ą”ąĖčäčĆąŠą▓čŗąĄ MEMS-ą╝ąĖą║čĆąŠč乊ąĮčŗ (MEMS ą░ą▒ą▒čĆąĄą▓ąĖą░čéčāčĆą░ ąŠčé MicroElectroMechanical Systems) ą┐čĆąĖą╝ąĄąĮčÅčÄčéčüčÅ ą▓ąŠ ą▓čüąĄčģ ą░čāą┤ąĖąŠ-ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ, ą│ą┤ąĄ ą║ą╗čÄč湥ą▓čŗąĄ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ - ą╝ą░ą╗čŗą╣ čĆą░ąĘą╝ąĄčĆ, ą▓čŗčüąŠą║ąŠąĄ ą║ą░č湥čüčéą▓ąŠ ąĘą▓čāą║ą░, ąĮą░ą┤ąĄąČąĮąŠčüčéčī ąĖ ą┤ąŠčüčéčāą┐ąĮąŠčüčéčī. ąæą╗ą░ą│ąŠą┤ą░čĆčÅ ą╝ą░ą╗čŗą╝ čĆą░ąĘą╝ąĄčĆą░ą╝ ąĖ ąĮąĖąĘą║ąŠą╣ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą║ ą┐ąŠą╝ąĄčģą░ą╝ ą╝ąŠąČąĮąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓ ą▓ ąŠą┤ąĮąŠą╝ čāčüčéčĆąŠą╣čüčéą▓ąĄ čćč鹊 čāą┐čĆąŠčēą░ąĄčé ąĖąĮč鹥ą│čĆą░čåąĖčÄ ą▓ ą┐ąŠčĆčéą░čéąĖą▓ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ą░čģ ą║ą░č湥čüčéą▓ąĄąĮąĮčŗčģ čüąĖčüč鹥ą╝ ąĘą░čģą▓ą░čéą░ ąĖ ąĘą░ą┐ąĖčüąĖ ąĘą▓čāą║ą░. 32-ą▒ąĖčéąĮčŗąĄ STM32 Arm┬« Cortex┬« MCU ąĖ STM32 Arm┬« Cortex┬« MPU ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé čłąĖčĆąŠą║ąĖąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ MEMS-ą╝ąĖą║čĆąŠč乊ąĮąŠą▓.
ąÆ čŹč鹊ą╝ ą┤ąŠą║čāą╝ąĄąĮč鹥 (ą┐ąĄčĆąĄą▓ąŠą┤ ą┤ą░čéą░čłąĖčéą░ AN5027 [1]) ąŠą┐ąĖčüčŗą▓ą░čÄčéčüčÅ čüą┐ąŠčüąŠą▒čŗ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ MEMS-ą╝ąĖą║čĆąŠč乊ąĮąŠą▓ čü ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄą╝ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ ą┐ąŠ ą╝ąĄč鹊ą┤čā ą┐ą╗ąŠčéąĮąŠčüčéąĖ ąĖą╝ą┐čāą╗čīčüą░ (pulse-density modulated, PDM), ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅčģ ą╝ąŠąĮąŠ ąĖ čüč鹥čĆąĄąŠ, ą║ STM32 MCU ąĖ MPU č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čüčŗ SPI/I2S, SAI ąĖ DFSDM. ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ą░ ąĖ ą┐čĆąĖą╝ąĄčĆčŗ, ąŠčüąĮąŠą▓ą░ąĮąĮčŗąĄ ąĮą░ STM32CubeMX, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēąĖąĄ ą┐čĆą░ą▓ąĖą╗čīąĮąŠąĄ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ STM32 ą┤ą╗čÅ ąĘą░čģą▓ą░čéą░ ąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüčŗčĆčŗčģ ą┤ą░ąĮąĮčŗčģ čü ą╝ąĖą║čĆąŠč乊ąĮąŠą▓, čćč鹊ą▒čŗ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░čéčī čŹčéąĖ ą┤ą░ąĮąĮčŗąĄ ą▓ čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĘą▓čāą║ą░.
[MEMS-ą╝ąĖą║čĆąŠč乊ąĮčŗ c PDM-ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖąĄą╝ ą▓čŗčģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ]
ą”ąĖčäčĆąŠą▓ąŠą╣ MEMS-ą╝ąĖą║čĆąŠč乊ąĮ čŹč鹊 čüąĄąĮčüąŠčĆ, ą┐čĆąĄąŠą▒čĆą░ąĘčāčÄčēąĖą╣ ą░ą║čāčüčéąĖč湥čüą║ąŠąĄ ą┤ą░ą▓ą╗ąĄąĮąĖąĄ ąĘą▓čāą║ąŠą▓čŗčģ ą▓ąŠą╗ąĮ ą▓ čåąĖčäčĆąŠą▓ąŠą╣ čüąĖą│ąĮą░ą╗. STM32 ąĘą░čģą▓ą░čéčŗą▓ą░čÄčé čåąĖčäčĆąŠą▓čŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĖąĘ čŹč鹊ą│ąŠ ą╝ąĖą║čĆąŠč乊ąĮą░ (ąĖą╗ąĖ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓) č湥čĆąĄąĘ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ ąĖąĮč鹥čĆč乥ą╣čüčŗ, ąĖ ą┐čĆąĄąŠą▒čĆą░ąĘčāčÄčé ą┐ąŠą╗čāč湥ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▓ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ąĘą▓čāą║ąŠą▓ąŠą╣ č乊čĆą╝ą░čé. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ ą┤ą░ąĮąĮčŗąĄ ąĘą▓čāą║ą░ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčéčüčÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ STM32 ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą░ą╗ą│ąŠčĆąĖčéą╝ąŠą╝ čåąĄą╗ąĄą▓ąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ąĀąĖčü. 1. ą¤čĆąĖą╝ąĄčĆ ąĘą░čģą▓ą░čéą░ ąĘą▓čāą║ą░ ą▓ ą░čāą┤ąĖąŠ-ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ.
ą”ąĖčäčĆąŠą▓ąŠą╣ ą╝ąĖą║čĆąŠč乊ąĮ čüąŠčüč鹊ąĖčé ąĖąĘ čüą╗ąĄą┤čāčÄčēąĖčģ ąŠčüąĮąŠą▓ąĮčŗčģ čāąĘą╗ąŠą▓: MEMS-ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čī, čāčüąĖą╗ąĖč鹥ą╗čī ąĖ PDM-ą╝ąŠą┤čāą╗čÅč鹊čĆ.
ąĀąĖčü 2. ąæą╗ąŠą║-čüčģąĄą╝ą░ čéąĖą┐ąŠą▓ąŠą│ąŠ čåąĖčäčĆąŠą▓ąŠą│ąŠ PDM MEMS-ą╝ąĖą║čĆąŠč乊ąĮą░.
MEMS-ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čī . ąŁč鹊 ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ąĄą╝ą║ąŠčüčéčī, ą┐čĆąĄąŠą▒čĆą░ąĘčāčÄčēą░čÅ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą┤ą░ą▓ą╗ąĄąĮąĖčÅ ą▓ąŠąĘą┤čāčģą░, ą▓čŗąĘą▓ą░ąĮąĮčŗąĄ ąĘą▓čāą║ąŠą▓ąŠą╣ ą▓ąŠą╗ąĮąŠą╣, ą▓ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ.
ąŻčüąĖą╗ąĖč鹥ą╗čī . ąŁč鹊čé čāąĘąĄą╗ ą▒čāč乥čĆąĖąĘąĖčĆčāąĄčé ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ, ą┐ąŠčüčéčāą┐ą░čÄčēąĄąĄ ąŠčé MEMS-ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗čÅ, ąĖ čüąŠąĘą┤ą░ąĄčé ą┤ąŠčüčéą░č鹊čćąĮąŠ ą╝ąŠčēąĮčŗą╣ čüąĖą│ąĮą░ą╗ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ PDM-ą╝ąŠą┤čāą╗čÅč鹊čĆą░.
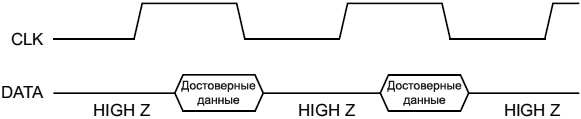
PDM-ą╝ąŠą┤čāą╗čÅč鹊čĆ . ą£ąŠą┤čāą╗čÅč鹊čĆ ą┐čĆąĄąŠą▒čĆą░ąĘčāąĄčé ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ čüąĖą│ąĮą░ą╗ ą▓ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ąĖą╝ą┐čāą╗čīčüąŠą▓ čü ą╝ąŠą┤čāą╗ąĖčĆąŠą▓ą░ąĮąĖąĄą╝ ą┐ą╗ąŠčéąĮąŠčüčéąĖ. ąöą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą╝ąŠą┤čāą╗čÅč鹊čĆąŠą╝ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čéą░ą║č鹊ą▓čŗą╣ ą▓čģąŠą┤ (CLK). ąóą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ą░čÅ ą┤ą╗čÅ čåąĖčäčĆąŠą▓čŗčģ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓ ST, ą╗ąĄąČąĖčé ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé 1 ą£ąōčå ą┤ąŠ 3.25 ą£ąōčå. ąŁčéą░ čćą░čüč鹊čéą░ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čćą░čüč鹊čéčā ą┤ąĖčüą║čĆąĄčéąĖąĘą░čåąĖąĖ (sampling rate), ąĮą░ ą║ąŠč鹊čĆąŠą╣ ą▓čŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ čāčüąĖą╗ąĖč鹥ą╗čÅ ąŠčåąĖčäčĆąŠą▓čŗą▓ą░ąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąĖčüą║čĆąĄčéąĮąŠą│ąŠ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ čåąĖčäčĆąŠą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ (ą▒ąĖč鹊ą▓čŗą╣ ą┐ąŠč鹊ą║ PDM).
ąÆčŗą▒ąŠčĆ ą║ą░ąĮą░ą╗ą░ . ąÆčŗčģąŠą┤ ą╝ąĖą║čĆąŠč乊ąĮą░ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ čāčĆąŠą▓ąĮąĄą╝ ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░ čüąĖą│ąĮą░ą╗ą░ čéą░ą║č鹊ą▓, ąĖ ąĘą░č鹥ą╝ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗčüąŠą║ąŠą│ąŠ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅ ą▓ č鹥č湥ąĮąĖąĄ ą┐ąŠą╗ąŠą▓ąĖąĮčŗ ą┐ąĄčĆąĖąŠą┤ą░ čéą░ą║č鹊ą▓. ąÆčŗą▒ąŠčĆ ą║ą░ąĮą░ą╗ą░ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą┐ąĄčĆąĄą┐ą░ą┤ čéą░ą║č鹊ą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░, ąĮą░ ą║ąŠč鹊čĆąŠą╝ čåąĖčäčĆąŠą▓ąŠą╣ ą╝ąĖą║čĆąŠč乊ąĮ ą▓čŗą▓ąŠą┤ąĖčé čüą▓ąŠąĖ ą┤ą░ąĮąĮčŗąĄ. ąÆčŗą▓ąŠą┤ LR ą╝ąĖą║čĆąŠč乊ąĮą░ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ Vdd ąĖą╗ąĖ ą║ GND.
ąóą░ą▒ą╗ąĖčåą░ 1. ąÆčŗą▒ąŠčĆ čłą░ą▒ą╗ąŠąĮą░ ą┤ą╗čÅ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ DOUT.
LR DOUT
CLK = 0 CLK = 1
GND
ąöąŠčüč鹊ą▓ąĄčĆąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ
ąÆčŗčüąŠą║ąŠąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ
Vdd
ąÆčŗčüąŠą║ąŠąĄ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖąĄ
ąöąŠčüč鹊ą▓ąĄčĆąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ
ą¤ąĖčéą░ąĮąĖąĄ . ąØą░ ą▓čŗą▓ąŠą┤čŗ Vdd ąĖ GND ą┐ąŠą┤ą░ąĄčéčüčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠąĄ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą║ąŠą╝ą┐ąŠąĮąĄąĮčé čåąĖčäčĆąŠą▓ąŠą│ąŠ ą╝ąĖą║čĆąŠč乊ąĮą░. ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čģąŠčĆąŠčłąŠ ąŠčéčäąĖą╗čīčéčĆąŠą▓ą░ąĮąŠ, ą┐ąŠč鹊ą╝čā čćč鹊 ą┐ąŠą╝ąĄčģąĖ ą┐ąŠ ą┐ąĖčéą░ąĮąĖčÄ ą╝ąŠą│čāčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą╗ąĖčłąĮąĖą╣ čłčāą╝ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą╝ąĖą║čĆąŠč乊ąĮą░.
ąóą░ą▒ą╗ąĖčåą░ 2. ąÆčŗą▓ąŠą┤čŗ ą╝ąĖą║čĆąŠč乊ąĮą░.
ąśą╝čÅ ą▓čŗą▓ąŠą┤ą░ ążčāąĮą║čåąĖčÅ ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ
Vdd
ą¤ąĖčéą░ąĮąĖąĄ 3.3V
ąÆčģąŠą┤ ą┐ąĖčéą░ąĮąĖčÅ
GND
0V, ąŠą▒čēąĖą╣ ą┐čĆąŠą▓ąŠą┤
ąŚąĄą╝ą╗čÅ
LR
ąÆčŗą▒ąŠčĆ ą╗ąĄą▓ąŠą│ąŠ (L) / ą┐čĆą░ą▓ąŠą│ąŠ (R) ą║ą░ąĮą░ą╗ą░
ąÆčģąŠą┤
CLK
ąóą░ą║čéčŗ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ
ąÆčģąŠą┤
DOUT
ąöą░ąĮąĮčŗąĄ PDM
ąÆčŗčģąŠą┤
[ąæą░ąĘąŠą▓čŗąĄ čüčģąĄą╝čŗ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ]
ą£ąŠąĮąŠ . ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą▓čŗą▓ąŠą┤ LR ą╝ąĖą║čĆąŠč乊ąĮą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą╗ąĖą▒ąŠ ą║ Vdd, ą╗ąĖą▒ąŠ ą║ GND. ąÜąŠą│ą┤ą░ LR ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ Vdd, ą│ąĄąĮąĄčĆąĖčĆčāčÄčéčüčÅ ą┤ą░ąĮąĮčŗąĄ ą┐čĆą░ą▓ąŠą│ąŠ ą║ą░ąĮą░ą╗ą░.
ąĀąĖčü. 3. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą╝ąŠąĮąŠ, ą┐ąŠą╗čāč湥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą┐čĆą░ą▓ąŠą│ąŠ ą║ą░ąĮą░ą╗ą░.
ąØą░ čäčĆąŠąĮč鹥 ąĮą░čĆą░čüčéą░ąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ čéą░ą║č鹊ą▓ ą╝ąĖą║čĆąŠč乊ąĮ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▓ č鹥č湥ąĮąĖąĄ ą┐ąŠą╗ąŠą▓ąĖąĮčŗ ą┐ąĄčĆąĖąŠą┤ą░ čéą░ą║č鹊ą▓, ąĘą░č鹥ą╝ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗčüąŠą║ąŠą│ąŠ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅ ą▓ č鹥č湥ąĮąĖąĄ ą┤čĆčāą│ąŠą╣ ą┐ąŠą╗ąŠą▓ąĖąĮčŗ ą┐ąĄčĆąĖąŠą┤ą░ čéą░ą║č鹊ą▓.
ąĀąĖčü. 4. ąöąĖą░ą│čĆą░ą╝ą╝čŗ čüąĖą│ąĮą░ą╗ąŠą▓ ą┐čĆą░ą▓ąŠą│ąŠ ą║ą░ąĮą░ą╗ą░.
ąÜąŠą│ą┤ą░ LR ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ GND, ą│ąĄąĮąĄčĆąĖčĆčāčÄčéčüčÅ ą┤ą░ąĮąĮčŗąĄ ą╗ąĄą▓ąŠą│ąŠ ą║ą░ąĮą░ą╗ą░.
ąĀąĖčü. 5. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą╝ąŠąĮąŠ, ą┐ąŠą╗čāč湥ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ą╗ąĄą▓ąŠą│ąŠ ą║ą░ąĮą░ą╗ą░.
ąØą░ ąĮą░ čüą┐ą░ą┤ąĄ čāčĆąŠą▓ąĮčÅ čüąĖą│ąĮą░ą╗ą░ čéą░ą║č鹊ą▓ ą╝ąĖą║čĆąŠč乊ąĮ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▓ č鹥č湥ąĮąĖąĄ ą┐ąŠą╗ąŠą▓ąĖąĮčŗ ą┐ąĄčĆąĖąŠą┤ą░ čéą░ą║č鹊ą▓, ąĘą░č鹥ą╝ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗčüąŠą║ąŠą│ąŠ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅ ą▓ č鹥č湥ąĮąĖąĄ ą┤čĆčāą│ąŠą╣ ą┐ąŠą╗ąŠą▓ąĖąĮčŗ ą┐ąĄčĆąĖąŠą┤ą░ čéą░ą║č鹊ą▓.
ąĀąĖčü. 6. ąöąĖą░ą│čĆą░ą╝ą╝čŗ čüąĖą│ąĮą░ą╗ąŠą▓ ą╗ąĄą▓ąŠą│ąŠ ą║ą░ąĮą░ą╗ą░.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čüč鹥čĆąĄąŠ . ąöą▓ą░ čĆą░ąĘąĮčŗčģ čåąĖčäčĆąŠą▓čŗčģ MEMS-ą╝ąĖą║čĆąŠč乊ąĮą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą║ ąŠą┤ąĮąŠą╝čā ąĖ č鹊ą╝čā ąČąĄ čüąĖą│ąĮą░ą╗čā ą┤ą░ąĮąĮčŗčģ, ą┐čĆąĖ čŹč鹊ą╝ ą┐ąĄčĆą▓čŗą╣ ą╝ąĖą║čĆąŠč乊ąĮ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ąĮą░ ą│ąĄąĮąĄčĆą░čåąĖčÄ čüąĖą│ąĮą░ą╗ą░ ą┐ąŠ čäčĆąŠąĮčéčā čéą░ą║č鹊ą▓ (LR ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ Vdd), ąĖ ą▓č鹊čĆąŠą╣ ą┐ąŠ čüą┐ą░ą┤čā čéą░ą║č鹊ą▓ (LR ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ GND).
ąĀąĖčü. 7. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čüč鹥čĆąĄąŠ, ąĖčüą┐ąŠą╗čīąĘčāčÄčēą░čÅ ąŠą▒čēąĖą╣ čüąĖą│ąĮą░ą╗ ą┤ą░ąĮąĮčŗčģ.
ąĀąĖčü. 8. ąöąĖą░ą│čĆą░ą╝ą╝čŗ čüąĖą│ąĮą░ą╗ąŠą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čüč鹥čĆąĄąŠ.
[ąĪąĖą│ąĮą░ą╗čŗ PDM ąĖ PCM ]
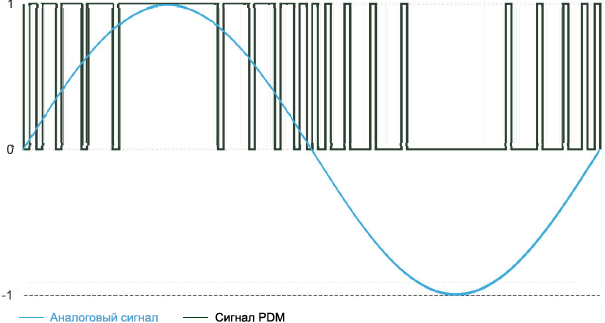
PDM . ąÜą░ą║ čāąČąĄ čāą┐ąŠą╝ąĖąĮą░ą╗ąŠčüčī, ą░ą▒ą▒čĆąĄą▓ąĖą░čéčāčĆą░ PDM ąŠąĘąĮą░čćą░ąĄčé Pulse Density Modulation, čé. ąĄ. ą╝ąŠą┤čāą╗čÅčåąĖčÅ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄą╝ ą┐ą╗ąŠčéąĮąŠčüčéąĖ ąĖą╝ą┐čāą╗čīčüąŠą▓. PDM ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖčÅ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą▓ čåąĖčäčĆąŠą▓ąŠą╣ ą┤ąŠą╝ąĄąĮ, ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÅ čüąŠą▒ąŠą╣ ą▓čŗčüąŠą║ąŠčćą░čüč鹊čéąĮčŗą╣ ąŠą┤ąĮąŠą▒ąĖčéąĮčŗą╣ ą┐ąŠč鹊ą║ čåąĖčäčĆąŠą▓čŗčģ ąĖą╝ą┐čāą╗čīčüąŠą▓. ąÆ čüąĖą│ąĮą░ą╗ąĄ PDM ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮą░čÅ ą┐ą╗ąŠčéąĮąŠčüčéčī ąĖą╝ą┐čāą╗čīčüąŠą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą░ą╝ą┐ą╗ąĖčéčāą┤ąĄ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░. ąæąŠą╗čīčłąŠą╣ ą║ą╗ą░čüč鹥čĆ ą╗ąŠą│ąĖč湥čüą║ąĖčģ ąĄą┤ąĖąĮąĖč湥ą║ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą▓čŗčüąŠą║ąŠą╣ (ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠą╣) ą▓ąĄą╗ąĖčćąĖąĮąĄ ą░ą╝ą┐ą╗ąĖčéčāą┤čŗ, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą▒ąŠą╗čīčłąŠą╣ ą║ą╗ą░čüč鹥čĆ ą╗ąŠą│ąĖč湥čüą║ąĖčģ ąĮčāą╗ąĄą╣ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąĮąĖąĘą║ąŠą╣ (ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą╣) ą▓ąĄą╗ąĖčćąĖąĮąĄ ą░ą╝ą┐ą╗ąĖčéčāą┤čŗ, ąĖ čüą╝ąĄąĮą░ ą╗ąŠą│. 1 ąĖ ą╗ąŠą│. 0 ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠą╣ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąĮčāą╗ąĄą▓ąŠą╝čā ąĘąĮą░č湥ąĮąĖčÄ ą░ą╝ą┐ą╗ąĖčéčāą┤čŗ.
ąĀąĖčü. 9. ąĪąĖą│ąĮą░ą╗ PDM.
ąĪąĖą│ąĮą░ą╗ PDM ą╗ąĄą│ą║ąŠ ą┐čĆąĄąŠą▒čĆą░ąĘčāąĄčéčüčÅ ą▓ ą░ąĮą░ą╗ąŠą│ąŠą▓čāčÄ č乊čĆą╝čā ą┐čāč鹥ą╝ ą┐čĆąŠą┐čāčüą║ą░ąĮąĖčÅ ą┐ąŠč鹊ą║ą░ PDM č湥čĆąĄąĘ čäąĖą╗čīčéčĆ ąĮąĖąĘą║ąĖčģ čćą░čüč鹊čé (ążąØą¦).
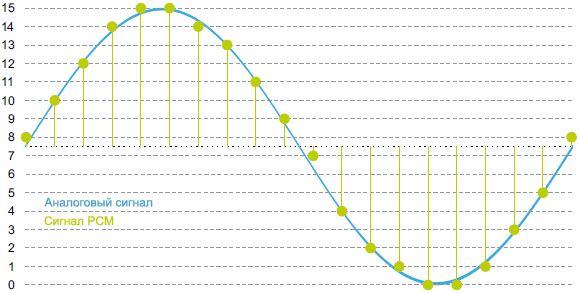
PCM . ąÉą▒ą▒čĆąĄą▓ąĖą░čéčāčĆą░ PCM ąŠąĘąĮą░čćą░ąĄčé Pulse Code Modulation, čé. ąĄ. ą╝ąŠą┤čāą╗čÅčåąĖčÅ ąĖą╝ą┐čāą╗čīčüąĮąŠą│ąŠ ą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ. ąŁč鹊 čüčéą░ąĮą┤ą░čĆčéąĮą░čÅ č乊čĆą╝ą░ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖčÅ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą▓ čåąĖčäčĆąŠą▓ąŠą╝ ą▓ąĖą┤ąĄ (ą▓ čćą░čüčéąĮąŠčüčéąĖ, ąĮąĄčüąČą░čéčŗąĄ WAV-čäą░ą╣ą╗čŗ ą║ąŠą┤ąĖčĆčāčÄčé čüą▓ąŠąĖ ą┤ą░ąĮąĮčŗąĄ ą▓ č乊čĆą╝ą░č鹥 PCM). ąÆ čüąĖą│ąĮą░ą╗ąĄ PCM ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ ą░ą╝ą┐ą╗ąĖčéčāą┤čŗ ą║ąŠą┤ąĖčĆčāčÄčéčüčÅ ą▓ čåąĖčäčĆąŠą▓čŗąĄ ąĖą╝ą┐čāą╗čīčüčŗ. ąŻ ą┐ąŠč鹊ą║ą░ PCM ąĄčüčéčī 2 ą▒ą░ąĘąŠą▓čŗčģ čüą▓ąŠą╣čüčéą▓ą░, ą║ąŠč鹊čĆčŗąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé č鹊čćąĮąŠčüčéčī čüąŠąŠčéą▓ąĄčüčéą▓ąĖčÅ ą┐ąŠč鹊ą║ą░ ąŠčĆąĖą│ąĖąĮą░ą╗čīąĮąŠą╝čā ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą╝čā čüąĖą│ąĮą░ą╗čā:
ŌĆó ą¦ą░čüč鹊čéą░ ą┤ąĖčüą║čĆąĄčéąĖąĘą░čåąĖąĖ (sampling rate).
ą¦ą░čüč鹊čéą░ ą┤ąĖčüą║čĆąĄčéąĖąĘą░čåąĖąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, čüą║ąŠą╗čīą║ąŠ ą▓čŗą▒ąŠčĆąŠą║ ą▓ čüąĄą║čāąĮą┤čā čåąĖčäčĆąŠą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčé ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ čüąĖą│ąĮą░ą╗ ą▓ čåąĖčäčĆąŠą▓čāčÄ č乊čĆą╝čā. ąĀą░ąĘčĆčÅą┤ąĮąŠčüčéčī ą▓čŗą▒ąŠčĆąŠą║ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, čüą║ąŠą╗čīą║ąĖą╝ąĖ ą▒ąĖčéą░ą╝ąĖ ą║ąŠą┤ąĖčĆčāąĄčéčüčÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ čüąĖą│ąĮą░ą╗ąĄ ą▓ ą║ą░ąČą┤ąŠą╣ ą▓čŗą▒ąŠčĆą║ąĄ.
ąĀąĖčü. 10. ąĪąĖą│ąĮą░ą╗ PCM.
ą¤čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ PDM ą▓ PCM . ą¦č鹊ą▒čŗ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░nm ą┐ąŠč鹊ą║ PDM ą▓ ą▓čŗą▒ąŠčĆą║ąĖ ą┤ą░ąĮąĮčŗčģ PCM, ą┐ąŠč鹊ą║ PDM ąĮčāąČąĮąŠ ąŠčéčäąĖą╗čīčéčĆąŠą▓ą░čéčī ąĖ ą┐ąŠą┤ą▓ąĄčĆą│ąĮčāčéčī ą┤ąĄčåąĖą╝ą░čåąĖąĖ.
ąØą░ čüčéą░ą┤ąĖąĖ ą┤ąĄčåąĖą╝ą░čåąĖąĖ čćą░čüč鹊čéą░ ą┤ąĖčüą║čĆąĄčéąĖąĘą░čåąĖąĖ čüąĖą│ąĮą░ą╗ą░ PDM čüąĮąĖąČą░ąĄčéčüčÅ ą┤ąŠ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠą╣ čćą░čüč鹊čéčŗ ą┤ąĖčüą║čĆąĄčéąĖąĘą░čåąĖąĖ ąĘą▓čāą║ą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, 16 ą║ąōčå). ąöąĄčåąĖą╝ą░čåąĖčÅ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą▓ąĘčÅčéąĖąĄą╝ ąŠą┤ąĮąŠą╣ ą▓čŗą▒ąŠčĆą║ąĖ ąĖąĘ M ą▓čŗą▒ąŠčĆąŠą║, ą┐čĆąĖ čŹč鹊ą╝ čćą░čüč鹊čéą░ ą┤ąĖčüą║čĆąĄčéąĖąĘą░čåąĖąĖ ą┐ąŠąĮąĖąČą░ąĄčéčüčÅ ą▓ M čĆą░ąĘ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćą░čüč鹊čéą░ ą┤ą░ąĮąĮčŗčģ PDM (ą║ąŠč鹊čĆą░čÅ čĆą░ą▓ąĮą░ čćą░čüč鹊č鹥 čéą░ą║č鹊ą▓ ą╝ąĖą║čĆąŠč乊ąĮą░) ą┐ąŠąĮąĖąČą░ąĄčéčüčÅ ą▓ M čĆą░ąĘ, čćč鹊ą▒čŗ čćą░čüč鹊čéą░ ą▓čŗą▒ąŠčĆąŠą║ ąĘą▓čāą║ą░ čüąŠąŠčéą▓ąĄčéčüčéą▓ąŠą▓ą░ą╗ą░ ąĮčāąČąĮąŠą╣ čćą░čüč鹊č鹥 ą▓čŗą▒ąŠčĆąŠą║ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ, ąĖ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé M ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ ą║ąŠčŹčäčäąĖčåąĖąĄąĮč鹊ą╝ ą┤ąĄčåąĖą╝ą░čåąĖąĖ.
ą¦ą░čüč鹊čéą░ PDM = ą¦ą░čüč鹊čéą░ ą▓čŗą▒ąŠčĆąŠą║ ąĘą▓čāą║ą░ x ąÜąŠčŹčäčäąĖčåąĖąĄąĮčé ą┤ąĄčåąĖą╝ą░čåąĖąĖ
ąÜąŠčŹčäčäąĖčåąĖąĄąĮčé ą┤ąĄčåąĖą╝ą░čåąĖąĖ ąŠą▒čŗčćąĮąŠ ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé 48 ą┤ąŠ 128. ąĪčéą░ą┤ąĖąĖ ą┤ąĄčåąĖą╝ą░čåąĖąĖ ą┐čĆąĄą┤čłąĄčüčéą▓čāąĄčé ążąØą¦, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ąĖčüą║ą░ąČąĄąĮąĖą╣ č乊čĆą╝čŗ čüąĖą│ąĮą░ą╗ą░ ąĖąĘ-ąĘą░ ąĮą░ą╗ąŠąČąĄąĮąĖą╣ čüą┐ąĄą║čéčĆą░ (ą░ą╗ąĖą░čüąĖąĮą│).
[ąÉą║čāčüčéąĖč湥čüą║ąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ]
ą¦čāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéčī . ąŁč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čāčĆąŠą▓ąĮčÄ čŹą╗ąĄą║čéčĆąĖč湥čüą║ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ (ą▓čŗčĆą░ąČąĄąĮąĮąŠą╝čā dBFS) ąĮą░ ą▓čŗčģąŠą┤ąĄ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą╝ąĖą║čĆąŠč乊ąĮą░ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ čŹčéą░ą╗ąŠąĮąĮąŠą│ąŠ ą░ą║čāčüčéąĖč湥čüą║ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░. ą×ą▒čŗčćąĮąŠ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéčī ą╝ąĖą║čĆąŠč乊ąĮą░ ą┐čĆąĖą▓ąŠą┤ąĖčéčüčÅ ą┤ą╗čÅ č鹊ąĮą░ą╗čīąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ąĘą▓čāą║ą░ 1 ą║ąōčå ą▓ ą║ą░č湥čüčéą▓ąĄ čŹčéą░ą╗ąŠąĮąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░, ą┐čĆąĖ 1 Pa (ąĖą╗ąĖ 94 dBSPL).
SNR . ąÉą▒ą▒čĆąĄą▓ąĖą░čéčāčĆą░ SNR čĆą░čüčłąĖčäčĆąŠą▓čŗą▓ą░ąĄčéčüčÅ Signal-to-Noise Ratio, čé. ąĄ. čüąŠąŠčéąĮąŠčłąĄąĮąĖąĄ čāčĆąŠą▓ąĮčÅ čüąĖą│ąĮą░ą╗ą░ ą║ čāčĆąŠą▓ąĮčÄ čłčāą╝ą░. SNR ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čüąŠąŠčéąĮąŠčłąĄąĮąĖąĄ ą╝ąĄąČą┤čā čŹčéą░ą╗ąŠąĮąĮčŗą╝ čüąĖą│ąĮą░ą╗ąŠą╝ (94 dBSPL@1kHz) ąĖ ą▓ąĄą╗ąĖčćąĖąĮąŠą╣ ąŠčüčéą░č鹊čćąĮąŠą│ąŠ čłčāą╝ą░ ąĮą░ ą▓čŗčģąŠą┤ąĄ ą╝ąĖą║čĆąŠč乊ąĮą░. ąæąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ SNR ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ąĄčé čāą╗čāčćčłąĄąĮąĮčāčÄ č湥čéą║ąŠčüčéčī čĆąĄčćąĖ, ą░ čéą░ą║ąČąĄ čĆą░ąĘą▒ąŠčĆčćąĖą▓ąŠčüčéčī ąĘą▓čāą║ą░ ąĮą░ ą┤ą░ą╗čīąĮąĄą╝ ą║ąŠąĮčåąĄ.
AOP . ąÉą▒ą▒čĆąĄą▓ąĖą░čéčāčĆą░ AOP ąŠą▒ąŠąĘąĮą░čćą░ąĄčé Acoustic Pverload Point (č鹊čćą║ą░ ą┐ąĄčĆąĄą│čĆčāąĘą║ąĖ ą┐ąŠ ąĘą▓čāą║čā). ąŁč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╣ ąĘą▓čāą║ąŠą▓ąŠą╣ čüąĖą│ąĮą░ą╗, ą║ąŠč鹊čĆčŗą╣ ą╝ąĖą║čĆąŠč乊ąĮ ą╝ąŠąČąĄčé ą┐ąĄčĆąĄą┤ą░čéčī čü ą┤ąŠą┐čāčüčéąĖą╝čŗą╝ čāčĆąŠą▓ąĮąĄą╝ ąĖčüą║ą░ąČąĄąĮąĖą╣ (ąĮąĄą║ąŠč鹊čĆčŗąĄ čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé čŹč鹊čé čāčĆąŠą▓ąĄąĮčī ąĖčüą║ą░ąČąĄąĮąĖą╣ 10% čü č鹊čćą║ąĖ ąĘčĆąĄąĮąĖčÅ ąĖčüą║ą░ąČąĄąĮąĖą╣ ą▓ č鹊čćą║ąĄ ą┐ąĄčĆąĄą│čĆčāąĘą║ąĖ).
PSRR . ąÉą▒ą▒čĆąĄą▓ąĖą░čéčāčĆą░ PSRR čĆą░čüčłąĖčäčĆąŠą▓čŗą▓ą░ąĄčéčüčÅ ą║ą░ą║ Power Supply Rejection Ratio, čé. ąĄ. ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą┐ąŠą┤ą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠą╝ąĄčģ ą┐ąŠ ą┐ąĖčéą░ąĮąĖčÄ. ą¤ą░čĆą░ą╝ąĄčéčĆ PSRR ą║ąŠą╗ąĖč湥čüčéą▓ąĄąĮąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī ą╝ąĖą║čĆąŠč乊ąĮą░ čāčüčéčĆą░ąĮčÅčéčī čłčāą╝, ą┐ąŠčüčéčāą┐ą░čÄčēąĖą╣ ąŠčé ąĖąĘą╝ąĄąĮąĄąĮąĖą╣ čāčĆąŠą▓ąĮčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ.
ąóą░ą▒ą╗ąĖčåą░ 3. ą¤čĆąĄąĖą╝čāčēąĄčüčéą▓ą░ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą╝ąĖą║čĆąŠč乊ąĮą░ ą▓ ą║ąŠąĮč鹥ą║čüč鹥 čāą╗čāčćčłąĄąĮąĖčÅ ą░ą║čāčüčéąĖč湥čüą║ąĖčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓.
ążčāąĮą║čåąĖčÅ ąØą░ą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ
ąØąĄčćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéčī ą║ čĆą░ą┤ąĖąŠčćą░čüč鹊čéąĮčŗą╝ ąĮą░ą▓ąŠą┤ą║ą░ą╝ (RF) ąĖ 菹╗ąĄą║čéčĆąŠą╝ą░ą│ąĮąĖčéąĮčŗą╝ ą┐ąŠą╝ąĄčģą░ą╝ (EMI)
- ą£ąĄąĮčīčłąĄ čāčüąĖą╗ąĖčÅ ą┐ąŠ ąĖąĮč鹥ą│čĆą░čåąĖąĖ ą╝ąĖą║čĆąŠč乊ąĮą░ ą▓ čüąĖčüč鹥ą╝čā
ąÜąŠąĮą┤ąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ
ŌĆō ąŻą┐čĆąŠčēąĄąĮąĖąĄ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ
ąØą░ą┤ąĄąČąĮą░čÅ čåąĖčäčĆąŠą▓ą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░
ŌĆō ą¤čĆąŠčüč鹊ąĄ ą┐ąŠąĘąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ MEMS ą▓ čüąĖčüč鹥ą╝ąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ
ąóą░ą▒ą╗ąĖčåą░ 4. ą”ąĖčäčĆąŠą▓čŗąĄ ą╝ąĖą║čĆąŠč乊ąĮčŗ ST, ąĖą╝ąĄčÄčēąĖąĄčüčÅ ąĮą░ čĆčŗąĮą║ąĄ.
ą£ąŠą┤ąĄą╗čī ąÆčģ. ą┐ąŠčĆčé ąØą░ą┐čĆ. ą┐ąĖčéą░ąĮąĖčÅ (V) SNR (dB) ą¦čāą▓čüčéą▓. (dBFS) AOP ( dBSPL)
MP34DB02
ąĪąĮąĖąĘčā
1.64 .. 3.6
62.6
-26
120
MP34DT01-M
ąĪą▓ąĄčĆčģčā
1.64 .. 3.6
61
-26
120
MP34DT02
ąĪą▓ąĄčĆčģčā
1.64 .. 3.6
60
-26
120
MP34DT04
ąĪą▓ąĄčĆčģčā
1.6 .. 3.6
64
-26
120
MP34DT04-C1
ąĪą▓ąĄčĆčģčā
1.6 .. 3.6
64
-26
120
MP34DT05
ąĪą▓ąĄčĆčģčā
1.6 .. 3.6
64
-26
122.5
MP45DT02-M
ąĪą▓ąĄčĆčģčā
1.64 .. 3.6
61
-26
120
ąØą░ AliExpress čéą░ą║ąČąĄ ą┤ąŠčüčéčāą┐ąĮčŗ ą╝ąĖą║čĆąŠč乊ąĮčŗ INMP441 ą║ąŠą╝ą┐ą░ąĮąĖąĖ InvenSense:
ą£ąŠą┤ąĄą╗čī ąÆčģ. ą┐ąŠčĆčé ąØą░ą┐čĆ. ą┐ąĖčéą░ąĮąĖčÅ (V) SNR (dB) ą¦čāą▓čüčéą▓. (dBFS) AOP ( dBSPL)
INMP441
ąĪąĮąĖąĘčā
1.62 .. 3.63
61
-26
120
[ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą┐ąŠč鹊ą║ą░ PDM ą║ STM32 ]
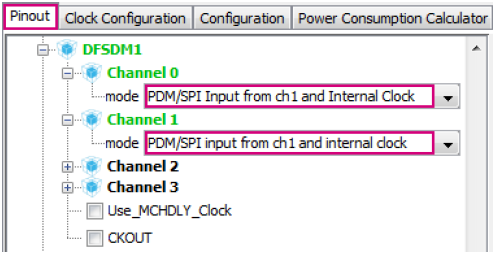
ąÆ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ąŠą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ, ą║ą░ą║ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī čåąĖčäčĆąŠą▓čŗąĄ MEMS-ą╝ąĖą║čĆąŠč乊ąĮčŗ ą║ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ ąĖąĮč鹥čĆč乥ą╣čüą░ą╝ SPI/I2S, SAI ąĖ DFSDM ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ STM32, ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅčģ ą╝ąŠąĮąŠ ąĖ čüč鹥čĆąĄąŠ.
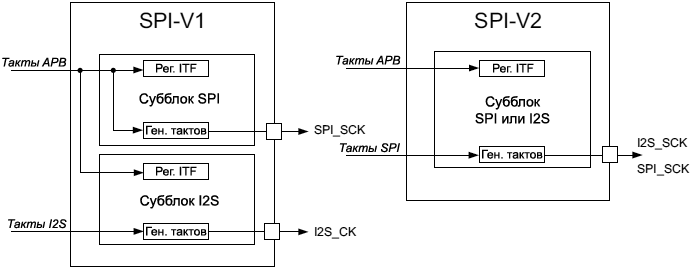
SPI/I2S . ąÉą▒ą▒čĆąĄą▓ąĖą░čéčāčĆą░ SPI ąŠą▒ąŠąĘąĮą░čćą░ąĄčé Serial Peripheral Interface, ą░ ą░ą▒ą▒čĆąĄą▓ąĖą░čéčāčĆą░ I2S ąŠąĘąĮą░čćą░ąĄčé Inter-IC Sound (ąŠą┐ąĖčüą░ąĮąĖąĄ ą┐ąĄčĆąĖč乥čĆąĖąĖ SPI ąĖ I2S čüą╝. ą▓ čüčéą░čéčīčÅčģ [2, 3]). ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ STM32 ą▓ čüąĮą░ą▒ąČąĄąĮčŗ ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ą╝ąĖ SPI. ąØąĄą║ąŠč鹊čĆčŗąĄ ąĖąĘ čŹčéąĖčģ SPI čéą░ą║ąČąĄ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čĆą░ą▒ąŠčéčŗ ą┐ąŠ ą┐čĆąŠč鹊ą║ąŠą╗čā I2S. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ STM32 ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčé 2 ą▓ąĄčĆčüąĖąĖ SPI. ąÆ čŹč鹊ą╝ ąŠą┐ąĖčüą░ąĮąĖąĖ čüčéą░čĆčŗąĄ ą▓ąĄčĆčüąĖąĖ ąĮą░ąĘčŗą▓ą░čÄčéčüčÅ SPI-V1, ąĖ ą┐ąŠčüą╗ąĄą┤ąĮąĖąĄ ą▓ąĄčĆčüąĖąĖ ąĮą░ąĘčŗą▓ą░čÄčéčüčÅ SPI-V2. ąÜąŠą│ą┤ą░ ą▓ č鹥ą║čüč鹥 ą┐čĆąŠčüč鹊 čāą┐ąŠą╝ąĖąĮą░ąĄčéčüčÅ ą▒ą╗ąŠą║ SPI, č鹊 čŹč鹊 ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠ ąŠčéąĮąŠčüąĖčéčüčÅ ą║ą░ą║ SPI-V1, čéą░ą║ ąĖ ą║ SPI-V2. ąÆąĄčĆčüąĖčÅ SPI-V2 ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ą┤ąŠčüčéčāą┐ąĮą░ ą▓ čüąĄčĆąĖąĖ STM32H7 ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ STM32.
ąÜ ą▒ą╗ąŠą║čā SPI ą╝ąŠąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ąŠą┤ąĖąĮ ąĖą╗ąĖ ą┤ą▓ą░ čåąĖčäčĆąŠą▓čŗčģ ą╝ąĖą║čĆąŠč乊ąĮą░, čĆą░ą▒ąŠčéą░čÅ čü ąĮąĖą╝ąĖ ą╗ąĖą▒ąŠ ą┐ąŠ ą┐čĆąŠč鹊ą║ąŠą╗čā SPI, ą╗ąĖą▒ąŠ ą┐ąŠ ą┐čĆąŠč鹊ą║ąŠą╗čā I2S.
ŌĆó ą¤čĆąŠč鹊ą║ąŠą╗ SPI ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐čĆąŠčüč鹊ą╣ čüą┐ąŠčüąŠą▒ ąŠą▒ą╝ąĄąĮą░, ą┐ąŠąĘą▓ąŠą╗čÅčÅ ąŠą▒ą╝ąĄąĮąĖą▓ą░čéčīčüčÅ ą┤ą░ąĮąĮčŗą╝ąĖ čü ą▓ąĮąĄčłąĮąĖą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ.
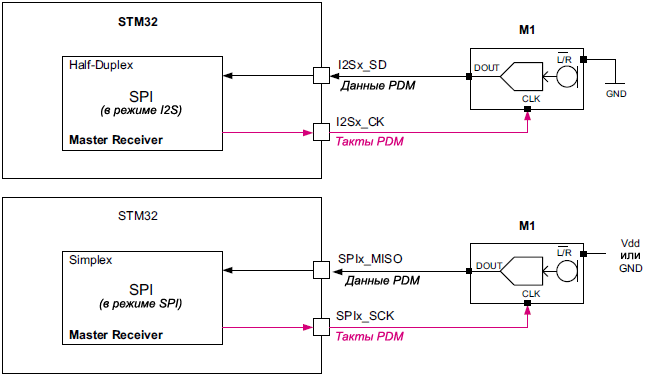
ą£ąŠąĮąŠ . ąÜ ą▒ą╗ąŠą║čā SPI ą┐ąŠą┤ą║ą╗čÄč湥ąĮ čåąĖčäčĆąŠą▓ąŠą╣ ą╝ąĖą║čĆąŠč乊ąĮ. SPI ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ čĆąĄąČąĖą╝ąĄ SPI ąĖą╗ąĖ ą▓ čĆąĄąČąĖą╝ąĄ I2S. ąÆ ąŠą▒ąŠąĖčģ čüą╗čāčćą░čÅčģ ą▒ą╗ąŠą║ SPI ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ master receiver (ą│ą╗ą░ą▓ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ čłąĖąĮčŗ, ą┐čĆąĖąĮąĖą╝ą░čÄčēąĄąĄ ą┤ą░ąĮąĮčŗąĄ). ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą▒ą╗ąŠą║ SPI ą│ąĄąĮąĄčĆąĖčĆčāąĄčé čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ ą┤ą╗čÅ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą╝ąĖą║čĆąŠč乊ąĮą░. ąÆčŗą▒ąŠčĆą║ąĖ ąĘą▓čāą║ą░ ą┐čĆąĖąĮąĖą╝ą░čÄčéčüčÅ č湥čĆąĄąĘ čüąĖą│ąĮą░ą╗ ą┤ą░ąĮąĮčŗčģ SPI (MISO).
ąĀąĖčü. 11. ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą╝ąĖą║čĆąŠč乊ąĮą░ ą┐ąŠ ą┐čĆąŠč鹊ą║ąŠą╗čā SPI ąĖą╗ąĖ I2S ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą╝ąŠąĮąŠ.
ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐čĆąŠč鹊ą║ąŠą╗ SPI, č鹊 ą▓čŗą▓ąŠą┤ ą▓čŗą▒ąŠčĆą░ ą╗ąĄą▓ąŠą│ąŠ/ą┐čĆą░ą▓ąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ (L/R, čüąĖą│ąĮą░ą╗ LR) ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą╗ąĖą▒ąŠ ą║ Vdd, ą╗ąĖą▒ąŠ ą║ GND. ą¤ąŠą╗čÅčĆąĮąŠčüčéčī čéą░ą║č鹊ą▓ SPI ą┤ąŠą╗ąČąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓ąŠą▓ą░čéčī ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą▓čģąŠą┤ą░ L/R.
ŌĆó ąĢčüą╗ąĖ L/R = GND, č鹊 SPI ą┤ąŠą╗ąČąĄąĮ ąĘą░čģą▓ą░čéčŗą▓ą░čéčī ą┐čĆąĖčģąŠą┤čÅčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ, ąĖčüą┐ąŠą╗čīąĘčāčÅ čäčĆąŠąĮčé ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ SPIx_SCK.
ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐čĆąŠč鹊ą║ąŠą╗ I2S, č鹊 čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą▓čŗą▒ąŠčĆ ą║ą░ąĮą░ą╗ą░ L/R (LR) ą╝ąĖą║čĆąŠč乊ąĮą░ ą║ GND. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐čĆąŠč鹊ą║ąŠą╗ I2S ąĘą░čģą▓ą░čéčŗą▓ą░ąĄčé ą┐čĆąĖčģąŠą┤čÅčēąĖąĄ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠ čäčĆąŠąĮčéčā I2Sx_CK. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą▒ą╗ąŠą║ SPI-V2 čéą░ą║ąČąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┐ą░ą┤ą░ ąĘą░čģą▓ą░čéą░ ą┤ą╗čÅ ą┐čĆąŠč鹊ą║ąŠą╗ą░ I2S.
ążąŠčĆą╝ą░čé ą┤ą░ąĮąĮčŗčģ . ąÆčŗą▒ąŠčĆą║ąĖ, ąĘą░čģą▓ą░čéčŗą▓ą░ąĄą╝čŗąĄ ą▒ą╗ąŠą║ąŠą╝ SPI ą▓ čĆąĄąČąĖą╝ąĄ I2S ąĖą╗ąĖ SPI, ą╝ąŠą│čāčé ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮčŗ ą▓ ą┐ą░ą╝čÅčéčī, ąĖčüą┐ąŠą╗čīąĘčāčÅ DMA ąĖą╗ąĖ čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąĀąĄą│ąĖčüčéčĆ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ (SPIx_DR) ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čćą░čüčéčī ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠą│ąŠ ą┐ąŠč鹊ą║ą░ ą▒ąĖčé ąŠčé ą╝ąĖą║čĆąŠč乊ąĮą░, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮąĖąČąĄ ą┤ą╗čÅ 16-ą▒ąĖčéąĮąŠą│ąŠ č乊čĆą╝ą░čéą░:
M1_bxx ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ą▒ąĖčéčŗ ą┤ą░ąĮąĮčŗčģ ąŠčé čåąĖčäčĆąŠą▓ąŠą│ąŠ ą╝ąĖą║čĆąŠč乊ąĮą░ 1, ą│ą┤ąĄ M1_bN čŹč鹊 čüą░ą╝čŗą╣ čüčéą░čĆčŗą╣ ą▒ąĖčé.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┐ąŠčĆčÅą┤ąŠą║ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą▒ąĖčé ą┐čĆąĖąĮčÅčéčŗčģ ą▓čŗą▒ąŠčĆąŠą║ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╝ąĄąĮčÅąĮ ąĮą░ ąŠą▒čĆą░čéąĮčŗą╣, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ąĮą░ ą┐ąŠą╗čāč湥ąĮąĖąĄ ą┐ąĄčĆą▓čŗą╝ ą╝ą╗ą░ą┤čłąĄą│ąŠ ą▒ąĖčéą░ (LSB first) ą▓ą╝ąĄčüč鹊 ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąĄčĆą▓čŗą╝ čüčéą░čĆčłąĄą│ąŠ ą▒ąĖčéą░ (MSB first). ą×ą▒čŗčćąĮąŠ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé čĆą░ąĘą╗ąĖčćąĮčŗąĄ čĆą░ąĘą╝ąĄčĆčŗ ą┤ą░ąĮąĮčŗčģ, ąĘą┤ąĄčüčī čŹč鹊 ą┐ąŠą┤čĆąŠą▒ąĮąŠ ąĮąĄ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░ąĄčéčüčÅ.
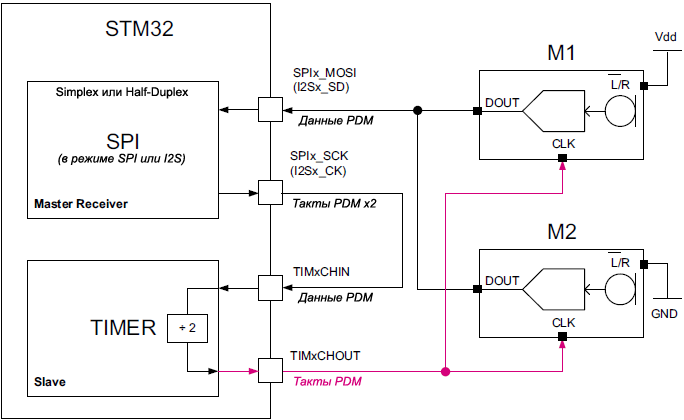
ąĪč鹥čĆąĄąŠ . ąĪ ą┐ąŠą╝ąŠčēčīčÄ čéą░ą╣ą╝ąĄčĆą░ ą╝ąŠąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī 2 čåąĖčäčĆąŠą▓čŗčģ ą╝ąĖą║čĆąŠč乊ąĮą░ ą║ ą▒ą╗ąŠą║čā SPI. ąæą╗ąŠą║ SPI ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ čĆąĄąČąĖą╝ąĄ SPI ąĖą╗ąĖ I2S. ąÆ ąŠą▒ąŠąĖčģ čüą╗čāčćą░čÅčģ ą▒ą╗ąŠą║ SPI ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ master receiver. ąÆ čŹč鹊ą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ SPI čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ ą┤ą▓ąŠą╣ąĮąŠą╣ čćą░čüč鹊č鹥 ą╝ąĖą║čĆąŠč乊ąĮą░, čćč鹊ą▒čŗ ą┐čĆąŠčćąĖčéą░čéčī ą┤ą░ąĮąĮčŗąĄ ąŠčé ąŠą▒ąŠąĖčģ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┤ą▓čāą╝ ą╝ąĖą║čĆąŠč乊ąĮą░ą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąŠą▒čēąĖą╣ čüąĖą│ąĮą░ą╗ ą┤ą░ąĮąĮčŗčģ.
ąæą╗ąŠą║ SPI ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čéą░ą║čéčŗ ą┤ą╗čÅ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░, ą║ąŠč鹊čĆčŗą╣ ą┤ąĄą╗ąĖčé ąĮą░ 2 čćą░čüč鹊čéčā čéą░ą║č鹊ą▓ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ (SPIx_SCK ąĖą╗ąĖ I2Sx_CK). ą¤ąŠą┤ąĄą╗ąĄąĮąĮą░čÅ čćą░čüč鹊čéą░ ą┐ąŠčüčéčāą┐ą░ąĄčé ąĮą░ čåąĖčäčĆąŠą▓čŗąĄ ą╝ąĖą║čĆąŠč乊ąĮčŗ. ąÆčŗą▒ąŠčĆą║ąĖ ąĘą▓čāą║ą░ ąĘą░čģą▓ą░čéčŗą▓ą░čÄčéčüčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ I2S č湥čĆąĄąĘ čüąŠąĄą┤ąĖąĮąĄąĮąĮčŗąĄ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ ą▓čŗčģąŠą┤čŗ ą┤ą░ąĮąĮčŗčģ čåąĖčäčĆąŠą▓čŗčģ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓.
ąĀąĖčü. 12. ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą┤ą▓čāčģ čåąĖčäčĆąŠą▓čŗčģ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓ ą║ ą▒ą╗ąŠą║čā SPI ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čüč鹥čĆąĄąŠ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓ čüą║ąŠą▒ą║ą░čģ čāą║ą░ąĘą░ąĮąŠ ąĖą╝čÅ čüąĖą│ąĮą░ą╗ą░, ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐čĆąŠč鹊ą║ąŠą╗ I2S.
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čéą░ą╣ą╝ąĄčĆą░ ą▓ ą║ą░č湥čüčéą▓ąĄ ą│ąĄąĮąĄčĆą░č鹊čĆą░ čéą░ą║č鹊ą▓ . ąÜąŠą│ą┤ą░ čéą░ą╣ą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čéą░ą║č鹊ą▓ ą┤ą╗čÅ ą┤ą▓čāčģ čåąĖčäčĆąŠą▓čŗčģ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓, čüą╗ąĄą┤čāąĄčé čāčćąĖčéčŗą▓ą░čéčī ą┤ą▓ą░ ą╝ąŠą╝ąĄąĮčéą░:
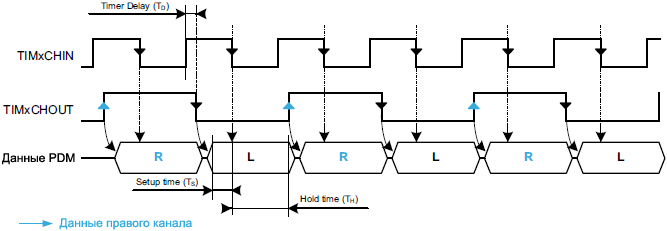
ŌĆó ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 ąĘą░ą┤ąĄčƹȹ║ą░, ą▓ą▓ąŠą┤ąĖą╝ą░čÅ ą┤ąĄą╗ąĄąĮąĖąĄą╝ čéą░ą║č鹊ą▓ čü ą┐ąŠą╝ąŠčēčīčÄ čéą░ą╣ą╝ąĄčĆą░, ą▓čüąĄ ąĄčēąĄ ą┐ąŠą┐ą░ą┤ą░ąĄčé ą▓ ą┐čĆąĄą┤ąĄą╗ ą▓čĆąĄą╝ąĄąĮąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ (setup time, TS ) ą▓čŗą▒ąŠčĆąŠą║, ą┐ąŠčüčéčāą┐ą░čÄčēąĖčģ ąŠčé ą╝ąĖą║čĆąŠč乊ąĮąŠą▓. ąöą╗čÅ čŹč鹊ą│ąŠ čéą░ą╣ą╝ąĄčĆ ą┤ąŠą╗ąČąĄąĮ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą▓ąŠąĘą╝ąŠąČąĮčāčÄ ą▓čŗčüąŠą║čāčÄ čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā. ą£ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ (TD ), ą║ąŠč鹊čĆčāčÄ ą▓ą▓ąŠą┤ąĖčé čéą░ą╣ą╝ąĄčĆ ą╝ąĄąČą┤čā ą▓čģąŠą┤ąĮčŗą╝ąĖ (TIMxCHIN) ąĖ ą▓čŗčģąŠą┤ąĮčŗą╝ąĖ (TIMxCHOUT) čéą░ą║čéą░ą╝ąĖ čüąŠčüčéą░ą▓ą╗čÅąĄčé 5 čéą░ą║č鹊ą▓ ąŠą┐ąŠčĆąĮąŠą╣ čćą░čüč鹊čéčŗ čéą░ą╣ą╝ąĄčĆą░. ąóą░ą╣ą╝ąĄčĆčŗ ąŠą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčé čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā APB ąĖą╗ąĖ čāą╝ąĮąŠąČąĄąĮąĮčāčÄ čćą░čüč鹊čéčā APB ą▓ ą║ą░č湥čüčéą▓ąĄ čüą▓ąŠąĄą╣ ąŠą┐ąŠčĆąĮąŠą╣ čćą░čüč鹊čéčŗ (čüą╝. čĆąĖčü. 13).
ąĀąĖčü. 13. ąöąĖą░ą│čĆą░ą╝ą╝čŗ ą▓čĆąĄą╝ąĄąĮąĖ čüąĖą│ąĮą░ą╗ąŠą▓ čĆąĄąČąĖą╝ą░ čüč鹥čĆąĄąŠ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: Timer Delay (TD ) ąĘą░ą┤ąĄčƹȹ║ą░ čéą░ą╣ą╝ąĄčĆą░, Setup time (TS ) ą▓čĆąĄą╝čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┤ą░ąĮąĮčŗčģ, Hold time (TH ) ą▓čĆąĄą╝čÅ čāą┤ąĄčƹȹ░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ.
ążąŠčĆą╝ą░čé ą┤ą░ąĮąĮčŗčģ . ąÆčŗą▒ąŠčĆą║ąĖ, ą┐ąŠą╗čāč湥ąĮąĮčŗąĄ ą▒ą╗ąŠą║ąŠą╝ SPI ą▓ čĆąĄąČąĖą╝ąĄ I2S ąĖą╗ąĖ SPI, ą╝ąŠą│čāčé ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮčŗ ą▓ ą┐ą░ą╝čÅčéąĖ ą╗ąĖą▒ąŠ čü ą┐ąŠą╝ąŠčēčīčÄ DMA, ą╗ąĖą▒ąŠ čü ą┐ąŠą╝ąŠčēčīčÄ čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąÆ čŹč鹊ą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┤ą░ąĮąĮčŗąĄ, ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ čü ą╝ąĖą║čĆąŠč乊ąĮąŠą▓, ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčé č湥čĆąĄą┤čāčÄčēąĖąĄčüčÅ ą▒ąĖčéčŗ ą╗ąĄą▓ąŠą│ąŠ ąĖ ą┐čĆą░ą▓ąŠą│ąŠ ą║ą░ąĮą░ą╗ąŠą▓. ąöą░ąĮąĮčŗąĄ, čüąŠčģčĆą░ąĮąĄąĮąĮčŗąĄ ą▓ čĆąĄą│ąĖčüčéčĆ SPIx_DR ą▓ ą▓ąĖą┤ąĄ č湥čĆąĄą┤čāčÄčēąĄą│ąŠčüčÅ ą┐ąŠč鹊ą║ą░ ą┐ąŠą║ą░ąĘą░ąĮčŗ ąĮąĖąČąĄ ą▓ ą┐čĆąĖą╝ąĄčĆąĄ ą┤ą╗čÅ č乊čĆą╝ą░čéą░ 16 ą▒ąĖčé:
M1_bxx ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčé ą▒ąĖčéčŗ ą┤ą░ąĮąĮčŗčģ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą╝ąĖą║čĆąŠč乊ąĮą░ 1, ąĖ M1_bN ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čüą░ą╝čŗą╣ čüčéą░čĆčŗą╣ ą▒ąĖčé. M2_bxx ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčé ą▒ąĖčéčŗ ą┤ą░ąĮąĮčŗčģ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą╝ąĖą║čĆąŠč乊ąĮą░ 2, ąĖ M2_bN ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čüą░ą╝čŗą╣ čüčéą░čĆčŗą╣ ą▒ąĖčé.
ąæą╗ąŠą║ąĖ SPI-V1 ąĖ SPI-V2 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ č乊čĆą╝ą░č鹊ą▓ ą┤ą░ąĮąĮčŗčģ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą╝ąŠąČąĮąŠ ąĖąĘą╝ąĄąĮąĖčéčī ą┐ąŠčĆčÅą┤ąŠą║ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą┐ąŠčüčéčāą┐ą░čÄčēąĖčģ ą▒ąĖčé, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹊ą│ąŠ, ą║ą░ą║ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ąĖąĮč鹥čĆč乥ą╣čü - ą╝ąŠąČąĮąŠ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī, čćč鹊ą▒čŗ ą╝ą╗ą░ą┤čłąĖą╣ ą▒ąĖčé ą┐ąŠčüčéčāą┐ą░ą╗ ą┐ąĄčĆą▓čŗą╝ (LSB first) ą▓ą╝ąĄčüč鹊 č鹊ą│ąŠ, čćč鹊ą▒čŗ čüčéą░čĆčłąĖą╣ ą▒ąĖčé ą┐ąŠčüčéčāą┐ą░ą╗ ą┐ąĄčĆą▓čŗą╝ (MSB first). ą×ą┤ąĮą░ą║ąŠ ą▓ą░ąČąĮąŠ ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 ą▓ ą╗čÄą▒ąŠą╝ čüą╗čāčćą░ąĄ ą▒ąĖčéčŗ ąŠčé ą╝ąĖą║čĆąŠč乊ąĮą░ 1 (M1) ąĖ ą▒ąĖčéčŗ ąŠčé ą╝ąĖą║čĆąŠč乊ąĮą░ 2 (M2) ą▓čüąĄą│ą┤ą░ č湥čĆąĄą┤čāčÄčéčüčÅ. ąØąĄąŠą▒čģąŠą┤ąĖą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ ą╝ąŠą┤čāą╗čī, ą║ąŠč鹊čĆčŗą╣ čĆą░ąĘą▒ąĖčĆą░ąĄčé čŹč鹊 č湥čĆąĄą┤ąŠą▓ą░ąĮąĖąĄ, ą│ąĄąĮąĄčĆąĖčĆčāčÅ ąŠčéą┤ąĄą╗čīąĮčŗą╣ čüąĖą│ąĮą░ą╗ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ąĖąĘ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓, čćč鹊 ąĮčāąČąĮąŠ ą┤ą╗čÅ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ąĖąĘ PDM ą▓ PCM.
[ąśąĮč鹥čĆč乥ą╣čü SAI ]
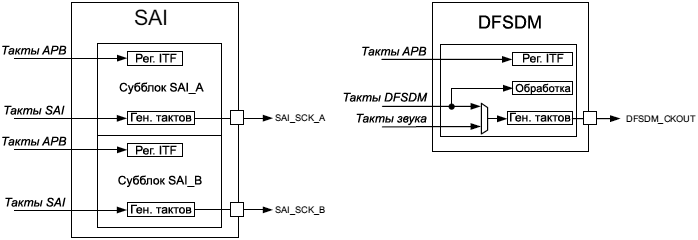
ąśąĮč鹥čĆč乥ą╣čü SAI (čĆą░čüčłąĖčäčĆąŠą▓čŗą▓ą░ąĄčéčüčÅ ą║ą░ą║ Serial Audio Interface), ą▓čüčéčĆąŠąĄąĮąĮčŗą╣ ą▓ STM32, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąŠą▒ą╝ąĄąĮąĖą▓ą░čéčīčüčÅ ą┤ą░ąĮąĮčŗą╝ąĖ čü ą▓ąĮąĄčłąĮąĖą╝ąĖ ąĘą▓čāą║ąŠą▓čŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ, čéą░ą║ąĖą╝ąĖ ą║ą░ą║ čāčüąĖą╗ąĖč鹥ą╗ąĖ, ą╝ąĖą║čĆąŠč乊ąĮčŗ, ą┤ąĖąĮą░ą╝ąĖą║ąĖ ąĖą╗ąĖ ą░čāą┤ąĖąŠą┐čĆąŠčåąĄčüčüąŠčĆčŗ. SAI čüąŠčüč鹊ąĖčé ąĖąĘ ą┤ą▓čāčģ ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗčģ čüčāą▒ą▒ą╗ąŠą║ąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé čĆą░ą▒ąŠčéą░čéčī čüąĖąĮčģčĆąŠąĮąĮąŠ ąĖą╗ąĖ ąĮąĄ čüąĖąĮčģčĆąŠąĮąĮąŠ. ąÜą░ąČą┤čŗą╣ čüčāą▒ą▒ą╗ąŠą║ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüą▓ąŠą╣ čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ čéą░ą║č鹊ą▓ ąĘą▓čāą║ą░. ąØąĄą║ąŠč鹊čĆčŗąĄ SAI čéą░ą║ąČąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗą╣ ąĖąĮč鹥čĆč乥ą╣čü PDM, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī ą┤ąŠ 8 čåąĖčäčĆąŠą▓čŗčģ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓.
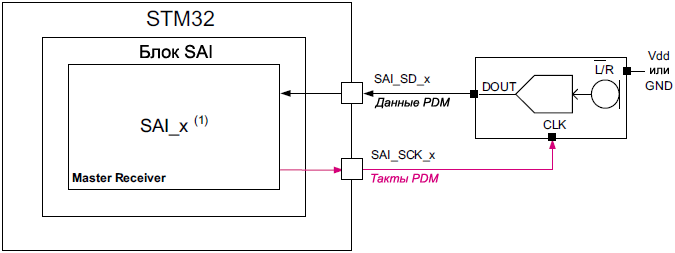
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąŠą┤ąĮąŠą│ąŠ čüčāą▒ą▒ą╗ąŠą║ą░ ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą╝ąŠąĮąŠ . ą”ąĖčäčĆąŠą▓ąŠą╣ ą╝ąĖą║čĆąŠč乊ąĮ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ ąŠą┤ąĮąŠą╝čā ąĖąĘ čüčāą▒ą▒ą╗ąŠą║ąŠą▓ ą┐ąĄčĆąĖč乥čĆąĖąĖ SAI ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą╝ąŠąĮąŠ. ąĪčāą▒ą▒ą╗ąŠą║ SAI čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ čĆąĄąČąĖą╝ąĄ ą▓ čĆąĄąČąĖą╝ąĄ master receive. ąÆ čŹč鹊ą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čüčāą▒ą▒ą╗ąŠą║ SAI ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čéą░ą║čéčŗ ą┤ą╗čÅ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą╝ąĖą║čĆąŠč乊ąĮą░. ąÆčŗą▒ąŠčĆą║ąĖ ąĘą▓čāą║ą░, ąĘą░čģą▓ą░č湥ąĮąĮčŗąĄ čüčāą▒ą▒ą╗ąŠą║ąŠą╝ SAI čü ą▓čŗčģąŠą┤ą░ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą╝ąĖą║čĆąŠč乊ąĮą░ (DOUT) č湥čĆąĄąĘ ą▓čŗą▓ąŠą┤ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ą┤ą░ąĮąĮčŗčģ (Serial Data, SD).
ąĀąĖčü. 14. ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą╝ąĖą║čĆąŠč乊ąĮą░ č湥čĆąĄąĘ SAI ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą╝ąŠąĮąŠ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (1): x ąŠą▒ąŠąĘąĮą░čćą░ąĄčé čüčāą▒ą▒ą╗ąŠą║ A ąĖą╗ąĖ B.
ąØąŠąČą║ą░ ą▓čŗą▒ąŠčĆ L/R ą║ą░ąĮą░ą╗ą░ (LR) ą╝ąĖą║čĆąŠč乊ąĮą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ą╗ąĖą▒ąŠ ą║ Vdd, ą╗ąĖą▒ąŠ ą║ GND. ą£ąĖą║čĆąŠč乊ąĮ ą▓čŗą▓ąŠą┤ąĖčé ą┤ą░ąĮąĮčŗąĄ ą┐ąŠ čäčĆąŠąĮčéčā ąĖą╗ąĖ čüą┐ą░ą┤čā ą┐ąŠčüčéčāą┐ą░čÄčēąĖčģ čéą░ą║č鹊ą▓ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░. ą¤ąĄčĆąĄą┐ą░ą┤ ą▓čŗą▒ąŠčĆą║ąĖ čéą░ą║č鹊ą▓ SAI ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┤čĆčāą│ąŠą╣ čüčāą▒ą▒ą╗ąŠą║ SAI ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąĮąĄąĘą░ą▓ąĖčüąĖą╝, ąĖ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┤čĆčāą│ąŠą╣ čåąĄą╗ąĖ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄą│ąŠ ą╝ąŠąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą▓ ą▓ąĮąĄčłąĮąĄą╝čā ą░čāą┤ąĖąŠą║ąŠą┤ąĄą║čā.
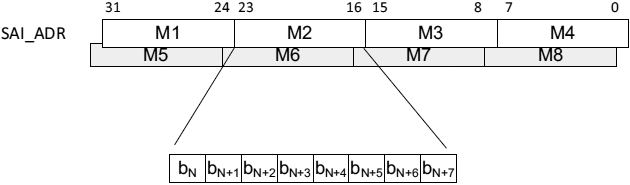
ążąŠčĆą╝ą░čé ą┤ą░ąĮąĮčŗčģ . ąÆčŗą▒ąŠčĆą║ąĖ, ąĘą░čģą▓ą░č湥ąĮąĮčŗąĄ čüčāą▒ą▒ą╗ąŠą║ąŠą╝ SAI, ą╝ąŠą│čāčé ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮčŗ ą▓ ą┐ą░ą╝čÅčéąĖ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą╗ąĖą▒ąŠ DMA, ą╗ąĖą▒ąŠ čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąĀąĄą│ąĖčüčéčĆ ą┐čĆąĖą╝ą░ ą┤ą░ąĮąĮčŗčģ (SAI_ADR, SAI_BDR) ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čćą░čüčéčī ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠą│ąŠ ą┐ąŠč鹊ą║ą░ ą▒ąĖčé ąŠčé ą╝ąĖą║čĆąŠč乊ąĮą░, ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ ą┐ąŠą║ą░ąĘą░ąĮąĮąŠą│ąŠ ąĮąĖąČąĄ:
M1_bxx ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ą▒ąĖčéčŗ ą┤ą░ąĮąĮčŗčģ ąŠčé čåąĖčäčĆąŠą▓ąŠą│ąŠ ą╝ąĖą║čĆąŠč乊ąĮą░ 1, ąĖ M1_bN ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé ą┐ąŠąĘąĖčåąĖčÄ čüą░ą╝ąŠą│ąŠ čüčéą░čĆąŠą│ąŠ ą▒ąĖčéą░ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ SAI_ADR ąĖ SAI_BDR. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą▒ąĖčéčŗ DS[2:0] čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ 010 (8 ą▒ąĖčé), č鹊 k čĆą░ą▓ąĮąŠ 7.
ąĀą░ąĘčĆčÅą┤ąĮąŠčüčéčī ą┤ą░ąĮąĮčŗčģ, čüąŠčģčĆą░ąĮąĄąĮąĮčŗčģ ą▓ čĆąĄą│ąĖčüčéčĆčŗ SAI_ADR/SAI_BDR, ąĘą░ą▓ąĖčüąĖčé ąŠčé čĆą░ąĘą╝ąĄčĆą░ ą┤ą░ąĮąĮčŗčģ (DS[2:0]), ą▓ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ ą▒ąĖčéą░ą╝ SLOTSZ[1:0], ą║ąŠč鹊čĆčŗąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ 0.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą┐ąŠčĆčÅą┤ąŠą║ ą▒ąĖčé ą┐čĆąĖąĮąĖą╝ą░ąĄą╝čŗčģ ą▓čŗą▒ąŠčĆąŠą║ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╝ąĄąĮčÅąĮ ąĮą░ ąŠą▒čĆą░čéąĮčŗą╣, ąĄčüą╗ąĖ ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ą▓ ąĖąĮč鹥čĆč乥ą╣čüąĄ ą┐ąŠą╗čāč湥ąĮąĖąĄ ą┐ąĄčĆą▓čŗą╝ąĖ ą╝ą╗ą░ą┤čłąĖčģ ą▒ąĖčé (LSB first) ą▓ą╝ąĄčüč鹊 ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąĄčĆą▓čŗą╝ąĖ čüčéą░čĆčłąĖčģ ą▒ąĖčé (MSB first).
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┤ą░ąĮąĮčŗąĄ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ SAI_ADR/SAI_BDR ą▓čüąĄą│ą┤ą░ ą▓čŗčĆąŠą▓ąĮąĄąĮčŗ ą▓ą┐čĆą░ą▓ąŠ.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čüč鹥čĆąĄąŠ . ąöą▓ą░ čåąĖčäčĆąŠą▓čŗčģ ą╝ąĖą║čĆąŠč乊ąĮą░ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą║ ąŠą┤ąĮąŠą╝čā ąĖąĘ čüčāą▒ą▒ą╗ąŠą║ąŠą▓ SAI čü ą┐ąŠą╝ąŠčēčīčÄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čéą░ą╣ą╝ąĄčĆą░. ąĪčāą▒ą▒ą╗ąŠą║ SAI čéą░ą║ąČąĄ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ master receiver. ąÆ čŹč鹊ą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čüčāą▒ą▒ą╗ąŠą║ SAI čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ ą┤ą▓ąŠą╣ąĮąŠą╣ čćą░čüč鹊č鹥 čéą░ą║č鹊ą▓ ą╝ąĖą║čĆąŠč乊ąĮą░, čćč鹊ą▒čŗ ą┐čĆąŠčćąĖčéą░čéčī ą┤ą░ąĮąĮčŗąĄ ąŠčé ąŠą▒ąŠąĖčģ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓, ą┐ąŠ ąŠą┤ąĮąŠą╝čā ąĖ č鹊ą╝čā ąČąĄ ą┐ąĄčĆąĄą┐ą░ą┤čā ąĖčģ čéą░ą║č鹊ą▓. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čüąŠą▓ą╝ąĄčüčéąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąŠą┤ąĖąĮ čüąĖą│ąĮą░ą╗ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ą┤ą▓čāčģ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓ (čüą╝. čĆąĖčü. 15).
ąĪčāą▒ą▒ą╗ąŠą║ SAI ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čéą░ą║čéčŗ (SAI_SCK_x) ą┤ą╗čÅ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░, ą║ąŠč鹊čĆčŗą╣ ą┤ąĄą╗ąĖčé čćą░čüč鹊čéčā ąĮą░ 2. ą¤ąŠą┤ąĄą╗ąĄąĮąĮą░čÅ čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ ą┐ąŠčüčéčāą┐ą░ąĄčé ąĮą░ čåąĖčäčĆąŠą▓čŗąĄ ą╝ąĖą║čĆąŠč乊ąĮčŗ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┤čĆčāą│ąŠą╣ čüčāą▒ą▒ą╗ąŠą║ SAI ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąĮąĄąĘą░ą▓ąĖčüąĖą╝, ąĖ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┤čĆčāą│ąŠą╣ čåąĄą╗ąĖ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄą│ąŠ ą╝ąŠąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą▓ ą▓ąĮąĄčłąĮąĄą╝čā ą░čāą┤ąĖąŠą║ąŠą┤ąĄą║čā.
ąöąĖą░ą│čĆą░ą╝ą╝ą░ ą▓čĆąĄą╝ąĄąĮąĖ, ą┐ąŠą║ą░ąĘą░ąĮąĮą░čÅ ąĮą░ čĆąĖčü. 13, čéą░ą║ąČąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé čŹč鹊ą╝čā čüą╗čāčćą░čÄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ. ąóą░ą║ąČąĄ čüą╝. ą▓čŗčłąĄ čüąĄą║čåąĖčÄ "ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čéą░ą╣ą╝ąĄčĆą░ ą▓ ą║ą░č湥čüčéą▓ąĄ ą│ąĄąĮąĄčĆą░č鹊čĆą░ čéą░ą║č鹊ą▓" ą┤ą╗čÅ čĆąĄą║ąŠą╝ąĄąĮą┤ą░čåąĖą╣ ą┐ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÄ čéą░ą╣ą╝ąĄčĆą░.
ąĀąĖčü. 15. ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą┤ą▓čāčģ čåąĖčäčĆąŠą▓čŗčģ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓ ą║ SAI ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čüč鹥čĆąĄąŠ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ąŠą┤ąĮąŠą│ąŠ čüčāą▒ą▒ą╗ąŠą║ą░ SAI ąĖ čéą░ą╣ą╝ąĄčĆą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (1): x ąŠą▒ąŠąĘąĮą░čćą░ąĄčé čüčāą▒ą▒ą╗ąŠą║ A ąĖą╗ąĖ B.
ążąŠčĆą╝ą░čé ą┤ą░ąĮąĮčŗčģ . ąÆčŗą▒ąŠčĆą║ąĖ, ąĘą░čģą▓ą░č湥ąĮąĮčŗąĄ čüčāą▒ą▒ą╗ąŠą║ąŠą╝ SAI, ą╝ąŠą│čāčé ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮčŗ ą▓ ą┐ą░ą╝čÅčéčī čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą╗ąĖą▒ąŠ DMA, ą╗ąĖą▒ąŠ čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąÆ čŹč鹊ą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą▒ąĖčéčŗ ą┤ą░ąĮąĮčŗčģ, ą┐čĆąŠčćąĖčéą░ąĮąĮčŗąĄ ąĖąĘ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓, č湥čĆąĄą┤čāčÄčéčüčÅ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ - ą▒ąĖčé ąŠą┤ąĮąŠą│ąŠ ą╝ąĖą║čĆąŠč乊ąĮą░, ą▒ąĖčé ą┤čĆčāą│ąŠą│ąŠ, ąĖ čéą░ą║ ą┤ą░ą╗ąĄąĄ. ąöą░ąĮąĮčŗąĄ ą▓ čĆąĄą│ąĖčüčéčĆąĄ SAI_ADR/SAI_BDR, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ ą┐čĆąĖą╝ąĄčĆąĄ ąĮąĖąČąĄ:
M1_bxx ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčé ą▒ąĖčéčŗ ą┤ą░ąĮąĮčŗčģ ąŠčé ą╝ąĖą║čĆąŠč乊ąĮą░ 1, ąĖ M1_bN ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čüą░ą╝čŗą╣ čüčéą░čĆčŗą╣ ą▒ąĖčé. M2_bxx ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčÄčé ą▒ąĖčéčŗ ą┤ą░ąĮąĮčŗčģ ąŠčé ą╝ąĖą║čĆąŠč乊ąĮą░ 2, ąĖ M2_bN ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čüą░ą╝čŗą╣ čüčéą░čĆčŗą╣ ą▒ąĖčé. ąĪąĖą╝ą▓ąŠą╗ k ąŠą▒ąŠąĘąĮą░čćą░ąĄčé ą┐ąŠąĘąĖčåąĖčÄ ą▒ąĖčéą░ ą▓ čĆąĄą│ąĖčüčéčĆąĄ SAI_ADR/SAI_BDR, ąĮą░ą┐čĆąĖą╝ąĄčĆ ąĄčüą╗ąĖ DS[2:0] čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ 100 (16 ą▒ąĖčé), č鹊 k čĆą░ą▓ąĮąŠ 15. ąĀą░ąĘą╝ąĄčĆ ą┤ą░ąĮąĮčŗčģ, čüąŠčģčĆą░ąĮąĄąĮąĮčŗčģ ą▓ čĆąĄą│ąĖčüčéčĆčŗ SAI_ADR/SAI_BDR, ąĘą░ą▓ąĖčüąĖčé ąŠčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čĆą░ąĘą╝ąĄčĆą░ ą┤ą░ąĮąĮčŗčģ (DS[2:0]), ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą▒ąĖčéčŗ SLOTSZ[1:0] ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ 0.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┐ąŠčĆčÅą┤ąŠą║ čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą▒ąĖčé ą┐čĆąĖąĮčÅčéčŗčģ ą▓čŗą▒ąŠčĆąŠą║ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╝ąĄąĮčÅąĮ ąĮą░ ąŠą▒čĆą░čéąĮčŗą╣, ąĄčüą╗ąĖ ąĖąĮč鹥čĆč乥ą╣čü ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ąĮą░ ą┐ąŠą╗čāč湥ąĮąĖąĄ ą┐ąĄčĆą▓čŗą╝ ą╝ą╗ą░ą┤čłąĄą│ąŠ ą▒ąĖčéą░ (LSB first) ą▓ą╝ąĄčüč鹊 ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąĄčĆą▓čŗą╝ čüčéą░čĆčłąĄą│ąŠ ą▒ąĖčéą░ (MSB first). ą×ą┤ąĮą░ą║ąŠ čüą╗ąĄą┤čāąĄčé ąŠčéą╝ąĄčéąĖčéčī čćč鹊 ą▓ ą╗čÄą▒ąŠą╝ čüą╗čāčćą░ąĄ ą┐ąŠčüčéčāą┐ą░čÄčēąĖąĄ ą▒ąĖčéčŗ ąŠčé ą╝ąĖą║čĆąŠč乊ąĮąŠą▓ čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ čü č湥čĆąĄą┤ąŠą▓ą░ąĮąĖąĄą╝. ąöą░ąĮąĮčŗąĄ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ SAI_ADR/SAI_BDR ą▓čüąĄą│ą┤ą░ ą▓čŗčĆąŠą▓ąĮąĄąĮčŗ ą▓ą┐čĆą░ą▓ąŠ. ąØąĄąŠą▒čģąŠą┤ąĖą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣ ą╝ąŠą┤čāą╗čī, ą║ąŠč鹊čĆčŗą╣ čĆą░ąĘą▒ąĖčĆą░ąĄčé čŹč鹊 č湥čĆąĄą┤ąŠą▓ą░ąĮąĖąĄ, ą│ąĄąĮąĄčĆąĖčĆčāčÅ ąŠčéą┤ąĄą╗čīąĮčŗą╣ čüąĖą│ąĮą░ą╗ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ąĖąĘ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓, čćč鹊 ąĮčāąČąĮąŠ ą┤ą╗čÅ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ąĖąĘ PDM ą▓ PCM.
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┤ą▓čāčģ čüąĖąĮčģčĆąŠąĮąĮčŗčģ čüčāą▒ą▒ą╗ąŠą║ą░ SAI . ąÜ ą┐ąĄčĆąĖč乥čĆąĖąĖ SAI ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą┤ą▓ą░ čåąĖčäčĆąŠą▓čŗčģ ą╝ąĖą║čĆąŠč乊ąĮą░ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░ ąĖ čüąĖąĮčģčĆąŠąĮąĮąŠ čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą┤ą▓čāčģ čüčāą▒ą▒ą╗ąŠą║ąŠą▓ SAI. ąÜą░ąČą┤čŗą╣ ą╝ąĖą║čĆąŠč乊ąĮ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ ąŠčéą┤ąĄą╗čīąĮąŠą╝čā čüčāą▒ą▒ą╗ąŠą║čā SAI. ą×ą┤ąĖąĮ ąĖąĘ čüčāą▒ą▒ą╗ąŠą║ąŠą▓ SAI čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ čĆąĄąČąĖą╝ąĄ master receive, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą┤čĆčāą│ąŠą╣ čüčāą▒ą▒ą╗ąŠą║ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓ čüąĖąĮčģčĆąŠąĮąĮąŠą╝ čĆąĄąČąĖą╝ąĄ slave receive. ąÆ čŹč鹊ą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čüčāą▒ą▒ą╗ąŠą║, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą▓ čĆąĄąČąĖą╝ąĄ master, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā ą║ą░ą║ ą┤ą╗čÅ čåąĖčäčĆąŠą▓čŗčģ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓, čéą░ą║ ąĖ ą┤ą╗čÅ ą┤čĆčāą│ąŠą│ąŠ čüčāą▒ą▒ą╗ąŠą║ą░ SAI. ąöą▓ą░ čüčāą▒ą▒ą╗ąŠą║ą░ SAI čüąĖąĮčģčĆąŠąĮąĮąŠ čüčćąĖčéčŗą▓ą░čÄčé ą┤ą░ąĮčŗčģ ąŠčé ą╝ąĖą║čĆąŠč乊ąĮąŠą▓.
ąĀąĖčü. 16. ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą┤ą▓čāčģ čåąĖčäčĆąŠą▓čŗčģ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓ ą║ SAI ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čüč鹥čĆąĄąŠ, ą║ąŠą│ą┤ą░ ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░ąĮąŠ ą┤ą▓ą░ čüąĖąĮčģčĆąŠąĮąĮčŗčģ čüčāą▒ą▒ą╗ąŠą║ą░ SAI.
ą¤ąŠčüą║ąŠą╗čīą║čā ą┤ą▓ą░ ą╝ąĖą║čĆąŠč乊ąĮą░ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ąŠą▒čēčāčÄ ą╗ąĖąĮąĖčÄ ą┤ą░ąĮąĮčŗčģ, ąĮąŠąČą║ą░ ą▓čŗą▒ąŠčĆą░ ą║ą░ąĮą░ą╗ą░ L/R (LR) ą╝ąĖą║čĆąŠč乊ąĮą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ą╗ąĖą▒ąŠ ą║ Vdd, ą╗ąĖą▒ąŠ ą║ GND. ąÆčŗčģąŠą┤ąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓ ąĘą░čģą▓ą░čéčŗą▓ą░čÄčéčüčÅ ą╗ąĖą▒ąŠ ą┐ąŠ čäčĆąŠąĮčéčā, ą╗ąĖą▒ąŠ ą┐ąŠ čüą┐ą░ą┤čā čéą░ą║č鹊ą▓, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą▓čŗą▒čĆą░ąĮąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░. ą¤ąŠą╗čÅčĆąĮąŠčüčéčī čéą░ą║č鹊ą▓ ą║ą░ąČą┤ąŠą│ąŠ čüčāą▒ą▒ą╗ąŠą║ą░ SAI ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
ążąŠčĆą╝ą░čé ą┤ą░ąĮąĮčŗčģ . ąÆčŗą▒ąŠčĆą║ąĖ, ąĘą░čģą▓ą░č湥ąĮąĮčŗąĄ ą║ą░ąČą┤čŗą╝ čüčāą▒ą▒ą╗ąŠą║ąŠą╝ SAI, ą╝ąŠą│čāčé ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮčŗ ą▓ ą┐ą░ą╝čÅčéčī ą╗ąĖą▒ąŠ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ DMA, ą╗ąĖą▒ąŠ ą┐ąŠ čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┤ąŠ 2 ą║ą░ąĮą░ą╗ąŠą▓ DMA. ąöą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ąĖąĘ čüčāą▒ą▒ą╗ąŠą║ąŠą▓ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čéą░ą║ąŠą╣ ąČąĄ č乊čĆą╝ą░čé ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆčŗą╣ ą▒čŗą╗ ąŠą┐ąĖčüą░ąĮ ą▓ ą╝ąŠąĮąŠ-ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ SAI.
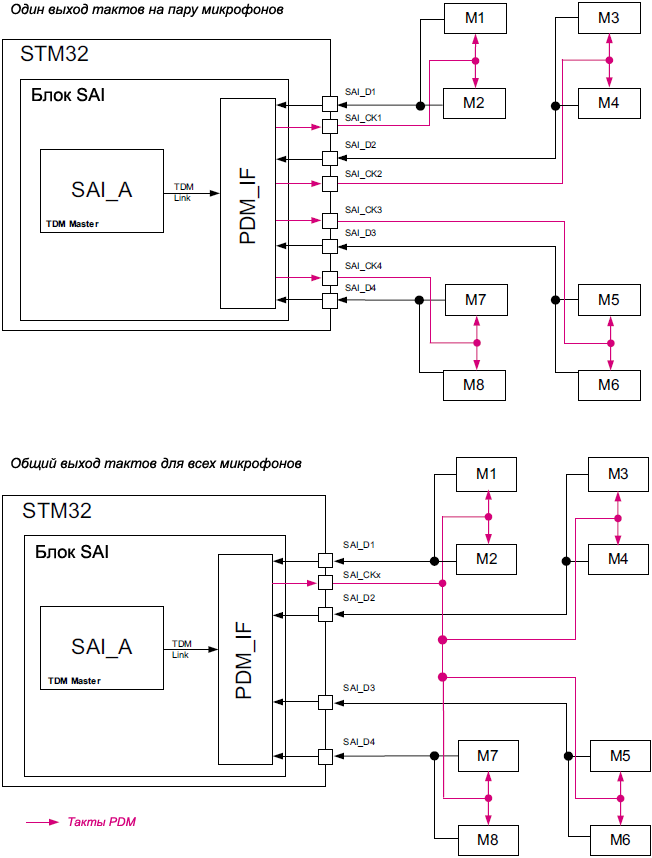
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąĖąĮč鹥čĆč乥ą╣čüą░ PDM . ąśąĮč鹥čĆč乥ą╣čü PDM ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čåąĖčäčĆąŠą▓čŗčģ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓. ąöąŠ 4 ą┐ą░čĆ čåąĖčäčĆąŠą▓čŗčģ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓ ą╝ąŠąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ. ąśąĮč鹥čĆč乥ą╣čü PDM čéą░ą║ąČąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą╗ąĖąĮąĖąĖ ąĘą░ą┤ąĄčƹȹ║ąĖ, čćč鹊ą▒čŗ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą╝ąĖą║čĆąŠąĘą░ą┤ąĄčƹȹ║ąĖ ą▓ ą║ą░ąČą┤ąŠą╝ ą┐ąŠčüčéčāą┐ą░čÄčēąĄą╝ ą▒ąĖč鹊ą▓ąŠą╝ ą┐ąŠč鹊ą║ąĄ, čćč鹊 čāą┐čĆąŠčēą░ąĄčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÄ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ą╗čāčćą░. ąōą╗čāą▒ąĖąĮą░ ą║ą░ąČą┤ąŠą╣ čÅč湥ą╣ą║ąĖ ąĘą░ą┤ąĄčƹȹ║ąĖ čüąŠčüčéą░ą▓ą╗čÅąĄčé 8 ą▓čŗą▒ąŠčĆąŠą║ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą┐ąŠč鹊ą║ą░.
ążčāąĮą║čåąĖčÅ PDM ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮą░ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čüąŠą▓ą╝ąĄčüčéąĮąŠ čü čüčāą▒ą▒ą╗ąŠą║ąŠą╝ SAI_A, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą╝ ą▓ master-čĆąĄąČąĖą╝ąĄ Time Division Multiplexing (TDM). ąŁč鹊 ąĮąĄ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čü čüčāą▒ą▒ą╗ąŠą║ąŠą╝ SAI_B.
ąöą╗čÅ čāą╝ąĄąĮčīčłąĄąĮąĖčÅ čĆą░čüčģąŠą┤ą░ ą┐ą░ą╝čÅčéąĖ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé ą▓čŗą▒čĆą░čéčī ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓, ą║ąŠč鹊čĆąŠąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÄ. ą£ąŠąČąĮąŠ ą▓čŗą▒čĆą░čéčī 2, 4, 6 ąĖą╗ąĖ 8 ą╝ąĖą║čĆąŠč乊ąĮą░.
ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé 3 ą╝ąĖą║čĆąŠč乊ąĮą░, č鹊 ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ą▓čŗą▒čĆą░čéčī 4. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┤ą░ąĮąĮčŗąĄ PDM ąĘą░čģą▓ą░čéčŗą▓ą░čÄčé č湥čĆąĄąĘ SAI_D1 ąĖ SAI_D2. SAI_D1 ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ąŠčé ą┐ąĄčĆą▓ąŠą╣ ą┐ą░čĆčŗ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ SAI_D2 ą┐čĆąĖąĮąĖą╝ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ąŠčé čéčĆąĄčéčīąĄą│ąŠ ą╝ąĖą║čĆąŠč乊ąĮą░.
ąóą░ą▒ą╗ąĖčåą░ 5 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą╗ąĖąĮąĖą╣ IO ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ čåąĖčäčĆąŠą▓čŗčģ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓.
ąóą░ą▒ą╗ąĖčåą░ 5. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą╗ąĖąĮąĖą╣ IO ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ čåąĖčäčĆąŠą▓čŗčģ ą╝ąĖą║čĆąŠč乊ąĮą░čģ.
ą£ąĖą║čĆąŠč乊ąĮąŠą▓ ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čŗąĄ ą╗ąĖąĮąĖąĖ ą┤ą░ąĮąĮčŗčģ ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čŗąĄ ą╗ąĖąĮąĖąĖ čéą░ą║č鹊ą▓
1 ąĖą╗ąĖ 2
SAI_D1
SAI_CK1, SAI_CK2, SAI_CK3 ąĖą╗ąĖ SAI_CK4
3 ąĖą╗ąĖ 4
SAI_D1 ąĖ SAI_D2
5 ąĖą╗ąĖ 6
SAI_D1, SAI_D2 ąĖ SAI_D3
7 ąĖą╗ąĖ 8
SAI_D1, SAI_D2, SAI_D3 ąĖ SAI_D4
ą£ąĖą║čĆąŠč乊ąĮčŗ ą╝ąŠą│čāčé čéą░ą║čéąĖčĆąŠą▓ą░čéčīčüčÅ ąŠčé ąŠą┤ąĮąŠą│ąŠ ąĖ č鹊ą│ąŠ ąČąĄ čéą░ą║č鹊ą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ SAI_CKx (x=0...3) ąĖą╗ąĖ ąŠčéą┤ąĄą╗čīąĮąŠ ąŠčé čĆą░ąĘąĮčŗčģ SAI_CK, ą┤ą░ą▓ą░čÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ą│ąĖą▒ą║ąŠčüčéčī ą▓ čĆą░ąĘčĆąĄčłąĄąĮąĖąĖ ąĖą╗ąĖ ąĘą░ą┐čĆąĄč鹥 ą┐ąŠą╗čāč湥ąĮąĖčÅ ą░čāą┤ąĖąŠ ąŠčé ąŠčéą┤ąĄą╗čīąĮčŗčģ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
SAI čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ ą▓čŗą▒čĆą░ąĮąĮąŠą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąĄ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓ (2, 4, 6 ąĖą╗ąĖ 8), ą║čĆą░čéąĮąŠą╝ čćą░čüč鹊č鹥 ą╝ąĖą║čĆąŠč乊ąĮą░, čćč鹊ą▒čŗ ąĖą╝ąĄčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čüčćąĖčéčŗą▓ą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ čüąŠ ą▓čüąĄčģ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ.
ąĀąĖčü. 17. ąÆąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ PDM ą┐ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÄ ą┤ąŠ 4 ą┐ą░čĆ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓.
ąśąĮč鹥čĆč乥ą╣čü PDM ąĖąĮč鹥čĆč乥ą╣čüą░ SAI ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąŠą┐čéąĖą╝ą░ą╗čīąĮąŠąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą║ čåąĖčäčĆąŠą▓ąŠą╝čā ą╝ąĖą║čĆąŠč乊ąĮčā, čü ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ 菹║ąŠąĮąŠą╝ąĖąĄą╣ ą╗ąĖąĮąĖą╣ IO, ąĮą░čüą║ąŠą╗čīą║ąŠ čŹč鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ąĖąĮč鹥čĆč乥ą╣čü PDM ą╝ąŠąČąĄčé ą┐ąŠą▒ą░ą╣čéąĮąŠ čĆą░ąĘą┤ąĄą╗ąĖčéčī ą┤ą░ąĮąĮčŗąĄ ą║ą░ąČą┤ąŠą│ąŠ ą╝ąĖą║čĆąŠč乊ąĮą░, ąĖąĘą▒ą░ą▓ą╗čÅčÅ ąŠčé ąŠą┐ąĄčĆą░čåąĖąĖ čāą┤ą░ą╗ąĄąĮąĖčÅ č湥čĆąĄą┤ąŠą▓ą░ąĮąĖčÅ ą▒ąĖčé.
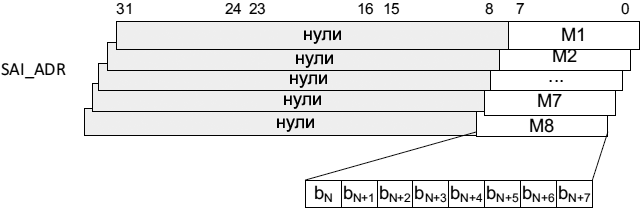
ążąŠčĆą╝ą░čé ą┤ą░ąĮąĮčŗčģ . ąÆčŗą▒ąŠčĆą║ąĖ, ąĘą░čģą▓ą░čéčŗą▓ą░ąĄą╝čŗąĄ čüčāą▒ą▒ą╗ąŠą║ąŠą╝ SAI_A, ą╝ąŠą│čāčé ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮčŗ ą▓ ą┐ą░ą╝čÅčéčī čü ą┐ąŠą╝ąŠčēčīčÄ ąŠą┤ąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ DMA ąĖą╗ąĖ ą┐ąŠ čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąĀąĄą│ąĖčüčéčĆ ą┐čĆąĖąĮąĖą╝ą░ąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ (SAI_ADR) ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé 8 čüą╗ąĄą┤čāčÄčēąĖčģ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ą▒ąĖčé, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮąĖąČąĄ:
ąĀąĖčü. 18. ążąŠčĆą╝ą░čé ą┤ą░ąĮąĮčŗčģ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ SAI PDM čü čĆą░ąĘą╝ąĄčĆąŠą╝ čüą╗ąŠčéą░ 32 ą▒ąĖčéą░ ąĖ 8 ą╝ąĖą║čĆąŠč乊ąĮą░ą╝ąĖ.
ąĀą░ąĘą╝ąĄčĆ ą┤ą░ąĮąĮčŗčģ, čüąŠčģčĆą░ąĮąĄąĮąĮčŗčģ ą▓ SAI_ADR, ąĘą░ą▓ąĖčüąĖčé ąŠčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ SAI, čüą╝. čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ SAI ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ č乊čĆą╝ą░č鹥 ą┤ą░ąĮąĮčŗčģ, ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĖąĮč鹥čĆč乥ą╣čü PDM.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ąĄčüą╗ąĖ čĆą░ąĘą╝ąĄčĆ čüą╗ąŠčéą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĮą░ 8 ą▒ąĖčé, č鹊 SAI_ADR čüąŠą┤ąĄčƹȹĖčé č鹊ą╗čīą║ąŠ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ąŠčé ąŠą┤ąĮąŠą│ąŠ ą╝ąĖą║čĆąŠč乊ąĮą░. SAI_ADR ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮ 8 čĆą░ąĘ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąŠą┤ąĮąŠą│ąŠ ą▒ą░čéą░ ąŠčé 8 ą╝ąĖą║čĆąŠč乊ąĮąŠą▓.
ąĀąĖčü. 19. ążąŠčĆą╝ą░čé ą┤ą░ąĮąĮčŗčģ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ąĖąĮč鹥čĆč乥ą╣čüą░ SAI PDM čü čĆą░ąĘą╝ąĄčĆąŠą╝ čüą╗ąŠčéą░ 8 ą▒ąĖčé ąĖ 8 ą╝ąĖą║čĆąŠč乊ąĮą░ą╝ąĖ.
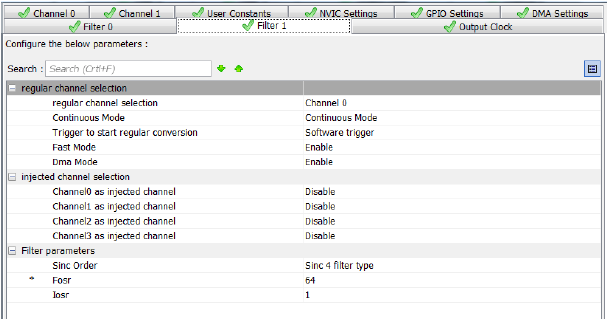
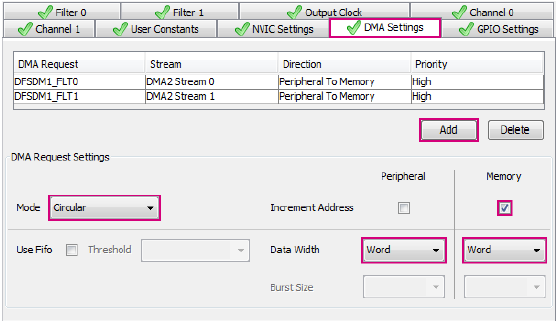
[ąśąĮč鹥čĆč乥ą╣čü DFSDM ]
DFSDM čĆą░čüčłąĖčäčĆąŠą▓čŗą▓ą░ąĄčéčüčÅ ą║ą░ą║ Digital Filter for Sigma Delta Modulators, čåąĖčäčĆąŠą▓ąŠą╣ čäąĖą╗čīčéčĆ ą┤ą╗čÅ čüąĖą│ą╝ą░-ą┤ąĄą╗čīčéą░ ą╝ąŠą┤čāą╗čÅč鹊čĆąŠą▓, čŹč鹊 čåąĖčäčĆąŠą▓ąŠąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓ STM32. ą×ąĮąŠ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ADC čü ą╝ą░čüčłčéą░ą▒ąĖčĆčāąĄą╝čŗą╝ čüą║ąŠčĆąŠčüčéčīčÄ/čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ ąĖ ą▓ąĮąĄčłąĮąĖą╝ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╝ čäčĆąŠąĮčé-菹Įą┤ąŠą╝.
ą”ąĖčäčĆąŠą▓čŗąĄ MEMS-ą╝ąĖą║čĆąŠč乊ąĮčŗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ą▓čŗčģąŠą┤ąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą▓ č乊čĆą╝ą░č鹥 PDM, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ąĮą░ą┐čĆčÅą╝čāčÄ ąĮą░ą┐čĆą░ą▓ą╗ąĄąĮčŗ ą▓ DFSDM. DFSDM ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąŠčéčäąĖą╗čīčéčĆąŠą▓ą░ąĮąĮčŗąĄ ąĖ ą┐čĆąŠčłąĄą┤čłąĖąĄ ą┤ąĄčåąĖą╝ą░čåąĖčÄ ą▓čŗą▒ąŠčĆą║ąĖ. ąÜą░ąČą┤čŗą╣ čäąĖą╗čīčéčĆ ąĖą╝ąĄąĄčé čüą▓ąŠą╣ čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╣ ą║ą░ąĮą░ą╗ DMA, ą▓čüą╗ąĄą┤čüčéą▓ąĖąĄ č湥ą│ąŠ ą▓čŗą▒ąŠčĆą║ąĖ ą║ą░ąČą┤ąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ čĆą░ąĘą┤ąĄą╗čÅčÄčéčüčÅ. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÄ ąĖąĘą▒ąĄąČą░čéčī čéčÅąČąĄą╗ąŠą╣ ąĮą░ą│čĆčāąĘą║ąĖ ąŠą┐ąĄčĆą░čåąĖą╣ čäąĖą╗čīčéčĆą░čåąĖąĖ ąĖ čāą┤ą░ą╗ąĄąĮąĖčÅ č湥čĆąĄą┤ąŠą▓ą░ąĮąĖčÅ ą▒ąĖčé. ąś ąĮą░ą║ąŠąĮąĄčå ąĮąĄą║ąŠč鹊čĆčŗąĄ ą▒ą╗ąŠą║ąĖ DFSDM ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ą╗ąĖąĮąĖąĖ ąĘą░ą┤ąĄčƹȹ║ąĖ, čćč鹊ą▒čŗ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą╝ąĖą║čĆąŠąĘą░ą┤ąĄčƹȹ║ąĖ ą▓ ą║ą░ąČą┤ąŠą╝ ą┐čĆąĖčģąŠą┤čÅčēąĄą╝ ą▒ąĖč鹊ą▓ąŠą╝ ą┐ąŠč鹊ą║ąĄ, čćč鹊 čāą┐čĆąŠčēą░ąĄčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÄ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ą╗čāčćą░. ąōą╗čāą▒ąĖąĮą░ ą║ą░ąČą┤ąŠą╣ ą╗ąĖąĮąĖąĖ ąĘą░ą┤ąĄčƹȹ║ąĖ čĆą░ą▓ąĮą░ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéčā ą┤ąĄčåąĖą╝ą░čåąĖąĖ.
ą£ąŠąČąĮąŠ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čåąĖčäčĆąŠą▓čŗčģ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓ ą║ ąŠą┤ąĮąŠą╝čā DFSDM. ąŁč鹊 ąĘą░ą▓ąĖčüąĖčé ąŠčé ą║ąŠą╗ąĖč湥čüčéą▓ą░ ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮąĮčŗčģ čäąĖą╗čīčéčĆąŠą▓ ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓.
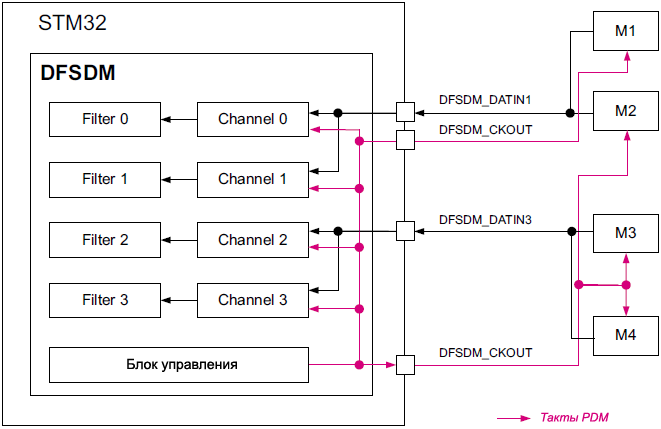
DFSDM ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čéą░ą║č鹊ą▓čŗą╣ ą▓čŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ (DFSDM_CKOUT) ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čåąĖčäčĆąŠą▓čŗą╝ąĖ ą╝ąĖą║čĆąŠč乊ąĮą░ą╝ąĖ. ąŻ čéą░ą║č鹊ą▓ąŠą│ąŠ ą▓čŗčģąŠą┤ą░ ąĄčüčéčī ąĮą░čüčéčĆą░ąĖą▓ą░ąĄą╝čŗą╣ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą┤ąĄą╗ąĄąĮąĖčÅ. DFSDM_CKOUT ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą▓ąĄą┤ąĄąĮ ąĮą░ čĆą░ąĘą╗ąĖčćąĮčŗąĄ IO, ą┤ą░ą▓ą░čÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ą│ąĖą▒ą║ąŠčüčéčī ą┐čĆąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖąĖ ąĖą╗ąĖ ąĘą░ą┐čĆąĄč鹥 ąĘą░čģą▓ą░čéą░ ąĘą▓čāą║ą░ ąŠčé čĆą░ąĘą╗ąĖčćąĮčŗčģ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą┐ąŠą║ą░ąĘą░ąĮą░ ąĮą░ čĆąĖčü. 20, DFSDM ąĖąĮč鹥čĆč乥ą╣čü čü 4 čåąĖčäčĆąŠą▓čŗą╝ąĖ ą╝ąĖą║čĆąŠč乊ąĮą░ą╝ąĖ, čćč鹊 ąŠą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ čü ąĮąĖąĘą║ąĖą╝ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ 菹ĮąĄčĆą│ąĖąĖ: čåąĖčäčĆąŠą▓ąŠą╣ ą╝ąĖą║čĆąŠč乊ąĮ M1 ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą┤čĆčāą│ąĖąĄ ą┐ąĄčĆąĄą║ą╗čÄčćą░čÄčéčüčÅ ą▓ čĆąĄąČąĖą╝ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čŹąĮąĄčĆą│ąĖąĖ, ą┐ąŠčüą║ąŠą╗čīą║čā ąŠąĮąĖ ąĮąĄ čéą░ą║čéąĖčĆčāčÄčéčüčÅ. ą¦č鹊ą▒čŗ čüąŠčģčĆą░ąĮąĖčéčī ą▒ąŠą╗čīčłąĄ 菹ĮąĄčĆą│ąĖąĖ, čéą░ą║ąČąĄ ą╝ąŠąČąĮąŠ ą▓čŗą║ą╗čÄčćąĖčéčī M3 ąĖ M4.
ąÜąŠą│ą┤ą░ ąĮčāąČąĮąŠ ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░čéčī ą▓čüąĄ ą╝ąĖą║čĆąŠč乊ąĮčŗ, ąŠą┤ąĮą░ ąĖ čéą░ ąČąĄ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ą┐ąŠą┤ą░ąĄčéčüčÅ ąĮą░ ą▓čüąĄ ą╝ąĖą║čĆąŠč乊ąĮčŗ č湥čĆąĄąĘ ą┤ą▓ą░ čĆą░ąĘąĮčŗčģ ą▓čŗą▓ąŠą┤ą░ (PAD).
ąĀąĖčü. 20. ąÆąŠąĘą╝ąŠąČąĮąŠčüčéčī DFSDM ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą┤ąŠ 4 čåąĖčäčĆąŠą▓čŗčģ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓.
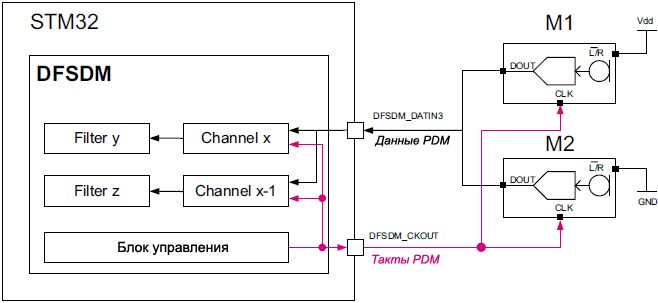
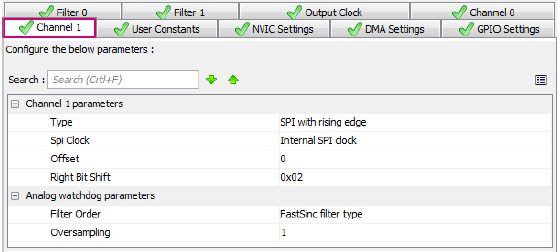
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čüč鹥čĆąĄąŠ . ąöą▓ą░ čåąĖčäčĆąŠą▓čŗčģ ą╝ąĖą║čĆąŠč乊ąĮą░ ą┐ąŠą┤ą║ą╗čÄčćą░čÄčéčüčÅ ą║ DFSDM ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čüč鹥čĆąĄąŠ. DFSDM ą┤ąŠą╗ąČąĄąĮ ą░ą║čéąĖą▓ąĖąĘąĖčĆąŠą▓ą░čéčī ą┤ą▓ą░ čüąŠčüąĄą┤ąĮąĖčģ ą║ą░ąĮą░ą╗ą░, čāą┐čĆą░ą▓ą╗čÅąĄą╝čŗčģ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ čéą░ą║č鹊ą▓čŗą╝ čüąĖą│ąĮą░ą╗ąŠą╝. ą¤ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ DFSDM ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▓ąĮąĄčłąĮąĖą╣ čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ (DFSDM_CKOUT) ą┤ą╗čÅ ą┐ąŠą┤ą░čćąĖ ąĮą░ čåąĖčäčĆąŠą▓čŗąĄ ą╝ąĖą║čĆąŠč乊ąĮčŗ. ąÆ čŹč鹊ą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ DFSDM ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄčéčüčÅ čéą░ą║, čćč鹊ą▒čŗ ą┐ąŠąĘą▓ąŠą╗ąĖčéčī ą║ą░ąĮą░ą╗ą░ą╝ x ąĖ x-1 ą┐čĆąĖąĮąĖą╝ą░čéčī ą┤ą░ąĮąĮčŗąĄ ąŠčé ą▓čŗą▓ąŠą┤ą░ DFSDM_DATINx. ąÜą░ąČą┤čŗą╣ ą║ą░ąĮą░ą╗ čćąĖčéą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ąĮą░ čĆą░ąĘąĮčŗčģ ą┐ąĄčĆąĄą┐ą░ą┤ą░čģ čéą░ą║č鹊ą▓, ą┐ąŠąĘą▓ąŠą╗čÅčÅ ą┤ą▓čāą╝ ą╝ąĖą║čĆąŠč乊ąĮą░ą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąŠą┤ąĮčā ą╗ąĖąĮąĖčÄ ą┤ą░ąĮąĮčŗčģ. ąŚą░č鹥ą╝ ą║ą░ąČą┤čŗą╣ ą║ą░ąĮą░ą╗ ą┐ąĄčĆąĄąĮą░ą┐čĆą░ą▓ą╗čÅąĄčé ąĘą░čģą▓ą░č湥ąĮąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĮą░ čĆą░ąĘą╗ąĖčćąĮčŗąĄ čäąĖą╗čīčéčĆčŗ DFSDM ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ.
ąĀąĖčü. 21. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čüč鹥čĆąĄąŠ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
1. x ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčé 1 ą┤ąŠ n, ą│ą┤ąĄ n čŹč鹊 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą║ą░ąĮą░ą╗ąŠą▓ ą▓ DFSDM. 2. y ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčé 1 ą┤ąŠ m, ą│ą┤ąĄ m čŹč鹊 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čäąĖą╗čīčéčĆąŠą▓ ą▓ DFSDM.
ążąŠčĆą╝ą░čé ą┤ą░ąĮąĮčŗčģ . ąöą░ąĮąĮčŗąĄ, ąĘą░čģą▓ą░č湥ąĮąĮčŗąĄ ą║ą░ąČą┤čŗą╝ čåąĖčäčĆąŠą▓čŗą╝ čäąĖą╗čīčéčĆąŠą╝, ą╝ąŠą│čāčé ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮčŗ ą▓ ą┐ą░ą╝čÅčéčī čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą▓čŗą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą║ą░ąĮą░ą╗ą░ DMA ąĖą╗ąĖ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čüąĖą│ąĮą░ą╗ąĖąĘą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąŚą┤ąĄčüčī ąĮąĄčé č湥čĆąĄą┤ąŠą▓ą░ąĮąĖčÅ, ą║ą░ąČą┤čŗą╣ čäąĖą╗čīčéčĆ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĮčŗąĄ ą▓čŗą▒ąŠčĆą║ąĖ ąŠą┤ąĮąŠą│ąŠ ą╝ąĖą║čĆąŠč乊ąĮą░. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄą╝čŗčģ ą║ą░ąĮą░ą╗ąŠą▓ DMA čĆą░ą▓ąĮąŠ ą║ąŠą╗ąĖč湥čüčéą▓čā ą░ą║čéąĖą▓ąĖčĆąŠą▓ą░ąĮąĮčŗčģ čåąĖčäčĆąŠą▓čŗčģ čäąĖą╗čīčéčĆąŠą▓.
[ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ]
ąóą░ą║čéčŗ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą╝ąĖą║čĆąŠč乊ąĮą░ . ąóą░ą║čéčŗ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗąĄ ą┤ą╗čÅ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą╝ąĖą║čĆąŠč乊ąĮą░, ą┤ąŠą╗ąČąĮčŗ ą▓čŗą┐ąŠą╗ąĮčÅčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čäčāąĮą║čåąĖą╣:
ŌĆó ąÜąŠą│ą┤ą░ čéą░ą║čéčŗ ąŠčéčüčāčéčüčéą▓čāčÄčé, ąĖą╗ąĖ ąĖą╝ąĄčÄčé ąŠč湥ąĮčī ąĮąĖąĘą║čāčÄ čćą░čüč鹊čéčā (čüą╝. ą┤ą░čéą░čłąĖčé ąĮą░ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą╝ąĖą║čĆąŠč乊ąĮ), č鹊 čåąĖčäčĆąŠą▓ąŠą╣ ą╝ąĖą║čĆąŠč乊ąĮ ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ ąĮąĖąĘą║ąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ.
ąĪą╗ąĄą┤čāąĄčé čéą░ą║ąČąĄ ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 ą║ąŠą│ą┤ą░ čåąĖčäčĆąŠą▓ąŠą╣ ą╝ąĖą║čĆąŠč乊ąĮ č鹊ą╗čīą║ąŠ čćč鹊 ą▓čŗčłąĄą╗ ąĖąĘ čĆąĄąČąĖą╝ą░ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą╣ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝ąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ ąĖąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 ąĄą│ąŠ čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą░ą║čéąĖą▓ąĮčŗą╝ ąĖą╗ąĖ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ąŠą▒ąĮą░čĆčāąČąĄąĮąĮąŠą╝ čćą░čüč鹊čéąĮąŠą╝ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ, čéčĆąĄą▒čāąĄčéčüčÅ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ ą▓čĆąĄą╝ąĄąĮąĖ, ą┐čĆąĄąČą┤ąĄ č湥ą╝ ą╝ąĖą║čĆąŠč乊ąĮ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčé ą▓čŗą▒ąŠčĆą║ąĖ čü ąŠąČąĖą┤ą░ąĄą╝čŗą╝ ą║ą░č湥čüčéą▓ąŠą╝.
ąÆ čéą░ą▒ą╗ąĖčåąĄ 6 ą┐ąŠą║ą░ąĘą░ąĮčŗ ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖą╝ąĄčĆčŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ąĖ čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ąĮąĖą╝ąĖ čéą░ą║č鹊ą▓čŗąĄ čćą░čüč鹊čéčŗ ą╝ąĖą║čĆąŠč乊ąĮą░.
ąóą░ą▒ą╗ąĖčåą░ 6. ą¤čĆąĖą╝ąĄčĆčŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čéą░ą║č鹊ą▓čŗąĄ čćą░čüč鹊čéčŗ ą╝ąĖą║čĆąŠč乊ąĮą░.
ąÆą░čĆąĖą░ąĮčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąóą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ą┤ą╗čÅ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą╝ąĖą║čĆąŠč乊ąĮą░
ąŚą░čģą▓ą░čé ąĘą▓čāą║ą░
ą×čé 400 ą┤ąŠ 800 ą║ąōčå
ą×ą▒čĆą░ą▒ąŠčéą║ą░ ą│ąŠą╗ąŠčüą░
ą×čé 1 ą┤ąŠ 1.5 ą£ąōčå
ąÆčŗčüąŠą║ąŠą║ą░č湥čüčéą▓ąĄąĮąĮčŗą╣ ąĘą▓čāą║
ą×čé 2.4 ą┤ąŠ 4.8 ą£ąōčå
ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ . ą¦č鹊ą▒čŗ ą▓čŗą▒čĆą░čéčī čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ, ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ čéą░ą║ąČąĄ čāčćąĖčéčŗą▓ą░čéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┤ą╗čÅ SPI, SAI ąĖą╗ąĖ DFSDM. ąóą░ą║ąČąĄ ą▓ą░ąČąĮąŠ ą┐čĆąŠą▓ąĄčĆąĖčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ čéą░ą║č鹊ą▓ąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░, ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą▓ SPI, SAI ąĖ DFSDM.
ą×ą▒čŗčćąĮąŠ ą▒ą╗ąŠą║ąĖ ąĘą▓čāą║ąŠą▓čŗčģ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ąĖą╝ąĄčÄčé ą┤ą▓ą░ čéą░ą║č鹊ą▓čŗčģ ą▓čģąŠą┤ą░:
ŌĆó ąóą░ą║čéčŗ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą┤ą╗čÅ čĆąĄą│ąĖčüčéčĆąŠą▓ąŠą│ąŠ ąĖąĮč鹥čĆč乥ą╣čüą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ (ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ čéą░ą║č鹊ą▓ čłąĖąĮčŗ APB).
ąÆ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą▓čŗą▒čĆą░ąĮąĮčŗą╝ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą╝ ą│ąĄąĮąĄčĆą░č鹊čĆ čéą░ą║č鹊ą▓ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąĖąĮč鹥čĆč乥ą╣čü čłąĖąĮčŗ ąĖą╗ąĖ ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗąĄ ąŠą┐ąŠčĆąĮčŗąĄ čéą░ą║čéčŗ. ąØą░ą┐čĆąĖą╝ąĄčĆ, SPI-V1 ąĖčüą┐ąŠą╗čīąĘčāąĄčé čéą░ą║čéčŗ APB ą▓ ą║ą░č湥čüčéą▓ąĄ ąŠą┐ąŠčĆąĮčŗčģ, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐čĆąŠč鹊ą║ąŠą╗ SPI, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą┐čĆąŠč鹊ą║ąŠą╗ I2S ąĖčüą┐ąŠą╗čīąĘčāąĄčé čéą░ą║čéčŗ I2S.
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čćą░čüč鹊č鹊ą╣ APB ąŠą▒čŗčćąĮąŠ ąĮąĄ čéą░ą║ąŠąĄ ą│ąĖą▒ą║ąŠąĄ, ą║ą░ą║ ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗąĄ čéą░ą║čéčŗ. ą×ą┤ąĮą░ ąĖąĘ ą┐čĆąĖčćąĖąĮ ą▓ č鹊ą╝, čćč鹊 čéą░ą║čéčŗ APB ą▓ą╗ąĖčÅčÄčé ąĮą░ ą▓čüąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗąĄ ą║ čŹč鹊ą╣ čłąĖąĮąĄ APB. ą×ą┤ąĮą░ą║ąŠ ą▓ čüą╗čāčćą░ąĄ, ą║ąŠą│ą┤ą░ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čüč鹥čĆąĄąŠč乊ąĮąĖč湥čüą║ąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čéą░ą╣ą╝ąĄčĆ (ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ čéą░ą║ąĖčģ ąČąĄ čéą░ą║č鹊ą▓, ą║ą░ą║ ąĖ čā čéą░ą╣ą╝ąĄčĆą░), čĆąĄčłą░ąĄčéčüčÅ ąŠą┤ąĮą░ ąĖąĘ ą┐čĆąŠą▒ą╗ąĄą╝, ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗčģ ą▓čŗčłąĄ ą▓ čüąĄą║čåąĖąĖ "ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čéą░ą╣ą╝ąĄčĆą░ ą▓ ą║ą░č湥čüčéą▓ąĄ ą│ąĄąĮąĄčĆą░č鹊čĆą░ čéą░ą║č鹊ą▓".
ąØąĄą║ąŠč鹊čĆčŗąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ čéą░ą║ąČąĄ ąĖą╝ąĄčÄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ą║ąŠą┐ąĖčÄ čéą░ą║č鹊ą▓ APB ą▓ ą║ą░č湥čüčéą▓ąĄ čéą░ą║č鹊ą▓ čÅą┤čĆą░.
ąĀąĖčü. 22. ąóąŠą┐ąŠą╗ąŠą│ąĖčÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čłąĖąĮčŗ ąĖ čÅą┤čĆą░ ą┤ą╗čÅ SPI.
ąöčĆčāą│ąĖąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ (SPI-V2, SAI ąĖ DFSDM) ą▓čüąĄą│ą┤ą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗąĄ čéą░ą║čéčŗ čÅą┤čĆą░ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ. ąŁčéą░ ąŠą┐čåąĖčÅ ą▒ąŠą╗ąĄąĄ ą│ąĖą▒ą║ą░čÅ, ąĖ ą┤ąĄą╗ą░ąĄčé ąČąĄą╗ą░ąĄą╝čāčÄ čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠą╣ ąŠčé čćą░čüč鹊čéčŗ ąĖąĮč鹥čĆč乥ą╣čüą░ čłąĖąĮčŗ.
ąĀąĖčü. 23. ąóąŠą┐ąŠą╗ąŠą│ąĖčÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čłąĖąĮčŗ ąĖ čÅą┤čĆą░ ą┤ą╗čÅ SAI ąĖ DFSDM.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: DFSDM ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▓čŗą▒čĆą░čéčī ą╗ąĖą▒ąŠ ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗąĄ čéą░ą║čéčŗ ą┐ąĄčĆąĖč乥čĆąĖąĖ (čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ąĘą▓čāą║ą░), ą╗ąĖą▒ąŠ ą▓čŗą▒čĆą░čéčī čéą░ą║čéčŗ DFSDM, ą║ąŠč鹊čĆčŗąĄ čüąĖąĮčģčĆąŠąĮąĮčŗ čü čćą░čüč鹊č鹊ą╣ čéą░ą║č鹊ą▓ APB.
[ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ GPIO ]
ąŁčéą░ čüąĄą║čåąĖčÅ ą┐ąŠą╝ąŠąČąĄčé ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ą▓čŗą▒čĆą░čéčī ąĮą░ąĖą▒ąŠą╗ąĄąĄ ą┐ąŠą┤čģąŠą┤čÅčēąĄąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ STM32 (SPI, I2S, SAI, DFSDM) ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ čåąĖčäčĆąŠą▓čŗčģ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ, ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ąĮąŠąČąĄą║ GPIO.
ąóą░ą▒ą╗ąĖčåčŗ 7, 8 ąĖ 9 ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé ą░ą┐ą┐ą░čĆą░čéčāčĆčā, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čāčÄ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ąŠą┤ąĮąŠą│ąŠ, ą┤ą▓čāčģ ąĖ č湥čéčŗčĆąĄčģ čåąĖčäčĆąŠą▓čŗčģ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓ ą║ čĆą░ąĘą╗ąĖčćąĮčŗą╝ ąĘą▓čāą║ąŠą▓čŗą╝ ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╝ ąĖąĮč鹥čĆč乥ą╣čüą░ą╝.
ŌĆó ąĪč鹊ą╗ą▒ąĄčå "ąÜąŠą╗ąĖč湥čüčéą▓ąŠ GPIO" ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĮąŠąČąĄą║ GPIO, ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗčģ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ čåąĖčäčĆąŠą▓čŗčģ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓ ą║ ąĘą▓čāą║ąŠą▓ąŠą╝čā ąĖąĮč鹥čĆč乥ą╣čüčā.
ąóą░ą▒ą╗ąĖčåą░ 7. ąÉą┐ą┐ą░čĆą░čéčāčĆą░, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ą░čÅ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ąŠą┤ąĮąŠą│ąŠ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą╝ąĖą║čĆąŠč乊ąĮą░.
ąśąĮč鹥čĆč乥ą╣čü ąÜąŠą╗ąĖč湥čüčéą▓ąŠ GPIO ąóą░ą╣ą╝ąĄčĆ
SPI
2
ąØąĄčé
I2S
2
ąØąĄčé
SAI
2
ąØąĄčé
DFSDM
2
ąØąĄčé
ąóą░ą▒ą╗ąĖčåą░ 8. ąÉą┐ą┐ą░čĆą░čéčāčĆą░, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ą░čÅ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą┤ą▓čāčģ čåąĖčäčĆąŠą▓čŗčģ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓.
ąśąĮč鹥čĆč乥ą╣čü ąÜąŠą╗ąĖč湥čüčéą▓ąŠ GPIO ąóą░ą╣ą╝ąĄčĆ
SPI
4
ąöą░
I2S
4
ąöą░
SAI
4
ąöą░
SAI (ą┤ą▓ą░ čüąĖąĮčģčĆąŠąĮąĮčŗčģ čüčāą▒ą▒ą╗ąŠą║ą░)
4
ąØąĄčé
SAI čü ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ PDM
2
ąØąĄčé
DFSDM
2
ąØąĄčé
ąóą░ą▒ą╗ąĖčåą░ 9. ąÉą┐ą┐ą░čĆą░čéčāčĆą░, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ą░čÅ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ č湥čéčŗčĆąĄčģ čåąĖčäčĆąŠą▓čŗčģ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓.
ąśąĮč鹥čĆč乥ą╣čü ąÜąŠą╗ąĖč湥čüčéą▓ąŠ GPIO ąóą░ą╣ą╝ąĄčĆ
SAI (ą┤ą▓ą░ čüąĖąĮčģčĆąŠąĮąĮčŗčģ čüčāą▒ą▒ą╗ąŠą║ą░)
6
ąöą░
SAI čü ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ PDM
3
ąØąĄčé
DFSDM
3
ąØąĄčé
[ą”ąĖčäčĆąŠą▓ą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ čüąĖą│ąĮą░ą╗ą░ ]
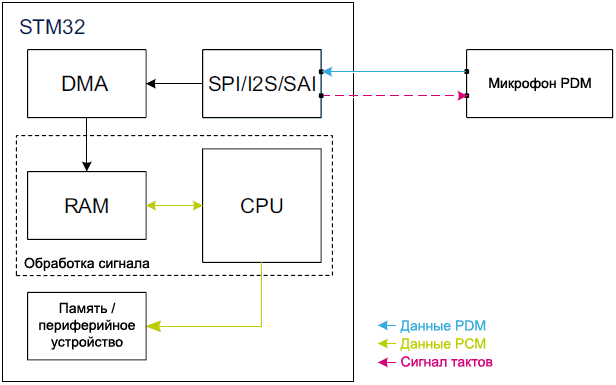
ąÆ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ 2 čüą┐ąŠčüąŠą▒ą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ PDM ą▓ ą┤ą░ąĮąĮčŗąĄ PCM. ą¤ąĄčĆą▓čŗą╣ čüą┐ąŠčüąŠą▒ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╣, ą║ąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüą┐ąĄčåąĖą░ą╗čīąĮą░čÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĘą▓čāą║ą░ PDM, ąĖ ą▓č鹊čĆąŠą╣ čüą┐ąŠčüąŠą▒ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣, ąĖčüą┐ąŠą╗čīąĘčāčÄčēąĖą╣ čäąĖą╗čīčéčĆčŗ DFSDM.
ą¤čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ PDM . ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĘą▓čāą║ą░ PDM čŹč鹊 ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮąŠąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ PDM ąĖ čĆąĄą║ąŠąĮčüčéčĆčāą║čåąĖąĖ čüąĖą│ąĮą░ą╗ą░, ą║ąŠą│ą┤ą░ ą║ STM32 ą┐ąŠą┤ą║ą╗čÄčćą░čÄčéčüčÅ MEMS-ą╝ąĖą║čĆąŠč乊ąĮčŗ. ąÆ čŹč鹊ą╣ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ ąĮąĄčüą║ąŠą╗čīą║ąŠ čäąĖą╗čīčéčĆąŠą▓ ą┤ą╗čÅ 1-ą▒ąĖčéąĮąŠą│ąŠ ą▓čŗčüąŠą║ąŠčćą░čüč鹊čéąĮąŠą│ąŠ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ PDM čåąĖčäčĆąŠą▓ąŠą│ąŠ ą╝ąĖą║čĆąŠč乊ąĮą░, ąĖ ąĄčüčéčī ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ čŹč鹊ą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą▓ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ 16-ą▒ąĖčéąĮčŗą╣ č乊čĆą╝ą░čé PCM ąĮą░ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą╣ čćą░čüč鹊č鹥 ą▓čŗą▒ąŠčĆąŠą║ ąĘą▓čāą║ą░.
ąÜą░ą║ čāąČąĄ čāą┐ąŠą╝ąĖąĮą░ą╗ąŠčüčī, čåąĖčäčĆąŠą▓ąŠą╣ MEMS-ą╝ąĖą║čĆąŠč乊ąĮ ą▓čŗą▓ąŠą┤ąĖčé čüąĖą│ąĮą░ą╗ PDM, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čüąŠą▒ąŠą╣ ą▓čŗčüąŠą║ąŠčćą░čüč鹊čéąĮčŗą╣ (ąŠčé 1 ą┤ąŠ 3.25 ą£ąōčå) ą┐ąŠč鹊ą║ 1-ą▒ąĖčéąĮčŗčģ čåąĖčäčĆąŠą▓čŗčģ ą▓čŗą▒ąŠčĆąŠą║. ąöą░ąĮąĮčŗąĄ PDM ąĘą░čģą▓ą░čéčŗą▓ą░čÄčéčüčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╝ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝, ą▓čüčéčĆąŠąĄąĮąĮčŗą╝ ą▓ STM32. ąŁčéąĖ ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą╝ąĄčēą░čÄčéčüčÅ č湥čĆąĄąĘ DMA (čćč鹊 čüąĮąĖąČą░ąĄčé ą▓čŗčćąĖčüą╗ąĖč鹥ą╗čīąĮčāčÄ ąĮą░ą│čĆčāąĘą║čā) ą▓ čüąĖčüč鹥ą╝ąĮčŗą╣ ą▒čāč乥čĆ RAM ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ. ą¤ąŠčüą╗ąĄ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ čüčŗčĆčŗąĄ ą┤ą░ąĮąĮčŗąĄ PCM ą╝ąŠą│čāčé ą▒čŗčéčī ąŠą▒čĆą░ą▒ąŠčéą░ąĮčŗ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ (čüąŠčģčĆą░ąĮąĄąĮčŗ ą║ą░ą║ WAV/čüąČą░čéčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĮą░ ąĮąŠčüąĖč鹥ą╗čī ą┤ą░ąĮąĮčŗčģ, ą┐ąĄčĆąĄą┤ą░ąĮčŗ ąĮą░ ą▓ąĮąĄčłąĮąĖą╣ ą░čāą┤ąĖąŠ ą║ąŠą┤ąĄą║ DAC).
ąĀąĖčü. 24. ąæą╗ąŠą║-čüčģąĄą╝ą░ ąĘą░čģą▓ą░čéą░ čåąĖčäčĆąŠą▓čŗčģ ą┤ą░ąĮąĮčŗčģ ąĖ ąĖčģ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ.
ąæąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĘą▓čāą║ą░ PDM ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé 2 čłą░ą│ą░ čåąĖčäčĆąŠą▓ąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąĖą│ąĮą░ą╗ą░: čåąĖčäčĆąŠą▓ąŠą╣ čäąĖą╗čīčéčĆ PDM ąĖ ą┤ąĄčåąĖą╝ą░čåąĖčÅ, ą░ čéą░ą║ąČąĄ ą║ąŠąĮą┤ąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ čåąĖčäčĆąŠą▓ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░.
ąĀąĖčü. 25. ą”ąĖčäčĆąŠą▓ą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ čüąĖą│ąĮą░ą╗ą░.
ąØą░ ą┐ąĄčĆą▓ąŠą╝ čłą░ą│ąĄ čüąĖą│ąĮą░ą╗ PDM ąŠčé ą╝ąĖą║čĆąŠč乊ąĮą░ čäąĖą╗čīčéčĆčāąĄčéčüčÅ ąĖ ą┤ąĄčåąĖą╝ąĖčĆčāąĄčéčüčÅ, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ąĘą▓čāą║ąŠą▓ąŠą╣ čüąĖą│ąĮą░ą╗ ąĮčāąČąĮąŠą╣ čćą░čüč鹊čéčŗ ą▓čŗą▒ąŠčĆąŠą║ ąĖ ąĮčāąČąĮąŠą│ąŠ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ.
ąØą░ ą▓č鹊čĆąŠą╝ čłą░ą│ąĄ čåąĖčäčĆąŠą▓ąŠą╣ ąĘą▓čāą║ąŠą▓ąŠą╣ čüąĖą│ąĮą░ą╗, ą▓čŗčłąĄą┤čłąĖą╣ ąĖąĘ ą┐čĆąĄą┤čŗą┤čāčēąĄą│ąŠ ą║ąŠąĮą▓ąĄą╣ąĄčĆą░ čäąĖą╗čīčéčĆą░, ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčéčüčÅ ą┤ąŠ ąĮčāąČąĮąŠą╣ ą║ąŠąĮą┤ąĖčåąĖąĖ čĆąĄą░ą╗ąĖąĘą░čåąĖąĄą╣ ążąØą¦ ąĖ ążąÆą¦. ą×ą▒ą░ čŹčéąĖčģ čäąĖą╗čīčéčĆą░ ą╝ąŠą│čāčé ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮčŗ/ąĘą░ą┐čĆąĄčēąĄąĮčŗ ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ (ą┐ąŠ čćą░čüč鹊čéą░ą╝ čüčĆąĄąĘą░) čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ čäąĖą╗čīčéčĆą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čüč鹥čĆąĄąŠ, ąĄčüą╗ąĖ 2 ą╝ąĖą║čĆąŠč乊ąĮą░ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ąŠą▒čēąĖą╣ čüąĖą│ąĮą░ą╗ ą┤ą░ąĮąĮčŗčģ, č鹊 ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ąŠčé ą╝ąĖą║čĆąŠč乊ąĮąŠą▓ ą┐ąŠą╗čāčćą░čÄčéčüčÅ ą┤ą░ąĮąĮčŗąĄ PDM čü č湥čĆąĄą┤ąŠą▓ą░ąĮąĖąĄą╝. ą¤ąŠčŹč鹊ą╝čā ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╣ čłą░ą│ čāą┤ą░ą╗ąĄąĮąĖčÅ č湥čĆąĄą┤ąŠą▓ą░ąĮąĖčÅ, čćč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┤ą╗čÅ čĆą░ąĘą┤ąĄą╗ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ą┤ą▓čāčģ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓ ą┐ąĄčĆąĄą┤ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄą╝ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ PDM ą▓ PCM.
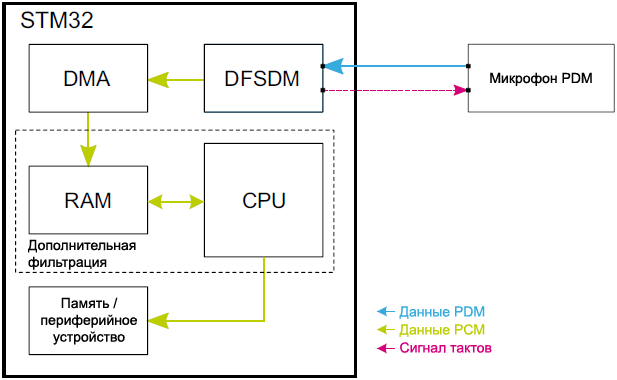
ążąĖą╗čīčéčĆčŗ DFSDM ą┤ą╗čÅ čåąĖčäčĆąŠą▓ąŠą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąĖą│ąĮą░ą╗ą░ . ą”ąĖčäčĆąŠą▓ąŠą╣ MEMS-ą╝ąĖą║čĆąŠč乊ąĮ ą▓čŗą▓ąŠą┤ąĖčé čüąĖą│ąĮą░ą╗ PDM, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅąĄčé čüąŠą▒ąŠą╣ ą▓čŗčüąŠą║ąŠčćą░čüč鹊čéąĮčŗą╣ (ąŠčé 1 ą┤ąŠ 3.25 ą£ąōčå) ą┐ąŠč鹊ą║ 1-ą▒ąĖčéąĮčŗčģ čåąĖčäčĆąŠą▓čŗčģ ą▓čŗą▒ąŠčĆąŠą║. ąöą░ąĮąĮčŗąĄ ąĘą░čģą▓ą░čéčŗą▓ą░čÄčéčüčÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╝ čéčĆą░ąĮčüąĖą▓ąĄčĆąŠą╝ DFSDM, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ čü ą▓ąĮąĄčłąĮąĖą╝ Sigma-Delta ą╝ąŠą┤čāą╗čÅč鹊čĆąŠą╝ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą╝ąĖą║čĆąŠč乊ąĮą░. ą”ąĖčäčĆąŠą▓čŗąĄ čäąĖą╗čīčéčĆčŗ ą▓čŗą┐ąŠą╗ąĮčÅčÄčé ą░ą┐ą┐ą░čĆą░čéąĮčāčÄ čäąĖą╗čīčéčĆą░čåąĖčÄ (ąĮąĄ ąĮą░ą│čĆčāąČą░čÅ CPU), ą║ąŠč鹊čĆą░čÅ čāčüčĆąĄą┤ąĮčÅąĄčé 1-ą▒ąĖčéąĮčŗą╣ ą▓čģąŠą┤ąĮąŠą╣ ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ ąŠčé ą╝ąŠą┤čāą╗čÅč鹊čĆą░ SD ą▓ ą┐ąŠč鹊ą║ ą┤ą░ąĮąĮčŗčģ ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąŠą│ąŠ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ąĖ ą▒ąŠą╗ąĄąĄ ąĮąĖąĘą║ąŠą╣ čćą░čüč鹊čéčŗ ą┤ąĖčüą║čĆąĄčéąĖąĘą░čåąĖąĖ (ą┐ąŠą╗čāčćą░čÄčéčüčÅ čüčŗčĆčŗąĄ ą┤ą░ąĮąĮčŗąĄ PCM). ąŁčéąĖ ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą╝ąĄčēą░čÄčéčüčÅ č湥čĆąĄąĘ DMA (čćč鹊 čüąĮąĖąČą░ąĄčé ą▓čŗčćąĖčüą╗ąĖč鹥ą╗čīąĮčāčÄ ąĮą░ą│čĆčāąĘą║čā) ą▓ čüąĖčüč鹥ą╝ąĮčŗą╣ ą▒čāč乥čĆ RAM ą┤ą╗čÅ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĄą╣ čäąĖą╗čīčéčĆą░čåąĖąĖ. ą¤ąŠčüą╗ąĄ čŹč鹊ą│ąŠ čüčŗčĆčŗąĄ ą┤ą░ąĮąĮčŗąĄ PCM ą╝ąŠą│čāčé ą▒čŗčéčī ąŠą▒čĆą░ą▒ąŠčéą░ąĮčŗ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ (čüąŠčģčĆą░ąĮąĄąĮčŗ ą║ą░ą║ WAW/čüąČą░čéčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąĮą░ ąĮąŠčüąĖč鹥ą╗čī ą┤ą░ąĮąĮčŗčģ, ą┐ąĄčĆąĄą┤ą░ąĮčŗ ąĮą░ ą▓ąĮąĄčłąĮąĖą╣ ą░čāą┤ąĖąŠ ą║ąŠą┤ąĄą║ DAC).
ąĀąĖčü. 26. ąæą╗ąŠą║-čüčģąĄą╝ą░ ąĘą░čģą▓ą░čéą░ čåąĖčäčĆąŠą▓čŗčģ ą┤ą░ąĮąĮčŗčģ ąĖ ąĖčģ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ DFSDM.
[ą¤čĆąĖą╝ąĄčĆčŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣, ąŠčüąĮąŠą▓ą░ąĮąĮčŗčģ ąĮą░ STM32CubeMX ]
ąÆ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ čĆą░ąĘą╗ąĖčćąĮčŗčģ čłą░ą│ąŠą▓, ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗčģ ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ą▒ą░ąĘąŠą▓ąŠą│ąŠ ąĘą▓čāą║ąŠą▓ąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ą║ąŠč鹊čĆąŠąĄ ąĘą░čģą▓ą░čéčŗą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ PDM čü čåąĖčäčĆąŠą▓čŗčģ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓ ą▓ čĆąĄąČąĖą╝ą░čģ ą╝ąŠąĮąŠ ąĖą╗ąĖ čüč鹥čĆąĄąŠ, ąĖ ąĘą░č鹥ą╝ ą┐čĆąĄąŠą▒čĆą░ąĘčāąĄčé ąĖčģ ą▓ ą┤ą░ąĮąĮčŗąĄ PCM.
ą×čüąĮąŠą▓ąĮčŗąĄ čłą░ą│ąĖ čüąŠčüč鹊čÅčé ą▓ ą▓čŗą▒ąŠčĆąĄ ą┐čĆą░ą▓ąĖą╗čīąĮąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ ąĖ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą║ąŠą┤ą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ąĮą░ čÅąĘčŗą║ąĄ C, ąĖčüą┐ąŠą╗čīąĘčāčÅ čāčéąĖą╗ąĖčéčā STM32CubeMX. ąØą░ ą▓č鹊čĆąŠą╝ čłą░ą│ąĄ ą┤ąŠą▒ą░ą▓ą╗čÅąĄčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą║ąŠą┤ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą║ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĮąŠą╝čā ą┐čĆąŠąĄą║čéčā. ąÆ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ ą┤ą░ąĄčéčüčÅ čüčüčŗą╗ą║ą░ ąĮą░ ą┐ą░ą║ąĄčé ą┐čĆąĖą╝ąĄčĆąŠą▓ STM32Cube_FW ąĘą▓čāą║ąŠą▓čŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ąĖ ąĮą░ ą┐ą░ą║ąĄčéčé X-CUBE-MEMSMIC1 ą┤ą╗čÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą┐ąŠčüčéčĆąŠąĄąĮąĖčÅ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠą│ąŠ ą║ąŠą┤ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐čĆąĖą╝ąĄčĆą░.
ąÆ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĄąĄ:
ŌĆó ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÄ ąĮčāąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ą┤ą░ąĮąĮčŗąĄ PCM čü čćą░čüč鹊č鹊ą╣ ą┤ąĖčüą║čĆąĄčéąĖąĘą░čåąĖąĖ 16 ąĖą╗ąĖ 48 ą║ąōčå.
ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ąŠčüąĮąŠą▓ą░ąĮ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ąĮą░ ą┐ą╗ą░č鹥 čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ NUCLEO-F413ZH, ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▓ąĮąĄčłąĮąĖąĄ čåąĖčäčĆąŠą▓čŗąĄ ą╝ąĖą║čĆąŠč乊ąĮčŗ, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗąĄ č湥čĆąĄąĘ I2S, SPI ąĖą╗ąĖ SAI.
ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ą┤ą░ąĮąĮčŗąĄ PCM čü čćą░čüč鹊č鹊ą╣ ą┤ąĖčüą║čĆąĄčéąĖąĘą░čåąĖąĖ 16 ą║ąōčå, čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ ą╝ąĖą║čĆąŠč乊ąĮą░, ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝ą░čÅ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝, ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī 1.024 ą£ąōčå ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ ą╝ąŠąĮąŠ ąĖ 2.048 ą£ąōčå ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ čüč鹥čĆąĄąŠ. ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ą┤ą░ąĮąĮčŗąĄ PCM čü čćą░čüč鹊č鹊ą╣ ą┤ąĖčüą║čĆąĄčéąĖąĘą░čåąĖąĖ 48 ą║ąōčå, čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ ą╝ąĖą║čĆąŠč乊ąĮą░, ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝ą░čÅ ąĖąĮč鹥čĆč乥ą╣čüąŠą╝, ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī 3.072 ą£ąōčå ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ ą╝ąŠąĮąŠ ąĖ 6.144 ą£ąōčå ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ čüč鹥čĆąĄąŠ.
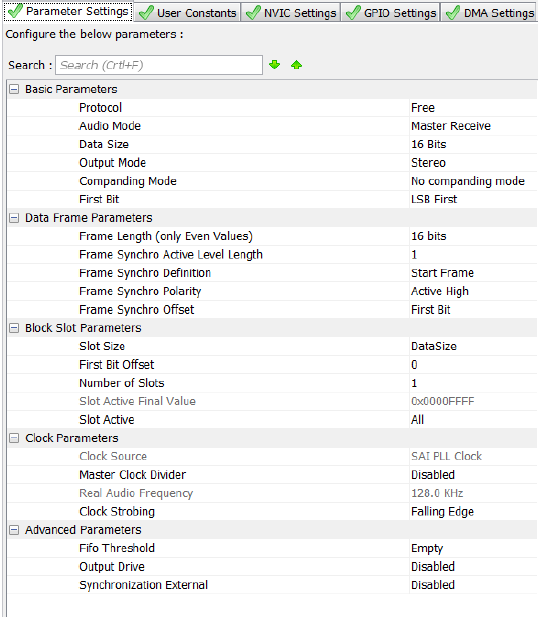
[ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ I2S, ą▓čŗą┐ąŠą╗ąĮąĄąĮąĮą░čÅ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ STM32CubeMX ]
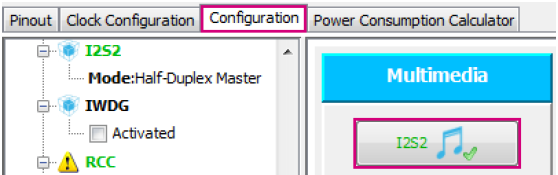
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ GPIO ąĖ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ ą▓čŗą▓ąŠą┤ąŠą▓ . ąśąĘ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮąŠą│ąŠ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖčÅ ąĮą░ ąĘą░ą║ą╗ą░ą┤ą║ąĄ Pinout ą▓čŗą▒ąĄčĆąĖč鹥 ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ I2S2, ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 ąĄą│ąŠ ą▓ čĆąĄąČąĖą╝ąĄ Half-duplex master. ąĀąĖčü. 27 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ čŹč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ.
ąĀąĖčü. 27. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĮąŠąČąĄą║ GPIO ą┤ą╗čÅ ąĖąĮč鹥čĆč乥ą╣čüą░ I2S.
ąĀą░ąĘčĆąĄčłąĄąĮąĮčŗąĄ ąĮąŠąČą║ąĖ I2S2_SD, I2S2_CK ąĖ I2S2_WS, ą▓čŗą┤ąĄą╗čÅčÄčéčüčÅ ąĘąĄą╗ąĄąĮčŗą╝ čåą▓ąĄč鹊ą╝, ą║ą░ą║ č鹊ą╗čīą║ąŠ GPIO ą┐ąĄčĆąĖč乥čĆąĖąĖ I2S ą║ąŠčĆčĆąĄą║čéąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ąĮąŠąČą║ą░ I2S2_WS ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ. ą×ąĮą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮą░ ąĖ ą┐čĆąĄą▓čĆą░čēąĄąĮą░ ą▓ ąŠą▒čŗčćąĮčŗą╣ ą┐ąŠčĆčé GPIO ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┤čĆčāą│ąĖčģ čäčāąĮą║čåąĖą╣, čćč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ ą┐čāč鹥ą╝ ąĮąĄą▒ąŠą╗čīčłąŠą╣ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĖ ą║ąŠą┤ą░ ą▓ čäą░ą╣ą╗ąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ MSP (stm32f4xx_hal_msp.c) ą┐ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąŠąĄą║čéą░.
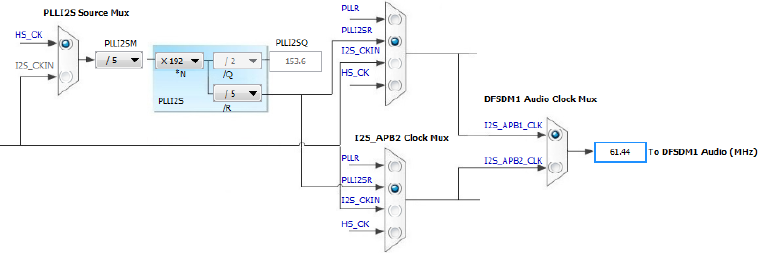
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ . ąŚą┤ąĄčüčī ąŠą┐ąĖčüčŗą▓ą░čÄčéčüčÅ čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čéą░ą║č鹊ą▓ I2S ą▓ čĆąĄąČąĖą╝ą░čģ ą╝ąŠąĮąŠ ąĖ čüč鹥čĆąĄąŠ ą┤ą╗čÅ ą┐ąŠč鹊ą║ąŠą▓ PCM čü čćą░čüč鹊č鹊ą╣ ą┤ąĖčüą║čĆąĄčéąĖąĘą░čåąĖąĖ 16 ą║ąōčå ąĖ 48 ą║ąōčå. ąÆ ą║ą░č湥čüčéą▓ąĄ ą▒ą░ąĘąŠą▓ąŠą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą▓ą░čĆčå HSE = 8 ą£ąōčå.
ąÆ čĆąĄąČąĖą╝ąĄ čüč鹥čĆąĄąŠ čéą░ą╣ą╝ąĄčĆ ąĖ I2S ą┤ąŠą╗ąČąĮčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čéą░ą║čéčŗ ąŠčé ąŠą┤ąĮąŠą│ąŠ ąĖ č鹊ą│ąŠ ąČąĄ ąĖčüč鹊čćąĮąĖą║ą░, ą┐ąŠ čŹč鹊ą╣ ą┐čĆąĖčćąĖąĮąĄ PLLR ą▓čŗą▒čĆą░ąĮ ą║ą░ą║ ąĖčüč鹊čćąĮąĖą║ čéą░ą║č鹊ą▓ ą┤ą╗čÅ I2S.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓ čüč鹊ą╗ą▒čåąĄ "ąóąŠčćąĮąŠčüčéčī (ppm)" čéą░ą▒ą╗ąĖčåčŗ 10 ą┐čĆąĖą▓ąĄą┤ąĄąĮą░ ąŠčłąĖą▒ą║ą░, ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčēą░čÅ čĆą░ąĘąĮąĖčåčā ą╝ąĄąČą┤čā ąŠąČąĖą┤ą░ąĄą╝ąŠą╣ čćą░čüč鹊č鹊ą╣ ą▓čŗą▒ąŠčĆąŠą║ ąĘą▓čāą║ą░ ąĖ čĆąĄą░ą╗čīąĮąŠą╣ čćą░čüč鹊č鹊ą╣. ąĢą┤ąĖąĮąĖčåą░ ppm ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čüą║ąŠą╗čīą║ąŠ ąĘąĮą░č湥ąĮąĖą╣ ą┐čĆąĖčģąŠą┤ąĖčéčüčÅ ąĮą░ ą╝ąĖą╗ą╗ąĖąŠąĮ (ppm čĆą░čüčłąĖčäčĆąŠą▓čŗą▓ą░ąĄčéčüčÅ Parts Per Million).
ąóą░ą▒ą╗ąĖčåą░ 10. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čéą░ą║č鹊ą▓ I2S2 ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēą░čÅ č鹊čćąĮąŠčüčéčī ą┐ąŠą╗čāč湥ąĮąĮąŠą╣ čćą░čüč鹊čéčŗ ą┤ąĖčüą║čĆąĄčéąĖąĘą░čåąĖąĖ.
ą”ąĄą╗ąĄą▓ą░čÅ čćą░čüč鹊čéą░ ą▓čŗą▒ąŠčĆąŠą║ ąĀąĄąČąĖą╝ ą╝ąĖą║čĆąŠč乊ąĮą░ ąśčüč鹊čćąĮąĖą║ čéą░ą║č鹊ą▓ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąŠčĆą░ I2S_APB1 DivM PLLN DivR DivP ąóą░ą║čéčŗ I2S (ą£ąōčå)(1) ąóąŠčćąĮąŠčüčéčī (ppm)
16 ą║ąōčå
ą£ąŠąĮąŠ
PLLI2SR
5
192
2
-
153.60
0
PLLI2SR
5
192
5
-
61.44
0
ąĪč鹥čĆąĄąŠ (čü čéą░ą╣ą╝ąĄčĆąŠą╝)
PLLR
7
344
6
4
65.52
-186
48 ą║ąōčå
ą£ąŠąĮąŠ
PLLI2SR
5
192
2
-
153.60
0
PLLI2SR
5
192
5
-
61.44
0
ąĪč鹥čĆąĄąŠ (čü čéą░ą╣ą╝ąĄčĆąŠą╝)
PLLR
7
344
4
4
98.29
-186
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (1): čćč鹊ą▒čŗ ą▓čüąĄ čĆą░ą▒ąŠčéą░ą╗ąŠ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ, čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ I2S ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čŗčłąĄ, č湥ą╝ ąĄą│ąŠ čćą░čüč鹊čéą░ APB.
ąĀąĖčü. 28 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆąĖą╝ąĄčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ I2S ą▓ čĆąĄąČąĖą╝ąĄ ą╝ąŠąĮąŠ.
ąĀąĖčü. 28. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čéą░ą║č鹊ą▓ I2S, čüąŠąĘą┤ą░ąĮąĮą░čÅ čāčéąĖą╗ąĖč鹊ą╣ STM32CubeMX.
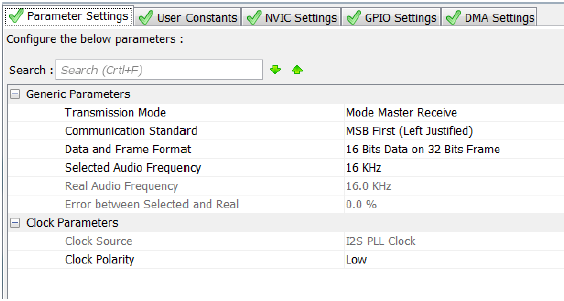
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ I2S . ąÆčŗą▒ąĄčĆąĖč鹥 ąĘą░ą║ą╗ą░ą┤ą║čā ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ (Configuration), ąĖ ąĘą░č鹥ą╝ ą║ą╗ąĖą║ąĮąĖč鹥 ąĮą░ ą║ąĮąŠą┐ą║čā I2S2, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 29.
ąĀąĖčü. 29. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ I2S.
a) ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ I2S.
ąÆ ąŠą║ąĮąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ I2S ą▓čŗą▒ąĄčĆąĖč鹥 ąĘą░ą║ą╗ą░ą┤ą║čā čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ (Parameter Settings) ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 ą┐ą░čĆą░ą╝ąĄčéčĆčŗ I2S čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
ŌĆó Selected Audio Frequency (ą▓čŗą▒čĆą░ąĮąĮą░čÅ čćą░čüč鹊čéą░ ą┤ąĖčüą║čĆąĄčéąĖąĘą░čåąĖąĖ ąĘą▓čāą║ą░) = AUDIO_SAMPLING_FREQUENCY
ąĀąĖčü. 30 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆąĖą╝ąĄčĆ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ I2S ą┤ą╗čÅ Audio Sampling Frequency = 16 ą║ąōčå ą▓ čĆąĄąČąĖą╝ąĄ ą╝ąŠąĮąŠ.
ąĀąĖčü. 30. ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ I2S.
b) ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ I2S DMA.
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ DMA ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ PDM ąŠčé I2S ą▓ ą┐ą░ą╝čÅčéčī. ąÆ ąŠą║ąĮąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ I2S ą▓čŗą▒ąĄčĆąĖč鹥 ąĘą░ą║ą╗ą░ą┤ą║čā DMA Settings ąĖ ą┤ąŠą▒ą░ą▓čīč鹥 ąĘą░ą┐čĆąŠčü DMA (DMA Request). ąĀąĖčü. 31 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ čĆą░ąĘčĆąĄčłąĖčéčī DMA.
ąĀąĖčü. 31. ąØą░čüčéčĆąŠą╣ą║ą░ I2S DMA.
ą¦č鹊ą▒čŗ ąĘą░ą▓ąĄčĆčłąĖčéčī ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ DMA, ą║ą╗ąĖą║ąĮąĖč鹥 ąĮą░ č鹊ą╗čīą║ąŠ čćč鹊 čüąŠąĘą┤ą░ąĮąĮčŗą╣ ąĘą░ą┐čĆąŠčü DMA, ąĖ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 čāą║ą░ąĘą░ąĮąĖčÅ ąĖąĘ ą▓čĆąĄąĘą║ąĖ "ąØą░čüčéčĆąŠą╣ą║ą░ ąĘą░ą┐čĆąŠčüą░ DMA", ą│ą┤ąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ąŠą┐ąĖčüą░ąĮąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ DMA.
[ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ SPI, ą▓čŗą┐ąŠą╗ąĮąĄąĮąĮą░čÅ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ STM32CubeMX ]
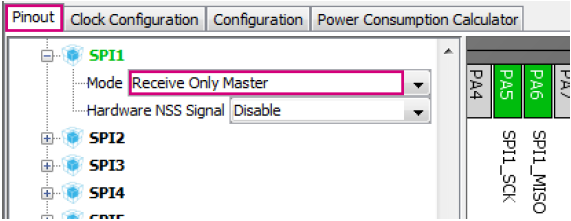
ąśąĘ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓, ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗčģ ąĮą░ ąĘą░ą║ą╗ą░ą┤ą║ąĄ Pinout, ą▓čŗą▒ąĄčĆąĖč鹥 ą┐ąĄčĆąĖč乥čĆąĖčÄ SPI1 ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 ąĄčæ ą▓ čĆąĄąČąĖą╝ąĄ Receive Only Master. ąĀąĖčü. 32 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ čŹč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ. ąĀą░ąĘčĆąĄčłąĄąĮąĮčŗąĄ ą▓čŗą▓ąŠą┤čŗ SPI1_SCK ąĖ SPI1_MISO ą▒čāą┤čāčé ą▓čŗą┤ąĄą╗ąĄąĮčŗ ąĘąĄą╗ąĄąĮčŗą╝, ą║ąŠą│ą┤ą░ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ąĮąŠąČą║ąĖ GPIO, čĆą░ą▒ąŠčéą░čÄčēąĖąĄ ą▓ čĆąĄąČąĖą╝ąĄ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ SPI.
ąĀąĖčü. 32. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĮąŠąČąĄą║ GPIO, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą▓ čĆąĄąČąĖą╝ąĄ SPI.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ . ąŚą┤ąĄčüčī ąŠą┐ąĖčüčŗą▓ą░čÄčéčüčÅ čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čéą░ą║č鹊ą▓ SPI ą▓ čĆąĄąČąĖą╝ą░čģ ą╝ąŠąĮąŠ ąĖ čüč鹥čĆąĄąŠ ą┤ą╗čÅ ą┐ąŠč鹊ą║ąŠą▓ PCM čü čćą░čüč鹊č鹊ą╣ ą┤ąĖčüą║čĆąĄčéąĖąĘą░čåąĖąĖ 16 ą║ąōčå ąĖ 48 ą║ąōčå. ąÆ ą║ą░č湥čüčéą▓ąĄ ą▒ą░ąĘąŠą▓ąŠą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą▓ą░čĆčå HSE = 8 ą£ąōčå. SPI čéą░ą║čéąĖčĆčāąĄčéčüčÅ ąŠčé čćą░čüč鹊čéčŗ čłąĖąĮčŗ APB2.
ąóą░ą▒ą╗ąĖčåą░ 11. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ SPI ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēą░čÅ č鹊čćąĮąŠčüčéčī ą┐ąŠą╗čāč湥ąĮąĮąŠą╣ čćą░čüč鹊čéčŗ ą▓čŗą▒ąŠčĆąŠą║.
ą”ąĄą╗ąĄą▓ą░čÅ čćą░čüč鹊čéą░ ą▓čŗą▒ąŠčĆąŠą║ ąĀąĄąČąĖą╝ ą╝ąĖą║čĆąŠč乊ąĮą░ DivM PLLN DivR DivP ąóą░ą║čéčŗ SPI (ą£ąōčå) ąóąŠčćąĮąŠčüčéčī (ppm)
16 ą║ąōčå
ą£ąŠąĮąŠ
7
344
-
6
65.52
-186
ąĪč鹥čĆąĄąŠ (čü čéą░ą╣ą╝ąĄčĆąŠą╝)
7
344
-
6
65.52
-186
48 ą║ąōčå
ą£ąŠąĮąŠ
7
344
-
4
98.29
-186
ąĪč鹥čĆąĄąŠ (čü čéą░ą╣ą╝ąĄčĆąŠą╝)
7
344
-
4
98.29
-186
ąĀąĖčü. 33 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆąĖą╝ąĄčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čéą░ą║č鹊ą▓ SPI ą▓ čĆąĄąČąĖą╝ąĄ ą╝ąŠąĮąŠ.
ąĀąĖčü. 33. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čéą░ą║č鹊ą▓ SPI, čüąŠąĘą┤ą░ąĮąĮą░čÅ čāčéąĖą╗ąĖč鹊ą╣ STM32CubeMX.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ SPI . ąÆčŗą▒ąĄčĆąĖč鹥 ąĘą░ą║ą╗ą░ą┤ą║čā ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ (Configuration), ąĘą░č鹥ą╝ ą║ą╗ąĖą║ąĮąĖč鹥 ąĮą░ ą║ąĮąŠą┐ą║čā SPI, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 34.
ąĀąĖčü. 34. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ SPI.
a) ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ SPI.
ąÆ ąŠą║ąĮąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ SPI ą▓čŗą▒ąĄčĆąĖč鹥 ąĘą░ą║ą╗ą░ą┤ą║čā čāčüčéą░ąĮąŠą▓ą║ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ (Parameter Settings) ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 ą┐ą░čĆą░ą╝ąĄčéčĆčŗ SPI.
ąÆ čĆąĄąČąĖą╝ąĄ ą╝ąŠąĮąŠ ą┐ąŠą╗čÅčĆąĮąŠčüčéčī čéą░ą║č鹊ą▓ Clock Polarity (CPOL) ąĖ čäą░ąĘą░ čéą░ą║č鹊ą▓ Clock Phase (CPHA) ą▓čŗą▒ąĖčĆą░čÄčéčüčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čüąŠčüč鹊čÅąĮąĖąĄą╝ ąĮąŠąČą║ąĖ L/R (LR) ą╝ąĖą║čĆąŠč乊ąĮą░.
ąĀąĖčü. 35 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆąĖą╝ąĄčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ SPI ą┤ą╗čÅ Audio Frequency = 16 ą║ąōčå ą▓ čĆąĄąČąĖą╝ąĄ ą╝ąŠąĮąŠ.
ąĀąĖčü. 35. ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ SPI.
b) ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ SPI DMA.
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ DMA ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ PDM ąŠčé SPI ą▓ ą┐ą░ą╝čÅčéčī. ąÆ ąŠą║ąĮąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ SPI ą▓čŗą▒ąĄčĆąĖč鹥 ąĘą░ą║ą╗ą░ą┤ą║čā DMA Settings ąĖ ą┤ąŠą▒ą░ą▓čīč鹥 ąĘą░ą┐čĆąŠčü DMA (DMA Request). ąĀąĖčü. 36 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ čĆą░ąĘčĆąĄčłąĖčéčī DMA.
ąĀąĖčü. 36. ąØą░čüčéčĆąŠą╣ą║ą░ I2S DMA.
ą¦č鹊ą▒čŗ ąĘą░ą▓ąĄčĆčłąĖčéčī ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ DMA, ą║ą╗ąĖą║ąĮąĖč鹥 ąĮą░ č鹊ą╗čīą║ąŠ čćč鹊 čüąŠąĘą┤ą░ąĮąĮčŗą╣ ąĘą░ą┐čĆąŠčü DMA, ąĖ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 čāą║ą░ąĘą░ąĮąĖčÅ ąĖąĘ ą▓čĆąĄąĘą║ąĖ "ąØą░čüčéčĆąŠą╣ą║ą░ ąĘą░ą┐čĆąŠčüą░ DMA", ą│ą┤ąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ąŠą┐ąĖčüą░ąĮąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ DMA.
[ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ SAI, ą▓čŗą┐ąŠą╗ąĮąĄąĮąĮą░čÅ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ STM32CubeMX ]
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ GPIO ąĖ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ ą▓čŗą▓ąŠą┤ąŠą▓ . ąśąĘ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮąŠą│ąŠ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖčÅ ąĮą░ ąĘą░ą║ą╗ą░ą┤ą║ąĄ Pinout ą▓čŗą▒ąĄčĆąĖč鹥 ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ SAI1, ąĖ čĆą░ąĘčĆąĄčłąĖč鹥 ąĄą│ąŠ čüčāą▒ą▒ą╗ąŠą║ A ą▓ čĆąĄąČąĖą╝ąĄ Master. ąĀąĖčü. 37 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ čŹč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ. ąĀą░ąĘčĆąĄčłąĄąĮąĮčŗąĄ ą▓čŗą▓ąŠą┤čŗ SAI1_SD_A, SAI1_SCK_A ąĖ SAI1_FS_A ą▒čāą┤čāčé ą▓čŗą┤ąĄą╗ąĄąĮčŗ ąĘąĄą╗ąĄąĮčŗą╝, ą║ąŠą│ą┤ą░ ą┐čĆą░ą▓ąĖą╗čīąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ąĮąŠąČą║ąĖ GPIO, čĆą░ą▒ąŠčéą░čÄčēąĖąĄ ą▓ čĆąĄąČąĖą╝ąĄ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ SAI.
ąĀąĖčü. 37. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĮąŠąČąĄą║ GPIO, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ą▓ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╝ čĆąĄąČąĖą╝ąĄ SAI.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ąĮąŠąČą║ą░ SAI1FS_A ąĮąĄ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ. ą¤čĆąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ąŠąĮą░ ąŠčüą▓ąŠą▒ąŠąČą┤ą░ąĄčéčüčÅ ąĖ ą┐čĆąĄą▓čĆą░čēą░ąĄčéčüčÅ ąŠą▒čĆą░čéąĮąŠ ą▓ ąŠą▒čŗčćąĮčŗą╣ ą▓čŗą▓ąŠą┤ ą┐ąŠčĆčéą░ GPIO ą┐čāč鹥ą╝ ąĮąĄąĘąĮą░čćąĖč鹥ą╗čīąĮąŠą╣ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĖ ą║ąŠą┤ą░ ą▓ čäą░ą╣ą╗ąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ MSP (stm32f4xx_hal_msp.c) ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čāą┤ąĄčé čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮ ą┐čĆąŠąĄą║čé.
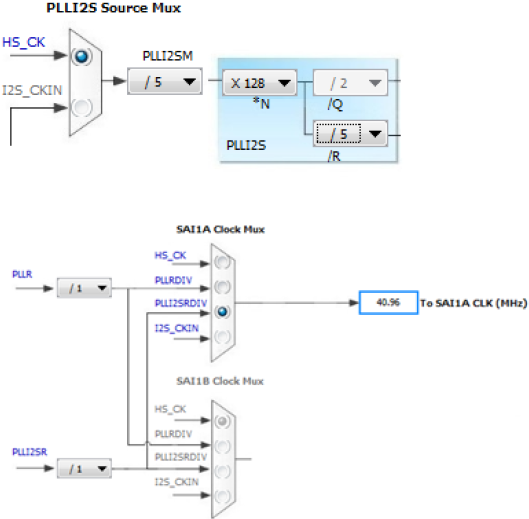
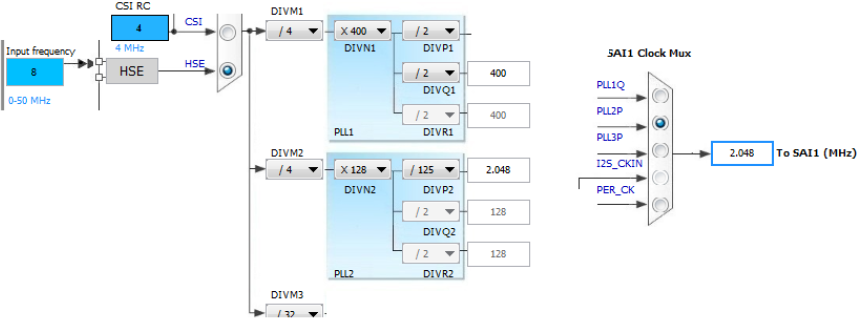
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čéą░ą║č鹊ą▓ . ąŚą░ą║ą╗ą░ą┤ą║ą░ Clock Configuration čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā SAI. ąóą░ą▒ą╗ąĖčåą░ 12 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĘąĮą░č湥ąĮąĖčÅ č鹊čćąĮąŠčüčéąĖ čāčüčéą░ąĮąŠą▓ą║ąĖ čćą░čüč鹊čéčŗ ą▓čŗą▒ąŠčĆąŠą║ ąĘą▓čāą║ą░ ą┤ą╗čÅ čĆą░ąĘąĮčŗčģ ą▓ą░čĆąĖą░ąĮč鹊ą▓ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą║č鹊ą▓. ąÆ ą║ą░č湥čüčéą▓ąĄ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓ SAI ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ PLLI2SR.
ąóą░ą▒ą╗ąĖčåą░ 12. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čéą░ą║č鹊ą▓ ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēą░čÅ č鹊čćąĮąŠčüčéčī čāčüčéą░ąĮąŠą▓ą║ąĖ čćą░čüč鹊čéčŗ ą▓čŗą▒ąŠčĆąŠą║ ąĘą▓čāą║ą░.
ą”ąĄą╗ąĄą▓ą░čÅ čćą░čüč鹊čéą░ ą▓čŗą▒ąŠčĆąŠą║ ąĀąĄąČąĖą╝ ą╝ąĖą║čĆąŠč乊ąĮą░ DivM PLLN DivR DivP ąóą░ą║čéčŗ SAI (ą£ąōčå) ąóąŠčćąĮąŠčüčéčī (ppm)
16 ą║ąōčå
ą£ąŠąĮąŠ
5
128
5
6
40.96
0
ąĪč鹥čĆąĄąŠ (čü čéą░ą╣ą╝ąĄčĆąŠą╝)
5
128
5
6
40.96
0
48 ą║ąōčå
ą£ąŠąĮąŠ
5
192
25
4
12.29
0
ąĪč鹥čĆąĄąŠ (čü čéą░ą╣ą╝ąĄčĆąŠą╝)
5
192
25
4
12.29
0
ąĀąĖčü. 38 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆąĖą╝ąĄčĆ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą║č鹊ą▓ SAI.
ąĀąĖčü. 38. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čéą░ą║č鹊ą▓ SAI ąĮą░ čćą░čüč鹊č鹥 ą▓čŗą▒ąŠčĆąŠą║ 16 ą║ąōčå ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ ą╝ąŠąĮąŠ.
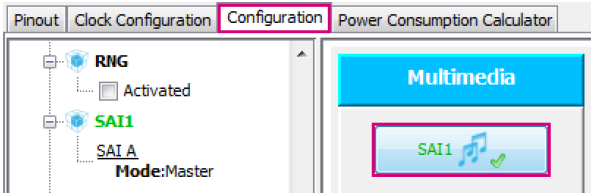
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ SAI . ąÆčŗą▒ąĄčĆąĖč鹥 ąĘą░ą║ą╗ą░ą┤ą║čā ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ (Configuration) ąĖ ą║ą╗ąĖą║ąĮąĖč鹥 ąĮą░ ą║ąĮąŠą┐ą║čā SAI1, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 39.
ąĀąĖčü. 39. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ SAI.
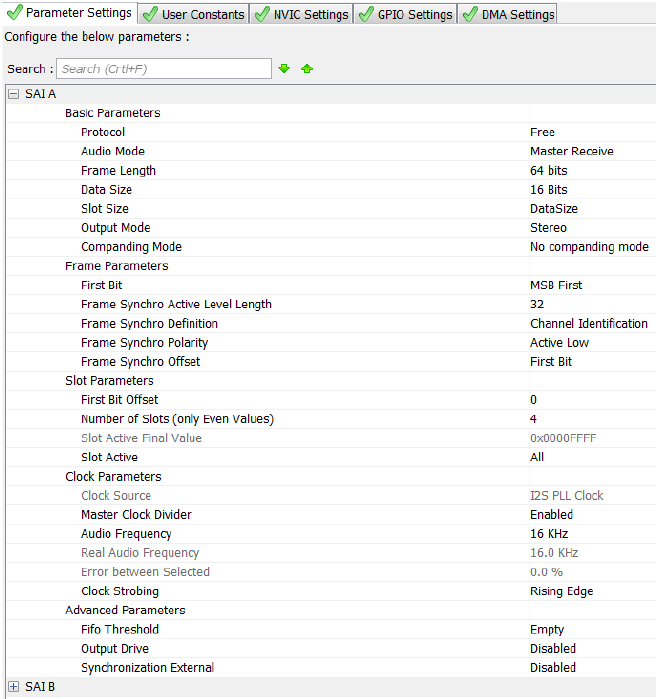
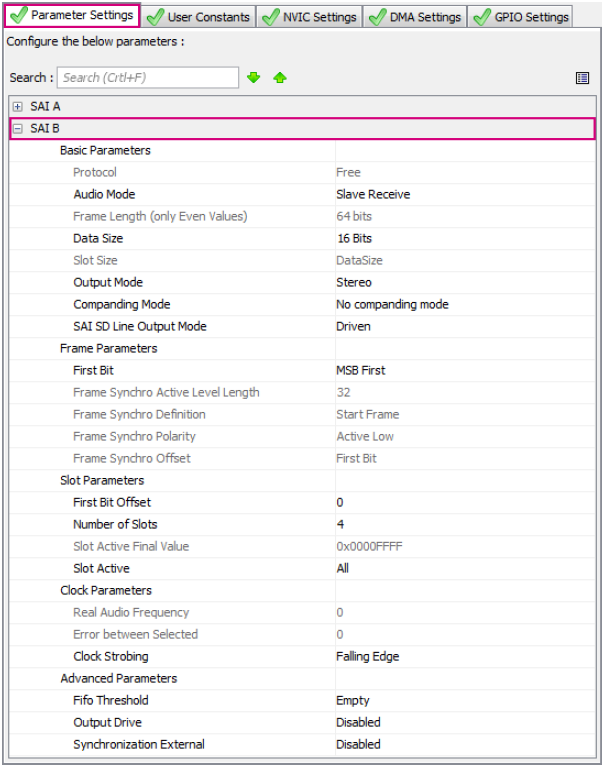
a) ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ SAI.
ąÆ ąŠą║ąĮąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ SAI ą▓čŗą▒ąĄčĆąĖč鹥 ąĘą░ą║ą╗ą░ą┤ą║čā Parameter Settings ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 ą┐ą░čĆą░ą╝ąĄčéčĆčŗ. ąĀą░ąĘčĆąĄčłąĄąĮąĮčŗą╣ čüčāą▒ą▒ą╗ąŠą║ SAI ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
ŌĆó Data Size = 16 Bits
ąĀąĖčü. 40 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆąĖą╝ąĄčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ SAI ą┤ą╗čÅ Audio Frequency = 16 ą║ąōčå ą▓ čĆąĄąČąĖą╝ąĄ ą╝ąŠąĮąŠ.
ąĀąĖčü. 40. ąØą░čüčéčĆąŠą╣ą║ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ SAI.
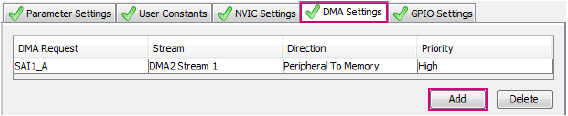
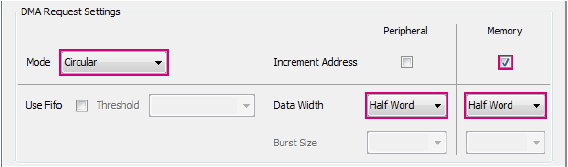
b) ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ SAI DMA.
ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ DMA ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ PDM ąŠčé SPI ą▓ ą┐ą░ą╝čÅčéčī. ąÆ ąŠą║ąĮąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ SAI ą▓čŗą▒ąĄčĆąĖč鹥 ąĘą░ą║ą╗ą░ą┤ą║čā DMA Settings ąĖ ą┤ąŠą▒ą░ą▓čīč鹥 ąĘą░ą┐čĆąŠčü DMA (DMA Request). ąĀąĖčü. 41 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ čĆą░ąĘčĆąĄčłąĖčéčī DMA.
ąĀąĖčü. 41. ąØą░čüčéčĆąŠą╣ą║ą░ SAI DMA.
ą¦č鹊ą▒čŗ ąĘą░ą▓ąĄčĆčłąĖčéčī ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ DMA, ą║ą╗ąĖą║ąĮąĖč鹥 ąĮą░ č鹊ą╗čīą║ąŠ čćč鹊 čüąŠąĘą┤ą░ąĮąĮčŗą╣ ąĘą░ą┐čĆąŠčü DMA, ąĖ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 čāą║ą░ąĘą░ąĮąĖčÅ ąĖąĘ ą▓čĆąĄąĘą║ąĖ "ąØą░čüčéčĆąŠą╣ą║ą░ ąĘą░ą┐čĆąŠčüą░ DMA", ą│ą┤ąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ąŠą┐ąĖčüą░ąĮąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ DMA.
[ąóą░ą╣ą╝ąĄčĆ ]
ąÆ čĆąĄąČąĖą╝ąĄ čüč鹥čĆąĄąŠ čéą░ą╣ą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┤ąĄą╗ąĄąĮąĖčÅ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ, ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝ąŠą╣ ą░čāą┤ąĖąŠąĖąĮč鹥čĆč乥ą╣čüąŠą╝, ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ąŠą┤ąĄą╗ąĄąĮąĮąŠą╣ čćą░čüč鹊čéčŗ ąĮą░ čåąĖčäčĆąŠą▓čŗąĄ ą╝ąĖą║čĆąŠč乊ąĮčŗ.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ GPIO ąĖ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ ą▓čŗą▓ąŠą┤ąŠą▓ . ąØą░ ąĘą░ą║ą╗ą░ą┤ą║ąĄ Pinout ą▓čŗą▒ąĄčĆąĖč鹥 čéą░ą╣ą╝ąĄčĆ 3 (TIM3) ąĖąĘ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗčģ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓, ąĖ čĆą░ąĘčĆąĄčłąĖč鹥 čĆąĄąČąĖą╝ slave ą┐čāč鹥ą╝ ą▓čŗą▒ąŠčĆą░ External Clock Mode 1. ąÆčŗą▒ąĄčĆąĖč鹥 TI1FP1 ą▓ ą║ą░č湥čüčéą▓ąĄ ąĖčüč鹊čćąĮąĖą║ą░ ą┤ą╗čÅ čéčĆąĖą│ą│ąĄčĆą░ čéą░ą╣ą╝ąĄčĆą░ (Trigger Source) ąĖ čĆą░ąĘčĆąĄčłąĖč鹥 Channel 2 ą▓ PWM Generation CH2. ąĀąĖčü. 43 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ čĆą░ąĘčĆąĄčłąĖčéčī TIM3. ąśčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą▓čŗą▓ąŠą┤čŗ TIM3_CH1 ąĖ TIM3_CH2 ą┐ąŠą┤čüą▓ąĄčćąĖą▓ą░čÄčéčüčÅ ąĘąĄą╗ąĄąĮčŗą╝, ą║ą░ą║ č鹊ą╗čīą║ąŠ ą▒čŗą╗ąĖ ą║ąŠčĆčĆąĄą║čéąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ąĮąŠąČą║ąĖ GPIO, ą┐čĆąĖą▓čÅąĘą░ąĮąĮčŗąĄ ą║ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝ čäčāąĮą║čåąĖčÅą╝ čéą░ą╣ą╝ąĄčĆą░ TIM3.
ąĀąĖčü. 43. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĮąŠąČąĄą║ GPIO čéą░ą╣ą╝ąĄčĆą░.
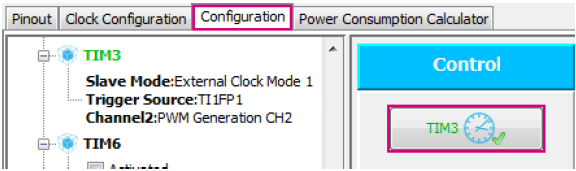
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čéą░ą╣ą╝ąĄčĆą░ . ąÆčŗą▒ąĄčĆąĖč鹥 ąĘą░ą║ą╗ą░ą┤ą║čā ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ (Configuration) ąĖ ą║ą╗ąĖą║ąĮąĖč鹥 ąĮą░ ą║ąĮąŠą┐ą║čā TIM3, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 44.
ąĀąĖčü. 44. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čéą░ą╣ą╝ąĄčĆą░.
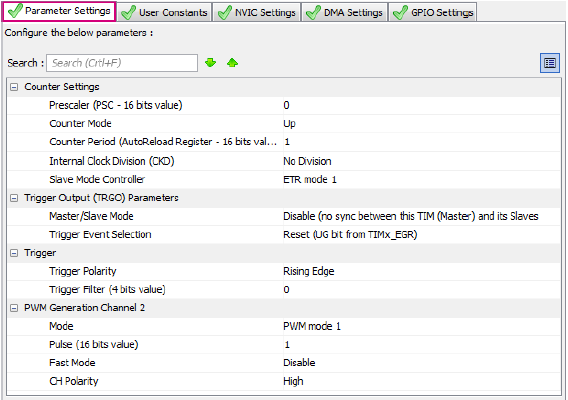
ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ čéą░ą╣ą╝ąĄčĆą░ . ąÆ ąŠą║ąĮąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ TIM3 ą▓čŗą▒ąĄčĆąĖč鹥 ąĘą░ą║ą╗ą░ą┤ą║čā Parameter Settings. ąĀąĖčü. 45 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī TIM3 ą┤ą╗čÅ ą┤ąĄą╗ąĄąĮąĖčÅ ąĮą░ 2 čćą░čüč鹊čéčŗ čéą░ą║č鹊ą▓ Trigger Source.
ąĀąĖčü. 45. ąØą░čüčéčĆąŠą╣ą║ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ čéą░ą╣ą╝ąĄčĆą░.
ąöąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥čćąĮčŗčģ ą╝ąŠą┤čāą╗ąĄą╣ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ PDM. ąĪą╝. ą▓čĆąĄąĘą║čā "ąöąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥čćąĮčŗčģ ą╝ąŠą┤čāą╗ąĄą╣ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ PDM".
ąĀąĖčü. 42 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ąĘą░ą┐čĆąŠčüą░ DMA ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ąĖąĘ ąĘą▓čāą║ąŠą▓čŗčģ ąĖąĮč鹥čĆč乥ą╣čüąŠą▓.
ąĀąĖčü. 42. ąØą░čüčéčĆąŠą╣ą║ąĖ ąĘą░ą┐čĆąŠčüą░ DMA.
ąÆčŗą▒ąĄčĆąĖč鹥 ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čāčÄ čüčĆąĄą┤čā čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ, čüą│ąĄąĮąĄčĆąĖčĆčāą╣č鹥 ą┐čĆąŠąĄą║čé čü ą┐ąŠą╝ąŠčēčīčÄ STM32CubeMX ąĖ ąŠčéą║čĆąŠą╣č鹥 ą▓ čüčĆąĄą┤ąĄ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą┐čĆąŠąĄą║čé.
ąöą╗čÅ STM32F413xx MCU ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĘą▓čāą║ą░ PDM ą▓ą║ą╗čÄčćą░ąĄčé ąŠą┤ąĖąĮ čäą░ą╣ą╗ ąĘą░ą│ąŠą╗ąŠą▓ą║ą░ pdm_filter.h ąĖ ą┤ą▓ąŠąĖčćąĮčŗąĄ/ąŠą▒čŖąĄą║čéąĮčŗąĄ ą║ąŠą┤čŗ ą┤ą╗čÅ čüą╗ąĄą┤čāčÄčēąĖčģ ą┐ą╗ą░čéč乊čĆą╝:
ŌĆó libPDMFilter_CM4F_IAR.a: ą┤ą╗čÅ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░ čüčĆąĄą┤čŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ IAR.
ąŁčéą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą▓ ą┐ą░ą║ąĄč鹥 STM32Cube_FW_F4 ą║ąŠą╝ą┐ą░ąĮąĖąĖ ST (ąĮą░čćąĖąĮą░čÅ čü ą▓ąĄčĆčüąĖąĖ V1.16), ąĖ ąŠąĮą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą║ą░čéą░ą╗ąŠą│ąĄ Middlewares\ST\STM32_Audio\Addons\PDM . ąŻą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗ pdm_filter.h ąĮą░čģąŠą┤ąĖčéčüčÅ čüčĆąĄą┤ąĖ ą┐čāč鹥ą╣ ą┐ąŠąĖčüą║ą░ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗčģ čäą░ą╣ą╗ąŠą▓ ą┐čĆąŠąĄą║čéą░ (Include Paths) ąĖ čéą░ą║ąČąĄ ą▓ ą┐čĆąŠąĄą║čé ą┤ąŠą▒ą░ą▓ą╗ąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą┤ą▓ąŠąĖčćąĮčŗą╣ ą▒ąĖą▒ą╗ąĖąŠč鹥čćąĮčŗą╣ čäą░ą╣ą╗.
ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ čéą░ą║ąČąĄ ąŠčüąĮąŠą▓ą░ąĮ ąĮą░ ą┐ą╗ą░č鹥 NUCLEO-F413ZH, ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčé 2 ą▓ąĮąĄčłąĮąĖčģ čåąĖčäčĆąŠą▓čŗčģ ą╝ąĖą║čĆąŠč乊ąĮą░, ą║ą░ąČą┤čŗą╣ ąĖąĘ ą║ąŠč鹊čĆčŗčģ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ ąŠčéą┤ąĄą╗čīąĮąŠą╝čā čüčāą▒ą▒ą╗ąŠą║čā SAI. ąŁč鹊 ąŠą┤ąĖąĮ ąĖąĘ ą┤ąŠą┐čāčüčéąĖą╝čŗčģ ą▓ą░čĆąĖą░ąĮč鹊ą▓ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ čüąŠąĄą┤ąĖąĮąĄąĮąĖčÅ, ąŠą┐ąĖčüą░ąĮąĮąŠą│ąŠ ą▓čŗčłąĄ ą▓ čüąĄą║čåąĖąĖ "ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┤ą▓čāčģ čüąĖąĮčģčĆąŠąĮąĮčŗčģ čüčāą▒ą▒ą╗ąŠą║ą░ SAI".
[ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ SAI, ą▓čŗą┐ąŠą╗ąĮąĄąĮąĮą░čÅ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ STM32CubeMX ]
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ GPIO ąĖ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ ą▓čŗą▓ąŠą┤ąŠą▓ . ą¤ąŠčüą╗ąĄ čüąŠąĘą┤ą░ąĮąĖčÅ ą┐čĆąŠąĄą║čéą░ STM32CubeMX ą▓čŗą▒ąĄčĆąĖč鹥 ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ SAI1 čüčĆąĄą┤ąĖ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗčģ ąĮą░ ąĘą░ą║ą╗ą░ą┤ą║ąĄ Pinout ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 čüčāą▒ą▒ą╗ąŠą║ A ą▓ čĆąĄąČąĖą╝ąĄ Master ąĖ čüčāą▒ą▒ą╗ąŠą║ B ą▓ čĆąĄąČąĖą╝ąĄ Synchronous Slave. ąĀąĖčü. 46 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ čŹč鹊 ą┤ąĄą╗ą░ąĄčéčüčÅ. ąöą╗čÅ čŹč鹊ą│ąŠ čüą╗čāčćą░čÅ čüąĖą│ąĮą░ą╗ čéą░ą║č鹊ą▓ ą▒ąĖčé ąĖ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ čäčĆąĄą╣ą╝ą░ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ąŠą▒čēąĖą╝ąĖ ą┤ą╗čÅ ą┤ą▓čāčģ čüčāą▒ą▒ą╗ąŠą║ąŠą▓, čćč鹊ą▒čŗ čüąĮąĖąĘąĖčéčī ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▓ąĮąĄčłąĮąĖčģ ą▓čŗą▓ąŠą┤ąŠą▓ ą┤ą╗čÅ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ čü ą╝ąĖą║čĆąŠč乊ąĮą░ą╝ąĖ. ąĀą░ąĘčĆąĄčłąĄąĮąĮčŗąĄ ą▓čŗą▓ąŠą┤čŗ SAI1_SD_A, SAI1_SD_B, SAI1_SCK_A ąĖ SAI1_FS_A ą┐ąŠą┤čüą▓ąĄčćąĖą▓ą░čÄčéčüčÅ ąĘąĄą╗ąĄąĮčŗą╝, ą║ą░ą║ č鹊ą╗čīą║ąŠ ą▒čŗą╗ąĖ ą║ąŠčĆčĆąĄą║čéąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ąĮąŠąČą║ąĖ GPIO, ą┐čĆąĖą▓čÅąĘą░ąĮąĮčŗąĄ ą║ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝ čäčāąĮą║čåąĖčÅą╝ SAI.
ąĀąĖčü. 46. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĮąŠąČąĄą║ GPIO ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ SAI.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čéą░ą║č鹊ą▓ . ąŚą┤ąĄčüčī ąŠą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čéą░ą║č鹊ą▓ SAI čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą┤ą▓čāčģ čüąĖąĮčģčĆąŠąĮąĮčŗčģ čüčāą▒ą▒ą╗ąŠą║ąŠą▓ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐ąŠč鹊ą║ąŠą▓ čü čćą░čüč鹊č鹊ą╣ ą▓čŗą▒ąŠčĆąŠą║ 16 ą║ąōčå ąĖ 48 ą║ąōčå. ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą▓čŗčģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ čü čćą░čüč鹊č鹊ą╣ ą▓čŗą▒ąŠčĆąŠą║ 16 ą║ąōčå čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ SAI ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī 1.024 ą£ąōčå. ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą▓čŗčģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ čü čćą░čüč鹊č鹊ą╣ ą▓čŗą▒ąŠčĆąŠą║ 48 ą║ąōčå čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ SAI ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī 3.072 ą£ąōčå. ąÆ ą║ą░č湥čüčéą▓ąĄ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ PLLI2SR. ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī č鹊čćąĮčāčÄ čćą░čüč鹊čéčā ą▒ąĖčé, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī MCKIDV.
ąóą░ą▒ą╗ąĖčåą░ 13. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čéą░ą║č鹊ą▓ SAI ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēą░čÅ č鹊čćąĮąŠčüčéčī čćą░čüč鹊čéčŗ ą▓čŗą▒ąŠčĆąŠą║.
ą”ąĄą╗ąĄą▓ą░čÅ čćą░čüč鹊čéą░ ą▓čŗą▒ąŠčĆąŠą║ DivM PLLN DivR ąóą░ą║čéčŗ SAI (ą£ąōčå) ąóąŠčćąĮąŠčüčéčī (ppm)
16 ą║ąōčå
5
128
5
40.96
0
48 ą║ąōčå
5
192
25
12.29
0
ąĀąĖčü. 47 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ čéą░ą║č鹊ą▓ SAI, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čāčÄ ą▓ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ.
ąĀąĖčü. 47. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čéą░ą║č鹊ą▓ SAI.
ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ . ąÆ ąŠą║ąĮąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ SAI ą▓čŗą▒ąĄčĆąĖč鹥 ąĘą░ą║ą╗ą░ą┤ą║čā Parameter Settings ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 ą┐ą░čĆą░ą╝ąĄčéčĆčŗ. ąĪčāą▒ą▒ą╗ąŠą║ąĖ SAI ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
ŌĆó Data Size = 16 Bits
ą¤ą░čĆą░ą╝ąĄčéčĆ Clock Strobing ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ L/R (LR) ą╝ąĖą║čĆąŠč乊ąĮą░, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą║ ą║ą░ąČą┤ąŠą╝čā čüčāą▒ą▒ą╗ąŠą║čā. ąĀąĖčüčāąĮą║ąĖ 48 ąĖ 49 ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé ą║ą░ą║ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ čüčāą▒ą▒ą╗ąŠą║ąĖ SAIA ąĖ SAIB ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ čćą░čüč鹊čéčŗ ą▓čŗą▒ąŠčĆąŠą║ ąĘą▓čāą║ą░ (audio sampling frequency) 16 ą║ąōčå.
ąĀąĖčü. 48. ąØą░čüčéčĆąŠą╣ą║ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ SAIA.
ąĀąĖčü. 49. ąØą░čüčéčĆąŠą╣ą║ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ SAIB.
ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ DMA . ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ DMA ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ PDM ą▓ ą┐ą░ą╝čÅčéčī, ą┐ąŠčüčéčāą┐ą░čÄčēąĖčģ ąŠčé ą║ą░ąČą┤ąŠą│ąŠ čüčāą▒ą▒ą╗ąŠą║ą░ SAI. ąÆ ąŠą║ąĮąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ SAI ą▓čŗą▒ąĄčĆąĖč鹥 ąĘą░ą║ą╗ą░ą┤ą║čā DMA Settings ąĖ ą┤ąŠą▒ą░ą▓čīč鹥 ąĘą░ą┐čĆąŠčü DMA (DMA Request) ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čüčāą▒ą▒ą╗ąŠą║ą░. ąĀąĖčü. 50 ą┐ąŠą║ą░ąĘčŗą▓ąĄčé, ą║ą░ą║ čĆą░ąĘčĆąĄčłąĖčéčī DMA.
ąĀąĖčü. 50. ąØą░čüčéčĆąŠą╣ą║ą░ DMA ą┤ą╗čÅ čüčāą▒ą▒ą╗ąŠą║ąŠą▓ SAI.
ąöą╗čÅ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ ą║ą╗ąĖą║ąĮąĖč鹥 ąĮą░ č鹊ą╗čīą║ąŠ čćč鹊 čüąŠąĘą┤ą░ąĮąĮčŗąĄ ąĘą░ą┐čĆąŠčüčŗ DMA ąĖ ą▓čŗą┐ąŠą╗ąĮąĖč鹥 čāą║ą░ąĘą░ąĮąĖčÅ ąĖąĘ ą▓čĆąĄąĘą║ąĖ "ąØą░čüčéčĆąŠą╣ą║ą░ ąĘą░ą┐čĆąŠčüą░ DMA", ą│ą┤ąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮąŠ ąŠą┐ąĖčüą░ąĮąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ DMA.
ąöąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥čćąĮčŗčģ ą╝ąŠą┤čāą╗ąĄą╣ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ PDM . ąĪą╝. ą▓čĆąĄąĘą║čā "ąöąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥čćąĮčŗčģ ą╝ąŠą┤čāą╗ąĄą╣ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ PDM".
ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ąŠčüąĮąŠą▓ą░ąĮ ąĮą░ ą┐ą╗ą░č鹥 NUCLEO-H743ZI ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčé 2 čåąĖčäčĆąŠą▓čŗčģ ą╝ąĖą║čĆąŠč乊ąĮą░, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ ą▓ čĆąĄąČąĖą╝ąĄ čüč鹥čĆąĄąŠ ą║ SAI č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü PDM.
[ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ SAI, ą▓čŗą┐ąŠą╗ąĮąĄąĮąĮą░čÅ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ STM32CubeMX ]
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ GPIO ąĖ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ ą▓čŗą▓ąŠą┤ąŠą▓ . ą¤ąŠčüą╗ąĄ čüąŠąĘą┤ą░ąĮąĖčÅ ą┐čĆąŠąĄą║čéą░ STM32CubeMX ą▓čŗą▒ąĄčĆąĖč鹥 ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ SAI1 čüčĆąĄą┤ąĖ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗčģ ąĮą░ ąĘą░ą║ą╗ą░ą┤ą║ąĄ Pinout ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓, ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 ąĄą│ąŠ ą▓ čĆąĄąČąĖą╝ąĄ Pulse Density Modulation. ąÆčŗą▒ąĄčĆąĖč鹥 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓ ąĖ ą▓čŗčģąŠą┤ąĮčāčÄ čéą░ą║č鹊ą▓čāčÄ čćą░čüč鹊čéčā. ąĀąĖčü. 51 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ čĆą░ąĘčĆąĄčłąĖčéčī čüčāą▒ą▒ą╗ąŠą║ A ąĖąĮč鹥čĆč乥ą╣čüą░ SAI1 ą▓ čĆąĄąČąĖą╝ąĄ Pulse Density Modulation čü ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ ą┤ą▓čāčģ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓ ąĖ CK1 ą▓ ą║ą░č湥čüčéą▓ąĄ ą▓čŗčģąŠą┤ą░ čéą░ą║č鹊ą▓. ąĀą░ąĘčĆąĄčłąĄąĮąĮčŗąĄ ą▓čŗą▓ąŠą┤čŗ SAI1_CK1 ąĖ SAI1_D1 ą┐ąŠą┤čüą▓ąĄčćąĖą▓ą░čÄčéčüčÅ ąĘąĄą╗ąĄąĮčŗą╝, ą║ą░ą║ č鹊ą╗čīą║ąŠ ą▒čŗą╗ąĖ ą║ąŠčĆčĆąĄą║čéąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ąĮąŠąČą║ąĖ GPIO, ą┐čĆąĖą▓čÅąĘą░ąĮąĮčŗąĄ ą║ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝ čäčāąĮą║čåąĖčÅą╝ SAI.
ąĀąĖčü. 51. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĮąŠąČąĄą║ GPIO ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ SAI.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čéą░ą║č鹊ą▓ . ąĀąĖčü. 52 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ čéą░ą║č鹊ą▓ SAI ą┤ą╗čÅ čŹč鹊ą│ąŠ ą┐čĆąĖą╝ąĄčĆą░. ąæąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ ą┐čĆąŠ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ čüą╝. čéą░ą▒ą╗ąĖčåčā "Allowed TDM frame configuration" ą▓ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąĄ RM0433 [4].
ąĀąĖčü. 52. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čéą░ą║č鹊ą▓ SAI ą┤ą╗čÅ ą┤ą▓čāčģ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī PCM čü čćą░čüč鹊č鹊ą╣ ą▓čŗą▒ąŠčĆąŠą║ 16 ą║ąōčå.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ SAI . ąÆčŗą▒ąĄčĆąĖč鹥 ąĘą░ą║ą╗ą░ą┤ą║čā ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ (Configuration) ąĖ ą║ą╗ąĖą║ąĮąĖč鹥 ąĮą░ ą║ąĮąŠą┐ą║čā SAI1, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 53.
ąĀąĖčü. 53. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ SAI.
ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ SAI . ąÆ ąŠą║ąĮąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ SAI ą▓čŗą▒ąĄčĆąĖč鹥 ąĘą░ą║ą╗ą░ą┤ą║čā Parameter Settings ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 ą┐ą░čĆą░ą╝ąĄčéčĆčŗ. ąĪčāą▒ą▒ą╗ąŠą║ A ąĖąĮč鹥čĆč乥ą╣čüą░ SAI ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
ŌĆó Data Size = 16 Bits
ąĀąĖčü. 54 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī čüčāą▒ą▒ą╗ąŠą║ SAIA ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ čćą░čüč鹊čéčŗ ą▓čŗą▒ąŠčĆąŠą║ ąĘą▓čāą║ą░ (audio sampling frequency) 16 ą║ąōčå.
ąĀąĖčü. 54. ąØą░čüčéčĆąŠą╣ą║ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ SAI.
ąØą░čüčéčĆąŠą╣ą║ąĖ DMA . ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ DMA čāą┐čĆą░ą▓ą╗čÅąĄčé ą┐ąĄčĆąĄą╝ąĄčēąĄąĮąĖąĄą╝ ą┤ą░ąĮąĮčŗčģ PDM ą▓ ą┐ą░ą╝čÅčéčī, ą┐ąŠčüčéčāą┐ą░čÄčēąĖčģ ąŠčé ąĖąĮč鹥čĆč乥ą╣čüą░ SAI. ąÆ ąŠą║ąĮąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ SAI ą▓čŗą▒ąĄčĆąĖč鹥 ąĘą░ą║ą╗ą░ą┤ą║čā DMA Settings ąĖ ą┤ąŠą▒ą░ą▓čīč鹥 ąĘą░ą┐čĆąŠčü DMA (DMA Request). ąĀąĖčü. 55 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī DMA.
ąĀąĖčü. 55. ąØą░čüčéčĆąŠą╣ą║ąĖ SAI DMA.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ Cortex M7 . ąÆčŗą▒ąĄčĆąĖč鹥 ąĘą░ą║ą╗ą░ą┤ą║čā ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ (Configuration) ąĖ ą║ą╗ąĖą║ąĮąĖč鹥 ąĮą░ ą║ąĮąŠą┐ą║čā CORTEX_M7, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 56.
ąĀąĖčü. 56. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ CORTEX_M7.
ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ Cortex M7 . ąÆ ąŠą║ąĮąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ CORTEX_M7 ą▓čŗą▒ąĄčĆąĖč鹥 ąĘą░ą║ą╗ą░ą┤ą║čā Parameter Settings ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ąĄčłą░ (Cache) ąĖ ą▒ą╗ąŠą║ą░ ąĘą░čēąĖčéčŗ ą┐ą░ą╝čÅčéąĖ (Memory Protection Unit, MPU). ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗ąĖčé čāą╗čāčćčłąĖčéčī ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčī ą▓ čüą╗čāčćą░ąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĖąĮč鹥čĆč乥ą╣čüą░ AXI čü ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ąĖ ą╝ą░čüč鹥čĆą░ą╝ąĖ.
ąöą╗čÅ čéąĖą┐ąŠą▓ąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ MPU ąŠą▒čĆą░čéąĖč鹥čüčī ą║ ą┐čĆąŠąĄą║čéčā-čłą░ą▒ą╗ąŠąĮčā ą▓ ą┐ą░ą║ąĄč鹥 STM32Cube_FW_H7_V1.0.0 (ąĮą░čćąĖąĮą░čÅ čü ą▓ąĄčĆčüąĖąĖ V1.0.0), ą║ąŠč鹊čĆčŗą╣ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą║ą░čéą░ą╗ąŠą│ąĄ Projects\STM32H743ZI-Nucleo\Templates .
ąæąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ ą┐ąŠ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▒ą╗ąŠą║ą░ ąĘą░čēąĖčéčŗ ą┐ą░ą╝čÅčéąĖ čüą╝. ą░ą┐ąĮąŠčāčé AN4838 [5]. ąĀąĖčü. 57 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą┐čĆąĖą╝ąĄčĆą░ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ Cache ąĖ MPU.
ąĀąĖčü. 57. ąØą░čüčéčĆąŠą╣ą║ą░ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ Cortex M7.
[ąöąŠą▒ą░ą▓ą╗ąĄąĮąĖąĄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ PDM ]
ąÆčŗą▒ąĄčĆąĖč鹥 ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čāčÄ čüčĆąĄą┤čā čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ (čéčāą╗č湥ą╣ąĮ), čüą│ąĄąĮąĄčĆąĖčĆčāą╣č鹥 ą┐čĆąŠąĄą║čé ą▓ čāčéąĖą╗ąĖč鹥 STM32CubeMX ąĖ ąŠčéą║čĆąŠą╣č鹥 ą┐čĆąŠąĄą║čé ą▓ čüčĆąĄą┤ąĄ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ.
ąöą╗čÅ čüąĄčĆąĖąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ STM32H7 ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĖčÅ PDM ą▓ą║ą╗čÄčćą░ąĄčé ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗ pdm2pcm_glo.h ąĖ ą┤ą▓ąŠąĖčćąĮčŗąĄ/ąŠą▒čŖąĄą║čéąĮčŗąĄ ą║ąŠą┤čŗ ą┤ą╗čÅ čüą╗ąĄą┤čāčÄčēąĖčģ ą┐ą╗ą░čéč乊čĆą╝:
ŌĆó libPDMFilter_CM7_IAR.a: ą┤ą╗čÅ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░ čüčĆąĄą┤čŗ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ IAR.
ąŁčéą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą▓ ą┐ą░ą║ąĄč鹥 STM32Cube_FW_H7 (ąĮą░čćąĖąĮą░čÅ čü ą▓ąĄčĆčüąĖąĖ V1.0.0), ąĖ ąŠąĮą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą║ą░čéą░ą╗ąŠą│ąĄ Middlewares\ST\STM32_Audio\Addons\PDM . ąŻą▒ąĄą┤ąĖč鹥čüčī, čćč鹊 ą┤ąŠą▒ą░ą▓ąĖą╗ąĖ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗ pdm2pcm_glo.h ą▓ ą┐čāčéąĖ ą┐ąŠąĖčüą║ą░ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗčģ čäą░ą╣ą╗ąŠą▓ ą┐čĆąŠąĄą║čéą░ (Include Paths), ąĖ ą┤ąŠą▒ą░ą▓ąĖą╗ąĖ ą▓ ą┐čĆąŠąĄą║čé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą┤ą▓ąŠąĖčćąĮčŗą╣ čäą░ą╣ą╗ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ.
ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ąŠčüąĮąŠą▓ą░ąĮ ąĮą░ ą┐ą╗ą░č鹥 NUCLEO-F413ZH čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą▓ąĮąĄčłąĮąĖčģ čåąĖčäčĆąŠą▓čŗčģ ą╝ąĖą║čĆąŠč乊ąĮąŠą▓, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ ą║ DFSDM ą▓ čĆąĄąČąĖą╝ąĄ čüč鹥čĆąĄąŠ. ąŁč鹊 ą┐čĆąĖą╝ąĄąĮąĖą╝ąŠ ą║ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ, ąŠą┐ąĖčüą░ąĮąĮąŠą╣ ą▓čŗčłąĄ ą▓ čĆą░ąĘą┤ąĄą╗ąĄ "ąśąĮč鹥čĆč乥ą╣čü DFSDM".
[ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ DFSDM, ą▓čŗą┐ąŠą╗ąĮąĄąĮąĮą░čÅ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ STM32CubeMX ]
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ GPIO ąĖ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ ą▓čŗą▓ąŠą┤ąŠą▓ . ą¤ąŠčüą╗ąĄ čüąŠąĘą┤ą░ąĮąĖčÅ ą┐čĆąŠąĄą║čéą░ STM32CubeMX ą▓čŗą▒ąĄčĆąĖč鹥 ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ DFSDM1 čüčĆąĄą┤ąĖ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗčģ ąĮą░ ąĘą░ą║ą╗ą░ą┤ą║ąĄ Pinout ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓, ąĖ čĆą░ąĘčĆąĄčłąĖč鹥 ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą║ą░ąĮą░ą╗čŗ DFSDM. ąĀąĖčü. 58 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ čĆą░ąĘčĆąĄčłąĖčéčī ą║ą░ąĮą░ą╗čŗ DFSDM ą▓ čĆąĄąČąĖą╝ąĄ čüč鹥čĆąĄąŠ. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ čĆą░ąĘčĆąĄčłąĄąĮąĮčŗąĄ ą║ą░ąĮą░ą╗čŗ ą┤ąŠą╗ąČąĮčŗ čüą╗ąĄą┤ąŠą▓ą░čéčī ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ą▓ ą┐ąŠčĆčÅą┤ą║ąĄ ą▓ąŠąĘčĆą░čüčéą░ąĮąĖčÅ ąĮąŠą╝ąĄčĆą░ ą║ą░ąĮą░ą╗ą░.
ąĀąĖčü. 58. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĮąŠąČąĄą║ GPIO ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ DFSDM ą▓ čĆąĄąČąĖą╝ąĄ čüč鹥čĆąĄąŠ.
ąĀą░ąĘčĆąĄčłąĄąĮąĮčŗąĄ ą▓čŗą▓ąŠą┤čŗ DFSDM1_DATIN1 ąĖ DFSDM1_CKOUT ą┐ąŠą┤čüą▓ąĄčćąĖą▓ą░čÄčéčüčÅ ąĘąĄą╗ąĄąĮčŗą╝, ą║ą░ą║ č鹊ą╗čīą║ąŠ ą▒čŗą╗ąĖ ą║ąŠčĆčĆąĄą║čéąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ąĮąŠąČą║ąĖ GPIO, ą┐čĆąĖą▓čÅąĘą░ąĮąĮčŗąĄ ą║ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╝ čäčāąĮą║čåąĖčÅą╝ DFSDM, čćč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 59.
ąĀąĖčü. 59. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĮąŠąČąĄą║ DFSDM.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą║ą░ąĮą░ą╗ą░ . ąÆ ąŠą║ąĮąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ DFSDM ą▓čŗą▒ąĄčĆąĖč鹥 ąĘą░ą║ą╗ą░ą┤ą║čā Parameter Settings ąĖ čüą║ąŠąĮčäąĖą│čāčĆčāą╣č鹥 ą┐ą░čĆą░ą╝ąĄčéčĆčŗ. ąŚąĮą░č湥ąĮąĖąĄ ą┐ąŠą╗čÅ Type ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čüąŠčüč鹊čÅąĮąĖąĄą╝ ąĮąŠąČą║ąĖ L/R (LR) ą╝ąĖą║čĆąŠč乊ąĮąŠą▓, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ ą║ ą║ą░ąĮą░ą╗ą░ą╝ DFSDM. ąÆ čĆąĄąČąĖą╝ąĄ čüč鹥čĆąĄąŠ ą║ą░ąČą┤čŗą╣ ą║ą░ąĮą░ą╗ ą┤ąŠą╗ąČąĄąĮ čüčćąĖčéčŗą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ ąĮą░ čĆą░ąĘąĮčŗčģ ą┐ąĄčĆąĄą┐ą░ą┤ą░čģ čéą░ą║č鹊ą▓, čćč鹊ą▒čŗ ą╝ąĖą║čĆąŠč乊ąĮčŗ ą╝ąŠą│ą╗ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąŠą▒čēąĖą╣ čüąĖą│ąĮą░ą╗ ą┤ą░ąĮąĮčŗčģ.
ąĀąĖčüčāąĮą║ąĖ 60 ąĖ 61 ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé, ą║ą░ą║ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą║ą░ąĮą░ą╗čŗ Channel 1 ąĖ Channel 0 čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ čćą░čüč鹊čéčŗ ą▓čŗą▒ąŠčĆąŠą║ ąĘą▓čāą║ą░ (Audio Frequency) 16 ą║ąōčå.
ąĀąĖčü. 60. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ DFSDM Channel 1.
ąĀąĖčü. 61. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ DFSDM Channel 0.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čäąĖą╗čīčéčĆą░ . ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ Filter 0 ąĖ Filter 1 ą┐čĆąĖą▓čÅąĘą░ąĮčŗ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ą║ Channel 1 ąĖ Channel 0 ą║ą░ą║ ą║ ąŠą▒čŗčćąĮčŗą╝ ą║ą░ąĮą░ą╗ą░ą╝. ą¤ą░čĆą░ą╝ąĄčéčĆ Sinc Order ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čćą░čüč鹊č鹊ą╣ ą▓čŗą▒ąŠčĆąŠą║ ąĘą▓čāą║ą░ (audio sampling frequency). ąóą░ą▒ą╗ąĖčåą░ 11 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čŹčéąĖ ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ ąĘąĮą░č湥ąĮąĖčÅ.
ąóą░ą▒ą╗ąĖčåą░ 11. ąŚąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ ą┐ąŠčĆčÅą┤ą║ą░ čäąĖą╗čīčéčĆą░ DFSDFM.
ą”ąĄą╗ąĄą▓ą░čÅ čćą░čüč鹊čéą░ ą▓čŗą▒ąŠčĆąŠą║ ą¤ąŠčĆčÅą┤ąŠą║ čäąĖą╗čīčéčĆą░
16 ą║ąōčå
ąóąĖą┐ čäąĖą╗čīčéčĆą░ Sinc 4 ąĖą╗ąĖ Sinc 5
48 ą║ąōčå
ą¤ąŠą╗ąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░ Fosr čüąŠą┤ąĄčƹȹĖčé ąĘąĮą░č湥ąĮąĖąĄ ą║ąŠčŹčäčäąĖčåąĖąĄąĮčéą░ ą┤ąĄčåąĖą╝ą░čåąĖąĖ. ąØą░ čĆąĖčüčāąĮą║ą░čģ 62 ąĖ 63 ą┐ąŠą║ą░ąĘą░ąĮ ą┐čĆąĖą╝ąĄčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ Filter 1 ąĖ Filter 0 ą┤ą╗čÅ čćą░čüč鹊čéčŗ ą▓čŗą▒ąŠčĆąŠą║ ąĘą▓čāą║ą░ (Audio Sampling Frequency) 16 ą║ąōčå.
ąĀąĖčü. 62. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ DFSDM Filter 0.
ąĀąĖčü. 63. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ DFSDM Filter 1.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą▓čŗčģąŠą┤ą░ čéą░ą║č鹊ą▓ . ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ Audio Clock ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ ą║ą░ą║ ąĖčüč鹊čćąĮąĖą║ čéą░ą║č鹊ą▓ ą┤ą╗čÅ ą▓čŗčģąŠą┤ą░ čéą░ą║č鹊ą▓ DFSDM, čćč鹊 ą┤ą░ąĄčé ą▒ąŠą╗čīčłąĄ ą│ąĖą▒ą║ąŠčüčéąĖ ą▓ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĖ čéą░ą║č鹊ą▓.
ąŚąĮą░č湥ąĮąĖąĄ ą┤ąĄą╗ąĖč鹥ą╗čÅ čéą░ą║č鹊ą▓ (Divider) ą┤ąŠą╗ąČąĮąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓ąŠą▓ą░čéčī čüą╗ąĄą┤čāčÄčēąĄą╣ č乊čĆą╝čāą╗ąĄ:
Divider = DFSDM Clock Source / (AUDIO_SAMPLING_FREQUENCY x DECIAMTION_FACTOR)
ąĀąĖčü. 64 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆąĖą╝ąĄčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ DFSDM Clock Source = 48 ą£ąōčå, Audio Sampling Frequency = 16 ą║ąōčå ąĖ Decimation Factor = 64.
ąĀąĖčü. 64. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą▓čŗčģąŠą┤ą░ čéą░ą║č鹊ą▓ DFSDM.
ąØą░čüčéčĆąŠą╣ą║ąĖ DFSDM DMA . ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ DMA ą▓ ą┐ą░ą╝čÅčéčī ą┐ąĄčĆąĄą╝ąĄčēą░čÄčéčüčÅ ą┤ą░ąĮąĮčŗąĄ, ą┐ąŠčüčéčāą┐ą░čÄčēąĖąĄ ąŠčé ą║ą░ąĮą░ą╗ąŠą▓ DFSDM, čćč鹊 čüąĮąĖąČą░ąĄčé ą▓čŗčćąĖčüą╗ąĖč鹥ą╗čīąĮčāčÄ ąĮą░ą│čĆčāąĘą║čā ąĮą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ.
ąÆ ąŠą║ąĮąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ DFSDM ą▓čŗą▒ąĄčĆąĖč鹥 ąĘą░ą║ą╗ą░ą┤ą║čā DMA Settings ąĖ ą┤ąŠą▒ą░ą▓čīč鹥 ąĘą░ą┐čĆąŠčü DMA (DMA Request) ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ Filter. ąÜą╗ąĖą║ąĮąĖč鹥 ąĮą░ č鹊ą╗čīą║ąŠ čćč鹊 čüąŠąĘą┤ą░ąĮąĮčŗąĄ ąĘą░ą┐čĆąŠčüčŗ DMA ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 ąĮą░čüčéčĆąŠą╣ą║ąĖ, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 65.
ąĀąĖčü. 65. ąØą░čüčéčĆąŠą╣ą║ąĖ DFSDM DMA.
ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čéą░ą║č鹊ą▓ DFSDM . ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą▓čŗčģąŠą┤ąĮčŗąĄ čéą░ą║čéčŗ DFSDM ą│ąĄąĮąĄčĆąĖčĆčāčÄčéčüčÅ ąĖąĘ čéą░ą║č鹊ą▓ ą░čāą┤ąĖąŠ ą┐čĆąĖ ą┐ąŠą┤ą░č湥 čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ 61.44 ą£ąōčå ąĮą░ ą▒ą╗ąŠą║ DFSDM, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 66.
ąĀąĖčü. 66. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čéą░ą║č鹊ą▓ DFSDM.
ąóą░ą▒ą╗ąĖčåą░ 15 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĘąĮą░č湥ąĮąĖčÅ č鹊čćąĮąŠčüčéąĖ ą┐ąŠą╗čāč湥ąĮąĮąŠą╣ čćą░čüč鹊čéčŗ ą▓čŗą▒ąŠčĆąŠą║ ąĘą▓čāą║ą░ (audio sampling frequency) ą┤ą╗čÅ čüą╗ąĄą┤čāčÄčēąĖčģ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖą╣ čéą░ą║č鹊ą▓:
ŌĆó ąöą╗čÅ ą┐ąŠč鹊ą║ą░ 16 ą║ąōčå čćą░čüč鹊čéą░ CKOUT ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī 1.024 ą£ąōčå.
ąóą░ą▒ą╗ąĖčåą░ 15. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čéą░ą║č鹊ą▓ DFSDM ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēą░čÅ č鹊čćąĮąŠčüčéčī čćą░čüč鹊čéčŗ ą▓čŗą▒ąŠčĆąŠą║ ąĘą▓čāą║ą░ PCM.
ą”ąĄą╗ąĄą▓ą░čÅ čćą░čüč鹊čéą░ ą▓čŗą▒ąŠčĆąŠą║ DivM PLLN DivR ąöąĄą╗ąĖč鹥ą╗čī ą▓čŗčģąŠą┤ą░ čéą░ą║č鹊ą▓ ąóą░ą║čéčŗ DFSDM (ą£ąōčå) ąóąŠčćąĮąŠčüčéčī (ppm)
16 ą║ąōčå
5
192
5
60
61.44
0
48 ą║ąōčå
5
192
5
20
61.44
0
[ąĪčüčŗą╗ą║ąĖ ]
1 . AN5027 Interfacing PDM digital microphones using STM32 MCUs and MPUs site:st.com.2 . STM32F407, ąĖąĮč鹥čĆč乥ą╣čü SPI .3 . STM32F4xx: ąĖąĮč鹥čĆč乥ą╣čü SPI .4 . RM0433 STM32H742, STM32H743/753 and STM32H750 Value line advanced Arm┬«-based 32-bit MCUs site:st.com.5 . AN4838 Managing memory protection unit in STM32 MCUs site:st.com.6 . INMP441: čåąĖčäčĆąŠą▓ąŠą╣ ą╝ąĖą║čĆąŠč乊ąĮ čü ąĖąĮč鹥čĆč乥ą╣čüąŠą╝ I2S .