|
[4.1. ąÆą▓ąĄą┤ąĄąĮąĖąĄ: ąŠ č湥ą╝ ą│ąŠą▓ąŠčĆąĖčéčüčÅ ą▓ čćą░čüčéąĖ 4]
ąśą╝ąĄąĄčéčüčÅ ą┐ąŠč鹥ąĮčåąĖą░ą╗čīąĮą░čÅ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ ą║ąŠąĮčäą╗ąĖą║čéą░ ą▓ ą╝ąĮąŠą│ąŠąĘą░ą┤ą░čćąĮąŠą╣ čüąĖčüč鹥ą╝ąĄ, ąĄčüą╗ąĖ ąŠą┤ąĮą░ ąĘą░ą┤ą░čćą░ ąĮą░čćąĖąĮą░ąĄčé ą┐ąŠą╗čāčćą░čéčī ą┤ąŠčüčéčāą┐ ą║ čĆąĄčüčāčĆčüčā, ąĮąŠ ąĮąĄ ąĘą░ą▓ąĄčĆčłąĖą╗ą░ čŹč鹊čé ą┤ąŠčüčéčāą┐ ą┤ąŠ ą▓čŗčģąŠą┤ą░ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ Running. ąĢčüą╗ąĖ ąĘą░ą┤ą░čćą░ ąŠčüčéą░ą▓ąĖą╗ą░ čĆąĄčüčāčĆčü ą▓ ąĮąĄąĘą░ą▓ąĄčĆčłąĄąĮąĮąŠą╝ čüąŠčüč鹊čÅąĮąĖąĖ, č鹊 ą┤ąŠčüčéčāą┐ ą║ č鹊ą╝čā ąČąĄ čüą░ą╝ąŠą╝čā čĆąĄčüčāčĆčüčā čüąŠ čüč鹊čĆąŠąĮčŗ ą┤čĆčāą│ąŠą╣ ąĘą░ą┤ą░čćąĖ ąĖą╗ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ą┐ąŠčĆč湥 ą┤ą░ąĮąĮčŗčģ ąĖą╗ąĖ ą┤čĆčāą│ąŠą╣ ą░ąĮą░ą╗ąŠą│ąĖčćąĮąŠą╣ ąŠčłąĖą▒ą║ąĄ.
[ą¤čĆąĄą┤čŗą┤čāčēą░čÅ čćą░čüčéčī FreeRTOS: ą┐čĆą░ą║čéąĖč湥čüą║ąŠąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ, čćą░čüčéčī 3 (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝ąĖ)]
ąÆąŠčé ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐čĆąĖą╝ąĄčĆąŠą▓:
1. ąöąŠčüčéčāą┐ ą║ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝
ąĀą░čüčüą╝ąŠčéčĆąĖą╝ čüą╗ąĄą┤čāčÄčēąĖą╣ čüčåąĄąĮą░čĆąĖą╣, ą║ąŠą│ą┤ą░ ą┤ą▓ąĄ ąĘą░ą┤ą░čćąĖ ą┐čŗčéą░čÄčéčüčÅ ąĘą░ą┐ąĖčüą░čéčī ą┤ą░ąĮąĮčŗąĄ ą▓ LCD (ąČąĖą┤ą║ąŠą║čĆąĖčüčéą░ą╗ą╗ąĖč湥čüą║ąĖą╣ ą┤ąĖčüą┐ą╗ąĄą╣):
┬Ę ąÆčŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ąĘą░ą┤ą░čćą░ A, ąĖ ąĮą░čćąĖąĮą░ąĄčé ąĘą░ą┐ąĖčüčī ą▓ LCD čüčéčĆąŠą║ąĖ "Hello world".
┬Ę ąŚą░ą┤ą░čćą░ A ą▓čŗč鹥čüąĮąĄąĮą░ ąĘą░ą┤ą░č湥ą╣ B ą┐ąŠčüą╗ąĄ ą▓čŗą▓ąŠą┤ą░ č鹊ą╗čīą║ąŠ čćą░čüčéąĖ čüčéčĆąŠą║ąĖ "Hello w".
┬Ę ą¤ąĄčĆąĄą┤ čüą▓ąŠąĖą╝ ą▓čģąŠą┤ąŠą╝ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Blocked ąĘą░ą┤ą░čćą░ B ą▓čŗą▓ąŠą┤ąĖčé ąĮą░ LCD ąĘą░ą┐čĆąŠčü ŌĆ£Abort, Retry, Fail?ŌĆØ.
┬Ę ąŚą░ą┤ą░čćą░ A ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ čü č鹊ą│ąŠ ą╝ąĄčüčéą░, ą│ą┤ąĄ ąŠąĮą░ ą▒čŗą╗ą░ ą▓čŗč鹥čüąĮąĄąĮą░, ąĖ ąĘą░ą▓ąĄčĆčłą░ąĄčé ą▓čŗą▓ąŠą┤ ąŠčüčéą░ą╗čīąĮčŗčģ čüąĖą╝ą▓ąŠą╗ąŠą▓ - ŌĆ£orldŌĆØ.
ąóąĄą┐ąĄčĆčī LCD ą▒čāą┤ąĄčé ąŠč鹊ą▒čĆą░ąČą░čéčī ąĖčüą┐ąŠčĆč湥ąĮąĮčāčÄ čüčéčĆąŠą║čā ŌĆ£Hello wAbort, Retry, Fail?orldŌĆØ.
2. ą×ą┐ąĄčĆą░čåąĖąĖ Read, Modify, Write (čćč鹥ąĮąĖąĄ, ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖčÅ, ąĘą░ą┐ąĖčüčī)
ąøąĖčüčéąĖąĮą│ 57 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čüčéčĆąŠą║ąĖ ą║ąŠą┤ą░ C ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ąĖą╝ ąŠą┐ąĄčĆą░č鹊čĆčŗ ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░ (ą░čĆčģąĖč鹥ą║čéčāčĆą░ ARM7). ą£ąŠąČąĮąŠ ą▓ąĖą┤ąĄčéčī, čćč鹊 ąĘąĮą░č湥ąĮąĖąĄ PORTA čüąĮą░čćą░ą╗ą░ ą┐čĆąŠčćąĖčéą░ąĮąŠ ąĖąĘ ą┐ą░ą╝čÅčéąĖ ą▓ čĆąĄą│ąĖčüčéčĆ, ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮąŠ ą▓ čĆąĄą│ąĖčüčéčĆąĄ, ąĖ ąĘą░č鹥ą╝ ąĘą░ą┐ąĖčüą░ąĮąŠ ąŠą▒čĆą░čéąĮąŠ ą▓ ą┐ą░ą╝čÅčéčī. ąóą░ą║ą░čÅ čüčéą░ąĮą┤ą░čĆčéąĮą░čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┤ąĄą╣čüčéą▓ąĖą╣ ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ ąŠą┐ąĄčĆą░čåąĖąĄą╣ Read, Modify, Write.
/* ąĪą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąĮčŗą╣ ą║ąŠą┤ C. */
155: PORTA |= 0x01;
/* ą¤ąŠą╗čāč湥ąĮąĮčŗą╣ ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą║ąŠą┤ ą░čüčüąĄą╝ą▒ą╗ąĄčĆą░. */
0x00000264 481C LDR R0,[PC,#0x0070]; ą¤ąŠą╗čāč湥ąĮąĖąĄ ą░ą┤čĆąĄčüą░ PORTA
0x00000266 6801 LDR R1,[R0,#0x00] ; ą¦č鹥ąĮąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ PORTA ą▓ čĆąĄą│ąĖčüčéčĆ R1
0x00000268 2201 MOV R2,#0x01 ; ą¤ąŠą╝ąĄčēąĄąĮąĖąĄ ą░ą▒čüąŠą╗čÄčéąĮąŠą╣ ą║ąŠąĮčüčéą░ąĮčéčŗ 1 ą▓ čĆąĄą│ąĖčüčéčĆ R2
0x0000026A 4311 ORR R1,R2 ; ą×ą┐ąĄčĆą░čåąĖčÅ OR R1 (PORTA) čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ R2 (ą║ąŠąĮčüčéą░ąĮčéą░ 1)
0x0000026C 6001 STR R1,[R0,#0x00] ; ąĪąŠčģčĆą░ąĮąĄąĮąĖąĄ ąĮąŠą▓ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ąŠą▒čĆą░čéąĮąŠ ą▓ PORTA
ąøąĖčüčéąĖąĮą│ 57. ą¤čĆąĖą╝ąĄčĆ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ Read, Modify, Write (čćč鹥ąĮąĖąĄ, ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖčÅ, ąĘą░ą┐ąĖčüčī)
ąŁčéą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┤ąĄą╣čüčéą▓ąĖą╣ čÅą▓ą╗čÅąĄčéčüčÅ 'ąĮąĄ ą░č鹊ą╝ą░čĆąĮąŠą╣', ą┐ąŠčüą║ąŠą╗čīą║čā ąĘą░ąĮąĖą╝ą░ąĄčé ą▒ąŠą╗čīčłąĄ ąŠą┤ąĮąŠą╣ ąĖąĮčüčéčĆčāą║čåąĖąĖ ą┤ąŠ ą┐ąŠą╗ąĮąŠą│ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ, ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĄčĆą▓ą░ąĮą░ ą┐ąŠčüąĄčĆąĄą┤ąĖąĮąĄ. ąĀą░čüčüą╝ąŠčéčĆąĖą╝ čüą╗ąĄą┤čāčÄčēąĖą╣ čüčåąĄąĮą░čĆąĖą╣, ą║ąŠą│ą┤ą░ ą┤ą▓ąĄ ąĘą░ą┤ą░čćąĖ ą┐čŗčéą░čÄčéčüčÅ ąŠą▒ąĮąŠą▓ąĖčéčī ą┐ą░ą╝čÅčéčī, ą┐čĆąĖą▓čÅąĘą░ąĮąĮčāčÄ ą║ čĆąĄą│ąĖčüčéčĆčā ą┐ąŠą┤ ąĖą╝ąĄąĮąĄą╝ PORTA:
┬Ę ąŚą░ą┤ą░čćą░ A ąĘą░ą│čĆčāąČą░ąĄčé ą▓ čĆąĄą│ąĖčüčéčĆ ąĘąĮą░č湥ąĮąĖąĄ ąĖąĘ PORTA - čŹč鹊 čćą░čüčéčī ąŠą┐ąĄčĆą░čåąĖąĖ Read.
┬Ę ąŚą░ą┤ą░čćą░ A ą▓čŗč鹥čüąĮąĄąĮą░ ąĘą░ą┤ą░č湥ą╣ B ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ ąĘą░ą┤ą░čćą░ A ąĘą░ą▓ąĄčĆčłąĖą╗ą░ čćą░čüčéąĖ ąŠą┐ąĄčĆą░čåąĖąĖ Modify ąĖ Write.
┬Ę ąŚą░ą┤ą░čćą░ B ąŠą▒ąĮąŠą▓ąĖą╗ą░ ąĘąĮą░č湥ąĮąĖąĄ PORTA, ąĖ ąĘą░č鹥ą╝ ą▓ąŠčłą╗ą░ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Blocked.
┬Ę ąŚą░ą┤ą░čćą░ A ą┐čĆąŠą┤ąŠą╗ąČąĖą╗ą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ąŠą┤ą░ čü č鹊ą│ąŠ ą╝ąĄčüčéą░, ą│ą┤ąĄ ąŠąĮą░ ą▒čŗą╗ą░ ą▓čŗč鹥čüąĮąĄąĮą░. ą×ąĮą░ ą╝ąŠą┤ąĖčäąĖčåąĖčĆčāąĄčé ą║ąŠą┐ąĖčÄ ąĘąĮą░č湥ąĮąĖčÅ PORTA, ą║ąŠč鹊čĆą░čÅ ą▒čŗą╗ą░ čĆą░ąĮąĄąĄ čüą┤ąĄą╗ą░ąĮą░ ąŠą┐ąĄčĆą░čåąĖąĄą╣ čćč鹥ąĮąĖčÅ (ąĖ č鹥ą┐ąĄčĆčī čüčéą░ą╗ą░ ąĮąĄą░ą║čéčāą░ą╗čīąĮąŠą╣ ąĖąĘ-ąĘą░ ąĘą░ą┤ą░čćąĖ B), ąĖ ąĘą░č鹥ą╝ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé čĆąĄąĘčāą╗čīčéą░čé ąŠą▒čĆą░čéąĮąŠ ą▓ PORTA.
ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ąĘą░ą┤ą░čćą░ A ąŠą▒ąĮąŠą▓ą╗čÅąĄčé ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ąŠą▒čĆą░čéąĮąŠ čāčüčéą░čĆąĄą▓čłąĄąĄ, ąĮąĄą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ PORTA. ąŚą░ą┤ą░čćą░ B čāčüą┐ąĄą╗ą░ ąĖąĘą╝ąĄąĮąĖčéčī PORTA ą╝ąĄąČą┤čā ą┐ąŠą╗čāč湥ąĮąĖąĄą╝ ą║ąŠą┐ąĖąĖ PORTA ąĘą░ą┤ą░č湥ą╣ A ąĖ ą╝ąŠą╝ąĄąĮč鹊ą╝ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠą│ą┤ą░ ąĘą░ą┤ą░čćą░ A ąĖąĘą╝ąĄąĮčÅąĄčé čŹčéčā čüą▓ąŠčÄ ą║ąŠą┐ąĖčÄ ąĖ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ąĄčæ ąŠą▒čĆą░čéąĮąŠ ą▓ PORTA. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ąĘą░ą┤ą░čćą░ A ą┐ąĄčĆąĄąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖčÄ PORTA, ą║ąŠč鹊čĆčāčÄ čüą┤ąĄą╗ą░ą╗ą░ ąĘą░ą┤ą░čćą░ B, ąĖ ąĘąĮą░č湥ąĮąĖąĄ PORTA ąŠą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ąĖčüą┐ąŠčĆč湥ąĮąĮčŗą╝.
ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čĆąĄą│ąĖčüčéčĆ ą┐ąĄčĆąĖč乥čĆąĖąĖ, ąĮąŠ č鹊čé ąČąĄ čüą░ą╝čŗą╣ ą┐čĆąĖąĮčåąĖą┐ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĖą╝ąĄąĮąĄąĮ ą┤ą╗čÅ ąŠą┐ąĄčĆą░čåąĖą╣ Read, Modify, Write ąĮą░ą┤ ą│ą╗ąŠą▒ą░ą╗čīąĮčŗą╝ąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗą╝ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
3. ąØąĄą░č鹊ą╝ą░čĆąĮčŗą╣ ą┤ąŠčüčéčāą┐ ą║ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗą╝
ą×ą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą┐ąŠą╗ąĄą╣ ą▓ čüčéčĆčāą║čéčāčĆąĄ ąĖą╗ąĖ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ čü čĆą░ąĘą╝ąĄčĆąŠą╝ ą▒ąŠą╗čīčłąĄ, č湥ą╝ ąĮą░čéčāčĆą░ą╗čīąĮčŗą╣ čĆą░ąĘą╝ąĄčĆ čüą╗ąŠą▓ą░ ą░čĆčģąĖč鹥ą║čéčāčĆčŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ 32-ą▒ąĖčéąĮąŠą╣ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ ąĮą░ 16-ą▒ąĖčéąĮąŠą╝ ą┐čĆąŠčåąĄčüčüąŠčĆąĄ) - čŹč鹊 ą▓čüąĄ ą┐čĆąĖą╝ąĄčĆčŗ ąĮąĄą░č鹊ą╝ą░čĆąĮčŗčģ ąŠą┐ąĄčĆą░čåąĖą╣. ąĢčüą╗ąĖ čŹčéą░ ąŠą┐ąĄčĆą░čåąĖčÅ ą▒čāą┤ąĄčé ą┐čĆąĄčĆą▓ą░ąĮą░, č鹊 ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ą┐ąŠą╗čāčćąĖčéčüčÅ ą┐ąŠč鹥čĆčÅ ąĖą╗ąĖ ą┐ąŠčĆčćą░ ą┤ą░ąĮąĮčŗčģ.
4. ąĀąĄąĄąĮč鹥čĆą░ą▒ąĄą╗čīąĮąŠčüčéčī (reentrant) čäčāąĮą║čåąĖąĖ
ążčāąĮą║čåąĖčÅ čÅą▓ą╗čÅąĄčéčüčÅ čĆąĄąĄąĮč鹥čĆą░ą▒ąĄą╗čīąĮąŠą╣, ąĄčüą╗ąĖ ąĄčæ ą╝ąŠąČąĮąŠ ą▒ąĄąĘąŠą┐ą░čüąĮąŠ ą▓čŗąĘą▓ą░čéčī ąĖąĘ ą▒ąŠą╗ąĄąĄ č湥ą╝ ąŠą┤ąĮąŠą╣ ąĘą░ą┤ą░čćąĖ, ąĖą╗ąĖ ą║ą░ą║ ąĖąĘ ąĘą░ą┤ą░čć, čéą░ą║ ąĖ ąĖąĘ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ.
ąÜą░ąČą┤ą░čÅ ąĘą░ą┤ą░čćą░ ąĖą╝ąĄąĄčé čüą▓ąŠą╣ čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╣ čüč鹥ą║ ąĖ čüą▓ąŠą╣ čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╣ ąĮą░ą▒ąŠčĆ ąĘąĮą░č湥ąĮąĖą╣ čĆąĄą│ąĖčüčéčĆąŠą▓. ąĢčüą╗ąĖ čäčāąĮą║čåąĖčÅ ąĮąĄ ą┤ąĄą╗ą░ąĄčé ą┐ąŠą┐čŗč鹊ą║ ą┤ąŠčüčéčāą┐ą░ ą║ ą┤čĆčāą│ąĖą╝ ą┤ą░ąĮąĮčŗą╝, ą║čĆąŠą╝ąĄ ą║ą░ą║ ą║ čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╝, ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗą╝ ą▓ čüč鹥ą║ąĄ, ąĖą╗ąĖ ąĄčüą╗ąĖ ąŠąĮą░ čüąŠčģčĆą░ąĮčÅąĄčé ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ąĄčÄ čĆąĄą│ąĖčüčéčĆčŗ, č鹊 ąŠąĮą░ čÅą▓ą╗čÅąĄčéčüčÅ čĆąĄąĄąĮč鹥čĆą░ą▒ąĄą╗čīąĮąŠą╣. ąøąĖčüčéąĖąĮą│ 58 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆąĖą╝ąĄčĆ čĆąĄąĄąĮč鹥čĆą░ą▒ąĄą╗čīąĮąŠą╣ čäčāąĮą║čåąĖąĖ. ąøąĖčüčéąĖąĮą│ 59 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆąĖą╝ąĄčĆ čäčāąĮą║čåąĖąĖ, ą║ąŠč鹊čĆą░čÅ ąĮąĄ čÅą▓ą╗čÅąĄčéčüčÅ čĆąĄąĄąĮč鹥čĆą░ą▒ąĄą╗čīąĮąŠą╣.
/* ąÆ čäčāąĮą║čåąĖčÄ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ą┐ą░čĆą░ą╝ąĄčéčĆ. ą×ąĮ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ąĮ ą╗ąĖą▒ąŠ č湥čĆąĄąĘ čüč鹥ą║,
ą╗ąĖą▒ąŠ č湥čĆąĄąĘ čĆąĄą│ąĖčüčéčĆ CPU. ąÆ ą╗čÄą▒ąŠą╝ čüą╗čāčćą░ąĄ ą║ą░ąČą┤ą░čÅ ąĘą░ą┤ą░čćą░ ą▒ąĄąĘąŠą┐ą░čüąĮąŠ
ą┐ąŠą╗čāčćą░ąĄčé ą┤ą╗čÅ čŹč鹊ą╣ čåąĄą╗ąĖ čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╣ čüč鹥ą║ ąĖą╗ąĖ čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╣ ąĮą░ą▒ąŠčĆ
čĆąĄą│ąĖčüčéčĆąŠą▓. */
long lAddOneHundered( long lVar1 )
{
/* ąŁčéą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ąĮą░čģąŠą┤ąĖčéčüčÅ čüčéčĆąŠą│ąŠ ą▓ ąŠą▒ą╗ą░čüčéąĖ ą┤ąĄą╣čüčéą▓ąĖčÅ čäčāąĮą║čåąĖąĖ ąĖ
ą▒čāą┤ąĄčé čéą░ą║ąČąĄ ą▓čŗą┤ąĄą╗ąĄąĮą░ č湥čĆąĄąĘ čüč鹥ą║ ąĖą╗ąĖ čĆąĄą│ąĖčüčéčĆ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░
ąĖ čāčĆąŠą▓ąĮčÅ ąŠą┐čéąĖą╝ąĖąĘą░čåąĖąĖ. ąÜą░ąČą┤ą░čÅ ąĘą░ą┤ą░čćą░ ąĖą╗ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ą║ąŠč鹊čĆą░čÅ ą▒čāą┤ąĄčé
ą▓čŗąĘą▓ą░čéčī čŹčéčā čäčāąĮą║čåąĖčÄ, ą┐ąŠą╗čāčćąĖčé čüąŠą▒čüčéą▓ąĄąĮąĮčāčÄ ą║ąŠą┐ąĖčÄ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ lVar2. */
long lVar2;
lVar2 = lVar1 + 100;
/* ą¦ą░čēąĄ ą▓čüąĄą│ąŠ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠą╝ąĄčēą░ąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆ CPU,
čģąŠčéčÅ ąŠąĮąŠ čéą░ą║ąČąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╝ąĄčēąĄąĮąŠ ąĖ ą▓ čüč鹥ą║. */
return lVar2;
}
ąøąĖčüčéąĖąĮą│ 58. ą¤čĆąĖą╝ąĄčĆ čĆąĄąĄąĮč鹥čĆą░ą▒ąĄą╗čīąĮąŠą╣ (reentrant) čäčāąĮą║čåąĖąĖ
/* ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ lVar1 čÅą▓ą╗čÅąĄčéčüčÅ ą│ą╗ąŠą▒ą░ą╗čīąĮąŠą╣, čéą░ą║ čćč鹊 ą║ą░ąČą┤ą░čÅ ąĘą░ą┤ą░čćą░, ą║ąŠč鹊čĆą░čÅ
ą▓čŗąĘąŠą▓ąĄčé čäčāąĮą║čåąĖčÄ, ą▒čāą┤ąĄčé ąŠą▒čĆą░čēą░čéčīčüčÅ ą║ ąŠą┤ąĮąŠą╣ ąĖ č鹊ą╣ ąČąĄ ąŠą┤ąĮąŠą╣ ą║ąŠą┐ąĖąĖ
ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣. */
long lVar1;
long lNonsenseFunction( void )
{
/* ąŁčéą░ ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ čüčéą░čéąĖč湥čüą║ą░čÅ (static), ą┐ąŠčŹč鹊ą╝čā ąŠąĮą░ ąĮąĄ ą▓čŗą┤ąĄą╗čÅąĄčéčüčÅ č湥čĆąĄąĘ
čüč鹥ą║. ąÜą░ąČą┤ą░čÅ ąĘą░ą┤ą░čćą░, ą║ąŠč鹊čĆą░čÅ ą▓čŗąĘčŗą▓ą░ąĄčé čäčāąĮą║čåąĖčÄ, ą▒čāą┤ąĄčé ąŠą▒čĆą░čēą░čéčīčüčÅ ą║ ąŠą┤ąĮąŠą╣
ąĖ č鹊ą╣ ąČąĄ ąŠą┤ąĮąŠą╣ ą║ąŠą┐ąĖąĖ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣. */
static long lState = 0;
long lReturn;
switch( lState )
{
case 0 : lReturn = lVar1 + 10;
lState = 1;
break;
case 1 : lReturn = lVar1 + 20;
lState = 0;
break;
}
}
ąøąĖčüčéąĖąĮą│ 59. ą¤čĆąĖą╝ąĄčĆ čäčāąĮą║čåąĖąĖ, ą║ąŠč鹊čĆą░čÅ ąĮąĄ čĆąĄąĄąĮč鹥čĆą░ą▒ąĄą╗čīąĮą░
ąÆąĘą░ąĖą╝ąĮąŠąĄ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ (mutual exclusion, mutex)
ąöąŠčüčéčāą┐ ą║ čĆąĄčüčāčĆčüčā, ą║ąŠč鹊čĆčŗą╣ čÅą▓ą╗čÅąĄčéčüčÅ ą╗ąĖą▒ąŠ ąŠą▒čēąĖą╝ ą┤ą╗čÅ ąĘą░ą┤ą░čć, ą╗ąĖą▒ąŠ ąŠą▒čēąĖą╝ ą┤ą╗čÅ ąĘą░ą┤ą░čć ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ąĮčāąČą┤ą░ąĄčéčüčÅ ą▓ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĖ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ č鹥čģąĮąĖą║ąĖ 'ą▓ąĘą░ąĖą╝ąĮąŠą│ąŠ ąĖčüą║ą╗čÄč湥ąĮąĖčÅ' (mutual exclusion), čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī čåąĄą╗ąŠčüčéąĮąŠčüčéčī ą┤ą░ąĮąĮčŗčģ ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ. ą”ąĄą╗čī čüąŠčüč鹊ąĖčé ą▓ č鹊ą╝, čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąŠą┤ąĮąŠą╣ ąĘą░ą┤ą░čćąĖ 菹║čüą║ą╗čĹʹĖą▓ąĮąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąŠą▒čēąĄą│ąŠ čĆąĄčüčāčĆčüą░, ąĮą░čćąĖąĮą░čÅ čü ą╝ąŠą╝ąĄąĮčéą░ ąŠą▒čĆą░čēąĄąĮąĖčÅ ą║ ąĮąĄą╝čā ą┤ąŠ ą╝ąŠą╝ąĄąĮčéą░ ąŠą║ąŠąĮčćą░ąĮąĖčÅ ą┤ąŠčüčéčāą┐ą░ (ą┤ąŠ ą▓ąŠąĘą▓čĆą░čēąĄąĮąĖčÅ čĆąĄčüčāčĆčüą░ ą▓ ąĮąĄą┐čĆąŠčéąĖą▓ąŠčĆąĄčćąĖą▓ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ).
FreeRTOS ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▓ąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą▓ąĘą░ąĖą╝ąĮąŠą│ąŠ ąĖčüą║ą╗čÄč湥ąĮąĖčÅ (mutual exclusion), ąŠą┤ąĮą░ą║ąŠ čüą░ą╝čŗą╣ ą╗čāčćčłąĖą╣ ą╝ąĄč鹊ą┤ ą▓ąĘą░ąĖą╝ąĮąŠą│ąŠ ąĖčüą║ą╗čÄč湥ąĮąĖčÅ (ą║ąŠą│ą┤ą░ čŹč鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ) - čĆą░ąĘčĆą░ą▒ąŠčéą║ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čéą░ą║ąĖą╝ čüą┐ąŠčüąŠą▒ąŠą╝, čćč鹊 čĆąĄčüčāčĆčüčŗ ąĮąĄ ą┤ąĄą╗ą░čÄčéčüčÅ ąŠą▒čēąĖą╝ąĖ, ąĖ ą║ ą║ą░ąČą┤ąŠą╝čā čĆąĄčüčāčĆčüčā ą┐ąŠą╗čāčćą░ąĄčé ą┤ąŠčüčéčāą┐ č鹊ą╗čīą║ąŠ ąŠą┤ąĮą░ ąĘą░ą┤ą░čćą░.
ą×ą▒čēąĖą╣ ąŠą▒ąĘąŠčĆ čćą░čüčéąĖ 4
ąŁčéą░ čćą░čüčéčī ą┤ą░ąĄčé čćąĖčéą░č鹥ą╗čÅą╝ čģąŠčĆąŠčłąĄąĄ ą┐ąŠąĮąĖą╝ą░ąĮąĖąĄ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ:
┬Ę ąÜąŠą│ą┤ą░ ąĖ ą┐ąŠč湥ą╝čā ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗ ą╝ąĄąĮąĄą┤ąČą╝ąĄąĮčé čĆąĄčüčāčĆčüąŠą▓ ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąĖą╝ąĖ.
┬Ę ą¦č鹊 čéą░ą║ąŠąĄ ą║čĆąĖčéąĖč湥čüą║ą░čÅ čüąĄą║čåąĖčÅ.
┬Ę ą¦č鹊 ąŠąĘąĮą░čćą░ąĄčé ą▓ąĘą░ąĖą╝ąĮąŠąĄ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ.
┬Ę ą¦č鹊 ąŠąĘąĮą░čćą░ąĄčé ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ą░ čłąĄą┤čāą╗ąĄčĆą░.
┬Ę ąÜą░ą║ čüąŠąĘą┤ą░čéčī ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĘą░ą┤ą░čćčā ą│ąĄą╣čéą║ąĖą┐ąĄčĆą░ (ą┐čĆąĖą▓čĆą░čéąĮąĖą║ą░).
┬Ę ą¦č鹊 čéą░ą║ąŠąĄ ąĖąĮą▓ąĄčĆčüąĖčÅ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓, ąĖ ą║ą░ą║ ąĮą░čüą╗ąĄą┤ąŠą▓ą░ąĮąĖąĄ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓ ą╝ąŠąČąĄčé čāą╝ąĄąĮčīčłąĖčéčī (ąĮąŠ ąĮąĄ čāčüčéčĆą░ąĮąĖčéčī) čŹčéčā čāą│čĆąŠąĘčā.
[4.2. ąÜčĆąĖčéąĖč湥čüą║ąĖąĄ čüąĄą║čåąĖąĖ ąĖ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ą░ čłąĄą┤čāą╗ąĄčĆą░]
ą×čüąĮąŠą▓ąĮčŗąĄ ą┐ąŠąĮčÅčéąĖčÅ ą┐ąŠ ą║čĆąĖčéąĖč湥čüą║ąŠą╣ čüąĄą║čåąĖąĖ
ąÆ ąŠą▒čēąĄą╝ čüą╗čāčćą░ąĄ ą║čĆąĖčéąĖč湥čüą║ą░čÅ čüąĄą║čåąĖčÅ - čŹč鹊 čĆąĄą│ąĖąŠąĮ ą║ąŠą┤ą░, ąŠą║čĆčāąČąĄąĮąĮčŗą╣ ą▓čŗąĘąŠą▓ą░ą╝ąĖ ą╝ą░ą║čĆąŠčüąŠą▓ taskENTER_CRITICAL() ąĖ taskEXIT_CRITICAL(), ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ ą╗ąĖčüčéąĖąĮą│ąĄ 60. ąÜčĆąĖčéąĖč湥čüą║ąĖąĄ čüąĄą║čåąĖąĖ čéą░ą║ąČąĄ ąĖąĘą▓ąĄčüčéąĮčŗ ą║ą░ą║ ą║čĆąĖčéąĖč湥čüą║ąĖąĄ čĆąĄą│ąĖąŠąĮčŗ.
/* ą×ą▒ąĄčüą┐ąĄčćąĖą╝, čćč鹊ą▒čŗ ą┤ąŠčüčéčāą┐ ą║ čĆąĄą│ąĖčüčéčĆčā PORTA ąĮąĄ ą▒čŗą╗ ą┐čĆąĄčĆą▓ą░ąĮ, ą┐čāč鹥ą╝ ą┐ąŠą╝ąĄčēąĄąĮąĖčÅ
ą║ąŠą┤ą░ ą┤ąŠčüčéčāą┐ą░ ą║ ąĮąĄą╝čā ą▓ ą║čĆąĖčéąĖč湥čüą║čāčÄ čüąĄą║čåąĖčÄ. ąŚą┤ąĄčüčī ą▓čģąŠą┤ ą▓ ą║čĆąĖčéąĖč湥čüą║čāčÄ
čüąĄą║čåąĖčÄ. */
taskENTER_CRITICAL();
/* ą£ąĄąČą┤čā ą▓čŗąĘąŠą▓ą░ą╝ąĖ ą╝ą░ą║čĆąŠčüąŠą▓ taskENTER_CRITICAL() ąĖ taskEXIT_CRITICAL()
ąĮąĄą▓ąŠąĘą╝ąŠąČąĮąŠ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ąĮą░ ą┤čĆčāą│čāčÄ ąĘą░ą┤ą░čćčā. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓čüąĄ ąĄčēąĄ ą╝ąŠą│čāčé
ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮčŗ ąĮą░ č鹥čģ ą┐ąŠčĆčéą░čģ FreeRTOS, čā ą║ąŠč鹊čĆčŗčģ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ
ą▓ą╗ąŠąČąĄąĮąĮąŠčüčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ąĮąŠ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ č鹥čģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, čā ą║ąŠč鹊čĆčŗčģ
ą┐čĆąĖąŠčĆąĖč鹥čé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąŠą╗čīčłąĄ ąĮą░ąĘąĮą░č湥ąĮąĮąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą║ąŠąĮčüčéą░ąĮčéčŗ
configMAX_SYSCALL_INTERRUPT_PRIORITY ŌĆō ąĖ čéą░ą║ąĖą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅą╝ ąĮąĄ
čĆą░ąĘčĆąĄčłąĄąĮąŠ ą▓čŗąĘčŗą▓ą░čéčī čäčāąĮą║čåąĖąĖ API FreeRTOS. */
PORTA |= 0x01;
/* ą£čŗ ąĘą░ą║ąŠąĮčćąĖą╗ąĖ ą┤ąŠčüčéčāą┐ ą║ PORTA, ąĖ č鹥ą┐ąĄčĆčī ą╝ąŠąČąĮąŠ ą┐ąŠą║ąĖąĮčāčéčī ą║čĆąĖčéąĖč湥čüą║čāčÄ
čüąĄą║čåąĖčÄ. */
taskEXIT_CRITICAL();
ąøąĖčüčéąĖąĮą│ 60. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą║čĆąĖčéąĖč湥čüą║ąŠą╣ čüąĄą║čåąĖąĖ ą┤ą╗čÅ ąĘą░čēąĖčéčŗ ą┤ąŠčüčéčāą┐ą░ ą║ čĆąĄą│ąĖčüčéčĆčā
ą¤čĆąŠąĄą║čéčŗ ą┐čĆąĖą╝ąĄčĆąŠą▓, ą║ąŠč鹊čĆčŗąĄ čüąŠą┐čĆąŠą▓ąŠąČą┤ą░čÄčé čŹčéčā ą║ąĮąĖą│čā, ąĖčüą┐ąŠą╗čīąĘčāčÄčé čäčāąĮą║čåąĖčÄ ą┐ąŠą┤ ąĮą░ąĘą▓ą░ąĮąĖąĄą╝ vPrintString(), čćč鹊ą▒čŗ ą▓čŗą▓ąĄčüčéąĖ čüčéčĆąŠą║ąĖ ąĮą░ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą▓čŗą▓ąŠą┤ - čéą░ą║ąŠą╣ ą║ą░ą║ ąŠą║ąĮąŠ č鹥čĆą╝ąĖąĮą░ą╗ą░ ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮčÅąĄą╝čŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ Open Watcom DOS. ążčāąĮą║čåąĖčÅ vPrintString() ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ąĖąĘ ą╝ąĮąŠą│ąĖčģ čĆą░ąĘą╗ąĖčćąĮčŗčģ ąĘą░ą┤ą░čć, čéą░ą║ čćč鹊 ą▓ č鹥ąŠčĆąĖąĖ ąĄčæ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĘą░čēąĖčéčā ą┤ąŠčüčéčāą┐ą░ ą║ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╝čā ą▓čŗą▓ąŠą┤čā čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą║čĆąĖčéąĖč湥čüą║ąŠą╣ čüąĄą║čåąĖąĖ, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ ą╗ąĖčüčéąĖąĮą│ąĄ 61.
void vPrintString( const portCHAR *pcString )
{
/* ąŚą░ą┐ąĖčüčī čüčéčĆąŠą║ąĖ ą▓ stdout, čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą║čĆąĖčéąĖč湥čüą║ąŠą╣ čüąĄą║čåąĖąĖ ą║ą░ą║
ą│čĆčāą▒ąŠą│ąŠ ą╝ąĄč鹊ą┤ą░ ą▓ąĘą░ąĖą╝ąĮąŠą│ąŠ ąĖčüą║ą╗čÄč湥ąĮąĖčÅ. */
taskENTER_CRITICAL();
{
printf( "%s", pcString );
fflush( stdout );
}
taskEXIT_CRITICAL();
/* ąĀą░ąĘčĆąĄčłą░ąĄą╝ ąĮą░ąČą░čéąĖąĄą╝ ą╗čÄą▒ąŠą╣ ą║ąĮąŠą┐ą║ąĖ ąŠčüčéą░ąĮąŠą▓ąĖčéčī ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ. ą×ą▒čŗčćąĮąŠ
ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤ą╗čÅ čŹč鹊ą│ąŠ čüą┐ąĄčåąĖą░ą╗čīąĮčāčÄ ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÄ ą║ą╗ą░ą▓ąĖčł (čéąĖą┐ą░
Alt+X), čćč鹊 čéą░ą║ąČąĄ ą┤ąŠą╗ąČąĮąŠ ąĘą░čēąĖčéąĖčéčī ą┤ąŠčüčéčāą┐ ą║ ą║ą╗ą░ą▓ąĖą░čéčāčĆąĮąŠą╝čā ą▓ą▓ąŠą┤čā. */
if( kbhit() )
{
vTaskEndScheduler();
}
}
ąøąĖčüčéąĖąĮą│ 61. ą×ą┤ąĮą░ ąĖąĘ ą▓ąŠąĘą╝ąŠąČąĮčŗčģ čĆąĄą░ą╗ąĖąĘą░čåąĖą╣ čäčāąĮą║čåąĖąĖ vPrintString()
ąÜčĆąĖčéąĖč湥čüą║ąĖąĄ čüąĄą║čåąĖąĖ, čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮčŗąĄ čéą░ą║ąĖą╝ čüą┐ąŠčüąŠą▒ąŠą╝, čÅą▓ą╗čÅčÄčéčüčÅ ąŠč湥ąĮčī ą│čĆčāą▒čŗą╝ ą╝ąĄč鹊ą┤ąŠą╝ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ą▓ąĘą░ąĖą╝ąĮąŠą│ąŠ ąĖčüą║ą╗čÄč湥ąĮąĖčÅ. ą×ąĮąĖ čĆą░ą▒ąŠčéą░čÄčé ą┐čĆąŠčüč鹊 ą┐čāč鹥ą╝ ąĘą░ą┐čĆąĄčéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą╗ąĖą▒ąŠ ą┐ąŠą╗ąĮąŠčüčéčīčÄ, ą╗ąĖą▒ąŠ ą┤ąŠ čāčĆąŠą▓ąĮčÅ ą┐čĆąĖąŠčĆąĖč鹥čéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą│ąŠ ą║ąŠąĮčüčéą░ąĮč鹊ą╣ configMAX_SYSCALL_INTERRUPT_PRIORITY - ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ą┐ąŠčĆčéą░ FreeRTOS. ąÆčŗč鹥čüąĮčÅčÄčēąĄąĄ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░ ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ č鹊ą╗čīą║ąŠ ąĖąĘąĮčāčéčĆąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, čéą░ą║ čćč鹊 ą┐ąŠą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĘą░ą┐čĆąĄčēąĄąĮčŗ, ąĘą░ą┤ą░čćą░ ą▓čŗąĘą▓ą░ą▓čłą░čÅ taskENTER_CRITICAL() ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░ąĮąĮąŠ ąŠčüčéą░ąĮąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Running ą┤ąŠ ą▓čŗčģąŠą┤ą░ ąĖąĘ ą║čĆąĖčéąĖč湥čüą║ąŠą╣ čüąĄą║čåąĖąĖ.
ąÜčĆąĖčéąĖč湥čüą║ąĖąĄ čüąĄą║čåąĖąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čāą┤ąĄčƹȹ░ąĮčŗ ą║ą░ą║ ą╝ąŠąČąĮąŠ ą▒ąŠą╗ąĄąĄ ą║ąŠčĆąŠčéą║ąĖą╝ąĖ, ą┐ąŠč鹊ą╝čā čćč鹊 ąĖąĮą░č湥 ąŠąĮąĖ ą┐ąŠą▓ą╗ąĖčÅčÄčé ąĮą░ ą▓čĆąĄą╝čÅ ąŠčéą▓ąĄčéą░ ąĮą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. ąÜą░ąČą┤čŗą╣ ą▓čŗąĘąŠą▓ taskENTER_CRITICAL() ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą┐ą░čĆąĮčŗą╝ čü ą▓čŗąĘąŠą▓ąŠą╝ taskEXIT_CRITICAL(). ą¤ąŠ čŹč鹊ą╣ ą┐čĆąĖčćąĖąĮąĄ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą▓čŗą▓ąŠą┤ ąĮąĄ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘą░čēąĖčēąĄąĮ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą║čĆąĖčéąĖč湥čüą║ąŠą╣ čüąĄą║čåąĖąĖ (ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ ą╗ąĖčüčéąĖąĮą│ąĄ 61), ą┐ąŠč鹊ą╝čā čćč鹊 ąĘą░ą┐ąĖčüčī ą▓ č鹥čĆą╝ąĖąĮą░ą╗ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą┤ąŠą╗ą│ąŠą╣ ąŠą┐ąĄčĆą░čåąĖąĄą╣. ąóą░ą║ąČąĄ 菹╝čāą╗čÅč鹊čĆ DOS ąĖ ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ ą▓čŗą▓ąŠą┤ą░ č鹥čĆą╝ąĖąĮą░ą╗ą░ Open Watcom ąĮąĄ čüąŠą▓ą╝ąĄčüčéąĖą╝čŗ čü čŹč鹊ą╣ č乊čĆą╝ąŠą╣ ą▓ąĘą░ąĖą╝ąĮąŠą│ąŠ ąĖčüą║ą╗čÄč湥ąĮąĖčÅ, čéą░ą║ ą║ą░ą║ ą▓čŗąĘąŠą▓čŗ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ąŠčüčéą░ą▓ą╗čÅčÄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čĆą░ąĘčĆąĄčłąĄąĮąĮčŗą╝ąĖ. ą¤čĆąĖą╝ąĄčĆčŗ ą▓ čŹč鹊ą╣ čćą░čüčéąĖ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░čÄčé ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗąĄ čĆąĄčłąĄąĮąĖčÅ čŹč鹊ą╣ ą┐čĆąŠą▒ą╗ąĄą╝čŗ.
ąÜčĆąĖčéąĖč湥čüą║ąĖąĄ čüąĄą║čåąĖąĖ ą▒ąĄąĘąŠą┐ą░čüąĮčŗ ą┤ą╗čÅ ą▓ąĘą░ąĖą╝ąĮąŠą│ąŠ ą▓ą║ą╗ą░ą┤čŗą▓ą░ąĮąĖčÅ, ą┐ąŠč鹊ą╝čā čćč鹊 čÅą┤čĆąŠ ą┐ąŠą┤čüčćąĖčéčŗą▓ą░ąĄčé ą│ą╗čāą▒ąĖąĮčā ą▓ą╗ąŠąČąĄąĮąĖčÅ. ąÆčŗčģąŠą┤ ąĖąĘ ą║čĆąĖčéąĖč湥čüą║ąŠą╣ čüąĄą║čåąĖąĖ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ ą│ą╗čāą▒ąĖąĮą░ ą▓ą╗ąŠąČąĄąĮąĖčÅ ą▓ąĄčĆąĮąĄčéčüčÅ ą║ ąĮčāą╗čÄ - č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ ąŠą┤ąĖąĮ ą▓čŗąĘąŠą▓ taskEXIT_CRITICAL() ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ čü ą┐čĆąĄą┤čłąĄčüčéą▓čāčÄčēąĖą╝ ąĄą╝čā ą▓čŗąĘąŠą▓ąŠą╝ taskENTER_CRITICAL().
ą¤čĆąĖąŠčüčéą░ąĮąŠą▓ą║ą░ (ąĖą╗ąĖ, ąĖąĮą░č湥 ą│ąŠą▓ąŠčĆčÅ, ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ą░) čłąĄą┤čāą╗ąĄčĆą░
ąÜčĆąĖčéąĖč湥čüą║ąĖąĄ čüąĄą║čåąĖąĖ ą╝ąŠą│čāčé ą▒čŗčéčī čéą░ą║ąČąĄ čüąŠąĘą┤ą░ąĮčŗ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąŠą╣ čłąĄą┤čāą╗ąĄčĆą░. ą¤čĆąĖąŠčüčéą░ąĮąŠą▓ą║ą░ čłąĄą┤čāą╗ąĄčĆą░ ąĖąĮąŠą│ą┤ą░ čéą░ą║ąČąĄ ąĖąĘą▓ąĄčüčéąĮą░ ą║ą░ą║ 'ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ą░' čłąĄą┤čāą╗ąĄčĆą░.
ą×ą▒čŗčćąĮąŠ ą║čĆąĖčéąĖč湥čüą║ąĖąĄ čüąĄą║čåąĖąĖ ąĘą░čēąĖčēą░čÄčé ąŠą▒ą╗ą░čüčéčī ą║ąŠą┤ą░ ąŠčé ą┤ąŠčüčéčāą┐ą░ čüąŠ čüč鹊čĆąŠąĮčŗ ą┤čĆčāą│ąĖčģ ąĘą░ą┤ą░čć ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. ąÜčĆąĖčéąĖč湥čüą║ą░čÅ čüąĄą║čåąĖčÅ, čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮą░čÅ ą┐čāč鹥ą╝ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ čłąĄą┤čāą╗ąĄčĆą░, ąĘą░čēąĖčēą░ąĄčé ąŠą▒ą╗ą░čüčéčī ą║ąŠą┤ą░ č鹊ą╗čīą║ąŠ ąŠčé ą┤ąŠčüčéčāą┐ą░ ą┤čĆčāą│ąĖčģ ąĘą░ą┤ą░čć, ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖ čŹč鹊ą╝ ąŠčüčéą░ąĮčāčéčüčÅ čĆą░ąĘčĆąĄčłąĄąĮąĮčŗą╝ąĖ.
ąÜčĆąĖčéąĖč湥čüą║ą░čÅ čüąĄą║čåąĖčÅ, ą║ąŠč鹊čĆą░čÅ čüą╗ąĖčłą║ąŠą╝ ą┤ą╗ąĖąĮąĮą░čÅ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą┐čāč鹥ą╝ ąĘą░ą┐čĆąĄčéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ą╝ąŠąČąĄčé ą▓ą╝ąĄčüč鹊 čŹč鹊ą│ąŠ ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ą┐čāč鹥ą╝ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ čłąĄą┤čāą╗ąĄčĆą░, ąŠą┤ąĮą░ą║ąŠ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ (ąŠčéą╝ąĄąĮą░ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ) čłąĄą┤čāą╗ąĄčĆą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠč鹥ąĮčåąĖą░ą╗čīąĮąŠ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą┤ąŠą╗ą│ąŠą╣ ąŠą┐ąĄčĆą░čåąĖąĄą╣, čéą░ą║ čćč鹊 ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ čüą╗čāčćą░čÅ ąĮčāąČąĮąŠ čéčēą░č鹥ą╗čīąĮąŠ ą┐čĆąŠą░ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī, ą║ą░ą║ąŠą╣ ą╝ąĄč鹊ą┤ ą╗čāčćčłąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī.
API čäčāąĮą║čåąĖčÅ vTaskSuspendAll()
void vTaskSuspendAll( void );
ąøąĖčüčéąĖąĮą│ 62. ą¤čĆąŠč鹊čéąĖą┐ API čäčāąĮą║čåąĖąĖ vTaskSuspendAll()
ą©ąĄą┤čāą╗ąĄčĆ ą┐čĆąĖąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┐čāč鹥ą╝ ą▓čŗąĘąŠą▓ą░ vTaskSuspendAll(). ą¤čĆąĖąŠčüčéą░ąĮąŠą▓ą║ą░ čłąĄą┤čāą╗ąĄčĆą░ ąĘą░čēąĖčēą░ąĄčé ąŠčé ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą║ąŠąĮč鹥ą║čüčéą░, ąŠą┤ąĮą░ą║ąŠ ąŠčüčéą░ą▓ą╗čÅąĄčé čĆą░ąĘčĆąĄčłąĄąĮąĮčŗą╝ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąĢčüą╗ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĘą░ą┐čĆą░čłąĖą▓ą░čÄčé ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą║ąŠąĮč鹥ą║čüčéą░, ą┐ąŠą║ą░ čłąĄą┤čāą╗ąĄčĆ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 ąĘą░ą┐čĆąŠčü čāą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ ąŠąČąĖą┤ą░ąĮąĖąĖ ąĖ ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮ č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ čłąĄą┤čāą╗ąĄčĆą░.
ążčāąĮą║čåąĖąĖ API FreeRTOS ąĮąĄ ą┤ąŠą╗ąČąĮčŗ ą▓čŗąĘčŗą▓ą░čéčīčüčÅ, ą║ąŠą│ą┤ą░ čłąĄą┤čāą╗ąĄčĆ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ. API-čäčāąĮą║čåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠč鹥ąĮčåąĖą░ą╗čīąĮąŠ ą╝ąŠą│čāčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÄ ą║ąŠąĮč鹥ą║čüčéą░ (čéą░ą║ąĖąĄ ą║ą░ą║ vTaskDelayUntil(), xQueueSend(), ąĖ čé. ą┐.), čéą░ą║ąČąĄ ąĮąĄ ą┤ąŠą╗ąČąĮčŗ ą▓čŗąĘčŗą▓ą░čéčīčüčÅ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ąĮąĄą╗čīąĘčÅ ą┤ą░ąČąĄ ą▓čŗąĘčŗą▓ą░čéčī čäčāąĮą║čåąĖčÄ osDelay, ą┐ąŠč鹊ą╝čā čćč鹊 ąŠčéčüč湥čé ą▓čĆąĄą╝ąĄąĮąĖ ą▓ čüčĆąĄą┤čüčéą▓ą░ą╝ąĖ RTOS ą┐čĆąĄą║čĆą░čēą░ąĄčéčüčÅ! ą×ą┤ąĮą░ą║ąŠ ą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čäčāąĮą║čåąĖąĄą╣ HAL_Delay ą▓ąĮčāčéčĆąĖ ą║čĆąĖčéąĖč湥čüą║ąŠą╣ čüąĄą║čåąĖąĖ (ą║ąŠą│ą┤ą░ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ) ą▓čüąĄ ąĄčēąĄ ą╝ąŠąČąĮąŠ.
API čäčāąĮą║čåąĖčÅ xTaskResumeAll()
portBASE_TYPE xTaskResumeAll( void );
ąøąĖčüčéąĖąĮą│ 63. ą¤čĆąŠč鹊čéąĖą┐ API čäčāąĮą║čåąĖąĖ xTaskResumeAll()
ą©ąĄą┤čāą╗ąĄčĆ ą┐čĆąĄą║čĆą░čēą░ąĄčé ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║čā (ą▓ąŠąĘąŠą▒ąĮąŠą▓ą╗čÅąĄčé čĆą░ą▒ąŠčéčā) ą┐ąŠčüą╗ąĄ ą▓čŗąĘąŠą▓ą░ xTaskResumeAll(). ążčāąĮą║čåąĖčÄ xTaskResumeAll ą╝ąŠąČąĮąŠ ą▓čŗąĘčŗą▓ą░čéčī č鹊ą╗čīą║ąŠ ąĖąĘ ąĘą░ą┤ą░čćąĖ, čé. ąĄ. ąŠąĮą░ ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮą░ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ ąĮą░čģąŠą┤ąĖčéčüčÅ ąĮą░ čüčéą░ą┤ąĖąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ (ą┤ąŠ ąĘą░ą┐čāčüą║ą░ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░).
ąóą░ą▒ą╗ąĖčåą░ 18. ąŚąĮą░č湥ąĮąĖąĄ ą▓ąŠąĘą▓čĆą░čéą░ čäčāąĮą║čåąĖąĖ xTaskResumeAll()
|
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ
|
ą×ą┐ąĖčüą░ąĮąĖąĄ
|
| ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ |
ą¤ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą║ąŠąĮč鹥ą║čüčéą░, ą║ąŠč鹊čĆčŗąĄ ąĘą░ą┐čĆą░čłąĖą▓ą░ą╗ąĖčüčī ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ čłąĄą┤čāą╗ąĄčĆą░, ą▒čŗą╗ąĖ čāą┤ąĄčƹȹ░ąĮčŗ ą▓ ąŠąČąĖą┤ą░ąĮąĖąĖ, ąĖ ą▒čāą┤čāčé ą▓čŗą┐ąŠą╗ąĮąĄąĮčŗ, ą║ą░ą║ č鹊ą╗čīą║ąŠ čłąĄą┤čāą╗ąĄčĆ ą▓ąŠąĘąŠą▒ąĮąŠą▓ąĖčé čĆą░ą▒ąŠčéčā. ą×ąČąĖą┤ą░čÄčēąĖą╣ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą║ąŠąĮč鹥ą║čüčé ą▒čŗą╗ ą▓čŗą┐ąŠą╗ąĮąĄąĮ ą┤ąŠ ą▓ąŠąĘą▓čĆą░čéą░ xTaskResumeAll(), ąĄčüą╗ąĖ čäčāąĮą║čåąĖčÅ ą▓ąĄčĆąĮčāą╗ą░ pdTRUE. ąÆąŠ ą▓čüąĄčģ ąŠčüčéą░ą╗čīąĮčŗčģ čüą╗čāčćą░čÅčģ xTaskResumeAll() ą▓ąĄčĆąĮąĄčé pdFALSE. |
ą£ąŠąČąĮąŠ ą▒ąĄąĘąŠą┐ą░čüąĮąŠ ą┤ąĄą╗ą░čéčī ą▓ą╗ąŠąČąĄąĮąĮčŗąĄ ą┤čĆčāą│ ą▓ ą┤čĆčāą│ą░ ą▓čŗąĘąŠą▓čŗ vTaskSuspendAll() ąĖ xTaskResumeAll(), ą┐ąŠč鹊ą╝čā čćč鹊 čÅą┤čĆąŠ ą┐ąŠą┤čüčćąĖčéčŗą▓ą░ąĄčé ą│ą╗čāą▒ąĖąĮčā ą▓ą╗ąŠąČąĄąĮąĖą╣. ą©ąĄą┤čāą╗ąĄčĆ ą▓ąŠąĘąŠą▒ąĮąŠą▓ąĖčé čĆą░ą▒ąŠčéčā č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ čüč湥čéčćąĖą║ ą│ą╗čāą▒ąĖąĮčŗ ą▓ą╗ąŠąČąĄąĮąĖą╣ ą▓ąĄčĆąĮąĄčéčüčÅ ą║ ąĮčāą╗čÄ - ą│ą░čĆą░ąĮčéąĖčÅ č鹊ą│ąŠ, čćč鹊 ą║ą░ąČą┤čŗą╣ ą▓čŗąĘąŠą▓ xTaskResumeAll() ą▒čŗą╗ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ą┐ąŠčüą╗ąĄ ą▓čŗąĘąŠą▓ą░ vTaskSuspendAll().
ąøąĖčüčéąĖąĮą│ 64 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čĆąĄą░ą╗čīąĮčāčÄ čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ vPrintString(), ą║ąŠč鹊čĆą░čÅ ą┐čĆąĖąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čłąĄą┤čāą╗ąĄčĆ ą┤ą╗čÅ ąĘą░čēąĖčéčŗ ą┤ąŠčüčéčāą┐ą░ ą║ ą▓čŗą▓ąŠą┤čā ąĮą░ č鹥čĆą╝ąĖąĮą░ą╗.
void vPrintString( const portCHAR *pcString )
{
/* ąŚą░ą┐ąĖčüčī čüčéčĆąŠą║ąĖ ą▓ stdout, čü ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąŠą╣ čłąĄą┤čāą╗ąĄčĆą░
ą▓ ą║ą░č湥čüčéą▓ąĄ ą╝ąĄč鹊ą┤ą░ ą▓ąĘą░ąĖą╝ąĮąŠą│ąŠ ąĖčüą║ą╗čÄč湥ąĮąĖčÅ. */
vTaskSuspendScheduler();
{
printf( "%s", pcString );
fflush( stdout );
}
xTaskResumeScheduler();
/* ąĀą░ąĘčĆąĄčłą░ąĄą╝ ąĮą░ąČą░čéąĖąĄą╝ ą╗čÄą▒ąŠą╣ ą║ąĮąŠą┐ą║ąĖ ąŠčüčéą░ąĮąŠą▓ąĖčéčī ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ. ą×ą▒čŗčćąĮąŠ
ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤ą╗čÅ čŹč鹊ą│ąŠ čüą┐ąĄčåąĖą░ą╗čīąĮčāčÄ ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÄ ą║ą╗ą░ą▓ąĖčł (čéąĖą┐ą░
Alt+X), čćč鹊 čéą░ą║ąČąĄ ą┤ąŠą╗ąČąĮąŠ ąĘą░čēąĖčéąĖčéčī ą┤ąŠčüčéčāą┐ ą║ ą║ą╗ą░ą▓ąĖą░čéčāčĆąĮąŠą╝čā ą▓ą▓ąŠą┤čā. */
if( kbhit() )
{
vTaskEndScheduler();
}
}
ąøąĖčüčéąĖąĮą│ 64. ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ čäčāąĮą║čåąĖąĖ vPrintString()
[4.3. ą£čīčÄč鹥ą║čüčŗ (ąĖ ą┤ą▓ąŠąĖčćąĮčŗąĄ čüąĄą╝ą░č乊čĆčŗ)]
ą£čīčÄč鹥ą║čü - čŹč鹊 čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╣ čéąĖą┐ ą┤ą▓ąŠąĖčćąĮąŠą│ąŠ čüąĄą╝ą░č乊čĆą░, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ ą┤ąŠčüčéčāą┐ą░ ą║ čĆąĄčüčāčĆčüčā, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüąŠą▓ą╝ąĄčüčéąĮąŠ ą┤ą▓čāą╝čÅ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĖą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ ąĘą░ą┤ą░čć. ąĪą╗ąŠą▓ąŠ MUTEX ą┐čĆąŠąĖąĘąŠčłą╗ąŠ ąŠčé "MUTual EXclusion" (ą▓ąĘą░ąĖą╝ąĮąŠąĄ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ).
ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüčåąĄąĮą░čĆąĖą╣ ą▓ąĘą░ąĖą╝ąĮąŠą│ąŠ ąĖčüą║ą╗čÄč湥ąĮąĖčÅ, ą╝čīčÄč鹥ą║čü ą╝ąŠąČąĮąŠ ą║ąŠąĮčåąĄą┐čéčāą░ą╗čīąĮąŠ čĆą░čüčüą╝ąŠčéčĆąĄčéčī ą║ą░ą║ č鹊ą║ąĄąĮ, čüą▓čÅąĘą░ąĮąĮčŗą╣ čü čüąŠą▓ą╝ąĄčüčéąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╝ čĆąĄčüčāčĆčüąŠą╝. ąöą╗čÅ ąĘą░ą║ąŠąĮąĮąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░ ą║ čĆąĄčüčāčĆčüčā ąĘą░ą┤ą░čćą░ ą┤ąŠą╗ąČąĮą░ čüąĮą░čćą░ą╗ą░ 'ą▓ąĘčÅčéčī' č鹊ą║ąĄąĮ (čüčéą░čéčī ą┤ąĄčƹȹ░č鹥ą╗ąĄą╝ č鹊ą║ąĄąĮą░). ąÜąŠą│ą┤ą░ ąĘą░ą┤ą░čćą░ - ą┤ąĄčƹȹ░č鹥ą╗čī č鹊ą║ąĄąĮą░ ąĘą░ą▓ąĄčĆčłąĖą╗ą░ čĆą░ą▒ąŠčéčā čü čĆąĄčüčāčĆčüąŠą╝, ąŠąĮą░ ą┤ąŠą╗ąČąĮą░ 'ąŠčéą┤ą░čéčī' č鹊ą║ąĄąĮ ąŠą▒čĆą░čéąĮąŠ. ąóąŠą╗čīą║ąŠ ą║ąŠą│ą┤ą░ č鹊ą║ąĄąĮ čüą▓ąŠą▒ąŠą┤ąĄąĮ, ą┤čĆčāą│ą░čÅ ąĘą░ą┤ą░čćą░ ą╝ąŠąČąĄčé ą▓ąĘčÅčéčī č鹊ą║ąĄąĮ ąĖ č鹊ą│ą┤ą░ ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ ą║ ąŠą▒čēąĄą╝čā čĆąĄčüčāčĆčüčā. ąŚą░ą┤ą░č湥 ąĮąĄ čĆą░ąĘčĆąĄčłąĄąĮąŠ ąŠą▒čĆą░čēą░čéčīčüčÅ ą║ ąŠą▒čēąĄą╝čā čĆąĄčüčāčĆčüčā, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ č鹊ą│ąŠ čüą╗čāčćą░čÅ, ą║ąŠą│ą┤ą░ ąŠąĮą░ ą┤ąĄčƹȹĖčé č鹊ą║ąĄąĮ. ąŁč鹊čé ą╝ąĄčģą░ąĮąĖąĘą╝ ą┐ąŠą║ą░ąĘą░ąĮ ąĮą░ čĆąĖčüčāąĮą║ąĄ 36.
ąØąĄčüą╝ąŠčéčĆčÅ ąĮą░ č鹊, čćč鹊 ą╝čīčÄč鹥ą║čüčŗ ąĖ čüąĄą╝ą░č乊čĆčŗ ąĖą╝ąĄčÄčé ą╝ąĮąŠą│ąŠ ąŠą▒čēąĖčģ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║, čüčåąĄąĮą░čĆąĖą╣ ąĮą░ čĆąĖčüčāąĮą║ąĄ 36 (ą│ą┤ąĄ ą╝čīčÄč鹥ą║čüčŗ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą▓ąĘą░ąĖą╝ąĮąŠą│ąŠ ąĖčüą║ą╗čÄč湥ąĮąĖčÅ) ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąŠčéą╗ąĖčćą░ąĄčéčüčÅ ąŠčé čüčåąĄąĮą░čĆąĖčÅ čĆąĖčüčāąĮą║ą░ 30 (ą│ą┤ąĄ ą┤ą▓ąŠąĖčćąĮčŗąĄ čüąĄą╝ą░č乊čĆčŗ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ). ąōą╗ą░ą▓ąĮąŠąĄ ąŠčéą╗ąĖčćąĖąĄ - ą▓ č鹊ą╝, čćč鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čü čüąĄą╝ą░č乊čĆąŠą╝ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ąŠąĮ ą▒čŗą╗ ą┐ąŠą╗čāč湥ąĮ:
┬Ę ąĪąĄą╝ą░č乊čĆ, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą▓ąĘą░ąĖą╝ąĮąŠą│ąŠ ąĖčüą║ą╗čÄč湥ąĮąĖčÅ, ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓čüąĄą│ą┤ą░ ą▓ąŠąĘą▓čĆą░čēąĄąĮ.
┬Ę ąĪąĄą╝ą░č乊čĆ, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ, ąĮąŠčĆą╝ą░ą╗čīąĮąŠ ąŠčéą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ąĖ ąĮąĄ ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ.

ąĀąĖčü. 36. ąÆąĘą░ąĖą╝ąĮąŠąĄ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ, čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮąŠąĄ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą╝čīčÄč鹥ą║čüą░
ą£ąĄčģą░ąĮąĖąĘą╝ čĆą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ą┐ąŠ ąĖąĮąĖčåąĖą░čéąĖą▓ąĄ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąØąĄčé ąĮąĖą║ą░ą║ąĖčģ ą┐čĆąĖčćąĖąĮ, ą┐ąŠč湥ą╝čā ą▒čŗ ąĘą░ą┤ą░č湥 ąĮąĄ ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ ą║ čĆąĄčüčāčĆčüčā ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé, ąŠą┤ąĮą░ą║ąŠ ą║ą░ąČą┤ą░čÅ ąĘą░ą┤ą░čćą░ "ą┐ąŠą┤čćąĖąĮčÅąĄčéčüčÅ" ą┐čĆą░ą▓ąĖą╗čā ą┤ąŠčüčéčāą┐ą░, čćč鹊 ąŠąĮą░ ąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ą┤ąŠą╗ąČąĮą░ čüąĮą░čćą░ą╗ą░ čüčéą░čéčī ą┤ąĄčƹȹ░č鹥ą╗ąĄą╝ ą╝čīčÄč鹥ą║čüą░.
API čäčāąĮą║čåąĖčÅ xSemaphoreCreateMutex()
ą£čīčÄč鹥ą║čü čÅą▓ą╗čÅąĄčéčüčÅ čéąĖą┐ąŠą╝ čüąĄą╝ą░č乊čĆą░. ąźąĄąĮą┤ą╗čŗ ą║ čĆą░ąĘą╗ąĖčćąĮčŗą╝ čéąĖą┐ą░ą╝ čüąĄą╝ą░č乊čĆąŠą▓ FreeRTOS čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ čéąĖą┐ą░ xSemaphoreHandle.
ą¤ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ą╝čīčÄč鹥ą║čü ą╝ąŠąČąĄčé ą▒čŗčéčī čĆąĄą░ą╗čīąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮ, ąŠąĮ čüąĮą░čćą░ą╗ą░ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüąŠąĘą┤ą░ąĮ. ąöą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ čüąĄą╝ą░č乊čĆą░ čéąĖą┐ą░ ą╝čīčÄč鹥ą║čü ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ API čäčāąĮą║čåąĖčÅ xSemaphoreCreateMutex().
xSemaphoreHandle xSemaphoreCreateMutex( void );
ąøąĖčüčéąĖąĮą│ 65. ą¤čĆąŠč鹊čéąĖą┐ API čäčāąĮą║čåąĖąĖ xSemaphoreCreateMutex()
ąóą░ą▒ą╗ąĖčåą░ 19. ąŚąĮą░č湥ąĮąĖąĄ ą▓ąŠąĘą▓čĆą░čéą░ čäčāąĮą║čåąĖąĖ xSemaphoreCreateMutex()
ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ
|
ą×ą┐ąĖčüą░ąĮąĖąĄ
|
| ąÆąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ |
ąĢčüą╗ąĖ ą▓ąŠąĘą▓čĆą░čēąĄąĮ NULL, č鹊 ą╝čīčÄč鹥ą║čü ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī čüąŠąĘą┤ą░ąĮ ąĖąĘ-ąĘą░ ąĮąĄą┤ąŠčüčéą░čéą║ą░ ą┐ą░ą╝čÅčéąĖ ą▓ ą║čāč湥 (heap), čéą░ą║ ą║ą░ą║ FreeRTOS ą┤ąŠą╗ąČąĮą░ ą▓ąĘčÅčéčī ąŠčéčéčāą┤ą░ ą┐ą░ą╝čÅčéčī ą┤ą╗čÅ čüčéčĆčāą║čéčāčĆ ą┤ą░ąĮąĮčŗčģ ą╝čīčÄč鹥ą║čüą░. ą¦ą░čüčéčī 5 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▒ąŠą╗čīčłąĄ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÄ ą┐ą░ą╝čÅčéčīčÄ.
ąØąĄąĮčāą╗ąĄą▓ąŠąĄ ą▓ąŠąĘą▓čĆą░čēąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą╝čīčÄč鹥ą║čü ą▒čŗą╗ čāčüą┐ąĄčłąĮąŠ čüąŠąĘą┤ą░ąĮ. ąÆąŠąĘą▓čĆą░čēąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čüąŠčģčĆą░ąĮąĄąĮąŠ ą║ą░ą║ čģąĄąĮą┤ą╗ ą║ čüąŠąĘą┤ą░ąĮąĮąŠą╝čā ą╝čīčÄč鹥ą║čüčā (ą┤ą╗čÅ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ ą▓čŗąĘąŠą▓ą░čģ API čäčāąĮą║čåąĖą╣).
|
ą¤čĆąĖą╝ąĄčĆ 15. ąØą░ą┐ąĖčüą░ąĮąĖąĄ ąĘą░ąĮąŠą▓ąŠ čäčāąĮą║čåąĖąĖ vPrintString() ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čüąĄą╝ą░č乊čĆą░
ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ čüąŠąĘą┤ą░ąĄčé ąĮąŠą▓čāčÄ ą▓ąĄčĆčüąĖčÄ čäčāąĮą║čåąĖąĖ vPrintString() ą┐ąŠą┤ ąĖą╝ąĄąĮąĄą╝ prvNewPrintString(). ąÆ ą┐čĆąĖą╝ąĄčĆąĄ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ąĮąŠą▓ą░čÅ čäčāąĮą║čåąĖčÅ prvNewPrintString() ąĖąĘ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ąĘą░ą┤ą░čć. ążčāąĮą║čåąĖčÅ prvNewPrintString() čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠ ąĖą┤ąĄąĮčéąĖčćąĮą░ vPrintString(), ąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą╝čīčÄč鹥ą║čü ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ąŠčüčéčāą┐ąŠą╝ ą║ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╝čā ą▓čŗą▓ąŠą┤čā ą▓ą╝ąĄčüč鹊 ąŠą▒čŗčćąĮąŠą╣ ą║čĆąĖčéąĖč湥čüą║ąŠą╣ čüąĄą║čåąĖąĖ. ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ prvNewPrintString() ą┐ąŠą║ą░ąĘą░ąĮą░ ą▓ ą╗ąĖčüčéąĖąĮą│ąĄ 66.
static void prvNewPrintString( const portCHAR *pcString )
{
/* ą£čīčÄč鹥ą║čü, čüąŠąĘą┤ą░ąĮąĮčŗą╣ ą┤ąŠ čüčéą░čĆčéą░ čłąĄą┤čāą╗ąĄčĆą░, čāąČąĄ čüčāčēąĄčüčéą▓čāąĄčé ą▓ ą╝ąŠą╝ąĄąĮčé
ą┐ąĄčĆą▓ąŠą│ąŠ ąĘą░ą┐čāčüą║ą░ čŹč鹊ą╣ ąĘą░ą┤ą░čćąĖ.
ą¤ąŠą┐čŗčéą║ą░ ą▓ąĘčÅčéčī ą╝čīčÄč鹥ą║čü, čü ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠą╣ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąŠą╣ ą▓ ąŠąČąĖą┤ą░ąĮąĖąĖ ą┤ąŠčüčéčāą┐ąĮąŠčüčéąĖ
ą╝čīčÄč鹥ą║čüą░, ąĄčüą╗ąĖ ąŠąĮ ą┐ąŠą║ą░ ąĮąĄą┤ąŠčüčéčāą┐ąĄąĮ. ąÆčŗčģąŠą┤ ąĖąĘ xSemaphoreTake() ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé
č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ ą╝čīčÄč鹥ą║čü čāčüą┐ąĄčłąĮąŠ ą┐ąŠą╗čāč湥ąĮ, čéą░ą║ čćč鹊 ąĮąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ
ą┐čĆąŠą▓ąĄčĆčÅčéčī čĆąĄąĘčāą╗čīčéą░čé ą▓ąŠąĘą▓čĆą░čéą░ čäčāąĮą║čåąĖąĖ. ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą╗čÄą▒ąŠą╣ ą┤čĆčāą│ąŠą╣
ą┐ąĄčĆąĖąŠą┤ ąĘą░ą┤ąĄčƹȹ║ąĖ, č鹊 ą║ąŠą┤ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąŠą▓ąĄčĆąĖčéčī, čćč鹊 xSemaphoreTake() ą▓ąĄčĆąĮčāą╗ą░
pdTRUE ą┐ąĄčĆąĄą┤ ą┤ąŠčüčéčāą┐ąŠą╝ ą║ ąŠą▒čēąĄą╝čā čĆąĄčüčāčĆčüčā (ą║ąŠč鹊čĆčŗą╣ ą▓ ąĮą░čłąĄą╝ čüą╗čāčćą░ąĄ
čÅą▓ą╗čÅąĄčéčüčÅ čüčéą░ąĮą┤ą░čĆčéąĮčŗą╝ ą▓čŗą▓ąŠą┤ąŠą╝). */
xSemaphoreTake( xMutex, portMAX_DELAY );
{
/* ąĪą╗ąĄą┤čāčÄčēą░čÅ čüčéčĆąŠą║ą░ ą▒čāą┤ąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░
ą╝čīčÄč鹥ą║čü ą▒čŗą╗ čāčüą┐ąĄčłąĮąŠ ą┐ąŠą╗čāč湥ąĮ. ąĪčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ą▓čŗą▓ąŠą┤ ą╝ąŠąČąĄčé ą▒čŗčéčī
ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮ čüą▓ąŠą▒ąŠą┤ąĮąŠ, čéą░ą║ ą║ą░ą║ č鹥ą┐ąĄčĆčī ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ ą╝čīčÄč鹥ą║čü
ą╝ąŠąČąĄčé ąĖą╝ąĄčéčī č鹊ą╗čīą║ąŠ ąŠą┤ąĮą░ ąĘą░ą┤ą░čćą░. */
printf( "%s", pcString );
fflush( stdout );
/* ą£čīčÄč鹥ą║čü ąöą×ąøą¢ąĢąØ ą▒čŗčéčī ą▓ąŠąĘą▓čĆą░čēąĄąĮ ąŠą▒čĆą░čéąĮąŠ! */
}
xSemaphoreGive( xMutex );
/* ąĀą░ąĘčĆąĄčłą░ąĄą╝ ąĮą░ąČą░čéąĖąĄą╝ ą╗čÄą▒ąŠą╣ ą║ąĮąŠą┐ą║ąĖ ąŠčüčéą░ąĮąŠą▓ąĖčéčī ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ. ą×ą▒čŗčćąĮąŠ
ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤ą╗čÅ čŹč鹊ą│ąŠ čüą┐ąĄčåąĖą░ą╗čīąĮčāčÄ ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÄ ą║ą╗ą░ą▓ąĖčł (čéąĖą┐ą░
Alt+X), čćč鹊 čéą░ą║ąČąĄ ą┤ąŠą╗ąČąĮąŠ ąĘą░čēąĖčéąĖčéčī ą┤ąŠčüčéčāą┐ ą║ ą║ą╗ą░ą▓ąĖą░čéčāčĆąĮąŠą╝čā ą▓ą▓ąŠą┤čā.
ąźąŠčéčÅ čĆąĄą░ą╗čīąĮąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą▓čĆčÅą┤ ą╗ąĖ ą▒čāą┤ąĄčé ąĖą╝ąĄčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ ąĘą░ą┤ą░čć, ą║ąŠč鹊čĆčŗąĄ
ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčé ąĮą░ąČą░čéąĖčÅ ą║ą╗ą░ą▓ąĖčł! */
if( kbhit() )
{
vTaskEndScheduler();
}
}
ąøąĖčüčéąĖąĮą│ 66. ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ čäčāąĮą║čåąĖąĖ prvNewPrintString()
ążčāąĮą║čåąĖčÅ prvNewPrintString() ą┐ąŠčüč鹊čÅąĮąĮąŠ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą┤ą▓čāą╝čÅ čŹą║ąĘąĄą╝ą┐ą╗čÅčĆą░ą╝ąĖ ąĘą░ą┤ą░čćąĖ ą┐ąŠą┤ ąĮą░ąĘą▓ą░ąĮąĖąĄą╝ prvPrintTask(). ą£ąĄąČą┤čā ą▓čŗąĘąŠą▓ą░ą╝ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüą╗čāčćą░ą╣ąĮąŠąĄ ą▓čĆąĄą╝čÅ ąĘą░ą┤ąĄčƹȹ║ąĖ. ą¤ą░čĆą░ą╝ąĄčéčĆ ąĘą░ą┤ą░čćąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ čāąĮąĖą║ą░ą╗čīąĮąŠą╣ čüčéčĆąŠą║ąĖ ą▓ ą║ą░ąČą┤čŗą╣ 菹║ąĘąĄą╝ą┐ą╗čÅčĆ ąĘą░ą┤ą░čćąĖ. ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ prvPrintTask() ą┐ąŠą║ą░ąĘą░ąĮą░ ą▓ ą╗ąĖčüčéąĖąĮą│ąĄ 67.
static void prvPrintTask( void *pvParameters )
{
char *pcStringToPrint;
/* ąĪąŠąĘą┤ą░ąĮčŗ ą┤ą▓ą░ 菹║ąĘąĄą╝ą┐ą╗čÅčĆą░ čŹč鹊ą╣ ąĘą░ą┤ą░čćąĖ, čéą░ą║ čćč鹊 čüčéčĆąŠą║ą░, ą║ąŠč鹊čĆčāčÄ ąĘą░ą┤ą░čćą░
ą┐ąŠčüčŗą╗ą░ąĄčé čäčāąĮą║čåąĖąĖ prvNewPrintString(), ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ, ą║ą░ą║ ąŠą▒čŗčćąĮąŠ,
č湥čĆąĄąĘ ą┐ą░čĆą░ą╝ąĄčéčĆ ąĘą░ą┤ą░čćąĖ. ąŚą┤ąĄčüčī ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐čĆąĖą▓ąĄą┤ąĄąĮąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆą░
ą║ ąĮčāąČąĮąŠą╝čā čéąĖą┐čā. */
pcStringToPrint = ( char * ) pvParameters;
for( ;; )
{
/* ąÆčŗą▓ąŠą┤ ąĮą░ ą┐ąĄčćą░čéčī čüčéčĆąŠą║ąĖ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ąĮąŠą▓ąŠą╣ čäčāąĮą║čåąĖąĖ. */
prvNewPrintString( pcStringToPrint );
/* ą×ąČąĖą┤ą░ąĮąĖąĄ ą▓ č鹥č湥ąĮąĖąĄ ą┐čüąĄą▓ą┤ąŠčüą╗čāčćą░ą╣ąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊
rand() ąĮąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ą▒čŗą▓ą░ąĄčé čĆąĄąĄąĮč鹥čĆą░ą▒ąĄą╗čīąĮąŠą╣, ąĮąŠ ą▓ ąĮą░čłąĄą╝ čüą╗čāčćą░ąĄ
čŹč鹊 ąĮąĄą▓ą░ąČąĮąŠ, čéą░ą║ ą║ą░ą║ ą║ąŠą┤ ąĮąĄ ąĘą░ą▒ąŠčéąĖčéčüčÅ ąŠ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠą╣ ą▓ąĄą╗ąĖčćąĖąĮąĄ.
ąÆ ą┤čĆčāą│ąĖčģ, ą▒ąŠą╗ąĄąĄ ąĮą░ą┤ąĄąČąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ ąĮčāąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī
čĆąĄąĄąĮč鹥čĆą░ą▒ąĄą╗čīąĮčāčÄ ą▓ąĄčĆčüąĖčÄ rand(), ąĖą╗ąĖ ą▓čŗąĘąŠą▓čŗ rand() ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī
ąĘą░čēąĖčēąĄąĮčŗ ą║čĆąĖčéąĖč湥čüą║ąŠą╣ čüąĄą║čåąĖąĄą╣. */
vTaskDelay( ( rand() & 0x1FF ) );
}
}
ąøąĖčüčéąĖąĮą│ 67. ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ čäčāąĮą║čåąĖąĖ prvPrintTask() ą┤ą╗čÅ ą┐čĆąĖą╝ąĄčĆą░ 15
ąÜą░ą║ ąŠą▒čŗčćąĮąŠ, čäčāąĮą║čåąĖčÅ main() ą┐čĆąŠčüč鹊 čüąŠąĘą┤ą░ąĄčé ą╝čīčÄč鹥ą║čü, čüąŠąĘą┤ą░ąĄčé ąĘą░ą┤ą░čćąĖ, ąĖ ąĘą░ą┐čāčüą║ą░ąĄčé čłąĄą┤čāą╗ąĄčĆ. ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ ą┐ąŠą║ą░ąĘą░ąĮą░ ą▓ ą╗ąĖčüčéąĖąĮą│ąĄ 68.
ąöą▓ą░ 菹║ąĘąĄą╝ą┐ą╗čÅčĆą░ prvPrintTask() čüąŠąĘą┤ą░čÄčéčüčÅ čü čĆą░ąĘąĮčŗą╝ąĖ ą┐čĆąĖąŠčĆąĖč鹥čéą░ą╝ąĖ, čéą░ą║ čćč鹊ą▒čŗ ąĘą░ą┤ą░čćą░ čü ą╝ąĄąĮčīčłąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ ą╝ąŠą│ą╗ą░ ą▒čŗčéčī ą▓čŗč鹥čüąĮąĄąĮą░ ąĘą░ą┤ą░č湥ą╣ čü ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝. ą£čīčÄč鹥ą║čü ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ą▓ąĘą░ąĖą╝ąŠąĖčüą║ą╗čÄčćą░čÄčēąĖą╣ ą┤ąŠčüčéčāą┐ ą║ą░ąČą┤ąŠą╣ ąĘą░ą┤ą░čćąĖ ą║ ą▓čŗą▓ąŠą┤čā ąĮą░ č鹥čĆą╝ąĖąĮą░ą╗, ą┤ą░ąČąĄ ą║ąŠą│ą┤ą░ ąŠą┤ąĮą░ ąĘą░ą┤ą░čćą░ ą▓čŗč鹥čüąĮąĄąĮą░ ą┤čĆčāą│ąŠą╣ - ą▓čŗą▓ąŠą┤ąĖą╝čŗąĄ čüčéčĆąŠą║ąĖ ą▒čāą┤čāčé ąŠč鹊ą▒čĆą░ąČą░čéčīčüčÅ ą║ąŠčĆčĆąĄą║čéąĮąŠ ąĖ ąĮąĄ ą▒čāą┤čāčé ąĖčüą┐ąŠčĆč湥ąĮčŗ. ą¦ą░čüč鹊čéą░ ą▓čŗč鹥čüąĮąĄąĮąĖą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą▓čŗčłąĄąĮą░ ą┐čāč鹥ą╝ čāą╝ąĄąĮčīčłąĄąĮąĖčÅ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąĮą░čģąŠąČą┤ąĄąĮąĖčÅ ąĘą░ą┤ą░čć ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Blocked, ą║ąŠč鹊čĆąŠąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ ąĘąĮą░č湥ąĮąĖąĄ 0x1FF čéąĖą║ąŠą▓.
int main( void )
{
/* ą¤ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ čüąĄą╝ą░č乊čĆ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ, ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čÅą▓ąĮčŗą╝
ąŠą▒čĆą░ąĘąŠą╝ čüąŠąĘą┤ą░ąĮ. ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ čüąŠąĘą┤ą░ąĄčéčüčÅ čüąĄą╝ą░č乊čĆ čéąĖą┐ą░ ą╝čīčÄč鹥ą║čü. */
xMutex = xSemaphoreCreateMutex();
/* ąŚą░ą┤ą░čćąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą┐čüąĄą▓ą┤ąŠčüą╗čāčćą░ą╣ąĮčāčÄ ąĘą░ą┤ąĄčƹȹ║čā, ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą│ąĄąĮąĄčĆą░č鹊čĆą░
čüą╗čāčćą░ą╣ąĮąŠą│ąŠ čćąĖčüą╗ą░. */
srand( 567 );
/* ą¤ąĄčĆąĄą┤ čüąŠąĘą┤ą░ąĮąĖąĄą╝ ąĘą░ą┤ą░čć ą┐čĆąŠą▓ąĄčĆąĖą╝, čćč鹊 čüąĄą╝ą░č乊čĆ čüąŠąĘą┤ą░ąĮ čāčüą┐ąĄčłąĮąŠ. */
if( xMutex != NULL )
{
/* ąĪąŠąĘą┤ą░ąĮąĖąĄ ą┤ą▓čāčģ 菹║ąĘąĄą╝ą┐ą╗čÅčĆąŠą▓ ąĘą░ą┤ą░čć, ą║ąŠč鹊čĆčŗąĄ ą┐ąĖčłčāčé ą▓ stdout. ąĪčéčĆąŠą║ą░,
ą║ąŠč鹊čĆčāčÄ ąŠąĮąĖ ą┐ąĖčłčāčé, ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ č湥čĆąĄąĘ ą┐ą░čĆą░ą╝ąĄčéčĆ ąĘą░ą┤ą░čćąĖ. ąŚą░ą┤ą░čćąĖ
čüąŠąĘą┤ą░čÄčéčüčÅ čü čĆą░ąĘąĮčŗą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝, čćč鹊ą▒čŗ ą╝ąŠą│ą╗ąŠ ą┐čĆąŠąĖąĘąŠą╣čéąĖ
ą▓čŗč鹥čüąĮąĄąĮąĖąĄ ąŠą┤ąĮąŠą╣ ąĘą░ą┤ą░čćąĖ ą┤čĆčāą│ąŠą╣ ąĘą░ą┤ą░č湥ą╣. */
xTaskCreate( prvPrintTask, "Print1", 1000,
"Task 1 ******************************************\r\n",
1, NULL );
xTaskCreate( prvPrintTask, "Print2", 1000,
"Task 2 ------------------------------------------\r\n",
2, NULL );
/* ąŚą░ą┐čāčüą║ čłąĄą┤čāą╗ąĄčĆą░, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ąĘą░ą┤ą░čćąĖ ąĘą░ą┐čāčüčéčÅčéčüčÅ ąĮą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ. */
vTaskStartScheduler();
}
/* ąĢčüą╗ąĖ ą▓čüąĄ čģąŠčĆąŠčłąŠ, č鹊 čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓ main() ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą┤ąŠą╣ą┤ąĄčé ą┤ąŠ čŹč鹊ą╣
č鹊čćą║ąĖ, ąĖ č鹥ą┐ąĄčĆčī čłąĄą┤čāą╗ąĄčĆ ą▒čāą┤ąĄčé čāą┐čĆą░ą▓ą╗čÅčéčī ąĘą░ą┤ą░čćą░ą╝ąĖ. ąĢčüą╗ąĖ main() ą┤ąŠą▓ąĄą╗ą░
čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ąŠ čŹč鹊ą│ąŠ ą╝ąĄčüčéą░, č鹊 čŹč鹊 ą╝ąŠąČąĄčé ąŠąĘąĮą░čćą░čéčī, čćč鹊 ąĮąĄ čģą▓ą░čéą░ąĄčé
ą┐ą░ą╝čÅčéąĖ ą║čāčćąĖ (heap) ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą╣ ąĘą░ą┤ą░čćąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle
task). ą¦ą░čüčéčī 5 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▒ąŠą╗čīčłąĄ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÄ
ą┐ą░ą╝čÅčéčīčÄ. */
for( ;; );
}
ąøąĖčüčéąĖąĮą│ 68. ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ čäčāąĮą║čåąĖąĖ main() ą┤ą╗čÅ ą┐čĆąĖą╝ąĄčĆą░ 15
ąÆčŗą▓ąŠą┤, ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖą╝čŗą╣ ą┐čĆąĖą╝ąĄčĆąŠą╝ 15, ą┐ąŠą║ą░ąĘą░ąĮ ąĮą░ čĆąĖčüčāąĮą║ąĄ 37. ąÆąŠąĘą╝ąŠąČąĮą░čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ąŠą┐ąĖčüą░ąĮą░ ąĮą░ čĆąĖčüčāąĮą║ąĄ 38.

ąĀąĖčü. 37. ąÆčŗą▓ąŠą┤, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčé ą┐čĆąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĖ ą┐čĆąĖą╝ąĄčĆ 15
ąØą░ čĆąĖčüčāąĮą║ąĄ 37 ą▓ąĖą┤ąĮąŠ, čćč鹊 ą║ą░ą║ ąĖ ąŠąČąĖą┤ą░ą╗ąŠčüčī, čüčéčĆąŠą║ąĖ ą▓čŗą▓ąŠą┤čÅčéčüčÅ ąĮą░ č鹥čĆą╝ąĖąĮą░ą╗ ą▒ąĄąĘ ąĖčüą║ą░ąČąĄąĮąĖą╣. ąĪą╗čāčćą░ą╣ąĮčŗą╣ ą┐ąŠčĆčÅą┤ąŠą║ čüčéčĆąŠą║ - čĆąĄąĘčāą╗čīčéą░čé čüą╗čāčćą░ą╣ąĮąŠą│ąŠ ą┐ąĄčĆąĖąŠą┤ą░ ąĘą░ą┤ąĄčƹȹ║ąĖ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ąĘą░ą┤ą░čćą░ą╝ąĖ.

ąĀąĖčü. 38. ąÆąŠąĘą╝ąŠąČąĮą░čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┤ą╗čÅ ą┐čĆąĖą╝ąĄčĆą░ 15
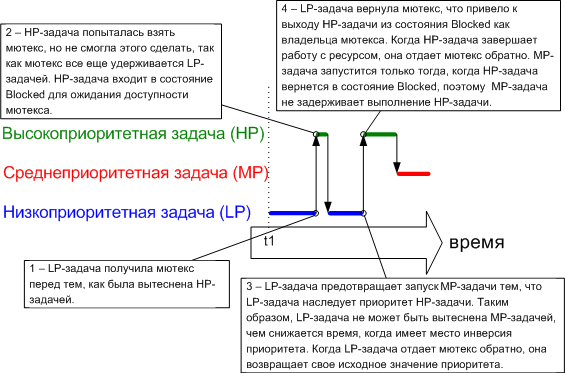
ąśąĮą▓ąĄčĆčüąĖčÅ ą┐čĆąĖąŠčĆąĖč鹥čéą░
ąĀąĖčüčāąĮąŠą║ 38 ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčé ąŠą┤ąĮčā ą┐ąŠč鹥ąĮčåąĖą░ą╗čīąĮčāčÄ ą╗ąŠą▓čāčłą║čā, ą▓ ą║ąŠč鹊čĆčāčÄ ą╝ąŠąČąĮąŠ ą┐ąŠą┐ą░čüčéčī, ąĖčüą┐ąŠą╗čīąĘčāčÅ ą╝čīčÄč鹥ą║čü ą┤ą╗čÅ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ą▓ąĘą░ąĖą╝ąĮąŠą│ąŠ ąĖčüą║ą╗čÄč湥ąĮąĖčÅ. ąĀą░čüčüą╝ąŠčéčĆąĄąĮąĮą░čÅ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ąĘą░ą┤ą░čćą░ 2 čü ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ ąČą┤ąĄčé ąĮąĖąĘą║ąŠą┐čĆąĖąŠčĆąĖč鹥čéąĮčāčÄ ąĘą░ą┤ą░čćčā 1, čćč鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī ą║ąŠąĮčéčĆąŠą╗čī ąĮą░ą┤ ą╝čīčÄč鹥ą║čüąŠą╝. ąóą░ą║ąŠą╣ čüą╗čāčćą░ą╣, ą║ąŠą│ą┤ą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą▓čŗčüąŠą║ąŠą┐čĆąĖąŠčĆąĖč鹥čéąĮąŠą╣ ąĘą░ą┤ą░čćąĖ ąŠčéą║ą╗ą░ą┤čŗą▓ą░ąĄčéčüčÅ ąĮąĖąĘą║ąŠą┐čĆąĖąŠčĆąĖč鹥čéąĮąŠą╣ ąĘą░ą┤ą░č湥ą╣, ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ 'ąĖąĮą▓ąĄčĆčüąĖąĄą╣ ą┐čĆąĖąŠčĆąĖč鹥čéą░' (priority inversion). ąŁč鹊 ąĮąĄąČąĄą╗ą░č鹥ą╗čīąĮąŠąĄ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĄčēąĄ ą▒ąŠą╗ąĄąĄ čāčģčāą┤čłąĄąĮąŠ, ąĄčüą╗ąĖ ąĘą░ą┐čāčüčéąĖčéčüčÅ ąĘą░ą┤ą░čćą░ čüąŠ čüčĆąĄą┤ąĮąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ ą▓ č鹊 ą▓čĆąĄą╝čÅ, ą║ą░ą║ ą▓čŗčüąŠą║ąŠą┐čĆąĖąŠčĆąĖč鹥čéąĮą░čÅ ąĘą░ą┤ą░čćą░ ąČą┤ąĄčé čüąĄą╝ą░č乊čĆ - ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ą┐ąŠą╗čāčćąĖčéčüčÅ, čćč鹊 ą▓čŗčüąŠą║ąŠą┐čĆąĖąŠčĆąĖč鹥čéąĮą░čÅ ąĘą░ą┤ą░čćą░ ąČą┤ąĄčé ąĮąĖąĘą║ąŠą┐čĆąĖąŠčĆąĖč鹥čéąĮčāčÄ ąĘą░ą┤ą░čćčā, ą║ąŠą│ą┤ą░ ąĮąĖąĘą║ąŠą┐čĆąĖąŠčĆąĖč鹥čéąĮą░čÅ ąĘą░ą┤ą░čćą░ ą┤ą░ąČąĄ ąĮąĄ ąĖą╝ąĄąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ąĘą░ą┐čāčüčéąĖčéčīčüčÅ! ąóą░ą║ąŠą╣ ąĮą░ąĖčģčāą┤čłąĖą╣ čüčåąĄąĮą░čĆąĖą╣ ą┐ąŠą║ą░ąĘą░ąĮ ąĮą░ čĆąĖčüčāąĮą║ąĄ 39.

ąĀąĖčü. 39. ąØą░ąĖčģčāą┤čłąĖą╣ ą▓ąŠąĘą╝ąŠąČąĮčŗą╣ čüčåąĄąĮą░čĆąĖą╣ ąĖąĮą▓ąĄčĆčüąĖąĖ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓
ąśąĮą▓ąĄčĆčüąĖčÅ ą┐čĆąĖąŠčĆąĖč鹥čéą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠč湥ąĮčī čüąĄčĆčīąĄąĘąĮąŠą╣ ą┐čĆąŠą▒ą╗ąĄą╝ąŠą╣, ąĮąŠ ą▓ ą╝ą░ą╗čŗčģ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ čüąĖčüč鹥ą╝ą░čģ ąĄčæ čćą░čüč鹊 ą╝ąŠąČąĮąŠ ąĖąĘą▒ąĄąČą░čéčī ą┐čāč鹥ą╝ čéčēą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ą╗ą░ąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ąŠčüčéčāą┐ą░ ą║ čĆąĄčüčāčĆčüą░ą╝ ą▓ąŠ ą▓čĆąĄą╝čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ čüąĖčüč鹥ą╝čŗ.
ąØą░čüą╗ąĄą┤ąŠą▓ą░ąĮąĖąĄ ą┐čĆąĖąŠčĆąĖč鹥čéą░
ą£čīčÄč鹥ą║čüčŗ ąĖ ą┤ą▓ąŠąĖčćąĮčŗąĄ čüąĄą╝ą░č乊čĆčŗ FreeRTOS ąŠč湥ąĮčī ą┐čĆąŠčüčéčŗ, ąĖ čĆą░ąĘą╗ąĖčćą░čÄčéčüčÅ ą┤čĆčāą│ ąŠčé ą┤čĆčāą│ą░ č鹊ą╗čīą║ąŠ č鹥ą╝, čćč鹊 ą╝čīčÄč鹥ą║čüčŗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ą▒ą░ąĘąŠą▓čŗą╣ ą╝ąĄčģą░ąĮąĖąĘą╝ 'ąĮą░čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą┐čĆąĖąŠčĆąĖč鹥čéą░'. ąØą░čüą╗ąĄą┤ąŠą▓ą░ąĮąĖąĄ ą┐čĆąĖąŠčĆąĖč鹥čéą░ - čüčģąĄą╝ą░, ą║ąŠč鹊čĆą░čÅ ą╝ąĖąĮąĖą╝ąĖąĘąĖčĆčāąĄčé ąĮąĄą│ą░čéąĖą▓ąĮčŗą╣ čŹčäč乥ą║čé ąŠčé ąĖąĮą▓ąĄčĆčüąĖąĖ ą┐čĆąĖąŠčĆąĖč鹥čéą░. ąØą░čüą╗ąĄą┤ąŠą▓ą░ąĮąĖąĄ ą┐čĆąĖąŠčĆąĖč鹥čéą░ ąĮąĄ 'ąĖčüą┐čĆą░ą▓ą╗čÅąĄčé' ąĖąĮą▓ąĄčĆčüąĖčÄ ą┐čĆąĖąŠčĆąĖč鹥čéą░, ą░ ą┐čĆąŠčüč鹊 ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ čüąĮąĖąČą░ąĄčé ąĄčæ ą▓ąŠąĘą┤ąĄą╣čüčéą▓ąĖąĄ. ą¤čĆąĖą╝ąĄąĮąĄąĮąĖąĄ ąĮą░čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą┐čĆąĖąŠčĆąĖč鹥čéą░ ą┤ąĄą╗ą░ąĄčé ą╝ą░č鹥ą╝ą░čéąĖč湥čüą║ąĖą╣ ą░ąĮą░ą╗ąĖąĘ ą┐ąŠą▓ąĄą┤ąĄąĮąĖčÅ čüąĖčüč鹥ą╝čŗ ą▒ąŠą╗ąĄąĄ čüą╗ąŠąČąĮčŗą╝, ą┐ąŠčŹč鹊ą╝čā ąĮąĄ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĮą░čüą╗ąĄą┤ąŠą▓ą░ąĮąĖąĄ ą┐čĆąĖąŠčĆąĖč鹥čéą░, ąĄčüą╗ąĖ čŹč鹊ą│ąŠ ą╝ąŠąČąĮąŠ ą║ą░ą║-č鹊 ąĖąĘą▒ąĄąČą░čéčī.
ąØą░čüą╗ąĄą┤ąŠą▓ą░ąĮąĖąĄ ą┐čĆąĖąŠčĆąĖč鹥čéą░ čĆą░ą▒ąŠčéą░ąĄčé č湥čĆąĄąĘ ą▓čĆąĄą╝ąĄąĮąĮąŠąĄ ą┐ąŠą▓čŗčłąĄąĮąĖąĄ ą┐čĆąĖąŠčĆąĖč鹥čéą░ ą┤ąĄčƹȹ░č鹥ą╗čÅ ą╝čīčÄč鹥ą║čüą░ ą┤ąŠ ą┐čĆąĖąŠčĆąĖč鹥čéą░ ąĘą░ą┤ą░čćąĖ čü čüą░ą╝čŗą╝ ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝, ą║ąŠč鹊čĆą░čÅ ą┐čŗčéą░ąĄčéčüčÅ ą┐ąŠą╗čāčćąĖčéčī č鹊čé ąČąĄ čüą░ą╝čŗą╣ ą╝čīčÄč鹥ą║čü. ąØąĖąĘą║ąŠą┐čĆąĖąŠčĆąĖč鹥čéąĮą░čÅ ąĘą░ą┤ą░čćą░, ą║ąŠč鹊čĆą░čÅ čāą┤ąĄčƹȹĖą▓ą░ąĄčé ą╝čīčÄč鹥ą║čü, 'ąĮą░čüą╗ąĄą┤čāąĄčé' ą┐čĆąĖąŠčĆąĖč鹥čé ąĘą░ą┤ą░čćąĖ, ą║ąŠč鹊čĆą░čÅ ąČą┤ąĄčé ą╝čīčÄč鹥ą║čü. ąŁč鹊 ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčéčüčÅ ąĮą░ čĆąĖčüčāąĮą║ąĄ 40. ą¤čĆąĖąŠčĆąĖč鹥čé ą┤ąĄčƹȹ░č鹥ą╗čÅ ą╝čīčÄč鹥ą║čüą░ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ąŠą▒čĆą░čéąĮąŠ ą▓ čüą▓ąŠąĄ ąĖčüčģąŠą┤ąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ą║ąŠą│ą┤ą░ ą┤ąĄčƹȹ░č鹥ą╗čī ą╝čīčÄč鹥ą║čüą░ ą▓ąŠąĘą▓čĆą░čēą░ąĄčé ą╝čīčÄč鹥ą║čü ąŠą▒čĆą░čéąĮąŠ.
ąĀąĖčü. 40. ąØą░čüą╗ąĄą┤ąŠą▓ą░ąĮąĖąĄ ą┐čĆąĖąŠčĆąĖč鹥čéą░ ą╝ąĖąĮąĖą╝ąĖąĘąĖčĆčāąĄčé čŹčäč乥ą║čé ąŠčé ąĖąĮą▓ąĄčĆčüąĖąĖ ą┐čĆąĖąŠčĆąĖč鹥čéą░.
ą¤ąŠčüą║ąŠą╗čīą║čā, ą▓ąŠ-ą┐ąĄčĆą▓čŗčģ, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąĖąĘą▒ąĄą│ą░čéčī ąĖąĮą▓ąĄčĆčüąĖąĖ ą┐čĆąĖąŠčĆąĖč鹥čéą░, ąĖ ą┐ąŠčüą║ąŠą╗čīą║čā, ą▓ąŠ-ą▓č鹊čĆčŗčģ, FreeRTOS ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮą░ ą┤ą╗čÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ čü ąŠą│čĆą░ąĮąĖč湥ąĮąĮčŗą╝ąĖ čĆąĄčüčāčĆčüą░ą╝ąĖ ą┐ą░ą╝čÅčéąĖ, ą╝ąĄčģą░ąĮąĖąĘą╝ ąĮą░čüą╗ąĄą┤ąŠą▓ą░ąĮąĖčÅ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą╝čīčÄč鹥ą║čüą░ą╝ąĖ č鹊ą╗čīą║ąŠ ą▓ ą▒ą░ąĘąŠą▓ąŠą╣ č乊čĆą╝ąĄ, ą║ąŠč鹊čĆą░čÅ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé, čćč鹊 ąĘą░ą┤ą░čćą░ ą▓ ą║ą░ąČą┤čŗą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ čāą┤ąĄčƹȹĖą▓ą░ąĄčé č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ ą╝čīčÄč鹥ą║čü.
ąōą╗čāčģą░čÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ą░, deadlock (ąĖą╗ąĖ "ą╝ąĄčĆčéą▓čŗąĄ ąŠą▒čŖčÅčéąĖčÅ")
'Deadlock' - ą┤čĆčāą│ą░čÅ ą┐ąŠč鹥ąĮčåąĖą░ą╗čīąĮą░čÅ ą╗ąŠą▓čāčłą║ą░ ą▓ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą╝čīčÄč鹥ą║čüąŠą▓ ą┤ą╗čÅ ą▓ąĘą░ąĖą╝ąĮąŠą│ąŠ ąĖčüą║ą╗čÄč湥ąĮąĖčÅ. Deadlock ąĖąĮąŠą│ą┤ą░ ąĖąĘą▓ąĄčüč鹥ąĮ ą┐ąŠą┤ ą▒ąŠą╗ąĄąĄ ą┤čĆą░ą╝ą░čéąĖč湥čüą║ąĖą╝ ąĖą╝ąĄąĮąĄą╝ 'čüą╝ąĄčĆč鹥ą╗čīąĮčŗąĄ ąŠą▒čŖčÅčéąĖčÅ'.
Deadlock ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé, ą║ąŠą│ą┤ą░ ą┤ą▓ąĄ ąĘą░ą┤ą░čćąĖ ąĮąĄ ą╝ąŠą│čāčé čĆą░ą▒ąŠčéą░čéčī, ą┐ąŠčüą║ąŠą╗čīą║čā ąŠąĮąĖ ąŠą▒ąĄ ąČą┤čāčé čĆąĄčüčāčĆčüą░, ą║ąŠč鹊čĆčŗą╣ čāą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ čéčĆąĄčéčīąĄą╣ ąĘą░ą┤ą░č湥ą╣. ą¤čĆąĄą┤čüčéą░ą▓ąĖą╝ čüąĄą▒ąĄ čüą╗ąĄą┤čāčÄčēąĖą╣ čüčåąĄąĮą░čĆąĖą╣, ą│ą┤ąĄ ąĘą░ą┤ą░čćą░ A ąĖ ąĘą░ą┤ą░čćą░ B ąŠą▒ąĄ čģąŠčéčÅčé ą┐ąŠą╗čāčćąĖčéčī ą╝čīčÄč鹥ą║čü X ąĖ ą╝čīčÄč鹥ą║čü Y ą▓ čüą╗ąĄą┤čāčÄčēąĄą╝ ą┐ąŠčĆčÅą┤ą║ąĄ ą┤ąĄą╣čüčéą▓ąĖą╣:
1. ąŚą░ą┤ą░čćą░ A ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ąĖ čāčüą┐ąĄčłąĮąŠ ą┐ąŠą╗čāčćą░ąĄčé ą╝čīčÄč鹥ą║čü X.
2. ąŚą░ą┤ą░čćą░ A ą▓čŗč鹥čüąĮčÅąĄčéčüčÅ ąĘą░ą┤ą░č湥ą╣ B.
3. ąŚą░ą┤ą░čćą░ B čāčüą┐ąĄčłąĮąŠ ą┐ąŠą╗čāčćąĖą╗ą░ ą╝čīčÄč鹥ą║čü Y ą┐ąĄčĆąĄą┤ ą┐ąŠą┐čŗčéą║ąŠą╣ ą┐ąŠą╗čāčćąĖčéčī ą╝čīčÄč鹥ą║čü X - ąŠą┤ąĮą░ą║ąŠ ą╝čīčÄč鹥ą║čü X čāą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ąĘą░ą┤ą░č湥ą╣ A, ąĖ ą┐ąŠčŹč鹊ą╝čā ąĮąĄą┤ąŠčüčéčāą┐ąĄąĮ ą┤ą╗čÅ ąĘą░ą┤ą░čćąĖ B. ąŚą░ą┤ą░čćą░ B čĆąĄčłą░ąĄčé ą▓ąŠą╣čéąĖ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Blocked ą┤ą╗čÅ ąŠąČąĖą┤ą░ąĮąĖčÅ ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖčÅ ą╝čīčÄč鹥ą║čüą░ X.
4. ąŚą░ą┤ą░čćą░ A ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ. ą×ąĮą░ ą┐čŗčéą░ąĄčéčüčÅ ą┐ąŠą╗čāčćąĖčéčī ą╝čīčÄč鹥ą║čü Y - ąĮąŠ ą╝čīčÄč鹥ą║čü Y čāą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ąĘą░ą┤ą░č湥ą╣ B, ąĖ ą┐ąŠčŹč鹊ą╝čā ąĮąĄą┤ąŠčüčéčāą┐ąĄąĮ ą┤ą╗čÅ ąĘą░ą┤ą░čćąĖ A. ąŚą░ą┤ą░čćą░ A čĆąĄčłą░ąĄčé ą▓ąŠą╣čéąĖ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Blocked ą┤ą╗čÅ ąŠąČąĖą┤ą░ąĮąĖčÅ ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮąĖčÅ ą╝čīčÄč鹥ą║čüą░ Y.
ąÆ ą║ąŠąĮčåąĄ čŹč鹊ą│ąŠ čüčåąĄąĮą░čĆąĖčÅ ąĘą░ą┤ą░čćą░ A ąČą┤ąĄčé ą╝čīčÄč鹥ą║čüą░, čāą┤ąĄčƹȹĖą▓ą░ąĄą╝ąŠą│ąŠ ąĘą░ą┤ą░č湥ą╣ B, ą░ ąĘą░ą┤ą░čćą░ B ąČą┤ąĄčé ą╝čīčÄč鹥ą║čüą░, čāą┤ąĄčƹȹĖą▓ą░ąĄą╝ąŠą│ąŠ ąĘą░ą┤ą░č湥ą╣ A. Deadlock ą┐čĆąŠąĖąĘąŠčłąĄą╗, ą┐ąŠč鹊ą╝čā čćč鹊 ąĮąĖ ąŠą┤ąĮą░ ąĖąĘ ąĘą░ą┤ą░čć ą┤ą░ą╗čīčłąĄ ąĮąĄ ą╝ąŠąČąĄčé ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ.
ąÜą░ą║ ąĖ čü ąĖąĮą▓ąĄčĆčüąĖąĄą╣ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓, ąĮą░ąĖą╗čāčćčłąĖą╣ ą╝ąĄč鹊ą┤ ąĖąĘą▒ąĄąČą░čéčī ą┤ąĄą░ą┤ą╗ąŠą║ą░ - čĆą░čüčüą╝ąŠčéčĆąĄčéčī čéą░ą║čāčÄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ąĮą░ čŹčéą░ą┐ąĄ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ąĖ čĆą░ąĘčĆą░ą▒ąŠčéą░čéčī čüąĖčüč鹥ą╝čā čéą░ą║, čćč鹊ą▒čŗ čéą░ą║ą░čÅ čüąĖčéčāą░čåąĖčÅ ą▓ ą┐čĆąĖąĮčåąĖą┐ąĄ ąĮąĄ čüą╝ąŠą│ą╗ą░ ą▒čŗ ą▓ąŠąĘąĮąĖą║ąĮčāčéčī. ąØą░ ą┐čĆą░ą║čéąĖą║ąĄ ą┤ąĄą░ą┤ą╗ąŠą║ ąĮąĄą▒ąŠą╗čīčłą░čÅ ą┐čĆąŠą▒ą╗ąĄą╝ą░ ą┤ą╗čÅ ą╝ą░ą╗čŗčģ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗčģ čüąĖčüč鹥ą╝, ą┐ąŠčüą║ąŠą╗čīą║čā ąĖčģ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ ą╝ąŠą│čāčé ąĖą╝ąĄčéčī čģąŠčĆąŠčłąĄąĄ ą┐ąŠąĮąĖą╝ą░ąĮąĖąĄ čĆą░ą▒ąŠčéčŗ ą▓čüąĄą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą▓ čåąĄą╗ąŠą╝, ąĖ ą╝ąŠą│čāčé ą▒čŗčüčéčĆąŠ ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆąŠą▓ą░čéčī ąĖ čāčüčéčĆą░ąĮąĖčéčī ą┐čĆąŠą▒ą╗ąĄą╝čā, ą│ą┤ąĄ ąŠąĮą░ ą▓ąŠąĘąĮąĖą║ą░ąĄčé.
[4.4. ąŚą░ą┤ą░čćąĖ ą┐čĆąĖą▓čĆą░čéąĮąĖą║ą░ (GATEKEEPER)]
ąŚą░ą┤ą░čćąĖ ą│ąĄą╣čéą║ąĖą┐ąĄčĆą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé čćąĖčüčéčŗą╣ ą╝ąĄč鹊ą┤ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą▓ąĘą░ąĖą╝ąĮąŠą│ąŠ ąĖčüą║ą╗čÄč湥ąĮąĖčÅ ą▒ąĄąĘ ą▓čüčÅą║ąŠą│ąŠ ą▒ąĄčüą┐ąŠą║ąŠą╣čüčéą▓ą░ ąŠ ąĖąĮą▓ąĄčĆčüąĖąĖ ą┐čĆąĖąŠčĆąĖč鹥čéą░ ąĖą╗ąĖ ą┤ąĄą░ą┤ą╗ąŠą║ąĄ.
ąŚą░ą┤ą░čćą░ ą│ąĄą╣čéą║ąĖą┐ąĄčĆą░ - čŹč鹊 ąĘą░ą┤ą░čćą░, ąĄą┤ąĖąĮąŠą╗ąĖčćąĮąŠ ą▓ą╗ą░ą┤ąĄčÄčēą░čÅ čĆąĄčüčāčĆčüąŠą╝. ąóąŠą╗čīą║ąŠ ąĘą░ą┤ą░čćą░ ą│ąĄą╣čéą║ąĖą┐ąĄčĆą░ ą╝ąŠąČąĄčé ąĮą░ą┐čĆčÅą╝čāčÄ ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ ą║ čĆąĄčüčāčĆčüčā - ą╗čÄą▒ą░čÅ ą┤čĆčāą│ą░čÅ ąĘą░ą┤ą░čćą░, ąĮčāąČą┤ą░čÄčēą░čÅčüčÅ ą▓ ą┤ąŠčüčéčāą┐ąĄ ą║ čĆąĄčüčāčĆčüčā, ą╝ąŠąČąĄčé čŹč鹊 ą┤ąĄą╗ą░čéčī č鹊ą╗čīą║ąŠ ą║ąŠčüą▓ąĄąĮąĮąŠ, ąĖčüą┐ąŠą╗čīąĘčāčÅ čüą╗čāąČą▒čŗ ą│ąĄą╣čéą║ąĖą┐ąĄčĆą░.
ą¤čĆąĖą╝ąĄčĆ 16. ąØą░ą┐ąĖčüą░ąĮąĖąĄ ąĘą░ąĮąŠą▓ąŠ čäčāąĮą║čåąĖąĖ vPrintString() ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĘą░ą┤ą░čćąĖ ą│ąĄą╣čéą║ąĖą┐ąĄčĆą░
ą¤čĆąĖą╝ąĄčĆ 16 čéą░ą║ąČąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčāčÄ čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ vPrintString(), ąĮą░ čŹč鹊čé čĆą░ąĘ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĘą░ą┤ą░čćą░ ą│ąĄą╣čéą║ąĖą┐ąĄčĆą░ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┤ąŠčüčéčāą┐ą░ ą║ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╝čā ą▓čŗą▓ąŠą┤čā. ąÜąŠą│ą┤ą░ ąĘą░ą┤ą░čćą░ čģąŠč湥čé ąĘą░ą┐ąĖčüą░čéčī čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓ č鹥čĆą╝ąĖąĮą░ą╗, ąŠąĮą░ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąĮą░ą┐čĆčÅą╝čāčÄ čäčāąĮą║čåąĖčÄ ą┐ąĄčćą░čéąĖ, ąĮąŠ ą▓ą╝ąĄčüč鹊 čŹč鹊ą│ąŠ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐čĆąĖą▓čĆą░čéąĮąĖą║čā.
ąōąĄą╣čéą║ąĖą┐ąĄčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąŠč湥čĆąĄą┤čī FreeRTOS ą┤ą╗čÅ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┤ąŠčüčéčāą┐ą░ ą║ č鹥čĆą╝ąĖąĮą░ą╗čā. ąÆąĮčāčéčĆąĄąĮąĮąĄą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąĘą░ą┤ą░čćąĖ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą▓ąĘą░ąĖą╝ąĮąŠąĄ ąĖčüą║ą╗čÄč湥ąĮąĖąĄ, čéą░ą║ ą║ą░ą║ č鹊ą╗čīą║ąŠ ąŠą┤ąĮą░ ąĘą░ą┤ą░čćą░ ą╝ąŠąČąĄčé ąŠą▒čĆą░čēą░čéčīčüčÅ ą║ č鹥čĆą╝ąĖąĮą░ą╗čā ąĮą░ą┐čĆčÅą╝čāčÄ.
ąŚą░ą┤ą░čćą░ ą│ąĄą╣čéą║ąĖą┐ąĄčĆą░ ą┐ąŠčćčéąĖ ą▓čüąĄ čüą▓ąŠąĄ ą▓čĆąĄą╝čÅ ą┐čĆąŠą▓ąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Blocked, ąŠąČąĖą┤ą░čÅ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ čüąŠąŠą▒čēąĄąĮąĖą╣ ąĮą░ ąŠč湥čĆąĄą┤ąĖ. ąÜąŠą│ą┤ą░ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐ąŠčüčéčāą┐ąĖą╗ąŠ ą▓ ąŠč湥čĆąĄą┤čī, ą│ąĄą╣čéą║ąĖą┐ąĄčĆ ą┐čĆąŠčüč鹊 ą▓čŗą▓ąŠą┤ąĖčé ąĄą│ąŠ ą▓ stdout ą┐ąĄčĆąĄą┤ ą▓ąŠąĘą▓čĆą░č鹊ą╝ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Blocked ą┤ą╗čÅ ąŠąČąĖą┤ą░ąĮąĖčÅ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ ąĘą░ą┤ą░čćąĖ ą│ąĄą╣čéą║ąĖą┐ąĄčĆą░ ą┐ąŠą║ą░ąĘą░ąĮą░ ą▓ ą╗ąĖčüčéąĖąĮą│ąĄ 70.
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą╝ąŠą│čāčé ąŠčéą┐čĆą░ą▓ąĖčéčī ą┤ą░ąĮąĮčŗąĄ ą▓ ąŠč湥čĆąĄą┤čī, čéą░ą║ čćč鹊 ISR ą╝ąŠą│čāčé ą▒ąĄąĘąŠą┐ą░čüąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüą╗čāąČą▒čŗ ą│ąĄą╣čéą║ąĖą┐ąĄčĆą░ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ čüąŠąŠą▒čēąĄąĮąĖą╣ ą▓ č鹥čĆą╝ąĖąĮą░ą╗. ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čäčāąĮą║čåąĖčÅ čģčāą║ą░ čéąĖą║ąŠą▓ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ ą║ą░ąČą┤čŗąĄ 200 čéąĖą║ąŠą▓.
ąźčāą║ čéąĖą║ąŠą▓ (ąĖą╗ąĖ callback) - čäčāąĮą║ąĖčÅ, ą║ąŠč鹊čĆą░čÅ ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ čÅą┤čĆąŠą╝ ą▓ąŠ ą▓čĆąĄą╝čÅ ą║ą░ąČą┤ąŠą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čéąĖą║ą░. ąöą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čäčāąĮą║čåąĖąĖ čģčāą║ą░ čéąĖą║ą░ ąĮčāąČąĮąŠ:
┬Ę ąŻčüčéą░ąĮąŠą▓ąĖčéčī configUSE_TICK_HOOK ą▓ 1 ą▓ čäą░ą╣ą╗ąĄ FreeRTOSConfig.h.
┬Ę ą¤čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ čäčāąĮą║čåąĖąĖ čģčāą║ą░ čéąĖą║ą░, ąĖčüą┐ąŠą╗čīąĘčāčÅ č鹊čćąĮąŠ čéą░ą║ąŠąĄ ąĖą╝čÅ ąĖ ą┐čĆąŠč鹊čéąĖą┐ čäčāąĮą║čåąĖąĖ, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ ą╗ąĖčüčéąĖąĮą│ąĄ 69.
void vApplicationTickHook( void );
ąøąĖčüčéąĖąĮą│ 69. ąśą╝čÅ ąĖ ą┐čĆąŠč鹊čéąĖą┐ ą┤ą╗čÅ čäčāąĮą║čåąĖąĖ čģčāą║ą░ čéąĖą║ąŠą▓ (tick hook)
ążčāąĮą║čåąĖąĖ čģčāą║ą░ čéąĖą║ą░ ąĖčüą┐ąŠą╗ąĮčÅčÄčéčüčÅ ą▓ ą║ąŠąĮč鹥ą║čüč鹥 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čéąĖą║ą░, čéą░ą║ čćč鹊 ąŠąĮą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą║ą░ą║ ą╝ąŠąČąĮąŠ ą┐čĆąŠčēąĄ ąĖ ą║ąŠčĆąŠč湥, ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī č鹊ą╗čīą║ąŠ čāą┐čĆą░ą▓ą╗čÅąĄą╝ąŠąĄ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ čüč鹥ą║ą░, ąĖ ąĮąĄ ą┤ąŠą╗ąČąĮą░ ą▓čŗąĘčŗą▓ą░čéčī ąĮąĖą║ą░ą║ąĖąĄ čäčāąĮą║čåąĖąĖ API FreeRTOS, ąĖą╝čÅ ą║ąŠč鹊čĆčŗčģ ąĮąĄ ąŠą║ą░ąĮčćąĖą▓ą░ąĄčéčüčÅ ąĮą░ 'FromISR()'.
static void prvStdioGatekeeperTask( void *pvParameters )
{
char *pcMessageToPrint;
/* ąóąŠą╗čīą║ąŠ čŹč鹊ą╣ ąĘą░ą┤ą░č湥 ą┐čĆąĖą▓čĆą░čéąĮąĖą║ą░ čĆą░ąĘčĆąĄčłąĄąĮąŠ ąĘą░ą┐ąĖčüčŗą▓ą░čéčī ą▓ ąŠą║ąĮąŠ
č鹥čĆą╝ąĖąĮą░ą╗ą░. ąÆčüąĄ ą┤čĆčāą│ąĖąĄ ąĘą░ą┤ą░čćąĖ, ą║ąŠč鹊čĆčŗą╝ ąĮą░ą┤ąŠ ą▓čŗą▓ąĄčüčéąĖ čćč鹊-č鹊 ąĮą░
č鹥čĆą╝ąĖąĮą░ą╗, ąĮąĄ ą┐ąŠą╗čāčćą░čÄčé ą┐čĆčÅą╝ąŠą╣ ą┤ąŠčüčéčāą┐ ą║ č鹥čĆą╝ąĖąĮą░ą╗čā, ąĮąŠ ą▓ą╝ąĄčüč鹊
čŹč鹊ą│ąŠ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčé čüčéčĆąŠą║čā ą┐čĆąĖą▓čĆą░čéąĮąĖą║čā. ąóą░ą║ ą║ą░ą║ č鹊ą╗čīą║ąŠ čŹčéą░ ąĘą░ą┤ą░čćą░
ą┐ąĖčłąĄčé ą▓ stdout, ąĮąĄ ąĮčāąČąĮąŠ ąĘą░ą▒ąŠčéąĖčéčīčüčÅ ąŠ ą▓ąĘą░ąĖą╝ąĮąŠą╝ ąĖčüą║ą╗čÄč湥ąĮąĖąĖ ąĖą╗ąĖ
čüąĄčĆąĖą░ą╗ąĖąĘą░čåąĖąĖ ą▓ąĮčāčéčĆąĖ čŹč鹊ą╣ ąĘą░ą┤ą░čćąĖ. */
for( ;; )
{
/* ą×ąČąĖą┤ą░ąĮąĖąĄ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąŻą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠąĄ
ą▓čĆąĄą╝čÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ, čéą░ą║ čćč鹊 ąĮąĄ ąĮą░ą┤ąŠ ą┐čĆąŠą▓ąĄčĆčÅčéčī ąĘąĮą░č湥ąĮąĖąĄ
ą▓ąŠąĘą▓čĆą░čéą░ - ą▓čŗčģąŠą┤ ąĖąĘ xQueueReceive() ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé č鹊ą╗čīą║ąŠ
č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ ą▒čāą┤ąĄčé čāčüą┐ąĄčłąĮąŠ ą┐ąŠą╗čāč湥ąĮąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ. */
xQueueReceive( xPrintQueue, &pcMessageToPrint, portMAX_DELAY );
/* ąÆčŗą▓ąŠą┤ ą┐čĆąĖąĮčÅč鹊ą╣ čüčéčĆąŠą║ąĖ. */
printf( "%s", pcMessageToPrint );
fflush( stdout );
/* ąóąĄą┐ąĄčĆčī ą┐čĆąŠčüč鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓ąŠąĘą▓čĆą░čé ą║ ąŠąČąĖą┤ą░ąĮąĖčÄ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ
čüąŠąŠą▒čēąĄąĮąĖčÅ. */
}
}
ąøąĖčüčéąĖąĮą│ 70. ąŚą░ą┤ą░čćą░ ą┐čĆąĖą▓čĆą░čéąĮąĖą║ą░ (gatekeeper)
ąŚą░ą┤ą░čćą░, ą║ąŠč鹊čĆą░čÅ ą▓čŗą▓ąŠą┤ąĖčé čüąŠąŠą▒čēąĄąĮąĖąĄ, čüą┤ąĄą╗ą░ąĮą░ čéą░ą║ ąČąĄ, ą║ą░ą║ ą▓ ą┐čĆąĖą╝ąĄčĆąĄ 15, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ č鹊ą│ąŠ, čćč鹊 ąĮą░ čŹč鹊čé čĆą░ąĘ čüčéčĆąŠą║ą░ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą▓ ąŠč湥čĆąĄą┤čī ą│ąĄą╣čéą║ąĖą┐ąĄčĆą░, ą░ ąĮąĄ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ ąĮą░ą┐čĆčÅą╝čāčÄ. ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ ąĘą░ą┤ą░čćąĖ ą┐ąŠą║ą░ąĘą░ąĮą░ ą▓ ą╗ąĖčüčéąĖąĮą│ąĄ 71. ąÜą░ą║ ąĖ ą▓ ą┐čĆąŠčłą╗čŗą╣ čĆą░ąĘ, čüąŠąĘą┤ą░čÄčéčüčÅ ą┤ą▓ą░ čĆą░ąĘąĮčŗčģ 菹║ąĘąĄą╝ą┐ą╗čÅčĆą░ ąŠą┤ąĮąŠą╣ ąĖ č鹊ą╣ ąČąĄ ąĘą░ą┤ą░čćąĖ, ą║ą░ąČą┤čŗą╣ ąĖąĘ 菹║ąĘąĄą╝ą┐ą╗čÅčĆąŠą▓ ą┐ąĄčćą░čéą░ąĄčé čüą▓ąŠčÄ čāąĮąĖą║ą░ą╗čīąĮčāčÄ čüčéčĆąŠą║čā, ą┐ąĄčĆąĄą┤ą░ąĮąĮčāčÄ č湥čĆąĄąĘ ą┐ą░čĆą░ą╝ąĄčéčĆ ąĘą░ą┤ą░čćąĖ.
static void prvPrintTask( void *pvParameters )
{
int iIndexToString;
/* ąĪąŠąĘą┤ą░ąĄčéčüčÅ ą┤ą▓ą░ 菹║ąĘąĄą╝ą┐ą╗čÅčĆą░ čŹč鹊ą╣ ąĘą░ą┤ą░čćąĖ. ą¤ą░čĆą░ą╝ąĄčéčĆ ąĘą░ą┤ą░čćąĖ
ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ ąĘą░ą┤ą░čćčā ąĖąĮą┤ąĄą║čüą░ čüčéčĆąŠą║ąĖ ą▓ ą╝ą░čüčüąĖą▓ąĄ.
ąŚą┤ąĄčüčī ą┤ąĄą╗ą░ąĄčéčüčÅ ą┐čĆąĖą▓ąĄą┤ąĄąĮąĖąĄ ą║ ąĮčāąČąĮąŠą╝čā čéąĖą┐čā. */
iIndexToString = ( int ) pvParameters;
for( ;; )
{
/* ąÆčŗą▓ąŠą┤ ąĮą░ ą┐ąĄčćą░čéčī čüčéčĆąŠą║ąĖ - ąĮąĄ ąĮą░ą┐čĆčÅą╝čāčÄ, ą░ ą▓ą╝ąĄčüč鹊 čŹč鹊ą│ąŠ
ą┐ąĄčĆąĄą┤ą░čćą░ čāą║ą░ąĘą░č鹥ą╗čÅ ąĮą░ čüčéčĆąŠą║čā ą┐čĆąĖą▓čĆą░čéąĮąĖą║čā č湥čĆąĄąĘ ąŠč湥čĆąĄą┤čī.
ą×č湥čĆąĄą┤čī čüąŠąĘą┤ą░ąĄčéčüčÅ ą┐ąĄčĆąĄą┤ ąĘą░ą┐čāčüą║ąŠą╝ čłąĄą┤čāą╗ąĄčĆą░, čéą░ą║ čćč鹊 ąŠč湥čĆąĄą┤čī
čāąČąĄ čüčāčēąĄčüčéą▓čāąĄčé ą┐ąĄčĆąĄą┤ ą┐ąĄčĆą▓čŗą╝ ąĘą░ą┐čāčüą║ąŠą╝ čŹč鹊ą╣ ąĘą░ą┤ą░čćąĖ. ąÆčĆąĄą╝čÅ
ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ąĮąĄ čāą║ą░ąĘą░ąĮąŠ, čéą░ą║ ą║ą░ą║ ą▓ ąŠč湥čĆąĄą┤ąĖ ą▓čüąĄą│ą┤ą░ ą┤ąŠą╗ąČąĮąŠ
ą▒čŗčéčī čüą▓ąŠą▒ąŠą┤ąĮąŠąĄ ą╝ąĄčüč鹊. */
xQueueSendToBack( xPrintQueue, &( pcStringsToPrint[ iIndexToString ] ), 0 );
/* ą×ąČąĖą┤ą░ąĮąĖąĄ ą▓ č鹥č湥ąĮąĖąĄ ą┐čüąĄą▓ą┤ąŠčüą╗čāčćą░ą╣ąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā,
čćč鹊 rand() ąĮąĄąŠą▒čÅąĘą░č鹥ą╗čīąĮąŠ ą▒čŗą▓ą░ąĄčé čĆąĄąĄąĮč鹥čĆą░ą▒ąĄą╗čīąĮąŠą╣, ąĮąŠ ą▓ ąĮą░čłąĄą╝
čüą╗čāčćą░ąĄ čŹč鹊 ąĮąĄą▓ą░ąČąĮąŠ, čéą░ą║ ą║ą░ą║ ą║ąŠą┤ ąĮąĄ ąĘą░ą▒ąŠčéąĖčéčüčÅ ąŠ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠą╣
ą▓ąĄą╗ąĖčćąĖąĮąĄ. ąÆ ą┤čĆčāą│ąĖčģ, ą▒ąŠą╗ąĄąĄ ąĮą░ą┤ąĄąČąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ ąĮčāąČąĮąŠ
ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čĆąĄąĄąĮč鹥čĆą░ą▒ąĄą╗čīąĮčāčÄ ą▓ąĄčĆčüąĖčÄ rand(), ąĖą╗ąĖ ą▓čŗąĘąŠą▓čŗ
rand() ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĘą░čēąĖčēąĄąĮčŗ ą║čĆąĖčéąĖč湥čüą║ąŠą╣ čüąĄą║čåąĖąĄą╣. */
vTaskDelay( ( rand() & 0x1FF ) );
}
}
ąøąĖčüčéąĖąĮą│ 71. ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ ąĘą░ą┤ą░čćąĖ ą┐ąĄčćą░čéąĖ ą┤ą╗čÅ ą┐čĆąĖą╝ąĄčĆą░ 16
ążčāąĮą║čåąĖčÅ čģčāą║ą░ čéąĖą║ąŠą▓ ą┐čĆąŠčüč鹊 čüčćąĖčéą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĄčæ ą▓čŗąĘąŠą▓ąŠą▓, ąŠčéą┐čĆą░ą▓ą╗čÅčÅ čüą▓ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ ąĘą░ą┤ą░č湥 ą│ąĄą╣čéą║ąĖą┐ąĄčĆą░, ą║ą░ą║ č鹊ą╗čīą║ąŠ čüč湥čéčćąĖą║ ą┤ąŠčüčéąĖą│ąĮąĄčé 200. ąóąŠą╗čīą║ąŠ ą▓ čåąĄą╗čÅčģ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąĖ čģčāą║ čéąĖą║ą░ ą┐ąĖčłąĄčé ą▓ ąĮą░čćą░ą╗ąŠ ąŠč湥čĆąĄą┤ąĖ, ąĖ ąĘą░ą┤ą░čćą░ prvPrintTask ą┐ąĖčłąĄčé ą▓ ą║ąŠąĮąĄčå ąŠč湥čĆąĄą┤ąĖ. ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ čģčāą║ą░ čéąĖą║ąŠą▓ ą┐ąŠą║ą░ąĘą░ąĮą░ ą▓ ą╗ąĖčüčéąĖąĮą│ąĄ 72.
void vApplicationTickHook( void )
{
static int iCount = 0;
portBASE_TYPE xHigherPriorityTaskWoken = pdFALSE;
/* ąÆčŗą▓ąŠą┤ ąĮą░ ą┐ąĄčćą░čéčī čüąŠąŠą▒čēąĄąĮąĖčÅ ą║ą░ąČą┤čŗąĄ 200 čéąĖą║ąŠą▓. ąĪąŠąŠą▒čēąĄąĮąĖąĄ ąĮąĄ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ
ąĮą░ą┐čĆčÅą╝čāčÄ, ąŠąĮąŠ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ąĘą░ą┤ą░č湥 ą│ąĄą╣čéą║ąĖą┐ąĄčĆą░. */
iCount++;
if( iCount >= 200 )
{
/* ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ (xHigherPriorityTaskWoken) čĆąĄą░ą╗čīąĮąŠ
ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, ąŠą┤ąĮą░ą║ąŠ ą▓čüąĄ čĆą░ą▓ąĮąŠ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ. */
xQueueSendToFrontFromISR( xPrintQueue,
&( pcStringsToPrint[ 2 ] ),
&xHigherPriorityTaskWoken );
/* ąĪą▒čĆąŠčü čüč湥čéčćąĖą║ą░, čćč鹊ą▒čŗ ą┐ąĄčćą░čéčī čüąŠąŠą▒čēąĄąĮąĖčÅ ą┐čĆąŠąĖčüčģąŠą┤ąĖą╗ą░ ą║ą░ąČą┤čŗąĄ 200 čéąĖą║ąŠą▓
ą▓čĆąĄą╝ąĄąĮąĖ. */
iCount = 0;
}
}
ąøąĖčüčéąĖąĮą│ 72. ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ čģčāą║ą░ čéąĖą║ąŠą▓
ąÜą░ą║ ąŠą▒čŗčćąĮąŠ, čäčāąĮą║čåąĖčÅ main() ą┐čĆąŠčüč鹊 čüąŠąĘą┤ą░ąĄčé ąŠč湥čĆąĄą┤čī ąĖ ąĘą░ą┤ą░čćąĖ, ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą┐čĆąĖą╝ąĄčĆą░, ąĖ ąĘą░č鹥ą╝ ąĘą░ą┐čāčüą║ą░ąĄčé čłąĄą┤čāą╗ąĄčĆ. ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ main() ą┐ąŠą║ą░ąĘą░ąĮą░ ą▓ ą╗ąĖčüčéąĖąĮą│ąĄ 73.
/* ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čüčéčĆąŠą║, ą║ąŠč鹊čĆčŗąĄ ą▒čāą┤čāčé ą▓čŗą▓ąŠą┤ąĖčéčī ąĮą░ ą┐ąĄčćą░čéčī ąĘą░ą┤ą░čćąĖ
ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ č湥čĆąĄąĘ ą│ąĄą╣čéą║ąĖą┐ąĄčĆą░. */
static char *pcStringsToPrint[] =
{
"Task 1 ****************************************************\r\n",
"Task 2 ----------------------------------------------------\r\n",
"Message printed from the tick hook interrupt ##############\r\n"
};
/*-----------------------------------------------------------*/
/* ąöąĄą║ą╗ą░čĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ čéąĖą┐ą░ xQueueHandle. ą×ąĮą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ
ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ čüąŠąŠą▒čēąĄąĮąĖą╣ ąĖąĘ ąĘą░ą┤ą░čć ą┐ąĄčćą░čéąĖ ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čéąĖą║ą░
ą▓ ąĘą░ą┤ą░čćčā ą│ąĄą╣čéą║ąĖą┐ąĄčĆą░. */
xQueueHandle xPrintQueue;
/*-----------------------------------------------------------*/
int main( void )
{
/* ą¤ąĄčĆąĄą┤ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ąŠč湥čĆąĄą┤ąĖ ąŠąĮą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čÅą▓ąĮąŠ čüąŠąĘą┤ą░ąĮą░.
ą×č湥čĆąĄą┤čī čüąŠąĘą┤ą░ąĄčéčüčÅ ą┤ą╗čÅ čāą┤ąĄčƹȹ░ąĮąĖčÅ ą▓ čüąĄą▒ąĄ ą╝ą░ą║čüąĖą╝čāą╝ 5
čāą║ą░ąĘą░č鹥ą╗ąĄą╣ ąĮą░ čüčéčĆąŠą║čā. */
xPrintQueue = xQueueCreate( 5, sizeof( char * ) );
/* ąŚą░ą┤ą░čćąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą┐čüąĄą▓ą┤ąŠčüą╗čāčćą░ą╣ąĮčāčÄ ąĘą░ą┤ąĄčƹȹ║čā, ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄą╝
ą│ąĄąĮąĄčĆą░č鹊čĆą░ čüą╗čāčćą░ą╣ąĮčŗčģ čćąĖčüąĄą╗. */
srand( 567 );
/* ą¤čĆąŠą▓ąĄčĆą║ą░: čāčüą┐ąĄčłąĮąŠ ą╗ąĖ čüąŠąĘą┤ą░ąĮą░ ąŠč湥čĆąĄą┤čī. */
if( xPrintQueue != NULL )
{
/* ąĪąŠąĘą┤ą░ąĮąĖąĄ ą┤ą▓čāčģ 菹║ąĘąĄą╝ą┐ą╗čÅčĆąŠą▓ ąĘą░ą┤ą░čć, ą║ąŠč鹊čĆčŗąĄ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčé čüąŠąŠą▒čēąĄąĮąĖčÅ
ą│ąĄą╣čéą║ąĖą┐ąĄčĆčā. ąöą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖąĮą┤ąĄą║čüą░ ą┐ąĄčćą░čéą░ąĄą╝ąŠą╣ čüčéčĆąŠą║ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ
ą┐ą░čĆą░ą╝ąĄčéčĆ ąĘą░ą┤ą░čćąĖ (4-ą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ xTaskCreate()). ąŚą░ą┤ą░čćąĖ čüąŠąĘą┤ą░čÄčéčüčÅ
čü čĆą░ąĘąĮčŗą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝, čéą░ą║ čćč鹊 čüą╗čāčćą░ą╣ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ąĮąĖąĘą║ąŠą┐čĆąĖąŠčĆąĖč鹥čéąĮą░čÅ
ąĘą░ą┤ą░čćą░ ą▒čāą┤ąĄčé ą▓čŗč鹥čüąĮčÅčéčīčüčÅ ą▓čŗčüąŠą║ąŠą┐čĆąĖąŠčĆąĖč鹥čéąĮąŠą╣ ąĘą░ą┤ą░č湥ą╣. */
xTaskCreate( prvPrintTask, "Print1", 1000, ( void * ) 0, 1, NULL );
xTaskCreate( prvPrintTask, "Print2", 1000, ( void * ) 1, 2, NULL );
/* ąĪąŠąĘą┤ą░ąĮąĖąĄ ąĘą░ą┤ą░čćąĖ ą│ąĄą╣čéą║ąĖą┐ąĄčĆą░. ąóąŠą╗čīą║ąŠ čŹč鹊ą╣ ąĘą░ą┤ą░č湥 čĆą░ąĘčĆąĄčłąĄąĮ ą┐čĆčÅą╝ąŠą╣
ą┤ąŠčüčéčāą┐ ą║ čüčéą░ąĮą┤ą░čĆčéąĮąŠą╝čā ą▓čŗą▓ąŠą┤čā. */
xTaskCreate( prvStdioGatekeeperTask, "Gatekeeper", 1000, NULL, 0, NULL );
/* ąŚą░ą┐čāčüą║ čłąĄą┤čāą╗ąĄčĆą░, čéą░ą║ čćč鹊 čüąŠąĘą┤ą░ąĮąĮčŗąĄ ąĘą░ą┤ą░čćąĖ ą╝ąŠą│čāčé ąĘą░ą┐čāčüčéąĖčéčīčüčÅ. */
vTaskStartScheduler();
}
/* ąĢčüą╗ąĖ ą▓čüąĄ čģąŠčĆąŠčłąŠ, č鹊 čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓ main() ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą┤ąŠą╣ą┤ąĄčé ą┤ąŠ
čŹč鹊ą╣ č鹊čćą║ąĖ, ąĖ č鹥ą┐ąĄčĆčī čłąĄą┤čāą╗ąĄčĆ ą▒čāą┤ąĄčé čāą┐čĆą░ą▓ą╗čÅčéčī ąĘą░ą┤ą░čćą░ą╝ąĖ. ąĢčüą╗ąĖ
main() ą┤ąŠą▓ąĄą╗ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┤ąŠ čŹč鹊ą│ąŠ ą╝ąĄčüčéą░, č鹊 čŹč鹊 ą╝ąŠąČąĄčé
ąŠąĘąĮą░čćą░čéčī, čćč鹊 ąĮąĄ čģą▓ą░čéą░ąĄčé ą┐ą░ą╝čÅčéąĖ ą║čāčćąĖ (heap) ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ
čüą┐ąĄčåąĖą░ą╗čīąĮąŠą╣ ąĘą░ą┤ą░čćąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle task). ą¦ą░čüčéčī 5 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé
ą▒ąŠą╗čīčłąĄ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÄ ą┐ą░ą╝čÅčéčīčÄ. */
for( ;; );
}
ąøąĖčüčéąĖąĮą│ 73. ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ čäčāąĮą║čåąĖąĖ main() ą┤ą╗čÅ ą┐čĆąĖą╝ąĄčĆą░ 16
ąÆčŗą▓ąŠą┤, ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖą╝čŗą╣ ą┐čĆąĖą╝ąĄčĆąŠą╝ 16, ą┐ąŠą║ą░ąĘą░ąĮ ąĮą░ čĆąĖčüčāąĮą║ąĄ 41. ąÜą░ą║ ą╝ąŠąČąĮąŠ ą▓ąĖą┤ąĄčéčī, čüčéčĆąŠą║ąĖ, ą┐čĆąĖčģąŠą┤čÅčēąĖąĄ ąĖąĘ ąĘą░ą┤ą░čć, ąĖ čüčéčĆąŠą║ąĖ, ą┐čĆąĖčģąŠą┤čÅčēąĖąĄ ąĖąĘ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą▓čüąĄ ą▓čŗą▓ąŠą┤čÅčéčüčÅ ą║ąŠčĆčĆąĄą║čéąĮąŠ, ą▒ąĄąĘ ą┐ąŠčĆčćąĖ čüą▓ąŠąĄą│ąŠ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ.

ąĀąĖčü. 41. ąÆčŗą▓ąŠą┤, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčé ą┐čĆąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĖ ą┐čĆąĖą╝ąĄčĆ 16
ąŚą░ą┤ą░čćą░ ą┐čĆąĖą▓čĆą░čéąĮąĖą║ą░ ą┐ąŠą╗čāčćąĖą╗ą░ ą┐čĆąĖąŠčĆąĖč鹥čé ą╝ąĄąĮčīčłąĄ, č湥ą╝ ą┐čĆąĖąŠčĆąĖč鹥čéčŗ ą┐ąĄčćą░čéą░čÄčēąĖčģ ąĘą░ą┤ą░čć - čéą░ą║ čćč鹊 čüąŠąŠą▒čēąĄąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ ą│ąĄą╣čéą║ąĖą┐ąĄčĆčā, ąŠčüčéą░čÄčéčüčÅ ą▓ ąŠč湥čĆąĄą┤ąĖ, ą┐ąŠą║ą░ ąŠą▒ąĄ ąĘą░ą┤ą░čćąĖ ą┐ąĄčćą░čéąĖ ąĮąĄ ą▒čŗą╗ąĖ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Blocked. ąÆ ąĮąĄą║ąŠč鹊čĆčŗčģ čüąĖčéčāą░čåąĖčÅčģ ą╝ąŠąČąĄčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčīčüčÅ ąĮą░ąĘąĮą░čćąĖčéčī ą┐čĆąĖą▓čĆą░čéąĮąĖą║čā ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé, čćč鹊ą▒čŗ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▒čŗą╗ąĖ ąŠą▒čĆą░ą▒ąŠčéą░ąĮčŗ ą▒čŗčüčéčĆąĄąĄ - ąĮąŠ čüą┤ąĄą╗ą░čéčī čéą░ą║ ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┐čĆąĖą▓čĆą░čéąĮąĖą║ ą▒čāą┤ąĄčé ąĘą░ą┤ąĄčƹȹĖą▓ą░čéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą╝ąĄąĮąĄąĄ ą┐čĆąĖąŠčĆąĖč鹥čéąĮčŗčģ ąĘą░ą┤ą░čć, ą┐ąŠą║ą░ ąŠąĮ ąĮąĄ ąĘą░ą▓ąĄčĆčłąĖčé ą┤ąŠčüčéčāą┐ ą║ ąĘą░čēąĖčēąĄąĮąĮąŠą╝čā čĆąĄčüčāčĆčüčā.
[ąĪą╗ąĄą┤čāčÄčēą░čÅ čćą░čüčéčī FreeRTOS: ą┐čĆą░ą║čéąĖč湥čüą║ąŠąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ, čćą░čüčéčī 5 (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ą░ą╝čÅčéčīčÄ)]
[ąĪčüčŗą╗ą║ąĖ]
1. ą×ą▒ąĘąŠčĆ FreeRTOS ąĮą░ čĆčāčüčüą║ąŠą╝ čÅąĘčŗą║ąĄ - ąÉąĮą┤čĆąĄą╣ ąÜčāčĆąĮąĖčå, čüčéą░čéčīčÅ ą▓ ąČčāčĆąĮą░ą╗ąĄ ┬½ąÜąŠą╝ą┐ąŠąĮąĄąĮčéčŗ ąĖ č鹥čģąĮąŠą╗ąŠą│ąĖąĖ┬╗ (2..10 ąĮąŠą╝ąĄčĆą░ 2011 ą│ąŠą┤ą░).
2. 150422FreeRTOS-API.pdf - ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ ą┐ąŠ API FreeRTOS 8.2.čģ ąĮą░ ą░ąĮą│ą╗ąĖą╣čüą║ąŠą╝ čÅąĘčŗą║ąĄ. |



