|
FreeRTOS ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčéčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ čäą░ą╣ą╗ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ FreeRTOSConfig.h. ąÜą░ąČą┤ąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ FreeRTOS ą┤ąŠą╗ąČąĮąŠ ąĖą╝ąĄčéčī čéą░ą║ąŠą╣ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗, ąĮą░čģąŠą┤čÅčēąĖą╣čüčÅ ą▓ ą┐čāčéčÅčģ ą┐ąŠąĖčüą║ą░ (include path) ą┐čĆąĄą┐čĆąŠčåąĄčüčüąŠčĆą░. FreeRTOSConfig.h ąĮą░čüčéčĆą░ąĖą▓ą░ąĄčé ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ čÅą┤čĆą░ RTOS ą┤ą╗čÅ čüąŠą▒ąĖčĆą░ąĄą╝ąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čüąŠą┤ąĄčƹȹ░ąĮąĖąĄ čŹč鹊ą│ąŠ čäą░ą╣ą╗ą░ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ąĮąĄ ąŠčé RTOS, ąĖ čäą░ą╣ą╗ FreeRTOSConfig.h ą┤ąŠą╗ąČąĄąĮ ąĮą░čģąŠą┤ąĖčéčīčüčÅ ą▓ ą┤ąĖčĆąĄą║č鹊čĆąĖąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ąĮąĄ ą▓ ąŠą┤ąĮąŠą╝ ąĖąĘ ą║ą░čéą░ą╗ąŠą│ąŠą▓ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ čÅą┤čĆą░ RTOS.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ąĮąĄą┐ąŠąĮčÅčéąĮčŗąĄ č鹥čĆą╝ąĖąĮčŗ ąĖ čüąŠą║čĆą░čēąĄąĮąĖčÅ ąĖčēąĖč鹥 ą▓ ąĪą╗ąŠą▓ą░čĆąĖą║ąĄ [2]. ąĢčēąĄ čüą╝. čüą╗ąŠą▓ą░čĆąĖą║ ą▓ čüčéą░čéčīąĄ [3], čéą░ą║ąČąĄ ą┐ąŠą╗ąĄąĘąĮąŠ ąŠąĘąĮą░ą║ąŠą╝ąĖčéčīčüčÅ čü čüąĄčĆąĖąĄą╣ čüčéą░č鹥ą╣ ąĮą░ čŹč鹊ą╝ čüą░ą╣č鹥, ąŠą┐ąĖčüčŗą▓ą░čÄčēąĖčģ ąŠčüąĮąŠą▓ąĮčŗąĄ ą┐čĆąĖąĮčåąĖą┐čŗ čĆą░ą▒ąŠčéčŗ FreeRTOS.
ąÜą░ąČą┤ąŠąĄ demo-ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ, ą▓ą║ą╗čÄč湥ąĮąĮąŠąĄ ą▓ ąĘą░ą│čĆčāąČą░ąĄą╝čŗą╣ ą┐ą░ą║ąĄčé ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ RTOS, ąĖą╝ąĄąĄčé čüą▓ąŠą╣ čüąŠą▒čüčéą▓ąĄąĮąĮčŗą╣ čäą░ą╣ą╗ FreeRTOSConfig.h. ąØąĄą║ąŠč鹊čĆčŗąĄ ą┤ąĄą╝ą║ąĖ ą┤ąŠą▓ąŠą╗čīąĮąŠ čüčéą░čĆčŗąĄ, ąĖ ą┐ąŠčŹč鹊ą╝čā ąĮąĄ čüąŠą┤ąĄčƹȹ░čé ą▓čüąĄ ą┤ąŠčüčéčāą┐ąĮčŗąĄ ąŠą┐čåąĖąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. ąóąĄ ąŠą┐čåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąŠą┐čāčēąĄąĮčŗ ą▓ FreeRTOSConfig.h, ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ą▓ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐čĆąŠą┐ąĖčüą░ąĮčŗ ą▓ čäą░ą╣ą╗ąĄ FreeRTOS.h).
ąÆąŠčé čéąĖą┐ąĖčćąĮčŗą╣ ą┐čĆąĖą╝ąĄčĆ čäą░ą╣ą╗ą░ FreeRTOSConfig.h, čü ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą┐ąĖčüą░ąĮąĖąĄą╝ ą║ą░ąČą┤ąŠą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░:
#ifndef FREERTOS_CONFIG_H
#define FREERTOS_CONFIG_H
/* ąŚą┤ąĄčüčī čģąŠčĆąŠčłąĄąĄ ą╝ąĄčüč鹊 ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗčģ čäą░ą╣ą╗ąŠą▓, ą║ąŠč鹊čĆčŗąĄ
ą┐ąŠčéčĆąĄą▒čāčÄčéčüčÅ ą▓ ąÆą░čłąĄą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ. */
#include "something.h"
#define configUSE_PREEMPTION 1
#define configUSE_PORT_OPTIMISED_TASK_SELECTION 0
#define configUSE_TICKLESS_IDLE 0
#define configCPU_CLOCK_HZ 60000000
#define configTICK_RATE_HZ 250
#define configMAX_PRIORITIES 5
#define configMINIMAL_STACK_SIZE 128
#define configMAX_TASK_NAME_LEN 16
#define configUSE_16_BIT_TICKS 0
#define configIDLE_SHOULD_YIELD 1
#define configUSE_TASK_NOTIFICATIONS 1
#define configUSE_MUTEXES 0
#define configUSE_RECURSIVE_MUTEXES 0
#define configUSE_COUNTING_SEMAPHORES 0
#define configUSE_ALTERNATIVE_API 0 /* ąŻčüčéą░čĆąĄą╗ąŠ! */
#define configQUEUE_REGISTRY_SIZE 10
#define configUSE_QUEUE_SETS 0
#define configUSE_TIME_SLICING 0
#define configUSE_NEWLIB_REENTRANT 0
#define configENABLE_BACKWARD_COMPATIBILITY 0
#define configNUM_THREAD_LOCAL_STORAGE_POINTERS 5
#define configSTACK_DEPTH_TYPE uint16_t
#define configMESSAGE_BUFFER_LENGTH_TYPE size_t
/* ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ą▓čŗą┤ąĄą╗ąĄąĮąĖąĄą╝ ą┐ą░ą╝čÅčéąĖ. */
#define configSUPPORT_STATIC_ALLOCATION 1
#define configSUPPORT_DYNAMIC_ALLOCATION 1
#define configTOTAL_HEAP_SIZE 10240
#define configAPPLICATION_ALLOCATED_HEAP 1
/* ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ, čüą▓čÅąĘą░ąĮąĮčŗąĄ čü čäčāąĮą║čåąĖčÅą╝ąĖ ą┐ąĄčĆąĄčģą▓ą░čéą░ čüąŠą▒čŗčéąĖą╣
(hook-čäčāąĮą║čåąĖąĖ). */
#define configUSE_IDLE_HOOK 0
#define configUSE_TICK_HOOK 0
#define configCHECK_FOR_STACK_OVERFLOW 0
#define configUSE_MALLOC_FAILED_HOOK 0
#define configUSE_DAEMON_TASK_STARTUP_HOOK 0
/* ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ, ąĮą░čüčéčĆą░ąĖą▓ą░čÄčēąĖąĄ ąĘą░čģą▓ą░čé ąĖąĮč乊čĆą╝ą░čåąĖąĖ
ą▓čĆąĄą╝ąĄąĮąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ąĖ čüčéą░čéąĖčüčéąĖą║ąĖ ąĘą░ą┤ą░čć. */
#define configGENERATE_RUN_TIME_STATS 0
#define configUSE_TRACE_FACILITY 0
#define configUSE_STATS_FORMATTING_FUNCTIONS 0
/* ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ, ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ čüąŠą┐čĆąŠą│čĆą░ą╝ą╝ą░ą╝. */
#define configUSE_CO_ROUTINES 0
#define configMAX_CO_ROUTINE_PRIORITIES 1
/* ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ, ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╝ čéą░ą╣ą╝ąĄčĆą░ą╝. */
#define configUSE_TIMERS 1
#define configTIMER_TASK_PRIORITY 3
#define configTIMER_QUEUE_LENGTH 10
#define configTIMER_TASK_STACK_DEPTH configMINIMAL_STACK_SIZE
/* ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ąŠą▓ąĄą┤ąĄąĮąĖčÅ ą▓ą╗ąŠąČąĄąĮąĮčŗčģ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣. */
// ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (*): ąĘą░ą▓ąĖčüąĖčé ąŠčé ą┐čĆąŠčåąĄčüčüąŠčĆą░:
#define configKERNEL_INTERRUPT_PRIORITY *
// ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (*): ąĘą░ą▓ąĖčüąĖčé ąŠčé ą┐čĆąŠčåąĄčüčüąŠčĆą░ ąĖ ąŠčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ:
#define configMAX_SYSCALL_INTERRUPT_PRIORITY *
#define configMAX_API_CALL_INTERRUPT_PRIORITY *
/* ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą╗ąŠą▓čāčłą║ąĖ ąŠčłąĖą▒ąŠą║ ą▓ąŠ ą▓čĆąĄą╝čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ. */
#define configASSERT( ( x ) ) if( ( x ) == 0 ) vAssertCalled( __FILE__, __LINE__ )
/* ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ FreeRTOS, čüą┐ąĄčåąĖčäąĖčćąĮčŗąĄ ą┤ą╗čÅ MPU. */
#define configINCLUDE_APPLICATION_DEFINED_PRIVILEGED_FUNCTIONS 0
/* ą×ą┐čåąĖąŠąĮą░ą╗čīąĮčŗąĄ čäčāąĮą║čåąĖąĖ - ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠ ą╗ąĖąĮą║ąĄčĆąŠą▓ ą▓čüąĄ čĆą░ą▓ąĮąŠ čāą┤ą░ą╗čÅčé
ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ čäčāąĮą║čåąĖąĖ. */
#define INCLUDE_vTaskPrioritySet 1
#define INCLUDE_uxTaskPriorityGet 1
#define INCLUDE_vTaskDelete 1
#define INCLUDE_vTaskSuspend 1
#define INCLUDE_xResumeFromISR 1
#define INCLUDE_vTaskDelayUntil 1
#define INCLUDE_vTaskDelay 1
#define INCLUDE_xTaskGetSchedulerState 1
#define INCLUDE_xTaskGetCurrentTaskHandle 1
#define INCLUDE_uxTaskGetStackHighWaterMark 0
#define INCLUDE_xTaskGetIdleTaskHandle 0
#define INCLUDE_eTaskGetState 0
#define INCLUDE_xEventGroupSetBitFromISR 1
#define INCLUDE_xTimerPendFunctionCall 0
#define INCLUDE_xTaskAbortDelay 0
#define INCLUDE_xTaskGetHandle 0
#define INCLUDE_xTaskResumeFromISR 1
/* ąŚą┤ąĄčüčī ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ
ą╝ą░ą║čĆąŠčüą░ čéčĆą░čüčüąĖčĆąŠą▓ą║ąĖ (trace macro). */
#endif /* FREERTOS_CONFIG_H */
[ą¤ą░čĆą░ą╝ąĄčéčĆčŗ "config"]
configUSE_PREEMPTION. ąŻčüčéą░ąĮąŠą▓ąĖč鹥 ą▓ 1 ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░ čü ą░ą╗ą│ąŠčĆąĖčéą╝ąŠą╝ ą▓čŗč鹥čüąĮčÅčÄčēąĄą╣ ą╝ąĮąŠą│ąŠąĘą░ą┤ą░čćąĮąŠčüčéąĖ (preemptive RTOS scheduler), ąĖą╗ąĖ ą▓ 0 ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą║ąŠąŠą┐ąĄčĆą░čéąĖą▓ąĮąŠą╣ ą╝ąĮąŠą│ąŠąĘą░ą┤ą░čćąĮąŠčüčéąĖ (cooperative RTOS scheduler).
configUSE_PORT_OPTIMISED_TASK_SELECTION. ąŻ ąĮąĄą║ąŠč鹊čĆčŗčģ ą┐ąŠčĆč鹊ą▓ FreeRTOS ąĄčüčéčī ą┤ą▓ą░ ą╝ąĄč鹊ą┤ą░ ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą░ čüą╗ąĄą┤čāčÄčēąĄą╣ ąĘą░ą┤ą░čćąĖ ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ŌĆō čéčĆą░ą┤ąĖčåąĖąŠąĮąĮčŗą╣ (generic) ą╝ąĄč鹊ą┤ ąĖ ą╝ąĄč鹊ą┤, čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖą╣ ą┤ą╗čÅ čŹč鹊ą│ąŠ ą┐ąŠčĆčéą░.
Generic-ą╝ąĄč鹊ą┤:
ŌĆó ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, ą║ąŠą│ą┤ą░ configUSE_PORT_OPTIMISED_TASK_SELECTION čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 0, ąĖą╗ąĖ ą║ąŠą│ą┤ą░ čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖą╣ ą╝ąĄč鹊ą┤ ąĮąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ.
ŌĆó ą£ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą▓čüąĄčģ ą┐ąŠčĆč鹊ą▓ FreeRTOS.
ŌĆó ą¤ąŠą╗ąĮąŠčüčéčīčÄ ąĮą░ą┐ąĖčüą░ąĮ ąĮą░ C, čćč鹊 ą┤ąĄą╗ą░ąĄčé ąĄą│ąŠ ą╝ąĄąĮąĄąĄ čŹčäč乥ą║čéąĖą▓ąĮčŗą╝ ą┐ąŠ čüčĆą░ą▓ąĮąĄąĮąĖčÅ čüąŠ čüą┐ąĄčåąĖčäąĖč湥čüą║ąĖą╝ ą╝ąĄč鹊ą┤ąŠą╝.
ŌĆó ąØąĄ ąĮą░ą║ą╗ą░ą┤čŗą▓ą░ąĄčé ą┐čĆąĄą┤ąĄą╗ ąĮą░ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ąŠčüčéčāą┐ąĮčŗčģ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓ ąĘą░ą┤ą░čć.
ą£ąĄč鹊ą┤, čüą┐ąĄčåąĖčäąĖčćąĮčŗą╣ ą┤ą╗čÅ ą┐ąŠčĆčéą░:
ŌĆó ąØąĄą┤ąŠčüčéčāą┐ąĄąĮ ą┤ą╗čÅ ą▓čüąĄčģ ą┐ąŠčĆč鹊ą▓.
ŌĆó ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, ą║ąŠą│ą┤ą░ configUSE_PORT_OPTIMISED_TASK_SELECTION čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ ą▓ 1.
ŌĆó ą¤ąŠą╗ą░ą│ą░ąĄčéčüčÅ ąĮą░ ąŠą┤ąĮčā ąĖą╗ąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ čüą┐ąĄčåąĖčäąĖčćąĮčŗčģ ą┤ą╗čÅ ą░čĆčģąĖč鹥ą║čéčāčĆčŗ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĮčŗčģ ąĖąĮčüčéčĆčāą║čåąĖą╣ (ąŠą▒čŗčćąĮąŠ ąĖąĮčüčéčĆčāą║čåąĖčÅ ą┐ąŠą┤čüč湥čéą░ ą╗ąĖą┤ąĖčĆčāčÄčēąĖčģ ąĮčāą╗ąĄą╣ Count Leading Zeros [CLZ] ąĖą╗ąĖ ą┐ąŠą┤ąŠą▒ąĮą░čÅ ąĖąĮčüčéčĆčāą║čåąĖčÅ), ą┐ąŠčŹč鹊ą╝čā ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ąĮą░ č鹊ą╣ ą░čĆčģąĖč鹥ą║čéčāčĆąĄ, ą┤ą╗čÅ ą║ąŠč鹊čĆąŠą╣ čŹč鹊čé ą┐ąŠčĆčé FreeRTOS ą▒čŗą╗ čüą┐ąĄčåąĖą░ą╗čīąĮąŠ ąĮą░ą┐ąĖčüą░ąĮ.
ŌĆó ąæąŠą╗ąĄąĄ čŹčäč乥ą║čéąĖą▓ąĄąĮ, č湥ą╝ generic-ą╝ąĄč鹊ą┤.
ŌĆó ą×ą▒čŗčćąĮąŠ ąĘą░ą┤ą░ąĄčé ą┐čĆąĄą┤ąĄą╗ 32 ą┤ą╗čÅ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą│ąŠ ą║ąŠą╗ąĖč湥čüčéą▓ą░ ą┤ąŠčüčéčāą┐ąĮčŗčģ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓.
configUSE_TICKLESS_IDLE. ąŻčüčéą░ąĮąŠą▓ąĖč鹥 configUSE_TICKLESS_IDLE ą▓ 1 ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čĆąĄąČąĖą╝ą░ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą▒ąĄąĘ čéąĖą║ąŠą▓, ąĖą╗ąĖ ą▓ 0 ą┤ą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ ą▓čüąĄą│ą┤ą░ čĆą░ą▒ąŠčéą░čÄčēąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čéąĖą║ąŠą▓. ąĀąĄą░ą╗ąĖąĘą░čåąĖąĖ čĆąĄąČąĖą╝ą░ ą▒ąĄąĘ čéąĖą║ąŠą▓ čü ą┐ąŠąĮąĖąČąĄąĮąĮčŗą╝ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ ąĮąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą┤ą╗čÅ ą▓čüąĄčģ ą┐ąŠčĆč鹊ą▓ FreeRTOS.
configUSE_IDLE_HOOK. ąŻčüčéą░ąĮąŠą▓ąĖč鹥 ą▓ 1, ąĄčüą╗ąĖ čģąŠčéąĖč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐ąĄčĆąĄčģą▓ą░čé čüąŠčüč鹊čÅąĮąĖčÅ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle hook), ąĖą╗ąĖ ą▓ 0, ąĄčüą╗ąĖ čŹčéą░ čäčāąĮą║čåąĖčÅ ąĮąĄ ąĮčāąČąĮą░.
configUSE_MALLOC_FAILED_HOOK. ą»ą┤čĆąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▓čŗąĘąŠą▓ pvPortMalloc() ą┤ą╗čÅ ą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ ąĖąĘ ą║čāčćąĖ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ čüąŠąĘą┤ą░ąĄčéčüčÅ ąĘą░ą┤ą░čćą░ (task), ąŠč湥čĆąĄą┤čī (queue) ąĖą╗ąĖ čüąĄą╝ą░č乊čĆ (semaphore). ą×čäąĖčåąĖą░ą╗čīąĮčŗą╣ ą┐ą░ą║ąĄčé ąĘą░ą│čĆčāąĘą║ąĖ FreeRTOS ą┤ą╗čÅ čŹč鹊ą╣ čåąĄą╗ąĖ ą▓ą║ą╗čÄčćą░ąĄčé ą▓ čüąĄą▒čÅ 4 čüčģąĄą╝čŗ ą┐čĆąĖą╝ąĄčĆą░ ą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ, ąŠąĮąĖ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ą▓ čäą░ą╣ą╗ą░čģ heap_1.c, heap_2.c, heap_3.c, heap_4.c ąĖ heap_5.c. ą¤ą░čĆą░ą╝ąĄčéčĆ configUSE_MALLOC_FAILED_HOOK ąŠčéąĮąŠčüąĖčéčüčÅ č鹊ą╗čīą║ąŠ ą║ ąŠą┤ąĮąŠą╣ ąĖąĘ čŹčéąĖčģ čüčģąĄą╝, ą║ąŠč鹊čĆą░čÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ.
ążčāąĮą║čåąĖčÅ ą┐ąĄčĆąĄčģą▓ą░čéą░ ąŠčłąĖą▒ą║ąĖ malloc() čŹč鹊 hook-čäčāąĮą║čåąĖčÅ (ąĖą╗ąĖ callback). ąĢčüą╗ąĖ ąŠąĮą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░, č鹊 ą▒čāą┤ąĄčé ą▓čŗąĘą▓ą░ąĮą░ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ, ą║ąŠą│ą┤ą░ pvPortMalloc() ą▓ąĄčĆąĮąĄčé NULL. ąŚąĮą░č湥ąĮąĖąĄ NULL ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ, ąĄčüą╗ąĖ ąĮąĄčé ą┤ąŠčüčéą░č鹊čćąĮąŠą│ąŠ ąŠą▒čŖąĄą╝ą░ ą┐ą░ą╝čÅčéąĖ ą▓ ą║čāč湥 FreeRTOS, čćč鹊ą▒čŗ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ąĘą░ą┐čĆąŠčü ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĮą░ ą▓čŗą┤ąĄą╗ąĄąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ.
ąĢčüą╗ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆ configUSE_MALLOC_FAILED_HOOK čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1, č鹊 ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī hook-čäčāąĮą║čåąĖčÄ ą┐ąĄčĆąĄčģą▓ą░čéą░ ąŠčłąĖą▒ą║ąĖ malloc(). ąĢčüą╗ąĖ configUSE_MALLOC_FAILED_HOOK čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0, č鹊 čäčāąĮą║čåąĖčÅ ą┐ąĄčĆąĄčģą▓ą░čéą░ ąŠčłąĖą▒ą║ąĖ malloc() ąĮąĄ ą▒čāą┤ąĄčé ą▓čŗąĘčŗą▓ą░čéčīčüčÅ, ą┤ą░ąČąĄ ąĄčüą╗ąĖ ąŠąĮą░ ą▒čŗą╗ą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░. ążčāąĮą║čåąĖčÅ ą┐ąĄčĆąĄčģą▓ą░čéą░ ąŠčłąĖą▒ą║ąĖ malloc() ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮą░ ą┐ąŠ čüą╗ąĄą┤čāčÄčēąĄą╝čā ą┐čĆąŠč鹊čéąĖą┐čā:
void vApplicationMallocFailedHook( void );
configUSE_DAEMON_TASK_STARTUP_HOOK. ąĢčüą╗ąĖ ąŠą▒ą░ ą┐ą░čĆą░ą╝ąĄčéčĆą░ configUSE_TIMERS ąĖ configUSE_DAEMON_TASK_STARTUP_HOOK čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ 1, č鹊 ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī hook-čäčāąĮą║čåąĖčÄ č鹊čćąĮąŠ čü čéą░ą║ąĖą╝ ąĖą╝ąĄąĮąĄą╝ ąĖ ą┐čĆąŠč鹊čéąĖą┐ąŠą╝, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮąĖąČąĄ. ąŁčéą░ hook-čäčāąĮą║čåąĖčÅ ą▒čāą┤ąĄčé ą▓čŗąĘą▓ą░ąĮą░ č鹊čćąĮąŠ č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ čĆą░ąĘ, ą║ąŠą│ą┤ą░ ą║ąŠą│ą┤ą░ ąĘą░ą┤ą░čćą░ ą┤ąĄą╝ąŠąĮą░ RTOS (čéą░ą║ąČąĄ ąĖąĘą▓ąĄčüčéąĮą░čÅ ą║ą░ą║ timer service task) ą▓čŗą┐ąŠą╗ąĮąĖčéčüčÅ ą▓ ą┐ąĄčĆą▓čŗą╣ čĆą░ąĘ. ąøčÄą▒ąŠą╣ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąŠąĮąĮčŗą╣ ą║ąŠą┤ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ą║ąŠč鹊čĆąŠą╝čā ąĮčāąČąĄąĮ čĆą░ą▒ąŠčćąĖą╣ čäčāąĮą║čåąĖąŠąĮą░ą╗ RTOS, ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╝ąĄčēąĄąĮ ą▓ čŹčéčā hook-čäčāąĮą║čåąĖčÄ.
void void vApplicationDaemonTaskStartupHook( void );
configUSE_TICK_HOOK. ąŻčüčéą░ąĮąŠą▓ąĖč鹥 ą▓ 1, ąĄčüą╗ąĖ čģąŠčéąĖč鹥 ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┐ąĄčĆąĄčģą▓ą░čé čéąĖą║ąŠą▓, ąĖą╗ąĖ 0, ąĄčüą╗ąĖ čŹč鹊 ąĮąĄ ąĮčāąČąĮąŠ.
configCPU_CLOCK_HZ. ąŚą┤ąĄčüčī čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ čćą░čüč鹊čéą░ ą▓ ąōčå, čü ą║ąŠč鹊čĆąŠą╣ čéą░ą║čéąĖčĆčāąĄčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĄąĄ čÅą┤čĆąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąØą░ ąŠčüąĮąŠą▓ąĄ čŹč鹊ą╣ čćą░čüč鹊čéčŗ ą░ą┐ą┐ą░čĆą░čéąĮčŗą╣ čéą░ą╣ą╝ąĄčĆ ą▒čāą┤ąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čéąĖą║ą░. ą×ą▒čŗčćąĮąŠ čŹčéą░ čéą░ ąČąĄ čüą░ą╝ą░čÅ čćą░čüč鹊čéą░, ąĮą░ ą║ąŠč鹊čĆąŠą╣ čĆą░ą▒ąŠčéą░ąĄčé CPU. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┤ą╗čÅ ą║ąŠčĆčĆąĄą║čéąĮąŠą│ąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ čéą░ą╣ą╝ąĄčĆą░.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ ą┐ąĄčĆąĄą▓ąŠą┤čćąĖą║ą░: ąĘąĮą░č湥ąĮąĖąĄ configCPU_CLOCK_HZ čüąŠą▓ą┐ą░ą┤ą░ąĄčé čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ SystemCoreClock ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ąĖ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓ HAL STM32.
configTICK_RATE_HZ. ą¦ą░čüč鹊čéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čéąĖą║ąŠą▓ RTOS.
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čéąĖą║ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, č湥ą╝ ą▓čŗčłąĄ čćą░čüč鹊čéą░ čéąĖą║ą░, č鹥ą╝ ą▓čŗčłąĄ čĆą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī ąŠčéčüč湥čéą░ ą▓čĆąĄą╝ąĄąĮąĖ. ą×ą┤ąĮą░ą║ąŠ ą▓čŗčüąŠą║ą░čÅ čćą░čüč鹊čéą░ čéąĖą║ąŠą▓ čéą░ą║ąČąĄ ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čÅą┤čĆąŠ RTOS ą▒čāą┤ąĄčé ą▒ąŠą╗čīčłąĄ čéčĆą░čéąĖčéčī ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ CPU, ąĖ čŹčäč乥ą║čéąĖą▓ąĮąŠčüčéčī čĆą░ą▒ąŠčéčŗ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čüąĮąĖąĘąĖčéčüčÅ. ąÆčüąĄ ą┤ąĄą╝ąŠ-ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ RTOS ąĖčüą┐ąŠą╗čīąĘčāčÄčé ąŠą┤ąĖąĮą░ą║ąŠą▓čāčÄ čćą░čüč鹊čéčā čéąĖą║ąŠą▓ 1000 ąōčå. ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ąŠčüčī ą┤ą╗čÅ č鹥čüčéąĖčĆąŠą▓ą░ąĮąĖčÅ čÅą┤čĆą░ RTOS, ąĖ ą▒ąŠą╗čīčłąĄąĄ ąĘąĮą░č湥ąĮąĖąĄ ąŠą▒čŗčćąĮąŠ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ.
ąŻ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ąĘą░ą┤ą░čć ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮą░čüčéčĆąŠąĄąĮ ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╣ ą┐čĆąĖąŠčĆąĖč鹥čé. ą¤ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ RTOS ą▒čāą┤ąĄčé čĆą░čüą┐čĆąĄą┤ąĄą╗čÅčéčī ąŠą▒čēąĄąĄ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ ą╝ąĄąČą┤čā ąĘą░ą┤ą░čćą░ą╝ąĖ čü ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ ą┐čāč鹥ą╝ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą╝ąĄąČą┤čā ąĘą░ą┤ą░čćą░ą╝ąĖ ąĮą░ ą║ą░ąČą┤ąŠą╝ čéąĖą║ąĄ RTOS. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą▓čŗčüąŠą║ą░čÅ čćą░čüč鹊čéą░ čéąĖą║ąŠą▓ čéą░ą║ąČąĄ ą┤ą░ąĄčé čŹčäč乥ą║čé čāą╝ąĄąĮčīčłąĄąĮąĖčÅ čüą╗ą░ą╣čüą░ ą▓čĆąĄą╝ąĄąĮąĖ, ą▓čŗą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ ąĘą░ą┤ą░čćąĖ.
configMAX_PRIORITIES. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓, ą┤ąŠčüčéčāą┐ąĮčŗčģ ą┤ą╗čÅ ąĘą░ą┤ą░čć ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąøčÄą▒ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┤ą░čć ą╝ąŠąČąĄčé ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą┐čĆąĖąŠčĆąĖč鹥čéą░. ąöą╗čÅ čüąŠą┐čĆąŠą│čĆą░ą╝ą╝ ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓ ąŠčéą┤ąĄą╗čīąĮą░čÅ, čüą╝. configMAX_CO_ROUTINE_PRIORITIES.
ąÜą░ąČą┤čŗą╣ ą┤ąŠčüčéčāą┐ąĮčŗą╣ ą┐čĆąĖąŠčĆąĖč鹥čé ą┐ąŠčéčĆąĄą▒ą╗čÅąĄčé RAM ą▓ čÅą┤čĆąĄ RTOS, ą┐ąŠčŹč鹊ą╝čā ą┐ą░čĆą░ą╝ąĄčéčĆ configMAX_PRIORITIES ąĮąĄ čüą╗ąĄą┤čāąĄčé čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčī ą▓ ąĘąĮą░č湥ąĮąĖąĄ ą▒ąŠą╗čīčłąĄ, č湥ą╝ čĆąĄą░ą╗čīąĮąŠ čéčĆąĄą▒čāąĄčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ.
configMINIMAL_STACK_SIZE. ąĀą░ąĘą╝ąĄčĆ čüč鹥ą║ą░, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ą┤ą╗čÅ idle task. ą×ą▒čŗčćąĮąŠ čŹč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ąĮąĄ ą┤ąŠą╗ąČąĄąĮ čāą║ą░ąĘčŗą▓ą░čéčīčüčÅ ą╝ąĄąĮčīčłąĄ, č湥ą╝ ąĘąĮą░č湥ąĮąĖąĄ ą▓ čäą░ą╣ą╗ FreeRTOSConfig.h ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠą│ąŠ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąŠąĮąĮąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ą▓ą░ą╝ąĖ ą┐ąŠčĆčéą░ FreeRTOS.
ąÜą░ą║ ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆ čĆą░ąĘą╝ąĄčĆą░ čüč鹥ą║ą░ ą┤ą╗čÅ čäčāąĮą║čåąĖą╣ xTaskCreate() ąĖ xTaskCreateStatic(), čĆą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ ą▓ configMINIMAL_STACK_SIZE čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▓ ąĄą┤ąĖąĮąĖčåą░čģ čüą╗ąŠą▓, ą░ ąĮąĄ ą▓ ą▒ą░ą╣čéą░čģ. ąÜą░ąČą┤čŗą╣ 菹╗ąĄą╝ąĄąĮčé ą▓ čüč鹥ą║ąĄ ąĘą░ąĮąĖą╝ą░ąĄčé 32-ą▒ąĖčéą░, ą┐ąŠčŹč鹊ą╝čā čĆą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ 100 ąŠąĘąĮą░čćą░ąĄčé 400 ą▒ą░ą╣čé (ą║ą░ąČą┤čŗą╣ 32-ą▒ąĖčéąĮčŗą╣ 菹╗ąĄą╝ąĄąĮčé čüč鹥ą║ą░ ąĘą░ąĮąĖą╝ą░ąĄčé 4 ą▒ą░ą╣čéą░).
configMAX_TASK_NAME_LEN. ą£ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą┤ąŠą┐čāčüčéąĖą╝ą░čÅ ą┤ą╗ąĖąĮą░ ąŠą┐ąĖčüą░č鹥ą╗čīąĮąŠą│ąŠ ąĖą╝ąĄąĮąĖ, ą║ąŠč鹊čĆąŠąĄ ą┤ą░ąĄčéčüčÅ ąĘą░ą┤ą░č湥 ą┐čĆąĖ ąĄčæ čüąŠąĘą┤ą░ąĮąĖąĖ. ąöą╗ąĖąĮą░ čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▓ ą║ąŠą╗ąĖč湥čüčéą▓ąĄ čüąĖą╝ą▓ąŠą╗ąŠą▓, ą▓ą║ą╗čÄčćą░čÅ čüąĖą╝ą▓ąŠą╗-č鹥čĆą╝ąĖąĮą░č鹊čĆ (ąĮčāą╗ąĄą▓ąŠą╣ ą▒ą░ą╣čé).
configUSE_TRACE_FACILITY. ąŻčüčéą░ąĮąŠą▓ąĖč鹥 ą▓ 1, ąĄčüą╗ąĖ čģąŠčéąĖč鹥 ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ ą┐ąŠą╗čÅ čüčéčĆčāą║čéčāčĆčŗ ąĖ čäčāąĮą║čåąĖąĖ, čćč鹊ą▒čŗ ą┐ąŠą╝ąŠčćčī čü ą▓ąĖąĘčāą░ą╗ąĖąĘą░čåąĖąĄą╣ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ąĘą░ą┤ą░čć ąĖ čéčĆą░čüčüąĖčĆąŠą▓ą║ąŠą╣.
configUSE_STATS_FORMATTING_FUNCTIONS. ąŻčüčéą░ąĮąŠą▓ąĖč鹥 configUSE_TRACE_FACILITY ąĖ configUSE_STATS_FORMATTING_FUNCTIONS ą▓ 1, čćč鹊ą▒čŗ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ą║ čüą▒ąŠčĆą║ąĄ čäčāąĮą║čåąĖąĖ vTaskList() ąĖ vTaskGetRunTimeStats(). ąøąĖą▒ąŠ čāčüčéą░ąĮąŠą▓ąĖč鹥 ą▓ 0, čćč鹊ą▒čŗ ąŠą┐čāčüčéąĖčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ vTaskList() ąĖ vTaskGetRunTimeStates().
configUSE_16_BIT_TICKS. ąÆčĆąĄą╝čÅ ąĖąĘą╝ąĄčĆčÅčéčüčÅ ą▓ "čéąĖą║ą░čģ". ąÜąŠą╗ąĖč湥čüčéą▓ąŠ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čéąĖą║ąŠą▓ čü ą╝ąŠą╝ąĄąĮčéą░ ąĘą░ą┐čāčüą║ą░ čÅą┤čĆą░ RTOS čģčĆą░ąĮąĖčéčüčÅ ą▓ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą╣ TickType_t.
ąĢčüą╗ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī configUSE_16_BIT_TICKS ą▓ 1, č鹊 čéąĖą┐ TickType_t ą▒čāą┤ąĄčé ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ (č湥čĆąĄąĘ typedef) ą║ą░ą║ 16-ą▒ąĖčéąĮąŠąĄ čćąĖčüą╗ąŠ ą▒ąĄąĘ ąĘąĮą░ą║ą░. ąĢčüą╗ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī configUSE_16_BIT_TICKS ą║ą░ą║ 0, č鹊 TickType_t ą▒čāą┤ąĄčé 32-ą▒ąĖčéąĮčŗą╝ čćąĖčüą╗ąŠą╝ ą▒ąĄąĘ ąĘąĮą░ą║ą░.
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ 16-ą▒ąĖčéąĮąŠą│ąŠ čéąĖą┐ą░ ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ čāą╗čāčćčłą░ąĄčé ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčī ąĮą░ 8-ą▒ąĖčéąĮčŗčģ ąĖ 16-ą▒ąĖčéąĮčŗčģ ą░čĆčģąĖč鹥ą║čéčāčĆą░čģ, ąĮąŠ ąŠą│čĆą░ąĮąĖčćąĖą▓ą░ąĄčé ą┐čĆąĖ čŹč鹊ą╝ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą┤ąŠčüčéčāą┐ąĮčŗą╣ ą┐ąĄčĆąĖąŠą┤ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ 65535 čéąĖą║ąŠą▓. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĄčüą╗ąĖ ą┐čĆąĄą┤ą┐ąŠą╗ąŠąČąĖčéčī čćą░čüč鹊čéčā čéąĖą║ąŠą▓ 250 ąōčå, č鹊 ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ ąŠčéčüą╗ąĄąČąĖą▓ą░ąĄą╝ą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░ ą▓čĆąĄą╝ąĄąĮąĖ ąĖą╗ąĖ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ą░ ą┐čĆąĖ 16-ą▒ąĖčéąĮąŠą╝ čüč湥čéčćąĖą║ąĄ čüąŠčüčéą░ą▓ąĖčé 262 čüąĄą║čāąĮą┤ (čüčĆą░ą▓ąĮąĖč鹥 čü 17179869 čüąĄą║čāąĮą┤ą░ą╝ąĖ ą┐čĆąĖ 32-ą▒ąĖčéąĮąŠą╝ čüč湥čéčćąĖą║ąĄ).
configIDLE_SHOULD_YIELD. ąŁč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ čāą┐čĆą░ą▓ą╗čÅąĄčé ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄą╝ ąĘą░ą┤ą░čć čü ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ idle (čüą░ą╝čŗą╣ ąĮąĖąĘą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé). ą×ąĮ ą┤ą░ąĄčé čŹčäč乥ą║čé č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ:
ŌĆó ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ čü ą░ą╗ą│ąŠčĆąĖčéą╝ąŠą╝ ą▓čŗč鹥čüąĮąĄąĮąĖčÅ (preemptive scheduler).
ŌĆó ą¤čĆąĖą╗ąŠąČąĄąĮąĖąĄ čüąŠąĘą┤ą░ąĄčé ąĘą░ą┤ą░čćąĖ, ą║ąŠč鹊čĆčŗąĄ čĆą░ą▒ąŠčéą░čÄčé čü ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ idle.
ąĢčüą╗ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆ configUSE_TIME_SLICING čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1 (ąĖą╗ąĖ ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ), č鹊 ąĘą░ą┤ą░čćąĖ, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╣ ą┐čĆąĖąŠčĆąĖč鹥čé, ą▒čāą┤čāčé ą┐ąĄčĆąĄą║ą╗čÄčćą░čéčīčüčÅ ąĮą░ ą║ą░ąČą┤ąŠą╝ čüą╗ą░ą╣čüąĄ ą▓čĆąĄą╝ąĄąĮąĖ (ą║ą░ąČą┤čŗą╣ čéąĖą║). ąĢčüą╗ąĖ ąĮąĖ ąŠą┤ąĮą░ ąĖąĘ ąĘą░ą┤ą░čć ąĮąĄ ą▒čŗą╗ą░ ą▓čŗč鹥čüąĮąĄąĮą░, č鹊 ą║ą░ąČą┤ą░čÅ ąĘą░ą┤ą░čćą░ čü ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ ą┐ąŠą╗čāčćąĖčé ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, ąĖ ąĄčüą╗ąĖ ą┐čĆąĖąŠčĆąĖč鹥čé ą▓čŗčłąĄ ą┐čĆąĖąŠčĆąĖč鹥čéą░ idle, č鹊 čŹč鹊 ą┤ąĄą╣čüčéą▓ąĖč鹥ą╗čīąĮąŠ čéą░ą║ąŠą╣ čüą╗čāčćą░ą╣.
ąÜąŠą│ą┤ą░ ąĘą░ą┤ą░čćąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą┐čĆąĖąŠčĆąĖč鹥čé idle, č鹊 ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą╝ąŠąČąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ ąŠčéą╗ąĖčćą░čéčīčüčÅ. ąĢčüą╗ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī configIDLE_SHOULD_YIELD ą▓ 1, č鹊 ąĘą░ą┤ą░čćą░ idle ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ čāčüčéčāą┐ąĖčé (yield) ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ, ąĄčüą╗ąĖ ąĖą╝ąĄąĄčéčüčÅ ą╗čÄą▒ą░čÅ ą│ąŠč鹊ą▓ą░čÅ ą║ ąĘą░ą┐čāčüą║čā ąĘą░ą┤ą░čćą░ čü ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ idle. ąŁč鹊 ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ č鹊ą╝čā, čćč鹊 ąĘą░ą┤ą░č湥 idle ą▒čāą┤ąĄčé ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąŠ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠąĄ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ, ą║ąŠą│ą┤ą░ ą┤ą╗čÅ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░ ą┤ąŠčüčéčāą┐ąĮčŗ ą┤čĆčāą│ąĖąĄ ąĘą░ą┤ą░čćąĖ. ą×ą┤ąĮą░ą║ąŠ čŹč鹊 ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą╝ąŠąČąĄčé ąĖą╝ąĄčéčī ąĮąĄąČąĄą╗ą░č鹥ą╗čīąĮčŗąĄ čŹčäč乥ą║čéčŗ (ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ąĮčāąČą┤ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ), čćč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ ą║ą░čĆčéąĖąĮą║ąĄ:

ąØą░ čŹč鹊ą╣ ą┤ąĖą░ą│čĆą░ą╝ą╝ąĄ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ 4 ąĘą░ą┤ą░čć, ą║ąŠč鹊čĆčŗąĄ ą▓čüąĄ čĆą░ą▒ąŠčéą░čÄčé čü ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ idle. ąŚą░ą┤ą░čćąĖ A, B ąĖ C čŹč鹊 ąĘą░ą┤ą░čćąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąŚą░ą┤ą░čćą░ I čŹč鹊 čüąĖčüč鹥ą╝ąĮą░čÅ ąĘą░ą┤ą░čćą░ ąŠąČąĖą┤ą░ąĮąĖčÅ (idle task). ą¤ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą║ąŠąĮč鹥ą║čüčéą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čü čĆąĄą│čāą╗čÅčĆąĮčŗą╝ąĖ ąĖąĮč鹥čĆą▓ą░ą╗ą░ą╝ąĖ, ą▓ ą╝ąŠą╝ąĄąĮčéčŗ T0, T1, ..., T6. ąÜąŠą│ą┤ą░ idle task čāčüčéčāą┐ą░ąĄčé ą┐čĆąŠčåąĄčüčüąŠčĆ, ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ąĘą░ą┤ą░čćą░ A ŌĆō ąŠą┤ąĮą░ą║ąŠ idle task čāąČąĄ ą┐ąŠčéčĆą░čéąĖą╗ą░ ąĮąĄą║ąŠč鹊čĆąŠąĄ ą▓čĆąĄą╝čÅ č鹥ą║čāčēąĄą│ąŠ čüą╗ą░ą╣čüą░. ąÆ čĆąĄąĘčāą╗čīčéą░č鹥 ą┐ąŠą╗čāčćą░ąĄčéčüčÅ, čćč鹊 ąĘą░ą┤ą░čćą░ I ąĖ ąĘą░ą┤ą░čćą░ A čŹčäč乥ą║čéąĖą▓ąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą▓čĆąĄą╝čÅ ąŠą┤ąĮąŠą│ąŠ ąĖ č鹊ą│ąŠ ąČąĄ čüą╗ą░ą╣čüą░. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĘą░ą┤ą░čćąĖ B ąĖ C ą┐ąŠą╗čāčćą░čé ą▒ąŠą╗čīčłąĄ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, č湥ą╝ ąĘą░ą┤ą░čć ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ A.
ą¤ąŠą┐ą░ą┤ą░ąĮąĖčÅ ą▓ čŹčéčā čüąĖčéčāą░čåąĖčÄ ą╝ąŠąČąĮąŠ ąĖąĘą▒ąĄąČą░čéčī čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝:
ŌĆó ąĢčüą╗ąĖ čŹč鹊 ą┤ąŠą┐čāčüčéąĖą╝ąŠ, ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī idle hook ą▓ą╝ąĄčüč鹊 ąŠčéą┤ąĄą╗čīąĮčŗčģ ąĘą░ą┤ą░čć čü ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ idle.
ŌĆó ąĪąŠąĘą┤ą░ąĮąĖąĄ ą▓čüąĄčģ ąĘą░ą┤ą░čć ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čü ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ ą▓čŗčłąĄ ą┐čĆąĖąŠčĆąĖč鹥čéą░ idle.
ŌĆó ąŻčüčéą░ąĮąŠą▓ą║ą░ configIDLE_SHOULD_YIELD ą▓ 0.
ąŻčüčéą░ąĮąŠą▓ą║ą░ configIDLE_SHOULD_YIELD ą▓ 0 ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░ąĄčé idle task ąŠčé č鹊ą│ąŠ, čćč鹊 ąŠąĮą░ ą▒čāą┤ąĄčé čāčüčéčāą┐ą░čéčī ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ ą┤ąŠ ąŠą║ąŠąĮčćą░ąĮąĖčÅ čüą▓ąŠąĄą│ąŠ čüą╗ą░ą╣čüą░ ą▓čĆąĄą╝ąĄąĮąĖ. ąŁč鹊 ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 ą▓čüąĄ ąĘą░ą┤ą░čćąĖ čü ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ idle ą┐ąŠą╗čāčćą░čé ąŠą┤ąĖąĮą░ą║ąŠą▓ąŠąĄ ą┐čĆąŠčåąĄčüčüąŠčĆąĮąŠąĄ ą▓čĆąĄą╝čÅ (ą┐čĆąĖ čāčüą╗ąŠą▓ąĖąĖ, čćč鹊 ąĮąĖ ąŠą┤ąĮą░ ąĖąĘ čŹčéąĖčģ ąĘą░ą┤ą░čć ąĮąĄ ą▒čŗą╗ą░ ą▓čŗč鹥čüąĮąĄąĮą░) ŌĆō ąŠą┤ąĮą░ą║ąŠ čåąĄąĮąŠą╣ ą▒ąŠą╗čīčłąĄą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ, ą▓čŗą┤ąĄą╗čÅąĄą╝ąŠą│ąŠ ą┤ą╗čÅ ąĘą░ą┤ą░čćąĖ idle.
configUSE_TASK_NOTIFICATIONS. ąŻčüčéą░ąĮąŠą▓ą║ą░ configUSE_TASK_NOTIFICATIONS ą▓ 1 (ąĖą╗ąĖ ąĄčüą╗ąĖ ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅčéčī ą┐ą░čĆą░ą╝ąĄčéčĆ configUSE_TASK_NOTIFICATIONS) ą▓ą║ą╗čÄčćąĖčé ą▓ čüą▒ąŠčĆą║čā ą┐čĆčÅą╝ąŠąĄ čāą▓ąĄą┤ąŠą╝ą╗ąĄąĮąĖąĄ ąŠ ąĘą░ą┐čāčüą║ąĄ ąĘą░ą┤ą░čćąĖ ąĖ čüą▓čÅąĘą░ąĮąĮčŗąĄ čü čŹčéąĖą╝ API-čäčāąĮą║čåąĖąĖ.
ąŻčüčéą░ąĮąŠą▓ą║ą░ configUSE_TASK_NOTIFICATIONS ą▓ 0 čāą▒ąĄčĆąĄčé čäčāąĮą║čåąĖąŠąĮą░ą╗ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čćąĖ ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ API.
ąÜą░ąČą┤ą░čÅ ąĘą░ą┤ą░čćą░ ą▒čāą┤ąĄčé ąĘą░ą┤ąĄą╣čüčéą▓ąŠą▓ą░čéčī ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ 8 ą▒ą░ą╣čé ąĖąĘ ą×ąŚąŻ, ą║ąŠą│ą┤ą░ ą▓ čüą▒ąŠčĆą║čā ą▓ą║ą╗čÄč湥ąĮčŗ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąĘą░ą┤ą░čć.
configUSE_MUTEXES. ąŻčüčéą░ąĮąŠą▓ąĖč鹥 ą▓ 1 ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░ ą╝čīčÄč鹥ą║čüąŠą▓ ą▓ čüą▒ąŠčĆą║čā, ąĖą╗ąĖ 0, čćč鹊ą▒čŗ ąŠą┐čāčüčéąĖčéčī čŹč鹊čé čäčāąĮą║čåąĖąŠąĮą░ą╗. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĖ ą┤ąŠą╗ąČąĮčŗ ą┐čĆąĄą┤čüčéą░ą▓ą╗čÅčéčī čĆą░ąĘąĮąĖčåčā ą╝ąĄąČą┤čā ą╝čīčÄč鹥ą║čüą░ą╝ąĖ ąĖ ą┤ą▓ąŠąĖčćąĮčŗą╝ąĖ čüąĄą╝ą░č乊čĆą░ą╝ąĖ, ąŠčéąĮąŠčüčÅčēčāčÄčüčÅ ą║ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéąĖ FreeRTOS.
configUSE_RECURSIVE_MUTEXES. ąŻčüčéą░ąĮąŠą▓ąĖč鹥 ą▓ 1 ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░ čĆąĄą║čāčĆčüąĖą▓ąĮčŗčģ ą╝čīčÄč鹥ą║čüąŠą▓, ąĖą╗ąĖ 0, čćč鹊ą▒čŗ ąŠą┐čāčüčéąĖčéčī čŹč鹊čé čäčāąĮą║čåąĖąŠąĮą░ą╗.
configUSE_COUNTING_SEMAPHORES. ąŻčüčéą░ąĮąŠą▓ąĖč鹥 ą▓ 1 ą┤ą╗čÅ ą▓ą║ą╗čÄč湥ąĮąĖčÅ čüąĄą╝ą░č乊čĆąŠą▓ čüąŠ čüč湥čéčćąĖą║ąŠą╝ ą▓ čüą▒ąŠčĆą║čā, ąĖą╗ąĖ 0 ą┤ą╗čÅ ąĖčüą║ą╗čÄč湥ąĮąĖčÅ čüąĄą╝ą░č乊čĆąŠą▓ čüąŠ čüč湥čéčćąĖą║ąŠą╝.
configUSE_ALTERNATIVE_API. ąŻčüčéą░ąĮąŠą▓ąĖč鹥 ą▓ 1 ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą▓ čüą▒ąŠčĆą║čā "ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗčģ" čäčāąĮą║čåąĖą╣ ąŠč湥čĆąĄą┤ąĖ, ąĖą╗ąĖ 0 čćč鹊ą▒čŗ ąŠą┐čāčüčéąĖčéčī čŹč鹊. ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠąĄ API ąŠą┐ąĖčüą░ąĮąŠ ą▓ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ queue.h. ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠąĄ API čüčćąĖčéą░ąĄčéčüčÅ čāčüčéą░čĆąĄą▓čłąĖą╝, ąĖ ąŠąĮąŠ ąĮąĄ ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮąŠ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓ ąĮąŠą▓čŗčģ čĆą░ąĘčĆą░ą▒ąŠčéą║ą░čģ.
configCHECK_FOR_STACK_OVERFLOW. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čŹč鹊ą│ąŠ ą┐ą░čĆą░ą╝ąĄčéčĆą░ čüą╝. ą▓ čüčéą░čéčīąĄ [4].
configQUEUE_REGISTRY_SIZE. ąŻ čĆąĄąĄčüčéčĆą░ ąŠč湥čĆąĄą┤ąĖ (queue registry) ą┤ą▓ąĄ čåąĄą╗ąĖ, ąŠą▒ąĄ čüą▓čÅąĘą░ąĮčŗ čü ąŠčéą╗ą░ą┤ą║ąŠą╣, čāčćąĖčéčŗą▓ą░čÄčēąĄą╣ čÅą┤čĆąŠ RTOS:
1. ą¤ąŠąĘą▓ąŠą╗čÅąĄčé čüą▓čÅąĘą░čéčī čü ąŠč湥čĆąĄą┤čīčÄ č鹥ą║čüč鹊ą▓ąŠąĄ ąĖą╝čÅ, čćč鹊ą▒čŗ čāą┐čĆąŠčüčéąĖčéčī ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖčÄ ąŠč湥čĆąĄą┤ąĖ ą▓ GUI ąŠčéą╗ą░ą┤ą║ąĖ.
2. ąĪąŠą┤ąĄčƹȹĖčé ąĖąĮč乊čĆą╝ą░čåąĖčÄ, čéčĆąĄą▒čāąĄą╝čāčÄ ąŠčéą╗ą░ą┤čćąĖą║ąŠą╝, čćč鹊ą▒čŗ ąĮą░ą╣čéąĖ ą║ą░ąČą┤čāčÄ ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąĮčāčÄ ąŠč湥čĆąĄą┤čī ąĖ čüąĄą╝ą░č乊čĆ.
ąŻ čĆąĄąĄčüčéčĆą░ ąŠč湥čĆąĄą┤ąĖ ąĮąĄčé ąĮąĖą║ą░ą║ąŠą╣ ą┤čĆčāą│ąŠą╣ čåąĄą╗ąĖ, ą║čĆąŠą╝ąĄ ą║ą░ą║ ąŠčéą╗ą░ą┤ą║ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą▓ čäčāąĮą║čåąĖąŠąĮą░ą╗ąĄ čÅą┤čĆą░ RTOS.
configQUEUE_REGISTRY_SIZE ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąŠč湥čĆąĄą┤ąĄą╣ ąĖ čüąĄą╝ą░č乊čĆąŠą▓, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĮąŠ ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░čéčī. ąØąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąĘą░čĆąĄą│ąĖčüčéčĆąĖčĆąŠą▓ą░čéčī č鹊ą╗čīą║ąŠ č鹥 ąŠč湥čĆąĄą┤ąĖ ąĖ čüąĄą╝ą░č乊čĆčŗ, ą║ąŠč鹊čĆčŗąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą┐čĆąŠčüą╝ąŠčéčĆąĄčéčī čü ą┐ąŠą╝ąŠčēčīčÄ ąŠčéą╗ą░ą┤čćąĖą║ą░ čü ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ čÅą┤čĆą░ RTOS. ąĪą╝. ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ API ą┤ą╗čÅ čäčāąĮą║čåąĖą╣ vQueueAddToRegistry() ąĖ vQueueUnregisterQueue().
configUSE_QUEUE_SETS. ąŻčüčéą░ąĮąŠą▓ąĖč鹥 ą▓ 1, čćč鹊ą▒čŗ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ąĮą░ą▒ąŠčĆ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéąĖ ąŠč湥čĆąĄą┤ąĄą╣ - ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ąĖ ąĘą░ą┤ą░čćąĖ (block), ąĖą╗ąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ ąĮą░ ąŠč湥čĆąĄą┤ąĖ ąĖą╗ąĖ čüąĄą╝ą░č乊čĆąĄ (pend), ąĮą░ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ąŠč湥čĆąĄą┤čÅčģ ąĖ čüąĄą╝ą░č乊čĆą░čģ. ąśą╗ąĖ čāą║ą░ąČąĖč鹥 0, čćč鹊ą▒čŗ ąŠą┐čāčüčéąĖčéčī čäčāąĮą║čåąĖąŠąĮą░ą╗ ąŠč湥čĆąĄą┤ąĄą╣.
configUSE_TIME_SLICING. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ (ąĄčüą╗ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆ configUSE_TIME_SLICING ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ, ąĖą╗ąĖ ąĄčüą╗ąĖ configUSE_TIME_SLICING čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1) FreeRTOS ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą▓čŗč鹥čüąĮčÅčÄčēąĖą╣ ą░ą╗ą│ąŠčĆąĖčéą╝ ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ą░ ą┐ąŠ čüą╗ą░ą╣čüą░ą╝ ą▓čĆąĄą╝ąĄąĮąĖ. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ RTOS ą▓čüąĄą│ą┤ą░ čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ąĘą░ą┤ą░čćą░ čü čüą░ą╝čŗą╝ ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝, ą║ąŠč鹊čĆą░čÅ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Ready, ąĖ ąŠąĮą░ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą║ą╗čÄčćą░čéčī ąĘą░ą┤ą░čćąĖ čü ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ ąĮą░ ą║ą░ąČą┤ąŠą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čéąĖą║ą░ RTOS. ąĢčüą╗ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī configUSE_TIME_SLICING ą▓ 0, č鹊 ą┐ą╗ą░ąĮąĖčĆąŠą▓čēąĖą║ RTOS ą▒čāą┤ąĄčé ą▓čüąĄ ąĄčēąĄ čĆą░ą▒ąŠčéą░čéčī čü čüą░ą╝čŗą╝ ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Ready, ąŠą┤ąĮą░ą║ąŠ ąŠąĮ ąĮąĄ ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą║ą╗čÄčćą░čéčī ąĘą░ą┤ą░čćąĖ čü ąŠą┤ąĖąĮą░ą║ąŠą▓čŗą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ ą┐čĆąŠčüč鹊 ą┐ąŠč鹊ą╝čā, čćč鹊 ą┐čĆąŠąĖąĘąŠčłą╗ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čéąĖą║ą░.
configUSE_NEWLIB_REENTRANT. ąĢčüą╗ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī configUSE_NEWLIB_REENTRANT ą▓ 1, č鹊 ą┤ą╗čÅ ą║ą░ąČą┤ąŠą╣ čüąŠąĘą┤ą░ąĮąĮąŠą╣ ąĘą░ą┤ą░čćąĖ ą▒čāą┤ąĄčé ą▓čŗą┤ąĄą╗čÅčéčīčüčÅ reent-čüčéčĆčāą║čéčāčĆą░ newlib [5].
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┐ąŠą┤ą┤ąĄčƹȹ║ą░ newlib ą▒čŗą╗ą░ ą┤ąŠą▒ą░ą▓ą╗ąĄąĮą░ ą┐ąŠ ą╝ąĮąŠą│ąŠčćąĖčüą╗ąĄąĮąĮčŗą╝ ą┐čĆąŠčüčīą▒ą░ą╝, ąŠą┤ąĮą░ą║ąŠ čŹčéą░ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ čüą░ą╝ą░ ą┐ąŠ čüąĄą▒ąĄ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ąŠą╣ čĆą░ąĘą▓ąĖčéąĖčÅ ąĖ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ FreeRTOS. FreeRTOS ąĮąĄ ąĮąĄčüąĄčé ąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠčüčéąĖ ąĘą░ čĆąĄąĘčāą╗čīčéą░čéčŗ čĆą░ą▒ąŠčéčŗ newlib. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĘąĮą░ą║ąŠą╝ čü newlib, ąĖ ą┤ąŠą╗ąČąĄąĮ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čéčī ąŠą▒čēąĄčüąĖčüč鹥ą╝ąĮčŗąĄ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗčģ ąĘą░ą│ą╗čāčłąĄą║ ą║ąŠą┤ą░. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 (ą▓ąŠ ą▓čĆąĄą╝čÅ ąĮą░ą┐ąĖčüą░ąĮąĖčÅ [1]) ą▓ č鹥ą║čāčēąĄą╣ ą▓ąĄčĆčüąĖąĖ newlib čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ čüąĖčüč鹥ą╝ąĮčŗą╣ malloc(), ą║ąŠč鹊čĆčŗą╣ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čüąĮą░ą▒ąČąĄąĮ ą▒ą╗ąŠą║ąĖčĆąŠą▓ą║ą░ą╝ąĖ.
configENABLE_BACKWARD_COMPATIBILITY. ąŚą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗ FreeRTOS.h čüąŠą┤ąĄčƹȹĖčé ąĮą░ą▒ąŠčĆ ą╝ą░ą║čĆąŠčüąŠą▓ #define, ą║ąŠč鹊čĆčŗą╣ ąŠč鹊ą▒čĆą░ąČą░ąĄčé ąĖą╝ąĄąĮą░ čéąĖą┐ąŠą▓ ą┤ą░ąĮąĮčŗčģ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą▓ ą▓ąĄčĆčüąĖčÅčģ FreeRTOS ą┤ąŠ ą▓ąĄčĆčüąĖąĖ 8.0.0, ąĮą░ ąĖą╝ąĄąĮą░ čéąĖą┐ąŠą▓ ą▓ FreeRTOS ą▓ąĄčĆčüąĖąĖ 8.0.0. ąŁčéąĖ ą╝ą░ą║čĆąŠčüčŗ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÄ ą▒ąĄąĘ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖą╣ čüą▓ąŠąĄą│ąŠ ą║ąŠą┤ą░ ąŠą▒ąĮąŠą▓ąĖčéčī FreeRTOS, ą║ąŠą│ą┤ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ čüąŠą▒ąĖčĆą░ą╗ąŠčüčī ą▓ ą▒ąŠą╗ąĄąĄ čüčéą░čĆąŠą╣, č湥ą╝ 8.0.0, ą▓ąĄčĆčüąĖąĖ FreeRTOS. ąŻčüčéą░ąĮąŠą▓ą║ą░ configENABLE_BACKWARD_COMPATIBILITY ą▓ 0 ą▓ čäą░ą╣ą╗ąĄ FreeRTOSConfig.h ąĖčüą║ą╗čÄčćą░ąĄčé čŹčéąĖ ą╝ą░ą║čĆąŠčüčŗ ąĖąĘ čüą▒ąŠčĆą║ąĖ, čćč鹊 ą┤ąĄą╗ą░ąĄčé ąĮąĄą▓ąŠąĘą╝ąŠąČąĮčŗą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąĖą╝ąĄąĮ čéąĖą┐ąŠą▓ čüčéą░čĆčŗčģ ą▓ąĄčĆčüąĖą╣ (ą┤ąŠ 8.0.0) FreeRTOS.
configNUM_THREAD_LOCAL_STORAGE_POINTERS. ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĖąĮą┤ąĄą║čüąŠą▓ ą╝ą░čüčüąĖą▓ą░ ą╗ąŠą║ą░ą╗čīąĮąŠą│ąŠ čģčĆą░ąĮąĖą╗ąĖčēą░ [6] ą▓ ą║ą░ąČą┤ąŠą╣ ąĘą░ą┤ą░č湥.
configSTACK_DEPTH_TYPE. ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čéąĖą┐, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą│ą╗čāą▒ąĖąĮčŗ čüč鹥ą║ą░ ą▓ ą▓čŗąĘąŠą▓ą░čģ xTaskCreate(), ąĖ čĆą░ąĘą╗ąĖčćąĮčŗąĄ ą┤čĆčāą│ąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą╝ąĄčüčéą░ čĆą░ąĘą╝ąĄčĆąŠą▓ čüč鹥ą║ą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą║ąŠą│ą┤ą░ ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ą▓ąĄčĆčłąĖąĮą░ čüč鹥ą║ą░, stack high water mark).
ąæąŠą╗ąĄąĄ čüčéą░čĆčŗąĄ ą▓ąĄčĆčüąĖąĖ FreeRTOS čāą║ą░ąĘčŗą▓ą░ą╗ąĖ čĆą░ąĘą╝ąĄčĆ čüč鹥ą║ą░ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗčģ čéąĖą┐ą░ UBaseType_t, ąŠą┤ąĮą░ą║ąŠ ąŠą║ą░ąĘą░ą╗ąŠčüčī, čćč鹊 čŹč鹊 čüą╗ąĖčłą║ąŠą╝ ąŠą│čĆą░ąĮąĖčćąĖą▓ą░ąĄčé ą┐ąŠčĆčéčŗ FreeRTOS ąĮą░ 8-ą▒ąĖčéąĮčŗčģ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░čģ. configSTACK_DEPTH_TYPE čüąĮąĖą╝ą░ąĄčé čŹč鹊 ąŠą│čĆą░ąĮąĖč湥ąĮąĖąĄ, čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąĖ č鹥ą┐ąĄčĆčī čüą░ą╝ąĖ ą╝ąŠą│čāčé čāą║ą░ąĘą░čéčī ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ čéąĖą┐.
configMESSAGE_BUFFER_LENGTH_TYPE. ąæčāč乥čĆčŗ čüąŠąŠą▒čēąĄąĮąĖą╣ FreeRTOS ąĖčüą┐ąŠą╗čīąĘčāčÄčé ą┐ąĄčĆąĄą╝ąĄąĮąĮčŗąĄ čéąĖą┐ą░ configMESSAGE_BUFFER_LENGTH_TYPE ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ ą┤ą╗ąĖąĮčŗ ą║ą░ąČą┤ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ. ąĢčüą╗ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆ configMESSAGE_BUFFER_LENGTH_TYPE ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ, č鹊 ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čéąĖą┐ size_t. ąĢčüą╗ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ, čüąŠčģčĆą░ąĮąĄąĮąĮčŗąĄ ą▓ ą▒čāč乥čĆąĄ čüąŠąŠą▒čēąĄąĮąĖą╣, ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą▒čāą┤čāčé ą┤ą╗ąĖąĮąĮąĄąĄ 255 ą▒ą░ą╣čé, č鹊 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ configMESSAGE_BUFFER_LENGTH_TYPE ą║ą░ą║ čéąĖą┐ uint8_t čüąŠčģčĆą░ąĮąĖčé 3 ą▒ą░ą╣čéą░ ąĮą░ ą║ą░ąČą┤ąŠą╝ čüąŠąŠą▒čēąĄąĮąĖąĖ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ 32-ą▒ąĖčéąĮąŠą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ą¤ąŠą┤ąŠą▒ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĄčüą╗ąĖ čüąŠčģčĆą░ąĮčÅąĄą╝čŗąĄ ą▓ ą▒čāč乥čĆ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĮąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą▒ąŠą╗čīčłąĄ 65535 ą▒ą░ą╣čé, č鹊 ąĄčüą╗ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī configMESSAGE_BUFFER_LENGTH_TYPE ą║ą░ą║ uint16_t, č鹊 čŹč鹊 ą▒čāą┤ąĄčé 菹║ąŠąĮąŠą╝ąĖčéčī 2 ą▒ą░ą╣čéą░ ąĮą░ čüąŠąŠą▒čēąĄąĮąĖąĄ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ 32-ą▒ąĖčéąĮąŠą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
configSUPPORT_STATIC_ALLOCATION. ąĢčüą╗ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆ configSUPPORT_STATIC_ALLOCATION čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1, č鹊 ąŠą▒čŖąĄą║čéčŗ RTOS ą╝ąŠą│čāčé ą▒čŗčéčī čüąŠąĘą┤ą░ąĮčŗ ą▓ ą×ąŚąŻ (ą┐ą░ą╝čÅčéčī RAM), ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠą╝ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąŠą╝ (čé. ąĄ. čüčéą░čéąĖč湥čüą║ąĖ, ą▓ ą╝ąŠą╝ąĄąĮčé ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ).
ąĢčüą╗ąĖ configSUPPORT_STATIC_ALLOCATION čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0, č鹊 ąŠą▒čŖąĄą║čéčŗ RTOS ą╝ąŠą│čāčé ą▒čŗčéčī čüąŠąĘą┤ą░ąĮčŗ č鹊ą╗čīą║ąŠ ąĖąĘ ą×ąŚąŻ, ą▓čŗą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą┤ą╗čÅ ą║čāčćąĖ FreeRTOS (čé. ąĄ. ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ, ą▓ąŠ ą▓čĆąĄą╝čÅ čĆą░ą▒ąŠčéčŗ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ).
ąĢčüą╗ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆ configSUPPORT_STATIC_ALLOCATION ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗čÅčéčī, č鹊 ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąŠąĮ ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0.
ąĢčüą╗ąĖ configSUPPORT_STATIC_ALLOCATION čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1, č鹊 čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ąŠą╗ąČąĄąĮ čéą░ą║ąČąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ą┤ą▓ąĄ callback-čäčāąĮą║čåąĖąĖ: vApplicationGetIdleTaskMemory() ą┤ą╗čÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╣ ąĘą░ą┤ą░č湥ą╣ ąŠąČąĖą┤ą░ąĮąĖčÅ (RTOS Idle task), ąĖ (ąĄčüą╗ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆ configUSE_TIMERS čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1) vApplicationGetTimerTaskMemory() ą┤ą╗čÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ ąĘą░ą┤ą░č湥 čüąĄčĆą▓ąĖčüąĮąŠą│ąŠ ą┤ąĄą╝ąŠąĮą░ (RTOS Daemon/Timer Service task). ą¤čĆąĖą╝ąĄčĆčŗ ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ ąĮąĖąČąĄ.
/* configSUPPORT_STATIC_ALLOCATION čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1, ą┐ąŠčŹč鹊ą╝čā ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ
ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ vApplicationGetIdleTaskMemory(), čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī
ą┐ą░ą╝čÅčéčī ą┤ą╗čÅ Idle task. */
void vApplicationGetIdleTaskMemory( StaticTask_t **ppxIdleTaskTCBBuffer,
StackType_t **ppxIdleTaskStackBuffer,
uint32_t *pulIdleTaskStackSize )
{
/* ąĢčüą╗ąĖ ą▒čāč乥čĆčŗ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗąĄ ą┤ą╗čÅ Idle task, ą▒čŗą╗ąĖ ą┤ąĄą║ą╗ą░čĆąĖčĆąŠą▓ą░ąĮčŗ
ą▓ąĮčāčéčĆąĖ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ, č鹊 ąŠąĮąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čü ą░čéčĆąĖą▒čāč鹊ą╝ static - ąĖąĮą░č湥
ąŠąĮąĖ ą▒čāą┤čāčé ą▓čŗą┤ąĄą╗ąĄąĮčŗ ąĖąĘ čüč鹥ą║ą░, ąĖ čāąĮąĖčćč鹊ąČą░čéčüčÅ ą┐čĆąĖ ą▓čŗčģąŠą┤ąĄ ąĖąĘ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ. */
static StaticTask_t xIdleTaskTCB;
static StackType_t uxIdleTaskStack[ configMINIMAL_STACK_SIZE ];
/* ą¤ąĄčĆąĄą┤ą░čćą░ ąĮą░čĆčāąČčā čāą║ą░ąĘą░č鹥ą╗čÅ ąĮą░ čüčéčĆčāą║čéčāčĆčā StaticTask_t, ą▓ ą║ąŠč鹊čĆąŠą╣
ąĘą░ą┤ą░čćą░ Idle ą▒čāą┤ąĄčé čüąŠčģčĆą░ąĮčÅčéčī čüą▓ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ. */
*ppxIdleTaskTCBBuffer = &xIdleTaskTCB;
/* ą¤ąĄčĆąĄą┤ą░čćą░ ąĮą░čĆčāąČčā čĆą░ąĘą╝ąĄčĆą░ ą╝ą░čüčüąĖą▓ą░, ąĮą░ ą║ąŠč鹊čĆčŗą╣ čāą║ą░ąĘčŗą▓ą░ąĄčé *ppxIdleTaskStackBuffer.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą┐ąŠčüą║ąŠą╗čīą║čā ą╝ą░čüčüąĖą▓ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čéąĖą┐ą░ StackType_t, č鹊
configMINIMAL_STACK_SIZE čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▓ čüą╗ąŠą▓ą░čģ, ą░ ąĮąĄ ą▓ ą▒ą░ą╣čéą░čģ. */
*pulIdleTaskStackSize = configMINIMAL_STACK_SIZE;
}
/* ą×ą▒ą░ ą┐ą░čĆą░ą╝ąĄčéčĆą░ configSUPPORT_STATIC_ALLOCATION ąĖ configUSE_TIMERS čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ
ą▓ 1, ą┐ąŠčŹč鹊ą╝čā ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī čĆąĄą░ą╗ąĖąĘą░čåąĖčÄ vApplicationGetTimerTaskMemory()
čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī ą┐ą░ą╝čÅčéčīčÄ ąĘą░ą┤ą░čćčā Timer service. */
void vApplicationGetTimerTaskMemory( StaticTask_t **ppxTimerTaskTCBBuffer,
StackType_t **ppxTimerTaskStackBuffer,
uint32_t *pulTimerTaskStackSize )
{
/* ąĢčüą╗ąĖ ą▒čāč乥čĆčŗ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮčŗąĄ ą┤ą╗čÅ Timer task, ą┤ąĄą║ą╗ą░čĆąĖčĆąŠą▓ą░ąĮčŗ ą▓ąĮčāčéčĆąĖ čŹč鹊ą╣
čäčāąĮą║čåąĖąĖ, č鹊 ąŠąĮąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čü ą░čéčĆąĖą▒čāč鹊ą╝ static ŌĆō ąĖąĮą░č湥 ą▒čāč乥čĆčŗ ą▒čāą┤čāčé
čāąĮąĖčćč鹊ąČąĄąĮčŗ ą┐čĆąĖ ą▓čŗčģąŠą┤ąĄ ąĖąĘ čŹč鹊ą╣ čäčāąĮą║čåąĖąĖ. */
static StaticTask_t xTimerTaskTCB;
static StackType_t uxTimerTaskStack[ configTIMER_TASK_STACK_DEPTH ];
/* ą¤ąĄčĆąĄą┤ą░čćą░ ąĮą░čĆčāąČčā čāą║ą░ąĘą░č鹥ą╗čÅ ąĮą░ čüčéčĆčāą║čéčāčĆčā StaticTask_t, ą▓ ą║ąŠč鹊čĆąŠą╣ ą▒čāą┤ąĄčé
čüąŠčģčĆą░ąĮčÅčéčīčüčÅ čüąŠčüč鹊čÅąĮąĖąĄ ąĘą░ą┤ą░čćąĖ Timer service. */
*ppxTimerTaskTCBBuffer = &xTimerTaskTCB;
/* ą¤ąĄčĆąĄą┤ą░čćą░ ąĮą░čĆčāąČčā ą╝ą░čüčüąĖą▓ą░, ą║ąŠč鹊čĆčŗą╣ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ čüč鹥ą║
ąĘą░ą┤ą░čćąĖ Timer service. */
*ppxTimerTaskStackBuffer = uxTimerTaskStack;
/* ą¤ąĄčĆąĄą┤ą░čćą░ ąĮą░čĆčāąČčā čĆą░ąĘą╝ąĄčĆą░ ą╝ą░čüčüąĖą▓ą░, ąĮą░ ą║ąŠč鹊čĆčŗą╣ čāą║ą░ąĘčŗą▓ą░ąĄčé *ppxTimerTaskStackBuffer.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą┐ąŠčüą║ąŠą╗čīą║čā ą╝ą░čüčüąĖą▓ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čéąĖą┐ą░ StackType_t, č鹊
configTIMER_TASK_STACK_DEPTH čāą║ą░ąĘčŗą▓ą░ąĄčéčüčÅ ą▓ čüą╗ąŠą▓ą░čģ, ą░ ąĮąĄ ą▓ ą▒ą░ą╣čéą░čģ. */
*pulTimerTaskStackSize = configTIMER_TASK_STACK_DEPTH;
}
ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüą╝. [7].
configSUPPORT_DYNAMIC_ALLOCATION. ąĢčüą╗ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆ configSUPPORT_DYNAMIC_ALLOCATION čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1, č鹊 ąŠą▒čŖąĄą║čéčŗ RTOS ą╝ąŠą│čāčé čüąŠąĘą┤ą░ą▓ą░čéčīčüčÅ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ RAM, ą║ąŠč鹊čĆčŗąĄ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą▓čŗą┤ąĄą╗čÅčÄčéčüčÅ ąĖąĘ ą║čāčćąĖ FreeRTOS.
ąĢčüą╗ąĖ configSUPPORT_DYNAMIC_ALLOCATION čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 0 č鹊 ąŠą▒čŖąĄą║čéčŗ RTOS ą╝ąŠą│čāčé čüąŠąĘą┤ą░ą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ą▓ RAM, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠą╝ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąŠą╝ (čüčéą░čéąĖč湥čüą║ąĖ, ą▓ ą╝ąŠą╝ąĄąĮčé ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ).
ąĢčüą╗ąĖ configSUPPORT_DYNAMIC_ALLOCATION ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ, č鹊 ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĄą│ąŠ ąĘąĮą░č湥ąĮąĖąĄ 1.
ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüą╝. [7].
configTOTAL_HEAP_SIZE. ą×ą▒čēąĄąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą┐ą░ą╝čÅčéąĖ RAM, ą┤ąŠčüčéčāą┐ąĮąŠą╣ ą▓ ą║čāč湥 FreeRTOS.
ąŁč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆ configSUPPORT_DYNAMIC_ALLOCATION čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1, ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąŠą┤ąĮčā ąĖąĘ ą┐čĆąĖą╝ąĄčĆąŠą▓ čüčģąĄą╝ ą▓čŗą┤ąĄą╗ąĄąĮąĖčÅ ą┐ą░ą╝čÅčéąĖ, ą║ąŠč鹊čĆčŗąĄ ąĄčüčéčī ą▓ ąĘą░ą│čĆčāąČą░ąĄą╝ąŠą╝ ą┐ą░ą║ąĄč鹥 ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ FreeRTOS. ąöą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ čüą╝. [8].
configAPPLICATION_ALLOCATED_HEAP. ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą║čāčćą░ FreeRTOS ą┤ąĄą║ą╗ą░čĆąĖčĆčāąĄčéčüčÅ ą║ąŠą┤ąŠą╝ FreeRTOS, ąĖ čĆą░ąĘą╝ąĄčēą░ąĄčéčüčÅ ą▓ ą┐ą░ą╝čÅčéąĖ ą╗ąĖąĮą║ąĄčĆąŠą╝. ąŻčüčéą░ąĮąŠą▓ą║ą░ configAPPLICATION_ALLOCATED_HEAP ą▓ 1 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą▓ą╝ąĄčüč鹊 čŹč鹊ą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą║čāčćčā, ą┤ąĄą║ą╗ą░čĆąĖčĆąŠą▓ą░ąĮąĮčāčÄ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąŠą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, čćč鹊 ą┤ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čĆą░ąĘą╝ąĄčüčéąĖčéčī ą║čāčćčā ą▓ ą╗čÄą▒ąŠą╝ ą╝ąĄčüč鹥 ą┐ą░ą╝čÅčéąĖ.
ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čüčģąĄą╝ą░ heap_1.c, heap_2.c ąĖą╗ąĖ heap_4.c, ąĖ configAPPLICATION_ALLOCATED_HEAP čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1, č鹊 čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ą╝ą░čüčüąĖą▓ uint8_t čü č鹊čćąĮčŗą╝ ąĖą╝ąĄąĮąĄą╝ ąĖ čĆą░ąĘą╝ąĄčĆąŠą╝, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮąĖąČąĄ. ąŁč鹊čé ą╝ą░čüčüąĖą▓ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ ą║čāčćą░ FreeRTOS. ąÜą░ą║ čĆą░ąĘą╝ąĄčüčéąĖčéčī ą╝ą░čüčüąĖą▓ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą╝ ą╝ąĄčüč鹥 ą┐ą░ą╝čÅčéąĖ - ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆą░, čüą╝. ąĄą│ąŠ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÄ.
uint8_t ucHeap[ configTOTAL_HEAP_SIZE ];
configGENERATE_RUN_TIME_STATS. ąŁč鹊čé ą┐ą░čĆą░ą╝ąĄčéčĆ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé čüčéą░čéąĖčüčéąĖą║čā ą▓čĆąĄą╝ąĄąĮąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ, čüą╝. [9].
configUSE_CO_ROUTINES. ąŻčüčéą░ąĮąŠą▓ąĖč鹥 ą▓ 1 ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą▓ čüą▒ąŠčĆą║čā čäčāąĮą║čåąĖąŠąĮą░ą╗ą░ čüąŠą┐čĆąŠą│čĆą░ą╝ą╝, ąĖą╗ąĖ 0, čćč鹊ą▒čŗ ąŠą┐čāčüčéąĖčéčī čŹč鹊čé čäčāąĮą║čåąĖąŠąĮą░ą╗. ąöą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ čüąŠą┐čĆąŠą│čĆą░ą╝ą╝ ą▓ ą┐čĆąŠąĄą║čé ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą┤ąŠą▒ą░ą▓ą╗ąĄąĮ ą╝ąŠą┤čāą╗čī croutine.c.
configMAX_CO_ROUTINE_PRIORITIES. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓, ą┤ąŠčüčéčāą┐ąĮčŗčģ ą┤ą╗čÅ čüąŠą┐čĆąŠą│čĆą░ą╝ą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ą×ą┤ąĖąĮ ąĖ č鹊čé ąČąĄ čāčĆąŠą▓ąĄąĮčī ą┐čĆąĖąŠčĆąĖč鹥čéą░ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą╗čÄą▒ąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüąŠą┐čĆąŠą│čĆą░ą╝ą╝. ą¤čĆąĖąŠčĆąĖč鹥čéčŗ ąĘą░ą┤ą░čć ąĖ čüąŠą┐čĆąŠą│čĆą░ą╝ą╝ ąŠą▒čüą╗čāąČąĖą▓ą░čÄčéčüčÅ ą┐ąŠ ąŠčéą┤ąĄą╗čīąĮąŠčüčéąĖ, čüą╝. ą┐ą░čĆą░ą╝ąĄčéčĆ configMAX_PRIORITIES.
configUSE_TIMERS. ąŻčüčéą░ąĮąŠą▓ąĖč鹥 ą▓ 1 ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗčģ čéą░ą╣ą╝ąĄčĆąŠą▓, ąĖą╗ąĖ 0, čćč鹊ą▒čŗ ąŠą┐čāčüčéąĖčéčī čŹč鹊čé čäčāąĮą║čåąĖąŠąĮą░ą╗. ą¤ąŠą╗ąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗčģ čéą░ą╣ą╝ąĄčĆąŠą▓ FreeRTOS čüą╝. ą▓ [10].
configTIMER_TASK_PRIORITY. ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą┐čĆąĖąŠčĆąĖč鹥čé ąĘą░ą┤ą░čćąĖ ą┤ąĄą╝ąŠąĮą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗčģ čéą░ą╣ą╝ąĄčĆąŠą▓ (software timer service/daemon task), čüą╝. [10].
configTIMER_QUEUE_LENGTH. ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą┤ą╗ąĖąĮčā ąŠč湥čĆąĄą┤ąĖ ą║ąŠą╝ą░ąĮą┤ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░, čüą╝. [10].
configTIMER_TASK_STACK_DEPTH. ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą│ą╗čāą▒ąĖąĮčā čüč鹥ą║ą░, ą▓čŗą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą┤ą╗čÅ ąĘą░ą┤ą░čćąĖ ą┤ąĄą╝ąŠąĮą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗčģ čéą░ą╣ą╝ąĄčĆąŠą▓ (software timer service/daemon task), čüą╝. [10].
configKERNEL_INTERRUPT_PRIORITY, configMAX_SYSCALL_INTERRUPT_PRIORITY ąĖ configMAX_API_CALL_INTERRUPT_PRIORITY. ą¤ąŠčĆčéčŗ FreeRTOS, ą║ąŠč鹊čĆčŗąĄ čüąŠą┤ąĄčƹȹ░čé ąĮą░čüčéčĆąŠą╣ą║čā configKERNEL_INTERRUPT_PRIORITY, ą▓ą║ą╗čÄčćą░čÄčé ARM Cortex-M3, PIC24, dsPIC, PIC32, SuperH ąĖ RX600. ą¤ąŠčĆčéčŗ FreeRTOS, ą║ąŠč鹊čĆčŗąĄ čüąŠą┤ąĄčƹȹ░čé ąĮą░čüčéčĆąŠą╣ą║čā configMAX_SYSCALL_INTERRUPT_PRIORITY, ą▓ą║ą╗čÄčćą░čÄčé PIC32, RX600, ARM Cortex-A ąĖ ARM Cortex-M.
ąśą╝ąĄą╣č鹥 ą▓ ą▓ąĖą┤čā, čćč鹊 ą┐ąŠčĆčéčŗ ARM Cortex-M3 ąĖ ARM Cortex-M4 čüąĮą░ą▒ąČąĄąĮčŗ čüą┐ąĄčåąĖą░ą╗čīąĮčŗą╝ąĖ ąĘą░ą╝ąĄčćą░ąĮąĖčÅą╝ąĖ ą┐ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÄ, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ ą▓ ą║ąŠąĮčåąĄ čŹč鹊ą╣ čüąĄą║čåąĖąĖ.
configMAX_API_CALL_INTERRUPT_PRIORITY čŹč鹊 ąĮąŠą▓ąŠąĄ ąĖą╝čÅ ą┤ą╗čÅ ą┐ą░čĆą░ą╝ąĄčéčĆą░ configMAX_SYSCALL_INTERRUPT_PRIORITY, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠąĄ č鹊ą╗čīą║ąŠ ą▓ ąĮąŠą▓čŗčģ ą┐ąŠčĆčéą░čģ FreeRTOS. ą×ą▒ą░ čŹčéąĖčģ ąĖą╝ąĄąĮąĖ 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮčŗ.
ą¤ą░čĆą░ą╝ąĄčéčĆ configKERNEL_INTERRUPT_PRIORITY ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ąĮą░ čüą░ą╝čŗą╣ ąĮąĖąĘą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ ą▓ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĄą╝ ąŠą┐ąĖčüą░ąĮąĖąĖ, čćč鹊 č鹊ą╗čīą║ąŠ API-čäčāąĮą║čåąĖąĖ, ąĖą╝ąĄąĮą░ ą║ąŠč鹊čĆčŗčģ ąŠą║ą░ąĮčćąĖą▓ą░čÄčéčüčÅ ąĮą░ "FromISR" ą╝ąŠą│čāčé ą▒čŗčéčī ą▓čŗąĘą▓ą░ąĮčŗ ąĖąĘ ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (interrupt service routine, ISR).
ąöą╗čÅ č鹥čģ ą┐ąŠčĆč鹊ą▓, ą║ąŠč鹊čĆčŗąĄ čĆąĄą░ą╗ąĖąĘčāčÄčé č鹊ą╗čīą║ąŠ configKERNEL_INTERRUPT_PRIORITY: ą┐ą░čĆą░ą╝ąĄčéčĆ configKERNEL_INTERRUPT_PRIORITY čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą┐čĆąĖąŠčĆąĖč鹥čé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ čüą░ą╝ąĖą╝ čÅą┤čĆąŠą╝ RTOS. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą▓čŗąĘčŗą▓ą░čÄčé API-čäčāąĮą║čåąĖąĖ FreRTOS, ą┤ąŠą╗ąČąĮčŗ čéą░ą║ąČąĄ ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ čü čŹčéąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ (ąĖą╗ąĖ ą▒ąŠą╗ąĄąĄ ąĮąĖąĘą║ąĖą╝). ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ą▓čŗąĘčŗą▓ą░čÄčé API-čäčāąĮą║čåąĖąĖ, ą╝ąŠą│čāčé ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ čü ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝, ąĖ ą┐ąŠ čŹč鹊ą╣ ą┐čĆąĖčćąĖąĮąĄ ąĖčģ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ąĮąĄ ąĘą░ą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą░ą║čéąĖą▓ąĮąŠčüčéčīčÄ čÅą┤čĆą░ RTOS (ą▓ ą┐čĆąĄą┤ąĄą╗ą░čģ ąŠą│čĆą░ąĮąĖč湥ąĮąĖą╣ čüą░ą╝ąŠą╣ ą░ą┐ą┐ą░čĆą░čéčāčĆčŗ).
ąöą╗čÅ ą┐ąŠčĆč鹊ą▓, ą│ą┤ąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ ąŠą▒ą░ ą┐ą░čĆą░ą╝ąĄčéčĆą░ configKERNEL_INTERRUPT_PRIORITY ąĖ configMAX_SYSCALL_INTERRUPT_PRIORITY: ą┐ą░čĆą░ą╝ąĄčéčĆ configKERNEL_INTERRUPT_PRIORITY čéą░ą║ąČąĄ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą┐čĆąĖąŠčĆąĖč鹥čé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ čüą░ą╝ąĖą╝ čÅą┤čĆąŠą╝ RTOS. ą¤ą░čĆą░ą╝ąĄčéčĆ configMAX_SYSCALL_INTERRUPT_PRIORITY čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüą░ą╝čŗą╣ ą▓čŗčüąŠą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ąĖąĘ ą║ąŠč鹊čĆąŠą│ąŠ ą╝ąŠąČąĮąŠ ą▒ąĄąĘąŠą┐ą░čüąĮąŠ ą▓čŗąĘčŗą▓ą░čéčī API-čäčāąĮą║čåąĖąĖ FreeRTOS.
ą¤ąŠą╗ąĮą░čÅ ą╝ąŠą┤ąĄą╗čī ą▓ą╗ąŠąČąĄąĮąĮąŠčüčéąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ą┤ąŠčüčéąĖą│ą░ąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ąĘąĮą░č湥ąĮąĖčÅ configMAX_SYSCALL_INTERRUPT_PRIORITY ą▒ąŠą╗čīčłąĄ (čé. ąĄ. ąĮą░ ą▒ąŠą╗ąĄąĄ ą▓čŗčüąŠą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī ą┐čĆąĖąŠčĆąĖč鹥čéą░) č湥ą╝ configKERNEL_INTERRUPT_PRIORITY. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čÅą┤čĆąŠ FreeRTOS ąĮąĄ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąĘą░ą┐čĆąĄčēą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą┤ą░ąČąĄ ą▓ąĮčāčéčĆąĖ ą║čĆąĖčéąĖč湥čüą║ąĖčģ čüąĄą║čåąĖą╣. ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, čŹč鹊 ą┤ąŠčüčéąĖą│ą░ąĄčéčüčÅ ą▒ąĄąĘ ąĮąĄą┤ąŠčüčéą░čéą║ąŠą▓ ą░čĆčģąĖč鹥ą║čéčāčĆčŗ čüąĄą│ą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ čÅą┤čĆą░. ą×ą┤ąĮą░ą║ąŠ čüą╗ąĄą┤čāąĄčé ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 ąĮąĄą║ąŠč鹊čĆčŗąĄ ą░čĆčģąĖč鹥ą║čéčāčĆčŗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ ą▒čāą┤čāčé (ą░ą┐ą┐ą░čĆą░čéąĮąŠ) ąĘą░ą┐čĆąĄčēą░čéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠą│ą┤ą░ ą┐čĆąĖąĮčÅč鹊 ąĮąŠą▓ąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ŌĆō ą║ą░ą║ čüą╗ąĄą┤čüčéą▓ąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▒čāą┤čāčé ąĮąĄąĖąĘą▒ąĄąČąĮąŠ ąĘą░ą┐čĆąĄčēąĄąĮčŗ ąĮą░ ą║ąŠčĆąŠčéą║ąĖą╣ ą┐čĆąŠą╝ąĄąČčāč鹊ą║ ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąĄąČą┤čā ą┐čĆąĖąĄą╝ąŠą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąĖ ą╝ąŠą╝ąĄąĮč鹊ą╝, ą║ąŠą│ą┤ą░ ą║ąŠą┤ FreeRTOS čüąĮąŠą▓ą░ čĆą░ąĘčĆąĄčłą░ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ą▓čŗąĘčŗą▓ą░čÄčé API-čäčāąĮą║čåąĖąĖ FreeRTOS, ą╝ąŠą│čāčé ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ čü ą┐čĆąĖąŠčĆąĖč鹥čéą░ą╝ąĖ ą▓čŗčłąĄ configMAX_SYSCALL_INTERRUPT_PRIORITY, ąĖ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ąĮą░ čüą║ąŠčĆąŠčüčéčī ąĖčģ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ąĮąĄ ą▓ą╗ąĖčÅąĄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ąŠą┤ą░ čÅą┤čĆą░ RTOS.
ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┐čĆąĄą┤čüčéą░ą▓ąĖą╝ čüąĄą▒ąĄ ą│ąĖą┐ąŠč鹥čéąĖč湥čüą║ąĖą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ, čā ą║ąŠč鹊čĆąŠą│ąŠ 8 čāčĆąŠą▓ąĮąĄą╣ ą┐čĆąĖąŠčĆąĖč鹥čéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ŌĆō 0 čüą░ą╝čŗą╣ ąĮąĖąĘą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé, ąĖ 7 čüą░ą╝čŗą╣ ą▓čŗčüąŠą║ąĖą╣ (čüą╝. čüą┐ąĄčåąĖą░ą╗čīąĮąŠąĄ ąĘą░ą╝ąĄčćą░ąĮąĖąĄ ą┤ą╗čÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣ ARM Cortex-M3 ą▓ ą║ąŠąĮčåąĄ čŹč鹊ą╣ čüąĄą║čåąĖąĖ). ąĀąĖčüčāąĮąŠą║ ąĮąĖąČąĄ ą┤ą░ąĄčé ą┐čĆąĖą╝ąĄčĆ ą║ąŠąĮą║čĆąĄčéąĮąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓ čŹč鹊ą│ąŠ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąØą░ ąĮąĄą╝ ą┐ąŠą║ą░ąĘą░ąĮąŠ, čćč鹊 ą╝ąŠąČąĮąŠ ąĖ čćč鹊 ąĮąĄą╗čīąĘčÅ ą┤ąĄą╗ą░čéčī ąĮą░ ą║ą░ąČą┤ąŠą╝ čāčĆąŠą▓ąĮąĄ ą┐čĆąĖąŠčĆąĖč鹥čéą░, ąĄčüą╗ąĖ ą║ąŠąĮčüčéą░ąĮčéčŗ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ configMAX_SYSCALL_INTERRUPT_PRIORITY ąĖ configKERNEL_INTERRUPT_PRIORITY čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ ąĘąĮą░č湥ąĮąĖčÅ 4 ąĖ 0:
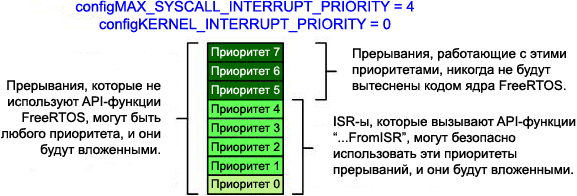
ąŁčéąĖ ą┤ą▓ą░ ą┐ą░čĆą░ą╝ąĄčéčĆą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ąŠč湥ąĮčī ą│ąĖą▒ą║čāčÄ ąŠą▒čĆą░ą▒ąŠčéą║čā ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣:
ŌĆó "ąŚą░ą┤ą░čćąĖ" ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (ąĮąĄ ISR) ą╝ąŠą│čāčé ą▒čŗčéčī ąĮą░ą┐ąĖčüą░ąĮčŗ ąĖ ąĖą╝ ąĮą░ąĘąĮą░č湥ąĮčŗ ą┐čĆąĖąŠčĆąĖč鹥čéčŗ čéą░ą║ ąČąĄ, ą║ą░ą║ ą╗čÄą▒ąŠą╣ ą┤čĆčāą│ąŠą╣ ąĘą░ą┤ą░č湥 (task) ą▓ čüąĖčüč鹥ą╝ąĄ. ąŁčéąĖ ąĘą░ą┤ą░čćąĖ ą┐čĆąŠą▒čāąČą┤ą░čÄčéčüčÅ ą┐ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÄ. ISR čüą░ą╝ ą┐ąŠ čüąĄą▒ąĄ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĮą░ą┐ąĖčüą░ąĮ ą║ą░ą║ ą╝ąŠąČąĮąŠ ą▒ąŠą╗ąĄąĄ ą║ąŠčĆąŠčéą║ąĖą╝ ŌĆō ąŠąĮ ą┐čĆąŠčüč鹊 ąĘą░ą▒ąĖčĆą░ąĄčé ą┤ą░ąĮąĮčŗąĄ, ąĖ ąĘą░č鹥ą╝ ą▒čāą┤ąĖčé ąĘą░ą┤ą░čćčā ąŠą▒čĆą░ą▒ąŠčéą║ąĖ čü ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝. ąóąŠą│ą┤ą░ ISR ą▓ąĄčĆąĮąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čüčĆą░ąĘčā ą▓ čĆą░ąĘą▒čāąČąĄąĮąĮčāčÄ ą▓čŗčüąŠą║ąŠą┐čĆąĖąŠčĆąĖč鹥čéąĮčāčÄ ąĘą░ą┤ą░čćčā ŌĆō čéą░ą║ čćč鹊 ąŠą▒čĆą░ą▒ąŠčéą║ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠą╣ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, č鹊čćąĮąŠ čéą░ą║ ąČąĄ, ą║ą░ą║ čŹč鹊 ą▒čŗą╗ąŠ ą▒čŗ ą▓ąĮčāčéčĆąĖ čüą░ą╝ąŠą│ąŠ ISR. ąöąŠčüč鹊ąĖąĮčüčéą▓ąŠ čéą░ą║ąŠą│ąŠ ą╝ąĄč鹊ą┤ą░ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▓ č鹊ą╝, čćč鹊 ą▓čüąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčüčéą░čÄčéčüčÅ čĆą░ąĘčĆąĄčłąĄąĮąĮčŗą╝ąĖ, ą║ąŠą│ą┤ą░ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ąĘą░ą┤ą░čćą░ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ŌĆó ą¤ąŠčĆčéčŗ FreeRTOS, ą║ąŠč鹊čĆčŗąĄ čĆąĄą░ą╗ąĖąĘčāčÄčé configMAX_SYSCALL_INTERRUPT_PRIORITY, ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ čĆą░ąĘčĆąĄčłą░čÄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┐ąŠą╗ąĮąŠčåąĄąĮąĮąŠą╣ ą╝ąŠą┤ąĄą╗ąĖ ą▓ą╗ąŠąČąĄąĮąĮąŠčüčéąĖ, ą│ą┤ąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą╝ąĄąČą┤čā ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čÅą┤čĆą░ RTOS ąĖ configMAX_SYSCALL_INTERRUPT_PRIORITY, ą╝ąŠą│čāčé ą▒čŗčéčī ą▓ą╗ąŠąČąĄąĮąĮčŗą╝ąĖ, ąĖ ą╝ąŠą│čāčé ą┤ąĄą╗ą░čéčī ą┐čĆąĖą╝ąĄąĮąĖą╝čŗąĄ ą▓čŗąĘąŠą▓čŗ API-čäčāąĮą║čåąĖą╣ FreeRTOS. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čü ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ ą▓čŗčłąĄ configMAX_SYSCALL_INTERRUPT_PRIORITY ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą▒čāą┤čāčé ąŠčéą║ą╗ą░ą┤čŗą▓ą░čéčīčüčÅ (čé. ąĄ. ąĮąĄ ą▒čāą┤čāčé ą▓čŗč鹥čüąĮčÅčéčīčüčÅ) ą░ą║čéąĖą▓ąĮąŠčüčéčīčÄ čÅą┤čĆą░ RTOS.
ŌĆó ISR, čĆą░ą▒ąŠčéą░čÄčēąĖąĄ čü ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ ą▓čŗčłąĄ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą│ąŠ čüąĖčüč鹥ą╝ąĮąŠą│ąŠ ą┐čĆąĖąŠčĆąĖč鹥čéą░ (ą▓čŗčłąĄ configMAX_SYSCALL_INTERRUPT_PRIORITY) ąĮąĖą║ąŠą│ą┤ą░ ąĮąĄ ą╝ą░čüą║ąĖčĆčāčÄčéčüčÅ čüą░ą╝ąĖą╝ čÅą┤čĆąŠą╝, ą┐ąŠčŹč鹊ą╝čā ąĮą░ ąĖčģ ąŠčéąĘčŗą▓čćąĖą▓ąŠčüčéčī ąĮąĖą║ą░ą║ ąĮąĄ ą▓ą╗ąĖčÅąĄčé čäčāąĮą║čåąĖąŠąĮą░ą╗ čÅą┤čĆą░ RTOS. ąŁč鹊 ąĖą┤ąĄą░ą╗čīąĮąŠ ą┐ąŠą┤čģąŠą┤ąĖčé ą┤ą╗čÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣, ą║ąŠč鹊čĆčŗąĄ čéčĆąĄą▒čāčÄčé ą▓čŗčüąŠą║ąŠą╣ č鹊čćąĮąŠčüčéąĖ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ŌĆō ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ą▓ąĖą│ą░č鹥ą╗ąĄą╝, ąĖą╗ąĖ ą┤ą╗čÅ ąŠčåąĖčäčĆąŠą▓ą║ąĖ ąĘą▓čāą║ą░. ą×ą┤ąĮą░ą║ąŠ čéą░ą║ąĖąĄ ISR ąĮąĄ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī API-čäčāąĮą║čåąĖąĖ FreeRTOS.
ą¦č鹊ą▒čŗ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī čŹčéčā čüčģąĄą╝čā, ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąĖą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą┐čĆą░ą▓ąĖą╗ą░: ą╗čÄą▒ąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé FreeRTOS API, ą┤ąŠą╗ąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čéą░ą║ąŠą╣ ąČąĄ ą┐čĆąĖąŠčĆąĖč鹥čé, čćč鹊 ąĖ čÅą┤čĆąŠ RTOS (ą║ąŠč鹊čĆčŗą╣ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą╝ą░ą║čĆąŠčüąŠą╝ configKERNEL_INTERRUPT_PRIORITY), ąĖą╗ąĖ čü ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝ configMAX_SYSCALL_INTERRUPT_PRIORITY ąĖą╗ąĖ ąĮąĖąČąĄ ąĄą│ąŠ ą┤ą╗čÅ ą┐ąŠčĆč鹊ą▓, ą║ąŠč鹊čĆčŗąĄ ą▓ą║ą╗čÄčćą░čÄčé čéą░ą║ąŠą╣ čäčāąĮą║čåąĖąŠąĮą░ą╗.
ąĪą┐ąĄčåąĖą░ą╗čīąĮąŠąĄ ąĘą░ą╝ąĄčćą░ąĮąĖąĄ ą┤ą╗čÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╣ ą┐ą╗ą░čéč乊čĆą╝ ARM Cortex-M3 ąĖ ARM Cortex-M4: ą▓ąĮąĖą╝ą░č鹥ą╗čīąĮąŠ ąŠąĘąĮą░ą║ąŠą╝čīč鹥čüčī čüąŠ čüčéą░čéčīąĄą╣ [11], ą│ą┤ąĄ ąŠą▒čŖčÅčüąĮčÅčÄčéčüčÅ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ ą┐ą╗ą░čéč乊čĆą╝čŗ ARM Cortex-M. ąÜą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ą┐ąŠą╝ąĮąĖč鹥 ąŠ č鹊ą╝, čćč鹊 čÅą┤čĆą░ ARM Cortex-M3 ąŠą▒ąŠąĘąĮą░čćą░čÄčé ą╝ą░ą╗čŗą╝ąĖ čćąĖčüą╗ąŠą▓čŗą╝ąĖ čāčĆąŠą▓ąĮčÅą╝ąĖ ą┐čĆąĖąŠčĆąĖč鹥čéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čü ą▓čŗčüąŠą║ąĖą╝ ą╗ąŠą│ąĖč湥čüą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝, čćč鹊 ą▓čŗą│ą╗čÅą┤ąĖčé ąĮąĄ ąŠč湥ą▓ąĖą┤ąĮąŠ, ąĖ ąŠ č湥ą╝ ą╗ąĄą│ą║ąŠ ąĘą░ą▒čŗčéčī! ąĢčüą╗ąĖ ąÆčŗ čģąŠčéąĖč鹥 ąĮą░ąĘąĮą░čćąĖčéčī ąĮąĖąĘą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÄ, č鹊 ąĮąĄ ąĮą░ąĘąĮą░čćą░ą╣č鹥 ąĄą╝čā čćąĖčüą╗ąŠą▓ąŠą╣ čāčĆąŠą▓ąĄąĮčī 0 (ąĖą╗ąĖ ą╗čÄą▒ąŠąĄ ą┤čĆčāą│ąŠąĄ ąĮąĖąĘą║ąŠąĄ čćąĖčüą╗ąŠą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ) ą┐ąŠč鹊ą╝čā čćč鹊 ą▓ čĆąĄąĘčāą╗čīčéą░č鹥 čŹč鹊 ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ č鹊ą╝čā, čćč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠą╗čāčćąĖčé čüą░ą╝čŗą╣ ą▓čŗčüąŠą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé ą▓ čüąĖčüč鹥ą╝ąĄ ŌĆō ąĖ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ąŠąĮąŠ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ą║čĆą░čģčā čüąĖčüč鹥ą╝čŗ, ąĄčüą╗ąĖ ąĄą│ąŠ ą┐čĆąĖąŠčĆąĖč鹥čé ą▓čŗčłąĄ configMAX_SYSCALL_INTERRUPT_PRIORITY.
ążą░ą║čéąĖč湥čüą║ąĖ čüą░ą╝čŗą╣ ąĮąĖąĘą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé čā ARM Cortex-M3 ą▒čāą┤ąĄčé 255 ŌĆō ąŠą┤ąĮą░ą║ąŠ čĆą░ąĘąĮčŗąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĖ ARM Cortex-M3 čĆąĄą░ą╗ąĖąĘčāčÄčé čŹč鹊 ą┐ąŠ-čĆą░ąĘąĮąŠą╝čā, ą║ąŠą┤ąĖčĆčāčÅ ą┐čĆąĖąŠčĆąĖč鹥čé čĆą░ąĘąĮčŗą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ ą▒ąĖčé, ąĖ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÅ ą▒ąĖą▒ą╗ąĖąŠč鹥čćąĮčŗąĄ čäčāąĮą║čåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ ąŠąČąĖą┤ą░čÄčé čāą║ą░ąĘą░ąĮąĖąĄ ą┐čĆąĖąŠčĆąĖč鹥čéą░ čĆą░ąĘą╗ąĖčćąĮčŗą╝ąĖ čüą┐ąŠčüąŠą▒ą░ą╝ąĖ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą╗čÅ STM32 ą╝ąŠąČąĮąŠ čāą║ą░ąĘą░čéčī čüą░ą╝čŗą╣ ąĮąĖąĘą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé 15 ą┤ą╗čÅ ą┤čĆą░ą╣ą▓ąĄčĆą░ ST ą▓ ą▒ąĖą▒ą╗ąĖąŠč鹥čćąĮąŠą╝ ą▓čŗąĘąŠą▓ąĄ čäčāąĮą║čåąĖąĖ, ąĖ ą┤ą╗čÅ čüą░ą╝ąŠą│ąŠ ą▓čŗčüąŠą║ąŠą│ąŠ ą┐čĆąĖąŠčĆąĖč鹥čéą░ ą╝ąŠąČąĄč鹥 čāą║ą░ąĘą░čéčī 0.
configASSERT. ąĪąĄą╝ą░ąĮčéąĖą║ą░ ą╝ą░ą║čĆąŠčüą░ configASSERT() čéą░ą║ą░čÅ ąČąĄ, ą║ą░ą║ ąĖ čā čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ą╝ą░ą║čĆąŠčüą░ assert() čÅąĘčŗą║ą░ C. ąŻčéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ (assertion) čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé, ąĄčüą╗ąĖ ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗą╣ ą▓ ą╝ą░ą║čĆąŠčü configASSERT(), čĆą░ą▓ąĄąĮ 0.
ą£ą░ą║čĆąŠčü configASSERT() ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ ą▓ąŠ ą╝ąĮąŠą│ąĖčģ ą╝ąĄčüčéą░čģ ą╝ąŠą┤čāą╗ąĄą╣ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ FreeRTOS, čćč鹊ą▒čŗ ą┐čĆąŠą▓ąĄčĆąĖčéčī, ą║ą░ą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčé FreeRTOS. ąØą░čüč鹊čÅč鹥ą╗čīąĮąŠ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą▓ąĄčüčéąĖ čĆą░ąĘčĆą░ą▒ąŠčéą║čā ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ FreeRTOS, ą║ąŠą│ą┤ą░ configASSERT() ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ.
ąÆ ą┐čĆąĖą╝ąĄčĆą░čģ, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗčģ ąĮąĖąČąĄ, ą▓čŗąĘčŗą▓ą░ąĄčéčüčÅ vAssertCalled(), ą║čāą┤ą░ ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ ąĖą╝čÅ čäą░ą╣ą╗ą░ ąĖ ąĮąŠą╝ąĄčĆ čüčéčĆąŠą║ąĖ, ą│ą┤ąĄ čüčĆą░ą▒ąŠčéą░ą╗ ą▓čŗąĘąŠą▓ configASSERT() (ąĘą┤ąĄčüčī __FILE__ ąĖ __LINE__ čŹč鹊 čüčéą░ąĮą┤ą░čĆčéąĮčŗąĄ ą╝ą░ą║čĆąŠčüčŗ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄą╝čŗąĄ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ąŠą╝ ą║ąŠą╝ą┐ąĖą╗čÅč鹊čĆąŠą▓).
/* ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ configASSERT() ą┤ą╗čÅ ą▓čŗąĘąŠą▓ą░ čäčāąĮą║čåąĖąĖ vAssertCalled(), ąĄčüą╗ąĖ čāčéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ
ą▓ ą╝ą░ą║čĆąŠčüąĄ ąĮąĄą┐čĆą░ą▓ąĖą╗čīąĮąŠąĄ (čĆą░ą▓ąĮąŠ 0). ąŻčéą▓ąĄčƹȹ┤ąĄąĮąĖąĄ čüčĆą░ą▒ąŠčéą░ąĄčé, ąĄčüą╗ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆ x, ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗą╣
ą▓ ą╝ą░ą║čĆąŠčü, čĆą░ą▓ąĄąĮ 0. */
#define configASSERT((x)) if( (x) == 0 ) vAssertCalled( __FILE__, __LINE__ )
ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐čĆąŠčüč鹊 ą┤ą╗čÅ ą┤ąĄą╝ąŠąĮčüčéčĆą░čåąĖąĖ, ą┐ąŠčüą║ąŠą╗čīą║čā vAssertCalled() čŹč鹊 ąĮąĄ čäčāąĮą║čåąĖčÅ FreeRTOS, configASSERT() ą╝ąŠąČąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī čéą░ą║, ą║ą░ą║ č鹊ą│ąŠ ą┐ąŠąČąĄą╗ą░ąĄčé čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, čćč鹊ą▒čŗ ą▓ ąĮąĄą╝ ą▓čŗą┐ąŠą╗ąĮčÅą╗ąĖčüčī ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┤ąĄą╣čüčéą▓ąĖčÅ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą▒ąĄčüą║ąŠąĮąĄčćąĮčŗą╣ čåąĖą║ą╗, ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčēąĖą╣ čĆą░ą▒ąŠčéčā ą┐čĆąŠą│čĆą░ą╝ą╝čŗ).
ąĢčüą╗ąĖ FreeRTOS čĆą░ą▒ąŠčéą░ąĄčé ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ ąŠčéą╗ą░ą┤čćąĖą║ą░, č鹊 configASSERT() ą╝ąŠąČąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą┤ą╗čÅ ąĘą░ą┐čĆąĄčéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąĖ ą▓čģąŠą┤ą░ ą▓ ą▒ąĄčüą║ąŠąĮąĄčćąĮčŗą╣ čåąĖą║ą╗, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮąĖąČąĄ. ąŁč鹊 ą┤ą░čüčé čŹčäč乥ą║čé ąŠčüčéą░ąĮąŠą▓ą║ąĖ ą║ąŠą┤ą░ ąĮą░ čüčéčĆąŠą║ąĄ, ą│ą┤ąĄ čüčĆą░ą▒ąŠčéą░ą╗ą░ ą┐čĆąŠą▓ąĄčĆą║ą░ ą╝ą░ą║čĆąŠčüą░ configASSERT() ŌĆō ą┐ąĄčĆąĄą▓ąŠą┤ ąŠčéą╗ą░ą┤čćąĖą║ą░ ąĮą░ ą┐ą░čāąĘčā ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čüčĆą░ąĘčā ą┐ąŠą║ą░ąČąĄčé ąÆą░ą╝ čüčéčĆąŠą║čā, ą│ą┤ąĄ ąĄčüčéčī ą┐čĆąŠą▒ą╗ąĄą╝ą░.
/* ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ configASSERT() ą┤ą╗čÅ ąĘą░ą┐čĆąĄčéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ ąĖ ą▒ąĄčüą║ąŠąĮąĄčćąĮąŠą│ąŠ ąĘą░čåąĖą║ą╗ąĖą▓ą░ąĮąĖčÅ. */
#define configASSERT((x)) if( (x) == 0 ) { taskDISABLE_INTERRUPTS(); for( ;; ); }
configINCLUDE_APPLICATION_DEFINED_PRIVILEGED_FUNCTIONS. ą¤ą░čĆą░ą╝ąĄčéčĆ configINCLUDE_APPLICATION_DEFINED_PRIVILEGED_FUNCTIONS ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ čüąĖčüč鹥ą╝ąŠą╣ MPU FreeRTOS.
ąĢčüą╗ąĖ ą┐ą░čĆą░ą╝ąĄčéčĆ configINCLUDE_APPLICATION_DEFINED_PRIVILEGED_FUNCTIONS čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ 1, č鹊 čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┤ąŠą╗ąČąĄąĮ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗą╣ čäą░ą╣ą╗ čü ąĖą╝ąĄąĮąĄą╝ application_defined_privileged_functions.h, ą▓ ą║ąŠč鹊čĆąŠą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüčéčā ą╝ąŠąČąĮąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī čäčāąĮą║čåąĖąĖ, ą║ąŠč鹊čĆčŗąĄ ąĮčāąČąĮąŠ ąĘą░ą┐čāčüą║ą░čéčī ą▓ ą┐čĆąĖą▓ąĖą╗ąĄą│ąĖčĆąŠą▓ą░ąĮąĮąŠą╝ čĆąĄąČąĖą╝ąĄ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ąĮąĄčüą╝ąŠčéčĆčÅ ąĮą░ čĆą░čüčłąĖčĆąĄąĮąĖąĄ *.h čŹč鹊ą│ąŠ čäą░ą╣ą╗ą░, ą▓ ąĮąĄą╝ ą┤ąŠą╗ąČąĮčŗ čüąŠą┤ąĄčƹȹ░čéčīčüčÅ ąĖą╝ąĄąĮąĮąŠ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ C-čäčāąĮą║čåąĖą╣, ąĮąĄ ą┐čĆąŠčüč鹊 ą┐čĆąŠč鹊čéąĖą┐čŗ čäčāąĮą║čåąĖą╣.
ążčāąĮą║čåąĖąĖ, čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮčŗąĄ ą▓ application_defined_privileged_functions.h, ą┤ąŠą╗ąČąĮčŗ ą╝ąĄąĮčÅčéčī ąĖ ą▓ąŠčüčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čéčī ą┐čĆąĖą▓ąĖą╗ąĄą│ąĖčĆąŠą▓ą░ąĮąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąŠčåąĄčüčüąŠčĆą░, ąĖčüą┐ąŠą╗čīąĘčāčÅ čäčāąĮą║čåąĖčÄ prvRaisePrivilege() ąĖ ą╝ą░ą║čĆąŠčü portRESET_PRIVILEGE() čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĄčüą╗ąĖ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║ą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čäčāąĮą║čåąĖčÄ ą┐ąĄčćą░čéąĖ, ą║ąŠč鹊čĆą░čÅ ąŠą▒čĆą░čēą░ąĄčéčüčÅ ą║ RAM, ą║ąŠč鹊čĆą░čÅ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ąĮąĄ ąŠą▒ą╗ą░čüčéąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ (ąĘą░čēąĖčēąĄąĮąĮą░čÅ ą┐ą░ą╝čÅčéčī), ąĖ ą┐ąŠčŹč鹊ą╝čā ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą┤ąĄą╗ąĄąĮą░ ą┤ą╗čÅ ąĘą░ą┤ą░čćąĖ, čĆą░ą▒ąŠčéą░čÄčēąĄą╣ ą▓ čĆąĄąČąĖą╝ąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ (user mode), č鹊 čäčāąĮą║čåąĖčÅ ą┐ąĄčćą░čéčī ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĮą║ą░ą┐čüčāą╗ąĖčĆąŠą▓ą░ąĮą░ ą▓ ą┐čĆąĖą▓ąĖą╗ąĄą│ąĖčĆąŠą▓ą░ąĮąĮčāčÄ čäčāąĮą║čåąĖčÄ čü ą┐ąŠą╝ąŠčēčīčÄ čüą╗ąĄą┤čāčÄčēąĄą│ąŠ ą║ąŠą┤ą░:
void MPU_debug_printf( const char *pcMessage )
{
/* ąĪąŠčüč鹊čÅąĮąĖąĄ čāčĆąŠą▓ąĮčÅ ą┐čĆąĖą▓ąĖą╗ąĄą│ąĖąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░, ą║ąŠą│ą┤ą░ ą▒čŗą╗ą░ ą▓čŗąĘą▓ą░ąĮą░ čŹčéą░ čäčāąĮą║čåąĖčÅ. */
BaseType_t xRunningPrivileged = prvRaisePrivilege();
/* ąÆčŗąĘąŠą▓ ą▒ąĖą▒ą╗ąĖąŠč鹥čćąĮąŠą╣ čäčāąĮą║čåąĖąĖ, ą║ąŠč鹊čĆą░čÅ ą╝ąŠąČąĄčé č鹥ą┐ąĄčĆčī ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐
ą║ąŠ ą▓čüąĄą╝čā RAM. */
debug_printf( pcMessage );
/* ąĪą▒čĆąŠčü čāčĆąŠą▓ąĮčÅ ą┐čĆąĖą▓ąĖą╗ąĄą│ąĖąĖ ą┐čĆąŠčåąĄčüčüąŠčĆą░ ą║ ą┐ąĄčĆą▓ąŠąĮą░čćą░ą╗čīąĮąŠą╝čā čāčĆąŠą▓ąĮčÄ. */
portRESET_PRIVILEGE( xRunningPrivileged );
}
ąŁčéą░ č鹥čģąĮąĖą║ą░ ą┤ąŠą╗ąČąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ą▓ąŠ ą▓čĆąĄą╝čÅ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĖ, ąĮąŠ ąĮąĄ ą┤ą╗čÅ ą│ąŠč鹊ą▓čŗčģ ąĖąĘą┤ąĄą╗ąĖą╣, ą│ą┤ąĄ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ąĘą░čēąĖčéą░ ą┐ą░ą╝čÅčéąĖ (ą▓ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ąŠčéą╗ą░ą┤ąŠčćąĮąŠą╣ čäčāąĮą║čåąĖąĖ ą┐ąĄčćą░čéąĖ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ąŠą▒čģąŠą┤ ąĘą░čēąĖčéčŗ ą┐ą░ą╝čÅčéąĖ).
[ą¤ą░čĆą░ą╝ąĄčéčĆčŗ "INCLUDE"]
ą£ą░ą║čĆąŠčüčŗ, ąĖą╝ąĄąĮą░ ą║ąŠč鹊čĆčŗčģ ąĮą░čćąĖąĮą░čÄčéčüčÅ ąĮą░ INCLUDE, ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ąĖčüą║ą╗čÄčćąĖčéčī ąĖąĘ čüą▒ąŠčĆą║ąĖ č鹥 ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ čÅą┤čĆą░ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝. ąŁč鹊 ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé, čćč鹊 RTOS ąĮąĄ ą▒čāą┤ąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ROM ąĖą╗ąĖ RAM ą▒ąŠą╗čīčłąĄ, č湥ą╝ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝ąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąÜą░ąČą┤čŗą╣ čéą░ą║ąŠą╣ ą╝ą░ą║čĆąŠčü ąĖą╝ąĄąĄčé č乊čĆą╝čā:
INCLUDE_FunctionName
ąŚą┤ąĄčüčī FunctionName ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé API-čäčāąĮą║čåąĖčÄ (ąĖą╗ąĖ ąĮą░ą▒ąŠčĆ čäčāąĮą║čåąĖą╣), ą║ąŠč鹊čĆčāčÄ ą╝ąŠąČąĮąŠ ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ ąĖčüą║ą╗čÄčćąĖčéčī. ą¦č鹊ą▒čŗ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī API-čäčāąĮą║čåąĖčÄ, čāčüčéą░ąĮąŠą▓ąĖč鹥 ąĘąĮą░č湥ąĮąĖąĄ ą╝ą░ą║čĆąŠčüą░ ą▓ 1, ą┤ą╗čÅ ąĖčüą║ą╗čÄč湥ąĮąĖčÅ čäčāąĮą║čåąĖąĖ čāčüčéą░ąĮąŠą▓ąĖč鹥 ą╝ą░ą║čĆąŠčü ą▓ 0. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ API čäčāąĮą║čåąĖčÅ vTaskDelete() ą▒čŗą╗ą░ ą▓ą║ą╗čÄč湥ąĮą░, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥:
#define INCLUDE_vTaskDelete 1
ą¦č鹊ą▒čŗ ąĖčüą║ą╗čÄčćąĖčéčī vTaskDelete() ąĖąĘ čüą▒ąŠčĆą║ąĖ, ąĖčüą┐ąŠą╗čīąĘčāą╣č鹥:
#define INCLUDE_vTaskDelete 0
[ąĪčüčŗą╗ą║ąĖ]
1. Customisation FreeRTOSConfig.h site:freertos.org.
2. STM32: ą░ą▒ą▒čĆąĄą▓ąĖą░čéčāčĆčŗ ąĖ č鹥čĆą╝ąĖąĮčŗ.
3. FreeRTOS: ą┐čĆą░ą║čéąĖč湥čüą║ąŠąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ, ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖčÅ, čüą╗ąŠą▓ą░čĆąĖą║.
4. FreeRTOS: ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čüč鹥ą║ą░ ąĖ ą┐čĆąŠą▓ąĄčĆą║ą░ čüč鹥ą║ą░ ąĮą░ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖąĄ.
5. Newlib C library for embedded systems site:sourceware.org.
6. Thread Local Storage Pointers site:freertos.org.
7. Static Vs Dynamic Memory Allocation site:freertos.org.
8. Memory Management site:freertos.org.
9. FreeRTOS: ą║ą░ą║ ą┐ąŠą╗čāčćąĖčéčī ąĖąĮč乊čĆą╝ą░čåąĖčÄ ąŠ ąĘą░ą│čĆčāąĘą║ąĄ ą┐čĆąŠčåąĄčüčüąŠčĆą░.
10. Software Timers site:freertos.org.
11. ą¤čĆąĖąŠčĆąĖč鹥čéčŗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ Cortex-M ąĖ ą┐čĆąĖąŠčĆąĖč鹥čéčŗ FreeRTOS.
12. FreeRTOS: čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ą░ą╝čÅčéčīčÄ. |



