|
ąÆ čŹč鹊ą╣ čüčéą░čéčīąĄ ą▒čāą┤ąĄčé čĆą░čüčüą╝ąŠčéčĆąĄąĮąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ą╝ąĖ ą┐ąŠčĆč鹊ą▓ STM32 ąĮą░ ą┐čĆąĖą╝ąĄčĆąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ STM32F407 ą▓ ą║ąŠčĆą┐čāčüąĄ LQFP144 (čéą░ą║ąŠą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĮą░ ą┐ą╗ą░čéą░čģ Olimex STM32-E407 ąĖ STM32-P407 [2]). ąØąĄą┐ąŠąĮčÅčéąĮčŗąĄ č鹥čĆą╝ąĖąĮčŗ ąĖ čüąŠą║čĆą░čēąĄąĮąĖčÅ čüą╝. ą▓ čüą╗ąŠą▓ą░čĆąĖą║ąĄ [3].
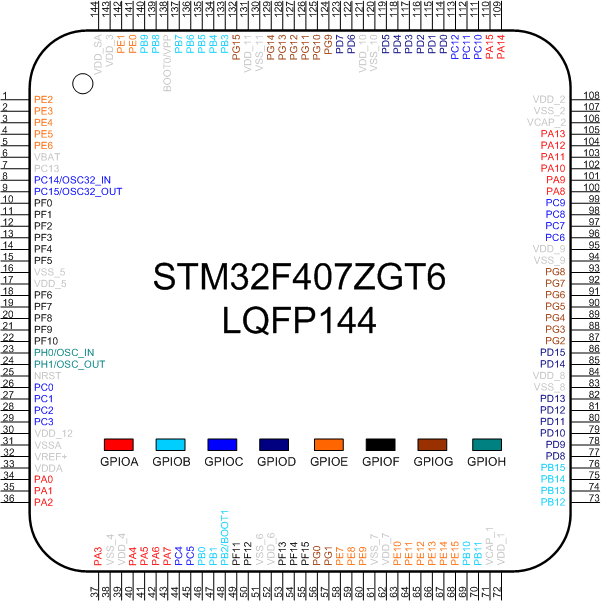
[ą×ą▒ąĘąŠčĆ ą▓čŗą▓ąŠą┤ąŠą▓ GPIO]
ąŻ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ STM32F407 ą▓čüąĄą│ąŠ ąĖą╝ąĄąĄčéčüčÅ čüąĄą╝čī 16-ą▓čŗą▓ąŠą┤ąĮčŗčģ ą┐ąŠčĆč鹊ą▓: GPIOA, GPIOB, GPIOC, GPIOD, GPIOE, GPIOF, GPIOG (ą┐ąŠą┤ GPIOx ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░čÄčéčüčÅ ą▓čüąĄ čŹčéąĖ ą┐ąŠčĆčéčŗ). ą×ąĮąĖ čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą┐ąŠ ą║ąŠčĆą┐čāčüčā ą║čĆąĖčüčéą░ą╗ą╗ą░, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčüčāąĮą║ąĄ. ąóą░ą║ąČąĄ ąĄčüčéčī ąĄčēąĄ ąĖ ą┐ąŠčĆčé GPIOH, ąĮąŠ čā ąĮąĄą│ąŠ ą▓ ą║ąŠčĆą┐čāčüąĄ LQFP144 ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ č鹊ą╗čīą║ąŠ 2 ąĮąŠąČą║ąĖ, ąĖ č鹥 ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮčŗ ą┐ąŠą┤ ą║ą▓ą░čĆčåąĄą▓čŗą╣ čĆąĄąĘąŠąĮą░č鹊čĆ, čéą░ą║ čćč鹊 čüą║ąŠčĆąĄąĄ GPIOH ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▒čāą┤ąĄčé ąŠč湥ąĮčī čĆąĄą┤ą║ąŠ.
ąøčÄą▒ą░čÅ ąĮąŠąČą║ą░ ą┐ąŠčĆčéą░ GPIO ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮą░čüčéčĆąŠąĄąĮą░ ą▓ ąŠą┤ąĮąŠą╣ ąĖąĘ č湥čéčŗčĆąĄčģ ą▓ąŠąĘą╝ąŠąČąĮčŗčģ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣:
ŌĆó Input (ą▓čģąŠą┤): Floating (ą┐ą╗ą░ą▓ą░čÄčēąĖą╣ ą▓čģąŠą┤ čü ą▓čŗčüąŠą║ąĖą╝ ą▓čģąŠą┤ąĮčŗą╝ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄą╝, ąĮąĖč湥ą╝ ąĮąĄ ąĮą░ą│čĆčāąČąĄąĮąĮčŗą╣), Pull-up (čü ą▓ąĄčĆčģąĮąĖą╝ ąĮą░ą│čĆčāąĘąŠčćąĮčŗą╝ čĆąĄąĘąĖčüč鹊čĆąŠą╝), Pull-down (čü ąĮąĖąČąĮąĖą╝ ąĮą░ą│čĆčāąĘąŠčćąĮčŗą╝ čĆąĄąĘąĖčüč鹊čĆąŠą╝).
ŌĆó Output (ą▓čŗčģąŠą┤): Push-Pull ą┤ą▓čāčģčéą░ą║čéąĮčŗą╣ ą║ą╗čÄčć (Pull-up čü ą▓ąĄčĆčģąĮąĄą╣ ąĮą░ą│čĆčāąĘą║ąŠą╣, Pull-down čü ąĮąĖąČąĮąĄą╣ ąĮą░ą│čĆčāąĘą║ąŠą╣ ąĖą╗ąĖ no Pull ą┐čĆąŠčüč鹊 ą┤ą▓čāčģčéą░ą║čéąĮčŗą╣ ą▓čŗčģąŠą┤), Open Drain ąŠčéą║čĆčŗčéčŗą╣ čüč鹊ą║ (Pull-up, Pull-down ąĖą╗ąĖ no Pull). ąÆ čĆąĄąČąĖą╝ąĄ ą▓čŗčģąŠą┤ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮą░ čüą║ąŠčĆąŠčüčéčī čĆą░ą▒ąŠčéčŗ ą┐ąŠčĆčéą░: 2 ą£ąōčå, 25 ą£ąōčå, 50 ą£ąōčå ąĖą╗ąĖ 100 ą£ąōčå.
ŌĆó Alternate Function (ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮą░čÅ čäčāąĮą║čåąĖčÅ): Push-Pull (Pull-up, Pull-down ąĖą╗ąĖ no Pull), Open Drain (Pull-up, Pull-down ąĖą╗ąĖ no Pull).
ŌĆó Analog (ą░ąĮą░ą╗ąŠą│ąŠą▓ą░čÅ ą╗ąĖąĮąĖčÅ): čŹč鹊čé čĆąĄąČąĖą╝ ąĮąĄąŠą▒čģąŠą┤ąĖą╝, ą║ąŠą│ą┤ą░ ą▓čŗą▓ąŠą┤ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ ą║ą░ąĮą░ą╗ ADC (ąÉą”ą¤) ąĖą╗ąĖ ą▓čŗčģąŠą┤ DAC (ą”ąÉą¤).
ąÆąŠ ą▓čĆąĄą╝čÅ ą░ą║čéąĖą▓ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ čüą▒čĆąŠčüą░ ąĖ čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ąĄą│ąŠ ąŠą║ąŠąĮčćą░ąĮąĖčÅ ą▓čüąĄ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗąĄ čäčāąĮą║čåąĖąĖ ąĮą░ ą▓čŗą▓ąŠą┤ą░čģ ą┐ąŠčĆč鹊ą▓ ąĮąĄ ą░ą║čéąĖą▓ąĮčŗ (ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ ą▓čŗą▓ąŠą┤ąŠą▓, ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮąĮčŗčģ ą┐ąŠą┤ JTAG), ąĖ ą▓čüąĄ ą┐ąŠčĆčéčŗ ąŠą║ą░ąĘčŗą▓ą░čÄčéčüčÅ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗą╝ąĖ ą║ą░ą║ ą┐ą╗ą░ą▓ą░čÄčēąĖąĄ ą▓čģąŠą┤čŗ čü ą▓čŗčüąŠą║ąĖą╝ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄą╝.
ąÆčŗą▓ąŠą┤čŗ ą│ąĄąĮąĄčĆą░č鹊čĆą░ LSE (OSC32_IN ąĖ OSC32_OUT) ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ GPIO (PC14 ąĖ PC15 čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ), ąĄčüą╗ąĖ ą│ąĄąĮąĄčĆą░č鹊čĆ LSE ą▓čŗą║ą╗čÄč湥ąĮ. LSE ąĖą╝ąĄąĄčé ą┐čĆąĖąŠčĆąĖč鹥čé ą┐ąĄčĆąĄą┤ čäčāąĮą║čåąĖąĄą╣ GPIO.
ąÆčŗą▓ąŠą┤čŗ ą│ąĄąĮąĄčĆą░č鹊čĆą░ HSE (OSC_IN ąĖ OSC_OUT) ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ GPIO (PH0 ąĖ PH1), ą║ąŠą│ą┤ą░ ą│ąĄąĮąĄčĆą░č鹊čĆ HSE ą▓čŗą║ą╗čÄč湥ąĮ (ąŠčüąĮąŠą▓ąĮąŠą╣ ą║ą▓ą░čĆčåąĄą▓čŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, čćč鹊 ą▒čŗą▓ą░ąĄčé ąŠč湥ąĮčī čĆąĄą┤ą║ąŠ). HSE ąĖą╝ąĄąĄčé ą┐čĆąĖąŠčĆąĖč鹥čé ąĮą░ą┤ čäčāąĮą║čåąĖąĄą╣ GPIO.
ą¦č鹊ą▒čŗ ą┐ąŠčĆčé ąĮą░čćą░ą╗ čĆą░ą▒ąŠčéą░čéčī ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░, ąĮčāąČąĮąŠ 2 ą▓ąĄčēąĖ: čĆą░ąĘčĆąĄčłąĖčéčī ąĄą│ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ, ąĖ ąĮą░čüčéčĆąŠąĖčéčī ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą┐ąŠčĆčéą░.
[ąØą░čüčéčĆąŠą╣ą║ą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąŠčĆčéą░]
ą¦č鹊ą▒čŗ ą┐ąŠčĆčé GPIOx ąĮą░čćą░ą╗ čĆą░ą▒ąŠčéą░čéčī, ąĖ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ čāą┐čĆą░ą▓ą╗čÅčéčī čüąŠčüč鹊čÅąĮąĖąĄą╝ ąĄą│ąŠ ąĮąŠąČąĄą║, ąĮčāąČąĮąŠ ą▓ą║ą╗čÄčćąĖčéčī čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠčĆčéą░. ąÜą░ąČą┤čŗą╣ ąĖąĘ ą┐ąŠčĆč鹊ą▓ GPIOx ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ čÅą┤čĆčā ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ č湥čĆąĄąĘ čłąĖąĮčā AHB1, ąĖ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓ą║ą╗čÄč湥ąĮąĖčÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╝ čĆąĄąČąĖą╝ąĄ čĆą░ą▒ąŠčéčŗ čüą╗čāąČąĖčé čĆąĄą│ąĖčüčéčĆ RCC_AHB1ENR (ąŠą┐ąĖčüą░ąĮąĖąĄ ąĄą│ąŠ ą▒ąĖčé čüą╝. [1]).
| 31 |
30 |
29 |
28 |
27 |
26 |
25 |
24 |
23 |
22 |
21 |
20 |
19 |
18 |
17 |
16 |
| Res. |
OTG
HSULPI
EN |
OTG
HS
EN |
ETH
MACPTP
EN |
ETH
MACRX
EN |
ETH
MACTX
EN |
ETH
MAC
EN |
Res. |
DMA2
EN |
DMA1
EN |
CCM
DATARAM
EN |
Res. |
BKP
SRAM
EN |
Res. |
| rw |
rw |
rw |
rw |
rw |
rw |
rw |
rw |
rw |
rw |
| 15 |
14 |
13 |
12 |
11 |
10 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
| Reserved |
CRCEN |
Reserved |
GPIOI
EN |
GPIOH
EN |
GPIOG
EN |
GPIOF
EN |
GPIOE
EN |
GPIOD
EN |
GPIOC
EN |
GPIOB
EN |
GPIOA
EN |
| rw |
rw |
rw |
rw |
rw |
rw |
rw |
rw |
rw |
rw |
ąØą░ą┐čĆąĖą╝ąĄčĆ, čćč鹊ą▒čŗ ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ąĮąŠąČą║ąŠą╣ PA3 ą║ą░ą║ ą┐ąŠčĆč鹊ą╝ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░, ąĮčāąČąĮąŠ čĆą░ąĘčĆąĄčłąĖčéčī čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ GPIOA, ą┤ą╗čÅ č湥ą│ąŠ ą▓ čĆą░ąĘčĆčÅą┤ GPIOAEN ąĮą░ą┤ąŠ ąĘą░ą┐ąĖčüą░čéčī ąĄą┤ąĖąĮąĖčåčā. ąöą╗čÅ čŹč鹊ą╣ čåąĄą╗ąĖ čüą╗čāąČą░čé čāą┤ąŠą▒ąĮčŗąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥čćąĮčŗąĄ čäčāąĮą║čåąĖąĖ (ą▓ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ čĆą░ąĘčĆąĄčłąĄąĮąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠčĆčéą░ GPIOA):
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
[ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠčĆč鹊ą╝ ą║ą░ą║ ą▓čŗčģąŠą┤ąŠą╝]
ąöą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ ąĮą░čćą░čéčī čāą┐čĆą░ą▓ą╗čÅčéčī ą▓čŗą▓ąŠą┤ąŠą╝, ą┐ąĄčĆąĄą▓ąŠą┤čÅ ąĄą│ąŠ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 0 ąĖą╗ąĖ ą╗ąŠą│. 1, ą┐ąŠčĆčé ąĮą░ą┤ąŠ ąĮą░čüčéčĆąŠąĖčéčī. ą¤čĆąĖą╝ąĄčĆ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠčĆčéą░ PF6 ą║ą░ą║ ą▓čŗčģąŠą┤ą░:
/* ąĀą░ąĘčĆąĄčłąĖčéčī čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ GPIOF */
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);
/* ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ąĮąŠąČą║ąĖ PF6, čéčāą┤ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ čüą▓ąĄč鹊ą┤ąĖąŠą┤ STAT1
ą┐ą╗ą░čéčŗ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ Olimex STM32-P407 */
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOF, &GPIO_InitStructure);
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą┐ąŠčĆčé ąĮą░čüčéčĆąŠąĄąĮ, ą╝ąŠąČąĮąŠ ąĄą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ą┐ąĄčĆąĄą║ą╗čÄčćą░čéčī ą▓ ą╗čÄą▒ąŠąĄ ąĮčāąČąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ. ąöą╗čÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą┐ąŠčĆčéą░ čüą╗čāąČą░čé čĆąĄą│ąĖčüčéčĆčŗ BSRRL ąĖ BSRRH, ą┐čĆąĖą╝ąĄčĆ:
/* ąæąĄčüą║ąŠąĮąĄčćąĮčŗą╣ čåąĖą║ą╗ ą╝ąĖą│ą░ąĮąĖčÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤ąŠą╝ STAT1 */
while(1)
{
GPIOF->BSRRL = GPIO_Pin_6; //STAT==1, čüą▓ąĄč鹊ą┤ąĖąŠą┤ ą│ąŠčĆąĖčé
Delay(3000000L);
GPIOF->BSRRH = GPIO_Pin_6; //STAT==0, čüą▓ąĄč鹊ą┤ąĖąŠą┤ ą┐ąŠą│ą░čü
Delay(3000000L);
}
ąöą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĮąŠąČą║ą░ą╝ąĖ ą╝ąŠąČąĮąŠ čéą░ą║ąČąĄ ą┐čĆąĖą╝ąĄąĮčÅčéčī čāą┤ąŠą▒ąĮčŗąĄ čäčāąĮą║čåąĖąĖ GPIO_SetBits ąĖ GPIO_ResetBits.
[ą¦č鹥ąĮąĖąĄ čüąŠčüč鹊čÅąĮąĖčÅ ą┐ąŠčĆčéą░ ą║ą░ą║ ą▓čģąŠą┤ą░]
ą¤ąŠą╗čāčćąĖčéčī č鹥ą║čāčēąĄąĄ čüąŠčüč鹊čÅąĮąĖąĄ ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░, čĆą░ą▒ąŠčéą░čÄčēąĄą╣ ą▓ čĆąĄąČąĖą╝ąĄ ą▓čģąŠą┤ą░, ą╝ąŠąČąĮąŠ čü ą┐ąŠą╝ąŠčēčīčÄ čäčāąĮą║čåąĖąĖ GPIO_ReadInputDataBit(). ąØąŠ ą┤ą╗čÅ ąĮą░čćą░ą╗ą░ ąĮčāąČąĮąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ąĮąŠąČą║ąĖ ąĮą░čüčéčĆąŠąĖčéčī ą║ą░ą║ ą▓čģąŠą┤čŗ, ąĖ čĆą░ąĘčĆąĄčłąĖčéčī čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠčĆčéą░. ąÆąŠčé ą┐čĆąĖą╝ąĄčĆ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą┐ąŠčĆč鹊ą▓ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ą┤ąČąŠą╣čüčéąĖą║ą░ ą┐ą╗ą░čéčŗ Olimex STM32-P407 [2]:
/* ąĀą░ąĘčĆąĄčłąĖčéčī čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ GPIOG, čéčāą┤ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą║ąŠąĮčéą░ą║čéčŗ ą┤ąČąŠą╣čüčéąĖą║ą░. */
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOG, ENABLE);
/* ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ąĮąŠąČąĄą║ ą┤ąČąŠą╣čüčéąĖą║ą░ ą┐ą╗ą░čéčŗ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ Olimex STM32-P407.
* PG6 RIGHT
* PG7 UP
* PG8 DOWN
* PG11 LEFT
* PG15 CENT */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7 | GPIO_Pin_8 | GPIO_Pin_11 | GPIO_Pin_15;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN;
GPIO_Init(GPIOG, &GPIO_InitStructure);
ąÜą░ą║ ąŠą┐čĆą░čłąĖą▓ą░čéčī čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠčĆčéą░:
if(GPIO_ReadInputDataBit(GPIOG, GPIO_Pin_15))
{
//čüčÄą┤ą░ ą┐ąŠą┐ą░ą┤ą░ąĄą╝, ąĄčüą╗ąĖ čü ą▓čģąŠą┤ą░ ą┐čĆąŠčćąĖčéą░ąĮą░ ą╗ąŠą│. 1.
...
}
[ąĪčüčŗą╗ą║ąĖ]
1. STM32F407, čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓.
2. Olimex STM32-P407.
3. STM32: ą░ą▒ą▒čĆąĄą▓ąĖą░čéčāčĆčŗ ąĖ č鹥čĆą╝ąĖąĮčŗ. |



