ąØąĄąŠą▒čģąŠą┤ąĖą╝ ą▓čŗčüąŠą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ 11 ą▒ąĖčé ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ čłąĖąĮčŗ CAN ąĖ 8 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ą┐ą░ą║ąĄčéą░ čüčĆąĄą┤ąĖ čĆą░ąĘąĮčŗčģ čāąĘą╗ąŠą▓ čüąĄą│ą╝ąĄąĮčéą░ čłąĖąĮčŗ. ąĪčāčēąĄčüčéą▓čāąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ čüčéą░ąĮą┤ą░čĆč鹊ą▓, ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčé čłąĖąĮčā CAN. ą×čĆą│ą░ąĮąĖąĘą░čåąĖčÅ CERN ą▓čŗą▒čĆą░ą╗ą░ čüčéą░ąĮą┤ą░čĆčé CANopen , ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗą╣ ąŠčĆą│ą░ąĮąĖąĘą░čåąĖąĄą╣ CAN in Automation (CiA). ąśąĘąĮą░čćą░ą╗čīąĮąŠ čŹč鹊čé čüčéą░ąĮą┤ą░čĆčé ą▒čŗą╗ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ ąĖąĘ ą┐čĆąŠąĄą║čéą░ EEC ESPRIT III, ąĖ ą┐ąŠą╗čāčćąĖą╗ čüą▓ąŠąĄ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ ą▓ ąĖąĮą┤čāčüčéčĆąĖą░ą╗čīąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ ą░ą▓č鹊ą╝ą░čéąĖąĘą░čåąĖąĖ. ąŚą┤ąĄčüčī ą┐čĆąĖą▓ąĄą┤ąĄąĮ ą┐ąĄčĆąĄą▓ąŠą┤ čüčéą░čéčīąĖ [1]. ąÆčüąĄ ąĮąĄąĘąĮą░ą║ąŠą╝čŗąĄ č鹥čĆą╝ąĖąĮčŗ ąĖ čüąŠą║čĆą░čēąĄąĮąĖą╣ čüą╝. ą▓ čĆą░ąĘą┤ąĄą╗ąĄ "ąĪą╗ąŠą▓ą░čĆąĖą║" čüčéą░čéčīąĖ [5].
[ą£ąŠą┤ąĄą╗čī čüą╗ąŠąĄą▓ ISO/OSI ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ CANopen ]
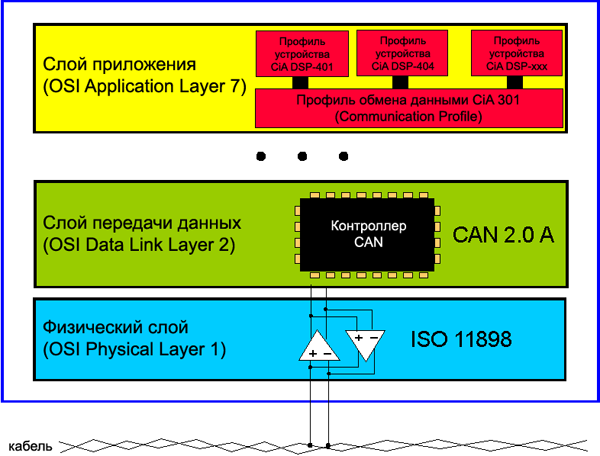
ą×čĆą│ą░ąĮąĖąĘą░čåąĖčÅ CANopen ą┐ąŠ ąŠčéąĮąŠčłąĄąĮąĖčÄ ą║ ą╝ąŠą┤ąĄą╗ąĖ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖčÅ ISO Open System Interconnect ą┐ąŠą║ą░ąĘą░ąĮą░ ąĮą░ čĆąĖčü. 1. ą×ąĮą░ čüąŠčüč鹊ąĖčé ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ą░ CANopen, čĆą░ą▒ąŠčéą░čÄčēąĄą│ąŠ ąĮą░ ą▓ąĄčĆčģąĮąĄą╝ čāčĆąŠą▓ąĮąĄ ą┐čĆąŠč鹊ą║ąŠą╗ą░, ąĖ ą░ą┐ą┐ą░čĆą░čéąĮčŗčģ čüą╗ąŠąĄą▓, ąŠą▒čüą╗čāąČąĖą▓ą░čÄčēąĖčģ ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ ą┐ąŠ čüąĄčéąĖ.
ąĀąĖčü. 1. ąĪčģąĄą╝ą░čéąĖč湥čüą║ąĖą╣ ą▓ąĘą│ą╗čÅą┤ ąĮą░ čüčéą░ąĮą┤ą░čĆčéčŗ CAN ąĖ CANopen ą▓ čüąĄč鹥ą▓ąŠą╣ ą╝ąŠą┤ąĄą╗ąĖ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖą╣ OSI.
ą¤čĆąŠą╝ąĄąČčāč鹊čćąĮčŗąĄ čüą╗ąŠąĖ ąĮąĄ ąĮčāąČąĮčŗ, ą┐ąŠč鹊ą╝čā čćč鹊 ą┐čĆąĖą║ą╗ą░ą┤ąĮą░čÅ čüąĄčéčī ąŠą▒čŗčćąĮąŠ čüąŠčüč鹊ąĖčé č鹊ą╗čīą║ąŠ ąĖąĘ ąŠą┤ąĮąŠą│ąŠ čüąĄą│ą╝ąĄąĮčéą░ (ąŠčéą┐ą░ą┤ą░ąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéčī ą▓ čéčĆą░ąĮčüą┐ąŠčĆčéąĮąŠą╝ čüą╗ąŠąĄ 3 ąĖ čüąĄč鹥ą▓ąŠą╝ čüą╗ąŠąĄ 4), ąĮąĄčé ą┐ąŠąĮčÅčéąĖčÅ 'čüąĄčüčüąĖą╣' (čüą╗ąŠą╣ 5) ąĖą╗ąĖ ąĮčāąČą┤čŗ ą▓ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ 'ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖčÅčģ' (čüą╗ąŠą╣ 6).
ą×ą┤ąĮą░ą║ąŠ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ 11-ą▒ąĖčéąĮčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ CAN ąĖ 8 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ čäčĆąĄą╣ą╝ą░, ąĮčāąČąĄąĮ ą▓čŗčüąŠą║ąŠčāčĆąŠą▓ąĮąĄą▓čŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗. ą¤ąŠčüčéčĆąŠąĄąĮąĖąĄ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮčŗčģ, ąŠčüąĮąŠą▓ą░ąĮąĮčŗčģ ąĮą░ CAN čüąĖčüč鹥ą╝ ą░ą▓č鹊ą╝ą░čéąĖąĘą░čåąĖąĖ čü ą│ą░čĆą░ąĮčéąĖąĄą╣ ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖčÅ ąĖ ą▓ąĘą░ąĖą╝ąŠąĘą░ą╝ąĄąĮčÅąĄą╝ąŠčüčéąĖ čāčüčéčĆąŠą╣čüčéą▓ č鹥ą▒čāąĄčé čüčéą░ąĮą┤ą░čĆčéąĖąĘąŠą▓ą░ąĮąĮąŠą│ąŠ čüą╗ąŠčÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ 'ą┐čĆąŠčäąĖą╗ąĄą╣', čüčéą░ąĮą┤ą░čĆčéąĖąĘąĖčĆčāčÄčēąĖčģ čüąĖčüč鹥ą╝čā ą║ąŠą╝ą╝čāąĮąĖą║čåąĖąĖ, čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéčī čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ ą░ą┤ą╝ąĖąĮąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąĖąĄ čüąĖčüč鹥ą╝čŗ:
ŌÖ” ąĪą╗ąŠą╣ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĮą░ą▒ąŠčĆ čüą╗čāąČą▒ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ąŠą▓, ą┐ąŠą╗ąĄąĘąĮčŗčģ ą┤ą╗čÅ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ ą▓ čüąĄčéąĖ.
ą¤čĆąŠčäąĖą╗ąĖ . ąĪą╗ąŠą╣ ą┤ą░ąĮąĮčŗčģ (data link layer), ą║ ą║ąŠč鹊čĆąŠą╝čā ąŠčéąĮąŠčüąĖčéčüčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ CAN, čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅąĄčé čüčéą░ąĮą┤ą░čĆčéčā CAN 2.0A ąĖ/ąĖą╗ąĖ 2.0B, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ čäąĖąĘąĖč湥čüą║ąĖą╣ čüą╗ąŠą╣ (physical layer) ąŠą┐ąĖčüą░ąĮ čüčéą░ąĮą┤ą░čĆč鹊ą╝ ISO 11898. ąĪą╗ąŠą╣ ą┤ą░ąĮąĮčŗčģ ąĖ čäąĖąĘąĖč湥čüą║ąĖą╣ čüą╗ąŠą╣ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ ą░ą┐ą┐ą░čĆą░čéąĮąŠ, ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ čüą╝. ą▓ [2].
CANopen ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą║ąŠąĮčåąĄą┐čåąĖčÄ ą┐čĆąŠčäąĖą╗ąĄą╣ čāčüčéčĆąŠą╣čüčéą▓ (device profiles). ą¤čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĖ ą╝ąŠą│čāčé čüąŠąĘą┤ą░ą▓ą░čéčī čüčéą░ąĮą┤ą░čĆčéąĖąĘąŠą▓ą░ąĮąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čāą║ą░ąĘą░ąĮąĖčÅą╝, čüąŠą┤ąĄčƹȹ░čēąĖą╝čüčÅ ą▓ CANopen device profile. ąæą╗ą░ą│ąŠą┤ą░čĆčÅ čŹč鹊ą╝čā ą╝ąŠą│čāčé ą▒čŗčéčī čüąŠąĘą┤ą░ąĮčŗ čüąĄčéąĖ čāčüčéčĆąŠą╣čüčéą▓ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗ąĄą╣ čāčüčéčĆąŠą╣čüčéą▓ CAN, ą▒ąĄąĘ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ąĮą░ą┐ąĖčüą░ąĮąĖčÅ čüą┐ąĄčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮąĮąŠą│ąŠ, ą║ą░ą║ąŠą│ąŠ-č鹊 ąŠčüąŠą▒ąĄąĮąĮąŠą│ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą│ąŠ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ čüąŠąĄą┤ąĖąĮąĖčéčī čāčüčéčĆąŠą╣čüčéą▓ą░ ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ ą▓ ąŠą┤ąĮčā čüąĄčéčī. ąæą░ąĘąŠą▓ąŠąĄ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ čüąĄčéąĖ ą│ą░čĆą░ąĮčéąĖčĆčāąĄčéčüčÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄą╝ ąŠą▒čÅąĘą░č鹥ą╗čīąĮčŗčģ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ čāčüčéčĆąŠą╣čüčéą▓ą░ - čāąĘą╗ą░ čüąĄčéąĖ. ą£ąŠąČąĮąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗąĄ čäčāąĮą║čåąĖąĖ, čćč鹊ą▒čŗ ą┐ąŠą╝ąŠčćčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī ąŠą┐čåąĖąŠąĮą░ą╗čīąĮčāčÄ ąĖ ąĘą░ą▓ąĖčüčÅčēčāčÄ ąŠčé ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ čćą░čüčéčī ą┐čĆąŠčäąĖą╗ąĄą╣. ąĢčüčéčī ąĮąĄą║ąŠč鹊čĆąŠąĄ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ čüčéą░ąĮą┤ą░čĆčéąĮčŗčģ ą┐čĆąŠčäąĖą╗ąĄą╣, ą┤ąŠčüčéčāą┐ąĮčŗčģ ąĖąĘ CiA, ą▓ č鹊ą╝ čćąĖčüą╗ąĄ CiA-401 [3], ą║ąŠč鹊čĆčŗą╣ ąŠą┐ąĖčüčŗą▓ą░ąĄčé ą╝ąŠą┤čāą╗ąĖ I/O, ąĖ CiA-404 [4] ą┤ą╗čÅ ąĖąĘą╝ąĄčĆąĖč鹥ą╗čīąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ ąŠą▒čĆą░čéąĮąŠą╣ čüą▓čÅąĘąĖ (closed loop controllers). ą¤čĆąŠčäąĖą╗ąĖ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ ą▓ čüčéą░ąĮą┤ą░čĆčéąĖąĘąŠą▓ą░ąĮąĮąŠą╣ ą▒ą░ąĘąĄ ą┤ą░ąĮąĮčŗčģ, ą║ąŠč鹊čĆą░čÅ ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ čüą╗ąŠą▓ą░čĆąĄą╝ ąŠą▒čŖąĄą║č鹊ą▓ (object dictionary, čüąŠą║čĆą░čēąĄąĮąĮąŠ OD). ąśą╝ąĄąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ, ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ąĘą░ą┐ąĖčüąĄą╣ ą▓ čüą╗ąŠą▓ą░čĆąĄ čāčüčéčĆąŠą╣čüčéą▓ą░. OD ąĮąĄ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ čüą░ą╝ąŠą╝ čāąĘą╗ąĄ CANopen (čģąŠčéčÅ ą┤ąŠą┐čāčüą║ą░ąĄčéčüčÅ ąĮą░ą╗ąĖčćąĖąĄ ą│ąŠč鹊ą▓ąŠą│ąŠ čüą╗ąŠą▓ą░čĆčÅ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąĄ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ąĄą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ), ąŠąĮ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╝ ąŠą┐ąĖčüą░ąĮąĖąĄą╝ 菹╗ąĄą║čéčĆąŠąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (Electronic Data Sheet, čüąŠą║čĆą░čēąĄąĮąĮąŠ EDS), čéą░ą║ čćč鹊 ą╝ą░čüč鹥čĆ čüąĄčéąĖ (ą│ą╗ą░ą▓ąĮčŗą╣ čāąĘąĄą╗, ąŠą▒čüą╗čāąČąĖą▓ą░čÄčēąĖą╣ ąŠčüąĮąŠą▓ąĮąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ čüąĄčéąĖ) ą▒čāą┤ąĄčé ąĘąĮą░čéčī čéąĖą┐ ą┤ą░ąĮąĮčŗčģ ąĖ čĆą░ąĘą╝ąĄčĆ ą║ą░ąČą┤ąŠą│ąŠ ąŠą▒čŖąĄą║čéą░.
ą¤čĆąŠčäąĖą╗čī ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ (communication profile) ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, čćč鹊 ą▓ čüąĄčéąĖ CANopen ą┤ąŠą╗ąČąĮąŠ ąĮą░čģąŠą┤ąĖčéčüčÅ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĮąŠ ą│ą╗ą░ą▓ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ, ąŠą▒čüą╗čāąČąĖą▓ą░čÄčēąĄąĄ ą│ą╗ą░ą▓ąĮąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ čüąĄčéąĖ ąĖ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ąŠą┤ąĮąŠ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ (ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▒ąŠą╗čīčłąĄ ąŠą┤ąĮąŠą│ąŠ), ą▓čŗą┐ąŠą╗ąĮčÅčÄčēąĄąĄ ą▓čüą┐ąŠą╝ąŠą│ą░č鹥ą╗čīąĮčŗąĄ čäčāąĮą║čåąĖąĖ ą│ą╗ą░ą▓ąĮąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆąĄą╗ąĄ ąĖą╗ąĖ ąŠčåąĖčäčĆąŠą▓ą║ą░ ą┐ąŠą║ą░ąĘą░ąĮąĖą╣ ą┤ą░čéčćąĖą║ąŠą▓). ą£ą░čüč鹥čĆ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą┐čĆąŠčåąĄčüčü ąĘą░ą│čĆčāąĘą║ąĖ (boot-up process), ąĖ ą┐čĆąŠą▓ąĄčĆčÅąĄčé čüąŠčüč鹊čÅąĮąĖąĄ čüąĄčéąĖ, ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÅ ąĄčæ ą▓ čĆą░ą▒ąŠč湥ą╝ čüąŠčüč鹊čÅąĮąĖąĖ (operational state). ą£ą░čüč鹥čĆ čéą░ą║ąČąĄ ą╝ą░ąĮąĖą┐čāą╗ąĖčĆčāąĄčé 菹╗ąĄą╝ąĄąĮčéą░ą╝ąĖ čüą╗ąŠą▓ą░čĆčÅ ąŠą▒čŖąĄą║č鹊ą▓ ąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ą╝ąĖ CAN ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ (čŹčéąĖ ą┤ąĄą╣čüčéą▓ąĖčÅ ąĮąĄ ąŠą▒čÅąĘą░č鹥ą╗čīąĮčŗ, ą┐ąŠčüą║ąŠą╗čīą║čā ą╝ąŠąČąĄčé čüčāčēąĄčüčéą▓ąŠą▓ą░čéčī ąĘą░čĆą░ąĮąĄąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą║ą░ąČą┤ąŠą│ąŠ čāąĘą╗ą░ čüąĄčéąĖ). Communication profile ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ ą╝ąĄč鹊ą┤ąŠą▓ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĖ ą┐čĆąĖąĄą╝ą░ čüąŠąŠą▒čēąĄąĮąĖą╣ ą┐ąŠ čüąĄčéąĖ CAN. ąĪąĖąĮčģčĆąŠąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčī čüą║ąŠąŠčĆą┤ąĖąĮąĖčĆąŠą▓ą░ąĮąĮčŗąĄ ą┐ąŠ ą▓čüąĄ čüąĄčéąĖ ąŠą┐ąĄčĆą░čåąĖąĖ ą┐ąŠ ą▓čŗą▒ąŠčĆą║ąĄ ą┤ą░ąĮąĮčŗčģ ąĖą╗ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąŠą▒čŖąĄą║čéą░ą╝ąĖ. ąĪąĖąĮčģčĆąŠąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčéčüčÅ ąĘą░čĆą░ąĮąĄąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ąĖ ąŠą▒čŖąĄą║čéą░ą╝ąĖ ąŠą▒ą╝ąĄąĮą░, ąĮą░ą┐čĆąĖą╝ąĄčĆ čåąĖą║ą╗ąĖč湥čüą║ąĖ, čü ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą╝ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ čüąŠąŠą▒čēąĄąĮąĖčÅ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ ąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ ą╝ąĄčéą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ (time stamp messages). ą£ąŠą│čāčé ą▒čŗčéčī ą░čüąĖąĮčģčĆąŠąĮąĮąŠ ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ čüąŠąŠą▒čēąĄąĮąĖčÅ ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ (čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą║ą░ą║ąĖą╝-č鹊 čüąŠą▒čŗčéąĖčÅą╝, event messages), čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąŠą┤ąĮąŠą╝čā čāčüčéčĆąŠą╣čüčéą▓čā ąĮąĄą╝ąĄą┤ą╗ąĄąĮąĮąŠ ąŠą┐ąŠą▓ąĄčēą░čéčī ą┤čĆčāą│ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▒ąĄąĘ ąŠąČąĖą┤ą░ąĮąĖčÅ ą┐ąŠčÅą▓ą╗ąĄąĮąĖčÅ ą╝ąŠą╝ąĄąĮčéą░ čüąĖąĮčģčĆąŠąĮąĮąŠą╣ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ. ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ ąŠą▒ąŠąĖčģ čéąĖą┐ąŠą▓ čüąŠąŠą▒čēąĄąĮąĖą╣ - čüąĖąĮčģčĆąŠąĮąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣ ąĖ čüąŠąŠą▒čēąĄąĮąĖą╣ čüąŠą▒čŗčéąĖčÅ (čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗąĄ ąŠą▒čŖąĄą║čéčŗ ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄą╝čŗčģ ą┤ą░ąĮąĮčŗčģ, Process Data Objects, čüąŠą║čĆą░čēąĄąĮąĮąŠ PDO) ą╝ąŠąČąĄčé ą▒čŗčéčī ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ ą▓ ą╝ąŠą╝ąĄąĮčé ąĘą░ą┐čāčüą║ą░ čüąĄčéąĖ (network boot up), čćč鹊 ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą╝ą░čüč鹥čĆąŠą╝ čüąĄčéąĖ čü ą┐ąŠą╝ąŠčēčīčÄ čüąĖčüč鹥ą╝čŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüąĄčéčīčÄ (Network Management, NMT). ąźąŠčéčÅ CAN ąŠą│čĆą░ąĮąĖčćąĖą▓ą░ąĄčé čĆą░ąĘą╝ąĄčĆ ą┐ąĄčĆąĄą┤ą░ą▓ą░ąĄą╝ąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ 8 ą▒ą░ą╣čéą░ą╝ąĖ, ą┐čĆąŠč鹊ą║ąŠą╗ CANopen ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé ąŠą▒ą╝ąĄąĮ ą▒ą╗ąŠą║ą░ą╝ąĖ ą┤ą░ąĮąĮčŗčģ ą┐čĆąŠąĖąĘą▓ąŠą╗čīąĮąŠą╣ ą┤ą╗ąĖąĮčŗ (ą▓ č鹊ą╝ čćąĖčüą╗ąĄ ą▒ąŠą╗čīčłąĄ 8 ą▒ą░ą╣čé) čü ą┐ąŠą╝ąŠčēčīčÄ ą┐čĆąŠč鹊ą║ąŠą╗ą░ Service Data Objects (SDO). ą¤ąŠą┤čĆąŠą▒ąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ CANopen communication čüąŠą┤ąĄčƹȹĖčéčüčÅ ą▓ ą┤ąŠą║čāą╝ąĄąĮč鹥 CiA DS 301 [2].
ąĪčāą╝ą╝ą░čĆąĮąŠ čüčéą░ąĮą┤ą░čĆčé ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ CANopen ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé 4 čéąĖą┐ą░ čüąŠąŠą▒čēąĄąĮąĖą╣ (ąŠą▒čŖąĄą║čéą░ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ):
ŌĆó ąĪąŠąŠą▒čēąĄąĮąĖčÅ ą░ą┤ą╝ąĖąĮąĖčüčéčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čüąĄčéąĖ Network Management (NMT), ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┤ą╗čÅ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą▓ čĆą░ą▒ąŠčéčā ąĖ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāąĘą╗ą░ čüąĄčéąĖ (čüąŠąŠą▒čēąĄąĮąĖčÅ čü čüą░ą╝čŗą╝ ą▓čŗčüąŠą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝).
[ą£ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╣ ąĮą░ą▒ąŠčĆ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░ čāčüčéčĆąŠą╣čüčéą▓ ]
ą¦č鹊ą▒čŗ ą┤ąŠą▒ąĖčéčīčüčÅ čāą┐čĆąŠčēąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ čü ą┐ąŠčćąĖąĮąĄąĮąĮčŗą╝ąĖ čāąĘą╗ą░ą╝ąĖ čüąĄčéąĖ, ą┐čĆąŠčäąĖą╗čī CiA 301 čéą░ą║ąČąĄ ąĘą░ą┤ą░ąĄčé ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čāčÄ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéčī, ą║ąŠč鹊čĆčāčÄ ą┤ąŠą╗ąČąĮąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ CANopen. ąŻčüąĖą╗ąĖčÅ ą┐ąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÄ ą┐čĆąŠčüčéčŗčģ čüąĄč鹥ą╣ ą╝ąŠą│čāčé ą▒čŗčéčī čāą╝ąĄąĮčīčłąĄąĮčŗ čü ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄą╝ ąŠą▒čÅąĘą░č鹥ą╗čīąĮčŗčģ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓, ąĘą░ą┤ą░ąĮąĮčŗčģ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ. ąŁčéąĖ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ ą┤ąŠčüčéčāą┐ąĮčŗ ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ą┐ąŠčüą╗ąĄ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ (ąĄčüą╗ąĖ ąĮąĄ ą▒čŗą╗ąĖ čĆą░ąĮčīčłąĄ čüąŠčģčĆą░ąĮąĄąĮčŗ ą║ą░ą║ąĖąĄ-ą╗ąĖą▒ąŠ ąĖčģ ą╝ąŠą┤ąĖčäąĖą║ą░čåąĖąĖ), ąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ą╝ąŠą┤ąĖčäąĖčåąĖčĆąŠą▓ą░ąĮčŗ ą┐ąŠčüčĆąĄą┤čüčéą▓ąŠą╝ ą┐čĆąŠčåąĄą┤čāčĆčŗ ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąŠą│ąŠ čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ. ąŻąĘą╗ąŠą╝ ą┤ąŠą╗ąČąĄąĮ ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ą▓čŗą▒ąŠčĆ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓. ąÆ čüąĄčéąĖ CANopen ą╝ąŠąČąĄčé ą▒čŗčéčī ą┤ąŠčüčéčāą┐ąĮąŠ ą┤ąŠ 127 čāąĘą╗ąŠą▓ ą▓ą║ą╗čÄčćąĖč鹥ą╗čīąĮąŠ. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ąĘą░ą┐čāčüą║ą░ (boot up sequence) čéą░ą║ąČąĄ čāą┐čĆąŠčēąĄąĮą░, ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąŠčüą╗ąĄ čüą▓ąŠąĄą╣ ąĘą░ą│čĆčāąĘą║ąĖ ą┐ąŠą┐ą░ą┤ą░ąĄčé ąĮąĄą┐ąŠčüčĆąĄą┤čüčéą▓ąĄąĮąĮąŠ ą▓ čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝ąŠąĄ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠąĄ čĆą░ą▒ąŠč湥ąĄ čüąŠčüč鹊čÅąĮąĖąĄ (pre-operational state). ąĢą┤ąĖąĮčüčéą▓ąĄąĮąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ąŠčé master ą┤ąŠčüčéą░č鹊čćąĮąŠ, čćč鹊ą▒čŗ ą┐ąĄčĆąĄą▓ąĄčüčéąĖ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▓ ą┐ąŠą╗ąĮąŠčäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗą╣ (operational). ą¤ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄą╝čŗąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ CAN ą┤ą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ą╝ąŠą│čāčé ą▒čŗčéčī, ąĮą░ą┐čĆąĖą╝ąĄčĆ, čüčéą░čéąĖč湥čüą║ąĖ ą▓čŗą┤ąĄą╗ąĄąĮčŗ ąĖ ąĘą░čĆą░ąĮąĄąĄ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ čü ą┐ąŠą╝ąŠčēčīčÄ DIP-ą┐ąĄčĆąĄą║ą╗čÄčćą░č鹥ą╗ąĄą╣ (ąĄčüčéčī ąĖ ą┤čĆčāą│ąĖąĄ ą╝ąĄč鹊ą┤čŗ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą┐čĆąŠč鹊ą║ąŠą╗ LSS). 11 ą▒ąĖčé čüčéą░ąĮą┤ą░čĆčéąĮąŠą│ąŠ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ čü 4 čüčéą░čĆčłąĖą╝ąĖ ą▒ąĖčéą░ą╝ąĖ ą┐ąŠą┤ ą║ąŠą┤ čäčāąĮą║čåąĖąĖ, ąĖ 7 ąŠčüčéą░ą╗čīąĮčŗą╝ąĖ ą▒ąĖčéą░ą╝ąĖ ą┐ąŠą┤ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čāąĘą╗ą░ (node ID). ąóą░ą▒ą╗ąĖčåą░ 1 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ ąĘą░ą┤ą░ąĮąĮčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┤ą╗čÅ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą│ąŠ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāąĘą╗ą░ (slave node).
ąóą░ą▒ą╗ąĖčåą░ 1. ąŚą░čĆą░ąĮąĄąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ ą┤ą╗čÅ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠą│ąŠ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░ čāčüčéčĆąŠą╣čüčéą▓ CANopen.
ąĪąŠąŠą▒čēąĄąĮąĖąĄ ąÜąŠą┤ čäčāąĮą║čåąĖąĖ (bin) ąĀąĄąĘčāą╗čīčéąĖčĆčāčÄčēąĖą╣ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ (hex) ąÜąŠą╝ą╝čāąĮąĖą║ą░čåąĖąŠąĮąĮčŗą╣ ąĖąĮą┤ąĄą║čü OD (hex) ąśąĮą┤ąĄą║čü ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ OD (hex) ąÜąŠą╝ą╝ąĄąĮčéą░čĆąĖą╣
NMT
0000b
0x000
-
-
ąĪą░ą╝čŗą╣ ą▓čŗčüąŠą║ąĖą╣ ą┐čĆąĖąŠčĆąĖč鹥čé
SYNC
0001b
0x080
(0x1005)
-
TIME STAMP
0010b
0x100
-
-
EMERGENCY
0001b
0x081..0x0FF
-
-
ąÜąŠą┤ DIP-ą┐ąĄčĆąĄą║ą╗čÄčćą░č鹥ą╗čÅ + 0x080
PDO1 (tx)
0011b
0x181..0x1FF
0x1800
0x1A00
ąÜąŠą┤ DIP-ą┐ąĄčĆąĄą║ą╗čÄčćą░č鹥ą╗čÅ +0x180
PDO1 (rx)
0100b
0x201..0x27F
0x1400
0x1600
ąÜąŠą┤ DIP-ą┐ąĄčĆąĄą║ą╗čÄčćą░č鹥ą╗čÅ +0x200
PDO2 (tx)
0101b
0x281..0x2FF
0x1801
0x1601
ąÜąŠą┤ DIP-ą┐ąĄčĆąĄą║ą╗čÄčćą░č鹥ą╗čÅ +0x280
PDO2 (rx)
0110b
0x301..0x37F
0x1401
0x1601
ąÜąŠą┤ DIP-ą┐ąĄčĆąĄą║ą╗čÄčćą░č鹥ą╗čÅ +0x300
SDO (tx) čüąĄčĆą▓ąĄčĆ
1011b
0x581..0x5FF
0x1200
-
ąÜąŠą┤ DIP-ą┐ąĄčĆąĄą║ą╗čÄčćą░č鹥ą╗čÅ +0x580
SDO (rx) ą║ą╗ąĖąĄąĮčé
1100b
0x601..0x67F
0x1280
-
ąÜąŠą┤ DIP-ą┐ąĄčĆąĄą║ą╗čÄčćą░č鹥ą╗čÅ +0x600
Nodeguard
1110b
0x701..0x77F
(0x100E)
-
ąÜąŠą┤ DIP-ą┐ąĄčĆąĄą║ą╗čÄčćą░č鹥ą╗čÅ +0x700
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą║ąŠą┤ DIP-ą┐ąĄčĆąĄą║ą╗čÄčćą░č鹥ą╗čÅ ąĘą░ą┤ą░ąĄčé ąĘąĮą░č湥ąĮąĖąĄ ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ 0x01 .. 0x7E (127 čāąĘą╗ąŠą▓ čüąĄčéąĖ).
[ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čüąĄčéčīčÄ ą▓ CANopen - ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ ąĖ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ ]
ąöą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖąĄą╝ čāčüčéčĆąŠą╣čüčéą▓ čüąĄčéąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╣ ą┐čĆąŠč鹊ą║ąŠą╗ Network Management (NMT). ąÆ čŹč鹊ą╝ ą┐čĆąŠč鹊ą║ąŠą╗ąĄ ą┤ąŠčüčéčāą┐ąĮčŗ čüą╗ąĄą┤čāčÄčēąĖąĄ čäčāąĮą║čåąĖąĖ:
1 . ąöąĖąĮą░ą╝ąĖč湥čüą║ąŠąĄ ąĖą╗ąĖ čüčéą░čéąĖč湥čüą║ąŠąĄ čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆąŠą▓ CAN ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ SDO/PDO ąĖ čüą╗čāąČą▒ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ąŠčłąĖą▒ąŠą║ (error services).2 . ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆą░ą▒ąŠčćąĖą╝ąĖ čüąŠčüč鹊čÅąĮąĖčÅą╝ąĖ čāąĘą╗ą░ ąĖ čĆąĄąČąĖą╝ą░ą╝ąĖ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ ą┤ą╗čÅ ąŠčéą┤ąĄą╗čīąĮčŗčģ čāąĘą╗ąŠą▓ ąĖą╗ąĖ ą┤ą╗čÅ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ čāąĘą╗ąŠą▓.3 . ą¤ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖą╣ ąŠą┐čĆąŠčü čāčüčéčĆąŠą╣čüčéą▓, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗čÅčéčī čāąĘą╗čŗ, ą║ąŠč鹊čĆčŗąĄ ą▒ąŠą╗čīčłąĄ ąĮąĄ čĆą░ą▒ąŠčéą░čÄčé ąĖą╗ąĖ čäčāąĮą║čåąĖąŠąĮąĖčĆčāčÄčé ąĮąĄą║ąŠčĆčĆąĄą║čéąĮąŠ.
ą¤ąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą╝čā ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčā čüąĮą░čćą░ą╗ą░ ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāčÄčéčüčÅ čāąĘą╗čŗ, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗąĄ ą║ čüąĄčéąĖ CANopen. ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čāąĘą╗ą░ čüąĄčéąĖ ą╝ąŠąČąĄčé ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčīčüčÅ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą┤ą▓ąĖąČą║ąŠą▓ DIP-ą┐ąĄčĆąĄą║ą╗čÄčćą░č鹥ą╗ąĄą╣. ąÜąŠą│ą┤ą░ čüąĄčéčī ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāąĄčéčüčÅ ąĖ ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ, ą╝ą░čüč鹥čĆ čüąĄčéąĖ čüąĮą░čćą░ą╗ą░ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ą┤ąĖą░ą╗ąŠą│ ąĖąĮą┤ąĖą▓ąĖą┤čāą░ą╗čīąĮąŠ čü ą║ą░ąČą┤čŗą╝ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ čüąĄčéąĖ čü ą┐ąŠą╝ąŠčēčīčÄ čüą╗čāąČą▒ NMT. ąÜą░ą║ č鹊ą╗čīą║ąŠ čŹč鹊čé ą┤ąĖą░ą╗ąŠą│ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ą┤ą╗čÅ čāąĘą╗ą░ ą▓čŗą┤ąĄą╗ąĄąĮčŗ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ CAN ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ čüąŠąŠą▒čēąĄąĮąĖčÅą╝ąĖ. ąøčÄą▒ą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą│čĆčāąČąĄąĮą░ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą╝ą░čüč鹥čĆąŠą╝ čüąĄčéąĖ čü ą┐ąŠą╝ąŠčēčīčÄ ąŠą▒čŖąĄą║č鹊ą▓ SDO. ąŁč鹊 ą▓ą║ą╗čÄčćą░ąĄčé ą╗čÄą▒čāčÄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą┤ą╗čÅ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ ą┤ą░ąĮąĮčŗčģ ą╗čÄą▒ąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ (PDO), ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĄčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī čāčüčéčĆąŠą╣čüčéą▓ąŠ.
ą¦č鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, čĆą░ą▒ąŠčéą░čÄčé ą╗ąĖ čāąĘą╗čŗ čüąĄčéąĖ, CANopen ąĖčüą┐ąŠą╗čīąĘčāąĄčé č鹥čģąĮąĖą║ąĖ NMT lifeguarding čü č鹥ą╝ąĖ čāąĘą╗ą░ą╝ąĖ, ą║ąŠč鹊čĆčŗąĄ čŹč鹊 ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čÄčé, ąĖ ą┤ą╗čÅ ąŠą┐čĆąŠčüą░ čāčüčéčĆąŠą╣čüčéą▓ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ CAN remote frame, ą▓ ąŠčéą▓ąĄčé ąĮą░ ą║ąŠč鹊čĆčŗą╣ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┤ąŠą╗ąČąĮąŠ ą┐ąŠčüą╗ą░čéčī ą┐ą░ą║ąĄčé čü ą┤ą░ąĮąĮčŗą╝ąĖ, ą┐ąŠą┤čéą▓ąĄčƹȹ┤ą░čÄčēąĖą╝ąĖ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ. ą£ąŠą│čāčé ą▒čŗčéčī čéą░ą║ąČąĄ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ ąĖąĮč鹥čĆą▓ą░ą╗čŗ ąĘą░ą┐čĆąĄčéą░ / čéą░ą╣ą╝ą░čāčéčŗ (inhibit time / timeout), čćč鹊ą▒čŗ ą┐ąŠ ąŠčéčüčāčéčüčéą▓ąĖčÄ ąŠčéą▓ąĄčéą░ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╣ ą┐čĆąŠą╝ąĄąČčāč鹊ą║ ą▓čĆąĄą╝ąĄąĮąĖ ą╝ą░čüč鹥čĆ ą╝ąŠą│ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, čćč鹊 ą║ą░ą║ąŠą╣-č鹊 čāąĘąĄą╗ ą┐ąĄčĆąĄčüčéą░ą╗ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░čéčī. ą¤ąŠą┤ą┤ąĄčƹȹ║ą░ ą▓čĆąĄą╝ąĄąĮąĖ ąĘą░ą┐čĆąĄčéą░ (inhibit time) ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ą┐ąŠą╗čāčćą░čéčī lifeguarding remote frame ą▓ č鹥č湥ąĮąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠą│ąŠ ą┐ąĄčĆąĖąŠą┤ą░ ą▓čĆąĄą╝ąĄąĮąĖ, čćč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čüąŠą│ą╗ą░čüąŠą▓ą░ąĮąŠ ą▓ ą╝ąŠą╝ąĄąĮčé ąĘą░ą│čĆčāąĘą║ąĖ ą╝ą░čüč鹥čĆąŠą╝ čüąĄčéąĖ.
ąĪą╗čāąČą▒čŗ NMT ą╝ąŠą│čāčé čéą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐čĆąĖą▓ąĄą┤ąĄąĮąĖčÅ ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓ čüąĄčéąĖ ą▓ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ čĆą░ą▒ąŠčćąĖąĄ čüąŠčüč鹊čÅąĮąĖčÅ, čćč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī čüą┤ąĄą╗ą░ąĮąŠ ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą╝ą░čüč鹥čĆ čüąĄčéąĖ ą╝ąŠąČąĄčé ą┐ąŠčüą╗ą░čéčī čłąĖčĆąŠą║ąŠą▓ąĄčēą░č鹥ą╗čīąĮčāčÄ ą║ąŠą╝ą░ąĮą┤čā (broadcast) čüąŠąŠą▒čēąĄąĮąĖąĄą╝ ą▓čģąŠą┤ą░ ą▓ čĆąĄąČąĖą╝ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠą│ąŠ čĆą░ą▒ąŠč湥ą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ Pre-Operational state (čüąŠąŠą▒čēąĄąĮąĖąĄ Enter_Preoperational_State), čćč鹊ą▒čŗ ą▓čüąĄ čāąĘą╗čŗ ą┐ąĄčĆąĄą║ą╗čÄčćąĖą╗ąĖčüčī ą▓ čüąŠčüč鹊čÅąĮąĖąĄ, ą▓ ą║ąŠč鹊čĆąŠą╝ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąŠąĮąĮą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą│čĆčāąČąĄąĮą░ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ čü ą┐ąŠą╝ąŠčēčīčÄ čüąŠąŠą▒čēąĄąĮąĖą╣ SDO. ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠ ąŠą┤ąĖąĮ čāąĘąĄą╗ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╝ąĄčēąĄąĮ ą▓ Pre-Operational state (ąĖą╗ąĖ čĆąĄąČąĖą╝ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ) č鹥ą╝ ąČąĄ čüą░ą╝čŗą╝ čüąŠąŠą▒čēąĄąĮąĖąĄą╝ čü ą┤čĆčāą│ąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ ą┐čĆąŠč鹊ą║ąŠą╗ą░, čćč鹊 ąŠčüčéą░ą▓ą╗čÅąĄčé ą▓čüąĄ ą┤čĆčāą│ąĖąĄ čāąĘą╗čŗ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą▓ čĆą░ą▒ąŠč湥ą╝ čüąŠčüč鹊čÅąĮąĖąĖ (operational).
ąĀąĄą░ą╗ąĖąĘą░čåąĖčÅ NMT . ąÜą░ąČą┤čŗą╣ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗą╣ čāąĘąĄą╗ čüąŠą┤ąĄčƹȹĖčé ą╗ąŠą│ąĖč湥čüą║čāčÄ ą╝ą░čłąĖąĮčā ąĖąĘ 4 čüąŠčüč鹊čÅąĮąĖą╣: (1) Initialisation (ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ), (2) Pre-Operational (čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠ čĆą░ą▒ąŠč湥ą╝čā, ąĖą╗ąĖ čüąŠčüč鹊čÅąĮąĖąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ), (3) Operational (čĆą░ą▒ąŠč湥ąĄ čüąŠčüč鹊čÅąĮąĖąĄ) ąĖ (4) Prepared (ą┐ąŠą┤ą│ąŠč鹊ą▓ą╗ąĄąĮąŠ). ąĢčüčéčī 5 čĆą░ąĘąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖą╣ NMT, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą╝ą░čüč鹥čĆčā CANopen ą┐ąŠą╝ąĄąĮčÅčéčī čüąŠčüč鹊čÅąĮąĖąĄ ąŠą┤ąĮąŠą│ąŠ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāąĘą╗ą░ ąĖą╗ąĖ ą▓čüąĄčģ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗčģ čāąĘą╗ąŠą▓ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ:
Start_Remote_Node
(1) Initialisation
(2) Pre-Operational
ŌĆó ąÆąĮčāčéčĆąĄąĮąĮąĖą╣ ą▓ą▓ąŠą┤ / ą▓čŗą▓ąŠą┤ (internal I/O function).
ąĪąŠčüč鹊čÅąĮąĖąĄ Pre-Operational ą╝ąŠąČąĄčé ą┐ąŠą╝ąĄąĮčÅčéčīčüčÅ ąĮą░ Operational (Operational_State) ą║ąŠą╝ą░ąĮą┤ąŠą╣ Start_Remote_Node, Prepared (Prepared_State) ą║ąŠą╝ą░ąĮą┤ąŠą╣ Stop_Remote_Node, čüą▒čĆąŠčü čāąĘą╗ą░ (Reset) ą║ąŠą╝ą░ąĮą┤ą░ą╝ąĖ Reset_Node ąĖą╗ąĖ Reset_Communication.
(3) Operational
ŌĆó ąÆąĮčāčéčĆąĄąĮąĮąĖą╣ ą▓ą▓ąŠą┤ / ą▓čŗą▓ąŠą┤ (internal I/O function).
ąĪąŠčüč鹊čÅąĮąĖąĄ Operational ą╝ąŠąČąĄčé ą┐ąŠą╝ąĄąĮčÅčéčīčüčÅ ąĮą░ Prepared (Prepared_State) ą║ąŠą╝ą░ąĮą┤ąŠą╣ Stop_Remote_Node, Pre-Operational (Pre-Operational_State) ą║ąŠą╝ą░ąĮą┤ąŠą╣ Enter_Pre-Operational_State, čüą▒čĆąŠčü čāąĘą╗ą░ (Reset) ą║ąŠą╝ą░ąĮą┤ą░ą╝ąĖ Reset_Node ąĖą╗ąĖ Reset_Communication.
(4) Prepared
ąĪąŠčüč鹊čÅąĮąĖąĄ Prepared ą╝ąŠąČąĄčé ą┐ąŠą╝ąĄąĮčÅčéčīčüčÅ ąĮą░ Pre-Operational (Pre-Operational_State) ą║ąŠą╝ą░ąĮą┤ąŠą╣ Enter_Pre-Operational_State, Operational (Operational_State) ą║ąŠą╝ą░ąĮą┤ąŠą╣ Start_Remote_Node, čüą▒čĆąŠčü čāąĘą╗ą░ (Reset) ą║ąŠą╝ą░ąĮą┤ą░ą╝ąĖ Reset_Node ąĖą╗ąĖ Reset_Communication.
ążąŠčĆą╝ą░čé čüąŠąŠą▒čēąĄąĮąĖčÅ NMT (ąĘą░ą│ąŠą╗ąŠą▓ąŠą║ CAN + 2 ą▒ą░ą╣čéą░ ą┤ą░ąĮąĮčŗčģ):
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ CAN
ąæą░ą╣čé 1
ąæą░ą╣čé 2
0x000
CS
Node_ID
ąŚą┤ąĄčüčī CS (Command Specifier, čüą┐ąĄčåąĖčäąĖą║ą░č鹊čĆ ą║ąŠą╝ą░ąĮą┤čŗ) ą╝ąŠąČąĄčé ą┐ąŠą╗čāčćąĖčéčī 5 ąĘąĮą░č湥ąĮąĖą╣ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ąČąĄą╗ą░ąĄą╝ąŠą╣ čäčāąĮą║čåąĖąĄą╣ NMT:
ążčāąĮą║čåąĖčÅ NMT CS
Start_Remote_Node
0x01
Stop_Remote_Node
0x02
Enter_Pre-Operational_State
0x80
Reset_Node
0x81
Reset_Communication
0x82
Node_ID ą╝ąŠąČąĄčé ą▒čŗčéčī čćąĖčüą╗ąŠą╝ ąŠčé 1 ą┤ąŠ 127 ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą░ ąŠą┤ąĮąŠą│ąŠ čāąĘą╗ą░, ą╗ąĖ 0 ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą░ ą▓čüąĄčģ čāąĘą╗ąŠą▓. ąÉą┐ą┐ą░čĆą░čéąĮčŗą╣ ą┐ąĄčĆąĄą║ą╗čÄčćą░č鹥ą╗čī ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (ąĖą╗ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ LSS ąĖ 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝ą░čÅ ą┐ą░ą╝čÅčéčī) ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé Node_ID. ą¤ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ CANopen ąĮąĄ ą┤ąŠą╗ąČąĮąŠ ą▓ ąŠčéą▓ąĄčé ąĮą░ čŹčéąĖ 5 ą║ąŠą╝ą░ąĮą┤ ąŠčéą┐čĆą░ą▓ą╗čÅčéčī ą║ą░ą║ąŠąĄ-ą╗ąĖą▒ąŠ čüąŠąŠą▒čēąĄąĮąĖąĄ CAN.
CANopen Node Guarding . ąŁčéą░ čäčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąŠčłąĖą▒ąŠą║ ąŠą▒ą╝ąĄąĮą░ ą▓ čüąĄčéąĖ. ą£ą░čüč鹥čĆ (NMT) ą╝ąŠąČąĄčé ą┐čĆąŠą▓ąĄčĆčÅčéčī čüą▓ąŠąĖ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ (node guarding), ąĖ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą╝ąŠą│čāčé ą┐čĆąŠą▓ąĄčĆčÅčéčī čĆą░ą▒ąŠčéčā master (life guarding). Node guarding ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, ąĄčüą╗ąĖ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠą┐čĆąŠčłąĄąĮąŠ ąĮą░ ąŠčüąĮąŠą▓ąĄ čĆąĄą│čāą╗čÅčĆąĮčŗčģ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ.
OD čüąŠą┤ąĄčƹȹĖčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ Node guarding:
100CH: guard time (ą▓čĆąĄą╝čÅ ąŠą┐čĆąŠčüą░ ą▓ ą╝ąĖą╗ą╗ąĖčüąĄą║čāąĮą┤ą░čģ).
Life guarding čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą┤čćąĖąĮąĄąĮąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, ą║ąŠą│ą┤ą░ ą╝ą░čüč鹥čĆ ą┐čĆąŠą▓ąĄčĆčÅąĄčé čüąŠčüč鹊čÅąĮąĖąĄ slave-čāčüčéčĆąŠą╣čüčéą▓ą░ č湥čĆąĄąĘ čäčĆąĄą╣ą╝ remote (Remote Transmit Request, RTR) ąĮą░ Node Guarding COB_ID, ąĄčüą╗ąĖ guard time ąĖ the life time factor ąĮąĄ čĆą░ą▓ąĮčŗ 0. ąØąĖąČąĄ ą┐ąŠą║ą░ąĘą░ąĮ č乊čĆą╝ą░čé čüąŠąŠą▒čēąĄąĮąĖčÅ MNT ąŠčé master:
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ CAN
111.0iii.iiii
Slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ NMT ąŠčéą▓ąĄčéąĖčé čüą▓ąŠąĖą╝ č鹥ą║čāčēąĖą╝ čüąŠčüč鹊čÅąĮąĖąĄą╝:
ąŚą░ą│ąŠą╗ąŠą▓ąŠą║ CAN
ąæą░ą╣čé 1
111.0iii.iiii tsss.ssss
ąØą░ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠą╗ąĄą╣:
ą¤ąŠą╗ąĄ ąØą░ąĘąĮą░č湥ąĮąĖąĄ
iiiiiii Node ID (ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ čāąĘą╗ą░)
t ą¤ąĄčĆąĄą║ą╗čÄčćą░čÄčēąĖą╣čüčÅ ą▒ąĖčé (toggle bit), ą║ąŠč鹊čĆčŗą╣ ą╝ąĄąĮčÅąĄčé čüą▓ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĖ ą║ą░ąČą┤ąŠą╝ ąĘą░ą┐čĆąŠčüąĄ Node Guarding.
sssssss ąĪąŠčüč鹊čÅąĮąĖąĄ čāąĘą╗ą░:
ąĢčüą╗ąĖ node-guarding master ąĮąĄ ą┐ąŠą╗čāčćąĖčé ąŠčéą▓ąĄčé čü č鹥ą║čāčēąĄą╝ čüąŠčüč鹊čÅąĮąĖąĄą╝ ąŠčé čāąĘą╗ą░ ą▓ č鹥č湥ąĮąĖąĄ guard time, č鹊 čĆąĄą│ąĖčüčéčĆąĖčĆčāąĄčéčüčÅ ąŠčłąĖą▒ą║ą░ remote error ą┤ą╗čÅ čŹč鹊ą│ąŠ slave-čāąĘą╗ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ąĢčüą╗ąĖ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ą┐ąŠą╗čāčćąĖčé čŹč鹊čé ąĘą░ą┐čĆąŠčü ą▓ č鹥č湥ąĮąĖąĄ life time (= guard time * life time factor), č鹊 slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ ą┐ąĄčĆąĄą║ą╗čÄčćąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ Pre-operational.
ąĢčüą╗ąĖ ą╝ą░čüč鹥čĆ node-guarding ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ, č鹊 ąŠąĮ ąŠą▒ąĮą░čĆčāąČąĖčé ąĖąĘą╝ąĄąĮąĄąĮąĮąŠąĄ čĆą░ą▒ąŠč湥ąĄ čüąŠčüč鹊čÅąĮąĖąĄ slave-čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ ąŠčéą┐čĆą░ą▓ąĖčé čüąĖą│ąĮą░ą╗ ąŠą▒ čŹč鹊ą╣ ąŠčłąĖą▒ą║ąĖ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ.
[ąĪčĆą░ą▓ąĮąĄąĮąĖąĄ ąŠą▒čŖąĄą║č鹊ą▓ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ CANopen ]
ąÆ ą┐čĆąŠč鹊ą║ąŠą╗ąĄ CANopen čüčāčēąĄčüčéą▓čāąĄčé 2 čĆą░ąĘąĮčŗčģ ą╝ąĄčģą░ąĮąĖąĘą╝ą░ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ: SDO ąĖ PDO. Service Data Object (SDO) ą│ą╗ą░ą▓ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ ą▒ąŠą╗čīčłąĖčģ, ąĮąĖąĘą║ąŠą┐čĆąĖąŠčĆąĖč鹥čéąĮčŗčģ ąŠą▒čŖąĄą╝ąŠą▓ ą┤ą░ąĮąĮčŗčģ ą╝ąĄąČą┤čā čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ, ąĖ čŹč鹊čé ą┐čĆąŠčåąĄčüčü ą┐ąĄčĆąĄą┤ą░čćąĖ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą░čüąĖąĮčģčĆąŠąĮąĮąŠ. ą×ą▒čŗčćąĮąŠ SDO ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ čüąĄčéąĖ CANopen. ąĢčüą╗ąĖ ą▓čüąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĘą░čĆą░ąĮąĄąĄ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ, č鹊 SDO ą╝ąŠąČąĄčé ąĮąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čüąŠą▓čüąĄą╝. ą×čéą┤ąĄą╗čīąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą░ą┤čĆąĄčüčāčÄčéčüčÅ ą┐ąŠ 16-ą▒ąĖčéąĮąŠą╝čā ąĖąĮą┤ąĄą║čüčā ąĖ 8-ą▒ąĖčéąĮąŠą╝čā sub-ąĖąĮą┤ąĄą║čüčā.
ąÆč鹊čĆąŠą╣ čĆąĄąČąĖą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ ąĘą░ą┤ąĄą╣čüčéą▓čāąĄčé Process Data Object (PDO), čŹč鹊 ąŠą▒ą╝ąĄąĮ čüąŠąŠą▒čēąĄąĮąĖčÅą╝ąĖ čü ąŠą▒čĆą░ą▒ą░čéčŗą▓ą░ąĄą╝čŗą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ (Process data messages), ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ąŠčéą┐čĆą░ą▓ą╗ąĄąĮčŗ čüąĖąĮčģčĆąŠąĮąĮąŠ čü čüąŠąŠą▒čēąĄąĮąĖčÅą╝ąĖ SYNC ąĖ ą░čüąĖąĮčģčĆąŠąĮąĮąŠ, ą▓ ą╝ąŠą╝ąĄąĮčé ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ čüąŠą▒čŗčéąĖčÅ. PDO ą▓ ąŠčüąĮąŠą▓ąĮąŠą╝ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ ą▓ čĆąĄą░ą╗čīąĮąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ, ąĖ čŹčéąĖ čüąŠąŠą▒čēąĄąĮąĖčÅ ąĖą╝ąĄčÄčé ą┐ąŠą▓čŗčłąĄąĮąĮčŗą╣ ą┐čĆąĖąŠčĆąĖč鹥čé ą┐ąŠ čłąĖąĮąĄ CAN ą┐ąŠ čüčĆą░ą▓ąĮąĄąĮąĖčÄ čü čüąŠąŠą▒čēąĄąĮąĖčÅą╝ąĖ SDO (ą┐čĆąĖąŠčĆąĖč鹥čéčŗ, ą║ą░ą║ ąŠą▒čŗčćąĮąŠ, ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░čÄčéčüčÅ čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄą╝ ą░ą┤čĆąĄčüąŠą▓ CAN). ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą┤ą░ąĮąĮčŗčģ ą▓ č鹥ą╗ąĄą│čĆą░ą╝ą╝ąĄ PDO ąŠą│čĆą░ąĮąĖč湥ąĮąŠ 8 ą▒ą░ą╣čéą░ą╝ąĖ (ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčé 1 ą┤ąŠ 8 ą▒ą░ą╣čé). ążąŠčĆą╝ą░čé ąĖ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┤ą░ąĮąĮčŗčģ čüąŠąŠą▒čēąĄąĮąĖčÅ PDO ą╝ąŠąČąĄčé ą▒čŗčéčī čäąĖą║čüąĖčĆąŠą▓ą░ąĮąĮčŗą╝, ąĖą╗ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┤ąĖąĮą░ą╝ąĖč湥čüą║ąĖ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ ą┐ąĄčĆąĄą┤ą░čćą░ą╝ąĖ SDO.
ą¤ąĄčĆąĄą┤ą░čćąĖ SDO ą╝ąŠą│čāčé ą▒čŗčéčī čüčĆą░ą▓ąĮąĄąĮčŗ ą┐ąŠ čüą║ąŠčĆąŠčüčéąĖ čü ą┐ąĄčĆąĄą┤ą░čćą░ą╝ąĖ PDO ą║ą░ą║ ą┐čĆąŠč鹊ą║ąŠą╗čŗ TCP ąĖ UDP čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ. ąöčĆčāą│ą░čÅ ą░ąĮą░ą╗ąŠą│ąĖčÅ - SDO ą╝ąŠąČąĮąŠ ą┐ąŠčüčéą░ą▓ąĖčéčī ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĄ čüąĖą╗čīąĮąŠ ąĮą░ą│čĆčāąČąĄąĮąĮčŗą╣ ą│čĆčāąĘąŠą▓ąĖą║, ą░ PDO - ą▒čŗčüčéčĆčŗą╣ čüą┐ąŠčĆčéą║ą░čĆ.
ąĀąĄąČąĖą╝čŗ ą┐ąĄčĆąĄą┤ą░čćąĖ PDO . CANopen ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░ąĄčé čĆą░ąĘąĮčŗąĄ čĆąĄąČąĖą╝čŗ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą╗čÅ ą┐ąĄčĆąĄąĮąŠčüą░ ą┤ą░ąĮąĮčŗčģ, ą┐čĆąĖą▓čÅąĘą░ąĮąĮčŗčģ ą║ čĆąĄą░ą╗čīąĮąŠą╝čā ą▓čĆąĄą╝ąĄąĮąĖ (real-time data). ą×ą┤ąĖąĮ ą╝ąĄč鹊ą┤ - ą┐čĆąŠčüčéą░čÅ ąŠčéą┐čĆą░ą▓ą║ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ PDO ą▓ ą╝ąŠą╝ąĄąĮčé ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ čüąŠą▒čŗčéąĖčÅ (event). ąØą░ą┐čĆąĖą╝ąĄčĆ, čåąĖčäčĆąŠą▓ąŠą╣ ą▓ą▓ąŠą┤/ą▓čŗą▓ąŠą┤ ą┐ąĄčĆąĄą┤ą░ąĄčé čüąŠčüč鹊čÅąĮąĖąĄ čüą▓ąŠąĖčģ ą▓čģąŠą┤ąĮčŗčģ ą╗ąĖąĮąĖą╣, ą║ąŠą│ą┤ą░ ąĮą░ ąĮąĖčģ ą┐ąŠą╝ąĄąĮčÅą╗čüčÅ ą╗ąŠą│ąĖč湥čüą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī. ą£ąŠą┤čāą╗čī ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ ą▓ą▓ąŠą┤ą░ ą╝ąŠąČąĄčé ą┐ąŠčüą╗ą░čéčī čüąŠčüč鹊čÅąĮąĖąĄ ą▓čģąŠą┤ąĮąŠą╣ ą╗ąĖąĮąĖąĖ, ą║ąŠą│ą┤ą░ ąĮą░ ąĮąĄą╣ ą┐ąŠą╝ąĄąĮčÅą╗ąŠčüčī ąĘąĮą░č湥ąĮąĖąĄ ąĮą░ ąĘą░čĆą░ąĮąĄąĄ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮčāčÄ ą▓ąĄą╗ąĖčćąĖąĮčā. ąöčĆčāą│ąŠą╣ ą╝ąĄč鹊ą┤ ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé čüąĖąĮčģčĆąŠąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ. ąÆ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ą║ą░ąČą┤ą░čÅ ą▓čŗčüąŠą║ąŠą┐čĆąĖąŠčĆąĖč鹥čéąĮą░čÅ č鹥ą╗ąĄą│čĆą░ą╝ą╝ą░ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ (SYNC) ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ (ąŠą▒čŗčćąĮąŠ ą╝ą░čüč鹥čĆąŠą╝ čüąĄčéąĖ) čü ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗą╝ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą╝ ą▓čĆąĄą╝ąĄąĮąĖ. ąóąĄą╗ąĄą│čĆą░ą╝ą╝ą░ SYNC čÅą▓ą╗čÅąĄčéčüčÅ čłąĖčĆąŠą║ąŠą▓ąĄčēą░č鹥ą╗čīąĮąŠą╣ (broadcast) ą┤ą╗čÅ ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓ čüąĄčéąĖ, ąĖ č鹥 čāčüčéčĆąŠą╣čüčéą▓ą░, ą║ąŠč鹊čĆčŗąĄ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ąĮą░ ąŠčéą┐čĆą░ą▓ą║čā ą┤ą░ąĮąĮčŗčģ ą▓ ąŠčéą▓ąĄčé ąĮą░ čüąŠąŠą▒čēąĄąĮąĖąĄ čüąĖąĮčģčĆąŠąĮąĖąĘą░čåąĖąĖ, ąŠčéą┐čĆą░ą▓ą╗čÅčÄčé čüą▓ąŠąĖ ą┤ą░ąĮąĮčŗąĄ ąĮą░ čłąĖąĮčā. ąöą░ąĮąĮčŗąĄ čéą░ą║ąČąĄ ąŠčéą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ąĖąĘ čāą┐čĆą░ą▓ą╗čÅčÄčēąĄą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮą░ č鹥 čāčüčéčĆąŠą╣čüčéą▓ą░, ą║ąŠč鹊čĆčŗąĄ ą▓ čŹč鹊ą╝ ąĮčāąČą┤ą░čÄčéčüčÅ. ąöą░ąĮąĮčŗąĄ, ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗąĄ ąŠčé čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ ą╝ąŠą╝ąĄąĮčé ą┐čĆąĖąĄą╝ą░ SYNC ąŠą▒čŗčćąĮąŠ ąĮą░ąĘčŗą▓ą░čÄčé ą░ą║čéčāą░ą╗čīąĮčŗą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą┤ą░ąĮąĮčŗąĄ, ąŠčéą┐čĆą░ą▓ą╗ąĄąĮąĮčŗąĄ ą▓ čāčüčéčĆąŠą╣čüčéą▓ąŠ, ąĮą░ąĘčŗą▓ą░čÄčé ą┤ą░ąĮąĮčŗą╝ąĖ ą║ąŠą╝ą░ąĮą┤čŗ. ąöą╗čÅ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą╝ąŠą┤čāą╗čÅ I/O ą░ą║čéčāą░ą╗čīąĮčŗą╝ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠą▒ čüąŠčüč鹊čÅąĮąĖąĖ ąĄą│ąŠ ą▓čģąŠą┤ąŠą▓, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą┤ą░ąĮąĮčŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ čŹč鹊 č鹥 ą┤ą░ąĮąĮčŗąĄ, ą║ąŠč鹊čĆčŗąĄ čāą┐čĆą░ą▓ą╗čÅčÄčé čüąŠčüč鹊čÅąĮąĖąĄą╝ ą▓čŗčģąŠą┤ąŠą▓. ą¤ąŠčüą╗ąĄ ą┐čĆąĖąĄą╝ą░ ą┤ą░ąĮąĮčŗčģ ą║ąŠą╝ą░ąĮą┤čŗ čāčüčéčĆąŠą╣čüčéą▓ąŠ ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ ąĮą░ ą┐čĆąĖąĄą╝ čüą╗ąĄą┤čāčÄčēąĄą╣ č鹥ą╗ąĄą│čĆą░ą╝ą╝čŗ SYNC. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĄčüą╗ąĖ ą▓ čüąĄčéąĖ ąĄčüčéčī ąĮąĄčüą║ąŠą╗čīą║ąŠ čāčüčéčĆąŠą╣čüčéą▓ ą▓čŗą▓ąŠą┤ą░, č鹊 ąĖčģ ą▓čŗčģąŠą┤čŗ ą╝ąŠą│čāčé ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ čüąĖąĮčģčĆąŠąĮąĮąŠ. ąöą░ąĮąĮčŗąĄ ą║ąŠą╝ą░ąĮą┤čŗ ąĖ ą░ą║čéčāą░ą╗čīąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ čéą░ą║, čćč鹊 čĆąĄą░ą║čåąĖčÅ ąĮą░ ą║ąŠą╝ą░ąĮą┤čā ąĖ/ąĖą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ ą▒čāą┤ąĄčé ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčīčüčÅ ą▓ ąŠčéą▓ąĄčé ąĮą░ ą║ą░ąČą┤čāčÄ N-ąĮčāčÄ č鹥ą╗ąĄą│čĆą░ą╝ą╝čā SYNC, čćč鹊 ą┐ąŠą╝ąŠą│ą░ąĄčé čüąĮąĖąĘąĖčéčī ąĮą░ą│čĆčāąĘą║čā ąĮą░ čłąĖąĮčā CAN.
ąöą░ąĮąĮčŗąĄ čéą░ą║ąČąĄ ą╝ąŠą│čāčé ąŠčéą┐čĆą░ą▓ą╗čÅčéčīčüčÅ ą┐čĆąĖ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖąĖ čüąŠą▒čŗčéąĖčÅ, ąĮąŠ čüąĖąĮčģčĆąŠąĮąĮąŠ, ąĮą░ą┐čĆąĖą╝ąĄčĆ ąĄčüą╗ąĖ ąĮą░ čāčüčéčĆąŠą╣čüčéą▓ąĄ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ čüąŠą▒čŗčéąĖąĄ, ąĖ čüąŠąŠą▒čēąĄąĮąĖąĄ PDO ą┐ąĄčĆąĄą┤ą░ąĄčé ą░ą║čéčāą░ą╗čīąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ąŠą┤ąĖąĮ čĆą░ąĘ ąĮą░ ą╝ąŠą╝ąĄąĮčé ą┐čĆąĖąĄą╝ą░ čüąŠąŠą▒čēąĄąĮąĖčÅ SYNC. ąĪąĖąĮčģčĆąŠąĮąĮčŗą╣ ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ čŹč鹊 ąŠą┤ąĮą░ ąĖąĘ čüą░ą╝čŗčģ ą╝ąŠčēąĮčŗčģ čäčāąĮą║čåąĖą╣ CANopen, ą│ą░čĆą░ąĮčéąĖčĆčāčÄčēąĖčģ ą┐čĆąĄą┤čüą║ą░ąĘčāąĄą╝čāčÄ ąĮą░ą│čĆčāąĘą║čā čłąĖąĮčŗ CAN.
ą¤čĆąĖą╝ąĄčĆ PDO . ą¤čĆąĄą┤ą┐ąŠą╗ąŠąČąĖą╝, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖą╝ąĄąĄčé 16-ą▒ąĖčéąĮčŗą╣ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ ą▓čŗčģąŠą┤, čŹč鹊 ąĘąĮą░č湥ąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠč鹊ą▒čĆą░ąČąĄąĮąŠ ąĮą░ ą┐ąĄčĆą▓čŗąĄ 2 ą▒ą░ą╣čéą░ PDO. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čüąŠąŠą▒čēąĄąĮąĖąĄ CAN ą┤ą╗čÅ čŹč鹊ą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▒čāą┤ąĄčé čüąŠą┤ąĄčƹȹ░čéčī č鹊ą╗čīą║ąŠ 2 ą▒ą░ą╣čéą░ ą┤ą░ąĮąĮčŗčģ. ąśąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 ą┐ąĄčĆąĄą┤ą░čćą░ PDO ąĮąĄ čéčĆąĄą▒čāąĄčé ą║ą░ą║ąŠą│ąŠ-ą╗ąĖą▒ąŠ ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĖčÅ, čāčüčéą░ąĮąŠą▓ą║ą░ čŹč鹊ą│ąŠ 16-ą▒ąĖčéąĮąŠą│ąŠ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠčéčĆąĄą▒čāąĄčé č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ CAN čü 2 ą▒ą░ą╣čéą░ą╝ąĖ ą┤ą░ąĮąĮčŗčģ, čćč鹊 ą▓čüąĄą│ąŠ čüąŠčüčéą░ą▓ąĖčé čäčĆąĄą╣ą╝ ąĖąĘ 60 ą▒ąĖčé, ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗčģ ą┐ąŠ čłąĖąĮąĄ CAN. ąóą░ ąČąĄ čüą░ą╝ą░čÅ čäčāąĮą║čåąĖčÅ, čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąĮą░čÅ ą┐ąŠ ą╝ąĄč鹊ą┤čā SDO, ą┐ąŠčéčĆąĄą▒čāąĄčé 2 čüąŠąŠą▒čēąĄąĮąĖčÅ CAN, ą║ą░ąČą┤ąŠąĄ ą┐ąŠ 8 ą▒ą░ą╣čé, čćč鹊 čüąŠčüčéą░ą▓ąĖčé čüčāą╝ą╝ą░čĆąĮąŠ 216 ą▒ąĖčé, ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗčģ ą┐ąŠ čłąĖąĮąĄ. ą¦č鹥ąĮąĖąĄ ą░ąĮą░ą╗ąŠą│ąŠą▓ąŠą│ąŠ ą▓čģąŠą┤ą░ ą╝ąŠąČąĄčé ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮąŠ č湥čĆąĄąĘ remote request ą┤ą╗čÅ PDO, čŹčéąĖ 2 čüąŠąŠą▒čēąĄąĮąĖčÅ CAN ąĘą░ą╣ą╝čāčé 104 ą▒ąĖčéą░, ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗčģ ą┐ąŠ čłąĖąĮąĄ. ąöčĆčāą│ąŠą╣ ą╝ąĄč鹊ą┤ ą┐ąĄčĆąĄą┤ą░čćąĖ PDO ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮ ą▓ ąŠčéą▓ąĄčé ąĮą░ ą║ą░ąČą┤ąŠąĄ čüąŠąŠą▒čēąĄąĮąĖąĄ SYNC. ąŁč鹊 ą╝ąŠą│ą╗ąŠ ą▒čŗ ą┤ą░ąČąĄ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░čéčī ą┐ąĄčĆąĄą┤ą░čćčā PDO ąĮą░ ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓ą░čģ čüąĄčéąĖ.
ąĢčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖą╝ąĄąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▓čģąŠą┤ąŠą▓ ąĖą╗ąĖ ą▓čŗčģąŠą┤ąŠą▓, ąŠąĮąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ąŠč鹊ą▒čĆą░ąČąĄąĮčŗ ąĮą░ ąŠą┤ąĖąĮ PDO (ąĮą░ą┐čĆąĖą╝ąĄčĆ, č湥čéčŗčĆąĄ 16-ą▒ąĖčéąĮčŗčģ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗčģ ą▓čģąŠą┤ą░), ą┐ąŠčüą║ąŠą╗čīą║čā ą┤ą╗ąĖąĮą░ PDO ąĮąĄ ą┤ąŠą╗ąČąĮą░ ą┐čĆąĄą▓čŗčłą░čéčī 8 ą▒ą░ą╣čé (ą╝ą░ą║čüąĖą╝čāą╝ ą┤ą╗čÅ ąŠą┤ąĖąĮąŠčćąĮąŠą│ąŠ čüąŠąŠą▒čēąĄąĮąĖčÅ CAN).
ą×č鹊ą▒čĆą░ąČąĄąĮąĖąĄ ąŠą▒čŖąĄą║čéą░ čüą╗ąŠą▓ą░čĆčÅ ą║ PDO ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ (č湥čĆąĄąĘ čüąŠąŠą▒čēąĄąĮąĖąĄ SDO) čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ąŠą▒čŖąĄą║č鹊ą▓ čüą╗ąŠą▓ą░čĆčÅ 1600H ąĖą╗ąĖ 1601H (ą┤ą╗čÅ ąŠą▒čŖąĄą║č鹊ą▓ PDO ą┐čĆąĖąĄą╝ą░ čāąĘą╗ąŠą▓ ą▓čŗą▓ąŠą┤ą░) ąĖ 1A00H ąĖą╗ąĖ 1A01H (ą┤ą╗čÅ ąŠą▒čŖąĄą║č鹊ą▓ PDO ą┐ąĄčĆąĄą┤ą░čćąĖ čāąĘą╗ąŠą▓ ą▓ą▓ąŠą┤ą░).
ą¤čĆąĖą╝ąĄčĆ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ ąĮą░ PDO (ą░ąĮą░ą╗ąŠą│ąŠą▓čŗą╣ 16-ą▒ąĖčéąĮčŗą╣ ą▓čģąŠą┤ ąĖ čćąĖčüą╗ąŠ float):
ąśąĮč乊čĆą╝ą░čåąĖčÅ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ ą▓ OD
ą×ą▒čŖąĄą║čé sub-ąĖąĮą┤ąĄą║čü ąŚąĮą░č湥ąĮąĖąĄ
ą×ą▒čŖąĄą║čé sub-ąĖąĮą┤ąĄą║čü ąöą╗ąĖąĮą░ ą▓ ą▒ąĖčéą░čģ ąŻą║ą░ąĘčŗą▓ą░ąĄčé ąĮą░:
0x1A01
1
0x64010110
=
0x6401
0x01
0x10
ąæą░ą╣čéčŗ 1, 2 PDO
0x1A01
2
0x64040120
=
0x6404
0x01
0x20
ąæą░ą╣čéčŗ 3, 4, 5, 6 PDO
ąĀąĄąĘčāą╗čīčéą░čéčŗ ą┐čĆąĖą┤čāčé ą▓ čüą╗ąĄą┤čāčÄčēąĄą╝ čüąŠąŠą▒čēąĄąĮąĖąĖ CAN:
PDO1 (tx)
ąśą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆ CAN, 11 ą▒ąĖčé ąæą░ą╣čé 1 ąæą░ą╣čé 2 ąæą░ą╣čé 3 ąæą░ą╣čé 4 ąæą░ą╣čé 5 ąæą░ą╣čé 6 ąæą░ą╣čé 7 ąæą░ą╣čé 8
ąØą░ą┐čĆąĖą╝ąĄčĆ, 0x181
LSB 0x6401
MSB 0x6401
LSB 0x6404
2-ą╣ 0x6404
3-ą╣ 0x6404
MSB 0x6404
ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ
ąśąĘą╝ąĄąĮąĄąĮąĖąĄ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ ąĮą░ PDO ą▓ąŠąĘą╝ąŠąČąĮąŠ, č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ čāąĘąĄą╗ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Pre-Operational. ąĢčüą╗ąĖ čāąĘąĄą╗ ąĖą╝ąĄąĄčé ąĮą░ ą▒ąŠčĆčéčā 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝čāčÄ ą┐ą░ą╝čÅčéčī, č鹊 ąŠąĮ ąĮčāąČą┤ą░ąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą▓ ąŠą┤ąĮąŠą║čĆą░čéąĮąŠą╣ ą┐ąĄčĆąĄą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ąĄčüą╗ąĖ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ. ąĢčüą╗ąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ ąĮą░ PDO ą┐ąŠč鹥čĆą┐ąĄą╗ąŠ ąĮąĄčāą┤ą░čćčā (čāąĘąĄą╗ ąĮąĄ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ Pre-Operational, ąŠą▒čŖąĄą║čé ąĮąĄ ąĖą╝ąĄąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ ąĖą╗ąĖ ąĖąĘ-ąĘą░ ą┤čĆčāą│ąŠą╣ ąŠčłąĖą▒ą║ąĖ), č鹊 čāąĘąĄą╗ ąŠčéą▓ąĄčćą░ąĄčé čüąŠąŠą▒čēąĄąĮąĖąĄą╝ 'Abort domain transfer'.
ąóąĖą┐ ą┐ąĄčĆąĄą┤ą░čćąĖ PDO . ą¤ąĄčĆąĄą┤ą░čćą░ PDO ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮą░ (ąĘą░ą┐čāčēąĄąĮą░) čĆą░ąĘąĮčŗą╝ąĖ čüą┐ąŠčüąŠą▒ą░ą╝ąĖ, ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čéąĖą┐ąŠą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ PDO. ą×ą┤ąĖąĮ ąĖąĘ ą╝ąĄč鹊ą┤ąŠą▓ - ą░čüąĖąĮčģčĆąŠąĮąĮą░čÅ ą┐ąĄčĆąĄą┤ą░čćą░. ąÉčüąĖąĮčģčĆąŠąĮąĮčŗą╣ PDO ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čāčēąĄąĮ čü ą┐ąŠą╝ąŠčēčīčÄ:
ŌĆó ąŚą░ą┐čĆąŠčüąŠą╝ Remote ąŠčé ą┤čĆčāą│ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (RTR).
ąöčĆčāą│ąŠą╣ ą╝ąĄč鹊ą┤ ąĘą░ą┐čāčüą║ą░ ą┐ąĄčĆąĄą┤ą░čćąĖ PDO - ą┐ąŠ ą┐ąŠą╗čāč湥ąĮąĖčÄ čüąŠąŠą▒čēąĄąĮąĖčÅ SYNC. ąŁč鹊čé ą▓ą░čĆąĖą░ąĮčé ą┐ąĄčĆąĄą┤ą░čćąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮ čĆą░ąĘąĮčŗą╝ąĖ čüą┐ąŠčüąŠą▒ą░ą╝ąĖ.
ąØąĄ čåąĖą║ą╗ąĖč湥čüą║ąĖ:
ŌĆó ą¤ąŠčüą╗ąĄ ą┐ąŠą╗čāč湥ąĮąĖčÅ ąĘą░ą┐čĆąŠčüą░ Remote ąŠčé ą┤čĆčāą│ąŠą│ąŠ čāąĘą╗ą░, ą║ąŠč鹊čĆčŗą╣ ą┤ąĄą╗ą░ąĄčé "ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮčŗą╣ ą▓ąĘą▓ąŠą┤" PDO.
ą”ąĖą║ą╗ąĖč湥čüą║ąĖ:
ŌĆó ą¤ąĄčĆąĄą┤ą░čćą░ PDO čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖ, ą▓ ąŠčéą▓ąĄčé ąĮą░ ą║ą░ąČą┤ąŠąĄ ą┐ąŠą╗čāč湥ąĮąĖąĄ 1, 2 (ąĖ čé. ą┤., ą┤ąŠ 240) čüąŠąŠą▒čēąĄąĮąĖą╣ SYNC.
ą×ą▒čŖąĄą║čéčŗ čüą╗ąŠą▓ą░čĆčÅ 1400H/1401H/1800H/1801H (ą┐ą░čĆą░ą╝ąĄčéčĆ ąŠą▒ą╝ąĄąĮą░ PDO), sub-ąĖąĮą┤ąĄą║čü 2 (čéąĖą┐ ą┐ąĄčĆąĄą┤ą░čćąĖ) ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé, ą║ą░ą║ ą▒čāą┤ąĄčé čüčĆą░ą▒ą░čéčŗą▓ą░čéčī ą┐ąĄčĆąĄą┤ą░čćą░ PDO:
ąóąĖą┐ ą┐ąĄčĆąĄą┤ą░čćąĖ
ąŻčüą╗ąŠą▓ąĖčÅ ą┤ą╗čÅ čüčĆą░ą▒ą░čéčŗą▓ą░ąĮąĖčÅ PDO:
ą£ąĄč鹊ą┤ ą┐ąĄčĆąĄą┤ą░čćąĖ PDO
SYNC
RTR
ąĪąŠą▒čŗčéąĖąĄ
0
A
A
ąĪąĖąĮčģčĆąŠąĮąĮąŠ, ąĮąĄ čåąĖą║ą╗ąĖč湥čüą║ąĖ
1..240
O
ąĪąĖąĮčģčĆąŠąĮąĮąŠ, čåąĖą║ą╗ąĖč湥čüą║ąĖ
241..251
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ
252
A
A
ąĪąĖąĮčģčĆąŠąĮąĮąŠ, ą┐ąŠčüą╗ąĄ RTR
253
O
ąÉčüąĖąĮčģčĆąŠąĮąĮąŠ, ą┐ąŠčüą╗ąĄ RTR
254
O
O
ąÉčüąĖąĮčģčĆąŠąĮąĮąŠ, ą┐ąŠ čüąŠą▒čŗčéąĖčÄ, čüą┐ąĄčåąĖčäąĖč湥čüą║ąŠą╝čā ą┤ą╗čÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čÅ
255
O
O
ąÉčüąĖąĮčģčĆąŠąĮąĮąŠ, ą┐ąŠ čüąŠą▒čŗčéąĖčÄ, čüą┐ąĄčåąĖčäąĖč湥čüą║ąŠą╝čā ą┤ą╗čÅ ą┐čĆąŠčäąĖą╗čÅ čāčüčéčĆąŠą╣čüčéą▓ą░
ą¤čĆąŠčäąĖą╗čī DS401 čāčüčéčĆąŠą╣čüčéą▓ą░ I/O ą┤ąĄą║ą╗ą░čĆąĖčĆčāąĄčé čéąĖą┐ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ PDO ą▓ ąĘąĮą░č湥ąĮąĖąĄ 255: ą┐ąĄčĆąĄą┤ą░čćą░ (ą▓čģąŠą┤ą░) PDO ą░čüąĖąĮčģčĆąŠąĮąĮą░čÅ, čāą┐čĆą░ą▓ą╗čÅąĄą╝ą░čÅ čüąŠą▒čŗčéąĖąĄą╝ (ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ ą▓čģąŠą┤ą░) ąĖą╗ąĖ ą┐ ąĘą░ą┐čĆąŠčüčā RTR. ą¤čĆąĖąĄą╝ (ą┤ą╗čÅ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▓čŗčģąŠą┤ąŠą▓) PDO čÅą▓ą╗čÅąĄčéčüčÅ ą░čüąĖąĮčģčĆąŠąĮąĮčŗą╝.
PDO inhibit time . ąÜąŠą│ą┤ą░ PDO čüčĆą░ą▒ą░čéčŗą▓ą░ąĄčé ą▓ ąŠčéą▓ąĄčé ąĮą░ ą║ą░ąČą┤ąŠąĄ čüąŠą▒čŗčéąĖąĄ I/O (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čāčĆąŠą▓ąĮčÅ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą▓čģąŠą┤ą░ ąĖą╗ąĖ ą┐čĆąĖąĄą╝ čüąĖą╝ą▓ąŠą╗ą░ č湥čĆąĄąĘ RS232), č鹊 ą▓ąŠąĘą╝ąŠąČąĮąŠ, čćč鹊 PDO ą▒čāą┤ąĄčé čüčĆą░ą▒ą░čéčŗą▓ą░čéčī čüą╗ąĖčłą║ąŠą╝ čćą░čüč鹊, čćč鹊 ą▓čŗąĘąŠą▓ąĄčé čćčĆąĄąĘą╝ąĄčĆąĮčŗą╣ čéčĆą░čäąĖą║ ą┐ąŠ čłąĖąĮąĄ CAN. ąöą╗čÅ ą┐čĆąĄą┤ąŠčéą▓čĆą░čēąĄąĮąĖčÅ čŹč鹊ą╣ čüąĖčéčāą░čåąĖąĖ ą▓ą▓ąĄą┤ąĄąĮ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčŗą╣ ą┐ą░čĆą░ą╝ąĄčéčĆ ą┐ąĄčĆąĄą┤ą░čÄčēąĖčģ PDO (ą┤ą╗čÅ čāąĘą╗ąŠą▓ čüąŠ ą▓čģąŠą┤ą░ą╝ąĖ), čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝ąŠąĄ ą▓čĆąĄą╝čÅ ąĘą░ą┐čĆąĄčéą░ (PDO inhibit time). ąŁč鹊 čüč湥čéčćąĖą║ čü č鹊čćąĮąŠčüčéčīčÄ 100 ą╝čü, ą║ąŠč鹊čĆčŗą╣ ąĘą░ą┐čĆąĄčēą░ąĄčé čüą╗ąĄą┤čāčÄčēčāčÄ ą┐ąĄčĆąĄą┤ą░čćčā PDO, ą┐ąŠą║ą░ ąĮąĄ ąĖčüč鹥č湥čé ąĘą░ą┤ą░ąĮąĮčŗą╣ ą┐ąĄčĆąĖąŠą┤ ą▓čĆąĄą╝ąĄąĮąĖ.
[ąĪčüčŗą╗ą║ąĖ ]
1 . ATLAS DCS CANopen Software description site:atlas.web.cern.ch.2 . CiA301: čüą╗ąŠą╣ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąĖ ą┐čĆąŠčäąĖą╗čī ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖąĖ CANopen .3 . CiA-401 site:can-cia.org.4 . CiA-404 site:can-cia.org.5 . ą×ą▒ąĘąŠčĆ ą┐čĆąŠč鹊ą║ąŠą╗ą░ CANopen .6 . Basics of CANopen site:ni.com.