|
[3.1. ąÆą▓ąĄą┤ąĄąĮąĖąĄ: ąŠ č湥ą╝ ą│ąŠą▓ąŠčĆąĖčéčüčÅ ą▓ čćą░čüčéąĖ 3]
ąĪąŠą▒čŗčéąĖčÅ
ąÆčüčéčĆą░ąĖą▓ą░ąĄą╝čŗąĄ čüąĖčüč鹥ą╝čŗ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ąŠą╗ąČąĮčŗ ą┐čĆąĄą┤ą┐čĆąĖąĮąĖą╝ą░čéčī ąĮąĄą║ąŠč鹊čĆčŗąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ ą▓ ąŠčéą▓ąĄčé ąĮą░ čüąŠą▒čŗčéąĖčÅ (event), ą┐čĆąĖčģąŠą┤čÅčēąĖąĄ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ąŠą║čĆčāąČąĄąĮąĖčÅ. ąØą░ą┐čĆąĖą╝ąĄčĆ ą┐ą░ą║ąĄčé, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąĖčłąĄą╗ ą▓ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ Ethernet (čüąŠą▒čŗčéąĖąĄ) ą╝ąŠąČąĄčé čéčĆąĄą▒ąŠą▓ą░čéčī čüą▓ąŠąĄą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▓ čüč鹥ą║ TCP/IP ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ (ą┤ąĄą╣čüčéą▓ąĖąĄ).
[ą¤čĆąĄą┤čŗą┤čāčēą░čÅ čćą░čüčéčī FreeRTOS: ą┐čĆą░ą║čéąĖč湥čüą║ąŠąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ, čćą░čüčéčī 2 (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ąŠč湥čĆąĄą┤čÅą╝ąĖ)]
ąĪą╗ąŠąČąĮčŗąĄ čüąĖčüč鹥ą╝čŗ ą▒čāą┤čāčé ąĖą╝ąĄčéčī čüą╗čāąČą▒čā čüąŠą▒čŗčéąĖą╣, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖčģąŠą┤čÅčé ąŠčé čĆą░ąĘąĮčŗčģ ąĖčüč鹊čćąĮąĖą║ąŠą▓, ą║ąŠč鹊čĆčŗąĄ čéčĆąĄą▒čāčÄčé čĆą░ąĘąĮčŗąĄ ą┐čĆąŠčåąĄą┤čāčĆčŗ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąĖ čĆą░ąĘąĮčŗąĄ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą║ ą▓čĆąĄą╝ąĄąĮąĖ čĆąĄą░ą║čåąĖąĖ. ąÆ ą║ą░ąČą┤ąŠą╝ čüą╗čāčćą░ąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐čĆąĖąĮčÅč鹊 čĆąĄčłąĄąĮąĖąĄ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą╗čāčćčłąĄą╣ čüčéčĆą░č鹥ą│ąĖąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąŠą▒čŗčéąĖčÅ:
1. ąÜą░ą║ čüąŠą▒čŗčéąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░čéčīčüčÅ? ą×ą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ąĮąŠ ą╝ąŠąČąĄčé čéą░ą║ąČąĄ ą▒čŗčéčī ą┐čĆąĖą╝ąĄąĮąĄąĮ ąŠą┐čĆąŠčü ą▓čģąŠą┤ąŠą▓ (polling).
2. ąÜąŠą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ą░ą║ ą╝ąĮąŠą│ąŠ ą┤ąĄą╣čüčéą▓ąĖą╣ ą┐ąŠ ąŠą▒čĆą░ą▒ąŠčéą║ąĄ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą┐čĆąĄą┤ą┐čĆąĖąĮčÅč鹊 ą▓ąĮčāčéčĆąĖ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (ISR), ąĖ ą║ą░ą║ ą╝ąĮąŠą│ąŠ ą┤ąĄą╣čüčéą▓ąĖą╣ ąĮčāąČąĮąŠ čüą┤ąĄą╗ą░čéčī ą▓ąĮąĄ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ? ą×ą▒čŗčćąĮąŠ ąČąĄą╗ą░č鹥ą╗čīąĮąŠ čüąŠčģčĆą░ąĮčÅčéčī čĆą░ąĘą╝ąĄčĆ ISR ą║ą░ą║ ą╝ąŠąČąĮąŠ ą╝ąĄąĮčīčłąĄ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ.
3. ąÜą░ą║ čüąŠą▒čŗčéąĖčÅ ą┤ąŠą╗ąČąĮčŗ ąŠą▒ą╝ąĄąĮąĖą▓ą░čéčīčüčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ čü ą│ą╗ą░ą▓ąĮčŗą╝ ą║ąŠą┤ąŠą╝ (ąĮąĄ ISR), ąĖ ą║ą░ą║ čŹč鹊čé ą║ąŠą┤ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüčéčĆčāą║čéčāčĆąĖčĆąŠą▓ą░ąĮ, čćč鹊ą▒čŗ ą╗čāčćčłąĄ ą▓čüąĄą│ąŠ čüąŠą▓ą╝ąĄčüčéąĖčéčī ąŠą▒čĆą░ą▒ąŠčéą║čā ą┐ąŠč鹥ąĮčåąĖą░ą╗čīąĮąŠ ą░čüąĖąĮčģčĆąŠąĮąĮčŗčģ ą┐čĆąŠčåąĄčüčüąŠą▓?
FreeRTOS ąĮąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║čā ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĮąĖą║ą░ą║čāčÄ čüą┐ąĄčåąĖą░ą╗čīąĮčāčÄ čüčéčĆą░č鹥ą│ąĖčÄ ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąŠą▒čŗčéąĖą╣, ąĮąŠ ą┤ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą▓čŗą▒čĆą░ąĮąĮąŠą╣ čüčéčĆą░č鹥ą│ąĖąĖ ą┐čĆąŠčüčéčŗą╝ ąĖ čģąŠčĆąŠčłąŠ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗą╝ ą╝ąĄč鹊ą┤ąŠą╝.
ąÆčüąĄą│ą┤ą░ ą┐ąŠą╝ąĮąĖč鹥, čćč鹊 ą╗čÄą▒čŗąĄ čäčāąĮą║čåąĖąĖ API ąĖ ą╝ą░ą║čĆąŠčüčŗ, ą║ąŠč鹊čĆčŗąĄ ąŠą║ą░ąĮčćąĖą▓ą░čÄčéčüčÅ ąĮą░ ŌĆśFromISRŌĆÖ ąĖą╗ąĖ ŌĆśFROM_ISRŌĆÖ, ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą▓čüąĄą│ą┤ą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮčŗ ą▓ąĮčāčéčĆąĖ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (interrupt service routine, ISR).
ą×ą▒čēąĖą╣ ąŠą▒ąĘąŠčĆ čćą░čüčéąĖ 3
ąŁčéą░ čćą░čüčéčī ą┤ą░ąĄčé čćąĖčéą░č鹥ą╗čÄ čģąŠčĆąŠčłąĄąĄ ą┐ąŠąĮąĖą╝ą░ąĮąĖąĄ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ:
┬Ę ąÜą░ą║ąĖąĄ čäčāąĮą║čåąĖąĖ FreeRTOS API ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĖąĘ ISR.
┬Ę ąÜą░ą║ ą╝ąŠąČąĄčé ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ čüčģąĄą╝ą░ ąŠčéą╗ąŠąČąĄąĮąĮčŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ (deferred interrupt).
┬Ę ąÜą░ą║ čüąŠąĘą┤ą░čéčī ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą▓ąŠąĖčćąĮčŗąĄ čüąĄą╝ą░č乊čĆčŗ ąĖ čüčćąĖčéą░čÄčēąĖąĄ čüąĄą╝ą░č乊čĆčŗ (čüąĄą╝ą░č乊čĆčŗ čüąŠ čüč湥čéčćąĖą║ąŠą╝).
┬Ę ąÆ č湥ą╝ ąŠčéą╗ąĖčćąĖąĄ ą┤ą▓ąŠąĖčćąĮąŠą│ąŠ čüąĄą╝ą░č乊čĆą░ ąŠčé čüąĄą╝ą░č乊čĆą░ čüąŠ čüč湥čéčćąĖą║ąŠą╝.
┬Ę ąÜą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąŠč湥čĆąĄą┤čī ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą▓ ISR ąĖ ąĖąĘ ąĮąĄą│ąŠ.
┬Ę ą£ąŠą┤ąĄą╗čī ą▓ą╗ąŠąČąĄąĮąĮąŠčüčéąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ą┤ąŠčüčéčāą┐ąĮą░čÅ ą┤ą╗čÅ ąĮąĄą║ąŠč鹊čĆčŗčģ ą┐ąŠčĆč鹊ą▓ FreeRTOS.
[3.2. ą×ą▒čĆą░ą▒ąŠčéą║ą░ ąŠčéą╗ąŠąČąĄąĮąĮčŗčģ (deferred) ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣]
ąöą▓ąŠąĖčćąĮčŗąĄ čüąĄą╝ą░č乊čĆčŗ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ
ąöą▓ąŠąĖčćąĮčŗąĄ čüąĄą╝ą░č乊čĆčŗ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ąĘą░ą┤ą░čćąĖ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą▓ąŠąĘąĮąĖą║ą░ąĄčé ą║ą░ą║ąŠąĄ-č鹊 ąŠčéą┤ąĄą╗čīąĮąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, č湥ą╝ ą╝ąŠąČąĮąŠ čŹčäč乥ą║čéąĖą▓ąĮąŠ ąĘą░čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░čéčī ąĘą░ą┤ą░čćčā čü ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄą╝. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čĆą░ąĘą╝ąĄčüčéąĖčéčī ą┐ąŠčćčéąĖ ą▓ąĄčüčī ą║ąŠą┤ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čüąŠą▒čŗčéąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓ąĮčāčéčĆąĖ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ, ąŠčüčéą░ą▓ą╗čÅčÅ ą▓ ISR č鹊ą╗čīą║ąŠ ąŠč湥ąĮčī ą╝ą░ą╗čāčÄ čćą░čüčéčī ą║ąŠą┤ą░. ąóą░ą║ą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ 'ąŠčéą╗ąŠąČąĄąĮąĮąŠą╣' (deferred) ą┤ą╗čÅ ąĘą░ą┤ą░čćąĖ-ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ čüąŠą▒čŗčéąĖčÅ.
ąĢčüą╗ąĖ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą║čĆąĖčéąĖčćąĮą░ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ čĆąĄą░ą║čåąĖąĖ, č鹊 ą┐čĆąĖąŠčĆąĖč鹥čé ąĘą░ą┤ą░čćąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮą░ąĘąĮą░č湥ąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ą▓čŗčłąĄ, čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ą▓čŗč鹥čüąĮąĄąĮąĖąĄ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ąŠą╝ ą┤čĆčāą│ąĖčģ ąĘą░ą┤ą░čć ą▓ čüąĖčüč鹥ą╝ąĄ. ąŁč鹊 ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ISR. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ą┤ąŠčüčéąĖą│ą░ąĄčéčüčÅ čŹčäč乥ą║čé ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▓čüąĄčģ čüąŠą▒čŗčéąĖą╣ ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ ą║ąŠą┤ąĄ, ą║ą░ą║ ąĄčüą╗ąĖ ą▒čŗ čŹčéą░ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą▒čŗą╗ą░ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ą▓ ą║ąŠą┤ąĄ ISR. ąóą░ą║ą░čÅ čüčģąĄą╝ą░ ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčéčüčÅ ąĮą░ čĆąĖčüčāąĮą║ąĄ 26.

ąĀąĖčü. 26. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąŠą┤ąĮčā ąĘą░ą┤ą░čćčā, ą┐čĆąĖ čŹč鹊ą╝ ą┤ąĄą╗ą░čÅ ą▓ąŠąĘą▓čĆą░čé ą▓ ą┤čĆčāą│čāčÄ ąĘą░ą┤ą░čćčā
ąŚą░ą┤ą░čćą░ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▒ą╗ąŠą║ąĖčĆčāčÄčēąĖą╣ ąĮą░ čüąĄą╝ą░č乊čĆąĄ ą▓čŗąĘąŠą▓ 'take' (ą▓ąĘčÅčéčī), čćč鹊 ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé ą▓čģąŠąČą┤ąĄąĮąĖąĄ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Blocked ą┤ą╗čÅ ąŠąČąĖą┤ą░ąĮąĖčÅ ą╝ąŠą╝ąĄąĮčéą░ čüąŠą▒čŗčéąĖčÅ. ąÜąŠą│ą┤ą░ čüąŠą▒čŗčéąĖąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé, ISR ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąŠą┐ąĄčĆą░čåąĖčÄ 'give' (ą┤ą░ą▓ą░čéčī) ąĮą░ č鹊ą╝ ąČąĄ čüą░ą╝ąŠą╝ čüąĄą╝ą░č乊čĆąĄ ą┤ą╗čÅ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ąĘą░ą┤ą░čćąĖ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░, čćč鹊ą▒čŗ ą╝ąŠą│ą╗ą░ ą┐čĆąŠąĖąĘąŠą╣čéąĖ čéčĆąĄą▒čāąĄą╝ą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ čüąŠą▒čŗčéąĖčÅ.
ąÜąŠąĮčåąĄą┐čåąĖčÅ čüąĄą╝ą░č乊čĆą░ 'take' (ą▓ąĘčÅčéčī) ąĖ 'give' (ą┤ą░ą▓ą░čéčī) ą╝ąŠąČąĄčé ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░čéčī čĆą░ąĘąĮąŠąĄ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čüčåąĄąĮą░čĆąĖčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ. ąÆ ą║ą╗ą░čüčüąĖč湥čüą║ąŠą╣ č鹥čĆą╝ąĖąĮąŠą╗ąŠą│ąĖąĖ čüąĄą╝ą░č乊čĆąŠą▓ 'ą▓ąĘčÅčéčī čüąĄą╝ą░č乊čĆ' 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮąŠ ąŠą┐ąĄčĆą░čåąĖąĖ P(), ą░ 'ą┤ą░čéčī čüąĄą╝ą░č乊čĆ' 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮąŠ ąŠą┐ąĄčĆą░čåąĖąĖ V().
ąÆ čŹč鹊ą╝ čüčåąĄąĮą░čĆąĖąĖ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čüąĄą╝ą░č乊čĆ ą║ąŠąĮčåąĄą┐čéčāą░ą╗čīąĮąŠ ą╝ąŠąČąĄčé čüčćąĖčéą░čéčīčüčÅ ąŠč湥čĆąĄą┤čīčÄ čü ą┤ą╗ąĖąĮąŠą╣, čĆą░ą▓ąĮąŠą╣ 1. ą×č湥čĆąĄą┤čī ą╝ąŠąČąĄčé čüąŠą┤ąĄčƹȹ░čéčī ą╝ą░ą║čüąĖą╝čāą╝ ąŠą┤ąĖąĮ 菹╗ąĄą╝ąĄąĮčé ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ, čéą░ą║ čćč鹊 ąŠč湥čĆąĄą┤čī ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗ąĖą▒ąŠ ą┐čāčüčéą░, ą╗ąĖą▒ąŠ ą┐ąŠą╗ąĮą░ (ą║ą░ą║ ą┤ą▓ąŠąĖčćąĮčŗą╣ čäą╗ą░ą│ ą╝ąŠąČąĄčé ą▒čŗčéčī ą╗ąĖą▒ąŠ čüą▒čĆąŠčłąĄąĮ, ą╗ąĖą▒ąŠ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ą┐ąŠčŹč鹊ą╝čā čüąĄą╝ą░č乊čĆ ą┤ą▓ąŠąĖčćąĮčŗą╣). ą¤čāč鹥ą╝ ą▓čŗąĘąŠą▓ą░ xSemaphoreTake() ąĘą░ą┤ą░čćą░ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čŗčéą░ąĄčéčüčÅ ą┐čĆąŠčćąĖčéą░čéčī ąĖąĘ ąŠč湥čĆąĄą┤ąĖ ąĮą░ ą▓čüąĄ ą▓čĆąĄą╝čÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ, čćč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ąŠ ą▓čģąŠą┤čā ąĘą░ą┤ą░čćąĖ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Blocked, ąĄčüą╗ąĖ ąŠč湥čĆąĄą┤čī ą┐čāčüčéą░ (čé. ąĄ. čüąŠą▒čŗčéąĖąĄ ą┐ąŠą║ą░ ąĮąĄ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ). ąÜąŠą│ą┤ą░ čüąŠą▒čŗčéąĖąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé, č鹊 ISR ą┐čĆąŠčüč鹊 ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čäčāąĮą║čåąĖčÄ xSemaphoreGiveFromISR() ą┤ą╗čÅ ą┐ąŠą╝ąĄčēąĄąĮąĖčÅ č鹊ą║ąĄąĮą░ (čüąĄą╝ą░č乊čĆą░) ą▓ ąŠč湥čĆąĄą┤čī, čćč鹊 čüą┤ąĄą╗ą░ąĄčé ąŠč湥čĆąĄą┤čī ąĘą░ą┐ąŠą╗ąĮąĄąĮąĮąŠą╣. ąŁč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą▓čŗčģąŠą┤čā ąĘą░ą┤ą░čćąĖ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ Blocked, ą║ąŠč鹊čĆą░čÅ čāą┤ą░ą╗ąĖčé č鹊ą║ąĄąĮ, čüąĮąŠą▓ą░ ąŠčćąĖčüčéąĖą▓ ąŠč湥čĆąĄą┤čī. ąÜą░ą║ č鹊ą╗čīą║ąŠ ąĘą░ą┤ą░čćą░ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ąĘą░ą▓ąĄčĆčłąĖčé čüą▓ąŠčÄ ąŠą▒čĆą░ą▒ąŠčéą║čā, ąŠąĮą░ čüąĮąŠą▓ą░ čüą┤ąĄą╗ą░ąĄčé ą┐ąŠą┐čŗčéą║čā čćč鹥ąĮąĖčÅ ąĖąĘ ąŠč湥čĆąĄą┤ąĖ, ąĮą░ą╣ą┤ąĄčé ąŠč湥čĆąĄą┤čī ą┐čāčüč鹊ą╣ ąĖ čüąĮąŠą▓ą░ ą▓ąŠą╣ą┤ąĄčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Blocked ą┤ą╗čÅ ąŠąČąĖą┤ą░ąĮąĖčÅ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ čüąŠą▒čŗčéąĖčÅ. ąŁčéą░ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą┐ąŠą║ą░ąĘą░ąĮą░ ąĮą░ čĆąĖčüčāąĮą║ąĄ 27.
ąØą░ čĆąĖčüčāąĮą║ąĄ 27 ą▓ąĖą┤ąĮąŠ, čćč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ 'ą┤ą░ąĄčé' čüąĄą╝ą░č乊čĆ ą▓ ą╗čÄą▒ąŠą╝ čüą╗čāčćą░ąĄ, ą┤ą░ąČąĄ ąĄčüą╗ąĖ ąŠąĮ ąĄčēąĄ ąĮąĄ 'ą▓ąĘčÅčé', ąĖ ąĘą░ą┤ą░čćą░ 'ą▒ąĄčĆąĄčé' čüąĄą╝ą░č乊čĆ, ąĮąŠ ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ąŠčéą┤ą░ąĄčé ąĄą│ąŠ ąŠą▒čĆą░čéąĮąŠ. ą¤ąŠčŹč鹊ą╝čā ąŠą┐ąĖčüą░ąĮąĮčŗą╣ čüčåąĄąĮą░čĆąĖą╣ ą║ąŠąĮčåąĄą┐čéčāą░ą╗čīąĮąŠ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮč鹥ąĮ ąĘą░ą┐ąĖčüąĖ ąĖ čćč鹥ąĮąĖčÄ č湥čĆąĄąĘ ąŠč湥čĆąĄą┤čī. ąŁč鹊 čćą░čüč鹊 ą▓čŗąĘčŗą▓ą░ąĄčé ą┐čāčéą░ąĮąĖčåčā, ą┐ąŠčüą║ąŠą╗čīą║čā ą▓ ą┤čĆčāą│ąĖčģ čüąĄą╝ą░č乊čĆąĮčŗčģ čüčåąĄąĮą░čĆąĖčÅčģ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤čĆčāą│ąĖąĄ ą┐čĆą░ą▓ąĖą╗ą░, ą│ą┤ąĄ ąĘą░ą┤ą░čćą░, ą║ąŠč鹊čĆą░čÅ ą▒ąĄčĆąĄčé čüąĄą╝ą░č乊čĆ, ą┤ąŠą╗ąČąĮą░ ą▓čüąĄą│ą┤ą░ ąĄą│ąŠ ąŠčéą┤ą░čéčī - čéą░ą║ąŠą╣ čüčåąĄąĮą░čĆąĖą╣ ąŠą┐ąĖčüą░ąĮ ą▓ čćą░čüčéąĖ 4.
API čäčāąĮą║čåąĖčÅ vSemaphoreCreateBinary()
ąźąĄąĮą┤ą╗čŗ ą║ąŠ ą▓čüąĄą╝ čĆą░ąĘą╗ąĖčćąĮčŗą╝ čéąĖą┐ą░ą╝ čüąĄą╝ą░č乊čĆąŠą▓ FreeRTOS čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ čéąĖą┐ą░ xSemaphoreHandle.
ą¤ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ čüąĄą╝ą░č乊čĆ ą╝ąŠąČąĮąŠ čĆąĄą░ą╗čīąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī, ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüąĮą░čćą░ą╗ą░ čüąŠąĘą┤ą░ąĮ. ąöą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ ą┤ą▓ąŠąĖčćąĮąŠą│ąŠ čüąĄą╝ą░č乊čĆą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ API čäčāąĮą║čåąĖčÅ vSemaphoreCreateBinary().
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: API čüąĄą╝ą░č乊čĆąŠą▓ čĆąĄą░ą╗čīąĮąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ ą║ą░ą║ ąĮą░ą▒ąŠčĆ ą╝ą░ą║čĆąŠčüąŠą▓, čŹč鹊 ąĮąĄ čäčāąĮą║čåąĖąĖ. ąöą╗čÅ čāą┐čĆąŠčēąĄąĮąĖčÅ ąĖąĘą╗ąŠąČąĄąĮąĖčÅ ą▓ čŹč鹊ą╣ ą║ąĮąĖą│ąĄ čŹčéąĖ ą╝ą░ą║čĆąŠčüčŗ ąĮą░ąĘčŗą▓ą░čÄčéčüčÅ čäčāąĮą║čåąĖčÅą╝ąĖ.
void vSemaphoreCreateBinary( xSemaphoreHandle xSemaphore );
ąøąĖčüčéąĖąĮą│ 41. ą¤čĆąŠč鹊čéąĖą┐ API čäčāąĮą║čåąĖąĖ vSemaphoreCreateBinary()
ąóą░ą▒ą╗ąĖčåą░ 12. ą¤ą░čĆą░ą╝ąĄčéčĆčŗ čäčāąĮą║čåąĖąĖ vSemaphoreCreateBinary()
| ąśą╝čÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| xSemaphore |
ąĪąŠąĘą┤ą░ą▓ą░ąĄą╝čŗą╣ čüąĄą╝ą░č乊čĆ
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 vSemaphoreCreateBinary() ą▓ ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéąĖ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ą║ą░ą║ ą╝ą░ą║čĆąŠčü, čéą░ą║ čćč鹊 ą┐ąĄčĆąĄą╝ąĄąĮąĮą░čÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮą░ ąĮą░ą┐čĆčÅą╝čāčÄ, ą░ ąĮąĄ č湥čĆąĄąĘ čāą║ą░ąĘą░č鹥ą╗čī. ą¤čĆąĖą╝ąĄčĆ ą▓ čŹč鹊ą╣ čćą░čüčéąĖ ą▓ą║ą╗čÄčćą░ąĄčé ą▓čŗąĘąŠą▓čŗ vSemaphoreCreateBinary(), ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī čüą║ąŠą┐ąĖčĆąŠą▓ą░ąĮčŗ ą▓ ą║ą░č湥čüčéą▓ąĄ ąŠą▒čĆą░ąĘčåą░. |

ąĀąĖčü. 27. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┤ą▓ąŠąĖčćąĮąŠą│ąŠ čüąĄą╝ą░č乊čĆą░ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ąĘą░ą┤ą░čćąĖ ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ
API čäčāąĮą║čåąĖčÅ xSemaphoreTake()
'ąÆąĘčÅčéčī' (Take) čüąĄą╝ą░č乊čĆ ąŠąĘąĮą░čćą░ąĄčé 'ą┐ąŠą╗čāčćąĖčéčī' ąĖą╗ąĖ 'ą┐čĆąĖąĮčÅčéčī' čüąĄą╝ą░č乊čĆ. ąĪąĄą╝ą░č乊čĆ ą╝ąŠąČąĮąŠ ą▓ąĘčÅčéčī č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ ąŠąĮ ą┤ąŠčüčéčāą┐ąĄąĮ. ąÆ ą║ą╗ą░čüčüąĖč湥čüą║ąŠą╣ č鹥čĆą╝ąĖąĮąŠą╗ąŠą│ąĖąĖ čüąĄą╝ą░č乊čĆąŠą▓ xSemaphoreTake() 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮą░ ąŠą┐ąĄčĆą░čåąĖąĖ P().
ąÆčüąĄ čĆą░ąĘą╗ąĖčćąĮčŗąĄ čéąĖą┐čŗ čüąĄą╝ą░č乊čĆąŠą▓ FreeRTOS, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ čĆąĄą║čāčĆčüąĖą▓ąĮčŗčģ čüąĄą╝ą░č乊čĆąŠą▓, ą╝ąŠą│čāčé ą▒čŗčéčī 'ą▓ąĘčÅčéčŗ' čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ xSemaphoreTake().
xSemaphoreTake() ąĮąĄą╗čīąĘčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĖąĘ ISR.
portBASE_TYPE xSemaphoreTake( xSemaphoreHandle xSemaphore, portTickType xTicksToWait );
ąøąĖčüčéąĖąĮą│ 42. ą¤čĆąŠč鹊čéąĖą┐ API čäčāąĮą║čåąĖąĖ xSemaphoreTake()
ąóą░ą▒ą╗ąĖčåą░ 13. ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ąĖ ąĘąĮą░č湥ąĮąĖąĄ ą▓ąŠąĘą▓čĆą░čéą░ čäčāąĮą║čåąĖąĖ xSemaphoreTake()
ąśą╝čÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░
/
ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ
|
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| xSemaphore |
ąĪąĄą╝ą░č乊čĆ, ą║ąŠč鹊čĆčŗą╣ ąĮą░ą┤ąŠ 'ą▓ąĘčÅčéčī'.
ąÜ čüąĄą╝ą░č乊čĆčā ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąŠą▒čĆą░čēąĄąĮąĖąĄ č湥čĆąĄąĘ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ xSemaphoreHandle, ąĖ čüąĄą╝ą░č乊čĆ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čÅą▓ąĮąŠ čüąŠąĘą┤ą░ąĮ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ąĄą│ąŠ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī. |
| xTicksToWait |
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą▓čĆąĄą╝čÅ, ą▓ ą║ąŠč鹊čĆąŠą╝ ąĘą░ą┤ą░čćą░ ą┤ąŠą╗ąČąĮą░ ąŠčüčéą░ą▓ą░čéčīčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Blocked ą┐čĆąĖ ąŠąČąĖą┤ą░ąĮąĖąĖ čüąĄą╝ą░č乊čĆą░, ąĄčüą╗ąĖ ąŠąĮ ąĄčēąĄ ąĮąĄą┤ąŠčüčéčāą┐ąĄąĮ.
ąĢčüą╗ąĖ xTicksToWait čĆą░ą▓ąĄąĮ 0, č鹊 xSemaphoreTake() čüą┤ąĄą╗ą░ąĄčé ą▓ąŠąĘą▓čĆą░čé ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ, ąĄčüą╗ąĖ čüąĄą╝ą░č乊čĆ ąĮąĄą┤ąŠčüčéčāą┐ąĄąĮ.
ąÆčĆąĄą╝čÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ čāą║ą░ąĘą░ąĮąŠ ą▓ ą┐ąĄčĆąĖąŠą┤ą░čģ čéąĖą║ą░, čéą░ą║ čćč鹊 ą░ą▒čüąŠą╗čÄčéąĮąŠąĄ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĮąŠąĄ ą▓čĆąĄą╝čÅ ąĘą░ą▓ąĖčüąĖčé ąŠčé čćą░čüč鹊čéčŗ čéąĖą║ąŠą▓. ą£ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║ąŠąĮčüčéą░ąĮčéčā portTICK_RATE_MS ą┤ą╗čÅ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ą░čģ ą▓ąŠ ą▓čĆąĄą╝čÅ, čāą║ą░ąĘą░ąĮąĮąŠąĄ ą▓ čéąĖą║ą░čģ.
ąŻčüčéą░ąĮąŠą▓ą║ą░ xTicksToWait ą▓ ąĘąĮą░č湥ąĮąĖąĄ portMAX_DELAY ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ č鹊ą╝čā, čćč鹊 ąĘą░ą┤ą░čćą░ ą▒čāą┤ąĄčé ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠ (ą▒ąĄąĘ čéą░ą╣ą╝ą░čāčéą░) ąŠąČąĖą┤ą░čéčī čüąĄą╝ą░č乊čĆą░, ąĄčüą╗ąĖ ą▓ čäą░ą╣ą╗ąĄ FreeRTOSConfig.h INCLUDE_vTaskSuspend čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą▓ 1. |
| ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ |
ąÆąŠąĘą╝ąŠąČąĮčŗ ą┤ą▓ą░ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝čŗčģ ąĘąĮą░č湥ąĮąĖčÅ:
pdPASS - ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ č鹊ą╗čīą║ąŠ ą▓ č鹊ą╝ čüą╗čāčćą░ąĄ, ąĄčüą╗ąĖ xSemaphoreTake() čāčüą┐ąĄčłąĮąŠ ą┐ąŠą╗čāčćąĖą╗ą░ čüąĄą╝ą░č乊čĆ.
ąĢčüą╗ąĖ čāą║ą░ąĘą░ąĮąŠ ą▓čĆąĄą╝čÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ (xTicksToWait ąĮąĄ čĆą░ą▓ąĮąŠ 0), č鹊 ą▓ąŠąĘą╝ąŠąČąĮą░ čüąĖčéčāą░čåąĖčÅ, čćč鹊 ąĘą░ą┤ą░čćą░ ą┐ąĄčĆąĄčłą╗ą░ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Blocked ą┤ą╗čÅ ąŠąČąĖą┤ą░ąĮąĖčÅ čüąĄą╝ą░č乊čĆą░ (ąĄčüą╗ąĖ ąŠąĮ ąĮąĄ ą▒čŗą╗ ą┤ąŠčüčéčāą┐ąĄąĮ), ąĮąŠ čüąĄą╝ą░č乊čĆ čüčéą░ą╗ ą┤ąŠčüčéčāą┐ąĄąĮ ą┤ąŠ ąĖčüč鹥č湥ąĮąĖčÅ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ.
pdFALSE - čüąĄą╝ą░č乊čĆ ąĮąĄą┤ąŠčüčéčāą┐ąĄąĮ.
ąĢčüą╗ąĖ čāą║ą░ąĘą░ąĮąŠ ą▓čĆąĄą╝čÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ (xTicksToWait ąĮąĄ čĆą░ą▓ąĮąŠ 0), č鹊 ą▓čŗąĘą▓ą░ą▓čłą░čÅ čäčāąĮą║čåąĖčÄ ąĘą░ą┤ą░čćą░ ą┐ąĄčĆąĄčłą╗ą░ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Blocked ą┤ą╗čÅ ąŠąČąĖą┤ą░ąĮąĖčÅ ą┤ąŠčüčéčāą┐ąĮąŠčüčéąĖ čüąĄą╝ą░č乊čĆą░, ąĮąŠ čüąĄą╝ą░č乊čĆ čéą░ą║ ąĖ ąĮąĄ čüčéą░ą╗ ą┤ąŠčüčéčāą┐ąĄąĮ ą┐ąŠčüą╗ąĄ ąĖčüč鹥č湥ąĮąĖčÅ čāą║ą░ąĘą░ąĮąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ. |
API čäčāąĮą║čåąĖčÅ xSemaphoreGiveFromISR()
ąÆčüąĄ čĆą░ąĘą╗ąĖčćąĮčŗąĄ čéąĖą┐čŗ čüąĄą╝ą░č乊čĆąŠą▓ FreeRTOS, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ čĆąĄą║čāčĆčüąĖą▓ąĮčŗčģ čüąĄą╝ą░č乊čĆąŠą▓, ą╝ąŠą│čāčé ą▒čŗčéčī 'ą▓čŗą┤ą░ąĮčŗ' čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čäčāąĮą║čåąĖąĖ xSemaphoreGiveFromISR().
xSemaphoreGiveFromISR() - čüą┐ąĄčåąĖą░ą╗čīąĮą░čÅ č乊čĆą╝ą░ čäčāąĮą║čåąĖąĖ xSemaphoreGive(), ą║ąŠč鹊čĆą░čÅ čüą┐ąĄčåąĖą░ą╗čīąĮąŠ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮą░ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĖąĘ ISR.
portBASE_TYPE xSemaphoreGiveFromISR( xSemaphoreHandle xSemaphore,
portBASE_TYPE *pxHigherPriorityTaskWoken );
ąøąĖčüčéąĖąĮą│ 43. ą¤čĆąŠč鹊čéąĖą┐ API čäčāąĮą║čåąĖąĖ xSemaphoreGiveFromISR()
ąóą░ą▒ą╗ąĖčåą░ 14. ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ąĖ ąĘąĮą░č湥ąĮąĖąĄ ą▓ąŠąĘą▓čĆą░čéą░ čäčāąĮą║čåąĖąĖ xSemaphoreGiveFromISR()
ąśą╝čÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░
/
ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ
|
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| xSemaphore |
ąĪąĄą╝ą░č乊čĆ, ą║ąŠč鹊čĆčŗą╣ ąĮą░ą┤ąŠ 'ą┤ą░čéčī'.
ąÜ čüąĄą╝ą░č乊čĆčā ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ąŠą▒čĆą░čēąĄąĮąĖąĄ č湥čĆąĄąĘ ą┐ąĄčĆąĄą╝ąĄąĮąĮčāčÄ xSemaphoreHandle, ąĖ čüąĄą╝ą░č乊čĆ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čÅą▓ąĮąŠ čüąŠąĘą┤ą░ąĮ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ąĄą│ąŠ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī. |
| pxHigherPriorityTaskWoken |
ąÆąŠąĘą╝ąŠąČąĄąĮ čüą╗čāčćą░ą╣, čćč鹊 ąŠą┤ąĖąĮ ąĖ č鹊čé ąČąĄ čüąĄą╝ą░č乊čĆ ą▒čāą┤ąĄčé ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčī ąŠą┤ąĮčā ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┤ą░čć ąĮą░ ąŠąČąĖą┤ą░ąĮąĖąĖ ą┤ąŠčüčéčāą┐ąĮąŠčüčéąĖ čüąĄą╝ą░č乊čĆą░. ąÆčŗąĘąŠą▓ xSemaphoreGiveFromISR() ą╝ąŠąČąĄčé čüą┤ąĄą╗ą░čéčī čüąĄą╝ą░č乊čĆ ą┤ąŠčüčéčāą┐ąĮčŗą╝, čéą░ą║ čćč鹊 čŹč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą▓čŗčģąŠą┤čā čéą░ą║ąĖčģ ąĘą░ą┤ą░čć ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ Blocked. ąĢčüą╗ąĖ ą▓čŗąĘąŠą▓ xSemaphoreGiveFromISR() ą┐čĆąĖą▓ąĄą╗ ą║ ą▓čŗčģąŠą┤čā ąĘą░ą┤ą░čćąĖ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ Blocked, ąĖ čā čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ ą┐čĆąĖąŠčĆąĖč鹥čé ą▓čŗčłąĄ, č湥ą╝ čā č鹥ą║čāčēąĄą╣ ą▓čŗą┐ąŠą╗ąĮčÅčÄčēąĄą╣čüčÅ ąĘą░ą┤ą░čćąĖ, (ąĘą░ą┤ą░čćą░, ą║ąŠč鹊čĆą░čÅ ą▒čŗą╗ą░ ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ISR ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ), č鹊 xSemaphoreGiveFromISR() čāčüčéą░ąĮąŠą▓ąĖčé ą▓ąĮčāčéčĆąĖ čüąĄą▒čÅ *pxHigherPriorityTaskWoken ą▓ ąĘąĮą░č湥ąĮąĖąĄ pdTRUE.
ąĢčüą╗ąĖ xSemaphoreGiveFromISR() čāčüčéą░ąĮąŠą▓ąĖčé čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą▓ pdTRUE, č鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮąŠ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░ ą┐ąĄčĆąĄą┤ ą▓čŗčģąŠą┤ąŠą╝ ąĖąĘ ISR. ąŁč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ č鹊ą╝čā, čćč鹊 ą▓čŗčģąŠą┤ ąĖąĘ ISR ą▒čāą┤ąĄčé ą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮ čüčĆą░ąĘčā ą┐čĆčÅą╝ąŠ ą▓ ąĘą░ą┤ą░čćčā čü ąĮą░ąĖą▓čŗčüčłąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝, ąĮą░čģąŠą┤čÅčēčāčÄčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Ready. |
| ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ |
ąÆąŠąĘą╝ąŠąČąĮčŗ ą┤ą▓ą░ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝čŗčģ ąĘąĮą░č湥ąĮąĖčÅ:
pdPASS - ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ č鹊ą╗čīą║ąŠ ą▓ č鹊ą╝ čüą╗čāčćą░ąĄ, ąĄčüą╗ąĖ ą▓čŗąĘąŠą▓ xSemaphoreGiveFromISR() ą▒čŗą╗ čāčüą┐ąĄčłąĮčŗą╝.
pdFAIL - ąĄčüą╗ąĖ čüąĄą╝ą░č乊čĆ čāąČąĄ ą┤ąŠčüčéčāą┐ąĄąĮ, ąŠąĮ ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮ, ąĖ xSemaphoreGiveFromISR() ą▓ąĄčĆąĮąĄčé pdFAIL. |
ą¤čĆąĖą╝ąĄčĆ 12. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┤ą▓ąŠąĖčćąĮąŠą│ąŠ čüąĄą╝ą░č乊čĆą░ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ąĘą░ą┤ą░čćąĖ čü ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄą╝
ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┤ą▓ąŠąĖčćąĮčŗą╣ čüąĄą╝ą░č乊čĆ ą┤ą╗čÅ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ąĘą░ą┤ą░čćąĖ ąĖąĘ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (ISR) - č湥ą╝ ą┤ąŠčüčéąĖą│ą░ąĄčéčüčÅ čŹčäč乥ą║čéąĖą▓ąĮą░čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖčÅ ąĘą░ą┤ą░čćąĖ čü ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄą╝.
ą¤čĆąŠčüčéą░čÅ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ą░čÅ ąĘą░ą┤ą░čćą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (software interrupt) ą║ą░ąČą┤čŗąĄ 500 ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤. ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāą┤ąŠą▒čüčéą▓ą░, ą┐ąŠč鹊ą╝čā čćč鹊 čéčĆčāą┤ąĮąŠ ąŠčéčüą╗ąĄąČąĖą▓ą░čéčī čĆąĄą░ą╗čīąĮčŗąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ IRQ ąŠčé 菹╝čāą╗ąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ DOS-ąŠą║čĆčāąČąĄąĮąĖčÅ. ąøąĖčüčéąĖąĮą│ 44 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąŠą╣ ąĘą░ą┤ą░čćąĖ. ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ąĘą░ą┤ą░čćą░ ą┐ąĄčćą░čéą░ąĄčé čüčéčĆąŠą║čā ą┐ąĄčĆąĄą┤ ąĖ ą┐ąŠčüą╗ąĄ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čÅą▓ąĮąŠ ą┐čĆąŠą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆąŠą▓ą░čéčī ą▓ ą▓čŗą▓ąŠą┤ąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
static void vPeriodicTask( void *pvParameters )
{
for( ;; )
{
/* ąŁčéą░ ąĘą░ą┤ą░čćą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐čĆąŠčüč鹊 ą┤ą╗čÅ 'čüąĖą╝čāą╗čÅčåąĖąĖ' ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ,
ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝ąŠą│ąŠ č湥čĆąĄąĘ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą║ą░ąČą┤čŗąĄ 500 ą╝čü. */
vTaskDelay( 500 / portTICK_RATE_MS );
/* ąōąĄąĮąĄčĆą░čåąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą┐ąĄčćą░čéčī ą▓ ą║ąŠąĮčüąŠą╗čī čüąŠąŠą▒čēąĄąĮąĖčÅ ą┤ąŠ ąĖ ą┐ąŠčüą╗ąĄ
ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ, čéą░ą║ čćč鹊 ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ
čģąŠčĆąŠčłąŠ ą▓ąĖą┤ąĮą░ ą┐čĆąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĖ ą┐čĆąĖą╝ąĄčĆą░. */
vPrintString( "Periodic task - About to generate an interrupt.\r\n" );
__asm{ int 0x82 } /* ąŁčéą░ čüčéčĆąŠą║ą░ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. */
vPrintString( "Periodic task - Interrupt generated.\r\n\r\n\r\n" );
}
}
ąøąĖčüčéąĖąĮą│ 44. ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ ąĘą░ą┤ą░čćąĖ, ą║ąŠč鹊čĆą░čÅ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą▓ ą┐čĆąĖą╝ąĄčĆąĄ 12
ąøąĖčüčéąĖąĮą│ 45 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ ąĘą░ą┤ą░čćąĖ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ - ąĘą░ą┤ą░čćą░, ą║ąŠč鹊čĆą░čÅ čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮą░ čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄą╝ č湥čĆąĄąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┤ą▓ąŠąĖčćąĮąŠą│ąŠ čüąĄą╝ą░č乊čĆą░. ąĪąĮąŠą▓ą░ čüąŠąŠą▒čēąĄąĮąĖąĄ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ ąĮą░ ą┐ąĄčćą░čéčī ą┐čĆąĖ ą║ą░ąČą┤ąŠą╣ ąĖč鹥čĆą░čåąĖąĖ ąĘą░ą┤ą░čćąĖ, čéą░ą║ čćč鹊 ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī, ą▓ ą║ąŠč鹊čĆąŠą╝ ą▓čŗą┐ąŠą╗ąĮčÅčÄčéčüčÅ ąĘą░ą┤ą░čćą░ ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, čģąŠčĆąŠčłąŠ ą▓ąĖą┤ąĮą░ ą┐čĆąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĖ ą┐čĆąĖą╝ąĄčĆą░.
static void vHandlerTask( void *pvParameters )
{
/* ąÜą░ą║ ąĖ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ ąĘą░ą┤ą░čć, čŹčéą░ ąĘą░ą┤ą░čćą░ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ąĮą░ ąŠčüąĮąŠą▓ąĄ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠą│ąŠ
čåąĖą║ą╗ą░. */
for( ;; )
{
/* ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čüąĄą╝ą░č乊čĆą░ ą┤ą╗čÅ ąŠąČąĖą┤ą░ąĮąĖčÅ čüąŠą▒čŗčéąĖčÅ. ąĪąĄą╝ą░č乊čĆ ą▒čŗą╗ čüąŠąĘą┤ą░ąĮ ą┐ąĄčĆąĄą┤
ąĘą░ą┐čāčüą║ąŠą╝ čłąĄą┤čāą╗ąĄčĆą░, čé. ąĄ. ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ čŹčéą░ ąĘą░ą┤ą░čćą░ ą▒čŗą╗ą░ ąĘą░ą┐čāčēąĄąĮą░
ą▓ ą┐ąĄčĆą▓čŗą╣ čĆą░ąĘ. ąŚą░ą┤ą░čćą░ ą▒ą╗ąŠą║ąĖčĆčāąĄčéčüčÅ ąĮą░ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠąĄ ą▓čĆąĄą╝čÅ, čéą░ą║ čćč鹊
ą▓ąŠąĘą▓čĆą░čé ąĖąĘ čäčāąĮą║čåąĖąĖ xSemaphoreTake() ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ čāčüą┐ąĄčłąĮąŠą│ąŠ
'ą▓ąĘčÅčéąĖčÅ' (ą┐ąŠą╗čāč湥ąĮąĖčÅ) čüąĄą╝ą░č乊čĆą░. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĘą┤ąĄčüčī ąĮąĄ ąĮčāąČąĮąŠ
ą┐čĆąŠą▓ąĄčĆčÅčéčī čĆąĄąĘčāą╗čīčéą░čé ą▓ąŠąĘą▓čĆą░čéą░ čäčāąĮą║čåąĖąĖ xSemaphoreTake(). */
xSemaphoreTake( xBinarySemaphore, portMAX_DELAY );
/* ą¦č鹊ą▒čŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠą┐ą░ą╗ąŠ čüčÄą┤ą░, ą┤ąŠą╗ąČąĮąŠ ą▒čŗą╗ąŠ ą┐čĆąŠąĖąĘąŠą╣čéąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ.
ąÆ čŹč鹊ą╝ ą╝ąĄčüč鹥 ą║ąŠą┤ą░ ąŠą▒čŗčćąĮąŠ čüč鹊ąĖčé ąŠą▒čĆą░ą▒ąŠčéą║ą░ čüąŠą▒čŗčéąĖčÅ, ą▓ ąĮą░čłąĄą╝ ąČąĄ čüą╗čāčćą░ąĄ
ą▓čüčÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ąĘą░ą║ą╗čÄčćą░ąĄčéčüčÅ ą▓ ą┐čĆąŠčüč鹊ą╝ ą▓čŗą▓ąŠą┤ąĄ čüąŠąŠą▒čēąĄąĮąĖčÅ. */
vPrintString( "Handler task - Processing event.\r\n" );
}
}
ąøąĖčüčéąĖąĮą│ 45. ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ ąĘą░ą┤ą░čćąĖ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ (handler task), čé. ąĄ. ąĘą░ą┤ą░čćąĖ, ą║ąŠč鹊čĆą░čÅ ąĘą░čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮą░ čü ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄą╝, ą▓ ą┐čĆąĖą╝ąĄčĆąĄ 12
ąøąĖčüčéąĖąĮą│ 46 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čĆąĄą░ą╗čīąĮčŗą╣ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ISR. ą×ąĮ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ąŠč湥ąĮčī ą╝ą░ą╗ąŠ ą┤ąĄą╣čüčéą▓ąĖą╣, ą║čĆąŠą╝ąĄ ą║ą░ą║ 'ą▓čŗą┤ą░ąĄčé' čüąĄą╝ą░č乊čĆ ą┤ą╗čÅ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ąĘą░ą┤ą░čćąĖ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐ą░čĆą░ą╝ąĄčéčĆ pxHigherPriorityTaskWoken. ą×ąĮ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ ąĘąĮą░č湥ąĮąĖąĄ pdFALSE ą┐ąĄčĆąĄą┤ ą▓čŗąĘąŠą▓ąŠą╝ xSemaphoreGiveFromISR(), čü ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄą╝ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą║ąŠąĮč鹥ą║čüčéą░, ąĄčüą╗ąĖ ą▓ą┐ąŠčüą╗ąĄą┤čüčéą▓ąĖąĖ ą▒čŗą╗ąŠ ąŠą▒ąĮą░čĆčāąČąĄąĮąŠ, čćč鹊 pxHigherPriorityTaskWoken čĆą░ą▓ąĮąŠ pdTRUE.
ąĪąĖąĮčéą░ą║čüąĖčü ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ISR ąĖ ą▓čŗąĘąŠą▓ ą╝ą░ą║čĆąŠčüą░ ą┤ą╗čÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą║ąŠąĮč鹥ą║čüčéą░ ą┐čĆąĖą▓čÅąĘą░ąĮ ą║ čüą┐ąĄčåąĖčäąĖč湥čüą║ąŠą╣ ą┐ą╗ą░čéč乊čĆą╝ąĄ ą┐ąŠčĆčéą░ Open Watcom DOS, ąĖ ą╝ąŠąČąĄčé ąŠčéą╗ąĖčćą░čéčīčüčÅ ąŠčé ą┤čĆčāą│ąĖčģ ą┐ąŠčĆč鹊ą▓. ą¤ąŠąČą░ą╗čāą╣čüčéą░ ąŠą▒čĆą░čéąĖč鹥čüčī ą║ ą┐čĆąĖą╝ąĄčĆą░ą╝, ą║ąŠč鹊čĆčŗąĄ ą▓ą║ą╗čÄč湥ąĮčŗ ą▓ ą┤ąĄą╝ąŠ-ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ąÆą░ą╝ąĖ ą┐ąŠčĆčéą░ FreeRTOS, čćč鹊ą▒čŗ ąĮą░ą╣čéąĖ ą░ą║čéčāą░ą╗čīąĮčŗą╣, čéčĆąĄą▒čāąĄą╝čŗą╣ ą┤ą╗čÅ ąÆą░čłąĄą│ąŠ ą┐ąŠčĆčéą░ čüąĖąĮčéą░ą║čüąĖčü.
static void __interrupt __far vExampleInterruptHandler( void )
{
static portBASE_TYPE xHigherPriorityTaskWoken;
xHigherPriorityTaskWoken = pdFALSE;
/* 'ąöą░čéčī' čüąĄą╝ą░č乊čĆ ą┤ą╗čÅ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ąĘą░ą┤ą░čćąĖ. */
xSemaphoreGiveFromISR( xBinarySemaphore, &xHigherPriorityTaskWoken );
if( xHigherPriorityTaskWoken == pdTRUE )
{
/* ąÆčŗą┤ą░čćą░ čüąĄą╝ą░č乊čĆą░ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆčāąĄčé ąĘą░ą┤ą░čćčā, ąĖ ą┐čĆąĖąŠčĆąĖč鹥čé čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĮąŠą╣
ąĘą░ą┤ą░čćąĖ ą▓čŗčłąĄ, č湥ą╝ čā č鹥ą║čāčēąĄą╣ ą▓čŗą┐ąŠą╗ąĮčÅčÄčēąĄą╣čüčÅ ąĘą░ą┤ą░čćąĖ - ą┐ąŠčŹč鹊ą╝čā ą║ąŠąĮč鹥ą║čüčé
ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄčéčüčÅ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ ą▓ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĮčāčÄ (čü ą▒ąŠą╗ąĄąĄ
ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝) ąĘą░ą┤ą░čćčā.
ąÆąØąśą£ąÉąØąśąĢ: ą╝ą░ą║čĆąŠčü, čĆąĄą░ą╗čīąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą║ąŠąĮč鹥ą║čüčéą░
ąĖąĘ ISR, ąĘą░ą▓ąĖčüąĖčé ąŠčé ą║ąŠąĮą║čĆąĄčéąĮąŠą│ąŠ ą┐ąŠčĆčéą░ FreeRTOS. ąŚą┤ąĄčüčī čāą║ą░ąĘą░ąĮąŠ
ąĖą╝čÅ ą╝ą░ą║čĆąŠčüą░, ą║ąŠčĆčĆąĄą║čéąĮąŠąĄ ą┤ą╗čÅ ą┐ąŠčĆčéą░ Open Watcom DOS. ąöčĆčāą│ąĖąĄ ą┐ąŠčĆčéčŗ
FreeRTOS ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤čĆčāą│ąŠą╣ čüąĖąĮčéą░ą║čüąĖčü. ąöą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ
ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ čüąĖąĮčéą░ą║čüąĖčüą░ ąŠą▒čĆą░čéąĖč鹥čüčī ą║ ą┐čĆąĖą╝ąĄčĆą░ą╝, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗą╝
ą▓ą╝ąĄčüč鹥 čü ą┐ąŠčĆč鹊ą╝ FreeRTOS. */
portSWITCH_CONTEXT();
}
}
ąøąĖčüčéąĖąĮą│ 46. ą×ą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą▓ ą┐čĆąĖą╝ąĄčĆąĄ 12
ążčāąĮą║čåąĖčÅ main() ą┐čĆąŠčüč鹊 čüąŠąĘą┤ą░ąĄčé ą┤ą▓ąŠąĖčćąĮčŗą╣ čüąĄą╝ą░č乊čĆ ąĖ ąĘą░ą┤ą░čćąĖ, ąĖąĮčüčéą░ą╗ą╗ąĖčĆčāąĄčé ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖ ąĘą░ą┐čāčüą║ą░ąĄčé čłąĄą┤čāą╗ąĄčĆ. ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ ą┐ąŠą║ą░ąĘą░ąĮą░ ą▓ ą╗ąĖčüčéąĖąĮą│ąĄ 47.
int main( void )
{
/* ą¤ąĄčĆąĄą┤ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čüąĄą╝ą░č乊čĆ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čÅą▓ąĮąŠ čüąŠąĘą┤ą░ąĮ. ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ
čüąŠąĘą┤ą░ąĄčéčüčÅ ą┤ą▓ąŠąĖčćąĮčŗą╣ čüąĄą╝ą░č乊čĆ. */
vSemaphoreCreateBinary( xBinarySemaphore );
/* ąśąĮčüčéą░ą╗ą╗čÅčåąĖčÅ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ISR. */
_dos_setvect( 0x82, vExampleInterruptHandler );
/* ą¤ąŠą▓ąĄčĆą║ą░ - čāčüą┐ąĄčłąĮąŠ ą╗ąĖ čüąŠąĘą┤ą░ąĮ čüąĄą╝ą░č乊čĆ. */
if( xBinarySemaphore != NULL )
{
/* ąĪąŠąĘą┤ą░ąĮąĖąĄ ąĘą░ą┤ą░čćąĖ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░. ąŁč鹊 ąĘą░ą┤ą░čćą░, ą║ąŠč鹊čĆą░čÅ ąĘą░čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮą░ čü
ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄą╝ (ISR). ąŚą░ą┤ą░čćą░ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ čüąŠąĘą┤ą░ąĄčéčüčÅ čü čüą░ą╝čŗą╝ ą▓čŗčüąŠą║ąĖą╝
ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝, čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ąĄą│ąŠ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮčŗą╣ ąĘą░ą┐čāčüą║ ą┐ąŠčüą╗ąĄ ą▓čŗčģąŠą┤ą░
ąĖąĘ ISR. ąÆ ąĮą░čłąĄą╝ čüą╗čāčćą░ąĄ ą▓čŗą▒čĆą░ąĮ ą┐čĆąĖąŠčĆąĖč鹥čé 3. */
xTaskCreate( vHandlerTask, "Handler", 1000, NULL, 3, NULL );
/* ąĪąŠąĘą┤ą░ąĮąĖąĄ ąĘą░ą┤ą░čćąĖ, ą║ąŠč鹊čĆą░čÅ ą▒čāą┤ąĄčé ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ
ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. ąŚą░ą┤ą░čćą░ čüąŠąĘą┤ą░ąĄčéčüčÅ čü ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ ą╝ąĄąĮčīčłąĖą╝, č湥ą╝ ąĘą░ą┤ą░čćą░
ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░, čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ą▓čŗč鹥čüąĮąĄąĮąĖąĄ ąĘą░ą┤ą░č湥ą╣ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░,
ą║ąŠą│ą┤ą░ ąĘą░ą┤ą░čćą░ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą▓čŗčģąŠą┤ąĖčé ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ Blocked. */
xTaskCreate( vPeriodicTask, "Periodic", 1000, NULL, 1, NULL );
/* ąŚą░ą┐čāčüą║ čłąĄą┤čāą╗ąĄčĆą░, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ ąĘą░ą┤ą░čćąĖ ąĘą░ą┐čāčüčéčÅčéčüčÅ ąĮą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ. */
vTaskStartScheduler();
}
/* ąĢčüą╗ąĖ ą▓čüąĄ čģąŠčĆąŠčłąŠ, č鹊 čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓ main() ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą┤ąŠą╣ą┤ąĄčé ą┤ąŠ čŹč鹊ą╣ č鹊čćą║ąĖ,
ąĖ č鹥ą┐ąĄčĆčī čłąĄą┤čāą╗ąĄčĆ ą▒čāą┤ąĄčé čāą┐čĆą░ą▓ą╗čÅčéčī ąĘą░ą┤ą░čćą░ą╝ąĖ. ąĢčüą╗ąĖ main() ą┤ąŠą▓ąĄą╗ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ
ą┤ąŠ čŹč鹊ą│ąŠ ą╝ąĄčüčéą░, č鹊 čŹč鹊 ą╝ąŠąČąĄčé ąŠąĘąĮą░čćą░čéčī, čćč鹊 ąĮąĄ čģą▓ą░čéą░ąĄčé ą┐ą░ą╝čÅčéąĖ ą║čāčćąĖ (heap)
ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą╣ ąĘą░ą┤ą░čćąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle task, ąŠą▒ čŹč鹊ą╣ ąĘą░ą┤ą░č湥
ą┤ą░ą╗ąĄąĄ). ą¦ą░čüčéčī 5 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▒ąŠą╗čīčłąĄ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÄ ą┐ą░ą╝čÅčéčīčÄ. */
for( ;; );
}
ąøąĖčüčéąĖąĮą│ 47. ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ čäčāąĮą║čåąĖąĖ main() ą┐čĆąĖą╝ąĄčĆą░ 12
ą¤čĆąĖą╝ąĄčĆ 12 ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčé ą▓čŗą▓ąŠą┤, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗą╣ ąĮą░ čĆąĖčüčāąĮą║ąĄ 28. ąÜą░ą║ ąĖ ąŠąČąĖą┤ą░ą╗ąŠčüčī, ąĘą░ą┤ą░čćą░ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ (Handler) ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ą┐ąŠčüą╗ąĄ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (Interrupt), čéą░ą║ čćč鹊 ą▓čŗą▓ąŠą┤ ąĖąĘ ąĘą░ą┤ą░čćąĖ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┤ąĄą╗ąĖčé ąĮą░ čćą░čüčéąĖ ą▓čŗą▓ąŠą┤, ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖą╝čŗą╣ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąŠą╣ ąĘą░ą┤ą░č湥ą╣ (Periodic). ąæąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ ą┐čĆąŠčåąĄčüčü ąŠą┐ąĖčüą░ąĮ ąĮą░ čĆąĖčüčāąĮą║ąĄ 29.

ąĀąĖčü. 28. ąÆčŗą▓ąŠą┤, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčé ą┐čĆąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĖ ą┐čĆąĖą╝ąĄčĆ 12

ąĀąĖčü. 29. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐čĆąĖą╝ąĄčĆą░ 12
[3.3. ąĪąĄą╝ą░č乊čĆčŗ čüąŠ čüč湥čéčćąĖą║ąŠą╝]
ą¤čĆąĖą╝ąĄčĆ 12 ą┐čĆąŠą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆąŠą▓ą░ą╗ ą┤ą▓ąŠąĖčćąĮčŗą╣ čüąĄą╝ą░č乊čĆ, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗čüčÅ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ąĘą░ą┤ą░čćąĖ čü ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄą╝. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą▒čŗą╗ą░ čüą╗ąĄą┤čāčÄčēąĄą╣:
1. ą¤čĆąŠąĖčüčģąŠą┤ąĖčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ.
2. ąŚą░ą┐čāčüą║ą░ąĄčéčüčÅ ISR, 'ą▓čŗą┤ą░ąĄčé' čüąĄą╝ą░č乊čĆ ą┤ą╗čÅ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ąĘą░ą┤ą░čćąĖ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░.
3. ąŚą░ą┤ą░čćą░ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ čüčĆą░ąĘčā ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ą┐ąŠčüą╗ąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ISR. ą¤ąĄčĆą▓ąŠąĄ, čćč鹊 ąĘą░ą┤ą░čćą░ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┤ąĄą╗ą░ąĄčé - ąŠąĮą░ 'ą▒ąĄčĆąĄčé' čüąĄą╝ą░č乊čĆ.
4. ąŚą░ą┤ą░čćą░ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ąŠą▒čĆą░ą▒ąŠčéą║čā čüąŠą▒čŗčéąĖčÅ ą┐ąĄčĆąĄą┤ ąĮąŠą▓ąŠą╣ ą┐ąŠą┐čŗčéą║ąŠą╣ 'ą▓ąĘčÅčéčī' čüąĄą╝ą░č乊čĆ - ąĖ ą▓čģąŠą┤ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Blocked, ąĄčüą╗ąĖ čüąĄą╝ą░č乊čĆ ąĄčēąĄ ąĮąĄą┤ąŠčüčéčāą┐ąĄąĮ.
ąŁč鹊čé čüčåąĄąĮą░čĆąĖą╣ čģąŠčĆąŠčłąŠ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ čüą╗čāčćą░čÅ, ą║ąŠą│ą┤ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą╝ąŠą│čāčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ č鹊ą╗čīą║ąŠ čü ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ąĮąĖąĘą║ąŠą╣ čćą░čüč鹊č鹊ą╣. ąĢčüą╗ąĖ ąČąĄ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą┤čĆčāą│ąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┤ąŠ č鹊ą│ąŠ, ą║ą░ą║ ąĘą░ą┤ą░čćą░ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ąĘą░ą▓ąĄčĆčłąĖčé čüą▓ąŠčÄ ąŠą▒čĆą░ą▒ąŠčéą║čā ą┐ąĄčĆą▓ąŠą│ąŠ ąĘą░čģą▓ą░č湥ąĮąĮąŠą│ąŠ čüąĄą╝ą░č乊čĆąŠą╝ čüąŠą▒čŗčéąĖčÅ, č鹊 ą┤ą▓ąŠąĖčćąĮčŗą╣ čüąĄą╝ą░č乊čĆ čŹčäč乥ą║čéąĖą▓ąĮąŠ čäąĖą║čüąĖčĆąŠą▓ą░ą╗ ą▒čŗ čüąŠą▒čŗčéąĖąĄ, ą┐ąŠąĘą▓ąŠą╗čÅčÅ ąĘą░ą┤ą░č湥 ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ąŠą▒čĆą░ą▒ąŠčéą░čéčī ąĮąŠą▓ąŠąĄ čüąŠą▒čŗčéąĖąĄ ą┐ąŠčüą╗ąĄ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄą┤čŗą┤čāčēąĄą│ąŠ. ąŚą░ą┤ą░čćą░ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ąĮąĄ ą▓ąŠčłą╗ą░ ą▒čŗ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Blocked ą╝ąĄąČą┤čā ąŠą▒čĆą░ą▒ąŠčéą║ąŠą╣ čŹčéąĖčģ ą┤ą▓čāčģ čüąŠą▒čŗčéąĖą╣, čéą░ą║ ą║ą░ą║ čäąĖą║čüąĖčĆčāąĄą╝čŗą╣ čüąĄą╝ą░č乊čĆ ą▒čŗą╗ ą▒čŗ ą┤ąŠčüčéčāą┐ąĄąĮ čüčĆą░ąĘčā, ą║ą░ą║ č鹊ą╗čīą║ąŠ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą▓čŗąĘąŠą▓ xSemaphoreTake(). ąŁč鹊čé čüą╗čāčćą░ą╣ ą┐ąŠą║ą░ąĘą░ąĮ ąĮą░ čĆąĖčüčāąĮą║ąĄ 30.

ąĀąĖčü. 30. ąöą▓ąŠąĖčćąĮčŗą╣ čüąĄą╝ą░č乊čĆ ą╝ąŠąČąĄčé čäąĖą║čüąĖčĆąŠą▓ą░čéčī ąĮąĄ ą▒ąŠą╗čīčłąĄ ąŠą┤ąĮąŠą│ąŠ čüąŠą▒čŗčéąĖčÅ
ąĀąĖčüčāąĮąŠą║ 30 ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčé, čćč鹊 ą┤ą▓ąŠąĖčćąĮčŗą╣ čüąĄą╝ą░č乊čĆ ą╝ąŠąČąĄčé ąĘą░čģą▓ą░čéąĖčéčī čüą░ą╝ąŠąĄ ą▒ą×ą╗čīčłąĄąĄ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ čüąŠą▒čŗčéąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąÆčüąĄ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖąĄ čüąŠą▒čŗčéąĖčÅ, ą┐čĆąŠąĖąĘąŠčłąĄą┤čłąĖąĄ ą┐ąĄčĆąĄą┤ ąŠą▒čĆą░ą▒ąŠčéą║ąŠą╣ čāąČąĄ ąĘą░čģą▓ą░č湥ąĮąĮąŠą│ąŠ čüąŠą▒čŗčéąĖčÅ, ą▒čāą┤čāčé ą┐ąŠč鹥čĆčÅąĮčŗ. ąŁč鹊ą│ąŠ ą╝ąŠąČąĮąŠ ąĖąĘą▒ąĄąČą░čéčī, ąĄčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüąĄą╝ą░č乊čĆ čüąŠ čüč湥čéčćąĖą║ąŠą╝ ą▓ą╝ąĄčüč鹊 ą┤ą▓ąŠąĖčćąĮąŠą│ąŠ čüąĄą╝ą░č乊čĆą░.
ąóą░ą║ ąČąĄ, ą║ą░ą║ ą┤ą▓ąŠąĖčćąĮčŗąĄ čüąĄą╝ą░č乊čĆčŗ ą╝ąŠąČąĮąŠ ą║ąŠąĮčåąĄą┐čéčāą░ą╗čīąĮąŠ čüąŠą┐ąŠčüčéą░ą▓ąĖčéčī čü ąŠč湥čĆąĄą┤čÅą╝ąĖ, ą┤ą╗ąĖąĮą░ ą║ąŠč鹊čĆčŗčģ čĆą░ą▓ąĮą░ 1, čüąĄą╝ą░č乊čĆčŗ čüąŠ čüč湥čéčćąĖą║ąŠą╝ ą╝ąŠąČąĮąŠ ą┐čĆąĄą┤čüčéą░ą▓ąĖčéčī ą║ą░ą║ ąŠč湥čĆąĄą┤ąĖ, ą┤ą╗ąĖąĮą░ ą║ąŠč鹊čĆčŗčģ ą▒ąŠą╗čīčłąĄ 1. ąŚą░ą┤ą░čćą░ą╝ ąĮąĄ ąĖąĮč鹥čĆąĄčüąĮčŗ ą┤ą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ čüąŠčģčĆą░ąĮąĄąĮčŗ ą▓ čéą░ą║ąŠą╣ ąŠč湥čĆąĄą┤ąĖ - ąĖą╝ ą┐čĆąŠčüč鹊 ąĮčāąČąĮąŠ ąĘąĮą░čéčī, ą┐čāčüčéą░ ąŠč湥čĆąĄą┤čī ąĖą╗ąĖ ąĮąĄčé.
ąÜą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ čüąĄą╝ą░č乊čĆčā čüąŠ čüč湥čéčćąĖą║ąŠą╝ 'ą┤ą░čÄčé', ą▓ ąĄą│ąŠ ąŠč湥čĆąĄą┤ąĖ ąĘą░ą┤ąĄą╣čüčéą▓čāąĄčéčüčÅ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąŠ (ąŠč湥čĆąĄą┤čī čüčéą░ąĮąŠą▓ąĖčéčüčÅ ąĮąĄą┐čāčüč鹊ą╣). ąÜąŠą╗ąĖč湥čüčéą▓ąŠ 菹╗ąĄą╝ąĄąĮč鹊ą▓ (čüąŠą▒čŗčéąĖą╣) ą▓ ąŠč湥čĆąĄą┤ąĖ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ čüąĄą╝ą░č乊čĆą░.

ąĀąĖčü. 31. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čüąĄą╝ą░č乊čĆą░-čüč湥čéčćąĖą║ą░ ą┤ą╗čÅ 'ą┐ąŠą┤čüč湥čéą░' čüąŠą▒čŗčéąĖą╣.
ąĪąĄą╝ą░č乊čĆčŗ čüąŠ čüč湥čéčćąĖą║ąŠą╝ ąŠą▒čŗčćąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą▓ čüą╗ąĄą┤čāčÄčēąĖčģ čüą╗čāčćą░čÅčģ:
1. ą¤ąŠą┤čüč湥čé čüąŠą▒čŗčéąĖą╣. ąÆ čŹč鹊ą╝ čüčåąĄąĮą░čĆąĖąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ISR 'ą▓čŗą┤ą░ąĄčé' čüąĄą╝ą░č乊čĆ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čüąŠą▒čŗčéąĖąĄ - čćč鹊 ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčé ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ čüąĄą╝ą░č乊čĆą░ ą┐čĆąĖ ą║ą░ąČą┤ąŠą╣ ą▓čŗą┤ą░č湥 čüąĄą╝ą░č乊čĆą░. ąŚą░ą┤ą░čćą░ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ čüąŠą▒čŗčéąĖčÅ ą▒čāą┤ąĄčé 'ą▒čĆą░čéčī' čüąĄą╝ą░č乊čĆ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ąŠąĮą░ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé čüąŠą▒čŗčéąĖąĄ - čćč鹊 ą▒čāą┤ąĄčé ą┤ąĄą║čĆąĄą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčī čüč湥čéčćąĖą║ čüąĄą╝ą░č乊čĆą░ ą┐čĆąĖ ą║ą░ąČą┤ąŠą╝ ą┐ąŠą╗čāč湥ąĮąĖąĖ čüąĄą╝ą░č乊čĆą░. ąŚąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ čüąĄą╝ą░č乊čĆą░ ąŠčéčĆą░ąČą░ąĄčé čĆą░ąĘąĮąĖčåčā ą╝ąĄąČą┤čā ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ ą┐čĆąŠąĖąĘąŠčłąĄą┤čłąĖčģ čüąŠą▒čŗčéąĖą╣ ąĖ ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ čāąČąĄ ąŠą▒čĆą░ą▒ąŠčéą░ąĮąĮčŗčģ čüąŠą▒čŗčéąĖą╣. ąŁč鹊čé ą╝ąĄčģą░ąĮąĖąĘą╝ ą┐ąŠą║ą░ąĘą░ąĮ ąĮą░ čĆąĖčüčāąĮą║ąĄ 31.
ąĪąĄą╝ą░č乊čĆčŗ čüąŠ čüč湥čéčćąĖą║ąŠą╝, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą┤ą╗čÅ ą┐ąŠą┤čüč湥čéą░ čüąŠą▒čŗčéąĖą╣, čüąŠąĘą┤ą░čÄčéčüčÅ čü ąĮą░čćą░ą╗čīąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ čüč湥čéčćąĖą║ą░, čĆą░ą▓ąĮčŗą╝ 0.
2. ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆąĄčüčāčĆčüą░ą╝ąĖ. ąÆ čŹč鹊ą╝ čüčåąĄąĮą░čĆąĖąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ąŠčüčéčāą┐ąĮčŗčģ čĆąĄčüčāčĆčüąŠą▓. ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą║ąŠąĮčéčĆąŠą╗čÅ ąĮą░ą┤ čĆąĄčüčāčĆčüąŠą╝ ąĘą░ą┤ą░čćą░ ą┤ąŠą╗ąČąĮą░ čüąĮą░čćą░ą╗ą░ ą┐ąŠą╗čāčćąĖčéčī čüąĄą╝ą░č乊čĆ - ąĖ čŹčéąĖą╝ čāą╝ąĄąĮčīčłąĖčéčī ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ čüąĄą╝ą░č乊čĆą░. ąÜąŠą│ą┤ą░ ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ čüąĄą╝ą░č乊čĆą░ čüčéą░ąĮąĄčé čĆą░ą▓ąĮčŗą╝ 0, č鹊 čŹč鹊 ą▒čāą┤ąĄčé ąŠąĘąĮą░čćą░čéčī, čćč鹊 ą▒ąŠą╗čīčłąĄ ąĮąĄčé čüą▓ąŠą▒ąŠą┤ąĮčŗčģ čĆąĄčüčāčĆčüąŠą▓. ąÜąŠą│ą┤ą░ ąĘą░ą┤ą░čćą░ ąĘą░ą▓ąĄčĆčłą░ąĄčé čĆą░ą▒ąŠčéčā čü čĆąĄčüčāčĆčüąŠą╝, ąŠąĮą░ 'ą▓čŗą┤ą░ąĄčé' čüąĄą╝ą░č乊čĆ ąŠą▒čĆą░čéąĮąŠ - čāą▓ąĄą╗ąĖčćąĖą▓ą░čÅ ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ čüąĄą╝ą░č乊čĆą░.
ąĪąĄą╝ą░č乊čĆčŗ čüąŠ čüč湥čéčćąĖą║ąŠą╝, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆąĄčüčāčĆčüą░ą╝ąĖ, čüąŠąĘą┤ą░čÄčéčüčÅ čü ąĮą░čćą░ą╗čīąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ čüč湥čéčćąĖą║ą░, čĆą░ą▓ąĮčŗą╝ ą║ąŠą╗ąĖč湥čüčéą▓čā ą┤ąŠčüčéčāą┐ąĮčŗčģ čĆąĄčüčāčĆčüąŠą▓. ąÆ čćą░čüčéąĖ 4 čĆą░čüčüą╝ą░čéčĆąĖą▓ą░ąĄčéčüčÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čüąĄą╝ą░č乊čĆąŠą▓ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆąĄčüčāčĆčüą░ą╝ąĖ.
API čäčāąĮą║čåąĖčÅ xSemaphoreCreateCounting()
ąźąĄąĮą┤ą╗čŗ ą║ąŠ ą▓čüąĄą╝ čĆą░ąĘą╗ąĖčćąĮčŗą╝ čéąĖą┐ą░ą╝ čüąĄą╝ą░č乊čĆąŠą▓ FreeRTOS čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ čéąĖą┐ą░ xSemaphoreHandle.
ą¤ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ čüąĄą╝ą░č乊čĆ ą╝ąŠąČąĮąŠ čĆąĄą░ą╗čīąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī, ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüąĮą░čćą░ą╗ą░ čüąŠąĘą┤ą░ąĮ. ąöą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ čüąĄą╝ą░č乊čĆą░ čüąŠ čüč湥čéčćąĖą║ąŠą╝ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ API čäčāąĮą║čåąĖčÅ xSemaphoreCreateCounting().
xSemaphoreHandle xSemaphoreCreateCounting
( unsigned portBASE_TYPE uxMaxCount,
unsigned portBASE_TYPE uxInitialCount );
ąøąĖčüčéąĖąĮą│ 48. ą¤čĆąŠč鹊čéąĖą┐ API čäčāąĮą║čåąĖąĖ xSemaphoreCreateCounting()
ąóą░ą▒ą╗ąĖčåą░ 15. ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ąĖ ąĘąĮą░č湥ąĮąĖąĄ ą▓ąŠąĘą▓čĆą░čéą░ čäčāąĮą║čåąĖąĖ xSemaphoreCreateCounting()
ąśą╝čÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░
/
ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ
|
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| uxMaxCount |
ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ą┤ąŠ ą║ąŠč鹊čĆąŠą│ąŠ ą▒čāą┤ąĄčé čüčćąĖčéą░čéčī čüąĄą╝ą░č乊čĆ. ą¦č鹊ą▒čŗ ą┐čĆąŠą┤ąŠą╗ąČąĖčéčī ą░ąĮą░ą╗ąŠą│ąĖčÄ čü ąŠč湥čĆąĄą┤čīčÄ, ąĘąĮą░č湥ąĮąĖąĄ uxMaxCount čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą┤ą╗ąĖąĮąĄ ąŠč湥čĆąĄą┤ąĖ.
ąÜąŠą│ą┤ą░ čüąĄą╝ą░č乊čĆ ąĮą░čćąĖąĮą░čÄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ą┐ąŠą┤čüč湥čéą░ ąĖą╗ąĖ ąĘą░čģą▓ą░čéą░ čüąŠą▒čŗčéąĖą╣, uxMaxCount ą▒čāą┤ąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ čüąŠą▒čŗčéąĖą╣, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĮąŠ ąĘą░čģą▓ą░čéąĖčéčī.
ąÜąŠą│ą┤ą░ čüąĄą╝ą░č乊čĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ąŠčüčéčāą┐ąŠą╝ ą║ ąĮą░ą▒ąŠčĆčā čĆąĄčüčāčĆčüąŠą▓, uxMaxCount ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ąŠčüčéčāą┐ąĮčŗčģ čĆąĄčüčāčĆčüąŠą▓. |
| uxInitialCount |
ąØą░čćą░ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ čüč湥čéčćąĖą║ą░ čüąĄą╝ą░č乊čĆą░ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ ą║ą░ą║ ąŠąĮ ą▒čŗą╗ čüąŠąĘą┤ą░ąĮ.
ąÜąŠą│ą┤ą░ čüąĄą╝ą░č乊čĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą┤čüč湥čéą░ ąĖą╗ąĖ ąĘą░čģą▓ą░čéą░ čüąŠą▒čŗčéąĖą╣, uxInitialCount ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 0 - ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 ą▓ ą╝ąŠą╝ąĄąĮčé čüąŠąĘą┤ą░ąĮąĖčÅ čüąĄą╝ą░č乊čĆą░ ąĄčēąĄ ąĮąĄ ąĮą░čüčéčāą┐ąĖą╗ąŠ ąĮąĖ ąŠą┤ąĮąŠ čüąŠą▒čŗčéąĖąĄ.
ąÜąŠą│ą┤ą░ čüąĄą╝ą░č乊čĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ąŠčüčéčāą┐ąŠą╝ ą║ ąĮą░ą▒ąŠčĆčā čĆąĄčüčāčĆčüąŠą▓, č鹊 uxInitialCount ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ ąĘąĮą░č湥ąĮąĖąĄ, čĆą░ą▓ąĮąŠąĄ uxMaxCount - ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčéčüčÅ, čćč鹊 ą▓ ą╝ąŠą╝ąĄąĮčé čüąŠąĘą┤ą░ąĮąĖčÅ čüąĄą╝ą░č乊čĆą░ ąĖą╝ąĄčÄčéčüčÅ ą▓ ąĮą░ą╗ąĖčćąĖąĖ ą▓čüąĄ ą┤ąŠčüčéčāą┐ąĮčŗąĄ čĆąĄčüčāčĆčüčŗ. |
| ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ |
ąĢčüą╗ąĖ čäčāąĮą║čåąĖčÅ ą▓ąĄčĆąĮčāą╗ą░ NULL, č鹊 čüąĄą╝ą░č乊čĆ ąĮąĄ čüąŠąĘą┤ą░ąĮ, čéą░ą║ ą║ą░ą║ ą▓ ą║čāč湥 (heap) FreeRTOS ąĮąĄą┤ąŠčüčéą░č鹊čćąĮąŠ čüą▓ąŠą▒ąŠą┤ąĮąŠą│ąŠ ą╝ąĄčüčéą░ ą┤ą╗čÅ ą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ ą┐ąŠą┤ čüčéčĆčāą║čéčāčĆčŗ ą┤ą░ąĮąĮčŗčģ čüąĄą╝ą░č乊čĆą░. ą¦ą░čüčéčī 5 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▒ąŠą╗čīčłąĄ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÄ ą┐ą░ą╝čÅčéčīčÄ.
ąĢčüą╗ąĖ čäčāąĮą║čåąĖčÅ ą▓ąĄčĆąĮčāą╗ą░ ąĮąĄ NULL, č鹊 čüąĄą╝ą░č乊čĆ čüąŠąĘą┤ą░ąĮ čāčüą┐ąĄčłąĮąŠ. ąÆąŠąĘą▓čĆą░čēąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ąĮčāąČąĮąŠ čüąŠčģčĆą░ąĮąĖčéčī ą║ą░ą║ čģąĄąĮą┤ą╗ čüąĄą╝ą░č乊čĆą░ ą┤ą╗čÅ ąĄą│ąŠ ą┤ą░ą╗čīąĮąĄą╣čłąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ. |
ą¤čĆąĖą╝ąĄčĆ 13. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čüčćąĖčéą░čÄčēąĄą│ąŠ čüąĄą╝ą░č乊čĆą░ ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ąĘą░ą┤ą░čćąĖ čü ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄą╝
ą¤čĆąĖą╝ąĄčĆ 13 čāą╗čāčćčłą░ąĄčé čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ ą┐čĆąĖą╝ąĄčĆą░ 12 ą┐čāč鹥ą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čüąĄą╝ą░č乊čĆą░ čüąŠ čüč湥čéčćąĖą║ąŠą╝ ą▓ą╝ąĄčüč鹊 ą┤ą▓ąŠąĖčćąĮąŠą│ąŠ čüąĄą╝ą░č乊čĆą░. ążčāąĮą║čåąĖčÅ main() ąĖąĘą╝ąĄąĮąĄąĮą░ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓čŗąĘąŠą▓ą░ xSemaphoreCreateCounting() ą▓ą╝ąĄčüč鹊 vSemaphoreCreateBinary(). ąÆčŗąĘąŠą▓ ąĮąŠą▓ąŠą╣ API čäčāąĮą║čåąĖąĖ ą┐ąŠą║ą░ąĘą░ąĮ ą▓ ą╗ąĖčüčéąĖąĮą│ąĄ 49.
/* ą¤ąĄčĆąĄą┤ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čüąĄą╝ą░č乊čĆą░ ąŠąĮ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čÅą▓ąĮąŠ čüąŠąĘą┤ą░ąĮ. ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ
čüąŠąĘą┤ą░ąĄčéčüčÅ čüąĄą╝ą░č乊čĆ čüąŠ čüč湥čéčćąĖą║ąŠą╝. ąĪąĄą╝ą░č乊čĆ čüąŠąĘą┤ą░ąĄčéčüčÅ ą┤ą╗čÅ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą│ąŠ
ąĘąĮą░č湥ąĮąĖčÅ čüč湥čéą░ 10, ąĖ ąĮą░čćą░ą╗čīąĮčŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝ čüč湥čéčćąĖą║ą░ 0. */
xCountingSemaphore = xSemaphoreCreateCounting( 10, 0 );
ąøąĖčüčéąĖąĮą│ 49. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ xSemaphoreCreateCounting() ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ čüąĄą╝ą░č乊čĆą░ čüąŠ čüč湥čéčćąĖą║ąŠą╝
ąöą╗čÅ čüąĖą╝čāą╗čÅčåąĖąĖ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čüąŠą▒čŗčéąĖą╣ čü ą▓čŗčüąŠą║ąŠą╣ čćą░čüč鹊č鹊ą╣ ąĖąĘą╝ąĄąĮąĄąĮą░ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ISR, čćč鹊ą▒čŗ 'ą▓čŗą┤ą░ą▓ą░čéčī' čüąĄą╝ą░č乊čĆ ą▒ąŠą╗čīčłąĄ ąŠą┤ąĮąŠą│ąŠ čĆą░ąĘą░ ąĘą░ ąŠą┤ąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. ąÜą░ąČą┤ąŠąĄ čüąŠą▒čŗčéąĖąĄ ąĘą░čģą▓ą░čéčŗą▓ą░ąĄčéčüčÅ ą▓ ąĘąĮą░č湥ąĮąĖąĖ čüč湥čéčćąĖą║ą░ čüąĄą╝ą░č乊čĆą░. ąśąĘą╝ąĄąĮąĄąĮąĮą░čÅ ISR ą┐ąŠą║ą░ąĘą░ąĮą░ ą▓ ą╗ąĖčüčéąĖąĮą│ąĄ 50.
static void __interrupt __far vExampleInterruptHandler( void )
{
static portBASE_TYPE xHigherPriorityTaskWoken;
xHigherPriorityTaskWoken = pdFALSE;
/* 'ąÆčŗą┤ą░čćą░' čüąĄą╝ą░č乊čĆą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ čĆą░ąĘ. ą¤ąĄčĆą▓ą░čÅ ą▓čŗą┤ą░čćą░ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆčāąĄčé ąĘą░ą┤ą░čćčā
ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ čüą╗ąĄą┤čāčÄčēąĖąĄ ą▓čŗą┤ą░čćąĖ ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāčÄčé, ą║ą░ą║ čüąĄą╝ą░č乊čĆ ąĘą░čģą▓ą░čéčŗą▓ą░ąĄčé
čüąŠą▒čŗčéąĖčÅ, čćč鹊ą▒čŗ ą┐ąŠąĘą▓ąŠą╗ąĖčéčī ąĘą░ą┤ą░č湥 ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ąŠą▒čĆą░ą▒ąŠčéą░čéčī ąĖčģ ą┤čĆčāą│ ąĘą░
ą┤čĆčāą│ąŠą╝, ąĖ ąĮąĄ ą┐ąŠč鹥čĆčÅčéčī ąĮąĖ ąŠą┤ąĮąŠą│ąŠ čüąŠą▒čŗčéąĖčÅ. ąŁč鹊 čüąĖą╝čāą╗ąĖčĆčāąĄčé ą┐ąŠčÅą▓ą╗ąĄąĮąĖąĄ
ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ą┐ąŠą╗čāč湥ąĮąĮčŗčģ ą┐čĆąŠčåąĄčüčüąŠčĆąŠą╝, ąĮąĄčüą╝ąŠčéčĆčÅ ąĮą░ č鹊, čćč鹊 ą▓ čŹč鹊ą╝
čüą╗čāčćą░ąĄ čüąŠą▒čŗčéąĖčÅ čüąĖą╝čāą╗ąĖčĆčāčÄčéčüčÅ ą▓ąĮčāčéčĆąĖ ąŠą┤ąĮąŠą│ąŠ ą▓ąŠąĘąĮąĖą║čłąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. */
xSemaphoreGiveFromISR( xCountingSemaphore, &xHigherPriorityTaskWoken );
xSemaphoreGiveFromISR( xCountingSemaphore, &xHigherPriorityTaskWoken );
xSemaphoreGiveFromISR( xCountingSemaphore, &xHigherPriorityTaskWoken );
if( xHigherPriorityTaskWoken == pdTRUE )
{
/* ąÆčŗą┤ą░čćą░ čüąĄą╝ą░č乊čĆą░ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ą╗ą░ ąĘą░ą┤ą░čćčā, ąĖ ą┐čĆąĖąŠčĆąĖč鹥čé čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĮąŠą╣
ąĘą░ą┤ą░čćąĖ ą▓čŗčłąĄ, č湥ą╝ čā č鹥ą║čāčēąĄą╣ ąĘą░ą┤ą░čćąĖ - ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄą╝
ą║ąŠąĮč鹥ą║čüčé ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ, čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ą▓ąŠąĘą▓čĆą░čé ąĖąĘ ISR ąĮą░ą┐čĆčÅą╝čāčÄ
ą▓ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĮčāčÄ (ą║ąŠč鹊čĆą░čÅ ąĖą╝ąĄąĄčé čüą░ą╝čŗą╣ ą▓čŗčüąŠą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé) ąĘą░ą┤ą░čćčā.
ąÆąØąśą£ąÉąØąśąĢ: ą╝ą░ą║čĆąŠčü, čĆąĄą░ą╗čīąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą║ąŠąĮč鹥ą║čüčéą░
ąĖąĘ ISR, ąĘą░ą▓ąĖčüąĖčé ąŠčé ą║ąŠąĮą║čĆąĄčéąĮąŠą│ąŠ ą┐ąŠčĆčéą░ FreeRTOS. ąŚą┤ąĄčüčī čāą║ą░ąĘą░ąĮąŠ ąĖą╝čÅ
ą╝ą░ą║čĆąŠčüą░, ą║ąŠčĆčĆąĄą║čéąĮąŠąĄ ą┤ą╗čÅ ą┐ąŠčĆčéą░ Open Watcom DOS. ąöčĆčāą│ąĖąĄ ą┐ąŠčĆčéčŗ FreeRTOS
ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤čĆčāą│ąŠą╣ čüąĖąĮčéą░ą║čüąĖčü. ąöą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ
čüąĖąĮčéą░ą║čüąĖčüą░ ąŠą▒čĆą░čéąĖč鹥čüčī ą║ ą┐čĆąĖą╝ąĄčĆą░ą╝, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗą╝ ą▓ą╝ąĄčüč鹥 čü ą┐ąŠčĆč鹊ą╝
FreeRTOS. */
portSWITCH_CONTEXT();
}
}
ąøąĖčüčéąĖąĮą│ 50. ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ISR, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ą▓ ą┐čĆąĖą╝ąĄčĆąĄ 13
ąÆčüąĄ ąŠčüčéą░ą╗čīąĮčŗąĄ čäčāąĮą║čåąĖąĖ ąŠčüčéą░ą╗ąĖčüčī ąĮąĄąĖąĘą╝ąĄąĮąĮčŗą╝ąĖ, ą║ą░ą║ ą▓ ą┐čĆąĖą╝ąĄčĆąĄ 12.
ąÆčŗą▓ąŠą┤, ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖą╝čŗą╣ ą┐čĆąĖą╝ąĄčĆąŠą╝ 13, ą┐ąŠą║ą░ąĘą░ąĮ ąĮą░ čĆąĖčüčāąĮą║ąĄ 32. ąÜą░ą║ ą╝ąŠąČąĮąŠ čāą▓ąĖą┤ąĄčéčī, ąĘą░ą┤ą░čćą░ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą▓čüąĄ čéčĆąĖ (čüąĖą╝čāą╗ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ) čüąŠą▒čŗčéąĖčÅ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą│ąĄąĮąĄčĆąĖčĆčāąĄčéčüčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. ąĪąŠą▒čŗčéąĖčÅ ąĘą░čģą▓ą░čéčŗą▓ą░čÄčéčüčÅ čü ąĘąĮą░č湥ąĮąĖąĖ čüč湥čéčćąĖą║ą░ čüąĄą╝ą░č乊čĆą░, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĘą░ą┤ą░č湥 ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ąŠą▒čĆą░ą▒ąŠčéą░čéčī ą▓čüąĄ čüąŠą▒čŗčéąĖčÅ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝.

ąĀąĖčü. 32. ąÆčŗą▓ąŠą┤, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčé ą┐čĆąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĖ ą┐čĆąĖą╝ąĄčĆ 13
[3.4. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąŠč湥čĆąĄą┤ąĄą╣ ą▓ąĮčāčéčĆąĖ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (ISR)]
ążčāąĮą║čåąĖąĖ xQueueSendToFrontFromISR(), xQueueSendToBackFromISR() ąĖ xQueueReceiveFromISR() čÅą▓ą╗čÅčÄčéčüčÅ ąĘą░čēąĖčēąĄąĮąĮčŗą╝ąĖ ą▓ąĄčĆčüąĖčÅą╝ąĖ čäčāąĮą║čåąĖą╣ xQueueSendToFront(), xQueueSendToBack() ąĖ xQueueReceive() čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ą▒ąĄąĘąŠą┐ą░čüąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ ą║ąŠą┤ąĄ ISR.
ąĪąĄą╝ą░č乊čĆčŗ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ čüąŠąŠą▒čēąĄąĮąĖą╣ (ąĖąĘ ISR ą▓ ąŠčüąĮąŠą▓ąĮčāčÄ ą┐čĆąŠą│čĆą░ą╝ą╝čā). ą×č湥čĆąĄą┤ąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą║ą░ą║ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ čüąŠąŠą▒čēąĄąĮąĖą╣, čéą░ą║ ąĖ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ (ąĖąĘ ISR ą▓ ąŠčüąĮąŠą▓ąĮčāčÄ ą┐čĆąŠą│čĆą░ą╝ą╝čā).
API čäčāąĮą║čåąĖąĖ xQueueSendToFrontFromISR() ąĖ xQueueSendToBackFromISR()
xQueueSendFromISR() čÅą▓ą╗čÅąĄčéčüčÅ čŹą║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮąŠą╣ ąĖ ą┐ąŠą╗ąĮąŠčüčéčīčÄ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé xQueueSendToBackFromISR().
portBASE_TYPE xQueueSendToFrontFromISR
( xQueueHandle xQueue,
void *pvItemToQueue
portBASE_TYPE *pxHigherPriorityTaskWoken );
ąøąĖčüčéąĖąĮą│ 51. ą¤čĆąŠč鹊čéąĖą┐ API čäčāąĮą║čåąĖąĖ xQueueSendToFrontFromISR()
portBASE_TYPE xQueueSendToBackFromISR
( xQueueHandle xQueue,
void *pvItemToQueue
portBASE_TYPE *pxHigherPriorityTaskWoken );
ąøąĖčüčéąĖąĮą│ 52. ą¤čĆąŠč鹊čéąĖą┐ API čäčāąĮą║čåąĖąĖ xQueueSendToBackFromISR()
ąóą░ą▒ą╗ąĖčåą░ 16. ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ąĖ ąĘąĮą░č湥ąĮąĖąĄ ą▓ąŠąĘą▓čĆą░čéą░ čäčāąĮą║čåąĖą╣ xQueueSendToFrontFromISR() ąĖ xQueueSendToBackFromISR()
ąśą╝čÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░
/
ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ
|
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| xQueue |
ąźąĄąĮą┤ą╗ ąŠč湥čĆąĄą┤ąĖ, ą▓ ą║ąŠč鹊čĆčāčÄ ą┤ą░ąĮąĮčŗąĄ ą┐ąŠčüčŗą╗ą░čÄčéčüčÅ (ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ). ąźąĄąĮą┤ą╗ ąŠč湥čĆąĄą┤ąĖ ą▒ąĄčĆčāčé ąĖąĘ ąĘąĮą░č湥ąĮąĖčÅ, ą║ąŠč鹊čĆąŠąĄ ą▓ąĄčĆąĮčāą╗ą░ čäčāąĮą║čåąĖčÅ xQueueCreate() ą┐čĆąĖ čüąŠąĘą┤ą░ąĮąĖąĖ ąŠč湥čĆąĄą┤ąĖ. |
| pvItemToQueue |
ąŻą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą┤ą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ ą▒čāą┤čāčé čüą║ąŠą┐ąĖčĆąŠą▓ą░ąĮčŗ ą▓ ąŠč湥čĆąĄą┤čī.
ąĀą░ąĘą╝ąĄčĆ ą║ą░ąČą┤ąŠą│ąŠ 菹╗ąĄą╝ąĄąĮčéą░ ąŠč湥čĆąĄą┤ąĖ, ą║ąŠč鹊čĆčŗą╣ ąŠąĮą░ ą╝ąŠąČąĄčé čģčĆą░ąĮąĖčéčī, čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą┐čĆąĖ čüąŠąĘą┤ą░ąĮąĖąĖ ąŠč湥čĆąĄą┤ąĖ, čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ čŹč鹊 ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą▒čāą┤ąĄčé čüą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąŠ ąĖąĘ ą┐ą░ą╝čÅčéąĖ ą┐ąŠ čāą║ą░ąĘą░č鹥ą╗čÄ pvItemToQueue ą▓ ąŠą▒ą╗ą░čüčéčī čģčĆą░ąĮąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ, ą┐čĆąĖąĮą░ą┤ą╗ąĄąČą░čēčāčÄ ąŠč湥čĆąĄą┤ąĖ. |
| pxHigherPriorityTaskWoken |
ąÆąŠąĘą╝ąŠąČąĄąĮ čüą╗čāčćą░ą╣, čćč鹊 ąŠą┤ąĮą░ ąĖ čéą░ ąČąĄ ąŠč湥čĆąĄą┤čī ą▒čāą┤ąĄčé ą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčī ąŠą┤ąĮčā ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┤ą░čć ąĮą░ ąŠąČąĖą┤ą░ąĮąĖąĖ ą┤ąŠčüčéčāą┐ąĮąŠčüčéąĖ ą┤ą░ąĮąĮčŗčģ. ąÆčŗąĘąŠą▓ xQueueSendToFrontFromISR() ąĖą╗ąĖ xQueueSendToBackFromISR() ą╝ąŠąČąĄčé čüą┤ąĄą╗ą░čéčī ą┤ą░ąĮąĮčŗąĄ ą┤ąŠčüčéčāą┐ąĮčŗą╝ąĖ, čéą░ą║ čćč鹊 čŹč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą▓čŗčģąŠą┤čā čéą░ą║ąĖčģ ąĘą░ą┤ą░čć ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ Blocked. ąĢčüą╗ąĖ ą▓čŗąĘąŠą▓ čäčāąĮą║čåąĖąĖ ą┐čĆąĖą▓ąĄą╗ ą║ ą▓čŗčģąŠą┤čā ąĘą░ą┤ą░čćąĖ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ Blocked, ąĖ čā čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ ą┐čĆąĖąŠčĆąĖč鹥čé ą▓čŗčłąĄ, č湥ą╝ čā č鹥ą║čāčēąĄą╣ ą▓čŗą┐ąŠą╗ąĮčÅčÄčēąĄą╣čüčÅ ąĘą░ą┤ą░čćąĖ, (ąĘą░ą┤ą░čćą░, ą║ąŠč鹊čĆą░čÅ ą▒čŗą╗ą░ ą┐čĆąĄčĆą▓ą░ąĮą░ ISR), č鹊 čäčāąĮą║čåąĖčÅ čāčüčéą░ąĮąŠą▓ąĖčé ą▓ąĮčāčéčĆąĖ čüąĄą▒čÅ *pxHigherPriorityTaskWoken ą▓ ąĘąĮą░č湥ąĮąĖąĄ pdTRUE.
ąĢčüą╗ąĖ xQueueSendToFrontFromISR() ąĖą╗ąĖ xQueueSendToBackFromISR() čāčüčéą░ąĮąŠą▓ąĖčé čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą▓ pdTRUE, č鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮąŠ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐ąĄčĆąĄą┤ ą▓čŗčģąŠą┤ąŠą╝ ąĖąĘ ISR. ąŁč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ č鹊ą╝čā, čćč鹊 ą▓čŗčģąŠą┤ ąĖąĘ ISR ą▒čāą┤ąĄčé ą┐čĆąŠąĖąĘą▓ąĄą┤ąĄąĮ čüčĆą░ąĘčā ą┐čĆčÅą╝ąŠ ą▓ ąĘą░ą┤ą░čćčā čü ąĮą░ąĖą▓čŗčüčłąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝, ąĮą░čģąŠą┤čÅčēčāčÄčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Ready. |
| ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ |
ąÆąŠąĘą╝ąŠąČąĮčŗ ą┤ą▓ą░ ą▓ąŠąĘą▓čĆą░čēą░ąĄą╝čŗčģ ąĘąĮą░č湥ąĮąĖčÅ:
pdPASS - ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ č鹊ą╗čīą║ąŠ ą▓ č鹊ą╝ čüą╗čāčćą░ąĄ, ą║ąŠą│ą┤ą░ ą┤ą░ąĮąĮčŗąĄ ą▒čŗą╗ąĖ čāčüą┐ąĄčłąĮąŠ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ ą▓ ąŠč湥čĆąĄą┤čī.
errQUEUE_FULL - ąĄčüą╗ąĖ ą┤ą░ąĮąĮčŗąĄ ąĮąĄ ą▒čŗą╗ąĖ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ ą▓ ąŠč湥čĆąĄą┤čī, čéą░ą║ ą║ą░ą║ ąŠč湥čĆąĄą┤čī čāąČąĄ ą┐ąŠą╗ąĮą░. |
ąŁčäč乥ą║čéąĖą▓ąĮąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąŠč湥čĆąĄą┤ąĖ
ąæąŠą╗čīčłąĖąĮčüčéą▓ąŠ ą┤ąĄą╝ąŠ-ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą▓ą║ą╗čÄč湥ąĮąĮčŗčģ ą▓ ąĘą░ą│čĆčāąČą░ąĄą╝čŗą╣ ą┐ą░ą║ąĄčé FreeRTOS, ą▓ą║ą╗čÄčćą░čÄčé ą▓ čüąĄą▒čÅ ą┐čĆąŠčüč鹊ą╣ ą┤čĆą░ą╣ą▓ąĄčĆ UART, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąŠč湥čĆąĄą┤ąĖ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ čüąĖą╝ą▓ąŠą╗ąŠą▓ ą▓ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ čüąĖą╝ą▓ąŠą╗ąŠą▓ ąĖąĘ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐čĆąĖąĄą╝ą░. ąÜą░ąČą┤čŗą╣ čüąĖą╝ą▓ąŠą╗, ą║ąŠč鹊čĆčŗą╣ ą▒čŗą╗ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ ąĖą╗ąĖ ą┐čĆąĖąĮčÅčé, ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮąŠ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ č湥čĆąĄąĘ ąŠč湥čĆąĄą┤čī. ąöčĆą░ą╣ą▓ąĄčĆčŗ UART čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ čéą░ą║ąĖą╝ čüą┐ąŠčüąŠą▒ąŠą╝ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ą┐čĆąŠą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆąŠą▓ą░čéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ąŠč湥čĆąĄą┤ąĖ ąĖąĘąĮčāčéčĆąĖ ISR. ąśąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░ čüąĖą╝ą▓ąŠą╗ąŠą▓ č湥čĆąĄąĘ ąŠč湥čĆąĄą┤čī čćčĆąĄąĘą▓čŗčćą░ą╣ąĮąŠ ąĮąĄčŹčäč乥ą║čéąĖą▓ąĮą░ (ąŠčüąŠą▒ąĄąĮąĮąŠ ą┤ą╗čÅ ą▓čŗčüąŠą║ąĖčģ čüą║ąŠčĆąŠčüč鹥ą╣), ąĖ ąĮąĄ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą┤ą╗čÅ čĆą░ą▒ąŠč湥ą│ąŠ ą║ąŠą┤ą░ ą│ąŠč鹊ą▓čŗčģ ąĖąĘą┤ąĄą╗ąĖą╣. ąæąŠą╗ąĄąĄ čŹčäč乥ą║čéąĖą▓ąĮą░čÅ č鹥čģąĮąĖą║ą░ ą▓ą║ą╗čÄčćą░ąĄčé ą▓ čüąĄą▒čÅ čüą╗ąĄą┤čāčÄčēąĄąĄ:
┬Ę ąĀą░ąĘą╝ąĄčēąĄąĮąĖąĄ ą║ą░ąČą┤ąŠą│ąŠ ą┐čĆąĖąĮčÅč鹊ą│ąŠ čüąĖą╝ą▓ąŠą╗ą░ ą▓ ą┐čĆąŠčüč鹥ą╣čłąĖą╣ ą▒čāč乥čĆ RAM, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čüąĄą╝ą░č乊čĆ ą┤ą╗čÅ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ąĘą░ą┤ą░čćąĖ, ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░čÄčēąĄą╣ ą▒čāč乥čĆ ą┐ąŠčüą╗ąĄ ą┐ąŠą╗ąĮąŠą│ąŠ ą┐čĆąĖąĄą╝ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ, ąĖą╗ąĖ ą┐ąŠčüą╗ąĄ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓ ą┐ąŠč鹊ą║ąĄ ą┐čĆąĖąĘąĮą░ą║ą░ break.
┬Ę ąśąĮč鹥čĆą┐čĆąĄčéą░čåąĖčÅ ą┐čĆąĖąĮčÅčéčŗčģ čüąĖą╝ą▓ąŠą╗ąŠą▓ ą┐čĆčÅą╝ąŠ ą▓ ISR, č鹊ą│ą┤ą░ ąŠč湥čĆąĄą┤čī ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠčéą┐čĆą░ą▓ą║ąĖ ąĖąĮč鹥čĆą┐čĆąĄčéąĖčĆąŠą▓ą░ąĮąĮčŗčģ ąĖ ą┤ąĄą║ąŠą┤ąĖčĆąŠą▓ą░ąĮąĮčŗčģ ą║ąŠą╝ą░ąĮą┤, ą║ąŠč鹊čĆčŗąĄ ą▒čāą┤čāčé ąŠą▒čĆą░ą▒ąŠčéą░ąĮčŗ ą▓ ą┐ąŠčüą╗ąĄą┤čüčéą▓ąĖąĖ čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ąĘą░ą┤ą░č湥ą╣ (č鹊čćąĮąŠ čéą░ą║ ąČąĄ, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčüčāąĮą║ąĄ 23). ąŁčéą░ č鹥čģąĮąĖą║ą░ ą┐ąŠą┤čģąŠą┤ąĖčé č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ ąĖąĮč鹥čĆą┐čĆąĄčéą░čåąĖčÅ ą┐ąŠč鹊ą║ą░ ą┤ą░ąĮąĮčŗčģ ą┤ąŠčüčéą░č鹊čćąĮąŠ ą▒čŗčüčéčĆą░čÅ, čćč鹊ą▒čŗ ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮąĮąŠą╣ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą▓ąĮčāčéčĆąĖ ISR.
ą¤čĆąĖą╝ąĄčĆ 14. ą×čéą┐čĆą░ą▓ą║ą░ ąĖ ą┐čĆąĖąĄą╝ ąĮą░ ąŠč湥čĆąĄą┤ąĖ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ
ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ xQueueSendToBackFromISR() ąĖ xQueueReceiveFromISR() ą▓ąĮčāčéčĆąĖ ąŠą┤ąĮąŠą│ąŠ ąĖ č鹊ą│ąŠ ąČąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąÜą░ą║ ąĖ ą▒čŗą╗ąŠ čĆą░ąĮąĄąĄ, ą┤ą╗čÅ čāą┤ąŠą▒čüčéą▓ą░ ą▓ ą┐čĆąĖą╝ąĄčĆąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ.
ąÆ ą┐čĆąĖą╝ąĄčĆąĄ čüąŠąĘą┤ą░ąĄčéčüčÅ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ą░čÅ ąĘą░ą┤ą░čćą░, ą║ąŠč鹊čĆą░čÅ ąŠčéą┐čĆą░ą▓ą╗čÅąĄčé ą┐čÅčéčī čćąĖčüąĄą╗ ą▓ ąŠč湥čĆąĄą┤čī ą║ą░ąČą┤čŗąĄ 200 ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤. ą×ąĮą░ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▓čüąĄ ą┐čÅčéčī ąĘąĮą░č湥ąĮąĖą╣ ą▒čāą┤čāčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ. ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ ąĘą░ą┤ą░čćąĖ ą┐ąŠą║ą░ąĘą░ąĮą░ ą▓ ą╗ąĖčüčéąĖąĮą│ąĄ 53.
static void vIntegerGenerator( void *pvParameters )
{
portTickType xLastExecutionTime;
unsigned portLONG ulValueToSend = 0;
int i;
/* ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ą▓ ą▓čŗąĘąŠą▓ąĄ vTaskDelayUntil(). */
xLastExecutionTime = xTaskGetTickCount();
for( ;; )
{
/* ąŁč鹊 ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ą░čÅ ąĘą░ą┤ą░čćą░. ąæą╗ąŠą║ąĖčĆąŠą▓ą║ą░ ą┤ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠą│ą┤ą░ ąĮčāąČąĮąŠ ą▒čāą┤ąĄčé
ąĘą░ą┐čāčüčéąĖčéčīčüčÅ čüąĮąŠą▓ą░. ąŚą░ą┤ą░čćą░ ą▒čāą┤ąĄčé ąĘą░ą┐čāčüą║ą░čéčīčüčÅ ą║ą░ąČą┤čŗąĄ 200 ą╝čü. */
vTaskDelayUntil( &xLastExecutionTime, 200 / portTICK_RATE_MS );
/* ą×čéą┐čĆą░ą▓ą║ą░ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄą╝ąŠą│ąŠ čćąĖčüą╗ą░ ą▓ ąŠč湥čĆąĄą┤čī ą┐čÅčéčī čĆą░ąĘ. ąŚąĮą░č湥ąĮąĖčÅ ą▒čāą┤čāčé
ą┐čĆąŠčćąĖčéą░ąĮčŗ ąĖąĘ ąŠč湥čĆąĄą┤ąĖ ą▓ąĮčāčéčĆąĖ ISR. ISR ą▓čüąĄą│ą┤ą░ ąŠą┐čāčüč鹊賹Ėčé ąŠč湥čĆąĄą┤čī, čéą░ą║
čćč鹊 ą│ą░čĆą░ąĮčéąĖčĆčāąĄčéčüčÅ, čćč鹊 čŹčéą░ ąĘą░ą┤ą░čćą░ ą▒čāą┤ąĄčé ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąĘą░ą┐ąĖčüą░čéčī
ą▓ ąŠč湥čĆąĄą┤čī ą▓čüąĄ ą┐čÅčéčī ąĘąĮą░č湥ąĮąĖą╣ čćąĖčüą╗ą░, čéą░ą║ čćč鹊 ą▓čĆąĄą╝čÅ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ
ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ. */
for( i = 0; i < 5; i++ )
{
xQueueSendToBack( xIntegerQueue, &ulValueToSend, 0 );
ulValueToSend++;
}
/* ą¤čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, čéą░ą║ čćč鹊ą▒čŗ čüčĆą░ą▒ąŠčéą░ą▓čłą░čÅ ISR
ą╝ąŠą│ą╗ą░ ą┐čĆąŠčćąĖčéą░čéčī ąĘąĮą░č湥ąĮąĖčÅ ąĖąĘ ąŠč湥čĆąĄą┤ąĖ. */
vPrintString( "Generator task - About to generate an interrupt.\r\n" );
__asm{ int 0x82 } /* ąŁčéą░ čüčéčĆąŠą║ą░ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ. */
vPrintString( "Generator task - Interrupt generated.\r\n\r\n\r\n" );
}
}
ąøąĖčüčéąĖąĮą│ 53. ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ ąĘą░ą┤ą░čćąĖ ą┐čĆąĖą╝ąĄčĆą░ 14, ą║ąŠč鹊čĆą░čÅ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą▓ ąŠč湥čĆąĄą┤čī
ISR ą┤ąĄą╗ą░ąĄčé ą┐ąŠą▓č鹊čĆčŗ ą▓čŗąĘąŠą▓ąŠą▓ xQueueReceiveFromISR() ą┤ąŠ č鹥čģ ą┐ąŠčĆ, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤čāčé čāą┤ą░ą╗ąĄąĮčŗ ąĖąĘ ąŠč湥čĆąĄą┤ąĖ ą▓čüąĄ ąĘąĮą░č湥ąĮąĖčÅ, ąĘą░ą┐ąĖčüą░ąĮąĮčŗąĄ ą▓ ąĮąĄčæ, čé. ąĄ. ą┐ąŠą║ą░ ąŠč湥čĆąĄą┤čī ąĮąĄ čüčéą░ąĮąĄčé ą┐čāčüč鹊ą╣. ą¤ąŠčüą╗ąĄą┤ąĮąĖąĄ ą┤ą▓ą░ ą▒ąĖčéą░ ą║ą░ąČą┤ąŠą│ąŠ ą┐čĆąĖąĮčÅč鹊ą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą║ą░ą║ ąĖąĮą┤ąĄą║čü ą▓ ą╝ą░čüčüąĖą▓ąĄ čüčéčĆąŠą║, ąĖ čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆąŠą║čā ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ ąĖąĮą┤ąĄą║čüąĮąŠą╣ ą┐ąŠąĘąĖčåąĖąĖ ą▒čāą┤ąĄčé ąŠčéą┐čĆą░ą▓ą╗ąĄąĮ ą▓ ą┤čĆčāą│čāčÄ ąŠč湥čĆąĄą┤čī čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą▓čŗąĘąŠą▓ą░ xQueueSendFromISR(). ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ ISR ą┐ąŠą║ą░ąĘą░ąĮą░ ą▓ ą╗ąĖčüčéąĖąĮą│ąĄ 54.
static void __interrupt __far vExampleInterruptHandler( void )
{
static portBASE_TYPE xHigherPriorityTaskWoken;
static unsigned long ulReceivedNumber;
/* ąĪčéčĆąŠą║ąĖ ą┤ąĄą║ą╗ą░čĆąĖčĆčāąĄčéčüčÅ ą║ą░ą║ static const, čćč鹊ą▒čŗ ąŠąĮąĖ ąĮąĄ ą▒čŗą╗ąĖ
čĆą░ąĘą╝ąĄčēąĄąĮčŗ ą▓ čüč鹥ą║ąĄ ISR, ąĖ čüčāčēąĄčüčéą▓ąŠą▓ą░ą╗ąĖ ą▓čüąĄą│ą┤ą░, ą┤ą░ąČąĄ ą║ąŠą│ą┤ą░
ISR ąĮąĄ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ. */
static const char *pcStrings[] =
{
"String 0\r\n",
"String 1\r\n",
"String 2\r\n",
"String 3\r\n"
};
xHigherPriorityTaskWoken = pdFALSE;
/* ą”ąĖą║ą╗ ą┤ąŠ ą┐ąŠą╗ąĮąŠą│ąŠ ąŠą┐čāčüč鹊賹ĄąĮąĖčÅ ąŠč湥čĆąĄą┤ąĖ. */
while( xQueueReceiveFromISR( xIntegerQueue,
&ulReceivedNumber,
&xHigherPriorityTaskWoken ) != errQUEUE_EMPTY )
{
/* ą×ą▒čĆąĄąĘą║ą░ ą┐čĆąĖąĮčÅč鹊ą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ, čćč鹊ą▒čŗ ąŠčüčéą░ą▓ąĖčéčī č鹊ą╗čīą║ąŠ ą┐ąŠčüą╗ąĄą┤ąĮąĖąĄ ą┤ą▓ą░ ą▒ąĖčéą░
(ąĘąĮą░č湥ąĮąĖčÅ ąŠčé 0 ą┤ąŠ 3), ąĘą░č鹥ą╝ ąŠčéą┐čĆą░ą▓ą║ą░ ą▓ ą┤čĆčāą│čāčÄ ąŠč湥čĆąĄą┤čī čāą║ą░ąĘą░č鹥ą╗čÅ
ąĮą░ čüčéčĆąŠą║čā, ą║ąŠč鹊čĆą░čÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ąŠą▒čĆąĄąĘą░ąĮąĮąŠą╝čā ąĘąĮą░č湥ąĮąĖčÄ. */
ulReceivedNumber &= 0x03;
xQueueSendToBackFromISR( xStringQueue,
&pcStrings[ ulReceivedNumber ],
&xHigherPriorityTaskWoken );
}
/* ą£čŗ čüą┤ąĄą╗ą░ą╗ąĖ čćč鹥ąĮąĖąĄ ąŠč湥čĆąĄą┤ąĖ ąĖ ąŠčéą┐čĆą░ą▓ą║čā č湥čĆąĄąĘ ą┤čĆčāą│čāčÄ ąŠč湥čĆąĄą┤čī, čćč鹊 ą┤ąŠą╗ąČąĮąŠ
čĆą░ąĘą▒ą╗ąŠą║ąĖčĆąŠą▓ą░čéčī ąĘą░ą┤ą░čćčā, ą║ąŠč鹊čĆą░čÅ ąĖą╝ąĄąĄčé ą┐čĆąĖąŠčĆąĖč鹥čé ą▓čŗčłąĄ, č湥ą╝ čéą░, čćč鹊 čĆą░ą▒ąŠčéą░ą╗ą░
ą┤ąŠ ą▓čŗąĘąŠą▓ą░ ISR? ąĢčüą╗ąĖ čŹč鹊 čéą░ą║, č鹊 ąĘą┤ąĄčüčī ą┤ąĄą╗ą░ąĄą╝ ą┐čĆąĖąĮčāą┤ąĖč鹥ą╗čīąĮąŠąĄ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ
ą║ąŠąĮč鹥ą║čüčéą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ. */
if( xHigherPriorityTaskWoken == pdTRUE )
{
/* ąÆąØąśą£ąÉąØąśąĢ: ą╝ą░ą║čĆąŠčü, čĆąĄą░ą╗čīąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą║ąŠąĮč鹥ą║čüčéą░
ąĖąĘ ISR, ąĘą░ą▓ąĖčüąĖčé ąŠčé ą║ąŠąĮą║čĆąĄčéąĮąŠą│ąŠ ą┐ąŠčĆčéą░ FreeRTOS. ąŚą┤ąĄčüčī čāą║ą░ąĘą░ąĮąŠ
ąĖą╝čÅ ą╝ą░ą║čĆąŠčüą░, ą║ąŠčĆčĆąĄą║čéąĮąŠąĄ ą┤ą╗čÅ ą┐ąŠčĆčéą░ Open Watcom DOS. ąöčĆčāą│ąĖąĄ ą┐ąŠčĆčéčŗ
FreeRTOS ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤čĆčāą│ąŠą╣ čüąĖąĮčéą░ą║čüąĖčü. ąöą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ
ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ čüąĖąĮčéą░ą║čüąĖčüą░ ąŠą▒čĆą░čéąĖč鹥čüčī ą║ ą┐čĆąĖą╝ąĄčĆą░ą╝, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗą╝
ą▓ą╝ąĄčüč鹥 čü ą┐ąŠčĆč鹊ą╝ FreeRTOS. */
portSWITCH_CONTEXT();
}
}
ąøąĖčüčéąĖąĮą│ 54. ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ISR, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ą▓ ą┐čĆąĖą╝ąĄčĆąĄ 14
ąŚą░ą┤ą░čćą░, ą║ąŠč鹊čĆą░čÅ ą┐čĆąĖąĮąĖą╝ą░ąĄčé čāą║ą░ąĘą░č鹥ą╗ąĖ ąĮą░ čüčéčĆąŠą║ąĖ ąĖąĘ ISR, ą┐čĆąŠčüč鹊 ą▒ą╗ąŠą║ąĖčĆčāąĄčéčüčÅ ąĮą░ ąŠč湥čĆąĄą┤ąĖ, ą┤ąŠ č鹊ą│ąŠ ą╝ąŠą╝ąĄąĮčéą░, ą║ą░ą║ ą▓ ąŠč湥čĆąĄą┤ąĖ ą┐ąŠčÅą▓ąĖčéčüčÅ čüąŠąŠą▒čēąĄąĮąĖąĄ (čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ čüčéčĆąŠą║čā), ąĖ ą┐ąĄčćą░čéą░ąĄčé ą║ą░ąČą┤čāčÄ čüčéčĆąŠą║čā, ą║ą░ą║ ąŠąĮą░ ą▒čŗą╗ą░ ą┐čĆąĖąĮčÅčéą░. ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ ą┐čĆąĖąĮąĖą╝ą░čÄčēąĄą╣ čüčéčĆąŠą║ąĖ ąĘą░ą┤ą░čćąĖ ą┐ąŠą║ą░ąĘą░ąĮą░ ą▓ ą╗ąĖčüčéąĖąĮą│ąĄ 55.
static void vStringPrinter( void *pvParameters )
{
char *pcString;
for( ;; )
{
/* ąæą╗ąŠą║ąĖčĆąŠą▓ą║ą░ ąĮą░ ąŠč湥čĆąĄą┤ąĖ ą┤ą╗čÅ ąŠąČąĖą┤ą░ąĮąĖčÅ ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ. */
xQueueReceive( xStringQueue, &pcString, portMAX_DELAY );
/* ąÆčŗą▓ąŠą┤ ąĮą░ ą┐ąĄčćą░čéčī ą┐čĆąĖąĮčÅč鹊ą╣ čüčéčĆąŠą║ąĖ. */
vPrintString( pcString );
}
}
ąøąĖčüčéąĖąĮą│ 55. ąŚą░ą┤ą░čćą░ ą▓ ą┐čĆąĖą╝ąĄčĆąĄ 14, ą║ąŠč鹊čĆą░čÅ ą┐ąĄčćą░čéą░ąĄčé čüčéčĆąŠą║ąĖ, ą┐čĆąĖąĮčÅčéčŗąĄ ąĖąĘ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ISR
ąÜą░ą║ ąŠą▒čŗčćąĮąŠ, čäčāąĮą║čåąĖčÅ main() čüąŠąĘą┤ą░ąĄčé čéčĆąĄą▒čāąĄą╝čŗąĄ ąŠč湥čĆąĄą┤ąĖ ąĖ ąĘą░ą┤ą░čćąĖ ą┐ąĄčĆąĄą┤ ąĘą░ą┐čāčüą║ąŠą╝ čłąĄą┤čāą╗ąĄčĆą░. ąĢčæ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ą┐ąŠą║ą░ąĘą░ąĮą░ ą▓ ą╗ąĖčüčéąĖąĮą│ąĄ 56.
int main( void )
{
/* ą¤ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ąŠč湥čĆąĄą┤čī ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī, ąŠąĮą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüąĮą░čćą░ą╗ą░
čüąŠąĘą┤ą░ąĮą░. ąĪąŠąĘą┤ą░ąĮąĖąĄ ąŠą▒ąŠąĖčģ ąŠč湥čĆąĄą┤ąĄą╣, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą▓ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ. ą×ą┤ąĮą░
ąŠč湥čĆąĄą┤čī ą╝ąŠąČąĄčé čüąŠčģčĆą░ąĮčÅčéčī ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ čéąĖą┐ą░ unsigned long, ą┤čĆčāą│ą░čÅ ą╝ąŠąČąĄčé
čüąŠčģčĆą░ąĮčÅčéčī čāą║ą░ąĘą░č鹥ą╗ąĖ ąĮą░ čüčéčĆąŠą║ąĖ (čéąĖą┐ char*). ą×ą▒ąĄ ąŠč湥čĆąĄą┤ąĖ ą╝ąŠą│čāčé ąĘą░ą┐ąŠą╝ąĖąĮą░čéčī
ą╝ą░ą║čüąĖą╝čāą╝ 10 菹╗ąĄą╝ąĄąĮč鹊ą▓. ąĀąĄą░ą╗čīąĮąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąŠą▓ąĄčĆčÅčéčī ąĘąĮą░č湥ąĮąĖąĄ
ą▓ąŠąĘą▓čĆą░čéą░ čäčāąĮą║čåąĖąĖ xQueueCreate, čćč鹊ą▒čŗ čāą▒ąĄą┤ąĖčéčīčüčÅ, čćč鹊 ąŠč湥čĆąĄą┤ąĖ ą▒čŗą╗ąĖ
čāčüą┐ąĄčłąĮąŠ čüąŠąĘą┤ą░ąĮčŗ. */
xIntegerQueue = xQueueCreate( 10, sizeof( unsigned long ) );
xStringQueue = xQueueCreate( 10, sizeof( char * ) );
/* ąŻčüčéą░ąĮąŠą▓ą║ą░ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. */
_dos_setvect( 0x82, vExampleInterruptHandler );
/* ąĪąŠąĘą┤ą░ąĮąĖąĄ ąĘą░ą┤ą░čćąĖ, ą║ąŠč鹊čĆą░čÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąŠč湥čĆąĄą┤čī ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ čåąĄą╗čŗčģ čćąĖčüąĄą╗
ą▓ ISR. ąŁčéą░ ąĘą░ą┤ą░čćą░ čüąŠąĘą┤ą░ąĄčéčüčÅ čü ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ 1. */
xTaskCreate( vIntegerGenerator, "IntGen", 1000, NULL, 1, NULL );
/* ąĪąŠąĘą┤ą░ąĮąĖąĄ ąĘą░ą┤ą░čćąĖ, ą▓čŗą▓ąŠą┤ąĖčé ąĮą░ ą┐ąĄčćą░čéčī čüčéčĆąŠą║ąĖ, ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮčŗąĄ ąĖąĘ ISR.
ąŁčéą░ ąĘą░ą┤ą░čćą░ čüąŠąĘą┤ą░ąĄčéčüčÅ čü čüą░ą╝čŗą╝ ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ 2. */
xTaskCreate( vStringPrinter, "String", 1000, NULL, 2, NULL );
/* ąŚą░ą┐čāčüą║ čłąĄą┤čāą╗ąĄčĆą░, ą┐ąŠčüą╗ąĄ č湥ą│ąŠ čüąŠąĘą┤ą░ąĮąĮčŗąĄ ąĘą░ą┤ą░čćąĖ ąĮą░čćąĮčāčé ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ. */
vTaskStartScheduler();
/* ąĢčüą╗ąĖ ą▓čüąĄ čģąŠčĆąŠčłąŠ, č鹊 čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓ main() ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą┤ąŠą╣ą┤ąĄčé ą┤ąŠ čŹč鹊ą╣ č鹊čćą║ąĖ,
ąĖ č鹥ą┐ąĄčĆčī čłąĄą┤čāą╗ąĄčĆ ą▒čāą┤ąĄčé čāą┐čĆą░ą▓ą╗čÅčéčī ąĘą░ą┤ą░čćą░ą╝ąĖ. ąĢčüą╗ąĖ main() ą┤ąŠą▓ąĄą╗ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ
ą┤ąŠ čŹč鹊ą│ąŠ ą╝ąĄčüčéą░, č鹊 čŹč鹊 ą╝ąŠąČąĄčé ąŠąĘąĮą░čćą░čéčī, čćč鹊 ąĮąĄ čģą▓ą░čéą░ąĄčé ą┐ą░ą╝čÅčéąĖ ą║čāčćąĖ (heap)
ą┤ą╗čÅ čüąŠąĘą┤ą░ąĮąĖčÅ čüą┐ąĄčåąĖą░ą╗čīąĮąŠą╣ ąĘą░ą┤ą░čćąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle task, ąŠą▒ čŹč鹊ą╣ ąĘą░ą┤ą░č湥
ą┤ą░ą╗ąĄąĄ). ą¦ą░čüčéčī 5 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▒ąŠą╗čīčłąĄ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÄ
ą┐ą░ą╝čÅčéčīčÄ. */
for( ;; );
}
ąøąĖčüčéąĖąĮą│ 56. ążčāąĮą║čåąĖčÅ main() ą┤ą╗čÅ ą┐čĆąĖą╝ąĄčĆą░ 14
ąÆčŗą▓ąŠą┤, ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖą╝čŗą╣ ą┐čĆąĖą╝ąĄčĆąŠą╝ 14, ą┐ąŠą║ą░ąĘą░ąĮ ąĮą░ čĆąĖčüčāąĮą║ąĄ 33. ąÜą░ą║ ą╝ąŠąČąĮąŠ čāą▓ąĖą┤ąĄčéčī, ISR ą┐čĆąĖąĮąĖą╝ą░ąĄčé 5 čåąĄą╗čŗčģ čćąĖčüąĄą╗ ąĖ ą▓ ąŠčéą▓ąĄčé ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčé 5 čüčéčĆąŠą║. ąæąŠą╗ąĄąĄ ą┐ąŠą┤čĆąŠą▒ąĮąŠ ą┐čĆąŠčåąĄčüčü čĆą░čüčüą╝ą░čéčĆąĖą▓ą░ąĄčéčüčÅ ąĮą░ čĆąĖčüčāąĮą║ąĄ 34.

ąĀąĖčü. 33. ąÆčŗą▓ąŠą┤, ą║ąŠč鹊čĆčŗą╣ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčé ą┐čĆąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĖ ą┐čĆąĖą╝ąĄčĆ 14.
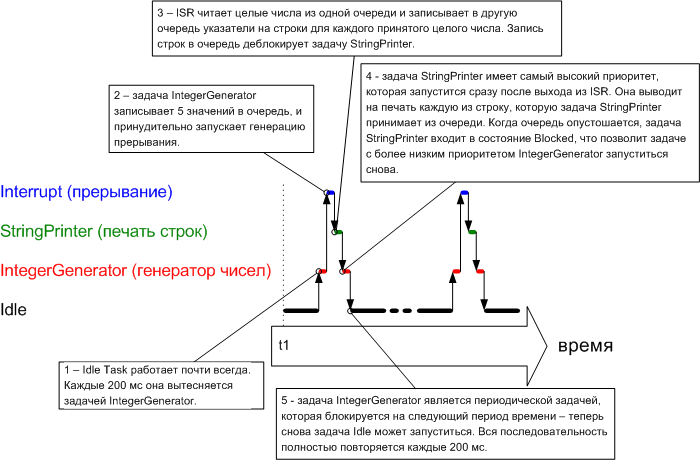
ąĀąĖčü. 34. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ąĘą░ą┤ą░čć ąĖąĘ ą┐čĆąĖą╝ąĄčĆą░ 14.
[3.5. ąÆą╗ąŠąČąĄąĮąĮčŗąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ]
ąĪą▓ąĄąČąĖąĄ ą┐ąŠčĆčéčŗ FreeRTOS ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▓ą╗ąŠąČąĄąĮąĮąŠčüčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, čé. ąĄ. ą▓ąŠ ą▓čĆąĄą╝čÅ čĆą░ą▒ąŠčéčŗ ąŠą┤ąĮąŠą│ąŠ ISR ą╝ąŠąČąĄčé čüčĆą░ą▒ąŠčéą░čéčī ą┤čĆčāą│ąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ąĖ ą▒čāą┤ąĄčé ąĘą░ą┐čāčēąĄąĮ ą┤čĆčāą│ąŠą╣ ISR (čŹč鹊 ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▓ą╗ąŠąČąĄąĮąĮąŠčüčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┤čĆčāą│ ą▓ ą┤čĆčāą│ą░). ąŁčéąĖ ą┐ąŠčĆčéčŗ čéčĆąĄą▒čāčÄčé ąŠą┤ąĮąŠą╣ ąĖą╗ąĖ ą┤ą▓čāčģ ą║ąŠąĮčüčéą░ąĮčé, ąĘą░ą┤ą░ąĮąĮčŗčģ ą▓ čģąĄą┤ąĄčĆąĄ FreeRTOSConfig.h. ąÜąŠąĮčüčéą░ąĮčéčŗ ąŠą┐ąĖčüą░ąĮčŗ ą▓ čéą░ą▒ą╗ąĖčåąĄ 17.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ ą┐ąĄčĆąĄą▓ąŠą┤čćąĖą║ą░: ą║ čüąŠąČą░ą╗ąĄąĮąĖčÄ, ą▓ ąĮą░čüč鹊čÅčēąĄąĄ ą▓čĆąĄą╝čÅ (ąŠą║čéčÅą▒čĆčī 2011 ą│ąŠą┤ą░, FreeRTOSv7.0.2) ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ ą║ąŠąĮčüčéą░ąĮčé configKERNEL_INTERRUPT_PRIORITY ąĖ configMAX_SYSCALL_INTERRUPT_PRIORITY ąĄčüčéčī č鹊ą╗čīą║ąŠ ąĮą░ ąĮąĄą▒ąŠą╗čīčłąŠą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąĄ ą┐ą╗ą░čéč乊čĆą╝ (ąĮą░ą┐čĆąĖą╝ąĄčĆ ąĮą░ Atmel ARM7 čŹč鹊ą│ąŠ ą┐ąŠą║ą░ ąĮąĄčé, čģąŠčéčÅ ą░čĆčģąĖč鹥ą║čéčāčĆą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĮą░ąĘąĮą░čćą░čéčī ą┐čĆąĖąŠčĆąĖč鹥čéčŗ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣). ąĪčĆąĄą┤ąĖ ą┐ąŠčĆč鹊ą▓, ą║ąŠč鹊čĆčŗąĄ čüąŠą┤ąĄčƹȹ░čé čāčüčéą░ąĮąŠą▓ą║čā configKERNEL_INTERRUPT_PRIORITY, ąĖą╝ąĄčÄčéčüčÅ ą┐ąŠą║ą░ č鹊ą╗čīą║ąŠ Cortex-M3, PIC24, dsPIC, PIC32, SuperH ąĖ RX600. ąĪčĆąĄą┤ąĖ ą┐ąŠčĆč鹊ą▓, ą║ąŠč鹊čĆčŗąĄ čüąŠą┤ąĄčƹȹ░čé čāčüčéą░ąĮąŠą▓ą║čā configMAX_SYSCALL_INTERRUPT_PRIORITY, ąĖą╝ąĄčÄčéčüčÅ ą┐ąŠą║ą░ č鹊ą╗čīą║ąŠ PIC32, RX600 ąĖ Cortex M3.
ąóą░ą▒ą╗ąĖčåą░ 17. ąÜąŠąĮčüčéą░ąĮčéčŗ, čāą┐čĆą░ą▓ą╗čÅčÄčēąĖąĄ ą▓ą╗ąŠąČąĄąĮąĮąŠčüčéčīčÄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣
ąÜąŠąĮčüčéą░ąĮčéą░
|
ą×ą┐ąĖčüą░ąĮąĖąĄ
|
| configKERNEL_INTERRUPT_PRIORITY |
ąŻčüčéą░ąĮąŠą▓ą║ą░ ą┐čĆąĖąŠčĆąĖč鹥čéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ą┤ą╗čÅ čéąĖą║ąŠą▓ FreeRTOS.
ąĢčüą╗ąĖ ą┐ąŠčĆčé ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą║ąŠąĮčüčéą░ąĮčéčā configMAX_SYSCALL_INTERRUPT_PRIORITY, č鹊 ą╗čÄą▒ąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąĘą░čēąĖčēąĄąĮąĮčŗąĄ ą┤ą╗čÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čäčāąĮą║čåąĖąĖ FreeRTOS API, ą┤ąŠą╗ąČąĮąŠ čéą░ą║ąČąĄ ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ čü čŹčéąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝. |
| configMAX_SYSCALL_INTERRUPT_PRIORITY |
ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĮą░ąĖą▓čŗčüčłąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé, ąĖąĘ ą║ąŠč鹊čĆąŠą│ąŠ ą╝ąŠą│čāčé ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮčŗ ąĘą░čēąĖčēąĄąĮąĮčŗąĄ ą┤ą╗čÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čäčāąĮą║čåąĖąĖ FreeRTOS API. |
ą£ąŠą┤ąĄą╗čī ą┐ąŠą╗ąĮąŠą╣ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą▓ą╗ąŠąČąĄąĮąĮąŠčüčéąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čüąŠąĘą┤ą░ąĄčéčüčÅ ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ configMAX_SYSCALL_INTERRUPT_PRIORITY ą▓ ą┐čĆąĖąŠčĆąĖč鹥čé ą▓čŗčłąĄ, č湥ą╝ configKERNEL_INTERRUPT_PRIORITY. ąŁč鹊 ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčéčüčÅ ąĮą░ čĆąĖčüčāąĮą║ąĄ 35, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą│ąĖą┐ąŠč鹥čéąĖč湥čüą║ąĖą╣ čüčåąĄąĮą░čĆąĖą╣, ą│ą┤ąĄ configMAX_SYSCALL_INTERRUPT_PRIORITY čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ ąĘąĮą░č湥ąĮąĖąĄ 3, ąĖ configKERNEL_INTERRUPT_PRIORITY čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 1. ąÜą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ, 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮčŗą╣ ą│ąĖą┐ąŠč鹥čéąĖč湥čüą║ąĖą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ąĖą╝ąĄąĄčé čüąĄą╝čī čĆą░ąĘąĮčŗčģ čāčĆąŠą▓ąĮąĄą╣ ą┐čĆąĖąŠčĆąĖč鹥čéą░. ąŚąĮą░č湥ąĮąĖąĄ 7 - ą┐čĆąŠčüč鹊 ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠąĄ čćąĖčüą╗ąŠ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą│ąĖą┐ąŠč鹥čéąĖč湥čüą║ąŠą│ąŠ ą┐čĆąĖą╝ąĄčĆą░, ąĖ ąŠąĮąŠ ą▓ąŠą▓čüąĄ ąĮąĄ ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą▒čāą┤ąĄčé ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąŠ ą▓ ą║ą░ą║ąŠą╣-č鹊 ą║ąŠąĮą║čĆąĄčéąĮąŠą╣ ą░čĆčģąĖč鹥ą║čéčāčĆąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ą×ą▒čŗčćąĮąŠ ą▓ąŠąĘąĮąĖą║ą░ąĄčé ą┐čāčéą░ąĮąĖčåą░ ą╝ąĄąČą┤čā ą┐čĆąĖąŠčĆąĖč鹥čéą░ą╝ąĖ ąĘą░ą┤ą░čćąĖ ąĖ ą┐čĆąĖąŠčĆąĖč鹥čéą░ą╝ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąĀąĖčüčāąĮąŠą║ 35 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆąĖąŠčĆąĖč鹥čéčŗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ą░ą║ ąŠąĮąĖ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ ą▓ ą░čĆčģąĖč鹥ą║čéčāčĆąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąŁč鹊 ą┐čĆąĖąŠčĆąĖč鹥čéčŗ, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ąĮą░ čāčĆąŠą▓ąĮąĄ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ, ąĖ ISR čĆą░ąĘąĮčŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą▓čŗą┐ąŠą╗ąĮčÅčÄčéčüčÅ čü čĆą░ąĘąĮčŗą╝ąĖ ą┐čĆąĖąŠčĆąĖč鹥čéą░ą╝ąĖ ą┤čĆčāą│ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ą┤čĆčāą│ą░. ąŚą░ą┤ą░čćąĖ ąĮąĄ ąĘą░ą┐čāčüą║ą░čÄčé ISR, čéą░ą║ čćč鹊 ą┐čĆąĖąŠčĆąĖč鹥čé, ąĮą░ąĘąĮą░č湥ąĮąĮčŗą╣ ąĘą░ą┤ą░č湥, ąĮąĖą║ą░ą║ ąĮąĄ ąŠčéąĮąŠčüąĖčéčüčÅ ą║ ą┐čĆąĖąŠčĆąĖč鹥čéčā, ąĮą░ąĘąĮą░č湥ąĮąĮąŠą╝čā ąĮą░ ąĖčüč鹊čćąĮąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.

ąĀąĖčü. 35. ąÜąŠąĮčüčéą░ąĮčéčŗ, ą▓ą╗ąĖčÅčÄčēąĖąĄ ąĮą░ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą▓ą╗ąŠąČąĄąĮąĮąŠčüčéąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣
ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖąĖ ą║ čĆąĖčüčāąĮą║čā 35:
┬Ę ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą┐čĆąĖąŠčĆąĖč鹥čéčŗ ąŠčé 1 ą┤ąŠ 3 ą▓ą║ą╗čÄčćąĖč鹥ą╗čīąĮąŠ, ąĮąĄ čüą╝ąŠą│čāčé ąĘą░ą┐čāčüčéąĖčéčīčüčÅ (ą▒čāą┤čāčé ąŠčéą╗ąŠąČąĄąĮčŗ) ąĮą░ ą▓čĆąĄą╝čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čÅą┤čĆą░ FreeRTOS ąĖą╗ąĖ ąĮą░ ą▓čĆąĄą╝čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ąŠą┤ą░ ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ ą║čĆąĖčéąĖč湥čüą║ąĖčģ čüąĄą║čåąĖą╣ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ą×ą┤ąĮą░ą║ąŠ čŹčéąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą╝ąŠą│čāčé čüą▓ąŠą▒ąŠą┤ąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī (ąĘą░čēąĖčēąĄąĮąĮčŗąĄ ą┤ą╗čÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą▓ąĄčĆčüąĖąĖ) ą▓čŗąĘąŠą▓čŗ čäčāąĮą║čåąĖą╣ API FreeRTOS.
┬Ę ąØą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčé čāčĆąŠą▓ąĄąĮčī 4 ąĖ ą▓čŗčłąĄ, ąĮąĖą║ą░ą║ ąĮąĄ ą▓ą╗ąĖčÅčÄčé ą║čĆąĖčéąĖč湥čüą║ąĖąĄ čüąĄą║čåąĖąĖ, ąĖ ąĮąĖą║ą░ą║ąĖąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ čÅą┤čĆą░ FreeRTOS ąĮąĄ ą╝ąŠą│čāčé ą┐ąŠą▓ą╗ąĖčÅčéčī ąĮą░ ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮčŗą╣ ąĘą░ą┐čāčüą║ čŹčéąĖčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ - ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ ąŠą│čĆą░ąĮąĖč湥ąĮąĖą╣ č鹊ą╗čīą║ąŠ čüą░ą╝ąŠą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ (ą║ą░ą║ ąĄčüą╗ąĖ ą▒čŗ FreeRTOS ą▓ąŠąŠą▒čēąĄ ąĮąĄ čüčāčēąĄčüčéą▓ąŠą▓ą░ą╗ąŠ). ą×ą▒čŗčćąĮąŠ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéčī, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ą░čÅ ą┤ą╗čÅ ąŠč湥ąĮčī ą▓čŗčüąŠą║ąŠą╣ č鹊čćąĮąŠčüčéąĖ ą▓čĆąĄą╝ąĄąĮąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╝), ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┐čĆąĖąŠčĆąĖč鹥čé ą┤ą╗čÅ ISR ą▓čŗčłąĄ configMAX_SYSCALL_INTERRUPT_PRIORITY, čćč鹊ą▒čŗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░čéčī, čćč鹊 ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ čłąĄą┤čāą╗ąĄčĆą░ ąĮąĄ ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą┤čĆąŠąČą░ąĮąĖčÄ ą▓čĆąĄą╝ąĄąĮąĖ ąŠčéą║ą╗ąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣.
┬Ę ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ą┤ąĄą╗ą░čÄčé ąĮąĖą║ą░ą║ąĖčģ ą▓čŗąĘąŠą▓ąŠą▓ čäčāąĮą║čåąĖą╣ FreeRTOS API, ą╝ąŠą│čāčé čüą▓ąŠą▒ąŠą┤ąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╗čÄą▒ąŠą╣ ą┐čĆąĖąŠčĆąĖč鹥čé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ ą┤ą╗čÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣ ARM Cortex M3
ą£ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ Cortex M3 ąĖčüą┐ąŠą╗čīąĘčāčÄčé ąŠą▒čĆą░čéąĮčāčÄ ąĮčāą╝ąĄčĆą░čåąĖčÄ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ - ą┐čĆąĖąŠčĆąĖč鹥čé čü ąĮąĖąĘą║ąĖą╝ čćąĖčüą╗ąŠą▓čŗą╝ ąĮąŠą╝ąĄčĆąŠą╝ ą╗ąŠą│ąĖč湥čüą║ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą▓čŗčüąŠą║ąŠą╝čā ą┐čĆąĖąŠčĆąĖč鹥čéčā ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ. ąŁč鹊 ą║ą░ąČąĄčéčüčÅ ą┐ą░čĆą░ą┤ąŠą║čüą░ą╗čīąĮčŗą╝, ąĖ ąŠą▒ čŹč鹊ą╝ ą╗ąĄą│ą║ąŠ ąĘą░ą▒čŗčéčī! ąĢčüą╗ąĖ čģąŠčéąĖč鹥 ąĮą░ąĘąĮą░čćąĖčéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÄ ąĮąĖąĘą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé, č鹊 ąÆčŗ ą┤ąŠą╗ąČąĮčŗ ąĮą░ąĘąĮą░čćąĖčéčī ąĄą╝čā ą▒ą×ą╗čīčłąĄąĄ čćąĖčüą╗ąŠą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐čĆąĖąŠčĆąĖč鹥čéą░. ąØąĄ ąĮą░ąĘąĮą░čćą░ą╣č鹥 ąĄą╝čā ą┐čĆąĖąŠčĆąĖč鹥čé 0 (ąĖą╗ąĖ ą┤čĆčāą│ąŠąĄ čćąĖčüą╗ąŠ čü ą╝ą░ą╗čŗą╝ ąĘąĮą░č湥ąĮąĖąĄą╝), čéą░ą║ ą║ą░ą║ ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠą╗čāčćąĖčé čüą░ą╝čŗą╣ ą▓čŗčüąŠą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé ą▓ čüąĖčüč鹥ą╝ąĄ 0 - ąĖ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ą┐ąŠč鹥ąĮčåąĖą░ą╗čīąĮąŠ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ čüąĖčüč鹥ą╝čā ą║ ą┐ąŠą╗ąĮąŠą╝čā ąŠčéą║ą░ąĘčā, ąĄčüą╗ąĖ ą┐čĆąĖąŠčĆąĖč鹥čé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠą║ą░ąČąĄčéčüčÅ ą▓čŗčłąĄ configMAX_SYSCALL_INTERRUPT_PRIORITY.
ąĪą░ą╝čŗą╣ ąĮąĖąĘą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé ą▓ čÅą┤čĆąĄ Cortex M3 čĆą░ą▓ąĄąĮ 255, čģąŠčéčÅ čĆą░ąĘąĮčŗąĄ ą┐ąŠčüčéą░ą▓čēąĖą║ąĖ čÅą┤ąĄčĆ Cortex M3 čĆąĄą░ą╗ąĖąĘčāčÄčé čĆą░ąĘąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ąĖčé ą┐čĆąĖąŠčĆąĖč鹥čéą░ ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé čäčāąĮą║čåąĖąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║, ą║ąŠč鹊čĆčŗąĄ čĆą░čüčüčćąĖčéą░ąĮčŗ ąĮą░ čāą║ą░ąĘą░ąĮąĖąĄ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓ čĆą░ąĘąĮčŗą╝ąĖ čüą┐ąŠčüąŠą▒ą░ą╝ąĖ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą╗čÅ STM32 čüą░ą╝čŗą╣ ąĮąĖąĘą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé ą╝ąŠąČąĄčé ą▒čŗčéčī čāą║ą░ąĘą░ąĮ ą▓ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĄ ą┤čĆą░ą╣ą▓ąĄčĆą░ ST ą║ą░ą║ 15, ą░ čüą░ą╝čŗą╣ ą▓čŗčüąŠą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé ą╝ąŠąČąĄčé ą▒čŗčéčī čāą║ą░ąĘą░ąĮ ą║ą░ą║ 0.
[ąĪą╗ąĄą┤čāčÄčēą░čÅ čćą░čüčéčī FreeRTOS: ą┐čĆą░ą║čéąĖč湥čüą║ąŠąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ, čćą░čüčéčī 4 (čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆąĄčüčāčĆčüą░ą╝ąĖ)]
[ąĪčüčŗą╗ą║ąĖ]
1. ą×ą▒ąĘąŠčĆ FreeRTOS ąĮą░ čĆčāčüčüą║ąŠą╝ čÅąĘčŗą║ąĄ - ąÉąĮą┤čĆąĄą╣ ąÜčāčĆąĮąĖčå, čüčéą░čéčīčÅ ą▓ ąČčāčĆąĮą░ą╗ąĄ ┬½ąÜąŠą╝ą┐ąŠąĮąĄąĮčéčŗ ąĖ č鹥čģąĮąŠą╗ąŠą│ąĖąĖ┬╗ (2..10 ąĮąŠą╝ąĄčĆą░ 2011 ą│ąŠą┤ą░).
2. 150422FreeRTOS-API.pdf - ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ ą┐ąŠ API FreeRTOS 8.2.čģ ąĮą░ ą░ąĮą│ą╗ąĖą╣čüą║ąŠą╝ čÅąĘčŗą║ąĄ. |



