|
ąŁč鹊čé ą░ą┐ąĮąŠčāčé (ą┐ąĄčĆąĄą▓ąŠą┤ AN2629 [1]) ą┐čĆąĄą┤ąĮą░ąĘąĮą░čćą░ąĄčéčüčÅ ą┤ą╗čÅ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ąŠą▓ čüąĖčüč鹥ą╝, ą║ąŠą╝čā ąĮčāąČąĮą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ąĖ ą░ą┐ą┐ą░čĆą░čéąĮą░čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖčÅ ąŠą┤ąĮąŠą│ąŠ ąĖąĘ čĆąĄąČąĖą╝ąŠą▓ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ (low-power mode) ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą▓ čüąĄčĆąĖą╣ STM32F101xx, STM32F102xx ąĖ STM32F103xx (ą┤ą░ą╗ąĄąĄ ą┤ą╗čÅ čüąŠą║čĆą░čēąĄąĮąĖčÅ MCU). ą×ą▒čŖčÅčüąĮčÅąĄčéčüčÅ, ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī MCU STM32F10xxx, ą┐ąŠą┤čĆąŠą▒ąĮąŠčüčéąĖ ąĖčģ čüąĖčüč鹥ą╝ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ, ąĮą░čüčéčĆąŠą╣ą║ąĖ čĆąĄą│ąĖčüčéčĆąŠą▓ ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠąĮąĖąČąĄąĮąĮčŗą╝ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝, čćč鹊ą▒čŗ ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░čéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ STM32F10xxx ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ, ą│ą┤ąĄ ą▓ą░ąČąĮą░ 菹║ąŠąĮąŠą╝ąĖčÅ čŹąĮąĄčĆą│ąĖąĖ.
ąŁč鹊čé ą░ą┐ąĮąŠčāčé čåąĄą╗ąĄčüąŠąŠą▒čĆą░ąĘąŠąĮąŠ čćąĖčéą░čéčī ą▓ą╝ąĄčüč鹥 čü ą┤ą░čéą░čłąĖč鹊ą╝ ąĮą░ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ STM32F10xxx ąĖ čüą┐čĆą░ą▓ąŠčćąĮčŗą╝ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠą╝ ą┐ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÄ STM32F10xxx [2]. ąöą╗čÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÄ, čüčéąĖčĆą░ąĮąĖčÄ ąĖ ąĘą░čēąĖč鹥 ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą┐ą░ą╝čÅčéąĖ Flash ąŠą▒čĆą░čēą░ą╣č鹥čüčī ą║ čĆčāą║ąŠą▓ąŠą┤čüčéą▓čā [3].
ąÆ ą┐ąĄčĆą▓čŗčģ č湥čéčŗčĆąĄčģ čüąĄą║čåąĖčÅčģ čŹč鹊ą│ąŠ ą░ą┐ąĮąŠčāčéą░ ą┤ą░ąĄčéčüčÅ ą▓ą▓ąŠą┤ąĮą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ąŠ čćą░čüčéčÅčģ STM32F10xxx, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗčģ ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ. ąÆ ą┐ąŠčüą╗ąĄą┤čāčÄčēąĖčģ čüąĄčåąĖčÅčģ ą┤ąĄą╝ąŠąĮčüčéčĆąĖčĆčāąĄčéčüčÅ čŹčéą░ čäčāąĮą║čåąĖčÅ ą▓ ą║ąŠąĮč鹥ą║čüč鹥 ą┐čĆą░ą║čéąĖč湥čüą║ąŠą│ąŠ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ. ąÜą░ąČą┤ą░čÅ čüąĄą║čåąĖčÅ čüčüčŗą╗ą░ąĄčéčüčÅ ąĮą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ, ą┐ąŠčüčéą░ą▓ą╗čÅąĄą╝ąŠąĄ čü čŹčéąĖą╝ ą┤ąŠą║čāą╝ąĄąĮč鹊ą╝.
[1. ąśčüč鹊čćąĮąĖą║ ą┐ąĖčéą░ąĮąĖčÅ]
MCU čéčĆąĄą▒čāąĄčé ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ąŠčé 2.0V ą┤ąŠ 3.6V (VDD). ąÆčüčéčĆąŠąĄąĮąĮčŗą╣ čĆąĄą│čāą╗čÅč鹊čĆ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ 1.8V ą┤ą╗čÅ ą┐ąĖčéą░ąĮąĖčÅ čåąĖčäčĆąŠą▓čŗčģ čāąĘą╗ąŠą▓ MCU.
ąæą╗ąŠą║ čćą░čüąŠą▓ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (real-time clock, RTC) ąĖ čĆąĄą│ąĖčüčéčĆčŗ čĆąĄąĘąĄčĆą▓ąĮąŠą│ąŠ čģčĆą░ąĮąĄąĮąĖčÅ (backup) ą╝ąŠą│čāčé ą┐ąŠą╗čāčćą░čéčī ą┐ąĖčéą░ąĮąĖąĄ ąŠčé ąŠčéą┤ąĄą╗čīąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ VBAT, ą║ąŠą│ą┤ą░ ąŠčüąĮąŠą▓ąĮąŠą╣ ąĖčüč鹊čćąĮąĖą║ ą┐ąĖčéą░ąĮąĖčÅ VDD ą▓čŗą║ą╗čÄč湥ąĮ.
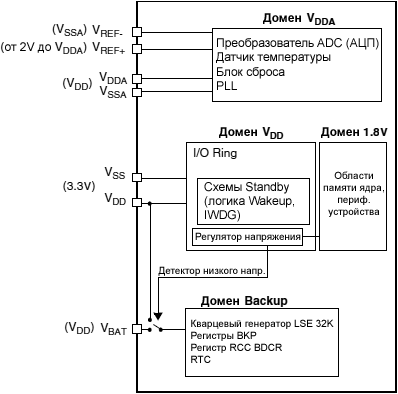
ąĀąĖčü. 1. ą×ą▒čēą░čÅ čüčģąĄą╝ą░ ą┐ąĖčéą░ąĮąĖčÅ.
ąØąĄąĘą░ą▓ąĖčüąĖą╝ąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ ADC ąĖ ąĖčüč鹊čćąĮąĖą║ą░ ąŠą┐ąŠčĆąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ąöą╗čÅ ą┐ąŠą▓čŗčłąĄąĮąĖčÅ č鹊čćąĮąŠčüčéąĖ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ čā ADC ąĄčüčéčī ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗą╣ ąĖčüč鹊čćąĮąĖą║ ą┐ąĖčéą░ąĮąĖčÅ, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčéčäąĖą╗čīčéčĆąŠą▓ą░ąĮ ąŠčéą┤ąĄą╗čīąĮąŠ, čü ąĮą░ ą┐ąĄčćą░čéąĮąŠą╣ ą┐ą╗ą░č鹥 ąĄą│ąŠ čåąĄą┐ąĖ ą╝ąŠą│čāčé ą▒čŗčéčī 菹║čĆą░ąĮąĖčĆąŠą▓ą░ąĮčŗ.
ŌŚÅ ąÆčģąŠą┤ ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ ADC ą┤ąŠčüčéčāą┐ąĄąĮ ąĮą░ ąŠčéą┤ąĄą╗čīąĮąŠą╣ ąĮąŠąČą║ąĄ ą║ąŠčĆą┐čāčüą░ VDDA.
ŌŚÅ ąśąĘąŠą╗ąĖčĆąŠą▓ą░ąĮąĮąŠąĄ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ čü ąĘąĄą╝ą╗ąĄą╣ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ąĮą░ ąĮąŠąČą║ąĄ VSSA.
ąÜąŠą│ą┤ą░ čŹč鹊 ą┤ąŠčüčéčāą┐ąĮąŠ (ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą║ąŠčĆą┐čāčüą░ MCU), ąĮąŠąČą║ą░ VREFŌĆō ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐čĆąĖčéčÅąĮčāčéą░ ą║ VSSA.
100-ą▓čŗą▓ąŠą┤ąĮčŗąĄ ą║ąŠčĆą┐čāčüą░. ąöą╗čÅ ą│ą░čĆą░ąĮčéąĖąĖ ą┐ąŠą▓čŗčłąĄąĮąĮąŠą╣ č鹊čćąĮąŠčüčéąĖ ąĮą░ ąĮąĖąĘą║ąŠą▓ąŠą╗čīčéąĮčŗčģ ą▓čģąŠą┤ą░čģ, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ąŠčéą┤ąĄą╗čīąĮąŠąĄ ą▓ąĮąĄčłąĮąĄąĄ ąŠą┐ąŠčĆąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ADC ą║ąŠ ą▓čģąŠą┤čā ąĮą░ ą▓čŗą▓ąŠą┤ąĄ VREF+. ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ VREF+ ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ ąŠčé 2.0V ą┤ąŠ VDDA.
ąÜąŠčĆą┐čāčüą░ čü 64 ą▓čŗą▓ąŠą┤ą░ą╝ąĖ ąĖ ą╝ąĄąĮčīčłąĄ. ąØąŠąČą║ąĖ VREF+ ąĖ VREF- ąĮąĄą┤ąŠčüčéčāą┐ąĮčŗ, ąŠąĮąĖ ą▓ąĮčāčéčĆąĖ ą║ąŠčĆą┐čāčüą░ čüąŠąĄą┤ąĖąĮąĄąĮčŗ čü ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄą╝ ą┐ąĖčéą░ąĮąĖčÅ ADC (VDDA) ąĖ ąĘąĄą╝ą╗ąĄą╣ (VSSA).
Battery backup. ąöą╗čÅ čüąŠčģčĆą░ąĮąĄąĮąĖčÅ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ čĆąĄą│ąĖčüčéčĆąŠą▓ Backup, ą║ąŠą│ą┤ą░ VDD ą▓čŗą║ą╗čÄč湥ąĮąŠ, ąĮąŠąČą║ą░ VBAT ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ą║ ąĮąĄ ąŠčéą║ą╗čÄčćą░ąĄą╝ąŠą╝čā ąĮą░ą┐čĆčÅąČąĄąĮąĖčÄ (standby voltage), ą┐ąŠčüčéčāą┐ą░čÄčēąĄą╝čā ąŠčé ą▒ą░čéą░čĆąĄąĖ ąĖą╗ąĖ ą┤čĆčāą│ąŠą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░.
ąØąŠąČą║ą░ VBAT čéą░ą║ąČąĄ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐ąĖčéą░ąĮąĖąĄ ą▒ą╗ąŠą║čā RTC, čćč鹊 ą┤ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī čĆą░ą▒ąŠčéą░čéčī ą┤ą╗čÅ RTC (ąŠčéčüč湥čé čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ), ą┤ą░ąČąĄ ą║ąŠą│ą┤ą░ ąŠčüąĮąŠą▓ąĮąŠą╣ ąĖčüč鹊čćąĮąĖą║ čåąĖčäčĆąŠą▓ąŠą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ (VDD) ą▓čŗą║ą╗čÄč湥ąĮ. ą¤ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄą╝ ąĮą░ ą┐ąĖčéą░ąĮąĖąĄ VBAT čāą┐čĆą░ą▓ą╗čÅąĄčé čüčģąĄą╝ą░ čüą▒čĆąŠčüą░ ą┐čĆąĖ ą▓čŗą║ą╗čÄč湥ąĮąĖąĖ (power down reset, PDR), ą║ąŠč鹊čĆą░čÅ ą▓čüčéčĆąŠąĄąĮą░ ą▓ ą▒ą╗ąŠą║ čüą▒čĆąŠčüą░ Reset.
ąĢčüą╗ąĖ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ąĮąĄčłąĮčÅčÅ ą▒ą░čéą░čĆąĄčÅ ą┤ą╗čÅ VBAT, č鹊 ąĮąŠąČą║ą░ VBAT ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüąŠąĄą┤ąĖąĮąĄąĮą░ čüąĮą░čĆčāąČąĖ čü VDD.
ąĀąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą▓čüąĄą│ą┤ą░ čĆą░ąĘčĆąĄčłąĄąĮ. ą×ąĮ čĆą░ą▒ąŠčéą░ąĄčé ą▓ 3 čĆą░ąĘąĮčŗčģ čĆąĄąČąĖą╝ą░čģ, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čĆąĄąČąĖą╝ąŠą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ:
ŌŚÅ ąÆ čĆąĄąČąĖą╝ąĄ Run (ąĮąŠčĆą╝ą░ą╗čīąĮčŗą╣ čĆą░ą▒ąŠčćąĖą╣ čĆąĄąČąĖą╝) čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąŠą┤ą░ąĄčé ą┐ąŠą╗ąĮąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ ą▓ ą┤ąŠą╝ąĄąĮ 1.8V (čÅą┤čĆąŠ, ąŠą▒ą╗ą░čüčéąĖ ą┐ą░ą╝čÅčéąĖ ąĖ čåąĖčäčĆąŠą▓čŗąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░).
ŌŚÅ ąÆ čĆąĄąČąĖą╝ąĄ Stop čĆąĄą│čāą╗čÅč鹊čĆ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐ąŠąĮąĖąČąĄąĮąĮčāčÄ ą╝ąŠčēąĮąŠčüčéčī ą┤ą╗čÅ ą┤ąŠą╝ąĄąĮą░ 1.8V, čüąŠčģčĆą░ąĮčÅčÅ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ ąĖ SRAM.
ŌŚÅ ąÆ čĆąĄąČąĖą╝ąĄ Standby čĆąĄą│čāą╗čÅč鹊čĆ ą▓čŗą║ą╗čÄčćą░ąĄčéčüčÅ. ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ ąĖ SRAM č鹥čĆčÅąĄčéčüčÅ, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ č鹥čģ čĆąĄą│ąĖčüčéčĆąŠą▓ ąĖ čÅč湥ąĄą║ ą┐ą░ą╝čÅčéąĖ, ą║ąŠč鹊čĆčŗąĄ ąŠčéąĮąŠčüčÅčéčüčÅ ą║ čüčģąĄą╝ąĄ Standby ąĖ ą┤ąŠą╝ąĄąĮčā Backup.
[ąĀąĄąČąĖą╝čŗ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ]
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖ, MCU ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ Run ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ąĖą╗ąĖ čüą▒čĆąŠčüą░. ąśą╝ąĄąĄčéčüčÅ ąĮąĄčüą║ąŠą╗čīą║ąŠ čĆąĄąČąĖą╝ąŠą▓ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ (low power modes), ą║ąŠč鹊čĆčŗąĄ ą┤ąŠčüčéčāą┐ąĮčŗ ą┤ą╗čÅ čŹą║ąŠąĮąŠą╝ąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ, ą║ąŠą│ą┤ą░ ą┤ą╗čÅ CPU ąĮąĄ ąĮčāąČąĮčŗ ą░ą║čéąĖą▓ąĮčŗąĄ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÅ, ąĮą░ą┐čĆąĖą╝ąĄčĆ ą║ąŠą│ą┤ą░ ąŠąĮ ą┐čĆąŠčüč鹊 ąČą┤ąĄčé ąĮą░čüčéčāą┐ą╗ąĄąĮąĖčÅ ą▓ąĮąĄčłąĮąĄą│ąŠ čüąŠą▒čŗčéąĖčÅ. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą▓čŗą▒ąĖčĆą░ąĄčé, ą║ą░ą║ąŠą╣ čĆąĄąČąĖą╝ ąĄą╝čā ąĮąĄąŠą▒čģąŠą┤ąĖą╝, ąĖ ą║ą░ą║ čćą░čüč鹊 ąŠąĮ ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ - čćč鹊ą▒čŗ ą┤ąŠčüčéąĖčćčī ąŠą┐čéąĖą╝ą░ą╗čīąĮąŠą│ąŠ ą║ąŠą╝ą┐čĆąŠą╝ąĖčüčüą░ ą╝ąĄąČą┤čā ąĮąĖąĘą║ąĖą╝ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ č鹊ą║ą░, ą▒čŗčüčéčĆčŗą╝ ą▓ąŠąĘą▓čĆą░č鹊ą╝ ą▓ čĆą░ą▒ąŠč湥ąĄ čüąŠčüč鹊čÅąĮąĖąĄ (short startup time) ąĖ ą┤ąŠčüčéčāą┐ąĮčŗą╝ąĖ ą┤ą╗čÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąĖčüč鹊čćąĮąĖą║ą░ą╝ąĖ čüąĖą│ąĮą░ą╗ąŠą▓ (wakeup sources).
ąŻ MCU STM32F10xxx ąĄčüčéčī čéčĆąĖ čĆąĄąČąĖą╝ą░ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ (low-power modes):
ŌŚÅ Sleep mode - čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ CPU ą▓čŗą║ą╗čÄč湥ąĮąŠ, ą▓čüąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░, ą▓ą║ą╗čÄčćą░čÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ čÅą┤čĆą░ Cortex-M3, ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ NVIC, SysTick, ąĖ čé. ą┐., ąŠčüčéą░čÄčéčüčÅ ą▓ čĆą░ą▒ąŠč湥ą╝ čüąŠčüč鹊čÅąĮąĖąĖ.
ŌŚÅ Stop mode - čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čüąĄčģ čāąĘą╗ąŠą▓ ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮąŠ.
ŌŚÅ Standby mode - ą┐ąĖčéą░ąĮąĖąĄ ą┤ąŠą╝ąĄąĮą░ 1.8V ą▓čŗą║ą╗čÄč湥ąĮąŠ.
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ 菹ĮąĄčĆą│ąĖąĖ ą▓ čĆąĄąČąĖą╝ąĄ Run ą╝ąŠąČąĄčé ą▒čŗčéčī čüąĮąĖąČąĄąĮąŠ ąŠą┤ąĮąĖą╝ ąĖąĘ čüą╗ąĄą┤čāčÄčēąĖčģ čüą┐ąŠčüąŠą▒ąŠą▓:
ŌŚÅ ąŻą╝ąĄąĮčīčłąĄąĮąĖąĄą╝ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ.
ŌŚÅ ą×čéą║ą╗čÄč湥ąĮąĖąĄ čéą░ą║č鹊ą▓ ą┤ą╗čÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ čłąĖąĮ APB ąĖ AHB, ą║ąŠą│ą┤ą░ čŹčéąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ.
ąÆ čéą░ą▒ą╗ąĖčåąĄ 1 ąĮąĖąČąĄ čüčāą╝ą╝ą░čĆąĮąŠ ą┐ąŠą║ą░ąĘą░ąĮčŗ čĆąĄąČąĖą╝čŗ low-power ą┤ą╗čÅ STM32F10xxx MCU.
ąóą░ą▒ą╗ąĖčåą░ 1. ąĀąĄąČąĖą╝čŗ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ.
| ąśą╝čÅ čĆąĄąČąĖą╝ą░ |
ąÆčģąŠą┤ |
ąÆčŗčģąŠą┤ (wakeup) |
ąÆą╗ąĖčÅąĮąĖąĄ ąĮą░ ą┤ąŠą╝ąĄąĮ čéą░ą║č鹊ą▓ 1.8V |
ąÆą╗ąĖčÅąĮąĖąĄ ąĮą░ ą┤ąŠą╝ąĄąĮ čéą░ą║č鹊ą▓ VDD |
ąĀąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ |
| Sleep (Sleep-now ąĖą╗ąĖ Sleep-on-exit) |
ąśąĮčüčéčĆčāą║čåąĖčÅ WFI |
ąøčÄą▒ąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ |
ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ CPU ąŠčéą║ą╗čÄčćą░ąĄčéčüčÅ. ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ čåąĖčäčĆąŠą▓čŗčģ ąĖą╗ąĖ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗčģ čāčüčéčĆąŠą╣čüčéą▓ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ. |
ąØąĄčé ą▓ą╗ąĖčÅąĮąĖčÅ |
ON (ą▓ą║ą╗čÄč湥ąĮ) |
| ąśąĮčüčéčĆčāą║čåąĖčÅ WFE |
ąĪąŠą▒čŗčéąĖąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (wakeup event) |
| Stop |
ąæąĖčéčŗ PDDS ąĖ LPDS + ą▒ąĖčé SLEEPDEEP + WFI ąĖą╗ąĖ WFE |
ąøčÄą▒ą░čÅ ą╗ąĖąĮąĖčÅ EXTI (čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮą░čÅ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ EXTI) |
ąÆčüąĄ čéą░ą║čéčŗ ą▓ ą┤ąŠą╝ąĄąĮąĄ 1.8 ąŠčéą║ą╗čÄčćą░čÄčéčüčÅ. |
ąōąĄąĮąĄčĆą░č鹊čĆčŗ HSI ąĖ HSE ą▓čŗą║ą╗čÄčćą░čÄčéčüčÅ. |
ąøąĖą▒ąŠ ON, ą╗ąĖą▒ąŠ ą▓ čĆąĄąČąĖą╝ąĄ low-power (čé. ąĄ. ą▓čŗą║ą╗čÄč湥ąĮ) - ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé čĆąĄą│ąĖčüčéčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ (Power control register, PWR_CR). |
| Standby |
ąæąĖčé PDDS + ą▒ąĖčé SLEEPDEEP + WFI ąĖą╗ąĖ WFE |
ążčĆąŠąĮčé ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ ąĮą░ ąĮąŠąČą║ąĄ WKUP, ą▒čāą┤ąĖą╗čīąĮąĖą║ (RTC alarm), ą▓ąĮąĄčłąĮąĖą╣ čüą▒čĆąŠčü ąĮą░ ąĮąŠąČą║ąĄ NRST, čüą▒čĆąŠčü ąŠčé IWDG. |
OFF (ą▓čŗą║ą╗čÄč湥ąĮ) |
ąĪąĮąĖąČąĄąĮąĖąĄ čćą░čüč鹊čéčŗ čüąĖčüč鹥ą╝ąĮčŗčģ čéą░ą║č鹊ą▓. ąÆ čĆąĄąČąĖą╝ąĄ Run čüą║ąŠčĆąŠčüčéčī čüąĖčüč鹥ą╝ąĮčŗčģ čéą░ą║č鹊ą▓ (SYSCLK, HCLK, PCLK1, PCLK2) ą╝ąŠąČąĄčé ą▒čŗčéčī čüąĮąĖąČąĄąĮą░ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆąŠą▓ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░. ąŁčéąĖ ą┐čĆąĄčüą║ą░ą╗ąĄčĆčŗ ą╝ąŠą│čāčé čéą░ą║ąČąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ąĘą░ą╝ąĄą┤ą╗ąĄąĮąĖčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą┐ąĄčĆąĄą┤ ą▓čģąŠą┤ąŠą╝ ą▓ čĆąĄąČąĖą╝ Sleep.
ą×čéą║ą╗čÄč湥ąĮąĖąĄ čéą░ą║č鹊ą▓ ą┐ąĄčĆąĖč乥čĆąĖąĖ. ąÆ čĆąĄąČąĖą╝ąĄ Run čéą░ą║čéčŗ HCLK ąĖ PCLKx ą┤ą╗čÅ ąŠčéą┤ąĄą╗čīąĮčŗčģ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ąĖ ą▓ąĖą┤ąŠą▓ ą┐ą░ą╝čÅčéąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮčŗ ą▓ ą╗čÄą▒ąŠąĄ ą▓čĆąĄą╝čÅ čü čåąĄą╗čīčÄ čüąĮąĖąČąĄąĮąĖčÅ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝ąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ.
ą¦č鹊ą▒čŗ ąĄčēąĄ ą▒ąŠą╗čīčłąĄ čüąĮąĖąĘąĖčéčī ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ č鹊ą║ą░ ą▓ čĆąĄąČąĖą╝ąĄ Sleep čéą░ą║čéčŗ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠą│čāčé ą▒čŗčéčī ąĘą░ą┐čĆąĄčēąĄąĮčŗ ą┐ąĄčĆąĄą┤ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄą╝ ąĖąĮčüčéčĆčāą║čåąĖą╣ WFI ąĖą╗ąĖ WFE.
ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄą╝ čéą░ą║č鹊ą▓ ą┐ąĄčĆąĖč乥čĆąĖąĖ čāą┐čĆą░ą▓ą╗čÅąĄčé čĆąĄą│ąĖčüčéčĆ AHB peripheral clock enable (RCC_AHBENR), čĆąĄą│ąĖčüčéčĆ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ čłąĖąĮčŗ APB1 (RCC_APB1ENR) ąĖ čĆąĄą│ąĖčüčéčĆ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ čłąĖąĮčŗ APB2 (RCC_APB2ENR).
[ąĀąĄąČąĖą╝ Sleep]
ąÆčģąŠą┤ ą▓ Sleep. ąÆčģąŠą┤ ą▓ čĆąĄąČąĖą╝ Sleep ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčüčÅ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄą╝ ąĖąĮčüčéčĆčāą║čåąĖą╣ WFI (Wait For Interrupt) ąĖą╗ąĖ WFE (Wait for Event). ąöąŠčüčéčāą┐ąĮčŗ 2 ąŠą┐čåąĖąĖ ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą░ ą╝ąĄčģą░ąĮąĖąĘą╝ą░ ą▓čģąŠą┤ą░ ą▓ čĆąĄąČąĖą╝ Sleep, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą▒ąĖčéą░ SLEEPONEXIT ą▓ čĆąĄą│ąĖčüčéčĆąĄ Cortex-M3 System Control:
ŌŚÅ Sleep-now: ąĄčüą╗ąĖ ą▒ąĖčé SLEEPONEXIT ąŠčćąĖčēąĄąĮ, č鹊 MCU ą▓ąŠą╣ą┤ąĄčé ą▓ čĆąĄąČąĖą╝ Sleep ą║ą░ą║ č鹊ą╗čīą║ąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčüčÅ ąĖąĮčüčéčĆčāą║čåąĖčÅ WFI ąĖą╗ąĖ WFE.
ŌŚÅ Sleep-on-exit: ąĄčüą╗ąĖ ą▒ąĖčé SLEEPONEXIT čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ, č鹊 MCU ą▓ąŠą╣ą┤ąĄčé ą▓ čĆąĄąČąĖą╝ Sleep, ą║ą░ą║ č鹊ą╗čīą║ąŠ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą▓čŗčģąŠą┤ ąĖąĘ ISR ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čü čüą░ą╝čŗą╝ ąĮąĖąĘą║ąĖą╝ ą┐čĆąĖąŠčĆąĖč鹥č鹊ą╝.
ąÆ čĆąĄąČąĖą╝ąĄ Sleep ą▓čüąĄ ąĮąŠąČą║ąĖ I/O čüąŠčģčĆą░ąĮčÅčÄčé č鹊 ąČąĄ čüąŠčüč鹊čÅąĮąĖąĄ, ą▓ ą║ą░ą║ąŠą╝ ąŠąĮąĖ ą▒čŗą╗ąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ čĆąĄąČąĖą╝ą░ Run mode.
ąĪą╝. čéą░ą▒ą╗ąĖčåčŗ 2 ąĖ 3 ą┤ą╗čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ, ą║ą░ą║ ą▓čģąŠą┤ąĖčéčī ą▓ čĆąĄąČąĖą╝ Sleep.
ąÆčŗčģąŠą┤ ąĖąĘ Sleep. ąĢčüą╗ąĖ ą┤ą╗čÅ ą▓čģąŠą┤ą░ ą▓ Sleep ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ą░čüčī ąĖąĮčüčéčĆčāą║čåąĖčÅ WFI, č鹊 ą╗čÄą▒ąŠąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą┐ąĄčĆąĖč乥čĆąĖąĖ, ą┐ąŠą┤čéą▓ąĄčƹȹ┤ąĄąĮąĮąŠąĄ ą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖą╣ čü ą┐ąŠą┤ą┤ąĄčƹȹ║ąŠą╣ ą▓ą╗ąŠąČąĄąĮąĮąŠčüčéąĖ (nested vectored interrupt controller, NVIC), ą╝ąŠąČąĄčé ą▓čŗą▓ąĄčüčéąĖ MCU ąĖąĘ čĆąĄąČąĖą╝ą░ Sleep.
ąĢčüą╗ąĖ ą┤ą╗čÅ ą▓čģąŠą┤ą░ ą▓ Sleep ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ą░čüčī ąĖąĮčüčéčĆčāą║čåąĖčÅ WFE, č鹊 MCU ą▓čŗą╣ą┤ąĄčé ąĖąĘ čĆąĄąČąĖą╝ą░ Sleep ą▓ ą╝ąŠą╝ąĄąĮčé, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé čüąŠą▒čŗčéąĖąĄ (event). ąĪąŠą▒čŗčéąĖąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąŠ ą╗ąĖą▒ąŠ:
ŌŚÅ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ čāčüčéčĆąŠą╣čüčéą▓ąŠą╝, ąĮąŠ ąĮąĄ ą▓ NVIC, ąĖ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ ą▒ąĖčéą░ SEVONPEND ą▓ čĆąĄą│ąĖčüčéčĆąĄ Cortex-M3 System Control. ąÜąŠą│ą┤ą░ MCU ą▓ąŠąĘąŠą▒ąĮąŠą▓ąĖčé čĆą░ą▒ąŠčéčā ą┐ąŠčüą╗ąĄ WFE, ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠčćąĖčēąĄąĮčŗ ąŠąČąĖą┤ą░čÄčēąĖą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▒ąĖčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĖč乥čĆąĖąĖ, ąĖ ą▒ ą▒ąĖčé ą║ą░ąĮą░ą╗ą░ NVIC IRQ ą┐ąĄčĆąĖč乥čĆąĖąĖ (ą▓ čĆąĄą│ąĖčüčéčĆąĄ NVIC interrupt clear pending);
ŌŚÅ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄą╝ ą▓ąĮąĄčłąĮąĄą╣ ąĖą╗ąĖ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ ą╗ąĖąĮąĖąĖ EXTI ą▓ čĆąĄąČąĖą╝ąĄ čüąŠą▒čŗčéąĖčÅ (event mode). ąÜąŠą│ą┤ą░ CPU ą▓ąŠąĘąŠą▒ąĮąŠą▓ąĖčé čĆą░ą▒ąŠčéčā ą┐ąŠčüą╗ąĄ WFE, ąĮąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ąŠčćąĖčüčéąĖčéčī ąŠąČąĖą┤ą░čÄčēąĖą╣ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą▒ąĖčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĖč乥čĆąĖąĖ ąĖą╗ąĖ ą▒ąĖčé ą║ą░ąĮą░ą╗ą░ NVIC IRQ ą┐ąĄčĆąĖč乥čĆąĖąĖ, ą┐ąŠčüą║ąŠą╗čīą║čā ąĮąĄ čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąĖčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ, čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą╗ąĖąĮąĖąĖ čüąŠą▒čŗčéąĖčÅ.
ąŁč鹊čé čĆąĄąČąĖą╝ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą▒ąŠą╗ąĄąĄ ą║ąŠčĆąŠčéą║ąŠąĄ ą▓čĆąĄą╝čÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ, ą┐ąŠč鹊ą╝čā čćč鹊 ąĮąĄ čéčĆą░čéąĖčéčüčÅ ą▓čĆąĄą╝čÅ ą┐čĆąĖ ą▓čģąŠą┤ąĄ ą▓ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ąĖ ą▓čŗčģąŠą┤ąĄ ąĖąĘ ąĮąĄą│ąŠ.
ąĪą╝. čéą░ą▒ą╗ąĖčåčŗ 2 ąĖ 3 ą┤ą╗čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ, ą║ą░ą║ ą▓čŗčģąŠą┤ąĖčéčī ąĖąĘ čĆąĄąČąĖą╝ą░ Sleep.
ąóą░ą▒ą╗ąĖčåą░ 2. ąĀą░ą▒ąŠčéą░ Sleep-now.
| Sleep-now |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| ąÆčģąŠą┤ (ąĘą░čüčŗą┐ą░ąĮąĖąĄ) |
ąśąĮčüčéčĆčāą║čåąĖčÅ WFI (Wait for Interrupt, ąŠąČąĖą┤ą░ąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ) ąĖą╗ąĖ ąĖąĮčüčéčĆčāą║čåąĖčÅ WFE (Wait for Event, ąŠąČąĖą┤ą░ąĮąĖčÅ čüąŠą▒čŗčéąĖčÅ), ą║ąŠą│ą┤ą░ SLEEPDEEP = 0 ąĖ SLEEPONEXIT = 0.
ąĪą╝. ąŠą┐ąĖčüą░ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüąĖčüč鹥ą╝ąŠą╣ (Cortex-M3 System Control register). |
| ąÆčŗčģąŠą┤ (ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ, wakeup) |
ąĢčüą╗ąĖ ą┤ą╗čÅ ą▓čģąŠą┤ą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ą░čüčī WFI, č鹊 ąŠąČąĖą┤ą░ąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ.
ąĢčüą╗ąĖ ą┤ą╗čÅ ą▓čģąŠą┤ą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ą░čüčī WFE, č鹊 ąŠąČąĖą┤ą░ąĮąĖąĄ čüąŠą▒čŗčéąĖčÅ (čüą╝. čéą░ą▒ą╗ąĖčåčā 1). |
| ąøą░č鹥ąĮčéąĮąŠčüčéčī (ąĘą░ą┤ąĄčƹȹ║ą░) ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ |
ą×čéčüčāčéčüčéą▓čāąĄčé |
ąóą░ą▒ą╗ąĖčåą░ 3. ąĀą░ą▒ąŠčéą░ Sleep-on-exit.
| Sleep-now |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| ąÆčģąŠą┤ (ąĘą░čüčŗą┐ą░ąĮąĖąĄ) |
ąśąĮčüčéčĆčāą║čåąĖčÅ WFI (Wait for Interrupt, ąŠąČąĖą┤ą░ąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ), ą║ąŠą│ą┤ą░ SLEEPDEEP = 0 ąĖ SLEEPONEXIT = 1.
ąĪą╝. ąŠą┐ąĖčüą░ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüąĖčüč鹥ą╝ąŠą╣ (Cortex-M3 System Control register). |
| ąÆčŗčģąŠą┤ (ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ, wakeup) |
ą×ąČąĖą┤ą░ąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą┤ą╗čÅ ą▓čŗčģąŠą┤ą░. |
| ąøą░č鹥ąĮčéąĮąŠčüčéčī (ąĘą░ą┤ąĄčƹȹ║ą░) ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ |
ą×čéčüčāčéčüčéą▓čāąĄčé |
[ąĀąĄąČąĖą╝ Stop]
ąĀąĄąČąĖą╝ Stop ąŠčüąĮąŠą▓ą░ąĮ ąĮą░ čĆąĄąČąĖą╝ąĄ Cortex-M3 deepsleep, ą║ąŠą╝ą▒ąĖąĮąĖčĆąŠą▓ą░ąĮąĮąŠą╝ čü čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄą╝ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄą╝ ą┐ąĄčĆąĖč乥čĆąĖąĖ. ąĀąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮ ą╗ąĖą▒ąŠ ą▓ ąĮąŠčĆą╝ą░ą╗čīąĮąŠą╝ čĆąĄąČąĖą╝ąĄ, ą╗ąĖą▒ąŠ ą▓ čĆąĄąČąĖą╝ąĄ low-power. ąÆ čĆąĄąČąĖą╝ąĄ Stop ą▓čüąĄ čéą░ą║čéčŗ ą▓ ą┤ąŠą╝ąĄąĮąĄ 1.8V ąŠčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░čÄčéčüčÅ, PLL, ą│ąĄąĮąĄčĆą░č鹊čĆčŗ HSI ąĖ HSE RC ąĘą░ą┐čĆąĄčēą░čÄčéčüčÅ. ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ SRAM ąĖ čĆąĄą│ąĖčüčéčĆąŠą▓ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ.
ąÆ čĆąĄąČąĖą╝ąĄ Stop ą▓čüąĄ ąĮąŠąČą║ąĖ I/O čüąŠčģčĆą░ąĮčÅčÄčé č鹊 ąČąĄ čüąŠčüč鹊čÅąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ čā ąĮąĖčģ ą▒čŗą╗ąŠ ą▓ čĆąĄąČąĖą╝ąĄ Run.
ąÆčģąŠą┤ ą▓ Stop. ą×ą▒čĆą░čéąĖč鹥čüčī ą║ čéą░ą▒ą╗ąĖčåąĄ 4 ą┤ą╗čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüč鹥ą╣, ą║ą░ą║ ą▓ąŠą╣čéąĖ ą▓ čĆąĄąČąĖą╝ Stop.
ą¦č鹊ą▒čŗ ąĄčēąĄ ą▒ąŠą╗čīčłąĄ čüąĮąĖąĘąĖčéčī ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ 菹ĮąĄčĆą│ąĖąĖ ą▓ čĆąĄąČąĖą╝ąĄ Stop, ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąĄčĆąĄą▓ąĄą┤ąĄąĮ ą▓ čĆąĄąČąĖą╝ low-power. ąŁč鹊 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą▒ąĖč鹊ą╝ LPDS čĆąĄą│ąĖčüčéčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ (Power control register, PWR_CR).
ąĢčüą╗ąĖ ą▓ ąĮą░čüč鹊čÅčēąĖą╣ ą╝ąŠą╝ąĄąĮčé ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖąĄ ą┐ą░ą╝čÅčéąĖ Flash, č鹊 ą▓čģąŠą┤ ą▓ čĆąĄąČąĖą╝ Stop ąŠčéą║ą╗ą░ą┤čŗą▓ą░ąĄčéčüčÅ ą┤ąŠ ą╝ąŠą╝ąĄąĮčéą░, ą║ąŠą│ą┤ą░ ą┤ąŠčüčéčāą┐ ą║ ą┐ą░ą╝čÅčéąĖ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ.
ąĢčüą╗ąĖ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą║ ą┤ąŠčüčéčāą┐ ą║ ą┤ąŠą╝ąĄąĮčā APB, č鹊 ą▓čģąŠą┤ ą▓ čĆąĄąČąĖą╝ Stop ąŠčéą║ą╗ą░ą┤čŗą▓ą░ąĄčéčüčÅ ą┤ąŠ ą╝ąŠą╝ąĄąĮčéą░, ą║ąŠą│ą┤ą░ ą┤ąŠčüčéčāą┐ ą║ APB ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ.
ąÆ čĆąĄąČąĖą╝ąĄ Stop ą╝ąŠą│čāčé ą▒čŗčéčī ą▓čŗą▒čĆą░ąĮčŗ čüą╗ąĄą┤čāčÄčēąĖąĄ čäčāąĮą║čåąĖąĖ ą┐čāč鹥ą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠčéą┤ąĄą╗čīąĮčŗčģ ą▒ąĖčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ:
ŌŚÅ Independent watchdog (IWDG): ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗą╣ čüč鹊čĆąŠąČąĄą▓ąŠą╣ čéą░ą╣ą╝ąĄčĆ IWDG [5] ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ąĘą░ą┐ąĖčüčīčÄ ą▓ ąĄą│ąŠ čĆąĄą│ąĖčüčéčĆ ą║ą╗čÄčćą░ (Key register), ą╗ąĖą▒ąŠ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╣ ąŠą┐čåąĖąĄą╣. ąæčāą┤čāčćąĖ ąĘą░ą┐čāčēąĄąĮąĮčŗą╝, IWDG ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ą║čĆąŠą╝ąĄ ą║ą░ą║ č湥čĆąĄąĘ Reset.
ŌŚÅ Real-time clock (RTC): čŹč鹊 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą▒ąĖč鹊ą╝ RTCEN ą▓ čĆąĄą│ąĖčüčéčĆąĄ Backup domain control (RCC_BDCR).
ŌŚÅ ąÆąĮčāčéčĆąĄąĮąĮąĖą╣ RC-ą│ąĄąĮąĄčĆą░č鹊čĆ (LSI RC): čŹč鹊 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą▒ąĖč鹊ą╝ LSION ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖ čüąŠčüč鹊čÅąĮąĖčÅ (Control/status register, RCC_CSR).
ŌŚÅ ąÆąĮąĄčłąĮąĖą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ 32.768 ą║ąōčå (LSE OSC): čŹč鹊 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą▒ąĖč鹊ą╝ LSEON ą▓ čĆąĄą│ąĖčüčéčĆąĄ Backup domain control (RCC_BDCR).
ADC ąĖą╗ąĖ DAC čéą░ą║ąČąĄ ą╝ąŠą│čāčé ą┐ąŠčéčĆąĄą▒ą╗čÅčéčī 菹ĮąĄčĆą│ąĖčÄ ą▓ čĆąĄąČąĖą╝ąĄ Stop, ąĄčüą╗ąĖ ąŠąĮąĖ ąĮąĄ ą▒čŗą╗ąĖ ąĘą░ą┐čĆąĄčēąĄąĮčŗ ą┐ąĄčĆąĄą┤ ą▓čģąŠą┤ąŠą╝ ą▓ čĆąĄąČąĖą╝ Stop. ąöą╗čÅ ąĖčģ ąĘą░ą┐čĆąĄčéą░ ą▒ąĖčé ADON čĆąĄą│ąĖčüčéčĆą░ ADC_CR2 ąĖ ą▒ąĖčé ENx čĆąĄą│ąĖčüčéčĆą░ DAC_CR ąŠą▒ą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮčŗ ą▓ 0.
ąÆčŗčģąŠą┤ ąĖąĘ Stop. ąĪą╝. čéą░ą▒ą╗ąĖčåčā 4 ą┤ą╗čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ č鹊ą╝, ą║ą░ą║ ą▓čŗą╣čéąĖ ąĖąĘ čĆąĄąČąĖą╝ą░ Stop.
ąÜąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą▓čŗčģąŠą┤ ąĖąĘ Stop ą┐ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÄ ąĖą╗ąĖ ą┐ąŠ čüąŠą▒čŗčéąĖčÄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ, ą▓ ą║ą░č湥čüčéą▓ąĄ čüąĖčüč鹥ą╝ąĮčŗčģ čéą░ą║č鹊ą▓ ą▓čŗą▒ąĖčĆą░ąĄčéčüčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ HSI RC.
ąÜąŠą│ą┤ą░ čĆąĄą│čāą╗čÅč鹊čĆ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čĆą░ą▒ąŠčéą░ąĄčé ą▓ čĆąĄąČąĖą╝ąĄ low-power, ą┐čĆąĖ ą▓čŗčģąŠą┤ąĄ ąĖąĘ čĆąĄąČąĖą╝ą░ Stop ą┤ąŠą▒ą░ą▓ą╗čÅąĄčéčüčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮą░čÅ ąĘą░ą┤ąĄčƹȹ║ą░. ąĢčüą╗ąĖ ąČąĄ ąŠčüčéą░ą▓ąĖčéčī ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čĆąĄą│čāą╗čÅč鹊čĆ ą▓ą║ą╗čÄč湥ąĮąĮčŗą╝ ą▓ čĆąĄąČąĖą╝ąĄ Stop, č鹊 ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝čŗą╣ č鹊ą║ čāą▓ąĄą╗ąĖčćąĖą▓ą░ąĄčéčüčÅ, ąĮąŠ ą▓čĆąĄą╝čÅ ąĘą░ą┐čāčüą║ą░ čüąĮąĖąČą░ąĄčéčüčÅ.
ąóą░ą▒ą╗ąĖčåą░ 4. Stop mode.
| Sleep-now |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| ąÆčģąŠą┤ (ąĘą░čüčŗą┐ą░ąĮąĖąĄ) |
ąśąĮčüčéčĆčāą║čåąĖčÅ WFI (Wait for Interrupt, ąŠąČąĖą┤ą░ąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ) ąĖą╗ąĖ ąĖąĮčüčéčĆčāą║čåąĖčÅ WFE (Wait for Event, ąŠąČąĖą┤ą░ąĮąĖčÅ čüąŠą▒čŗčéąĖčÅ), ą║ąŠą│ą┤ą░ SLEEPDEEP = 1 ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüąĖčüč鹥ą╝ąŠą╣,PDDS = 0 ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ PWR_CR, ąĖ ą▓čŗą▒čĆą░ąĮ čĆąĄąČąĖą╝ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą▒ąĖč鹊ą╝ LPDS ą▓ čĆąĄą│ąĖčüčéčĆąĄ PWR_CR.
ąĪą╝. ąŠą┐ąĖčüą░ąĮąĖčÅ čĆąĄą│ąĖčüčéčĆą░ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čüąĖčüč鹥ą╝ąŠą╣ (Cortex-M3 System Control register).
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┤ą╗čÅ ą▓čģąŠą┤ą░ ą▓ čĆąĄąČąĖą╝ Stop, ą▓čüąĄ ą▒ąĖčéčŗ EXTI Line (ą▓ čĆąĄą│ąĖčüčéčĆąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ EXTI_PR) ąĖ čäą╗ą░ą│ ą▒čāą┤ąĖą╗čīąĮąĖą║ą░ (RTC Alarm) ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüą▒čĆąŠčłąĄąĮčŗ. ąśąĮą░č湥 ą┐čĆąŠčåąĄą┤čāčĆą░ ą▓čģąŠą┤ą░ ą▓ čĆąĄąČąĖą╝ Stop ą▒čāą┤ąĄčé ą┐čĆąŠąĖą│ąĮąŠčĆąĖčĆąŠą▓ą░ąĮą░ ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┐čĆąŠą┤ąŠą╗ąČąĖčé čüą▓ąŠąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ. |
| ąÆčŗčģąŠą┤ (ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ, wakeup) |
ąĢčüą╗ąĖ ą┤ą╗čÅ ą▓čģąŠą┤ą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ą░čüčī WFI, č鹊 ąŠąČąĖą┤ą░ąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░ ą╗čÄą▒ąŠą╣ EXTI Line, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ą▓ čĆąĄąČąĖą╝ąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╣ ą▓ąĄą║č鹊čĆ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ EXTI ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čĆą░ąĘčĆąĄčłąĄąĮ ą▓ NVIC).
ąĢčüą╗ąĖ ą┤ą╗čÅ ą▓čģąŠą┤ą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ą░čüčī WFE, č鹊 ąŠąČąĖą┤ą░ąĮąĖąĄ čüąĖą│ąĮą░ą╗ą░ ą╗čÄą▒ąŠą╣ EXTI Line, čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ą▓ čĆąĄąČąĖą╝ąĄ čüąŠą▒čŗčéąĖčÅ. |
| ąøą░č鹥ąĮčéąĮąŠčüčéčī (ąĘą░ą┤ąĄčƹȹ║ą░) ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ |
ąÆčĆąĄą╝čÅ čüčéą░čĆčéą░ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ (HSI RC wakeup time) + ą▓čĆąĄą╝čÅ ą▓čŗčģąŠą┤ą░ ąĖąĘ čüąĮą░ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ (regulator wakeup time from low-power mode). |
[ąĀąĄąČąĖą╝ Standby]
ąĀąĄąČąĖą╝ Standby ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą┤ąŠčüčéąĖčćčī čüą░ą╝ąŠą│ąŠ ąĮąĖąĘą║ąŠą│ąŠ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čŹąĮąĄčĆą│ąĖąĖ. ą×ąĮ ąŠčüąĮąŠą▓ą░ąĮ ąĮą░ čĆąĄąČąĖą╝ąĄ Cortex-M3 deepsleep, čü ąĘą░ą┐čĆąĄč鹊ą╝ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ. ąĪą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ, ą┐ąĖčéą░ąĮąĖąĄ ą┤ąŠą╝ąĄąĮą░ 1.8V ą▓čŗą║ą╗čÄč湥ąĮąŠ. PLL, ąŠą┐ąŠčĆąĮčŗąĄ ą│ąĄąĮąĄčĆą░č鹊čĆčŗ HSI ąĖ HSE čéą░ą║ąČąĄ ą▓čŗą║ą╗čÄč湥ąĮčŗ. ąĪąŠą┤ąĄčƹȹĖą╝ąŠąĄ SRAM ąĖ čĆąĄą│ąĖčüčéčĆąŠą▓ č鹥čĆčÅąĄčéčüčÅ, ą║čĆąŠą╝ąĄ čüčģąĄą╝čŗ Standby č鹥čģ čĆąĄą│ąĖčüčéčĆąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą╗čāčćą░čÄčé ąŠčéą┤ąĄą╗čīąĮąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ ą▓ ą┤ąŠą╝ąĄąĮąĄ Backup (čüą╝. čĆąĖčü. 1).
ąÆčģąŠą┤ ą▓ Standby. ąĪą╝. čéą░ą▒ą╗ąĖčåčā 5 ą┤ą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ č鹊ą╝, ą║ą░ą║ ą▓ąŠą╣čéąĖ ą▓ čĆąĄąČąĖą╝ Standby.
ąÆ čĆąĄąČąĖą╝ąĄ Standby ą┐čāč鹥ą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ąŠčéą┤ąĄą╗čīąĮčŗčģ ą▒ąĖčé čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą╝ąŠąČąĮąŠ ą▓čŗą▒čĆą░čéčī čüą╗ąĄą┤čāčÄčēąĖąĄ čäčāąĮą║čåąĖąĖ:
ŌŚÅ Independent watchdog (IWDG): ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗą╣ čüč鹊čĆąŠąČąĄą▓ąŠą╣ čéą░ą╣ą╝ąĄčĆ IWDG [5] ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ąĘą░ą┐ąĖčüčīčÄ ą▓ ąĄą│ąŠ čĆąĄą│ąĖčüčéčĆ ą║ą╗čÄčćą░ (Key register), ą╗ąĖą▒ąŠ ą░ą┐ą┐ą░čĆą░čéąĮąŠą╣ ąŠą┐čåąĖąĄą╣. ąæčāą┤čāčćąĖ ąĘą░ą┐čāčēąĄąĮąĮčŗą╝, IWDG ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮ, ą║čĆąŠą╝ąĄ ą║ą░ą║ č湥čĆąĄąĘ Reset.
ŌŚÅ Real-time clock (RTC): čŹč鹊 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą▒ąĖč鹊ą╝ RTCEN ą▓ čĆąĄą│ąĖčüčéčĆąĄ Backup domain control (RCC_BDCR).
ŌŚÅ ąÆąĮčāčéčĆąĄąĮąĮąĖą╣ RC-ą│ąĄąĮąĄčĆą░č鹊čĆ (LSI RC): čŹč鹊 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą▒ąĖč鹊ą╝ LSION ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĖ čüąŠčüč鹊čÅąĮąĖčÅ (Control/status register, RCC_CSR).
ŌŚÅ ąÆąĮąĄčłąĮąĖą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ 32.768 ą║ąōčå (LSE OSC): čŹč鹊 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą▒ąĖč鹊ą╝ LSEON ą▓ čĆąĄą│ąĖčüčéčĆąĄ Backup domain control (RCC_BDCR).
ąÆčŗčģąŠą┤ ąĖąĘ Standby. MCU ą▓čŗčģąŠą┤ąĖčé ąĖąĘ čĆąĄąČąĖą╝ą░ Standby (ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ, wakeup), ą║ąŠą│ą┤ą░ ą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ čüąĖą│ąĮą░ą╗ ą▓ąĮąĄčłąĮąĄą│ąŠ čüą▒čĆąŠčüą░ (external Reset, ą▓čŗą▓ąŠą┤ ą║ąŠčĆą┐čāčüą░ NRST), čüą▒čĆąŠčü ąŠčé čüč鹊čĆąŠąČąĄą▓ąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░ (IWDG Reset), čäčĆąŠąĮčé ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ ąĮą░ ąĮąŠąČą║ąĄ WKUP, ąĖą╗ąĖ ą┐čĆąĖ ą▓ąŠąĘąĮąĖą║ąĮąŠą▓ąĄąĮąĖąĖ čüąŠą▒čŗčéąĖčÅ ą▒čāą┤ąĖą╗čīąĮąĖą║ą░ čćą░čüąŠą▓ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (RTC alarm). ą¤ąŠčüą╗ąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąĖąĘ čĆąĄąČąĖą╝ą░ Standby ą▓čüąĄ čĆąĄą│ąĖčüčéčĆčŗ čüą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ, ą║čĆąŠą╝ąĄ čĆąĄą│ąĖčüčéčĆą░ Power control/status (PWR_CSR).
ą¤ąŠčüą╗ąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąĖąĘ čĆąĄąČąĖą╝ą░ Standby ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ č鹊čćąĮąŠ čéą░ą║ ąČąĄ, ą║ą░ą║ ą┐ąŠčüą╗ąĄ Reset - ą░ąĮą░ą╗ąĖąĘąĖčĆčāąĄčéčüčÅ čüąŠčüč鹊čÅąĮąĖąĄ ą▓čŗą▓ąŠą┤ąŠą▓ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąĘą░ą│čĆčāąĘą║ąŠą╣ (BOOT1, BOOT0), ąĘą░čģą▓ą░čéčŗą▓ą░ąĄčéčüčÅ ą▓ąĄą║č鹊čĆ čüą▒čĆąŠčüą░, ąĖ čé. ą┤. ążą╗ą░ą│ čüčéą░čéčāčüą░ SBF ą▓ čĆąĄą│ąĖčüčéčĆąĄ Power control/status (PWR_CSR) ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 MCU ą▒čŗą╗ ą▓ čĆąĄąČąĖą╝ąĄ Standby.
ąóą░ą▒ą╗ąĖčåą░ 5. ąĀą░ą▒ąŠčéą░ Standby mode.
| Sleep-now |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
| ąÆčģąŠą┤ (ąĘą░čüčŗą┐ą░ąĮąĖąĄ) |
ąśąĮčüčéčĆčāą║čåąĖčÅ WFI (Wait for Interrupt, ąŠąČąĖą┤ą░ąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ) ąĖą╗ąĖ ąĖąĮčüčéčĆčāą║čåąĖčÅ WFE (Wait for Event, ąŠąČąĖą┤ą░ąĮąĖčÅ čüąŠą▒čŗčéąĖčÅ), ą║ąŠą│ą┤ą░ SLEEPDEEP = 1, čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé PDDS ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ PWR_CR ąĖ ąŠčćąĖčēąĄąĮ ą▒ąĖčé WUF ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ/čüčéą░čéčāčüą░ ą┐ąĖčéą░ąĮąĖčÅ PWR_CSR. |
| ąÆčŗčģąŠą┤ (ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ, wakeup) |
ążčĆąŠąĮčé ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ ąĮą░ ąĮąŠąČą║ąĄ WKUP, čüąĖą│ąĮą░ą╗ ą▒čāą┤ąĖą╗čīąĮąĖą║ą░ (RTC alarm), čüąĖą│ąĮą░ą╗ ą▓ąĮąĄčłąĮąĄą│ąŠ čüą▒čĆąŠčüą░ ąĮą░ ąĮąŠąČą║ąĄ NRST, čüą▒čĆąŠčü ąŠčé IWDG. |
| ąøą░č鹥ąĮčéąĮąŠčüčéčī (ąĘą░ą┤ąĄčƹȹ║ą░) ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ |
ąÆčĆąĄą╝čÅ ąĘą░ą┐čāčüą║ą░ čĆąĄą│čāą╗čÅč鹊čĆą░ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ + ą▓čĆąĄą╝čÅ čäą░ąĘčŗ čüą▒čĆąŠčüą░. |
ąÆ čĆąĄąČąĖą╝ąĄ Standby ą▓čüąĄ ąĮąŠąČą║ąĖ I/O ąĮą░čģąŠą┤čÅčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą▓čŗčüąŠą║ąŠą│ąŠ čüąŠą┐čĆąŠčéąĖą▓ą╗ąĄąĮąĖčÅ, ą║čĆąŠą╝ąĄ:
ŌŚÅ ąØąŠąČą║ą░ Reset (ą▓čüąĄ ąĄčēąĄ ą┤ąŠčüčéčāą┐ąĮą░).
ŌŚÅ ąØąŠąČą║ą░ TAMPER, ąĄčüą╗ąĖ čŹč鹊 čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąŠ ą┤ą╗čÅ čäčāąĮą║čåąĖąĖ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓ą╝ąĄčłą░č鹥ą╗čīčüčéą▓ą░ (tamper) ąĖą╗ąĖ ą┤ą╗čÅ ą▓čŗčģąŠą┤ą░ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ.
ŌŚÅ ąØąŠąČą║ą░ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ WKUP, ąĄčüą╗ąĖ čŹč鹊 čĆą░ąĘčĆąĄčłąĄąĮąŠ.
[ąĀąĄąČąĖą╝ ąŠčéą╗ą░ą┤ą║ąĖ (Debug mode)]
ą¤ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ čüąŠąĄą┤ąĖąĮąĄąĮąĖąĄ čü ąŠčéą╗ą░ą┤čćąĖą║ąŠą╝ č鹥čĆčÅąĄčéčüčÅ, ąĄčüą╗ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą┐ąĄčĆąĄą▓ąŠą┤ąĖčé MCU ą▓ čĆąĄąČąĖą╝ Stop ąĖą╗ąĖ Standby, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ čäčāąĮą║čåąĖąĖ ąŠčéą╗ą░ą┤ą║ąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ. ą¤ąŠč鹥čĆčÅ čüą▓čÅąĘąĖ čü ąŠčéą╗ą░ą┤čćąĖą║ąŠą╝ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐ąŠč鹊ą╝čā, čćč鹊 čÅą┤čĆąŠ CortexŌäó-M3 ą▒ąŠą╗čīčłąĄ ąĮąĄ čéą░ą║čéąĖčĆčāąĄčéčüčÅ.
ą×ą┤ąĮą░ą║ąŠ ą┐čāč鹥ą╝ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĮąĄą║ąŠč鹊čĆčŗčģ ą▒ąĖčé ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą▓ čĆąĄą│ąĖčüčéčĆąĄ DBGMCU_CR, ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ą▓čüąĄ-čéą░ą║ąĖ ą╝ąŠąČąĄčé ąŠčéą╗ą░ąČąĖą▓ą░čéčīčüčÅ, ą┤ą░ąČąĄ ą║ąŠą│ą┤ą░ 菹║čüč鹥ąĮčüąĖą▓ąĮąŠ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ čĆąĄąČąĖą╝čŗ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ.
[Auto-wakeup (AWU)]
ą¦ą░čüčŗ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ RTC ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ MCU ąĖąĘ čĆąĄąČąĖą╝ą░ low-power ą▒ąĄąĘ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (Auto-wakeup mode, čĆąĄąČąĖą╝ ą░ą▓č鹊ąĮąŠą╝ąĮąŠą│ąŠ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ). ąæą╗ąŠą║ RTC ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čāčÄ ą▒ą░ąĘčā ą▓čĆąĄą╝ąĄąĮąĖ ą┤ą╗čÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąĖąĘ čĆąĄąČąĖą╝ąŠą▓ Stop ąĖą╗ąĖ Standby, čü ą┐ąŠą▓č鹊čĆčÅčÄčēąĖą╝ąĖčüčÅ ąĖąĮč鹥čĆą▓ą░ą╗ą░ą╝ąĖ. ąöą╗čÅ čŹč鹊ą╣ čåąĄą╗ąĖ ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą▓ą░ ąĖąĘ čéčĆąĄčģ ą░ą╗čīč鹥čĆąĮą░čéąĖą▓ąĮčŗčģ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ RTC, ą┐čāč鹥ą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ ą▒ąĖčé RTCSEL[1:0] ą▓ čĆąĄą│ąĖčüčéčĆąĄ Backup domain control (RCC_BDCR):
ŌŚÅ Low-power 32.768 ą║ąōčå ą▓ąĮąĄčłąĮąĖą╣ ą║ą▓ą░čĆčåąĄą▓čŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ (LSE OSC). ąŁč鹊čé ąĖčüč鹊čćąĮąĖą║ čéą░ą║č鹊ą▓ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé č鹊čćąĮčāčÄ ą▒ą░ąĘčā ą▓čĆąĄą╝ąĄąĮąĖ čü ąĮąĖąĘą║ąĖą╝ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ č鹊ą║ą░ (ą╝ąĄąĮąĄąĄ 1 ╬╝A, ą┤ąŠą▒ą░ą▓ą╗čÅąĄą╝čŗčģ ą░ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÄ č鹊ą║ą░ ą▓ ąŠą▒čŗčćąĮčŗčģ čāčüą╗ąŠą▓ąĖčÅčģ).
ŌŚÅ Low-power ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ RC-ą│ąĄąĮąĄčĆą░č鹊čĆ (LSI RC). ąŻ čŹč鹊ą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓ ą┤ąŠčüč鹊ąĖąĮčüčéą▓ąŠ ą▓ č鹊ą╝, čćč鹊 菹║ąŠąĮąŠą╝ąĖčéčüčÅ čüč鹊ąĖą╝ąŠčüčéčī ą┐čĆąĖą╝ąĄąĮąĄąĮąĖčÅ ą║ą▓ą░čĆčåą░ 32.768 ą║ąōčå (ąŠąĮ ąĮąĄ ąĮčāąČąĄąĮ). ąÆąĮčāčéčĆąĄąĮąĮąĖą╣ RC-ą│ąĄąĮąĄčĆą░č鹊čĆ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮ čü čåąĄą╗čīčÄ ą╝ąĖąĮąĖą╝ą░ą╗čīąĮąŠ ą▓ąŠąĘą╝ąŠąČąĮąŠą│ąŠ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čŹąĮąĄčĆą│ąĖąĖ.
ąöą╗čÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąĖąĘ čĆąĄąČąĖą╝ą░ Stop čüąŠą▒čŗčéąĖąĄą╝ RTC alarm ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī čüą╗ąĄą┤čāčÄčēąĄąĄ:
ŌŚÅ ąĪą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī EXTI Line 17 ąĮą░ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮąŠčüčéčī ą║ čäčĆąŠąĮčéčā ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ.
ŌŚÅ ąĪą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī RTC ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ RTC alarm.
ąöą╗čÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąĖąĘ čĆąĄąČąĖą╝ą░ Standby ąĮąĄ ąĮčāąČąĮąŠ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī EXTI Line 17.
[2. ąóą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ]
ąöą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čüąĖčüč鹥ą╝ąĮčŗčģ čéą░ą║č鹊ą▓ (system clock, SYSCLK) ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ 3 čĆą░ąĘąĮčŗčģ ąĖčüč鹊čćąĮąĖą║ą░:
ŌŚÅ HSI oscillator clock (ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ RC-ą│ąĄąĮąĄčĆą░č鹊čĆ 8 ą£ąōčå)
ŌŚÅ HSE oscillator clock (ą▓ąĮąĄčłąĮąĖą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ, čĆą░ą▒ąŠčéą░čÄčēąĖą╣ čü ą║ą▓ą░čĆčåąĄą╝, ąĖą╗ąĖ ą┐ąŠą╗čāčćą░čÄčēąĖą╣ čéą░ą║čéčŗ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░)
ŌŚÅ PLL clock (ążąÉą¤ą¦ ą┤ą╗čÅ čāą╝ąĮąŠąČąĄąĮąĖčÅ čćą░čüč鹊čéčŗ)
ąŻ MCU ąĄčüčéčī ą┤ą▓ą░ ą▓č鹊čĆąĖčćąĮčŗčģ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║č鹊ą▓:
ŌŚÅ ąÆąĮčāčéčĆąĄąĮąĮąĖą╣, ąĮąĖąĘą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą╣ RC-ą│ąĄąĮąĄčĆą░č鹊čĆ 40 ą║ąōčå (LSI RC), ą║ąŠč鹊čĆčŗą╣ ą┐ąŠą┤ą░ąĄčé čéą░ą║čéčŗ ąĮą░ ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗą╣ čüč鹊čĆąŠąČąĄą▓ąŠą╣ čéą░ą╣ą╝ąĄčĆ IWDG, ąĖ ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ ą╝ąŠąČąĄčé čéą░ą║čéąĖčĆąŠą▓ą░čéčī RTC, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ Auto-Wakeup ąĖąĘ čĆąĄąČąĖą╝ąŠą▓ Stop/Standby.
ŌŚÅ ąÆąĮąĄčłąĮąĖą╣ ą║ą▓ą░čĆčå 32.768 ą║ąōčå (LSE), ą║ąŠč鹊čĆčŗą╣ ąŠą┐čåąĖąŠąĮą░ą╗čīąĮąŠ ą╝ąŠąČąĄčé ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čéą░ą║čéčŗ ą┤ą╗čÅ RTC (RTCCLK).
ąÜą░ąČą┤čŗą╣ ąĖąĘ ąĖčüč鹊čćąĮąĖą║ąŠą▓ čéą░ą║č鹊ą▓ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ą▓ą║ą╗čÄč湥ąĮ ąĖą╗ąĖ ą▓čŗą║ą╗čÄč湥ąĮ ąĄčüą╗ąĖ ąŠąĮ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĖą╗ąĖ ąĮąĄčé, čćč鹊ą▒čŗ ą┤ąŠčüčéąĖčćčī ąŠą┐čéąĖą╝ą░ą╗čīąĮąŠą│ąŠ ą║ąŠą╝ą┐čĆąŠą╝ąĖčüčüą░ ą┐ąŠ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÄ čŹąĮąĄčĆą│ąĖąĖ.
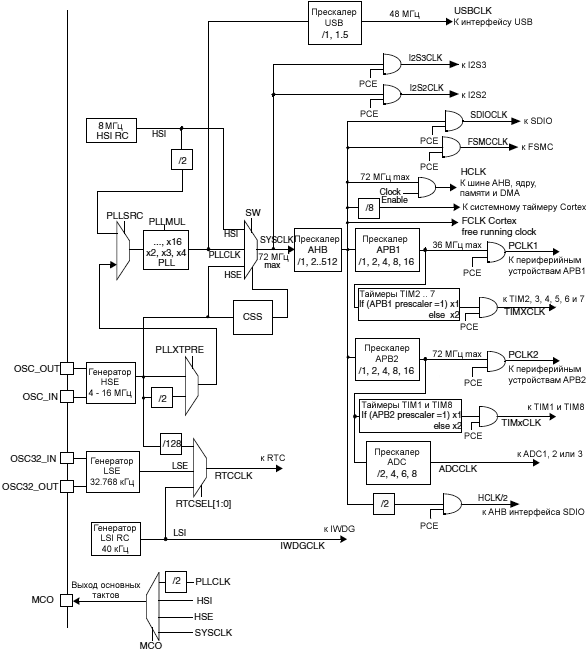
ąĀąĖčü. 2. ąĪčģąĄą╝ą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ.
ąøąĄą│ąĄąĮą┤ą░ čĆąĖčü. 2:
HSE High-speed external clock signal, ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą╣ ą▓ąĮąĄčłąĮąĖą╣ čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗.
LSE Low-speed external clock signal, ąĮąĖąĘą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą╣ ą▓ąĮąĄčłąĮąĖą╣ čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗.
LSI Low-speed internal clock signal, ąĮąĖąĘą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą╣ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗.
HSI High-speed internal clock signal, ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą╣ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗.
Clock enable čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ.
PCE Peripheral Clock Enable, čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░ (clock gating).
FCLK Cortex free running clock ą┐ąŠčüč鹊čÅąĮąĮąŠ ą│ąĄąĮąĄčĆąĖčĆčāąĄą╝ą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ čÅą┤čĆą░ Cortex.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą║ąŠą│ą┤ą░ HSI ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĮą░ ą▓čģąŠą┤ąĄ čéą░ą║č鹊ą▓ PLL, ą╝ąŠąČąĄčé ą┐ąŠą╗čāč湥ąĮą░ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ čüąĖčüč鹥ą╝ąĮą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ 64 ą£ąōčå.
ąØąĄčüą║ąŠą╗čīą║ąŠ ą┐čĆąĄčüą║ą░ą╗ąĄčĆąŠą▓ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░čéčī čćą░čüč鹊čéčā ą┤ąŠą╝ąĄąĮąŠą▓ čłąĖąĮčŗ AHB, ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą╣ čłąĖąĮčŗ APB (APB2) ąĖ ąĮąĖąĘą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą╣ čłąĖąĮčŗ APB (APB1). ą£ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ čćą░čüč鹊čéą░ ą┤ąŠą╝ąĄąĮąŠą▓ AHB ąĖ APB2 čüąŠčüčéą░ą▓ą╗čÅąĄčé 72 ą£ąōčå, ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠ ą┤ąŠą┐čāčüčéąĖą╝ą░čÅ čćą░čüč鹊čéą░ ą┤ąŠą╝ąĄąĮą░ APB1 čüąŠčüčéą░ą▓ą╗čÅąĄčé 36 ą£ąōčå. RCC ą┐ąŠą┤ą░ąĄčé ą▓ąĮąĄčłąĮąĖą╣ čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ čüąĖčüč鹥ą╝ąĮąŠą│ąŠ čéą░ą╣ą╝ąĄčĆą░ Cortex (SysTick) čü čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹊ą╣ AHB (HCLK), ą┐ąŠą┤ąĄą╗ąĄąĮąĮąŠą╣ ąĮą░ 8. SysTick ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą╗ąĖą▒ąŠ čü čŹčéąĖą╝ąĖ čéą░ą║čéą░ą╝ąĖ, ą╗ąĖą▒ąŠ čü čéą░ą║čéą░ą╝ąĖ Cortex (HCLK), čćč鹊 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ čüčéą░čéčāčüą░ ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ SysTick (SysTick Control and Status Register). ąÉąĮą░ą╗ąŠą│ąŠ-čåąĖčäčĆąŠą▓čŗąĄ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░č鹥ą╗ąĖ (ADC) čéą░ą║čéąĖčĆčāčÄčéčüčÅ ąŠčé čéą░ą║č鹊ą▓ ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą│ąŠ ą┤ąŠą╝ąĄąĮą░ (APB2), ą┐ąŠą┤ąĄą╗ąĄąĮąĮčŗčģ ąĮą░ 2, 4, 6 ąĖą╗ąĖ 8.
ąóą░ą║č鹊ą▓čŗąĄ čćą░čüč鹊čéčŗ čéą░ą╣ą╝ąĄčĆą░ ą▓ 2 čĆą░ąĘą░ ą▓čŗčłąĄ čćą░čüč鹊čéčŗ ą┤ąŠą╝ąĄąĮą░ APB, ą║ ą║ąŠč鹊čĆąŠą╝čā ąŠąĮąĖ ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ (čĆą░ąĘąĮčŗąĄ čéą░ą╣ą╝ąĄčĆčŗ ą╝ąŠą│čāčé ąĖą╝ąĄčéčī čĆą░ąĘąĮčŗąĄ čéą░ą║č鹊ą▓čŗąĄ ą┤ąŠą╝ąĄąĮčŗ APB). ąóąĄą╝ ąĮąĄ ą╝ąĄąĮąĄąĄ, ąĄčüą╗ąĖ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ APB čĆą░ą▓ąĄąĮ 1, č鹊 čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ čéą░ą╣ą╝ąĄčĆą░ čüąŠą▓ą┐ą░ą┤ą░ąĄčé čü čćą░čüč鹊č鹊ą╣ ą┤ąŠą╝ąĄąĮą░ APB, ą║ ą║ąŠč鹊čĆąŠą╝čā ąŠąĮ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ.
FCLK ą┤ąĄą╣čüčéą▓čāąĄčé ą║ą░ą║ čüą▓ąŠą▒ąŠą┤ąĮčŗą╣ čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ CortexŌäó-M3 (free running clock). ąöą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠčüč鹥ą╣ ąŠą▒čĆą░čēą░ą╣č鹥čüčī ą║ č鹥čģąĮąĖč湥čüą║ąŠą╝čā čĆčāą║ąŠą▓ąŠą┤čüčéą▓čā ARM CortexŌäó-M3 Technical Reference Manual.
[3. Real-time clock (RTC)]
ą¦ą░čüčŗ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (real-time clock, RTC) čŹč鹊 ąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗą╣ čéą░ą╣ą╝ąĄčĆ. RTC ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĮą░ą▒ąŠčĆ ą┐ąŠčüč鹊čÅąĮąĮąŠ čĆą░ą▒ąŠčéą░čÄčēąĖčģ čüč湥čéčćąĖą║ąŠą▓, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī, ą▓ą╝ąĄčüč鹥 čü čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖą╝ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮčŗą╝ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄą╝, ą┤ą╗čÅ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĖčÅ čäčāąĮą║čåąĖąĖ čćą░čüąŠą▓ ąĖ ą║ą░ą╗ąĄąĮą┤ą░čĆčÅ. ąŚąĮą░č湥ąĮąĖčÅ čüč湥čéčćąĖą║ąŠą▓ ą╝ąŠąČąĮąŠ ąĘą░ą┐ąĖčüčŗą▓ą░čéčī, čćč鹊ą▒čŗ čāčüčéą░ąĮąŠą▓ąĖčéčī ą▓ čüąĖčüč鹥ą╝ąĄ č鹥ą║čāčēąĖąĄ ą▓čĆąĄą╝čÅ/ą┤ą░čéčā.
ą×čüąĮąŠą▓ąĮčŗąĄ čäčāąĮą║čåąĖąĖ ąĖ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéąĖ RTC:
ŌŚÅ ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╣ ą┐čĆąĄčüą║ą░ą╗ąĄčĆ: ą║ąŠčŹčäčäąĖčåąĖąĄąĮčé ą┤ąĄą╗ąĄąĮąĖčÅ ą┤ąŠ 220.
ŌŚÅ 32-čĆą░ąĘčĆčÅą┤ąĮčŗą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╣ čüč湥čéčćąĖą║ ą┤ą╗čÅ ą┤ąŠą╗ą│ąŠą▓čĆąĄą╝ąĄąĮąĮąŠą│ąŠ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ.
ŌŚÅ ąöą▓ą░ ąŠčéą┤ąĄą╗čīąĮčŗčģ ąĖčüč鹊čćąĮąĖą║ą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ: PCLK1 ą┤ą╗čÅ ąĖąĮč鹥čĆč乥ą╣čüą░ APB1 ąĖ ą┤ą╗čÅ čéą░ą║č鹊ą▓ RTC (čéą░ą║čéčŗ RTC ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ ą▓ 4 čĆą░ąĘą░ ą╝ąĄą┤ą╗ąĄąĮąĮąĄąĄ, č湥ą╝ čćą░čüč鹊čéą░ PCLK1).
ŌŚÅ ąöą▓ą░ ąŠčéą┤ąĄą╗čīąĮčŗčģ čéąĖą┐ą░ čüą▒čĆąŠčüą░:
ŌĆō ąśąĮč鹥čĆč乥ą╣čü APB1 čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ąŠčé čüąĖčüč鹥ą╝ąĮąŠą│ąŠ čüą▒čĆąŠčüą░.
ŌĆō ą»ą┤čĆąŠ RTC (Prescaler, Alarm, Counter ąĖ Divider) čüą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ č鹊ą╗čīą║ąŠ ąŠčé čüą▒čĆąŠčüą░ ą┤ąŠą╝ąĄąĮą░ Backup (čüą╝. čüąĄą║čåąĖčÄ "Backup domain reset" ą▓ čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ STM32F10xxx [2]).
ŌŚÅ ąóčĆąĖ ą▓čŗą┤ąĄą╗ąĄąĮąĮčŗąĄ, ą╝ą░čüą║ąĖčĆčāąĄą╝čŗąĄ ą╗ąĖąĮąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ:
ŌĆō Alarm interrupt, ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▒čāą┤ąĖą╗čīąĮąĖą║ą░.
ŌĆō Seconds interrupt, ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąŠą│ąŠ čüąĖą│ąĮą░ą╗ą░ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čü ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ąŠą╣ ą┤ą╗ąĖąĮąŠą╣ ą┐ąĄčĆąĖąŠą┤ą░ (ą┤ąŠ 1 čüąĄą║čāąĮą┤čŗ).
ŌĆō Overflow interrupt, ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ą╝ąŠą╝ąĄąĮčéą░, ą║ąŠą│ą┤ą░ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╣ čüč湥čéčćąĖą║ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĖčéčüčÅ, ąĖ čüąĮąŠą▓ą░ ąŠą║ą░ąČąĄčéčüčÅ ą▓ ąĘąĮą░č湥ąĮąĖąĖ 0.
RTC čüąŠčüč鹊ąĖčé ąĖąĘ ą┤ą▓čāčģ ąŠčüąĮąŠą▓ąĮčŗčģ čāąĘą╗ąŠą▓ (čüą╝. čĆąĖčü. 3). ą¤ąĄčĆą▓čŗą╣ (ąĖąĮč鹥čĆč乥ą╣čü APB1) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ą║ čłąĖąĮąĄ APB1. ąŁč鹊čé čāąĘąĄą╗ čéą░ą║ąČąĄ čüąŠą┤ąĄčƹȹĖčé ąĮą░ą▒ąŠčĆ 16-ą▒ąĖčéąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓, ą┤ąŠčüčéčāą┐ąĮčŗčģ č湥čĆąĄąĘ čłąĖąĮčā APB1 ą┤ą╗čÅ čćč鹥ąĮąĖčÅ ąĖ ąĘą░ą┐ąĖčüąĖ. ąśąĮč鹥čĆč乥ą╣čü APB1 čéą░ą║čéąĖčĆčāąĄčéčüčÅ ąŠčé čłąĖąĮčŗ APB1, čćč鹊ą▒čŗ ąŠą▒ąĄčüą┐ąĄčćąĖą▓ą░ą╗ąŠčüčī ą▓ąĘą░ąĖą╝ąŠą┤ąĄą╣čüčéą▓ąĖąĄ čü čłąĖąĮąŠą╣ APB1.
ąöčĆčāą│ąŠą╣ čāąĘąĄą╗ RTC Core (čÅą┤čĆąŠ čćą░čüąŠą▓ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ) čüąŠčüč鹊ąĖčé ąĖąĘ čåąĄą┐ąŠčćą║ąĖ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗčģ čüč湥čéčćąĖą║ąŠą▓, ąŠą▒čĆą░ąĘčāčÄčēąĖčģ ą┤ą▓ą░ ąŠčüąĮąŠą▓ąĮčŗčģ ą▒ą╗ąŠą║ą░. ą¤ąĄčĆą▓čŗą╣ ą▒ą╗ąŠą║ čŹč鹊 ą┐čĆąĄčüą║ą░ą╗ąĄčĆ RTC, ą║ąŠč鹊čĆčŗą╣ ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą▒ą░ąĘčā ąŠčéčüč湥čéą░ ą▓čĆąĄą╝ąĄąĮąĖ RTC - čüąĖą│ąĮą░ą╗ TR_CLK, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮ ą┤ą╗čÅ ą┐ąŠą╗čāč湥ąĮąĖčÅ ą┐ąĄčĆąĖąŠą┤ą░ ą▓čĆąĄą╝ąĄąĮąĖ ą▓ 1 čüąĄą║čāąĮą┤čā. ą×ąĮ ą▓ą║ą╗čÄčćą░ąĄčé 20-ą▒ąĖčéąĮčŗą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╣ ą┤ąĄą╗ąĖč鹥ą╗čī (RTC Prescaler). ąÜą░ąČą┤čŗą╣ ą┐ąĄčĆąĖąŠą┤ TR_CLK čÅą┤čĆąŠ RTC ą│ąĄąĮąĄčĆąĖčĆčāąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ (Second Interrupt, ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ čüąĄą║čāąĮą┤), ąĄčüą╗ąĖ čŹč鹊 čĆą░ąĘčĆąĄčłąĄąĮąŠ ą▓ čĆąĄą│ąĖčüčéčĆąĄ RTC_CR. ąæą╗ąŠą║ čüąĄą║čāąĮą┤ čŹč鹊 32-ą▒ąĖčéąĮčŗą╣ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝čŗą╣ čüč湥čéčćąĖą║, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ č鹥ą║čāčēąĖą╝ čüąĖčüč鹥ą╝ąĮčŗą╝ ą▓čĆąĄą╝ąĄąĮąĄą╝. ąĪąĖčüč鹥ą╝ąĮąŠąĄ ą▓čĆąĄą╝čÅ ąĖąĮą║čĆąĄą╝ąĄąĮčéąĖčĆčāąĄčéčüčÅ čü čćą░čüč鹊č鹊ą╣ TR_CLK, ąĖ čüčĆą░ą▓ąĮąĖą▓ą░ąĄčéčüčÅ čü ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ą┤ą░č鹊ą╣ (čüąŠčģčĆą░ąĮąĄąĮąĮąŠą╣ ą▓ čĆąĄą│ąĖčüčéčĆąĄ RTC_ALR), čćč鹊ą▒čŗ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ ą▒čāą┤ąĖą╗čīąĮąĖą║ą░ (alarm interrupt), ąĄčüą╗ąĖ čŹč鹊 čĆą░ąĘčĆąĄčłąĄąĮąŠ ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ RTC_CR.
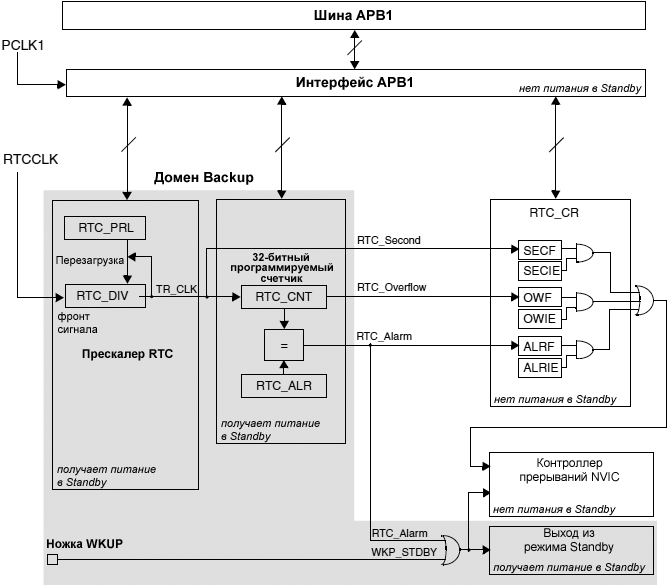
ąĀąĖčü. 3. ąŻą┐čĆąŠčēąĄąĮąĮą░čÅ ą▒ą╗ąŠą║-čüčģąĄą╝ą░ RTC.
ąĪą▒čĆąŠčü čĆąĄą│ąĖčüčéčĆąŠą▓ RTC. ąÆčüąĄ čĆąĄą│ąĖčüčéčĆčŗ čüąĖčüč鹥ą╝čŗ ą░čüąĖąĮčģčĆąŠąĮąĮąŠ čüą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ ąŠčé čüąĖčüč鹥ą╝ąĮąŠą│ąŠ čüą▒čĆąŠčüą░ (System Reset) ąĖą╗ąĖ ąŠčé čüą▒čĆąŠčüą░ ą┐ąŠ ą┐ąĖčéą░ąĮąĖčÄ (Power Reset), ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆąŠą▓ RTC_PRL, RTC_ALR, RTC_CNT ąĖ RTC_DIV. ą×ąĮąĖ čüą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ č鹊ą╗čīą║ąŠ ąŠčé čüą▒čĆąŠčüą░ ą┤ąŠą╝ąĄąĮą░ čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮąĖčÅ (Backup Domain reset), čüą╝. čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ STM32F10xxx [2].
ą¦č鹥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ RTC. ą»ą┤čĆąŠ čćą░čüąŠą▓ čĆąĄą░ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ (RTC core) ą┐ąŠą╗ąĮąŠčüčéčīčÄ ąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠ ąŠčé ąĖąĮč鹥čĆč乥ą╣čüą░ RTC APB1. ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčé ą┤ąŠčüčéčāą┐ ą║ ą┐čĆąĄčüą║ą░ą╗ąĄčĆčā RTC, ąĘąĮą░č湥ąĮąĖčÅą╝ čĆąĄą│ąĖčüčéčĆąŠą▓ čüč湥čéčćąĖą║ąŠą▓ ąĖ ą▒čāą┤ąĖą╗čīąĮąĖą║ą░ č湥čĆąĄąĘ ąĖąĮč鹥čĆč乥ą╣čü APB1, ąĮąŠ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čćąĖčéą░ąĄą╝čŗąĄ čĆąĄą│ąĖčüčéčĆčŗ ą▓ąĮčāčéčĆąĄąĮąĮąĄ ąŠą▒ąĮąŠą▓ą╗čÅčÄčéčüčÅ ą┐ąŠ ą║ą░ąČą┤ąŠą╝čā čäčĆąŠąĮčéčā ąĮą░čĆą░čüčéą░ąĮąĖčÅ čéą░ą║č鹊ą▓ RTC, čĆą░čüčüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮąĮčŗčģ čü čéą░ą║čéą░ą╝ąĖ RTC APB1. ąŁč鹊 čéą░ą║ąČąĄ ą▓ąĄčĆąĮąŠ ą┤ą╗čÅ čäą╗ą░ą│ąŠą▓ RTC.
ąŁč鹊 ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ą┐ąĄčĆą▓ąŠąĄ čćč鹥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ RTC APB1 ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą▓čĆąĄąČą┤ąĄąĮąĮčŗą╝ (ąŠą▒čŗčćąĮąŠ čü čĆąĄąĘčāą╗čīčéą░č鹊ą╝ 0), ąĄčüą╗ąĖ čĆą░ąĮąĄąĄ ąĖąĮč鹥čĆč乥ą╣čü APB1 ą▒čŗą╗ ąĘą░ą┐čĆąĄčēąĄąĮ, ąĖ čćč鹥ąĮąĖąĄ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ čĆą░ąĘčĆąĄčłąĄąĮąĖčÅ ąĖąĮč鹥čĆč乥ą╣čüą░ APB1, ąĮąŠ ą┐ąĄčĆąĄą┤ ą┐ąĄčĆą▓čŗą╝ ą▓ąĮčāčéčĆąĄąĮąĮąĖą╝ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄą╝ čĆąĄą│ąĖčüčéčĆąŠą▓. ąóą░ą║ąŠąĄ ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ, ąĄčüą╗ąĖ:
ŌŚÅ ą¤čĆąŠąĖąĘąŠčłąĄą╗ čüąĖčüč鹥ą╝ąĮčŗ čüą▒čĆąŠčü, ąĖą╗ąĖ čüą▒čĆąŠčü ą┐ąŠ ą┐ąĖčéą░ąĮąĖčÄ.
ŌŚÅ MCU č鹊ą╗čīą║ąŠ čćč鹊 ą┐čĆąŠą▒čāą┤ąĖą╗čüčÅ ąĖąĘ čĆąĄąČąĖą╝ą░ Standby (čüą╝. čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ STM32F10xxx [2]).
ŌŚÅ MCU č鹊ą╗čīą║ąŠ čćč鹊 ą┐čĆąŠą▒čāą┤ąĖą╗čüčÅ ąĖąĘ čĆąĄąČąĖą╝ą░ Stop (čüą╝. čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ STM32F10xxx [2]).
ąÆąŠ ą▓čüąĄčģ ą┐ąĄčĆąĄčćąĖčüą╗ąĄąĮąĮčŗčģ ą▓čŗčłąĄ čüą╗čāčćą░čÅčģ čÅą┤čĆąŠ RTC ą┐čĆąŠą┤ąŠą╗ąČą░ą╗ąŠ čĆą░ą▒ąŠčéą░čéčī, ą║ąŠą│ą┤ą░ ąĖąĮč鹥čĆč乥ą╣čü APB1 ą▒čŗą╗ ąĘą░ą┐čĆąĄčēąĄąĮ (čüą▒čĆąŠčłąĄąĮ, ąĮąĄ čéą░ą║čéąĖčĆąŠą▓ą░ą╗čüčÅ ąĖą╗ąĖ ąĮąĄ ą┐ąŠą╗čāčćą░ą╗ ą┐ąĖčéą░ąĮąĖąĄ).
ąÜą░ą║ čüą╗ąĄą┤čüčéą▓ąĖąĄ, ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čćč鹥ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ RTC, ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą▒čŗą╗ ąĘą░ą┐čĆąĄčēąĄąĮ ąĖąĮč鹥čĆč乥ą╣čü RTC APB1, ą┐čĆąŠą│čĆą░ą╝ą╝ą░ ą┤ąŠą╗ąČąĮą░ čüąĮą░čćą░ą╗ą░ ą┐ąŠą┤ąŠąČą┤ą░čéčī ą░ą┐ą┐ą░čĆą░čéąĮąŠą╣ čāčüčéą░ąĮąŠą▓ą║ąĖ čäą╗ą░ą│ą░ RSF bit (Register Synchronized Flag) ą▓ čĆąĄą│ąĖčüčéčĆąĄ RTC_CRL.
ąĪą╗ąĄą┤čāąĄčé ąŠčéą╝ąĄčéąĖčéčī, čćč鹊 ąĮą░ ąĖąĮč鹥čĆč乥ą╣čü APB1 RTC ąĮąĄ ą▓ą╗ąĖčÅčÄčé čĆąĄąČąĖą╝čŗ ąĮąĖąĘą║ąŠą│ąŠ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ WFI ąĖ WFE.
ąÜąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ RTC. ą¦č鹊ą▒čŗ ąĘą░ą┐ąĖčüą░čéčī čĆąĄą│ąĖčüčéčĆčŗ RTC_PRL, RTC_CNT, RTC_ALR, ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ RTC ą┤ąŠą╗ąČąĮąŠ ą▓ąŠą╣čéąĖ ą▓ čĆąĄąČąĖą╝ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ (Configuration Mode). ąŁč鹊 ąŠčüčāčēąĄčüčéą▓ą╗čÅąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ CNF ą▓ čĆąĄą│ąĖčüčéčĆąĄ RTC_CRL.
ąÜčĆąŠą╝ąĄ č鹊ą│ąŠ, ąĘą░ą┐ąĖčüčī ą▓ ą╗čÄą▒ąŠą╣ čĆąĄą│ąĖčüčéčĆ RTC čĆą░ąĘčĆąĄčłąĄąĮą░ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ ą┐čĆąĄą┤čŗą┤čāčēą░čÅ ąŠą┐ąĄčĆą░čåąĖčÅ ąĘą░ą┐ąĖčüąĖ ą▒čŗą╗ą░ ąĘą░ą▓ąĄčĆčłąĄąĮą░. ą¦č鹊ą▒čŗ ą┐ąŠąĘą▓ąŠą╗ąĖčéčī ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░čéčī čŹčéčā čüąĖčéčāą░čåąĖčÄ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą▒ąĖčé čüčéą░čéčāčüą░ RTOFF ą▓ čĆąĄą│ąĖčüčéčĆąĄ RTC_CR, ą║ąŠč鹊čĆčŗą╣ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐čĆąŠčåąĄčüčü ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ čĆąĄą│ąĖčüčéčĆąŠą▓. ąØąŠą▓ąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮąŠ ą▓ čĆąĄą│ąĖčüčéčĆčŗ RTC č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ ąĘąĮą░č湥ąĮąĖąĄ ą▒ąĖčéą░ RTOFF čĆą░ą▓ąĮąŠ 1.
ą¤čĆąŠčåąĄą┤čāčĆą░ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čüą╗ąĄą┤čāčÄčēą░čÅ:
1. ą×ą┐čĆą░čłąĖą▓ą░ąĄčéčüčÅ ą▒ąĖčé RTOFF čü ąŠąČąĖą┤ą░ąĮąĖąĄą╝, ą║ąŠą│ą┤ą░ ąĄą│ąŠ ąĘąĮą░č湥ąĮąĖąĄ čüčéą░ąĮąĄčé čĆą░ą▓ąĮčŗą╝ 1.
2. ąŻčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▒ąĖčé CNF ą┤ą╗čÅ ą▓čģąŠą┤ą░ ą▓ čĆąĄąČąĖą╝ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ RTC.
3. ąŚą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ąŠą┤ąĖąĮ ąĖą╗ąĖ ąĮąĄčüą║ąŠą╗čīą║ąŠ čĆąĄą│ąĖčüčéčĆąŠą▓ RTC.
4. ą×čćąĖčēą░ąĄčéčüčÅ ą▒ąĖčé CNF ą┤ą╗čÅ ą▓čŗčģąŠą┤ą░ ąĖąĘ čĆąĄąČąĖą╝ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
5. ą×ą┐čĆą░čłąĖą▓ą░ąĄčéčüčÅ ą▒ąĖčé RTOFF čü ąŠąČąĖą┤ą░ąĮąĖąĄą╝, ą║ąŠą│ą┤ą░ ąĄą│ąŠ ąĘąĮą░č湥ąĮąĖąĄ čüčéą░ąĮąĄčé čĆą░ą▓ąĮčŗą╝ 1. ąŁč鹊 ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĄ ąŠą┐ąĄčĆą░čåąĖąĖ ąĘą░ą┐ąĖčüąĖ.
ą×ą┐ąĄčĆą░čåąĖčÅ ąĘą░ą┐ąĖčüąĖ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ ąŠčćąĖčēąĄąĮ ą▒ąĖčé CNF. ąöą╗čÅ ą┐ąŠą╗ąĮąŠą│ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖčÅ ąŠą┐ąĄčĆą░čåąĖąĖ ąĘą░ą┐ąĖčüąĖ čéčĆąĄą▒čāąĄčéčüčÅ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 3 čéą░ą║čéą░ RTCCLK.
ąŻčüčéą░ąĮąŠą▓ą║ą░ čäą╗ą░ą│ą░ RTC. ążą╗ą░ą│ čüąĄą║čāąĮą┤ RTC (Second flag, SECF) čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ąĮą░ ą║ą░ąČą┤ąŠą╝ čéą░ą║č鹥 čÅą┤čĆą░ RTC Core ą┐ąĄčĆąĄą┤ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄą╝ čüč湥čéčćąĖą║ą░ RTC.
ążą╗ą░ą│ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ RTC (Overflow flag, OWF) čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ąĮą░ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╝ čéą░ą║č鹥 čÅą┤čĆą░ RTC Core ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ čüč湥čéčćąĖą║ ą┤ąŠčüčéąĖą│ąĮąĄčé ąĘąĮą░č湥ąĮąĖčÅ 0x0000.
RTC_Alarm ąĖ čäą╗ą░ą│ ą▒čāą┤ąĖą╗čīąĮąĖą║ą░ RTC (Alarm flag, ALRF, čüą╝. čĆąĖčü. 4) čāčüčéą░ąĮąŠą▓čÅčéčüčÅ ąĮą░ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╝ čéą░ą║č鹥 čÅą┤čĆą░ RTC ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ čüč湥čéčćąĖą║ ą┤ąŠčüčéąĖą│ąĮąĄčé ąĘąĮą░č湥ąĮąĖčÅ RTC Alarm, čüąŠčģčĆą░ąĮąĄąĮąĮąŠą│ąŠ ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą▒čāą┤ąĖą╗čīąĮąĖą║ą░, čāą▓ąĄą╗ąĖč湥ąĮąĮąŠą│ąŠ ąĮą░ 1 (RTC_ALR + 1). ą×ą┐ąĄčĆą░čåąĖčÅ ąĘą░ą┐ąĖčüąĖ ą▓ RTC Alarm ąĖ čäą╗ą░ą│ čüąĄą║čāąĮą┤ RTC (SECF) ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüąĖąĮčģčĆąŠąĮąĖąĘąĖčĆąŠą▓ą░ąĮą░ ą┐čāč鹥ą╝ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ąŠą┤ąĮąŠą╣ ąĖąĘ čüą╗ąĄą┤čāčÄčēąĖčģ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüč鹥ą╣:
ŌŚÅ ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą▒čāą┤ąĖą╗čīąĮąĖą║ą░ (RTC Alarm interrupt). RTC Alarm ąĖ/ąĖą╗ąĖ čĆąĄą│ąĖčüčéčĆą░ čüč湥čéčćąĖą║ą░ RTC ąŠą▒ąĮąŠą▓ą╗čÅčÄčéčüčÅ ą▓ąĮčāčéčĆąĖ ISR.
ŌŚÅ ą×ąČąĖą┤ą░ąĮąĖąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ ą▒ąĖčéą░ SECF ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ RTC. ą×ą▒ąĮąŠą▓ą╗ąĄąĮąĖąĄ čĆąĄą│ąĖčüčéčĆą░ RTC Alarm ąĖ/ąĖą╗ąĖ čĆąĄą│ąĖčüčéčĆą░ čüč湥čéčćąĖą║ą░ RTC.
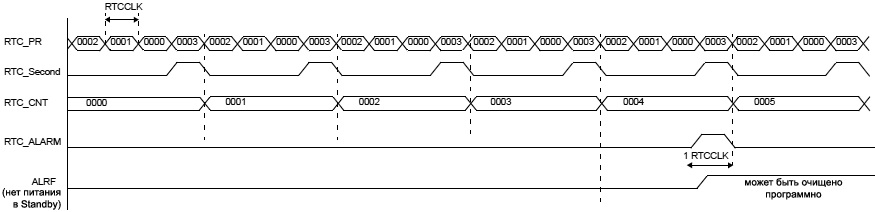
ąĀąĖčü. 4. ą¤čĆąĖą╝ąĄčĆ ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ čüąĄą║čāąĮą┤ RTC ąĖ ą▒čāą┤ąĖą╗čīąĮąĖą║ą░ (PR=0003, ALARM=00004).
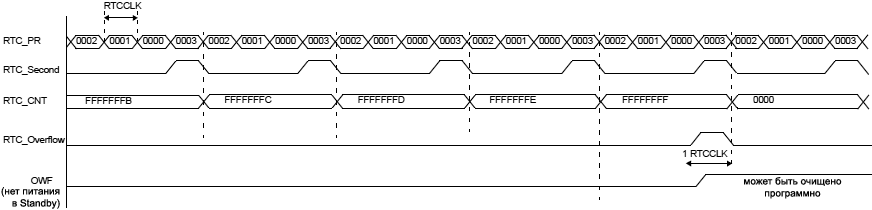
ąĀąĖčü. 5. ą¤čĆąĖą╝ąĄčĆ ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ ą┐ąĄčĆąĄą┐ąŠą╗ąĮąĄąĮąĖčÅ RTC (PR=0003).
[4. ąĀąĄą│ąĖčüčéčĆčŗ Backup]
ąĀąĄą│ąĖčüčéčĆčŗ backup (BKP) čŹč鹊 ą┤ąĄčüčÅčéčī 16-ą▒ąĖčéąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓ ą┤ą╗čÅ čģčĆą░ąĮąĄąĮąĖčÅ 20 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ. ą×ąĮąĖ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ ą▓ ą┤ąŠą╝ąĄąĮąĄ backup, ą║ąŠč鹊čĆčŗą╣ čüąŠčģčĆą░ąĮčÅąĄčé ą┐ąĖčéą░ąĮąĖąĄ, ąĄčüą╗ąĖ ąĮą░ VBAT ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ, ą┤ą░ąČąĄ ą║ąŠą│ą┤ą░ ąŠčüąĮąŠą▓ąĮąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ VDD ą▓čŗą║ą╗čÄč湥ąĮąŠ. ąĀąĄą│ąĖčüčéčĆčŗ BKP ąĮąĄ čüą▒čĆą░čüčŗą▓ą░čÄčéčüčÅ, ą║ąŠą│ą┤ą░ MCU ą┐čĆąŠą▒čāąČą┤ą░ąĄčéčüčÅ ąĖąĘ čĆąĄąČąĖą╝ą░ Standby, ąĖą╗ąĖ ą║ąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé čüąĖčüč鹥ą╝ąĮčŗą╣ čüą▒čĆąŠčü ąĖą╗ąĖ čüą▒čĆąŠčü ą┐ąŠ ą┐ąĖčéą░ąĮąĖčÄ.
ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ čĆąĄą│ąĖčüčéčĆčŗ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ BKP ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ čäčāąĮą║čåąĖąĄą╣ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąŠąĮąĖą║ąĮąŠą▓ąĄąĮąĖčÅ (Tamper detection) ąĖ čäčāąĮą║čåąĖąĄą╣ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ RTC.
ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą┤ąŠčüčéčāą┐ ą║ čĆąĄą│ąĖčüčéčĆą░ą╝ BKP ąĖ RTC ąĘą░ą┐čĆąĄčēąĄąĮ, ąĖ ą┤ąŠą╝ąĄąĮ Backup ąĘą░čēąĖčēąĄąĮ ąŠčé ą▓ąŠąĘą╝ąŠąČąĮčŗčģ ą┐ą░čĆą░ąĘąĖčéąĮčŗčģ ą┐ąŠą┐čŗč鹊ą║ ąĘą░ą┐ąĖčüąĖ. ą¦č鹊ą▒čŗ čĆą░ąĘčĆąĄčłąĖčéčī ą┤ąŠčüčéčāą┐ ą║ čĆąĄą│ąĖčüčéčĆą░ą╝ Backup ąĖ RTC, ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▒ąĖčé DBP ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖąĄą╝ (Power control register, PWR_CR).
ążčāąĮą║čåąĖąĖ čĆąĄą│ąĖčüčéčĆąŠą▓ BKP:
ŌŚÅ ąöąĄčüčÅčéčī 16-ą▒ąĖčéąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓.
ŌŚÅ ąĀąĄą│ąĖčüčéčĆ čüčéą░čéčāčüą░/čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┤ą╗čÅ ąŠą▒čüą╗čāąČąĖą▓ą░ąĮąĖčÅ čäčāąĮą║čåąĖąĖ ąĘą░čēąĖčéčŗ ąŠčé ą▓ąĘą╗ąŠą╝ą░ (anti-Tamper).
ŌŚÅ ąĀąĄą│ąĖčüčéčĆ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ, ą║čāą┤ą░ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ąĘąĮą░č湥ąĮąĖąĄ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ RTC.
ąöąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓ąĘą╗ąŠą╝ą░. ąØąŠąČą║ą░ TAMPER ą│ąĄąĮąĄčĆąĖčĆčāąĄčé čüąŠą▒čŗčéąĖąĄ (Tamper detection), ą║ąŠą│ą┤ą░ čāčĆąŠą▓ąĄąĮčī ąĮą░ ąĮąĄą╣ ą╝ąĄąĮčÅąĄčéčüčÅ čü 0 ąĮą░ 1, ąĖą╗ąĖ čü 1 ąĮą░ 0, ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé ą▒ąĖčéą░ TPAL ą▓ čĆąĄą│ąĖčüčéčĆąĄ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ Backup (BKP_CR). ąĪąŠą▒čŗčéąĖąĄ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą▓ąĘą╗ąŠą╝ą░ (tamper detection event) čüą▒čĆą░čüčŗą▓ą░ąĄčé ą▓čüąĄ čĆąĄą│ąĖčüčéčĆčŗ ą┤ą░ąĮąĮčŗčģ backup.
ą×ą┤ąĮą░ą║ąŠ čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą┐ąŠč鹥čĆąĖ čüąŠą▒čŗčéąĖą╣ Tamper, čüąĖą│ąĮą░ą╗, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĄą┐ą░ą┤ą░, čüą║ą╗ą░ą┤čŗą▓ą░ąĄčéčüčÅ ą╗ąŠą│ąĖč湥čüą║ąŠą╣ ąŠą┐ąĄčĆą░čåąĖąĄą╣ ąś čü čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ Tamper, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī čüąŠą▒čŗčéąĖąĄ Tamper ą┤ą╗čÅ čüą╗čāčćą░čÅ, ą║ąŠą│ą┤ą░ ąŠąĮąŠ ą▓ąŠąĘąĮąĖą║ą╗ąŠ ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ąĮąŠąČą║ą░ TAMPER čĆą░ąĘčĆąĄčłąĄąĮą░.
ŌŚÅ ąÜąŠą│ą┤ą░ TPAL=0: ąĄčüą╗ąĖ ąĮąŠąČą║ą░ TAMPER čāąČąĄ ą▓ ą╗ąŠą│. 1 ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ąŠąĮą░ ą▒čŗą╗ą░ čĆą░ąĘčĆąĄčłąĄąĮą░ (čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ TPE), č鹊 ą┤ąĄč鹥ą║čéąĖčĆčāąĄčéčüčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠąĄ čüąŠą▒čŗčéąĖąĄ Tamper, ą║ą░ą║ č鹊ą╗čīą║ąŠ ąĮąŠąČą║ą░ TAMPER čĆą░ąĘčĆąĄčłąĄąĮą░ (čģąŠčéčÅ ąĮąĄ ą▒čŗą╗ąŠ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮąŠą│ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░ čāčĆąŠą▓ąĮčÅ ąĮą░ ąĮąŠąČą║ąĄ TAMPER ą┐ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ TPE).
ŌŚÅ ąÜąŠą│ą┤ą░ TPAL=1: ąĄčüą╗ąĖ ąĮąŠąČą║ą░ TAMPER čāąČąĄ ą▓ ą╗ąŠą│. 0 ą┐ąĄčĆąĄą┤ č鹥ą╝, ą║ą░ą║ ąŠąĮą░ ą▒čŗą╗ą░ čĆą░ąĘčĆąĄčłąĄąĮą░ (čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ TPE), č鹊 ą┤ąĄč鹥ą║čéąĖčĆčāąĄčéčüčÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠąĄ čüąŠą▒čŗčéąĖąĄ Tamper, ą║ą░ą║ č鹊ą╗čīą║ąŠ ąĮąŠąČą║ą░ TAMPER čĆą░ąĘčĆąĄčłąĄąĮą░ (čģąŠčéčÅ ąĮąĄ ą▒čŗą╗ąŠ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ąĄčĆąĄą┐ą░ą┤ą░ čāčĆąŠą▓ąĮčÅ ąĮą░ ąĮąŠąČą║ąĄ TAMPER ą┐ąŠčüą╗ąĄ čāčüčéą░ąĮąŠą▓ą║ąĖ TPE).
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ čüąŠą▒čŗčéąĖąĄ Tamper ą▒čŗą╗ąŠ ąŠą▒ąĮą░čĆčāąČąĄąĮąŠ ąĖ ąŠčćąĖčēąĄąĮąŠ, ąĮąŠąČą║ą░ TAMPER ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĘą░ą┐čĆąĄčēąĄąĮą░ ąĖ ąĘą░č鹥ą╝ čüąĮąŠą▓ą░ čĆą░ąĘčĆąĄčłąĄąĮą░ ą▒ąĖč鹊ą╝ TPE ą┐ąĄčĆąĄą┤ ą┐ąŠą▓č鹊čĆąĮąŠą╣ ąĘą░ą┐ąĖčüčīčÄ ą▓ čĆąĄą│ąĖčüčéčĆčŗ ą┤ą░ąĮąĮčŗčģ backup (BKP_DRx). ąŁč鹊 ąĮąĄ ą┤ą░čüčé ą┐čĆąŠą│čĆą░ą╝ą╝ąĮąŠą╝čā ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÄ ąĘą░ą┐ąĖčüą░čéčī čĆąĄą│ąĖčüčéčĆčŗ ą┤ą░ąĮąĮčŗčģ backup (BKP_DRx), ą║ąŠą│ą┤ą░ ąĮąŠąČą║ą░ TAMPER ą▓čüąĄ ąĄčēąĄ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ Tamper. ąŁč鹊 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮąŠ ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖčÄ čāčĆąŠą▓ąĮčÅ ąĮą░ ąĮąŠąČą║ąĄ TAMPER.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┤ąĄč鹥ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ Tamper ą▓čüąĄ ąĄčēąĄ ą░ą║čéąĖą▓ąĮąŠ, ą║ąŠą│ą┤ą░ ą┐ąĖčéą░ąĮąĖąĄ VDD ą▓čŗą║ą╗čÄč湥ąĮąŠ. ą¦č鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ąĮąĄąČąĄą╗ą░č鹥ą╗čīąĮąŠą│ąŠ čüą▒čĆąŠčüą░ ą┤ą░ąĮąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓ backup, ąĮąŠąČą║ą░ TAMPER ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüąĮą░čĆčāąČąĖ ą┐ąŠą┤čéčÅąĮčāčéą░ ą║ ą║ąŠčĆčĆąĄą║čéąĮąŠą╝čā čāčĆąŠą▓ąĮčÄ.
ąÜą░ą╗ąĖą▒čĆąŠą▓ą║ą░ RTC. ąöą╗čÅ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ čćą░čüč鹊čéčŗ čéą░ą║č鹊ą▓čŗą╣ čüąĖą│ąĮą░ą╗ 32.768 ą║ąōčå RTC ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓čŗą▓ąĄą┤ąĄąĮ ąĮą░ ąĮąŠąČą║čā TAMPER. ąŁč鹊 čĆą░ąĘčĆąĄčłą░ąĄčéčüčÅ čāčüčéą░ąĮąŠą▓ą║ąŠą╣ ą▒ąĖčéą░ CCO ą▓ čĆąĄą│ąĖčüčéčĆąĄ ą║ą░ą╗ąĖą▒čĆąŠą▓ą║ąĖ RTC (BKP_RTCCR).
ąóą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą╝ąĄą┤ą╗ąĄąĮą░ ąĮą░ ą▓ąĄą╗ąĖčćąĖąĮčā ą┤ąŠ 121 ppm ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖąĄą╝ ą▒ąĖčé CAL[6:0].
[5. ą¤ąĖčéą░ąĮąĖąĄ ąĖ ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ]
ąŁčéą░ čüąĄą║čåąĖčÅ ąŠą┐ąĖčüčŗą▓ą░ąĄčé ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ č鹊ą║ą░ STM32F10xxx ą▓ čĆąĄąČąĖą╝ą░čģ low-power, ąĖ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ. ąÆčüąĄ ąŠą┐ąĖčüą░ąĮąĮčŗąĄ č鹥čüčéčŗ ą▒čŗą╗ąĖ ą┐čĆąŠą▓ąĄą┤ąĄąĮčŗ ąĮą░ ą┐ą╗ą░č鹥 čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ STM3210B (ą║ąŠą╝ą╝ąĄčĆč湥čüą║ąĖą╣ ą║ąŠą┤ STM3210B-EVAL), ąĖ ąŠąĮąĖ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐čĆąŠčüč鹊 ą┐ąĄčĆąĄąĮąĄčüąĄąĮčŗ ąĮą░ ą╗čÄą▒ąŠąĄ ą┤čĆčāą│ąŠąĄ ąČąĄą╗ąĄąĘąŠ.
ąŁčéą░ čüąĄą║čåąĖčÅ ą┐ąŠą┤ąĄą╗ąĄąĮą░ ąĮą░ 2 ąŠčüąĮąŠą▓ąĮčŗąĄ čćą░čüčéąĖ: ą┐ąĄčĆą▓ą░čÅ ąŠą┐ąĖčüčŗą▓ą░ąĄčé ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ čŹąĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ, ąĖ ą▓č鹊čĆą░čÅ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ, čéčĆąĄą▒čāąĄą╝ąŠą│ąŠ ą┤ą╗čÅ STM32F10xxx ą┤ą╗čÅ ą▓čŗčģąŠą┤ą░ ąĖąĘ čĆą░ąĘąĮčŗčģ čĆąĄąČąĖą╝ąŠą▓ low-power.
[ą¤ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ č鹊ą║ą░]
ąŚą┤ąĄčüčī ąŠą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ, ą║ą░ą║ ąĖąĘą╝ąĄčĆąĖčéčī ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ ą╝ąŠčēąĮąŠčüčéąĖ STM32F10xxx, ąĖčüą┐ąŠą╗čīąĘčāčÅ firmware, ą┐ąŠčüčéą░ą▓ą╗čÅąĄą╝ąŠą│ąŠ ą▓ ZIP-čäą░ą╣ą╗ąĄ ą▓ą╝ąĄčüč鹥 čü čŹčéąĖą╝ ą░ą┐ąĮąŠčāč鹊ą╝ [7]. ąŁč鹊 firmware ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ą░ą┐ą║ąĄ CurrentMeasurements. ąÆčüąĄ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ąĖ ą┐ą░ą┐ą║ąĖ CurrentMeasurements čüąŠą┤ąĄčƹȹ░čé čäą░ą╣ą╗čŗ, ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗąĄ ą┤ą╗čÅ čüą▒ąŠčĆą║ąĖ ą┐čĆąĖą╝ąĄčĆą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ:
ŌŚÅ ą¤ąŠą┤ą║ą░čéą░ą╗ąŠą│ inc čüąŠą┤ąĄčƹȹĖčé ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗąĄ čäą░ą╣ą╗čŗ (*.h).
ŌŚÅ ą¤ąŠą┤ą║ą░čéą░ą╗ąŠą│ src čüąŠą┤ąĄčƹȹĖčé čäą░ą╣ą╗čŗ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ ą┐čĆąĖą╝ąĄčĆą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ŌŚÅ ą¤ąŠą┤ą║ą░čéą░ą╗ąŠą│ project čüąŠą┤ąĄčƹȹĖčé ą┤ą▓ą░ ą┐čĆąŠąĄą║čéą░, ą║ąŠč鹊čĆčŗąĄ ą║ąŠą╝ą┐ąĖą╗ąĖčĆčāčÄčé čäą░ą╣ą╗čŗ ą┐čĆąĖą╝ąĄčĆą░:
ŌĆō EWARMv5: čüąŠą┤ąĄčƹȹĖčé ą┐čĆąŠąĄą║čé ą┤ą╗čÅ čéčāą╗č湥ą╣ąĮą░ IAR EWARM.
ŌĆō RVMDK: čüąŠą┤ąĄčƹȹĖčé ą┐čĆąŠąĄą║čé ą┤ą╗čÅ čéčāą╗č湥ą╣ąĮą░ Keil.
ŌĆō RIDE: čüąŠą┤ąĄčƹȹĖčé ą┐čĆąŠąĄą║čé ą┤ą╗čÅ čéčāą╗č湥ą╣ąĮą░ RIDE.
ąśąĘą╝ąĄčĆąĄąĮąĖčÅ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝ąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ STM32F10xxx ą┐čĆąŠą▓ąŠą┤čÅčéčüčÅ ą▓ čüą╗ąĄą┤čāčÄčēąĖčģ čĆąĄąČąĖą╝ą░čģ low-power:
ŌŚÅ Sleep mode: ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ č鹊ą║ą░ ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ąĖ ą░ą║čéąĖą▓ąĮčŗčģ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓. ą¤ąŠčŹč鹊ą╝čā, čćč鹊ą▒čŗ ą┐ąŠą║čĆčŗčéčī ą▓čüčÄ ą▓ąŠąĘą╝ąŠąČąĮčāčÄ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠčüčéčī ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ, ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą┤ąĄą╗ą░ą╗ąĖčüčī ą┐čĆąĖ čĆą░ąĘąĮčŗčģ ąĖčüč鹊čćąĮąĖą║ą░čģ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ (HSI ąĖ HSE), čĆą░ąĘąĮčŗčģ čéą░ą║č鹊ą▓čŗčģ čćą░čüč鹊čéą░čģ (ąŠčé 125 ą║ąōčå ą┤ąŠ 72 ą£ąōčå) ąĖ čĆą░ąĘąĮčŗčģ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅčģ APB (čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čüąĄčģ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą▓ą║ą╗čÄč湥ąĮąŠ ąĖą╗ąĖ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ą▓čüąĄčģ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą▓čŗą║ą╗čÄč湥ąĮąŠ).
ŌŚÅ Stop mode: ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ č鹊ą║ą░ ą▓ čŹč鹊ą╝ čĆąĄąČąĖą╝ąĄ ąĖąĘą╝ąĄčĆčÅą╗ąŠčüčī ą▓ ą┤ą▓čāčģ ą▓ąŠąĘą╝ąŠąČąĮčŗčģ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅčģ čĆąĄąČąĖą╝ą░ Stop (čĆąĄą│čāą╗čÅč鹊čĆ ą▓ čĆąĄąČąĖą╝ąĄ Run ąĖ čĆąĄą│čāą╗čÅč鹊čĆ ą▓ čĆąĄąČąĖą╝ąĄ low-power).
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą┤ą╗čÅ ą▓čüąĄčģ čĆąĄąČąĖą╝ąŠą▓ Sleep ąĖ Stop ą▓čüąĄ ąĮąĄąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ąĮąŠąČą║ąĖ I/O (ą▓ą▓ąŠą┤ą░-ą▓čŗą▓ąŠą┤ą░) čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą║ą░ą║ ą░ąĮą░ą╗ąŠą│ąŠą▓čŗąĄ ą┐ąŠčĆčéčŗ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą▓čģąŠą┤ čéčĆąĖą│ą│ąĄčĆą░ ą©ą╝ąĖčéčéą░ ą┤ąĄą░ą║čéąĖą▓ąĖčĆčāąĄčéčüčÅ, čćč鹊 ą┐čĆąĖą▓ąŠą┤ąĖčé ą║ ąĮčāą╗ąĄą▓ąŠą╝čā ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÄ ą┤ą╗čÅ čŹčéąĖčģ ą║ąŠąĮčéą░ą║č鹊ą▓ ą▓ą▓ąŠą┤ą░-ą▓čŗą▓ąŠą┤ą░.
ŌŚÅ Standby mode: ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ č鹊ą║ą░ ą▓ čĆąĄąČąĖą╝ąĄ standby ąĖąĘą╝ąĄčĆčÅąĄčéčüčÅ čü ą▓čŗą║ą╗čÄč湥ąĮąĮčŗą╝ąĖ RTC ąĖ ą▓ą║ą╗čÄč湥ąĮąĮčŗą╝ąĖ RTC.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┤ą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ čĆąĄąČąĖą╝ą░ą╝ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čüą╝. ą▓čŗčłąĄ čüąĄą║čåąĖčÄ "1. ąśčüč鹊čćąĮąĖą║ ą┐ąĖčéą░ąĮąĖčÅ".
ąśčüą┐ąŠą╗čīąĘčāąĄą╝ąŠąĄ ą░ą┐ą┐ą░čĆą░čéąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ:
ŌŚÅ Sleep, Stop ąĖ Standby (čü ą▓čŗą║ą╗čÄč湥ąĮąĮčŗą╝ąĖ RTC): ąĖąĘą╝ąĄčĆąĄąĮąĖąĄ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝ąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖčéčüčÅ ąĘą░ą╝ąĄąĮąŠą╣ ą┐ąĄčĆąĄą╝čŗčćą║ąĖ JP9 ąĮą░ ą┐ą╗ą░č鹥 STM3210B-EVAL ąĮą░ ą╝ąĖą╗ą╗ąĖą░ą╝ą┐ąĄčĆą╝ąĄčéčĆ. ą¤ąĖčéą░ąĮąĖąĄ ą┐ąŠą┤ą░ąĄčéčüčÅ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ, ą╗ąĖą▒ąŠ č湥čĆąĄąĘ ą║ą░ą▒ąĄą╗čī USB.
ŌŚÅ RTC čü ą┐ąĖčéą░ąĮąĖąĄą╝ ąŠčé VBAT: ąĖąĘą╝ąĄčĆąĄąĮąĖąĄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖą╗ąŠčüčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄą╝ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ ą║ ą║ąŠąĮčéą░ą║čéčā 2 ą┐ąĄčĆąĄą╝čŗčćą║ąĖ J11. ą£ąĖą╗ą╗ąĖą░ą╝ą┐ąĄčĆą╝ąĄčéčĆ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠ čü ąĖčüč鹊čćąĮąĖą║ąŠą╝ ą┐ąĖčéą░ąĮąĖčÅ.
ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄą╝čŗą╣ ą║ąŠą┤ firmware ą┐ąŠą┤ąĄą╗ąĄąĮ ąĮą░ čüą╗ąĄą┤čāčÄčēąĖąĄ čäą░ą╣ą╗čŗ:
ŌŚÅ main.c: čŹč鹊čé čäą░ą╣ą╗ čüąŠą┤ąĄčƹȹĖčé ąŠčüąĮąŠą▓ąĮąŠąĄ č鹥ą╗ąŠ č鹥čüč鹊ą▓ąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé ą▓čŗą▒čĆą░čéčī ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗą╣ low-power čĆąĄąČąĖą╝ ą┐čāč鹥ą╝ čĆą░čüą║ąŠą╝ą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮąĖčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ čüčéčĆąŠą║ąĖ:
/* ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čĆąĄąČąĖą╝ą░ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ
菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ (Low power mode) */
//#define SLEEP
//#define SLEEP_ALLPERIPH_ENABLE
//#define SLEEP_ALLPERIPH_DISABLE
//#define STOP
//#define STOP_Regulator_ON
//#define STOP_Regulator_LowPower
//#define STANDBY
//#define RTC_ON
ŌŚÅ hw_config.c ąĖ hw_config.h: čŹčéąĖ čäą░ą╣ą╗čŗ čüąŠą┤ąĄčƹȹ░čé ą▓čüąĄ čäčāąĮą║čåąĖąĖ, ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ STM32F10xxx (ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čéą░ą║č鹊ą▓, čĆą░ąĘčĆąĄčłąĄąĮąĖąĄ/ąĘą░ą┐čĆąĄčé ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ MCU, ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ I/O, ąĖ čé. ą┤.).
ąöą╗čÅ ą▓čŗą▒ąŠčĆą░ čüą┐ąŠčüąŠą▒ą░ ą▓čģąŠą┤ą░ ą▓ čĆąĄąČąĖą╝čŗ Sleep ąĖ Stop (WFI ąĖą╗ąĖ WFE) čĆą░čüą║ąŠą╝ą╝ąĄąĮčéąĖčĆčāą╣č鹥 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ čüčéčĆąŠą║čā ą▓ čäą░ą╣ą╗ąĄ hw_config.h:
/* ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą▓čģąŠą┤ą░ ą▓ čĆąĄąČąĖą╝ low power */
//#define Entry_WFE
//#define Entry_WFI
ąöą╗čÅ ą▓čŗą▒ąŠčĆą░ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ Sleep čĆą░čüą║ąŠą╝ą╝ąĄąĮčéąĖčĆčāą╣č鹥 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ čüčéčĆąŠą║čā ą▓ čäą░ą╣ą╗ąĄ hw_config.h:
/* ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ąĮą░čüčéčĆąŠąĄą║ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ */
#define HSE_PLL_ON
#define HSE_PLL_ON_72MHz
//#define HSE_PLL_ON_48MHz
//#define HSE_PLL_ON_36MHz
//#define HSE_PLL_ON_24MHz
//#define HSE_PLL_ON_16MHz
//#define HSE_PLL_OFF
//#define HSE_PLL_OFF_8MHz
//#define HSE_PLL_OFF_4MHz
//#define HSE_PLL_OFF_2MHz
//#define HSE_PLL_OFF_1MHz
//#define HSE_PLL_OFF_500kHz
//#define HSE_PLL_OFF_125kHz
//#define HSI_PLL_ON
//#define HSI_PLL_ON_64MHz
//#define HSI_PLL_ON_48MHz
//#define HSI_PLL_ON_36MHz
//#define HSI_PLL_ON_24MHz
//#define HSI_PLL_ON_16MHz
//#define HSI_PLL_OFF
//#define HSI_PLL_OFF_8MHz
//#define HSI_PLL_OFF_4MHz
//#define HSI_PLL_OFF_2MHz
//#define HSI_PLL_OFF_1MHz
//#define HSI_PLL_OFF_500kHz
//#define HSI_PLL_OFF_125kHz
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
(1) ąĪ ąŠą▒ąŠąĖą╝ąĖ ąĖčüč鹊čćąĮąĖą║ą░ą╝ąĖ čéą░ą║č鹊ą▓ HSI ąĖ HSE, ąĄčüą╗ąĖ čćą░čüč鹊čéą░ čéą░ą║č鹊ą▓ čĆą░ą▓ąĮą░ ąĖą╗ąĖ ą╝ąĄąĮčīčłąĄ 8 ą£ąōčå, č鹊 PLL ą▓čŗą║ą╗čÄčćą░ąĄčéčüčÅ.
(2) ąÜąĮąŠą┐ą║ą░ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (Wakeup push-button) ąŠčåąĄąĮąŠčćąĮąŠą╣ ą┐ą╗ą░čéčŗ STM3210B-EVAL (ą┐ąŠą┤ą║ą╗čÄč湥ąĮąŠ ą║ ąĮąŠąČą║ąĄ PA0 ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ STM32F10xxx) ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠą┤ą░čćąĖ čüąĖą│ąĮą░ą╗ą░ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ą┤ą╗čÅ ą▓čüąĄčģ čĆąĄąČąĖą╝ąŠą▓ low-power.
ŌŚÅ stm32f10x_it.c: čŹč鹊 čäą░ą╣ą╗ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (interrupt service routine, ISR) ą┤ą╗čÅ ą▓ąĮąĄčłąĮąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ EXTI line 0, ąĄčüą╗ąĖ ą▓čŗą▒čĆą░ąĮą░ ąĖąĮčüčéčĆčāą║čåąĖčÅ WFI ą▓ ą║ą░č湥čüčéą▓ąĄ čüą┐ąŠčüąŠą▒ą░ ą▓čģąŠą┤ą░ ą▓ čĆąĄąČąĖą╝ low-power.
ąĀąĄąĘčāą╗čīčéą░čéčŗ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣. ąÆ čéą░ą▒ą╗ąĖčåą░čģ 6 ąĖ 7 čüčāą╝ą╝ą░čĆąĮąŠ ą┐ąŠą║ą░ąĘą░ąĮčŗ čĆąĄąĘčāą╗čīčéą░čéčŗ ąĖčüą┐čŗčéą░ąĮąĖą╣ ą┐ąŠ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝ąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ ą▓ čĆąĄąČąĖą╝ą░čģ Sleep, Stop ąĖ Standby.
ąóą░ą▒ą╗ąĖčåą░ 6. ąÆą░čĆąĖą░ąĮčéčŗ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ č鹊ą║ą░ ą▓ čĆąĄąČąĖą╝ąĄ Sleep (ą▓ čüč鹊ą╗ą▒čåą░čģ EN ąĖ DIS čāą║ą░ąĘą░ąĮ č鹊ą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ IDD, ą╝ąÉ).
| ąŻčüą╗ąŠą▓ąĖčÅ |
fHCLK |
EN(1) |
DIS(1) |
ąĀą░ą▒ąŠčéą░ ąŠčé HSE, ą┐čĆąĄčüą║ą░ą╗ąĄčĆ AHB ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ
ą┤ą╗čÅ ą┐ąŠąĮąĖąČąĄąĮąĖčÅ čćą░čüč鹊čéčŗ. |
72 ą£ąōčå |
14.4 |
5.5 |
| 48 ą£ąōčå |
9.9 |
3.9 |
| 36 ą£ąōčå |
7.6 |
3.1 |
| 24 ą£ąōčå |
5.3 |
2.3 |
| 16 ą£ąōčå |
3.8 |
1.8 |
| 8 ą£ąōčå |
2.1 |
1.2 |
| 4 ą£ąōčå |
1.6 |
1.1 |
| 2 ą£ąōčå |
1.3 |
1 |
| 1 ą£ąōčå |
1.11 |
0.98 |
| 500 ą║ąōčå |
1.04 |
0.96 |
| 125 ą║ąōčå |
0.98 |
0.95 |
ąĀą░ą▒ąŠčéą░ ąŠčé ą▓čŗčüąŠą║ąŠčüą║ąŠčĆąŠčüčéąĮąŠą│ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ
RC-ą│ąĄąĮąĄčĆą░č鹊čĆą░ (HSI), ą┐čĆąĄčüą║ą░ą╗ąĄčĆ AHB
ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąŠąĮąĖąČąĄąĮąĖčÅ čćą░čüč鹊čéčŗ. |
64 ą£ąōčå |
12.3 |
4.4 |
| 48 ą£ąōčå |
9.3 |
3.3 |
| 36 ą£ąōčå |
7 |
2.5 |
| 24 ą£ąōčå |
4.8 |
1.8 |
| 16 ą£ąōčå |
3.8 |
1.2 |
| 8 ą£ąōčå |
1.6 |
0.6 |
| 4 ą£ąōčå |
1 |
0.5 |
| 2 ą£ąōčå |
0.72 |
0.47 |
| 1 ą£ąōčå |
0.56 |
0.44 |
| 500 ą║ąōčå |
0.49 |
0.42 |
| 125 ą║ąōčå |
0.43 |
0.41 |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (1): čüč鹊ą╗ą▒ąĄčå EN ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé č鹊ą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą▓ ą╝ąĖą╗ą╗ąĖą░ą╝ą┐ąĄčĆą░čģ ą┐čĆąĖ ą▓čüąĄčģ čĆą░ąĘčĆąĄčłąĄąĮąĮčŗčģ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ą░čģ čłąĖąĮ APB, čüč鹊ą╗ą▒ąĄčå DIS ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé č鹊ą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą▓ ą╝ąĖą╗ą╗ąĖą░ą╝ą┐ąĄčĆą░čģ ą┐čĆąĖ ą▓čüąĄčģ ąĘą░ą┐čĆąĄčēąĄąĮąĮčŗčģ (ąĖčģ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ ąĘą░ą┐čĆąĄčēąĄąĮąŠ) ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ą░čģ čłąĖąĮ APB.
ąóą░ą▒ą╗ąĖčåą░ 7. ąÆą░čĆąĖą░ąĮčéčŗ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ č鹊ą║ą░ ą▓ čĆąĄąČąĖą╝ą░čģ Stop ąĖ Standby (ą▓ čüč鹊ą╗ą▒čåą░čģ 2.4V ąĖ 3.3V čāą║ą░ąĘą░ąĮ č鹊ą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ IDD ąĖ IDD_VBAT, ą╝ą║ąÉ).
| ąóąŠą║ |
ą¤ą░čĆą░ą╝ąĄčéčĆ |
ąŻčüą╗ąŠą▓ąĖčÅ |
2.4V(1) |
3.3V(1) |
| IDD |
ąóąŠą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą▓ Stop |
ąĀąĄą│čāą╗čÅč鹊čĆ čĆą░ą▒ąŠčéą░ąĄčé (čĆąĄąČąĖą╝ Run), |
- |
24 |
| ąĀąĄą│čāą╗čÅč鹊čĆ ą▓ čĆąĄąČąĖą╝ąĄ low power, ą│ąĄąĮąĄčĆą░č鹊čĆčŗ HSE ąĖ HSI ą▓čŗą║ą╗čÄč湥ąĮčŗ (IWDG ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ). |
- |
14 |
| ąóąŠą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą▓ Standby |
ąōąĄąĮąĄčĆą░č鹊čĆ HSI ą▓čŗą║ą╗čÄč湥ąĮ, IWDG ą▓čŗą║ą╗čÄč湥ąĮ, ą▒ą╗ąŠą║ RTC ąĖ ąĄą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆ 32.768 ą║ąōčå ą▓čŗą║ą╗čÄč湥ąĮ. |
- |
2 |
| IDD_VBAT |
ąóąŠą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą┤ąŠą╝ąĄąĮą░ Backup |
ąæą╗ąŠą║ RTC ąĖ ąĄą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆ 32.768 ą║ąōčå ą▓ą║ą╗čÄč湥ąĮ. |
1.08 |
1.4 |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ (1): čāą║ą░ąĘą░ąĮčŗ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ čåąĄą┐ąĄą╣ VDD ąĖ VBAT.
[ąśąĘą╝ąĄčĆąĄąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ]
ąŚą┤ąĄčüčī ąŠą┐ąĖčüą░ąĮąŠ, ą║ą░ą║ ąĖąĘą╝ąĄčĆčÅčéčī ą▓čĆąĄą╝čÅ, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠąĄ MCU STM32F10xxx ą┤ą╗čÅ ą▓čŗčģąŠą┤ą░ ąĖąĘ čĆąĄąČąĖą╝ąŠą▓ low-power. ąöą╗čÅ čŹč鹊ą│ąŠ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ čüą┐ąĄčåąĖą░ą╗čīąĮąŠąĄ firmware [7], ą║ąŠč鹊čĆąŠąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ąĮčāčéčĆąĖ ZIP-ą░čĆčģąĖą▓ą░, ą▓ ą┐ą░ą┐ą║ąĄ WakeUpTiming.
ą¤ą░ą┐ą║ą░ WakeUp_Timing čüąŠą┤ąĄčƹȹĖčé ą▓čüąĄ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ąĖ ąĖ čäą░ą╣ą╗čŗ, ąĖąĘ ą║ąŠč鹊čĆčŗčģ čüąŠčüč鹊ąĖčé čÅą┤čĆąŠ ą┐čĆąĖą╝ąĄčĆą░ č鹥čüč鹊ą▓ąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ:
ŌŚÅ ą¤ąŠą┤ą║ą░čéą░ą╗ąŠą│ inc čüąŠą┤ąĄčƹȹĖčé ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗąĄ čäą░ą╣ą╗čŗ (*.h).
ŌŚÅ ą¤ąŠą┤ą║ą░čéą░ą╗ąŠą│ src čüąŠą┤ąĄčƹȹĖčé čäą░ą╣ą╗čŗ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ ą┐čĆąĖą╝ąĄčĆą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ŌŚÅ ą¤ąŠą┤ą║ą░čéą░ą╗ąŠą│ project čüąŠą┤ąĄčƹȹĖčé ą┤ą▓ą░ ą┐čĆąŠąĄą║čéą░, ą║ąŠč鹊čĆčŗąĄ ą║ąŠą╝ą┐ąĖą╗ąĖčĆčāčÄčé čäą░ą╣ą╗čŗ ą┐čĆąĖą╝ąĄčĆą░:
ŌĆō EWARMv5: čüąŠą┤ąĄčƹȹĖčé ą┐čĆąŠąĄą║čé ą┤ą╗čÅ čéčāą╗č湥ą╣ąĮą░ IAR EWARM.
ŌĆō RVMDK: čüąŠą┤ąĄčƹȹĖčé ą┐čĆąŠąĄą║čé ą┤ą╗čÅ čéčāą╗č湥ą╣ąĮą░ Keil.
ŌĆō RIDE: čüąŠą┤ąĄčƹȹĖčé ą┐čĆąŠąĄą║čé ą┤ą╗čÅ čéčāą╗č湥ą╣ąĮą░ RIDE.
ąÆčĆąĄą╝čÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠą┐čĆąĄą┤ąĄą╗čÅąĄčéčüčÅ čüą╗ąĄą┤čāčÄčēąĖą╝ ąŠą▒čĆą░ąĘąŠą╝.
ŌŚÅ Sleep ąĖ Stop. ąÆ čŹčéąĖčģ čĆąĄąČąĖą╝ą░čģ ą▓čĆąĄą╝čÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü ą╝ąŠą╝ąĄąĮčéą░ čāčüčéą░ąĮąŠą▓ą║ąĖ ąĖčüč鹊čćąĮąĖą║ą░ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (ą▓ ąĮą░čłąĄą╝ čüą╗čāčćą░ąĄ čŹč鹊 ą║ąĮąŠą┐ą║ą░ Wakeup ą┐ą╗ą░čéčŗ STM3210B-EVAL, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮą░čÅ ą║ ąĮąŠąČą║ąĄ ą┐ąŠčĆčéą░ PA0), ąĖ ąĘą░ą▓ąĄčĆčłą░ąĄčéčüčÅ:
ŌĆō ą┐ąŠčüą╗ąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐ąĄčĆą▓ąŠą╣ ąĖąĮčüčéčĆčāą║čåąĖąĖ ą┐ąŠčüą╗ąĄ WFE (ą▓ čüą╗čāčćą░ąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ čüąŠą▒čŗčéąĖčÅ) ąĖą╗ąĖ
ŌĆō ą┐ąŠčüą╗ąĄ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą┐ąĄčĆą▓ąŠą╣ ąĖąĮčüčéčĆčāą║čåąĖąĖ ISR (ą▓ čüą╗čāčćą░ąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ).
ŌŚÅ Standby. ą¤ąŠčüą╗ąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąĖąĘ čŹč鹊ą│ąŠ čĆąĄąČąĖą╝ą░ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü ąĮą░čćą░ą╗ą░, č鹊čćąĮąŠ čéą░ą║ ąČąĄ, ą║ą░ą║ ą┐ąŠčüą╗ąĄ Reset. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┤ą╗čÅ čĆąĄąČąĖą╝ą░ Standby čŹč鹊 ą▓čĆąĄą╝čÅ ą╝ąĄąČą┤čā ą▓čŗą▒ąŠčĆąŠą╝ ą╝ąĄąČą┤čā ąĖčüč鹊čćąĮąĖą║ąŠą╝ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (čā ąĮą░čü čŹč鹊 ą║ąĮąŠą┐ą║ą░ Wakeup) ąĖ ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖąĄą╝ ą┐ąĄčĆą▓ąŠą╣ ąĖąĮčüčéčĆčāą║čåąĖąĖ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┤ą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ čĆąĄąČąĖą╝ą░ą╝ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čüą╝. ą▓čŗčłąĄ čüąĄą║čåąĖčÄ "1. ąśčüč鹊čćąĮąĖą║ ą┐ąĖčéą░ąĮąĖčÅ".
ąśčüą┐ąŠą╗čīąĘčāąĄą╝ąŠąĄ ą░ą┐ą┐ą░čĆą░čéąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ: ąĮąŠąČą║ą░ ą┐ąŠčĆčéą░ PC6 čāčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčéčüčÅ ą▓ ą╗ąŠą│. 1 ą┐ąŠčüą╗ąĄ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąĖąĘ čĆąĄąČąĖą╝ąŠą▓ low-power, ą┐ąŠčŹč鹊ą╝čā ąĖąĘą╝ąĄčĆąĄąĮąĖąĄ ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ą┤ąĄą╗ą░ąĄčéčüčÅ čü ą┐ąŠą╝ąŠčēčīčÄ ąŠčüčåąĖą╗ą╗ąŠą│čĆą░čäą░, ą▓čģąŠą┤čŗ ą║ąŠč鹊čĆąŠą│ąŠ ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą║ ąĮąŠąČą║ą░ą╝ ą┐ąŠčĆč鹊ą▓ PC6 ąĖ PA0. ąÆčĆąĄą╝čÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ čŹč鹊 ą▓čĆąĄą╝čÅ ą╝ąĄąČą┤čā čäčĆąŠąĮč鹊ą╝ ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ ąĮą░ PA0 (ą╝ąŠą╝ąĄąĮčé ąĮą░ąČą░čéąĖčÅ ąĮą░ ą║ąĮąŠą┐ą║čā Wakeup) ąĖ čäčĆąŠąĮč鹊ą╝ ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ ąĮą░ PC6.
ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄą╝čŗą╣ ą║ąŠą┤ firmware ą┐ąŠą┤ąĄą╗ąĄąĮ ąĮą░ čüą╗ąĄą┤čāčÄčēąĖąĄ čäą░ą╣ą╗čŗ:
ŌŚÅ main.c: čŹč鹊čé čäą░ą╣ą╗ čüąŠą┤ąĄčƹȹĖčé ąŠčüąĮąŠą▓ąĮąŠąĄ č鹥ą╗ąŠ č鹥čüč鹊ą▓ąŠą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé ą▓čŗą▒čĆą░čéčī ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗą╣ low-power čĆąĄąČąĖą╝ ą┐čāč鹥ą╝ čĆą░čüą║ąŠą╝ą╝ąĄąĮčéąĖčĆąŠą▓ą░ąĮąĖčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ čüčéčĆąŠą║ąĖ:
/* ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ čĆąĄąČąĖą╝ą░ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ
菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ (Low power mode) */
//#define SLEEP
//#define STOP_Regulator_ON
//#define STOP_Regulator_LowPower
//#define STANDBY
ą¤ąĄčĆąĄą┤ ą▓čģąŠą┤ąŠą╝ ą▓ čĆąĄąČąĖą╝ low-power ąĮąŠąČą║ą░ ą┐ąŠčĆčéą░ PC6 ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą║ą░ą║ ą▓čŗčģąŠą┤ čü ą┤ą▓čāčģčéą░ą║čéąĮčŗą╝ ą┤čĆą░ą╣ą▓ąĄčĆąŠą╝ (output push-pull, čüą║ąŠčĆąŠčüčéčī ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ 50 ą£ąōčå), ąĖ čüą▒čĆą░čüčŗą▓ą░ąĄčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĄ ą╗ąŠą│. 0.
a) ąöą╗čÅ čĆąĄąČąĖą╝ąŠą▓ Sleep ąĖ Stop:
ŌĆō ą▓ čüą╗čāčćą░ąĄ ąĖąĮčüčéčĆčāą║čåąĖąĖ WFE ą┤ą╗čÅ ą┐ąĄčĆąĄą▓ąŠą┤ą░ ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░ PC6 ą▓ ą╗ąŠą│. 1 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĘą░ą┐ąĖčüčī ą▓ čĆąĄą│ąĖčüčéčĆ BSRR (Bit Set Reset register).
ŌĆō ą▓ čüą╗čāčćą░ąĄ ąĖąĮčüčéčĆčāą║čåąĖąĖ WFI čāčüčéą░ąĮąŠą▓ą║ą░ čāčüčéą░ąĮąŠą▓ą║ą░ ą▓ ą╗ąŠą│. 1 ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░ PC6 ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą▓ ISR ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ EXTI line 0.
b) ąöą╗čÅ čĆąĄąČąĖą╝ą░ Standby čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 1 ąĮą░ ąĮąŠąČą║ąĄ PC6 ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ ą▓ ą▓ čüą░ą╝ąŠą╝ ąĮą░čćą░ą╗ąĄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ, ą▓ ą║ąŠą┤ąĄ startup (čŹčéą░ čćą░čüčéčī ą┐čĆąŠą│čĆą░ą╝ą╝čŗ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮą░ ą▓ ąŠčéą┤ąĄą╗čīąĮčŗčģ čäą░ą╣ą╗ą░čģ, čüą╝. ąŠą┐ąĖčüą░ąĮąĖąĄ ąĮąĖąČąĄ).
ŌŚÅ startup. ąöą╗čÅ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ą▓ čĆąĄąČąĖą╝ąĄ Standby, čüą░ą╝čŗą╝ąĖ ą┐ąĄčĆą▓čŗą╝ąĖ ą┤ąĄą╣čüčéą▓ąĖčÅą╝ąĖ ą▓ ą┐čĆąŠą│čĆą░ą╝ą╝ąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĮą░čüčéčĆąŠą╣ą║ą░ ąĮą░ ą▓čŗčģąŠą┤ ąĖ čāčüčéą░ąĮąŠą▓ą║ą░ ą▓ ą╗ąŠą│. 1 ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░ PC6. ąöą╗čÅ čŹč鹊ą│ąŠ ąĮą░ ą░čüčüąĄą╝ą▒ą╗ąĄčĆąĄ ą┤ąŠą▒ą░ą▓ą╗čÅčÄčéčüčÅ čüčéčĆąŠą║ąĖ ą▓ čäą░ą╣ą╗ startup:
; ąŻčüčéą░ąĮąŠą▓ą║ą░ čéą░ą║č鹊ą▓ GPIOC (APB)
MOVW.W r3,#0x1000
MOVT.W r3,#0x4002
MOVS r1,#0x10
STR r1,[r3,#0x18]
; ąŻčüčéą░ąĮąŠą▓ą║ą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ GPIOC ą┤ą╗čÅ ąĮąŠąČą║ąĖ 6:
; ą▓čŗčģąŠą┤, ą┤ą▓čāčģčéą░ą║čéąĮčŗą╣ ą┤čĆą░ą╣ą▓ąĄčĆ (Output Push-Pull)
MOVW.W r3,#0x1000
MOVT.W r3,#0x4001
MOVS r1,#0x03000000
STR r1,[r3,#0x00]
; GPIOC, GPIO_Pin_6, Bit_SET
MOVS r2,#0x40
STR r2,[r3,#0x10]
ŌĆō ąÆ čéčāą╗č湥ą╣ąĮąĄ Keil (RVMDK) čŹč鹊čé ą║ąŠą┤ ą▓čüčéą░ą▓ą╗čÅąĄčéčüčÅ ą▓ čäą░ą╣ą╗ startup_stm32f10x_md.s ą┐ąĄčĆąĄą┤ ą▓ąĄčéą▓ą╗ąĄąĮąĖąĄą╝ ą▓ čäčāąĮą║čåąĖčÄ main.
ŌĆō ąÆ čéčāą╗č湥ą╣ąĮąĄ IAR (EWARM) čŹč鹊čé ą║ąŠą┤ ą▓čüčéą░ą▓ą╗čÅąĄčéčüčÅ ą▓ čäą░ą╣ą╗ startup_stm32f10x_md.s, ą▓ čäčāąĮą║čåąĖčÄ __low_level_init(void).
ŌŚÅ hw_config.c ąĖ hw_config.h. ąŁčéąĖ čäą░ą╣ą╗čŗ čüąŠą┤ąĄčƹȹ░čé ą▓čüąĄ čäčāąĮą║čåąĖąĖ, ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ STM32F10xxx (ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čéą░ą║č鹊ą▓, ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ I/O, ąĖ čé. ą┤.). ą¦č鹊ą▒čŗ ą▓čŗą▒čĆą░čéčī čüą┐ąŠčüąŠą▒ ą▓čģąŠą┤ą░ ą▓ čĆąĄąČąĖą╝ Sleep ąĖ Stop (ąĖąĮčüčéčĆčāą║čåąĖąĄą╣ WFI ąĖą╗ąĖ WFE), čĆą░čüą║ąŠą╝ą╝ąĄąĮčéąĖčĆčāą╣č鹥 čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ čüčéčĆąŠą║čā ą▓ čäą░ą╣ą╗ąĄ hw_config.h:
/* ą×ą┐čĆąĄą┤ąĄą╗ąĄąĮąĖąĄ ą▓čģąŠą┤ą░ ą▓ čĆąĄąČąĖą╝ low power */|
//#define Entry_WFE
//#define Entry_WFI
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┤ą╗čÅ ą▓čüąĄčģ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ąĖčüč鹊čćąĮąĖą║ąŠą╝ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąĖ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖąĖ čÅą▓ą╗čÅąĄčéčüčÅ HSI.
ŌŚÅ stm32f10x_it.c. ąŁč鹊čé čäą░ą╣ą╗ čüąŠą┤ąĄčƹȹĖčé ąŠą▒čĆą░ą▒ąŠčéčćąĖą║ (interrupt service routine, ISR) ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ EXTI line 0, ąĄčüą╗ąĖ ą▓ ą║ą░č湥čüčéą▓ąĄ čüą┐ąŠčüąŠą▒ą░ ą▓čģąŠą┤ą░ ą▓ čĆąĄąČąĖą╝ low-power ą▓čŗą▒čĆą░ąĮą░ ąĖąĮčüčéčĆčāą║čåąĖčÅ WFI.
ąĀąĄąĘčāą╗čīčéą░čéčŗ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣. ąÆ čéą░ą▒ą╗ąĖčåąĄ 8 čüčāą╝ą╝ą░čĆąĮąŠ ą┐ąŠą║ą░ąĘą░ąĮčŗ ą▓čĆąĄą╝ąĄąĮą░ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ą┤ą╗čÅ čĆąĄąČąĖą╝ąŠą▓ Sleep, Stop ąĖ Standby.
ąóą░ą▒ą╗ąĖčåą░ 8. ąĀąĄąĘčāą╗čīčéą░čéčŗ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ą▓čĆąĄą╝ąĄąĮąĖ Wakeup.
| ąĪąĖą╝ą▓ąŠą╗ |
ą¤ą░čĆą░ą╝ąĄčéčĆ |
ąŻčüą╗ąŠą▓ąĖčÅ |
Typ |
ąĢą┤. |
| tWUSLEEP |
ą¤čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ ąĖąĘ Sleep (WFE) |
ą¤čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ
čü čĆą░ą▒ąŠčéą░čÄčēąĖą╝ąĖ
čéą░ą║čéą░ą╝ąĖ HSI RC |
1.8 |
ą╝ą║čü |
| ą¤čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ ąĖąĘ Sleep (WFI) |
3.75 |
| tWUSTOP |
ą¤čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ ąĖąĘ Stop (čĆąĄą│čāą╗čÅč鹊čĆ čĆą░ą▒ąŠčéą░ąĄčé + WFE) |
3.52 |
| ą¤čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ ąĖąĘ Stop (čĆąĄą│čāą╗čÅč鹊čĆ čĆą░ą▒ąŠčéą░ąĄčé + WFI) |
5.42 |
| ą¤čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ ąĖąĘ Stop (čĆąĄą│čāą╗čÅč鹊čĆ ą▓ čĆąĄąČąĖą╝ąĄ low power + WFE) |
5.32 |
| ą¤čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ ąĖąĘ Stop (čĆąĄą│čāą╗čÅč鹊čĆ ą▓ čĆąĄąČąĖą╝ąĄ low power + WFI) |
7.21 |
| tWUSTDBY |
ą¤čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ ąĖąĘ Standby |
50 |
ą¤čĆąĖą▓ąĄą┤ąĄąĮąĮčŗąĄ čĆąĄąĘčāą╗čīčéą░čéčŗ ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé ą▓ą░čĆąĖą░ąĮčéčŗ ą║ąŠą╝ą┐čĆąŠą╝ąĖčüčüą░ ą╝ąĄąČą┤čā ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ 菹ĮąĄčĆą│ąĖąĖ ąĖ ą▓čĆąĄą╝ąĄąĮąĄą╝ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ą┤ą╗čÅ MCU STM32F10xxx. ą×ą▒čēą░čÅ č鹥ąĮą┤ąĄąĮčåąĖčÅ - č湥ą╝ ą╝ąĄąĮčīčłąĄ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ č鹊ą║ą░ ą▓ čĆąĄąČąĖą╝ąĄ 菹ĮąĄčĆą│ąŠčüą▒ąĄčĆąĄąČąĄąĮąĖčÅ, č鹥ą╝ ą▒ąŠą╗čīčłąĄ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ ą▓čĆąĄą╝čÅ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (wakeup time). ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ą┐ąŠą┤ąŠą▒čĆą░čéčī ą┐ąŠą┤čģąŠą┤čÅčēąĖą╣ ą║ąŠą╝ą┐čĆąŠą╝ąĖčüčü ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅą╝ąĖ ą║ąŠąĮą║čĆąĄčéąĮąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
[6. ą×ą┐čéąĖą╝ąĖąĘą░čåąĖčÅ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čŹąĮąĄčĆą│ąĖąĖ]
ąÆ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ąĘą░ą║ąŠąĮą░ą╝ąĖ čäąĖąĘąĖą║ąĖ, ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆąŠą╝ (MCU) ą╝ąŠčēąĮąŠčüčéąĖ čĆą░čüč鹥čé čü čāą▓ąĄą╗ąĖč湥ąĮąĖąĄą╝ ąĄą│ąŠ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ. ą¤ąŠčŹč鹊ą╝čā ąĮčāąČąĮąŠ ąĮą░ą╣čéąĖ čüą░ą╝ąŠąĄ ą╗čāčćčłąĄąĄ čüąŠąŠčéąĮąŠčłąĄąĮąĖąĄ ą╝ąĄąČą┤čā ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ č鹊ą║ą░ ąĖ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠą╣ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéčīčÄ MCU. ąÆąŠ ą╝ąĮąŠą│ąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ ą╝ąŠčēąĮąŠčüčéąĖ ą╝ąŠąČąĮąŠ čüąĮąĖąĘąĖčéčī ą┐ąŠą┤čüčéčĆąŠą╣ą║ąĖ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ čüąĖčüč鹥ą╝čŗ/ą┐ąĄčĆąĖč乥čĆąĖąĖ ą┤ą╗čÅ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ čéčĆąĄą▒čāąĄą╝ąŠą╣ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ. ąöą╗čÅ ą┤ąŠčüčéąĖąČąĄąĮąĖčÅ čŹč鹊ą╣ čåąĄą╗ąĖ STM32F10xxx ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé čäčāąĮą║čåąĖąĖ ą╝ąĄą┤ą╗ąĄąĮąĮąŠą│ąŠ čĆąĄąČąĖą╝ą░ (Slow mode). ąĢčüą╗ąĖ ąĮąĄčé čüą┐ąĄčåąĖą░ą╗čīąĮčŗčģ čéčĆąĄą▒ąŠą▓ą░ąĮąĖą╣ ą┐ąŠ ąĮąĄą┐čĆąĄčĆčŗą▓ąĮąŠą╣ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ čüąĖčüč鹥ą╝čŗ/ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓, č鹊 ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī low-power čĆąĄąČąĖą╝čŗ STM32F10xxx.
ąÆ čŹč鹊ą╣ čüąĄą║čåąĖąĖ ąŠą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ, ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čĆąĄąČąĖą╝čŗ Slow ąĖ Low-power ą┤ą╗čÅ ąŠą┐čéąĖą╝ąĖąĘą░čåąĖąĖ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čŹąĮąĄčĆą│ąĖąĖ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅą╝ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ą¤čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą┐čĆąĖą╝ąĄčĆ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ [7] čü ą┐čĆą░ą║čéąĖč湥čüą║ąŠą╣ čĆąĄą░ą╗ąĖąĘą░čåąĖąĄą╣ ąŠą┐čéąĖą╝ąĖąĘą░čåąĖąĖ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝ąŠą╣ ą╝ąŠčēąĮąŠčüčéąĖ. ąĪ ą┐ąŠą╝ąŠčēčīčÄ čŹč鹊ą╣ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé ąĖąĘą╝ąĄčĆąĖčéčī ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ č鹊ą║ą░ STM32F10xxx čü čĆą░ąĘą╗ąĖčćąĮčŗą╝ąĖ ąŠą┐čåąĖčÅą╝ąĖ ąŠą┐čéąĖą╝ąĖąĘą░čåąĖąĖ.
[ą¤čĆąŠą┤ą▓ąĖąĮčāčéą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čéą░ą║č鹊ą▓]
ąŚą┤ąĄčüčī ąŠą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą┐čĆąĖą╝ąĄčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čéą░ą║č鹊ą▓ ą▓ firmware ą┤ą╗čÅ STM32F10xxx, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ ZIP-ą░čĆčģąĖą▓ąĄ [7], ą┐ąŠčüčéą░ą▓ą╗čÅąĄą╝ąŠą╝ čü čŹčéąĖą╝ ą░ą┐ąĮąŠčāč鹊ą╝. ąÜąŠą┤ čŹč鹊ą│ąŠ firmware ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ą░ą┐ą║ąĄ Run_Mode. ą¤ą░ą┐ą║ą░ Run_Mode čüąŠą┤ąĄčƹȹĖčé ą▓čüąĄ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ąĖ ąĖ čäą░ą╣ą╗čŗ, čüąŠčüčéą░ą▓ą╗čÅčÄčēąĖąĄ čÅą┤čĆąŠ ą┐čĆąĖą╝ąĄčĆą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ:
ŌŚÅ ą¤ąŠą┤ą║ą░čéą░ą╗ąŠą│ inc čüąŠą┤ąĄčƹȹĖčé ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗąĄ čäą░ą╣ą╗čŗ (*.h).
ŌŚÅ ą¤ąŠą┤ą║ą░čéą░ą╗ąŠą│ src čüąŠą┤ąĄčƹȹĖčé čäą░ą╣ą╗čŗ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ ą┐čĆąĖą╝ąĄčĆą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ŌŚÅ ą¤ąŠą┤ą║ą░čéą░ą╗ąŠą│ project čüąŠą┤ąĄčƹȹĖčé ą┤ą▓ą░ ą┐čĆąŠąĄą║čéą░, ą║ąŠč鹊čĆčŗąĄ ą║ąŠą╝ą┐ąĖą╗ąĖčĆčāčÄčé čäą░ą╣ą╗čŗ ą┐čĆąĖą╝ąĄčĆą░:
ŌĆō EWARMv5: čüąŠą┤ąĄčƹȹĖčé ą┐čĆąŠąĄą║čé ą┤ą╗čÅ čéčāą╗č湥ą╣ąĮą░ IAR EWARM.
ŌĆō RVMDK: čüąŠą┤ąĄčƹȹĖčé ą┐čĆąŠąĄą║čé ą┤ą╗čÅ čéčāą╗č湥ą╣ąĮą░ Keil.
ŌĆō RIDE: čüąŠą┤ąĄčƹȹĖčé ą┐čĆąŠąĄą║čé ą┤ą╗čÅ čéčāą╗č湥ą╣ąĮą░ RIDE.
ą¤čĆąŠą│čĆą░ą╝ą╝ą░ čŹč鹊 ą▒ą░ąĘąŠą▓ąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą┐ąŠčüčŗą╗ą░ąĄčé ą▓čĆąĄą╝čÅ ąĖąĘ RTC č湥čĆąĄąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé (USART, čüą╝. ąĮą░ čĆąĖčü. 6 ąĮąĖąČąĄ ąŠą║ąĮąŠ č鹥čĆą╝ąĖąĮą░ą╗ą░).
ŌŚÅ ąÆ ąĮą░čćą░ą╗ąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ ą┐ąŠą┤čüčéčĆąŠąĖčéčī ą▓čĆąĄą╝čÅ, ąĮą░ą┐čĆąĖą╝ąĄčĆ čü ą┐ąŠą╝ąŠčēčīčÄ ą┐čĆąŠą│čĆą░ą╝ą╝čŗ HyperTerminal.
ŌŚÅ ąÆčĆąĄą╝čÅ ąŠč鹊ą▒čĆą░ąČą░ąĄčéčüčÅ ą▓ č鹥čĆą╝ąĖąĮą░ą╗ąĄ, ąĖ ąŠą▒ąĮąŠą▓ą╗čÅąĄčéčüčÅ ą║ą░ąČą┤čāčÄ čüąĄą║čāąĮą┤čā. ą¤čĆą░ą║čéąĖč湥čüą║ąĖ RTC ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāąĄčéčüčÅ ą┤ą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ą║ą░ąČą┤čāčÄ čüąĄą║čāąĮą┤čā.
ŌŚÅ ąÜąŠą│ą┤ą░ ą┐čĆąŠąĖčüčģąŠą┤ąĖčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖąĄ, ąĘą░čģą▓ą░čéčŗą▓ą░ąĄčéčüčÅ čüč湥čéčćąĖą║ RTC; ą▓čĆąĄą╝čÅ ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ąĖ ą┐ąŠčüčŗą╗ą░ąĄčéčüčÅ č湥čĆąĄąĘ USART1.
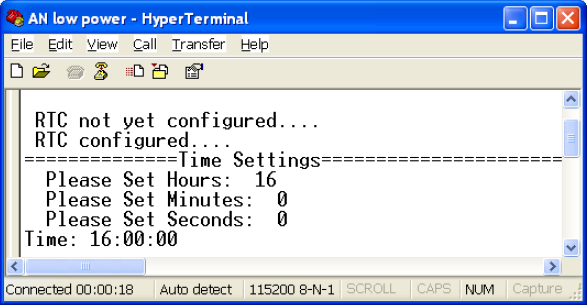
ąĀąĖčü. 6. ąśąĮč鹥čĆč乥ą╣čü HyperTerminal ą┤ą╗čÅ ą┐ąŠą┤čüčéčĆąŠą╣ą║ąĖ ą▓čĆąĄą╝ąĄąĮąĖ.
ąÉą┐ą┐ą░čĆą░čéąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 čŹč鹊čé ą┐čĆąĖą╝ąĄčĆ čü ąŠčåąĄąĮąŠčćąĮąŠą╣ ą┐ą╗ą░č鹊ą╣ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ STM32F10xxx (STM3210B-EVAL): čüą╝. čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ UM0426 [6].
ŌŚÅ ąĪąĖą│ąĮą░ą╗čŗ USART1 (RX, TX) ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüąŠąĄą┤ąĖąĮąĄąĮčŗ čü ą║ąŠąĮąĮąĄą║č鹊čĆąŠą╝ DB9, čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čéčĆą░ąĮčüąĖą▓ąĄčĆą░ RS232.
ŌŚÅ Null-ą╝ąŠą┤ąĄą╝ąĮčŗą╣ ą║ą░ą▒ąĄą╗čī female/female RS232 ą┤ąŠą╗ąČąĄąĮ čüąŠąĄą┤ąĖąĮčÅčéčī ą║ąŠąĮąĮąĄą║č鹊čĆ DB9 (CN6 ąĮą░ ą┐ą╗ą░č鹥 STM3210B-EVAL) ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé ą║ąŠą╝ą┐čīčÄč鹥čĆą░ PC.
ŌŚÅ ą¤ąŠčüą╗ąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ ąĖ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖčÅ JTAG ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ č鹊ą║ą░ ą╝ąŠąČąĮąŠ ąĖąĘą╝ąĄčĆąĖčéčī ąĘą░ą╝ąĄąĮąŠą╣ ą┐ąĄčĆąĄą╝čŗčćą║ąĖ JP9 ąĮą░ ą╝ąĖą╗ą╗ąĖą░ą╝ą┐ąĄčĆą╝ąĄčéčĆ.
ą×ą┐ąĖčüą░ąĮąĖąĄ firmware. ąÜą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī č鹥čüč鹊ą▓čŗą╣ ą┐čĆąĖą╝ąĄčĆ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ:
ŌŚÅ ąŚą░ą┐čāčüčéąĖč鹥 čŹč鹊čé ą┐čĆąĖą╝ąĄčĆ č鹥ą╝ čéčāą╗č湥ą╣ąĮąŠą╝, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥. ą£ąŠąČąĮąŠ ą┐čĆąĖą╝ąĄąĮąĖčéčī čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖą╣. ążą░ą╣ą╗ .uv2 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ą┐čĆąŠąĄą║čéą░ ą▓ čéčāą╗č湥ą╣ąĮąĄ RVMDK (Keil), čŹč鹊čé čäą░ą╣ą╗ čüąŠą┤ąĄčƹȹĖčéčüčÅ ą▓ ą┐ą░ą┐ą║ąĄ RVMDK. ążą░ą╣ą╗ .eww, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ą┐čĆąŠąĄą║čéą░ ą▓ čéčāą╗č湥ą╣ąĮąĄ EWARM (IAR), ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ą░ą┐ą║ąĄ EWARM.
ŌŚÅ ąĪą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 HyperTerminal ąĮą░ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ PC (ąĖą╗ąĖ ą╗čÄą▒čāčÄ ą┤čĆčāą│čāčÄ ą┐čĆąŠą│čĆą░ą╝ą╝čā č鹥čĆą╝ąĖąĮą░ą╗ą░, ąĮą░ą┐čĆąĖą╝ąĄčĆ Putty ąĖą╗ąĖ SecureCRT) čüąŠ čüą╗ąĄą┤čāčÄčēąĖą╝ąĖ ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠčĆčéą░:
ŌĆō ą┤ą╗ąĖąĮą░ čüą╗ąŠą▓ą░ 8 ą▒ąĖčé
ŌĆō ąŠą┤ąĖąĮ Stop-ą▒ąĖčé
ŌĆō ą▒ąĄąĘ ą║ąŠąĮčéčĆąŠą╗čÅ č湥čéąĮąŠčüčéąĖ (No parity)
ŌĆō čüą║ąŠčĆąŠčüčéčī (Baud rate) 115200 baud
ŌĆō čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ ąŠčéą║ą╗čÄč湥ąĮąŠ (flow control: none)
ŌŚÅ ąĪą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 firmware. ąÆ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ (main.h) ą╝ąŠą│čāčé ą▒čŗčéčī ą▓čŗą▒čĆą░ąĮčŗ ąĮąĄčüą║ąŠą╗čīą║ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖą╣ #define, čćč鹊ą▒čŗ ąĮą░čüčéčĆąŠąĖčéčī ąĮčāąČąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą┐čĆąĖą╝ąĄčĆą░. ąśčüą┐ąŠą╗čīąĘčāčÅ #define, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé čüą░ą╝ąŠčüč鹊čÅč鹥ą╗čīąĮąŠ ąĖąĘą╝ąĄčĆąĖčéčī ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝ąŠą│ąŠ č鹊ą║ą░, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą┤ą░ą╗ąĄąĄ ą▓ čéą░ą▒ą╗ąĖčåąĄ 9.
ŌĆō #define ą┤ą╗čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░ čéą░ą║č鹊ą▓ APB1 ąĖ APB2:
#define ABP1_DIV4
#define ABP2_DIV2
#define ABP1_DIV8
#define ABP2_DIV8
ŌĆō #define ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą░ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓:
#define ALL_PERIPHERIALS_ENABLE
#define USART_ONLY
ŌĆō #define ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą░ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊čéčŗ:
#define HCLK_FREQ_72MHz /* ąóąŠą╗čīą║ąŠ čü ą▓ąĮąĄčłąĮąĖą╝ ą│ąĄąĮąĄčĆą░č鹊čĆąŠą╝ ąĖą╗ąĖ ą║ą▓ą░čĆčåąĄą╝ */
#define HCLK_FREQ_8MHz
ŌĆō #define ą┤ą╗čÅ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠą╣ ą▓čŗą▒ąŠčĆą║ąĖ ąĖąĮčüčéčĆčāą║čåąĖą╣ (Prefetch) ąĖą╗ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čäčāąĮą║čåąĖąĖ ą┐ąŠą╗ąŠą▓ąĖąĮčŗ čéą░ą║čéą░ (Half Cycle):
#define PREFETCH_ON
#define HALF_CYCLE_ON
ŌĆō #define ą┤ą╗čÅ ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖčÅ ą▓ čĆąĄąČąĖą╝ Sleep, ą▓ č鹊 ą▓čĆąĄą╝čÅ ą║ą░ą║ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąČą┤ąĄčé ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ ąŠčé RTC:
ŌĆō #define ą┤ą╗čÅ ą▓čŗą▒ąŠčĆą░ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ąĖą╗ąĖ ą▓ąĮąĄčłąĮąĄą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ čéą░ą║č鹊ą▓:
#define HSI_ENABLE /* ąśčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ */
#define HSE_ENABLE /* ąśčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ąĮąĄčłąĮąĖą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ */
ą¤čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖąĄ: ą┤ą╗čÅ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ ą┐ą░ą╝čÅčéąĖ Flash ą┐ąŠčüą╗ąĄ ąĘą░ą┐čāčüą║ą░ ą┐čĆąĖą╝ąĄčĆą░ low-power, ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĮąŠąČąĄą║ ą▓čŗą▒ąŠčĆą░ ąĘą░ą│čĆčāąĘą║ąĖ (BOOT1, BOOT0) ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čĆąĄą╝ąĄąĮąĮąŠ ąĖąĘą╝ąĄąĮąĄąĮą░ čü BOOT FLASH ąĮą░ BOOT RAM, ąĖ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĮą░ąČą░čéą░ ą║ąĮąŠą┐ą║ą░ čüą▒čĆąŠčüą░. ą¤čĆąĖčćąĖąĮą░ čŹč鹊ą│ąŠ ą▓ č鹊ą╝, čćč鹊 ąŠčéą╗ą░ą┤čćąĖą║ ąĮąĄ ą╝ąŠąČąĄčé ą▓ąĘčÅčéčī ąĮą░ čüąĄą▒čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ, ą║ąŠą│ą┤ą░ STM32F10xxx ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ low-power. ąÜą░ą║ č鹊ą╗čīą║ąŠ čŹč鹊 čüą┤ąĄą╗ą░ąĮąŠ, ą▓čŗą▓ąŠą┤čŗ ą▓čŗą▒ąŠčĆą░ ąĘą░ą│čĆčāąĘą║ąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠą▒čĆą░čéąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą┤ą╗čÅ BOOT FLASH. ąŚą░č鹥ą╝ ąĖąĘą╝ąĄčĆąĄąĮąĖąĄ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ąŠčéą║ą╗čÄč湥ąĮąĖąĄą╝ ąĖ ą┐ąŠą▓č鹊čĆąĮčŗą╝ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄą╝ ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ/čüą▒čĆąŠčüą░ ą┐čĆąĖ ą┐ąŠą┤ą░č湥 ą┐ąĖčéą░ąĮąĖčÅ (power off/power on reset) ąĮąĄąŠą▒čģąŠą┤ąĖą╝ą░, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ č鹊ą║ą░ ą╝ąŠą┤čāą╗ąĄą╝ ąŠčéą╗ą░ą┤ą║ąĖ.
ąóąĖą┐ąŠą▓čŗąĄ čĆąĄąĘčāą╗čīčéą░čéčŗ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ. ąóą░ą▒ą╗ąĖčåą░ 9 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ, ą║ąŠč鹊čĆčŗąĄ ą▒čŗą╗ąĖ čüą┤ąĄą╗ą░ąĮčŗ čü čŹčéąĖą╝ąĖ ą┐čĆąĖą╝ąĄčĆą░ą╝ąĖ.
ąóą░ą▒ą╗ąĖčåą░ 9. ąĀąĄąĘčāą╗čīčéą░čéčŗ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣.
| APB1 |
APB2 |
ą¤ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ
čāčüčéčĆąŠą╣čüčéą▓ą░ |
ą¦ą░čüč鹊čéą░ |
Prefetch |
Half
cycle |
WFI |
ąōąĄąĮąĄčĆ. |
ąóąŠą║ |
| DIV4 |
DIV2 |
ąÆčüąĄ ą▓ą║ą╗čÄč湥ąĮčŗ |
72 ą£ąōčå |
ON |
OFF |
OFF |
HSE |
33.35 |
| DIV8 |
DIV8 |
ON |
OFF |
OFF |
27.85 |
| USART |
ON |
OFF |
OFF |
25.13 |
| DIV4 |
DIV2 |
USART |
8 ą£ąōčå |
ON |
OFF |
OFF |
9.23 |
| USART |
OFF |
ON |
OFF |
6.42 |
| USART |
OFF |
ON |
ON |
1.67 |
| USART |
OFF |
ON |
ON |
HSI |
1.09 |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą▓ čüč鹊ą╗ą▒čåąĄ č鹊ą║ čāą║ą░ąĘą░ąĮąŠ čéąĖą┐ąŠą▓ąŠąĄ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ č鹊ą║ą░ ą▓ ą╝ąÉ, ą┐čĆąĖ 25┬░C.
ąöą╗čÅ čüąĮąĖąČąĄąĮąĖčÅ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ č鹊ą║ą░ STM32F10xxx ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆąŠą▓ą░ąĮ ąŠą┐čéąĖą╝ąĖąĘąĖčĆąŠą▓ą░ąĮąĮąŠą╣ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĄą╣ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĖąĖ čü ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╝ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄą╝. ą¤ąŠ čŹč鹊ą╣ ą┐čĆąĖčćąĖąĮąĄ, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą┤ąŠą╗ąČąĄąĮ čüč乊ą║čāčüąĖčĆąŠą▓ą░čéčīčüčÅ ąĮą░ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 STM32F10xxx. ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čéą░ą║č鹊ą▓ STM32F10xxx, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ąŠą┐čéąĖą╝ąĖąĘą░čåąĖąĖ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čŹąĮąĄčĆą│ąĖąĖ ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ:
ŌŚÅ ą¦ą░čüč鹊čéą░ čéą░ą║č鹊ą▓ čüąĖčüč鹥ą╝čŗ ąĖ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓.
ŌĆō ąĢčüą╗ąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÄ ąĮąĄ ąĮčāąČąĮąŠ čĆą░ą▒ąŠčéą░čéčī ąĮą░ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮąŠą╣ čćą░čüč鹊č鹥, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé ą┐ąŠąĮąĖąĘąĖčéčī HCLCK, ąĖčüą┐ąŠą╗čīąĘčāčÅ PLL ąĖą╗ąĖ ą┤ąĄą╗ąĖč鹥ą╗čī čćą░čüč鹊čéčŗ ą┐čĆąĄčüą║ą░ą╗ąĄčĆą░.
ŌĆō ą¦ą░čüč鹊čéčŗ čłąĖąĮčŗ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠąĮąĖąČąĄąĮą░ čü ą┐ąŠą╝ąŠčēčīčÄ ą┐čĆąĄčüą║ą░ą╗ąĄčĆąŠą▓ APB1 ąĖ APB2.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┤ą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ ą┤ąĄčĆąĄą▓ąĄ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą║č鹊ą▓ čüą╝. ą▓čŗčłąĄ čĆąĖčü. 2.
ŌŚÅ ąŚą░ą┐čĆąĄčé čéą░ą║č鹊ą▓ ą┐ąĄčĆąĖč乥čĆąĖąĖ
ŌĆō ąöą╗čÅ ąŠą┐čéąĖą╝ąĖąĘą░čåąĖąĖ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čŹąĮąĄčĆą│ąĖąĖ ą┤ąŠą╗ąČąĮčŗ ą┐ąŠą╗čāčćą░čéčī čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĄ č鹊ą╗čīą║ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗąĄ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ MCU. ąŁč鹊 ą╝ąŠąČąĮąŠ čĆąĄą░ą╗ąĖąĘąŠą▓ą░čéčī čäčāąĮą║čåąĖąĄą╣ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ čéą░ą║č鹊ą▓ ą┐ąĄčĆąĖč乥čĆąĖąĖ (clock gating).
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┤ą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ čäčāąĮą║čåąĖąĖ clock gating ąŠą▒čĆą░čēą░ą╣č鹥čüčī ą║ čĆčāą║ąŠą▓ąŠą┤čüčéą▓čā ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ STM32F10xxx [2].
ŌŚÅ ążčāąĮą║čåąĖąĖ prefetch ąĖą╗ąĖ half cycle
ŌĆō ążčāąĮą║čåąĖčÅ ą┐čĆąĄą┤ą▓ą░čĆąĖč鹥ą╗čīąĮąŠą╣ ą▓čŗą▒ąŠčĆą║ąĖ ąĖąĮčüčéčĆčāą║čåąĖą╣ (prefetch) ą┐ąŠą╗ąĄąĘąĮą░ ą┤ą╗čÅ čāą╗čāčćčłąĄąĮąĖčÅ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ. ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą▒čāč乥čĆą░ prefetch ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĖ ą┐čĆąĄą┤ąŠčéą▓čĆą░čēą░ąĄčé ą┐ąŠč鹥čĆčÄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĖąĘ-ąĘą░ čéą░ą║č鹊ą▓ ąŠąČąĖą┤ą░ąĮąĖčÅ (wait state) ą┐čĆąĖ ą┤ąŠčüčéčāą┐ąĄ ą║ ą┐ą░ą╝čÅčéąĖ Flash.
ŌĆō ąÆ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ, ą║ąŠč鹊čĆčŗąĄ ąĮąĄ čćčāą▓čüčéą▓ąĖč鹥ą╗čīąĮčŗ ą║ čéą░ą║čéą░ą╝ ąŠąČąĖą┤ą░ąĮąĖčÅ Flash, čäčāąĮą║čåąĖčÅ half cycle ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą┤ą╗čÅ čāą╝ąĄąĮčīčłąĄąĮąĖčÅ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ č鹊ą║ą░.
ą¤čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖąĄ: ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ half cycle ąĮąĄą┤ąŠčüčéčāą┐ąĮą░ ą▓ ą║ąŠą╝ą▒ąĖąĮą░čåąĖąĖ čü ą┐čĆąĄčüą║ą░ą╗ąĄčĆąŠą╝ ąĮą░ čłąĖąĮąĄ AHB. ą¦ą░čüč鹊čéą░ čéą░ą║č鹊ą▓ čüąĖčüč鹥ą╝čŗ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čĆą░ą▓ąĮą░ čćą░čüč鹊č鹥 čéą░ą║č鹊ą▓ HCLK. ąŁčéą░ čäčāąĮą║čåąĖčÅ, čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ą┐čĆąĖ ą┐čĆčÅą╝ąŠą╝ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖąĖ ąŠčé ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ 8 ą£ąōčå RC-ą│ąĄąĮąĄčĆą░č鹊čĆą░ (HSI), ąĖą╗ąĖ ąŠčé ą│ąĄąĮąĄčĆą░č鹊čĆą░ HSE.
ŌŚÅ ąÆąĮčāčéčĆąĄąĮąĮąĖą╣ ąĖą╗ąĖ ą▓ąĮąĄčłąĮąĖą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ
ŌĆō ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ą▓ą╝ąĄčüč鹊 ą▓ąĮąĄčłąĮąĄą│ąŠ čéą░ą║ąČąĄ čāą╝ąĄąĮčīčłą░ąĄčé ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ 菹ĮąĄčĆą│ąĖąĖ. ą×ą┤ąĮą░ą║ąŠ ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐ąŠą╗čāč湥ąĮą░ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮą░čÅ čüąĖčüč鹥ą╝ąĮą░čÅ čéą░ą║č鹊ą▓ą░čÅ čćą░čüč鹊čéą░ 64 ą£ąōčå, ąĖ č鹊čćąĮąŠčüčéčī čŹč鹊ą╣ čćą░čüč鹊čéčŗ ąĮą░ą╝ąĮąŠą│ąŠ ąĮąĖąČąĄ, č湥ą╝ ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą▓ąĮąĄčłąĮąĄą│ąŠ ą║ą▓ą░čĆčåąĄą▓ąŠą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ąĖą╗ąĖ ą║ąĄčĆą░ą╝ąĖč湥čüą║ąŠą│ąŠ čĆąĄąĘąŠąĮą░č鹊čĆą░ (HSE).
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: ą┤ą╗čÅ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░čģ čéą░ą║č鹊ą▓ ąŠą▒čĆą░čēą░ą╣č鹥čüčī ą║ čĆčāą║ąŠą▓ąŠą┤čüčéą▓čā ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ STM32F10xxx [2].
ŌŚÅ ąĀąĄąČąĖą╝ Sleep
ąöčĆčāą│ąŠą╣ čüą┐ąŠčüąŠą▒ čüąĮąĖąČąĄąĮąĖčÅ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čŹąĮąĄčĆą│ąĖąĖ - ą┐ąĄčĆąĄą║ą╗čÄč湥ąĮąĖąĄ STM32F10xxx ą▓ čĆąĄąČąĖą╝ Sleep, ą║ąŠą│ą┤ą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ąČą┤ąĄčé čüąŠą▒čŗčéąĖčÅ (event) ąĖą╗ąĖ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ (interrupt).
ąŁč鹊čé ą┐čĆąĖą╝ąĄčĆ ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮčŗąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ STM32F10xxx, ą║ąŠč鹊čĆčŗąĄ ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą┤ą╗čÅ ąŠą┐čéąĖą╝ąĖąĘą░čåąĖąĖ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čŹąĮąĄčĆą│ąĖąĖ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąŁčéąĖ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą║ą░čüą░čÄčéčüčÅ ą▓čŗą▒ąŠčĆą░ čéą░ą║č鹊ą▓čŗčģ čćą░čüč鹊čé, čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ čĆą░ąĘčĆąĄčłąĄąĮąĖąĄą╝ čéą░ą║čéąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓ (clock gating), ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĄ čäčāąĮą║čåąĖąĖ half cycle, ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ą│ąĄąĮąĄčĆą░č鹊čĆą░ ąĖ čĆąĄąČąĖą╝ą░ ąŠąČąĖą┤ą░ąĮąĖčÅ ą┐čĆąĄčĆčŗą▓ą░ąĮąĖčÅ čü ąĖąĮčüčéčĆčāą║čåąĖąĄą╣ WFI - ą▓čüąĄ čŹč鹊 ą╝ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ą▓ čĆą░ąĘą╗ąĖčćąĮčŗčģ ą║ąŠą╝ą▒ąĖąĮą░čåąĖčÅčģ ą┤ą╗čÅ ą║ąŠąĮą║čĆąĄčéąĮąŠą│ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ čü čåąĄą╗čīčÄ ąŠą┐čéąĖą╝ąĖąĘą░čåąĖąĖ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čŹąĮąĄčĆą│ąĖąĖ.
[7. Stop ąĖ Standby ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ čü ą▒ą░čéą░čĆąĄą╣ąĮčŗą╝ ą┐ąĖčéą░ąĮąĖąĄą╝]
ąØąĄą║ąŠč鹊čĆčŗąĄ ą▓čüčéčĆą░ąĖą▓ą░ąĄą╝čŗąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ, ą┐ąŠą╗čāčćą░čÄčēąĖąĄ ą┐ąĖčéą░ąĮąĖąĄ ąŠčé čüčéą░ąĮą┤ą░čĆčéąĮąŠą╣ ą▒ą░čéą░čĆąĄąĖ, ąĮąĄ čĆą░ą▒ąŠčéą░čÄčé ą┐ąŠčüč鹊čÅąĮąĮąŠ. ąØą░ą┐čĆąĖą╝ąĄčĆ, ąĖąĮą┤čāčüčéčĆąĖą░ą╗čīąĮčŗąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ ąČą┤čāčé ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąŠčé čüąĄąĮčüąŠčĆą░, čćč鹊ą▒čŗ ą┐čĆąŠą▒čāą┤ąĖčéčīčüčÅ ąĖ ąĘą░ą┐čāčüčéąĖčéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ ą┐čĆąŠčåąĄčüčüčŗ ą┤ą╗čÅ ąŠą▒čĆą░ą▒ąŠčéą║ąĖ ą┐ąŠčüčéčāą┐ąĖą▓čłąĄą╣ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ąĖ ą┤čĆčāą│ąĖčģ ąĘą░ą┤ą░čć. ąÆ ą┤čĆčāą│ąĖčģ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ MCU ąČą┤ąĄčé ą▓ąĮąĄčłąĮąĄą│ąŠ čüąŠą▒čŗčéąĖčÅ, ąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ čŹč鹊ą╣ čäą░ąĘčŗ ąŠąČąĖą┤ą░ąĮąĖčÅ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ čüąĮąĖąĘąĖčéčī ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ 菹ĮąĄčĆą│ąĖąĖ.
ą»ą┤čĆąŠ Cortex-M3 ą▒čŗą╗ąŠ čĆą░ąĘčĆą░ą▒ąŠčéą░ąĮąŠ, čćč鹊ą▒čŗ čāč湥čüčéčī čŹčéąĖ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ąĖ ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░čéčī čüą┐ąĄčåąĖą░ą╗čīąĮčŗąĄ čĆąĄąČąĖą╝čŗ ąĖ ąĖąĮčüčéčĆčāą║čåąĖąĖ ąĮą░ čāčĆąŠą▓ąĮąĄ čÅą┤čĆą░.
ą¤čĆąŠą│čĆą░ą╝ą╝ąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ, ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąĮąŠąĄ čü čŹčéąĖą╝ ą░ą┐ąĮąŠčāč鹊ą╝, ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą┤ą▓ą░ ą┐čĆąĖą╝ąĄčĆą░ (WFE_Stop_Flash ąĖ WFE_Stop_RAM), ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī STM32F10xxx ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ, čĆą░ą▒ąŠčéą░čÄčēąĖčģ ąŠčé ą▒ą░čéą░čĆąĄąĖ. ąÆ čŹčéąĖčģ ą┐čĆąĖą╝ąĄčĆą░čģ STM32F10xxx ą┐ąĄčĆąĄą║ą╗čÄčćą░ąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ low-power, ą║ą░ą║ č鹊ą╗čīą║ąŠ ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĮą░čÅ ąŠą▒čĆą░ą▒ąŠčéą║ą░ - ą▓ą╝ąĄčüč鹊 č鹊ą│ąŠ čćč鹊ą▒čŗ ąŠčüčéą░ą▓ą░čéčīčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ Run ąĮą░ ąĮąĖąĘą║ąŠą╣ čéą░ą║č鹊ą▓ąŠą╣ čćą░čüč鹊č鹥.
ąŁčéąĖ ą┤ą▓ą░ čĆąĄąČąĖą╝ą░ low-power ąŠčüąĮąŠą▓čŗą▓ą░ąĄčéčüčÅ čäčāąĮą║čåąĖąĖ Cortex-M3 Deep Sleep ąĖ ąĖąĮčüčéčĆčāą║čåąĖąĖ WFE (Wait for Event).
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ Wait For Event ąĖ Stop Wait For Event. ąŁčéą░ čüąĄą║čåąĖčÅ ąŠą┐ąĖčüčŗą▓ą░ąĄčé, ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī ąĖąĮčüčéčĆčāą║čåąĖčÄ Wait for Event (WFI) ąĖ čĆąĄąČąĖą╝ą░ Stop ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ STM32F10xxx. ąÆą╝ąĄčüč鹥 čü čŹčéąĖą╝ ą░ą┐ąĮąŠčāč鹊ą╝ ą┐ąŠčüčéą░ą▓ą╗čÅąĄčéčüčÅ ą▓ ZIP-čäą░ą╣ą╗ąĄ ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ firmware. ąÜąŠą┤ firmware ą▓ ą▓ąĖą┤ąĄ ą┤ą▓čāčģ ą┐čĆąŠąĄą║č鹊ą▓ ą┤ąŠčüčéčāą┐ąĄąĮ ą▓ čüą╗ąĄą┤čāčÄčēąĖčģ ą┐ą░ą┐ą║ą░čģ: WFE_Stop_Flash ąĖ WFE_Stop_RAM.
ąŁčéąĖ ą┤ą▓ą░ ą┐čĆąŠąĄą║čéą░ ą┐ąŠčćčéąĖ ąŠą┤ąĖąĮą░ą║ąŠą▓čŗąĄ, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ ąŠč鹊ą▒čĆą░ąČąĄąĮąĖčÅ ąĮą░ ą┐ą░ą╝čÅčéčī:
ŌŚÅ WFE_Stop_Flash ąČąĄčüčéą║ąŠ ą┐čĆąĖą▓čÅąĘą░ąĮ ą║ ą┐ą░ą╝čÅčéąĖ Flash, ąĖ čĆą░ą▒ąŠčéą░ąĄčé ąĖąĘ ą┐ą░ą╝čÅčéąĖ Flash.
ŌŚÅ WFE_Stop_Ram ąĘą░ą│čĆčāąČą░ąĄčéčüčÅ ąĖąĘ ą┐ą░ą╝čÅčéąĖ Flash, ąĮąŠ ąĮąĄą║ąŠč鹊čĆčŗąĄ čäčāąĮą║čåąĖąĖ ąŠč鹊ą▒čĆą░ąČą░čÄčéčüčÅ ą▓ RAM ą║ąŠą┤ąŠą╝ startup. ąÜą░ą║ ą┤ąĄą╗ą░čéčī ąŠč鹊ą▒čĆą░ąČąĄąĮąĖąĄ ą║ąŠą┤ą░ (remap) ą▓ RAM, ąŠą▒čŖčÅčüąĮčÅąĄčéčüčÅ ą▓ ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖąĖ ą║ ąĮą░ą▒ąŠčĆčā ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖčÅ ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčüčéą░.
ą¤ą░ą┐ą║ąĖ WFE_Stop_Flash ąĖ WFE_Stop_Ram čüąŠą┤ąĄčƹȹ░čé ą▓čüąĄ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ąĖ ąĖ čäą░ą╣ą╗čŗ, ąĖąĘ ą║ąŠč鹊čĆčŗčģ čüąŠąĘą┤ą░ąĄčéčüčÅ čÅą┤čĆąŠ ą┐čĆąĖą╝ąĄčĆą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ:
ŌŚÅ ą¤ąŠą┤ą║ą░čéą░ą╗ąŠą│ inc čüąŠą┤ąĄčƹȹĖčé ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗąĄ čäą░ą╣ą╗čŗ (*.h).
ŌŚÅ ą¤ąŠą┤ą║ą░čéą░ą╗ąŠą│ src čüąŠą┤ąĄčƹȹĖčé čäą░ą╣ą╗čŗ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ ą┐čĆąĖą╝ąĄčĆą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ŌŚÅ ą¤ąŠą┤ą║ą░čéą░ą╗ąŠą│ project čüąŠą┤ąĄčƹȹĖčé ą┤ą▓ą░ ą┐čĆąŠąĄą║čéą░, ą║ąŠč鹊čĆčŗąĄ ą║ąŠą╝ą┐ąĖą╗ąĖčĆčāčÄčé čäą░ą╣ą╗čŗ ą┐čĆąĖą╝ąĄčĆą░:
ŌĆō EWARMv5: čüąŠą┤ąĄčƹȹĖčé ą┐čĆąŠąĄą║čé ą┤ą╗čÅ čéčāą╗č湥ą╣ąĮą░ IAR EWARM.
ŌĆō RVMDK: čüąŠą┤ąĄčƹȹĖčé ą┐čĆąŠąĄą║čé ą┤ą╗čÅ čéčāą╗č湥ą╣ąĮą░ Keil.
ŌĆō RIDE: čüąŠą┤ąĄčƹȹĖčé ą┐čĆąŠąĄą║čé ą┤ą╗čÅ čéčāą╗č湥ą╣ąĮą░ RIDE.
ą¤čĆąĖą╝ąĄčĆ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖąĄ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ čāčĆąŠą▓ąĮčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čü ą┐ąŠą╝ąŠčēčīčÄ ADC, ąĖ čüąŠčģčĆą░ąĮąĄąĮąĖąĄ ąĖąĘą╝ąĄčĆąĄąĮąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣ ą▓ ą▒čāč乥čĆ RAM. ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čäčāąĮą║čåąĖčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą│ąŠ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (Auto-Wakeup, AWU) ą┤ą╗čÅ ą▓čŗčģąŠą┤ą░ ąĖąĘ čĆąĄąČąĖą╝ą░ low-power, ą║ą░ą║ čŹč鹊 ąŠą┐ąĖčüčŗą▓ą░ą╗ąŠčüčī ą▓čŗčłąĄ ą▓ čüąĄą║čåąĖąĖ "Auto-wakeup (AWU)".
ŌŚÅ ąĪąĮą░čćą░ą╗ą░ čäčāąĮą║čåąĖąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāčÄčé čéą░ą║čéčŗ, GPIO, RTC ąĖ ADC. ąŁčéąĖ čäčāąĮą║čåąĖąĖ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ ą▓ ą║ąŠąĮčåąĄ čäą░ą╣ą╗ą░ main.c, ąĖ ąŠąĮąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčé čüčéą░ąĮą┤ą░čĆčéąĮčāčÄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā čäčāąĮą║čåąĖą╣ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ (STM32F10xxx standard peripheral library).
ŌŚÅ ąĀą░ą▒ąŠčéą░čÄčé čćą░čüčŗ RTC, ąĖ ą║ą░ąČą┤ąŠąĄ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ ADC ąĖ čüąŠčģčĆą░ąĮąĄąĮąĖąĄ čĆąĄąĘčāą╗čīčéą░čéą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ąĘą░ą┐čāčüą║ą░čÄčéčüčÅ ą▒čāą┤ąĖą╗čīąĮąĖą║ąŠą╝ (RTC Alarm) ą▓ ą│ą╗ą░ą▓ąĮąŠą╝ čåąĖą║ą╗ąĄ čäčāąĮą║čåąĖąĖ main.
ŌŚÅ RTC Alarm ą▓čŗą▓ąŠą┤ąĖčé STM32F10xxx ąĖąĘ čĆąĄąČąĖą╝ą░ WFE ąĖą╗ąĖ STOP_WFE.
ŌŚÅ ąØąŠąČą║ą░ ą┐ąŠčĆčéą░ PC1 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓čĆąĄą╝čÅ, ąĘą░čéčĆą░čćąĖą▓ą░ąĄą╝ąŠąĄ ąĮą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ ADC ąĖ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║čā čĆąĄą│ąĖčüčéčĆą░ ą▒čāą┤ąĖą╗čīąĮąĖą║ą░ RTC Alarm.
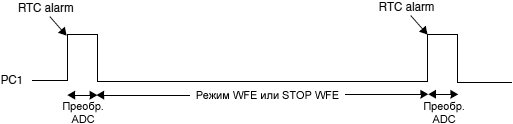
ąĀąĖčü. 7. WFE ąĖ STOP WFE.
ąśčüą┐ąŠą╗čīąĘčāąĄą╝ą░čÅ ą░ą┐ą┐ą░čĆą░čéčāčĆą░. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 čŹč鹊čé ą┐čĆąĖą╝ąĄčĆ čü ąŠčåąĄąĮąŠčćąĮąŠą╣ ą┐ą╗ą░č鹊ą╣ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ STM32F10xxx (STM3210B-EVAL), čüą╝. čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ UM0426 [6]. ą¤ąŠčüą╗ąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ ąĖ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖčÅ JTAG ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ č鹊ą║ą░ ą╝ąŠąČąĮąŠ ąĖąĘą╝ąĄčĆąĖčéčī ą┐čāč鹥ą╝ ąĘą░ą╝ąĄąĮčŗ ą┐ąĄčĆąĄą╝čŗčćą║ąĖ JP9 ąĮą░ ą╝ąĖą╗ą╗ąĖą░ą╝ą┐ąĄčĆą╝ąĄčéčĆ.
ą×ą┐ąĖčüą░ąĮąĖąĄ firmware:
ŌŚÅ ąŚą░ą┐čāčüčéąĖč鹥 čŹč鹊čé ą┐čĆąĖą╝ąĄčĆ ą▓ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╝ ąÆą░ą╝ąĖ čéčāą╗č湥ą╣ąĮąĄ. ą£ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čéčāą╗č湥ą╣ąĮ. ążą░ą╣ą╗ .uv2 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ą┐čĆąŠąĄą║čéą░ ą▓ čüčĆąĄą┤ąĄ čéčāą╗č湥ą╣ąĮą░ RVMDK (Keil), čŹč鹊čé čäą░ą╣ą╗ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ą░ą┐ą║ąĄ RVMDK. ążą░ą╣ą╗ .eww, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ą┐čĆąŠąĄą║čéą░ ą▓ čüčĆąĄą┤ąĄ čéčāą╗č湥ą╣ąĮą░ EWARM (IAR), ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ą░ą┐ą║ąĄ EWARM.
ŌŚÅ ąĪą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 firmware. ąÆ ąĮą░čćą░ą╗ąĄ ą╝ąŠą┤čāą╗čÅ main.c č湥čéčŗčĆčīą╝čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅą╝ąĖ #define ą╝ąŠąČąĮąŠ ą▓čŗą▒čĆą░čéčī ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą┐čĆąĖą╝ąĄčĆą░:
ŌĆō ą┤ą▓ą░ #define ą▓čŗą▒ąĖčĆą░čÄčé ą▓čĆąĄą╝čÅ ą┐čĆąŠą║čĆčāčéą║ąĖ čåąĖą║ą╗ą░:
#define LOOP_20ms
#define LOOP_200ms
ŌĆō ąĄčēąĄ ą┤ą▓ą░ #define ą▓čŗą▒ąĖčĆą░čÄčé čĆąĄąČąĖą╝ low-power:
#define WFE
#define STOP_WFE
ŌĆō ąöą╗čÅ ąĘą░ą┐čāčüą║ą░ ą┐čĆąĖą╝ąĄčĆą░ ąĮčāąČąĮąŠ čĆą░čüą║ąŠą╝ą╝ąĄąĮčéąĖčĆąŠą▓ą░čéčī ą┐ąŠ ąŠą┤ąĮąŠą╝čā ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÄ #define ą║ą░ąČą┤ąŠą│ąŠ čéąĖą┐ą░.
ŌĆō ą¤ąŠčüą╗ąĄ ą║ąŠą╝ą┐ąĖą╗čÅčåąĖąĖ ą┐čĆąĖą╝ąĄčĆą░ ąĄą│ąŠ ą╝ąŠąČąĮąŠ ąĘą░ą│čĆčāąĘąĖčéčī ą▓ ą┐ą░ą╝čÅčéčī Flash ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ STM32F10xxx.
ą¤čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖąĄ: ą┤ą╗čÅ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ ą┐ą░ą╝čÅčéąĖ Flash ą┐ąŠčüą╗ąĄ ąĘą░ą┐čāčüą║ą░ ą┐čĆąĖą╝ąĄčĆą░ low-power, ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĮąŠąČąĄą║ ą▓čŗą▒ąŠčĆą░ ąĘą░ą│čĆčāąĘą║ąĖ (BOOT1, BOOT0) ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čĆąĄą╝ąĄąĮąĮąŠ ąĖąĘą╝ąĄąĮąĄąĮą░ čü BOOT FLASH ąĮą░ BOOT RAM, ąĖ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĮą░ąČą░čéą░ ą║ąĮąŠą┐ą║ą░ čüą▒čĆąŠčüą░. ą¤čĆąĖčćąĖąĮą░ čŹč鹊ą│ąŠ ą▓ č鹊ą╝, čćč鹊 ąŠčéą╗ą░ą┤čćąĖą║ ąĮąĄ ą╝ąŠąČąĄčé ą▓ąĘčÅčéčī ąĮą░ čüąĄą▒čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ, ą║ąŠą│ą┤ą░ STM32F10xxx ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ low-power. ąÜą░ą║ č鹊ą╗čīą║ąŠ čŹč鹊 čüą┤ąĄą╗ą░ąĮąŠ, ą▓čŗą▓ąŠą┤čŗ ą▓čŗą▒ąŠčĆą░ ąĘą░ą│čĆčāąĘą║ąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠą▒čĆą░čéąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą┤ą╗čÅ BOOT FLASH. ąŚą░č鹥ą╝ ąĖąĘą╝ąĄčĆąĄąĮąĖąĄ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ąŠčéą║ą╗čÄč湥ąĮąĖąĄą╝ ąĖ ą┐ąŠą▓č鹊čĆąĮčŗą╝ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄą╝ ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ/čüą▒čĆąŠčüą░ ą┐čĆąĖ ą┐ąŠą┤ą░č湥 ą┐ąĖčéą░ąĮąĖčÅ (power off/power on reset) ąĮąĄąŠą▒čģąŠą┤ąĖą╝ą░, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ č鹊ą║ą░ ą╝ąŠą┤čāą╗ąĄą╝ ąŠčéą╗ą░ą┤ą║ąĖ.
[ą¤čĆąĖą║ą╗ą░ą┤ąĮąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ čĆąĄąČąĖą╝ą░ Standby]
ąŚą┤ąĄčüčī ąŠą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ, ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čĆąĄąČąĖą╝ Standby ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ STM32F10xxx ąĮą░ ą┐čĆąĖą╝ąĄčĆąĄ, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ ZIP-ą░čĆčģąĖą▓ąĄ [7], ą┐ąŠčüčéą░ą▓ą╗čÅąĄą╝ąŠą╝ čü čŹčéąĖą╝ ą░ą┐ąĮąŠčāč鹊ą╝. ąÜąŠą┤ čŹč鹊ą│ąŠ firmware ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ą░ą┐ą║ąĄ Standby. ą¤ą░ą┐ą║ą░ Standby čüąŠą┤ąĄčƹȹĖčé ą▓čüąĄ ą┐ąŠą┤ą║ą░čéą░ą╗ąŠą│ąĖ ąĖ čäą░ą╣ą╗čŗ, čüąŠčüčéą░ą▓ą╗čÅčÄčēąĖąĄ čÅą┤čĆąŠ ą┐čĆąĖą╝ąĄčĆą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ:
ŌŚÅ ą¤ąŠą┤ą║ą░čéą░ą╗ąŠą│ inc čüąŠą┤ąĄčƹȹĖčé ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗąĄ čäą░ą╣ą╗čŗ (*.h).
ŌŚÅ ą¤ąŠą┤ą║ą░čéą░ą╗ąŠą│ src čüąŠą┤ąĄčƹȹĖčé čäą░ą╣ą╗čŗ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ ą┐čĆąĖą╝ąĄčĆą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ŌŚÅ ą¤ąŠą┤ą║ą░čéą░ą╗ąŠą│ project čüąŠą┤ąĄčƹȹĖčé ą┤ą▓ą░ ą┐čĆąŠąĄą║čéą░, ą║ąŠč鹊čĆčŗąĄ ą║ąŠą╝ą┐ąĖą╗ąĖčĆčāčÄčé čäą░ą╣ą╗čŗ ą┐čĆąĖą╝ąĄčĆą░:
ŌĆō EWARMv5: čüąŠą┤ąĄčƹȹĖčé ą┐čĆąŠąĄą║čé ą┤ą╗čÅ čéčāą╗č湥ą╣ąĮą░ IAR EWARM.
ŌĆō RVMDK: čüąŠą┤ąĄčƹȹĖčé ą┐čĆąŠąĄą║čé ą┤ą╗čÅ čéčāą╗č湥ą╣ąĮą░ Keil.
ą¤čĆąĖą╝ąĄčĆ ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą┐ąĄčĆąĖąŠą┤ąĖč湥čüą║ąĖąĄ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ čāčĆąŠą▓ąĮčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čü ą┐ąŠą╝ąŠčēčīčÄ ADC, ąĖ čüąŠčģčĆą░ąĮąĄąĮąĖąĄ ąĖąĘą╝ąĄčĆąĄąĮąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣ ą▓ ą▒čāč乥čĆ RAM. ąśčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ čäčāąĮą║čåąĖčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąŠą│ąŠ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ (Auto-Wakeup, AWU) ą┤ą╗čÅ ą▓čŗčģąŠą┤ą░ ąĖąĘ čĆąĄąČąĖą╝ą░ low-power, ą║ą░ą║ čŹč鹊 ąŠą┐ąĖčüčŗą▓ą░ą╗ąŠčüčī ą▓čŗčłąĄ ą▓ čüąĄą║čåąĖąĖ "Auto-wakeup (AWU)".
ŌŚÅ ąĪąĮą░čćą░ą╗ą░ čäčāąĮą║čåąĖąĖ ą║ąŠąĮčäąĖą│čāčĆąĖčĆčāčÄčé čéą░ą║čéčŗ, GPIO, RTC ąĖ ADC. ąŁčéąĖ čäčāąĮą║čåąĖąĖ čĆąĄą░ą╗ąĖąĘąŠą▓ą░ąĮčŗ ą▓ ą║ąŠąĮčåąĄ čäą░ą╣ą╗ą░ main.c, ąĖ ąŠąĮąĖ ąĖčüą┐ąŠą╗čīąĘčāčÄčé čüčéą░ąĮą┤ą░čĆčéąĮčāčÄ ą▒ąĖą▒ą╗ąĖąŠč鹥ą║čā čäčāąĮą║čåąĖą╣ ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ čü ą┐ąĄčĆąĖč乥čĆąĖą╣ąĮčŗą╝ąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ (STM32F10xxx standard peripheral library).
ŌŚÅ ąĀą░ą▒ąŠčéą░čÄčé čćą░čüčŗ RTC, ąĖ ą▒čāą┤ąĖą╗čīąĮąĖą║ (RTC Alarm) ą▓čŗą▓ąŠą┤ąĖčé STM32F10xxx ąĖąĘ čĆąĄąČąĖą╝ą░ Standby.
ŌŚÅ ą¤ąŠčüą╗ąĄ ą║ą░ąČą┤ąŠą│ąŠ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąĖąĘ čĆąĄąČąĖą╝ą░ Standby ą┐čĆąŠą│čĆą░ą╝ą╝ą░ STM32F10xxx ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ čüąĮą░čćą░ą╗ą░, ą║ą░ą║ ą┐ąŠčüą╗ąĄ čüą▒čĆąŠčüą░, ąĖ ą┐ąŠčüą╗ąĄ ą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮąĖčÅ ADC ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ąĄą│ąŠ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ čāčĆąŠą▓ąĮčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą▓ čåąĖčäčĆąŠą▓ąŠą╣ č乊čĆą╝ą░čé.
ŌŚÅ ąØąŠąČą║ą░ ą┐ąŠčĆčéą░ PC1 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą▓čĆąĄą╝čÅ, ąĘą░čéčĆą░čćąĖą▓ą░ąĄą╝ąŠąĄ ąĮą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ ADC ąĖ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║čā čĆąĄą│ąĖčüčéčĆą░ ą▒čāą┤ąĖą╗čīąĮąĖą║ą░ RTC Alarm, ąŠą┤ąĮą░ą║ąŠ ą▒ąĄąĘ čāč湥čéą░ ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠč鹊čĆąŠąĄ čéčĆąĄą▒čāąĄčéčüčÅ STM32F10xxx ą┤ą╗čÅ ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ą░.

ąĀąĖčü. 8. Standby.
ąśčüą┐ąŠą╗čīąĘčāąĄą╝ą░čÅ ą░ą┐ą┐ą░čĆą░čéčāčĆą░. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 čŹč鹊čé ą┐čĆąĖą╝ąĄčĆ čü ąŠčåąĄąĮąŠčćąĮąŠą╣ ą┐ą╗ą░č鹊ą╣ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ STM32F10xxx (STM3210B-EVAL), čüą╝. čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ UM0426 [6]. ą¤ąŠčüą╗ąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ ąĖ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖčÅ JTAG ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ č鹊ą║ą░ ą╝ąŠąČąĮąŠ ąĖąĘą╝ąĄčĆąĖčéčī ą┐čāč鹥ą╝ ąĘą░ą╝ąĄąĮčŗ ą┐ąĄčĆąĄą╝čŗčćą║ąĖ JP9 ąĮą░ ą╝ąĖą╗ą╗ąĖą░ą╝ą┐ąĄčĆą╝ąĄčéčĆ.
ą×ą┐ąĖčüą░ąĮąĖąĄ firmware:
ŌŚÅ ąŚą░ą┐čāčüčéąĖč鹥 čŹč鹊čé ą┐čĆąĖą╝ąĄčĆ ą▓ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą╝ ąÆą░ą╝ąĖ čéčāą╗č湥ą╣ąĮąĄ. ą£ąŠąČąĮąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ čéčāą╗č湥ą╣ąĮ. ążą░ą╣ą╗ .uv2 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ą┐čĆąŠąĄą║čéą░ ą▓ čüčĆąĄą┤ąĄ čéčāą╗č湥ą╣ąĮą░ RVMDK (Keil), čŹč鹊čé čäą░ą╣ą╗ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ą░ą┐ą║ąĄ RVMDK. ążą░ą╣ą╗ .eww, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ą┐čĆąŠąĄą║čéą░ ą▓ čüčĆąĄą┤ąĄ čéčāą╗č湥ą╣ąĮą░ EWARM (IAR), ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ą░ą┐ą║ąĄ EWARM.
ŌŚÅ ąĪą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 firmware. ąÆ ąĮą░čćą░ą╗ąĄ ą╝ąŠą┤čāą╗čÅ main.c ą┤ą▓čāą╝čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅą╝ąĖ #define ą╝ąŠąČąĮąŠ ą▓čŗą▒čĆą░čéčī ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą┐čĆąĖą╝ąĄčĆą░:
ąÆ ąĮą░čćą░ą╗ąĄ ą╝ąŠą┤čāą╗čÅ main.c ą┤ą▓čāą╝čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅą╝ąĖ #define ą╝ąŠąČąĮąŠ ą▓čŗą▒čĆą░čéčī ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą┐čĆąĖą╝ąĄčĆą░.
- ąöą▓ą░ #define ąŠą┐čĆąĄą┤ąĄą╗čÅčÄčé ą▓čĆąĄą╝čÅ ą┐čĆąŠą║čĆčāčéą║ąĖ čåąĖą║ą╗ą░ main, ąĮčāąČąĮąŠ ą▓čŗą▒čĆą░čéčī ąŠą┤ąĖąĮ ąĖąĘ ą▓ą░čĆąĖą░ąĮč鹊ą▓:
#define LOOP_20ms
#define LOOP_200ms
ŌĆō ą¤ąŠčüą╗ąĄ ą║ąŠą╝ą┐ąĖą╗ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐čĆąĖą╝ąĄčĆą░ ąŠąĮ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĘą░ą│čĆčāąČąĄąĮ ą▓ ą┐ą░ą╝čÅčéčī Flash ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ STM32F10xxx.
ą¤čĆąĄą┤čāą┐čĆąĄąČą┤ąĄąĮąĖąĄ: ą┤ą╗čÅ ą┐ąĄčĆąĄąĘą░ą│čĆčāąĘą║ąĖ ą┐ą░ą╝čÅčéąĖ Flash ą┐ąŠčüą╗ąĄ ąĘą░ą┐čāčüą║ą░ ą┐čĆąĖą╝ąĄčĆą░ low-power, ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ ąĮąŠąČąĄą║ ą▓čŗą▒ąŠčĆą░ ąĘą░ą│čĆčāąĘą║ąĖ (BOOT1, BOOT0) ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą▓čĆąĄą╝ąĄąĮąĮąŠ ąĖąĘą╝ąĄąĮąĄąĮą░ čü BOOT FLASH ąĮą░ BOOT RAM, ąĖ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąĮą░ąČą░čéą░ ą║ąĮąŠą┐ą║ą░ čüą▒čĆąŠčüą░. ą¤čĆąĖčćąĖąĮą░ čŹč鹊ą│ąŠ ą▓ č鹊ą╝, čćč鹊 ąŠčéą╗ą░ą┤čćąĖą║ ąĮąĄ ą╝ąŠąČąĄčé ą▓ąĘčÅčéčī ąĮą░ čüąĄą▒čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ, ą║ąŠą│ą┤ą░ STM32F10xxx ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ low-power. ąÜą░ą║ č鹊ą╗čīą║ąŠ čŹč鹊 čüą┤ąĄą╗ą░ąĮąŠ, ą▓čŗą▓ąŠą┤čŗ ą▓čŗą▒ąŠčĆą░ ąĘą░ą│čĆčāąĘą║ąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąŠą▒čĆą░čéąĮąŠ čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮčŗ ą┤ą╗čÅ BOOT FLASH. ąŚą░č鹥ą╝ ąĖąĘą╝ąĄčĆąĄąĮąĖąĄ ąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ąŠčéą║ą╗čÄč湥ąĮąĖąĄą╝ ąĖ ą┐ąŠą▓č鹊čĆąĮčŗą╝ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄą╝ ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ. ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ/čüą▒čĆąŠčüą░ ą┐čĆąĖ ą┐ąŠą┤ą░č湥 ą┐ąĖčéą░ąĮąĖčÅ (power off/power on reset) ąĮąĄąŠą▒čģąŠą┤ąĖą╝ą░, čćč鹊ą▒čŗ ąĖąĘą▒ąĄąČą░čéčī ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ č鹊ą║ą░ ą╝ąŠą┤čāą╗ąĄą╝ ąŠčéą╗ą░ą┤ą║ąĖ.
ąóą░ą▒ą╗ąĖčåą░ 10 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čéąĖą┐ąŠą▓čŗąĄ čĆąĄąĘčāą╗čīčéą░čéčŗ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ č鹊ą║ą░ čŹčéąĖčģ ą┐čĆąĖą╝ąĄčĆąŠą▓.
ąóą░ą▒ą╗ąĖčåą░ 10. ąĀąĄąĘčāą╗čīčéą░čéčŗ ąĖąĘą╝ąĄčĆąĄąĮąĖą╣ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝ąŠą│ąŠ č鹊ą║ą░ ą┐čĆąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĄ TA = +25┬░C.
#define
|
ą¤ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ č鹊ą║ą░
|
| 20 ą╝čü |
200 ą╝čü |
| WFE |
1 ą╝ąÉ |
970 ą╝ą║ąÉ |
| STOP_WFE, ą║ąŠą┤ ą║čĆčāčéąĖčéčüčÅ ą▓ ą┐ą░ą╝čÅčéąĖ Flash |
58 ą╝ą║ąÉ |
18.5 ą╝ą║ąÉ |
| STOP_WFE, čüą┤ąĄą╗ą░ąĮ remap ą║ąŠą┤ą░ ą▓ RAM |
34.7 ą╝ą║ąÉ |
16.2 ą╝ą║ąÉ |
| Standby |
106 ą╝ą║ąÉ |
14 ą╝ą║ąÉ |
ą×ą▒čēąĖąĄ ą▓čŗą▓ąŠą┤čŗ. ąŁčéąĖ ą┐čĆąĖą╝ąĄčĆčŗ ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé, ą║ą░ą║ Cortex-M3 ąĖąĮč鹥ą│čĆąĖčĆčāąĄčé ą▓ čüąĄą▒ąĄ čŹčäč乥ą║čéąĖą▓ąĮčŗąĄ ąĖąĮčüčéčĆčāą║čåąĖąĖ čāčĆąŠą▓ąĮčÅ čÅą┤čĆą░ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣ čü ąĮąĖąĘą║ąĖą╝ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ č鹊ą║ą░ (čĆąĄąČąĖą╝ Sleep ąĖ čĆąĄąČąĖą╝ Deepsleep), čüą▓čÅąĘą░ąĮąĮčŗąĄ čü čäčāąĮą║čåąĖčÅą╝ąĖ STM32F10xxx (AWU, Stop, Low-power ąĖ Standby).
ąśąĘą╝ąĄčĆąĄąĮąĖčÅ ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé ą▓ą░čĆąĖą░ąĮčéčŗ ą║ąŠą╝ą┐čĆąŠą╝ąĖčüčüą░ ą╝ąĄąČą┤čā ą▓čĆąĄą╝ąĄąĮąĄą╝ ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖčÅ ąĖ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ č鹊ą║ą░, ą║ąŠč鹊čĆčŗąĄ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┐čĆąĖąĮčÅčéčī ą▓ąĮąĖą╝ą░ąĮąĖąĄ ą┐čĆąĖ čĆą░ąĘčĆą░ą▒ąŠčéą║ąĄ:
ŌŚÅ ąĀąĄąČąĖą╝ Standby ą▒ąŠą╗ąĄąĄ čŹčäč乥ą║čéąĖą▓ąĄąĮ čü č鹊čćą║ąĖ ąĘčĆąĄąĮąĖčÅ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ č鹊ą║ą░ (3.6 ą╝ą║ąÉ), ąŠą┤ąĮą░ą║ąŠ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ ą║ą░ąČą┤čŗą╣ čĆą░ąĘ ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ą░ąĄčéčüčÅ ąĖąĘ čüąŠčüč鹊čÅąĮąĖčÅ čüą▒čĆąŠčüą░, ąĖ ą▓čĆąĄą╝čÅ ą┐ąŠą▓č鹊čĆąĮąŠą╣ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ąĮąĄ čéą░ą║ąŠąĄ čāąČ ą╝ą░ą╗ąĄąĮčīą║ąŠąĄ. ąÜąŠąĮąĄčćąĮąŠ, čäą░ąĘą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ čĆą░ą▒ąŠčéą░ąĄčé ąĮą░ čćą░čüč鹊č鹥 8 ą£ąōčå, ąĖ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄčé č鹊ą║. ąĢčüą╗ąĖ ą▓čĆąĄą╝čÅ ą┐ąŠą▓č鹊čĆą░ čåąĖą║ą╗ą░ čüąŠąĮ/ą┐čĆąŠą▒čāąČą┤ąĄąĮąĖąĄ čüą╗ąĖčłą║ąŠą╝ ą╝ą░ą╗ąĄąĮčīą║ąŠąĄ (20 ą╝čü), č鹊 čŹč鹊čé čĆąĄąČąĖą╝ ą╝ąĄąĮąĄąĄ čŹčäč乥ą║čéąĖą▓ąĄąĮ, č湥ą╝ čĆąĄąČąĖą╝ Stop (106 ą╝ą║ąÉ ą┐čĆąŠčéąĖą▓ 34.7 ą╝ą║ąÉ).
ŌŚÅ ąĀąĄąČąĖą╝ Stop ą╝ąĄąĮąĄąĄ čŹčäč乥ą║čéąĖą▓ąĄąĮ ą┐ąŠ čüčĆą░ą▓ąĮąĄąĮąĖčÄ čü čĆąĄąČąĖą╝ąŠą╝ Standby ą┐ąŠ č鹊ą║čā ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ low-power, ąĮąŠ čā čĆąĄąČąĖą╝ą░ Stop ąĄčüčéčī ą┤ąŠčüč鹊ąĖąĮčüčéą▓ąŠ ą▓ č鹊ą╝, čćč鹊 čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą║ąŠąĮč鹥ą║čüčé ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ą║ąŠą┤ą░ ąĖ čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ RAM. ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ąĄčüą╗ąĖ ą▓čĆąĄą╝čÅ ą┐ąŠą▓č鹊čĆąĄąĮąĖčÅ čåąĖą║ą╗ą░ ą║ąŠčĆąŠč湥 200 ą╝čü, č鹊 čĆąĄąČąĖą╝ Stop čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąŠą╗ąĄąĄ čŹčäč乥ą║čéąĖą▓ąĮčŗą╝, ąŠčüąŠą▒ąĄąĮąĮąŠ ąĄčüą╗ąĖ ą║ąŠą┤ čåąĖą║ą╗ą░ ąŠč鹊ą▒čĆą░ąČąĄąĮ (remapped) ą┤ą╗čÅ čĆą░ą▒ąŠčéčŗ ą▓ RAM. ą×ą┤ąĮą░ą║ąŠ, ąĄčüą╗ąĖ čåąĖą║ą╗ ą┤ą╗ąĖčéčüčÅ 200 ą╝čü ąĖą╗ąĖ ą▒ąŠą╗ąĄąĄ, čĆąĄąČąĖą╝ Standby čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą▒ąŠą╗ąĄąĄ ą┐čĆąĄą┤ą┐ąŠčćčéąĖč鹥ą╗čīąĮčŗą╝.
[8. ąöąŠą╝ąĄąĮ Backup ą▓ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅčģ čü ąŠč湥ąĮčī ąĮąĖąĘą║ąĖą╝ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝]
ąŁčéą░ čüąĄą║čåąĖčÅ ąŠą┐ąĖčüčŗą▓ą░ąĄčé, ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čĆąĄą│ąĖčüčéčĆčŗ čĆąĄąĘąĄčĆą▓ąĮąŠą│ąŠ čģčĆą░ąĮąĄąĮąĖčÅ (backup) ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ STM32F10xxx ąĖ čüąŠčģčĆą░ąĮąĖčéčī ą┐čĆąĄąĖą╝čāčēąĄčüčéą▓ą░ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ č鹊ą║ą░ ą▓ čĆąĄąČąĖą╝ą░čģ low-power ą┤ą╗čÅ ą┤ąŠą╝ąĄąĮą░ Backup.
ą¤čĆąĖą║ą╗ą░ą┤ąĮąŠąĄ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┤ąŠą╝ąĄąĮą░ Backup. ąŚą┤ąĄčüčī ąŠą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ, ą║ą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čĆąĄą│ąĖčüčéčĆčŗ backup ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆą░ STM32F10xxx, ąĖčüą┐ąŠą╗čīąĘčāčÅ č鹊 ąČąĄ čüą░ą╝ąŠąĄ firmware, ą║ąŠč鹊čĆąŠąĄ ą▒čŗą╗ąŠ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓čŗčłąĄ ą▓ čüąĄą║čåąĖąĖ 6. ąÜąŠą┤ firmware ą╝ąŠąČąĮąŠ ąĮą░ą╣čéąĖ ą▓ ą┐ą░ą┐ą║ąĄ Run_Mode ą░čĆčģąĖą▓ą░ ZIP [7].
ŌŚÅ ą¤ąŠą┤ą║ą░čéą░ą╗ąŠą│ inc čüąŠą┤ąĄčƹȹĖčé ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮčŗąĄ čäą░ą╣ą╗čŗ (*.h).
ŌŚÅ ą¤ąŠą┤ą║ą░čéą░ą╗ąŠą│ src čüąŠą┤ąĄčƹȹĖčé čäą░ą╣ą╗čŗ ąĖčüčģąŠą┤ąĮąŠą│ąŠ ą║ąŠą┤ą░ ą┐čĆąĖą╝ąĄčĆą░ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
ŌŚÅ ą¤ąŠą┤ą║ą░čéą░ą╗ąŠą│ project čüąŠą┤ąĄčƹȹĖčé ą┤ą▓ą░ ą┐čĆąŠąĄą║čéą░, ą║ąŠč鹊čĆčŗąĄ ą║ąŠą╝ą┐ąĖą╗ąĖčĆčāčÄčé čäą░ą╣ą╗čŗ ą┐čĆąĖą╝ąĄčĆą░:
ŌĆō EWARMv5: čüąŠą┤ąĄčƹȹĖčé ą┐čĆąŠąĄą║čé ą┤ą╗čÅ čéčāą╗č湥ą╣ąĮą░ IAR EWARM.
ŌĆō RVMDK: čüąŠą┤ąĄčƹȹĖčé ą┐čĆąŠąĄą║čé ą┤ą╗čÅ čéčāą╗č湥ą╣ąĮą░ Keil.
ŌĆō RIDE: čüąŠą┤ąĄčƹȹĖčé ą┐čĆąŠąĄą║čé ą┤ą╗čÅ čéčāą╗č湥ą╣ąĮą░ RIDE.
ą¤čĆąŠą│čĆą░ą╝ą╝ą░ čŹč鹊 ą▒ą░ąĘąŠą▓ąŠąĄ ą┐čĆąĖą╗ąŠąČąĄąĮąĖąĄ, ą║ąŠč鹊čĆąŠąĄ ą┐ąŠčüčŗą╗ą░ąĄčé ą▓čĆąĄą╝čÅ ąĖąĘ RTC č湥čĆąĄąĘ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé (USART). ąÜą░ąČą┤čāčÄ čüąĄą║čāąĮą┤čā čŹč鹊 ą▓čĆąĄą╝čÅ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ backup. ą¤ąŠčüą╗ąĄ čüą▒čĆąŠčüą░ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ (power on reset) čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ backup ąŠčéą┐čĆą░ą▓ą╗čÅąĄčéčüčÅ č湥čĆąĄąĘ USART. ąÆčĆąĄą╝čÅ, ąĮą░ ą║ąŠč鹊čĆąŠą╝ ą┐čĆąŠąĖąĘąŠčłą╗ąŠ čüąŠą▒čŗčéąĖąĄ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ, ąŠč鹊ą▒čĆą░ąČą░ąĄčéčüčÅ ą▓ ąŠą║ąĮąĄ č鹥čĆą╝ąĖąĮą░ą╗ą░, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 9.
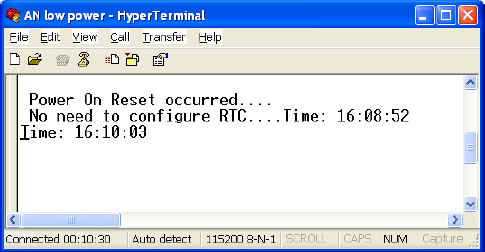
ąĀąĖčü. 9. ą×ą║ąĮąŠ HyperTerminal, ą│ą┤ąĄ ąŠč鹊ą▒čĆą░ąČą░ąĄčéčüčÅ ą▓čĆąĄą╝čÅ.
ąśčüč湥čĆą┐čŗą▓ą░čÄčēąĄąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ čüą╝. ą▓čŗčłąĄ ą▓ čĆą░ąĘą┤ąĄą╗ąĄ "6. ą×ą┐čéąĖą╝ąĖąĘą░čåąĖčÅ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ čŹąĮąĄčĆą│ąĖąĖ".
ąÉą┐ą┐ą░čĆą░čéąĮąŠąĄ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖąĄ. ąśčüą┐ąŠą╗čīąĘčāą╣č鹥 čŹč鹊čé ą┐čĆąĖą╝ąĄčĆ čü ąŠčåąĄąĮąŠčćąĮąŠą╣ ą┐ą╗ą░č鹊ą╣ čĆą░ąĘčĆą░ą▒ąŠčéčćąĖą║ą░ STM32F10xxx (STM3210B-EVAL): čüą╝. čĆčāą║ąŠą▓ąŠą┤čüčéą▓ąŠ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čÅ UM0426 [6].
ŌŚÅ ąĪąĖą│ąĮą░ą╗čŗ USART1 (RX, TX) ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī čüąŠąĄą┤ąĖąĮąĄąĮčŗ čü ą║ąŠąĮąĮąĄą║č鹊čĆąŠą╝ DB9, čü ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄą╝ čéčĆą░ąĮčüąĖą▓ąĄčĆą░ RS232.
ŌŚÅ Null-ą╝ąŠą┤ąĄą╝ąĮčŗą╣ ą║ą░ą▒ąĄą╗čī female/female RS232 ą┤ąŠą╗ąČąĄąĮ čüąŠąĄą┤ąĖąĮčÅčéčī ą║ąŠąĮąĮąĄą║č鹊čĆ DB9 (CN6 ąĮą░ ą┐ą╗ą░č鹥 STM3210B-EVAL) ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮčŗą╣ ą┐ąŠčĆčé ą║ąŠą╝ą┐čīčÄč鹥čĆą░ PC.
ŌŚÅ RTC čü ą┐ąĖčéą░ąĮąĖąĄą╝ ąŠčé VBAT: ąĘą░ą╝ąĄąĮąĖč鹥 ą┐ąĄčĆąĄą╝čŗčćą║čā J11 ąĮą░ ą╝ąĖą╗ą╗ąĖą░ą╝ą┐ąĄčĆą╝ąĄčéčĆ (čćč鹊ą▒čŗ ąĖąĘą╝ąĄčĆąĖčéčī ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄ č鹊ą║ą░), ąĖą╗ąĖ ą┐ąŠą┤ą║ą╗čÄčćąĖč鹥 ą▒ą░čéą░čĆąĄčÄ ąĮą░ 3V ą║ ąĮąŠąČą║ąĄ VBAT (ą▒ą░čéą░čĆąĄčÅ čāąČąĄ čüą╝ąŠąĮčéąĖčĆąŠą▓ą░ąĮą░ ąĮą░ ą┐ą╗ą░č鹥 STM3210B-EVAL) čü ą┐ąŠą╝ąŠčēčīčÄ čŹč鹊ą╣ ą┐ąĄčĆąĄą╝čŗčćą║ąĖ.
ą×ą┐ąĖčüą░ąĮąĖąĄ firmware. ąÜą░ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī č鹥čüč鹊ą▓čŗą╣ ą┐čĆąĖą╝ąĄčĆ ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ:
ŌŚÅ ąŚą░ą┐čāčüčéąĖč鹥 čŹč鹊čé ą┐čĆąĖą╝ąĄčĆ č鹥ą╝ čéčāą╗č湥ą╣ąĮąŠą╝, ą║ąŠč鹊čĆčŗą╣ ąĖčüą┐ąŠą╗čīąĘčāąĄč鹥. ą£ąŠąČąĮąŠ ą┐čĆąĖą╝ąĄąĮąĖčéčī čüčéą░ąĮą┤ą░čĆčéąĮčŗą╣ ąĖąĮčüčéčĆčāą╝ąĄąĮčéą░čĆąĖą╣. ążą░ą╣ą╗ .uv2 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ą┐čĆąŠąĄą║čéą░ ą▓ čéčāą╗č湥ą╣ąĮąĄ RVMDK (Keil), čŹč鹊čé čäą░ą╣ą╗ čüąŠą┤ąĄčƹȹĖčéčüčÅ ą▓ ą┐ą░ą┐ą║ąĄ RVMDK. ążą░ą╣ą╗ .eww, ąĖčüą┐ąŠą╗čīąĘčāąĄą╝čŗą╣ ą┤ą╗čÅ ąĘą░ą┐čāčüą║ą░ ą┐čĆąŠąĄą║čéą░ ą▓ čéčāą╗č湥ą╣ąĮąĄ EWARM (IAR), ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ą░ą┐ą║ąĄ EWARM.
ŌŚÅ ąĪą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 HyperTerminal ąĮą░ ą║ąŠą╝ą┐čīčÄč鹥čĆąĄ PC (ąĖą╗ąĖ ą╗čÄą▒čāčÄ ą┤čĆčāą│čāčÄ ą┐čĆąŠą│čĆą░ą╝ą╝čā č鹥čĆą╝ąĖąĮą░ą╗ą░, ąĮą░ą┐čĆąĖą╝ąĄčĆ Putty ąĖą╗ąĖ SecureCRT) čüąŠ čüą╗ąĄą┤čāčÄčēąĖą╝ąĖ ąĮą░čüčéčĆąŠą╣ą║ą░ą╝ąĖ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠą│ąŠ ą┐ąŠčĆčéą░:
ŌĆō ą┤ą╗ąĖąĮą░ čüą╗ąŠą▓ą░ 8 ą▒ąĖčé
ŌĆō ąŠą┤ąĖąĮ Stop-ą▒ąĖčé
ŌĆō ą▒ąĄąĘ ą║ąŠąĮčéčĆąŠą╗čÅ č湥čéąĮąŠčüčéąĖ (No parity)
ŌĆō čüą║ąŠčĆąŠčüčéčī (Baud rate) 115200 baud
ŌĆō čāą┐čĆą░ą▓ą╗ąĄąĮąĖąĄ ą┐ąŠč鹊ą║ąŠą╝ ąŠčéą║ą╗čÄč湥ąĮąŠ (flow control: none)
ŌŚÅ ąĪą║ąŠąĮčäąĖą│čāčĆąĖčĆčāą╣č鹥 firmware. ąÆ ąĘą░ą│ąŠą╗ąŠą▓ąŠčćąĮąŠą╝ čäą░ą╣ą╗ąĄ (main.h) ą╝ąŠą│čāčé ą▒čŗčéčī ą▓čŗą▒čĆą░ąĮčŗ ąĮąĄčüą║ąŠą╗čīą║ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖą╣ #define, čćč鹊ą▒čŗ ąĮą░čüčéčĆąŠąĖčéčī ąĮčāąČąĮčŗąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą┐čĆąĖą╝ąĄčĆą░. ąśčüą┐ąŠą╗čīąĘčāčÅ #define, ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé čüą░ą╝ąŠčüč鹊čÅč鹥ą╗čīąĮąŠ ąĖąĘą╝ąĄčĆąĖčéčī ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠčéčĆąĄą▒ą╗čÅąĄą╝ąŠą│ąŠ č鹊ą║ą░, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą┤ą░ą╗ąĄąĄ ą▓ čéą░ą▒ą╗ąĖčåąĄ 9.
ążčāąĮą║čåąĖčÅ ą┤ąŠą╝ąĄąĮą░ Backup ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ STM32F10xxx čü čüąŠčģčĆą░ąĮąĄąĮąĖąĄą╝ čĆą░ą▒ąŠčéčŗ RTCąĖ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ ą┤ąĄčüčÅčéąĖ 16-ą▒ąĖčéąĮčŗčģ čĆąĄą│ąĖčüčéčĆąŠą▓. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé čüąŠčģčĆą░ąĮąĖčéčī ąĮąĄą║ąŠč鹊čĆčāčÄ ą┐ąŠą╗ąĄąĘąĮčāčÄ ąĖąĮč乊čĆą╝ą░čåąĖčÄ ą╝ąĄąČą┤čā ą┐ąĄčĆąĄąĘą░ą┐čāčüą║ą░ą╝ąĖ (ą▓čŗą║ą╗čÄč湥ąĮąĖąĄą╝ ąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĄą╝ ąŠą▒čēąĄą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ) ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ. ąÆ čŹč鹊ą╝ ą┐čĆąĖą╝ąĄčĆąĄ ą┐čĆąŠčüč鹊 ąĘą░ą┐ąĖčüčŗą▓ą░ą╗ąŠčüčī ą▓čĆąĄą╝čÅ ą╝ąŠą╝ąĄąĮčéą░ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą▓čŗą║ą╗čÄč湥ąĮąĖčÅ. ąóąŠčćąĮąŠ čéą░ą║ ąČąĄ ą╝ąŠąČąĄčé čüąŠčģčĆą░ąĮčÅčéčīčüčÅ ąĖ ąĮąĄą║ąŠč鹊čĆčŗą╣ ą║ąŠąĮč鹥ą║čüčé ą┐čĆąĖą╗ąŠąČąĄąĮąĖčÅ.
[ąĪčüčŗą╗ą║ąĖ]
1. AN2629 STM32F101xx, STM32F102xx and STM32F103xx low-power modes site:st.com.
2. RM0008 Reference manual STM32F101xx, STM32F102xx, STM32F103xx, STM32F105xx and STM32F107xx advanced Arm®-based 32-bit MCUs site:st.com.
3. PM0075 Programming manual STM32F10xxx Flash memory microcontrollers site:st.com.
4. ARM CortexŌäó-M3 Technical Reference Manual site:developer.arm.com.
5. STM32 IWDG.
6. UM0426 User manual STM3210B-EVAL evaluation board site:st.com.
7. 210510AN2629-STM32F10xxx-low-power-modes.zip - ąĖčüčģąŠą┤ąĮčŗą╣ ą║ąŠą┤ ą┐čĆąĖą╝ąĄčĆąŠą▓, ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ. |



