘąĖčåąĖčÄ ą▒ąĖčéą░ ą▓ čĆąĄą│ąĖčüčéčĆąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (CAN_GIS). ąöąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī ą▓ CAN_GIF ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░. ąĪčéą░čĆčłąĖąĄ ą▒ąĖčéčŗ (15 .. 11) ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ, ąĖ ą▓čüąĄą│ą┤ą░ čćąĖčéą░čÄčéčüčÅ ą║ą░ą║ 0. ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ąĖą╗ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čüą▒čĆąŠčüą░ ą▓čüąĄ ą▒ąĖčéčŗ ąŠčćąĖčēą░čÄčéčüčÅ.
ąĢčüą╗ąĖ ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą░ą║čéąĖą▓ąĄąĮ, ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_GIF ą▓čüąĄ ąĄčēąĄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 čŹč鹊čé ą▒ąĖčé ąŠčüčéą░ąĮąĄčéčüčÅ ąĮąĄ ąĖąĘą╝ąĄąĮąĄąĮąĮčŗą╝. ąĢčüą╗ąĖ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_GIF čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ąĖ ąĘą░č鹥ą╝ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą┤čĆčāą│ąŠą╣ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_GIF, č鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčüčéą░ąĮąĄčéčüčÅ ą░ą║čéąĖą▓ąĮčŗą╝ (čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ č鹊ą╗čīą║ąŠ ąĮąŠą▓čŗą╣ ą▒ąĖčé ą▓ CAN_GIF). ąĢčüą╗ąĖ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_GIF čüą▒čĆąŠčłąĄąĮ, ąĖ ąĘą░č鹥ą╝ ą┤čĆčāą│ąŠą╣ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_GIF ą▓čüąĄ ąĄčēąĄ ąŠčüčéą░ąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗą╝, č鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčüčéą░ąĄčéčüčÅ ą░ą║čéąĖą▓ąĮčŗą╝.
ąĢčüą╗ąĖ ą▒ąĖčé čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_GIF čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_GIM čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ/čüą▒čĆąŠčłąĄąĮ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, č鹊 ą▒ąĖčé čäą╗ą░ą│ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_GIF čéą░ą║ąČąĄ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ/čüą▒čĆąŠčüąĖčéčüčÅ. ąĢčüą╗ąĖ ą▒ąŠą╗čīčłąĄ ąĮąĄ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą┤čĆčāą│ąŠą╣ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_GIF, č鹊 ą▓čŗčģąŠą┤ ą░ą║čéąĖą▓ą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (GIRQ) ą▓ąĄą┤ąĄčé čüąĄą▒čÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮčŗą╝ čüąŠčüč鹊čÅąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ ą╝ą░čüą║ąĖ CAN_GIM.
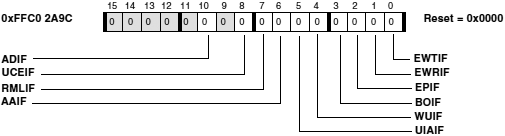
ąĀąĖčü. 19-48. Global Interrupt Flag Register.
[ą£ąŠą┤čāą╗čī čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠą│ąŠ čüč湥čéčćąĖą║ą░]
ąŻąĮąĖą▓ąĄčĆčüą░ą╗čīąĮčŗą╣ 16-ą▒ąĖčéąĮčŗą╣ čüč湥čéčćąĖą║ čĆą░ą▒ąŠčéą░ąĄčé čü č鹊ą╣ ąČąĄ čüą░ą╝ąŠą╣ čćą░čüč鹊č鹊ą╣, čćč鹊 ąĖ čćą░čüč鹊čéą░ ą▒ąĖčé čÅą┤čĆą░ ą╝ąŠą┤čāą╗čÅ CAN. ąŁč鹊čé čüč湥čéčćąĖą║ čéą░ą║čéąĖčĆčāąĄčéčüčÅ čü č鹥ą╝ąĖ ąČąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ą╝ąĖ, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ bit rate (BRP, TSEG1 ąĖ TSEG2).
ąŻąĮąĖą▓ąĄčĆčüą░ą╗čīąĮčŗą╣ čüč湥čéčćąĖą║ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮ ą▓ ąĮąĄą║ąŠč鹊čĆčŗčģ čĆąĄąČąĖą╝ą░čģ, ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_UCCNF. ąŁč鹊 čĆąĄąČąĖą╝čŗ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ (time stamp mode), čüč鹊čĆąŠąČąĄą▓ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░ (watchdog mode), ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ (auto transmit mode) ąĖ čüč湥čéčćąĖą║ą░ čüąŠą▒čŗčéąĖą╣ (event counter mode).
Time Stamp Mode. ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ąĖąĮą┤ąĖą║ą░čåąĖčÄ ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąĖąĄą╝ą░ ąĖą╗ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą║ą░ąČą┤ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ, ąĘąĮą░č湥ąĮąĖąĄ 16-ą▒ąĖčéąĮąŠą│ąŠ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠ čĆą░ą▒ąŠčéą░čÄčēąĄą│ąŠ čüč湥čéčćąĖą║ą░ (CAN_UCCNT) ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆ CAN_MBxx_TIMESTAMP čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ mailbox, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĮčÅč鹊ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ čüąŠčģčĆą░ąĮąĄąĮąŠ, ąĖą╗ąĖ ą║ąŠą│ą┤ą░ ą┐ąĄčĆąĄą┤ą░ąĮąŠ.
ąŚąĮą░č湥ąĮąĖąĄ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ąĘą░čģą▓ą░čéčŗą▓ą░ąĄčéčüčÅ ą▓ č鹊čćą║ąĄ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ ą▒ąĖčéą░ ąĮą░čćą░ą╗ą░ čäčĆąĄą╣ą╝ą░ (start of frame, SOF) ą║ą░ąČą┤ąŠą│ąŠ ą┐čĆąĖčģąŠą┤čÅčēąĄą│ąŠ ąĖą╗ąĖ ąĖčüčģąŠą┤čÅčēąĄą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąÆą┐ąŠčüą╗ąĄą┤čüčéą▓ąĖąĖ čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ą║ąŠą┐ąĖčĆčāąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆ CAN_MBxx_TIMESTAMP čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ mailbox.
ąĢčüą╗ąĖ mailbox čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čäčĆąĄą╣ą╝ą░ remote, č鹊 ąĘąĮą░č湥ąĮąĖąĄ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ čäčĆąĄą╣ą╝ą░ ą┤ą░ąĮąĮčŗčģ (ą║ąŠą│ą┤ą░ mailbox čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą┐ąĄčĆąĄą┤ą░čÄčēąĖą╣) ąĖą╗ąĖ ą┤ą╗čÅ ą┐čĆąĖąĄą╝ą░ ąĘą░ą┐čĆąŠčłąĄąĮąĮąŠą│ąŠ čäčĆąĄą╣ą╝ą░ ą┤ą░ąĮąĮčŗčģ (ą║ąŠą│ą┤ą░ mailbox čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą┐čĆąĖąĮąĖą╝ą░čÄčēąĖą╣).
ąĪč湥čéčćąĖą║ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčćąĖčēąĄąĮ ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēąĄąĮ ąĘą░ą┐ąĖčüčīčÄ ą▓ čĆąĄą│ąĖčüčéčĆ CAN_UCCNF. ąĪč湥čéčćąĖą║ čéą░ą║ąČąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą│čĆčāąČąĄąĮ ąĘąĮą░č湥ąĮąĖąĄą╝ ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ ą▓ čüą░ą╝ čĆąĄą│ąĖčüčéčĆ čüč湥čéčćąĖą║ą░ (CAN_UCCNT).
ąóą░ą║ąČąĄ ą╝ąŠąČąĮąŠ ąŠčćąĖčüčéąĖčéčī čüč湥čéčćąĖą║ (CAN_UCCNT) ą┐čāč鹥ą╝ ą┐čĆąĖąĄą╝ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ mailbox 4 (čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ą▓čüąĄčģ čüč湥čéčćąĖą║ąŠą▓ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ čüąĖčüč鹥ą╝ąĄ). ąŁč鹊 ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ UCCT ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_UCCNT.
ą¤ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ čüč湥čéčćąĖą║ą░ čāčüčéą░ąĮąŠą▓ąĖčé ą▒ąĖčé UCEIS ą▓ čĆąĄą│ąĖčüčéčĆąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ CAN_GIS. ą×ą┐čåąĖąŠąĮą░ą╗čīąĮąŠ ą▓ čŹč鹊čé ą╝ąŠą╝ąĄąĮčé ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐čāč鹥ą╝ ą┤ąĄą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąĖčÅ ą▒ąĖčéą░ ą▓ ą╝ą░čüą║ąĄ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (ą▒ąĖčé UCEIM ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_GIM). ąĢčüą╗ąĖ ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ąĄą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮ, č鹊 čéą░ą║ąČąĄ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ čäą╗ą░ą│ąŠą▓ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (UCEIF ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_GIF).
Watchdog Mode. ąĀąĄąČąĖą╝ čüč鹊čĆąŠąČąĄą▓ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░ (Watchdog Mode) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖą╣ ą┐čĆąĖąĄą╝ čüąŠąŠą▒čēąĄąĮąĖą╣. ą¤čĆąĖ ą▓čģąŠą┤ąĄ ą▓ čĆąĄąČąĖą╝ watchdog čüč湥čéčćąĖą║ CAN_UCCNT ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝, čüąŠą┤ąĄčƹȹ░čēąĖą╝čüčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ/ąĘą░čģą▓ą░čéą░ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠą│ąŠ čüč湥čéčćąĖą║ą░ CAN (CAN_UCRC). ąŁč鹊čé čüč湥čéčćąĖą║ č鹊ą│ą┤ą░ ą┤ąĄą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ čü čćą░čüč鹊č鹊ą╣ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą▒ąĖčé CAN. ąĢčüą╗ąĖ ą▒ąĖčé UCCT ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_UCCNT čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ąĖ ą┐čĆąĖąĮčÅč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓ mailbox 4 ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ čüč湥čéčćąĖą║ ą┤ąŠčüčćąĖčéą░ąĄčé ą▓ąĮąĖąĘ ą┤ąŠ 0, č鹊 čüč湥čéčćąĖą║ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘąĖčéčüčÅ čüąŠą┤ąĄčƹȹĖą╝čŗą╝ čĆąĄą│ąĖčüčéčĆą░ CAN_UCRC. ąĢčüą╗ąĖ čüč湥čéčćąĖą║ ą┤ąŠčüčćąĖčéą░ą╗ ą┤ąŠ 0 ą▒ąĄąĘ ą┐čĆąĖąĄą╝ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ mailbox 4, č鹊 čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé UCEIS ą▓ čĆąĄą│ąĖčüčéčĆąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (CAN_GIS), ąĖ čüč湥čéčćąĖą║ čéą░ą║ąČąĄ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘąĖčéčüčÅ čüąŠą┤ąĄčƹȹĖą╝čŗą╝ čĆąĄą│ąĖčüčéčĆą░ CAN_UCRC. ąĢčüą╗ąĖ ą▓ čŹč鹊čé ą╝ąŠą╝ąĄąĮčé ąĮčāąČąĮąŠ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ UCEIM ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_GIM. ą¤čĆąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą╝ ą▒ąĖč鹥 ą╝ą░čüą║ąĖ, ą║ąŠą│ą┤ą░ ą▓ąŠąĘąĮąĖą║ąĮąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ watchdog, čéą░ą║ąČąĄ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé UCEIF ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_GIF.
ąĪč湥čéčćąĖą║ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąĄčĆąĄąĘą░ą│čĆčāąČąĄąĮ čüąŠą┤ąĄčƹȹĖą╝čŗą╝ čĆąĄą│ąĖčüčéčĆą░ CAN_UCRC, ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēąĄąĮ ąĘą░ą┐ąĖčüčīčÄ ą▓ čĆąĄą│ąĖčüčéčĆ CAN_UCCNF.
ą¤ąĄčĆąĖąŠą┤ ą▓čĆąĄą╝ąĄąĮąĖ, č湥čĆąĄąĘ ą║ąŠč鹊čĆčŗą╣ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ watchdog, čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄą╝, ąĘą░ą┐ąĖčüą░ąĮąĮčŗą╝ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ą▓ čĆąĄą│ąĖčüčéčĆ CAN_UCRC.
Auto Transmit Mode. ąÆ čĆąĄąČąĖą╝ąĄ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮčŗą╣ čüč湥čéčćąĖą║ ąĖąĮąĖčåąĖąĖčĆčāąĄčé čåąĖą║ą╗ąĖč湥čüą║čāčÄ ą┐ąĄčĆąĄą┤ą░čćčā čüąŠąŠą▒čēąĄąĮąĖčÅ CAN. ąĪč湥čéčćąĖą║ (CAN_UCCNT) ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄą╝, čüąŠčģčĆą░ąĮąĄąĮąĮčŗą╝ ą▓ čĆąĄą│ąĖčüčéčĆ CAN_UCRC. ąĪč湥čéčćąĖą║ ą┤ąĄą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ ą┤ąŠ 0, ąĖ ą┐ąĄčĆąĄąĘą░ą│čĆčāąČą░ąĄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ. ąÜąŠą│ą┤ą░ čüč湥čéčćąĖą║ ą┤ąŠčüčéąĖą│ą░ąĄčé ąĘąĮą░č湥ąĮąĖčÅ 0, ą▒ąĖčé TRS11 ą┤ą╗čÅ mailbox 11 ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣. ąĪąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčéą┐čĆą░ą▓ąĖčéčüčÅ.
Mailbox 11 ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą┐ąĄčĆąĄą┤ą░čÄčēąĖą╣, ąĖ ą┤ąŠą╗ąČąĄąĮ čüąŠą┤ąĄčƹȹ░čéčī ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ (ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ, ą▒ąĖčéčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖ ą┤ą░ąĮąĮčŗąĄ).
ą¤ąŠčüą║ąŠą╗čīą║čā ą▒ąĖčé TRS11 ą┤ą╗čÅ mailbox 11 čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą▒ąĖčéčŗ TA11 and AA11 ąŠčüčéą░ąĮčāčéčüčÅ ąĮąĄ ąĖąĘą╝ąĄąĮąĄąĮąĮčŗą╝ąĖ. ąŁčéąĖ ą▒ąĖčéčŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüą▒čĆąŠčłąĄąĮčŗ ą┐čĆąŠą│čĆą░ą╝ą╝ąŠą╣ CPU.
Event Counter Mode. ąöą╗čÅ čåąĄą╗ąĄą╣ ą┤ąĖą░ą│ąĮąŠčüčéąĖą║ąĖ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮčŗą╣ čüč湥čéčćąĖą║ ą║ą░ą║ čüč湥čéčćąĖą║ čüąŠą▒čŗčéąĖą╣. ąĪč湥čéčćąĖą║ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ąĮą░ ąĖąĮą║čĆąĄą╝ąĄąĮčé ą┐čĆąĖ čüą╗ąĄą┤čāčÄčēąĖčģ čāčüą╗ąŠą▓ąĖčÅčģ:
ŌĆó ąĪč湥čéčćąĖą║ čäčĆąĄą╣ą╝ąŠą▓ ąŠčłąĖą▒ą║ąĖ CAN, ą║ąŠč鹊čĆčŗą╣ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ, ąĄčüą╗ąĖ ąĮą░ čłąĖąĮąĄ CAN ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ error frame.
ŌĆó ąĪč湥čéčćąĖą║ čäčĆąĄą╣ą╝ąŠą▓ ą┐ąĄčĆąĄą│čĆčāąĘą║ąĖ CAN, ą║ąŠč鹊čĆčŗą╣ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ, ąĄčüą╗ąĖ ąĮą░ čłąĖąĮąĄ CAN ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ overload frame.
ŌĆó ąÜąŠą│ą┤ą░ ą┐čĆąĖ ą┐ąĄčĆąĄą┤ą░č湥 ą┐ąŠč鹥čĆčÅąĮ ą░čĆą▒ąĖčéčĆą░ąČ ą┐ąŠ čłąĖąĮąĄ CAN.
ŌĆó ąÜąŠą│ą┤ą░ ą┐ąĄčĆąĄą┤ą░čćą░ ąŠą▒ąŠčĆą▓ą░ąĮą░ (čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé AAn).
ŌĆó ą¤čĆąĖ čāčüą┐ąĄčłąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░č湥 ą▒ąĄąĘ ąŠą▒ąĮą░čĆčāąČąĄąĮąĮčŗčģ ąŠčłąĖą▒ąŠą║ (čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé TAn).
ŌĆó ą¤čĆąĖąĮčÅč鹊ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠčéą▒čĆąŠčłąĄąĮąŠ (čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐čĆąĖąĮčÅč鹊 ą▒ąĄąĘ ąŠą▒ąĮą░čĆčāąČąĄąĮąĮčŗčģ ąŠčłąĖą▒ąŠą║, ąŠą┤ąĮą░ą║ąŠ ąŠąĮąŠ ąĮąĄ čüąŠčģčĆą░ąĮąĄąĮąŠ ą▓ mailbox, ą┐ąŠč鹊ą╝čā čćč鹊 ąĮąĄ ą▒čŗą╗ ąĮą░ą╣ą┤ąĄąĮ čüąŠą▓ą┐ą░ą┤ą░čÄčēąĖą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ).
ŌĆó ąŻčüą┐ąĄčłąĮčŗą╣ ą┐čĆąĖąĄą╝ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▒ąĄąĘ ąŠą▒ąĮą░čĆčāąČąĄąĮąĮčŗčģ ąŠčłąĖą▒ąŠą║. ąĪč湥čéčćąĖą║ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ, ąĄčüą╗ąĖ ą┐čĆąĖąĮčÅč鹊ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ąŠčéą▒čĆąŠčłąĄąĮąŠ ąĖą╗ąĖ čüąŠčģčĆą░ąĮąĄąĮąŠ ą▓ mailbox.
ŌĆó ą¤čĆąĖąĮčÅč鹊ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐ąŠč鹥čĆčÅąĮąŠ: čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐čĆąĖąĮčÅč鹊 ą▒ąĄąĘ ąŠą▒ąĮą░čĆčāąČąĄąĮąĮčŗčģ ąŠčłąĖą▒ąŠą║, ąŠą┤ąĮą░ą║ąŠ ąŠąĮąŠ ąĮąĄ čüąŠčģčĆą░ąĮąĄąĮąŠ ą▓ mailbox, ą┐ąŠč鹊ą╝čā čćč鹊 čŹč鹊čé mailbox čüąŠą┤ąĄčƹȹĖčé ąĮąĄ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ (čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé RMLn).
ŌĆó ąŻčüą┐ąĄčłąĮčŗą╣ ą┐čĆąĖąĄą╝ ąĖ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░. ąĪąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ ąĖąĘ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ mailbox. ąĪč湥čéčćąĖą║ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ, ąĄčüą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ mailbox (čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé RMPn).
ŌĆó ąØą░ čłąĖąĮąĄ CAN ąŠą▒ąĮą░čĆčāąČąĄąĮąŠ ą┤ąŠą┐čāčüčéąĖą╝ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ. ąŁč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĖąĄą╝ ąĖą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćą░.
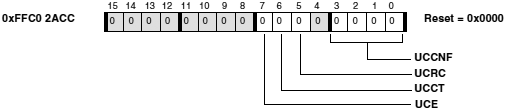
ąĀąĖčü. 19-49. Universal Counter Configuration Mode Register.
ąæąĖčéčŗ CAN_UCCNF:
ŌĆó Universal Counter Enable (UCE).
1: čüč湥čéčćąĖą║ čĆą░ąĘčĆąĄčłąĄąĮ ąĖ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ/ą┤ąĄą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ čü ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮąŠą╣ čćą░čüč鹊č鹊ą╣ (čéą░ą║čéčŗ ą▒ąĖčé ą╝ąŠą┤čāą╗čÅ CAN).
0: čüč湥čéčćąĖą║ ąĘą░ą┐čĆąĄčēąĄąĮ.
ŌĆó Universal Counter CAN Trigger (UCCT).
1: ą▓ čĆąĄąČąĖą╝ąĄ watchdog čüč湥čéčćąĖą║ ą┐ąĄčĆąĄąĘą░ą│čĆčāąČą░ąĄčéčüčÅ, ąĄčüą╗ąĖ ą┐čĆąĖąĮčÅč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą┤ą╗čÅ mailbox 4. ąÆ čĆąĄąČąĖą╝ąĄ time stamp čüč湥čéčćąĖą║ ąŠčćąĖčēą░ąĄčéčüčÅ, ąĄčüą╗ąĖ ą┐čĆąĖąĮčÅč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą┤ą╗čÅ mailbox 4 (čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ą▓čüąĄčģ ą╝ąĄč鹊ą║ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ čüąĖčüč鹥ą╝ąĄ). ąŁč鹊čé ą▒ąĖčé ąĮąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░ ą▓ ą╗čÄą▒ąŠą╝ ą┤čĆčāą│ąŠą╝ čĆąĄąČąĖą╝ąĄ.
0: ąĮąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░ ą┐čĆąĖ ą┐čĆąĖąĄą╝ąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ CAN.
ŌĆó Universal Counter Reload/Clear (UCRC).
1: ą▓ čĆąĄąČąĖą╝ąĄ watchdog ąĘą░ą┐ąĖčüčī 1 ą▓ čŹč鹊čé ą▒ąĖčé ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘąĖčé čüč湥čéčćąĖą║ ąĘąĮą░č湥ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ/ąĘą░čģą▓ą░čéą░. ąÆ čĆąĄąČąĖą╝ąĄ time stamp ąĘą░ą┐ąĖčüčī 1 ą▓ čŹč鹊čé ą▒ąĖčé čüą▒čĆą░čüčŗą▓ą░ąĄčé čüč湥čéčćąĖą║ ą▓ 0. ąÆąŠ ą▓čüąĄčģ ą┤čĆčāą│ąĖčģ čĆąĄąČąĖą╝ą░čģ ąĘą░ą┐ąĖčüčī 1 ą▓ čŹč鹊čé ą▒ąĖčé čüą▒čĆą░čüčŗą▓ą░ąĄčé čüč湥čéčćąĖą║. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 čŹč鹊čé ą▒ąĖčé čĆąĄą│ąĖčüčéčĆą░ ą▓čüąĄą│ą┤ą░ čćąĖčéą░ąĄčéčüčÅ ą║ą░ą║ 0.
0: ąĘą░ą┐ąĖčüčī 0 ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░.
ŌĆó Universal Counter Mode (UCCNF).
0: ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ.
1: čĆąĄąČąĖą╝ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ (Time Stamp Mode). ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆą░ ąĘą░čģą▓ą░čéą░ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą▓ č鹥ą║čāčēąĖą╣ mailbox, ąĄčüą╗ąĖ ą┤ą╗čÅ čŹč鹊ą│ąŠ mailbox ą┐čĆąŠąĖąĘąŠčłąĄą╗ ą┐čĆąĖąĄą╝ ąĖą╗ąĖ ąĖąĘ ąĮąĄą│ąŠ ą▒čŗą╗ą░ ą┐ąĄčĆąĄą┤ą░čćą░.
2: čĆąĄąČąĖą╝ čüč鹊čĆąŠąČąĄą▓ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░ (Watchdog Mode). ąŻąĮąĖą▓ąĄčĆčüą░ą╗čīąĮčŗą╣ čüč湥čéčćąĖą║ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘąĖčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ CAN_UCRC, ąĄčüą╗ąĖ ą▒čŗą╗ ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┐čĆąĖąĄą╝ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┤ą╗čÅ mailbox 4 (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ).
3: čĆąĄąČąĖą╝ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ (Auto Transmit Mode). ąŻąĮąĖą▓ąĄčĆčüą░ą╗čīąĮčŗą╣ čüč湥čéčćąĖą║ ą▓čüąĄą│ą┤ą░ ą┐ąĄčĆąĄąĘą░ą│čĆčāąČą░ąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ CAN_UCRC, ąĄčüą╗ąĖ čüč湥čéčćąĖą║ (čŹč鹊čé čüč湥čéčćąĖą║ čüčćąĖčéą░ąĄčé ą▓ąĮąĖąĘ) ą┤ąŠčüčéąĖą│ ąĘąĮą░č湥ąĮąĖčÅ 0x0000. ą¤čĆąĖ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĄ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ (ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąŠą│ąĖą║ąŠą╣) čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé ąĘą░ą┐čĆąŠčüą░ ą┐ąĄčĆąĄą┤ą░čćąĖ TRS11 (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ), ąĖ ąŠčéą┐čĆą░ą▓ąĖčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĖąĘ mailbox 11.
4: ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ.
5: ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ.
6: čĆąĄąČąĖą╝ čüč湥čéčćąĖą║ą░ čüąŠą▒čŗčéąĖą╣. ąśąĮą║čĆąĄą╝ąĄąĮčé ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé, ąĄčüą╗ąĖ ąĮą░ čłąĖąĮąĄ CAN ą┐ąŠčÅą▓ąĖą╗čüčÅ error frame.
7: čĆąĄąČąĖą╝ čüč湥čéčćąĖą║ą░ čüąŠą▒čŗčéąĖą╣. ąśąĮą║čĆąĄą╝ąĄąĮčé ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé, ąĄčüą╗ąĖ ąĮą░ čłąĖąĮąĄ CAN ą┐ąŠčÅą▓ąĖčéčüčÅ overload frame.
8: čĆąĄąČąĖą╝ čüč湥čéčćąĖą║ą░ čüąŠą▒čŗčéąĖą╣. ąśąĮą║čĆąĄą╝ąĄąĮčé ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé, ąĄčüą╗ąĖ ą┐čĆąĖ ą┐ąĄčĆąĄą┤ą░č湥 ąĮą░ čłąĖąĮąĄ CAN ą┐ąŠč鹥čĆčÅąĮ ą░čĆą▒ąĖčéčĆą░ąČ.
9: čĆąĄąČąĖą╝ čüč湥čéčćąĖą║ą░ čüąŠą▒čŗčéąĖą╣. ąśąĮą║čĆąĄą╝ąĄąĮčé ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé, ąĄčüą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćą░ ąŠą▒ąŠčĆą▓ą░ąĮą░ (čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé AAn).
A: čĆąĄąČąĖą╝ čüč湥čéčćąĖą║ą░ čüąŠą▒čŗčéąĖą╣. ąśąĮą║čĆąĄą╝ąĄąĮčé ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé, ąĄčüą╗ąĖ ą┐čĆąŠčłą╗ą░ čāčüą┐ąĄčłąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ą▒ąĄąĘ ąŠą▒ąĮą░čĆčāąČąĄąĮąĮčŗčģ ąŠčłąĖą▒ąŠą║ (čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé TAn)
B: čĆąĄąČąĖą╝ čüč湥čéčćąĖą║ą░ čüąŠą▒čŗčéąĖą╣. ąśąĮą║čĆąĄą╝ąĄąĮčé ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé, ąĄčüą╗ąĖ ą┐čĆąĖąĮčÅč鹊ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ąŠčéą▒čĆąŠčłąĄąĮąŠ (čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐čĆąĖąĮčÅč鹊 ą▒ąĄąĘ ąŠą▒ąĮą░čĆčāąČąĄąĮąĮčŗčģ ąŠčłąĖą▒ąŠą║, ąĮąŠ ąĮąĄ čüąŠčģčĆą░ąĮąĄąĮąŠ ą▓ mailbox, ą┐ąŠč鹊ą╝čā čćč鹊 ąĮąĄ ą▒čŗą╗ąŠ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖčÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░).
C: čĆąĄąČąĖą╝ čüč湥čéčćąĖą║ą░ čüąŠą▒čŗčéąĖą╣. ąśąĮą║čĆąĄą╝ąĄąĮčé ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé, ąĄčüą╗ąĖ ą┐čĆąĖąĮčÅč鹊ąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐ąŠč鹥čĆčÅąĮąŠ - čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 ą▒ąĄąĘ ąŠą▒ąĮą░čĆčāąČąĄąĮąĮčŗčģ ąŠčłąĖą▒ąŠą║, ąŠą┤ąĮą░ą║ąŠ ąŠąĮąŠ ąĮąĄ ą▒čŗą╗ąŠ čüąŠčģčĆą░ąĮąĄąĮąŠ ą▓ mailbox, ą┐ąŠč鹊ą╝čā čćč鹊 ą▓ čŹč鹊ą╝ mailbox čüąŠą┤ąĄčƹȹ░ą╗ąĖčüčī ąĮąĄ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ (čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé RMLn).
D: čĆąĄąČąĖą╝ čüč湥čéčćąĖą║ą░ čüąŠą▒čŗčéąĖą╣. ąśąĮą║čĆąĄą╝ąĄąĮčé ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé, ąĄčüą╗ąĖ ą▒čŗą╗ čāčüą┐ąĄčłąĮčŗą╣ ą┐čĆąĖąĄą╝ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▒ąĄąĘ ąŠą▒ąĮą░čĆčāąČąĄąĮąĮčŗčģ ąŠčłąĖą▒ąŠą║, ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ ą╗ąĖą▒ąŠ ąŠčéą▒čĆąŠčłąĄąĮąŠ, ą╗ąĖą▒ąŠ čüąŠčģčĆą░ąĮąĄąĮąŠ ą▓ mailbox.
E: čĆąĄąČąĖą╝ čüč湥čéčćąĖą║ą░ čüąŠą▒čŗčéąĖą╣. ąæčŗą╗ čāčüą┐ąĄčłąĮčŗą╣ ą┐čĆąĖąĄą╝ ąĖ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ (ą▒čŗą╗ąŠ ą┐čĆąĖąĮčÅč鹊 čüąŠąŠą▒čēąĄąĮąĖąĄ ą┤ą╗čÅ ąŠą┤ąĮąŠą│ąŠ ąĖąĘ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ mailbox). ąĪč湥čéčćąĖą║ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ, ąĄčüą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▒čŗą╗ąŠ čüąŠčģčĆą░ąĮąĄąĮąŠ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ mailbox (čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé RMPn).
F: čĆąĄąČąĖą╝ čüč湥čéčćąĖą║ą░ čüąŠą▒čŗčéąĖą╣. ąśąĮą║čĆąĄą╝ąĄąĮčé ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé, ąĄčüą╗ąĖ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąŠ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĮą░ čłąĖąĮąĄ CAN. ąŁč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĖąĄą╝ ąĖą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćą░.
ąĀąĄą│ąĖčüčéčĆ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠą│ąŠ čüč湥čéčćąĖą║ą░ CAN (CAN_UCCNT), ą│ą┤ąĄ čģčĆą░ąĮąĖčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░. ąÆ čĆąĄąČąĖą╝ąĄ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ čŹč鹊čé čüč湥čéčćąĖą║ ąŠčćąĖčēą░ąĄčéčüčÅ ąĘą░ą┐ąĖčüčīčÄ 1 ą▓ ą▒ąĖčé UCRC čĆąĄą│ąĖčüčéčĆą░ CAN_UCCNF. ąÆ čĆąĄąČąĖą╝ąĄ čüč鹊čĆąŠąČąĄą▓ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░ čüč湥čéčćąĖą║ ąŠčćąĖčēą░ąĄčéčüčÅ ąĘą░ą┐ąĖčüčīčÄ ą▓ čŹč鹊čé čĆąĄą│ąĖčüčéčĆ 0x0000.

ąĀąĖčü. 19-50. Universal Counter Register.
ąĀąĄą│ąĖčüčéčĆ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ/ąĘą░čģą▓ą░čéą░ čāąĮąĖą▓ąĄčĆčüą░ą╗čīąĮąŠą│ąŠ čüč湥čéčćąĖą║ą░ CAN (CAN_UCRC) čģčĆą░ąĮąĖčé ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ čĆąĄą│ąĖčüčéčĆą░ CAN_UCCNT. ąÆ čĆąĄąČąĖą╝ąĄ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ čćč鹥ąĮąĖąĄ čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ą┤ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ CAN_UCCNT ą▓ ą╝ąŠą╝ąĄąĮčé čāčüą┐ąĄčłąĮąŠą│ąŠ ą┐čĆąĖąĄą╝ą░ ąĖą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ. ąÆ čĆąĄąČąĖą╝ąĄ čüč鹊čĆąŠąČąĄą▓ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░ čćč鹥ąĮąĖąĄ čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ą┤ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ.

ąĀąĖčü. 19-51. Universal Counter Reload/Capture Register.
[ą×čłąĖą▒ą║ąĖ ąĖ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ CAN]
ą£ąŠąČąĮąŠ ąŠčéą┤ąĄą╗čīąĮąŠ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī čāčĆąŠą▓ąĄąĮčī ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ą┤ą╗čÅ EWTIS (ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ąŠą▒ ąŠčłąĖą▒ą║ą░čģ ą┐ąĄčĆąĄą┤ą░čćąĖ) ąĖ ą┤ą╗čÅ EWRIS (ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ąŠą▒ ąŠčłąĖą▒ą║ą░čģ ą┐čĆąĖąĄą╝ą░).
ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ čŹč鹊čé čĆąĄą│ąĖčüčéčĆ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čāčĆąŠą▓ąĮąĄą╝ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 96 ą┤ą╗čÅ ąŠą▒ąŠąĖčģ čüč湥čéčćąĖą║ąŠą▓ ąŠčłąĖą▒ąŠą║. ą¤ąŠčüą╗ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čüą▒čĆąŠčüą░ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ąŠčüčéą░ąĮąĄčéčüčÅ ąĮąĄ ąĖąĘą╝ąĄąĮąĄąĮąĮčŗą╝.
ą×čłąĖą▒ą║ąĖ ąĖ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ CAN čāą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ čĆąĄą│ąĖčüčéčĆąŠą▓ CAN_CEC, CAN_ESR ąĖ CAN_EWR.
ąĀąĄą│ąĖčüčéčĆ čüč湥čéčćąĖą║ą░ ąŠčłąĖą▒ąŠą║ CAN (CAN_CEC) čģčĆą░ąĮąĖčé čüč湥čéčćąĖą║ąĖ ąŠčłąĖą▒ąŠą║ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░. ąŚąĮą░č湥ąĮąĖčÅ čŹčéąĖčģ čüč湥čéčćąĖą║ąŠą▓ ąĮąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ąĖąĘą╝ąĄąĮąĄąĮčŗ ą▓ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╝ čĆą░ą▒ąŠč湥ą╝ čĆąĄąČąĖą╝ąĄ. ąŚąĮą░č湥ąĮąĖąĄ CAN_CEC čüąŠčģčĆą░ąĮąĄąĮąŠ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┤ąŠčüčéčāą┐ą░ ąĮą░ čćč鹥ąĮąĖąĄ. ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ą▓čüąĄ ą▒ąĖčéčŗ ąŠčćąĖčēą░čÄčéčüčÅ. ą¤čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čüą▒čĆąŠčü (ą▒ąĖč鹊ą╝ SRS ą▓ CAN_CONTROL) ąĮąĄ ą▓ą╗ąĖčÅąĄčé ąĮą░ čŹč鹊čé čĆąĄą│ąĖčüčéčĆ.

ąĀąĖčü. 19-52. CAN Error Counter Register.
ąŚąĮą░č湥ąĮąĖąĄ CAN_CEC ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ, ąĄčüą╗ąĖ ą╝ąŠą┤čāą╗čī CAN ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ ąŠčé čłąĖąĮčŗ CAN (bus-off mode).
ą¤ąŠčüą╗ąĄ ą▓čŗčģąŠą┤ą░ ąĖąĘ čĆąĄąČąĖą╝ąŠą▓ ąŠčéą║ą╗čÄč湥ąĮąĖčÅ ąŠčé čłąĖąĮčŗ ąĖą╗ąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čüč湥čéčćąĖą║ ąŠčłąĖą▒ąŠą║ CAN čüą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ. ą×ą┤ąĮą░ą║ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ čüą▒čĆąŠčü čāčüčéą░ąĮąŠą▓ąĖčé ą▒ąĖčé ąĘą░ą┐čĆąŠčüą░ čĆąĄąČąĖą╝ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ CAN (CCR=1 ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_CONTROL), ąĖ ą╝ąŠą┤čāą╗čī ą┐ąŠą╝ąĄąĮčÅąĄčé čüąŠčüč鹊čÅąĮąĖąĄ ą▓ ąĘą░ą┐čĆąŠčłąĄąĮąĮčŗą╣ čĆąĄąČąĖą╝ ą┐ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą▓čüąĄčģ ą▓čŗą┐ąŠą╗ąĮčÅąĄą╝čŗčģ č鹥ą║čāčēąĖčģ ą░ą║čéąĖą▓ąĮąŠčüč鹥ą╣ (ą┐ąĄčĆąĄą┤ą░čćą░ / ą┐čĆąĖąĄą╝ čüąŠąŠą▒čēąĄąĮąĖčÅ CAN message).
ąĀąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ ąŠčłąĖą▒ą║ąĖ (CAN_ESR) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ ąŠčłąĖą▒ąŠą║, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąŠąĖąĘąŠčłą╗ąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ čĆą░ą▒ąŠčéčŗ. ąĪąŠčģčĆą░ąĮčÅąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą┐ąĄčĆą▓ą░čÅ ąŠčłąĖą▒ą║ą░, ą╗čÄą▒čŗąĄ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖąĄ ąŠčłąĖą▒ą║ąĖ ąĮąĄ ą╝ąĄąĮčÅčÄčé čüąŠčüč鹊čÅąĮąĖąĄ čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░. ąæąĖčéčŗ čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ąŠčćąĖčēą░čÄčéčüčÅ ąĘą░ą┐ąĖčüčīčÄ 1 (ąŠą┐ąĄčĆą░čåąĖčÅ W1C), ą║čĆąŠą╝ąĄ ą▒ąĖčéą░ SA0, ą║ąŠč鹊čĆčŗą╣ ąŠčćąĖčēą░ąĄčéčüčÅ ą╗čÄą▒čŗą╝ čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╝ ą▒ąĖč鹊ą╝ ąĮą░ čłąĖąĮąĄ.

ąĀąĖčü. 19-53. Error Status Register.
ąæąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ CAN_ESR:
ŌĆó Form Error Flag (FER).
1: ąĮą░ čłąĖąĮąĄ ąŠą▒ąĮą░čĆčāąČąĄąĮą░ ąŠčłąĖą▒ą║ą░ č乊čĆą╝čŗ. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąŠą┤ąĮąŠ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ąĖč鹊ą▓čŗčģ ą┐ąŠą╗ąĄą╣ čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮąŠą╣ č乊čĆą╝čŗ ąĖą╝ąĄčÄčé ąĮą░ čłąĖąĮąĄ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮčŗą╣ čāčĆąŠą▓ąĄąĮčī.
0: ą╝ąŠą┤čāą╗čī CAN ą╝ąŠą│ ą║ąŠčĆčĆąĄą║čéąĮąŠ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ąĖ ą┐čĆąĖąĮąĖą╝ą░čéčī.
ŌĆó Bit Error Flag (BEF).
1: ą┐čĆąĖąĮčÅčéčŗą╣ ą▒ąĖčé ąĮąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠą╝čā ą▒ąĖčéčā ą▓ąĮąĄ ą┐ąŠą╗čÅ ą░čĆą▒ąĖčéčĆą░ąČą░, ąĖą╗ąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ąŠą╗čÅ ą░čĆą▒ąĖčéčĆą░ąČą░ ą▒čŗą╗ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ ą┤ąŠą╝ąĖąĮą░ąĮčéąĮčŗą╣ ą▒ąĖčé, ąŠą┤ąĮą░ą║ąŠ ą▒čŗą╗ ą┐čĆąĖąĮčÅčé čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╣ ą▒ąĖčé.
0: ą╝ąŠą┤čāą╗čī CAN ą╝ąŠą│ ą║ąŠčĆčĆąĄą║čéąĮąŠ ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ąĖ ą┐čĆąĖąĮąĖą╝ą░čéčī.
ŌĆó Stuck at Dominant Error (SA0).
1: ą▒ąĖčé SA0 čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ, ąĄčüą╗ąĖ ą╝ąŠą┤čāą╗čī CAN ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ąĖą╗ąĖ ą╝ąŠą┤čāą╗čī ą▓ąŠčłąĄą╗ ą▓ čĆąĄąČąĖą╝ bus-off. ąæąĖčé čüą▒čĆąŠčüąĖčéčüčÅ, ąĄčüą╗ąĖ ą╝ąŠą┤čāą╗čī ą┐ąŠą╗čāčćąĖą╗ čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╣ ą▒ąĖčé ąĮą░ ą▓čģąŠą┤ąĮąŠą╣ ą╗ąĖąĮąĖąĖ CANRX.
0: ą╝ąŠą┤čāą╗čī CAN ąŠą┐čĆąĄą┤ąĄą╗ąĖą╗ čĆąĄčåąĄčüčüąĖą▓ąĮčŗą╣ ą▒ąĖčé.
ŌĆó CRC Error (CRCE).
1: ą╝ąŠą┤čāą╗čī CAN ą┐čĆąĖąĮčÅą╗ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮčāčÄ ą║ąŠąĮčéčĆąŠą╗čīąĮčāčÄ čüčāą╝ą╝čā.
0: ą╝ąŠą┤čāą╗čī CAN ąĮąĖ čĆą░ąĘčā ąĮąĄ ą┐čĆąĖąĮčÅą╗ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮčāčÄ ą║ąŠąĮčéčĆąŠą╗čīąĮčāčÄ čüčāą╝ą╝čā.
ŌĆó Stuff Error (SER).
1: ąĮą░čĆčāčłąĄąĮąŠ ą┐čĆą░ą▓ąĖą╗ąŠ stuff-ą▒ąĖčéą░.
0: ąĮąĄ ą▒čŗą╗ąŠ ąŠčłąĖą▒ąŠą║ stuff-ą▒ąĖčéą░.
ŌĆó Acknowledge Error (ACKE).
1: ą╝ąŠą┤čāą╗čī CAN ą┐ąŠą╗čāčćąĖą╗ ąŠčéčüčāčéčüčéą▓ąĖąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ.
0: ą╝ąŠą┤čāą╗čī CAN ą┐ąŠą╗čāčćąĖą╗ ą║ąŠčĆčĆąĄą║čéąĮąŠąĄ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ.
ąæąĖčéčŗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ąŠą▒ ąŠčłąĖą▒ą║ą░čģ EWRIS ąĖ EWTIS ą▓ čĆąĄą│ąĖčüčéčĆąĄ CAN_GIS čāčüčéą░ąĮąŠą▓čÅčéčüčÅ, ąĄčüą╗ąĖ ąŠą┤ąĖąĮ ąĖąĘ čüč湥čéčćąĖą║ąŠą▓ ąŠčłąĖą▒ąŠą║ CAN ą┤ąŠčüčéąĖą│ąĮąĄčé čāčĆąŠą▓ąĮčÅ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 96 ąŠčłąĖą▒ąŠą║ ą┤ą╗čÅ ąŠą▒ąŠąĖčģ čüč湥čéčćąĖą║ąŠą▓ ąŠčłąĖą▒ąŠą║). ąĀąĄą│ąĖčüčéčĆ čāčĆąŠą▓ąĮčÅ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ąŠą▒ ąŠčłąĖą▒ą║ą░čģ (CAN_EWR) ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠčéą┤ąĄą╗čīąĮąŠ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī čāčĆąŠą▓ąĄąĮčī ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ą┤ą╗čÅ čüąŠą▒čŗčéąĖą╣ EWTIS ąĖ EWRIS. ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▓ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 96 ą┤ą╗čÅ ąŠą▒ąŠąĖčģ čüč湥čéčćąĖą║ąŠą▓ ąŠčłąĖą▒ąŠą║. ą¤ąŠčüą╗ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čüą▒čĆąŠčüą░ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ąĮąĄ ąĖąĘą╝ąĄąĮąĖčéčüčÅ.

ąĀąĖčü. 19-54. CAN Error Counter Warning Level Register.
ą¤ąŠą╗čÅ čĆąĄą│ąĖčüčéčĆą░ CAN_EWR:
ŌĆó Error Warning Level for Receive Error Count (EWLREC).
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ąŠčłąĖą▒ąŠą║ ą┐čĆąĖąĄą╝ą░, ą║ąŠč鹊čĆąŠąĄ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąŠąĖąĘąŠą╣čéąĖ ą┐ąĄčĆąĄą┤ ą│ąĄąĮąĄčĆą░čåąĖąĄą╣ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ąŠą▒ ąŠčłąĖą▒ą║ą░čģ ą┐čĆąĖąĄą╝ą░ (EWRIS).
ŌĆó Error Warning Level for Transmit Error Count (EWLTEC).
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ąŠčłąĖą▒ąŠą║ ą┐ąĄčĆąĄą┤ą░čćąĖ, ą║ąŠč鹊čĆąŠąĄ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąŠąĖąĘąŠą╣čéąĖ ą┐ąĄčĆąĄą┤ ą│ąĄąĮąĄčĆą░čåąĖąĄą╣ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖčÅ ąŠą▒ ąŠčłąĖą▒ą║ą░čģ ą┐ąĄčĆąĄą┤ą░čćąĖ (EWTIS).
[ąĪčüčŗą╗ą║ąĖ]
1. ADSP-BF538/ADSP-BF538F Blackfin® Processor Hardware Reference site:analog.com.
2. ADSP-BF538: čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠčĆčéą░ą╝ąĖ GPIO C, D, E.
3. ADSP-BF538: ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖąĄą╝.
4. ąóčĆą░ąĮčüąĖą▓ąĄčĆčŗ CAN.
5. CAN Bit Time Calculation.
6. 190304TestCAN.zip - ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą┐čĆąŠąĄą║čéą░, ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāčÄčēąĄą│ąŠ čĆą░ą▒ąŠčéčā čü CAN.
7. CAN Bus Bit Timing Calculator. |



