|
ą¤ąĄčĆąĄą▓ąŠą┤ ą┤ą░čéą░čłąĖčéą░ AVR287 [1] ą║ąŠą╝ą┐ą░ąĮąĖąĖ Atmel, ąŠą┐ąĖčüčŗą▓ą░čÄčēąĖą╣ ą┐čĆąĖą╝ąĄčĆ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čģąŠčüčéą░ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ USB HID (ą║ą╗ą░ą▓ąĖą░čéčāčĆčŗ, ą╝čŗčłąĖ ąĖ ą┤čĆčāą│ąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░) ąĖ čāčüčéčĆąŠą╣čüčéą▓ USB Mass Storage (čäą╗ąĄčłą║ąĖ, ą▓ąĮąĄčłąĮąĖąĄ ąČąĄčüčéą║ąĖąĄ ą┤ąĖčüą║ąĖ). ąöčĆčāą│ąĖąĄ ą┐čĆąĖą╝ąĄčĆčŗ čģąŠčüčéą░ ąĮą░ čćąĖą┐ą░čģ AVR USB ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ LUFA [2].
ŌĆó ą¤čĆąĖą╝ąĄčĆ ąŠčüąĮąŠą▓ą░ąĮ ąĮą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ AVR┬« USB OTG Reduced Host
ŌĆó ąĀą░ą▒ąŠčéą░ąĄčé ąĮą░ čćąĖą┐ą░čģ AT90USB647/AT90USB1287
ŌĆó ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ąĘą░ą│čĆčāąČą░ąĄą╝čŗąĄ ąĖ ąĮąĄ ąĘą░ą│čĆčāąČą░ąĄą╝čŗąĄ čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ą╝čŗčłąĖ USB
ŌĆó ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čäčāąĮą║čåąĖčÄ čģą░ą▒ą░ USB (č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ čģčĆą░ąĮąĄąĮąĖčÅ USB Mass Storage)
ŌĆó Mass Storage:
- ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ čüąŠą║čĆą░čēąĄąĮąĮčŗą╣ ąĮą░ą▒ąŠčĆ ą║ąŠą╝ą░ąĮą┤ ą▒ą╗ąŠą║ą░ (Reduced Block Commands, RBC)
- ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą║ąŠą╝ą░ąĮą┤čŗ ą▒ą╗ąŠą║ą░ SFF-8020i ąĖą╗ąĖ MMC-2 (ATAPI)
- čĆą░čüčüčćąĖčéą░ąĮ ąŠą▒čŗčćąĮąŠ ąĮą░ UFI, čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓ąĮąĄčłąĮąĄą│ąŠ ą│ąĖą▒ą║ąŠą│ąŠ ą┤ąĖčüą║ą░ (floppy disk drive, FDD)
- ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą║ąŠą╝ą░ąĮą┤čŗ ą▒ą╗ąŠą║ą░ SFF-8070i
- ą┐čĆąŠąĘčĆą░čćąĮčŗą╣ ąĮą░ą▒ąŠčĆ ą║ąŠą╝ą░ąĮą┤ SCSI

ąĀąĖčü. 1-1. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ čģąŠčüčéą░ HID ąĖ Mass Storage
[1. ąÆą▓ąĄą┤ąĄąĮąĖąĄ]
ąĪąĄą╣čćą░čü ą▓čüąĄ ą▒ąŠą╗čīčłąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ąĖąĮč鹥čĆč乥ą╣čü USB. ąØą░ą╗ąĖčćąĖąĄ čäčāąĮą║čåąĖąĖ čģąŠčüčéą░ ą┤ą╗čÅ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ą┤ą░ąĄčé ąĖą╝ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖąĄ čüąŠ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ USB, ąĖ čéą░ą║ąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠą╗čāčćą░ąĄčé ą▒ąŠą╗čīčłąĖąĄ ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ą░ ąĮą░ čĆčŗąĮą║ąĄ. ą”ąĄą╗čī čŹč鹊ą│ąŠ ą┤ąŠą║čāą╝ąĄąĮčéą░ - ąŠą┐ąĖčüą░čéčī, ą║ą░ą║ ąĮą░čćą░čéčī čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čģąŠčüčéą░ USB ąĮą░ ą▒ą░ąĘąĄ ą║ą╗ą░čüčüą░ USB HID (ą╝čŗčłčī USB) ąĖ ą║ą╗ą░čüčüą░ USB Mass Storage (čāčüčéčĆąŠą╣čüčéą▓ąŠ čģčĆą░ąĮąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ, čäą╗ąĄčłą║ą░, ą▓ąĮąĄčłąĮąĖą╣ ą┤ąĖčüą║). ąÆ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ ą▒čāą┤ąĄčé ą┐ąŠą║ą░ąĘą░ąĮ ą┐čĆąŠčüč鹊ą╣ ą┐čĆąĖą╝ąĄčĆ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ AT90USB (čüąĄčĆąĖčÅ čćąĖą┐ąŠą▓ Atmel Series-7 čü ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ USB) ą║ą╗ą░čüčüąŠą▓ čāčüčéčĆąŠą╣čüčéą▓ USB HID ąĖ USB Mass Storage, čü ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ čäą░ą╣ą╗ąŠą▓ąŠą╣ čüąĖčüč鹥ą╝čŗ (FAT12/FAT16/FAT32). ą¤ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ąĘąĮą░ą║ąŠą╝ čü AVR USB firmware framework ą║ąŠą╝ą┐ą░ąĮąĖąĖ Atmel, ą░ čéą░ą║ąČąĄ čüčéą░ąĮą┤ą░čĆčéą░ą╝ąĖ HID ąĖ MassStotage, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ąĮą░ čüą░ą╣č鹥 usb.org.
ąöą╗čÅ ąĘą░ą┐čāčüą║ą░ ą┐čĆąĖą╝ąĄčĆą░ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐ą╗ą░čéčā USBKEY, ąĮąŠ ą╝ąŠąČąĮąŠ ą┐čĆąĖą╝ąĄąĮąĖčéčī ąĖ ą╗čÄą▒čāčÄ ą┤čĆčāą│čāčÄ ą┐ą╗ą░čéčā, ąĮą░ ą║ąŠč鹊čĆąŠą╣ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ AT90USB647 ąĖą╗ąĖ AT90USB1287 (ąĮą░ą┐čĆąĖą╝ąĄčĆ userial [3]).
[2.1 ąØąĄą╝ąĮąŠą│ąŠ č鹥ąŠčĆąĖąĖ: ą║ą░ą║ čĆą░ą▒ąŠčéą░ąĄčé ą║ą╗ą░čüčü USB HID]
2.1.1. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ HID. ąÜą╗ą░čüčü čāčüčéčĆąŠą╣čüčéą▓ USB HID čéčĆąĄą▒čāąĄčé ąĮą░ą╗ąĖčćąĖčÅ ąŠą┤ąĮąŠą╣ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą╣ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ (Ctrl endpoint, ep0. ąĪčéčĆąŠą│ąŠ ą│ąŠą▓ąŠčĆčÅ, ąĮą░ą╗ąĖčćąĖąĄ čéą░ą║ąŠą╣ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ čéčĆąĄą▒čāąĄčéčüčÅ ą▓ ą╗čÄą▒ąŠą╝ čāčüčéčĆąŠą╣čüčéą▓ąĄ USB), ąŠą┤ąĮąŠą╣ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ Interrupt IN (ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░ USB ą║ čģąŠčüčéčā) ąĖ ąŠą┤ąĮąŠą╣ ąĮąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠą╣ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ Interrupt OUT (ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ ąŠčé čģąŠčüčéą░ ą║ čāčüčéčĆąŠą╣čüčéą▓čā USB). ą×ą▒čŗčćąĮąŠ ep0 ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮą░ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ą┐čĆąŠčåąĄčüčüą░ 菹Įčāą╝ąĄčĆą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ USB. ąÜąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ Interrupt IN ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮą░ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ čĆąĄą┐ąŠčĆč鹊ą▓ IN ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░ USB ą║ čģąŠčüčéčā (ąŠčüąĮąŠą▓ąĮąŠą╣ čéčĆą░čäąĖą║ ą╝čŗčłąĖ, ąŠą┐ąĖčüčŗą▓ą░čÄčēąĖą╣ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą║čāčĆčüąŠčĆą░ ąĖ ąĮą░ąČą░čéąĖčÅ ąĮą░ ą║ąĮąŠą┐ą║ąĖ). ąÜąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ Interrupt OUT ą┐čĆąĖą╝ąĄąĮčÅąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ čĆąĄą┐ąŠčĆč鹊ą▓ OUT (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą╗čÅ ą║ąŠą╝ą░ąĮą┤ ąĘą░ąČąĄčćčī ąĮčāąČąĮčŗą╣ čüą▓ąĄč鹊ą┤ąĖąŠą┤ NumLock, CapsLock, ScrollLock ąĮą░ ą║ą╗ą░ą▓ąĖą░čéčāčĆąĄ) ąŠčé čģąŠčüčéą░ ą║ čāčüčéčĆąŠą╣čüčéą▓čā USB. ą¤ąŠ čüčéą░ąĮą┤ą░čĆčéčā ą┤ą╗čÅ ą╝čŗčłąĖ USB ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ąĮą░ą╗ąĖčćąĖąĄ ąŠą┤ąĮąŠą╣ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą╣ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ Ctrl endpoint, ep0 ąĖ ąŠą┤ąĮąŠą╣ ą║ąŠąĮąĄčćąĮąŠą╣ č鹊čćą║ąĖ Interrupt IN.
2.1.2. ą¤ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ USB HID (ą╝čŗčłčī USB) ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┐čĆąŠčüč鹊ą╣ ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ ą╝ąĄąČą┤čā čģąŠčüč鹊ą╝ ąĖ ą╝čŗčłčīčÄ. ąźąŠčüčé ąŠą┐čĆą░čłąĖą▓ą░ąĄčé ą╝čŗčłčī č湥čĆąĄąĘ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ P (polling interval time, ąĖąĮč鹥čĆą▓ą░ą╗ ąŠą┐čĆąŠčüą░) ąĮą░ ą┐čĆąĄą┤ą╝ąĄčé ąĮą░ą╗ąĖčćąĖčÅ ąĮąŠą▓čŗčģ ą┤ą░ąĮąĮčŗčģ, ąĖ ą╝čŗčłčī ą▓ ąŠčéą▓ąĄčé ą┐ąŠčüčŗą╗ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ, ąĄčüą╗ąĖ ąŠąĮąĖ ą┤ąŠčüčéčāą┐ąĮčŗ, ąĖąĮą░č湥 ą┐ąŠčüčŗą╗ą░ąĄčé ą╝ą░čĆą║ąĄčĆ NAK (No Acknowledge) čćč鹊ą▒čŗ čüą║ą░ąĘą░čéčī čģąŠčüčéčā, čćč鹊 ą┤ą░ąĮąĮčŗčģ ą┐ąŠą║ą░ ąĮąĄčé. ąöą░ąĮąĮčŗąĄ, ą┐ąŠčüčŗą╗ą░ąĄą╝čŗąĄ čģąŠčüčéčā, ąĮą░ąĘčŗą▓ą░čÄčéčüčÅ čĆąĄą┐ąŠčĆč鹊ą╝. ą¤ąŠ čüčāčéąĖ čŹč鹊 ą┐čĆąŠčüč鹊 ą▒ą╗ąŠą║ ą▒ą░ą╣čé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ č乊čĆą╝ą░čéą░. ąĪčéčĆčāą║čéčāčĆą░ čŹč鹊ą│ąŠ čĆąĄą┐ąŠčĆčéą░ ą┐ąŠą║ą░ąĘą░ąĮą░ ąĮą░ čĆąĖčüčāąĮą║ąĄ ąĮąĖąČąĄ:

ąÜą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝čŗčłąĖ ą┐ąĄčĆąĄą╝ąĄčüčéąĖą╗ ą║čāčĆčüąŠčĆ ąĮą░ 菹║čĆą░ąĮąĄ, ą┐ąŠą║čĆčāčéąĖą╗ ą║ąŠą╗ąĄčüąĖą║ąŠ ąĖą╗ąĖ ąĮą░ąČą░ą╗ ąĮą░ ąŠą┤ąĮčā ąĖąĘ ą║ąĮąŠą┐ąŠą║, čŹč鹊čé čĆąĄą┐ąŠčĆčé ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ ą║ čģąŠčüčéčā. ąæą░ą╣čéčŗ čĆąĄą┐ąŠčĆčéą░ ą▒čāą┤čāčé ą┐čĆąŠčćąĖčéą░ąĮčŗ ą▓ ą┐ąŠčĆčÅą┤ą║ąĄ ąŠčé ą▒ą░ą╣čéą░ 0 ą┤ąŠ ą▒ą░ą╣čéą░ 3.
[2.2. ąØąĄą╝ąĮąŠą│ąŠ č鹥ąŠčĆąĖąĖ: ą║ą░ą║ čĆą░ą▒ąŠčéą░ąĄčé ą║ą╗ą░čüčü USB Mass Storage]
2.2.1. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ Mass Storage. ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ Mass Storage ąĖčüą┐ąŠą╗čīąĘčāąĄčé 2 ą║ąŠąĮąĄčćąĮčŗąĄ č鹊čćą║ąĖ čéąĖą┐ą░ bulk (ąŠą┤ąĮą░ IN, ą┤čĆčāą│ą░čÅ OUT) ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┐ąĄčĆąĄą┤ą░čć ą┤ą░ąĮąĮčŗčģ ąĖ čüąŠčüč鹊čÅąĮąĖčÅ. ąÜąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░ 0 (Ctrl endpoint, ep0) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą▓ čåąĄą╗čÅčģ 菹Įčāą╝ąĄčĆą░čåąĖąĖ, ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąŠčłąĖą▒ąŠą║ ąĖ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąĘąĮą░č湥ąĮąĖąĄ LUN (Logic Unit Number).
2.2.2. ą¤ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ. ą×ą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ č湥čĆąĄąĘ USB ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ Mass Storage ąŠčüąĮąŠą▓ą░ąĮąŠ ąĮą░ ą║ąŠą╝ą░ąĮą┤ą░čģ SCSI. ąöčĆčāą│ąĖą╝ąĖ čüą╗ąŠą▓ą░ą╝ąĖ, ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ Mass Storage čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ąĮą░ą▒ąŠčĆąŠą╝ ą║ąŠą╝ą░ąĮą┤ SCSI, ą┐ąŠčüčŗą╗ą░ąĄą╝čŗčģ čģąŠčüč鹊ą╝ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░č湥ą╣ čäą░ą╣ą╗ąŠą▓. ąæą╗ą░ą│ąŠą┤ą░čĆčÅ ąĮą░ą╗ąĖčćąĖčÄ LUN ą║ą╗ą░čüčü Mass Storage ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠą┤ąĮąŠą╝čā čāčüčéčĆąŠą╣čüčéą▓čā ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čÄąĮąĖč鹊ą▓ čģčĆą░ąĮąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ.
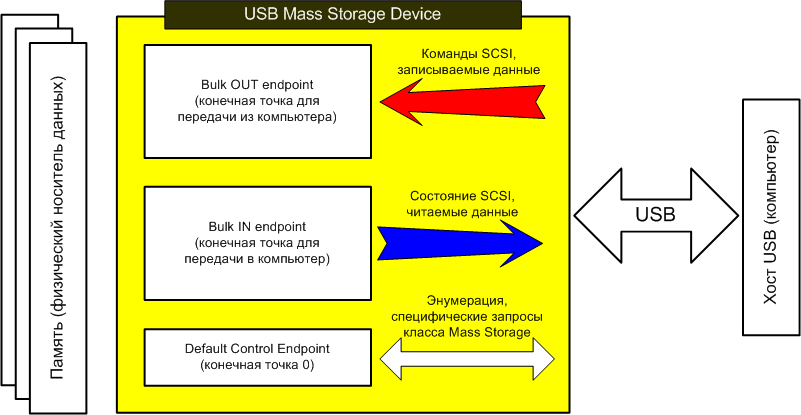
ąĀąĖčü. 2-2. ą×ą▒ąĘąŠčĆ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ USB Mass Storage. ąÆ ą║ą░č湥čüčéą▓ąĄ čģąŠčüčéą░ ąŠą▒čŗčćąĮąŠ čäąĖą│čāčĆąĖčĆčāąĄčé ą║ąŠą╝ą┐čīčÄč鹥čĆ, ąĮąŠ ą▓ ąĮą░čłąĄą╝ ąČąĄ ą┐čĆąĖą╝ąĄčĆąĄ čģąŠčüč鹊ą╝ ą▒čāą┤ąĄčé čĆą░ą▒ąŠčéą░čéčī ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮą░čÅ ą┐ą╗ą░čéą░ čü ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ AVR.
ąÜ čüąŠąČą░ą╗ąĄąĮąĖčÄ ą┐čĆąŠč鹊ą║ąŠą╗ SCSI čüą╗ąĖčłą║ąŠą╝ čüą╗ąŠąČąĄąĮ, čćč鹊ą▒čŗ ąĄą│ąŠ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ čĆą░čüčüą╝ąŠčéčĆąĄčéčī ą▓ čĆą░ą╝ą║ą░čģ čŹč鹊ą╣ čüčéą░čéčīąĖ. ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠą▒čĆą░čéąĖč鹥čüčī ą║ čüčéą░ąĮą┤ą░čĆčéčā "USB Mass Storage Class Bulk-Only Transport specification" ąĮą░ čüą░ą╣č鹥 usb.org.
[3. ąÉčĆčģąĖč鹥ą║čéčāčĆą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ Atmel]
ąØąĖąČąĄ ąĮą░ čĆąĖčüčāąĮą║ąĄ ą┐ąŠą║ą░ąĘą░ąĮą░ ą░čĆčģąĖč鹥ą║čéčāčĆą░ firmware čģąŠčüčéą░ HID ąĖ Mass Storage, ą│ą┤ąĄ ąŠč鹊ą▒čĆą░ąČąĄąĮčŗ čäą░ą╣ą╗čŗ ą║ąŠą┤ą░, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą▓ ą┐čĆąŠąĄą║č鹥.
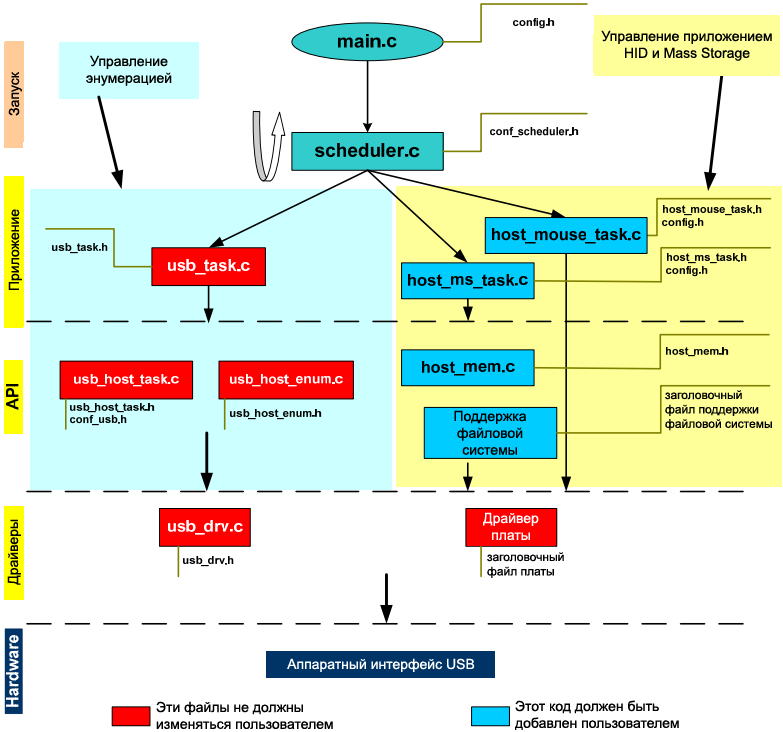
ąĀąĖčü. 3-1. ąÉčĆčģąĖč鹥ą║čéčāčĆą░ čģąŠčüčéą░ HID ąĖ Mass Storage.
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą║ą╗ą░čüčüąŠą╝ HID (ą╝čŗčłčī) čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ ą▓ ą╝ąŠą┤čāą╗ąĄ host_mouse_task.c, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ ą║ą╗ą░čüčüą░ Mass Storage čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ą▓ ą╝ąŠą┤čāą╗ąĄ host_ms_task.c. ą©ąĄą┤čāą╗ąĄčĆ (ą┐čĆąŠčåąĄą┤čāčĆą░, ą┐ąŠčüč鹊čÅąĮąĮąŠ ą▓čŗąĘčŗą▓ą░ąĄą╝ą░čÅ ą▓ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠą╝ čåąĖą║ą╗ąĄ main) ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ ą▓čŗąĘčŗą▓ą░ąĄčé ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝čŗ usb_task(void), host_mouse_task(void) ąĖ host_ms_task(void). ąĀą░ą▒ąŠčéą░ čŹčéąĖčģ čéčĆąĄčģ čäčāąĮą║čåąĖą╣ ąŠą┐ąĖčüą░ąĮą░ ąĮąĖąČąĄ.
ŌĆó usb_task(void)
- ąöąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ čĆąĄąČąĖą╝ą░ USB.
- ąŁąĮčāą╝ąĄčĆą░čåąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ USB / čģąŠčüčéą░ USB.
ŌĆó host_mouse_task(void)
- ą¤čĆąŠą▓ąĄčĆčÅąĄčé, ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ą╗ąĖ ą╝čŗčłčī.
- ą¤ąŠą╗čāčćą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ąŠčé ą╝čŗčłąĖ, ąĖ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ.
- ą¤čĆąŠą▓ąĄčĆčÅąĄčé ąŠčéą║ą╗čÄč湥ąĮąĖąĄ ą╝čŗčłąĖ ąŠčé čģąŠčüčéą░.
ŌĆó host_ms_task(void)
- ą¤čĆąŠą▓ąĄčĆčÅąĄčé, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ čģčĆą░ąĮąĄąĮąĖčÅ Mass Storage.
- ąÆčŗą┐ąŠą╗ąĮčÅąĄčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ.
- ą¤čĆąŠą▓ąĄčĆčÅąĄčé ąŠčéą║ą╗čÄč湥ąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ Mass Storage ąŠčé čģąŠčüčéą░.
[3.1. ąŁąĮčāą╝ąĄčĆą░čåąĖčÅ]
ąÜąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ USB ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ čģąŠčüčéčā, ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą┐čĆąŠčåąĄą┤čāčĆą░ 菹Įčāą╝ąĄčĆą░čåąĖąĖ. ąÜčĆą░čéą║ąŠ 菹Įčāą╝ąĄčĆą░čåąĖčÄ ą╝ąŠąČąĮąŠ ąŠą┐ąĖčüą░čéčī ą║ą░ą║ ą┐čĆąŠčåąĄčüčü ąŠą┐ąŠąĘąĮą░ąĮąĖčÅ čģąŠčüč鹊ą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ USB. ąĢčüą╗ąĖ firmware čģąŠčüčéą░ USB ą┐čĆąĖą╝ąĄčé ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ąĖąĮč鹥čĆč乥ą╣čüą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮą░ ąĮąĖąĘą║ąŠą╝ čāčĆąŠą▓ąĮąĄ, č鹊 ą▒čāą┤čāčé ą┐čĆąŠą▓ąĄčĆąĄąĮčŗ ą┤ąĄčüą║čĆąĖą┐č鹊čĆčŗ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĄ čüą┐ąĖčüą║čā ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ (čüą┐ąĖčüąŠą║ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ ą▓ čäą░ą╣ą╗ąĄ conf_usb.h), ąĖ ą┤ą░ą╗ąĄąĄ ą┐čĆąŠčåąĄą┤čāčĆčŗ host_mouse_task() ąĖ host_ms_task() čāą▓ąĖą┤čÅčé ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ (ą╝ą░ą║čĆąŠčü Is_new_device_connection_event() ą▓ąĄčĆąĮąĄčé TRUE).
ąóąĄą║čāčēąĄąĄ čćąĖčüą╗ąŠ ą┐čĆąĖąĮčÅčéčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮ čäčāąĮą║čåąĖąĄą╣ Get_nb_device(), ąĄčüą╗ąĖ čŹč鹊 čĆą░ąĘčĆąĄčłąĄąĮąŠ ąŠą┐čåąĖąĄą╣ USB_HUB_SUPPORT ą▓ čäą░ą╣ą╗ąĄ conf_usb.h, ąĖ čćąĖčüą╗ąŠ ą┐čĆąĖąĮčÅčéčŗčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓ ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ čäčāąĮą║čåąĖąĄą╣ Get_nb_supported_interface(). ąöą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ ą║ą░ąČą┤ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ąŠąĘą╝ąŠąČąĄąĮ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ ą┤ąŠčüčéčāą┐ ą║ ą║ąŠą┤ą░ą╝ ą║ą╗ą░čüčüą░, ą┐ąŠą┤ą║ą╗ą░čüčüą░ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ą░ ą▒ą╗ą░ą│ąŠą┤ą░čĆčÅ ą╝ą░ą║čĆąŠčüą░ą╝ Get_class(i), Get_subclass(i) ąĖ Get_protocol(i).
ą¤čĆąŠą│čĆą░ą╝ą╝ą░ ą┐čĆąŠą▓ąĄčĆčÅąĄčé - ąĖą╝ąĄąĄčé ą╗ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą║ą╗ą░čüčüą░, ąĖ ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐čĆąĖąĮčÅčé, ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé ą║ą░ąĮą░ą╗čŗ čäčāąĮą║čåąĖąĄą╣ host_auto_configure_endpoint ąĖą╗ąĖ čäčāąĮą║čåąĖąĄą╣ User_configure_endpoint(), ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹊ą│ąŠ, ą▒čŗą╗ą░ ą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮą░ ąŠą┐čåąĖčÅ HOST_AUTO_CFG_ENDPOINT ą▓ čäą░ą╣ą╗ąĄ conf_usb.h, ąĖą╗ąĖ ąĮąĄčé.
ąÜąŠą│ą┤ą░ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąŠ, čģąŠčüčé ą┐ąŠčüčŗą╗ą░ąĄčé ąĘą░ą┐čĆąŠčü Set_configuration() ą║ čāčüčéčĆąŠą╣čüčéą▓čā USB, ąĖ ą┐ąĄčĆąĄą╣ą┤ąĄčé ą║ čüąŠčüč鹊čÅąĮąĖčÄ DEVICE_READY (čāčüčéčĆąŠą╣čüčéą▓ąŠ USB ą│ąŠč鹊ą▓ąŠ ą║ čĆą░ą▒ąŠč鹥).
ąöą╗čÅ ąĘą░ą┤ą░čćąĖ čģąŠčüčéą░ ą╝čŗčłąĖ, ą║ąŠą│ą┤ą░ ąŠąĮą░ ą┐ąŠą╗čāčćąĖčé ąŠą┐ąŠą▓ąĄčēąĄąĮąĖąĄ ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĖ, ą▒čāą┤ąĄčé ą┐čĆąŠą▓ąĄčĆąĄąĮčŗ ą║ą╗ą░čüčü ąĖ ą┐čĆąŠč鹊ą║ąŠą╗, čćč鹊ą▒čŗ čāą▒ąĄą┤ąĖčéčīčüčÅ, čćč鹊 ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ą╝čŗčłčī. ąĢčüą╗ąĖ čŹč鹊 čéą░ą║, ąĘą░ą┤ą░čćą░ čĆą░ąĘą╝ąŠčĆąŠąĘąĖčé ą║ą░ąĮą░ą╗ IN ąĖ ą┐ąŠą┤ą│ąŠč鹊ą▓ąĖčé ąĄą│ąŠ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ. ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą║ąŠą┤ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą╝čŗčłąĖ čģąŠčüč鹊ą╝ HID:
if(Is_new_device_connection_event()) //ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░
{
mouse_connected=0;
for(i=0; i < Get_nb_supported_interface(); i++)
{
if(Get_class(i)==HID_CLASS
&& Get_protocol(i)==HID_PROTOCOL_MOUSE)
{
mouse_connected=1;
host_hid_set_idle();
host_get_hid_report_descriptor();
LOG_STR_CODE(log_mouse_connect);
PIPE_MOUSE_IN=host_get_hwd_pipe_nb(Get_ep_addr(i,0));
Host_select_pipe(PIPE_MOUSE_IN);
Host_continuous_in_mode();
Host_unfreeze_pipe();
break;
}
}
}
ąÜąŠą│ą┤ą░ ąĘą░ą┤ą░čćą░ mass storage čāą▓ąĖą┤ąĖčé čüąŠą▒čŗčéąĖąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ąĮąŠą▓ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, č鹊 ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čāčüčéčĆąŠą╣čüčéą▓ mass storage ąŠąĮą░ ąĖčēąĄčé ą║ą░ąČą┤čŗą╣ ąĖąĮč鹥čĆč乥ą╣čü ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ąĢčüą╗ąĖ č鹥ą║čāčēąĖą╣ ąĖąĮč鹥čĆč乥ą╣čü ą┐čĆąĖąĮą░ą┤ą╗ąĄąČąĖčé ą║ą╗ą░čüčüčā mass storage, č鹊 č鹥ą║čāčēąĖą╣ ąĖąĮą┤ąĄą║čü čāčüčéčĆąŠą╣čüčéą▓ą░ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ ą╝ą░čüčüąĖą▓ąĄ čāčüčéčĆąŠą╣čüčéą▓ mass storage dms[n] ąĖ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čāčüčéčĆąŠą╣čüčéą▓ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ dms_connected. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ, ąĘą░ą┤ą░čćą░ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčé ą║ą░ąĮą░ą╗ IN ąĖ ą║ą░ąĮą░ą╗ OUT, ąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčé ą▓čüąĄ ą┐čĆąĖą▓ąŠą┤čŗ USB (čāčüčéčĆąŠą╣čüčéą▓ąŠ Mass Storage). ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮ ą║ąŠą┤ čģąŠčüčéą░ ą┤ą╗čÅ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ Mass Storage.
if(Is_new_device_connection_event())
{
for(k=0; k < Get_nb_device(); k++)
{
Host_select_device(k);
new_dms=TRUE;
for(i=0; i < Get_nb_supported_interface(); i++)
{
if(Get_class(i)==MS_CLASS)
{
LOG_STR_CODE(log_ms_connect);
if (dms_connected!=0) // ą¤ąŠą┤ą║ą╗čÄč湥ąĮąŠ ą┤čĆčāą│ąŠąĄ DMS?
{
for(n=0;n<USB_MAX_DMS_NUMBER;n++)
{
if(dms[n].device_index==k)
{
new_dms=FALSE;
}
}
}
if(new_dms)
{
dms_connected++; // TODO: ą┐čĆąŠą▓ąĄčĆąĖčéčī USB_MAX_DMS_NUMBER
dms[dms_connected-1].device_index=k;
//ą¤ąŠą╗čāč湥ąĮąĖąĄ ą║ąŠčĆčĆąĄą║čéąĮčŗčģ čäąĖąĘąĖč湥čüą║ąĖčģ ą║ą░ąĮą░ą╗ąŠą▓, čüą▓čÅąĘą░ąĮąĮčŗčģ
// čü ą║ąŠąĮąĄčćąĮčŗą╝ąĖ č鹊čćą║ą░ą╝ąĖ IN/OUT čāčüčéčĆąŠą╣čüčéą▓ą░ DMS.
if(Is_ep_addr_in(Get_ep_addr(i,0)))
{ //ąöą░, ą┐čĆąĖą▓čÅąČąĄą╝ čŹč鹊 ą║ ą║ą░ąĮą░ą╗čā MassStorage IN
dms[dms_connected-1].pipe_in=usb_tree.device[k].interface[i].ep[0].pipe_number;
dms[dms_connected-1].pipe_out=usb_tree.device[k].interface[i].ep[1].pipe_number;
}
else
{ //ąØąĄčé, ąĖąĮą▓ąĄčĆčüąĖčÅ...
dms[dms_connected-1].pipe_in=usb_tree.device[k].interface[i].ep[1].pipe_number;
dms[dms_connected-1].pipe_out=usb_tree.device[k].interface[i].ep[0].pipe_number;
}
//ą¤ąŠą╗čāč湥ąĮąĖąĄ ąĮąŠą╝ąĄčĆą░ lun ą▓ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą╝ DMS
Select_dms(dms_connected-1);
dms[dms_connected-1].nb_lun=host_get_lun();
//ąÆčŗčćąĖčüą╗ąĖčéčī ąĮąŠą╝ąĄčĆ USB LUN
lun=0;
for(n=0;n<dms_connected-1;n++)
{
lun +=dms[n].nb_lun;
}
//ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą▓čüąĄčģ ą┐čĆąĖą▓ąŠą┤ąŠą▓ USB
for(n = 0; n < dms[dms_connected-1].nb_lun; n++)
{
host_ms_inquiry();
//host_read_format_capacity(lun); //ąĮąĄą║ąŠč鹊čĆčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ čéčĆąĄą▒čāčÄčé
//čŹčéčā ą║ąŠą╝ą░ąĮą┤čā ą┐ąĄčĆąĄą┤ ą║ąŠą╝ą░ąĮą┤ąŠą╣ čćč鹥ąĮąĖčÅ
host_read_capacity(lun, &capacity);
host_ms_request_sense();
while (CTRL_GOOD != host_test_unit_ready(lun));
host_read_capacity( lun, &capacity );
lun++;
}
break;
}
}
}
}
}
[3.2. ą¤ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ]
3.2.1. ąŚą░ą┤ą░čćą░ čģąŠčüčéą░ HID, čĆą░ą▒ąŠčéą░čÄčēą░čÅ čü ą╝čŗčłčīčÄ. ąĢčüą╗ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ą╝čŗčłčī, č鹊 ąĘą░ą┤ą░čćą░ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ čüąĮą░čćą░ą╗ą░ ą┐čĆąŠą▓ąĄčĆčÅąĄčé, ą┐čĆąĖąĮčÅčé ą╗ąĖ ą┤ąŠą┐čāčüčéąĖą╝čŗą╣ ą┐ą░ą║ąĄčé IN. ąÜąŠą│ą┤ą░ ą┤ą░ąĮąĮčŗąĄ ą┤ąŠčüčéčāą┐ąĮčŗ, ą┐čĆąŠą│čĆą░ą╝ą╝ą░ čćąĖčéą░ąĄčé čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ čäčāąĮą║čåąĖąĄą╣ Host_read_byte() ąĖ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą░ą╗ą│ąŠčĆąĖčéą╝ ą┐ąŠ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┤ąĄą╣čüčéą▓ąĖą╣ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (čćč鹊 ąĮčāąČąĮąŠ ą┤ąĄą╗ą░čéčī, čćč鹊ą▒čŗ ąŠą▒čĆą░ą▒ąŠčéą░čéčī ąĮąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠą╗ąŠąČąĄąĮąĖčÅ ą║čāčĆčüąŠčĆą░ ą╝čŗčłąĖ ąĖ ąĮą░ąČą░čéąĖą╣ ą║ąĮąŠą┐ąŠą║). ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ čģąŠčüčé ą┐ąŠčüčŗą╗ą░ąĄčé IN-ą║ąŠą╝ą░ąĮą┤čā čäčāąĮą║čåąĖąĄą╣ Host_read_byte(), ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ąĘą░ą┤ą░čćą░ ą│ąŠč鹊ą▓ą░ ą║ ą┐čĆąĖąĄą╝čā čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą┐ą░ą║ąĄčéą░ ą┤ą░ąĮąĮčŗčģ. ąØąĖąČąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą║ąŠą┤ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čģąŠčüč鹊ą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ąŠčé ą╝čŗčłąĖ. ąśąĮą┤ąĖą║ą░čåąĖąŠąĮąĮčŗąĄ čüą▓ąĄč鹊ą┤ąĖąŠą┤čŗ Led3..Led0 ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé čüąŠčüč鹊čÅąĮąĖąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┤ą░ąĮąĮčŗčģ ą╝čŗčłąĖ (菹╝čāą╗ąĖčĆčāąĄčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ).
Host_select_pipe(PIPE_MOUSE_IN);
if(Is_host_in_received())
{
if(Is_host_stall()==FALSE)
{
i=Host_read_byte();
new_x=(S8)Host_read_byte();
new_y=(S8)Host_read_byte();
if(new_x==0)
{
Led0_off();
Led1_off();}
else if(new_x>0)
{
Led0_on();
Led1_off();
}
else
{
Led0_off();
Led1_on();
}
if(new_y==0)
{
Led2_off();
Led3_off();
}
else if(new_y>0)
{
Led2_on();
Led3_off();
}
else
{
Led2_off();
Led3_on();
}
}
Host_ack_in_received();
Host_send_in();
}
ą×ą┐ąĄčĆą░čåąĖąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┤ą░ąĮąĮčŗčģ ą╝čŗčłąĖ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ č鹊ą╗čīą║ąŠ ą▓ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮčŗčģ čåąĄą╗čÅčģ - ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą║čāčĆčüąŠčĆą░ ą▒čāą┤čāčé ąĘą░ą│ąŠčĆą░čéčīčüčÅ ąĖ ą│ą░čüąĮčāčéčī čĆą░ąĘąĮčŗąĄ ąĖąĮą┤ąĖą║ą░čåąĖąŠąĮąĮčŗąĄ čüą▓ąĄč鹊ą┤ąĖąŠą┤čŗ ąĮą░ ą┐ą╗ą░č鹥 USBKEY. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čŹčéčā čäčāąĮą║čåąĖčÄ "ą║ą░ą║ ąĄčüčéčī", ąĮąŠ ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ ą▓ čŹč鹊ą╝ ą╝ąĄčüč鹥 ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą▓ąŠą╣ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┤ą░ąĮąĮčŗčģ ąŠčé ą╝čŗčłąĖ (ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ).
3.2.2. ąŚą░ą┤ą░čćą░ čģąŠčüčéą░ ą┐ąŠ ąŠą▒čĆą░ą▒ąŠčéą║ąĄ Mass Storage. ąÜą░ą║ čāą┐ąŠą╝ąĖąĮą░ą╗ąŠčüčī čĆą░ąĮąĄąĄ, ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ Mass Storage ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąĮą░ą▒ąŠčĆ ą║ąŠą╝ą░ąĮą┤ SCSI, ąŠčéą┐čĆą░ą▓ą╗čÅąĄą╝čŗčģ čģąŠčüč鹊ą╝ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ čäą░ą╣ą╗ąŠą▓ ąĮą░ ą┤ąĖčüą║ąĄ MSD. ąæą░ąĘąŠą▓ą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ čäčāąĮą║čåąĖčÅą╝ąĖ host_get_data() ąĖ host_send_data(). ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą┤ąŠą╗ąČąĮąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą║ąŠą┤ąĖčĆąŠą▓čēąĖą║ ą┐čĆąŠč鹊ą║ąŠą╗ą░ SCSI, ą┤ąĄą║ąŠą┤ąĄčĆ čäą░ą╣ą╗ąŠą▓ąŠą╣ čüąĖčüč鹥ą╝čŗ (čüą╝. ą░ą┐ąĮąŠčāčé AVR114 [5]).
[4. ą¤čĆąĖą╝ąĄčĆ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ]
ąÆčüčÅ čŹčéą░ č鹥ąŠčĆąĖčÅ ą╝ąŠąČąĄčé ą┐ąŠą║ą░ąĘą░čéčīčüčÅ čüą╗ąŠąČąĮąŠą╣, ą┐ąŠčŹč鹊ą╝čā ąĘą┤ąĄčüčī ą▒čāą┤ąĄčé ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐čĆąŠčüč鹊ą╣ ą┐čĆąĖą╝ąĄčĆ, ą┐ąŠąĘą▓ąŠą╗čÅčÄčēąĖą╣ ą▒čŗčüčéčĆąŠ ą┐ąŠą┐čĆąŠą▒ąŠą▓ą░čéčī čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ čģąŠčüčéą░ USB ą┤ą╗čÅ ą║ą╗ą░čüčüąŠą▓ USB HID ąĖ USB Mass Storage.
ąÆ čŹč鹊ą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮą░čÅ ą┐ą╗ą░čéą░ čüąĮą░čćą░ą╗ą░ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā PC č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü USB, čĆą░ą▒ąŠčéą░čÅ ą║ą░ą║ čāčüčéčĆąŠą╣čüčéą▓ąŠ čģčĆą░ąĮąĄąĮąĖčÅ USB Mass Storage device, ą┐ąŠą┤ą│ąŠčéą░ą▓ą╗ąĖą▓ą░čÅ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ. ąŚą░č鹥ą╝ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮą░čÅ ą┐ą╗ą░čéą░ ąŠčéą║ą╗čÄčćą░ąĄčéčüčÅ ąŠčé PC, ąĖ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ čāčüčéčĆąŠą╣čüčéą▓čā čģčĆą░ąĮąĄąĮąĖčÅ Mass Storage device (čäą╗ąĄčłą║ąĄ), čćč鹊ą▒čŗ ą┐ąŠą║ą░ąĘą░čéčī ą┐ąĄčĆąĄą┤ą░čćčā ą┤ą░ąĮąĮčŗčģ Mass Storage. ą£čŗ čéą░ą║ąČąĄ ą╝ąŠąČąĄą╝ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī čüčéą░ąĮą┤ą░čĆčéąĮčāčÄ ą╝čŗčłčī USB ą║ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮąŠą╣ ą┐ą╗ą░č鹥,
čćč鹊ą▒čŗ ą┐ąŠą║ą░ąĘą░čéčī čĆą░ą▒ąŠčéčā ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čģąŠčüčéą░, ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčēąĄą│ąŠ ą┐čĆąŠč鹊ą║ąŠą╗ USB HID ą╝čŗčłąĖ.
ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ čģąŠčüčéą░ USB HID ąĖ Mass Storage ą╝ąŠąČąĄčé ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ ąĮą░ ą╗čÄą▒ąŠą╝ AVR, čā ą║ąŠč鹊čĆčŗčģ ąĄčüčéčī ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü čü ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ čäčāąĮą║čåąĖąĖ čģąŠčüčéą░, ą┐čāč鹥ą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐ą░ą║ąĄčéą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ, ą┤ąŠčüčéčāą┐ąĮąŠą│ąŠ ąĮą░ čüą░ą╣č鹥 Atmel.
ą¤čĆąĖą╝. ą┐ąĄčĆąĄą▓ąŠą┤čćąĖą║ą░: ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ "ąĮą░ ą╗čÄą▒ąŠą╝ AVR" čüą╗ąĖčłą║ąŠą╝ ą│čĆąŠą╝ą║ąŠ čüą║ą░ąĘą░ąĮąŠ. ąÆ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čćąĖą┐ąŠą▓ AVR, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčēąĖčģ čäčāąĮą║čåąĖčÄ čģąŠčüčéą░, ą▓ąĄčüčīą╝ą░ ąŠą│čĆą░ąĮąĖč湥ąĮąŠ - čŹč鹊 č鹊ą╗čīą║ąŠ čüąĄą╝ąĄą╣čüčéą▓ąŠ AVR USB Series7, ą▓ ą║ąŠč鹊čĆąŠąĄ ą▓čģąŠą┤ąĖčé 2 čćąĖą┐ą░: AT90USB647 ąĖ AT90USB1287. ą¤čĆąĖčćąĖąĮą░ ą┐ąŠąĮčÅčéąĮą░ - ą┤ą╗čÅ ą║ą░č湥čüčéą▓ąĄąĮąĮąŠą╣ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čäčāąĮą║čåąĖą╣ čģąŠčüčéą░ čéčĆąĄą▒čāąĄčéčüčÅ ą│ąŠčĆą░ąĘą┤ąŠ ą▒ąŠą╗čīčłąĄ ą┐ą░ą╝čÅčéąĖ ąĖ ą▒čŗčüčéčĆąŠą┤ąĄą╣čüčéą▓ąĖčÅ, č湥ą╝ ąĖą╝ąĄąĄčéčüčÅ ą▓ ąĮą░ą╗ąĖčćąĖąĖ čā ą║ą╗ą░čüčüąĖč湥čüą║ąĖčģ AVR.
[4.2. ąÉą┐ą┐ą░čĆą░čéčāčĆą░]
ą×ą▒ą░ ą┐ą░ą║ąĄčéą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ą╝ąŠą│čāčé ą▒čŗčéčī ąĘą░ą┐čāčēąĄąĮčŗ ąĮą░ ąĖą╝ąĄčÄčēąĖčģčüčÅ čüčéą░čĆč鹥čĆ-ą║ąĖčéą░čģ. ąØą░ ą╝ąŠą╝ąĄąĮčé ąĮą░ą┐ąĖčüą░ąĮąĖčÅ čŹč鹊ą│ąŠ ą┤ąŠą║čāą╝ąĄąĮčéą░ ą┐ą░ą║ąĄčéčŗ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čģąŠčüčéą░ HID ąĖ čģąŠčüčéą░ Mass Storage ą╝ąŠą│čāčé ą▒čŗčéčī ąĘą░ą┐čāčēąĄąĮčŗ ąĮą░ ą┐ą╗ą░čéą░čģ STK525 ąĖ USBKEY (ąĮą░ ą║ąŠč鹊čĆčŗčģ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ čćąĖą┐čŗ AT90USB647 ąĖą╗ąĖ AT90USB1287). ąŻčüčéčĆąŠą╣čüčéą▓ąŠ USB Mass Storage, ą║ąŠč鹊čĆąŠąĄ ą┐ąŠą┤ą║ą╗čÄčćą░ąĄčéčüčÅ ą║ čģąŠčüčéčā Mass Storage, ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗ąĖą▒ąŠ ąŠą▒čŗčćąĮąŠą╣ čäą╗ąĄčłą║ąŠą╣ USB, ą╗ąĖą▒ąŠ čüčéą░čĆč鹥čĆ-ą║ąĖč鹊ą╝, čĆą░ą▒ąŠčéą░čÄčēąĖą╝ ą║ą░ą║ čāčüčéčĆąŠą╣čüčéą▓ąŠ USB Mass Storage (čüą╝. [5, 6]).
ą¤ą╗ą░čéą░ čģąŠčüčéą░ ą┤ąŠą╗ąČąĮą░ čĆą░ą▒ąŠčéą░čéčī ą▓ čĆąĄąČąĖą╝ąĄ čģąŠčüčéą░ (ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ąŠąĮąĮąĄą║č鹊čĆ miniA). ąöą╗čÅ čĆą░ą▒ąŠčéčŗ ą┐ą╗ą░čéčŗ ą▓ čĆąĄąČąĖą╝ąĄ čģąŠčüčéą░ čéčĆąĄą▒čāąĄčéčüčÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ. ą¤čĆąĖčćąĖąĮą░ ą┐ąŠąĮčÅčéąĮą░ - ą┐ą╗ą░čéą░ čģąŠčüčéą░ ąĮčāąČą┤ą░ąĄčéčüčÅ ą▓ ą┐ąĖčéą░ąĮąĖąĖ, ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ USB (ą╝čŗčłčī HID ąĖą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ Mass Storage) čéčĆąĄą▒čāąĄčé ą┤ą╗čÅ čüąĄą▒čÅ ą┐ąŠą┤ą░čćąĖ ą┐ąĖčéą░ąĮąĖčÅ č湥čĆąĄąĘ USB.
[4.3. ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ]
4.3.1. ą×ą┐ąĖčüą░ąĮąĖąĄ čĆą░ą▒ąŠčéčŗ. ąöą╗čÅ ąĘą░ą┤ą░čćąĖ čģąŠčüčéą░, ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčēąĄą╣ ą┐čĆąŠč鹊ą║ąŠą╗ USB HID ą╝čŗčłąĖ, ąĄčüą╗ąĖ ąÆčŗ ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥 čüčéą░ąĮą┤ą░čĆčéąĮčāčÄ ą╝čŗčłčī USB ą║ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮąŠą╣ ą┐ą╗ą░č鹥, č鹊 ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖčÅ ą╝čŗčłąĖ ą▒čāą┤čāčé ąŠč鹊ą▒čĆą░ąČą░čéčīčüčÅ ąĘą░ąČąĖą│ą░ąĮąĖąĄą╝ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą▓ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮąŠą╣ ą┐ą╗ą░čéčŗ LED3..LED0. ąÜą░ą║ č鹊ą╗čīą║ąŠ ą┐čĆąŠčłą╗ą░ 菹Įčāą╝ąĄčĆą░čåąĖčÅ, čüąŠą▒čŗčéąĖąĄ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ą░ą║ąĄčéą░ IN ą▒čāą┤ąĄčé čüčĆą░ą▒ą░čéčŗą▓ą░čéčī ą▓čüčÅą║ąĖą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą╝ąĄčēą░čéčīčüčÅ ą╝čŗčłčī, ą╗ąĖ ą║ąŠą│ą┤ą░ ąĮą░ ąĮąĄą╣ ą▒čāą┤čāčé ąĮą░ąČąĖą╝ą░čéčīčüčÅ ą║ąĮąŠą┐ą║ąĖ. ąźąŠčüčé ą┐čĆąŠčćąĖčéą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą╝čŗčłąĖ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü USB. ą¤ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┐ąŠ ąŠčüąĖ X ą▒čāą┤ąĄčé čāą┐čĆą░ą▓ą╗čÅčéčī ą│ąŠčĆąĄąĮąĖąĄą╝ LED0 ąĖ LED1 (ą┐čĆąĖ X > 0 ą▓ą║ą╗čÄčćąĖčéčüčÅ LED0, ą┐čĆąĖ X < 0 ą▓ą║ą╗čÄčćąĖčéčüčÅ LED1), ą░ ą┐ąŠ ąŠčüąĖ Y ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą▒čāą┤ąĄčé ąŠč鹊ą▒čĆą░ąČą░čéčīčüčÅ ą│ąŠčĆąĄąĮąĖąĄą╝ LED2 ąĖ LED3 (ą┐čĆąĖ Y > 0 ą▓ą║ą╗čÄčćąĖčéčüčÅ LED2, ą┐čĆąĖ Y < 0 ą▓ą║ą╗čÄčćąĖčéčüčÅ LED3).
ąöą╗čÅ ąĘą░ą┤ą░čćąĖ čģąŠčüčéą░ USB Host Mass Storage, ą║ą░ą║ č鹊ą╗čīą║ąŠ ą┐čĆąŠčłą╗ą░ 菹Įčāą╝ąĄčĆą░čåąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ MSD, ą╝ąŠąČąĮąŠ ąŠčüčāčēąĄčüčéą▓ąĖčéčī ąŠą▒ą╝ąĄąĮ čäą░ą╣ą╗ą░ą╝ąĖ ą╝ąĄąČą┤čā ą┤ą░ąĮąĮčŗą╝ąĖ, ąĘą░ą┐ąĖčüą░ąĮąĮčŗą╝ąĖ ąĮą░ flash-ą┤ąĖčüą║ąĄ ą┐ą╗ą░čéčŗ čģąŠčüčéą░ (čŹč鹊 ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ ą┐ą░ą╝čÅčéąĖ, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮą░čÅ ąĮą░ ą┐ą╗ą░čéčā), ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ USB MSD. ą¤čĆą░ą▓ąŠąĄ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ą┤ąČąŠą╣čüčéąĖą║ą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐čĆąŠčćąĖčéą░čéčī čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ą░ą┐ą║ąĖ "OUT" ąĮą░ čāčüčéčĆąŠą╣čüčéą▓ąĄ USB MSD, ąĖ ąĘą░ą┐ąĖčüą░čéčī ąĄą│ąŠ ąĮą░ flash-ą┤ąĖčüą║ ą┐ą╗ą░čéčŗ čģąŠčüčéą░ ą▓ ą┐ą░ą┐ą║čā "IN". ąś ąĮą░ąŠą▒ąŠčĆąŠčé, ą╗ąĄą▓ąŠąĄ ą┐ąŠą╗ąŠąČąĄąĮąĖąĄ ą┤ąČąŠą╣čüčéąĖą║ą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ąĄčĆąĄą┐ąĖčüą░čéčī ą┤ą░ąĮąĮčŗąĄ ą▓ ąŠą▒čĆą░čéąĮąŠą╝ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ, čü ą┤ąĖčüą║ą░ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ dataflash ąĮą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ USB MSD.
4.3.2. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ. ąØąĄą║ąŠč鹊čĆčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮąŠ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čéąĖą┐ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ą┐čĆą░ą▓ąĖą╗čīąĮčāčÄ čĆą░ą▒ąŠčéčā ą║ąŠą┤ą░ čģąŠčüčéą░ USB. ą×čüąĮąŠą▓ąĮąŠą╣ ą║ąŠą┤ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░čéčī ąĮąĄ ąĮčāąČąĮąŠ, ąŠąĮ ą▒čāą┤ąĄčé čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ, ąŠą┐ąĖčüą░ąĮąĮčŗą╝ąĖ ąĮąĖąČąĄ.
ŌĆó ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ USB, ą▓ čäą░ą╣ą╗ąĄ conf_usb.h:
- ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮą░ ąŠą┐čåąĖčÅ USB_HOST_FEATURE ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čäčāąĮą║čåąĖąĖ čģąŠčüčéą░ USB.
- ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮą░ ąŠą┐čåąĖčÅ USB_DEVICE_FEATURE ą┤ą╗čÅ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ čü ą║ąŠą╝ą┐čīčÄč鹥čĆąŠą╝ PC.
- ą▓ ą╝ą░čüčüąĖą▓ąĄ VID_PID_TABLE ą┤ąŠą╗ąČąĮčŗ čüąŠą┤ąĄčƹȹ░čéčīčüčÅ ąĘąĮą░č湥ąĮąĖčÅ VID ąĖ PID ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗčģ čāčüčéčĆąŠą╣čüčéą▓, ąĄčüą╗ąĖ čĆą░ąĘčĆąĄčłąĄąĮą░ ąŠą┐čåąĖčÅ HOST_STRICT_VID_PID_TABLE.
- ą╝ą░čüčüąĖą▓ CLASS_SUBCLASS_PROTOCOL ą┤ąŠą╗ąČąĄąĮ ą▓ą║ą╗čÄčćą░čéčī ą▓ čüąĄą▒čÅ ą┐čĆąŠč鹊ą║ąŠą╗ ą║ą╗ą░čüčüą░ HID class Mouse. ąöą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ ą╝čŗčłąĄą╣ USB ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą▓ą║ą╗čÄč湥ąĮčŗ ąĘą░ą│čĆčāąČą░ąĄą╝čŗąĄ (bootable) ąĖ ąĮąĄ ąĘą░ą│čĆčāąČą░ąĄą╝čŗąĄ (non-bootable) ą┐ąŠą┤ą║ą╗ą░čüčüčŗ, ąĖ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čāčüčéčĆąŠą╣čüčéą▓ USB MSD ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ąĖąĮč鹥čĆč乥ą╣čü Mass Storage (Mass Storage class, SCSI subclass, ą┐čĆąŠč鹊ą║ąŠą╗ č鹊ą╗čīą║ąŠ bulk). ąÆčüąĄ čŹčéąĖ 菹╗ąĄą╝ąĄąĮčéčŗ class/subclass/protocol ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┤ąŠą▒ą░ą▓ą╗ąĄąĮčŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝, ąĄčüą╗ąĖ ąĮčāąČąĮąŠ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ HUB.
- ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮą░ ąŠą┐čåąĖčÅ USB_HUB_SUPPORT, ąĄčüą╗ąĖ ąÆčŗ čģąŠčéąĖč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čāčüčéčĆąŠą╣čüčéą▓ USB MSD.
- ąŠą┐čåąĖčÅ HOST_STRICT_VID_PID_TABLE ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗ąĖą▒ąŠ čĆą░ąĘčĆąĄčłąĄąĮą░, ą╗ąĖą▒ąŠ ąĘą░ą┐čĆąĄčēąĄąĮą░. ąöą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čĆą░ąĘąĮčŗčģ ą┐čĆąŠą┤čāą║č鹊ą▓ ąŠčé čĆą░ąĘą╗ąĖčćąĮčŗčģ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĘą░ą┐čĆąĄčéąĖčéčī čŹč鹊čé ą╝ą░ą║čĆąŠčü.
ŌĆó ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ USB Mass Storage:
- ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮą░ ąŠą┐čåąĖčÅ HOST_SYNC_MODE ą▓ čäą░ą╣ą╗ąĄ config.h ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┐čĆąĖą╝ąĄčĆą░ čģąŠčüčéą░ USB Mass Storage.
[ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮą░čÅ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ]
ŌĆó AVR USB products Datasheet (atmel.com)
ŌĆó USB HID Class specification (usb.org)
ŌĆó USB Mass Storage Class specification (usb.org)
[ąĪą╗ąŠą▓ą░čĆąĖą║]
ąŚą┤ąĄčüčī ą┐čĆąĖą▓ąĄą┤ąĄąĮą░ čĆą░čüčłąĖčäčĆąŠą▓ą║ą░ ąĮąĄą║ąŠč鹊čĆčŗčģ ąĮąĄą┐ąŠąĮčÅčéąĮčŗčģ č鹥čĆą╝ąĖąĮąŠą▓ ąĖ ą░ą▒ą▒čĆąĄą▓ąĖą░čéčāčĆ. ą×ą▒čŖčÅčüąĮąĄąĮąĖąĄ ą┤čĆčāą│ąĖčģ č鹥čĆą╝ąĖąĮąŠą▓, ą║ą░čüą░čÄčēąĖčģčüčÅ čüčéą░ąĮą┤ą░čĆčéą░ USB (ą║ąŠąĮąĄčćąĮą░čÅ č鹊čćą║ą░, čĆąĄą┐ąŠčĆčé, 菹Įčāą╝ąĄčĆą░čåąĖčÅ, ą┤ąĄčüą║čĆąĖą┐č鹊čĆčŗ ąĖ čé. ą┤.) čüą╝. ą▓ čüčéą░čéčīąĄ USB in a NutShell [4].
ATAPI Advanced Technology Attachment Packet Interface, čüčéą░ąĮą┤ą░čĆčé čłąĖąĮčŗ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ ą║ąŠą╝ą┐čīčÄč鹥čĆčā čģčĆą░ąĮąĖą╗ąĖčē ą┤ą░ąĮąĮčŗčģ. ą¤ąŠą┤čĆąŠą▒ąĮąĄąĄ čüą╝. ąÆąĖą║ąĖą┐ąĄą┤ąĖčÄ.
DMS Device Mass Storage, čāčüčéčĆąŠą╣čüčéą▓ąŠ čģčĆą░ąĮąĄąĮąĖčÅ USB.
LUN Logical Unit Number ŌĆö čŹč鹊 ą░ą┤čĆąĄčü ą┤ąĖčüą║ą░ (ą▓ čĆą░ąĮąĮąĖčģ ą▓ąĄčĆčüąĖčÅčģ) ąĖą╗ąĖ ą┤ąĖčüą║ąŠą▓ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ čüąĄčéčÅčģ čģčĆą░ąĮąĄąĮąĖčÅ (čüąŠą▓čĆąĄą╝ąĄąĮąĮąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ).
MMC-2 MultiMedia Card ą▓ąĄčĆčüąĖąĖ 2, čéąĖą┐ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ flash-ą║ą░čĆčé ą┐ą░ą╝čÅčéąĖ.
MSD Mass Storage Device, čāčüčéčĆąŠą╣čüčéą▓ąŠ čģčĆą░ąĮąĄąĮąĖčÅ USB, č鹊 ąČąĄ čüą░ą╝ąŠąĄ, čćč鹊 ąĖ DMS.
OTG On The Go, ą┤ąŠčüą╗ąŠą▓ąĮčŗą╣ ą┐ąĄčĆąĄą▓ąŠą┤ "ąĮą░ ą╗ąĄčéčā". ą×ą▒ąŠąĘąĮą░čćą░ąĄčé ąĖąĮč鹥čĆč乥ą╣čü USB, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą║ą░ą║ ą▓ čĆąĄąČąĖą╝ąĄ čģąŠčüčéą░ USB, čéą░ą║ ąĖ ą▓ čĆąĄąČąĖą╝ąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ USB.
RBC Reduced Block Commands, ą┐ąŠą┤ą╝ąĮąŠąČąĄčüčéą▓ąŠ ą║ąŠą╝ą░ąĮą┤ čüčéą░ąĮą┤ą░čĆčéą░ SCSI.
SCSI Small Computer System Interface, čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čéąĖą┐ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą▓ąĮąĄčłąĮąĖčģ čāčüčéčĆąŠą╣čüčéą▓ čģčĆą░ąĮąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ, ąĖ ąŠą┤ąĮąŠąĖą╝ąĄąĮąĮčŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗.
SFF-8020i čüčéą░ąĮą┤ą░čĆčé ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ CD-ROM/DVD ąĮą░ ąŠčüąĮąŠą▓ąĄ ąĖąĮč鹥čĆč乥ą╣čüą░ ATA/ATAPI.
SFF-8070i čüčéą░ąĮą┤ą░čĆčé ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ ą│ąĖą▒ą║ąĖčģ ą┤ąĖčüą║ąŠą▓.
UFI Universal File Interface, čüčéą░ąĮą┤ą░čĆčé ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ ą│ąĖą▒ą║ąĖčģ ą┤ąĖčüą║ąŠą▓.
[ąĪčüčŗą╗ą║ąĖ]
1. AVR287: USB Host HID and Mass Storage Demonstration site:atmel.com.
2. LUFA - ą▒ąĄčüą┐ą╗ą░čéąĮą░čÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ USB ą┤ą╗čÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ Atmel AVR.
3. userial - ą╝ąŠčüčé USBI2C/SPI/GPIO/ADC ąĮą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ AT90USB647.
4. USB in a NutShell - ą┐čāč鹥ą▓ąŠą┤ąĖč鹥ą╗čī ą┐ąŠ čüčéą░ąĮą┤ą░čĆčéčā USB (ąĮą░čćą░ą╗ąŠ).
5. AVR114: ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čäą░ą╣ą╗ąŠą▓ąŠą╣ čüąĖčüč鹥ą╝čŗ Atmel.
6. AVR273: čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ čäą╗ąĄčłą║ąĖ USB ąĮą░ AVR čü ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝ USB.
7. AVR276: USB Software Library for AT90USBxxx Microcontrollers.
8. AVR270: ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮčŗą╣ ą┐čĆąŠąĄą║čé ą╝čŗčłąĖ ąĮą░ AVR čü ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝ USB.
9. 141127AVR287.zip - ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą┐čĆąŠąĄą║čéą░. |



