|
ą”ąĖčäčĆąŠą▓ąŠą╣ č鹥čĆą╝ąŠą╝ąĄčéčĆ DS18B20 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ą▓ ą│čĆą░ą┤čāčüą░čģ ą”ąĄą╗čīčüąĖčÅ, čü čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčīčÄ ąŠčé 9 ą┤ąŠ 12 ą▒ąĖčé. ąóą░ą║ąČąĄ ą▓ ąĮąĄą│ąŠ ą▓čüčéčĆąŠąĄąĮą░ čäčāąĮą║čåąĖčÅ čéčĆąĄą▓ąŠą│ąĖ, ą▓ąĄčĆčģąĮąĖąĄ ąĖ ąĮąĖąČąĮąĖąĄ ą┐ąŠčĆąŠą│ąĖ ą┤ą╗čÅ ą║ąŠč鹊čĆąŠą╣ ąĘą░ą┐ąŠą╝ąĖąĮą░čÄčéčüčÅ ą▓ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ, ą║ąŠč鹊čĆčāčÄ ą╝ąŠąČąĄčé ąĘą░ą┐čĆąŠą│čĆą░ą╝ą╝ąĖčĆąŠą▓ą░čéčī ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī.
DS18B20 ąŠą▒ą╝ąĄąĮąĖą▓ą░ąĄčéčüčÅ ą┤ą░ąĮąĮčŗą╝ąĖ čü čģąŠčüč鹊ą╝ ą┐ąŠ čłąĖąĮąĄ 1-Wire (ą╝ą░čüč鹥čĆąŠą╝ čłąĖąĮčŗ 1-Wire ąŠą▒čŗčćąĮąŠ čÅą▓ą╗čÅąĄčéčüčÅ ą▓ąĮąĄčłąĮąĖą╣ ą╝ąĖą║čĆąŠą║ąŠąĮčéčĆąŠą╗ą╗ąĄčĆ, MCU). ą©ąĖąĮą░ ąĖ ą┐čĆąŠč鹊ą║ąŠą╗ 1-Wire čāčüčéčĆąŠąĄąĮčŗ čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, čćč鹊 ą┐čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą┐ą░čĆą░ąĘąĖčéąĮąŠą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ (ąŠą▒ čŹč鹊ą╝ ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ ą┤ą░ą╗ąĄąĄ) ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ ąĖ ąŠą▒ą╝ąĄąĮą░ ą┤ą░ąĮąĮčŗą╝ąĖ čü MCU ą┤ąŠčüčéą░č鹊čćąĮąŠ č鹊ą╗čīą║ąŠ ą┤ą▓čāčģ ą┐čĆąŠą▓ąŠą┤ąŠą▓ - čüąĖą│ąĮą░ą╗ą░ ą┤ą░ąĮąĮčŗčģ ąĖ ąŠą▒čēąĄą│ąŠ ą┐čĆąŠą▓ąŠą┤ą░ (GND). ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, DS18B20 ą╝ąŠąČąĄčé ą┐ąŠą╗čāčćą░čéčī ą┐ąĖčéą░ąĮąĖąĄ ą╗ąĖą▒ąŠ ąŠčé čüą┐ąĄčåąĖą░ą╗čīąĮąŠą│ąŠ ą▓čŗą▓ąŠą┤ą░, ą╗ąĖą▒ąŠ č湥čĆąĄąĘ ąĮą░ą│čĆčāąĘąŠčćąĮčŗą╣ čĆąĄąĘąĖčüč鹊čĆ čüąĖą│ąĮą░ą╗ą░ ą┤ą░ąĮąĮčŗčģ (ą┐ą░čĆą░ąĘąĖčéąĮąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ), ą▓ąŠ ą▓č鹊čĆąŠą╝ čüą╗čāčćą░ąĄ čāčüčéčĆą░ąĮčÅąĄčéčüčÅ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéčī ą▓ ą┐čĆąĖą╝ąĄąĮąĄąĮąĖąĖ ą┤ąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ.
ąÆ ą║ą░ąČą┤čŗą╣ DS18B20 ą┐čĆąŠčłąĖčé čāąĮąĖą║ą░ą╗čīąĮčŗą╣ 64-čĆą░ąĘčĆčÅą┤ąĮčŗą╣ čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ, ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą║ąŠč鹊čĆąŠą│ąŠ ą▓ ą┐čĆąŠč鹊ą║ąŠą╗ąĄ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĮąĄčüą║ąŠą╗čīą║ąĖą╝ DS18B20 čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░čéčī ąĮą░ ąŠą┤ąĮąŠą╣ ąĖ č鹊ą╣ ąČąĄ čłąĖąĮąĄ 1-Wire. ą¤čĆąĖ čŹč鹊ą╝ ą▓čüąĄ DS18B20 ą┐ąŠą┤ą║ą╗čÄčćą░čÄčéčüčÅ ą║ MCU ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ, ąĖ ąŠą┤ąĖąĮ MCU ą╝ąŠąČąĄčé čüąĮąĖą╝ą░čéčī ą┤ą░ąĮąĮčŗąĄ čü ą╝ąĮąŠą│ąĖčģ ą╝ąĖą║čĆąŠčüčģąĄą╝ DS18B20, čĆą░čüą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗčģ ą┐ąŠ ą▒ąŠą╗čīčłąŠą╝čā ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓čā. ą¤ąŠą┤ą║ą╗čÄč湥ąĮąĖąĄ ą┤ą░čéčćąĖą║ąŠą▓ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ čāą┐čĆąŠčēą░ąĄčéčüčÅ, čćč鹊 ąŠč湥ąĮčī ą▓ą░ąČąĮąŠ ą┤ą╗čÅ čüąĖčüč鹥ą╝ ą║ąŠąĮčéčĆąŠą╗čÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ, ą▓ąĄąĮčéąĖą╗čÅčåąĖąĖ ąĖ ą║ąŠąĮą┤ąĖčåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ ą┐ąŠą╝ąĄčēąĄąĮąĖą╣ (HVAC) ąĖą╗ąĖ ą┐čĆąŠą╝čŗčłą╗ąĄąĮąĮąŠą│ąŠ ąŠą▒ąŠčĆčāą┤ąŠą▓ą░ąĮąĖčÅ.
ą×čüąĮąŠą▓ąĮčŗąĄ ąŠčüąŠą▒ąĄąĮąĮąŠčüčéąĖ DS18B20:
ŌŚÅ ąŻąĮąĖą║ą░ą╗čīąĮčŗą╣ 1-Wire ąĖąĮč鹥čĆč乥ą╣čü, ą║ąŠč鹊čĆčŗą╣ čéčĆąĄą▒čāąĄčé ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠą╣ ąĮąŠąČą║ąĖ ą┐ąŠčĆčéą░ MCU.
ŌŚÅ ąŻą╝ąĄąĮčīčłą░ąĄčéčüčÅ ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ąĮąĄąŠą▒čģąŠą┤ąĖą╝čŗčģ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ ą▓ čüąĖčüč鹥ą╝ąĄ, ą┐ąŠč鹊ą╝čā čćč鹊 ą▓ ąŠą┤ąĮąŠą╝ DS18B20 ąĖąĮč鹥ą│čĆąĖčĆąŠą▓ą░ąĮčŗ čüčĆą░ąĘčā ąĖ čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ, ąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗą╣ ą┤ą░čéčćąĖą║, ąĖ ą┐ą░ą╝čÅčéčī EEPROM.
ŌŚÅ ąöąĖą░ą┐ą░ąĘąŠąĮ ąĖąĘą╝ąĄčĆčÅąĄą╝čŗčģ č鹥ą╝ą┐ąĄčĆą░čéčāčĆ -55┬░C .. +125┬░C (-67┬░F .. +257┬░F).
ŌŚÅ ąóąŠčćąĮąŠčüčéčī ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ┬▒0.5┬░C ą▓ ą┤ąĖą░ą┐ą░ąĘąŠąĮąĄ -10┬░C .. +85┬░C.
ŌŚÅ ą¤čĆąŠą│čĆą░ą╝ą╝ąĖčĆčāąĄą╝ą░čÅ čĆą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī ąŠčé 9 ą┤ąŠ 12 ą▒ąĖčé (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ 12 ą▒ąĖčé).
ŌŚÅ ąśąĘ ą▓ąĮąĄčłąĮąĖčģ ą║ąŠą╝ą┐ąŠąĮąĄąĮč鹊ą▓ čéčĆąĄą▒čāąĄčéčüčÅ č鹊ą╗čīą║ąŠ ą▓ąĄčĆčģąĮąĖą╣ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖą╣ čĆąĄąĘąĖčüč鹊čĆ (čéąĖą┐ąŠą▓ąŠą╣ ąĮąŠą╝ąĖąĮą░ą╗ 4.7 ą║ą×ą╝).
ŌŚÅ ąĀąĄąČąĖą╝ ą┐ą░čĆą░ąĘąĖčéąĮąŠą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ čéčĆąĄą▒čāąĄčé č鹊ą╗čīą║ąŠ 2 ą┐čĆąŠą▓ąŠą┤ąŠą▓ ą┤ą╗čÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĖčÅ (DQ ąĖ GND).
ŌŚÅ ąŻą┐čĆąŠčēą░ąĄčéčüčÅ ą┐ąŠčüčéčĆąŠąĄąĮąĖąĄ ą╝ąĮąŠą│ąŠč鹊č湥čćąĮčŗčģ čüąĖčüč鹥ą╝ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮąŠą│ąŠ ą║ąŠąĮčéčĆąŠą╗čÅ.
ŌŚÅ ąÆ ą║ą░ąČą┤ąŠą╝ čāčüčéčĆąŠą╣čüčéą▓ąĄ ąĘą░ą┐ąĖčüą░ąĮ čāąĮąĖą║ą░ą╗čīąĮčŗą╣ 64-čĆą░ąĘčĆčÅą┤ąĮčŗą╣ čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ (čüąŠčģčĆą░ąĮąĄąĮąĮčŗą╣ ą▓ąŠ ą▓ąĮčāčéčĆąĄąĮąĮąĄą╝ ą¤ąŚąŻ).
ŌŚÅ ąōąĖą▒ą║ą░čÅ ąĮą░čüčéčĆąŠą╣ą║ą░ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗčģ ą┐ą░čĆą░ą╝ąĄčéčĆąŠą▓ ą┤ą╗čÅ čäčāąĮą║čåąĖąĖ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąŠ ą┐čĆąĄą▓čŗčłąĄąĮąĖąĖ ąĮąĖąČąĮąĄą│ąŠ ąĖ ą▓ąĄčĆčģąĮąĄą│ąŠ ą┐ąŠčĆąŠą│ąŠą▓ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ (Alarm Settings). ąĪą┐ąĄčåąĖą░ą╗čīąĮą░čÅ ą║ąŠą╝ą░ąĮą┤ą░ Alarm Search ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāąĄčé čāčüčéčĆąŠą╣čüčéą▓ą░, čā ą║ąŠč鹊čĆčŗčģ č鹥ą╝ą┐ąĄčĆą░čéčāčĆą░ ą┐čĆąĄą▓čŗčüąĖą╗ą░ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗąĄ ą┐čĆąĄą┤ąĄą╗čŗ.
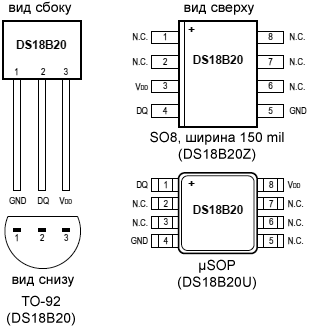
ŌŚÅ ąöą░čéčćąĖą║ąĖ DS18B20 ą┐ąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ ą▓ 8-ą▓čŗą▓ąŠą┤ąĮčŗčģ ą║ąŠčĆą┐čāčüą░čģ SO (čü čłąĖčĆąĖąĮąŠą╣ ą║ąŠčĆą┐čāčüą░ 150 mil), 8-ą▓čŗą▓ąŠą┤ąĮčŗčģ ą║ąŠčĆą┐čāčüą░čģ ╬╝SOP, ąĖ 3-ą▓čŗą▓ąŠą┤ąĮčŗčģ ą║ąŠčĆą┐čāčüą░čģ TO-92.
[ą¤čĆąĄą┤ąĄą╗čīąĮčŗąĄ ą┤ąŠą┐čāčüčéąĖą╝čŗąĄ ąĘąĮą░č湥ąĮąĖčÅ]
ąĪą╗ąĄą┤čāčÄčēąĖąĄ ą┐ą░čĆą░ą╝ąĄčéčĆčŗ ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ č鹊ą╗čīą║ąŠ ą║ą░ą║ čüčéčĆąĄčüčüąŠą▓čŗąĄ ą┐čĆąĄą┤ąĄą╗čīąĮčŗąĄ, ąĖ ą╗čÄą▒ąŠąĄ čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą┐čĆąĖ čŹčéąĖčģ ą┐ą░čĆą░ą╝ąĄčéčĆą░čģ ąĖą╗ąĖ ą┐čĆąĄą▓čŗčłą░čÄčēąĖčģ čŹčéąĖ ąĘąĮą░č湥ąĮąĖčÅ, ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ č鹊ą╝čā, čćč鹊 čüą┐ąĄčåąĖčäąĖą║ą░čåąĖąĖ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓čŗą┐ąŠą╗ąĮčÅčéčīčüčÅ ąĮąĄ ą▒čāą┤čāčé. ąĀą░ą▒ąŠčéą░ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓ čāčüą╗ąŠą▓ąĖčÅčģ ą┐čĆąĄą┤ąĄą╗čīąĮčŗčģ ą┤ąŠą┐čāčüčéąĖą╝čŗčģ ąĘąĮą░č湥ąĮąĖą╣ ą▓ č鹥č湥ąĮąĖąĄ ą┤ą╗ąĖč鹥ą╗čīąĮąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąŠąČąĄčé ą┐ąŠą▓ą╗ąĖčÅčéčī ąĮą░ ąĮą░ą┤ąĄąČąĮąŠčüčéčī čäčāąĮą║čåąĖąŠąĮąĖčĆąŠą▓ą░ąĮąĖčÅ.
| ą¤ą░čĆą░ą╝ąĄčéčĆ |
ąŚąĮą░č湥ąĮąĖčÅ |
| ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ąĮą░ ą╗čÄą▒ąŠą╝ ą▓čŗą▓ąŠą┤ąĄ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ GND |
-0.5V .. +6.0V |
| ąĀą░ą▒ąŠčćąĖą╣ ą┤ąĖą░ą┐ą░ąĘąŠąĮ č鹥ą╝ą┐ąĄčĆą░čéčāčĆ |
-55┬░C .. +125┬░C |
| ąöąĖą░ą┐ą░ąĘąŠąĮ č鹥ą╝ą┐ąĄčĆą░čéčāčĆ čģčĆą░ąĮąĄąĮąĖčÅ |
-55┬░C .. +125┬░C |
| ąóąĄą╝ą┐ąĄčĆą░čéčāčĆą░ ą┐ą░ą╣ą║ąĖ |
ąĪą╝. čüą┐ąĄčåąĖčäąĖą║ą░čåąĖčÄ IPC/JEDEC J-STD-020 |
[DC-čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ]
ąÆ čüą╗ąĄą┤čāčÄčēąĄą╣ čéą░ą▒ą╗ąĖčåąĄ ą┐čĆąĖą▓ąĄą┤ąĄąĮčŗ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ ą┐ąŠ ą┐ąŠčüč鹊čÅąĮąĮąŠą╝čā (DC) č鹊ą║čā ą┤ą╗čÅ čāčüą╗ąŠą▓ąĖą╣ -55┬░C .. +125┬░C, VDD = 3.0V .. 5.5V.
| ąĪąĖą╝ą▓. |
ą¤ą░čĆą░ą╝ąĄčéčĆ |
ąŻčüą╗ąŠą▓ąĖčÅ |
min |
Typ |
MAX |
ąĢą┤. |
| VDD |
ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąĖčéą░ąĮąĖčÅ |
ąøąŠą║ą░ą╗čīąĮąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ(1) |
+3.0 |
|
+5.5 |
V |
| VPU |
ąØą░ą┐čĆčÅąČąĄąĮąĖąĄ ą┐ąŠą┤čéčÅąČą║ąĖ |
ą¤ą░čĆą░ąĘąĖčéąĮąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ(1,2) |
+3.0 |
|
+5.5 |
| ąøąŠą║ą░ą╗čīąĮąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ(1,2) |
+3.0 |
|
VDD |
| tERR |
ąóąĄą╝ą┐ąĄčĆą░čéčāčĆąĮą░čÅ ąŠčłąĖą▒ą║ą░ |
-10┬░C .. +85┬░C(3) |
|
|
┬▒0.5 |
┬░C |
| -30┬░C .. +100┬░C(3) |
|
|
┬▒1 |
| -55┬░C .. +125┬░C(3) |
|
|
┬▒2 |
| VIL |
ąÆčģąŠą┤ąĮąŠą╣ ą╗ąŠą│. 0(1,4,5) |
|
-0.3 |
|
+0.8 |
V |
| VIH |
ąÆčģąŠą┤ąĮą░čÅ ą╗ąŠą│. 1(1,6) |
ąøąŠą║ą░ą╗čīąĮąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ |
+2.2 |
|
ą£ąĄąĮčīčłąĄ 5.5
ąĖą╗ąĖ
VDD+0.3 |
| ą¤ą░čĆą░ąĘąĖčéąĮąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ |
+3.0 |
|
| IL |
ąÆč鹥ą║ą░čÄčēąĖą╣ č鹊ą║ (Sink Current) |
VI/O = 0.4V |
4.0 |
|
|
mA |
| IDDS |
ąóąŠą║ čĆąĄąČąĖą╝ą░ ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą║ąĖ (standby)(7,8) |
|
|
750 |
1000 |
nA |
| IDD |
ąóąŠą║ ą┐čĆąĖ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ(9) |
VDD = 5V |
|
1 |
1.5 |
mA |
| IDQ |
ąÆčģąŠą┤ąĮąŠą╣ č鹊ą║ DQ(10) |
|
|
5 |
|
╬╝A |
| |
ąöčĆąĄą╣čä(11) |
|
|
┬▒0.2 |
|
┬░C |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
(1) ąÆčüąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ čāą║ą░ąĘą░ąĮčŗ ąŠčéąĮąŠčüąĖč鹥ą╗čīąĮąŠ ąŠą▒čēąĄą│ąŠ ą┐čĆąŠą▓ąŠą┤ą░ GND.
(2) ąĪą┐ąĄčåąĖčäąĖą║ą░čåąĖčÅ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ, ą┐ąŠą┤ą░ą▓ą░ąĄą╝ąŠą│ąŠ č湥čĆąĄąĘ čĆąĄąĘąĖčüč鹊čĆ ą┐ąŠą┤čéčÅąČą║ąĖ (Pullup Supply Voltage) ą┐ąŠą┤čĆą░ąĘčāą╝ąĄą▓ą░ąĄčé ąĖą┤ąĄą░ą╗čīąĮčŗą╣ ą║ąŠą╝ą┐ąŠąĮąĄąĮčé pullup, ąĖ ą┐ąŠ čŹč鹊ą╣ ą┐čĆąĖčćąĖąĮąĄ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 1 ą┐ąŠą┤čéčÅąČą║ąĖ čĆą░ą▓ąĄąĮ VPU. ą¦č鹊ą▒čŗ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčéčī ą┐ą░čĆą░ą╝ąĄčéčĆčā VIH ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ DS18B20, čĆąĄą░ą╗čīąĮąŠąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ čłąĖąĮčŗ ą┐ąĖčéą░ąĮąĖčÅ ą┤ą╗čÅ čéčĆą░ąĮąĘąĖčüč鹊čĆą░ strong pullup ą┤ąŠą╗ąČąĮąŠ ą▓ą║ą╗čÄčćą░čéčī ą┐ą░ą┤ąĄąĮąĖąĄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĮą░ čŹč鹊ą╝ čéčĆą░ąĮąĘąĖčüč鹊čĆąĄ, ą║ąŠą│ą┤ą░ ąŠąĮ ąŠčéą║čĆčŗčé. ą¤ąŠčŹč鹊ą╝čā VPU_ACTUAL = VPU_IDEAL + VTRANSISTOR.
(3) ąĪą╝. čéąĖą┐ąŠą▓čāčÄ ą║čĆąĖą▓čāčÄ ą┐čĆąŠąĖąĘą▓ąŠą┤ąĖč鹥ą╗čīąĮąŠčüčéąĖ ąĮą░ čĆąĖčü. 1. ą¤čĆąĄą┤ąĄą╗čŗ ą┐ąŠą│čĆąĄčłąĮąŠčüčéąĖ č鹥čĆą╝ąŠą╝ąĄčéčĆą░ čüąŠčüčéą░ą▓ą╗čÅčÄčé 3-sigma ąĘąĮą░č湥ąĮąĖčÅ.
(4) ąØą░ą┐čĆčÅąČąĄąĮąĖčÅ ą╗ąŠą│. 0 čāą║ą░ąĘą░ąĮčŗ ą┤ą╗čÅ ą▓č鹥ą║ą░čÄčēąĄą│ąŠ č鹊ą║ą░ (Sink Current) 4 mA.
(5) ąöą╗čÅ ą│ą░čĆą░ąĮčéąĖąĖ č乊čĆą╝ąĖčĆąŠą▓ą░ąĮąĖčÅ presence pulse ą▓ čāčüą╗ąŠą▓ąĖčÅčģ ą┐ąŠąĮąĖąČąĄąĮąĮąŠą│ąŠ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąŠčé ą┐ą░čĆą░ąĘąĖčéąĮąŠą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ, VILMAX ą▓ąŠąĘą╝ąŠąČąĮąŠ ą┐čĆąĖą┤ąĄčéčüčÅ čāą╝ąĄąĮčīčłąĖčéčī ą┤ąŠ 0.5V.
(6) ąØą░ą┐čĆčÅąČąĄąĮąĖčÅ ą╗ąŠą│. 1 čāą║ą░ąĘą░ąĮčŗ ą┐čĆąĖ ą▓čŗč鹥ą║ą░čÄčēąĄą╝ č鹊ą║ąĄ (source current) 1 mA.
(7) ąóąŠą║ standby čāą║ą░ąĘą░ąĮ ą┤ą╗čÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆ ą┤ąŠ +70┬░C. ąóąŠą║ standby ą┐čĆąĖ +125┬░C ąŠą▒čŗčćąĮąŠ čüąŠčüčéą░ą▓ą╗čÅąĄčé 3╬╝A.
(8) ąöą╗čÅ ą╝ąĖąĮąĖą╝ąĖąĘą░čåąĖąĖ IDDS, čāčĆąŠą▓ąĄąĮčī DQ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ą▓ čüą╗ąĄą┤čāčÄčēąĖčģ ą┤ąĖą░ą┐ą░ąĘąŠąĮą░čģ: GND Ōēż DQ Ōēż GND + 0.3V ąĖą╗ąĖ VDD ŌĆō 0.3V Ōēż DQ Ōēż VDD.
(9) ąóąŠą║ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé č鹊ą║čā ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą▓ąŠ ą▓čĆąĄą╝čÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗčģ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖą╣ ąĖą╗ąĖ ąĘą░ą┐ąĖčüąĄą╣ ą▓ EEPROM.
(10) DQ ą▓ ą╗ąŠą│. 1 (čüąŠčüč鹊čÅąĮąĖąĄ ąŠčéą║ą╗čÄč湥ąĮąŠ, high-Z).
(11) ąöą░ąĮąĮčŗąĄ ą┤čĆąĄą╣čäą░ ąŠčüąĮąŠą▓ą░ąĮčŗ ąĮą░ 1000-čćą░čüąŠą▓ąŠą╝ č鹥čüč鹥 ą┐čĆąĖ +125┬░C ąĖ VDD = 5.5V.
[AC-čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝ąŠą╣ ą┐ą░ą╝čÅčéąĖ]
ąöą░ąĮąĮčŗąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą│ąŠ (AC) č鹊ą║ą░ čāą║ą░ąĘą░ąĮčŗ ą┤ą╗čÅ čāčüą╗ąŠą▓ąĖą╣ -55┬░C .. +125┬░C, VDD = 3.0V .. 5.5V.
| ąĪąĖą╝ą▓. |
ą¤ą░čĆą░ą╝ąĄčéčĆ |
ąŻčüą╗ąŠą▓ąĖčÅ |
min |
Typ |
MAX |
ąĢą┤. |
| tWR |
ąÆčĆąĄą╝čÅ čåąĖą║ą╗ą░ ąĘą░ą┐ąĖčüąĖ |
|
|
2 |
10 |
ą╝čü |
| NEEWR |
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ąĘą░ą┐ąĖčüąĄą╣ ą▓ EEPROM |
-55┬░C .. +55┬░C |
50k |
|
|
|
| tEEDR |
ąÆčĆąĄą╝čÅ čüąŠčģčĆą░ąĮąĮąŠčüčéąĖ ąĘą░ą┐ąĖčüą░ąĮąĮčŗčģ ą┤ą░ąĮąĮčŗčģ |
10 |
|
|
ą╗ąĄčé |
[AC-čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ąĖ]
ąöą░ąĮąĮčŗąĄ čģą░čĆą░ą║č鹥čĆąĖčüčéąĖą║ ą┐ąĄčĆąĄą╝ąĄąĮąĮąŠą│ąŠ (AC) č鹊ą║ą░ čāą║ą░ąĘą░ąĮčŗ ą┤ą╗čÅ čāčüą╗ąŠą▓ąĖą╣ -55┬░C .. +125┬░C, VDD = 3.0V .. 5.5V.
| ąĪąĖą╝ą▓. |
ą¤ą░čĆą░ą╝ąĄčéčĆ |
ąŻčüą╗ąŠą▓ąĖčÅ |
min |
Typ |
MAX |
ąĢą┤. |
| tCONV |
ąÆčĆąĄą╝čÅ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ(12) |
ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ 9 ą▒ąĖčé |
|
|
93.75 |
ą╝čü |
| ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ 10 ą▒ąĖčé |
|
|
187.5 |
| ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ 11 ą▒ąĖčé |
|
|
375 |
| ąĀą░ąĘčĆąĄčłąĄąĮąĖąĄ 12 ą▒ąĖčé |
|
|
750 |
| tSPON |
ąÆčĆąĄą╝čÅ ą▓ą║ą╗čÄč湥ąĮąĖčÅ strong pullup |
ąÆčŗą┤ą░ąĮą░ ą║ąŠą╝ą░ąĮą┤ą░ Convert T |
|
|
10 |
ą╝ą║čü |
| tSLOT |
ąÆčĆąĄą╝čÅ čéą░ą╣ą╝čüą╗ąŠčéą░(12) |
|
60 |
|
120 |
| tREC |
ąÆčĆąĄą╝čÅ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ(12) |
|
1 |
|
|
| tLOW0 |
ąÆčĆąĄą╝čÅ ą╗ąŠą│. 0 ąŠą┐ąĄčĆą░čåąĖąĖ Write 0(12) |
|
60 |
|
120 |
| tLOW1 |
ąÆčĆąĄą╝čÅ ą╗ąŠą│. 0 ąŠą┐ąĄčĆą░čåąĖąĖ Write 1(12) |
|
1 |
|
15 |
| tRDV |
ąÆčĆąĄą╝čÅ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠčüčéąĖ ą┤ą░ąĮąĮčŗčģ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ(12) |
|
|
|
15 |
| tRSTH |
ąÆčĆąĄą╝čÅ ą╗ąŠą│. 1 ąĖą╝ą┐čāą╗čīčüą░ čüą▒čĆąŠčüą░(12) |
|
480 |
|
|
| tRSTL |
ąÆčĆąĄą╝čÅ ą╗ąŠą│. 0 ąĖą╝ą┐čāą╗čīčüą░ čüą▒čĆąŠčüą░(12,13) |
|
480 |
|
|
| tPDHIGH |
ąÆčĆąĄą╝čÅ ą╗ąŠą│. 1 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąĖą╝ą┐čāą╗čīčüą░ ą┐čĆąĖčüčāčéčüčéą▓ąĖčÅ(12) |
|
15 |
|
60 |
| tPDLOW |
ąÆčĆąĄą╝čÅ ą╗ąŠą│. 0 ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ ąĖą╝ą┐čāą╗čīčüą░ ą┐čĆąĖčüčāčéčüčéą▓ąĖčÅ(12) |
|
60 |
|
240 |
| CIN/OUT |
ąĢą╝ą║ąŠčüčéčī |
|
|
|
25 |
ą┐ąż |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
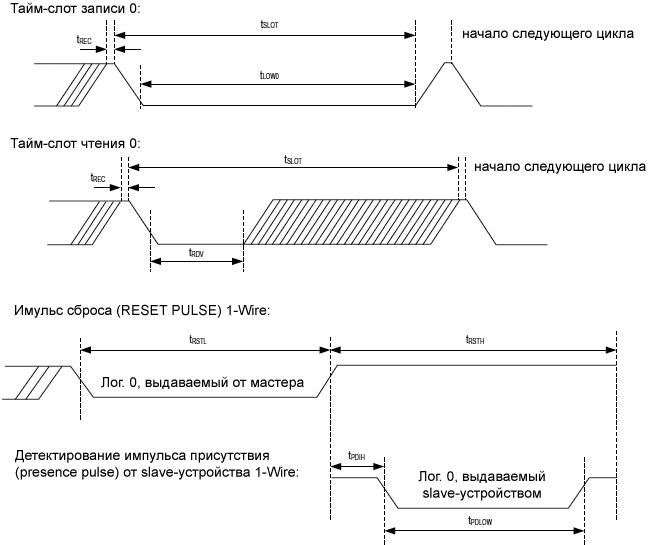
(12) ąĪą╝. ą┤ąĖą░ą│čĆą░ą╝ą╝čŗ ą▓čĆąĄą╝ąĄąĮąĖ ąĮą░ čĆąĖčü. 2.
(13) ąÆ čĆąĄąČąĖą╝ąĄ ą┐ą░čĆą░ąĘąĖčéąĮąŠą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ, ąĄčüą╗ąĖ tRSTL > 960 ą╝ą║čü, č鹊 ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ čüą▒čĆąŠčü ą┐ąŠ ą┐ąĖčéą░ąĮąĖčÄ (power-on reset).
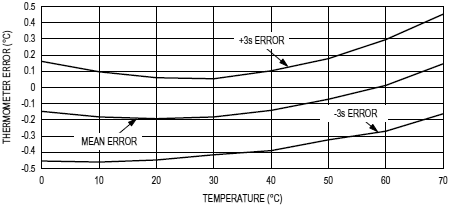
ąĀąĖčü. 1. ąóąĖą┐ąŠą▓ą░čÅ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéčī ąŠčłąĖą▒ą║ąĖ ą▓ ąĘą░ą▓ąĖčüąĖą╝ąŠčüčéąĖ ąŠčé č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ.
ąĀąĖčü. 2. ąöąĖą░ą│čĆą░ą╝ą╝čŗ ą▓čĆąĄą╝ąĄąĮąĖ.
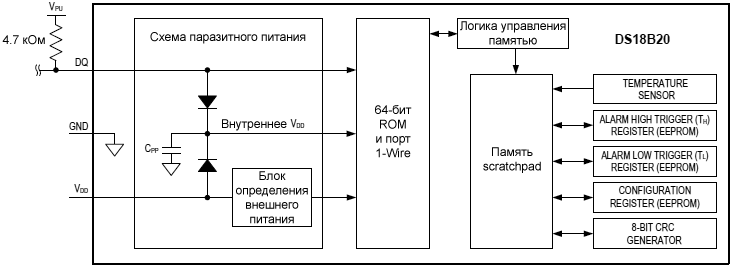
[ą×ą▒čēąĄąĄ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ DS18B20]
ąØą░ čĆąĖčü. 3 ą┐ąŠą║ą░ąĘą░ąĮą░ ą▒ą╗ąŠą║-čüčģąĄą╝ą░ DS18B20. ąÆ 64-bit ROM čģčĆą░ąĮąĖčéčüčÅ čāąĮąĖą║ą░ą╗čīąĮčŗą╣ čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ. ą¤ą░ą╝čÅčéčī scratchpad čüąŠą┤ąĄčƹȹĖčé 2-ą▒ą░ą╣čéąĮčŗą╣ čĆąĄą│ąĖčüčéčĆ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ, ą║ąŠč鹊čĆčŗą╣ čģčĆą░ąĮąĖčé čåąĖčäčĆąŠą▓ąŠą╣ čĆąĄąĘčāą╗čīčéą░čé ąŠčåąĖčäčĆąŠą▓ą║ąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ scratchpad ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┤ąŠčüčéčāą┐ ą║ ąŠą┤ąĮąŠą▒ą░ą╣čéąĮčŗą╝ čĆąĄą│ąĖčüčéčĆą░ą╝ ą▓ąĄčĆčģąĮąĄą│ąŠ ąĖ ąĮąĖąČąĮąĄą│ąŠ ą┐ąŠčĆąŠą│ą░ čéčĆąĄą▓ąŠą│ąĖ (alarm trigger registers TH ąĖ TL) ąĖ ąŠą┤ąĮąŠą▒ą░ą╣čéąĮąŠą╝čā čĆąĄą│ąĖčüčéčĆčā ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. ąĀąĄą│ąĖčüčéčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ąĮą░čüčéčĆąŠąĖčéčī čĆą░ąĘčĆąĄčłą░čÄčēčāčÄ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ą▓ čåąĖčäčĆąŠą▓ąŠą╣ ą▓ąĖą┤, ą┤ąŠčüčéčāą┐ąĮčŗ ą▓ą░čĆąĖą░ąĮčéčŗ 9, 10, 11 ąĖą╗ąĖ 12 ą▒ąĖčé (ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ąĮą░čüčéčĆąŠą╣ą║ą░ 12 ą▒ąĖčé). ąĀąĄą│ąĖčüčéčĆčŗ TH, TL ąĖ čĆąĄą│ąĖčüčéčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗąĄ (čģčĆą░ąĮčÅčéčüčÅ ą▓ ą┐ą░ą╝čÅčéąĖ EEPROM), čéą░ą║ čćč鹊 ąŠąĮąĖ čüąŠčģčĆą░ąĮčÅčé čüą▓ąŠąĖ ą┤ą░ąĮąĮčŗąĄ, ą║ąŠą│ą┤ą░ ą┐ąĖčéą░ąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▒čŗą╗ąŠ ąŠčéą║ą╗čÄč湥ąĮąŠ.
ąĀąĖčü. 3. ąæą╗ąŠą║-čüčģąĄą╝ą░ DS18B20.
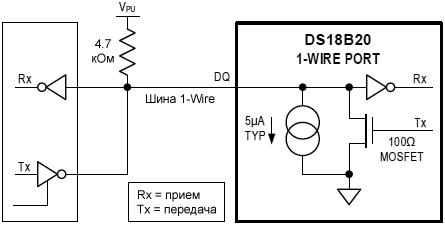
DS18B20 ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┐čĆąŠč鹊ą║ąŠą╗ 1-Wire, ą┤ą╗čÅ čĆąĄą░ą╗ąĖąĘą░čåąĖąĖ ą║ąŠč鹊čĆąŠą│ąŠ ąĮčāąČąĄąĮ ą▓ąĮąĄčłąĮąĖą╣ ą▓ąĄčĆčģąĮąĖą╣ ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÄčēąĖą╣ čĆąĄąĘąĖčüč鹊čĆ (pullup) ąĖ ąŠą┤ąĖąĮ ą┐ąŠčĆčé MCU, ą║ąŠč鹊čĆčŗą╣ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą▓ čĆąĄąČąĖą╝ąĄ 3 ą╗ąŠą│ąĖč湥čüą║ąĖčģ čüąŠčüč鹊čÅąĮąĖą╣ čü ąŠčéą║čĆčŗčéčŗą╝ čüč鹊ą║ąŠą╝ (čŹč鹊čé ą┐ąŠčĆčé čüąŠąĄą┤ąĖąĮčÅąĄčéčüčÅ čü ąĮąŠąČą║ąŠą╣ DQ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ DS18B20). ąÆ čüąĖčüč鹥ą╝ąĄ čü čéą░ą║ąŠą╣ čłąĖąĮąŠą╣ MCU ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆčāąĄčé ąĖ ą░ą┤čĆąĄčüčāąĄčé ąŠčéą┤ąĄą╗čīąĮčŗąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮą░ čłąĖąĮąĄ ą┐ąŠ ąĖčģ čāąĮąĖą║ą░ą╗čīąĮąŠą╝čā 64-ą▒ąĖčéąĮąŠą╝čā ą║ąŠą┤čā (čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ). ąśąĘ-ąĘą░ č鹊ą│ąŠ, čćč鹊 ą║ą░ąČą┤ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮą░ čłąĖąĮąĄ ąĖą╝ąĄąĄčé čüą▓ąŠą╣ čāąĮąĖą║ą░ą╗čīąĮčŗą╣ čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ, ą║ąŠą╗ąĖč湥čüčéą▓ąŠ ą░ą┤čĆąĄčüčāąĄą╝čŗčģ čāčüčéčĆąŠą╣čüčéą▓ ąĮą░ čłąĖąĮąĄ ą▓ąĖčĆčéčāą░ą╗čīąĮąŠ ąĮąĄ ąŠą│čĆą░ąĮąĖč湥ąĮąŠ ("ą▓ąĖčĆčéčāą░ą╗čīąĮąŠ" ąŠąĘąĮą░čćą░ąĄčé, čćč鹊 ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ ąĮą░ą║ą╗ą░ą┤čŗą▓ą░čÄčéčüčÅ ą┤čĆčāą│ąĖąĄ čäąĖąĘąĖč湥čüą║ąĖąĄ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅ). ą¤čĆąŠč鹊ą║ąŠą╗ čłąĖąĮčŗ 1-Wire, ą▓ą║ą╗čÄčćą░čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ą║ąŠą╝ą░ąĮą┤ ąĖ čéą░ą╣ą╝čüą╗ąŠč鹊ą▓, čĆą░čüčüą╝ą░čéčĆąĖą▓ą░ąĄčéčüčÅ ą┤ą░ą╗ąĄąĄ ą▓ čüąĄą║čåąĖąĖ "ąĪąĖčüč鹥ą╝ą░ čłąĖąĮčŗ 1-Wire".
ąöčĆčāą│ą░čÅ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮą░čÅ ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī DS18B20 - čĆą░ą▒ąŠčéą░ ą▒ąĄąĘ ąŠčéą┤ąĄą╗čīąĮąŠą│ąŠ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ. ąŁč鹊 čéą░ą║ ąĮą░ąĘčŗą▓ą░ąĄą╝ąŠąĄ "ą┐ą░čĆą░ąĘąĖčéąĮąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ", ą║ąŠą│ą┤ą░ 菹ĮąĄčĆą│ąĖčÅ ą┐ąŠą┤ą░ąĄčéčüčÅ č湥čĆąĄąĘ čüąĖą│ąĮą░ą╗ ą┤ą░ąĮąĮčŗčģ DQ, ą║ąŠą│ą┤ą░ ąŠąĮ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ą╗ąŠą│. 1. ąŻčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 1 ąĘą░čĆčÅąČą░ąĄčé ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ 1-Wire (CPP), ąĖ ąĄą│ąŠ ąĘą░čĆčÅą┤ ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą┐ąĖčéą░ąĮąĖąĄ ą┤ą╗čÅ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ, ą║ąŠą│ą┤ą░ čüąĖą│ąĮą░ą╗ ąĮą░ čłąĖąĮąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čāčĆąŠą▓ąĮąĄ ą╗ąŠą│. 0. ąÉą╗čīč鹥čĆąĮą░čéąĖą▓ąĮąŠ ą╝ąŠąČąĮąŠ ą┐ąŠą┤ą░ą▓ą░čéčī ą┐ąĖčéą░ąĮąĖąĄ ąĮą░ DS18B20 ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ č湥čĆąĄąĘ ąŠčéą┤ąĄą╗čīąĮčŗą╣ ą▓čŗą▓ąŠą┤ VDD.
ąśąĘą╝ąĄčĆąĄąĮąĖąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ. ąĀą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī čüąĄąĮčüąŠčĆą░ DS18B20 čüąŠčüčéą░ą▓ą╗čÅąĄčé 0.5┬░C (9 ą▒ąĖčé), 0.25┬░C (10 ą▒ąĖčé), 0.125┬░C (11 ą▒ąĖčé) ąĖą╗ąĖ 0.0625┬░C (12 ą▒ąĖčé, ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ). ą¤čĆąĖ ą┐ąŠą┤ą░č湥 ą┐ąĖčéą░ąĮąĖčÅ ąĮą░ ą╝ąĖą║čĆąŠčüčģąĄą╝čā DS18B20 ąŠąĮą░ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ čü ą┐ąŠąĮąĖąČąĄąĮąĮčŗą╝ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ (low power idle state, č鹊ą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ ą▓ čŹč鹊ą╝ čüąŠčüč鹊čÅąĮąĖąĖ ą╝ąĄąĮąĄąĄ 1 ą╝ą║ąÉ, čüą╝. [1]). ą¦č鹊ą▒čŗ ąĮą░čćą░čéčī ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ą▓ čåąĖčäčĆčā, ą╝ą░čüč鹥čĆ ą┤ąŠą╗ąČąĄąĮ ą▓čŗą┤ą░čéčī ą║ąŠą╝ą░ąĮą┤čā Convert T [44h]. ą¤ąŠčüą╗ąĄ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą▓ 2-ą▒ą░ą╣čéąĮąŠą╝ čĆąĄą│ąĖčüčéčĆąĄ ą┐ą░ą╝čÅčéąĖ scratchpad, ąĖ DS18B20 ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ą▓ idle state. ąĢčüą╗ąĖ DS18B20 ą┐ąŠą╗čāčćą░ąĄčé ą┐ąĖčéą░ąĮąĖąĄ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ, č鹊 ą╝ą░čüč鹥čĆ ą╝ąŠąČąĄčé ą▓čŗą┤ą░čéčī čéą░ą╣ą╝čüą╗ąŠčé čćč鹥ąĮąĖčÅ (čüą╝. čüąĄą║čåąĖąĖ "ąĪąĖčüč鹥ą╝ą░ čłąĖąĮčŗ 1-Wire" ąĖ "ąóą░ą╣ą╝čüą╗ąŠčéčŗ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ") ą┐ąŠčüą╗ąĄ ą║ąŠą╝ą░ąĮą┤čŗ Convert T, ąĖ č鹊ą│ą┤ą░ DS18B20 ą▒čāą┤ąĄčé ąŠčéą▓ąĄčćą░čéčī ą┐ąĄčĆąĄą┤ą░č湥ą╣ 0 ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐čĆąŠą│čĆąĄčüčüą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ, ąĖ ąŠčéą▓ąĄčéąĖčé 1, ą║ąŠą│ą┤ą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ ąĘą░ą▓ąĄčĆčłąĖčéčüčÅ. ąĢčüą╗ąĖ DS18B20 ą┐ąŠą╗čāčćą░ąĄčé "ą┐ą░čĆą░ąĘąĖčéąĮąŠąĄ" ą┐ąĖčéą░ąĮąĖąĄ, č鹊 čŹčéą░ č鹥čģąĮąĖą║ą░ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąŠą▒ ąŠą║ąŠąĮčćą░ąĮąĖąĖ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ąĮąĄą┐čĆąĖą╝ąĄąĮąĖą╝ą░, ą┐ąŠčüą║ąŠą╗čīą║čā ą┤ą╗čÅ čāčüą┐ąĄčłąĮąŠą│ąŠ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ čéčĆąĄą▒čāąĄčéčüčÅ ą┐ąĖčéą░ąĮąĖąĄ ąŠčé čāčĆąŠą▓ąĮčÅ ą╗ąŠą│. 1, ą┐ąŠą┤ą░ą▓ą░ąĄą╝ąŠą│ąŠ č湥čĆąĄąĘ pullup-čĆąĄąĘąĖčüč鹊čĆ. ąóčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą║ ą┐ą░čĆą░ąĘąĖčéąĮąŠą╝čā ą┐ąĖčéą░ąĮąĖčÄ ą┐ąŠą┤čĆąŠą▒ąĮąĄąĄ čĆą░čüčüą╝ą░čéčĆąĖą▓ą░ąĄčéčüčÅ ą▓ čüąĄą║čåąĖąĖ "ą¤ąĖčéą░ąĮąĖąĄ DS18B20".
ąÆčŗčģąŠą┤ąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ DS18B20 ąŠčéą║ą░ą╗ąĖą▒čĆąŠą▓ą░ąĮčŗ ą▓ ą│čĆą░ą┤čāčüą░čģ ą”ąĄą╗čīčüąĖčÅ. ąöą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą│ą┤ąĄ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ ą│čĆą░ą┤čāčüčŗ ążą░čĆąĄąĮą│ąĄą╣čéą░, ą┤ąŠą╗ąČąĮą░ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ čäčāąĮą║čåąĖčÅ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ą╗ąĖą▒ąŠ ąĮą░ ąŠčüąĮąŠą▓ąĄ č乊čĆą╝čāą╗čŗ, ą╗ąĖą▒ąŠ ąĮą░ ąŠčüąĮąŠą▓ąĄ čéą░ą▒ą╗ąĖčåčŗ. ąöą░ąĮąĮčŗąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ą║ą░ą║ 16-čĆą░ąĘčĆčÅą┤ąĮąŠąĄ čćąĖčüą╗ąŠ čüąŠ ąĘąĮą░ą║ąŠą╝ ą▓ č乊čĆą╝ą░č鹥 ą┤ą▓ąŠąĖčćąĮąŠą│ąŠ ą┤ąŠą┐ąŠą╗ąĮąĄąĮąĖčÅ (sign-extended twoŌĆÖs complement number), čüą╝. čĆąĖčü. 4. ąæąĖčéčŗ ąĘąĮą░ą║ą░ (S) ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé, ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮą░čÅ ąĖą╗ąĖ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮą░čÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆą░: ą┤ą╗čÅ ą┐ąŠą╗ąŠąČąĖč鹥ą╗čīąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣ S = 0, ąĖ ą┤ą╗čÅ ąŠčéčĆąĖčåą░č鹥ą╗čīąĮčŗčģ ąĘąĮą░č湥ąĮąĖą╣ S = 1. ąĢčüą╗ąĖ DS18B20 čüą║ąŠąĮčäąĖą│čāčĆąĖčĆąŠą▓ą░ąĮą░ ą▓ čĆąĄąČąĖą╝ąĄ 12-čĆą░ąĘčĆčÅą┤ąĮąŠą╣ čĆą░ąĘčĆąĄčłą░čÄčēąĄą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ (čüąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ), č鹊 ą▓čüąĄ ą▒ąĖčéčŗ ą▓ čĆąĄą│ąĖčüčéčĆąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ą▒čāą┤čāčé čüąŠą┤ąĄčƹȹ░čéčī ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ. ąöą╗čÅ 11-čĆą░ąĘčĆčÅą┤ąĮąŠą╣ čĆą░ąĘčĆąĄčłą░čÄčēąĄą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ ą▒ąĖčé 0 ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮ. ąĪąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ą┤ą╗čÅ 10 ą▒ąĖčé ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▒ąĖčéčŗ 1 ąĖ 0, ąĖ ą┤ą╗čÅ 9 ą▒ąĖčé ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ą▒ąĖčéčŗ 2, 1 ąĖ 0.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: čĆąĄą░ą╗čīąĮčŗąĄ 菹║čüą┐ąĄčĆąĖą╝ąĄąĮčéčŗ čü ą┤ą░čéčćąĖą║ą░ą╝ąĖ DS18B20 ą┐ąŠą║ą░ąĘčŗą▓ą░čÄčé, čćč鹊 "ąĮąĄ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮčŗąĄ" ą╝ą╗ą░ą┤čłąĖąĄ ą▒ąĖčéčŗ (ą║ąŠą│ą┤ą░ ąĮą░čüčéčĆąŠąĄąĮą░ čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčī ąŠčé 9 ą┤ąŠ 11) ąĮą░ čüą░ą╝ąŠą╝ ą┤ąĄą╗ąĄ ą▓čüąĄą│ą┤ą░ čüą▒čĆąŠčłąĄąĮčŗ ą▓ 0. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą┤ą╗čÅ ą╗čÄą▒ąŠą╣ ą▓čŗą▒čĆą░ąĮąĮąŠą╣ čĆą░ąĘčĆčÅą┤ąĮąŠčüčéąĖ ą▓čüąĄą│ą┤ą░ ą▒čāą┤ąĄčé ą║ąŠčĆčĆąĄą║č鹥ąĮ ąŠą┤ąĖąĮ ąĖ č鹊čé ąČąĄ ą░ą╗ą│ąŠčĆąĖčéą╝ ą┐ąŠą╗čāč湥ąĮąĖčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ą▓ ą│čĆą░ą┤čāčüą░čģ ą”ąĄą╗čīčüąĖčÅ ąĖąĘ ą▒ą░ą╣čé čĆąĄą│ąĖčüčéčĆą░ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ.
ąóą░ą▒ą╗ąĖčåą░ 1 ą┤ą░ąĄčé ą┐čĆąĖą╝ąĄčĆčŗ čåąĖčäčĆąŠą▓čŗčģ ą▓čŗčģąŠą┤ąĮčŗčģ ą┤ą░ąĮąĮčŗčģ ąĖ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄ ąĘąĮą░č湥ąĮąĖčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ą┤ą╗čÅ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖą╣ čü čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčīčÄ 12 ą▒ąĖčé.
ą£ą╗ą░ą┤čłąĖą╣ ą▒ą░ą╣čé
|
ą▒ąĖčé 7 |
ą▒ąĖčé 6 |
ą▒ąĖčé 5 |
ą▒ąĖčé 4 |
ą▒ąĖčé 3 |
ą▒ąĖčé 2 |
ą▒ąĖčé 1 |
ą▒ąĖčé 0 |
| 23 |
22 |
21 |
20 |
2-1 |
2-2 |
2-3 |
2-4 |
ąĪčéą░čĆčłąĖą╣ ą▒ą░ą╣čé
|
ą▒ąĖčé 15 |
ą▒ąĖčé 14 |
ą▒ąĖčé 13 |
ą▒ąĖčé 12 |
ą▒ąĖčé 11 |
ą▒ąĖčé 10 |
ą▒ąĖčé 9 |
ą▒ąĖčé 8 |
| S |
S |
S |
S |
S |
26 |
25 |
24 |
ąĀąĖčü. 4. ążąŠčĆą╝ą░čé ą┤ą░ąĮąĮčŗčģ ą▓ čĆąĄą│ąĖčüčéčĆąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ (S ą▒ąĖčé ąĘąĮą░ą║ą░, 2n ą▓ąĄčü čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ čĆą░ąĘčĆčÅą┤ą░).
ąóą░ą▒ą╗ąĖčåą░ 1. ąÆąĘą░ąĖą╝ąŠčüą▓čÅąĘčī ą╝ąĄąČą┤čā č鹥ą╝ą┐ąĄčĆą░čéčāčĆąŠą╣ ąĖ ą┤ą░ąĮąĮčŗą╝ąĖ.
| ąóąĄą╝ą┐ąĄčĆą░čéčāčĆą░, ┬░C |
ą”ąĖčäčĆąŠą▓ąŠą╣ čĆąĄąĘčāą╗čīčéą░čé (ą▓ ą┤ą▓ąŠąĖčćąĮąŠą╝ ą▓ąĖą┤ąĄ) |
ą”ąĖčäčĆąŠą▓ąŠą╣ čĆąĄąĘčāą╗čīčéą░čé (HEX-č乊čĆą╝ą░čé) |
| +125 |
0000 0111 1101 0000 |
07D0h |
| +85(*) |
0000 0101 0101 0000 |
0550h |
| +25.0625 |
0000 0001 1001 0001 |
0191h |
| +10.125 |
0000 0000 1010 0010 |
00A2h |
| +0.5 |
0000 0000 0000 1000 |
0008h |
| 0 |
0000 0000 0000 0000 |
0000h |
| -0.5 |
1111 1111 1111 1000 |
FFF8h |
| -10.125 |
1111 1111 0101 1110 |
FF5Eh |
| -25.0625 |
1111 1110 0110 1111 |
FE6Fh |
| -55 |
1111 1100 1001 0000 |
FC90h |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ *: ąĘąĮą░č湥ąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ ą┤ą╗čÅ čĆąĄą│ąĖčüčéčĆą░ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ.
ąĪąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÅ čéčĆąĄą▓ąŠą│ąĖ. ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ DS18B20 ą▓čŗą┐ąŠą╗ąĮąĖčé č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮąŠąĄ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ, ąĘąĮą░č湥ąĮąĖąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ čüčĆą░ą▓ąĮąĖą▓ą░ąĄčéčüčÅ čü ąŠą┐čĆąĄą┤ąĄą╗čÅąĄą╝čŗąĄ ą┐ąŠą╗čīąĘąŠą▓ą░č鹥ą╗ąĄą╝ ą▓ąĄą╗ąĖčćąĖąĮą░ą╝ąĖ ą┐ąŠčĆąŠą│ą░ (complement alarm trigger values), ą║ąŠč鹊čĆčŗąĄ čģčĆą░ąĮčÅčéčüčÅ ą▓ ąŠą┤ąĮąŠą▒ą░ą╣čéąĮčŗčģ čĆąĄą│ąĖčüčéčĆą░čģ TH ąĖ TL (čüą╝. čĆąĖčü. 5). ąæąĖčé ąĘąĮą░ą║ą░ (S) ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ąŠčéčĆąĖčåą░č鹥ą╗čīąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ, ąĄčüą╗ąĖ S = 1. ąĀąĄą│ąĖčüčéčĆčŗ TH ąĖ TL 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗąĄ (čģčĆą░ąĮčÅčéčüčÅ ą▓ EEPROM), čéą░ą║ čćč鹊 ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą▓ ąĮąĖčģ čüąŠčģčĆą░ąĮčÅąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą┐ąĖčéą░ąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▒čāą┤ąĄčé ąŠčéą║ą╗čÄč湥ąĮąŠ. ąÜ TH ąĖ TL ą╝ąŠąČąĮąŠ ą┐ąŠą╗čāčćąĖčéčī ą┤ąŠčüčéčāą┐ č湥čĆąĄąĘ ą▒ą░ą╣čéčŗ 2 ąĖ 3 ą┐ą░ą╝čÅčéąĖ scratchpad, ą║ą░ą║ ąŠą┐ąĖčüą░ąĮąŠ ą▓ čüąĄą║čåąĖąĖ "ą¤ą░ą╝čÅčéčī DS18B20". ąöą╗čÅ čüčĆą░ą▓ąĮąĄąĮąĖčÅ čü TH ąĖ TL ą▓ čĆąĄą│ąĖčüčéčĆąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ąĖčüą┐ąŠą╗čīąĘčāčÄčéčüčÅ č鹊ą╗čīą║ąŠ ą▒ąĖčéčŗ 11 .. 4, ą┐ąŠč鹊ą╝čā čćč鹊 čĆąĄą│ąĖčüčéčĆčŗ TH ąĖ TL 8-čĆą░ąĘčĆčÅą┤ąĮčŗąĄ. ąĢčüą╗ąĖ ąĖąĘą╝ąĄčĆąĄąĮąĮą░čÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆą░ ą╝ąĄąĮčīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮą░ TL, ąĖą╗ąĖ ą▒ąŠą╗čīčłąĄ ąĖą╗ąĖ čĆą░ą▓ąĮą░ TH, č鹊 ą▓ DS18B20 čāčüčéą░ąĮąŠą▓ąĖčéčüčÅ čäą╗ą░ą│ čéčĆąĄą▓ąŠą│ąĖ Alarm. ąŁč鹊čé čäą╗ą░ą│ ąŠą▒ąĮąŠą▓ą╗čÅąĄčéčüčÅ ą┐ąŠčüą╗ąĄ ą║ą░ąČą┤ąŠą│ąŠ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ; čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ąĄčüą╗ąĖ čāčüą╗ąŠą▓ąĖčÅ čéčĆąĄą▓ąŠą│ąĖ ą┐čĆąŠą┐ą░ą┤čāčé, č鹊 čäą╗ą░ą│ ąŠčćąĖčüčéąĖčéčüčÅ ąĮą░ čüą╗ąĄą┤čāčÄčēąĄą╝ ąĖąĘą╝ąĄčĆąĄąĮąĖąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ. ąŻčüčéčĆąŠą╣čüčéą▓ąŠ ą╝ą░čüč鹥čĆ ą╝ąŠąČąĄčé ą┐čĆąŠą▓ąĄčĆąĖčéčī čüąŠčüč鹊čÅąĮąĖčÅ čäą╗ą░ą│ą░ alarm ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓ DS18B20 ąĮą░ čłąĖąĮąĄ ą┐čāč鹥ą╝ ą▓čŗą┤ą░čćąĖ ą║ąŠą╝ą░ąĮą┤čŗ Alarm Search [ECh]. ąøčÄą▒ą░čÅ ąĖąĘ DS18B20, čā ą║ąŠč鹊čĆąŠą╣ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čäą╗ą░ą│ alarm ąŠčéą▓ąĄčéąĖčé ąĮą░ čŹčéčā ą║ąŠą╝ą░ąĮą┤čā, čéą░ą║ čćč鹊 čā ą╝ą░čüč鹥čĆą░ ąĄčüčéčī ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī č鹊čćąĮąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ąĮą░ ą║ą░ą║ąŠą╣ ąĖąĘ DS18B20 ą┐čĆąĖčüčāčéčüčéą▓čāčÄčé čāčüą╗ąŠą▓ąĖčÅ čéčĆąĄą▓ąŠą│ąĖ. ąĢčüą╗ąĖ ąĖą╝ąĄąĄčéčüčÅ čāčüą╗ąŠą▓ąĖąĄ čéčĆąĄą▓ąŠą│ąĖ, ąĖ ąĖąĘą╝ąĄąĮčÅčÄčéčüčÅ ąĮą░čüčéčĆąŠą╣ą║ąĖ TH ąĖą╗ąĖ TL, ą┤čĆčāą│ąŠąĄ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ą┤ąŠą╗ąČąĮąŠ ą▒čŗčéčī ą▓čŗą┐ąŠą╗ąĮąĄąĮąŠ ą┤ą╗čÅ ąŠą▒ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┤ąŠčüč鹊ą▓ąĄčĆąĮąŠą│ąŠ čüąŠčüč鹊čÅąĮąĖčÅ čéčĆąĄą▓ąŠą│ąĖ.
| ą▒ąĖčé 7 |
ą▒ąĖčé 6 |
ą▒ąĖčé 5 |
ą▒ąĖčé 4 |
ą▒ąĖčé 3 |
ą▒ąĖčé 2 |
ą▒ąĖčé 1 |
ą▒ąĖčé 0 |
| S |
26 |
25 |
24 |
23 |
22 |
21 |
20 |
ąĀąĖčü. 5. ążąŠčĆą╝ą░čé čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ čĆąĄą│ąĖčüčéčĆąŠą▓ TH ąĖ TL (S ą▒ąĖčé ąĘąĮą░ą║ą░, 2n ą▓ąĄčü čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą│ąŠ čĆą░ąĘčĆčÅą┤ą░).
[ą¤ąĖčéą░ąĮąĖąĄ DS18B20]
ą£ąĖą║čĆąŠčüčģąĄą╝ą░ DS18B20 ą╝ąŠąČąĄčé ą┐ąŠą╗čāčćą░čéčī ą┐ąĖčéą░ąĮąĖąĄ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ č湥čĆąĄąĘ ąĮąŠąČą║čā VDD, ąĖą╗ąĖ ąŠąĮą░ ą╝ąŠąČąĄčé čĆą░ą▒ąŠčéą░čéčī ą▓ čĆąĄąČąĖą╝ąĄ "ą┐ą░čĆą░ąĘąĖčéąĮąŠą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ", čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé DS18B20 čĆą░ą▒ąŠčéą░čéčī ą▒ąĄąĘ ą╗ąŠą║ą░ą╗čīąĮąŠą│ąŠ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ. ą¤ą░čĆą░ąĘąĖčéąĮąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ ąŠč湥ąĮčī ą┐ąŠą╗ąĄąĘąĮąŠ ą┤ą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą║ąŠč鹊čĆčŗąĄ čéčĆąĄą▒čāčÄčé ą┤ąĖčüčéą░ąĮčåąĖąŠąĮąĮąŠą│ąŠ ą║ąŠąĮčéčĆąŠą╗čÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ, ąĖą╗ąĖ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ ą┐čĆąŠąĖąĘą▓ąŠą┤čÅčéčüčÅ ą▓ ąŠč湥ąĮčī ąŠą│čĆą░ąĮąĖč湥ąĮąĮąŠą╝ ą┐čĆąŠčüčéčĆą░ąĮčüčéą▓ąĄ. ąĀąĖčü. 3 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé čüčģąĄą╝čā ą┐ą░čĆą░ąĘąĖčéąĮąŠą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ DS18B20, ą║ąŠč鹊čĆą░čÅ "ą▓ąŠčĆčāąĄčé" ą┐ąĖčéą░ąĮąĖąĄ ąŠčé čüąĖą│ąĮą░ą╗ą░ ą┤ą░ąĮąĮčŗčģ čłąĖąĮčŗ 1-Wire (ąĮąŠąČą║ą░ DQ), ą║ąŠą│ą┤ą░ ąĮą░ čłąĖąĮąĄ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 1. ą¤ą░čĆą░ąĘąĖčéąĮąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ ąĘą░čĆčÅąČą░ąĄčé ą▓ąĮčāčéčĆąĄąĮąĮąĖą╣ ą║ąŠąĮą┤ąĄąĮčüą░č鹊čĆ CPP ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ DS18B20, ąĖ čŹč鹊 ąĮą░ą┐čĆčÅąČąĄąĮąĖąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┤ą╗čÅ ą┐ąĖčéą░ąĮąĖčÅ ą▓ąĮčāčéčĆąĄąĮąĮąĖčģ čüčģąĄą╝, ą║ąŠą│ą┤ą░ čāčĆąŠą▓ąĄąĮčī čłąĖąĮčŗ ąĮą░ ą║ąŠčĆąŠčéą║ąĖąĄ ąĖąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ ą┐ąĄčĆąĄčģąŠą┤čÅčé ą▓ ą╗ąŠą│. 0. ąÜąŠą│ą┤ą░ DS18B20 ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą┐ą░čĆą░ąĘąĖčéąĮąŠą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ, ąĮąŠąČą║ą░ VDD ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī čüąŠąĄą┤ąĖąĮąĄąĮą░ čü ąĘąĄą╝ą╗ąĄą╣ GND.
ąÆ čĆąĄąČąĖą╝ąĄ ą┐ą░čĆą░ąĘąĖčéąĮąŠą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ čłąĖąĮą░ 1-Wire ąĖ CPP ą╝ąŠąČąĄčé ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčéčī ą┤ąŠčüčéą░č鹊čćąĮąŠ č鹊ą║ą░ ą┤ą╗čÅ ą▒ąŠą╗čīčłąĖąĮčüčéą▓ą░ ąŠą┐ąĄčĆą░čåąĖą╣ DS18B20, ą┐ąŠą║ą░ čāą┤ąŠą▓ą╗ąĄčéą▓ąŠčĆčÅčÄčéčüčÅ čāą║ą░ąĘą░ąĮąĮčŗąĄ čéčĆąĄą▒ąŠą▓ą░ąĮąĖčÅ ą┐ąŠ ąĖąĮč鹥čĆą▓ą░ą╗ą░ą╝ ą▓čĆąĄą╝ąĄąĮąĖ ąĖ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÄ (čüą╝. "DC Electrical Characteristics" ąĖ "AC Electrical Characteristics"). ą×ą┤ąĮą░ą║ąŠ, ą║ąŠą│ą┤ą░ DS18B20 ą▓čŗą┐ąŠą╗ąĮčÅąĄčé ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ąĖą╗ąĖ ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖąĄ ą┤ą░ąĮąĮčŗčģ ąĖąĘ ą┐ą░ą╝čÅčéąĖ scratchpad ą▓ EEPROM, čĆą░ą▒ąŠčćąĖą╣ č鹊ą║ ą╝ąŠąČąĄčé ą┐ąŠą▓čŗčüąĖčéčīčüčÅ ą┤ąŠ 1.5 mA. ąŁč鹊čé č鹊ą║ ą╝ąŠąČąĄčé ą┐čĆąĖą▓ąĄčüčéąĖ ą║ ąĮąĄą┤ąŠą┐čāčüčéąĖą╝ąŠą╝čā ą┐ą░ą┤ąĄąĮąĖčÄ ąĮą░ą┐čĆčÅąČąĄąĮąĖčÅ ąĮą░ pullup-čĆąĄąĘąĖčüč鹊čĆąĄ ą┐ąŠą┤čéčÅąČą║ąĖ čłąĖąĮčŗ 1-Wire ąĖ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÄ č鹊ą║ą░ ą▒ąŠą╗čīčłąĄą│ąŠ, č湥ą╝ ą╝ąŠąČąĄčé ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī CPP. ąöą╗čÅ ą│ą░čĆą░ąĮčéąĖąĖ, čćč鹊 DS18B20 ą┐ąŠą╗čāčćąĖčé ą┤ąŠčüčéą░č鹊čćąĮčŗą╣ č鹊ą║ ą┐ąŠ čłąĖąĮąĄ 1-Wire ą▓ąŠ ą▓čĆąĄą╝čÅ ąŠą┐ąĄčĆą░čåąĖą╣ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ąĖ ą║ąŠą┐ąĖčĆąŠą▓ą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗčģ, ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░čéčī ą╝ąŠčēąĮčāčÄ ą┐ąŠą┤čéčÅąČą║čā (strong pullup). ąŁč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ąŠčüčāčēąĄčüčéą▓ą╗ąĄąĮąŠ čü ą┐ąŠą╝ąŠčēčīčÄ čéčĆą░ąĮąĘąĖčüč鹊čĆą░ MOSFET, ą║ąŠč鹊čĆčŗą╣ ąĮą░ ą▓čĆąĄą╝čÅ čŹčéąĖčģ ąŠą┐ąĄčĆą░čåąĖą╣ ą▒čāą┤ąĄčé čüąŠąĄą┤ąĖąĮčÅčéčī čüąĖą│ąĮą░ą╗ ą┤ą░ąĮąĮčŗčģ ąĮą░ą┐čĆčÅą╝čāčÄ čü čłąĖąĮąŠą╣ ą┐ąĖčéą░ąĮąĖčÅ, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 6. ą©ąĖąĮą░ 1-Wire ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ą║ strong pullup ąĮą░ ą▓čĆąĄą╝čÅ 10 ą╝ą║čü (max) ą┐ąŠčüą╗ąĄ ą▓čŗą┤ą░čćąĖ ą║ąŠą╝ą░ąĮą┤čŗ Convert T [44h] ąĖą╗ąĖ Copy Scratchpad [48h], ąĖ čłąĖąĮą░ ą┤ąŠą╗ąČąĮą░ čāą┤ąĄčƹȹĖą▓ą░čéčīčüčÅ ą▓ ą╗ąŠą│. 1 pullup-čĆąĄąĘąĖčüčéčĆąŠą╝ ąĮą░ ą▓čüąĄ ą▓čĆąĄą╝čÅ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ (tCONV) ąĖą╗ąĖ ą┐ąĄčĆąĄą┤ą░čćąĖ ą┤ą░ąĮąĮčŗčģ (tWR = 10 ą╝čü). ą¤ąŠą║ą░ čĆą░ąĘčĆąĄčłąĄąĮą░ ą┐ąŠą┤čéčÅąČą║ą░, ąĮą░ čłąĖąĮąĄ 1-Wire ąĮąĄ ą╝ąŠąČąĄčé ą▒čŗčéčī ąĮąĖą║ą░ą║ąŠą╣ ą░ą║čéąĖą▓ąĮąŠčüčéąĖ.

ąĀąĖčü. 6. ąŻčüąĖą╗ąĄąĮąĮąŠąĄ ą┐ą░čĆą░ąĘąĖčéąĮąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ (strong pullup) DS18B20 ą▓ąŠ ą▓čĆąĄą╝čÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗčģ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖą╣.
ą£ąĖą║čĆąŠčüčģąĄą╝ą░ DS18B20 ą╝ąŠąČąĄčé ą▒čŗčéčī čéą░ą║ąČąĄ ąĘą░ą┐ąĖčéą░ąĮą░ čéčĆą░ą┤ąĖčåąĖąŠąĮąĮčŗą╝ ą╝ąĄč鹊ą┤ąŠą╝, ą║ąŠą│ą┤ą░ ą▓ąĮąĄčłąĮąĖą╣ ąĖčüč鹊čćąĮąĖą║ ą┐ąĖčéą░ąĮąĖčÅ ą┐ąŠą┤ą║ą╗čÄč湥ąĮ ą║ ąĮąŠąČą║ąĄ VDD, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ąĮą░ čĆąĖčü. 7. ąöąŠčüč鹊ąĖąĮčüčéą▓ąŠ čŹč鹊ą│ąŠ ą╝ąĄč鹊ą┤ą░ ą▓ č鹊ą╝, čćč鹊 MOSFET pullup ąĮąĄ čéčĆąĄą▒čāąĄčéčüčÅ, ąĖ čłąĖąĮą░ 1-Wire ąŠčüą▓ąŠą▒ąŠąČą┤ą░ąĄčéčüčÅ ą┤ą╗čÅ ą┤čĆčāą│ąŠą│ąŠ čéčĆą░čäąĖą║ą░ ą▓ąŠ ą▓čĆąĄą╝čÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮąŠą│ąŠ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ.

ąĀąĖčü. 7. ą¤ąĖčéą░ąĮąĖąĄ DS18B20 ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ (VDD).
ąśčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĄ ą┐ą░čĆą░ąĘąĖčéąĮąŠą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ ąĮąĄ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ą┐čĆąĖ ąĖąĘą╝ąĄčĆąĄąĮąĖąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆ čüą▓čŗčłąĄ +100┬░C, ą┐ąŠčüą║ąŠą╗čīą║čā ąĄčüčéčī čłą░ąĮčü, čćč鹊 DS18B20 ąĮąĄ čüą╝ąŠąČąĄčé ą┐ąŠą┤ą┤ąĄčƹȹ░čéčī čāčüč鹊ą╣čćąĖą▓čŗą╣ ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ ąĖąĘ-ąĘą░ ą▒ąŠą╗čīčłąĖčģ č鹊ą║ąŠą▓ čāč鹥čćą║ąĖ ą┐čĆąĖ čéą░ą║ąĖčģ č鹥ą╝ą┐ąĄčĆą░čéčāčĆą░čģ. ąöą╗čÅ ą┐čĆąĖą╗ąŠąČąĄąĮąĖą╣, ą│ą┤ąĄ ąĮčāąČąĮąŠ ąĖąĘą╝ąĄčĆąĄąĮąĖąĄ čéą░ą║ąĖčģ č鹥ą╝ą┐ąĄčĆą░čéčāčĆ, ąĮą░čüč鹊čÅč鹥ą╗čīąĮąŠ čĆąĄą║ąŠą╝ąĄąĮą┤čāąĄčéčüčÅ ąĘą░ą┐ąĖčéčŗą▓ą░čéčī DS18B20 ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ (č湥čĆąĄąĘ ą▓čŗą▓ąŠą┤ VDD).
ąÆ ąĮąĄą║ąŠč鹊čĆčŗčģ čüąĖčéčāą░čåąĖčÅčģ ą╝ą░čüč鹥čĆ čłąĖąĮčŗ ą╝ąŠąČąĄčé ąĮąĄ ąĘąĮą░čéčī, ą║ą░ą║ ą┐ąŠą╗čāčćą░ąĄčé ą┐ąĖčéą░ąĮąĖąĄ DS18B20 ąĮą░ čłąĖąĮąĄ - ą▓ čĆąĄąČąĖą╝ąĄ ą┐ą░čĆą░ąĘąĖčéąĮąŠą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ ąĖą╗ąĖ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ. ą£ą░čüč鹥čĆčā ąĮčāąČąĮą░ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą┤ą╗čÅ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÅ, ąĮčāąČąĮąŠ ą╗ąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī strong pullup ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ. ą¦č鹊ą▒čŗ ą┐ąŠą╗čāčćąĖčéčī čŹčéčā ąĖąĮč乊čĆą╝ą░čåąĖčÄ, ą╝ą░čüč鹥čĆ ą╝ąŠąČąĄčé ą▓čŗą┤ą░čéčī ą║ąŠą╝ą░ąĮą┤čā Skip ROM [CCh], ąĘą░ ą║ąŠč鹊čĆąŠą╣ ąĖą┤ąĄčé ą║ąŠą╝ą░ąĮą┤ą░ Read Power Supply [B4h], ą░ ąĘą░č鹥ą╝ čéą░ą╣ą╝čüą╗ąŠčé čćč鹥ąĮąĖčÅ. ąÆąŠ ą▓čĆąĄą╝čÅ čéą░ą╣ą╝čüą╗ąŠčéą░ čćč鹥ąĮąĖčÅ ą┐ąŠą╗čāčćą░čÄčēąĖąĄ ą┐ą░čĆą░ąĘąĖčéąĮąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ DS18B20 ą┐ąŠą┤čéčÅąĮčāčé čłąĖąĮčā ą║ ą╗ąŠą│. 0, ą░ ą┐ąŠą╗čāčćą░čÄčēąĖąĄ ą▓ąĮąĄčłąĮąĄąĄ ą┐ąĖčéą░ąĮąĖąĄ DS18B20 ąŠčüčéą░ą▓čÅčé čüąŠčüč鹊čÅąĮąĖąĄ čłąĖąĮčŗ ą▓ ą╗ąŠą│. 1. ąĢčüą╗ąĖ čłąĖąĮą░ ą┐ąŠą┤čéčÅąĮčāčéą░ ą║ ą╗ąŠą│. 0, č鹊 ą╝ą░čüč鹥čĆ čāąĘąĮą░ąĄčé ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠčüčéąĖ ą┐ąŠą┤ą║ą╗čÄčćą░čéčī strong pullup ąĮą░ čłąĖąĮąĄ 1-Wire ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖą╣ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ.
[64-čĆą░ąĘčĆčÅą┤ąĮčŗą╣ ROM-ą║ąŠą┤]
ąÆ ą┐ą░ą╝čÅčéąĖ ROM ą║ą░ąČą┤ąŠą╣ ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ DS18B20 čüąŠą┤ąĄčƹȹĖčéčüčÅ čāąĮąĖą║ą░ą╗čīąĮčŗą╣ 64ŌĆōą▒ąĖčéąĮčŗą╣ ą║ąŠą┤ (čüą╝. čĆąĖčü. 8). ąĪą░ą╝čŗąĄ ą╝ą╗ą░ą┤čłąĖąĄ 8 ą▒ąĖčé čŹč鹊ą│ąŠ ą║ąŠą┤ą░ čüąŠą┤ąĄčƹȹ░čé ą║ąŠą┤ 1-Wire čüąĄą╝ąĄą╣čüčéą▓ą░ DS18B20: 28h. ąĪą╗ąĄą┤čāčÄčēąĖąĄ 48 ą▒ąĖčé čüąŠą┤ąĄčƹȹ░čé čāąĮąĖą║ą░ą╗čīąĮčŗą╣ čüąĄčĆąĖą╣ąĮčŗą╣ ąĮąŠą╝ąĄčĆ. ąĪą░ą╝čŗąĄ čüčéą░čĆčłąĖąĄ 8 ą▒ąĖčé čüąŠą┤ąĄčƹȹ░čé ą║ąŠąĮčéčĆąŠą╗čīąĮčāčÄ čüčāą╝ą╝čā (CRC), ą▓čŗčćąĖčüą╗ąĄąĮąĮčāčÄ ąŠčé ą┐ąĄčĆą▓čŗčģ 56 ą▒ąĖčé ą║ąŠą┤ą░ ROM. ą¤ąŠą┤čĆąŠą▒ąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ą▒ąĖčé CRC ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮąŠ ą▓ čüąĄą║čåąĖąĖ "ąōąĄąĮąĄčĆą░čåąĖčÅ CRC". 64-čĆą░ąĘčĆčÅą┤ąĮčŗą╣ ROM-ą║ąŠą┤ ąĖ čüą▓čÅąĘą░ąĮąĮčŗąĄ čü ąĮąĖą╝ čäčāąĮą║čåąĖąĖ ą╗ąŠą│ąĖą║ąĖ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé čāčüčéčĆąŠą╣čüčéą▓čā DS18B20 čĆą░ą▒ąŠčéą░čéčī ąĮą░ ąŠą┤ąĮąŠą╣ čłąĖąĮąĄ ą▓ą╝ąĄčüč鹥 čü ą┤čĆčāą│ąĖą╝ąĖ 1-Wire čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ ą┐ąŠ ą┐čĆąŠč鹊ą║ąŠą╗čā, ąŠą┐ąĖčüą░ąĮąĮąŠą╝čā ą▓ čüąĄą║čåąĖąĖ "ąĪąĖčüč鹥ą╝ą░ čłąĖąĮčŗ 1-Wire".

ąĀąĖčü. 8. 64-ą▒ąĖčé Lasered ROM Code. MSB ąŠą▒ąŠąĘąĮą░čćą░ąĄčé čüčéą░čĆčłąĖą╣ ą▒ąĖčé, LSB ą╝ą╗ą░ą┤čłąĖą╣ ą▒ąĖčé.
[ą¤ą░ą╝čÅčéčī DS18B20]
ą×čĆą│ą░ąĮąĖąĘą░čåąĖčÅ ą┐ą░ą╝čÅčéąĖ DS18B20 ą┐ąŠą║ą░ąĘą░ąĮą░ ąĮą░ čĆąĖčü. 9. ą¤ą░ą╝čÅčéčī ąŠčüąĮąŠą▓ą░ąĮą░ ąĮą░ čÅč湥ą╣ą║ą░čģ SRAM scratchpad čü 菹ĮąĄčĆą│ąŠąĮąĄąĘą░ą▓ąĖčüąĖą╝čŗą╝ čģčĆą░ąĮąĖą╗ąĖčēąĄą╝ EEPROM ą┤ą╗čÅ čĆąĄą│ąĖčüčéčĆąŠą▓ čüčéą░čĆčłąĄą│ąŠ ąĖ ąĮąĖąČąĮąĄą│ąŠ ą┐ąŠčĆąŠą│ąŠą▓ čéčĆąĄą▓ąŠą│ąĖ (TH ąĖ TL) ąĖ čĆąĄą│ąĖčüčéčĆą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ. ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ąĄčüą╗ąĖ alarm-čäčāąĮą║čåąĖčÅ DS18B20 ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, č鹊 čĆąĄą│ąĖčüčéčĆčŗ TH ąĖ TL ą╝ąŠą│čāčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą║ą░ą║ ą┐ą░ą╝čÅčéčī ąŠą▒čēąĄą│ąŠ ąĮą░ąĘąĮą░č湥ąĮąĖčÅ. ąÆčüąĄ ą║ąŠą╝ą░ąĮą┤čŗ ą┐ą░ą╝čÅčéąĖ ą┐ąŠą┤čĆąŠą▒ąĮąŠ ąŠą┐ąĖčüą░ąĮčŗ ą▓ čüąĄą║čåąĖąĖ "ąÜąŠą╝ą░ąĮą┤čŗ čäčāąĮą║čåąĖą╣ DS18B20".

ąĀąĖčü. 9. ąÜą░čĆčéą░ ą┐ą░ą╝čÅčéąĖ DS18B20.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ *: čüąŠčüč鹊čÅąĮąĖąĄ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ąĘą░ą▓ąĖčüąĖčé ąŠčé ąĘąĮą░č湥ąĮąĖą╣, čüąŠčģčĆą░ąĮąĄąĮąĮčŗčģ ą▓ EEPROM.
ąæą░ą╣čéčŗ 0 ąĖ 1 ą┐ą░ą╝čÅčéąĖ scratchpad čüąŠą┤ąĄčƹȹ░čé čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ ą╝ą╗ą░ą┤čłąĖą╣ (LSB) ąĖ čüčéą░čĆčłąĖą╣ (MSB) ą▒ą░ą╣čéčŗ čĆąĄą│ąĖčüčéčĆą░ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ. ąŁčéąĖ ą▒ą░ą╣čéčŗ čĆą░ą▒ąŠčéą░čÄčé č鹊ą╗čīą║ąŠ ąĮą░ čćč鹥ąĮąĖąĄ. ąæą░ą╣čéčŗ 2 ąĖ 3 ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅčÄčé ą┤ąŠčüčéčāą┐ ą║ čĆąĄą│ąĖčüčéčĆą░ą╝ TH ąĖ TL. ąæą░ą╣čé 4 čüąŠą┤ąĄčƹȹĖčé ą┤ą░ąĮąĮčŗąĄ čĆąĄą│ąĖčüčéčĆą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, čćč鹊 ą┐ąŠą┤čĆąŠą▒ąĮąŠ čĆą░čüčüą╝ąŠčéčĆąĄąĮąŠ ą┤ą░ą╗ąĄąĄ ą▓ čüąĄą║čåąĖąĖ "ąĀąĄą│ąĖčüčéčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ". ąæą░ą╣čéčŗ 5, 6 ąĖ 7 ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮčŗ ą┤ą╗čÅ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĖ ąĮąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąĄčĆąĄąĘą░ą┐ąĖčüą░ąĮčŗ.
ąæą░ą╣čé 8 ą┐ą░ą╝čÅčéąĖ scratchpad ą┐čĆąĄą┤ąĮą░ąĘąĮą░č湥ąĮ č鹊ą╗čīą║ąŠ ą┤ą╗čÅ čćč鹥ąĮąĖčÅ, ąĖ ąŠąĮ čüąŠą┤ąĄčƹȹĖčé ą║ąŠąĮčéčĆąŠą╗čīąĮčāčÄ čüčāą╝ą╝čā (CRC) ąŠčé ą▒ą░ą╣čé 0 .. 7 ą┐ą░ą╝čÅčéąĖ scratchpad. DS18B20 ą│ąĄąĮąĄčĆąĖčĆčāąĄčé čŹčéčā CRC, ą║ą░ą║ ąŠą┐ąĖčüą░ąĮąŠ ą▓ čüąĄą║čåąĖąĖ "ąōąĄąĮąĄčĆą░čåąĖčÅ CRC".
ąöą░ąĮąĮčŗąĄ ą▓ ą▒ą░ą╣čéčŗ 2, 3 ąĖ 4 ą┐ą░ą╝čÅčéąĖ scratchpad ąĘą░ą┐ąĖčüčŗą▓ą░čÄčéčüčÅ ą║ąŠą╝ą░ąĮą┤ąŠą╣ Write Scratchpad [4Eh], ą┤ą░ąĮąĮčŗąĄ ą┤ąŠą╗ąČąĮčŗ ą┐ąŠčüčŗą╗ą░čéčīčüčÅ ąĮą░čćąĖąĮą░čÅ čü ą╝ą╗ą░ą┤čłąĄą│ąŠ ą▒ąĖčéą░ ą▒ą░ą╣čéą░ 2. ąöą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ čåąĄą╗ąŠčüčéąĮąŠčüčéąĖ ą┤ą░ąĮąĮčŗčģ ą┐ą░ą╝čÅčéčī scratchpad ą┐ąŠčüą╗ąĄ ąĘą░ą┐ąĖčüąĖ ą╝ąŠąČąĄčé ą▒čŗčéčī ą┐čĆąŠčćąĖčéą░ąĮą░ (čü ą┐ąŠą╝ąŠčēčīčÄ ą║ąŠą╝ą░ąĮą┤čŗ Read Scratchpad [BEh]). ą¤čĆąĖ čćč鹥ąĮąĖąĖ scratchpad ą┤ą░ąĮąĮčŗąĄ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą┐ąŠ čłąĖąĮąĄ 1-Wire ąĮą░čćąĖąĮą░čÅ čü čüą░ą╝ąŠą│ąŠ ą╝ą╗ą░ą┤čłąĄą│ąŠ ą▒ąĖčéą░ ą▒ą░ą╣čéą░ 0. ąöą╗čÅ ą┐ąĄčĆąĄą┤ą░čćąĖ TH, TL ąĖ ą┤ą░ąĮąĮčŗčģ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą▓ EEPROM ą╝ą░čüč鹥čĆ ą┤ąŠą╗ąČąĄąĮ ą▓čŗą┤ą░čéčī ą║ąŠą╝ą░ąĮą┤čā Copy Scratchpad [48h].
ąöą░ąĮąĮčŗąĄ ą▓ čĆąĄą│ąĖčüčéčĆą░čģ EEPROM čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ, ą║ąŠą│ą┤ą░ ą┐ąĖčéą░ąĮąĖąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ą▓čŗą║ą╗čÄč湥ąĮąŠ. ą¤čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗąĄ EEPROM ą┐ąĄčĆąĄąĘą░ą│čĆčāąČą░čÄčéčüčÅ ą▓ čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĖąĄ čÅč湥ą╣ą║ąĖ scratchpad. ąŁčéąĖ ą┤ą░ąĮąĮčŗąĄ čéą░ą║ąČąĄ ą╝ąŠą│čāčé ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą▒čŗčéčī ą┐ąĄčĆąĄąĘą░ą│čĆčāąČąĄąĮčŗ ąĖąĘ EEPROM ą▓ scratchpad ą║ąŠą╝ą░ąĮą┤ąŠą╣ Recall E2 [B8h]. ą£ą░čüč鹥čĆ ą╝ąŠąČąĄčé ą▓čŗą┤ą░čéčī čéą░ą╣ą╝čüą╗ąŠčéčŗ čćč鹥ąĮąĖčÅ ą▓čüą╗ąĄą┤ ąĘą░ ą║ąŠą╝ą░ąĮą┤ąŠą╣ Recall E2, ąĖ DS18B20 ą┐ąŠą║ą░ąČąĄčé čüčéą░čéčāčü recall ą┐ąĄčĆąĄą┤ą░č湥ą╣ 0, ą║ąŠą│ą┤ą░ ą┐čĆąŠčåąĄčüčü recall ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ, ąĖ 1 ą║ąŠą│ą┤ą░ recall ąĘą░ą▓ąĄčĆčłąĖą╗čüčÅ.
[ąĀąĄą│ąĖčüčéčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ]
ąæą░ą╣čé 4 ą┐ą░ą╝čÅčéąĖ scratchpad čüąŠą┤ąĄčƹȹĖčé čĆąĄą│ąĖčüčéčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ąŠčĆą│ą░ąĮąĖąĘą░čåąĖčÅ ą║ąŠč鹊čĆąŠą│ąŠ ą┐ąŠą║ą░ąĘą░ąĮą░ ąĮą░ čĆąĖčü. 10. ą¤ąŠą╗čīąĘąŠą▓ą░č鹥ą╗čī ą╝ąŠąČąĄčé čāčüčéą░ąĮąŠą▓ąĖčéčī čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčī ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ DS18B20 čü ą┐ąŠą╝ąŠčēčīčÄ ą▒ąĖčé R0 ąĖ R1 čŹč鹊ą│ąŠ čĆąĄą│ąĖčüčéčĆą░, ą║ą░ą║ ą┐ąŠą║ą░ąĘą░ąĮąŠ ą▓ čéą░ą▒ą╗ąĖčåąĄ 2. ąĪąŠčüč鹊čÅąĮąĖąĄ ą┐ąŠ čāą╝ąŠą╗čćą░ąĮąĖčÄ ą┐čĆąĖ ą▓ą║ą╗čÄč湥ąĮąĖąĖ ą┐ąĖčéą░ąĮąĖčÅ čŹčéąĖčģ ą▒ąĖčé R0 = 1 ąĖ R1 = 1 (12-čĆą░ąĘčĆčÅą┤ąĮą░čÅ čĆą░ąĘčĆąĄčłą░čÄčēą░čÅ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī). ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ ąĮą░ ą▓ąĘą░ąĖą╝ąŠčüą▓čÅąĘčī ą╝ąĄąČą┤čā čĆą░ąĘčĆąĄčłą░čÄčēąĄą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéčīčÄ ąĖ ą▓čĆąĄą╝ąĄąĮąĄą╝ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ - č湥ą╝ ą▓čŗčłąĄ čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčī, č鹥ą╝ ą▒ąŠą╗čīčłąĄ ą▓čĆąĄą╝čÅ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ąĖ ą▓čŗčłąĄ č鹊ą║ ą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖčÅ. ąæąĖčé 7 ąĖ ą▒ąĖčéčŗ ąŠčé 4 ą┤ąŠ 0 čĆąĄą│ąĖčüčéčĆą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĘą░čĆąĄąĘąĄčĆą▓ąĖčĆąŠą▓ą░ąĮčŗ ą┤ą╗čÅ ą▓ąĮčāčéčĆąĄąĮąĮąĄą│ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖ ąŠąĮąĖ ąĮąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąĄčĆąĄąĘą░ą┐ąĖčüą░ąĮčŗ.
| ą▒ąĖčé 7 |
ą▒ąĖčé 6 |
ą▒ąĖčé 5 |
ą▒ąĖčé 4 |
ą▒ąĖčé 3 |
ą▒ąĖčé 2 |
ą▒ąĖčé 1 |
ą▒ąĖčé 0 |
| 0 |
R1 |
R0 |
1 |
1 |
1 |
1 |
1
|
ąĀąĖčü. 10. ąĀąĄą│ąĖčüčéčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ.
ąóą░ą▒ą╗ąĖčåą░ 2. ąÜąŠąĮčäąĖą│čāčĆą░čåąĖčÅ čĆą░ąĘčĆąĄčłą░čÄčēąĄą╣ čüą┐ąŠčüąŠą▒ąĮąŠčüčéąĖ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ.
| R1 |
R0 |
ąĀą░ąĘčĆ. čüą┐ąŠčüąŠą▒ąĮąŠčüčéčī (ą▒ąĖčé) |
MAX ą▓čĆąĄą╝čÅ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ |
| 0 |
0 |
9 |
93.75 ą╝čü (tCONV/8) |
0
|
1 |
10 |
187.5 ą╝čü (tCONV/4) |
| 1 |
0 |
11 |
375 ą╝čü (tCONV/2) |
| 1 |
1 |
12 |
750 ą╝čü (tCONV) |
ąĪ ą│ąĄčĆą╝ąĄčéąĖčćąĮčŗą╝ąĖ ą┤ą░čéčćąĖą║ą░ą╝ąĖ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ AMP-X145, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠ ąĘą░čÅą▓ą╗ąĄąĮąĖčÄ ą┐čĆąŠą┤ą░ą▓čåą░ čéą░ą║ąČąĄ ąŠčüąĮąŠą▓ą░ąĮčŗ ąĮą░ DS18B20, ąĖ čā ą║ąŠč鹊čĆčŗčģ čÅą║ąŠą▒čŗ č鹊ąČąĄ ą╝ąŠąČąĮąŠ ą╝ąĄąĮčÅčéčī čĆą░ąĘčĆčÅą┤ąĮąŠčüčéčī ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ąŠčé 9 ą┤ąŠ 12 ą▒ąĖčé, ąŠą▒ąĮą░čĆčāąČąĖą╗ą░čüčī ąĮąĄą┐čĆąĖčÅčéąĮą░čÅ ą┐čĆąŠą▒ą╗ąĄą╝ą░ - čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ą┐ąŠą╝ąĄąĮčÅčéčī ąĮąĖą║ą░ą║ ąĮąĄ ą┐ąŠą╗čāčćą░ąĄčéčüčÅ.

ąÜąŠą╝ą░ąĮą┤ą░ Write Scratchpad ąĮąŠčĆą╝ą░ą╗čīąĮąŠ ą╝ąĄąĮčÅąĄčé ą▒ą░ą╣čéčŗ TH ąĖ TL, ąĮąŠ čĆąĄą│ąĖčüčéčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĮąĄ ą╝ąĄąĮčÅąĄčéčüčÅ, ąĄą│ąŠ ąĘąĮą░č湥ąĮąĖąĄ ą▓čüąĄą│ą┤ą░ 7Fh. ą¤čĆąĖčćąĖąĮą░ ąĖą╝ąĄąĮąĮąŠ ą▓ ą┤ą░čéčćąĖą║ąĄ AMP-X145, ą┐ąŠč鹊ą╝čā čćč鹊 ąĄčüą╗ąĖ ą┐ąŠą┤ą║ą╗čÄčćąĖčéčī ąŠą▒čŗčćąĮčāčÄ ą╝ąĖą║čĆąŠčüčģąĄą╝čā DS18B20, č鹊 čü ąĮąĄą╣ čéą░ą║ąŠą╣ ą┐čĆąŠą▒ą╗ąĄą╝čŗ ąĮąĄčé.
[ąōąĄąĮąĄčĆą░čåąĖčÅ CRC]
ąæą░ą╣čéčŗ CRC ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗ąĄąĮčŗ ą║ą░ą║ čćą░čüčéčī ROM-ą║ąŠą┤ą░ DS18B20 ąĖ ą▓ 9-ąŠą╝ ą▒ą░ą╣č鹥 ą┐ą░ą╝čÅčéąĖ scratchpad. CRC ąŠčé ROM-ą║ąŠą┤ą░ ą▓čŗčćąĖčüą╗ąĄąĮą░ ąŠčé ą┐ąĄčĆą▓čŗčģ 56 ą▒ąĖčé ROM-ą║ąŠą┤ą░ ąĖ čüąŠą┤ąĄčƹȹĖčéčüčÅ ą▓ ą┐ąŠčüą╗ąĄą┤ąĮąĄą╝ čüą░ą╝ąŠą╝ ąĘąĮą░čćą░čēąĄą╝ ą▒ą░ą╣č鹥 ROM. CRC ąŠčé ą┐ą░ą╝čÅčéąĖ scratchpad ą▓čŗčćąĖčüą╗čÅąĄčéčüčÅ ąŠčé ą┤ą░ąĮąĮčŗčģ, čüąŠčģčĆą░ąĮąĄąĮąĮčŗčģ ą▓ scratchpad, ąĖ ą┐ąŠčŹč鹊ą╝čā čŹčéą░ CRC ą╝ąĄąĮčÅąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ą╝ąĄąĮčÅčÄčéčüčÅ ą┤ą░ąĮąĮčŗąĄ ą▓ scratchpad. CRC ą┐čĆąĄą┤ąŠčüčéą░ą▓ą╗čÅąĄčé ą╝ą░čüč鹥čĆčā čłąĖąĮčŗ ą╝ąĄč鹊ą┤ ą┐čĆąŠą▓ąĄčĆą║ąĖ čåąĄą╗ąŠčüčéąĮąŠčüčéąĖ ą┤ą░ąĮąĮčŗčģ, ą║ąŠą│ą┤ą░ ą┤ą░ąĮąĮčŗąĄ čüčćąĖčéčŗą▓ą░čÄčéčüčÅ ąĖąĘ DS18B20. ąöą╗čÅ ą┐čĆąŠą▓ąĄčĆą║ąĖ, čćč鹊 ą┤ą░ąĮąĮčŗąĄ ą▒čŗą╗ąĖ ą║ąŠčĆčĆąĄą║čéąĮąŠ ą┐čĆąŠčćąĖčéą░ąĮčŗ, ą╝ą░čüč鹥čĆ čłąĖąĮčŗ ą┤ąŠą╗ąČąĄąĮ ą▓čŗčćąĖčüą╗ąĖčéčī CRC ąŠčé ą┐čĆąĖąĮčÅčéčŗčģ ą┤ą░ąĮąĮčŗčģ ąĖ čüčĆą░ą▓ąĮąĖčéčī ą▓čŗčćąĖčüą╗ąĄąĮąĮčāčÄ CRC čü čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēąĄą╣ CRC (ą╗ąĖą▒ąŠ CRC ąŠčé ROM-ą║ąŠą┤ą░, ą║ąŠą│ą┤ą░ čüčćąĖčéčŗą▓ą░ąĄčéčüčÅ ROM, ą╗ąĖą▒ąŠ čüąŠ scratchpad CRC, ą║ąŠą│ą┤ą░ čüčćąĖčéčŗą▓ą░ąĄčéčüčÅ scratchpad). ąĢčüą╗ąĖ ą▓čŗčćąĖčüą╗ąĄąĮąĮą░čÅ CRC čüąŠą▓ą┐ą░ą┤ą░ąĄčé čü ą┐čĆąŠčćąĖčéą░ąĮąĮąŠą╣ CRC, č鹊 čćč鹥ąĮąĖąĄ ą▒čŗą╗ąŠ ą▒ąĄąĘ ąŠčłąĖą▒ąŠą║. ąĪčĆą░ą▓ąĮąĄąĮąĖąĄ ąĘąĮą░č湥ąĮąĖą╣ CRC ąĖ ą┐čĆąĖąĮčÅčéąĖąĄ čĆąĄčłąĄąĮąĖą╣ ąŠ ą┤ą░ą╗čīąĮąĄą╣čłąĖčģ ą┤ąĄą╣čüčéą▓ąĖčÅčģ ą┐ąŠą╗ąĮąŠčüčéčīčÄ ą▓ ąĘąŠąĮąĄ ąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠčüčéąĖ ą╝ą░čüč鹥čĆą░ čłąĖąĮčŗ. ąÆąĮčāčéčĆąĖ DS18B20 ąĮąĄčé čüčģąĄą╝, ą║ąŠč鹊čĆčŗąĄ ą┐čĆąĄą┐čÅčéčüčéą▓čāčÄčé ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÄ ą║ąŠą╝ą░ąĮą┤, ąĄčüą╗ąĖ DS18B20 CRC (ROM ąĖą╗ąĖ scratchpad) ąĮąĄ čüąŠą▓ą┐ą░ą┤ą░ąĄčé čüąŠ ąĘąĮą░č湥ąĮąĖąĄą╝, čüą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░ąĮąĮčŗą╝ ą╝ą░čüč鹥čĆąŠą╝.
ąŁą║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮą░čÅ čäčāąĮą║čåąĖčÅ ąĖčüą┐ąŠą╗čīąĘčāąĄą╝ąŠą│ąŠ ą┐ąŠą╗ąĖąĮąŠą╝ą░ CRC (ROM ąĖą╗ąĖ scratchpad) čüą╗ąĄą┤čāčÄčēą░čÅ:
CRC = X8 + X5 + X4 + 1
ą£ą░čüč鹥čĆ čłąĖąĮčŗ ą╝ąŠąČąĄčé ą▓čŗčćąĖčüą╗ąĖčéčī CRC ąĖ čüčĆą░ą▓ąĮąĖčéčī ąĄčæ čüąŠ ąĘąĮą░č湥ąĮąĖčÅą╝ąĖ CRC ąĖąĘ DS18B20, ąĖčüą┐ąŠą╗čīąĘčāčÅ ą┐ąŠą╗ąĖąĮąŠą╝ąĮčŗą╣ ą│ąĄąĮąĄčĆą░č鹊čĆ, ą┐ąŠą║ą░ąĘą░ąĮąĮčŗą╣ ąĮą░ čĆąĖčü. 11. ąŁčéą░ čüčģąĄą╝ą░ čüąŠčüč鹊ąĖčé ąĖąĘ čĆąĄą│ąĖčüčéčĆą░ čüą┤ą▓ąĖą│ą░ ąĖ ą╗ąŠą│ąĖč湥čüą║ąĖčģ 菹╗ąĄą╝ąĄąĮč鹊ą▓ ąśąĪąÜąøą«ą¦ąÉą«ą®ąĢąĢ ąśąøąś (XOR), ąĖ ą▒ąĖčéčŗ čĆąĄą│ąĖčüčéčĆą░ čüą┤ą▓ąĖą│ą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘąĖčĆčāčÄčéčüčÅ ąĮčāą╗čÅą╝ąĖ 0. ąØą░čćąĖąĮą░čÅ čü čüą░ą╝ąŠą│ąŠ ą╝ą╗ą░ą┤čłąĄą│ąŠ ąĘąĮą░čćą░čēąĄą│ąŠ ą▒ąĖčéą░ ROM-ą║ąŠą┤ą░ ąĖą╗ąĖ čüą░ą╝ąŠą│ąŠ ą╝ą╗ą░ą┤čłąĄą│ąŠ ąĘąĮą░čćą░čēąĄą│ąŠ ą▒ąĖčéą░ scratchpad, ą┤ą░ąĮąĮčŗąĄ ą┐ąŠą▒ąĖčéąĮąŠ ą▓ą┤ą▓ąĖą│ą░čÄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░. ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ 56-ą╣ ą▒ąĖčé ąĖąĘ ROM ą▒čŗą╗ ą▓ą┤ą▓ąĖąĮčāčéROM (ąĖą╗ąĖ ą▒ąĖčé 7 ąĖąĘ čüą░ą╝ąŠą│ąŠ čüčéą░čĆčłąĄą│ąŠ ą▒ą░ą╣čéą░ scratchpad), ą▓ ą│ąĄąĮąĄčĆą░č鹊čĆąĄ ą▒čāą┤ąĄčé čüąŠą┤ąĄčƹȹ░čéčīčüčÅ CRC. ąöą░ą╗ąĄąĄ 8 ą▒ąĖčé CRC ąŠčé ROM-ą║ąŠą┤ą░ ąĖą╗ąĖ CRC ąŠčé scratchpad ąĖąĘ DS18B20 ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą▓ą┤ą▓ąĖąĮčāčéčŗ ą▓ čüčģąĄą╝čā. ąÆ čŹč鹊čé ą╝ąŠą╝ąĄąĮčé, ąĄčüą╗ąĖ ą▓čŗčćąĖčüą╗ąĄąĮąĮą░čÅ CRC ą▒čŗą╗ą░ ą║ąŠčĆčĆąĄą║čéąĮą░, č鹊 čĆąĄą│ąĖčüčéčĆ čüą┤ą▓ąĖą│ą░ ą▒čāą┤ąĄčé čüąŠą┤ąĄčƹȹ░čéčī ą▓čüąĄ ąĮčāą╗ąĖ. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮą░čÅ ąĖąĮč乊čĆą╝ą░čåąĖčÅ ą┐ąŠ ą▓čŗčćąĖčüą╗ąĄąĮąĖčÄ ą║ąŠąĮčéčĆąŠą╗čīąĮąŠą╣ čåąĖą║ą╗ąĖč湥čüą║ąŠą╣ čüčāą╝ą╝čŗ Maxim 1-Wire ą┤ąŠčüčéčāą┐ąĮą░ ą▓ ą░ą┐ąĮąŠčāč鹥 [2].

ąĀąĖčü. 11. ąōąĄąĮąĄčĆą░č鹊čĆ CRC.
[ąĪąĖčüč鹥ą╝ą░ čłąĖąĮčŗ 1-Wire]
ąĪąĖčüč鹥ą╝ą░ čłąĖąĮčŗ 1-Wire ąĖčüą┐ąŠą╗čīąĘčāąĄčé ąŠą┤ąĮąŠą│ąŠ ą╝ą░čüč鹥čĆą░ čłąĖąĮčŗ ą┤ą╗čÅ čāą┐čĆą░ą▓ą╗ąĄąĮąĖčÅ ąŠą┤ąĮąĖą╝ ąĖą╗ąĖ ą▒ąŠą╗čīčłąĖą╝ ą║ąŠą╗ąĖč湥čüčéą▓ąŠą╝ ą┐ąŠą┤čćąĖąĮąĄąĮąĮčŗčģ (slave) čāčüčéčĆąŠą╣čüčéą▓, ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮčŗčģ ą║ čłąĖąĮąĄ 1-Wire ą┐ą░čĆą░ą╗ą╗ąĄą╗čīąĮąŠ. ą£ąĖą║čĆąŠčüčģąĄą╝ą░ DS18B20 ą▓čüąĄą│ą┤ą░ ą▓čŗčüčéčāą┐ą░ąĄčé ą║ą░ą║ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ. ąÜąŠą│ą┤ą░ ąĮą░ čłąĖąĮąĄ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ, ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ ąĘąĮą░čćąĖč鹥ą╗čīąĮąŠ čāą┐čĆąŠčēą░ąĄčéčüčÅ, čŹč鹊čé čüą╗čāčćą░ą╣ ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ čüąĖčüč鹥ą╝ąŠą╣ "single-drop"; čüąĖčüč鹥ą╝ą░, ą▓ ą║ąŠč鹊čĆąŠą╣ ąĮą░ čłąĖąĮąĄ ąĮąĄčüą║ąŠą╗čīą║ąŠ slave-čāčüčéčĆąŠą╣čüčéą▓, ąĮą░ąĘčŗą▓ą░ąĄčéčüčÅ "multidrop".
ąÆčüąĄ ą┤ą░ąĮąĮčŗąĄ ąĖ ą║ąŠą╝ą░ąĮą┤čŗ ą┐ąĄčĆąĄą┤ą░čÄčéčüčÅ ą┐ąŠ čłąĖąĮąĄ 1-Wire čüą░ą╝čŗą╝ ą╝ą╗ą░ą┤čłąĖą╝ ąĘąĮą░čćą░čēąĖą╝ ą▒ąĖč鹊ą╝ ą▓ą┐ąĄčĆąĄą┤.
ąÉą┐ą┐ą░čĆą░čéąĮą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ. ą©ąĖąĮą░ 1-Wire ą┐ąŠ ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĖčÄ čüąŠą┤ąĄčƹȹĖčé č鹊ą╗čīą║ąŠ ąŠą┤ąĖąĮ čüąĖą│ąĮą░ą╗ ą┤ą░ąĮąĮčŗčģ. ąÜą░ąČą┤ąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮą░ čłąĖąĮąĄ (master ąĖą╗ąĖ slave) ąŠą▒ą╝ąĄąĮąĖą▓ą░čÄčéčüčÅ ąĖąĮč乊čĆą╝ą░čåąĖąĄą╣ ą┐ąŠ čŹč鹊ą╝čā čüąĖą│ąĮą░ą╗čā ą┤ą░ąĮąĮčŗčģ čü ą┐ąŠą╝ąŠčēčīčÄ ą┐ąŠčĆčéą░ čü ąŠčéą║čĆčŗčéčŗą╝ čüč鹊ą║ąŠą╝. ąŁč鹊 ą┤ą░ąĄčé ą▓ąŠąĘą╝ąŠąČąĮąŠčüčéčī ą║ą░ąČą┤ąŠą╝čā ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ "ąŠčüą▓ąŠą▒ąŠą┤ąĖčéčī" čüąĖą│ąĮą░ą╗ ą┤ą░ąĮąĮčŗčģ, ą║ąŠą│ą┤ą░ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮąĄ ą┐ąĄčĆąĄą┤ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą┐ąŠ čłąĖąĮąĄ, čćč鹊ą▒čŗ čłąĖąĮą░ čüčéą░ą╗ą░ ą┤ąŠčüčéčāą┐ąĮą░ ą┤ą╗čÅ ą┤čĆčāą│ąŠą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░. ą¤ąŠčĆčé 1-Wire ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ DS18B20 (ąĮąŠąČą║ą░ DQ) ąĖą╝ąĄąĄčé ąŠčéą║čĆčŗčéčŗą╣ čüč鹊ą║ čü ą▓ąĮčāčéčĆąĄąĮąĮąĄą╣ čüčģąĄą╝ąŠą╣, 菹║ą▓ąĖą▓ą░ą╗ąĄąĮčéąĮąŠą╣ ą┐ąŠą║ą░ąĘą░ąĮąĮąŠą╣ ąĮą░ čĆąĖčü. 12.
ąĀąĖčü. 12. ąÉą┐ą┐ą░čĆą░čéąĮą░čÅ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖčÅ.
ą©ąĖąĮą░ 1-Wire čéčĆąĄą▒čāąĄčé ą▓ąĮąĄčłąĮąĄą│ąŠ pullup-čĆąĄąĘąĖčüč鹊čĆą░ ąĮąŠą╝ąĖąĮą░ą╗ąŠą╝ ą┐čĆąĖą▒ą╗ąĖąĘąĖč鹥ą╗čīąĮąŠ 5 ą║ą×ą╝; čéą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ ąŠąČąĖą┤ą░ąĮąĖčÅ čłąĖąĮą░ 1-Wire (idle state) ą┐ąŠą╗čāčćą░ąĄčé ą╗ąŠą│. 1. ąĢčüą╗ąĖ ą┐ąŠ ą║ą░ą║ąŠą╣-ą╗ąĖą▒ąŠ ą┐čĆąĖčćąĖąĮąĄ čéčĆą░ąĮąĘą░ą║čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐čĆąĖąŠčüčéą░ąĮąŠą▓ą╗ąĄąĮą░, čłąĖąĮą░ ąöą×ąøą¢ąØąÉ ąæą½ąóą¼ ąŠčüčéą░ą▓ą╗ąĄąĮą░ ą▓ čüąŠčüč鹊čÅąĮąĖąĖ idle, ąĄčüą╗ąĖ čéčĆą░ąĮąĘą░ą║čåąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐čĆąŠą┤ąŠą╗ąČąĄąĮą░. ąæąĄčüą║ąŠąĮąĄčćąĮąŠąĄ ą▓čĆąĄą╝čÅ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą╝ąŠąČąĄčé ą┐čĆąŠąĖčüčģąŠą┤ąĖčéčī ą╝ąĄąČą┤čā ą▒ąĖčéą░ą╝ąĖ ą┤ąŠ č鹥čģ ą┐ąŠčĆ, ą┐ąŠą║ą░ čłąĖąĮą░ 1-Wire ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ąĮąĄą░ą║čéąĖą▓ąĮąŠą╝ (ą▓ ą╗ąŠą│. 1) čüąŠčüč鹊čÅąĮąĖąĖ ą▓ąŠ ą▓čĆąĄą╝čÅ ą┐ąĄčĆąĖąŠą┤ą░ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ. ąĢčüą╗ąĖ čłąĖąĮą░ čāą┤ąĄčƹȹĖą▓ą░ąĄčéčüčÅ ą▓ ą╗ąŠą│. 0 ąĮą░ ą▓čĆąĄą╝čÅ ą▒ąŠą╗čīčłąĄąĄ, č湥ą╝ 480 ą╝ą║čü, č鹊 ą▓čüąĄ ą║ąŠą╝ą┐ąŠąĮąĄąĮčéčŗ ąĮą░ čłąĖąĮąĄ ą▒čāą┤čāčé čüą▒čĆąŠčłąĄąĮčŗ.
ą¤ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī čéčĆą░ąĮąĘą░ą║čåąĖąĖ. ąóčĆą░ąĮąĘą░ą║čåąĖčÅ ą┤ą╗čÅ ą┤ąŠčüčéčāą┐ą░ ą║ DS18B20 čüąŠčüč鹊ąĖčé ąĖąĘ čüą╗ąĄą┤čāčÄčēąĖčģ ą┤ąĄą╣čüčéą▓ąĖą╣:
ą©ą░ą│ 1. ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ.
ą©ą░ą│ 2. ąÜąŠą╝ą░ąĮą┤ą░ ROM (ąĘą░ ą║ąŠč鹊čĆąŠą╣ ąĖą┤ąĄčé ą╗čÄą▒ąŠą╣ čéčĆąĄą▒čāąĄą╝čŗą╣ ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ).
ą©ą░ą│ 3. ążčāąĮą║čåąĖąŠąĮą░ą╗čīąĮą░čÅ ą║ąŠą╝ą░ąĮą┤ą░ DS18B20 (ąĘą░ ą║ąŠč鹊čĆąŠą╣ ąĖą┤ąĄčé ą╗čÄą▒ąŠą╣ čéčĆąĄą▒čāąĄą╝čŗą╣ ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ).
ą×č湥ąĮčī ą▓ą░ąČąĮąŠ čüąŠą▒ą╗čÄą┤ą░čéčī čéą░ą║čāčÄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéčī ą║ą░ąČą┤čŗą╣ čĆą░ąĘ ą┐čĆąĖ ą┤ąŠčüčéčāą┐ąĄ ą║ DS18B20, ą┐ąŠčüą║ąŠą╗čīą║čā DS18B20 ąĮąĄ ąŠčéą▓ąĄčéąĖčé, ąĄčüą╗ąĖ ą╗čÄą▒ąŠą╣ ąĖąĘ čłą░ą│ąŠą▓ ą▓ čŹč鹊ą╣ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ą┐čĆąŠą┐čāčēąĄąĮ, ąĖą╗ąĖ čüą╗ąĄą┤čāąĄčé ąĮąĄ ą▓ č鹊ą╝ ą┐ąŠčĆčÅą┤ą║ąĄ. ąśčüą║ą╗čÄč湥ąĮąĖąĄ ąĖąĘ čŹč鹊ą│ąŠ ą┐čĆą░ą▓ąĖą╗ą░ - ą║ąŠą╝ą░ąĮą┤čŗ Search ROM [F0h] ąĖ Alarm Search [ECh]. ą¤ąŠčüą╗ąĄ ą▓čŗą┤ą░čćąĖ ą╗čÄą▒ąŠą╣ ąĖąĘ čŹčéąĖčģ ą║ąŠą╝ą░ąĮą┤ ą╝ą░čüč鹥čĆ ą┤ąŠą╗ąČąĄąĮ ą▓ąĄčĆąĮčāčéčīčüčÅ ą║ čłą░ą│čā 1 ą┐ąŠą║ą░ąĘą░ąĮąĮąŠą╣ ą▓čŗčłąĄ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ čéčĆą░ąĮąĘą░ą║čåąĖąĖ.
ąśąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ. ąÆčüąĄ čéčĆą░ąĮąĘą░ą║čåąĖąĖ ąĮą░ čłąĖąĮąĄ 1-Wire ąĮą░čćąĖąĮą░čÄčéčüčÅ čü ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ. ą×ąĮą░ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü ąĖą╝ą┐čāą╗čīčüą░ čüą▒čĆąŠčüą░, ą┐ąĄčĆąĄą┤ą░ąĮąĮąŠą│ąŠ ą╝ą░čüč鹥čĆąŠą╝, ąĘą░ ą║ąŠč鹊čĆčŗą╝ ąĖą┤ąĄčé ąĖą╝ą┐čāą╗čīčü (ąĖą╝ą┐čāą╗čīčüčŗ) ą┐čĆąĖčüčāčéčüčéą▓ąĖčÅ, ą┐ąĄčĆąĄą┤ą░ąĮąĮčŗąĄ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠą╝ (čāčüčéčĆąŠą╣čüčéą▓ą░ą╝ąĖ). ąśą╝ą┐čāą╗čīčü ą┐čĆąĖčüčāčéčüčéą▓ąĖčÅ (presence pulse) ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą╝ą░čüč鹥čĆčā čāąĘąĮą░čéčī, čćč鹊 slave-čāčüčéčĆąŠą╣čüčéą▓ą░ (ąĮą░ą┐ąŠą┤ąŠą▒ąĖąĄ DS18B20) ą┐ąŠą┤ą║ą╗čÄč湥ąĮčŗ ą║ čłąĖąĮąĄ ąĖ ą│ąŠč鹊ą▓čŗ ą║ čĆą░ą▒ąŠč鹥. ąśąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ ąĖą╝ą┐čāą╗čīčüą░ čüą▒čĆąŠčüą░ ąĖ ąĖą╝ą┐čāą╗čīčüą░ ą┐čĆąĖčüčāčéčüčéą▓ąĖčÅ ąŠą┐ąĖčüą░ąĮčŗ ą▓ čüąĄą║čåąĖąĖ "ąĪąĖą│ąĮą░ą╗čŗ 1-Wire".
[ąÜąŠą╝ą░ąĮą┤čŗ ROM]
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą╝ą░čüč鹥čĆ ąŠą┐čĆąĄą┤ąĄą╗ąĖą╗ ą┐ąŠčÅą▓ą╗ąĄąĮąĖąĄ presence pulse, ąŠąĮ ą╝ąŠąČąĄčé ą▓čŗą┤ą░čéčī ą║ąŠą╝ą░ąĮą┤čŗ ROM. ąŁčéąĖ ą║ąŠą╝ą░ąĮą┤čŗ čĆą░ą▒ąŠčéą░čÄčé čü čāąĮąĖą║ą░ą╗čīąĮčŗą╝ąĖ 64-ą▒ąĖčéąĮčŗą╝ąĖ ROM-ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆą░ą╝ąĖ ą║ą░ąČą┤ąŠą│ąŠ slave-čāčüčéčĆąŠą╣čüčéą▓ą░, ąĖ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą╝ą░čüč鹥čĆčā ą▓čŗą┤ąĄą╗ąĖčéčī ąĮą░ čłąĖąĮąĄ 1-Wire ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ čāčüčéčĆąŠą╣čüčéą▓ąŠ, ąĄčüą╗ąĖ ą║ čłąĖąĮąĄ ą┐ąŠą┤ą║ą╗čÄč湥ąĮą░ ąĮąĄčüą║ąŠą╗čīą║ąŠ čāčüčéčĆąŠą╣čüčéą▓. ąŁčéąĖ ą║ąŠą╝ą░ąĮą┤čŗ čéą░ą║ąČąĄ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą╝ą░čüč鹥čĆčā ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, čüą║ąŠą╗čīą║ąŠ čāčüčéčĆąŠą╣čüčéą▓ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ąĮą░ čłąĖąĮąĄ ąĖ ą║ą░ą║ąĖąĄ čā ąĮąĖčģ čéąĖą┐čŗ, ąĖ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ą╗ąĖ ą▓ ą║ą░ą║ąŠą╝-ąĮąĖą▒čāą┤čī čāčüčéčĆąŠą╣čüčéą▓ąĄ čüąŠčüč鹊čÅąĮąĖąĄ čéčĆąĄą▓ąŠą│ąĖ (alarm). ąĪčāčēąĄčüčéą▓čāąĄčé 5 ą║ąŠą╝ą░ąĮą┤ ROM, ą║ą░ąČą┤ą░čÅ ąĖąĘ ąĮąĖčģ ą┤ą╗ąĖąĮąŠą╣ 8 ą▒ąĖčé. ą£ą░čüč鹥čĆ ą┤ąŠą╗ąČąĄąĮ ą▓čŗą┤ą░čéčī čüąŠąŠčéą▓ąĄčéčüčéą▓čāčÄčēčāčÄ ą║ąŠą╝ą░ąĮą┤čā ROM ą┐ąĄčĆąĄą┤ ą▓čŗą┤ą░č湥ą╣ ą║ąŠą╝ą░ąĮą┤čŗ čäčāąĮą║čåąĖąĖ DS18B20. ąÉą╗ą│ąŠčĆąĖčéą╝ čĆą░ą▒ąŠčéčŗ ą║ąŠą╝ą░ąĮą┤ ROM ą┐ąŠą║ą░ąĘą░ąĮ ąĮą░ čĆąĖčü. 13.
ąÜąŠą│ą┤ą░ ąĮą░ čüąĖčüč鹥ą╝čā ą┐ąŠą┤ą░ąĮąŠ ą┐ąĖčéą░ąĮąĖąĄ, ą╝ą░čüč鹥čĆ ą┤ąŠą╗ąČąĄąĮ ąĖą┤ąĄąĮčéąĖčäąĖčåąĖčĆąŠą▓ą░čéčī ROM-ą║ąŠą┤čŗ (čāąĮąĖą║ą░ą╗čīąĮčŗąĄ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░č鹊čĆčŗ) ą▓čüąĄčģ slave-čāčüčéčĆąŠą╣čüčéą▓ ąĮą░ čłąĖąĮąĄ, čćč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą╝ą░čüč鹥čĆčā ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī ą║ąŠą╗ąĖč湥čüčéą▓ąŠ slave-čāčüčéčĆąŠą╣čüčéą▓ ąĖ ąĖčģ čéąĖą┐čŗ. ą£ą░čüč鹥čĆ čĆą░čüą┐ąŠąĘąĮą░ąĄčé ROM-ą║ąŠą┤čŗ ą┐ąŠčüčĆąĄą┤čüčéą▓ąŠą╝ ą┐čĆąŠčåąĄčüčüą░ ąĖčüą║ą╗čÄč湥ąĮąĖčÅ, ą║ąŠč鹊čĆčŗą╣ čéčĆąĄą▒čāąĄčé, čćč鹊ą▒čŗ ą╝ą░čüč鹥čĆ ą▓čŗą┐ąŠą╗ąĮąĖą╗ čåąĖą║ą╗ Search ROM (čé. ąĄ. ą║ąŠą╝ą░ąĮą┤čā Search ROM, ąĘą░ ą║ąŠč鹊čĆąŠą╣ čüą╗ąĄą┤čāąĄčé ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ) čüč鹊ą╗čīą║ąŠ čĆą░ąĘ, čüą║ąŠą╗čīą║ąŠ ąĮąĄąŠą▒čģąŠą┤ąĖą╝ąŠ ą┤ą╗čÅ ąĖą┤ąĄąĮčéąĖčäąĖą║ą░čåąĖąĖ ą▓čüąĄčģ slave-čāčüčéčĆąŠą╣čüčéą▓. ąĢčüą╗ąĖ ąĮą░ čłąĖąĮąĄ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ, č鹊 ą▓ą╝ąĄčüč鹊 ą┐čĆąŠčåąĄčüčüą░ Search ROM ą╝ąŠąČąĄčé ą▒čŗčéčī ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮą░ ą▒ąŠą╗ąĄąĄ ą┐čĆąŠčüčéą░čÅ ą║ąŠą╝ą░ąĮą┤ą░ Read ROM [33h]. ąöą╗čÅ ą┐ąŠą┤čĆąŠą▒ąĮąŠą│ąŠ ąŠą┐ąĖčüą░ąĮąĖčÅ ą┐čĆąŠčåąĄą┤čāčĆčŗ Search ROM čüą╝. ą░ą┐ąĮąŠčāčé AN937 [3]. ą¤ąŠčüą╗ąĄ ą║ą░ąČą┤ąŠą│ąŠ čåąĖą║ą╗ą░ Search ROM ą╝ą░čüč鹥čĆ ą┤ąŠą╗ąČąĄąĮ ą▓ąĄčĆąĮčāčéčīčüčÅ ą║ čłą░ą│čā 1 (ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ) ą▓ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ čéčĆą░ąĮąĘą░ą║čåąĖąĖ.
ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ ąĮą░ čłąĖąĮąĄ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ. ąŁč鹊 ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą╝ą░čüč鹥čĆčā čłąĖąĮčŗ ą┐čĆąŠčćąĖčéą░čéčī 64-čĆą░ąĘčĆčÅą┤ąĮčŗą╣ ROM-ą║ąŠą┤ ą▒ąĄąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ ą┐čĆąŠčåąĄą┤čāčĆčŗ Search ROM. ąĢčüą╗ąĖ ą║ąŠą╝ą░ąĮą┤ą░ Read Rom ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, ą║ąŠą│ą┤ą░ ąĮą░ čłąĖąĮąĄ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ą▒ąŠą╗čīčłąĄ ąŠą┤ąĮąŠą│ąŠ slave-čāčüčéčĆąŠą╣čüčéą▓ą░, č鹊 ą┐čĆąŠąĖąĘąŠą╣ą┤ąĄčé ą║ąŠą╗ą╗ąĖąĘąĖčÅ ą┤ą░ąĮąĮčŗčģ, ą┐ąŠč鹊ą╝čā čćč鹊 ą▓čüąĄ čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮą░ čłąĖąĮąĄ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą┐ąŠą┐čŗčéą░čÄčéčüčÅ ąŠčéą▓ąĄčéąĖčéčī ąĮą░ čŹčéčā ą║ąŠą╝ą░ąĮą┤čā.
ąÜąŠą╝ą░ąĮą┤ą░ Match ROM, ąĘą░ ą║ąŠč鹊čĆąŠą╣ ąĖą┤ąĄčé 64-čĆą░ąĘčĆčÅą┤ąĮčŗą╣ ROM-ą║ąŠą┤, ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą╝ą░čüč鹥čĆčā ą▓ ą╗čÄą▒ąŠą╝ čüą╗čāčćą░ąĄ ą░ą┤čĆąĄčüąŠą▓ą░čéčī ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮąĮąŠąĄ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĮą░ čłąĖąĮąĄ - ąĖ ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ multidrop (ą║ąŠą│ą┤ą░ ąĮą░ čłąĖąĮąĄ ąĮąĄčüą║ąŠą╗čīą║ąŠ slave-čāčüčéčĆąŠą╣čüčéą▓), ąĖ ą▓ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ single-drop (ą║ąŠą│ą┤ą░ ąĮą░ čłąĖąĮąĄ č鹊ą╗čīą║ąŠ ąŠą┤ąĮąŠ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ). ąóąŠą╗čīą║ąŠ č鹊 slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ, čā ą║ąŠč鹊čĆąŠą│ąŠ ą┐ąŠą╗ąĮąŠčüčéčīčÄ čüąŠą▓ą┐ą░ą┤ąĄčé 64-ą▒ąĖčéąĮčŗą╣ ROM-ą║ąŠą┤, ąŠčéą▓ąĄčéąĖčé ąĮą░ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčāčÄ ą║ąŠą╝ą░ąĮą┤čā, ą║ąŠč鹊čĆčāčÄ ą▓čŗą┤ą░čüčé ą╝ą░čüč鹥čĆ; ą▓čüąĄ ą┤čĆčāą│ąĖąĄ slave-čāčüčéčĆąŠą╣čüčéą▓ą░ ąĮą░ čłąĖąĮąĄ ą▒čāą┤čāčé ąŠąČąĖą┤ą░čéčī ąĖą╝ą┐čāą╗čīčüą░ čüą▒čĆąŠčüą░.
ą£ą░čüč鹥čĆ ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčī čŹčéčā ą║ąŠą╝ą░ąĮą┤čā ą┤ą╗čÅ ą░ą┤čĆąĄčüą░čåąĖąĖ ą▓čüąĄčģ čāčüčéčĆąŠą╣čüčéą▓ ąĮą░ čłąĖąĮąĄ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ, ą▒ąĄąĘ ąŠčéą┐čĆą░ą▓ą║ąĖ ą║ą░ą║ąŠą╣-ą╗ąĖą▒ąŠ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ROM-ą║ąŠą┤ą░. ąØą░ą┐čĆąĖą╝ąĄčĆ, ą╝ą░čüč鹥čĆ ą╝ąŠąČąĄčé ą┤ą░čéčī ą║ąŠą╝ą░ąĮą┤čā ą▓čüąĄą╝ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ą╝ DS18B20 ąĮą░ čłąĖąĮąĄ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą▓čŗą┐ąŠą╗ąĮąĖčéčī ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ, ąĄčüą╗ąĖ čüąĮą░čćą░ą╗ą░ ą┐ąŠčłą╗ąĄčé ą║ąŠą╝ą░ąĮą┤čā Skip ROM, ą░ ąĘą░č鹥ą╝ ą║ąŠą╝ą░ąĮą┤čā Convert T [44h].
ą×ą▒čĆą░čéąĖč鹥 ą▓ąĮąĖą╝ą░ąĮąĖąĄ, čćč鹊 ą║ąŠą╝ą░ąĮą┤ą░ Read Scratchpad [BEh] ą╝ąŠąČąĄčé čüą╗ąĄą┤ąŠą▓ą░čéčī ąĘą░ ą║ąŠą╝ą░ąĮą┤ąŠą╣ Skip ROM č鹊ą╗čīą║ąŠ ąĄčüą╗ąĖ ąĮą░ čłąĖąĮąĄ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ąŠą┤ąĮąŠ slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ. ąÆ čŹč鹊ą╝ čüą╗čāčćą░ąĄ ą╝ąŠąČąĄčé 菹║ąŠąĮąŠą╝ąĖčéčīčüčÅ ą▓čĆąĄą╝čÅ čćč鹥ąĮąĖčÅ scratchpad, ą┐ąŠč鹊ą╝čā čćč鹊 slave-čāčüčéčĆąŠą╣čüčéą▓ąŠ ą▒čāą┤ąĄčé ą┐čĆąŠčćąĖčéą░ąĮąŠ ą▒ąĄąĘ ąŠčéą┐čĆą░ą▓ą║ąĖ 64-ą▒ąĖčéąĮąŠą│ąŠ ROM-ą║ąŠą┤ą░ (čŹč鹊 ą╝ąŠąČąĄčé ą▒čŗčéčī ą▓ą░ąČąĮčŗą╝ čäą░ą║č鹊čĆąŠą╝ ą┤ą╗čÅ ą┐ąĄčĆąĄąĮąŠčüąĮčŗčģ ą░ą▓č鹊ąĮąŠą╝ąĮčŗčģ čāčüčéčĆąŠą╣čüčéą▓, ą║ąŠą│ą┤ą░ 菹║ąŠąĮąŠą╝ąĖčÅ čŹąĮąĄčĆą│ąĖąĖ čÅą▓ą╗čÅąĄčéčüčÅ ą║čĆąĖčéąĖčćąĮčŗą╝ čäą░ą║č鹊čĆąŠą╝). ąĢčüą╗ąĖ ąČąĄ ąĮą░ čłąĖąĮąĄ ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ąĮąĄčüą║ąŠą╗čīą║ąŠ slave-čāčüčéčĆąŠą╣čüčéą▓, č鹊 ą║ąŠą╝ą░ąĮą┤ą░ Skip ROM, ąĘą░ ą║ąŠč鹊čĆąŠą╣ ąĖą┤ąĄčé ą║ąŠą╝ą░ąĮą┤ą░ Read Scratchpad, ą┐čĆąĖą▓ąĄą┤ąĄčé ą║ ą║ąŠą╗ą╗ąĖąĘąĖąĖ ą┤ą░ąĮąĮčŗčģ ąĮą░ čłąĖąĮąĄ, ą┐ąŠč鹊ą╝čā čćč鹊 ąĮąĄčüą║ąŠą╗čīą║ąŠ slave-čāčüčéčĆąŠą╣čüčéą▓ ą┐ąŠą┐čŗčéą░čÄčéčüčÅ ąŠą┤ąĮąŠą▓čĆąĄą╝ąĄąĮąĮąŠ ą┐ąĄčĆąĄą┤ą░čéčī čüą▓ąŠąĖ ą┤ą░ąĮąĮčŗąĄ.
ą¤čĆąĖąĮčåąĖą┐ čĆą░ą▒ąŠčéčŗ čŹč鹊ą╣ ą║ąŠą╝ą░ąĮą┤čŗ ąĖą┤ąĄąĮčéąĖč湥ąĮ čĆą░ą▒ąŠč鹥 ą║ąŠą╝ą░ąĮą┤čŗ Search ROM, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ č鹊ą│ąŠ, čćč鹊 ąŠčéą▓ąĄčéčÅčé č鹊ą╗čīą║ąŠ č鹥 slave-čāčüčéčĆąŠą╣čüčéą▓ą░, čā ą║ąŠč鹊čĆčŗčģ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮ čäą╗ą░ą│ čéčĆąĄą▓ąŠą│ąĖ (alarm flag). ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą╝ą░čüč鹥čĆčā ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ą╗ąĖ ąĮą░ ą║ą░ą║ąŠą╝-ą╗ąĖą▒ąŠ ąĖąĘ čāčüčéčĆąŠą╣čüčéą▓ DS18B20 čüąŠčüč鹊čÅąĮąĖąĄ čéčĆąĄą▓ąŠą│ąĖ, ą║ąŠč鹊čĆąŠąĄ ą╝ąŠąČąĄčé ą┐čĆąŠąĖąĘąŠą╣čéąĖ ą┐ąŠčüą╗ąĄ čüą░ą╝ąŠą│ąŠ ą┐ąŠčüą╗ąĄą┤ąĮąĄą│ąŠ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ (ąĄčüą╗ąĖ ąĖąĘą╝ąĄčĆąĄąĮąĮąŠąĄ ąĘąĮą░č湥ąĮąĖąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ą┐čĆąĄą▓čŗčüąĖą╗ąŠ čāčüčéą░ąĮąŠą▓ą╗ąĄąĮąĮčŗąĄ ą┐ąŠčĆąŠą│ąĖ TL ąĖ TH). ą¤ąŠčüą╗ąĄ ą║ą░ąČą┤ąŠą│ąŠ čåąĖą║ą╗ą░ Alarm Search (čé. ąĄ. ą▓čŗą┤ą░čćąĖ ą║ąŠą╝ą░ąĮą┤čŗ Alarm Search, ą┐ąŠčüą╗ąĄ ą║ąŠč鹊čĆąŠą╣ ąĖą┤ąĄčé ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ), ą╝ą░čüč鹥čĆ čłąĖąĮčŗ ą┤ąŠą╗ąČąĄąĮ ą▓ąĄčĆąĮčāčéčīčüčÅ ą║ čłą░ą│čā 1 (ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖčÅ) ą▓ ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ čéčĆą░ąĮąĘą░ą║čåąĖąĖ. ąĪą╝. ą▓čŗčłąĄ čüąĄą║čåąĖčÄ "ąĪąĖą│ąĮą░ą╗ąĖąĘą░čåąĖčÅ čéčĆąĄą▓ąŠą│ąĖ" ą┤ą╗čÅ ąŠą┐ąĖčüą░ąĮąĖčÅ čĆą░ą▒ąŠčéčŗ čäą╗ą░ą│ą░ čéčĆąĄą▓ąŠą│ąĖ.

ąĀąĖčü. 13. ąÆčŗą┐ąŠą╗ąĮąĄąĮąĖąĄ ROM-ą║ąŠą╝ą░ąĮą┤.
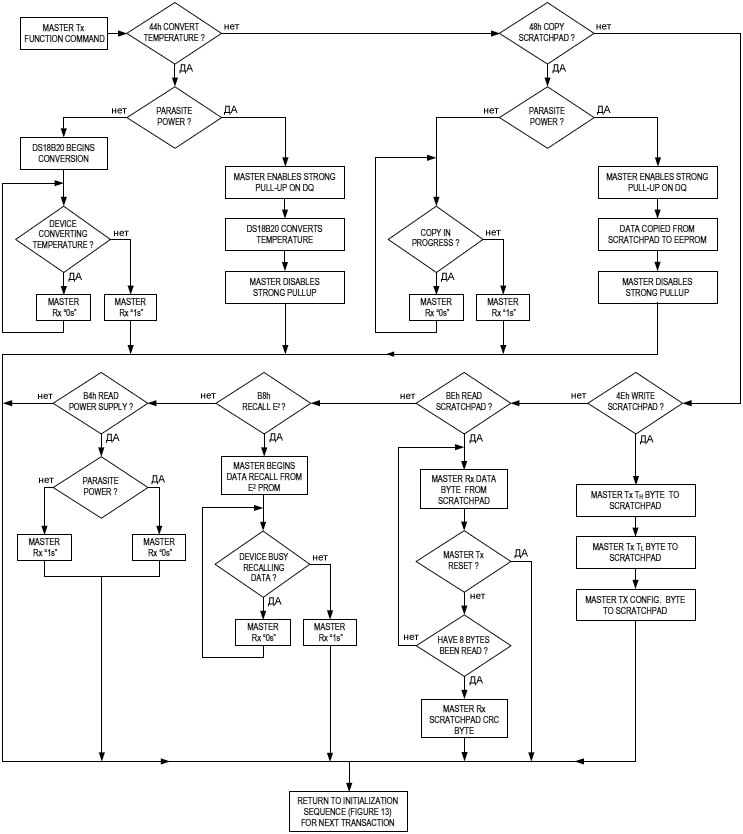
[ąÜąŠą╝ą░ąĮą┤čŗ čäčāąĮą║čåąĖą╣ DS18B20]
ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą╝ą░čüč鹥čĆ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ą╗ ą║ąŠą╝ą░ąĮą┤čā ROM ą┤ą╗čÅ ą░ą┤čĆąĄčüą░čåąĖąĖ č鹊ą│ąŠ čāčüčéčĆąŠą╣čüčéą▓ą░, čü ą║ąŠč鹊čĆčŗą╝ čģąŠč鹥ą╗ ą▒čŗ ąŠčĆą│ą░ąĮąĖąĘąŠą▓ą░čéčī ąŠą▒ą╝ąĄąĮ ą┤ą░ąĮąĮčŗą╝ąĖ, ą╝ą░čüč鹥čĆ ą╝ąŠąČąĄčé ą▓čŗą┤ą░čéčī ąŠą┤ąĮčā ąĖąĘ ą║ąŠą╝ą░ąĮą┤ čäčāąĮą║čåąĖą╣ DS18B20. ąŁčéąĖ ą║ąŠą╝ą░ąĮą┤čŗ ą┐ąŠąĘą▓ąŠą╗čÅčÄčé ą╝ą░čüč鹥čĆčā ąĘą░ą┐ąĖčüą░čéčī ąĖą╗ąĖ ą┐čĆąŠčćąĖčéą░čéčī ą┐ą░ą╝čÅčéčī scratchpad ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ DS18B20, ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░čéčī ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ąĖ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī čĆąĄąČąĖą╝ ą┐ąŠą┤ą░čćąĖ ą┐ąĖčéą░ąĮąĖčÅ. ąÜąŠą╝ą░ąĮą┤čŗ čäčāąĮą║čåąĖą╣ DS18B20, ąŠą┐ąĖčüą░ąĮąĮčŗąĄ ą┤ą░ą╗ąĄąĄ, čüčāą╝ą╝ą░čĆąĮąŠ ą┐čĆąĄą┤čüčéą░ą▓ą╗ąĄąĮčŗ ą▓ čéą░ą▒ą╗ąĖčåąĄ 3, ąĖ ąĖčģ čĆą░ą▒ąŠčéą░ ą┐čĆąŠąĖą╗ą╗čÄčüčéčĆąĖčĆąŠą▓ą░ąĮą░ ą░ą╗ą│ąŠčĆąĖčéą╝ąŠą╝ ąĮą░ čĆąĖčü. 14.
ąóą░ą▒ą╗ąĖčåą░ 3. ąØą░ą▒ąŠčĆ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗčģ ą║ąŠą╝ą░ąĮą┤ DS18B20.
| ąÜąŠą╝ą░ąĮą┤ą░ |
ą×ą┐ąĖčüą░ąĮąĖąĄ |
ą¤čĆąŠč鹊ą║ąŠą╗ |
ąÉą║čéąĖą▓ąĮąŠčüčéčī čłąĖąĮčŗ ą┐ąŠčüą╗ąĄ ą▓čŗą┤ą░čćąĖ ą║ąŠą╝ą░ąĮą┤čŗ |
| ąÜąŠą╝ą░ąĮą┤čŗ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ |
| Convert T |
ąśąĮąĖčåąĖąĖčĆčāąĄčé ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ(1). |
44h |
ąĢčüą╗ąĖ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ąĮąĄčłąĮąĖą╣ ąĖčüč鹊čćąĮąĖą║ ą┐ąĖčéą░ąĮąĖčÅ, č鹊 DS18B20 ą┐ąĄčĆąĄą┤ą░ąĄčé čüčéą░čéčāčü ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ą▓ ąŠčéą▓ąĄčé ąĮą░ čéą░ą╣ą╝čüą╗ąŠčéčŗ čćč鹥ąĮąĖčÅ (čŹč鹊čé čäčāąĮą║čåąĖąŠąĮą░ą╗ ąĮąĄą┤ąŠčüčéčāą┐ąĄąĮ ą┤ą╗čÅ ą┐ą░čĆą░ąĘąĖčéąĮąŠą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ). |
| ąÜąŠą╝ą░ąĮą┤čŗ ą┐ą░ą╝čÅčéąĖ |
| Read Scratchpad |
ą¦č鹥ąĮąĖąĄ ą▓čüąĄą│ąŠ čüąŠą┤ąĄčƹȹĖą╝ąŠą│ąŠ scratchpad, ą▓ą║ą╗čÄčćą░čÅ ą▒ą░ą╣čé CRC. |
BEh |
DS18B20 ą┐ąĄčĆąĄą┤ą░ąĄčé ą┤ąŠ 9 ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ą╝ą░čüč鹥čĆčā čłąĖąĮčŗ(2). |
| Write Scratchpad |
ąŚą░ą┐ąĖčüčŗą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą▓ ą▒ą░ą╣čéčŗ 2, 3 ąĖ 4 ą┐ą░ą╝čÅčéąĖ scratchpad (čĆąĄą│ąĖčüčéčĆčŗ TH, TL ąĖ čĆąĄą│ąĖčüčéčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ). |
4Eh |
ą£ą░čüč鹥čĆ ą┐ąĄčĆąĄą┤ą░ąĄčé 3 ą▒ą░ą╣čéą░ ą┤ą░ąĮąĮčŗčģ ą▓ DS18B20(3). |
| Copy Scratchpad |
ąÜąŠą┐ąĖčĆčāąĄčé ą┤ą░ąĮąĮčŗąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ TH, TL ąĖ čĆąĄą│ąĖčüčéčĆą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ ąĖąĘ ą┐ą░ą╝čÅčéąĖ scratchpad ą▓ EEPROM(1). |
48h |
ąØąĄčé ą░ą║čéąĖą▓ąĮąŠčüčéąĖ. |
| Recall E2 |
ąÆčüą┐ąŠą╝ąĖąĮą░ąĄčé TH, TL ąĖ čĆąĄą│ąĖčüčéčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ą║ąŠą┐ąĖčĆčāčÅ ą┤ą░ąĮąĮčŗąĄ ąĖąĘ EEPROM ą▓ scratchpad. |
B8h |
ą¤čĆąĖ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖąĖ ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ ą┐ąĖčéą░ąĮąĖčÅ DS1820 ą┐ąĄčĆąĄą┤ą░ąĄčé čüčéą░čéčāčü ąŠą┐ąĄčĆą░čåąĖąĖ ą▓ ąŠčéą▓ąĄčé ąĮą░ čéą░ą╣ą╝ą░čāčéčŗ čćč鹥ąĮąĖčÅ. |
| Read Power Supply |
ąĪąĖą│ąĮą░ą╗ąĖąĘąĖčĆčāąĄčé ą╝ą░čüč鹥čĆčā čłąĖąĮčŗ ąŠ č鹥ą║čāčēąĄą╝ čĆąĄąČąĖą╝ąĄ ą┐ąĖčéą░ąĮąĖčÅ DS18B20. |
B4h |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
(1) ąöą╗čÅ ą╝ąĖą║čĆąŠčüčģąĄą╝ DS18B20, ą┤ą╗čÅ ą║ąŠč鹊čĆčŗčģ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą┐ą░čĆą░ąĘąĖčéąĮąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ, ą╝ą░čüč鹥čĆ ą┤ąŠą╗ąČąĄąĮ ąŠą▒ąĄčüą┐ąĄčćąĖčéčī strong pullup ąĮą░ čłąĖąĮąĄ 1-Wire ą▓ąŠ ą▓čĆąĄą╝čÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆąĮčŗčģ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖą╣, ąĖ ą║ąŠą┐ąĖčĆąŠą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ ąĖąĘ scratchpad ą▓ EEPROM. ąÆ čŹč鹊 ą▓čĆąĄą╝čÅ ąĮąĖą║ą░ą║ą░čÅ ą┤čĆčāą│ą░čÅ ą░ą║čéąĖą▓ąĮąŠčüčéčī ąĮą░ čłąĖąĮąĄ ąĮąĄ ą┤ąŠą┐čāčüą║ą░ąĄčéčüčÅ.
(2) ą£ą░čüč鹥čĆ ą╝ąŠąČąĄčé ą┐čĆąĄčĆą▓ą░čéčī ą┐ąĄčĆąĄą┤ą░čćčā ą┤ą░ąĮąĮčŗčģ ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé ą┐čāč鹥ą╝ ą▓čŗą┤ą░čćąĖ ąĖą╝ą┐čāą╗čīčüą░ čüą▒čĆąŠčüą░.
(3) ąÆčüąĄ 3 ą▒ą░ą╣čéą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮčŗ ą┐ąĄčĆąĄą┤ ą▓čŗą┤ą░č湥ą╣ ąĖą╝ą┐čāą╗čīčüą░ čüą▒čĆąŠčüą░.
ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ąĖąĮąĖčåąĖąĖčĆčāąĄčé ąŠą┤ąĖąĮąŠčćąĮąŠąĄ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ. ą¤ąŠčüą╗ąĄ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ą┤ą░ąĮąĮčŗąĄ čĆąĄąĘčāą╗čīčéą░čéą░ ąĖąĘą╝ąĄčĆąĄąĮąĖčÅ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ čüąŠčģčĆą░ąĮčÅčÄčéčüčÅ ą▓ 2-ą▒ą░ą╣čéąĮąŠą╝ čĆąĄą│ąĖčüčéčĆąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ, ą║ąŠč鹊čĆčŗą╣ ąĮą░čģąŠą┤ąĖčéčüčÅ ą▓ ą┐ą░ą╝čÅčéąĖ scratchpad, ąĖ DS18B20 ą▓ąĄčĆąĮąĄčéčüčÅ ą▓ čüą▓ąŠąĄ čüąŠčüč鹊čÅąĮąĖąĄ ąŠąČąĖą┤ą░ąĮąĖčÅ čü ą┐ąŠąĮąĖąČąĄąĮąĮčŗą╝ 菹ĮąĄčĆą│ąŠą┐ąŠčéčĆąĄą▒ą╗ąĄąĮąĖąĄą╝ (low-power idle state). ąĢčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą┐ą░čĆą░ąĘąĖčéąĮąŠą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ, č鹊 ą▓ č鹥č湥ąĮąĖąĄ 10 ą╝ą║čü (ą╝ą░ą║čüąĖą╝čāą╝) ą┐ąŠčüą╗ąĄ ą▓čŗą┤ą░čćąĖ ą╝ą░čüč鹥čĆąŠą╝ čŹč鹊ą╣ ą║ąŠą╝ą░ąĮą┤čŗ ąĮą░ čłąĖąĮąĄ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠą▒ąĄčüą┐ąĄč湥ąĮą░ ą╝ąŠčēąĮą░čÅ ą┐ąŠą┤čéčÅąČą║ą░ (strong pullup) ą▓ č鹥č湥ąĮąĖąĄ ąĖąĮč鹥čĆą▓ą░ą╗ą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ (tCONV), ą║ą░ą║ ą▒čŗą╗ąŠ ąŠą┐ąĖčüą░ąĮąŠ ą▓čŗčłąĄ ą▓ čüąĄą║čåąĖąĖ "ą¤ąĖčéą░ąĮąĖąĄ DS18B20". ąĢčüą╗ąĖ ą┐ą░čĆą░ąĘąĖčéąĮąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ ąĮąĄ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ, čé. ąĄ. DS18B20 ą┐ąŠą╗čāčćą░ąĄčé ą┐ąĖčéą░ąĮąĖąĄ ąĮąĄ ąŠčé čüąĖą│ąĮą░ą╗ą░ čłąĖąĮčŗ, ą░ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░ (ą┐ąŠą┤ą║ą╗čÄč湥ąĮąĮąŠą│ąŠ ą║ ąĮąŠąČą║ąĄ VDD), č鹊 ą╝ą░čüč鹥čĆ ą╝ąŠąČąĄčé ą▓čŗą┤ą░čéčī čéą░ą╣ą╝čüą╗ąŠčéčŗ čćč鹥ąĮąĖčÅ ą┐ąŠčüą╗ąĄ ą║ąŠą╝ą░ąĮą┤čŗ Convert T, ąĖ DS18B20 ą▒čāą┤ąĄčé ąŠčéą▓ąĄčćą░čéčī ą┐ąĄčĆąĄą┤ą░č湥ą╣ 0, ą║ąŠą│ą┤ą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ąĄčēąĄ ąĮąĄ ąŠą║ąŠąĮč湥ąĮąŠ, ąĖ ą┐ąĄčĆąĄą┤ą░č湥ą╣ 1, ą║ąŠą│ą┤ą░ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖąĄ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ ąĘą░ą▓ąĄčĆčłąĄąĮąŠ. ąÆ čĆąĄąČąĖą╝ąĄ ą┐ą░čĆą░ąĘąĖčéąĮąŠą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ čŹčéą░ č鹥čģąĮąĖą║ą░ ąŠą┐ąŠą▓ąĄčēąĄąĮąĖčÅ ąŠ ąĘą░ą▓ąĄčĆčłąĄąĮąĖąĖ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ ąĮąĄą┐čĆąĖą╝ąĄąĮąĖą╝ą░, ą┐ąŠčüą║ąŠą╗čīą║čā čłąĖąĮą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą┐ąŠą┤čéčÅąĮčāčéą░ ą║ ą╗ąŠą│. 1 č湥čĆąĄąĘ ą║ą╗čÄčć strong pullup ą▓ č鹥č湥ąĮąĖąĄ ą▓čüąĄą│ąŠ ąŠąČąĖą┤ą░ąĄą╝ąŠą│ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ą┐čĆąĄąŠą▒čĆą░ąĘąŠą▓ą░ąĮąĖčÅ.
ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą╝ą░čüč鹥čĆčā ąĘą░ą┐ąĖčüą░čéčī 3 ą▒ą░ą╣čéą░ ą┤ą░ąĮąĮčŗčģ ą▓ ą┐ą░ą╝čÅčéčī scratchpad ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ DS18B20. ą¤ąĄčĆą▓čŗą╣ ą▒ą░ą╣čé ą┤ą░ąĮąĮčŗčģ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčéčüčÅ ą▓ čĆąĄą│ąĖčüčéčĆ TH (ą▒ą░ą╣čé 2 ą┐ą░ą╝čÅčéąĖ scratchpad), ą▓č鹊čĆąŠą╣ ą▒ą░ą╣čé ą▓ čĆąĄą│ąĖčüčéčĆ TL (ą▒ą░ą╣čé 3 ą┐ą░ą╝čÅčéąĖ scratchpad), ąĖ čéčĆąĄčéąĖą╣ ą▒ą░ą╣čé ą▓ čĆąĄą│ąĖčüčéčĆ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ (ą▒ą░ą╣čé 4 ą┐ą░ą╝čÅčéąĖ scratchpad). ąöą░ąĮąĮčŗąĄ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąĄčĆąĄą┤ą░ąĮčŗ čüą░ą╝čŗą╝ ą╝ą╗ą░ą┤čłąĖą╝ ąĘąĮą░čćą░čēąĖą╝ ą▒ąĖč鹊ą╝ ą▓ą┐ąĄčĆąĄą┤. ąÆčüąĄ 3 ą▒ą░ą╣čéą░ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ąĘą░ą┐ąĖčüą░ąĮčŗ ą┐ąĄčĆąĄą┤ ą▓čŗą┤ą░č湥ą╣ ą╝ą░čüč鹥čĆąŠą╝ ąĖą╝ą┐čāą╗čīčüą░ čüą▒čĆąŠčüą░, ąĖąĮą░č湥 ą┤ą░ąĮąĮčŗąĄ ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠą▓čĆąĄąČą┤ąĄąĮčŗ.
ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą┐ąŠąĘą▓ąŠą╗čÅąĄčé ą╝ą░čüč鹥čĆčā ą┐čĆąŠčćąĖčéą░čéčī čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ ą┐ą░ą╝čÅčéąĖ scratchpad. ą¤ąĄčĆąĄą┤ą░čćą░ ą┤ą░ąĮąĮčŗčģ ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü čüą░ą╝ąŠą│ąŠ ą╝ą╗ą░ą┤čłąĄą│ąŠ ą▒ąĖčéą░ ą▒ą░ą╣čéą░ 0, ąĖ ą┐čĆąŠą┤ąŠą╗ąČą░ąĄčéčüčÅ ą┐ąŠ ą▓čüąĄą╣ ą┐ą░ą╝čÅčéąĖ scratchpad, ą┐ąŠą║ą░ ąĮąĄ ą▒čāą┤ąĄčé ą┐čĆąŠčćąĖčéą░ąĮ 9-ą╣ ą▒ą░ą╣čé (ą▒ą░ą╣čé 8, ą│ą┤ąĄ ąĮą░čģąŠą┤ąĖčéčüčÅ CRC). ą£ą░čüč鹥čĆ ą╝ąŠąČąĄčé ą▓čŗą┤ą░čéčī ąĖą╝ą┐čāą╗čīčü čüą▒čĆąŠčüą░ ą┤ą╗čÅ č鹊ą│ąŠ, čćč鹊ą▒čŗ ą┐čĆąĄčĆą▓ą░čéčī čćč鹥ąĮąĖąĄ ą▓ ą╗čÄą▒ąŠą╣ ą╝ąŠą╝ąĄąĮčé, ąĄčüą╗ąĖ ąĮčāąČąĮąŠ ą┐čĆąŠčćąĖčéą░čéčī č鹊ą╗čīą║ąŠ čćą░čüčéčī ą┤ą░ąĮąĮčŗčģ scratchpad.
ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą║ąŠą┐ąĖčĆčāąĄčé čüąŠą┤ąĄčƹȹĖą╝ąŠąĄ čĆąĄą│ąĖčüčéčĆąŠą▓ TH, TL ąĖ čĆąĄą│ąĖčüčéčĆą░ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ (ą▒ą░ą╣čéčŗ 2, 3 ąĖ 4 ą┐ą░ą╝čÅčéąĖ scratchpad) ą▓ EEPROM. ąĢčüą╗ąĖ čāčüčéčĆąŠą╣čüčéą▓ąŠ ąĖčüą┐ąŠą╗čīąĘčāąĄčéčüčÅ ą▓ čĆąĄąČąĖą╝ąĄ ą┐ą░čĆą░ąĘąĖčéąĮąŠą│ąŠ ą┐ąĖčéą░ąĮąĖčÅ, č鹊 ą▓ č鹥č湥ąĮąĖąĄ 10 ą╝ą║čü (ą╝ą░ą║čüąĖą╝čāą╝) ą┐ąŠčüą╗ąĄ ą▓čŗą┤ą░čćąĖ čŹč鹊ą╣ ą║ąŠą╝ą░ąĮą┤čŗ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠą▒ąĄčüą┐ąĄč湥ąĮą░ ą╝ąŠčēąĮą░čÅ ą┐ąŠą┤čéčÅąČą║ą░ (strong pullup) ąĮą░ ą▓čĆąĄą╝čÅ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 10 ą╝čü, ą║ą░ą║ čŹč鹊 ą▒čŗą╗ąŠ ąŠą┐ąĖčüą░ąĮąŠ ą▓čŗčłąĄ ą▓ čüąĄą║čåąĖąĖ "ą¤ąĖčéą░ąĮąĖąĄ DS18B20".
ąŁčéą░ ą║ąŠą╝ą░ąĮą┤ą░ ą▓ąŠčüčüčéą░ąĮą░ą▓ą╗ąĖą▓ą░ąĄčé ąĘąĮą░č湥ąĮąĖčÅ ą┐ąŠčĆąŠą│ąŠą▓ čéčĆąĄą▓ąŠą│ąĖ (TH ąĖ TL) ąĖ ą┤ą░ąĮąĮčŗąĄ ą║ąŠąĮčäąĖą│čāčĆą░čåąĖąĖ, ą┐ąĄčĆąĄą┐ąĖčüčŗą▓ą░čÅ ąĖčģ ąĖąĘ EEPROM ą▓ ą▒ą░ą╣čéčŗ 2, 3 ąĖ 4 ą┐ą░ą╝čÅčéąĖ scratchpad čüąŠąŠčéą▓ąĄčéčüčéą▓ąĄąĮąĮąŠ. ą£ą░čüč鹥čĆ ą╝ąŠąČąĄčé ą▓čŗą┤ą░čéčī čéą░ą╣ą╝čüą╗ąŠčéčŗ čćč鹥ąĮąĖčÅ ąĘą░ ą║ąŠą╝ą░ąĮą┤ąŠą╣ Recall E2, ąĖ DS18B20 ą▒čāą┤ąĄčé ąŠčéą▓ąĄčćą░čéčī ąĮą░ čŹč鹊 čüčéą░čéčāčüąŠą╝ ą┐čĆąŠčåąĄčüčüą░ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą┐čāč鹥ą╝ ą┐ąĄčĆąĄą┤ą░čćąĖ 0, ą║ąŠą│ą┤ą░ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖąĄ ąĄčēąĄ ąĮąĄ ąĘą░ą▓ąĄčĆčłąĄąĮąŠ, ąĖ ą┐ąĄčĆąĄą┤ą░č湥ą╣ 1, ą║ąŠą│ą┤ą░ ą┐čĆąŠčåąĄą┤čāčĆą░ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ąĘą░ą▓ąĄčĆčłąĄąĮą░. ą×ą┐ąĄčĆą░čåąĖčÅ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą▓čŗą┐ąŠą╗ąĮčÅąĄčéčüčÅ ą░ą▓č鹊ą╝ą░čéąĖč湥čüą║ąĖ ą┐ąŠčüą╗ąĄ ą▓ą║ą╗čÄč湥ąĮąĖčÅ ą┐ąĖčéą░ąĮąĖčÅ, čéą░ą║ čćč鹊 ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ ą┤ąŠčüčéčāą┐ąĮčŗ ą▓ scratchpad, ą║ą░ą║ č鹊ą╗čīą║ąŠ ą┐ąĖčéą░ąĮąĖąĄ ą┐ąŠą┤ą░ąĮąŠ ąĮą░ ą╝ąĖą║čĆąŠčüčģąĄą╝čā DS18B20.
ą£ą░čüč鹥čĆ ą▓čŗą┤ą░ąĄčé čŹčéčā ą║ąŠą╝ą░ąĮą┤čā, ąĘą░ ą║ąŠč鹊čĆąŠą╣ čüą╗ąĄą┤čāčÄčé čéą░ą╣ą╝čüą╗ąŠčé čćč鹥ąĮąĖčÅ, čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī, ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą╗ąĖ ą┐ą░čĆą░ąĘąĖčéąĮąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ ą║ą░ą║ą░čÅ-ą╗ąĖą▒ąŠ ąĖąĘ ą╝ąĖą║čĆąŠčüčģąĄą╝ DS18B20 ąĮą░ čłąĖąĮąĄ. ąÆąŠ ą▓čĆąĄą╝čÅ čéą░ą╣ą╝čüą╗ąŠčéą░ čćč鹥ąĮąĖčÅ čéą░ ąĖąĘ ą╝ąĖą║čĆąŠčüčģąĄą╝ DS18B20, ą║ąŠč鹊čĆą░čÅ ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┐ą░čĆą░ąĘąĖčéąĮąŠąĄ ą┐ąĖčéą░ąĮąĖąĄ, ą▒čāą┤ąĄčé ą┐ąŠą┤čéčÅą│ąĖą▓ą░čéčī čłąĖąĮčā ą┤ą░ąĮąĮčŗčģ ą║ ą╗ąŠą│. 0, ąĖ č鹥 ą╝ąĖą║čĆąŠčüčģąĄą╝čŗ DS18B20, ą║ąŠč鹊čĆčŗąĄ ą┐ąŠą╗čāčćą░čÄčé ą┐ąĖčéą░ąĮąĖąĄ ąŠčé ą▓ąĮąĄčłąĮąĄą│ąŠ ąĖčüč鹊čćąĮąĖą║ą░, ą▒čāą┤čāčé ą┐ąŠą┤ą┤ąĄčƹȹĖą▓ą░čéčī čāčĆąŠą▓ąĄąĮčī ąĮą░ čłąĖąĮąĄ ą┤ą░ąĮąĮčŗčģ ą▓ ą╗ąŠą│. 1. ąĪą╝. ą▓čŗčłąĄ čüąĄą║čåąĖčÄ "ą¤ąĖčéą░ąĮąĖąĄ DS18B20" ą┤ą╗čÅ ąĖąĮč乊čĆą╝ą░čåąĖąĖ ą┐ąŠ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÄ čŹč鹊ą╣ ą║ąŠą╝ą░ąĮą┤čŗ.
ąĀąĖčü. 14. ąÆčŗą┐ąŠą╗ąĮąĄąĮąĖąĄ čäčāąĮą║čåąĖąŠąĮą░ą╗čīąĮčŗčģ ą║ąŠą╝ą░ąĮą┤.
[ąĪąĖą│ąĮą░ą╗čŗ 1-Wire]
ąöą╗čÅ ąŠą▒ąĄčüą┐ąĄč湥ąĮąĖčÅ čåąĄą╗ąŠčüčéąĮąŠčüčéąĖ ą┤ą░ąĮąĮčŗčģ ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ DS18B20 ąĖčüą┐ąŠą╗čīąĘčāąĄčé ą┐čĆąŠč鹊ą║ąŠą╗ ąŠą▒ą╝ąĄąĮą░ 1-Wire čüąŠ čüčéčĆąŠą│ąĖą╝ąĖ ąŠą│čĆą░ąĮąĖč湥ąĮąĖčÅą╝ąĖ ą┤ą╗čÅ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ ą▓čĆąĄą╝ąĄąĮąĖ čüąĖą│ąĮą░ą╗ąŠą▓. ą¤čĆąŠč鹊ą║ąŠą╗ąŠą╝ 1-Wire ąŠą┐čĆąĄą┤ąĄą╗ąĄąĮčŗ ąĮąĄčüą║ąŠą╗čīą║ąŠ čéąĖą┐ąŠą▓ čüąĖą│ąĮą░ą╗ąŠą▓: reset pulse (ąĖą╝ą┐čāą╗čīčü čüą▒čĆąŠčüą░), presence pulse (ąĖą╝ą┐čāą╗čīčü ą┐čĆąĖčüčāčéčüčéą▓ąĖčÅ ąĮą░ čłąĖąĮąĄ), write 0 (ąĘą░ą┐ąĖčüčī 0), write 1 (ąĘą░ą┐ąĖčüčī 1), read 0 (čćč鹥ąĮąĖąĄ 0) ąĖ read 1 (čćč鹥ąĮąĖąĄ 1). ą£ą░čüč鹥čĆ čłąĖąĮčŗ ąĖąĮąĖčåąĖąĖčĆčāąĄčé ą▓čüąĄ čŹčéąĖ čüąĖą│ąĮą░ą╗čŗ, ąĘą░ ąĖčüą║ą╗čÄč湥ąĮąĖąĄą╝ presence pulse.
ą¤čĆąŠčåąĄą┤čāčĆą░ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ - ąĖą╝ą┐čāą╗čīčü čüą▒čĆąŠčüą░ ąĖ ąĖą╝ą┐čāą╗čīčü ą┐čĆąĖčüčāčéčüčéą▓ąĖčÅ. ąøčÄą▒ą░čÅ ą║ąŠą╝ą╝čāąĮąĖą║ą░čåąĖčÅ čü ą╝ąĖą║čĆąŠčüčģąĄą╝ąŠą╣ DS18B20 ąĮą░čćąĖąĮą░ąĄčéčüčÅ čü ą┐ąŠčüą╗ąĄą┤ąŠą▓ą░č鹥ą╗čīąĮąŠčüčéąĖ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ, ą║ąŠč鹊čĆą░čÅ čüąŠčüč鹊ąĖčé ąĖąĘ reset pulse ąŠčé ą╝ą░čüč鹥čĆ, ąĘą░ ą║ąŠč鹊čĆčŗą╝ ąĖą┤ąĄčé presence pulse ąŠčé DS18B20. ąŁč鹊 ąĖą╗ą╗čÄčüčéčĆąĖčĆčāąĄčéčüčÅ ąĮą░ čĆąĖčü. 15. ąÜąŠą│ą┤ą░ DS18B20 ą┐ąŠčüčŗą╗ą░ąĄčé presence pulse ą▓ ąŠčéą▓ąĄčé ąĮą░ reset pulse, čŹč鹊 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé ą╝ą░čüč鹥čĆčā, čćč鹊 čāčüčéčĆąŠą╣čüčéą▓ąŠ DS18B20 ą┐čĆąĖčüčāčéčüčéą▓čāąĄčé ąĮą░ čłąĖąĮąĄ ąĖ ą│ąŠč鹊ą▓ąŠ ą║ čĆą░ą▒ąŠč鹥.

ąĀąĖčü. 15. ąśąĮč鹥čĆą▓ą░ą╗čŗ ą┐čĆąŠčåąĄą┤čāčĆčŗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ.
ąÆąŠ ą▓čĆąĄą╝čÅ ą┐čĆąŠčåąĄą┤čāčĆčŗ ąĖąĮąĖčåąĖą░ą╗ąĖąĘą░čåąĖąĖ ą╝ą░čüč鹥čĆ ą┐ąĄčĆąĄą┤ą░ąĄčé (Tx) reset pulse ą┐čāč鹥ą╝ ą┐ąŠą┤čéčÅąČą║ąĖ čüąĖą│ąĮą░ą╗ą░ čłąĖąĮčŗ 1-Wire ą║ ą╗ąŠą│. 0 ąĮą░ ą▓čĆąĄą╝čÅ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 480 ą╝ą║čü. ąŚą░č鹥ą╝ ą╝ą░čüč鹥čĆ ąŠčüą▓ąŠą▒ąŠąČą┤ą░ąĄčé čłąĖąĮčā ąĖ ą┐ąĄčĆąĄčģąŠą┤ąĖčé ą▓ čĆąĄąČąĖą╝ ą┐čĆąĖąĄą╝ą░ (Rx). ąÜąŠą│ą┤ą░ čłąĖąĮą░ ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮą░, pullup-čĆąĄąĘąĖčüč鹊čĆ ą┐ąŠą┤čéčÅą│ąĖą▓ą░ąĄčé čāčĆąŠą▓ąĄąĮčī čłąĖąĮčŗ ą║ ą╗ąŠą│. 1. ąÜąŠą│ą┤ą░ DS18B20 čāą▓ąĖą┤ąĖčé čäčĆąŠąĮčé ąĮą░čĆą░čüčéą░ąĮąĖčÅ čāčĆąŠą▓ąĮčÅ, ąŠąĮą░ ą┐ąŠą┤ąŠąČą┤ąĄčé ąĖąĮč鹥čĆą▓ą░ą╗ ą▓čĆąĄą╝ąĄąĮąĖ ąŠčé 15 ą╝ą║čü ą┤ąŠ 60 ą╝ą║čü, ąĖ ąĘą░č鹥ą╝ ą┐ąĄčĆąĄą┤ą░čüčé presence pulse, ą┐ąŠą┤čéčÅą│ąĖą▓ą░čÅ čāčĆąŠą▓ąĄąĮčī čłąĖąĮčŗ 1-Wire ą║ ą╗ąŠą│. 0 ąĮą░ ą▓čĆąĄą╝čÅ ąŠčé 60 ą╝ą║čü ą┤ąŠ 240 ą╝ą║čü.
[ąóą░ą╣ą╝čüą╗ąŠčéčŗ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ]
ą£ą░čüč鹥čĆ čłąĖąĮčŗ ąĘą░ą┐ąĖčüčŗą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ą▓ DS18B20 ą▓ąŠ ą▓čĆąĄą╝čÅ čéą░ą╣ą╝čüą╗ąŠč鹊ą▓ ąĘą░ą┐ąĖčüąĖ (write time slots) ąĖ čüčćąĖčéčŗą▓ą░ąĄčé ą┤ą░ąĮąĮčŗąĄ ąĖąĘ DS18B20 ą▓ąŠ ą▓čĆąĄą╝čÅ čéą░ą╣ą╝čüą╗ąŠč鹊ą▓ čćč鹥ąĮąĖčÅ (read time slots). ąŚą░ ąŠą┤ąĖąĮ čéą░ą╣ą╝čüą╗ąŠčé ą┐ąŠ čłąĖąĮąĄ 1-Wire ą┐ąĄčĆąĄą┤ą░ąĄčéčüčÅ 1 ą▒ąĖčé.
Write Time Slots. ąĪčāčēąĄčüčéą▓čāąĄčé 2 čéąĖą┐ą░ čéą░ą╣ą╝čüą╗ąŠč鹊ą▓ ąĘą░ą┐ąĖčüąĖ (Write Time Slots): Write 1 čéą░ą╣ą╝čüą╗ąŠčé ąĖ Write 0 čéą░ą╣ą╝čüą╗ąŠčé. ą£ą░čüč鹥čĆ čłąĖąĮčŗ ąĖčüą┐ąŠą╗čīąĘčāąĄčé čéą░ą╣ą╝čüą╗ąŠčé Write 1 ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ą╗ąŠą│ąĖč湥čüą║ąŠą╣ 1 ą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝čā DS18B20, ąĖ čéą░ą╣ą╝čüą╗ąŠčé Write 0 ą┤ą╗čÅ ąĘą░ą┐ąĖčüąĖ ą╗ąŠą│ąĖč湥čüą║ąŠą│ąŠ 0. ąÆčüąĄ čéą░ą╣ą╝čüą╗ąŠčéčŗ ąĘą░ą┐ąĖčüąĖ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąŠ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 60 ą╝ą║čü, čü ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╝ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą╝ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ 1 ą╝ą║čü ą╝ąĄąČą┤čā ąŠčéą┤ąĄą╗čīąĮčŗą╝ąĖ čéą░ą╣ą╝čüą╗ąŠčéą░ą╝ąĖ ąĘą░ą┐ąĖčüąĖ. ą×ą▒ą░ čéąĖą┐ą░ čéą░ą╣ą╝čüą╗ąŠčéą░ ąĘą░ą┐ąĖčüąĖ ąĖąĮąĖčåąĖąĖčĆčāčÄčéčüčÅ ą╝ą░čüč鹥čĆąŠą╝ ą┐čāč鹥ą╝ ą┐ąŠą┤čéčÅąČą║ąĖ čāčĆąŠą▓ąĮčÅ čłąĖąĮčŗ 1-Wire ą║ ą╗ąŠą│. 0.
ąöą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čéą░ą╣ą╝čüą╗ąŠčéą░ Write 1 ą┐ąŠčüą╗ąĄ ą┐ąŠą┤čéčÅąČą║ąĖ čłąĖąĮčŗ ą║ ą╗ąŠą│. 0 ą╝ą░čüč鹥čĆ ą┤ąŠą╗ąČąĄąĮ ąŠčüą▓ąŠą▒ąŠą┤ąĖčéčī čłąĖąĮą░ ą▓ č鹥č湥ąĮąĖąĄ 15 ą╝ą║čü. ąÜąŠą│ą┤ą░ čłąĖąĮą░ ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮą░, pullup-čĆąĄąĘąĖčüč鹊čĆ ą┐ąŠą┤čéčÅąĮąĄčé čāčĆąŠą▓ąĄąĮčī čłąĖąĮčŗ ą║ ą╗ąŠą│. 1. ąöą╗čÅ ą│ąĄąĮąĄčĆą░čåąĖąĖ čéą░ą╣ą╝čüą╗ąŠčéą░ Write 0 ą┐ąŠčüą╗ąĄ ą┐ąŠą┤čéčÅąČą║ąĖ čłąĖąĮčŗ ą║ čāčĆąŠą▓ąĮčÄ ą╗ąŠą│. 0 ą╝ą░čüč鹥čĆ ą┤ąŠą╗ąČąĄąĮ čāą┤ąĄčƹȹĖą▓ą░čéčī čŹč鹊čé čāčĆąŠą▓ąĄąĮčī ą▓ č鹥č湥ąĮąĖąĄ ą▓čüąĄą╣ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ čéą░ą╣ą╝čüą╗ąŠčéą░ (ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 60 ą╝ą║čü).
DS18B20 ą░ąĮą░ą╗ąĖąĘąĖčĆčāąĄčé čāčĆąŠą▓ąĄąĮčī čłąĖąĮčŗ ą▓ąŠ ą▓čĆąĄą╝čÅ ąŠą║ąĮą░ ą▓čĆąĄą╝ąĄąĮąĖ ą╝ąĄąČą┤čā 15 ą╝ą║čü ąĖ 60 ą╝ą║čü ą┐ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą╝ą░čüč鹥čĆ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ą╗ čéą░ą╣ą╝čüą╗ąŠčé. ąĢčüą╗ąĖ čłąĖąĮą░ ą▒čŗą╗ą░ ą▓ ą╗ąŠą│. 1 ą▓ąŠ ą▓čĆąĄą╝čÅ čŹč鹊ą│ąŠ ąŠą║ąĮą░, č鹊 ą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝čā DS18B20 ąĘą░ą┐ąĖčłąĄčéčüčÅ 1. ąĢčüą╗ąĖ čłąĖąĮą░ ą▒čŗą╗ą░ ą▓ ą╗ąŠą│. 0 ą▓ąŠ ą▓čĆąĄą╝čÅ čŹč鹊ą│ąŠ ąŠą║ąĮą░, č鹊 ą▓ ą╝ąĖą║čĆąŠčüčģąĄą╝čā DS18B20 ąĘą░ą┐ąĖčłąĄčéčüčÅ 0.
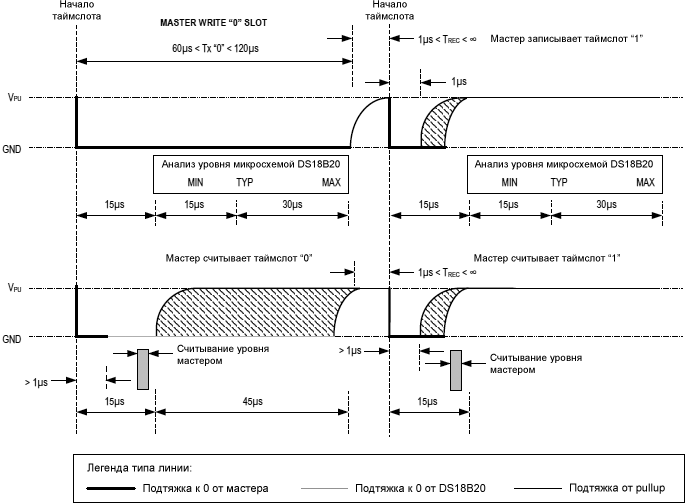
ąĀąĖčü. 16. ąśąĮč鹥čĆą▓ą░ą╗čŗ ą▓čĆąĄą╝ąĄąĮąĖ čéą░ą╣ą╝čüą╗ąŠč鹊ą▓ čćč鹥ąĮąĖčÅ/ąĘą░ą┐ąĖčüąĖ.
Read Time Slots. DS18B20 ą╝ąŠąČąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ą┤ą░ąĮąĮčŗąĄ ą╝ą░čüč鹥čĆčā č鹊ą╗čīą║ąŠ ą║ąŠą│ą┤ą░ ąŠąĮ ą▓čŗą┤ą░ąĄčé čéą░ą╣ą╝čüą╗ąŠčéčŗ čćč鹥ąĮąĖčÅ (read time slots). ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą╝ą░čüč鹥čĆ ą┤ąŠą╗ąČąĄąĮ ą│ąĄąĮąĄčĆąĖčĆąŠą▓ą░čéčī čéą░ą╣ą╝čüą╗ąŠčéčŗ čćč鹥ąĮąĖčÅ čüčĆą░ąĘčā ą┐ąŠčüą╗ąĄ ą▓čŗą┤ą░čćąĖ ą║ąŠą╝ą░ąĮą┤ Read Scratchpad [BEh] ąĖą╗ąĖ Read Power Supply [B4h], čćč鹊ą▒čŗ DS18B20 ą╝ąŠą│ą╗ą░ ą┐čĆąĄą┤ąŠčüčéą░ą▓ąĖčéčī ąĘą░ą┐čĆą░čłąĖą▓ą░ąĄą╝čŗąĄ ą┤ą░ąĮąĮčŗąĄ. ąöąŠą┐ąŠą╗ąĮąĖč鹥ą╗čīąĮąŠ ą╝ą░čüč鹥čĆ ą╝ąŠąČąĄčé ą▓čŗą┤ą░ą▓ą░čéčī čéą░ą╣ą╝čüą╗ąŠčéčŗ čćč鹥ąĮąĖčÅ ą┐ąŠčüą╗ąĄ ą▓čŗą┤ą░čćąĖ ą║ąŠą╝ą░ąĮą┤ Convert T [44h] ąĖą╗ąĖ Recall E2 [B8h], čćč鹊ą▒čŗ ąŠą┐čĆąĄą┤ąĄą╗ąĖčéčī čüčéą░čéčāčü ą▓čŗą┐ąŠą╗ąĮąĄąĮąĖčÅ ąŠą┐ąĄčĆą░čåąĖąĖ, ą║ą░ą║ ą▒čŗą╗ąŠ ąŠą┐ąĖčüą░ąĮąŠ ą▓čŗčłąĄ ą▓ čüąĄą║čåąĖąĖ "ąÜąŠą╝ą░ąĮą┤čŗ čäčāąĮą║čåąĖą╣ DS18B20".
ąÆčüąĄ čéą░ą╣ą╝čüą╗ąŠčéčŗ čćč鹥ąĮąĖčÅ ą┤ąŠą╗ąČąĮčŗ ą▒čŗčéčī ą┐ąŠ ą┤ą╗ąĖč鹥ą╗čīąĮąŠčüčéąĖ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 60 ą╝ą║čü, čü ą╝ąĖąĮąĖą╝ą░ą╗čīąĮčŗą╝ ą▓čĆąĄą╝ąĄąĮąĄą╝ ą▓ąŠčüčüčéą░ąĮąŠą▓ą╗ąĄąĮąĖčÅ ą╝ąĄąČą┤čā čéą░ą╣ą╝čüą╗ąŠčéą░ą╝ąĖ 1 ą╝ą║čü. ąóą░ą╣ą╝čüą╗ąŠčé čćč鹥ąĮąĖčÅ ą┤ąŠą╗ąČąĄąĮ ą▒čŗčéčī ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ąĮ ą╝ą░čüč鹥čĆąŠą╝ ą┐čāč鹥ą╝ ą┐ąŠą┤čéčÅąČą║ąĖ čłąĖąĮčŗ ą║ ą╗ąŠą│. 0 ąĮą░ ą▓čĆąĄą╝čÅ ą║ą░ą║ ą╝ąĖąĮąĖą╝čāą╝ 1 ą╝ą║čü, ą┐ąŠčüą╗ąĄ čŹč鹊ą│ąŠ čłąĖąĮą░ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ąŠčüą▓ąŠą▒ąŠąČą┤ąĄąĮą░ (čüą╝. čĆąĖčü. 16). ą¤ąŠčüą╗ąĄ č鹊ą│ąŠ, ą║ą░ą║ ą╝ą░čüč鹥čĆ ąĖąĮąĖčåąĖąĖčĆąŠą▓ą░ą╗ čéą░ą╣ą╝čüą╗ąŠčé čćč鹥ąĮąĖčÅ, ą╝ąĖą║čĆąŠčüčģąĄą╝ą░ DS18B20 ą▒čāą┤ąĄčé ą┐ąĄčĆąĄą┤ą░ą▓ą░čéčī ąĮą░ čłąĖąĮčā 1 (ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ DS18B20 ąĮąĄ ą┐ąŠą┤čéčÅą│ąĖą▓ą░ąĄčé čłąĖąĮčā ą║ 0) ąĖą╗ąĖ 0 (ą▓ čŹč鹊ą╝ čüą╗čāčćą░ąĄ DS18B20 ą┐ąŠą┤čéčÅą│ąĖą▓ą░ąĄčé čłąĖąĮčā ą║ 0). ą¤ąŠčüą╗ąĄ ąĖčüč鹥č湥ąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ čéą░ą╣ą╝čüą╗ąŠčéą░ DS18B20 ąŠčüą▓ąŠą▒ąŠą┤ąĖčé čłąĖąĮčā, ąĖ ąŠąĮą░ ą▓ąĄčĆąĮąĄčéčüčÅ ąĮą░ čāčĆąŠą▓ąĄąĮčī ą╗ąŠą│. 1 ą┐ąŠą┤čéčÅąČą║ąŠą╣ ąŠčé pullup-čĆąĄąĘąĖčüč鹊čĆą░. ąÆčŗčģąŠą┤ąĮčŗąĄ ą┤ą░ąĮąĮčŗąĄ DS18B20 ą┤ąŠčüč鹊ą▓ąĄčĆąĮčŗ č湥čĆąĄąĘ 15 ą╝ą║čü ą┐ąŠčüą╗ąĄ čüą┐ą░ą┤ą░ čāčĆąŠą▓ąĮčÅ ą▓ ą╝ąŠą╝ąĄąĮčé ąĮą░čćą░ą╗ą░ čéą░ą╣ą╝čüą╗ąŠčéą░ čćč鹥ąĮąĖčÅ, ąĖ ą┤ąŠ ą▓čĆąĄą╝ąĄąĮąĖ ąŠą║ąŠąĮčćą░ąĮąĖčÅ čéą░ą╣ą╝čüą╗ąŠčéą░ čćč鹥ąĮąĖčÅ. ąóą░ą║ąĖą╝ ąŠą▒čĆą░ąĘąŠą╝, ą╝ą░čüč鹥čĆ ą┤ąŠą╗ąČąĄąĮ ąŠčüą▓ąŠą▒ąŠą┤ąĖčéčī čłąĖąĮčā, ąĖ ąĘą░č鹥ą╝ ą░ąĮą░ą╗ąĖąĘąĖčĆąŠą▓ą░čéčī ąĄčæ čāčĆąŠą▓ąĄąĮčī ą┐ąŠčüą╗ąĄ ąĖčüč鹥č湥ąĮąĖčÅ 15 ą╝ą║čü ąŠčé ąĮą░čćą░ą╗ą░ čéą░ą╣ą╝čüą╗ąŠčéą░ čćč鹥ąĮąĖčÅ.
ąØą░ čĆąĖčü. 17 ą┐ąŠą║ą░ąĘą░ąĮąŠ, čćč鹊 čüčāą╝ą╝ą░ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ TINIT, TRC ąĖ TSAMPLE ą┤ą╗čÅ čéą░ą╣ą╝čüą╗ąŠčéą░ čćč鹥ąĮąĖčÅ ą┤ąŠą╗ąČąĮą░ ą▒čŗčéčī ą╝ąĄąĮčīčłąĄ 15 ą╝ą║čü. ąĀąĖčü. 18 ą┐ąŠą║ą░ąĘčŗą▓ą░ąĄčé, čćč鹊 ąĘą░ą┐ą░čü čéą░ą╣ą╝ąĖąĮą│ą░ čüąĖčüč鹥ą╝čŗ čüčéą░ąĮąŠą▓ąĖčéčüčÅ ą╝ą░ą║čüąĖą╝ą░ą╗čīąĮčŗą╝ ą┐čāč鹥ą╝ čāą┤ąĄčƹȹĖą▓ą░ąĮąĖčÅ ą║ą░ą║ ą╝ąŠąČąĮąŠ ą▒ąŠą╗ąĄąĄ ą║ąŠčĆąŠčéą║ąĖčģ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ TINIT ąĖ TR, ąĖ ą┐čāč鹥ą╝ čĆą░ąĘą╝ąĄčēąĄąĮąĖčÅ ą▓čĆąĄą╝ąĄąĮąĖ ą▓čŗą▒ąŠčĆą║ąĖ čāčĆąŠą▓ąĮčÅ ą╝ą░čüč鹥čĆąŠą╝ ą║ą░ą║ ą╝ąŠąČąĮąŠ ą▒ą╗ąĖąČąĄ ą║ ąŠą║ąŠąĮčćą░ąĮąĖčÄ ą┐ąĄčĆąĖąŠą┤ą░ 15 ą╝ą║čü.
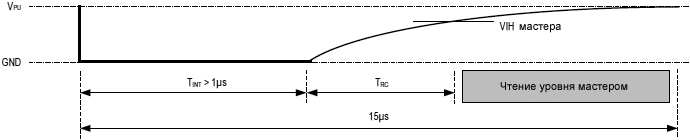
ąĀąĖčü. 17. ą¤ąŠą┤čĆąŠą▒ąĮąŠąĄ ąŠą┐ąĖčüą░ąĮąĖąĄ ąĖąĮč鹥čĆą▓ą░ą╗ąŠą▓ čéą░ą╣ą╝čüą╗ąŠčéą░ čćč鹥ąĮąĖčÅ ą╗ąŠą│. 1.

ąĀąĖčü. 18. ąĀąĄą║ąŠą╝ąĄąĮą┤čāąĄą╝čŗąĄ ąĖąĮč鹥čĆą▓ą░ą╗čŗ čéą░ą╣ą╝čüą╗ąŠčéą░ čćč鹥ąĮąĖčÅ ą╗ąŠą│. 1.
ą¤čĆąĖą╝ąĄčćą░ąĮąĖąĄ: č鹊ą╗čüč鹊ą╣ ą╗ąĖąĮąĖąĄą╣ ąŠčüčåąĖą╗ą╗ąŠą│čĆą░ą╝ą╝čŗ ą┐ąŠą║ą░ąĘą░ąĮą░ ą┐ąŠą┤čéčÅąČą║ą░ ą║ ą╗ąŠą│. 0 ą╝ą░čüč鹥čĆąŠą╝. ą×ą▒čŗčćąĮą░čÅ ą╗ąĖąĮąĖčÅ čüąŠąŠčéą▓ąĄčéčüčéą▓čāąĄčé ą▓čĆąĄą╝ąĄąĮąĖ, ą║ąŠą│ą┤ą░ čüąĖą│ąĮą░ą╗ ą▓ąŠąĘą▓čĆą░čēą░ąĄčéčüčÅ ą║ čāčĆąŠą▓ąĮčÄ ą╗ąŠą│. 1 č鹊ą║ąŠą╝ ąŠčé pullup-čĆąĄąĘąĖčüč鹊čĆą░.
ąĪą╗ąĄą┤čāčÄčēąĖąĄ ą░ą┐ąĮąŠčāčéčŗ, ąŠčéąĮąŠčüčÅčēąĖąĄčüčÅ ą║ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÄ DS18B20, ą╝ąŠą│čāčé ą▒čŗčéčī ą┐ąŠą╗čāč湥ąĮčŗ ąĮą░ čüą░ą╣č鹥 ą║ąŠą╝ą┐ą░ąĮąĖąĖ Maxim www.maximintegrated.com.
Application Note 27: Understanding and Using Cyclic Redundancy Checks with Maxim iButton Products.
Application Note 122: Using DallasŌĆÖ 1-Wire ICs in 1-Cell Li-Ion Battery Packs with Low-Side N-Channel Safety FETs Master.
Application Note 126: 1-Wire Communication Through Software.
Application Note 162: Interfacing the DS18x20/DS1822 1-Wire Temperature Sensor in a Microcontroller Environment.
Application Note 208: Curve Fitting the Error of a Bandgap-Based Digital Temperature Sensor.
Application Note 2420: 1-Wire Communication with a Microchip PICmicro Microcontroller.
Application Note 3754: Single-Wire Serial Bus Carries Isolated Power and Data.
ą¤čĆąĖą╝ąĄčĆ ą┐ąŠą┤ą┐čĆąŠą│čĆą░ą╝ą╝ 1-Wire ą╝ąŠąČąĄčé ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░čéčīčüčÅ ą▓ą╝ąĄčüč鹥 čü Application Note 74: Reading and Writing iButtons via Serial Interfaces, čŹč鹊čé ą┐čĆąĖą╝ąĄčĆ ą╝ąŠąČąĮąŠ ąĘą░ą│čĆčāąĘąĖčéčī čü čüą░ą╣čéą░ ą║ąŠą╝ą┐ą░ąĮąĖąĖ Maxim. ąĪą╝. čéą░ą║ąČąĄ čüčéą░čéčīčÄ [4].
[ąśąĮč乊čĆą╝ą░čåąĖčÅ ą┤ą╗čÅ ąĘą░ą║čāą┐ą║ąĖ]
PART
|
ąöąĖą░ą┐ą░ąĘąŠąĮ č鹥ą╝ą┐ąĄčĆą░čéčāčĆ
|
ąÜąŠą╗ąĖč湥čüčéą▓ąŠ ą▓čŗą▓ąŠą┤ąŠą▓ ąĖ čéąĖą┐ ą║ąŠčĆą┐čāčüą░ |
ą£ą░čĆą║ąĖčĆąŠą▓ą║ą░ |
| DS18B20 |
-55┬░C .. +125┬░C |
3 TO-92 |
18B20 |
| DS18B20+ |
-55┬░C .. +125┬░C |
| DS18B20/T&R |
-55┬░C .. +125┬░C |
3 TO-92 (2000 čłčé.) |
| DS18B20+T&R |
-55┬░C .. +125┬░C |
| DS18B20-SL/T&R |
-55┬░C .. +125┬░C |
3 TO-92 (2000 čłčé.)* |
| DS18B20-SL+T&R |
-55┬░C .. +125┬░C |
| DS18B20U |
-55┬░C .. +125┬░C |
8 FSOP |
| DS18B20U+ |
-55┬░C .. +125┬░C |
| DS18B20U/T&R |
-55┬░C .. +125┬░C |
8 FSOP (3000 čłčé.) |
| DS18B20U+T&R |
-55┬░C .. +125┬░C |
| DS18B20Z |
-55┬░C .. +125┬░C |
8 SO |
DS18B20 |
| DS18B20Z+ |
-55┬░C .. +125┬░C |
| DS18B20Z/T&R |
-55┬░C .. +125┬░C |
8 SO (2500 čłčé.) |
| DS18B20Z+T&R |
-55┬░C .. +125┬░C |
ą¤čĆąĖą╝ąĄčćą░ąĮąĖčÅ:
(+) ą×ą▒ąŠąĘąĮą░čćą░ąĄčé ą║ąŠčĆą┐čāčü ą▒ąĄąĘ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ čüą▓ąĖąĮčåą░ (lead-free). ąĪąĖą╝ą▓ąŠą╗ + ą┐ąŠčÅą▓ą╗čÅąĄčéčüčÅ ą▓ ą▓ąĄčĆčģąĮąĄą╣ čćą░čüčéąĖ ą╝ą░čĆą║ąĖčĆąŠą▓ą║ąĖ lead-free ą║ąŠčĆą┐čāčüąŠą▓.
(T&R) ą×ą▒ąŠąĘąĮą░čćą░ąĄčé čāą┐ą░ą║ąŠą▓ą║čā Tape and reel.
(*) ąÜąŠčĆą┐čāčüą░ TO-92 ą▓ čāą┐ą░ą║ąŠą▓ą║ąĄ tape and reel ą╝ąŠą│čāčé ą┐ąŠčüčéą░ą▓ą╗čÅčéčīčüčÅ ą║ą░ą║ čü ą┐čĆčÅą╝čŗą╝ąĖ, čéą░ą║ ąĖ čü č乊čĆą╝ąŠą▓ą░ąĮąĮčŗą╝ąĖ ą▓čŗą▓ąŠą┤ą░ą╝ąĖ. ąÆčŗą▒ąĖčĆą░ą╣č鹥 ą▓ą░čĆąĖą░ąĮčé SL ą┤ą╗čÅ ą┐čĆčÅą╝čŗčģ ą▓čŗą▓ąŠą┤ąŠą▓ (SL čŹč鹊 čüąŠą║čĆą░čēąĄąĮąĖąĄ ąŠčé straight leads). Bulk-ąĘą░ą║ą░ąĘčŗ ąĮą░ TO-92 ą┐ąŠčüčéą░ą▓ą╗čÅčÄčéčüčÅ č鹊ą╗čīą║ąŠ čü ą┐čĆčÅą╝čŗą╝ąĖ ą▓čŗą▓ąŠą┤ą░ą╝ąĖ.
[ąĪčüčŗą╗ą║ąĖ]
1. DS18B20 Programmable Resolution 1-Wire Digital Thermometer site:datasheets.maximintegrated.com.
2. Application Note 27 Understanding and Using Cyclic Redundancy Checks with Maxim iButton Products site:maximintegrated.com.
3. Application Note 937 Book of iButton Standards site:maximintegrated.com.
4. iButton: ąŠą┐ąĖčüą░ąĮąĖąĄ ą┐čĆąŠč鹊ą║ąŠą╗ą░, 菹╗ąĄą║čéčĆąŠąĮąĮčŗą╣ ąĘą░ą╝ąŠą║ ąĮą░ ą║ą╗čÄčćą░čģ-čéą░ą▒ą╗ąĄčéą║ą░čģ.
5. 220215DS18B20.zip - ą┤ąŠą║čāą╝ąĄąĮčéą░čåąĖčÅ, ą┐čĆąĖą╝ąĄčĆčŗ ąĖčüą┐ąŠą╗čīąĘąŠą▓ą░ąĮąĖčÅ.
6. ą¤čĆąĖą╝ąĄčĆčŗ čćč鹥ąĮąĖčÅ ą┤ą░čéčćąĖą║ą░ č鹥ą╝ą┐ąĄčĆą░čéčāčĆčŗ DS18B20.
7. ą×čéą╗ąĖčćąĖčÅ DS1820, DS18S20 ąĖ DS18B20. |



