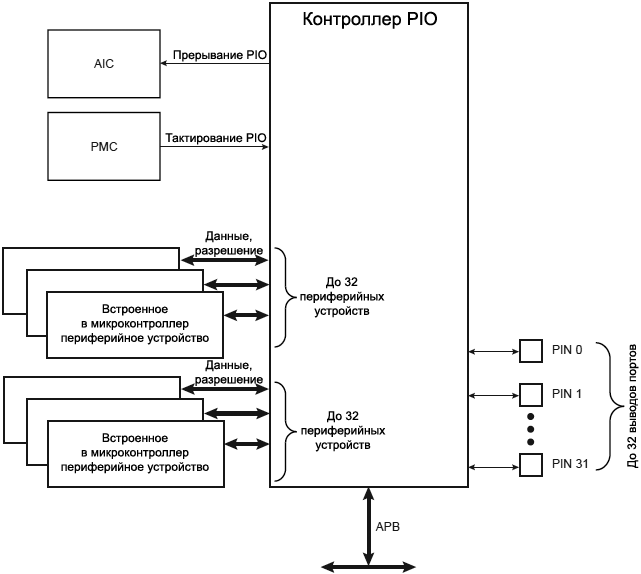
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠą│ąŠ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (Parallel Input/Output Controller, čüąŠą║čĆą░čēąĄąĮąĮąŠ PIO ) ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ AT91SAM7 (ARM7 ą║ąŠą╝ą┐ą░ąĮąĖąĖ Atmel) čāą┐čĆą░ą▓ą╗čÅąĄčé ą┤ąŠ 32 ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗčģ ą┐ąŠčĆč鹊ą▓ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░. ąÜą░ąČą┤ą░čÅ čéą░ą║ą░čÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ą░čÅ ąĮąŠąČą║ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą┤ąĄą╗ąĄąĮą░ ą║ą░ą║ ą┐čĆąŠčüč鹊ą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╣ čåąĖčäčĆąŠą▓ąŠą╣ ą┐ąŠčĆčé, čĆą░ą▒ąŠčéą░čÄčēąĖą╣ ąĮą░ ą▓čģąŠą┤ ąĖą╗ąĖ ą▓čŗčģąŠą┤ (GPIO), ąĖą╗ąĖ ąĮą░ąĘąĮą░č湥ąĮą░ ą┤ą╗čÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ čäčāąĮą║čåąĖąĖ ą▓čüčéčĆąŠąĄąĮąĮąŠą│ąŠ ą▓ ą║čĆąĖčüčéą░ą╗ą╗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (SPI, CAN, UART ąĖ čé. ą┤.). ąŁč鹊 ą│ą░čĆą░ąĮčéąĖčĆčāąĄčé čŹčäč乥ą║čéąĖą▓ąĮčāčÄ ąŠą┐čéąĖą╝ąĖąĘą░čåąĖčÄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▓čŗą▓ąŠą┤ąŠą▓ ą║čĆąĖčüčéą░ą╗ą╗ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ąÜą░ąČą┤ą░čÅ ąĮąŠąČą║ą░ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ čüą▓čÅąĘą░ąĮą░ čü ąĮąŠą╝ąĄčĆąŠą╝ ą▒ąĖčéą░ ą▓ąŠ ą▓čüąĄčģ 32-ą▒ąĖčéąĮčŗčģ čĆąĄą│ąĖčüčéčĆą░čģ, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą▓ ąĖąĮč鹥čĆč乥ą╣čüąĄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ (čüą╝. ąĮąĖąČąĄ čĆą░ąĘą┤ąĄą╗ "ąśąĮč鹥čĆč乥ą╣čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PIO").
ąÜą░ąČą┤ą░čÅ ąĮąŠąČą║ą░ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (I/O) ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ PIO ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čüą╗ąĄą┤čāčÄčēąĖąĄ čäčāąĮą║čåąĖąĖ:
ŌĆó ąöąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ ą▓čģąŠą┤ąĮąŠą│ąŠ ą╗ąŠą│ąĖč湥čüą║ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ čü ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčīčÄ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ čŹč鹊ą╝čā čüąŠą▒čŗčéąĖčÄ.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ PIO čéą░ą║ąČąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čäčāąĮą║čåąĖčÄ čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ ą▓čŗą▓ąŠą┤ą░ ą┤ąŠ 32 ą▒ąĖčé ą┤ą░ąĮąĮčŗčģ ąĘą░ ąŠą┤ąĮčā ąŠą┐ąĄčĆą░čåąĖčÄ ąĘą░ą┐ąĖčüąĖ.
ąĀąĖčü. 27-1. ąæą╗ąŠą║-ą┤ąĖą░ą│čĆą░ą╝ą╝ą░ PIO.
ąĀąĖčü. 27-2. ą¤čĆąĖąĮčåąĖą┐ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ PIO ą▓ firmware ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
[ąŚą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ PIO ąŠčé čĆąĄčüčāčĆčüąŠą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ]
ą£čāą╗čīčéąĖą┐ą╗ąĄą║čüąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓ . ąÜą░ąČą┤čŗą╣ ą▓čŗą▓ąŠą┤ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą╝ąŠąČąĮąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī ą╗ąĖą▒ąŠ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąŠą▒čŗčćąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ (general-purpose I/O, GPIO) line only, ąĖą╗ąĖ ą║ą░ą║ ą╗ąĖąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░, ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąĖčĆčāąĄą╝ą░čÅ ąĮą░ ąŠą┤ąĮąŠ ąĖą╗ąĖ ą┤ą▓ą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (SPI, CAN, UART ąĖ čé. ą┤.). ą¤ąŠčüą║ąŠą╗čīą║čā ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąĖčĆąŠą▓ą░ąĮąĖąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąŠ ą░ą┐ą┐ą░čĆą░čéąĮąŠ, ąĖ čüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ ąĘą░ą▓ąĖčüąĖčé ąŠčé ą╝ąŠą┤ąĄą╗ąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, č鹊 čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ čüąĖčüč鹥ą╝čŗ ą┤ąŠą╗ąČąĄąĮ čéčēą░č鹥ą╗čīąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ PIO, ą║ąŠč鹊čĆą░čÅ ą╝ąŠąČąĄčé ą┐ąŠčéčĆąĄą▒ąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ firmware. ąÜąŠą│ą┤ą░ ąĮąŠąČą║ą░ ą┐ąŠčĆčéą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą║ą░ą║ ą▓čŗą▓ąŠą┤ GPIO, ąĮą░ą┐čĆąĖą╝ąĄčĆ ąŠąĮą░ ąĮąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąĖčĆčāąĄčéčüčÅ čü ą║ą░ą║ąĖą╝-ą╗ąĖą▒ąŠ ą▓čüčéčĆąŠąĄąĮąĮčŗą╝ ą▓ ą║čĆąĖčüčéą░ą╗ą╗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝, ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ PIO ą▓ ą║ąŠąĮč鹥ą║čüč鹥 ąĮą░ąĘąĮą░č湥ąĮąĖčÅ ą┤ą╗čÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮąĄ ą┤ą░ąĄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░, ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ PIO ą╝ąŠąČąĄčé č鹊ą╗čīą║ąŠ čāą┐čĆą░ą▓ą╗čÅčéčī čüąŠčüč鹊čÅąĮąĖąĄą╝ ą▓čŗą▓ąŠą┤ą░ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą║ą░ą║ąŠą╣ ąĮčāąČąĮąŠ ą▓čŗą┤ą░ą▓ą░čéčī ą╗ąŠą│. čāčĆąŠą▓ąĄąĮčī ąĮą░ ą▓čŗčģąŠą┤ąĄ) ąĖ ąĄą│ąŠ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĄą╣ (ąĮą░ą┐čĆąĖą╝ąĄčĆ, ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą╗ąĖ ąĮą░ ąĮąĄą╝ pull-up čĆąĄąĘąĖčüč鹊čĆ, ąĖ ą║ą░ą║ ąĮą░čüčéčĆąŠąĄąĮ ą▓čŗą▓ąŠą┤ - ąĮą░ ą▓čģąŠą┤ ąĖą╗ąĖ ą▓čŗčģąŠą┤).
ąÆąĮąĄčłąĮąĖąĄ čüąĖą│ąĮą░ą╗čŗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (External Interrupt Lines). ąĪąĖą│ąĮą░ą╗čŗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ FIQ (ą▒čŗčüčéčĆąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ) ąĖ IRQ0 .. IRQn ąŠą▒čŗčćąĮąŠ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąĖčĆčāčÄčéčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ PIO. ą×ą┤ąĮą░ą║ąŠ ąĮąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ąĮą░ąĘąĮą░čćą░čéčī ąĮąŠąČą║čā I/O ąĮą░ čäčāąĮą║čåąĖčÄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą┐ąŠčüą║ąŠą╗čīą║čā ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ PIO ąĮąĄ ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓ą╗ąĖčÅąĮąĖčÅ ąĮą░ ą▓čģąŠą┤čŗ ąĖ čüąĖą│ąĮą░ą╗čŗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (FIQ ąĖą╗ąĖ IRQ), ą║ąŠč鹊čĆčŗąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą║ą░ą║ ą▓čģąŠą┤čŗ.
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖąĄą╝ . ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ (Power Management Controller, PMC [2]) čāą┐čĆą░ą▓ą╗čÅąĄčé ą┐ąŠčüčéčāą┐ą╗ąĄąĮąĖąĄą╝ čéą░ą║č鹊ą▓čŗčģ čüąĖą│ąĮą░ą╗ąŠą▓ ąĮą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ PIO, čćč鹊ą▒čŗ ą╝ąŠąČąĮąŠ ą▒čŗą╗ąŠ čāą┐čĆą░ą▓ą╗čÅčéčī 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ (ą║ąŠą│ą┤ą░ čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ ąŠčéą║ą╗čÄč湥ąĮ, č鹊 č鹊ą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ čāą╝ąĄąĮčīčłą░ąĄčéčüčÅ). ąŚą░ą┐ąĖčüčī ą▓ ą╗čÄą▒ąŠą╣ čĆąĄą│ąĖčüčéčĆ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PIO ąĮąĄ čéčĆąĄą▒čāąĄčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ ą┤ą╗čÅ PIO. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī čüąĖą│ąĮą░ą╗čŗ I/O ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ąĮąĄ čéčĆąĄą▒čāąĄčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ PIO.
ą×ą┤ąĮą░ą║ąŠ, ą║ąŠą│ą┤ą░ čéą░ą║čéčŗ ąŠčéą║ą╗čÄč湥ąĮčŗ, ą┤ąŠčüčéčāą┐ąĮčŗ ąĮąĄ ą▓čüąĄ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéąĖ PIO. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ ą╗ąŠą│ąĖč湥čüą║ąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ (Input Change Interrupt) ąĖ čćč鹥ąĮąĖąĄ čāčĆąŠą▓ąĮčÅ čüąĖą│ąĮą░ą╗ą░ ąĮą░ ą▓čģąŠą┤ąĄ čéčĆąĄą▒čāčÄčé čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐ąŠą┤ą░čćąĖ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ.
ą¤ąŠčüą╗ąĄ ą░ą┐ą┐ą░čĆą░čéąĮąŠą│ąŠ čüą▒čĆąŠčüą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ PIO ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĘą░ą┐čĆąĄčēąĄąĮąŠ.
ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī PIO ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ąŠčüčāčēąĄčüčéą▓ą╗čÅčéčī ą┤ąŠčüčéčāą┐ ą║ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą╗čÄą▒ąŠą│ąŠ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░.
ąōąĄąĮąĄčĆą░čåąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ . ąÆ ą║ąŠąĮč鹥ą║čüč鹥 ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčŗ PIO čüčćąĖčéą░čÄčéčüčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 čüąĖą│ąĮą░ą╗čŗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ PIO ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ čüčĆąĄą┤ąĖ ąĖčüč鹊čćąĮąĖą║ąŠą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ 2 .. 31. ą×ą▒čĆą░čéąĖč鹥čüčī ą║ ąĘąĮą░č湥ąĮąĖčÄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ ą┐ąĄčĆąĖč乥čĆąĖąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ PIO ą▓ ą┤ą░čéą░čłąĖč鹥 ąĮą░ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąĖčüč鹊čćąĮąĖą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗąĄ ą┤ą╗čÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ PIO.
ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ PIO ą╝ąŠąČąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ č鹊ą╗čīą║ąŠ ą▓ č鹊ą╝ čüą╗čāčćą░ąĄ, ąĄčüą╗ąĖ ą┤ą╗čÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ PIO čĆą░ąĘčĆąĄčłąĄąĮąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ (čŹč鹊 ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄą╝ PMC [2]).
[ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ PIO ]
ą×ą┤ąĖąĮ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ PIO (ą▓ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ AT91SAM7 ąĖčģ ąĮąĄčüą║ąŠą╗čīą║ąŠ, PIOA, PIOB ąĖ čé. ą┤.) ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┤ąŠ 32 ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗčģ ą╗ąĖąĮąĖąĖ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░. ą×čüąĮąŠą▓ąĮą░čÅ ą╗ąŠą│ąĖą║ą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠą║ą░ąĘą░ąĮą░ ąĮą░ čĆąĖčü. 27-3. ąÆ čŹč鹊ą╝ ąŠą┐ąĖčüą░ąĮąĖąĖ ąŠč鹊ą▒čĆą░ąČąĄąĮ ąŠą┤ąĖąĮ čéą░ą║ąŠą╣ čüąĖą│ąĮą░ą╗, ąĮąŠ ą▓čüąĄą│ąŠ ąĖčģ 32, ą║ą░ąČą┤čŗą╣ ąĖąĘ ą║ąŠč鹊čĆčŗčģ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠą╝čā ąĖąĮą┤ąĄą║čüčā 0..31.
ąĀąĖčü. 27-3. I/O Line Control Logic.
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓ąĄčĆčģąĮąĖą╝ ąĮą░ą│čĆčāąĘąŠčćąĮčŗą╝ čĆąĄąĘąĖčüč鹊čĆąŠą╝ (pull-up). ąÜą░ąČą┤čŗą╣ čüąĖą│ąĮą░ą╗ I/O čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ čüąŠ ą▓čüčéčĆąŠąĄąĮąĮčŗą╝ pull-up čĆąĄąĘąĖčüč鹊čĆąŠą╝. ąŁč鹊čé čĆąĄąĘąĖčüč鹊čĆ ą╝ąŠąČąĮąŠ čĆą░ąĘčĆąĄčłąĖčéčī (ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī) ąĖą╗ąĖ ąĘą░ą┐čĆąĄčéąĖčéčī (ąŠčéą║ą╗čÄčćąĖčéčī) ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ ą▓ čĆą░ąĘčĆčÅą┤čŗ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ čĆąĄą│ąĖčüčéčĆąŠą▓ PIO_PUER (Pull-up Enable Register) ąĖ PIO_PUDR (Pull-up Disable Resistor). ąŚą░ą┐ąĖčüčī ą▓ čŹčéąĖ čĆąĄą│ąĖčüčéčĆčŗ ąŠčéčĆą░ąČą░ąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ąĖą╗ąĖ ąŠčćąĖčüčéą║ąŠą╣ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ PIO_PUSR (Pull-up Status Register). ą¤čĆąŠčćąĖčéą░ąĮąĮą░čÅ ą╗ąŠą│. 1 ą▓ čĆą░ąĘčĆčÅą┤ąĄ čĆąĄą│ąĖčüčéčĆą░ PIO_PUSR ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 pull-up ąĮą░ čŹč鹊ą╣ ąĮąŠąČą║ąĄ ąĘą░ą┐čĆąĄčēąĄąĮ, ąĖ ą┐čĆąŠčćąĖčéą░ąĮąĮčŗą╣ ą╗ąŠą│. 0 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 pull-up čĆą░ąĘčĆąĄčłąĄąĮ.
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ pull-up čĆąĄąĘąĖčüč鹊čĆąŠą╝ ą▓ąŠąĘą╝ąŠąČąĮąŠ ą▓ ą╗čÄą▒ąŠą╝ čüą╗čāčćą░ąĄ, ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čüąĖą│ąĮą░ą╗ą░ ą▓ą▓ąŠą┤ą░ ą▓čŗą▓ąŠą┤ą░ (čé. ąĄ. ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé č鹊ą│ąŠ, ą║ą░ą║ ąŠąĮą░ ąĮą░čüčéčĆąŠąĄąĮą░ - ąĖą╗ąĖ ą║ą░ą║ ą▓čŗą▓ąŠą┤ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖą╗ąĖ ą║ą░ą║ ą┐ąŠčĆčé GPIO).
ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą▓čüąĄ čĆąĄąĘąĖčüč鹊čĆčŗ pull-up ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čĆą░ąĘčĆąĄčłąĄąĮčŗ, čé. ąĄ. ą▓ čĆąĄą│ąĖčüčéčĆ PIO_PUSR čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ą▓ ąĘąĮą░č湥ąĮąĖąĄ 0x0.
ąØąŠąČą║ą░ GPIO ąĖą╗ąĖ ąĮąŠąČą║ą░ ą┤ą╗čÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ . ąÜąŠą│ą┤ą░ ą▓čŗą▓ąŠą┤ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąĖčĆąŠą▓ą░ąĮ čü ąŠą┤ąĮąĖą╝ ąĖą╗ąĖ ą┤ą▓čāą╝čÅ čäčāąĮą║čåąĖčÅą╝ąĖ ą▓čüčéčĆąŠąĄąĮąĮčŗčģ ą▓ ą║čĆąĖčüčéą░ą╗ą╗ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓, ą▓čŗą▒ąŠčĆ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čĆąĄą│ąĖčüčéčĆą░ą╝ąĖ PIO_PER (PIO Enable Register) ąĖ PIO_PDR (PIO Disable Register). ąĀąĄą│ąĖčüčéčĆ PIO_PSR (PIO Status Register) ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čĆąĄąĘčāą╗čīčéą░čé ąĘą░ą┐ąĖčüąĖ ą▓ čŹčéąĖ čĆąĄą│ąĖčüčéčĆčŗ, ąĖ ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé, čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą╗ąĖ ą▓čŗą▓ąŠą┤ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ąĖą╗ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ PIO. ąŚąĮą░č湥ąĮąĖąĄ 0 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą▓čŗą▓ąŠą┤ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ą▓čüčéčĆąŠąĄąĮąĮčŗą╝ ą▓ ą║čĆąĖčüčéą░ą╗ą╗ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝, ą▓čŗą▒čĆą░ąĮąĮčŗą╝ čĆąĄą│ąĖčüčéčĆąŠą╝ PIO_ABSR (AB Select Status Register). ąŚąĮą░č湥ąĮąĖąĄ 1 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą▓čŗą▓ąŠą┤ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ PIO.
ąĢčüą╗ąĖ ąĮąŠąČą║ą░ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą║ą░ą║ ą┐ąŠčĆčé GPIO (čé. ąĄ. ąŠąĮą░ ąĮąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąĖčĆąŠą▓ą░ąĮą░ čüąŠ ą▓čüčéčĆąŠąĄąĮąĮčŗą╝ ą▓ ą║čĆąĖčüčéą░ą╗ą╗ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝), čĆąĄą│ąĖčüčéčĆčŗ PIO_PER ąĖ PIO_PDR ąĮąĄ ąŠą║ą░ąĘčŗą▓ą░čÄčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░, ąĖ čćč鹥ąĮąĖąĄ PIO_PSR ą▓ąŠąĘą▓čĆą░čéąĖčé 1 ą┤ą╗čÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ ą▒ąĖčéą░.
ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ąŠą▒čŗčćąĮąŠ čüąĖą│ąĮą░ą╗čŗ I/O ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čāą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ PIO, ąĮą░ą┐čĆąĖą╝ąĄčĆ PIO_PSR čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ą▓ 1. ą×ą┤ąĮą░ą║ąŠ ą┤ą╗čÅ ąĮąĄą║ąŠč鹊čĆčŗčģ čüą╗čāčćą░ąĄą▓ ą▓ą░ąČąĮąŠ čāą┐čĆą░ą▓ą╗čÅčéčī čüąĖą│ąĮą░ą╗ą░ą╝ąĖ PIO čüąŠ čüč鹊čĆąŠąĮčŗ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (ą║ą░ą║ čŹč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┤ą╗čÅ čüąĖą│ąĮą░ą╗ąŠą▓ ą▓čŗą▒ąŠčĆą║ąĖ ą╝ąĖą║čĆąŠčüčģąĄą╝ ą┐ą░ą╝čÅčéąĖ, ą║ąŠč鹊čĆčŗąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĮąĄą░ą║čéąĖą▓ąĮčŗ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ąĖą╗ąĖ čüąĖą│ąĮą░ą╗ąŠą▓ ą░ą┤čĆąĄčüą░, ą║ąŠč鹊čĆčŗąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąĄčĆąĄą▓ąĄą┤ąĄąĮčŗ ą▓ 0 ą┤ą╗čÅ ąĘą░ą│čĆčāąĘą║ąĖ ąĖąĘ ą▓ąĮąĄčłąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ). ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĘąĮą░č湥ąĮąĖąĄ čüą▒čĆąŠčüą░ ą┤ą╗čÅ čĆąĄą│ąĖčüčéčĆą░ PIO_PSR ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ą╝ą░čĆą║ąŠą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąĖčĆąŠą▓ą░ąĮąĖčÅ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗčģ ą▓ąŠąĘą╝ąŠąČąĮąŠčüč鹥ą╣ ą▓čŗą▓ąŠą┤ąŠą▓.
ąÆčŗą▒ąŠčĆ Peripheral A ąĖą╗ąĖ B . ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ PIO ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąĖčĆąŠą▓ą░ąĮąĖąĄ ą┤ąŠ 2 ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čäčāąĮą║čåąĖą╣ ąĮą░ ąŠą┤ąĮąŠą╝ ą▓čŗą▓ąŠą┤ąĄ ą┐ąŠčĆčéą░. ąÆčŗą▒ąŠčĆ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ąĘą░ą┐ąĖčüčīčÄ ą▓ čĆąĄą│ąĖčüčéčĆ PIO_ASR (A Select Register) ąĖ PIO_BSR (Select B Register). PIO_ABSR (AB Select Status Register) ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ąŠą╣ čüąĖą│ąĮą░ą╗ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ą▓čŗą▒čĆą░ąĮ. ąöą╗čÅ ą║ą░ąČą┤ąŠą│ąŠ ą▓čŗą▓ąŠą┤ą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąŠą│. 0 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą▓čŗą▒čĆą░ąĮą░ čäčāąĮą║čåąĖčÅ peripheral A, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąŠą│. 1 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą▓čŗą▒čĆą░ąĮą░ čäčāąĮą║čåąĖčÅ peripheral B.
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąĖčĆąŠą▓ą░ąĮąĖąĄ čüąĖą│ąĮą░ą╗ąŠą▓ peripheral A ąĖ B ą▓ą╗ąĖčÅąĄčé č鹊ą╗čīą║ąŠ ąĮą░ ą▓čŗčģąŠą┤ąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ. ą¤ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ ą▓čģąŠą┤ąĮčŗąĄ čüąĖą│ąĮą░ą╗čŗ ą▓čüąĄą│ą┤ą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą║ ą▓čŗą▓ąŠą┤čā ą▓čģąŠą┤ą░.
ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ PIO_ABSR ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąŠą│. 0, ąĖ čŹč鹊 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą▓čüąĄ čüąĖą│ąĮą░ą╗čŗ PIO čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą┤ą╗čÅ čäčāąĮą║čåąĖą╣ peripheral A. ą×ą┤ąĮą░ą║ąŠ peripheral A ąŠą▒čŗčćąĮąŠ ąĮąĄ čāą┐čĆą░ą▓ą╗čÅčÄčé ą▓čŗą▓ąŠą┤ąŠą╝, ą┐ąŠčüą║ąŠą╗čīą║čā ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ PIO čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ čüąĖą│ąĮą░ą╗ą░ ą▓ą▓ąŠą┤ą░/ą▓čŗą▓ąŠą┤ą░ (GPIO).
ąŚą░ą┐ąĖčüčī ą▓ PIO_ASR ąĖ PIO_BSR čāą┐čĆą░ą▓ą╗čÅąĄčé čüąŠčüč鹊čÅąĮąĖąĄą╝ PIO_ABSR ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą▓čŗą▓ąŠą┤ą░. ą×ą┤ąĮą░ą║ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖąĄ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ čäčāąĮą║čåąĖąĖ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ čéčĆąĄą▒čāąĄčé ąĘą░ą┐ąĖčüąĖ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čĆąĄą│ąĖčüčéčĆ ą▓čŗą▒ąŠčĆą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (PIO_ASR ąĖą╗ąĖ PIO_BSR) ą▓ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖąĄ ą║ ąĘą░ą┐ąĖčüąĖ ą▓ PIO_PDR.
ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓čŗčģąŠą┤ąŠą╝ . ąÜąŠą│ą┤ą░ čüąĖą│ąĮą░ą╗ I/0 ąĮą░ąĘąĮą░č湥ąĮ ą┐ąŠą┤ čäčāąĮą║čåąĖčÄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą║ąŠą│ą┤ą░ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ PIO_PSR ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąŠą│. 0, čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čüąĖą│ąĮą░ą╗ąŠą╝ I/O ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ą▓čüčéčĆąŠąĄąĮąĮčŗą╝ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. Peripheral A ąĖą╗ąĖ B, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ąĘąĮą░č湥ąĮąĖčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ PIO_ABSR, ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, čĆą░ą▒ąŠčéą░ąĄčé ą╗ąĖ ą▓čŗą▓ąŠą┤ ą║ą░ą║ ą▓čŗčģąŠą┤, ąĖą╗ąĖ ąĮąĄčé.
ąÜąŠą│ą┤ą░ čüąĖą│ąĮą░ą╗ I/O čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ PIO, ą▓čŗą▓ąŠą┤ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą║ą░ą║ ą▓čŗčģąŠą┤. ąŁč鹊 ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ ąĘą░ą┐ąĖčüčīčÄ ą▓ čĆąĄą│ąĖčüčéčĆčŗ PIO_OER (Output Enable Register) ąĖ PIO_ODR (Output Disable Register). ąĀąĄąĘčāą╗čīčéą░čé čŹčéąĖčģ ąŠą┐ąĄčĆą░čåąĖą╣ ąĘą░ą┐ąĖčüąĖ ąŠč鹊ą▒čĆą░ąČą░ąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ PIO_OSR (Output Status Register). ąÜąŠą│ą┤ą░ ą▒ąĖčé ą▓ čŹč鹊ą╝ čĆąĄą│ąĖčüčéčĆąĄ čćąĖčéą░ąĄčéčüčÅ ą║ą░ą║ 0, č鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čüąĖą│ąĮą░ą╗ I/O ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą║ą░ą║ ą▓čģąŠą┤. ąÜąŠą│ą┤ą░ ą▒ąĖčé čćąĖčéą░ąĄčéčüčÅ ą║ą░ą║ 1, č鹊 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ čüąĖą│ąĮą░ą╗ I/O čĆą░ą▒ąŠčéą░ąĄčé ą║ą░ą║ ą▓čŗčģąŠą┤ ąĖ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄą╝ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ PIO.
ąŻčĆąŠą▓ąĄąĮčī, ą║ąŠč鹊čĆčŗą╣ ą▓čŗčüčéą░ą▓ą╗ąĄąĮ ąĮą░ ą▓čŗčģąŠą┤ąĄ, ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ ąĘą░ą┐ąĖčüčīčÄ ą▓ čĆąĄą│ąĖčüčéčĆčŗ PIO_SODR (Set Output Data Register) ąĖ PIO_CODR (Clear Output Data Register). ąĀąĄąĘčāą╗čīčéą░čé čŹčéąĖčģ ąŠą┐ąĄčĆą░čåąĖą╣ ąĘą░ą┐ąĖčüąĖ ąŠč鹊ą▒čĆą░ąČą░ąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ PIO_ODSR (Output Data Status Register), ą║ąŠč鹊čĆčŗą╣ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą╗ąŠą│ąĖč湥čüą║ąĖąĄ čāčĆąŠą▓ąĮąĖ ąĮą░ ą▓čŗčģąŠą┤ąĮčŗčģ ą╗ąĖąĮąĖčÅčģ I/O. ąŚą░ą┐ąĖčüčī ą▓ PIO_OER ąĖ PIO_ODR čāą┐čĆą░ą▓ą╗čÅąĄčé čüąŠčüč鹊čÅąĮąĖąĄą╝ PIO_OSR ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé č鹊ą│ąŠ, ą║ą░ą║ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą▓čŗą▓ąŠą┤ - ąĖą╗ąĖ ąŠčé ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ PIO, ąĖą╗ąĖ ąŠčé ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ąŁčéą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī čüąĖą│ąĮą░ą╗ I/O ą┐ąĄčĆąĄą┤ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ąĄą│ąŠ ą┐ąŠą┤ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ PIO.
ą¤ąŠą┤ąŠą▒ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ąĘą░ą┐ąĖčüčī ą▓ čĆąĄą│ąĖčüčéčĆčŗ PIO_SODR ąĖ PIO_CODR ą▓ą╗ąĖčÅąĄčé ąĮą░ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆą░ PIO_ODSR. ąŁč鹊 ą▓ą░ąČąĮąŠ, ą┐ąŠčüą║ąŠą╗čīą║čā ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé ą┐ąĄčĆą▓čŗą╣ čāčĆąŠą▓ąĄąĮčī, ą║ąŠč鹊čĆčŗą╣ ą▓čŗą┤ą░ąĄčéčüčÅ ąĮą░ ą▓čŗčģąŠą┤ąĮąŠą╣ čüąĖą│ąĮą░ą╗ I/O.
ąĪąĖąĮčģčĆąŠąĮąĮčŗą╣ ą▓čŗą▓ąŠą┤ ą┤ą░ąĮąĮčŗčģ . ąŻą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮčŗą╝ąĖ čłąĖąĮą░ą╝ąĖ čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ ąĮąĄčüą║ąŠą╗čīą║ąĖčģ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ PIO čéčĆąĄą▒čāąĄčé ą┤ą▓čāčģ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗčģ ąŠą┐ąĄčĆą░čåąĖą╣ ąĘą░ą┐ąĖčüąĖ ą▓ čĆąĄą│ąĖčüčéčĆčŗ PIO_SODR ąĖ PIO_CODR čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖčģ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ PIO. ąŁč鹊 ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ąĮąĄąČąĄą╗ą░č鹥ą╗čīąĮčŗą╝ ą┐ąĄčĆąĄčģąŠą┤ąĮčŗą╝ ąĘąĮą░č湥ąĮąĖčÅą╝ ąĮą░ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠą╣ čłąĖąĮąĄ. ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ PIO ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐čĆčÅą╝ąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓čŗčģąŠą┤ą░ą╝ąĖ PIO ąĘą░ ąŠą┤ąĖąĮ ą┤ąŠčüčéčāą┐ ąĮą░ ąĘą░ą┐ąĖčüčī ą▓ čĆąĄą│ąĖčüčéčĆ PIO_ODSR (Output Data Status Register). ąæčāą┤čāčé ąĘą░ą┐ąĖčüą░ąĮčŗ č鹊ą╗čīą║ąŠ ą▒ąĖčéčŗ, ą┤ąĄą╝ą░čüą║ąĖčĆąŠą▓ą░ąĮąĮčŗąĄ čĆąĄą│ąĖčüčéčĆąŠą╝ PIO_OWSR (Output Write Status Register). ąæąĖčéčŗ ą╝ą░čüą║ąĖ ą▓ čĆąĄą│ąĖčüčéčĆąĄ PIO_OWSR čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ ąĘą░ą┐ąĖčüčīčÄ ą▓ čĆąĄą│ąĖčüčéčĆ PIO_OWER (Output Write Enable Register), ąĖ ąŠčćąĖčēą░čÄčéčüčÅ ąĘą░ą┐ąĖčüčīčÄ ą▓ čĆąĄą│ąĖčüčéčĆ PIO_OWDR (Output Write Disable Register).
ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ čüąĖąĮčģčĆąŠąĮąĮčŗą╣ ą▓čŗą▓ąŠą┤ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ ą▓čüąĄčģ čüąĖą│ąĮą░ą╗ąŠą▓ I/O ąĘą░ą┐čĆąĄčēąĄąĮ, ą┐ąŠčüą║ąŠą╗čīą║čā čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čĆąĄą│ąĖčüčéčĆą░ PIO_OWSR čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ą▓ ąĘąĮą░č湥ąĮąĖąĄ 0x0.
ąĪąŠą▓ą╝ąĄčēąĄąĮąĮąŠąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą▓čŗčģąŠą┤ąŠą╝ (ąŠčéą║čĆčŗčéčŗą╣ čüč鹊ą║) . ąÜą░ąČą┤ą░čÅ ąĮąŠąČą║ą░ I/O ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮą░ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ą┤čĆčāą│ąĖčģ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą║ą░ą║ ą▓čŗčģąŠą┤ čü ąŠčéą║čĆčŗčéčŗą╝ čüč鹊ą║ąŠą╝ (Open Drain), čŹč鹊 čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝ą░čÅ čäčāąĮą║čåąĖčÅ čüąŠą▓ą╝ąĄčēąĄąĮąĮąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čŗčģąŠą┤ąŠą╝ (Multi Drive). ąŁčéą░ čäčāąĮą║čåąĖčÅ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ čüąŠąĄą┤ąĖąĮąĖčéčī ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą▓čŗčģąŠą┤ąŠą▓ I/O, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠą│čāčé ą┐ąĄčĆąĄą▓ąŠą┤ąĖčéčīčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 0 ą║ą░ąČą┤čŗą╝ ąĖąĘ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ ąĮą░ čŹč鹊čé čüąĖą│ąĮą░ą╗ čāčüčéčĆąŠą╣čüčéą▓ (čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝ą░čÅ ą╝ąŠąĮčéą░ąČąĮą░čÅ čäčāąĮą║čåąĖčÅ ąśąøąś-ąØąĢ). ą×ą▒čŗčćąĮąŠ ą┤ą╗čÅ čéą░ą║ąŠą│ąŠ čäčāąĮą║čåąĖąŠąĮą░ą╗ą░ čéčĆąĄą▒čāąĄčéčüčÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą▓ąĮąĄčłąĮąĄą│ąŠ ą▓ąĄčĆčģąĮąĄą│ąŠ ąĮą░ą│čĆčāąĘąŠčćąĮąŠą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░ pull-up (ąĖą╗ąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ čĆąĄąĘąĖčüč鹊čĆą░ pull-up) čŹč鹊 ąŠą▒čŗčćąĮąŠ čéčĆąĄą▒čāąĄčéčüčÅ ą┤ą╗čÅ ą│ą░čĆą░ąĮčéąĖąĖ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĮą░ ą┐ąŠą╗čāč湥ąĮąĮąŠą╝ čüąĖą│ąĮą░ą╗ąĄ čāčĆąŠą▓ąĮčÅ ą╗ąŠą│. 1.
ąŁčéą░ čäčāąĮą║čåąĖčÅ Multi Drive čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ čĆąĄą│ąĖčüčéčĆą░ą╝ąĖ PIO_MDER (Multi-driver Enable Register) ąĖ PIO_MDDR (Multi-driver Disable Register). Multi Drive ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą▒čĆą░ąĮąŠ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé č鹊ą│ąŠ, čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą╗ąĖ čüąĖą│ąĮą░ą╗ I/O ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ PIO, ą╗ąĖą▒ąŠ čäčāąĮą║čåąĖąĄą╣ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ąĀąĄą│ąĖčüčéčĆ PIO_MDSR (Multi-driver Status Register) ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ą░ą║ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą▓čŗą▓ąŠą┤ ą┤ą╗čÅ ą┐ąŠą┤ą┤ąĄčƹȹ║ąĖ ą▓ąĮąĄčłąĮąĖčģ ą┤čĆą░ą╣ą▓ąĄčĆąŠą▓.
ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ čäčāąĮą║čåąĖčÅ Multi Drive ą┤ą╗čÅ ą▓čüąĄčģ ą▓čŗą▓ąŠą┤ąŠą▓ ąĘą░ą┐čĆąĄčēąĄąĮą░, čé. ąĄ. PIO_MDSR čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ą▓ ąĘąĮą░č湥ąĮąĖąĄ 0x0.
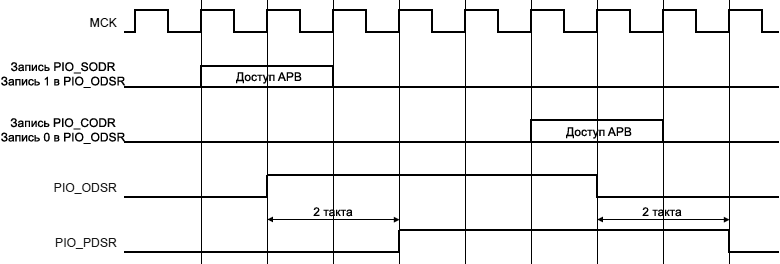
ą¤ą░čĆą░ą╝ąĄčéčĆčŗ ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą╗čÅ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čüąŠčüč鹊čÅąĮąĖčÅ ą▓čŗčģąŠą┤ą░ . ąØą░ čĆąĖčü. 27-4 ą┐ąŠą║ą░ąĘą░ąĮąŠ, ą║ą░ą║ ą▓čŗčģąŠą┤čŗ čāą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ąĘą░ą┐ąĖčüčīčÄ ą╗ąĖą▒ąŠ ą▓ čĆąĄą│ąĖčüčéčĆ PIO_SODR, ą╗ąĖą▒ąŠ ą▓ čĆąĄą│ąĖčüčéčĆ PIO_CODR, ą╗ąĖą▒ąŠ ą┐čĆčÅą╝ąŠą╣ ąĘą░ą┐ąĖčüčīčÄ ą▓ čĆąĄą│ąĖčüčéčĆ PIO_ODSR. ąŁč鹊čé ą┐ąŠčüą╗ąĄą┤ąĮąĖą╣ čüą╗čāčćą░ą╣ čĆą░ąĘčĆąĄčłąĄąĮ č鹊ą╗čīą║ąŠ č鹊ą│ą┤ą░, ą║ąŠą│ą┤ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ PIO_OWSR. ąĀąĖčü. 27-4 čéą░ą║ąČąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą║ąŠą│ą┤ą░ ą┤ąŠčüčéčāą┐ąĮą░ ąŠą▒čĆą░čéąĮą░čÅ čüą▓čÅąĘčī ą▓ čĆąĄą│ąĖčüčéčĆąĄ PIO_PDSR.
ąĀąĖčü. 27-4. ąöąĖą░ą│čĆą░ą╝ą╝čŗ ą▓čĆąĄą╝ąĄąĮąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čŗčģąŠą┤ąŠą╝.
ąÆčģąŠą┤čŗ . ąøąŠą│ąĖč湥čüą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī ąĮą░ ą║ą░ąČą┤ąŠą╝ ąĖąĘ čüąĖą│ąĮą░ą╗ąŠą▓ I/O ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮ č湥čĆąĄąĘ čĆąĄą│ąĖčüčéčĆ PIO_PDSR (Pin Data Status Register). ąŁč鹊čé čĆąĄą│ąĖčüčéčĆ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čāčĆąŠą▓ąĄąĮčī ąĮą░ ąĮąŠąČą║ąĄ I/O ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ąĄčæ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, čé. ąĄ. ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé č鹊ą│ąŠ, čĆą░ą▒ąŠčéą░ąĄčé ą╗ąĖ ąĮąŠąČą║ą░ čāąĮąĖą║ą░ą╗čīąĮąŠ ą║ą░ą║ ą▓čģąŠą┤, ą╗ąĖą▒ąŠ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ PIO, ą╗ąĖą▒ąŠ čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą▓čüčéčĆąŠąĄąĮąĮčŗą╝ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ą¦č鹥ąĮąĖąĄ čāčĆąŠą▓ąĮąĄą╣ I/O čéčĆąĄą▒čāąĄčé ąĮą░ą╗ąĖčćąĖčÅ čĆą░ąĘčĆąĄčłąĄąĮąĮąŠą│ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ PIO, ąĖąĮą░č湥 čćč鹥ąĮąĖčÅ PIO_PDSR ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēą░čéčī čāčĆąŠą▓ąĮąĖ ąĮą░ čüąĖą│ąĮą░ą╗ą░čģ I/O ą▓ č鹊čé ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠą│ą┤ą░ čéą░ą║čéčŗ PIO ą▒čŗą╗ąĖ ąĘą░ą┐čĆąĄčēąĄąĮčŗ.
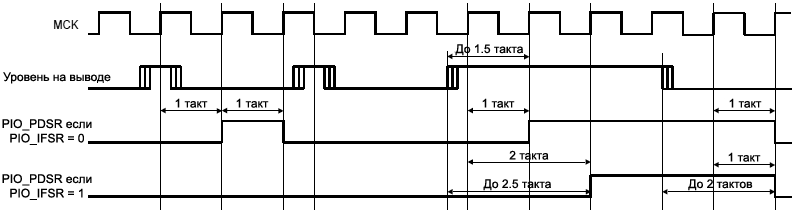
ążąĖą╗čīčéčĆą░čåąĖčÅ ąĖą│ąŠą╗ąŠą║ ąĮą░ ą▓čģąŠą┤ąĄ (Input Glitch Filtering). ąØą░ ą║ą░ąČą┤ąŠą╝ ą▓čŗą▓ąŠą┤ąĄ ą┐ąŠčĆčéą░ I/O ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé čäąĖą╗čīčéčĆ ą┐ąŠą╝ąĄčģ ą┐ąŠ ą▓čģąŠą┤čā, ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╣ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ą┤čĆčāą│ąĖčģ ą▓čŗą▓ąŠą┤ąŠą▓ ą┐ąŠčĆč鹊ą▓ I/O, čŹč鹊 čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝čŗą╣ glitch filter. ąÜąŠą│ą┤ą░ čŹč鹊čé čäąĖą╗čīčéčĆ čĆą░ąĘčĆąĄčłąĄąĮ, ąĖą╝ą┐čāą╗čīčüąĮčŗąĄ ą▓čŗą▒čĆąŠčüčŗ ąĮą░ ą▓čģąŠą┤ąĄ čü ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčīčÄ ą╝ąĄąĮčīčłąĄ č湥ą╝ 1/2 ą┐ąĄčĆąĖąŠą┤ą░ ą│ą╗ą░ą▓ąĮąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ (Master Clock, MCK) ą▒čāą┤čāčé ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčéą▒čĆą░čüčŗą▓ą░čéčīčüčÅ, ąĖ ąĮąĄ ą▒čāą┤čāčé ą┐čĆąŠčģąŠą┤ąĖčéčī ą▓ ą░ą┐ą┐ą░čĆą░čéčāčĆčā ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ą▓ č鹊 ą▓čĆąĄą╝čÅ ąĖą╝ą┐čāą╗čīčüčŗ čü ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčīčÄ 1 čéą░ą║čé MCK ąĖą╗ąĖ ą▒ąŠą╗ąĄąĄ ą┤ą╗ąĖąĮąĮčŗąĄ ą▒čāą┤čāčé ą▓ąŠčüą┐čĆąĖąĮčÅčéčŗ. ąśą╝ą┐čāą╗čīčüčŗ čü ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčÅą╝ąĖ ą╝ąĄąČą┤čā 1/2 ą┐ąĄčĆąĖąŠą┤ą░ MCK ąĖ 1 ą┐ąĄčĆąĖąŠą┤ąŠą╝ MCK ą╝ąŠą│čāčé čüą╗čāčćą░ą╣ąĮčŗą╝ ąŠą▒čĆą░ąĘąŠą╝ ą▓ąŠčüą┐čĆąĖąĮčÅčéčŗ ąĖą╗ąĖ ąĮąĄčé, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹊ą│ąŠ, ą▓ ą║ą░ą║ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▓čĆąĄą╝ąĄąĮąĖ čŹčéąĖ ąĖą╝ą┐čāą╗čīčüčŗ ą┐ąŠčÅą▓ąĖą╗ąĖčüčī. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊ą▒čŗ ąĖą╝ą┐čāą╗čīčü ą▒čŗą╗ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░ąĮąĮąŠ ą▓ąŠčüą┐čĆąĖąĮčÅčé, ąĄą│ąŠ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą┤ąŠą╗ąČąĮą░ ą┐čĆąĄą▓čŗčłą░čéčī 1 čéą░ą║čé MCK, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą┤ą╗čÅ ą│ą░čĆą░ąĮčéąĖčĆąŠą▓ą░ąĮąĮąŠą╣ čäąĖą╗čīčéčĆą░čåąĖąĖ ą▓čģąŠą┤ąĮčŗčģ ą┐ąŠą╝ąĄčģ čéčĆąĄą▒čāąĄčéčüčÅ, čćč鹊ą▒čŗ ąĖčģ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéčī ą▒čŗą╗ą░ ąĮąĄ ą▒ąŠą╗čīčłąĄ 1/2 čéą░ą║čéą░ MCK. ąŁč鹊čé čäąĖą╗čīčéčĆ, ąĄčüą╗ąĖ ąŠąĮ čĆą░ąĘčĆąĄčłąĄąĮ, ą▓ąĮąŠčüąĖčé ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮčāčÄ ąĘą░ą┤ąĄčƹȹ║čā ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ąĮą░ 1 čéą░ą║čé MCK, ąĄčüą╗ąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░ ąĮą░ ą▓čģąŠą┤ąĄ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ ą┐ąĄčĆąĄą┤ čäčĆąŠąĮč鹊ą╝ ąĮą░čĆą░čüčéą░ąĮąĖčÅ. ą×ą┤ąĮą░ą║ąŠ čŹčéą░ ąĘą░ą┤ąĄčƹȹ║ą░ ąĮąĄ ąĮą░ą▒ą╗čÄą┤ą░ąĄčéčüčÅ, ąĄčüą╗ąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░ ąĮą░ ą▓čģąŠą┤ąĄ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ ą┐ąĄčĆąĄą┤ čüą┐ą░ą┤ąŠą╝ čāčĆąŠą▓ąĮčÅ ąĮą░ ą▓čģąŠą┤ąĄ. ąŁč鹊 ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 27-5.
ąĀąĖčü. 27-5. ąśąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ čĆą░ą▒ąŠčéčŗ čäąĖą╗čīčéčĆą░ ą▓čģąŠą┤ąĮčŗčģ ą┐ąŠą╝ąĄčģ.
ążąĖą╗čīčéčĆčŗ ą┐ąŠą╝ąĄčģ čāą┐čĆą░ą▓ą╗čÅčÄčéčüčÅ ąĮą░čüčéčĆąŠą╣ą║ąŠą╣ čĆąĄą│ąĖčüčéčĆąŠą▓ PIO_IFER (Input Filter Enable Register), PIO_IFDR (Input Filter Disable Register), ąĖ čüąŠčüč鹊čÅąĮąĖąĄ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ čäąĖą╗čīčéčĆą░ ą╝ąŠąČąĮąŠ ąŠčéčüą╗ąĄą┤ąĖčéčī ą▓ čĆąĄą│ąĖčüčéčĆąĄ PIO_IFSR (Input Filter Status Register). ąŚą░ą┐ąĖčüčī ą▓ PIO_IFER ąĖ PIO_IFDR čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĖ ąŠčćąĖčēą░ąĄčé ą▒ąĖčéčŗ ą▓ čĆąĄą│ąĖčüčéčĆąĄ PIO_IFSR. ąĪąŠčüč鹊čÅąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ PIO_IFSR ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, čĆą░ąĘčĆąĄčłąĄąĮ ąĖą╗ąĖ ąĘą░ą┐čĆąĄčēąĄąĮ ą▓čģąŠą┤ąĮąŠą╣ čäąĖą╗čīčéčĆ ąĮą░ ą║ą░ąČą┤ąŠą╝ čĆą░ąĘčĆčÅą┤ąĄ ą┐ąŠčĆčéą░ I/O.
ąÜąŠą│ą┤ą░ čäąĖą╗čīčéčĆ ą┐ąŠą╝ąĄčģ čĆą░ąĘčĆąĄčłąĄąĮ, čŹč鹊 ąĮąĄ ą▓ą╗ąĖčÅąĄčé ąĮą░ ą┐ąŠą▓ąĄą┤ąĄąĮąĖąĄ ą▓čģąŠą┤ąŠą▓ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓. ążąĖą╗čīčéčĆ ą▓ą╗ąĖčÅąĄčé č鹊ą╗čīą║ąŠ ąĮą░ ąĘąĮą░č湥ąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ čćąĖčéą░čÄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ PIO_PDSR, ąĖ čéą░ą║ąČąĄ čäąĖą╗čīčéčĆ ą▓ą╗ąĖčÅąĄčé ąĮą░ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ ą▓čģąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░. ążąĖą╗čīčéčĆčŗ ą┐ąŠą╝ąĄčģ čéčĆąĄą▒čāčÄčé, čćč鹊ą▒čŗ ą▒čŗą╗ąŠ čĆą░ąĘčĆąĄčłąĄąĮąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ PIO.
ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ ąĮą░ ą▓čģąŠą┤ąĄ (Input Change Interrupt). ąÜąŠąĮčéčĆąŠą╗ą╗ąĄčĆ PIO ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠą│ą┤ą░ ąŠą▒ąĮą░čĆčāąČąĄąĮąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ ą▓čģąŠą┤ą░ čüąĖą│ąĮą░ą╗ą░ I/O. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ Input Change čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ąĘą░ą┐ąĖčüčīčÄ ą▓ čĆąĄą│ąĖčüčéčĆ PIO_IER (Interrupt Enable Register) ąĖ PIO_IDR (Interrupt Disable Register), ą║ąŠč鹊čĆčŗąĄ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ čĆą░ąĘčĆąĄčłą░čÄčé ąĖ ąĘą░ą┐čĆąĄčēą░čÄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ ą▓čģąŠą┤ą░, čćč鹊 ąŠčéčĆą░ąČą░ąĄčéčüčÅ ą▓ čāčüčéą░ąĮąŠą▓ą║ąĄ ąĖ ąŠčćąĖčüčéą║ąĄ ą▒ąĖčé čĆąĄą│ąĖčüčéčĆą░ PIO_IMR (Interrupt Mask Register). ąöąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ą░ ąĮą░ ą▓čģąŠą┤ąĄ ą▓ąŠąĘą╝ąŠąČąĮąŠ č鹊ą╗čīą║ąŠ ą┐čāč鹥ą╝ čüčĆą░ą▓ąĮąĄąĮąĖčÅ ą┤ą▓čāčģ čüą╗ąĄą┤čāčÄčēąĖčģ ą┤čĆčāą│ ąĘą░ ą┤čĆčāą│ąŠą╝ ą┐ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą▓čŗą▒ąŠčĆąŠą║ ą▓čģąŠą┤ąĮąŠą│ąŠ čāčĆąŠą▓ąĮčÅ ąĮą░ ą▓čģąŠą┤ąĄ, ą┐čĆąĖ čŹč鹊ą╝ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ PIO. ą¤čĆąĄčĆčŗą▓ą░ąĮąĖąĄ Input Change ą┤ąŠčüčéčāą┐ąĮąŠ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ąŠčĆčéą░ ą▓ą▓ąŠą┤ą░ ą▓čŗą▓ąŠą┤ą░, čé. ąĄ. ąŠąĮ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ č鹊ą╗čīą║ąŠ ą║ą░ą║ ą▓čģąŠą┤, čāą┐čĆą░ą▓ą╗čÅčéčīčüčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ PIO ą║ą░ą║ ą▓čŗčģąŠą┤ ąĖą╗ąĖ ąĮą░ąĘąĮą░č湥ąĮ ąĮą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čäčāąĮą║čåąĖąĄą╣ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
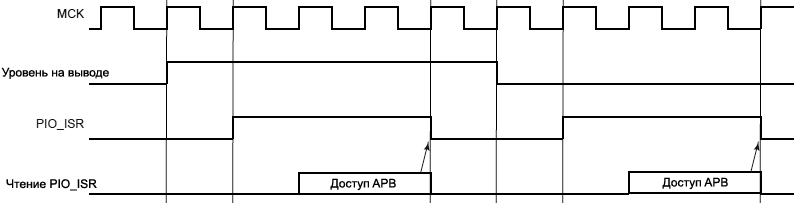
ąÜąŠą│ą┤ą░ ą▒čŗą╗ąŠ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖąĄ čāčĆąŠą▓ąĮčÅ ąĮą░ ąĮąŠąČą║ąĄ ą┐ąŠčĆčéą░ I/O, ą▒čāą┤ąĄčé čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ą▓ čĆąĄą│ąĖčüčéčĆąĄ PIO_ISR (Interrupt Status Register). ąĢčüą╗ąĖ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé čĆąĄą│ąĖčüčéčĆą░ PIO_IMR, č鹊 ą▒čāą┤ąĄčé ą▓čŗčüčéą░ą▓ą╗ąĄąĮąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ PIO. ąĪąĖą│ąĮą░ą╗čŗ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčé 32 ą║ą░ąĮą░ą╗ąŠą▓ čüčāą╝ą╝ąĖčĆčāčÄčéčüčÅ čäčāąĮą║čåąĖąĄą╣ ąśąøąś ą┤čĆčāą│ čü ą┤čĆčāą│ąŠą╝ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ąŠą┤ąĮąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą╗čÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ AIC (Advanced Interrupt Controller).
ąÜąŠą│ą┤ą░ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ čćąĖčéą░ąĄčé PIO_ISR, ą▓čüąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ąŠčćąĖčēą░čÄčéčüčÅ. ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą▓čüąĄ ąŠąČąĖą┤ą░čÄčēąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ąŠą▒ąŠąĘąĮą░č湥ąĮčŗ čüąŠčüč鹊čÅąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆą░ PIO_ISR, ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠą▒čĆą░ą▒ąŠčéą░ąĮčŗ ą┐ąŠčüą╗ąĄ ąĄą┤ąĖąĮčüčéą▓ąĄąĮąĮąŠą╣ ąŠą┐ąĄčĆą░čåąĖąĖ čćč鹥ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░ PIO_ISR.
ąĀąĖčü. 27-6. ąśąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ ą▓čģąŠą┤ą░ (Input Change Interrupt).
[ą¤čĆąĖą╝ąĄčĆ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ I/O ]
ą¤čĆąĖą╝ąĄčĆ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗą╣ ą▓ čéą░ą▒ą╗ąĖčåąĄ 27-1, ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ čüą╗ąĄą┤čāčÄčēąĄą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ:
ŌĆó 4-čĆą░ąĘčĆčÅą┤ąĮčŗą╣ ą▓čŗčģąŠą┤ąĮąŠą╣ ą┐ąŠčĆčé ą┤ą╗čÅ čüąĖą│ąĮą░ą╗ąŠą▓ I/O čü ąĮąŠą╝ąĄčĆą░ą╝ąĖ ą▒ąĖčé 0 .. 3 (čŹč鹊 ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ ąŠą┤ąĮąŠą╣ ąŠą┐ąĄčĆą░čåąĖąĄą╣ ąĘą░ą┐ąĖčüąĖ), čü ąŠčéą║čĆčŗčéčŗą╝ čüč鹊ą║ąŠą╝, čü čĆą░ąĘčĆąĄčłąĄąĮąĮčŗą╝ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ pull-up čĆąĄąĘąĖčüč鹊čĆąŠą╝.
ąóą░ą▒ą╗ąĖčåą░ 27-1. ą¤čĆąĖą╝ąĄčĆ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąĮąŠąČąĄą║ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░.
ąĀąĄą│ąĖčüčéčĆ (ą╝ąĮąĄą╝ąŠąĮąĖą║ą░) ąŚą░ą┐ąĖčüčŗą▓ą░ąĄą╝ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ
PIO_PER
0x0000 FFFF
PIO_PDR
0x0FFF 0000
PIO_OER
0x0000 00FF
PIO_ODR
0x0FFF FF00
PIO_IFER
0x0000 0F00
PIO_IFDR
0x0FFF F0FF
PIO_SODR
0x0000 0000
PIO_CODR
0x0FFF FFFF
PIO_IER
0x0F00 0F00
PIO_IDR
0x00FF F0FF
PIO_MDER
0x0000 000F
PIO_MDDR
0x0FFF FFF0
PIO_PUDR
0x00F0 00F0
PIO_PUER
0x0F0F FF0F
PIO_ASR
0x0F0F 0000
PIO_BSR
0x00F0 0000
PIO_OWER
0x0000 000F
PIO_OWDR
0x0FFF FFF0
// ą¤čĆąĖą╝ąĄčĆ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠčĆč鹊ą╝ ą┤ą╗čÅ ą▓ą║ą╗čÄč湥ąĮąĖčÅ/ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░. // ąĪą▓ąĄč鹊ą┤ąĖąŠą┤ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ 21-ą╝čā čĆą░ąĘčĆčÅą┤čā ą┐ąŠčĆčéą░ PIOB. #include "AT91SAM7X256.h"
// ąÆčŗą▓ąŠą┤ ą┐ąŠčĆčéą░ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░: #define LED_PIN (1<<21) // ą£ą░ą║čĆąŠčü ą┤ą╗čÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą▓čŗą▓ąŠą┤ą░ ą▓ ą╗ąŠą│. 0: #define LED0() (AT91C_BASE_PIOB->PIO_CODR = LED_PIN) // ą£ą░ą║čĆąŠčü ą┤ą╗čÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą▓čŗą▓ąŠą┤ą░ ą▓ ą╗ąŠą│. 1: #define LED1() (AT91C_BASE_PIOB->PIO_SODR = LED_PIN) // ą£ą░ą║čĆąŠčü ą┤ą╗čÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą▓čŗą▓ąŠą┤ą░ ą▓ ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ: #define LEDCHANGE() {(AT91C_BASE_PIOB->PIO_ODSR & LED_PIN)?LED0():LED1();}
//*---------------------------------------------------------------------------- //* ążčāąĮą║čåąĖčÅ čĆą░ąĘčĆąĄčłą░ąĄčé čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĖč乥čĆą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ //*---------------------------------------------------------------------------- __inline void AT91F_PMC_EnablePeriphClock (
AT91PS_PMC pPMC, // čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ PMC
unsigned int periphIds) // ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓
// ą▓ ą▓ąĖą┤ąĄ OR-ą╝ą░čüą║ąĖ
{
pPMC-> PMC_PCER = periphIds;
}
//*---------------------------------------------------------------------------- //* ążčāąĮą║čåąĖčÅ čĆą░ąĘčĆąĄčłą░ąĄčé PIO ą▓ čĆąĄąČąĖą╝ąĄ ą▓čŗčģąŠą┤ą░ output mode //*---------------------------------------------------------------------------- __inline void AT91F_PIO_CfgOutput (
AT91PS_PIO pPio, // čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ PIO
unsigned int pioEnable) // OR-ą╝ą░čüą║ą░ ą▓čŗą▓ąŠą┤ą░, ą║ąŠč鹊čĆčŗą╣ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮ
{
pPio-> PIO_PER = pioEnable; // ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą▓čŗą▓ąŠą┤ą░ ą▓ čĆąĄąČąĖą╝ GPIO
pPio-> PIO_OER = pioEnable; // ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ąŠčĆčéą░ ą║ą░ą║ ą▓čŗčģąŠą┤ą░
}
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ PIOB:
AT91F_PMC_EnablePeriphClock ( AT91C_BASE_PMC, 1 << AT91C_ID_PIOB );// ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ą▓čŗą▓ąŠą┤ą░ ą┐ąŠčĆčéą░ ą┤ą╗čÅ čüą▓ąĄč鹊ą┤ąĖąŠą┤ą░ ą▓ čĆąĄąČąĖą╝ąĄ ą▓čŗčģąŠą┤ą░:
AT91F_PIO_CfgOutput(AT91C_BASE_PIOB, LED_PIN);
// ąÆčŗą▓ąŠą┤ ą╗ąŠą│. 0:
LED0();// ąÆčŗą▓ąŠą┤ ą╗ąŠą│. 1:
LED0();// ą¤ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ ą▓ ą┐čĆąŠčéąĖą▓ąŠą┐ąŠą╗ąŠąČąĮąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ:
LEDCHANGE();
// ą¤čĆąĖą╝ąĄčĆ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą╗ąŠą│. čāčĆąŠą▓ąĮčÅ ąĮą░ ą▓čģąŠą┤ąĄ čü čåąĄą╗čīčÄ čāąĘąĮą░čéčī, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą╗ąĖ // ą║ą░čĆčéą░ ą┐ą░ą╝čÅčéąĖ ą▓ čüą╗ąŠčé, ąĖą╗ąĖ ąĮąĄčé. ąØą░ ą▓čģąŠą┤ ą┐ąŠą┤ą░ąĄčéčüčÅ čüąĖą│ąĮą░ą╗ čü ą║ąŠąĮčéą░ą║čéą░ čāčüčéą░ąĮąŠą▓ą║ąĖ // ą▓ čüą╗ąŠčé ą║ą░čĆčéčŗ ą┐ą░ą╝čÅčéąĖ SD. ąŁč鹊čé čüąĖą│ąĮą░ą╗ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ 26-ą╝čā ą▒ąĖčéčā ą┐ąŠčĆčéą░ PIOB.
// ą£ą░čüą║ą░ ą┤ą╗čÅ ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░: #define CARD_SENSE_SW (1<<26)
//*---------------------------------------------------------------------------- //* ążčāąĮą║čåąĖčÅ čĆą░ąĘčĆąĄčłą░ąĄčé PIO ą▓ čĆąĄąČąĖą╝ąĄ ą▓čģąŠą┤ą░ //*---------------------------------------------------------------------------- __inline void AT91F_PIO_CfgInput (
AT91PS_PIO pPio, // čāą║ą░ąĘą░č鹥ą╗čī ąĮą░ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ PIO
unsigned int inputEnable) // OR-ą╝ą░čüą║ą░ ą▓čŗą▓ąŠą┤ąŠą▓
{
// ąŚą░ą┐čĆąĄčé čĆą░ą▒ąŠčéčŗ ą┐ąŠčĆčéą░ ą▓ čĆąĄąČąĖą╝ąĄ ą▓čŗčģąŠą┤ą░:
pPio-> PIO_ODR = inputEnable;
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ ą┐ąŠčĆčéą░:
pPio-> PIO_PER = inputEnable;
}
// ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ PIOB:
AT91F_PMC_EnablePeriphClock ( AT91C_BASE_PMC, 1 << AT91C_ID_PIOB );// ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĮąŠąČą║ąĖ ą║ą░čĆč鹊čćą║ąĖ (0: ą║ą░čĆčéą░ SD ą▓čüčéą░ą▓ą╗ąĄąĮą░, 1: ąĮąĄčé)
AT91F_PIO_CfgInput(AT91C_BASE_PIOB, CARD_SENSE_SW);
//*---------------------------------------------------------------------------- //* ążčāąĮą║čåąĖčÅ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčé, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░ ą╗ąĖ ą║ą░čĆčéą░ SD ą▓ čüą╗ąŠčé. ąĢčüą╗ąĖ ą║ą░čĆčéą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮą░, //* č鹊 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ ąĘąĮą░č湥ąĮąĖąĄ true, ąĖąĮą░č湥 ą▒čāą┤ąĄčé ą▓ąŠąĘą▓čĆą░čēąĄąĮąŠ false. //*----------------------------------------------------------------------------
boolean isCardInSlot (void )
{
if (CARD_SENSE_SW & AT91F_PIO_GetInput(AT91C_BASE_PIOB))
return false ;
else
return true ;
}
[ąśąĮč鹥čĆč乥ą╣čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ PIO ]
ąÜą░ąČą┤ą░čÅ ąĮąŠąČą║ą░ I/O čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ PIO Controller čüą▓čÅąĘą░ąĮąĮčŗą╝ čü ąĮąĄą╣ ą▒ąĖč鹊ą╝ ą▓ ą║ą░ąČą┤ąŠą╝ ąĖąĘ čĆąĄą│ąĖčüčéčĆąŠą▓ ąĖąĮč鹥čĆč乥ą╣čüą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ PIO. ąÜą░ąČą┤čŗą╣ čĆąĄą│ąĖčüčéčĆ čĆą░ąĘą╝ąĄčĆąŠą╝ ą▓ 32 ą▒ąĖčéą░. ąĢčüą╗ąĖ ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮčŗą╣ čüąĖą│ąĮą░ą╗ I/O ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ, č鹊 ąĘą░ą┐ąĖčüčī ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▒ąĖčé ąĮąĄ ą┤ą░čüčé ąĮąĖą║ą░ą║ąŠą│ąŠ čŹčäč乥ą║čéą░. ąØąĄąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ ą▒ąĖčéčŗ ą▒čāą┤čāčé ą┐čĆąŠčćąĖčéą░ąĮčŗ ą║ą░ą║ 0. ąĢčüą╗ąĖ čüąĖą│ąĮą░ą╗ I/O ąĮąĄ ą╝čāą╗čīčéąĖą┐ą╗ąĄą║čüąĖčĆčāąĄčéčüčÅ čü ą║ą░ą║ąĖą╝-ą╗ąĖą▒ąŠ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝, č鹊 čŹčéą░ ą╗ąĖąĮąĖčÅ I/O čāą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ PIO, ąĖ ą▒ąĖčé ą▓ ą▓ čĆąĄą│ąĖčüčéčĆąĄ PIO_PSR čüąĖčüč鹥ą╝ą░čéąĖč湥čüą║ąĖ ą▒čāą┤ąĄčé čćąĖčéą░čéčīčüčÅ ą║ą░ą║ ą╗ąŠą│. 1.
ąÆ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąĄ ARM7 ąŠą▒čŗčćąĮąŠ ąĖą╝ąĄąĄčéčüčÅ ąĮąĄčüą║ąŠą╗čīą║ąŠ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ PIO, ą║ą░ąČą┤čŗą╣ ąĖąĘ ą║ąŠč鹊čĆčŗčģ ąŠčéą▓ąĄčćą░ąĄčé ąĘą░ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčāčÄ ą│čĆčāą┐ą┐čā ąĖąĘ 32 ą▓čŗą▓ąŠą┤ąŠą▓, ą▓čŗą▓ąĄą┤ąĄąĮąĮčŗčģ ąĖąĘ ą║ąŠčĆą┐čāčüą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ PIO ąĘą░ą▓ąĖčüąĖčé ąŠčé ą╝ą░čĆą║ąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░, ąŠą▒čĆą░čéąĖč鹥čüčī ąĘą░ ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ ą║ ą┤ą░čéą░čłąĖčéčā. ąóą░ą▒ą╗ąĖčåą░ 27-2 ą▓ ą┐ąĄčĆą▓ąŠą╝ čüč鹊ą╗ą▒čåąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čüą╝ąĄčēąĄąĮąĖčÅ ąŠčé ąĮą░čćą░ą╗čīąĮąŠą│ąŠ ą▒ą░ąĘąŠą▓ąŠą│ąŠ ą░ą┤čĆąĄčüą░, ą║ąŠč鹊čĆčŗą╣ ąĮą░ąĘąĮą░č湥ąĮ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆčā PIO (ą░ą┤čĆąĄčü čāą║ą░ąĘą░ąĮ ą▓ ą┤ą░čéą░čłąĖč鹥 ąĮą░ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ). ąØą░ą┐čĆąĖą╝ąĄčĆ, čā ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ AT91SAM7X128, AT91SAM7X256, AT91SAM7X512 ąĖą╝ąĄąĄčéčüčÅ 2 ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ PIO: PIOA (ą▒ą░ąĘąŠą▓čŗą╣ ą░ą┤čĆąĄčü 0xFFFFF400) ąĖ PIOB (ą▒ą░ąĘąŠą▓čŗą╣ ą░ą┤čĆąĄčü 0xFFFFF600).
ąóą░ą▒ą╗ąĖčåą░ 27-2. ąĀąĄą│ąĖčüčéčĆčŗ PIO.
ąĪą╝ąĄčēąĄąĮąĖąĄ ąĀąĄą│ąĖčüčéčĆ ąśą╝čÅ ąöąŠčüčéčāą┐ ąĪą▒čĆąŠčü
0x0000
PIO Enable Register (čĆąĄą│ąĖčüčéčĆ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ)
PIO_PER
W
-
0x0004
PIO Disable Register (čĆąĄą│ąĖčüčéčĆ ąĘą░ą┐čĆąĄčēąĄąĮąĖčÅ)
PIO_PDR
W
-
0x0008
PIO Status Register (čĆąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ)
PIO_PSR
R
(1)
0x000C ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ -
-
-
0x0010
Output Enable Register (čĆąĄą│ąĖčüčéčĆ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą▓čŗčģąŠą┤ą░)
PIO_OER
W
-
0x0014
Output Disable Register (čĆąĄą│ąĖčüčéčĆ ąĘą░ą┐čĆąĄčēąĄąĮąĖčÅ ą▓čŗčģąŠą┤ą░)
PIO_ODR
W
-
0x0018
Output Status Register (čĆąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ ą▓čŗčģąŠą┤ą░)
PIO_OSR
R
0x00000000
0x001C ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ - - -
0x0020
Glitch Input Filter Enable Register (čĆąĄą│ąĖčüčéčĆ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą▓čģąŠą┤ąĮąŠą│ąŠ čäąĖą╗čīčéčĆą░ ą┐ąŠą╝ąĄčģ)
PIO_IFER
W
-
0x0024
Glitch Input Filter Disable Register (čĆąĄą│ąĖčüčéčĆ ąĘą░ą┐čĆąĄčēąĄąĮąĖčÅ ą▓čģąŠą┤ąĮąŠą│ąŠ čäąĖą╗čīčéčĆą░ ą┐ąŠą╝ąĄčģ)
PIO_IFDR
W
-
0x0028
Glitch Input Filter Status Register (čĆąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ ą▓čģąŠą┤ąĮąŠą│ąŠ čäąĖą╗čīčéčĆą░ ą┐ąŠą╝ąĄčģ)
PIO_IFSR
R
0x00000000
0x002C ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ - - -
0x0030
Set Output Data Register (čĆąĄą│ąĖčüčéčĆ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▓čŗčģąŠą┤ą░)
PIO_SODR
W
-
0x0034
Clear Output Data Register (čĆąĄą│ąĖčüčéčĆ čüą▒čĆąŠčüą░ ą▓čŗčģąŠą┤ą░)
PIO_CODR
W
-
0x0038
Output Data Status Register (čĆąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ ą▓čŗčģąŠą┤ą░)
PIO_ODSR
R ąĖą╗ąĖ R/W(2)
-
0x003C
Pin Data Status Register (čĆąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ ą▓čŗą▓ąŠą┤ą░)
PIO_PDSR
R
(3)
0x0040
Interrupt Enable Register (čĆąĄą│ąĖčüčéčĆ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣)
PIO_IER
W
-
0x0044
Interrupt Disable Register (čĆąĄą│ąĖčüčéčĆ ąĘą░ą┐čĆąĄčéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣)
PIO_IDR
W
-
0x0048
Interrupt Mask Register (čĆąĄą│ąĖčüčéčĆ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣)
PIO_IMR
R
0x00000000
0x004C
Interrupt Status Register(4) (čĆąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣)
PIO_ISR
R
0x00000000
0x0050
Multi-driver Enable Register (čĆąĄą│ąĖčüčéčĆ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą▓čŗčģąŠą┤ąŠą▓ čü ąŠčéą║čĆčŗčéčŗą╝ čüč鹊ą║ąŠą╝)
PIO_MDER
W
-
0x0054
Multi-driver Disable Register (čĆąĄą│ąĖčüčéčĆ ąĘą░ą┐čĆąĄčēąĄąĮąĖčÅ ą▓čŗčģąŠą┤ąŠą▓ čü ąŠčéą║čĆčŗčéčŗą╝ čüč鹊ą║ąŠą╝)
PIO_MDDR
W
-
0x0058
Multi-driver Status Register (čĆąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ ą▓čŗčģąŠą┤ąŠą▓ čü ąŠčéą║čĆčŗčéčŗą╝ čüč鹊ą║ąŠą╝)
PIO_MDSR
R
0x00000000
0x005C ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ - - -
0x0060
Pull-up Disable Register (čĆąĄą│ąĖčüčéčĆ ąĘą░ą┐čĆąĄčēąĄąĮąĖčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ ą▓ąĄčĆčģąĮąĖčģ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓)
PIO_PUDR
W
-
0x0064
Pull-up Enable Register (čĆąĄą│ąĖčüčéčĆ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ ą▓ąĄčĆčģąĮąĖčģ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓)
PIO_PUER
W
-
0x0068
Pad Pull-up Status Register (čĆąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ ą▓ąĄčĆčģąĮąĖčģ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓)
PIO_PUSR
R
0x00000000
0x006C ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ - - -
0x0070
Peripheral A Select Register(5) (čĆąĄą│ąĖčüčéčĆ ą▓čŗą▒ąŠčĆą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą│čĆčāą┐ą┐čŗ A)
PIO_ASR
W
-
0x0074
Peripheral B Select Register(5) (čĆąĄą│ąĖčüčéčĆ ą▓čŗą▒ąŠčĆą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą│čĆčāą┐ą┐čŗ B)
PIO_BSR
W
-
0x0078
AB Status Register(5) (čĆąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ ą▓čŗą▒ąŠčĆą░ ą┐ąĄčĆąĖč乥čĆąĖąĖ ą│čĆčāą┐ą┐čŗ A ąĖą╗ąĖ B)
PIO_ABSR
R
0x00000000
0x007C...0x009C
ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ
-
-
-
0x00A0
Output Write Enable (čĆąĄą│ąĖčüčéčĆ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čüąĖąĮčģčĆąŠąĮąĮąŠą╣ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▓čŗčģąŠą┤ąŠą▓)
PIO_OWER
W
-
0x00A4
Output Write Disable (čĆąĄą│ąĖčüčéčĆ ąĘą░ą┐čĆąĄčéą░ čüąĖąĮčģčĆąŠąĮąĮąŠą╣ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▓čŗčģąŠą┤ąŠą▓)
PIO_OWDR
W
-
0x00A8
Output Write Status Register (čĆąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ čüąĖąĮčģčĆąŠąĮąĮąŠą╣ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▓čŗčģąŠą┤ąŠą▓)
PIO_OWSR
R
0x00000000
0x00AC ąŚą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąŠ - - -
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
(1). ąŚąĮą░č湥ąĮąĖąĄ ą┐čĆąĖ čüą▒čĆąŠčüąĄ PIO_PSR ąĘą░ą▓ąĖčüąĖčé ąŠčé ą╝ą░čĆą║ąĖ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░. (2). PIO_ODSR čĆą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ ąĘą░ą┐ąĖčüčī (R) ąĖą╗ąĖ ąĮą░ čćč鹥ąĮąĖąĄ-ąĘą░ą┐ąĖčüčī (R/W) ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ąĮą░čüčéčĆąŠąĄą║ ą▓ čĆąĄą│ąĖčüčéčĆąĄ PIO_OWSR. (3). ąŚąĮą░č湥ąĮąĖąĄ ą┐čĆąĖ čüą▒čĆąŠčüąĄ ą▓ čĆąĄą│ąĖčüčéčĆąĄ PIO_PDSR ąĘą░ą▓ąĖčüąĖčé ąŠčé čāčĆąŠą▓ąĮąĄą╣ ąĮą░ ą▓čŗą▓ąŠą┤ą░čģ ą┐ąŠčĆč鹊ą▓. ą¦č鹥ąĮąĖąĄ čāčĆąŠą▓ąĮąĄą╣ ąĮą░ ą▓čŗą▓ąŠą┤ą░čģ čéčĆąĄą▒čāąĄčé čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ PIO, ąĖąĮą░č湥 čĆąĄą│ąĖčüčéčĆ PIO_PDSR ą▒čāą┤ąĄčé čćąĖčéą░čéčīčüčÅ čüąŠ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ ąĮą░ ą▓čŗą▓ąŠą┤ą░čģ ą▓ ą╝ąŠą╝ąĄąĮčé ąĘą░ą┐čĆąĄčéą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ PIO. (4). ąŚąĮą░č湥ąĮąĖčÅ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą▓ čĆąĄą│ąĖčüčéčĆąĄ PIO_ISR čĆą░ą▓ąĮčŗ 0x0. ą×ą┤ąĮą░ą║ąŠ ą┐ąĄčĆą▓ąŠąĄ čćč鹥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ ą╝ąŠąČąĄčé ą┐ąŠą║ą░ąĘą░čéčī ą┤čĆčāą│ąĖąĄ ąĘąĮą░č湥ąĮąĖčÅ, ą┐ąŠčüą║ąŠą╗čīą║čā ą╝ąŠą│ą╗ąĖ ą┐čĆąŠąĖąĘąŠą╣čéąĖ ąĖąĘą╝ąĄąĮąĄąĮąĖčÅ čüąĖą│ąĮą░ą╗ąŠą▓ ąĮą░ ą▓čŗą▓ąŠą┤ą░čģ. (5). ąóąŠą╗čīą║ąŠ čŹč鹊čé ąĮą░ą▒ąŠčĆ čĆąĄą│ąĖčüčéčĆąŠą▓ ąŠčćąĖčēą░ąĄčé čüą▓ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ 1 ą▓ ą┐ąĄčĆą▓čŗą╣ čĆąĄą│ąĖčüčéčĆ, ąĖ čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé čüą▓ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ą┐čāč鹥ą╝ ąĘą░ą┐ąĖčüąĖ 1 ą▓ąŠ ą▓č鹊čĆąŠą╣ čĆąĄą│ąĖčüčéčĆ.
ąĀąĄą│ąĖčüčéčĆ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čŗą▓ąŠą┤ąŠą╝ čüąŠ čüč鹊čĆąŠąĮčŗ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ PIO (PIO Controller PIO Enable Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
P31 P30 P29 P28 P27 P26 P25 P24 P23 P22 P21 P20 P19 P18 P17 P16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
P15 P14 P13 P12 P11 P10 P9 P8 P7 P6 P5 P4 P3 P2 P1 P0
P0-P31 : PIO Enable, čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čŗą▓ąŠą┤ą░ą╝ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ PIO.
ąĀąĄą│ąĖčüčéčĆ ąĘą░ą┐čĆąĄčēąĄąĮąĖčÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čŗą▓ąŠą┤ąŠą╝ čüąŠ čüč鹊čĆąŠąĮčŗ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ PIO (PIO Controller PIO Disable Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
P31 P30 P29 P28 P27 P26 P25 P24 P23 P22 P21 P20 P19 P18 P17 P16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
P15 P14 P13 P12 P11 P10 P9 P8 P7 P6 P5 P4 P3 P2 P1 P0
P0-P31 : PIO Disable, ąĘą░ą┐čĆąĄčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čŗą▓ąŠą┤ą░ą╝ąĖ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ PIO.
ąĀąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čŗą▓ąŠą┤ąŠą╝ čüąŠ čüč鹊čĆąŠąĮčŗ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ PIO (PIO Controller PIO Status Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ čćč鹥ąĮąĖąĄ.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
P31 P30 P29 P28 P27 P26 P25 P24 P23 P22 P21 P20 P19 P18 P17 P16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
P15 P14 P13 P12 P11 P10 P9 P8 P7 P6 P5 P4 P3 P2 P1 P0
P0-P31 : PIO Status, čüąŠčüč鹊čÅąĮąĖąĄ ąĮą░čüčéčĆąŠą╣ą║ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čŗą▓ąŠą┤ąŠą╝.
ąĀąĄą│ąĖčüčéčĆ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą▓čŗčģąŠą┤ą░ (PIO Controller Output Enable Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
P31 P30 P29 P28 P27 P26 P25 P24 P23 P22 P21 P20 P19 P18 P17 P16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
P15 P14 P13 P12 P11 P10 P9 P8 P7 P6 P5 P4 P3 P2 P1 P0
P0-P31 : Output Enable, čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čĆą░ą▒ąŠčéčŗ ą▓čŗą▓ąŠą┤ą░ ą▓ čĆąĄąČąĖą╝ąĄ ą▓čŗčģąŠą┤ą░.
ąĀąĄą│ąĖčüčéčĆ ąĘą░ą┐čĆąĄčéą░ ą▓čŗčģąŠą┤ą░ (PIO Controller Output Disable Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
P31 P30 P29 P28 P27 P26 P25 P24 P23 P22 P21 P20 P19 P18 P17 P16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
P15 P14 P13 P12 P11 P10 P9 P8 P7 P6 P5 P4 P3 P2 P1 P0
P0-P31 : Output Disable, ąĘą░ą┐čĆąĄčé čĆą░ą▒ąŠčéčŗ ą▓čŗą▓ąŠą┤ą░ ą▓ čĆąĄąČąĖą╝ąĄ ą▓čŗčģąŠą┤ą░.
ąĀąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ ą▓čŗčģąŠą┤ą░ (PIO Controller Output Status Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ čćč鹥ąĮąĖąĄ.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
P31 P30 P29 P28 P27 P26 P25 P24 P23 P22 P21 P20 P19 P18 P17 P16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
P15 P14 P13 P12 P11 P10 P9 P8 P7 P6 P5 P4 P3 P2 P1 P0
P0-P31 : Output Status, čüąŠčüč鹊čÅąĮąĖąĄ čĆą░ą▒ąŠčéčŗ ą▓čŗą▓ąŠą┤ą░.
ąĀąĄą│ąĖčüčéčĆ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ čäąĖą╗čīčéčĆą░ ą┐ąŠą╝ąĄčģ ąĮą░ ą▓čģąŠą┤ąĄ (PIO Controller Input Filter Enable Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
P31 P30 P29 P28 P27 P26 P25 P24 P23 P22 P21 P20 P19 P18 P17 P16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
P15 P14 P13 P12 P11 P10 P9 P8 P7 P6 P5 P4 P3 P2 P1 P0
P0-P31 : Input Filter Enable, čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą▓čģąŠą┤ąĮąŠą│ąŠ čäąĖą╗čīčéčĆą░.
ąĀąĄą│ąĖčüčéčĆ ąĘą░ą┐čĆąĄčéą░ čĆą░ą▒ąŠčéčŗ čäąĖą╗čīčéčĆą░ ą┐ąŠą╝ąĄčģ ąĮą░ ą▓čģąŠą┤ąĄ (PIO Controller Input Filter Disable Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
P31 P30 P29 P28 P27 P26 P25 P24 P23 P22 P21 P20 P19 P18 P17 P16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
P15 P14 P13 P12 P11 P10 P9 P8 P7 P6 P5 P4 P3 P2 P1 P0
P0-P31 : Input Filter Disable, ąĘą░ą┐čĆąĄčé ą▓čģąŠą┤ąĮąŠą│ąŠ čäąĖą╗čīčéčĆą░.
ąĀąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ ą▓čģąŠą┤ąĮąŠą│ąŠ čäąĖą╗čīčéčĆą░ (PIO Controller Input Filter Status Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ čćč鹥ąĮąĖąĄ.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
P31 P30 P29 P28 P27 P26 P25 P24 P23 P22 P21 P20 P19 P18 P17 P16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
P15 P14 P13 P12 P11 P10 P9 P8 P7 P6 P5 P4 P3 P2 P1 P0
P0-P31 : Input Filer Status, čüąŠčüč鹊čÅąĮąĖąĄ čĆą░ą▒ąŠčéčŗ ą▓čģąŠą┤ąĮąŠą│ąŠ čäąĖą╗čīčéčĆą░ ą┐ąŠą╝ąĄčģ.
ąĀąĄą│ąĖčüčéčĆ čāčüčéą░ąĮąŠą▓ą║ąĖ ą┤ą░ąĮąĮčŗčģ ąĮą░ ą▓čŗčģąŠą┤ąĄ (PIO Controller Set Output Data Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
P31 P30 P29 P28 P27 P26 P25 P24 P23 P22 P21 P20 P19 P18 P17 P16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
P15 P14 P13 P12 P11 P10 P9 P8 P7 P6 P5 P4 P3 P2 P1 P0
P0-P31 : Set Output Data, ąĘą░ą┐ąĖčüčī ą▓ čŹčéąĖ ą▒ąĖčéčŗ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čāčüčéą░ąĮąŠą▓ąĖčéčī ąĮą░ ą▓čŗą▓ąŠą┤ą░čģ ą▓čŗčģąŠą┤ą░ ą╗ąŠą│. 1.
ąĀąĄą│ąĖčüčéčĆ čüą▒čĆąŠčüą░ ą┤ą░ąĮąĮčŗčģ ąĮą░ ą▓čŗčģąŠą┤ąĄ (PIO Controller Clear Output Data Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
P31 P30 P29 P28 P27 P26 P25 P24 P23 P22 P21 P20 P19 P18 P17 P16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
P15 P14 P13 P12 P11 P10 P9 P8 P7 P6 P5 P4 P3 P2 P1 P0
P0-P31 : Clear Output Data, ąĘą░ą┐ąĖčüčī ą▓ čŹčéąĖ ą▒ąĖčéčŗ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čāčüčéą░ąĮąŠą▓ąĖčéčī ąĮą░ ą▓čŗą▓ąŠą┤ą░čģ ą▓čŗčģąŠą┤ą░ ą╗ąŠą│. 0.
ąĀąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ąĮą░ ą▓čŗčģąŠą┤ąĄ (PIO Controller Output Data Status Register). ąĀą░ą▒ąŠčéą░ąĄčé ą╗ąĖą▒ąŠ č鹊ą╗čīą║ąŠ ąĮą░ čćč鹥ąĮąĖąĄ, ą╗ąĖą▒ąŠ ąĮą░ čćč鹥ąĮąĖąĄ ąĖ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
P31 P30 P29 P28 P27 P26 P25 P24 P23 P22 P21 P20 P19 P18 P17 P16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
P15 P14 P13 P12 P11 P10 P9 P8 P7 P6 P5 P4 P3 P2 P1 P0
P0-P31 : Output Data Status, ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą╗ąŠą│ąĖč湥čüą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī, ą║ąŠč鹊čĆčŗą╣ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ ąĮą░ ą▓čŗčģąŠą┤čŗ.
ąĀąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ ą┐ąŠčĆčéą░ (PIO Controller Pin Data Status Register). ąĀą░ą▒ąŠčéą░ąĄčé ą╗ąĖą▒ąŠ č鹊ą╗čīą║ąŠ ąĮą░ čćč鹥ąĮąĖąĄ.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
P31 P30 P29 P28 P27 P26 P25 P24 P23 P22 P21 P20 P19 P18 P17 P16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
P15 P14 P13 P12 P11 P10 P9 P8 P7 P6 P5 P4 P3 P2 P1 P0
P0-P31 : Pad Data Status, ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą╗ąŠą│ąĖč湥čüą║ąĖą╣ čāčĆąŠą▓ąĄąĮčī, ą║ąŠč鹊čĆčŗą╣ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓čŗą▓ąŠą┤ąĖčéčüčÅ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ ą┐ąŠčĆčéą░.
ąĀąĄą│ąĖčüčéčĆ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ ą┐ąŠčĆčéą░ (PIO Controller Interrupt Enable Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
P31 P30 P29 P28 P27 P26 P25 P24 P23 P22 P21 P20 P19 P18 P17 P16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
P15 P14 P13 P12 P11 P10 P9 P8 P7 P6 P5 P4 P3 P2 P1 P0
P0-P31 : Input Change Interrupt Enable, čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ ąĮą░ čŹč鹊ą╝ ą▓čŗą▓ąŠą┤ąĄ ą┐ąŠčĆčéą░.
ąĀąĄą│ąĖčüčéčĆ ąĘą░ą┐čĆąĄčéą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ ą┐ąŠčĆčéą░ (PIO Controller Interrupt Disable Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
P31 P30 P29 P28 P27 P26 P25 P24 P23 P22 P21 P20 P19 P18 P17 P16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
P15 P14 P13 P12 P11 P10 P9 P8 P7 P6 P5 P4 P3 P2 P1 P0
P0-P31 : Input Change Interrupt Disable, čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ ąĮą░ čŹč鹊ą╝ ą▓čŗą▓ąŠą┤ąĄ ą┐ąŠčĆčéą░.
ąĀąĄą│ąĖčüčéčĆ ą╝ą░čüą║ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ ą┐ąŠčĆčéą░ (PIO Controller Interrupt Mask Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ čćč鹥ąĮąĖąĄ.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
P31 P30 P29 P28 P27 P26 P25 P24 P23 P22 P21 P20 P19 P18 P17 P16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
P15 P14 P13 P12 P11 P10 P9 P8 P7 P6 P5 P4 P3 P2 P1 P0
P0-P31 : Input Change Interrupt Mask, čüąŠčüč鹊čÅąĮąĖąĄ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ ąĮą░ čŹč鹊ą╝ ą▓čŗą▓ąŠą┤ąĄ ą┐ąŠčĆčéą░.
ąĀąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ ą┐ąŠčĆčéą░ (PIO Controller Interrupt Status Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ čćč鹥ąĮąĖąĄ.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
P31 P30 P29 P28 P27 P26 P25 P24 P23 P22 P21 P20 P19 P18 P17 P16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
P15 P14 P13 P12 P11 P10 P9 P8 P7 P6 P5 P4 P3 P2 P1 P0
P0-P31 : Input Change Interrupt Status, čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąŠ ąĖąĘą╝ąĄąĮąĄąĮąĖčÄ čāčĆąŠą▓ąĮčÅ ąĮą░ čŹč鹊ą╝ ą▓čŗą▓ąŠą┤ąĄ ą┐ąŠčĆčéą░.
ąĀąĄą│ąĖčüčéčĆ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čĆą░ą▒ąŠčéčŗ ą▓čŗą▓ąŠą┤ąŠą▓ ą▓ čĆąĄąČąĖą╝ąĄ ą▓čŗčģąŠą┤ą░ čü ąŠčéą║čĆčŗčéčŗą╝ čüč鹊ą║ąŠą╝ (PIO Multi-driver Enable Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
P31 P30 P29 P28 P27 P26 P25 P24 P23 P22 P21 P20 P19 P18 P17 P16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
P15 P14 P13 P12 P11 P10 P9 P8 P7 P6 P5 P4 P3 P2 P1 P0
P0-P31 : Multi Drive Enable, čĆą░ąĘčĆąĄčłą░ąĄčé čĆą░ą▒ąŠčéčā ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą▓ čĆąĄąČąĖą╝ąĄ ąŠčéą║čĆčŗč鹊ą│ąŠ čüč鹊ą║ą░.
ąĀąĄą│ąĖčüčéčĆ ąĘą░ą┐čĆąĄčéą░ čĆą░ą▒ąŠčéčŗ ą▓čŗą▓ąŠą┤ąŠą▓ ą▓ čĆąĄąČąĖą╝ąĄ ą▓čŗčģąŠą┤ą░ čü ąŠčéą║čĆčŗčéčŗą╝ čüč鹊ą║ąŠą╝ (PIO Multi-driver Disable Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
P31 P30 P29 P28 P27 P26 P25 P24 P23 P22 P21 P20 P19 P18 P17 P16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
P15 P14 P13 P12 P11 P10 P9 P8 P7 P6 P5 P4 P3 P2 P1 P0
P0-P31 : Multi Drive Disable, ąĘą░ą┐čĆąĄčēą░ąĄčé čĆą░ą▒ąŠčéčā ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą▓ čĆąĄąČąĖą╝ąĄ ąŠčéą║čĆčŗč鹊ą│ąŠ čüč鹊ą║ą░.
ąĀąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ čĆą░ą▒ąŠčéčŗ ą▓čŗą▓ąŠą┤ąŠą▓ ą▓ čĆąĄąČąĖą╝ąĄ ą▓čŗčģąŠą┤ą░ čü ąŠčéą║čĆčŗčéčŗą╝ čüč鹊ą║ąŠą╝ (PIO Multi-driver Status Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ čćč鹥ąĮąĖąĄ.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
P31 P30 P29 P28 P27 P26 P25 P24 P23 P22 P21 P20 P19 P18 P17 P16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
P15 P14 P13 P12 P11 P10 P9 P8 P7 P6 P5 P4 P3 P2 P1 P0
P0-P31 : Multi Drive Status, čüąŠčüč鹊čÅąĮąĖąĄ čĆą░ą▒ąŠčéčŗ ą▓čŗčģąŠą┤ąĮąŠą│ąŠ ą┤čĆą░ą╣ą▓ąĄčĆą░ ą▓ čĆąĄąČąĖą╝ąĄ ąŠčéą║čĆčŗč鹊ą│ąŠ čüč鹊ą║ą░.
ąĀąĄą│ąĖčüčéčĆ ąĘą░ą┐čĆąĄčéą░ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ ą▓ąĄčĆčģąĮąĖčģ ąĮą░ą│čĆčāąĘąŠčćąĮčŗčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓ (PIO Pull Up Disable Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
P31 P30 P29 P28 P27 P26 P25 P24 P23 P22 P21 P20 P19 P18 P17 P16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
P15 P14 P13 P12 P11 P10 P9 P8 P7 P6 P5 P4 P3 P2 P1 P0
P0-P31 : Pull Up Disable, ąĘą░ą┐čĆąĄčēą░ąĄčé ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ ą▓ąĄčĆčģąĮąĖčģ ąĮą░ą│čĆčāąĘąŠčćąĮčŗčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓ (pull-up).
ąĀąĄą│ąĖčüčéčĆ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ ą▓ąĄčĆčģąĮąĖčģ ąĮą░ą│čĆčāąĘąŠčćąĮčŗčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓ (PIO Pull Up Disable Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
P31 P30 P29 P28 P27 P26 P25 P24 P23 P22 P21 P20 P19 P18 P17 P16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
P15 P14 P13 P12 P11 P10 P9 P8 P7 P6 P5 P4 P3 P2 P1 P0
P0-P31 : Pull Up Enable, čĆą░ąĘčĆąĄčłą░ąĄčé ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ ą▓ąĄčĆčģąĮąĖčģ ąĮą░ą│čĆčāąĘąŠčćąĮčŗčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓ (pull-up).
ąĀąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą▓ąĄčĆčģąĮąĖčģ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ ąĮą░ą│čĆčāąĘąŠčćąĮčŗčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓ (PIO Pull Up Status Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ čćč鹥ąĮąĖąĄ.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
P31 P30 P29 P28 P27 P26 P25 P24 P23 P22 P21 P20 P19 P18 P17 P16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
P15 P14 P13 P12 P11 P10 P9 P8 P7 P6 P5 P4 P3 P2 P1 P0
P0-P31 : Pull Up Status, čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ąĮą░ą│čĆčāąĘąŠčćąĮčŗčģ čĆąĄąĘąĖčüč鹊čĆąŠą▓.
ąĀąĄą│ąĖčüčéčĆ ą▓čŗą▒ąŠčĆą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ A (Peripheral A Select Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
P31 P30 P29 P28 P27 P26 P25 P24 P23 P22 P21 P20 P19 P18 P17 P16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
P15 P14 P13 P12 P11 P10 P9 P8 P7 P6 P5 P4 P3 P2 P1 P0
P0-P31 : Peripheral A Select, ą▓čŗą▒ąŠčĆ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą│čĆčāą┐ą┐čŗ A.
ąĀąĄą│ąĖčüčéčĆ ą▓čŗą▒ąŠčĆą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ B (Peripheral B Select Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
P31 P30 P29 P28 P27 P26 P25 P24 P23 P22 P21 P20 P19 P18 P17 P16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
P15 P14 P13 P12 P11 P10 P9 P8 P7 P6 P5 P4 P3 P2 P1 P0
P0-P31 : Peripheral B Select, ą▓čŗą▒ąŠčĆ ą┤ą╗čÅ ą▓čŗą▓ąŠą┤ą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą│čĆčāą┐ą┐čŗ B.
ąĀąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ ą▓čŗą▒ąŠčĆą░ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ A ąĖą╗ąĖ B (PIO Peripheral A B Status Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ čćč鹥ąĮąĖąĄ.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
P31 P30 P29 P28 P27 P26 P25 P24 P23 P22 P21 P20 P19 P18 P17 P16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
P15 P14 P13 P12 P11 P10 P9 P8 P7 P6 P5 P4 P3 P2 P1 P0
P0-P31 : Peripheral A B Status, ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓čŗą▒ąŠčĆ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą╣ čäčāąĮą║čåąĖąĖ ąĮą░ ą▓čŗą▓ąŠą┤ąĄ ą┐ąŠčĆčéą░.
ąĀąĄą│ąĖčüčéčĆ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čüąĖąĮčģčĆąŠąĮąĮąŠą╣ ąĘą░ą┐ąĖčüąĖ ą▓ ą▓čŗčģąŠą┤čŗ ą┐ąŠčĆč鹊ą▓ (PIO Output Write Enable Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
P31 P30 P29 P28 P27 P26 P25 P24 P23 P22 P21 P20 P19 P18 P17 P16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
P15 P14 P13 P12 P11 P10 P9 P8 P7 P6 P5 P4 P3 P2 P1 P0
P0-P31 : Output Write Enable, čĆą░ąĘčĆąĄčłą░ąĄčé ąĘą░ą┐ąĖčüčī ą▓ čĆąĄą│ąĖčüčéčĆ PIO_ODSR ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čŗčģąŠą┤ą░ą╝ąĖ.
ąĀąĄą│ąĖčüčéčĆ ąĘą░ą┐čĆąĄčéą░ čüąĖąĮčģčĆąŠąĮąĮąŠą╣ ąĘą░ą┐ąĖčüąĖ ą▓ ą▓čŗčģąŠą┤čŗ ą┐ąŠčĆč鹊ą▓ (PIO Output Write Disable Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ ąĘą░ą┐ąĖčüčī.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
P31 P30 P29 P28 P27 P26 P25 P24 P23 P22 P21 P20 P19 P18 P17 P16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
P15 P14 P13 P12 P11 P10 P9 P8 P7 P6 P5 P4 P3 P2 P1 P0
P0-P31 : Output Write Disable, ąĘą░ą┐čĆąĄčēą░ąĄčé ąĘą░ą┐ąĖčüčī ą▓ čĆąĄą│ąĖčüčéčĆ PIO_ODSR ą┤ą╗čÅ čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čŗčģąŠą┤ą░ą╝ąĖ.
ąĀąĄą│ąĖčüčéčĆ čüąŠčüč鹊čÅąĮąĖčÅ čüąĖąĮčģčĆąŠąĮąĮąŠą╣ ąĘą░ą┐ąĖčüąĖ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čŗčģąŠą┤ą░ą╝ąĖ (PIO Output Write Status Register). ąĀą░ą▒ąŠčéą░ąĄčé č鹊ą╗čīą║ąŠ ąĮą░ čćč鹥ąĮąĖąĄ.
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
P31 P30 P29 P28 P27 P26 P25 P24 P23 P22 P21 P20 P19 P18 P17 P16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
P15 P14 P13 P12 P11 P10 P9 P8 P7 P6 P5 P4 P3 P2 P1 P0
P0-P31 : Output Write Status, čüąŠčüč鹊čÅąĮąĖąĄ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čüąĖąĮčģčĆąŠąĮąĮąŠą│ąŠ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą▓čŗčģąŠą┤ą░ą╝ąĖ.
[ąĪčüčŗą╗ą║ąĖ ]
1 . SAM7X512 / SAM7X256 / SAM7X128 DATASHEET site:atmel.com .2 . Power Management Controller ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ AT91SAM7X .