| AT91SAM7X: контроллер CAN |
|
| Добавил(а) microsin | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
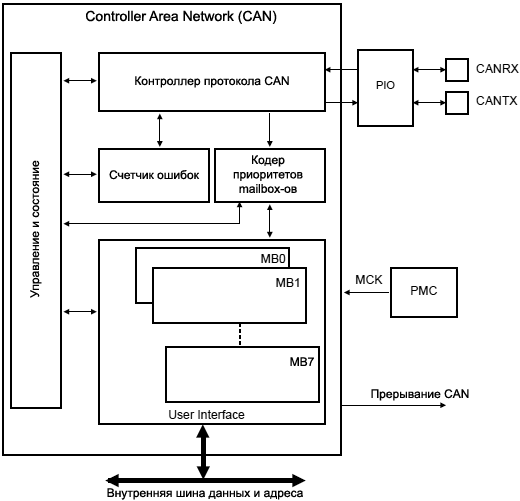
Здесь приведен раздел даташита Atmel [1], посвященный контроллеру CAN в микроконтроллерах ARM7 на ядре ARM7TDMI. Пример практического использования интерфейса CAN в этих микроконтроллерах см. в статье [2]. Контроллер CAN предоставляет все возможности, требуемые для последовательного обмена данными по протоколу CAN, как он был определен Robert Bosch GmbH, стандарт CAN ISO/11898A (2.0 Part A и 2.0 Part B) для высоких скоростей и ISO/11519-2 для низких скоростей. Контроллер CAN может обработать все типы фреймов (Data, Remote, Error и Overload), и достичь скоростей обмена до 1 Mbit/sec. К контроллеру CAN осуществляется доступ через регистры конфигурации. Реализовано 8 независимых объектов сообщений (так называемые почтовые ящики, mailbox). Любой mailbox может быть запрограммирован как блок буфера приема (даже непоследовательные буферы). Для приема определенных сообщений один или несколько объектов сообщений могут быть маскированы без участия в функционировании буфера. Когда буфер заполняется, генерируется прерывание. В соответствии с конфигурацией mailbox, первое принятое сообщение может быть заблокировано в регистрах контроллера CAN, пока приложение не подтвердит его, или это сообщение может быть отброшено новыми принятыми сообщениями. Любой mailbox может быть запрограммирован для передачи. Одновременно может быть разрешено несколько передающих mailbox-ов. Приоритет может быть задан для каждого mailbox независимо. Внутренний 16-битный таймер используется для привязки метки времени к каждому принятому и отправленному сообщению. Этот таймер начинает счет с момента разрешения работы контроллера CAN. Этот счетчик может быть сброшен приложением или автоматически после приема в последний mailbox, когда установлен Time Triggered Mode. Контроллер CAN предоставляет оптимизированные возможности для поддержки протокола Time Triggered Communication (TTC).
Рис. 36-1. Блок-схема контроллера CAN.
Рис. 36-2. Блок-диаграмма приложения CAN. [От чего зависит работа CAN] Порты ввода/вывода. Выводы, которыми контроллер CAN обменивается данными с внешним миром (см. таблицу 36-1), могут быть мультиплексированы с портами (выводами) микроконтроллера (ножки GPIO). Программист должен сначала запрограммировать контроллер PIO, чтобы присвоить нужные выводы CAN к своей функции как периферийного устройства CAN. Если сигналы CAN не используются приложением, то они могут быть запрограммированы контроллером PIO для других целей. Таблица 36-1. Выводы сигналов CAN у процессоров AT91SAM7X (AT91SAM7X128, AT91SAM7X256, AT91SAM7X512).
Управление питанием. Перед использованием CAN программист должен сначала разрешить тактирование контроллера CAN с помощью контроллера управления питанием (Power Management Controller, PMC). Для контроллера CAN имеется режим пониженного энергопотребления (Low-power Mode): если приложению не нужно работать через интерфейс CAN, то тактирование CAN может быть остановлено, и впоследствии запущено снова, когда CAN опять потребуется. Перед остановкой тактирования контроллер CAN должен быть переведен в режим Low-power для завершения текущей передачи. Для выхода из режима пониженного энергопотребления сначала запускается тактирование, и потом приложение должно запретить Low-power Mode контроллера CAN. Прерывания. Сигнал прерывания CAN может быть соединен с одним из внутренних источников продвинутого контроллера прерывания (Advanced Interrupt Controller, AIC). Использование прерывания CAN требует предварительного программирования AIC. Имейте в виду, что не рекомендуется использовать линию прерывания CAN в режиме чувствительности к перепаду. Практический пример программирования см. в статье [2]. [Обзор протокола CAN] Controller Area Network (CAN) является последовательным протоколом обмена данными с нескольким главными устройствами на шине (multi-master), который эффективно поддерживает управление в реальном времени с очень высоким уровнем безопасности на скоростях до 1 Mbit/s включительно. Протокол CAN поддерживает 4 различные типа фрейма: Data: эти фреймы переносят данные между узлами передатчика и приемника. Полная длина фрейма составляет 108 для стандартного фрейма и 128 бит для расширенного фрейма. Контроллер Atmel CAN предоставляет для CPU полный функционал протокола CAN V2.0 Part A и V2.0 Part B. Это минимизирует нагрузку CPU при осуществлении обмена по шине. Слой связи уровня данных (Data Link Layer) и часть физического слоя обрабатываются автоматически самим контроллером CAN. CPU читает или записывает данные или сообщения через mailbox-ы. Для каждого mailbox назначается идентификатор. Контроллер CAN создает или декодирует сообщения данных, чтобы построить или обработать фреймы data шины. Фреймы remote, error и overload автоматически обрабатываются контроллером CAN под общим управлением программы приложения. Организация mailbox. Модуль CAN имеет 8 буферов, которые называются mailbox-ами. Для каждого активного mailbox-а определяется идентификатор, который соответствует идентификатору CAN. Идентификаторы сообщения могут совпадать со стандартным идентификатором фрейма или расширенным идентификатором фрейма. Эти идентификаторы определяются первый раз при инициализации CAN, но могут быть динамически реконфигурироваться позже, так что mailbox может обслуживать новое семейство сообщений. Несколько mailbox-ов могут быть сконфигурированы с одинаковым ID. Каждый mailbox может быть сконфигурирован в режиме приема или передачи независимо от других mailbox-ов. Тип mailbox-а определяется полем MOT в регистре CAN_MMRx. Процедура приема или отбрасывания сообщения. Если установлено поле MIDE в регистре CAN_MIDx, то mailbox может обработать расширенный формат идентификатора; иначе mailbox поддерживает стандартный формат идентификатора. Как только принято новое сообщение, его идентификатор (ID) маскируется значением регистра CAN_MAMx и сравнивается со значением CAN_MIDx. Если сообщение принято (в том смысле, что не отфильтровано идентификатором), этот ID сообщения копируется в регистр CAN_MIDx.
Рис. 36-3. Процедура фильтрации приема сообщения. Если mailbox предназначен для приема нескольких сообщений (семейства сообщений) с разными ID, то маска в регистре CAN_MAMx должна маскировать нулями переменную часть в семействе идентификаторов ID. Как только сообщение принято, приложение должно декодировать маскированные биты в CAN_MIDx. Чтобы ускорить декодирование, маскированные биты группируются в регистре идентификатора семейства (family ID register, CAN_MFIDx). Например, если следующие идентификаторы обрабатываются одним и тем же mailbox-ом ID0 101000100100010010000100 0 11 00b то CAN_MIDx и CAN_MAMx этого mailbox-а должны быть инициализированы следующими значениями (напомню, что x соответствует номеру mailbox-а от 0 до 7): CAN_MIDx = 001 101000100100010010000100 x 11 xxb Если mailbox примет сообщение с ID6, то CAN_MIDx и CAN_MFIDx установятся следующим образом: CAN_MIDx = 001 101000100100010010000100 1 11 10b Таким образом, в регистре CAN_MFIDx находится номер сообщения в группе, в данном примере это будет число от 0 до 7, поскольку замаскировано 3 бита адреса. Эту возможность удобно использовать для быстрого декодирования адреса сообщения. Если приложение свяжет обработчик с каждым ID сообщения, то обработчики можно поместить в массив указателей на функцию: void (*pHandler[8])(void); Когда сообщение принимается, то соответствующий обработчик может быть вызван с использованием регистра CAN_MFIDx, и здесь уже не нужно проверять маскированные биты: unsigned int MFID0_register; // Get_CAN_MFID0_Register() вернет значение из регистра CAN_MFID0: MFID0_register = Get_CAN_MFID0_Register(); pHandler[MFID0_register](); Mailbox приема. Когда модуль CAN принимает сообщение, он смотрит на первый доступный mailbox по порядку, начиная с самого малого номера, и сравнивает его ID с ID принятого сообщения. Если такой mailbox найден, то сообщение сохраняется в его регистрах данных. В зависимости от конфигурации, этот mailbox запрещается на столько времени, пока принятое сообщение не будет подтверждено приложением, или пока не будут приняты новые сообщения с тем же ID, тогда эти новые сообщения с тем же ID перезапишут ранее принятые сообщения (прием с перезаписью). Можно также сконфигурировать mailbox в потребительском режиме (Consumer Mode). В этом режиме после каждого запроса передачи будет автоматически отправлен фрейм remote. Первый принятый ответ сохраняется в соответствующих регистрах данных. Несколько mailbox-ов могут быть соединены в цепочку для буфера приема. Они должны быть сконфигурированы с одинаковым ID в режиме приема, кроме последнего mailbox, который может быть сконфигурирован в режиме приема с перезаписью (Receive with Overwrite Mode). Этот последний mailbox может использоваться для детектирования переполнения буфера.
Mailbox передачи. Когда передается сообщение, длина сообщения и его данные записываются в передающий mailbox с корректным идентификатором. Для каждого передающего mailbox назначается приоритет. Контроллер автоматически отправляет в первую очередь сообщение с самым высоким приоритетом (приоритет настраивается в поле PRIOR регистра CAN_MMRx). Также есть возможность сконфигурировать mailbox в режиме продюсера (Producer Mode). В этом режиме когда принят фрейм remote, то данные mailbox-а будут отправлены автоматически. Путем разрешения этого режима продюсер может использовать только один mailbox вместо двух: один для детектирования фрейма, и один для отправки ответа.
Блок обработки времени. В контроллер CAN интегрирован автоматически инкрементирующийся 16-битный таймер. Счетчик в нем управляется по тактам бит шины CAN. Таймер разрешается вместе с разрешением контроллера CAN (когда устанавливается бит CANEN в регистре CAN_MR). Счетчик таймера автоматически очищается в следующих случаях: • После сброса. Приложение может также сбросить внутренний таймер установкой бита TIMRST в регистре CAN_TCR. Текущее значение внутреннего таймера всегда доступно путем чтения регистра CAN_TIM. Когда таймер при свободном счете переходит от значения FFFFh к 0000h, то в регистре CAN_SR устанавливается флаг переполнения таймера TOVF (Timer Overflow). Бит TOVF в регистре CAN_SR очищается при чтении регистра CAN_SR. В зависимости от соответствующей маски прерывания в регистре CAN_IMR, может быть сгенерировано прерывание при установке бита TOVF. В сети CAN некоторые устройства CAN могут иметь счетчик, у которого разрядность больше. В этом случае приложение может также решить заморозить внутренний счетчик таймера, когда он достигнет FFFFh, и ждать условия перезапуска от другого устройства. Эта возможность разрешается установкой бита TIMFRZ в регистре CAN_MR. Регистр CAN_TIM заморозится на значении FFFFh. Ранее описанные условия очистки счетчика перезапустят таймер. Сработает прерывание переполнения таймера (TOVF). Чтобы отслеживать активность шины CAN, регистр CAN_TIM копируется в регистр CAN_TIMESTP после каждого начала фрейма или окончания фрейма, и когда сработает прерывание TSTP. Если установлен бит TEOF в регистре CAN_MR, то значение счетчика захватывается по каждому окончанию фрейма, иначе значение будет захватываться в начале фрейма (Start Of Frame). В зависимости от соответствующей маски в регистре CAN_IMR, генерируется прерывание, когда установлен бит TSTP в регистре CAN_SR. Бит TSTP очищается чтением регистра CAN_SR. Блок обработки времени может работать в одном из двух следующих режимов: • Timestamping: значение внутреннего счетчика таймера захватывается на каждом начале фрейма или на каждом конце фрейма. Режим Timestamping разрешается очисткой поля TTM в регистре CAN_MR. Режим Time Triggered разрешается установкой поля TTM в регистре CAN_MR. [Стандартные функции CAN 2.0] Все контроллеры на шине CAN должны иметь одинаковую скорость бит и длину бита. На разных тактовых частотах отдельных контроллеров скорость бит подстраивается с помощью сегментов времени. Параметры интервалов времени формирования бита. Стандарт протокола CAN делит номинальное время бита на 4 разных сегмента:
Рис. 36-4. Разделение времени бит шины CAN. TIME QUANTUM: квант времени (TIME QUANTUM, TQ) это фиксированная единица времени, вычисленная от периода MCK. Общее количество TIME QUANTA во времени бита программируется от 8 до 25. SYNC SEG: сегмент синхронизации. Эта часть бит времени используется для синхронизации различных узлов шины. Ожидается, что перепад сигнала появится в этом сегменте времени. Его длина равна 1 TQ. PROP SEG: сегмент распространения. Эта часть времени бита используется для компенсации физической задержки в пределах сети. Это двойная сумма времени распространения сигнала по шине, задержки входного компаратора и задержки выходного драйвера. Программируется от 1 до 8 TQ. Этот параметр определяется в поле PROPAG регистра настройки скорости CAN (CAN Baudrate Register, CAN_BR). PHASE SEG1, PHASE SEG2: сегменты фазы 1 и 2. Это сегменты фазы буфера, используемые для компенсации ошибок фазы перепадов. Эти сегменты могут быть продлены (PHASE SEG1) или укорочены (PHASE SEG2) при ресинхронизации. PHASE SEG1 программируется в пределах от 1 до 8 TQ. PHASE SEG2 будет длиной как минимум времени обработки информации (Information Processing Time, IPT), и не может быть больше чем длина PHASE SEG1. Эти параметры определены в полях PHASE1 и PHASE2 регистра настройки скорости CAN (CAN_BR). IPT: время обработки информации. Время обработки информации (Information Processing Time, IPT) это время, требуемое для логики, чтобы определить уровень бита во время выборки сигнала на шине данных. Интервал IPT начинается на точке выборки, измеряется в TQ и зафиксирован на величине 2 TQ для Atmel CAN. Поскольку PHASE SEG2 также начинается в точке выборки и в последнем сегменте времени бита, то PHASE SEG2 не должен быть меньше IPT. SAMPLE POINT: точка выборки. Точка выборки это момент во времени, когда уровень сигнала на шине считывается и интерпретируется как значение соответствующего бита. Место этого момента по окончании PHASE_SEG1. SJW: ширина прыжка ресинхронизации. Этот параметр определяет предел удлинения или укорачивания сегментов фазы. SJW программируется до минимума PHASE SEG1 и 4 TQ. Если поле SMP в регистре CAN_BR установлено, то приходящий поток бит оцифровывается три раза за половину периода тактовой частоты CAN, центрируясь на точке выборки. В контроллере CAN длина бита на шине CAN определяется параметрами BRP, PROPAG, PHASE1 и PHASE2. tBIT = tCSC + tPRS + tPHS1 + tPHS2 Квант времени (TQ) вычисляется по следующей формуле: tCSC = (BRP + 1) / MCK Примечание: поле BRP должно быть в диапазоне field [1, 0x7F], например значение BRP = 0 не допустимо. tPRS = tCSC * (PROPAG + 1) Чтобы компенсировать сдвиги фазы между генераторами тактов отдельных контроллеров на шине, контроллер CAN должен ресинхронизироваться по любому соответствующему перепаду сигнала текущей передачи. Ресинхронизация укорачивает или удлиняет время бита таким образом, чтобы позиция точки оцифровки сигнала (точка выборки) сдвигалась в соответствии с детектированным перепадом. Прыжок ресинхронизации (SJW) определяет максимальное время, на которое период бита может быть укорочен или удлинен при ресинхронизации. tSJW = tCSC * (SJW + 1)
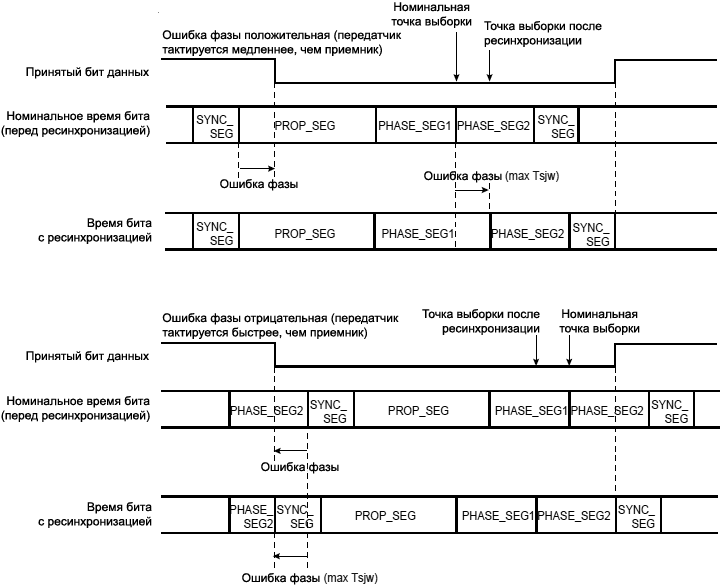
Рис. 36-5. Временные диаграммы бит шины CAN. MCK = 48 МГц Скорость CAN = 500 kbit/s => время бита = 2 us Общее количество кванта времени во времени бита должно быть представлено значением между 8 и 25. Если мы фиксируем время бита на значении 16, то квант времени получится: Tcsc = 1 квант времени = время бита / 16 = 125 ns Время распространения в сегменте связи равно двойной сумме составляющих задержки на всем пути сигнала по шине, задержки приемника и задержки драйвера: Tprs = 2 * (50+30+110) ns = 380 ns = 3 Tcsc Оставшееся время для двух сегментов фазы: Tphs1 + Tphs2 = время бита - Tcsc - Tprs = (16 - 1 - 3)Tcsc Из-за того, что это число четное, мы выбираем Tphs2 = Tphs1 (иначе мы должны выбрать Tphs2 = Tphs1 + Tcsc) Tphs1 = Tphs2 = (12/2) Tcsc = 6 Tcsc Прыжок ресинхронизации должен быть представлен значением между 1 Tcsc и минимальным значением из 4 Tcsc и Tphs1. Мы выберем максимальное значение: Tsjw = Min(4 Tcsc,Tphs1) = 4 Tcsc Окончательное значение для регистра скорости: CAN_BR = 0x00053255 Синхронизация на шине CAN. Различают два типа синхронизации: "жесткая" в момент начала фрейма, и "ресинхронизация" внутри фрейма. После жесткой синхронизации время бита перезапускается по окончании сегмента SYNC_SEG segment, независимо от имеющейся ошибки фазы. Ресинхронизация приводит к уменьшению или увеличению времени бита так, что позиция выборки сдвигается в соответствии с детектированными перепадом сигнала. Эффект ресинхронизации тот же, что и у жесткой синхронизации, когда величина ошибки фазы на перепаде дает ресинхронизацию меньше или равной запрограммированной величине ширины прыжка ресинхронизации (tSJW). Когда величина ошибки фазы больше, чем ширина прыжка ресинхронизации, и • ошибка фазы положительна, тогда PHASE_SEG1 удлиняется на величину, равную ширине прыжка ресинхронизации.
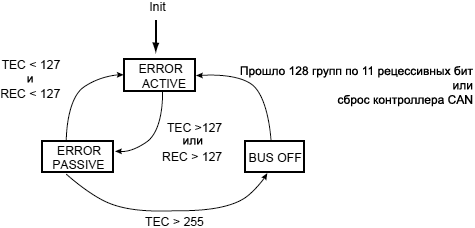
Рис. 36-6. Ресинхронизация CAN. Режим Autobaud. Функция автоопределения скорости (autobaud) разрешается путем установки поля ABM в регистре CAN_MR. В этом режиме контроллер CAN только слушает сигналы на шине без подтверждения принятых сообщений. При этом обновляются флаги ошибок. Параметры времени бита могут быть подстроены, пока ошибки не исчезнут (т. е. пока не найдена хорошая конфигурация). В этом режиме счетчик ошибок замораживается. Чтобы перейти обратно в стандартный режим, бит ABM в регистре CAN_MR должен быть очищен. Детектирование ошибок. Имеется 5 различных типов ошибок, которые не являются взаимоисключающими. Каждая ошибка касается только к специфичным полям фрейма данных CAN (обратитесь к стандарту Bosch CAN): • Ошибка CRC (бит CERR в регистре CAN_SR): с применением CRC передатчик вычисляет контрольную сумму для последовательности бит от бита начала фрейма (Start of Frame bit) до окончания поля данных. Последовательность бит CRC передается в поле CRC фрейма Data или Remote. Для абстрагирования от среды передачи спецификация CAN избегает описывать двоичные значения как «0» и «1». Вместо этого применяются термины «рецессивный» и «доминантный», при этом подразумевается, что при передаче одним узлом сети рецессивного бита, а другим доминантного, принят будет доминантный бит. Например, при реализации физического уровня на радиоканале отсутствие сигнала означает рецессивный бит, а наличие — доминантный; тогда как в типичной реализации проводной сети рецессив бывает при наличии сигнала, а доминант, соответственно, при отсутствии. Стандарт сети требует от «физического уровня», фактически, единственного условия: чтобы доминантный бит мог подавить рецессивный, но не наоборот. Например, в оптическом волокне доминантному биту должен соответствовать «свет», а рецессивному — «темнота». В электрическом проводе может быть так: рецессивное состояние — высокое напряжение на линии (от источника с большим внутренним сопротивлением), доминантное — низкое напряжение (доминантный узел сети «подтягивает» линию на землю). Если линия находится в рецессивном состоянии, перевести её в доминантное может любой узел сети (включив свет в оптоволокне или закоротив высокое напряжение). Наоборот — нельзя (включить темноту нельзя). Другой пример - организация выхода драйвера с открытым коллектором (стоком). Для этого случая рецессивным будет бит с уровнем лог. 1 (когда выходной ключ драйвера закрыт), а доминантным будет бит с уровнем лог. 0 (когда выходной ключ драйвера открыт). Ограничение ошибок (Fault Confinement). Чтобы отделить друг от друга временные и постоянные отказы, контроллер CAN имеет два счетчика ошибок: REC (Receive Error Counter, счетчик ошибок приема) и TEC (Transmit Error Counter, счетчик ошибок передачи). Эти два счетчика инкрементируются при детектировании ошибок, и декрементируются при корректных передачах или приемах соответственно. В зависимости от значений счетчиков меняется состояние узла: начальное состояние контроллера CAN будет Error Active, это означает, что контроллер может отправить флаги Error Active. Контроллер меняет состояние на Error Passive, если есть накопление ошибок. Если контроллер CAN терпит отказ, или если есть экстремальное накопление ошибок, то состояние переходит в выключение шины, Bus Off.
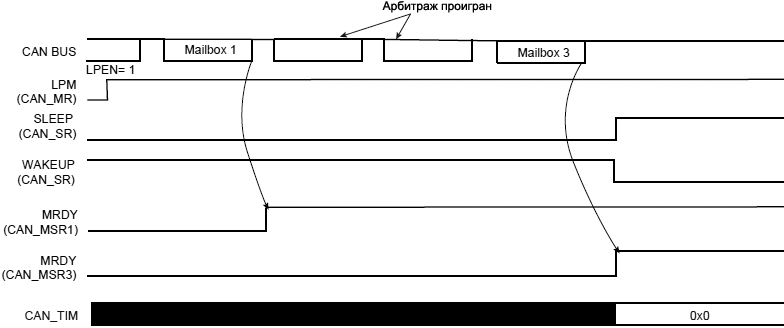
Рис. 36-7. Режим ошибки линии (Line Error Mode). Узел Error Active принимает участие в обмене по шине, и посылает фрейм активной ошибки, когда контроллер CAN детектирует ошибку. Узел Error Passive не может отправлять фрейм активной ошибки. Он принимает участие в обмене по шине, но когда произошла ошибка, будет отправлен фрейм пассивной ошибки. Также, после передачи, блок Error Passive ждет перед началом будущей передачи. Блоку Bus Off не позволено никак влиять на шину. Для ограничения ошибок реализовано два счетчика ошибок (TEC и REC). Эти счетчики доступны через регистр CAN_ECR. Состояние контроллера CAN автоматически обновляется в соответствии со значением этих счетчиков. Если контроллер CAN находится в состоянии Error Active, то устанавливается бит ERRA в регистре CAN_SR. Будет заказан запуск соответствующего прерывания, если оно не замаскировано в регистре CAN_IMR. Если контроллер CAN в режиме Error Passive, то устанавливается бит ERRP в регистре CAN_SR, и остается заказанным прерывание, если в регистре CAN_IMR установлен бит ERRP. Если CAN находится в режиме Bus Off, то устанавливается бит BOFF в регистре CAN_SR. Как и для битов ERRP и ERRA, ожидается обработка прерывания, пока бит BOFF установлен в регистре CAN_IMR. Когда один из счетчиков ошибок превысит значение 96, увеличивающаяся скорость возникновения ошибок показывается битом WARN в регистре CAN_SR, но узел остается в состоянии Error Active. Соответствующее прерывание ожидает обработки, когда это прерывание установлено в регистре CAN_IMR. Про ограничение ошибок (fault confinement) подробнее см. спецификацию стандарта Bosch CAN v2.0. Обработчик прерывания ошибки. Биты WARN, BOFF, ERRA и ERRP (в регистре CAN_SR) представляют текущее состояние шины represent CAN, и эти биты не работают по принципу защелки. Эти биты напрямую отражают текущие значения счетчиков TEC и REC (находящихся в регистре CAN_ECR), как это описано в предыдущей секции "Ограничение ошибок (Fault Confinement)". На базе этого, если эти биты используются как прерывание, пользовательский код может войти в прерывание и не увидеть соответствующее состояние в регистре статуса, если счетчики TEC и REC поменяли свое значение. Когда произошел вход в режим Bus Off, единственный способ выйти из этого состояния - 128 возникновений 11 последовательных рецессивных бит, или сброс контроллера CAN. В режиме Error Active пользователь прочитает: ERRA = 1 В режиме Error Passive пользователь прочитает: ERRA = 0 В режиме Bus Off пользователь прочитает: ERRA = 0 Пользовательский код с целью обработки прерывания CAN должен сделать следующее: • В каждый момент времени разрешать прерывание только одного режима. Перегрузка (Overload). Перегрузка фрейма предоставляется для запроса узлом приемника задержки следующего фрейма Data или Remote ("Request overload frame", запрос перегрузки фрейма) или для сигнализации об определенных условиях ошибки ("Reactive overload frame", реактивная перегрузка фрейма), что соответственно связано с полем перерыва (intermission). Фреймы реактивной перегрузки посылаются после детектирования следующих условий ошибок: • Детектирование доминантного бита во время первых двух бит поля перерыва (intermission). Контроллер CAN может автоматически генерировать запрос фрейма перегрузки (overload frame) после каждого сообщения, отправленного в один из почтовых ящиков (mailbox) контроллера CAN. Эта функция разрешена установкой бита OVL в регистре CAN_MR. Фреймы реактивной перегрузки обрабатываются контроллером CAN автоматически, даже если бит OVL в регистре CAN_MR не установлен. Флаг перегрузки генерируется точно таким же способом, как и флаг ошибки, но счетчики не инкрементируется. [Режим пониженного энергопотребления (Low-power Mode)] В режиме Low-power контроллер CAN не может передавать или принимать сообщения. Все почтовые ящики (mailbox) не активны. В режиме Low-power установлен сигнал SLEEP в регистре CAN_SR; иначе установлен сигнал WAKEUP в регистре CAN_SR. Эти два поля взаимоисключающие, за исключением состояния после сброса контроллера CAN (после сброса оба бита WAKEUP и SLEEP залипают в состоянии 0). После сброса при включении питания режим Low-power запрещен и бит WAKEUP в регистре CAN_SR установлен только после 11 следующих друг за другом рецессивных бит на шине. Разрешение Low-power Mode. Программа приложения может разрешить режим Low-power установкой бита LPM в глобальном регистре CAN_MR. Контроллер CAN войдет в режим Low-power, как только будут переданы все ожидающие отправки сообщения. Когда контроллер CAN входит в режим Low-power, устанавливается сигнал SLEEP в регистре CAN_SR. В зависимости от соответствующей маски в регистре CAN_IMR, будет сгенерировано прерывание при установке бита SLEEP. Сигнал SLEEP в регистре CAN_SR автоматически очищается, когда установится бит WAKEUP. Сигнал WAKEUP автоматически очищается, когда SLEEP устанавливается. Прием запрещен, когда сигнал SLEEP устанавливается в лог. 1 в регистре CAN_SR. Важно отметить, что сообщения с более высоким приоритетом, чем последнее переданное сообщение могут быть получены между выдачей команды для установки бита LPM и входом в режим Low-power. Как только произведен вход в режим Low-power, тактирование контроллера CAN может быть выключено программированием встроенного контроллера управления питанием (Power Management Controller, PMC). Контроллер CAN будет потреблять только статический ток. Счетчики ошибок запрещены, когда сигнал SLEEP установится в лог.1. Таким образом, чтобы войти в режим Low-power, программа приложения должна: • Установить поле LPM в регистре CAN_MR. После установки бита SLEEP может быть выключена тактовая частота контроллера CAN. Это выполняется программированием PMC.
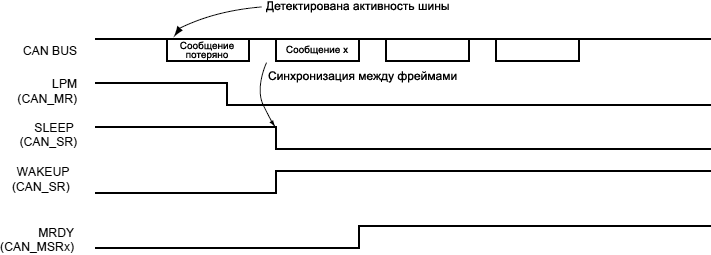
Рис. 36-8. Разрешение Low-power Mode. Выход из Low-power Mode. Контроллер CAN может проснуться после детектирования активности на шине CAN. Детектирование активности шины осуществляется внешним модулем, который может быть встроен в чип микроконтроллера. Когда получено оповещение об активности шины CAN, программное обеспечение запрещает режим Low-power путем программирования контроллера CAN. Чтобы запретить режим Low-power, программа приложения должна: • Разрешить тактирование контроллера CAN. Это осуществляется программированием PMC. Контроллер CAN синхронизируется самостоятельно по активности шины путем проверки 11 последовательных "рецессивных" бит. Как только синхронизация произошла, устанавливается флаг WAKEUP в регистре CAN_SR. В зависимости от соответствующей маски в регистре CAN_IMR, генерируется прерывание при установке бита WAKEUP. Бит SLEEP в регистре CAN_SR автоматически сбрасывается в лог. 0, когда бит WAKEUP устанавливается в лог. 1. И наоборот, сигнал WAKEUP автоматически сбросится в лог. 0, когда установится в лог. 1 бит SLEEP. Если по шине не отправляется сообщение, тогда контроллер CAN может отправить сообщений на 11 бит позже запрета режима Low-power. Если имеется активность на шине, когда режим Low-power запрещен, то контроллер CAN синхронизируется по активности шины в следующем межкадровом промежутке. Предыдущее сообщение теряется (см. рис. 36-9).
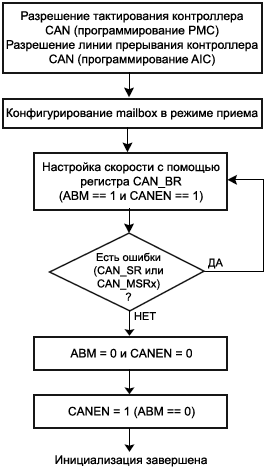
Рис. 36-9. Запрет Low-power Mode. [Инициализация контроллера CAN] После сброса при включении питания контроллер CAN запрещен. Активизация тактирования контроллера CAN должна быть запущена с помощью контроллера управления питанием (Power Management Controller, PMC), и линия прерывания контроллера CAN должна быть разрешена с помощью контроллера прерывания (AIC). Контроллер CAN должен быть инициализирован в соответствии с параметрами сети CAN. Регистр CAN_BR определяет точку выборки во время периода времени бита. CAN_BR должен быть установлен перед тем, как контроллер CAN разрешен установкой бита CANEN в регистре CAN_MR. Контроллер CAN разрешается установкой бита CANEN в регистре CAN_MR. На этой стадии внутренняя машина состояний контроллера CAN сбрасывается, счетчики ошибок сбрасываются в 0, флаги ошибок сбрасываются в 0. Как только контроллер CAN разрешен, синхронизация шины осуществляется автоматически сканированием 11 рецессивных бит. Бит WAKEUP в регистре CAN_SR автоматически устанавливается в 1, когда контроллер CAN засинхронизировался (WAKEUP и SLEEP находятся в лог. 0 сразу после сброса). Контроллер CAN может начать прослушивать сеть в режиме Autobaud. В этом случае счетчики ошибки заблокированы, и mailbox может быть сконфигурирован в режиме приема (Receive Mode). Путем сканирования флагов ошибок значение регистра CAN_BR синхронизируется с сетью. Как только будет обнаружено отсутствие ошибок, приложение запрещает режим Autobaud очисткой бита ABM в регистре CAN_MR.
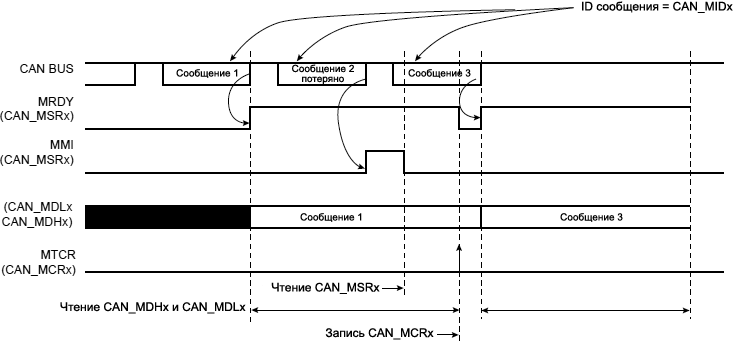
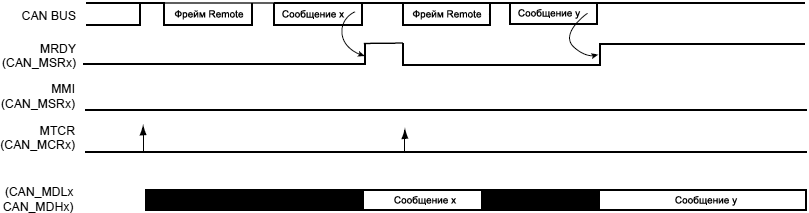
Рис. 36-10. Возможная процедура инициализации. [Обработка прерываний контроллера CAN] Имеется 2 типа прерываний. Один тип прерывания связан с получением сообщения, и другой тип обрабатывает ошибки или связанные с системой источники прерывания. Все источники прерывания могут маскироваться записью лог. 1 в соответствующие поля регистра CAN_IDR (маскирование означает запрет прерывания). Прерывания могут быть демаскированы (разрешены) записью лог. 1 в соответствующие поля регистра CAN_IER. После сброса при включении питания все источники прерывания запрещены (маскированы). Текущее состояние маски может быть проверено чтением регистра CAN_IMR. Чтение регистра CAN_SR дает состояние всех источников прерывания. Следующие события могут инициировать одно из двух видов прерываний: • Прерывание, связанное с объектом сообщения - Для приложения доступны регистры данных в объекте почтового ящика. В режиме приема (Receive Mode) было принято новое сообщение. В режиме передачи (Transmit - Mode) сообщение было успешно отправлено. • Системные прерывания - Прерывание Bus off: модуль CAN вошел в состояние выключения шины. Все прерывания очищаются путем очистки их источника, за исключением прерывания от переполнения счетчика внутреннего таймера и прерывания метки времени. Эти прерывания очищаются чтением регистра CAN_SR. [Обработка сообщений контроллера CAN] Обработка приема. Для конфигурирования почтовых ящиков (mailbox) с целью приема сообщений доступно 2 режима - режим приема (Receive Mode) и режим приема с перезаписью (Receive with Overwrite Mode). В Receive Mode первое принятое сообщение сохраняется в регистре данных mailbox. В Receive with Overwrite Mode последнее принятое сообщение сохраняется в mailbox. Простой mailbox приема. Mailbox находится в Receive Mode, как только сконфигурировано поле MOT в регистре CAN_MMRx. Перед разрешением Receive Mode должны быть установлены идентификатор сообщения (Message ID) и маска допустимости сообщения (Message Acceptance Mask). После того, как Receive Mode разрешен, флаг MRDY в регистре CAN_MSR автоматически очищается, пока не будет принято первое сообщение. Когда первое сообщение было принято mailbox, установится флаг MRDY. При установке флага MRDY будет ожидать обработки прерывание. Это прерывание может быть маскировано в зависимости от флага mailbox в глобальном регистре CAN_IMR. Данные сообщения сохраняются в регистре данных mailbox, пока программа приложения не оповестит, что обработка принятых данных окончена. Это осуществляется запросом новой команды перемещения данных с установкой флага MTCR в регистре CAN_MCRx. Это автоматически очистит флаг MRDY. Флаг MMI в регистре CAN_MSRx оповестит программу, что сообщение было потеряно mailbox-ом. Этот флаг устанавливается, когда сообщения были приняты, но установлен флаг MRDY в регистре CAN_MSRx. Этот флаг очищается чтением регистра CAN_MSR. Mailbox, настроенный в Receive Mode, предотвращает перезапись первого сообщения новыми, пока установлен флаг MRDY в регистре CAN_MSRx. См. рис. 36-11.
Рис. 36-11. Mailbox приема. Примечание: в случае архитектуры ARM, регистры CAN_MSRx, CAN_MDLx, CAN_MDHx могут быть прочитаны с использованием оптимизированной инструкции LDM ассемблера. Почтовый ящик в режиме приема с перезаписью (Receive with Overwrite Mailbox). Для установки этого режима также требуется конфигурирования поля MOT регистра CAN_MMRx. Также перед разрешением приема должны быть установлены идентификатор сообщения (Message ID) и маска допустимости сообщения (Message Acceptance Mask). После того, как прием разрешен, флаг MRDY в регистре CAN_MSR автоматически очищается, пока не будет принято первое сообщение. Когда первое сообщение было принято mailbox, установится флаг MRDY. При установке флага MRDY будет ожидать обработки прерывание. Это прерывание может быть маскировано в зависимости от флага mailbox в глобальном регистре CAN_IMR. Если новое сообщение было принято, когда флаг MRDY установлен, то это новое сообщение будет сохранено в регистре данных mailbox, перезаписывая старое сообщение. Флаг MMI в регистре CAN_MSRx оповестит программное обеспечение, что сообщение было отброшено mailbox-ом. Этот флаг очищается чтением регистра CAN_MSR. Контроллер CAN может сохранить новое сообщение в регистрах данных CAN (это регистры CAN_MDHx и CAN_MDLx), когда приложение их считывает. Чтобы проверить, что CAN_MDHx и CAN_MDLx не принадлежат различным сообщениям, приложение должно проверить поле MMI в регистре CAN_MSRx перед и после чтения CAN_MDHx и CAN_MDLx. Если флаг MMI установился опять после того, как регистры данных были прочитаны, программа приложения должна перечитать регистры CAN_MDHx и CAN_MDLx (см. рис. 36-12).
Рис. 36-12. Почтовый ящик, работающий на прием с перезаписью (Receive with Overwrite Mailbox). Соединение почтовых ящиков в цепочку (Chaining Mailboxes). Несколько mailbox-ов можно использовать для приема буфера, разделенного на несколько сообщений с одинаковым ID. В этом случае mailbox с самым маленьким номером будет обработан первым. В режимах обычного приема и приема с перезаписью, поле PRIOR в регистре CAN_MMRx не оказывает эффекта. Если Mailbox 0 и Mailbox 5 приняли сообщение с одинаковым ID, то первое из этих двух сообщений будет находиться в Mailbox 0, и второе сообщение будет находиться в Mailbox 5. Mailbox 0 должен быть сконфигурирован в режиме простого приема (Receive Mode, т. е. сохраняется первое принятое сообщение) и Mailbox 5 должен быть сконфигурирован в режиме приема с перезаписью (Receive with Overwrite Mode). Mailbox 0 не может быть сконфигурирован в режиме приема с перезаписью, иначе все сообщения попадут в этот mailbox, и Mailbox 5 никогда не будет обрабатываться. Если несколько mailbox-ов соединяются в цепочку для приема буфера с разделением на несколько сообщений, то все mailbox-ы, за исключением последнего (у которого самый большой порядковый номер) должны быть сконфигурированы в режиме приема. Первое принятое сообщение попадет в первый mailbox, второе будет отклонено первым и попадет во второй mailbox, и т. д., так что последнее сообщение будет принято последним mailbox и будет отклонено предыдущим (см. рис. 36-13).
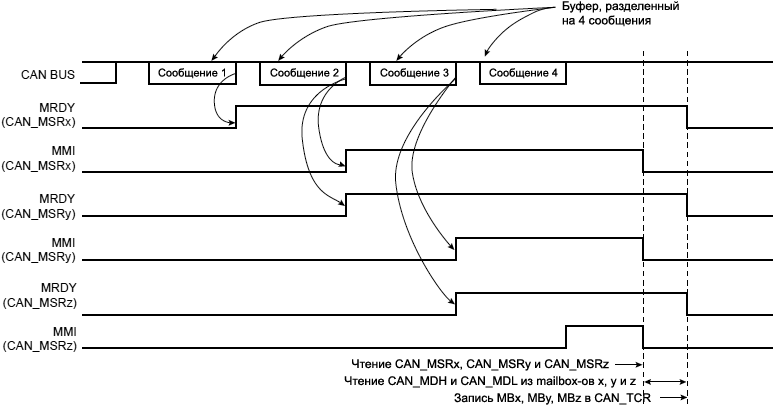
Рис. 36-13. Соединение 3 почтовых ящиков в цепочку, чтобы разделить принимаемый буфер на 3 сообщения. Если количества почтовых ящиков недостаточное (установился флаг MMI в последнем mailbox), пользователь должен прочитать все данные, принятые в последнем mailbox, чтобы получить все сообщения разделенного буфера (см. рис. 36-14).
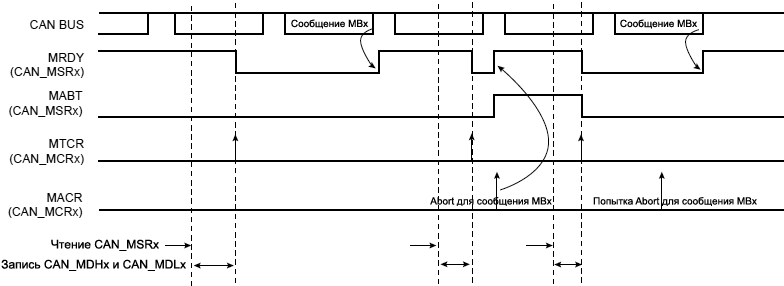
Рис. 36-14. Соединение 3 почтовых ящиков в цепочку, чтобы разделить принимаемый буфер на 4 сообщения. Обработка передачи. Для конфигурирования mailbox в режиме передачи (Transmit Mode) также требуется соответствующая настройка поля MOT регистра CAN_MMRx. Также требуется установить Message ID и Message Acceptance mask, чтобы определить получателя сообщения. После того, как режим передачи разрешен, автоматически установится флаг MRDY в регистре CAN_MSR, пока не будет отправлена первая команда. Когда флаг MRDY установлен, программа приложения может подготовить сообщение к отправке путем записи регистров CAN_MDx. Сообщение будет передано, как только программа запросит команду передачи установкой бита MTCR, и установит длину сообщения в регистре CAN_MCRx. Флаг MRDY остается в состоянии 0 так долго, пока сообщение не отправлено или его передача оборвана. Важно отметить, что нельзя обращаться к регистрам данных mailbox, пока флаг MRDY очищен. Когда флаг MRDY установится, будет ожидать своей обработки прерывание mailbox. Это прерывание может быть замаскировано в зависимости от соответствующего флага mailbox в глобальном регистре CAN_IMR. Можно также отправить фрейм remote установкой бита MRTR вместо установки поля MDLC. Ответ на фрейм remote обрабатывается другим mailbox-ом приема. В этом случае устройство работает как потребитель данных, но с помощью двух mailbox-ов. Можно обработать эмиссию фрейма remote и прием ответа, используя только один mailbox, сконфигурированный в режиме потребителя (Consumer Mode). Подробнее см. секцию "Обработка фреймов Remote". Несколько сообщений в одно и то же время могут конкурировать за доступ к шине, тогда задействуется арбитраж. В этом случае первым будет отправлено сообщение с самым высоким приоритетом. Несколько команд запросов на передачу могут быть сгенерированы одновременно путем установки битов MBx в регистре CAN_TCR. Приоритет настраивается в поле PRIOR регистра CAN_MMRx. Приоритет 0 это самый высокий приоритет, приоритет 15 самый низкий. Таким образом, можно установить часть ID сообщения для установки поля PRIOR. Если два mailbox-а имеют одинаковый приоритет, то сначала будет отправлено сообщение из mailbox с меньшим порядковым номером. Так что если mailbox 0 и mailbox 5 имеют одинаковый приоритет, и одновременно имеют для отправки сообщение, то сначала будет отправлено сообщение из mailbox 0. Установка бита MACR в регистре CAN_MCRx обрывает передачу. Передаче нескольких mailbox-ов может быть прервана записью полей MBx в регистре CAN_MACR. Если сообщение отправляется, когда установлена команда обрыва передачи, то приложение оповещается установкой бита MRDY, но не бита MABT в регистре CAN_MSRx. Иначе, если сообщение не отправлено, то биты MRDY и MABT устанавливаются в регистре CAN_MSR. Когда арбитраж на шине потерян для сообщения mailbox-а, контроллер CAN пытается выиграть следующий арбитраж шины с таким же сообщением, если него все еще есть самый высокий приоритет. Сообщения отправляются и предпринимается автоматическая повторная переотправка, пока для них не будет выигран арбитраж шины. Эта функция может быть запрещена путем установки бита DRPT в регистре CAN_MR. В этом случае если сообщение не было отправлено первый раз и передано трансиверу CAN, то оно автоматически обрывается. Устанавливается флаг MABT в регистре CAN_MSRx до следующей команды передачи. На рис. 36-15 показано, как делаются 3 попытки сообщения MBx (MRDY в MBx установлен в 0). Первое сообщение MBx отправлено, второе оборвано и для последнего делается попытка оборвать передачу, но слишком поздно, потому что оно уже было передано трансиверу CAN.
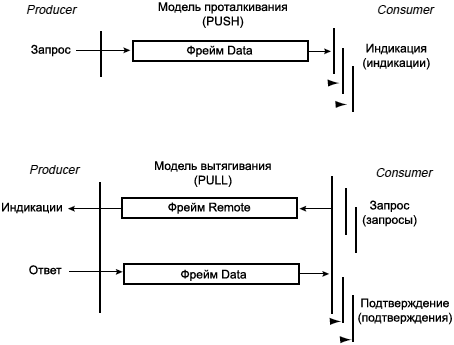
Рис. 36-15. Обработка передачи. Обработка фреймов Remote. Модель продюсера / потребителя (Producer / consumer) эффективна в контексте обработки широковещательных сообщений. Модель проталкивания (push) позволяет продюсеру выполнять широковещание для сообщений; модель вытягивания (pull) позволяет потребителю запрашивать сообщения.
Рис. 36-16. Модель Producer / Consumer. В режиме Pull потребитель посылает фрейм remote продюсеру. Когда продюсер получил фрейм remote, он отправляет ответ, который может быть принят одним или многими потребителями. При использовании передающих и принимающих mailbox-ов потребитель должен выделить 2 mailbox-а, один в режиме передачи для отправки фреймов remote, и как минимум один в режиме приема, чтобы захватывать ответ продюсера. Та же самая структура прикладывается и к продюсеру: один mailbox приема требуется для получения фрейма remote, и один передающий mailbox требуется для ответа. Mailbox-ы могут быть сконфигурированы в режиме продюсера (Producer) или потребителя (Consumer). Единственный mailbox может обрабатывать фрейм remote и производить ответ. С 8 mailbox-ами контроллер CAN может обработать 8 независимых продюсеров / потребителей. Конфигурация продюсера. Mailbox в режиме Producer требует соответствующего конфигурирования поля MOT в регистре CAN_MMRx. Перед разрешением приема должны быть настроены Message ID и маски Message Acceptance. После разрешение режима Producer флаг MRDY в регистре CAN_MSR автоматически установится, пока не появится первая команда переноса данных. Программа приложения подготавливает данные для отправки путем записи регистров CAN_MDHx и CAN_MDLx, затем путем установки бита MTCR в регистре CAN_MCRx. Данные отправляются после приема фрейма remote, как только произойдет выигрыш арбитража шины. Флаг MRDY остается в 0, пока сообщение не будет отправлено или оборвано. Нельзя осуществлять доступ к регистрам данных, пока флаг MRDY очищен. Когда флаг MRDY установится, будет выставлен запрос на обработку прерывания. Это прерывание может быть замаскировано (запрещено) в соответствии с флагом mailbox-а в глобальном регистре CAN_IMR. Если фрейм remote был принят, когда нет готовых данных для отправки (установился сигнал MRDY в регистре CAN_MSRx), то устанавливается сигнал MMI в регистре CAN_MSRx. Этот бит очищается чтением регистра CAN_MSRx. Поле MRTR в регистре CAN_MSRx ничего не означает. Оно используется только когда настроены режимы обычного приема или приема с перезаписью. После того, как принят фрейм remote, mailbox функционирует как передающий mailbox. Первым будет отправлено сообщение с самым высоким приоритетом. Передаваемое сообщение может быть оборвано установкой бита MACR в регистре CAN_MCR. См. секцию выше "Обработка передачи".
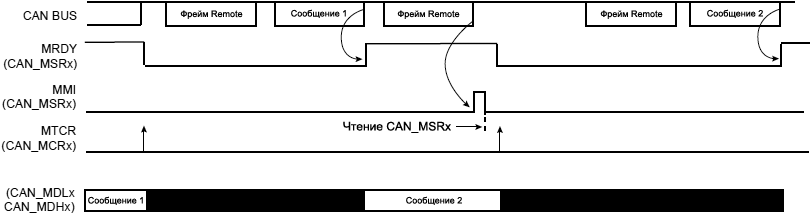
Рис. 36-17. Обработка продюсера. Конфигурация потребителя (Consumer). Для конфигурирования mailbox в режиме Consumer нужно соответствующим образом сконфигурировать поле MOT в регистре CAN_MMRx. Также должны быть настроены Message ID и маски Message Acceptance перед разрешением приема. После разрешения режима Consumer флаг MRDY в регистре CAN_MSR автоматически установится, пока не появится первая команда переноса данных. Программа приложения посылает remote frame путем установки бита MTCR в регистре CAN_MCRx, или бита MBx в глобальном регистре CAN_TCR. Приложение оповещается об ответе установкой бита MRDY в регистре CAN_MSRx. Приложение может прочитать содержимое данных в регистрах CAN_MDHx и CAN_MDLx. Когда флаг MRDY установится, будет выставлен запрос на обработку прерывания. Это прерывание может быть замаскировано (запрещено) в соответствии с флагом mailbox-а в глобальном регистре CAN_IMR. Бит MRTR в регистре CAN_MCRx ничего не означает. Он используется только когда настроен режим передачи. После того, как фрейм remote отправлен, mailbox функционирует как принимающий mailbox. Первое принятое сообщение сохраняется в регистрах данных mailbox-а. Если другие сообщения, предназначенные для этого mailbox, были отправлены, когда флаг MRDY установлен в регистре CAN_MSRx, то они будут потеряны. Приложение об этом будет оповещено чтением поля MMI в регистре CAN_MSRx. Операция чтения автоматически очистит флаг MMI. Если продюсер отвечает нескольким сообщениям, у контроллера CAN может быть один mailbox в конфигурации потребителя, 0 или несколько mailbox-ов в режиме простого приема и один mailbox в режиме приема с перезаписью. В этом случае mailbox потребителя должен иметь номер меньше, чем номер mailbox-а в режиме приема с перезаписью. Команда передачи может сработать для всех mailbox-ов одновременно путем установки нескольких полей MBx в регистре CAN_TCR.
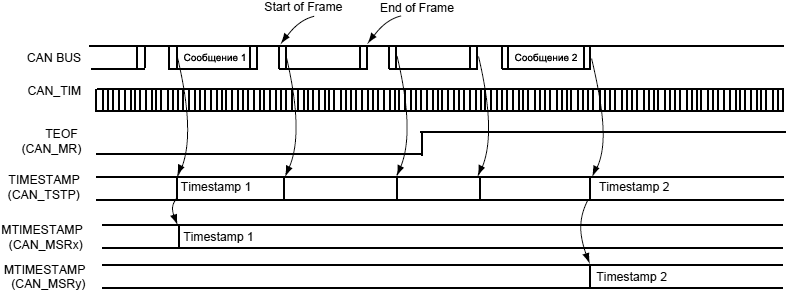
Рис. 36-18. Обработка потребителя. [Режимы диаграмм времени контроллера CAN] С использованием 16-битного внутреннего таймера, счетчик которого работает в режиме свободного счета, контроллер CAN может быть установлен в один из двух следующих режимов работы с привязкой ко времени: • Timestamping Mode: значение счетчика внутреннего таймера захватывается в момент начала фрейма (Start Of Frame, SoF) или окончания фрейма (End Of Frame, EoF). Timestamping Mode разрешается очисткой бита TTM в регистре CAN_MR. Time Triggered Mode разрешается установкой бита TTM в регистре CAN_MR. Timestamping Mode. Каждый mailbox имеет свое собственное значение метки времени (timestamp). Каждый раз, когда сообщение отправляется или принимается через mailbox, 16-битное значение MTIMESTAMP в регистре CAN_TIMESTP перемещается в младшие биты биты регистра CAN_MSRx. Значение, прочитанное в регистре CAN_MSRx соответствует значению внутреннего таймера в момент начала фрейма (SoF) или (EoF), когда сообщение обрабатывается mailbox-ом.
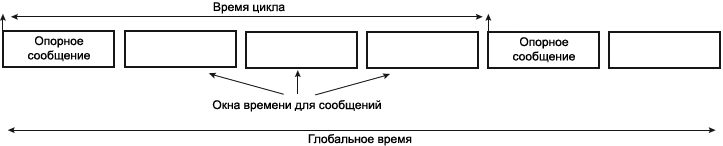
Рис. 36-19. Mailbox Timestamp. Time Triggered Mode. В режиме Time Triggered базовые циклы могут быть разделены на несколько окон времени. Базовый цикл начинается с эталонного сообщения. Каждое время окна определяется от эталонного сообщения, операция передачи должна произойти внутри предопределенного окна времени. Mailbox не должен выиграть арбитраж в предыдущем окне времени, и это не должно быть повторено, если арбитраж потерян в окне времени.
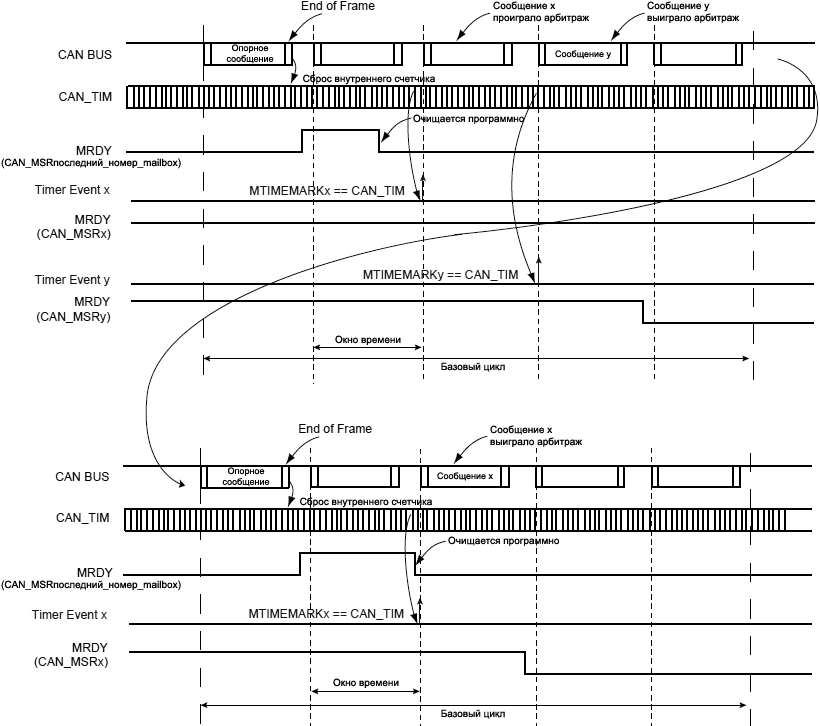
Рис. 36-20. Принцип работы Time Triggered Mode. Режим Time Trigger разрешается установкой поля TTM в регистре CAN_MR. В режиме Time Triggered, как и в режиме Timestamp, поле CAN_TIMESTP захватывает значения счетчика внутреннего таймера, но поля MTIMESTAMP в регистрах CAN_MSRx не активны и будут прочитаны как 0. Синхронизация по опорному сообщению. В режиме Time Triggered счетчик внутреннего таймера автоматически сбрасывается, когда новое сообщение принимается в последний mailbox. Этот сброс происходит после приема окончания фрейма (EoF) по фронту нарастания сигнала MRDY в регистре CAN_MSRx. Это позволяет синхронизацию счетчика внутреннего таймера с приемом опорного сообщения и началом нового окна времени. Передача в пределах окна времени. Метка времени определена для каждого mailbox. Это определяется 16-битным полем MTIMEMARK в регистре CAN_MMRx. На каждом тактовом цикле внутреннего таймера значение CAN_TIM сравнивается с меткой времени каждого mailbox. Когда счетчик внутреннего таймера достигает значения MTIMEMARK, генерируется событие внутреннего таймера для mailbox. В режиме Time Triggered операции передачи задерживаются, пока не произойдет событие внутреннего таймера для mailbox. Приложение подготавливает сообщение для отправки путем установки MTCR в регистре CAN_MCRx. Сообщение не отправляется, пока значение CAN_TIM меньше чем значение MTIMEMARK, заданное в регистре CAN_MMRx. Если операция передачи потерпела неудачу, например сообщение потеряло арбитраж шины и следующая попытка передачи откладывается до следующего события триггера внутреннего таймера. Это предотвращает от перекрытия следующего окна времени, но сообщение все еще ожидает отправки и будет повторно отправлено в следующем окне времени, когда CAN_TIM станет равным значению MTIMEMARK. Также можно предотвратить повтор установкой поля DRPT в регистре CAN_MR. Остановка счетчика внутреннего таймера. Внутренний таймер может быть заморожен установкой бита TIMFRZ в регистре CAN_MR. Это предотвращает неожиданное переполнение счетчика таймера, когда он достигает значения FFFFh. Когда такое происходит, это автоматически заморозит таймер до выдачи нового сброса, либо до приема сообщения в последний mailbox или любой другой операции, сбрасывающей счетчик. Бит TOVF в регистре CAN_SR устанавливается, когда счетчик замораживается. Бит TOVF в регистре CAN_SR очищается чтением регистра CAN_SR. В зависимости от соответствующей маски прерывания в регистре CAN_IMR, генерируется прерывание, когда TOVF устанавливается.
Рис. 36-21. Функционирование режима Time Triggered. [Интерфейс программирования контроллера CAN] Таблица 36-2. Карта адресов регистров (смещения указаны относительно начального адреса 0xFFFD0000).
// *****************************************************************************
// Структура, отражающая адресное пространство CAN микроконтроллеров ARM7
// *****************************************************************************
typedef struct _AT91S_CAN { AT91_REG CAN_MR; // Mode Register AT91_REG CAN_IER; // Interrupt Enable Register AT91_REG CAN_IDR; // Interrupt Disable Register AT91_REG CAN_IMR; // Interrupt Mask Register AT91_REG CAN_SR; // Status Register AT91_REG CAN_BR; // Baudrate Register AT91_REG CAN_TIM; // Timer Register AT91_REG CAN_TIMESTP; // Time Stamp Register AT91_REG CAN_ECR; // Error Counter Register AT91_REG CAN_TCR; // Transfer Command Register AT91_REG CAN_ACR; // Abort Command Register AT91_REG Reserved0[52]; // AT91_REG CAN_VR; // Version Register AT91_REG Reserved1[64]; // AT91S_CAN_MB CAN_MB0; // CAN Mailbox 0 AT91S_CAN_MB CAN_MB1; // CAN Mailbox 1 AT91S_CAN_MB CAN_MB2; // CAN Mailbox 2 AT91S_CAN_MB CAN_MB3; // CAN Mailbox 3 AT91S_CAN_MB CAN_MB4; // CAN Mailbox 4 AT91S_CAN_MB CAN_MB5; // CAN Mailbox 5 AT91S_CAN_MB CAN_MB6; // CAN Mailbox 6 AT91S_CAN_MB CAN_MB7; // CAN Mailbox 7 AT91S_CAN_MB CAN_MB8; // CAN Mailbox 8 AT91S_CAN_MB CAN_MB9; // CAN Mailbox 9 AT91S_CAN_MB CAN_MB10; // CAN Mailbox 10 AT91S_CAN_MB CAN_MB11; // CAN Mailbox 11 AT91S_CAN_MB CAN_MB12; // CAN Mailbox 12 AT91S_CAN_MB CAN_MB13; // CAN Mailbox 13 AT91S_CAN_MB CAN_MB14; // CAN Mailbox 14 AT91S_CAN_MB CAN_MB15; // CAN Mailbox 15 } AT91S_CAN, *AT91PS_CAN; Примечание: у микроконтроллеров AT91SAM7X128, AT91SAM7X256, AT91SAM7X512 имеются только mailbox 0..7. [Общие регистры контроллера] Регистр режима контроллера CAN. Регистр работает и на чтение, и на запись.
CANEN: CAN Controller Enable (разрешение работы контроллера CAN). LPM: Disable/Enable Low Power Mode (управление режимом экономии энергии). Контроллер CAN входит в Low Power Mode, как только все ожидающие отправки сообщения были отправлены. ABM: Disable/Enable Autobaud/Listen mode (управление режимом прослушивания автодетекта скорости). OVL: Disable/Enable Overload Frame (управление разрешением фрейма перегрузки). TEOF: Timestamp messages at each end of Frame (когда генерировать метку времени относительно фрейма). TTM: Disable/Enable Time Triggered Mode (управление режимом срабатывания по времени). TIMFRZ: Enable Timer Freeze (разрешение остановки таймера). DRPT: Disable Repeat (запрет повтора). RXSYNC: Reception Synchronization Stage (стадия синхронизации приема, не читаемое поле). Это поле позволяет конфигурировать стадию приема макроячейки (предназначается только для отладки).
Регистр разрешения прерывания по определенным событиям. Регистр работает только на запись.
Ниже приведены описание назначения битов. Запись 0 в бит не оказывает никакого влияния, запись 1 разрешает соответствующее прерывание. MBx: Mailbox x Interrupt Enable (разрешение прерывания почтового ящика x). ERRA: Error Active Mode Interrupt Enable (разрешение прерывания режима Error Active). WARN: Warning Limit Interrupt Enable (разрешение прерывания предупреждения превышения лимита счетчиков TEC и REC). ERRP: Error Passive Mode Interrupt Enable (разрешение прерывания режима Error Passive). BOFF: Bus Off Mode Interrupt Enable (разрешение прерывания режима выключения шины). SLEEP: Sleep Interrupt Enable (разрешение прерывания сна). WAKEUP: Wakeup Interrupt Enable (разрешение прерывания пробуждения). TOVF: Timer Overflow Interrupt Enable (разрешение прерывания при переполнении счетчика таймера CAN). TSTP: TimeStamp Interrupt Enable (разрешение прерывания метки времени). CERR: CRC Error Interrupt Enable (разрешение прерывания ошибки CRC). SERR: Stuffing Error Interrupt Enable (разрешение прерывания ошибки вставки пустого бита). AERR: Acknowledgment Error Interrupt Enable (разрешение прерывания ошибки подтверждения). FERR: Form Error Interrupt Enable (разрешение прерывания ошибки формы). BERR: Bit Error Interrupt Enable (разрешение прерывания ошибки бита). Регистр запрета прерывания по определенным событиям. Регистр работает только на запись.
Ниже приведены описание назначения битов. Запись 0 в бит не оказывает никакого влияния, запись 1 запрещает соответствующее прерывание. MBx: Mailbox x Interrupt Disable (запрет прерывания почтового ящика x). ERRA: Error Active Mode Interrupt Disable (запрет прерывания режима Error Active). WARN: Warning Limit Interrupt Disable (запрет прерывания предупреждения превышения лимита счетчиков TEC и REC). ERRP: Error Passive Mode Interrupt Disable (запрет прерывания режима Error Passive). BOFF: Bus Off Mode Interrupt Disable (запрет прерывания режима выключения шины). SLEEP: Sleep Interrupt Disable (запрет прерывания сна). WAKEUP: Wakeup Interrupt Disable (запрет прерывания пробуждения). TOVF: Timer Overflow Interrupt Disable (запрет прерывания при переполнении счетчика таймера CAN). TSTP: TimeStamp Interrupt Disable (запрет прерывания метки времени). CERR: CRC Error Interrupt Disable (запрет прерывания ошибки CRC). SERR: Stuffing Error Interrupt Disable (запрет прерывания ошибки вставки пустого бита). AERR: Acknowledgment Error Interrupt Disable (запрет прерывания ошибки подтверждения). FERR: Form Error Interrupt Disable (запрет прерывания ошибки формы). BERR: Bit Error Interrupt Disable (запрет прерывания ошибки бита). Регистр маски прерываний по определенным событиям. Регистр работает только на чтение.
Ниже приведены описание назначения битов. Прочитанный 0 в бите означает, что соответствующее прерывание запрещено, прочитанная 1 означает, что прерывание разрешено. MBx: Mailbox x Interrupt Mask (маска прерывания почтового ящика x). ERRA: Error Active Mode Interrupt Mask (маска прерывания режима Error Active). WARN: Warning Limit Interrupt Mask (маска прерывания предупреждения превышения лимита счетчиков TEC и REC). ERRP: Error Passive Mode Interrupt Mask (маска прерывания режима Error Passive). BOFF: Bus Off Mode Interrupt Mask (маска прерывания режима выключения шины). SLEEP: Sleep Interrupt Mask (маска прерывания сна). WAKEUP: Wakeup Interrupt Mask (маска прерывания пробуждения). TOVF: Timer Overflow Interrupt Mask (маска прерывания при переполнении счетчика таймера CAN). TSTP: TimeStamp Interrupt Mask (маска прерывания метки времени). CERR: CRC Error Interrupt Mask (маска прерывания ошибки CRC). SERR: Stuffing Error Interrupt Mask (маска прерывания ошибки вставки пустого бита). AERR: Acknowledgment Error Interrupt Mask (маска прерывания ошибки подтверждения). FERR: Form Error Interrupt Mask (маска прерывания ошибки формы). BERR: Bit Error Interrupt Mask (маска прерывания ошибки бита). Регистр состояния (статуса) CAN. Регистр работает только на чтение.
Ниже приведены описание назначения битов. Прочитанный 0 в бите означает, что не было определенного события, прочитанная 1 означает, что событие произошло. MBx: Mailbox x Event (было ли событие, связанное с почтовым ящиком x). События связаны с полями MRDY, MABT регистра CAN_MSRx. ERRA: Error Active Mode (режим Error Active). Этот флаг зависит от значений счетчиков TEC и REC. Он устанавливается, когда узел не находится ни в режиме Error Passive, ни в режиме Bus Off. Этот флаг автоматически сбрасывается, когда указанное выше условие не соблюдается. Подробнее см. секцию "Обработчик прерывания ошибки". WARN: Warning Limit (предупреждение лимита счетчиков TEC и REC). Установка этого флага зависит от значения счетчиков TEC и REC. Он установится, когда как минимум один из этих счетчиков превысит значение 96. Этот флаг автоматически сбрасывается, когда указанное выше условие не соблюдается. Подробнее см. секцию "Обработчик прерывания ошибки". ERRP: Error Passive Mode (режим Error Passive). Установка этого флага зависит от значения счетчиков TEC и REC. Он установится, когда счетчик TEC больше или равен 128 (десятичное), или когда счетчик REC больше или равен 128 (десятичное). Этот флаг автоматически сбрасывается, когда указанное выше условие не соблюдается. Подробнее см. секцию "Обработчик прерывания ошибки". BOFF: Bus Off Mode (режим выключения шины). Установка этого флага зависит от значения счетчика TEC. Узел сети выключит свое подключение к шине, когда значение счетчика TEC большие или равно 256 (десятичное). Этот флаг автоматически сбрасывается, когда указанное выше условие не соблюдается. Подробнее см. секцию "Обработчик прерывания ошибки". SLEEP: CAN controller in Low power Mode (находится ли контроллер CAN в режиме пониженного энергопотребления). Этот флаг автоматически сбрасывается, когда запрещается режим пониженного энергопотребления. WAKEUP: CAN controller is not in Low power Mode (находится ли контроллер CAN в активном режиме). Когда происходит событие пробуждения (WAKEUP), контроллер CAN синхронизируется с активностью на шине. Сообщения могут быть переданы или приняты. Такты контроллера CAN должны быть доступны, когда происходит событие пробуждения. Этот флаг автоматически сбросится, когда контроллер CAN войдет в режим пониженного энергопотребления (Low Power mode, режим сна). TOVF: Timer Overflow (переполнение счетчика таймера CAN). Этот флаг автоматически очистится чтением регистра CAN_SR. TSTP: TimeStamp (метка времени). Этот флаг автоматически очистится чтением регистра CAN_SR. CERR: Mailbox CRC Error (ошибка CRC почтового ящика). Ошибка CRC детектируется по последнему приему. Этот флаг автоматически очистится чтением регистра CAN_SR. SERR: Mailbox Stuffing Error (ошибка вставки пустого бита почтового ящика). Ошибка формы сигнала приводит к тому, что обнаруживается больше 5 следующих друг за другом бит в одинаковой полярности. Этот флаг автоматически очистится чтением регистра CAN_SR. AERR: Acknowledgment Error (ошибка подтверждения). Ошибка подтверждения определяется, когда не был обнаружен доминантный бит в слоте подтверждения. Этот флаг автоматически очистится чтением регистра CAN_SR. FERR: Form Error (ошибка формы). Ошибка формы происходит из-за нарушения в одном или большем количестве следующих полей бита: Разделитель CRC Этот флаг автоматически очистится чтением регистра CAN_SR. BERR: Bit Error (ошибка бита). Флаг ошибки бита устанавливается, когда значение бита, отслеживаемое на линии, отличается от значения реально отправленного бита. Этот флаг автоматически очистится чтением регистра CAN_SR. RBSY: Receiver busy (занятость приемника). Этот бит показывает занятость приемника. Он устанавливается аппаратно, когда приемник CAN вычитывает или отслеживает фрейм (фрейм может быть типа remote, data, overload или error). Бит автоматически сбрасывается, когда CAN ничего не принимает. TBSY: Transmitter busy (занятость передатчика). Этот бит показывает занятость передатчика. Он установится аппаратно, когда передатчик генерирует сигнал фрейма (фрейм может быть типа remote, data, overload или error). Бит автоматически сбрасывается, когда CAN ничего не передает. OVLSY: Overload busy (занятость перегрузки). Этот флаг автоматически сбросится, когда шина не передает фрейм перегрузки (overload frame). Регистр настройки скорости (baudrate) CAN. Регистр работает и на чтение, и на запись.
Ниже приведены описание назначения полей регистра. Любые модификации этих полей должны осуществляться, когда контроллер CAN запрещен. Чтобы вычислить различные параметры интервалов времени для бита, см. секцию "Параметры интервалов времени формирования бита". PHASE2: время сегмента фазы 2. Эта фаза используется для компенсации ошибки фазы перепада сигнала. tPHS2 = tCSC × (PHASE2 + 1) Внимание: значение PHASE2 не должно быть равно 0. PHASE1: время сегмента фазы 1. Эта фаза используется для компенсации ошибки фазы перепада сигнала. tPHS1 = tCSC × (PHASE1 + 1) PROPAG: программирование параметров времени сегмента сети CAN. Эта часть времени бита используется для компенсации времени физической задержки в сети CAN. tPRS = tCSC × (PROPAG + 1) SJW: ширина прыжка пересинхронизации (Re-synchronization jump width). Этот параметр предназначен компенсировать сдвиг фазы между тактовыми генераторами разных контроллеров на шине. Контроллер должен пересинхронизироваться на каждом соответствующем перепаде сигнала текущей передачи. Ширина прыжка ресинхронизации задает максимальное количество тактов в длительности бита, на которое в процессе ресинхронизации длительность бита может быть укорочена или удлинена. tSJW = tCSC × (SJW + 1) BRP: Baudrate Prescaler (настройка предделителя скорости). Это поле позволяет пользователю запрограммировать период системной тактовой частоты CAN, чтобы определить длительность каждого отдельного бита. tCSC = (BRP + 1) ⁄ MCK Значение поля BRP должно быть в диапазоне 0x01 .. 0x7F], т. е. поведение контроллера при BRP = 0 будет не гарантированным. SMP: Sampling Mode (режим оцифровки сигнала). SMP Sampling Mode автоматически запрещается, если BRP = 0. Регистр счетчика таймера CAN. Регистр работает только на чтение.
TIMER: значения бит этого поля представляют содержимое счетчика внутреннего таймера контроллера CAN. Регистр метки времени CAN. Регистр работает только на чтение.
MTIMESTAMP: значения бит этого поля представляют содержимое счетчика внутреннего таймера контроллера CAN в определенный момент времени. Если бит TEOF в регистре CAN_MR сброшен, то значение внутреннего таймера/счетчика CAN захватывается в поле MTIMESTAMP по началу каждого фрейма (start of frame, SoF). Иначе значение захватывается по окончании каждого фрейма (end of frame, EoF). Когда значение захвачено, в регистре CAN_SR установится флаг TSTP. Если маска для бита TSTP в регистре CAN_IMR установлена, то будет генерироваться прерывание каждый раз при установке флага TSTP в регистре CAN_SR. Этот флаг очищается при чтении регистра CAN_SR. Примечание: регистр CAN_TIMESTP сбрасывается, когда CAN запрещается с помощью бита CANEN в регистре CAN_MR. Регистр счетчиков ошибок CAN. Регистр работает только на чтение.
REC: Receive Error Counter (счетчик ошибок приема). Когда приемник определил ошибку, REC увеличится на 1, за исключением случая, когда детектирована ошибка бита (BIT ERROR) при отправке флага активной ошибки (ACTIVE ERROR FLAG) или флага перегрузки (OVERLOAD FLAG). Когда приемник детектирует доминантный бит как первый бит после отправки ERROR FLAG, REC увеличивается на 8. Когда приемник детектирует BIT ERROR, когда отправляется ACTIVE ERROR FLAG, REC увеличивается на 8. Любой узел допускает до 7 следующих друг за другом доминантных бит после отправки ACTIVE ERROR FLAG, PASSIVE ERROR FLAG или OVERLOAD FLAG. После детектирования 14-го последовательного доминантного бита (в случае ACTIVE ERROR FLAG или OVERLOAD FLAG), или после детектирования 8-го последовательного доминантного бита, за которым следует PASSIVE ERROR FLAG, и после каждой последовательности дополнительных восьми доминантных бит, каждый приемник увеличивает REC на 8. После успешного приема сообщения REC уменьшается на 1, если значение счетчика было между 1 и 127. Если REC был равен 0, то он останется равным 0, и если значение счетчика было больше 127, то он установится в значение между 119 и 127. TEC: Transmit Error Counter (счетчик ошибок передачи). Когда передатчик посылает ERROR FLAG, TEC увеличивается на 8, за исключением следующих случаев: • Передатчик находится в режиме error passive, и детектирует ACKNOWLEDGMENT ERROR, потому что определение доминантного бита ACK не сработало при отправке своего PASSIVE ERROR FLAG. Когда передатчик детектирует BIT ERROR, когда отправляет ACTIVE ERROR FLAG или OVERLOAD FLAG, TEC увеличится на 8. Любой узел допускает до 7 следующих друг за другом доминантных бит после отправки ACTIVE ERROR FLAG, PASSIVE ERROR FLAG или OVERLOAD FLAG. После детектирования 14-го последовательного доминантного бита (в случае ACTIVE ERROR FLAG или OVERLOAD FLAG), или после детектирования 8-го последовательного доминантного бита, за которым следует PASSIVE ERROR FLAG, и после каждой последовательности дополнительных восьми доминантных бит, каждый приемник увеличивает REC на 8. После каждой успешной передачи TEC уменьшается на 1, если он пока не равен 0. Регистр команды перемещения данных CAN (Transfer Command Register). Регистр работает только на запись.
Регистр позволяет одновременно инициализировать несколько запросов на перемещение данных. Ниже приведены описание назначения битов регистра. MBx: Transfer Request for Mailbox x (запрос на перемещение данных почтового ящика x).
Эти флаги очищают флаги MRDY и MABT в соответствующем регистре CAN_MSRx. Когда несколько mailbox-ов одновременно запрашивают передачу, то сообщения из них будут отправлены в порядке очередности начиная с mailbox с самым высоким приоритетом. Если у нескольких mailbox-ов установлен одинаковый приоритет, то mailbox с самым маленьким номером отправит свои данные первым (например, MB0 будет отправлен раньше MB1). TIMRST: Timer Reset (сброс таймера CAN). Сбрасывает счетчик внутреннего таймера CAN. Если счетчик внутреннего таймера заморожен, то эта команда заново разрешит его счет. Эта команда полезна в режиме Time Triggered. Регистр команды обрыва CAN (CAN Abort Command Register). Регистр работает только на запись.
Регистр позволяет одновременно инициализировать несколько запросов на обрыв перемещения данных. MBx: Abort Request for Mailbox x (запрос на обрыв перемещения данных почтового ящика x).
Это делает возможным установить поле MACR (в регистре CAN_MCRx) для каждого mailbox. [Регистры mailbox-ов] // *****************************************************************************
// Структура, отражающая адресное пространство регистров mailbox
// *****************************************************************************
typedef struct _AT91S_CAN_MB { AT91_REG CAN_MB_MMR; // MailBox Mode Register AT91_REG CAN_MB_MAM; // MailBox Acceptance Mask Register AT91_REG CAN_MB_MID; // MailBox ID Register AT91_REG CAN_MB_MFID; // MailBox Family ID Register AT91_REG CAN_MB_MSR; // MailBox Status Register AT91_REG CAN_MB_MDL; // MailBox Data Low Register AT91_REG CAN_MB_MDH; // MailBox Data High Register AT91_REG CAN_MB_MCR; // MailBox Control Register } AT91S_CAN_MB, *AT91PS_CAN_MB; Регистр режима сообщения почтового ящика (CAN Message Mode Register). Работает и на чтение, и на запись.
MTIMEMARK: Mailbox Timemark (метка времени почтового ящика). Это поле активно в режиме Time Triggered. Операции передачи допускаются, когда внутренний счетчик таймера достигнет метки времени mailbox. См. секцию "Передача в пределах окна времени". В режиме Timestamp значение MTIMEMARK устанавливается в 0. PRIOR: Mailbox Priority (приоритет почтового ящика). Это поле никак не влияет в режимах обычного приема или приема с перезаписью. В этих режимах первым будет обработан mailbox с самым маленьким порядковым номером. Когда несколько mailbox-ов пытаются одновременно передать сообщение, то сначала будет передавать сообщение mailbox с самым высоким приоритетом. Если у нескольких mailbox-ов одинаковый приоритет, то сначала будет обработан mailbox с самым маленьким порядковым номером (например MB0 будет обработан перед MB1, если у них установлен одинаковый приоритет). MOT: Mailbox Object Type (тип почтового ящика). Это поле позволяет пользователю определить поведение mailbox. Все mailbox-ы конфигурируются независимо друг от друга. Для каждого mailbox возможно настроить один из 5 его типов:
Регистр фильтрации сообщений по маске (CAN Message Acceptance Mask Register). Регистр работает и на чтение, и на запись.
Для предотвращения конкурентного доступа ко внутреннему ядру CAN приложение должно запретить mailbox перед записью в регистры CAN_MAMx. MIDvB: биты фильтрующей маски в расширенном режиме фрейма идентификации mailbox. Маска фильтрации (acceptance mask), накладываемая на соответствующее поле сообщения IDvB в mailbox-е. MIDvA: биты фильтрующей маски для стандартного режима идентификации фрейма. Маска фильтрации (acceptance mask), накладываемая на соответствующее поле сообщения IDvA в mailbox-е. MIDE: Identifier Version (версия идентификатора). 0 = обычный режим адресации, когда для фильтрации сообщений используется сравнение IDvA (из регистра CAN_MIDx) с результатом операции наложения маски MIDvA (из регистра CAN_MAMx) на идентификатор IDvA в принятом сообщении. Регистр идентификации сообщений (CAN Message ID Register). Регистр работает и на чтение, и на запись.
Для предотвращения конкурентного доступа ко внутреннему ядру CAN приложение должно запретить mailbox перед записью в регистры CAN_MIDx. MIDvB: Complementary bits for identifier in extended frame mode (комплементарные биты для идентификации mailbox в расширенном режиме адресации фрейма). Если MIDE очищен, то значение MIDvB равно 0. MIDvA: Identifier for standard frame mode (то же самое, но для обычного режима фрейма). MIDE: Identifier Version (версия идентификатора). Этот бит позволяет пользователю определить версию обрабатываемых в mailbox сообщений. Если этот бит установлен, то mailbox имеет дело с сообщениями по стандарту версии 2.0 Part B; иначе mailbox обрабатывает сообщения версии 2.0 Part A. Регистр идентификации сообщений в пределах семейства, ограниченного группой с помощью маски (CAN Message Family ID Register). Регистр работает только на чтение.
MFID: Family ID (идентификатор сообщения в пределах семейства). Это поле содержит слияние бит регистра CAN_MIDx, которые попали под маску регистра CAN_MAMx. Короче говоря, это поле содержит порядковый номер идентификатора сообщений среди всех возможных идентификаторов сообщений в группе, выделенной маской. Поле MFID полезно использовать для декодирования сообщений, потому что его можно использовать как индекс в массиве (например, в массиве указателей на функции обработчиков). Пример установки поля MFID при приеме сообщения: CAN_MIDx = 0x305A4321 Регистр статуса сообщения (CAN Message Status Register). Регистр работает только на чтение.
Эти поля регистра обновляются каждый раз, когда сообщение принято или его передача оборвана. MMI очищается путем чтения регистра CAN_MSRx. MRDY, MABT очищаются путем записи MTCR или MACR в регистре CAN_MCRx. Предупреждение: состояние MRTR и MDLC частично зависит от типа mailbox (от поля MOT регистра CAN_MMRx). MTIMESTAMP: Timer value (значение метки времени таймера). Это поле обновляется только когда запрещены операции связанные с запуском по времени (time-triggered operations, очищен бит TTM в регистре CAN_MR). Если поле TEOF в регистре CAN_MR очищено, TIMESTAMP будет значением внутреннего таймера в момент начала фрейма (start of frame, SoF) последнего принятого или отправленного через этот mailbox сообщения. Если поле TEOF в регистре CAN_MR установлено, TIMESTAMP будет значением внутреннего таймера в момент конца фрейма (end of frame, EoF) последнего принятого или отправленного через этот mailbox сообщения. В режиме Time Triggered значение MTIMESTAMP равно 0. MDLC: Mailbox Data Length Code (код длины данных сообщения).
MRTR: Mailbox Remote Transmission Request (запрос передачи со стороны противоположной точки).
MABT: Mailbox Message Abort (обрыв передачи сообщения). Когда установится бит MABT, сработает прерывание (если оно разрешено). 0 = предыдущая передача не была оборвана. Это флаг очищается записью в регистр CAN_MCRx.
MRDY: Mailbox Ready (готовность почтового ящика). Когда установится бит MRDY, сработает прерывание (если оно разрешено). 0 = регистры данных mailbox (регистры CAN_MDLx, CAN_MDHx) не могут быть прочитаны или записаны программой приложения (они заблокированы). Этот флаг очищается записью в регистр CAN_MCRx.
Примечание: есть не описанная в документации проблема с битом MRDY, когда ящик интенсивно работает на передачу (поле MOT в регистре CAN_MMRx установлено в значение 3). Если очень интенсивно читать регистр CAN_MSRx в ожидании установки бита MRDY, то он он оказывается заблокированным (навсегда устанавливается в 0). Подробнее про эту проблему и её решение см. [3]. MMI: Mailbox Message Ignored (было игнорировано сообщение). Очищается чтением регистра CAN_MSRx.
Младший регистр данных почтового ящика (CAN Message Data Low Register). Регистр работает и на чтение, и на запись.
MDL: Message Data Low Value (младшая половина данных mailbox). Когда поле MRDY установится в регистре CAN_MSRx, младшие 32 бита принятого сообщения могут быть прочитаны программой приложения. Иначе значение MDL заблокировано контроллером CAN с целью отправки или приема нового сообщения. В режиме приема с перезаписью контроллер CAN может модифицировать значение MDL, когда программа приложения читает MDH и MDL. Чтобы проверить, что MDH и MDL не принадлежат разным сообщениям, приложение должно проверить поле MMI в регистре CAN_MSRx. В этом режиме программа приложения должна заново перечитать регистры CAN_MDH и CAN_MDL, когда бит MMI в регистре CAN_MSRx установлен. Байты принимаются / передаются по шине CAN в следующем порядке: 1. CAN_MDL[7:0] Старший регистр данных почтового ящика (CAN Message Data High Register). Регистр работает и на чтение, и на запись. Все то же самое, что для младшего регистра, только здесь находится половина данных MDH. Регистр управления сообщением (CAN Message Control Register). Работает только на запись.
MDLC: Mailbox Data Length Code (код длины данных сообщения).
MRTR: Mailbox Remote Transmission Request (запрос передачи со стороны противоположной точки).
Ситуации с потребителем (consumer) обрабатываются автоматически путем установки типа mailbox в Consumer. Это требует только одного mailbox. Также можно использовать 2 mailbox-а, один для приема, другой для передачи. Биты MRTR и MTCR должны быть установлены одновременно. MACR: Abort Request for Mailbox x (запрос обрыва передачи сообщения для mailbox x).
Можно установить поле MACR для нескольких mailbox-ов одновременно, установив несколько бит в регистре CAN_ACR. MTCR: Mailbox Transfer Command (команда для mailbox начать перемещение данных).
Этот флаг очистит флаги MRDY и MABT в регистре CAN_MSRx. Когда было запрошено передать одновременно несколько mailbox-ов, то они будут передаваться по очереди. Mailbox с самым высоким приоритетом будет обработан в первую очередь. Если несколько mailbox-ов имеют одинаковый приоритет, то сначала будет обработан mailbox с самым маленьким порядковым номером (например, MB0 будет обработан перед MB1, если у них одинаковый приоритет). Можно установить MTCR для нескольких mailbox-ов одновременно путем записи регистра CAN_TCR. [Ссылки] 1. ARM-based Flash MCU SAM7X512 / SAM7X256 / SAM7X128 DATASHEET site:atmel.com. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||