|
ąÆ čŹč鹊ą╝ ą┐ąĄčĆąĄą▓ąŠą┤ąĄ ą░ą┐ąĮąŠčāčéą░ AVR130 [1] čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čÄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖąĄ ą▓ąŠą┐čĆąŠčüčŗ:
ŌĆó ą×ą┐ąĖčüą░ąĮąĖąĄ čüąŠą▒čŗčéąĖą╣ čéą░ą╣ą╝ąĄčĆąŠą▓/čüč湥čéčćąĖą║ąŠą▓
ŌĆó ą×ą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ąŠ čüąŠą▒čŗčéąĖčÅčģ čéą░ą╣ą╝ąĄčĆą░/čüč湥čéčćąĖą║ą░
ŌĆó ą×ą┐čåąĖąĖ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ
ŌĆó ą¤čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ ą┤ą╗čÅ Timer0 (ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÄ)
ŌĆó ą¤čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ ą┤ą╗čÅ Timer1 (Input Capture, ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ ąĘą░čģą▓ą░čéčā ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░)
ŌĆó ą¤čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ ą┤ą╗čÅ Timer2 (ą░čüąĖąĮčģčĆąŠąĮąĮą░čÅ čĆą░ą▒ąŠčéą░, ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖčÄ Compare Match)
ŌĆó ąæą░ąĘąŠą▓čŗąĄ čüą▓ąĄą┤ąĄąĮąĖčÅ ąŠ ą©ąśą£ (PWM)
ŌĆó ą¤čĆąĖą╝ąĄčĆ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą©ąśą£ ąĮą░ ąŠčüąĮąŠą▓ąĄ Timer2
ąÆ ą░ą┐ąĮąŠčāč鹥 ąŠą┐ąĖčüą░ąĮąŠ, ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čĆą░ąĘą╗ąĖčćąĮčŗąĄ čéą░ą╣ą╝ąĄčĆčŗ AVR ąĮą░ ą┐čĆąĖą╝ąĄčĆąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ AT90S8535. ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą┤ąŠą║čāą╝ąĄąĮčéą░ - ą┤ą░čéčī ąŠą▒čēąĖą╣ ąŠą▒ąĘąŠčĆ čéą░ą╣ą╝ąĄčĆąŠą▓, ą┐ąŠą║ą░ąĘą░čéčī ąĖčģ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ąĖ čĆą░ąĘčŖčÅčüąĮąĖčéčī ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ. ąÆčüąĄ čŹč鹊 ą┐ąŠčÅčüąĮąĄąĮąŠ ą┐čĆąĖą╝ąĄčĆą░ą╝ąĖ ą║ąŠą┤ą░, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ą▓ąĘčÅčéčī ąĘą░ ąŠčüąĮąŠą▓čā ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ą┤čĆčāą│ąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣. ą¤čĆąŠą┤ą▓ąĖąĮčāčéčŗąĄ čćąĖčéą░č鹥ą╗ąĖ ą╝ąŠą│čāčé ą┐čĆąŠą┐čāčüčéąĖčéčī ąŠą▒čēąĖą╣ ąŠą▒ąĘąŠčĆ, ąĖ čüčĆą░ąĘčā ąĮą░čćą░čéčī čü čüąĄą║čåąĖąĖ "ąØą░čüčéčĆąŠą╣ą║ą░ čéą░ą╣ą╝ąĄčĆąŠą▓". ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ ą┤ą░čéą░čłąĖčéą░čģ ąĮą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĖ ą▓ ą░ą┐ąĮąŠčāčéą░čģ, ą│ą┤ąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čéą░ą╣ą╝ąĄčĆčŗ.
[ą×ą▒čēąĖą╣ ąŠą▒ąĘąŠčĆ]
ąÆ ą┐čĆąĖąĮčåąĖą┐ąĄ čéą░ą╣ą╝ąĄčĆ čŹč鹊 ą┐čĆąŠčüč鹊ą╣ čüč湥čéčćąĖą║. ąĢą│ąŠ ą┤ąŠčüč鹊ąĖąĮčüčéą▓ąŠ ą▓ č鹊ą╝, čćč鹊 ąŠąĮ ą╝ąŠąČąĄčé čüčćąĖčéą░čéčī ąĖą╝ą┐čāą╗čīčüčŗ ą▓čģąŠą┤ąĮąŠą╣ čćą░čüč鹊čéčŗ ąĖ čĆą░ą▒ąŠčéą░čéčī ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ąŠčüąĮąŠą▓ąĮąŠą│ąŠ ą┐ąŠč鹊ą║ą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ. ąĪčéčĆąŠą│ąŠ ąĘą░ą┤ą░ąĮąĮą░čÅ čćą░čüč鹊čéą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ąĄą╗ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮčŗą╝ ąĖąĘą╝ąĄčĆčÅčéčī ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ ąĄą┤ąĖąĮąĖčåą░čģ ą┐ąĄčĆąĖąŠą┤ą░ čéą░ą║č鹊ą▓ čéą░ą╣ą╝ąĄčĆą░.
ą¤ąŠč湥ą╝čā čüčāčēąĄčüčéą▓čāčÄčé čĆą░ąĘąĮčŗąĄ čéą░ą╣ą╝ąĄčĆčŗ? ą×čéą▓ąĄčé ąŠč湥ąĮčī ą┐čĆąŠčüčé: ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ą┐ąŠą┤čģąŠą┤čÅčēąĄą│ąŠ čéą░ą╣ą╝ąĄčĆą░ ą┤ą╗čÅ čĆą░ąĘąĮčŗčģ ąĘą░ą┤ą░čć ąĮčāąČąĮčŗ ąĮąĄą║ąŠč鹊čĆčŗąĄ čĆą░ąĘąĮčŗąĄ (ą░ą┐ą┐ą░čĆą░čéąĮčŗąĄ) čĆąĄčüčāčĆčüčŗ.
ą×ą▒čŗčćąĮąŠ ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░čģ čüąĄčĆąĖą╣ 90S, megaAVR ąĖ tinyAVR ąĖą╝ąĄąĄčéčüčÅ ą┤ą▓ą░ 8-ą▒ąĖčéąĮčŗčģ čéą░ą╣ą╝ąĄčĆą░ ąĖ ąŠą┤ąĖąĮ 16-ą▒ąĖčéąĮčŗą╣. ąóą░ą╣ą╝ąĄčĆ, čā ą║ąŠč鹊čĆąŠą│ąŠ 16-ą▒ąĖčéąĮąŠąĄ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ, ąŠą▒čŗčćąĮąŠ ą▒ąŠą╗ąĄąĄ ą│ąĖą▒ąŠą║ ą▓ ąĮą░čüčéčĆąŠą╣ą║ąĄ ąĖ ąŠą▒ą╗ą░ą┤ą░ąĄčé čĆą░čüčłąĖčĆąĄąĮąĮčŗą╝ čäčāąĮą║čåąĖąŠąĮą░ą╗ąŠą╝ ą▓ čüčĆą░ą▓ąĮąĄąĮąĖąĖ čü 8-ą▒ąĖčéąĮčŗą╝ čéą░ą╣ą╝ąĄčĆąŠą╝. ą×ą┤ąĮą░ą║ąŠ ą┐čĆą░ą▓ąĖą╗ąŠ "č湥ą╝ ą▒ąŠą╗čīčłąĄ č鹥ą╝ ą╗čāčćčłąĄ" ąĮąĄ ą▓čüąĄą│ą┤ą░ čüą┐čĆą░ą▓ąĄą┤ą╗ąĖą▓ąŠ ą┤ą╗čÅ ą╝ąĖčĆą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓, ą║ąŠą│ą┤ą░ ąĮčāąČąĮąŠ čĆąĄčłąĖčéčī čāąĘą║ąŠčüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮčāčÄ ąĘą░ą┤ą░čćčā. ąöą╗čÅ ą╝ąĮąŠą│ąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ą┤ąŠčüčéą░č鹊čćąĮąŠ 8-čĆą░ąĘčĆčÅą┤ąĮąŠą╣ čĆą░ąĘčĆąĄčłą░čÄčēąĄą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čĆą░ąĘčĆčÅą┤ąĮąŠčüčéąĖ ą▓čŗčłąĄ ąŠąĘąĮą░čćą░ąĄčé čāą▓ąĄą╗ąĖč湥ąĮąĖąĄ ąĘą░čéčĆą░čé ąĮą░ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ, čāą▓ąĄą╗ąĖč湥ąĮąĖąĄ ą▓čĆąĄą╝ąĄąĮąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ, ąĖ čŹč鹊ą│ąŠ ąĮčāąČąĮąŠ ą┐čŗčéą░čéčīčüčÅ ąĖąĘą▒ąĄą│ą░čéčī ą┐čāč鹥ą╝ ąŠą┐čéąĖą╝ąĖąĘą░čåąĖąĖ ą║ąŠą┤ą░ ą┐ąŠ čüą║ąŠčĆąŠčüčéąĖ. ąŁč鹊 čéą░ą║ąČąĄ ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąĮčāąČąĮąŠ ą┐čĆąĖą╝ąĄąĮčÅčéčī ą▒ąŠą╗ąĄąĄ ą┤ąŠčĆąŠą│ąŠą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ. ąōąĖą▒ą║ąŠčüčéčī čéą░ą╣ą╝ąĄčĆąŠą▓ AVR ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐čĆąĖčüą┐ąŠčüąŠą▒ąĖčéčī ąĖčģ ą┤ą╗čÅ čĆąĄčłąĄąĮąĖčÅ čĆą░ąĘą╗ąĖčćąĮčŗčģ ąĘą░ą┤ą░čć. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čéą░ą╣ą╝ąĄčĆąŠą▓ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣. ąöą░ą╗ąĄąĄ ą▒čāą┤čāčé ą▒ąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ ąŠą┐ąĖčüą░ąĮčŗ čŹčéąĖ ąŠą┐čåąĖąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
[ąĪąŠą▒čŗčéąĖčÅ čéą░ą╣ą╝ąĄčĆąŠą▓]
ąóą░ą╣ą╝ąĄčĆ AVR ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮą░čüčéčĆąŠąĄąĮ ąĮą░ ąŠą▒čĆą░ą▒ąŠčéą║čā ąĮąĄą║ąŠč鹊čĆčŗčģ čüąŠą▒čŗčéąĖą╣. ążą╗ą░ą│ąĖ čüąŠčüč鹊čÅąĮąĖčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ TIMSK ą┐ąŠą║ą░ąČčāčé, ą┐čĆąŠąĖąĘąŠčłą╗ąŠ ą╗ąĖ ą║ą░ą║ąŠąĄ-č鹊 čüąŠą▒čŗčéąĖąĄ. ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ AT90S8535 ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĮąĖčÅ ą┤ąŠ 3 čüąŠą▒čŗčéąĖą╣ ąĮą░ čéą░ą╣ą╝ąĄčĆ. ąØąĖąČąĄ ąŠą┐ąĖčüą░ąĮčŗ čŹčéąĖ čüąŠą▒čŗčéąĖčÅ.
ą¤ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ (Timer Overflow). ą¤ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ čéą░ą╣ą╝ąĄčĆą░ (timer overflow) ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čüč湥čéčćąĖą║ čéą░ą╣ą╝ąĄčĆą░ ą┤ąŠčüčćąĖčéą░ą╗ ą┤ąŠ čüą▓ąŠąĄą│ąŠ ą┐čĆąĄą┤ąĄą╗čīąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ (255 ą┤ą╗čÅ 8-ą▒ąĖčéąĮąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░ ąĖ 65535 ą┤ą╗čÅ 16-ą▒ąĖčéąĮąŠą│ąŠ) ąĖ čüą▒čĆąŠčüąĖą╗čüčÅ ą▓ 0 ą┐čĆąĖ čüą╗ąĄą┤čāčÄčēąĄą╝ čéą░ą║č鹊ą▓ąŠą╝ čåąĖą║ą╗ąĄ. ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čéą░ą╣ą╝ąĄčĆą░ (čé. ąĄ. ą┤ąĖą░ą┐ą░ąĘąŠąĮ ąĄą│ąŠ čüč湥čéą░) ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčīčÄ čüč湥čéčćąĖą║ą░ ą▓ čéą░ą╣ą╝ąĄčĆąĄ. ąÆ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ AT90S8535 ąĄčüčéčī 2 čéą░ą╣ą╝ąĄčĆą░ čü 8-ą▒ąĖčéąĮčŗą╝ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ ąĖ 1 čéą░ą╣ą╝ąĄčĆ čü 16-ą▒ąĖčéąĮčŗą╝ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝. ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ą┤ąŠ ą║ąŠč鹊čĆąŠą│ąŠ ą╝ąŠąČąĄčé čüčćąĖčéą░čéčī čéą░ą╣ą╝ąĄčĆ, ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ą┐ąŠ čüą╗ąĄą┤čāčÄčēąĄą╣ č乊čĆą╝čāą╗ąĄ (ąĘą┤ąĄčüčī Res, čüč鹊čÅčēą░čÅ ą▓ ą┐ąŠą║ą░ąĘą░č鹥ą╗ąĄ čüč鹥ą┐ąĄąĮąĖ, čŹč鹊 čĆą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī ą▓ ą▒ąĖčéą░čģ, ąĖą╗ąĖ 8 ąĖą╗ąĖ 16):
| MaxVal = 2Res ŌĆō 1 |
|
(ążąŠčĆą╝čāą╗ą░ 1) |
ąĪąŠą▒čŗčéąĖąĄ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▓ąĘą▓ąĄą┤ąĄčé čäą╗ą░ą│ Timer Overflow (TOVx) ą▓ čĆąĄą│ąĖčüčéčĆąĄ Timer Interrupt Flag Register (TIFR).
ąĪąŠą▓ą┐ą░ą┤ąĄąĮąĖąĄ (Compare Match). ąÆ č鹥čģ čüą╗čāčćą░čÅčģ, ą║ąŠą│ą┤ą░ ąĮąĄą┤ąŠčüčéą░č鹊čćąĮąŠ ąŠčéčüą╗ąĄąČąĖą▓ą░čéčī ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ čéą░ą╣ą╝ąĄčĆą░, ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖčÄ čüč湥čéčćąĖą║ą░ čü ąĮąĄą║ąĖą╝ ąĘą░ą┤ą░ąĮąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ (compare match interrupt). ąĀąĄą│ąĖčüčéčĆ Output Compare Register (OCRx) ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą│čĆčāąČąĄąĮ ąĘąĮą░č湥ąĮąĖąĄą╝ [0..MaxVal] ą║ąŠč鹊čĆąŠąĄ ą▒čāą┤ąĄčé ą┐čĆąŠą▓ąĄčĆčÅčéčīčüčÅ ąĮą░ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖąĄ čüąŠ čüč湥čéčćąĖą║ąŠą╝ ą┐čĆąĖ ą║ą░ąČą┤ąŠą╝ čéą░ą║č鹊ą▓ąŠą╝ čåąĖą║ą╗ąĄ čéą░ą╣ą╝ąĄčĆą░. ąÜąŠą│ą┤ą░ čéą░ą╣ą╝ąĄčĆ ą┤ąŠčüčéąĖą│ąĮąĄčé ąĘąĮą░č湥ąĮąĖčÅ čüčĆą░ą▓ąĮąĄąĮąĖčÅ, ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čäą╗ą░ą│ Output Compare Flag (OCFx) ą▓ čĆąĄą│ąĖčüčéčĆąĄ TIFR. ąóą░ą╣ą╝ąĄčĆ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ąŠčćąĖčüčéą║ąĖ čĆąĄą│ąĖčüčéčĆą░ čüč湥čéčćąĖą║ą░ ą▓ 0 ą┐čĆąĖ čüąŠą▒čŗčéąĖąĖ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖčÅ.
ąĪą▓čÅąĘą░ąĮąĮčŗąĄ čü čäčāąĮą║čåąĖąĄą╣ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖčÅ ą┐ąŠčĆčéčŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą╝ąŠą│čāčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą║ą░ą║ ą▓čŗčģąŠą┤čŗ ą┤ą╗čÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ čāčüčéą░ąĮąŠą▓ą║ąĖ, čüą▒čĆąŠčüą░ ąĖ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą┐čĆąĖ ąĮą░čüčéčāą┐ą╗ąĄąĮąĖąĖ čüąŠą▒čŗčéąĖčÅ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖčÅ. ąŁčéą░ čäčāąĮą║čåąĖčÅ ąŠč湥ąĮčī ą┐ąŠą╗ąĄąĘąĮą░ ą┤ą╗čÅ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čüąĖą│ąĮą░ą╗ąŠą▓ ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮąŠą╣ č乊čĆą╝čŗ čĆą░ąĘą╗ąĖčćąĮčŗčģ čćą░čüč鹊čé. ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą╝ąĮąŠą│ąŠ ą▓ąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ DAC (ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ čåąĖčäčĆąŠą▓čŗčģ ą┤ą░ąĮąĮčŗčģ ą▓ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ čüąĖą│ąĮą░ą╗). ąĀąĄąČąĖą╝ PWM čüą┐ąĄčåąĖą░ą╗čīąĮąŠ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ ą┤ą╗čÅ ąĮą░ąĖą╗čāčćčłąĄą╣ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüąĖą│ąĮą░ą╗ąŠą▓ čüąĖąĮčāčüąŠąĖą┤ą░ą╗čīąĮąŠą╣ ąĖ ą┤čĆčāą│ąŠą╣ č乊čĆą╝čŗ. ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. čĆą░ąĘą┤ąĄą╗ "ąæą░ąĘąŠą▓čŗąĄ čüą▓ąĄą┤ąĄąĮąĖčÅ ąŠ PWM", ą┤ą░čéą░čłąĖčé [4].
ąŚą░čģą▓ą░čé ą▓čģąŠą┤ą░ (Input Capture). ąŻ AVR ąĄčüčéčī ą▓čģąŠą┤ąĮąŠą╣ ą┐ąŠčĆčé, ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąĮčŗą╣ ą┤ą╗čÅ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÅ ąŠčé ą▓čģąŠą┤ąĮčŗčģ čüąŠą▒čŗčéąĖą╣, čé. ąĄ. ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čüąŠą▒čŗčéąĖąĄ ąĘą░čģą▓ą░čéą░ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąŠą▒čŗčéąĖčÅ (input capture event). ąśąĘą╝ąĄąĮąĄąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░ ąĮą░ čŹč鹊ą╝ ą▓čģąŠą┤ąĄ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ č鹊ą╝čā, čćč鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĖąĘ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░ ą▒čāą┤ąĄčé ą┐čĆąŠčćąĖčéą░ąĮąŠ ąĖ čüąŠčģčĆą░ąĮąĄąĮąŠ ą▓ čĆąĄą│ąĖčüčéčĆąĄ ąĘą░čģą▓ą░čéą░ Input Capture Register (ICRx). ą×ą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ čü čŹčéąĖą╝ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čäą╗ą░ą│ Input Capture Flag (ICFx) ą▓ čĆąĄą│ąĖčüčéčĆąĄ TIFR. ążčāąĮą║čåąĖčÅ ąĘą░čģą▓ą░čéą░ ą┐ąŠą╗ąĄąĘąĮą░ ą┤ą╗čÅ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą▓ąĮąĄčłąĮąĖčģ ąĖą╝ą┐čāą╗čīčüąŠą▓.
[ąÜą░ą║ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ąŠ čüąŠą▒čŗčéąĖčÅčģ]
ąóą░ą╣ą╝ąĄčĆ čĆą░ą▒ąŠčéą░ąĄčé ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ąŠą┤ą░ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ. ąöą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čüąŠą▒čŗčéąĖčÅ čéą░ą╣ą╝ąĄčĆą░ ąĄčüčéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čäą╗ą░ą│ čüąŠčüč鹊čÅąĮąĖčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (Timer Interrupt Flag Register, TIFR). ą¤čĆąŠąĖąĘąŠčłąĄą┤čłąĄąĄ čüąŠą▒čŗčéąĖąĄ čéą░ą╣ą╝ąĄčĆą░ čéčĆąĄą▒čāąĄčé ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ą┐čĆąŠčåąĄčüčüąŠčĆą░, čćč鹊ą▒čŗ ąŠąĮ ą┐čĆąĄą┤ą┐čĆąĖąĮąĖą╝ą░ą╗ ą┐ąŠ čüąŠą▒čŗčéąĖčÄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ. ąŁč鹊 ą║ą░ą║ čĆą░ąĘ ąĖ ą┤ąĄą╗ą░ąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ čäą╗ą░ą│ą░, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ čüąŠą▒čŗčéąĖąĄ.
ąĢčüčéčī čéčĆąĖ čĆą░ąĘą╗ąĖčćąĮčŗčģ čüą┐ąŠčüąŠą▒ą░ ąŠčéčüą╗ąĄąČąĖą▓ą░čéčī čüąŠą▒čŗčéąĖčÅ čéą░ą╣ą╝ąĄčĆą░ ąĖ čĆąĄą░ą│ąĖčĆąŠą▓ą░čéčī ąĮą░ ąĮąĖčģ:
1. ą¤ąŠčüč鹊čÅąĮąĮčŗą╣ ąŠą┐čĆąŠčü čäą╗ą░ą│ąŠą▓ čüčéą░čéčāčüą░ ŌĆō čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖ ą┐ąŠ ąĮąĖą╝ ąŠą┐čĆąĄą┤ąĄą╗čÅčéčī ąĘą░ą┐čāčüą║ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą║ąŠą┤ą░.
2. ą×čüčéą░ąĮąŠą▓ą║ą░ ąŠčüąĮąŠą▓ąĮąŠą│ąŠ ą┐ąŠč鹊ą║ą░ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ Interrupt Service Routines (ISR).
3. ąÉą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠąĄ ąĖąĘą╝ąĄčĆąĄąĮąĖąĄ čāčĆąŠą▓ąĮčÅ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ą┐ąŠčĆčéą░.
ą×ą┐čĆąŠčü čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąŁč鹊čé ą╝ąĄč鹊ą┤ ąĖčüą┐ąŠą╗čīąĘčāąĄčé č鹊čé čäą░ą║čé, čćč鹊 ą┐čĆąŠčåąĄčüčüąŠčĆ ą┐ąŠą╝ąĄčćą░ąĄčé čüąŠą▒čŗčéąĖčÅ čéą░ą╣ą╝ąĄčĆą░ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ čäą╗ą░ą│ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ą×čüąĮąŠą▓ąĮąŠą╣ ą║ąŠą┤ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą╝ąŠąČąĄčé čćą░čüč鹊 ą┐čĆąŠą▓ąĄčĆčÅčéčī čüąŠčüč鹊čÅąĮąĖąĄ čŹčéąĖčģ čäą╗ą░ą│ąŠą▓ - čćč鹊ą▒čŗ čāąĘąĮą░čéčī, ą┐čĆąŠąĖąĘąŠčłą╗ąŠ ą╗ąĖ ą║ą░ą║ąŠąĄ-č鹊 čüąŠą▒čŗčéąĖąĄ. ąŁč鹊 čéčĆąĄą▒čāąĄčé ąĮąĄą║ąŠč鹊čĆąŠą╣ ąĖąĘą╗ąĖčłąĮąĄą╣ čéčĆą░čéčŗ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ. ąöąŠčüč鹊ąĖąĮčüčéą▓ą░ čŹč鹊ą│ąŠ čĆąĄčłąĄąĮąĖčÅ - ą┐čĆąŠčüč鹊čéą░, ąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąŠč湥ąĮčī ą▒čŗčüčéčĆąŠą╣ čĆąĄą░ą║čåąĖąĖ, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąŠč湥ąĮčī ą║ąŠčĆąŠčéą║ąĖąĄ čåąĖą║ą╗čŗ ąŠą┐čĆąŠčüą░.
ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ ąĮą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ čŹč鹊ą│ąŠ ą╝ąĄč鹊ą┤ą░ ą┤ą╗čÅ Timer0 ą╝ąŠąČąĄčé ą▓čŗą│ą╗čÅą┤ąĄčéčī ą┐čĆąĖą╝ąĄčĆąĮąŠ ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ ą┐čĆąĖą╝ąĄčĆąĄ ąĮąĖąČąĄ. ąŁčéąĖ čéčĆąĖ čüčéčĆąŠą║ąĖ ą║ąŠą┤ą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆą░ąĘą╝ąĄčēąĄąĮčŗ ą▓ ą│ą╗ą░ą▓ąĮąŠą╝ čåąĖą║ą╗ąĄ, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąŠą║čĆčāčćąĖą▓ą░ąĄčéčüčÅ čü ą▒ąŠą╗čīčłąŠą╣ čćą░čüč鹊č鹊ą╣.
loop:
in r16,TIFR ; ąĘą░ą│čĆčāąĘą║ą░ TIFR ą▓ čĆąĄą│ąĖčüčéčĆ 16
sbrs r16,TOV0 ; ą┐čĆąŠą┐čāčüą║ čüą╗ąĄą┤čāčÄčēąĄą╣ ąĖąĮčüčéčĆčāą║čåąĖąĖ, ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé TOV0
rjmp loop ; ąĄčüą╗ąĖ ąĮąĄ ą▒čŗą╗ąŠ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ Timer0, č鹊 ą┐ąĄčĆąĄčģąŠą┤ ą┐ąŠ ą╝ąĄčéą║ąĄ loop
; ą▓ čŹč鹊ą╝ ą╝ąĄčüč鹥 ą┤ąŠą╗ąČąĄąĮ ąĮą░čćąĖąĮą░čéčīčüčÅ ą║ąŠą┤ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąŠą▒čŗčéąĖčÅ
ą×ą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ą┐ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝. ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ AVR ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ čéą░ą║, čćč鹊 ą▒čāą┤ąĄčé ąĘą░ą┐čāčüą║ą░čéčīčüčÅ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ąĄčüą╗ąĖ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ čüąŠą▒čŗčéąĖąĄ čéą░ą╣ą╝ąĄčĆą░ (ąĄčüą╗ąĖ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čäą╗ą░ą│ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ TIFR). ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą│ą╗ą░ą▓ąĮčŗą╣ ą┐ąŠč鹊ą║ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ (ą┐ąŠčćčéąĖ ą▓čüąĄą│ą┤ą░ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ) ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ (ą┐čĆąĄčĆčŗą▓ą░ąĄčéčüčÅ, ąŠčéčüčÄą┤ą░ ąĖ ą┐ąŠčłąĄą╗ č鹥čĆą╝ąĖąĮ "ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ"), ąĖ ą┐čĆąŠčåąĄčüčüąŠčĆ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą║ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÄ ą║ąŠą┤ą░ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (Interrupt Service Routine, čüąŠą║čĆą░čēąĄąĮąĮąŠ ISR). ąöąŠčüč鹊ąĖąĮčüčéą▓ąŠ ą┐ąŠ čüčĆą░ą▓ąĮąĄąĮąĖčÄ čü ąŠą┐čĆąŠčüąŠą╝ čäą╗ą░ą│ąŠą▓ čüąŠčüč鹊ąĖčé ą▓ č鹊ą╝, čćč鹊 ąŠčüąĮąŠą▓ąĮąŠą╣ ą║ąŠą┤ ąŠčüą▓ąŠą▒ąŠąČą┤ą░ąĄčéčüčÅ ąŠčé ąĘą░čéčĆą░čé ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąĮą░ ąŠą┐čĆąŠčü čäą╗ą░ą│ąŠą▓, ąĖ ą╝ąŠąČąĄčé ą▓ą╝ąĄčüč鹊 ąŠą┐čĆąŠčüą░ ąĘą░ąĮąĖą╝ą░čéčīčüčÅ ą┤čĆčāą│ąĖą╝ąĖ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅą╝ąĖ. ąÆ čĆą░ąĘą┤ąĄą╗ąĄ "ąØą░čüčéčĆąŠą╣ą║ą░ čéą░ą╣ą╝ąĄčĆąŠą▓" ą┤ą░ąĮčŗ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐čĆąĖą╝ąĄčĆąŠą▓, ą║ą░ą║ čŹč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ čĆą░ąĘčĆąĄčłą░čÄčéčüčÅ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ ą▒ąĖč鹊ą▓ ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čéą░ą╣ą╝ąĄčĆą░ Timer Timer Interrupt Mask Register (TIMSK). ąÆ čüą╗ąĄą┤čāčÄčēąĄą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą┐ąŠą║ą░ąĘą░ąĮąŠ, ą║ą░ą║ čĆą░ąĘčĆąĄčłąĖčéčī Output Compare Interrupt ą┤ą╗čÅ Timer2:
ldi r16, 1 << OCIE2
out TIMSK,r16 ; ąĀą░ąĘčĆąĄčłąĖčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čéą░ą╣ą╝ąĄčĆą░ output compare
sei ; ąĀą░ąĘčĆąĄčłąĖčéčī ą│ą╗ąŠą▒ą░ą╗čīąĮčŗąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ
ąÉą▓č鹊ą╝ą░čéąĖč湥čüą║ą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ čüąŠą▒čŗčéąĖą╣. Timer1 ąĖ Timer2 ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé čĆąĄą░ą│ąĖčĆąŠą▓ą░ąĮąĖąĄ ąĮą░ čüąŠą▒čŗčéąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą░ą┐ą┐ą░čĆą░čéąĮąŠ, ą▒ąĄąĘ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ąŠą┤ą░. ąĪą▓čÅąĘą░ąĮąĮčŗąĄ čü čŹč鹊ą╣ čäčāąĮą║čåąĖąĄą╣ ą▓čŗčģąŠą┤ąĮčŗąĄ ą┐ąŠčĆčéčŗ ą╝ąŠą│čāčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą┤ą╗čÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą╣ čāčüčéą░ąĮąŠą▓ą║ąĖ, čüą▒čĆąŠčüą░ ąĖą╗ąĖ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą▓ ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĖ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖąĖ čüąŠą▒čŗčéąĖčÅ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖčÅ (compare match). ąĢčüą╗ąĖ čüčĆą░ą▓ąĮąĖą▓ą░čéčī čü ą┤ą▓čāą╝čÅ ą┐čĆąĄą┤čŗą┤čāčēąĖą╝ąĖ ą╝ąĄč鹊ą┤ą░ą╝ąĖ, č鹊 ą┐ąŠčüą╗ąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ čŹč鹊 ą▒čāą┤ąĄčé ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ čü ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄą╝ ąŠą▒čŗčćąĮąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, ąĖ ąĮąĄ ą▒čāą┤ąĄčé čéčĆąĄą▒ąŠą▓ą░čéčī čéčĆą░čé ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąĮą░ ąŠą▒čĆą░ą▒ąŠčéą║čā čüąŠą▒čŗčéąĖą╣.
ąĪą╗ąĄą┤čāčÄčēąĖą╣ ą┐čĆąĖą╝ąĄčĆ ą║ąŠą┤ą░ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ čāčüčéą░ąĮąŠą▓ąĖčéčī ąĘąĮą░č湥ąĮąĖąĄ čüąŠą▓ą┐ą░ą┤ąĄąĮąĖčÅ ąĖ čĆą░ąĘčĆąĄčłąĖčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ ą┐ąŠčĆčéą░. ą×ą▒čŗčćąĮąŠ ąĮą░čüčéčĆąŠą╣ą║ą░ ą┤ąĄą╣čüčéą▓ąĖčÅ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ą┐ąŠčĆčéą░ ą┤ąĄą╗ą░ąĄčéčüčÅ ą┐čāč鹥ą╝ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą▓čāčģ ą▒ąĖč鹊ą▓ COMx0 ąĖ COMx1 ą▓ čĆąĄą│ąĖčüčéčĆąĄ TCCRx (ą▓ą╝ąĄčüč鹊 x ą┐ąŠą┤čüčéą░ą▓ą╗čÅąĄčéčüčÅ ąĮąŠą╝ąĄčĆ čéą░ą╣ą╝ąĄčĆą░, 1 ąĖą╗ąĖ 2). ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ Timer2 ą╝ąŠąČąĄčé ą▓čŗą│ą╗čÅą┤ąĄčéčī ą┐čĆąĖą╝ąĄčĆąĮąŠ čéą░ą║:
ldi r16, (1 << COM20)|(1 << CS20)
out TCCR2,r16 ; ą┐ąŠčĆčé OC2 ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą║ą╗čÄčćą░čéčīčüčÅ ą┐čĆąĖ čüąŠą▒čŗčéąĖąĖ compare match
; čćą░čüč鹊čéą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ čĆą░ą▓ąĮą░ čüąĖčüč鹥ą╝ąĮąŠą╣ čćą░čüč鹊č鹥 čÅą┤čĆą░
ldi r16,32
out OCR2,r16 ; ą▓ąĄą╗ąĖčćąĖąĮą░ ą┤ą╗čÅ čüčĆą░ą▓ąĮąĄąĮąĖčÅ (output compare value) ą▒čāą┤ąĄčé čĆą░ą▓ąĮą░ 32
ąöą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ą▓čŗą▓ąŠą┤ ą┐ąŠčĆčéą░ OCx ą╝ąŠą│ ą┐ąĄčĆąĄą║ą╗čÄčćą░čéčīčüčÅ, ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĮą░čüčéčĆąŠąĄąĮ ą║ą░ą║ ą▓čŗčģąŠą┤ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą▒ąĖčéą░ ą▓ čĆąĄą│ąĖčüčéčĆąĄ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ (data direction register, DDR). ąÜ čäčāąĮą║čåąĖąĖ OCx ą┐čĆąĖą▓čÅąĘą░ąĮą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮą░čÅ ąĮąŠąČą║ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą┐ąŠčĆčéą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
[ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ]
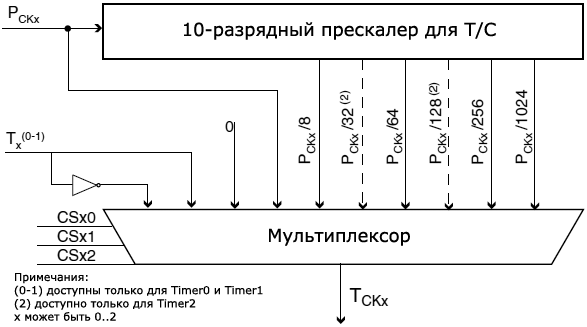
ąŻąĘąĄą╗ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆąŠą▓ AVR čüąŠčüč鹊ąĖčé ąĖąĘ ą┐čĆąĄą┤ą┤ąĄą╗ąĖč鹥ą╗čÅ (ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░), ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą║ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆčā. ą¤čĆąĄčüą║ą░ą╗ąĄčĆ ą╝ąŠąČąĮąŠ ąŠą┐ąĖčüą░čéčī ą║ą░ą║ čüčéčāą┐ąĄąĮčćą░čéčŗą╣ ą┤ąĄą╗ąĖč鹥ą╗čī čćą░čüč鹊čéčŗ. ą×ąĮ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą║ą░ą║ ą┤ą▓ąŠąĖčćąĮčŗą╣ čüč湥čéčćąĖą║ čü ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ ą▓čŗčģąŠą┤ąĮčŗą╝ąĖ čüąĖą│ąĮą░ą╗ą░ą╝ąĖ ąŠčé čĆą░ąĘąĮčŗčģ čüčéčāą┐ąĄąĮąĄą╣ čüč湥čéčćąĖą║ą░. ąöą╗čÅ AT90S8535 čŹč鹊 10-čĆą░ąĘčĆčÅą┤ąĮčŗą╣ čüč湥čéčćąĖą║, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ą┤ąĄą╗ąĄąĮąĖčÅ ą▓čģąŠą┤ąĮąŠą╣ čćą░čüč鹊čéčŗ ąĮą░ 4 čĆą░ąĘąĮčŗčģ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ ą┤ąĄą╗ąĄąĮąĖčÅ (ą▓ čüą╗čāčćą░ąĄ Timer2 čŹč鹊 6 ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą▓), čéą░ą║ čćč鹊 ą╝ąŠąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī čĆą░ąĘąĮčŗąĄ čéą░ą║č鹊ą▓čŗąĄ čćą░čüč鹊čéčŗ. ą£čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą░ ąĮčāąČąĮąŠą╣ ą┐ąŠą┤ąĄą╗ąĄąĮąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ ą▓ ą║ą░č湥čüčéą▓ąĄ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą┤ą╗čÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░. ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮ ą┤ą╗čÅ ą┐čĆąŠą┐čāčüą║ą░ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░, ąĖ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ ą▓čŗą▓ąŠą┤ą░ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĄą│ąŠ ą║ą░ą║ ą▓čģąŠą┤ą░ ą┤ą╗čÅ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░.
ążą░ą║čéąĖč湥čüą║ąĖ ąĖą╝ąĄąĄčéčüčÅ 2 čĆą░ąĘąĮčŗčģ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░, ąĮąŠ 3 čĆą░ąĘąĮčŗčģ čéą░ą╣ą╝ąĄčĆą░, čćč鹊 ą╝ąŠąČąĮąŠ čāą▓ąĖą┤ąĄčéčī ą▓ ą║ąŠąĮč鹥ą║čüč鹥 ą▓čŗą▒ąŠčĆą░ - ąĮą░ ą║ą░ą║ąŠą╝ ąĖčüč鹊čćąĮąĖą║ąĄ čéą░ą║č鹊ą▓ ąŠčüąĮąŠą▓ą░ąĮą░ ą┤ąĄą╗ąĖą╝ą░čÅ ą▓ąĄą╗ąĖčćąĖąĮą░ čćą░čüč鹊čéčŗ. ą×ą▒ą░ čéą░ą╣ą╝ąĄčĆą░ Timer0 ąĖ Timer1 čüąĖąĮčģčĆąŠąĮąĮčŗ čü čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹊ą╣ (čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ čÅą┤čĆą░ AVR) ą▓ ą║ą░č湥čüčéą▓ąĄ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąĮąĄčé ąŠą│čĆą░ąĮąĖč湥ąĮąĖą╣, ąĄčüą╗ąĖ ąŠą▒ą░ čüč湥čéčćąĖą║ą░ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ąŠą┤ąĖąĮ ąĖ č鹊čé ąČąĄ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ (ą┐čĆąĖ čŹč鹊ą╝ ą║ą░ąČą┤čŗą╣ čéą░ą╣ą╝ąĄčĆ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąŠčéą┤ąĄą╗čīąĮąŠ). ą×ą┤ąĮą░ą║ąŠ ą░čüąĖąĮčģčĆąŠąĮąĮąŠ čéą░ą║čéąĖčĆčāąĄą╝čŗą╣ Timer2 ąĮčāąČą┤ą░ąĄčéčüčÅ ą▓ čüąŠą▒čüčéą▓ąĄąĮąĮąŠą╝ ą┐čĆąĄčüą║ą░ą╗ąĄčĆąĄ, čćč鹊ą▒čŗ ą▒čŗčéčī ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗą╝ ąŠčé čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ.
ąØą░ čĆąĖčü. 1 ąĮąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ ąĖ čāąĘąĄą╗ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ čéą░ą╣ą╝ąĄčĆą░ ąĮą░ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆąĄ. ąöą░čéą░čłąĖčé ąĮą░ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┤ą░čüčé ą▒ąŠą╗čīčłąĄ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ ą▓čüąĄčģ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░čģ ąĖ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆą░čģ. ą×ą▒ąĘąŠčĆ ą▓ąŠąĘą╝ąŠąČąĮčŗčģ ąĮą░čüčéčĆąŠąĄą║ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą▓ čéą░ą▒ą╗ąĖčåąĄ 1. ąÆ čüą╗ąĄą┤čāčÄčēąĖčģ čüąĄą║čåąĖčÅčģ čŹč鹊 ą▒čāą┤ąĄčé čĆą░čüčüą╝ąŠčéčĆąĄąĮąŠ ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ.
ąóą░ą▒ą╗ąĖčåą░ 1. ą×ą▒ąĘąŠčĆ ąĮą░čüčéčĆąŠąĄą║ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ.
| TCCRx |
ąöą╗čÅ čüąĖąĮčģčĆąŠąĮąĮčŗčģ Timer0 ąĖ Timer1
PCK = CK |
ąöą╗čÅ čüąĖąĮčģčĆąŠąĮąĮąŠ/ą░čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ Timer2
PCK = f(AS2) |
| ąæąĖčé 2 |
ąæąĖčé 1 |
ąæąĖčé 0 |
| CSx2 |
CSx1 |
CSx0 |
TCK0,1 |
TCK2 |
| 0 |
0 |
0 |
0 (čéą░ą╣ą╝ąĄčĆ ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ) |
0 (čéą░ą╣ą╝ąĄčĆ ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ) |
| 0 |
0 |
1 |
PCK (čüąĖčüč鹥ą╝ąĮą░čÅ čćą░čüč鹊čéą░ čÅą┤čĆą░ AVR) |
PCK2 (čüąĖčüč鹥ą╝ąĮą░čÅ čćą░čüč鹊čéą░ / ą░čüąĖąĮčģčĆąŠąĮąĮąŠąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ) |
| 0 |
1 |
0 |
PCK / 8 |
PCK2 / 8 |
| 0 |
1 |
1 |
PCK / 64 |
PCK2 / 32 |
| 1 |
0 |
0 |
PCK / 256 |
PCK2 / 64 |
| 1 |
0 |
1 |
PCK / 1024 |
PCK2 / 128 |
| 1 |
1 |
0 |
ąÆąĮąĄčłąĮąĖą╣ ą▓čŗą▓ąŠą┤, čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠ čüą┐ą░ą┤čā čāčĆąŠą▓ąĮčÅ |
PCK2 / 256 |
| 1 |
1 |
1 |
ąÆąĮąĄčłąĮąĖą╣ ą▓čŗą▓ąŠą┤, čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠ ąĮą░čĆą░čüčéą░ąĮąĖčÄ čāčĆąŠą▓ąĮčÅ |
PCK2 / 1024 |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
1. ąÆąŠ ą▓čĆąĄą╝čÅ čĆą░ą▒ąŠčéčŗ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ čäčāąĮą║čåąĖąŠąĮąĖčĆčāąĄčé ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠ. ąÆ čüą╗čāčćą░čÅčģ, ą║ąŠą│ą┤ą░ čéą░ą╣ą╝ąĄčĆ ą┤ąŠą╗ąČąĄąĮ ą┤ąĄą╗ą░čéčī ąŠčéčüč湥čéčŗ ąŠč湥ąĮčī č鹊čćąĮąŠ, ąĮčāąČąĮąŠ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī, čćč鹊ą▒čŗ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ ąĮą░čćąĖąĮą░ą╗ čüčćąĖčéą░čéčī ąŠčé ąĮčāą╗čÅ. ąÆ ą╝ąŠą┤ąĄą╗čÅčģ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓, ą│ą┤ąĄ ąĮąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ čüą▒čĆąŠčüą░ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░, ą╝ąŠą╝ąĄąĮčé ą┐ąĄčĆąĄčģąŠą┤ą░ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ č湥čĆąĄąĘ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ ą╝ąŠąČąĮąŠ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░čéčī ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╝ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĖ, ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī čĆąĄą│ąĖčüčéčĆ čéą░ą╣ą╝ąĄčĆą░/čüč湥čéčćąĖą║ą░ TCNTx.
2. ąÆ ąĮąŠą▓čŗčģ čāčüčéčĆąŠą╣čüčéą▓ą░čģ, ą│ą┤ąĄ ąĖą╝ąĄąĄčéčüčÅ ąŠą▒čēąĖą╣ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ, ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ čüą▒čĆąŠčüą░ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ą┐ąŠą▓ą╗ąĖčÅąĄčé ąĮą░ ą▓čüąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗąĄ ą║ ąĮąĄą╝čā čéą░ą╣ą╝ąĄčĆčŗ.
ąĀąĖčü. 1. ą¤čĆąĄą┤ą┤ąĄą╗ąĖč鹥ą╗čī (ą┐čĆąĄčüą║ą░ą╗ąĄčĆ).
ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ąŠčé čćą░čüč鹊čéčŗ čÅą┤čĆą░ (System Clock). ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ čüąĖčüč鹥ą╝ąĮą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą┤ą╗čÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░. ąöą░ąČąĄ ąĄčüą╗ąĖ ą▒čŗą╗ąŠ ą▓čŗą▒čĆą░ąĮąŠ ą┐ąŠą┤ąĄą╗ąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čćą░čüč鹊čéčŗ ą▓ą╝ąĄčüč鹊 čüąĖčüč鹥ą╝ąĮąŠą╣ čćą░čüč鹊čéčŗ, čŹčéą░ ą┐ąŠą┤ąĄą╗ąĄąĮąĮą░čÅ čćą░čüč鹊čéą░ ąŠčüąĮąŠą▓ą░ąĮą░ ąĮą░ čćą░čüč鹊č鹥 čüąĖčüč鹥ą╝ąĮčŗčģ čéą░ą║č鹊ą▓. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ čéą░ą╣ą╝ąĄčĆą░ čüąĖąĮčģčĆąŠąĮąĮą░ čü čüąĖčüč鹥ą╝ąĮąŠą╣ čćą░čüč鹊č鹊ą╣ čéą░ą║č鹊ą▓.
ąÆčüąĄ 3 čéą░ą╣ą╝ąĄčĆą░ AT90S8535 ąĖ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ čéą░ą╣ą╝ąĄčĆąŠą▓ ą┤čĆčāą│ąĖčģ AVR ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé čŹčéčā ąŠą┐čåąĖčÄ. ąöąŠčüč鹊ąĖąĮčüčéą▓ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠčé čćą░čüč鹊čéčŗ čÅą┤čĆą░ ą▓ č鹊ą╝, čćč鹊 ą┤ą╗čÅ čŹč鹊ą│ąŠ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ ą▓ąĮąĄčłąĮąĖčģ čüčģąĄą╝. ąśąĘ-ąĘą░ ą▓čŗčüąŠą║ąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ čüąĖčüč鹥ą╝čŗ ą╝ąŠąČąĮąŠ ąŠčéčüą╗ąĄąČąĖą▓ą░čéčī ą║ąŠčĆąŠčéą║ąĖąĄ ąŠčéčĆąĄąĘą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ.
ą¦ą░čüč鹊čéą░ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ čÅą▓ą╗čÅąĄčéčüčÅ čģąŠčĆąŠčłąĖą╝ ąĖąĮą┤ąĖą║ą░č鹊čĆąŠą╝ čĆą░ąĘą╝ąĄčĆą░ čäčĆąĄą╣ą╝ą░ ą▓čĆąĄą╝ąĄąĮąĖ, ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ ą║ąŠč鹊čĆąŠą│ąŠ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī čéą░ą╣ą╝ąĄčĆ. ążąŠčĆą╝čāą╗ą░ ąĮąĖąČąĄ (ą▓čŗčćąĖčüą╗ąĄąĮąĖąĄ čćą░čüč鹊čéčŗ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ TOVCK) ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓ąĘą░ąĖą╝ąŠčüą▓čÅąĘčī ą╝ąĄąČą┤čā čćą░čüč鹊č鹊ą╣ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ TOVCK, ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ ą┤ą╗čÅ čüč湥čéčćąĖą║ą░ čéą░ą╣ą╝ąĄčĆą░ (MaxVal), čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ (CK) ąĖ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ ą┤ąĄą╗ąĄąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ (PVal):
fCK (PCKx/PVal) PCKx
TOVCK = --------- = ------------- = -----------------
MaxVal MaxVal (PVal * MaxVal) |
|
(ążąŠčĆą╝čāą╗ą░ 2) |
ą¤čĆąĄą┤ą┐ąŠą╗ąŠąČąĖą╝, čćč鹊 čÅą┤čĆąŠ AVR čĆą░ą▒ąŠčéą░ąĄčé čćą░čüč鹊č鹥 fCPU = 3.69 ą£ąōčå, čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčī čéą░ą╣ą╝ąĄčĆą░ 8 ą▒ąĖčét (MaxVal = 256). ąĢčüą╗ąĖ ą▓čŗą▒čĆą░čéčī ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą┤ąĄą╗ąĄąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ 64, č鹊 čéą░ą╣ą╝ąĄčĆ ą▒čāą┤ąĄčé čéą░ą║čéąĖčĆąŠą▓ą░čéčīčüčÅ ąŠčé čćą░čüč鹊čéčŗ TCK = 3.69 MHz/64, čéą░ą║ čćč鹊 ą▒čāą┤ąĄčé ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī 225 ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖą╣ čéą░ą╣ą╝ąĄčĆą░ ą▓ čüąĄą║čāąĮą┤čā. ąÆąŠčé ą║ąŠčĆčĆąĄą║čéąĮąŠąĄ ą╝ą░č鹥ą╝ą░čéąĖč湥čüą║ąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ:
fCK (3.69 ą£ąōčå / 64)
TOVCK = --------- = ------------------ = ~225
MaxVal 256
ą¤čĆąĖ 225 ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅčģ čéą░ą╣ą╝ąĄčĆą░ ą▓ čüąĄą║čāąĮą┤čā ą┐ąŠą╗čāčćą░ąĄčéčüčÅ, čćč鹊 ą╝ąĄąČą┤čā ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅą╝ąĖ ą▒čāą┤ąĄčé ą┐čĆąŠčģąŠą┤ąĖčéčī 4.4 ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤čŗ. ąĪ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╝ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą╝ ą┤ąĄą╗ąĄąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčé ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ ą▒čāą┤ąĄčé ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī ą║ą░ąČą┤čāčÄ 71 ą╝čü, ą░ čü ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╝ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą╝ ą┤ąĄą╗ąĄąĮąĖčÅ ą║ą░ąČą┤čŗąĄ 69 ą╝ą║čü. ąÆ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąĄ čüą╗čāčćą░ąĄą▓ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąĮą░čüčéčĆąŠąĄą║ ą╝ąŠą│čāčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮčŗ čĆą░ąĘąĮčŗąĄ ą╝ąĄč鹊ą┤čŗ. ąóčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą▒čāą┤čāčé ąĘą░ą┤ą░ą▓ą░čéčī čćą░čüč鹊čéčā ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖą╣ čéą░ą╣ą╝ąĄčĆą░. ąæą░ąĘąĖčĆčāčÅčüčī ąĮą░ ąĮąĄą╣, ąĖ ąĮą░ ąĖą╝ąĄčÄčēąĄą╣čüčÅ čćą░čüč鹊č鹥 čéą░ą║č鹊ą▓ čÅą┤čĆą░ ą▓ą╝ąĄčüč鹥 čü čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčīčÄ čéą░ą╣ą╝ąĄčĆą░ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ą╝ąŠą│čāčé ą▒čŗčéčī ą▓čŗčćąĖčüą╗ąĄąĮčŗ ą┐ąŠ čüą╗ąĄą┤čāčÄčēąĄą╣ č乊čĆą╝čāą╗ąĄ:
PCKx
PVal = -----------------
(TOV * MaxVal) |
|
(ążąŠčĆą╝čāą╗ą░ 3) |
ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ ąĮą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ ą┤ą╗čÅ Timer0 ą╝ąŠąČąĄčé ą▓čŗą│ą╗čÅą┤ąĄčéčī ą║ą░ą║ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą║ąŠą┤ą░. ąŁčéąĖ čüčéčĆąŠą║ąĖ čāčüčéą░ąĮąŠą▓čÅčé ąĘąĮą░č湥ąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ą▓ TCCR0 ą┤ą╗čÅ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ ą┤ąĄą╗ąĄąĮąĖčÅ 1024 (čüą╝. čéą░ą▒ą╗ąĖčåčā 1).
ldi r16, (1 << CS02)|(1 << CS00)
out TCCR0,r16 ; čćą░čüč鹊čéą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ = system clock/1024
ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ąŠčé ą░čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░. ąÆ ąŠčéą╗ąĖčćąĖąĄ ąŠčé ą┤ą▓čāčģ ą┤čĆčāą│ąĖčģ čéą░ą╣ą╝ąĄčĆąŠą▓, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé čŹč鹊čé ą▓ą░čĆąĖą░ąĮčé čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ, Timer2 ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ AT90S8535 ą╝ąŠąČąĄčé ą░čüąĖąĮčģčĆąŠąĮąĮąŠ čéą░ą║čéąĖčĆąŠą▓ą░čéčīčüčÅ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ čéą░ą║č鹊ą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░. ąöą╗čÅ čŹč鹊ą╣ čåąĄą╗ąĖ ą║ ą▓čŗą▓ąŠą┤ą░ą╝ TOSC1 ąĖ TOSC2 ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ą▓ą░čĆčåąĄą▓čŗą╣ ąĖą╗ąĖ ą║ąĄčĆą░ą╝ąĖč湥čüą║ąĖą╣ čĆąĄąĘąŠąĮą░č鹊čĆ - čŹč鹊 ą▓čŗą▓ąŠą┤čŗ, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą┤čüąŠąĄą┤ąĖąĮąĄąĮčŗ ą║ ą▓čüčéčĆąŠąĄąĮąĮąŠą╝čā ą│ąĄąĮąĄčĆą░č鹊čĆčā.
ąÆčüčéčĆąŠąĄąĮąĮčŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ ąĮą░ ą▓čŗą▓ąŠą┤ą░čģ TOSC1 ąĖ TOSC2 ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ čćą░čüąŠą▓ąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░ ąĮą░ čćą░čüč鹊čéčā 32.768 ą║ąōčå. ąŁčéą░ čćą░čüč鹊čéą░ čģąŠčĆąŠčłąŠ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čćą░čüąŠą▓ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (Real Time Clocks, RTC)(1). ą¤ąŠą║ą░ąĘą░ąĮąŠ ą│ą╗ą░ą▓ąĮąŠąĄ ą┤ąŠčüč鹊ąĖąĮčüčéą▓ąŠ ąŠčéą┤ąĄą╗čīąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ - ąŠąĮą░ ąĮąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé čüąĖčüč鹥ą╝ąĮąŠą╣ čćą░čüč鹊čéčŗ čÅą┤čĆą░ AVR. ąŁč鹊 ą┤ąĄą╗ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮčŗą╝ čĆą░ą▒ąŠčéčā ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĮą░ ą▓čŗčüąŠą║ąŠą╣ čćą░čüč鹊č鹥, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ čéą░ą╣ą╝ąĄčĆ čéą░ą║čéąĖčĆčāąĄčéčüčÅ ąŠčé ą▓ąĮąĄčłąĮąĖčģ čéą░ą║č鹊ą▓ čü čćą░čüč鹊č鹊ą╣, ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ą┐ąŠą┤ č鹊čćąĮčŗą╣ ąŠčéčüč湥čé ą▓čĆąĄą╝ąĄąĮąĖ. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą╝ąŠąČąĮąŠ ą┐ąĄčĆąĄą║ą╗čÄčćą░čéčī čÅą┤čĆąŠ ą▓ čĆąĄąČąĖą╝čŗ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ, čćč鹊 ąĮąĄ ą┐ąŠą▓ą╗ąĖčÅąĄčé ąĮą░ čĆą░ą▒ąŠčéčā ą░čüąĖąĮčģčĆąŠąĮąĮąŠ čéą░ą║čéąĖčĆčāąĄą╝ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (1): ą▓ąĮąĄčłąĮčÅčÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓ ąĖąĮč鹥čĆą▓ą░ą╗ąĄ 0 ąōčå .. 256 ą║ąōčå, ąĖ čü ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ CK/4.
ąÉčüąĖąĮčģčĆąŠąĮąĮąŠąĄ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ čéčĆąĄą▒čāąĄčé čāč湥čéą░ ąĮąĄą║ąŠč鹊čĆčŗčģ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗčģ čāčüą╗ąŠą▓ąĖą╣. ą¤ąŠčüą║ąŠą╗čīą║čā čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ Timer2 ą░čüąĖąĮčģčĆąŠąĮąĮąŠ, č鹊 čüąŠą▒čŗčéąĖčÅ čéą░ą╣ą╝ąĄčĆą░ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆčāčÄčéčüčÅ čü čÅą┤čĆąŠą╝ AVR. ąŁč鹊 čéčĆąĄą▒čāąĄčé, čćč鹊ą▒čŗ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ čéą░ą╣ą╝ąĄčĆą░ ą▒čŗą╗ą░ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ą▓č湥čéą▓ąĄčĆąŠ ą╝ąĄąĮčīčłąĄ, č湥ą╝ čüąĖčüč鹥ą╝ąĮą░čÅ čćą░čüč鹊čéą░ čÅą┤čĆą░ (čé. ąĄ. ą▓ąĮčāčéčĆąĄąĮąĮčÅčÅ čćą░čüč鹊čéą░ čÅą┤čĆą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ą▓ 4 čĆą░ąĘą░ ą▓čŗčłąĄ čćą░čüč鹊čéčŗ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░). ąĪ ą┤čĆčāą│ąŠą╣ čüč鹊čĆąŠąĮčŗ, ąĮčāąČąĮąŠ ąĖąĘą▒ąĄą│ą░čéčī ą║ąŠąĮčäą╗ąĖą║č鹊ą▓ ą╝ąĄąČą┤čā čüąĖąĮčģčĆąŠąĮąĮčŗą╝ ąĖ ą░čüąĖąĮčģčĆąŠąĮąĮčŗą╝ ą┤ąŠčüčéčāą┐ąŠą╝. ąŁč鹊 ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┐čāč鹥ą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓. ąæąĖčéčŗ čüąŠčüč鹊čÅąĮąĖčÅ čüąĖą│ąĮą░ą╗ąĖąĘąĖčĆčāčÄčé, čćč鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓. ąĪą╝. ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ ą▓ ąŠą┐ąĖčüą░ąĮąĖąĖ Asynchronous Status Register (ASSR) ą▓ ą┤ą░čéą░čłąĖč鹥 ąĮą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ.
ą¦ą░čüč鹊čéą░ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ TOVCK ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ą┐ąŠ č乊čĆą╝čāą╗ąĄ 2, ąĮąŠ ą▓ą╝ąĄčüč鹊 čüąĖčüč鹥ą╝ąĮąŠą╣ čćą░čüč鹊čéčŗ ą▓ č乊čĆą╝čāą╗čā ą┐ąŠą┤čüčéą░ą▓ą╗čÅąĄčéčüčÅ čćą░čüč鹊čéą░ ą│ąĄąĮąĄčĆą░č鹊čĆą░. ąØą░čüčéčĆąŠą╣ą║ąĖ TCCR2 ą┤ą░ąĮčŗ ą▓ čéą░ą▒ą╗ąĖčåąĄ 1. ąÆčģąŠą┤ąĮą░čÅ čćą░čüč鹊čéą░ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ PCK2 čÅą▓ą╗čÅąĄčéčüčÅ čäčāąĮą║čåąĖąĄą╣ ą▒ąĖčéą░ AS2 ą▓ čĆąĄą│ąĖčüčéčĆąĄ ASSR. ąĢčüą╗ąĖ čŹč鹊čé ą▒ąĖčé ąŠčćąĖčēąĄąĮ, č鹊 čéą░ą╣ą╝ąĄčĆ čĆą░ą▒ąŠčéą░ąĄčé ą▓ čüąĖąĮčģčĆąŠąĮąĮąŠą╝ čĆąĄąČąĖą╝ąĄ ąŠčé čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ. ąĢčüą╗ąĖ čŹč鹊čé ą▒ąĖčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 ą┤ą╗čÅ ą▓čģąŠą┤ąĮąŠą╣ čćą░čüč鹊čéčŗ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą░čüąĖąĮčģčĆąŠąĮąĮčŗą╣ čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ ą▓čŗą▓ąŠą┤ąŠą▓ TOSC1 ąĖ TOSC2.
ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ ąĮą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ ą┤ą╗čÅ Timer2 ą╝ąŠąČąĄčé ą▓čŗą│ą╗čÅą┤ąĄčéčī ą║ą░ą║ ą▓ ą┐čĆąĖą╝ąĄčĆąĄ ą║ąŠą┤ą░ ąĮąĖąČąĄ. ąŁčéąĖ 2 čüčéčĆąŠą║ąĖ čāčüčéą░ąĮąŠą▓čÅčé ąĮą░čüčéčĆąŠą╣ą║čā ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ą▓ TCCR2 ąĮą░ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą┤ąĄą╗ąĄąĮąĖčÅ 1024 (čüą╝. čéą░ą▒ą╗ąĖčåčā 1).
ldi r16, (1 << CS22)|(1 << CS21)|(1 << CS20)
out TCCR2,r16 ; čćą░čüč鹊čéą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ = system clock/1024
ąÆąĮąĄčłąĮąĄąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ. ąÆąĮąĄčłąĮąĄąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ čéą░ą╣ą╝ąĄčĆą░ą╝ąĖ Timer0 ąĖ Timer1. ąŁč鹊čé čĆąĄąČąĖą╝ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čłąĖčĆąŠą║ąĖą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ ą▓ąĮąĄčłąĮąĖčģ čüąĖą│ąĮą░ą╗ąŠą▓ ą▓ ą║ą░č湥čüčéą▓ąĄ čéą░ą║č鹊ą▓čŗčģ čćą░čüč鹊čé. ąŁč鹊 čüąĖąĮčģčĆąŠąĮąĮąŠąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ, čćč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čÅą┤čĆąŠ ą┤ąĄč鹥ą║čéąĖčĆčāąĄčé čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ ąĖ čéą░ą║čéąĖčĆčāąĄčé čéą░ą╣ą╝ąĄčĆ čüąĖąĮčģčĆąŠąĮąĮąŠ čü čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹊ą╣, ąĄčüą╗ąĖ ą▒čŗą╗ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮ ą▓ąĮąĄčłąĮąĖą╣ čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗. ą¤ąŠ ą║ą░ąČą┤ąŠą╝čā čäčĆąŠąĮčéčā ąĮą░čĆą░čüčéą░ąĮąĖčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čéą░ą║čéą░ čÅą┤čĆą░ ą┤ąĄą╗ą░ąĄčéčüčÅ ą▓čŗą▒ąŠčĆą║ą░ ą▓ąĮąĄčłąĮąĄą│ąŠ čéą░ą║č鹊ą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░. ąöą╗čÅ čÅą┤čĆą░ ąĮčāąČąĮąŠ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 2 čéą░ą║čéą░ čÅą┤čĆą░ ą┤ą╗čÅ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĮą░ ą▓ąĮąĄčłąĮąĄą╝ čéą░ą║č鹊ą▓ąŠą╝ ą▓čģąŠą┤ąĄ, čéą░ą║ čćč鹊 ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ą▓ąĮąĄčłąĮąĖčģ čéą░ą║č鹊ą▓ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĮąĄ ą▒ąŠą╗ąĄąĄ č湥ą╝ CK/2. ąöą╗čÅ ąĖąĮą┤ąĖą║ą░čåąĖąĖ ą▓ąĮąĄčłąĮąĄą│ąŠ čüąŠą▒čŗčéąĖčÅ čéą░ą║čéą░ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą╗ąĖą▒ąŠ čäčĆąŠąĮčé, ą╗ąĖą▒ąŠ čüą┐ą░ą┤ ą▓ąĮąĄčłąĮąĄą│ąŠ čéą░ą║č鹊ą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ T0/T1. ąŁč鹊čé ą▓čŗą▒ąŠčĆ ą┤ąĄą╗ą░ąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ TCCRx ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖč鹊ą▓ CS00, CS01 ąĖ CS02 (čüą╝. čéą░ą▒ą╗ąĖčåčā 1).
ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ ąĮą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ ą┤ą╗čÅ Timer0 ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą│ą╗čÅą┤ąĄčéčī ą║ą░ą║ ą▓ ą┐čĆąĖą╝ąĄčĆąĄ ą║ąŠą┤ą░ ąĮąĖąČąĄ. ąŁčéąĖ čüčéčĆąŠą║ąĖ ąĮą░čüčéčĆąŠčÅčé ą▓čŗą▓ąŠą┤ T0 ą▓ ą║ą░č湥čüčéą▓ąĄ ą▓čģąŠą┤ą░ ą┤ą╗čÅ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ čéą░ą╣ą╝ąĄčĆą░, ą░ą║čéąĖą▓ąĮčŗą╝ ą┐ąĄčĆąĄą┐ą░ą┤ąŠą╝ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą▒čāą┤ąĄčé čäčĆąŠąĮčé ąĮą░čĆą░čüčéą░ąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ (čüą╝. čéą░ą▒ą╗ąĖčåčā 1).
ldi r16, (1 << CS02)|(1 << CS01)|(1 << CS00)
out TCCR0,r16 ; čćą░čüč鹊čéą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ = ą▓ąĮąĄčłąĮąĖą╣ ą▓čŗą▓ąŠą┤ T0,
; ą┐ąŠ čäčĆąŠąĮčéčā ąĮą░čĆą░čüčéą░ąĮąĖčÅ
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓ą░ąČąĮąŠ ąĮą░čüčéčĆąŠąĖčéčī ą▓čŗą▓ąŠą┤ T0 ą║ą░ą║ ą▓čģąŠą┤ č湥čĆąĄąĘ čĆąĄą│ąĖčüčéčĆ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ (Data Direction Register) ą┐ąŠčĆčéą░ B (DDRB). ąØą░čüčéčĆąŠą╣ą║ą░ čĆąĄą│ąĖčüčéčĆą░ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĮąĄ ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ąĮą░čüčéčĆąŠą╣ą║ąŠą╣ čéą░ą╣ą╝ąĄčĆą░, ą┐ąŠč鹊ą╝čā čćč鹊 čŹč鹊 čéą░ą║ąČąĄ čĆą░ąĘčĆąĄčłąĄąĮąŠ ą▓ AVR ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ čéą░ą║čéąĖčĆčāąĄą╝ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░. T0 ąĖ T1 ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ąĖą╗ąĖ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ) ąĮą░čüčéčĆąŠąĄąĮčŗ ą║ą░ą║ ą▓čģąŠą┤čŗ.
ąÜą░ą║ ąŠčüčéą░ąĮąŠą▓ąĖčéčī čéą░ą╣ą╝ąĄčĆ. ą×čüčéą░ąĮąŠą▓ą║ą░ čéą░ą╣ą╝ąĄčĆą░, čćč鹊ą▒čŗ ąŠąĮ ą┐čĆąĄą║čĆą░čéąĖą╗ čüč湥čé, ąŠč湥ąĮčī ą┐čĆąŠčüčéą░. ąØčāą╗ąĄą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ą▓ čĆąĄą│ąĖčüčéčĆąĄ TCCRx ąŠčüčéą░ąĮąŠą▓ąĖčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čéą░ą╣ą╝ąĄčĆ (čüą╝. čéą░ą▒ą╗ąĖčåčā 1). ą×ą┤ąĮą░ą║ąŠ ą┐ąŠą╝ąĮąĖč鹥, čćč鹊 ą┐čĆąĄčüą║ą░ą╗ąĄčĆ ą▓čüąĄ čĆą░ą▓ąĮąŠ čĆą░ą▒ąŠčéą░ąĄčé.
ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ ąĮą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ ą┤ą╗čÅ Timer0 ą╝ąŠąČąĄčé ą▓čŗą│ą╗čÅą┤ąĄčéčī ą║ą░ą║ ą▓ ą┐čĆąĖą╝ąĄčĆąĄ ą║ąŠą┤ą░ ąĮąĖąČąĄ.
clr r16
out TCCR0,r16 ; ąĘą░ą┐ąĖčüčī 0 ą▓ TCCR0 ąŠčüčéą░ąĮąŠą▓ąĖčé Timer0
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┤čĆčāą│ąĖąĄ čĆąĄą│ąĖčüčéčĆčŗ TCCRx ą╝ąŠą│čāčé čüąŠą┤ąĄčƹȹ░čéčī ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčŗąĄ ą▒ąĖčéčŗ ą┐ąŠą╝ąĖą╝ąŠ ą▒ąĖč鹊ą▓ ą▓čŗą▒ąŠčĆą░ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ (CSxx). ą¤ąŠčŹč鹊ą╝čā ą┐čĆąĖą╝ąĄčĆ ą▓čŗčłąĄ čéą░ą║ąČąĄ čüą▒čĆąŠčüąĖčé ąĖ čŹčéąĖ ą▒ąĖčéčŗ. ąÆ ą┐čĆąĖą╝ąĄčĆąĄ ąĮąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮąŠ, ą║ą░ą║ čŹč鹊ą│ąŠ ą╝ąŠąČąĮąŠ ąĖąĘą▒ąĄąČą░čéčī, čćč鹊 ą┐ąŠčéčĆąĄą▒čāąĄčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ čüčéčĆąŠą║ąĖ ą║ąŠą┤ą░:
in r16,TCCR0 ; ąĘą░ą│čĆčāąĘą║ą░ č鹥ą║čāčēąĄą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ TCCR0
andi r16, ~((1 << CS02)|(1 << CS01)|(1 << CS00))
; ąŠčćąĖčüčéą║ą░ CS02,CS01,CS00
out TCCR0,r16 ; ąĘą░ą┐ąĖčüčī ąĮčāą╗čÅ čā ą▒ąĖčéčŗ CS02, CS01, ąĖ CS00 čĆąĄą│ąĖčüčéčĆą░ TCCR0
; ąŠčüčéą░ąĮąŠą▓ąĖčé Timer0. ąöčĆčāą│ąĖąĄ ą▒ąĖčéčŗ ąŠčüčéą░ąĮčāčéčüčÅ ąĮąĄčéčĆąŠąĮčāčéčŗą╝ąĖ.
[ąØą░čüčéčĆąŠą╣ą║ą░ čéą░ą╣ą╝ąĄčĆąŠą▓]
ąÆ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ą┐ąŠą║ą░ąĘą░ąĮčŗ ą║ąŠąĮą║čĆąĄčéąĮčŗąĄ ą┐čĆąĖą╝ąĄčĆčŗ - ą║ą░ą║ ąĮą░čüčéčĆąŠąĖčéčī čéčĆąĖ čĆą░ąĘąĮčŗąĄ čéą░ą╣ą╝ąĄčĆą░. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąĄčüčéčī ą▓ ą┤ą░čéą░čłąĖčéą░čģ ąĖ ą░ą┐ąĮąŠčāčéą░čģ, ą┐čĆąĖą▓ąĄą┤ąĄąĮąĮčŗčģ ą▓ čĆą░ąĘą┤ąĄą╗ąĄ "ąĪčüčŗą╗ą║ąĖ", ą║ ąĮąĖą╝ čüą╗ąĄą┤čāąĄčé ą▓ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéąĖ ąŠą▒čĆą░čéąĖčéčīčüčÅ ą▓ č鹥čģ čüą╗čāčćą░čÅčģ, ą║ąŠą│ą┤ą░ ąĮą░čüčéčĆąŠą╣ą║ą░ čéą░ą╣ą╝ąĄčĆą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐ąŠčĆčéąĖčĆąŠą▓ą░ąĮą░ ąĮą░ ą┤čĆčāą│ąĖąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ (ą┐čĆąĖą╝ąĄčĆčŗ čĆą░čüčüčćąĖčéą░ąĮčŗ ąĮą░ AT90S8535). ąöą╗čÅ čĆąĄą░ą│ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĮą░ čüąŠą▒čŗčéąĖčÅ čéą░ą╣ą╝ąĄčĆąŠą▓ čćą░čēąĄ ą▓čüąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą┐ąŠčŹč鹊ą╝čā ą▓ ą┐čĆąĖą╝ąĄčĆą░čģ ąĮąĖąČąĄ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮčŗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ąØąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé čĆą░ąĘąĮčŗčģ ą▓ąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣ čéčĆąĄčģ čéą░ą╣ą╝ąĄčĆąŠą▓, čā ąĮąĖčģ čā ą▓čüąĄčģ ąĄčüčéčī ą┤ą▓ąĄ ąŠą▒čēąĖąĄ č湥čĆčéčŗ. ąóą░ą╣ą╝ąĄčĆ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ąĮą░ čüč湥čé ą┐čāč鹥ą╝ ą▓čŗą▒ąŠčĆą░ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ, ąĖ ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, č鹊 ąŠąĮąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮčŗ.
ą×ą▒čēąĖąĄ čĆąĄą│ąĖčüčéčĆčŗ. ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ąŠą▒čēąĖąĄ čĆąĄą│ąĖčüčéčĆčŗ ą▓ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (ISR) ąĖ ąŠčüąĮąŠą▓ąĮąŠą╝ ą║ąŠą┤ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, č鹊 čŹčéąĖ čĆąĄą│ąĖčüčéčĆčŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ čüąŠčģčĆą░ąĮąĄąĮčŗ ą▓ ąĮą░čćą░ą╗ąĄ ISR, ąĖ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą┐ąŠ ąŠą║ąŠąĮčćą░ąĮąĖąĖ ISR. ąĢčüą╗ąĖ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ąĮąĄ ą▓čüąĄ 32 čĆąĄą│ąĖčüčéčĆą░, č鹊 ą╝ąŠąČąĮąŠ ąĖąĘą▒ąĄąČą░čéčī ą┐čĆąŠčåąĄą┤čāčĆčŗ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ąĖ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ čĆąĄą│ąĖčüčéčĆąŠą▓ ą┐čāč鹥ą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čĆą░ąĘąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ ą║ąŠą┤ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĖ ą▓ ISR.
ą×č湥ąĮčī ą▓ą░ąČąĮąŠ ą┐ąŠą╝ąĮąĖčéčī, čćč鹊 ąĮčāąČąĮąŠ čüąŠčģčĆą░ąĮąĖčéčī čĆąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ (Status Register, SREG), ą┐ąŠč鹊ą╝čā čćč鹊 ISR čŹč鹊 ąĮąĄ ą┤ąĄą╗ą░ąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓čüąĄ ą▓čŗčłąĄą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮąŠąĄ ą║ą░čüą░ąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čÅąĘčŗą║ą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░. ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čÅąĘčŗą║ C, č鹊 ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆ C ą▓čüąĄ čŹč鹊 ą┤ąĄą╗ą░ąĄčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ.
[8-bit Timer0]
8-čĆą░ąĘčĆčÅą┤ąĮčŗą╣ čéą░ą╣ą╝ąĄčĆ Timer0 čÅą▓ą╗čÅąĄčéčüčÅ čüąĖąĮčģčĆąŠąĮąĮčŗą╝ čéą░ą╣ą╝ąĄčĆąŠą╝. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąŠąĮ čéą░ą║čéąĖčĆčāąĄčéčüčÅ ąŠčé čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ (ą▓ąŠąĘą╝ąŠąČąĮąŠ ą┐ąŠą┤ąĄą╗ąĄąĮąĮąŠą╣ ą┐čĆąĄčüą║ą░ą╗ąĄčĆąŠą╝), ąĖą╗ąĖ ąŠčé ą▓ąĮąĄčłąĮąĄą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ (ą▓ąŠąĘą╝ąŠąČąĮąŠ čéą░ą║ąČąĄ ą┐ąŠą┤ąĄą╗ąĄąĮąĮąŠą╣ ą┐čĆąĄčüą║ą░ą╗ąĄčĆąŠą╝), ą║ąŠč鹊čĆą░čÅ ą▓čüąĄ čĆą░ą▓ąĮąŠ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆčāąĄčéčüčÅ čü čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹊ą╣ (ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. čĆą░ąĘą┤ąĄą╗ "ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ"). ąŁč鹊čé čéą░ą╣ą╝ąĄčĆ čüą░ą╝čŗą╣ ą┐čĆąŠčüč鹊ą╣ ąĖąĘ ą▓čüąĄčģ čéčĆąĄčģ. ąöą╗čÅ ąĄą│ąŠ ąĘą░ą┐čāčüą║ą░ ąĮčāąČąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī č鹊ą╗čīą║ąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ čāčüčéą░ąĮąŠą▓ąŠą║.
ąŚą┤ąĄčüčī ą▒čāą┤ąĄčé ą┐ąŠą║ą░ąĘą░ąĮąŠ, ą║ą░ą║ Timer0 ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ Timer Overflow Interrupt. ąÆ ą║ąŠą┤ąĄ ISR ą┤ą╗čÅ ą┐čĆąĖą╝ąĄčĆą░ ą▒čāą┤čāčé ą┐ąĄčĆąĄą║ą╗čÄčćą░čéčīčüčÅ ą▓čŗą▓ąŠą┤čŗ ą┐ąŠčĆčéą░ B. ą¦č鹊ą▒čŗ čŹč鹊 ą▒čŗą╗ąŠ ą▓ąĖą┤ąĮąŠ, ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐ą╗ą░čéčā čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ STK500. ąÆ ąĮąĄą╣ ą┐ąŠčĆčé B ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ą╝ 10-ąČąĖą╗čīąĮčŗą╝ ą╗ąĄąĮč鹊čćąĮčŗą╝ ą║ą░ą▒ąĄą╗ąĄą╝. ąĪą▓ąĄč鹊ą┤ąĖąŠą┤čŗ (LED) ą▒čāą┤čāčé ą╝ąĖą│ą░čéčī čü čćą░čüč鹊č鹊ą╣ fLED, ą║ąŠč鹊čĆčāčÄ ą╝ąŠąČąĮąŠ ą▓čŗčćąĖčüą╗ąĖčéčī ą┐ąŠ č乊čĆą╝čāą╗ąĄ:
fCK (CK/ PVal) CK
fLED = --------- = ------------- = ---------------------
MaxVal 2 * MaxVal 2 * (PVal * MaxVal)
ąŻ ąĮą░čłąĄą│ąŠ 8-čĆą░ąĘčĆčÅą┤ąĮąŠą│ąŠ Timer0 ą▓ąĄą╗ąĖčćąĖąĮą░ MaxVal = 256, ąĖ čüąĖčüč鹥ą╝ąĮą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čé CK = 3.69 ą£ąōčå, ą┐ąŠą┤ąĄą╗ąĄąĮąĮą░čÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆąŠą╝ ąĮą░ ą▓ąĄą╗ąĖčćąĖąĮčā PVal = 1024, čćč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ čćą░čüč鹊č鹥 ą╝ąĄčĆčåą░ąĮąĖčÅ LED fLED ą┐čĆąĖą╝ąĄčĆąĮąŠ 7 ąōčå. ąØą░čüčéčĆąŠą╣ą║ą░ ą┐ąŠą║ą░ąĘą░ąĮą░ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą║ąŠą┤ą░:
init_Ex1:
ldi r16, (1 << CS02)|(1 << CS00)
out TCCR0,r16 ; čćą░čüč鹊čéą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ = system clock / 1024
ldi r16, 1 << TOV0
out TIFR,r16 ; ą×čćąĖčüčéą║ą░ TOV0 (čüą▒čĆąŠčü ąŠąČąĖą┤ą░čÄčēąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ)
ldi r16, 1 << TOIE0
out TIMSK,r16 ; ąĀą░ąĘčĆąĄčłąĖčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ Timer/Counter0 Overflow
ser r16
out DDRB,r16 ; ąØą░čüčéčĆąŠą╣ą║ą░ ą▓čŗą▓ąŠą┤ąŠą▓ ą┐ąŠčĆčéą░ B ą║ą░ą║ ą▓čŗčģąŠą┤ąŠą▓
ret
ąĪąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą║ąŠą┤ ąĮą░ C ą┤ą╗čÅ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░ IAR:
void init_Ex1(void)
{
TCCR0 = (1 << CS02)|(1 << CS00); //čćą░čüč鹊čéą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ = system clock / 1024
TIFR = 1 << TOV0; //ą×čćąĖčüčéą║ą░ TOV0 (čüą▒čĆąŠčü ąŠąČąĖą┤ą░čÄčēąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ)
TIMSK = 1 << TOIE0; //ąĀą░ąĘčĆąĄčłąĖčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ Timer/Counter0 Overflow
DDRB = 0xFF; //ąØą░čüčéčĆąŠą╣ą║ą░ ą▓čŗą▓ąŠą┤ąŠą▓ ą┐ąŠčĆčéą░ B ą║ą░ą║ ą▓čŗčģąŠą┤ąŠą▓
}
ąØą░ čüą╗ąĄą┤čāčÄčēąĄą╝ čłą░ą│ąĄ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĮą░ą┐ąĖčüą░ąĮ ą║ąŠą┤ ą┤ą╗čÅ ISR (ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ - ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ). ąŁč鹊čé ą║ąŠą┤ ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ čéą░ą╣ą╝ąĄčĆ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĖčéčüčÅ. ąÆ ą║ą░č湥čüčéą▓ąĄ ą┐čĆąĖą╝ąĄčĆą░ ISR ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą║ą╗čÄčćą░čéčī ą▓ ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░ B (ą┐ąŠčŹč鹊ą╝čā čüą▓ąĄč鹊ą┤ąĖąŠą┤čŗ LED ą▒čāą┤čāčé ą╝ąĄčĆčåą░čéčī).
ISR_TOV0:
push r16
in r16,SREG
push r16
in r16,PORTB ; ą¦č鹥ąĮąĖąĄ ą┐ąŠčĆčéą░ B ą▓ čĆąĄą│ąĖčüčéčĆ r16
com r16 ; ąśąĮą▓ąĄčĆčüąĖčÅ ą▒ąĖč鹊ą▓ ą▓ čĆąĄą│ąĖčüčéčĆąĄ r16
out PORTB,r16 ; ąŚą░ą┐ąĖčüčī r16 ą▓ ą┐ąŠčĆčé B
pop r16
out SREG,r16
pop r16
reti
ąĪąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą║ąŠą┤ ąĮą░ C ą┤ą╗čÅ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░ IAR:
void interrupt [TIMER0_OVF0_vect] ISR_TOV0 (void)
{
PORTB = ~PORTB; // ą¤ąĄčĆąĄą║ą╗čÄčćąĖčéčī ą▓čŗą▓ąŠą┤čŗ ą┐ąŠčĆčéą░ B
}
[16-bit Timer1]
16-čĆą░ąĘčĆčÅą┤ąĮčŗą╣ Timer1 čéą░ą║ąČąĄ čÅą▓ą╗čÅąĄčéčüčÅ čüąĖąĮčģčĆąŠąĮąĮčŗą╝. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąŠąĮ čéą░ą║čéąĖčĆčāąĄčéčüčÅ ąŠčé čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ, ą┐ąŠą┤ąĄą╗ąĄąĮąĮąŠą╣ ą┐čĆąĄčüą║ą░ą╗ąĄčĆąŠą╝ čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ, ąĖą╗ąĖ ąŠčé ą▓ąĮąĄčłąĮąĖčģ čéą░ą║č鹊ą▓ (ą║ąŠč鹊čĆčŗąĄ čéą░ą║ąČąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠą┤ąĄą╗ąĄąĮčŗ ą┐čĆąĄčüą║ą░ą╗ąĄčĆąŠą╝), ą║ąŠč鹊čĆčŗąĄ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆčāčÄčéčüčÅ čü čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹊ą╣. ą¦č鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 16-čĆą░ąĘčĆčÅą┤ąĮčŗąĄ čĆąĄą│ąĖčüčéčĆčŗ ą▒čāą┤čāčé čćąĖčéą░čéčīčüčÅ ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░čéčīčüčÅ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ (ą░č鹊ą╝ą░čĆąĮąŠą╣ ąŠą┐ąĄčĆą░čåąĖąĄą╣), ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ čüą┐ąĄčåąĖą░ą╗čīąĮą░čÅ ą┐čĆąŠčåąĄą┤čāčĆą░ čü ąĮąĄčÅą▓ąĮčŗą╝ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮąĖąĄą╝ ą┐čĆąŠą╝ąĄąČčāč鹊čćąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ (Temp). ąÆąŠ ą▓čĆąĄą╝čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čŹč鹊ą╣ ą┐čĆąŠčåąĄą┤čāčĆčŗ ą┤ąŠčüčéčāą┐ ą║ čĆąĄą│ąĖčüčéčĆą░ą╝ ą┤ąŠą╗ąČąĄąĮ ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝, čüčéčĆąŠą│ąŠ ąĘą░ą┤ą░ąĮąĮąŠą╝ ą┐ąŠčĆčÅą┤ą║ąĄ (ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. AVR072 [2]). ąÜąŠčĆčĆąĄą║čéąĮčŗą╣ ą┐čāčéčī ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ ą║ čĆąĄą│ąĖčüčéčĆą░ą╝ ą┐ąŠą║ą░ąĘą░ąĮ ą▓ čéą░ą▒ą╗ąĖčåąĄ 2.
ąóą░ą▒ą╗ąĖčåą░ 2. ąöąŠčüčéčāą┐ ą║ 16-ą▒ąĖčéąĮčŗą╝ čĆąĄą│ąĖčüčéčĆą░ą╝.
| ą×ą┐ąĄčĆą░čåąĖčÅ |
1 ą┤ąŠčüčéčāą┐ |
2 ą┤ąŠčüčéčāą┐ |
| ą¦č鹥ąĮąĖąĄ |
ą£ą╗ą░ą┤čłąĖą╣ ą▒ą░ą╣čé |
ąĪčéą░čĆčłąĖą╣ ą▒ą░ą╣čé |
| ąŚą░ą┐ąĖčüčī |
ąĪčéą░čĆčłąĖą╣ ą▒ą░ą╣čé |
ą£ą╗ą░ą┤čłąĖą╣ ą▒ą░ą╣čé |
ąÆ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čŹčéąĖą╝ąĖ ą┐čĆą░ą▓ąĖą╗ą░ą╝ąĖ, ąŠą┐ąĄčĆą░čåąĖčÅ čćč鹥ąĮąĖčÅ 16-ą▒ąĖčéąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ ą▒čāą┤ąĄčé ą▓čŗą│ą╗čÅą┤ąĄčéčī čéą░ą║:
in r16,TCNT1L
in r17,TCNT1H
ą×ą┐ąĄčĆą░čåąĖčÅ ąĘą░ą┐ąĖčüąĖ ą▓ čŹč鹊čé čĆąĄą│ąĖčüčéčĆ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ ąŠą▒čĆą░čéąĮąŠą╝ ą┐ąŠčĆčÅą┤ą║ąĄ:
out TCNT1H,r17
out TCNT1L,r16
ąÜąŠą╝ą┐ąĖą╗čÅč鹊čĆ C ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ąŠą┐ąĄčĆą░čåąĖąĖ 16-ą▒ąĖčéąĮąŠą│ąŠ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ ą▓ ąĮčāąČąĮąŠą╝ ą┐ąŠčĆčÅą┤ą║ąĄ.
ąŚą┤ąĄčüčī ą┐ąŠą║ą░ąĘą░ąĮ ąŠč湥ąĮčī ą┐čĆąŠčüč鹊ą╣ ą┐čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čüąŠą▒čŗčéąĖčÅ ąĘą░čģą▓ą░čéą░ ą┐ąŠ ą▓čģąŠą┤čā čü ąŠą▒čĆą░ą▒ąŠčéą║ąŠą╣ ą┐ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÄ. ąÆčŗą▓ąŠą┤ ą┐ąŠčĆčéą░ PD6 čÅą▓ą╗čÅąĄčéčüčÅ ą▓čģąŠą┤ąŠą╝ ąĘą░čģą▓ą░čéą░ (input capture pin, ICP). ąĢčüą╗ąĖ ą╗ąŠą│ąĖč湥čüą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī ąĮą░ čŹč鹊ą╝ ą▓čŗą▓ąŠą┤ąĄ ą┐ąŠą╝ąĄąĮčÅąĄčéčüčÅ, č鹊 ą▓čĆąĄą╝čÅ ą╝ąĄąČą┤čā čüąŠčüąĄą┤ąĮąĖą╝ąĖ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮčŗą╝ąĖ ąĖą╗ąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮčŗą╝ąĖ ą┐ąĄčĆąĄą┐ą░ą┤ą░ą╝ąĖ ą▒čāą┤ąĄčé ąĖąĘą╝ąĄčĆąĄąĮąŠ čüąĖčüč鹥ą╝ąŠą╣ ąĘą░čģą▓ą░čéą░ Timer1. 8 čüčéą░čĆčłąĖčģ ą▒ąĖčé ąĘąĮą░č湥ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ ą▒čāą┤čāčé ąĘą░ą┐ąĖčüą░ąĮčŗ ą▓ ą┐ąŠčĆčé B. ą¤ąŠčĆčé B ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ą╝ ą┐ą╗ą░čéčŗ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ STK500, ą░ ą┐ąŠčĆčé D ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ ą║ąĮąŠą┐ą║ą░ą╝ (čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą┤ą▓čāčģ 10-ąČąĖą╗čīąĮčŗčģ ą╗ąĄąĮč鹊čćąĮčŗčģ ą║ą░ą▒ąĄą╗ąĄą╣). ąŁč鹊 čüą┤ąĄą╗ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮčŗą╝ ąĮą░ą▒ą╗čÄą┤ąĄąĮąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ą╝ąĖ LED, ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ąĮąŠą┐ą║ąĖ ą┤ą╗čÅ ą┐ąŠą┤ą░čćąĖ ąĖąĘą╝ąĄčĆčÅąĄą╝ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ąĮą░ ą▓čģąŠą┤ ICP.
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĖąĘą╝ąĄčĆąĄąĮąĮąŠąĄ ą▓čĆąĄą╝čÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĖą╝ąĄčĆąĮąŠ 1 čüąĄą║čāąĮą┤ąŠą╣ (TOVCK = 1). ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 č乊čĆą╝čāą╗čā 3 ą┤ą╗čÅ ą┐ąŠą┤ą▒ąŠčĆą░ ąĮčāąČąĮąŠą│ąŠ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ ą┤ąĄą╗ąĄąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░. ąöą╗čÅ čüąĖčüč鹥ą╝ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ CK = 3.69 ą£ąōčå ąĘąĮą░č湥ąĮąĖąĄ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ ą┤ąĄą╗ąĄąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ čéą░ą║:
3.69 ą£ąōčå
----------- = 56
216
ąæą╗ąĖąČą░ą╣čłąĄąĄ ą║ 56 ą▓čŗą▒ąĖčĆą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ ą┤ąĄą╗ąĄąĮąĖčÅ PVal ą▒čāą┤ąĄčé 64. ąĪą╗ąĄą┤čāčÄčēą░čÅ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ ąĮą░čüčéčĆąŠąĖčéčī čéą░ą║čāčÄ čüąĖčüč鹥ą╝čā:
init_Ex2:
ldi r16, (1 << CS11)|(1 << CS10)
out TCCR1B,r16 ; ą¦ą░čüč鹊čéą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ = system clock/64
ldi r16, 1 << ICF1
out TIFR,r16 ; ą×čćąĖčüčéą║ą░ ICF1 (čüą▒čĆąŠčü ąŠąČąĖą┤ą░čÄčēąĖčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣)
ldi r16, 1 << TICIE1
out TIMSK,r16 ; ąĀą░ąĘčĆąĄčłąĖčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ Timer/Counter1 Capture Event
ser r16 ; ąŻčüčéą░ąĮąŠą▓ąĖčéčī ą▓čüąĄ ą▒ąĖčéčŗ ą▓ čĆąĄą│ąĖčüčéčĆąĄ
out DDRB,r16 ; ąØą░čüčéčĆąŠą╣ą║ą░ ą▓čŗą▓ąŠą┤ąŠą▓ ą┐ąŠčĆčéą░ B ą║ą░ą║ ą▓čŗčģąŠą┤ąŠą▓
cbi DDRD,PD6 ; ąĮą░čüčéčĆąŠą╣ą║ą░ PD6/ICP ą║ą░ą║ ą▓čģąŠą┤ą░
ret
ąĪąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą║ąŠą┤ ąĮą░ C ą┤ą╗čÅ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░ IAR:
void init_Ex2(void)
{
TCCR1B = (1 << CS11)|(1 << CS10);// ą¦ą░čüč鹊čéą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ = system clock/64
TIFR = 1 << ICF1; // ą×čćąĖčüčéą║ą░ ICF1 (čüą▒čĆąŠčü ąŠąČąĖą┤ą░čÄčēąĖčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣)
TIMSK = 1 << TICIE1; // ąĀą░ąĘčĆąĄčłąĖčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ Timer/Counter1 Capture Event
DDRB = 0xFF; // ąØą░čüčéčĆąŠą╣ą║ą░ ą▓čŗą▓ąŠą┤ąŠą▓ ą┐ąŠčĆčéą░ B ą║ą░ą║ ą▓čŗčģąŠą┤ąŠą▓
DDRD &= ~(1 << PD6); // ąĮą░čüčéčĆąŠą╣ą║ą░ PD6/ICP ą║ą░ą║ ą▓čģąŠą┤ą░
}
ąØą░ čüą╗ąĄą┤čāčÄčēąĄą╝ čłą░ą│ąĄ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĮą░ą┐ąĖčüą░ąĮ ą║ąŠą┤ ą┤ą╗čÅ ISR (ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ - ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ). ąŁč鹊čé ą║ąŠą┤ ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čüąŠą▒čŗčéąĖąĄ ąĘą░čģą▓ą░čéą░ (input capture event). ąØą░ąĘąĮą░č湥ąĮąĖąĄ čŹč鹊ą│ąŠ ą┐čĆąĖą╝ąĄčĆą░ - ą▓čŗą▓ąĄčüčéąĖ čüčéą░čĆčłąĖą╣ ą▒ą░ą╣čé Timer1 ą▓ ą┐ąŠčĆčé B (čüą▓ąĄč鹊ą┤ąĖąŠą┤čŗ LED). ą¤ąŠč鹊ą╝ čéą░ą╣ą╝ąĄčĆ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą┤ą│ąŠč鹊ą▓ą║ąĖ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ.
TIM1_CAPT:
push r16
in r16,SREG
push r16
in r16,ICR1L ; ą¦č鹥ąĮąĖąĄ ą╝ą╗ą░ą┤čłąĄą│ąŠ ą▒ą░ą╣čéą░ ICR, čüčéą░čĆčłąĖą╣ ą▒ą░ą╣čé ICR
; ą┐čĆąĖ čŹč鹊ą╝ ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮąĄąĮ ąĮąĄčÅą▓ąĮąŠ ą▓ Temp
in r16,ICR1H ; ą¦č鹥ąĮąĖąĄ čüčéą░čĆčłąĄą│ąŠ ą▒ą░ą╣čéą░ ICR
com r16 ; ąśąĮą▓ąĄčĆčéąĖčĆąŠą▓ą░ąĮąĖąĄ ą▒ąĖčé, čüą╝. ą┐čĆąĖą╝ąĄčćą░ąĮąĖąĄ 1
out PORTB,r16 ; ąŚą░ą┐ąĖčüčī ICR1H ą▓ ą┐ąŠčĆčé PORTB
clr r16
out TCNT1H,r16 ; ąŚą░ą┐ąĖčüčī ą▓ čĆąĄą│ąĖčüčéčĆ Temp
out TCNT1L,r16 ; ą×čćąĖčüčéą║ą░ 16-ą▒ąĖčéąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ TCNT1
pop r16
out SREG,r16
pop r16
reti
ąĪąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą║ąŠą┤ ąĮą░ C ą┤ą╗čÅ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░ IAR:
void interrupt [TIMER1_CAPT1_vect] ISR_ICP1(void)
{
// ą¦č鹥ąĮąĖąĄ 16-ą▒ąĖčéąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ Input Capture Register
// ąĖ čüą┤ą▓ąĖą│ ąĄą│ąŠ ą▓ą┐čĆą░ą▓ąŠ 8 čĆą░ąĘ, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī čüčéą░čĆčłąĖą╣ ą▒ą░ą╣čé
PORTB = ~( ICR1>>8); // ąĖąĮą▓ąĄčĆčüąĖčÅ (čüą╝. ą┐čĆąĖą╝ąĄčćą░ąĮąĖąĄ 1) ąĖ ą▓čŗą▓ąŠą┤
// čüčéą░čĆčłąĄą│ąŠ ą▒ą░ą╣čéą░ ą▓ ą┐ąŠčĆčé B
TCNT1 = 0; // ąĪą▒čĆąŠčü 16-ą▒ąĖčéąĮąŠą│ąŠ čĆąĄą│ąĖčüčéčĆą░ čüč湥čéčćąĖą║ą░ Timer1
}
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
1. ąśąĮą▓ąĄčĆčüąĖčÅ ą▒ąĖč鹊ą▓ ąĮčāąČąĮą░ ą┐ąŠč鹊ą╝čā, čćč鹊 čüą▓ąĄč鹊ą┤ąĖąŠą┤čŗ ą▓ STK500 ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą║ + ą┐ąĖčéą░ąĮąĖčÅ, čé. ąĄ. ą║ąŠą│ą┤ą░ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą┐ąŠčĆčéą░ ą╗ąŠą│. 0, č鹊 čüą▓ąĄč鹊ą┤ąĖąŠą┤ ą│ąŠčĆąĖčé, ą░ ą║ąŠą│ą┤ą░ ą╗ąŠą│. 1 - ą│ą░čüąĮąĄčé.
2. ąÆ čŹč鹊ą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąĄčüčéčī ąŠą┤ąĖąĮ ąĮąĄą┤ąŠčüčéą░č鹊ą║: ąĮąĄ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ čéą░ą╣ą╝ąĄčĆą░. ąöą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ čŹč鹊ą│ąŠ ąĖąĘą▒ąĄąČą░čéčī, ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čāčüčéą░ąĮąŠą▓ą║čā ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╣ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ą▓ ąŠčéą┤ąĄą╗čīąĮąŠą╝ ISR ą┤ą╗čÅ čüąŠą▒čŗčéąĖčÅ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░. ąĢčüą╗ąĖ čŹčéą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░, č鹊 ą▓ ą┐ąŠčĆčé B ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ 0xFF ą▓ą╝ąĄčüč鹊 ąĘąĮą░č湥ąĮąĖčÅ ąĖąĘ čéą░ą╣ą╝ąĄčĆą░.
[ąÉčüąĖąĮčģčĆąŠąĮąĮčŗą╣ 8-bit Timer2]
Timer2 ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ čüąĖąĮčģčĆąŠąĮąĮąŠą╝ čĆąĄąČąĖą╝ąĄ, ą║ą░ą║ Timer0 ąĖ Timer1. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą░čüąĖąĮčģčĆąŠąĮąĮčŗą╣ čĆąĄąČąĖą╝. ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. "ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ąŠčé ą░čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░" ą▓ čĆą░ąĘą┤ąĄą╗ąĄ "ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ".
ąŚą┤ąĄčüčī ą┐ąŠą║ą░ąĘą░ąĮąŠ, ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī output compare interrupt ą┤ą╗čÅ Timer2. ąóą░ą╣ą╝ąĄčĆ ą▒čāą┤ąĄčé čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ čéą░ą║, čćč鹊 čüąŠą▒čŗčéąĖąĄ compare match ą▒čāą┤ąĄčé ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī ą║ą░ąČą┤čāčÄ čüąĄą║čāąĮą┤čā. ąŁčéą░ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čćą░čüąŠą▓ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ RTC. ąØąŠ ą▓ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą┤ą╗čÅ čāą┐čĆąŠčēąĄąĮąĖčÅ ą▒čāą┤čāčé ą┐čĆąŠčüč鹊 ą┐ąĄčĆąĄą║ą╗čÄčćą░čéčīčüčÅ ą▓ ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░, čéą░ą║ čćč鹊 ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗąĄ ą║ ąĮąĖą╝ LED-čŗ ą▒čāą┤čāčé ą╝ąĖą│ą░čéčī čü čćą░čüč鹊č鹊ą╣ 0.5 ąōčå.
ąÜą░ą║ ąĖ ą▓ ą┐čĆąĄą┤čŗą┤čāčēąĄą╝ ą┐čĆąĖą╝ąĄčĆąĄ, ą┐ąŠčĆčé B ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ą╝ LED ąĖ ą┐ąŠčĆčé D ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ ą┐ąĄčĆąĄą║ą╗čÄčćą░č鹥ą╗čÅą╝ ą┐ą╗ą░čéčŗ STK500. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą║ą▓ą░čĆčåąĄą▓čŗą╣ čĆąĄąĘąŠąĮą░č鹊čĆ ąĮą░ 32.768 ą║ąōčå (čćą░čüąŠą▓ąŠą╣ ą║ą▓ą░čĆčå) ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ ą▓čŗą▓ąŠą┤ą░ą╝ TOSC1/PC6 ąĖ TOSC2/PC7 ą┐ąŠčĆčéą░ C.
ąØą░čüčéčĆąŠą╣ą║ąĖ čéą░ą╣ą╝ąĄčĆą░ ą╝ąŠą│čāčé ą▒čŗčéčī ą▓čŗčćąĖčüą╗ąĄąĮčŗ ą┐ąŠ č乊čĆą╝čāą╗ąĄ 2. ąÆą╝ąĄčüč鹊 ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ ą▓ąĄą╗ąĖčćąĖąĮčŗ čéą░ą╣ą╝ąĄčĆą░ MaxVal ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄ OCR2. ą¦ą░čüč鹊čéą░ ą┤ą╗čÅ ą┐ąŠą┤ą░čćąĖ ąĮą░ ą▓čģąŠą┤ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ (PCKx) ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą▒čāą┤ąĄčé čéą░ą║č鹊ą▓čŗą╝ čüąĖą│ąĮą░ą╗ąŠą╝ ąŠčé čćą░čüąŠą▓ąŠą│ąŠ ą║ą▓ą░čĆčåą░ (fOSCCK), ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ TOVCK ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ ą║ą░č湥čüčéą▓ąĄ čéą░ą║č鹊ą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą┤ą╗čÅ čüąŠą▒čŗčéąĖčÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čāčĆąŠą▓ąĮčÅ ą▓čŗą▓ąŠą┤ą░ čü ą┐ąĄčĆąĖąŠą┤ąŠą╝ 1 čüąĄą║čāąĮą┤ą░. ą£ą░č鹥ą╝ą░čéąĖč湥čüą║ąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ čŹč鹊ą│ąŠ čüąŠąŠčéąĮąŠčłąĄąĮąĖčÅ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čüą╗ąĄą┤čāčÄčēąĄą╣ č乊čĆą╝čāą╗ąĄ:
fOSCCK 32.768 ą║ąōčå
1 = TOVCK = --------------- = --------------
PVal * OCR2 PVal * OCR2
ąÆčŗą▒čĆą░ąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ ą┤ąĄą╗ąĄąĮąĖčÅ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ 1024 ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ 32 ą┤ą╗čÅ OCR2, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ąĘą░ą┤ąĄčƹȹ║čā 1 čüąĄą║čāą┤ą░ ą╝ąĄąČą┤čā ą┤ą▓čāą╝čÅ čüąŠą▒čŗčéąĖčÅą╝ąĖ Timer compare match.
ąĪą╗ąĄą┤čāčÄčēą░čÅ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ ąĮą░čüčéčĆąŠąĖčéčī čéą░ą║čāčÄ čüąĖčüč鹥ą╝čā:
init_Ex3:
ldi r16, 1 << AS2
out ASSR, r16 ; ąĀą░ąĘčĆąĄčłąĖčéčī ą░čüąĖąĮčģčĆąŠąĮąĮčŗą╣ čĆąĄąČąĖą╝,
; ąŠčćąĖčüčéąĖčéčī čéą░ą╣ą╝ąĄčĆ ą┤ą╗čÅ compare match,
ldi r16, (1 << CTC2)|(1 << CS22)|(1 << CS21)|(1 << CS20)
out TCCR2,r16 ; čćą░čüč鹊čéą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ = system clock / 1024
ldi r16, 1 << OCF2
out TIFR,r16 ; ą×čćąĖčüčéą║ą░ OCF2 (čüą▒čĆąŠčü ąŠąČąĖą┤ą░čÄčēąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ)
ldi r16, 1 << OCIE2
out TIMSK,r16 ; ąĀą░ąĘčĆąĄčłąĖčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ Timer2 Output Compare Match Interrupt
ldi r16,32
out OCR2,r16 ; ąŻčüčéą░ąĮąŠą▓ąĖčéčī ąĘąĮą░č湥ąĮąĖąĄ čüčĆą░ą▓ąĮąĄąĮąĖčÅ 32
ser r16
out DDRB,r16 ; ąØą░čüčéčĆąŠąĖčéčī ą▓čŗą▓ąŠą┤čŗ ą┐ąŠčĆčéą░ B ą║ą░ą║ ą▓čŗčģąŠą┤čŗ
loop:
sbic ASSR, OCR2UB ; ą×ąČąĖą┤ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čĆąĄą│ąĖčüčéčĆąŠą▓
rjmp loop
ret
ąĪąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą║ąŠą┤ ąĮą░ C ą┤ą╗čÅ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░ IAR:
void init_Ex3(void)
{
ASSR= 1 << AS2; // ąĀą░ąĘčĆąĄčłąĖčéčī ą░čüąĖąĮčģčĆąŠąĮąĮčŗą╣ čĆąĄąČąĖą╝,
// ąŠčćąĖčüčéąĖčéčī čéą░ą╣ą╝ąĄčĆ ą┤ą╗čÅ compare match,
// čćą░čüč鹊čéą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ = system clock / 1024
TCCR2 = (1 << CTC2)|(1 << CS22)|(1 << CS21)|(1 << CS20);
TIFR= 1 << OCF2; // ą×čćąĖčüčéą║ą░ OCF2 (čüą▒čĆąŠčü ąŠąČąĖą┤ą░čÄčēąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ)
TIMSK= 1 << OCIE2; // ąĀą░ąĘčĆąĄčłąĖčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ Timer2 Output Compare Match Interrupt
OCR2= 32; // ąŻčüčéą░ąĮąŠą▓ąĖčéčī ąĘąĮą░č湥ąĮąĖąĄ čüčĆą░ą▓ąĮąĄąĮąĖčÅ 32
DDRB= 0xFF; // ąØą░čüčéčĆąŠąĖčéčī ą▓čŗą▓ąŠą┤čŗ ą┐ąŠčĆčéą░ B ą║ą░ą║ ą▓čŗčģąŠą┤čŗ
while (ASSR & (1 << OCR2UB))
; // ą×ąČąĖą┤ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čĆąĄą│ąĖčüčéčĆąŠą▓
}
ąØą░ čüą╗ąĄą┤čāčÄčēąĄą╝ čłą░ą│ąĄ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĮą░ą┐ąĖčüą░ąĮ ą║ąŠą┤ ą┤ą╗čÅ ISR (ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ - ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ). ąŁč鹊čé ą║ąŠą┤ ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čüąŠą▒čŗčéąĖąĄ čüčĆą░ą▓ąĮąĄąĮąĖčÅ ą▓čŗčģąŠą┤ą░ (output compare event). ąØą░ąĘąĮą░č湥ąĮąĖąĄ čŹč鹊ą│ąŠ ą┐čĆąĖą╝ąĄčĆą░ - ą┐čĆąŠčüč鹊 ą┐ąĄčĆąĄą║ą╗čÄčćąĖčéčī ą▓ ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą▒ąĖčéčŗ ą┐ąŠčĆčéą░ B (ąŠąĮąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą║ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ą╝ LED ą┤ą╗čÅ ąĖąĮą┤ąĖą║ą░čåąĖąĖ čüąŠą▒čŗčéąĖčÅ).
ISR_OCIE2:
push r16
in r16,SREG
push r16
in r16,PORTB ; ą¦č鹥ąĮąĖąĄ ą┐ąŠčĆčéą░ B ą▓ čĆąĄą│ąĖčüčéčĆ r16
com r16 ; ąśąĮą▓ąĄčĆčüąĖčÅ ą▒ąĖč鹊ą▓ ą▓ čĆąĄą│ąĖčüčéčĆąĄ r16
out PORTB,r16 ; ąŚą░ą┐ąĖčüčī r16 ą▓ ą┐ąŠčĆčé B
pop r16
out SREG,r16
pop r16
reti
ąĪąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą║ąŠą┤ ąĮą░ C ą┤ą╗čÅ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░ IAR:
void interrupt [TIMER2_COMP_vect] ISR_OCIE2 (void)
{
PORTB = ~PORTB; // invert bits on Port B
}
[ąæą░ąĘąŠą▓čŗąĄ čüą▓ąĄą┤ąĄąĮąĖčÅ ąŠ PWM]
PWM čÅą▓ą╗čÅąĄčéčüčÅ ą░ą▒ą▒čĆąĄą▓ąĖą░čéčāčĆąŠą╣ ąŠčé Pulse Width Modulation (ą┐ąŠ-čĆčāčüčüą║ąĖ čŹč鹊 ą©ąĖčĆąŠčéąĮąŠ-ąśą╝ą┐čāą╗čīčüąĮą░čÅ ą£ąŠą┤čāą╗čÅčåąĖčÅ, ąĖą╗ąĖ ą©ąśą£). ąŁč鹊 čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╣ čĆąĄąČąĖą╝ ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ čéą░ą╣ą╝ąĄčĆąŠą▓ Timer1 ąĖ Timer2. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ čéą░ą╣ą╝ąĄčĆ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ čüč湥čéčćąĖą║ ą▓ą▓ąĄčĆčģ ąĖ ą▓ąĮąĖąĘ. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čüč湥čéčćąĖą║ čüčćąĖčéą░ąĄčé ą▓ą▓ąĄčĆčģ ą┤ąŠ čüą▓ąŠąĄą│ąŠ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ, ąĖ ąĘą░č鹥ą╝ čüčćąĖčéą░ąĄčé ą▓ąĮąĖąĘ ą┤ąŠ ąĮčāą╗čÅ. ąŁč鹊 ą║ąŠąĮčéčĆą░čüčéąĖčĆčāąĄčé čü ąŠą▒čŗčćąĮčŗą╝ čĆąĄąČąĖą╝ąŠą╝ čüč湥čéą░, ą║ąŠą│ą┤ą░ čéą░ą╣ą╝ąĄčĆ ą┐ąĄčĆąĄą┐ąŠą╗ąĮčÅąĄčéčüčÅ ąĖ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ 0 ą┐ąŠčüą╗ąĄ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ čüą▓ąŠąĄą│ąŠ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ. ą¤čĆąĄąĖą╝čāčēąĄčüčéą▓ąŠ čĆąĄąČąĖą╝ą░ PWM ą▓ č鹊ą╝, čćč鹊 ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čüą║ą▓ą░ąČąĮąŠčüčéąĖ ą©ąśą£ ą╝ąŠąČąĄčé ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ čü ą║ąŠčĆčĆąĄą║čéąĮčŗą╝ čüąŠčģčĆą░ąĮąĄąĮąĖąĄą╝ čäą░ąĘčŗ.
ąĢčüą╗ąĖ PWM čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą▓čŗą▓ąŠą┤ą░ Output Compare (OCx), č鹊 čüąĖą│ąĮą░ą╗ ąĮą░ čŹč鹊ą╝ ą▓čŗą▓ąŠą┤ąĄ ą╝ąŠąČąĄčé ą▓čŗą│ą╗čÅą┤ąĄčéčī čéą░ą║, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 2.
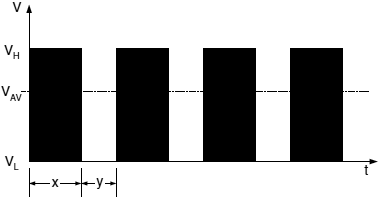
ąĀąĖčü. 2. ąÆčŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ PWM.
VH: ą▓čŗčģąŠą┤ąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą╗ąŠą│. 1
VL: ą▓čŗčģąŠą┤ąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą╗ąŠą│. 0
VAV: čüčĆąĄą┤ąĮąĖą╣ čāčĆąŠą▓ąĄąĮčī ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ (Average Output Voltage)
x: ą▓čŗčüąŠą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī ą┐ąĄčĆąĖąŠą┤ą░ PWM
y: ąĮąĖąĘą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī ą┐ąĄčĆąĖąŠą┤ą░ PWM
ążąØą¦, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗą╣ ą║ ą▓čŗčģąŠą┤ąĮąŠą╝čā ą▓čŗą▓ąŠą┤čā PWM, ą▓ą╝ąĄčüč鹥 čü ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą▓čŗčüąŠą║ąŠą╣ čćą░čüč鹊č鹊ą╣ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ PWM ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą┐ąŠčüč鹊čÅąĮąĮąŠą╝čā čüčĆąĄą┤ąĮąĄą╝čā čāčĆąŠą▓ąĮčÄ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą▓ą╝ąĄčüč鹊 ą┐čĆčÅą╝ąŠčāą│ąŠą╗čīąĮčŗčģ ąĖą╝ą┐čāą╗čīčüąŠą▓. ążąŠčĆą╝čāą╗ą░ 4 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ ą╝ąŠąČąĮąŠ ą▓čŗčćąĖčüą╗ąĖčéčī čāčĆąŠą▓ąĄąĮčī čŹč鹊ą│ąŠ čüčĆąĄą┤ąĮąĄą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ:
(VH * x + VL * y)
VAV = -------------------
(x + y) |
|
(ążąŠčĆą╝čāą╗ą░ 4) |
ą│ą┤ąĄ
x = OCRx * 2
y = (MaxVal - OCRx) * 2
(VH * OCRx + VL * (MaxVal - OCRx))
VAV = -----------------------------------------
MaxVal |
|
(ążąŠčĆą╝čāą╗ą░ 5) |
ążą░ą║čéąĖč湥čüą║ąĖ čŹč鹊čé ą╝ąĄč鹊ą┤ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čéą░ą╣ą╝ąĄčĆčā ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čāčĆąŠą▓ąĮąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą╝ąĄąČą┤čā ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝ ą┐ąĖčéą░ąĮąĖčÅ VCC ąĖ ąĮčāą╗ąĄą▓čŗą╝ ąŠą▒čēąĖą╝ ą┐čĆąŠą▓ąŠą┤ąŠą╝ GND - ą┐ąŠą╗čāčćąĖčéčüčÅ čåąĖčäčĆąŠ-ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čī (DAC), čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮčŗą╣ ąĮą░ ąŠčüąĮąŠą▓ąĄ PWM. ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ, ą║ą░ą║ čŹč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ, ąŠą┐ąĖčüą░ąĮąŠ ą▓ ą░ą┐čéąĮąŠčāčéą░čģ AVR314 [4] ąĖ AVR335 [5].
ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą╝ąĄąČą┤čā VCC ąĖ GND čü ą┐ąŠą╝ąŠčēčīčÄ čüąĖą│ąĮą░ą╗ą░ PWM (PD7/OC2). ą¦č鹊ą▒čŗ čāą▓ąĖą┤ąĄčéčī čĆąĄąĘčāą╗čīčéą░čéčŗ čĆąĄą│čāą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ, ą┐ąŠčĆčé D ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ą╝ čü ą┐ąŠą╝ąŠčēčīčÄ 10-ąČąĖą╗čīąĮąŠą│ąŠ ą┐ą╗ąŠčüą║ąŠą│ąŠ ą║ą░ą▒ąĄą╗čÅ.
ą¤ąŠčĆčé D čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ čéą░ą║, čćč鹊 čüą▓ąĄč鹊ą┤ąĖąŠą┤čŗ, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗąĄ ą║ ą╝ą╗ą░ą┤čłąĄą╣ č湥čéą▓ąĄčĆą║ąĄ ą▒ąĖč鹊ą▓ ą┐ąŠčĆčéą░ ą▒čāą┤čāčé ą▓ą║ą╗čÄčćą░čéčīčüčÅ, ą░ čüą▓ąĄč鹊ą┤ąĖąŠą┤čŗ, ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą║ čüčéą░čĆčłąĄą╣ č湥čéą▓ąĄčĆą║ąĄ ą▒ąĖč鹊ą▓ ą┐ąŠčĆčéą░, ą▓čŗą║ą╗čÄčćą░čéčīčüčÅ. ąóąŠą╗čīą║ąŠ čüą▓ąĄč鹊ą┤ąĖąŠą┤ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ PD7 / OC2 ąĮąĄ ą▒čāą┤ąĄčé ą▓čŗą║ą╗čÄčćą░čéčīčüčÅ, čā ąĮąĄą│ąŠ ą▒čāą┤ąĄčé ą╝ąĄąĮčÅčéčīčüčÅ čÅčĆą║ąŠčüčéčī, ą┐ąŠč鹊ą╝čā čćč鹊 čüą║ą▓ą░ąČąĮąŠčüčéčī čüąĖą│ąĮą░ą╗ą░ PWM ą▒čāą┤ąĄčé ą╝ąĄąĮčÅčéčīčüčÅ ąŠčé 1/8 ą┤ąŠ 7/8 (OCR2 = 0xE0).
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čüąŠąŠčéąĮąŠčłąĄąĮąĖąĄ čüą║ą▓ą░ąČąĮąŠčüčéčī ą▓ čŹč鹊ą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐čĆąŠąĖąĮą▓ąĄčĆčéąĖčĆąŠą▓ą░ąĮąŠ ą┐ąŠč鹊ą╝čā, čćč鹊 čüą▓ąĄč鹊ą┤ąĖąŠą┤čŗ ąĮą░ ą┐ą╗ą░č鹥 STK500 ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą║ + ą┐ąĖčéą░ąĮąĖčÅ.
init_Ex4:
ldi r16, (1 << PWM2)|(1 << COM21)|(1 << CS20)
out TCCR2,r16 ; ąØąĄąĖąĮą▓ąĄčĆčéąĖčĆąŠą▓ą░ąĮąĮą░čÅ 8-čĆą░ąĘčĆčÅą┤ąĮą░čÅ PWM (Fck/510)
ldi r16,0xE0
out OCR2,r16 ; ąŻčüčéą░ąĮąŠą▓ąĖčéčī ąĘąĮą░č湥ąĮąĖąĄ čüčĆą░ą▓ąĮąĄąĮąĖčÅ (čüą║ą▓ą░ąČąĮąŠčüčéčī PWM)
ldi r16,0x8F
out DDRD,r16 ; ąØą░čüčéčĆąŠąĖčéčī PD7/OC2 ąĖ ą╝ą╗ą░ą┤čłčāčÄ č湥čéą▓ąĄčĆą║čā čĆą░ąĘčĆčÅą┤ąŠą▓
; ą┐ąŠčĆčéą░ D ą║ą░ą║ ą▓čŗčģąŠą┤čŗ
ret
ąĪąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą║ąŠą┤ ąĮą░ C ą┤ą╗čÅ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░ IAR:
void init_Ex4(void)
{
// ąĀą░ąĘčĆąĄčłąĖčéčī ąĮąĄąĖąĮą▓ąĄčĆčüąĮčŗą╣ 8-ą▒ąĖčéąĮčŗą╣ čĆąĄąČąĖą╝ PWM
// čćą░čüč鹊čéą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą╣ą╝ąĄčĆą░ = system clock
TCCR2 = (1 << COM21)+(1 << PWM2)+(1 << CS20);
DDRD = (1 << PD7)|0x0F; // PD7 (OC2) ąĖ PD0..PD3 čĆą░ą▒ąŠčéą░čÄčé ą║ą░ą║ ą▓čŗčģąŠą┤čŗ
OCR2= 0xE0; // čāčüčéą░ąĮąŠą▓ąĖčéčī ąĘąĮą░č湥ąĮąĖąĄ čüčĆą░ą▓ąĮąĄąĮąĖčÅ (čüą║ą▓ą░ąČąĮąŠčüčéčī PWM)
}
[ąĪčüčŗą╗ą║ąĖ]
1. AVR130: Setup and Use the AVR® Timers site:atmel.com.
2. ąöąŠčüčéčāą┐ ą║ 16-ą▒ąĖčéąĮčŗą╝ čĆąĄą│ąĖčüčéčĆą░ą╝ AVR.
3. AVR134: Real Time Clock (RTC) using the Asynchronous Timer site:atmel.com.
4. AVR314: DTMF Transmitter site:atmel.com.
5. AVR335: Digital Sound Recorder with AVR and Serial DataFlash site:atmel.com.
6. ąóą░ą╣ą╝ąĄčĆčŗ-čüč湥čéčćąĖą║ąĖ ATmega2560. |



